capitulo 4 dinâmica dos osciladores lineares discreto e ... · o . três casos distintos consoante...
TRANSCRIPT

Capitulo 4 Dinâmica dos osciladores lineares discreto e contínuo
4.1 Noção de grau de liberdade dinâmico

4.2 Equilíbrio do OL1GL Equilíbrio dinâmico por aplicação do Princípio de D’Alembert
0dtrdm
dtd)t(f
rrr=
−
0)t(f)t(f0)t(um)t(f
I =+=− &&

Força actuante ( ) ( ) ( )tftftf)t(f ERD ++=
Força de dissipação ( ) ( )tuctfD &−=
Força de restituição ( ) ( )tuktfR &−=
Força exterior ( )tfE
Equação de equilíbrio
f ( ) ( ) ( ) )t(umtftft ERD &&=++

Formulação do problema de equilíbrio
Equação de equilíbrio do regime forçado Condições iniciais
( )
===++
0
0
E
u)t(uu)t(u
tf)t(uk)t(uc)t(um
&&
&&&
Solução da equação diferencial linear de 2ª ordem com coeficientes constantes
)t(u)t(u)t(u PH +=

Capitulo 4 Dinâmica dos osciladores lineares discreto e contínuo 4.3 Regime livre (amortecido) do OL1GL Corresponde à solução homogénea da equação de equilíbrio
0)t(fE
0
0u)0(uu)0(u0)t(uk)t(uc)t(um

Solução homogénea da equação diferencial de equilíbrio; Condições iniciais
Frequência (circular) própria ou natural do oscilador (rad/s) [s-1]
mk
n
Período próprio do oscilador [s] k
m22Tn
n
Coeficiente de amortecimento crítico[Kg s-1]
mk2mkm2m2c nc
0)t(uk)t(uc)t(um 0)t(umk)t(u
mc)t(u

Fracção de amortecimento crítico ou coeficente de amortecimento relativo (vulgo “coeficiente de amortecimento”)
nc m2c
mk2c
cc
Soluções da forma teU)t(u
Equação característica 0Ue)2( t2nn
2
)1(2
442 2n
2n
2n
2n

Três casos distintos consoante o valor de
Regime supercítico 1;cc c
t1t1t 2n
2nn BeAee)t(u

Regime crítico 1;cc c
BtAe)t(u tn

Regime subcrítico 1;cc cti
2ti
1t DDn eUeUe)t(u
O único de interesse em Engenharia Sísmica
Frequência amortecida Período amortecido 2
nD 1 D
D2T

A resposta u(t) é real, logo as parcelas ti1 DeU e t
2 DeU sãoconjugadas:
)UeRe(2eUeUee)t(u titttit DnDDn
)U(Re)UIm(tg;eU)UIm(i)URe(U i
)tcos()t()tcos(e|U|2
eRee|U|2)ee|URe(|e2)t(u
DDt
)t(ittiit
n
DnDn

)tcos(e
)tcos(e|U|2)eeRe(e|U|2)t(u
Dt
Dttiit
n
nDn
Amplitude decai ao longo do tempo tne
Ângulo de fase)U(Re)UIm(tg
Expressão alternativa ))tsin(B)tcos(A(e)t(u DD
tn
)UIm(2B;)URe(2A

Imposição das condições iniciais para determinação das constantes A e B ou e .
D
n000
uvB
u)0(uA
D0000
2
D
00020
uuvarctg
uvu)0(
D0000
2
D
00020
uuvarctg
uvu21U



Decaímento do movimento
ee
eTtcosetcos
Ttutu
eTtcosTtu
etcostu
DD
D
DD
D
Dn
n
Tt
t
TtDD
tD
D
TtDDD
tD
decremento logarítmico (após um ciclo)
2Ttutuln11:1para
1
2Ttutulne
Ttutu
D
2
2D
T
DDn
Decremento logarítmico após n ciclos
2n1
n2nTtutuln
n
Dn

Estimativa experimental do amortecimento relativo
1uu
231
uuln
231
4
1
4
1

Recordemos o objectivo fundamental da Engenharia Sísmica
Analisar o comportamento das construções sob o efeito de movimentos sísmicos (habitualmente impostos na sua fundação)
A resposta deslocamento u(t) é a solução da equação
)t(f)t(uk)t(uc)t(um E
e resulta da soma da solução geral já estudada e de umasolução particular dependente da forma de )t(fE , à qual é necessário impor condições iniciais.

4.4 Regime forçado sob movimento imposto na base )t(ugDecomposição do movimento da massa na soma de movimento imposto e de movimento relativo à base
)t(u)t(u)t(u)t(u)t(u)t(u)t(u)t(u)t(u
gt gt gt
0)t(uk)t(uc)t(um t
)t(um)t(uk)t(uc)t(um g
O efeito da aceleração imposta na base do oscilador é equivalente a uma força de inércia aplicada à massa oscilante:
)t(f)t(uk)t(uc)t(um e
Outra equação equivalente de equilíbrio
tuktuctuktuctum ggttt

Caso do movimento imposto com variação harmónica
2tcosUtsinU)t(u ggg
Acrescento ao termo excitador de uma parcela complexa
2tsinUi
2tcosU)t(u ggg
tig
2iti
g2
tigg
eUi
eeUeU)t(u
Força de inércia equivalente tie
tige eFeUmi)t(f

Problema de equilíbrio
)0(u)0(u0)0(u
)0(u)0(u0)0(ueF)t(uk)t(uc)t(um
gt
gt
tie
tie2nn
tie
emF)t(u)t(u2)t(u
eF)t(uk)t(uc)t(um
Solução da equação diferencial de equilíbrio )t(u)t(u)t(u PH

Solução homogénea (regime livre)
0)t(u)t(u2)t(u 2nn
)tcos(e
)tcos(e|U|2
))tsin(B)tcos(A(e)t(u
Dt
Dt
DDt
H
n
n
n
Solução particular (regime forçado) tie2
nn emF
)t(u)t(u2)t(u
Solução pretendida tiUe)t(uMovimento harmónico de frequência igual à do movimento na base (amplitude U complexa); incógnita U
Substituindo na equação de equilíbrio ti2titi Ue)t(ueUi)t(uUe)t(u
tieti2nn
2 emF
Ue)i2(

i21i
kF
i21
ikF
i21
im
F)i2(
imFU
2e
n
2
n
e
n
2
n
2n
e2nn
2e

Outra expressão para a solução particular
Frequência adimensional n
Deslocamento relativo estático2ge
estáticon
UkF
u
i222
2estático
eUi21
)i21(uiU
Amplitude
)(RU
)(Ru
21
1uU
d2n
gdestático
222estático
Ângulo de fase 212arctg

Factor de amplificação dinâmica (de deslocamento)
222
estáticod
21
1u
U)(R

Ângulo de fase. Significado do sinal

Somente a parte real da resposta é representativa do fenómeno físico. Solução particular
PP
)t(iP
tsinU))tsin(i)t(cos((UiRe(
)eUiRe()t(u

Imposição das condições iniciais e obtenção das constantes indeterminadas
PPDDt
PH
tsinU))tsin(B)tcos(A(e
)t(u)t(u)t(un
0PPDn0
0PP0vcosUBAv)0(u
u)sin(UAu)0(u
Solução homogénea (regime livre) com amplitude decaíndo no tempoSolução particular (regime forçado) com amplitude constante

Movimento relativo total nas condições: estáticon u)0(u,0)0(u%,5,2.0

Condição de ressonância
n121)1(R d
)0(u,0)0(u%,5,1

Tempo para atingir a resposta estacionária ressonante e o valor da amplificação ressonante dependem exclusivamente de

Valor máximo do factor de amplificação dinâmico de deslocamento
D
n2máx;d
2
2d
2d
21
2121R21
0d
Rd0d
dR
4.4 Amplificação dinâmica (relativa à análise no domínio do tempo da solução particular devida a movimento harmónico)
Função de amplificação dinâmica de deslocamento relativo
Pd2ng
P
Pde
P
PPP
tsin)(R/U
)t(u
tsin)(Rk/f)t(u
tsinU)t(u
222d
21
1)(R

Função de amplificação dinâmica de velocidade relativa
Pvng
P
Pdne
P
PPP
tcos)(R/U
)t(u
tcos)(Rkm/f)t(u
tcosU)t(u
222dv
21)(R)(R


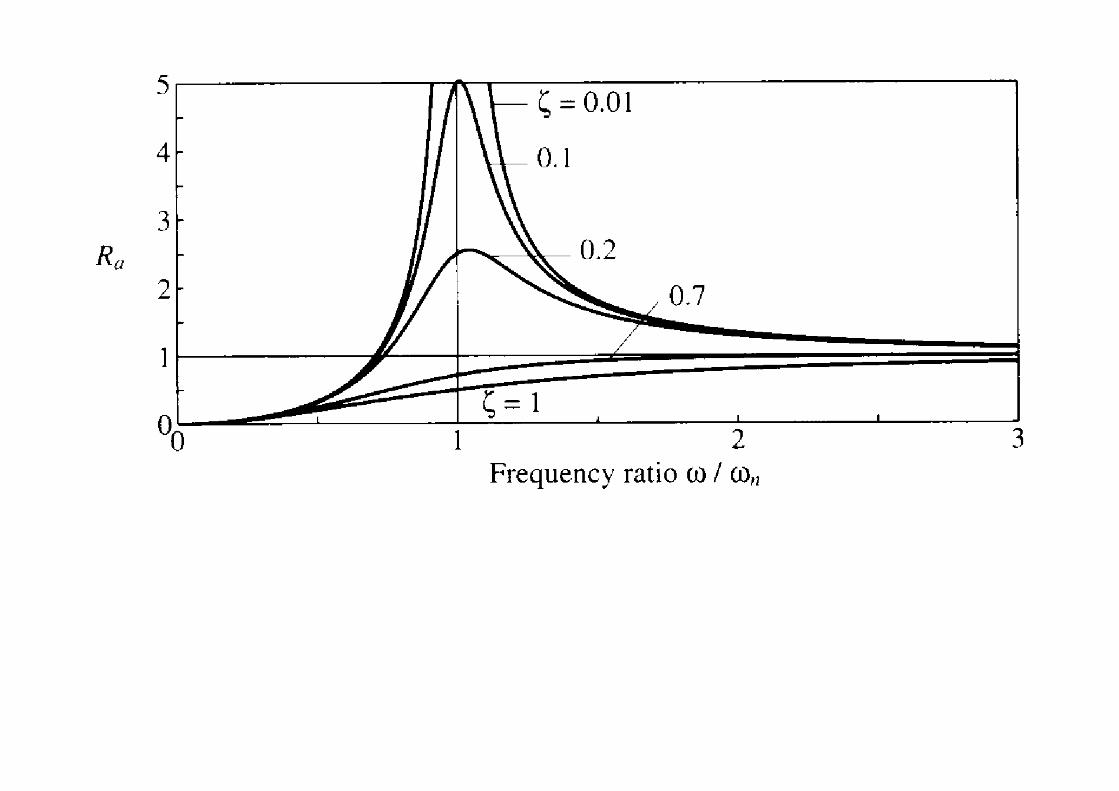
Função de amplificação dinâmica de aceleração relativa
222
2
d2
a21
)(R)(R
Pag
P
Pd
2
ne
P
PP2
P
tsin)(RU
)t(u
tsin)(Rm/f)t(u
tsinU)t(u

Valores máximos das funções de amplificação dinâmica
)(R d )(R v )(R amax 221 1
221
1
)(Rmax212
121
212
1

4.5 Funções de transferência (análise no domínio da frequência da solução particular devida a uma excitação harmónica)
Conceito de função de transferência
Aplicável a sistemas lineares com excitação exterior harmónica da forma
tie)(X)t(xe output da forma
tie)(Y)t(y

)(X e )(Y podem em geral ser complexos e )t(x e )t(y são reais
Função de transferência de x para y )(Hxy
Relaciona linearmente )(X com )(Y
)(X)(H)(Y xy
Função de transferência de aceleração imposta para deslocamento relativo
i21
i1i2
iUU)(H
22n
n22
nguug
guu U)(HUg
tiguu
ti eU)(HUe)t(ug
2n
d
2222ng
uu)(R
21
11UU
)(Hg
Função de transferência de aceleração imposta para velocidade relativa
tip Ue)t(u
titip eUUei)t(u
i211
i2)(Hi
UU)(H
2n
n22
nuu
guu gg
guu U)(HUg
tiguu
tip eU)(HUe)t(u
g
n
v
222nguu
)(R
21
1U
U)(H
g

Função de transferência de aceleração imposta para aceleração relativa
titi2p eUUe)t(u
guu U)(HUg
tiguu eU)(H)t(u
g

i21i
i2i)(H
UU)(H
2
2n
22n
2
uu2
guu gg
)(R21U
U)(H a
222
2
guug

Recordando a decomposição do movimento total nas parcelas relativa e imposta:
gt
gt UiUU)t(u)t(u)t(u
Função de transferência de aceleração para aceleração absoluta
1i2
Ui
UiU)(HU
n22
n
2
g
gguut
g
n22
n
n2n
g
t
uu
i2
i2i
UU)(H t
g
)(R)(R)2(1
21
)2(1U
U)(H
t
tg
a
d2
222
2
g
t
uu

Função de transferência de aceleração para velocidade absoluta
n22
n
n2n
uug
t
g
t
uu
i2i21
)(Hi1
UiU
UU)(H t
gt
g

)(R)(R
)(R)2(1
21
)2(11U
U)(H
t
t
tg
va
d2
222
2
g
t
uu

Função de transferência de aceleração para deslocamento absoluto
n22
n
n2n
2
uu2g
2
t
g
t
uu
i2i21
)(H1U
U
UU)(H t
gt
g
)(R)(R
)(R)2(1
21
)2(11U
U)(H
t
t
tg
d2a
2d2
222
2
2g
t
uu
4.6 Resposta a movimentos periódicos (análise no domínio da frequência da solução particular)
)t(um)t(uk)t(uc)t(um gDecomposição de Fourier do movimento excitador )t(ug
A excitação é expressa como a soma (infinita) de termos harmónicos complexos da forma
T2kk;eU)t(u k
k
tik;gg k
tik;g keU

k
tik
k
tik
2k
k
tik
k
tikk
k
tik
kk
kk
k
eUeU)t(u
eUeUi)t(u
eU)t(u
Decomposição de Fourier das respostas
Reescrita da equação de equilíbrio com a excitação e as respostas expressas como soma de Fourier
k
tik;g
k
tik
2nnk
2k kk eUeU)i2(
A igualdade deve ser válida para cada frequência de ordem k.

A igualdade deve ser válida para cada frequência de ordem k.
2nnk
2k
k;gk
k;gk2nnk
2k
i2
UU
UU)i2(
Solução do movimento para a frequência de ordem k k;gk;uuk UHU
g
k
tik;gk;uu
k
tik k
gk eUHeU)t(u
Solução de deslocamento relativo através da soma inversa de Fourier (transformação inversa)