victor miranda de amorim e silva anÁlise estÁtica e
TRANSCRIPT

VICTOR MIRANDA DE AMORIM E SILVA
ANÁLISE ESTÁTICA E DINÂMICA DE CASCAS
CILÍNDRICAS AXISSIMÉTRICAS PELO MÉTODO DOS
ELEMENTOS FINITOS
NATAL-RN
2018
UNIVERSIDADE FEDERAL DO RIO GRANDE DO NORTE
CENTRO DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA CIVIL

Victor Miranda de Amorim e Silva
Análise estática e dinâmica de cascas cilíndricas axissimétricas pelo método dos elementos
finitos
Trabalho de Conclusão de Curso na modalidade
Monografia, submetido ao Departamento de
Engenharia Civil da Universidade Federal do Rio
Grande do Norte como parte dos requisitos
necessários para obtenção do Título de Bacharel em
Engenharia Civil.
Orientador: Profa. Dra. Fernanda Rodrigues
Mittelbach
Natal-RN
2018

Silva, Victor Miranda de Amorim e. Análise estática e dinâmica de cascas cilíndricasaxissimétricas pelo Método dos Elementos Finitos / VictorMiranda de Amorim e Silva. - 2018. 41 f.: il.
Monografia (graduação) - Universidade Federal do Rio Grandedo Norte, Centro de Tecnologia, Curso de Engenharia Civil.Natal, RN, 2018. Orientadora: Profª. Drª. Fernanda Rodrigues Mittelbach.
1. Método dos Elementos Finitos - Monografia. 2. CascaCilíndrica - Monografia. 3. Análise Dinâmica - Monografia. 4.Estruturas Axissimétricas - Monografia. I. Mittelbach, FernandaRodrigues. II. Título.
RN/UF/BCZM CDU 69.01
Universidade Federal do Rio Grande do Norte - UFRNSistema de Bibliotecas - SISBI
Catalogação de Publicação na Fonte. UFRN - Biblioteca Central Zila Mamede
Elaborado por Ana Cristina Cavalcanti Tinôco - CRB-15/262

Victor Miranda de Amorim e Silva
Análise estática e dinâmica de cascas cilíndricas axissimétricas pelo método dos elementos
finitos
Trabalho de conclusão de curso na modalidade
Monografia, submetido ao Departamento de
Engenharia Civil da Universidade Federal do
Rio Grande do Norte como parte dos requisitos
necessários para obtenção do título de Bacharel
em Engenharia Civil.
Aprovado em 28 de novembro de 2018:
___________________________________________________
Profa. Dra. Fernanda Rodrigues Mittelbach – Orientadora
___________________________________________________
Prof. Dr. José Neres da Silva Filho – Examinador interno
___________________________________________________
Eng. Pedro Mitzcun Coutinho – Examinador externo
Natal-RN
2018

DEDICATÓRIA
À Alcinda, Magnus e Giovanna
AGRADECIMENTOS
Agradeço especialmente à minha família, meus pais Alcinda e Magnus e minha irmã
Giovanna, pela educação e incentivo por todos esses anos, apoiando todas as minhas decisões
e me fazendo uma pessoa melhor.
À minha orientadora Fernanda Mittelbach por todos os ensinamentos dentro e fora da
sala de aula, paciência e auxilío nos problemas enfrentados ao longo deste trabalho.
À Bárbara, pelo amor ao longo desses anos, apoio, paciência e incentivos em todos os
momentos.
À todos os amigos, os de longa data e os novos, que tornaram todo esse processo mais
fácil, auxiliando e e apoiando.
À todos os professores que passaram conhecimento e fundamentaram esta jornada,
subsidiando minha formação acadêmica.
Victor Miranda de Amorim e Silva

RESUMO
Análise estática e dinâmica de cascas cilíndricas axissimétricas pelo método dos
elementos finitos
Este trabalho busca fazer uma análise estática e dinâmica de cascas cilíndricas axissimétricas
pelo Método dos Elementos Finitos (MEF), em comparação com o Método das Diferenças
Finitas Energéticas (MDFE). O MEF utiliza-se do Príncipio dos Trabalhos Virtuais (PTV) nas
expressões dos elementos da estrutura, desenvolvendo assim um estudo numérico do problema.
Desenvolveu-se um código computacional na linguagem Fortran para a realização de tal
comparação. Também é mostrado toda a formulação analítica teórica do problema, para a
comparação na análise estática. São apresentados quatro exemplos afim de validar o método
para a análise desse tipo de estrutura e carregamento.
Palavras-chave: Método dos Elementos Finitos. Casca cilíndrica. Análise dinâmica. Estruturas
axissimétricas.

ABSTRACT
Análise estática e dinâmica de cascas cilíndricas axissimétricas pelo método dos elementos
finitos
This work aims to perform a static and dynamic analysis of axisymmetric cylindrical shells by
the Finite Element Method (FEM), in comparison with the Energetic Finite Difference Method
(EFDM). The FEM uses the Principle of Virtual Work (PVW) in the expressions of the structure
elements, thus developing a numerical study of the problem. A computational code was
developed in the Fortran language to make such comparison. The problem theoretical analytical
formulation is also shown, for comparison in the static analysis. Four examples are presented
in order to validate the method for the analysis of this type of structure and loading.
Keywords: Finite element method. Cylindrical shell. Dynamic analysis. Axisymmetric
structures.

ÍNDICE DE FIGURAS
Figura 1 - Discretização pelo MEF de uma estrutura contínua .................................. 14
Figura 2 - Fluxograma do Processo de Análise pelo MEF......................................... 15
Figura 3 - Estruturas Laminares ................................................................................. 16
Figura 4 - Museu Nacional de Brasília ....................................................................... 17
Figura 5 - Cilíndro de Pressão .................................................................................... 17
Figura 6 - Sistema de Coordenadas para a casca cilíndrica ....................................... 20
Figura 7 - Esforços não nulos no elemento de casca .................................................. 21
Figura 8 - Carregamentos de domínio e de contorno na Casca Cilíndrica ................. 24
Figura 9 - Elemento Finito ......................................................................................... 26
Figura 10 – Estrutura uniformemente discretizada .................................................... 27
Figura 11 - Método da Aceleração Constante ............................................................ 30
Figura 12 - Montagem das Matrizes Globais ............................................................. 34
Figura 13 – Montagem do vetor de cargas global ...................................................... 35
Figura 14 - Representação Matricial do Sistema de Equações .................................. 35
Figura 15 - Tipos de Discretizações ........................................................................... 37
Figura 16 - Casca cilíndrica apoiada com carregamento transversal constante ......... 38
Figura 17 - Casca cilíndrica engastada com carregamento transversal variável ........ 42
Figura 18 - Casca cilíndrica apoiada com carregamento transversal variável e
longitudinal constante ............................................................................................................... 45
Figura 19 - Exemplo 4 – Casca engastada submetida à deformação inicial, sem
carregamentos ........................................................................................................................... 48

ÍNDICE DE TABELAS
Tabela 1 - Exemplo 1 - Estática ................................................................................. 40
Tabela 2 - Exemplo 1 – Dinâmica .............................................................................. 42
Tabela 3 - Exemplo 2 - Estática ................................................................................. 43
Tabela 4 - Exemplo 2 - Dinâmica .............................................................................. 44
Tabela 5 - Exemplo 3 - Estática ................................................................................. 46
Tabela 6 - Exemplo 3 - Dinâmica .............................................................................. 47
Tabela 7 - Exemplo 4 - Dinâmica .............................................................................. 49

ÍNDICE DE GRÁFICOS
Gráfico 1 - Exemplo 1 - Solução Analítica ................................................................ 39
Gráfico 2 - Exemplo 1 - Estática ................................................................................ 40
Gráfico 3 - Exemplo 1 - Dinâmica ............................................................................. 41
Gráfico 4 - Exemplo 2 - Estática ................................................................................ 43
Gráfico 5 - Exemplo 2 - Dinâmica ............................................................................. 44
Gráfico 6 - Exemplo 3 - Estática ................................................................................ 46
Gráfico 7 - Exemplo 3 - Dinâmica ............................................................................. 47
Gráfico 8 - Exemplo 4 - Dinâmica ............................................................................. 49

SIMBOLOGIA
SÍMBOLO SIGNIFICADO
a - Raio da casca
Bx, By, Bz - Componentes das forças de volume
C - Rigidez extensional da casca
D - Rigidez flexional da casca
E - Módulo de elasticidade longitudinal
F - Vetor de cargas global
Fd - Vetor de cargas dinâmico
fx, fz, fφ - Forças de inércia
f - Deslocamento, podendo ser u, w ou φ
g, h - Funções que descrevem a marcha no tempo
h - Espesura da casca
[K] - Matriz de rigidez
l - Comprimento da casca
[M] - Matriz de massa
M, N - Esforços solicitantes na casca
px, pz - Carregamento longitudinal e transversal
Δt - Intervalo de tempo
δu, δv, δw - Variação das componentes dos deslocamentos
u, v, w, φ - Deslocamentos
V - Volume do elemento
δWe, δWi - Trabalho virtual externo e interno
x, y, z, θ - Direções
εx, εy, εz - Deformações específicas
λ - Comprimento do elemento
μ - Massa específica
ρx, ρy, ρz - Componentes das forças de superfície
σx, σy, σz - Componentes da tensão normal
τxy, τxz, τyz - Componentes da tensão de cisalhamento
(… ) , (… ) - Designação para as derivadas temporais de primeira e segunda ordem
SUMÁRIO
1. INTRODUÇÃO .................................................................................................................. 13
1.1 OBJETIVOS .......................................................................................................................... 18
Objetivo geral ..................................................................................................... 18
Objetivos específicos .......................................................................................... 18
2. FORMULAÇÃO ANALÍTICA DO PROBLEMA ......................................................... 19
2.1 INTRODUÇÃO ...................................................................................................................... 19
2.2 PRINCÍPIO DOS TRABALHOS VIRTUAIS ............................................................................... 19
2.3 HIPÓTESES BÁSICAS ............................................................................................................ 20
2.4 FORMULAÇÃO .................................................................................................................... 21
Trabalho Virtual Interno ..................................................................................... 21
Trabalho Virtual Externo .................................................................................... 23
3. FORMULAÇÃO NUMÉRICA DO PROBLEMA ......................................................... 26
3.1 INTRODUÇÃO ...................................................................................................................... 26
3.2 DISCRETIZAÇÃO ................................................................................................................. 27
3.3 FUNÇÕES DE INTERPOLAÇÃO .............................................................................................. 27
Deslocamento longitudinal ................................................................................. 28
Deslocamento transversal ................................................................................... 28
Rotação ............................................................................................................... 29
3.4 REPRESENTAÇÃO DAS DERIVADAS TEMPORAIS DOS DESLOCAMENTOS PELO MÉTODO DA
ACELERAÇÃO CONSTANTE ........................................................................................................ 29
3.5 AVALIAÇÃO DO TRABALHO VIRTUAL INTERNO ................................................................... 31
3.6 AVALIAÇÃO DO TRABALHO VIRTUAL EXTERNO .................................................................. 31
Parcela Estática ................................................................................................... 31
Parcela Dinâmica ................................................................................................ 32
3.7 MONTAGEM DAS MATRIZES E VETORES DE CARGA GLOBAIS ............................................... 33
3.8 RESOLUÇÃO DO SISTEMA DE EQUAÇÕES ............................................................................. 35
3.9 CÓDIGO COMPUTACIONAL .................................................................................................. 36
4. EXEMPLOS E RESULTADOS ....................................................................................... 37
4.1 INTRODUÇÃO ...................................................................................................................... 37
4.2 EXEMPLO 1 – CASCA APOIADA SUBMETIDA À CARREGAMENTO TRANSVERSAL CONSTANTE
38
Análise estática ................................................................................................... 39
Análise dinâmica ................................................................................................ 41

4.3 EXEMPLO 2 – CASCA ENGASTADA SUBMETIDA À CARREGAMENTO TRANSVERSAL VARIÁVEL
42
Análise estática ................................................................................................... 43
Análise dinâmica, ............................................................................................... 44
4.4 EXEMPLO 3 – CASCA APOIADA SUBMETIDA À CARREGAMENTO LONGITUDINAL UNIFORME E
CARREGAMENTO TRANSVERSAL VARIÁVEL ............................................................................... 45
Análise estática ................................................................................................... 46
Análise dinâmica, ............................................................................................... 47
4.5 EXEMPLO 4 – CASCA ENGASTADA SUBMETIDA À DEFORMAÇÃO INICIAL, SEM
CARREGAMENTOS ...................................................................................................................... 48
5. CONCLUSÃO E ANÁLISE DOS RESULTADOS ........................................................ 50
6. REFERÊNCIAS ................................................................................................................. 52

13
1. INTRODUÇÃO
A análise estrutural tem como principal objetivo analisar e determinar tensões e/ou
esforços internos e deslocamentos de estruturas e elementos estruturais. Segundo ARAGÃO
FILHO (s.d.), “[...] a análise estrutural tem como alvo propiciar o necessário entendimento e
apreciação do comportamento da estrutura e comparar a performance esperada com os
requerimentos de projeto e prescrições de normas.”. Para a análise de uma estrutura, é
necessária a criação de um modelo matemático da situação física real, sendo esse modelo
resolvido analitíca ou numericamente. BRASIL et al (2015) definem modelo como uma
representação da realidade, sendo esta, uma formulação ou conjunto de equações, que vão
expressar características de um determinado sistema ou processo. Além disso, os autores
destacam que o grau de realismo desejado para o modelo depende de diversas considerações,
mantendo algumas características, negligenciando umas e aproximando outras.
Um dos métodos numéricos utilizados para a análise de estruturas é o Método dos
Elementos Finitos (MEF), que segundo Zienkiewicz & Taylor (2000), é comumente utilizado
em estruturas contínuas (que não são compostas por barras) e é definido como um procedimento
de discretização geral de problemas contínuos através de declarações matemáticas definidas.
Em tal método, discretiza-se o domínio contínuo em pequenas parcelas, denominadas de
elementos finitos. O domínio discretizado forma uma malha de elementos finitos e as incógnitas
são os deslocamentos nodais situados em tal malha, como demonstrado na Figura 1 abaixo.
(MARTHA, 2016).

14
Figura 1 - Discretização pelo MEF de uma estrutura contínua
Fonte: MARTHA (2016)
De acordo com BATHE (2014), para a técnica de solução por Elementos Finitos, por
esta ser um procedimento numérico, é necessário adereçar a precisão da solução com critérios,
refinando os parâmetros (como por exemplo, discretizando mais a estrutura) até o momento em
que uma aproximação aceitável seja alcançada. A Figura 2 abaixo resume o processo de análise
por Elementos Finitos, com suas etapas.

15
Figura 2 - Fluxograma do Processo de Análise pelo MEF
Fonte: Traduzido pelo autor de BATHE (2014)
As estruturas podem ser classificadas em: a) lineares, como pilares e vigas; b) de
superfície, como lajes e radier; e c) volumétricas, como blocos, por exemplo. Este trabalho tem
como foco um tipo de elemento de superfície, as cascas cilíndricas.
A NBR 6118 (2014) define elementos de superfície como “Elementos em que uma
dimensão, usualmente chamada de espessura, é relativamente pequena em face das demais
[...]”. Esta mesma norma apresenta a definição de três tipos de elementos de superfície: as
placas, as chapas e as cascas, conforme aponta a Figura 3 abaixo. As duas primeiras são
definidas como elementos planos – as placas, que são sujeitas a ações normais a seu plano, e as
chapas com ações contidas em seu plano. O terceiro elemento, por sua vez, é definido como um

16
elemento de superfície não plano. Os elementos de superfície também são conhecidos como
elementos laminares.
Figura 3 - Estruturas Laminares
Fonte: Elaborada pelo autor
Segundo SORIANO (2003): “Casca é um sólido que se caracteriza uma dimensão
denominada espessura, muito menor do que as dimensões de sua superfície média, sólido este
submetido a efeitos de flexão e de membrana. [...] Usualmente, o nome casca se refere a
estruturas de curvatura simples ou dupla.”.
Já segundo GARCIA e VILLAÇA (1998): “Designa-se por casca o elemento estrutural
bi-dimensional de superfície média curva.”.
As cascas possuem diversas aplicações na engenharia, como em conchas acústicas e
barragens abobodadas. Isso se dá principalmente pela capacidade de carga eficiente e pelo apelo
estético, podendo assim vencer grandes vãos. As figuras 4 e 5 ilustram exemplos de cascas.

17
Figura 4 - Museu Nacional de Brasília
Fonte: Metrópoles¹
1
Figura 5 - Cilíndro de Pressão
Fonte: Wikipedia²
Elas podem podem possuir um formato cilíndrico, usadas majoritariamente em tanques
de alta pressão e usualmente possuem axissimetria (simetria ao longo de seu eixo axial), como
mostra o exemplo da figura 5.
1 Disponível em: https://goo.gl/AD4SpR 2 Disponível em: https://goo.gl/SVm1tS

18
1.1 Objetivos
Objetivo geral
Esse estudo tem por objetivo realizar uma análise, tanto estática quanto dinâmica, de
cascas cilindricas axissimétricas pelo Método dos Elementos Finitos.
Objetivos específicos
Para atingir tal objetivo, temos como objetivos específicos:
• Apresentar as formulações analíticas e numéricas que concerne ao problema
• Desenvolver e aplicar um código computacional na linguagem Fortran para a
análise das cascas cilíndricas axissimétricas, utilizando o MEF.
• Analisar e quantificar, por meio do código criado, o deslocamento das estruturas
• Promover comparações dos resultados obtidos com soluções analíticas e/ou
soluções numéricas obtidas por outro método.

19
2. FORMULAÇÃO ANALÍTICA DO PROBLEMA
2.1 Introdução
Este capítulo tem como objetivo apresentar a formulação analítica de cascas cilíndricas
axissimétricas baseada no Princípio dos Trabalhos Virtuais (PTV). As expressões obtidas aqui
– tanto do trabalho virtual interno quanto externo - serão utlizidas como base para a formulação
numérica no capítulo 3.
O elemento estrutural é considerado axissimétrico devido a sua geometria e
características das solicitações que nele atuam.
2.2 Princípio dos Trabalhos Virtuais
O PTV enuncia que “[...] considerando um campo de deslocamentos virtuais em uma
estrutura sob ações externas, há igualdade entre o trabalho virtual externo e o trabalho virtual
interno.” (SORIANO, 2005). Para isso, o sistema precisa estar em equilíbrio e esse campo de
deslocamentos precisa ser cinematicamente admissível, ou seja, compatível com vinculações
da estrutura, manter sua continuidade, ser suficientemente pequeno para ser consistente com
hipóteses de pequenas mudanças de configuração e atender às condições de prescrição de
deslocamentos. Sendo assim, temos que:
𝛿𝑊𝑖 = 𝛿𝑊𝑒
Onde δWi representa o trabalho virtual das forças internas e δWe o trabalho virtual das
forças externas. A seguir, têm-se as expressões gerais para ambos os trabalhos virtuais para um
sólido num espaço definido pelas coordenadas x, y e z.
𝛿𝑊𝑖 = ∫(𝜎𝑥𝛿휀𝑥 +
𝑉
𝜎𝑦𝛿휀𝑦 + 𝜎𝑧𝛿휀𝑧 + 𝜏𝑥𝑦𝛿𝛾𝑥𝑦 + 𝜏𝑥𝑧𝛿𝛾𝑥𝑧 + 𝜏𝑦𝑧𝛿𝛾𝑦𝑧)𝑑𝑉
(2.1)
𝛿𝑊𝑒 = ∫(𝜌𝑥𝛿𝑢 + 𝜌𝑦𝛿𝑣 + 𝜌𝑧𝛿𝑤)𝑑𝑠 + ∫(𝐵𝑥𝛿𝑢 + 𝐵𝑦𝛿𝑣 + 𝐵𝑧𝛿𝑤)𝑑𝑉
𝑉𝑆𝑓
(2.2)
Onde:
σx, σy, σz – Componentes de tensão normal;
τxy, τxz, τyz – Componentes de tensão de cisalhamento;
δεx, δεy, δεz, δγxy, δγxz, δγyz – Variações das componentes de deformação as quais são
ligadas às variações nos deslocamentos;
ρx, ρy, ρz – Componentes das forças de superfície que atuam na região Sf do contorno
onde são prescritas as forças;

20
Bx, By, Bz – Componentes das forças de volume;
δu, δv, δw – Variações das componentes de deslocamento (u, v, w) segundo as direções
x, y, z.
2.3 Hipóteses básicas
Algumas hipóteses são admitidas de acordo com a Teoria Clássica de Love para o
desenvolvimento da formulação analítica da casca cilíndrica, tais como:
i. A casca é considerada delgada, com comportamento linear físico e geométrico;
ii. Linhas retas normais à superfície média antes da deformação, permanecem retas,
normais e de mesmo comprimento após a deformação da casca (Hipótese de Kirchhoff-
Love);
iii. A componente da tensão normal σz (na direção normal à superfície média) é
suficientemente menor em relação as demais tensões e pode ser desprezada;
iv. O material obedece à Lei de Hooke generalizada, ou seja, é homogêneo, isotrópico e de
comportamento elástico linear.
A casca é definida em relação ao sistema de coordenadas x, θ, z, como mostra a figura
6. Devido a axissimetria do problema, o deslocamento uθ, a distorção γθz, os esforços
solicitantes Nθx, Nxθ, Mθx, Mxθ, Qθ e as componentes de carregamento pθ e deslocamento v são
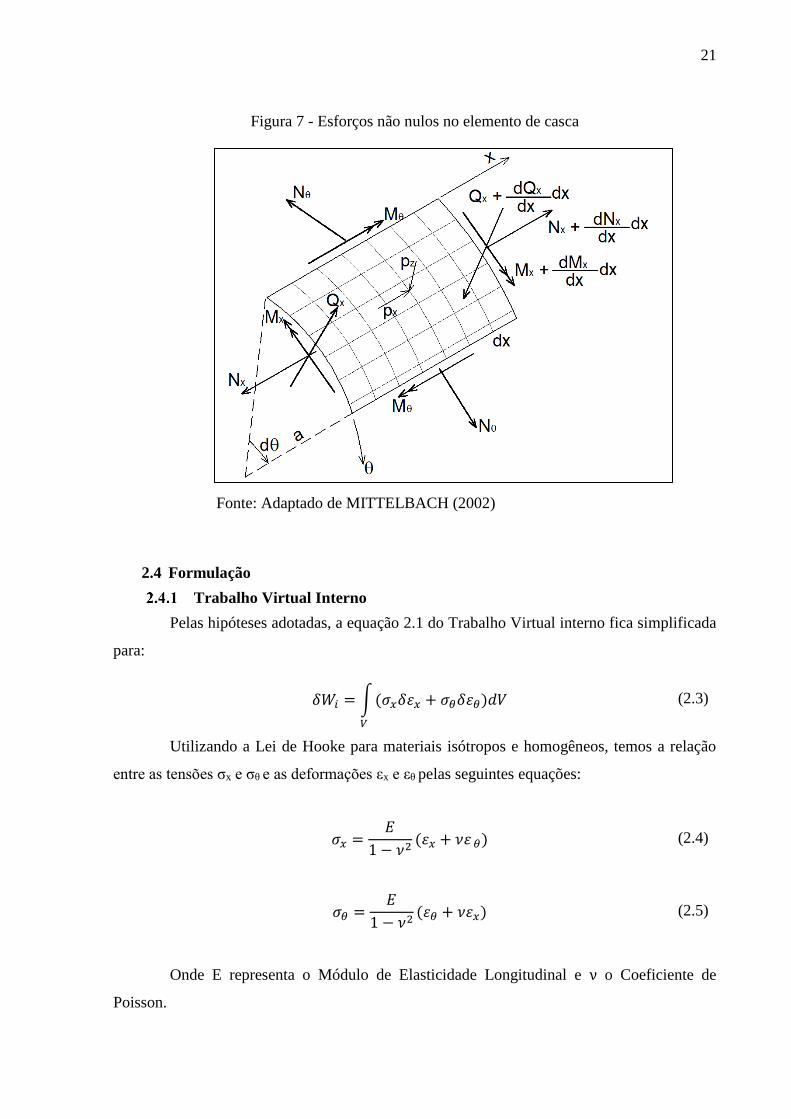
nulos. A figura 7 representa os sentidos positivos para os esforços não nulos.
Figura 6 - Sistema de Coordenadas para a casca cilíndrica
Fonte: Adaptado de MITTELBACH (2002)
21
Figura 7 - Esforços não nulos no elemento de casca
Fonte: Adaptado de MITTELBACH (2002)
2.4 Formulação
Trabalho Virtual Interno
Pelas hipóteses adotadas, a equação 2.1 do Trabalho Virtual interno fica simplificada
para:
𝛿𝑊𝑖 = ∫(𝜎𝑥𝛿휀𝑥 + 𝜎𝜃𝛿휀𝜃)𝑑𝑉
𝑉
(2.3)
Utilizando a Lei de Hooke para materiais isótropos e homogêneos, temos a relação
entre as tensões σx e σθ e as deformações εx e εθ pelas seguintes equações:
𝜎𝑥 =
𝐸
1 − 𝜈2(휀𝑥 + 𝜈휀 𝜃) (2.4)
𝜎𝜃 =
𝐸
1 − 𝜈2(휀𝜃 + 𝜈휀𝑥) (2.5)
Onde E representa o Módulo de Elasticidade Longitudinal e ν o Coeficiente de
Poisson.

22
Podemos reescrever a equação 2.3 considerando o comprimento da casca como “l”,
espessura “h” e raio da superfície média “a”, como sendo:
𝛿𝑊𝑖 = 2𝜋𝑎 ∫ [∫ (𝜎𝑥𝛿휀𝑥 + 𝜎𝜃𝛿휀𝜃)𝑑𝑧
ℎ2
−ℎ2
] 𝑑𝑥𝑙
0
(2.6)
Segundo TIMOSHENKO (1959), temos as relações deformações-deslocamento para
esse problema como:
휀𝑥 =
𝑑𝑢
𝑑𝑥− 𝑧
𝑑2𝑤
𝑑𝑥2 (2.7)
휀𝜃 = −𝑤
𝑎 (2.8)
Além disso, dispomos que a definição dos esforços solicitantes, por unidade de
comprimento são dadas por:
𝑁𝑥 = ∫ 𝜎𝑥 𝑑𝑧
ℎ2
−ℎ2
(2.9)
𝑁𝜃 = ∫ 𝜎𝜃 𝑑𝑧
ℎ2
−ℎ2
(2.10)
𝑀𝑥 = ∫ 𝜎𝑥𝑧 𝑑𝑧
ℎ2
−ℎ2
(2.11)
Logo, a expressão para o trabalho virtual interno assume o seguinte aspecto:
𝛿𝑊𝑖 = 2𝜋𝑎 ∫ (𝑁𝑥𝛿
𝑑𝑢
𝑑𝑥− 𝑀𝑥𝛿
𝑑2𝑤
𝑑𝑥2− 𝑁𝜃𝛿
𝑤
𝑎) 𝑑𝑥
𝑙
0
(2.13)
A partir das relações deformações-deslocamento do problema, juntamente com a Lei
de Hooke das tensões-deformações, obtem-se os esforços solicitantes em termos dos
deslocamentos u e w.
𝑀𝜃 = ∫ 𝜎𝜃𝑧 𝑑𝑧
ℎ2
−ℎ2
(2.12)

23
𝑁𝑥 = 𝐶 (
𝑑𝑢
𝑑𝑥− 𝜈
𝑤
𝑎) (2.14)
𝑁𝜃 = 𝐶 (𝜈
𝑑𝑢
𝑑𝑥−
𝑤
𝑎) (2.15)
𝑀𝑥 = −𝐷
𝑑2𝑤
𝑑𝑥2 (2.16)
𝑀𝜃 = −𝜈𝐷
𝑑2𝑤
𝑑𝑥2 (2.17)
Onde C e D, são respectivamentes, as Rigidezes Extensional e Flexional da casca
definidas por:
𝐶 =
𝐸ℎ
1 − 𝜈2 (2.18)
𝐷 =
𝐸ℎ3
12(1 − 𝜈2) (2.19)
Logo, substituindo as equações 2.14-2.17 dos esforços em termos dos deslocamentos
na equação 2.13 do trabalho virtual interno, temos:
𝛿𝑊𝑖 = 2𝜋𝑎 ∫ [𝐶 (
𝑑𝑢
𝑑𝑥− 𝜈
𝑤
𝑎) 𝛿
𝑑𝑢
𝑑𝑥+ 𝐷
𝑑2𝑤
𝑑𝑥2𝛿
𝑑2𝑤
𝑑𝑥2− 𝐶 (𝜈
𝑑𝑢
𝑑𝑥−
𝑤
𝑎)𝛿𝑤
𝑎 ] 𝑑𝑥
𝑙
0
(2.20)
Trabalho Virtual Externo
A figura 8 exibe os possíveis carregamentos, sejam eles de domínios ou de contorno
que podem atuar na casca cilíndrica. Sua representação é demonstrada em seu sentido positivo.

24
Figura 8 - Carregamentos de domínio e de contorno na Casca Cilíndrica
Fonte: Adaptado de MITTELBACH (2002)
Podemos então, separar a expressão do Trabalho Virtual Externo na parcela referente
aos carregamentos de domínio (definidos por unidade de área) e de contorno (definidos por
unidade de comprimento). Sendo assim, temos a seguinte expressão relativa ao carregamento
de domínio, considerando as forças de inércia fx, fz e fφ, que correspondem respectimante aos
deslocamentos lineares u, w e a rotação φ (dw/dx):
𝛿𝑊𝑒𝐷𝑜𝑚í𝑛𝑖𝑜 = ∫ [(𝑝𝑥 − 𝑓𝑥)𝛿𝑢 + (𝑝𝑧 − 𝑓𝑧)𝛿𝑤 − 𝑓𝜑𝛿
𝑑𝑤
𝑑𝑥] 𝑑𝑆 =
𝑆
= 2𝜋𝑎 ∫ [(𝑝𝑥 − 𝑓𝑥)𝛿𝑢 + (𝑝𝑧 − 𝑓𝑧)𝛿𝑤 − 𝑓𝜑𝛿𝑑𝑤
𝑑𝑥] 𝑑𝑥
𝑙
0
(2.21)
Onde:
𝑓𝑥 = ∫ 𝜇��𝑥𝑑𝑧 =
ℎ2
−ℎ2
∫ 𝜇 (��𝑥0 − 𝑧𝑑(��)
𝑑𝑥)𝑑𝑧 = 𝜇ℎ��𝑥0
ℎ2
−ℎ2
(2.22)

25
𝑓𝑧 = ∫ 𝜇��𝑑𝑧 =
ℎ2
−ℎ2
𝜇ℎ�� (2.23)
𝑓𝜑 = −∫ 𝜇��𝑥𝑧 𝑑𝑧 = ∫ 𝜇 (��𝑥0 − 𝑧𝑑(��)
𝑑𝑥) 𝑧 𝑑𝑧
ℎ2
−ℎ2
ℎ2
−ℎ2
=𝜇ℎ3
12
𝑑(��)
𝑑𝑥 (2.24)
Substituindo os valores das forças de inércia na equação 2.21 do Trabalho Virtual
Externo, temos:
𝛿𝑊𝑒 = 2𝜋𝑎 ∫ [(𝑝𝑥 − 𝜇ℎ��𝑥0)𝛿𝑢 + (𝑝𝑧 − 𝜇ℎ��)𝛿𝑤 −
𝜇ℎ3
12
𝑑(��)
𝑑𝑥𝛿
𝑑𝑤
𝑑𝑥] 𝑑𝑥
𝑙
0
(2.25)
Já o trabalho virtual externo relativo aos carregamentos de contorno é representado
abaixo:
𝛿𝑊𝑒 = 2𝜋𝑎 [��𝑥𝛿𝑢 + ��𝑥𝛿𝑤 − ��𝑥𝛿
𝑑𝑤
𝑑𝑥]0
𝑙
(2.26)
Onde:
��𝑥|0 = ��𝑥0 , ��𝑥|𝑙 = ��𝑥𝑙, ��𝑥|0 = ��𝑥0 , ��𝑥|𝑙 = ��𝑥𝑙, ��𝑥|0 = ��𝑥0 e
��𝑥|𝑙 = ��𝑥𝑙
Logo, temos assim o Trabalho Virtual Externo total sendo como a soma das equações
2.25 e 2.26 relativos as parcelas dos dois tipos de carregamento.
𝛿𝑊𝑒 = 2𝜋𝑎 ∫ [(𝑝𝑥 − 𝜇ℎ��𝑥0)𝛿𝑢 + (𝑝𝑧 − 𝜇ℎ��)𝛿𝑤 −
𝜇ℎ3
12
𝑑(��)
𝑑𝑥𝛿
𝑑𝑤
𝑑𝑥] 𝑑𝑥
𝑙
0
+ 2𝜋𝑎 [��𝑥𝛿𝑢 + ��𝑥𝛿𝑤 − ��𝑥𝛿𝑑𝑤
𝑑𝑥]0
𝑙
(2.27)

26
3. FORMULAÇÃO NUMÉRICA DO PROBLEMA
3.1 Introdução
Devido à axissimetria do problema, a análise pode ser realizada com elementos
unidimensionais, uma vez que o problema é independente de θ. Toda a formulação numérica
deste trabalho será baseada no Método dos Elementos Finitos (MEF), no qual cada elemento
contém dois nós, e cada nó possui três graus de liberdade (deslocamento longitudinal “u”,
deslocamento transversal “w” e rotação “φ”). O comprimento do elemento é dado por λ, este
representado na figura 9.
Figura 9 - Elemento Finito
Fonte: Adaptado de VIEIRA (2007)
Para a aplicação deste Método, são avaliada as integrais relativas aos Trabalhos
Virtuais Interno e Externo para cada elemento finito, considerando ao final, o somatório das
contribuições de todos os elementos da estrutura. Após a utlização do Princípio dos Trabalhos
Virtuais (igualando as expressões dos trabalhos virtuais interno e externo), impõem-se as

27
condições de contorno, geométricas e monta-se um sistema de equações lineares onde as
incógnitas são os deslocamentos nos nós dos elementos.
3.2 Discretização
A discretização dos elementos para a estrutura, poderá ser realizada de duas maneiras:
uma uniforme, onde todos os elementos possuem a mesma dimensão λ e o número de elementos
será o resultado da razão entre o comprimento L da estrutura e esta dimensão λ; e a outra não
uniforme, onde a estrutura é dividida em trechos e cada trecho possui a sua própria dimensão λ
e consequentemente um determinado número de elementos. Tal tipo de discretização é útil
devido ao comportamento das placas cilíndricas axissimétricas, nas quais os efeitos de flexão,
decorrentes a deslocamentos prescritos ou forças concentradas, têm caráter localizado. Dai a
discretização deve ser mais refinada onde ocorrem os efeitos de flexão, podendo ser mais
grosseira onde prevalece o comportamento de membrana. Fazendo isso, evita-se refinar toda a
malha da estrutura em regiões onde não há variação significativa do deslocamento,
economizando esforço computacional.
A axissimetria da estrutura torna a discretização mais simples por tornar o problema
unidimensional. Os nós são numerados da base para o topo. Para um total de “N” elementos
(divisões) na casca, o número de nós “NN” será NN = N + 1, no domínio, como mostra a figura
10.
Figura 10 – Estrutura uniformemente discretizada
Fonte: Adaptado de MITTELBACH (2007)
3.3 Funções de interpolação
Os deslocamentos longitudinais “u”, transversais “w” e a rotação “φ” em um dado
elemento são aproximados por meio de funções que dependem dos valores destes
deslocamentos nos nós incial e final do elemento. Estas funções de interpolação são polinômios
cujo grau depende do número de deslocamentos nodais do elemento relacionadas à variável que
se quer representar. Para a função u(x) existem dois deslocamentos nodais no elemento. Desta
forma, a função u(x) será linear. Para a função w(x), que descreve tanto o w(x) quanto φ(x)

28
(dw/dx), existem quatro deslocamentos nodais no elemento, portanto, w(x) será uma função
cúbica.
Deslocamento longitudinal
Para o deslocamento longitudinal, tem-se:
𝑢(𝑥) = 𝑓𝑢1𝑢𝑖 + 𝑓𝑢2𝑢𝑓 (3.1)
Onde fu1 e fu2 são funções do tipo f(x) = ax + b que dependem das condições de
contorno nos nós iniciais e finais. Sendo assim, temos:
𝑓𝑢1 = 𝑎1𝑥 + 𝑏1 𝑐𝑜𝑚 𝑓𝑢1(0) = 1 𝑒 𝑓𝑢1(𝜆) = 0
𝑓𝑢1 = −𝑥
𝜆+ 1
𝑓𝑢2 = 𝑎2𝑥 + 𝑏2 𝑐𝑜𝑚 𝑓𝑢2(0) = 0 𝑒 𝑓𝑢2(𝜆) = 1
𝑓𝑢2 =𝑥
𝜆
Portanto:
𝑢(𝑥) = (−
𝑥
𝜆+ 1) 𝑢𝑖 +
𝑥
𝜆𝑢𝑓 (3.2)
Logo, sua derivada:
𝑑𝑢(𝑥)
𝑑𝑥= −
1
𝜆𝑢𝑖 +
1
𝜆𝑢𝑓 (3.3)
Deslocamento transversal
A função de interpolação do deslocamento transversal se escreve:
𝑤(𝑥) = 𝑓𝑤1𝑤𝑖 + 𝑓𝜑1𝜑𝑖 + 𝑓𝑤2𝑤𝑓 + 𝑓𝜑2𝜑𝑓 (3.4)
Onde as funções fw1, fφ1, fw2 e fφ2 são do tipo f(x) = ax³ + bx² + cx + d, dependendo das
condições de contorno w e w’ nos nós. Logo:
𝑓𝑤1 = 𝑎1𝑥3 + 𝑏1𝑥
2 + 𝑐1𝑥 + 𝑑1
𝑐𝑜𝑚 𝑓𝑤1(0) = 1,𝑑𝑓𝑤1
𝑑𝑥(0) = 0, 𝑓𝑤1(𝜆) = 0 𝑒
𝑑𝑓𝑤1
𝑑𝑥(𝜆) = 0
Aplicando as condições de contorno, temos:
𝑓𝑤1 =2
𝜆3𝑥3 −
3
𝜆2𝑥2 + 1
𝑓𝑤2 = 𝑎2𝑥3 + 𝑏2𝑥
2 + 𝑐2𝑥 + 𝑑2
𝑐𝑜𝑚 𝑓𝑤2(0) = 0,𝑑𝑓𝑤2
𝑑𝑥(0) = 0, 𝑓𝑤2(𝜆) = 1 𝑒
𝑑𝑓𝑤2
𝑑𝑥(𝜆) = 0
𝑓𝑤2 = −2
𝜆3𝑥3 +
3
𝜆2𝑥2

29
𝑓𝜑1 = 𝑎3𝑥3 + 𝑏3𝑥
2 + 𝑐3𝑥 + 𝑑3
𝑐𝑜𝑚 𝑓𝜑1(0) = 0,𝑑𝑓𝜑1
𝑑𝑥(0) = 1, 𝑓𝜑1(𝜆) = 0 𝑒
𝑑𝑓𝜑1
𝑑𝑥(𝜆) = 0
𝑓𝜑1 =𝑥3
𝜆2−
2
𝜆𝑥2 + 𝑥
𝑓𝜑2 = 𝑎4𝑥3 + 𝑏4𝑥
2 + 𝑐4𝑥 + 𝑑4
𝑐𝑜𝑚 𝑓𝜑2(0) = 0,𝑑𝑓𝜑2
𝑑𝑥(0) = 0, 𝑓𝜑2(𝜆) = 0 𝑒
𝑑𝑓𝜑2
𝑑𝑥(𝜆) = 1
𝑓𝜑2 =𝑥3
𝜆2−
𝑥2
𝜆
Logo:
𝑤(𝑥) = (
2𝑥3
𝜆3−
3𝑥2
𝜆2+ 1)𝑤𝑖 + (
𝑥3
𝜆2−
2𝑥2
𝜆+ 𝑥)𝜑𝑖 + (−
2𝑥3
𝜆3+
3𝑥2
𝜆2)𝑤𝑓 + (
𝑥3
𝜆2−
𝑥2
𝜆)𝜑𝑓 (3.5)
Rotação
A função da rotação é igual a derivada da função do deslocamento transversal em
relação a x, portanto:
𝜑(𝑥) =
𝑑𝑤(𝑥)
𝑑𝑥= (
6𝑥2
𝜆3−
6𝑥
𝜆2)𝑤𝑖 + (
3𝑥2
𝜆2−
4𝑥
𝜆+ 1) 𝜑𝑖 + (−
6𝑥2
𝜆3+
6𝑥
𝜆2)𝑤𝑓 + (
3𝑥2
𝜆2−
2𝑥
𝜆)𝜑𝑓 (3.6)
Analogamente, tem-se a derivada da rotação pela seguinte expressão:
𝑑𝜑(𝑥)
𝑑𝑥=
𝑑2𝑤(𝑥)
𝑑𝑥2= (
12𝑥
𝜆3−
6
𝜆2)𝑤𝑖 + (
6𝑥
𝜆2−
4
𝜆)𝜑𝑖 + (−
12𝑥
𝜆3+
6
𝜆2)𝑤𝑓 + (
6𝑥
𝜆2−
2
𝜆)𝜑𝑓 (3.7)
3.4 Representação das derivadas temporais dos deslocamentos pelo Método da
Aceleração Constante
Para a análise dinâmica, utiliza-se o Método da Aceleração Constante, um dos casos
específicos do Método de Newmark (BATHE, 1996). Este método é um sistema implicito de
integração ao longo do tempo. Como o próprio nome já diz, o método toma a segunda derivada
temporal (aceleração) dos deslocamentos como sendo constante em cada intervalo de tempo Δt,
mostrado na figura 11:

30
Figura 11 - Método da Aceleração Constante
Fonte: MITTELBACH (2007)
Neste método, f pode representar qualquer um dos deslocamentos u, w ou φ; f é a sua
primeira derivada temporal (velocidade); f sua segunda derivada temporal (aceleração); t1 e t2
são os instantes inicial e final do intervalo considerado, sendo a aceleração no referido intervalo
é dada por:
𝑓∆𝑡 =
𝑓1 + 𝑓22
(3.8)
Com base nas relações:
��∆𝑡 = 𝑓∆𝑡𝑡 + 𝑓1 → ��2 =𝑓1 + 𝑓2
2∆𝑡 + 𝑓1
𝑓∆𝑡 = 𝑓∆𝑡
𝑡2
2+ ��1𝑡 + 𝑓1 → 𝑓2 =
𝑓1 + 𝑓22
∆𝑡2
2+ 𝑓1∆𝑡 + 𝑓1
Podemos escrever as derivadas f2 e f2 a partir dos deslocamentos nodais f2 no instante
de tempo t2:
𝑓2 =
4
∆𝑡2𝑓2 + 𝑔 (3.9)
𝑓2 =
2
∆𝑡𝑓2 + ℎ (3.10)
Onde g e h são funções que descrevem a marcha do tempo, e dependem dos
deslocamentos e suas derividas no instante de tempo inicial do passo de tempo (t1).

31
𝑔 = −
4
∆𝑡2(𝑓1 + 𝑓1∆𝑡) − 𝑓1 (3.11)
ℎ = −
2
∆𝑡𝑓1 − 𝑓1 (3.12)
3.5 Avaliação do trabalho virtual interno
Para cada elemento finito, tem-se a seguinte expressão para a contribuição no trabalho
virtual interno:
𝛿𝑊𝑖 = 2𝜋𝑎 ∫[𝐶 (𝑑𝑢(𝑥)
𝑑𝑥− 𝜈
𝑤(𝑥)
𝑎)𝛿
𝑑𝑢(𝑥)
𝑑𝑥+ 𝐷
𝑑2𝑤(𝑥)
𝑑𝑥2𝛿
𝑑2𝑤(𝑥)
𝑑𝑥2− 𝐶 (𝜈
𝑑𝑢(𝑥)
𝑑𝑥−
𝑤(𝑥)
𝑎)𝛿
𝑤(𝑥)
𝑎] 𝑑𝑥
𝜆
0
(3.13)
Substituindo as funções dos deslocamentos e de suas derivadas demonstradas no
tópico 3.3, obtêm-se os elementos da Matriz de Rigidez local do elemento finito:
𝐾 =
[ 2𝜋𝑎
𝐶
𝜆𝜋𝐶𝜈
𝜋𝐶𝜆𝜈
6−2𝜋𝑎
𝐶
𝜆𝜋𝐶𝜈 −
𝜋𝐶𝜆𝜈
6
𝜋𝐶𝜈 𝜋 (24𝑎𝐷
𝜆3+
26𝐶𝜆
35𝑎) 𝜋 (
12𝑎𝐷
𝜆2+
11𝐶𝜆2
105𝑎) −𝜋𝐶𝜈 𝜋 (
9𝐶𝜆
35𝑎−
24𝑎𝐷
𝜆3) 𝜋 (
12𝑎𝐷
𝜆2−
13𝐶𝜆2
210𝑎)
𝜋𝐶𝜆𝜈
6𝜋 (
12𝑎𝐷
𝜆2+
11𝐶𝜆2
105𝑎) 𝜋 (
2𝐶𝜆3
105𝑎+
8𝑎𝐷
𝜆) −
𝜋𝐶𝜆𝜈
6𝜋 (
13𝐶𝜆2
210𝑎−
12𝑎𝐷
𝜆2) 𝜋 (−
𝐶𝜆3
70𝑎+
4𝑎𝐷
𝜆)
−2𝜋𝑎𝐶
𝜆−𝜋𝐶𝜈 −
𝜋𝐶𝜆𝜈
62𝜋𝑎
𝐶
𝜆−𝜋𝐶𝜈
𝜋𝐶𝜆𝜈
6
𝜋𝐶𝜈 𝜋 (9𝐶𝜆
35𝑎−
24𝑎𝐷
𝜆3) 𝜋 (
13𝐶𝜆2
210𝑎−
12𝑎𝐷
𝜆2) −𝜋𝐶𝜈 𝜋 (
26𝐶𝜆
35𝑎+
24𝑎𝐷
𝜆3) −𝜋(
11𝐶𝜆2
105𝑎+
12𝑎𝐷
𝜆2)
−𝜋𝐶𝜆𝜈
6𝜋 (
12𝑎𝐷
𝜆2−
13𝐶𝜆2
210𝑎) 𝜋 (−
𝐶𝜆3
70𝑎+
4𝑎𝐷
𝜆)
𝜋𝐶𝜆𝜈
6−𝜋 (
11𝐶𝜆2
105𝑎+
12𝑎𝐷
𝜆2) 𝜋 (
2𝐶𝜆3
105𝑎+
8𝑎𝐷
𝜆)
]
3.6 Avaliação do trabalho virtual externo
Parcela Estática
O trabalho virtual externo da parcela estática dos carregamentos de domínio em cada
elemento finito pode ser escrita como:
𝛿𝑊𝑒 = 2𝜋𝑎 ∫[𝑝𝑥𝛿𝑢(𝑥) + 𝑝𝑧𝛿𝑤(𝑥)]𝑑𝑥
𝜆
0
(3.14)

32
Onde px é o carregamento longitudinal na estrutura, que será considerado sempre
constante, e pz o carregamento transversal. Como este poderá variar linearmente, ele será regido
pela seguinte função:
𝑝𝑧 = 𝑝𝑧1 + (𝑝𝑧2 − 𝑝𝑧1) ∙𝑥
𝜆 (3.15)
Onde pz1 representa o valor deste carregamento no nó inicial, e pz2 no nó final.
Substituindo as funções u(x), w(x) e pz e realizando a integração, obtemos os
elementos do vetor de carga estática, dos carregamenos de domínio para cada elemento,
representada abaixo:
𝑉𝐶𝑒𝑠𝑡 =
[
𝜋𝑎𝜆𝑝𝑥
𝜋𝑎 (7𝜆𝑝𝑧1 + 3𝜆𝑝𝑧2
10)
𝜋𝑎 (𝑝𝑧1𝜆
2
10+
𝑝𝑧2𝜆2
15)
𝜋𝑎𝜆𝑝𝑥
𝜋𝑎 (3𝜆𝑝𝑧1 + 7𝜆𝑝𝑧2
10)
−𝜋𝑎 (𝑝𝑧1𝜆
2
15+
𝑝𝑧2𝜆2
10)]
Parcela Dinâmica
Para a dinâmica, temos a seguinte expressão para o Trabalho Virtual Externo:
𝛿𝑊𝑒𝑑𝑖𝑛 = 2𝜋𝑎 ∫ [−𝑓𝑥𝛿𝑢(𝑥) − 𝑓𝑤𝛿𝑤(𝑥) − 𝑓𝜃𝛿
𝑑𝑤(𝑥)
𝑑𝑥] 𝑑𝑥
𝜆
0
(3.16)
Onde:
𝑓𝑥 = 𝜇ℎ
4
∆𝑡2𝑢(𝑥) + 𝜇ℎ𝑔𝑢 (3.17)
𝑓𝑤 = 𝜇ℎ
4
∆𝑡2𝑤(𝑥) + 𝜇ℎ𝑔𝑤 (3.18)
𝑓𝜑 =
𝜇ℎ3
3∆𝑡2
𝑑𝑤(𝑥)
𝑑𝑥+
𝜇ℎ𝑔𝜑
12 (3.19)

33
Substituindo as equações fx, fw e fφ na integral, além das funções u(x), w(x) e dw(x)/dx,
e integrando, obtêm-se os elementos da Matriz de Massa para cada elemento e o vetor de carga
dinâmicas:
𝑀 =
2𝜋𝑎
[ 4ℎ𝜆𝜇
3∆𝑡20 0
2ℎ𝜆𝜇
3∆𝑡20 0
052ℎ𝜆𝜇
35∆𝑡2+
2ℎ3𝜇
5𝜆∆𝑡2
22ℎ𝜆2𝜇
105∆𝑡2+
ℎ3𝜇
30∆𝑡20
18ℎ𝜆𝜇
35∆𝑡2−
2ℎ3𝜇
5𝜆∆𝑡2−
13ℎ𝜆2𝜇
105∆𝑡2+
ℎ3𝜇
30∆𝑡2
022ℎ𝜆2𝜇
105∆𝑡2+
ℎ3𝜇
30∆𝑡2
4ℎ𝜆3𝜇
105∆𝑡2+
2ℎ3𝜆𝜇
45∆𝑡20
13ℎ𝜆2𝜇
105∆𝑡2−
ℎ3𝜇
30∆𝑡2−
ℎ𝜆3𝜇
35∆𝑡2−
ℎ3𝜆𝜇
90∆𝑡2
2ℎ𝜆𝜇
3∆𝑡20 0
4ℎ𝜆𝜇
3∆𝑡20 0
018ℎ𝜆𝜇
35∆𝑡2−
2ℎ3𝜇
5𝜆∆𝑡2
13ℎ𝜆2𝜇
105∆𝑡2−
ℎ3𝜇
30∆𝑡20
52ℎ𝜆𝜇
35∆𝑡2+
2ℎ3𝜇
5𝜆∆𝑡2−
22ℎ𝜆2𝜇
105∆𝑡2−
ℎ3𝜇
30∆𝑡2
0 −13ℎ𝜆2𝜇
105∆𝑡2+
ℎ3𝜇
30∆𝑡2−
ℎ𝜆3𝜇
35∆𝑡2−
ℎ3𝜆𝜇
90∆𝑡20 −
22ℎ𝜆2𝜇
105∆𝑡2−
ℎ3𝜇
30∆𝑡2
4ℎ𝜆3𝜇
105∆𝑡2+
2ℎ3𝜆𝜇
45∆𝑡2 ]
Nota-se que, para a integração da matriz de massa, não é considerada a parcela que
representa a função “g” da marcha do tempo das equações fx, fw e fφ, uma vez que essa parcela
contribui para o Vetor de Carga Dinâmica, e não para a Matriz de Massa.
O Vetor de Carga Dinâmica irá variar a cada passo de tempo, de acordo com os novos
valores das primeiras e segundas derivadas temporais para cada deslocamento apresentado no
tópico 3.4.
3.7 Montagem das matrizes e vetores de carga globais
As matrizes globais (para toda a estrutura) tanto de Rigidez quanto de Massa, são
formadas a partir da superposição das deslocabilidades semelhantes dos diversos elementos
finitos. Por exemplo, o primeiro elemento contribui para as deslocabilidades globais d1, d2, d3,
d4, d5 e d6, enquanto o segundo elemento para as deslocabilidades d4, d5, d6, d7, d8 e d9. As
contribuições das deslocabilidaes d4, d5 e d6, por serem coincidentes, são somadas. Este padrão
é repetido para todo o domínio da estrutura, passando por todos os elementos. O esquema geral
é representado na figura 12.

34
Figura 12 - Montagem das Matrizes Globais
Fonte: Adaptado de MITTELBACH (2002)
Por cada nó possuir 3 deslocabilidades, as matrizes globais serão (NN x 3) x (NN x 3).
O vetor de ações equivalentes nodais é montado de maneira análoga, a partir do vetor VC para
cada elemento. Após a superposição e montagem deste vetor global, são somadas as forças
aplicadas nos nós em cada deslocabilidade, resultando no Vetor de Cargas Global ‘F’, como
mostra a figura 13. Este vetor possuirá (NN x 3) elementos.
35
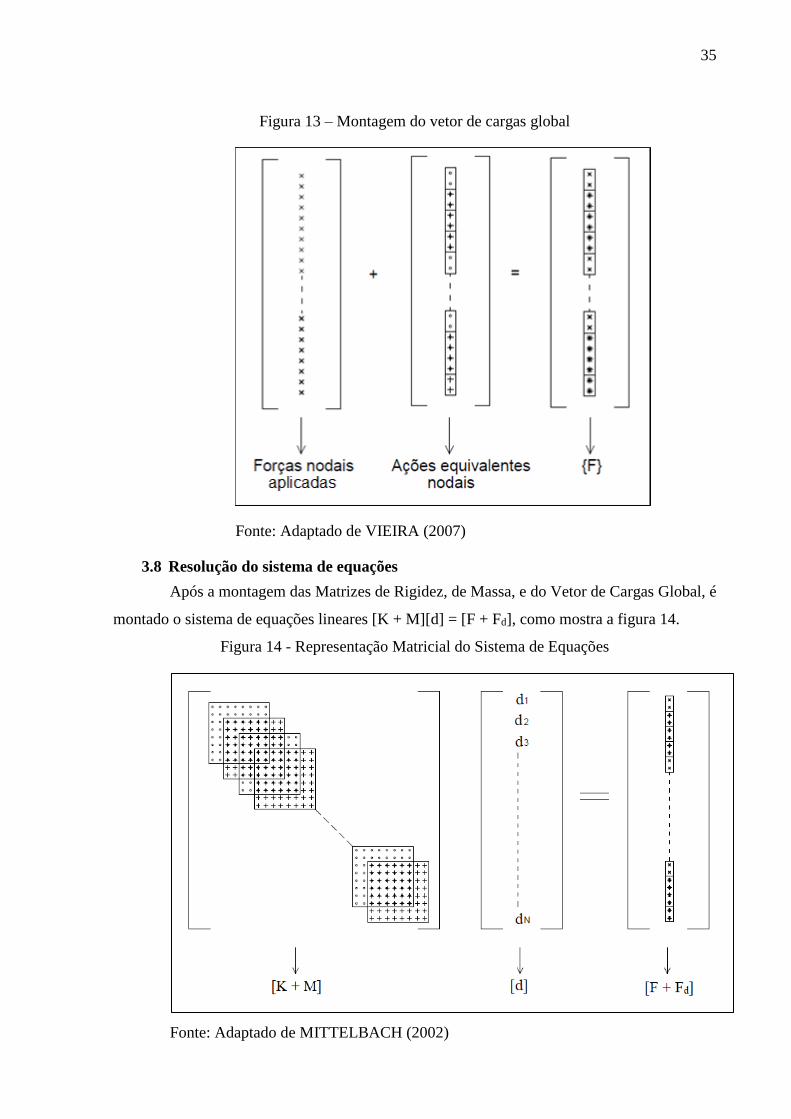
Figura 13 – Montagem do vetor de cargas global
Fonte: Adaptado de VIEIRA (2007)
3.8 Resolução do sistema de equações
Após a montagem das Matrizes de Rigidez, de Massa, e do Vetor de Cargas Global, é
montado o sistema de equações lineares [K + M][d] = [F + Fd], como mostra a figura 14.
Figura 14 - Representação Matricial do Sistema de Equações
Fonte: Adaptado de MITTELBACH (2002)

36
O primeiro passo para a resolução desse sistema de equações é a aplicação das
condições de contorno do problema, a partir do tipo de vinculação (apoio ou engaste) da
estrutura, pois a priori, o sistema é inderteminado por ter um número de incógnitas maior que
o número de equações. Essas condições de contorno são referentes ao primeiro nó da casca
cilíndrica, na sua base. Além das condições de contorno da estrutura, é necessário também o
conhecimento no tempo t = 0, dos deslocamentos, velocidades e acelerações de cada
deslocabilidade. As condições de contorno são introduzidas no sistema de equações pela técnica
dos “zeros e uns”, que consiste na mudança do vetor de cargas e da matriz global, afim de inserir
as informações dos deslocamentos prescritos. Para a resolução do sistema, foi utilizado o
Método de Gauss, obtendo assim os deslocamentos de cada nó. Para cada passo de tempo, são
atualizado os parâmetros da marcha do tempo “g” e “h”, juntamente com as velocidades e
acelerações de cada deslocabilidade com os valores dos deslocamentos obtidos no tempo
anterior. Este processo é repetido até o final da marcha no tempo, sempre com a montagem e
resolução do sistema de equações.
3.9 Código computacional
O programa desenvolvido para análise numérica do problema foi realizado no software
PLATO v4.75, que consiste em um compilador da linguagem FORTRAN95, muito utilizada
nas análises pelo Método dos Elementos Finitos e Método das Diferenças Finitas Energéticas,
pela alta rapidez computacional.
Os exemplos tratados neste trabalho são apresentados no Capítulo 4.

37
4. EXEMPLOS E RESULTADOS
4.1 Introdução
Neste capítulo serão apresentados quatro exemplos, os três primeiros com uma análise
estática e dinâmica, com o objetivo de testar e validar o algoritmo desenvolvido comparando o
resultado neles obtidos. Na análise estática, os resultados do Método dos Elementos Finitos do
programa serão comparados com a solução análitica teórica da teoria das cascas, enquanto na
análise dinâmica, o MEF será comparado com os resultados pelo Método das Diferenças Finitas
Energéticas (MDFE). Nesta análise dinâmica, o carregamento será aplicada de maneira súbita,
no instante de tempo t = 0s. Tal aplicação repentina do carregamento gerará uma aceleração
que estimulará o comportamento dinâmico da estrutura.
O primeiro exemplo será de uma casca cilíndrica apoiada na base com carregamento
transversal constante ao longo de todo o comprimento. Na sua análise estática, serão
considerados 5 tipos de discretizações diferentes: duas uniformes, duas com dois trechos de
discretizações distintas e uma com três trechos de discretização, porém todas com o mesmo
número de elementos. O segundo exemplo terá um carregamento transversal linear ao longo da
casca, sendo nulo no topo da estrutura, e a casca será engastada na base. O terceiro exemplo
será de uma casca apoiada na base, com um carregamento transversal linear e um carregamento
longitudinal. Já o quarto exemplo, não haverá nenhum carregamento, porém ela terá uma
deformação inicial. Nos três últimos exemplos só será utilizada uma discretização não uniforme
na análise estática. Os tipos de discretizações adotas são representadas na figura 15.
Figura 15 - Tipos de Discretizações
Fonte: VIEIRA (2007)

38
Para a comparação entre o Método dos Elementos Finitos e a solução analítica na análise
estática, e entre o MEF e a solução pelo Método das Diferenças Finitas Energéticas na análise
dinâmica, será calculado um erro relativo, de acordo com as seguintes expressões:
Na análise estática:
𝐸𝑟𝑒𝑙% =
|𝑑𝑎𝑛𝑎𝑙í𝑡𝑖𝑐𝑜 − 𝑑𝑀𝐸𝐹|
𝑑𝑎𝑛𝑎𝑙í𝑡𝑖𝑐𝑜 ∙ 100 (4.1)
Enquanto na análise dinâmica:
𝐸𝑟𝑒𝑙% =
|𝑑𝑀𝐷𝐸𝐹 − 𝑑𝑀𝐸𝐹|
𝑑𝑀𝐷𝐸𝐹∙ 100 (4.2)
A comparação percentual se dará com o ponto de deslocamento máximo e seu valor
analítico na análise estática. Já na parte dinâmica, a comparação será com a média dos erros
para os passos de tempos analisados, no MEF e no MDFE.
4.2 Exemplo 1 – Casca apoiada submetida à carregamento transversal constante
A figura 16 representa o esquema do Exemplo 1, e seus dados relativos à geometria e
carregamento.
ℎ = 5,00 𝑥 10−3 𝑚
𝑎 = 8,00 𝑥 10−1 𝑚
𝐿 = 3,00 𝑚
𝐸 = 2,10 𝑥 1011 𝑁/𝑚2
𝜈 = 0,30
𝑝𝑧 = −5,00 𝑥 105 𝑁/𝑚2
𝜇 = 7000 𝑘𝑔/𝑚³
Fonte: Adaptado de VIEIRA (2007)
Figura 16 - Casca cilíndrica apoiada com carregamento transversal constante

39
Neste exemplo, são utilizados 5 tipos de discretizações:
• Uniforme – I: 1 trecho de discretização com 20 elementos (λ = 0,15 m)
• Uniforme – II: 1 trecho de discretização com 30 elementos (λ = 0,10 m)
• Não Uniforme – I: 2 trechos de discretização, um com comprimento de 0,50 m e outro
com 2,50 m, com 10 elementos cada (λ1 = 0,05 m e λ2 = 0,25 m)
• Não Uniforme – II: 2 trechos de discretização, um com comprimento de 0,50 m e outro
com 2,50 m, com 15 elementos cada (λ1 = 0,0333 m e λ2 = 0,1667 m)
• Não Uniforme – III: 3 trechos de discretização, um com comprimento de 0,20 m, outro
com 0,30 m e o terceiro com 2,50 m. O primeiro trecho com 15 elementos, o segundo
com 9 e o terceiro com 6 (λ1 = 0,0133 m, λ2 = 0,0333 m e λ3 = 0,4167 m)
Análise estática
Observando o gráfico do deslocamento pela solução analítica, percebe-se uma grande
variação entre as abscissas 0,0 m e 0,30 m, enquanto a partir deste ponto, ele permanece
constante como mostrado a solução de membrana no gráfico abaixo.
Isto também é percebido nos gráficos dos deslocamentos pelo Método dos Elementos
Finitos, para todos os tipos de discretização for adotado. Devido a isso, no gráfico 2
Gráfico 1 - Exemplo 1 - Solução Analítica
Fonte: Elaboração do autor

40
comparativo, é destacada apenas a região onde ocorre tal variação, ou seja, entre as abscissas
0,0 m e 0,30 m.
O gráfico 2 e a tabela 1 ilustram a análise comparativa para os deslocamentos
transversais máximos para cada tipo de discretização.
Gráfico 2 - Exemplo 1 - Estática
Fonte: Elaboração do autor (2018)
Tabela 1 - Exemplo 1 - Estática
Abscissa x (m) w máximo (m) Diferença Percentual
Analítica 0,120 -3,250548E-04 -
Uniforme - I 0,150 -3,197306E-04 -1,638%
Uniforme - II 0,100 -3,223500E-04 -0,832% Não Uniforme - I 0,100 -3,218713E-04 -0,979%
Não Uniforme - II 0,133 -3,230032E-04 -0,631% Não Uniforme - III 0,120 -3,250152E-04 -0,012%
Fonte: Elaboração do autor (2018)
Percebe-se, como esperado, que com o refino da discretização na área sujeita à flexão,
mesmo utilizando o mesmo número de elementos finitos, o valor do deslocamento encontrado
pelo MEF se aproxima do valor analítico teórico, sendo no caso com 3 trechos de discretização,
uma diferença de aproximadamente 0,01% apenas.
-4,00E-04
-3,50E-04
-3,00E-04
-2,50E-04
-2,00E-04
-1,50E-04
-1,00E-04
-5,00E-05
0,00E+00
0,00 0,10 0,20 0,30
Des
loca
men
to w
(m
)
x (m)
Exemplo 1 - Estática
Analítica
Uniforme - I
Uniforme - II
Não Uniforme - I
Não Uniforme - II
Não Uniforme - III

41
Análise dinâmica
Na análsie dinâmica, incialmente utilizaria-se a mesma discretização que obtivesse
melhor resultado na análise estática, no caso, a Não Uniforme – III. Entretanto, houve uma
divergência anormal quando utilizava-se uma discretização não uniforme na análise dinâmica
e assim foi identificada uma limitação do código computacional. A amplitude das deformações
se afastava do resultado obtido pelo MDFE. Devido a este imprevisto, utilizou-se uma
discretização uniforme de um trecho, contudo, com 100 elementos para obtenção de uma
precisão adequada. Entretanto, por necessitar de um alto refinamento na malha para não
dispersar do resultado obtido na análise estática, isso requisitou um alto esforço computacional.
Uma das hipóteses levantada foi a formação de uma matriz mal condicionada no MEF, podendo
ter ocorrido pois a ordem dos polinômios deste método é maior que do MDFE, por tratar com
a aproximação dos deslocamentos, sendo um método mais sensível quanto a isso.
Para esta análise, observou-se o nó da abscissa 0,12 m, seção na qual ocorreu a maior
deformação na solução estática, com um tempo total Δt = 0,03s e 300 passos de tempo, A seguir,
temos o gráfico 3 e a tabela 2, comparativas dos resultados.
Gráfico 3 - Exemplo 1 - Dinâmica
Fonte: Elaboração do Autor
-1,10E-03
-9,00E-04
-7,00E-04
-5,00E-04
-3,00E-04
-1,00E-04
1,00E-04
3,00E-04
0,000 0,005 0,010 0,015 0,020 0,025 0,030
Des
loca
men
to w
(m
)
Tempo (s)
Exemplo 1 - Dinâmica
MEF
MDFE

42
Tabela 2 - Exemplo 1 – Dinâmica
Método Média das diferenças percentuais para cada passo de
tempo
MDFE -
MEF -3,605%
Fonte: Elaboração do Autor
Esta diferença percentual foi bastante satisfatória, uma vez que obteve um diferença
menor que 5%. Além disso, não houve defasagem do período para o intervalo de tempo
considerado.
4.3 Exemplo 2 – Casca engastada submetida à carregamento transversal variável
Para o segundo exemplo, a casca encontra-se sujeita a um carregamento transversal linear ao
longo do seu comprimento, sendo nulo no topo da estrutura, e a casca é engastada na base. A
figura 17 ilustra esta situação, com os dados de sua geometria e carregamento.
Figura 17 - Casca cilíndrica engastada com carregamento transversal variável
ℎ = 5,00 𝑥 10−3 𝑚
𝑎 = 8,00 𝑥 10−1 𝑚
𝐿 = 3,00 𝑚
𝐸 = 2,10 𝑥 1011 𝑁/𝑚2
𝜈 = 0,30
𝑝𝑧 = −5,00 𝑥 105 𝑁/𝑚2
𝜇 = 7000 𝑘𝑔/𝑚³
Fonte: Adaptado de VIEIRA (2007)

43
Análise estática
Para a análise estática, foram realizados dois tipos de discretizações, uma uniforme outra não
uniforme para a comparação com a solução analítica. Foi realizada uma discretização uniforme
para a análise estática, uma vez que essa discretização será utilizada na análise dinâmica. A
discretização Uniforme utilizou 150 elementos de 0,02 m cada, enquanto a discretização Não
Uniforme possui 3 trechos, o primeiro próximo à base com 15 elementos e 0,20 m (λ = 0,013
m), o segundo com 9 elementos e 0,30 m (λ = 0,033 m), e o terceiro com 6 elementos e 2,50 m
(λ = 0,417 m). O gráfico 4 e a tabela 3 apresentam a comparação das duas soluções pelo MEF,
com a solução analítica.
Gráfico 4 - Exemplo 2 - Estática
Fonte: Elaboração do autor
Tabela 3 - Exemplo 2 - Estática
Abscissa (m) w máximo (m) Diferença Percentual
Analítica 0,147 -3,020289E-04 -
MEF - Uniforme 0,140 -3,023229E-04 -0,097%
MEF - Não Uniforme 0,147 -3,026571E-04 -0,208%
Fonte: Elaboração do autor
-3,50E-04
-3,00E-04
-2,50E-04
-2,00E-04
-1,50E-04
-1,00E-04
-5,00E-05
0,00E+00
0,00 0,10 0,20 0,30 0,40 0,50
Des
loca
men
to w
(m
)
x (m)
Exemplo 2 - Estática
Analítica
MEF - Uniforme
MEF - Não Uniforme

44
Ambas as discretizações alcançaram excelentes resultados, com baixa diferença percentual em
relação à solução analítica. A discretização uniforme performou um pouco melhor devido ao
alto refinamento, que aumenta o esforço computacional.
Análise dinâmica,
Na análsie dinâmica do Exemplo 2, utilizou-se uma discretização uniforme com 150
elementos para obtenção de uma precisão adequada.
Para esta análise, observou-se o nó da abscissa 0,14 m, seção onde ocorreu a maior
deformação na solução estática, com um tempo total Δt = 0,03s e 300 passos de tempo, A seguir,
temos o gráfico 5 e a tabela 4 comparativos das soluções do MEF e do MDFE.
Gráfico 5 - Exemplo 2 - Dinâmica
Fonte: Elaboração do autor
Tabela 4 - Exemplo 2 - Dinâmica
Método Média das diferenças percentuais para cada passo de
tempo
MDFE -
MEF -5,281%
Fonte: Elaboração do autor
-7,00E-04
-6,00E-04
-5,00E-04
-4,00E-04
-3,00E-04
-2,00E-04
-1,00E-04
0,00E+00
0,000 0,005 0,010 0,015 0,020 0,025 0,030
Des
loca
men
to w
(m
)
Tempo (s)
Exemplo 2 - Dinâmica
MEF
MDFE

45
Mais uma vez o resultado foi satisfatório, com uma diferença percentual média em
torno dos 5%. Novamente, não houve defasagem no período entre os métodos no intervalo de
tempo considerado.
4.4 Exemplo 3 – Casca apoiada submetida à carregamento longitudinal uniforme e
carregamento transversal variável
Para o terceiro exemplo, a casca encontra-se submetida a um carregamento transversal linear
ao longo do seu comprimento, sendo nulo no topo da estrutura, além de um carregamento
longitudinal constante, e a casca é apoiada na base. A figura 18 ilustra esta situação, com os
dados de sua geometria e carregamento.
ℎ = 5,00 𝑥 10−3 𝑚
𝑎 = 8,00 𝑥 10−1 𝑚
𝐿 = 2,00 𝑚
𝐸 = 2,10 𝑥 1011 𝑁/𝑚2
𝜈 = 0,30
𝑝𝑧 = −10,00 𝑥 105 𝑁/𝑚2
𝑝𝑥 = −3,50 𝑥 102 𝑁/𝑚²
𝜇 = 7000 𝑘𝑔/𝑚³
Fonte: Adaptado de VIEIRA (2007)
Figura 18 - Casca cilíndrica apoiada com carregamento transversal variável e
longitudinal constante

46
Análise estática
Para a análise estática, foram realizados dois tipos de discretizações, uma uniforme outra não
uniforme para a comparação com a solução analítica. Foi realizada uma discretização uniforme
para a análise estática, uma vez que essa discretização será utilizada na análise dinâmica. A
discretização Uniforme utilizou 150 elementos de 0,02 m cada, enquanto a discretização Não
Uniforme possui 3 trechos, o primeiro próximo à base com 15 elementos e 0,20 m (λ = 0,013
m), o segundo com 9 elementos e 0,30 m (λ = 0,033 m), e o terceiro com 6 elementos e 2,50 m
(λ = 0,417 m). O gráfico 6 e a tabela 5 apresentam a comparação das duas soluções pelo MEF,
com a solução analítica.
Gráfico 6 - Exemplo 3 - Estática
Fonte: Elaboração do autor
Tabela 5 - Exemplo 3 - Estática
Abscissa (m) w máximo (m) Diferença Percentual
Analítica 0,1067 -6,139743E-04 -
MEF - Uniforme 0,1067 -6,162910E-04 -0,377%
MEF - Não Uniforme 0,1100 -6,163002E-04 -0,379%
Fonte: Elaboração do autor
Ambas as discretizações alcançaram excelentes resultados, com baixa diferença percentual em
relação à solução analítica.
-7,00E-04
-6,00E-04
-5,00E-04
-4,00E-04
-3,00E-04
-2,00E-04
-1,00E-04
0,00E+00
0,00 0,10 0,20 0,30 0,40 0,50
Des
loca
men
to w
(m
)
x (m)
Exemplo 3 - Estática
Analítica
MEF - Uniforme
MEF - Não Uniforme

47
Análise dinâmica,
Na análise dinâmica do Exemplo 2, utilizou-se uma discretização uniforme com 150
elementos para obtenção de uma precisão adequada.
Para esta análise, observou-se o nó da abscissa 0,1067 m, seção na qual ocorreu o
deslocamento transversal na solução estática, com um tempo total Δt = 0,03s e 300 passos de
tempo, A seguir, temos o gráfico 7 e a tabela 6, comparativos das soluções do MEF e do MDFE.
Gráfico 7 - Exemplo 3 - Dinâmica
Fonte: Elaboração do autor
Tabela 6 - Exemplo 3 - Dinâmica
Método Média das diferenças percentuais para cada passo de
tempo
MDFE -
MEF -3,589%
Fonte: Elaboração do autor
O resultado apresentado foi satisfatório, com uma diferença percentual média abaixo dos 5%.
Mais uma vez, sem defasagem no período entre os métodos no intervalo de tempo considerado.
-1,40E-03
-1,20E-03
-1,00E-03
-8,00E-04
-6,00E-04
-4,00E-04
-2,00E-04
0,00E+00
0,000 0,005 0,010 0,015 0,020 0,025 0,030
Des
loca
men
to w
(m
)
Tempo (s)
Exemplo 3 - Dinâmica
MEF
MDFE

48
4.5 Exemplo 4 – Casca engastada submetida à deformação inicial, sem
carregamentos
A casca do quarto exemplo não está submetida a carregamento transversal nem longitudinal, ao
invés disso, aplica-se um estado de deslocamentos iniciais, como ilustra a figura 19, e a casca
é engastada na base. Neste exemplo não será tratado a situação estática, apenas a comparação
na análise dinâmica entre o Método dos Elementos Finitos e o Método das Diferenças Finitas
Energéticas.
ℎ = 5,00 𝑥 10−3 𝑚
𝑎 = 8,00 𝑥 10−1 𝑚
𝐿 = 2,00 𝑚
𝐸 = 2,10 𝑥 1011 𝑁/𝑚2
𝜈 = 0,30
𝜇 = 7000 𝑘𝑔/𝑚³
Na análise dinâmica, foi tratado um tempo de Δt = 0,03s, com 300 divisões. O ponto de análise
foi na abscissa x = 0,18 m (nó 9), onde ocorre a maior deformação inicial. A discretização foi
uniforme, com uma malha de 100 elementos (λ = 0,02 m). O gráfico 8 e a tabela 7 mostram os
resultados obtidos da comparação.
Figura 19 - Exemplo 4 – Casca engastada submetida à deformação
inicial, sem carregamentos
Fonte: Elaboração do autor

49
Gráfico 8 - Exemplo 4 - Dinâmica
Fonte: Elaboração do autor
Tabela 7 - Exemplo 4 - Dinâmica
Método Média das diferenças percentuais para cada passo de
tempo
MDFE -
MEF 7,369%
Fonte: Elaboração do autor
O exemplo 4 resultou numa maior diferença percentual em relação aos demais exemplos.
Observa-se que a partir do passo de tempo t = 0,025 s, houve divergência em relação aos dois
métodos em comparação ao intervalo de tempo de 0,00 s – 0,025 s. Ainda assim, a média das
diferenças percentuais em cada passo de tempo resultou num valor aceitável de
aproximadamente 7,4%. Neste exemplo também não houve defesagem do período ao longo do
intervalo de tempo considerado.
-4,000000E-04
-3,000000E-04
-2,000000E-04
-1,000000E-04
0,000000E+00
1,000000E-04
2,000000E-04
3,000000E-04
0,000 0,005 0,010 0,015 0,020 0,025 0,030
Des
loca
men
to w
(m
)
Tempo (s)
Exemplo 4 - Dinâmica
MEF
MDFE
50
5. CONCLUSÃO E ANÁLISE DOS RESULTADOS
Este trabalho, teve como objetivo desenvolver um código computacional, utilizando o
Método dos Elementos Finitos na análise dinâmica de cascas cilíndricas axissimétricas. Para a
validação dos resultados, foi utilizado um código computacional baseado na formulação pelo
Método das Diferenças Finitas Energéticas. Pode-se concluir que o código foi validado, uma
vez que nos quatro exemplos apresentados, houve uma diferença percentual satisfatória na
ordem de 5%.
Ao se comparar, na análise estática, o MEF com o resultado teórico analítico, obteve-se
excelentes resultados com diferença percentual menores que 1% em todos os exemplos
apresentados, validando assim o método para este tipo de análise para cascas cilíndricas.
Também foi possível observar na análise estática que quanto mais refinada a discretização na
região próxima ao apoio, onde os efeitos de flexão são mais proeminentes, melhores os
resultados em comparação com o analítico, o que é esperado.
Já na análise dinâmica, foi identificada uma limitação do código elaborado, quando se
utilizava uma discretização não uniforme, a amplitude das deformações se afastavam do
resultado obtido pelo Método das Diferenças Finitas Energéticas. Sendo assim, foi utilizada na
análise dinâmica uma discretização uniforme, que, por necessitar de um alto refinamento para
não se dispersar da solução analítica no estático, necessitou de uma alto esforço computacional.
Uma das hipóteses para esse problema encontrado é o formação de uma matriz mal
condicionada pelo Método dos Elementos Finitos. Isto pode ocorrer pois a ordem dos
polinômios do MEF é maior que do MDFE, por tratar com a aproximação de deslocamentos
enquanto no MDFE aproxima as derivadas dos deslocamentos, o que o torna o MEF mais
sensível em relação a isso. Logo, alguns coeficientes da matriz de massa podem ter atingidos
valores elevados em relação a outro, com a discretização uniforme este problema não ocorre.
A identificação mais precisa e correção deste fenômeno é uma sugestão para possíveis trabalhos
futuros.
Observando os resultados obtidos na análise dinâmica, os deslocamentos obtidos por ambos
os métodos se superpuseram por praticamente todo o intervalo de tempo analisado,
principalmente nos exemplos onde há um carregamento atuante na estrutura. Uma excessão
ocorre nos pontos de deformações mínimas. Ainda assim, a diferença percentual média variou
em torno dos 5% em todos os exemplos, que se mostrou um valor satisfatório. O exemplo 4
resultou numa maior diferença entre os métodos, uma vez que ele baseia-se apenas nas
derivadas temporais dos deslocamentos, sendo mais sensível às diferenças dos dois métodos.

51
De modo geral, os resultados foram aceitáveis, validando o Método dos Elementos Finitos
para a análise dinâmica de cascas cilíndricas axissimétricas.
Para trabalhos futuros, são propostas algumas sugestões:
• Corrigir a limitação da análise dinâmica para discretizações não uniformes;
• Implementar no código solicitações provenientes da variação de temperatura;
• Otimizar o código computacional para melhorias na velocidade de processamente e
alocação de memória;
• Aliar o código a algum programa de desenho assistido por computador (CAD) afim
de gerar as situações deformadas da estrutura.

52
6. REFERÊNCIAS
SORIANO, H. L. Método de Elementos Finitos em Análise de Estruturas. São Paulo.
Edusp. 2003.
ABNT – ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 6118: 2014 –
Projeto de estruturas de concreto – Procedimento. Rio de Janeiro, 2014.
GARCIA, L. F. T; VILLAÇA, S. F. – Teoria das Cascas – Notas de Aula, Rio de Janeiro,
1998
MARTHA, L.F., Análise Matricial de Estruturas: Aplicada a modelos lineares, livro em
preparação, Editora Elsevier, 2016. Disponível em http://www.tecgraf.puc-
rio.br/~lfm/analestrut3-162
BRASIL, R. M. L. R. d. F.; BALTHAZAR, J. M.; GÓIS, W. Métodos Numéricos e
Computacionais na Prática de Engenharias e Ciências. São Paulo: Blüucher, 2015. ISBN
978-85-212- 0934-8.
BATHE, Klaus-Jürgen. Finite element procedures. Klaus-Jurgen Bathe, 2006.
ARAGÃO FILHO, L. A. C. M. Curso de Análise Matricial de Estruturas – Notas de Aula,
Rio de Janeiro, sem data
SORIANO, Humberto Lima Análise de Estruturas – Formulação Matricial e
Implementação Computacional Rio de Janeiro: Editora Ciência Moderna Ltda., 2005.
MITTELBACH, Fernanda Rodrigues Método das Diferenças Finitas Energéticas na
Análise de Reservatórios Cilíndricos Rio de Janeiro, 2002
TIMOSHENKO, Stephen P.; WOINOWSKY-KRIEGER, Sergius. Theory of plates and
shells. McGraw-hill, 1959.

53
VIEIRA, Ana Paula Gomes Metodo das Diferencas Finitas Energeticas Versus Metodo dos
Elementos Finitos na Analise dos Efeitos de Perturbacao de Bordo em Cascas Cilindricas
Axissimetricas Rio de Janeiro, 2007
MITTELBACH, Fernanda Rodrigues Método das Diferenças Finitas Energéticas na Análise
Dinâmica de Problemas Axissimétricos de Placas Delgadas e Espessas Rio de Janeiro, 2007
ZIENKIEWICZ, Olgierd Cecil; TAYLOR, Robert Leroy. The finite element method: solid
mechanics. Butterworth-heinemann, 2000.