texto de apoio n.º 1 assunto: calculo vectorial · medida da grandeza física ... construindo o...
TRANSCRIPT
Departamento de Matemática e Ciências Experimentais
FÍSICA – 12.º Ano
Texto de apoio n.º 1
Assunto: Calculo vectorial __________________________________________________________________________________________
O vector é uma entidade matemática caracterizada por três elementos: módulo, (magnitude ou intensidade), direcção e sentido.
Normalmente o vector é livre; se, no entanto, representar uma grandeza física, cujo efeito depende do ponto de aplicação do vector, temos um vector ligado.
A direcção de um vector é representada por um feixe de rectas paralelas; uma dessas rectas, que constitui o suporte do vector, é a sua linha de acção.
A cada direcção correspondem dois sentidos; o sentido do vector é indicado pela seta colocada na sua extremidade. Na letra de imprensa a letra é normalmente substituída por um tom mais carregado; deste modo, sempre que o símbolo de uma grandeza apareça em tom mais escuro, significa que se trata de um vector.
Por exemplo, v representa a grandeza velocidade (vectorial), ao passo que v indica o módulo, intensidade ou magnitude da velocidade.
Graficamente o módulo de um vector é representado pelo comprimento do segmento de recta orientado; corresponde, utilizando uma escala conveniente, ao valor numérico, ou seja, à medida da grandeza física que representa.
Por exemplo, o módulo (magnitude ou intensidade) de um vector, que represente uma força, será expresso em Newton.
Entende-se por vector unitário (ou versor) de uma dada direcção, um vector de módulo igual à unidade, cuja direcção e sentido são os definidos pela direcção e sentido dados.
Por exemplo, o vector unitário da tangente a uma curva será um vector de módulo igual à unidade, com a direcção da tangente (o sentido dependerá da situação particular).
De acordo com o que foi dito, é fácil compreender que qualquer vector vv pode ser representado em função do seu módulo v e do seu vector unitário uv , o qual também se pode designar por versor de vv :
uvv vv = (1) ou ainda
vversvv vv .= (2) vO versor de v (ou ainda o vector unitário uv ) pode ser calculado através da relação: v
vvvvers v = (3)
Dois vectores paralelos têm o mesmo vector unitário (ou versor).
Um vector é uma unidade independente de qualquer sistema de coordenadas. Por isso é de grande utilidade na representação de leis da Física, como por exemplo, a 2.ª lei de Newton, que é válida independentemente do sistema de coordenadas utilizado.
O tensor, de que o vector é um caso particular, permite ainda uma maior independência dos sistemas.
O facto do vector ter uma realidade independente de qualquer sistema de eixos, não impede, porém, que, por vezes, tenhamos necessidade de o representar em função das suas componentes cartesianas. Trata-se de calcular a expressão vectorial de um vector ou a sua expressão cartesiana, como veremos de seguida.
Representação cartesiana de um vector
Por uma questão de simplicidade na exposição, começaremos por referir o vector a um sistema de eixos, no plano e só depois se generalizará para o espaço.
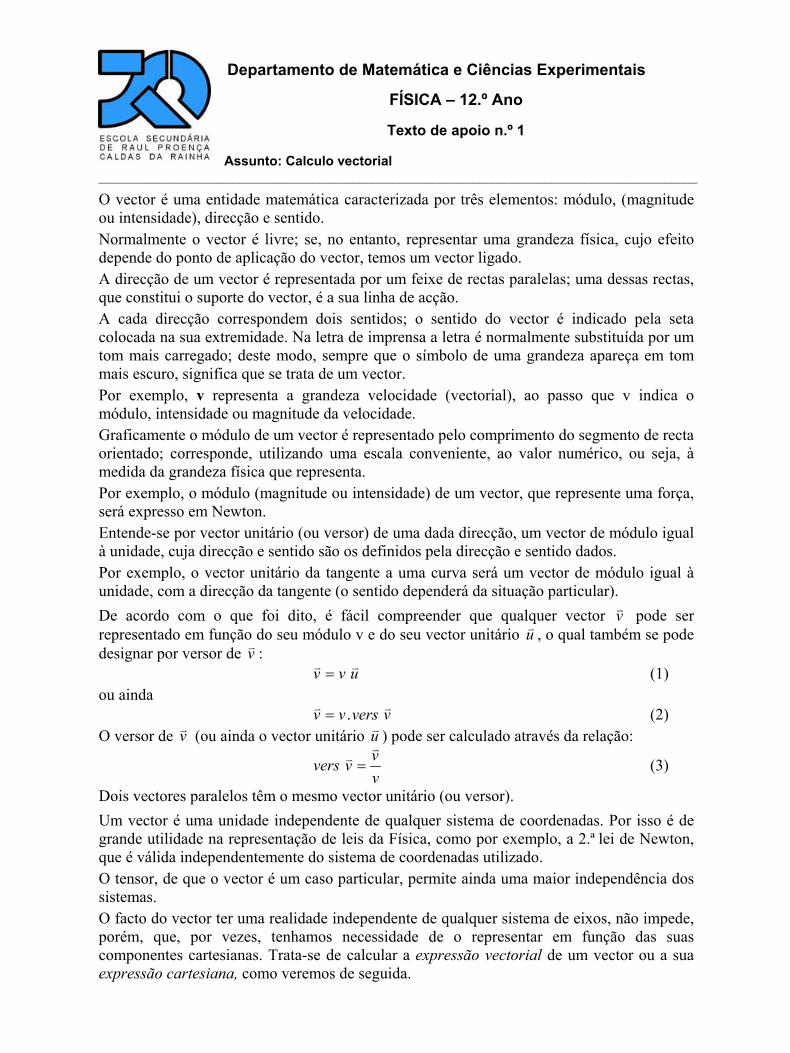
Seja então o sistema de eixos cartesianos X0Y representado na figura I-1 e v� um vector dado.
Os vectores xe� e ye� são os vectores unitários (ou versores) dos eixos dos XX e dos YY, respectivamente.
Figura I-1 - Representação cartesiana de um vector num plano: sistema de
eixos e vectores unitários.
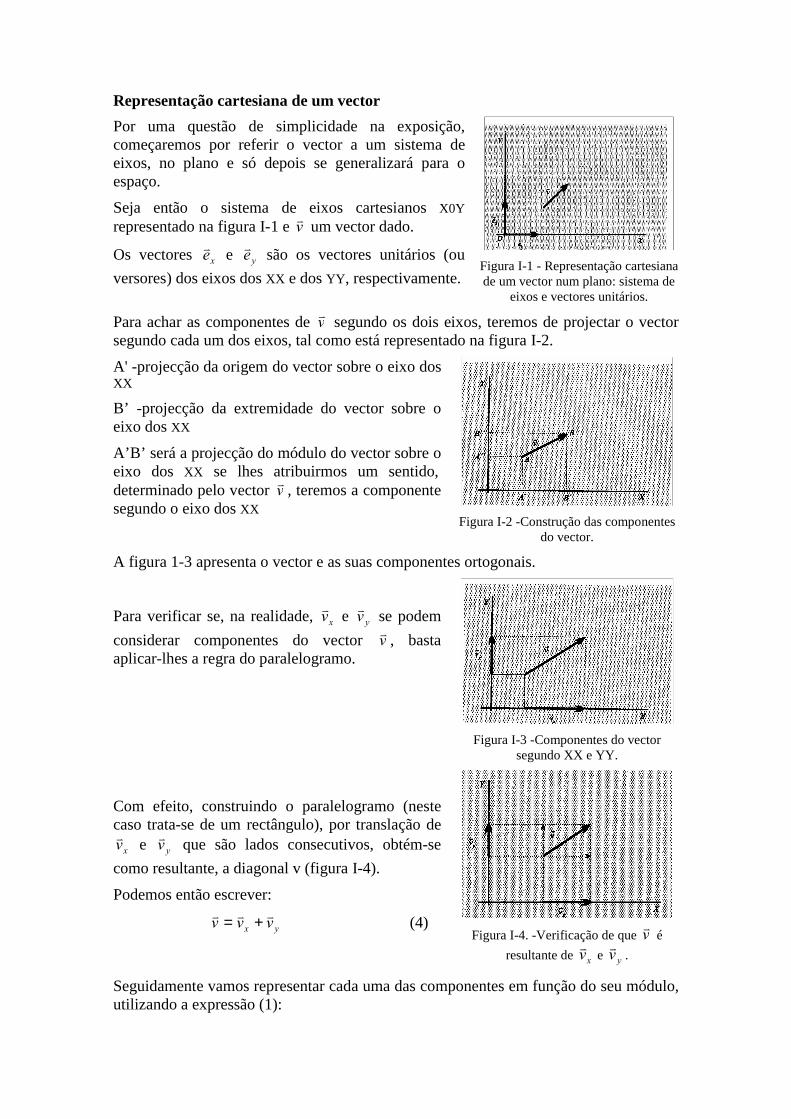
Para achar as componentes de v� segundo os dois eixos, teremos de projectar o vector segundo cada um dos eixos, tal como está representado na figura I-2.
A' -projecção da origem do vector sobre o eixo dos XX B’ -projecção da extremidade do vector sobre o eixo dos XX
A’B’ será a projecção do módulo do vector sobre o eixo dos XX se lhes atribuirmos um sentido, determinado pelo vector v� , teremos a componente segundo o eixo dos XX
Figura I-2 -Construção das componentes do vector.
A figura 1-3 apresenta o vector e as suas componentes ortogonais.
Para verificar se, na realidade, xv� e yv� se podem considerar componentes do vector v� , basta aplicar-lhes a regra do paralelogramo.
Figura I-3 -Componentes do vector segundo XX e YY.
Com efeito, construindo o paralelogramo (neste caso trata-se de um rectângulo), por translação de
xv� e yv� que são lados consecutivos, obtém-se como resultante, a diagonal v (figura I-4).
Podemos então escrever:
yx vvv ��� += (4) Figura I-4. -Verificação de que v� é
resultante de xv� e yv� .
Seguidamente vamos representar cada uma das componentes em função do seu módulo, utilizando a expressão (1):
yyy
xxx
evvevv��
��
==
Finalmente, da conjunção de (4) e (5) obtemos a expressão cartesiana (ou a representação cartesiana) do vector v� , no plano:
yyxxx evevv ��� += (6)
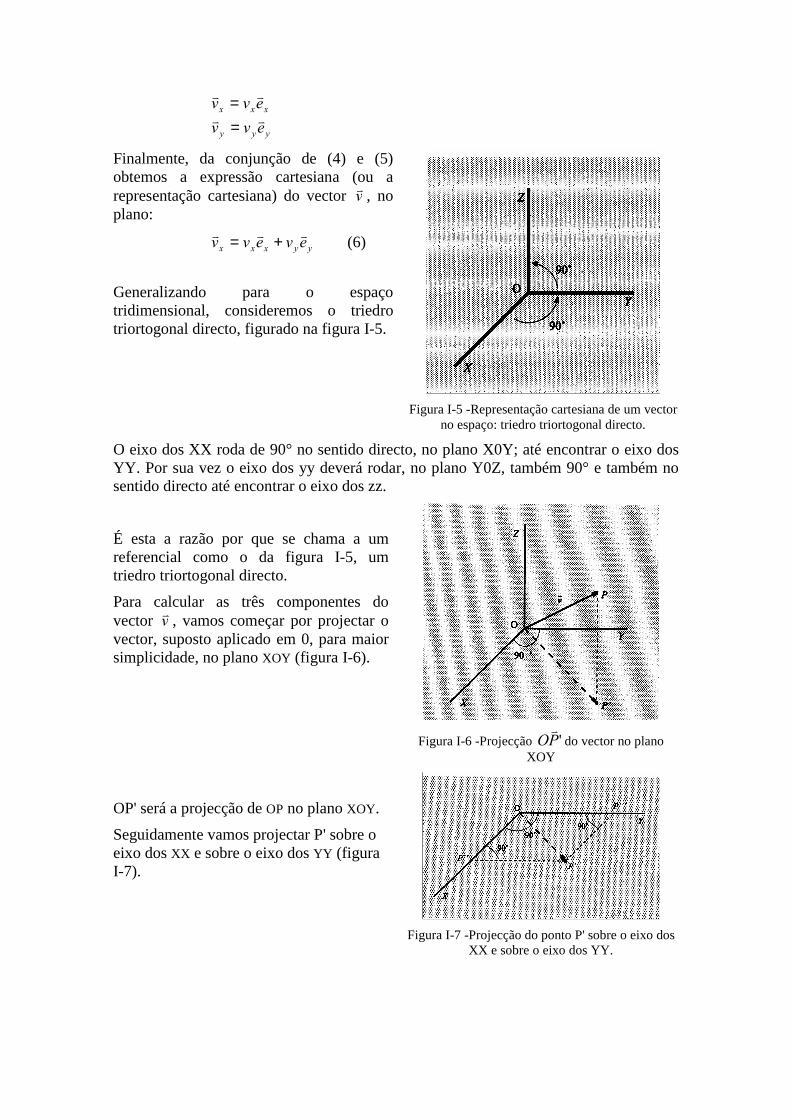
Generalizando para o espaço tridimensional, consideremos o triedro triortogonal directo, figurado na figura I-5.
Figura I-5 -Representação cartesiana de um vector no espaço: triedro triortogonal directo.
O eixo dos XX roda de 90° no sentido directo, no plano X0Y; até encontrar o eixo dos YY. Por sua vez o eixo dos yy deverá rodar, no plano Y0Z, também 90° e também no sentido directo até encontrar o eixo dos zz.
É esta a razão por que se chama a um referencial como o da figura I-5, um triedro triortogonal directo.
Para calcular as três componentes do vector v� , vamos começar por projectar o vector, suposto aplicado em 0, para maior simplicidade, no plano XOY (figura I-6).
Figura I-6 -Projecção 'PO�
do vector no plano XOY
OP' será a projecção de OP no plano XOY.
Seguidamente vamos projectar P' sobre o eixo dos XX e sobre o eixo dos YY (figura I-7).
Figura I-7 -Projecção do ponto P' sobre o eixo dos XX e sobre o eixo dos YY.
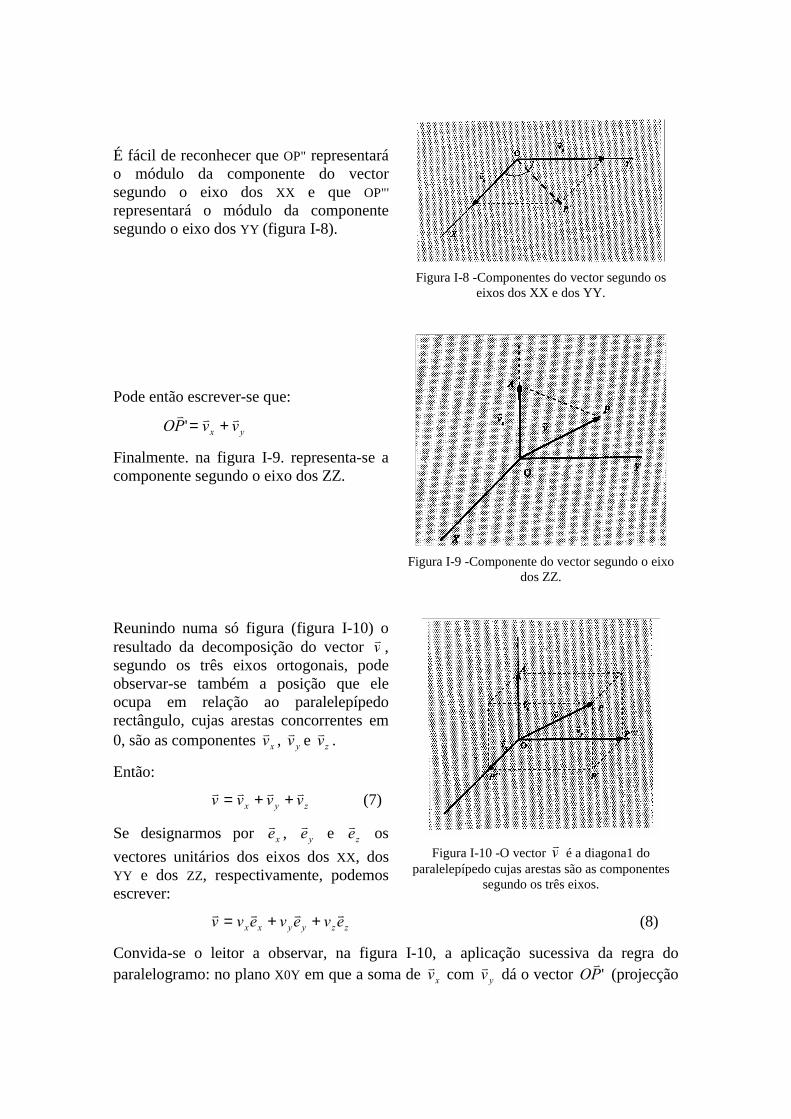
É fácil de reconhecer que OP" representará o módulo da componente do vector segundo o eixo dos XX e que OP"' representará o módulo da componente segundo o eixo dos YY (figura I-8).
Figura I-8 -Componentes do vector segundo os
eixos dos XX e dos YY.
Pode então escrever-se que:
yx vvPO ��
�
+='
Finalmente. na figura I-9. representa-se a componente segundo o eixo dos ZZ.
Figura I-9 -Componente do vector segundo o eixo dos ZZ.
Reunindo numa só figura (figura I-10) o resultado da decomposição do vector v� , segundo os três eixos ortogonais, pode observar-se também a posição que ele ocupa em relação ao paralelepípedo rectângulo, cujas arestas concorrentes em 0, são as componentes xv� , yv� e zv� .
Então:
zyx vvvv ���� ++= (7)
Se designarmos por xe� , ye� e ze� os vectores unitários dos eixos dos XX, dos YY e dos ZZ, respectivamente, podemos escrever:
Figura I-10 -O vector v� é a diagona1 do paralelepípedo cujas arestas são as componentes
segundo os três eixos.
zzyyxx evevevv ���� ++= (8)
Convida-se o leitor a observar, na figura I-10, a aplicação sucessiva da regra do paralelogramo: no plano X0Y em que a soma de xv� com yv� dá o vector 'PO
�
(projecção

de v� sobre o plano X0Y); no plano diagonal 0APP', em que a soma de xv� com 'PO�
dá o vector v� .
Relações entre o módulo de um vector e os das suas componentes. Co-senos directores 1) No plano Considerando a figura 1-11, onde a representa o ângulo formado pela linha de acção do vector com a parte positiva do eixo dos XX; tem-se:
vx=vcosα (9)
e
vy=vcosβ.
Aos valores cosα e cosβ dá-se o nome de co-senos directores da direcção do vector e costuma-se designá-los por a e b, respectivamente.
Assim, Figura I-11 –Co-senos directores da direcção do vector.
a= cosα e
b= cosβ.
O módulo do vector está relacionado com o módulo das componentes, pelo teorema de Pitágoras:
222yx vvv += (10)
II) No espaço
Introduzindo mais um ângulo, γ, que a direcção do vector faz com o eixo dos ZZ, ter-se-á:
vx=vcosα a= cosα
vy=vcosβ b=cosβ (11)
vz=vcosγ c=cosγ Aplicando por duas vezes o teorema de Pitágoras (ao triângulo rectângulo do plano XOY e ao triângulo rectângulo do plano APP' da figura I-10) chega-se à relação:
2222zyx vvvv ++= . (12)
Verifica-se ainda, recorrendo à relação fundamental da trigonometria, que:
a2+b2+c2=1. (13)

Operações sobre vectores I) Adição
A regra do paralelogramo para somar, graficamente, 2 vectores, é de todos conhecida; como simplificação desta regra usa-se, também, a do triângulo (figura I-12).
Figura I-12 -Adição de dois vectores: regra do triângulo.
Quando se precisa de somar mais de dois vectores é pouco cómodo aplicar sucessivamente a regra do paralelogramo. Usa-se então a regra indicada na figura I-13 que não é mais que uma aplicação sucessiva da regra do triângulo:
Figura I-13 -Adição de vários vectores: regra prática.
Analiticamente e sempre que os vectores se apresentam na sua forma cartesiana, somam-se vectores, somando as componentes relativas aos mesmos eixos; deste modo, dados a� e b
�
, segundo:
zzyyxx
zzyyxx
ebebebb
eaeaeaa���
�
����
++=
++=
calcula-se o vector soma a� +b�
através da operação:
( ) ( ) ( ) zzzyyyxxx ebaebaebaba ���
�
� +++++=+
Deve chamar-se a atenção do leitor para o facto de que o módulo do vector soma não é igual à soma dos módulos dos vectores parcelas. Só no caso, muito particular, da direcção dos vectores ser a mesma é que isso acontece.

Cálculo do módulo do vector soma, no caso geral
Na figura I-14 estão representados os vectores a� e b�
cuja soma se pretende calcular.
Figura I-14 -Cálculo do vector soma: módulo e inclinação.
Aplicando conhecimentos de trigonometria temos que:
S2=a2+b2+2abcosψ (15)
e também:
( )[ ]ψϕπϕψ +−==
sena
senb
senS ,
ou, o que é o mesmo:
( )ψϕϕψ +==
sena
senb
senS
Desta última relação tira-se o factor cosψ que, substituído em (15), permite calcular S.
II) Subtracção Usando o mesmo processo que adoptámos na adição, vamos separar a resolução geométrica da resolução analítica.
Geometricamente aplica-se a regra do paralelogramo, após se ter invertido o segundo vector, ou seja, após se ter transformado a operação "diferença de dois vectores" na operação "soma algébrica de dois vectores", a+(-b).
A figura I-15 apresenta as fases desta operação geométrica.
Figura I-15 -Três fases da regra geométrica para subtrair dois vectores.

Um processo mais expedito de obter o mesmo resultado é fechar o triângulo com um vector dirigido da extremidade de b
�
para a extremidade de a� , tal como se representa na figura I-16.
Analiticamente e conhecendo a representação cartesiana de cada um dos vectores a� e b
�
tal como se segue,
zzyyxx
zzyyxx
ebebebb
eaeaeaa���
�
����
++=
++=
obtém-se o vector a� - b�
da maneira indicada: Figura I-16 –Subtracção de dois vectores:
regra do triângulo.
( ) ( ) ( ) zzzyyyxxx ebaebaebaba ���
�
� −+−+−=−
O módulo do vector diferença, a que podemos chamar D, para simplificar, é dado por:
D2=a2+b2-2abcosθ (18)
sendo θ o ângulo agudo que se opõe a D.
III) Produto Nas operações efectuadas sobre escalares o produto é uma operação uniforme, isto é, obtém-se sempre o mesmo resultado desde que se mantenham os factores. No Cálculo Vectorial existem dois processos diferentes de multiplicar vectores; temos assim o produto interno ou produto escalar e o produto externo ou produto vectorial.
A razão pela qual se chama produto escalar ao produto interno é porque o resultado desse produto é um escalar; razão análoga para o nome de produto vectorial, no qual se obtém um vector.
a) Produto interno (ou escalar)
Define-se o produto a� .b�
de dois vectores a� e b�
através da seguinte igualdade:
a� .b�
=abcos( a� ,b�
), (19)
em que a e b são os módulos dos vectores a� e b�
; por sua vez cos(a,b) é o co-seno do ângulo formado pelos dois vectores.
Também podem ser usadas as expressões
( a� ,b�
) e a� b�
para designar o produto interno.
No entanto a expressão que adoptaremos no decorrer do curso será
a� .b�
Se o ângulo formado pelos vectores não for conhecido e se, em contrapartida, se conhecer a representação cartesiana dos mesmos, ou seja:
zzyyxx
zzyyxx
ebebebb
eaeaeaa���
�
����
++=
++=
o produto interno é dado por:
a� .b�
=axbx+ayby+azbz, (20)
como se pode provar sem grande dificuldade, partindo das expressões dos vectores na sua forma cartesiana, aplicando a propriedade distributiva em relação à soma e resolvendo as situações que forem surgindo por aplicação da definição de produto interno.
O produto interno goza das seguintes propriedades:
1) É comutativo
2) É uniforme
3) Passa por valores máximos e mínimos, de acordo com a variação do co-seno, que depende, por sua vez, da posição relativa dos vectores.
4) Pode anular-se.
O anulamento do produto interno, que se verifica se os dois vectores são perpendiculares, pode ser utilizado como condição de perpendicularidade de dois vectores dados.
Cálculo do ângulo de dois vectores Pode utilizar-se o produto interno de dois vectores, para conhecer o ângulo que eles fazem.
Sejam os vectores a� e b�
, dados por:
zzyyxx
zzyyxx
ebebebb
eaeaeaa���
�
����
++=
++=
e calcule-se o seu produto interno. Será:
a� .b�
=axbx+ayby+azbz
Por outro lado, aplicando a definição, tem-se:
a� .b�
=abcos( a� ,b�
). (22)
Igualando os segundos membros das equações (21) e (22), obtém-se:
axbx+ayby+azbz =abcos( a� ,b�
),
donde se tira o valor do co-seno do ângulo:
abbababa
ba zzyyxx ++=),cos( .
b) Produto externo (ou vectorial)
Como neste caso o produto é um vector, não pode ser definido tão simplesmente como o produto interno.
Exige a definição de uma direcção, de um sentido e de um módulo (ou intensidade), para ficar completamente identificado.
Definição da direcção
A direcção do vector produto externo de dois vectores a� e b�
complanares (se não o forem, não existe produto externo) é perpendicular ao plano definido por eles.
Definição do sentido
O sentido do vector produto externo, a� xb
� ∗ é tal que o triedro formado pelos três vectores a� xb
�
, a� e b
�
por esta ordem, seja um triedro directo.
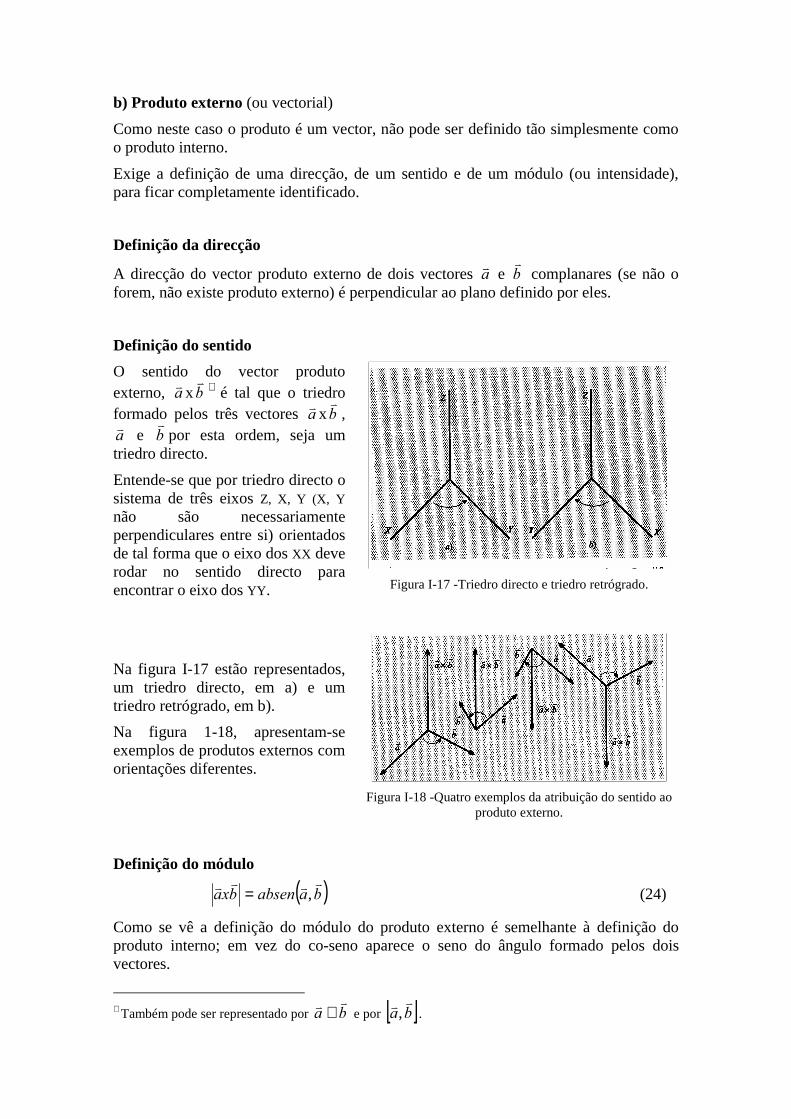
Entende-se que por triedro directo o sistema de três eixos Z, X, Y (X, Y não são necessariamente perpendiculares entre si) orientados de tal forma que o eixo dos XX deve rodar no sentido directo para encontrar o eixo dos YY. Figura I-17 -Triedro directo e triedro retrógrado.
Na figura I-17 estão representados, um triedro directo, em a) e um triedro retrógrado, em b). Na figura 1-18, apresentam-se exemplos de produtos externos com orientações diferentes.
Figura I-18 -Quatro exemplos da atribuição do sentido ao produto externo.
Definição do módulo
( )baabsenbxa�
�
�
� ,= (24)
Como se vê a definição do módulo do produto externo é semelhante à definição do produto interno; em vez do co-seno aparece o seno do ângulo formado pelos dois vectores.
∗ Também pode ser representado por ba
�
� ∧ e por [ ]ba�
�, .

Anulamento Quando os vectores são paralelos ou quando têm a mesma linha de acção, o seu produto externo é nulo.
Semelhante ao que se viu no produto interno, esta propriedade pode servir para impor uma condição de paralelismo de dois vectores.
Se os vectores forem conhecidos na sua expressão cartesiana
zzyyxx
zzyyxx
ebebebb
eaeaeaa���
�
����
++=
++=
o produto externo calcula-se como se indica a seguir.
Constrói-se um determinante de 3.a ordem, no qual a 1.a linha é formada pelos vectores unitários dos três eixos (X, Y, Z), a 2.a linha pelas componentes do primeiro vector e a 3.a
linha pela componentes do segundo vector.
zyx
zyx
zyx
bbbaaaeee
bxa
���
�
� = . (25)
O desenvolvimento deste determinante conduz a:
( ) ( ) ( ) zxyyxyzxxzxyzzy ebabaebabaebababxa ���
�
� −+−+−= . (26)
Significado geométrico O significado geométrico de um produto externo é uma área.
Com efeito, supondo os vectores a� e b�
aplicados no mesmo ponto O, podemos considerá-los lados consecutivos de um paralelogramo (figura 1-19).
Figura I-19 -Significado geométrico do produto externo.
Atendendo, seguidamente, à definição de um módulo do produto externo dos dois vectores a� e b
�
, o qual se representa por
αabsenbxa =�
� ,
virá que
ahbxa =�
� ,
ou seja, a área do paralelogramo referido.
Quanto ao carácter vectorial do produto externo, aplica-se também à área,
A direcção do vector área é perpendicular à superfície que se considera; o sentido é dado pelo produto externo; com efeito, cada superfície tem duas faces, o que conduz à existência de dois vectores área, conforme se considera uma ou outra face,
Aplicações A grandeza trabalho de uma força que desloca o seu ponto de aplicação ao longo de uma direcção é definida como um produto interno da força pelo vector deslocamento.
A grandeza momento de uma força em relação a um ponto é definida através de um produto externo, tal como a grandeza momento cinético, ambas estas grandezas desempenham um importante papel no estudo dos movimentos de rotação.
IV) Derivação vectorial Como qualquer função contínua cumprindo as condições de derivabilidade, impostas pela matemática, um vector pode admitir derivada.
Considerando o vector v uma função contínua da variável x, define-se derivada desse vector em ordem a x, pela expressão:
( ) ( )xv
xxvxxv
dxvd
xx ∆∆=
∆−∆+=
→∆→∆
����
limlim00
(27)
Como se vê, as operações envolvidas nesta definição são possíveis; com efeito em numerador figura uma diferença de dois vectores, já definida; por outro lado a divisão de um vector por um escalar já foi também apresentada na relação entre um vector, o seu módulo e o vector unitário da sua direcção.
Na derivação dos vectores são aplicáveis todas as regras de derivação estudadas para os escalares.