ao˜ a` m ˆ a - ief.ita.brrrpela/downloads/fis26/fis26-2013-aula15.pdf · introduc¸ao˜ a mec`...
TRANSCRIPT
Introducao a Mecanica Analıtica
INTRODUCAO A MECANICA ANALITICAMecanica II (FIS-26)
Prof. Dr. Ronaldo Rodrigues Pela
IEFF-ITA
14 de maio de 2013
R.R.Pela Mecanica Analıtica
Introducao a Mecanica Analıtica
Roteiro
1 Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Roteiro
1 Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Motivacao
No estudo da Mecanica Classica conduzido ate agora,ficou clara a importancia das leis de Newton.Usando a 2a Lei de Newton e dadas as condicoes iniciais,somos capazes de obter as equacoes de movimento deum sistema e descrever seu movimento.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Motivacao
No entanto, a leis de Newton so podem ser usadas setodas as forcas agindo num sistema sao conhecidas.
Em muitas situacoes, isto complica o problema.Nesse sentido, dois metodos foram desenvolvidos parafacilitar a solucao dos problemas: Lagrange e Hamilton.
Estes metodos nao sao resultados de novas teorias naMecanica, mas sim sao derivados das leis de Newton.
R.R.Pela Mecanica Analıtica

Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Motivacao
Realidade virtual
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Motivacao
Realidade virtual
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vantagens da Mecanica Analıtica
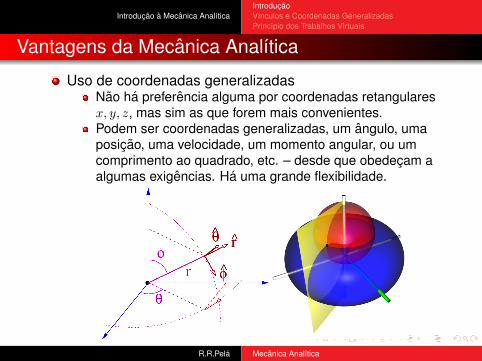
Uso de coordenadas generalizadasNao ha preferencia alguma por coordenadas retangularesx, y, z, mas sim as que forem mais convenientes.Podem ser coordenadas generalizadas, um angulo, umaposicao, uma velocidade, um momento angular, ou umcomprimento ao quadrado, etc. – desde que obedecam aalgumas exigencias. Ha uma grande flexibilidade.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vantagens da Mecanica Analıtica
Uso de grandezas escalares em vez de vetoriaisSao metodos baseados em energia.Isto evita muitas confusoes tıpicas de vetores (comosentido positivo do movimento).
Mecanica Analıtica: base das Mecanica Estatıstica eQuantica.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vınculos
Equacao de movimento:
mid2~ridt2
= ~Fi = ~F(ext)i +
∑j
~Fji
sendo ~Fji a forca da partıcula j sobre a partıcula i(~Fii , ~0).Esta equacao, de certa forma, assume que a partıculapode movimentar em qualquer lugar do espaco.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vınculos
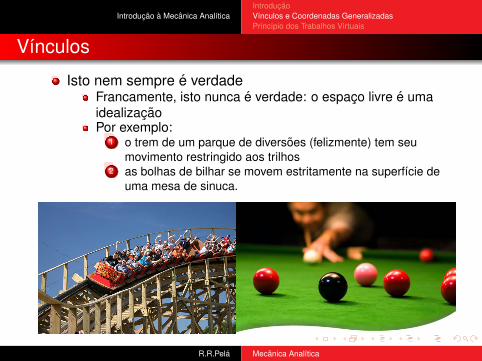
Isto nem sempre e verdadeFrancamente, isto nunca e verdade: o espaco livre e umaidealizacaoPor exemplo:
1 o trem de um parque de diversoes (felizmente) tem seumovimento restringido aos trilhos
2 as bolhas de bilhar se movem estritamente na superfıcie deuma mesa de sinuca.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vınculos
Nos casos em que o movimento e restrito por algumaimposicao externa, dizemos que o sistema possui vınculos(que sao dados pela propria imposicao externa).Para expressar a restricoes impostas pelos vınculos,escrevemos algumas equacoes matematicas querelacionam as coordenadas entre si.Os vınculos podem ser holonomicos, quando a restricaotem a forma:
f(~r1, ~r2, · · · , t) = 0
ou entao, nao-holonomico, caso nao seja possıvelencontrar uma equacao como antes.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vınculos
Exemplos de vınculos holonomicos.Partıcula se movendo no plano xy : z = 0.Corpo rıgido: (~ri − ~rj)
2 − c2ij = 0.
Exemplos de vınculos nao-holonomicos:Quando a restricao envolve desigualdades, como z ≥ 0.
Quando a restricao depende de derivadasd~ridt
.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vınculos
Os vınculos sao um conceito classico idealizado: nenhummovimento segue uma restricao perfeita na MecanicaQuantica (devido ao Princıpio da Incerteza).
R.R.Pela Mecanica Analıtica

Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vınculos
Um vınculo holonomico pode envolver uma forca que ateassume valores infinitos, se for o caso – na realidade, ascoisas sao mais suaves.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Vınculos
Um vınculo holonomico (que e o que iremos considerar nocurso) reduz o numero de variaveis independentes em 1.Por exemplo, se z = 0, entao so estao livres x e y. De umaforma geral:
f(~r1, ~r2, · · · , t) = 0 implica x1 = g(y1, z1, ~r2, ~r3, · · · , t)
ou seja, x1 e dependente das demais coordenadas, assimbasta encontrar y1(t), z1(t), ~r2(t), · · · que automaticamentex1(t) fica determinado.As vezes, conforme o vınculo, pode ser interesanterealizar uma mudanca de coordenadas, como
x2 + y2 + z2 = R2
seria uma boa escolha mudar para θ e φ (comocoordenadas independentes)
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Coordenadas generalizadas
O conjunto de coordenadas independentes capazes deespecificar completamente o problema e chamado decoordenadas generalizadas.Em princıpio, na ausencia de forcas, todos os sistemas decoordenadas sao iguais (x, y, z e o mais simples).No entanto, as forcas quebram essa simetria: algunssistemas de coordenadas funcionam melhor que outros.As coordenadas generalizadas oferecem uma maneiranatural de lidar com sistemas sob a acao de tais forcas.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Coordenadas generalizadas
Para descrever completamete um sistema de N partıculaspodem ser necessarias 3N coordenadas. No entanto, seexistirem k vınculos holonomicos, o numero decoordenadas (generalizadas) cai para n = 3N − k.Esse numero n e chamado de numero de graus deliberdade e as coordenadas generalizadas saorepresentadas por:
q1, q2, q3, · · · , qn
A seguir, veremos como encontrar a equacao de evolucaotemporal de cada coordenadas generalizadas.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Princıpio dos Trabalhos Virtuais
Existe um metodo de estudar o equilıbrio de um corporıgido que dispensa o calculo das reacoes vinculares,reduzindo o numero de equacoes a serem resolvidas.Este metodo esta apoiado num princıpio – conhecidocomo Princıpio dos Trabalhos Virtuais – que foi:
Imaginado por AristotelesAperfeicoado por Galileu e StevinEnunciado de forma geral em 1717 pelo matematico suıcoJohanm BernoulliColocado, por Lagrange, na posicao singular que aindahoje ocupa de princıpio basico para todas as MecanicasAvancadas
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Princıpio dos Trabalhos Virtuais
Deslocamento virtual: de um deslocamento elementar(infinitesimal) possıvel de se imprimir a um sistema e queseja compatıvel com os vınculos.
Veja que o deslocamento virtual e hipotetico (isto e, apenaspensado, nao realizado) e e concebido sem que o tempopasseE um deslocamento imaginario a “tempo congelado” querespeita os vınculos
Para distinguir um deslocamento virtual e umdeslocamento real, e costume escrever δ~r para o primeiroe d~r para o segundo.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Princıpio dos Trabalhos Virtuais
Se um sistema de N partıculas e descrito com ncoordenadas generalizadas qj(j = 1, · · · , n), entao:
~r1 = ~r1(q1, q2, · · · , qn, t)~r2 = ~r2(q1, q2, · · · , qn, t)
...~rN = ~rN (q1, q2, · · · , qn, t)
Imaginando, entao, que cada partıcula recebeu sofreu umligeiro deslocamento virtual e sua posicao passou de ~ripara ~ri + δ~ri, onde temos:
δ~ri =
n∑j=1
∂~ri∂qj
δqj
Note a ausencia de ∆t
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Princıpio dos Trabalhos Virtuais
Sendo ~Fi a forca total que age na partıcula i, entaotrabalho virtual de ~Fi e:
δWi = ~Fi.δ~ri
O trabalho total realizado sobre o sistema e:
δW =
N∑i=1
~Fi.δ~ri
Separando em duas partes: ~Fi = ~F(a)i + ~fi, onde ~fi e a
soma de todas as forcas de vınculos agindo na partıcula ie ~F
(a)i as forcas aplicadas agindo em i.
OBS.: quando uma forca nao e vincular, ela e chamada deforca aplicada.
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Princıpio dos Trabalhos Virtuais
As forcas de vınculos holonomicos realizam trabalhovirtual nulo (geralmente porque sao normais aodeslocamento ao deslocamento virtuais realizados):
δW =
N∑i=1
~F(a)i .δ~ri =
N∑i=1
n∑j=1
~F(a)i .
∂~ri∂qj
δqj
Princıpio dos trabalhos virtuais:“A condicao necessaria e suficiente para que um
sistema permaneca em equilıbrio e que seja nula a somados trabalhos virtuais das forcas aplicadas ao sistema,num deslocamento reversıvel qualquer.”
R.R.Pela Mecanica Analıtica
Introducao a Mecanica AnalıticaIntroducaoVınculos e Coordenadas GeneralizadasPrincıpio dos Trabalhos Virtuais
Princıpio dos Trabalhos Virtuais
A demonstracao de que e condicao necessaria e simples.Por outro lado, a demonstracao de que e condicaosuficiente e complicada e, por isso, omitiremos.Veja que a condicao de equilıbrio implica
~Fi = ~0 = ~F(a)i + ~fi
Assim, δW =
N∑i=1
~Fi.δ~ri = 0.
A vantagem de usar esse princıpio para obter o equilıbrioe que as forcas de vınculo nao aparecem nas equacoes,somente aperecem forca aplicadas (que, em geral, saoconhecidas).
R.R.Pela Mecanica Analıtica