apontamentos
DESCRIPTION
ApontamentosTRANSCRIPT
Física
Apontamentos
João Campos Gil Departamento de Física, F.C.T.U.C.
Licenciatura em Biologia, F.C.T.U.C.
2014

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
2
Índice Capítulo 0 – Introdução .................................................................................................................... 4
0.1 – Metodologia da Física .......................................................................................................... 4 Capítulo 1 – Forças ........................................................................................................................... 6
1.1 – Interacções ........................................................................................................................... 6 1.1.1 – Interacções Fundamentais e Forças Derivadas ............................................................ 6 1.1.2 – Leis de Newton ............................................................................................................. 7 1.1.3 – Interacção Gravítica ...................................................................................................... 9 1.1.4 – Trabalho e Energia ........................................................................................................ 9 1.1.5 – Energia num Choque .................................................................................................. 10
1.2 – Forças de Pressão ............................................................................................................... 11 1.2.1 – Modelo Cinético dos Gases Perfeitos ......................................................................... 11 1.2.2 – Pressão entre Superfícies Sólidas ............................................................................... 11
1.3 – Equilíbrio de um Corpo Rígido ........................................................................................... 12 1.3.1 – Sistema de Partículas e Corpo Rígido ......................................................................... 12 1.3.2 – Dinâmica do Corpo Rígido .......................................................................................... 12 1.3.3 – Condições de Equilíbrio Estático do Corpo Rígido ...................................................... 14
1.4 – Electrostática ..................................................................................................................... 15 1.4.1 – Lei de Coulomb ........................................................................................................... 15 1.4.2 – Campo Eléctrico .......................................................................................................... 16 1.4.3 – Potencial Eléctrico ...................................................................................................... 17 1.4.4 – Polarização da Matéria ............................................................................................... 18
1.5 – Outras Forças Derivadas .................................................................................................... 19 1.5.1 – Forças de Ligação ........................................................................................................ 20 1.5.2 – Forças de Contacto ..................................................................................................... 21 1.5.3 – Forças de Atrito .......................................................................................................... 21 1.5.4 – Forças de Resistência .................................................................................................. 22
Capítulo 2 – Mecânica dos Meios Contínuos ................................................................................. 23 2.1 – Elasticidade ........................................................................................................................ 23 2.2 – Plasticidade e Ruptura ....................................................................................................... 24
Capítulo 3 – Mecânica de Fluidos e de Corpos em Fluidos ............................................................ 26 3.1 – Hidrostática ........................................................................................................................ 26 3.2 – Escoamento de Fluidos Ideais ............................................................................................ 27 3.3 – Escoamento de Fluidos Reais ............................................................................................. 29
3.3.1 – Viscosidade ................................................................................................................. 29 3.3.2 – Lei de Poiseuille .......................................................................................................... 30
3.4 – Movimento de Sólidos em Fluidos ..................................................................................... 31 3.4.1 – Lei de Stokes ............................................................................................................... 31 3.4.2 – Sedimentação e Velocidade Terminal ........................................................................ 31
Capítulo 4 – Tensão Superficial e Capilaridade .............................................................................. 33 4.1 – Tensão Superficial .............................................................................................................. 33 4.2 – Interfaces Líquido-Sólido-Gás. Ângulo de Contacto .......................................................... 35 4.3 – Diferença de Pressão em Superfícies Curvas. Capilaridade ............................................... 37
Capítulo 5 – Electromagnetismo .................................................................................................... 39 5.1 – Corrente Contínua ............................................................................................................. 39
5.1.1 – Condensadores ........................................................................................................... 39 5.1.2 – Corrente e Resistência Eléctricas ................................................................................ 40

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
3
5.1.3 – Leis de Kirchhoff ......................................................................................................... 41 5.1.4 – Fontes de Tensão Reais .............................................................................................. 42 5.1.5 – Carga e Descarga de Condensadores ......................................................................... 42
5.2 – Campo Magnético .............................................................................................................. 43 5.2.1 – Dipolos Magnéticos. Linhas de Campo ....................................................................... 43 5.2.2 – Forças sobre Correntes ............................................................................................... 44
5.3 – Aparelhos Simples de Medida ........................................................................................... 45 5.3.1 – Galvanómetro ............................................................................................................. 45 5.3.2 – Voltímetro e Amperímetro ......................................................................................... 45 5.3.3 – Algumas Aplicações .................................................................................................... 46
5.4 – Indução Electromagnética ................................................................................................. 46 5.4.1 – Fluxo Magnético ......................................................................................................... 46 5.4.2 – Lei de Faraday ............................................................................................................. 47 5.4.3 – Gerador de Corrente Alternada .................................................................................. 47
5.5 – Leis de Maxwell .................................................................................................................. 48 Capítulo 6 – Ondas e Luz ................................................................................................................ 49
6.1 – Movimento Oscilatório ...................................................................................................... 49 6.1.1 – Oscilador Simples........................................................................................................ 49 6.1.2 – Oscilador Amortecido ................................................................................................. 50 6.1.3 – Oscilador Forçado e Ressonância ............................................................................... 50
6.2 – Movimento Ondulatório .................................................................................................... 51 6.2.1 – Ondas Transversais e Ondas Longitudinais ................................................................ 51 6.2.2 – Polarização de Ondas Transversais............................................................................. 52
6.3 – Ondas Electromagnéticas .................................................................................................. 53 6.3.1 – Transições Electrónicas............................................................................................... 54
Capítulo 7 – Radioactividade .......................................................................................................... 55 7.1 – Radiação ............................................................................................................................. 55
7.1.1 – Radiação e Interacção com a Matéria ........................................................................ 55 7.1.2 – Decaimento radioactivo ............................................................................................. 59
7.2 – Imagiologia Nuclear ........................................................................................................... 60 7.2.1 – Técnicas de Medicina Nuclear .................................................................................... 60
7.3 – Efeitos Biológicos da Radiação ........................................................................................... 63 7.3.1 – Efeitos Biológicos ........................................................................................................ 63 7.3.2 – Dosagem de Radiação ................................................................................................ 63
7.4 – Protecção Radiológica ........................................................................................................ 66 7.4.1 – Princípios Básicos ........................................................................................................ 66 7.4.2 – Minimização da Irradiação Externa ............................................................................ 67 7.4.3 – Contaminação ............................................................................................................. 67

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
4
Capítulo 0
Introdução
Nesta Unidade Curricular abordam-se brevemente algumas áreas da Física em que se estudam fenómenos físicos e propriedades de materiais com relevância para a Biologia. Muitas propriedades e fenómenos físicos têm um papel preponderante na sustentação dos processos biológicos de seres vivos e na sua relação com o meio exterior. O estudo dos fundamentos físicos envolvidos nessas propriedades e fenómenos correlacionados poderá contribuir para o aprofundamento da compreensão desses processos biológicos e ainda de inúmeros métodos analíticos e de investigação na Biologia.
Antes de iniciar o estudo dos temas propostos no programa desta Unidade Curricular, interessa-nos fazer algumas considerações gerais sobre a metodologia da Física, que está na base de todos os estudos científicos que levaram à formulação das leis e descrições aqui apresentadas, e a sua aplicação no estudo de propriedades de materiais.
0.1 – Metodologia da Física
A Física tem por objectivo o alargamento do conhecimento de como se organiza o Universo Natural e como interagem os seus elementos constituintes de modo a que ele seja como o observamos e medimos. O desenvolvimento permanente deste conhecimento deve-se à utilização do Método Científico, comum a outras ciências básicas, que procura chegar aos fundamentos da constituição, organização e dinâmica do universo físico. Embora muitas experiências humanas e o porquê último do Universo Natural não estejam ao alcance do método científico, este permite estabelecer leis fundamentais, a partir das quais deverá ser possível explicar os fenómenos naturais e as propriedades físicas da matéria.
O método científico consiste, em primeiro lugar, em fazer observações e medidas da Natureza associadas a cada fenómeno que se pretende estudar. Essas observações e medidas distinguem as diferentes variáveis que possam estar implicadas, sendo os resultados quantificados segundo um padrão de medida para cada variável. Estes padrões estabelecem um Sistema de Unidades que permite comparar resultados de diferentes medidas da mesma variável. O Sistema Internacional de Unidades (SI) é actualmente adoptado por quase todos os países do mundo e é composto por sete unidades fundamentais: metro (m), quilograma (kg), segundo (s), ampere (A), kelvin (K), candela (cd,

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
5
intensidade luminosa), mole (mol, quantidade de matéria). A partir destas definem-se todas as unidades derivadas necessárias à quantificação das diferentes variáveis, ou quantidades físicas, mensuráveis ou determináveis.
As medidas e observações são feitas cuidadosamente, de modo a constituírem experiências
controladas, em que se procura definir a influência de cada variável separadamente de todas as outras implicadas em cada fenómeno em estudo, tentando ainda procurar a existência e perceber a origem de possíveis erros sistemáticos, eliminando-os ou conhecendo-os o melhor possível. O conhecimento dos erros aleatórios de cada medida permite por sua vez determinar a incerteza com que se apresentam os resultados finais, ou seja, a sua precisão.
A realização de medidas e observações requer naturalmente a utilização de instrumentos, os mais simples dos quais são de utilização comum desde tempos anteriores ao estabelecimento do método científico, como p. ex. as réguas, balanças, relógios, instrumentos ópticos simples, etc.
O segundo passo na aplicação do método científico consiste em colocar hipóteses sobre as relações que possam existir entre as diferentes variáveis medidas, traduzindo essas relações por expressões matemáticas que se ajustem aos dados experimentais. Em muitas circunstâncias, a hipótese é interpretativa, tentando-se ajustar aos dados experimentais expressões matemáticas já utilizadas para descrever fenómenos correlacionáveis com o que está a ser estudado.
Expressões ou formalismos matemáticos novos estabelecidos no âmbito da formulação de hipóteses podem vir a constituir Leis da Física, se se provar serem aplicáveis em situações diversificadas de alterações das variáveis implicadas no fenómeno e se tiverem a capacidade de esclarecer ou clarificar dum modo geral um determinado fenómeno. Este terceiro passo do método científico requer a realização de repetidas experiências, de preferência por laboratórios e processos diferentes, cujos resultados sejam todos coerentes com a hipótese formulada. Uma lei da Física tem, no entanto, um âmbito de aplicação sempre limitado às condições e gamas de valores das variáveis utilizadas no conjunto de experiências realizadas e às precisões dos instrumentos utilizados.
Algumas leis são consideradas fundamentais (p. ex., a 2ª lei de Newton), por a partir delas ser possível derivar todas as outras leis dum determinado campo de estudo. Leis derivadas são úteis na formulação das relações entre variáveis de muitos fenómenos, mas poderão ser deduzidas das fundamentais através de raciocínios interpretativos e de correlação entre os diferentes aspectos e parâmetros de cada problema em discussão (p. ex. a lei do movimento uniformemente acelerado).
A procura de provar a aplicabilidade geral duma lei inclui a realização de testes à hipótese, constituídos pelas novas e diferentes experiências e pela aplicação ou desenvolvimento de outras leis e expressões matemáticas que possam conter uma hipótese alternativa à inicial. Há critérios para a escolha da melhor hipótese, caso haja várias aparentemente aplicáveis, entre as quais é relevante o princípio da hipótese mais simples ser a mais plausível. Uma lei, mesmo que fundamental, pode com o decorrer do tempo e o melhoramento das precisões ou do âmbito das medidas, ou ainda da descoberta de novos formalismos mais abrangentes, ser refutada ou alterada de modo a abranger outros campos de aplicação ou outras gamas de valores das variáveis. Neste processo há uma interdependência muito grande entre teoria e experimentação.
Descrevemos o método científico, adoptado na investigação fundamental em Física e noutras ciências básicas. A investigação científica não se esgota, no entanto, na compreensão e descrição dos fenómenos da Natureza através de leis. O desenvolvimento tecnológico, hoje cada vez mais procurado como motor de economias e base do desenvolvimento das condições de vida de toda a Humanidade, sempre teve e continua a ter na sua origem as descobertas da investigação fundamental. A Física Aplicada utiliza aqueles conhecimentos e os meios experimentais desenvolvidos na investigação fundamental para a criação de novos intrumentos que podem servir para fazer medidas não acessíveis até então ou de maior precisão, ou que permitem o fabrico de materiais ou outro equipamento que facilite ou realize novas tarefas.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
6
Capítulo 1
Forças
1.1 – Interacções
1.1.1 – Interacções Fundamentais e Forças Derivadas
Podemos definir Interacção como sendo a influência mútua entre entidades de natureza idêntica, p. ex. duas massas ou duas cargas eléctricas, que altera o seu estado individual de repouso ou movimento uniforme e rectilíneo. Por observação experimental e conjecturas teóricas escrevem-se leis para as interacções, que são modelos matemáticos que devem corresponder às correlações entre variáveis medidas (posição, velocidade, tempo, etc.) através de funções matemáticas adequadas. Estas funções matemáticas devem ainda permitir a previsão da evolução de novas situações que envolvam entidades da mesma natureza das estudadas.
Deste modo, a Física identificou quatro Interacções Fundamentais na Natureza, tanto quanto é perceptível e abordável pelo método científico. Designam-se fundamentais porque nas condições energéticas do Universo actual as entidades envolvidas num tipo de interacção não interagem directamente com as responsáveis por outro tipo de interacção (p. ex. massas e cargas eléctricas não interagem mutuamente dum modo directo). Deste modo, cada uma destas interacções fundamentais não pode ser explicada com base em qualquer das outras três nem de combinações de algumas delas.
A primeira dessas quatro interacções fundamentais a ser estudada foi a interacção atractiva entre massas – Gravítica. Só no século XIX foi estudada a segunda interacção – Electromagnética, que surgiu a partir do estudo dos campos eléctrico e magnético, tendo-se compreendido que o campo magnético corresponde a uma variação temporal dum campo eléctrico, ou seja, pode ter origem em cargas eléctricas em movimento.
Ao longo do século XX, com o desenvolvimento da física nuclear, foi possível estabelecer duas teorias que traduzem as interacções entre as partículas constituintes do núcleo e as interacções entre partículas elementares: distingue-se a interacção Nuclear Forte da interacção Nuclear Fraca. A primeira é necessária para traduzir a coesão dos nucleões, contrariando a forte interacção repulsiva (electromagnética) entre as cargas eléctricas positivas dos protões. A segunda é necessária para traduzir fenómenos de decaimento radioactivo em que são emitidos electrões ou anti-electrões

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
7
(positrões). As forças nucleares manifestam-se apenas a distâncias muito pequenas, da ordem de grandeza do tamanho dos núcleos atómicos. Em interacções de carácter macroscópico não teremos de as considerar, uma vez que nas condições ambientais normais não há a possibilidade de fazer aproximar dois núcleos a essas distâncias. Por outro lado, a generalidade dos núcleos existentes na Terra mantém-se estável no seu estado de energia fundamental, contribuindo apenas com a sua carga eléctrica para as interacções que dizem respeito aos átomos. Há, no entanto, alguns núcleos que são instáveis, sujeitos a desintegrações e emissão de radiação. Os que existem naturalmente estão na origem da radioactividade ambiente. Outros podem ser criados artificialmente, com utilizações relevantes para a investigação em Biologia através da síntese e observação do metabolismo de compostos orgânicos marcados, sendo nessas situações necessário conhecer com algum pormenor os diferentes tipos de radiação, o seu impacto para a saúde humana e as medidas de segurança radiológica a ter em conta na sua utilização. Nunca haverá, no entanto, necessidade de considerar as forças nucleares propriamente ditas nas profissões ligadas à Biologia.
Todas as forças que precisamos de considerar em estudos de carácter científico são ou a manifestação directa de uma dessas interacções fundamentais, como o caso do peso dos corpos, ou são derivadas de uma delas. Todas as outras forças do dia-a-dia são derivadas da interacção electromagnética, mesmo quando não estamos a usar directamente as expressões específicas do electromagnetismo. Pensemos na situação familiar da dinâmica de um corpo a escorregar num plano horizontal com atrito, empurrado pela acção de contacto com outro corpo (p. ex. a mão do investigador): o peso do corpo tem de ser considerado usando uma expressão directamente obtida da expressão da interacção gravítica, como adiante lembramos sumariamente; as outras forças estão microscopicamente relacionadas com a interacção electromagnética através da interacção das cargas eléctricas dos átomos (electrões e cargas nucleares positivas) que estão em contacto nas superfícies dos corpos e entre todas as cargas envolvidas na coesão dos átomos no interior dos próprios corpos. Num estudo deste tipo não precisamos de envolver as expressões do electromagnetismo, mas a interacção fundamental está implicada nestas forças que são consideradas na abordagem macroscópica dos fenómenos em estudo. A ferramenta da Mecânica Quântica é necessária à compreensão aprofundada de muitas das consequências desta interacção à escala atómica e molecular, mas não será objecto de estudo desta disciplina.
Voltando às interacções fundamentais, as expressões dos modelos matemáticos que as definem não dão uma explicação do porquê da sua existência. No entanto, alguns aspectos misteriosos, como o facto de as interacções se manifestarem à distância, mesmo na ausência de um meio material (no vazio), são explicadas pelos formalismos da Física moderna, em que se considera que as interacções são caracterizadas pela troca de partículas mediadoras. Os fotões, p. ex., são os mediadores da interacção electromagnética. O carácter instantâneo dos modelos da mecânica clássica e do modelo da interacção electrostática (lei de Coulomb) é retirado ao observar-se que a velocidade da luz não é infinita. A própria interacção gravítica, quando estudada no âmbito da relatividade geral como um campo vectorial, propaga-se à velocidade da luz, à semelhança da interacção electromagnética. Assim foi recentemente demonstrado experimentalmente em algumas observações astronómicas. Actualmente são conhecidas todas as partículas mediadoras das interacções fundamentais, excepto a da interacção gravítica, o gravitão, postulado na teoria quântica de campos mas ainda por demonstrar e observar experimentalmente.
1.1.2 – Leis de Newton
Do ponto de vista clássico, uma interacção manifesta-se por uma alteração do estado de movimento que é característico dum corpo isolado. Dum corpo podemos observar (fazendo medidas) a sua posição e a variação dessa posição em função do tempo (velocidade) relativamente a um sistema de coordenadas de referência. Observa-se que um corpo isolado mantém constante a

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
8
sua velocidade (vector), que pode ser nula (repouso). Esta é a lei da inércia, ou 1ª lei de Newton. Esta e as seguintes são leis fenomenológicas, derivadas de observações experimentais, que permitem prever o comportamento de sistemas da mesma natureza quando conhecidas as condições iniciais, ou seja a posição e velocidade iniciais, e as forças aplicadas (Mecânica).
Ao fazer a observação dos movimentos de dois corpos em interacção (por exemplo num choque entre duas partículas) verifica-se que o parâmetro mais adequado para descrever as alterações sofridas é o momento linear vmp
rr= , e não a velocidade v
r, uma vez que se se considerarem os
dois corpos como um conjunto (sistema) isolado é a soma dos momentos lineares dos dois corpos que se mantém constante. Como consequência, e sendo a variação do momento linear de cada um dos corpos a diferença entre o momento final (depois do choque) e o momento inicial (antes do
choque) if vmvmprrr
−=∆ , a variação do momento linear dum corpo é igual e de sentido contrário
à variação do momento linear do outro: 21
pprr
∆−=∆ . Esta é de novo a expressão da 1ª lei de
Newton, agora não apenas para uma partícula, mas para o sistema de duas partículas. Corresponde ao princípio de conservação do momento linear. O mesmo princípio aplica-se a um sistema de mais de duas partículas, desde que isolado, para o qual se mantém constante o somatório de todos os momentos lineares. É necessário dar atenção ao facto de o momento linear, e a sua variação, serem quantidades vectoriais, com um sentido positivo ou negativo na direcção que os define.
Sendo o tempo de interacção t∆ o mesmo para os dois corpos, podemos escrever a 3ª lei de
Newton, que tem a seguinte expressão:
t
p
t
p
∆
∆−=
∆
∆21
rr
Num choque podemos distinguir facilmente o estado de cada corpo antes (inicial) e depois (final) do choque. Na maior parte dos casos de interacção, no entanto, esta processa-se num tempo alargado, como por exemplo no caso da passagem de um asteróide na proximidade de um planeta. Temos nesses casos mais gerais de considerar as variações instantâneas dos momentos lineares, que são as derivadas em ordem ao tempo, i.e., o limite do quociente atrás considerado:
t
p
dt
pd
t ∆
∆=
→∆
rr
0lim
A 3ª lei de Newton toma então a sua forma mais geral:
dt
pd
dt
pd 21
rr
−=
Esta lei é também designada por lei da acção e reacção, sendo que a acção e a reacção (vectores com o mesmo módulo e direcção e com sentidos contrários) são a manifestação da interacção entre os dois corpos, ou seja, a influência que provocam mutuamente nos seus estados de movimento. Esta variação temporal do momento linear, manifestação da interacção em cada uma das partículas, designa-se por Força. Esta definição de Força constitui a 2ª lei de Newton, ou lei fundamental da
dinâmica:
dt
rr
=
Calculando a derivada do momento linear obtemos: ( )
dt
vdmv
dt
dm
dt
vmd
dt
rr
rrr
+=== . Em
situações (as mais comuns) em que a massa se mantém constante ao longo do tempo obtém-se a
forma mais conhecida da lei fundamental da dinâmica amdt
vdmF
rr
r== , em que a variação
temporal instantânea (derivada) da velocidade é a aceleração.
Física – Licenciatura em Biologia – 2º Semestre 2013/2014
9
1.1.3 – Interacção Gravítica
Uma força que temos sempre de considerar quando estudamos a estática ou a dinâmica de corpos à superfície da Terra (ou nas proximidades de um planeta qualquer) é o peso de cada corpo.
O peso corresponde à força de atracção gravítica GFr
, que é a manifestação da interacção gravítica,
entre massas, e que é uma interacção fundamental. GFr
é uma força sempre atractiva e o seu
módulo é expresso pela lei de atracção universal:
2r
mmGFG
′=
r
em que G = 6.6726×10-11 m3·kg-1·s-2 é a constante de gravitação universal. À superfície da Terra
corpocorpo
T
T
G mgmr
MGF =
=
2
r ,
com TM a massa da Terra e
Tr o raio da Terra. A aceleração gravítica g pode variar de local para
local da Terra, devido à variação de latitude, de altitude ou devido a falta de homogeneidades da distribuição de massa no globo terrestre. Utilizamos o valor médio convencionado g = 9.81 m/s2. Noutro planeta, de massa e raio diferentes, o valor de g será necessariamente diferente do da Terra.
A massa m dum corpo, quando analisamos esta interacção, é designada por massa gravítiva. Os métodos mais usuais de medir a massa dum corpo referem-se à medida do seu peso em comparação com o peso de corpos de massa padronizada. Sendo g a mesma para os dois corpos numa balança, a relação de pesos é a mesma que a relação de massas. A unidade de massa, o quilograma (kg), é uma unidade fundamental do sistema internacional de unidades.
Uma outra quantidade que caracteriza os materiais é a sua densidade, quociente entre a sua massa e o volume que ocupa. Nalguns casos o problema da medida da densidade não é trivial. Como definir, por exemplo, a densidade de um material na forma de pó? Há que considerar os espaços entre grãos. Mergulhar em água ou noutro líquido pode não resolver o problema se há a possibilidade de dissolução do pó ou de absorção do líquido pelo pó, ou do não preenchimento total de todos os poros e interstícios entre grãos. Alguns métodos utilizam gases inertes, como o hélio, para procurar reconhecer qual o volume ocupado realmente pelo material sólido do pó.
1.1.4 – Trabalho e Energia
Uma força realiza trabalho sobre um corpo se contribuir de algum modo para o deslocar no
espaço. Define-se trabalho W realizado por uma força Fr
constante num deslocamento linear dr
como o produto escalar:
dFWrr
⋅=
Só a componente da força segundo a direcção do deslocamento contribui para o trabalho realizado, podendo este ser negativo se a força provocar uma diminuição da velocidade e positivo se a força provocar um aumento da velocidade do corpo. O trabalho é uma quantidade escalar e tem
dimensões de uma energia, com a unidade derivada joule (J ≡ kg·m2·s-2). O cálculo do trabalho realizado por forças variáveis no espaço e em deslocamentos não lineares requer o uso do cálculo integral e não é essencial para esta disciplina.
Física – Licenciatura em Biologia – 2º Semestre 2013/2014
10
O trabalho realizado pela resultante das forças aplicadas a um corpo (soma vectorial de todas as forças), quaisquer que elas sejam, é sempre igual à variação da sua energia cinética:
2
2
12
2
1ifinicialCfinalCCR
mvmvEEEW −=−=∆=r
Uma força diz-se conservativa se o trabalho que realiza for independente da trajectória, o que é equivalente a dizer que o trabalho realizado numa qualquer trajectória fechada é nulo. Cada força conservativa tem associada uma energia potencial, que é definida como uma função apenas das coordenadas, cuja variação entre dois pontos é simétrica do trabalho realizado pela respectiva força conservativa:
( )inicialPfinalPPvaconservatiFEEEW −−=∆−=r
A energia potencial associada à força gravítica à superfície da Terra é EP = m g h, com h a altura a que está o corpo em relação a um referencial h = 0.
A definição de energia potencial diz respeito a uma diferença de energia, e não a uma energia absoluta, pelo que se tem de definir para cada situação concreta qual o ponto ou lugar geométrico que tem energia potencial nula.
Uma força cujo trabalho não seja igual ao simétrico da variação de uma função das coordenadas, energia potencial, é evidentemente uma força não conservativa. Um exemplo é o das forças de atrito.
Sobre um determinado corpo podem estar aplicadas várias forças conservativas (p. ex. gravítica, electrostática), cada uma com a sua energia potencial associada, além de outras não conservativas.
1.1.5 – Energia num Choque
No problema do choque entre corpos podemos também juntar a informação sobre a energia, começando por considerar as diferentes situações que podem acontecer num choque que ocorra num plano horizontal: se a energia cinética total do sistema se conserva o choque diz-se elástico, caso contrário o choque diz-se inelástico (ou não elástico).
Num choque elástico entre dois corpos podemos escrever então a seguinte equação, além da de conservação do momento linear, que é sempre válida:
2
22
12
12
12
22
12
12
1ffii mvmvmvmv +=+
Num choque inelástico, parte da energia cinética que os corpos tinham antes do choque é dissipada noutras formas de energia, resultando por exemplo num aumento da energia interna (térmica) dos corpos, numa deformação dos corpos ou na propagação de uma onda sonora. Apesar de o momento linear total se conservar ainda, a relação de conservação da energia cinética já não é válida.
O caso extremo de inelasticidade corresponde ao choque totalmente inelástico, no qual os dois corpos têm velocidades finais iguais, i.e., ficam “colados” um ao outro.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
11
1.2 – Forças de Pressão
1.2.1 – Modelo Cinético dos Gases Perfeitos
Um gás perfeito é uma abstracção idealizada, na qual se faz a aproximação de considerar que as moléculas não interagem entre si, i.e., cada molécula pode percorrer todo o volume disponível no contentor sem que encontre ou seja influenciada no seu movimento por qualquer outra das moléculas do próprio gás. À pressão atmosférica e à temperatura ambiente os gases constituintes do ar podem ser considerados como gases perfeitos dentro duma boa aproximação.
Um volume de um gás perfeito consiste então num número muito grande (da ordem de grandeza da constante de Avogadro) de moléculas com movimentos aleatórios, sendo a temperatura do gás proporcional à energia cinética média das suas moléculas. A única interacção que uma molécula tem é através dos choques com as paredes do contentor.
Para haver mudança de direcção do movimento da molécula num choque tem de haver uma força exercida pela parede na molécula, assim como uma força de reacção que a molécula exerce sobre a parede. A parede não se move uma vez que o contentor fica em equilíbrio, por ser nula a soma vectorial de todas as forças exercidas pelo número total de moléculas em cada uma das paredes, supondo rígido o contentor. A força exercida pelas moléculas do gás sobre as paredes do contentor faz-se sentir uniformemente em toda a superfície, podendo então definir-se uma pressão que o gás exerce sobre uma parede do contentor como o quociente entre a força resultante e a área dessa parede, sendo o resultado igual para todas as paredes:
A
FP R=
As unidades de pressão são assim N/m2, a que corresponde uma unidade própria no S.I. que se chama pascal e tem o símbolo Pa.
1.2.2 – Pressão entre Superfícies Sólidas
A força de compressão entre duas superfícies sólidas é distribuída pela área de contacto, variando a pressão na razão inversa da área. Os efeitos (por exemplo, a deformação da superfície) da mesma força fazem sentir-se com maior intensidade se a área de contacto for menor, ou seja, se o número de átomos em contacto for menor.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
12
1.3 – Equilíbrio de um Corpo Rígido
1.3.1 – Sistema de Partículas e Corpo Rígido
Da segunda lei de Newton (definição de força) sabemos correlacionar a aceleração de uma partícula de massa m constante com a força que lhe é aplicada. Se houver várias forças aplicadas ao mesmo tempo sabemos ainda que a aceleração da partícula deriva da resultante das forças aplicadas, isto é, da resultante da soma vectorial de todas as forças aplicadas (princípio de sobreposição de forças):
amFRi
i
rrr==∑
O conceito de partícula implica que a sua massa está toda concentrada num ponto do espaço, o que evidentemente não é verdade para corpos macroscópicos, constituídos por um número muito elevado de átomos. Estando a massa de cada átomo praticamente toda no respectivo núcleo, cujo tamanho é muitíssimo menor que o do próprio átomo, é razoável fazer a aproximação de considerar um corpo como constituído por partículas coincidentes com os núcleos dos seus átomos.
Na Física chamamos sistema de partículas a um conjunto de duas ou mais partículas que estejam de algum modo implicadas em conjunto nalguma situação em estudo. Se as partículas estiverem ligadas entre si (ver secção 1.5.1) o sistema de partículas constitui um corpo. Um corpo é sólido se as partículas vizinhas de cada uma forem sempre as mesmas ao longo do tempo. As distâncias entre os átomos de um corpo sólido real não são rígidas, podendo alterar-se ligeira ou fortemente quando sujeitas a forças de compressão ou distensão, como descrito no capítulo 2. Além disso, os átomos dum sólido têm constantemente movimentos de vibração em torno de posições de equilíbrio, com energia correlacionada com a temperatura do material e correspondente ao que designamos por energia interna do sistema.
Para estudar dum modo simplificado a dinâmica ou o equilíbrio dum corpo macroscópico cuja forma se mantenha razoavelmente inalterada, a Física adopta em primeira aproximação um conceito idealizado em que se desprezam as deformações e as oscilações das ligações atómicas, considerando que as distâncias entre as partículas constituintes são fixas, designando-se um tal corpo como corpo rígido.
1.3.2 – Dinâmica do Corpo Rígido
A questão que se põe a seguir é como reage um corpo rígido à acção de forças externas.
Imaginemos uma régua homogénea (a mesma densidade em todo o volume) numa situação de imponderabilidade, isto é, sem peso aparente como acontece na estação espacial internacional. Se não se lhe aplicar qualquer força ela fica parada ou com velocidade constante (primeira lei de Newton). Sendo um corpo não pontual, com dimensões, a velocidade constante pode não ser de translacção, mas de rotação, ou as duas combinadas. Para uma partícula não faz sentido a rotação, mas no estudo da dinâmica dum corpo rígido temos de considerar velocidades angulares (ou de rotação) e as suas variações temporais a que chamamos acelerações angulares.
Acelerações implicam a aplicação de forças, mas temos agora que esclarecer quando é que uma força provoca acelerações angulares ou acelerações lineares.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
13
Voltando à régua sem peso aparente, se aplicarmos uma só força no seu centro geométrico observamos que o resultado é uma aceleração de translacção na direcção e no sentido do vector força aplicada, sem que haja qualquer aceleração angular.
Se aplicarmos a mesma força em qualquer outro ponto da régua haverá uma combinação de acelerações de translacção e de rotação. Ao centro geométrico da régua chamamos neste contexto centro de massa. A aceleração linear de translacção continua a ser dada pela segunda lei de Newton, mas é curioso notar que é apenas o centro de massa que segue um movimento rectilíneo e uniformemente acelerado (se a régua estava inicialmente em repouso de translacção e de rotação), enquanto todos os outros pontos da régua têm movimentos combinados de translacção e de rotação. A segunda lei de Newton
para a translacção escreve-se então do seguinte modo, com CMar
a aceleração do centro de massa:
CM
i
i aMFRrrr
==∑
1.3.2.1 – Momento de uma Força
Para analisarmos a capacidade que uma força tem para provocar acelerações angulares, observemos a situação comum do dia a dia de abrir ou fechar uma porta: sabemos da nossa experiência comum que a eficácia com que abrimos a porta depende do ponto onde aplicamos a força e da direcção em que a aplicamos: a rotação é tanto mais eficaz quanto maior a distância do ponto de aplicação da força ao eixo de rotação e quanto mais próximo de 90° for o ângulo formado pelo vector força e pelo vector posição
rr do ponto de aplicação em relação ao eixo. Repare-se na
figura do meio abaixo que as forças 1 e 2 têm eficácia nula, enquanto a força 3 tem a máxima eficácia. É natural então que os parâmetros envolvidos na origem da aceleração angular sejam a intensidade da força, o vector posição do ponto de aplicação da força e o seno do ângulo entre os dois vectores. Com estes parâmetros define-se uma quantidade vectorial que se chama momento
da força em relação ao ponto de rotação:
FrMrrr
×=
O módulo do momento é
bFsenFrMrrrr
== θ
em que b é chamado o braço da força em relação a O. Notar que este vector depende do ponto O em relação ao qual é determinado.
brr
Fr
θ
O
Mr
brr
Fr
θ
O
Mr

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
14
1.3.2.2 – Binário de Forças
Um binário de forças é um sistema de forças constituído por duas forças com o mesmo módulo, direcções paralelas, sentidos contrários, e com pontos de aplicação diferentes. A soma vectorial destas duas forças é evidentemente nula, pelo que se forem estas as únicas forças a actuar sobre um corpo, a aceleração linear do seu centro de massa é nula.
O mesmo não acontece, porém com a soma vectorial dos momentos:
( ) FrFrrFrFrM total
rvrrvrrrvr×=×−=×−×=
2121
dFsenrFsenFrM === θθrvr
O resultado é independente do ponto O em relação ao qual se calculam os momentos de cada força e é ainda independente da posição de cada vector na sua recta de suporte. Embora a resultante do binário seja nula, não é nulo o momento resultante, pelo que o corpo terá uma aceleração angular não nula. É muito comum referirmo-nos a um binário de forças apenas pelo seu momento resultante, o qual é muitas vezes designado simplesmente por binário.
A aceleração angular αr
é proporcional ao momento resultante, o mesmo acontecendo se houver mais do que duas forças aplicadas:
αrr
IM i =∑
A constante de proporcionalidade é uma característica da distribuição geométrica da massa do corpo e chama-se momento de inércia. Não cabendo no âmbito desta disciplina explorar mais a fundo os aspectos da dinâmica de rotação do corpo rígido, deixemos ficar este assunto por aqui e passemos a explorar apenas as situações em que as acelerações, tanto a de translacção como a de rotação, são nulas, isto é, as situações de equilíbrio do corpo rígido.
1.3.3 – Condições de Equilíbrio Estático do Corpo Rígido
Como já afirmado atrás, um corpo rígido está em equilíbrio se forem nulas as suas acelerações linear e angular. As condições de equilíbrio são então satisfeitas se:
0== ∑ iFRrr
0== ∑ iR MMrr
Estático significa parado, com velocidade nula. As condições para o equilíbrio são necessárias, mas não suficientes para a estática dum corpo. É condição adicional que a velocidade seja nula.
Para verificar as condições de equilíbrio de um dado corpo rígido é necessário conhecer todas as forças que lhe estão aplicadas, sem esquecer forças de apoios e o peso que está aplicado no centro de massa. Escolhido um sistema de eixos cartesiano, deve verificar-se se a soma vectorial das próprias forças é nula. Escolhido um ponto qualquer do corpo, em geral um ponto em relação ao qual se suspeita que o corpo pode rodar, determinam-se os momentos de todas as forças em relação a esse mesmo ponto, verificando-se na situação de equilíbrio de rotação que o somatório dos momentos é nulo. Convém notar que sendo o momento de uma força um vector, é necessário ter em conta os sentidos de cada um dos momentos ao realizar a soma, que é também vectorial.
d
Fr
Fr
−rr
O1rr
2rr
Mr

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
15
1.4 – Electrostática
1.4.1 – Lei de Coulomb
Observações antigas correlacionadas com o que hoje chamamos interacção eléctrica, separadas então das observações dos fenómenos magnéticos, tinham já dado conta da existência de dois tipos de carga que se manifestam pelas forças atractivas ou repulsivas entre cargas de tipos diferentes ou do mesmo tipo, respectivamente. Estas forças são observadas
quando se friccionam materiais isolantes de naturezas diferentes, como se ilustra na figura com objectos de plástico ou de vidro, que podem ser carregados com
electricidade estática por este método.
A aplicação do método científico a este problema resultou na formulação por Coulomb da lei fundamental que descreve a interacção electrostática entre duas cargas pontuais em repouso, depois da realização de inúmeras experiências controladas em que eram medidas as forças e as distâncias entre as duas cargas. Foi necessário introduzir uma nova unidade nos sistemas de unidades para a carga eléctrica, o coulomb (C). Esta interacção é um aspecto particular da interacção electromagnética. A unidade fundamental do sistema internacional correspondente é actualmente o ampere (A), unidade de corrente eléctrica dimensionalmente equivalente a C/s.
A Lei de Coulomb para a interacção electrostática expressa-se do seguinte modo:
rr
QQkF ˆ
2
21=r
Fr
é a força que se exerce entre as duas cargas eléctricas Q1 e Q2 quando colocadas a uma distância r entre si. k é uma constante universal que depende do sistema de unidades e tem o valor no SI de k = 8,988×109 N·m2/C2. r é o versor da direcção radial para fora a partir da carga que origina a força e que é colocado no ponto onde está a outra carga, ou seja, define a direcção entre as duas cargas e o sentido de cada uma das duas forças sentidas pelas duas cargas. Estes sentidos são então contrários, como aliás é de esperar das duas forças de acção e reacção duma interacção. O sentido das forças depende ainda do sinal do produto das duas cargas, que podem ser negativas ou positivas, sendo as forças repulsivas se as cargas tiverem o mesmo sinal e atractivas se as cargas tiverem sinais contrários.
A carga eléctrica existe na Natureza em quantidades discretas, i.e. múltiplas de um valor fixo, que é a carga de um protão (positiva), ou a de um electrão (negativa), cujo módulo é designado por carga elementar e = 1,60×10-19 C.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
16
1.4.2 – Campo Eléctrico
Os tratamentos mais gerais das interacções entre cargas eléctricas, no electromagnetismo, não utilizam as forças a não ser quando em resultados finais do estudo ou desenho (engenharia) de distribuições de cargas ou correntes eléctricas. Os formalismos mais gerais são extremamente simplificados pela introdução de um outro conceito relacionado com a força electrostática – o do campo eléctrico, quantidade também vectorial e que se justifica e obtém do modo que se descreve de seguida.
Uma carga +Q fixa num ponto e isolada não provoca força electrostática nenhuma simplesmente porque não há outra carga sobre a qual possa ser exercida essa força. No entanto, a carga tem a potencialidade de vir a provocar uma força electrostática sobre uma outra carga q0, se esta for colocada nas proximidades da primeira. A esta carga q0 chamamos carga de prova, por ser um meio de sondar o espaço circundante de Q acerca da potencialidade de esta última exercer forças electrostáticas. Como resultado desta sondagem, definimos uma quantidade vectorial que designamos por campo eléctrico, associada a cada ponto do espaço circundante da carga Q onde a carga de prova
poderá sentir a força Fr
:
rr
Qkr
qr
qQk
q
FE ˆˆ
2
0
2
0
0
===
rr
O campo eléctrico Er
é uma quantidade independente da carga de prova, a qual só serviu para o definir. O campo eléctrico é apenas função da carga Q que o origina e das coordenadas r
r de cada
ponto do espaço em relação a essa carga. Q é assim a carga origem do vector campo eléctrico, com
r o versor da direcção radial a partir da posição de Q. O campo eléctrico devido a uma carga pontual é radial, apontando para fora da carga Q se ela for positiva e apontando para a carga se ela for negativa. Pode dizer-se que o campo eléctrico diverge a partir das cargas positivas e converge para as cargas negativas.
Para termos uma noção rápida e sumária das características do vector campo eléctrico nas proximidades de uma (ou mais) carga eléctrica pontual usa-se a simulação de linhas de campo, que
têm as seguintes características: (a) O vector campo eléctrico é tangente à linha de campo em qualquer ponto do espaço; (b) O vector campo eléctrico tem o sentido definido pela seta marcada na linha de campo; (c) A intensidade do campo (módulo do vector campo) é proporcional à densidade de linhas de campo em cada ponto.
Não se podem desenhar, evidentemente, todas as linhas de campo no espaço à volta das cargas origem, pelo que se desenham só algumas para simplificar o desenho, mas em número suficiente para o diagrama nos dar uma ideia da geometria global do campo total. Podemos fazer interpolações geométricas entre as poucas linhas representadas, para saber o campo eléctrico num ponto situado entre duas linhas. Não esquecer que as linhas de campo se definem nas três dimensões, sendo os desenhos apenas um corte no plano da folha.
Quando temos mais do que uma carga eléctrica, é válido o princípio de sobreposição de forças,
transcrito para o vector Er
directamente pela sua definição. O campo devido a um conjunto de

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
17
cargas é simplesmente a soma vectorial dos campos provocados por cada carga pontual individual. As figuras seguintes mostram as linhas de campo provocadas por diversas distribuições de cargas pontuais ou linhas de carga.
1.4.3 – Potencial Eléctrico
Pensemos agora de novo na força electrostática, de modo a introduzir o conceito de potencial eléctrico, indispensável quando se estudam circuitos e correntes eléctricas ou na aplicação de alguns métodos analíticos, além da resolução de problemas de electrostática de geometrias mais complexas que aqui não abordaremos.
Pensemos então na força electrostática sentida por uma carga q, esquecendo outras forças como
a gravítica, ou seja, uma carga sujeita apenas a um campo eléctrico Er
. Não interessa também agora considerar que cargas provocam esse campo. A força é então:
EqFrr
=
Se esta for a única força aplicada à carga, como estipulámos, podemos usar a segunda lei de Newton para obter a aceleração da carga, se ela estiver associada a uma partícula ou corpo com
massa m constante: amEqrr
= . Se o campo for um campo uniforme (vector campo eléctrico igual
em todos os pontos do espaço considerado, i.e. com linhas de campo rectilíneas e paralelas), como ilustrado na figura junta, o movimento é uniformemente acelerado. O trabalho realizado pela força eléctrica constante é igual à variação da energia cinética. Pode demonstrar-se que a força electrostática é uma força conservativa, pelo que aquele trabalho é também igual ao simétrico da variação de uma energia potencial EP:
dEqEEdFW PCab
rrr=∆−=∆=⋅= ,
em que d é a distância percorrida pela carga acelerada sob influência daquele campo.
Define-se diferença de potencial eléctrico como o quociente entre o simétrico da variação de energia potencial electrostática e o valor da carga acelerada:
dEq
EVVV P
ba
r=
∆−=∆=−
O potencial eléctrico, definido sempre a menos duma constante que determina o local de
potencial nulo, é o quociente qEV P= , com unidades J/C, ou simplesmente volt (V).
Como curiosidade, notamos que a unidade de energia electrão-volt (eV) se define como a energia cinética adquirida a partir do repouso por um electrão (carga elementar) quando acelerado por um campo eléctrico uniforme numa distância para a qual a diferença de potencial seja de um volt.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
18
1.4.4 – Polarização da Matéria
Consideremos agora um conjunto de duas cargas pontuais de igual módulo mas sinais contrários colocadas a uma distância a fixa entre elas. A carga total é nula mas o conjunto cria um campo eléctrico à sua volta como ilustrado numa das figuras da secção anterior. Este arranjo de duas cargas chama-se dipolo eléctrico.
Vejamos como reage um dipolo eléctrico quando sujeito a um campo eléctrico uniforme exterior, produzido por outras cargas que não nos interessa aqui considerar. Cada uma das cargas do dipolo
fica sujeita a uma força Eqr
na direcção do campo (ver figura junta, em que os símbolos de vector
campo eléctrico estão identificados a negrito), com a mesma intensidade mas sentidos contrários. Mantendo fixa a distância a entre as cargas percebemos que o dipolo vai ter tendência a rodar até ficar alinhado com o campo, mas a resultante de forças é sempre nula, pelo que não há translacção do dipolo devido a este campo. Se o dipolo não estiver sujeito a mais nenhuma força, ficará a oscilar em torno da posição de equilíbrio, que é a posição de alinhamento com o campo. Define-se o momento dipolar do dipolo pelo vector aqp
rr= .
Os materiais, isolantes ou condutores, podem ser electrizados, adquirindo uma carga electrostática global macroscópica. Em geral, no entanto, a matéria e os corpos encontram-se neutros (com carga total nula), apesar de serem constituídos microscopicamente por cargas positivas (núcleos atómicos) e negativas (electrões) em quantidades muito elevadas, da ordem de grandeza do número de Avogadro.
A nível das dimensões atómicas e moleculares, por outro lado, a distribuição dessas cargas positivas e negativas não é igualmente uniforme, existindo zonas do espaço onde há mais carga dum tipo do que do outro. Um átomo neutro isolado pode ter uma distribuição média esférica de cargas, mas moléculas constituídas por vários átomos, em particular as constituídas por átomos de elementos químicos diferentes, ou com afinidade electrónica diferente, têm muitas vezes distribuições muito assimétricas de carga electrónica, mantendo a molécula a sua neutralidade global. No caso da molécula de água, p. ex., o átomo de oxigénio tem maior afinidade para os electrões do que os átomos de hidrogénio. A molécula constitui assim um dipolo eléctrico, com o centro de cargas negativas mais próximo do átomo de oxigénio e o de cargas positivas num ponto entre os átomos de hidrogénio.
É fácil entender que moléculas dipolares tenderão a alinhar-se na direcção de um campo eléctrico externo que se lhes aplique, podendo o material macroscópico ficar polarizado, embora neutro. Este campo externo pode inclusive ser provocado por uma molécula dipolar nas suas proximidades.
Muitos outros átomos ou moléculas que não têm por natureza distribuições de carga dipolares podem ainda ser polarizados quando sujeitos a campos eléctricos externos, por separação dos centros geométricos das cargas positivas (núcleos) e negativas (nuvens electrónicas). Estamos perante uma polarização induzida. Mais uma vez, para este efeito basta muitas vezes o campo eléctrico criado por uma molécula dipolar que esteja na proximidade.
Nas moléculas orgânicas, mais ou menos complexas, há ligações covalentes entre átomos de elementos diferentes, como por exemplo a ligação entre um N e um H, ou entre um C e um O, em que a maior afinidade electrónica de um dos átomos cria uma separação local de centros de carga positiva e negativa. A molécula não constituirá necessariamente um dipolo como um todo, mas

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
19
essas distribuições locais não deixam de criar um campo eléctrico de pequena intensidade que pode ser sentido por outras distribuições assimétricas de carga nas proximidades, eventualmente de outra molécula. Isto tem repercussões importantíssimas em muitos processos biológicos, pela possibilidade de se criarem ligações atractivas entre moléculas, sem a intervenção de ligações covalentes, principalmente se a geometria de configuração das moléculas intervenientes for favorável à ligação. Esta poderá adicionalmente ser reforçada se houver mais do que um ponto de ligação, criando uma compatibilidade entre as moléculas de tal modo que se pode falar em reconhecimento mútuo. As mais importantes destas ligações são as que se formam quando está envolvido um átomo de hidrogénio, chamadas ligações de hidrogénio.
Nas próximas figuras ilustra-se como estas ligações são o fundamento para a ligação entre as bases na dupla cadeia helicoidal de DNA. Muitos processos biológicos de reconhecimento molecular são realizados por este meio.
Na próxima secção enquadra-se este tipo de ligação no problema mais geral de coesão da matéria.
1.5 – Outras Forças Derivadas
Quando lidamos com corpos ou materiais de dimensões macroscópicas ou microscópicas nas suas interacções mútuas, temos em geral de considerar forças que não são de carácter fundamental. Qualquer força, no entanto, tem de ser derivada de pelo menos uma das quatro interacções fundamentais. Identificadas claramente as forças com origem na interacção gravítica e posta de lado a intervenção das interacções nucleares, teremos necessariamente de concluir que todas as outras forças que vamos considerar têm origem na interacção electromagnética. Esta faz-se sentir através das interacções complexas das unidades estruturais básicas constituintes da matéria – os átomos, com as suas cargas nucleares positivas e as distribuições de carga associadas às funções de onda electrónicas. Trataremos aqui de alguns tipos de forças derivadas da interacção electromagnética, na perspectiva microscópica das interacções (não fundamentais) entre os átomos ou moléculas constituintes de materiais: as forças de ligação (coesão e adesão), forças de contacto simples, e as forças que se opõem ao movimento relativo entre corpos sólidos ou de corpos sólidos em meios fluidos (atrito e resistência).

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
20
1.5.1 – Forças de Ligação
Dum ponto de vista global pode fazer-se a distinção entre forças de coesão e forças de adesão, sendo as primeiras definidas como forças de ligação entre materiais semelhantes, e as segundas como ligações entre materiais diferentes. A ideia de coesão estará assim associada com as forças internas que mantêm coesos os materiais em agregados de dimensões que podem ser macroscópicas (corpos). A ideia de adesão estará por seu lado associada a forças de ligação entre agregados originalmente separados, ou seja, a corpos ou agregados que são “colados” entre si para formar um corpo de maiores dimensões. Do ponto de vista microscópico estes dois tipos de forças são explicados pelas mesmas interacções (ou forças) de ligação, pelo que não as vamos distinguir nas considerações seguintes, em que falaremos de ligações que abrangem também materiais que não estão no estado sólido.
Na matéria condensada (sólidos e líquidos) os átomos ou moléculas base estão agregados entre si através de ligações de carácter predominantemente atractivo. Estas mesmas ligações podem, no entanto, tomar um carácter fortemente repulsivo se os átomos ou moléculas forem forçados a aproximar-se para lá da distância de equilíbrio, por exemplo se um material for comprimido por acção de forças exteriores, como as forças de pressão a grande profundidade no oceano. Nos gases, as forças de ligação entre os átomos ou moléculas constituintes são superadas pela energia cinética ou rotacional e vibracional próprias da temperatura desse estado para cada material. A condensação dum gás no estado líquido pode fazer-se quando estas energias se tornam suficientemente baixas para permitir a formação das ligações possíveis, ou seja, quando a temperatura descer abaixo da temperatura de ebulição. Em geral, quanto mais intensas são as forças de ligação possíveis para um material, maior será a temperatura daquela transição de fase.
As forças de ligação mais intensas são as ligações químicas covalentes, responsáveis pela coesão de moléculas (ligações intramoleculares), polímeros e muitos sólidos inorgânicos. As ligações
metálicas são de carácter diferente das covalentes, no sentido em que os electrões são partilhados (electrões de condução) por um número macroscópico de átomos do material, ao passo que nas covalentes a partilha de electrões é feita entre dois ou um número muito limitado de átomos. As ligações iónicas, responsáveis pela coesão de sais inorgânicos (p. ex. Na+Cl-), correspondem também a forças de ligação de grande intensidade uma vez que envolvem cargas eléctricas da ordem da carga inteira do electrão separadas por distâncias muito pequenas. As diferenças entre estes tipos de ligação e as suas intensidades dão origem a uma grande diversidade de manifestações de algumas propriedades físicas de materiais. As ligações agora enumeradas são designadas como ligações fortes.
As ligações fracas são de carácter electrostático, envolvendo distribuições de carga electrónica não homogéneas que podem formar dipolos eléctricos ou distribuições com simetrias ainda menores, formando quadrupolos ou multipolos de ordens mais elevadas. A separação de cargas não é tão clara nem os valores de carga presentes em volumes definidos são tão elevados como nas ligações iónicas, conferindo assim um carácter de menor intensidade a estas ligações. Apesar disso, mantém-se um carácter atractivo na ligação entre moléculas (ligações intermoleculares) com distribuições de cargas destes tipos. O exemplo mais comum duma molécula dipolar é o da água, característica que lhe confere muitas das suas propriedades físicas e químicas. Outras moléculas são apolares no seu estado normal, mas são induzidas a tornar-se polares pela presença de dipolos eléctricos na sua vizinhança. Há então a possibilidade de ligações entre um dipolo permanente e um dipolo induzido, mais fracas que as anteriores. Mais fracas ainda são as ligações entre moléculas com distribuições quadrupolares de carga.
Resumindo, as ligações electrostáticas podem ter origem em interacções entre dois dipolos permanentes, entre um dipolo permanente e um dipolo induzido, entre dipolo e quadrupolo, entre

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
21
quadrupolos. Por último na escala de intensidade, temos a interacção entre dipolos ou multipolos
induzidos apenas temporariamente, por alterações breves da simetria de distribuições electrónicas. Este último tipo de ligação é o responsável pela agregação de átomos de gases raros (hélio, árgon, etc.) no estado líquido, o que acontece apenas a temperaturas extremamente baixas, dada a natureza extremamente fraca da ligação.
As forças de van der Waals designam simplesmente ligações electrostáticas, havendo grande diversidade de significados específicos para a expressão. As ligações de hidrogénio, como se referiu na secção anterior, são ligações electrostáticas que envolvem um átomo de hidrogénio parcialmente despido do seu electrão numa das moléculas ligadas, em frente de um átomo aceitador de electrões (p. ex. N ou O) na outra molécula.
A agregação dos materiais líquidos não é feita por ligações fortes, mas tem origem em ligações electrostáticas (entre dipolos em materiais que são líquidos a temperaturas próximas da ambiente). As moléculas são atraídas entre si pelas partes de carga contrária. Estas forças de coesão estão na origem da tensão superficial, que estudaremos mais adiante.
Muitas ligações entre moléculas orgânicas com actividades bioquímicas são feitas através de ligações electrostáticas em mais do que um ponto, o que fortalece a coesão e confere até em muitos casos um carácter de reconhecimento mútuo quando há a conjugação geométrica dos vários pontos de atracção. Ainda noutros casos com diversos pontos de ligação, a geometria das moléculas agregadas é tão complexa que elas se entrelaçam, acrescentando um carácter mecânico à ligação, quebrável apenas se forem forçadas a romper algumas ligações covalentes.
1.5.2 – Forças de Contacto
Falamos de forças de contacto quando dois corpos sólidos se empurram, ou seja quando as superfícies (ou parte das superfícies) tocam uma na outra exercendo uma acção de compressão mútua, sem a intervenção de forças de coesão ou adesão entre as superfícies. Efeitos mistos de coesão e adesão podem, no entanto, existir em muitas situações reais.
No limite microscópico, as forças de contacto têm origem novamente nas forças de natureza electromagnética entre os átomos de cada superfície, mas agora a sua manifestação tem carácter repulsivo, opondo-se à tentativa de os átomos que tocam ocuparem o mesmo espaço físico. Haverá algum deslocamento das nuvens electrónicas dos átomos das primeiras camadas superficiais nos pontos de contacto, contando com a rugosidade natural das superfícies, além de algum deslocamento colectivo dos átomos de todo o volume, de acordo com a elasticidade do material (ver a secção 2.1). Os átomos são assim afastados das suas posições naturais de equilíbrio. Se o esforço de compressão não for para além dum certo limite, a estrutura atómica tem tendência a recuperar a sua forma original após separar de novo as superfícies, o que equivale a dizer que há uma força de restauração que contraria a deformação, como no caso duma mola comprimida.
Macroscopicamente, uma força de contacto pode equilibrar outras forças que estão aplicadas a um corpo, como no caso dum corpo pousado numa mesa, em que o peso do corpo é equilibrado pela força de contacto que a mesa exerce sobre ele.
1.5.3 – Forças de Atrito
Temos de considerar forças de atrito quando as superfícies de corpos sólidos em contacto são forçadas a deslocar-se mutuamente ao longo do plano das superfícies e há uma força que contraria
F F
F F F F

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
22
esse deslocamento. De notar que a força de atrito só se faz sentir se existir uma força de contacto que empurra as superfícies uma contra a outra.
Estas forças de atrito entre superfícies sólidas não têm origem sempre no mesmo tipo de fenómeno. Podem estar em jogo forças de contacto, ou forças de adesão ou de coesão nos pontos microscópicos de verdadeiro contacto entre alguns átomos ou moléculas das superfícies.
As forças de contacto têm relevância especial se as superfícies forem rugosas: um encaixe parcial das rugosidades das duas superfícies pode dificultar o movimento lateral relativo, sendo necessária alguma força numa direcção do plano das superfícies para desencaixar as rugosidades a partir do repouso, ou fazer saltar as rugosidades através dos encaixes menos perfeitos quando as superfícies já estão em movimento. Esta distinção entre as situações de repouso ou movimento relativo das superfícies implica a definição de dois coeficientes de atrito diferentes: estático e cinético. O coeficiente de atrito cinético é sempre menor que o estático, para as mesmas superfícies.
Além das forças de contacto das rugosidades das superfícies, também podem ser importantes as forças de adesão ou coesão, se houver afinidade electrostática ou química entre os constituintes das duas superfícies. Ainda aqui será maior a força de atrito numa situação estática do que numa situação de movimento.
Quanto maior for a força de contacto macroscópica entre as superfícies (perpendicular, ou normal, à tangente da superfície macroscópica de contacto), mais eficaz é o encaixe das rugosidades e maior é a superfície total sujeita a ligações de adesão ou coesão (quando existirem). A força de atrito é assim
proporcional à força de contacto (força normal): NFa
rrµ= ,
em que µ é o coeficiente de atrito (cinético ou estático), que
depende dos dois materiais em contacto. Estes coeficientes podem ser medidos em experiências e tabelados para pares de superfícies de uso mais comum.
1.5.4 – Forças de Resistência
As forças que um fluido (gás ou líquido) opõe à passagem dum corpo sólido são chamadas forças
de resistência. São muitas vezes classificadas também como forças de atrito, estando na sua base o efeito do choque das moléculas do fluido com o corpo, ou vice-versa. Podem formar-se zonas de pressões diferentes nas diversas superfícies dum corpo em movimento num fluido, associadas a formas não simétricas ou a fenómenos de turbulência, que impõem componentes transversais às forças de resistência ou simplesmente adicionam mais resistência ao movimento.
Outro tipo de forças de resistência em líquidos (ou em gases não ideais) provém das forças de coesão entre as próprias moléculas constituintes, limitando o movimento relativo das próprias moléculas e dificultando a passagem de corpos sólidos no seu meio. O conceito de viscosidade do fluido está associado a estas forças de resistência.
Algumas destas forças serão tratadas em pormenor mais adiante, no capítulo de dinâmica de fluidos.
N
N
NN
NN
N
N
NN
NN

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
23
Capítulo 2
Mecânica dos Meios Contínuos
2.1 – Elasticidade
Como se viu no capítulo anterior, as forças de coesão dos materiais procedem das ligações interatómicas ou intermoleculares dos constituintes microscópicos dos materiais. As distâncias relativas entre esses constituintes correspondem a posições de equilíbrio quando o material não está sujeito a solicitações externas, mas se as houver, estas distâncias podem alterar-se, diminuindo se a solicitação externa macroscópica for de compressão ou aumentando se a solicitação externa for de tracção (distensão). As posições de equilíbrio serão retomadas depois de deixar de ser exercida a solicitação externa, se esta não tiver ultrapassado um certo limite de intensidade até ao qual o material tem este comportamento, designado como comportamento elástico. Para estudar o comportamento de materiais perante estas solicitações externas e aplicando o método científico, é necessário começar por distinguir situações com geometrias simples, definindo vocabulário e quantidades adequadas.
Consideremos em primeiro lugar um corpo homogéneo cilíndrico, com área de base A e comprimento em repouso L, sujeito a duas forças de tracção nos topos segundo a direcção do eixo do cilindro. O cilindro tem um aumento de comprimento de um valor l, como sugere a figura. Façamos a aproximação de desprezar neste problema a inevitável e pequena redução do diâmetro, que existe por se manter aproximadamente constante o volume total. Definimos tensão de tracção (ou de compressão se as forças forem de sentidos contrários aos da figura) como AF=σ . Chamamos deformação a
Ll=ε .
Para pequenas deformações a tensão é proporcional à deformação:
L
lY
A
FY =⇔= εσ
Esta é a expressão da Lei de Hooke. O factor de proporcionalidade Y designa-se por módulo de
elasticidade, ou módulo de Young e tem unidades de N/m2, ou Pa, unidade de pressão.
A lei de Hooke, de proporcionalidade entre a tensão e a deformação pode ser usada para descrever também a situação em que uma tensão isostática (igual em qualquer direcção) de

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
24
compressão é aplicada a um volume V0 de um material homogéneo, diminuindo de modo idêntico as
três dimensões, com a variação de volume ∆V. A tensão de compressão é
agora simplesmente um acréscimo de pressão externa ∆P que se exerce sobre todas as superfícies do corpo. A lei de Hooke toma agora a expressão:
( )0VVBP ∆−=∆
em que B é o módulo de compressibilidade, com unidades de pressão, Pa.
Uma terceira geometria que interessa considerar na aplicação de tensões a materiais homogéneos é a da aplicação de duas forças paralelas, de sentidos contrários, com as direcções de aplicação separadas de uma distância l. O material é deformado segundo um
ângulo θ, definindo-se uma deformação de corte (ou deslizamento)
pela expressão lxtg ∆=θ . À tensão assim aplicada chama-se tensão
de corte, definida mais uma vez com unidades de pressão, como F/A, sendo A a área deslocada no plano da força aplicada. A lei de Hooke escreve-se para este caso:
θθ SSS MtgMlxMAF ≈=∆=
MS (em Pa) designa-se por módulo de corte, ou de deslizamento, ou de rigidez.
Em muitas circunstâncias, porém, a tensão aplicada tem ainda outras geometrias, para as quais se pode escrever a respectiva lei de Hooke com o módulo respectivo definindo a proporcionalidade válida para pequenas deformações. Distinguimos aqui a tensão de flexão e a tensão de torção, ilustradas pelas figuras juntas.
2.2 – Plasticidade e Ruptura
Como se referiu atrás, quando se aplica uma tensão de deformação a um material homogéneo de geometria simples, como nos três casos descritos, todas as unidades estruturais (átomos ou moléculas) alteram as suas posições relativas, deixando de estar nas posições de equilíbrio, tendendo as forças de ligação a repor essas posições de equilíbrio quando deixa de ser aplicada a tensão exterior.
É fácil de imaginar que se se aplicar uma tensão com intensidade acima de um certo limite, que dependerá naturalmente de cada material e das suas forças de coesão, a geometria das ligações pode sofrer uma alteração permanente, não voltando o material macroscopicamente à sua forma original depois de acabar a solicitação externa. Diz-se nesta situação que o material sofreu uma deformação permanente de carácter plástico, ou que tem um comportamento plástico, ou ainda que ultrapassou a gama de elasticidade. Esse valor limite de tensão é designado limite elástico, ou tensão de cedência.
Abaixo do limite elástico, o material recupera a sua forma original. Enquanto se aplica uma tensão dentro da gama de elasticidade, porém, a lei de Hooke só é válida para pequenas deformações, até um limite de tensão designado limite de proporcionalidade, ou tensão de
proporcionalidade. Este limite é sempre inferior ao limite de cedência. Acima do limite de

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
25
proporcionalidade e até à tensão de cedência o material tem comportamento elástico, mas não há proporcionalidade entre a tensão e a deformação.
Um gráfico de tensão vs. deformação como o da figura junta faz uma descrição sucinta destes diferentes comportamentos para cada material: O ponto 1 assinalado no gráfico é o limite de proporcionalidade e o ponto 2 o limite elástico.
Um último limite de tensão a considerar é o que provoca a ruptura ou fractura do material, acima do limite de cedência, quebrando definitivamente a coesão do material por algum ponto ou superfície, depois de uma deformação plástica mais ou menos extensa, conforme as propriedades do material. Designa-se por tensão de ruptura, ou de fractura, e é assinalado como o ponto 3 do gráfico, a partir do qual deixa de fazer sentido definir qualquer relação tensão/deformação.
O processo de aplicação de uma tensão crescente designa-se por carga. Ao voltar para trás, diminuindo a tensão aplicada no processo de descarga, o material recupera a sua forma se a tensão aplicada não tiver ultrapassado a tensão de cedência. Se esta foi ultrapassada, poderemos observar uma curva de tensão-deformação na descarga diferente da da carga, ainda com uma gama proporcional mas com uma deformação permanente final, que depende da tensão máxima que foi aplicada e da plasticidade do material.
A reacção de materiais a tensões externas é muitas vezes caracterizada ainda por outras propriedades qualitativas correlacionadas com os limites definidos acima:
A dureza de um material (hardness, em Inglês) é o grau de resistência à deformação plástica. Um material é tanto mais duro quanto maior for a tensão de cedência. A ductibilidade (ductility, em Inglês) é a tendência para grande deformação plástica antes da ruptura. Um material dúctil tem tipicamente uma tensão de cedência baixa e muito menor do que a tensão de ruptura. A fragilidade de um material (brittleness, em Inglês) é a tendência para a fractura, ou a pouca tendência para deformação plástica antes da fractura ou ruptura. Um material muito frágil tem uma tensão de fractura baixa e pouco mais alta que a tensão de cedência.
Define-se resiliência (resilience, em Inglês) como a energia por unidade de volume máxima absorvida sem deformações permanentes. A resiliência corresponde ao integral da curva tensão-deformação de carga, desde zero até à deformação atingida com a tensão de cedência. Define-se tenacidade (toughness, em Inglês) como a energia por unidade de volume máxima absorvida sem ruptura ou fractura, o que corresponde ao integral da curva tensão-deformação de carga, desde zero até à deformação atingida com a tensão de ruptura. A rigidez (stiffness, em Inglês) é a resistência à deformação e define-se como a constante de proporcionalidade k entre a força aplicada e o alongamento na gama de proporcionalidade: lkF = .
Os materiais constituintes de sistemas biológicos apresentam propriedades elásticas e plásticas muito diversificadas, em muitos casos coincidindo com alguma função estrutural do próprio organismo vivo. Nem sempre as propriedades descritas atrás, nomeadamente o aspecto do diagrama tensão-deformação, se aplicam de um modo directo aos materiais biológicos, havendo muitos desvios ao que foi descrito. A título de exemplo, há materiais com módulo de elasticidade que varia abruptamente quando as moléculas se desdobraram completamente (p. ex. elastina) ou que têm diagramas dependentes da aplicação da tensão ser transversal ou longitudinal (tecido ósseo). Noutras situações, os diagramas tensão-deformação dependem da taxa temporal de variação da tensão aplicada; esta propriedade designa-se por viscoelasticidade. Embora estudos científicos da reacção de materiais biológicos a tensões externas e internas ao organismo tenham em conta todos estes tipos de propriedade, não caberá nesta disciplina introdutória o seu estudo aprofundado.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
26
Capítulo 3
Mecânica de Fluidos e de
Corpos em Fluidos
3.1 – Hidrostática
Os fluidos, gases ou líquidos, exercem pressão sobre as paredes dos contentores onde estão ou sobre quaisquer superfícies sólidas imersas no fluido, através dos choques das suas moléculas ou átomos com essas superfícies sólidas. A pressão é uma força por unidade de área e tem uma
unidade própria, o pascal, Pa ≡ N/m2.
Num volume V de um fluido de densidade ρ a pressão não é a única força a exercer-se no sistema. A força gravítica origina o peso de cada molécula e,
naturalmente, de todo o volume: mg = ρVg . O peso das moléculas a uma determinada altura no fluido vai exercer-se sobre as moléculas que estão abaixo, de tal modo que as moléculas são forçadas a uma maior proximidade entre si, que poderá traduzir-se num aumento de densidade no caso de fluidos muito compressíveis, como os gases. Isto significa que a pressão é tanto mais elevada quanto maior é a profundidade, sendo o aumento de pressão correspondente ao peso da coluna de fluido que está acima. Podemos assim escrever uma equação relativa à diferença de pressões entre dois pontos a uma diferença de alturas, ou profundidades, h, começando por considerar as forças aplicadas a um volume cilíndrico no meio do fluido, constituído pelo mesmo fluido e por isso em equilíbrio:
ghPPPghPPAgAhAPPAmgAP ρρρ =−⇔=+⇔=+⇔=+ 0000
Se se exercer uma força exterior tendente a comprimir o volume do fluido, p.ex.
através dum êmbolo, há um acréscimo de pressão ∆P = F/A, sendo A a área sobre a qual se exerce a força externa. O Princípio de Pascal diz que esse acréscimo de pressão se faz exercer do mesmo modo em todos os pontos do volume do fluido, independentemente da forma do contentor.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
27
Imaginemos agora de novo o cilindro de fluido dentro do próprio fluido e consideremos as forças aplicadas a esse cilindro como se ele formasse um volume destacado (mas imerso) do resto do fluido. As forças de pressão que se exercem na superfície lateral do cilindro estão em equilíbrio horizontal a cada valor de profundidade, uma vez que se exercem sempre em direcções perpendiculares à superfície. Já as forças que se exercem nas bases do cilindro são diferentes uma da outra, por serem diferentes as pressões exercidas sobre as superfícies de área igual. O cilindro como um todo, no entanto, está em equilíbrio uma vez que o peso do cilindro é precisamente igual à diferença de forças de pressão exercidas nas
bases: gVFF fρ=− 12
rr.
Este raciocínio é o mesmo já considerado acima, mas tem interesse para as considerações que se seguem.
Consideremos a situação de o cilindro de fluido ser substituído por um cilindro com a mesma forma mas constituído por um material sólido de
densidade ρs. Este cilindro só estará em equilíbrio no meio do fluido se a sua
densidade for igual à do fluido, ρf. Se o sólido for mais denso que o fluido haverá uma força resultante para baixo, que tende a afundar o corpo, correspondente à diferença entre o peso do cilindro e a diferença de forças de pressão exercidas sobre as bases:
( ) ( ) gVgVgVFFmgR fsfs ρρρρ −=−=−−= 12
r
Se o sólido for menos denso que o fluido a força resultante aponta para cima e o corpo sobe até ficar a flutuar (se houver uma superfície livre do fluido, como nos líquidos).
É de notar que um corpo mais denso que o fluido, embora afunde, acaba por ter um peso
aparente, que é a resultante das forças, menor do que o peso real que tem fora do fluido.
Se o fluido for um líquido, a diferença pode ser considerável, como notou Arquimedes quando estava no banho e percebeu que esta descoberta (- Eureka!) lhe resolvia o problema de saber se a coroa do Rei de Siracusa era mesmo de ouro maciço, como lhe garantia o seu fraudulento ourives. Ao valor de decréscimo do peso aparente quando mergulhado, que é igual à diferença de forças de pressão exercidas nas bases no caso do cilindro, chama-se força de impulsão. Arquimedes definiu dum modo geral a força de impulsão no seu Princípio de Arquimedes, dizendo que ela é igual ao peso do volume de fluido deslocado pela imersão do corpo:
gVI fρ=
Esta definição é válida qualquer que seja a forma do corpo.
3.2 – Escoamento de Fluidos Ideais
Um fluido ideal é um fluido incompressível e não sujeito a forças de resistência ao movimento dos seus constituintes, entre si ou contra as paredes de tubos ou contentores onde escoem. Este conceito é uma abstracção, válida como aproximação inicial dentro de certos limites das variáveis em causa, permitindo estabelecer algumas equações e leis simples básicas sobre o escoamento de fluidos. Os líquidos têm uma compressibilidade tão baixa que a condição de incompressibilidade não é muito restritiva na aplicação destas leis.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
28
A primeira equação a considerar é a Equação da Continuidade, que estabelece que o fluxo volumétrico IV (m3/s) total de um fluido incompressível é o mesmo em qualquer ponto dum tubo de escoamento, qualquer que seja a sua secção transversal ou posição vertical. Se houver ramificações no tubo o fluxo total é tomado como a soma dos fluxos parciais de todos os ramos em paralelo. Esta equação corresponde ao princípio de conservação da massa de fluido em escoamento. Se o fluido for ideal, todas as moléculas do fluido têm a mesma velocidade numa determinada secção transversal do tubo. Deste modo, o fluxo volumétrico pode definir-se como o produto dessa velocidade pela área A da secção transversal:
AvIV =
A equação da continuidade estabelece então que 2211
AvAv = para dois pontos diferentes do
mesmo tubo. Significa que a quantidade de matéria do fluido que entra por unidade de tempo em qualquer troço do tubo é a mesma que sai, em regime estacionário, i.e., sem variações temporais do fluxo.
A segunda equação aplicável ao escoamento de fluidos ideais é a lei de Bernoulli, que diz respeito à conservação da energia mecânica do fluido em escoamento e que vamos deduzir de seguida. Consideremos o mesmo tubo da figura anterior, com dois troços de áreas de secção transversal
diferentes e a alturas médias iguais, no qual escoa um fluido de densidade ρ com fluxo volumétrico constante. Pela equação da continuidade v2>v1, havendo um acréscimo de energia cinética para qualquer volume de fluido que passe do troço 1 para o troço 2. Este acréscimo de energia cinética provém do trabalho realizado pelas forças de pressão, uma vez que não há forças de resistência e a energia potencial gravítica se mantém constante neste tubo horizontal. Consideremos o deslocamento do volume contido inicialmente entre os pontos a1 e a2, até à posição em que fica contido entre os pontos b1 e b2. A força de pressão nos pontos a1 e b1 é P1A1, enquanto nos pontos do troço 2 é P2A2. O trabalho total realizado por estas forças é a diferença entre o trabalho no troço 1 (força de pressão × deslocamento entre a1 e b1) e o trabalho no troço 2 (força de pressão × deslocamento entre a2 e b2), sendo este último negativo, pois estamos a considerar as forças de pressão exercidas sobre o volume em causa pelo fluido que está à frente no tubo:
( ) ( )22221111
abAPabAPW −−−=
O acréscimo de energia cinética, por sua vez, é a diferença entre a energia cinética do volume que entretanto entrou no troço 2 e a energia cinética do volume que saiu do troço 1 (sombreados na figura). Estes volumes são naturalmente iguais, pela equação da continuidade,
( ) ( )222111
abAabAV −=−=∆ , com massa Vm ∆= ρ :
2
1212
2212
1212
221 vVvVvmvmEC ∆−∆=−=∆ ρρ
Podemos então escrever a equação de conservação da energia mecânica total para este volume:
2
1212
221
21 vVvVVPVPEW C ∆−∆=∆−∆⇔∆= ρρ
ou, dividindo pelo volume que passou de um troço ao outro e separando os termos da equação relativos a cada troço:
2
2
221
1
2
121 PvPv +=+ ρρ
Os termos desta equação são densidades de energia, com unidades J/m3.
Se, além do estreitamento, o tubo tiver também um desnível h = h2 - h1 entre os dois troços, como esquematizado na figura seguinte, há que acrescentar um termo de densidade de energia

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
29
potencial gravítica daquele volume (mgh/∆V = ρ ∆V g h /
∆V) à equação de conservação da energia mecânica, obtendo-se finalmente a Lei de Bernoulli:
22
2
221
11
2
121 PhgvPhgv ++=++ ρρρρ
3.3 – Escoamento de Fluidos Reais
3.3.1 – Viscosidade
Um fluido real, além de compressível (pouco, para os líquidos) está sujeito a forças de resistência ao movimento relativo das suas moléculas e ao movimento destas em relação às paredes sólidas dos contentores ou tubos onde escoam. Estas forças de resistência provêm das forças de ligação entre as moléculas dos líquidos (muito menores para os gases), forças de coesão, que não deixam cada molécula movimentar-se livremente em relação às outras nas proximidades, e às forças de ligação com as moléculas das paredes sólidas, forças de adesão. Dum ponto de vista macroscópico referimo-nos a esta resistência como a viscosidade do fluido: quanto mais viscoso é um fluido, maior a resistência ao escoamento e maior a dissipação de energia mecânica, que não é conservada, sendo necessário realizar permanentemente trabalho para manter um fluxo constante.
Para quantificar a viscosidade imaginemos a experiência ilustrada na figura ao lado: um volume de fluido contido entre duas placas sólidas de área A, paralelas e à distância z, é forçado a movimentar-se por acção de uma força F aplicada a uma das placas segundo o seu plano. Consideramos que as forças de adesão do fluido ao material sólido das placas são mais intensas do que as forças de coesão internas do fluido, de tal modo que as moléculas do fluido que estão junto das superfícies sólidas têm velocidade nula em relação a essas superfícies. Para a maior parte dos fluidos esta é uma experiência puramente imaginada, para definir quantitativamente a viscosidade, uma vez que o fluido nunca ficaria contido simplesmente entre placas com esta geometria. No entanto, é possível o desenho de equipamento científico (viscosímetros) em que se consegue fazer uma experiência muito semelhante, p. ex. com superfícies cilíndricas, e em que se medem as variáveis adequadas. Consideramos ainda que a placa sobre a qual se exerce a força tem velocidade v constante, ou seja, a força aplicada é equilibrada pela força de resistência, não havendo aceleração. A placa de baixo fica imóvel. Ao quociente F/A chamamos tensão de deslizamento e ao quociente v/z chamamos taxa de deslizamento. Esta situação é algo semelhante à da aplicação de uma tensão de corte a um material sólido elástico, mas aqui as forças de coesão entre as moléculas do fluido não são restauradoras de qualquer posição de equilíbrio.
Para muitos fluidos, chamados newtonianos, e para valores baixos da tensão de deslizamento, há uma proporcionalidade entre a tensão e a taxa de deslizamento:
z
v
A
Fη=
O factor de proporcionalidade η designa-se por coeficiente de viscosidade, ou simplesmente
viscosidade, com unidades Pa⋅s.
Para soluções, verifica-se em geral que o coeficiente de viscosidade aumenta com o aumento da concentração do soluto.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
30
3.3.2 – Lei de Poiseuille
O escoamento dum fluido viscoso não obedece à lei de Bernoulli porque a força de resistência viscosa não é conservativa. A equação da continuidade, por outro lado, continua a ser uma aproximação muito razoável para líquidos, devido à sua baixa compressibilidade.
Consideremos um tubo cilíndrico horizontal, de raio R constante e o escoamento de um fluido de
viscosidade η, com fluxo constante IV. Devido às forças de adesão com as paredes do tubo e às forças de resistência viscosa, a velocidade do fluido não é a mesma em todos os pontos de uma secção transversal, sendo, para fluxos baixos, máxima no eixo do cilindro (vmax) e nula junto às paredes do tubo. Nos pontos intermédios, a velocidade é dada pela seguinte equação, função da posição r em relação ao eixo do cilindro (ver figura junta):
( )
−=
R
rvrv 1max
O valor médio da velocidade é max21 vv = e o fluxo é ( )2RvAvIV π== .
Devido à perda de energia mecânica e mantendo-se constante ao longo do tubo horizontal a energia potencial gravítica e também a energia cinética (fluxo constante), haverá necessariamente diminuição da pressão ao longo do tubo no sentido do escoamento (lembrando a lei de Bernoulli).
A diferença de pressão entre dois pontos à distância L (ver a figura junta) é dada pela Lei de Poiseuille:
VV IKPPIR
LP =−==∆ 214
8
π
η
K é a resistência do tubo ao escoamento, entre os dois pontos 1 e 2.
Este tipo de escoamento ordenado, com cada molécula do fluido a movimentar-se com velocidade constante paralela ao eixo do tubo cilíndrico e dependente da posição em relação ao eixo, é designado fluxo laminar. Este tipo de regime de fluxo só se verifica para fluxos baixos, sendo o valor limite do fluxo para manter o regime laminar dependente das características do fluido e do raio do tubo. É possível prever se o fluxo se mantém laminar calculando a quantidade adimensional designada por número de Reynolds, que corresponde ao quociente entre a força de inércia (proporcional à energia cinética, ou seja, ao quadrado da velocidade) e a força de resistência viscosa (proporcional à velocidade e ao coeficiente de viscosidade):
η
ρ vR2Re =
R é ainda o raio do tubo e ρ a densidade do fluido. O fluxo mantém-se sempre laminar se Re < 2000. Quando a viscosidade é muito baixa ou a velocidade é muito elevada as forças de coesão entre as moléculas do fluido já não são suficientes para manter o fluxo ordenado, sendo o movimento de cada molécula individual sempre um movimento caótico, com trajectórias complexas que podem passar por qualquer ponto em relação ao eixo do cilindro no seu progresso no sentido do fluxo total. Este tipo de regime designa-se por fluxo turbulento e é observado para Re > 3000 em quaisquer circunstâncias. Neste tipo de fluxo há uma maior perda de energia ao longo do tubo, sendo

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
31
necessária uma maior diferença de pressões para o manter constante do que o previsto na lei de Poiseuille.
Para valores do número de Reynolds entre 2000 e 3000 o fluxo pode ser laminar ou turbulento, dependendo do modo como se atingiu esse valor. Pode manter-se laminar se o número de Reynolds for subindo lentamente acima de 2000, passando necessariamente a turbulento quando atinge 3000. Dum modo semelhante, quando Re desce abaixo de 3000, o fluxo pode manter-se turbulento até Re atingir o valor de 2000.
3.4 – Movimento de Sólidos em Fluidos
3.4.1 – Lei de Stokes
Devido à viscosidade, um fluido exerce uma força de resistência ao movimento de um corpo sólido no seu volume. Para velocidades baixas o fluxo do fluido em torno de um objecto sólido é
laminar, sendo nessa situação a força de resistência proporcional à velocidade do corpo vfFrr
−= ,
em que f é o coeficiente de resistência viscosa, que depende da geometria do corpo e da viscosidade do fluido. Para objectos esféricos, com raio R, esse coeficiente é ηπRf 6= , sendo
então a força dada pela Lei de Stokes:
vRFrr
ηπ6−=
Mais uma vez utiliza-se o número de Reynolds
η
ρ vR2Re =
em que a velocidade e o raio são agora da esfera e a densidade e a viscosidade do fluido. O fluxo em torno da esfera é laminar enquanto Re < 0,1. Para valores do número de Reynolds crescentes, aparece turbulência cada vez mais intensa na esteira do movimento da esfera, como ilustrado na figura abaixo. A turbulência não é ainda muito relevante até Re = 1. A força de resistência é proporcional ao quadrado da velocidade para números de Reynolds elevados.
3.4.2 – Sedimentação e Velocidade Terminal
O movimento de sólidos em fluidos viscosos tem particular relevância quando partículas sólidas ou células, ou moléculas grandes, caem num fluido, acumulando-se no fundo do contentor se houver tempo suficiente para isso. Este processo de queda e acumulação designa-se por sedimentação.
Consideremos um corpo esférico de raio R e densidade ρc em queda num fluido de densidade ρf
<ρc e coeficiente de viscosidade η. As forças aplicadas ao corpo já em movimento são o peso P, a

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
32
impulsão I e a força de resistência viscosa Fa. O corpo está em aceleração; pela segunda lei de Newton:
dt
dvVvRgVgVamFIP cfca ρηπρρ =++−⇔=++ 6
rrrr
Consideramos velocidades baixas de modo a poder usar a lei de Stokes. O aumento da velocidade devido à aceleração não altera o peso nem a impulsão, mas aumenta a força de resistência viscosa, eventualmente atingindo um valor que, somado ao da
impulsão, equilibra o peso do corpo, i.e., a aceleração diminui até se anular. Atinge-se assim um valor limite vT para a velocidade de queda:
060 =++−⇔=++ Tfca vRgVgVFIP ηπρρrrr
À velocidade limite vT chama-se velocidade terminal, a qual se obtém da equação anterior, para partículas esféricas:
( )fcT g
Rv ρρ
η−=
2
9
2
No caso de partículas não esféricas a força de resistência tem de ser expressa apenas em termos do coeficiente de resistência viscosa f, de modo que:
0=++− T
c
f
c
c vfgm
gm
ρρ
ρρ
−=
c
fc
T gf
mv
ρ
ρρ
A medida da velocidade terminal de corpos pode ser utilizada na determinação do tamanho ou desvio da forma esférica de partículas sólidas, em queda num fluido de propriedades conhecidas.
a
P
I
Fa
ρc
ρf
v
aa
PP
II
FaFa
ρc
ρf
vv
a=0
P
I
Fa
ρc
ρf
vT
a=0a=0
PP
II
FaFa
ρc
ρf
vTvT
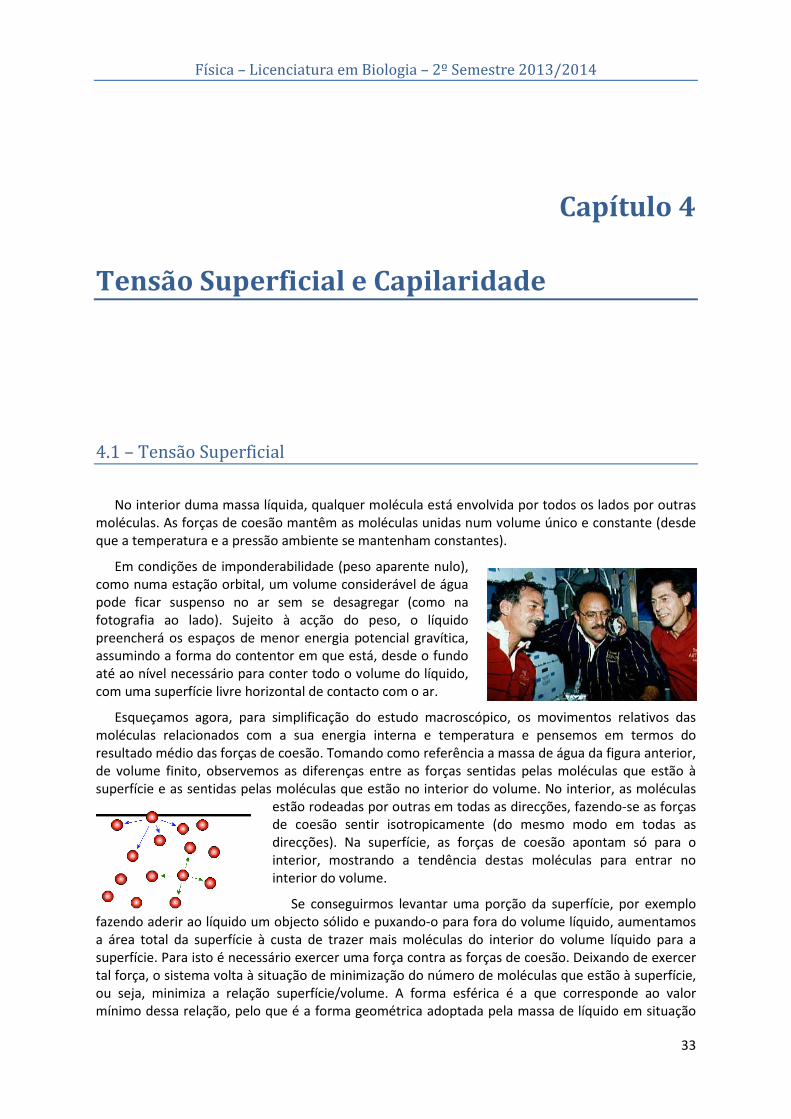
Física – Licenciatura em Biologia – 2º Semestre 2013/2014
33
Capítulo 4
Tensão Superficial e Capilaridade
4.1 – Tensão Superficial
No interior duma massa líquida, qualquer molécula está envolvida por todos os lados por outras moléculas. As forças de coesão mantêm as moléculas unidas num volume único e constante (desde que a temperatura e a pressão ambiente se mantenham constantes).
Em condições de imponderabilidade (peso aparente nulo), como numa estação orbital, um volume considerável de água pode ficar suspenso no ar sem se desagregar (como na fotografia ao lado). Sujeito à acção do peso, o líquido preencherá os espaços de menor energia potencial gravítica, assumindo a forma do contentor em que está, desde o fundo até ao nível necessário para conter todo o volume do líquido, com uma superfície livre horizontal de contacto com o ar.
Esqueçamos agora, para simplificação do estudo macroscópico, os movimentos relativos das moléculas relacionados com a sua energia interna e temperatura e pensemos em termos do resultado médio das forças de coesão. Tomando como referência a massa de água da figura anterior, de volume finito, observemos as diferenças entre as forças sentidas pelas moléculas que estão à superfície e as sentidas pelas moléculas que estão no interior do volume. No interior, as moléculas
estão rodeadas por outras em todas as direcções, fazendo-se as forças de coesão sentir isotropicamente (do mesmo modo em todas as direcções). Na superfície, as forças de coesão apontam só para o interior, mostrando a tendência destas moléculas para entrar no interior do volume.
Se conseguirmos levantar uma porção da superfície, por exemplo fazendo aderir ao líquido um objecto sólido e puxando-o para fora do volume líquido, aumentamos a área total da superfície à custa de trazer mais moléculas do interior do volume líquido para a superfície. Para isto é necessário exercer uma força contra as forças de coesão. Deixando de exercer tal força, o sistema volta à situação de minimização do número de moléculas que estão à superfície, ou seja, minimiza a relação superfície/volume. A forma esférica é a que corresponde ao valor mínimo dessa relação, pelo que é a forma geométrica adoptada pela massa de líquido em situação

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
34
de imponderabilidade e repouso. (Nota: a massa de água da fotografia acima está sujeita a oscilações da superfície, que lhe conferem uma forma variável não esférica.) A força de coesão faz-se assim sentir como uma propriedade da superfície.
Poderíamos dizer, por outro lado, que a situação de energia mínima para uma molécula num líquido é estar rodeada por outras no interior do volume, mas a inevitabilidade da existência duma fronteira para o volume finito leva a que algumas moléculas tenham de ficar nessa fronteira, constituindo uma superfície livre, na qual têm uma energia mais elevada. Podemos assim pensar em termos da energia própria do conjunto destas moléculas da superfície, que é tanto maior quanto mais moléculas tiver a superfície.
Para quantificarmos os aspectos macroscópicos de manifestação destas propriedades da superfície livre dum líquido, analisemos a experiência ilustrada nas figuras seguintes, que demonstra
precisamente esta tendência para minimizar a área da superfície: Nos braços dum arame com a forma de U (A1ABB1 na primeira figura) desliza um outro arame (CD na figura) com um mínimo de atrito. Mergulhando este quadro numa solução de sabão em água podemos conter uma película de líquido na área interior do quadro, como mostram as figuras. Nesta situação, a película de líquido tem duas superfícies planas em contacto
com o ar. Não sendo esférica, a superfície não tem a energia mínima possível. A tendência para a área mínima manifesta-se por uma força que está aplicada no arame móvel e que o vai fazer mover-se como ilustrado na segunda figura, se ele estiver livre de atrito. Tal força pode ser equilibrada p. ex. por um peso adequado pendurado nesse arame móvel, como sugere a primeira figura. Pode ainda verificar-se que a força aplicada é sempre a mesma, qualquer que seja a superfície total do líquido contido em ABDC. Isto acontece porque quando varia a área da superfície há moléculas que passam do volume para a superfície e vice-versa, sendo a força dependente da força de coesão entre moléculas. A força que o arame sente é proporcional ao comprimento total L da linha de
contacto entre o líquido, o ar e o arame CD: LF γ= . Este comprimento é o dobro do comprimento
do arame lL 2= , uma vez que há duas linhas de contacto entre o líquido, o ar e o arame, i.e., uma
correspondente a cada superfície livre da película. A constante de proporcionalidade γ depende das forças de coesão das moléculas do líquido e ainda do gás que está em contacto com a superfície, sendo uma característica de cada par líquido-gás que constitui a fronteira. Chama-se a esta constante tensão superficial. É de notar que esta tensão é um vector paralelo à superfície. Segundo
aquela expressão as unidades de γ são N/m. Notemos ainda que as forças de adesão do líquido ao material sólido do arame têm de ser suficientes para não haver descolagem do líquido.
A tensão superficial manifesta-se ainda em muitas outras situações. Um exemplo é o efeito da tensão superficial que permite pôr a “flutuar” um objecto de maior densidade que o líquido, como uma agulha de aço (ou um clip) engordurada. Pousada com cuidado na superfície da água a agulha não mergulha, apesar de ser substancialmente mais densa que a água.
Não é a impulsão que permite equilibrar a agulha à superfície, como se observa se for largada no interior do volume de água, caindo até ao fundo do contentor.
Num outro exemplo semelhante, a imagem à esquerda mostra um insecto que é capaz de andar sobre a água.
Deste modo, do ponto de vista macroscópico o resultado das forças de coesão entre as moléculas do líquido sente-se como uma tensão resultante na direcção tangente à superfície, tendente a
FFF
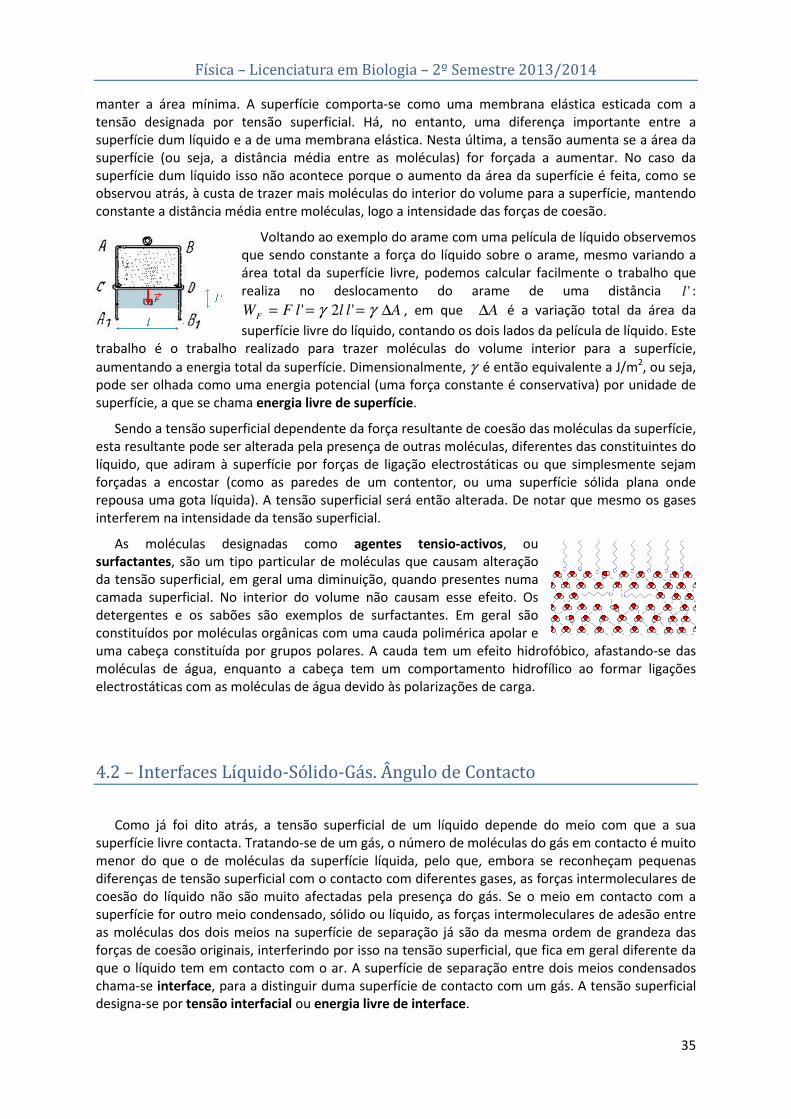
Física – Licenciatura em Biologia – 2º Semestre 2013/2014
35
manter a área mínima. A superfície comporta-se como uma membrana elástica esticada com a tensão designada por tensão superficial. Há, no entanto, uma diferença importante entre a superfície dum líquido e a de uma membrana elástica. Nesta última, a tensão aumenta se a área da superfície (ou seja, a distância média entre as moléculas) for forçada a aumentar. No caso da superfície dum líquido isso não acontece porque o aumento da área da superfície é feita, como se observou atrás, à custa de trazer mais moléculas do interior do volume para a superfície, mantendo constante a distância média entre moléculas, logo a intensidade das forças de coesão.
Voltando ao exemplo do arame com uma película de líquido observemos que sendo constante a força do líquido sobre o arame, mesmo variando a área total da superfície livre, podemos calcular facilmente o trabalho que realiza no deslocamento do arame de uma distância 'l :
AlllFWF ∆=== γγ '2' , em que A∆ é a variação total da área da
superfície livre do líquido, contando os dois lados da película de líquido. Este trabalho é o trabalho realizado para trazer moléculas do volume interior para a superfície,
aumentando a energia total da superfície. Dimensionalmente, γ é então equivalente a J/m2, ou seja, pode ser olhada como uma energia potencial (uma força constante é conservativa) por unidade de superfície, a que se chama energia livre de superfície.
Sendo a tensão superficial dependente da força resultante de coesão das moléculas da superfície, esta resultante pode ser alterada pela presença de outras moléculas, diferentes das constituintes do líquido, que adiram à superfície por forças de ligação electrostáticas ou que simplesmente sejam forçadas a encostar (como as paredes de um contentor, ou uma superfície sólida plana onde repousa uma gota líquida). A tensão superficial será então alterada. De notar que mesmo os gases interferem na intensidade da tensão superficial.
As moléculas designadas como agentes tensio-activos, ou surfactantes, são um tipo particular de moléculas que causam alteração da tensão superficial, em geral uma diminuição, quando presentes numa camada superficial. No interior do volume não causam esse efeito. Os detergentes e os sabões são exemplos de surfactantes. Em geral são constituídos por moléculas orgânicas com uma cauda polimérica apolar e uma cabeça constituída por grupos polares. A cauda tem um efeito hidrofóbico, afastando-se das moléculas de água, enquanto a cabeça tem um comportamento hidrofílico ao formar ligações electrostáticas com as moléculas de água devido às polarizações de carga.
4.2 – Interfaces Líquido-Sólido-Gás. Ângulo de Contacto
Como já foi dito atrás, a tensão superficial de um líquido depende do meio com que a sua superfície livre contacta. Tratando-se de um gás, o número de moléculas do gás em contacto é muito menor do que o de moléculas da superfície líquida, pelo que, embora se reconheçam pequenas diferenças de tensão superficial com o contacto com diferentes gases, as forças intermoleculares de coesão do líquido não são muito afectadas pela presença do gás. Se o meio em contacto com a superfície for outro meio condensado, sólido ou líquido, as forças intermoleculares de adesão entre as moléculas dos dois meios na superfície de separação já são da mesma ordem de grandeza das forças de coesão originais, interferindo por isso na tensão superficial, que fica em geral diferente da que o líquido tem em contacto com o ar. A superfície de separação entre dois meios condensados chama-se interface, para a distinguir duma superfície de contacto com um gás. A tensão superficial designa-se por tensão interfacial ou energia livre de interface.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
36
Consideremos uma gota de um líquido sobre um volume maior (substrato) de outro líquido com o qual seja imiscível, ou de um sólido. As superfícies em contacto com o ar estão sujeitas às respectivas tensões superficiais (equivalentes às energias livres), que tendem a tornar esférica a gota e a tornar plana a superfície do substrato, se este for líquido. A questão que se põe é qual a forma geométrica que a gota vai tomar. Uma situação extrema será uma forma esférica, se as forças de coesão da gota forem muito superiores às forças de adesão entre as moléculas dos dois líquidos. No outro extremo teremos a gota espalhada sobre a superfície do substrato, numa camada fina que pode ir até à espessura de uma só molécula, quando as forças de adesão são mais intensas que as de coesão da gota.
A relação entre as forças de coesão e de adesão resulta no espalhamento da gota se se verificar a seguinte relação, designada a condição de espalhamento da gota líquida (L) sobre o substrato (S),
com γLS a tensão interfacial:
0>−− LSLS γγγ
À quantidade LSLSS γγγ −−= chama-se coeficiente de espalhamento.
No caso de uma gota líquida sobre uma superfície sólida plana, as considerações anteriores ainda se aplicam, excepto que a interface líquido-sólido mantém sempre a forma geométrica da superfície sólida, se não ocorrer dissolução.
No caso da superfície dum sólido em contacto com um gás pode definir-se ainda uma tensão superficial, mas o seu valor é diferente da energia livre de superfície. A energia livre de superfície pode ser vista como a energia por unidade de área da superfície que as moléculas da superfície têm a mais que as do volume interior do material. Nos sólidos, se se conseguir aumentar a área da superfície exercendo forças exteriores não há (dentro do limite de elasticidade) aumento do número de moléculas à superfície, alterando-se antes a configuração da superfície de maior área através do aumento das distâncias interatómicas, o que significa que a energia da superfície por unidade de área é alterada, contrariamente ao que acontece nos líquidos. A força tangencial à superfície que é necessária para aumentar a área será ainda a tensão superficial, mas não é agora igual numericamente à energia original da superfície não perturbada. Para as considerações que nos interessam neste capítulo, não vamos esticar as superfícies dos substratos sólidos que temos em contacto com gotas líquidas. A influência da superfície sólida na forma das gotas é determinável considerando a energia livre de superfície do sólido e não aquele tipo de tensão superficial, que tem um valor numérico diferente. Resumindo, para o estudo da geometria adoptada por uma gota líquida sobre um substrato sólido é necessário considerar a energia livre de superfície do sólido, e não a tensão superficial, embora muitas vezes os conceitos apareçam confundidos, por os respectivos valores serem iguais no caso dos líquidos.
Mais uma vez, a forma da gota sobre o substrato, agora um sólido, é condicionada pela relação entre as forças de coesão do líquido e as forças de adesão do líquido à superfície sólida. A condição de espalhamento é a mesma definida anteriormente, considerando as tensões como energias livres de superfície. Apesar de se tratar de energias, e não de tensões, as moléculas da gota na linha de contacto entre os três meios continuam a estar sujeitas às diferentes forças tangentes às superfícies, que se podem traduzir nos diagramas de forças por unidade de comprimento apresentadas nas figuras juntas, em que as intensidades correspondem aos valores das energias livres de superfície ou interface.
As relações de intensidades destas três tensões determinam a
forma da gota na superfície sólida, e em particular o ângulo de contacto θ. Se as forças de coesão
são claramente mais intensas que as de adesão o ângulo tende a ser maior que 90°, como no caso

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
37
do mercúrio em contacto com o vidro. Um ângulo menor que 90° é determinado por uma menor intensidade das forças de coesão em relação às de adesão. O ângulo de contacto para a situação de equilíbrio pode definir-se pela equação de Young, obtida do diagrama de forças:
LSSL γγθγ −=cos
Numa situação em que a coesão seja muito superior à adesão, as forças não podem equilibrar-se,
resultando num ângulo de contacto de 180°, não havendo por isso linha de contacto, o qual é feito apenas num ponto, pelo menos na ausência de peso. O peso deforma a gota esférica forçando, mesmo para estas situações, a um contacto não pontual.
Por outro lado, se a adesão do líquido ao sólido é claramente superior à coesão, o desequilíbrio de forças implica que o líquido vai ser todo puxado da gota para a superfície sólida, estendendo a superfície líquido-ar até um limite de espessura muito pequena da película de líquido. O coeficiente de espalhamento é superior a zero e o líquido molha completamente a superfície sólida, sendo o ângulo de contacto nulo. É este o caso da água em vidro muito limpo. Diz-se ainda que o líquido
molha parcialmente a superfície sólida se o ângulo de contacto for inferior a 90°, falando-se de
molhar muito ou pouco consoante o ângulo se aproxima de 0° ou de 90°, respectivamente.
Quando a superfície sólida está na posição vertical, como no caso das paredes dum tubo de vidro, o ângulo de contacto continua o mesmo para todos os casos. A parede limpa de vidro não pode ficar completamente molhada pela água, o que seria de esperar do ângulo de contacto nulo, devido ao peso do volume de líquido. No caso do mercúrio dá-se a situação contrária de o vidro ter tendência a ficar seco, não podendo obviamente isso acontecer completamente devido ao peso do líquido e à ocupação do espaço livre dentro do tubo. A zona curva da superfície líquido-ar que está junto às paredes chama-se menisco. Este faz a transição da
direcção horizontal para a direcção que faz o ângulo de contacto com as paredes verticais (≈0° para a água em vidro limpo). No caso da água, o peso do líquido no menisco compensa a diferença de forças (que tem o sentido para cima) proveniente do valor elevado da energia livre de superfície do sólido.
4.3 – Diferença de Pressão em Superfícies Curvas. Capilaridade
Antes de abordar a questão da capilaridade, voltemos aos efeitos da tensão superficial num volume de líquido, distinguindo agora as situações em que a superfície é curva (como no caso da massa líquida na fotografia da estação orbital) das outras situações em que a superfície é plana (como no caso da superfície livre dum líquido contido num copo sob a acção da força gravítica).
A tensão superficial tende a manter a área mínima da superfície do líquido. Numa superfície curva, como no caso duma gota esférica, essa tensão manifesta-se por uma diferença de pressão entre os dois lados da superfície, sendo superior no lado interior da superfície. Observemos o equilíbrio das forças que se exercem numa semi-esfera resultante de um corte imaginário duma gota esférica em repouso, como ilustrado na figura ao lado. A pressão interior P faz-se sentir sobre a área A com o sentido da esquerda para a direita. A pressão exterior Pa exerce uma força distribuída pela superfície esférica, mas a resultante tem a direcção perpendicular à área A e sentido para a esquerda. Para o cálculo das forças temos então de considerar apenas as

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
38
componentes de Pa perpendiculares à área A, ou seja, a projecção sobre o plano dessa área, sendo a força total simplesmente PaA. Por outro lado, a força S devida à tensão superficial faz-se sentir para a esquerda ao longo do perímetro da circunferência de raio R. A equação de equilíbrio é então:
RR
RPPPRAPAP aa
γ
π
γπγπ
222
2==−=∆⇔+=
Numa bolha de sabão (figura à esquerda) a situação é ligeiramente diferente: o ar contido no interior da bolha está a uma pressão superior à do ar exterior, sendo a diferença de
pressão dada por R
Pγ4
=∆ , uma vez que há agora duas
superfícies de líquido a exercer a sua tensão superficial para o interior da curvatura.
Numa superfície plana não há diferença de pressão entre os dois lados, uma vez que a tensão superficial se faz sentir no plano da superfície. É de notar que o peso é a força predominante, de modo que no caso de um volume considerável de líquido num contentor a energia total mínima da superfície corresponde à forma geométrica de um plano horizontal.
Façamos agora a análise da superfície líquido-ar dum líquido num tubo vertical, pensando num
líquido que molha o tubo, ou seja, cujo menisco faça um ângulo θ < 90°. Como vimos, um pequeno volume de líquido junto da parede sólida fica acima da superfície horizontal a formar o menisco. Consideremos um tubo aberto nas duas extremidades e mergulhado parcialmente no líquido. O menisco num tubo de grande diâmetro não tem um perfil circular, mas para o caso de tubos de pequeno diâmetro consideramos a forma circular como uma boa aproximação. Se o raio do tubo for menor que o raio que o menisco tem numa superfície grande (≈2-3 mm para a água em contacto com vidro limpo e ar) observa-se que o nível do líquido no tubo sobe acima do nível do contentor aberto. Quanto menor for o diâmetro do tubo, mais alta é a coluna de líquido. Este fenómeno designa-se por capilaridade.
A superfície líquido-ar é agora totalmente curva, não havendo nenhuma zona que seja horizontal. O raio do menisco é forçado a diminuir com a diminuição do raio do próprio tubo para que se mantenha o ângulo de contacto, ficando assim a curvatura cada vez mais acentuada, aumentando consequentemente a diferença de pressão entre o lado côncavo (neste caso o ar) e o lado convexo (o interior do líquido), sendo a pressão menor deste último lado. O equilíbrio de pressões hidrostáticas do líquido exige que a superfície curva do menisco no tubo esteja a uma altura superior à da superfície horizontal do líquido no contentor, uma vez que o lado do menisco no interior do líquido está a uma pressão inferior à atmosférica, devido à curvatura do menisco.
A diferença de pressões entre os lados da superfície curva do
menisco é RP γ2=∆ . Equacionando esta diferença de
pressões com a altura média h da coluna de líquido de
densidade ρ , o raio r do tubo, e o ângulo de contacto θ , obtemos (ver a primeira figura ao lado):
rghhg
rhg
R ρ
θγρ
θ
γρ
γ cos2
cos
22=⇔=⇔=
Quando θ > 90° (segunda figura), o coseno é negativo e h < 0 , ficando o nível no tubo abaixo do nível no contentor, como se observa para o mercúrio num tubo estreito de vidro.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
39
Capítulo 5
Electromagnetismo
5.1 – Corrente Contínua
5.1.1 – Condensadores
Um condensador é um conjunto de dois condutores isolados um do outro. O condensador mais simples é o condensador de placas paralelas, constituído por duas placas condutoras paralelas. Consideremos um condensador deste tipo com área A e com as placas à distância d. Se as placas do condensador forem ligadas aos pólos duma fonte de tensão ficará, quando atingido o equilíbrio, acumulada uma carga +Q na placa ligada ao pólo positivo e -Q na placa ligada ao pólo negativo da fonte de tensão. A quantidade de carga acumulada depende da geometria do condensador, do
material isolante entre as placas (o ar ou um material plástico, p. ex.), e da diferença de potencial imposta pela fonte. Define-se a capacidade do condensador C como o quociente entre a carga acumulada e a diferença de potencial V. Prova-se que a capacidade está correlacionada com a geometria do condensador de placas paralelas da seguinte forma:
d
A
V
QC
ε==
A capacidade tem uma unidade própria: o faraday (F ≡ C/V). A permitividade eléctrica ε do material entre as placas influencia o campo eléctrico nesse espaço, alterando a capacidade do condensador. A permitividade eléctrica de materiais isolantes está correlacionada com a
permitividade eléctrica do vazio ε0 (εar≈ε0) através da constante dieléctrica K (≥ 1): 0εε K= . ε0
está correlacionada com a constante da lei de Coulomb pela expressão:
12
01085,8
4
1 −×==kπ
ε F/m
O armazenamento de carga num condensador corresponde a um armazenamento de energia 2
21
21 CVQVU == .

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
40
Os condensadores são componentes importantes dos circuitos eléctricos, tanto em corrente contínua como em corrente alternada. Os condensadores com geometria idêntica à do condensador de placas paralelas são constituídos por folhas finas metálicas enroladas num cilindro, com uma folha de material isolante entre as placas.
Nos circuitos eléctricos podem associar-se condensadores
em série. A capacidade equivalente de um condensador que substitui a associação é dada pela expressão:
...111
21
++=CCC sérieeq
Outro modo de associação de condensadores é em
paralelo, com a capacidade equivalente:
...21 ++= CCC paraleq
5.1.2 – Corrente e Resistência Eléctricas
Os átomos de um material condutor, como os metais, têm vários electrões de condução, que não estão ligados a apenas um átomo mas estão livres para se movimentarem por todo o volume coeso dum corpo ou fio. Se se aplicar um campo eléctrico ao longo dum condutor cilíndrico (um fio, p. ex.), ligando os seus extremos a uma fonte de tensão constante, i.e., forçando uma diferença de potencial eléctrico entre os seus extremos, todos os electrões livres (de condução) do volume ficam sujeitos a uma força electrostática que os tende a acelerar ao mesmo tempo. Os choques desses electrões com os iões (núcleos com os electrões ligados) do material impedem-nos, no entanto, de acelerar indefinidamente, resultando numa velocidade média vd designada por velocidade de deriva, que depende das características do material. Define-se a corrente eléctrica I assim gerada como a quantidade de carga eléctrica que passa por unidade de tempo na secção transversal do condutor (de área A):
dvAent
QI =
∆
∆=
Os electrões têm a carga elementar e. Cada tipo de material condutor tem um número n de electrões livres por unidade de volume. Por terem carga negativa, os electrões movimentam-se no sentido do potencial mais baixo para o potencial mais alto. O sentido da corrente eléctrica é, no entanto, sempre definido como o sentido que seria tomado por cargas positivas quando sujeitas ao campo eléctrico aplicado.
A velocidade de deriva depende, como se disse, das características do material, que opõe uma resistência maior ou menor à sua passagem. A Lei de Ohm define a
resistência eléctrica R dum condutor, com a unidade própria ohm (Ω), como sendo a razão entre a diferença de potencial (ou tensão) V aplicada e a corrente que passa no condutor:
IRV =
Define-se ainda para o material em si, independentemente da forma e do volume que toma, uma característica da qual deriva a resistência, chamada resistividade eléctrica. Para um condutor cilíndrico de comprimento l e área da secção transversal A, a relação entre a resistência eléctrica do
condutor e a resistividade ρ do material de que é feito é dada pela expressão:

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
41
A
lR ρ=
As unidades da resistividade são, como se pode ver facilmente pela expressão, Ω·m.
Esta resistência à passagem da corrente eléctrica é dissipativa da energia potencial electrostática, uma vez que as forças que impedem a aceleração das cargas eléctricas não são conservativas, estando os electrões impedidos de atingir a energia cinética que a diferença de potencial aplicada provocaria na ausência dos átomos do material, como num espaço vazio. A potência (energia por unidade de tempo) dissipada no processo faz aquecer o condutor e pode produzir luz, como nas lâmpadas de incandescência, por radiação do corpo negro a uma temperatura elevada. O efeito de aquecimento é o Efeito de Joule, sendo a potência dissipada dada por:
2IRIVP ==
As resistências eléctricas são outras componentes essenciais nos circuitos eléctricos e podem ser associadas em série, com a resistência equivalente:
...21 ++= RRR sérieeq ,
ou em paralelo, com a resistência equivalente dada por:
...111
21
++=RRR paraleq
5.1.3 – Leis de Kirchhoff
Um circuito eléctrico, mesmo contendo apenas resistências e fontes de tensão, pode ser mais complexo do que simplesmente um conjunto de resistências em série ou em paralelo. Em geral é necessário conhecer em pormenor as correntes e diferenças de potencial em todos os ramos do circuito, mas o número de incógnitas exige a escrita de outras tantas equações linearmente independentes. As Leis de Kirchhoff permitem escrever essas equações para circuitos com vários ramos. Um ramo do circuito é uma secção que tem apenas um ponto de entrada e um ponto de saída para a corrente eléctrica. Em regime estacionário, é evidente que a corrente eléctrica é a mesma em todos os pontos desse ramo, ou seja, em todas as componentes inseridas em série nesse ramo.
Um nodo do circuito é um ponto de confluência de vários ramos (quatro no caso do nodo ilustrado na figura). Pela lei dos nodos, a soma das correntes que entram num nodo tem de ser igual à soma das correntes que saem. Doutro modo, diremos que é nulo o somatório das correntes que entram num nodo:
0=∑i
iI
Uma malha do circuito é uma série qualquer de ramos do circuito que, passando por vários nodos, volta a um inicial. No exemplo da figura, delimita-se um ramo entre os nodos abcda. Os tracejados da figura sugerem a existência de mais ramos e nodos não mostrados no circuito. A lei das malhas estipula o que é óbvio para uma situação estacionária: que
é nula a soma das diferenças de potencial ao longo de uma malha fechada, sendo necessário ter cuidado na escrita das equações quanto ao sinal da diferença de potencial em cada ramo:
0=∑i
iV
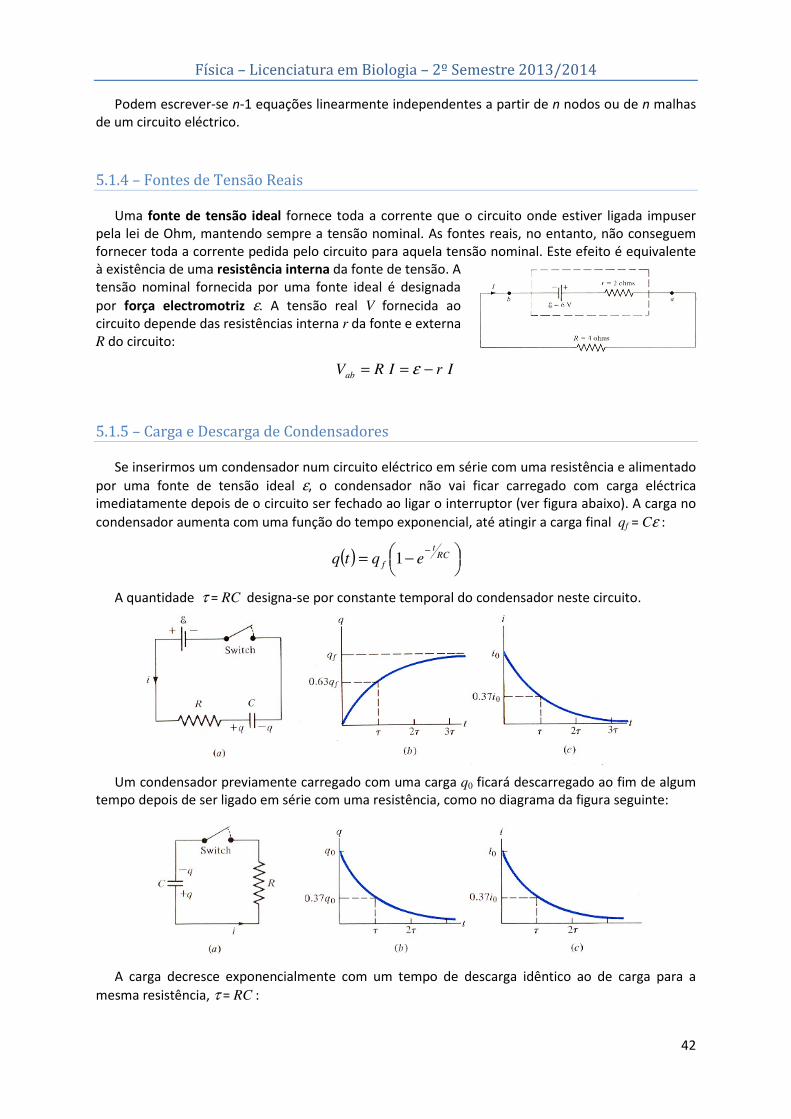
Física – Licenciatura em Biologia – 2º Semestre 2013/2014
42
Podem escrever-se n-1 equações linearmente independentes a partir de n nodos ou de n malhas de um circuito eléctrico.
5.1.4 – Fontes de Tensão Reais
Uma fonte de tensão ideal fornece toda a corrente que o circuito onde estiver ligada impuser pela lei de Ohm, mantendo sempre a tensão nominal. As fontes reais, no entanto, não conseguem fornecer toda a corrente pedida pelo circuito para aquela tensão nominal. Este efeito é equivalente à existência de uma resistência interna da fonte de tensão. A tensão nominal fornecida por uma fonte ideal é designada
por força electromotriz ε. A tensão real V fornecida ao circuito depende das resistências interna r da fonte e externa R do circuito:
IrIRVab −== ε
5.1.5 – Carga e Descarga de Condensadores
Se inserirmos um condensador num circuito eléctrico em série com uma resistência e alimentado
por uma fonte de tensão ideal ε, o condensador não vai ficar carregado com carga eléctrica imediatamente depois de o circuito ser fechado ao ligar o interruptor (ver figura abaixo). A carga no
condensador aumenta com uma função do tempo exponencial, até atingir a carga final qf = Cε :
( )
−=
−RC
t
f eqtq 1
A quantidade τ = RC designa-se por constante temporal do condensador neste circuito.
Um condensador previamente carregado com uma carga q0 ficará descarregado ao fim de algum tempo depois de ser ligado em série com uma resistência, como no diagrama da figura seguinte:
A carga decresce exponencialmente com um tempo de descarga idêntico ao de carga para a
mesma resistência, τ = RC :

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
43
( ) RCt
eqtq−
=0
A corrente eléctrica que passa nestes circuitos também varia com o tempo, diminuindo exponencialmente tanto na carga como na descarga:
( ) RCt
eItI−
=0 R
Cq
R
VI inicial 0
0==
A condução de um impulso eléctrico no axónio de um neurónio pode ser simulada por um circuito eléctrico em que se associa a resistência do axoplasma interior ao neurónio, a resistência da membrana do axónio e uma capacidade eléctrica correspondente à membrana do axónio, que mantém uma diferença de potencial entre o interior e o exterior da célula. A figura seguinte ilustra o circuito equivalente de uma secção de um axónio. O fechar do interruptor corresponde ao disparo de um impulso.
5.2 – Campo Magnético
5.2.1 – Dipolos Magnéticos. Linhas de Campo
O magnetismo ocorre naturalmente em alguns materiais, que foram utilizados muito antes de se estudar o magnetismo com o método científico e de compreender as leis que o correlacionam com as correntes eléctricas, no desenvolvimento completo do electromagnetismo clássico no século XIX.
As forças observadas nos materiais magnéticos reconhecem-se pela atracção de polos contrários e pela repulsão de pólos idênticos dos magnetes.
Contrariamente ao que acontece na electrostática, não é possível separar os polos magnéticos, que inicialmente se designavam por cargas magnéticas dadas as semelhanças com as cargas eléctricas e a ilusão de que seria possível fazer a separação dessas “cargas”. O magnetismo natural ocorre sempre com origem em dipolos magnéticos.
O campo magnético de qualquer origem pode ser sondado com a ajuda duma pequena agulha magnética (um dipolo), como a agulha duma
bússola. O pólo da agulha que aponta para o Norte geográfico terrestre é designado pólo N do dipolo e o
outro por pólo S. Definem-se assim as linhas de campo como linhas paralelas à agulha magnética em cada ponto do espaço. As linhas do campo
magnético criado por um dipolo vêem-se a sair do pólo N e a voltar ao pólo S, com uma configuração algo semelhante às linhas de campo de um dipolo eléctrico.
Como nota de curiosidade, constatamos que a Terra tem um forte dipolo magnético no seu interior, cujo pólo N está perto do pólo Sul geográfico.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
44
É conhecida a importância do campo magnético terrestre em mecanismos de orientação de muitos animais, sendo o mais estudado o caso do pombo correio, embora não sejam ainda compreendidos todos os processos envolvidos na percepção animal do campo magnético.
Uma das primeiras experiências que determinou o desenvolvimento do electromagnetismo clássico e que ligou pela primeira vez o magnetismo à presença de cargas eléctricas em movimento foi a observação de que uma corrente eléctrica provoca um campo magnético, mesmo na ausência de materiais magnéticos. As linhas de campo magnético duma corrente rectilínea são linhas circulares em planos perpendiculares e concêntricas com a linha. O sentido das linhas, ou seja, o sentido do
vector campo magnético Br
, é dado pela regra da mão direita como ilustrado na figura ao lado.
O vector campo magnético Br
é definido a partir do campo produzido por uma corrente eléctrica rectilínea. A direcção e sentido do vector estão definidos pelas linhas de campo, como referido acima. A intensidade do campo é dada por:
r
IkB
2'=
r tesla
Nesta expressão, r é a distância da linha de campo à corrente eléctrica rectilínea, de intensidade I, e k’ é uma constante associada à permeabilidade magnética, µ0 para o vazio:
70 104
'−==
π
µk T·m·A-1
Aquela expressão do campo magnético provocado por uma corrente eléctrica rectilínea provém da lei de Biot e Savart, cuja expressão não interessa aqui apresentar, mas que permite o cálculo do campo magnético provocado por qualquer corrente eléctrica através do cálculo de um integral para todo o comprimento da corrente, o que pode tornar-se complicado para geometrias complexas de correntes. A unidade do campo magnético é o tesla (T). Nos meios materiais a permeabilidade magnética µ é diferente da do vazio, influenciando o campo magnético interno e a propagação de ondas electromagnéticas.
Os campos criados por uma espira de corrente e por um solenoide têm as características de um campo dipolar. As linhas podem ser seguidas até ao espaço interior à espira e ao solenoide, demonstrando que as linhas de
campo magnético são sempre linhas
fechadas, i.e. não têm divergência. Num magnete sólido, uma parte das linhas de campo fechadas está no interior do volume do magnete, eventualmente alteradas pela distribuição de campos atómicos.
5.2.2 – Forças sobre Correntes
A relação entre o campo magnético e correntes eléctricas também se faz notar pela força exercida por um campo magnético estático sobre uma corrente eléctrica constante. Para uma corrente rectilínea I a passar num fio de comprimento l, a força exercida por um campo magnético
uniforme nesse comprimento é dada pela expressão BIlFrrr
×=

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
45
O produto vectorial define a direcção e o sentido da força, sendo a corrente definida por um vector com a direcção do fio e o sentido da corrente. Mais uma vez pode usar-se uma regra da mão direita para visualizar os sentidos dos vectores neste produto vectorial.
Daqui segue ainda que duas correntes eléctricas exercem forças mútuas entre si, atractivas ou repulsivas consoante os sentidos das correntes sejam os mesmos ou contrários. Estas forças são exercidas por via dos campos magnéticos que as correntes geram.
Uma carga eléctrica isolada em movimento pode ser considerada como a corrente eléctrica mais elementar. Assim sendo, uma carga q em
movimento com velocidade vr
num campo magnético Br
vai sentir uma força definida pela
expressão: BvqFrrr
×= .
5.3 – Aparelhos Simples de Medida
5.3.1 – Galvanómetro
O aparelho de medidas eléctricas mais simples é o galvanómetro, que funciona com base na força exercida por um campo magnético fixo sobre a corrente eléctrica que passa numa espira que está sujeita a esse campo. Como ilustrado na figura junta, as forças são exercidas de modo a provocar a rotação da espira, que pode ser associada a uma mola elástica para mostrar, com uma agulha numa escala, o valor da corrente que passa na espira. Se este circuito tiver uma resistência eléctrica muito baixa, o aparelho pode ter uma sensibilidade muito grande à passagem de correntes eléctricas também muito baixas. Este aparelho é a base da construção de voltímetros e amperímetros com mostrador de agulha.
5.3.2 – Voltímetro e Amperímetro
Um voltímetro serve para medir diferenças de potencial eléctrico. Para que o próprio voltímetro introduza o menor erro de medida possível, interessa que a sua resistência interna seja a maior possível, uma vez que o voltímetro será ligado em paralelo nos troços de circuito onde se pretende efectuar a medida. Para isto, podemos construir um voltímetro associando em série um galvanómetro G (de resistência muito baixa) com uma resistência de valor muito elevada RS.
Um amperímetro serve para medir correntes eléctricas e é inserido em série no local dum circuito onde se pretende fazer a medida. Para poder medir correntes eléctricas mais elevadas do que as que o galvanómetro permite, constrói-se um amperímetro associando uma pequena resistência r em paralelo com o galvanómetro.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
46
5.3.3 – Algumas Aplicações
Eléctrodos muito finos podem ser usados para pesquisar os potenciais eléctricos celulares, p. ex. para estudar os fenómenos associados à condução eléctrica nos axónios de células nervosas, baseada como se sabe no equilíbrio e variações bruscas das concentrações de iões Na+, K+, Cl-, etc., dum e doutro lado da membrana celular.
Eléctrodos colados à pele em locais apropriados permitem obter muita informação associada à actividade neuronal sem invadir o organismo, em métodos de diagnóstico médico como a electroencefalografia.
5.4 – Indução Electromagnética
5.4.1 – Fluxo Magnético
O fluxo magnético φ que passa numa área A é definido como o produto da componente do vector campo magnético perpendicular à superfície pelo valor da área:
ABAB ⊥== θφ cos
O ângulo é medido entre a direcção do vector campo magnético e a perpendicular à superfície.
O fluxo que passa na área é nulo se ela estiver num plano
paralelo às linhas de campo (θ = 90°) e é máximo se o plano da área estiver numa posição perpendicular às linhas de
campo (θ = 0°). Se definirmos a própria superfície como um vector de intensidade igual à área e perpendicular à superfície, podemos escrever a expressão do fluxo magnético duma forma
simplificada adoptando um produto escalar: ABrr
⋅=φ .

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
47
5.4.2 – Lei de Faraday
Observa-se experimentalmente que se fizermos variar no tempo o fluxo do campo magnético que passa na área circunscrita a uma espira condutora de circuito fechado, é gerada uma corrente eléctrica na espira. Isto é traduzido pela Lei de Faraday, que define quantitativamente qual a força
electromotriz induzida no circuito condutor fechado:
dt
dφε −=
A figura junta ilustra a experiência em que se faz variar o fluxo de campo magnético que passa na área interior a uma espira movimentando um magnete permanente junto da espira. O fluxo varia porque o campo dipolar produzido pelo magnete varia fortemente de intensidade no espaço nas proximidades dos pólos. Podemos dizer que um campo magnético variável no tempo induz um campo eléctrico, o qual provoca a corrente eléctrica induzida no interior do volume do material condutor. Um campo magnético estático não induz qualquer campo eléctrico.
O sinal menos na lei de Faraday traduz o sentido de circulação da corrente induzida na espira fechada, que é aquele que cria por sua vez um campo magnético cuja orientação tende a contrariar o efeito da indução do campo inicial. Isto é o enunciado da Lei de Lenz.
5.4.3 – Gerador de Corrente Alternada
Se rodarmos com uma frequência angular ω uma espira condutora em circuito fechado enquanto está sujeita a um campo magnético estático, obtemos também um fluxo magnético variável no tempo, com a mesma frequência da rotação da espira:
AtBAB ωφ cos== ⊥
A força electromotriz induzida no circuito de N espiras é alternada:
( ) tsenABNtV ωωε ==
Este é o princípio do gerador de corrente alternada, usado para produção de energia eléctrica a partir do movimento mecânico de rotação da espira.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
48
5.5 – Leis de Maxwell
No Electromagnetismo clássico, as leis de Maxwell e as suas consequências fazem o fecho de uma área de conhecimento, completando a modelação unificada dos fenómenos correlacionados com a electrostática e com o magnetismo. Sem aprofundarmos o assunto e muito menos a matemática envolvida, é interessante aqui referir estas leis para fixar essa mesma ideia de que o conjunto de leis simples do electromagnetismo abordadas nesta disciplina constitui a base desta modelação completa.
Assim, recordemos rapidamente as leis básicas simples que estudámos:
Da lei de Coulomb definimos o campo eléctrico provocado por cargas eléctricas estáticas. A primeira lei de Maxwell generaliza esta lei apontando para a característica do campo eléctrico ter uma divergência, que enunciámos dum modo simplista dizendo que “o campo eléctrico diverge das cargas positivas e converge para as cargas negativas”. Na verdade, define-se um operador matemático diferencial com o nome Divergência, implicado nesta lei.
Como as linhas de campo magnético são sempre fechadas, não existindo monopólos magnéticos isolados, a sua divergência é nula, o que constitui a segunda lei de Maxwell.
A generalização da lei de Faraday é definida por Maxwell como a terceira lei do electromagnetismo, observando que a variação temporal de um campo magnético induz a presença de um campo eléctrico, mesmo no vazio e sem a presença de um circuito eléctrico onde se observe uma corrente induzida.
Da lei de Biot-Savart podemos definir o campo magnético provocado por qualquer distribuição de correntes eléctricas. Maxwell generalizou esta lei incluindo a possibilidade de indução do campo magnético mesmo na ausência de correntes eléctricas, desde que exista uma variação temporal do campo eléctrico.
As quatro leis de Maxwell têm uma relevância para o electromagnetismo que ultrapassa o significado de cada uma isoladamente. É o seu conjunto que se manifesta como o ponto de viragem, através das soluções matemáticas que se obtêm do conjunto quando se aplicam a situações concretas de distribuições de cargas ou correntes. Em particular, é da solução deste conjunto de quatro equações diferenciais que surge a equação de propagação do campo electromagnético, ou seja, das ondas electromagnéticas.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
49
Capítulo 6
Ondas e Luz
6.1 – Movimento Oscilatório
6.1.1 – Oscilador Simples
Se largarmos sem velocidade inicial uma massa pendurada, ou agarrada, a uma mola, de uma posição que não seja a posição de equilíbrio, a força restauradora
îxkF −=r
tende a fazer a massa voltar à posição de equilíbrio x = 0, executando-
se o movimento segundo o eixo dos xx. A massa passa pela posição de equilíbrio e oscila para o outro lado até atingir a posição extrema, à mesma distância A da posição de equilíbrio que tinha quando foi largada, ficando a oscilar entre estas duas posições extremas x = A e x = -A, sendo A a amplitude do movimento oscilatório descrito pela equação de movimento:
( ) ( ) ( )tsenAtfsenAtx ωπ == 2
A oscilação é caracterizada por uma frequência f – número de ciclos por unidade de tempo
(ciclos por segundo, ou Hertz), inversa do período temporal T: Tf 1= (s-1) e relacionada com a
frequência angular por fπω 2= (rad/s).
Consideramos que a mola é deformada dentro do seu limite elástico, sendo k a constante
elástica da mola, correspondente ao módulo de elasticidade de qualquer material contínuo e homogéneo.
A força restauradora é conservativa, pelo que se não houver forças de atrito ou de resistência
viscosa a actuar sobre o oscilador haverá conservação da energia mecânica total 2
21 kAEM = ,
sendo a energia potencial variável com a posição na oscilação: 2
21 kxEP = .
O oscilador assim largado, livre de forças de resistência, tem uma frequência de oscilação bem definida f0, designada frequência natural do oscilador, dependente das características do sistema.
No caso de uma massa m agarrada a uma mola a frequência angular natural é mk=0
ω .
x
x = 0
x = +A
x = −A

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
50
6.1.2 – Oscilador Amortecido
Consideremos agora um oscilador real, sujeito a forças de resistência ou de atrito, como a força de resistência do ar, mesmo que sejam de muito baixa intensidade. Sendo essas forças não conservativas, vão dissipar energia. Se o oscilador for simplesmente largado de uma posição fora do equilíbrio, a oscilação realiza-se com uma amplitude decrescente no tempo:
( ) teAtA λ−= 0
O movimento diz-se amortecido com uma constante de amortecimento λ.
6.1.3 – Oscilador Forçado e Ressonância
É possível manter a oscilar um oscilador amortecido, fornecendo continuamente energia por algum meio de modo a compensar a energia dissipada pela força não conservativa. Para isso, tem de ser aplicada uma força externa, que naturalmente não pode ser uma força constante, mas uma força periódica, de intensidade oscilante com mudança periódica de sentido. O oscilador já não oscila livremente, é agora um oscilador forçado, sendo forçado a oscilar com a frequência da força externa aplicada. A amplitude de oscilação fica dependente da amplitude e da frequência da força externa,
mas também das características do próprio oscilador, i.e. de k, m e λ.
O valor máximo de amplitude de oscilação do oscilador forçado é atingido para uma frequência da força externa próxima, mas ligeiramente menor do que a frequência natural
do oscilador livre ω0:
2
2
0 22
−=
mresλωω
A energia máxima transferida para o oscilador é atingida para uma frequência da força externa exactamente igual à frequência natural do oscilador livre.
Esta situação de valor máximo da amplitude ou da energia transferida para o oscilador forçado designa-se por ressonância. Os fenómenos de ressonância são muito relevantes não apenas para os osciladores mecânicos, como o que aqui descrevemos, mas para todos os osciladores em geral, como p. ex. para os osciladores electromagnéticos (cargas eléctricas) em antenas receptoras ou emissoras de ondas electromagnéticas, com extensão aos sistemas descritíveis pela mecânica quântica, como os electrões atómicos e moleculares.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
51
6.2 – Movimento Ondulatório
6.2.1 – Ondas Transversais e Ondas Longitudinais
Se imaginarmos uma “corda” rectilínea formada por uma cadeia de partículas ligadas entre si ao longo da direcção longitudinal, percebemos que um movimento de oscilação que se imprima a uma das partículas numa direcção transversal, i.e. perpendicularmente ao comprimento da corda, se vai transmitir às partículas que lhe estão imediatamente ligadas, transferindo-lhe toda a energia contida na oscilação original. As partículas seguintes na cadeia transferirão por sua vez a oscilação às seguintes, propagando assim a energia original ao longo da corda. Se se continuar a fornecer energia à primeira partícula, manter-se-á a propagação, formando uma onda.
A onda descrita diz-se onda transversal, por a direcção de oscilação das partículas ser transversal, ou perpendicular, à direcção de propagação da onda, que é neste caso a direcção do comprimento da corda. Uma onda transversal de oscilação sinusoidal, i.e. harmónica, segundo o eixo dos yy e com propagação no sentido positivo do eixo dos xx é descrita pela expressão seguinte, função do tempo t e da posição x ao longo do comprimento da corda:
( )
−=
λπ
x
T
tsenAtxy 2,
Se o sentido de propagação fosse o negativo do eixo dos xx, o sinal negativo do termo espacial no argumento do seno seria positivo. Cada ponto da corda oscila com o mesmo período temporal T
obedecendo a uma equação de movimento sinusoidal ( )
+= φ
πt
TsenAty
2, em que φ é a fase da
oscilação de cada ponto, determinada pela sua posição x e pela definição da posição e do tempo iniciais.
A onda é então caracterizada por três parâmetros: a amplitude de oscilação A, comum a todas as partículas da corda se não houver dissipação de energia, o período de oscilação temporal T (ou o seu
inverso, a frequência), e o período espacial λ, que se designa por comprimento de onda (wavelength, em Inglês) e corresponde à distância entre dois pontos da corda que estão a oscilar na mesma fase, p. ex. entre duas cristas da onda.
A propagação da energia de oscilação não se dá instantaneamente, estando dependente do tempo de transferência da energia entre partículas, que está correlacionado com o modo como as ligações entre partículas reagem à transmissão. Há assim uma velocidade de propagação finita v, que está relacionada com os outros parâmetros da
onda pela expressão: Tv λ= .
As partículas dum meio não estão limitadas a oscilações transversais. Quando a oscilação das partículas individuais se faz na mesma direcção da propagação, propaga-se uma onda longitudinal, descrita por uma expressão semelhante à das transversais.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
52
Em meios gasosos ou líquidos não há forças de ligação suficientemente fortes entre as moléculas para exercer um efeito restaurador da posição de equilíbrio. Na verdade, logo que uma molécula é afastada para uma nova posição num meio fluido, ela adopta novas ligações com as moléculas do local para onde foi deslocada, não havendo por isso posição de equilíbrio para onde voltar. Isto significa que não é possível fazer propagar ondas transversais em meios fluidos. Ondas longitudinais, no entanto, podem propagar-se em meios fluidos, servindo a pressão como força restauradora, uma vez que a deslocação oscilatória das partículas de um plano, em conjunto, provoca zonas de pressão superior e zonas de pressão inferior a um valor de pressão de equilíbrio que o meio tem se não for perturbado pela onda. Por esta razão, as ondas longitudinais em fluidos designam-se também por ondas de
pressão. O som é uma onda de pressão, propagando-se em qualquer meio, uma vez que as ondas longitudinais também se podem propagar em meios sólidos.
6.2.2 – Polarização de Ondas Transversais
Voltando às ondas transversais, notemos que a oscilação de cada partícula se pode fazer num plano, a duas dimensões, ao passo que nas ondas longitudinais só há uma direcção possível de oscilação.
Uma onda transversal diz-se polarizada linearmente se a oscilação de cada partícula se dá numa única direcção transversal e ainda se todas as partículas do meio oscilam num único plano contendo a direcção de propagação como sugere a figura junta.
Em geral, porém, a oscilação de cada partícula pode dar-se nas duas direcções transversais, podendo aplicar-se o princípio de sobreposição tomando a oscilação como a soma de duas oscilações componentes, cada uma polarizada linearmente segundo uma das direcções transversais perpendiculares entre si, com as mesmas características em cada uma delas. Se estas duas componentes não têm uma correlação de fase a onda diz-se não polarizada. Numa polarização linear as duas componentes estão em fase ou em oposição de fase.
Se as oscilações segundo as duas direcções transversais tiverem uma relação de fase
de 90°, que resulta num movimento circular no plano transversal para cada partícula do meio, estamos perante uma onda polarizada circularmente. Este movimento circular pode fazer-se de dois modos, para uma pessoa que olhe para o sentido de onde vem a onda: no sentido directo (sentido anti-horário) ou no sentido retrógrado (sentido horário), falando-se de uma polarização circular esquerda ou direita, respectivamente.
Uma polarização idêntica é a polarização elíptica, para a qual as duas componentes de oscilação têm amplitudes diferentes, descrevendo as partículas trajectórias elípticas no plano transversal.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
53
6.3 – Ondas Electromagnéticas
O desenvolvimento do electromagnetismo clássico no século XIX culminou com a dedução das quatro leis de Maxwell, referidas no fim do capítulo anterior, em que é patente a indução mútua dos campos eléctrico e magnético quando variam no tempo. As soluções das equações de Maxwell são as equações de propagação do campo electromagnético, ou seja das ondas electromagnéticas:
( )[ ] jtcxkEtxE ˆcos),( 0 −= e ( )[ ] ktcxkBtxB ˆcos),( 0 −=
Estas soluções correspondem a uma onda harmónica transversal (a propagar-se no sentido positivo do eixo dos xx), sendo o campo eléctrico sempre perpendicular ao campo magnético. A indução dos campos não é instantânea, mas propaga-se ao longo do espaço com a velocidade que hoje sabemos ser c = 2.99792458×108 m/s no vazio. O número de onda k está correlacionado com o
comprimento de onda λ pela relação k = 2π/λ e com a frequência da onda pela relação kc = 2π f =
ω. (Não confundir este k com a constante universal da lei de Coulomb.) Com isto ficou demonstrado que a luz consiste precisamente de ondas em que se propaga a variação temporal conjunta dos campos eléctrico e magnético, perpendiculares entre si na onda. As ondas electromagnéticas não necessitam de meios materiais para se propagarem, do mesmo modo que os campos eléctrico e magnético estáticos não precisam de meios materiais para se fazerem sentir à distância das cargas ou correntes eléctricas que os originam.
Uma onda electromagnética pode atravessar meios materiais transparentes, mas os electrões do meio reagem às variações dos campos atrasando a propagação da onda, resultando numa velocidade menor que c. A relação entre c e a velocidade da luz v num determinado meio é designada como o seu índice de refracção n = c/v. Por outro lado é interessante referir que a velocidade da luz no vazio pode ser expressa numa relação entre as constantes universais da lei de
Coulomb e da lei de Biot-Savart: 'kkc = .
A energia transportada pela onda é definida pela sua intensidade:
200
2
1
4mW
k
BEI
′=
π
A luz visível é apenas uma pequena parte do espectro electromagnético, que vai das frequências baixas das ondas de rádio até às muito elevadas frequências dos raios gama.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
54
Como referimos anteriormente, nas ondas electromagnéticas propaga-se a variação temporal conjunta dos campos eléctrico e magnético, que se induzem mutuamente. Um solenoide, ou circuitos eléctricos com outras geometrias como se vê nas antenas emissoras de ondas de rádio, pode ser usado para produzir ondas electromagnéticas se se fizer circular no solenoide uma corrente eléctrica alternada, com intensidade oscilando sinusoidalmente em torno de zero. As cargas eléctricas em movimento geram simultaneamente um campo eléctrico e um campo magnético variáveis no tempo, que se propagam como ondas electromagnéticas de frequência igual à da corrente alternada. É possível gerar deste modo ondas de rádio e micro-ondas, mas já não é possível deste modo gerar luz visível, por exemplo, devido à impossibilidade prática de provocar uma corrente eléctrica alternada com a frequência adequada.
Além das utilizações em telecomunicações, este modo de gerar ondas electromagnéticas, usando um solenoide, é utilizado em instrumentação científica, como na geração de micro-ondas ou de rádio-frequências em experiências de ressonância magnética nuclear (RMN), ressonância de spin electrónico (ESR), etc.
6.3.1 – Transições Electrónicas
A partir da Física Quântica, iniciada por Planck e Einstein no início do século XX, sabe-se que as ondas electromagnéticas interagem com os electrões de átomos e moléculas sendo absorvidas ou emitidas por transições quantificadas entre estados de energia electrónica. Essa forma quantificada da radiação electromagnética absorvida ou emitida é designada por fotão. Há deste modo uma dualidade da natureza da luz, ora observada como uma onda electromagnética ora como composta por partículas sem massa, os fotões, conforme o modo de detecção ou observação ou ainda dos fenómenos que estão em causa na interação com a matéria. Um fotão transporta uma energia bem definida, função da frequência f, ou da cor, da onda electromagnética correspondente:
λchfhE == , em que h é a constante de Planck, envolvida na solução do problema da radiação
do corpo negro.
Estas transições quânticas, ou melhor, a interacção da luz com estruturas moleculares ou atómicas, estão envolvidas em muitos fenómenos biológicos implicados em funcionalidades bioquímicas e sensoriais de seres vivos, como a bioluminescência, fotosíntese, visão, etc., e utilizadas em métodos espectroscópicos de identificação de moléculas e de processos bioquímicos.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
55
Capítulo 7
Radioactividade
Abordamos neste capítulo as bases de alguns métodos de imagiologia utilizados na investigação em Biologia, coincidentes em larga medida com métodos de imagiologia médica, baseados na utilização de radiação ionizante proveniente de sistemas de produção de raios-X ou de decaimentos radioactivos de núcleos instáveis.
São ainda abordados os aspectos fundamentais de segurança a ter em conta por quem trabalhe em ambientes sujeitos a radiação ionizante. Interessa conhecer os diferentes tipos de radiação, a sua produção e tempos de vida, os efeitos biológicos provocados, e as medidas de segurança a ter em conta na sua utilização.
7.1 – Radiação
7.1.1 – Radiação e Interacção com a Matéria
Do ponto de vista da protecção radiológica, é necessário distinguir os diferentes tipos de radiação quanto à sua natureza e proveniência, ao seu alcance na matéria, à energia depositada e aos efeitos físicos que provocam.
A designação dos diferentes tipos de radiação que ainda hoje se usa provém dos tempos em que se estudou a estrutura do átomo, diferenciando-se as diferentes radiações observadas pelos seus
efeitos, mas em que não se conhecia ainda a natureza de cada uma. Temos assim os raios α, raios β,
raios γ, raios-X. Os raios ultra-violeta têm uma designação diferente devido ao seu enquadramento na espectroscopia atómica e molecular. Os neutrões foram reconhecidos posteriormente como emitidos em processos de fissão nuclear.
As radiações que interessa considerar neste capítulo são de dois tipos quanto à sua natureza: partículas com elevada energia cinética e radiação electromagnética.
As radiações constituídas por partículas são em geral emitidas em processos de decaimento radioactivo. Além disso, as partículas com carga eléctrica podem também ser aceleradas por campos electromagnéticos em aceleradores de partículas, até atingir velocidades suficientes para causar efeitos físicos importantes quando atingem um organismo vivo.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
56
A radiação electromagnética pode provir de vários tipos de fonte: do Sol; transições nucleares em processos de decaimento radioactivo; transições atómicas em átomos ou moléculas excitados, como nas ampolas de raios-X ou nas lâmpadas de ultra-violeta; emissão por aceleração (ou desaceleração) de partículas carregadas, como os electrões, nos sincrotrões ou nos aceleradores lineares.
A energia contida na radiação é um factor muito importante para os efeitos que causa. A energia é normalmente dada em eV (electrão-volt, energia cinética adquirida por um electrão quando acelerado por uma diferença de potencial de 1 volt; 1 eV = 1,602×10-19 J). A energia de radiação electromagnética emitida por transições quânticas entre estados excitados atómicos (raios X) ou
nucleares (raios γ) corresponde à energia dos fotões, E = h f, em que h é a constante de Planck.
Descrevemos a seguir sucintamente cada um dos tipos de radiação ionizante, capazes de ionizar átomos e moléculas dos materiais onde incidam:
7.1.1.1 – Raios α
Os raios αααα são núcleos de Hélio (2 protões e 2 neutrões), com carga +2e e massa cerca de 4 vezes a massa do protão. Provêm do decaimento alfa, em que núcleos instáveis se desintegram em partes deixando para trás núcleos de menor massa, e são emitidos com energias à volta de 5 MeV (megaelectrão-volt). Devido à carga eléctrica e massa
elevada, os raios α têm um alcance pequeno na matéria, perdendo a sua energia em alguns cm de ar ou mm de material biológico. A interacção electromagnética com os electrões dos materiais provoca ionização de átomos e moléculas. Choques frontais com núcleos de hidrogénio podem arrancá-los das suas posições em moléculas. Átomos de maior massa são mais eficientes a parar as partículas
α. A figura ao lado mostra o alcance de partículas α em alguns materiais, em função da energia cinética das partículas.
7.1.1.2 – Raios β
Os raios ββββ são electrões (β-, carga -e) ou positrões (anti-
electrões, β+, carga +e), emitidos em decaimentos radioactivos de núcleos leves. Têm um alcance médio na
matéria (dezena de cm). A carga ±e provoca também ionização de átomos e moléculas. A figura ao lado mostra o
alcance de partículas β em alguns materiais, em função da energia cinética das partículas.
7.1.1.3 – Raios γ
Os raios γγγγ são constituídos por radiação electromagnética de frequência (e energia) muito elevada, proveniente de transições quânticas entre diferentes estados de energia nuclear, por núcleos que resultam de decaimentos radioactivos e ficam inicialmente em estados nucleares excitados. São por isso radiação electromagnética na forma quântica de fotões.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
57
O alcance dos raios γ na matéria é elevado. Estes fotões interagem com a matéria por três efeitos, a seguir descritos e ilustrados na figura junta:
(a) Efeito fotoeléctrico: toda a energia é transferida para o electrão do átomo, provocando ionização.
(b) Efeito de Compton: parte da energia é transferida para o electrão do átomo, provocando ionização. Fica ainda um fotão de menor energia.
(c) Produção de pares e-e+: quando a energia do γ é ≥ 2×511 keV, pode haver a
criação de uma partícula (electrão) e da sua anti-partícula (positrão), que têm uma massa que corresponde à energia de 511 keV, pela relação de
Einstein keVcmE e 5112 == .
A figura junta mostra a probabilidade de ocorrência de cada um dos efeitos, em função da energia do fotão incidente.
7.1.1.4 – Neutrões
Os neutrões são nucleões não carregados, com massa idêntica à dos protões. Emitidos em decaimentos de núcleos instáveis pesados por fissão nuclear. Podem ser produzidos artificialmente por choques de protões de elevada energia com materiais pesados. Perdem a energia por colisões elásticas. Perdem mais energia por choques sucessivos com núcleos de átomos leves, como o H, que são ejectados das suas posições originais, podendo provocar choques ou ionizações secundárias. Quando ficam quase parados (<1eV), os neutrões podem ser absorvidos por núcleos em reacções
nucleares de captura, seguindo-se muitas vezes emissão de fotões γ no decaimento radioactivo do núcleo resultante da absorção. São necessários muitos cm de materiais leves como parafina ou água para os parar. Têm um alcance muito mais elevado noutros materiais, da ordem dos metros, para energias cinéticas de alguns MeV. Os neutrões, como radiação, não estarão presentes nos ambientes de investigação na área da Biologia.
7.1.1.5 – Raios-X
Os raios-X são radiação electromagnética produzida por travagem de partículas carregadas, em geral electrões, em ampolas de raios-X, em aceleradores lineares (radioterapia), ou em sincrotrões (estudos científicos de difracção de raios-X e outras técnicas). Podem também ser emitidos em decaimentos radioactivos em que o núcleo resultante passa por algum estado excitado de muito baixa energia. Têm um elevado alcance na matéria e ionizam átomos e moléculas. Átomos mais pesados têm maior eficiência a absorver os raios-X.
7.1.1.6 – Raios Ultra-Violeta:
A radiação ultra-violeta pode ser produzida por lâmpadas especiais e estão presentes no espectro electromagnético da luz do Sol. Normalmente dividem-se em três gamas de comprimento de onda: UVA, 400-320 nm, UVB, 320-290 nm e UVC, 290-200 nm. A gama UVC é absorvida nas camadas elevadas da atmosfera pelo ozono. A absorção de ultra-violetas por muitas moléculas leva a transformações químicas relevantes para os processos biológicos. O alcance dos ultra-violeta na matéria biológica é muito reduzido, menos de 1 mm, pelo que os seus efeitos se fazem sentir apenas na pele e no cristalino.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
58
7.1.1.7 – Espectro de Radiação Electromagnética
Ilustra-se neste diagrama a correspondência das escalas de energia nas unidades eV e J com as escalas de frequência e comprimentos de onda no vazio da radiação electromagnética. São assinalados alguns valores particulares de energia que chamam a atenção para o efeito de ionização das radiações descritas atrás.
100
101
102
103
104
105
106
107
108
raio
s γ
raio
s X
ultra
-vio
leta
vis
íve
l
(eV)
E
10-19
10-18
10-17
1x10-16
10-15
1x10-14
1x10-13
1x10-12
1x10-11
(J)
1014
1015
1016
1017
1018
1019
1020
1021
1022
1x1023
(m)
λvazio
(Hz)
fE
10-6
10-7
10-8
10-9
1x10-10
1x10-11
1x10-12
1x10-13
1x10-14
β
γγγγ
90Srenergia
energia ββββ 60
Co
energia dois γγγγ 60
Co
energia αααα 235
U
1 MeV
1 nm
linha Kα W (raios X)
1 Angstrom
linha Kα Cu (raios X)
linha Kα C (raios X)
ionização completa He
potencial ionização H
linha ultra-violeta Hg
linha verde-azul H
linha vermelha H
energia n fissão 235
U
energia libertada
na fissão 235
U

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
59
7.1.2 – Decaimento radioactivo
Os núcleos de composição instável desintegram-se, em processos de decaimento, transformando-se noutras espécies nucleares, emitindo partículas e fotões gama. Estes núcleos designam-se por núcleos radioactivos. A estabilidade ou instabilidade dum núcleo está correlacionada com as forças nucleares de interacção entre os seus nucleões constituintes, sendo este assunto objecto de estudo na física nuclear, que não vamos aprofundar nesta disciplina. De cada elemento da tabela periódica há em geral vários isótopos estáveis e outros instáveis, ou radioactivos. Alguns isótopos radioactivos são naturais, ou porque são produzidos por interacção de raios cósmicos, partículas altamente energéticas provenientes do exterior da Terra, ou porque faziam parte dos materiais que constituíram a Terra desde a sua formação, ou ainda porque provêm do decaimento de outros núcleos existentes na formação da Terra.
Se tivéssemos a possibilidade de ficar a observar um núcleo radioactivo individual, não saberíamos à partida quando é que aconteceria o seu decaimento. Podia acontecer logo no primeiro segundo de observação, ou podia acontecer que esgotássemos a paciência à espera por muito tempo. Sabemos, no entanto, caracterizar muito bem o que acontece com uma população de um número muito elevado de núcleos semelhantes: O número de núcleos da população que ainda não decaíram vai decrescendo duma forma exponencial, que é assimptótica no tempo t :
teNtN λ−= 0)(
Esta equação é sempre a mesma, qualquer que seja o tempo de início de uma hipotética observação desse número de núcleos. É uma equação característica de processos aleatórios, em que se atribui a cada núcleo uma probabilidade de decaimento por unidade de
tempo, λ , a que se dá a designação de constante de decaimento.
Podemos ainda caracterizar o decaimento de cada espécie radioactiva pelo tempo característico T, que designamos por tempo de
meia-vida, em que o número de núcleos por decair passa para metade do número inicial N0. O
tempo de meia-vida é também representado por T1/2 ou τ1/2. A relação entre a constante de decaimento e o tempo de meia-vida é:
TT
693.02ln==λ
Se medirmos o número de decaimentos por unidade de tempo de uma determinada população de núcleos da mesma espécie (isótopo) radioactiva, com um sistema de detecção das partículas ou fotões emitidos, observaremos que esse número, designado como a actividade A dessa fonte radioactiva, é traduzido também por uma função exponencial decrescente com o tempo:
teAtA λ−= 0)(
A actividade da fonte está correlacionada com a variação temporal do número de núcleos por decair existentes em cada instante na fonte:
( ) teNdt
dNtA λλ −−−=−=
0)(
Temos então λ00 NA =
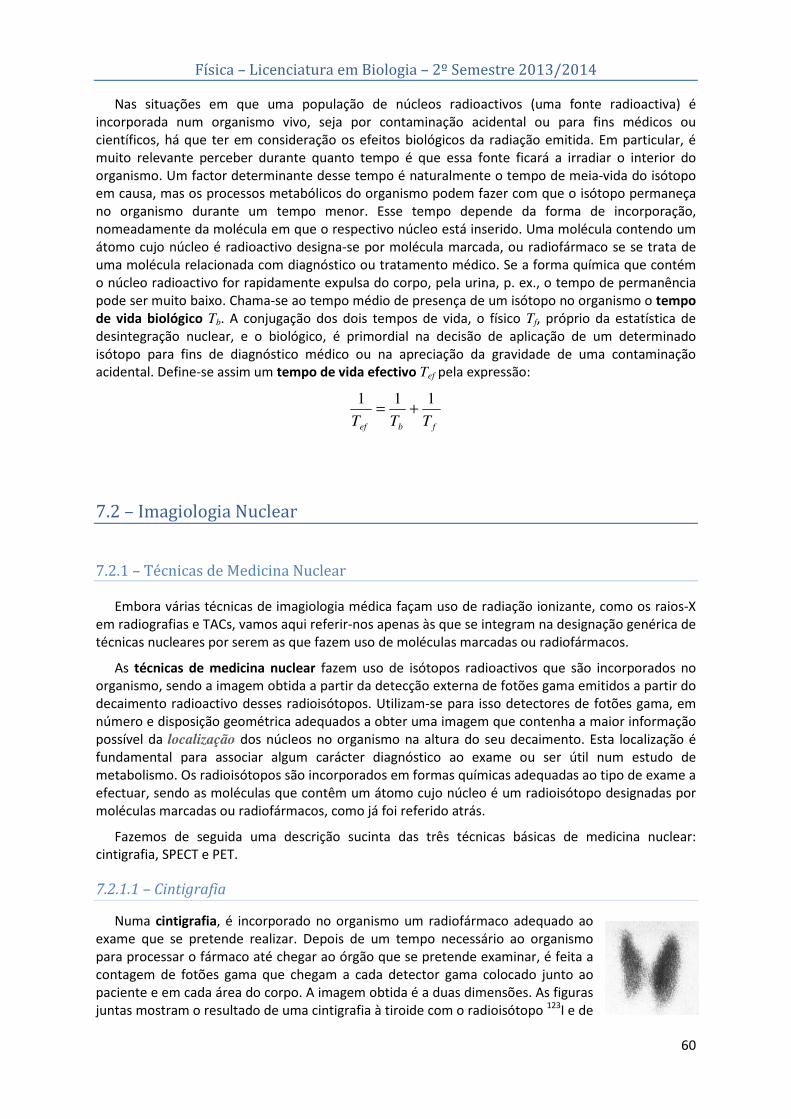
Física – Licenciatura em Biologia – 2º Semestre 2013/2014
60
Nas situações em que uma população de núcleos radioactivos (uma fonte radioactiva) é incorporada num organismo vivo, seja por contaminação acidental ou para fins médicos ou científicos, há que ter em consideração os efeitos biológicos da radiação emitida. Em particular, é muito relevante perceber durante quanto tempo é que essa fonte ficará a irradiar o interior do organismo. Um factor determinante desse tempo é naturalmente o tempo de meia-vida do isótopo em causa, mas os processos metabólicos do organismo podem fazer com que o isótopo permaneça no organismo durante um tempo menor. Esse tempo depende da forma de incorporação, nomeadamente da molécula em que o respectivo núcleo está inserido. Uma molécula contendo um átomo cujo núcleo é radioactivo designa-se por molécula marcada, ou radiofármaco se se trata de uma molécula relacionada com diagnóstico ou tratamento médico. Se a forma química que contém o núcleo radioactivo for rapidamente expulsa do corpo, pela urina, p. ex., o tempo de permanência pode ser muito baixo. Chama-se ao tempo médio de presença de um isótopo no organismo o tempo
de vida biológico Tb. A conjugação dos dois tempos de vida, o físico Tf, próprio da estatística de desintegração nuclear, e o biológico, é primordial na decisão de aplicação de um determinado isótopo para fins de diagnóstico médico ou na apreciação da gravidade de uma contaminação acidental. Define-se assim um tempo de vida efectivo Tef pela expressão:
fbef TTT
111+=
7.2 – Imagiologia Nuclear
7.2.1 – Técnicas de Medicina Nuclear
Embora várias técnicas de imagiologia médica façam uso de radiação ionizante, como os raios-X em radiografias e TACs, vamos aqui referir-nos apenas às que se integram na designação genérica de técnicas nucleares por serem as que fazem uso de moléculas marcadas ou radiofármacos.
As técnicas de medicina nuclear fazem uso de isótopos radioactivos que são incorporados no organismo, sendo a imagem obtida a partir da detecção externa de fotões gama emitidos a partir do decaimento radioactivo desses radioisótopos. Utilizam-se para isso detectores de fotões gama, em número e disposição geométrica adequados a obter uma imagem que contenha a maior informação possível da localização dos núcleos no organismo na altura do seu decaimento. Esta localização é fundamental para associar algum carácter diagnóstico ao exame ou ser útil num estudo de metabolismo. Os radioisótopos são incorporados em formas químicas adequadas ao tipo de exame a efectuar, sendo as moléculas que contêm um átomo cujo núcleo é um radioisótopo designadas por moléculas marcadas ou radiofármacos, como já foi referido atrás.
Fazemos de seguida uma descrição sucinta das três técnicas básicas de medicina nuclear: cintigrafia, SPECT e PET.
7.2.1.1 – Cintigrafia
Numa cintigrafia, é incorporado no organismo um radiofármaco adequado ao exame que se pretende realizar. Depois de um tempo necessário ao organismo para processar o fármaco até chegar ao órgão que se pretende examinar, é feita a contagem de fotões gama que chegam a cada detector gama colocado junto ao paciente e em cada área do corpo. A imagem obtida é a duas dimensões. As figuras juntas mostram o resultado de uma cintigrafia à tiroide com o radioisótopo 123I e de

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
61
uma cintigrafia aos ossos de corpo inteiro em duas posições, com o radioisótopo 99mTc.
O conjunto de detectores é designado habitualmente por câmara gama. Deve ser suficientemente extenso em número de detectores e área abrangida, para obter numa só contagem a imagem da área a estudar. Mesmo assim é necessário acumular contagens durante algum tempo para obter uma imagem
com o máximo de contraste e informação. Haverá um equilíbrio entre o tempo de contagem e a actividade incorporada, que se quer naturalmente à partida que seja a mais baixa possível, para evitar o mais possível os efeitos da radiação sobre o paciente. Na imagem à esquerda mostra-se um tipo de câmara gama a fazer uma cintigrafia ao coração.
Se o conjunto de detectores é limitado, haverá necessidade de o mover em frente à área a examinar para acumular informação suficiente. O mínimo necessário será evidentemente um único detector, que não deverá ter dimensões muito grandes para maximizar a resolução espacial da imagem final. O tempo de medida será, no entanto, necessariamente mais longo.
Este tipo de câmaras extensas é ainda utilizado no âmbito da segurança radiológica em situações de contaminação por incorporação acidental de radioisótopos, para observar o grau e extensão da contaminação, em medidas de corpo inteiro.
7.2.1.2 – SPECT
SPECT é a sigla em inglês de “single photon emission computed tomography”, ou seja, tomografia de emissão de fotão único. Esta técnica está baseada na técnica de cintigrafia, à qual se juntou a capacidade das técnicas de tomografia computorizada para obter imagens a três dimensões, o que traz vantagens enormes do ponto de vista da resolução espacial da imagem e da quantidade de informação espacial que se pode obter do conjunto de detectores.
Os detectores estão posicionados de modo diferente para esta técnica, devendo haver detectores a abranger o corpo a toda a volta, e não apenas num plano em frente (ou atrás) do paciente. A geometria mais simples é a de um anel de detectores gama abrangendo um ângulo de
360° que é deslocado ao longo do corpo do paciente de modo a abranger a área necessária, tal como nos aparelhos de TAC ou NMR.
Os radiofármacos utilizados são os mesmos das cintigrafias. As técnicas simples de cintigrafia continuam a ser utilizadas pelo seu custo de produção e manutenção muito menor, o que permite a sua existência em maior número.
Dada a relativamente baixa resolução espacial das imagens de SPECT, estas são muitas vezes obtidas em simultâneo com imagens de maior resolução espacial, p. ex. de RMN, para uma melhor visualização da localização da fonte de gamas, como ilustrado na imagem ao lado, relativa à actividade do cérebro.
A investigação científica em biologia tem beneficiado muito do uso desta técnica para estudos de metabolismo e acção de fármacos em modelos animais, incluindo estudos de evolução temporal, para o que são fabricados aparelhos de dimensões menores e com maior resolução espacial, adequados ao tamanho de pequenos animais ou plantas. A técnica toma o nome de micro-SPECT nestas condições. A figura ao lado ilustra uma imagem de micro-
SPECT sobreposta a uma de micro-CT (TAC), obtidas em simultâneo.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
62
7.2.1.3 – PET
PET é a sigla em inglês de “positron emission tomography”, ou seja, tomografia de emissão de positrões. Esta técnica nuclear utiliza radioisótopos emissores de positrões, de elementos químicos presentes generalizadamente em compostos orgânicos, como o carbono, oxigénio, azoto e flúor, sendo por isso enorme a potencialidade de utilização desta técnica com uma grande variedade de moléculas marcadas ou radiofármacos.
No decaimento β+ dos radioisótopos usados em PET é emitido um positrão, sem a emissão de fotões gama pelo núcleo filho (núcleo resultante do decaimento). Sendo a anti-partícula do electrão, o positrão sofrerá aniquilação com o primeiro electrão que encontrar quando tiver reduzido a sua energia cinética para uma energia equivalente à energia térmica. O positrão percorre uma pequena distância antes de isso acontecer. A aniquilação do par partícula / anti-partícula (e+e-) resulta simplesmente em dois fotões de
energia 511 keV cada, emitidos em direcções a 180° entre si. A energia de 511 keV corresponde à massa do electrão e do positrão, que se transforma completamente em energia na forma electromagnética, pela relação de Einstein E = m c
2. As direcções opostas de emissão dos gamas devem-se ao facto de a aniquilação se dar só quando o positrão estiver praticamente parado, sendo necessário conservar o momento linear total no processo, que era quase nulo logo antes da aniquilação. Os dois fotões emitidos em direcções opostas garantem assim que o momento linear se mantém constante. (Nota: por estranho que pareça também se define na física moderna um momento linear para os fotões, apesar de não terem massa.) Pela mesma razão, a aniquilação não poderia resultar num só fotão, que não poderia nunca ter momento nulo.
Utilizando um sistema de detectores em anel, do mesmo género dos utilizados para o SPECT, e juntando novamente as técnicas de tomografia computorizada, obtêm-se imagens a três dimensões das localizações das moléculas marcadas na altura do seu decaimento.
Assim como para a técnica de SPECT, em máquinas PET avançadas é utilizada uma imagem de NMR adquirida ao mesmo tempo, para acrescentar informação espacial e estrutural à imagem PET.
A resolução espacial das imagens de PET não é grande, mas há um esforço continuado na procura de soluções no sentido de a melhorar, como o caso dos detectores RPC em desenvolvimento no Laboratório de Instrumentação e Física de Altas Energias (LIP-Coimbra), a funcionar no Departamento de Física da Universidade de Coimbra, e que está associado às grandes experiências do CERN.
Também no caso da técnica de PET são fabricados instrumentos para realizar investigação em pequenos animais, sendo a técnica chamada micro-PET. Um
desenvolvimento recente associa a técnica de PET com técnicas de bioluminescência para produzir
Física – Licenciatura em Biologia – 2º Semestre 2013/2014
63
imagens 3D do organismo que distinguem os diferentes tipos de tecido orgânico. Esta técnica é designada OPET, de optical-PET.
7.3 – Efeitos Biológicos da Radiação
7.3.1 – Efeitos Biológicos
Os efeitos físicos da radiação ionizante são a ionização de átomos e moléculas, com a possibilidade de provocar transformações químicas e a formação de radicais livres por quebra de ligações moleculares. Uma das moléculas de maior risco é o DNA.
Os órgãos de maior risco são os olhos, a medula óssea, células em reprodução ou tecidos em crescimento. Alguns efeitos biológicos são cataratas, leucemias, malformações, mutações, morte de células cancerígenas. Estas últimas são especialmente vulneráveis, mais do que as células saudáveis do mesmo tecido, uma vez que não têm mecanismos de reparação do DNA que são reconhecidos nas células saudáveis. Por esta razão é tão eficaz a utilização de radiação ionizante em radioterapia.
Os efeitos são cumulativos, excepto para doses muito baixas (da ordem da radiação ambiental), para as quais os mecanismos de reparação biológica, nomeadamente do DNA, são muito eficazes.
Há que ter em conta ainda os efeitos imediatos, que se fazem sentir para doses elevadas. A tabela seguinte refere os efeitos imediatos para algumas gamas de doses de radiação absorvida (ver a secção seguinte sobre o significado de dose).
Dose (Sv) < 0.25 Sv > 1 Sv > 8 Sv >> 5 Sv
Efeitos imediatos
não são observados
na medula gastro-
intestinais graves
morte num período de dias
a semanas (Tchernobyl)
7.3.2 – Dosagem de Radiação
A dosagem de radiação tem como objectivo principal a prevenção de efeitos biológicos da radiação sobre cada pessoa individualizada e sobre populações caracterizadas por factores ambientais comuns de carácter geográfico, profissional, ou de intervenção médica.
Por um lado, procura-se fazer estimativas dos efeitos previsíveis sobre indivíduos sujeitos a condições de radiação conhecidas, de modo a prevenir situações de sobredosagem. Por outro lado, procura-se estimar as doses de radiação efectivamente recebidas (através de dosímetros e detectores de radiação) no decorrer de trabalho profissional ou por exposição acidental, ocasional ou simplesmente ambiental a radiação, de proveniência natural ou não.
7.3.2.1 – Actividade duma fonte
No caso de radiação proveniente do decaimento radioactivo, é importante o conhecimento da actividade da fonte dessa radiação, que é definida simplesmente pelo número de desintegrações

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
64
por unidade de tempo (segundo). À unidade de actividade (1 desintegração por segundo) dá-se o nome de Becquerel, com o símbolo Bq.
A unidade antiga, o Curie, vale: 1 Ci = 3.7 × 1010 Bq.
Quando a radiação tem outra origem, como nas ampolas de raios-X, é muitas vezes conveniente definir o número de fotões emitidos por unidade de tempo, ou o número de fotões que incidem sobre a pessoa (ou tecido, ou órgão) por unidade de tempo e por unidade de área.
7.3.2.2 – Dose Absorvida (D)
A dose absorvida D define-se como a energia absorvida por unidade de massa. A unidade é o Gray: 1 Gy = 1 J/kg.
Trata-se de estimar a quantidade de energia que as partículas ou os fotões depositam ao interagir com os tecidos do corpo humano. É de realçar que a energia pode ser absorvida num espaço de tempo curto ou longo, havendo já aqui uma noção da importância da acumulação de doses e do tempo que se demora a acumular essas doses.
Esta dose absorvida é a quantidade básica na dosimetria, a partir da qual se definem as doses equivalente e efectiva, tratadas de seguida.
A unidade antiga de dose absorvida era o rad, que valia: 1 rad = 0.01 Gy
7.3.2.3 – Dose Equivalente (HT)
A dose equivalente HT define-se como a dose absorvida no tecido ou órgão T, ponderada em função do tipo e qualidade da radiação.
Nesta fase dos cálculos de doses é necessário considerar qual o tipo de radiação que está a depositar energia, reconhecendo que os efeitos biológicos dependem do tipo e da qualidade (energia cinética da partícula) da radiação incidente. Utiliza-se um factor de ponderação wR, tabelado na legislação adequada, que se multiplica pela dose absorvida, para obter a dose
equivalente: RTRRT DwH,,
= .
Na tabela seguinte apresentam-se exemplos de valores desse factor de ponderação:
Radiação γ β n (< 10 keV) n (0.1 – 2 MeV) p (> 2 MeV) α wR 1 1 5 20 5 20
De notar que se houver mais do que um tipo de radiação a incidir simultaneamente sobre o mesmo tecido é necessário fazer o cálculo de cada dose separadamente para obter a dose
equivalente HT total para um determinado tecido ou órgão T:
∑∑ ==R
RTR
R
RTT DwHH,, .
A unidade de dose equivalente é o Sievert, cujo símbolo é Sv.
É necessário por outro lado fazer este cálculo para cada tecido ou órgão do corpo para permitir o cálculo da dose efectiva, que se discute a seguir.
7.3.2.4 – Dose Efectiva (E)
A dose efectiva é a soma das doses equivalentes recebidas em todos os tecidos e órgãos irradiados no corpo humano. Considerando as diferentes sensibilidades de cada tecido à radiação e os efeitos biológicos causados, nesta soma pondera-se cada dose equivalente com um factor de
ponderação tecidular wT (tabelado na legislação relevante) adequado a cada tecido:

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
65
∑=T
TT HwE . A unidade de dose efectiva é ainda o Sievert (Sv).
Na tabela seguinte apresentam-se exemplos de alguns factores de ponderação:
Tecido/órgão Gónadas Medula óssea Fígado Pele wT 0,2 0,12 0,05 0,01
Esta dose efectiva é um valor que vai sendo somado ao longo da vida de cada indivíduo. Os profissionais expostos a radiações devem ser acompanhados através de dosimetria individual controlada por uma entidade licenciada pela Direcção Geral da Saúde, do Ministério da Saúde, que manterá um registo das doses efectivas recebidas.
É importante registar as doses acumuladas ao longo do tempo devido aos efeitos biológicos cumulativos da radiação. Por outro lado, sendo os efeitos avolumados se se ultrapassarem doses limite em espaço de tempo definidos, é necessário observar também a acumulação de doses nesses períodos de tempo definidos, como um dia, um mês, um ano, períodos de cinco anos, etc.
7.3.2.5 – Dose Efectiva Comprometida por Incorporação
Para o cálculo da dose efectiva interessa considerar todo o tipo de irradiação a que os diferentes tecidos e órgão estão sujeitos. A irradiação proveniente de fontes externas ao corpo (irradiação externa) é recebida apenas enquanto a pessoa estiver de facto exposta à radiação, durante um intervalo de tempo que será o mínimo possível se a irradiação for devidamente controlada.
Há no entanto situações em que uma fonte radioactiva é incorporada através de ingestão, inalação ou contaminação (tecidos em contacto físico com o ambiente exterior) acidental, ou ainda através de procedimentos de medicina nuclear, de diagnóstico ou de intervenção radiológica. Todas estas irradiações contribuem para a dose efectiva. Para o cálculo da dose efectiva comprometida
por incorporação considera-se o tempo em que as fontes permanecem incorporadas, designado por tempo de vida biológico, que depende da forma química em que o(s) isótopo(s) radioactivos estão integrados, ou seja de que moléculas fazem parte. A dose efectiva deve ser multiplicada por factores de ponderação metabólicos e de idade da pessoa para obter um valor significativo de dose efectiva, que compreende o tempo mesmo futuro em que a irradiação se processa. Considera-se cada radionuclido em particular em tabelas extensas presentes na legislação existente.
7.3.2.6 – Doses Limite
No sentido da prevenção dos efeitos nocivos da radiação, é necessário ter uma noção de quais serão as doses que representam um aumento considerável do risco de surgir alguma situação indesejável do ponto de vista da saúde dos indivíduos expostos. Reconhece-se facilmente que informações deste tipo se obtêm através de experiências, mas obviamente que não há experiências de irradiação de humanos. Podemos no entanto inferir os efeitos biológicos de doses elevadas de radiação através da análise de acontecimentos como as explosões das bombas atómicas da segunda guerra mundial e das décadas posteriores ou os acidentes com centrais nucleares, como em Tchernobyl e Fukushima.
Há que distinguir entre efeitos imediatos, correlacionados com a concentração temporal das doses, e efeitos a longo prazo, correlacionados com a acumulação de doses ao longo do tempo. Neste sentido, é necessário ter em consideração as doses acumuladas em diferentes intervalos de tempo.
As doses limite são assim valores de doses equivalentes ou efectivas que se estabelecem como limites seguros e que correspondem a uma probabilidade baixa de ocorrência de efeitos negativos.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
66
Não devemos esquecer que se trata de processos estatísticos em que a probabilidade aumenta com a dose acumulada.
A lei estabelece as doses máximas permitidas, distinguindo a população geral dos profissionais que trabalham com fontes de radiação ionizante, e pensando nas perspectivas de saúde pública e segurança individual. A legislação portuguesa actual deriva duma directiva do Conselho da União Europeia e regula tanto os diferentes aspectos da dosimetria individual e ambiental, com também o licenciamento e as normas de segurança de instalações onde existam fontes de radiação ionizante.
A dose efectiva máxima permitida para a população geral é de E = 1 mSv/ano (ao longo de 5 anos). São definidas doses equivalentes H especialmente para o cristalino e para a pele.
As doses máximas permitidas para os profissionais expostos são de E = 50 mSv/ano e 100 mSv/ 5 anos sucessivos. São definidas doses equivalentes H especialmente para o cristalino, pele e mãos.
Como termo de comparação, apresentam-se na tabela seguinte as doses efectivas recebidas por pacientes em exames médicos comuns, com a indicação do respectivo tempo equivalente de exposição à radiação ambiental.
Exame médico Dose efectiva (mSv) Tempo equiv. rad. ambiental
RX ao tórax 0,02 3 dias
RX ao crânio 0,1 2 semanas
RX ao abdómen 1 a 1,5 ≈ 6 meses
RX à coluna TAC ao crânio Cintigrafia à tiroide
2 1 ano
Cintigrafia aos ossos 4 2 anos
TAC ao abdómen TAC ao tórax
8 4 anos
TAC helicoidal < ½ dose da 4ª geração
RX digital ≈ ½ da dose convencional
7.4 – Protecção Radiológica
O objectivo principal da protecção radiológica é reduzir ao mínimo as doses recebidas por exposição a fontes de radiação ionizante. Resumem-se nesta secção os procedimentos, cuidados e atitudes que decorrem desse objectivo, relativos a locais onde são instaladas fontes de radiação.
7.4.1 – Princípios Básicos
– Os locais têm de estar licenciados pelas entidades governamentais supervisoras, de acordo com a lei vigente.
– Uma instalação deve ter um responsável pela segurança radiológica.
– Os locais devem ser de acesso reservado e devem estar identificados com sinalização adequada.
– Deve manter-se um registo permanente e actualizado das fontes existentes e da sua localização.
– Devem existir locais próprios de armazenagem que preservem a irradiação e contaminação do seu exterior e garantam a segurança contra riscos de incêndios, inundações, etc..

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
67
– Deve ser estabelecida uma lista de medidas de emergência, e deve promover-se a formação e o treino contínuos dos trabalhadores expostos.
– É obrigatória a dosimetria individual, de leitura periódica de acordo com a lei. Uma especial atenção deve ser dada às doses recebidas nas mãos, no caso de trabalhadores de serviços de radio-medicina. Monitores portáteis de radiação permitem avaliar as doses ambientais.
7.4.2 – Minimização da Irradiação Externa
– É necessário em primeiro lugar conhecer o(s) tipo(s) de radiação emitidos por cada fonte e as respectivas actividades e tempos de vida.
– A utilização de monitores portáteis de radiação (detector Geiger) permite verificar quais as zonas que estão a ser irradiadas e como a radiação se distribui no espaço disponível, ajudando a planear o posicionamento e os movimentos dos profissionais.
– Limitar ao mínimo absolutamente necessário o tempo de exposição.
– Manter a máxima distância possível em relação às fontes. A exposição é inversamente proporcional ao quadrado da distância. Tendo em conta a actividade das fontes, poderá ser necessário equipamento de manipulação à distância.
– Sempre que possível, interpor materiais que absorvam as radiações emitidas. Poderá ser necessária a utilização de equipamento de manipulação remota. As espessuras de materiais que se dão a seguir podem depender também da actividade das fontes:
Raios-X: 1 cm de plástico
α: 1 mm de alumínio
β: 2 cm de alumínio
γ: vários cm de chumbo ou tungsténio; depende da energia dos fotões – utilizar monitor de radiação; o chumbo é tóxico, pelo que convém pintar as chapas ou tijolos utilizados.
Neutrões: muitos cm (metros) de parafina ou água.
7.4.3 – Contaminação
A contaminação consiste na deposição de material radioactivo em locais em que a sua presença não é útil. A maior parte das vezes a contaminação ocorre acidentalmente. Podem ocorrer contaminações de equipamento e mobiliário ou das próprias pessoas – vestuário, calçado, pele, cabelo, olhos. As piores situações são aquelas em que ocorre incorporação do material radioactivo através de inalação ou ingestão, pois a irradiação será permanente e interna enquanto o metabolismo não processar completamente as formas químicas de que fazem parte os núcleos radioactivos.
Há por um lado que planear todos os procedimentos de manipulação de fontes tendo em conta os riscos de contaminação, minimizando-a e, quando inevitável, circunscrevendo-a a zonas e equipamento bem delimitados. Por outro lado, há que estabelecer normas de procedimentos a seguir na eventualidade de uma contaminação acidental. Resumem-se alguns cuidados e noções a ter em conta:
– As fontes não seladas (pós, gases, líquidos) são especialmente vulneráveis a acidentes.

Física – Licenciatura em Biologia – 2º Semestre 2013/2014
68
– A abertura de contentores (frascos, ampolas, etc.) e a manipulação de fontes não seladas devem ser feitas em locais o mais possível isolados fisicamente para evitar a disseminação pelo ambiente (eventualmente atingindo as próprias pessoas). Podem ser usadas caixas de luvas.
– Quando o isolamento não é completo, deve usar-se vestuário protector. As luvas são inevitáveis.
– Todo o equipamento ou materiais que saem dos locais isolados devem ser verificados com um monitor de radiação para despiste de contaminações. Nunca partir do princípio que não há contaminação, por exemplo no exterior de embalagens de transporte do material radioactivo.
– O lixo radioactivo deve ser armazenado em local apropriado, até decair completamente ou até ser enviado às autoridades competentes, conforme a lei vigente.
– Devem estabelecer-se procedimentos de verificação de rotina de possíveis contaminações no ambiente onde são manipuladas as fontes radioactivas – chão, mobiliário, roupa.
– Em locais de acumulação de grande actividade radioactiva pode ser necessário instalar monitores de radiação de pés e mãos para verificação obrigatória de contaminações de cada vez que uma pessoa sai do local reservado.
– Em caso de acidente:
. Afastar-se do local da contaminação no caso de doses de irradiação elevadas, mas tomando todas as precauções para não espalhar a contaminação.
. Evitar a inalação e ingestão de material radioactivo.
. Chamar o responsável da segurança radiológica.
. Com a ajuda dum responsável de segurança radiológica, fazer o reconhecimento das zonas contaminadas. O uso de monitores portáteis de radiação é essencial.
. Lavagem da pele, olhos, etc., contaminados.
. Se se suspeitar de incorporação, fazer a observação da actividade radioactiva do corpo inteiro.
. Providenciar o acompanhamento médico do indivíduo contaminado.