aula 6 sistemas mecânicos discretos e contínuos. oscilador ... · decremento logarítmico ... o...
TRANSCRIPT
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
30
Aula 6
Sistemas mecânicos discretos e contínuos.
Oscilador linear de um grau de liberdade (OL1GL)
Princípio de D’Alembert. Equação de equilíbrio.
Regime livre amortecido.

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
31
Princípio de D’Alembert 0dtrdm
dtd)t(f
rrr=
− ; 0)t(f)t(f
0)t(um)t(fI =+
=− &&
Força actuante ( ) ( ) ( )tftftf)t(f ERD ++=
Força de dissipação ( ) ( )tuctfD &−=Força de restituição ( ) ( )tuktfR &−=
Força exterior ( )tfE
Equação de equilíbrio ( ) ( ) ( ) )t(umtftftf ERD &&=++
Formulação do problema de equilíbrioEquação de equilíbrio do regime
forçado(relevância física)
Condições iniciais
( )
===++
0
0
E
u)t(uu)t(u
tf)t(uk)t(uc)t(um
&&
&&&
Solução da equação diferencial linearde 2ª ordem com coeficientes
constantes
)t(u)t(u)t(u PH +=
Regime livre: 0)t(fE =
(relevância física)
===++
0
0
u)t(uu)t(u0)t(uk)t(uc)t(um
&&
&&&
Regime livre; Solução homogénea da equação diferencial de
equilíbrio; Condições iniciais
0)t(uk)t(uc)t(um =++ &&&
0)t(umk)t(u
mc)t(u =++ &&&

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
32
Frequência (circular) própria ou naturaldo oscilador (rad/s) [s-1]
mk n =ω
Período próprio do oscilador [s]
km2 2T
nn π=
ωπ
=
Coeficiente de amortecimento crítico[Kg s-1] mk2
mkm2m2c 0c ==ω=
Fracção de amortecimento crítico oucoeficente de amortecimento relativo
(vulgo “coeficiente de amortecimento”) nc m2c
mk2c
cc
ω===β
teU)t(u λ=0Ue)2( t2
nn2 =ω+λβω+λ λ
)1(2
442 2n
2n
2n
2n −β±β−ω=
ω−ωβ±βω−=λ
Regimesobrecrítco
1;cc c >β>
( )t1t1t 2n
2nn BeAee)t(u −βω−−βωβω− +=
Regime crítico 1;cc c =β=( )BtAe)t(u tn += βω−
Regime subcrítico
Frequência amortecida
Período amortecido
1;cc c <β<( )ti
2ti
1t DDn eUeUe)t(u ω−ωβω− +=
2nD 1 β−ω=ω
DD
2Tωπ
=
Resposta em regime livre crítico. S047.pcx
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
33
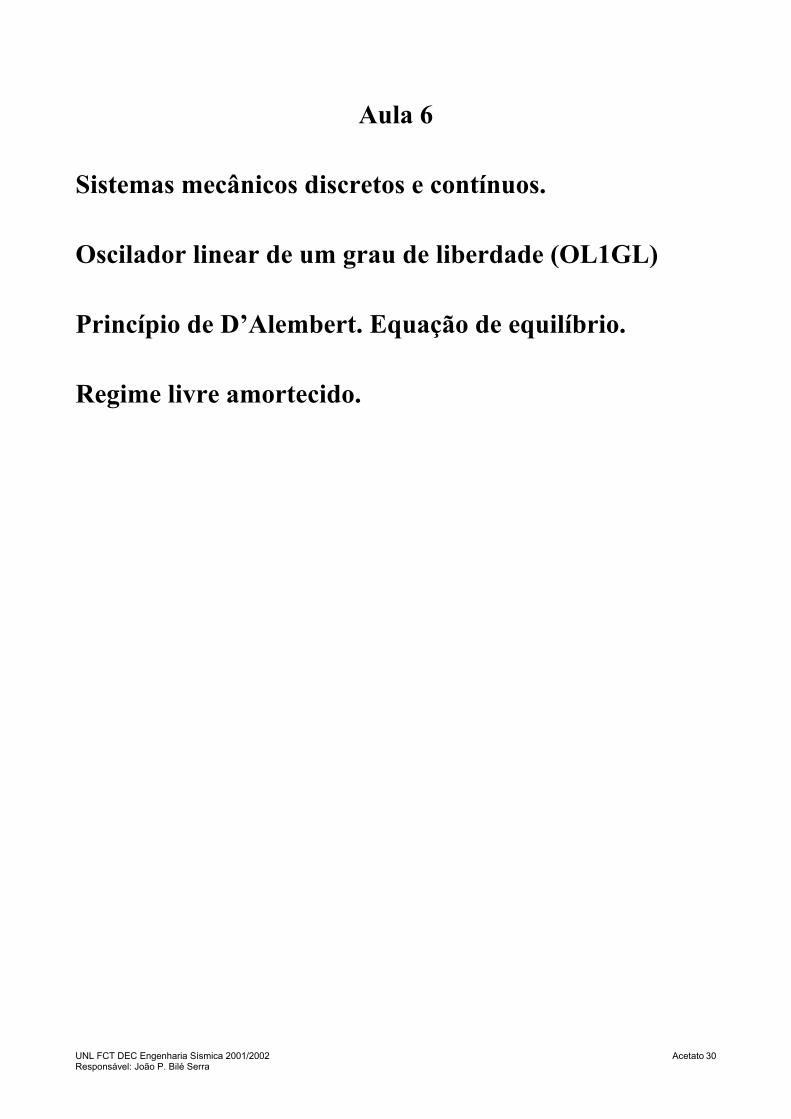
Respostas oscilantes em regime livre subcrítico. S047.pcx
Regime subcrítico. A resposta u(t) é real, logo as parcelas ti1
DeU ω et
2DeU ω− são conjugadas:
( ) ( )( )
)tcos()t()tcos(e|U|2)eeRe(e|U|2
)UeRe(2eUeUee)t(u
D
Dttiit
titttit
nDn
DnDDn
θ+ωρ=θ+ω==
=+=βω−ωθβω−
ωβω−ω−ωβω−
)U(Re)UIm(tg;eU)UIm(i)URe(U i =θ=+= θ
( ))tcos()t(
)tcos(e|U|2)eeRe(e|U|2)t(uD
Dttiit nDn
θ+ωρ=θ+ω== βω−ωθβω−
Expressão alternativa ))tsin(B)tcos(A(e)t(u DDtn ω+ω= βω−
com )UIm(2B;)URe(2A −==
Imposição das condições iniciais para determinação das constantes A e Bou ρ e θ.
ωβω+
=
==
D
n00
0uvB
u)0(uA
ωβω+
−=θ
ω
βω++=ρ
D0
000
2
D
00020
uuvarctg
uvu

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
34
Regimes livre e amortecido subcrítico. S045.pcx
Decaímento do movimento
( ) ( )
( ) ( )[ ] ( )
( )( )
( )( )[ ] ( ) ( )
e
eeTtcos
etcosTtutu
eTtcosTtu
etcostu
DD
D
DD
D
Dn
n
Tt
t
TtDD
tD
D
TtDDD
tD
+⋅ω⋅β−
⋅ω⋅β−
+⋅ω⋅β−
⋅ω⋅β−
+⋅ω⋅β−
⋅ω⋅β−
=⋅θ++⋅ω⋅ρ⋅θ+⋅ω⋅ρ
=+
⋅θ++⋅ω⋅ρ=+
⋅θ+⋅ω⋅ρ=
decremento logarítmico δ( )
( )( )
( )( )
( ) πβ≈
+
=δ⇒≈β−<<β
β−
πβ=
+
=δ⇒=+
⋅ω⋅β
2Ttutuln 11 : 1 para
12
Ttutulne
Ttutu
D
2
2D
T
D
Dn
( )( )
πδ
=β
πβ≈
+
=δ
2n1
n2nTtutulnciclosnPara
m
Dn
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
35
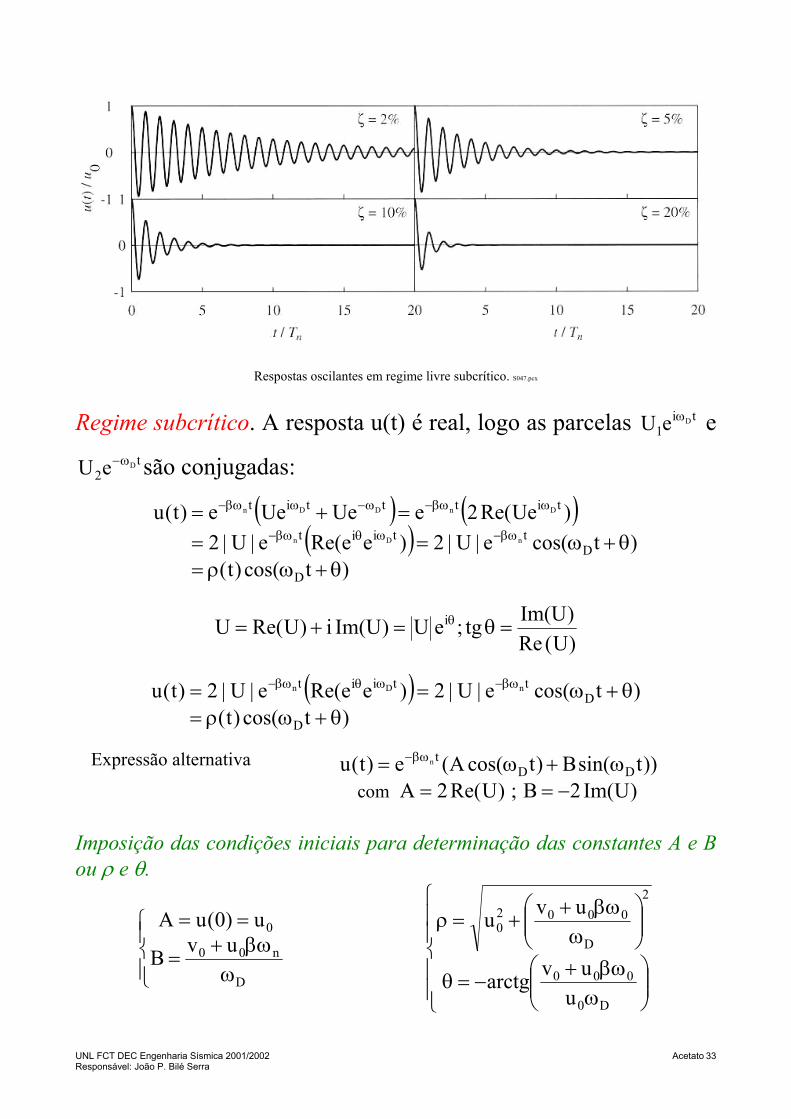
Aproximação linear (de 1ª ordem)( )
( )( )
( )( )
( )
( )( )
−
+π=β
−
+π=β⇔πβ+≈
+
δ+≈+δ
+δ+===+
δ⋅ω⋅ζ
1nTtutu
n21 :ciclosn Para
1Ttutu
2121
Ttutu
1...!2
1eeTtutu
D
DD
2T
D
Dn
Estimativa experimental do amortecimento relativo
−
π⋅=
π⋅
=β 1uu
231
uuln
231
4
1
4
1

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
36
Aula 7
OL1GL actuado por movimento imposto na sua base
Movimento absoluto e relativo
Movimento harmónico imposto na base do OL1GL
Frequência adimensional
Factor de amplificação dinâmica
Parcelas transitória (regime livre amortecido) e
estacionária (regime forçado)
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
37
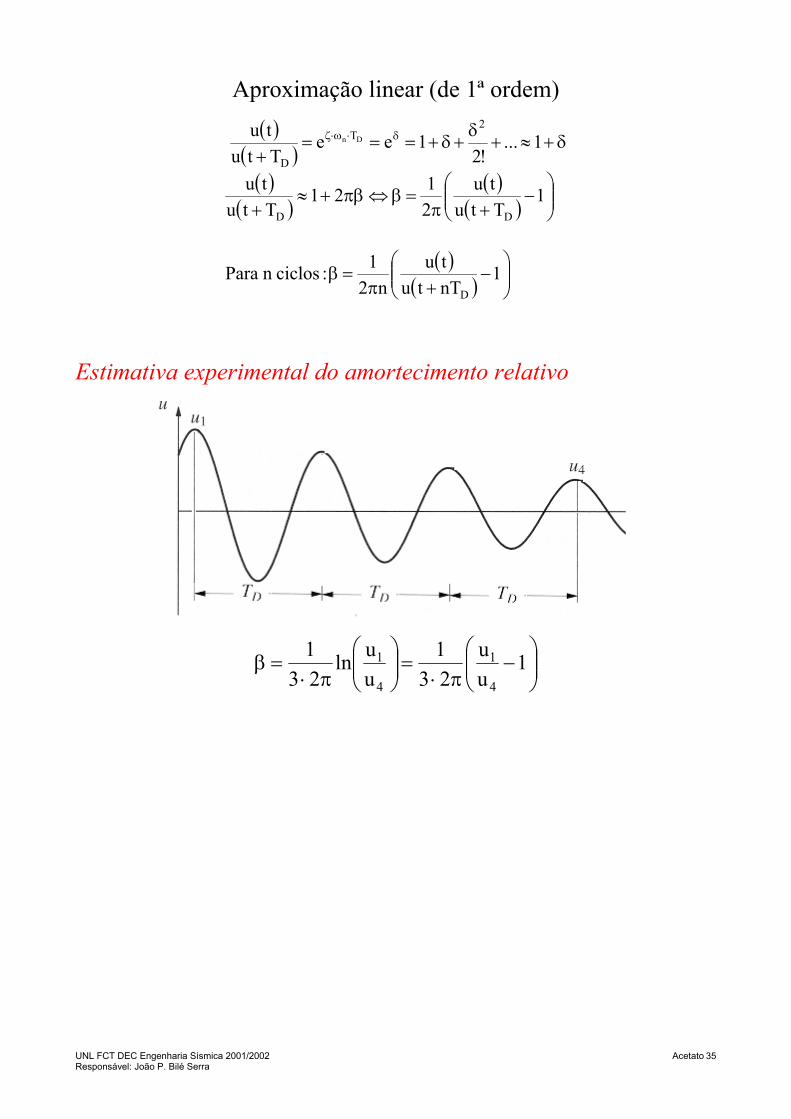
Decomposição do movimento da massa na soma de movimento
imposto e de movimento relativo à base
)t(u)t(u)t(u)t(u)t(u)t(u)t(u)t(u)t(u
gt
gt
gt
&&&&&&
&&&
+=+=+=
Oscilador actuado exclusivamente por movimento imposto na
base
0)t(uk)t(uc)t(um t =++ &&&
)t(um)t(uk)t(uc)t(um g&&&&& −=++
O efeito da aceleração imposta na base do oscilador é equivalente
a uma força de inércia aplicada à massa oscilante:
)t(f)t(uk)t(uc)t(um e=++ &&&
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
38
Outra equaçãoequivalente de equilíbrio
( ) ( ) ( ) ( ) ( )tuktuctuktuctum ggttt +=++ &&&&
Caso do movimento imposto com variação harmónica
π
−ω=ω=2
tcosUtsinU)t(u ggg&&&&&&
tig
2iti
g2
ti
gg
eUieeUeU)t(u
ω
π−ω
π
−ω
−===
&&
&&&&&&
Força de inércia equivalente
tie
tige eFeUmi)t(f ωω == &&
Problema de equilíbrio
−=⇔=−=⇔==++ ω
)0(u)0(u0)0(u)0(u)0(u0)0(u
eF)t(uk)t(uc)t(um
gt
gt
tie
&&&
&&&
tie2nn
tie
emF)t(u)t(u2)t(u
eF)t(uk)t(uc)t(umω
ω
=ω+βω+
=++
&&&
&&&
Solução da equação diferencial de equilíbrio
)t(u)t(u)t(u PH +=
Solução homogénea (regime livre)
0)t(u)t(u2)t(u 2nn =ω+βω+ &&&
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
39
)tcos()t()tcos(e|U|2
))tsin(B)tcos(A(e)t(u
D
Dt
DDt
Hn
n
θ+ωρ=θ+ω=
ω+ω=βω−
βω−
Solução particular (regime forçado)
tie2nn e
mF)t(u)t(u2)t(u ω=ω+βω+ &&&
Movimento harmónico de frequênciaigual à do movimento na base
(amplitude U complexa)
tiUe)t(u ω=
ti2titi Ue)t(ueUi)t(uUe)t(u ωωω ω−=⇔ω=⇔= &
tieti2nn
2 emFUe)i2( ωω =ω+βωω+ω−
( ) βϖ+ϖ−=
ω
ωβ+
ω
ω−
=
ω
ωβ+
ω
ω−
ω=
ω+βωω+ω−=
i21i
kF
i21
ikF
i21
im
F)i2(
imFU
2e
n
2
n
e
n
2
n
2n
e2nn
2e
Frequência adimensional nωω
=ϖ
2ge
estáticon
UkFu
ω−==&&
( ) ( )θ−=
βϖ+ϖ−
βϖ−ϖ−=
i
222
2
estático
eUi21
)i21(uiU

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
40
Amplitude( ) ( )
)(RU
)(Ru
21
1uU
d2n
gdestático
222estático
ϖω
=ϖ=
βϖ+ϖ−=
&&
Ângulo de fase21
2arctgϖ−βϖ
=θ
Factor de amplificação dinâmica (de deslocamento)
( ) ( )222estático
d21
1u
U)(R
βϖ+ϖ−==ϖ
Factor de amplificação dinâmica

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
41
Somente a parte real da resposta é representativa do fenómenofísico:
( )PP
)t(iP
tsinU))tsin(i)t(cos((UiRe(
)eUiRe()t(u
θ−ω−=θ−ω+θ−ω=
= θ−ω
Imposição das condições iniciais e obtenção da solução u(t)( )PPDD
tPH tsinU))tsin(B)tcos(A(e)t(u)t(u)t(u n θ−ω−ω+ω=+= βω−
0PPDn0
0PP0
vcosUBAv)0(uu)sin(UAu)0(u
=θω+ω+βω−⇔==θ+⇔=
&
Movimento relativo total nas condições: estáticon u)0(u,0)0(u%,5,2.0 ω===β=ϖ &

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
42
Aulas 8 e 9
OL1GL actuado por movimento imposto na sua base
Factores de amplificação dinâmica de aceleração,
velocidade e deslocamento relativos
Funções de transferência entre aceleração imposta eacelerações, velocidades e deslocamentos relativos eabsolutos
Resposta a movimentos periódicos: equações nodomínio do tempo e da frequência
Resolução no domínio da frequência
Transformadas de Fourier do movimento relativo
Transformadas de Fourier do movimento absoluto
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
43
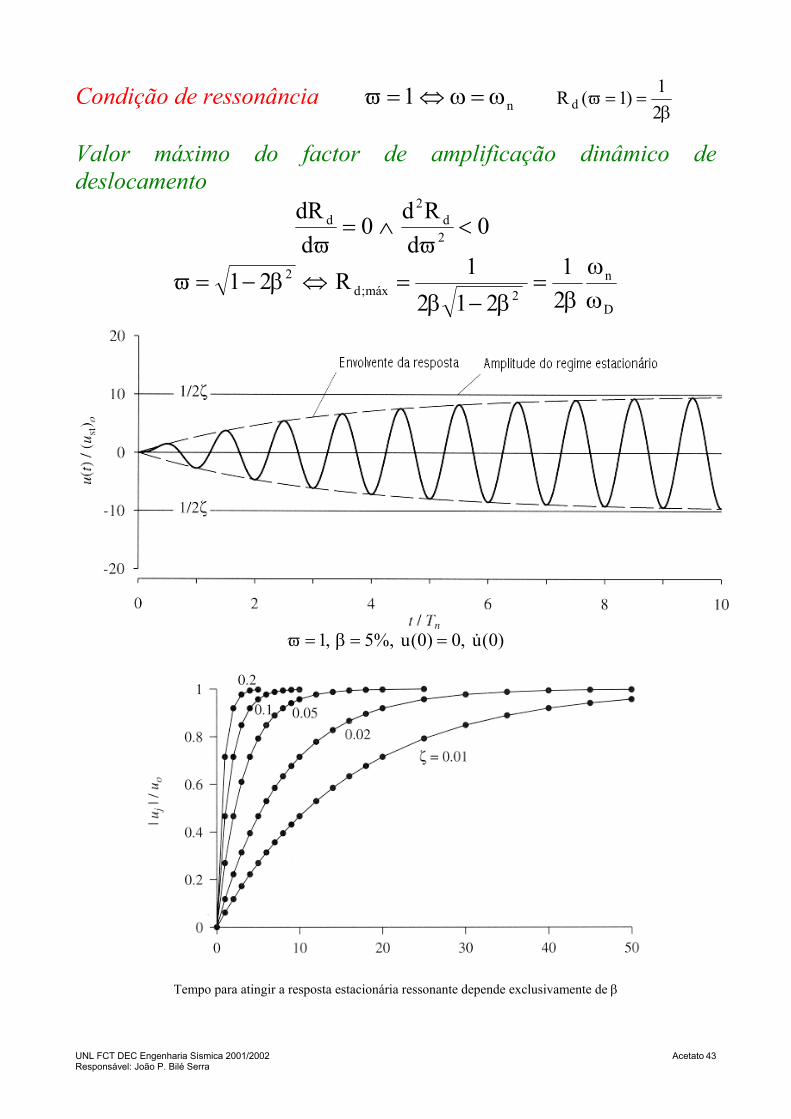
Condição de ressonância n1 ω=ω⇔=ϖβ
==ϖ21)1(R d
Valor máximo do factor de amplificação dinâmico dedeslocamento
D
n2máx;d
2
2d
2d
21
2121R21
0d
Rd0ddR
ωω
β=
β−β=⇔β−=ϖ
<ϖ
∧=ϖ
)0(u,0)0(u%,5,1 &==β=ϖ
Tempo para atingir a resposta estacionária ressonante depende exclusivamente de β

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
44
Tempo para atingir a resposta estacionária ressonante e amplificação ressonante dependem exclusivamente de β
Função de amplificação dinâmica
De deslocamento relativo
( ) ( )222d
21
1)(R
βϖ+ϖ−=ϖ
( )( )
( )Pd2ng
P
Pde
P
PPP
tsin)(R/U
)t(u
tsin)(Rk/f)t(u
tsinU)t(u
θ−ωϖ=ω
θ−ωϖ=
θ−ω−=
&&
De velocidade relativa
( ) ( )222
dv
21
)(R)(R
βϖ+ϖ−
ϖ=
ϖϖ=ϖ
( )( )
( )Pvng
P
Pdne
P
PPP
tcos)(R/U
)t(u
tcos)(Rkm/f)t(u
tcosU)t(u
θ−ωϖ−=ω
θ−ωϖωω
−=
θ−ωω−=
&&&
&&
de aceleração relativa
( ) ( )222
2d
2a
21
)(R)(R
βϖ+ϖ−
ϖ=
ϖϖ=ϖ
( )
( )
( )Pag
P
Pd
2
ne
P
PP2
P
tsin)(RU
)t(u
tsin)(Rm/f)t(u
tsinU)t(u
θ−ωϖ=
θ−ωϖ
ωω
=
θ−ωω=
&&&&
&&
&&

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
45
Funções de amplificação dinâmica de: (a) deslocamento relativo, (b) velocidade relativa, (c) aceleração relativa
)(R d ϖ )(R v ϖ )(R a ϖ
maxϖ221 β− 1
2211β−
)(R max ϖ212
1β−β β2
1212
1β−β
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
46
Função de transferência de aceleração imposta para
deslocamento relativo
βϖ+ϖ−ω=
βωω+ω−ω==ω
i21i1
i2i
UU)(H
22n
n22
nguu g &&&&
guu U)(HUg
&&&& ω= ti
guuti eU)(HUe)t(u
g
ωω ω== &&&&
( ) ( ) 2
n
d2222
nguu
)(R
21
11UU
)(Hg ω
ϖ=
βϖ+ϖ−ω==ω
&&&&
Função de transferência de aceleração imposta para velocidade
relativati
p Ue)t(u ω=
titip eUUei)t(u ωω =ω= &&
βϖ+ϖ−ϖ
ω−
=
βωω+ω−ωω−
=
=ωω==ω
i211
i2
)(HiUU)(H
2n
n22
n
uug
uu gg &&&&& &&
&
guu U)(HUg
&&&&&& ω= ti
guuti
p eU)(HUe)t(ug
ωω ω== &&&&&
( ) ( ) n
v
222ng
uu)(R
21
1UU
)(Hg ω
ϖ=
βϖ+ϖ−
ϖω
==ω&&
&
&&&
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
47
Aulas 8 e 9
Funções de transferência entre aceleração imposta eacelerações, velocidades e deslocamentos relativos eabsolutos (continuação)
Resposta a movimentos periódicos: equações nodomínio do tempo e da frequência
Resolução no domínio da frequência
Transformadas de Fourier do movimento relativo
Transformadas de Fourier do movimento absoluto
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
48
Função de transferência de aceleração imposta para aceleração
relativatiti2
p eUUe)t(u ωω =ω−= &&&&
guu U)(HUg
&&&&&& ω= ti
guu eU)(H)t(ug
ωω= &&&& &&
βϖ+ϖ−ϖ
−=
βωω+ω−ωω−
=
=ωω−==ω
i21i
i2i
)(HUU)(H
2
2n
22n
2
uu2
guu gg &&&&&& &&
&&
( ) ( )
)(R21U
U)(H a222
2
guu g
ϖ=βϖ+ϖ−
ϖ==ω
&&
&&&&&&
Recordando a decomposição do movimento total nas parcelasrelativa e imposta:
gt
gt UiUU)t(u)t(u)t(u &&&&&&&&&&&& −=⇔+=
Função de transferência de aceleração para aceleração absoluta
+
βωω+ω−ωω
−=
−ω=
1i2
Ui
UiU)(HU
n22
n
2
g
gguut
g
&&
&&&&&&&&&&
n22
n
n2n
g
t
uu
i2i2i
UU)(H t
g
βωω+ω−ωβωω+ω
−=
=ω&&
&&&&&&
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
49
( ) ( )
)(R)(R)2(1
21
)2(1UU
)(H
t
tg
a
d2
222
2
g
t
uu
ϖ=ϖβϖ+=
βϖ+ϖ−
βϖ+==ω
&&
&&
&&&&
Função de transferência de aceleração para velocidade absoluta
n22
n
n2n
uug
t
guu
i2i21
)(Hi1
UiU
UU
)(H tg
tg
βωω+ω−ωβωω+ω
ω−=
ωω
=
ω
==ω &&&&&&&& &&
&&
&&
&
( ) ( )
)(R)(R
)(R)2(1
21
)2(11UU
)(H
t
t
tg
va
d2
222
2
g
t
uu
ϖ=ωϖ
=
ωϖ
βϖ+=
βϖ+ϖ−
βϖ+ω
==ω&
&&&&&&&
Função de transferência de aceleração para deslocamentoabsoluto
n22
n
n2n
2
uu2g
2
t
guu
i2i21
)(H1U
U
UU
)(H tg
tg
βωω+ω−ωβωω+ω
ω=
ωω
−=
ω
−==ω &&&&&&& &&
&&
&&
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
50
( ) ( )
)(R)(R
)(R)2(1
21
)2(11UU
)(H
t
t
tg
d2a
2d2
222
2
2g
t
uu
ϖ=ωϖ
=
ωϖ
βϖ+=
βϖ+ϖ−
βϖ+ω
==ω&&&
Resposta a movimentos periódicos
)t(um)t(uk)t(uc)t(um g&&&&& −=++
Decomposição de Fourier domovimento excitador )t(ug&& T
2kkeU)t(u kk
tik;gg
kπ
=ω∆=ω= ∑+∞
−∞=
ω&&&&
Decomposição de Fourier dasrespostas
∑∑
∑∑
∑
∞+
−∞=
ω∞+
−∞=
ω
∞+
−∞=
ω∞+
−∞=
ω
+∞
−∞=
ω
=ω−=
=ω=
=
k
tik
k
tik
2k
k
tik
k
tikk
k
tik
kk
kk
k
eUeU)t(u
eUeUi)t(u
eU)t(u
&&&&
&&
∑∑+∞
−∞=
ω+∞
−∞=
ω =ω+ωωβ+ω−k
tik;g
k
tik
2nnk
2k
kk eUeU)i2( &&
k;gk;uuk
2nnk
2k
k;gk
k;gk2nnk
2k
UHUi2
UU
UU)i2(
g
&&
&&
&&
&&=ω+ωωβ+ω−
=
=ω+ωωβ+ω−
k;gk;uu2
k;gk;uuk
k;gk;uuk;gk;uuk
k;gk;uuk
UHUHUUHiUHU
UHU
gg
gg
g
&&&&&&
&&&&&
&&
&&&&&&
&&&&&
&&
ω−==ω==
=

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
51
Aula 10
Resposta a movimentos quaisquer definidos por sériescronológicas discretas.
Resolução no domínio do tempo. Integral de Duhamel.
Soluções de deslocamento e velocidades relativas.
Solução de aceleração absoluta.
Oscilador de infinitos graus de liberdade.
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
52
Determinação da solução particular (regime forçado) do
movimento do OL1GL sujeito a uma força exterior fE(t).
Problema e
condições
iniciais
===++
0
0
E
v)0(uu)0(u
)t(f)t(uk)t(uc)t(um
&
&&&
Resposta forçada a uma força impulsiva aplicada a partir de
condições iniciais de repouso no intervalo de tempo [0,tI]Princípio deD’Alembert )t(f)um(
dtd
=&
Concretização para oOL1GL )t(ku)t(uc)t(f))t(um(
dtd
E −−= &&
∫∫∫ −−=−III t
0
t
0
t
0 EI dt)t(ukdt)t(ucdt)t(f))0(u)t(u(m &&& (*)
Impulso da força )t(fE ∫=It
0 EI dt)t(f)t(I
Dada a pequenaduração do impulso:
Itt0;0)t(u ≤≤=
Simplificando (*) 0))0(u)t(u(c)(I))0(u)t(u(m II −−−τ=− &&
Obtém-se no final daaplicação do impulsoem Itt =
0)t(u I = m
)(I)t(u Iτ≈&
Após a cessação do impulso vigora o regime livre amortecido doOL1GL:
IIDID)tt(
I tt;)))tt(sin(B))tt(cos(A(e)tt(u In ≥−ω+−ω=− −βω−
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
53
com condiçõesiniciais para Itt = :
ω=
ωβω+
=
==
DD
nIII
mI)t(u)t(uB
0)t(uA&
Regime forçadodevido à forçaimpulsiva IID
)tt(
DII tt));tt(sin(e
m1)t(I)tt(u In ≥−ωω
=− −βω−
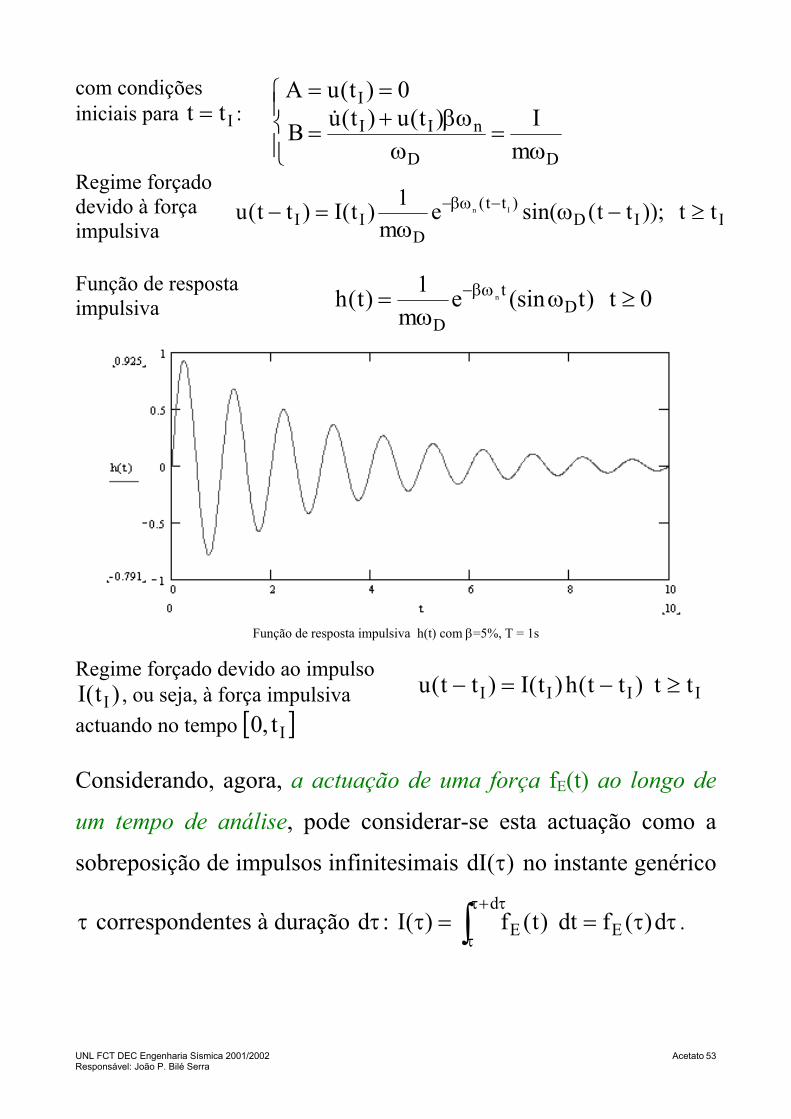
Função de respostaimpulsiva 0t)t(sine
m1)t(h D
t
D
n ≥ωω
= βω−
Função de resposta impulsiva h(t) com β=5%, T = 1s
Regime forçado devido ao impulso)t(I I , ou seja, à força impulsiva
actuando no tempo [ ]It,0IIII tt)tt(h)t(I)tt(u ≥−=−
Considerando, agora, a actuação de uma força fE(t) ao longo de
um tempo de análise, pode considerar-se esta actuação como a
sobreposição de impulsos infinitesimais )(dI τ no instante genérico
τ correspondentes à duração τd : ττ==τ ∫τ+τ
τd)(fdt)t(f)(I E
dE .
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
54
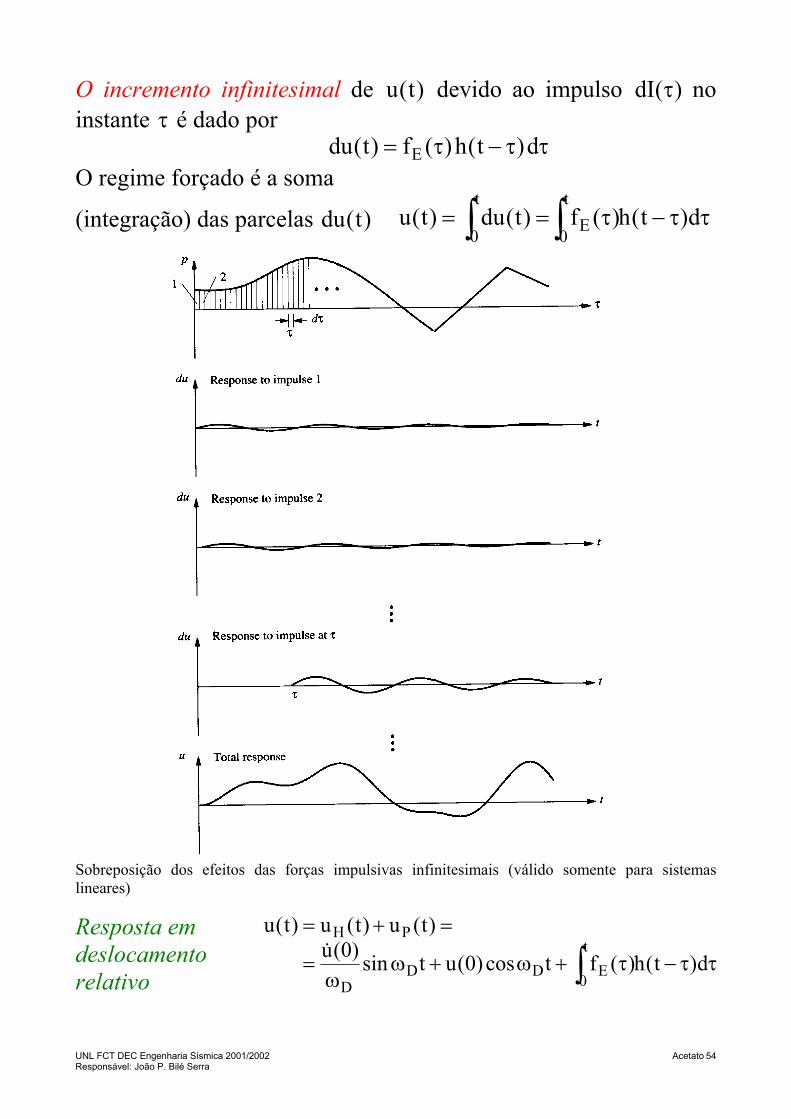
O incremento infinitesimal de )t(u devido ao impulso )(dI τ noinstante τ é dado por ττ−τ= d)t(h)(f)t(du EO regime forçado é a soma
(integração) das parcelas )t(du ττ−τ== ∫∫ d)t(h)(f)t(du)t(ut
0 Et
0
Sobreposição dos efeitos das forças impulsivas infinitesimais (válido somente para sistemaslineares)
Resposta emdeslocamentorelativo
ττ−τ+ω+ωω
=
=+=
∫ d)t(h)(ftcos)0(utsin)0(u)t(u)t(u)t(u
t
0 EDDD
PH&
UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
55
Considerando a condição
inicial de repouso:ττ−τ= ∫ d)t(h)(f)t(u
t
0 E
Particularizando fE(t) como aceleração imposta )t(ug&& : )t(um)t(f gE &&−=
Deslocamentorelativo
(força de restituição)ττ−τ−= ∫ d)t(h)(um)t(u
t
0 g&&
Integral de Duhamel ττ−ωτω
−= τ−βω−∫ d))t(sin(e)(u1)t(u D)t(t
0 gD
n&&
Velocidaderelativa(força
dissipativa)
ττ−ωτ−βω−= τ−βω−∫ d))t(cos(e)(u)t(u)t(u D)t(t
0 gnn&&&
(**)
Aceleraçãoabsoluta )t(ut&&(força de inércia)
)t(u)t(u)t(u gt &&&&&& +=
)t(u)t(u2)t(u 2nn
t ω−βω−= &&&
ττ−ωτβω+ω−β= τ−βω−∫ d))t(cos(e)(u2)t(u)12()t(u D)t(t
0 gn2n
2 n&&&& (***)
Cálculo numérico do integral de Duhamel (Clough&Penzien)
ττ−ωτω
−= τ−βω−∫ d))t(sin(e)(u1)t(u D)t(t
0 gD
n&&
)sin()tcos()cos()tsin())t(sin( DDDDD τωω−τωω=τ−ω

UNL FCT DEC Engenharia Sísmica 2001/2002 AcetatoResponsável: João P. Bilé Serra
56
))tcos()t(B)tsin()t(A(1)t(u DDD
ω−ωω
−=
ττωτ=
ττωτ=
τβωβω−
τ−βω−
∫∫
d)cos(e)(ue
d)cos(e)(u)t(A
Dt
0 gt
D)t(t
0 g
nn
n
&&
&&
ττωτ=
ττωτ=
τβωβω−
τ−βω−
∫∫
d)sin(e)(ue
d)sin(e)(u)t(B
Dt
0 gt
D)t(t
0 g
nn
n
&&
&&
Integração numérica (discretizada nos N instantes tj=∆t j=1, …, N) poraplicação da regra dos trapézios (aproximação linear por troços)
Fórmula recursiva para obtenção dos termos A(t) e B(t) em instantesdiscretos intervalados de τ∆
N...2,1j)yey(
2eBB
)xex(2
eAA
0B;0A
j1jD
1jj
j1jD
1jj
00
nn
nn
=
+ωτ∆
+=
+ωτ∆
+=
==
τ∆βω−−
τ∆βω−−
τ∆βω−−
τ∆βω−−
em que)tcos()t(ux jDjgj ω−= && e )tsin()t(uy jDjgj ω−= &&
Determinada a resposta em deslocamento relativo pode obter-se a respostaem velocidade relativa e aceleração absoluta através das equações (**) e(***).
Nota: Para o cálculo numérico de ττ−ωτ τ−βω−∫ d))t(cos(e)(u D)t(t
0 gn&&
procede-se de forma semelhante por aplicação da igualdade)sin()tsin()cos()tcos())t(cos( DDDDD τωω+τωω=τ−ω