descrição de sistemas: diagrama de blocos e gráfico de ... · apresentar a descric¸ao matem˜...
TRANSCRIPT

Descricao de sistemas: diagrama de blocos egrafico de fluxo de sinais.
ENGC33: Sinais e Sistemas II
Departamento de Engenharia Eletrica - DEEUniversidade Federal da Bahia - UFBA
27 de janeiro de 2017
Prof. Tito Luís Maia Santos 1/ 28

Sumario
1 Apresentacao
2 Revisao
3 Diagrama de blocos
4 Grafico de fluxo de sinais
5 Comentarios Finais
Prof. Tito Luís Maia Santos 2/ 28

Sumario
1 Apresentacao
2 Revisao
3 Diagrama de blocos
4 Grafico de fluxo de sinais
5 Comentarios Finais
Prof. Tito Luís Maia Santos 3/ 28

Apresentacao
Objetivos da aula de hoje:
Apresentar a descricao matematica de sistemas via diagramade blocos.Apresentar a descricao matematica de sistemas via grafico defluxo de sinais.
Prof. Tito Luís Maia Santos 4/ 28

Sumario
1 Apresentacao
2 Revisao
3 Diagrama de blocos
4 Grafico de fluxo de sinais
5 Comentarios Finais
Prof. Tito Luís Maia Santos 5/ 28

RevisaoFuncao de Transferencia
A funcao de transferencia de um dado sistema (G(s)) e definidacomo a transformada de Laplace de sua resposta impulsiva, comtodas as condicoes iniciais nulas:
G(s) = L{g(t)} =Y (s)
U(s).
Comentarios:
Aplicavel apenas a sistemas lineares invariantes no tempo;Independe do sinal de entrada;Pode ser determinada a partir do par (entrada-saıda);E funcao da variavel complexa “s”;A discussao a seguir e extensıvel a transformada Z.
Prof. Tito Luís Maia Santos 6/ 28

RevisaoFuncao de Transferencia
A funcao de transferencia de um dado sistema (G(s)) e definidacomo a transformada de Laplace de sua resposta impulsiva, comtodas as condicoes iniciais nulas:
G(s) = L{g(t)} =Y (s)
U(s).
Comentarios:
Aplicavel apenas a sistemas lineares invariantes no tempo;Independe do sinal de entrada;Pode ser determinada a partir do par (entrada-saıda);E funcao da variavel complexa “s”;A discussao a seguir e extensıvel a transformada Z.
Prof. Tito Luís Maia Santos 6/ 28

RevisaoFuncao de Transferencia
A funcao de transferencia de um dado sistema (G(s)) e definidacomo a transformada de Laplace de sua resposta impulsiva, comtodas as condicoes iniciais nulas:
G(s) = L{g(t)} =Y (s)
U(s).
Comentarios:
Aplicavel apenas a sistemas lineares invariantes no tempo;Independe do sinal de entrada;Pode ser determinada a partir do par (entrada-saıda);E funcao da variavel complexa “s”;A discussao a seguir e extensıvel a transformada Z.
Prof. Tito Luís Maia Santos 6/ 28

RevisaoFuncao de Transferencia
A funcao de transferencia de um dado sistema (G(s)) e definidacomo a transformada de Laplace de sua resposta impulsiva, comtodas as condicoes iniciais nulas:
G(s) = L{g(t)} =Y (s)
U(s).
Comentarios:
Aplicavel apenas a sistemas lineares invariantes no tempo;Independe do sinal de entrada;Pode ser determinada a partir do par (entrada-saıda);E funcao da variavel complexa “s”;A discussao a seguir e extensıvel a transformada Z.
Prof. Tito Luís Maia Santos 6/ 28

RevisaoFuncao de Transferencia
A funcao de transferencia de um dado sistema (G(s)) e definidacomo a transformada de Laplace de sua resposta impulsiva, comtodas as condicoes iniciais nulas:
G(s) = L{g(t)} =Y (s)
U(s).
Comentarios:
Aplicavel apenas a sistemas lineares invariantes no tempo;Independe do sinal de entrada;Pode ser determinada a partir do par (entrada-saıda);E funcao da variavel complexa “s”;A discussao a seguir e extensıvel a transformada Z.
Prof. Tito Luís Maia Santos 6/ 28

RevisaoFuncao de Transferencia
A funcao de transferencia de um dado sistema (G(s)) e definidacomo a transformada de Laplace de sua resposta impulsiva, comtodas as condicoes iniciais nulas:
G(s) = L{g(t)} =Y (s)
U(s).
Comentarios:
Aplicavel apenas a sistemas lineares invariantes no tempo;Independe do sinal de entrada;Pode ser determinada a partir do par (entrada-saıda);E funcao da variavel complexa “s”;A discussao a seguir e extensıvel a transformada Z.
Prof. Tito Luís Maia Santos 6/ 28

Sumario
1 Apresentacao
2 Revisao
3 Diagrama de blocos
4 Grafico de fluxo de sinais
5 Comentarios Finais
Prof. Tito Luís Maia Santos 7/ 28

Diagrama de blocosDefinicao
Representacao ilustrada das funcoes desempenhadas por cadaum dos componentes de um sistemas e dos fluxos de sinaiscorrespondentes.
Diagrama de Blocos
� Representacao ilustrada das funcoes desempenhadas por cada um dos
componentes de um sistema e do fluxo de sinais correspondentes
� Inclui apenas informacoes sobre comportamento dinamico, ie, sistemas
diferentes podem ter mesmo diagrama
� FT sao introduzidas nos blocos correspondentes nos quais a saıda = entrada ∗ FT
G(s)
Y (s) = G(s)U(s)U(s)
c�Reinaldo M. Palharespag.7 Controle de Sistemas Lineares – Aula 2
Prof. Tito Luís Maia Santos 8/ 28

Diagrama de blocosExemplo - Circuito RC
Sejam ei (t) a tensao de entrada, i(t) a corrente do circuito e vc(t) atensao do capacitor.
Neste caso temos:
i(t) =ei (t)− vc(t)
R⇒ I(s) =
Ei (s)− Vc(s)
R,
vc(t) =1C
ˆi(t)dt ⇒ Vc(s) =
1sC
I(s).
ei(t) vc(t)
i(t)
Prof. Tito Luís Maia Santos 9/ 28
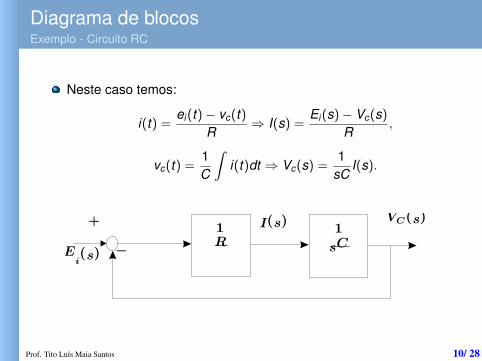
Diagrama de blocosExemplo - Circuito RC
Neste caso temos:
i(t) =ei (t)− vc(t)
R⇒ I(s) =
Ei (s)− Vc(s)
R,
vc(t) =1C
ˆi(t)dt ⇒ Vc(s) =
1sC
I(s).
Construcao de um Diagrama de Blocos
Exemplo Circuito RC serie cuja saıda e a tensao no capacitor (vC )
i =ei − vC
R; vC =
1
C
Z
idtL
−→ I(s) =1
R(Ei(s)−VC (s)) ; VC (s) =
1
sCI(s)
1
sC
1
REi(s)
VC (s)I(s)+
−
FT malha fechada – M (s) =VC (s)
Ei(s)=
1
sRC + 1
c�Reinaldo M. Palharespag.10 Controle de Sistemas Lineares – Aula 2
Prof. Tito Luís Maia Santos 10/ 28

Diagrama de blocosManipulacao de blocos
MASTER 18
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
TABLE 2.8 Block Diagram Transformations
Transformation Original Diagram Equivalent Diagram
1. Combining blocks incascade
X1G1(s)
X2 X1G1G2
X3
X1G2G1
X3
X3G2(s)
or
2. Moving a summingpoint behind a block
�
�
X3
X2
X1G
�
�
X3
X2
X1G
G
3. Moving a pickoffpoint ahead of ablock
X2
X2
X1G
X2
X2
X1G
G
4. Moving a pickoffpoint behind a block
X2X1G
X2
X1
X1
X1
G
1G
5. Moving a summingpoint ahead of ablock
�
�
X3
X2
X1G
�
�
X3
X2
X1G
1G
6. Eliminating afeedback loop �
G
1 GH
� X2X1G
H
X2X1
�
Table 2.8 Block diagram transformations
Prof. Tito Luís Maia Santos 11/ 28

Diagrama de blocosManipulacao de blocos
MASTER 18
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
TABLE 2.8 Block Diagram Transformations
Transformation Original Diagram Equivalent Diagram
1. Combining blocks incascade
X1G1(s)
X2 X1G1G2
X3
X1G2G1
X3
X3G2(s)
or
2. Moving a summingpoint behind a block
�
�
X3
X2
X1G
�
�
X3
X2
X1G
G
3. Moving a pickoffpoint ahead of ablock
X2
X2
X1G
X2
X2
X1G
G
4. Moving a pickoffpoint behind a block
X2X1G
X2
X1
X1
X1
G
1G
5. Moving a summingpoint ahead of ablock
�
�
X3
X2
X1G
�
�
X3
X2
X1G
1G
6. Eliminating afeedback loop �
G
1 GH
� X2X1G
H
X2X1
�
Table 2.8 Block diagram transformations
Prof. Tito Luís Maia Santos 12/ 28
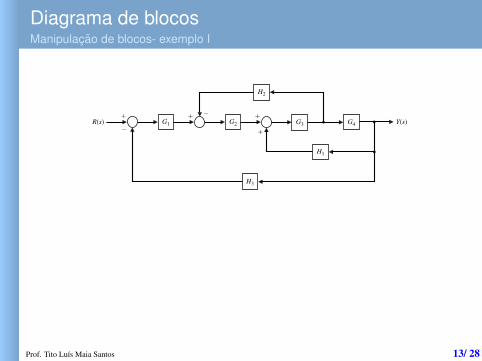
Diagrama de blocosManipulacao de blocos- exemplo I
MASTER 19
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
�
�
� ��
�R(s) Y(s)
H2
H1
H3
G1 G2 G3 G4
(a)
�
�
� ��
�R Y(s)
H1
H3
G1 G2 G3 G4
� ��
�R Y(s)
H3
G1 G2
(b)
G3G4
1� G3G4H1
�
�R Y(s)
R(s)H3
G1
(c) (d)
G2G3G4
1� G3G4H1�G2G3H2
Y(s)G1G2G3G4
1� G3G4H1�G2G3H2�G1G2G3G4H3
H2
G4
H2
G4
Figure 2.24 Multiple-loop feedback control system
Figure 2.25 Block diagram reduction of the system of Fig. 2.24
Prof. Tito Luís Maia Santos 13/ 28

Diagrama de blocosManipulacao de blocos- exemplo I
MASTER 19
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
�
�
� ��
�R(s) Y(s)
H2
H1
H3
G1 G2 G3 G4
(a)
�
�
� ��
�R Y(s)
H1
H3
G1 G2 G3 G4
� ��
�R Y(s)
H3
G1 G2
(b)
G3G4
1� G3G4H1
�
�R Y(s)
R(s)H3
G1
(c) (d)
G2G3G4
1� G3G4H1�G2G3H2
Y(s)G1G2G3G4
1� G3G4H1�G2G3H2�G1G2G3G4H3
H2
G4
H2
G4
Figure 2.24 Multiple-loop feedback control system
Figure 2.25 Block diagram reduction of the system of Fig. 2.24
MASTER 19
Copyright © 1998 by Addison Wesley Longman. All rights reserved.
�
�
� ��
�R(s) Y(s)
H2
H1
H3
G1 G2 G3 G4
(a)
�
�
� ��
�R Y(s)
H1
H3
G1 G2 G3 G4
� ��
�R Y(s)
H3
G1 G2
(b)
G3G4
1� G3G4H1
�
�R Y(s)
R(s)H3
G1
(c) (d)
G2G3G4
1� G3G4H1�G2G3H2
Y(s)G1G2G3G4
1� G3G4H1�G2G3H2�G1G2G3G4H3
H2
G4
H2
G4
Figure 2.24 Multiple-loop feedback control system
Figure 2.25 Block diagram reduction of the system of Fig. 2.24
Prof. Tito Luís Maia Santos 14/ 28

Diagrama de blocosManipulacao de blocos- exemplo II
Prof. Tito Luís Maia Santos 15/ 28

Diagrama de blocosManipulacao de blocos- exemplo II
Prof. Tito Luís Maia Santos 16/ 28

Sumario
1 Apresentacao
2 Revisao
3 Diagrama de blocos
4 Grafico de fluxo de sinais
5 Comentarios Finais
Prof. Tito Luís Maia Santos 17/ 28
Grafico de fluxo de sinaisDefinicoes
A descricao de um sistema pode ser realizada atraves de um grafo,i.e. , rede de nos ligada por ramos orientados.
Prof. Tito Luís Maia Santos 18/ 28

Grafico de fluxo de sinaisDefinicoes
No - ponto que representa uma variavel ou sinal;
Transmitancia - ganho entre dois nos;
Fonte ou no de entrada - possui ramos de saıda;
Sorvedouro ou no de saıda - possui apenas ramos de chegada;
No misto - possui ramos de chegada e de saıda;
Caminho - percurso dos ramos orientados;
Laco ou malha - caminho fechado (inıcio e fim no mesmo no);
Ganho de malha - produto das transmitancias de uma malha;
Malhas que nao se tocam - malhas que nao possuem nos emcomum;
Caminho direto ou caminho de avanco - parte de um no de entradae vai a um no de saıda sem cruzar qualquer no por mais de umavez.
Prof. Tito Luís Maia Santos 19/ 28

Grafico de fluxo de sinaisPropriedades basicas
Para um sinal, x1, que atravessa o ramo entre x1 e x2, temosx2 = ax1, com a sendo o ganho do ramo.
Em um no, os sinais de todos os ramos de entrada sao somados eo resultado e transmitido a todos os ramos de saıda.
Para um dado sistema, o grafico de fluxo de sinai nao e unico.
Prof. Tito Luís Maia Santos 20/ 28

Grafico de fluxo de sinaisOperacoes basicas
Prof. Tito Luís Maia Santos 21/ 28
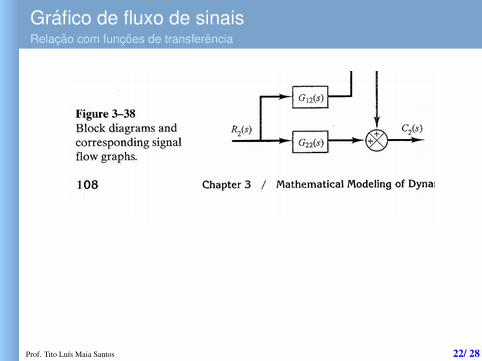
Grafico de fluxo de sinaisRelacao com funcoes de transferencia
Prof. Tito Luís Maia Santos 22/ 28

Grafico de fluxo de sinaisRelacao com funcoes de transferencia
Prof. Tito Luís Maia Santos 23/ 28
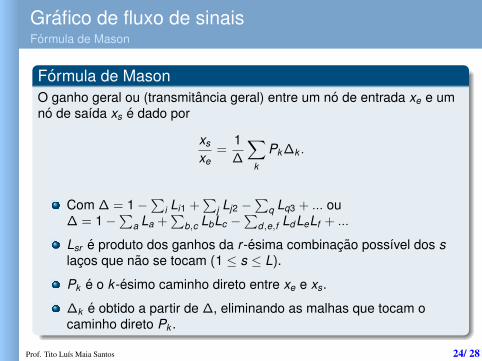
Grafico de fluxo de sinaisFormula de Mason
Formula de MasonO ganho geral ou (transmitancia geral) entre um no de entrada xe e umno de saıda xs e dado por
xs
xe=
1∆
∑k
Pk ∆k .
Com ∆ = 1−∑
i Li1 +∑
j Lj2 −∑
q Lq3 + ... ou∆ = 1−
∑a La +
∑b,c LbLc −
∑d,e,f LdLeLf + ...
Lsr e produto dos ganhos da r -esima combinacao possıvel dos slacos que nao se tocam (1 ≤ s ≤ L).
Pk e o k -esimo caminho direto entre xe e xs.
∆k e obtido a partir de ∆, eliminando as malhas que tocam ocaminho direto Pk .
Prof. Tito Luís Maia Santos 24/ 28

Grafico de fluxo de sinaisExemplo 3.13 (Ogata)
Prof. Tito Luís Maia Santos 25/ 28
Grafico de fluxo de sinaisExemplo 3.14 (Ogata)
Prof. Tito Luís Maia Santos 26/ 28

Sumario
1 Apresentacao
2 Revisao
3 Diagrama de blocos
4 Grafico de fluxo de sinais
5 Comentarios Finais
Prof. Tito Luís Maia Santos 27/ 28

Comentarios Finais
Nesta aula apresentou-se a representacao de sistemas viadiagrama de blocos e grafico de fluxo de sinais
Prof. Tito Luís Maia Santos 28/ 28