cônicas e suas relações com autovalores
TRANSCRIPT

Cônicas e suas relações com autovalores
Bruno Cezar Steinmetz ∗
Licenciatura em Matemática - [email protected]
Prof. Dr. Abel Soares SiqueiraDepartamento de Matemática - UFPR
Dezembro, 2015
ResumoNo presente trabalho, serão introduzidos conceitos fundamentais para o
estudo de funções quadráticas. Inicialmente, será estudado o Polinômio deTaylor, ferramenta essencial em otimização, pois aparece em condições deotimalidade de segunda ordem de funções reais. Além disso, será apresen-tado um estudo da relação entre as cônicas e os autovalores de uma matriz,ou seja, a caracterização das cônicas em função dos autovalores da matrizque define a parte quadrática de sua expressão algébrica formal. Para auxi-liar esse processo, usaremos mudança de coordenadas por meio de rotação etranslação, para gerar uma forma simplificada da expressão algébrica. Alémde facilitar os cálculos, essa forma simplificada deixa clara a relação com osautovalores. Dessa maneira, a partir de conclusões acerca do objeto centraldesse estudo dirigido, será enunciado, portanto, um teorema que auxilia noprocesso de identificação das cônicas e, então, aplicações por meio de exem-plos. Esse estudo serve de prelúdio para o estudo de funções quadráticas,que em duas dimensões têm curvas de nível que são cônicas. O teorema podeser usado para identificação do comportamento da função, e para estabelecera existência de um minimizador.Palavras-chave: Otimização. Cônicas. Autovalores. Autovetores.
∗Bolsista do Programa de Educação Tutorial - Universidade Federal do Paraná
1

1 Polinômio de TaylorMuitas vezes no estudo de funções, se torna cômodo a utilização do Po-
linômio de Taylor em aproximações sucintas. Nesse sentido, faremos aquiuma breve introdução dessa importante ferramenta.
Inicialmente, iremos considerar funções de uma variável real.Seja f : X ⊆ R → R derivável em x ∈ X. O Polinômio de Taylor de
primeira ordem de f em torno de x é a aproximação linear
p1(x) = f(x) + f ′(x)(x− x),
e podemos escreverf(x) = p1(x) + r(x),
onde r(x) é tal que limx→x
r(x)
x− x= 0.
Figura 1: Resto de Taylor de ordem 1 de f em torno de x.
Agora, considere f : X ⊆ R → R derivável até ordem n em x ∈ X. OPolinômio de Taylor de ordem n de f em torno de x é
pn(x) = f(x) +n∑k=1
f (k)(x)
k!(x− x)k,
e podemos escreverf(x) = pn(x) + r(x),
2

onde r(x) é tal que limx→x
r(x)
(x− x)n= 0.
Para funções de n variáveis, estaremos interessados em estudar apenas ospolinômios de Taylor de primeira e segunda ordem.
Considere f : B ⊆ Rn → R diferenciável em x ∈ B. Então, o polinômiode Taylor de ordem 1 de f em torno de x é
p1(x) = f(x) +∇f(x)T (x− x),
em que ∇f(x) =
∂f
∂x1(x)
...∂f
∂xn(x)
, e podemos escrever
f(x) = p1(x) + r(x),
onde r(x) é tal que limx→x
r(x)
‖x− x‖= 0.
Considere agora, f : B ⊆ Rn → R duas vezes diferenciável em x ∈ B.Então, o polinômio de Taylor de ordem 2 de f em torno de x é
p2(x) = f(x) +∇f(x)T (x− x) +1
2(x− x)T∇2f(x)(x− x),
em que ∇2f(x) =
∂2f
∂x1∂x1(x) · · · ∂2f
∂x1∂xn(x)
... . . . ...∂2f
∂xn∂x1(x) · · · ∂2f
∂xn∂xn(x)
, e podemos escrever
f(x) = p2(x) + r(x),
onde r(x) é tal que limx→x
r(x)
‖x− x‖2= 0.
1.1 Taylor com resto de Lagrange
Ao aproximarmos uma função real por um polinômio de Taylor de ordemn cometemos certo erro. Foi Joseph Louis Lagrange quem deu uma funçãopara o erro cometido por essa aproximação, que é o que conhecemos hoje porresto Lagrange.
Considere f : X ⊆ R → R derivável até ordem n + 1 em x ∈ X. Então,podemos escrever
f(x) = pn(x) + r(x),
3

em que r(x) =f (n+1)(ξ)
(n+ 1)!(x − x)n+1 para algum ξ entre x e x. Nesse caso,
r(x) é denominado Resto de Lagrange.Consideraremos agora f : B ⊆ Rn → R de classe C1 e x, d ∈ B. Se f for
derivável até segunda ordem no segmento (x, x+d) então existe t ∈ (0, 1) talque
f(x+ d) = f(x) +∇f(x)Td+1
2dT∇2f(x+ td)d.
2 Autovalores e AutovetoresConsidere um espaço vetorial V sobre um corpo K e T : V → V um
operador linear. Um autovetor de T é um vetor de V, com v 6= 0, tal que
T (v) = λv,
para algum λ ∈ K. Nesse caso, λ será chamado de autovalor associado aoautovetor v. Ou seja,
AutT (λ) = v.
A partir dos autovalores é possível obter um resumo completo das pro-priedades da representação matricial de T , que denotaremos por A. Assim,se λj, com j = 1, · · · , n, são os autovalores de A, então:
• detA = λ1 . . . λn.
• Tr(A) = λ1 + · · ·+ λn.
3 Matrizes definidas positivasTeorema 1. Cada uma das afirmações abaixo são equivalentes para que amatriz simétrica A ∈ Rn×n seja definida positiva:
(I) xTAx > 0 para todos os vetores reais x não nulos.
(II) Todos os autovalores de A são positivos.
(III) Todas as submatrizes superiores Ak = A[1 : k, 1 : k] à esquerda têmdeterminantes positivos.
Demonstração de (I)⇒ (II). A condição (I) define uma matriz definida po-sitiva. Vamos demonstrar que cada autovalor é positivo (λi > 0).
4

Se Ax = λx, x 6= 0, então
xTAx = xTλx = λ||x||2 > 0⇔ λ > 0.
Demonstração de (II)⇒ (I). Pelo Teorema Espectral, todas as matrizes si-métricas possuem um conjunto completo de autovetores ortonormais, todo xé uma combinação de c1x1 + · · ·+ cnxn. Então:
Ax = c1Ax1 + · · ·+ cnAxn = c1λ1x1 + · · ·+ cnλnxn
Pela ortogonalidade de xTi xj = 0 e a normalização xTi xi = 1, temos:
xTAx = c21λ1 + · · ·+ c2nλn > 0.
Demonstração de (I)⇒ (III). Considere a matriz simétria A ∈ Rn×n, daforma
A =
[Ak BBT C
],
onde Ak ∈ Rk×k.Seja x ∈ Rk não nulo, então
xTAkx =[xT 0
] [ Ak BBT C
] [x0
]= yTAy > 0.
Assim Ak é definida positiva e, pela condição (II), seus autovalores são po-sitivos.
Logo, det(Ak) > 0.
Demonstração de (III)⇒ (I). Vamos provar por indução matemática sobren:
Para n = 1: é trivial.Para n = k: suponha válido para n = k, vamos provar para n = k + 1.
Considere A ∈ R(k+1)×(k+1), A simétrica, tal que: A =
[Ak bbT c
], onde:
Ak ∈ Rk×k, b ∈ Rk e c ∈ R.Tomando o vetor y, analisaremos dois casos:
• Caso yn = 0
• Caso yn 6= 0
5

Se yn = 0, então
y =
[x0
], com x ∈ Rk não nulo. Daí,
yTAy =[xT 0
] [ Ak bbT c
] [x0
]= xTAkx > 0,
pela hipótese de indução.Se yn 6= 0, então
y = yn
[x1
]yTAy = y2n
[xT 1
] [ Ak bbT c
] [x1
]= y2n(xTAkx+ 2bTx+ c).
Para concluir, só resta que a função f(x) = xTAkx+ 2bTx+ c seja positiva.Mostraremos que f(x) ≥ f(x∗),∀x ∈ Rk onde x∗ = −A−1k b.Considere v = x− x∗. Então
f(x) = (x∗ + v)TAk(x∗ + v) + 2bT (x∗ + v) + c
= f(x∗) + vTAkv.
Como, pela hipótese de indução, vTAkv > 0, temos: f(x) ≥ f(x∗). Paraconcluir a prova, só resta provar, então, que f(x∗) > 0.
Note que f(x∗) = x∗TAkx∗+2bTx∗+c = c+bTx∗ = c−bTA−1k b. Analisemos
agora a matriz inicial A:
A =
[Ak bbT c
]=
[Id 0
bTA−1k 1
] [Ak b0 c− bTA−1k b
].
Calculando então o determinante, temos
detA = (c− bTA−1k b) detAk.
Portanto,f(x∗) = c− bTA−1k b > 0.
6

4 Mudança de coordenadasConsidere P um ponto do plano com coordenadas (x1, x2). Então as
componentes de−→OP também são (x1, x2) quando O é a origem do sistema,
ou seja,−→OP = (x1, x2) = (x1, 0) + (0, x2) = x1E1 + x2E2
onde E1 e E2 são os vetores canônicos do R2.Assim, o ponto O = (0, 0) e os vetores E1 e E2 determinam um sistema
de coordenadas ortogonal O,E1, E2.Para resolvermos alguns problemas geométricos precisamos de um se-
gundo sistema de coordenadas ortogonal determinado por uma origem O′ epor vetores E ′1 e E ′2.
As coordenadas de um ponto P no sistema de coordenadas O′, E ′1, E ′2são definidas como os coeficientes da combinação linear que fizemos ao escre-vermos
−−→O′P em relação a E ′1 e E ′2, ou seja, se
−−→O′P = x′1E
′1 + x′2E
′2,
então as coordenadas de P em O′, E ′1, E ′2 são P ′ = (x′1, x′2).
4.1 Rotação
Considere um novo sistema de coordenadas que foi obtido a partir de umarotação de um ângulo θ no sistema original. Observe a imagem abaixo:
Figura 2: Rotação de um ângulo θ no sistema original
Assim, temos que
7

E ′1 = (cos θ, senθ)
E ′2 = (−senθ, cos θ)
Seja P ∈ R2. Vamos determinar as coordenadas de P em relação ao novosistema de coordenadas obtido a partir da rotação θ. Para tanto, devemosencontrar x′1 e x′2 tais que
−−→O′P = x′1E
′1 + x′2E
′2.
Substituindo E ′1 e E ′2, temos que a equação acima é equivalente ao sistemalinear abaixo:
x′1 cos θ − x′2senθ = x1x′1senθ + x′2 cos θ = x2
ou
RθX = P ,
onde Rθ =
[cos θ −senθsenθ cos θ
]é chamada matriz de rotação e P =
[x1x2
].
A solução é dada por[x′1x′2
]= R−1θ P = RT
θ P =
[cos θ senθ−senθ cos θ
] [x1x2
].
4.2 Translação
Consideremos o caso em que o novo sistema de coordenadas não coincidacom o original, ou seja, O′ 6= O. Nesse caso, dizemos que ocorreu umatranslação no sistema.
Observe a Figura 3 abaixo:Assim,
−−→O′P =
−→OP −
−−→OO′.
Portanto, se−−→OO′ = (o1, o2), então
−−→O′P = (x′1, x
′2) = (x1, x2)− (o1, o2).
Logo, as coordenadas de P no novo sistema são dadas por
P = (x1, x2)− (o1, o2) = (x1 − o1, x2 − o2).
8

Figura 3: Coordenadas de um ponto P em dois sistemas (translação).
5 CônicasDo grego Konikós (que tem forma de cone) essas curvas são obtidas pela
interseção de um plano secante com um cone de duas folhas. Essas figurastiveram grande destaque já no século IV a.C – I a.C com Apolônio.
Apolônio de Perga (262 a.C – 190 a.C), matemático grego, mostrou queas seções cônicas eram obtidas a partir de um único cone. E é a partir dissoque temos então as conhecidas curvas cônicas, utilizadas em diversos camposda ciência e tecnologia atual.
Figura 4: Representação das curvas cônicas.
9

Na Figura 4 acima, temos as representações de parábola, circunferência(caso particular de elipse), elipse e hipérbole, respectivamente.
No plano, uma cônica é o conjunto de pontos do R2 que satisfazem umaexpressão da forma
ax21 + bx1x2 + cx22 + dx1 + ex2 + f = 0,
onde a, b, c, d, e e f são números reais (a, b e c não simultaneamente nulos).
5.1 Elipse
A Elipse é a curva resultante da interseção de um cone com um planosecante e esse, por sua vez, secciona o cone em apenas uma de suas folhas.
Figura 5: Interseção do plano secante com o cone formando a elipse.
Figura 6: Interseção do plano secante com o cone formando a elipse.
10

5.1.1 Algebricidade da Elipse
Definição 1. A elipse é o conjunto de pontos P do plano tais que a somadas distâncias de P a dois pontos fixos F1 e F2 é constante, ou seja, sed(F1, F2) = 2c, então a elipse é o conjunto de pontos P tais que
d(P, F1) + d(P, F2) = 2a,
onde c < a.
Proposição 1. i. A equação da elipse cujos focos são F1 = (−c, 0) eF2 = (c, 0) é
x21a2
+x22b2
= 1.
ii. A equação da elipse cujos focos são F1 = (0,−c) e F2 = (0, c) é
x21b2
+x22a2
= 1.
Em ambos os casos b =√a2 − c2.
5.1.2 Geometria da Elipse
x1
x2
F1 F2
Figura 7: Representação de uma elipse no plano.
11

5.2 Hipérbole
A Hipérbole é a curva resultante da interseção de um cone com um planosecante e esse, por sua vez, secciona as duas folhas do cone e é perpendicularà base do mesmo.
Figura 8: Interseção do plano secante com o cone formando a hipérbole.
Figura 9: Interseção do plano secante com o cone formando a hipérbole.
5.2.1 Algebricidade da Hipérbole
Definição 2. A hipérbole é o conjunto de pontos P do plano tais que o mó-dulo da diferença das distâncias de P a dois pontos fixos F1 e F2 é constante,ou seja, se d(F1, F2) = 2c, então a hipérbole é o conjunto de pontos P taisque
|d(P, F1)− d(P, F2)| = 2a,
onde a < c.
12

Proposição 2. i. A equação da hipérbole cujos focos são F1 = (−c, 0) eF2 = (c, 0) é
x21a2− x22b2
= 1.
ii. A equação da hipérbole cujos focos são F1 = (0,−c) e F2 = (0, c) é
x22b2− x21a2
= 1.
Em ambos os casos b =√c2 − a2.
5.2.2 Geometria da Hipérbole
x1
x2
F1 F2
Figura 10: Representação de uma hipérbole no plano.
13

5.3 Parábola
A Parábola é a curva resultante da interseção de um cone com um planosecante e esse, por sua vez, é paralelo a uma reta geratriz do cone.
Figura 11: Interseção do plano secante com o cone formando a parábola.
Figura 12: Interseção do plano secante com o cone formando a parábola.
5.3.1 Algebricidade da Parábola
Definição 3. A Parábola é o conjunto de pontos P do plano equidistantesde uma reta r e de um ponto F , F /∈ r, ou seja, a parábola é o conjunto depontos P tais que
d(P, F ) = d(P, r).
Proposição 3. i. A equação da parábola cujo foco é F = (p, 0) e a retadiretriz r : x1 = −p é
x22 = 4px1.
14

ii. A equação da parábola cujo foco é F = (0, p) e a reta diretriz r : x2 =−p é
x21 = 4px2.
5.3.2 Geometria da Parábola
x1
x2
r
F
Figura 13: Representação de uma parábola no plano.
6 Caracterização das cônicasA partir de agora estaremos interessados em estudar uma forma mais
simples para identificar uma cônica em sua degeneração.Dada a equação algébrica de uma cônica, iremos procurar fazer uma mu-
dança de coordenadas para facilitar a identificação. Considere a equaçãoabaixo no plano:
xtAx+Kx+ f = 0,
onde x =
[x1x2
], A =
[a b
2b2
c
]e K =
[d e
].
Iremos fazer uma rotação de um ângulo θ que elimina o termo x1x2 naequação acima transformando-a em
x′TBx′ +K ′x′ + f ′ = 0,
ou seja, fazendo a mudança de coordenadas por rotação, temos[x1x2
]=
[cos θ −senθsenθ cos θ
] [x′1x′2
]
15

x2
x1
x′1
x′2
E ′1E ′2
E1
E2
− sin θ
cos θ
cos θ
sin θθ
θ
Figura 14: Rotação de um ângulo θ no sistema original.
e, portanto, para um ângulo θ adequado, obtemos
a′x′21 + c′x′22 + d′x′1 + e′x′2 + f ′ = 0.
16

Fazendo a mudança de coordenadas x = Rθx′, onde x′ =
[x′1x′2
]e Rθ =[
cos θ −senθsenθ cos θ
], obtemos
x′TBx′ +K ′x′ + f = 0,
onde B = RTθ ARθ e K ′ = KRθ. Como I2 = RT
θ Rθ, concluímos que
det(B − λI2) = det(RTθ ) det(A− λI2) det(Rθ) = det(A− λI2).
Assim, escolhido θ tal que b′ = 0 temos que
det(A− λI2) = det(B − λI2) = (λ− a′)(λ− c′).
Logo, os coeficientes a′ e c′ são os autovalores da matriz A, ou seja, as raízesdo polinômio característico p(λ) de A.
Vamos, então, determinar qual o ângulo θ que faz esse trabalho. Noteque a matriz Rθ é tal que
B = RTθ ARθ =⇒ RθB = ARθ.
Por um lado,
ARθ = A
[cos θ −senθsenθ cos θ
]=
[A
[cos θsenθ
]A
[−senθcos θ
]],
por outro lado,
RθB =
[cos θ −senθsenθ cos θ
] [a′ 00 c′
]=
[a′[
cos θsenθ
]c′[−senθcos θ
]].
Como RθB = ARθ segue que E ′1 =
[cos θsenθ
]é tal que
AE ′1 = a′E ′1 =⇒ AE ′1 = a′Id2E′1
ou(A− a′Id2)E ′1 = 0.
Analogamente,(A− c′Id2)E ′2 = 0.
Logo, E ′1 e E ′2 são soluções de norma igual a 1 do sistema linear
(A− λId2)X = 0,
17

em que λ = a′ para E ′1 e λ = c′ para E ′2, isto é, são os autovetores de norma1 associados a estes autovalores.
Portanto, a mudança de coordenadas dada por X = RθX′, em que Rθ =[
E ′1 E ′2], a equação
ax21 + bx1x2 + cx22 + dx1 + ex2 + f = 0
se transforma em
a′x′21 + c′x′22 + d′x1 + e′x′2 + f ′ = 0.
Concluímos, portanto, que os vetores E ′1 e E ′2 dão a direção e o sentidodos novos eixos x′1 e x′2.
6.1 Centro da Cônica
Definição 4. Definimos como o centro C de uma cônica, o ponto de sime-tria dessa cônica, caso exista.
Considere a expressão abaixo obtida por uma rotação
a′x′21 + c′x′22 + d′x′1 + e′x′2 + f = 0.
O centro da cônica rotacionada será o ponto
C ′ =
(− d′
2a′,− e′
2c′
),
com a′ e c′ não nulos. De fato,
a′x′21 + c′x′22 + d′x′1 + e′x′2 + f ⇒ a′(x′1 +
d′
2a′
)2
+ c′(x′2 +
e′
2c′
)2
= F,
onde F =d′2
4a′+e′2
4c′− f . Portanto, o centro C original da cônica é
C = RθC′,
onde Rθ =
[cos θ − sin θsin θ cos θ
]e C ′ =
[− d′
2a′
− e′
2c′
].
18

7 Teorema dos AutovaloresTeorema 2. Seja Ω, não vazio, o conjunto de pontos do plano que satisfazema equação
xTAx+Kx+ f = 0,
onde x =
[x1x2
], A =
[a b
2b2
c
]e K =
[d e
]. Sejam a′ e c′ as raízes de
p(λ) de A. Então,
i. Se a′c′ > 0, então Ω é uma elipse e supondo, sem perda de generali-dade, |c′| < |a′|, então a medida dos eixos maior e menor da elipse é,respectivamente,
√Fc′e√
Fa′.
ii. Se a′c′ < 0, então Ω é uma hipérbole e supondo, sem perda de genera-lidade, c′F < 0, então a medida do eixo real é 2
√Fa′.
iii. Se a′c′ = 0, então Ω é uma parábola e supondo, sem perda de generali-dade, c′ = 0, então a distância focal é K
4a′vc′‖vc′‖
.
Vejamos alguns exemplos de quadráticas e classifiquemos em elipse, hi-pérbole ou parábola:
Exemplo 1. Considere a seguinte expressão
4x21 + 3x1x2 + 4x22 − 16x1 − 16x2 + 17 = 0.
• Autovalores da matriz que gera: λ1 = 112e λ2 = 5
2;
• Autovetores relativos: E ′1 = (1, 1) e E ′2 = (−1, 1);
• Elipse de centro C =(1611, 1611
);
x1
x2
v1v2
C
19
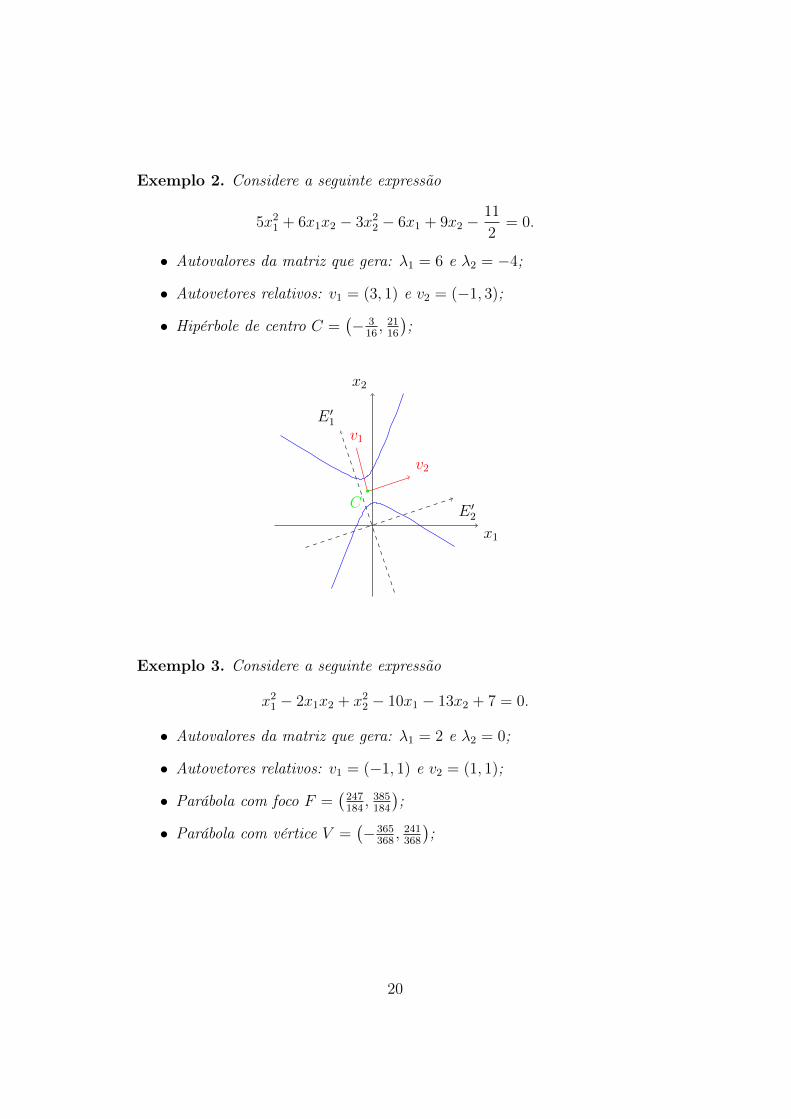
Exemplo 2. Considere a seguinte expressão
5x21 + 6x1x2 − 3x22 − 6x1 + 9x2 −11
2= 0.
• Autovalores da matriz que gera: λ1 = 6 e λ2 = −4;
• Autovetores relativos: v1 = (3, 1) e v2 = (−1, 3);
• Hipérbole de centro C =(− 3
16, 2116
);
x1
x2
v2
v1
C
E ′1
E ′2
Exemplo 3. Considere a seguinte expressão
x21 − 2x1x2 + x22 − 10x1 − 13x2 + 7 = 0.
• Autovalores da matriz que gera: λ1 = 2 e λ2 = 0;
• Autovetores relativos: v1 = (−1, 1) e v2 = (1, 1);
• Parábola com foco F =(247184, 385184
);
• Parábola com vértice V =(−365
368, 241368
);
20

x1
x2
V
pv2
E ′2
v1
E ′1
F
8 Considerações FinaisCom o estudo dirigido acima, pudemos estabelecer diversas conexões en-
tre as áreas em que a Matemática se formaliza. Em Otimização, estamosinteressados em estudar métodos para se obter o melhor rendimento possívelde um problema, afim de melhor alcançar um objetivo.
Nesse sentido, fazendo uso de ferramentas bem utilizadas em teorias deAnálise como, por exemplo, condições de existência de maximizadores e/ouminimizadores de uma função, aproximações sucessivas de funções por po-linômios, etc, buscamos trabalhar com processos de otimização de funçõesquadráticas reais, analisando as curvas de níveis que são as cônicas.
Para esse desenvolvimento, fez-se necessário a utilização de construçõesobtidas na Álgebra Linear e na Geometria Analítica. O teorema dos autovalo-res descrito analisa características presentes na matriz que define a expressãoalgébrica formal de uma quadrática.
Desse modo, podemos concluir, então, que as investigações feitas acercado trabalho torna clara a relação entre construções geométricas e algébricasfeitas sob uma função quadrática. É possível estudar o comportamento dessetipo de função a partir de relações com autovalores, sendo possível determinara existência de maximizadores e/ou minimizadores.
Referências[1] Ivan de Camargo and Paulo Boulos. Geometria Analítica: um tratamento
vetorial. 2005.
21

[2] Ademir Ribeiro e Elizabeth Karas. Otimização Contínua: Aspectos Teó-ricos e Computacionais. Cengage: São Paulo, 2013.
[3] F. Coelho e M. Lourenço. Um curso de Álgebra Linear. USP, 2002.
[4] Jorge Nocedal and Stephen Wright. Numerical optimization. SpringerScience & Business Media, 2006.
[5] Reginaldo J Santos. Matrizes, Vetores e Geometria Analítica. ImprensaUniversitária da UFMG: Belo Horizonte, 2012.
[6] Gilbert Strang. Álgebra Linear e suas aplicações. Cengage, 2011.
22