sumário e objectivos - fe.up.ptldinis/aula1msnl.pdf · adiÇÃo de vectores a soma do vector u com...
TRANSCRIPT
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
1
Sumário e Objectivos
Sumário: Vectores, Tensores. Operações Com Vectores e Tensores de 2ª Ordem. Tensores de ordem superior à 2ª. Mudança de Base. Valores e Vectores Próprios. Campos Escalares, Vectoriais e Tensoriais.
Objectivos da Aula: Familiarização com as notações Indicial e Tensorial. Realização de Operações com Vectores e Tensores tirando partido das notações referidas.
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
2
Vector de Posição
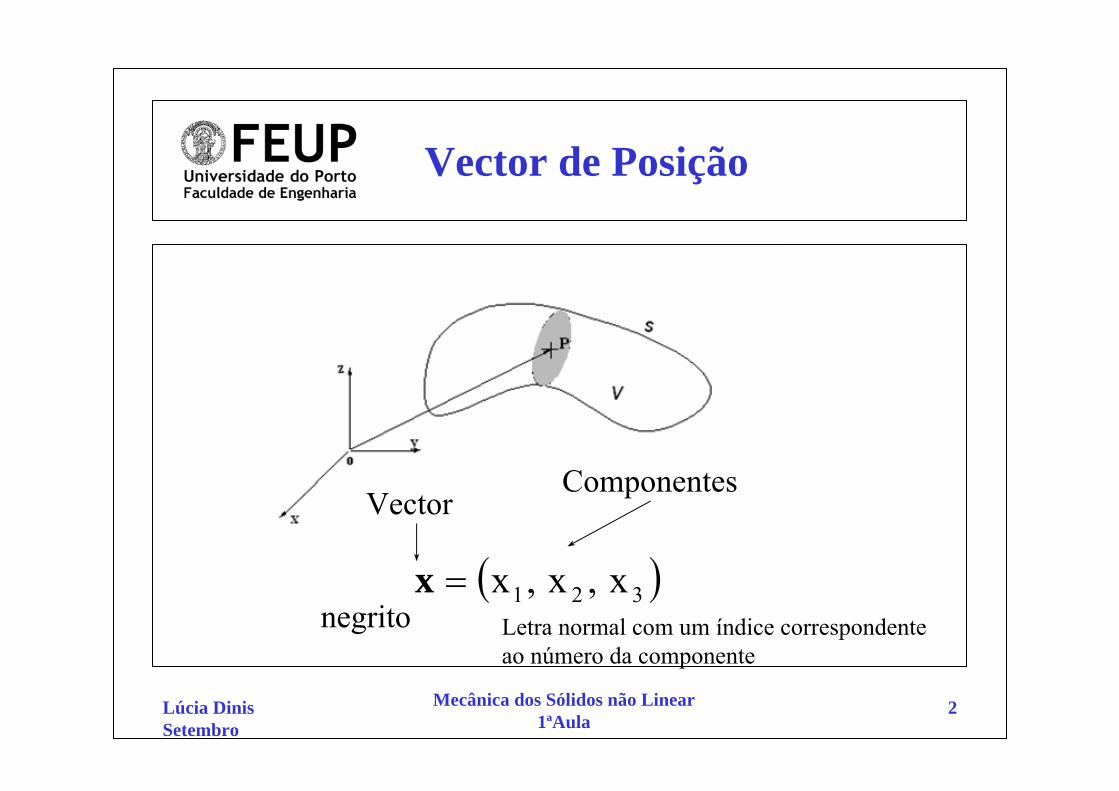
( )321 x,x,x=x
VectorComponentes
negrito Letra normal com um índice correspondente ao número da componente
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
3
Simbologia das Grandezas
As quantidades físicas relevantes são por vezes, grandezas escalares que podem ser representadas por caracteres, como a,b,c…ou a,b,g,… como é o caso da massa, da densidade e da temperatura. Grandezas físicas como a força, a velocidade e a aceleração são em geral representadas por vectores para os quais se usam letras minúsculas em negrito, u,v,w… ou para as suas componentes a notação indicial. As tensões, as deformações, etc…, são quantidades representadas em geral por tensores de segunda ordem, para os quais se usa a simbologia A,B,C… ou a notação indicial associada às componentes do tensor. Os tensores de 2ª ordem ao longo do texto são em geral referidos simplesmente como Tensores. Para algumas grandezas podem ter de utilizar-se tensores de 3ª ordem para a sua representação, sendo a notação utilizada A,B,C…, ou eventualmente tensores de ordem superior á 3ª para os quais se utiliza a notação A,B,C….
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
4
Vector
u
B
A
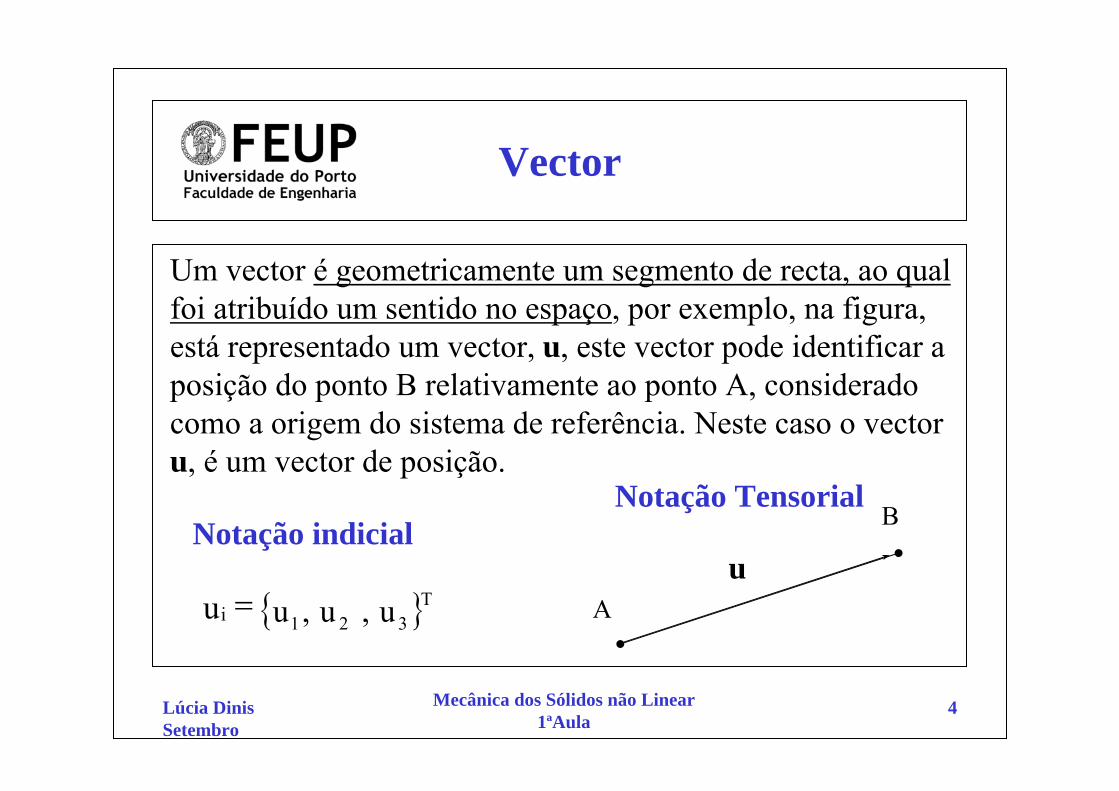
Um vector é geometricamente um segmento de recta, ao qual foi atribuído um sentido no espaço, por exemplo, na figura, está representado um vector, u, este vector pode identificar a posição do ponto B relativamente ao ponto A, considerado como a origem do sistema de referência. Neste caso o vector u, é um vector de posição.
{ }321Tu,u,u=ui
Notação indicialNotação Tensorial
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
5
Vector
Um vector no espaço Euclidiano tridimensional pode ser representado pelas suas componentes relativamente a uma base de vectores. Designando por a base de vectores, o vector u pode ser escrito como uma combinação linear dos vectores de base, ou seja
{ }321 ,, eee
332211 uuu eeeu ++=
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
6
Vector
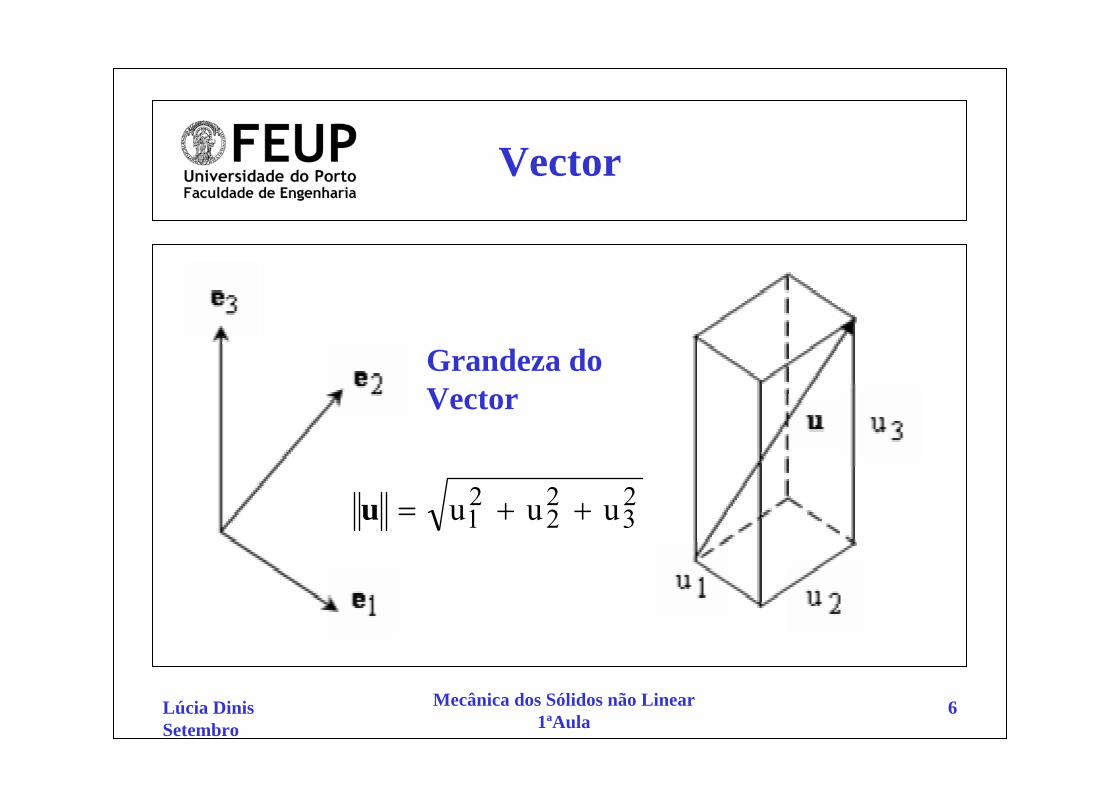
23
22
21 uuu ++=u
Grandeza do Vector
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
7
ADIÇÃO DE VECTORES
A soma do vector u com o vector v é o vector w que se obtém adicionando os dois vectores vuw +=As componentes do vector w obtém-se por adição das componentes dos vectores u e v:
111 vuw += 222 vuw += 333 vuw +=A subtracção de dois vectores também é possível e processa-se adicionado um dos vectores ao vector que se obtém considerando o outro vector com o sinal negativo. ( )vuw −+=
111 vuw −= 222 vuw −= 333 vuw −=
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
8
Adição Geométrica de Vectores
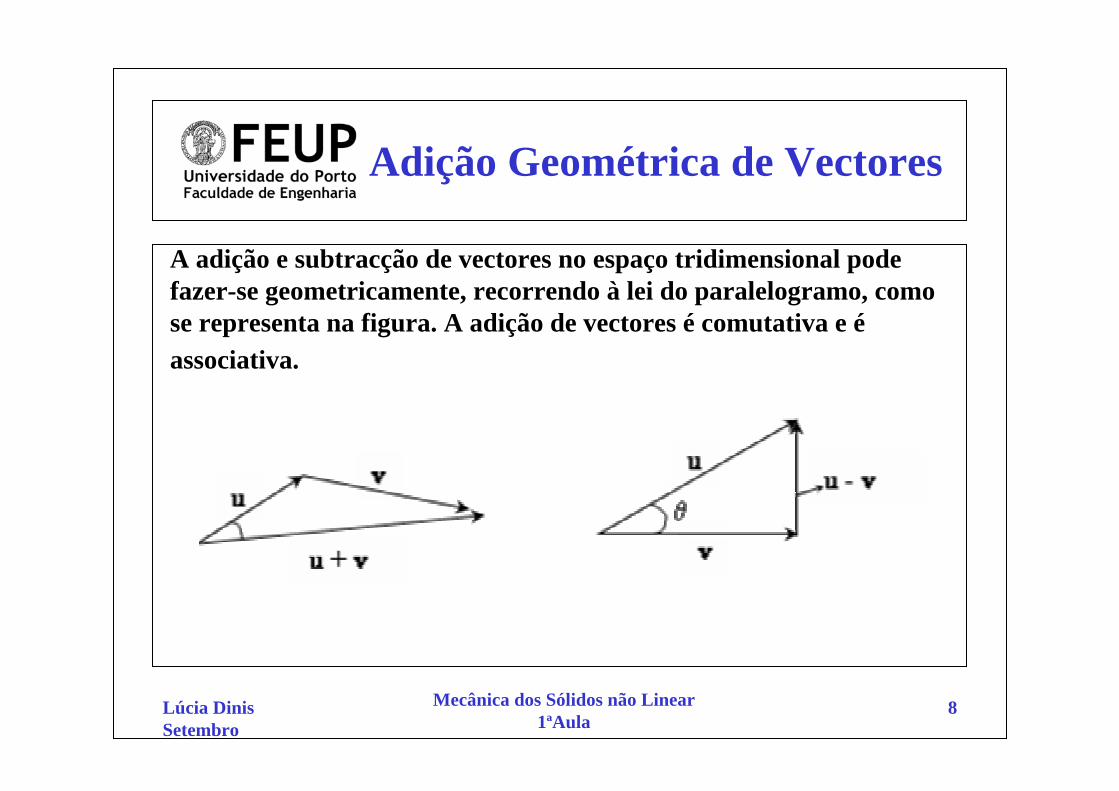
A adição e subtracção de vectores no espaço tridimensional pode fazer-se geometricamente, recorrendo à lei do paralelogramo, como se representa na figura. A adição de vectores é comutativa e é associativa.
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
9
Produto de um Escalar por um Vector
No caso de se considerarem vectores no espaço a n dimensões a adição processa-
se de modo análogo ao referido sendo as componentes iii vuw += . Podem somar-se
α vezes o mesmo vector obtendo-se um vector que é w = α u e que corresponde ao
produto de um escalar por um vector. A adição do vector u com o vector (-u) conduz ao
vector nulo designado por o.
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
10
Produto Escalar ou Produto Interno
O produto escalar ou produto interno de dois vectores costuma representar-se por u ⋅v e é:
( ) ( )222
21,cos uvvuvuvuvu −−+==⋅ θ
ij
n
1jji
n
1i
n
1iii vuvu δ∑∑=∑=⋅
===vu
é o símbolo de Kronecker
jiji
sese
01
ij ≠=
⎩⎨⎧
=δ
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
11
Produto Escalar
A grandeza resultante do produto escalar de dois vectores é uma grandeza escalar, no caso de serem dois vectores ortogonais entre si, o produto escalar, u.v, tem o valor zero. No caso de se usar a convenção dos índices repetidos, inventada por Einstein, o sinal de somatório pode ser omitido e a equação anterior toma a forma:
∑ ==⋅=
n
1iiiii vuvuvucontraccão
A partir de dois vectores obtém-se um escalar
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
12
Exemplo 1.1
Considere as expressões seguintes e expanda-as tendo em conta a convenção dos índices repetidos.
e jjii wvua) b) ee ijijδ =
a) Somando primeiro em i e depois em j obtém-se:
( )( )eee 332211332211 wwwvuvuvu ++++
b) Somando em j para o 1º membro da igualdade obtém-se :
j i1 1 i2 2 i3 3ijδ = + +δ δ δe e e e
Para i=1 j 11 1 12 2 13 3 11 1 11jδ = + + = =δ δ δ δe e e e e e Etc.
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
13
Produto Vectorial
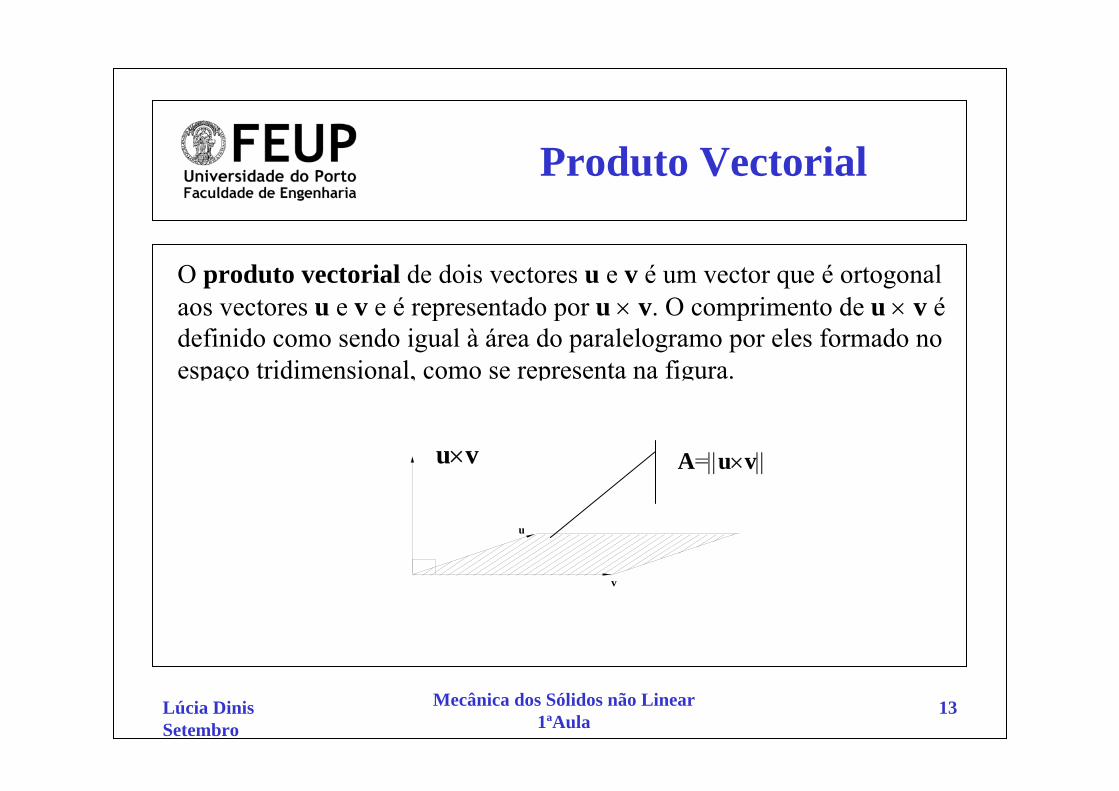
O produto vectorial de dois vectores u e v é um vector que é ortogonal aos vectores u e v e é representado por u × v. O comprimento de u × v é definido como sendo igual à área do paralelogramo por eles formado no espaço tridimensional, como se representa na figura.
u
v
u×v A=||u×v||
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
14
Produto Vectorial
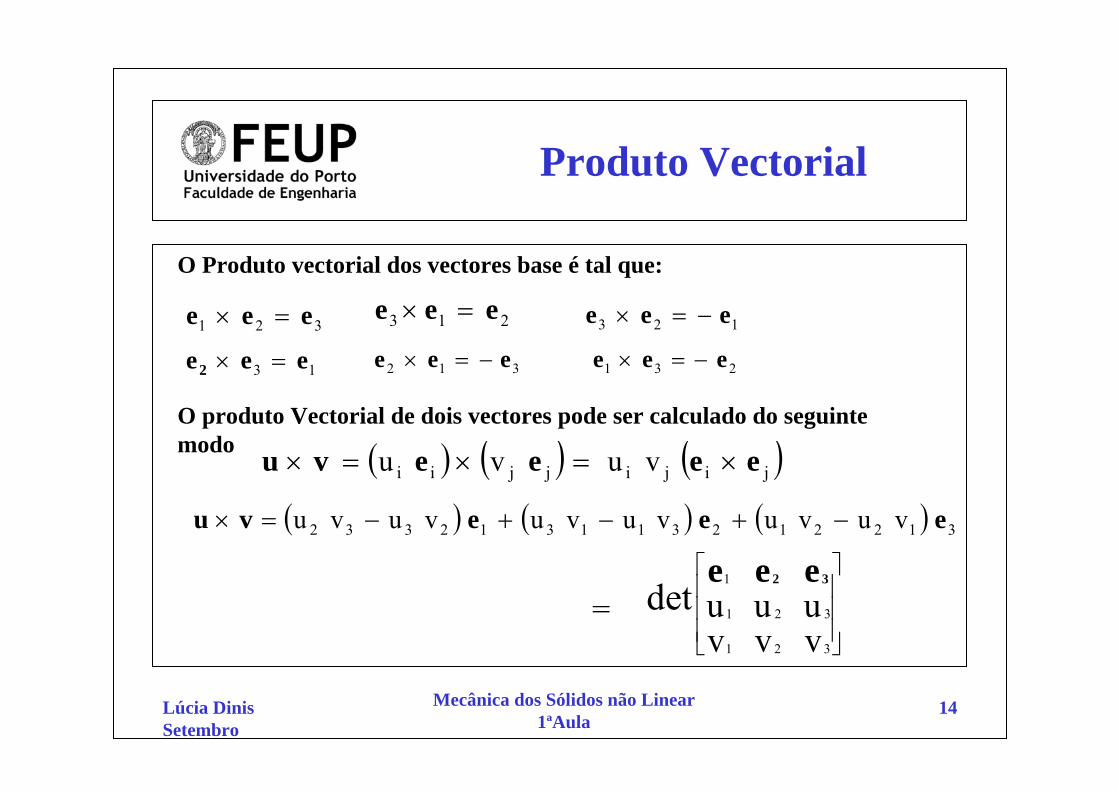
O Produto vectorial dos vectores base é tal que:
321 eee =×
13 eee2 =×
213 eee =×
312 eee −=×
123 eee −=×
231 eee −=×
O produto Vectorial de dois vectores pode ser calculado do seguinte modo ( ) ( ) ( )jijijjii vuvu eeeevu ×=×=×
( ) ( ) ( ) 312212311312332 vuvuvuvuvuvu eeevu −+−+−=×
1
1 2 3
1 2 3
u u uv v v
det⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
2 3e e e=
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
15
Exemplo 1.2
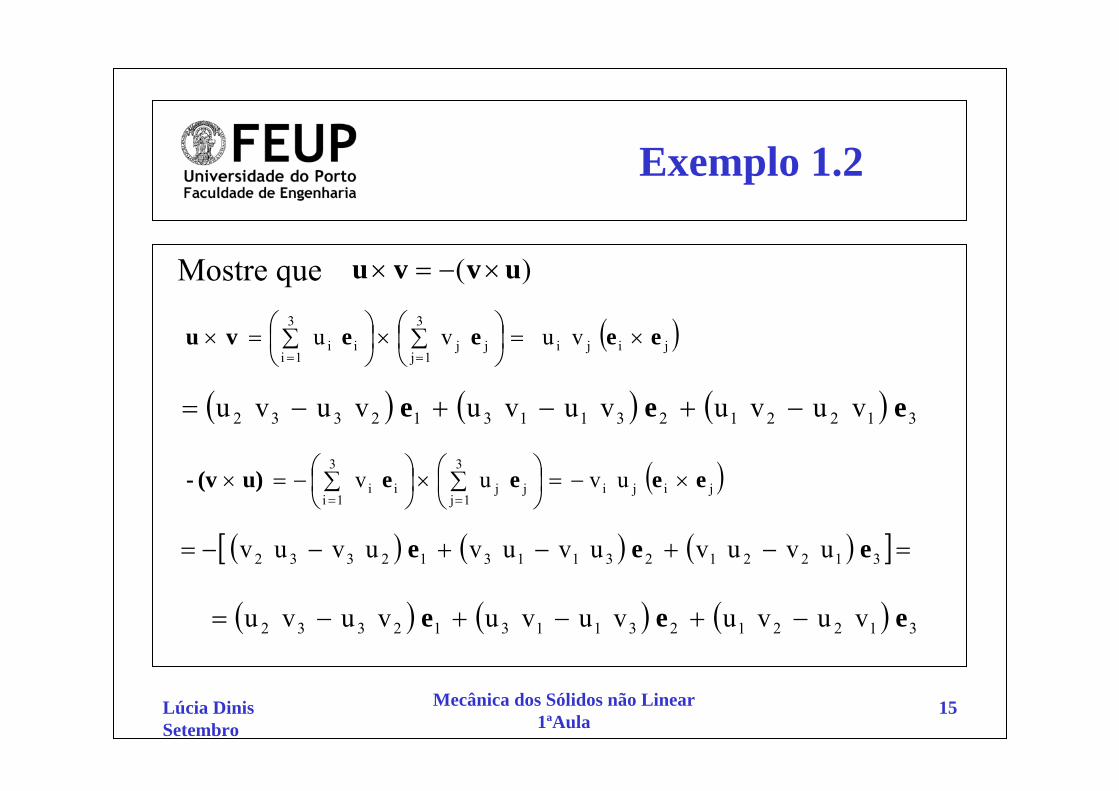
)( uvvu ×−=×Mostre que
( )jiji
3
1jjj
3
1iii vuvu eeeevu ×=⎟
⎠⎞
⎜⎝⎛∑×⎟
⎠⎞
⎜⎝⎛∑=×
==
( ) ( ) ( ) 312212311312332 vuvuvuvuvuvu eee −+−+−=
( )jiji
3
1jjj
3
1iii uvuv eeeeu)(v- ×−=⎟
⎠⎞
⎜⎝⎛∑×⎟
⎠⎞
⎜⎝⎛∑−=×
==
( ) ( ) ( )[ ] =−+−+−−= 312212311312332 uvuvuvuvuvuv eee
( ) ( ) ( ) 312212311312332 vuvuvuvuvuvu eee −+−+−=
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
16
Produto Escalar Triplo
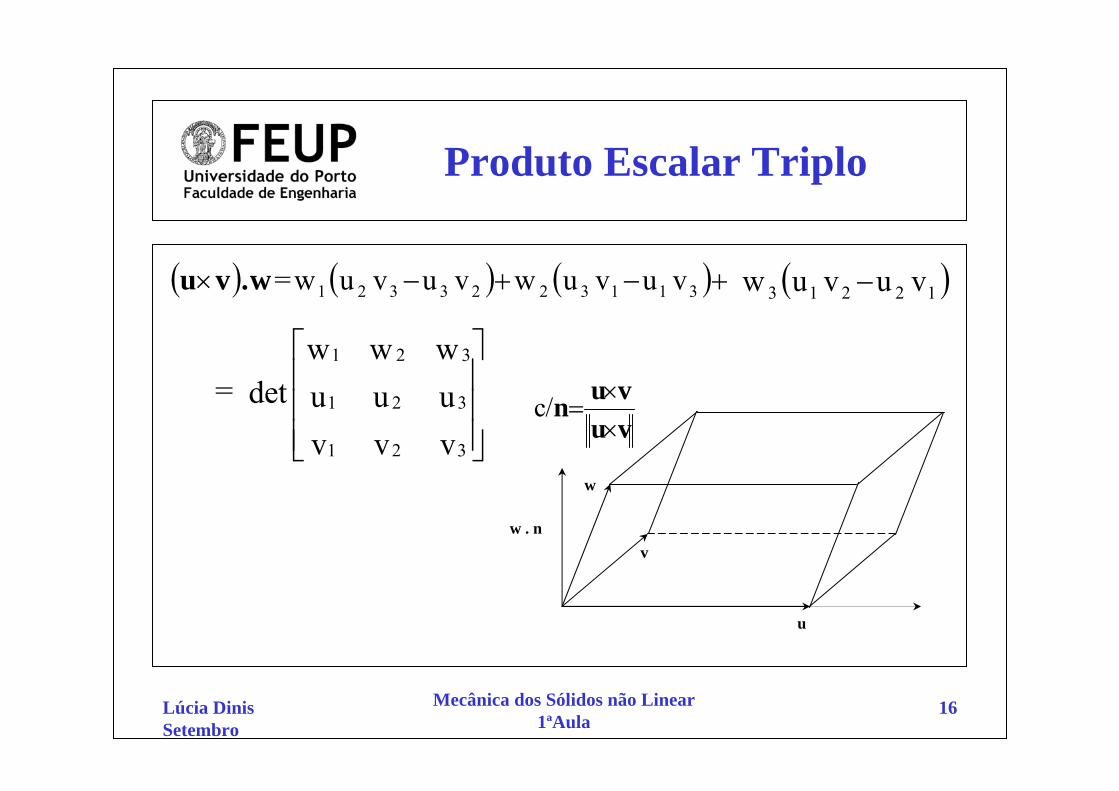
( ) ( ) ( )+−+−× 3113223321 vuvuwvuvuw=w.vu ( )12213 vuvuw −
1 2 3
1 2 3
1 2 3
w w wdet u u u
v v v
⎡ ⎤⎢ ⎥⎢ ⎥⎢ ⎥⎣ ⎦
=
w
w . nv
u
c/ ×=
×u vnu v
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
17
Produto Escalar Triplo
A representação do produto escalar triplo pode ser simplificada recorrendo ao chamado símbolo permutador que é representado por , tensor de 3ª ordem, o qual pode ser definido do seguinte modo:
ijkε
( )( )( )
1 se for i, j, k em ordem cíclica e c m i, j, k distintos0 se for i, j, k t
1 se for i, j, k i, j, k distintos e em ordem cíclica
oal que i j ou i k ou j kijk
nãoε
⎧⎪= = = =⎨⎪−⎩
( ).i j k ijkε× =e e e
As ordens cíclicas de (i, j, k) com i = 1, 3 e k = 1, 3 são (1, 2, 3); (2, 3, 1) e (3, 1, 2). As ordens não cíclicas de (i, j, k) são (3, 2, 1); (1, 3, 2) e (2, 1, 3).
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
18
Exemplo 1.3
ijkε pqkε δ δ δ δjq iq jpip −=Mostre que
( )⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡=×=
δδδδδδδδδ
det.ε
3k2k1k
3j2j1j
3i2i1i
kjiijk eee
)δδδδ(δ)δδδδ(δ)δδδδ(δ 1k2j2k1j3i1k3j3k1j2i2k3j3k2j1i −+−−−
=
=
etc
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
19
Produto Vectorial Triplo
( ) eew)(vu knmimnjkijknmmnjiijk wvuεεwvεuε ==××
( ) eknmiimkninkm wvuδδδδ −
ee kkmmknkn wvuwvu −
= (u.w) v-(u.v) w
=
=
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
20
Produto Tensorial de dois vectores
é um tensor de 2ª ordem u v⊗ este tensor pode actuar num vector w.
A definição de produto tensorial está incluída na igualdade seguinte [ ] ( )uwvwvu ⋅=⊗
1. A cada para de vector ( )vu, com u∈E e v∈F, está associado um elemento
FE ⊗ , chamado produto tensorial de u por v e designado por vu ⊗ , de tal
modo que
a) ( ) 2121 v⊗+⊗=+⊗ uvuvvu (Lei Distributiva)
b) ( ) vuvuvuu ⊗+⊗=⊗+ 2121 "
c) ( ) ( ) ( )vuvuvu λ⊗=⊗λ=⊗λ (Lei Associativa)
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
21
Produto Tensorial de dois vectores
2. Se { }p1 ..., ee for uma base de vectores de E e { }q1 ..., ff for uma base de
vectores de F, os pq vectores α⊗ fei constituem uma base de FE ⊗ (espaço
de dimensão pq).
As condições 1a) b) c) e 2 permitem-nos concluir que, com iiu eu = e
ααv fv = , o elemento vu⊗ do produto se pode escrever na forma
( ) ( ) ( )αααα ⊗=⊗=⊗ fefevu iiii vuvu
Base Tensorial
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
22
Produto Tensorial de dois vectores
O produto tensorial dos vectores de base ji e ee do espaço tridimensional,
ji ee ⊗ representa um conjunto de tensores de 2ª ordem. Uma vez que o número de
vectores base é 3, existem 9 combinações de produtos tensoriais entre eles.
Os 9 tensores, ji ee ⊗ , constituem uma base adequada para representar as
componentes de um tensor de 2ª ordem e tem uma função semelhante aos vectores
base ie em relação aos vectores.
O produto tensorial de três vectores dá origem a um tensor de 3ª ordem e é:
wvu ⊗⊗=R
O produto tensorial é em geral não comutativo.
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
23
Exemplo 1.5
O tensor A é um tensor cartesiano de ordem 2. Mostre que a projecção de A na base
ortogonal de vectores ei é definida de acordo com a relação seguinte
e.Ae jiijA =
onde Aij são as nove componentes do tensor A.
O produto eA j , de acordo com a definição de tensor de 2ª ordem, pode escrever-se
com a seguinte forma
( )eeeeA jnmmnj A ⊗=
De acordo com a definição [ ] ( )u v w v w u⊗ = . o segundo membro da equação
anterior pode ser alterado
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
24
Exemplo 1.5
( ) ( ) eeeeeeeeeA mmjmnjmnmjnmnjnmmnj AAAA ==⋅=⊗= δ
Multiplicando escalarmente por ei ambos os membros da equação anterior obtém-se:
AAAA ijimmjmmj imi mjji ==⋅=⋅=⋅ δeeeeeAe
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
25
Tensor de 2ª Ordem
O tensor de 2ª ordem T, pode ser expresso em termos das componentes Tij
relativas à base tensorial ji ee ⊗ , como sendo:
ou tendo em conta a convenção dos índices repetidos [ ]jiijT eeT ⊗= .
[ ]jiij
3
1j
3
1iT eeT ⊗= ∑∑
==
Nestas condições as quantidades Tij são valores escalares que dependem da base
escolhida para a sua representação. A parte tensorial de T está ligada à base de tensores
ji ee ⊗ .
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
26
Tensor de 2ª Ordem
À semelhança do que acontece com os vectores, o tensor T, ele próprio não
depende do sistema de coordenadas escolhido, mas as suas componentes Tij dependem.
O tensor é completamente caracterizado pela sua acção nos três vectores base. A acção
do tensor T no vector base ke é: [ ] kjiijk T eeeeT ⊗=
[ ] ( ) ijkikjkji . eeeeeee δ==⊗iijk T eeT =
ijij vT evT = ( ) jiji vT=vTAcção do Tensor sobre um vector
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
27
Adição de Tensores
A adição de vectores é uma operação já conhecida e já foi referida, a soma dos vectores resultantes do produto de um tensor de 2ª ordem por um vector, v, pode escrever-se com a seguinte forma
[ ] vPTvPvT
tensoresdesoma
+=+ [ ] jijijjijjij vPTvPvT +=+Ou
Consequentemente a soma dos tensores T + P referidos à mesma base tensorial é facilmente calculada da seguinte forma:
[ ] ijijij PT +=+PTÉ comutativa
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
28
Multiplicação por um Escalar
A multiplicação de um vector, Tv, por um escalar, α, também é possível, sendo
[ ] [ ]α αT v T v= ou seja [ ] ijij TT αα =
A multiplicação por um escalar é uma operação distributiva
[ ] ijijij PT ααα +=+ PT
uTvvTu T⋅=⋅
A operação produto escalar seguinte não é comutativa
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
29
Produto de Dois Tensores
[ ] [ ]PT v P T v=
[ ] [ ] ( ) ( ) ijkmmjikmjmjkiikijij vTPvTPv eeeeePT δ=⊗=
[ ]PT ij ik kjP T=
kjkiij
T TP=⎥⎦⎤
⎢⎣⎡ TP ( ) vTP.uvTP.uvT.uP TT
⎥⎦⎤
⎢⎣⎡==
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
30
Tensor Identidade
A norma do tensor A é designada por A é um valor não negativo que é igual à
raiz quadrada de A:A.
Tensor Identidade ⎥⎦⎤
⎢⎣⎡ ⊗δ=⊗= jiijiiI eeee
O tensor T, tem um inverso, 1−T , tal que
( ) vvTT =−1 e ( ) vvTT =−1 sendo ITTTT 11 == −−
ijkj1
ik TT δ=−ij
1kjki TT δ=−
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
31
M ostre que o ten sor A pode se r considerado igu a l à som a de um tenso r sim étrico com
um tensor an ti-sim étrico do segu in te m odo:
22AAAAA
TT −+
+=
Exemplo 1.6
Considere-se que a decomposição é feita de tal modo que A=B+C sendo 2
AABT+
= e
2AAC
T−= e pretende-se mostrar que B é simétrico e C anti-simétrico.
BB2
AA2
AA2
AAB T
ijji
Tjijijiij
Tijij
ij ==+
=+
=+
=
Consequentemente B é um tensor simétrico.
CC2
AA2
AA2
AAC T
ijji
Tjijijiij
Tijij
ij −=−=−
−=−
=−
=
Consequentemente C é um tensor anti-simétrico.
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
32
Traço
O traço de um tensor A, é um escalar designado por trA que é igual à soma dos
elementos da diagonal da forma matricial do tensor de 2ª ordem,
trA= AAA 332211ii ++=A .
Em notação indicial a contracção significa, identificar dois índices e somar considerando os índices mudos. Em notação simbólica é caracterizada por um ponto entre os dois vectores. Além da contracção simples já referida, é possível considerar a contracção dupla de dois tensores A e B, caracterizada por dois pontos, da qual resulta um escalar. A contracção dupla pode ser definida em termos do traço do seguinte modo:
ABABBAABBABA :)(tr)(tr)(tr)(tr: TTTT =====
ABBA ijijijij =
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
33
Propriedades da Contracção Dupla
I:A=trA=A:I
B:C)A(C:A)B((BC):A TT ==
A:v)(uAvuv)(u:A ⊗=⋅=⊗
y)w)(vuy)(w:v)(u ⋅⋅=⊗⊗ (
δδ( jlik=⋅⋅=⊗⊗ )ee)(ee)ee(:)ee( ljkilkji
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
34
Exemplo 1.7
Mostre a partir da definição (1.34) que:
a) ( ) ABAB 111 −−− = b) ( ) ( )AAT 1 T1 −− =
Solução:
a) Multiplicando AB à esquerda por AB 11 −− , obtém-se:
IBBBIBBAAB === −−−−− 11111
consequentemente ( ) ABAB 111 −−− = .
b) ( ) ( ) IIAAAA TT11 T === −− T
Consequentemente ( ) ( )AAT 1 T1 −− =
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
35
Produto Triádico
u⊗v⊗w
(u⊗v)⊗w=u⊗v⊗w
(u⊗v⊗w)x=(w⋅x)u⊗v
(u⊗v⊗w):(x⊗y)=(v⋅x)(w⋅y)u
(u⊗v⊗w):I=(v⋅w)u
Propriedades do Produto Triádico
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
36
Contracção Dupla
A contracção dupla de um tensor de 3ªordem, A com um tensor de 2ª ordem,
B produz um vector, como se pode verificar:
( ) ( )eeeeeB mlkji ⊗⊗⊗= :B: lmijkAA
= ( )( )eeeee imklj ⋅⋅BlmijkA
= eiδδ kmjllmijk BA
= eiBjkijkA
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
37
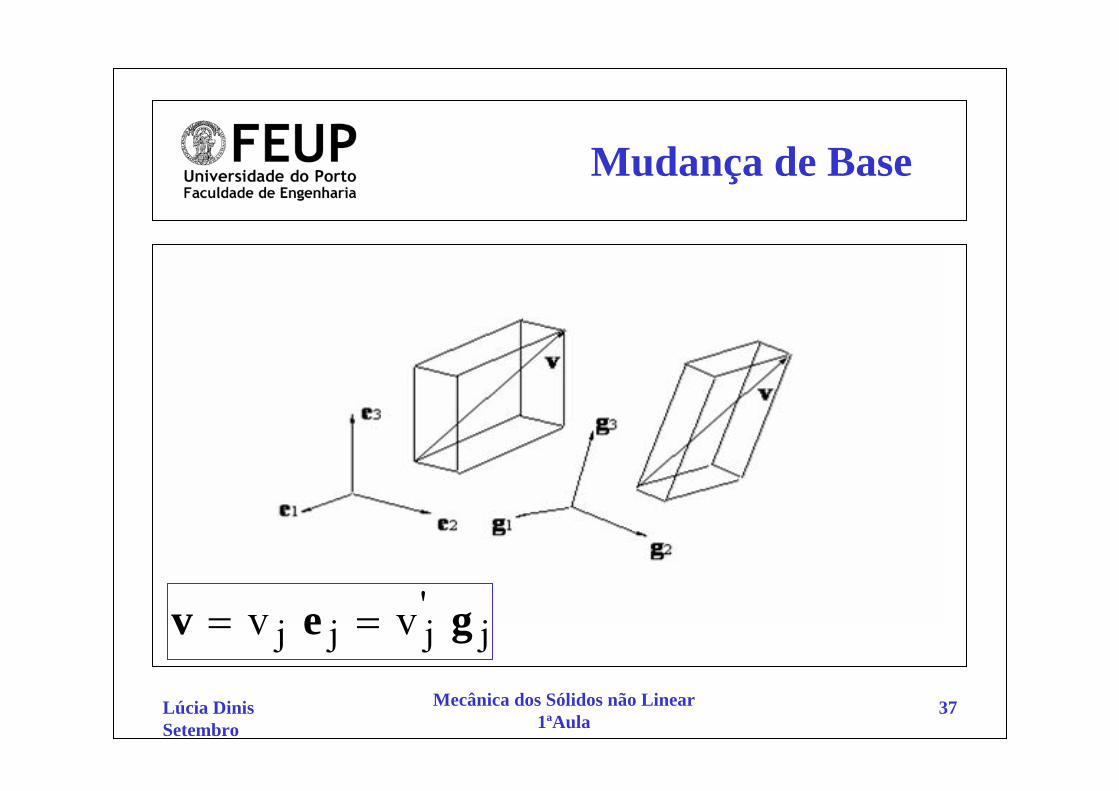
Mudança de Base
v e g= =v vj j j j'
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
38
Mudança de Base
( ) 'jijiii
'iii vQvou.vv === geve
( ) iijjjij vv.v =δ=ee
jiijQ ge ⋅=Tensor de Transformação
[ ] [ ]jiijji'ij TT eeggT ⊗=⊗=
( ) ( )njmiijmnnm T'TT gegegg ⋅⋅==⋅
ijnjmi'mn TQQT =
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
39
Invariantes
( ) ( )ijkjik TfT,Q,Qf =Os invariantes são tais que
Os invariantes do tensor, T, considerados fundamentais são
iiT TI =
jiijT TTII =
kijkijT TTTIII =
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
40
Valores e Vectores Próprios
Tu = v vuT jjij = T.n = v vnT ijij =
T.n =λ n nnT ijij λ=sendo a direcção n chamada de direcção principal ou vector próprio de T e o escalar l chamado de valor principal ou valor próprio de T. As equações 1.53constituem um sistema de equações a que se pode dar a forma
0n)T( jijij =λ− δ
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
41
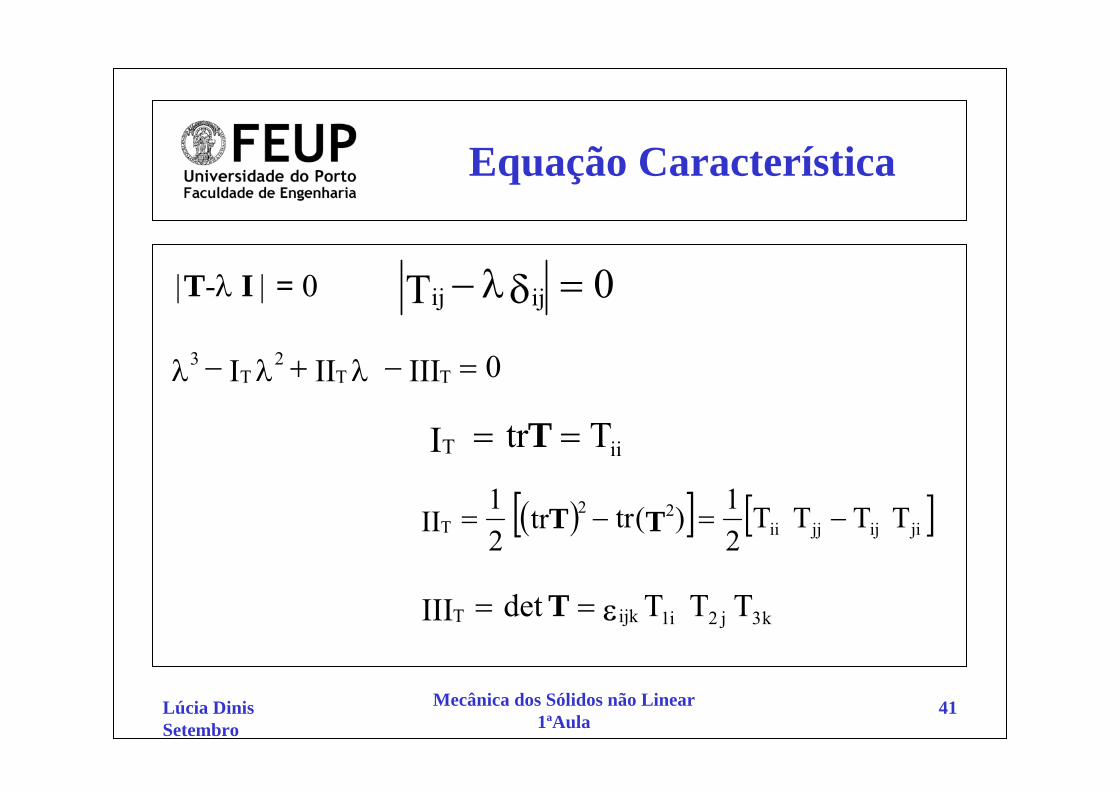
Equação Característica
|T-λ I | = 0 0T ijij =λ− δ
0IIIIII TT2
T3 =−λ+λ−λ
iiT TtrI == T
( )[ ] [ ]jiijjjii22
T TTTT21)(trtr
21
II −=−= TT
k3j2i1ijkT TTTdetIII ε== T
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
42
Campos Escalares, Vectoriais e Tensoriais
Um campo corresponde essencialmente a uma função que é definida num domínio contínuo. Uma função tensorial é uma função cujos argumentos são uma ou mais variáveis tensoriais cujos valores são escalares, vectores ou tensores. Um campo escalar está associado a uma função cujo valor para umponto x do domínio contínuo é um escalar, um campo vectorial está associado a um função cujo valor num ponto é um vector e um campo tensorial está associado a uma função cujo valor num ponto é um tensor. As funções f(A), u(A) e T(A) são exemplos de funções escalares, vectoriais e tensoriais de um tensor variável A. O tensor variável pode ser visto duma forma geral e pode ser um escalar, um vector ou um tensor de ordem superior.
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
43
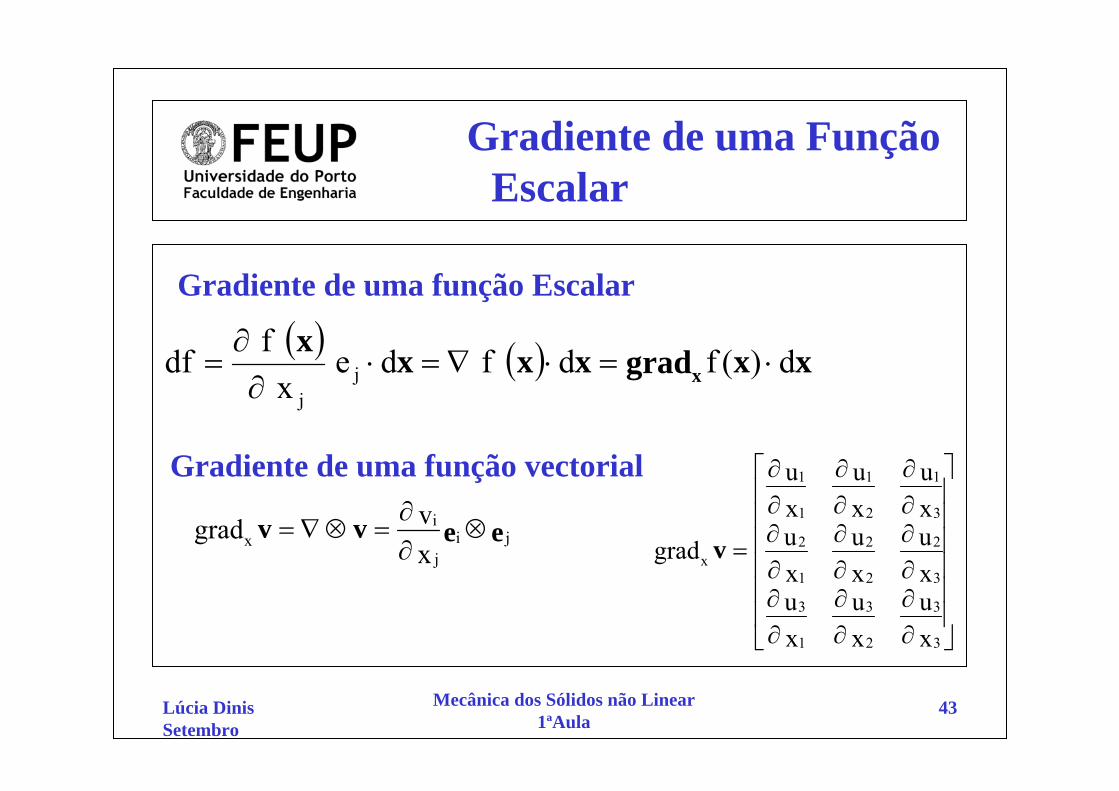
Gradiente de uma Função Escalar
( ) ( ) xxgradxxxxx d)(fdfde
xfdf j
j
⋅=⋅∇=⋅∂∂
=
Gradiente de uma função Escalar
Gradiente de uma função vectorial
eevv jij
ix x
vgrad ⊗∂∂
=⊗∇=
⎥⎥⎥⎥⎥⎥
⎦
⎤
⎢⎢⎢⎢⎢⎢
⎣
⎡
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
∂∂
=
xu
xu
xu
xu
xu
xu
xu
xu
xu
grad
3
3
2
3
1
3
3
2
2
2
1
2
3
1
2
1
1
1
x v
Lúcia DinisSetembro
Mecânica dos Sólidos não Linear1ªAula
44
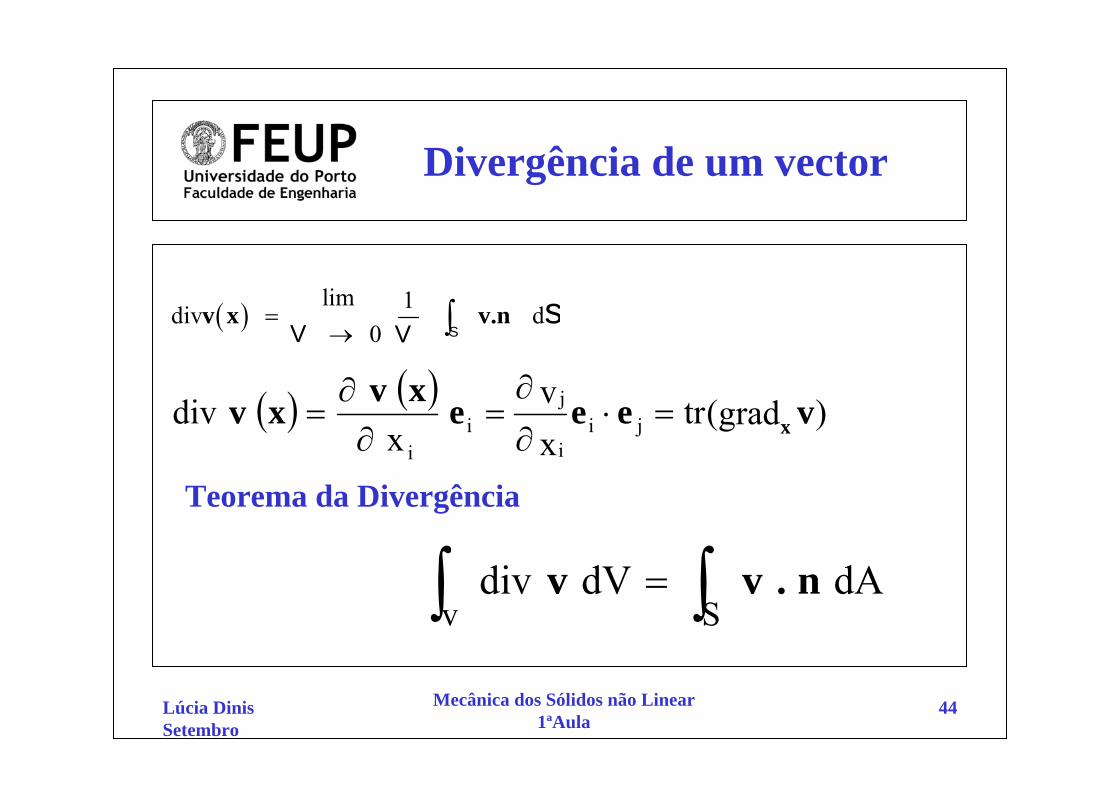
Divergência de um vector
( )lim 1div d
0=
→ ∫x v.nvSV V
s
( ) ( ) )grad(trxv
xdiv ji
i
ji
i
veeexvxv x=⋅∂∂
=∂∂
=
Teorema da Divergência
∫∫ =Sv
dAdVdiv n.vv