princípios de controle, utfpr - páginas...
TRANSCRIPT

Estabilidade
• Estabilidade e um comportamento desejado em qualquer sistema fısico.
• Sistemas instaveis tem comportamento, na maioria das vezes, imprevisıvel;por isso e desejavel sempre garantirmos a estabilidade do sistema.
1 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Nyquist
• Nos anos 1940, Nyquist desenvolveu um metodo para determinar aestabilidade de sistemas em malha-fechada analisando-se a malha aberta.
• O metodo de Nyquist baseia-se no Grafico Polar.
R(s) Y (s)E(s)
+
−
G(s)
H(s)
O Metodo de Nyquist e capaz de determinar a estabilidade do sistemamalha-fechada acima somente analisando-se o Grafico Polar da funcao detransferencia de malha-aberta resultante do produto G(s)H(s).
2 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Criterio da Estabilidade de Nyquist
Criterio de Nyquist
Se um contorno A, que envolve todo o semiplano direito do plano-s, for ma-peado atraves da funcao de transferencia de malha aberta, G(s)H(s), entaoo numero de polos de malha fechada, Z , no semiplano da direita e igual aonumero de polos de malha aberta, P , no semiplano da direita menos o numerode rotacoes no sentido antihorario, N, do contorno mapeamento, isto e,
Z = P − N
Esse mapeamento e chamado de Diagrama de Nyquist de G(s)H(s).
Trabalhamos com a analise de F (s) = G(s)H(s) em vez de F (s) = 1 +G(s)H(s), e por isso deve-se contar as rotacoes do contorno mapeado emtorno do ponto −1 (ponto de analise).
3 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Criterio da Estabilidade de Nyquist
Criterio de Nyquist
• O valor P representa o numero de Polos de L(s) = G(s)H(s) no semiplanodireito (P equivale a quantidade de Polos com parte real positiva).
• O valor N e o numero de voltas completas em torno do ponto −1; essasvoltas sao realizadas por uma reta que liga o ponto −1 ao Diagrama deNyquist fazendo-o variar desde ω = −∞ ate ω = +∞. N e positivo nosentido counter-clock-wise ccw e negativo no sentido clock-wise cw.
• O sistema sera estavel quando Z = 0. Qualquer outro valor de Z
diferente de zero implica em Instavel.
4 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Na figura a seguir, o sistema da parte (a) e estavel pois P = 0 e N = 0; e osistema da parte (b) nao e estavel pois P = 0 e N = −2.
5 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo
Considere a funcao de transferencia
L(s) =1
s(1 + τs).
Determine a frequencia ω1 em que a fase e φ(ω1) = 45o . Baseando-se nografico, pode-se afirmar que o sistema sera estavel para qualquer τ > 0?
6 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo
Considere a funcao de transferencia
L(s) =K
s(τ1s + 1)(τ2s + 1).
Baseando-se no grafico, pode-se afirmar que o sistema sera estavel para todosos valores τ1 > 0, τ2 > 0,K > 0?
7 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil
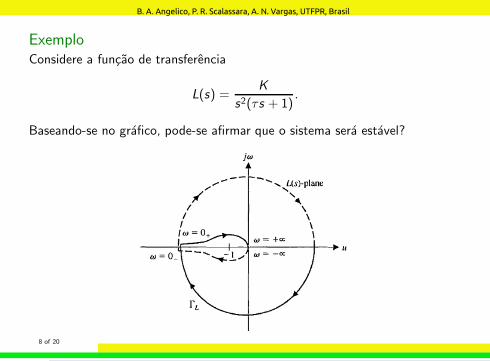
Exemplo
Considere a funcao de transferencia
L(s) =K
s2(τs + 1).
Baseando-se no grafico, pode-se afirmar que o sistema sera estavel?
8 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Exemplo
No sistema abaixo, para quais valores do ganho K o sistema e estavel?
9 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Solucao:• Percebemos que P = 2 (dois polos no semiplano direito).
• Note que se −1/k estiver no intervalo (0,−1.33) entao N = +2 pois haduas rotacoes no sentido ccw. Concluımos que o sistema e estavel quando−1/k ∈ (0,−1.33).
• Se −(1/k) < −1.33 entao N = 0 e o sistema sera instavel.10 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Sistemas de Fase Mınima e de Fase Nao-Mınima
• Sistemas que nao possuem zeros e polos no semiplano direito sao denomi-nados sistemas de fase mınima.
• Sistemas que possuem zeros e/ou polos no semiplano direito sao denomi-nados sistemas de fase nao mınima.
• Em ambos os tipos de sistema, a inclinacao da curva de modulo em dBquando ω → ∞ tende a −20(q − p) dB/decada, onde p e q sao os grausdos polinomios do numerador e do denominador da funcao de transferencia,respectivamente.
• Em sistemas de fase mınima, o angulo de fase quando ω → ∞ tende a−90◦(q − p). Em sistemas de fase nao mınima isso nao ocorre.
11 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• A analise seguinte e considerada para sistemas de fase mınima.
• Margem de Ganho (Kg ): Mudanca no valor do ganho a malha aberta noponto com fase de 180◦ necessaria para tornar instavel o sistema a malhafechada. Em outras palavras, e o recıproco de |G(jω)| na frequencia ω1 emque o angulo e −180◦, ou seja, quando φ(ω1) = −180o temos
Kg =1
|G(jω1)|.
Expressa em dB, a margem de fase sera positiva se o sistema (de fasemınima) for estavel e sera negativa para sistema (de fase mınima) instavel.
Kg = 20 log10
[
1
|G(jω1)|
]
dB = −20 log10|G(jω1)| dB
12 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• Margem de Fase (φpm): Mudanca no valor de fase de malha aberta noponto com ganho unitario, necessaria para tornar instavel o sistema a malhafechada. Em outras palavras, e o atraso de fase adicional, na frequenciade cruzamento de ganho, necessaria para que o sistema atinja o limiar deinstabilidade.
φpm = 180◦ + φ,
onde φ e o angulo de fase da funcao de transferencia de malha aberta nocruzamento de ganho. Para sistemas de fase mınima estaveis, φpm deve serpositiva.
• As margens de fase e de ganho sao medidas da proximidade do diagramapolar em relacao ao ponto −1+ j0. Tais margens podem ser utilizadas comocriterios de projeto;
• Para um sistema de fase mınima, as margens de ganho e de fase devem serpositivas para que o sistema seja estavel;
• Margens de ganho e de fase apropriados protegem contra variacoes no com-portamento do sistema;
• Para um desempenho satisfatorio, a margem de fase deve estar situada entre30◦ e 60◦ e a margem de ganho deve ser superior a 6 dB;
13 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

14 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• No grafico do meio, a margem de ganho e o inverso da distancia d , ou seja1/d .
• A margem de fase e o angulo que deveria ser incrementado de modo que ografico assumisse −180o, e no grafico central e φ2.
15 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

• A margem de fase e o valor que, se for adicionada ao sistema, torna-oinstavel.
• A margem de fase positiva garante a estabilidade. Em projetos,costuma-se escolher margem de fase entre +30o e +60o.
16 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Note que se a Margem de Ganho for maior que 1 (ou Margem de Fase fornegativa), entao o sistema sera instavel.
17 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Considere os graficos acima e suponha que x = 0.5 e PM = 25o . Determine aMargem de Ganho e Margem de Fase.
18 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Relacao: fator de amortecimento ξ e Margem de fase
R(s) Y (s)E(s)
+
−
G(s)
H(s)
Considerando o sistema em malha fechada acima, suponha que definimosL(s) = G(s)H(s) e que L(s) tenha a forma-padrao de 2a. ordem
L(s) =ω2n
s(s + 2ξωn)
Pode-se mostrar que
ξ = 0.01φpm, 0 < ξ < 0.707
19 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil

Dica de atividades
Dica
1. Fazer os Exercıcios apresentados no Cap. 9 do livro “Sistemas de ControleModernos” - Richard C. Dorf, Robert H. Bishop.
2. Fazer os Exercıcios apresentados no livro K. OGATA, “Engenharia deControle Moderno”.
20 of 20
B. A. Angelico, P. R. Scalassara, A. N. Vargas, UTFPR, Brasil