a ´itico e supercr´rrpela/downloads/fis26/fis26-2018-aula02.pdf · o corpo de 8,00 kg e deslocado...
TRANSCRIPT
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
AMORTECIMENTOS SUBCRITICO, CRITICO E
SUPERCRITICOMecanica II (FIS-26)
Prof. Dr. Ronaldo Rodrigues Pela
IEFF-ITA
26 de marco de 2018
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Roteiro
1 Oscilacoes AmortecidasModelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
2 Oscilacoes forcadasResposta ao degrau
3 ExemplosSistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Roteiro
1 Oscilacoes AmortecidasModelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
2 Oscilacoes forcadas
3 Exemplos
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Introducao
Atrito viscoso: modelo deamortecimento e f = −cv
M
x
Mx = −kx− cx
x+ 2γx+ ω20x = 0
Sendo γ =c
2Me ω0 =
√k
M.
Equacao caracterıstica:
λ2+2γλ+ω20 = 0 ∆ = 4(γ2−ω2
0)
Ha 3 casos:1 ∆ > 0 (supercrıtico): solucoes
exponenciais2 ∆ < 0 (subcrıtico): solucoes
oscilatorias com amplitudedecrescente
3 ∆ = 0 (crıtico): solucaoexponencial
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Balanco de energia
Equacao do oscilador amortecido
Mx+ cx+ kx = 0
Multiplicando por x:
Mxx+ kxx = −cx2 ,
Mxx+ kxx =dEMEC
dt, e
cx2 e a potencia da forca de atrito viscoso = Fv
Note quedEMEC
dt< 0, isto e, a energia mecanica sempre
diminui.
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
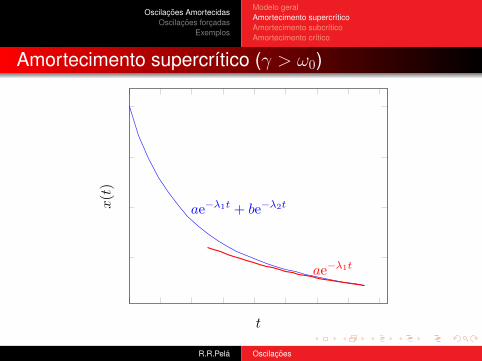
Amortecimento supercrıtico (γ > ω0)
Equacao caracterıstica: duas solucoes reais e distintas
λ1 = −γ +√γ2 − ω2
0
λ2 = −γ −√γ2 − ω2
0
Note que λ2 < λ1 < 0
Solucao geral da EDO:
x(t) = aeλ1t + beλ2t = e−γt(a∗ coshω∗dt+ b∗ sinhω∗
dt)
ω∗d =
√γ2 − ω2
0
Sendo a e b determinados a partir das condicoes iniciais.
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Amortecimento supercrıtico (γ > ω0)
ae−λ1t + be−λ2t
ae−λ1t
t
x(t
)
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
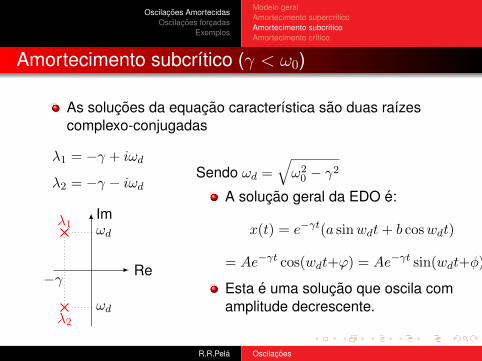
Amortecimento subcrıtico (γ < ω0)
As solucoes da equacao caracterıstica sao duas raızescomplexo-conjugadas
λ1 = −γ + iωd
λ2 = −γ − iωd
Re
Imωd
ωd
−γ
λ2
λ1
Sendo ωd =√ω20 − γ2
A solucao geral da EDO e:
x(t) = e−γt(a sinwdt+ b coswdt)
= Ae−γt cos(wdt+ϕ) = Ae−γt sin(wdt+φ)
Esta e uma solucao que oscila comamplitude decrescente.
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Amortecimento subcrıtico (γ < ω0)
Td
t
x(t
)
Td: perıodo das oscilacoes amortecidas ou pseudo-perıodo ousimplesmente perıodo.
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Amortecimento subcrıtico (γ < ω0)
E interessante analisar a fracao da energia dissipada por ciclo
∼= Td
t
x(t
)
x1 = Ae−γt1
x2 ∼= Ae−γt1−γTd = x1e−γTd
Energia armazenada =kx212
Energia dissipada ∼=kx212
(1− e−2γTd)
∼=kx212
(2γTd)
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Amortecimento subcrıtico (γ < ω0)
Pode-se definir o fator de qualidade do oscilador como:
Q = 2π
(Energia armazenada
Energia dissipada num ciclo
)∼= 2π
1
2γTd=ωd2γ
Q ∼=ω0
2γ
Note que, quanto maior o Q, menor o amortecimento(menor perda de energia).Estas ultimas deducoes sao validas quando oamortecimento e pequeno, ou seja, quando γ � ω0.
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Modelo geralAmortecimento supercrıticoAmortecimento subcrıticoAmortecimento crıtico
Amortecimento crıtico (γ = ω0)
Equacao caracterıstica tem uma raiz dupla: λ = −γA solucao geral da EDO e: x(t) = e−γt(a+ bt)
Se mantivermos ω0 e variarmos γ, o caso crıtico e o quedecai mais rapidamente.
t
x(t
)
Subcrıtico
Supercrıtico
Crıtico
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
ExemplosResposta ao degrau
Roteiro
1 Oscilacoes Amortecidas
2 Oscilacoes forcadasResposta ao degrau
3 Exemplos
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
ExemplosResposta ao degrau
Introducao
Vamos estudar o efeito produzido sobre o oscilador poruma forca externa F (t). Estudaremos dois casos:
1 F (t) = F0: degrau de amplitude F02 F (t) = F0 sinωt: forca harmonica
O primeiro caso e analise simples, mas tem umaimportancia capital em projetos de controladores.No segundo caso, a forca externa e periodica comfrequencia angular ω, que pode coincidir ou nao com afrequencia natural do proprio oscilador.EDO de um oscilador forcado: Mx+ cx+ kx = F (t)(EDOLNH de 2a ordem)
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
ExemplosResposta ao degrau
Resposta ao degrau
Se F (t) = F0 = kx0, entao a resposta do oscilador sera:
x(t) = x0 + xH(t)
A solucao completa e a mesma do caso homogeneo, amenos de um deslocamento (“shift”) de x0.
xH(t) =
Aeλ1t +Beλ2t, amortecimento supercrıticoAe−γt sin(ωdt+ φ), amortecimento subcrıticoe−γt(A+Bt), amortecimento crıtico
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
ExemplosResposta ao degrau
Resposta ao degrau
A entrada degrau aparece muito em engenhariaOs sistemas fısicos comumente admitem um modelosimplificado de sistema massa-molaQuando e necessario controlar um sistema fısico,geralmente se aplica uma forca F (t) (ou uma correnteI(t), ou uma tensao E(t), ou algum outro mecanismoatuador) para que ele se comporte como desejadoF (t) = kx0: geralmente deseja-se que o sistema(considerado inicialmente em repouso na posicao x = 0)atinja a posicao x0 (a nova posicao de equilıbrio) o maisrapido possıvel e aı permanecaVamos vislumbrar isso para o caso subcrıtico
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
ExemplosResposta ao degrau
Resposta ao degrau
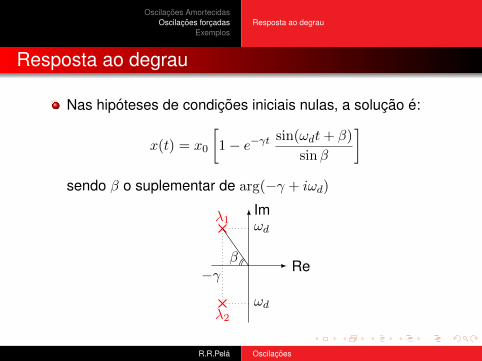
Nas hipoteses de condicoes iniciais nulas, a solucao e:
x(t) = x0
[1− e−γt sin(ωdt+ β)
sinβ
]sendo β o suplementar de arg(−γ + iωd)
Re
Imωd
ωd
−γ
λ2
λ1
β
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
ExemplosResposta ao degrau
Resposta ao degrau
Esboco de x(t)
Mpx0
tr tst
x(t
)
Mp = e−π cot β : “overshoot”
tr =π − βωd
: tempo de subida (“rise time”)
ts ∼=3
γ(para ± 5%): tempo de estabilizacao (“settling time”)
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Roteiro
1 Oscilacoes Amortecidas
2 Oscilacoes forcadas
3 ExemplosSistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Enunciado
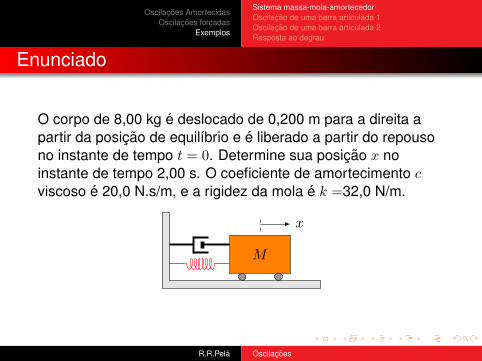
O corpo de 8,00 kg e deslocado de 0,200 m para a direita apartir da posicao de equilıbrio e e liberado a partir do repousono instante de tempo t = 0. Determine sua posicao x noinstante de tempo 2,00 s. O coeficiente de amortecimento cviscoso e 20,0 N.s/m, e a rigidez da mola e k =32,0 N/m.
M
x
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Solucao
Equacao de movimento
x+c
Mx+
k
Mx = 0
Daı, concluımos que ω0 = 2,00 rad/s e γ = 1,25 s−1, e que setrata de um oscilador subamortecido. A frequencia angularamortecida e ωd =
√ω2 − γ2 = 1,56125 rad/s. Solucao geral:
x(t) = Ae−γt sin(ωdt+ φ)
A velocidade e:
v(t) = −γAe−γt sin(ωdt+ φ) + ωdAe−γt cos(ωdt+ φ)
Para obter A e φ, precisamos das condicoes iniciaisx(0) = 0,200 m e v(0) = 0.
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Solucao
A sinφ = 0,2, 0 = −1,25A sinφ+ 1,56125A cosφ
Resolvendo as duas equacoes, obtemos A = 0,256205 m eφ = 0,895664 rad. Assim, a solucao e
x(t) = 0,256205e−1,25t sin(1,56125t+ 0,895664)
Precisamos encontrar x(t) para t = 2,00 s. Fazendo oscalculos, obtemos x = −0,016163 m ∼= −0,0161 m.
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Enunciado
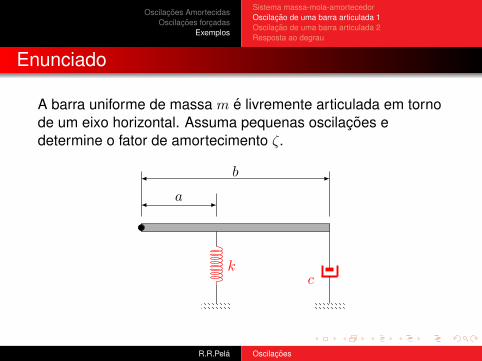
A barra uniforme de massa m e livremente articulada em tornode um eixo horizontal. Assuma pequenas oscilacoes edetermine o fator de amortecimento ζ.
kc
a
b
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Solucao
Assumindo pequenas oscilacoes, podemos escrever aequacao dos momentos (usando a articulacao comoreferencia):
−kxa− cvb−mg(b/2) =mb2
3θ
Como x = aθ e v = bθ, temos
θ +3c
mθ +
3ka2
mb2=
3g
2b
Portanto ω0 =√
3ka2/(mb2), γ = 3c/(2m)
ζ =cb
2a
√3
km
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Enunciado
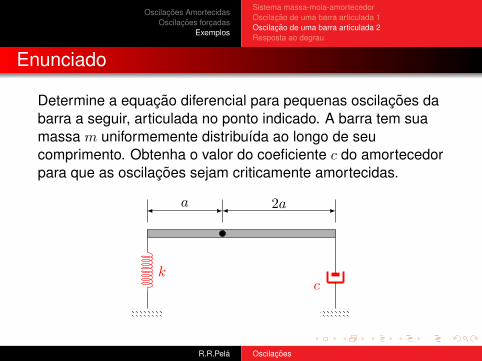
Determine a equacao diferencial para pequenas oscilacoes dabarra a seguir, articulada no ponto indicado. A barra tem suamassa m uniformemente distribuıda ao longo de seucomprimento. Obtenha o valor do coeficiente c do amortecedorpara que as oscilacoes sejam criticamente amortecidas.
kc
a 2a
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Solucao
Escrevendo a eq. dos momentos em relacao ao ponto dearticulacao, temos, para pequenas oscilacoes:
−mg(a
2
)cos θ − kxa cos θ − cv(2a) cos θ = Iθ
Sabemos que x = aθ, v = 2aθ, e pelo teorema dos eixos
paralelos: I = m
[(3a)2
12+(a
2
)2]= ma2.
θ +4c
mθ +
k
mθ = − g
2a
E para um amortecimento crıtico,
ccr =m
2
√k
m=
√mk
2
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Enunciado
Um oscilador amortecido tem os seguintes parametros:m = 1,00 kg, c = 10,0 N.s/m, k = 169 N/m. Se este osciladoresta sujeito a uma forca degrau, obtenha
a o tempo de subida e o overshoot.b suponha F (t) = F0 − ηx− χx. Determine η e χ para que o
tempo de subida seja menor que 50 ms, e o overshootseja menor que 10%.
R.R.Pela Oscilacoes
Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Solucao
a Para os parametros especificados, temos γ = 5,00 s−1,ω0 = 13,0 rad/s, ωd = 12,0 rad/s, β = 1.1760 rad. Oovershoot e
Mp = e−π cotβ = 0,270 = 27,0%
O tempo de subida e tr =π − βωd
= 164 ms
R.R.Pela Oscilacoes

Oscilacoes AmortecidasOscilacoes forcadas
Exemplos
Sistema massa-mola-amortecedorOscilacao de uma barra articulada 1Oscilacao de uma barra articulada 2Resposta ao degrau
Solucao
b Considerando a forca dada, temos a seguinte EDO
x+(c+ χ)
mx+
(k + η)
mx = F0
Pelos requisitos de projeto, devemos tomar χ e η tal que
Mp = e−π cotβ < 0,10π − βωd
< 0,05
Podemos, por exemplo, tomar β = 0,900 rad e ωd = 23,0 rad/s.Isto implica γ = 18,252 s−1, ou seja, χ = 8,25 N.s/m.Analogamente, obtemos ω0 = 29,362 rad/s. Assim,η = 693 N/m.
R.R.Pela Oscilacoes