apostila introduÇÃo a engenharia e seguranÇa do...
TRANSCRIPT

CURSO DE PÓS-GRADUAÇÃO
MBA ENGENHARIA E SEGURANÇA DO TRABALHO
APOSTILA
INTRODUÇÃO A ENGENHARIA E
SEGURANÇA DO TRABALHO
MINAS GERAIS
P á g i n a | 2
ANÁLISE DE RISCOS
1. INTRODUÇÃO
Podemos dizer que os acidentes são tão antigos quanto o próprio homem, pois
o envolvimento deste com a questão tem ceifado muitas vidas, mas também têm
salvado outras tantas. Nas buscas e desenvolvimento contínuo de técnicas e
ferramentas gerenciais que venham a garantir um ambiente seguro para realização
de atividades de quaisquer naturezas, faz-se necessário utilizar uma terminologia
conhecida e alinhada a padrões internacionais, para que estes assuntos ganhem
clareza e precisão. Assim, evita-se os possíveis desvios e vícios de comunicação e
compreensão que podem se adicionar as dificuldades na resolução de problemas
estudados.
Sugerimos a leitura e a fixação de alguns conceitos que facilitarão nossa
abordagem.
2. TERMINOLOGIA
Risco:
(HAZARD)
Uma ou mais condições de uma variável com o potencial
necessário para causar danos. Esses danos podem ser entendidos
como lesões a pessoas, danos a equipamentos ou estruturas,
perda de material em processo, ou redução da capacidade de
desempenho de uma função predeterminada.
Havendo um risco, persistem as possibilidades de efeitos
adversos.
Risco:
(RISK)
Expressa uma probabilidade de possíveis danos dentro de um
período específico de tempo ou número de ciclos operacionais.
Pode ser indicado pela probabilidade de um acidente multiplicada
pelo dano em reais, vidas ou unidades operacionais.

P á g i n a | 3
Podendo significar ainda:
- a incerteza quanto a ocorrência de um determinado evento
(acidente);
- a chance de perda ou perdas que uma empresa pode sofrer por
causa de um acidente ou série de acidentes.
Segurança:
É freqüentemente definida como “isenção de riscos”. Entretanto, é
praticamente impossível a eliminação completa de todos os riscos.
Segurança é, portanto, um compromisso acerca de uma relativa
proteção da exposição a riscos. É o antônimo de perigo.
Perigo: Expressa uma exposição relativa a um risco, que favorece a sua
materialização em danos.
Dano: É a gravidade da perda humana, material ou financeira que pode
resultar se o controle sobre um risco é perdido.
Causa: É a origem de caráter humano ou material relacionada com o
evento catastrófico (acidente), pela materialização de um risco,
resultando danos.
Perda: É o prejuízo sofrido por uma organização, sem garantia de
ressarcimento por seguro ou por outros meios.
Sinistro: É o prejuízo sofrido por uma organização com garantia de
ressarcimento por seguro ou por outros meios.
Incidente: Qualquer evento ou fato negativo com potencial para provocar
danos. É também chamado “quase acidente”: situação em que não
há danos macroscópicos.
Controle: É o domínio que se exerce sobre ações, atividades, projetos,
processos, tec. Um sistema é considerado sob controle quando as

P á g i n a | 4
seguintes condições são satisfeitas, isto é:
Quando existe;
- padrão (trabalho, operação, etc.);
- sistema de medição / comparação;
- sistema de análise / avaliação;
- ação corretiva / preventiva;
Pode ainda ser acrescido:
- sistema de melhoria contínua;
- capacidade de mudar o processo.
Processo
crítico:
É aquele que é básico para que uma organização atinja seus
objetivos e alcance seus resultados. Os processos críticos não
podem ser instáveis, sob pena de não atenderem as necessidades
do cliente e do negócio. São aqueles que têm impacto sobre a
missão institucional da organização e que devem refletir o que a
sociedade e os consumidores esperam dela.
Sistemas
abertos:
São os sistemas que apresentam relação de intercâmbio com o
ambiente.
Sistemas
fechados:
São os que não apresentam relação de intercâmbio com o meio
ambiente; são herméticos a qualquer influência ambiental. São
utópicos, apenas imagináveis em nível de estudo. Não existem na
natureza.
Sistemas
probabilísticos:
São aqueles para os quais não poderemos fornecer previsões
de resultados.
Sistemas
determinísticos:
São aqueles que as partes integrantes interagem de forma
previsível.
Uma empresa pode ser classificada como um “sistema aberto,
complexo e probabilístico”, desenvolvendo técnicas de
sobrevivência num ambiente em alteração contínua.

P á g i n a | 5
Entropia: É a tendência que os sistemas tem para o desgaste, para a
desintegração, para o afrouxamento dos padrões e para o
aumento da aleatoriedade. A medida que aumenta o processo de
informação / comunicação, diminui a entropia.
Homeostase: É o equilíbrio dinâmico entre as partes do sistema. Só se consegue
a homeostase com adaptação do sistema às mudanças que
ocorrem no meio ambiente. Um bom sistema de comunicações
pode concorrer para o alcance deste estado.
3. NATUREZA DOS RISCOS
Pesquisando diversos autores, principalmente norte-americanos, quanto a
“Gerência de Riscos”, no contexto tradicional, percebemos uma classificação não
formal, mas funcional dos riscos que podem atingir uma empresa ou organização.
Basicamente, divididas em: riscos especulativos (ou dinâmicos) e riscos puros (ou
estáticos).
A diferença principal entre essas duas categorias de risco reside no fato de
que os riscos especulativos envolvem uma possibilidade de ganho ou chance de
perda; ao passo que os riscos puros envolvem somente uma chance de perda, não
existindo nenhuma possibilidade de ganho de lucro.
Os riscos especulativos podem ainda ser divididos em três tipos: riscos
administrativos, políticos e de inovação.
Os riscos administrativos estão intimamente relacionados ao processo de
tomada de decisões gerenciais: uma decisão errada pode gerar perdas
consideráveis, enquanto que uma decisão correta pode trazer lucros para a
empresa. O problema maior está na dificuldade de se prever, com exatidão, o
resultado que advirá da decisão adotada. Essa incerteza nada mais é do que a
própria definição de risco, conforme visto anteriormente.

P á g i n a | 6
Os riscos administrativos podem ser subdivididos em:
Riscos de mercado: são certos fatores que tornam incerta a venda de um
determinado produto ou serviço, a um preço suficiente que traga resultados
satisfatórios em relação ao capital investido;
Riscos financeiros: dizem respeito as incertezas em relação as decisões
tomadas sobre a política econômico-financeira da organização;
Riscos de produção: envolvem questões e incertezas quando a materiais,
equipamentos, mão-de-obra e tecnologia utilizados na fabricação de um
produto ou na prestação de um determinado serviço.
Os riscos políticos, por sua vez, derivam-se de leis, decretos, portarias,
resoluções, etc, emanados do Governo Federal, Estadual e Municipal, os quais
podem ameaçar os interesses e objetivos da organização.
Por último, os riscos de inovação referem-se as incertezas decorrentes,
normalmente, da introdução (oferta) de novos produtos ou serviços no mercado, e
da sua aceitação (demanda) pelos consumidores.
Os riscos puros, como já mencionamos, existem quando há somente uma
chance de perda e nenhuma possibilidade de ganho ou lucro.
Normalmente, considera-se que a Gerência de Riscos trata apenas das
questões relativas a prevenção e ao financiamento dos riscos puros. Entretanto, vale
mencionar que muitas de suas técnicas podem ser igualmente aplicadas aos riscos
especulativos.
É importante lembrar também o papel fundamental que desempenha, nos
programas de gerenciamento de riscos, o estudo dos incidentes (quase acidentes).
Para melhor caracterizar esta afirmação, vamos considerar um estudo bastante
representativo realizado nos Estados Unidos, em 1969, pela “Insurance Company of
North America”, o qual abrangeu 1.753.498 acidentes registrados por 297
organizações, que representavam 21 diferentes setores de atividades e
empregavam 1.750.000 trabalhadores. O tempo de exposição aos riscos somou, no
período analisado, mais de 3 bilhões de horas-homem.

P á g i n a | 7
Esse estudo revelou que, para cada acidente com lesão grave (com
afastamento), havia 9,8 acidentes com lesão leve (sem afastamento) e 30,2
acidentes com danos a propriedade.
Parte do estudo compreendeu 4.000 horas de entrevistas a trabalhadores sobre
a ocorrência de incidentes que, em circunstâncias ligeiramente diferentes, poderiam
ter causado lesões ou danos a propriedade. Como resultado dessas entrevistas,
concluiu-se que, para cada lesão grave, ocorreram 600 incidentes (quase-acidentes)
que não apresentaram lesões ou danos visíveis – figura a seguir.
Esta relação indica claramente que os esforços de prevenção e controle de
riscos devem ser concentrados não só nos acidentes com lesão*, mas também com
acidentes com danos à propriedade e incidentes, pois qualquer um destes últimos
pode resultar ainda em uma lesão grave ou morte.
* “Lesão pessoal que impede o acidentado de voltar ao trabalho no dia imediato
ao do acidente ou de que resulte incapacidade permanente.”
“Lesão pessoal que não impede o acidentado de voltar ao trabalho no dia
imediato ao do acidente, desde que não haja incapacidade permanente.”
1
10
30
600
Acidente com afastamento
Acidente sem afastamento
Acidente com danos à
propriedade
Incidentes críticos

P á g i n a | 8
4. Gerência de riscos (definição)
Várias têm sido as tentativas para se definir o conceito de Gerência de
Riscos. No entanto a definição que propomos a seguir está intimamente relacionada
ao conceito e conteúdo que atribuímos à mesma.
Podemos dizer que a Gerência de Riscos é a ciência, a arte e a função que
visa a proteção dos recursos humanos, materiais e financeiros de uma empresa,
quer através da eliminação ou redução de seus riscos, quer através do
financiamento dos riscos remanescentes, conforme seja economicamente mais
viável.
5. Engenharia de segurança de sistemas
Um breve retrospecto seria suficiente para se inferir que o prevencionismo,
em seu mais amplo sentido, evoluiu de uma maneira crescente, englobando um
número cada vez maior de fatores e atividades, desde as precoces ações de
reparação de danos (lesões), até uma conceituação bastante ampla, onde se
buscou a prevenção de todas as situações geradoras de efeitos indesejados ao
trabalho. As abordagens mais modernas de prevencionismo envolvem, assim, uma
série de atividades que transcendem de longe a pura “prevenção de acidentes”,
como definidas duas ou três décadas passadas.
Ainda, pudemos notar que essas abordagens modernas se assemelham em
seu objetivo de “controle de danos”, ou “controle total de perdas”, porém diferem em
aspectos básicos. De fato, há uma corrente que é fortemente baseada no aspecto
administrativo da prevenção, conjugando as técnicas tradicionais a algumas outras
mais recentes, mas enfatizando a ação administrativa de controle.
Outra corrente é derivada de um enfoque mais técnico da infortunística, e
que procura dar soluções técnicas a problemas técnicos.

P á g i n a | 9
Pode-se dizer mais uma vez que os subprodutos da corrida espacial norte-
americana ofereceram abundantes e proveitosas aplicações na vida em geral. Os
engenheiros de Segurança e Sistemas e as técnicas ai aplicadas surgiram na
necessidade imperiosa de segurança total, em uma área onde não se poderia correr
riscos.
Muitas técnicas foram desenvolvidas com o correr do tempo, dirigidas ao
campo aeroespacial, militar (indústria de mísseis) e a indústria de apoio, as quais se
notaram depois, seriam igualmente úteis nas áreas “civis” de riscos. As técnicas de
Segurança de sistemas foram, assim, apresentadas pouco a pouco ao
prevencionismo, já na década de sessenta, e, até hoje, essa infiltração vem
ocorrendo paulatinamente.
SEGUNDA PARTE
GRANDEZAS FÍSICAS
- considerações importantes -
GRANDEZAS FÍSICAS
1. MEDIDAS
Em Física define-se grandeza como sendo tudo aquilo que podemos medir.
Uma grandeza física é a propriedade de um corpo, substância ou fenômeno que
pode ser medida, ou seja, comparada com algum padrão de referência que seja do
mesmo tipo que a grandeza que se quer medir (medidas do tipo “comprimento” só
podem ser feitas com um padrão de referência do tipo “comprimento”).
Podemos medir, por exemplo, a altura de um corpo (a altura é uma grandeza
do tipo “comprimento”) comparando-a com o comprimento de um de nossos pés e
dizer que o corpo possui “6 pés de altura”. O número “6” é o valor numérico da

P á g i n a | 10
medida, obtido pela razão entre a altura e a referência (quantas vezes a referência
está contida na altura) e “pés” é a unidade de medida (pé).
valor da grandeza física = valor numérico x unidade de medida
ou
quantidade física = valor numérico x unidade de medida
Algumas definições
Em física, uma grandeza ou quantidade é o conceito que descreve qualitativa
e quantitativamente as relações entre as propriedades observadas no estudo da
natureza (no seu sentido mais amplo).
Uma grandeza descreve qualitativamente um conceito porque para cada
noção diferente pode haver (pelo menos em princípio) uma grandeza diferente e
vice-versa.
Uma grandeza descreve quantitativamente um conceito porque o exprime em
forma de um binário de número e unidade.
Grandeza é tudo aquilo que envolva medidas. Medir significa comparar
quantitativamente uma grandeza física com uma unidade através de uma escala
pré-definida. Nas medições as grandezas sempre devem vir acompanhadas de
unidades.
Exemplos de grandezas: comprimento, massa, temperatura, velocidade.
Medir uma grandeza física é compará-la com outra grandeza de mesma
espécie, que é a unidade de medida. Verifica-se, então, quantas vezes a unidade
está contida na grandeza que está sendo medida.
Tipos de grandezas físicas (quantidades físicas) usuais: comprimento,
temperatura, tempo, massa, força, etc.

P á g i n a | 11
1.1 Grandezas escalares e vetoriais
Existem grandezas escalares e grandezas vetoriais.
Uma grandeza escalar (ou, na terminologia dos físicos, um “escalar”) é uma
quantidade física que não depende da direção e, portanto, não depende de um
sistema de coordenadas. O comprimento, a massa e a temperatura de um corpo são
exemplos de grandezas escalares. A altura de um prédio é uma grandeza escalar do
tipo “comprimento”, que pode ser expressa como sendo “20 m” (20 é o valor
numérico e “m” é a unidade de medida).
Já as grandezas vetoriais, além da parte escalar possuem ainda direção e
sentido. A velocidade é uma grandeza vetorial.
Quando um veículo está se deslocando a uma velocidade de 40 km/h, em uma
linha reta, virar a direção para fazer uma curva, mantendo os mesmos 40 km/h,
implica em mudar a direção do veículo, enquanto que sobre a mesma linha reta,
passar a andar em sentido contrário com a mesma velocidade de 40 km/h significa
mudar o sentido do veículo.
1.2 Organismos normalizadores
Unidades de medida tais como o “pé”, a “jarda” (passo), a “polegada” (largura do
polegar) e o “palmo” foram e ainda são utilizadas para medir comprimento. A
referência, nesse caso, pode ser feita com o nosso próprio corpo (nossos pés,
polegares, etc.), ou uma referência mais universal (pé ou polegar de um
determinado rei).
No Brasil o Inmetro – Instituto Nacional de Metrologia, Normalização e Qualidade
Industrial (http://www.inmetro.gov.br/) regulamenta a utilização de unidades de
medida, além de exercer outras funções importantes para o cidadão brasileiro.
Organismos internacionais são responsáveis pela padronização de unidades de
medida entre os países (Bureaux Internacional des Poix et Mesures – BIPM é um
deles, cujo site pode ser visitado no endereço http://www.bipm.fr).
Uma brochura do documento “Système Internacional d’Unités – SI” (documento
oficial) pode ser obtida por download gratuito no site http://www.bipm.fr/fr/si/ e uma

P á g i n a | 12
tradução da mesma em português (não oficial) pode ser obtida no site
http://www.inmetro.gov.br/.
NOTA: A “grandeza física”, também é denominada “quantidade física”.
Existem grandezas que não possuem unidade de medida e por isso são chamadas
“grandezas adimensionais”. Para estas a unidade de medida é convencionada como
sendo o número “1”, que pode ser subentendido (esta unidade não precisa e nem
deve ser expressa, para não ser confundida com o símbolo do litro). Exemplos de
grandezas adimensionais: o “coeficiente de atrito” e a “densidade relativa”.
1.3 Sistema Internacional de Unidades – SI
As unidades de medida do Sistema Internacional de Unidades – SI são
obrigatórias no Brasil, segundo a Resolução nº 12 de 1988 do Conselho Nacional de
Metrologia, Normalização e Qualidade Industrial – Conmetro. São baseadas na
publicação em francês do Bureaux Internacional des Poix et Mesures, que está em
sua 8a edição, de março de 2006. Uma cópia dessa edição se encontra na intranet
do UniAnchieta, em www.fatepa.anchieta.br.
1.4 Grandezas de base e unidades de base
O SI possui 7 unidades de base, correspondentes às 7 grandezas de base, e
as unidades derivadas, correspondentes às grandezas derivadas. As unidades
derivadas são formadas a partir de produtos de potências das unidades de base.

P á g i n a | 13
Tabela 1 – Grandezas e unidades de base SI (fonte: Inmetro)
Nome da grandeza de base
Símbolo da grandeza de
base
Dimensão da grandeza de
base
Nome da unidade de base
Símbolo da unidade de
base
DEFINIÇÃO DA UNIDADE DE BASE
comprimento
l, h, r, x
L
metro
m
O metro é o comprimento do trajeto percorrido
pela luz no vácuo durante um intervalo de tempo
de 1/299 792 458 do segundo.
Assim, a velocidade da luz no vácuo, c0, é
exatamente igual a 299 792 458 m/s.
massa
m
M
quilograma
kg
O quilograma é a unidade de massa, igual à
massa do protótipo internacional do quilograma.
Assim, a massa do protótipo internacional do
quilograma, m3, é exatamente igual a 1 kg.
tempo
t
T
segundo
s
O segundo é a duração de 9 192 631 770
períodos da radiação correspondente à transição
entre os dois níveis hiperfinos do estado
fundamental do átomo de césio 133.
Assim, a freqüência da transição hiperfina do
estado fundamental do átomo de césio 133,
ν(hfs Cs), é exatamente igual a 9 192 631 770
Hz.

P á g i n a | 14
corrente elétrica
I, i
I
ampère
A
O ampère é a intensidade de uma corrente
elétrica constante que, mantida em dois
condutores paralelos, retilíneos, de comprimento
infinito, de seção circular
desprezível, e situados à distância de 1 metro
entre si, no vácuo, produziria entre estes
condutores uma força igual a 2 x 10-7 newton por
metro de comprimento.
Assim, a constante magnética, μ0 , também
conhecida como permeabilidade do vácuo, é
exatamente igual a -7 H/m.
temperatura termodinâmica
T
Θ
kelvin
K
O kelvin é a fração 1/273,16 da temperatura
termodinâmica no ponto tríplice da água.
Assim, a temperatura do ponto tríplice da água,
Tpta, é exatamente igual a 273,16 K.
quantidade de substância
n
N
mol
mol
1. O mol é a quantidade de substância de um
sistema contendo tantas partículas elementares
quantos átomos existem em 0,012 quilograma
de carbono 12.
2. Quando se utiliza o mol, as partículas
elementares devem ser especificadas, podendo
ser átomos, moléculas, íons, elétrons, assim
como outras partículas, ou agrupamentos
especificados dessas partículas.
Assim, a massa molar do carbono 12, M(12C), é
exatamente igual a 12 g/mol.
intensidade luminosa
Iv
A candela é a intensidade luminosa, numa dada
direção, de uma fonte que emite uma radiação

P á g i n a | 15
J
candela
cd
monocromática de freqüência 540 x 1012 hertz e
cuja intensidade energética nessa direção é
1/683 watt por esterradiano.
Assim, a eficácia luminosa espectral, K, da
radiação monocromática de freqüência 540
12 Hz é exatamente igual a 683 lm/W.
“m” é o símbolo do metro padrão internacional.
1.5 Sistema de unidades coerente
Um conjunto de unidades de medida é dito “coerente” quando podem ser
feitas operações com as unidades de medida sem que seja preciso fazer
transformações de unidade. Suponha, por exemplo, que você deva calcular o ponto
de ressuprimento de um item segundo a fórmula PR = D·TR + ES onde:
D = demanda em quilogramas por dia (por exemplo: D = 25 kg/d);
TR = tempo de ressuprimento em dias (por exemplo: TR = 3 d);
ES = estoque de segurança em quilogramas (por exemplo: ES = 8 kg).
Quando você multiplica a demanda pelo tempo de ressuprimento,
multiplicando-se os valores numéricos do exemplo anterior, teremos:
3·25 = 75
e, multiplicando-se as unidades de medida, teremos:
(kg/d)·d = kg
Obtém-se, como resultado das operações com as unidades de medida, a
mesma unidade de medida de ES, que é kg.

P á g i n a | 16
Poderemos, então, somar 75 kg (resultado de D·TR), com o valor de ES (8
kg), pois as unidades de medida são iguais, chegando-se ao resultado de 83 kg.
Quando, no SI, as unidades de base e as unidades derivadas são utilizadas
sem qualquer prefixo (com exceção de “kg”, em que há um prefixo mas é uma
unidade de base), tem-se um sistema de unidades coerentes, o que traz facilidades
com os cálculos envolvendo unidades de medida.
Tabela 2 – Exemplos de grandezas e unidades derivadas SI coerentes (fonte:
Inmetro e BIPM)
Quantidade
derivada
Símbolo Unidade derivada Símbolo
área A metro quadrado
m2
Volume V metro cúbico
m3
velocidade v metro por segundo
m/s
aceleração a metro por segundo
ao quadrado
m/s2
Número de ondas σ, ῦ
inverso do metro
m-1
Massa específica ρ
quilograma por
metro cúbico
kg/m3
Densidade
superficial
ρ A
quilograma por
metro quadrado
kg/m2
Volume
específico
v metro cúbico por
quilograma
m3/kg
Densidade de j ampere por metro A/m2

P á g i n a | 17
corrente quadrado
Campo
magnético
H ampere por metro
A/m
Concentração de
quantidade de
matéria
c mol por metro
cúbico
mol/m3
Concentração de
massa
ρ, γ
quilograma por
metro cúbico
kg/m3
luminância Lv
candela por metro
quadrado
cd/m2
Índice de
refração
n
(adimensional)
(*)
Permeabilidade
relativa
μr
(adimensional)
(*)
NOTA: As unidades derivadas da Tabela 2 são um subconjunto das unidades
derivadas existentes, que são em um número extremamente grande para poder
atender às necessidades científicas.
1.6 Unidades derivadas especiais (fonte: Inmetro e BIPM)
Algumas unidades derivadas recebem nome especial, sendo estas
simplesmente uma forma compacta de expressão de combinações de unidades de
base que são usadas freqüentemente. Então, por exemplo, o joule, símbolo J, é por
definição, igual a m2·kg·s-2.
Existem, atualmente, 22 nomes especiais para unidades aprovados para uso
no SI, que estão listados na Tabela 3.

P á g i n a | 18
Tabela 3 – Grandezas e unidades derivadas SI coerentes especiais (fonte:
Inmetro e BIPM)
Quantidade
derivada
Nome da
unidade
derivada
Símbolo da
unidade
Expressão
usando
outras
unidades
Expressão
em
unidades de
base
angulo plano
radiano rad m/m = 1
angulo sólido
esterradiano sr m2/m2 = 1
freqüência
hertz Hz s-1
força
newton N m·kg·s-2
pressão,
esforço
pascal Pa N/m2 m-1.kg·s-2
energia,
trabalho,
quantidade de
calor
joule J N·m m2·kg·s-2
potência, fluxo
radiante
watt W J/s m2·kg·s-3
carga elétrica,
quantidade de
eletricidade
coulomb C s·A
diferença de
potencial
elétrico
volt V W/A m2·kg·s-3·A-1

P á g i n a | 19
capacitância
farad F C/V m-2·kg-1·s4
·A2
resistência
elétrica
ohm Ω V/A m2·kg·s-3·A-2
condutância
elétrica
siemens S A/V m-2·kg-1·s3·A2
fluxo de
indução
magnética
weber Wb V·s m2·kg·s-2·A-1
indução
magnética
tesla T Wb/m2 kg·s-2·A-1
indutância
henry H Wb/A m2·kg·s-2·A-2
temperatura
Celsius
grau Celsius oC K
fluxo luminoso
lumen lm cd·sr cd
iluminância
lux lx lm/m2 m-2·cd
atividade de
um
radionuclídio
becquerel Bq s-1
dose
absorvida,
energia
específica
gray Gy
J/kg
m2·s-2

P á g i n a | 20
(comunicada),
kerma
equivalente de
dose,
equivalente de
dose ambiente
sievert Sv J/kg m2·s-2
atividade
catalítica
katal kat s-1·mol
1.7 Múltiplos e submúltiplos das unidades do SI
Para exprimir unidades de medida muito maiores ou muito menores que as
unidades de base ou derivadas, são utilizados prefixos padronizados no SI, de modo
a se obter valores numéricos mais fáceis de manusear.
A Tabela 4 mostra esses prefixos.
Tabela 4 – Múltiplos e submúltiplos SI (fonte: Inmetro)
Fator
Nome Símbolo Fator Nome Símbolo
101
deca da 10-1 deci d
102
hecto h 10-2 centi c
103
quilo k 10-3 mili m
106
mega M 10-6 micro µ
109
giga G 10-9 nano n

P á g i n a | 21
1012
tera T 10-12 pico p
1015
peta P 10-15 femto f
1018
exa E 10-18 atto a
1021
zetta Z 10-21 zepto z
1024
yotta Y 10-24 yocto y
Quando os prefixos são usados, o nome do prefixo e o da unidade são
combinados para formar uma palavra única e, similarmente, o símbolo do prefixo e o
símbolo da unidade são escritos sem espaço, para formar um símbolo único que
pode ser elevado a qualquer potência.
Por exemplo, pode-se escrever: quilômetro, km; microvolt, µV; femtosegundo,
fs; 50 V/cm = V(10-2 m)-1 = 5000 V/m.
Um exemplo típico para uso de prefixos se encontra na medida da
capacitância de capacitores na indústria eletrônica, que são expressos
habitualmente em pF.
1.8 Unidades fora do SI
O SI é um sistema que, pouco a pouco, vai se impondo internacionalmente.
Todavia, existem unidades de medida que possuem uso universal e não pertencem
ao SI, apesar de poderem ser expressas em unidades SI.
Para isso dispõe-se no BIPM de tabelas com as unidades não SI. Na Tabela 5
abaixo encontram-se as unidades não SI e os respectivos fatores de conversão
disponíveis no Inmetro.
P á g i n a | 22
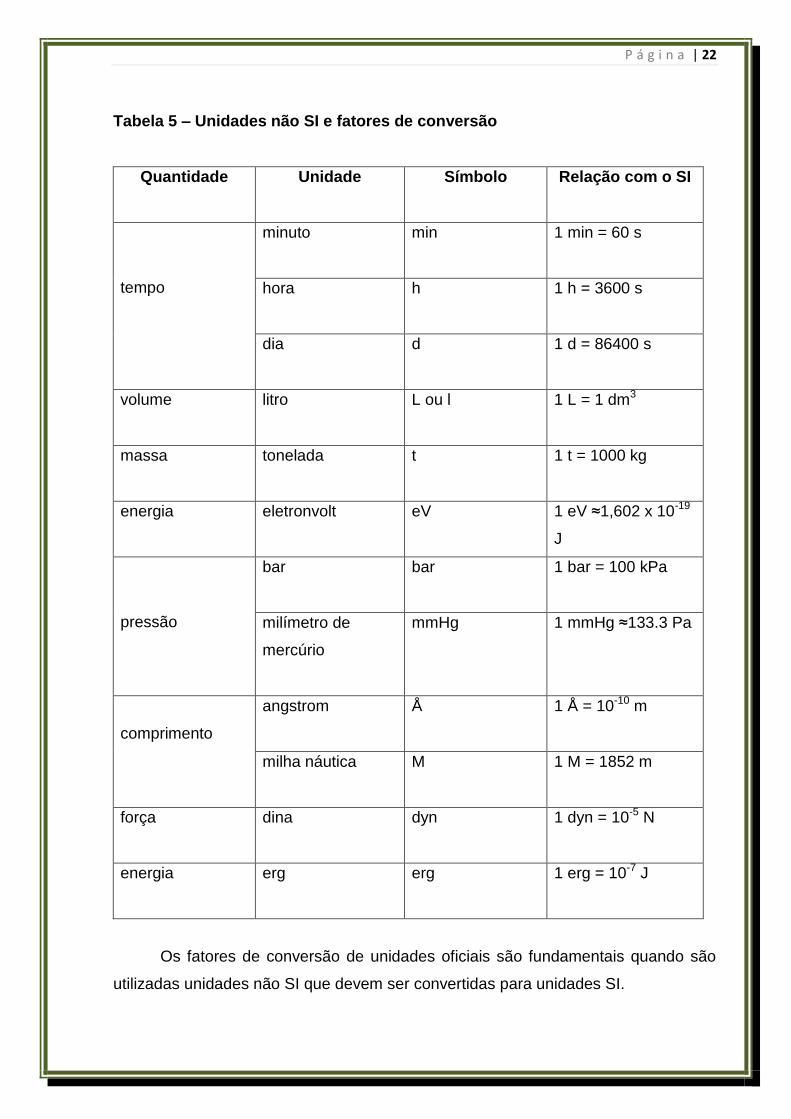
Tabela 5 – Unidades não SI e fatores de conversão
Quantidade
Unidade Símbolo Relação com o SI
tempo
minuto
min 1 min = 60 s
hora
h
1 h = 3600 s
dia
d 1 d = 86400 s
volume
litro L ou l 1 L = 1 dm3
massa
tonelada t 1 t = 1000 kg
energia
eletronvolt eV 1 eV ≈1,602 x 10-19
J
pressão
bar
bar 1 bar = 100 kPa
milímetro de
mercúrio
mmHg 1 mmHg ≈133.3 Pa
comprimento
angstrom
Å 1 Å = 10-10 m
milha náutica
M 1 M = 1852 m
força
dina dyn 1 dyn = 10-5 N
energia
erg erg 1 erg = 10-7 J
Os fatores de conversão de unidades oficiais são fundamentais quando são
utilizadas unidades não SI que devem ser convertidas para unidades SI.

P á g i n a | 23
Uma tabela com conversões oficiais, além de outras informações importantes
acerca de unidades de medida, pode ser obtida gratuitamente no endereço:
http://physics.nist.gov/Document/sp811.pdf
Esta mesma tabela também pode ser encontrada em www.fatepa.anchieta.br,
na disciplina de Administração de Recursos Materiais e Patrimoniais.
1.9 Algumas regras para unidades de medida com base no BIPM
O texto a seguir segue as regras do BIPM, porém é baseado no texto
traduzido pelos Assessores Especiais da Presidência do Inmetro, físico José
Joaquim Vinge e engenheiro Aldo Cordeiro Dutra (fev 2006).
Lembretes:
Os símbolos das unidades de medida do SI são obrigatórios, porém os
símbolos das grandezas são apenas recomendados.
Se nos reportarmos ao exemplo anterior do cálculo do ponto de
ressuprimento, não há impropriedade alguma em se utilizar o símbolo D para
expressar a demanda, o símbolo TR para o tempo de ressuprimento e o símbolo ES
para expressar o estoque de segurança.
Os símbolos não devem ser confundidos com abreviaturas. Um símbolo é
uma entidade matemática e por isso podem ser feitas operações algébricas com os
mesmos.
Por exemplo, a fórmula tradicional de lote econômico
L = ------- pode ser expressa como
L2 = ------- pode ser expressa como
L2 = 2DCP-1E-1 ou
L = (2DCP-1E-1)1/2
2DC
PE
PE
2DC

P á g i n a | 24
Com os símbolos das unidades de medida se dá o mesmo.
Deixar sempre um espaço entre o valor numérico e a unidade de medida. Na
expressão D = 234 kg/d temos que deixar um espaço entre o valor numérico 234 e a
unidade kg/d.
A expressão 2DC, do exemplo acima, pode ser escrita sem espaços,
subtendendo-se a multiplicação, seguindo as regras tradicionais da álgebra. Caso
existam variáveis que possam trazer confusão (como em D x TR onde, se
escrevermos DTR, pode haver dubiedade de interpretação), utilizamos o “ponto a
meia-altura” (·) ou o símbolo “x”.
Como exemplo de utilização dos símbolos seguindo as regras da álgebra,
temos a expressão
v = 72 km/h que pode ser escrita como
v/72 = km/h ou como
v/km = 72/h.
Quando duas unidades de medida são multiplicadas, o espaço entre elas é
uma convenção de multiplicação:
newton x metro pode ser escrito N m, ou N x m ou N·m
Note que m s significa metro x segundo, ao passo que ms significa
milissegundo.
Unidades de medida que não possuem dimensão (unidade de medida = 1, ou
seja, o número um) não precisam ser colocadas. Às vezes é utilizado um símbolo
sem dimensão, como por exemplo o “%”, que significa “por cento” ou 1/100 ou 0,01
ou 10-2. Quando dizemos 12 % estamos nos referindo a um número puro (sem
unidade de medida ou adimensional) e o significado é 12/100 ou 12 x 0,01 ou 12 x
10-2.

P á g i n a | 25
Unidades diferentes de medida para uma mesma grandeza física implicam
em valores numéricos diferentes, porém a medida é a mesma. Por exemplo,
podemos expressar a velocidade de um veículo como sendo:
v = 72 km/h ou
v = (72 x 1000 m)/(3600 s) = 20 m/s
NOTA: Uma exceção é quando se utilizam medidas de ângulo plano. Por exemplo:
3o25’4” (não há espaço entre o valor numérico e a unidade de medida).
No Word, para escrever esse símbolo, deixe o teclado numérico ativado,
aperte a tecla Alt e, mantendo-a apertada, digite 0183 que o símbolo “ponto a meia-
altura” será obtido.
Note, no exemplo anterior, a utilização do símbolo da grandeza “velocidade”
escrito em itálico. Os símbolos de grandeza devem, como recomendação, ser
escritos em itálico. Se estivermos nos referindo a dois veículos poderemos indicar a
velocidade de cada um através de um subscrito (v1 e v2) ou por meio de parênteses
v(A) e v(B).
Já o símbolo da unidade de medida deve ser escrito em romano (vertical),
mesmo que o texto onde está sendo utilizado esteja em itálico, pois são entidades
matemáticas e não abreviaturas. Os valores numéricos das unidades de medida
também devem ser escritos em romano, mesmo que o texto onde estão sendo
utilizados estejam em itálico.
Correto:
“A velocidade do automóvel era de 50 km/h no momento da batida.”
Incorreto:
“A velocidade do automóvel era de 50 km/h no momento da batida.”
P á g i n a | 26
Como as operações com os valores numéricos são as mesmas feitas com as
unidades de medida, para indicar as dimensões de uma folha de papel A4, por
exemplo, é incorreto escrever 210 x 297 mm (deve-se escrever 210 mm x 297 mm).
Os símbolos das unidades de medida não devem ser seguidos de ponto, a
não ser que estejam no final de uma sentença. É incorreto escrever 20 cm. no meio
de uma sentença.
Os símbolos das unidades de medida não possuem plural. É correto escrever
20 cm mas é incorreto escrever 20 cms.
No valor numérico de uma medida, grupos com mais de três dígitos devem
ser separados de três em três por um espaço tanto da direita para a esquerda a
partir do sinal de decimal como da esquerda para a direita a partir do sinal de
decimal: 23 456,234 21 é preferível ao invés de 23456,23421 ou 23.456,23421
porque é uma notação que não causa confusão entre números escritos na notação
de “ponto” decimal ou na de “vírgula” decimal.
2 ARREDONDAMENTO
O arredondamento pode ser feito de diversas maneiras, porém há norma
nacional (ABNT NBR 5891:1977) e internacional (ISO 31-0:1992, Anexo B).
O arredondamento, segundo essas normas, deve ser feito segundo o
seguinte critério:
Se o algarismo imediatamente à direita da posição para a qual será feito o
arredondamento é menor que 5, o algarismo da posição para a qual será feito o
arredondamento fica inalterado.
Exemplos:
58,43 arredondado a 1 decimal passa a ser 58,4 (o algarismo imediatamente
à direita da posição para a qual será feito o arredondamento é 3);
234,9876432 arredondado a 4 decimais passa a ser 234,9876 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 4);

P á g i n a | 27
432,391 arredondado a 2 decimais passa a ser 432,39 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 1);
123,6702 arredondado a 3 decimais passa a ser 123,670 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 2).
Se o algarismo imediatamente à direita da posição para a qual será feito o
arredondamento é maior que 5 ou, sendo 5, há pelo menos um algarismo
subseqüente diferente de zero, o algarismo da posição para a qual será feito o
arredondamento deve ser aumentado de uma unidade.
Exemplos:
58,46 arredondado a 1 decimal passa a ser 58,5 (o algarismo imediatamente
à direita da posição para a qual será feito o arredondamento é 6);
234,9876732 arredondado a 4 decimais passa a ser 234,9877 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 7);
432,36512 arredondado a 2 decimais passa a ser 432,37 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 5 e
este é seguido de pelo menos um algarismo diferente de zero);
123,670501 arredondado a 3 decimais passa a ser 123,671 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 5 e
este é seguido de pelo menos um algarismo diferente de zero).
Se o algarismo imediatamente à direita da posição para a qual será feito o
arredondamento é igual a 5 e não há algarismos subseqüentes ou, sendo igual a 5,
os algarismos subseqüentes são constituídos de zeros sem nenhum algarismo
diferente de zero, o arredondamento deve ser feito para o número par mais próximo.
Em outras palavras, se o algarismo da posição para a qual deve ser feito o
arredondamento é par, este será mantido e se for ímpar a ele deve ser somada uma
unidade.

P á g i n a | 28
Exemplos:
123,465 arredondado a 2 decimais passa a ser 123,46 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 5, sem
nenhum algarismo subseqüente e o algarismo da posição para a qual deve ser feito
o arredondamento é par);
123,425 000 arredondado a 2 decimais passa a ser 123,42 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 5
seguido de zeros, sem nenhum algarismo subseqüente diferente de zero e o
algarismo da posição para a qual deve ser feito o arredondamento é par);
123,491 5 arredondado a 3 decimais passa a ser 123,492 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 5, sem
nenhum algarismo subseqüente e o algarismo da posição para a qual deve ser feito
o arredondamento é ímpar, sendo a ele somada uma unidade);
123,435 000 arredondado a 2 decimais passa a ser 123,44 (o algarismo
imediatamente à direita da posição para a qual será feito o arredondamento é 5
seguido de zeros, sem nenhum algarismo subseqüente diferente de zero e o
algarismo da posição para a qual deve ser feito o arredondamento é ímpar, sendo a
ele somada uma unidade);
129,500 0 arredondado a inteiro passa a ser 130 (o algarismo imediatamente
à direita da posição para a qual será feito o arredondamento é 5 seguido de zeros,
sem nenhum algarismo subseqüente diferente de zero e o algarismo da posição
para a qual deve ser feito o arredondamento é ímpar, sendo a ele somada uma
unidade).

P á g i n a | 29
3 TRUNCAMENTO
O truncamento consiste em eliminar algarismos à direita de um número, sem
alterar os outros algarismos. Exemplos:
Para truncar o número 234,769 4 para duas decimais tem-se 234,76 como
resultado.
Para truncar o número 47 546,98 para inteiro, tem-se 47 546 como resultado.
4 ALGARISMOS SIGNIFICATIVOS
4.1 Conceitos básicos
Conceito: algarismos significativos são os algarismos que, em uma medida,
possuem algum “significado”.
Nas medidas utiliza-se a quantidade de algarismos que a leitura do
instrumento mostra com certeza e mais um algarismo, aproximado, denominado
“algarismo duvidoso”
Um exemplo é a medida de uma caneta conforme a Figura 1 com uma régua
que possui divisões até milímetros. Podemos afirmar, se fizermos uma boa
ampliação da imagem, como a mostrada na Figura 2, que a caneta mede 9,1X cm.
O “X” é o algarismo duvidoso, que para uns pode ser o 7, para outros o 8 e
talvez até um algarismo menor que 7 ou maior que 8. Se, para o nosso olhar, existe
a dúvida entre o 7 e o 8, resta uma relativa certeza de que a medida está entre 9,16
cm e 9,19 cm.
Figura 1 – Medida de uma caneta

P á g i n a | 30
Figura 2 – Medida da caneta da Figura 1 ampliada
Não podemos acrescentar nenhum outro algarismo nesta medida. Não
podemos, por exemplo, informar uma medida de 9,175 cm para a caneta da figura
só porque ficamos em dúvida entre o 7 e o 8. O algarismo 5, neste caso, não tem
significado algum (não é “significativo”).
Se escolhermos o 7 como o algarismo duvidoso, a medida do comprimento da
caneta será expressa como sendo 9,17 cm, onde há 3 algarismos significativos,
sendo os dois primeiros (9 e 1) exatos e o último (7) duvidoso.
Os zeros à direita do sinal decimal (seja ele um ponto ou uma vírgula) não
podem ser desprezados, mesmo que não haja nenhum algarismo diferente de zero.
Se tivéssemos 9,00 cm como resultado da medida, não seria correto exprimi-
la como sendo 9 cm, pois estaríamos perdendo a informação de quantos algarismos
significativos teríamos na medida.
Para efetuar a contagem de quantos algarismos significativos existem em
uma medida desprezam-se todos os zeros à esquerda da medida7.
Exemplos:
0,0005678 possui 4 algarismos significativos;
000345,23 possui 5 algarismos significativos;
0,002345600 possui 7 algarismos significativos.

P á g i n a | 31
Assim, 09,17 cm ou 009,17 cm ou 0 009,17 cm correspondem a 3 algarismos
significativos.
A transformação da medida em metros (0,0917 m) ou milímetros (91,7 mm)
também não altera a quantidade de algarismos significativos. Todavia, expressar
essa medida em micrômetros pode trazer informação errada sobre a quantidade de
algarismos significativos, pois 91 700 μm nos leva a imaginar que estamos com 5
algarismos significativos, o que não é verdade. Neste caso é interessante adotar a
notação científica, como por exemplo 9,17·104 μm ou 0,917・105 μm.
Se temos um número com mais algarismos do que os algarismos
significativos, basta arredondá-lo para a quantidade correta:
Escrever 0,00234567 com 3 algarismos significativos. Resultado: 0,00235.
Escrever 2386,456 com 3 algarismos significativos. Resultado: 2390 ou, mais
precisamente, 2,39・103.
4.2 Notação científica
A notação científica é um modo de representar um número que facilita a
apresentação de números muito grandes e muito pequenos. Permite, também,
separar o número em uma parte que mostra a significância do número (quantidade
de algarismos significativos ou precisão do número) e outra que mostra a grandeza
do número.
Na notação científica um número é representado no formato m·be, onde m é a
“mantissa” (também chamada “fração”), b é a “base” (ou “raiz”) e e é o “expoente”. A
base é geralmente 10 (na utilização normal por físicos, químicos, matemáticos,
engenheiros, etc.). A mantissa contém os algarismos significativos e o expoente
indica a grandeza do número.
Há uma padronização para a notação científica onde a mantissa é
apresentada sempre como um número igual ou superior a 1 e menor que 10. Assim,
se tivermos um número representado por 23,456·102, ele deverá ser transformado
em 2,3456·103.

P á g i n a | 32
4.3 Calculadoras
Em muitas calculadoras, para melhor utilização do visor da máquina, usa-se a
letra E no lugar do valor da base 10 e o expoente é mostrado como um número de
tamanho normal.
Exemplo:
-1,234567E-5 (a letra E indica que o número -5 que vem à sua frente é um
expoente de 10) e o número, portanto, corresponde a -1,234567·10-5.
Algumas calculadoras utilizam, além da notação científica, a “notação de
engenharia”, onde a mantissa pode chegar a três algarismos à esquerda do sinal
decimal. Como exemplo, podemos ter o número -12,34567E-6 em que há 2
algarismos antes do sinal decimal.
A mantissa, nas calculadoras, pode não estar representando a precisão do
número, pois internamente a calculadora pode ter uma precisão superior à mostrada
no visor. É importante examinar o manual de cada calculadora para se verificar
esses detalhes.
4.4 Computadores
Em computadores o termo utilizado no lugar de “notação científica” é “ponto
flutuante”. Os dois termos têm praticamente o mesmo significado, porém em
computadores a representação em ponto flutuante obedece a critérios que buscam a
otimização de seu desempenho. Os números são “normalizados” (conceito
semelhante ao da padronização da notação científica) e a quantidade de algarismos
significativos (precisão) depende do formato de ponto flutuante utilizado (simples,
duplo, etc.). Para maiores detalhes, ver norma IEEE 754.

P á g i n a | 33
Em planilhas eletrônicas os números são representados internamente, como
regra geral, por meio de ponto flutuante duplo, em que há 64 bits disponíveis para
registro da mantissa e do expoente, sendo 1 para o sinal do número, 11 para o
expoente e 52 para a mantissa, o que corresponde a 15 algarismos significativos.
NOTA: Lembre-se do expressão popular “zero à esquerda” como algo que nada
vale.
4.5 Operações com algarismos significativos
Quando se efetuam operações com algarismos significativos devem ser
adotados alguns procedimentos para não se utilizar algarismos sem significado. É
claro que o procedimento mais correto é a utilização da teoria dos erros, porém
podem ser usadas algumas regras práticas para não se usar indevidamente um
excesso de algarismos sem significado.
Na soma ou subtração de números que apresentem quantidade diferente de
decimais deve-se arredondar os números de modo que fiquem com a mesma
quantidade de decimais que o número com menor quantidade de decimais.
Exemplo:
Para efetuar a operação 34,5 + 2,567 + 10,22 arredonda-se o segundo e o
terceiro de modo que fiquem com uma decimal apenas (que é a quantidade de
decimais do primeiro) e depois se efetua a soma:
34,5 + 2,6 + 10,2 = 47,3
Na multiplicação e na divisão adota-se critério semelhante: os resultados de
operações com números que apresentem quantidades de decimais diferentes
devem ser arredondados para o que tiver menor quantidade de algarismos
significativos.
Exemplo:

P á g i n a | 34
34,5 x 12,567 = 433,5615 → 433 (porque o primeiro fator possui apenas três
algarismos significativos)
5 CONVERSÃO DE UNIDADES DE MEDIDA (exemplos em problemas de
Logística)
5.1 Erros no modo de expressar unidades de medida
Existe às vezes um costume, que deve ser combatido, que é mostrar valores
com unidades de medida expressas erradamente. Um exemplo típico, na área de
logística, é expressar demanda, vendas ou consumo como, por exemplo, 200
quilogramas-mês.
Demanda, vendas e consumo são conceitos que envolvem uma quantidade
de material por período de tempo. A expressão correta para demanda, venda ou
consumo deve sempre utilizar o termo “por” entre a quantidade e o período de
tempo. O termo “por” equivale a um traço de fração, pois é uma divisão. Assim,
devemos dizer 200 quilogramas por mês, que equivale a 200 kg/mês.
Expressões como “homem-hora” e “homens por hora” têm significado
inteiramente diferente. Homem-hora corresponde a uma multiplicação de quantidade
de homens pela quantidade de horas. Se tivermos 4 homens trabalhando 8 horas
por dia durante 5 dias teremos (4 homens) x (8 horas/dia) x (5 dias) que resultam em
160 homem-hora (que é o mesmo que 160 homem x hora).
Homens por hora pode ser aplicado no caso de termos uma roleta de um
estádio por onde passam 1 000 homens por hora durante 3 horas. Teremos (1 000
homens/h) x 3 h = 3 000 homens.
5.2 Conversões de unidade – regras básicas
Quando são feitas operações com medidas, as mesmas operações feitas com
os valores numéricos devem ser feitas com as unidades de medida.
Se tivermos uma quantidade de 2 000 kg de demanda em um período de 10
meses, para encontrar a demanda média mensal nós dividimos o valor 2 000 por 10
P á g i n a | 35
e, também, dividimos a unidade kg pela unidade mês. O resultado será (2 000/10) x
(kg/mês) = 200 kg/mês.
A multiplicação de símbolos de unidades de medida deve ser indicada ou pelo
sinal de multiplicação (x) ou por um espaço ou pelo ponto a meia-altura (·).
Exemplo para newton x metro:
N m ou N·m ou N x m .
A divisão de símbolos de unidades de medida deve ser indicada ou por um
traço horizontal de fração ou por um traço oblíquo (/) de fração ou por um expoente
negativo.
Exemplo para metro por segundo:
------- ou m/s ou m.s-1
Em uma fórmula ou equação, deve-se homogeneizar as unidades de medida
de mesma natureza.
Por exemplo, se estiverem sendo utilizadas medidas de tempo em dias e em meses,
deve-se transformá-las de modo que todas sejam dadas em dias ou todas sejam
dadas em meses; se estiverem sendo utilizadas unidades de medida de estocagem
em quilogramas e em litros, deve-se transformá-las de modo que todas sejam dadas
em quilogramas ou todas sejam dadas em litros; se estiverem sendo utilizadas
medidas de moeda em euros e em reais, deve-se transformá-las de modo que todas
sejam dadas em euros ou todas sejam dadas em reais
Essa “homogeneização” de unidades torna o conjunto de unidades “coerente”.
5.3 Exemplos de conversão
1. Uma caixa (cx) contém 5 quilogramas (kg). Quantos kg existem em 3 cx ?
m s

P á g i n a | 36
Solução:
1 cx = 5 kg .
Como 1 cx = 1·cx = cx, podemos escrever:
cx = 5 kg .
Se temos 3 cx, basta substituir o símbolo “cx” pelo seu igual, que é “5 kg”.
Assim, 3 cx = 3·5 kg = 15 kg .
2. Uma caixa (cx) contém 12 litros (L) e cada litro (L) equivale a 0,9 quilogramas (kg).
Quantos kg existem em 5 cx?
Resultado:
cx = 12 L, (1)
L = 0,9 kg11 . (2)
Na expressão (1) vamos substituir “L” pelo seu equivalente “0,9 kg” mostrado na
expressão (2):
cx = 12·0,9 kg = 10,8 kg . (3)
Se temos 5 cx, basta substituir o símbolo “cx” pelo seu igual, que é “10,8 kg”,
conforme (3):
5 cx = 5·10,8 kg = 54 kg .

P á g i n a | 37
3. A demanda (D) de um item é de 3 600 t/ano, seu tempo de ressuprimento (TR) é
de 6 dias e seu estoque de segurança é de 5 000 kg. Qual é o ponto de
ressuprimento (PR)?
Assumir que 1 ano = 12 meses, 1 mês = 30 dias e 1 € = 3,00 R$.
Fórmula: PR = D x TR + ES
O primeiro passo é transformar as unidades de estocagem, que são diferentes, para
a mesma unidade. Vamos transformar “toneladas”, que aparece na demanda, em
“quilogramas”, que é a unidade do estoque de segurança:
Como 1 t = 1 000 kg, então D = 3 600 t/ano = 3 600 000 kg/ano
Agora vamos transformar a unidade de tempo “ano” para a unidade de tempo “dia”,
que é a unidade do tempo de ressuprimento:
Como 1 ano = 12 meses = 12 x 30 dias = 360 dias, então D = 3 600 000 kg/ano = 3
600 000 kg/360 dias = 10 000 kg/dia.
Agora podemos efetuar os cálculos:
PR = D x TR + ES = (10 000 kg/dia) x (6 dias) + 5 000 kg = 60 000 kg + 5 000 kg =
65 000 kg .
4. Calcular o lote econômico de um item pela fórmula tradicional
L = ------- tendo-se
D = 3 600 t/ano;
C = 50,00 €;
2DC
PE

P á g i n a | 38
P = 20,00 R$/kg;
E = 2 % a.m.12 .
Transformando t em kg, como 1 t = 1 000 kg, então D = 3 600 000 kg/ano.
Transformando € em R$, como 1 € = 3,00 R$, então C = 50,00 x 3,00 R$ = 150,00
R$.
Transformando mês em ano e já eliminando o símbolo %:
E = 2 % a.m. = (2/100)/mês = 0,02/mês = 0,02/(ano/12) = (0,02 x 12)/ano = 0,24/ano
Agora basta efetuar os cálculos. Como temos um conjunto “coerente” de unidades, o
resultado será dado na unidade de lote (L), que é uma unidade de estocagem, ou
seja, em kg:
L = ---------------------- = 15 000 kg.
TERCEIRA PARTE
ELEMENTOS ORGÂNICOS DE MÁQUINAS
- Revisão geral simplificada -
Elementos orgânicos de máquinas
Considerações Iniciais
Estudaremos aqui alguns elementos de máquinas para que possamos, dentro
do contexto da disciplina “Segurança Industrial”, conhecer, de forma geral os
2 . 3600000 . 150
20 . 0,24

P á g i n a | 39
conceitos e elementos que compõem uma máquina. Como técnico de segurança do
trabalho, faz-se necessário o profundo conhecimento das máquinas envolvidas no
processo de manufatura da empresa onde atua, bem como a capacidade e
produtividade inerentes a estas. Desta forma, as medidas de segurança, quando
sugeridas e implementadas surtirão efeito promissor sob todos os aspectos.
Aqui, procuramos dar uma visão geral dos principais elementos de uma
máquina. Não nos aprofundando em detalhes técnicos construtivos ou projetivos,
pois não faz parte do aporte de conhecimento exigido neste curso. Contudo, como
todo conhecimento é promissor, estes ajudarão no dia-a-dia de exercício da
atividade.
Procuramos neste intuito, transmitir o conhecimento em uma linguagem
rasteira, mas com muita propriedade, com o principal objetivo de tornar nosso
profissional mais crítico e interativo com as máquinas e os sistemas de produção
envolvidos, a fim de buscar soluções tecnicamente corretas e acima de tudo, viáveis
do ponto de vista operacional e comercial.
Elementos de fixação
Se quisermos fazer uma caixa de papelão, possivelmente usaremos cola, fita
adesiva ou grampos para unir as partes. Por outro lado, se desejamos construir uma
caixa ou engradado de madeira, usaremos pregos ou
taxas para unir as partes.
Na industria mecânica é muito comum
percebemos união de peças como chapas, perfis e
barras. Na verdade, em qualquer construção, por
mais simples que seja, exige união de peças entre si.
Entretanto, as peças a serem unidas, exigem
elementos próprios de união que são denominados elementos de fixação.

P á g i n a | 40
Arruela
Porca
Parafuso
Rebite Solda
Considerando uma classificação geral, os elementos de fixação mais usados
na indústria mecânica são: parafuso e porca, rebites, pinos, cavilhas, porcas,
arruelas, chavetas, dentre outros.
Estas uniões, executadas pelos elementos
de fixação, poderão ser efetuadas de duas formas
básicas. Móvel ou permanente.
Quando a união é feita de forma móvel, os
elementos de fixação podem ser colocados ou
retirados do conjunto sem causar qualquer dano às peças que foram unidas. Como
exemplo, citamos as uniões feitas com parafusos, porcas e arruelas.
No tipo de união
permanente, os elementos
de fixação, uma vez
instalados, não
podem ser retirados sem que
fiquem inutilizados. É o caso,
por exemplo, de uniões feitas com rebites e soldas.
Tanto os elementos de fixação móvel como os elementos de fixação
permanentes são usados na indústria com muita habilidade e cautela, pois
constituem geralmente, os componentes mais frágeis da máquina.
Assim, no projeto de um conjunto mecânico é imprescindível escolher o
elemento de fixação adequado aos tipos de peças que irão ser unidas ou fixadas.
Em caso de união de peças robustas, por exemplo, com elementos de fixação fracos
e mal planejados, o conjunto apresentará falhas e poderá ficar inutilizado. Ocorrerá,
certamente, desperdício de tempo, de materiais e de recursos financeiros.
Salientamos ainda, a grande importância de se fazer esta escolha de forma correta
para evitar concentrações de tenção nas peças fixadas, bem como fragilidade do
material.

P á g i n a | 41
Tipos mais comuns de elementos de fixação
Apresentamos a seguir uma descrição geral de cada um dos elementos de
fixação aqui considerados:
Rebite
O rebite é formado por um corpo e cabeça
cilíndrico. É fabricado em aço, alumínio, cobre
ou latão. Usado para fixação permanente
de duas ou mais peças.
Pino
O pino une peças articuladas. Nesse tipo de
união, uma das peças pode se movimentar por
rotação.
Cavilha
A cavilha tem a função de unir peças que não
são articuladas entre si.

P á g i n a | 42
Parafuso de cabeça
cilíndrica com
fenda
Porca sextavada
Arruela chanfrada
Contrapino ou cupilha
O contrapino ou também conhecido como cupilha é uma haste ou arame com
forma semelhante à de um meio-cilindro, dobrado de modo a fazer uma cabeça
circular e tem duas pernas desiguais. Introduz-se o contrapino ou
cupilha num furo na extremidade de um pino ou parafuso com
porca castelo. As pernas do contrapino são viradas para trás
e, assim, impedem a saída do pino ou da porca durante vibrações das peças
fixadas.
Parafuso
O parafuso é um elemento de máquina bastante conhecido
devido a sua larga utilização. É formado por um corpo
cilíndrico roscado e uma cabeça, que pode ter várias
formas, conforme o uso pretendido.
Porca
A porca tem forma prismática, apresentando um furo
roscado em seu centro. Através desse furo, a porca é atarraxada ao parafuso.
Arruela
Arruela é um disco metálico com um furo no centro.
Tem diversas funções associadas ao seu uso, conforme o tipo de arruela. Uma das
funções é não machucar a peça unida pelo parafuso quando da necessidade de um
torque mais excessivo. O corpo do parafuso passa por esse furo.

P á g i n a | 43
Anel
Chaveta
Anel elástico
O anel elástico é usado para impedir
deslocamento de eixos. Serve, também, para
posicionar ou limitar o movimento de uma
peça que desliza sobre um eixo.
Chaveta
Na literatura, alguns autores classificam a chaveta como elemento de fixação
e outros autores, como elementos de transmissão. Tem corpo em forma prismática
ou cilíndrica podendo ter faces paralelas ou inclinadas, em função da grandeza do
esforço e do tipo de movimento que deve ser transmitido.
Elementos de transmissão
Nós convivemos, no nosso dia-a-dia, com diversos mecanismos que se
utilizam de elementos de transmissão para poder desempenhar bem a função para a
qual foi projetado. O vídeo cassete, o gravador, o aparador de gramas, o automóvel,
dentre tantos outros. Desta forma, estudaremos
aqui alguns elementos de máquinas para
transmissão como correias, correntes,
engrenagens, rodas de atrito, roscas e
cabos de aço. Veremos como estes elementos são
montados, ou seja, como formam estes
sistemas de transmissão que tem como
objetivo a transferência de potência e
movimento a um outro sistema.

P á g i n a | 44
A título de exemplo, colocamos na figura ao lado um sistema de transmissão
de movimentos montado. Bem como a identificação dos elementos dinâmicos de
máquinas que o compõe.
Uma caracterísca de um sistema de transmissão é a possibilidade de
variação das rotações entre eixos. Nestes casos o sistema é chamado de variador.
E as formas mais comuns de se variar a rotação entre eixos pode se dar pelo uso de
engrenagens, correias ou por atrito.
Formas de transmissão
As transmissões de movimentos podem ser pela forma e por atrito.
A transmissão pela forma é assim chamada porque a forma dos elementos
transmissores é adequada para encaixamento desses elementos entre si. Este tipo
de transmissão são os mais usados, principalmente com os elementos chavetados,
eixos-árvore entalhados e aixos-árvores estriados.

P á g i n a | 45
Já a transmissão por atrito possibilita uma boa centralização das peças
ligadas aos eixos. Entretanto, não possibilitam transmissão de grandes esforços
quanto os transmitidos pela forma. Os principais elementos de transmissão por atrito
são os elementos anelares e
arruelas estreladas.
Esses elementos
constituem-se de dois anéis
cônicos apertados entre si que
atuam ao mesmo tempo sobre o eixo e o cubo
As arruelas estreladas possibilitam grande rigor de movimento axial (dos eixos) e
radial (dos raios). As arruelas são apertadas por meio de parafusos que forçam a
arruela contra o eixo e o cubo ao mesmo tempo.
Descrição dos elementos de transmissão
Estudaremos agora, de uma forma bem simples, os principais elementos de
transmissão utilizados em máquinas e equipamentos. A superficialidade da
P á g i n a | 46
descrição deve remeter o estudante a buscar mais a frente os aspectos mais
detalhados destes elementos conforme o curso e aplicabilidade no seu dia-a-dia
profissional.
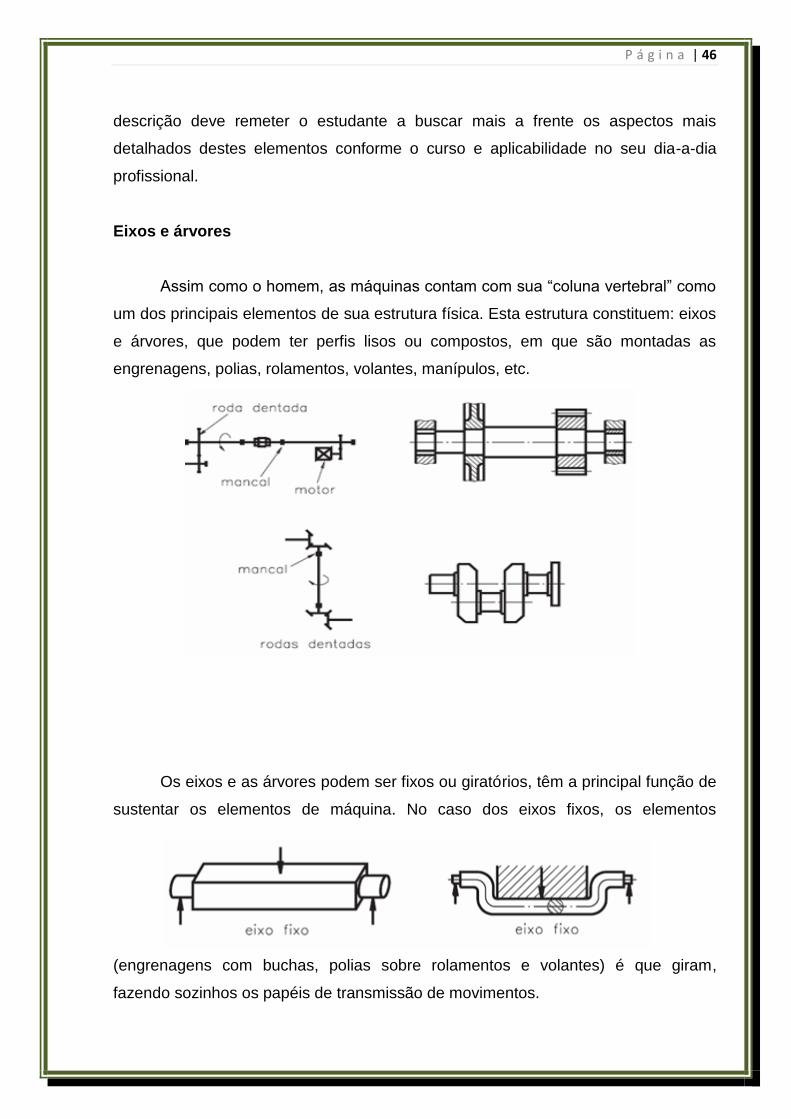
Eixos e árvores
Assim como o homem, as máquinas contam com sua “coluna vertebral” como
um dos principais elementos de sua estrutura física. Esta estrutura constituem: eixos
e árvores, que podem ter perfis lisos ou compostos, em que são montadas as
engrenagens, polias, rolamentos, volantes, manípulos, etc.
Os eixos e as árvores podem ser fixos ou giratórios, têm a principal função de
sustentar os elementos de máquina. No caso dos eixos fixos, os elementos
(engrenagens com buchas, polias sobre rolamentos e volantes) é que giram,
fazendo sozinhos os papéis de transmissão de movimentos.

P á g i n a | 47
Quando se trata de eixo-árvore giratório, o eixo se movimenta juntamente
com seus elementos ou independentemente deles como, por exemplo, eixos de
afiadores (esmeris), rodas de trole (trilhos), eixos de máquinas-ferramenta, eixos
sobre mancais, dentre outros tantos.
Material de fabricação
Os eixos e árvores são fabricados em aço ou ligas de aço, pois os materiais
metálicos apresentam melhores propriedades mecânicas (resistência a torção) do
que os outros materiais. Por isso, são mais adequados para a fabricação de
elementos de
transmissão:
· eixos com pequena solicitação mecânica são fabricados em aço ao
carbono;
· eixo-árvore de máquinas e automóveis são fabricados em aço-níquel;
· eixo-árvore para altas rotações ou para bombas e turbinas são fabricados
em aço cromo-níquel;
· eixo para vagões são fabricados em aço-manganês.
Quando os eixos e árvores têm finalidades específicas, podem ser fabricados
em cobre, alumínio, latão. Logo, o material de fabricação varia de acordo com a
função dos eixos e árvores.
Tipos e características de árvores

P á g i n a | 48
De acordo com suas funções, uma árvore pode ser de engrenagens (em que
são montados mancais e rolamentos) ou de manivelas, que transforma movimentos
circulares em movimentos retilíneos.
Para suporte de forças radiais, usam-se geralmente espigas retas, cônicas,
de colar, de manivela e esférica.

P á g i n a | 49
As forças axiais têm direção perpendicular (90º) à seção transversal do eixo,
enquanto que as forças radiais apresentam direção tangente ou paralela à seção
transversal do eixo.
Quanto ao tipo, os eixos podem ser roscados, ranhurados, estriados, maci-
ços, vazados, flexíveis, cônicos, cujas características estão descritas a seguir.
Eixos maciços
A maioria dos eixos maciços têm seção transversal circular maciça, com
degraus ou apoios para ajuste das peças montadas sobre eles. A extremidade do
eixo é chanfrada para evitar rebarbas e arestas cortantes. As arestas também são
arredondadas para aliviar a concentração de esforços.

P á g i n a | 50
Eixos vazados
Normalmente, as máquinas-ferramenta possuem o eixo-árvore vazado para
facilitar a fixação de peças mais longas para a usinagem. Temos ainda o emprego
de eixos vazados na indústria aeronáutica (motores de avião), por serem mais leves.
Eixos cônicos
Os eixos cônicos devem ser ajustados a um componente que possua um furo
de encaixe cônico. A parte que se ajusta tem um formato cônico e é firmemente
presa por uma porca. Uma chaveta é utilizada para evitar a rotação relativa.
Eixos roscados
Esse tipo de eixo é composto de rebaixos e furos roscados, o que permite sua
utilização como elemento de transmissão e também como eixo prolongador utilizado
na fixação de rebolos para retificação interna e de ferramentas para usinagem de
furos.

P á g i n a | 51
Eixos-árvore ranhurados
Esse tipo de eixo apresenta uma série de ranhuras longitudinais em torno de
sua circunferência. Essas ranhuras engrenam-se com os sulcos correspondentes de
peças que serão montadas no eixo. Os eixos ranhurados são utilizados na
transmissão de potências elevadas.
Eixos-árvore estriados
Assim como os eixos cônicos caracterizam-se por garantir uma boa
concentricidade e boa fixação, os eixos-árvore estriados também são utilizados para
evitar rotação relativa em
barras de direção de
automóveis, alavancas de
máquinas etc.
Eixos-árvore flexíveis
Consistem em uma série de camadas de arame de aço enroladas
alternadamente em sentidos opostos e apertadas fortemente. O conjunto é protegido
por um tubo flexível e a união com o motor é feita mediante uma braçadeira especial
com uma rosca.

P á g i n a | 52
São eixos empregados para
transmitir movimento a ferramentas
portáteis (roda de afiar), e adequados a
forças não muito grandes e altas
velocidades (cabo de velocímetro, por
exemplo).
Correias
São elementos de máquinas que trnasmitem movimentos de
rotação entre eixos poe intermídio de um conjunto de outros
elementos chamados de polias. As correias podem
ser contínuas ou com emendas. As correias podem
assumir também as formas de “V”, lisa e dentada.
Polias
São peças cilíndricas, movimentadas pela rotação do eixo do motor e pelas
correias. Seus tipos são determinados pela forma da superfície na qual a correia se
assenta. Elas podem ser planas ou
trapeizoidais. As polias planas podem
apresentar dois formatos na sua superfície de
contato. Essa superfície pode ser plana ou

P á g i n a | 53
abaulada.
A plana conserva mais as correias e a abaulada guia melhor as correias.
Quanto a polia trapezoidal, podemos afirmar que
recebem este nome porque a superfície na qual a
correia se asenta apresenta a forma de um trapézio.
São providas de canaletas (ou canais, ou ainda
gornes) e são dimensionadas
de acordo
com o
perfil
padrão
da correia a ser
utilizada.
As polias apresentam braços a partir de 200
milímetros de diâmetro. Abaixo desse valor, a coroa é ligada ao cubo por meio de
discos (alma).
Além das polias para correias planas e
trapezoidais, existem polias para cabos de aço,
para correntes, polias (ou rodas) de atrito, polias
para correias redondas e para correias dentadas.
Algumas vezes, as palavras roda e polia são
utilizadas como sinônimos.
Na trnasmissão por polias e correias, a polia que transmite o
movimento é chamada polia motora ou condutora. Já a polia
que recebe o movimento é denominada polia movida ou conduzida.
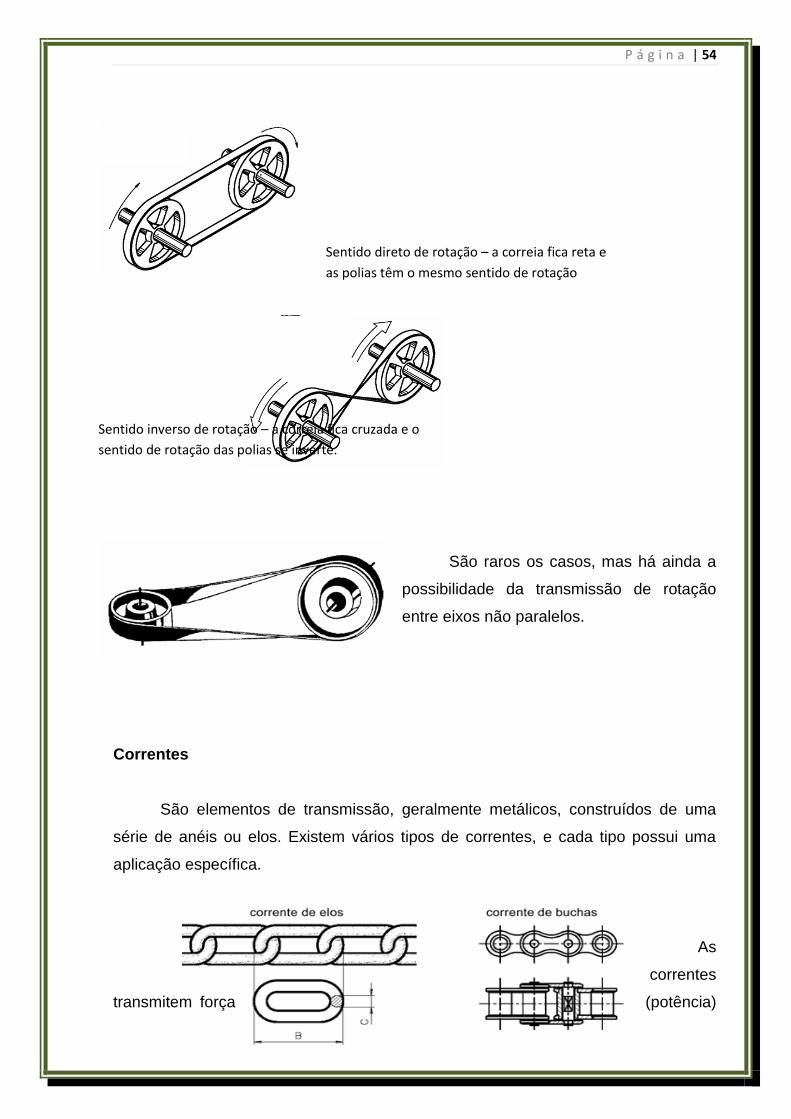
A maneira como a correia é colocada determina o sentido de
rotação das polias. Logo temos:
P á g i n a | 54
São raros os casos, mas há ainda a
possibilidade da transmissão de rotação
entre eixos não paralelos.
Correntes
São elementos de transmissão, geralmente metálicos, construídos de uma
série de anéis ou elos. Existem vários tipos de correntes, e cada tipo possui uma
aplicação específica.
As
correntes
transmitem força (potência)
Sentido direto de rotação – a correia fica reta e
as polias têm o mesmo sentido de rotação
Sentido inverso de rotação – a correia fica cruzada e o
sentido de rotação das polias se inverte.

P á g i n a | 55
Corpo em forma de disco
com furo central
Corpo em forma de disco
com cubo e furo central
e movimento que fazem com que a rotação do eixo ocorra nos sentidos horário ou
anti-horários. Para isso, as engrenagens devem estar num mesmo plano. Os eixos
de sustentação das engrenagens ficam sempre perpendiculares a este plano.
A transmissão é feita por meio do acoplamento dos elos da corrente com os
dentes da engrenagem. A junção desses elementos gera uma pequena oscilação
durante o movimento. Para resolver este tipo de problema, algumas medidas são
adotadas, como: instalação de amortecedores especiais, colocação de apoios ou
guias ou ainda a colocação de um dispositivo chamado esticador ou tensor. Este
último tem a finalidade de reduzir grandes folgas melhorando sensivelmente o
contato das engrenagens com a corrente.
Engrenagens
Bastante conhecidas como rodas destadas, as engrenagens são elementos
de máquinas usados na transmissão de força (potência) e movimento entre eixos.
Existem vários tipos de engrenagens, que são usados de acordo com as
peculiaridades e necessidades da transmissão pretendida. São também utilizadas
com o objetivo de variar o número de rotações e o sentido da mesma entre eixos.
Na figura ao lado
demosntramos uma
engrenagem, onde nominamos
algumas de suas partes.
Existem diferenças
também quanto a apresentação do
corpo de uma engrenagem, como
segue:

P á g i n a | 56
Corpo com 4 furos, cubo e
corpo central
Corpo com braços, cubo e
furo central
Destacamos os dentes como o elemento mais importante de uma
engrenagem, pois é através deles
que ocorre a transmissão
propriamente dita. Assim, na figura
ao lado, apresenta as partes
principais de um dente de
engrenagem.
Para produzir o
movimento de rotação, as rodas
devem estar engrenadas. Estas se engrenam quando os dentes de uma se
encaixam nos vãos dos dentes da outra engrenagem. Desta forma, para se realizar
trabalho de transmissão é necessário que haja um conjunto de no mínimo duas
engrenagens corretamente engrenadas.
Quando um par de engrenagens possui rodas de
tamanhos diferentes, a engrenagem maior é dita coroa
enquanto a menor chamamos de pinhão.
Os materiais utilizados na fabricação de
engrenagens são: aço-liga fundido, ferro fundido, cromo-
níquel, bronze fosforoso, alumínio e náilon.
Tipos de engrenagens

P á g i n a | 57
Engrenagem cilíndrica de
dentes retos
Engrenagem cilíndrica de
dentes helicoidais
Há alguns tipos diferentes de engrenagens, que são escolhidos de acordo
com a função a que vão ser requisitadas. A escolha do tipo certo da engrenagem
utilizada para transmissão garante um melhor desempenho do trabalho realizado por
estas. Os tipos mais comuns são:
Engrenagens cilíndricas
Possuem este norme devido a forma cilíndrica e podem ter dentes retos ou
helicoidais (inclinados em forma de hélice).
Os dentes retos são paralelos entre si e
igualmente paralelos ao eixo da engrenagem, já os dentes helicoidais são paralelos
entre si porém oblíquos em relação ao eixo da engrenagem.
As engrenagens
cilíndricas transmitem
rotação e potência entre eixos
paralelos.
As engrenagens
helicoidais transmitem
rotação e potência entre eixos
reversos (não paralelos).

P á g i n a | 58
Funcionam de forma mais suave que as engrenagens cilíndricas de dentes
retos, tornando o ruído muito menor.
Engrenagens cônicas
Possuem forma de um tronco
de cone.
Elas também podem ter
dentes retos ou helicoidais.
As engrenagens
cônicas transmitem rotação e
potência entre eixos concorrentes, que são aqueles eixos que, quando prolongados,
encontrar-se-iam em um mesmo ponto. Na figura ao lado, o ponto A determina o
ponto de encontro entre os dois eixos imaginariamente prolongados, bem como o
ângulo por estes formados.
Engrenagens helicoidais
Nas engrenagens helicoidais os dentes são
oblíquos em relação ao eixo.
Entre as engrenagens helicoidais, a engrenagem
para rosca sem fim merece atenção especial. Essa
engrenagem é usada quando se deseja uma redução de
velocidade na transmissão do movimento.
Os dentes da engrenagem helicoidal para a rosca sem fim são côncavos, pois
são dentes curvos, ou seja, menos elevados no meio do que nas bordas para grantir
um perfeito engrenamento. No engrenamento apresentado, o parafuso sem fim é o
pinhão e a engrenagem helicoidal a coroa. Destacamos também que esta
transmissão se dá também entre eixos não coplanares.
P á g i n a | 59
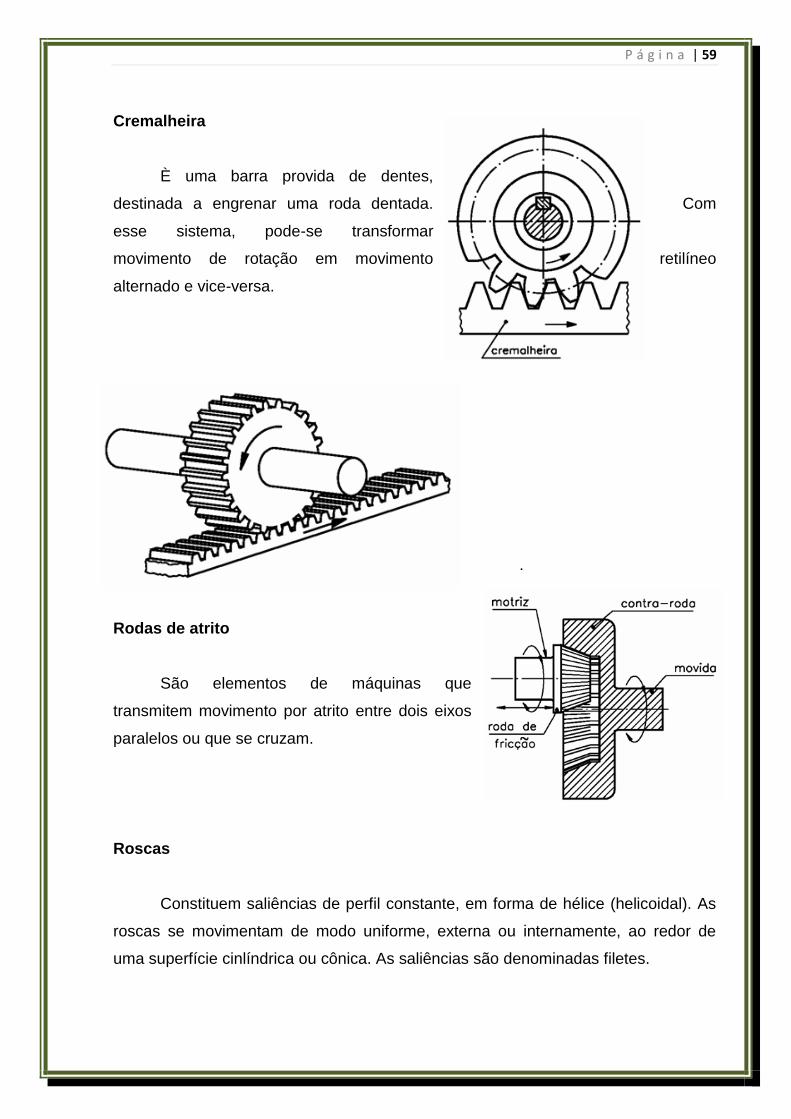
Cremalheira
È uma barra provida de dentes,
destinada a engrenar uma roda dentada. Com
esse sistema, pode-se transformar
movimento de rotação em movimento retilíneo
alternado e vice-versa.
.
Rodas de atrito
São elementos de máquinas que
transmitem movimento por atrito entre dois eixos
paralelos ou que se cruzam.
Roscas
Constituem saliências de perfil constante, em forma de hélice (helicoidal). As
roscas se movimentam de modo uniforme, externa ou internamente, ao redor de
uma superfície cinlíndrica ou cônica. As saliências são denominadas filetes.

P á g i n a | 60
Existem roscas de transporte ou movimento que transformam o movimento
giratório num movimento longitudinal. Essas roscas são usadas, normalmente, em
tornos e prensas, principalmente quando são
freqüentes as montagens e desmontagens.
Cabos de aço
São elementos de transmissão que suportam
cargas (força de tração). Podemos dizer, de uma
forma grasseira, que este elemento de máquina é
feito de arame trefilado a frio. Inicialmente, o arame
é enrolado de modo a formar pernas. Depois as
pernas são enroladas em espirais em torno de um
elemento central chamado núcleo ou alma.
Associados aos outros elementos de
máquinas, como roldanas, os cabos de aço
compõem o sistema de transmissão de movimento.
São muito empregados em equipamentos de
transporte e na elevação de cargas, como em elevadores, escavadeiras e pontes
rolantes.

P á g i n a | 61
Componentes
O cabo de aço se
constitui de alma e
perna. A perna se
compõe de vários
arames em torno
de um arame
Elevador Escavadeira
Ponte rolante

P á g i n a | 62
central, conforme demonstrado na figura ao lado.
Fixação do cabo de aço
Os cabos de aço são fixados em sua extremidade por meio de ganchos ou
laços. Os laços são formados pelo trançamento do próprio cabo. Os ganchos são
acrescentados ao cabo.
Acoplamento
Utilizando um
conceito mais formal,
podemos dizer que o
acoplamento é um conjunto
mecânico, contituido de
elementos de máquinas, empregado na transmissão de movimento de rotação entre
duas árvores ou eixo-árvores.
Os acoplamentos podem ser fixos, elásticos e móveis.
Acoplamentos fixos
Os acoplamentos fixos servem para unir árvores de tal maneira como se
fossem uma única peça, alinhando as árvores de forma precisa. Por motivos de
segurança os acoplamentos devem ser construidos de forma que naõ apresentem
nenhuma saliência. A seguir vamos demonstrar alguns tipos de acoplamentos fixos.
Acoplamento rígido com
flanges parafusados
Esse tipo de
acoplamento é utilizado
quando se pretende conectar

P á g i n a | 63
árvores, e é proprio para a transmissão de grande potência em baixa
velocidade.
Acoplamento com luva de compressão ou de aperto
Esse tipo de luva
facilita a manutenção de
máquinas e
equipamentos, com a
vantagem de não interferir no posicionamento das árvores, podendo inclusive
ser montado e removido sem problemas de alinhamento.
Acoplamento de discos ou pratos
Empregado na transmissão de grandes potências em casos especiais,
como, por exemplo, nas árvores de turbinas. As superfícies de contato nesse
tipo de acoplamento podem ser lisas ou dentadas.
Acoplamentos elásticos
Esses elementos tornam mais suaves a transmissão do movimento em
árvores que tenham movimentos bruscos, e permitam o funcionamento do conjunto
com desalinhamento paralelo, angular e axial entre árvores.

P á g i n a | 64
Os acoplamentos elásticos são construidos em forma artivulada, elástica ou
articulada elástica. Permitem a compensação de até 6 graus de ângulo de troção e
deslocamento angular axial. Os acoplamentos eásticos podem se apresentar nos
seguintes tipos:
Acoplamento elástico de pinos
Os elementos
transmissores são pinos de aço
com mangas de borracha.
Acoplamento perflex
Os discos de acoplamento são
unidos perifericamente por uma ligação de
borracha apertada por anéis de pressão.
Esse acoplamento permite o jogo
longitudinal de eixos.
Acoplamento elástico de garras
As garras, constituídas por tocos de borracha, encaixan-se nas
aberturas do contradisco e transmitem o movimento de rotação.
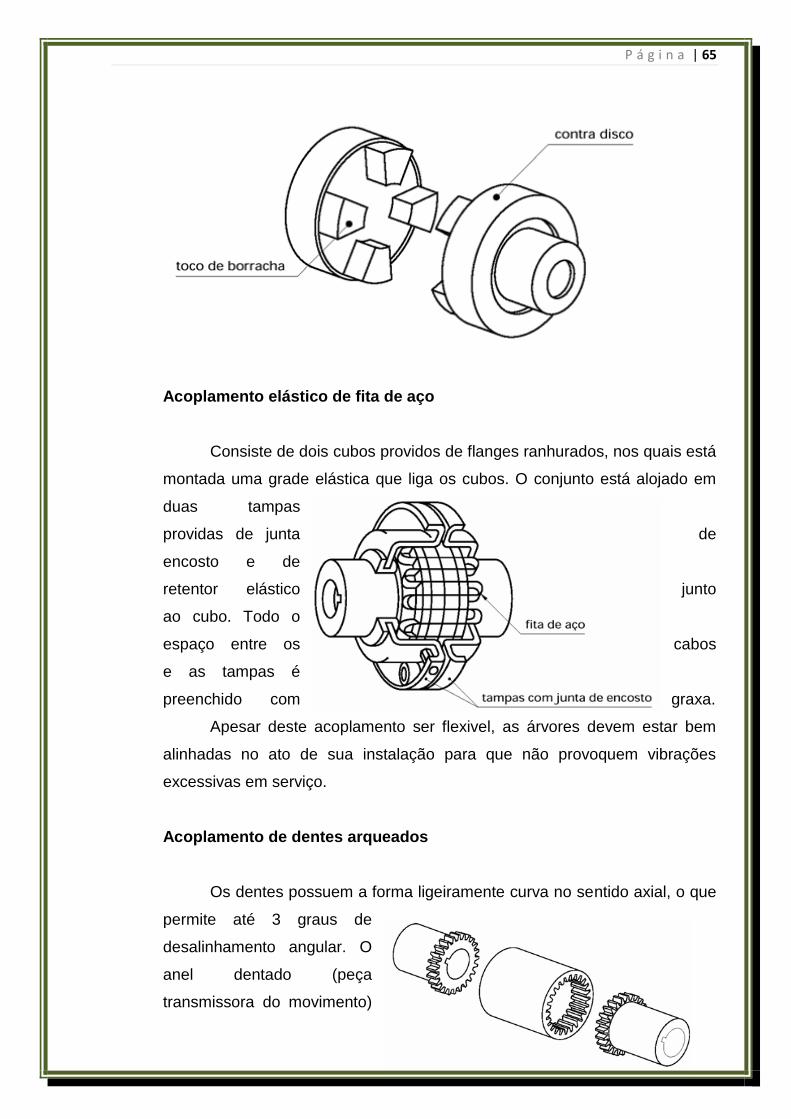
P á g i n a | 65
Acoplamento elástico de fita de aço
Consiste de dois cubos providos de flanges ranhurados, nos quais está
montada uma grade elástica que liga os cubos. O conjunto está alojado em
duas tampas
providas de junta de
encosto e de
retentor elástico junto
ao cubo. Todo o
espaço entre os cabos
e as tampas é
preenchido com graxa.
Apesar deste acoplamento ser flexivel, as árvores devem estar bem
alinhadas no ato de sua instalação para que não provoquem vibrações
excessivas em serviço.
Acoplamento de dentes arqueados
Os dentes possuem a forma ligeiramente curva no sentido axial, o que
permite até 3 graus de
desalinhamento angular. O
anel dentado (peça
transmissora do movimento)

P á g i n a | 66
possui duas carreiras de dentes que são separadas por uma saliência central.
Junta universal homocinética
Esse tipo de junta é usado para transmitir movimento entre árvores
que precisam sofrer variação angular durante sua atividade. Essa junta é
contituída de esferas de aço que se alojam em calhas.
Na ilustração a seguir, temos um exemplo típico de junta homocinética
utilizadas em veículos.
Acoplamentos
móveis
São empregados para permitir o
jogo longitudinal das árvores. Esses
acoplamentos transmitem força e
movimento somente quando acionados, isto
é, obedecem a um comando.
Os acoplamentos móveis podem
ser: de garras ou dentes, e a rotação é
transmitida por meio do encaixe das
garras ou de dentes.
Geralmente, esses acoplamentos
são usados em aventais e caixas de
engrenagens de máquinas-ferramenta convencionais.

P á g i n a | 67
Molas
As molas são muito usadas como componentes de fixação elástica. Elas
sofrem deformação quando recebem a ação de alguma força, mas voltam ao estado
normal, ou seja, ao repouso, quando a força cessa.
As uniões elásticas são usadas para amortecer choques, reduzir ou absorver
vibrações e para tornar possível o retorno de um componente mecânico à sua
posição primitiva. Como exemplo de utilização temos: estofamentos, fechaduras,
válvulas de descarga, suspensão de automóvel, relógios, brinquedos...
São portanto usadas, principalmente, nos casos de armazenamento de
energia, amortecimento de choques, distribuição de cargas, limitação de vazão,
preservação de junções ou contatos.
Armazenamento de energia
Nesse caso, as molas são utilizadas para acionar mecanismos de relógios, de
brinquedos, de retrocesso das válvulas de descarga e aparelhos de controle.
Amortecimento de choques
As molas amortecem choques em suspensão e pára-choques de veículos, em
acoplamento de eixos e na proteção de instrumentos delicados ou sensíveis.
Distribuição de cargas
As molas distribuem cargas em estofamentos de poltronas, colchões,
estrados
de camas e veículos em que, por meio de molas, a carga pode ser distribuída pelas
rodas.
Limitação de vazão
As molas regulam a vazão de água em válvulas e registros e a vazão de gás

P á g i n a | 68
em bujões ou outros recipientes.
Preservação de junções ou contatos
Nesse caso, a função das molas é a de
preservar peças articuladas, alavancas de contato,
vedações, etc. que estejam em movimento ou
sujeitas a desgastes.
Tipos de mola
Os diversos tipos de molas podem ser classificados quanto à sua forma
geométrica ou segundo o modo como resistem aos esforços.
Quanto à forma geométrica, as molas podem ser helicoidais (forma de hélice)
ou planas.

P á g i n a | 69
Quanto ao esforço que suportam, as molas podem ser de tração, de
compressão ou de torção.
Molas
helicoidais
A
mola helicoidal é
a mais usada
em mecânica. Em geral, ela é feita de barra de aço enrolada em forma de hélice
cilíndrica ou cônica. A barra de aço pode ter seção retangular, circular, quadrada,
etc. Em geral, a mola helicoidal é enrolada à direita. Quando a mola helicoidal for
enrolada à esquerda, o sentido da hélice é ser indicado no desenho.
As molas helicoidais podem funcionar por compressão, por tração ou por
torção.
A mola helicoidal de compressão é formada por espirais.
Quando esta mola é comprimida por alguma força, o espaço entre as
espiras diminui, tornando menor o comprimento da mola. Um
exemplo desta mola é demonstrado na figura acima.

P á g i n a | 70
A mola helicoidal de tração possui ganchos nas extremidades, além das
espiras. Os ganchos são também chamados de olhais.
Para a mola helicoidal de tração desempenhar sua função, deve ser esticada,
aumentando seu comprimento. Em estado de repouso, ela volta ao seu comprimento
normal.
Observe alguns exemplos de mola de torção nas figuras abaixo.
Vejamos agora exemplos de molas
helicoidais cônicas e suas aplicações em alguns
utensílios.
Algumas molas padronizadas são produzidas por fabricantes específicos.
Outras são executadas de acordo com as especificações do projeto, segundo
medidas proporcionais padronizadas.

P á g i n a | 71
Seguidor
Came
A seleção de uma mola depende
das respectivas formas e solicitações
mecânicas a que a mesma vai ser
solicitada.
Para se poder ler e interpretar os
desenhos técnicos de molas diversas é
necessário conhecer bem suas
características. Logo, o bom profissional
em contato com este material não se
limitará apenas a esta abordagem.
Came
Came é um elemento de máquina cuja
superfície tem um formato especial.
Normalmente, há um excêntrico, isto é, essa
superfície possui uma excentricidade que produz movimento
num segundo elemento denominado seguidor.

P á g i n a | 72
Balancim
Mola
Haste
Válvula
Came
Came
À medida que a came vai
girando, o seguidor sobe e desce,
ou vice-versa.
Abaixo, dois momentos destacados desses movimentos.
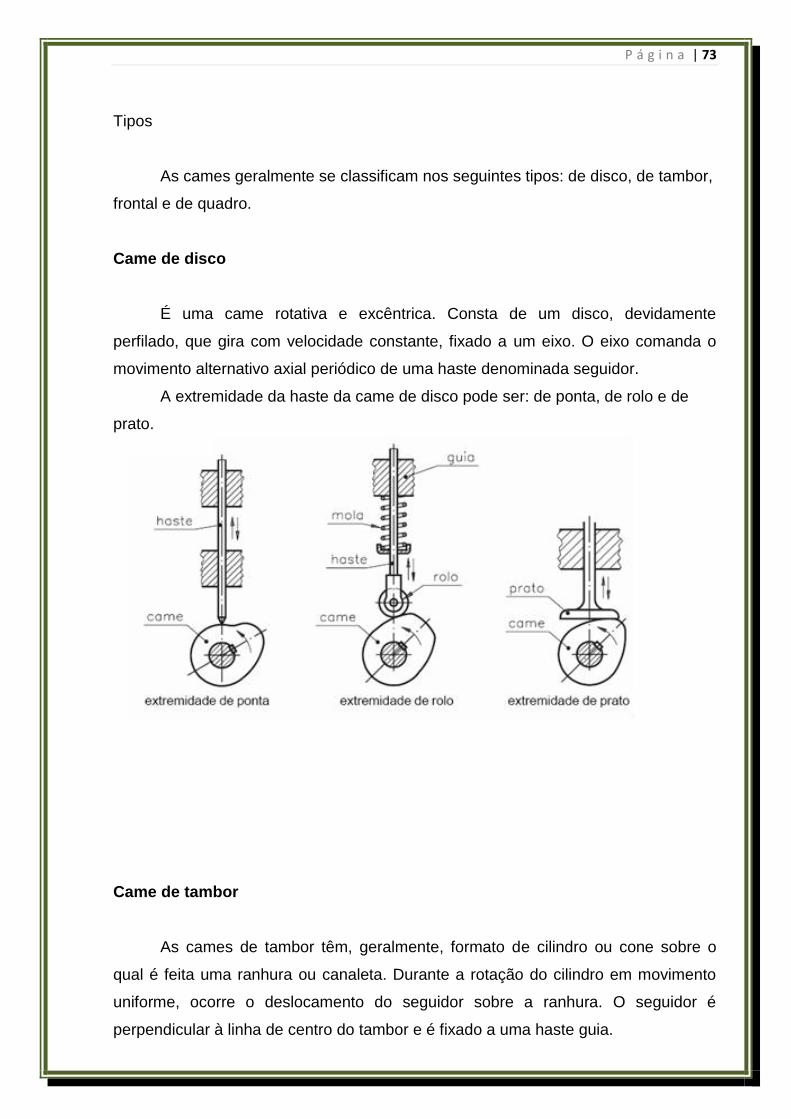
P á g i n a | 73
Tipos
As cames geralmente se classificam nos seguintes tipos: de disco, de tambor,
frontal e de quadro.
Came de disco
É uma came rotativa e excêntrica. Consta de um disco, devidamente
perfilado, que gira com velocidade constante, fixado a um eixo. O eixo comanda o
movimento alternativo axial periódico de uma haste denominada seguidor.
A extremidade da haste da came de disco pode ser: de ponta, de rolo e de
prato.
Came de tambor
As cames de tambor têm, geralmente, formato de cilindro ou cone sobre o
qual é feita uma ranhura ou canaleta. Durante a rotação do cilindro em movimento
uniforme, ocorre o deslocamento do seguidor sobre a ranhura. O seguidor é
perpendicular à linha de centro do tambor e é fixado a uma haste guia.
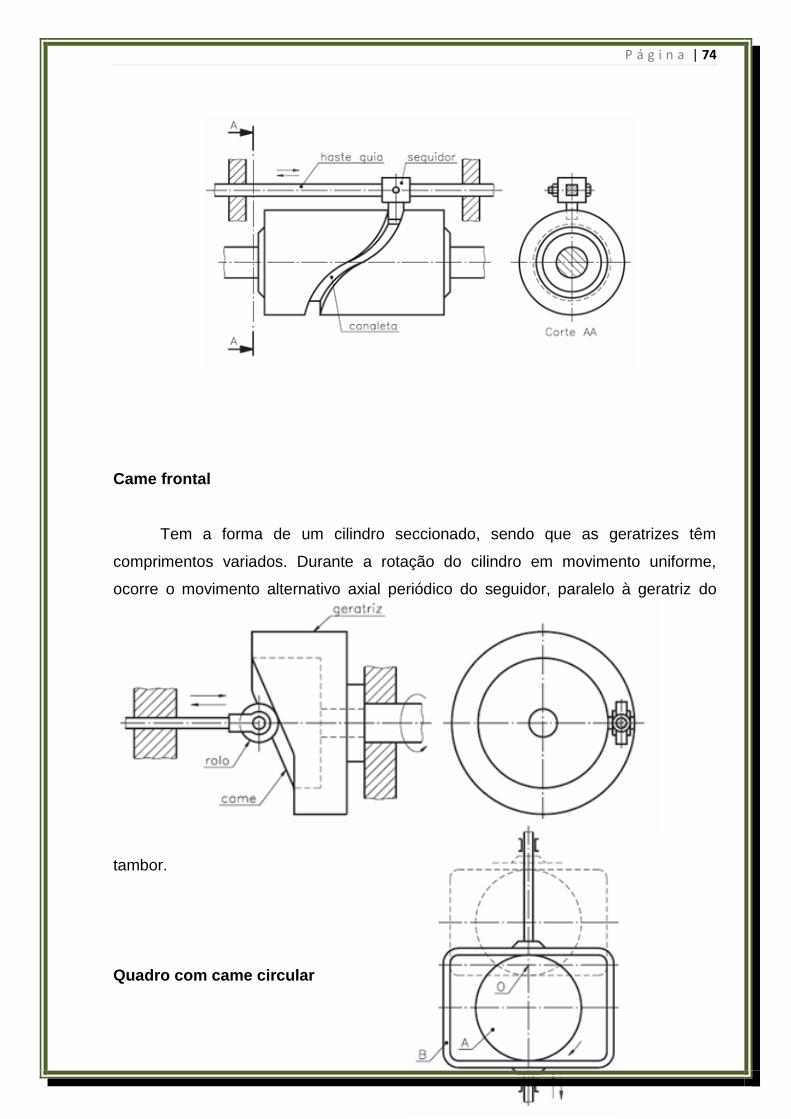
P á g i n a | 74
Came frontal
Tem a forma de um cilindro seccionado, sendo que as geratrizes têm
comprimentos variados. Durante a rotação do cilindro em movimento uniforme,
ocorre o movimento alternativo axial periódico do seguidor, paralelo à geratriz do
tambor.
Quadro com came circular

P á g i n a | 75
É constituído de um quadro que encerra
um disco circular. Veja, ao lado, o funcionamento desse tipo de came.
O disco (A), ao girar pelo eixo (O), com movimento uniforme, faz com que o
quadro (B) se desloque com movimentos alternados de vaivém.
Quadro com came triangular
É constituído de um quadro retangular que
encerra um disco triangular. Os lados desse disco são
arcos de circunferência.
O disco triangular, ao girar com movimento
circular uniforme, conduz o quadro num movimento
alternado variado.
Came de palminha
Palminhas são cames que transformam o movimento circular contínuo em
movimento intermitente de queda. Existem palminhas de martelo e de pilão.
Palminha de martelo

P á g i n a | 76
Nesse tipo de came, a distância entre os dentes do elemento condutor deve
ter dimensões que evitem a queda da alavanca sobre o dente seguinte. Portanto, é
preciso que, durante a queda da alavanca, o elemento condutor permaneça girando.
Palminha de pilão
Nesse tipo de came, o
elemento condutor deve ser perfilado de
modo que, durante o movimento
circular, a haste do pilão faça o
movimento uniforme de subida e a sua
descida seja rápida.

P á g i n a | 77
Representação gráfica do movimento da came de disco
O disco, ao girar, apresenta seus contornos
excêntricos, com raios variáveis. A haste se
desloca conforme o movimento dado pela
excentricidade ou pela diferença
desses raios.
Para melhopr entendimento, observemos a figura anterior. Você pode verificar
que, quando a came gira no sentido da seta A, o seguidor toca a came nos pontos
1', 2', 3', 4'..., retornando ao ponto 1', após uma volta completa. Para obter o
diagrama da came, basta retificar a circunferência de raio 0-1 da figura anterior.

P á g i n a | 78
Nesse desenho, o ciclo corresponde à circunferência de raio 0-1 retificada. A
linha formada pelos pontos 1', 2', 3', 4', ... 1', corresponde à curva descrita pelo
seguidor, na qual as alturas 1-1', 2-2', 3-3', 4-4', 5-5', ... 1-1', correspondem às
distâncias da circunferência de raio 0-1 até a superfície percorrida pelo seguidor na
came. Esse gráfico é utilizado para construir a came.
Aplicação das cames
As cames são aplicadas principalmente em:
· máquinas operatrizes
· máquinas têxteis
· máquinas automáticas de embalar
· armas automáticas
· motores térmicos
· comandos de válvulas
Elementos de apoio
De um modo geral, os elementos de apoio consistem de acessórios auxiliares
para o funcionamento de máquinas. Aqui, abordaremos os seguintes elementos de
apoio: buchas, guias, rolamentos e mancais.
Na prática, podemos observar que buchas e mancais são elementos que
funcionam conjuntamente. Apenas para facilitar o estudo, eles são descritos
separadamente.
Para uma visão mais geral apresentamos algumas das principais informações
relativas aos elementos de apoio.
Buchas
As buchas existem desde que se passou a usar transportes com rodas e
eixos. No caso de rodas de madeira, que até hoje são usadas em carros de boi, já

P á g i n a | 79
existia o problema de atrito. Durante o movimento de rotação as superfícies em
contato provocavam atritos e, com o tempo, desgastavam-se eixos e rodas sendo
preciso trocá-los.
Com a introdução das rodas de aço o problema com atritos ainda se manteve.
Só que de uma forma bem maior, pois estas suportam maiores rotações e impactos.
A solução encontrada foi a de colocar um anel de metal entre o eixo e as rodas.
Esse anel, mais conhecido como bucha, reduz bastante o atrito, passando a
constituir um elemento de apoio indispensável.
As buchas podem ser classificadas, quanto ao tipo de solicitação, em buchas
de fricção radial e de fricção axial.
Em determinados trabalhos de usinagem, há a necessidade de furação, ou
seja, de fazer furos. Para isso é preciso que a ferramenta de furar fique
corretamente posicionada para que os furos sejam feitos exatamente nos locais
marcados. Nesse caso, são usadas as buchas-guia para furação e também para
alargamento dos furos.

P á g i n a | 80
Guias
As guias também são considerados elementos de apoio de máquinas. A guia
tem a função de manter a direção de uma peça em movimento. Por exemplo, numa
janela corrediça, seu movimento de abrir e de fechar é feito dentro de trilhos. Esses
trilhos evitam que o movimento saia da direção.
A guia tem a mesma função desses trilhos. Numa máquina industrial, como
em uma serra de fita, a guia assegura a direção da trajetória da serra.
Geralmente, usa-se mais de uma guia em máquinas. Normalmente, se usa
um conjunto de guias com perfis variados, que se denomina barramento.
Existem vários tipos de barramento, conforme a função que ele exerce.

P á g i n a | 81
Rolamentos e mancais
Os mancais como as buchas têm a função de servir de suporte a eixos, de
modo a reduzir o atrito e amortecer choques ou vibrações. Eles podem ser de
deslizamento ou rolamento.
Os mancais de deslizamento são
constituídos de uma bucha fixada num
suporte. São usados em máquinas
pesadas ou em equipamentos de baixa
rotação.
Os mancais de rolamento dispõem de
elementos rolantes: esferas, roletes e agulhas.
De acordo com as forças que suportam,
os mancais podem ser radiais, axiais ou mistos.
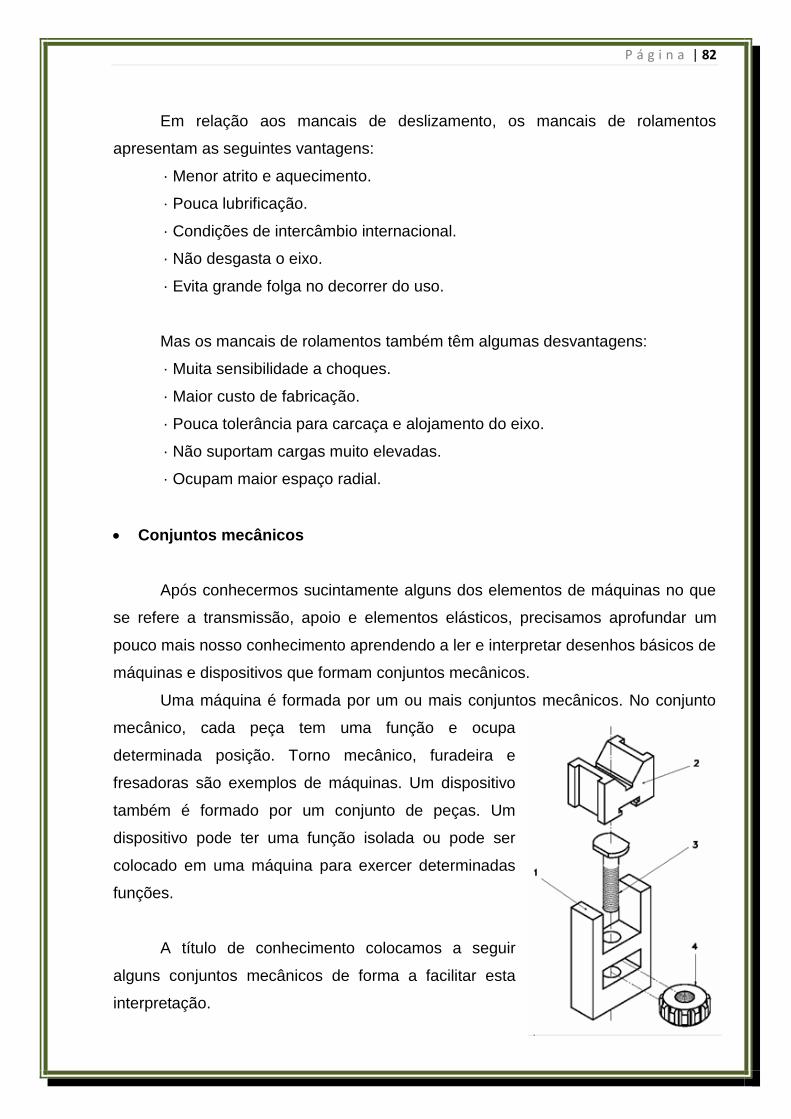
P á g i n a | 82
Em relação aos mancais de deslizamento, os mancais de rolamentos
apresentam as seguintes vantagens:
· Menor atrito e aquecimento.
· Pouca lubrificação.
· Condições de intercâmbio internacional.
· Não desgasta o eixo.
· Evita grande folga no decorrer do uso.
Mas os mancais de rolamentos também têm algumas desvantagens:
· Muita sensibilidade a choques.
· Maior custo de fabricação.
· Pouca tolerância para carcaça e alojamento do eixo.
· Não suportam cargas muito elevadas.
· Ocupam maior espaço radial.
Conjuntos mecânicos
Após conhecermos sucintamente alguns dos elementos de máquinas no que
se refere a transmissão, apoio e elementos elásticos, precisamos aprofundar um
pouco mais nosso conhecimento aprendendo a ler e interpretar desenhos básicos de
máquinas e dispositivos que formam conjuntos mecânicos.
Uma máquina é formada por um ou mais conjuntos mecânicos. No conjunto
mecânico, cada peça tem uma função e ocupa
determinada posição. Torno mecânico, furadeira e
fresadoras são exemplos de máquinas. Um dispositivo
também é formado por um conjunto de peças. Um
dispositivo pode ter uma função isolada ou pode ser
colocado em uma máquina para exercer determinadas
funções.
A título de conhecimento colocamos a seguir
alguns conjuntos mecânicos de forma a facilitar esta
interpretação.
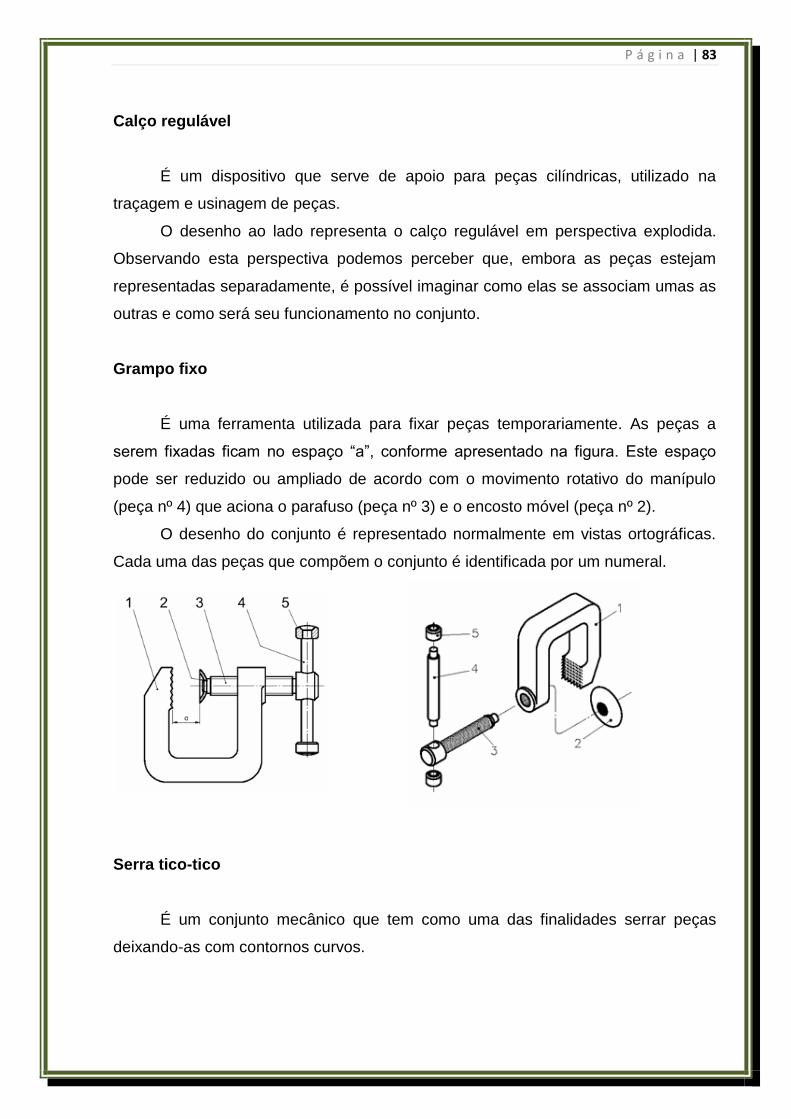
P á g i n a | 83
Calço regulável
É um dispositivo que serve de apoio para peças cilíndricas, utilizado na
traçagem e usinagem de peças.
O desenho ao lado representa o calço regulável em perspectiva explodida.
Observando esta perspectiva podemos perceber que, embora as peças estejam
representadas separadamente, é possível imaginar como elas se associam umas as
outras e como será seu funcionamento no conjunto.
Grampo fixo
É uma ferramenta utilizada para fixar peças temporariamente. As peças a
serem fixadas ficam no espaço “a”, conforme apresentado na figura. Este espaço
pode ser reduzido ou ampliado de acordo com o movimento rotativo do manípulo
(peça nº 4) que aciona o parafuso (peça nº 3) e o encosto móvel (peça nº 2).
O desenho do conjunto é representado normalmente em vistas ortográficas.
Cada uma das peças que compõem o conjunto é identificada por um numeral.
Serra tico-tico
É um conjunto mecânico que tem como uma das finalidades serrar peças
deixando-as com contornos curvos.
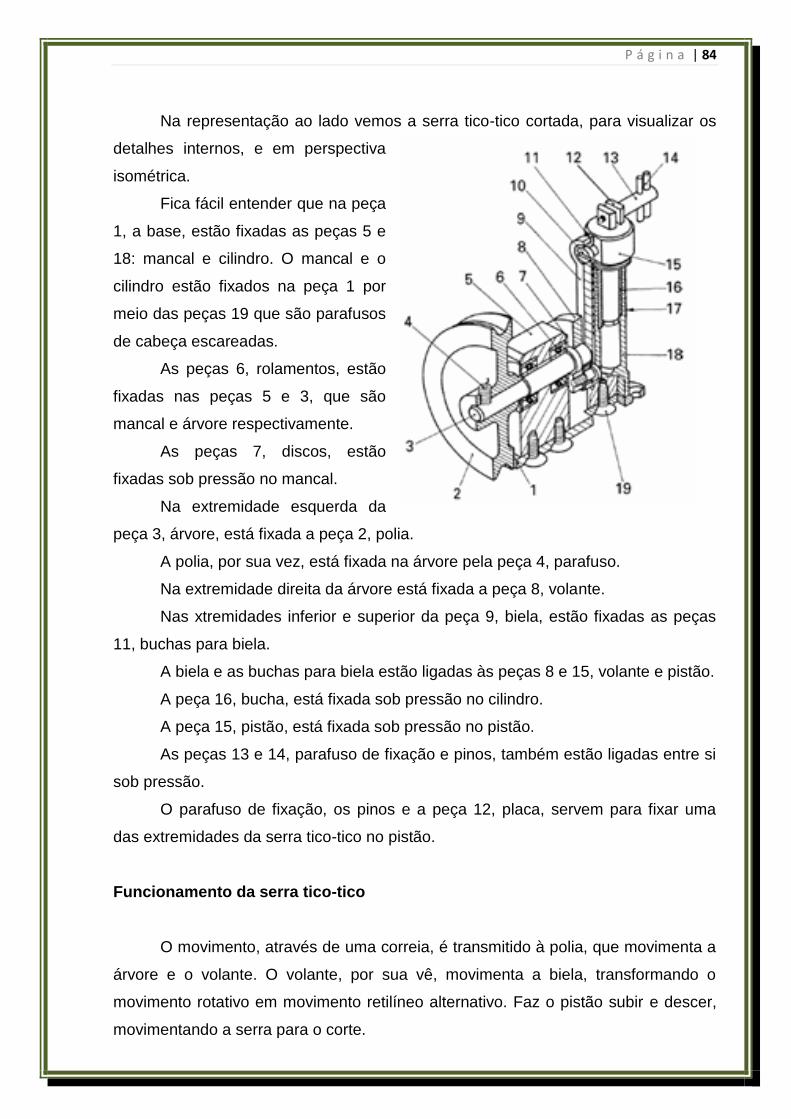
P á g i n a | 84
Na representação ao lado vemos a serra tico-tico cortada, para visualizar os
detalhes internos, e em perspectiva
isométrica.
Fica fácil entender que na peça
1, a base, estão fixadas as peças 5 e
18: mancal e cilindro. O mancal e o
cilindro estão fixados na peça 1 por
meio das peças 19 que são parafusos
de cabeça escareadas.
As peças 6, rolamentos, estão
fixadas nas peças 5 e 3, que são
mancal e árvore respectivamente.
As peças 7, discos, estão
fixadas sob pressão no mancal.
Na extremidade esquerda da
peça 3, árvore, está fixada a peça 2, polia.
A polia, por sua vez, está fixada na árvore pela peça 4, parafuso.
Na extremidade direita da árvore está fixada a peça 8, volante.
Nas xtremidades inferior e superior da peça 9, biela, estão fixadas as peças
11, buchas para biela.
A biela e as buchas para biela estão ligadas às peças 8 e 15, volante e pistão.
A peça 16, bucha, está fixada sob pressão no cilindro.
A peça 15, pistão, está fixada sob pressão no pistão.
As peças 13 e 14, parafuso de fixação e pinos, também estão ligadas entre si
sob pressão.
O parafuso de fixação, os pinos e a peça 12, placa, servem para fixar uma
das extremidades da serra tico-tico no pistão.
Funcionamento da serra tico-tico
O movimento, através de uma correia, é transmitido à polia, que movimenta a
árvore e o volante. O volante, por sua vê, movimenta a biela, transformando o
movimento rotativo em movimento retilíneo alternativo. Faz o pistão subir e descer,
movimentando a serra para o corte.

P á g i n a | 85
BIBLIOGRAFIA
ATLAS - Manuais de Legislação Atlas. Segurança e medicina do trabalho. 48.ed.
São Paulo: Atlas, 2000.
BARBOSA FILHO, Antônio Nunes. Segurança do trabalho e gestão ambiental.
São Paulo: Atlas, 2001.
CAMPOS, José Luiz Dias. O ministério público e o meio ambiente do trabalho:
responsabilidade civil e criminal do empregador e prepostos. São Paulo:
FUNDACENTRO, 1991.
DELA COLETA, José Augusto. Acidentes de trabalho. São Paulo: Atlas, 1989.
MACHER, Cezar et al. Curso de engenharia e segurança do trabalho. São Paulo:
FUNDACENTRO, 1979.
MONTICUCO, Deogledes. Medidas de proteção coletiva contra quedas de
altura. São Paulo: FUNDACENTRO, 1991.
NORMAS REGULAMENTADORAS. Segurança e medicina do trabalho. 14.ed.
São Paulo: Atlas, 1989.
WONGTSCHOWISKI, Pedro. Curso de coordenação de projetos industriais.
2.ed. Rio de Janeiro: Instituto Brasileiro de Petróleo, 1994.
ZOCCHIO, Álvaro. Prática da prevenção de acidentes: ABC da segurança do
trabalho. 7.ed. São Paulo: Atlas, 2001.

P á g i n a | 86
ATIVIDADES DE FIXAÇÃO
1- Uma ou mais condições de uma variável com o potencial necessário para
causar danos. Esses danos podem ser entendidos como lesões a pessoas,
danos a equipamentos ou estruturas, perda de material em processo, ou
redução da capacidade de desempenho de uma função predeterminada.
Estamos nos referindo ao:
a) Risco
b) Perigo
c) Dano
d) Acidente
2- É freqüentemente definida como “isenção de riscos”. Entretanto, é
praticamente impossível a eliminação completa de todos os riscos. Estamos
nos referindo a (ao):
a) Risco
b) Perigo
c) Segurança
d) Acidente
3- Expressa uma exposição relativa a um risco, que favorece a sua
materialização em danos. Este é o(a):
a) Risco
b) Perigo
c) Segurança
d) Acidente
4- É a gravidade da perda humana, material ou financeira que pode resultar se o
controle sobre um risco é perdido. Este é o (a):
a) Risco
P á g i n a | 87
b) Perigo
c) Dano
d) Acidente
5- É o prejuízo sofrido por uma organização com garantia de ressarcimento por
seguro ou por outros meios. Estamos nos retratando ao:
a) Dano
b) Sinistro
c) Incidente
d) Controle
6- Qualquer evento ou fato negativo com potencial para provocar danos. É
também chamado “quase acidente”: situação em que não há danos
macroscópicos. Este é o:
a) Dano
b) Sinistro
c) Incidente
d) Controle
7- É a tendência que os sistemas tem para o desgaste, para a desintegração,
para o afrouxamento dos padrões e para o aumento da aleatoriedade.
a) Dano
b) Sinistro
c) Incidente
d) Entropia
8- Os riscos especulativos podem ainda ser divididos em três tipos, estes são
exceto:
a) riscos administrativos
b) riscos políticos
c) riscos de inovação
d) riscos ambientais.

P á g i n a | 88
9- Podemos dizer que a _______________________ é a ciência, a arte e a
função que visa a proteção dos recursos humanos, materiais e financeiros de
uma empresa, quer através da eliminação ou redução de seus riscos, quer
através do financiamento dos riscos remanescentes, conforme seja
economicamente mais viável. Complete a frase:
a) Gerencia de projetos
b) Gerencia de riscos
c) Gerencia ambiental
d) Gerencia pessoal
10- Expressa uma exposição relativa a um risco, que favorece a sua
materialização em danos. Este é o:
a) Dano
b) Perigo
c) Sinistro
d) Acidente

P á g i n a | 89
GABARITO
Nome do Aluno:_____________________________________________________
Curso:_____________________________________________________________
Disciplina:__________________________________________________________
Data de envio: __________/____________/_________________.
Questão Letra
1
2
3
4
5
6
7
8
9
10
________________________
Assinatura do Aluno