princípios de controle, utfpr - páginas...
TRANSCRIPT

Analise Transitoria
A resposta temporal de um sistema e constituıda de duas partes:
• Resposta transitoria: saıda do sistema vista desde o princıpio ate um ins-tante de tempo no qual o sistema se estabiliza numa regiao de operacao.Esse intervalo de tempo transitorio geralmente apresenta oscilacoes amor-tecidas.
• Resposta estacionaria: comportamento da saıda do sistema a medida emque t → ∞.
ObjetivoDeterminar o que ocorre com a saıda y(t) quando o sistema e submetido auma determinada entrada-padrao em r(t).
r(t) y(t)
entrada saıda
G(s)
processo
1 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

A entrada-padrao, ou entrada de teste, e uma entrada na forma de impulso,degrau, rampa, parabola ou senoide. Muitas propriedades essenciais de umsistema podem ser determinadas atraves da resposta correspondente a essasentradas de teste.
2 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Analise de Sistemas de Primeira Ordem
Muito utilizados para descrever processos simples, como a velocidade de umamassa, a temperatura de um lıquido em um tanque, o nıvel de um tanque e atensao num circuito RC serie.
Possuem funcao de transferencia abaixo, sendo k o ganho e τ a constante detempo do sistema.
T (s) =Y (s)
R(s)=
k
τs + 1
3 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Resposta ao impulso unitario
Para r(t) = δ(t), tem-se que R(s) = 1. Portanto,
Y (s) =k
τs + 1⇒ y(t) =
k
τe−t/τ , t ≥ 0
4 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
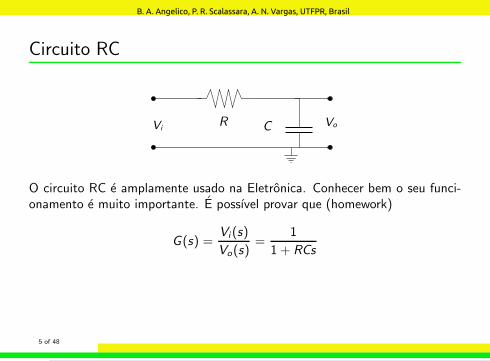
Circuito RC
ViVoR C
O circuito RC e amplamente usado na Eletronica. Conhecer bem o seu funci-onamento e muito importante. E possıvel provar que (homework)
G(s) =Vi (s)
Vo(s)=
1
1 + RCs
5 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

ViVoR C
ExemploSuponha que R = 1kΩ e C = 1mF .(a) Determine o valor de pico de tensao sobre o capacitor C quando a entradaVi e um pulso.(b) Determine o tempo necessario para que o capacitor apresente uma tensaoinferior a 0.15V .
Solucao: Note que k = 1 e τ = RC = 1. O valor de pico ocorre no instanteinicial e e dado por 1/τ = 1V .Relembrando a formula y(t) = k
τ e−t/τ , determine o tempo ta tal que
0.15 = 1e−ta .
6 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

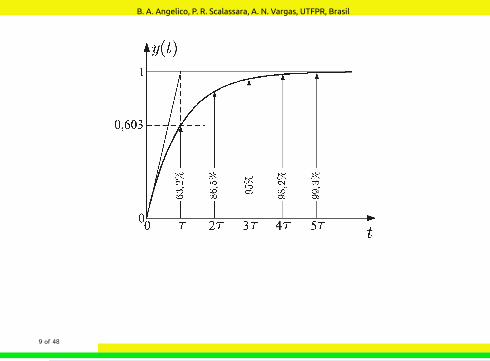
Resposta ao degrau unitario
Y (s) =k
τs + 1· 1s=
k/τ
s (s + 1/τ)
=k
s− k
s + (1/τ)
y(t) = k − ke−t/τ , t ≥ 0
• Note que y(0) = 0 e que y(∞) = k .
• Quanto menor a constante de tempo τ , mais rapido o sistema responde.
• A inclinacao da reta tangente em t = 0 e k/τ .
• Para t ≥ 4τ , a resposta se mantem a 2% do valor final.
7 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
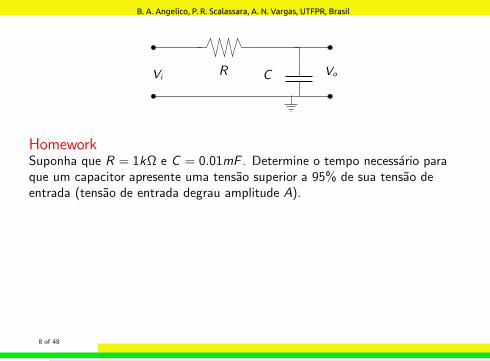
ViVoR C
HomeworkSuponha que R = 1kΩ e C = 0.01mF . Determine o tempo necessario paraque um capacitor apresente uma tensao superior a 95% de sua tensao deentrada (tensao de entrada degrau amplitude A).
8 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
9 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

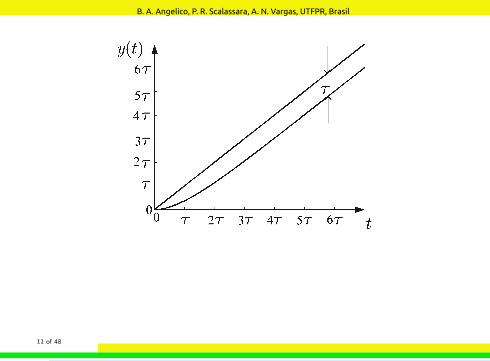
Resposta a rampa unitaria
Y (s) =Y (s)
R(s)=
1
s2· k
τs + 1=
k/τ
s2 (s + 1/τ)
=k
s2− kτ
s+
kτ
s + 1/τ
y(t) = kt − kτ + kτe−t/τ , t ≥ 0
Particularmente, para k = 1, o sinal de erro e dado por:
e(t) = r(t) − y(t) = τ(
1− e−t/τ)
O erro de estado permanente para k = 1 e dado por
e (∞) = limt→∞
e(t) = τ
10 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
11 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
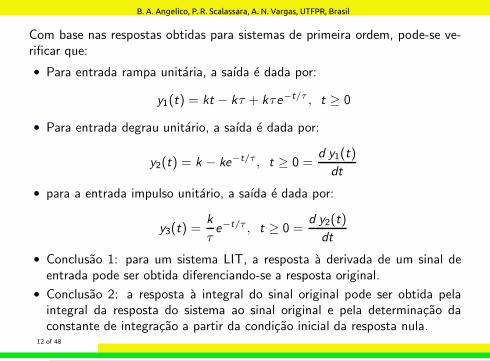
Com base nas respostas obtidas para sistemas de primeira ordem, pode-se ve-rificar que:
• Para entrada rampa unitaria, a saıda e dada por:
y1(t) = kt − kτ + kτe−t/τ , t ≥ 0
• Para entrada degrau unitario, a saıda e dada por:
y2(t) = k − ke−t/τ , t ≥ 0 =d y1(t)
dt
• para a entrada impulso unitario, a saıda e dada por:
y3(t) =k
τe−t/τ , t ≥ 0 =
d y2(t)
dt
• Conclusao 1: para um sistema LIT, a resposta a derivada de um sinal deentrada pode ser obtida diferenciando-se a resposta original.
• Conclusao 2: a resposta a integral do sinal original pode ser obtida pelaintegral da resposta do sistema ao sinal original e pela determinacao daconstante de integracao a partir da condicao inicial da resposta nula.
12 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Analise de Sistemas de Segunda Ordem
Exemplos de sistemas com modelos de segunda ordem: posicao de uma massanum sistema massa-mola-atrito, deslocamento angular do eixo de um motorDC (modelo simplificado) e carga no capacitor de um circuito RLC serie.
A forma padrao de um sistema de segunda ordem e dada por
T (s) =Y (s)
R(s)=
ω2n
s2 + 2sξωn + ω2n
,
onde:
• ωn: frequencia natural nao amortecida;
• ξ: coeficiente de amortecimento;
• ωd = ωn
√
1− ξ2: frequencia natural amortecida do sistema.
A equacao caracterıstica e dada por s2+2sξωn+ω2n, portanto, o comportamento
dinamico do sistema de 2a ordem pode ser descrito pelos parametros ξ e ωn.13 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

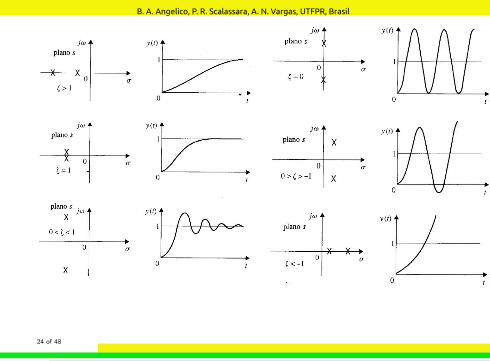
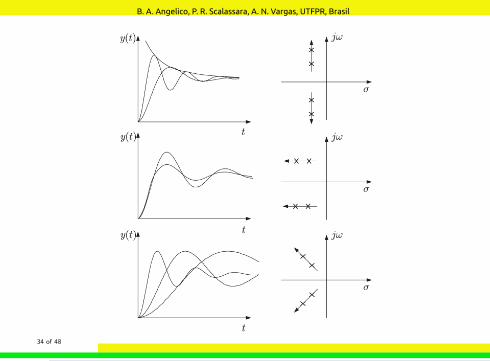
Dependendo do valor de ξ, tem-se tres tipos de sistemas de 2a ordem:
• Sistema subamortecido (0 < ξ < 1): Os polos de malha fechada saocomplexos conjugados e se situam no semiplano esquerdo do plano s. Nessecaso, as raızes da equacao caracterıstica sao:
s1,2 = −ξωn ± jωn
√
1− ξ2 = −ξωn ± jωd ,
E a funcao de transferencia e dada por:
Y (s)
R(s)=
ω2n
(s + ξωn + jωd) (s + ξωn − jωd)
14 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

15 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Pode-se reescrever a funcao de transferencia como:
Y (s)
R(s)=
ω2n
(s + ξωn)2+ ω2
d
pois, tem-se:
(s + ξωn)2 = s2 + 2sξωn + ξ2ω2
n
(s + ξωn)2 −ξ2ω2
n + ω2n
︸ ︷︷ ︸
ω2d
= s2 + 2sξωn + ω2n
(s + ξωn)2 + ω2
d = s2 + 2sξωn + ω2n
Portanto, para entrada degrau unitario, R(s) = 1/s, tem-se:
Y (s) =ω2n
(s + ξωn)2+ ω2
d
· 1s
16 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Utilizando-se fracoes parciais, encontra-se:
Y (s) =1
s− s + 2ξωn
(s + ξωn)2+ ω2
d
=1
s− s + ξωn
(s + ξωn)2 + ω2
d
− ξωn
(s + ξωn)2 + ω2
d
=1
s− s + ξωn
(s + ξωn)2+ ω2
d
−
(
ξ√1−ξ2
)
ωd
(s + ξωn)2+ ω2
d
Como L−11s
= 1 e
L−1
s + ξωn
(s + ξωn)2+ ω2
d
= e−ξωnt cos (ωd t) ,
L−1
ωd
(s + ξωn)2 + ω2
d
= e−ξωnt sin (ωd t) ,
17 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Tem-se:
y(t) = L−1 Y (s) = 1− e−ξωnt
(
cos (ωd t) +ξ
√
1− ξ2sin (ωd t)
)
= 1− e−ξωnt
√
1− ξ2sin (ωd t + θ) , t ≥ 0,
onde θ = tan−1
(√1−ξ2
ξ
)
. O termo ξωn = α controla o amortecimento do
sistema e e chamado de coeficiente de atenuacao.
A frequencia de oscilacao transitoria e a frequencia natural amortecida (ωd),que varia de acordo com ξ. O sinal de erro e dado por:
e(t) = r(t) − y(t)
=e−ξωnt
√
1− ξ2sin (ωd t + θ)
18 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

19 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
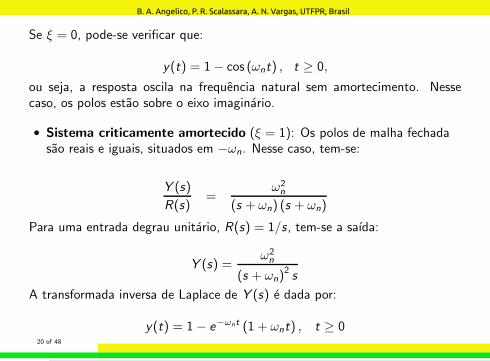
Se ξ = 0, pode-se verificar que:
y(t) = 1− cos (ωnt) , t ≥ 0,
ou seja, a resposta oscila na frequencia natural sem amortecimento. Nessecaso, os polos estao sobre o eixo imaginario.
• Sistema criticamente amortecido (ξ = 1): Os polos de malha fechadasao reais e iguais, situados em −ωn. Nesse caso, tem-se:
Y (s)
R(s)=
ω2n
(s + ωn) (s + ωn)
Para uma entrada degrau unitario, R(s) = 1/s, tem-se a saıda:
Y (s) =ω2n
(s + ωn)2s
A transformada inversa de Laplace de Y (s) e dada por:
y(t) = 1− e−ωnt (1 + ωnt) , t ≥ 020 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

21 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• Sistema superamortecido (ξ > 1): Os polos de malha fechada sao reaise diferentes. Nesse caso, tem-se:
Y (s)
R(s)=
ω2n
(
s + ξωn + ωn
√
ξ2 − 1)(
s + ξωn − ωn
√
ξ2 − 1)
Para entrada degrau,
Y (s) =ω2n
(
s + ξωn + ωn
√
ξ2 − 1)(
s + ξωn − ωn
√
ξ2 − 1)1
s
y(t) = 1 +ωn
2√
ξ2 − 1
(e−s1t
s1− e−s2t
s2
)
, t > 0
Se |s1| << |s2|, entao e−s2t decai muito mais rapido do que e−s1t , s1 e polodominante, e a resposta pode ser aproximada por um sistema de primeira ordem:
y(t) ≈ 1 +ωn
2√
ξ2 − 1
(e−s1t
s1
)
, t > 0
22 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

23 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
24 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Especificacoes da Resposta Transitoria para Sistemas Subamortecidos
• As caracterısticas de um sistema de controle sao geralmente especificadasem termos da resposta transitoria a uma entrada degrau.
• Para sistemas LIT, quando a resposta ao degrau e conhecida, pode-se cal-cular a resposta a qualquer tipo de entrada.
• Costuma-se utilizar condicao inicial de sistema em repouso.
Especificacoes mais comuns:
• Tempo de atraso (td ): tempo necessario para que a resposta alcancemetade do seu valor final pela primeira vez.
• Tempo de subida (tr ): tempo requerido para que a resposta passe de 10%a 90%, ou de 5% a 95%, ou de 0% a 100% do valor final. Para sistemas de2a ordem subamortecido, utiliza-se 0% a 100% do valor final. Para sistemassuperamortecidos, geralmente considera-se de 10% a 90%.
• Tempo de pico (tp): tempo para que a resposta atinja o primeiro pico desobresinal.
25 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• Maximo overshoot (MO): valor maximo de pico da curva de resposta,medido a partir da unidade. Se o valor da resposta em regime diferir daunidade, utiliza-se a porcentagem maxima de sobresinal (ou ultrapassagempercentual, U .P .):
U .P . =y (tp)− y (∞)
y (∞)× 100%
• Tempo de acomodacao ou assentamento) (ts): tempo necessario paraque a resposta permaneca com valores no interior de uma certa faixa ±∆(usualmente ±2% ou ±5%) em torno do valor final.
26 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

27 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Consideracoes de projeto:
• Deseja-se geralmente que a resposta transitoria seja rapida e amortecida.
• Para um sistema de 2a ordem com resposta transitoria aceitavel, deve-sefazer 0, 4 < ξ < 0, 8.
• Valores pequenos (ξ < 0, 4) resultam em excessivo sobresinal na respostatransitoria.
• Valores grandes (ξ > 0, 8) a resposta se torna muito lenta.
• Sobresinal e tempo de subida sao conflitantes entre si, ou seja, eles naopodem ser diminuıdos simultaneamente.
28 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Calculo das Especificacoes de Transitorio
As especificacoes de tempo de subida, tempo de pico, maximo sobresinal etempo de acomodacao podem ser obtidos em funcao dos parametros ξ e ωn.
• Tempo de subida tr : fazendo-se t = tr na equacao da resposta ao degraudo sistema subamortecido, tem-se:
y(tr ) = 1 = 1− e−ξωntr
(
cos (ωd tr ) +ξ
√
1− ξ2sin (ωd tr )
)
Como e−ξωntr 6= 0, tem-se:
cos (ωd tr ) +ξ√1−ξ2
sin (ωd tr ) = 0
⇒ tan (ωd tr ) = −√
1−ξ2
ξ = − ωd
ξωn
⇒ tr =1ωd
tan−1(
− ωd
ξωn
)
tr =π − θ
ωd
29 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• Tempo de pico tp: pode ser obtido derivando-se y(t) em relacao a t eigualando o resultado a zero:
dy(t)
dt
]
t=tp
= ξωne−ξωntp
[
cos (ωd tp) +ξ
√
1− ξ2sin (ωd tp)
]
+e−ξωntp [ωd sin (ωd tp)− ξωn cos (ωd tp)] = 0
⇒ e−ξωntp sin (ωd tp)ωn
√
1− ξ2= 0.
Com isso,
sin (ωd tp) = 0 ⇒ ωd tp = 0, π, 2π, 3π, . . .
Como o tempo de pico corresponde ao primeiro pico de sobresinal, ωd tp = π,tem-se:
tp =π
ωd
Lembre-se que ωd = ωn
√
1− ξ2.30 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
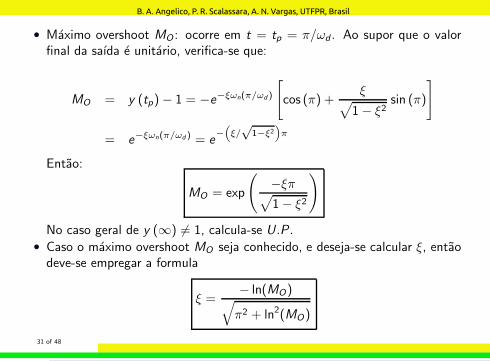
• Maximo overshoot MO : ocorre em t = tp = π/ωd . Ao supor que o valorfinal da saıda e unitario, verifica-se que:
MO = y (tp)− 1 = −e−ξωn(π/ωd )
[
cos (π) +ξ
√
1− ξ2sin (π)
]
= e−ξωn(π/ωd ) = e−
(
ξ/√
1−ξ2)
π
Entao:
MO = exp
(
−ξπ√
1− ξ2
)
No caso geral de y (∞) 6= 1, calcula-se U .P .• Caso o maximo overshoot MO seja conhecido, e deseja-se calcular ξ, entaodeve-se empregar a formula
ξ =− ln(MO)
√
π2 + ln2(MO)
31 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• Tempo de acomodacao ts : A resposta transitoria permanece sempre dentrode um par de envoltorias com constante de tempo 1/ξωn. Para ωn fixo, tse funcao de ξ. Considerando o criterio de 2%, tem-se (ωd = ωn
√
1− ξ2):
e−ξωnt1
√
1− ξ2= 0, 02 ⇒ ts(2%) =
− ln(
0, 02√
1− ξ2)
ξωn
Se 0 < ξ < 0, 9, pode-se aproximar ts como:
ts (2%) ≈ 4
ξωn
ts (5%) ≈ 3
ξωn
32 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Algumas observacoes:
• O tempo de pico (tp) e inversamente proporcional a parte imaginaria dopolo, ou seja, ωd .
Como as retas horizontais no plano-s sao linhas de valores imaginarios cons-tantes, representam linhas de tempo de pico constante.
• O tempo de assentamento (ts) e inversamente a parte real do polo, ou seja,ξωn.
Como as linhas verticais no plano-s sao linhas de valor real constante, saolinhas de tempo de assentamento constante.
• O maximo sobressinal (MO) so depende de ξ, ou seja do angulo θ, poisξ = cos(θ).
Como as linhas radiais no plano-s sao linhas de angulo constante, sao linhasde valores de pico constantes.
33 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
34 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
ExemploConsidere um sistema de segunda ordem com ξ = 0, 6 e ωn = 5 rad/s.Obtenha tr , tp , MO e ts(2%) da resposta do sistema a um degrau unitario.
• tempo de subida tr :
tr =π − θ
ωd
Sendo:
θ = tan−1
(ωd
ξωn
)
= tan−1
(
5√
1− 0, 62
0, 6× 5
)
= tan−1
(4
3
)
= 0, 93 rad.
Portanto:
tr =π − 0, 93
4≈ 0, 55 s.
35 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Exemplo (Continuacao)
• tempo de pico tp:
tp =π
ωd
=π
4≈ 0, 785 s
• maximo sobresinal MO :
MO = e−(ξωn/ωd )π = e−(3/4)π ≈ 0, 095.
Em termos percentuais,
U .P . =1, 095− 1
1× 100% = 9, 5%
• tempo de acomodacao ts(2%):
ts =4
ξωn
=4
3≈ 1, 33 s
36 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

ExemploConsiderando o sistema de controle abaixo, deseja-se escolher o ganho K e oparametro p de modo que as seguintes especificacoes da resposta transitoria aum degrau sejam alcancadas:
• maximo overshoot percentual igual ou inferior a 4,3%;
• tempo de assentamento para uma faixa de 2% do valor final deve serinferior a 4 s.
37 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo (Continuacao)Para uma U.P. igual ou inferior a 4,3%, faca MO = 4.3/100 e calcule:
ξ =− ln(MO)
√
π2 + ln2(MO)= 0.707
Para o tempo de assentamento (2%) ser inferior a 4 s, tem-se:
ts =4
ξωn
≤ 4 ⇒ ξωn ≥ 1,
ou seja, e necessario que o modulo da parte real dos polos de T (s) seja maiorou igual a 1. Pode-se escolher, por exemplo, ξωn = 1, e disto obtemosωn = 1.41.
38 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo (Continuacao)
A funcao de transferencia de malha fechada e:
T (s) =G(s)
1 + G(s)=
K
s2 + ps + K.
39 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo (Continuacao)Comparando com o sistema de segunda ordem padrao, tem-se:
ω2n
s2 + 2ξωns + ω2n
=2
s2 + 2s + 2,
Portanto, K = 2 e p = 2.
40 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

ExemploSendo um sistema de 2a ordem com a localizacao dos polos abaixo, determinetp , U .P . e ts(2%).
41 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo (Continuacao)
ξ =ξωn
ωn
=α
ωn
= cos (θ) = cos[tan−1 (7/3)
]= 0, 394
A frequencia natural e a distancia radial da origem ao polo.
ωn =√
32 + 72 = 7, 616
• Calculo de tp:
tp =π
ωd
=π
7≈ 0, 449 s
• Calculo de U .P .:
U .P . = e−ξπ/√
1−ξ2 × 100 = 26%
• Calculo de tS (2%):
tS =4
α=
4
3≈ 1, 333 s
42 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
Analise de Sistemas de Ordem Superior
Sendo um sistema com funcao de transferencia de malha fechada dada por:
Y (s)
R(s)=
G(s)
1 + G(s)H(s)
com G(s) e H(s) polinomios em s, tem-se:
G(s) =p(s)
q(s), H(s) =
n(s)
d(s)
Y (s)
R(s)=
p(s)d(s)
q(s)d(s) + p(s)n(s)
=b0s
m + b1sm−1 + · · ·+ bm−1s + bm
a0sn + a1sn−1 + · · ·+ an−1s + an(m ≤ n)
=K (s + z1) (s + z1) · · · (s + zm)
(s + p1) (s + p2) · · · (s + pn)
43 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Para a resposta do sistema a uma entrada degrau, consideram-se dois casos:
• Todos os polos reais e distintos.
Por expansao em fracoes parciais, tem-se:
Y (s) =a
s+
n∑
i=1
ai
s + pi,
onde ai e o resıduo do polo em s = −pi .
- Se o sistema possuir polos multiplos, entao Y (s) tera termos multipolares.
- Com todos os polos situados no semiplano esquerdo do plano-s, os valores dosresıduos determinarao a importancia relativa dos componentes de Y (s).
- Zero proximo a um polo → resıduo nesse polo e pequeno.
- Polos muito afastados da origem → resıduos nesses polos sao pequenos, por-tanto o sistema pode ser aproximado para um sistema de menor ordem.
44 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• Polos reais e distintos e pares de polos conjugados.
Um par de polos complexos conjugados resulta em um termo de segundaordem, entao tem-se (n = q + 2r):
Y (s) =a
s+
q∑
j=1
aj
s + pj+
r∑
k=1
bk (s + ξkωk) + ckωk
√
1− ξ2ks2 + 2ξkωks + ω2
k
Portanto, a resposta e dada por:
y(n) = a +
q∑
j=1
aje−pj t +
r∑
k=1
bke−ξkωk t cos
(
ωk
√
1− ξ2k t
)
+
r∑
k=1
cke−ξkωk t sin
(
ωk
√
1− ξ2k t
)
, t ≥ 0
- A curva de um sistema de ordem superior estavel e a soma de curvas exponen-ciais (primeira ordem) e senoidais amortecidas (segunda ordem).
- y(∞) = a;- Esses sistemas podem ser aproximados por sistemas de menor ordem.
45 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Efeito de Polo Adicional
A TL da resposta ao degrau de um sistema com tres polos, −ξωn ± j√
1− ξ2
e −p1 e dada por:
Y (s) =A
s+
A1
s + p1+
B(s + ξωn) + Cωd
(s + ξωn)2 + ω2d
No domınio do tempo, tem-se:
y(t) = A+ A1e−p1t + e−ξωnt [B cos (ωd t) + C sin (ωd t)]
• Se pr >> ξωn, a exponencial pura desaparecera muito mais rapidamente doque o termo de segunda ordem.
• Se o polo real estiver a esquerda dos polos dominantes cinco vezes maisdistante, admite-se que o sistema seja representado somente por seu par depolos de segunda ordem dominantes.
• Se o polo real estiver proximo ao par de polos dominantes, entao ele naopodera ser desprezado.
46 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Efeito de Zero Adicional
Seja Y (s) a TL da resposta ao degrau de um sistema T (s) sem zeros finitos. Seum zero s = −a for adicionado a funcao de transferencia, gerando (s+a)T (s),tem-se:
(s + a)Y (s) = sY (s) + aY (s)
A resposta divide-se em duas partes: a derivada da resposta original e umaversao ponderada por a dessa resposta.
• Se a for muito grande, tem-se praticamente a resposta original ponderadapor a.
• Se a for pequeno (zero mais proximo a origem), o termo que corresponde aderivada tem um efeito maior.
• Se a for negativo (sistema de fase nao-mınima), o termo da resposta emescala tera sinal oposto ao termo da derivada. A resposta pode comecar ase orientar em direcao negativa, embora o valor final seja positivo.
47 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Dica de atividades
Dica
1. Fazer os Exercıcios apresentados no livro K. OGATA,“Engenharia deControle Moderno”.
48 of 48
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil