sistemas de controle ii - unidade 0
DESCRIPTION
Controle, revisãoTRANSCRIPT

Controladores PID e Sistemas
com 2 graus de liberdade
Sistemas de Controle II
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 1

Sumário
• Introdução;
• Ações de Controle;
• Sintonia de Controladores PID;
• Controle com Dois Graus de Liberdade;
• Abordagem de Alocação de Zero para
Melhorar as Características de Resposta.
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 2
Introdução
• O que faz um controlador automático?
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 3
Compara o valor real da grandeza de saída do processo com a grandeza de referência (valor desejado);
Determina o desvio e produz um sinal de controle que reduzirá o desvio a zero ou a um valor pequeno;
Produz um sinal de controle a partir de uma ação de controle.
Ações de controle
• Classificação dos controladores (ação):
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 4
Liga-desliga Proporcional Integral
Proporcional
+integral
Proporcional
+derivativo
Proporcional
+integral
+derivativo

Ações de controle
• Liga-desliga
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 5

Ações de controle
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 6

Ações de controle
• Proporcional (P)
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 7
Ganho
proporcional

Ações de controle
• Integral (I)
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 8
Ganho integral
Ações de controle
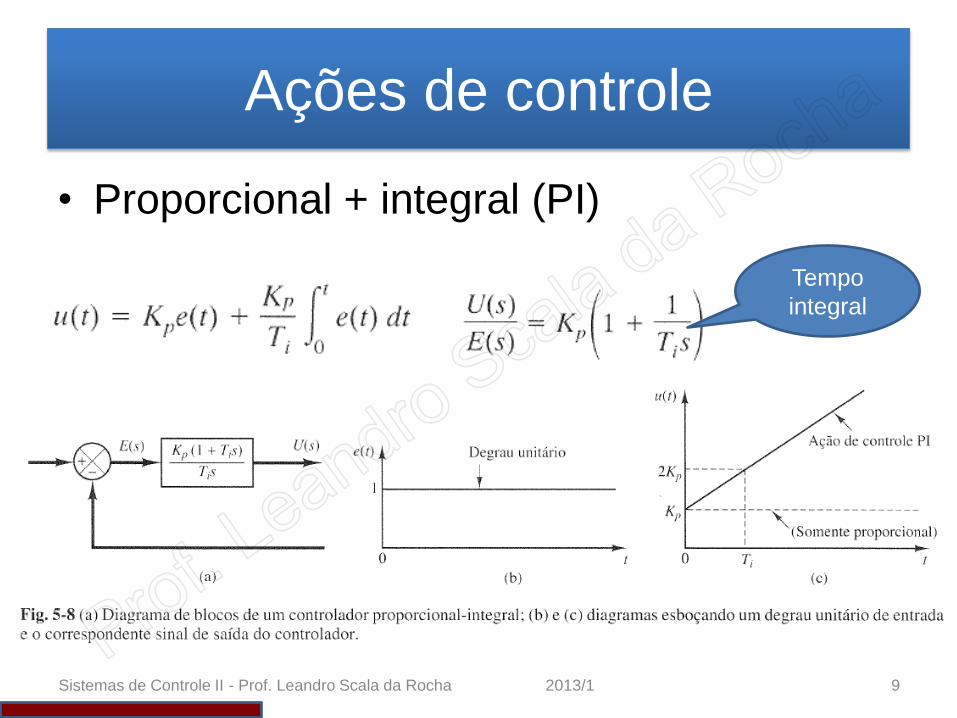
• Proporcional + integral (PI)
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 9
Tempo
integral

Ações de controle
• Proporcional + derivativa (PD)
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 10
Tempo
derivativo

Ações de controle
• Proporcional + integral + derivativa (PID)
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 11

Ações de controle
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 12
Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 13
• Controlador mais usado em controle de processos contínuos.
• Sua saída é resultado da soma de três diferentes tipos de ação:
Ação proporcional (P)
• Ação imediata e proporcional ao valor do erro corrente
• Acelera a resposta de um processo controlado
• Reduz o tempo de subida e o erro máximo
• Aumenta o “overshoot” e o tempo de estabilização
• Produz um “off-set” inversamente proporcional ao ganho

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 14
Ação Integral (I)
• Ação de controle gradual, proporcional a integral do erro
• Responde ao passado do erro enquanto este for diferente de zero
• Elimina o “off-set”. Reduz o tempo de subida.
• Aumenta o “overshoot”, o período de oscilação e tempo de estabilização
• Produz respostas lentas e oscilatória. Tende a instabilizar a malha
Ação Derivativa (D)
• Ação antecipatória, resposta proporcional à derivada do erro
• Usada para acelerar e estabilizar a malha.
• Reduz o “overshoot” e o erro máximo e o período de oscilação
• Não é indicada para processos com ruído

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 15

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 16
A boa sintonia é sempre um compromisso entre a estabilidade/robustez e a velocidade de resposta/desempenho da malha de controle. A sintonia é parte de um processo de redução de variabilidade. Não existe uma “receita de bolo” única para todos os casos. O sucesso da sintonia depende de vários fatores como conhecimento, método, ferramentas adequadas e principalmente experiência. A sintonia é facilitada pelo conhecimento do processo controlado.
Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 17
Objetivo da sintonia:
Encontrar os parâmetros proporcional, integral e derivativo
para atender critérios tais como:
•Conseguir variabilidade mínima em operação normal
•Mínimo (ou nenhum) “overshoot” para mudanças de
“set-point”
•Atingir rapidamente o novo “set-point” em caso de
mudança
•Operação estável do controlador mesmo para
alterações significativas nos parâmetros do processo
(robustez)

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 18
1º método de Ziegler-Nichols – malha aberta
• Obter experimentalmente a resposta da planta a uma
entrada degrau unitário;
• Se a resposta tem um aspecto de S... (quando a planta
não tem um integrador);
•Caracterizar as constantes L (atraso de transporte) e
T (constante de tempo) da função de transferência de
primeira ordem com tempo morto;
LseTs
K
sU
sC
1

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 19
LseTs
K
sU
sC
1

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 20
Tipo de
controlador Kp Ti Td
P T/L 0
PI 0,9T/L L/0,3 0
PID 1,2T/L 2L 0,5L
•Determinar os parâmetros do controlador a partir da tabela 1.
Tabela 1 – sintonia 1º método de ZN

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 21
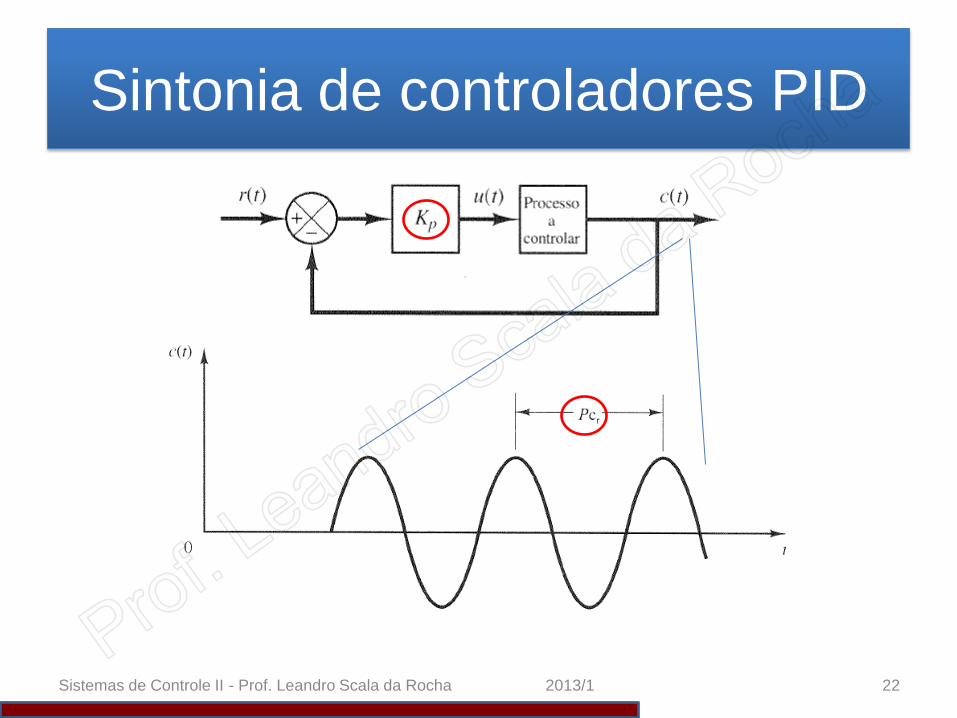
2º método de Ziegler-Nichols – malha fechada
• usar apenas a ação proporcional (Kp);
• aumenta-se o valor de Kp até que a resposta apresente
uma oscilação sustentada (quando Kp=Kcr);
•Mede-se o período crítico Pcr;
•Utiliza-se a tabela 2 para a sintonia.
Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 22

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 23
Tipo de
controlador Kp Ti Td
P 0,5Kcr 0
PI 0,45Kcr Pcr /1,2 0
PID 0,6Kcr 0,5Pcr 0,125Pcr
Tabela 2 – sintonia 2º método de ZN
Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 24
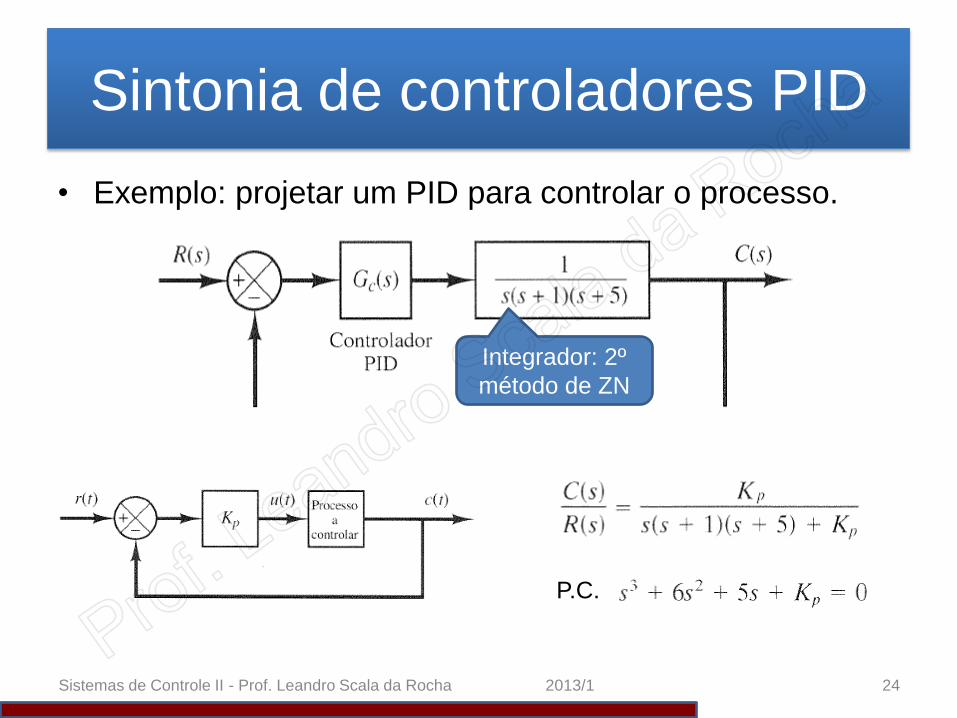
• Exemplo: projetar um PID para controlar o processo.
Integrador: 2º
método de ZN
P.C.

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 25
Logo o P.C é:
Para determinar a freq. de oscilação:

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 26
Tipo de
controlador Kp Ti Td
P 0,5Kcr 0
PI 0,45Kcr Pcr /1,2 0
PID 0,6Kcr 0,5Pcr 0,125Pcr
Tabela 2 – sintonia 2º método de ZN

Sintonia de controladores PID
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1 27

Controle com 2 graus de liberdade
28
Sistema a um grau de liberdade
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1
yn
yd
yr
G
G
G
Se uma das F.T. é conhecida, as
outras 2 podem ser determinadas
O grau de liberdade
ser refere a quantas
dessas funções são
independentes

Controle com 2 graus de liberdade
29
Sistema a 2 graus de liberdade
Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1
yn
yd
yr
G
G
G
Se duas das F.T. é conhecida, a
outra pode ser determinada

Abordagem de alocação de zeros
para melhorar a resposta
30 Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1
• Projeto de SC que não exibem erro estacionário e
forçam a resposta ao distúrbio se anular rapidamente.
• Considere:
sB
sAKsGp
mn
N
pspspsssB
zszszssA
nNN
N
m
,2,1,0
21
21

Abordagem de alocação de zeros
para melhorar a resposta
31 Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1
• Suponha:
• Portanto:
sAs
ssGGG
sAs
sssG
sAs
sssG
ccc
c
c1
1
12
212
2222
2
1111
KssssB
ssKA
sB
K
s
ss
sB
sAK
GGG
G
sD
sY
pcc
p
22
21 11

Abordagem de alocação de zeros
para melhorar a resposta
32 Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1
• Para um distúrbio degrau:
• O erro será:
s
d
KssssB
ssKAsY
2
0
0
0limlim
020
KsB
dsKA
s
d
KssssB
ssKAsy
ss

Abordagem de alocação de zeros
para melhorar a resposta
33 Sistemas de Controle II - Prof. Leandro Scala da Rocha 2013/1
• Alocação de zeros: considere o sistema
• Se escolhermos
• Então o sistema não exibirá erros estacionários na
resposta em degrau, rampa e aceleração.
01
2
2
1
1
1 asasasasas
sp
sR
sYn
n
n
n
n
21201
2
2 ssssaasasasp