caoticidade dos atratores hiperbolicos-singulares · universidade federal da bahia-ufba instituto...
TRANSCRIPT
Universidade Federal da Bahia - UFBA
Instituto de Matematica - IM
Programa de Pos-Graduacao em Matematica - PGMAT
Dissertacao de Mestrado
Caoticidade dos AtratoresHiperbolicos-singulares
Katia Silene Ferreira Lima Rocha
Salvador-Bahia
Fevereiro de 2011

Caoticidade dos AtratoresHiperbolicos-singulares
Katia Silene Ferreira Lima Rocha
Dissertacao de Mestrado apresentada ao
Colegiado da Pos-Graduacao em Matematica da
Universidade Federal da Bahia como requisito
parcial para obtencao do tıtulo de Mestre em
Matematica.
Orientador: Prof. Dr. Paulo Cesar R. Pinto
Varandas.
Co-orientador: Prof. Dr. Vilton Jeovan Viana
Pinheiro.
Salvador-Bahia
Fevereiro de 2011

Rocha, Katia Silene Ferreira Lima.
Caoticidade dos Atratores Hiperbolicos-singulares /
Katia Silene F.Lima Rocha. – Salvador: UFBA, 2011.
76 f. : il
Orientador: Prof. Dr. Paulo Cesar R. Pinto Varandas.
Co-orientador: Prof. Dr. Vilton Jeovan Viana Pinheiro.
Dissertacao (mestrado) – Universidade Federal da Bahia,
Instituto de Matematica, Programa de Pos-graduacao em
Matematica, 2011.
Referencias bibliograficas.
1. Sistemas Dinamicos. 2. Atratores. 3. Expansividade. 4.
Teoria Ergodica. 5. Medidas S.R.B. I. Varandas, Paulo Cesar
R. Pinto. II. Pinheiro, Vilton Jeovan Viana. III. Universidade
Federal da Bahia, Instituto de Matematica. IV. Tıtulo.
CDU : 517.930
Caoticidade dos AtratoresHiperbolicos-singulares
Katia Silene Ferreira Lima Rocha
Dissertacao de Mestrado apresentada ao
Colegiado da Pos-Graduacao em Matematica da
Universidade Federal da Bahia como requisito
parcial para obtencao do tıtulo de Mestre em
Matematica, aprovada em 25 de Fevereiro de
2011.
Banca examinadora:
Prof. Dr. Paulo Cesar Rodrigues Pinto Varandas (Orientador)
UFBA
Prof. Dr. Vilton Jeovan Viana Pinheiro (Co-orientador)
UFBA
Prof. Dr. Vıtor Domingos Martins de Araujo
UFRJ

A memoria de meu pai, Jose
Pedro Filho!
Agradecimentos
Embora possam dizer que dissertacao tenha uma finalidade puramente academica,
ha contribuicoes diversas que nao podem deixar de serem realcadas, como sentimentos e
vibracoes que a tornaram possıvel. Por essa razao, reservo esse texto para nao somente
agradecer a todos que me ajudaram neste novo projeto, quero trazer para dentro do meu
texto aqueles que ja o percorreram nas entrelinhas. Afirmo que nao sera tarefa facil, por
esta razao serei o mais seletiva possıvel.
A Deus, por me amparar nos momentos difıceis e me proporcionar paz e forca
interior para superar dificuldades.
A CAPES pela bolsa concedida durante os dois anos de curso.
Aos amigos academicos, pela ajuda prestada na elaboracao deste ou de alguma
forma no meu percurso nesses dois anos, os quais partilharam comigo ideias, fomentaram
discussoes, dentre eles, Angela Soldatelli, Felipe Antonio, Luiz Alberto, Marcus Morro,
Roberto Sacramento, Rodrigo von Flach e Tiago Bomfim. E de uma forma especial a
aqueles que por muitas vezes deram sentido ao meu sorriso, Caio(Cainho), Elaıs(a fro),
Fran(Framba soneca), Tina(a grossa), Reni(Rn) e Andressa(I love you Brasil).
Continuando minha lista seletiva nao poderia deixar de citar a aqueles que fizeram
parte da minha vida escolar e academica, lembrarei do inıcio, Dourile Nunes, Efigenia,
Maria Jose, Nelson e Zilda Paiva. E parte da minha famılia UEFS: Andiara, Andre
Mandolesi, Arleide, Claudiano Goulart, Fabıola Lima, Hildete, Jean Fernandes, Joao
Cardeal, Joilma Carneiro e Marcos Grilo.
A todos os funcionarios do IM-UFBA, pela disposposicao e profissionalismo. Em
especial a Dona Tania, Dona Zeze, Jairo, Cleber, Douglas e Sr. Gilmar.
A todos os professores da PGMAT do IM-UFBA, pela dedicacao, Enaldo Ver-
gasta, por ter me acolhido de bracos abertos, Taıse Santiago, que por muitas vezes foi
muito alem de ser professora, pelo carinho e conselhos e a Armando Castro, seu pensar
academico e um exemplo a ser seguido.
A Vilton Pinheiro, por ter aceitado o desafio da orientacao e que rapidamente me
encaminhou para o tema tratado nesta dissertacao, obrigada pela disponibilidade revelada
desde o inıcio, entusiasmo, encorajamento e experiencias academicas que pude vivenciar
durante estes dois anos.
A Paulo Varandas, por ter me ensinado a arte de pensar o trabalho academico
com rigor e disciplina. Suas sugestoes e manuscritos levaram a sucessivas revisoes, cujas
eventuais falhas que permanecem e de inteiramente responsabilidade da autora, teriam
sido inumeras nao fosse por suas intervencoes incisivas. Sua dedicacao me fez um profis-
sional diferente.
Ao Prof. Vıtor Araujo por aceitar participar da comissao julgadora de minha
dissertacao, pela prestatividade e agradeco-o ainda pelas correcoes e aconselhamentos.
Aqueles que nossa longa historia de amizade e sempre fonte de inspiracao, obri-
gada por terem sido e por serem, simplesmente meus amigos, Van, Miss, Baixinha, Iranı,
Dudu, Lan, Andre Luiz, Jonathas Maicon, Thy, Dı, Flavinho, Gily, Dan, Jutha, tia Izis,
Gavila, Fa, Nina(irma preta e companheira de casa “blanca”). Bel, Wagner e Cıntia pelo
abrigo durante o primeiro verao e a Didi pelo apoio.
A minha famılia porto seguro em todos os momentos.
Meus irmaos, caminhoneiros pelo Brasil, nao sou a mesma sem te-los por perto.
Meu Pai(Painho) que cedo partiu deixando orfas paginas de minha vida, o que
me resta neste momento e lembrar do quao pouco precisava fazer para ser motivo de
orgulho, lembro-me bem quanto orgulho em dizer aos seus amigos que sua filha ja sabia
ler e escrever... continuarei sonhando no dia em que enfim me diras novamente : “Amo-te,
desde quando nem sabias a cor dos meus olhos. Amo-te, desde quando eu sequer sabia,
se eras um menino ou uma menina. Amo-te, desde quando sequer existias e apenas era
um sonho do meu desejo de pai”.
Minha Mae(Mainha) de uma forma muito carinhosa, quanto por mim ja fez e
faz cuidando de mim sem se importar com o amanha. Es minha companheira diaria,
teus ensinamentos carrego sempre comigo e o ser humano que sou devo a senhora; sem-
pre empenhada em nossa educacao e que por muitas vezes abdicou de viver para nos
proporcionar dias melhores. Te amo.
A Neva, minha sempre Cunhada/irma pelo carinho e inestimavel apoio familiar
que por vezes preencheu minha ausencia. Aos meus sobrinhos pela ternura sempre pre-
sente apesar do “debito de atencao”e muitas vezes falta de paciencia, fruto do desgaste
diario. Espero que o entusiasmo, seriedade e empenho que ponho no trabalho lhes possa
servir de estımulo para fazerem sempre “mais e melhor”.
E a voce “Cheiro”, pois sua paciencia infinita e crenca absoluta na minha capaci-
dade de realizacao deste foram elementos propulsores. Nesta trajetoria soube compreen-
der como ninguem, as fases pelas quais eu estava passando e as falhas que fui tendo por
forca da circunstancia, sempre tentando entender minhas dificuldades, ausencia, e sempre
encontrando um jeitinho unico de se aproximar em meio as pilhas de livros, te amo.
“A percepcao do desconhecido e a mais fascinante das ex-
periencias. O homem que nao tem os olhos abertos para o mis-
terioso passara pela vida sem ver nada.”
Albert Einstein
Resumo
Provaremos que um atrator Hiperbolico-singular de um fluxo 3-dimensional e
caotico sob dois pontos de vista diferentes. Primeiro provaremos que o fluxo e expansivo,
isto e, se dois pontos permanecem proximos por todo tempo, entao suas orbitas coincidem.
O segundo objetivo e a existencia de uma medida fısica suportada no atrator.
Palavras-chave: Atrator; Hiperbolico-singular; Expansividade; Medida fısica.
Abstract
We prove that a singular-hyperbolic attractor of a 3-dimensional flow is chaotic
from two different perspectives. The first is that the flow is expansive, that is, if two
points remain close for all time, then their orbits coincide. The second is the existence of
a physical measure supported on the attractor.
Keywords: Attractor; Singular-hyperbolic ; Expansivity; physical measure.
Sumario
Introducao 1
1 Notacoes, Definicoes e Ferramentas 4
1.1 Notacoes e Definicoes . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2 Ferramentas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.3 Conjuntos Hiperbolicos-singulares . . . . . . . . . . . . . . . . . . . . . . . 9
1.4 Modelo Geometrico para as equacoes do Lorenz . . . . . . . . . . . . . . . 11
1.5 Expansividade segundo Komuro versus Expansividade segundo Bowen . . . 14
2 Expansividade 17
2.1 Secao transversal e Mapas de Poincare . . . . . . . . . . . . . . . . . . . . 18
2.1.1 Folheacoes Estaveis em secoes transversais . . . . . . . . . . . . . . 18
2.1.2 Hiperbolicidade dos mapas de Poincare . . . . . . . . . . . . . . . . 20
2.1.3 Secao transversal adaptada . . . . . . . . . . . . . . . . . . . . . . . 23
2.2 Vizinhanca de Singularidade . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.3 Prova de Expansividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.3.1 Conclusao da Demonstracao do Teorema (A) . . . . . . . . . . . . . 32
2.3.2 Prova do Lema Tecnico - Controle de angulos . . . . . . . . . . . . 33
2.3.3 Prova do Teorema de Expansividade para o Futuro . . . . . . . . . 34
2.4 Expansividade robusta . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
3 Medida S.R.B. 45
3.1 Medidas de probabilidade invariantes absolutamente contınuas para a aplicacao
unidimensional . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
3.1.1 Mapa de Poincare Global . . . . . . . . . . . . . . . . . . . . . . . . 46
3.1.2 Reducao do Mapa de Poincare Global a um mapa unidimensional
f , existencia e finitude de medidas de probabilidades f -invariantes
absolutamente contınuas . . . . . . . . . . . . . . . . . . . . . . . . 49
3.2 Construcao de medidas invariantes para a transformacao R . . . . . . . . . 52
3.3 Fluxo de suspensao sobre o mapa de Poincare . . . . . . . . . . . . . . . . 56

3.4 Fluxo original . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
3.4.1 Unicidade da medida fısica . . . . . . . . . . . . . . . . . . . . . . . 65
3.4.2 Hiperbolicidade da medida fısica . . . . . . . . . . . . . . . . . . . . 65
4 Trabalhos recentes e Perspectivas futuras 67
4.1 Expansividade e hiperbolicidade singular . . . . . . . . . . . . . . . . . . . 67
4.2 Transformacoes expansoras por pedacos com singularidades . . . . . . . . . 68
4.2.1 Medida misturadora e decaimento de correlacoes . . . . . . . . . . . 68
4.2.2 Particao de Markov . . . . . . . . . . . . . . . . . . . . . . . . . . . 69
4.3 Decaimento de correlacoes para fluxos hiperbolicos-singulares . . . . . . . . 70
4.4 Especificacao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
Referencias 74
Lista de Figuras
1.1 Fluxo na vizinhanca de um ponto fixo - Cuspides . . . . . . . . . . . . . . 12
1.2 Modelo Geometrico do Lorenz . . . . . . . . . . . . . . . . . . . . . . . . . 13
1.3 Aplicacao unidimensional para o Lorenz . . . . . . . . . . . . . . . . . . . 13
2.1 Secao transversal imagem de um quadrado por um difeomorfismo . . . . . 20
2.2 Secao transversal δ-adaptada . . . . . . . . . . . . . . . . . . . . . . . . . . 24
2.3 Construcao da secao transversal δ-adaptada de um ponto regular x . . . . 26
2.4 Existencia de Variedades estaveis para o mapa de Poincare . . . . . . . . . 28
2.5 Secoes transversais adaptadas na vizinhanca de uma singularidade . . . . . 29
2.6 Conjunto A . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.7 Prova de expansividade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
2.8 Posicao relativa das variedades estaveis e orbitas no argumento da reducao
do Teorema(A) para Teorema de Expansividade para o futuro . . . . . . . 33
2.9 Controle de angulos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
2.10 Caixa de fluxo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
2.11 Construcao de mapas de Poincare entre variedades estaveis . . . . . . . . . 37
2.12 Intersecao em mesma componente conexa . . . . . . . . . . . . . . . . . . . 39
2.13 Entrada em uma caixa de fluxo de uma singularidade . . . . . . . . . . . . 39
2.14 Mapa de Poincare definido com o fluxo induzido . . . . . . . . . . . . . . . 42
2.15 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42
2.16 Expansao . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
3.1 Holonomia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
3.2 Projecao ao longo das folhas . . . . . . . . . . . . . . . . . . . . . . . . . . 51
3.3 Relacao de equivalencia para o fluxo de suspensao . . . . . . . . . . . . . . 57
3.4 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
Introducao
Em termos gerais Sistemas Dinamicos estao relacionados com a descricao do
comportamento da maioria das orbitas da maioria dos sistemas, especialmente quando
o tempo tende ao infinito. Alem disso, estamos interessados em saber quando e em que
sentido este comportamente e robusto quando submetido a perturbacoes.
A teoria de dinamica uniformemente hiperbolica foi iniciada por volta de 1960 por
Smale, em cerca de dez anos toda uma teoria ergodica foi desenvolvida para esses sistemas.
Um subconjunto fechado H de uma variedade compacta e hiperbolico se e invariante e
existe uma decomposicao do seu fibrado tangente em dois subfibrados invariantes, onde
um deles contrai e o outro expande sob a acao da derivada do fluxo.
Os sistemas uniformemente hiperbolicos apresentam comportamentos caoticos,
contudo admitem uma descricao precisa do seu comportamento, pois podem ser decompos-
tos em subconjuntos invariantes Λ1,Λ2, ...,Λn que sao transitivos (possuem obita densa) e
quase todas as orbitas futuras desses sistemas se acumulam em um deles, ou seja, embora
a dinamica proxima a esses atratores possam ser bastante “caoticas”sao surpreendente-
mente “bem comportadas”do ponto de vista estatıstico.
Por volta de 1962 o meteorologista Edward Norton Lorenz buscava um modelo
para previsao do clima e acabou encontrando, atraves de um sistema de equacoes diferen-
ciais, o atrator de Lorenz. As equacoes de Lorenz destacam o de fato que para sistemas
de tempo contınuo, dinamica robustamente transitiva pode ocorrer fora do contexto da
hiperbolicidade uniforme. Neste caso, a origem e singularidade com decomposicao do
espaco tangente em soma direta de um subespaco estavel de dimensao dois e um su-
bespaco instavel de dimensao um, em qualquer outro ponto a decomposicao e dada por
um subespaco instavel, um subespaco estavel e uma direcao central ambos com dimensao
um, logo nao e uniformemente hiperbolico. Apesar da hiperbolicidade nos fornecer mo-
delos caoticos, robustos e estaveis, ela exige propriedades muito rıgidas, excluindo muitas
dinamicas importantes que nao satisfazem seus presupostos.
Isso motivou a busca de uma generalizacao da nocao de hiperbolicidade uniforme
abrangendo todos os sistemas de tempo contınuo com comportamento dinamico robusto.
O passo fundamental para tal abrangencia foi realizado por Morales, Pacıfico e Pujals
1
2
[MPPuj98], com o estudo da classe de sistemas dinamicos hiperbolicos-singulares, que
sao sistemas com todas as singularidades hiperbolicas e admitindo uma decomposicao
invariante dominada. Informalmente, um conjunto Λ compacto e invariante e dito ser
hiperbolico singular se existe uma decomposicao do fibrado tangente em dois subfibrados
invariantes, onde um deles tem um comportamento contrativo e o outro, sendo dominado
pelo primeiro, expande volume.
O primeiro exemplo, dentre outros, de conjunto hiperbolico singular e o atrator
de Lorenz e seus modelos geometricos.
Um passo natural e tentar entender quais as consequencias da dinamica de hiper-
bolicidade singular dos conjuntos invariantes do ponto de vista da dinamica, geometria,
estatıstica; sendo que muitos problemas permanecem em aberto. Este trabalho e base-
ado no artigo “Singular-Hyperbolic Attractors are Chaotic”[APPujV07], uma importante
contribuicoes para tal teoria.
Inicialmente vamos provar que um atrator hiperbolico-singular e expansivo, ou
seja, qualquer duas orbitas que permanecem perto em todos os momentos devem coincidir.
A definicao que usaremos foi introduzida por Komuro em [Kom84]. O primeiro resultado
principal da dissertacao e o seguinte:
Teorema (A) Seja Λ um atrator hiperbolico-singular. Entao Λ e expansivo.
Uma caracterıstica comum em dinamica caotica e a dependencia sensıvel as
condicoes iniciais, que de forma geral significa que pequenas diferencas sao rapidamente
aumentadas com o passar do tempo. Como expansividade implica dependencia as condicoes
iniciais com a prova do Teorema (A) concluımos a prova de caoticidade dos atratores hi-
perbolicos-singulares.
Dizemos que uma propriedade e Cr-robusta, r ≥ 1, se ela vale num aberto de
classe Cr no espaco X(M) dos campos vetoriais que contem um dado campo X.
Teorema (B) Seja Λ um atrator hiperbolico-singular e C1 robustamente expan-
sivo.
Isto significa que se X ∈ X(M) tem um atrator hiperbolico-singular Λ, entao alem
de Λ ser expansivo (Teorema A), os conjuntos maximais invariantes numa vizinhanca de
Λ para campos C1 proximas a X sao tambem expansivos.
Outro importante resultado que demonstraremos aqui, e que orbitas tıpicas da
bacia de atracao tem seu comportamento estatıstico bem definido, para Lebesgue quase
todo ponto as medias de Birkhoff convergem, e e dada por uma medida de probabilidade
3
fısica. De forma mais precisa,
Teorema (C) Seja Λ um atrator hiperbolico-singular. Entao Λ suporta uma
unica medida de probabilidade fısica µ que e ergodica, hiperbolica e sua bacia coincide
com a bacia de atracao de Λ: B(µ) = Ws(Λ)Lebesgue, mod 0 .
Observando que nossos argumentos sao preservados por pequenas pertubacoes,
provamos tambem a seguinte versao.
Teorema (D) Numa C2 vizinhanca de X com atrator hiperbolico-singular Λ,
o maximal invariante do campo de vetores Y ∈ U numa vizinhanca de Λ admite um
numero finito de medidas fısicas µ1, µ2, ..., µk cuja uniao das bacias cobre a bacia de
atracao lebesgue-q.t.p.: B(µ1) ∪ ...B(µk) = Ws(Λ), Lebesgue mod 0 .
A dissertacao esta organizada da seguinte forma. No primeiro capıtulo, listamos
alguns conceitos e resultados de Equacoes Diferenciais Ordinarias, Teoria da Medida e Te-
oria Ergodica, necessarios para uma boa compreensao no decorrer do texto. Apresentamos
as definicoes e principais propriedades de conjuntos hiperbolicos e hiperbolicos-singulares.
Estudando o Modelo Geometrico para as equacoes do Lorenz definimos a aplicacao do
Lorenz unidimensional e por fim, estabelecemos os conceitos de expansividade segundo
Bowen e Komuro.
O segundo capıtulo e destinado a prova do Teoremas A e B. Tais provas sao
baseadas na analise de mapas de retorno de Poincare para uma secao transversal conve-
niente, onde reduzimos a propriedade de expansividade para expansividade para o futuro
de mapas de Poincare.
No terceiro capıtulo, provamos os Teoremas C e D. A prova tem como principais
instrumentos tecnicos a construcao da secao transversal e sua folheacao invariante con-
trativa para um mapa de Poincare global, que nos permite reduzir a dinamica do fluxo
em certas transformacoes unidimensionais expansoras por partes, e a extensao do mapa
de Poincare global a seu semi-fluxo com a funcao altura sendo determinada pelo tempo
de retorno de Poincare.
Finalmente no quarto e ultimo capıtulo apresentaremos algumas discursoes de
trabalhos recentes e perspectivas futuras apresentando questoes em aberto.
Capıtulo 1
Notacoes, Definicoes e Ferramentas
Ao longo dessa dissertacao M designa variedade compacta 3-dimensional sem
bordo, fixada alguma estrutura Riemaniana suave e uma forma de volume, m, que cha-
mamos de medida de Lebesgue. Alem disso, escrevemos dist para a distancia induzida em
M . Na primeira secao desta dissertacao recordaremos alguns conceitos e resultados basicos
de Equacoes Diferenciais Ordinarias, Teoria da Medida e Teria Ergodica que facilitarao a
compreensao da teoria que sera desenvolvida no decorrer deste. Na segunda secao esta-
beleceremos as principais ferramentas utilizadas ao longo deste texto, as demonstracoes
dos fatos aqui anunciados podem ser encontrados em [C04], [M83] e [PM77] . Na terceira
secao apresentaremos as definicoes de conjuntos hiperbolico e hiperbolico-singular e suas
principais propriedades. Enquanto na quarta secao construiremos um dos exemplos mais
representativos de atrator hiperbolico-singular, o atrator do Lorenz geometrico. Por fim,
na quinta secao estabeleceremos as definicoes de expansividade segundo Bowen e Komuro,
que denominaremos Bowen-expansividade e Komuro-expansividade.
1.1 Notacoes e Definicoes
Um campo de vetores de classe C1 em M e uma aplicacao com a topologia C1
X : M → R3 que, a cada ponto p ∈ M , associa um vetor X(p) ∈ TpM .Isso corresponde
a uma aplicacao C1 X : M → TM , onde TM e o fibrado tangente associado a variedade
M. Denotemos por X1(M) o conjunto dos campos de vetores C1 em M .
Um fluxo de classe C1 e uma famılia (Xt)t∈R de difeomorfismos de classe C1 que
satisfazem X0 = Id : M →M e Xt+s = XtoXs para quaisquer t, s ∈ R. Dado um campo
de classe C1, desde que X e definido em M , com M compacta, X e limitado, entao existe
um unico fluxo e Xt definido para todo t ∈ R associado ao campo, solucao da equacao
diferencial ddtx = X(x) sujeita a uma condicao inicial.
Definicao 1.1.1 (Conjugacao de campos). Sejam X : U → Rn e Y : V → Rncampos4

5
vetoriais de Rn, e sejam ϕ : D → U e ψ : D → V os fluxos gerados respectivamente por
X e Y . Diz-se que X e topologicamente conjugado a Y quando existe um homeomorfismo
h : U → V tal que h(ϕ(t, x)) = ψ(t, h(x)), ∀(t, x) ∈ D. h e dita conjugacao topologica
entre X e Y .
Dizemos que p ∈M e singularidade para X se X(p) = 0, ou um ponto fixo para
o fluxo Xt, isto e, Xt(p) = p para qualquer t ∈ R. Caso contrario, p e dito ponto regular
para o campo X.
Definicao 1.1.2 (Singularidade hiperbolica). Dado um campo de vetores Ck, X : U →Rm, uma singularidade p ∈ U de X e dita hiperbolica se a equacao determinada pela sua
parte linear DX(p) ∈ L(Rm) e hiperbolica(isto e, se os autovalores de DX(p) tem parte
real nao nula).
Uma orbita de um ponto q ∈M e o conjunto O(q) = {Xt(q); t ∈ R}. Uma orbita
periodica de X e uma orbita O(p) tal que XT (p) = p para algum numero mınimo T > 0.
Uma orbita fechada de X e uma singularidade ou uma orbita periodica de X.
Se p ∈M e [a, b] ⊂ R entao um segmento de orbita {Xt(p); a ≤ t ≤ b} e denotado
por X[a,b](p).
O conjunto ω − limite de um ponto p ∈ M ,ω(p), e o conjunto { q ∈ M : q =
limtn→∞Xtn(p) para alguma sequencia tn}. O conjunto α − limite de um ponto p, α(p),
e o ω − limite de p para o campo −X.
Um conjunto Λ ⊂M e:
• Invariante , se Xt(Λ) = Λ, ∀t ∈ R;
• Transitivo, se Λ = ω(p) para algum p ∈M ;
• Nao trivial, se Λ nao e uma orbita fechada de X;
• Isolado, se existe uma vizinhanca compacta U de Λ tal que
Λ = ΛX(U) =⋂t∈R
Xt(U)
U e chamado bloco isolante;
• Sumidouro, se este e isolado e tem um bloco isolante positivamente invariante U,
isto e,
Xt(U) ⊂ U ∀t > 0
• Atrator, se este e um sumidouro transitivo.

6
Uma aplicacao F : A→M , A ⊂ R2, de classe C2 e uma secao transversal local ao
campo X se DF (a)R2 e X(F (a)) geram R3 para qualquer a ∈ A. Dizemos que Σ = F (A)
e a secao transversal quando F : A→ F (A) e uma bijecao e sua inversa de classe C2, ou
seja, disco mergulhado C2 transversal a X em todo ponto.
Um Mapa de Poincare e um mapa contınuo R : Σ→ Σ′
entre secoes transversais
Σ e Σ′
que associa cada x ∈ Σ o seu primeiro retorno Xt(x)(x) a secao Σ′.
Seja X um conjunto e A ⊂ P(X),A 6= ∅, A e uma σ−algebra se e so se:
i) ∅ ∈ A
ii) Se A1, A2 ∈ A entao A1 ∪ A2, A1 ∩ Ac2 ∈ A
iii) X ∈ A
Alem disso, se tais unioes e intersecoes acima podem ser enumeraveis dizemos
que A e uma σ−algebra.
Seja X um conjunto e A σ−algebra. Seja µ uma aplicacao definida em A, µ :
A → [0,∞], satisfazendo as seguintes propriedades:
i) µ(∅) = 0
ii) µ(⋃∞i=1Ai) =
∑∞i=1 µ(Ai), com Ai ∈ A ∀i e disjuntos dois a dois.
Dizemos que a aplicacao µ definida acima e uma medida em X e chamamos a
terna (X;A;µ) de espaco de medida. Uma medida µ e σ−finita se podemos escrever X
como uma uniao enumeravel X =⋃n=0An, com µ(An) < ∀n ∈ N. Quando µ(X) = 1,
dizemos que µ e medida de probabilidade e (X;A;µ) e um espaco de probabilidade.
Dizemos que T : X → X e uma transformacao mensuravel se T−1(A) ∈ A∀A ∈ A. Quando µ(T−1(A)) = µ(A) ∀A ∈ A, dizemos que T preserva medida ou
simplesmente que µ e T−invariante.
Seja (X;A;µ) um espaco de medida e seja T uma transformacao que preserva
medida. Um conjunto A ∈ A e dito T−invariante se T−1(A) = A. Dizemos que T e
ergodica (ou que a medida e ergodica em relacao a T) se e so se todo conjunto T−invariante
possui medida 0 ou 1.
Uma propriedade se diz satisfeita em quase todos os pontos (q.t.p.), se o conjunto
dos pontos onde a propriedade nao e satisfeita tem medida nula.
Seja (X;A;µ) um espaco de medida, (X′;A′) um espaco mensuravel e T : X →
X′
uma aplicacao mensuravel. A medida transportada de µ por T e a medida µ′:= T∗µ :
A′ → [0; +] definida por:
µ′(A′) := µ(T−1(A
′)), A
′ ∈ A′
.

7
Sejam µ e ν duas medidas num espaco mensuravel (X;A). Dizemos que ν e
absolutamente contınua com respeito a µ se µ(A) = 0 implica ν(A) = 0, qualquer que
seja A o conjunto mensuravel. Neste caso escrevemos ν � µ. Caso tenhamos µ(A) = 0
se e somente se ν(A) = 0, dizemos que µ e equivalente a ν e escrevemos µ ∼ ν.
Chamamos suporte da medida µ o conjunto dos pontos tais que toda vizinhanca
tem medida positiva para µ e este e denotado por
supp(µ) = {x; para todo aberto V 3 x;µ(V ) > 0}.
Quando µ e invariante para Xt a bacia de µ a qual denotamos por B(µ) e o conjunto dos
pontos tais que
limt→∞
1
t
∫ t
0
h(Xs(x))ds =
∫hdµ
para toda funcao contınua h : X → R. Note que a bacia sempre e um conjunto invariante.
Uma probabilidade invariante µ e uma medida S.R.B.( Sinai-Ruelle-Bowen ),
conhecida tambem como medida fısica do fluxo {Xt}t∈R se os pontos que satisfazem a
media de Birkoff tem medida de Lebesgue positiva, isto e, Leb(B(µ)) > 0.
1.2 Ferramentas
Nesta secao apresentaremos as principais ferramentas utilizadas no decorrer do
texto. Para maiores detalhes sobre os resultados aqui apresentados o leitor podera con-
sultar [C04] e [M83].
O Teorema abaixo descreve o comportamento local das orbitas na vizinhaca de
um ponto regular.
Teorema 1.2.1 (Fluxo Tubular). Seja p um ponto nao singular de um campo X : U →Rn de classe Ck.Entao, existe uma vizinhanca V de p em U e um difeomorfismo Ck
F : (−ε, ε)×B → V , onde ε > 0 e B e uma bola em Rn−1 tal que F e uma Ck-conjugacao
entre o campo constante Y : (−ε, ε)× B → Rn dado por Y ≡ (1, 0, ..., 0) ∈ Rn e o campo
X |V .
O proximo resultado responde todas a questoes relativas a dinamica assintotica
das solucoes de equacoes diferencias ordinarias autonomas em variedades compactas de
dimensao dois.
Teorema 1.2.2 (Poincare-Bendixson). Seja Sejam M uma variedade compacta de di-
mensao dois, X ∈ X(M2), um campo de vetor com um numero finito de singularidades e
p ∈M . Entao o conjunto ω-limite de p, ω(p), satisfaz uma das seguintes condicoes:

8
1. ω(p) e uma unica singularidade;
2. ω(p) e uma unica orbita periodica;
3. ω(p) consiste de um numero finito de singularidades σ1, σ2, ..., σn e orbitas regulares
γ ∈ ω(p) tais que α(γ) = σi e ω(γ) = σj para algum i, j = 1, 2, ..., n.
O passo seguinte e apresentar o resultado mais geral de classificacao topologica
de campos em vizinhanca de singularidades.
Teorema 1.2.3 (Grobman-Hartman para campos). Seja X : V ⊂ Rm → Rm um campo
Ck(k ≥ 1) e p uma singularidade hiperbolica de X. Seja L = DXp. Entao X e localmente
topologicamente conjugado a L, em vizinhanca de p e 0 ∈ Rn, respectivamente.
Seja Cc(X) = {f : X → R; f contınua com suporte compacto } e o suporte de f
e o conjunto supp(f) = fecho(x ∈ X; f(x) 6= 0).
Teorema 1.2.4 (Riesz-Markov,[C04]pag.136). Seja X um espaco metrico localmente
compacto σ-compacto. Seja Φ : Cc(X) → R um operador linear positivo. Entao, existe
uma unica medida boreliana µ em X tal que Φ(f) =∫Xfdµ,∀f ∈ Cc(X).
Teorema 1.2.5 (Oseledets). Seja µ uma medida (Xt)t∈R-invariante e ergodica. Entao
existe k ≥ 0 tal que TxM = E1x ⊕ E2
x ⊕ ...⊕ Ekx para x q.t.p. tal que
limt→∞
1
tlog ‖DXt(x)v‖ = λi∀v ∈ Ei\0.
Os valores λ1, ..., λn sao ditos expoentes de Lyapunov para (Xt, µ) e os espacos
Eix sao invariantes pela DXt e variam mensuravelmente com x. A decomposicao acima
TxM = E1x ⊕ E2
x ⊕ ... ⊕ Ekx e chamada de decomposicao de Oseledets. Uma medida µ e
dita ser hiperbolica para o fluxo Xt se todos os expoentes de Lyapunov sao nao nulos.
Um dos grandes objetivos dos sistemas dinamicos estao relacionados com o estudo
do comportamento das orbitas de algumas transformacoes. Esse estudo pode ser feito com
o auxılio de alguma funcao.
Dada uma transformacao T que preserva medida de um espaco (X,A, µ) e uma
funcao integravel ϕ : X → R, em quais condicoes o limite
limn→+∞
ϕ(x) + ϕ(T (x)) + ...+ ϕ(T−1(x))
n(1.1)
existe e e o mesmo em q.t.p.?
Essa pergunta e uma questao basica da Teoria Ergodica, o proximo teorema
responde a esse questionamento.

9
Teorema 1.2.6 (Teorema Ergodico de Birkhoff). Sejam (X;A;µ) um espaco de medida
e T : X uma transformacao que preserva medida. Entao, o limite
ϕ(x) = limn→∞
1
n
n−1∑j=1
ϕ(T j(x))
existe em µ−q.t.p. x ∈ X dada qualquer funcao integravel ϕ : X → R.
Assim, sob tais condicoes, podemos dizer que, para qualquer funcao integravel, a
media temporal sobre toda orbita,ϕ(x), coincide com a media espacial,∫Xϕdµ, da funcao.
Alem disso, a proxima proposicao garante, entre outras coisas, que se µ e uma medida
ergodica, entao
ϕ =1
µ(X)
∫X
ϕdµ.
Proposicao 1.2.7 ([M83]pag. 130). As seguintes propriedades sao equivalentes:
1. T e ergodica;
2. Se ϕ ∈ L1(X) e T−invariante entao ϕ e constante em q.t.p.;
3. Se ϕ ∈ Lp(X) e T−invariante entao ϕ e constante em q.t.p.;
4. Para todo A,B ∈ A vale lim 1n
∑n−1m=0 µ(T−m(A) ∩B) = µ(A)µ(B);
5. Para toda ϕ ∈ L1(X), ϕ = 1µ(X)
∫Xϕdµ q.t.p.
Teorema 1.2.8 (Teorema Ergodico de Birkhoff para fluxos). Sejam Xt : R×M →M um
fluxo de uma campo de vetores completo X, e µ uma medida de probabilidade invariante
e ergodica para Xt. Entao para cada funcao h integravel∫hdµ = lim
t→∞
1
t
∫ t
0
h(Xs(x))ds µ− q.t.p. x ∈M.
1.3 Conjuntos Hiperbolicos-singulares
Definicao 1.3.1. Um conjunto compacto invariante H ⊂M de X e hiperbolico se existe
uma decomposicao continua e DXt-invariante do fibrado tangente de M sobre H
THM = EsH ⊕ Ec
H ⊕ EuH
e existem constantes K > 0 e 0 < λ < 1 tais que
• ‖ DXt |Es‖≤ Kλt,∀t > 0;
• ‖ DX−t |Eu‖≤ Kλt,∀t > 0;
• EcH direcao do fluxo.

10
Nestas condicoes dizemos que o subfibrado Es e (K,λ)- contrator enquanto o
subfibrado Eu e (K,λ)-expansor.
Definicao 1.3.2. O conjunto
Wss(p) = {q ∈M : dist(Xt(q), Xt(p))→ 0; quando t → +∞}
e chamado Variedade Estavel forte do ponto p para o campo X.
Teorema 1.3.3 (Teorema da Variedade Estavel). Seja X ∈ Xk(M). Seja H um conjunto
hiperbolico invariante para X. Entao existe um ε > 0 tal que para cada p ∈ H existem
discos mergulhados Wssε (p) e Wss
ε (p) os quais sao tangente a Esp e Es
p respectivamente.
O conjunto Wssε (p) e chamado variedade estavel local de p para o campo X que
e um conjunto
Wssε (p) = {q ∈M : dist(Xt(q), Xt(p))→ 0; quando t → +∞ e dist(Xt(q), Xt(p)) ≤ ε}
Alem disso, a variedade estavel forte de um ponto p para um campo X pode ser
obtida como
Wss(p) =⋃t≥0
X−t(Wssε (Xt(p)))
Agora, definimos a variedade estavel do ponto p para o campo X como o conjunto
Ws(p) =⋃t∈R
Xt(Wssε (p))
que e tangente a Es ⊕ Ec e depende continuamente com respeito a p.
Analogamente, definimos variedades instaveis forte, instavel local e instavel.
Uma orbita fechada de X e hiperbolica se e um conjunto hiperbolico visto como
um conjunto compacto invariante de X. Um conjunto hiperbolico H e tipo sela se Esx 6= 0
e Eux 6= 0 para todo x ∈ H. Um exemplo simples de um conjunto hiperbolico tipo sela de
um fluxo 3-dimensional e a suspensao do difeomorfismo ferradura de Smale em S2, para
maiores detalhes consultar [PT93].
Definicao 1.3.4. Seja Λ ⊂ M um conjunto compacto e invariante por X. Uma de-
composicao contınua e DXt-invariante do fibrado tangente de M sobre Λ, da forma
TΛM = EsΛ⊕Ecu
Λ e uma decomposicao dominada, se existem constantes C > 0 e 0 < λ < 1
tais que
‖ DXt |Esx‖‖ DX−t |EcuXt(x)‖≤ Cλt,∀x ∈ Λ,∀t > 0
Definicao 1.3.5. Um conjunto compacto invariante Λ de X e parcialmente hiperbolico,
se este exibe uma decomposicao dominada TΛM = EsΛ ⊕ Ecu
Λ tal que
‖ DXt |Esx‖≤ Cλt,∀x ∈ Λ, ∀t > 0

11
Definicao 1.3.6. Dizemos que um conjunto Λ parcialmente hiperbolico expande volume
no subfibrado central, se | det(DXt) |Ecux |≥ C−1λ−t para x ∈ Λ e t > 0.
Definicao 1.3.7. Um conjunto Λ compacto invariante de X com singularidades e singular-
hiperbolico para X se Λ e parcialmente hiperbolico, expande volume no subfibrado central
e cada singularidade em Λ e hiperbolica.
O exemplo mais representativo de conjunto singular-hiperbolico e o atrator de
Lorenz geometrico, gracas a Tucker que provou em [T99] que as equacoes do Lorenz exibem
um atrator singular-hiperbolico para certos valores representativos dos parametros.
1.4 Modelo Geometrico para as equacoes do Lorenz
Nesta secao, descreveremos rapidamente a construcao do Modelo Geometrico do
Lorenz. Consequentemente definiremos a aplicacao unidimensional do Lorenz, enunciando
suas principais propriedades. Para maiores detalhes ver [GH90] e [S82].
O atrator do modelo geometrico do Lorenz, ou simplesmente atrator geometrico
do Lorenz, e um atrator em R3 ∪ {∞} (3-esfera) que tem como bloco isolante um bitoro
solido U em R3. O modelo geometrico do Lorenz e motivado pelo campo de Lorenzx(t) = −σx+ σy σ = 10
y(t) = ρx− y − xz ρ = 28
z(t) = xy − βz β = 83
numa vizinhanca da origem. Pelo Teorema de Hartman-Grobman, as equacoes sao con-
jugadas por um difeomorfismo as equacoes linearizadas numa vizinhaca da origem dadas
por x(t) = ax
y(t) = −byz(t) = −cz
com a = λu ≈ 11, 83, b = −λss ≈ 22, 83 e c = −λs ≈ 2, 66. Assim, as solucoes das
equacoes linearizadas com condicoes iniciais (x(0), y(0), z(0)) = (x0, y0, z0) sao dadas porx(t) = x0e
at
y(t) = y0e−bt
z(t) = z0e−ct
Nosso objetivo inicial e estudar as solucoes a medida que as orbitas do fluxo
passam perto do ponto singular, ou seja, a partir do momento em que z(t) e igual a

12
algum z1 fixado, ate o momento em que x(t) seja igual a algum ±x1 fixado. Para isso,
considere as secoes
Σ = {(x, y, z1) : |x| ≤ A e |y| ≤ A},
Σ′= Σ\{(x, y, z1) : x = 0}
e
S± = {(±x, y, z) : |y| ≤ B e |z| ≤ B}
Sejam (x, y, z1) ∈ Σ′
e T o primeiro tempo positivo para o qual a orbita de
(x, y, z1) intercepta o plano S = S+ ∪ S−, entao T e determinado por
|x|eaT = x1 ⇔ eT = (x1
|x|)
1a
portanto x(T ) = x1
y(T ) = y0( x1
|x|)−ba
z(T ) = z0( x1
|x|)−ca
Com isso, a aplicacao de Poincare, P1 : Σ′ → S e dada por
P1(x, y) = (y(T ), z(T )), onde y(T) e z(T) estao descritos acima .
Note que se x > 0, entao P1(x, y) ∈ S+ e se x < 0, entao P1(x, y) ∈ S−. Como
os autovalores da aplicacao P1, na origem, sao os mesmos autovalores das equacoes do
Lorenz e gracas a forte contracao na direcao de y as regioes quadradas {(x, y, z0) : 0 <
x ≤ A, |y| ≤ A} e {(x, y, z0) : −A ≤ x < 0, |y| ≤ A} sao levadas para regioes no formato
de cuspides em S+ e S− respectivamente. Ver figura 1.1.
Figura 1.1: Fluxo na vizinhanca de um ponto fixo - Cuspides
Agora assuma uma aplicacao de Poincare P2 definida em S que volta para Σ
levando linhas x = x1 em linhas z = z1 em tempo finito. Seja P = P2 ◦ P1, P : Σ′ → Σ.
Ver figura 1.2.
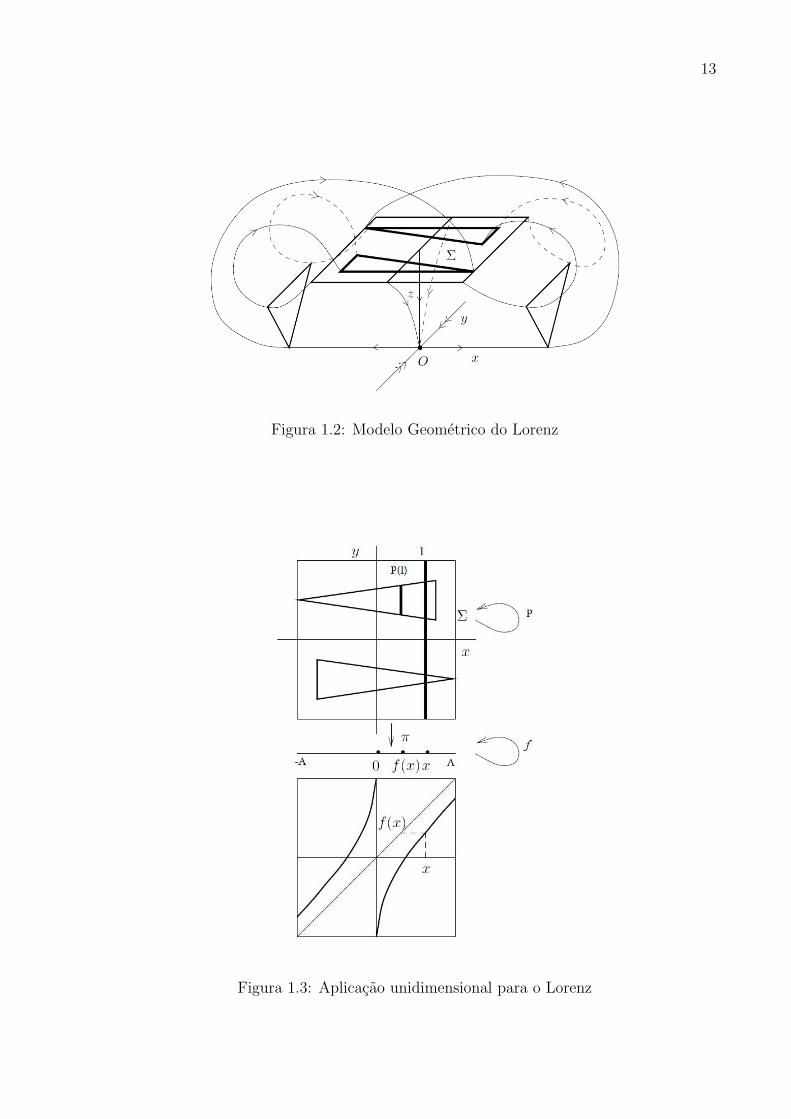
13
Figura 1.2: Modelo Geometrico do Lorenz
Figura 1.3: Aplicacao unidimensional para o Lorenz
14
Portanto a aplicacao P1 leva um segmento de linha, com os mesmo valores de x
em Σ′, para um segmento de linha, com os mesmos valores de z em S e a aplicacao P2
leva um segmento de linha, com os mesmos valores de z em S de volta a um segmento
com os mesmos valores de x em Σ. Assim, a aplicacao P e da forma
P (x, y) = (L(x), G(x, y))
tal que para um ponto x2 fixado a aplicacao G e uma contracao na direcao do eixo y e
|L′(x)| > 1, tendo assim uma decomposicao hiperbolica, visto que P tem uma folheacao
estavel invariante Ws(q) para q ∈ Σ′, formada por curvas com valores de x constantes
sobre Σ. Como P envia Ws(q) em Ws(P (q)) possivelmente em um valor de x diferente,
construımos classes de equivalencia com os pontos de Σ que se situam sobre o mesmo
segmento de linha Ws(q).
Escolhendo um representante de cada classe de equivalencia como a coordenada
x do ponto q em [−A,A] obtemos a aplicacao π : Σ → [−A,A]. Consequentemente, P e
π induzem uma aplicacao f : [−A,A]\{0} → R. Ver figura 1.3.
Assim a aplicacao unidimensional f e tal que f(−x) = −f(x), tem uma unica
descontinuidade em x = 0, f(0−) = limx→0− f(x) = A, f(0+) = limx→0+ f(x) = −A,
f(0−) = limx→0 f′(x) = ∞ e 0 < f 2(A) < f(A) < A, portanto 0 > f 2(−A) > f(−A) >
−A.
1.5 Expansividade segundo Komuro versus Expansi-
vidade segundo Bowen
Bowen e Walters, em [BW72] introduziram a definicao de expansividade para
fluxos que, em variedades compactas e conexas sem bordo, nao admitem singularidades.
Sejam C(R,R) o conjunto de todas as funcoes contınuas h : R → R e B = {h ∈C(R,R) : h(R) = R, h(s) > h(t), para todo s > t, e h(0) = 0}.
Definicao 1.5.1. Dizemos que um fluxo Xt e Bowen-expansivo se para cada ε > 0 existe
δ > 0 tal que para quaisquer x, y ∈M , se existe h ∈ B tal que
dist(Xt(x), Xh(t)(y)) ≤ δ para todo t ∈ R,
entao
y ∈ X[−ε,ε](x) := {Xt(x) : −ε ≤ t ≤ ε}.
Alem disso, dizemos que um campo vetorial e Bowen-expansivo se o fluxo gerado por esse
campo for Bowen-expansivo.

15
Para provar que os fluxos Bowen-expansivos em variedades sem fronteiras nao
admitem singularidades precisaremos do seguinte resultado:
Lema 1.5.2. As seguintes condicoes sao equivalentes para um fluxo Xt:
i) Xt e Bowen-expansivo;
ii) Para todo ε > 0, existe δ > 0 tal que se x, y ∈M sao tais que dist(Xt(x), Xα(t)(y)) < δ
para todo t ∈ R e alguma α ∈ B, entao y = Xt0(x) para algum t0 ∈ [−ε, ε];
iii) Para todo ε > 0, existe δ > 0 tal que se x, y ∈M sao tais que dist(Xt(x), Xα(t)(y)) < δ
para todo t ∈ R e alguma α : R→ R contınua com α(0) = 0, entao y = Xt0(x) para
algum t0 ∈ [−ε, ε];
Prova: Ver [O90]. �
Teorema 1.5.3. Seja X um campo vetorial Bowen-expansivo. Entao X nao admite
singularidades.
Demonstracao: A demostracao e por contradicao. Suponha que X admite singularidade
p ∈ M , entao p e ponto fixo para o fluxo, isto e, Xt(p) = p para todo t ∈ R. Fixe ε > 0.
Como M e variedade compacta, para todo δ > 0 existe q ∈M tal que 0 < dist(p, q) < δ.
Para aplicar o Lema anterior, devemos encontrar uma funcao α : R → R contınua com
α(0) = 0 tal que dist(Xt(p), Xα(t)(q)) < δ para todo t ∈ R. Defina α : R→ R por α(t) = 0
para todo t ∈ R, entao dist(Xt(p), Xα(t)(q)) = dist(p, q) < δ para todo t ∈ R, pelo item
iii) Lema anterior q = Xt0(p) para algum t0 ∈ [−ε, ε], mas p e uma singularidade, portanto
p = q, contradicao, visto que 0 < dist(p, q).
�
A pergunta natural que segue e:
Questao 1.5.4. Podemos estender a nocao de expansividade dada por Bowen para outra
definicao que admita pontos fixos?
A resposta e positiva, em [Kom84] Komuro extendeu a definicao proposta por
Bowen para outra que tem o atrator geometrico do Lorenz como exemplo e entao, admite
singularidades.
Seja K = {h ∈ C(R,R) : h(R) = R e h(s) > h(t) para todo s > t}.
Definicao 1.5.5. Dizemos que um fluxo Xt e Komuro-expansivo se para cada ε > 0 existe
δ > 0 tal que para quaisquer x, y ∈M , se existe h ∈ K tal que
dist(Xt(x), Xh(t)(y)) ≤ δ para todo t ∈ R,
entao podemos encontrar t0 ∈ R tal que
Xh(t0)(y) ∈ X[t0−ε,t0+ε](x) := {Xt(x) : t0 − ε ≤ t ≤ t0 + ε}.
16
Alem disso, dizemos que um campo vetorial e Komuro-expansivo se o fluxo gerado por
esse campo for Komuro-expansivo.
No que se segue expansividade significa Komuro-expansividade.
Capıtulo 2
Expansividade
Como ja foi dito acima Komuro [Kom84] provou que o atrator geometrico do
Lorenz e expansivo. Um dos principais resultados apresentados aqui generaliza essa ex-
pansividade para qualquer atrator hiperbolico-singular.
Teorema 2.0.6 (A). Seja Λ um atrator singular-hiperbolico. Entao Λ e expansivo.
O objetivo principal deste capıtulo e a prova deste teorema, tal prova e baseada
na analise de mapas de Poincare, que sao mapas contınuos
R : Σ→ Σ′
x 7→ Xt(x)(x)
para secoes transversais convenientes.
A seguir, Λ e um atrator singular hiperbolico de X ∈ X(M) com decomposicao
invariante TΛM = Es ⊕ Ecu com dimensao de Ecu igual a dois.
Afirmacao 2.0.7. Existe uma extensao contınua da decomposicao de TΛM , Es⊕Ecu,para
pequena vizinhanca invariante U0 de Λ.
De fato, pelo Teorema de extensao de Tietze-Urysohn aplicado as funcoes co-
ordenadas existe tal extensao contınua para uma vizinhanca U0, por conveniencia essa
vizinhaca pode ser tomada estritamente invariante, isto e, Xt(U0) ⊂ U0∀t > 0. Con-
sideremos em cada ponto q ∈ U0 a direcao formada pelos vetores que sao fortemente
contraıdos pela DXt para t positivo, tais vetores formam Es que e invariante, ver [PT93]
. Mas, em geral, Ecu nao e invariante, entao consideremos um campo de cones em torno
de U0, Ccua (x) = { v = vs + vcu; vs ∈ Esx e vcu ∈ Ecu
x com ‖ vs ‖ 6 a ‖ vcu ‖ }, que
e invariante para a > 0 . Alem disso podemos tomar a > 0 arbitrariamente pequeno
reduzindo U0 se necessario.
417
18
Por um abuso de notacao no que se segue denotaremos Es e Ecu por Es e Ecu
respectivamente.
2.1 Secao transversal e Mapas de Poincare
Nesta secao construiremos secoes transversais Σ que tem folheacao de codimensao
um, definida dinamicamente pela interseccao da secao transversal com as variedades
estaveis para o fluxo. Posteriormente, verificaremos que tais folhas sao uniformemente
contratativas e a aplicacao de Poincare R : Σ→ Σ′e uniformemente expansiva na direcao
transversal. Em seguida, provaremos que tal folheacao e invariante (assumindo uma secao
transversal adaptada) pela aplicacao de Poincare P , mostramos tambem a robustez da
existencia de secoes adaptadas, isto e, existe
2.1.1 Folheacoes Estaveis em secoes transversais
Definicao 2.1.1. Dado qualquer x ∈ U0 defina o conjunto
Wss(x) = {y ∈M : dist(Xt(x), Xt(y))→ 0 quando t→ +∞}.
Dado ε > 0 tome Iε = (−ε, ε) e denote por E1(I1,M) o conjunto de mapas
f : I1 →M dotado com a topologia C1. Seja x ∈ U0 ponto regular, a proxima proposicao
afirma que existe localmente variedades forte-estavel invariantes e centro-instavel definidas
em x, que sao discos mergulhados tangentes a Esx e Ecu
x respectivamente.
Proposicao 2.1.2 (Variedades forte estaveis e centro-instavel locais). Existem mapas
contınuos φss : Uo → E1(I1,M) e φcu : Uo → E1(I1 × I1,M) tal que dado qualquer
0 < ε < 1 e x ∈ Uo, se chamarmos Wssε (p) = φss(x)(Iε) e Wcu
ε (p) = φcu(x)(Iε × Iε),
1. TxWssε (x) = Es(x);
2. TxWcuε (x) = Ecu(x);
3. Wssε (x) e uma vizinhanca de x dentro de Wss(x);
4. y ∈Wss(x)⇐⇒ exist T ≥ 0 tal que XT (y) ∈Wssε (XT (x));
5. d(Xt(x), Xt(y)) < Kλtd(x, y) para todo t > 0 e y ∈Wssε (x). Onde C > 0 e 0 < λ < 1
sao as constantes consideradas na definicao 1.3.4 e a distancia d(x, y) e a distancia
entre dois pontos na variedade Wssε (x), dada pelo comprimento da menor curva suave
contida em Wssε (x) ligando x para y.

19
Demonstracao: Ver [HPS77] �
O conjunto Wssε (x) e chamado variedade forte estavel local de x para o campo X
que e um conjunto
Wssε (x) = {q ∈M : dist(Xt(q), Xt(p))→ 0; quando t → +∞ e dist(Xt(q), Xt(p)) ≤ ε}
e o conjunto Wcuε (x) e chamado variedade forte centro-instavel local de x para o campo
X.
Assim a variedade estavel forte de um ponto x para um campo X pode ser obtida
como
Wss(x) =⋃t≥0
X−t(Wssε (Xt(x)))
Agora, definimos a variedade estavel do ponto x para o campo X como o conjunto
Ws(x) =⋃t∈R
Xt(Wssε (x))
que e tangente a Es ⊕ Ec e depende continuamente com respeito a x.
Seja Σ secao transversal ao fluxo. Para cada x ∈ Σ definimos Ws(x,Σ) como
componente conexa de Ws ∩ Σ que contem x. Com isso definimos uma folheacao FsΣ de
Σ em subvariedades de classe C1.
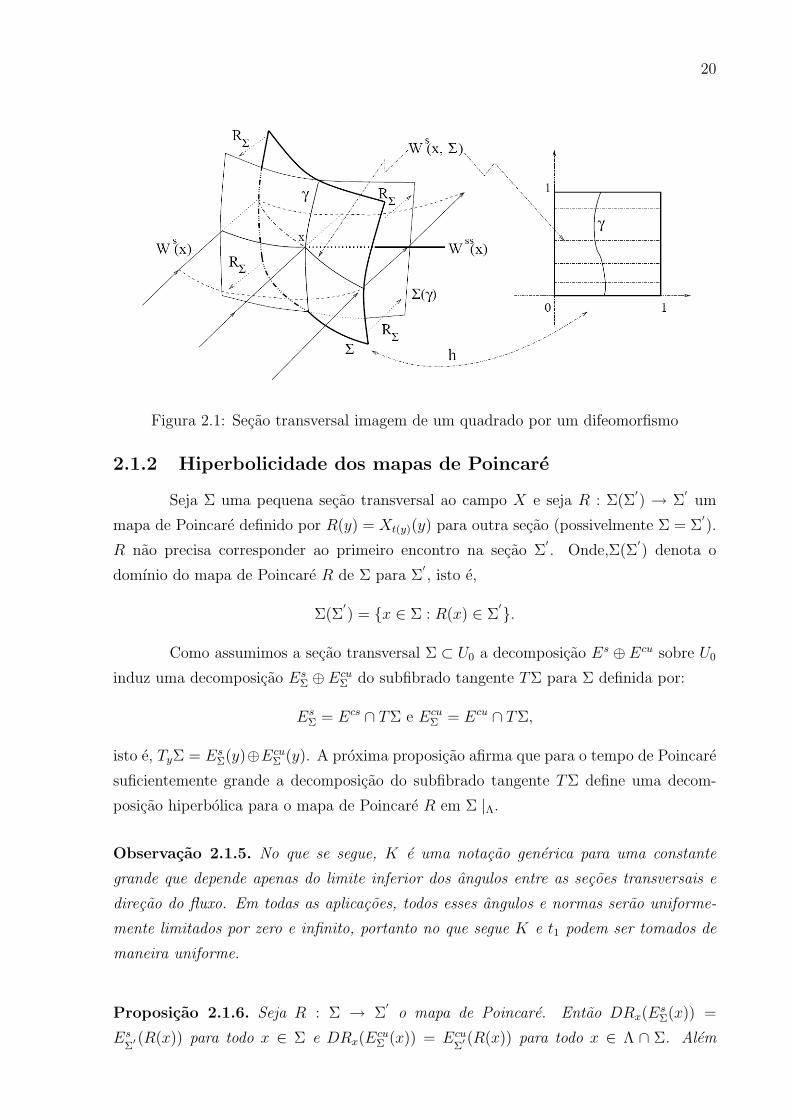
Observacao 2.1.3. Dada uma secao transversal Σ e um ponto x em seu interior, podemos
sempre encontrar uma secao transversal menor, com x em seu interior, que e imagem de
um quadrado [0, 1]× [0, 1] por um difeomorfismo h dotada da topologia C2 que envia linhas
horizontais em folhas de FsΣ, isto e, linhas horizontais [0, 1]×η sao mapeadas pelo conjunto
Ws(y,Σ). Denotaremos por ∂sΣ o espaco estavel imagem de [0, 1] × {0, 1} e por ∂cuΣ o
espaco centro instavel imagem de {0, 1} × [0, 1]. No que segue as secoes transversais Σ
satisfazem tal propriedade e esta contida em U0, de modo que a cada x ∈ Σ, ω(x) ⊂ Λ.
Observacao 2.1.4. Em geral, nao podemos escolher a secao transversal tal que Ws(x,Σ) ⊂Wss
ε (x) mas podemos considerar uma secao tansversal pequena em relacao ao ε, escolher
qualquer curva γ ⊂ Σ atravessando transversalmente todas as folhas de FsΣ e considerar
um mapa de Poincare
PΣ : Σ→ Σ(γ) =⋃z∈γ
Wssε (z)
com tempo de Poincare perto de zero. Ver Figura 2.1.
Este e um homeomorfismo sobre sua imagem, proximo da identidade tal que
RΣ(Ws(x,Σ)) ⊂ Wssε (RΣ(x)). No que se segue secoes transversais sao as secoes for-
madas pela imagem do mapa PΣ,se necessario.
20
Figura 2.1: Secao transversal imagem de um quadrado por um difeomorfismo
2.1.2 Hiperbolicidade dos mapas de Poincare
Seja Σ uma pequena secao transversal ao campo X e seja R : Σ(Σ′) → Σ
′um
mapa de Poincare definido por R(y) = Xt(y)(y) para outra secao (possivelmente Σ = Σ′).
R nao precisa corresponder ao primeiro encontro na secao Σ′. Onde,Σ(Σ
′) denota o
domınio do mapa de Poincare R de Σ para Σ′, isto e,
Σ(Σ′) = {x ∈ Σ : R(x) ∈ Σ
′}.
Como assumimos a secao transversal Σ ⊂ U0 a decomposicao Es ⊕ Ecu sobre U0
induz uma decomposicao EsΣ ⊕ Ecu
Σ do subfibrado tangente TΣ para Σ definida por:
EsΣ = Ecs ∩ TΣ e Ecu
Σ = Ecu ∩ TΣ,
isto e, TyΣ = EsΣ(y)⊕Ecu
Σ (y). A proxima proposicao afirma que para o tempo de Poincare
suficientemente grande a decomposicao do subfibrado tangente TΣ define uma decom-
posicao hiperbolica para o mapa de Poincare R em Σ |Λ.
Observacao 2.1.5. No que se segue, K e uma notacao generica para uma constante
grande que depende apenas do limite inferior dos angulos entre as secoes transversais e
direcao do fluxo. Em todas as aplicacoes, todos esses angulos e normas serao uniforme-
mente limitados por zero e infinito, portanto no que segue K e t1 podem ser tomados de
maneira uniforme.
Proposicao 2.1.6. Seja R : Σ → Σ′
o mapa de Poincare. Entao DRx(EsΣ(x)) =
EsΣ′
(R(x)) para todo x ∈ Σ e DRx(EcuΣ (x)) = Ecu
Σ′(R(x)) para todo x ∈ Λ ∩ Σ. Alem

21
disso para 0 < λ < 1 dado existe t1 = t1(Σ,Σ′, λ) > 0 tal que se t(.) > t1 em cada ponto,
entao ‖ DR |EsΣ(x)‖< λ e ‖ DR |EcuΣ (x)‖> 1λ
em todo x ∈ Σ.
Prova: A diferencial do mapa de Poincare para qualquer ponto x ∈ Σ e dada por
DR(x) = PR(x) ◦DXt(x) |TxΣ
onde PR(x) e a projecao ao longo do campo de vetor, que envia EcuR(x) para Ecu
Σ′. Com
isso, provamos a invariancia do subespaco estavel e do subespaco centro-instavel, porem
a invariancia do subfibrado centro-instavel e restrito ao atrator Λ, visto que Ecu em geral
nao e invariante como dito antes.
Agora provaremos a contracao e expansao da aplicacao R. Comecemos por notar
que ‖PR(x)‖ ≤ K.
Considere uma base { X(x)‖X(x)‖ , e
ux} de Ecu
x de vetores unitarios, onde eux e um vetor
unitario na direcao de EcuΣ (x). Como a direcao do fluxo e invariante, a matriz de DXt |(Ecux )
em relacao a essa base e dada por:
DXt(x) |Ecux =
(‖X(R(x))‖‖X(x)‖ ?
0 4
)Alem disso,
1
Kdet(DXt(x) |Ecux ) ≤ det(DXt(x) |Ecux ) ≤ K det(DXt(x) |Ecux )
m1
K| det(DXt(x) |Ecux )| ≤ | det(DXt(x) |Ecux )| ≤ K| det(DXt(x) |Ecux )|
m1
K| det(DXt(x) |Ecux )| ≤ |‖ X(R(x)) ‖
‖ X(x) ‖4 |︸ ︷︷ ︸ ≤ K| det(DXt(x) |Ecux )|
⇓
| 4 | ≥ 1
K3| det(DXt(x) |Ecux )|
Entao,
‖DR(x)eux‖ = ‖PR(x)(DXt(x)(x)eux)‖ = ‖PR(x)(4eux)‖ = ‖ 4 eux‖ = | 4 |‖eux‖ = | 4 |
≥ 1
K3| det(DXt(x) |Ecux )|
como o subfibrado Ecux expande volume temos
1
K3| det(DXt(x) |Ecux )| ≥ 1
K3λ−t(x) ≥ 1
K3λ−t
′1

22
para t′1 suficientemente grande temos que 1
K3λ−t′1 > 1
λ. Portanto ‖DR(x)eux‖ > 1
λcomo
querıamos mostrar.
Agora vamos provar que ‖DR |EsΣ(x) ‖ < λ. Considere os vetores unitarios esx ∈ Esx
e esx ∈ EsΣ(x) e escreva esx = axe
sx + bx
X(x)‖X(x)‖ , entao
‖DR(x)esx‖ = ‖PR(x)(DXt(x)(x)esx)‖ = ‖PR(x)(DXt(x)(x)(1
ax(esx − bx
X(x)
‖ X(x) ‖))‖ =
=1
|ax|‖PR(x)(DXt(x)(e
sx − bx
X(x)
‖X(x)‖))‖ =
1
|ax|‖PR(x)(DXt(x)e
sx −DXt(x)bx
X(x)
‖X(x)‖)‖ =
=1
|ax|‖PR(x)(DXt(x)e
sx)‖.
Uma vez que ^(Esx, X(x)) ≥ ^(Es
x, Ecux ) (^(Es
x, Ecux ) e uniformemente limitado pelo zero)
temos que |ax| ≥ k para algum k que depende apenas do fluxo. Entao como ha contracao
do fibrado Esx por DXt
1
|ax|‖PR(x)(DXt(x)e
sx)‖ ≤
K
kλt(x) ≤ K
kλt′′1
⇓
‖DR |EsΣ(x) ‖ ≤K
kλt′′1 .
Portanto , para t′′1 suficientemente grande temos que K
kλt′′1 < λ. Para concluir tome
t1 = max{t′1, t′′1}.
�
Dada uma secao transversal Σ, um numero positivo ρ pequeno e um ponto x ∈ Σ
definimos o cone-instavel de largura ρ em x por
Cuρ (x){v = vs + vu : vs ∈ EsΣ(x), vu ∈ Ecu
Σ (x) e ‖vs‖ ≤ ρ‖vu‖}.
Em consequencia da proposicao anterior assumiremos a vizinhaca U0 escolhida
suficientemente pequena, dependendo de ρ e do limite sobre os angulos entre o fluxo e as
secoes transversais. Por tanto segue o seguinte corolario.
Corolario 2.1.7. Para qualquer R : Σ→ Σ′
como acima, com t(.) > t1, e qualquer x ∈ Σ,
temos DR(x)(Cuρ (x)) ⊂ Cu
ρ2(R(x)) e ‖ DRx(v) ‖≥ 5
6λ−1 ‖ v ‖ para todo v ∈ Cu
ρ (x).
Prova: Inicialmente note que a estimativa de expansao conclusao do corolario ja e ga-
rantida pela proposicao anterior, basta que ,como feito anteriormente, tomar t′1 tal que
K−3λ−t1 > 56λ
.
23
Para pontos do atrator Λ a prova esta concluıda, visto que pela proposicao an-
terior temos que DRx(Cuρ (x)) esta contido num cone de largura menor que ρ (supor que
seja ρ4) em torno de DR em relacao a decomposicao
TR(x)Σ′= DR(x)(Es
Σ(x))⊕DR(x)(EcuΣ (x))
onde EsΣ e mapeado para Es
Σ′e Ecu
Σ e mapeado para EcuΣ′
, para pontos do atrator como
visto anteriormente.
Para provar o caso geral, temos que mostrar que DR(x)(EcuΣ (x)) pertence a um
cone-instavel de largura menor que ρ4
em torno de EcuΣ′
(R(x)).
Considere um campo de cones em torno de Ecux como na afirmacao 2.0.6, assim
para a > 0 temos a invariancia dada por DXt(Ccua (x)) ⊂ Ccua (Xt(x)) para todo t > 0. Por
outro lado
DXt(x)(EcuΣ (x)) ⊂ DXt(x)(E
cux ) ⊂ DXt(x)(Ccua (x)) ⊂ Ccua (R(x))
⇓
DR(x)(EcuΣ (x)) = PR(x) ◦DXt(x)(E
cuΣ (x)) ⊂ PR(x)(Ccua(R(x))).
Como P mapeia EcuR(x) para Ecu
Σ′(R(x)) e tem sua norma limitada por alguma constante
K, concluimos que DR(x)(EcuΣ (x)) esta contido em um cone de largura b em torno de
EcuΣ′
(R(x)), onde b depende de a e K e pode ser tomado tao pequeno quanto queira,
reduzindo a, que por sua vez sera pequeno reduzindo U0. Portanto, reduzindo U0 se
necessario, podemos tomar a pequeno tal que b < ρ4. �
2.1.3 Secao transversal adaptada
Visto que, pelos resultados anteriores ja garantimos a hiperbolicidade dos mapas
de Poincare, o proximo passo e expor variedades estaveis para tais mapas. Os candidatos
naturais sao as intersecoes Ws(x,Σ) definidas anteriormente como componente conexa de
Ws ∩Σ que sao tangentes aos subespacos EsΣ. A existencia destas variedades e garantida
pela escolha da extensao Es DXt−invariante, para garantir a invariancia pela aplicacao
R precisaremos restringir a classe de secoes tranversais a uma classe cuja fronteira centro-
instavel e disjunta de Λ, isto e, d(Λ ∩ Σ, ∂cuΣ) > δ, que denominamos como secoes
transversais δ-adaptadas. Ver Figura 2.2.
A fim de provar a existencia de tais secoes transversais, precisaremos dos dois
seguintes resultados, a demostracao de tais fatos podem ser encontrados em [MPPuj04].
Teorema 2.1.8 ([MPPuj04], Teorema B). Seja Λ um conjunto singular-hiperbolico para o
campo X e assuma que Λ nao e hiperbolico. Entao, Λ tem pelos menos uma singularidade
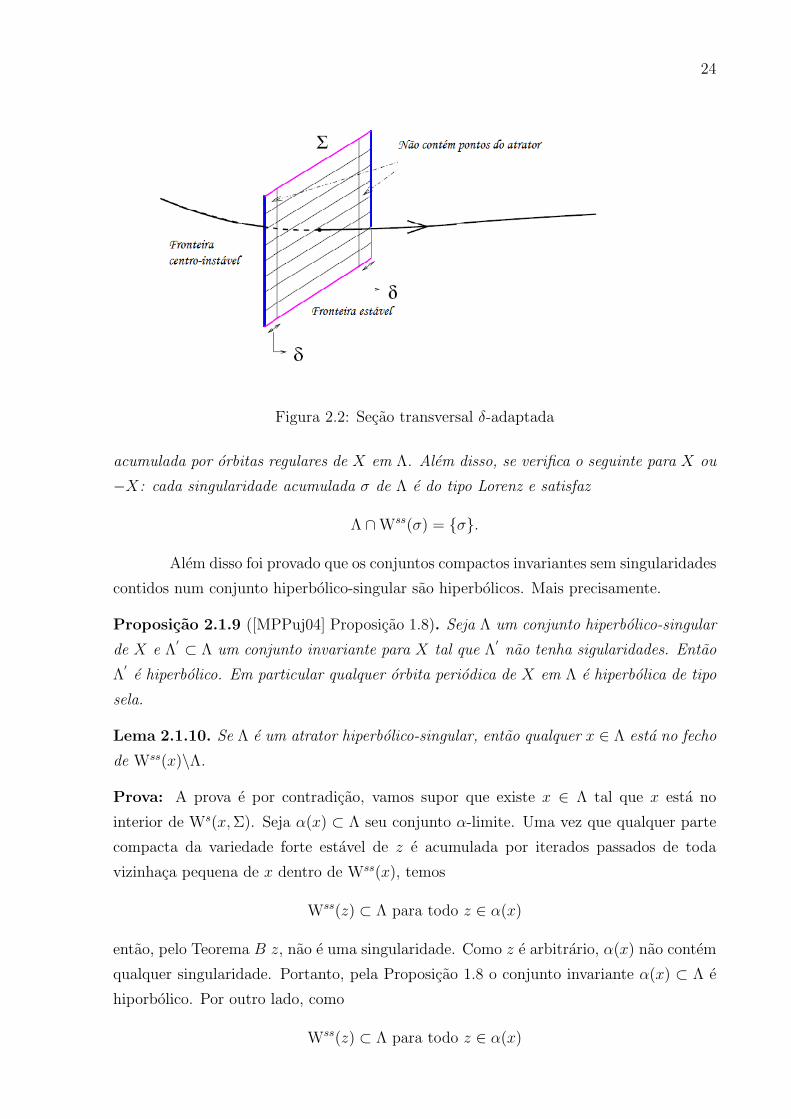
24
Figura 2.2: Secao transversal δ-adaptada
acumulada por orbitas regulares de X em Λ. Alem disso, se verifica o seguinte para X ou
−X: cada singularidade acumulada σ de Λ e do tipo Lorenz e satisfaz
Λ ∩Wss(σ) = {σ}.
Alem disso foi provado que os conjuntos compactos invariantes sem singularidades
contidos num conjunto hiperbolico-singular sao hiperbolicos. Mais precisamente.
Proposicao 2.1.9 ([MPPuj04] Proposicao 1.8). Seja Λ um conjunto hiperbolico-singular
de X e Λ′ ⊂ Λ um conjunto invariante para X tal que Λ
′nao tenha sigularidades. Entao
Λ′
e hiperbolico. Em particular qualquer orbita periodica de X em Λ e hiperbolica de tipo
sela.
Lema 2.1.10. Se Λ e um atrator hiperbolico-singular, entao qualquer x ∈ Λ esta no fecho
de Wss(x)\Λ.
Prova: A prova e por contradicao, vamos supor que existe x ∈ Λ tal que x esta no
interior de Ws(x,Σ). Seja α(x) ⊂ Λ seu conjunto α-limite. Uma vez que qualquer parte
compacta da variedade forte estavel de z e acumulada por iterados passados de toda
vizinhaca pequena de x dentro de Wss(x), temos
Wss(z) ⊂ Λ para todo z ∈ α(x)
entao, pelo Teorema B z, nao e uma singularidade. Como z e arbitrario, α(x) nao contem
qualquer singularidade. Portanto, pela Proposicao 1.8 o conjunto invariante α(x) ⊂ Λ e
hiporbolico. Por outro lado, como
Wss(z) ⊂ Λ para todo z ∈ α(x)
25
temos
S =⋃
y∈α(x)
Wss(y) ⊂ Λ que tambem nao contem qualquer singularidade .
Considere agora uma orbita de y para tempo passado densa em Λ. Por um lado
seu conjunto α-limite e Λ e por outro α(y) ⊂ S, concluımos assim que Λ ⊂ S, que e uma
contradicao, pois Λ contem singularidades.
�
Corolario 2.1.11. Para qualquer x ∈ Λ existem pontos x+ /∈ Λ e x− /∈ Λ em diferentes
componentes conexas de Wss(x)\{x}.
Prova: A prova e por contradicao. Por um lado suponha que existe x+ ∈ Λ na mesma
componente conexa de Wss\{x}, entao existiria um segmento inteiro da variedade forte
estavel inteiramente contido em Λ. Considere um ponto no interior deste segmento,
chegarıamos a uma contradicao pelo Lema 2.1.10. Repita o mesmo argumento para x− ∈Λ, finalizando assim a demonstracao.
�
O proximo Lema exibe a construcao da secao transversal δ-adaptada para x ∈ Λ
regular.
Lema 2.1.12. Seja x ∈ Λ um ponto regular, isto e, tal que X(x) 6= 0. Entao existe δ > 0
para o qual existe uma secao transversal δ- adaptada Σ em x.
Prova: Tome ε > 0 como na proposicao 2.1.2. Como visto na subsecao 2.1.1 qualquer
secao transversal Σ0, para x suficientemente pequena com respeito a ε > 0, e folheada
pela intersecao Wsε(x,Σ0). Pelo corolario acima, podemos encontrar x+ /∈ Λ e x− /∈ Λ em
cada componente conexa de Wsε(x,Σ0). Como Λ e fechado, seu complementar e aberto,
entao existem vizinhancas V ± de x± disjuntos de Λ de raio δ. Seja γ ⊂ Σ0 alguma curva
passando por x transversal a Wsε(x,Σ0). Podemos encontrar uma famılia contınua de
segmentos dentro de Wsε(y,Σ0) com y ∈ γ com parametros contidos em V ±. Entao, tome
Σ como a secao transversal formada pela uniao dos segmentos Wsε(y,Σ0) limitados por
∂cuΣ passando pelos pontos x± com y ∈ γ, ver figura 2.3.
�
Agora que ja garantimos a existencia de secoes δ-adaptadas, provaremos a pro-
priedade de invariancia das folheacoes Ws(x,Σ)pela aplicacao R.
Lema 2.1.13. Dado δ > 0 e Σ,Σ′
secoes transversais δ-adaptadas, entao existe t2 =
t2(Σ,Σ′) > 0 tal que se R : Σ(Σ
′)→ Σ definido por R(z) = Rt(z)(z) e o mapa de Poincare
com tempo t(.) > t2, entao

26
Figura 2.3: Construcao da secao transversal δ-adaptada de um ponto regular x
1. R(Ws(x,Σ)) ⊂Ws(R(x),Σ)
2. d(R(y), R(x)) ≤ 12d(y, z) para y,z ∈Ws(x,Σ) e x ∈ Σ(Σ
′).
Prova: Seja esx ∈ EsΣ como na proposicao 2.1.6, ` denotando o comprimento de curvas e
K = sup{`(Ws(x,Σ)), x ∈ Σ}entao
‖DR(x)esx‖ ≤K
kλt′′1
o que implica que a direcao da tangente de cada Ws(x,Σ) e contraıdo a uma taxa expo-
nencial. Por outro lado como Σ e uma secao δ-adaptada temos que
sup{`(Ws(x,Σ)), x ∈ Σ} > δ
⇓
escolha t′2 suficientemente grande tal que
1
kλt′2 sup{`(Ws(x,Σ)), x ∈ Σ} < δ
⇓1
kλt′2K < δ
portanto
‖DR(x)esx‖ ≤K
kλt′′1 ≤ K
kλt′2 < δ.
Concluindo assim a prova do item (1), para a prova do item (2) basta considerar t′′2
suficientemente grande tal que Kkλt′′2 < 1
2. Para conclusao da prova tome t2 = max{t′2, t
′′2}.�

27
Observacao 2.1.14. Podemos tomar t2 > t1, e t2 pode ser tomado de maneira uniforme
como t1, ver observacao 2.1.5.
Por fim o proximo resultado conclui a prova de que Ws(x,Σ) sao variedades
estaveis para a aplicacao R.
Lema 2.1.15. Seja Σ uma secao δ-adaptada. Entao, dada R+ 3 r > 0 existe ρ tal que
dist(y, z) < ρ implica que d(Xs(y), Xs(z)) < r para todo s > 0, cada y, z ∈ Ws(x,Σ) e
cada x ∈ Λ ∩ Σ.
Prova: Sejam y, z ∈Ws(x,Σ), como assumimos secoes transversais tais que Ws(x,Σ) ⊂Wss
ε (x), podemos encontrar z′= Xτ (z) ∈Wss(y) satisfazendo
1
Kd(y, z) ≤ dist(y,Xτ (z)) ≤ Kd(y, z) e |τ | ≤ Kd(y, z)
Entao, dado ε > 0
dist(Xs(y), Xs(z)) ≤ dist(Xs(y), Xs(z′)) + dist(Xs(z
′), Xs(z))
≤ Ceγsdist(y, z′) + dist(Xs(Xτ (z)), Xs(z))
≤ CeγsKd(y, z) + dist(Xs+τ (z), Xs(z))
≤ CeγsKd(y, z) + |τ |
≤ CeγsKd(y, z) +K|τ |
≤ CKd(y, z) +K|τ |
≤ CKd(y, z) +KKd(y, z)
≤ (CK +K2)d(y, z)
< (CK +K2)ρ
< r
sempre que ρ < r(KC+K2)
. �
Para cada secao Σ δ-adaptada temos o seguinte:
Lema 2.1.16. Dada uma secao Σ δ-adaptada para o campo X existe vizinhanca U0 em
X1(M) do campo X tal que para todo campo de vetores Y ∈ U0 a secao transversal Σ eδ2-adaptada ao campo Y em relacao ao sumidouro ΛY (U).
Prova: Precisamos mostrar que dada uma secao Σ δ-adaptada para o campo X, esta
mesma secao e tambem adaptada para o campo Y ∈ X1(M) suficientemente C1 proximo
de X. Pelo Lema 2.3 em [AP10] ΛX(U) e ΛY (U) estao perto na distancia de Hausdorff
se X e Y estao perto na distancia C0. Assim, se Σ e uma secao δ-adaptada podemos
encontrar uma vizinhanca U0 em X1(M) de X tal que Σ e uma secao δ2-adaptada para
todo fluxo Yt gerado pelo campo em U0.
�

28
Figura 2.4: Existencia de Variedades estaveis para o mapa de Poincare
2.2 Vizinhanca de Singularidade
Nesta secao analisaremos o fluxo perto das singularidades por meio das secoes
transversais apresentando os principais resultados.
Definicao 2.2.1. Uma singularidade σ de um campo X e do tipo Lorenz se seus autova-
lores associados λ1,λ2,λ3 sao reais e em alguma ordem satisfazem a seguinte relacao:
λ2 < λ3 < 0 < −λ3 < λ1.
Uma singularidade do tipo Lorenz e hiperbolica, e assim, Wss(σ), Wu(σ) e Ws(σ)
existem.
Como ja citado anteriormente, por [MPPuj04] temos que num atrator singular-
hiperbolico todas as singularidades σk sao do tipo Lorenz e Wss(σk) ∩ Λ = {σk}.Para algum δ > 0 podemos escolher secoes transversais δ-adaptadas contidas em
U0 de pontos regulares
• Σ0,± nos pontos y± em difentes componentes conexas de Wuloc(σk)\σk;
• Σi,± nos pontos x± em difentes componentes conexas de Wsloc(σk)\Wss
loc(σk).
e mapas de Poincare R± : Σi,±\`± → Σ0,+∪Σ0,− com tempo τ±σk , onde `± = Σi,±∩Wsloc(σk)
satisfazendo
1. Cada orbita do atrator passando por uma pequena vizinhanca de cada singularidade
σk intersecta alguma secao transversal Σi,±;
29
2. Os mapas R± ligam difeomorficamente cada componente de Σi,±\`± dentro de di-
ferentes secoes transversais Σ0,± preservando as folheacoes estaveis e cones instaveis
correspondentes.
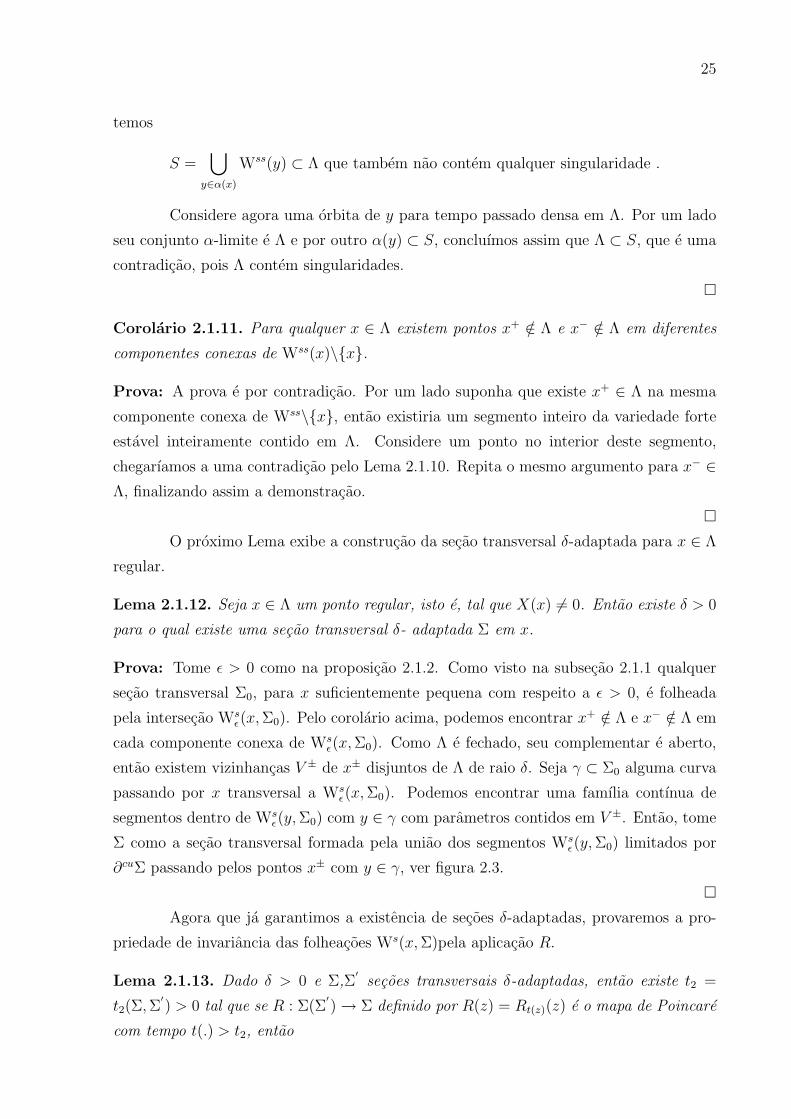
As secoes transversais Σ0,± e Σi,± podem ser tomadas como planares em relacao a algum
sistema de linearizacao de coordenadas perto de σk, por exemplo, para δ pequeno
Σ0,± = {(x, y, z) : |x| ≤ δ, |y| ≤ δe|z| ≤ δ}
e
Σi,± = {(x, y, z) : |x| ≤ δ, |y| ≤ δe|z| ≤ δ}
onde o eixo-x corresponde a variedade instavel de σk, o eixo-y a variedade forte-estavel
e o eixo-z a variedade estavel fraca da singularidade σk, que por sua vez esta na origem.
Ver Figura 2.5.
Figura 2.5: Secoes transversais adaptadas na vizinhanca de uma singularidade
Reduzindo a secao transversal, se necessario, garantimos que o tempo de Poincare
e maior que t2. De modo que as mesmas conclusoes da secao anterior sao consequencias
aqui. E assim como foi feita na secao 1.3 e facil determinar o tempo que uma orbita leva
para sair da secao Σi,± ate chegar em Σ0,±, determinando assim, a expressao do mapa de
Poincare, R±, e o seu tempo,τ±σk .
Afirmacao 2.2.2. τ∓σk e integravel com respeito a medida de lebesgue em Ξ.
Como vimos anteriomente, podemos facilmente determinar o tempo de poincare
na vizinhanca de uma singularidade, tal tempo e dado por τ∓σk = − log |x1|λ1
. Assim,
−1
λ1
∫ a
0
log xdm = limx→0
1
λ1
[1
x+ c]a0 < +∞

30
Para ε > 0 pequeno definimos a caixa de fluxo por
⋃σk
=⋃
x∈Σi,±\`±X(−ε,τ±(x)+ε)(x)
⋃(−δ, δ)× (−δ, δ)× (−1, 1) (2.1)
que e uma vizinhaca aberta de σk, onde σk e o unico zero de X |∪σk .
2.3 Prova de Expansividade
Nesta secao provaremos o Teorema (A), tal prova e por contradicao: Suponha
que existe ε > 0, dada uma sequencia δn → 0 existem sequencias de pontos xn, yn em Λ
e hn sequencia de funcoes em K tais que:
dist(Xt(xn), Xhn(t)(yn)) ≤ δn para todo t ∈ R
mas
Xhn(t)(yn) /∈ X[t−ε,t+ε](xn) para todo t ∈ R
Vamos usar a seguinte afirmacao:
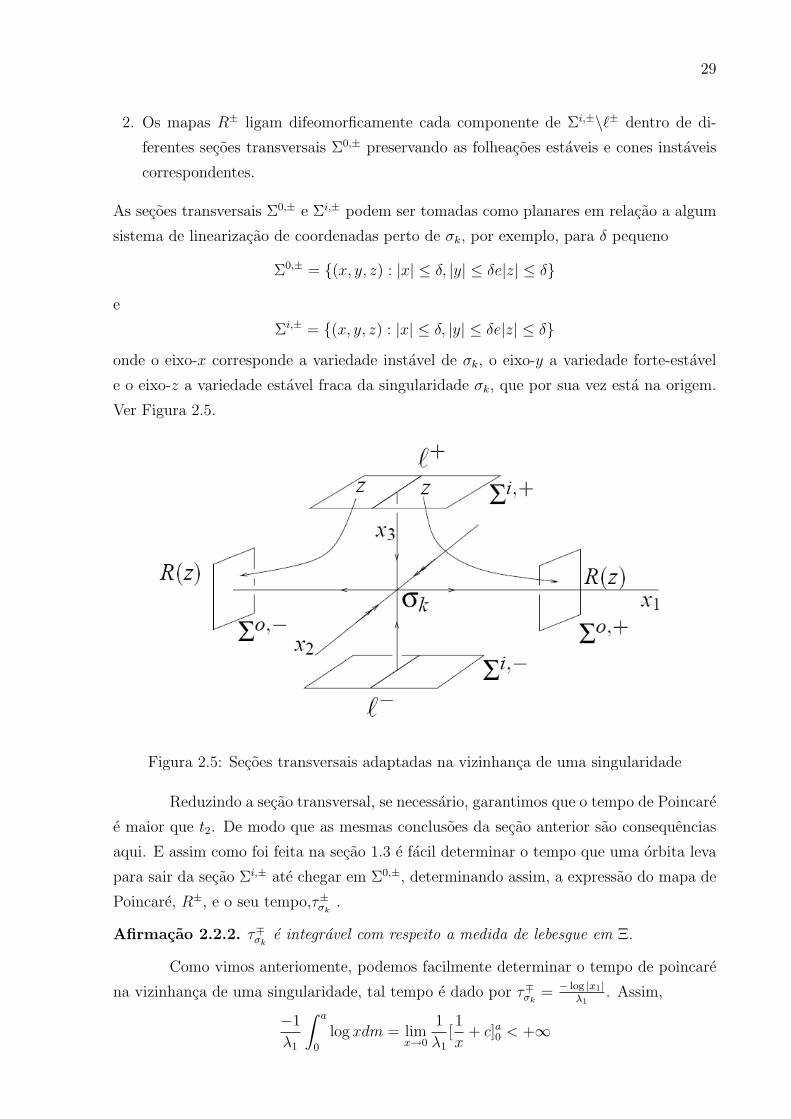
Afirmacao 2.3.1. Existe um conjunto A de pontos regulares pertencentes a Λ que sao
acumulados por uma sequencia ω(xn).
De fato, como o espaco ambiente e compacto existem pontos de acumulacao, e
estes pertencem ao conjunto, e alem disso, se o conjunto ω(xn) contem uma singularidade
σk, entao eles acumulam pelo menos em dos ramos instaveis, que consiste de pontos
regulares pertencentes a Λ. Portanto existe um conjunto A contido no ramo instavel que
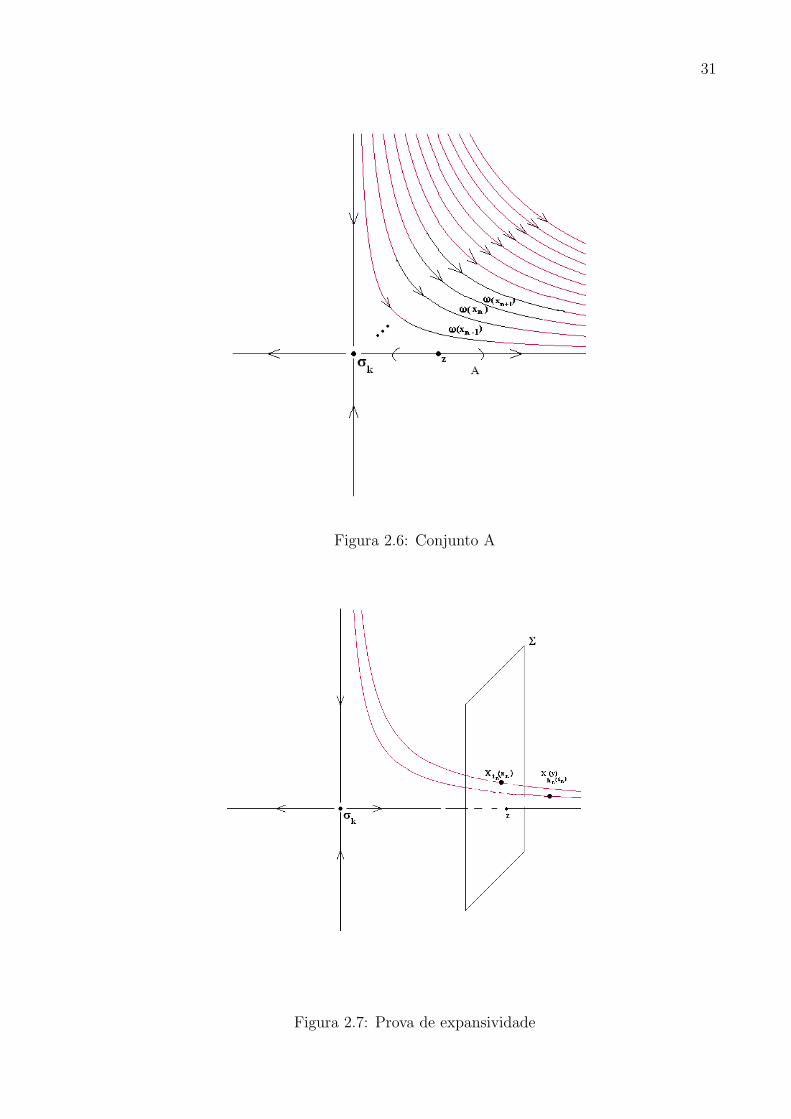
sao acumulados por uma sequencia ω(xn). Ver figura 2.6 4Fixe um ponto z ∈ A, e para cada n considere a subsequencia zn ∈ ω(xn) tal
que zn → z e para δ pequeno considere Σ uma secao transversal δ-adaptada em z tal que
(reduzindo δ e mantendo a mesma secao transversal)z esta no interior de Σδ = {y ∈ Σ :
d(y, ∂Σ) > δ}. Como zn ∈ ω(xn), a orbita de xn retorna infinitas vezes na vizinhanca de
zn que esta perto de z. Assim, a orbita de xn intersecta Σ infinitas vezes, seja tn o tempo
de primeira intersecao.
Considere yn ∈ Λ tais que dist(Xt(xn), Xhn(t)(yn)) ≤ δn∀t ∈ R e substitua xn,
yn, t e hn respectivamente por x(n) = Xtn(xn), y(n) = Xtn(yn), t′
= t − tn e h′n(t′) =
hn(t)− hn(tn).
31
Figura 2.6: Conjunto A
Figura 2.7: Prova de expansividade

32
Suponha que x(n) ∈ Σδ para qualquer n ∈ Z+, se nao diminua δ, alem disso existe
τn,j, j ≥ 0 tal que
Xτn,j(x(n)) = x(n)(j) ∈ Σδ e τn,j − τn,j−1 > max{t1, t2}∀j ≥ 1 (2.2)
Para conclusao da demonstracao do Teorema (A), precisaremos dos seguintes
resultados, os quais adiaremos a prova.
Teorema 2.3.2 (Expansividade para o futuro). Dado εo existe δo tal que se x ∈ Σδ e
y ∈ Σ satisfazem
a) Existe τj tal que xj = Xτj(x) ∈ Σδ e τj − τj−1 > max{t1, t2} para todo j ≥ 1;
b) dist(Xt(x), Xh(t)(y)) < δo para todo t > 0 e algum h ∈ K
entao ∃ s ∈ R tal que Xh(s) ∈Wssε0
(X[s−ε0,s+ε0](x)).
Prova: Ver secao 2.3.3
�
Lema 2.3.3 (Controle de angulos). Existem ρ > 0 pequeno e C > 0 dependendo apenas
do fluxo tais que para z1, z2, z3 ∈ Λ tais que z3 ∈ X[−ρ,ρ](z2), z2 ∈Wssρ (z1) entao
dist(z1, z3) ≥ C max{dist(z1, z2), dist(z2, z3)}.
Prova: Ver secao 2.3.2
�
2.3.1 Conclusao da Demonstracao do Teorema (A)
Demonstracao: Suponha por contradicao que Λ e um atrator singular-hiperbolico nao
expansivo, isto e, existe ε > 0, dada uma sequencia δn → 0 existem sequencias de pontos
xn, yn em Λ e hn sequencia de funcoes em K tais que:
dist(Xt(xn), Xhn(t)(yn)) ≤ δn para todo t ∈ R
mas
Xhn(t)(yn) /∈ X[t−ε,t+ε](xn) para todo t ∈ R
Fixe ε0 = ε, fixe tambem n tal que δn < δ0 e δn < Cρ, como fixamos n denote
x = x(n), y = y(n) e h = hn entao
dist(Xt(xn), Xhn(t)(yn)) ≤ δn < δ0 para todo t > 0
33
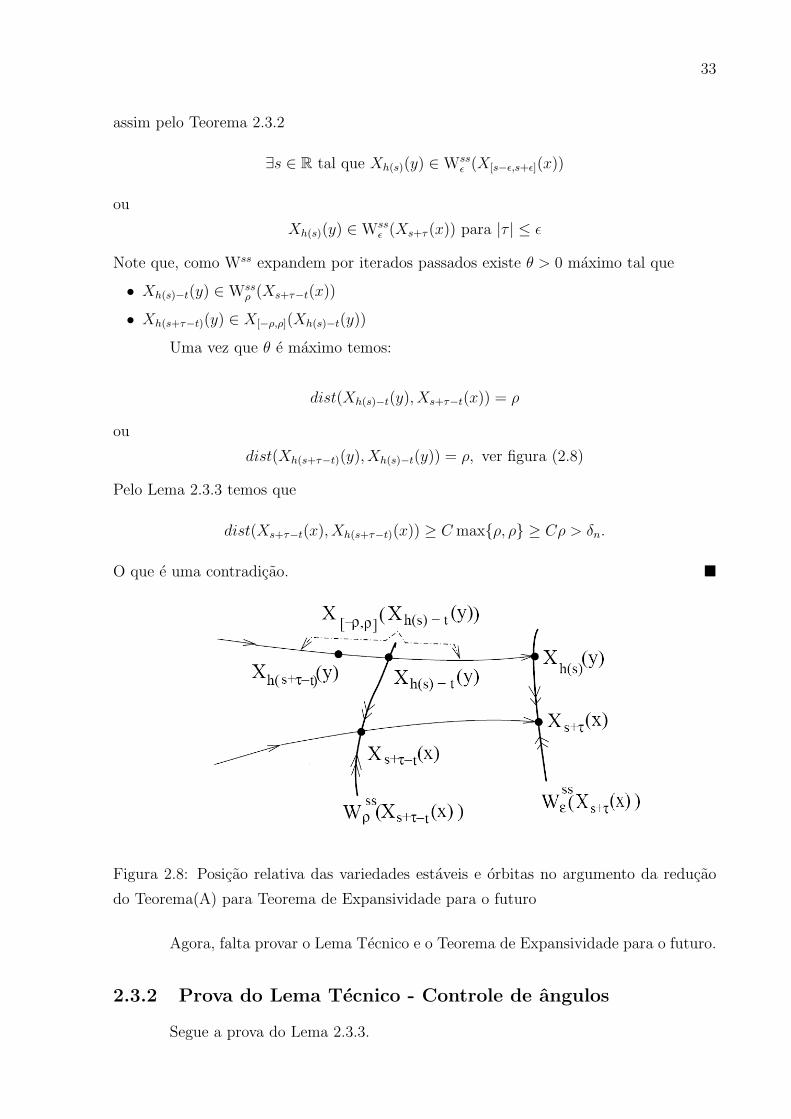
assim pelo Teorema 2.3.2
∃s ∈ R tal que Xh(s)(y) ∈Wssε (X[s−ε,s+ε](x))
ou
Xh(s)(y) ∈Wssε (Xs+τ (x)) para |τ | ≤ ε
Note que, como Wss expandem por iterados passados existe θ > 0 maximo tal que
• Xh(s)−t(y) ∈Wssρ (Xs+τ−t(x))
• Xh(s+τ−t)(y) ∈ X[−ρ,ρ](Xh(s)−t(y))
Uma vez que θ e maximo temos:
dist(Xh(s)−t(y), Xs+τ−t(x)) = ρ
ou
dist(Xh(s+τ−t)(y), Xh(s)−t(y)) = ρ, ver figura (2.8)
Pelo Lema 2.3.3 temos que
dist(Xs+τ−t(x), Xh(s+τ−t)(x)) ≥ C max{ρ, ρ} ≥ Cρ > δn.
O que e uma contradicao. �
Figura 2.8: Posicao relativa das variedades estaveis e orbitas no argumento da reducao
do Teorema(A) para Teorema de Expansividade para o futuro
Agora, falta provar o Lema Tecnico e o Teorema de Expansividade para o futuro.
2.3.2 Prova do Lema Tecnico - Controle de angulos
Segue a prova do Lema 2.3.3.

34
Figura 2.9: Controle de angulos
Prova: : Como o angulo entre Ess e a direcao do fluxo e afastada de zero, visto que a
direcao do fluxo esta contida em Ecu, considere ρ pequeno tal que X[−ρ,ρ](Wssρ (z1)) seja um
disco de classe C1. Assim, a metrica Riemanianna e uniformemente perto da Euclidiana,
podendo assim escolher [−ρ, ρ] tal que z1 corresponda a origem, Wssρ (z1) corresponda ao
segmento {0} × [−ρ, ρ] e X[−ρ,ρ](z1) corresponda a [−ρ, ρ] × {0}. Assim, o angulo entre
X[−ρ,ρ](z2) e a vertical e limitado por baixo e longe de zero. Ver figura (2.9) �
2.3.3 Prova do Teorema de Expansividade para o Futuro
A prova do Teorema e dividida em tres etapas, a saber:
• A primeira, e mostrar que a cada retorno xj da orbita de x para Σ corresponde um
retorno proximo yj da orbita de y para Σ. Isso e feito no Lema 2.3.3.
• A segunda, e mostrar que existe um mapa de Poincare suave, com tempo grande,
definido em toda faixa de Σ entre as variedades estaveis de xj e yj.
• E por ultimo, mostrar que esses mapas de Poincare sao uniformemente hiperbolicos,
em particular, eles expandem cu-curvas uniformemente.
Por uma cu-curva em Σ entende-se uma curva γ contida na secao transversal Σ
e cuja direcao tangente Tzγ ⊂ Cuρ (z) para todo z ∈ γ.
Lema 2.3.4. Dado ε0 > 0 existe δ > 0 tal que se x ∈ Σδ e y ∈ Λ satisfazem:
a) ∃ τj tal que xj = Xτj(x) ∈ Σδ e τj − τj−1 > max{t1, t2} para todo j ≥ 1;
b) d(Xt(x), Xh(t)) < δo para todo t > 0 e algum h ∈ K
entao ∃ K > 0 tal que existe uma sequencia (νj)j≥0 tal que
• yj = Xνj(y) esta em Σ para ∀ j ≥ 0;
35
• | νj − h(τj) |< Kδ0;
• d(xj, yj) < Kδ0.
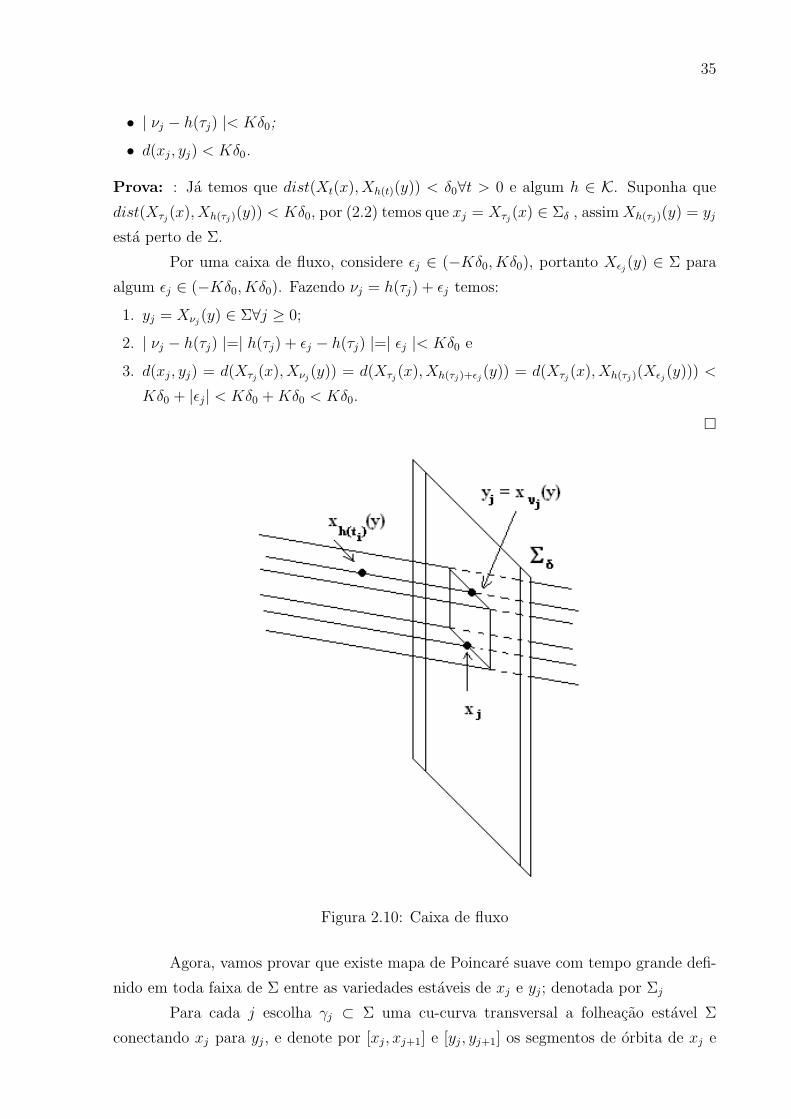
Prova: : Ja temos que dist(Xt(x), Xh(t)(y)) < δ0∀t > 0 e algum h ∈ K. Suponha que
dist(Xτj(x), Xh(τj)(y)) < Kδ0, por (2.2) temos que xj = Xτj(x) ∈ Σδ , assim Xh(τj)(y) = yj
esta perto de Σ.
Por uma caixa de fluxo, considere εj ∈ (−Kδ0, Kδ0), portanto Xεj(y) ∈ Σ para
algum εj ∈ (−Kδ0, Kδ0). Fazendo νj = h(τj) + εj temos:
1. yj = Xνj(y) ∈ Σ∀j ≥ 0;
2. | νj − h(τj) |=| h(τj) + εj − h(τj) |=| εj |< Kδ0 e
3. d(xj, yj) = d(Xτj(x), Xνj(y)) = d(Xτj(x), Xh(τj)+εj(y)) = d(Xτj(x), Xh(τj)(Xεj(y))) <
Kδ0 + |εj| < Kδ0 +Kδ0 < Kδ0.
�
Figura 2.10: Caixa de fluxo
Agora, vamos provar que existe mapa de Poincare suave com tempo grande defi-
nido em toda faixa de Σ entre as variedades estaveis de xj e yj; denotada por Σj
Para cada j escolha γj ⊂ Σ uma cu-curva transversal a folheacao estavel Σ
conectando xj para yj, e denote por [xj, xj+1] e [yj, yj+1] os segmentos de orbita de xj e
36
yj respectivamente. Como dist(Xt(x), Xh(t)(y)) < δ0∀t ∈ R entao dist(Xt(x), Xh(t)(y)) <
δ0∀t ∈ [tj, tj+1].
Lembrando que para Σ secao δ-adaptada existem mapas de Poincare Rj tais que
Rj(Wsε(xj,Σ)) ⊂Ws
ε(Rj(xj),Σ)
e
Rj(Wsε(yj,Σ)) ⊂Ws
ε(Rj(yj),Σ),
assim, para mostrar a existencia de um mapa de Poincare, basta provar que existe um
mapa de Poincare definido em γj ⊂ Σ.
Tomar δ0 menor que o raio de injetividade do mapa exponencial da variedade
ambiente, isto e, a parametrizacao da geodesica exp : TxM → M e inversıvel na δ0 vizi-
nhaca de x em M para qualquer ponto x ∈M , entao existe uma unica geodesica ligando
cada Xt(x) para Xh(t)(y) e varia continuamente com t. Usando essas geodesicas podemos
deformar a curva γj ∪ [yj, yj+1] ∪ γj+1 na curva [xj, xj+1]. Alem disso tal deformacao tem
derivada injetiva. Segue-se que ha uma imersao suave
φ : [0, 1]× [0, 1]→M
tal que
φ({0} × [0, 1]) = γj φ([0, 1]× {1}) = [yj, yj+1]
φ({1} × [0, 1]) = γj+1 φ([0, 1]× {0}) = [xj, xj+1].
Alem disso Sj = φ([0, 1] × [0, 1]), que e uma superfıcie imersa cuja fronteira e formada
por γj,γj+1 e os segmentos de orbita [xj, xj+1] e [yj, yj+1], pode ser escolhido tal que
• Todos os pontos de Sj estao a uma distancia inferior a δ1 do segmento de orbita
[xj, xj+1], para alguma constante uniforme δ0 com δ1 > δ0, que podem ser tomadas
arbitrariamente proximas de zero, reduzindo se necessario, ver figura 2.11.
• A intersecao de Sj com uma secao transversal de qualquer singularidade, denotadas
por Σ0,± e Σi,±, e transversal a folhecao estavel correspondente, ver figura 2.11.
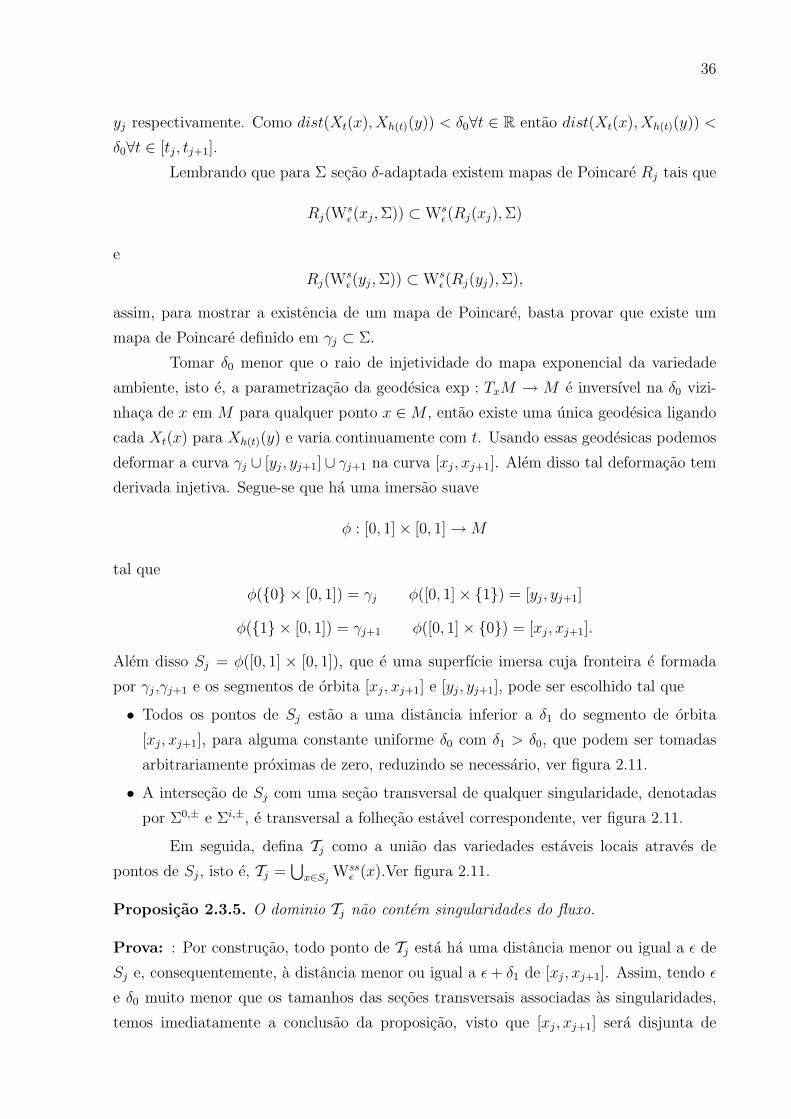
Em seguida, defina Tj como a uniao das variedades estaveis locais atraves de
pontos de Sj, isto e, Tj =⋃x∈Sj Wss
ε (x).Ver figura 2.11.
Proposicao 2.3.5. O dominio Tj nao contem singularidades do fluxo.
Prova: : Por construcao, todo ponto de Tj esta ha uma distancia menor ou igual a ε de
Sj e, consequentemente, a distancia menor ou igual a ε+ δ1 de [xj, xj+1]. Assim, tendo ε
e δ0 muito menor que os tamanhos das secoes transversais associadas as singularidades,
temos imediatamente a conclusao da proposicao, visto que [xj, xj+1] sera disjunta de
37
Figura 2.11: Construcao de mapas de Poincare entre variedades estaveis
qualquer singularidade. Assim, quando o segmento de orbita [xj, xj+1] nao intersecta
secao transversal na vizinhanca de alguma singularidade a prova esta concluıda.
No caso geral devemos analisar as intersecoes do tubo com as caixas de fluxo
associadas as singularidades. Uma observacao importante e o lema seguinte.
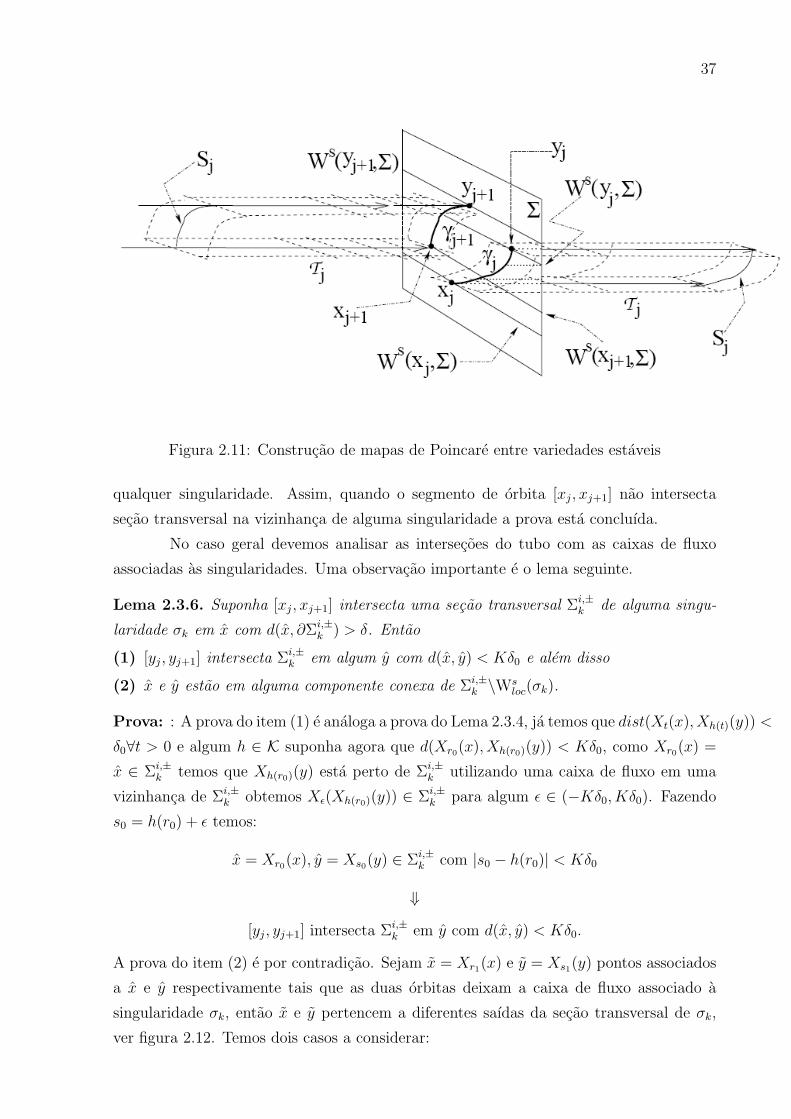
Lema 2.3.6. Suponha [xj, xj+1] intersecta uma secao transversal Σi,±k de alguma singu-
laridade σk em x com d(x, ∂Σi,±k ) > δ. Entao
(1) [yj, yj+1] intersecta Σi,±k em algum y com d(x, y) < Kδ0 e alem disso
(2) x e y estao em alguma componente conexa de Σi,±k \Ws
loc(σk).
Prova: : A prova do item (1) e analoga a prova do Lema 2.3.4, ja temos que dist(Xt(x), Xh(t)(y)) <
δ0∀t > 0 e algum h ∈ K suponha agora que d(Xr0(x), Xh(r0)(y)) < Kδ0, como Xr0(x) =
x ∈ Σi,±k temos que Xh(r0)(y) esta perto de Σi,±
k utilizando uma caixa de fluxo em uma
vizinhanca de Σi,±k obtemos Xε(Xh(r0)(y)) ∈ Σi,±
k para algum ε ∈ (−Kδ0, Kδ0). Fazendo
s0 = h(r0) + ε temos:
x = Xr0(x), y = Xs0(y) ∈ Σi,±k com |s0 − h(r0)| < Kδ0
⇓
[yj, yj+1] intersecta Σi,±k em y com d(x, y) < Kδ0.
A prova do item (2) e por contradicao. Sejam x = Xr1(x) e y = Xs1(y) pontos associados
a x e y respectivamente tais que as duas orbitas deixam a caixa de fluxo associado a
singularidade σk, entao x e y pertencem a diferentes saıdas da secao transversal de σk,
ver figura 2.12. Temos dois casos a considerar:
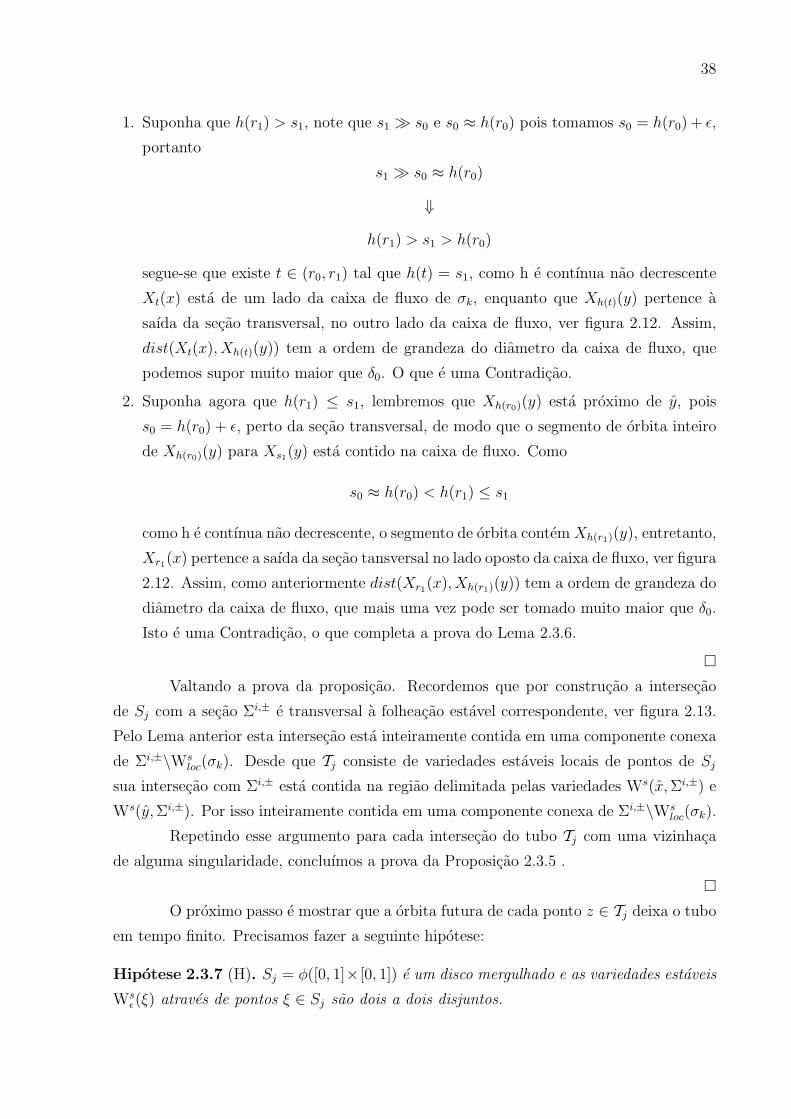
38
1. Suponha que h(r1) > s1, note que s1 � s0 e s0 ≈ h(r0) pois tomamos s0 = h(r0) + ε,
portanto
s1 � s0 ≈ h(r0)
⇓
h(r1) > s1 > h(r0)
segue-se que existe t ∈ (r0, r1) tal que h(t) = s1, como h e contınua nao decrescente
Xt(x) esta de um lado da caixa de fluxo de σk, enquanto que Xh(t)(y) pertence a
saıda da secao transversal, no outro lado da caixa de fluxo, ver figura 2.12. Assim,
dist(Xt(x), Xh(t)(y)) tem a ordem de grandeza do diametro da caixa de fluxo, que
podemos supor muito maior que δ0. O que e uma Contradicao.
2. Suponha agora que h(r1) ≤ s1, lembremos que Xh(r0)(y) esta proximo de y, pois
s0 = h(r0) + ε, perto da secao transversal, de modo que o segmento de orbita inteiro
de Xh(r0)(y) para Xs1(y) esta contido na caixa de fluxo. Como
s0 ≈ h(r0) < h(r1) ≤ s1
como h e contınua nao decrescente, o segmento de orbita contem Xh(r1)(y), entretanto,
Xr1(x) pertence a saıda da secao tansversal no lado oposto da caixa de fluxo, ver figura
2.12. Assim, como anteriormente dist(Xr1(x), Xh(r1)(y)) tem a ordem de grandeza do
diametro da caixa de fluxo, que mais uma vez pode ser tomado muito maior que δ0.
Isto e uma Contradicao, o que completa a prova do Lema 2.3.6.
�
Valtando a prova da proposicao. Recordemos que por construcao a intersecao
de Sj com a secao Σi,± e transversal a folheacao estavel correspondente, ver figura 2.13.
Pelo Lema anterior esta intersecao esta inteiramente contida em uma componente conexa
de Σi,±\Wsloc(σk). Desde que Tj consiste de variedades estaveis locais de pontos de Sj
sua intersecao com Σi,± esta contida na regiao delimitada pelas variedades Ws(x,Σi,±) e
Ws(y,Σi,±). Por isso inteiramente contida em uma componente conexa de Σi,±\Wsloc(σk).
Repetindo esse argumento para cada intersecao do tubo Tj com uma vizinhaca
de alguma singularidade, concluımos a prova da Proposicao 2.3.5 .
�
O proximo passo e mostrar que a orbita futura de cada ponto z ∈ Tj deixa o tubo
em tempo finito. Precisamos fazer a seguinte hipotese:
Hipotese 2.3.7 (H). Sj = φ([0, 1]× [0, 1]) e um disco mergulhado e as variedades estaveis
Wsε(ξ) atraves de pontos ξ ∈ Sj sao dois a dois disjuntos.
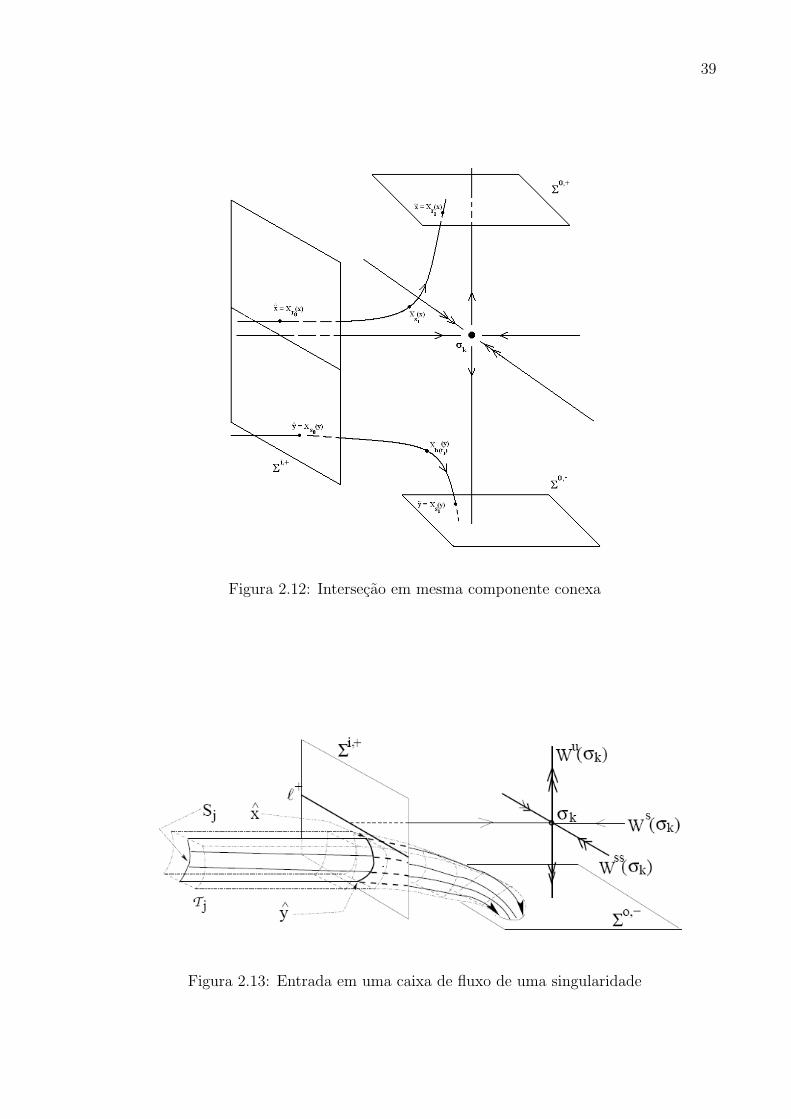
39
Figura 2.12: Intersecao em mesma componente conexa
Figura 2.13: Entrada em uma caixa de fluxo de uma singularidade

40
Com isso, esta bem definida a projecao contınua π : Tj → Sj atribuindo a cada
z ∈ Tj um unico ξ ∈ Sj cuja variedade forte estavel local que contem z. Seja Yt(ξ) =
π(Xt(ξ)) fluxo induzido por Xt em Sj nao necessariamente completo, definido para maior
intervalo de tempo t, tal que [xj, xj+1] e [yj, yj+1] sao orbitas de Yt.
Por continuidade, para qualquer subconjunto E de Sj a uma distancia positiva
de ∂Sj existe ε > 0 tal que Yt(ξ) esta definido para qualquer ξ ∈ E e t ∈ [0, ε]. Entao
como consequencia temos a seguinte propriedade
(P) Dado qualquer subconjunto E de Sj a uma distancia poistiva de γj+1, existe ε > 0
tal que Yt(ξ) esta definido para todo ξ ∈ E e t ∈ [0, ε].
A Hipotese acima pode ser removida desde que lembremos que φ : [0, 1]× [0, 1]→M e uma imersao, entao neste caso podemos definir o fluxo Yt em [0, 1] × [0, 1] ao inves
de Sj da seguinte maneira: Dado qualquer w ∈ [0, 1] × [0, 1] existe U vizinhanca de
w e V vizinhanca de φ(w) tal que φ : U → V e um difeomorfismo. Escolhendo V
suficientemente pequeno, Wssε (ξ) intersecta V apenas em ξ. Temos entao, bem definido
a projecao π :⋃ξ∈V Wss
ε (ξ)→ V que a cada z ∈⋃ξ∈V Wss
ε (ξ) associa um unico elemento
de V cuja variedade estavel contem z. Podemos entao definir Yt(w) para t pequeno por
Yt(w) = φ−1(π(Xt(φ(w)))); como antes podemos estender Yt a um domınio maximo. Isso
define um fluxo em [0, 1]× [0, 1] tal que [0, 1]× {i} e {i} × [0, 1] sao trajetorias.
Afirmacao 2.3.8. Uma singularidade σ para Yt corresponde a uma singularidade de X
na variedade forte estavel de σ em M .
De fato, pois Yt(σ) = σ ⇒ π(Xt(σ)) = σ ⇒ Xt(σ) = σ visto que π e definido
como . O mesmo para Yt(w) = φ−1(π(Xt(φ(w)))), pois Yt(σ) = σ ⇒ φ−1(π(Xt(φ(σ)))) =
σ ⇒ π(Xt(φ(σ))) = φ(σ)⇒ Xt(φ(σ)) = φ(σ)⇒ φ(σ) e singularidade para X.
4
Note que as trajetorias dos pontos de {0}×[0, 1] entram no quadrado. Portanto, a
unica maneira das trajetorias saırem e atraves de {1}×[0, 1], assim teremos a reformulacao
da propriedade (P).
(P) Dado qualquer subconjunto E de [0, 1]× [0, 1] a uma distancia poistiva de {1}× [0, 1],
existe ε > 0 tal que Yt(w) esta definido para todo w ∈ E e t ∈ [0, ε].
Proposicao 2.3.9. Dado qualquer ponto z ∈ Tj existe t > 0 tal que Xt(z) /∈ Tj.
Prova: : A prova e por contradicao. Primeiro assuma a hipotese (H) e suponha que
existe z ∈ Tj tal que Xt(z) ∈ Tj para todo t ≥ 0. Seja z0 = π(z), entao Yt(z0) esta definido

41
para todo t ≥ 0 assim faz sentido ω(z0). Yt(z0) nao pode acumular em γj+1, caso contrario
Yt(z0) nao estaria definido para todo t ≥ 0. Como M e compacto, temos que ω(z0) e um
subconjunto compacto de Sj, e esta a uma distancia positiva de γj+1. Pela propriedade
(P) temos que exite ε > 0 tal que Yt(w) esta definido para todo t ∈ [0, ε] e todo w ∈ ω(z0),
ja que ω(z0) e invariante, podemos estender Yt para todo R. Pelo Teorema de Poincare
Bendixson temos que ω(z0) so podera ser formado por um unica orbita fechada, visto
que o tubo nao tem singularidades. Considere o disco D ⊂ Sj delimitado pela orbita
de w0 ∈ ω(z0), aplicando o Teorema de Poincare sucessivamente concluımos que Yt tem
alguma singularidade σ no interior de D, o que implica que Xt tem uma singularidade
na variedade estavel local, contrariando a Proposicao 2.3.5. Esta contradicao completa
a prova da proposicao 2.3.9, sob hipotese (H). O caso geral e feito da mesma maneira,
lidando apenas com o fluxo induzido em [0, 1]× [0, 1] em vez de Sj.
�
Ate aqui, mostramos que toda orbita do fluxo induzido Yt em Sj deve eventual-
mente cruzar γj+1 entao existe mapa de Poincare contınuo
r : γj → γj+1
ξ 7→ Yθ(ξ)(ξ).
Agora vamos deduzir que toda Xt-orbita deixa Tj atraves de Σj+1, o que prova
que Rj esta definido em Σj.
Seja γ uma curva centro instavel em Σδ(Σδ= ) conectando W(xj,Σ) e W(yj,Σ).
Para cada z ∈ γ seja t(z) o menor tempo tal que Xt(z) esta na fronteira de Tj.
Observacao 2.3.10. Cada Xt(ξ)(ξ) ∈Ws(Yt(z)(π(z))).
Observacao 2.3.11. Para {ξ} = γ∩Ws(xj,Σ) temos Yt(ξ) = Xt(ξ) e assim t(ξ) = θ(ξ),
assim Xt(z)(ξ) so sai de Tj por γj+1
Precisamos provar agora que qualquer ponto de γ, por Xt, tambem deixa o tubo,
Tj, por γj+1.
Tome z ∈ γ perto de ξ, por continuidade Xt-trajetoria de z e ξ mantem-se
proximas e por contracao, Xt-trajetorias de ξ mantem-se proximas de [xj, xj+1]. Note que
a orbita de z nao deixa o tubo atraves da uniao de variedades forte estaveis passando por
[xj, xj+1], pois se assim fosse, contrariaria a definicao de Yt. Portanto, Xt(z) deixa o tubo
atraves de Σj+1.
Considere agora, γ ⊂ γ o maior subconjunto conexo contendo ξ tal que Xt(z)(z) ∈Σj+1 para todo z ∈ γ. Para concluir que toda Xt-orbita dexa Tj atraves de Σj+1, preci-
samos mostrar que γ = γ.
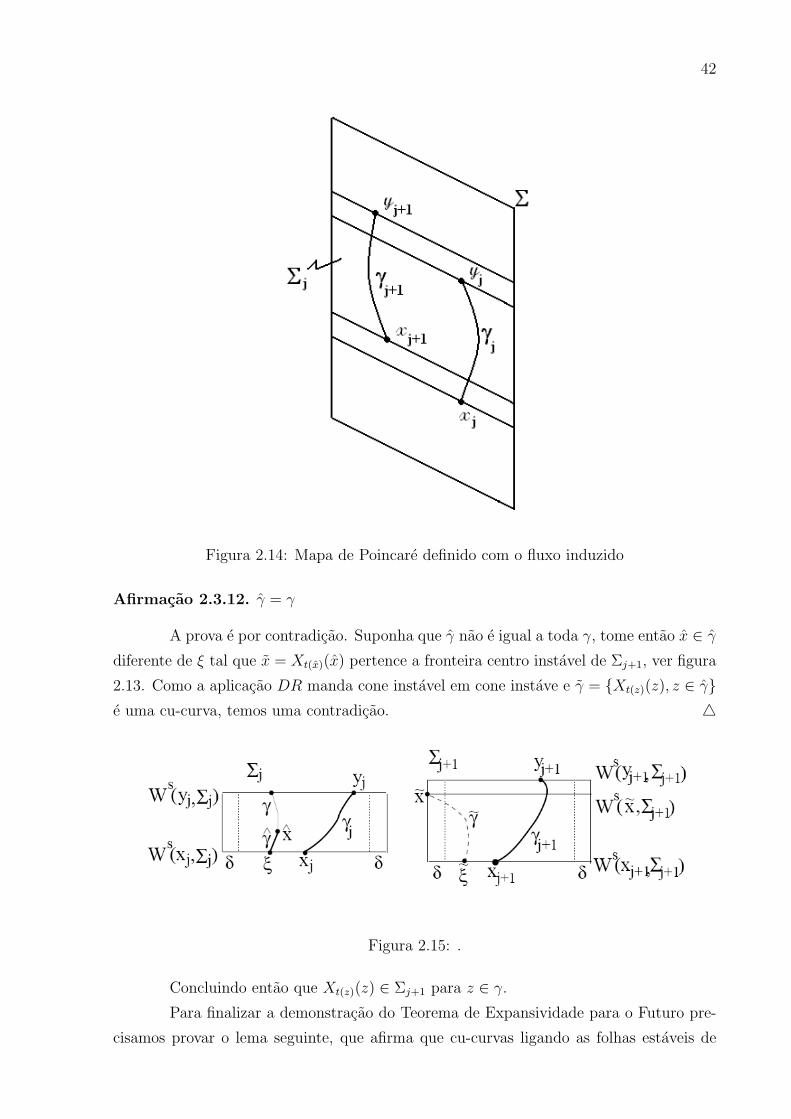
42
Figura 2.14: Mapa de Poincare definido com o fluxo induzido
Afirmacao 2.3.12. γ = γ
A prova e por contradicao. Suponha que γ nao e igual a toda γ, tome entao x ∈ γdiferente de ξ tal que x = Xt(x)(x) pertence a fronteira centro instavel de Σj+1, ver figura
2.13. Como a aplicacao DR manda cone instavel em cone instave e γ = {Xt(z)(z), z ∈ γ}e uma cu-curva, temos uma contradicao. 4
Figura 2.15: .
Concluindo entao que Xt(z)(z) ∈ Σj+1 para z ∈ γ.
Para finalizar a demonstracao do Teorema de Expansividade para o Futuro pre-
cisamos provar o lema seguinte, que afirma que cu-curvas ligando as folhas estaveis de
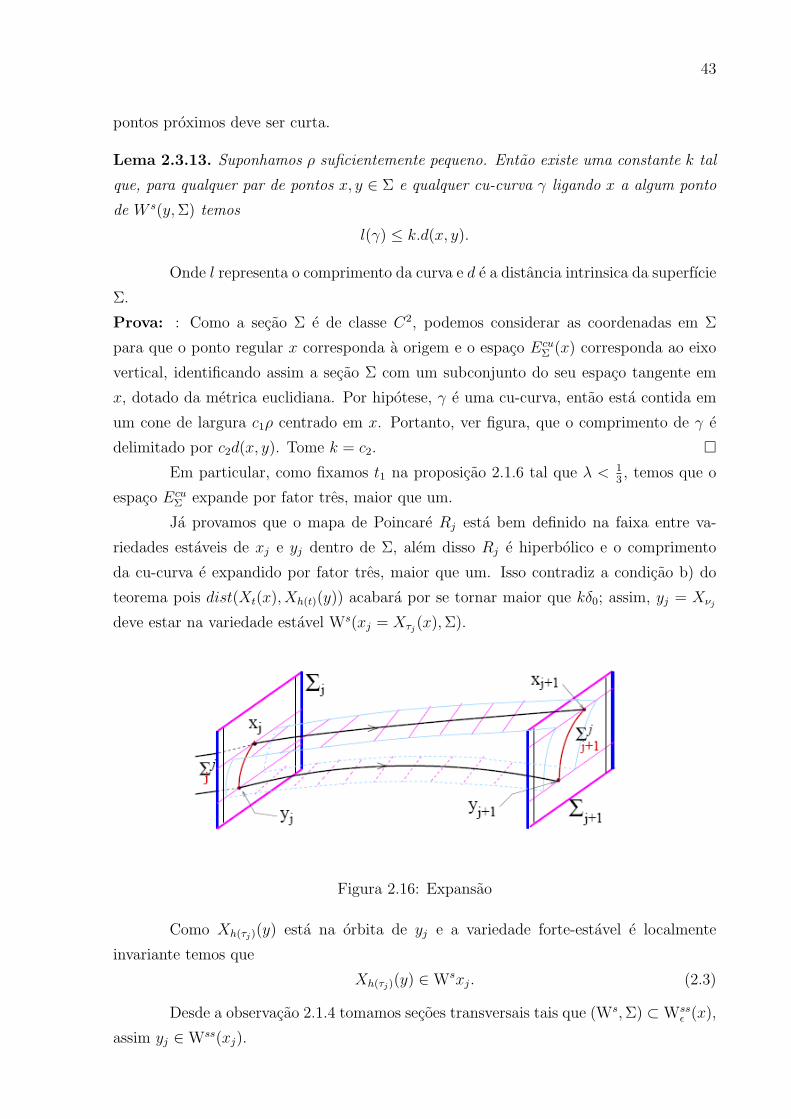
43
pontos proximos deve ser curta.
Lema 2.3.13. Suponhamos ρ suficientemente pequeno. Entao existe uma constante k tal
que, para qualquer par de pontos x, y ∈ Σ e qualquer cu-curva γ ligando x a algum ponto
de W s(y,Σ) temos
l(γ) ≤ k.d(x, y).
Onde l representa o comprimento da curva e d e a distancia intrinsica da superfıcie
Σ.
Prova: : Como a secao Σ e de classe C2, podemos considerar as coordenadas em Σ
para que o ponto regular x corresponda a origem e o espaco EcuΣ (x) corresponda ao eixo
vertical, identificando assim a secao Σ com um subconjunto do seu espaco tangente em
x, dotado da metrica euclidiana. Por hipotese, γ e uma cu-curva, entao esta contida em
um cone de largura c1ρ centrado em x. Portanto, ver figura, que o comprimento de γ e
delimitado por c2d(x, y). Tome k = c2. �
Em particular, como fixamos t1 na proposicao 2.1.6 tal que λ < 13, temos que o
espaco EcuΣ expande por fator tres, maior que um.
Ja provamos que o mapa de Poincare Rj esta bem definido na faixa entre va-
riedades estaveis de xj e yj dentro de Σ, alem disso Rj e hiperbolico e o comprimento
da cu-curva e expandido por fator tres, maior que um. Isso contradiz a condicao b) do
teorema pois dist(Xt(x), Xh(t)(y)) acabara por se tornar maior que kδ0; assim, yj = Xνj
deve estar na variedade estavel Ws(xj = Xτj(x),Σ).
Figura 2.16: Expansao
Como Xh(τj)(y) esta na orbita de yj e a variedade forte-estavel e localmente
invariante temos que
Xh(τj)(y) ∈Wsxj. (2.3)
Desde a observacao 2.1.4 tomamos secoes transversais tais que (Ws,Σ) ⊂Wssε (x),
assim yj ∈Wss(xj).
44
De acordo com o Lema 2.3.4. |νj−h(τj)| < kδ0, entao o segmento de orbita Oy =
X[νj−kδ0,νj+kδ0](y) contem Xh(τj)(y), que por sua vez, esta na vizinhaca de yj ∈ Wssε (x),
assim a intersecao da variedade forte-estavel local de x com o segmento de orbita Oy e
difente do vazio.
Agora, seja ε0 > 0 dado, considere o segmento de orbita Ox = X[τj−ε0,τj+ε0](x) e
o segmento de orbita de x cuja variedade forte-estavel intersecta Oy,
Oxy = {Xs(x) : ∃t ∈ [νj − kδ0 − t, νj + kδ0 + t] tal que Xt(y) ∈Wssε (Xs(x))}.
Portanto, como yj ∈ Ws(xj) temos que Oxy e vizinhaca de xj, que pode ser
tomada tao pequena quanto queira desde que δ0 seja fixado desde o inıcio suficientemente
pequeno. Em particular podemos garantir que Oxy ⊂ Ox, concluımos entao que
Xh(τj)(y) ∈Wssε (Xτj−ε0,τj+ε0(x)).
�
Concluımos aqui a demonstracao do Teorema de Expansividade para o Futuro.
2.4 Expansividade robusta
Nesta secao iremos provar que a propriedade de expansividade vale para num
aberto de classe C1 no espaco dos campos vetoriais que contem o campo X.
Teorema 2.4.1 (B). Seja Λ um atrator singular-hiperbolico. Entao Λ e C1 robustamente
expansivo.
Demonstracao: Seja Y campo de vetores numa vizinhanca U0 de X1(M) contendo X
pelo Lema 2.1.16 temos a existencia de secoes δ2
adaptadas para o campo Y , repetindo os
argumentos feitos anteriormente para o conjunto maximal invariante ΛY (U), concluimos
que ΛY (U) e expansivo, ou seja, o atrator hiperbolico-singular e robustamente expansivo.
�
Capıtulo 3
Medida S.R.B.
Ao longo deste capıtulo vamos supor que o fluxo (Xt)t∈R e de classe C2, Ξ denotara
uma secao de Poincare global(com varias componentes conexas) dotada da particao F,
m medida de Lebesgue e R : Ξ\Γ −→ Ξ a aplicacao de Poincare que definiremos mais
adiante.
O objetivo principal aqui e provar que todo atrator hiperbolico-singular suporta
uma unica medida fısica, que se apresenta como teorema B abaixo.
Teorema 3.0.2 (C). Seja Λ um atrator singular-hiperbolico. Entao Λ suporta uma unica
medida de probabilidade fısica (SRB), µ, que e ergodica, hiperbolica e sua bacia coincide
com a bacia de atracao Λ, i.e.,
B(µ) = W s(Λ)mmod0.
Para a prova deste teorema seguiremos o seguinte esquema:
1. Inicialmente, apos definir a aplicacao de Poincare, R, iremos restringir tal aplicacao ao
quociente sobre as folhas estaveis, f , tal aplicacao tem uma famılia finita ν1, ν2, ..., νl
de medidas de probabilidades invariantes ergodicas absolutamente contınuas a lebes-
gue, cujas bacias cobrem lebesgue q.t.p de I(uniao finita de intervalos difeomorfa ao
espaco das folhas) e o suporte de cada νk esta contido em um intervalo nao vazio.
2. Posteriormente, verifica-se que cada νi define uma medida de probabilidade ergodica
ηi R−invariante, cujas bacias sao dadas pela uniao de faixas de Ξ, portanto medidas
de probabilidades ergodicas SRB.
3. A partir de ηi SRB R−invariantes, construir υi para o semi-fluxo suspensao de R com
funcao altura τ , com as mesmas propriedades ja conseguidas.
4. Converter cada υi SRB em µi para o fluxo original, e concluir unicidade da medida
µ SRB por existencia de orbitas regulares densas em Λ e bacia de µ conter conjunto
aberto lebesgue modulo zero. Por fim, concluir que µ e hiperbolica
45

46
Observamos o seguinte, que vai provar o Teorema D. No item 4, observemos que
se o conjunto ΛY for um sumidouro nao transitivo obtido como o maximal invariante de
Y C2 proximo de X numa vizinhanca de Λ, entao o argumento que prova unicidade da
medida fısica nao pode ser aplicado. Porem, os argumentos usados ate o item 3 continuam
valendo, e abtemos assim um numero finito de medidas fısicas S.R.B. ηi invariantes para
o fluxo de suspensao cujas bacias cobrem lebesgue quase todo ponto. Entao podemos
associar cada uma delas a uma medida fısica para o fluxo original e suas bacias cobrem
lebesgue quase todo ponto de uma vizinhanca de Λ
3.1 Medidas de probabilidade invariantes absoluta-
mente contınuas para a aplicacao unidimensional
3.1.1 Mapa de Poincare Global
Como visto no Lema2.1.12 em cada ponto regular x ∈ Λ temos a existencia de
secoes transversais δ−adaptadas e perto de cada singularidade σk existe uma caixa de
fluxo Uσkcomo em (2.1), dada por
⋃σk
=⋃
x∈Σi,±\`±X(−ε,τ±(x)+ε)(x)
⋃(−δ, δ)× (−δ, δ)× (−1, 1)
Usando a vizinhanca tubular perto de cada secao δ−adaptada, linearizamos o
fluxo em UΣ = X(−δ,δ)(intΣ) para ε pequeno. Isto fornece uma cobertura aberta finita
para Λ, U = {UΣi , Uσk : i = 1, 2, ..., l e k = 1, 2, ..., s}.Seja Ξ = {Σj,Σ
i,±σk,Σ0,±
σk: j = 1, 2, ..., l e k = 1, 2, ..., s} a secao transversal global.
Enfim, definamos a aplicacao R : Ξ → Ξ. Seja z em Ξ, considere z = Xt2(z) e
esperamos o tempo, t(z), tal que a obita do ponto z toca novamente alguma secao, (nos
pontos onde estao definidos), entao R(z) = Xt2+t(z)(z).
Observacao 3.1.1. Considere o mapa dado pelo primeiro retorno
R0 : Ξ→ Ξ
z 7→ Xτ(z)(z)
onde τ(z) = inf{t > 0 : Xt(z) ∈ Ξ}. Observe que com esse tempo τ(z); R0 pode nao
satisfazer ao Lema 2.1.13, que nos garante a invariancia das variedade estaveis para as
transformacoes de Poincare,P , no entanto essas variedades estao definidas. Pela definicao
de R e R0 dizemos que R e induzido por R0, isto e, se R esta definido para z ∈ Ξ entao
existe r(x) tal que R(z) = Rr(z)0 (z). Como o numero de Ξ e finito e t2 e constante, existe
r0 tal que r(x) ≤ r0.

47
O proximo resultado afirma que fixado uma secao transversal a famılia de todas
as faixas possıveis em Σ(Σ′) cobre Σ exceto em um numero finito de folhas estaveis
(W s(xi,Σ)). E que cada faixa dada em (Σ(Σ′)) temos um numero finito de componentes
conexas.
Lema 3.1.2. O conjunto de descontinuidades de R em Ξ\∂sΞ esta contido no conjunto
de pontos x ∈ Ξ\∂sΞ tal que:
1. ou R(x) esta definido e pertence a ∂sΞ
2. ou ha algum tempo 0 < t ≤ t2 tal que Xt(x) ∈ W sε (σ) para alguma singularidade σ
de Λ.
Alem disso, este conjunto esta contido em um numero finito de folhas estaveis da secao
transversal Σ ∈ Ξ.
Prova: Mostraremos inicialmente que todas as possıveis descontinuidades de R em Ξ\∂sΞcorrespondem os casos (1) e (2). De fato, seja x ∈ Σ\∂sΣ para algumΣ ∈ Ξ, que nao
satisfaca qualquer item, (1) e (2). Entao R(x) esta definido e pertence ao interior de
alguma Σ′. Pela suavidade do fluxo e Teorema do Fluxo Tubular temos que R e suave
na vizinhaca de x em Σ, combinando com o Teorema do Fluxo Tubular longo, R e suave.
Concluımos entao que qualquer ponto de descontinuidade para R dever satisfazer (1) ou
(2).
O proximo passo da prova e mostrar que pontos que satisfazem o item (2) estao
contidos em um numero finito de folhas estaveis em cada Σ ∈ Ξ. De fato, seja W =
X[−t2,0](⋃σ Ws
ε(σ)) o conjunto de pontos satisfazendo item (2), onde a uniao e tomada
sobre todas as singularidades de Λ(numero finito), visto que
Xt(W ) = Xt(X[−t2,0](⋃σ
Wsε(σ)))
⇓
Xt(x) ∈Wsε(σ), 0 < t ≤ t2 e ∀x ∈ W.
Temos entao que W e uma subvariedade compacta de M com bordo, tangente a Es⊕EX ,
portanto transversal a qualquer secao transversal de Ξ. Alem disso, a intersecao de W
com cada Σ ∈ Ξ e uma subvariedade com dimensao um em Σ, portanto o numero de
componentes conexas da intersecao e finito em cada Σ, isto e, ha um numero finito de
pontos, x1, ..., xn ∈ Σ, tais que W ∩ Σ ⊂Ws(x1,Σ) ∪ ... ∪Ws(xk,Σ).
O terceiro e ultimo passo da prova e mostrar que o conjunto de pontos, D ⊂ Σ,
em cada Σ ∈ Ξ enviados por R em pontos de fronteira estavel de alguma secao transversal
estao contidos em um numero finito de folhas estaveis. De fato, pelo Lema 2.1.13 podemos

48
assumir que D pode ser visto como L = Ws(x,Σ), x ∈ D, suponha por contradicao que
L tem um numero infinito de linhas, entao existe uma linha de acumulacao,Ws(x0,Σ).
Como Ξ e finito podemos assumir que Ws(xo,Σ) e acumulado por distintas Ws(xi,Σ),
i ≥ 1, com xi ∈ D satisfazendo R(xi) ∈Ws(z, ∂sΣ′) para Σ
′ ∈ Ξ fixado, e como Ws(z,Σ′)
e fechada temos que R(x0) tambem pertence a Ws(z,Σ′).
Afirmacao 3.1.3. R(xi) = Xsi(xi), onde si e uma sequencia limitada na reta real.
De fato, suponha si nao e uma sequencia limitada, entao si −→∞, entao temos
que a orbita de Xt2(xi) esta perto de uma variedade estavel local de alguma singularidade
σ e por definicao de R e conjunto D temos que R(xi) ∈ Σ0,±σ . Portanto, Xsi(xi) tende
para a variedade estavel de σ quando i −→ ∞ e R(xi) tende para a frontreira estavel de
Σ0,±δ , uma vez que nenhum ponto satisfaz essas condicoes, temos uma contradicao.
4Entao ja temos que
R(x0) = limi→∞
R(xi) = limi→∞
Xsi(xi) = Xs0(x0), onde limi→∞
si = s0.
Alem disso, R(Ws(x0,Σ)) ⊂ Ws(R(x0),Σ) ⊂ Ws(z,Σ′) e R(x0) esta no interior
de R(Ws(x0,Σ)), entao para i suficientemente grande, temos que R(xi) ∈ R(Ws(x0,Σ)),
isto e, existe uma sequencia yi ∈Ws(x0,Σ) e uma sequencia de numeros reais,τi, tal que
Xτi(yi) = R(yi) = R(xi) para i ∈ Z suficientemente grande.
Com essa construcao, temos que xi 6= yi estao na mesma orbita e pertencem
a alguma secao transversal, entao existe uma sequencia αi tal que xi = Xαi(yi) com
|αi| ≥ t3 > 0 para i suficientemente grande. No entanto,
Xτi(yi) = R(yi) = R(xi) = Xsi(xi) −→i→∞ Xs0(x0)⇒ |si − τi| = |si − τi + s0 − s0| ≤
≤ |si − s0|+ |s0 − τi| −→i→∞ 0,
mas
Xτi(yi) = R(yi) = R(xi) = Xsi(xi)⇒ Xτi−si(yi) = xi = Xαi(yi), assim |si−τi| = |αi| ≥ t3 > 0,
contradicao.
Combinando as tres etapas, concluımos a prova do Lema. �
Afirmacao 3.1.4. O tempo de Poincare τ e integravel com respeito a medida de Lebesgue
em Ξ.
49
De fato, sejam z ∈ Ξ e t3 o limite superior que cada z ∈ UΣi leva para sair da
vizinhaca tubular (assumir sem perda que t2 > t3), o ponto z = Xt2(z) pode estar no
interior de alguma caixa de fluxo, Uσk , para alguma singularidade, σk, ou no interior de
alguma vizinhanca dada pelo teorema do fluxo tubular, UΣ, para alguma secao transversal
Σ.
No primeiro caso, o tempo que z leva para sair da caixa de fluxo, Uσk , atraves da
secao transversal, Σ0,±σk
, e limitada pela existencia da funcao tempo τ∓σk , que e integravel
com respeito a medida de lebesgue em Ξ.
Ja no segundo caso, z leva um tempo que esta delimitado por t2 +2t3, que e soma
de um numero finito de funcoes integraveis.
4
Observacao 3.1.5. Dado z ∈ Σ ∈ Ξ escrevemos τ k(z) = τ(Rk−1(z)) + ... + (τ(z)) para
k ≥ 1. Temos que
Rk(W s(z,Σ)) ⊂ Xτk(z)(Ws(z,Σ)) ⊂ Xτk(z)(U)
o comprimento `(Rk(W s(z,Σ))) e uniformemente contraıdo e τ k(z)→ +∞ quando k →+∞, obtemos entao que
Rk(W s(z,Σ)) ⊂ Σ′
para algum Σ′ ∈ Ξ e d(Rk(W s(z,Σ)), ∂cuΣ
′) >
δ
2,
para todo k suficientemente grande, k ≥ k0 ∈ N , ja que estamos assumindo secoes δ-
adaptadas. Obtendo assim, uma propriedade valida para todas as folhas estaveis Ws(z,Σ),
para todo z ∈ Σ e cada Σ ∈ Ξ.
3.1.2 Reducao do Mapa de Poincare Global a um mapa unidi-
mensional f , existencia e finitude de medidas de probabi-
lidades f-invariantes absolutamente contınuas
Seja x ∈ Λ e S uma secao transversal ao fluxo em x e ζ0 componente conexa de
W s(x) ∩ S contendo x. Assuma que x tem uma variedade instavel, W uu, e sejam D0,D1
discos mergulhados em M transversal a W uu(x) em x0,x1 tal que TxiDi ⊕ TxiW uu(x) =
TxiM , i = 0, 1. As folhas instaveis de pontos de D0 que atravessam D1 define um mapa
h entre um subconjunto de D0 para D1:
h(y0) = y1 = W uu(y0) ∩D1,
chamado holonomia da folheacao instavel entre discos transversais D0, D1. Ver figura 3.1.
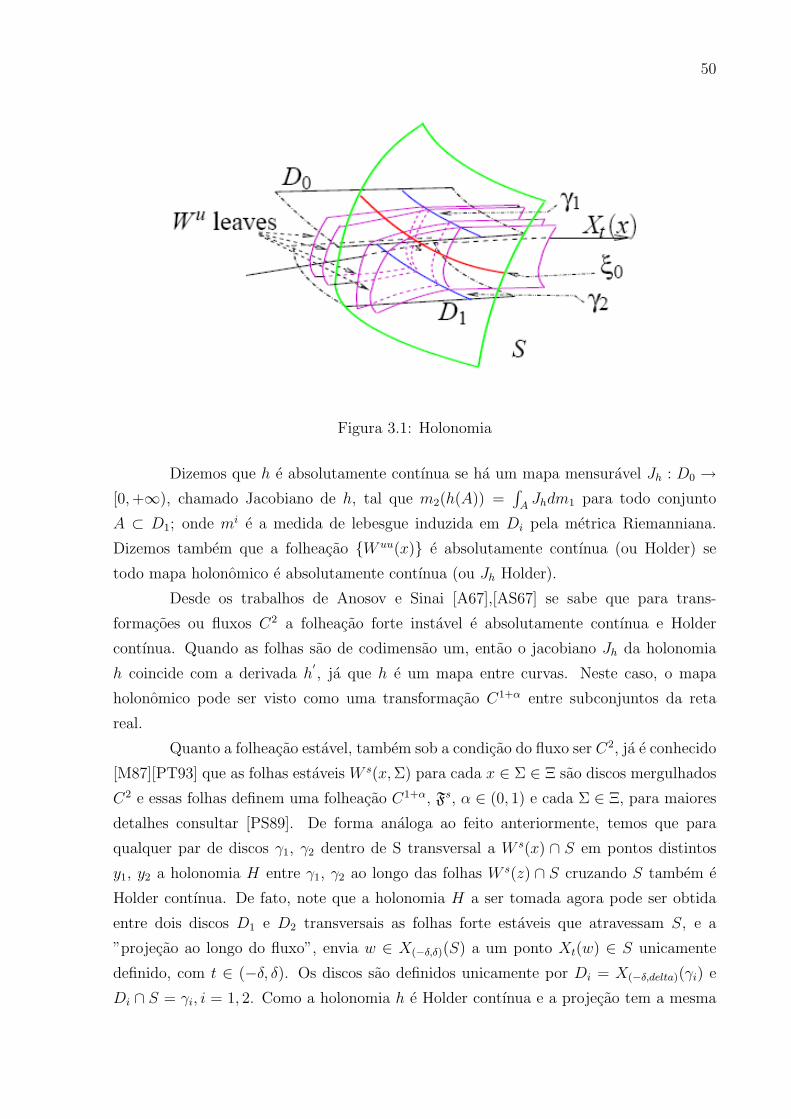
50
Figura 3.1: Holonomia
Dizemos que h e absolutamente contınua se ha um mapa mensuravel Jh : D0 →[0,+∞), chamado Jacobiano de h, tal que m2(h(A)) =
∫AJhdm1 para todo conjunto
A ⊂ D1; onde mi e a medida de lebesgue induzida em Di pela metrica Riemanniana.
Dizemos tambem que a folheacao {W uu(x)} e absolutamente contınua (ou Holder) se
todo mapa holonomico e absolutamente contınua (ou Jh Holder).
Desde os trabalhos de Anosov e Sinai [A67],[AS67] se sabe que para trans-
formacoes ou fluxos C2 a folheacao forte instavel e absolutamente contınua e Holder
contınua. Quando as folhas sao de codimensao um, entao o jacobiano Jh da holonomia
h coincide com a derivada h′, ja que h e um mapa entre curvas. Neste caso, o mapa
holonomico pode ser visto como uma transformacao C1+α entre subconjuntos da reta
real.
Quanto a folheacao estavel, tambem sob a condicao do fluxo ser C2, ja e conhecido
[M87][PT93] que as folhas estaveis W s(x,Σ) para cada x ∈ Σ ∈ Ξ sao discos mergulhados
C2 e essas folhas definem uma folheacao C1+α, Fs, α ∈ (0, 1) e cada Σ ∈ Ξ, para maiores
detalhes consultar [PS89]. De forma analoga ao feito anteriormente, temos que para
qualquer par de discos γ1, γ2 dentro de S transversal a W s(x) ∩ S em pontos distintos
y1, y2 a holonomia H entre γ1, γ2 ao longo das folhas W s(z) ∩ S cruzando S tambem e
Holder contınua. De fato, note que a holonomia H a ser tomada agora pode ser obtida
entre dois discos D1 e D2 transversais as folhas forte estaveis que atravessam S, e a
”projecao ao longo do fluxo”, envia w ∈ X(−δ,δ)(S) a um ponto Xt(w) ∈ S unicamente
definido, com t ∈ (−δ, δ). Os discos sao definidos unicamente por Di = X(−δ,delta)(γi) e
Di ∩ S = γi, i = 1, 2. Como a holonomia h e Holder contınua e a projecao tem a mesma

51
classe de diferenciabilidade do fluxo, concluımos que H e Holder contınua.
Agora iremos definir a aplicacao quociente. Escolha uma cu-curva C2,γΣ, trans-
versal a FsΣ em cada Σ ∈ Ξ. Seja agora PΣ : Σ → γΣ a projecao ao longo das folhas FsΣ
em γΣ, pela discursao anterior temos que PΣ e um mapa C1+α.
Figura 3.2: Projecao ao longo das folhas
Seja
I =⋃
Σ,Σ′∈Ξ
int(Σ(Σ′)) ∩ γΣ
como ja vimos Σ(Σ′) tem interior nao vazio, entao o conjunto I e difeomorfo a uma uniao
de intervalos nao degenerados I1, ..., Im por um difeomorfismo C2 e PΣ|P−1Σ (I) torna-se uma
submersao C1+α. Note que desde que Ξ e finito podemos escolher γΣ de modo que PΣ
tem derivada limitada
existe β0 > 1 tal que1
β0
≤ |DPΣ|γ| ≤ β0 para cada cu-curvaγ dentro de qualquer Σ ∈ Ξ.
Em particular, usando o Teorema de Fubini podemos dizer que (PΣ) ∗m2 � m
onde m2 e a medida de area de lebesgue sobre Ξ e m e a medida de comprimento em I.
Pela Proposicao 2.1.6, Corolario 2.1.7 e Lema 2.1.13 o mapa de Poincare R : Ξ→Ξ leva folhas estaveis de FsΣ dentro de folhas estaveis da folheacao, e hiperbolico e leva
cu-curva, γ ∈ Σ, em uma cu-curva, R(γ) na secao transversal imagem. Portanto o mapa
f : I → I dado por I 3 z 7→ PΣ′ (R(W s(z,Σ) ∩ Σ(Σ′))) para Σ,Σ
′ ∈ Ξ
e um mapa C1+α, onde P : Ξ→ γΞ e a uniao de todos os PΣ,Σ ∈ Ξ e γΞ = {γΣ : Σ ∈ Ξ}.
52
Como PΣ tem derivada limitada, para pontos no interior de Ii, i = 1, ...,m
|Df | = |D(PΣ′ (R(γΣ)))| ≥ 1
β0
.σ
tomando t1 e t2 suficientemente grandes temos que
|Df | = |D(PΣ′ (R(γΣ)))| ≥ 1
β0
.σ >3
2> 1.
Portanto f e expansor por pedacos. Alem disso, |f ′ |−1|Ij e uma funcao α-Holder contınua.
Afirmacao 3.1.6. 1f ′
e α-Holder.
De fato, ∣∣∣∣ 1
f ′(x)− 1
f ′(y)
∣∣∣∣ =
∣∣∣∣f ′(y)− f ′(x)
f ′(x)f ′(y)
∣∣∣∣ =|f ′(y)− f ′(x)||f ′(x)f ′(y)|
=
=|f ′(y)− f ′(x)||f ′(x)||f ′(y)|
≤ c|x− y|α
(32)2
para algum 0 < α < 1, portanto 1|f ′ (·)| e α-Holder.
4Por [HK82], [V97] e [W78] mapas expansores por partes, f , tais que 1
|f ′ | e de
variacao limitada, tem um numero finito de medidas de probabilidades invariantes abso-
lutamente contınuas a lebesgue quase todo ponto de I. Usando uma extensao da variacao
limitada foi mostrado em [K85] que os resultados da existencia e finitude de medidas in-
variantes ergodicas absolutamente pode ser extendido para mapas expansores por partes
tais que 1|f ′ | e α-Holder para algum α ∈ (0, 1).
3.2 Construcao de medidas invariantes para a trans-
formacao R
Nesta secao iremos apresentar como construir medidas invariantes ergodicas para
a transformacao R a partir de medidas invariantes ergodicas para o mapa quociente f .
Seja R : Ξ\Γ → Ξ a aplicacao de poincare global, por resultados mostrados
anteriormente, temos que para qualquer ξ ∈ F(distinto de Γ) sua imagem por R esta
contida em algum elemento ξ′
de F e o diametro de Rn(ξ)(onde esta definido) vai a zero
uniformemente quando n→∞.
Denote por ξx um elemento da folhecao que contem o ponto x.
Seja µf qualquer medida de probabilidade em F invariante por f . Para qualquer
funcao limitada ψ : Ξ −→ R, sejam tambem ψ− : F −→ R e ψ+ : F −→ R definidos por
ψ−(ξ) = infx∈ξ
ψ(x) e ψ+(ξ) = supx∈ξ
ψ(x).

53
Lema 3.2.1. Dada qualquer funcao contınua limitada ψ : Ξ→ R ambos os limites
limn
∫(ψ ◦Rn)−dµf e lim
n
∫(ψ ◦Rn)+dµf
existem e coincidem
Prova: Para provar esse lema iremos mostrar que {∫
(ψ(Rn))−dµf}n≥1 e {∫
(ψ(Rn))+dµf}n≥1
sao sequencias de Cauchy.
Como ψ e limitada, dado ε > 0 seja δ > 0 tal que |ψ(x) − ψ(y)| ≤ ε para
todo x,y com dist(x, y) ≤ δ. Note que, como F e uma contracao, existe n0 ≥ 0 tal que
diam(Rn(ξ)) ≤ δ para todo ξ ∈ F e todo n ≥ n0. Seja n+ k ≥ n ≥ n0, entao temos
(ψ(Rn+k))−(ξ)− (ψ(Rn))−(ξfk) = inf(ψ|Rn+k(ξ))− inf(ψ|Rn(ξfk
))
note que Rn+k(ξ) ⊂ Rn(ξfk). Assim,
inf(ψ|Rn+k(ξ))− inf(ψ|Rn(ξfk
)) ≤ sup(ψ|Rn(ξfk
))− inf(ψ|Rn(ξfk
)) ≤ ε
entao,
|∫
(ψ(Rn+k))−dµf −∫
(ψ(Rn))−(ξfk)dµf | ≤ ε︸ ︷︷ ︸ =
= |∫
(ψ(Rn+k))−dµf−∫
(ψ(Rn))−dµf | ≤ ε visto que µf e f -invariante.
Portanto, {∫
(ψ(Rn))−dµf}n≥1 e uma sequencia de Cauchy em R, em particular converge.
Com mesmos argumentos podemos provar que a sequencia {∫
(ψ(Rn))+dµf}n≥1 e
convergente. Temos entao que os limites limn
∫(ψ(Rn))−dµf e limn
∫(ψ(Rn))+dµf exis-
tem, para a prova de igualdade note que 0 ≤ (ψ(Rn))+(ξ)− (ψ(Rn))−(ξ) = sup(ψ|Rnξ)−inf(ψ|Rnξ) ≤ ε para cada n ≥ n0, entao as duas sequencias deve ter o mesmo limite.
�
Corolario 3.2.2. Existe uma unica medida de probabilidade µR em Ξ tal que∫ψdµR =
lim∫
(ψ(Rn))−dµf = lim∫
(ψ(Rn))+dµf para cada funcao contınua ψ : Ξ → R. Alem
disso, µR e R-invariante e a correspondencia µf 7→ µR e injetiva.
Prova: A prova deste corolario sera a prova de que esses dois limites definem um operador
linear positivo, e por consequencia do Teorema de Riesz-Markov teremos existencia e
unicidade da medida µR.

54
Seja µ(ψ) = limn
∫(ψ(Rn))−dµf entao temos que µ(ψ1 + ψ2) ≥ µ(ψ1) + µ(ψ2),
analogamente, seja µ(ψ) = limn
∫(ψ(Rn))+dµf entao µ(ψ1 + ψ2) ≤ µ(ψ1) + µ(ψ2), entao
µ(·) e aditiva. Alem disso, µ(cψ) = cµ(ψ) para c ∈ R e ψ contınua. Portanto, µ(·) e um
operador linear real no espaco das funcoes contınuas.
Temos tambem que µ(1) = 1 e µ(ψ) ≥ 0 se ψ ≥ 0. Pelo teorema de Riesz-Markov,
existe uma unica medida µF ∈ Ξ tal que µ(ψ) =∫ψdµR para qualquer ψ contınua.
Para a conclusao que µR e invariante por R e suficiente notar que µ(ψ(R)) =
limn
∫(ψ(Rn+1))−dµf = µ(ψ) para cada ψ.
A prova de que a correspondencia µf 7→ µR e injetiva. Seja µR = µ′R, note
que µR,µ′R sao obtidas atraves de µf e µ
′
f , respectivamente, para cada funcao contınua
ϕ : F→ R temos que ψ = ϕ ◦ P : Ξ→ R e contınua e
µf ((ψ ◦Rn)±) = µf ((ϕ ◦ P ◦Rn)±) = µf ((ϕ ◦ fn ◦ P )±) = µf (ϕ ◦ fn) = µf (ϕ) (3.1)
de forma analoga,
µ′
f ((ψ ◦Rn)±) = µ′
f ((ϕ ◦ P ◦Rn)±) = µ′
f ((ϕ ◦ fn ◦ P )±) = µ′
f (ϕ ◦ fn) = µ′
f (ϕ) (3.2)
Assim, µf (ϕ) = µf ((ψ ◦ Rn)±) = µR(ψ) = µ′R(ψ) = µ
′
f ((ψ ◦ Rn)±) = µ′
f (ϕ).
Portanto, µf = µ′
f , concluindo assim a prova.
�
Lema 3.2.3. Seja ψ : Ξ→ R uma funcao contınua e ζ ∈ F tal que lim 1n
∑n−1j=0 (ψ(Rk))−(ζfj) =∫
(ψ(Rk))−dµf para k ≥ 1. Entao limn1n
∑n−1j=0 ψ(Rj(x)) =
∫ψdµR para todo x ∈ ζ.
Prova: Fixe ψ e ξ. Pela definicao de (ψ ◦Rk)± e pelas propriedades da folhecao F temos
(ψ ◦Rk)−(ξfj(x)) ≤ (ψ ◦Rk)(Rj(x)) ≤ (ψ ◦Rk)+(ξfj(x)) para todo x ∈ ξejek ≥ 1
Ja mostramos no Corolario 3.2.2 que existe uma unica medida µR tal que∫ψdµR =
limn
∫(ψ ◦ Rn)−dµf = limn
∫(ψ ◦ Rn)+dµf , assim, dado ε > 0 existem k1,k2 ∈ N tais que
para todo k > k0 = max{k1, k2}∣∣∣∣∫ ψdµR −∫
(ψ ◦Rn)−dµf
∣∣∣∣ < ε
2e
∣∣∣∣∫ ψdµR −∫
(ψ ◦Rn)+dµf
∣∣∣∣ < ε
2
⇓
µR(ψ)− ε
2≤ µf ((ψ ◦Rk)−) ≤ µf ((ψ ◦Rk)+) ≤ µR(ψ) +
ε
2. (3.3)

55
Por hipotese ha n0 ∈ N tal que para n ≥ n0 = n0(k) temos∣∣∣∣∣ 1nn−1∑j=0
(ψ ◦Rk)−(ξfj(x))− µf (ψ ◦Rk)−
∣∣∣∣∣ ≤ ε
2
⇓
− ε2≤ 1
n
n−1∑j=0
(ψ ◦Rk)−(ξfj(x))− µf (ψ ◦Rk)− ≤ε
2
⇓
µf (ψ ◦Rk)− −ε
2≤ 1
n
n−1∑j=0
(ψ ◦Rk)−(ξfj(x)) ≤ µf (ψ ◦Rk)− +ε
2(3.4)
assim,
µR(ψ)− ε = µR(ψ)− (ε
2+ε
2) = µR(ψ)− ε
2︸ ︷︷ ︸− ε2 ≤por 3.3
≤ µf ((ψ ◦Rk)−)− ε
2︸ ︷︷ ︸por 3.4
≤ 1
n
n−1∑j=0
(ψ ◦Rk)−(ξfj(x)) ≤
≤ 1
n
n−1∑j=0
(ψ ◦Rk)(Rj(x)) =n+ k
n
1
n+ k
n+k−1∑j=0
(ψ ◦Rj)(x)− 1
n
k−1∑j=0
(ψ ◦Rj)(x) ≤ µR(ψ) + ε.
temos entao a conclusao que querıamos, ja que n pode ser tomado tao grande quanto
queira e ε > 0 pode ser tomando tao pequeno quanto queira. �
Corolario 3.2.4. Se µf e f−ergodica entao µR e ergodica.
Prova: Como µf e f−ergodica entao limn1n
∑n−1j=0 ϕ(f j(x)) =
∫ϕdµf para todo x ∈ ε
tal que µf (ε) = 1 e toda ϕ ∈ L1(µf ). Portanto, a conclusao do Lema anterior e valida
para um subconjunto de E = ξε =⋃x∈ξ ξx. Para provar o corolario e suficiente mostrar
que µR(E) = 1.
Seja ϕ = χE = χε ◦p e tome ψn : F→ R uma sequencia de funcoes contınuas tais
que ψn −→ χε quando n → ∞ na topologia L1 com respeito a µf . Entao ϕn = ψn ◦ p e

56
uma sequencia de funcoes contınuas em Ξ tal que ϕn → ϕ quando n → ∞ na norma L1
com respeito a µR.
Assim,
µR(ψn) = limkµf ((ψn ◦Rk)−) = lim
kµf (ϕn ◦ fk) = µf (ϕn)
↓ ↓
µR(E) µf (ε) = 1
quando n→∞. Concluımos entao que µR(E) = 1, como querıamos.
�
Seja agora, P =⋃
Σ∈Ξ PΣ : Ξ → γΞ, onde γΞ = {γΣ : Σ ∈ Ξ} e cada PΣ foi
definido anteriorment como a projecao ao longo das folhas FsΣ em γΣ.
Afirmacao 3.2.5. As bacias de cada η1, η2, ..., ηl tem area de lebesgue positiva em Ξ e
cobrem quase todo ponto de P−1(I).
De fato, devido a contracao uniforme das folhas FsΣ\Γ provada no Lema 2.1.13,
implica que o tempo medio de qualquer par x,y de pontos de ξ ∈ F\P (Γ) em funcoes
contınuas ϕ : Ξ→ R sao iguais
lim[1
n
n−1∑j=0
ϕ(Rj(x))− 1
n
n−1∑j=0
ϕ(Rj(y))] = 0.
Pelo Lema 3.2.3 juntamente com com a densidade das funcoes C0(Σ,R) em L1(Σ,R)
temos que B(ηi) ⊃ P−1(B(νl)),i = 1, ..., l. Isso mostra que B(ηi) contem uma tira de
folhas estaveis inteira, exceto para um subconjunto de medida de area de lebesgue nula
(pois, B(νi) pode conter algum algum subconjunto de medida de lebesgue zero)
4Ja que P ∗ (m2)� m obtemos em particular
m2(B(ηi)) > 0 e m2(P−1(I)\ ∪li=1 B(ηi)) = P ∗ (m2)(I\ ∪li=1 B(ηi)) = 0.
Portanto, η1, ..., ηl sao medidas fısicas cujas bacias cobrem P−1(I) lebesgue quase todo
ponto.
3.3 Fluxo de suspensao sobre o mapa de Poincare
Nesta secao iremos extender a transformacao R para seu semi-fluxo de suspensao,
com funcao altura τ , e mostrar que cada medida invariante ergodica S.R.B. para a trans-
formacao, corresponde a uma unica medida para o semi-fluxo de suspensao, com as mes-
mas propriedades.
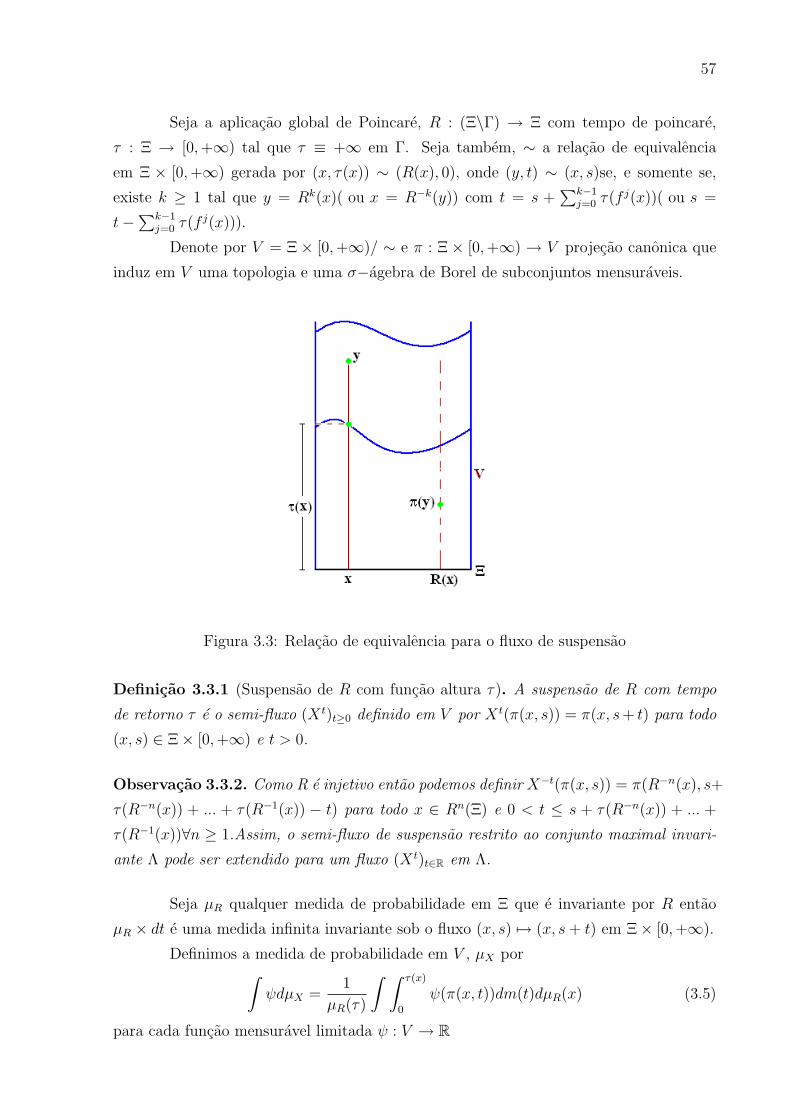
57
Seja a aplicacao global de Poincare, R : (Ξ\Γ) → Ξ com tempo de poincare,
τ : Ξ → [0,+∞) tal que τ ≡ +∞ em Γ. Seja tambem, ∼ a relacao de equivalencia
em Ξ × [0,+∞) gerada por (x, τ(x)) ∼ (R(x), 0), onde (y, t) ∼ (x, s)se, e somente se,
existe k ≥ 1 tal que y = Rk(x)( ou x = R−k(y)) com t = s +∑k−1
j=0 τ(f j(x))( ou s =
t−∑k−1
j=0 τ(f j(x))).
Denote por V = Ξ × [0,+∞)/ ∼ e π : Ξ × [0,+∞) → V projecao canonica que
induz em V uma topologia e uma σ−agebra de Borel de subconjuntos mensuraveis.
Figura 3.3: Relacao de equivalencia para o fluxo de suspensao
Definicao 3.3.1 (Suspensao de R com funcao altura τ). A suspensao de R com tempo
de retorno τ e o semi-fluxo (X t)t≥0 definido em V por X t(π(x, s)) = π(x, s+ t) para todo
(x, s) ∈ Ξ× [0,+∞) e t > 0.
Observacao 3.3.2. Como R e injetivo entao podemos definir X−t(π(x, s)) = π(R−n(x), s+
τ(R−n(x)) + ... + τ(R−1(x)) − t) para todo x ∈ Rn(Ξ) e 0 < t ≤ s + τ(R−n(x)) + ... +
τ(R−1(x))∀n ≥ 1.Assim, o semi-fluxo de suspensao restrito ao conjunto maximal invari-
ante Λ pode ser extendido para um fluxo (X t)t∈R em Λ.
Seja µR qualquer medida de probabilidade em Ξ que e invariante por R entao
µR × dt e uma medida infinita invariante sob o fluxo (x, s) 7→ (x, s+ t) em Ξ× [0,+∞).
Definimos a medida de probabilidade em V , µX por∫ψdµX =
1
µR(τ)
∫ ∫ τ(x)
0
ψ(π(x, t))dm(t)dµR(x) (3.5)
para cada funcao mensuravel limitada ψ : V → R

58
Afirmacao 3.3.3. A correspondencia µR 7→ µX definida acima e injetiva.
Analoga a prova feita no Corolario3.2.2. Seja µX = µ′X , que definem µR e µ
′R
respectivamente. Para cada funcao ϕ : Ξ→ R limitada, difinimos ψ em x× [0, τ(x)) por
ψ = ϕ ◦ π1, identificando os pontos que estao na mesma classe de equivalencia, obtendo
entao ψ : V → R tal que µX(ψ) = µR(ψ), de forma mais precisa,∫ ∫ψ ◦ π(x, t)dm(t)dµR(x) =
∫ ∫ϕ ◦ π1 ◦ π(x, t)dm(t)dµR(x)
reescrevendo
µR(m(ψ ◦ π)) = µR(m(ϕ ◦ π1 ◦ π)) = µR(ϕ)
e de forma analoga,
µ′
R(m(ψ ◦ π)) = µ′
R(ϕ)
Assim, µR(ϕ) = µR(m(ψ ◦π)) =def. µX(ψ) = µ′X(ψ) =def. µ
′R(m(ψ ◦π)) = µ
′R(ϕ).
Portanto, µR = µ′R, concluındo assim a prova da afirmacao.
4
Lema 3.3.4. A medida µX e invariante sobre o semi-fluxo (X t)t≥0
Prova: Temos que mostrar que µX((X t)−1(B)) = µX(B) para cada conjunto mensuravel
B ⊂ V e qualquer 0 < t < inf τ . Suponha que B = π(A × J) para algum A ⊂ Ξ e J
um intervalo limitado em [0, inf(τ |A), visto que tais conjuntos formam uma base para a
σ−algebra de subconjuntos mensuraveis de V .
Figura 3.4: .

59
Seja (x, s) ∈ Ξ× [0,+∞) com 0 ≤ s < τ(x) entao X t(x, s) ∈ B ⇔ π(x, s + t) =
π(x, s) para algum (x, s) ∈ A × J , em outras palavras (x, s) ∈ (X t)−1(B) ⇔ x = Rn(x)
e s = s + t − τ(x) − ... − τ(Rn−1(x)). Como s < τ(x),t < inf τ e s ≥ 0 e impossıvel ter
n ≥ 2. Assim,
1. x = x e s = s+ t (n = 0); ou
2. x = R(x) e s = s+ t− τ(x) (n = 1).
Os dois casos sao mutualmente exclusivos; para o caso (1) temos s + t < τ(x),
enquanto no caso (2) temos s + t ≥ τ(x); isso mostra que podemos escrever o conjunto
(X t)−1(B) como uma uniao disjunta, (X t)−1(B) = B1 ∪B2, com
B1 = π{(x, s) : x ∈ A e s = (J 3 s 3 −t)∩[0, τ(x))} = π{(x, s) : x ∈ A e s ∈ (J−t)∩[0, τ(x))}
e
B2 = π{(x, s) : R(x) ∈ A e s ∈ (J − t+ τ(x)) ∩ [0, τ(x))},
desde que t > 0 e sup J < τ(x) podemos reescrever B1
B1 = π{(x, s) : x ∈ A e s ∈ (J − t) ∩ [0,+∞)},
similarmente como inf J ≥ 0 e t < τ(x), podemos reescrever B2
B2 = π{(x, s) : R(x) ∈ A e s ∈ (J − t+ τ(x)) ∩ [0,−∞)},
Assim, usando (3.5) temos:
µX(B1) =
∫A
`((J − t) ∩ [0,+∞))dµR(x) = µR(A).`((J − t) ∩ [0,+∞))
e
µX(B2) =
∫R−1(A)
`((J − t) ∩ [−∞, 0))dµR(x) = µR(R−1(A)).`((J − t) ∩ [−∞, 0)) =
= µR((A)).`((J − t) ∩ [−∞, 0))
a ultima igualdade e devido a invariancia de R por µR.
Usando essa construcao temos:
µX((X t)−1(B)) = µX(B1)+µX(B2) = µR(A).`((J−t)∩[0,+∞))+µR((A)).`((J−t)∩[−∞, 0)) =
= µR(A).(`((J−t)∩[0,+∞))+`((J−t)∩[−∞, 0))) = µR(A).`((J−t) = µR(A).`((J) = µX(B),
portanto, µX e invariante sobre o semi-fluxo.

60
�
Dada uma funcao limitada mensuravel ψ : V → R, seja ψ : Ξ→ R definida por
ψ(x) =
∫ τ(x)
0
ψ(π(x, t))dt, (3.6)
observer que ψ e integravel com respeito a µR, assim
(3.6)⇒∫ψdµR =
∫ ∫ τ(x)
0
ψ(τ(x, t))dtdµR =µR(τ)
µR(τ)
∫ ∫ τ(x)
0
ψ(τ(x, t))dtdµR = µR(τ).
∫ψdµX
⇓
∫ψdµR = µR(τ).
∫ψdµX (3.7)
O proximo Lema e uma ferramenta que usaremos para provar que ergodicidade
da medida µR implica ergodicidade da medida µX .
Lema 3.3.5. Seja ψ : V → R uma funcao limitada e ψ como acima. Assuma que x ∈ Ξ
e tal que τ(Rj(x)) e ψ(Rj(x)) sao finitos para cada j ≥ 0 e
a) limn1n
∑n−1j=0 τ(Rj(x)) =
∫τdµR, e
b) limn1n
∑n−1j=0 ψ(Rj(x)) =
∫ϕdµR.
Entao limT1T
∫ T0ψ(π(x, s+ t))dt =
∫ψdµX para cada π(x, s) ∈ V .
Prova: Seja x ∈ Ξ fixado satisfazendo a) e b). Dado qualquer T > 0 defina n = n(T )
por Tn−1 ≤ T < Tn onde Tj = τ(x) + ...+ τ(Rj(x)) para j ≥ 0.
1
T
∫ T
0
ψ(π(x, s+ t))dt =1
T
[∫ s
0
ψ(π(x, t))dt+
∫ T
0
ψ(π(x, t))dt
](3.8)
=1
T
[∫ s
0
ψ(π(x, t))dt+
∫ Tn−1
0
ψ(π(x, t))dt+
∫ T−Tn−1
0
ψ(π(x, t))dt
]usando que (y, τ(y)) ∼ (R(y), 0) e a definicao de Tn−1 temos
∫ Tn−1
0
ψ(π(x, t))dt =
∫ (τ(x)+...+τ(Rn−1(x)))
0
ψ(π(Rj(x), t))dt
=n−1∑j=0
∫ τ(Rj(x))
0
ψ(π(Rj(x), t))dt
=n−1∑j=0
ψ(Rj(x))
(3.9)

61
A ultima igualdade e devido a ψ(x) =∫ τ(x)
0ψ(π(x, t))dt.
Pelo item a) temos ∣∣∣∣∣∫τdµR −
1
n
n−1∑j=0
τ(Rj(x))
∣∣∣∣∣ < ε
⇓
−ε <∫τdµR −
1
n
n−1∑j=0
τ(Rj(x)) < ε
Por um lado
∫τdµR − ε <
1
n
n−1∑j=0
τ(Rj(x))
⇓
n(
∫τdµR − ε) <
n−1∑j=0
τ(Rj(x)) = Tn−1 ≤ T < Tn
Por outro lado
1
n
n−1∑j=0
τ(Rj(x)) <
∫τdµR + ε
⇓n−1∑j=0
τ(Rj(x)) < n(
∫τdµR + ε)
⇓n∑j=0
τ(Rj(x)) < (n+ 1)(
∫τdµR + ε)
⇓
Tn < (n+ 1)(
∫τdµR + ε)
Portanto,
n(
∫τdµR − ε) < Tn−1 ≤ T < Tn < (n+ 1)(
∫τdµR + ε)
⇓∫τdµR − ε <
T
n<n+ 1
n(
∫τdµR + ε) =
∫τdµR + ε+
1
n(
∫τdµR + ε)
para n suficientemente grande temos que∫τdµR − ε <
T
n<
∫τdµR + 2ε
62
Observe que n −→ ∞ quando T −→ ∞, desde que τ(Rj(x)) < ∞ para todo j.
Assim, para T grande,T
n−→T→∞
∫τdµR
⇓
n
T−→T→∞ 1∫
τdµR(3.10)
Assim, por (3.7),(3.10) e item b) temos
n
T.1
n
n−1∑j=0
ψ(Rj(x)) −→ 1
µR(τ).
∫ψdµR =
∫ψdµX (3.11)
Passando o limite em (3.9) e usando (3.11) concluımos que
limT→∞
1
T
∫ Tn−1
0
ψ(π(x, t))dt = limT→∞
1
T
n−1∑j=0
ψ(Rj(x)) = limT→∞
n
T.1
n
n−1∑j=0
ψ(Rj(x)) −→∫ψdµX
Entao para finalizar a prova basta mostrar que os demais termos em (3.8) converge
para zero quando T vai para o infinito.
E claro que 1T
∫ s0ψ(π(x, t))dt −→ 0 quando T −→ +∞.
Como ψ e limitada temos que
∣∣∣∣ 1
T
∫ T−Tn−1
0
ψ(π(Rn(x), t))dt
∣∣∣∣ ≤ 1
T
∫ T−Tn−1
0
|ψ(π(Rn(x), t))|dt
≤ 1
T
∫ T−Tn−1
0
sup |ψ|dt
=1
Tsup |ψ|
∫ T−Tn−1
0
dt
=1
Tsup |ψ|(T − Tn−1) (3.12)
Pela definicao de n(T ) temos
T − Tn−1 ≤ Tn − Tn−1 ≤ (n+ 1)(
∫τdµR + ε)− n(
∫τdµR − ε)
⇓
T − Tn−1 ≤ (n+ 1)(
∫τdµR + ε)− n(
∫τdµR − ε)
= n(
∫τdµR + ε) +
∫τdµR + ε− n
∫τdµR + nε
= n
∫τdµR + nε+
∫τdµR + ε− n
∫τdµR + nε
=
∫τdµR + ε+ 2nε

63
para T , consequentemente n, suficientemente grande temos
T − Tn−1
T≤
∫τdµR + ε+ 2nε
n(∫τdµR − ε)
=
∫τdµR
n(∫τdµR − ε)
+ε
n(∫τdµR − ε)
+2nε
n(∫τdµR − ε)︸ ︷︷ ︸
↓ n→∞2ε∫
τdµR − ε
Isto prova que T−Tn−1
Tconverge para zero, voltando para (3.13) concluımos que
1T
∫ T−Tn−1
0ψ(π(Rn(x), t))dt converge para zero quando T −→∞.
Completando assim a prova do Lema. �
Corolario 3.3.6. Se µF e ergodica entao µX e ergodica.
Prova: Seja ψ : V → R uma funcao mensuravel limitada, e ψ como em (3.6). Como
ψ e µR-integravel, segue que ψ(Rj(x)) e finito para j ≥ 0 µR quase todo ponto x ∈ Ξ,
portanto pelo Teorema ergodico de Birkoff [Teorema 1.2.6] e [Proposicao 1.2.7]temos:
limn
1
n
n−1∑j=0
ψ(Rj(x)) =
∫ϕdµR µR q.t.p. x
Por outro lado, τ(Rj(x)) e µR-integravel, entao τ(Rj(x)) e finito para j ≥ 0 µR
quase todo ponto x ∈ Ξ, pelo Teorema ergodico de Birkoff [Teorema 1.2.6] e [Proposicao
1.2.7] temos:
limn
1
n
n−1∑j=0
τ(Rj(x)) =
∫τdµR µR q.t.p. x
.
Entao a conclusao do Lema anterior vale para um subconjunto A ⊂ Ξ com
µR(A) = 1, portanto
limT
1
T
∫ T
0
ψ(π(x, s+ t))dt =
∫ψdµX
para cada π(x, s) ∈ V e todo z ∈ B = π(A× [0,+∞)) com µX(B) = 1.
Em seguida, o mesmo e verdadeiro para quelquer funcao integravel, visto que
funcoes limitadas sao densas em L1(µX). Finalizando assim a prova do Corolario.
�
Ate aqui provamos que υ1, ..., υl sao medidas de probabilidades ergodicas invari-
antes para a suspensao (X t)t≥0 de R com funcao altura τ . Agora vamos mostrar que υi
sao medidas SRB para (X t)t≥0, i ∈ {1, ..., l}.

64
Seja x ∈ Σ ∩ B(υi) para Σ ∈ Ξ fixado e i ∈ {1, ..., l}, mostramos no Lema 2.1.13
que o tempo de Poincare, τ , e constante em folhas estaveis Ws(x,Σ) para todo x ∈ Σ ∈ Ξ.
Observacao 3.3.7. Seja τI em I uma funcao tempo de retorno, tal que τ = τI ◦ P . A
integrabilidade de τ com respeito a medida de lebesgue em Ξi naturalmente implica na
integrabilidade de τI com respeito a medida de lebesgue em I, ja que (PΣ)∗m2 � m e
τI ◦ P = τ .
Assim, νi, i ∈ 1, .., l tambem e integravel, visto que dνdm
e limitada. Portanto, cada
νi define uma ηi, tal que τ e η−integravel. Pelo Lema 3.3.5 limT1T
∫ T0ψ(π(x, s + t))dt =∫
ψdµX∀π(x, s) ∈ V , e alem disso ηi e S.R.B; entao B(υi) contem a orbita positiva
m2−q.t.p. (x, 0), x ∈ B(υi).
Denote m3 = π∗(m2 × dt) a medida de volume usual em V , entao m3(B(υi)).
Alem disso, B(υ1), ..., B(υl) cobre m3-q.t.p.
Completando assim a prova que υi i ∈ {1, ..., l} sao medidas S.R.B. para o semi-
fluxo de suspensao.
3.4 Fluxo original
Nesta secao concluiremos a prova do Teorema C e D extendendo as conclusoes
acerca do fluxo de suspencao para o fluxo original.
O fluxo original se relaciona com o fluxo de suspensao com tempo de retorno τ
em U da seguinte forma: Defina
φ : Ξ× [0,+∞)→ U
(x, t) 7→ Xt(x)
e desde que φ(x, τ(x)) = (R(x), 0) ∈ Ξ×0, este mapa define um mapa quociente φ : V → U
tal que φ◦X t = Xt ◦φ para todo t ≥ 0 atraves da identificacao da relacao de equivalencia
∼ definida anteriormente.
Seja Ξτ = {(x, t) ∈ (Ξ\Γ) × [0,+∞) : 0 < t < τ(x)}, devido a condicao aberta
0 < t < τ(x), Ξ e um conjunto aberto, e como t < τ(x) temos que o mapa π|Ξτ : Ξτ → Ξτ
e a identidade, portanto um homeomorfismo. A definicao de φ e o Teorema do Fluxo
Tubular, garantem que φ|Ξτ e um difeomorfismo local sobre sua imagem. E como Ξτ e
um subconjunto de V de medida de lebesgue total, φ e uma semiconjugacao modulo zero.
Portanto, µi = φ∗(υ) i ∈ {1, ..., l} sao medidas fısicas para o semi-fluxo original
X t, cujas bacias cobre um subconjunto de medida de lebesgue total.

65
3.4.1 Unicidade da medida fısica
A prova de unicidade da medida fısica sera feita por contradicao, assuma que
existe um numero l maior que um de medidas fısicas distintas. Entao podemos tomar
medidas fısicas distintas η1,η2 invariantes por R em Ξ associadas a medidas fısicas distintas
µ1, µ2 invariantes pelo fluxo restrito ao atrator. Sejam U1,U2 conjuntos abertos tais que
U1 ∩ U2 = ∅ e m2(B(ηi\Ui)) = 0,i = 1, 2.
Para ε pequeno, considere o conjunto aberto Vi = X(−ε,ε), i = 1, 2, de U tal que
V1 ∩ V2 = ∅.
Como Λ e um atrator, temos que existe z0 ∈ Λ tal que ω(z0) = Λ, entao existem
t1, t2 com 0 < t1 < t2 tais que Xti(z0) ∈ Vi, i = 1, 2, (se necessario substituir V1 por V2).
Seja o difeormorfismo Xt2−t1 , e como Vi sao abertos existem Wi ⊂ Vi tais que
Xt2−t1 : V1 → W2 = Xt2−t1(V1) e um difeomorfismo C1 sobre sua imagem. Portanto um
conjunto de W1 de medida total e enviado para um subconjunto de W2 tambem de medida
total, assim exite um ponto em B(µ1)∩W1 cuja orbita positiva passa por B(µ2)∩W2, como
µi sao medidas fısicas ergodicas suas medias espaciais sao iguais as temporais, portanto
µ1 = µ2.
Concluindo assim, que atratores singular-hiperbolico tem uma unica medida de
probabilidade fısica.
3.4.2 Hiperbolicidade da medida fısica
Para a prova da hiperbolicidade da medida fısica µ note que
• O subfibrado Es tem dimensao um e contrai uniformemente, portanto na direcao Es
o exponte de Lyapunov e negativo para todo ponto em U ;
• O subfibrado Ecu tem dimensao dois, dominado por Es, contem a direcao do fluxo e
expande volume, assim pelo teorema de Oseledets a soma dos expoentes de Lyapunov
na direcao de Ecu e dada por µi
Afirmacao 3.4.1. A expansao na direcao Ecu nao coincide com a direcao do fluxo EXz =
{Xs(z) : s ∈ R}, z ∈ Λ.
De fato, a direcao invariante dada por EXz nao pode ter expoente de Lyapunov
positivo, uma vez que para todo t > 0 e z ∈ U1
tlog ‖DXt(z).X(z)‖ =
1
tlog ‖X(Xt(z))‖ ≤ 1
tlog ‖X‖0
onde ‖X‖0 = sup{‖X(z)‖, z ∈ U} e uma constante. De forma analoga, para todo t < 0 e
z ∈ U1
tlog ‖DXt(z).X(z)‖ =
1
tlog ‖X(Xt(z))‖ ≥ 1
tlog ‖X‖1
66
onde ‖X‖1 = inf{‖X(z)‖, z ∈ U} e uma constante. Portanto, o subespaco EX nao tem
expoente de Lyapunov positivo, em particular, para pontos regulares temos que expoente
de Lyapunov na direcao do fluxo e zero.
4Isso mostra que em µ q.t.p z a decomposicao de Oseledets do espaco tangente
tem a forma
TzM = Esz ⊕ Ex
z ⊕ Fz
onde Fz e um subespaco mensuravel de dimensao um com expoente de Lyapunov positivo.
Portanto, a prova do Teorema C esta concluıda e como explicado no inıcio deste
capıtulo, tambem a prova do Teorema D esta completa. �
Capıtulo 4
Trabalhos recentes e Perspectivas
futuras
4.1 Expansividade e hiperbolicidade singular
Questao 4.1.1. Expansividade robusta do atrator Λ com singularidades genericas implica
Λ ser hiperbolico-singular?
Uma caracterıstica comum da dinamica caotica e a dependencia sensıvel as condicoes
iniciais, isto e duas trajetorias de pontos praticamente indestinguıvel se comportam de
maneira completamente diferente depois de um determinado tempo. Formalmente, a de-
finicao de sensibilidade para um fluxo Xt: Um subconjunto Λ Xt-invariante e dito ser
sensıvel as condicoes iniciais ou ter dependencia sensıvel das condicoes iniciais ou simples-
mente caotico se para todo ε > 0 suficientemente peque e x ∈ Λ, para qualquer vizinhanca
U de x, existe y ∈ U e t 6= 0 tal que dist(Xt(y).Xt(x)) ≥ ε.
No capıtulo 3 provamos expansividade para o futuro num atrator hiperbolico-
singular e notamos que podemos realizar a prova para todo sumidouro C1 proximo
tambem. Em particular, mostramos que todo atrator hiperbolico-singular e C1 robus-
tamente sensıvel as condicoes iniciais para o futuro, ou seja, existe ε > 0 tal que para
cada x ∈ Λ existe vizinhanca W de x ∈ Λ e existem y ∈ W ∩ Λ e algum t > 0 tal
que dist(Xt(x), Xt(y)) > ε. Usando a variedade estavel para cada ponto de Λ obtemos
tambem sensibilidade C1 robusta as condicoes iniciais para o passado. A primeira propri-
edade impede a existencia de pocos nos sumidouros C1 proximos a Λ; a segunda impede
a existencia de fontes nos sumidouros C1 proximos a Λ. A ausencia de pocos e fontes
C1 proximas de Λ e o principal ingrediente da prova de que um atrator robustamente
transitivo e hiperbolico-singular.
E possıvel provar o seguinte resultado para campos C1.
Teorema 4.1.2. Seja Λ um atrator robustamente sensıvel as condicoes iniciais para o67
68
passado e para o futuro e suas singularidades sao do tipo Lorenz. Entao Λ e um atrator
hiperbolico-singular.
No entanto, nao sabemos se expansividade implica sensibilidade para o passado
e para o futuro.
Conjectura 4.1.3. Todo atrator C1 robustamente sensıvel as condicoes iniciais(para o fu-
turo) com fluxo 3-dimensional com singularidades do tipo Lorenz e um atrator hiperbolico-
singular.
4.2 Transformacoes expansoras por pedacos com sin-
gularidades
4.2.1 Medida misturadora e decaimento de correlacoes
Seja f : I → I mensuravel no intervalo I. Denotamos a composicao de f por
f 0(x) = x e fn(x) = f(fn−1(x)), n ∈ N. Em geral f pode nao ser invertıvel e consideramos
o conjunto pre-imagem, f−n(x) = {y ∈ I; fn(y) = x}.A propriedade de mistura surge em analogia com um sistema aleatorio e e possıvel
atraves da seguinte definicao.
Definicao 4.2.1. Seja µ uma medida de probabilidade f -invariante. Dizemos que µ e
uma medida misturadora(mixing) se
limn→∞
µ(A ∩ f−n(B)) = µ(A).µ(B) (4.1)
para todos conjuntos A,B mensuraveis.
Ou seja, conjuntos de pontos em A, cuja imagem em tempo n pertence a B
tendem a ter a mesma proporcao em A como B, proporcoes entendidas em termos da
medida µ. Assim, qualquer conjunto mensuravel tende a distribuir-se ao longo do espaco
de acordo com µ.
Observacao 4.2.2. Note que se µ e uma medida misturadora entao µ e ergodica
De fato, como µ e uma medida misturadora temos que para quaisquer conjuntos
A,B mensuraveis temos
µ(A ∩ f−n(B)) −→ µ(A)µ(B)
para B = A temos µ(A) = µ(A∩A)µ(A∩f−n(A)) −→ µ(A)µ(A) = µ2(A) entao µ(A) = 0
ou µ(A) = 1.
Agora vamos reescrever (4.1) da seguinte forma:

69
limn→∞
∣∣∣∣∫ XA(XB ◦ fn)dµ−∫XAdµ.
∫XBdmu
∣∣∣∣ = 0 (4.2)
onde XA e a funcao caracterıstica de A, isto e, XA(x) = 1 se x ∈ A e XA(x) = 0 caso
contrario.
Note que podemos ver (4.2) como a covariancia entre variaveis aleatorias XA e
XB ◦ fn. Definimos o Coeficiente de correlacao(taxa de mistura ) como a volocidade com
que (4.1) acontece, isto e,
Cn(ψ, ϕ) =
∣∣∣∣∫ ψ(ϕ ◦ fn)dµ−∫ψdµ.
∫ϕdmu
∣∣∣∣ −→ 0, para quaisquer dois observaveis ψ, ϕ : I → R em espacos de funcoes adequadas
A imposicao de uma certa regularidade nos observaveis nos dira algo sobre o
comportamento dos coeficientes de correlacao para determinados sistemas.
Definicao 4.2.3. Dizemos que o sistema (f, µ) tem decaimento exponencial de correlacoes
se existe β > 0, tal que para todo ψ, ϕ : I → R existe constante C(ψ, ϕ) tais que:
Cn(ψ, ϕ) ≤ C(ψ, ϕ)e−βn para todo n ≥ 1.
Exemplificamos atraves do seguinte Teorema folclore:
Teorema 4.2.4. Seja f uniformemente expansora, µ medida f -invariante absolutamente
contınua a Lebesgue, entao existe λ ∈ (0, 1) tal que
∣∣∣∣∫ ψ(ϕ ◦ fn)dµ−∫ψdµ.
∫ϕdmu
∣∣∣∣ ≤ c‖ψ‖L1‖ϕ‖αλn para todo ψ ∈ L1(µ) e ϕ ∈ Cα.
4.2.2 Particao de Markov
Nesta secao definimos Particao de Morkov.
Definicao 4.2.5. Um mapa F : J → J de classe C1 definido em um intervalo J e
chamado mapa de Markov se existe uma colecao finita ou enumeravel de intervalos abertos
disjuntos Ji, i ∈ N, tais que
1. m(J\ ∪i Ji) = 0;
2. se F (Ji) ∩ Jj 6= ∅ entao Jj ⊂ F (Ji);
3. existem c > 0 e β > 0 tais que se, para um intervalo U ⊂ J, F j(U) esta contido em
algum intervalo Ji para cada j = 1, ..., n entao∣∣∣∣DF n(x)
DF n(y)− 1
∣∣∣∣ ≤ c |F n(x)− F n(y)|β para todo x, y ∈ U ;
70
4. existe δ > 0 tal que diam (F (Ji)) ≥ δ para todo i
Definicao 4.2.6. Dizemos que F : J → J e um mapa de Markov induzido por f : I → I,
onde J ⊂ I, se for um mapa de Markov como na definicao acima e se existe T : ∪Ii → Ntal que se Ti = T (Ji) entao F |Ji = fTi.
Ja e conhecido que sistemas nao-uniformemente expansoresf admitem particao
de Markov e sistemas induzidos F .Mais ainda, ha existencia e unicidade de medidas
invariantes absolutamente contınuas com respeito a lebesgue para F , que induzem uma
unica medida invariante µ absolutamente contınua com respeito a lebesgue para f . Ver
[P10]
Uma pergunta que surge e qual a velocidade de mistura do sistema (f, µ), isto e,
qual a velocidade com que∣∣µ(A ∩ f−n(B))− µ(A).µ(B)∣∣ −→n→∞ 0?
No caso do Lorenz mostrou-se que existe estrutura de Markov e que o sistema
gerado pela aplicacao unidimensional tem decaimento exponencial de correlacoes.Ver
[DOr06].
Questao 4.2.7. As transformacoes expansoras unidimensionais obtidas como quociente
sob folheacao estavel de aplicacoes de Poincare para conjuntos hiperbolicos-singulares tem
decaimento exponencial de correlacoes?
Uma resposta afirmativa passaria por responder a seguinte questao:
Questao 4.2.8. E possıvel construir sistema induzido Markoviano com cauda exponen-
cial?
4.3 Decaimento de correlacoes para fluxos hiperbolicos-
singulares
Seja (Xt)t um fluxo hiperbolico-singular 3-dimensional. Vimos anteriormente que
tal fluxo e semi-conjugado a um fluxo de suspensao (Xt)t sobre uma aplicacao de Poincare
R : Σ(Σ′) → Σ. Em particular, se (Xt) e transitivo entao existe uma unica medida µ
absolutamente contınua com respeito a medida de Lebesgue.
Dizemos que um conjunto isolado Λ e topologicamente misturador (mixing) se
para quaisquer A,B ∈ Λ abertos existe t0 ≥ 0 tais que
A ∩X−t(B) 6= ∅, ∀t ≥ t0

71
Uma observacao e que fluxos de suspensao sobre tempo constante nunca sao
topologicamente misturadores.
Definimos o Coeficiente de correlacao para fluxos, como a velocidade com que
Ct(ψ, ϕ) =
∣∣∣∣∫ ψ(ϕ ◦Xt)dµ−∫ψdµ.
∫ϕdmu
∣∣∣∣ −→ 0,
acontece, para quaisquer dois observaveis ψ, ϕ : M → R em espacos de funcoes adequadas.
Questao 4.3.1. Qual a velocidade de mistura do fluxo hiperbolico singular (Xt, µ)? E
para o fluxo de suspensao sobre tempo nao constante?
No caso do atrator de Lorenz foi provado em [AV11] que existe aberto do campo
C2 tal que o sistema e exponencialmente misturador para a unica µ medida S.R.B.
Conjectura 4.3.2. Vale o resultado acima para campos C1+α.
Uma outra questao e quanto outras medidas que possivelmente nao sao medidas
S.R.B.
Questao 4.3.3. E para fluxos seccionais hiperbolicos?
Isto e,
Definicao 4.3.4. Dado um campo de vetores X dizemos que um conjunto compacto in-
variante Λ e seccional hiperbolico se toda singularidade em Λ e hiperbolica, existe uma
decomposicao contınua e invariante TΛM = E ⊕ F sobre Λ e existem constantes C > 0 e
λ > 0 tais que para todo x ∈ Λ e t ≥ 0 :
i) A decomposicao e nao-trivial: Ex 6= 0 e Fx 6= 0
ii) A decomposicao e dominada: ‖ DXt |Ex‖‖ DX−t |FXt(x)‖< Ce−λt
iii) O subespaco E e contrativo: ‖ DXt(x)v ‖≤ Ce−λt ‖ v ‖ ∀v ∈ Ex − {0}
iv) O subespaco F e seccionalmente expansor: Para todo 2-plano L ⊂ F | det(DXt(x) |Lx) |> Ceλt onde Lx ⊂ Fx e um 2-plano no subespaco Fx.
4.4 Especificacao
Seja M uma variedade Riemanniana compacta e X campo de vetores em M. Seja
Λ um conjunto compacto e invariante de M . Uma especificacao uniforme (topologica)
S = (τ, P ) consiste de uma colecao finita τ = {I1, I2, ..., Im} de intervalos limitados
Ii = [ai, bi] e um mapa
P :⋃Ii∈τ
Ii → Λ

72
tal que para quaisquer t1, t2 ∈ Ii temos Xt2(P (t1)) = Xt1(P (t2)). S e dita ser k-espacada
se ai+1 > bi + k para todo i ∈ {1, ...,m} e o mınimo k como e chamado espacamento de
S. Se τ = {I1, I2}, entao S e chamada especificacao uniforme fraca. Dizemos que S e
ε-sombreada por x ∈ Λ se
d(Xt(x), P (t)) < ε para todo t ∈⋃Ii∈τ
Ii.
Definicao 4.4.1. Um subconjunto compacto invariante Λ de M tem a propriedade de
especificacao uniforme se para todo ε > 0 existe k = k(ε) ∈ R tal que toda especificacao
uniforme S k-espacada e ε-sombreada por pontos de Λ. Neste caso o campo de vetores
X|Λ e dito ter a propriedade de especificacao uniforme. Dizemos que um campo de vetores
X tem a propriedade de especificacao uniforme se M a tem.
Definicao 4.4.2. Dizemos que um conjunto isolado Λ = ΛX(U), para qualquer vizi-
nhanca atratora U , tem a propriedade de especificacao uniforme robusta se existe uma
C1-vizinhanca U de X tal que para todo campo de vetores Y ∈ U , Y |ΛY (U) tem a pro-
priedade de especificacao uniforme . Neste caso o campo de vetores X|Λ e dito ter a
propriedade de especificacao uniforme robusta. O campo de vetores X tem a propriedade
de especificacao uniforme robusta se M a tem.
Analoga para a propriedade de especificacao uniforme fraca.
Em [ASSo11] podemos encontrar uma caracterizacao para fluxos satisfazendo a
propriedade de especificacao uniforme e especificacao uniforme fraca. Mais precisamente
se Λ e isolado e se X|Λ tem a propriedade de especificacao uniforme fraca robusta, onde
Λ e isolado, entao Λ e um conjunto hiperbolico secccional topologicamente misturador
e se X|Λ tem a propriedade de especificacao uniforme robusta entao Λ e um conjunto
hiperbolico topologicamente misturador.
Observacao 4.4.3. Todo campo de vetores com Λ conjunto compacto invariante tal que
X|Λ tem a propriedade de especificacao uniforme fraca, Xt|Λ e topologicamente mistura-
dor. Ver [ASSo11]
Por outro lado, fluxos de suspensao de conjuntos hiperbolicos com tempo cons-
tante, nao sao topologicamente misturadores portanto nao satisfazem a propriedade de
especificacao.
Observacao 4.4.4. Bowen caracterizou os fluxos uniformente hiperbolico satisfazendo a
propriedade de especificacao.
Uma questao natural e tentar caracterizar fluxos nao-uniformemente hiperbolicos
satisfazendo a propriedade de especificacao uniforme fraca e especificacao uniforme para
o Atrator Geometrico do Lorenz.

73
Questao 4.4.5. O atrator geometrico do Lorenz topologicamente misturador satisfaz a
propriedade de especificacao uniforme (fraca)?
E sob reparametrizacoes?
Dizemos que um subconjunto compacto invariante Λ de M tem a propriedade de
especificacao uniforme(fraca) sob reparametrizacoes se dado ε > 0 existe k = k(ε) ∈ R tal
que para toda especificacao uniforme S k-espacada existe x ∈ M e h : R → R crescente
com h(ai) = ai tal que
d(Xh(t)(x), P (t)) < ε ∀t ∈⋃i
Ji.
Agora iremos definir a propriedade de especificacao nao-uniforme(metrica). In-
troduziremos primeiro o caso para tempo discreto, para fluxo e analogo.
Seja f : M →M uma transformacao e Λ subconjunto compacto invariante de M ,
o sistema (f, µ) satisfaz a propriedade de especificacao nao-uniforme(E.N.U.) se µ(Λ) = 1
e para todo ε > 0 e n ∈ N existem p(x, n, ε) ≥ 1 satisfazendo limn→∞p(x,n,ε)
n= 0 e ainda:
dados x1, ..., xn ∈ Λ e li ≥ p(xi, ni, ε) i = 1, ..., k existe x ∈M tal que
d(f j(x), f j(x1)) < ε,∀j = 1, ..., n1
d(fn1+l1+j(x), f j(x2)) < ε,∀j = 1, ..., n2
...
Em [Ol10] prova-se que para µ medida ergodica expansora entao satisfaz a pro-
priedade de especificacao nao-uniforme.
Questao 4.4.6. O atrator geometrico do Lorenz satisfaz propriedade de especificacao
nao-uniforme (metrica)?
Conjectura 4.4.7. Seja (Xt)t um fluxo de suspensao sobre uma base nao-uniformemente
hiperbolica (f, µ) com funcao altura τ e com medida Xt-invariante µ = µ×Leb∫τdµ
. Entao
((Xt)t, µ) satisfaz E.N.U.
Para maiores detalhes ver [Va11].
Referencias
[A67] ANOSOV, D.V. Geodesic flows on closed Riemannian manifolds of negative curva-
ture, Proc.Steklov Math.Inst.,(90): (1)-(235), (1967).
[AS67] ANOSOV, D.V.; SINAI, Ja.G. Certain smooth ergodic systems, Uspehi Mat.
Nauk,22(5(137)):(107)-(172), (1967).
[AP07] ARAUJO, Vıtor; PACIFICO, Maria Jose. Three Dimensional Flows: 26◦
Coloquio Brasileiro de Matematica.(1). ed. (Rio de Janeiro): Instituto de Matematica
Pura e Aplicada, 2007. (Publicacaoes Matematicas)
[AP10] ARAUJO, Vıtor; PACIFICO, Maria Jose. Three-Dimensional Flows. Springer
:2010
[AV11] ARAUJO, Vıtor; VARANDAS, Paulo. Robust exponential decay of correlations
for singular-flows,:acecepted for publications in math.DS,(2011)
[APPujV07] ARAUJO, V.; PACIFICO, M.J.; PUJALS, E.R.; VIANA, M. Singular-
Hyperbolic Attractors are Chaotic, Trans. Amer. Math. Soc., 361, n. (5), p. (2431)-
(2485), (2009).
[ASSo11] ARBIETO, A.; SENOS, L. ; SODERO, T.The specification property for flows
from the robust e generic viewpoint, Math.DS, 1101.3445v1, (2011).
[BW72] BOWEN, R.; WALTERS, P. Expansive one-parameter flows, J. Differential
Equations, 12, p. (180)-(193), (1972).
[C04] CASTRO, Armando de. Curso de Teoria da Medida. (1). ed. (Rio de Janeiro):
Instituto de Matematica Pura e Aplicada,2004. (Projeto Euclides.)
[DOr06] DIAZ, K.-Ordaz. Decay of correlations for non-Holder observable for one-
dimensional expanding Lorenz-like mapas,Discrete Contin. Dyn.Syst., 15(1): 159-176,
(2006).
[GH90] GUCKENHEIMER, J.; HOLMES, P. Nonlinear oscillations, dynamical systems,
and bifurcations of vector field, (New York): Springer-Verlag, 1990,vol 42. Revised and
corrected reprint of the 1983 original. Applied Mathematical Sciences, 42. xvi+459
pp. ISBN: 0-387-90819-6.
74
75
[HK82] HOFBAUER, F.; KELLER, G. Ergodic properties of invariant measuress for
piercewise monotonic transformations, Math.Z., n. 180: (119)-(140), (1982).
[HPS77] HIRSCH, Morris W.; PUGH, Charles C.; SHUB, Michael. Lecture Notes
on Mathematics - Invariant Manifolds . (Berlin-Heidelberg-New York): Springer-
Verlag,1977.
[K85] KELLER, G. Generalized bounded variation and applications to piecewise monotic
transformations, Z. Wahrsch. Verw. Gebiete , 69(3): p. (461)-(478), (1985).
[Kom84] KOMURO, M. Expansive properties of Lorenz attractors, World Scientific Pu-
blishing, p. (4)-(26), (1984).
[M87] MANE, Ricardo. Ergodic theory and differentiable dynamics. (New York): Springer
Verlag, 1987.
[M83] MANE, Ricardo. Introducao a Teoria Ergodica. (1). ed. (Rio de Janeiro): Instituto
de Matematica Pura e Aplicada, CNPq, 1983. (Projeto Euclides.)
[MPPuj98] MORALES, C.A.; PACIFICO, M.J.; PULJALS, On C1 robust singular tran-
sitive sets for three-dimensional flows , C.R.Acad.Sci.Paris,326, Serie I:81-86, (1998).
[MPPuj04] MORALES, C.A.; PACIFICO, M.J.; PULJALS, E.R. Robust transitive sin-
gular sets for 3-flows are partially hyperbolic attractors or repelers , Ann. of Math.,
(2),160(2), p. (375)-(432), (2004).
[MPPuj99] MORALES, C.A.; PACIFICO, M.J.; PUJALS, E.R.. Singular hyperbolic sys-
tems, Proc.Amer.Math.Soc., 127(11): p. (3393)-(3401), (1999).
[O90] OKA, M. Expansiveness of real flows, Tsukuba J. Math., 14, n. 1, p. (1)-(8), (1990).
[Ol10] OLIVEIRA, Krerley, Every expanding measure has the nonuniform specification
property, math.DS, 1007.1449v1, (2010)
[PM77] PALIS, Jacob; MELO, Welington de. Introducao aos sistemas dinamicos . (1).
ed. (Rio de Janeiro): Instituto de Matematica Pura e Aplicada, CNPq, 1977. (Projeto
Euclides.)
[PT93] PALIS, J.; TAKENS, F. Hyperbolicity and sensitive chaotic dynamics at homo-
clinic bifurcations. Fractal dimensions and infinitely many attractors , (Cambridge):
Cambridge Univerity Press, Cambridge Studies in Advanced Mathematics.
[P10] PINHEIRO, V., Expanding Measures, Trans.Amer.Math.Soc., (2010).
[PS89] PUGH, C.; SHUB, M. Ergodic attractors, Trans.Amer.Math.Soc., 312:(1)-(54),
(1989).
[S82] SPRARROW, C. The Lorenz equations: bifurcations, chaos, and strange attrac-
tors, (New York): Springer-Verlag, 1982,vol 41. Applied Mathematical Sciences, 42.
xvi+459 pp. ISBN: 0-387-90819-6.
76
[T99] TUCKER, W. The Lorenz attractor exists, C.R.Acad.Sci.Paris Ser. I Math , 328,
n. 12, p. (1197)-(1202), (1999).
[Va11] VARANDAS, Paulo. Non-uniform specification and large derivations for weak
Gibbs measures,: acecepted for publications in Erg.Th. Dyn. Syst.,(2011)
[V97] VIANA, Marcelo. Stochastic dynamics of deterministic systems: 21◦ Coloquio Bra-
sileiro de Matematica. (Rio de Janeiro): Instituto de Matematica Pura e Aplicada,
1997. (Publicacaoes Matematicas).
[W78] WONG, S. Some metric properties of piecewise monotonic mapping of the unit
interval, Trans.Amer.Math.Soc. , 246: (493)-(500), (1978).

Universidade Federal da Bahia - UFBA
Instituto de Matematica / Colegiado da Pos-Graduacao em Matematica
Av. Adhemar de Barros, s/n, Campus Universitario de Ondina, Salvador - BA
CEP: 40170 -110
<http://www.pgmat.ufba.br>