relatório 3 - sistemas de controle 1
DESCRIPTION
Sistemas de Controle 1TRANSCRIPT

EN2704 – Sistemas de Controle I
Atividade 3: Gráfico do lugar das raízes
André Mitsuo Ravazzi RA 11002511
Relatório apresentado à
Universidade Federal do ABC
como parte dos requisitos para
aprovação na disciplina EN2704
– Sistemas de Controle I
Prof., Dr. Leandro Baroni
SANTO ANDRÉ – 2015

1. As equações de movimento longitudinal da aeronave Ling-Temco-Vought A-7A
Corsair II, referentes ao sistema do corpo, são dadas no espaço de estados, para a
condição de voo correspondente ao nível de cruzeiro em uma altitude de 15000 ft em
Mach 0.3.
- u, v, w: velocidade relativa aos eixos do corpo [ft/s];
- p, q, r: velocidade angular dos eixos do corpo com relação a uma referência [rad/s];
- 𝜓, 𝜃, 𝜙: ângulos de Euler [rad/s];
- 𝛼, 𝛾: ângulos de ataque e de trajetória [rad];
- 𝜂: ângulo do elevador [rad]
[ 𝑢����
��
]
= [
0.00501 0.00464 −72.90000 −31.34000−0.08570 −0.54500 309.00000 −7.400000.00185 −0.00767 −0.39500 0.00132
0 0 1 0
] [
𝑢𝜔𝑞𝜃
] + [
5.63000−23.80000−4.51576
0
] 𝜂
[ 𝑢𝜔𝑞𝜃𝛼𝛾]
=
[ 1 0 0 00 1 0 00 0 1 00 0 0 10 0.00316 0 00 −0.00316 0 0]
[
𝑢𝜔𝑞𝜃
] +
[ 000000]
𝜂

1.1. Determine as funções de transferência correspondentes a cada variável de estado.
Utilizando a função ss2tf() podemos passar o sistema matricial de variáveis
de estado para um sistema matricial de funções de transferência, cuja cada variável
de estado corresponde a uma função de transferência, como mostrado abaixo:
𝑢(𝑡): 𝑈(𝑠)
𝜂(𝑠)=
5.63𝑠3 + 334.4𝑠2 + 315.7𝑠 + 71.24
𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255 𝑓𝑡/𝑠/𝑟𝑎𝑑
𝜔(𝑡): Ω(𝑠)
𝜂(𝑠)=
−23.8𝑠3 − 1405𝑠2 + 12.09𝑠 + 13.75
𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255 𝑓𝑡/𝑠/𝑟𝑎𝑑
𝑞(𝑡): 𝑄(𝑠)
𝜂(𝑠)=
−4.516𝑠3 − 2.246𝑠2 + 0.01879𝑠
𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255 𝑟𝑎𝑑/𝑠/𝑟𝑎𝑑
𝜃(𝑡): Θ(𝑠)
𝜂(𝑠)=
−4.516𝑠2 + 22246𝑠 + 0.01879
𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255 𝑟𝑎𝑑/𝑟𝑎𝑑
𝛼(𝑡): Α(𝑠)
𝜂(𝑠)=
−0.07521𝑠3 − 4.44𝑠2 − 0.03821𝑠 + 0.04346
𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255𝑟𝑎𝑑/𝑟𝑎𝑑
𝛾(𝑡): Γ(𝑠)
𝜂(𝑠)=
0.07521𝑠3 − 0.07554𝑠2 − 2.284𝑠 + 0.06225
𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255 𝑟𝑎𝑑/𝑟𝑎𝑑
1.2. A equação característica pode ser fatorada na forma (dois pares de polos
complexos conjugados):
𝑎(𝑠) = (𝑠2 + 2𝜁𝑝𝜔𝑝𝑠 + 𝜔𝑝2)(𝑠2 + 2𝜁𝑠𝜔𝑠𝑠 + 𝜔𝑠
2)
O primeiro par de polos descreve o modo de estabilidade fugoide (phugoid). O
segundo par descreve o modo de estabilidade de curto período. Determine seus
coeficientes de amortecimento e frequências naturais.
Utilizando a função zpk()o Matlab retorna a equação característica na forma
fatorada:
𝑎(𝑠) = (𝑠2 + 2𝜁𝑝𝜔𝑝𝑠 + 𝜔𝑝2)(𝑠2 + 2𝜁𝑠𝜔𝑠𝑠 + 𝜔𝑠
2)
∴ 𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255
= (𝑠2 + 0.03329𝑠 + 0.01972)(𝑠2 + 0.9017𝑠 + 2.665)
Assim, podemos fazer as seguintes relações:
{0.03329 = 2𝜁𝑝𝜔𝑝
0.01972 = 𝜔𝑝2 {
0.9017 = 2𝜁𝑠𝜔𝑠
2.665 = 𝜔𝑠2
E então:
{𝜔𝑝 = 0.1404 𝑟𝑎𝑑/𝑠
𝜁𝑝 = 0.1185 {
𝜔𝑠 = 1.63248 𝑟𝑎𝑑/𝑠𝜁𝑠 = 0.27617

1.3. Determine a resposta de cada variável a uma entrada degrau do elevador de 1°.
Multiplicando cada função de transferência obtida no item 1.2 pela entrada
degrau de 1°, 𝑅(𝑠) =0.01745
𝑠, onde 0.01745 é o valor de 1° em radianos, obtemos:
Figura 1: Resposta de u(t) a entrada degrau de 1 grau.
Figura 2: Resposta de 𝜔(t) a entrada degrau de 1 grau.
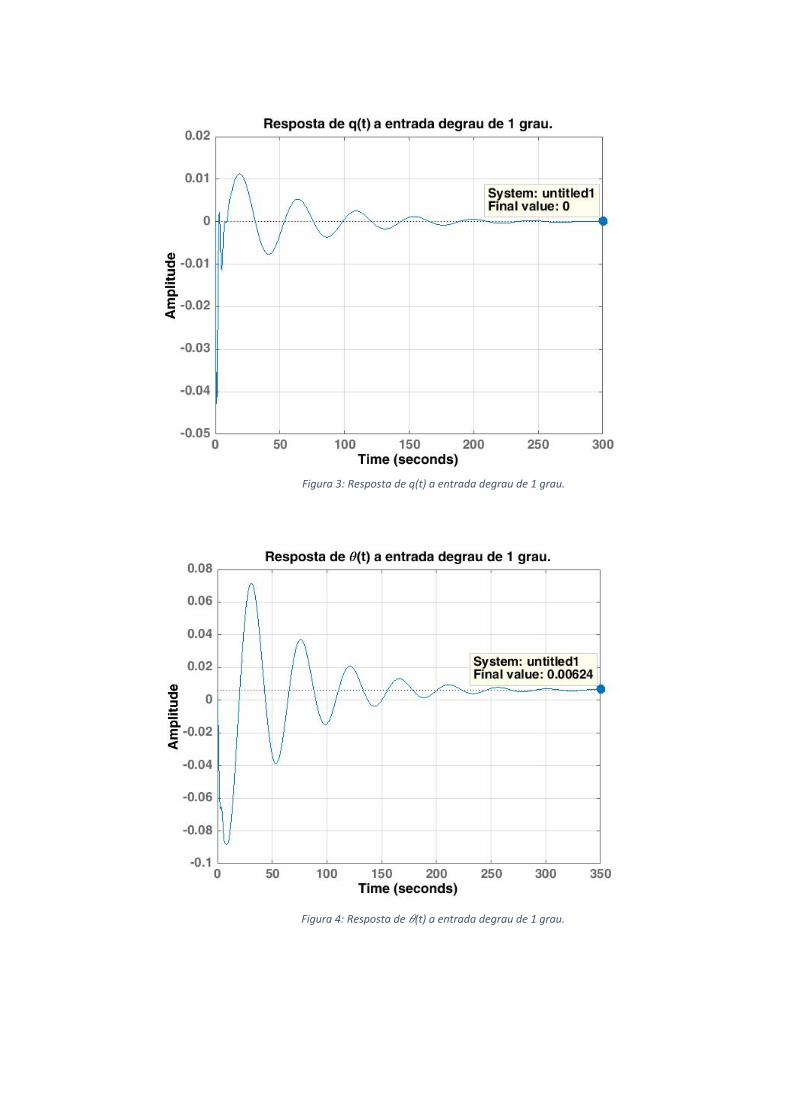
Figura 3: Resposta de q(t) a entrada degrau de 1 grau.
Figura 4: Resposta de 𝜃(t) a entrada degrau de 1 grau.
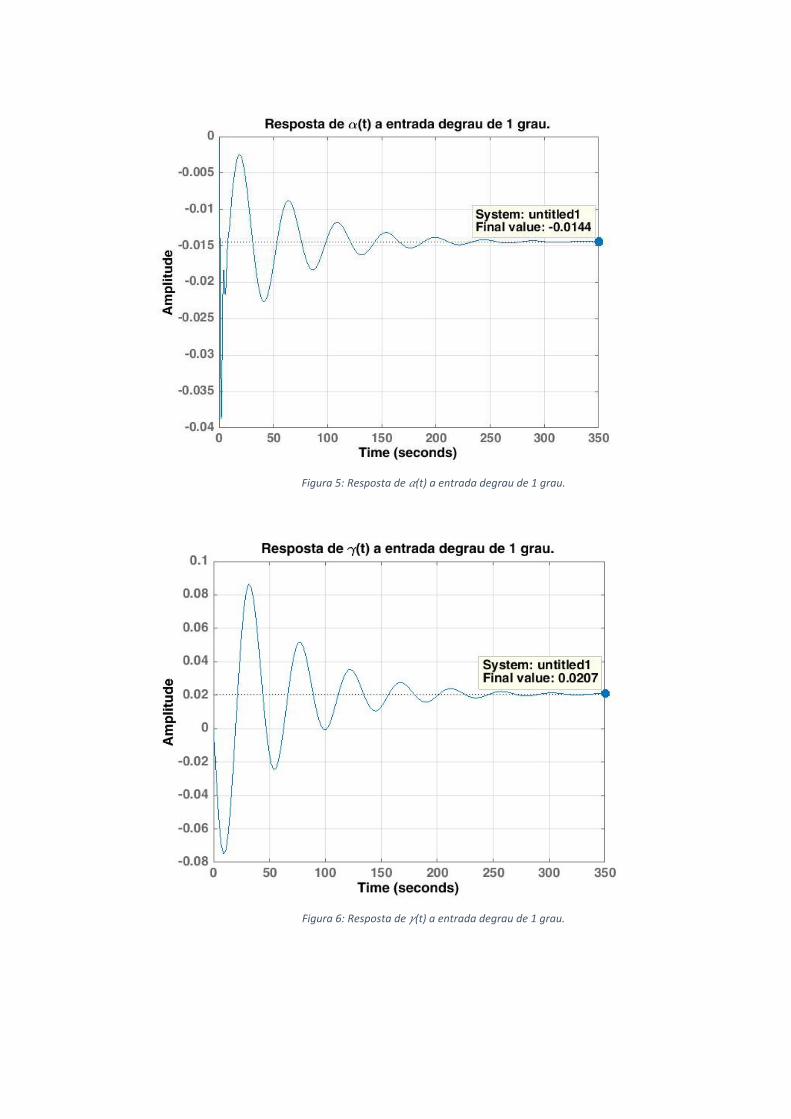
Figura 5: Resposta de 𝛼(t) a entrada degrau de 1 grau.
Figura 6: Resposta de 𝛾(t) a entrada degrau de 1 grau.
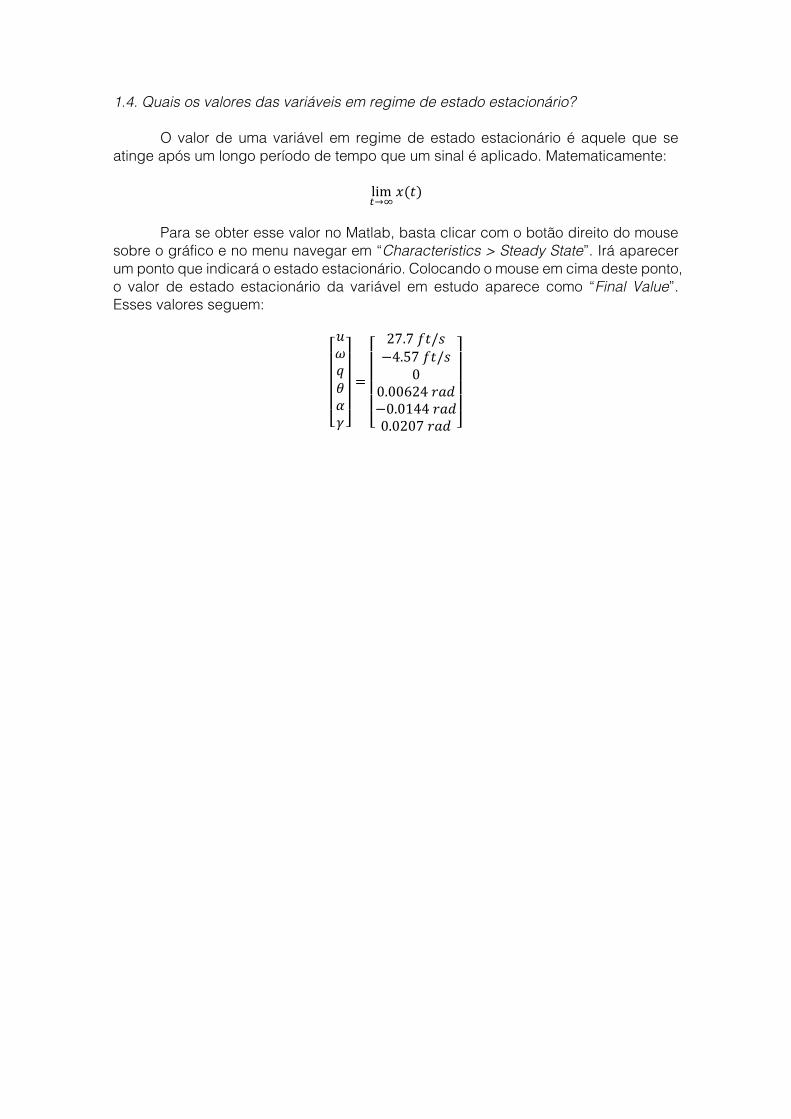
1.4. Quais os valores das variáveis em regime de estado estacionário?
O valor de uma variável em regime de estado estacionário é aquele que se
atinge após um longo período de tempo que um sinal é aplicado. Matematicamente:
lim𝑡→∞
𝑥(𝑡)
Para se obter esse valor no Matlab, basta clicar com o botão direito do mouse
sobre o gráfico e no menu navegar em “Characteristics > Steady State”. Irá aparecer
um ponto que indicará o estado estacionário. Colocando o mouse em cima deste ponto,
o valor de estado estacionário da variável em estudo aparece como “Final Value”.
Esses valores seguem:
[ 𝑢𝜔𝑞𝜃𝛼𝛾]
=
[
27.7 𝑓𝑡/𝑠−4.57 𝑓𝑡/𝑠
00.00624 𝑟𝑎𝑑−0.0144 𝑟𝑎𝑑0.0207 𝑟𝑎𝑑 ]

2. Considere um sistema com realimentação no ângulo de arfagem:
2.1. Calcule a função de transferência de malha aberta e faça o gráfico do lugar das
raízes para este sistema.
Temos que a função de transferência de malha aberta para o sistema
apresentado acima é:
𝐹𝑇𝑀𝐴 = 𝐺(𝑠). 𝐾𝜃 =𝜃(𝑠)
𝜂(𝑠). 𝐾𝜃 =
−4.516𝑠2 + 2.2246𝑠 + 0.01879
𝑠4 + 0.935 𝑠3 + 2.715 𝑠2 + 0.1065 𝑠 + 0.05255 𝐾𝜃
E o gráfico do lugar das raízes é dado a seguir:
Se a função de transferência é negativa, a realimentação negativa tem um efeito
de realimentação positiva, então deve-se considerar a realimentação positiva.
Figura 7: Gráfico do lugar das raízes para um sistema com realimentação no ângulo de arfagem.

2.2. Encontre os valores dos coeficientes de amortecimento e frequências naturais para
um ganho 𝐾𝜃 = -1.6.
𝐹𝑇𝑀𝐹 =𝐺(𝑠)
1 + 𝐺(𝑠)𝐾𝜃=
𝜃(𝑠)
𝜂(𝑠) + 𝜃(𝑠)𝐾𝜃=
−4.516 𝑠2 − 2.246 𝑠 + 0.01879
𝑠4 + 0.935 𝑠3 + 9.94 𝑠2 + 3.699 𝑠 + 0.02248
∴ 𝐹𝑇𝑀𝐹 =−4.516 𝑠2 − 2.246 𝑠 + 0.01879
(𝑠2 + 0.3802𝑠 + 0.002311)(𝑠2 + 0.5548𝑠 + 9.727)
Assim, podemos fazer as seguintes relações:
{0.3802 = 2𝜁𝑝𝜔𝑝
0.002311 = 𝜔𝑝2 {
0.5548 = 2𝜁𝑠𝜔𝑠
9.727 = 𝜔𝑠2
E então:
{𝜔𝑝 = 0.0481 𝑟𝑎𝑑/𝑠
𝜁𝑝 = 3.9522 {
𝜔𝑠 = 3.1188 𝑟𝑎𝑑/𝑠𝜁𝑠 = 0.0889
2.3. Obtenha a resposta do sistema realimentado ao degrau de 1°. Avalie o efeito da
realimentação nos modos de curto período e fugoide.
Figura 8: Resposta do sistema realimentado ao degrau de 1°.
Comparando o gráfico da figura 8 com o da figura 4, pode-se perceber que o
tempo de subida, tempo de pico e máximo de sobressinal são menores no sistema
realimentado. Contudo, seu tempo de acomodação é maior. Conclui-se assim que a
estabilidade do sistema realimentado é maior.
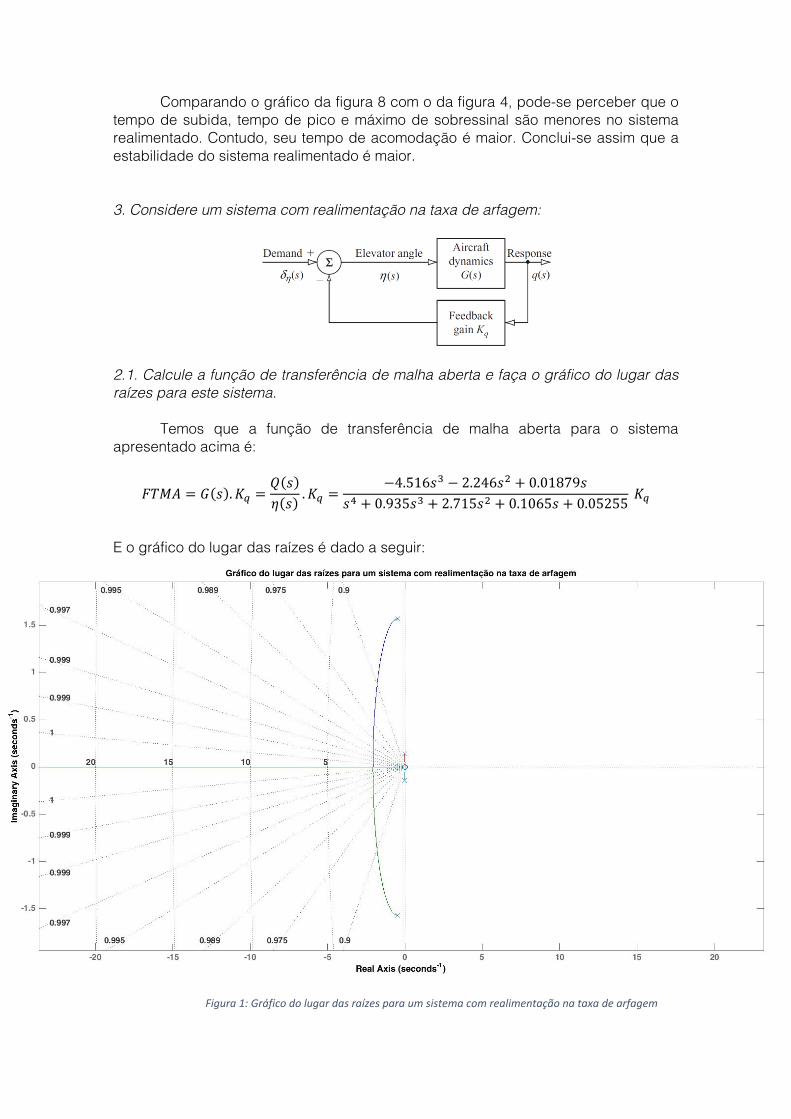
3. Considere um sistema com realimentação na taxa de arfagem:
2.1. Calcule a função de transferência de malha aberta e faça o gráfico do lugar das
raízes para este sistema.
Temos que a função de transferência de malha aberta para o sistema
apresentado acima é:
𝐹𝑇𝑀𝐴 = 𝐺(𝑠). 𝐾𝑞 =𝑄(𝑠)
𝜂(𝑠). 𝐾𝑞 =
−4.516𝑠3 − 2.246𝑠2 + 0.01879𝑠
𝑠4 + 0.935𝑠3 + 2.715𝑠2 + 0.1065𝑠 + 0.05255 𝐾𝑞
E o gráfico do lugar das raízes é dado a seguir:
Figura 1: Gráfico do lugar das raízes para um sistema com realimentação na taxa de arfagem

3.2. Se as restrições seguintes forem aplicadas:
- Coeficiente de amortecimento fugoide: 𝜁𝑝 ≥ 0.04
- Coeficiente de amortecimento de curto período: 𝜁𝑠 ≥ 0.5
- Frequência natural de curto período: 0.8 ≤ 𝜔𝑠 ≤ 3.0 rad/s
Determine o ganho mínimo para que estes requisitos sejam satisfeitos. Quais os novos
valores dos coeficientes de amortecimento e frequências naturais?
Observando o gráfico, podemos concluir que o ganho mínimo deverá ser 𝐾𝑞 =
0.187, e os novos valores de dos coeficientes de amortecimento e frequência naturais
será 0.501 e 1.75rad/s respectivamente.
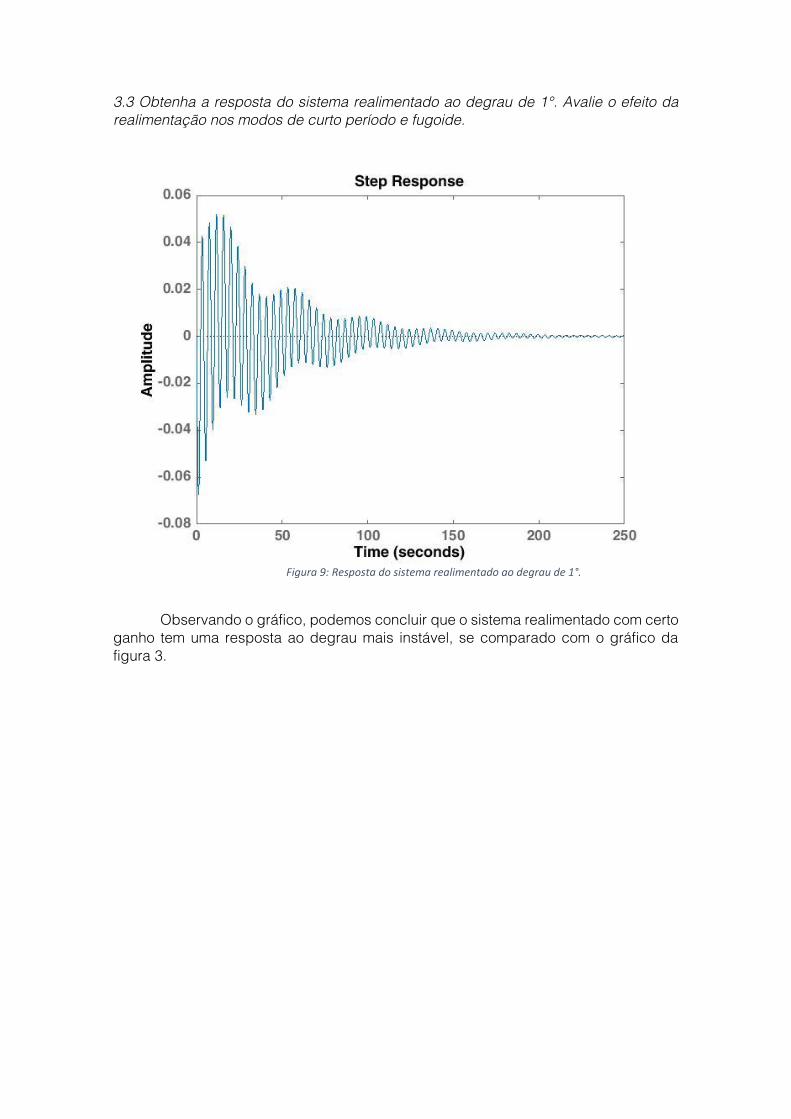
3.3 Obtenha a resposta do sistema realimentado ao degrau de 1°. Avalie o efeito da
realimentação nos modos de curto período e fugoide.
Observando o gráfico, podemos concluir que o sistema realimentado com certo
ganho tem uma resposta ao degrau mais instável, se comparado com o gráfico da
figura 3.
Figura 9: Resposta do sistema realimentado ao degrau de 1°.
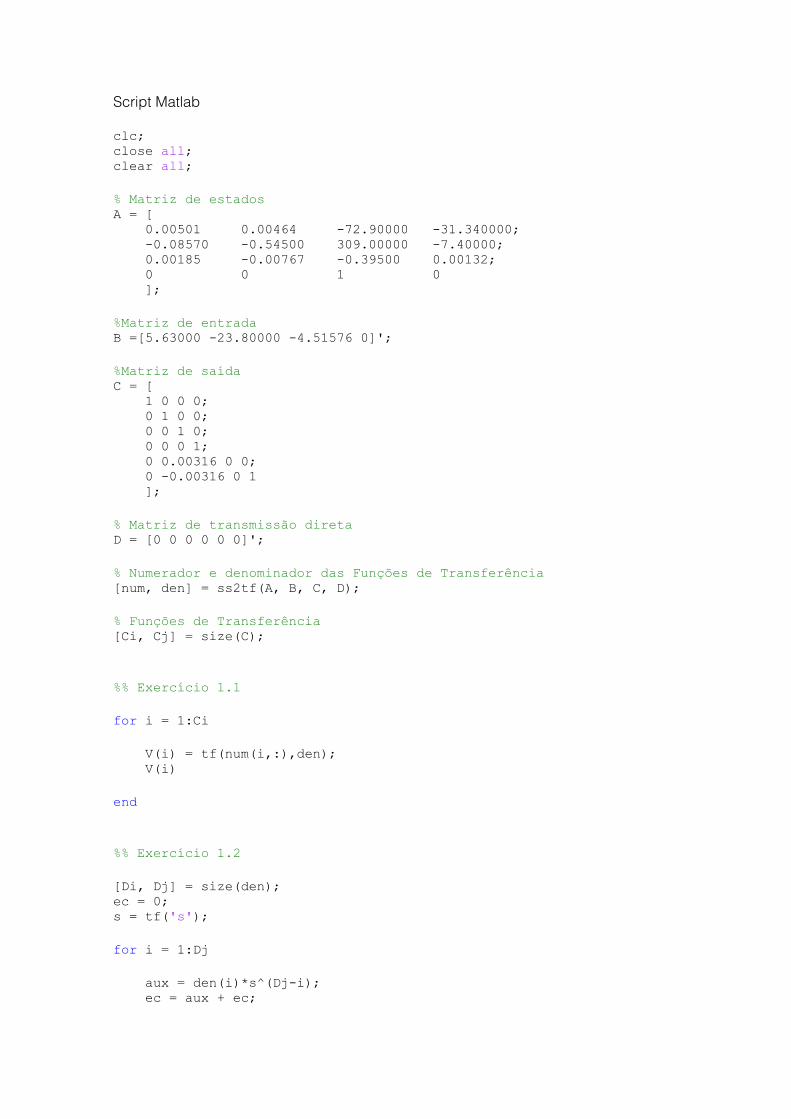
Script Matlab
clc; close all; clear all;
% Matriz de estados A = [ 0.00501 0.00464 -72.90000 -31.340000; -0.08570 -0.54500 309.00000 -7.40000; 0.00185 -0.00767 -0.39500 0.00132; 0 0 1 0 ];
%Matriz de entrada B =[5.63000 -23.80000 -4.51576 0]';
%Matriz de saída C = [ 1 0 0 0; 0 1 0 0; 0 0 1 0; 0 0 0 1; 0 0.00316 0 0; 0 -0.00316 0 1 ];
% Matriz de transmissão direta D = [0 0 0 0 0 0]';
% Numerador e denominador das Funções de Transferência [num, den] = ss2tf(A, B, C, D);
% Funções de Transferência [Ci, Cj] = size(C);
%% Exercício 1.1
for i = 1:Ci
V(i) = tf(num(i,:),den); V(i)
end
%% Exercício 1.2
[Di, Dj] = size(den); ec = 0; s = tf('s');
for i = 1:Dj
aux = den(i)*s^(Dj-i); ec = aux + ec;
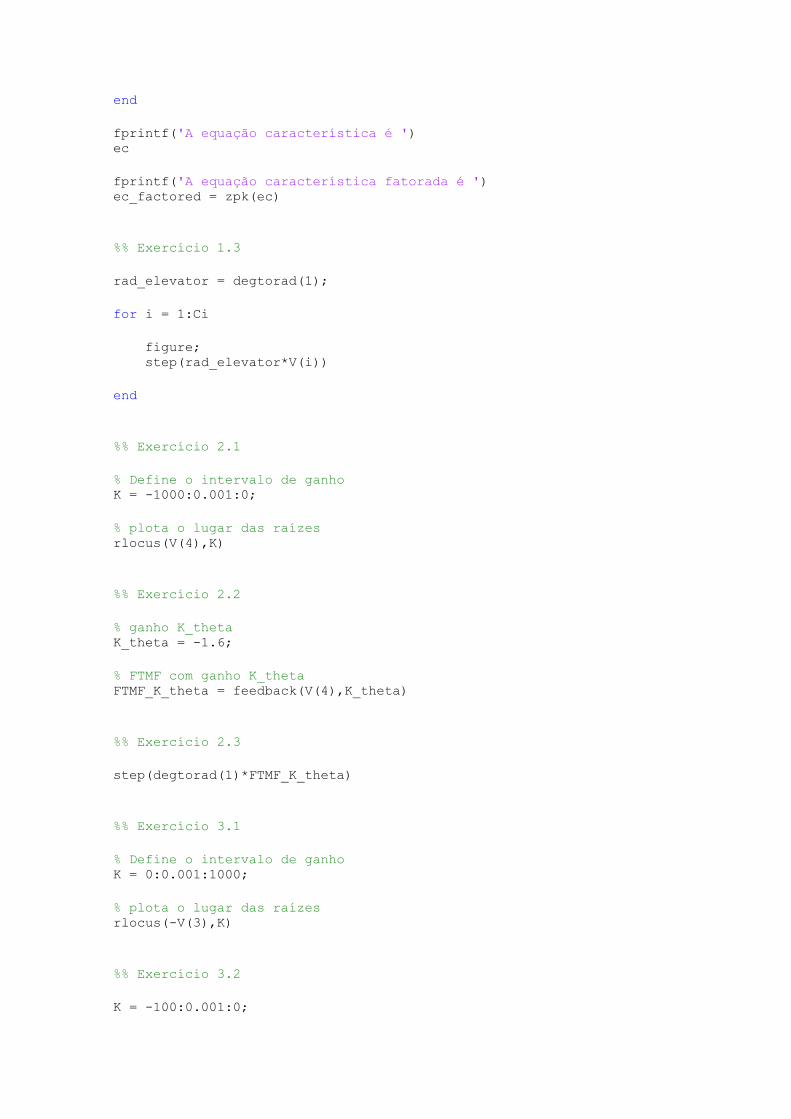
end
fprintf('A equação característica é ') ec
fprintf('A equação característica fatorada é ') ec_factored = zpk(ec)
%% Exercício 1.3
rad_elevator = degtorad(1);
for i = 1:Ci
figure; step(rad_elevator*V(i))
end
%% Exercício 2.1
% Define o intervalo de ganho K = -1000:0.001:0;
% plota o lugar das raízes rlocus(V(4),K)
%% Exercício 2.2
% ganho K_theta K_theta = -1.6;
% FTMF com ganho K_theta FTMF_K_theta = feedback(V(4),K_theta)
%% Exercício 2.3
step(degtorad(1)*FTMF_K_theta)
%% Exercício 3.1
% Define o intervalo de ganho K = 0:0.001:1000;
% plota o lugar das raízes rlocus(-V(3),K)
%% Exercício 3.2
K = -100:0.001:0;

rlocus(V(3), K), axis([-3.5 0.5 -2 2]), sgrid([0.04 0.5],[0.8 3]);
%% Exercício 3.3
% ganho K_theta K_q = 0.187;
% FTMF com ganho K_theta FTMF_K_q = feedback(V(3),K_q)
step(degtorad(1)*FTMF_K_q)