modulo 2808_teorico e pratico-v1
TRANSCRIPT

MÓDULO 2808
SISTEMA DE CONTROLE,
TRANSPORTE E
SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO

MÓDULO 2808
SISTEMA DE CONTROLE,
TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
SUMÁRIO
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. i
SUMÁRIO
CAPÍTULO 1 - SISTEMA DE CONTROLE 1
CAPÍTULO 2 - CONCEITOS TEÓRICOS SOBRE SENSORES 3
2.1 INTRODUÇÃO 3
2.2 SELEÇÃO DE SENSORES 4
2.3 CARACTERÍSTICAS DOS SENSORES 5
2.4 CLASSIFICAÇÃO DOS SENSORES 6
CAPÍTULO 3 - SENSORES FOTOELÉTRICOS 8
3.1 SENSOR DE BARREIRA 9
3.2 SENSOR RETROREFLEXÍVEL 10
3.3 SENSOR DIFUSO 11
CAPÍTULO 4 - SENSORES INDUTIVOS 13
CAPÍTULO 5 - SENSOR DE COR 16
CAPÍTULO 6 - SENSOR DE CORTINA 17
CAPÍTULO 7 - ENCODER 18
7.1 ENCODER ABSOLUTO 20
7.2 ENCODER INCREMENTAL 21
CAPÍTULO 8 - MOTOR DE PASSO 23
8.1 MOTOR DE CAMPO MAGNÉTICO PERMANENTE 25
8.2 MOTOR DE RELUTÂNCIA VARIÁVEL 26
8.3 MOTOR HÍBRIDO 26
CAPÍTULO 9 - MOTOR DC 28
9.1 MODULAÇÃO POR LARGURA DE PULSO (PWM) 29

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
SUMÁRIO
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. ii
CAPÍTULO 10 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS 31
CAPÍTULO 11 - CLP2301 CONTROLADOR LÓGICO PROGRAMÁVEL 32
11.1 PAINEL TRASEIRO 34
11.2 CONECTOR LATERAL 34
11.3 MÓDULO DE INTERFACE HOMEM / MÁQUINA 35
11.4 CONEXÃO ENTRE O MÓDULO 2808 E CLP2301 36
CAPÍTULO 12 – SDM 9431 MICROPROCESSADOR 38
12.1 CONECTOR SDM 9431 39
12.2 CONEXÃO ENTRE O MÓDULO 2808 E SDM 9431 40
CAPÍTULO 13 – DAQ AQUISIÇÃO DE DADOS 42
13.1 CONEXÃO ENTRE O MÓDULO 2808 E DAQ 42
CAPÍTULO 14 - EXPERIÊNCIAS 44
14.1 EXPERIÊNCIAS USANDO CLP 2301 44
14.1.1 EXPERIÊNCIA 0 – LEITURA 45 14.1.2 EXPERIÊNCIA 1 – SELECIONADOR 47
14.1.3 EXPERIÊNCIA 2 – PWM E ENCODER 50 14.1.4 EXPERIÊNCIA 3 – SENSOR DE COR 53 14.1.5 EXPERIÊNCIA 4 – SENSOR INDUTIVO 57 14.1.6 EXPERIÊNCIA 5 – SENSOR REFLEXIVO 59
14.1.7 EXPERIÊNCIA 6 – EXTRAS 63 14.1.8 EXPERIÊNCIA 7 – ESTEIRA COMPLETA 64
14.2 EXPERIÊNCIAS USANDO MICROCONTROLADOR SDM 9431 64
14.3 EXPERIÊNCIAS USANDO DAQ – AQUISIÇÃO DE DADOS – VIA PC 66
14.3.1 EXPERIÊNCIA 0 – LEITURA 67 14.3.2 EXPERIÊNCIA 1 – SELECIONADOR 70 14.3.3 EXPERIÊNCIA 2 – PWM E ENCODER 72 14.3.4 EXPERIÊNCIA 3 – SENSOR DE COR 75 14.3.5 EXPERIÊNCIA 4 – SENSOR INDUTIVO 79
14.3.6 EXPERIÊNCIA 5 – SENSOR REFLEXIVO 81 14.3.7 EXPERIÊNCIA 6 – EXTRAS 85 14.3.8 EXPERIÊNCIA 7 – ESTEIRA COMPLETA 86

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 1 – SISTEMA DE CONTROLE
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 1
CAPÍTULO 1 - SISTEMA DE CONTROLE
Os sistemas de controle automáticos são amplamente utilizados em vários processos
industriais, tais como, controle de tensão e freqüência em geração de energia elétrica;
controle de temperatura em caldeiras a vapor ou fornos; controle de nível em
reservatórios; controle de rotação de motores elétricos; controle automático de navegação
em aviões, navios e naves espaciais; etc.
As variáveis envolvidas em sistemas de controle em geral podem ser classificadas como
discretas ou contínuas. As variáveis discretas possuem apenas dois níveis básicos: “alto”
ou “baixo”; “ligado” ou “desligado”; “1” ou “0”; e como exemplos típicos pode-se citar os
estados de sensores de proximidade, chaves finais de curso, termostatos, etc. Uma
variável contínua pode variar continuamente entre o seu extremo de valores máximo e
mínimo, exemplos típicos são os sinais de transdutores de temperatura como termopares,
de posição ou nível como potenciômetros, etc.
Um sistema de controle que utiliza variáveis tipicamente discretas é chamado de controle
lógico combinacional / sequencial. Um exemplo de equipamento de controle que foi
originariamente desenvolvido para manipular este tipo de variável em automações é o
controlador lógico programável (CLP). Um sistema de controle que utiliza variáveis
tipicamente contínuas é chamado de controle de processo contínuo. Exemplos de
equipamentos que manipulam variáveis contínuas em controles automáticos são os
controladores de malha. Estes controladores, dependendo do número de malhas de
controle implementadas e de outras funções de processamento, podem ser classificados
em Single-Loop, Multi-Loop, SDCD (Sistemas Digitais de Controle Distribuído), CLP,
Computadores de Processo, etc. Na utilização desses equipamentos que são geralmente
digitais, uma variável contínua freqüentemente é convertida em um número binário
associado. Apesar de cada bit de informação do número em questão ser discreto, ainda
assim o dado representativo da variável relacionada pode variar entre uma faixa de
valores máximo e mínimo, proporcionais ao número de bits do dado.
A necessidade de controle automático ou de malhas de controle contínuas não está
relacionada apenas com o interesse da automação em si, mas sim ligada a questões mais
fundamentais como estabilizar sistemas instáveis, rejeitar distúrbios, perturbações ou
variações em um processo, planta ou modificar a dinâmica de um sistema. Uma das
idéias fundamentais neste contexto é o conceito de realimentação (feedback).
Basicamente um sinal de informação relacionado com a grandeza a ser controlada, como
a de uma temperatura, pressão, velocidade, tensão, fluxo etc., é somado (subtraído) a um
valor de referência desejado para a mesma. O erro resultante dessa operação é
processado (atenuado/amplificado, filtrado, etc.) e excita a entrada do processo em
questão. Geralmente em malhas de controle contínuo utilizam-se realimentações

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 1 – SISTEMA DE CONTROLE
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 2
negativas com a finalidade de estabilizar sistemas, rejeitar distúrbios e/ou modificar suas
dinâmicas, daí o sinal de realimentação ser subtraído da referência desejada.
É cada vez mais comum falar-se em sistemas automatizados, que não deixa de ser mais
uma tentativa de tornar as máquinas mais parecidas com o ser humano, porém com um
índice de erros muito menor. Neste caso, utilizam-se diferentes tipos de sensores,
assemelhando-se aos sentidos humanos, para que seja possível fazer o reconhecimento
do material ou objeto a ser analisado. Por exemplo, em indústrias de shampoos podem-se
utilizar sensores de cor para reconhecer a embalagem e assim separar seus diferentes
tipos e encaminhá-los a locais distintos.
Para tal, faz-se necessário um controle eletrônico inteligente, capaz de interpretar os
sinais emitidos pelo sensor e tomar uma decisão como, por exemplo, eliminar os objetos
fora de um determinado padrão.
É necessário, portanto, o conhecimento detalhado do funcionamento dos sensores a
serem utilizados, bem como quais serão os recursos eletrônicos a serem desenvolvidos.
A figura 1 mostra etapas de um sistema automatizado, neste caso uma esteira.
Figura 1 – Etapas de um sistema automatizado.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 2 – CONCEITOS TEÓRICOS SOBRE SENSORES
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 3
CAPÍTULO 2 - CONCEITOS TEÓRICOS SOBRE SENSORES
2.1 INTRODUÇÃO
Os sensores são dispositivos que mudam seu comportamento sob a ação de uma
grandeza física, podendo fornecer diretamente ou indiretamente um sinal que indica
alguma condição operacional. Quando operam diretamente, convertendo uma grandeza
física em um sinal proporcional, são chamados de transdutores. Os de operação indireta
alteram suas propriedades, como a resistência, a capacitância ou a indutância, sob ação
de uma grandeza, de forma mais ou menos proporcional.
Os sensores são dispositivos que mudam seu comportamento sob a ação de uma
grandeza física, podendo fornecer diretamente ou indiretamente um sinal que indica
alguma condição operacional. Quando operam diretamente, convertendo uma grandeza
física em um sinal proporcional, são chamados de transdutores. Os de operação indireta
alteram suas propriedades, como a resistência, a capacitância ou a indutância, sob ação
de uma grandeza, de forma mais ou menos proporcional.
O sinal de um sensor pode ser usado para detectar e sinalizar desvios em sistemas de
alarme ou de controle, interagindo com os mesmos por meio de respostas elétricas que
são resultantes de suas atuações.
Sistemas de controle recebem informações do mundo exterior através de sensores,
também denominados de detectores e transdutores de entrada, que são responsáveis
pela detecção e medida de propriedade tais como temperatura, luz, composições
químicas, movimento, etc. Estes dispositivos possibilitam fazer com que os sistemas
sejam capazes de tomar decisões sobre o ambiente onde se encontram.
As aplicações típicas de sensores são as de monitoração em geral, incluindo detecção e
medição de informações. Entretanto alguns equipamentos eletrônicos podem usar
sensores para propósitos de detecções não primarias. Por exemplo, as impressoras
possuem sensores que detectam a ausência de papel. Muitas câmeras podem detectar
níveis de luz e distâncias. Automóveis contem vários tipos de sensores incluindo os de
medição de temperatura do motor, de composição de emissão de gás, de pressão do
óleo, de velocidade, de uso de cintos de segurança, etc.
Algumas das variáveis físicas que podem ser medidas com sensores comerciais são:
Fluxo: fluídos em geral como consumo de combustível, velocidade e direção do vento,
etc.;
Força: como cisalhamento, peso, compressão, tração, torque, etc.;
Concentração: líquidos ou gases como cloro, dióxido de azoto, dióxido de enxofre,
dióxido de carbono, hidrogênio, monóxido de carbono, sulfito de hidrogênio, e outros;
Dimensões (distância, altura e volume): como altímetros, sensores de nível, etc.;

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 2 – CONCEITOS TEÓRICOS SOBRE SENSORES
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 4
Precipitação: detecção de ponto de orvalho, pluviômetro;
Pressão: absoluta ou diferencial, pressão em meio gasoso, em meio líquido, etc.;
Radiação: infravermelha, ultravioleta, etc.;
Temperatura: de meio gasoso, de meio líquido, de superfície sólida;
Umidade: do solo, umidade relativa do ar, etc.
Outras Variáveis: resistividade do solo; visibilidade; fumaça; chama e outras.
2.2 SELEÇÃO DE SENSORES
Atualmente existe uma vasta disponibilidade de sensores no mercado. Alguns deles já
estão prontos para uso direto, contendo fontes de alimentação e componentes eletrônicos
compatíveis com entradas de registradores, computadores, controladores, etc. A seleção
do sensor adequado a uma aplicação ou projeto deve ser realizada atendendo as
seguintes questões:
Que propriedade se deseja medir?
Qual a faixa de medição desejada?
Que resolução e precisão são desejadas?
Qual a velocidade de resposta?
Qual o tipo de saída?
Qual nível de alimentação?
Após a seleção das questões básicas, a escolha do modelo e fabricante do sensor deve
ser efetuada através da documentação técnica correspondente. É comum obter as
informações de usuários que já possuem sistemas em funcionamento. Na documentação
técnica dos sensores devem estar presentes, pelo menos, a faixa de trabalho e a
precisão. A faixa de trabalho é o valor mínimo e o máximo que o sensor pode medir. Esta
informação pode constar em catálogos sob outros termos, como “span” ou “range”. A
precisão é relacionada ao erro que um sensor pode apresentar na leitura. Nas
documentações técnicas, é praticamente obrigatória a apresentação do valor do erro
apresentado pelo sensor durante a sua operação efetiva. Os erros podem ser
apresentados em relação ao valor lido, em relação ao fundo de escala ou uma faixa de
valor.
A precisão e a faixa de trabalho são os elementos mais importantes para a escolha do
sensor. Entretanto, ao efetuar a leitura de um catálogo, se depara com outros parâmetros
apresentados em grandezas como mV (milivolt), mA (miliampère), entre outras. A razão
de se apresentar essas unidades são os sinais de saída dos sensores. Nesse caso, os
sensores podem ser considerados os elementos que irão transformar a variável de

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 2 – CONCEITOS TEÓRICOS SOBRE SENSORES
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 5
interesse em um sinal elétrico que possa ser enviado a um elemento leitor. Esses tipos de
sensores são denominados transdutores, que são basicamente elementos que trans-
formam um tipo de sinal em outro.
Nos transdutores, devido ao valor esperado possuir uma unidade diferente do valor
disponível, a relação entre os dois valores é expressa pela sensibilidade, a relação entre a
unidade de saída pela unidade de entrada. Quanto maior a sensibilidade, maior o nível de
saída apresentado pelo transdutor para um determinado valor de entrada. A forma como
um transdutor transforma um tipo de variável em outro é conhecida como princípio de
transdução, cuja essência é baseada em fenômenos físicos, como por exemplo, a
alteração da dimensão de um elemento que modifica sua resistência elétrica
correspondente, como acontece em alguns transdutores de força.
2.3 CARACTERÍSTICAS DOS SENSORES
Linearidade: É o grau de proporcionalidade entre o sinal gerado e a grandeza física
correspondente. Quanto maior esta característica, mais fiel é a resposta do sensor ao
estímulo. Os sensores mais usados são geralmente aqueles que apresentam ações
lineares. Os sensores não lineares são usados em faixas limitadas, em que os desvios
são aceitáveis, ou com adaptadores especiais, que tornam lineares os sinais resultantes.
Faixa de atuação: É o intervalo de valores da grandeza em que pode ser usado o sensor.
Resolução: Define-se como resolução o menor incremento da grandeza física medida
que provoca uma mudança mensurável no nível do sinal de saída do sensor. No caso de
sensores digitais, a resolução vai estar representada pelo menor incremento da grandeza
física medida que provoca uma mudança de um bit na leitura da medição correspondente.
Sensibilidade: A sensibilidade é a relação de transferência do sensor, ou seja, a relação
entre a variação do sinal elétrico entregue na saída pela variação da grandeza física
medida.
Range (Faixa): Define-se como faixa ou range todos os níveis de amplitude da grandeza
física medida nos quais se supõe que o sensor pode operar dentro da precisão
especificada.
Histerese: É à relação em porcentagem (%) do ponto de operação e o ponto de
modificação da saída correspondente. Geralmente esta característica esta relacionada a
sensores com ações não lineares.
Exatidão ou Erro: Dada uma determinada grandeza física a ser medida, a exatidão é a
diferença absoluta entre o valor do sinal de saída entregue pelo sensor e o valor do sinal
ideal que o sensor deveria fornecer para esse determinado valor de grandeza física.
Relação Sinal / Ruído: É a relação entre a potência de um sinal qualquer entregue na
saída do instrumento e a potência do sinal de ruído agregado ao sinal original.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 2 – CONCEITOS TEÓRICOS SOBRE SENSORES
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 6
Resposta em Frequência: Qualquer sistema eletrônico que manuseia sinais elétricos
tem suas limitações em frequência, isto é, sinais em determinadas frequências são
adequadamente reproduzidos e em outras não. No caso dos sensores a grandeza física
medida varia sua amplitude com uma determinada faixa de freqüência. Desta forma
define-se resposta em frequência de um sensor como a faixa do espectro que esse
consegue reproduzir com precisão.
2.4 CLASSIFICAÇÃO DOS SENSORES
Os transdutores podem ser divididos em: ativos e passivos, digitais e analógicos.
Os transdutores ativos geram a variável de saída (sinal elétrico) excitada pela própria
variável de entrada, isto é, não necessita de alimentação externa. É o caso de um sensor
de radiação solar que utiliza o efeito termopilha como princípio de transdução. Conforme a
intensidade da radiação solar, este tipo de sensor gera uma corrente elétrica que é
proporcional à energia solar aplicada. Um outro exemplo é o do sensor de velocidade que
utiliza um gerador como elemento de transdução, gerando uma tensão elétrica
proporcional à rotação do seu elemento sensor. A figura 2 ilustra um transdutor ativo em
medições de velocidade de ventos.
Figura 2 – Transdutor ativo.
Os transdutores passivos necessitam de uma alimentação externa, como ilustra a figura
3. É o caso, por exemplo, de transdutor que utiliza a variação da resistência elétrica como
princípio de transdução. É possível encontrar sensor para medir a direção do vento que
utiliza potenciômetro para indicar a direção. Para medir a variação da resistência é
necessário aplicar uma tensão e observar a variação da corrente elétrica do circuito
associado ao mesmo. Para esse tipo de transdutor deve-se observar a “qualidade” da
alimentação. No exemplo, caso a tensão de alimentação varie, a leitura irá variar
proporcionalmente, introduzindo um erro adicional no sistema. Tais erros podem ser
compensados eletronicamente e os fabricantes devem indicar a variação permissível da
alimentação para o sensor utilizado. A vantagem dos sistemas ativos está na
possibilidade de se obter maior sensibilidade nos transdutores através do uso de
dispositivos amplificadores.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 2 – CONCEITOS TEÓRICOS SOBRE SENSORES
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 7
Figura 3 – Transdutor passivo.
Uma outra divisão se refere aos sensores digitais e analógicos. Os analógicos possuem
como característica sinais contínuos que portam na sua intensidade o valor de interesse.
Os digitais se caracterizam pela lógica de dígitos binários. Por exemplo, um sensor de
presença, como encontrado em portas automáticas de aeroportos, indica apenas a
presença ou a ausência de transeunte por meio de uma mudança de estado. Podem ser
utilizados também para medir rotações de sistemas mecânicos, onde registrando o
período da modificação de estado tem-se o tempo de uma rotação e, consequentemente,
a freqüência de giro. Medidores de velocidade de vento utilizam este princípio. A figura 4
ilustra um gráfico resultante desse processo de medição, a distância horizontal entre
pulsos é o tempo resultante. Portanto, o inverso do tempo entre ocorrências é a
frequência de rotação do sistema que é proporcional a velocidade do vento.
Figura 4 – Dados na forma de pulsos.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 3 – SENSORES FOTOELÉTRICOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 8
CAPÍTULO 3 - SENSORES FOTOELÉTRICOS
Os sensores fotoelétricos ou ópticos utilizam feixes de luz para detectar um objeto. O seu
princípio de funcionamento baseia-se em dois circuitos: um emissor do feixe de luz e o
receptor do mesmo. O emissor pode ser um fotodiodo e o receptor um fototransistor
sensível à luz vinda do emissor. A luz gerada pelo emissor deve atingir o receptor com
intensidade suficiente para fazer com que o sensor comute sua saída. A figura 5 ilustra o
princípio de funcionamento de um sensor fotoelétrico.
&Emissor
ReceptorAnalisador de
Frequência
Estado de
Saída
Sincronismo entre
Emissor e Receptor
Created with Visio
Figura 5 – Princípio de funcionamento.
O sinal de luz gerado pelo emissor óptico é modulado numa determinada frequência e/ou
nível. O receptor do sinal do sensor é acoplado a um filtro que somente considera sinais
com mesma natureza do emissor. Essa característica é empregada no sensor óptico para
minimizar os efeitos de possíveis interferências causadas por outras fontes luminosas que
não o emissor. A figura 6 ilustra um diagrama de blocos de um sensor óptico típico.
&
Analisador de
FrequênciaOscilador Emissor Receptor
Pré-
amplificadorDiscriminador
Indicador de
Estado
Estágio de
Saída
Fonte
Vcc
Saída
GND
G
Created with Visio
Figura 6 – Diagrama de blocos de operação de um sensor óptico.
A figura 4 divide-se da seguinte forma:
Oscilador: gera um sinal elétrico modulado e envia ao emissor;

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 3 – SENSORES FOTOELÉTRICOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 9
Emissor: transforma o sinal elétrico vindo do oscilador em um feixe de luz pulsante
(modulado), sendo executada a emissão do sinal físico;
Receptor: converte o sinal de luz pulsante em um sinal elétrico modulado;
Pré-amplificador: ajusta o sinal elétrico modulado vindo do receptor a níveis
compatíveis com o circuito eletrônico do sensor;
Analisador de frequência: compara a frequência do sinal recebido pelo receptor com
a frequência do sinal gerado pelo emissor, considerando apenas os sinais que sejam
compatíveis;
Discriminador: compara o nível do sinal recebido do analisador de frequência com
níveis preestabelecidos, definindo o estado do sensor;
Estágio de saída: recebe o sinal do discriminador e aciona a saída correspondente;
Led: indicador de estado, sendo acionado pelo discriminador;
Fonte de alimentação: a alimentação do circuito do sensor é feita por um regulador
interno.
Os sensores fotoelétricos são utilizados onde uma detecção sem contato físico do objeto
a ser detectado é requerida. Comparado com os sensores de proximidade, o sensor
fotoelétrico possui uma zona de sensoriamento muito maior. Com os sensores de
barreira, é possível monitorar distância com mais de 20 metros. Existem alguns tipos
básicos de sensores fotoelétricos.
3.1 SENSOR DE BARREIRA
Nos sensores fotoelétricos tipo barreira o transmissor e o receptor estão em unidades
separadas e são montado um de frente para o outro de modo que o receptor receba
sempre a luz emitida pelo emissor. O transmissor emite uma luz pulsante no alcance de
onda infravermelho ou vermelho visível. Quando o objeto a ser detectado interrompe o
feixe de luz, a saída é acionada, como indicado na figura 7.
Figura 7 – Princípio de funcionamento do sensor fotoelétrico tipo barreira.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 3 – SENSORES FOTOELÉTRICOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 10
Nos sensores de barreira, o feixe propaga somente em um sentido (do transmissor ao
receptor). Efeitos desfavoráveis como poeira no ar, sujeiras nas lentes, fumaça ou
serração, não interferem diretamente no sistema. Um sensor de barreira é distinguido pelo
alcance. As características da zona de sensoriamento podem ser facilmente descritas: um
objeto deve ter no mínimo o tamanho do eixo óptico, ou seja, o tamanho da superfície
sensora ou das suas lentes, para permitir uma detecção segura. Isso vale também para a
distância total entre o transmissor e receptor.
Os sensores tipo barreira têm funcionamento adequado com objetos opacos ou
translúcidos. No caso de objetos transparentes, o feixe de luz não é suficientemente
interrompido. Um sensor de barreira deve operar com sensibilidade alta para assegurar
uma máxima confiabilidade operacional. Uma exceção é a detecção de objetos
parcialmente transparentes. A sensibilidade deve ser reduzida conforme a necessidade.
Os modelos usados em automação industrial chegam até uma distância de 40 metros, já
nos modelos utilizados em automação predial pode-se trabalhar até uma distância de 100
metros. A figura 4 ilustra um conjunto de sensor foto-elétrico tipo barreira.
Figura 8 – Sensor de barreira.
3.2 SENSOR RETROREFLEXÍVEL
Nos sensores fotoelétricos do tipo retroreflexíveis o emissor e o receptor estão em uma
única unidade e um espelho prismático é instalado na frente do sensor, como ilustra a
figura 9. A luz emitida é refletida pelo refletor e chega ao receptor. Quando um objeto
interrompe este caminho a saída do sensor é acionada.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 3 – SENSORES FOTOELÉTRICOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 11
Figura 9 – Princípio de funcionamento de um sensor retroreflexível.
Os sensores retrorefletivos são adequados para detectar objetos opacos, translúcidos e
até transparentes, porque o feixe de luz precisa passar pelo objeto duas vezes, sendo
assim atenuadas duas vezes mais do que com um sensor de barreira. Um cuidado
especial deve ser tomado com objetos muito refletivos, pois a luz pode refletir no próprio
objeto e retornar ao receptor e assim o objeto não serão detectados. Neste caso deve-se
tomar cuidados especiais na instalação, montando o sensor a 45 graus da face refletiva
do objeto.
Há também os sensores refletivos com filtro polarizador incorporados. Esses filtros
instalados tanto no emissor como no receptor fazem com que somente a luz refletida pelo
refletor prismático chegue ao receptor. Esse tipo de recurso facilita a instalação no caso
de objetos refletivos, bem como no caso de objetos transparentes. Sensores
retrorefletivos sem filtro polarizador operam na área de infravermelho, sistemas com filtros
polarizadores operam na área de luz vermelha visível.
Uma vantagem dos sensores tipo refletivo em relação ao do tipo barreira é a facilidade de
instalação, pois somente a conexão de um cabo é necessária, uma vez que os
transmissores e receptores estão integrados em um único corpo.
As distâncias de trabalho deste tipo de sensor também são grandes e estão na faixa de
até 30 metros, aproximadamente. O tamanho da zona de reflexão pode ser facilmente
estabelecido, o objeto deve ter o tamanho da lente e do refletor, direcionados diretamente
em frente aos mesmos. Para uma detecção segura de objetos menores é utilizado um
refletor prismático menor.
3.3 SENSOR DIFUSO
Um sensor difuso é utilizado para a detecção direta de objetos. Assim como em um
sensor retroreflexívo, o transmissor e receptor estão incorporados em uma única unidade.
O transmissor emite luz que é refletida pelo próprio objeto a ser detectado e é visto pelo
receptor. Este sistema não avalia a interrupção do feixe de luz, mas a luz refletida pelo
objeto. A luz transmitida neste sistema é pulsante.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 3 – SENSORES FOTOELÉTRICOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 12
Neste tipo de sensor deve ser tomado cuidado especial com a cor do objeto. Como o
receptor detecta a luz refletida pelo objeto, a cor e rugosidade do mesmo influenciam no
índice de reflexão da luz, logo o sensor irá detectar objetos de cores claras a uma
distância maior do que os objetos de cores escuras. No entanto, essa desvantagem é
utilizada como recurso, por exemplo, na detecção de marcas em películas plásticas em
sistemas de embalagem.
A distância máxima entre este tipo sensor e o objeto a ser detectado está na faixa de 2
metros, bem menor que nos tipos barreira e refletivo, mas há grande vantagem na
facilidade de instalação. Uma vez que os transmissores e receptores estão integrados em
um único corpo, é necessário somente à ligação de um cabo.
Como no caso do sensor de barreira, um sensor difuso deve sempre ser operado com
sensibilidade máxima, para atingir a máxima confiabilidade operacional. Um plano de
fundo interferente é uma exceção. O plano de fundo deve ser suprimido reduzindo a
sensibilidade. Deve ser levado em consideração que não somente o alcance é reduzido
como também a zona morta em frente à lente aumenta. O sistema, dessa maneira, fica
mais susceptível a poeira, névoa, etc.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 4 – SENSORES INDUTIVOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 13
CAPÍTULO 4 - SENSORES INDUTIVOS
Os sensores de proximidade indutivos são dispositivos eletroeletrônicos capazes de
detectar a aproximação de peças, componentes, elementos de máquinas, etc. A detecção
ocorre sem que haja o contato físico entre o elemento e o sensor. Isto aumenta a vida útil
do sensor, uma vez que estes sensores não possuem peças móveis sujeitas a desgastes
mecânicos. Muitas das aplicações onde eram empregadas chaves fim-de-curso passaram
a optar pelos sensores indutivos devido a sua detecção sem contato e elevada vida útil.
Sensores indutivos operam segundo o princípio de que havendo um movimento relativo
entre um campo magnético e um condutor, uma corrente poderá ser induzida no condutor.
Usualmente, o condutor é um fio, e esse fio é enrolado de tal maneira a produzir uma
bobina. Assim que o campo magnético passa pela bobina, ele induz na mesma uma
tensão que é proporcional à intensidade do campo magnético, à velocidade do movimento
e ao número de espiras do fio da bobina. A relutância em circuitos magnéticos é o
equivalente à resistência em circuitos elétricos. Um caminho de baixa relutância é um
bom condutor magnético. Como exemplo, se um material ferromagnético é aproximado de
um imã permanente, o campo que circunda o imã aumenta em intensidade, fazendo com
que o fluxo seja redirecionado para passar através do material.
Os sensores de proximidade indutivos funcionam gerando um campo magnético à sua
frente. Eles consistem de uma bobina sobre um núcleo de ferrite, um oscilador, um
circuito detector e um circuito de saída. A bobina faz parte de um circuito oscilador que
gera um sinal de tensão senoidal. Quando um objeto-alvo metálico ferroso ou não-ferroso
penetra no campo, a perda de energia ocasionada pelas correntes de fuga no objeto,
resulta numa amplitude de oscilação menor. Um circuito detector então reconhece esta
mudança específica de amplitude e, dependendo da magnitude da mudança gera um
sinal de comando para o circuito de saída do sistema. A figura 10 ilustra o princípio de
funcionamento de um sensor indutivo.
Figura 10 – Princípio de funcionamento de um sensor indutivo.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 4 – SENSORES INDUTIVOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 14
À distância de atuação dos sensores indutivos não é muito grande, pode-se encontrar
modelos com distância sensora típica de 30 mm. E importante observar que os catálogos
dos fabricantes sempre informam a distância sensora nominal baseada em um objeto-alvo
padrão de aço, chamado alvo padrão. O alvo padrão é uma plaqueta quadrada de aço
doce, com 1 mm de espessura, com comprimentos dos lados iguais ao diâmetro da face
ativa. No entanto, à distância sensora operacional varia com o tipo de metal e necessita
ser multiplicada por um fator de redução. O fator de redução é usado para determinar o
alcance quando se deseja detectar outros materiais que não o aço doce padrão. A
composição química do objeto-alvo tem grande efeito no alcance de detectores de
proximidade indutivos. Caso o material de seu objeto-alvo seja de um outro material,
deve-se multiplicar a distância sensora informada através do fator de redução, conforme
tabela 1, para se determinar o alcance específico para aquele alvo.
MATERIAL DO OBJETO FATOR DE REDUÇÃO
Aço doce 1,00
Aço inoxidável 0,85
Latão 0,50
Alumínio 0,45
Cobre 0,40
Tabela 1 – Fator de redução para outros materiais diferentes do aço doce.
O tamanho e a forma do alvo também podem afetar o alcance. Os seguintes pontos
devem ser usados como orientação geral quanto ao tamanho e à forma de um objeto:
Alvos planos são preferíveis;
Alvos arredondados podem diminuir o alcance;
Materiais não-ferrosos normalmente diminuem o alcance (válido somente para as
versões de sensores que detectam todos os metais);
Alvos menores que a face ativa, tipicamente reduzem o alcance do sensor;
Alvos maiores que a face ativa podem aumentar o alcance;
Películas, folhas e filmes metálicos podem aumentar o alcance.
Para um alvo que executa movimento cíclico, aproximando e afastando-se do sensor
(especialmente para sensores digitais), a histerese resultante pode tornar-se uma
característica importante, uma vez que irá evitar oscilações (comutações) na saída do
sensor quando o mesmo estiver sujeito a choques e vibrações ou quando o alvo estiver
posicionado exatamente no ponto de alcance nominal do sensor. Os sensores indutivos
são utilizados em posicionamentos de peças em máquinas de produção automática,
elemento contador em equipamentos de seleção ou esteiras transportadoras, sensor de

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 4 – SENSORES INDUTIVOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 15
proximidade em portões ou elevadores, gerador de pulso para monitoramento de rotação,
detecção de posição de trilhos em pátios de ferrovia, etc.
A maioria dos sensores indutivos disponíveis no mercado é para a detecção de presença
(ou ausência), mas também há modelos que possuem uma saída analógica proporcional
à distância do objeto à face sensora que são utilizados em algumas aplicações
específicas.
Os sensores indutivos podem ser do tipo blindados e não blindados. A construção
blindada inclui uma faixa metálica que envolve o conjunto núcleo de ferrite/bobina. Já os
sensores não blindados não possuem essa faixa. A figura 11 apresenta um sensor
indutivo blindado e um sensor indutivo não blindado.
Figura 11 – Sensores indutivos blindados e não-blindados.
Atualmente há uma ampla gama de modelos com dimensões e formatos diversos de
sensores, o que permite a aplicação destes em locais de dimensões reduzidas. A figura
12 ilustra um sensor indutivo típico de mercado e a figura 13 representa o seu circuito
interno.
Figura 12 – Sensor indutivo típico.
Figura 13 – Circuito interno do sensor de proximidade indutivo básico.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 5 – SENSOR DE COR
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 16
CAPÍTULO 5 - SENSOR DE COR
A cor pode ser um importante fator na automação. Seja na identificação, classificação,
checagem ou avaliação de um produto. Os sensores de cor são utilizados para a
detecção sem contato de objetos opacos e transparentes, com base em suas cores. Os
transmissores emitem pulsos de luz nas três cores básicas, vermelho, verde e azul, os
quais são refletidos por um objeto. A luz recebida pelo receptor é amplificada, digitalizada
e avaliada por meio de um microprocessador. Se o valor do sinal corresponder a um valor
de referência lido anteriormente, a saída chaveada será ativada.
O sensor de cor tem a finalidade reconhecer cores distintas, previamente configuradas.
Alguns sensores baseiam-se no modelo de cores RGB, que é um modelo aditivo no qual
o vermelho, o verde e o azul são combinados de várias maneiras para reproduzir outras
cores. O nome do modelo e a abreviação RGB vêm das três cores primárias: vermelho,
verde e azul (Red, Green e Blue, em inglês).
Para reconhecer a cor, o sensor emite uma luz sobre os objetos a serem inspecionados e
através da radiação refletida calcula as coordenadas de cromaticidade (níveis de verde,
vermelho e azul), após isto, compara-as com os valores de referência das cores
previamente armazenadas. Se estes valores estiverem dentro de uma faixa de tolerância
determinada, é ativada uma de suas saídas lógicas.
Os sensores de cor podem detectar tanto as cores de objetos opacos através de suas
reflexões (luz incidente) como as de materiais transparentes em luz transmitida, por onde
é utilizado um refletor. No entanto, o sensor pode reconhecer as cores de objetos muito
brilhantes como sendo acromáticas na luz incidente. Este problema pode ser resolvido
inclinando-se o sensor.
Figura 14 – Sensor de cor.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 6 – SENSOR DE CORTINA
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 17
CAPÍTULO 6 - SENSOR DE CORTINA
As cortinas de luz (também chamadas de grades de luz, sensores fotoelétricos ou bordas
de portas) são formadas por uma fileira de elementos transmissores infravermelhos em
uma carcaça e por uma fileira de elementos receptores em uma carcaça separada. As
duas carcaças são montadas voltadas uma à outra para criar um feixe de luz, no qual
cada receptor reconhece a luz emitida por um ou mais transmissores. Quando um alvo
(tal como um braço ou uma perna) interrompe um ou mais feixes de luz, o receptor não vê
mais a luz de seus transmissores correspondentes e aciona o alarme para mudar de
condição.
Esses dispositivos podem possuir desde quatro até vinte feixes de luz entre os elementos
sensores. A atribuição é definida pelo comprimento de região a ser monitorada.
O tempo de resposta é um dos fatores mais importantes que devem ser considerados ao
ser calculados a distância mínima de segurança adequada. O tempo de resposta de uma
cortina de luz é o tempo que uma cortina de luz leva para transmitir o sinal de alarme à
interface de segurança ou ao elemento de controle da máquina depois que o campo de
proteção foi interrompido. O tempo de resposta geral do sistema de segurança da cortina
de luz inclui o tempo de resposta da cortina de luz, o tempo de resposta de qualquer
interface interposta (tal como um controlador de segurança ou controlador lógico
programável de segurança) e o tempo de resposta dos elementos de controle primários
da máquina (por exemplo, contato do motor ou relê de controle).
Esses dispositivos são utilizados principalmente em sistemas de segurança de máquinas
de indústrias metalúrgicas em que os operários podem sofrer graves ferimentos em
função da movimentação das máquinas, como prensas ou esteiras transportadoras. Além
disso, podem ser utilizados na detecção de pessoas em elevadores (sistemas
antifechamento nas portas) ou em controle de acesso a estacionamentos.
Figura 15 – Sensor de cortina de luz.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 7 – ENCODER
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 18
CAPÍTULO 7 - ENCODER
O encoder é um transdutor que converte um deslocamento mecânico em pulsos elétricos.
Ele realiza as chamadas “medidas indiretas”, isto é, mede o deslocamento linear de um
eixo qualquer através do deslocamento angular do eixo do motor, através de um
acoplamento (conexão mecânica direta ao eixo do motor) ou transmissão de movimento
através de correias e polias. A figura 16 ilustra sua estrutura.
Figura 16 – Estrutura de um encoder.
O disco perfurado é o responsável pela passagem ou não da luz ate os elementos
sensíveis, como mostra a figura 17.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 7 – ENCODER
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 19
Figura 17 – Elementos sensíveis do encoder.
Na figura 18, pode-se observar os três sinais do encoder. Os sinais A e B são os que
fornecem a indicação da posição e também o sentido de giro. Este é determinado pela
fase dos canais, ou seja, se o canal A estiver 90º avançado em relação a B, o encoder
estará girando no sentido horário. Se o canal A estiver 90º atrasado em relação a B, o
encoder estará girando no sentido anti-horário.
Periodo do Sinal
360º
Canal A
Canal B
Pulso de Referência
Resolusão90º
Created with Visio
Figura 18 – Sinais do encoder
Os cinco principais parâmetros que determinam a performance do encoder são:
Resolução: É o menor incremento de contagem que o dispositivo pode fornecer.
Trata-se do numero de pulsos emitidos por rotação. Quanto maior o numero de pulsos,
maior a resolução e vice-versa.
Graduação: É a distancia entre janelas da escala graduada.
Precisão: Trata-se por precisão o erro real do transdutor.
Interpretação: É a contagem das bordas do sinal digitalizado.
Classe de precisão: É a faixa de erro utilizada para classificar o encoder.
Basicamente, há dois tipos de encoder: o incremental e o absoluto. O encoder
incremental gera pulso para a eletrônica subsequente, porem, quando parado, não há
sinal algum na sua saída. Isto significa que, para a máquina saber onde ela esta, é

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 7 – ENCODER
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 20
necessária a movimentação do encoder. A partir daí a maquina conta o numero de pulsos
gerados. Uma maquina equipada com este tipo de encoder ao ser desligada, necessita de
um novo referenciamento. O encoder absoluto gera uma palavra de 6 a 8 bits de uma
única vez, e não serialmente. Além de maior precisão, uma maquina que usa este tipo de
dispositivo não necessita ser referenciada a pós seu desligamento. A figura 19 mostra a
diferença entre os discos perfurados do encoder incremental e absoluto. A equação (10)
representa a formula utilizada para dimensionar um encoder.
Figura 19 – Disco perfurado do encoder incremental e absoluto.
sInt
PANp
Re* (10)
onde Np é o número de pulsos do encoder; PA é o passo de fuso das esferas da
maquina; Int é o fator de interpolação e Res é a resolução da maquina.
7.1 ENCODER ABSOLUTO
O elemento básico de um encoder absoluto é um disco de vidro estampado por um
padrão de trilhas concêntricas. Feixes de luz atravessam cada trilha para iluminar
fotosensores individuais, o qual fornece sempre a posição absoluta de um objeto e não
existe contato físico para que ocorra a detecção. Feita essa detecção, definimos a
posição absoluta do encoder através de um código.
Figura 20 – Encoder de código binário padrão.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 7 – ENCODER
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 21
O código mais empregado é o binário, pois este é facilmente manipulado por um circuito
relativamente simples e, com isso, não se faz necessário nenhum tipo de conversão para
se obter à posição real do encoder. O código é extraído diretamente do disco (que está
em rotação). O sincronismo e a aquisição da posição no momento da variação entre dois
códigos tornam-se muito difíceis, tornando-os mais susceptíveis a erros, como ocorre com
os seguintes códigos binários consecutivos, o 7 (0111) e o 8 (1000), onde é possível notar
que a variação do nível zero para um e um para zero ocorre em todos os bits, e uma
leitura feita no momento da transição pode resultar em um valor completamente errado.
Figura 21 – Encoder absoluto com base binária padrão.
Como o mau alinhamento das fotocélulas pode causar erros de leitura, uma solução
comum é o uso de um disco estampado em Código Gray, em lugar do código binário
padrão. O Código Gray é um código digital com a propriedade de que duas palavras
códigos consecutivas diferem apenas de 1 bit, conforme pode ser visualizado na fig. 22.
Figura 22 – Encoder absoluto com base no código de Gray.
7.2 ENCODER INCREMENTAL
O encoder incremental possui apenas uma trilha com dentes igualmente espaçados
(figura 23). A posição do objeto é determinada pela contagem do número de dentes que
passam na frente de um fotossensor, onde cada dente representa um ângulo conhecido.
Este sistema requer um ponto de referência inicial.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 7 – ENCODER
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 22
Figura 23 – Encoder incremental.
A resolução de um encoder incremental é dada pela relação pulsos/revolução
(normalmente chamado de PPR), isto é, o encoder gera uma certa quantidade de pulsos
elétricos por uma revolução dele próprio. Para se determinar à resolução basta pegar, por
exemplo, o número de pulsos que passam em uma revolução propriamente dita e dividi-lo
por um ângulo de uma revolução (360°). Se um encoder fornecesse 720 pulsos/revolução,
neste caso teríamos uma resolução de 2 pulsos por grau da trilha, ou poderíamos
interpretar que seria gerado um pulso elétrico a cada 0,5º mecânicos.
A precisão de um encoder incremental depende de fatores mecânicos, elétricos e
ambientais, que são: erros na escala das janelas do disco, excentricidade do disco,
excentricidade das janelas, erro introduzido na leitura eletrônica dos sinais, temperatura
de operação e nos próprios componentes transmissores e receptores de luz.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 8 – MOTOR DE PASSO
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 23
CAPÍTULO 8 - MOTOR DE PASSO
Trata-se de um dispositivo que transforma um pulso elétrico em um movimento angular de
rotação. O eixo do motor roda por um ângulo específico a cada pulso aplicado. Este
ângulo, ou deslocamento efetuado repete precisamente com cada pulso aplicado, através
de uma lógica de amplificação.
Devido a este movimento angular fixo, preciso e repetitivo, este tipo de motor possui a
habilidade para controle de velocidade, posição ou direção de cargas. Assim, a partir de
uma posição inicial, pode-se deslocar uma carga, em uma certa direção, a uma distância
proporcional ao número de pulsos aplicados ao motor e, invertendo-se o sentido do
deslocamento, retorna-se a carga a posição inicial aplicando-se o mesmo número de
pulsos anterior. A repetibilidade deste movimento é muito precisa, podendo ter um erro
geralmente menor que 5% em um único passo. Este erro é não acumulativo em relação à
distância posicionada, ou ao número de vezes que se reposiciona a carga.
O motor de passo é geralmente controlado por uma tensão contínua aplicada por uma
lógica através de um circuito amplificador (“driver”). Os tamanhos comuns dos passos
variam entre 0,8º até 30º por passo.
Posicionamentos lineares podem ser conseguidos, transformando o movimento angular
em linear por meio de polias acopladas ao eixo do motor.
Os motores de passo podem ser divididos, dependendo da construção, em três grupos
principais:
Motor de campo magnético permanente (PM);
Motor de relutância variável (VR);
Motor híbrido.
Os motores dos tipos campo magnético permanente e relutância variável são
normalmente encontrados na configuração de três ou quatro fases, enquanto que os do
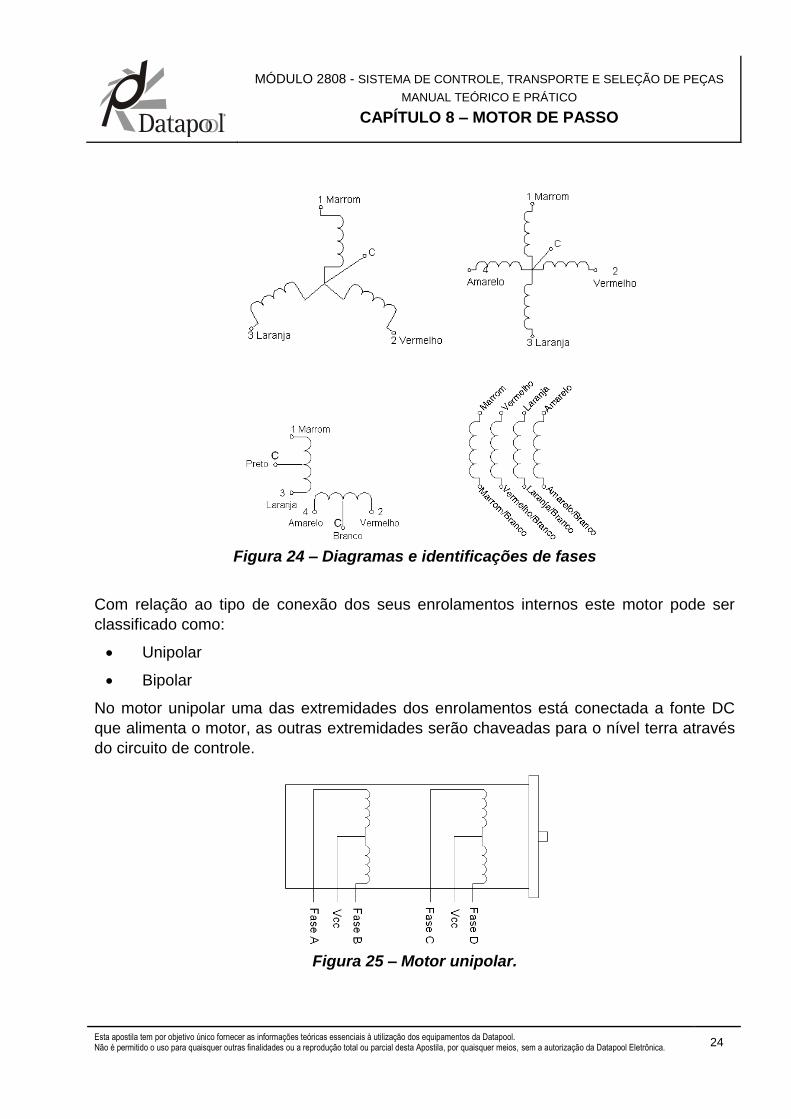
tipo híbrido estão somente disponíveis na forma de quatro fases. A figura 24 mostra os
diagramas e identificações de fases para os diversos tipos. As cores das terminações dos
enrolamentos indicadas ainda não foram padronizadas, porém são usadas por grande
número de fabricantes.
MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 8 – MOTOR DE PASSO
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 24
Figura 24 – Diagramas e identificações de fases
Com relação ao tipo de conexão dos seus enrolamentos internos este motor pode ser
classificado como:
Unipolar
Bipolar
No motor unipolar uma das extremidades dos enrolamentos está conectada a fonte DC
que alimenta o motor, as outras extremidades serão chaveadas para o nível terra através
do circuito de controle.
Figura 25 – Motor unipolar.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 8 – MOTOR DE PASSO
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 25
No motor bipolar as extremidades dos enrolamentos estão disponíveis extensamente e o
circuito de controle deverá aplicar tensões de polaridades inversas nestes enrolamentos,
conforme descrito posteriormente.
Figura 26 – Motor bipolar.
8.1 MOTOR DE CAMPO MAGNÉTICO PERMANENTE
O motor de campo magnético permanente emprega um rotor radial permanente
magnetizado (imã). Quando cada fase está energizada na sequência de um modo de
operação, o fluxo resultante no estator reage com o fluxo do rotor, alinhando os dois
campos ao longo do eixo de relutância mínima. Isto resulta no movimento de um passo do
rotor, quando cada fase do estator está energizada.
Estes motores são disponíveis com ângulos de passos de 90º, 120º e na faixa de 7,5º a
18º.
Os motores PM têm como vantagens bom torque residual e bom amortecimento. E como
desvantagens alta inércia do rotor e funcionamento afetado por modificações nas forças
magnéticas do campo.
Figura 27 – Diagrama esquemático de um motor PM de quatro fases.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 8 – MOTOR DE PASSO
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 26
8.2 MOTOR DE RELUTÂNCIA VARIÁVEL
Este motor consiste de um rotor cilíndrico com dentes radiais e estator que tem um
número diferente de dentes do rotor, com bobinas colocadas em torno de cada dente do
estator. A figura 28 mostra a configuração de um motor VR de três fases e passo de 15º.
Quando uma das fases do motor está energizada, o rotor moverá para a posição onde
quatro de seus dentes, alinhem com os dentes energizados do estator. O deslocamento
do rotor de sua posição resultará no desenvolvimento de um toque de ação contrária.
O rotor de ferro mole não tem praticamente magnetismo residual, o motor não
desenvolverá torque na condição desenergizado. Os motores de relutância variável são
obtidos com passos de 15º e podem operar em velocidade de passos rápido e tem boa
resposta devido à pequena inércia do rotor. Existem, entretanto, tendências a
ressonâncias e oscilações devido à ausência de amortecimento inerente.
Estes motores têm como vantagens o auto torque, em relação à inércia, e a capacidade
de altas velocidades de passos. Porém, apresentam como desvantagens o fato de não
possuir torque residual e estão sujeitos à ressonância.
Figura 28 – Diagrama esquemático de um motor VR de três fases.
8.3 MOTOR HÍBRIDO
A construção de um motor híbrido representa a combinação dos dois tipos descritos
anteriormente. O rotor consiste de um cilindro magnético, axialmente magnetizado,
montado em um eixo e colocado entre duas capas de ferro laminadas ou sólidas.
O estator em oito pólos salientes, com dentes radiais em cada face do pólo, o qual
contém enrolamentos bifilares.
As principais características deste tipo de motor são seus pequenos ângulos de passo,
alto torque e habilidade para operar velocidades de passos rápidos.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 8 – MOTOR DE PASSO
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 27
Suas vantagens são a de fornecer torque residual, capacidade de alta velocidade de
passo e alta resolução. Porém, como desvantagens possuem alta inércia do rotor e
ressonâncias podem ocorrer para certas velocidades.
Figura 29 – Laminação usada na construção de motores híbridos.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 9 – MOTOR DC
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 28
CAPÍTULO 9 - MOTOR DC
Esses tipos de motores são conhecidos por seu controle preciso de velocidade e por seu
ajuste fino e são muito utilizados em aplicações que exigem tais características. Os
motores de corrente contínua teve um grande aumento nos últimos anos, devido à
eletrônica de potência. Fontes estáticas de corrente contínua com tiristores confiáveis, de
baixo custo e manutenção simples, substituíram os grupos conversores rotativos. Com
isso, motores de corrente contínua passaram a constituir alternativa mais atrativa em uma
série de aplicações.
O funcionamento básico do motor DC está fundamentado na força de Lorentz aplicada em
uma carga em movimento dentro de um campo magnético (F = qvB). Seja uma espira de
corrente inserida num campo magnético criado por um ímã permanente, em que há uma
corrente criada por uma bateria (fonte DC). De uma forma simplificada, a simples
passagem desta corrente faz com que apareçam duas forças de sentidos contrários,
aplicadas uma em cada lado da espira. Estas forças criam um torque que faz a espira
girar, transformando a energia elétrica da corrente em energia cinética num eixo acoplado
às espiras. A direção da rotação depende da polaridade da bateria e da direção das linhas
de campo magnético criadas pelo ímã.
Figura 30 – Motor DC.
Um motor real é composto de conjuntos múltiplos de espiras, dispostas de tal forma que
as forças que agem em cada espira sejam somadas e produzam um torque significativo
para uma possível aplicação.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 9 – MOTOR DC
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 29
9.1 MODULAÇÃO POR LARGURA DE PULSO (PWM)
Uma das técnicas utilizadas para o controle da velocidade de um motor DC é a técnica de
modulação por largura de pulso.
A figura 31 ilustra o princípio de funcionamento de um PWM aplicado a controle de
potência, onde tem-se um circuito imaginário formado por um interruptor de ação muito
rápida e uma carga a ser controlada.
Figura 31 – Interruptor de ação.
Quando o interruptor está aberto não há corrente na carga e a potência aplicada é nula.
No instante em que o interruptor se fechado, a carga recebe a tensão total da fonte e a
potência aplicada é máxima.
Para obter uma potência intermediária, por exemplo, 50%, aplicada à carga é necessário
que a chave seja aberta e fechada rapidamente de modo a ficar 50% do tempo aberta e
50% fechada. Isso significa que, em média, tem-se metade do tempo com corrente e
metade do tempo sem corrente (figura 32).
Figura 32 – Tempos de abertura e fechamento da chave .
A potência média e, portanto, a própria tensão média aplicada à carga é neste caso 50%
da tensão de entrada. Note que o interruptor fechado pode definir uma largura de pulso
pelo tempo em que ele fica nesta condição, e um intervalo entre pulsos pelo tempo em
que ele fica aberto. Os dois tempos juntos definem o período e, portanto, uma freqüência
de controle.
A relação entre o tempo do pulso e a duração de um ciclo completo de operação do
interruptor define ainda o ciclo ativo, conforme mostra a figura 33.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 9 – MOTOR DC
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 30
Figura 33 - Relação entre o período e o pulso em nível alto.
Variando-se a largura do pulso e também o intervalo de modo a termos ciclos ativos
diferentes, pode-se controlar a potência média aplicada a uma carga. Assim, quando a
largura do pulso varia de zero até o máximo, a potência também varia na mesma
proporção, conforme está indicado na figura 34.
Figura 34 – Variação da potência aplicada à carga
Este princípio é usado no controle PWM, onde a largura de pulso é modulada (variada) de
modo a controlar o ciclo ativo do sinal aplicado a uma carga e, com isso, a potência
aplicada a ela.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 10 – SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica.
31
CAPÍTULO 10 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
O sistema de controle, transporte e seleção de peças é constituído por uma esteira
transportadora equipada com sensores e atuadores, para detecção, transporte e seleção
de peça. Os elementos disponíveis neste equipamento são: sensor de cor, sensores
reflexivos, sensores indutivos, sensor de barreira, sensor de rotação (encoder), motor de
passo e motor de corrente contínua (DC).
O módulo tem por finalidade reconhecer características de um objeto, por intermédio dos
sensores¸ bem como separar cada objeto de acordo com as características configuradas
pelo usuário. Esta tem a capacidade de separar até três tipos distintos de objetos e caso
não seja satisfeita a condição imposta pelo usuário, o objeto será considerado um rejeito
e separado dos demais. Os objetos podem ser separados por cor, tamanho e tipo de
material.
O controle eletrônico inteligente pode ser realizado de três formas: via Controlador Lógico
Programável (CLP2301), via PC (utilizando sistema de aquisição de dados) ou via
microcontrolador (módulo SDM9431). Estes equipamentos foram programados de forma a
interpretar o sinal de cada elemento do módulo. Em um primeiro instante, é necessário
que o usuário configure os controladores para que o mesmo possa receber a informação
do tipo de seleção que o processo exige. Após a atuação do controlador, os mesmo ficam
responsáveis pelo recebimento dos sinais vindo dos sensores e transmissão de sinais
para os atuadores.
Figura 35 – Sistema de controle, transporte e seleção de peças.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 11 – CLP 2301 CONTROLADOR LÓGICO PROGRAMÁVEL
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 32
CAPÍTULO 11 - CLP2301 CONTROLADOR LÓGICO PROGRAMÁVEL
O CLP 2301 possui toda funcionalidade para implementar um controlador completo com
12 entradas digitais, 12 saídas digitais, 8 entradas analógicas e 1 saída analógica. A
tabela 2 apresenta suas principais características:
PARÂMETROS ESPECIFICAÇÕES OBSERVAÇÕES
Alimentação 5VDC
Consumo 185 mA
Memória de programa 256/512 kbytes Flash ROM.
Memória de dados retentiva 128 kbytes RAM estática.
Canal de comunicação COM1 RS232-C RS485 Operação ponto a ponto ou em rede
multiponto.
Canal de comunicação COM2 RS232-C Operação ponto a ponto.
Entradas digitais isoladas 12 canais Isolação óptica, sinais de 121 a 30VDC, Tipo
PNP.
Saídas digitais isoladas 12 canais Isolação óptica, Tipo PNP a transistor para
sinais de 5 a 24VDC/500mA com proteção
contra curto.
Entradas analógicas 8 canais Resolução de 10 bits para sinais de 0-
10VDC, 0-20mA e 4-20mA e PT100 3 fios.
Saídas analógicas 1 canal Resolução de 10 bits e para sinais de 0-
20mA, 4-20mA (0-10VDC via resistor
externo).
Gerador de frequência 1 canal Canal de saída digital O8 pode operar como
gerador de frequência programável de 16 a
2000Hz, duty ciclo fixo 50%.
Interface para encoder 1 canal Entradas I0, I1 e I2. Operar com ou sem sinal
de sincronismo. Freq. Max. de contagem
2000Hz
Interface para contador rápido 1canal Entradas I0 e I1. Operar com ou sem sinal de
sincronismo. Freq. Max. de contagem de
2000Hz.
Tabela 2 – Principais características.
O CLP vem montado em gabinete metálico, com pintura eletrostática com tinta epóxi, e
fixado em cartão frontal feito em policarbonato, com adesivo, impresso em serigrafia
indelével a nomenclatura dos componentes presentes neste cartão, os quais são citados
a seguir:

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 11 – CLP 2301 CONTROLADOR LÓGICO PROGRAMÁVEL
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 33
CLP e interface homem/máquina (IHM)
Chave LIGA/DESLIGA (CH1) para alimentação de todo o equipamento;
Fusível (F1) para proteção da fonte;
Conector (CN1) de entrada para o cabo de alimentação AC;
Conectores de comunicação CN2 e CN3 localizados no painel traseiro e conector de
comunicação CN4 localizado na parte lateral do gabinete;
Conector DB9 (RS232) para entrada de cabo de comunicação com o PC;
Borne com sinal de alimentação disponível (24V).
O gabinete possui ainda uma fonte interna para alimentação do CLP (100 a 240VAC) e
placa com conector traseiro com os pontos do CLP disponíveis em borneiras.
A figura 36 ilustra o CLP2301.
Figura 36 – CLP2301 – Controlador lógico programável.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 11 – CLP 2301 CONTROLADOR LÓGICO PROGRAMÁVEL
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 34
11.1 PAINEL TRASEIRO
Todos os pontos de I/O do CLP 2301 – Controlador Lógico Programável está disponível
na parte traseira do mesmo. A figura 37 mostra como estes pontos estão distribuídos. O
controlador é formado por um subsistema processador completo com memória Flash,
ROM, RAM, acoplada a um subsistema de I/O digital com 12 entradas digitais, 12 saídas
digitais, 8 entradas analógicas e 1 saída analógica. Quando acoplado a uma fonte de
alimentação este módulo se torna um controlador completo. Através do conector traseiro
do equipamento, pode-se acessar a interface de processo deste módulo. Esta interface é
composta por duas réguas de borne com 36 pontos (CN2 e CN3), dispostos verticalmente
na placa traseira.
CONECTOR DE ACESSO- CLP 2301
EA0
EA1
EA2
EA3
EA4
EA5
EA6
EA7
SA0
VCC
DGND
AGND
SD1
SD0
SD2
SD3
SD4
SD5
SD6
SD7
ED0
ED1
ED2
ED3
ED4
ED5
ED6
ED7
CN2
SD8
SD9
SD10
SD11
ED8
ED9
ED10
ED11
CN3
Created with Visio
Figura 37 – Painel traseiro do CLP 2301.
11.2 CONECTOR LATERAL
O CLP 2301 possui um conector lateral (CN4) através do qual é feita a conexão via cabo DB-25 ao módulo 2808, de maneira mais simples e rápida.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 11 – CLP 2301 CONTROLADOR LÓGICO PROGRAMÁVEL
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 35
11.3 MÓDULO DE INTERFACE HOMEM / MÁQUINA
O CLP 2301 vem equipado com um painel de interface com o operador composto de um teclado com 15 teclas, incluindo10 teclas de função programáveis e 10 led’s programáveis. Um display de cristal líquido, equipado com backlight disponibiliza duas linhas com 16 caracteres cada para apresentação de mensagens e valores do processo a ser controlado. O painel com disposição das teclas é apresentado na figura 38:
Figura 38 – Interface Homem / Máquina.
As teclas possuem a seguinte funcionalidade:
Enter: Permite ao usuário confirmar uma opção escolhida entre as existentes ou uma entrada do dado que estiver sendo solicitado pela interface.
Cancela: Permite ao usuário cancelar uma função selecionada ou uma entrada de dados.
Seta para Cima: Entra no menu de funções disponível para usuário. Estas funções permitem a supervisão e/ou programação de variáveis do tipo Memória Inteira (M) e Real (D) e Contato Auxiliar (R). Propicia acesso a especificação de senhas de acesso e do relógio de tempo real. Durante programação de contatos auxiliares permite a seleção ON e OFF para o contato a ser programado.
Seta para esquerda: Durante a entrada de dados serve para retornar o cursor para a esquerda, apagando o ultimo caracter digital pelo usuário (backspace). Ainda permite retornar para opção anterior na qual se está programando, percorrendo opções no sentido circular para trás.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 11 – CLP 2301 CONTROLADOR LÓGICO PROGRAMÁVEL
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 36
Seta para Direita: Permite comutar entre todas as outras opções disponíveis no menu de função percorrendo as opções no sentido circular para frente.
Ponto Decimal: Esta função é realizada pela tecla seta para cima, durante uma entrada de dados reais, tendo a função de separar a parte inteira da fracionária.
Sinal: Esta função é realizada pela tecla seta para a direita, durante uma entrada de dados, permitindo digitar valores negativos. Para entrar com um valor negativo digitar o número desejado e pressionar a tecla seta para a direita.
Numéricas: Tecla para a entrada de dados numéricos inteiros e/ou reais. Podem também ser utilizadas como teclas de função. Quando o display estiver apresentando um valor para ser alterado (modo de entrada de dados), as teclas 0...9 operam como teclas numéricas, permitindo a digitação de valores que serão apresentados no display. Quando a tecla não estiver no modo de entrada de dados, as teclas 0...9, quando pressionadas, operam como teclas de função, quando programadas para este fim.
Figura 39- Funcionalidade das teclas do CLP 2301.
NOTA Para maiores informações sobre o equipamento CLP2301, consultar material teórico e prático fornecido junto com o equipamento.
11.4 CONEXÃO ENTRE O MÓDULO 2808 E CLP2301
Para a realização do controle do módulo 2808 utilizando o CLP 2301 é necessário efetuar
as ligações entre estes equipamentos. Além dos pontos de I/O, responsáveis pela
comunicação entre os equipamentos, o circuito eletrônico do módulo 2808, necessita ser
alimentado por uma fonte de 24V, cujo sinal é fornecido pela fonte do CLP 2301, através
das ligações VCC e DGND. A figura 39 identifica os pontos (internamente) de entrada do
CLP 2301, localizados no conector CLP do módulo 2808.
I2 I3 I4 I5 I6 I7 ENCO O0I124V GND I0 O5 O6 O7 ADDR0O1 O2 O3 O4
CLP
ADDR1ADDR2
Created with Visio
Figura 40 – Identificação dos pontos do conector CLP do módulo 2808.
A régua de bornes localizada na parte traseira do CLP 2301 deve ser ligada ponto a ponto
(internamente) no conector CLP do módulo 2808, conforme indicado na tabela 3, mas, de
modo a simplificarmos o processo de ligação, foi projetado um cabo de comunicação,
onde basta conectarmos via cabo DB-25 o conector CN4 localizado no CLP ao conector

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 11 – CLP 2301 CONTROLADOR LÓGICO PROGRAMÁVEL
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 37
DB-25 denominado “CLP” presente no módulo 2808. Maiores informações sobre estas
ligações e cabos estão disponíveis no manual de Manutenção do módulo 2808.
CLP2301 MÓDULO 2808 DESCRIÇÃO
CONECTOR CN2 CONECTOR CLP
ED0 I0 Entrada digital I0.
ED1 I1 Entrada digital I1.
ED2 I2 Entrada digital I2.
ED8 I3 Entrada digital I8.
ED4 I4 Entrada digital I4.
ED5 I5 Entrada digital I5.
ED6 I6 Entrada digital I6.
ED7 I7 Entrada digital I7.
ED3 ENCO Entrada do contador rápido (Encoder) I3.
SD0 O0 Saída digital O0.
SD1 O1 Saída digital O1.
SD2 O2 Saída digital O2.
SD3 O3 Saída digital O3.
SD4 O4 Saída digital O4.
SD5 O5 Saída digital O5.
SD6 O6 Saída digital O6.
SD7 O7 Saída digital O7.
CONECTOR CN3 CONECTOR CLP
VCC +24V Tensão de referência para saídas.
DGND GND Tensão referência para entradas.
SD8 ADDR0 Saída para endereçamento 0.
SD9 ADDR1 Saída para endereçamento 1.
SD11 ADDR2 Saída para endereçamento 2.
Tabela 3 – Ligação entre módulo 2808 e CLP 2301.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 12 – SDM 9431 MICROPROCESSADOR
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 38
CAPÍTULO 12 – SDM 9431 MICROPROCESSADOR
O Módulo SDM 9431 é um sistema de desenvolvimento para os microcontroladores da
família 8051. A figura 40 ilustra o módulo SDM 9431.
Figura 41 – Módulo SDM9431.
O mesmo poderá operar no MODO TECLADO, onde toda a programação será
desenvolvida no próprio equipamento, através do seu teclado e do seu display de cristal
líquido. Um computador compatível com IBM-PC poderá ser usado para armazenagens
em unidades de disquetes dos programas desenvolvidos, através de comunicação serial.
O sistema também poderá operar no MODO PC, onde toda a programação será
desenvolvida em um computador compatível com IBM-PC, interligado através de
comunicação serial. Neste modo toda a programação, verificação de áreas de memórias e
registros será apresentada no vídeo do computador IBM-PC. O programa SDM.EXE,
desenvolvido pela DATAPOOL, será utilizado para a comunicação e programação do
módulo SDM 9431. Este programa possibilita execuções, depurações e verificações para
o sistema de desenvolvimento de microcontroladores SDM 9431, incluindo utilizações de
arquivos no padrão HEX gerados por programas em linguagem Assembly, ou linguagem
C, disponíveis para a família 8051. Por exemplo, AVCASE da Avocet Systems, Inc.
As características técnicas do Módulo SDM 9431 estão resumidas a seguir:
Sistema está baseado no microcontrolador 8031, que é a versão sem ROM interna do
8051. O qual possuem uma arquitetura de barramento de dados de 8 bits, instruções
de operação de bits, duas fontes de interrupções externas com dois níveis de
prioridades programáveis, dois contadores/temporizadores de 16 bits, porta serial com
quatro modos de programação, 32 linhas de entrada/saída endereçáveis bit a bit.
Memória RAM externa de 32K bytes, com opção de se usar memória de 8K bytes,
acessada como memória de programa, ou como memória de dados, para possibilitar
desenvolvimento de programas.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 12 – SDM 9431 MICROPROCESSADOR
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 39
Memória EPROM externa de 16K, contendo o programa monitor do sistema SDM
9431, que permite a execução de programas em tempo real, no modo passo a passo e
no modo "breakpoint", que será a execução de um programa até um ponto pré-
determinado, entretanto neste último caso, a execução não será realizada em tempo
real. O programa monitor permite que o usuário verifique/altere registros, memórias de
programa e memórias de dados, como também a comunicação serial com um
computador compatível com IBM-PC tanto na operação no modo teclado, quanto na
operação no modo PC.
Teclado de 24 teclas para comandos e dados hexadecimais, usados no modo teclado,
ou para experiências de entradas de dados, quando operando no modo PC.
Display de cristal líquido do tipo alfanumérico, de duas linhas por 16 colunas, para
comunicação no modo teclado e para experiências de saídas de dados, quando
operando no modo PC.
8 led's e 8 chaves do tipo "dip switch" para experiências de entrada e saída binária.
Um conversor análogo-digital de oito canais multiplexados, de oito bits cada, para
implementações de experiências analógicas.
Um conversor digital-analógico de um canal de oito bits para implementações em
controle analógico.
Sinais de barramentos estão amplificados e disponíveis em conectores e em
barramentos do tipo soquete, possibilitando experiências de análise e
desenvolvimento de circuitos de interface. Com possibilidade de endereçamentos já
decodificados e disponíveis para o usuário.
Um protoboard de 550 pontos para montagem de circuitos externos ao SDM 9431.
Fontes de alimentação de +5 (3A), +12 (1A) e -12 (1A) volts.
12.1 CONECTOR SDM 9431
O módulo SDM 9431 possui um conector (CN12) com todos os pontos do microprocessador disponível, o que permite a conexão do módulo a outros equipamentos. Essa conexão é realizada através de cabo flat de 40 vias. A figura ilustra a identificação dos pontos do conector CON12 do módulo SDM 9431.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 12 – SDM 9431 MICROPROCESSADOR
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 40
IO5
CO
N1
2
D2
D3
D1
D0
D4
D5
D6
D7
RESET
INT1
IO7
WR#
PSEN#
IO6
T0
RD#
T1
ALE
MS6
A7
A13
A12
A14
A15
A11
A10
A9
A8
A6
+12V
A3
A2
A4
A5
A1
A0
-12V
GND
+5V
Created with Visio
Figura 42 – Identificação dos pontos do conector CON12 do módulo SDM 9431.
NOTA: Para maiores informações sobre o equipamento SDM9431, consultar material teórico e prático fornecido junto com o equipamento.
12.2 CONEXÃO ENTRE O MÓDULO 2808 E SDM 9431
Para a realização do controle do módulo 2808 utilizando o módulo SDM 9431 existem
ligações entre estes equipamentos. A figura 39 identifica os pontos de entrada do SDM
9431, localizados no conector microprocessador do módulo 2808.
D2
D3
D1
GN
D
D0
AD
DR
0
D4
D5
D6
D7
MICROPROCESSADOR
AD
DR
1
AD
DR
2
Created with Visio
Figura 43 – Identificação dos pontos do conector microprocessador do módulo
2808.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 12 – SDM 9431 MICROPROCESSADOR
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 41
A conexão entre estes equipamentos é realizada através de um cabo flat de 40 vias,
fornecido junto com os equipamentos, ou seja, deve-se ligar o conector CON12 do
módulo SDM 9431 ao conector tipo DB-25 “Microprocessador” do módulo 2808. No
entanto, esta ligação requer um certo cuidado. Ao realizar este procedimento é necessário
identificar um ponto do conector, por exemplo, “D0” do módulo 2808, e manusear o cabo
de forma a conectar este mesmo ponto no pino identificado por D0 do módulo SDM 9431.
Tal identificação deve estar marcada no cabo, e também pode ser obtida conferindo-se as
ligações do cabo, entre o conector DB-25 e o conector Latch 40 pinos, conforme a Tabela
4 à seguir:
CONECTOR LATCH 40 PINOS CONECTOR DB-25
1 (D0) 1
3 (D1) 2
5 (D2) 3
7 (D3) 4
9 (D4) 5
11 (D5) 6
13 (D6) 7
15 (D7) 8
17 (ADDR0) 9
21 (ADDR1) 10
32 (ADDR2) 11
36 (GND) 12
Tabela 4 – Ligações do cabo de comunicação microcontrolador.
ATENÇÃO! Antes de ligar o cabo flat verifica a posição do mesmo, conforme nomenclatura na placa. Ligação do cabo flat invertida podem danificar a placa e ocasionar a queima dos componentes.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 13 – DAQ AQUISIÇÃO DE DADOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 42
CAPÍTULO 13 – DAQ AQUISIÇÃO DE DADOS
Sistema de aquisição de dados com interface USB constituído de 8 entradas analógicas,
2 saídas analógicas, 12 pontos de I/O configuráveis como entrada ou saída e 1 entrada
para contador.
O software que acompanha o sistema de aquisição de dados via USB, deve ser instalado
antes da inserção do sistema de modo que o Windows possa detectar o dispositivo
adequadamente.
13.1 CONEXÃO ENTRE O MÓDULO 2808 E DAQ
Para a realização do controle do módulo 2808 utilizando sistema de aquisição de dados
(DAQ) existem ligações entre estes equipamentos. A figura 43 identifica os pontos de
entrada da DAQ no módulo 2808 internamente, mas de modo a facilitar o uso do
equipamento, basta conectar o cabo USB na entrada USB de seu Computador e na
entrada tipo USB denominada “PC” localizada na lateral direita do módulo 2808.
D0 +5VGNDD5 D6 D7 ADDR0D1 D2 D3 D4
PC
ADDR1ADDR2
Created with Visio
Figura 44 – Identificação interna no módulo 2808 dos pontos de conexão entre
módulo 2808 e DAQ.
As ligações (internamente) entre o módulo 2808 e a DAQ devem são realizados conforme
indicado na tabela 4, lembrando que ao usuário basta apenas “plugar” o cabo USB no PC
e no módulo 2808 na entrada denominada “PC”.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 13 – DAQ AQUISIÇÃO DE DADOS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 43
Módulo 2808 DAQ Descrição
CONECTOR PC CONECTOR DIGITAL
GND GND Referência (comum).
ENCO PFI0 Entrada do contador rápido.
ADDR2 P1.2 Saída para endereçamento 0.
ADDR1 P1.1 Saída para endereçamento 1.
ADDR0 P1.0 Saída para endereçamento 2.
D7 P0.7 Dados 7.
D6 P0.6 Dados 6.
D5 P0.5 Dados 5.
D4 P0.4 Dados 4.
D3 P0.3 Dados 3.
D2 P0.2 Dados 2.
D1 P0.1 Dados 1.
D0 P0.0 Dados 0.
Tabela 5– Ligação entre módulo 2808 e DAQ.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 44
CAPÍTULO 14 - EXPERIÊNCIAS
ATENÇÃO!
O uso deste sistema requer ligações a outros equipamentos.
Quaisquer experiências, montagens ou testes devem ser realizadas ou supervisionadas
por profissionais habilitados.
Antes de energizar quaisquer montagens, experiências ou testes, as ligações devem ser
cuidadosamente revisadas.
IMPORTANTE:
As experiências no módulo 2808 podem ser realizadas através de 3 equipamentos de
controle diferentes: PC, Microcontrolador ou CLP. Somente o cabo de um destes
dispositivos poderá estar conectado ao módulo 2808 por vez. Caso contrário poderá
haver conflito de dados na comunicação do módulo com o equipamento.
14.1 EXPERIÊNCIAS USANDO CLP 2301
Siga o seguinte procedimento para executar as experiências utilizando o CLP 2301:
Carregue o programa SPDSW no seu PC: Será gerado o Ícone do SPDSW (onde
irá ser carregado o programa) e o Ícone do OPPE (onde será carregado o
programa da IHM- interface homem máquina do CLP);
Ligue o CLP, conecte o cabo de comunicação DB-9, “Pause” o programa em
execução no CLP através do SPDSW, carregue a experiência desejada
(arquivo.PJW).
Compile e Carregue o IHM correspondente (arquivo.OPJ) no OPPE, retorne ao
SPDSW e pressione “Play”.
Seu programa está carregado no CLP e pronto para ser executado.
MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 45
Agora, ligue o módulo 2808 através da chave ON/OFF (CH1), a lâmpada L1
localizada na parte superior do módulo deverá ascender.
O Módulo 2808 controlado pelo CLP será então inicializado e a experiência poderá
ser configurada através do teclado do CLP.
Observações:
A Experiência 0 – Leitura é a única experiência onde não é necessário carregar o arquivo
IHM no programa OPPE, só será utilizado o Programa SPDSW neste caso.
Devem ser mantidas as configurações de fábrica para o CLP para que todas as
experiências funcionem corretamente.
14.1.1 EXPERIÊNCIA 0 – LEITURA
Introdução
Certifique-se de que as ligações entre a esteira e o CLP estejam corretas. Caso surja
alguma dúvida consultar o tópico 11.4 (Conexão entre o módulo 2808 e CLP).
Procedimentos
a) Conectar o cabo paralelo no conector CN4 CLP ao conector CLP da esteira;
b) Conectar o cabo serial no conector RS 232 da esteira ao PC;
c) Abrir o programa SPDSW no PC;
d) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp0 e selecionar
o arquivo leitura;
e) Abrir o editor ladder;
f) Selecionar o Ícone compila;
g) Na tela do CLP, não é identificado o programa por este não ter HIM;
h) Ligar a esteira;
i) Colocar uma peça manualmente na frente de um dos sensores e acompanhar o
acionamento do sensor no editor Ladder. Poderá ser acompanhado no fluxograma
da página 60.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 46
Considerações Iniciais
Todas as experiências têm como princípio básico à leitura e escrita de dados. A leitura
dos sensores é efetuada em três etapas, pois não é possível realizar a leitura dos 24
sensores simultaneamente. Para que isso seja possível, é necessária a utilização de três
variáveis de endereçamento (ADDR0, ADDR1 e ADDR2) como pode ser observado na
tabela 3.
ENDEREÇO DE: ADDR0 ADDR1 ADDR2
Leitura dos sensores de 0 a 7 0 1 0
Leitura dos sensores de 8 a 15 0 1 1
Leitura dos sensores de 16 a 23 1 0 1
Tabela 6 – Endereçamento da leitura dos sensores.
Segue abaixo o fluxograma para realizar as leituras.
INÍCIO
ADD1=0
ADD2=1
ADD3=0
I0002=1
GRANDE=0
GRANDE=1
I0004=1
MEDIO=0
MEDIO=1
I0005=1
POS3=0
POS3=1
I0006=1
COR1=0
COR1=1
I0004=1
COR2=0
COR2=1
I0005=1
PECAOK=0
PECAOK=1
I0006=1
COR3=0
COR3=1
I0008=1
ALIMEN=0
ALIMEN=1
1
I0002=1
POS4=0
POS4=1
ADD1=0
ADD2=1
ADD3=1
2
S
S
S
S S
S S
S S
N
N
N
N N
N N
N N

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 47
ADD1=1
ADD2=0
ADD3=1
I0004=1
METAL=0
METAL=1
I0005=1
POS1=0
POS1=1
I0006=1
PEQUENO=0
PEQUENO=1
I0008=1
POS2=0
POS2=1
ADD1=0
ADD2=0
ADD3=1
1
S
S
S
SN
N
N
N
2
Figura 45 – Fluxograma experiência 0 CLP 2301.
A escrita é realizada automaticamente, não sendo necessário escrever um endereço
específico. O Acionamento de Sensores e Atuadores nesta Experiência deve ser
acompanhado por meio do Editor Ladder do programa SPDSW.
14.1.2 EXPERIÊNCIA 1 – SELECIONADOR
Introdução
Certifique-se de que as ligações entre a esteira e o CLP estejam corretas. Caso surja
alguma dúvida consultar o tópico 11.4 (Conexão entre o módulo 2808 e CLP). Nesta
experiência será desenvolvido um programa em linguagem Ladder para estudar o
funcionamento do selecionado de peças, que é constituído de um motor de passo e
quatro sensores indutivos.
Objetivo
Ajustar a posição do selecionador de peças a critério do usuário.
Material Utilizado
Software para programação em Ladder;
Controlador Lógico Programável;
Modulo 2808 - Esteira.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 48
Procedimentos
a) Abrir o programa SPDSW no PC;
b) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp1 e selecionar
o arquivo selecionador;
c) Abrir o editor Ladder;
d) Selecionar o Ícone compilar
e) Após compilar, fechar o programa SPDSW;
f) Abrir o programa OPPE;
g) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp1 e selecionar
o arquivo selecionador;
h) Compilar;
i) Na tela do CLP aparecerá as opções 1, 2, 3 e 4. Apertando a tecla referente a 1, 2,
3, ou 4 o ponteiro selecionador da esteira deslocará a posição referente.
Considerações Iniciais
O motor de passo é controlado através de duas variáveis. A variável SENTIDO que se
refere ao sentido de rotação do motor, isto é, define o sentido de deslocamento da haste
metálica (esquerda ou direita). A variável HABMP refere-se ao acionamento ou não do
mesmo. O controle da presença da haste metálica em cada posição é realizado através
dos sensores indutivos que estão devidamente posicionados. Assim como o sentido e o
acionamento do motor de passo são controlados por meio de variáveis, os sensores
responsáveis por cada posição também são. Suas variáveis são: posição 1 – POS1,
posição 2 – POS2, posição 3 – POS3 e posição 4 – POS4.
Fluxograma

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 49
INÍCIO
SENTIDO=0POS1=0
LER POSIÇÃO
SEGUINTE
ACIONAR
MOTOR DE
PASSO
S
N
POSIÇÃO
SEGUINTE=1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POSIÇÃO
SEGUINTE=2
S
N
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POSIÇÃO
SEGUINTE=3
S
N
POS3=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POSIÇÃO
SEGUINTE=4
S
N
POS4=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
1
1
1
1
Figura 46 – Fluxograma experiência 1 CLP 2301.
Discussão
Cada posição possui um sensor, que é acionado com a presença da haste do
selecionador; por meio do software é feita a associação de cada sensor a sua respectiva
posição. Logo, o motor de passo será habilitado até que o sensor referente à posição
escolhida pelo usuário seja ativado e logo em seguida o motor será desabilitado
aguardando um novo comando. A cada novo comando, o programa é capaz de
movimentar o motor de passo no sentido correto, independente da posição em que este
se encontra, pois, caso este se desloque no sentido errado, nunca acionará o sensor
esperado.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 50
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir. Utilizando o conjunto selecionador (motor de passo e
sensores indutivos), desenvolver um programa em linguagem Ladder capaz de fazer com
que o motor de passo execute, automaticamente, a seguinte sequência em relação às
posições:
Figura 47 – Sequência de posições proposta.
14.1.3 EXPERIÊNCIA 2 – PWM E ENCODER
Introdução
Certifique-se de que as ligações entre a esteira e o CLP estejam corretas. Caso surja
alguma dúvida consultar o tópico 11.4 (Conexão entre o módulo 2808 e CLP).
Nesta experiência será desenvolvido um programa em linguagem Ladder para estudar o
funcionamento do encoder e do controle de velocidade de um motor DC através da
modulação por largura de pulso (PWM).
Objetivo
Entender o funcionamento do encoder e aprender a manipular o PWM.
Material Utilizado
Software para programação em Ladder;
Controlador Lógico Programável;
Modulo 2808 - Esteira.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 51
Procedimentos
a) Abrir o programa SPDSW no PC;
b) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp2 e selecionar
o arquivo PWM;
c) Editor Ladder;
d) Selecionar o Ícone compila;
e) Após compilar, fechar o programa SPDSW;
f) Abrir o programa OPPE;
g) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp2 e selecionar
o arquivo PWM;
h) Compilar;
i) No CLP, aparece no display a opção 2 ou 7 para variar velocidade. Aperte a tecla 2
até que a esteira entre em movimento. A velocidade será controlada pela tecla 2 ou
7.
Considerações Iniciais
O encoder foi utilizado para que se possa medir a velocidade de rotação da esteira, e o
PWM para controlar a velocidade da mesma. Tais elementos são controlados através de
variáveis via software. Suas variáveis são: ENCODER e PWM.
Fluxograma

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 52
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
BOTÃO
AUMENTAR=1
S
N
PWM<10S
N
INCREMENTAR
PWM
2
CONTADOR=0
INCREMENTA
CONTADOR
CONTADOR=0CONTADOR=11S
N
BOTÃO
DIMINUIR=1
S
N
PWM>0S
N
DECREMENTAR
PWM
CONTADOR=0S
N
LIGAR
MOTOR DC
1
1
CONTADOR =
PWM
S DESLIGAR
MOTOR DC
N
TEMPORIZADOR
DESLIGADO
S LIGAR
TEMPORIZADOR
N
CONTAR E
ACUMULAR OS
PULSOS DO
ENCODER
TEMPORIZADOR
= TEMPO PRÉ-
DETERMINADO
S DESLIGAR
TEMPORIZADOR
N CALCULAR A VELOCIDADE
DE ROTAÇÃO DA ESTEIRA
DIVIDINDO OS PULSOS
CONTADOS POR 500 E PELO
TEMPO PRÉ-DETERMINADO
2
Figura 48 – Fluxograma experiência 2 CLP 2301.
Discussão
A modulação por largura de pulso (PWM) é utilizada para controlar a velocidade de
motores de corrente continua, pois altera o valor eficaz da tensão de alimentação do
motor, sendo essa responsável pelo movimento do mesmo. Para tanto, define-se o tempo
em que sua onda permanecerá em nível lógico alto e baixo, ou seja, define-se o valor de
seu duty-cicle. Para gerar o PWM foi utilizado o gerador de frequência do CLP, onde o
valor do duty-cicle é alterado a critério do usuário. O encoder possui uma resolução de
500 passos por volta, para realizar o calculo da velocidade de rotação da esteira faz-se à
leitura do tempo, que o encoder leva pra girar 10 passos, e sua velocidade é calculada
por meio da seguinte expressão:

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 53
Vrpm = [(1 rotação/500)*10]/(t/60) = 6/(5t) [rpm]
onde t é o tempo adquirido em segundos.
Observação
No início desta experiência, a Esteira está parada, a mesma irá se movimentar a medida
em que aumentamos a velocidade “+” através do teclado do CLP.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir. Utilizando o encoder e o motor DC, fazer um programa em
linguagem Ladder capaz de alterar a velocidade da esteira de acordo com a tecla
pressionada pelo usuário, ou seja, caso aperte a tecla 2, a velocidade da esteira deve ser
2rpm, não importando sua velocidade anterior.
14.1.4 EXPERIÊNCIA 3 – SENSOR DE COR
Introdução
Certifique-se de que as ligações entre a esteira e o CLP estejam corretas. Caso surja
alguma dúvida consultar o tópico: 11.4 (Conexão entre o módulo 2808 e CLP). Verifique
também se o sensor de cor já está devidamente programado com as três cores a serem
utilizadas, se houver dúvidas consultar o tópico 5 Sensor de Cor (maiores informações
também no Tópico 4.5 do Manual de Manutenção).
Nesta experiência será desenvolvido um programa em linguagem Ladder para estudar o
funcionamento do sensor de cor juntamente com o conjunto selecionador.
Objetivo
Entender o funcionamento do sensor de cor.
Material Utilizado
Software para programação em Ladder;
Controlador Lógico Programável;
Modulo 2808 - Esteira.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 54
Procedimentos
a) Abrir o programa SPDSW no PC;
b) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp3 e selecionar
o arquivo sensor de cor;
c) Editor Ladder;
d) Selecionar o Ícone compila
e) Após compilar, fechar o programa SPDSW.
f) Abrir o programa OPPE;
g) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp3 e selecionar
o arquivo sensor de cor;
h) Compilar;
i) No CLP aparece configuração da posição 1 na esteira. Escolha através das teclas
1, 2 e 3 a cor referente;
j) Logo aparecerá configuração da posição 2, escolha novamente a cor referente;
k) E finalmente a configuração da posição 3. Não repetir as cores na programação
das posições. Ao digitar a terceira cor, a esteira entra em funcionamento.
l) Colocar e verificar se a peça selecionada cairá no depósito conforme a cor
especificada;
m) Ao colocar uma cor diferente das 3 selecionadas esta será depositada na quarta
gaveta.
n) Ao colocar uma peça na esteira, esperar até que ela seja depositada para que a
outra peça seja inserida na esteira.
Procedimento de programação do Sensor de cor
a) Ligue a esteira
b) No sensor de cor pressione a tecla “Set” por mais ou menos 3 segundos;
c) Nas teclas + e – selecione sensibilidade;
d) Aperte novamente a tecla “Set”, estando a peça com 2 cores referentes na frente
do sensor. Um led amarelo acenderá.
e) Ligue a esteira;
f) Aperte a tecla “Set” no sensor de cor por 3 segundos até que só fique acesso a
lâmpada do barramento verde (sensibilidade). Esta pode ser variada apertando a
tecla + ou -.
g) Coloque a segunda peça na frente do sensor e repita o procedimento anterior.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 55
Considerações Iniciais
Como dito anteriormente, o sensor de cor é capaz de identificar até três cores distintas,
logo cada cor será associada a uma variável. Tais variáveis são: COR1 referente à cor 1,
COR2 referente à cor 2 e COR3 referente à cor 3. O usuário escolherá a posição de cada
cor. Por exemplo, COR1 na posição 1, COR2 na posição 2 e COR3 na posição 3.
Fluxograma
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
DEFINIR COR
PARA A
POSIÇÃO 1
DEFINIR COR
PARA A
POSIÇÃO 2
DEFINIR COR
PARA A
POSIÇÃO 3
REALIZAR A
LEITURA DO
SENSOR DE COR
COR LIDA = COR
ESCOLHIDA NA
POSIÇÃO 1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
COR LIDA = COR
ESCOLHIDA NA
POSIÇÃO 2
S
N
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
2
1
1
1
ALIMENTAR A
ESTEIRA

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 56
COR LIDA = COR
ESCOLHIDA NA
POSIÇÃO 3
S
N
POS3=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
POS4=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
2
Figura 49 – Fluxograma experiência 3 CLP 2301.
Discussão
De acordo com a cor, do objeto, lida pelo sensor, o motor de passo movimentará a haste
do selecionador até que o sensor indutivo responsável pela posição escolhida seja
acionado. A configuração das cores em cada posição fica a critério do usuário.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.
Utilizando o conjunto selecionador (motor de passo e sensores indutivos) e sensor de cor,
desenvolver um programa em linguagem Ladder capaz de executar a seguinte tarefa:
Cada posição deverá ter a seguinte sequência de cores:
Posição 1: COR1, COR2 e COR3.
Posição 2: COR2, COR3 e COR1.
Posição 3: COR3, COR1 e COR2.
Posição 4: rejeito.
A esteira deverá ser alimentada, com peças, de maneira aleatória. A posição 4 será
utilizada como rejeito, não importando a sequência de cores nela depositada, quanto
menos peças o rejeito tiver, melhor será o programa.
Quando todas as posições forem preenchidas corretamente a esteira deverá ser
desligada automaticamente.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 57
14.1.5 EXPERIÊNCIA 4 – SENSOR INDUTIVO
Introdução
Certifique-se de que as ligações entre a esteira e o CLP estejam corretas. Caso surja
alguma dúvida consultar o tópico: 11.4 (Conexão entre o módulo 2808 e CLP).
Nesta experiência será desenvolvido um programa em linguagem Ladder para estudar o
funcionamento do sensor indutivo juntamente com o conjunto selecionador.
Objetivo
Entender o funcionamento do sensor de indutivo.
Material Utilizado
Software para programação em Ladder;
Controlador Lógico Programável;
Modulo 2808 - Esteira.
Procedimentos
a) Abrir o programa SPDSW no PC;
b) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp4 e selecionar
o arquivo sensor indutivo;
c) Abrir o editor Ladder;
d) Selecionar o Ícone compilar;
e) Após compilar, fechar o programa SPDSW;
f) Abrir o programa OPPE;
g) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp4 e selecionar
o arquivo sensor indutivo;
h) Compilar;
i) No CLP aparece metal e a posição para o depósito. Se escolher a posição 1 para
metal, as peças não metálicas serão depositadas na segunda posição ou vice
versa. Ao escolher a posição a esteira entra em funcionamento.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 58
Considerações Iniciais
O sensor indutivo é acionado quando há a presença de um material metálico. Sua variável
é METAL.
Fluxograma
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
DEFINIR A
POSIÇÃO 1 OU 2
PARA A PEÇA
METÁLICA
REALIZAR A
LEITURA DO
SENSORE
INDUTIVO
MATERIAL LIDO
= MATERIAL
ESCOLHIDO NA
POSIÇÃO 1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
1
1
ALIMENTAR A
ESTEIRA
Figura 50 – Fluxograma experiência 4 CLP 2301.
Discussão
Neste caso, utilizaram-se apenas duas posições, visto que são duas as condições do
sensor indutivo, metal ou não metal. O motor de passo fará o seu posicionamento assim
que a peça for lida pelo sensor. A escolha de tais posições também fica a critério do
usuário.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 59
Utilizando o conjunto selecionador (motor de passo e sensores indutivos) desenvolver um
programa em linguagem Ladder capaz de executar a seguinte tarefa:
Cada posição deverá ter a seguinte sequência:
Posição 1: metal, metal, não metal.
Posição 2: não metal, metal, não metal.
Posição 3: metal, não metal, não metal.
Posição 4: rejeito.
A esteira deverá ser alimentada, com peças, de maneira aleatória. A posição 4 será
utilizada como rejeito, não importando a sequência nela depositada, quanto menos peças
o rejeito tiver, melhor será o programa.
Quando todas as posições forem preenchidas corretamente a esteira deverá ser
desligada automaticamente.
14.1.6 EXPERIÊNCIA 5 – SENSOR REFLEXIVO
Introdução
Certifique-se de que as ligações entre a esteira e o CLP estejam corretas. Caso surja
alguma dúvida consultar o tópico: 11.4 (Conexão entre o módulo 2808 e CLP).
Nesta experiência será desenvolvido um programa em linguagem Ladder para estudar o
funcionamento do sensor reflexivo juntamente com o conjunto selecionador.
Objetivo
Entender o funcionamento do sensor reflexivo utilizado na esteira para identificar o
tamanho das peças.
Material Utilizado
Software para programação em Ladder;
Controlador Lógico Programável;
Modulo 2808 - Esteira.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 60
Procedimentos
a) Abrir o programa SPDSW no PC;
b) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp5 e selecionar o
arquivo sensor refletivo;
c) Abrir o editor Ladder;
d) Selecionar o Ícone compilar
e) Após compilar, fechar o programa SPDSW.
f) Abrir o programa OPPE;
g) Projeto, abrir, selecionar a pasta CLP, pasta experiências, pasta exp5 e selecionar o
arquivo sensor refletivo;
h) Compilar;
i) No CLP aparece Configuração das posições, configure nas posições 1, 2 e 3. Ao
configurar a 3 posição a esteira entra em funcionamento, coloque a peça na esteira
e configura o resultado.
Considerações Iniciais
É possível separar as peças em três tamanhos distintos, cada tamanho será associado a
uma variável.
Tais variáveis são: PEQUENO, MEDIO e GRANDE.
O usuário escolherá a posição de cada tamanho. Por exemplo, PEQUENO na posição 1,
MEDIO na posição 2 e GRANDE na posição 3.
Fluxograma

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 61
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
DEFINIR
TAMANHO PARA
A POSIÇÃO 1
DEFINIR
TAMANHO PARA
A POSIÇÃO 2
DEFINIR
TAMANHO PARA
A POSIÇÃO 3
REALIZAR A
LEITURA DOS
SENSORES
REFLEXIVOS
TAMANHO LIDO
= TAMANHO
ESCOLHIDO NA
POSIÇÃO 1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
TAMANHO LIDO
= TAMANHO
ESCOLHIDO NA
POSIÇÃO 2
S
N
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
2
1
1
1
ALIMENTAR A
ESTEIRA

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 62
TAMANHO LIDO
= TAMANHO
ESCOLHIDO NA
POSIÇÃO 3
S
N
POS3=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
POS4=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
2
Figura 51 – Fluxograma experiência 5 CLP 2301.
Discussão
De acordo com o tamanho do objeto, o motor de passo movimentará a haste do
selecionador até que o sensor indutivo responsável pela posição escolhida seja acionado.
A movimentação da haste é feita a partir do momento em que o sensor de peças
pequenas fizer sua leitura. A configuração dos tamanhos em cada posição fica a critério
do usuário.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.
Os sensores reflexivos aqui utilizados para medir o tamanho das peças podem também
ser utilizados para medir comprimento. Para isso, ajuste os três sensores reflexivos
contidos na esteira na mesma altura do menor deles. Em seguida, utilizando o conjunto
selecionador (motor de passo e sensores indutivos) e sensores reflexivos, desenvolver
um programa em linguagem Ladder capaz de executar a seguinte tarefa:
Separar as peças de acordo com o comprimento de cada uma delas.
Posição 1: peças de comprimento pequeno.
Posição 2: peças de comprimento médio.
Posição 3: peças de comprimento grande.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 63
14.1.7 EXPERIÊNCIA 6 – EXTRAS
As experiências a seguir têm como finalidade fazer com que o aluno solidifique os
conhecimentos adquiridos, uma vez que estas envolverão mais de um tipo de sensor.
Sensor de Cor, Conjunto Selecionador e Sensor Indutivo
Desenvolver um programa em linguagem Ladder, capaz de realizar a seguinte tarefa.
Cada posição deverá conter objetos com as seguintes características:
Posição 1: peça metálica cuja cor seja a COR1.
Posição 2: peça não metálica cuja cor seja a COR3.
Posição 3: peça metálica cuja cor seja a COR2.
Posição 4: rejeito.
Sensor de Cor, Conjunto Selecionador e Sensor Reflexivo
Desenvolver um programa em linguagem Ladder, capaz de realizar a seguinte tarefa.
Cada posição deverá conter objetos com as seguintes características:
Posição 1: peça pequena cuja cor seja a COR1.
Posição 2: peça média cuja cor seja a COR3.
Posição 3: peça grande cuja cor seja a COR2.
Posição 4: rejeito.
Sensor de Cor, Conjunto Selecionador, Sensor Indutivo e Sensor Reflexivo.
Desenvolver um programa em linguagem Ladder, capaz de realizar a seguinte tarefa.
Cada posição deverá conter objetos com as seguintes características:
Posição 1: peça metálica, pequena e cuja cor seja a COR1.
Posição 2: peça não metálica, grande e cuja cor seja a COR3.
Posição 3: peça metálica, media e cuja cor seja a COR2.
Posição 4: rejeito.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 64
14.1.8 EXPERIÊNCIA 7 – ESTEIRA COMPLETA
Como nas indústrias, uma esteira pode ser configurada de acordo com o processo que
esta irá realizar, deve-se deixar a critério do usuário as características do objeto a ser
configurado em cada posição. Baseado nisso, desenvolver um programa em linguagem
Ladder capaz de controlar toda a esteira a critério do usuário.
14.2 EXPERIÊNCIAS USANDO MICROCONTROLADOR SDM 9431
Siga o seguinte procedimento para executar as experiências utilizando o SDM 9431:
Carregue o programa SDM 9431 no seu PC: Será gerado o Ícone do SDM 9431
na área de trabalho, caso este ícone não seja gerado, coloque-o na área de
trabalho como um “atalho”. Clique sobre este ícone, clique em conectar dentro do
programa SDM 9431, configure a porta serial;
Ligue o módulo 9431, com o módulo 9431 no modo PC, clique em conectar.
pressione a tecla RESET no módulo 9431;
Carregue o programa desejado (arquivo .hex);
Agora, ligue o módulo 2808 através da chave ON/OFF (CH1), a lâmpada L1
localizada na parte superior do módulo deverá ascender;
Execute o programa através da tela do SDM 9431
O programa foi carregado no módulo 9431.
O módulo 2808 controlado pelo módulo 9431 será então inicializado, e a
experiência poderá ser configurada através do teclado do 9431.
Observação:
Caso o programa não carregue por algum motivo, repita o procedimento, ou reset o
módulo 9431 com o mesmo ligado para não perder o programa carregado e execute a
operação via modo teclado do módulo 9431.
Todas as experiências têm como princípio básico à leitura e escrita de dados. A leitura
dos sensores é efetuada em três etapas, pois não é possível realizar a leitura dos 24
sensores simultaneamente. Para que isso seja possível, é necessária a utilização de três
endereços de leitura. A escrita dos atuadores também é realizada através de um
endereço como pode ser observado a seguir.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 65
OPERAÇÃO ENDEREÇO (HEXA)
Leitura dos sensores de 0 a 7 F400
Leitura dos sensores de 8 a 15 F401
Leitura dos sensores de 16 a 23 F801
Escrita F800
Tabela 7 – Endereçamento da leitura dos sensores e escrita dos atuadores.
Segue abaixo a tabela que relaciona os sensores com os seus endereços e respectivo bit
do barramento dados.
SENSOR NOME ENDEREÇO BIT DO BARRAMENTO DE DADOS
Tamanho grande GRANDE F400 D2
Tamanho médio MEDIO F400 D4
Posição 3 POSICAO3 F400 D5
Cor 1 COR1 F400 D6
Posição 4 POSICAO4 F400 D7
Alimentador ALIMENT F401 D3
Cor 2 COR2 F401 D4
Barreira PECAOK F401 D5
Cor 3 COR3 F401 D6
Encoder ENCODER F801 D0
Posição 2 POSICAO2 F801 D3
Material metálico METAL F801 D4
Posição 1 POSICAO1 F801 D5
Tamanho Pequeno PEQUENO F801 D6
Tabela 8 – Endereçamento da leitura dos sensores.
E a tabela que relaciona os atuadores com os seus endereços e respectivo bit do
barramento dados.
ATUADOR NOME ENDEREÇO BIT DO BARRAMENTO DE DADOS
Sentido do motor de passo SENTIDO F800 D0
Habilitador do motor de passo HABMP F800 D1
Habilitador do motor DC PWM F800 D2
Tabela 9 – Endereçamento da escrita dos atuadores.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 66
14.3 EXPERIÊNCIAS USANDO DAQ – AQUISIÇÃO DE DADOS – VIA PC
Siga o seguinte procedimento para executar as experiências utilizando o DAQ:
Carregue o programa de comunicação com a placa NI6008 OEM em seu PC;
Agora, ligue o módulo 2808 através da chave ON/OFF (CH1), a Lâmpada L1
localizada na parte superior do módulo deverá ascender.
Conecte o cabo USB entre o módulo 2808 e o PC, o led verde próximo à entrada
PC no módulo 2808 deverá ascender e ficar piscando;
Abra o arquivo da experiência desejada (arquivo . exe), para isso na pasta “PC”,
clique no arquivo .exe da experiência desejada e execute o mesmo.
O módulo 2808 controlado pelo DAQ será então inicializado e a experiência
poderá ser configurada através das teclas presentes na tela do sistema
supervisório no PC.
Observação: Caso o seu PC não consiga identificar a placa DAQ, siga o
procedimento à seguir e faça a limpeza do dispositivo (Device) junto ao programa
(software) Measurement & Automation que acompanha a placa DAQ. Isto pode
ocorrer, caso, anteriormente, seu PC tenha sido usado com uma outra placa DAQ. O
software irá “salvar” a identificação desta placa DAQ, não permitindo a identificação
de uma segunda placa usada posteriormente. Para que isso seja possível, deve-se
“limpar” o dispositivo (Device) junto ao software seguindo o procedimento abaixo.
No Windows 7 ou de modo semelhante em outras versões do Windows:
Na área de trabalho, vá em Iniciar ;
Acesse “ Todos os programas”;
Vá a pasta National instruments;
Acesse o programa “ Measurement & Automation “ na aba “Configuration”;
Acesse “ Device and Interfaces” ;
Para “limpar” todos os dispositivos do tipo “ NI USB-6008 “, vá em Todos os
dispositivos do tipo NI USB-6008;
Clique com o botão direito e exclua os mesmos;
Uma vez excluída toda a lista de dispositivos, o próximo dispositivo plugado
assumirá a prioridade.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 67
14.3.1 EXPERIÊNCIA 0 – LEITURA
Introdução
Certifique-se de que as ligações entre a esteira e o módulo NI USB-6008 OEM estejam
corretas. Caso surja alguma dúvida consultar o tópico 13.1 (Conexão entre o módulo 2808
e o DAQ).
Procedimentos
a) Ao executar o programa, aparecerá na tela do PC, um desenho com as indicações
de acionamento dos sensores;
b) A esteira entra em funcionamento;
c) Inserir uma peça na esteira e acompanhe a ativação dos sensores no PC. Espera a
peça chegar ao depósito de peças para inserir outra.
d) A peça será deslocada até o depósito;
e) Não tendo controle de qual caixa cairá. O porteiro deslocador manterá a última
posição;
f) Para parar o programa, desligue a esteira.
Considerações Iniciais
Todas as experiências têm como princípio básico à leitura e escrita de dados. A leitura
dos sensores é efetuada em três etapas, pois não é possível realizar a leitura dos 24
sensores simultaneamente. Para que isso seja possível, é necessária a utilização de três
variáveis de endereçamento (ADDR0, ADDR1 e ADDR2) como pode ser observado na
tabela 10.
ENDEREÇO DE: ADDR0 ADDR1 ADDR2
Leitura dos sensores de 0 a 7 0 1 0
Leitura dos sensores de 8 a 15 0 1 1
Leitura dos sensores de 16 a 23 1 0 1
Tabela 10 – Endereçamento da leitura dos sensores.
Segue a seguir o fluxograma para realizar as leituras.
Fluxograma

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 68
INÍCIO
ADDR0=0
ADDR1=1
ADDR2=0
D2=1
GRANDE=0
GRANDE=1
D4=1
MEDIO=0
MEDIO=1
D5=1
POS3=0
POS3=1
D6=1
COR1=0
COR1=1
D4=1
COR2=0
COR2=1
D5=1
PECAOK=0
PECAOK=1
D6=1
COR3=0
COR3=1
D3=1
ALIMEN=0
ALIMEN=1
1
POS4=0
ADDR0=0
ADDR1=1
ADDR2=1
2
S
S
S
S
S
S
S
S
N
N
N
N
N
N
N
N
D7=1 POS4=1S
N
3
3

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 69
ADDR0=1
ADDR1=0
ADDR2=1
D4=1
METAL=0
METAL=1
D5=1
POS1=0
POS1=1
D6=1
PEQUENO=0
PEQUENO=1
D3=1
POS2=0
POS2=1
1
S
S
S
SN
N
N
N
2
Figura 58 – Fluxograma experiência 0 DAQ.
Para a escrita, a tabela a seguir relaciona cada atuador com os seus endereços e
respectivo bit do barramento dados.
ATUADOR NOME ADDR0 ADDR1 ADDR2 BIT DO BARRAMENTO DE
DADOS
Sentido do motor de passo SENTIDO 1 0 0 D0
Habilitador do motor de passo HABMP 1 0 0 D1
Habilitador do motor DC PWM 1 0 0 D2
Tabela 11 – Endereçamento da escrita dos atuadores.
O Acionamento de sensores e atuadores nesta experiência deve ser acompanhado por
meio da tela do sistema supervisório no PC quando do acionamento dos mesmos.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 70
14.3.2 EXPERIÊNCIA 1 – SELECIONADOR
Introdução
Certifique-se de que as ligações entre a esteira e o módulo NI USB-6008 OEM estejam
corretas. Caso surja alguma dúvida consultar o tópico 13.1 (Conexão entre o Módulo 2808
e o DAQ). Nesta experiência será desenvolvido um programa no LabVIEW para estudar o
funcionamento do selecionado de peças, que é constituído de um motor de passo e
quatro sensores indutivos.
Objetivo
Ajustar a posição do selecionador de peças a critério do usuário.
Material Utilizado
LabVIEW 7.1;
Módulo NI USB-6008;
Módulo 2808 - Esteira.
Procedimentos
a) Ao executar o programa, aparecerá na tela do PC, um desenho com as indicações
de acionamento dos sensores;
b) Nesta experiência só entrará em funcionamento o motor que ativa a posição do
depósito de peças;
c) Clicar nos ícones (selecione a posição) para selecionar qual posição deve parar o
deslocador;
d) Os demais sensores poderão ser visualizados atuando peças manualmente;
e) Para parar, desligue a esteira.
Considerações Iniciais
O motor de passo é controlado através de duas variáveis. A variável SENTIDO que se
refere ao sentido de rotação do motor, isto é, definindo o sentido de deslocamento da
haste metálica (esquerda ou direita). A variável HABMP refere-se ao acionamento ou não
do mesmo. O controle da presença da haste metálica em cada posição é realizado
através dos sensores indutivos que estão devidamente posicionados. Assim como o
sentido e o acionamento do motor de passo são controlados por meio de variáveis, os
sensores responsáveis por cada posição também são. Suas variáveis são: posição 1 –
POS1, posição 2 – POS2, posição 3 – POS3 e posição 4 – POS4.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 71
Fluxograma
INÍCIO
SENTIDO=0POS1=0
LER POSIÇÃO
SEGUINTE
ACIONAR
MOTOR DE
PASSO
S
N
POSIÇÃO
SEGUINTE=1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POSIÇÃO
SEGUINTE=2
S
N
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POSIÇÃO
SEGUINTE=3
S
N
POS3=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POSIÇÃO
SEGUINTE=4
S
N
POS4=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
1
1
1
1
Figura 59 – Fluxograma experiência 1 DAQ.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 72
Discussão
Cada posição possui um sensor, que é acionado com a presença da haste do
selecionador; por meio do software é feita a associação de cada sensor a sua respectiva
posição. Logo, o motor de passo será habilitado até que o sensor referente à posição
escolhida pelo usuário seja ativado e logo em seguida o motor será desabilitado
aguardando um novo comando. A cada novo comando, o programa é capaz de
movimentar o motor de passo no sentido correto, independente da posição em que este
se encontra, pois, caso este se desloque no sentido errado, nunca acionará o sensor
esperado.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.
Utilizando o conjunto selecionador (motor de passo e sensores indutivos), desenvolver um
programa no LabVIEW capaz de fazer com que o motor de passo execute,
automaticamente, a seguinte sequência em relação às posições:
Figura 60 – Sequência de posições proposta.
14.3.3 EXPERIÊNCIA 2 – PWM E ENCODER
Introdução
Certifique-se de que as ligações entre a esteira e o módulo NI USB-6008 estejam
corretas. Caso surja alguma dúvida consultar o tópico 13.1 (Conexão entre o módulo 2808
e o DAQ).

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 73
Nesta experiência será desenvolvido um programa no LabVIEW para estudar o
funcionamento do encoder e do controle de velocidade de um motor DC através da
modulação por largura de pulso (PWM).
Objetivo
Entender o funcionamento do encoder e aprender a manipular o PWM.
Material Utilizado
LabVIEW 7.1;
Módulo NI USB-6008;
Módulo 2808 - Esteira.
Procedimentos
a) Ao executar o programa aparecerá na tela do PC, um desenho com as indicações
de acionamento dos sensores;
b) Atue no ícone (iniciar esteira);
c) Atuar nos ícones (aumentar) ou (diminuir), para que a esteira mude os valores de
RPM;
d) Este valor de RPM poderá ser acompanhado no ícone (RPM);
e) Para parar o programa atue novamente no ícone (iniciar esteira).
Considerações Iniciais
O encoder foi utilizado para que se possa medir a velocidade de rotação da esteira, e o
PWM para controlar a velocidade da mesma. Tais elementos são controlados através de
variáveis via software. Suas variáveis são: ENCODER e PWM.
Fluxograma

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 74
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
BOTÃO
AUMENTAR=1
S
N
PWM<10S
N
INCREMENTAR
PWM
2
CONTADOR=0
INCREMENTA
CONTADOR
CONTADOR=0CONTADOR=11S
N
BOTÃO
DIMINUIR=1
S
N
PWM>0S
N
DECREMENTAR
PWM
CONTADOR=0S
N
LIGAR
MOTOR DC
1
1
CONTADOR =
PWM
S DESLIGAR
MOTOR DC
N
TEMPORIZADOR
DESLIGADO
S LIGAR
TEMPORIZADOR
N
CONTAR E
ACUMULAR OS
PULSOS DO
ENCODER
TEMPORIZADOR
= TEMPO PRÉ-
DETERMINADO
S DESLIGAR
TEMPORIZADOR
N CALCULAR A VELOCIDADE
DE ROTAÇÃO DA ESTEIRA
DIVIDINDO OS PULSOS
CONTADOS POR 500 E PELO
TEMPO PRÉ-DETERMINADO
2
Figura 61 – Fluxograma experiência 2 DAQ.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 75
Discussão
A modulação por largura de pulso (PWM) é utilizada para controlar a velocidade de
motores de corrente continua, pois altera o valor eficaz da tensão de alimentação do
motor, sendo essa responsável pelo movimento do mesmo. Para tanto, define-se o tempo
em que sua onda permanecerá em nível lógico alto e baixo, ou seja, define-se o valor de
seu duty-cicle, sendo este alterado a critério do usuário.
O encoder possui uma resolução de 500 passos por volta, para realizar o calculo da
velocidade de rotação da esteira faz-se a leitura do tempo, que o encoder leva pra girar
10 passos, e sua velocidade é calculada por meio da seguinte expressão:
Vrpm = [(1 rotação/500)*10]/(t/60) = 6/(5t) [rpm]
onde t é o tempo adquirido em segundos.
Observação
No início desta experiência, a esteira está parada, a mesma irá se movimentar a medida
em que aumentamos a velocidade através do botão “aumentar” presente na tela do
supervisório desta experiência.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.
Utilizando o encoder e o motor DC, fazer um programa no LabVIEW capaz de alterar a
velocidade da esteira de acordo com a tecla pressionada pelo usuário, ou seja, caso
aperte a tecla 2, a velocidade da esteira deve ser 2 rpm, não importando sua velocidade
anterior.
14.3.4 EXPERIÊNCIA 3 – SENSOR DE COR
Introdução
Certifique-se de que as ligações entre a esteira e o módulo NI USB-6008 estejam
corretas. Caso surja alguma dúvida consultar o tópico 13.1 (Conexão entre o módulo 2808
e o DAQ)

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 76
Verifique também se o sensor de cor já está devidamente programado com as três cores
a serem utilizadas, se houverem dúvidas consultarem o tópico: 5 Sensor de Cor (maiores
informações também no tópico 4.5 do manual de manutenção).
Nesta experiência será desenvolvido um programa no LabVIEW para estudar o
funcionamento do sensor de cor juntamente com o conjunto selecionador.
Objetivo
Entender o funcionamento do sensor de cor.
Material Utilizado
LabVIEW 7.1;
Módulo NI USB-6008;
Módulo 2808 - Esteira.
Procedimentos
a) Ao executar o programa aparecerá na tela do PC um desenho com indicação de
acionamento dos sensores;
b) Os ícones (posição 1, 2 e 3) servem para configurar a cor desejada;
c) Após programar as cores, iniciar a esteira atuando no ícone (iniciar esteira);
d) A esteira entrará em funcionamento;
e) Colocar uma peça na esteira;
f) A indicação dos sensores poderá ser visualizada no PC;
g) A peça será depositada na posição estabelecida;
h) No programa também poderá ser visualizada a rotação do motor no ícone RPM;
i) A cor diferente da estabelecida será enviada na caixa 4;
j) Para parar o programa, ativar novamente o ícone (iniciar esteira).
Considerações Iniciais
Como dito anteriormente, o sensor de cor é capaz de identificar até três cores distintas,
logo cada cor será associada a uma variável.
Tais variáveis são: COR1 referente à cor 1, COR2 referente à cor 2 e COR3 referente à
cor 3.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 77
O usuário escolherá a posição de cada cor. Por exemplo, COR1 na posição 1, COR2 na
posição 2 e COR3 na posição 3.
Fluxograma
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
DEFINIR COR
PARA A
POSIÇÃO 1
DEFINIR COR
PARA A
POSIÇÃO 2
DEFINIR COR
PARA A
POSIÇÃO 3
REALIZAR A
LEITURA DO
SENSOR DE COR
COR LIDA = COR
ESCOLHIDA NA
POSIÇÃO 1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
COR LIDA = COR
ESCOLHIDA NA
POSIÇÃO 2
S
N
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
2
1
1
1
ALIMENTAR A
ESTEIRA

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 78
COR LIDA = COR
ESCOLHIDA NA
POSIÇÃO 3
S
N
POS3=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
POS4=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
2
Figura 62 – Fluxograma experiência 3 DAQ.
Discussão
De acordo com a cor, do objeto, lida pelo sensor, o motor de passo movimentará a haste
do selecionador até que o sensor indutivo responsável pela posição escolhida seja
acionado. A configuração das cores em cada posição fica a critério do usuário.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.
Utilizando o conjunto selecionador (motor de passo e sensores indutivos) e sensor de cor,
desenvolver um programa no LabVIEW capaz de executar a seguinte tarefa:
Cada posição deverá ter a seguinte sequência de cores:
Posição 1: COR1, COR2 e COR3.
Posição 2: COR2, COR3 e COR1.
Posição 3: COR3, COR1 e COR2.
Posição 4: Rejeito.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 79
A esteira deverá ser alimentada, com peças, de maneira aleatória. A posição 4 será
utilizada como rejeito, não importando a sequência de cores nela depositada, quanto
menos peças o rejeito tiver, melhor será o programa.
Quando todas as posições forem preenchidas corretamente a esteira deverá ser
desligada automaticamente.
14.3.5 EXPERIÊNCIA 4 – SENSOR INDUTIVO
Introdução
Certifique-se de que as ligações entre a esteira e o módulo NI USB-6008 estejam
corretas. Caso surja alguma dúvida consultar o tópico 13.1 (Conexão entre o módulo 2808
e o DAQ).
Nesta experiência será desenvolvido um programa no LabVIEW para estudar o
funcionamento do sensor indutivo juntamente com o conjunto selecionador.
Objetivo
Entender o funcionamento do sensor de indutivo.
Material Utilizado
LabVIEW 7.1;
Módulo NI USB-6008;
Módulo 2808 - Esteira.
Procedimentos
a) Ao executar o programa aparecerá um desenho na tela do PC, dando a opção para
escolha de qual posição deverá ser depositada a peça metálica;
b) Assinale o campo preferido e atue no ícone (em funcionamento). Aparecerá outra
tela com desenho das indicações dos sensores;
c) Ativar a esteira ícone (iniciar esteira);
d) A esteira entrará em funcionamento depositando peças metálicas na posição
escolhidas e peças não metálicas na outra caixa;
e) Para parar o programa atue novamente no ícone (iniciar esteira).

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 80
Considerações Iniciais
O sensor indutivo é acionado quando há a presença de um material metálico. Sua variável
é METAL.
Fluxograma
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
DEFINIR A
POSIÇÃO 1 OU 2
PARA A PEÇA
METÁLICA
REALIZAR A
LEITURA DO
SENSORE
INDUTIVO
MATERIAL LIDO
= MATERIAL
ESCOLHIDO NA
POSIÇÃO 1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
1
1
ALIMENTAR A
ESTEIRA
Figura 63 – Fluxograma experiência 4 DAQ.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 81
Discussão
Neste caso, utilizaram-se apenas duas posições, visto que são duas as condições do
sensor indutivo, metal ou não metal. O motor de passo fará o seu posicionamento assim
que a peça for lida pelo sensor. A escolha de tais posições também fica a critério do
usuário.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.
Utilizando o conjunto selecionador (motor de passo e sensores indutivos) e o sensor
indutivo desenvolver um programa no LabVIEW capaz de executar a seguinte tarefa:
Cada posição deverá ter a seguinte seqüência:
Posição 1: metal, metal, não metal.
Posição 2: não metal, metal, não metal.
Posição 3: metal, não metal, não metal.
Posição 4: Rejeito.
A esteira deverá ser alimentada, com peças, de maneira aleatória. A posição 4 será
utilizada como rejeito, não importando a seqüência nela depositada, quanto menos peças
o rejeito tiver, melhor será o programa.
Quando todas as posições forem preenchidas corretamente a esteira deverá ser
desligada automaticamente.
14.3.6 EXPERIÊNCIA 5 – SENSOR REFLEXIVO
Introdução
Certifique-se de que as ligações entre a esteira e o módulo NI USB-6008 estejam
corretas. Caso surja alguma dúvida consultar o tópico 13.1 (Conexão entre o Módulo 2808
e o DAQ)
Nesta experiência será desenvolvido um programa no LabVIEW para estudar o
funcionamento do sensor de tamanho juntamente com o conjunto selecionador.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 82
Objetivo
Entender o funcionamento do sensor de tamanho.
Material Utilizado
LabVIEW 7.1;
Módulo NI USB-6008;
Módulo 2808 - Esteira.
Procedimentos
a) Ao executar o programa, aparecerá um desenho no PC, com a opção de
localização do depósito e tamanho de peças;
b) Poderão ser configurados 3 posições no depósito com tamanhos diferentes;
c) Atue o ícone (funcionamento);
d) Aparecerá outra tela no PC com indicação de atuação dos sensores;
e) Atuar o ícone (iniciar esteira);
f) A esteira entra em funcionamento;
g) Inserir uma peça na esteira, e aguardar até que ela seja depositada na caixa;
h) Para parar o programa atue novamente no ícone (iniciar esteira).
Considerações Iniciais
É possível separar as peças em três tamanhos distintos, cada tamanho será associado a
uma variável.
Tais variáveis são: PEQUENO, MEDIO e GRANDE.
O usuário escolherá a posição de cada tamanho. Por exemplo, PEQUENO na posição 1,
MEDIO na posição 2 e GRANDE na posição 3.
Fluxograma

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 83
INÍCIO
SENTIDO=0POS1=0
ACIONAR
MOTOR DE
PASSO
S
N
DEFINIR
TAMANHO PARA
A POSIÇÃO 1
DEFINIR
TAMANHO PARA
A POSIÇÃO 2
DEFINIR
TAMANHO PARA
A POSIÇÃO 3
REALIZAR A
LEITURA DOS
SENSORES
REFLEXIVOS
TAMANHO LIDO
= TAMANHO
ESCOLHIDO NA
POSIÇÃO 1
S
N
POS1=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
TAMANHO LIDO
= TAMANHO
ESCOLHIDO NA
POSIÇÃO 2
S
N
POS2=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
2
1
1
1
ALIMENTAR A
ESTEIRA

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 84
TAMANHO LIDO
= TAMANHO
ESCOLHIDO NA
POSIÇÃO 3
S
N
POS3=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
POS4=0S
N
DEFINIR
SENTIDO
ACIONAR
MOTOR DE
PASSO
1
2
Figura 64 – Fluxograma experiência 5 DAQ.
Discussão
De acordo com o tamanho do objeto, o motor de passo movimentará a haste do
selecionador até que o sensor indutivo responsável pela posição escolhida seja acionado.
A movimentação da haste é feita a partir do momento em que o sensor de peças
pequenas fizer sua leitura. A configuração dos tamanhos em cada posição fica a critério
do usuário.
Experiência Proposta
Baseado nos conhecimentos adquiridos com a experiência acima é recomendado que se
faça o experimento a seguir.
Os sensores reflexivos aqui utilizados para medir o tamanho das peças podem também
ser utilizados para medir comprimento. Para isso, ajuste os três sensores reflexivos
contidos na esteira na mesma altura do menor deles. Em seguida, utilizando o conjunto
selecionador (motor de passo e sensores indutivos) e sensores reflexivos, desenvolver
um programa no LabVIEW capaz de executar a seguinte tarefa:
Separar as peças de acordo com o comprimento de cada uma delas.
Posição 1: peças de comprimento pequeno.
Posição 2: peças de comprimento médio.
Posição 3: peças de comprimento grande.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 85
14.3.7 EXPERIÊNCIA 6 – EXTRAS
As experiências a seguir têm como finalidade fazer com que o aluno solidifique os
conhecimentos adquiridos, uma vez que estas envolverão mais de um tipo de sensor.
Sensor de Cor, Conjunto Selecionador e Sensor Indutivo
Desenvolver um programa no LabVIEW, capaz de realizar a seguinte tarefa. Cada
posição deverá conter objetos com as seguintes características:
Posição 1: peça metálica cuja cor seja a COR1.
Posição 2: peça não metálica cuja cor seja a COR3.
Posição 3: peça metálica cuja cor seja a COR2.
Posição 4: rejeito.
Sensor de Cor, Conjunto Selecionador e Sensor Reflexivo
Desenvolver um programa no LabVIEW, capaz de realizar a seguinte tarefa. Cada
posição deverá conter objetos com as seguintes características:
Posição 1: peça pequena cuja cor seja a COR1.
Posição 2: peça média cuja cor seja a COR3.
Posição 3: peça grande cuja cor seja a COR2.
Posição 4: rejeito.
Sensor de Cor, Conjunto Selecionador, Sensor Indutivo e Sensor Reflexivo.
Desenvolver um programa no LabVIEW, capaz de realizar a seguinte tarefa. Cada
posição deverá conter objetos com as seguintes características:
Posição 1: peça metálica, pequena e cuja cor seja a COR1.
Posição 2: peça não metálica, grande e cuja cor seja a COR3.
Posição 3: peça metálica, media e cuja cor seja a COR2.
Posição 4: rejeito.

MÓDULO 2808 - SISTEMA DE CONTROLE, TRANSPORTE E SELEÇÃO DE PEÇAS
MANUAL TEÓRICO E PRÁTICO
CAPÍTULO 14 – EXPERIÊNCIAS
Esta apostila tem por objetivo único fornecer as informações teóricas essenciais à utilização dos equipamentos da Datapool. Não é permitido o uso para quaisquer outras finalidades ou a reprodução total ou parcial desta Apostila, por quaisquer meios, sem a autorização da Datapool Eletrônica. 86
14.3.8 EXPERIÊNCIA 7 – ESTEIRA COMPLETA
Como nas indústrias, uma esteira pode ser configurada de acordo com o processo que
esta irá realizar, deve-se deixar a critério do usuário as características do objeto a ser
configurado em cada posição. Baseado nisso, desenvolver um programa no LabVIEW
capaz de controlar toda a e esteira a critério do usuário.