anÁlise sÍsmica de pÓrticos planos metÁlicos...
TRANSCRIPT
UNIVERSIDADE DE BRASÍLIAFACULDADE DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA CIVIL E AMBIENTAL
ANÁLISE SÍSMICA DE PÓRTICOS PLANOSMETÁLICOS UTILIZANDO O MÉTODO DOS
ELEMENTOS FINITOS
VICTOR ULYSSES SOUSA OLIVEIRA
ORIENTADOR: WILLIAM TAYLOR MATIAS SILVA
MONOGRAFIA DE PROJETO FINAL EM ESTRUTURAS
BRASÍLIA/DF: DEZEMBRO DE 2016
UNIVERSIDADE DE BRASÍLIAFACULDADE DE TECNOLOGIA
DEPARTAMENTO DE ENGENHARIA CIVIL E AMBIENTAL
ANÁLISE SÍSMICA DE PÓRTICOS PLANOS METÁLICOSUTILIZANDO O MÉTODO DOS ELEMENTOS FINITOS
VICTOR ULYSSES SOUSA OLIVEIRA
MONOGRAFIA DE PROJETO FINAL SUBMETIDA AO DEPARTAMENTO DE ENGENHARIA CI-
VIL E AMBIENTAL DA FACULDADE DE TECNOLOGIA DA UNIVERSIDADE DE BRASÍLIA, COMO
PARTE DOS REQUISITOS NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE BACHAREL EM EN-
GENHARIA CIVIL.
APROVADA POR:
PROF. WILLIAM TAYLOR MATIAS SILVA, Dr. Ing. (ENC-UnB)(Orientador)
PROF. RAÚL DARIO DURAND FARFÁN, DSc (ENC-UnB)(Examinador interno)
ENG. RAMON SALENO YURE RUBIM COSTA SILVA, DSc (VALEC)(Examinador externo)
BRASÍLIA/DF, 12 DE DEZEMBRO DE 2016
i
FICHA CATALOGRÁFICA
OLIVEIRA, VICTOR ULYSSES SOUSA
Análise Sísmica de Pórticos Planos Metálicos Utilizando o Método dos Elementos Finitos [Dis-
trito Federal] 2016.
xi, 67 p., 210 x 279 mm (ENC/FT/UnB, Bacharel, Engenharia Civil, 2016)
Monografia de Projeto Final. Universidade de Brasília. Faculdade de Tecnologia. Departa-
mento de Engenharia Civil e Ambiental.
1. Dinâmica das Estruturas
2. Análise Sísmica
3. Elementos Finitos
4. Dissipador de Energia
REFERÊNCIA BIBLIOGRÁFICA
OLIVEIRA, V. U. S. (2016). Análise Sísmica de Pórticos Planos Metálicos Utilizando o Mé-
todo dos Elementos Finitos. Monografia de Projeto Final. Departamento de Engenharia Civil e
Ambiental, Universidade de Brasília, Brasília, DF, xi, 67 p.
CESSÃO DE DIREITOS
NOME DO AUTOR: Victor Ulysses Sousa Oliveira
TÍTULO DA MONOGRAFIA DE PROJETO FINAL: Análise Sísmica de Pórticos Planos Me-
tálicos pelo Método dos Elementos Finitos
GRAU / ANO: Bacharel em Engenharia Civil / 2016
É concedida à Universidade de Brasília a permissão para reproduzir cópias desta monografia
de Projeto Final e para emprestar ou vender tais cópias somente para propósitos acadêmicos e
científicos. O autor reserva outros direitos de publicação e nenhuma parte desta monografia de
Projeto Final pode ser reproduzida sem a autorização por escrito do autor.
Victor Ulysses Sousa OliveiraQd. 10, Conj. F, 52 - Sobradinho
73.005-106 - Brasília/DF - Brasil
ii
RESUMO
ANÁLISE SÍSMICA DE PÓRTICOS PLANOS METÁLICOS UTILIZANDO O MÉ-TODO DOS ELEMENTOS FINITOS
Autor: Victor Ulysses Sousa OliveiraOrientador: William Taylor Matias SilvaGraduação em Engenharia CivilBrasília, 12 de dezembro de 2016
As estruturas submetidas a carregamentos que variam com o tempo que gerem forças de inér-cia com valores altos de forma que não possam ser desprezadas não podem ser resolvidas poranálises estáticas simples, sendo necessário lançar mão de análises dinâmicas. Os sismos sãoexemplos desses carregamentos e apesar de não serem frequentes no Brasil, seus efeitos sãoimportantes no projeto de obras especiais. O presente trabalho apresenta os conceitos básicosda análise dinâmica aplicados aos casos de sistemas de um grau de liberdade, assim como seudesenvolvimento para casos mais complexos com vários graus de liberdade. Por fim tais conhe-cimentos são aplicados para analisar numericamente um pórtico plano metálico em três casosdistintos: sem contraventamento, com contraventamento e com contraventamento e com dissi-pador. São comparadas as respostas dos três casos a um carregamento sísmico.
Palavras chave: análise dinâmica, sistemas de um grau de liberdade, análise sísmica.
iii
SUMÁRIO
LISTA DE FIGURAS vi
LISTA DE SÍMBOLOS viii
1 Introdução 11.1 Objetivo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.2 Metodologia . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2
1.3 Organização do trabalho . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3
2 Estudo do Oscilador Simples 42.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.1 Graus de liberdade . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
2.1.2 Amortecimento . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.1.3 Tipos de ação dinâmica . . . . . . . . . . . . . . . . . . . . . . . . . . 6
2.2 Sistemas com Um Grau de Liberdade . . . . . . . . . . . . . . . . . . . . . . 7
2.2.1 Equação de movimento . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2.2.2 Oscilador simples em vibração livre . . . . . . . . . . . . . . . . . . . 9
2.2.2.1 Sistema sem amortecimento . . . . . . . . . . . . . . . . . . 10
2.2.2.2 Sistema com amortecimento . . . . . . . . . . . . . . . . . . 11
2.2.3 Oscilador simples submetido a força harmônica . . . . . . . . . . . . . 13
2.2.3.1 Sistema sem amortecimento . . . . . . . . . . . . . . . . . . 13
2.2.3.2 Sistema com amortecimento . . . . . . . . . . . . . . . . . . 14
2.2.3.3 Ressonância . . . . . . . . . . . . . . . . . . . . . . . . . . 15
2.2.4 Oscilador simples submetido a força periódica arbitrária . . . . . . . . 16
2.2.5 Oscilador simples submetido a força aperiódica . . . . . . . . . . . . . 17
2.2.5.1 Método por diferença finita central . . . . . . . . . . . . . . 18
2.2.5.2 Método de Newmark com aceleração constante . . . . . . . 19
2.2.5.3 Método Wilson θ . . . . . . . . . . . . . . . . . . . . . . . 21
3 Sistemas com Múltiplos Graus de Liberdade 233.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
iv
3.2 Obtenção da Equação de Movimento . . . . . . . . . . . . . . . . . . . . . . . 25
3.2.1 Formulação com o Método dos Elementos Finitos . . . . . . . . . . . . 25
3.2.2 Matriz de Rigidez do Elemento . . . . . . . . . . . . . . . . . . . . . 27
3.2.2.1 Elemento de Viga . . . . . . . . . . . . . . . . . . . . . . . 27
3.2.2.2 Elemento de Treliça Plana . . . . . . . . . . . . . . . . . . . 29
3.2.2.3 Elemento de Pórtico Plano . . . . . . . . . . . . . . . . . . 31
3.2.3 Matriz de Massa do Elemento . . . . . . . . . . . . . . . . . . . . . . 31
3.2.3.1 Matriz de Massa Discreta . . . . . . . . . . . . . . . . . . . 31
3.2.3.2 Matriz de Massa Consistente . . . . . . . . . . . . . . . . . 32
3.2.4 Matriz de Amortecimento do Elemento . . . . . . . . . . . . . . . . . 32
3.2.5 Sistema Global de Equações de Movimento . . . . . . . . . . . . . . . 33
3.2.5.1 Transformação para o Referencial Global . . . . . . . . . . . 33
3.2.5.2 Montagem do Sistema Global de Equações . . . . . . . . . . 34
3.3 Resolução da Equação de Movimento . . . . . . . . . . . . . . . . . . . . . . 36
3.3.1 Frequências e Modos Naturais de Vibração . . . . . . . . . . . . . . . 36
3.3.2 Superposição Modal . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
3.3.3 Matriz de amortecimento de Rayleigh . . . . . . . . . . . . . . . . . . 39
3.3.4 Resolução por Integração Direta . . . . . . . . . . . . . . . . . . . . . 40
4 Dissipador de Energia 434.1 Introdução aos amortecedores ADAS . . . . . . . . . . . . . . . . . . . . . . . 43
4.2 Modelagem do dissipador . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5 Excitação Sísmica 475.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.2 Oscilador simples submetido à movimentação da base . . . . . . . . . . . . . . 50
5.2.1 Movimento harmônico da base . . . . . . . . . . . . . . . . . . . . . . 51
5.3 Modelo com múltiplos graus de liberdade sob ação sísmica . . . . . . . . . . . 53
6 Análise de Exemplo de Pórtico Plano sob Excitação Sísmica 556.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
6.2 O programa fea_frames . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.2.1 Entrada de dados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
6.3 Resultados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 58
7 Conclusões 657.1 Sugestões para trabalhos futuros . . . . . . . . . . . . . . . . . . . . . . . . . 66
REFERÊNCIAS BIBLIOGRÁFICAS 66
v
LISTA DE FIGURAS
2.1 Exemplo de sistema de um grau de liberdade (Adaptado de CLOUGH; PEN-
ZIEN, 2003 e SORIANO, 2014) . . . . . . . . . . . . . . . . . . . . . . . . . 5
2.2 Modelo de multigraus de liberdade (Adaptado de CLOUGH; PENZIEN, 2003) 5
2.3 Tipos de ação dinâmica (SORIANO, 2014) . . . . . . . . . . . . . . . . . . . 7
2.4 Corpo submetido a ação de força f . . . . . . . . . . . . . . . . . . . . . . . . 7
2.5 Sistema massa-mola-amortecedor . . . . . . . . . . . . . . . . . . . . . . . . 8
2.6 Sistema massa-mola submetido a ação estática do peso . . . . . . . . . . . . . 9
2.7 Resposta para os amortecimentos crítico, subcrítico e supercrítico (Adaptado de
SORIANO, 2014) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
2.8 Amplificação dinâmica em função da razão de frequências, para várias razões
de amortecimento (Adaptado de SORIANO, 2014) . . . . . . . . . . . . . . . 16
2.9 Aproximação de u para o instante ti (SORIANO, 2014) . . . . . . . . . . . . . 18
2.10 Média da aceleração no intervalo de tempo ∆t (SORIANO, 2014) . . . . . . . 20
2.11 Aceleração linear no intervalo estendido de tempo (SORIANO, 2014) . . . . . 21
3.1 Deslocamentos nodais do elemento de viga . . . . . . . . . . . . . . . . . . . 28
3.2 Deslocamentos nodais do elemento de treliça . . . . . . . . . . . . . . . . . . 30
3.3 Decomposição vetorial no plano (SORIANO, 2014) . . . . . . . . . . . . . . 33
3.4 Pórtico exemplo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1 Amortecedor ADAS (SIRVE, 2016) . . . . . . . . . . . . . . . . . . . . . . . 43
4.2 Esquema de montagem do amortecedor ADAS . . . . . . . . . . . . . . . . . 44
4.3 Conjunto de molas equivalentes do elemento link . . . . . . . . . . . . . . . . 44
4.4 Conjunto de amortecedores equivalentes do elemento link . . . . . . . . . . . . 45
5.1 Mapeamento da aceleração sísmica horizontal característica de projeto (NBR
15421, 2006, apud. SORIANO, 2014) . . . . . . . . . . . . . . . . . . . . . . 48
5.2 Acelerograma do sismo El Centro de 1940, componente Norte-Sul (Adaptado
de CLOUGH; PENZIEN, 2003) . . . . . . . . . . . . . . . . . . . . . . . . . 48
5.3 Espectro de resposta de deslocamento relativo para o sismo El Centro (SORI-
ANO, 2014) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
vi
5.4 Sistema submetido a movimentação da base (Adaptado de CLOUGH & PEN-
ZIEN, 2003) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.5 Amplificação dinâmica do deslocamento relativo em função da razão de frequên-
cias, para várias razões de amortecimento (Adaptado de SORIANO, 2009) . . . 52
5.6 Amplificação dinâmica do deslocamento total em função da razão de frequên-
cias, para várias razões de amortecimento (Adaptado de SORIANO, 2009) . . . 53
6.1 Pórtico contraventado com dissipador . . . . . . . . . . . . . . . . . . . . . . 55
6.2 Casos de análise do pórtico . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
6.3 Comparação do deslocamento dos nós superiores esquerdos . . . . . . . . . . 58
6.4 Comparação da velocidade dos nós superiores esquerdos . . . . . . . . . . . . 59
6.5 Comparação da aceleração dos nós superiores esquerdos . . . . . . . . . . . . 60
6.6 Comparação dos deslocamentos dos nós do dissipador . . . . . . . . . . . . . 61
6.7 Comparação das velocidades dos nós do dissipador . . . . . . . . . . . . . . . 61
6.8 Comparação das acelerações dos nós do dissipador . . . . . . . . . . . . . . . 62
6.9 Força elástica desenvolvida no dissipador . . . . . . . . . . . . . . . . . . . . 62
6.10 Relação entre força elástica e deslocamentos . . . . . . . . . . . . . . . . . . . 63
6.11 Força viscosa desenvolvida no dissipador . . . . . . . . . . . . . . . . . . . . 63
6.12 Relação entre força viscosa e velocidades . . . . . . . . . . . . . . . . . . . . 64
vii
LISTA DE SÍMBOLOS
Símbolo Descrição
a0 Primeiro termo da série de Fourier
a1, a2 Constantes dependentes dos valores iniciais
a Amplitude de deslocamento
Ad Fator de amplificação dinâmica
Areld Fator de amplificação dinâmica do deslocamento relativo
Atotd Fator de amplificação dinâmica do deslocamento total
ap Amplitude do deslocamento em regime permanente
aq Coeficiente da série de Fourier
b1, b2 Constantes dependentes das condições iniciais
bq Coeficiente da série de Fourier
c Constante de amortecimento viscoso
ci j Coeficiente de influência de amortecimento
ccr Constante de amortecimento crítico
e Exponencial
f (t) Força externa variável com o tempo
f0 Amplitude da força harmônica
fa Força de amortecimento
fb Força horizontal equivalente aplicada na base
fe Força elástica
fi Força de inércia
f ′i Pseudoforça estática noinstante tifn Frequência natural
g Aceleração da gravidade
I Momento de inércia
k Constante de rigidez
ki j Coeficiente de influência de rigidez
k′ Pseudorrigidez
viii
L Comprimento
m Massa
mi j Coeficiente de influência de massa
m′ Pseudomassa, massa linear
Nk k-ésima função de forma
p1, p2 Constantes dependentes das características do sistema
r Razão de frequências
t Tempo
Sa Pseudoaceleração relativa espectral espectral
Sd Deslocamento relativo espectral espectral
Sv Pseudovelocidade relativa espectral espectral
T0 Período fundamental de força periódica
Tn Período natural angular
u Deslocamento
ue Deslocamento nodal do elemento
u Derivada primeira do deslocamento, ou velocidade
u Derivada segunda do deslocamento, ou aceleração
ub Deslocamento da base
uest Deslocamento estático
up Deslocamento em regime permanente
uso Amplitude do deslocamento da base
ut Deslocamento total
v Velocidade
Yj Coordenadas nodais
α Fator de amortecimento de Rayleigh
β Fator de amortecimento de Rayleigh
∆t Intervalo de tempo
ε Deformação axial
θ Coeficiente de extensão do intervalo ∆t
κ Curvatura
ξ Razão de amortecimento
ρ Densidade de massa
σxx Tensão normal a x
τ Tempo em relação a ti−1
φ Ângulo de fase
ω Frequência angular
ix
ωa Frequência angular amortecida
ωn Frequência natural angular
ω j j-ésima frequência natural de vibração
a Vetor aceleração
B Multiplicação entre L e NC Matriz de amortecimento
Ce Matriz de amortecimento do elemento
D Matriz dinâmica
d Vetor deslocamento
d Vetor velocidade
d Vetor aceleração
E Matriz de propriedades elásticas
f Vetor força
fI Vetor de forças de inércia
fA Vetor de forças de amortecimento
fE Vetor de forças elásticas
I Matriz identidade
K Matriz de rigidez
Ke Matriz de rigidez do elemento
L Operador diferencial
M Matriz de massa
Me Matriz de massa do elemento
N Matriz de funções de forma
R Matriz de rotação
Re Matriz de rotação do elemento
qe Vetor de forças nodais equivalentes do elemento
qm Vetor de correspondência de deslocamentos
ue Vetor deslocamento do elemento
ue Vetor velocidade do elemento
ue Vetor aceleração do elemento
Y Vetor de coordenadas nodais
εεε Vetor deformações
σσσ Vetor tensões
ννν Campo de deslocamentos
ννν Campo de velocidades
x
ννν Campo de acelerações
ΦΦΦ Matriz modal
ϕϕϕ j j-ésimo modo de vibração natural
ΩΩΩ Matriz espectral
xi
1. INTRODUÇÃO
Na análise estrutural procura-se com a descrição da estrutura em um modelo matemá-
tico simplificado, a partir da definição de suas características, tais como as condições de apoio,
as características dos materiais e as cargas às quais a estrutura estará submetida, obter os esfor-
ços nos elementos que compõem a o modelo estrutural, bem como estimar os deslocamentos
da estrutura devido às ações a que é submetida. Tais informações são necessárias para poste-
rior dimensionamento da estrutura, onde será verificado o atendimento desta a condições que
garantam a segurança quanto à ruptura e quanto à utilização.
A análise estática é a forma mais usual, onde se considera que as ações à qual a estrutura
está submetida são também estáticas, ou seja, não variam com o tempo. Para ações que apresen-
tam variabilidade, são usados valores de projeto que sejam significativos quanto a probabilidade
de ocorrência, porém na construção do modelo, são tratados como carregamentos estáticos.
Porém há casos em que se faz necessário estudar o comportamento da estrutura quando
submetida a ações que variam com o tempo. Nesse caso lança-se mão da análise dinâmica
estrutural para determinar o efeito destas sobre as estruturas.
Na análise estática de uma estrutura submetida a uma determinada carga, os esforços in-
ternos e a configuração deformada dependem apenas desta carga e das características de defor-
mabilidade dos materiais, podendo ser determinados por princípios estabelecidos de equilíbrio
de forças. Já na análise de uma estrutura submetida a uma carga dinâmica, os deslocamentos
dependerão também das forças inerciais que se opõem às acelerações que as produzem. Assim,
os esforços internos têm de equilibrar não só as cargas externas, mas também as forças inerciais
resultantes da aceleração da estrutura (CLOUGH; PENZIEN, 2003)
Várias ações a que está submetida uma estrutura variam com o tempo, tais como as de-
correntes das atividades humanas, equipamentos móveis, vento, sismos, etc. Tais ações deverão
ser classificadas como dinâmicas na análise quando há o desenvolvimento de forças de inércia
relevantes na estrutura. Particularmente com os avanços em ciência dos materiais possibilitou-
se a construção de estruturas mais esbeltas, com maiores vãos e, portanto, mais sujeitas aos
efeitos de ações dinâmicas, tais como vibrações e fadiga (SORIANO, 2014).
Especificamente em relação aos sismos, observa-se que são eventos de ocorrência não
tão frequente no Brasil, sendo o estudo destes e de seus efeitos sobre as estruturas deixado para
casos especiais. Não obstante, é importante para uma formação globalizada do engenheiro o co-
1
nhecimento e estudo do tema, visto a importância que tem em outros países, incluindo vizinhos
próximos, bem como seu requerimento no projeto de estruturas especiais e de grande porte,
tais como usinas nucleares, hidrelétricas e instalações de exploração de petróleo (SORIANO,
2014).
Na avaliação de projetos resistentes a sismos podem ser aplicados diferentes tipos de
análises, desde métodos simples, como a plicação de forças equivalentes, até métodos mais
complexos que envolvam simulações numéricas de aplicação da excitação sísmica e determi-
nação da resposta da estrutura, onde se pode decidir por utilizar métodos que melhorem tal
resposta, como a utilização de dispositivos dissipadores de energia.
1.1. OBJETIVO
O presente trabalho tem como objetivo avaliar a resposta de um exemplo de pórtico
plano metálico a um carregamento símico imposto na base, comparando três situações distintas
na construção de tal pórtico. Na primeira situação o pórtico é considerando sem a presença
de contraventamento e sem a presença de dispositivo dissipador de energia. Na segunda é
considerada a dição de contraventamento ao pórtico e na terceira, além do contraventamento, é
considerada a existência de um dispositivo dissipador de energia.
1.2. METODOLOGIA
Nas análises a serem realizadas não se pretende discutir parâmetros de projeto ou re-
comendações normativas, mas tão somente realizar a comparação entre o comportamento da
estrutura nos três casos distintos, mesmo porque se trata de um exemplo simples e porque serão
consideradas simplificações no modelo,como a consideração de comportamento linear tanto dos
elementos estruturais quanto do dissipador de energia.
Para a avaliação será utilizado software específico para análise dinâmica, que utilizará
como método escolhido para a determinação da resposta da estrutura ao carregamento sísmico o
método de Newmark de integração direta da equação de movimento do modelo, sendo que este
é discretizado em elementos de barra, além da consideração do amortecimento de Rayleigh.
Como parte do trabalho, para cumprir o objetivo citado acima será apresentada uma revi-
são da teoria necessária para compreender bem como se dá a análise de uma estrutura submetida
a um carregamento dinâmico como o proposto. Nesse sentido serão adquiridos os conceitos bá-
sicos da dinâmica das estruturas pelo estudo do oscilador simples, passando-se em seguida para
o estudo de sistemas mais complexos, com mais graus de liberdade, as considerações de dis-
cretização e avaliação da equação de movimento. Será feita também uma breve revisão sobre
o dispositivo dissipador de energia considerado e sobre os carregamentos sísmicos e como eles
entram na análise do modelo.
2
1.3. ORGANIZAÇÃO DO TRABALHO
No capítulo 2 serão tratados conceitos básicos da dinâmica da estrutura e o estudo do
oscilador simples, que é um sistema que possui apenas um grau de liberdade. Serão mostradas a
obtenção da equação de movimento e as respostas desse sistema a alguns tipos de carregamentos
dinâmicos comuns em análises dinâmicas para uma compreensão geral do comportamento de
tais sistemas.
No capítulo 3 serão tratados os sistemas com múltiplos graus de liberdade, que são es-
truturas mais complexas. Para a obtenção da equação de movimento será necessário discutir
a discretização do modelo, no caso, em elementos de barras, e a formulação do método dos
elementos finitos para a obtenção das matrizes de rigidez e de massa. Será ainda discutida a
resolução do sistema de equações de movimento, passando pela obtenção dos modos e frequên-
cias naturais até o desenvolvimento do método de integração direta de Newmark a ser utilizado
na análise do exemplo.
No capítulo 4 será feita uma breve descrição do amortecedor ADAS, que é o dispositivo
dissipador de energia a ser considerado na análise do exemplo, porém com a simplificação para
comportamento linear. Será ainda discutida a modelagem de tal dispositivo.
No capítulo 5 serão feitas considerações acerca dos sismos e sua consideração em pro-
jetos estruturais. Será feita, ainda, uma revisão da consideração da movimentação da base no
modelo, primeiro para o oscilador simples, depois para modelos com vários graus de liberdade.
No capítulo 6 são descritas as análises do exemplo de pórtico submetido à excitação
sísmica e são apresentados os resultados obtidos.
Finalmente, no capítulo 7 são tecidas as conclusões do trabalho, bem como sugestões
para trabalhos futuros.
3
2. ESTUDO DO OSCILADOR SIMPLES
2.1. INTRODUÇÃO
A resolução de problemas relacionados à análise dinâmica de estruturas passa pela ela-
boração de modelos matemáticos que representem tanto a estrutura quanto as ações dinâmicas
que agem sobre ela. Modelos simplificados têm análise também mais simplificadas, porém
podem não representar o problema real com acurácia. Ainda assim, modelos simples podem
ser úteis no estudo de conceitos básicos. A adição de complexidade ao modelo aproxima-o do
comportamento real da estrutura porém a resolução será também mais complexa.
Nesta seção serão abordados os conceitos de algumas características importantes do
modelo. A forma como tais características são consideradas na construção do modelo contribui
para um maior ou menor grau de complexidade deste.
2.1.1. GRAUS DE LIBERDADE
O número de graus de liberdade do sistema pode ser definido como o número de deslo-
camentos independentes necessários para definir as posições das massas em relação à posição
inicial das mesmas em uma análise dinâmica (CHOPRA, 1995), ou como o número de compo-
nentes de deslocamento que devem ser consideradas para representar os efeitos das forças de
inércia significativas na estrutura (CLOUGH; PENZIEN, 2003).
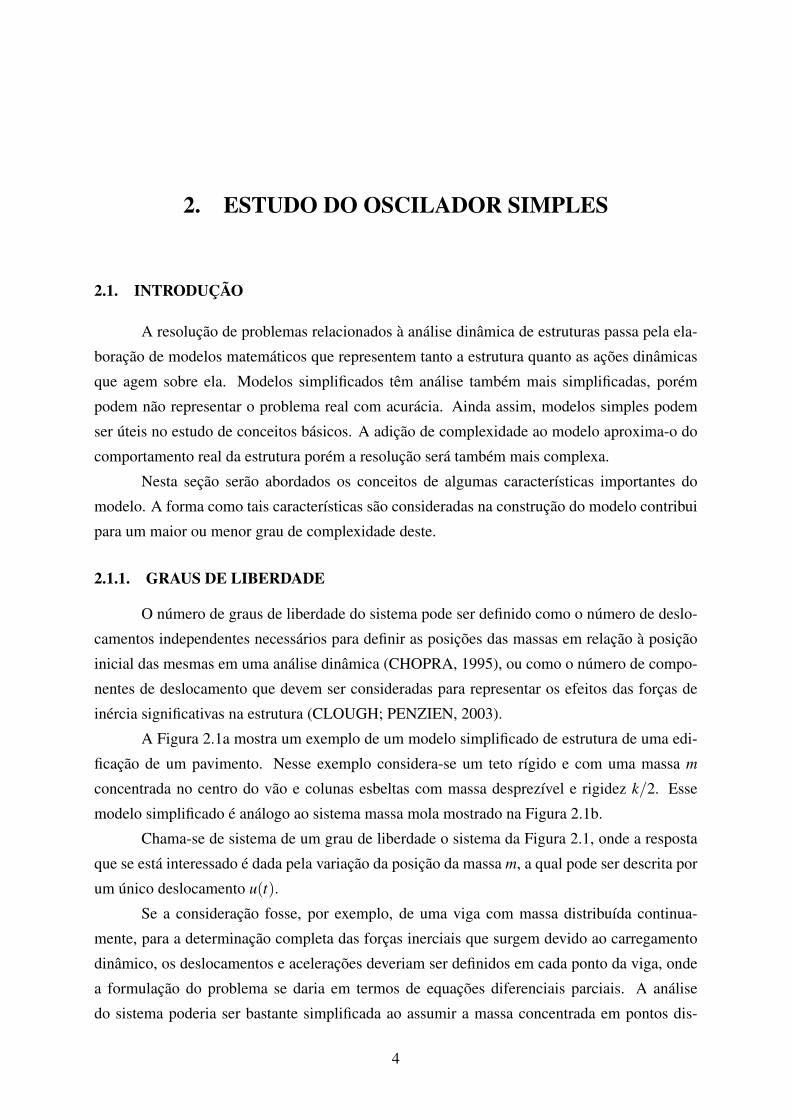
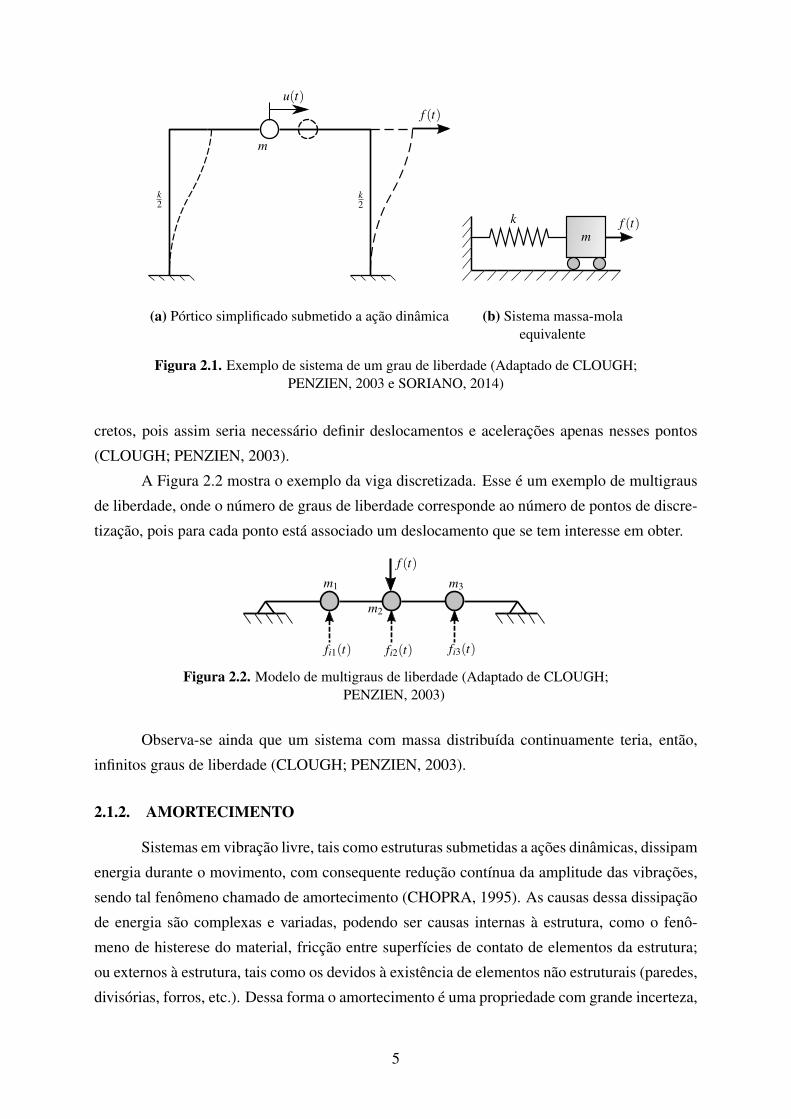
A Figura 2.1a mostra um exemplo de um modelo simplificado de estrutura de uma edi-
ficação de um pavimento. Nesse exemplo considera-se um teto rígido e com uma massa m
concentrada no centro do vão e colunas esbeltas com massa desprezível e rigidez k/2. Esse
modelo simplificado é análogo ao sistema massa mola mostrado na Figura 2.1b.
Chama-se de sistema de um grau de liberdade o sistema da Figura 2.1, onde a resposta
que se está interessado é dada pela variação da posição da massa m, a qual pode ser descrita por
um único deslocamento u(t).
Se a consideração fosse, por exemplo, de uma viga com massa distribuída continua-
mente, para a determinação completa das forças inerciais que surgem devido ao carregamento
dinâmico, os deslocamentos e acelerações deveriam ser definidos em cada ponto da viga, onde
a formulação do problema se daria em termos de equações diferenciais parciais. A análise
do sistema poderia ser bastante simplificada ao assumir a massa concentrada em pontos dis-
4
m
u(t)
k2
f (t)
k2
(a) Pórtico simplificado submetido a ação dinâmica
mk f (t)
(b) Sistema massa-molaequivalente
Figura 2.1. Exemplo de sistema de um grau de liberdade (Adaptado de CLOUGH;PENZIEN, 2003 e SORIANO, 2014)
cretos, pois assim seria necessário definir deslocamentos e acelerações apenas nesses pontos
(CLOUGH; PENZIEN, 2003).
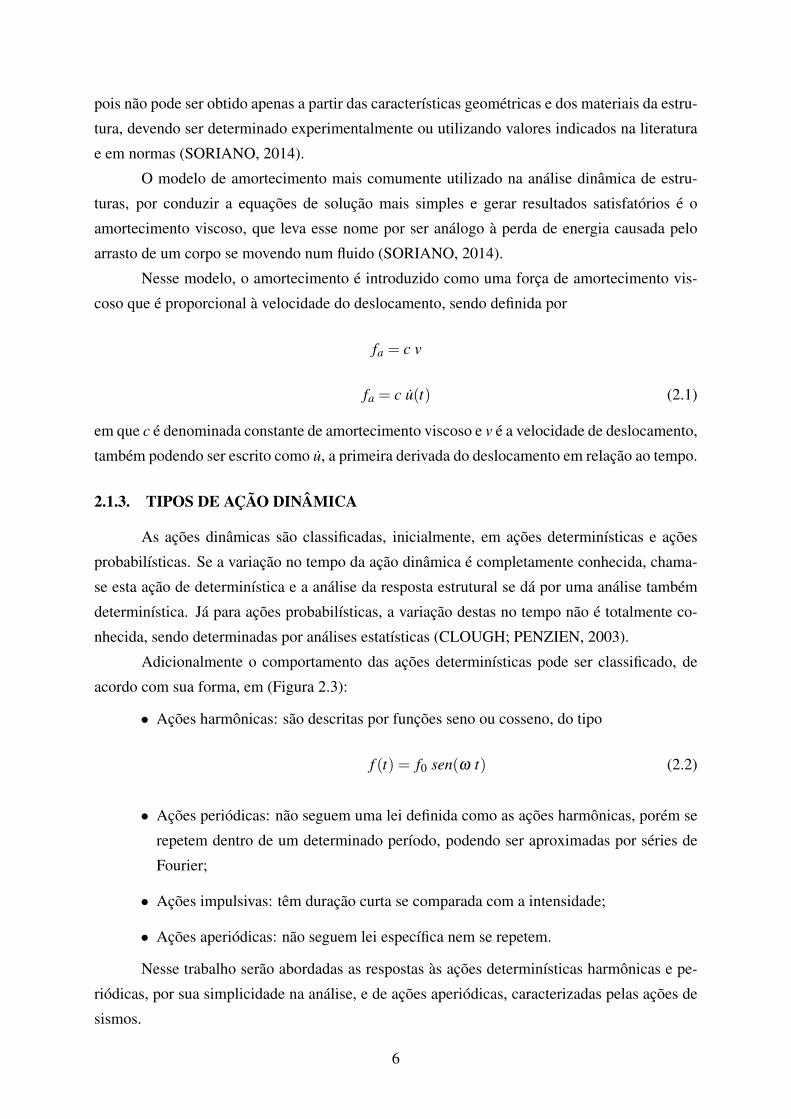
A Figura 2.2 mostra o exemplo da viga discretizada. Esse é um exemplo de multigraus
de liberdade, onde o número de graus de liberdade corresponde ao número de pontos de discre-
tização, pois para cada ponto está associado um deslocamento que se tem interesse em obter.
f (t)
fi1(t) fi2(t) fi3(t)
m1
m2
m3
Figura 2.2. Modelo de multigraus de liberdade (Adaptado de CLOUGH;PENZIEN, 2003)
Observa-se ainda que um sistema com massa distribuída continuamente teria, então,
infinitos graus de liberdade (CLOUGH; PENZIEN, 2003).
2.1.2. AMORTECIMENTO
Sistemas em vibração livre, tais como estruturas submetidas a ações dinâmicas, dissipam
energia durante o movimento, com consequente redução contínua da amplitude das vibrações,
sendo tal fenômeno chamado de amortecimento (CHOPRA, 1995). As causas dessa dissipação
de energia são complexas e variadas, podendo ser causas internas à estrutura, como o fenô-
meno de histerese do material, fricção entre superfícies de contato de elementos da estrutura;
ou externos à estrutura, tais como os devidos à existência de elementos não estruturais (paredes,
divisórias, forros, etc.). Dessa forma o amortecimento é uma propriedade com grande incerteza,
5
pois não pode ser obtido apenas a partir das características geométricas e dos materiais da estru-
tura, devendo ser determinado experimentalmente ou utilizando valores indicados na literatura
e em normas (SORIANO, 2014).
O modelo de amortecimento mais comumente utilizado na análise dinâmica de estru-
turas, por conduzir a equações de solução mais simples e gerar resultados satisfatórios é o
amortecimento viscoso, que leva esse nome por ser análogo à perda de energia causada pelo
arrasto de um corpo se movendo num fluido (SORIANO, 2014).
Nesse modelo, o amortecimento é introduzido como uma força de amortecimento vis-
coso que é proporcional à velocidade do deslocamento, sendo definida por
fa = c v
fa = c u(t) (2.1)
em que c é denominada constante de amortecimento viscoso e v é a velocidade de deslocamento,
também podendo ser escrito como u, a primeira derivada do deslocamento em relação ao tempo.
2.1.3. TIPOS DE AÇÃO DINÂMICA
As ações dinâmicas são classificadas, inicialmente, em ações determinísticas e ações
probabilísticas. Se a variação no tempo da ação dinâmica é completamente conhecida, chama-
se esta ação de determinística e a análise da resposta estrutural se dá por uma análise também
determinística. Já para ações probabilísticas, a variação destas no tempo não é totalmente co-
nhecida, sendo determinadas por análises estatísticas (CLOUGH; PENZIEN, 2003).
Adicionalmente o comportamento das ações determinísticas pode ser classificado, de
acordo com sua forma, em (Figura 2.3):
• Ações harmônicas: são descritas por funções seno ou cosseno, do tipo
f (t) = f0 sen(ω t) (2.2)
• Ações periódicas: não seguem uma lei definida como as ações harmônicas, porém se
repetem dentro de um determinado período, podendo ser aproximadas por séries de
Fourier;
• Ações impulsivas: têm duração curta se comparada com a intensidade;
• Ações aperiódicas: não seguem lei específica nem se repetem.
Nesse trabalho serão abordadas as respostas às ações determinísticas harmônicas e pe-
riódicas, por sua simplicidade na análise, e de ações aperiódicas, caracterizadas pelas ações de
sismos.
6
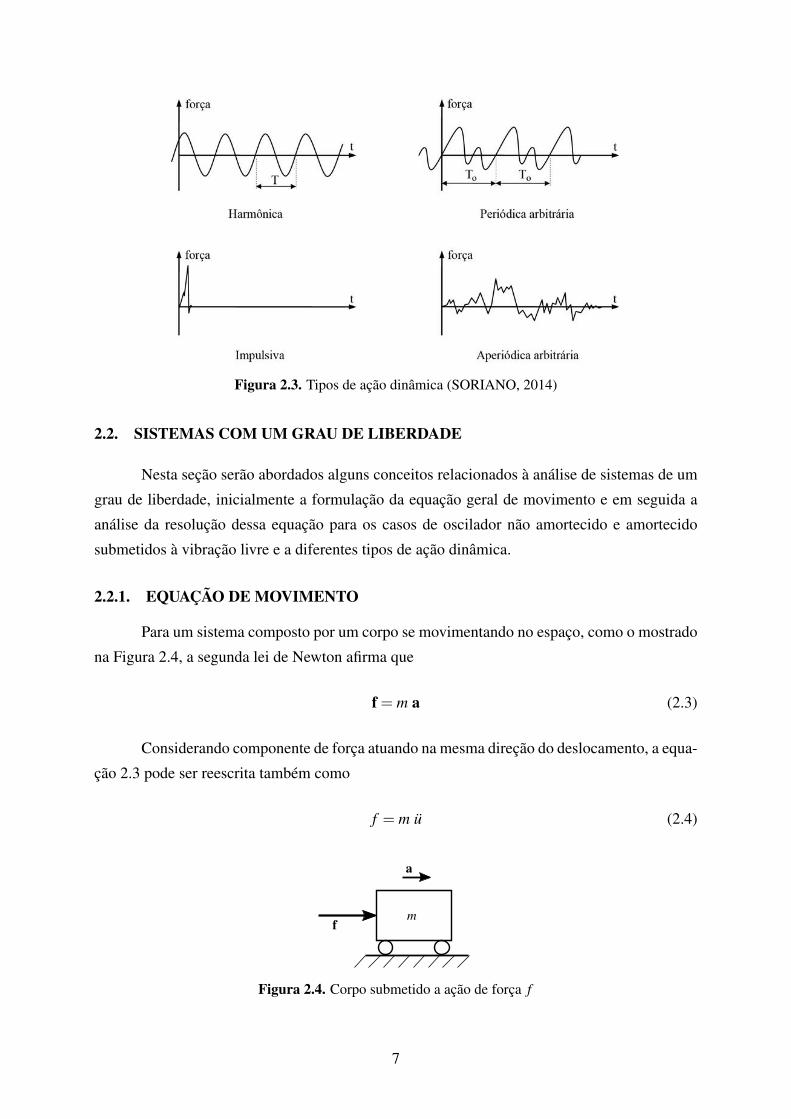
Figura 2.3. Tipos de ação dinâmica (SORIANO, 2014)
2.2. SISTEMAS COM UM GRAU DE LIBERDADE
Nesta seção serão abordados alguns conceitos relacionados à análise de sistemas de um
grau de liberdade, inicialmente a formulação da equação geral de movimento e em seguida a
análise da resolução dessa equação para os casos de oscilador não amortecido e amortecido
submetidos à vibração livre e a diferentes tipos de ação dinâmica.
2.2.1. EQUAÇÃO DE MOVIMENTO
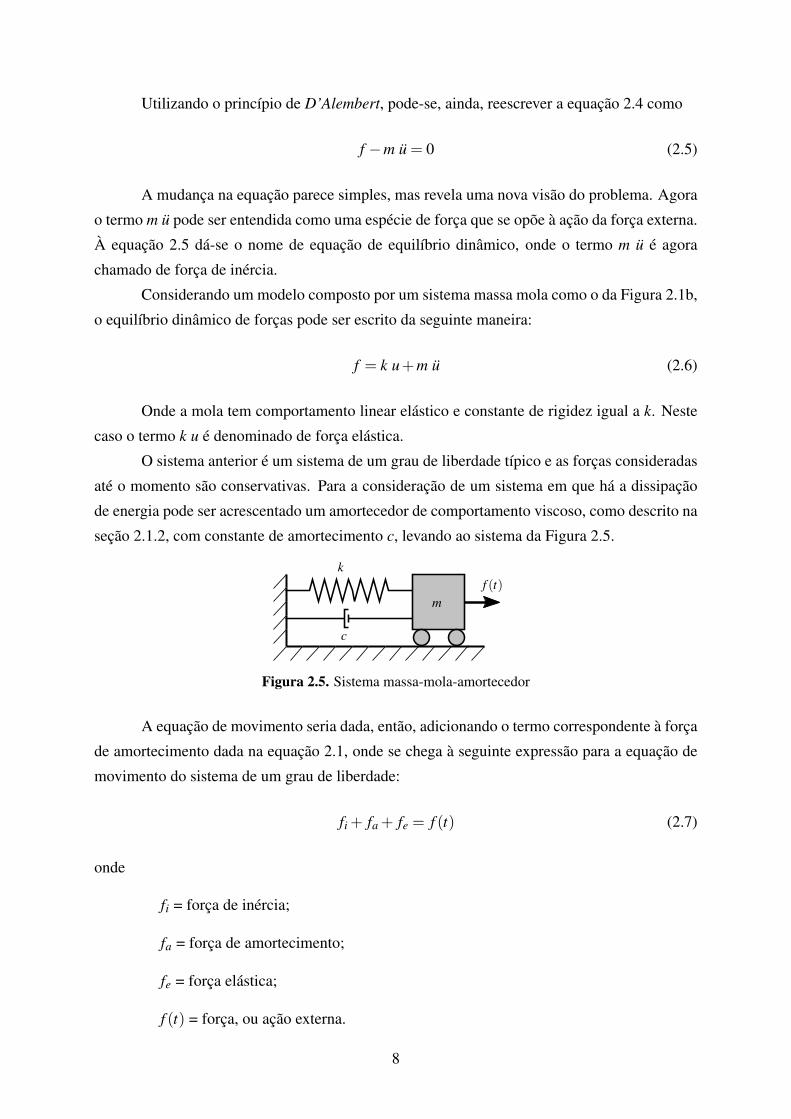
Para um sistema composto por um corpo se movimentando no espaço, como o mostrado
na Figura 2.4, a segunda lei de Newton afirma que
f = m a (2.3)
Considerando componente de força atuando na mesma direção do deslocamento, a equa-
ção 2.3 pode ser reescrita também como
f = m u (2.4)
f
a
m
Figura 2.4. Corpo submetido a ação de força f
7
Utilizando o princípio de D’Alembert, pode-se, ainda, reescrever a equação 2.4 como
f −m u = 0 (2.5)
A mudança na equação parece simples, mas revela uma nova visão do problema. Agora
o termo m u pode ser entendida como uma espécie de força que se opõe à ação da força externa.
À equação 2.5 dá-se o nome de equação de equilíbrio dinâmico, onde o termo m u é agora
chamado de força de inércia.
Considerando um modelo composto por um sistema massa mola como o da Figura 2.1b,
o equilíbrio dinâmico de forças pode ser escrito da seguinte maneira:
f = k u+m u (2.6)
Onde a mola tem comportamento linear elástico e constante de rigidez igual a k. Neste
caso o termo k u é denominado de força elástica.
O sistema anterior é um sistema de um grau de liberdade típico e as forças consideradas
até o momento são conservativas. Para a consideração de um sistema em que há a dissipação
de energia pode ser acrescentado um amortecedor de comportamento viscoso, como descrito na
seção 2.1.2, com constante de amortecimento c, levando ao sistema da Figura 2.5.
m
kf (t)
c
Figura 2.5. Sistema massa-mola-amortecedor
A equação de movimento seria dada, então, adicionando o termo correspondente à força
de amortecimento dada na equação 2.1, onde se chega à seguinte expressão para a equação de
movimento do sistema de um grau de liberdade:
fi + fa + fe = f (t) (2.7)
onde
fi = força de inércia;
fa = força de amortecimento;
fe = força elástica;
f (t) = força, ou ação externa.
8
A partir das considerações anteriores a equação 2.7 pode ser reescrita como:
m u+ c u+ k u = f (t) (2.8)
que é uma equação diferencial de segunda ordem que pode ser resolvida para u(t).
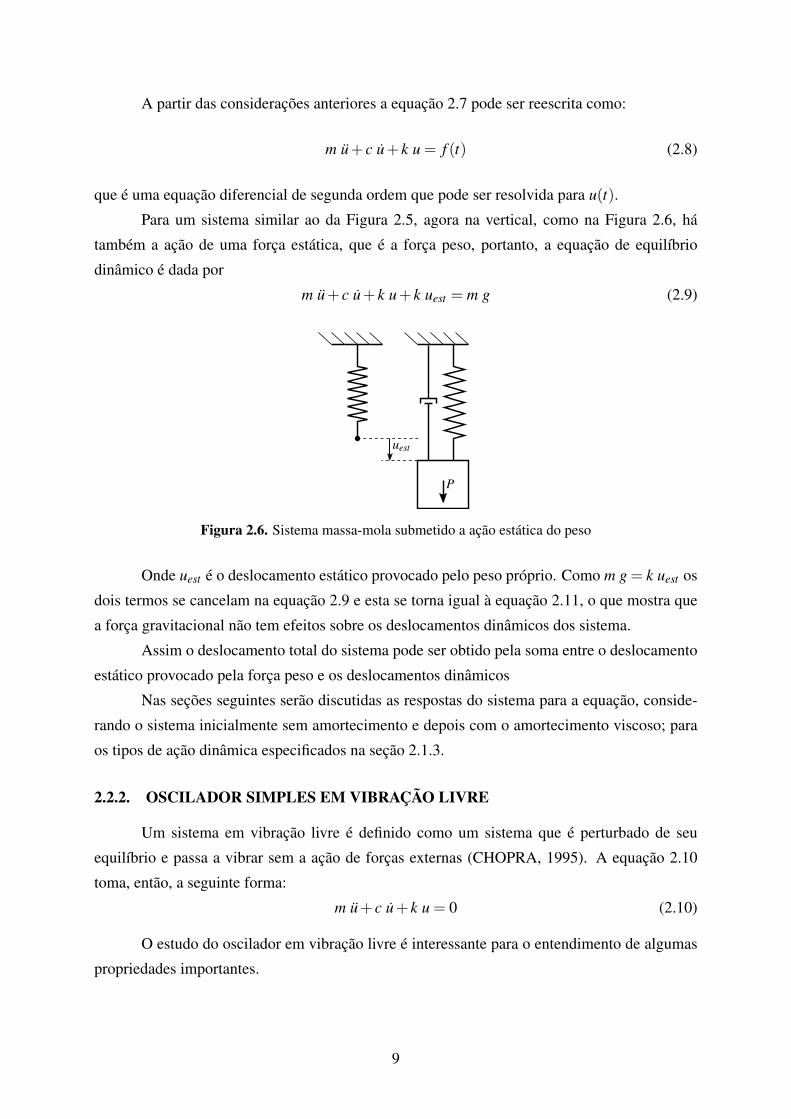
Para um sistema similar ao da Figura 2.5, agora na vertical, como na Figura 2.6, há
também a ação de uma força estática, que é a força peso, portanto, a equação de equilíbrio
dinâmico é dada por
m u+ c u+ k u+ k uest = m g (2.9)
uest
P
Figura 2.6. Sistema massa-mola submetido a ação estática do peso
Onde uest é o deslocamento estático provocado pelo peso próprio. Como m g = k uest os
dois termos se cancelam na equação 2.9 e esta se torna igual à equação 2.11, o que mostra que
a força gravitacional não tem efeitos sobre os deslocamentos dinâmicos dos sistema.
Assim o deslocamento total do sistema pode ser obtido pela soma entre o deslocamento
estático provocado pela força peso e os deslocamentos dinâmicos
Nas seções seguintes serão discutidas as respostas do sistema para a equação, conside-
rando o sistema inicialmente sem amortecimento e depois com o amortecimento viscoso; para
os tipos de ação dinâmica especificados na seção 2.1.3.
2.2.2. OSCILADOR SIMPLES EM VIBRAÇÃO LIVRE
Um sistema em vibração livre é definido como um sistema que é perturbado de seu
equilíbrio e passa a vibrar sem a ação de forças externas (CHOPRA, 1995). A equação 2.10
toma, então, a seguinte forma:
m u+ c u+ k u = 0 (2.10)
O estudo do oscilador em vibração livre é interessante para o entendimento de algumas
propriedades importantes.
9

2.2.2.1. SISTEMA SEM AMORTECIMENTO
O modelo mais simples de oscilador desconsidera também a parcela de amortecimento
da equação 2.10, podendo ser representado por um modelo massa mola simples, com massa
m e mola elástica linear com rigidez k. Para tal sistema em posição horizontal, a equação de
equilíbrio dinâmico pode ser escrita como
m u+ k u = 0 (2.11)
Para a obtenção dos deslocamentos do sistema ao longo do tempo pode-se proceder à
análise da equação 2.11. Esta é uma equação diferencial de segunda ordem homogênea que tem
como solução
u(t) = a1 cos(ωn t)+a2 sen(ωn t) (2.12)
onde as constantes a1 e a2 são dependentes das condições iniciais e dadas por:
a1 = u0 ; a2 =v0
ωn
em que u0 é a posição inicial e v0 é a velocidade inicial do sistema.
Já ω é a frequência angular do sistema que, no caso do oscilador em vibração livre, é
chamada de frequência natural angular (ωn). Esta é uma propriedade do sistema que depende
de suas características, sendo dada por
ωn =
√km
(2.13)
a partir da qual é possível obter a frequência natural de vibração do sistema fazendo
fn =ωn
2 π(2.14)
e o período de vibração natural por
Tn =1fn
=2 π
ωn(2.15)
A solução dada pela equação 2.12 pode ser escrita também, de forma simplificada, como
u(t) = a cos(ωn t−φ) (2.16)
onde as constantes a e φ estão em função de a1 e a2, portanto, em função das condições iniciais,
sendo dadas por
a =√
a21 +a2
2 ; φ = arctg(
a1
a2
)10
u
u0
−u0
amortecimento subcrítico c < ccrit
amortecimento supercrítico c > ccrit
amortecimento crítico c = ccrit
t
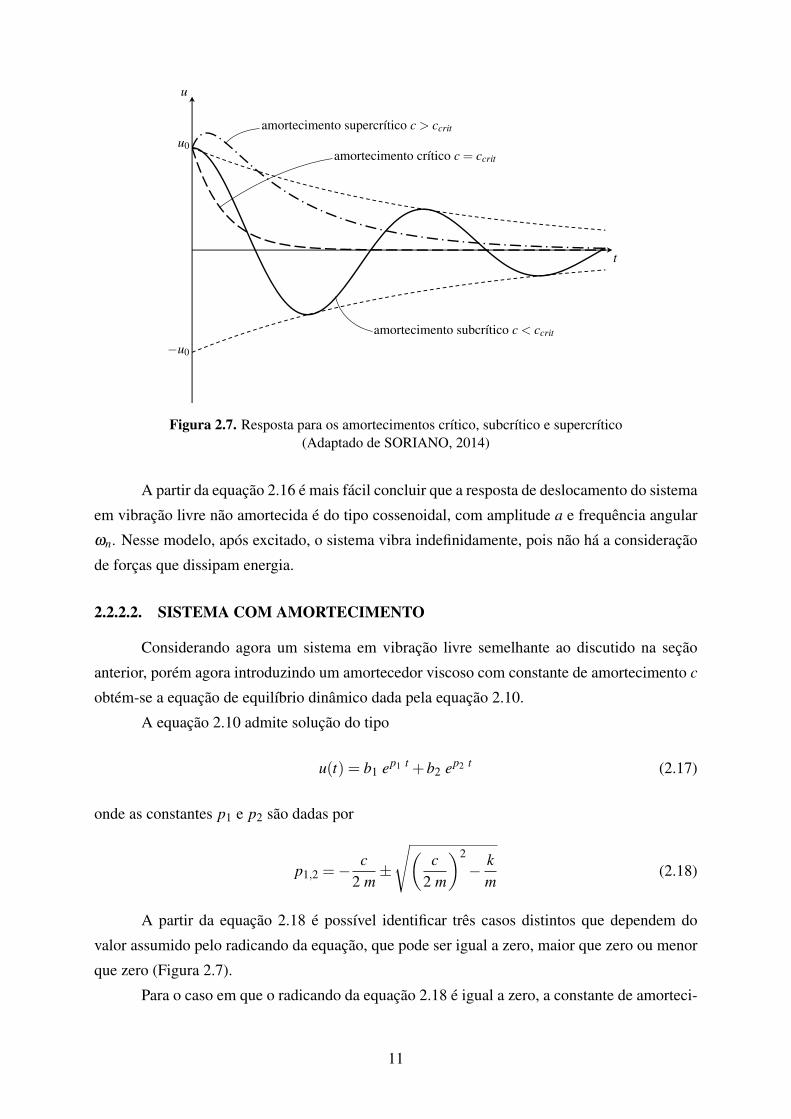
Figura 2.7. Resposta para os amortecimentos crítico, subcrítico e supercrítico(Adaptado de SORIANO, 2014)
A partir da equação 2.16 é mais fácil concluir que a resposta de deslocamento do sistema
em vibração livre não amortecida é do tipo cossenoidal, com amplitude a e frequência angular
ωn. Nesse modelo, após excitado, o sistema vibra indefinidamente, pois não há a consideração
de forças que dissipam energia.
2.2.2.2. SISTEMA COM AMORTECIMENTO
Considerando agora um sistema em vibração livre semelhante ao discutido na seção
anterior, porém agora introduzindo um amortecedor viscoso com constante de amortecimento c
obtém-se a equação de equilíbrio dinâmico dada pela equação 2.10.
A equação 2.10 admite solução do tipo
u(t) = b1 ep1 t +b2 ep2 t (2.17)
onde as constantes p1 e p2 são dadas por
p1,2 =−c
2 m±
√(c
2 m
)2
− km
(2.18)
A partir da equação 2.18 é possível identificar três casos distintos que dependem do
valor assumido pelo radicando da equação, que pode ser igual a zero, maior que zero ou menor
que zero (Figura 2.7).
Para o caso em que o radicando da equação 2.18 é igual a zero, a constante de amorteci-
11

mento do amortecedor viscos deve assumir o valor de
c = ccr = 2√
k m (2.19)
Esse caso é chamado de amortecimento crítico e o valor de c é chamado de constante de
amortecimento crítico do sistema.
Quando c > ccr o radicando da equação 2.18 assume um valor maior que zero, sendo
que esse caso é chamado de amortecimento supercrítico.
Para os dois casos anteriores, como o valor do radicando é maior ou igual a zero, os
valores de p1 e p2 são reais, portanto pode-se concluir que a resposta, dada pela equação 2.17
corresponde a um decaimento exponencial que tende a zero quando t tende a infinito.
Um terceiro caso ocorre quando c < ccr, sendo chamado de amortecimento subcrítico.
Esse caso é de maior interesse para a análise dinâmica estrutural, visto que a maioria das estru-
turas reais recaem em casos de amortecimento subcrítico. Nesse caso o radicando da equação
2.18 é negativo, introduzindo um termo complexo à solução. Desenvolvendo a equação 2.18
com a consideração da equação de Euler
eix = cos(x)+ i sen(x) (2.20)
obtém-se a seguinte solução para o sistema em vibração livre com amortecimento subcrítico
u(t) = e−ξ ωn t [a1 cos(ωa t)+a2 sen(ωa t)] (2.21)
Novamente, as constantes a1 e a2 são dependentes das condições iniciais e dadas por
a1 = u0 ; a2 =u0 ξ ωn + v0
ωa
O termo ξ é chamado de razão de amortecimento e é dado por
ξ =c
ccr(2.22)
Já o termo ωa é a frequência angular amortecida, sendo dada por
ωa = ωn
√1−ξ 2 (2.23)
A equação 2.20 pode ser escrita, alternativamente, como
u(t) = a eξ ωn tcos(ωa t−φ) (2.24)
12
onde a e φ são dados por
a =√
a21 +a2
2 ; φ = arctg(
a1
a2
)A partir da equação 2.24 pode-se concluir que a forma da resposta do sistema é oscilató-
ria, com frequência angular ωa, porém com amplitude que decai exponencialmente, delimitada
pelas curvas envelope u= a e−ξ ωn t e u=−a e−ξ ωn t , com a amplitude tendendo a zero quando
t tende a infinito.
Pode-se obter o período de vibração para o caso amortecido por
Ta =2 π
ωa=
2 π
ωn√
1−ξ 2=
Tn√1−ξ 2
(2.25)
e a frequência pelo inverso de 2.25.
Como os valores de ξ para estruturas de engenharia civil são baixos, variando de 0,01
a 0,1, com exceção de ações sísmicas e estruturas com dispositivos específicos para dissipar
energia (SORIANO, 2014), os valores de ωa, Ta e fa em geral são bem próximos aos valores de
ωn, Tn e fn.
2.2.3. OSCILADOR SIMPLES SUBMETIDO A FORÇA HARMÔNICA
Para um sistema similar ao discutido na seção anterior, agora submetido a uma força
externa, retorna-se à equação de equilíbrio 2.8.
Nessa seção será analisado o caso em que a força externa f (t) é do tipo harmônica, ou
seja, é dada por uma expressão cossenoidal ou senoidal. Nesse caso a expressão que descreve
a força tem forma bem definida e é periódica, com frequência angular ω também definida.
Trabalhando com a hipótese de força cossenoidal, a expressão geral da força externa harmônica
aplicada ao sistema é dada por
f (t) = f0 cos(ω t) (2.26)
2.2.3.1. SISTEMA SEM AMORTECIMENTO
Para o caso de sistema sem amortecimento, a equação de equilíbrio dinâmico é dada por
m u+ k u = f0 cos(ω t) (2.27)
Essa equação tem como solução homogênea a equação 2.12, abordada na seção anterior,
e como solução particular
up(t) = ap cos(ω t) (2.28)
13

onde
ap =f0
k−m ω2 =f0
k1
1− (ω/ωn)2
ap =uest
1− r2 (2.29)
Os parâmetros uest = f0/k e r = ω/ωn são, respectivamente, o deslocamento estático
provocado por f0 e a razão de frequências.
Dessa maneira, a solução completa para a equação fica
u(t) = a1 cos(ωn t)+a2 sen(ωn t)+ap cos(ω t) (2.30)
Onde as constantes a1 e a2 são dependentes das condições iniciais e dadas por
a1 = u0−uest
1− r2 ; a2 =v0
ωn
2.2.3.2. SISTEMA COM AMORTECIMENTO
Acrescentando a parcela de amortecimento chega-se à equação de equilíbrio
m u+ c u+ k u = f0 cos(ω t) (2.31)
cuja solução particular é
up(t) = ap cos(ω t−φ) (2.32)
onde as constantes ap e φ são dadas por
φ = arctg(
c ω
k−m ω2
)(2.33)
ap =f0√
(k−m ω)2 +(c ω)2(2.34)
As equações podem ser reescritas como
φ = arctg(
2 ξ r1− r2
)(2.35)
ap =uest√
(1− r2)2 +(2 ξ r)2(2.36)
Em que uest é o deslocamento estático provocado por f0, ξ é a razão de amortecimento,
14

definido na equação 2.22, e r é a razão de frequências, dada por
r =ω
ωn(2.37)
A solução completa é, então,
u(t) = e−ξ ωn t [a1 cos(ωa t)+a2 sen(ωa t)]+ap cos(ω t−φ) (2.38)
onde as constantes a1 e a2 são dadas por
a1 = u0−uest cosφ√
(1− r2)2 +(2 ξ r)2
a2 =1
ωa
(v0 +a1 ξ ωn−
uest ω senφ√(1− r2)2 +(2 ξ r)2
)Na equação 2.38 podem ser identificados dois termos, o primeiro dado por e−ξ ωn t [a1
cos(ωa t)+a2 sen(ωa t)], que é chamado de resposta transiente, pois decresce rapidamente com
o tempo, e o segundo, dado pela solução particular, chamado de resposta em regime permanente
pois seu efeito tende a predominar num instante de tempo de valor elevado.
2.2.3.3. RESSONÂNCIA
A partir das equações 2.29 e 2.36 pode-se definir o fator de amplificação dinâmica como
Ad =ap
uest(2.39)
Para o caso do sistema sem amortecimento, a equação 2.29 mostra que o valor da ampli-
ficação dinâmica e, por consequência, a amplitude do deslocamento, tende ao infinito quando r
tende a 1, ou seja, quando ω tende a ωn. O caso da coincidência de frequências é chamado de
ressonância, onde a solução particular dada pela equação 2.28 não fica definida.
Para o caso do sistema com amortecimento, a amplificação dinâmica tende para 1/2 ξ
quando ω = ωn (r = 1). A Figura 2.8 mostra os valores de Ad em função de r para diferentes
valores de ξ .
Observa-se que os maiores valores de Ad não ocorrem para r = 1. De fato eles ocorrem
para os valores
r =1√2 ξ 2
(2.40)
e
Amaxd =
1
2 ξ√
1−ξ 2(2.41)
15

1 2 3r
Ad
4
3
2
1
0
ξ = 0
ξ = 0,12
ξ = 0,15
ξ = 0,2
ξ = 0,3
ξ = 0,5
ξ = 0,8
Figura 2.8. Amplificação dinâmica em função da razão de frequências, para váriasrazões de amortecimento (Adaptado de SORIANO, 2014)
Como citado anteriormente, os valores de ξ para estruturas usuais da engenharia civil
são baixos, o que leva a frequências de ressonância bem próximas à frequência natural e a
valores máximos de Ad próximos a 1/2 ξ . A Figura 2.8 mostra como os valores de Ad são
elevados para valores de r próximos de 1. è possível observar também que Ad = 1 para r = 0
(Vibração livre) e Ad tende para zero para valores altos de r. Além disso uma maior razão de
amortecimento leva a menores valores de amplificação dinâmica.
2.2.4. OSCILADOR SIMPLES SUBMETIDO A FORÇA PERIÓDICA ARBITRÁRIA
Como definido na seção 2.1.3, as forças periódicas arbitrárias não têm uma expressão
definida, porém se repetem em determinados períodos de tempo. Tais forças podem, então, ser
definidas por
f (t) = f (t +q T0) q = 0, 1, 2, 3, ... (2.42)
onde T0 é chamado de período fundamental.
Funções desse tipo podem ser desenvolvida em uma série de Fourier, que consiste em
uma série de infinitas funções harmônicas. A série de Fourier pode ser escrita, na forma trigo-
nométrica, como
f (t) = a0 +∞
∑q=1
[aq cos(q ω0 t)+bq sen(q ω0 t)] (2.43)
onde os coeficientes de Fourier são dados por
a0 =1T0
∫ t1+T0
t1f (t) dt
16

aq =2T0
∫ t1+T0
t1f (t) cos(q ω0 t) dt
bq =2T0
∫ t1+T0
t1f (t) sen(q ω0 t) dt
onde t1 é um instante de tempo qualquer.
A solução particular, ou solução em regime permanente, para esse caso pode ser de-
senvolvida considerando separadamente as soluções individuais em regime permanente para o
termo a0, para os termos em cosseno e para os termos em seno, que remetem à solução obtida
para o oscilador submetido à força harmônica, dadas, respectivamente, por
u0 =a0
k(2.44)
u(t)cosq =
aq
k√
(1− r2q)
2 +(2 ξ rq)2cos(q ω0 t) (2.45)
u(t)senq =
bq
k√
(1− r2q)
2 +(2 ξ rq)2sen(q ω0 t) (2.46)
onde
rq = qω0
ωn(2.47)
A solução total em regime permanente será, então, dada por
up(t) =a0
k+
1k
∞
∑q=1
1√(1− r2
q)2 +(2 ξ rq)2
[aq cos(q ω0 t)+bq sen(q ω0 t)] (2.48)
2.2.5. OSCILADOR SIMPLES SUBMETIDO A FORÇA APERIÓDICA
As forças aperiódicas são mais gerais e as que têm maior ocorrência na prática da en-
genharia, porém conduzem a análises mais elaboradas, sendo, assim, substituídas por forças
periódicas arbitrárias ou harmônicas quando possível, que possibilitam análises mais simples.
No caso de forças aperiódicas não há resposta em regime permanente, pois a resposta do os-
cilador não tem padrão definido. Também não é possível obter de forma analítica explícita a
solução da equação de movimento do oscilador simples, sendo necessário realizar simplifica-
ções e resoluções numéricas (SORIANO, 2005).
Nesta seção será tratada a obtenção da resposta à força aperiódica por meio da integração
numérica da equação do oscilador, onde a ação externa é discretizada em uma sequência de
instantes. Este é um método no domínio do tempo, isto é, fornece a resposta para cada instante
17

t a partir das respostas nos instantes anteriores.
Métodos de integração numérica podem ser classificados como explícitos, quando a so-
lução para o instante t depende apenas das soluções de instantes anteriores, como o método por
diferença finita central, ou implícitos, quando as soluções dependem tanto de valores de instan-
tes interiores quanto de valores referentes ao próprio instante, como os métodos de Newmark e
Wilson θ .
2.2.5.1. MÉTODO POR DIFERENÇA FINITA CENTRAL
Nesse método a derivada primeira em relação ao tempo da resposta u(t), em um instante
de tempo ti (Figura 2.9), é aproximada por
ui =ui+1−ui−1
2∆t(2.49)
onde os deslocamentos ui+1 e ui−1 são os deslocamentos para os tempos ti+1 = t +∆t e ti−1 =
t−∆t respectivamente, sendo u(t), então, dividida em intervalos ∆t arbitrários, como mostrado
na Figura 2.9.
Figura 2.9. Aproximação de u para o instante ti (SORIANO, 2014)
A derivada segunda é aproximada, de maneira semelhante, por
ui =ui+1/2− ui−1/2
∆t(2.50)
onde define-se, de acordo com o estabelecido na equação 2.49, que
ui+1/2 =ui+1−ui
∆t(2.51)
ui−1/2 =ui−ui−1
∆t(2.52)
18
Substituindo as equações 2.50 e 2.51 em 2.49 obtém-se, após manipulação, que
ui =ui+1−2ui +ui−1
∆t2 (2.53)
Agora, considerando a equação de movimento para o instante ti
m ui + c ui + k ui = fi (2.54)
e substituindo nela as equações 2.53 e 2.49 chega-se a
m′ ui+1 = f ′i (2.55)
em que m′ é chamada de pseudomassa e f ′i é chamado de pseudoforça estática, sendo dados por
m′ =m
∆t2 +c
2∆t(2.56)
f ′i = fi−(
k− 2m∆t2
)ui−
(m
∆t2 +c
2∆t
)ui−1 (2.57)
Dessa forma, a resposta em cada instante depende da resposta nos dois instantes anteri-
ores e é dada por
ui+1 =f ′im′
(2.58)
Para a obtenção da resposta u1 será necessário, então, conhecer o deslocamento inicial
u0 e um deslocamento fictício u−1 em t =−∆t, sendo este último dado por
u−1 = u0− u0∆t + u0∆t2
2(2.59)
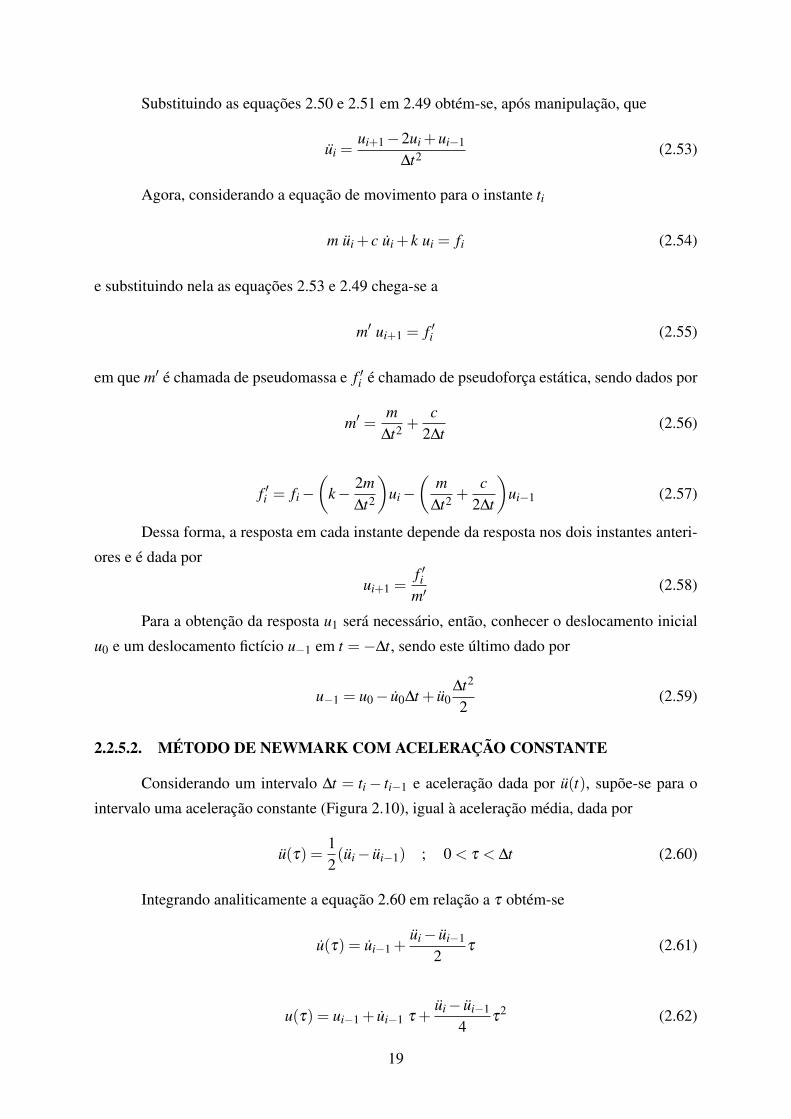
2.2.5.2. MÉTODO DE NEWMARK COM ACELERAÇÃO CONSTANTE
Considerando um intervalo ∆t = ti− ti−1 e aceleração dada por u(t), supõe-se para o
intervalo uma aceleração constante (Figura 2.10), igual à aceleração média, dada por
u(τ) =12(ui− ui−1) ; 0 < τ < ∆t (2.60)
Integrando analiticamente a equação 2.60 em relação a τ obtém-se
u(τ) = ui−1 +ui− ui−1
2τ (2.61)
u(τ) = ui−1 + ui−1 τ +ui− ui−1
4τ
2 (2.62)
19

Figura 2.10. Média da aceleração no intervalo de tempo ∆t (SORIANO, 2014)
em que para τ = ∆t
u(τ = ∆t) = ui = ui−1 +ui− ui−1
2∆t (2.63)
u(τ = ∆t) = ui = ui−1 + ui−1 ∆t +ui− ui−1
4∆t2 (2.64)
Manipulando-se as equações 2.63 e 2.64 pode-se escrever as expressões da velocidade
e da aceleração em função dos deslocamentos nos instante ti e ti−1, dadas por
ui =−ui−1 +4
∆t2 (ui−ui−1− ui−1∆t) (2.65)
ui =−ui−1 +2∆t
(ui−ui−1) (2.66)
Substituindo na equação 2.54 obtém-se
k′ ui = f ′i (2.67)
onde k′ e f ′i são,respectivamente, chamados de pseudorrigidez e pseudoforça estática, sendo
dados por
k′ = k+4m∆t2 +
2c∆t
(2.68)
f ′i = fi +m(
ui−1 +4ui−1
∆t+
4ui−1
∆t2
)+ c(
ui−1 +2ui−1
∆t
)(2.69)
A resposta para o instante i depende, então, do deslocamento, da velocidade e da acele-
ração no instante anterior, sendo dada por
ui =f ′ik′
(2.70)
20
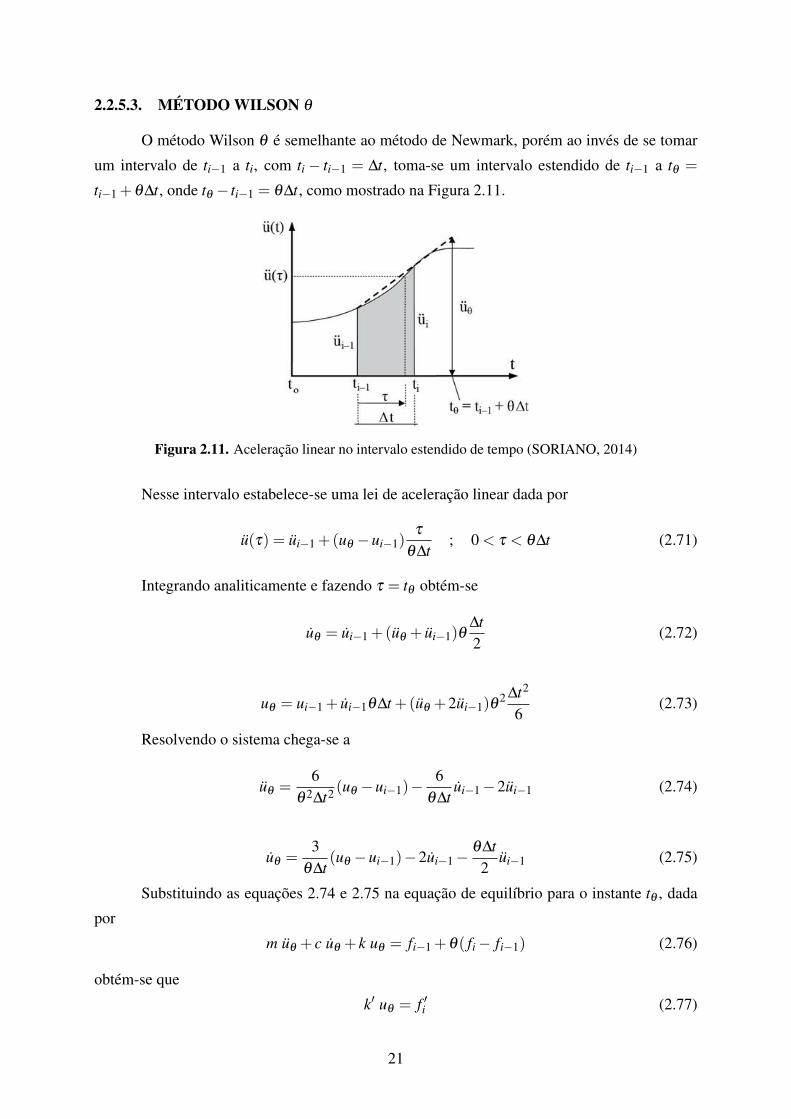
2.2.5.3. MÉTODO WILSON θ
O método Wilson θ é semelhante ao método de Newmark, porém ao invés de se tomar
um intervalo de ti−1 a ti, com ti− ti−1 = ∆t, toma-se um intervalo estendido de ti−1 a tθ =
ti−1 +θ∆t, onde tθ − ti−1 = θ∆t, como mostrado na Figura 2.11.
Figura 2.11. Aceleração linear no intervalo estendido de tempo (SORIANO, 2014)
Nesse intervalo estabelece-se uma lei de aceleração linear dada por
u(τ) = ui−1 +(uθ −ui−1)τ
θ∆t; 0 < τ < θ∆t (2.71)
Integrando analiticamente e fazendo τ = tθ obtém-se
uθ = ui−1 +(uθ + ui−1)θ∆t2
(2.72)
uθ = ui−1 + ui−1θ∆t +(uθ +2ui−1)θ2 ∆t2
6(2.73)
Resolvendo o sistema chega-se a
uθ =6
θ 2∆t2 (uθ −ui−1)−6
θ∆tui−1−2ui−1 (2.74)
uθ =3
θ∆t(uθ −ui−1)−2ui−1−
θ∆t2
ui−1 (2.75)
Substituindo as equações 2.74 e 2.75 na equação de equilíbrio para o instante tθ , dada
por
m uθ + c uθ + k uθ = fi−1 +θ( fi− fi−1) (2.76)
obtém-se que
k′ uθ = f ′i (2.77)
21

onde a pseudorrigidez e a pseudoforça estática são agora dados por
k′ = k+6m
θ 2∆t2 +3c
θ∆t(2.78)
f ′i = fi−1+θ( fi− fi−1)+6m(
ui−1
3+
ui−1
θ∆t+
ui−1
θ 2∆t2
)+c(
θ∆t2
ui−1+2ui−1+3ui−1
θ∆t
)(2.79)
Para determinar a resposta no instante ti, faz-se a integração analítica da equação 2.71 e
toma-se τ = ∆t, obtendo-se
ui = ui−1 + ui−1∆t +(uθ − ui−1)∆t2θ
(2.80)
ui = ui−1 + ui−1∆t + ui−1∆t2
2+(uθ − ui−1)
∆t2
6θ(2.81)
A partir das equações 2.80 e 2.81 pode-se obter as soluções para o instante t1, dadas por
ui =6
θ 3∆t2 (uθ −ui−1)−6
θ 2∆tui−1 +
(1− 3
θ
)ui−1 (2.82)
ui = ui−1 +∆t2(ui + ui−1) (2.83)
ui = ui−1 +∆t ui−1 +∆t2
6(ui +2ui−1) (2.84)
22
3. SISTEMAS COM MÚLTIPLOS GRAUS DE
LIBERDADE
3.1. INTRODUÇÃO
Como discutido na seção 2.1.1, um sistema com n graus de liberdade é aquele cujo
comportamento pode ser descrito por n deslocamentos independentes. Um modelo contínuo
teria, em tese, infinitos graus de liberdade, sendo então comum proceder à análise de modelos
discretizados, que são baseados em uma configuração geométrica especificada por um número
finito de parâmetros independentes entre si (SORIANO, 2004). Nesse trabalho as estruturas
a serem estudadas são pórticos planos, contraventados ou não, discretizados em elementos de
barra. Assim as estruturas serão representadas por dois tipos de elementos, sendo que as barras
dos contraventamentos serão representadas por elementos de treliça plana, enquanto as demais
barras do pórtico serão representadas por elementos de pórtico plano.
Para um sistema descrito por n deslocamentos o equilíbrio de forças associado a cada
grau de liberdade pode ser descrito da seguinte maneira:
fI1 + fA1 + fE1 = f1(t)
fI2 + fA2 + fE2 = f2(t)
... (3.1)
fIi + fAi + fEi = fi(t)
...
fIn + fAn + fEn = fn(t)
onde fI , fA, fE e f (t) são, respectivamente, as forças de inércia, amortecimento, elástica
e externa associadas a cada grau de liberdade.
Escrevendo 3.1 em forma matricial chega-se a
fI + fA + fE = f(t) (3.2)
23

As forças associadas a um dos graus de liberdade i podem ser mais convenientemente
escritas como uma combinação linear que relacione os deslocamentos e suas derivadas por
meios de coeficientes apropriados.
Desta forma, e correlacionando com o modelo de um grau de liberdade, pode-se escrever
a força de inércia associada ao grau de liberdade i como
fIi = mi1u1 +mi2u2 + · · ·+miiui + · · ·+minun (3.3)
a força de amortecimento associada a esse grau de liberdade como
fAi = ci1u1 + ci2u2 + · · ·+ ciiui + · · ·+ cinun (3.4)
e a força elástica como
fEi = ki1u1 + ki2u2 + · · ·+ kiiui + · · ·+ kinun (3.5)
Os coeficientes mi j, ci j e ki j são, respectivamente, os coeficientes de influência de massa,
amortecimento e rigidez, onde mi j corresponde à força no nó i devido a uma aceleração uni-
tária do nó j; ci j corresponde à força no nó i devido a uma velocidade unitária do nó j e ki j
corresponde à força no nó i devido a um deslocamento unitária do nó j.
Assim, os termos da equação 3.2 podem ser reescritos como
fI =
fI1
fI2...
fIi...
fIn
=
m11 m12 · · · m1i · · · m1n
m21 m22 · · · m1i · · · m2n...
... . . . ......
mi1 mi2 · · · mii · · · min...
...... . . . ...
mn1 mn2 · · · mni · · · mnn
u1
u2...
ui...
un
= M u (3.6)
fA =
fA1
fA2...
fAi...
fAn
=
c11 c12 · · · c1i · · · c1n
c21 c22 · · · c1i · · · c2n...
... . . . ......
ci1 ci2 · · · cii · · · cin...
...... . . . ...
cn1 cn2 · · · cni · · · cnn
u1
u2...
ui...
un
= C u (3.7)
24
fE =
fE1
fE2...
fEi...
fEn
=
k11 k12 · · · k1i · · · k1n
k21 k22 · · · k1i · · · k2n...
... . . . ......
ki1 ki2 · · · kii · · · kin...
...... . . . ...
kn1 kn2 · · · kni · · · knn
u1
u2...
ui...
un
= K u (3.8)
Chega-se, então, à seguinte equação de movimento para o sistema com n graus de liber-
dade:
M u+C u+K u = f(t) (3.9)
onde as matrizes M, C e K são denominadas, respectivamente, matriz de massa, matriz
de amortecimento e matriz de rigidez do modelo.
Nas seções seguintes são discutidos os métodos de construção dessas matrizes para as
estruturas a serem estudadas. Para a obtenção das matrizes serão utilizados os conceitos do
Método dos Elementos Finitos, sendo as estruturas consideradas discretizadas por um número
finito de elementos ligados por seus nós.
3.2. OBTENÇÃO DA EQUAÇÃO DE MOVIMENTO
3.2.1. FORMULAÇÃO COM O MÉTODO DOS ELEMENTOS FINITOS
Tomando um elemento finito definido pelos nós i, j, etc., e contorno definido por linhas
retas, considera-se o campo de deslocamentos do elemento dado por
υυυ = ∑k
Nk uek =
[Ni N j · · ·
]ue
i
uej
...
= N ue (3.10)
onde uek representam os deslocamentos nodais e NK são funções de forma apropriadas. De forma
análoga, os campos de velocidades e acelerações do elemento são dados, respectivamente, por
υυυ = N ue (3.11)
υυυ = N ue (3.12)
A partir das equações 3.11 e 3.12, as componentes das forças de inércia e de amor-
tecimento viscoso que agem sobre uma unidade de volume do elemento, considerando ρ e c
25

constantes, podem ser escritas como
fI = ρ υυυ = ρ N ue (3.13)
fA = c υυυ = c N ue (3.14)
As deformações do elemento podem ser escritas através de uma relação do tipo
εεε = L υυυ = L N ue = B ue (3.15)
onde L é um operador diferencial apropriado e define-se que B = L N.
Já a relação entre tensões e deformações é dada por relação do tipo
σσσ = E εεε = E B ue (3.16)
onde E é uma matriz de propriedades elásticas, dependente do material.
As forças nodais equivalentes, isto é, as forças externas aplicadas nos nós do elemento,
são dadas por
qe =
qe
i
qej
...
(3.17)
Para o caso considerado, de equilíbrio à ação dinâmica, as forças nodais externas, dadas
por qe devem ser estaticamente equivalentes à forças internas desenvolvidas no elemento. Para
tanto, considerando um deslocamento virtual arbitrário δu aplicado aos nós do elemento, o
trabalho virtual das forças externas é dado por
δueT qe (3.18)
Já o trabalho virtual por unidade de volume realizado pelas forças internas é dado pela
soma dos trabalhos das forças internas, das forças de inércia e das forças de amortecimento,
podendo ser escrito por
δυυυT fI +δυυυ
T fA +δεεεT
σσσ (3.19)
Considerando que
δεεε = Bδue (3.20)
δυυυ = Nδue (3.21)
e as equações 3.13, 3.14 e 3.16, igualando o trabalho das forças externas ao trabalho das forças
26

internas chega-se a
δueT qe =∫
V eδυυυ
T fIdV e +∫
V eδυυυ
T fAdV e +∫
V eδεεε
TσσσdV e (3.22)
δueT qe =∫
V eδueT NT
ρ N uedV e +∫
V eδueT NT c N uedV e +
∫V e
δueT BT E B uedV e (3.23)
qe =
(∫V e
NTρ N dV e
)ue +
(∫V e
NT c N dV e)
ue +
(∫V e
BT E B dV e)
ue (3.24)
Comparando a equação 3.24 com a equação 3.9 pode-se escrever a equação de movi-
mento para um elemento da estrutura como
Me ue +Ce ue +Ke ue = fe (3.25)
onde as matrizes de massa, amortecimento e rigidez do elemento são dadas, respectivamente,
por
Me =∫
V eNT
ρ N dV e (3.26)
Ce =∫
V eNT c N dV e (3.27)
Ke =∫
V eBT E B dV e (3.28)
3.2.2. MATRIZ DE RIGIDEZ DO ELEMENTO
3.2.2.1. ELEMENTO DE VIGA
Considerando um elemento de viga, com comprimento L, em que não se considera a
deformação devido ao esforço cortante, este pode ser descrito pelos quatro deslocamentos in-
dependentes uei mostrados na Figura 3.1.
O campo de deslocamentos para o elemento pode ser escrito, então, como
υ = N1 ue1 +N2 ue
2 +N3 ue3 +N4 ue
4 (3.29)
υ = N ue (3.30)
27

ue1 ue
2
ue3
ue4
Figura 3.1. Deslocamentos nodais do elemento de viga
onde as funções Ni são as funções de forma do elemento e, nesse caso, são dadas por
N1 = 1− 3x2
l2 +2x3
l3 (3.31)
N2 = x− 2x2
l+
x3
l2 (3.32)
N3 =3x2
l2 +2x3
l3 (3.33)
N4 =−x2
l+
x3
l2 (3.34)
Nesse modelo de viga considera-se que há deformação apenas ao longo do eixo x da
viga. A deformação em uma seção da viga pode ser escrita, então, por
εxx =d2υ
dx2 y = κ y (3.35)
Já a tensão na direção x é dada por
σxx = E ε = E κ y (3.36)
O trabalho virtual realizado pelas forças internas será dado, então, por
δWi =∫
V eδεεε
Tσσσ dV e =
∫ L
0
∫Ae
δεxx σxx dAe dx
δWi =∫ L
0
∫Ae
δκ y E κ y dAe dx =∫ L
0E κ δκ
∫Ae
y2 dAe dx
28
δWi =∫ L
0EI κ δκ dx =
∫ L
0δκ M dx (3.37)
Assim, Zienckievicz (2000), considera que as deformações generalizadas e as tensões
generalizadas podem, definidas, respectivamente, nas equações 3.15 e 3.16, para o caso do
elemento de viga podem ser escritas como
εεε = κ =d2υ
dx2 = υ,xx (3.38)
σσσ = E εεε = M = EI κ (3.39)
O operador L, definido em 3.15, degenera-se, então, na derivada segunda em relação a
x, podendo-se então definir a matriz B para o elemento de viga por
B = L N =d
dx2 N = N,xx (3.40)
Semelhantemente, a matriz E da equação 3.16 pode ser escrita, para o elemento de viga,
como
E = EI (3.41)
A matriz de rigidez do elemento de viga pode ser obtida, então, modificando a equação
3.28 para obter
Ke =∫ L
0NT,xx EI N,xx dx (3.42)
onde os elementos da matriz podem ser obtidos por
kei j = EI
∫ L
0Ni,xx N j,xx dx (3.43)
resultando na seguinte matriz de rigidez para o elemento de viga
Ke =EIL3
12 6L −12 6L
6L 4L2 −6L 2L2
−12 −6L 12 −6L
6L 2L2 −6L 4L2
(3.44)
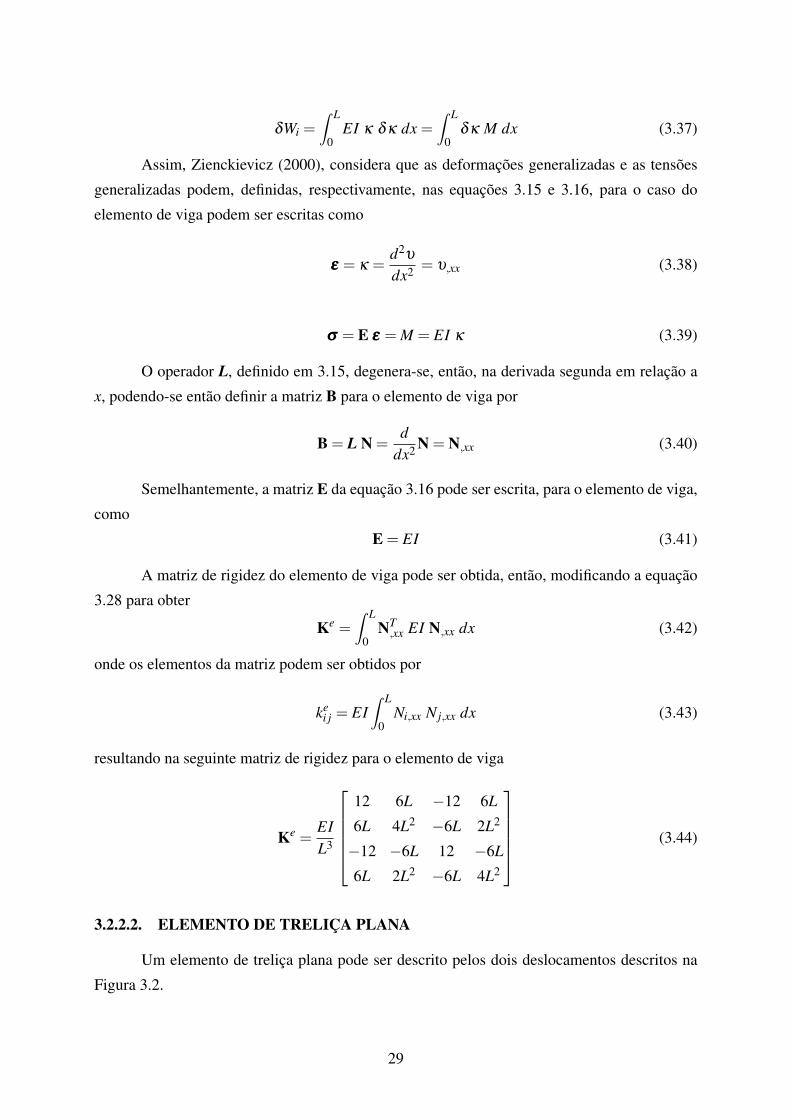
3.2.2.2. ELEMENTO DE TRELIÇA PLANA
Um elemento de treliça plana pode ser descrito pelos dois deslocamentos descritos na
Figura 3.2.
29

ue1 ue
2
Figura 3.2. Deslocamentos nodais do elemento de treliça
O campo de deslocamentos para este elemento é dado, então, por
υ =[N1 N2
]u1
u2
(3.45)
onde as funções de forma N1 e N2 são dadas por
N1 = 1− xL
(3.46)
N2 =xL
(3.47)
As deformações e as tensões são dadas, respectivamente, por
εxx =dυ
dx= N,x ue (3.48)
σxx = E ε (3.49)
O trabalho virtual realizado pelas forças internas é, então, dado por
δWi =∫
V eδεεε
Tσσσ xx dAe dx = δWi =
∫ L
0
∫Ae
δue NT,x E N,x dAe dx
A matriz de rigidez do elemento será, então
Ke =∫ L
0NT,x EA N,x dx (3.50)
onde os elementos da matriz são dados por
kei j = EA
∫ L
0Ni,x N j,x dx (3.51)
de onde se obtém a matriz de rigidez para o elemento de treliça plana
Ke =EAL
[1 −1
−1 1
](3.52)
30

3.2.2.3. ELEMENTO DE PÓRTICO PLANO
Observa-se que o elemento de pórtico plano será uma combinação dos elementos de viga
e de treliça plana. Seus nós apresentam seis deslocamentos possíveis, que correspondem aos
quatros deslocamentos do elemento de viga mais os dois deslocamentos do elemento de treliça
plana. Dessa forma a matriz de rigidez deste elemento pode ser obtida de maneira similar à dos
outros dois, sendo dada, finalmente, por
Ke =
EAL 0 0 −EA
L 0 0
0 12EIL3
6EIL2 0 −12EI
L36EIL2
0 6EIL2
4EIL 0 −6EI
L22EI
L
−EAL 0 0 EA
L 0 0
0 −12EIL3 −6EI
L2 0 12EIL3 −6EI
L2
0 6EIL2
2EIL 0 −6EI
L24EI
L
(3.53)
3.2.3. MATRIZ DE MASSA DO ELEMENTO
3.2.3.1. MATRIZ DE MASSA DISCRETA
As matrizes de massa discreta são obtidas a partir de um procedimento simplificado,
onde considera-se massa concentrada nos nós do elemento.
Para um elemento de treliça plana, por exemplo, considera-se metade da massa da barra
concentrada em cada extremidade, sendo a matriz de massa desse elemento dada por
Me =m′ L
2
[1 0
0 1
](3.54)
onde m′ é a massa por unidade de comprimento, dada por
m′ = ρ A (3.55)
Já para um elemento de viga é feita consideração semelhante e, desconsiderando a inér-
cia à rotação, isto é, associando a matriz de massa apenas aos graus de liberdade de desloca-
mento vertical e não aos de rotação, obtém-se a seguinte matriz de massa para a viga
Me =m′ L
2
1 0 0 0
0 0 0 0
0 0 1 0
0 0 0 0
(3.56)
A matriz de massa para o elemento de pórtico plano é obtida combinando as matrizes
31

dos elementos de viga e de treliça plana, obtendo-se
Me =m′ L
2
1 0 0 0 0 0
0 1 0 0 0 0
0 0 0 0 0 0
0 0 0 1 0 0
0 0 0 0 1 0
0 0 0 0 0 0
(3.57)
3.2.3.2. MATRIZ DE MASSA CONSISTENTE
A matriz de massa consistente é obtida através da formulação do método dos elementos
finitos (SORIANO, 2014), de acordo com a equação 3.26, que para elemento de área de seção
constante é escrita
Me =∫
V eNT
ρ N dV e = m′∫ L
0NT N dx (3.58)
A partir da equação 3.58 obtém-se a matriz de massa consistente para o elemento de
treliça plana, dada por
Me =m′ L
6
[2 1
1 2
](3.59)
Para o elemento de viga, a matriz de massa consistente é
Me =m′ L420
156 22L 54 −13L
22L 4L2 13L −3L2
54 13L 156 −22L
−13L −3L2 −22L 4L2
(3.60)
Para o elemento de pórtico plano obtém-se, então
Me =m′ L420
140 0 0 70 0 0
0 156 22L 0 54 −13L
0 22L 4L2 0 13L −3L2
70 0 0 140 0 0
0 54 13L 0 156 −22L
0 −13L −3L2 0 −22L 4L2
(3.61)
3.2.4. MATRIZ DE AMORTECIMENTO DO ELEMENTO
A partir da formulação desenvolvida na seção 3.2.1 obteve-se pela equação 3.28 uma
maneira de obter a matriz de amortecimento. Entretanto, observa-se que não é prático de-
32

terminar a matriz de amortecimento dessa maneira pois os parâmetros de amortecimento dos
materiais não são conhecidos e mesmo que fossem, a matriz de amortecimento resultante não
consideraria a energia dissipada nas ligações dos elementos estruturais, fissuração do concreto
ou pelos elementos não estruturais, etc. (CHOPRA, 1995).
Nesse sentido, segundo Soriano, 2014, "é prático especificar o amortecimento em ter-
mos de razões de amortecimento de modos naturais de vibração e, para facilitar a resolução do
sistema global das equações de movimento, arbitra-se que esses modos sejam também ortogo-
nais com respeito à matriz de amortecimento global".
Alguns desses conceitos, como o de modo natural de vibração, serão tratados nas seções
seguintes. Por isso, um método conveniente para a construção da matriz de amortecimento,
chamado método de Rayleigh, será também tratado mais à frente, na seção 3.3.3.
3.2.5. SISTEMA GLOBAL DE EQUAÇÕES DE MOVIMENTO
3.2.5.1. TRANSFORMAÇÃO PARA O REFERENCIAL GLOBAL
Considerando que o nó de um elemento sofre um deslocamento u em relação ao refe-
rencial local do elemento (plano xy), como mostrado na Figura 3.3, os componentes do deslo-
camento são ux e uy.
Figura 3.3. Decomposição vetorial no plano (SORIANO, 2014)
Para transformar esses deslocamentos para o referencial global XY utiliza-se a matriz de
rotação R dada por
R =
[λxX λxY
λyX λyY
]=
[cos α sen α
−sen α cos α
](3.62)
Para o elemento de pórtico plano considerado, que possui dois nós, utiliza-se a matriz
de rotação do elemento, expandida adequadamente. A transformação dos deslocamentos nodais
no referencial local para o referencial global escreve-se, então, como
ue = Re ueG (3.63)
33

onde, para o caso do elemento de pórtico plano
Re =
R 0 0 0
0 1 0 0
0 0 R 0
0 0 0 1
(3.64)
Assim, para transformar a equação de movimento do elemento no referencial local,
dada em 3.25, multiplica-se ambos os lados pela transposta da matriz de rotação do elemento,
obtendo-se
ReT (Me ue)+ReT (Ce ue)+ReT (Ke ue) = ReT fe
ReT Me Re ueG +ReT Ce Re ue
G +ReT Ke Re ueG = ReT fe (3.65)
A equação de movimento do elemento pode ser escrita, então, como
MeG ue
G +CeG ue
G +KeG ue
G = feG (3.66)
onde
MeG = ReT Me Re (3.67)
CeG = ReT Ce Re (3.68)
KeG = ReT Ke Re (3.69)
feG = ReT fe (3.70)
3.2.5.2. MONTAGEM DO SISTEMA GLOBAL DE EQUAÇÕES
Segundo Soriano, 2014, "com o Método dos Elementos Finitos podem ser feitas discre-
tizações com um número qualquer de graus de liberdade, de maneira a obter o correspondente
sistema de equações diferenciais de movimento. Contudo, esse sistema é usualmente cons-
truído a partir das matrizes de rigidez e de massa, assim como dos vetores de forças nodais,
dos diversos elementos finitos da discretização, por acumulação adequada dos correspondentes
coeficientes que dizem respeito a cada um dos deslocamentos nodais da malha de elementos, de
maneira a obter as chamadas matrizes globais de rigidez e de massa, assim como obter o vetor
global de forças nodais."
Desse modo, para a obtenção das matrizes globais inicialmente define-se a matriz de
incidência, que fará a correspondência entre a numeração local do nó no elemento e a numeração
global do nó na estrutura. O número de linhas da matriz de incidência será igual ao número de
elementos que formam a estrutura e o número de colunas será igual ao número de nós dos
34

elementos, no caso dos elementos estudados, será 2.
1
2 3
4
Figura 3.4. Pórtico exemplo
Para a estrutura exemplo da Figura 3.4, a matriz de incidência é dada por
Inc =
1 3
2 3
3 4
(3.71)
Na matriz, a linha m corresponde ao elemento m. O primeiro número da linha diz o
número do nó na estrutura ao qual o nó 1 do elemento corresponde e na segunda coluna o
mesmo para o nó 2 do elemento.
Cada nó do elemento tem g graus de liberdade, no caso dos elementos estudados, 3 des-
locamentos por nó e, logo, 6 deslocamentos por elemento. Os deslocamentos de um elemento
m, numerados de 1 a 3 para o nó 1 e de 4 a 6 para o nó 2, podem ser colocados na numeração
global dos deslocamentos da estrutura de acordo com
ue1 = d(Intm,1−1)g+1
ue2 = d(Intm,1−1)g+2
ue3 = d(Intm,1−1)g+3
ue4 = d(Intm,2−1)g+1
ue5 = d(Intm,2−1)g+2
ue6 = d(Intm,2−1)g+3
(3.72)
A numeração, para o elemento m, pode ser armazenada no vetor de correspondência de
deslocamentos
qm =[(Intm,1−1)g+1 (Intm,1−1)g+2 · · · (Intm,2−1)g+3
]T(3.73)
35
A montagem, por exemplo, da matriz de rigidez global não restringida, K∗ se dá por
m = 1, ...,n de elementos;
i = 1, ...,6;
j = 1, ...,6;
k∗qmi qm
j= k∗qm
i qmj+ km
i j,G
(3.74)
Fazendo o mesmo para as demais matrizes chega-se ao sistema global de equações não
restringido, isto é, incluindo os deslocamentos restringidos pelos apoios, dado por
M∗d∗+C∗d∗+K∗d∗ = f∗(t) (3.75)
Organizando os deslocamentos restringidos pelos apoios em um vetor db, chega-se a[M Mbb
MTbb Mb
]ddb
+
[C Cbb
CTbb Cb
]ddb
+
[K Kbb
KTbb Kb
]ddb
=
f(t)fb(t)
(3.76)
e considerando que os apoios são indeslocáveis, ou seja, d = 0, d = 0 e d = 0, chega-se à
equação global de movimento restringida
Md+Cd+Kd = f(t) (3.77)
3.3. RESOLUÇÃO DA EQUAÇÃO DE MOVIMENTO
3.3.1. FREQUÊNCIAS E MODOS NATURAIS DE VIBRAÇÃO
Considerando um sistema de múltiplos graus de liberdade submetido à vibração livre
não amortecida, sua equação de movimento pode ser escrita como
Md+Kd = 0 (3.78)
Analogamente ao sistema com um grau de liberdade, assume-se que o movimento do
sistema é do tipo harmônico simples, sendo a solução dada, então, por
d = ϕϕϕ j cos(ω j t−φ j) (3.79)
onde ϕ jϕ jϕ j é o j-ésimo modo natural de vibração, ω j é a j-ésima frequência natural correspondente
e φ j é o ângulo de fase. Substituindo a solução na equação 3.79 chega-se a que a solução do
sistema só é possível se a seguinte condição for atendida
Kϕϕϕ j = ω2j M ϕϕϕ j (3.80)
36

A equação 3.80 apresenta um problema de autovalor com n soluções não triviais (ω2j , ϕϕϕ j),
onde ω2j são os autovalores e ϕϕϕ j são autovetores, ou seja, para um modelo com n graus de li-
berdade há n pares de frequências e modos naturais, que usualmente são ordenados na ordem
crescente das frequências, sendo a primeira frequência chamada de frequência fundamental e o
modo associado chamado de modo fundamental.
De acordo com Clough, 2003, as soluções para este tipo de problema podem ser avalia-
das por métodos iterativos, como o método de Stodola. Considerando que a equação 3.80 pode
ser reescrita como
ϕϕϕ j = ω2j K−1M ϕϕϕ j
ϕϕϕ j = ω2j D ϕϕϕ j (3.81)
onde D é chamada matriz dinâmica.
O processo iterativo considera
ϕϕϕ(1)1 = ω
2j D ϕϕϕ
(0)1 (3.82)
A amplitude do vetor depende da frequência, que não é conhecida a priori, mas apenas
o modo é necessário para o processo iterativo. Assim considera-se a forma
ϕϕϕ(1)1 ≡ D ϕϕϕ
(0)1 (3.83)
onde ϕϕϕ(1)1 é o autovetor não normalizado. Uma maneira vantajosa de normalizar o autovetor é
fazê-lo em relação à matriz de massa
ϕϕϕ i =ϕϕϕ i
(ϕϕϕTi M ϕϕϕ i)
1/2(3.84)
de maneira que a matriz modal estará ortonormalizada em relação à matriz de massa, o que
pode ser expresso por
ΦΦΦT M ΦΦΦ = I (3.85)
onde ΦΦΦ é a matriz modal, dada por
ΦΦΦ =[ϕϕϕ1 ϕϕϕ2 · · · ϕϕϕn
](3.86)
Além disso a equação 3.80 pode ser reescrita como
K ΦΦΦ = M ΦΦΦ ΩΩΩ (3.87)
37
o que leva a
ΦΦΦT K ΦΦΦ =ΩΩΩ (3.88)
onde ΩΩΩ é chamada matriz espectral, sendo dada por
ΩΩΩ =
ω2
1 · · · 0... . . . ...
0 · · · ω2n
(3.89)
Uma aproximação do autovalor será obtida tomando a média dentre o intervalo
(ϕ(0)j1
ϕ(1)j1
)min≤ ω
21 ≤
(ϕ(0)j1
ϕ(1)j1
)max
(3.90)
O processo iterativo converge para o par de frequência e modo fundamentais quando o
intervalo da equação 3.90 diminui para um valor especificado. Os modos superiores podem ser
obtidos partindo de uma tentativa inicial que seja ortogonal aos modos obtidos anteriormente.
Por exemplo, para a análise do segundo modo pode-se obter uma tentativa inicial que
seja ortogonal ao primeiro modo fazendo
ϕϕϕ(0)2 =ϕϕϕ
(0)2 −
ϕϕϕ1 ϕϕϕT1 M
ϕϕϕT1 M ϕϕϕ
ϕϕϕ(0)2 (3.91)
3.3.2. SUPERPOSIÇÃO MODAL
Segundo Soriano, 2014, "uma vez que um modelo de estrutura seja deformado segundo
o seu j-ésimo modo natural de vibração e se retirem as restrições externas que imponham esse
modo, o modelo passa a vibrar em movimento harmônico simples na j-ésima frequência natural
e mantém esse modo ao longo do tempo. Assim, as frequências naturais e os modos naturais de
vibração independem das forças externas, como funções apenas das distribuições de massa e de
rigidez do modelo".
Os modos naturais são linearmente independentes e em número igual ao de graus de
liberdade, formando, então uma base completa no espaço n-dimensional. Assim, qualquer con-
figuração do sistema pode ser escrita como uma superposição dos modos de vibração, ou seja
d =n
∑j=1
ϕϕϕ j Yj =ΦΦΦ Y (3.92)
onde Yj são chamadas coordenadas modais.
38

Substituindo na equação de movimento e multiplicando por ΦΦΦT obtém-se
ΦΦΦT M ΦΦΦ Y+ΦΦΦ
T C ΦΦΦ Y+ΦΦΦT K ΦΦΦ Y =ΦΦΦ
T f (3.93)
Na seção 3.2.4 colocou-se que seria conveniente que a matriz de amortecimento do sis-
tema fosse ortogonal aos modos naturais de vibração e escrita em termos de razões de amorte-
cimento. A partir da equação 3.93 observa-se que a matriz de amortecimento deveria satisfazer
o seguinte
ΦΦΦT C ΦΦΦ = 2
ω1ξ1 · · · 0
... . . . ...
0 · · · ωnξn
(3.94)
Considerando, então, as equações 3.85, 3.88 e 3.94, pode-se reescrever a equação 3.93
como um sistema de equações desacopladas da forma
Yj +2ω jξ j Y j +ω2j Y =ϕϕϕ j f j (3.95)
Assim, para cada grau de liberdade, a equação pode ser resolvida para Y de acordo com
os desenvolvimentos feitos anteriormente para sistemas com um grau de liberdade, podendo
obter-se os deslocamentos d a partir da equação 3.92. Observa-se também que se aplicam os
efeitos de ressonância ao modelo com vários graus de liberdade quando a frequência das forças
externas se aproximam das frequências naturais.
Outra observação importante é que para a obtenção da resposta da estrutura de maneira
precisa não é necessário fazer a superposição de todos os modos. Os modos de frequências mais
elevadas têm pouca influência no comportamento e, além disso, os primeiros modos do modelo
discreto são mais acurados em relação ao modelo contínuo original (SORIANO, 2014).
3.3.3. MATRIZ DE AMORTECIMENTO DE RAYLEIGH
Um procedimento para construir a matriz de amortecimento na forma mostrada na equa-
ção 3.94 tem como base uma combinação linear das matrizes de massa e de amortecimento
C = α M+β K (3.96)
onde as α e β são constantes de proporcionalidade determinadas com a condição de que a
matriz modal seja ortogonal à matriz de amortecimento (SORIANO, 2014).
Multiplicando por ΦΦΦT e ΦΦΦ chega-se a
ΦΦΦT C ΦΦΦ = α (ΦΦΦT M ΦΦΦ)+β (ΦΦΦT K ΦΦΦ) = α +βΩΩΩ (3.97)
39
Para um modo de vibração, a equação 3.97 se reescreve como
ϕϕϕTj (α M+β K) ϕϕϕ j = α +β ω
2j (3.98)
Comparando com 3.94 pode-se escrever
α +β ω2j = 2 ω j ξ j (3.99)
Estabelecendo dois modos de referência com suas respectivas frequências ωi e ω j e
considerando uma mesma razão de amortecimento ξ para ambos pode-se obter α e β por
α = 2ξωiω j
ωi +ω j(3.100)
β = 2ξ1
ωi +ω j(3.101)
Para os exemplos a serem estudados serão consideradas as duas primeira frequências
naturais por se considerar que estas são mais determinantes no comportamento da estrutura.
3.3.4. RESOLUÇÃO POR INTEGRAÇÃO DIRETA
A superposição modal, discutida na seção 3.3.2, só é válida para modelos com com-
portamento linear e exige a utilização do amortecimento proporcional para que seja possível
a obtenção das equações desacopladas. Tal método é indicado para a obtenção de respostas
de longa duração para modelos com muitos graus de liberdade em que se possa obter a res-
posta de forma precisa utilizando reduzido número de primeiros modos naturais. Os métodos
de integração direta por sua vez são mais gerais, fornecendo a resposta para modelos com com-
portamento linear ou não que utilizem matriz de amortecimento proporcional ou não, sendo
eficazes principalmente na obtenção de respostas de curta duração (SORIANO, 2014).
Os métodos de integração direta já foram discutidos na seção 2.2.5.1 para o caso de os-
ciladores simples, sendo que para os modelos com vários graus de liberdade pode ser feita uma
extensão do caso de um grau de liberdade. Como optou-se por utilizar o método de Newmark
na análise do exemplo, apenas este método será estendido, nesta seção, para o caso de múltiplos
graus de liberdade.
Assim, assume-se aceleração linear média no intervalo, agora dada por
d(τ) =12(di + di+1) (3.102)
Similar ao caso do oscilador simples podem ser obtidas a aceleração e a velocidade no
40

instante i em função dos valores do instante i−1, dadas por
di =−di−1 +4
∆t2 (di−di−1− di−1∆t) (3.103)
di =−di−1 +2∆t
(di−di−1) (3.104)
Substituindo as equações 3.103 e 3.104 na equação de movimento do sistema para o
instante i, dada por
Mdi +Cdi +Kdi = fi (3.105)
chega-se a uma expressão do tipo
K′ di = f′i (3.106)
onde o termo K′ é agora chamado de pseudomatriz de rigidez e o termo f′i é chamado de pseu-
dovetor das forças nodais. Ambos são dados, respectivamente, por
K′ = K+4
∆t2 M+2∆t
C (3.107)
f′i = fi +M(
di−1 +4∆t
di−1 +4
∆t2 di−1
)+C
(di−1 +
2∆t
di−1
)(3.108)
O vetor deslocamento no instante i é então calculado por
di = K′−1 f′i (3.109)
O método, considerando uso de matriz de amortecimento de Rayleigh, é resumido no
seguinte algoritmo:
1. Especificar as condições iniciais d0, d0, o intervalo de tempo ∆t e os valores da ação
dinâmica fi para cada instante i;
2. Construir as matrizes globais M e K;
3. Determinar as duas primeiras frequências naturais ω1 e ω2 para o cálculo dos coefi-
cientes α e β do amortecimento de Rayleigh;
4. Calcular α e β pelas equações 3.100 e 3.101, a matriz de amortecimento C pela
equação 3.96 e a pseudomatriz de rigidez K′ de acordo com 3.107;
5. Determinar a aceleração inicial d0 considerando que
Se d0 = 0 e d0 = 0⇒ d0 = 0;
Se d0 6= 0 ou d0 6= 0⇒M d0 = f0−K d0−C d0;
41
6. Para o instante ti, com i= 1, · · · ,n, sendo n o número total de discretizações do tempo,
com passo ∆t;
Calcular f′i pela equação 3.108;
Calcular di pela equação 3.109;
Calcular di pela equação 3.104;
Calcular di pela equação 3.103;
7. Repetir o passo 6 para i = i+1, até o número total de instantes de discretização.
42
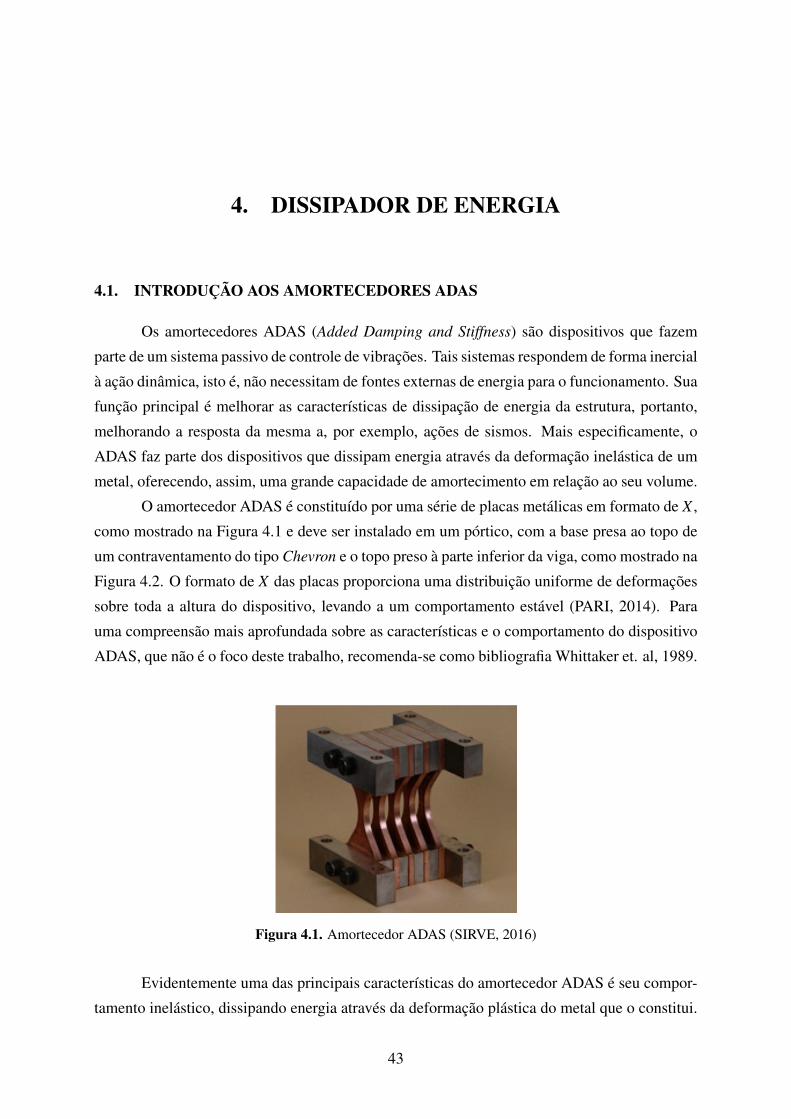
4. DISSIPADOR DE ENERGIA
4.1. INTRODUÇÃO AOS AMORTECEDORES ADAS
Os amortecedores ADAS (Added Damping and Stiffness) são dispositivos que fazem
parte de um sistema passivo de controle de vibrações. Tais sistemas respondem de forma inercial
à ação dinâmica, isto é, não necessitam de fontes externas de energia para o funcionamento. Sua
função principal é melhorar as características de dissipação de energia da estrutura, portanto,
melhorando a resposta da mesma a, por exemplo, ações de sismos. Mais especificamente, o
ADAS faz parte dos dispositivos que dissipam energia através da deformação inelástica de um
metal, oferecendo, assim, uma grande capacidade de amortecimento em relação ao seu volume.
O amortecedor ADAS é constituído por uma série de placas metálicas em formato de X ,
como mostrado na Figura 4.1 e deve ser instalado em um pórtico, com a base presa ao topo de
um contraventamento do tipo Chevron e o topo preso à parte inferior da viga, como mostrado na
Figura 4.2. O formato de X das placas proporciona uma distribuição uniforme de deformações
sobre toda a altura do dispositivo, levando a um comportamento estável (PARI, 2014). Para
uma compreensão mais aprofundada sobre as características e o comportamento do dispositivo
ADAS, que não é o foco deste trabalho, recomenda-se como bibliografia Whittaker et. al, 1989.
Figura 4.1. Amortecedor ADAS (SIRVE, 2016)
Evidentemente uma das principais características do amortecedor ADAS é seu compor-
tamento inelástico, dissipando energia através da deformação plástica do metal que o constitui.
43
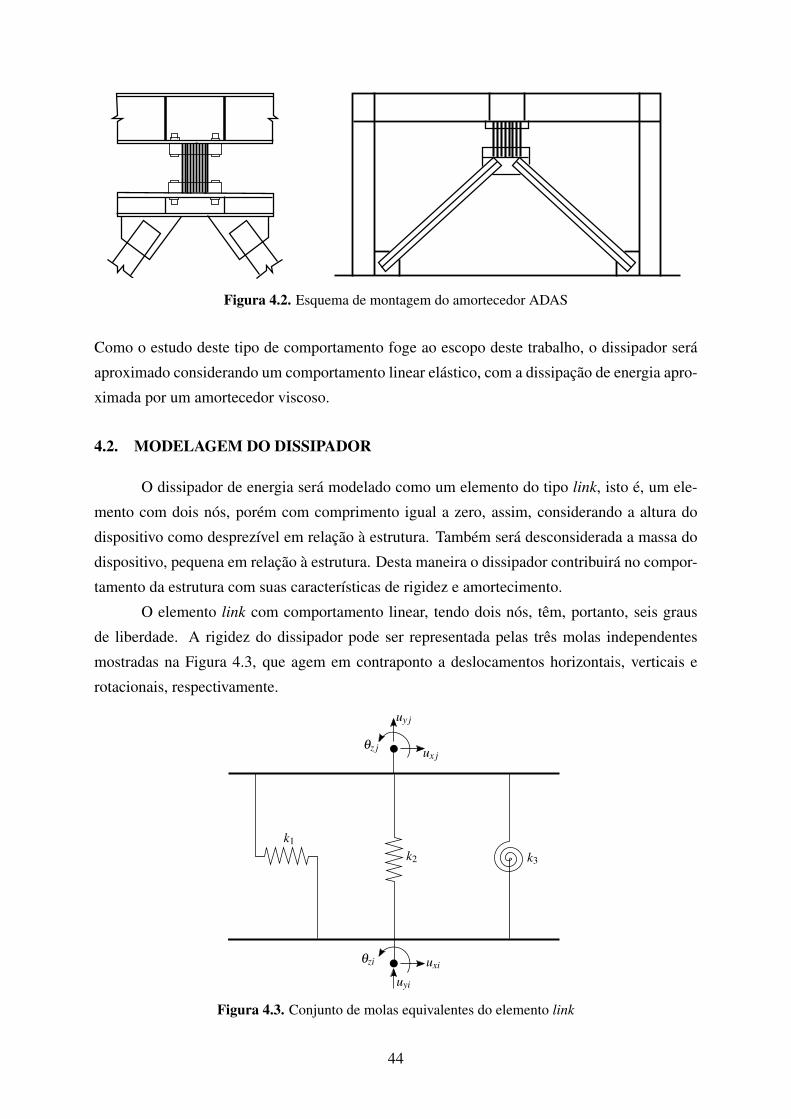
Figura 4.2. Esquema de montagem do amortecedor ADAS
Como o estudo deste tipo de comportamento foge ao escopo deste trabalho, o dissipador será
aproximado considerando um comportamento linear elástico, com a dissipação de energia apro-
ximada por um amortecedor viscoso.
4.2. MODELAGEM DO DISSIPADOR
O dissipador de energia será modelado como um elemento do tipo link, isto é, um ele-
mento com dois nós, porém com comprimento igual a zero, assim, considerando a altura do
dispositivo como desprezível em relação à estrutura. Também será desconsiderada a massa do
dispositivo, pequena em relação à estrutura. Desta maneira o dissipador contribuirá no compor-
tamento da estrutura com suas características de rigidez e amortecimento.
O elemento link com comportamento linear, tendo dois nós, têm, portanto, seis graus
de liberdade. A rigidez do dissipador pode ser representada pelas três molas independentes
mostradas na Figura 4.3, que agem em contraponto a deslocamentos horizontais, verticais e
rotacionais, respectivamente.
uxi
uyi
θzi
ux j
uy j
θz j
k1
k2 k3
Figura 4.3. Conjunto de molas equivalentes do elemento link
44

As forças elásticas atuantes nas molas são dadas por
Fe1 = k1(uxi−ux j)
Fe2 = k2(uyi−uy j)
Fe3 = k3(θzi−θz j)
(4.1)
Dessa maneira, a matriz de rigidez do dissipador pode ser obtida pela equação de equi-
líbrio
Kd ud =
k1 0 0 −k1 0 0
0 k2 0 0 −k2 0
0 0 k3 0 0 −k3
−k1 0 0 k1 0 0
0 −k2 0 0 k2 0
0 0 −k3 0 0 k3
ux j
uy j
θz j
uxi
uyi
θzi
=
−k1(uxi−ux j)
−k2(uyi−uy j)
−k3(θzi−θz j)
k1(uxi−ux j)
k2(uyi−uy j)
k3(θzi−θz j)
(4.2)
De maneira semelhante, o amortecimento do dissipador pode ser representado pelos três
amortecedores equivalentes da Figura 4.4.
uxi
uyi
θzi
ux j
uy j
θz j
c1
c2 c3
Figura 4.4. Conjunto de amortecedores equivalentes do elemento link
As forças viscosas nos amortecedores são
Fv1 = c1(uxi− ux j)
Fv2 = c2(uyi− uy j)
Fv3 = c3(θzi− θz j)
(4.3)
45

Assim, a matriz de amortecimento pode ser obtida a partir de
Cd ud =
c1 0 0 −c1 0 0
0 c2 0 0 −c2 0
0 0 c3 0 0 −c3
−c1 0 0 c1 0 0
0 −c2 0 0 c2 0
0 0 −c3 0 0 c3
ux j
uy j
θz j
uxi
uyi
θzi
=
−c1(uxi− ux j)
−c2(uyi− uy j)
−c3(θzi− θz j)
c1(uxi− ux j)
c2(uyi− uy j)
c3(θzi− θz j)
(4.4)
Para o exemplo estudado, o comportamento do dissipador só será considerado em re-
lação aos deslocamentos horizontais, sendo o dispositivo caracterizado, então, apenas pelas
propriedades k1 e c1 por se considerar que seus efeitos são bem mais relevantes para desloca-
mentos horizontais do que para deslocamentos nos outros graus de liberdade e pela dificuldade
em quantificar as constantes k2, k3, c2 e c3 para que representem um comportamento acurado.
46
5. EXCITAÇÃO SÍSMICA
5.1. INTRODUÇÃO
Uma importante ação dinâmica a que uma estrutura pode estar submetida e que acar-
reta a movimentação de sua base é a ação sísmica. As causas dos sismos são, princialmente,
naturais, com estes ocorrendo devido à movimentação relativa entre placas tectônicas (sismos
interplacas) ou devido à movimentação relativa de blocos geológicos em falhas (sismos intra-
placas), sendo que a primeira causa gera os sismos mais frequentes e de maior intensidade. Os
sismos podem ser classificados de maneira quantitativa por meio da escala Richter, uma classifi-
cação que está relacionada com a energia liberada pelo sismo. Podem também ser classificados
pela escala de Mercalli, que descreve qualitativamente os efeitos do sismo (SORIANO, 2014).
O Brasil está localizado no centro da placa sul-americana, com suas fronteiras situadas
a uma distância razoável de regiões de atividade sísmica mais intensa. Por isso a sismicidade
no território brasileiro é reduzida, havendo pouca frequência de sismos de grande magnitude.
A NBR 15421 de 2006, que trata do projeto de estruturas usuais submetidas a sismos divide o
país em cinco zonas, atribuindo acelerações caraterísticas de projeto como mostrado na Figura
5.1 (SORIANO, 2009; SORIANO, 2014).
Os sismos são em geral registrados por meio de acelerogramas, como o mostrado na
Figura 5.2, que se refere à componente Norte-Sul do sismo El Centro, ocorrido em 18 de maio
de 1940 na Califórnia, com duração de 30 s, magnitude 6,7 e aceleração de pico de 0,319g
(SORIANO, 2014). Os acelerogramas são formados a partir do registro das acelerações do solo
em intervalos definidos de tempo. Considerando aceleração linear entre tais intervalos pode ser
obtida por integração os históricos de velocidades e deslocamentos dos sismos. Utilizando a
formulação obtida na equação 5.10 observa-se que o histórico de deslocamentos relativos da
estrutura pode, então, ser obtido através dos métodos discutidos na seção 2.2.5.
A partir do histórico de deslocamentos relativos pode-se identificar o valor máximo,
chamado de deslocamento relativo espectral, dado por
Sd(Tn; ξ ) = umax (5.1)
que em geral é o valor de interesse para critérios de projeto. Dessa forma pode-se também
47
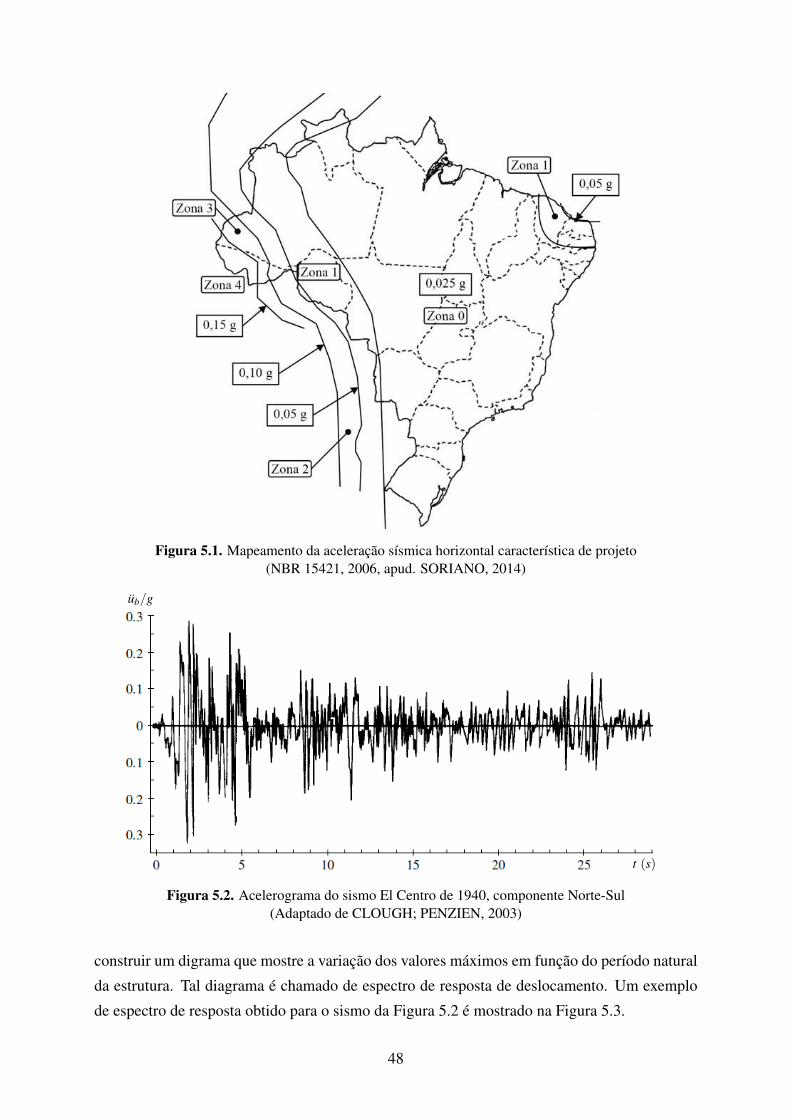
Figura 5.1. Mapeamento da aceleração sísmica horizontal característica de projeto(NBR 15421, 2006, apud. SORIANO, 2014)
t (s)
ub/g
Figura 5.2. Acelerograma do sismo El Centro de 1940, componente Norte-Sul(Adaptado de CLOUGH; PENZIEN, 2003)
construir um digrama que mostre a variação dos valores máximos em função do período natural
da estrutura. Tal diagrama é chamado de espectro de resposta de deslocamento. Um exemplo
de espectro de resposta obtido para o sismo da Figura 5.2 é mostrado na Figura 5.3.
48
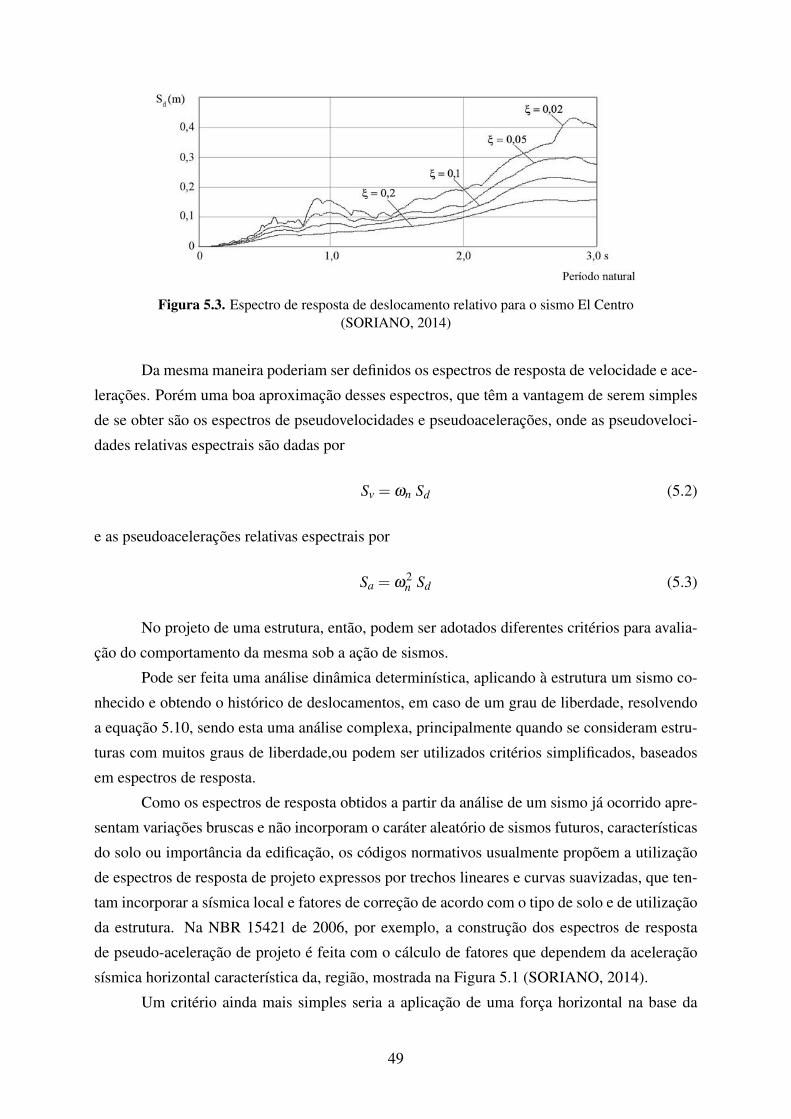
Figura 5.3. Espectro de resposta de deslocamento relativo para o sismo El Centro(SORIANO, 2014)
Da mesma maneira poderiam ser definidos os espectros de resposta de velocidade e ace-
lerações. Porém uma boa aproximação desses espectros, que têm a vantagem de serem simples
de se obter são os espectros de pseudovelocidades e pseudoacelerações, onde as pseudoveloci-
dades relativas espectrais são dadas por
Sv = ωn Sd (5.2)
e as pseudoacelerações relativas espectrais por
Sa = ω2n Sd (5.3)
No projeto de uma estrutura, então, podem ser adotados diferentes critérios para avalia-
ção do comportamento da mesma sob a ação de sismos.
Pode ser feita uma análise dinâmica determinística, aplicando à estrutura um sismo co-
nhecido e obtendo o histórico de deslocamentos, em caso de um grau de liberdade, resolvendo
a equação 5.10, sendo esta uma análise complexa, principalmente quando se consideram estru-
turas com muitos graus de liberdade,ou podem ser utilizados critérios simplificados, baseados
em espectros de resposta.
Como os espectros de resposta obtidos a partir da análise de um sismo já ocorrido apre-
sentam variações bruscas e não incorporam o caráter aleatório de sismos futuros, características
do solo ou importância da edificação, os códigos normativos usualmente propõem a utilização
de espectros de resposta de projeto expressos por trechos lineares e curvas suavizadas, que ten-
tam incorporar a sísmica local e fatores de correção de acordo com o tipo de solo e de utilização
da estrutura. Na NBR 15421 de 2006, por exemplo, a construção dos espectros de resposta
de pseudo-aceleração de projeto é feita com o cálculo de fatores que dependem da aceleração
sísmica horizontal característica da, região, mostrada na Figura 5.1 (SORIANO, 2014).
Um critério ainda mais simples seria a aplicação de uma força horizontal na base da
49

estrutura, equivalente à parcela de força elástica, dada, a partir dos espectros de resposta, por
fb = k Sd (5.4)
ou
fb = k Sa/ω2n
fb = m Sa (5.5)
5.2. OSCILADOR SIMPLES SUBMETIDO À MOVIMENTAÇÃO DA BASE
Considera-se um sistema similar ao da Figura 2.1a, porém acrescentando o amorteci-
mento e considerando que, ao invés de estar submetido a uma força dinâmica, o sistema esteja
submetido a uma movimentação de sua base, obtendo o sistema mostrado na Figura 5.4. As
forças de inércia desenvolvidas na estrutura serão função do deslocamento total da mesma em
relação a um referencial fixo. Enquanto isso as forças elásticas e de amortecimento serão fun-
ção apenas do deslocamento relativo entre a massa e a base (SORIANO, 2009). Nesse caso a
equação de equilíbrio dinâmico se escreve como
m ut + c u+ k u = 0 (5.6)
onde ut representa o deslocamento total da estrutura em relação a um referencial fixo, ou seja, a
soma do deslocamento da estrutura relativo à base (u) mais o deslocamento da base (ub), como
mostra a Figura 2.8, sendo dado por
ut = u+ub (5.7)
m
u(t)
k2
k2
ut(t)
ub(t)
c
refe
renc
ialfi
xo
Figura 5.4. Sistema submetido a movimentação da base (Adaptado de CLOUGH& PENZIEN, 2003)
50
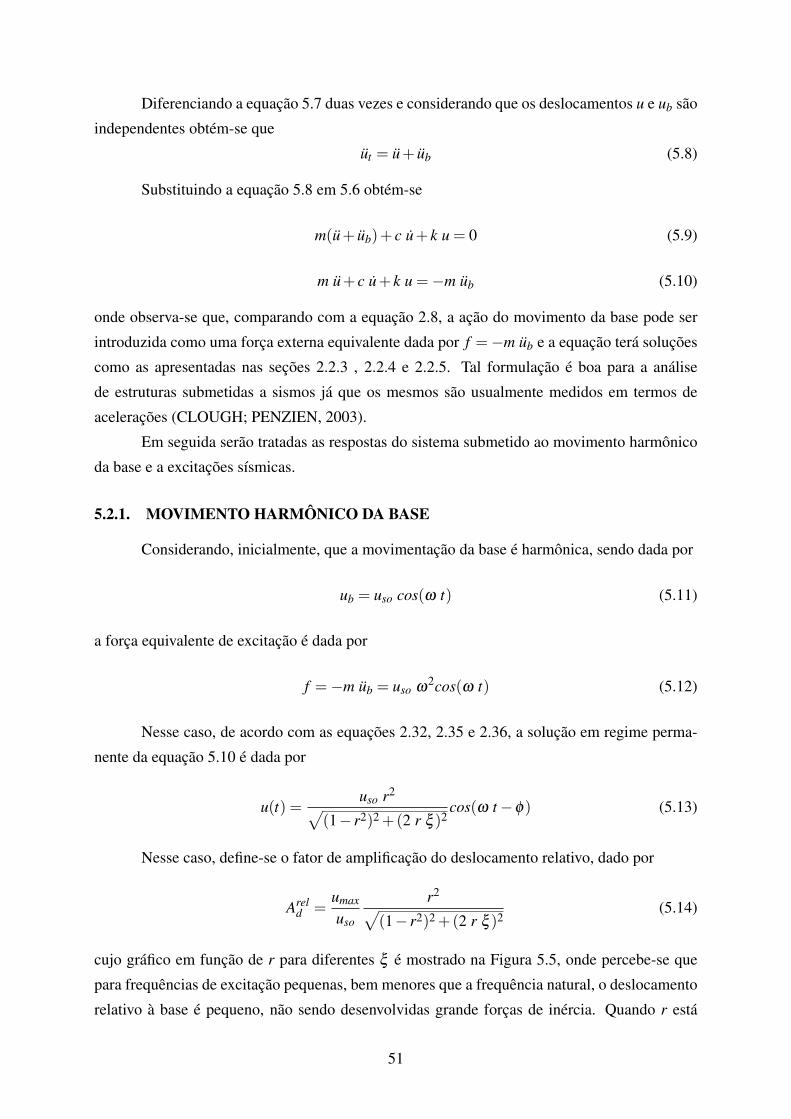
Diferenciando a equação 5.7 duas vezes e considerando que os deslocamentos u e ub são
independentes obtém-se que
ut = u+ ub (5.8)
Substituindo a equação 5.8 em 5.6 obtém-se
m(u+ ub)+ c u+ k u = 0 (5.9)
m u+ c u+ k u =−m ub (5.10)
onde observa-se que, comparando com a equação 2.8, a ação do movimento da base pode ser
introduzida como uma força externa equivalente dada por f =−m ub e a equação terá soluções
como as apresentadas nas seções 2.2.3 , 2.2.4 e 2.2.5. Tal formulação é boa para a análise
de estruturas submetidas a sismos já que os mesmos são usualmente medidos em termos de
acelerações (CLOUGH; PENZIEN, 2003).
Em seguida serão tratadas as respostas do sistema submetido ao movimento harmônico
da base e a excitações sísmicas.
5.2.1. MOVIMENTO HARMÔNICO DA BASE
Considerando, inicialmente, que a movimentação da base é harmônica, sendo dada por
ub = uso cos(ω t) (5.11)
a força equivalente de excitação é dada por
f =−m ub = uso ω2cos(ω t) (5.12)
Nesse caso, de acordo com as equações 2.32, 2.35 e 2.36, a solução em regime perma-
nente da equação 5.10 é dada por
u(t) =uso r2√
(1− r2)2 +(2 r ξ )2cos(ω t−φ) (5.13)
Nesse caso, define-se o fator de amplificação do deslocamento relativo, dado por
Areld =
umax
uso
r2√(1− r2)2 +(2 r ξ )2
(5.14)
cujo gráfico em função de r para diferentes ξ é mostrado na Figura 5.5, onde percebe-se que
para frequências de excitação pequenas, bem menores que a frequência natural, o deslocamento
relativo à base é pequeno, não sendo desenvolvidas grande forças de inércia. Quando r está
51
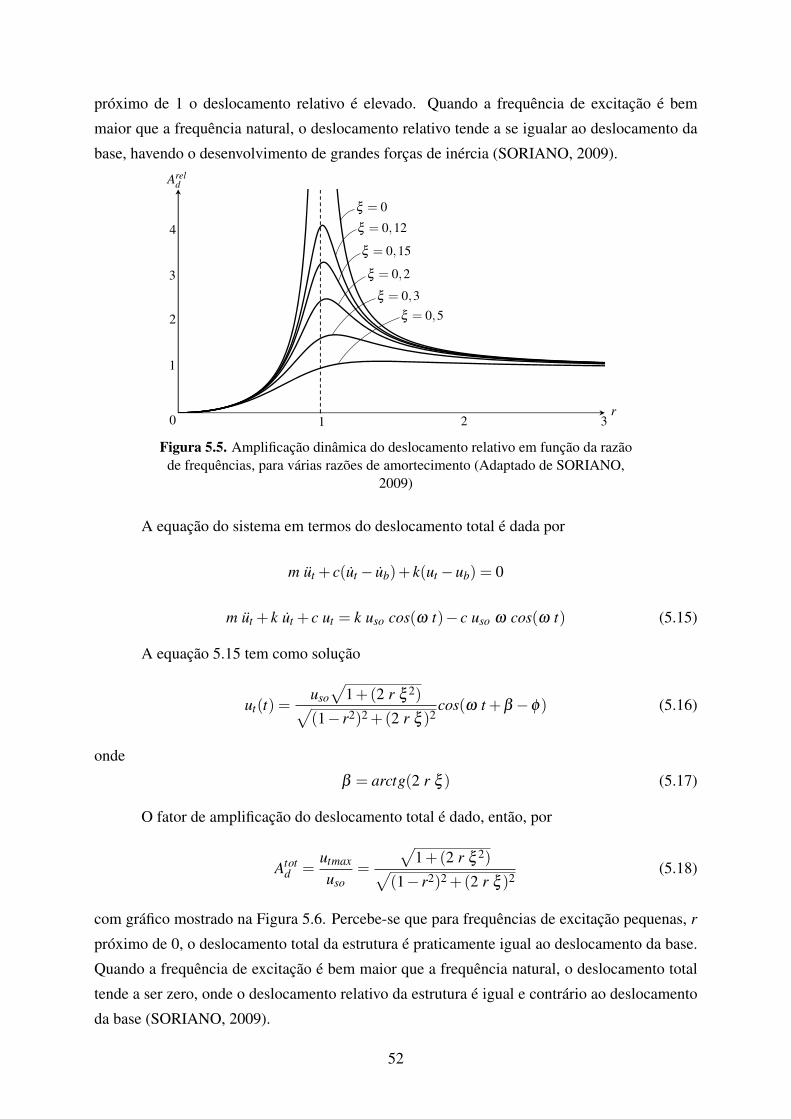
próximo de 1 o deslocamento relativo é elevado. Quando a frequência de excitação é bem
maior que a frequência natural, o deslocamento relativo tende a se igualar ao deslocamento da
base, havendo o desenvolvimento de grandes forças de inércia (SORIANO, 2009).
1 2 3r
Areld
4
3
2
1
0
ξ = 0
ξ = 0,12
ξ = 0,15
ξ = 0,2
ξ = 0,3ξ = 0,5
Figura 5.5. Amplificação dinâmica do deslocamento relativo em função da razãode frequências, para várias razões de amortecimento (Adaptado de SORIANO,
2009)
A equação do sistema em termos do deslocamento total é dada por
m ut + c(ut− ub)+ k(ut−ub) = 0
m ut + k ut + c ut = k uso cos(ω t)− c uso ω cos(ω t) (5.15)
A equação 5.15 tem como solução
ut(t) =uso√
1+(2 r ξ 2)√(1− r2)2 +(2 r ξ )2
cos(ω t +β −φ) (5.16)
onde
β = arctg(2 r ξ ) (5.17)
O fator de amplificação do deslocamento total é dado, então, por
Atotd =
utmax
uso=
√1+(2 r ξ 2)√
(1− r2)2 +(2 r ξ )2(5.18)
com gráfico mostrado na Figura 5.6. Percebe-se que para frequências de excitação pequenas, r
próximo de 0, o deslocamento total da estrutura é praticamente igual ao deslocamento da base.
Quando a frequência de excitação é bem maior que a frequência natural, o deslocamento total
tende a ser zero, onde o deslocamento relativo da estrutura é igual e contrário ao deslocamento
da base (SORIANO, 2009).
52

1 2 3r
Atotd
4
3
2
1
0
ξ = 0
ξ = 0,12
ξ = 0,15
ξ = 0,2
ξ = 0,3
ξ = 0,5
Figura 5.6. Amplificação dinâmica do deslocamento total em função da razão defrequências, para várias razões de amortecimento (Adaptado de SORIANO, 2009)
5.3. MODELO COM MÚLTIPLOS GRAUS DE LIBERDADE SOB AÇÃO SÍSMICA
Considerando uma estrutura submetida a uma excitação sísmica, onde a base se move
como um corpo rígido, os nós restringidos, isto é, os nós junto à base sofrerão um deslocamento
igual ao do solo. Os deslocamentos, velocidades e acelerações desses nós podem ser expressos
pordbr = lb ub
dbr = lb ub
dbr = lb ub
(5.19)
onde lb é um vetor que garante que os deslocamentos horizontais do solo afetem apenas os graus
de liberdade horizontais dos nós restringidos, sendo dado por
lTb =[1 0 0 1 0 0 · · · 0
](5.20)
De maneira similar ao oscilador simples, os deslocamentos dos nós livres serão a soma
entre um deslocamento devido ao movimento de corpo rígido (dar) e um deslocamento devido
à ação sísmica (da). A equação de movimento pode ser reescrita como[Maa Mab
Mba Mbb
]da + dar
lb ub
+
[Caa Cab
Cba Cbb
]da + dar
lb ub
+
[Kaa Kab
Kba Kbb
]da +dar
lb ub
=
00
(5.21)
53

Desenvolvendo a primeira linha chega-se a
Maa da +Maa dar +Mab lb ub +Caa da +Caa dar +Cab lb ub+
Kaa da +Kaa dar +Kab lb ub = 0(5.22)
Como nos nós livres não há aplicação direta de aceleração e velocidade do solo o terceiro
e o sexto termos serão iguais a zero
Mab lb ub = Cab lb ub = 0 (5.23)
Como não há forças externas diretamente aplicadas nos nós livres os dois últimos termos
também serão iguais a zero
Kaa dar +Kab lb ub = 0 (5.24)
dar = K−1aa Kab lb ub (5.25)
dar = K−1aa Kab lb ub (5.26)
dar = la ub (5.27)
onde o vetor la é dado por
la = K−1aa Kab lb (5.28)
Considerando ainda os efeitos viscosos desprezíveis em relação aos efeitos inerciais da
ação sísmica
Caa la ub << Maa la ub (5.29)
chega-se à equação de movimento para sistema submetido à movimentação da base.
Maa da +Caa da +Kaa da =−Maa la ub (5.30)
54
6. ANÁLISE DE EXEMPLO DE PÓRTICO PLANO SOB
EXCITAÇÃO SÍSMICA
6.1. INTRODUÇÃO
O exemplo a ser analisado trata-se do pórtico plano metálico mostrado na figura 6.1,
cujas características são baseadas em exemplo de Paz, 1997, por isso o uso de unidades do
sistema imperial. O exemplo possui as seguintes características:
1
23
4
5
6
100 pol (254 cm)
100
pol(
254
cm)
111,
8po
l (28
4cm
)
Figura 6.1. Pórtico contraventado com dissipador
Módulo de elasticidade: E = 107 lb/pol2 (69,0 GPa);
Área das colunas e viga: A = 6 pol2 (38,71 cm2);
Área das barras de contraventamento: Ab = 0,8 pol2 (5,16 cm2);
Momento de inércia das colunas e viga: I = 100 pol4 (4162,31 cm4);
Momento de inércia dos contraventamentos: Ib = 18 pol4(749,21 cm4);
Densidade de massa: ρ = 0,7 lb s pol−4 (7483,8 kg/m3);
Coeficiente de Poisson: ν = 0,3;
Razão de amortecimento: ξ = 0,01;
55

1
2 3
4
(a) Pórtico sem contraventamento
1
2 3 4
5
(b) Pórticos com contraventamento e semdissipador
Figura 6.2. Casos de análise do pórtico
O pórtico da figura 6.1 possui um dissipador entre o topo do contraventamento e a
viga. Considera-se que o dissipador é efetivo para deslocamentos horizontais que tendem
a cisalhá-lo. Portanto considera-se rigidez e constante de amortecimento para esse dissipa-
dor apenas, o que corresponderia, respectivamente a k1 e c1 nas figuras 4.3 e 4.4. Os valo-
res dessa constantes utilizados para este amortecedor são k1 = 1000 lb/pol (11,3 kN/cm) e
c1 = 1500 lb s/pol (262,8 kN s/m).
Considerando que este trabalho tem propósitos acadêmicos, tais valores característicos
do amortecedor foram tomados de maneira a aproximar o comportamento de amortecedor com
comportamento não linear, tais como os analisados por Pari, 2007, mas também de maneira a
evidenciar a atuação deste em relação aos outros casos.
Serão analisadas três situações com esse pórtico. Na primeira será considerado o caso
do pórtico sem o dissipador e sem o contraventamento. Nesse caso, o modelo discretizado terá
4 nós e três elementos de pórtico plano, como mostrado na figura 6.2a. No segundo caso será
considerado o pórtico sem o dissipador e com os contraventamentos. Nesse caso o modelo terá
cinco nós e 6 elementos, como mostra a figura 6.2b, sendo que duas barras são elementos de
treliça plana e as demais são elementos de pórtico plano.
O terceiro caso é o da própria figura 6.1, considerando a presença tanto do contraventa-
mento quanto do dissipador. Nesse caso o modelo têm 6 nós e 7 elementos. Nesse caso o sétimo
elemento, que representa o dissipador, é um elemento link, tendo, portanto, comprimento igual
a zero.
O carregamento ao qual os pórticos estarão submetidos é uma excitação sísmica na
base, dada pelo componente Norte-Sul do acelerograma do sismo El Centro de 1940, que foi
mostrado na figura 5.2.
Serão comparadas, inicialmente, as componentes horizontais de deslocamento, veloci-
dade e aceleração do nó superior esquerdo de cada pórtico, onde se procura uma visualização
de como o contraventamento e o dissipador influenciam na resposta ao carregamento sísmico.
Para o caso do pórtico com o dissipador também serão comparadas as componentes horizontais
56
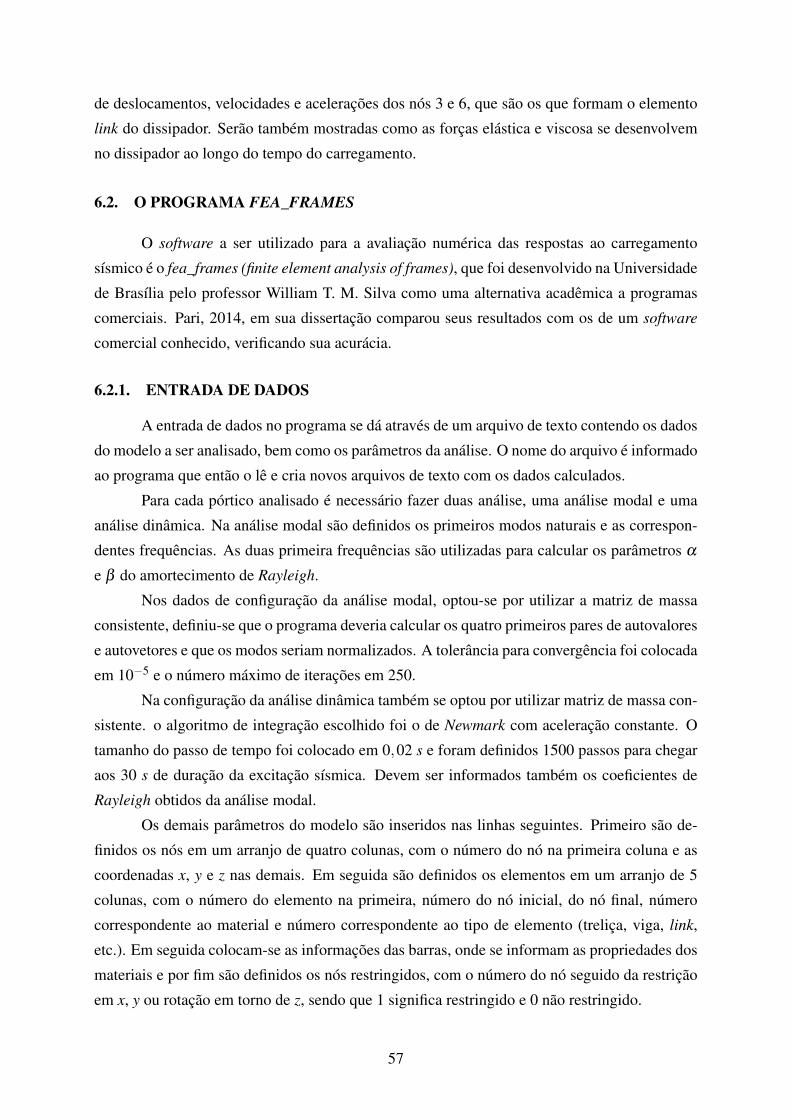
de deslocamentos, velocidades e acelerações dos nós 3 e 6, que são os que formam o elemento
link do dissipador. Serão também mostradas como as forças elástica e viscosa se desenvolvem
no dissipador ao longo do tempo do carregamento.
6.2. O PROGRAMA FEA_FRAMES
O software a ser utilizado para a avaliação numérica das respostas ao carregamento
sísmico é o fea_frames (finite element analysis of frames), que foi desenvolvido na Universidade
de Brasília pelo professor William T. M. Silva como uma alternativa acadêmica a programas
comerciais. Pari, 2014, em sua dissertação comparou seus resultados com os de um software
comercial conhecido, verificando sua acurácia.
6.2.1. ENTRADA DE DADOS
A entrada de dados no programa se dá através de um arquivo de texto contendo os dados
do modelo a ser analisado, bem como os parâmetros da análise. O nome do arquivo é informado
ao programa que então o lê e cria novos arquivos de texto com os dados calculados.
Para cada pórtico analisado é necessário fazer duas análise, uma análise modal e uma
análise dinâmica. Na análise modal são definidos os primeiros modos naturais e as correspon-
dentes frequências. As duas primeira frequências são utilizadas para calcular os parâmetros α
e β do amortecimento de Rayleigh.
Nos dados de configuração da análise modal, optou-se por utilizar a matriz de massa
consistente, definiu-se que o programa deveria calcular os quatro primeiros pares de autovalores
e autovetores e que os modos seriam normalizados. A tolerância para convergência foi colocada
em 10−5 e o número máximo de iterações em 250.
Na configuração da análise dinâmica também se optou por utilizar matriz de massa con-
sistente. o algoritmo de integração escolhido foi o de Newmark com aceleração constante. O
tamanho do passo de tempo foi colocado em 0,02 s e foram definidos 1500 passos para chegar
aos 30 s de duração da excitação sísmica. Devem ser informados também os coeficientes de
Rayleigh obtidos da análise modal.
Os demais parâmetros do modelo são inseridos nas linhas seguintes. Primeiro são de-
finidos os nós em um arranjo de quatro colunas, com o número do nó na primeira coluna e as
coordenadas x, y e z nas demais. Em seguida são definidos os elementos em um arranjo de 5
colunas, com o número do elemento na primeira, número do nó inicial, do nó final, número
correspondente ao material e número correspondente ao tipo de elemento (treliça, viga, link,
etc.). Em seguida colocam-se as informações das barras, onde se informam as propriedades dos
materiais e por fim são definidos os nós restringidos, com o número do nó seguido da restrição
em x, y ou rotação em torno de z, sendo que 1 significa restringido e 0 não restringido.
57
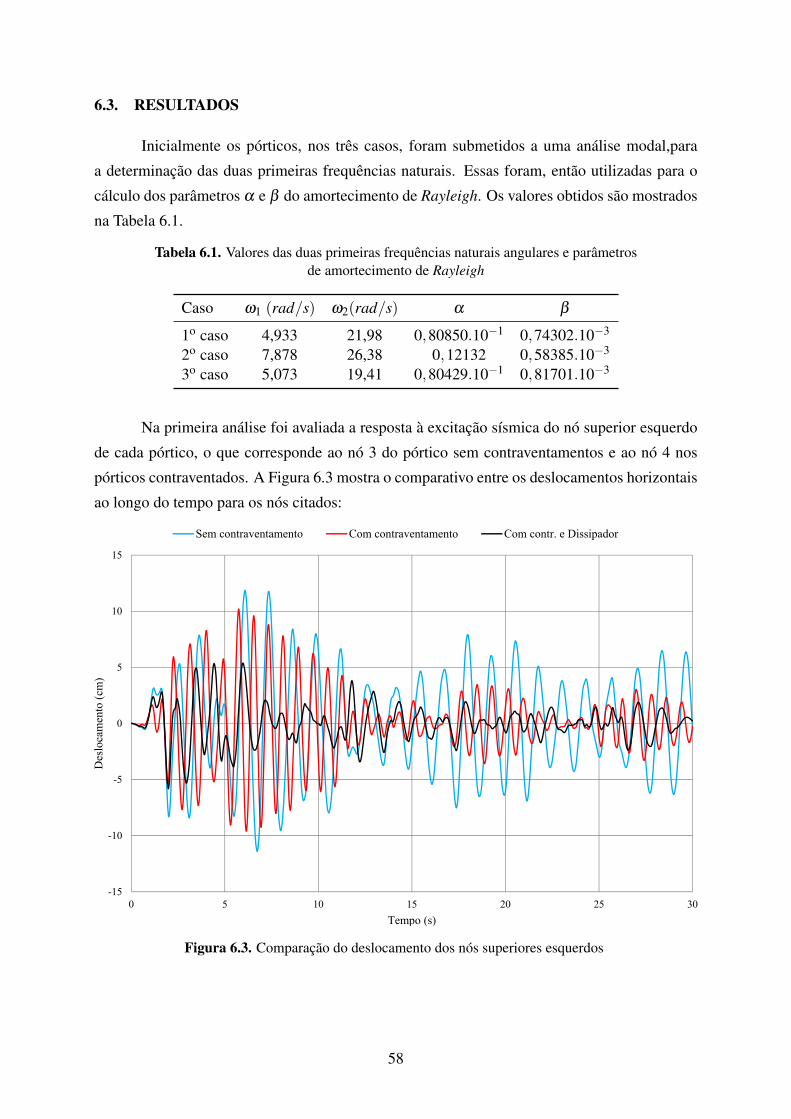
6.3. RESULTADOS
Inicialmente os pórticos, nos três casos, foram submetidos a uma análise modal,para
a determinação das duas primeiras frequências naturais. Essas foram, então utilizadas para o
cálculo dos parâmetros α e β do amortecimento de Rayleigh. Os valores obtidos são mostrados
na Tabela 6.1.
Tabela 6.1. Valores das duas primeiras frequências naturais angulares e parâmetrosde amortecimento de Rayleigh
Caso ω1 (rad/s) ω2(rad/s) α β
1o caso 4,933 21,98 0,80850.10−1 0,74302.10−3
2o caso 7,878 26,38 0,12132 0,58385.10−3
3o caso 5,073 19,41 0,80429.10−1 0,81701.10−3
Na primeira análise foi avaliada a resposta à excitação sísmica do nó superior esquerdo
de cada pórtico, o que corresponde ao nó 3 do pórtico sem contraventamentos e ao nó 4 nos
pórticos contraventados. A Figura 6.3 mostra o comparativo entre os deslocamentos horizontais
ao longo do tempo para os nós citados:
-15
-10
-5
0
5
10
15
0 5 10 15 20 25 30
Des
loca
men
to (
cm)
Tempo (s)
Sem contraventamento Com contraventamento Com contr. e Dissipador
Figura 6.3. Comparação do deslocamento dos nós superiores esquerdos
58
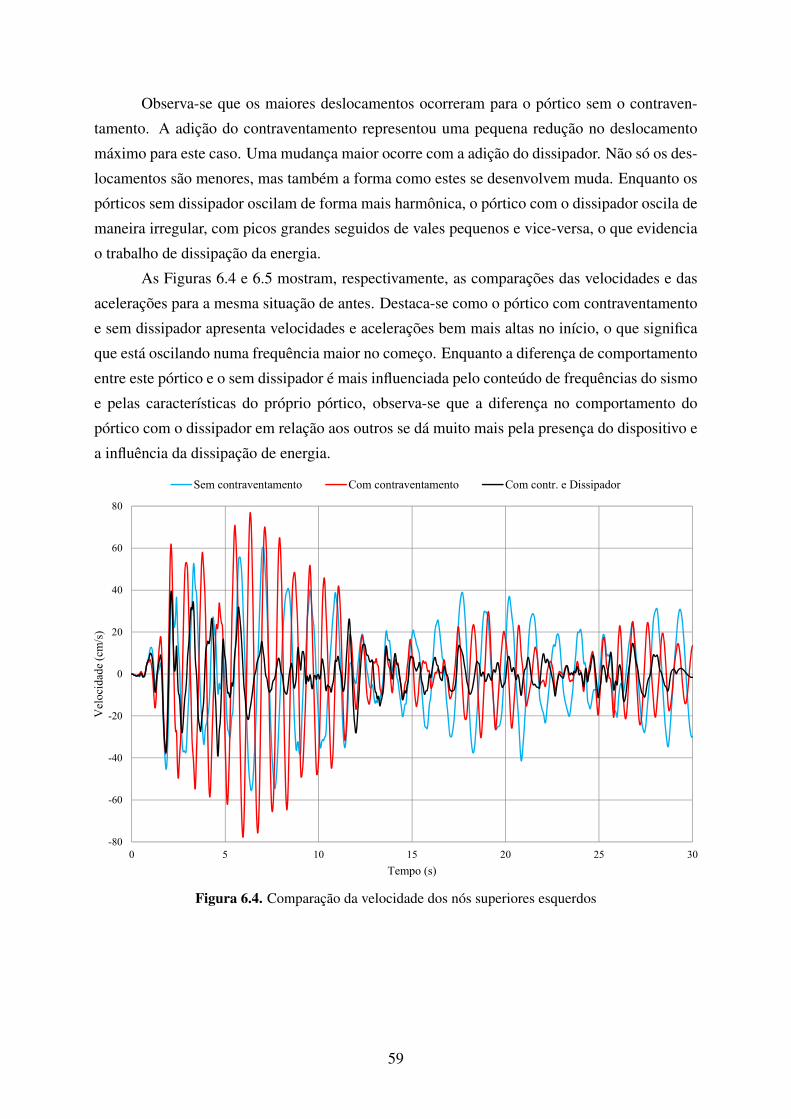
Observa-se que os maiores deslocamentos ocorreram para o pórtico sem o contraven-
tamento. A adição do contraventamento representou uma pequena redução no deslocamento
máximo para este caso. Uma mudança maior ocorre com a adição do dissipador. Não só os des-
locamentos são menores, mas também a forma como estes se desenvolvem muda. Enquanto os
pórticos sem dissipador oscilam de forma mais harmônica, o pórtico com o dissipador oscila de
maneira irregular, com picos grandes seguidos de vales pequenos e vice-versa, o que evidencia
o trabalho de dissipação da energia.
As Figuras 6.4 e 6.5 mostram, respectivamente, as comparações das velocidades e das
acelerações para a mesma situação de antes. Destaca-se como o pórtico com contraventamento
e sem dissipador apresenta velocidades e acelerações bem mais altas no início, o que significa
que está oscilando numa frequência maior no começo. Enquanto a diferença de comportamento
entre este pórtico e o sem dissipador é mais influenciada pelo conteúdo de frequências do sismo
e pelas características do próprio pórtico, observa-se que a diferença no comportamento do
pórtico com o dissipador em relação aos outros se dá muito mais pela presença do dispositivo e
a influência da dissipação de energia.
-80
-60
-40
-20
0
20
40
60
80
0 5 10 15 20 25 30
Vel
ocid
ade
(cm
/s)
Tempo (s)
Sem contraventamento Com contraventamento Com contr. e Dissipador
Figura 6.4. Comparação da velocidade dos nós superiores esquerdos
59
-800
-600
-400
-200
0
200
400
600
800
0 5 10 15 20 25 30
Ace
lera
ção
(cm
/s²)
Tempo (s)
Sem contraventamento Com contraventamento Com contr. e Dissipador
Figura 6.5. Comparação da aceleração dos nós superiores esquerdos
Uma segunda análise foi feita somente para o pórtico com o dissipador. Foram anali-
sados os deslocamentos horizontais dos nós que compõem o elemento do dissipador, no caso
o nó 3 e o nó 6, como mostrado na Figura 6.6. Observa-se que o nó 3 que se localiza na viga
têm um deslocamento similar ao do nó 4 analisado anteriormente. Já o nó 6 que está sob o
dissipador tem deslocamentos bem menores, evidenciando a diferença de comportamento entre
este pórtico e o pórtico sem dissipador, onde nesse ponto há apenas um nó, com o conjunto
movendo-se como um todo.
Foram avaliadas também as velocidades e acelerações nesses nós, com os históricos
mostrados nas Figuras 6.7 e 6.8. Em conjunto também foram avaliadas as forças elásticas e vis-
cosas desenvolvidas no dissipador, mostradas nas Figuras 6.9 e 6.11, respectivamente. Observa-
se como os pontos onde há um maior deslocamento relativo são onde se desenvolvem as maiores
forças elásticas e os pontos onde há maior diferença de velocidade são aqueles em que há maior
desenvolvimento de forças viscosas, como previsto. Os trechos onde se desenvolvem forças
viscosas maiores também estão relacionados a uma maior dissipação de energia.
As Figuras 6.10 e 6.12 mostram, respectivamente a força elástica no dissipador em rela-
ção ao seu deslocamento e a força viscosa em relação à sua velocidade, confirmando, portanto
o comportamento linear do dispositivo.
60
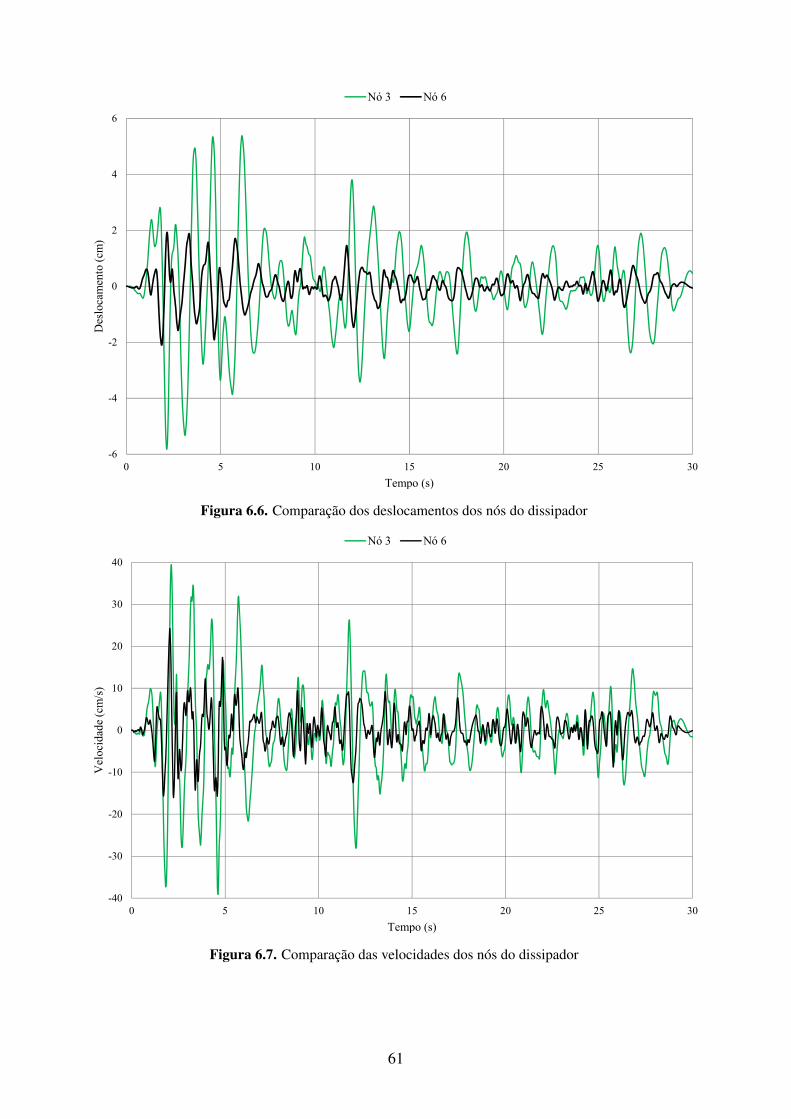
-6
-4
-2
0
2
4
6
0 5 10 15 20 25 30
Des
loca
men
to (
cm)
Tempo (s)
Nó 3 Nó 6
Figura 6.6. Comparação dos deslocamentos dos nós do dissipador
-40
-30
-20
-10
0
10
20
30
40
0 5 10 15 20 25 30
Vel
ocid
ade
(cm
/s)
Tempo (s)
Nó 3 Nó 6
Figura 6.7. Comparação das velocidades dos nós do dissipador
61

-500
-400
-300
-200
-100
0
100
200
300
400
500
0 5 10 15 20 25 30
Ace
lera
ção
(cm
/s²)
Tempo (s)
Nó 3 Nó 6
Figura 6.8. Comparação das acelerações dos nós do dissipador
-10
-8
-6
-4
-2
0
2
4
6
8
10
0 5 10 15 20 25 30
Forç
a E
lást
ica
(kN
)
Tempo (s)
Figura 6.9. Força elástica desenvolvida no dissipador
62
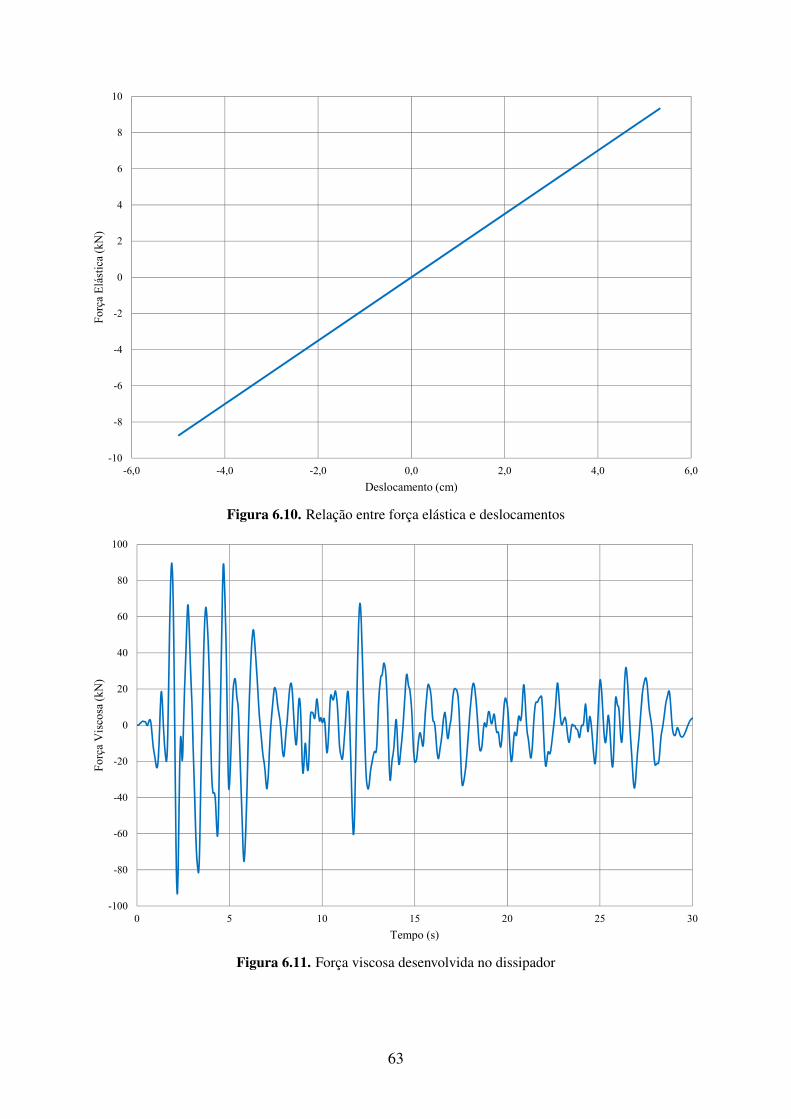
-10
-8
-6
-4
-2
0
2
4
6
8
10
-6,0 -4,0 -2,0 0,0 2,0 4,0 6,0
Forç
a E
lást
ica
(kN
)
Deslocamento (cm)
Figura 6.10. Relação entre força elástica e deslocamentos
-100
-80
-60
-40
-20
0
20
40
60
80
100
0 5 10 15 20 25 30
For
ça V
isco
sa (k
N)
Tempo (s)
Figura 6.11. Força viscosa desenvolvida no dissipador
63
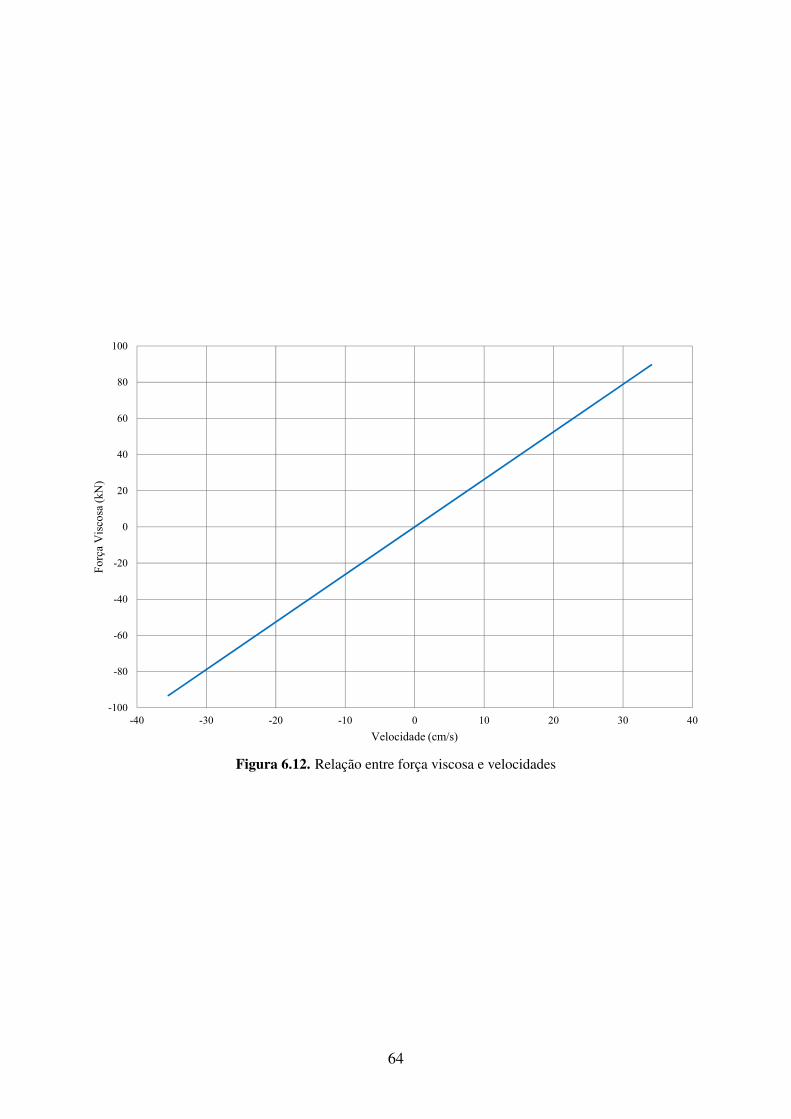
-100
-80
-60
-40
-20
0
20
40
60
80
100
-40 -30 -20 -10 0 10 20 30 40
Forç
a V
isco
sa (k
N)
Velocidade (cm/s)
Figura 6.12. Relação entre força viscosa e velocidades
64
7. CONCLUSÕES
Nesse trabalho foi desenvolvida uma revisão dos conceitos necessários para compreen-
der a análise de estruturas submetidas a carregamentos dinâmicos, começando por conceitos
básicos ao se estudar osciladores simples, que são sistemas com um grau de liberdade e depois
desenvolvendo para a análise de sistemas mais complexos com vários graus de liberdade, pas-
sando pelo estudo de conceitos básicos do método dos elementos finitos para a discretização dos
modelos e avaliação das matrizes de massa e rigidez que compõem a equação de movimento
do modelo. Foram também brevemente estudados os amortecedores ADAS e como podem ser
modelados dentro do estudo proposto, além dos carregamentos sísmicos, como eles podem ser
avaliados e como este tipo de carregamento afeta na análise dinâmica.
O estudo desses temas ofereceu a base para proceder com o objetivo do trabalho que era
analisar um exemplo de pórtico submetido a um carregamento sísmico e comparar a resposta
em diferentes casos, sem contraventamento, com contraventamento e com contraventamento e
com dissipador de energia. A partir das análises conclui-se que os resultados ocorreram dentro
do esperado, com o pórtico apresentado uma resposta ligeiramente melhor com a presença do
contraventamento e uma resposta melhor ainda com o dissipador. É importante observar que o
conteúdo de frequências do sismo e efeitos de ressonância são bastante importantes na análise
dinâmica, como evidenciado, respectivamente, no capítulo de análise sísmica com a construção
dos espectros de resposta do sismo e no capítulo do estudo do oscilador simples com o fator de
amplificação dinâmica.
Observa-se, assim, na análise dos casos estudados, que o comportamento dos pórticos
que não possuem o dissipador está intimamente às suas características, como frequências na-
turais de vibração e como estas se relacionam com o conteúdo de frequências do sismo. Já no
caso do pórtico com dissipador, o comportamento é visivelmente alterado, principalmente em
relação ao segundo pórtico,que possui características semelhantes, observando-se, assim, que
dispositivos amortecedores como o estudado podem se apresentar como alternativas efetivas
para melhora de desempenho da estrutura por basearem seu funcionamento na dissipação da
energia.
65
7.1. SUGESTÕES PARA TRABALHOS FUTUROS
Neste trabalho foi analisado um exemplo de pórtico plano submetido a um carregamento
sísmico, com o objetivo de comparar o comportamento entre situações com ou sem dissipador
de energia e com ou sem contraventamento, porém de forma acadêmica, sem querer avaliar
alternativas de projeto. Também são simplificações adotadas a adoção de comportamento linear
para os elementos da estrutura e para o dissipador de energia, além da análise considerando
apenas um método de integração direta.
Nesse sentido, para trabalhos futuros poderia ser considerada a realização de análises se-
melhantes às desse trabalho, porém adicionando camadas de complexidade não abordadas aqui,
como a análise de exemplos de pórticos mais complexos e casos reais com a consideração de
parâmetros de projeto e recomendações de norma; consideração do comportamento não linear
do amortecedor e não linearidades físicas e geométricas dos elementos da estrutura; análise de
outros métodos de controle de vibrações; comparação de diferentes métodos para a obtenção da
resposta dinâmica, como a superposição modal e o método Wilson θ .
66
REFERÊNCIAS BIBLIOGRÁFICAS
ASSOCIAÇÃO BRASILEIRA DE NORMAS TÉCNICAS. NBR 15421 - Projeto de Estrutu-ras Resistentes a Sismos. Rio de Janeiro: ABNT, 2006, 26 p.
PARI, D. M. C. Análise Sísmica de Pórticos Planos com Dissipadores Metálicos de Ener-gia. Dissertação de Mestrado em Estruturas e Construção Civil. Publicação E.DM-003A/14,Departamento de Engenharia Civil e Ambiental, Universidade de Brasília. Brasília, 2014, 118p.
CHOPRA, Anil K. Dynamics of Structures. 1a Ed. New Jersey: Prentice-Hall, 1995. 729p.
CLOUGH, Ray W.; PENZIEN, Joseph. Dynamics of Structures. 3a Ed. Berkeley: Com-puters & Structures, Inc, 2003. 730 p.
PAZ, Mario. Structural Dynamics: Theory and Computation. 4a Ed. Norwell: KluwerAcademic Publishers, 1997, 827 p.
SORIANO, Humberto Lima. Introdução à Dinâmica das Estruturas. 1a Ed. Rio de Ja-neiro: Elsevier, 2014. 420 p.
SORIANO, Humberto Lima. Elementos Finitos. Formulação e Aplicação na Estática eDinâmica das Estruturas. 1a Ed. Rio de Janeiro: Ciência Moderna, 2009. 432 p.
SIRVE. Disipación de Energia - Concepto y Aplicación. Disponível em <sirve.cl/insights>.Acesso em 01 de dezembro de 2016.
VAZ, Luiz Eloy. Método dos Elementos Finitos em Análise de Estruturas. 1a Ed. Riode Janeiro: Elsevier, 2011. 296 p.
WHITAKKER, A. S.; BERTERO, V. V.; ALONSO, L. J.; THOMPSON, C. L. EarthquakeSimulator Testing of Steel Plate Added Damping And Stiffness Elements. Report No.UCB/EERC-89/02. Earthquake Engineering Research Center. University of California at Ber-kerley, 1989.
ZIENKIEWICZ, O. Z.; TAYLOR, R. L. The Finite Element Method - Volume 1: The Basis.5a Ed. Oxford: Butterworth-Heinemann, 2000. 689 p.
67