representação da incerteza e entropia em classes de...
TRANSCRIPT

Representação da incerteza e entropia em classes de cobertura do solo urbano resultantes da aplicação de uma rede neural artificial
Letícia Andrade Sabo 1
Maria de Lourdes Bueno Trindade Galo 2
1,2
Universidade Estadual Paulista - UNESP
CEP 19060-900 – Presidente Prudente - SP, Brasil
Abstract. The great diversity of materials that characterizes the urban environment determines a structure of
mixed classes in the classification of multiespectral images. In that sense, it is important to define an appropriate
classification system using a non parametric classifier, that allows to incorporate non spectral data to the process.
They also allow to analyze the uncertainty associated to each class from the output values of the network
calculated in relation to each class. Considering these properties, it was developed an experiment that consisted
in the application of an Artificial Neural Network (ANN) to the classification of the urban land cover of
Presidente Prudente and the analysis of the uncertainty and the entropy in the representation of the mapped
thematic classes. The results showed that the aim of discriminating the variations in the urban land cover through
the application of an ANN in the classification was reached and that the class characterized by a defined pattern
as intermediary related to the urban soil impermeability presented larger ambiguity degree (larger mixture).
Palavras-chave: classification of urban environment, artificial neural networks, uncertainty in the classification,
remote sensing, classificação de ambientes urbanos, redes neurais artificiais, incerteza na classificação,
sensoriamento remoto.
1. INTRODUÇÃO
A classificação de dados de Sensoriamento Remoto é um processo de extração de
informações que engloba um conjunto de técnicas que possibilitam reconhecer padrões e
objetos com características similares nas imagens. Nesse processo, é importante estabelecer
claramente as classes que representarão a informação a ser extraída e para isso, deve ser
levado em consideração o nível de detalhamento oferecido pelos dados disponíveis a serem
classificados.
O método de classificação adotado para a extração da informação de interesse é outro
aspecto a ser considerado no esquema de classificação. Nesse sentido, as abordagens de
classificação supervisionada usando redes neurais artificiais, têm apresentado resultados
expressivos quando comparados aos métodos tradicionais de classificação de dados de
Sensoriamento Remoto (Venturieri e Santos, 1998). Essa condição tem levado a uma
crescente utilização dessa ferramenta, particularmente das redes multicamadas treinadas com
o algoritmo de aprendizagem backpropagation. No entanto, apesar da quase unanimidade em
relação ao modelo de rede que tem sido adotado, diferentes situações de classificação exigem
arquiteturas de rede e parâmetros de treinamento distintos, cuja definição influencia na
capacidade da rede “aprender” as características das classes de interesse, que possibilitem
uma associação correta para todo o conjunto de dados.
Genericamente, utilizar técnicas para classificar informações, colocando-as em grupos
previamente definidos, implica em reduzir a entropia do sistema. A entropia, por sua vez é
determinada pelo grau de incerteza contido em uma dada informação e é uma questão chave
para avaliar a qualidade temática do mapa produzido e, conseqüentemente, verificar o grau de
6103

adequação para usos posteriores do conjunto de dados classificados (Van Der Well et al.,
1998).
A questão da incerteza na atribuição de classes é particularmente significativa quando as
classes definem um padrão misturado na cena. Pelo fato das cidades constituírem ambientes
heterogêneos, sua classificação apresenta maior grau de dificuldade. Raramente, dentro de
uma cidade, podem ser definidas classes discretas, pelo fato das diferentes categorias de
ocupação do espaço urbano não apresentarem limites bem definidos, ou seja, transições
abruptas.
Em relação aos ambientes urbanos, Hamburger (1993) especifica que as categorias de uso
do solo apresentam-se como uma manifestação entre o comportamento sócio-econômico e
cultural e a ocupação espacial de uma determinada área. Por outro lado, as funções urbanas de
residir, trabalhar, circular e recrear definem uma estrutura espacial bastante complexa, mesmo
quando se trata de categorizar tipos de cobertura do solo urbano no contexto de uma análise
específica, o que geralmente implica em se estabelecer classes com maior grau de
ambigüidade.
Considerando que a classificação da paisagem urbana realizada a partir da utilização de
imagens de média resolução espacial, incorpora uma componente de ambigüidade na
definição das classes, concebeu-se um experimento que prevê o desenvolvimento de um
sistema de classificação que permita representar espacialmente a incerteza da classificação.
Nesse contexto, o objetivo deste trabalho é realizar uma análise da incerteza e da entropia
associadas à representação de classes de cobertura do solo urbano, definidas a partir da
aplicação de uma rede neural artificial para a classificação de uma imagem multiespectral de
média resolução espacial e produzir representações que permitam visualizar a variação
espacial da incerteza e da entropia na atribuição das classes.
2 – CLASSIFICAÇÃO, INCERTEZA E ENTROPIA
Em sensoriamento remoto, a classificação de imagens consiste em se estabelecer um processo
de decisão no qual um pixel ou grupo de pixels é definido como pertencente a uma
determinada classe (Venturieri e Santos, 1998).
Um dos métodos mais usados na classificação de imagens multiespectrais implica na
interação entre o intérprete humano e o sistema de análise possibilitando o treinamento do
algoritmo de classificação através de amostras usadas para caracterizar ou estimar parâmetros
estatísticos de cada classe (Richards,1986).
Muitas vezes porém, as propriedades estatísticas de uma classe não podem ser estimadas,
de modo que os problemas de teoria de decisão são melhor trabalhados pelos métodos que
produzem diretamente as funções de decisão através dos dados de treinamento, sem levar em
conta qualquer informação probabilística das classes de interesse. Os modelos de redes
neurais artificiais permitem desenvolver adaptativamente os coeficientes das funções de
decisão através de apresentações sucessivas de conjunto de padrões de treinamento (Gonzalez
e Woods, 2000).
As Redes Neurais Artificiais (RNA) são organizadas em camadas constituídas de
elementos de processamentos (nós) interligados, definindo a topologia ou arquitetura da rede.
As interconexões entre os nós de cada camada têm um peso associado e quando um valor é
transmitido para a camada seguinte, ele é multiplicado pelo peso. Em cada nó é produzido um
somatório das várias entradas ponderados pelos pesos, passando o resultado por uma função
de ativação que, por sua vez produzirá um valor de saída (Lippman, 1987).
6104

De acordo com Gonzalez e Woods (2000), o número de elementos de processamento
(nós) da primeira camada corresponde ao número de variáveis ou dimensão vetor de atributos
dos dados de entrada, a camada de saída terá tantos elementos quantas forem as classes a
serem separadas. O problema está na definição do número de camadas escondidas e do
número de nós que as compõem. Na prática este problema tem sido geralmente resolvido por
tentativa e erro experimentalmente e/ou pela experiência prévia do operador no domínio de
uma dada situação.
Segundo Galo (2000a), após o aprendizado da rede, ela classifica os padrões de interesse
usando o conjunto dos pesos ajustados durante a fase de treinamento e calculando, para cada
padrão de entrada, os valores de saída (ou ativação de saída) associados a cada classe. Essas
ativações de saída indicam então, o grau de associação de um dado padrão de interesse em
relação a cada uma das classes, fornecendo um indicador importante da ocorrência de
ambigüidade ou incerteza.
Normalmente, estimativas de probabilidade, geradas como subproduto da classificação,
refletem as diferenças da incerteza para a classificação resultante e podem ser considerados
indicativos de classificações duvidosas, de pixels misturados, classes heterogêneas, de limites
ambíguos entre classes.
A incerteza pode então, ser caracterizada pelos vetores de probabilidade que são
produzidos como um subproduto da classificação, disponibilizados pela maioria dos
procedimentos de classificação probabilísticos (Goodchild, Sun e Yang, 1992, apud
Goodchild, 2002). Estas probabilidades fornecem uma informação útil sobre a qualidade da
classificação resultante em termos das incertezas envolvidas. Para explorar completamente a
informação do vetor de probabilidade, medidas adicionais de incerteza são necessárias (Van
Der Wel et al., 1998).
Considerando P ij a probabilidade de uma dado pixel j estar associado à classe i, a
incerteza Iij pode ser descrita por:
ijij PI −= 1 (01)
Geralmente, a classe verdadeira do pixel não é conhecida e, conseqüentemente, a
quantidade de informação requerida para indicar a classe do pixel é também desconhecida. A
entropia do pixel é, conseqüentemente, definida como o índice de informação esperado de
uma parte da informação que revele sua verdadeira classe. Para este fim, a medida de entropia
combina as incertezas das várias classes do pixel, ponderando-as por suas probabilidades.
Dessa forma, a entropia global (Eij) pode ser estimada a partir dos valores normalizados
de probabilidades por classe, a partir da seguinte expressão:
ij2ijij Plog*PE ∑−= (02)
A principal vantagem da medida de entropia global sobre a medida simples é sua
habilidade de sumariar toda a informação contida no vetor das probabilidades num único
número, mas ela não é a única medida que exibe esta propriedade (Van Der Wel et al., 1998).
3 – DESENVOLVIMENTO
A área de estudos refere-se à área urbana e de expansão urbana de Presidente Prudente,
Estado de São Paulo, cuja delimitação foi feita com base na Carta de Zoneamento do Uso do
Solo Urbano de Presidente Prudente.
6105

3.1 – Imagem e material utilizado
A imagem multiespectral utilizada no experimento foi tomada pelo sensor CCD do satélite
Cbers2, cuja resolução espacial é de 20 metros e está disponível nas bandas espectrais 1 (luz
azul), 2 (luz verde), 3 (luz vermelha), 4 (luz infravermelho próximo).
A ferramenta computacional básica utilizada neste trabalho foi o simulador de redes
neurais SNNS (Stuttgart Neural Network Simulator). Trata-se de um ambiente de simulação e
pesquisa, desenvolvido por um grupo de pesquisadores da universidade Stuttgart, que engloba
uma vasta quantidade de modelos de redes neurais e que apresenta grande flexibilidade.
Além disso, foram utilizados os aplicativos Spring (Sistema de processamento de
Informações Georreferenciadas), desenvolvido e disponibilizado gratuitamente pelo INPE, e o
Idrisi, desenvolvido originalmente na “Clark University”. Estes programas foram usados no
processamento e tratamento dos dados de entrada e saída da classificação.
3.2 – Classes de cobertura do solo urbano e dados de entrada para classificação
As classes referentes aos tipos de cobertura do solo da área urbana e expansão urbana de
Presidente Prudente foram definidas e caracterizadas com base na Carta de Zoneamento
Urbano de Presidente Prudente: Maior Densidade de Superfícies Impermeáveis, Densidade Intermediária de Superfícies Impermeáveis, Menor Densidade de Superfícies Impermeáveis,
Vegetação Arbórea/Arbustiva, Vegetação Rasteira/Solo Exposto, Corpo d’Água.
Para que os dados de Sensoriamento Remoto passassem a constituir os planos de entrada
para a rede, que efetivamente permitissem a discriminação das classes de interesse foram
aplicadas transformações específicas à imagem multiespectral. Desta maneira, foram
realizados os seguintes processamentos: o registro entre a imagem multiespectral e a Carta de
Zoneamento Urbano de Presidente Prudente, uma transformação no espaço de cores (para
converter as imagens do espaço RGB para o IHS e retorno para o espaço RGB, visando
realçar o contraste da componente de Intensidade) e a geração de imagens: uma representando
variações de textura e outra realçando áreas de vegetação.
3.3 – Aplicação da Rede Neural Artificial na classificação
A definição de uma arquitetura de rede neural multicamadas, adequada para classificar o
conjunto de dados de entrada, implicou na determinação prévia da dimensionalidade das
classes de interesse e dos dados a serem classificados, os quais especificam, respectivamente,
o número de elementos de processamento (nós) das camadas de saída e de entrada da rede.
Considerando o exposto, a configuração da rede neural artificial utilizada constou de cinco (5)
elementos de processamento de entrada (três imagens selecionadas da transformação RGB-
IHS-RGB; a imagem de textura e NDVI) e sete elementos de processamento na camada de
saída (correspondentes às classes especificadas anteriormente, mais a parte externa a área de
interesse – Fundo).
Com base no resultado da aplicação da rede treinada à área estabelecida para validação,
foi selecionada a arquitetura de rede mais adequada para classificar o conjunto de dados
espaciais, constituindo cinco elementos de processamento na entrada da rede, 54 nós na
camada escondida e sete nós na camada de saída. Essa arquitetura, especificada como [5-54-
7] foi treinada com 6000 iterações discriminado todas as sete classes de interesse, com um
erro de 0,00365.
Na Figura 1 apresenta-se a classificação resultante da aplicação da arquitetura [5-54-7],
treinada com 6000 ciclos. Como indicado nesta figura, a aplicação de uma arquitetura de
RNA com uma única camada escondida possibilitou discriminar as seis classes de interesse,
cuja delimitação geral no contexto da área urbana ficou bem definida.
6106

Ainda pela Figura 1 pode-se notar que os eixos centrais da área urbana foram bem
representados e foram incluídos na classe Maior Densidade de Superfícies Impermeáveis,
caracterizada por áreas com maior densidade de construções e totalmente revestidas com
material impermeável. A classe Densidade Intermediária de Superfícies Impermeáveis foi a
que apresentou maior mistura de classes, pelo fato de ser constituída por áreas construídas,
porém com maior heterogeneidade quanto aos revestimentos da superfície, que podem ser
tanto impermeáveis quanto permeáveis. A classe Menor Densidade de Superfícies Impermeáveis ficou coerentemente caracterizada na classificação e representou bem o
espalhamento urbano, já que essa classe é constituída por áreas externas ao núcleo urbano, ou
seja, bairros residenciais com terrenos de dimensões maiores e loteamentos recentes. A classe
Vegetação Arbórea/Arbustiva, referente a áreas verdes que ocorrem no contexto urbano e na
área de expansão urbana, foi representada corretamente, assim como Vegetação Rasteira/Solo Exposto, constituída por vegetação de menor porte. A representação de Corpo d’água ficou
perfeitamente definida na classificação.
Figura 1– Classificação resultante da aplicação da RNA com a arquitetura [5-54-7]
3.4 – Representação da incerteza e da entropia
A partir da aplicação das Equações (01) e (02) os valores de incerteza e entropia foram
obtidos e convertidos para o formato imagem (através do programa computacional
implementado pelo Prof. Dr. Maurício Galo da FCT/Unesp), gerando as representações em
tons de cinza.
A Figuras 2, 3 e 4 referem-se à incerteza de cada pixel estar associado à determinada
classe, ou seja, o complementar da probabilidade. Nessas figuras, as regiões que se
apresentam mais claras indicam maior incerteza na associação à classe em questão. Já as áreas
mais escuras representam menor incerteza. Quanto maior a incerteza, menor a chance de um
6107
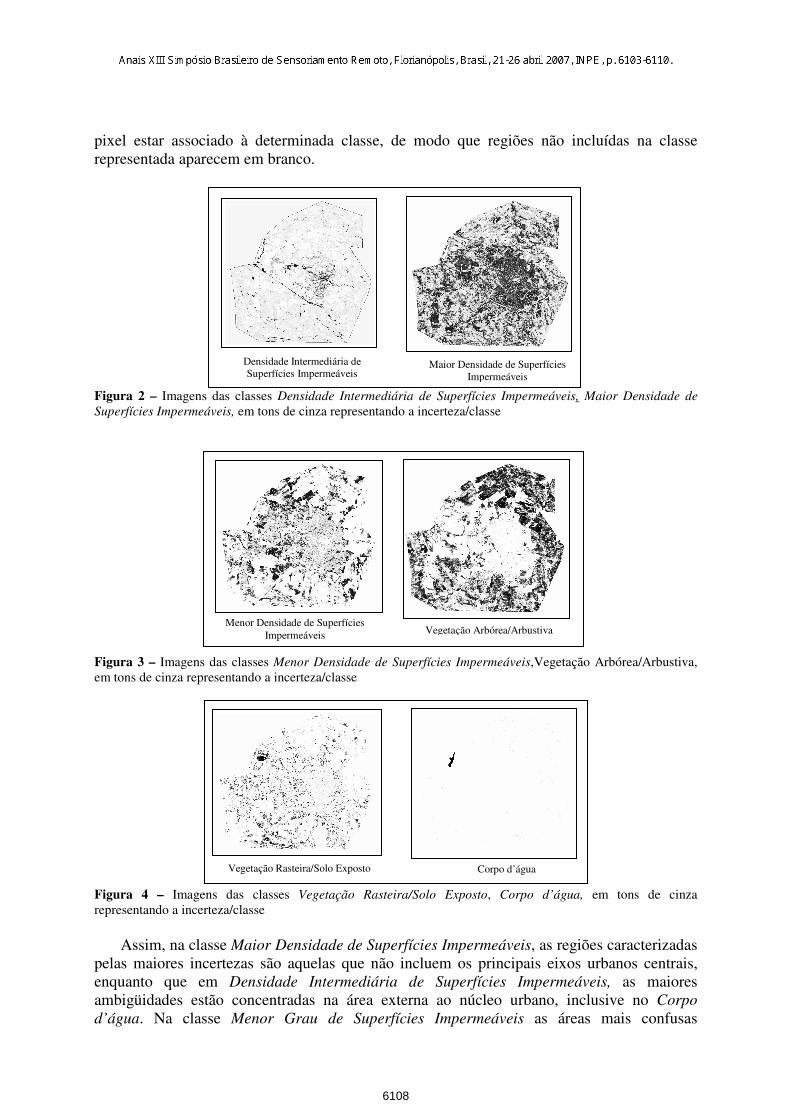
pixel estar associado à determinada classe, de modo que regiões não incluídas na classe
representada aparecem em branco.
Figura 2 – Imagens das classes Densidade Intermediária de Superfícies Impermeáveis, Maior Densidade de Superfícies Impermeáveis, em tons de cinza representando a incerteza/classe
Figura 3 – Imagens das classes Menor Densidade de Superfícies Impermeáveis,Vegetação Arbórea/Arbustiva,
em tons de cinza representando a incerteza/classe
Figura 4 – Imagens das classes Vegetação Rasteira/Solo Exposto, Corpo d’água, em tons de cinza
representando a incerteza/classe
Assim, na classe Maior Densidade de Superfícies Impermeáveis, as regiões caracterizadas
pelas maiores incertezas são aquelas que não incluem os principais eixos urbanos centrais,
enquanto que em Densidade Intermediária de Superfícies Impermeáveis, as maiores
ambigüidades estão concentradas na área externa ao núcleo urbano, inclusive no Corpo d’água. Na classe Menor Grau de Superfícies Impermeáveis as áreas mais confusas
Densidade Intermediária de
Superfícies Impermeáveis Maior Densidade de Superfícies
Impermeáveis
Menor Densidade de Superfícies
Impermeáveis Vegetação Arbórea/Arbustiva
Vegetação Rasteira/Solo Exposto Corpo d’água
6108
representam a Vegetação Arbórea/Arbustiva e o Corpo d’água. Para a classe Vegetação Arbórea/Arbustiva, as maiores incertezas ocorrem no núcleo urbano (inserção em outras
classes), nas áreas de espalhamento de superfícies impermeabilizadas e no corpo d’água. Já
para Vegetação Rasteira/Solo Exposto, poucos locais indicaram baixo grau de incerteza,
enquanto que para Corpo d’água a única representação com ambigüidade reduzida refere-se a
uma represa incluída na área de estudo.
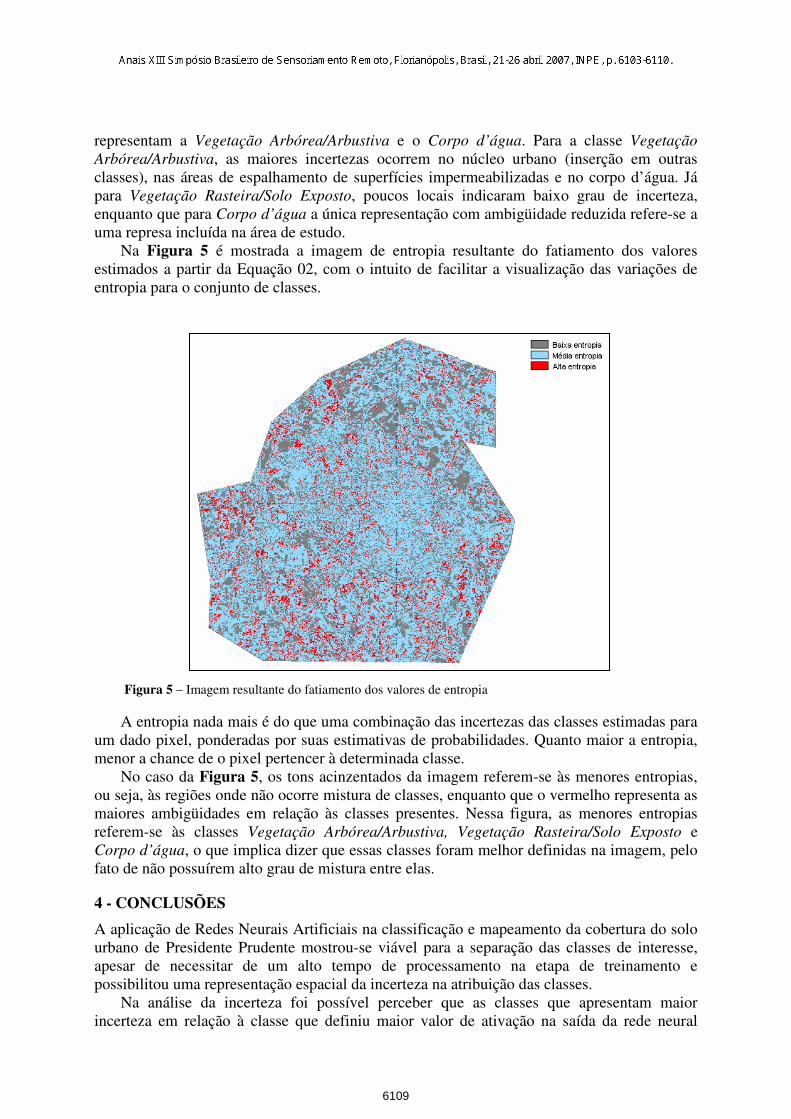
Na Figura 5 é mostrada a imagem de entropia resultante do fatiamento dos valores
estimados a partir da Equação 02, com o intuito de facilitar a visualização das variações de
entropia para o conjunto de classes.
Figura 5 – Imagem resultante do fatiamento dos valores de entropia
A entropia nada mais é do que uma combinação das incertezas das classes estimadas para
um dado pixel, ponderadas por suas estimativas de probabilidades. Quanto maior a entropia,
menor a chance de o pixel pertencer à determinada classe.
No caso da Figura 5, os tons acinzentados da imagem referem-se às menores entropias,
ou seja, às regiões onde não ocorre mistura de classes, enquanto que o vermelho representa as
maiores ambigüidades em relação às classes presentes. Nessa figura, as menores entropias
referem-se às classes Vegetação Arbórea/Arbustiva, Vegetação Rasteira/Solo Exposto e
Corpo d’água, o que implica dizer que essas classes foram melhor definidas na imagem, pelo
fato de não possuírem alto grau de mistura entre elas.
4 - CONCLUSÕES
A aplicação de Redes Neurais Artificiais na classificação e mapeamento da cobertura do solo
urbano de Presidente Prudente mostrou-se viável para a separação das classes de interesse,
apesar de necessitar de um alto tempo de processamento na etapa de treinamento e
possibilitou uma representação espacial da incerteza na atribuição das classes.
Na análise da incerteza foi possível perceber que as classes que apresentam maior
incerteza em relação à classe que definiu maior valor de ativação na saída da rede neural
6109

artificial foram Densidade Intermediária e Menor Densidade de Superfícies Impermeáveis, o
que já era esperado, visto que as médias estimadas a partir dos dados de treinamento, tiveram
pequena variação nos diferentes planos de entrada para a classificação pela rede, antecipando
maior dificuldade na discriminação dessas classes.
Posteriormente, analisando a imagem de entropia, o resultado observado foi o mesmo, as
menores entropias ocorreram para as classes Vegetação Arbórea/Arbustiva, Vegetação Rasteira/Solo Exposto e Corpo d’água, o que implica dizer que essas classes ficaram melhor
definidas, pelo fato de não possuírem alto grau de ambigüidade. Isso permite concluir que as
classes com maior entropia, ou seja, maior mistura, referem-se à Densidade Intermediária e
Menor Densidade de Superfícies Impermeáveis.
Agradecimento
Ao CNPq (Conselho Nacional de Pesquisas) pela concessão da bolsa de estudos.
5 - REFERÊNCIAS BIBLIOGRÁFICAS
GALO, M. L. B. T.. Aplicação de redes neurais artificiais e sensoriamento remoto na caracterização ambiental do Parque Estadual Morro do Diabo. 2000a. 205f. Tese (Doutorado em Engenharia Ambiental) -
Escola de Engenharia de São Carlos. Universidade de São Paulo.
GONZALEZ, R. C.; WOODS, R. E.. Processamento Digital de Imagens. Edgard Blücher, 2000. 717p
GOODCHILD, M. F.; SHI, W.; FISHER, P. F.. Spatial Data Quality. Taylor & Francis, London e New York,
2002.
HAMBURGER, D. S.. Utilização de Informações Derivadas de Características Texturais de Imagens Orbitais na definição de Classes de Uso do Solo Urbano. Apostila. São José dos Campos. INPE, 1993.
LIPPMANN, R. P.. An introduction to computing with neural nets. IEEE ASSP Magazine, v.4, 4-22p, 1987.
RICHARDS, J. A.; JIA, X.. Remote Sensing Digital Image Analysis. Springer, 1999.
VAN DER WEL, F. J. M., VAN DER GAAG, L. C., and GORTE, B. G. H. Visual exploration of uncertainty in
remote sensing classification. Computers and Geosciences, 24:335-343, 1998.
VENTURIERI, A.; SANTOS, J. R. Técnicas de Classificação de Imagens para Análise de Cobertura Vegetal. In:
ASSAD, E. D.; SANO, E. E., eds. Sistema de Informação Geográfica: Aplicações na Agricultura. Brasília:
DF. Embrapa –SPI/Embrapa-CPAC, 1998. p 351-371.
6110