yzumi taguti mÉtodo dos elementos de contorno na …
TRANSCRIPT

YZUMI TAGUTI
MÉTODO DOS ELEMENTOS DE CONTORNO NA RESOLUÇÃO DO PROBLEMA DE SEGUNDA
ORDEM EM PLACAS DELGADAS
Tese apresentada à Faculdade de Engenharia do Campus de Guaratinguetá, Universidade Estadual Paulista, para a obtenção do título de Doutor em Engenharia Mecânica na área de Projetos.
Orientador: Prof. Dr. Edson Luiz França Senne Co-orientador: Prof. Dr. Webe João Mansur
Guaratinguetá 2010

Livros Grátis
http://www.livrosgratis.com.br
Milhares de livros grátis para download.


DADOS CURRICULARES
YZUMI TAGUTI NASCIMENTO 14.10.1950 – PIACATÚ / SP FILIAÇÃO Siuki Taguti Fumi Sato Taguti 1974/1978 Curso de Graduação Engenharia Civil Escola de Engenharia de São Carlos Universidade de São Paulo 1983/1987 Curso de Pós-Graduação em Engenharia de Estruturas
nível Mestrado Escola Politécnica Universidade de São Paulo.

Dedicatória
de modo especial, à minha querida esposa Márcia pelo carinho,
paciência, apoio e incentivo e aos meus filhos Alexandre, Tátia e
Érika por existirem.

AGRADECIMENTOS
Em primeiro lugar agradeço ao povo brasileiro, que me deu sustentação como
docente de uma universidade pública. Agradeço pela minha vida, minha inteligência,
minha família e meus amigos,
Ao meu orientador, Prof. Dr. Edson Luiz França Senne que jamais deixou de me
incentivar. Sem a sua orientação, dedicação e auxílio, o estudo aqui apresentado seria
praticamente impossível porque ao longo da convivência me ajudou a ser um ser
humano melhor.
Aos meus pais Siuki e Fumi, com respectivamente, 88 e 83 anos pela educação
recebida e pelo incentivo.
Aos colegas e professores de trabalho Wellington Cyro , Enos, João Alberto,
Fernando Azevedo, Luttgardes e Celso Pinto pelas discussões e dedicação.
Aos prof. Dr. Luiz Eduardo, Prof. Dr. Júlio Santana e Prof. Dr. Marcelo dos
Santos Pereira pelo apoio recebido,
Às secretárias da pós-graduação Regina, Cristina e ao Sidney pela dedicação e
alegria no atendimento,
Às funcionárias da Biblioteca do Campus de Guaratinguetá pela dedicação,
presteza e principalmente pela vontade de ajudar.

TAGUTI, Y. Método dos elementos de contorno na resolução do problema de segunda ordem em placas delgadas. 2010. 189 f. Tese (Doutorado em Engenharia
Mecânica) − Faculdade de Engenharia do Campus de Guaratinguetá, Universidade Estadual Paulista, Guaratinguetá, 2010.
RESUMO
No projeto estrutural de qualquer obra de engenharia busca-se o menor custo, a
alta resistência e confiabilidade. Portanto, com o avanço da técnica e do
desenvolvimento dos materiais empregados, são projetadas estruturas cada vez mais
esbeltas, que conduzem à necessidade de conhecimentos nas áreas de instabilidade,
dinâmica e reologia. Neste trabalho são realizados estudos de problemas de segunda
ordem em placas elásticas delgadas através do Método dos Elementos de Contorno
(MEC), considerando-se para a montagem do sistema de equações algébricas apenas a
equação integral do deslocamento transversal da placa e as variáveis de canto como
incógnitas. Apresenta-se uma nova Metodologia para tratar dos efeitos de segunda
ordem de placas pelo MEC. Primeiramente é feito um estudo da teoria de primeira
ordem em placas e também em chapas, pois estes estão relacionados com o estudo de
segunda ordem. Este trabalho trata do problema desde o início mostrando as diferenças
entre a teoria de primeira ordem e a de segunda ordem, após explicitar as hipóteses e
as deduções das equações que conduzem a uma teoria de segunda ordem simplificada,
da qual uma das aplicações é a equação da flambagem de Von Kármán.
Outra contribuição deste trabalho foi dar um tratamento novo para as integrais de
domínio, cujo integrando é função da curvatura “ ,ijw ” que passou a ser função apenas
do deslocamento transversal “w”, permitindo assim escrever na formulação do
problema pelo MEC apenas equações integrais de “w”, tanto no contorno quanto no
domínio.
PALAVRAS CHAVES: Efeitos de segunda ordem. Não-linearidade geométrica.
Placas elásticas. Método dos Elementos de Contorno.

TAGUTI, Y. Boundary Element Method in the resolution of second order
problem in thin plates. 2010. 189 f. Thesis (Doctorate in Mechanical Engineering) −
Faculdade de Engenharia do Campus de Guaratinguetá, Universidade Estadual
Paulista, Guaratinguetá, 2010.
ABSTRACT
In structural design of any engineering project seeks to lower cost, high strength
and reliability. Therefore, with the advance of technique and strength of materials
used, more slender structures are designed, which lead to the need for knowledge in
the areas of instability, dynamics and rheology. This work studies the problems of
second order and buckling in thin elastic plates through the Boundary Element Method
(BEM), considering, for mounting the system of algebraic equations, only the integral
equation of the transverse displacement of the plates and unknown corner variables. It
presents a new methodology to adress the effects of second order plates by the BEM.
First it is studied the theory of first order in bending plates, and also in plane stress, as
they are related to the study of second order. This paper addresses the problem from
the beginning showing the differences between the theory of first and second order,
after explaining the hypotheses and deductions of equations that lead to a simplified
theory of second order, which is one of the applications of the equation Von Kármán
buckling.
Another contribution of this paper was to give a new treatment for the domain
integrals, whose integrand is function of curvature “ ,ijw ” which is now a function only
of transversal displacement, “w”, enabling to write in the problem’s formulation by
BEM, only the integral equations of “w”, both in boundary and in the domain.
KEY WORDS: Second order effects. Geometric nonlinearity. Elastic Plates.
Boundary Element Method.

LISTA DE FIGURAS
FIGURA 2.1 – Chapas ...............................................................................................21 FIGURA 2.2 – Placas ..................................................................................................21 FIGURA 2.3 – Cascas ................................................................................................21 FIGURA 2.4 – Estado plano de tensão .......................................................................22 FIGURA 2.5 – Discretização do contorno Γ em elementos Γj ...................................29 FIGURA 2.6 – Elemento Γj, com aproximação linear ................................................30 FIGURA 2.7 – Função aproximadora contínua ..........................................................30 FIGURA 2.8 – Função aproximadora descontínua .....................................................30 FIGURA 3.1 – Sistema de coordenadas......................................................................36 FIGURA 3.2 – Superficie média da placa após a deformação....................................37 FIGURA 3.3 – Representações de Tensões e Momentos ...........................................39 FIGURA 3.4 – Momentos fletores (por unidade de comprimento) ............................41 FIGURA 3.5 – Momentos de torção (por unidade de comprimento) .........................41 FIGURA 3.6 – Forças Cortantes (por unidade de comprimento) ...............................42 FIGURA 3.7 – Condições de contorno da placa .........................................................45 FIGURA 3.8 – Forças aplicadas na borda livre ..........................................................46 FIGURA 3.9 – Forças aplicadas na borda livre, x = a ................................................47 FIGURA 3.10 – Forças aplicadas na borda livre, y = b ................................................48 FIGURA 3.11 – Condições de contorno para placas com formato qualquer................49 FIGURA 3.12 – Tensões e Esforços em um Elemento Infinitesimal de Placa .............49 FIGURA 3.13 – Forças concentradas aplicadas nos pontos P e T ................................53 FIGURA 3.14 – Sistemas de Coordenadas Cartesianas e Polares ................................54 FIGURA 3.15 – Relações das coordenadas (n,s) de um ponto P com as coordenadas
(x,y) e (r,θ) ..........................................................................................56 FIGURA 3.16 – Representação do domínio, pontos de carregamento “q” e pontos de
deslocamentos “p”...............................................................................58 FIGURA 3.17 – Tensões Força cortante equivalente num círculo de raio r devido à
uma carga unitária aplicada no ponto q...............................................59 FIGURA 3.18 – Sistemas de coordenadas (n,s) e (m,u) ...............................................62 FIGURA 3.19 – Representação de uma placa com carregamento ................................64 FIGURA 3.20 – Acréscimo de um contorno circular ...................................................68 FIGURA 3.21 – Sistema de coordenadas associadas aos pontos anterior e posterior aos
cantos ..................................................................................................74 FIGURA 3.22 – Discretização do Contorno da Placa (apenas elementos lineares) .....77 FIGURA 3.23 – Tipos de elementos para as variáveis (ex. w). ....................................78 FIGURA 3.24 – Descrição geométrica do elemento linear...........................................79 FIGURA 4.1 – Componentes de deslocamentos dos pontos da placa ........................90 FIGURA 4.2 – Tensões positivas................................................................................94 FIGURA 4.3 – Forças de membrana positivas, por unidade de comprimento. ..........94 FIGURA 4.4 – Momentos fletores e de torção positivos. ...........................................94 FIGURA 4.5 – Forças de membrana. ..........................................................................97 FIGURA 4.6 – Corte através do elemento dxdy, por um plano paralelo a xz........ ....98 FIGURA 4.7 – Corte através do elemento dxdy, por um plano paralelo a yz........ ....98

FIGURA 4.8 – Forças cortantes e carga transversal ...................................................99 FIGURA 4.9 – Corte no elemento dxdy, por um plano paralelo a xz ........................99 FIGURA 4.10 – Corte no elemento dxdy, por um plano paralelo a yz.........................99 FIGURA 4.11 – Corte através do elemento dxdy, por um plano paralelo a yz ........102 FIGURA 4.12 – Corte através do elemento dxdy, por um plano paralelo a yz ........102 FIGURA 4.13 – Momentos fletores e de torção .........................................................104 FIGURA 4.14 – Contorno da placa e elemento infinitesimal submetido a forças .....108 FIGURA 4.15 – Elemento infinitesimal submetido a momentos e esforço cortante ..109 FIGURA 4.16 – Deslocamentos e cargas de superfície na placa................................110 FIGURA 5.1 – Forças de membrana e cargas de superfície .....................................114 FIGURA 5.2 – Pontos de carga (q e Q) e pontos nodais (p e P)...............................115 FIGURA 5.3 – Transferência dos nós junto aos cantos ............................................116 FIGURA 5.4 – Ângulo interno ao canto ...................................................................117 FIGURA 5.5 – Relações entre si pep,p η ..............................................................118
FIGURA 5.6 – Relações entre sni e, θθθ .................................................................119
FIGURA 5.7 – Relações entre 21sn pep,p,p ........................................................120
FIGURA 5.8a – Discretização do contorno e do domínio : o contorno por elementos lineares ; o domínio por células triangulares.....................................123
FIGURA 5.8b – Pontos nodais, onde estão associadas às incógnitas do problema. ...123 FIGURA 5.8c – Pontos de carga, (“load points”), onde para cada um deles está associada uma equação integral de deslocamento “w......................123 FIGURA 5.9 – Elemento contínuo. Os valores nodais estão situados nos extremos do
elemento. ...........................................................................................125 FIGURA 5.10 – Elemento descontínuo.......................................................................125 FIGURA 5.11 – Elemento misto. ................................................................................126 FIGURA 5.12 – Coordenadas de Área........................................................................127 FIGURA 5.13 – Mudança de coordenadas..................................................................128 FIGURA 5.14 – Aproximação de “w” na célula mΩ ................................................129 FIGURA 5.15 – Limites de integração de r e θ...........................................................134 FIGURA 5.16 – Célula m dividida nas sub-células m1 e m2 .....................................136 FIGURA 5.17 – Transformação de coordenadas. .......................................................141 FIGURA 5.18 – Transformação de coordenadas. .......................................................143 FIGURA 5.19 – Descontinuidade geométrica ............................................................145 FIGURA 5.20 – Descontinuidade das cargas pi..........................................................145 FIGURA 5.21 – Pontos de carga Q no contorno e integração dos elementos Γj ........148 FIGURA 5.22 – Transformação de coordenadas de ξ para s ......................................149 FIGURA 5.23 – Transformação de coordenadas de ξ para r(Q,P) .............................150 FIGURA 5.24 – Versores η e s; coordenadas polares r e θ ........................................151 FIGURA 5.25 – Pontos de carga (“load point”) .........................................................156 FIGURA 6.1 – Esquema do sistema de solução dos efeitos de segunda ordem em
placas pelo MEC ...............................................................................162 FIGURA 6.2 – Viga-parede em balanço com carga concentrada na extremidade ...168 FIGURA 6.3 – Viga biapoiada com carga concentrada no meio do vão ..................169 FIGURA 6.4 – Contorno da viga discretizada ..........................................................170 FIGURA 6.5 – Aplicação 1: Placa ...........................................................................172

FIGURA 6.6 – Discretização da aplicação 1: Placas1 ..............................................173 FIGURA 6.7 – Discretização da aplicação 1: Placas2 ..............................................173 FIGURA 6.8 – Aplicação 2: Placa real .....................................................................175 FIGURA 6.9 – Discretização da aplicação 2: Placa real...........................................176 FIGURA 6.10 – Aplicação 2: Placa aproximada ........................................................176 FIGURA 6.11 – Discretização da aplicação 2: Placa aproximada..............................177 FIGURA 6.12 – Aplicação 3: Placa ............................................................................179 FIGURA 6.13 – Discretização da aplicação 3: Placa..................................................179 FIGURA 6.14 – Aplicação 4: Placa ............................................................................181 FIGURA 6.15 – Discretização da aplicação 4:Placa...................................................181

LISTA DE TABELAS TABELA 6.1 – Resultados da aplicação 1: chapa ......................................................168 TABELA 6.2 – Resultados da aplicação 2: chapa ......................................................171 TABELA 6.3 – Resultados da aplicação 1: placa .......................................................174 TABELA 6.4 – Resultados da aplicação 2: placa .......................................................177 TABELA 6.5 – Resultados da aplicação 3: placa .......................................................180 TABELA 6.6 – Resultados da aplicação 4: placa .......................................................182

LISTA DE SÍMBOLOS LATINOS u, v e w deslocamentos nas direções x, y e z x, y e z eixos coordenados x, y e z bx , by força de massa nas direções x e y G módulo de elasticidade transversal E módulo de elasticidade longitudinal
*iku deslocamentos fundamentais
Q, P pontos de cargas e pontos nodais no contorno q, p Pontos de cargas e pontos nodais no domínio H matriz de coeficientes G matriz de coeficientes U vetor de deslocamentos P vetor dos esforços X vetor de incógnita A matriz de coeficientes B vetor independente com termos conhecidos
ckf resistência característica à compressão do concreto
vão (comprimento) da peça h altura da seção transversal I momento de inércia
*iku solução fundamental
* *ik ikp , u esforços e deslocamentos fundamentais
D rigidez à flexão g(x,y) carga uniformemente distribuida
x y xyM , M , M momentos fletores e momento volvente
x yQ , Q esforços cortantes
xV esforço cortante de Kirchhoff n, s
versores normal e tangencial ao contorno Rci reação do canto i
x y xyN , N , N forças de membrana
hX, hY forcas de volume X, Y forças de contorno
n nV , M força cortante e momento fletor normal ao contorno

LISTA DE SÍMBOLOS GREGOS Ω domínio do problema
, ,σ σ σx y z tensões normais nas direções x, y e z
,xy yxτ τ tensões de cisalhamento
, ,ε ε γx y deformações normais e distorção
ν coeficiente de Poisson λ fator multiplicativo do material
,η ηx y versores nas direções x e y * *,σ εijk ijk tensões e deformações fundamentais
Γ contorno do problema φ função aproximadora α, θ, β Ângulos
2∇ operador lapraciano
d , σΓ Γ respectivamente, contorno vinculado e contorno livre
gΩ região carregada com g
λ fator de carga
nθ rotação normal ao contorno
iξ coordenadas de área, i=1,2,3

SUMÁRIO
1 INTRODUÇÃO ................................................................................................16 1.1 MOTIVAÇÃO....................................................................................................16 1.2 ESTADO DA ARTE...........................................................................................17 1.3 OBJETIVOS.......................................................................................................18 2 CHAPAS ELÁSTICAS PELO MÉTODO DOS ELEMENTOS DE CONTORNO ....................................................................................................20 2.1 INTRODUÇÃO..................................................................................................20 2.2 TEORIA DA ELASTICIDADE.........................................................................20 2.3 TEORIA DA ELASTICIDADE APLICADA AO ESTUDO DE CHAPAS.....21 2.3.1 Estado plano de tensão .....................................................................................21 2.3.2 Estado plano de deformação............................................................................24 2.4 MÉTODO DOS ELEMENTOS DE CONTORNO APLICADO A CHAPAS..27 2.4.1 Solução fundamental das chapas ....................................................................27 2.4.2 Discretização do contorno................................................................................28 3 PLACAS ELÁSTICAS DE PRIMEIRA ORDEM PELO MÉTODO DOS
ELEMENTOS DE CONTORNO....................................................................33 3.1 INTRODUÇÃO..................................................................................................33 3.2 PLACAS ELÁSTICAS DE PRIMEIRA ORDEM ............................................35 3.2.1 Equações diferenciais de Lagrange.................................................................35 3.2.2 Deslocamentos ...................................................................................................36 3.2.3 Equações de compatibilidade ..........................................................................37 3.2.4 Equações constitutivas .....................................................................................38 3.2.5 Momentos fletores e de torção .........................................................................39 3.2.6 Equações diferenciais de equilíbrio ................................................................41 3.2.7 Condições de contorno para placas retangulares ..........................................45 3.2.8 Condições de contorno para placas com formato qualquer .........................48 3.2.9 Equações de placas em coordenadas polares .................................................53 3.2.10 Soluções fundamentais de placas de primeira ordem ...................................57 3.3 MÉTODO DOS ELEMENTOS DE CONTORNO APLICADO A PLACAS ..63 3.3.1 Introdução .........................................................................................................63 3.3.2 Equações integrais para pontos do domínio ..................................................63 3.3.3 Equações integrais para pontos do contorno .................................................67 3.3.4 Discretização .....................................................................................................76 3.3.5 Transformação das equações integrais em equações algébricas..................80 4 TEORIA DE SEGUNDA ORDEM DE PLACAS ELÁSTICAS..................86 4.1 INTRODUÇÃO..................................................................................................86 4.2 TEORIA DE SEGUNDA ORDEM SIMPLIFICADA.......................................86

4.3 DESLOCAMENTOS .........................................................................................89 4.4 RELAÇÕES DEFORMAÇÕES-DESLOCAMENTOS ....................................90 4.5 EQUAÇÕES CONSTITUTIVAS ......................................................................93 4.5.1 Relações tensões-deformações .........................................................................93 4.5.2 Tensões em função das componentes u, v, w..................................................93 4.6 ESFORÇOS SOLICITANTES...........................................................................94 4.7 EQUAÇÕES DE EQUILÍBRIO.........................................................................96 4.7.1 Introdução .........................................................................................................96 4.7.2 Equações de equilíbrio no plano da placa ......................................................97 4.7.3 Equações de equilíbrio transversal ao plano da placa ................................100 4.8 EQUAÇÕES DE EQUILÍBRIO EM FUNÇÃO DAS COMPONENTES u, v e
w DOS DESLOCAMENTOS DOS PONTOS DA PLACA............................107 4.9 CONDIÇÕES DE CONTORNO DE UMA PLACA DE FORMATO
QUALQUER ...................................................................................................108 4.9.1 Introdução .......................................................................................................108 4.10 ACOPLAMENTO DOS EFEITOS DE MEMBRANA E DE FLEXÃO ........110 5 FORMULAÇÃO DO PROBLEMA DE FLAMBAGEM DE PLACAS
PELO MEC .....................................................................................................112
5.1 INTRODUÇÃO................................................................................................112 5.2 EQUAÇÕES DIFERENCIAIS.........................................................................112 5.3 EQUAÇÕES INTEGRAIS...............................................................................115 5.4 TRANSFORMAÇÃO DA INTEGRAL DE DOMÍNIO .................................117 5.5 DISCRETIZAÇÃO DO PROBLEMA DE FLAMBAGEM DE PLACA .......122 5.5.1 Introdução .......................................................................................................122 5.5.2 Aproximação das variáveis ............................................................................124 5.5.2.1Variáveis no contorno.......................................................................................124 5.5.2.2Variáveis no domínio .......................................................................................126 5.5.3 Equações integrais após a discretização .......................................................129 5.5.3.1Equações integrais para pontos "Q" no contorno .............................................129 5.5.3.2Equações integrais para os pontos externos ao contorno .................................147 5.5.3.3Equações integrais para os cantos da placa ......................................................147 5.5.3.4Equações integrais para os pontos internos ......................................................147 5.5.3.5Integração sobre os elementos..........................................................................148 5.6 SISTEMA DE EQUAÇÕES ALGÉBRICAS DO PROBLEMA DE FLAMBAGEM DE PLACAS..........................................................................155 5.6.1 Introdução .......................................................................................................155 5.6.2 Sistema de equações........................................................................................155 6 RESULTADOS COMPUTACIONAIS ........................................................162 7 CONSIDERAÇÕES FINAIS.........................................................................184 REFERÊNCIAS BIBLIOGRÁFICAS .........................................................186

16
1 INTRODUÇÃO
1.1 MOTIVAÇÃO
Na teoria de primeira ordem de estruturas considera-se que os deslocamentos e as
deformações são muito pequenas. Nesta teoria as equações de equilíbrio são
desenvolvidas para a configuração indeformada da estrutura , as relações
deformações-deslocamentos são lineares, e as relações tensões-deformações assumem
formas relativamente simples.
A aplicação desta teoria permite a solução, com relativa precisão, de muitas
classes importantes de problemas de engenharia. Há, entretanto, problemas para os
quais é necessário considerar uma aproximação mais exata. Por exemplo, os
problemas que se prendem ao cálculo dos esforços de segunda ordem em estruturas de
rigidez reduzida, e aqueles referentes a perdas da estabilidade do equilíbrio.
Em tais problemas estruturais deve ser aplicada a teoria de segunda ordem (não-
linearidade geométrica), na qual as equações de equilíbrio devem ser escritas
considerando-se a configuração deformada da estrutura, as relações deformações-
deslocamentos não são lineares e as relações tensões-deformações assumem ainda
formas relativamente simples.
Devido a complexidade, e muitas vezes à inexistência de soluções analíticas das
equações diferenciais governantes da placa, mesmo em teorias simplificadas, recorre-
se para a sua resolução de métodos numéricos, que se tornaram exeqüíveis graças ao
advento e desenvolvimento de processadores eletrônicos.
O Método dos Elementos Finitos (MEF), assim como o Método das Diferenças
Finitas, aproxima a solução da equação diferencial que rege o problema físico,
utilizando-se variáveis incógnitas associadas a pontos discretos internos e do contorno
do domínio em análise. Daí decorre a denominação " Métodos de Domínio " muitas
vezes atribuída a essas técnicas.
As técnicas de resolução de equações integrais de contorno surgem como
procedimentos numéricos alternativos para a resolução dos diversos problemas físicos
usuais da engenharia.

17
Em particular, o Método dos Elementos de Contorno (MEC) vem ganhando
espaço entre os pesquisadores dos mais conceituados centros de pesquisa. Neste
Método, como nos demais, a solução do problema físico é determinada em pontos
discretos, só que agora localizados apenas sobre o contorno. Essa característica do
Método leva sempre a uma redução das dimensões dos problemas analisados, o que
significa menor quantidade de dados de entrada, diminuição do tempo de
processamento e menor área auxiliar de armazenamento das informações necessárias
no processamento, que o torna bastante útil.
Aliado com as características do MEC e a existência de poucas pesquisas
realizadas sobre o assunto em pauta, optou-se em abordar a teoria de segunda ordem,
ou seja, tratar os problemas de deslocamentos não muito pequenos em placas
delgadas, em regime elástico linear, através do MEC, enfocando se com pormenor
certos aspectos conceituais e práticos importantes, relativos aos efeitos de segunda
ordem.
1.2 ESTADO DA ARTE
Existem duas principais teorias desenvolvidas para a análise de placas; a
primeira, chamada Teoria Clássica, foi formulada por Kirchhoff (1850) com hipóteses
simplificadoras, sendo válida apenas para placas delgadas, que admitem quatro
variáveis no contorno da placa, gerando uma equação diferencial governante de 4a
ordem; a segunda, formulada por Reissner (1944) e Mindlin (1951), considera as
deformações por cisalhamento, elevando a equação diferencial governante para 6a
ordem. Esta teoria apresenta resultados mais completos e é valida para placas espessas.
O Método dos Elementos de Contorno originou-se como uma evolução natural
das técnicas de resolução de equações integrais de Contorno, tais como, as aplicadas
em problemas de Elasticidade por Betti (1872), por Kupradze (1965), por Rizzo
(1967). Em problemas de engenharia em geral pode-se citar, Brebbia (1984), Brebia et
AL (1984), Brebia e Venturini (1987), Venturini (1988), Hesebe e Wang (2002)
utilizaram a função de Green para a flexão de placas pelo MEC. Hashed (2002) tratou
de placas sobre apoios internos.

18
A aplicação do Método dos Elementos de Contorno na análise de placas teve
início a partir dos trabalhos de Jaswon et al. (1967), de Hansen (1976), de Bezine
(1978), de Stern (1979). Posteriormente, pode-se citar entre outros os trabalhos de
Paiva (1987), Calderón (1991), que trataram de problemas relacionados a placas
utilizando uma formulação alternativa que consiste no uso de equações integrais
apenas do deslocamento transversal “w” da placa, que será utilizada no presente
trabalho aplicada a problemas de efeitos de segunda ordem em placas. Pode-se citar os
trabalhos relacionados a placas enrijecidas formuladas pelo MEC, tais como os de
Tanaka et AL (2000), Fernandes e Venturini (2002) e Guo et al (2002), .
Os trabalhos iniciais mais relevantes relacionados ao comportamento não-linear
geométrico de placas são os de Kamiya e Sawaky (1982), Tanaka (1984), Costa Jr.
(1985), Syngellakis e Kang (1987), Liu (1987), Katsikadelis (1991) que tratou de
grandes deslocamentos de placas sobre fundação elástica, e Kouhia e Meuren (1995),
que trataram de problemas de flambagem de placas utilizando a formulação clássica do
MEC, ou seja escrevendo para cada ponto nodal do contorno duas equações integrais
uma do deslocamento transversal e a outra da derivada direcional do deslocamento.
Mais recentemente podem-se citar os trabalhos de Mirasso e Godoy (1992) que
estudaram técnicas iterativas para problemas de autovalor, Abdel-Aziz (1994), Tanaka
et al. (1999) e Taflesh (2002) analisaram a pré/pós flambagem da placa de Von
Kármán, Aliabad (2006) e (2007) que analisou a não-linearidade física e geométrica
em placas, Guo et al (2002) que trataram de problemas de flambagem e pós-
flambagem, partindo da equação diferencial de Von Kármán.
1.2 OBJETIVOS
Este trabalho tem por objetivo apresentar uma nova metodologia de tratar os
efeitos de segunda ordem em placas utilizando-se o MEC. Primeiramente é feito um
estudo da teoria de primeira ordem em placas e também em chapas, pois estes estão
relacionados com o estudo de segunda ordem. Nesse aspecto, a metodologia adotada
se diferencia da de outros autores, pois os mesmos tratam do problema diretamente a
partir da equação diferencial governante de placas de Von Kármán, enquanto que, por

19
sua vez, este trabalho trata do problema desde o início mostrando as diferenças entre a
teoria de primeira ordem e a de segunda ordem, após explicitar as hipóteses e as
deduções das equações que conduzem a uma teoria de segunda ordem simplificada, da
qual uma das aplicações é a equação da flambagem de Von Kármán.
Outra contribuição no estudo de segunda ordem consiste na aplicação das
equações integrais apenas dos deslocamentos transversais da placa, enquanto que na
formulação clássica se utiliza para cada ponto do contorno uma equação integral do
deslocamento transversal e outra da derivada direcional do deslocamento.
Além disso, foi dado um tratamento novo para as integrais de domínio, cujo
integrando é função da curvatura “ ,ijw ” e, com o tratamento, passou a ser função
apenas do deslocamento, permitindo assim na formulação escrever apenas equações
integrais do deslocamento transversal, tanto no contorno quanto no domínio.
Este trabalho está dividido em 7 capítulos. O Capítulo 1 trata do contexto do
tema, os objetivos e sua execução. A análise dos efeitos de segunda ordem depende,
primeiramente, da análise de primeira ordem das estruturas denominadas chapas, que
são estruturas planas com carregamento no próprio plano, e placas, com carregamento
transversal ao plano.
No Capítulo 2 é desenvolvida a teoria de chapas e sua formulação pelo Método
dos Elementos de Contorno. O mesmo procedimento é apresentado no Capítulo 3 para
o caso de placas em teoria primeira ordem.
A teoria de segunda ordem de placas é apresentada em detalhe no Capítulo 4. No
Capítulo 5 é desenvolvida a formulação do problema de flambagem de placas pelo
MEC, com a discretização da placa e a conseqüente transformação das equações
integrais em equações algébricas.
No Capítulo 6 são apresentados os resultados computacionais obtidos neste
trabalho, produtos da elaboração de vários programas em linguagem Fortran. As
considerações finais são descritas no Capítulo 7.

20
2 CHAPAS ELÁSTICAS PELO MÉTODO DOS ELEMENTOS DE CONTORNO
2.1 INTRODUÇÃO
Neste capítulo considera-se o problema de chapas elásticas, que são estruturas
planas com carregamento no próprio plano. O objetivo deste estudo é formular o
problema pelo Método dos Elementos de Contorno (MEC) e produzir resultados, pois
o mesmo será parte da formulação de segunda ordem de Placas, que é a meta principal
deste trabalho.
2.2 TEORIA DA ELASTICIDADE
Um corpo sujeito a forças externas se deforma, aparecendo deformações e
tensões em cada ponto do corpo. Para um dado carregamento, a deformação depende
da configuração geométrica do corpo, da maneira como ele é fixado ao meio externo
(apoios), além das propriedades mecânicas do material que o constitui.
Na Teoria de Elasticidade estudam-se as relações entre as forças externas,
deslocamentos, deformações e tensões em um corpo constituído de material elástico.
As principais equações desenvolvidas serão: equações de equilíbrio, relações de
deformação-deslocamento e relações constitutivas.
Os corpos podem ser classificados em rígidos ou deformáveis. No primeiro caso,
a distância entre dois pontos quaisquer não varia sob a ação de forças; já no segundo
caso, o corpo sofre deformação.
Denomina-se elasticidade a propriedade de que um material se deforma sob a
ação de forças, e uma vez cessada esta força, o corpo retorna a sua posição inicial. O
material que possui esta propriedade denomina-se elástico. Quando o retorno é apenas
parcial, o corpo denomina-se parcialmente elástico e quando a deformação é
permanente, o material denomina-se plástico.
Existem três tipos de estruturas, cujo domínio denomina-se de Ω, em que podem
ser aplicados a Teoria da Elasticidade, cada um com suas hipóteses particulares.

21
Quando Ω for plana e os esforços agirem no plano de Ω, a estrutura será
denominada chapa, Figura 2.1.
Quando Ω for plana e os esforços agirem perpendicularmente ao plano Ω, a
estrutura será denominada placa. Em caso de estruturas de concreto armado ou
protendido, ela é denominada laje, Figura 2.2.
Quando Ω não for plana, a estrutura de superfície será denominada casca, Figura
2.3.
2.3 TEORIA DA ELASTICIDADE APLICADA AO ESTUDO DE CHAPAS
2.3.1 Estado Plano de Tensão
Se uma chapa fina é carregada por forças no contorno, paralelas ao plano da
chapa e distribuídas uniformemente ao longo da espessura, Figura 2.4, as componentes
de tensão z xz yz, ,σ τ τ são nulas em ambas as faces da chapa. O estado de tensão é
então especificado apenas por x y xy, ,σ σ τ , e é denominado estado plano de tensão.
Pode ser admitido como aproximação que estas três componentes são independentes
de z, isto é, elas não variam ao longo da espessura. Tais componentes são então
funções apenas de x e y.
Figura 2.2 -Placa Figura 2.1 -Chapa Figura 2.3 -Casca

22
Se o Estado Plano de Tensão de um corpo é tal como representado pela equação
(2.1) diz-se que o corpo está num estado de tensão paralelo ao plano xy.
( )( )
( )y,x
y,x
y,x
xyxy
yy
xx
τ=τ
σ=σ
σ=σ
(2.1)
Assim, as equações de equilíbrio são:
0byyx
0bxyx
yxy
xyx
=+∂
σ∂+
∂
τ∂
=+∂
τ∂+
∂
σ∂
(2.2)
onde, as componentes bx e by deverão ser funções apenas de x e y, e z deverá ser nulo
para que o Estado de Tensão exista.
As equações constitutivas são escritas como:
( )
( )
G
E
1E
1
xyxy
xyy
yxx
τ=γ
νσ−σ=ε
νσ−σ=ε
(2.3)
( )
( )
xz yz
z x y
z x y
0
E
1
γ = γ =
νε = − σ − σ
νε = − ε − ε
− ν
(2.4)
Onde, x,y e z são os eixos cartesianos ,
u,v, e w são os deslocamentos correspondentes
aos eixos x,y e z
x , u
y , v
z , w
y, v
Figura 2.4 – Estado plano de tensão (Timoshenko, 1980)

23
onde,
ν coeficiente de Poisson, determinado através de ensaios de laboratório
Observe-se que no estado plano de tensão zσ é nulo, mas zε não é. Invertendo-
se as equações constitutivas, tem-se:
( )
( )
xyxy
xy2y
yx2x
G1
E1
E
γ=τ
νε+εν−
=σ
νε+εν−
=σ
(2.5)
onde,
E módulo de elasticidade longitudinal
G módulo de elasticidade transversal
A relação entre estes dois módulos é dada pela expressão:
( )ν−=
12
EG (2.6)
Finalmente, escrevem-se as relações deformação-deslocamento que envolvem as
componentes de deslocamentos u e v:
y
u
x
v
y
vx
u
xy
y
x
∂
∂+
∂
∂=γ
∂
∂=ε
∂
∂=ε
(2.7)
A chapa em geral é submetida no contorno a restrições mecânicas ou
geométricas. Assim, têm-se as condições de contorno mecânicas dadas por:
yyxxyy
yxyxxx
T
T
ησ+ητ=
ητ+ησ= (2.8)
e as geométricas dadas por:
vv
uu
=
= (2.9)
Encontram-se situações do Estado Plano de Tensão em chapas finas, onde as
forças externas T que atuam sobre a chapa são paralelas ao plano xy e uniformemente

24
distribuídas ao longo da espessura. Não existem forças aplicadas nas faces da chapa e,
portanto, 0yzxzz =τ=τ=σ nas faces. Se a chapa é fina é improvável que estas
componentes atinjam valores substanciais no interior da chapa. Portanto, podem-se
admitir que elas permanecem nulas ao longo da espessura e que as outras três
componentes de tensão permaneçam constantes.
Estas oito equações a oito incógnitas podem ser resolvidas por apenas duas
equações diferenciais em termos dos deslocamentos u e v dos pontos da chapa.
( )
( )0b
y
v
x
u
y12
EvG
0by
v
x
u
x12
EuG
y2
x2
=+
∂
∂+
∂
∂
∂
∂
ν−+∇
=+
∂
∂+
∂
∂
∂
∂
ν−+∇
(2.10)
Portanto, o problema consiste em determinar as componentes xyyx e, τσσ que
satisfazem simultaneamente às equações de equilíbrio (2.2), às equações deformação-
deslocamento (2.7) e às equações constitutivas (2.5), sujeitas às condições de contorno
(2.8) e (2.9).
Resumindo, a hipótese do Estado Plano de Tensão resultou em duas equações de
equilíbrio, três relações deformação-deslocamento e três equações constitutivas,
totalizando oito incógnitas e oito equações.
2.3.2 Estado Plano de Deformação
Se a componente do deslocamento “w” for nula e se “u” e “v” forem funções
apenas de x e y, não de z, diz-se que o corpo está num Estado Plano de Deformação
paralelo ao plano xy, ou seja:
( )( )
0w
y,xvv
y,xuu
=
=
=
(2.11)
Assim, as relações deformação-deslocamento são dadas por:
25
y
u
x
v
y
vx
u
xy
y
x
∂
∂+
∂
∂=γ
∂
∂=ε
∂
∂=ε
(2.12)
e as equações constitutivas por:
( )( )
xyxy
yxyy
xyxx
G
G2
G2
γ=τ
ε+ε+ελ=σ
ε+ε+ελ=σ
(2.13)
onde,
( )( )ν−ν+
ν=λ
211
E
As equações de equilíbrio simplificam-se para:
xyxx
xy yy
b 0x y
b 0x y
∂τ∂σ+ + =
∂ ∂
∂τ ∂σ+ + =
∂ ∂
(2.14)
Portanto, para a existência de um estado de deformação paralelo ao plano xy, as
componentes bx e by da força de massa deverão ser funções apenas de “x” e “y” e a
componente bz deverá ser nula.
Encontram-se situações de estado plano de deformação em corpos cilíndricos, ou
prismáticos, de grande comprimento comparado com as dimensões da seção
transversal. Se as forças externas atuam perpendicularmente ao eixo do corpo e não
sofrem qualquer variação na direção axial, pode ser admitido que todas as seções
transversais, suficientemente afastadas das extremidades do corpo, se deformam
apenas no seu plano e do mesmo modo. Para determinar os deslocamentos,
deformações e tensões em pontos afastados das extremidades, basta considerar uma
única seção transversal ao invés de trabalhar com todo o corpo.

26
( )
( ) 0by
v
x
u
yGvG
0by
v
x
u
xGuG
y2
x2
=+
∂
∂+
∂
∂
∂
∂+λ+∇
=+
∂
∂+
∂
∂
∂
∂+λ+∇
(2.15)
Portanto, o problema consiste em determinar as componentes xyyx e, τσσ que
satisfazem simultaneamente as equações de equilíbrio (2.14), as equações deformação-
deslocamento (2.12) e as equações constitutivas (2.13), sujeitas as condições de
contorno (2.8) e (2.9).
Resumindo, a hipótese do Estado Plano de Deformação resultou em duas
equações de equilíbrio, três relações deformação-deslocamento e três equações
constitutivas, totalizando oito incógnitas e oito equações.
Estas oito equações a oito incógnitas podem ser resolvidas por apenas duas
equações diferenciais em termos dos deslocamentos “u” e “v”.
Comparando-se o Estado Plano de Tensão com o Estado Plano de Deformação,
observa-se que ambos possuem as mesmas equações de equilíbrio, as mesmas relações
deformação deslocamento, porém diferentes equações constitutivas. Para fazer estas
equações coincidirem, basta que se mude no Estado Plano de Deformação:
( )
ν+
ν→ν
ν+
ν+→
1
E1
21E
2
(2.16)
E no Estado Plano de Tensão:
ν−
ν→ν
ν+→
1
1
EE
2 (2.17)

27
2.4 MÉTODO DOS ELEMENTOS DE CONTORNO APLICADO A CHAPAS
2.4.1 Solução Fundamental das Chapas
A partir da equação de Navier (2.15) para o Estado Plano de Deformação e (2.10)
para o Estado Plano de Tensão , obtém-se a solução fundamental para as equações
diferenciais.
( )( )*
ik ik l k1 1
u 3 4 ln r r8 1 r
= − ν δ + πν − ν
(2.18)
O Teorema da Reciprocidade (Teorema de Betti), o qual enuncia “se dois estados
de tensão (a) e (b) existem e estão em equilíbrio, então o trabalho realizado pelas
forças do sistema (a) sobre o sistema (b) é igual ao trabalho realizado pelas forças de
(b) sobre (a)”, ou seja:
(a) (b) (b) (a)p p p p
p p
F u F u=∑ ∑ (2.19)
Aplicando-se este Teorema à equação (2.19), obtém-se a equação integral (2.20):
( ) ( ) ( ) ( ) ( ) ( )∫∫ΩΩ
Ωεσ=Ωεσ pdpp,qsdpp,q *ijkijkijk
*ijk (2.20)
onde:
*ijk
*ijk ,εσ correspondem à solução fundamental
ijkijk ,εσ correspondem ao problema real
Após a integração por partes e a utilização das relações deformação-deslocamento,
obtém-se a equação integral do deslocamento de um ponto q interno a Ω.
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )∫∫∫ΩΓΓ
Ω+Γ+Γ= sdp,qupbPdP,quPpPdP,qpPuqu *ikk
*ikk
*ikki (2.21)
Após manipulações algébricas, chega-se à equação integral geral:

28
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
* *ik k ik k ik k
*ik k
c Q u Q p Q,P u P d P u Q,P p P d P
u Q,p b p d p
Γ Γ
Ω
+ Γ = Γ
+ Ω
∫ ∫
∫ (2.22)
ou em forma matricial:
∫∫∫ΩΓΓ
Ω+Γ=Γ+ d d d *** u bu ppuu c (2.23)
onde:
c = 1 para ponto interno;
c = 0 para ponto externo;
c = 1/2 para ponto no contorno sem angulosidade;
( )( )
( )( )
( )( )
( )( )
ν−π
αγ−
π
α
ν−π
αγν−π
αγ
ν−π
γ+
π
α
=
14
sen2cos
214
sen2sen14
sen2cos
14
2cos
2 c para ponto com angulosidade
Baseando-se nas equações integrais chega-se a um sistema de equações
algébricas lineares pela discretização do contorno em elementos de contorno e pela
aproximação das variáveis.
Assim, as integrais de contorno são transformadas em somatórios de integrais
sobre cada trecho do contorno, passando-se assim, a solução em termos dos pontos
nodais.
2.4.2 Discretização do contorno
Admitindo-se o contorno Γ de domínio Ω, dividido em elementos de contorno jΓ
,Figura 2.5. A representação do contorno pode ser exata ou aproximada dependendo da
coincidência ou não do contorno real com a função aproximada escolhida para cada
elemento. Na Figura 2.5, tem-se um exemplo de discretização do contorno com seus
respectivos pontos nodais e elementos.

29
Aproximando-se a geometria de cada elemento Γj em função de seus valores
nodais tem-se, para um ponto P qualquer:
( ) ( ) xPPx jmmmk φ= (2.24)
ou em forma explícita, para o caso linear:
( ) ( ) ( ) j212
j1111 xPxPPx φ+φ= (2.25)
( ) ( ) ( ) j222
j1212 xPxPPx φ+φ= (2.26)
onde:
k é a direção do eixo coordenado;
j indica o elemento Γj;
φ é a função aproximadora
m indica o ponto nodal (m = 1,2)
Para a aproximação linear da geometria, utilizada neste trabalho, tem-se a partir
da Figura 2.6:
( ) -12
11 ξ=φ
( ) 12
12 ξ+=φ (2.27)
Figura 2.5 : Discretização do contorno Γ em elementos Γj
Ω • q
Q jΓ
•
••
•
•
•••
P
Γ
• p
Onde:
Q, q = pontos de carga
P, p = pontos nodais
jΓ = contorno do elemento j

30
Tanto a geometria quanto as variáveis podem ser aproximadas por funções
polinomiais lineares ou quadráticas. Para aproximação linear tem-se:
( ) ( ) ( ) ( ) ( )PUPPUPPu 2211 φ+φ= (2.28)
Estas funções podem ser contínuas ou descontínuas dependendo da posição do
ponto nodal em relação aos nós. Se o ponto nodal coincidir com o nó a função é
contínua, caso contrário, descontínua, como apresentadas nas Figuras 2.7 e 2.8,
respectivamente.
Figura 2.6 : Elemento Γj, com aproximação linear
1
1
φ1
φ2
ξ
ponto nodal 1
Figura 2.8 : Função aproximadora descontínua
1
1 ξ
ponto nodal 2
1φ
2φ
nó 1 = ponto nodal 1
Figura 2.7 : Função aproximadora contínua
1
1
1φ
2φ
ξ
nó 2 = ponto nodal 2

31
As funções aproximadoras lineares contínuas são idênticas àquelas dadas em
(2.27), enquanto que as descontínuas são dadas por:
12
21
ξ−ξ
ξ−ξ=φ
21
11
ξ−ξ
ξ−ξ=φ (2.29)
Portanto, as variáveis em qualquer ponto do elemento Γj são dadas pelo
somatório destas integrais em todos os elementos e de acordo com cada função
aproximadora.
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
e
m
e
m
N*
ik k ik k mm 1
N*ik k m
m 1
C Q u Q p Q,P u P d P
u Q,P p P d P
Γ=
Γ=
+ Γ
= Γ
∑∫
∑ ∫
(2.30)
Aproximando-se as variáveis uk e pk por funções interpoladoras obtém-se:
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
e
m
e
m
N* jm
ik k ik m km 1
N* jmik m k
m 1
C Q u Q p Q,P P d P U
u Q,P P d P P
Γ=
Γ=
+ φ Γ
= φ Γ
∑∫
∑ ∫
(2.31)
que pode ser escrita da seguinte forma:
( ) ( ) ∑∑==
=+elemelem N
1m
jmk
jmik
N
1m
jmik
jmikkik PgUhQuQC (2.32)
onde:
( ) ( ) ( ) ( )∫ Γφ= jmkm
*ik
jmik UPdPP,QpQh
( ) ( ) ( ) ( )∫ Γφ= jmkm
*ik
jmik PPdPP,QuQg
sendo:
k = 1, 2;
m = 1, 2;
j = 1,..., Ne

32
Considerando-se a contribuição de todos os elementos e compatibilizando-se as
variáveis obtém-se:
=H U G P (2.33)
Em cada ponto nodal, há quatro variáveis, U1, U2, P1, P2 porém apenas duas delas
são incógnitas do problema sendo as outras prescritas. Portanto, no problema
algébrico, o sistema de equações é formado por 2N equações algébricas e 2N
incógnitas.
Após a imposição das condições de contorno, a equação (2.33) pode ser escrita
como:
=A X B (2.34)
sendo:
X o vetor incógnita formado por U1, U2, P1, P2 dos pontos nodais “P”;
A a matriz coeficiente que contém termos relativos a H e G
B é um vetor conhecido, pois representa as condições de contorno.
Após a determinação do vetor de incógnitas “X”, podem-se obter as variáveis em
pontos internos às chapas.

33
3 PLACAS ELÁSTICAS DE PRIMEIRA ORDEM PELO MÉTODO DOS
ELEMENTOS DE CONTORNO
3.1 INTRODUÇÃO
Neste capítulo considera-se o problema de placas elásticas de primeira ordem,
que são estruturas planas com carregamento transversal ao plano médio. O objetivo
deste estudo é formular o problema pelo Método dos Elementos de Contorno (MEC) e
produzir resultados, pois o mesmo se constitui parte fundamental da formulação de
segunda ordem de Placas, que é a meta principal deste trabalho.
O projeto estrutural visa, a partir da análise do comportamento dos elementos
estruturais, e suas interações, que compõem as obras civis em geral, dimensionarem
estes elementos quando solicitados por diversas ações externas.
Existem duas principais teorias desenvolvidas para a análise de placas; a
primeira, chamada Teoria Clássica, foi formulada por Kirchhoff (1850) com hipóteses
simplificadoras, sendo válida apenas para placas delgadas, que admitem quatro
variáveis no contorno da placa, gerando uma equação diferencial governante de 4a
ordem; a segunda, formulada por Reissner (1944) e Mindlin (1951), considera as
deformações por cisalhamento, elevando a equação diferencial governante para 6a
ordem. Esta teoria apresenta resultados mais completos e é valida para placas espessas.
As soluções analíticas dessas equações são conhecidas apenas para casos muito
particulares e mais simples, porém, com a utilização de técnicas numéricas de solução
de sistema de equações, ampliaram-se os casos de análise. Com o advento de
computadores estas análises foram facilitadas.
Os métodos numéricos mais utilizados atualmente são dois denominados de
domínio - Método das Diferenças Finitas (MDF) e Método dos Elementos Finitos
(MEF) - que nas suas formulações associam pontos do domínio e do contorno, e um
denominado de contorno, Método dos Elementos de Contorno (MEC), que na sua
formulação associa apenas pontos no contorno.

34
O Método das Diferenças Finitas, o mais antigo dos três, surgiu antes do advento
dos computadores, com o trabalho de Southwell (1946), e é ainda utilizado na solução
de diversos problemas de engenharia.
O Método dos Elementos Finitos surgiu através dos trabalhos de Turner (1956) e
Argyris e Kelset (1960), na época de grandes desenvolvimentos tecnológicos, o que
possibilitou a sua rápida expansão, tornando-se o método mais difundido e utilizado,
atingindo praticamente todos os campos de aplicação da engenharia.
O Método dos Elementos de Contorno originou-se como uma evolução natural
das técnicas de resolução de equações integrais de Contorno, tais como, as aplicadas
em problemas de Elasticidade por Betti (1872), por Kupradze (1965), por Rizzo
(1967).
A aplicação do Método dos Elementos de Contorno na análise de placas teve
início a partir dos trabalhos de Jaswon, Maiti e Symm (1967), de Hansen (1976), de
Bezine (1978), de Stern (1979).
Neste capítulo apresentam-se as formulações clássica e alternativa do Método
dos Elementos de Contorno na análise de placas elásticas e delgadas. A formulação
clássica considera as equações integrais de deslocamento transversal "w" e sua
derivada direcional " w / n∂ ∂ ", em cada ponto do contorno, na montagem do sistema
de equações algébricas do problema de placa. A formulação alternativa utiliza apenas
a equação integral do deslocamento "w" aplicada em dois pontos associados a cada nó
do contorno, um situado no contorno e outro fora do domínio.
Alguns exemplos numéricos são apresentados para comparar os resultados
obtidos com essas duas formulações e a solução analítica. Outros exemplos são para
comparar os resultados entre a formulação alternativa e outros processos de solução.

35
3.2 PLACAS ELÁSTICAS DE PRIMEIRA ORDEM
3.2.1 Equações Diferenciais de Lagrange
3.2.1.1 Hipóteses
Em primeiro lugar, para que se preserve a validade da lei de Hooke, as
deformações (lineares ε, e angulares γ) do material que constitui a placa não devem ser
superiores a poucos milésimos. Assim, a ordem de grandeza das deformações será da
ordem de 10-3.
Por outro lado, em se tratando de teoria de primeira ordem, sabe-se que as
rotações, ou os deslocamentos angulares, devem ser da mesma ordem de grandeza das
deformações. Para uma rotação α que tenha a mesma ordem de grandeza 10-3 será
sempre possível escrever:
cos 1α = (3.1a)
sen tg (com em radianos)α = α = α α (3.1b)
Além disso, as seguintes outras hipóteses serão adotadas:
a) Espessura da placa constante e pequena face às outras dimensões.
b) Material homogêneo e isótropo.
c) Linearidade física. Isto significa que as deformações serão imediatas,
reversíveis, e que as relações entre tensões e deformações (equações
constitutivas) serão expressas por equações lineares (Lei de Hooke).
d) Linearidade geométrica. Isto é conseqüência de a ordem de grandeza das
rotações terem sido limitadas a 10-3 e significa, em outras palavras, que as
equações de equilíbrio serão escritas na geometria indeformada da placa,
que as relações deformação-deslocamento serão lineares e ainda que as
curvaturas considerar-se-ão linearizadas.
e) Os pontos da placa situados inicialmente numa reta normal ao plano médio
estarão, após o equilíbrio, numa reta normal à superfície média da placa
deformada. Equivale esta hipótese a desprezar o efeito das forças cortantes

36
na deformação da placa, e corresponde à hipótese de Navier na Teoria das
Vigas.
f) A tensão normal (produzida pela carga transversal) de direção perpendicular
ao plano médio da placa será desprezada face às demais.
g) Não há cargas externas paralelas ao plano médio da placa atuando no
mesmo.
h) O plano médio da placa não se deforma, permanecendo neutro durante a
flexão.
3.2.2 Deslocamentos
De acordo com as hipóteses feitas, pode-se escrever, com muito boa
aproximação, para os pontos da placa:
w w(x, y)= (3.2a)
Além disso, para os pontos da superfície média deformada, tem-se:
u = 0 (3.2b)
v = 0 (3.2c)
Figura 3.1 - Sistema de coordenadas
Ω
Γ
y z
x 0
A
Superfície média da placa

37
Supõe-se que o plano médio da placa seja o plano 0xy. Fazendo-se um corte
vertical paralelo ao eixo 0y , passando pelo ponto A situado no plano médio da placa,
Figura 3.1, tem-se, para um ponto B da placa, situado ao longo da sua espessura,
Figura 3.2:
wv z
y
∂= −
∂ (3.3a)
Analogamente, fazendo-se um corte vertical paralelo ao eixo 0x, obtém-se:
wu z
x
∂= −
∂ (3.3b)
Assim, todos os deslocamentos em B de uma placa são inteiramente
determinados pelo conhecimento da função w = w(x, y).
3.2.3 Equações de Compatibilidade
Pelas relações deformações-deslocamentos da Teoria da Elasticidade e
utilizando-se as expressões (3.3a) e (3.3b), têm-se:
Figura 3.2 - Superficie média da placa após a deformação
B’
y
z
0
-w
A = ponto do plano médio da placa
B = ponto qualquer ao longo da
espessura " h" da placa
A’
z
v
A
B
z
φ=∂
∂−
y
w
φ=∂
∂−
y
w
Superfície média elástica (deformada)

38
2
x 2
u wz
x x
∂ ∂ε = = −
∂ ∂ (3.4a)
2
y 2
v wz
y y
∂ ∂ε = = −
∂ ∂ (3.4b)
2 2
xyu v w w
z zy x x y x y
∂ ∂ ∂ ∂γ = + = − −
∂ ∂ ∂ ∂ ∂ ∂ (3.4c)
2
xyw
2zx y
∂γ = −
∂ ∂ (3.4d)
3.2.4 Equações Constitutivas
As tensões em B podem ser obtidas a partir de suas relações com as deformações
(Lei de Hooke) e do fato de z 0σ ≅
( )x x y2
E
1σ = ε + νε
− ν (3.5a)
Substituindo-se (3.4a) e (3.4b) tem-se:
2 2
x 2 2 2
E w wz
1 x y
∂ ∂σ = − + ν
− ν ∂ ∂ (3.5b)
Para a componente em y, pode-se escrever:
( )y x y2
E
1σ = νε + ε
− ν (3.5c)
Substituindo-se (3.4a) e (3.4b) tem-se:
2 2
y 2 2 2
E w wz
1 x y
∂ ∂σ = − ν +
− ν ∂ ∂ (3.5d)
A tensão de cisalhamento é dada por:
( )xy xyE
2 1τ = γ
+ ν (3.5e)
Substituindo-se (3.4d) tem-se:
( )
2
xyE w
z1 x y
∂τ = −
+ ν ∂ ∂ (3.5f)

39
Assim, todas as tensões no ponto B de uma placa são inteiramente determinadas
pelo conhecimento da função w=w(x,y). Pode-se observar ainda que em uma mesma
normal à superfície Ω, as tensões variam linearmente com z, anulando-se para z = 0.
3.2.5 Momentos Fletores e de Torção
Na Figura 3.3, encontram-se representadas as tensões ao longo de uma normal
genérica à placa, supondo-se que as grandezas 2
2
w
x
∂
∂,
2
2
w
y
∂
∂ e
2w
x y
∂
∂ ∂ sejam negativas
para z > 0 .
Por integração das tensões ao longo da espessura h, obtêm-se os momentos
fletores e de torção por unidade de comprimento:
h
2
x xh
2
M z( .1.dz)
−
= σ∫ (3.6a)
h
2
y yh
2
M z( .1.dz)
−
= σ∫ (3.6b)
h
2
xy xyh
2
M z( .1.dz)
−
= τ∫ (3.6c)
dy
dx
h
x
y z
xyτ
Myx dx
My dx Mxy dy
Mx dy
Figura 3.3 – Representações de Tensões e Momentos
xσ
yxτ yσ

40
h
2
x xzh
2
Q dz)
−
= τ∫
(3.6d)
h
2
y yzh
2
Q dz)
−
= τ∫
(3.6e)
Substituindo-se nas expressões acima as fórmulas (3.5b), (3.5d) e (3.5f), e
chamando de rigidez da placa o parâmetro:
3
2
EhD
12(1 )=
− ν (3.7)
2 2
x 2 2
w wM D( )
x y
∂ ∂= − + ν
∂ ∂ (3.8a)
2 2
y 2 2
w wM D( )
y x
∂ ∂= − + ν
∂ ∂ (3.8b)
2
xyw
M D(1 )x y
∂= − − ν
∂ ∂ (3.8c)
Finalmente, sendo:
h
2
yx yxh
2
M z( .1.dz)
−
= τ∫ (3.9)
Sabendo-se que xy yxτ = τ , resulta:
yx xyM M= (3.10)
Verifica-se que também os momentos ficam definidos quando se conhece w w(x, y)=

41
3.2.6 Equações Diferenciais de Equilíbrio
Para a determinação da função w, basta impor as condições de equilíbrio.
- Qx e Qy são as forças por unidade de comprimento
- Mx , My e Mxy são momentos por unidade de comprimento.
- g=g(x, y) é o carregamento suposto distribuído e normal ao plano médio da
placa.
São válidas as seguintes condições de equilíbrio para as forças e momentos, ver
Figuras 3.4, 3.5 e 3.6:
Figura 3.4 - Momentos fletores (por unidade de comprimento)
yM
dxx
MM x
x∂
∂+
x
y dyy
MM
yy
∂
∂+
yM
Figura 3.5 - Momentos de torção (por unidade de comprimento)
yxM
xyM
dxx
MM
xyxy
∂
∂+
dyy
MM
yxyx
∂
∂+
y
x

42
Equilíbrio de forças:
x
y
z
F 0
F 0
F 0
=
=
=
∑∑∑
(3.11)
Equilíbrio de Momentos:
x
y
z
M 0
M 0
M 0
=
=
=
∑∑∑
(3.12)
Equilíbrio de forças na vertical:
yxQQ
dxdy dydx gdxdy 0x y
∂∂+ + =
∂ ∂
de onde:
yxQQ
g(x, y)x y
∂∂+ = −
∂ ∂ (3.13)
Equilíbrio de momentos em torno do eixo 0x:
xy yxy xy y y y
y xyy
M MM dx dy M dy M dy dx M dx Q dxdy 0
x y
M MQ
y x
∂ ∂ + − + + − − = ∂ ∂
∂ ∂+ =
∂ ∂
(3.14a)
Equilíbrio de Momentos em torno do eixo 0y:
Figura 3.6 - Forças Cortantes (por unidade de comprimento)
yQ
xQ
xx
QQ dx
x
∂+
∂
yy
QQ dy
y
∂+
∂
x
y
g(x,y)

43
yx xyx yx x x x
M MM dy dx M dx M dx dy M dy Q dxdy 0
y x
∂ ∂ + − + + − − = ∂ ∂
(3.14b)
e considerando-se (3.10), tem-se:
xyxx
MMQ
x y
∂∂+ =
∂ ∂
(3.14c)
As relações (3.14a) e (3.14c) permitem obter Qx e Qy uma vez conhecidos Mx,
My e Mxy, e, portanto a partir do conhecimento de w=w(x,y). A relação (3.13),
eliminando-se Qx e Qy, transforma-se em:
y xy xyxM M MM
gy y x x x y
∂ ∂ ∂ ∂∂ ∂+ + + = − ∂ ∂ ∂ ∂ ∂ ∂
(3.15a)
2 2 22y xy xyx
2 2
M M MMg
x y x yy x
∂ ∂ ∂∂+ + + = −
∂ ∂ ∂ ∂∂ ∂
(3.15b)
2 22y xyx
2
M MM2 g
y x yx
∂ ∂∂+ + = −
∂ ∂ ∂∂
(3.15c)
Substituindo-se (3.8a), (3.8b) e (3.8c), tem-se que:
( )2 2 2 2 2
2 2 2
2 2 2
2 2 2
w w 2 wD D 1
x y x yx x y
w wD g
y y x
∂ ∂ ∂ ∂ ∂− + ν + − − ν ∂ ∂ ∂ ∂∂ ∂ ∂
∂ ∂ ∂+ − + ν = − ∂ ∂ ∂
ou, 4 4 4 4 4 4
4 2 2 2 2 2 2 4 2 2
w w w w w w g2 2
Dx x y x y x y y x y
∂ ∂ ∂ ∂ ∂ ∂− − ν − + ν − − ν = −
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂
ou, 4 4 4
4 2 2 4
w w w g2
Dx x y y
∂ ∂ ∂+ + =
∂ ∂ ∂ ∂ (3.16)

44
Esta é a equação diferencial geral de placas em termos do deslocamento w,
conhecida como a equação de Lagrange.
Pode ser escrita também da seguinte forma:
4 2 2g gw ou ( w)
D D∇ = ∇ ∇ = (3.17)
onde: 2 2
22 2x y
∂ ∂∇ = +
∂ ∂ (3.18)
é o operador Lapraciano. Substituindo-se (3.8a), (3.8b) e (3.8c), em (3.14a) e (3.14c) obtém-se as forças
cortantes Qy e Qx em termos do deslocamento transversal w.
2 22
y 2 2
w wQ D D w
y yx y
∂ ∂ ∂ ∂= − + = − ∇
∂ ∂∂ ∂ (3.19a)
2 2
2x 2 2
w wQ D D w
x xx y
∂ ∂ ∂ ∂= − + = − ∇
∂ ∂∂ ∂ (3.19b)
As equações (3.8a), (3.8b), (3.8c) e (3.19a), (3.19b) podem ser escritas em
termos gerais como:
( )2 2
ij ijl l l l
w wM D 1
x x x x
∂ ∂= − νδ + − ν
∂ ∂ ∂ ∂ (3.20a)
3
ii l l
wQ D
x x x
∂= −
∂ ∂ ∂ (3.20b)

45
3.2.7 Condições de Contorno para Placas Retangulares
a) engastamento:
para y=0, têm-se:
w 0 (essencial)
w0 (essencial)
y
=
∂= ∂
(3.21)
b) apoio simples:
para x=0, têm-se:
x
w 0
M 0
=
= (3.22a)
Considerando (3.8a) e que, sendo w=0, resulta:
2
2
w w0 e 0
y y
∂ ∂= =
∂ ∂ (3.22b)
Portanto, as condições para apoio simples (x=0) serão:
2
2
w 0 (essencial)
w0 (natural)
y
=
∂= ∂
(3.22c)
Trata-se de condição mista, evidentemente (uma essencial e outra natural).
Figura 3.7 - Condições de contorno da placa
engastamento
x
y
borda livre
apoio simples
a
b
apoio simples

46
c) borda livre:
em x=a, em princípio, têm-se:
x
xy
x
M 0
M 0
Q 0
=
=
=
(3.23a)
Tais condições foram expressas por Poisson sob esta forma. Mas três condições
são demais para a ordem da equação de Lagrange. Sendo assim, Kirchhoff substituiu
as duas últimas condições por uma única, resultando, para x=a:
x
xyx x
M 0
MV Q 0
y
=
∂= + =
∂
(3.23b)
sendo xV a carga vertical de borda.
Lord Kelvin e P. G. Tait deram a explicação física do fato. Tal justificativa foi
colocada em termos de equivalência estática.
dyy
MM
xyxy
∂
∂−
dyy
MM
xyxy
∂
∂+
xyM
dy
dy
dy
Figura 3.8 - Forças aplicadas na borda livre
y
x
z

47
O estado de flexão da placa não se altera se as tensões τxy, atuando num elemento
dy, as quais originam um momento Mxydy (Figura 3.8), são substituídas por duas
forças verticais de grandeza Mxy separadas pela distância dy, dando origem ao binário
Mxydy. Pelo princípio de Saint Venant, as mudanças no campo de tensões serão apenas
locais.
Na interseção de dois trechos dy há um saldo de força igual a ( )xyM y dy∂ ∂ ,
que somada com a resultante do esforço cortante no mesmo trecho dy, dada por
xQ dy , fornece a força cortante efetiva, a qual por unidade de comprimento, vale:
xyx x
MV Q
y
∂= +
∂ (3.23c)
Analogamente, para o contorno normal ao eixo y, tem-se:
xyy y
MV Q
x
∂= +
∂ (3.23d)
Além disso, surge nas extremidades da borda livre da placa, uma reação
concentrada, de intensidade igual a Mxy, Figura 3.9.
Analogamente, considerando a borda livre y = b, a distribuição de yxM será
equivalente a certa distribuição de forças cortantes, e haverá duas forças concentradas,
como indicado na Figura 3.10.
Figura 3.9 - Forças aplicadas na borda livre, x = a
x
y
a
b
(Mxy) x = a , y = b
(Mxy) x = a , y = 0

48
Em resumo, para borda livre (x=a) as condições de contorno são:
x
xyx x
M 0
MV Q 0
y
=
∂= + =
∂
(3.23e)
Considerando-se (3.8a), (3.8c) e (3.23e), estas condições podem ser colocadas
em função de “w” e suas derivadas. Respectivamente, em x=a:
( )
( ) ( )
2 2
2 2
3 3
3 2
w w0 natural
x y
w w2 0 natural
x y x
∂ ∂+ ν =
∂ ∂
∂ ∂ + − ν = ∂ ∂ ∂
(3.23f)
As duas condições são naturais, pois a borda é livre, sem vinculação que impeça
os deslocamentos.
3.2.8 Condições de Contorno para Placas com Formato Qualquer
Considere o contorno “ Γ ” da placa, dividido em duas partes, de acordo com a
Figura 3.11:
dΓ = borda apoiada da placa
σΓ = borda livre da placa
Figura 3.10 - Forças aplicadas na borda livre, y = b
x
y
a
b
0x;byyx )M( ==
ax;byyx )M( ==

49
Três observações precisam ser feitas:
a) A condição de apoio simples será por enquanto esquecida. No momento
oportuno, será indicada a maneira como tratá-la.
b) Serão deduzidas agora expressões que se revelarão úteis mais tarde. Para
isto isola-se um trecho infinitesimal “ds” do contorno, conforme a
Figura 3.12.
Figura 3.11 - Condições de contorno para placas com formato qualquer
s
x
y
P
T
Ω dΓ
σΓ
α
jsenicosn
α+α=
jcosisens
α+α−=
s
(normal externa) (versor tangente) n
Figura 3.12 - Tensões e Esforços em um Elemento Infinitesimal de Placa
c o s d y d s
s e n d x d s
α =
α =
dyds
dx
α
yxM
xM
xyM
yQ
nQ
xQ
yM
nM
nsM
snnσ
nsτ
s
α α
xyτ
yσ
yxτ
xσ
n
ds
dx
dy
x
y
z
x
y

50
Impondo-se o equilíbrio de forças, produzidas pelas tensões, nas direções n e s do
contorno da placa, obtêm-se, respectivamente:
2 2n x y xycos sen 2 sen cosσ = σ α + σ α + τ α α (3.24a)
2 2ns y x xy( )sen cos (cos sen )τ = σ − σ α α + τ α − α (3.24b)
O equilíbrio de forças na vertical (eixo z) fornece:
n x y Q Q cos Q sen= α + α (3.25)
O equilíbrio de momentos em torno de Ox indica que:
ns n xy y M cos M sen M x cos M senα − α = − α − α (3.26)
Analogamente, o equilíbrio de momentos em torno de Oy fornece:
n ns x yx M ds cos M ds sen M ds cos M ds senα − α = α + α (3.27a)
Sendo : Myx = Mxy, vem:
n ns x xy M cos M sen M cos M senα − α = α + α (3.27)
c) Na imposição das condições contorno, quando este tem uma forma qualquer,
é necessário obter Mn , Mns e Qn em função de “w” e suas derivadas.
Inicialmente, estabelece-se, no prisma elementar da Figura 3.12, o equilíbrio de
momentos nas direções Mn e Mns .
2 2n x y xy M M cos M sen 2M sen cos= α + α + α α (3.28a)
( ) ( )2 2ns y x xyM M M sen cos M cos sen= − α α + α − α (3.28b)
Considerando-se as expressões (3.8a), (3.8b) e (3.8c), e as derivadas direcionais,
as expressões (3.28a) e (3.28b), respectivamente, são:

51
2 2
n 2 2
w w M D
n s
∂ ∂= − + ν
∂ ∂ (3.29a)
( )2
nsw
M D 1n s
∂= − − ν
∂ ∂ (3.29b)
Em seguida, considere-se a expressão (3.25b), substituída por (3.14a) e (3.14c),
obtendo-se:
xy y xyxn
M M MM Q cos sen
x y y x
∂ ∂ ∂ ∂= + α + + α ∂ ∂ ∂ ∂
(3.29c)
De (3.28a) e (3.28b) pode-se escrever:
nn
y xy2 2x
y xy2 2x
M grad M n
nM MM
cos sen 2 sen cos cosx x x
M MMcos sen 2 sen cos sen
y y y
∂= × =
∂
∂ ∂ ∂= α + α + α α α
∂ ∂ ∂
∂ ∂ ∂+ α + α + α α α
∂ ∂ ∂
(3.30a)
( ) ( )
( ) ( )
nsns
y xy 2 2x
y xy 2 2x
M grad M s
s
M MMsen cos cos sen sen
x x x
M MMsen cos cos sen cos
y x y
∂= × =
∂
∂ ∂ ∂= − α α + α − α − α
∂ ∂ ∂
∂ ∂ ∂+ − α α + α − α α
∂ ∂ ∂
(3.30b)
Somando-se (3.30a) e (3.30b) e levando-se em conta (3.29c) tem-se finalmente:
nsnn
MM Q
n s
∂∂ = + ∂ ∂
(3.31)

52
3.2.8.1 Condições de Contorno Geométricas (ou Essenciais) Γd é a região de apoio da placa, Figura 3.11. Em Γd são conhecidos:
- recalque de apoio:
( ) w w s= (3.32a)
- rotação forçada de apoio:
( )w
sn
∂= θ
∂ (3.32b)
Evidentemente quando o apoio for um engastamento perfeito, as condições acima
enunciadas serão homogêneas.
3.2.8.2 Condições de Contorno Estáticas (ou Naturais)
Cσ é a borda livre da placa, que pode estar carregada ou não, Figura 3.11. Em Γσ
são conhecidos:
- momento fletor externo aplicado:
( )n n M M s= (3.33a)
- carga vertical externa aplicada:
( )n n V V s= (3.33b)
sendo:
nsn n
M V Q
s
∂= +
∂ (3.33c)
Existem ainda, duas forças concentradas, aplicadas nos pontos “P” e “T”, Figura
3.13, dadas por:
( )P ns P
R M=
( )T ns T R M=
(3.33d)

53
Evidentemente, no caso de borda descarregada, as condições (3.33a) e (3.33b)
serão homogêneas.
Para finalizar, observa-se que a aplicação das expressões (3.29a), (3.29b) e (3.31)
coloca as condições de contorno (3.33a) e (3.33b) em função das derivadas de “w”
normal e tangente ao contorno. Ter-se-á então, respectivamente:
( )2 2
n2 2
w w -D M s
n s
∂ ∂+ ν =
∂ ∂ (3.34a)
( ) ( )3 3
n3 2
w w -D 2 V s
n n s
∂ ∂+ − ν =
∂ ∂ ∂ (3.34b)
3.2.9 Equações de Placas em Coordenadas Polares
Na formulação do Método de Elementos de Contorno é necessária a obtenção de
soluções fundamentais da equação diferencial de placas aplicada a um domínio
infinito, expressas em coordenadas polares, portanto é necessário escrevê-las em
coordenadas polares.
s
M ns∂
∂
ds
RT
RP
Figura 3.13 : Forças concentradas aplicadas nos pontos P e T
P
T

54
A Figura 3.14 mostra os sistemas de coordenada cartesiana e polar.
Considerando-se as expressões (3.17) e a Figura 3.14, obtém-se a equação
diferencial de placas em coordenadas polares:
2 2 2 22 2
2 2 2 2
2 2 2 2
2 2 2 2 2 2
w w( w)
x y x y
1 1 w 1 w 1 w g
r r r r Dr r r r
∂ ∂ ∂ ∂∇ ∇ = + +
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂= + + + + =
∂ ∂∂ ∂θ ∂ ∂θ
(3.35)
Os esforços solicitantes em coordenadas polares são obtidos das expressões
(3.8a), (3.8b), (3.8c), (3.19a), (3.19b) e da Figura 3.14:
( )
( )
22 2
x 2
22 2
2 2
wM D cos sen
r
1 w 1 w 1 wsen cos 2sen cos (1 )
r r r rr
∂= − θ + ν θ
∂
∂ ∂ ∂ ∂ + + θ + ν θ − θ θ − ν
∂ ∂ ∂θ∂θ
(3.36a)
( )
( )
22 2
y 2
22 2
2 2
wM D sen cos
r
1 w 1 w 1 wcos sen 2(1 )sen cos
r r r rr
∂= − θ + ν θ
∂
∂ ∂ ∂ ∂ + + θ + ν θ + − ν θ θ
∂ ∂ ∂θ∂θ
(3.36b)
r
θ x
y
P(x,y)
OPr =
Figura 3.14 - Sistemas de Coordenadas Cartesianas e Polares

55
( )
2 2
xy 2 2 2
2 2
w 1 w 1 wM D(1 ) sen cos
r rr r
1 wcos sen
r r
∂ ∂ ∂= − − ν − − θ θ
∂∂ ∂θ
∂ ∂ + θ − θ ∂ ∂θ
(3.36c)
2 2 2x
2 2
2 2 2
2 2
2 2 2
senQ D w D cos w w
x r r
w 1 w 1 wD cos
r r rr r
sen w 1 w 1 w
r r rr r
∂ ∂ θ ∂ = − ∇ = − θ ∇ − ∇ ∂ ∂ ∂θ
∂ ∂ ∂ ∂= − θ + +
∂ ∂∂ ∂θ
θ ∂ ∂ ∂ ∂− + +
∂θ ∂∂ ∂θ
(3.36d)
2 2 2y
2 2
2 2 2
2 2
2 2 2
cosQ D w D sen w w
y r r
w 1 w 1 wD sen
r r rr r
cos w 1 w 1 w
r r rr r
∂ ∂ θ ∂ = − ∇ = − θ ∇ + ∇ ∂ ∂ ∂θ
∂ ∂ ∂ ∂= − θ + +
∂ ∂∂ ∂θ
θ ∂ ∂ ∂ ∂+ + +
∂θ ∂∂ ∂θ
(3.36e)
A partir das expressões (3.36) e considerando-se a Figura 3.15, as
correspondentes expressões em coordenadas polares, em um ponto genérico P do
contorno, são apresentadas abaixo.

56
( )
( )
22 2
n 2
22 2
2 2
wM D cos sen
r
1 w 1 w 1 wsen cos 2sen cos (1 )
r r r rr
∂= − β + ν β
∂
∂ ∂ ∂ ∂ + + β + ν β + β β − ν
∂ ∂ ∂θ∂θ
(3.37a)
( )
2 2
ns 2 2 2
2 2
w 1 w 1 wM D(1 ) sen cos
r rr r
1 wcos sen
r r
∂ ∂ ∂= − − ν − − β β
∂∂ ∂θ
∂ ∂ + β − β ∂ ∂θ
(3.37b)
2 2 2n
2 2
2 2 2
2 2
2 2 2
senQ D w D cos w w
x r r
w 1 w 1 wD cos
r r rr r
sen w 1 w 1 w
r r rr r
∂ ∂ β ∂ = − ∇ = − β ∇ − ∇ ∂ ∂ ∂θ
∂ ∂ ∂ ∂= − β + +
∂ ∂∂ ∂θ
β ∂ ∂ ∂ ∂− + +
∂θ ∂∂ ∂θ
(3.37c)
β α
r
R
θ
n
s
x
y
P
O
r
α=θ+β
OPr =
contorno da placa
Figura 3.15 - Relações das coordenadas (n,s) de um ponto P com as coordenadas (x,y)
e (r,θ)

57
Considerando-se a expressão (3.33c) e a Figura 3.15 tem-se a força cortante
equivalente:
nsn n
2 2ns
2 2 2
2 2ns
2 2 2
ns
MV Q
s
Mw 1 w 1 w 1D cos
r r r rr r
MD w 1 w 1 wsen
r r r rr r
M1 cos
R r
∂= +
∂
∂∂ ∂ ∂ ∂= − + + + β
∂ ∂ ∂θ∂ ∂θ
∂∂ ∂ ∂ ∂+ + + − β
∂θ ∂ ∂∂ ∂θ
∂β + −
∂β
(3.38)
onde, R é o raio de curvatura do contorno no ponto P, mostrado na Figura 3.15
3.2.10 Soluções Fundamentais de Placas de Primeira Ordem
A solução fundamental w* é obtida a partir da seguinte equação:
( )2 2 q,p
w*D
δ∇ ∇ = (3.39)
Sendo ( )q,pδ a distribuição delta de Dirac, que tem as seguintes propriedades:
(q,p) 0 se p q
(q,p) se p q
(p) (q,p)d (q)Ω
δ = ≠
δ = ∞ =
φ δ Ω = ϕ∫
(3.40)
onde φ(p) é uma função definida em todo o domínio Ω.
A partir da equação (3.40), pode-se escrever:
(q,p)d 1Ω
δ Ω =∫ (3.41)
ou seja, a integral da função delta de Dirac em todo o domínio é uma força unitária
aplicada no ponto q, e corresponde a totalidade do carregamento transversal aplicado à
placa.

58
Entende-se como solução fundamental, a resposta em um ponto genérico “ p” em
um domínio, denominado domínio fundamental, devido à aplicação de uma carga
unitária em outro ponto “q” deste domínio.
Para o caso de placas, a solução fundamental é o deslocamento transversal w*
em um ponto de coordenadas [x(p) , y(p)], denominado ponto de deslocamento, devido
a ação de uma força unitária aplicada em um ponto “q”, de coordenadas [(x(q),y(q)],
denominado ponto de carregamento, ver Figura 3.16.
A solução fundamental w* é obtida a partir da equação diferencial (3.39)
aplicada a todos os pontos do domínio, exceto ao ponto do carregamento “q”.
2 2w* 0∇ ∇ = (3.42)
Para um sistema de coordenadas polares com origem em "q"e observando-se a
simetria existente em relação a este ponto (domínio infinito), Figura 3.16, o que
elimina a dependência em relação à coordenada θ, a equação (3.42) pode ser reescrita
como:
2 2
2 22 2
d 1 d d w * 1 dw *w* 0
r dr r drdr dr
∇ ∇ = + + =
(3.43)
4 3 2
4 3 2 2 3
d w * 2 d w * 1 d w * 1 dw *0
r drdr dr r dr r+ − + = (3.44)
cuja solução é conhecida e tendo a seguinte forma:
Domínio infinito
β
θ
n
s
x
y p
q
∞Γ
∞Ω
Figura 3.16 - Representação do domínio, pontos de carregamento "q" e pontos de deslocamentos "p"
r

59
2 2w* A ln r B r ln r C r E= + + + (3.45)
As constantes A e B são obtidas considerando-se a simetria em relação ao ponto
"q" e a condição de equilíbrio das forças verticais atuante em um círculo de raio "r",
Figura 3.17, cujo centro é o ponto de aplicação da carga unitária, e resultam em:
A 0= (3.46a)
Da Figura 3.17(b), por equilíbrio, resulta:
n1
V2 r
= −π
(3.46b)
Considerando-se (3.46) escrita apenas em função de "r" e para β=0, resulta:
2 * * 2 *
n 2 2 2
w 1 w 1 w 1V D
r r r 2 rr r
∂ ∂ ∂ ∂= − + + = −
∂ ∂ π∂ ∂θ (3.46c)
Levando-se (3.46c) em (3.45) obtém-se:
1
B8 D
=π
(3.46d)
As constantes C e E, no caso da placa fundamental, podem assumir quaisquer
valores. Stern (1979) e Bezine (1978) adotam valores nulos, mas, Danson (1979) adota
(que serão usadas neste trabalho):
1
nV
r
p
q q
p
n
s
θ
(a) (b)
Figura 3.17 - Força cortante equivalente num círculo de raio r devido à uma carga unitária aplicada
no ponto q.
x
y
60
1
C16 D
= −π
(3.46e)
E 0= (3.46f)
Substituindo-se (3.46) em (3.45), tem-se a solução fundamental w*:
2r 1
w* ln r-8 D 2
=
π (3.47)
onde r é dado por:
( ) ( ) ( ) ( ) 1
2 2 2r x p x q y p y q= − + − (3.48)
Assim, pode-se determinar a solução fundamental da derivada do deslocamento e
dos esforços no ponto "p" em relação a um sistema (n, s).
* *w w r
n r n
∂ ∂ ∂=
∂ ∂ ∂ (3.49)
Como a derivada é calculada no ponto "p", tem-se:
i,i i
i
x (p)r r x(p) r y(p) rr n
n x(p) n y(p) n x (p) n
∂∂ ∂ ∂ ∂ ∂ ∂= + = =
∂ ∂ ∂ ∂ ∂ ∂ ∂ (3.50)
A partir de (3.48), vem:
i i,i
i
x (p) x (q)rr
x (p) r
−∂= =
∂ (3.51a)
2
ij ,i , j,ij
i j
r rrr
x (p) x (p) r
δ −∂= =
∂ ∂ (3.51b)
onde ijδ é o delta de Kronecker.
Considerando-se a Figura 3.15, obtêm-se:

61
xx(p)
n cosn
∂= = α
∂ (3.52a)
yy(p)
n senn
∂= = α
∂ (3.52b)
Da Figura 3.17 e da expressão (3.49) :
*w r
ln r cosn 4 D
∂= β
∂ π (3.53)
Considerando-se que r
e n
são versores (módulo unitário) nas direções r e n
respectivamente, a equação (3.53) pode ser escrita da seguinte forma:
*
,i ,iw r r
ln r(r.n) ln r(r .n )n 4 D 4 D
∂= =
∂ π π
(3.54)
Impondo-se as condições da placa fundamental a (3.37a), (3.37b) e (3.38), e após
os cálculos necessários, pode-se chegar aos esforços fundamentais de momento e
cortante.
( ) ( )* 2n
1M 1 ln r 1 cos
4 = − + ν + − ν β + ν π
(3.55)
*ns
1M sen 2
8
− ν= β
π (3.56)
( )* 2n
cos 1V 2 1 sen 3 cos 2
4 r 4 R
β − ν = − ν β − + ν + β π π (3.57)
onde:
r x r y
cosx n y n
∂ ∂ ∂ ∂β = +
∂ ∂ ∂ ∂ (3.58a)
r x r y
senx s y s
∂ ∂ ∂ ∂β = − −
∂ ∂ ∂ ∂ (3.58b)

62
É necessário também determinar as derivadas dos deslocamentos e dos esforços
fundamentais em relação à direção m no ponto "q", Figura 3.18, em relação ao sistema
(m,u).
Analogamente a (3.54) a (3.57) obtêm-se:
*
,i iw r r r
ln r cos ln r(r.m) ln r(r .m )m 4 D 4 D 4 D
∂= − ϕ = − = −
∂ π π π
(3.59)
Para as demais soluções fundamentais, derivadas em relação a "m", obtém-se:
*
,i i ,i i ,i iw 1
(r n )(r m ) (n m )ln rm n 4 D
∂ ∂ = − + ∂ ∂ π
(3.60)
( ) *n
,i i ,i i ,i i ,i i ,i i
M 11 (r m ) 2(1 )(r n ) (n m ) (r n )(r m )
m 4 r
∂ = − + ν + − ν − ∂ π
(3.61)
*ns
,i i i i ,i i ,i ,i ,i ,i ,i i i i
M 1(r n )(s m ) 2(r m )(r s )(r n ) (r s )(n m )
m 4 r
∂ − ν = − − + ∂ π
(3.62)
β
n
s
x
y
p
Figura 3.18 - Sistemas de coordenadas (n,s) e (m,u)
α
θ q
m
u
r
φ
γ
φ+θ=γ
β+θ=α

63
*n
,i i ,i i ,i i ,i i ,i i i i2
,i i i i i i ,i i ,i i
,i i i i ,i i ,i i
V 12(1 )(r s ) 4(r n )(r s )(r m ) 2(r n )(s m )
m 4 r
(r s )(n m ) (3 ) (n m ) 2(r n )(r m )
1(r s ) (s m ) (r s )(r m )
Rr
∂= − − ν −∂ π
− + − ν −
− ν + − π
(3.63)
3.3 MÉTODO DOS ELEMENTOS DE CONTORNO APLICADO A PLACAS 3.3.1 Introdução
Na formulação do Método dos Elementos de Contorno são necessárias equações
Integrais que envolvem as soluções fundamentais obtidas no capítulo anterior. A sua
obtenção pode ser feita através do Teorema da Reciprocidade de Betti ou através do
Método dos Resíduos Ponderados.
Aplicando-se o teorema de Betti em uma placa submetida a carregamentos não
simultâneos g e g*, que dão origem a dois estados de tensão e deformação distintos,
obtêm-se equações integrais referentes ao deslocamento w(q) e à sua derivada
direcional w(q)
n
∂
∂ de um ponto do domínio ou do contorno, relacionados a esforços e
deslocamentos no contorno.
3.3.2 Equações Integrais para Pontos do Domínio
Seja uma placa isótropa de domínio Ω e contorno Γ contida em uma placa
infinita de domínio ∞Ω e contorno ∞Γ (Figura 3.19), submetida a dois carregamentos,
g distribuído em uma área Ωg , e g* , correspondente à solução fundamental. Destes
estados de carregamentos resultam dois estados de tensão, *ij ijeσ σ , e dois estados
de deformação, *ij ijeε ε .

64
Aplicando-se o Teorema da Reciprocidade de Betti aos campos de tensões e
deformações acima descritos obtém-se:
* *ij ij ij ij
V V
dV dV i,j 1,2,3...σ ε = σ ε =∫ ∫ (3.60)
onde:
( )* * * * * * *ij ij x x y y z z xy xy xz xz yz yz2σ ε = σ ε + σ ε + σ ε + σ ε + σ ε + σ ε (3.61)
A seguir transformam-se ambos os membros da equação (3.60) de modo a obter-
se uma equação integral para um ponto do domínio.
Inicialmente, transforma-se o termo da direita de (3.60), denominada de U.
*ij ij
V
U dV= σ ε∫ (3.62)
Explicitando-se a equação acima e desprezando-se as tensões relativas à direção
normal da placa, obtém-se:
( )* * *x x y y xy xy
V
U 2 dV= σ ε + σ ε + σ ε∫ (3.63)
Figura 3.19 - Representação de uma placa com carregamento
y
x
∞Ω
∞Γ
Ω
gΩ
Γ

65
Substituindo-se (3.4) e (3.5) em (3.63), e sabendo-se que devido à grande rigidez
da placa em seu plano os termos *
i i
i i
u u
x x
∂ ∂
∂ ∂ são desprezíveis em relação a algum temo
de primeira ordem i
i
u
x
∂
∂ ou
*i
i
u
x
∂
∂, obtém-se:
2 2 2 *
22 2 2 2
V
E w w wU z
1 x y x
∂ ∂ ∂= + ν
− ν ∂ ∂ ∂ ∫
2 2 2 * 2 2 *2 2
2 2 2 2
E w w w w wz 4G z dV
x y x y1 y x y
∂ ∂ ∂ ∂ ∂+ + ν +
∂ ∂ ∂ ∂− ν ∂ ∂ ∂ (3.64)
Após a integração da equação (3.64) em relação à espessura h da placa e
substituindo-se (3.8), resulta em:
2 * 2 * 2 *
x y xy2 2
w w wU M M 2M d
x yx yΩ
∂ ∂ ∂= − − − Ω
∂ ∂∂ ∂ ∫ (3.65)
A integral sobre o domínio Ω pode ser transformada em integral sobre o contorno
Γ. Após integrações por partes a equação (3.65) pode ser escrita da seguinte forma:
* * * *
x y xy xy
xy y xy *x
2 22xy yx
2 2
w w w wU M cos M sen M cos M sen d
x y y y
M M MMcos sen w d
x y y x
M MM2 d
x yx y
Γ
Γ
Ω
∂ ∂ ∂ ∂= − α + α + α + α Γ
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ + + α + + α Γ
∂ ∂ ∂ ∂
∂ ∂∂ − + + Ω
∂ ∂∂ ∂
∫
∫
∫
(3.66)
Considerando-se (3.14a), (3.14c), (3.15c) e (3.25), a equação (3.66) pode ser
escrita como:

66
( ) ( )
g
*2 2
x xy y
*2 2
y x xy
* *n g
wM cos 2M sen cos M sen
nU dw
M M sen cos M cos sens
Q w d gw d
Γ
Γ Ω
∂ α + α α + α + ∂= − Γ
∂ + − α α + α − α ∂
+ Γ + Ω
∫
∫ ∫
(3.67)
Substituindo-se (3.25b), (3.28a) e (3.28b) em (3.67), fica-se com:
g
*Nc* * *
n n ci ci gi 1
wU V w M d R w g w d
n =Γ Ω
∂ = − − Γ + + Ω
∂ ∑∫ ∫ (3.68)
Em seguida, de forma análoga, transforma-se o primeiro membro da equação
(3.60), chegando-se a:
g
Nc' * * * * *ij ij n n ci ci gi 1
V
wU dV V w M d R w g wd
n =Γ Ω
∂ = σ ε = − − Γ + + Ω
∂ ∑∫ ∫ ∫ (3.69)
Finalmente, substituindo-se as equações (3.68) e (3.69) em (3.60) e assumindo-se
*g como uma carga e sua representação matemática é a distribuição delta de Dirac,
(q,p)δ , tem-se:
( )c
c
g
N* * *n n ci ci
i 1
N** * *
n n ci ci gi 1
ww q V w M d R w
n
w V w M d R w gw d
n
=Γ
=Γ Ω
∂ + − Γ + =
∂
∂ = − Γ + + Ω
∂
∑∫
∑∫ ∫ (3.70)
Esta equação é a equação integral do deslocamento w de um ponto “q” do
domínio da placa. Derivando-se (3.70) em relação a direção m, obtém-se a equação
integral da derivada direcional do deslocamento wm
∂∂
, para um ponto “q” da placa.

67
( )( ) ( ) ( ) ( ) ( )
( ) ( )
( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
c c
g
* *n n
N N**ci ci
ci cii 1 i 1
* *
n n
*g
w q V M wq,P w P q,P P d P
m m m n
R R(q,P)w P (P)w q,P
m m
w wV P q,P M P q,P d P
m m n
g P w q,P d P
Γ
= =
Γ
Ω
∂ ∂ ∂ ∂ + − Γ
∂ ∂ ∂ ∂
∂ ∂+ = +
∂ ∂
∂ ∂ ∂ + − Γ
∂ ∂ ∂
+ Ω
∫
∑ ∑
∫
∫
(3.71)
As equações (3.70) e (3.71) são válidas para pontos “q” do domínio, entretanto,
são necessárias equações integrais para pontos “Q” do contorno, na formulação do
problema de placas pelo Método dos Elementos de Contorno.
3.3.3 Equações Integrais para Pontos do Contorno
Seja a Figura 3.20, onde o ponto “Q” inicialmente encontra-se sobre o contorno.
Devido a um acréscimo de um contorno circular εΓ de centro em “Q” e raio ε , agora
este ponto pertence ao domínio.
Após a modificação do domínio da placa, a equação integral (3.70) para o ponto
“Q” resulta:
c 1
* *n n
N* * *n n ci ci
i 1
* *
c c c c
**
n n
ww(Q) V (Q,P)w(P) M (Q,P) (P) d (P)
n
wV (Q,P)w(P) M (Q,P) (P) d (P) R (Q,P)w (P)
n
R (Q,P)w (P) R (Q,P)w (P)
wV (Q,P)w (P) M (P) (Q,P) d (P)
n
−
ε
− − + +
Γ−Γ
ε=Γ
λ λ λ λ
Γ−Γ
∂ + − Γ
∂
∂ + − Γ +
∂
+ +
∂ = − Γ
∂
∫
∑∫
∫
c 1
g
N** *
n n ci cii 1
* * *
c c c c
wV (Q,P)w (P) M (P) (Q,P) d (P) R (P)w (Q,P)
n
R (P)w (Q,P) R (P)w (Q,P) g(p)w (Q,p)d (p)
−
ε
− − + +
ε=Γ
λ λ λ λΩ
∂ + − Γ +
∂
+ + + Ω
∑∫
∫
(3.71)

68
À medida que o raio "ε " se aproxima de zero, o ponto “Q” se aproxima do
contorno e, na condição limite, tem-se que:
( ) ( )
c 1
* *n n
0
N* * *n n ci ci
0 i 1
* *
c c c c0
*n n
0
ww(Q) lim V (Q,P)w(P) M (Q,P) (P) d (P)
n
wlim V (Q,P)w(P) M (Q,P) (P) d (P) R (Q,P)w (P)
n
lim R (Q,P)w (P) R (Q,P)w (P)
lim V (Q,P)w (P) M (P
−
ε
− − + +
Γ→Γ−Γ
εε→
=Γ
λ λ λ λε→
Γ→
∂ + − Γ
∂
∂ + − Γ +
∂
+ +
= −
∫
∑∫
( ) ( )
c 1
g
*
N** *
n n ci ci0 i 1
* * *
c c c c0
w) (Q,P) d (P)
n
wlim V (Q,P)w (P) M (P) (Q,P) d (P) R (P)w (Q,P)
n
lim R (P)w (Q,P) R (P)w (Q,P) g(p)w (Q,p)d (p)
−
ε
− − + +
Γ−Γ
εε→
=Γ
λ λ λ λε→Ω
∂ Γ
∂
∂ + − Γ +
∂
+ + + Ω
∫
∑∫
∫
(3.72)
Figura 3.20 : Acréscimo de um contorno circular
εΓ
ss
n
Γ
Γ
u m ε=r
Q
Γ Γ +λ −λ
n
s
Ω
Γ
cβ
y
x
cβ

69
Nas integrais sobre Γ − Γ , indicadas na equação (3.72), por definição,
representam o valor principal de Cauchy das mesmas. Como *w
n
∂
∂ é função de
2
1
r e
*w função de “r”, as integrais são singulares em r=0 e portanto, é necessário calcular
estas integrais no sentido do valor principal, ou seja:
0f (r)d lim f (r)d
Γ→Γ Γ−Γ
Γ = Γ∫ ∫ (3.73)
Através de propriedades de cálculo, pode-se dizer que esta integral está sendo
calculada em todo o contorno, menos onde ocorre a singularidade.
Assim, tem-se:
* *n n
0
* *n n
wlim V (Q,P)w(P) M (Q,P) (P) d (P)
n
wV (Q,P)w(P) M (Q,P) (P) d (P)
n
Γ→Γ−Γ
Γ
∂ − Γ
∂
∂ = − Γ
∂
∫
∫ (3.74a)
**
n n0
**
n n
wlim V (Q,P)w (P) M (Q,P) (P) d (P)
n
wV (Q,P)w (P) M (Q,P) (P) d (P)
n
Γ→Γ−Γ
Γ
∂ − Γ
∂
∂ = − Γ
∂
∫
∫
(3.74b)
Para o limite 0εΓ → nas integrais de w(P) e w
m
∂
∂ cujo integrando é chamado de
f ( )ε , tem-se:
( )* *n n
0 0
wlim V (Q,P)w(P) M (Q,P) (P) d (P) lim f d (P)
nε
εε→ ε→
Γ Γ
∂ − Γ = ε Γ
∂ ∫ ∫ (3.75)
Aplicando-se a propriedade referente à integral de uma soma de funções, a
equação (3.75) pode ser escrita como:

70
( )
[ ]
0
* *n n
0
* *n n
0
lim f d (P)
w wlim V (Q,P) w(P) w(Q) M (Q,P) (P) (Q) d (P)
n n
wlim V (Q,P)w(Q)d (P) M (Q,P) (Q)d (P)
n
ε
ε ε
εε→
Γ
εε→
Γ
ε εε→
Γ Γ
ε Γ
∂ ∂ = − − − Γ ∂ ∂
∂+ Γ − Γ
∂
∫
∫
∫ ∫
(3.76)
Supondo que é válida a condição de Hölder: 1
1w(P) w(Q) C r (P,Q)α− ≤ (3.77a)
e
22
w w(P) (Q) C r (P,Q)
n nα∂ ∂
− ≤∂ ∂
(3.77b)
onde C1 e C2 são constantes e i0 1< α ≤ , i=1,2.
A primeira integral de (3.76) se anula. Como w(Q) e w
(Q)n
∂
∂ são valores do
domínio, (3.76) pode ser escrita como:
( ) *n
0 0
*n
0
lim f d (P) w(Q) lim V (Q,P)d (P)
w(Q) lim M (Q,P)d (P)
n
ε
ε
ε εε→ ε→
Γ Γ
εε→
Γ
ε Γ = Γ
∂− Γ
∂
∫ ∫
∫ (3.78)
Substituindo-se as expressões (3.55) e (3.56), respectivamente,
* *n nde M (Q,P) e de V (Q,P) , em (3.78) e sabendo-se que o ângulo entre as direções
dos versores r e n
é β e que, para o contorno εΓ , 0β = , pois, em quaisquer ponto
deste contorno as direções dos versores coincidem, tem-se :
( )
( )
0 0
0
1lim f d (P) w(Q) lim d
2
w 1(Q) lim 1 ln 1 d (P)
n 4
ε ε
ε
ε εε→ ε→
Γ Γ
εε→
Γ
ε Γ = − Γπε
∂+ − υ ε + Γ ∂ π
∫ ∫
∫ (3.79)
como: d (P) dεΓ = ε ϕ (3.80)
sendo, ϕ = o ângulo que o raio r = ε faz quando percorre o contorno εΓ no sentido anti-
horário, com origem do percurso em −λ , Figura 3.4.
A expressão (3.79) pode ser escrita como:

71
( )
( ) [ ]
( )
2 c
0 0
2 c2 c
000
2 c
c00
1lim d (P) w(Q) lim d
2
w 1 w(Q)(Q) lim 1 ln 1 d
n 4 2
w(Q) 1 w(Q)lim 1 ln 1 d 2
n 4 2
ε ε
π−β
εε→ ε→
Γ Γ
π−βπ−β
ε→
π−β
ε→
ϕ ε Γ = − ε ϕπε
∂ −+ − υ ε + ε ϕ = ϕ ∂ π π
∂ −+ − υ ε + ε ϕ = π − β ∂ π π
∫ ∫
∫
∫
(3.81)
De onde se tira que:
( ) c
0
2lim f d (P) w(Q)
2ε
εε→
Γ
π − βε Γ = −
π∫ (3.82)
As demais integrais sobre εΓ indicadas em (3.76) conduzem a valores nulos, o
mesmo ocorrendo com os limites sobre as parcelas que envolvem as reações de canto
Rc.
Portanto a equação integral para um ponto no contorno fica:
g
* *n n
*Nc 1 * *
ci ci n ni 1
Nc 1 *ci cii 1
wK(Q)w(Q) V (Q,P)w(P) M (Q,P) (P) d (P)
n
wR (Q,P)w (P) V (Q,P)w (P) M (P) (Q,P) d (P)
n
R (P)w (Q,P) g(P)w (Q,P)d (P)
Γ
−
=Γ
−
=Ω
∂ + − Γ
∂
∂ + = − Γ
∂
+ + Ω
∫
∑ ∫
∑ ∫
(3.83)
onde:
cK(Q)2
β=
π (3.84)
Para o caso particular de pontos no contorno com uma única tangente:
1
K(Q)2
= (3.85)
Analogamente, pode-se calcular a derivada w(Q)
m
∂
∂ a partir da equação (3.70).

72
* *n n
* *n n
* **Nci 1ci c c
ci c ci 1
*
n
V Mw(Q) w(Q,P)w(P) (Q,P) (P) d (P)
m m m n
V M w(Q,P)w(P) (Q,P) (P) d (P)
m m n
R RR(Q,P)w (P) (Q,P)w (P) (Q,P)w (P)
m m m
wV (Q,P) (Q,
m
ε
− +
− +
Γ−Γ
ε
Γ
−λ λ
λ λ=
∂ ∂∂ ∂ + − Γ
∂ ∂ ∂ ∂
∂ ∂ ∂ + − Γ
∂ ∂ ∂
∂ ∂∂+ + +
∂ ∂ ∂
∂
∂
∫
∫
∑
g
*
n
* *
n n
* **Nci 1ci c c
ci c ci 1
*
wP) M (P) (Q,P) d (P)
m n
w wV (Q,P) (Q,P) M (P) (Q,P) d (P)
m m n
w wwR (P) (Q,P) R (P) (Q,P) R (P) (Q,P)
m m m
g(P)w (Q,P)d (P)
ε
− +
− +
Γ−Γ
ε
Γ
−λ λ
λ λ=
Ω
∂ ∂ − Γ
∂ ∂
∂ ∂ ∂ + − Γ
∂ ∂ ∂
∂ ∂∂+ + +
∂ ∂ ∂
+ Ω
∫
∫
∑
∫(3.86)
Calculando-se os limites indicados a seguir, o ponto “Q”, inicialmente no
domínio, será ponto de contorno.
* *n n
0
* *n n
0
* **Nc 1ci c c
ci c c0i 1
V Mw(Q) wlim (Q,P)w(P) (Q,P) (P) d (P)
m m m n
V M wlim (Q,P)w(P) (Q,P) (P) d (P)
m m n
R RR(Q,P)w (P) lim (Q,P)w (P) (Q,P)w (
m m m
ε
− +
− +
Γ→Γ−Γ
εε→
Γ
−λ λ
λ λε→=
∂ ∂∂ ∂ + − Γ
∂ ∂ ∂ ∂
∂ ∂ ∂ + − Γ
∂ ∂ ∂
∂ ∂∂+ + +
∂ ∂ ∂
∫
∫
∑
* *
n n0
* *
n n0
**Nc 1ci c
ci c0i 1
P)
w wlim V (Q,P) (Q,P) M (P) (Q,P) d (P)
m m n
w wlim V (Q,P) (Q,P) M (P) (Q,P) d (P)
m m n
wwR (P) (Q,P) lim R (P) (Q,P)
m m
ε
−
−
εΓ→
Γ−Γ
εε→
Γ
−λ
λε→=
∂ ∂ ∂ − Γ
∂ ∂ ∂
∂ ∂ ∂ + − Γ
∂ ∂ ∂
∂∂+ +
∂ ∂
∫
∫
∑
g
*
cc
*g
wR (P) (Q,P)
m
g(p)w (Q,p)d (p)
+
+λ
λ
Ω
∂ +
∂
+ Ω∫
(3.87)

73
É conveniente dar à placa um deslocamento vertical de corpo rígido igual a
w(Q), para remover a singularidade envolvida na equação quando 0ε → . Neste caso,
todas as derivadas permanecem inalteradas. E lembrando-se que os limites das
integrais sobre Γ − Γ , são os respectivos valores principais das integrais sobre Γ , a
equação (3.87) fica:
[ ]
[ ]
* *n n
* *n n
0
*Nc 1ci
ci cii 1
*
cc c
0
V Mw(Q) w(Q,P) w(P) w(Q) (Q,P) (P) d (P)
m m m n
V M wlim (Q,P) w(P) w(Q) (Q,P) (P) d (P)
m m n
R(Q,P) w (P) w (Q)
m
Rlim (Q,P) w (P) w
m
ε
−
Γ
εε→
Γ
−
=
λλ− λ−
ε→
∂ ∂∂ ∂ + − − Γ
∂ ∂ ∂ ∂
∂ ∂ ∂ + − − Γ
∂ ∂ ∂
∂+ − + ∂
∂+ −
∂
∫
∫
∑
*
cc
* *n
c n0
* *
n n0
*ci
cii 1
R(Q) (Q,P) w (P)
m
Mw ww (Q) lim V (P) (Q,P) (P) (Q,P) d (P)
m m m n
w wlim V (Q,P) (Q,P) M (P) (Q,P) d (P)
m m n
wR (P)
m
+
ε
λλ+
λ+Γ→
Γ−Γ
εε→
Γ
=
∂ + ∂
∂∂ ∂ ∂ − = − Γ ∂ ∂ ∂ ∂
∂ ∂ ∂ + − Γ
∂ ∂ ∂
∂+
∂
∫
∫
g
* *Nc 1c c
cc0
*
g
w w(Q,P) lim R (P) (Q,P) R (P) (Q,P)
m m
wg(p) (Q,p)d (p)
m
− +
−
−λ λ
λ+λε→
Ω
∂ ∂ + +
∂ ∂
∂+ Ω
∂
∑
∫(3.88)
Os limites de 0ε → , são:
[ ]
( ) ( )
( )
* *n n
0
c c
c
V M wlim (Q,P) w(P) w(Q) (Q,P) (P) d (P)
m m n
1 w4 2 sen 2 sen 2 (Q)
4 m
wcos 2 sen 2 (Q)
u
ε
εε→
Γ
∂ ∂ ∂ − − Γ
∂ ∂ ∂
∂ = − π − β + γ + β − γ π ∂
∂ + γ + β − γ ∂
∫
(3.89a)

74
( ) ( )
c cc c0
c c
R Rlim (Q,P) w (P) w(Q) (Q,P) w (P) w(Q)
m m1 w w
sen 2 sen 2 (Q) cos2 cos2 (Q)4 m u
− +λ+ λ
λ λε→
∂ ∂ − + − ∂ ∂
− ν ∂ ∂ = − γ − γ + β + − γ + γ + β π ∂ ∂
(3.89b)
onde γ é um ângulo entre os sistemas de coordenadas (n1, s1) e (m, n), mostradas na Figura 3.21.
Os demais limites quando 0ε → conduzem a valores nulos.
substituindo (3.89a) e (3.89b) em (3.88) e considerando-se que w(Q) é um
deslocamento de corpo rígido, obtém-se:
g
* *n n
1 2
* *Ncci
ci ni 1
** Ncci
n cii 1
*
V Mw w wK (Q) K (Q) (Q,P)w(P) (Q,P) (P) d (P)
m u m m n
R w(Q,P)w (P) V (Q,P) (Q,P)
m m
wwM (P) (Q,P) d (P) R (P) (Q,P)
m n m
wg(p) (Q,p)d
m
Γ
= Γ
=
Ω
∂ ∂∂ ∂ ∂ + + − Γ
∂ ∂ ∂ ∂ ∂
∂ ∂+ =
∂ ∂
∂∂ ∂ − Γ +
∂ ∂ ∂
∂+
∂
∫
∑ ∫
∑
∫ (p)Ω
(3.90)
Figura 3.21 - Sistemas de coordenadas associadas aos pontos anterior e posterior aos
cantos +− λλ e .
εΓ s
n
Γ Γ
m γ
u Q
cβ+λ
−λ
3s
2s
2n
1s 1n 3n
4n
4s
r
φ
θ x
β
1n

75
onde:
( )c1 cK sen 2 sen 2
2 4
β ν = − + γ − γ + β π π
(3.91)
( )2 cK cos 2 cos 24
ν = γ − γ + β π
(3.92)
v 1 2w w
K (Q) K (Q) K (Q)m u
∂ ∂= +
∂ ∂ (3.93)
A partir da Figura 3.23 observa-se que o eixo m pode assumir direções normais
ao contorno da placa em ambos os lados do canto “Q”. Para 1m n= e escrevendo-se
(3.93) em função das normais aos lados, 1 4n e n n1 e n4, obtém-se:
cv c
1 4
w wK (Q) (Q) sen (Q)
2 n 2 n
β ∂ ν ∂= + β
π ∂ π ∂ (3.94)
Analogamente para 4m m= m=m4, obtém-se:
cv c
1 4
w w(Q) sen (Q) (Q)
2 n 2 n
βν ∂ ∂β = β +
π ∂ π ∂ (3.95)
Portanto, conclui-se que para um canto “Q” da placa, podem-se escrever duas
equações integrais para as derivadas do deslocamento em relação às duas normais aos
lados que ocorrem no canto. Substituindo-se (3.94) ou (3.95) em (3.90) serão obtidas
as equações para o ponto anterior ou posterior ao canto respectivamente.
Para o caso em que o ponto “Q” do contorno não pertencer ao contorno, ou seja,
cβ = π as expressões (3.94) e (3.95) são idênticas. Considerando-se que “m” coincida
com a direção normal ao contorno no ponto “Q:
g
* *n n
* * *Ncci
ci n ni 1
* *Ncci
ci cii 1
V M1 w w(Q) (Q,P)w(P) (Q,P) (P) d (P)
2 m m m n
R w w(Q,P)w (P) V (P) (Q,P) M (P) (Q,P) d (P)
m m m n
w wR (P) (Q,P)R (P) g(p) (Q,p)d (p)
m m
Γ
= Γ
= Ω
∂ ∂∂ ∂ + − Γ
∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ + = − Γ
∂ ∂ ∂ ∂
∂ ∂+ + + Ω
∂ ∂
∫
∑ ∫
∑ ∫
(3.96)

76
3.3.4 Discretização
As equações integrais do deslocamento e de sua derivada são praticamente
impossíveis de serem resolvidas analiticamente. Uma alternativa viável é a resolução
destas equações através de métodos numéricos, transformando-as em equações
algébricas. Utilizando-se o Método dos Elementos de Contorno, essa transformação é
feita dividindo-se o contorno da placa em segmentos, os quais recebem o nome de -
elementos de contorno– onde os deslocamentos e esforços nestes pequenos segmentos
são aproximados por funções interpoladoras, que fornecem os valores dos
deslocamentos e esforços, de pontos do elemento, em função de seus valores nodais.
Assim, cada equação integral terá sua correspondente equação algébrica,
podendo-se definir um sistema de equações lineares de fácil resolução, onde as
incógnitas são deslocamentos e esforços nos pontos de contorno. Sabendo-se as
condições de contorno dos problemas, o sistema é resolvido em termos dos valores de
contorno, podendo-se posteriormente, extrapolar os resultados para todo o domínio.
3.3.4.1 Discretização do contorno
Inicialmente deve-se aproximar o contorno real da placa em segmentos retos ou
curvos, em número suficiente para que o mesmo seja bem representado.
O contorno da Figura 3.22 foi aproximado por um número finito de segmentos
ou “Elementos de Contorno” jΓ , cuja geometria é definida pelos pontos nodais
(extremos) correspondentes.

77
A cada elemento de contorno, jΓ , associam-se um ou mais pontos denominados
"nós" ou "pontos nodais" e os valores das variáveis a eles associados são denominados
"valores nodais". Ao longo de cada elemento as variáveis do problema (deslocamentos
e esforços) são aproximadas por funções polinomiais (constante, lineares e
quadráticas) em funções dos quais é definido o número de pontos nodais, 1,2 e 3,
respectivamente.
Neste trabalho, serão utilizadas apenas funções lineares para aproximar a
geometria e as variáveis do problema.
Na Figura 3.23 que se segue adota-se a seguinte convenção:
nó geométrico (extremidade do elemento)
"nó" ou "ponto" nodal onde são colocadas as variáveis do problema
(incógnitas ou valores conhecidos).
x
y
Nós geométricos do elemento
= extremidades do elemento
Elemento de Contorno Contorno real
Figura 3.22 - Discretização do Contorno da Placa (apenas elementos lineares)
jΓ
1Γ
2Γ
Γ
Ω

78
OBS. O Contorno em todos os casos da Figura 3.23 foi aproximado por segmento de
retas, enquanto que as variáveis, como exemplificado para o deslocamento transversal
"wi" da placa, foram aproximados em cada elemento por uma função constante, linear
e quadrática.
A geometria do elemento é aproximada por um polinômio do primeiro grau.
Portanto, as coordenadas de um ponto P do elemento são dadas em função das
coordenadas nodais (extremos dos elementos).
Figura 3.23 - Tipos de elementos para as variáveis (ex. w) e elemento
linear para a geometria.
iw
ξnó i
nó i
Elemento mΓ
Ω
a) Elemento constante
iw
ξnó i
nó i
Elemento mΓ
Ω
b) Elemento linear contínuo
nó j
nó j
jw
iw
ξnó i
nó i
Elemento mΓ
Ω
c) Elemento linear descontínuo
nó j
nó j
jwiw
ξnó i
nó i
Elemento mΓ
Ω
d) Elemento quadrático contínuo
nó j
nó j
kwjw
nó k
nó k

79
Com o propósito de facilitar os cálculos das integrações numéricas, expressam-
se as coordenadas de cada ponto “P” de um elemento “j”, em função das coordenadas
locais homogêneas ξ em termos de matrizes.
T N(P) (P)=x XΨΨΨΨ (3.97) onde:
1
2
x (P)(P)
x (P)
=
x (3.98)
TT
T
(P)(P)
(P)
=
0
0
φφφφψψψψ
φφφφ (3.99)
11
21N12
22
x
x
x
x
=
X (3.100)
O índice N é utilizado para indicar valores nodais. Ni x é a coordenada nodal do
nó “N” na direção “i”, Figura 3.24.
O vetor da função interpoladora é dado por:
( )( )( )
1
2
P P
P
φ =
φ φφφφ (3.101)
onde,
11
(P) (1 )2
φ = − ξ (3.102a)
11
(P) (1 )2
φ = + ξ (3.102b)
Nó 1 ( 12
11 x,x )
Nó 2 ( 22
21 x,x )
n
P ( 21 x,x )
11x
21x
22x
12x
0=ξ
1+=ξ
1−=ξ
jΓ
2x
1x
Figura 3.24 - Descrição geométrica do elemento linear

80
3.3.4.2 Aproximação das Variáveis
De maneira análoga a geometria, pode-se expressar as variáveis (P)u e (P)p
(deslocamentos e esforços) sobre cada elemento, através de funções aproximadas φφφφ e
valores nodais NU e NP .
( )T N(P) P=u Uϕϕϕϕ (3.103)
( )T N(P) P=p Pϕϕϕϕ (3.104)
ou escrita explicitamente:
11
21 21 1
12 1 2 2
22
U
(P) (P) 0 0u (P) U
u (P) 0 0 (P) (P) U
U
ϕ ϕ =
ϕ ϕ
(3.105)
11
21 21 1
12 1 2 2
22
P
(P) (P) 0 0p (P) P
p (P) 0 0 (P) (P) P
P
ϕ ϕ =
ϕ ϕ
(3.106)
Assim, para um elemento qualquer “j”, os deslocamentos e esforços nos pontos nodais
serão:
1 1 2 21 1 1u (P) w(P) U w U w= = = (3.107a)
1 21 2
2 2 2w w w
u (P) (P) U U n n n
∂ ∂ ∂= = =
∂ ∂ ∂ (3.107b)
1 1 2 21 n 1 n 1 np (P) V (P) P V P V= = = (3.107c)
1 1 2 22 n 2 n 2 np (P) M (P) P M P M= = = (3.107d)
3.3.5 Transformação das Equações Integrais em Equações Algébricas
A equação integral do deslocamento w(Q), (3.83), de um ponto “Q” qualquer do
contorno, pode ser escrita de forma genérica como:

81
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )c
g
* *ci ci
i 1
N* * * *
ci ci ci gi 1
C Q u Q Q,P P d P p Q,P w P
Q,P P d P u P Q,P R P g p u Q,p d p
=Γ
=Γ Ω
+ Γ + =
Γ + + Ω
∑∫
∑∫ ∫
p u
u p (3.108)
onde os esforços e os deslocamentos são expressos através de variáveis generalizadas.
Assim, tem-se:
cC(Q)2
u(Q) w(Q)
β=
π
=
(3.109)
w(P)(P) w
(P)n
= ∂ ∂
u (3.110)
n
n
V (P)(P)
M (P)
=
p (3.111)
* * *n n n(Q,P) V (Q,P) M (Q,P)= −p (3.112)
** * w(Q,P) w (Q,P) (Q,P)
n
∂ = −
∂ u (3.113)
* *ci ci
* *ci ci
P (Q,P) R (Q,P)
u (Q,P) w (Q,P)
=
= (3.114)
* *gu (Q,p) w (Q,p)= (3.115)
Considerando-se o contorno da placa discretizado em “Ne” elementos e
substituindo-se as variáveis por suas aproximações (3.103) e (3.104), a equação
(3.109) fica:
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )g
Ne Ne* T N *
j ci cii 1 i 1
Ne Ne* T N * *
j ci ci g gi 1 i 1
C Q u Q Q,P P d P p Q,P w P
Q,P P d P P u Q,P R P g p u Q,p d p
= =
= = Ω
+ Γ + =
Γ + + Ω
∑ ∑
∑ ∑ ∫
p U
u
ϕϕϕϕ
ϕϕϕϕ
(3.114)
As integrais de contorno da equação (3.114) têm funções conhecidas, portanto,
elas podem ser calculadas. Por facilidade, definem-se abaixo as integrais sobre um
elemento genérico.

82
j
j * Tj(Q) (Q,P) (P)d (P)
Γ
= Γ∫h p ϕϕϕϕ (3.115a)
j
j * Tj(Q) (Q,P) (P)d (P)
Γ
= Γ∫g u ϕϕϕϕ (3.115b)
Após a soma das influências j j(Q) e (Q)h g de todos os elementos (Ne) nos nN
nós do contorno, a equação algébrica fica:
c c c cC(Q)u(Q) (Q) (Q) (Q) (Q) T(Q)+ + = + +H U H W G P G R (3.116)
O deslocamento u(Q) pode ser escrito em função dos deslocamentos U do
elemento ao qual pertence o ponto Q.
Portanto,
C(Q)u(Q) C(Q)w(Q) (Q)= = C U ou seja, considerando-se todos Nn nós, tem-se:
n
w(1)0 .. 0 .. 0
:.. .. .. .. 0
w(Q)(Q) 0 0 C(Q) 0 0
:.. .. .. .. ..
w(N )0 .. .. .. 0
=
C U (3.117)
Então, (3.116) fica:
c c c c(Q) (Q) (Q) (Q) T(Q)+ = + +H U H W G P G R (3.118)
onde:
nn
N1NT 1 w w
U w ... wn n
∂ ∂ =
∂ ∂
n nN NT 1 1n n n nP V M ... V M=
c
Tc c1 c2 cNW w w ... w=
c
Tc c1 c2 cNR R R ... R=
Agrupando-se os termos da equação (3.118), resulta:
(Q) (Q) T(Q)= +H U G P (3.119)

83
Note-se que a expressão (3.119) corresponde a uma linha, ou seja, é a equação do
deslocamento w(Q), apenas do ponto Q, após a discretização do contorno, da
aproximação das variáveis e da consideração de (3.117).
Analogamente, pode-se obter uma expressão semelhante à (3.119) para a
derivada direcional do mesmo ponto Q, w
(Q)m
∂
∂, utilizando-se a expressão (3.90),
mudando-se apenas os valores de
c c'(Q), (Q), (Q), (Q) e T(Q)H G H G , em função das
soluções fundamentais correspondentes.
Com a discretização do contorno da placa, quatro variáveis são associadas a cada
nó, w(P), w
(P)n
∂
∂, Vn(P) e Mn(P), das quais duas são conhecidas, dadas pelas
condições de contorno da placa. Nos casos de vinculações clássicas, tem-se
- Borda engastada w
w 0n
∂= =
∂
Vn e Mn desconhecidos
- Borda simplesmente apoiada W=Mn=0
nw
V e n
∂
∂ desconhecidos
- Borda livre
Vn=Mn=0 w
w e n
∂
∂ desconhecidos
Portanto, impondo-se as condições de contorno a todos os “Nn’ nós da equação
(3.119), tem-se “2Nn” incógnitas, o que torna necessário a utilização de duas equações
para cada nó, para definir um sistema de equações lineares.
= +HU GP T (3.120)
No caso da equação (3.118), os termos wc e Rc associados aos cantos, podem ser
considerados como variáveis, sendo que um dos quais é possível conhecer-se nos
casos clássicos de vinculação. Assim, tem-se “2Nn” incógnitas nos nós e "Nc"
incógnitas nos cantos, tornando-se necessário utilizar duas equações para cada nó e

84
uma para cada canto para a definição do sistema. O sistema de equações lineares fica
assim definido:
c c
c cc c c
= +
H H G GU P T
W R TH H G G (3.121)
onde c c e H G são as submatrizes formadas pelos coeficientes correspondentes a wc e
Rc respectivamente, e têm 2(Nn)x(Nc) elementos; c c, , e H G H G são submatrizes
semelhantes a c c, , e H G H G , respectivamente, provenientes das equações integrais
de deslocamento aplicadas nos cantos da placa, o subvetor cT é também semelhante a
T .
As submatrizes e H G têm (Nc)x2(Nn) elementos e as submatrizes c c e H G
são quadradas de ordem (Nc).
O sistema de equações lineares (3.120) pode ser resolvido levando-se todas as
incógnitas para o primeiro membro, e todos as parcelas conhecidas para o segundo
membro, obtendo-se:
=AX B (3.122) onde:
A é a matriz formada pelos elementos das matrizes e H G , correspondentes aos
valores de e U P desconhecidos.
B é o vetor obtido a partir da soma do vetor T com o vetor formado pelo produto dos
elementos das matrizes e H G pelos correspondentes valores de e U P
conhecidos.
A solução de (3.122) é dada por:
1−=X A B (3.123) onde:
X é o vetor das incógnitas procuradas, composto por deslocamentos e esforços nodais.
O sistema de equações (3.121) é semelhante ao sistema (3.120) e pode ser resolvido de
forma análoga, obtendo-se:
c c c=A X B (3.124)

85
1c c c
−=X A B (3.125)
Onde, cX é o vetor das incógnitas procuradas, cujos elementos são os
deslocamentos e esforços nos nós e cantos da placa.

86
4 TEORIA DE SEGUNDA ORDEM DE PLACAS ELÁSTICAS
4.1 INTRODUÇÃO
A presente proposta consiste no estudo de problemas de segunda ordem em
placas elásticas delgadas, através do Método dos Elementos de Contorno,
considerando-se para a montagem do sistema de equações algébricas apenas a equação
integral do deslocamento transversal da placa e as variáveis de canto da placa como
incógnitas.
Este estudo tem o objetivo de comparar os esforços de segunda e primeira ordem
em placas, e esta comparação permitirá, nos casos onde os esforços tiverem diferenças
sensíveis, projetos estruturais mais realísticos. Além disso, determinar a carga crítica
de flambagem.
Para o desenvolvimento do trabalho será utilizada uma teoria de segunda ordem
simplificada, pois se trata de um estudo de placas elásticas onde é válida a lei de
Hooke, que será exposta a seguir.
4.2 TEORIA DE SEGUNDA ORDEM SIMPLIFICADA
Na análise não linear das estruturas pode-se ter:
- Não-linearidade física: o material não obedece à lei de Hooke.
-Não-linearidade geométrica: as equações de equilíbrio devem ser desenvolvidas
para a configuração deformada da estrutura e as relações deformações-deslocamentos
deixam de ser lineares (consideração dos efeitos de segunda ordem).
Quando se admite a validade da lei de Hooke, fica limitada a ordem de grandeza
das deformações ( 001,0≅ε ), no entanto, torna-se ainda possível resolver, com precisão
suficiente, muitos problemas práticos de engenharia estrutural que envolve
considerações de segunda ordem, utilizando-se uma teoria simplificada.
Por outro lado, sabe-se que a ordem de grandeza das rotações é que define o
maior ou menor grau de precisão exigido na construção dessa teoria de segunda
ordem.

87
Na teoria da elasticidade não-linear, segundo Novozhilov (1953) e na análise de
estruturas reticuladas, segundo Souza Lima e Venâncio Filho (1982), classifica-se as
rotações θ , de acordo com a sua ordem de grandeza, em:
- Rotações muito pequenas - da ordem de grandeza das deformações ε ,
001,0≅ε≅θ , as únicas que se pode admitir na teoria de primeira ordem.
Para estas rotações, é válido escrever:
1cos =θ (4.1)
θ=θ=θ tgsen (4.2)
- Rotações pequenas - da ordem de grandeza da raiz quadrada do módulo de ε ,
são aquelas rotações que, apesar de não serem grandes, têm intensidade suficiente para
provocar efeitos de segunda ordem. O presente estudo será feito para rotações dessa
ordem de grandeza.
Para uma rotação dessa intensidade )03,0001,0( ≅≅θ , podem-se confundir o
seno, a tangente, e o ângulo (em radianos), de acordo com a aproximação mostrada na
equação (4.2).
Quanto ao cosseno, será feito unitário quando aparecer como fator multiplicativo.
Entretanto, sempre que uma deformação e a diferença )cos1( θ− figurarem como
parcelas de uma mesma expressão, a aproximação da equação (4.1) ficará impossível
de ser aceita, pois )cos1( θ− será da mesma ordem de grandeza da deformação.
Neste caso, adotar-se-á a aproximação:
21cos
2θ−=θ (4.3)
que resulta da consideração dos dois primeiros termos, não nulos, do desenvolvimento
da função cosseno em série de McLaurin, sendo dispensados os demais termos por
serem desprezíveis face a 2θ , ou seja,
2 2
0 0 02
3 3 2
03
dcos d coscos (cos ) ( ) ( )
d 2! d
d cos( ) ........................................ 1
3! 2d
θ= θ= θ=
θ=
θ θ θθ = θ + θ +
θ θ
θ θ θ+ + = −
θ
- Rotações grandes - da ordem de grandeza maior que a raiz quadrada do módulo de ε , )03,0001,0( ≅≅θ .

88
Para estas rotações é inadmissível aceitarem-se as aproximações (4.1), (4.2) e
(4.3). Os problemas que envolvem grandes rotações são de equacionamento complexo;
felizmente, têm pouco interesse prático. Além disso, em geral, deixa de valer a lei de
Hooke.
Portanto, neste trabalho adota-se a teoria de segunda ordem simplificada, que
adota rotações pequenas e é valida a lei de Hooke, ou seja, consideram-se:
a) Linearidade física, onde se admite a validade da lei de Hooke, e portanto, as
deformações devem ser muito pequenas (da ordem de milésimo).
b) Não-linearidade geométrica restrita, entretanto, a problemas com rotações
pequenas.
Por conseguinte, admitem-se aqui, as aproximações (4.1), (4.3) e (4.2), que são a
seguir reescritas:
1cos =θ
utilizada quando o cosseno aparece como coeficiente multiplicativo.
21cos
2θ−=θ
utilizada sempre que )cos1( θ− e a deformação ε aparecem como parcelas de uma
mesma expressão, e,
θ=θ=θ sentg
sempre válida.
c) Espessura da placa constante e pequena, face às outras dimensões.
d) Material homogêneo, isótropo e elástico (validade da lei de Hooke).
e) Os pontos da placa situados numa reta normal à superfície média antes da
deformação permanecem numa reta normal àquela superfície após a
deformação. Esta hipótese é equivalente a considerar os efeitos das tensões
tangenciais, oriundas das forças cortantes, desprezíveis. Ou seja, não se
considera a distorção devida àquelas tensões.
f) Despreza-se a tensão normal (produzida pela carga p(x,y)) de direção normal ao
plano médio da placa, o que equivale a desprezar a variação da distância de um
ponto qualquer à superfície média da placa,

89
Assim sendo, as deformações do plano médio da placa (encurtamento ou
alongamento) não podem mais ser desprezadas, como é feito na teoria de primeira
ordem, porque além das forças de membrana daí decorrente ser agora de grandeza
apreciável, o fato de as rotações não serem mais muito pequenas faz com que aquelas
forças interfiram no equilíbrio transversal do elemento de placa.
4.3 DESLOCAMENTOS
Estabelecem-se as componentes do deslocamento de um ponto P qualquer, em
função dos componentes do deslocamento do ponto P’, projeção de P na superfície
média da placa.
Sejam,
)y,x(ww
)y,x(vv
)y,x(uu
=
=
=
(4.4)
Os componentes do deslocamento do ponto P’ , e
)z,y,x(uu
)y,x(vv
)y,x(uu
zz
yy
xx
=
=
=
(4.5)
Os componentes do deslocamento do ponto P.
Considerando-se as hipóteses e) , f) e a Figura 4.1, obtém-se:
x
y
wu u z
xw
u v zy
∂= −
∂
∂= −
∂
(4.6)
Por outro lado,
wu z =
(4.7)

90
4.4 RELAÇÕES DEFORMAÇÕES-DESLOCAMENTOS
Da teoria das deformações tem-se, para o caso geral, as seguintes expressões para
os alongamentos e distorção, dados em função das componentes do tensor das
deformações:
yyxx
xyxy
yyy
xxx
2121
2sen
121
121
ε+ε+
ε=γ
−ε+=ε
−ε+=ε
(4.8)
Sendo ,xyyyxx ,, εεε os componentes do tensor das deformações, as quais são
dadas por:
∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂
∂
∂+
∂
∂+
∂
∂=ε
∂
∂+
∂
∂+
∂
∂+
∂
∂=ε
∂
∂+
∂
∂+
∂
∂+
∂
∂=ε
y
u
x
u
y
u
x
u
y
u
x
u
x
u
y
u
2
1
)y
u()
y
u()
y
u(
2
1
y
u
)x
u()
x
u()
x
u(
2
1
x
u
zzyyxxyxxy
2z2y2xyyy
2z2y2xxxx
(4.9)
z
xu
z
u
h/2
h/2
w
P’
P O
z
x
w
superfície média antes da deformação
h : espessura da placa
superfície média deformada
x
w
∂
∂
x
wz
∂
∂−
P’
P
Figuras 4.1 – Componentes de deslocamentos dos pontos da placa

91
Considerando-se as hipóteses da teoria de segunda ordem simplificada, podem
ser feitas alterações nas equações (4.8) e (4.9), resultando:
- Das equações (4.8)
xyxyxy
yyy
xxx
2sen ε=γ≅γ
ε≅ε
ε≅ε
(4.10)
pois, como exemplo, da primeira expressão de (4.8), tem-se:
xxx 211 ε+=+ε
elevando-se ambos os membros ao quadrado, vem:
xxx2x 2112 ε+=+ε+ε
como as deformações são muito pequenas, então, 2xε é desprezível face a xε , portanto,
xxx ε≅ε
Analogamente,
yyy ε≅ε
No caso da distorção, tem-se:
• Para pequenas rotações:
xyxysen γ=γ
• Para deformações muito pequenas:
12121 yyxx =ε+=ε+
pois, yyxx 2e2 εε são desprezíveis face à unidade.
Portanto, de (4.8), vem:
xyxy 2ε=γ
Das equações (4.9), tem-se:
∂
∂+
∂
∂+
∂
∂+
∂
∂=ε 2z2y2xx
xx )x
u()
x
u()
x
u(
2
1
x
u .
Devido à grande rigidez da placa no seu próprio plano:
x
u à faceisdesprezívesão)
x
u(e)
x
u( x2x2x
∂
∂
∂
∂
∂
∂. Entretanto, por hipótese referente à

92
grandeza das rotações adotada neste trabalho, 2z )x
u(
∂
∂ é da mesma ordem da
deformação xxε .
Finalmente, têm-se as seguintes expressões aproximadas:
)y
u
x
u
x
u
y
u(
2
1
)y
u(
2
1
x
u
)x
u(
2
1
x
u
zzyxxy
2zxyy
2zxxx
∂
∂
∂
∂+
∂
∂+
∂
∂=ε
∂
∂+
∂
∂=ε
∂
∂+
∂
∂=ε
(4.11)
Utilizando-se as expressões (4.6), (4.7), (4.10) e (4.11) chega-se às relações
deformações-deslocamentos, em função das componentes u,v e w do deslocamento
dos pontos do plano médio da placa:
y
w
x
w)
xy
w
yx
w(z
x
v
y
u
)y
w(
2
1
y
wz
y
v
)x
w(
2
1
x
wz
x
u
22
xy
22
2
y
22
2
x
∂
∂
∂
∂+
∂∂
∂+
∂∂
∂−
∂
∂+
∂
∂=γ
∂
∂+
∂
∂−
∂
∂=ε
∂
∂+
∂
∂−
∂
∂=ε
(4.12)
Com o objetivo de fazer uma comparação, expõem-se abaixo as equações
correspondentes da teoria de primeira ordem:
)xy
w
yx
w(z
x
v
y
u
y
wz
y
v
x
wz
x
u
22
xy
2
2
y
2
2
x
∂∂
∂+
∂∂
∂−
∂
∂+
∂
∂=γ
∂
∂−
∂
∂=ε
∂
∂−
∂
∂=ε
Nota-se, nas expressões anteriores, a ausência dos termos não-lineares que
comparecem em (4.12).

93
4.5 EQUAÇÕES CONSTITUTIVAS
4.5.1 Relações Tensões-Deformações
A lei de Hooke para os estado plano de tensão é dada pelas seguintes relações:
yxyxy
xy2y
yx2x
)1(2
EG
)(1
E
)(1
E
γν−
=γ=τ
νε+εν−
=σ
νε+εν−
=σ
(4.13)
4.5.2 Tensões em função das componentes u, v, w do deslocamento dos pontos do
plano médio da placa.
Substituindo-se as expressões (4.12) nas expressões (4.13), vem,
∂
∂+
∂
∂−
∂
∂ν+
∂
∂+
∂
∂−
∂
∂
ν−=σ 2
2
22
2
2
2x )y
w(
2
1
y
wz
y
v)
x
w(
2
1
x
wz
x
u
1
1
2 22 2
2 2 2
1 u v w w 1 w wz( ) ( ) ( )
x y 2 x 2 y1 x y
∂ ∂ ∂ ∂ ∂ ν ∂= + ν − + ν + +
∂ ∂ ∂ ∂− ν ∂ ∂ (4.14)
∂
∂+
∂
∂−
∂
∂ν+
∂
∂+
∂
∂−
∂
∂
ν−=σ 2
2
22
2
2
2y )x
w(
2
1
x
wz
x
v)
y
w(
2
1
y
wz
y
v
1
1
2 22 2
2 2 2
1 v u w w 1 w wz( ) ( ) ( )
y x 2 y 2 x1 y x
∂ ∂ ∂ ∂ ∂ ν ∂= + ν − + ν + +
∂ ∂ ∂ ∂− ν ∂ ∂ (4.15)
∂
∂
∂
∂+
∂∂
∂−
∂
∂+
∂
∂
ν+=τ
y
w
x
w)
yx
w(z2
x
v
y
u
)1(2
E 2
xy (4.16)

94
4.6 ESFORÇOS SOLICITANTES
Associado às tensões (4.14), (4.15) e (4.16), representadas na Figura 4.2,
definem-se os esforços solicitantes, por unidade de comprimento, indicados nas
Figuras 4.3 e 4.4.
h h2 22 2
x x 2 2 2h h2 2
2 2 2 22
E u v w wN .1.dz z( )
x y1 x y
1 w w Eh u 1 w v 1 w( ) ( ) dz ( ) ( )
2 x 2 y x 2 x y 2 y1
− −
∂ ∂ ∂ ∂= σ = + ν − + ν
∂ ∂− ν ∂ ∂
∂ ν ∂ ∂ ∂ ∂ ∂+ + = + + ν + ∂ ∂ ∂ ∂ ∂ ∂− ν
∫ ∫ (4.17)
Figura 4.2 – Tensões positivas
z
x
y dx
dy
h
xσxyτ
yσ yxτ
z
dz
y
z dx
yN
xN
yxN
xyN
dy
h x
Figura 4.3 – Forças de membrana positivas, por unidade de comprimento.
dx
dy
h
Figura 4.4 – Momentos fletores e de torção positivos, por unidade de comprimento.
y
z yxM
xyM
yM
xM
x

95
h h2 22 2
y y 2 2 2h h
2 2
2 2 2 22
E v u w wN .1.dz z( )
y x1 y x
1 w w Eh v 1 w u 1 w( ) ( ) dz ( ) ( )
2 y 2 x y 2 y x 2 x1
− −
∂ ∂ ∂ ∂= σ = + ν − + ν
∂ ∂− ν ∂ ∂
∂ ν ∂ ∂ ∂ ∂ ∂ + + = + + ν + ∂ ∂ ∂ ∂ ∂ ∂− ν
∫ ∫ (4.18)
dz.1.N;dz.1.N2
h
2
hyxyx
2
h
2
hxyxy ∫∫
−−
τ−=τ=
mas, pelo teorema de Cauchy: yxxy τ=τ , então,
xyyx
2
h
2
hxy
2
h
2
hyxyx NNdz.1.dz.1.N −=∴τ−=τ−= ∫∫
−−
,
portanto,
h h22 2
xy yx xh h
2 2
2
E u v w w wN N .1.dz 2z( ) dz
2(1 ) y x x y x y
Eh u v w w Eh (1 ) u v w w( ) ( ( )
2(1 ) y x x y 2 y x x y(1 )
− −
∂ ∂ ∂ ∂ ∂= − = τ = + − +
+ ν ∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ − ν ∂ ∂ ∂ ∂= + + = + +
+ ν ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂+ ν
∫ ∫ (4.19)
h h2 22 2
2x x 2 2 2
h h
2 2
3 2 22 2
2 2 2
2 2
2 2
E u v w wM ( .1.dz).z .z .z z ( )
x y(1 ) x y
z w z w Eh w w( ) ( ) dz ( )
2 x 2 y 12(1 ) x y
w wD( )
x y
− −
∂ ∂ ∂ ∂= σ = + ν − + ν
∂ ∂− ν ∂ ∂
∂ ν ∂ ∂ ∂+ + = + ν∂ ∂ − ν ∂ ∂
∂ ∂= − + ν
∂ ∂
∫ ∫
(4.20)
onde,
)1(12
EhD
2
3
ν−=

96
Analogamente,
)x
w
y
w(Dz).dz.1.(M
2
2
2
22
h
2
hyy
∂
∂ν+
∂
∂−=σ= ∫
−
(4.21)
h h22 2
2xy xy
h h
2 2
3 2 2
2
E u v wM ( .1.dz).z .z .z 2z
2(1 ) y x x y
w w Eh w wz dz (1 ) D(1 )
x y x y x y12(1 )
− −
∂ ∂ ∂= − τ = − + −
+ ν ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂+ = − ν = − ν∂ ∂ ∂ ∂ ∂ ∂− ν
∫ ∫ (4.22)
O sinal (−) na fórmula de xyM indica que ao sentido positivo indicado para as
tensões 0M a e correspond xyxy <τ (os sentidos positivos dos momentos estão
indicados na Figura 4.4 .
Por último, sendo
z).dz.1.(M2
h
2
hyxyx ∫
−
τ=
e, sabendo-se que xyyx τ=τ , resulta
yx
w)1(DMM
2
xyyx∂∂
∂ν−−=−= (4.23)
4.7 EQUAÇÕES DE EQUILÍBRIO
4.7.1 Introdução
Na teoria de primeira ordem as equações de equilíbrio podem ser escritas na
configuração indeformada da estrutura, enquanto que na teoria de segunda ordem as
mesmas devem ser escritas na configuração deformada da estrutura.
A diferença, quanto às equações de equilíbrio, entre a teoria de primeira ordem e
de segunda ordem aproximada (considerada no presente estudo), reside basicamente
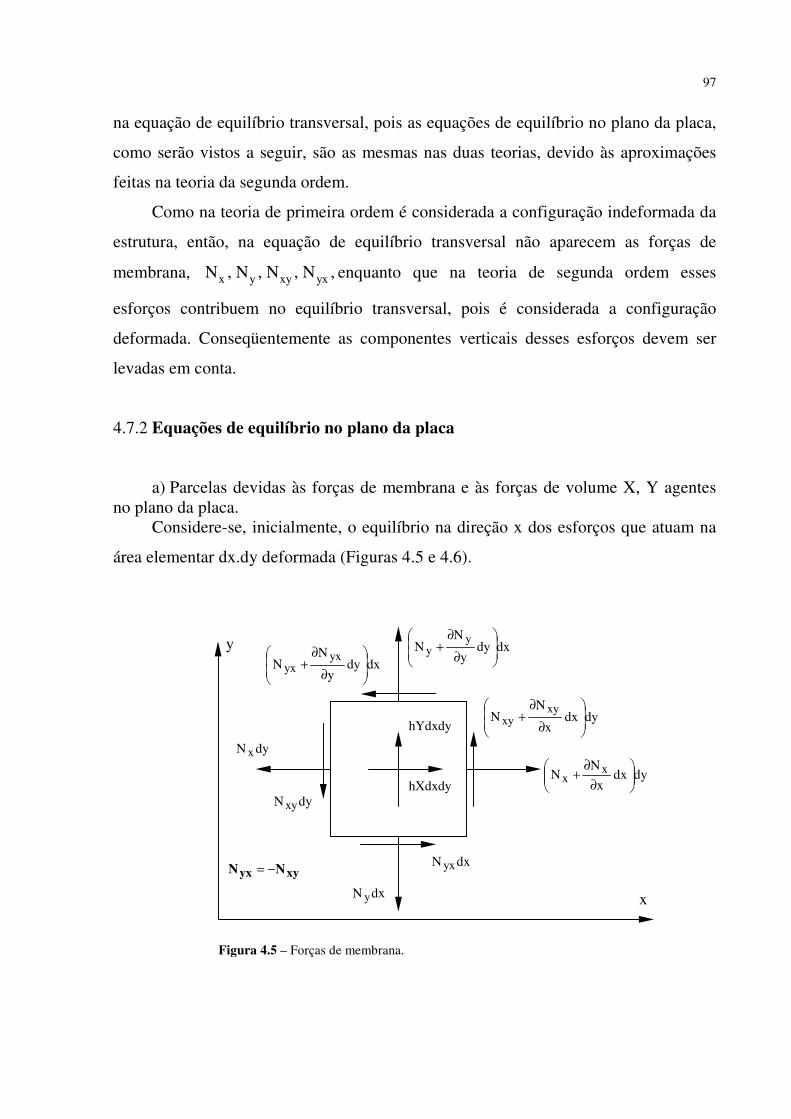
97
na equação de equilíbrio transversal, pois as equações de equilíbrio no plano da placa,
como serão vistos a seguir, são as mesmas nas duas teorias, devido às aproximações
feitas na teoria da segunda ordem.
Como na teoria de primeira ordem é considerada a configuração indeformada da
estrutura, então, na equação de equilíbrio transversal não aparecem as forças de
membrana, x y xy yxN , N , N , N , enquanto que na teoria de segunda ordem esses
esforços contribuem no equilíbrio transversal, pois é considerada a configuração
deformada. Conseqüentemente as componentes verticais desses esforços devem ser
levadas em conta.
4.7.2 Equações de equilíbrio no plano da placa
a) Parcelas devidas às forças de membrana e às forças de volume X, Y agentes no plano da placa.
Considere-se, inicialmente, o equilíbrio na direção x dos esforços que atuam na
área elementar dx.dy deformada (Figuras 4.5 e 4.6).
dxdyy
NN
yy
∂
∂+
dydxx
NN x
x
∂
∂+
x
y
dydxx
NN
xyxy
∂
∂+
dxdyy
NN
yxyx
∂
∂+
dxN yx
dxN y
dyN x
dyNxy
hYdxdy
hXdxdy
xyyx NN −=
Figura 4.5 – Forças de membrana.

98
( )xx x
yxyx yx
NN dycos + N + dx dycos + dx + hX dx dy
x x
N N dx cos - N + dy dxcos + dy
y y
∂ ∂α − α α ∂ ∂
∂ ∂α+ α α
∂ ∂
Considerando-se, cos = 1; cos + dx = 1; cos + dy = 1,x y
∂α ∂α α α α
∂ ∂ pois os
mesmos aparecem como coeficientes multiplicativos, tem-se:
yxxNN
dx dy - dx dy + hX dx dyx y
∂∂
∂ ∂
Mas,
yx xyN - N=
então,
yxxNN
dxdy + dxdy + hX dxdyx y
∂∂
∂ ∂ (4.24)
analogamente, realizando-se o equilíbrio na direção y, Figura 4.7, obtém-se:
xy yN Ndxdy + dxdy + hY dxdy
x y
∂ ∂
∂ ∂ (4.25)
dy)dxx
NN( x
x∂
∂+
dxO
z
x
w
Figura 4.6 – Corte através do elemento dxdy da
Figura 4.5, por um plano paralelo a xz
dxx∂
α∂+α dx
x
w
∂
∂
w dyNx
α
dx)dyy
NN(
yy
∂
∂+
dy
O
z
y
w
Figura 4.7 – Corte através do elemento dxdy da
Figura 4.5, por um plano paralelo a yz
dyy∂
β∂+β dy
y
w
∂
∂
w dxNy
β

99
b) Parcelas devidas às forças cortantes
Considerando-se a Figura 4.9, tem-se:
xx x
x
QQ dy sen - Q + dx dy sen + dx
x
∂ ∂α α α
∂ ∂
mas,
w =
x
∂α
∂
então
2 2x x
x x x 2 2x x
Q Qw w w w wQ dy - Q dy Q dxdy - dxdy - dx dxdy
x x xx x
∂ ∂∂ ∂ ∂ ∂ ∂−
∂ ∂ ∂ ∂ ∂∂ ∂
desprezando-se os infinitésimos de ordem maior que dois, tem-se:
y
x
dx)dyy
QQ(
yy
∂
∂+
Figura 4.8 – Forças cortantes e carga transversal
dy)dxx
QQ( x
x∂
∂+
dyQx
dxQy
dydxg d
d
Figura 4.10 – Corte no elemento dxdy da Figura 4.8 por um plano paralelo a yz
yy
Q(Q dy)dx
y
∂+
∂
dy
z
y
dyy
∂ββ +
∂
β
β yQ dx
Figura 4.9 – Corte no elemento dxdy da Figura 4.8 por um plano paralelo a xz
dy)dxx
QQ( x
x∂
∂+
dx
z
x
dxx∂
α∂+α
α
α dyQx

100
2x
x 2x
Qw wQ - dxdy
xx
∂∂ ∂−
∂ ∂∂
analogamente, para a direção y, Figura 4.10, tem-se:
2y
y 2y
Qw wQ - dxdy
yy
∂∂ ∂− ∂ ∂∂
As parcelas devidas às forças cortantes, representadas pelas duas últimas
expressões, são infinitésimos de segunda ordem e são desprezíveis em relação às
parcelas devidas às forças de membrana; expressões (4.24) e (4.25).
Conseqüentemente, as equações de equilíbrio no plano da placa são dadas pelas
expressões (4.24) e (4.25) igualadas a zero, ou seja:
xyxNN
direção x : + +hX = 0x y
∂∂
∂ ∂ (4.26)
xy yN Ndireção y : + +hY = 0
x y
∂ ∂
∂ ∂ (4.27)
Como se observa, obtiveram-se as mesmas equações de equilíbrio da teoria de
primeira ordem. Isto ocorreu devido às aproximações adotadas na teoria de segunda
ordem simplificada.
4.7.3 Equações de equilíbrio transversal ao plano da placa
A equação de equilíbrio transversal, de um elemento dx dy da placa, é composta
de três parcelas: projeções das forças de membrana e das forças cortantes, na direção z,
e da carga g(x, y).
4.7.3.1 Parcela devida as forças de membrana
a) Forças x yN , N
A partir da Figura 4.6 tem-se a soma das projeções das forças
xx x
NN dy e N + dx dy,
x
∂ ∂
na direção z,

101
xx x
N N dysen + N + dx dysen + dx
x x
∂ ∂α − α α ∂ ∂
mas,
wsen = =
x
∂α α
∂
então,
2x
x x x2
2 2x x
x x 2 2
Nw w w w N dy + N + dx dy + dx = N dy
x x x xx
N Nw w w w N dy +N dy dx+ dxdy + dxdy dx
x x x xx x
∂∂ ∂ ∂ ∂ − − ∂ ∂ ∂ ∂∂
∂ ∂∂ ∂ ∂ ∂+
∂ ∂ ∂ ∂∂ ∂
desprezando-se o infinitésimo de terceira ordem, obtém-se:
2x
x 2
Nw wN dxdy dxdy
x xx
∂∂ ∂+
∂ ∂∂ (4.28)
Analogamente, as projeções, das forças yy y
N dx N , N + y dx
y
∂ ∂
na direção z,
Figura 4.7, produz
2y
y 2
Nw w N dxdy dxdy
y yy
∂∂ ∂+
∂ ∂∂ (4.29)
b) Forças xy yxN , N
Considerando as Figuras 4.11 e 4.12 obtém-se as projeções das forças
xyxy xy
N N dy e N + dx dy,
x
∂ ∂
na direção de z e, a soma destes fornece:

102
xyxy xy
N N dysen + N + dx dysen + dx
x x
∂ ∂β − β β ∂ ∂
mas,
wsen = =
y
∂β β
∂
então
2xy
xy xy
Nw w w N dy + N + dx dy + dx
y x y x y
∂ ∂ ∂ ∂− ∂ ∂ ∂ ∂ ∂
desenvolvendo-se a expressão acima e desprezando-se o infinitésimo do terceiro grau,
obtém-se:
2xy
xy
Nw w N dxdy+ dxdy
x y x y
∂∂ ∂
∂ ∂ ∂ ∂ (4.30)
Analogamente, para as forças
2xy
xy
Nw w N + dxdy
x y y x
∂ ∂ ∂ ∂ ∂ ∂ ∂
(4.31)
c) Forças de volume X e Y
Essas forças não contribuem diretamente no equilíbrio transversal, pois, mesmo
na configuração deformada, suas direções permanecem inalteradas, ou seja, X
permanecerá na direção x (portanto, não tem componente vertical) e Y na direção y
dy
O
z
y
Figura 4.11 – Corte através do elemento dxdy da Figura 4.5, por um plano paralelo a
yz que passa por dyNxy
dyNxy
β
Figura 4.12 – Corte através do elemento dxdy da Figura 4.5, por um plano paralelo a yz que
passa por dy)dxx
NN(
xyxy
∂
∂+
dy)dxx
NN(
xyxy
∂
∂+
dy
O
z
y
dyy∂
β∂+β

103
(também sem componente transversal). Entretanto, estas forças aparecerão na
expressão da resultante das projeções das forças de membrana, na direção z, por meio
das equações de equilíbrio (4.26) e (4.27), como será visto a seguir.
d) Resultante das projeções das forças de membrana na direção z
Esta resultante é obtida somando-se as expressões (4.28), (4.29), (4.30) e (4.31).
2 2 2yx
x y xy2 2
2xy xy
xy
NNw w w w w N + + N + +N
x x y y x yx y
N Nw w w + +N + dxdy
x y x y y x
∂ ∂∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂∂ ∂
∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂
reagrupando-se a expressão anterior, tem-se:
2 2 2xy xy yx
x y xy2 2
N N NNw w w w wN +N +2N + + dxdy
x y x y x x y yx y
∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂+ + ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂
(4.32)
Note-se que os termos entre parênteses correspondem às equações de equilíbrio
(4.26) e (4.27), respectivamente, ou seja,
xyxNN
+ hX x y
∂∂= −
∂ ∂
xy yN N+ hY
x y
∂ ∂= −
∂ ∂
Portanto, a expressão (4.32) pode ser escrita da seguinte forma,
2 2 2
x y xy2 2
w w w w wN N 2N hX hY dxdy
x y x yx y
∂ ∂ ∂ ∂ ∂+ + − −
∂ ∂ ∂ ∂∂ ∂ (4.33)
A expressão (4.33) corresponde à contribuição das forças de membrana, no
equilíbrio transversal.

104
4.7.3.2 Parcelas devida às forças cortante e ao carregamento externo g(x,y)
a) Carga g(x,y) e forças cortantes x yQ e Q
Das Figuras (4.9) e (4.10), obtém-se:
xx x y
yy
QQ dy cos +gdxdy+ Q dx dy cos dx Q dx cos
x x
Q+ Q dy dx cos dy
y y
∂ ∂α − α + α + − β ∂ ∂
∂ ∂β+ β +
∂ ∂
mas,
cos cos dx cos cos dy 1x y
∂α ∂β α = α + = β = β + =
∂ ∂
pois, aparecem na expressão acima como coeficientes multiplicativos, então
yxQQ
g dxdy x y
∂ ∂+ + ∂ ∂
(4.34)
b) Equilíbrio de momentos em torno do eixo x
Considerando-se, além da Figura 4.13, as Figuras 4.7, 4.8, 4.9 e 4.10, obtém-se:
y
dxx
MM
xyxy
∂
∂+
x
dxx
MM x
x∂
∂+
dyy
MM
yy
∂
∂+
dyy
MM
yxyx
∂
∂+
xyM
xM
yM
yxM
Figura 4.13 – Momentos fletores e de torção
dy
dx

105
y xyy y xy xy
y yy y
yy
M MM dx M dx dy dx M dy M dy dx dy
y x
Q Q wQ dy dx cos dy dy Q dy dx sen dy dy
y y y y y
NN dy dx sen dy dy
y y+
∂ ∂ − − − + +
∂ ∂
∂ ∂ ∂β ∂β ∂+ + β + + + β +
∂ ∂ ∂ ∂ ∂
∂ ∂β+ β + −
∂ ∂
yy
2 22y xy y y
y y y 2
2 2 2y y y 2
y y2 2 2
y
N wN dy dx cos dy dy
y y y
M M Q Qw w w wQ dy Q Q dy dy
y x y y y y yy
Q N Nw w w w w wdydy N N dy dy dy
y y y y y yy y y
wN
y
+
+
∂ ∂β ∂β +
∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂= − + + + + +
∂ ∂ ∂ ∂ ∂ ∂ ∂∂
∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂+ + + + +
∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂
∂− −
∂
yN wdy dxdy 0
y y
∂ ∂=
∂ ∂
Os termos infinitesimais de segunda ordem da expressão que estão entre o
colchete maior são desprezíveis quando comparados com os três primeiros, portanto,
y xyy
M MQ
y x
∂ ∂− =
∂ ∂ (4.35)
c) Equilíbrio de momentos em torno do eixo y
Procedendo-se de maneira análoga ao item anterior, e considerando-se que,
yx xyM M= −
obtém-se:
xyxx
MMQ
x y
∂∂− =
∂ ∂ (4.36)
d) Expressão final que considera a contribuição das forças cortantes e da carga
distribuída g(x,y), no equilíbrio transversal
Derivando-se a expressão (4.35) em relação à y e a expressão (4.36) em relação a
x, obtêm-se:
2 2y y xy
2
Q M M
y x yy
∂ ∂ ∂= −
∂ ∂ ∂∂
22xyx x
2
MQ M
x x yx
∂∂ ∂= −
∂ ∂ ∂∂ (4.37)

106
Substituindo-se as expressões (4.37) em (4.34), obtém-se:
2 22y xyx
2 2
M MM2 g dxdy
x yx y
∂ ∂∂ + − + ∂ ∂∂ ∂
(4.38)
4.7.3.3 Equação resultante do equilíbrio transversal
Somando-se a expressão (4.33) com a expressão (4.38) obtém-se o somatório de
todas as forças na direção do eixo z, que por equilíbrio, deve ser igual a zero, portanto,
2 2 2
x y xy2 2
2 22y xyx
2 2
w w w w wN N 2N hX hY dxdy
x y x yx y
M MM+ 2 g dxdy 0
x yx y
∂ ∂ ∂ ∂ ∂+ + − −
∂ ∂ ∂ ∂∂ ∂
∂ ∂∂ + − + = ∂ ∂∂ ∂
então,
2 22 2 2 2y xyx
x y xy2 2 2 2
M MM w w w2 g N N 2N
x y x yx y x y
w whX hY
x y
∂ ∂ ∂ ∂ ∂ ∂+ − = − + + +
∂ ∂ ∂ ∂∂ ∂ ∂ ∂
∂ ∂− −
∂ ∂
(4.39)
Substituindo-se as expressões (4.20), (4.21) e (4.22), na expressão acima, obtém-
se:
4 4 4 2 2 2
x y xy4 4 2 2 2 2
w w w 1 w w w2 g N N 2N
D x yx y x y x y
w whX hY
x y
∂ ∂ ∂ ∂ ∂ ∂+ + = + + +
∂ ∂∂ ∂ ∂ ∂ ∂ ∂
∂ ∂− −
∂ ∂
(4.40)

107
4.8 EQUAÇÕES DE EQUILÍBRIO EM FUNÇÃO DAS COMPONENTES u, v e w
DOS DESLOCAMENTOS DOS PONTOS DA PLACA.
A introdução das expressões (4.17), (4.18) e (4.19), nas equações de equilíbrio
no plano, (4.26), (4.27) e na equação de equilíbrio transversal (4.40), fornece um
sistema de três equações de equilíbrio nas incógnitas u, v e w, dado abaixo.
Esse sistema de equações, com as condições de contorno geométricas e estáticas
da placa permite a obtenção daqueles deslocamentos.
- Equilíbrio na direção x
2 2 2 2 2 2
2 2 2 2
2 2 2 2 2
2 2
u w w 1 u v w w w w
x 2 x y x x y yx x y y
u v w w w w 1X 0
2 x y x y y x Ey y
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂+ + + + +
∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂
ν ∂ ∂ ∂ ∂ ∂ ∂ − ν+ − + + − + =
∂ ∂ ∂ ∂ ∂ ∂∂ ∂
(4.41)
- Equilíbrio na direção y
2 2 2 2 2 2
2 2 2 2
2 2 2 2 2
2 2
v w w 1 v u w w w w
x 2 x y y x y xy y x x
v u w w w w 1Y 0
2 x y x y x y Ex x
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂+ + + + +
∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂
ν ∂ ∂ ∂ ∂ ∂ ∂ − ν+ − + + − + =
∂ ∂ ∂ ∂ ∂ ∂∂ ∂
(4.42)
- Equilíbrio na direção z
4 4 4 2 2 2
4 4 2 2 2 2 2
2 2 2 22 2
2 2
2 2 2 2 2
2 2
w w w 12 u w u w v w2
x y x y yy y x y h x y
v w w w w 1 w w w w( ) ( )
x x y x y x y 2 x yx y
u w u w v w v w w w w
x y x y y x x y x y x yy x
1
2
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂+ + = + +
∂ ∂ ∂ ∂ ∂∂ ∂ ∂ ∂ ∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂+ + + +
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂+ν − + − −
∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂ ∂∂ ∂
+2 2
2 22 2
w w 1 w w 1 w w( ) ( ) g hX hY
y 2 x D x yx y
∂ ∂ ∂ ∂ ∂ ∂+ + − − ∂ ∂ ∂ ∂∂ ∂
(4.43)
Sendo,
)1(12
EhD
2
3
ν−=

108
h = espessura da placa
X, Y são forças de volume, respectivamente, na direção x e y
g = carga transversal, na direção z
Entretanto, a solução analítica desse sistema de equações diferenciais não
lineares é desconhecida para o caso geral.
4.9 CONDIÇÕES DE CONTORNO DE UMA PLACA DE FORMATO QUALQUER
4.9.1 Introdução
Para estabelecer as condições de contorno que as equações (4.41), (4.42) e 4.43)
devem obedecer, divide-se o contorno da placa, designado por Γ , em duas partes:
- dΓ , referente à parte do contorno Γ vinculado ao meio externo;
- σΓ , referente à parte do contorno Γ que é livre como esquematizado na Figura 4.14.
η
Ω
xN
xyN
hX
hY η
δ=η1
2η
y(2)
x(1)
B
A
dΓ
σΓ
s
yxNyN
t
dy
ds
dx
δ
onde,
Figura 4.14 – Contorno da placa e elemento infinitesimal submetido a forças de

109
==Γ ABd porção do contorno de A até B
==Γσ BA porção do contorno de B até A
hX e hY são cargas externas, por unidade de comprimento, aplicadas no contorno dΓ ,
respectivamente nas direções x e y;
os versores t e n são dados por: n cos i sen j i m j
t sen i cos j mi j
= δ + δ = +
= − δ + δ = − +
com, mds
dxsen;
ds
dycos =−=δ==δ
De forma análoga ao que foi feito no item 4.7.3.1d) tem-se, a partir da Figura
4.15, a resultante das componentes verticais das forças de membrana,
x
wsendsN
y
wcosdsN
y
wsendsN
x
wcosdsNdsV xyxyyx
Nn
∂
∂δ+
∂
∂δ+
∂
∂δ+
∂
∂δ=
ou
y
w)cosNsenN(
x
w)senNcosN(V xyyxyx
Nn
∂
∂δ+δ+
∂
∂δ+δ=
mas, considerando-se as expressões dos versores n e t
, vem:
Figura 4.15 - Elemento infinitesimal submetido a momentos e esforço cortante
dsdxsen;ds
dycos =δ=δ
dy ds
dx
yxM
xM
xyM
yQ
nQ
xQ
yM
nM
nsM t η
δ
ds
dx
dy
x
y
δ δ
t
η
x
y
z

110
y
wYh
x
wXhV N
n∂
∂+
∂
∂= (4.44)
Considerando-se a expressão da cortante equivalente deduzida no capítulo 3 e a
expressão (4.44), tem-se a resultante dos esforços transversais nV , no contorno σΓ ,
que deve ser igual ao esforço externo aplicado nV , então,
N nsnn n n
MV (Q V ) V
s
∂= + + =
∂ (4.45)
que é a condição de contorno estática relativa aos esforços transversais. A diferença
entre esta condição de contorno, e a condição correspondente da teoria de primeira
ordem, é que, nesta, 0VNn = .
4.10 ACOPLAMENTO DOS EFEITOS DE MEMBRANA E DE FLEXÃO
Considere-se para efeito de ilustração o plano médio da placa da Figura 4.16,
onde se representam os deslocamentos u, v e w, as cargas de superfície p1 , p2 e p3 e a
sua vinculação.
Na teoria de segunda ordem de placas, no lugar de uma equação diferencial de
equilíbrio governante da teoria de primeira ordem na incógnita w, há três equações
Ω
dΓ
zx3 =
0
A
Figura 4.16 - Deslocamentos e cargas de superfície na placa
Superfície média da placa
w v
u
σΓ
p3 = g
hp2 = h Y
yx2 =
xx1 =
hp1 = h X

111
acopladas nas incógnitas u, v e w, sendo duas do estado plano (chapas, nas direções x1
e x2) e uma, correspondente à placa, na direção x3.
Trata-se de equações diferenciais não-lineares, acoplando os efeitos de
membrana com os de flexão. As forças de membrana são funções não apenas de u e v,
mas também de w.
Considerando-se as hipóteses da teoria de segunda ordem obtém-se a seguinte
equação diferencial de equilíbrio, na direção x3 , cuja dedução foi apresentada
detalhadamente no item 4.7.3.3 e que é a mesma de Timoshenko e Woinowsky-
Krieger (1981) e conhecida como equação de Von Kármán:
2,1,12,1222,2211,1134 hYwhXwwN2wNwNpwD −−+++=∇
(4.46)
onde,
w é o deslocamento transversal da placa,
N ij forças de membrana , por unidade de comprimento, nas direções x1 e x2 , funções
agora de u, v e w. Nos eixos usuais x = x1 ; y = x2 ; z = x3 têm-se:
xxx11 NNN == ; xy12 NN = e yyy22 NNN == ,
x
w
x
ww
11,
∂
∂=
∂
∂= ;
y
w
x
ww
22,
∂
∂=
∂
∂= ;
2
2
11
2
11,x
w
xx
ww
∂
∂=
∂∂
∂=
yx
w
xx
ww
2
21
2
12,∂∂
∂=
∂∂
∂= ;
2
2
22
2
22,y
w
xx
ww
∂
∂=
∂∂
∂=
X , Y forças de volume nas direções 1x e 2x , respectivamente,
h espessura da placa,
D rigidez à flexão da placa.
A expressão (4.46) será utilizada na formulação do problema de segunda ordem
pelo Método dos Elementos de Contorno.

112
5. FORMULAÇÃO DO PROBLEMA DE FLAMBAGEM DE PLACAS PELO MEC
5.1 INTRODUÇÃO Supondo-se que p3 = 0 em Ω e que sejam desprezadas as forças de volume, e
que o carregamento no contorno σΓ , hX e hY , cresce, a partir de zero,
proporcionalmente a um parâmetro λ (fator de carga). A partir de certo valor de λ
(que será denominado crítico), a placa pode passar a ter, além da configuração trivial
de equilíbrio (w = 0), outra configuração (estável) de equilíbrio, enquanto que a trivial
se torna instável. Em outras palavras, pode ocorrer um ponto de bifurcação do
equilíbrio (flambagem).
O fenômeno da flambagem, se acontecer, será governado pela equação (4.46),
quando nela se fizer a carga transversal 3p 0= e as forças de volume hX hY 0= = , o
que será visto no item seguinte.
Quando λ aumenta e atinge o seu valor crítico, a chapa flamba, mesmo para
rotações w w
e x y
∂ ∂
∂ ∂ muito pequenas. Então, se as rotações são muito pequenas, as
forças de membrana passam a ser funções apenas dos deslocamentos u e v, e portanto
determináveis apenas e tão somente com a utilização das equações de equilíbrio no
plano da placa. Portanto, no problema de flambagem, as equações de equilíbrio
governantes são as duas do estado plano de primeira ordem e a equação de equilíbrio
transversal (4.46), com 3p 0= e hX hY 0= = .
Isto significa que a flexão não influencia o estado plano, embora a recíproca
evidentemente não se verifica. É como se houvesse um desacoplamento parcial das
equações governantes.
5.2 EQUAÇÕES DIFERENCIAIS A equação governante do problema de flambagem de placas pode ser escrita,
segundo Timoshenko e Woinowsky-Krieger (1981), como se segue:

113
( )411 ,11 22 ,22 12 ,12w N w N w 2N w ,
D
λ∇ = + + (5.1)
onde,
w é o deslocamento transversal da placa,
ijN são as forças de membrana de referência, por unidade de comprimento, obtidas com o uso exclusivo das equações de equilíbrio, de primeira ordem, no plano da placa,
λ é o fator de carga, D é a rigidez à flexão da placa.
Se a equação (5.1) for resolvida sob as condições de contorno prescritas, a carga
de flambagem é λ vezes a carga de referência aplicada no plano da placa.
As forças de membrana, por unidade de comprimento, estão em equilíbrio
segundo as equações:
xyxNN
hX 0x y
∂∂+ + =
∂ ∂
xy yN NhY 0
x y
∂ ∂+ + =
∂ ∂
(5.2)
ou em forma concisa,
ij, j iN hb 0+ = (5.2a)
No caso do estudo de flambagem as forças de volume hX e hY são desprezadas,
considerando-se apenas as cargas aplicadas no contorno da placa. Da Figura 5.1 as
relações entre as cargas de superfície no contorno e as forças de membrana, podem ser
escritas da seguinte forma:
x x y xy
y y x xy
N N hX
N N hY
η + η =
η + η =
(5.3)
ou em forma indicial,

114
ij j iN hPη = (5.3a)
Para a formulação da equação integral do problema de flambagem de placas é
admitido que a pseudo carga lateral "g" definida por,
,11 ,11 22 ,22 12 ,12 ij ,ijg (N w N w 2N w ) N w= λ + + = λ (5.4)
atua na direção perpendicular ao plano da placa. Desta forma a equação (5.1) pode ser
formulada da mesma forma que o problema de flexão de placas em teoria de primeira
ordem. Ou seja, pode-se utilizar a mesma solução fundamental deduzida no Capítulo 3
item 3.2.10, dada por:
* 21w r (ln r 1 / 2)
8 D= −
π (5.5)
Figura 5.1 – Forças de membrana e cargas de superfície
η
Ω
y(2)
x(1)
N22 N21
N11
N12
hP1
hP2 η
η1
η2

115
5.3. EQUAÇÕES INTEGRAIS Utilizando-se o teorema de reciprocidade de Betti ou o método dos resíduos
ponderados e considerando-se as equações (5.1) e (5.5), chega-se à seguinte equação
integral:
( ) ( ) ( ) ( ) ( )( )
( )
( ) ( ) ( ) ( ) ( ) ( ) ( )c
* *n n
N ** *ci ci n n
i 1
w PK Q w Q V Q,P w P M Q,P d P
n
wR Q,P w P V P w Q,P M P Q,P d P
n
Γ
Γ=
∂ + − Γ
∂
∂= − Γ
∂
∫
∑ ∫
( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( )
cN* *
ci ci 11 ,11i 1
22 ,22 12 ,22
R P w Q,P w Q,p N p w p
N p w p 2N w p d p
Ω=
+ + λ
+ + Ω
∑ ∫
(5.6)
onde,
K(Q) =
0, para ponto Q fora do domínio
1/2, para ponto Q no contorno,
1, para ponto Q q= , ou seja, ponto interno ao domínio,
2
β
π, para pontos no contorno com angulosidade (cantos),
onde, β= ângulo interno ao ponto Q
Na Figura (5.2) explicitam-se os pontos de carga (load points) "Q" no contorno e
"q" interno ao domínio e os pontos nodais "P" e "p", respectivamente, no contorno e
no domínio, onde se obtêm as respostas das ações aplicadas nos pontos de carga.
pq
P
Q
Figura 5.2 - Pontos de carga (q e Q) e pontos nodais (p e P)

116
Observa-se na equação (5.6) a presença de incógnitas nos cantos, dadas por ciR
ou wci. Escolheu-se neste trabalho considerá-las como variáveis do problema, pois
segundo Timoshenko e Gere (1961) os resultados são melhores do que aqueles no qual
as incógnitas no canto são consideradas como contribuições dos nós vizinhos.
Nos cantos as variáveis são cR e wc. Sendo que, devido às condições de
contorno, apenas uma é incógnita. O mesmo ocorre nos demais pontos nodais do
contorno onde das quatro variáveis, n n nw, , M e Vθ , apenas duas são incógnitas. Nos
pontos internos, as incógnitas são as derivadas segundas ,11 ,12 ,22w , w e w .
Então são necessárias, duas equações integrais para cada ponto nodal do
contorno, uma para cada canto e como se verá mais adiante, apenas uma para cada
ponto interno, para que o sistema de equações algébricas do problema seja definido.
Como é preciso escrever uma equação para cada canto, então, os nós adjacentes
aos mesmos devem ser transferidos para o interior de seus respectivos elementos,
Figura 5.3, caso contrário haverá singularidade na matriz dos coeficientes.
Conforme Timoshenko e Gere (1961), quando se escreve a equação integral para
o canto o coeficiente K(Q) da equação (5.6) é dado por:
( ) cK Q2
β=
π (5.7)
onde,
cβ é o ângulo interno do canto Figura 5.4
375,0
Ponto nodal junto ao canto, deslocado para o interior do elemento
Figura 5.3 – Transferência dos nós junto aos cantos

117
Na expressão (5.6) aparecem além das incógnitas nodais no contorno, as
incógnitas ,11 ,12 ,22w , w , w nos pontos internos. Porém, como a integral de domínio da
equação (5.6) será calculada através da discretização do domínio em células e para que
as incógnitas no domínio fiquem coerentes com aquelas do contorno, transforma-se
esta integral de modo a resultarem apenas incógnitas “w” nos vértices (pontos nodais
internos) das células.
5.4. TRANSFORMAÇÃO DA INTEGRAL DE DOMÍNIO
Da equação (5.6) tem-se a seguinte equação de domínio:
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )*11 ,11 22 ,22 ,12 ,12w Q, p N p w p N p w p 2N p w p d p
Ω + + Ω ∫ (5.8)
ou em forma indicial,
( ) ( ) ( ) ( )*ij ,ijw Q, p N p w p d p
ΩΩ∫ (5.9)
ou de modo mais sucinto,
*ij ijw N w d
ΩΩ∫ (5.10)
Integrando-se por partes a equação (5.10) e considerando-se as equações (5.2a) e
(5.3a), obtém-se:
cβ cβ
Figura 5.4 – Ângulo interno ao canto

118
( )* * * *ij ,ij i ,i ij , j ,i i ,iw N w d hb w w N w w d hp w w d
Ω Ω Ω ΓΩ = − Ω + Γ∫ ∫ ∫ ∫ (5.11)
Integrando-se por partes a segunda integral da equação (5.11) e considerando-se
novamente as expressões (5.2a) e (5.3a), a equação (5.11) fica,
( ) ( )
( )
* * * *ij ,ij i ,i j , j ij , ji
* *i ,i j , j
w N w d h b w w b w w d N w w d p
h p w w p w w d
Ω Ω Ω
Γ
Ω = − Ω + Ω +
+ − Γ
∫ ∫ ∫
∫
(5.12)
onde,
ijN são as forças de membrana internas, por unidade de comprimento,
ip são as forças de superfície externas aplicadas no contorno,
ib são as forças do volume.
Da Figura 5.5 pode-se obter uma expressão que relaciona i sp com p e pη .
Decompondo-se n sp e p nas direções de 1 2p e p têm-se da Figura 5.5a:
1 n s
2 n s
p p cos p sen
p p sen p cos
= α − α
= α − α (5.13)
mas, da Figura 5.5b têm-se:
( )x
y
cosn
sen cos 90
α = η→
α = − α = η
ppη
p1
α+90o α
η s x2
x1
η s
α
x1
x2
Figura 5.5 – Relações entre si pep,p η
a) b)

119
( )
( )x
y
cos 90 sen ss
sen 90 cos s
α + = − α =→
α + = α =
então a equação (5.13) fica:
1 n x s x
2 n y s y
p p p s
p p p s
= η +
= η +
ou indicialmente,
i n i s ip p p s= η + (5.14)
Substituindo-se a expressão (5.14) na equação (5.12), tem-se:
( )( ) ( )
* * * *ij ,ij i ,i j , j ij ,ij
* *n i s i ,i n j s j , j
N w w d h b w w b w w d N w w d
h p p s w w p p s w w d
Ω Ω Ω
Γ
Ω = − Ω + Ω +
+ η + − η + Γ
∫ ∫ ∫
∫
(5.15)
De acordo com a Figura 5.6,
têm-se:
* *s i i s j j
* *n i i n j j
s ; s
;
θ = θ θ = θ
θ = θ η θ = θ η
(5.16)
Levando-se a equação (5.16) na equação (5.15) obtém-se:
2θ
η1θ nθ
1x
α
2x
Figura 5.6 – Relações entre sni e, θθθ
sθ
sη
Com ,
s,s
,n
i,i
w
w
w
=θ
=θ
=θ
η
OBS.: Os sentidos positivos de sn e θθ foram considerados de acordo com as
tensões positivas (sentido de η e s na fibra superior)

120
( ) ( )
( ) ( )
* * * *ij ,ij i ,i j , j ij , ji
* * *n n s s n n s s
N w w d h b w w b w w d N w w d p
h p p w p p w d
Ω Ω Ω
Γ
Ω = − Ω + Ω
+ θ + θ − θ + θ Γ
∫ ∫ ∫
∫
(5.17)
Comparando-se as integrais de contorno das equações (5.12) e (5.17), verifica-se
que,
i i n n s s
* * *j j n n s s
p p p
p p p
θ = θ + θ
θ = θ + θ
(5.18)
Note-se que na integral de contorno da equação (5.17) há cargas no contorno
n sp e p . Entretanto, no programa elaborado para resolver o problema de chapas, que
será utilizado para a obtenção das forças de membrana ijN as cargas de contorno são
ip . Então, é conveniente que se obtenha as relações de n sp e p em função de 1 2p e p .
Da Figura 5.7. tem-se:
n 1 2 1 1 2 2 i i
s 1 2 1 1 2 2 i i
p p cos p sen p p p
p p sen p cos p s p s p s
= α + α = η + η = η
= − α + α = + = (5.19)
Substituindo-se a equação (5.19) na equação (5.17) vem,
( )( ) ( )
* * * *ij ,ij i ,i i , j ij , ji
* * *i i n i i s i i n i i s
N w w d h b w w b w w d N w w d
h p p s w p p s w d
Ω Ω Ω
Γ
Ω = − Ω + Ω
+ η θ + θ − η θ + θ Γ
∫ ∫ ∫
∫
(5.20)
Como no contorno as incógnitas são nw e θ , torna-se necessário transformar sθ .
1p
np 2p sp
1x
α2x
Figura 5.7 – Relações entre 21sn pep,p,p

121
A parcela da integral de contorno da equação (5.20) correspondente a sθ é dada
por:
*i i sp s w d
Γθ Γ∫ (5.21)
Integrando-se por partes o termo da expressão (5.21), tem-se:
( )f* * * *
i i ,s i i ,s i i i i i,s
f* * * *i ii i i i ,s i i i
p s w w d (p s w )w d p s w wd wp s w
s pp w s w p s w wd p s w w
s s
Γ Γ Γ
Γ
Γ = Γ = − Γ +
∂ ∂ = − + + Γ + ∂ ∂
∫ ∫ ∫
∫
(5.22)
Levando-se a expressão (5.22) na equação (5.20) tem-se,
( )
( )
* * * *ij ,ij i ,i j , j ij , ji
* * * *i i n i i i i n i i s,s
f*i i i
N w w d h b w w b w w d N w wd
h p w p s w p p s w d
wp s w
Ω Ω Ω
Γ
Ω = − Ω + Ω
+ − η θ − + η θ + θ Γ
+
∫ ∫ ∫
∫
(5.23)
Da expressão (5.23) observa-se que a incógnita no domínio passou a ser apenas o
deslocamento transversal "w", pois as forças de membrana são determináveis através
do programa de chapas. Também, observa-se que há uma contribuição das cargas de
membrana nos coeficientes das incógnitas de contorno.
Levando-se a expressão (5.23) na equação (5.6) resulta,
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( )
( )
c
c
* *n n
N ** *ci ci n n
i 1
N* * *
ci ci i ,i j , ji 1
* * * *ij , ji i i n i i i i n,s
f* *
i i s i ii
wK Q w Q V Q,P w P M Q,P P d P
n
wR Q,P w P V P w Q,P M P Q,P d P
n
R P w Q,P h b w w b w w d
N w w d h p w p s w p
p s w d hwp s w
Γ
Γ=
Ω=
Ω Γ
∂ + − Γ ∂
∂+ = − Γ
∂
+ + λ − Ω
+ Ω + η θ − + η θ
+ θ Γ +
∫
∑ ∫
∑ ∫
∫ ∫
(5.24)

122
Não será considerada, no caso em estudo, a primeira integral de domínio do
segundo membro da equação (5.24), isto é, as forças de domínio não serão
consideradas. Enquanto que a segunda integral de domínio será avaliada através da
discretização do domínio em " ceN " células.
5.5 DISCRETIZAÇÃO DO PROBLEMA DE FLAMBAGEM DE PLACAS
5.5.1 Introdução
O contorno e o domínio da placa são aproximados, respectivamente, por um
número finito de elementos de contorno " jΓ " e de células " jΩ ". Os números de
elementos e o de células são escolhidos de modo a que a geometria real e a
convergência dos resultados sejam adequadas.
Na Figura 5.8a estão representados os elementos e as células com os respectivos
"nós" que são as extremidades dos elementos ou os vértices das células.
Associam-se às variáveis do problema os chamados "pontos nodais", Figura 8b,
observa-se que quando há nó duplo os pontos nodais são deslocados para o interior dos
elementos adjacentes. Isto porque é definida neste ponto (nó duplo) uma variável
adicional àquelas dos nós do contorno, chamada de variável de canto, que pode se
c cR ou w dependendo das condições de contorno.
A Figura 5.8c mostra os pontos onde serão escritas as equações integrais de
deslocamento w. Esses pontos são denominados "pontos de carga", que também são
deslocados para dentro do elemento quando o nó do contorno é duplo, para se evitar
equações integrais idênticas que acarretaria singularidade na matriz dos coeficientes.
Note-se que para cada ponto nodal do contorno, Figura 5.8a, associam-se dois
pontos de carga, um no contorno, ponto Q, e outro externo, ponto A, Figura 5.8c, pois
havendo duas incógnitas em cada ponto nodal há a necessidade de duas equações
integrais.

123
contorno da placa
canto 3
canto 2
canto 1
canto 5
nó duplo
1Ω 2Ω3Ω
4Ω
5Ω
6Ω
7Ω
1Γ2Γ
3Γ
4Γ
5Γ
6Γ7Γ
8Γ
9Γ
Figura 5.8a - Discretização do contorno e do domínio : o contorno por elementos lineares ; o
domínio por células triangulares.
nó simples
canto 4
q
Figura 5.8c - Pontos de carga, (“load points”), onde para cada um deles está associada uma equação integral de deslocamento “w”.
canto 3
canto 2
canto 1
canto 5
canto 4
Q
Q
Q
A
A
A
A
Q
pP
Figura 5.8b - Pontos nodais, onde estão associadas às incógnitas do problema. - Quando há nó duplo, os pontos nodais são obtidos deslocando-se o nó
duplo para o interior do elemento adjacente.
canto 3
canto 2
canto 1
canto 5
canto 4

124
Para cada canto associa-se um ponto de carga, pois há uma incógnita, c cR ou w ,
então é necessário escrever uma equação integral.
Além disso, como se verá a seguir, nos pontos internos a incógnita será apenas " iw "
(deslocamentos nos vértices das células), então é suficiente escrever apenas uma
equação integral de iw em cada vértice das células.
5.5.2 APROXIMAÇÃO DAS VARIÁVEIS 5.5.2.1 Variáveis no contorno
As variáveis no contorno e as cargas ip serão aproximadas, respectivamente, por
funções lineares k eφ φ
, denominadas funções de interpolação. Observa-se que a
geometria do contorno também será aproximada por funções lineares.
Portanto, estas variáveis podem ser escritas da seguinte forma:
kk
kn k n
kn k n
kn k n
i i
w w
V V ,k 1,2
M M
p p
= φ
θ = φ θ
= φ =
= φ
= φ
(5.25)
onde, os índices repetidos indicam somatório e os valores, k k k kn n n iw , ,V ,M e pθ são os
valores nodais, associados aos pontos nodais de cada elemento em que foi discretizado
o contorno.
Para o elemento contínuo, Figura 5.9, as funções de interpolação são dadas por:
( )11
12
φ = − ξ ⇒ corresponde ao nó 1 do elemento
( )21
12
φ = − ξ ⇒ corresponde ao nó 2 do elemento (5.26)

125
O elemento descontínuo, permite que haja descontinuidade das variáveis entre
dois elementos adjacentes. Uma das maneiras de se obter essa representação
descontínua é através da definição de pontos nodais no interior do elemento, Figura
5.10. Neste caso estas funções são as seguintes:
( ) ( )1 22 1
1Pφ = ξ − ξ
ξ − ξ
( ) ( )2 11 2
1Pφ = ξ − ξ
ξ − ξ
(5.26)
No caso em que é necessário considerar a descontinuidade em apenas um nó,
tem-se o elemento misto esquematizado na Figura 5.11.
Figura 5.9 - Elemento contínuo. Os valores nodais estão situados nos extremos do elemento.
ξ
( )1+=ξ ( )1 ( )2
( )1−=ξ
1 1
1φ 2φ
jΓ
Figura 5.10 – Elemento descontínuo. Os pontos nodais não coincidem com as
extremidades do elemento.
ξ
( )1 ( )2
1−=ξ
1 1
1φ 2φ
jΓ
1=ξ
2ξ=ξ
0=ξ
1ξ=ξ
2 21=ξ

126
Quando a descontinuidade é apenas no ponto nodal 2, Figura 5.11a , têm-se:
( )1 22
1
1φ = ξ − ξ
ξ +
( )22
11
1φ = − ξ
− ξ
(5.28)
Com a descontinuidade apenas no ponto nodal 1, Figura 5.11b, têm-se:
( )11
11
1φ = − ξ
− ξ
( )2 11
1
1φ = ξ − ξ
ξ −
(5.29)
5.5.2.2 Variáveis no domínio
As variáveis do domínio também serão aproximadas por funções de interpolação
lineares. Verifica-se que esta função, para o elemento triangular, aqui denominado
genericamente de célula, pode ser tomada como sendo as próprias coordenadas de
área.
As coordenadas de área são definidas, Figura 5.12, como sendo:
p p p 31 21 2 3
AA A; ;
A A Aξ = ξ = ξ = (5.30)
e obedecem, em qualquer ponto, a seguinte relação:
1 2 3 1ξ + ξ + ξ = (5.31)
2ξ=ξ 1=ξ
1
2φ
1φ
( )2 ( )1
1−=ξ
0=ξ
ξ 1
1ξ=ξ 1=ξ
2φ
1φ
( )2 ( )1
1−=ξ
0=ξ
ξ1
jΓ
1
Figura 5.11 – Elemento misto. a) descontínuo no ponto nodal 2 b) descontínuo no ponto nodal 1
b) a)
jΓ

127
onde,
1A é a área do triângulo p-2-3
2A é a área do triângulo p-3-1
3A é a área do triângulo p-2-1
A é a área da célula
As coordenadas de área para um ponto qualquer “p”, pode ser escrita da seguinte
forma:
( )p p p1 2
1a b x c x
2Aα α α
αξ = + + (5.32)
onde,
( )
j k k j1 2 1 2
j k2 2
k j1 1
1 2 2 1
a x x x x
b x x
c x x
1A b c b c
2
α
α
α
= −
= −
= −
= −
(5.33)
com os expoentes obedecendo a um sentido de percurso anti-horário sobre os vértices
da célula, ou seja,
Figura 5.12 – Coordenadas de Área
2(0,1,0)
1(1,0,0)
3(0,0,1)
P(ξ1, ξ2, ξ3) ξ1 = 0
ξ2 = 0
ξ3 = 0
ξ1 = 1
ξ3 = 1
ξ2 = 1 ξ3 = 0
ξ2 = 0
ξ1 = 0
x2
x1
A1
A2
A3

128
1,2,3
j 2,3,1
k 3,1,2
α =
=
=
Como a segunda integral de domínio da equação (5.24) envolve soluções
fundamentais, que são funções do vetor posição r(Q,p) ou r(q,p) e do ângulo θ entre
esse vetor e o eixo x1, é conveniente expressar a equação (5.32) em coordenadas
polares (r,θ) com origem no ponto Q ou em q.
Considerando-se a Figura 5.13,
pode-se escrever as coordenadas de área em função das coordenadas polares, da
seguinte forma,
( )p q rb cos c sen
2Aα α
α αξ = ξ + θ + θ (5.34)
onde, qαξ é obtido com a equação (5.32) para o ponto q e os coeficientes são dados
pela expressões (5.33) e, ( )r r q, p= .
Observe-se que se o ponto q coincidir com um dos vértices da célula, a
coordenada qαξ é igual a 1 (um) para este vértice e nula para os demais.
Após a discretização do domínio em células triangulares, Figura 5.8a, o
deslocamento "w" de um ponto qualquer desta célula pode se escrito em função dos
∗
)x,x(q q2
q1
)x,x(p p2
p1
)p,q(r
1x
θ1
2
3
Figura 5.13 – Mudança de coordenadas
2x

129
valores nos vértices 1 2 3w , w e w , Figura 5.14, utilizando-se como funções de
interpolação as próprias coordenadas de área. Portanto,
( ) 1 2 31 2 3w p w w w= ξ + ξ + ξ (5.35)
ou indicialmente
( )w p wαα= ξ (5.36)
Note-se a linearidade da aproximação usada e além disso, que as coordenadas de
área obedecem às características de uma função de interpolação, isto é, tem valor
unitário se pα = e valor nulo nos demais vértices.
5.5.3 Equações integrais após a discretização 5.5.3.1 Equações integrais para pontos "Q" no contorno
A equação integral de deslocamento, (5.24), pode ser escrita em forma resumida
como segue,
e c
j
e c
j
j
j
N N* *
ci cij 1 i 1
N N* *
ci cij 1 i 1
*ij ,ij
* *i i
K(Q)w(Q) (Q,P) (P)d (P) R (Q,P) w (P)
(Q,P) (P)d (P) w (Q,P) R (P)
N (P)w (Q,p)w(p)d (P)
fh (Q,p) (P)d (P) hwp s w
i
Γ= =
Γ= =
Γ
Γ
+ Γ +
= Γ +
+λ Ω
+ Γ +
∑ ∑∫
∑ ∑∫
∫
∫
p u
u p
F u
(5.37)
'p
3
1W
( )pW
p
21
3W
2WmΩ
Figura 5.14 – Aproximação de “w” na célula mΩ

130
onde,
n
w(P)(P)
(P)
=
θ u
(5.38)
n
n
V (P)(P)
M (P)
=
p
(5.39)
* * *n(Q,P) w (Q,P) (Q,P)= − θu (5.40)
* * *n n(Q,P) V (Q,P) M (Q,P)= −p (5.41)
( ) * * * *i i i i s i i,s
(Q,P) p s w p p w = − + η θ η
F (5.42)
Após a discretização do contorno em "Ne" elementos de contorno e o domínio
em “Nce” células e substituindo-se as variáveis (P), (P) e (p)u p w por suas
aproximações, a equação (5.37) fica,
e c
j
e c
j
ce
m
e
j
N N* N *
j ci cij 1 i 1
N N* T N *
j ci cij 1 i 1
N* p
ij , ji m mm 1
N* T N *
j i ij 1
K(Q)w(Q) (Q,P) (P)d (P) R (Q,P) w (P)
(Q,P) (P) d (P) w (Q,P)R (P)
N (p) w (Q,p) d
fh (Q,P) (P)d (P) hwp s w
i
Γ= =
Γ= =
ααΩ
=
Γ=
+ Γ +
= Γ +
+λ Ω
+ Γ +
∑ ∑∫
∑ ∑∫
∑ ∫
∑∫
p U
u P
W
F U
ΦΦΦΦ
ΦΦΦΦ
ξξξξ
ΦΦΦΦ
(5.43)
onde,
1
2T N 1 2
j 1n 1 2 n
2n
w
w(P) 0 0 w(P) (P)(P) (P)
(P) (P) (P)0 0
φ φ = = = θ φ φ θ
θ
u UΦΦΦΦ
(5.44)

131
1n2
n nT N 1 2j 1
n 1 2 n2n
V
V (P) 0 0 V(P) (P)(P) (P)
M (P) (P) (P)0 0 M
M
φ φ = = Φ = φ φ
p p
(5.45)
1
2m
3
m
w
w
w
α
=
W
(5.46)
p p pm 1 2 3 m
αξ = ξ ξ ξ (5.47)
N = 1,2, pontos nodais do elemento j
Os cinco primeiros termos da equação (5.43) são os mesmos do problema de
primeira ordem de placas. As integrais multiplicadas por λ representam as influências
das cargas contidas no plano da placa e surgiram devido à utilização da teoria de
segunda ordem de placas.
5.5.3.1.1 Parcelas referentes aos efeitos de segunda ordem na equação integral
Analisam-se a seguir as parcelas multiplicadas por λ , da equação (5.43).
Reescrevem-se abaixo estas parcelas:
ce
m
e
j
N* p
ij ,ij m mm 1
N* T N *
j i ij 1
N (p)w (Q,p) d
fh (Q,P) (P)d (P) hwp s w
i
ααΩ
=
Γ=
λ Ω
+ Γ +
∑∫
∑∫
W
F U
ξξξξ
ΦΦΦΦ
(5.48)
5.5.3.1.2 Primeira parcela da equação (5.48)
Da equação (5.48), tem-se a seguinte integral de domínio:
ce
m
N* p
ij ,ij m mm 1
N (p)w (Q,p) d ααΩ
=
Ω∑∫ Wξξξξ (5.49)

132
Os esforços ( )ijN p são conhecidos, pois são calculados no problema de primeira
ordem de chapas, ou seja, no cálculo não se consideram os efeitos de flexão nas
equações de equilíbrio no plano de chapa.
Tendo em vista que as forças de membrana são determinadas em pontos
discretos, por exemplo, nos vértices das células, então para um ponto p no interior de
uma determinada célula o esforço ( )ijN p é obtido pela interpolação desses valores,
isto é:
( ) ( )pij ijN p Nγ γ
= ξ (5.50)
onde,
( )ijNγ são as forças de membrana nos vértices 1,2,3γ = da célula mΩ ,
pγξ são as funções de interpolação lineares, que no caso são as próprias
coordenadas de área.
Levando-se (5.50) em (5.49) e sabendo-se que * *,ij , jiw w= , vem,
ce
m
ce ce
m
N* p
ij ,ij m mm 1
N Np * p m
ij ,ij m m mm 1 m 1
N (p)w (Q,p) d
(N ) w (Q,p) d (Q)
ααΩ
=
α αγ γ αΩ
= =
Ω
= ξ Ω =
∑∫
∑ ∑∫
W
W f W
ξξξξ
ξξξξ
(5.51)
onde,
m1 2 3 m
(Q) f f f=f
(5.52)
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
( ) ( ) ( )
m
m
p *ij ,ij m
p * * *1 11 ,11 12 ,12 22 ,221 1 1
p * * *2 11 ,11 12 ,12 22 ,222 2 2
p * * * p3 11 ,11 12 ,12 22 ,22 m3 3 3
f N w Q,p d
N w 2 N w N w
N w 2 N w N w
N w 2 N w N w d
α γ αΩ γ
Ω
α
= ξ ξ Ω
= ξ + +
+ ξ + +
+ ξ + + ξ Ω
∫
∫
(5.53)
A expressão (5.53) também pode ser escrita como,
11 12 22f f f fγα γα γαα = + + (5.54)

133
onde,
( )m
p * p11 11 ,11 mf N w dγα
Ω γ αγ= ξ ξ Ω∫ (5.55a)
( )m
p * p12 12 ,12 mf 2 N w dγα
Ω γ αγ= ξ ξ Ω∫ (5.55b)
( )m
p * p22 22 ,22 mf N w dγα
Ω γ αγ= ξ ξ Ω∫ (5.55c)
As funções p peγ αξ ξ dependem de q qr, , eγ αθ ξ ξ , segundo a expressão (5.34).
Porém, para cada ponto de carga (“load Point”), pontos Q ou q, as parcelas
q qeγ αξ ξ são constantes, para qualquer ponto da célula, pois são valores que estão fora
do domínio mΩ ou no máximo nos vértices da célula, dependendo portanto, apenas
das coordenadas do ponto q e dos vértices da célula. Conseqüentemente, estas parcelas
podem sair da integral.
Em relação a r e θ há variação na célula, de acordo com o ponto “p” que se
considere. Portanto, dentro das integrais (5.55) restarão termos que são funções de r e
θ . Com isso, é conveniente realizar uma mudança de variáveis da seguinte forma:
( ) ( )m m rf r. d f r. r dr dΩ θθ Ω = θ θ∫ ∫ ∫ (5.56)
As curvaturas fundamentais segundo Calderón (1991) podem ser escritas como
segue,
( ) ( )*,ij ,i , j ij
1w Q,p r r ln r
4 D= + δ
π (5.57)
onde,
ijδ é delta de Kronecker
Para exemplificar os cálculos das expressões (5.55) considere-se a primeira
destas. Substitui-se (5.34), (5.57) e levando-se em conta (5.56), resulta o seguinte:

134
( ) ( )
] ( )
( ) ( )
( ) ( ) ( )
( ) ( )
q11 11 ,1 ,1r
q
q q11 r ,1 ,1
2q
11 ,1 ,1r
2q
11 ,1 ,1r
1 rf b cos c sen N r r
4 D 2A
rln r b cos c sen r dr d
2A
1N r r ln r rdrd
4 D
rN r r ln r b cos c sen drd
2A
rN r r ln r b cos
2A
γα γ γγ γθ
α αα
γ α θγ
α αγ γ θ
γα γ θ
= ξ + θ + θ π
+ ξ + θ + θ θ
= ξ ξ + θπ
+ ξ + θ + θ θ
+ ξ + θ
∫ ∫
∫ ∫
∫ ∫
∫ ∫ ( )
( ) ( ) ( )(
)
3
11 ,1 ,1 2r
c sen drd
rN r r ln r b cos c sen b cos
2A
c sen drd
γ
γ γ α
γ θ
α
+ θ θ
+ + θ + θ θ
+ θ θ
∫ ∫
(5.58)
Note-se em (5.58) que os produtos de termos com índice ou expoente repetidos
em “ γ “ significam somatório, com 1,2,3γ = .
Os limites de integração das integrais de (5.58) são obtidos a partir da Figura
5.15.
V1
ξ 3 0p =
ξ1 0p =ξ2 0p =
θ θ2
θ θ1 = i
θ θ3 = f
R Rf ( )θ = 2
R Rf i−
R Ri ( )θ = 1
V2
V3
q
Figura 5.15 - Limites de integração de r e θ

135
OBS. Na Figura 5.15 as numerações de R e θ não têm concordância com a numeração
dos vértices e sim com a seqüência em ordem crescente de R e θ.
Observe-se também que na Figura 5.15 o limite inferior de R fica indefinido,
dependendo do lado da célula que se considere, gerando dois intervalos de integração.
Impondo-se na expressão (5.34), p 0αξ = , obtém-se os limites de integração
1 2R e R , isto é:
p2 3
p1
1 p2
R 0
0R dois intervalos
0
→ ξ =
ξ =→
ξ =
Para se evitar o cálculo das integrais com dois intervalos, divide-se a célula em
duas sub-células de modo a resultar numa soma de integrais. Quando
1 2 2 3ouθ = θ θ = θ não é necessário utilizar este artifício.
A divisão da célula é feita prolongando-se a reta, que resulta do ângulo θ2, do
ponto q até o lado 1 2V V , de acordo com a Figura 5.16.

136
São considerados que nas sub-células m1 e m2 os ângulo θ e as distâncias R
obedecem às seguintes relações:
Figura 5.16 – a) célula m dividida nas sub-células 21 mem
b) sub-célula 1m com os novos valores de θ e R
c) sub-célula 2m com os novos valores de θ e R
q
θ2 θ1
m2 c) 2
3
R1 R2
1
indica o sentido anti-horário da numeração dos vértices
q
1
θ2 θ1
m1 b)
2
3
R1 R2
θ3
V2
V3
q
V1
θ2 θ1
m1
m2 a)

137
2 1
2 1R R
θ > θ
> (5.59)
Desta forma, as integrais de (5.58) são transformadas numa soma das integrais
sobre as sub-células m1 e m2, ou seja:
1 2
11 11 11m m mf f fγα γα γα = = (5.60)
com limites de integração definidos para cada sub-célula.
Após a integração em R tem-se para uma sub-célula mi a seguinte expressão:
( )
( )(
)
( )( )
2
1i
2
1
2
1
2q q 22
11 11 2m
q21121
1
3 32 22 1
2 1
q11
R1 1f N ln R cos
4 D 2 2
NR 1ln R cos d b cos
2 2 2A
R R1 1c sen cos ln R cos ln R d
3 3 3 3
Nb cos c sen
2A
θγαγ α γ θ
θγ γ α
θ
α
θα γ γ γ
θ
= ξ ξ − + θ π
ξ − − + θ θ + θ
+ θ θ + − − θ + − θ
ξ+ θ + θ
∫
∫
∫
( )( )(
)
2
1
322
2
31121
1 2
4 42 22 1
2 1
R 1cos ln R
3 3
NR 1cos ln R d b cos c sen b cos
3 3 4A
R R1 1c sen cos ln R cos ln R d
4 4 4 4
θγ γ γ α
θ
α
θ + −
− θ + − θ + θ + θ θ
+ θ θ + − − θ + − θ
∫
(5.61)
onde o índice mi pode representar m1 ou m2, o raio R1 é sempre obtido para p2 0ξ = ,
segundo (5.34) e R2 > R1.
As integrais de (5.61) podem ser transformadas em integrais numéricas através
da mudança da variável θ para uma variável adimensional η. Isto pode ser feito por
meio de uma interpolação linear entre θ e η, da seguinte forma:
a bη = θ + ,

138
resultando as seguintes relações:
2 1
2 1
2
2
θ + θ η = θ − θ − θ
; 2 1 2 1
2 2
θ − θ θ + θθ = η + (5.62)
2 1d d2
θ − θθ = η (5.63)
Substituindo-se (5.62) e (5.63) em (5.61) tem-se:
( ) ( )
( ) ( )(
i
q q12 1 11 2 2
11 2 21m
q12 1 112 2
1 1 1
N 1f R ln R cos
16 D 2
N1R ln R cos d b cos
2 48 DA
+γ α γγα
−
+γ γ α
−
θ − θ ξ ξ = − + θ π
θ − θ ξ − − + θ η + θ π
∫
∫
)
( ) ( )( )
3 2 3 22 2 1 1
q12 1 11 3 2
2 21
1 1c sen R cos ln R R cos ln R d
3 3
N 1b cos c sen R cos ln R
48 DA 3
α
+α γ γ γ
−
+ θ θ + − − θ + − η
θ − θ ξ + θ + θ θ + − π
∫
( )( )( )
( )
12 1 113 21 1 2 1
4 2 4 22 2 1 1
N1R cos ln R d b cos c sen
3 128 DA
1 1b cos c sen R cos ln R R cos ln R d
4 4
+γ γ γ
−
α α
θ − θ − θ + − η + θ + θ
π
⋅ θ + θ θ + − − θ + − η
∫
(5.64)
Levando-se (5.64) em (5.60) obtém-se a integral da célula "m".
As outras parcelas de (5.54) são obtidos da mesma forma que a expressão (5.64)
e suas expressões finais são as seguintes:

139
( ) ( )( ) ( )
( ) ( )(
i
q q12 1 11 2 2
12 2 11m
q12 1 11
1
Nf R cos sen R cos sen d
8 D
Nb cos
24 DA
+γ α γγα
−
+γ γ α
−
θ − θ ξ ξ = θ θ − θ θ η π
θ − θ ξ+ θ
π
∫
∫
) ( ) ( )
( ) ( )( ) ( )
3 32 1
q12 1 11 3
21
c sen R cos sen R cos sen d
Nb cos c sen R cos sen
24 DA
α
+α γ γ γ
−
+ θ θ θ − θ θ η
θ − θ ξ+ θ + θ θ θπ ∫
( )
( )( )( )
( ) ( ) ( )
12 1 1131 2 1
4 42 1
NR cos sen d b cos c sen
64 DA
b cos c sen R cos sen R cos sen d
+γ γ γ
−
α α
θ − θ− θ θ η + θ + θ π
⋅ θ + θ θ θ − θ θ η
∫
(5.65)
( ) ( )
)( ) ( )
( ) (
( ) ( )
i
q q12 1 11 2 2
22 2 2 1 11m
q12 1 11 3
21
q2 1 113
2 1 1
N 1 1f R lnR sen sen R lnR
16 D 2 2
Nsen sen d b cos c sen R sen sen
48 DA
N1 1lnR R sen sen lnR d b
3 3 48 DA
+γ α γγα
−
+γ γ α α
−
α γ
θ −θ ξ ξ = − + θ θ − − π
θ −θ ξ+ θ θ η+ θ+ θ θ θ π
θ −θ ξ + − − θ θ+ − η+ π
∫
∫
(
)
( )( )( )( )
1
1
3 32 2 1 1
12 1 11
2 1
4 42 2 1 1
cos
1 1c sen R sen sen lnR R sen sen lnR d
3 3
Nb cos c sen b cos c sen
128 DA
1 1R sen sen lnR R sen sen lnR d
4 4
+ γ
−
γ
+γ γ γ α α
−
θ
+ θ θ θ+ − − θ θ+ − η
θ −θ+ θ+ θ θ+ θ
π
⋅ θ θ+ − − θ θ+ − η
∫
∫
(5.66)
Observe-se, novamente, que o produto de variáveis com índice repetido γ
significa somatório, 1,2,3γ = e que se deve calcular θ com a expressão (5.62) .

140
5.5.3.1.3 Segunda parcela da equação (5.48)
Da equação (5.48) tem-se a seguinte integral:
e
j
N* T N
jj 1
h (Q,P) (P)d (P)Γ
=
Φ Γ∑∫ F U
(5.67)
que, também pode ser escrita da seguinte forma:
eN
j Nj
j 1=∑F U (5.68)
onde,
j j j j j11 12 21 22F F F F=F (5.69)
com
j
jnk n k jF h F d
Γ= φ Γ∫ (5.70)
sendo,
( )
n
* * *1 i i i i n i i s,s
1 incógnita"w" n
2 incógnita " "
k 1,2 pontos nodais do elemento j
F p s w p p s
⇒=
⇒ θ
= ⇒
= − + η θ + θ
(5.71)
*2 i iF p w= η (5.72)
Após a derivação do primeiro termo de (5.71) , tem-se:
* * *i1 i i i s i i n
pF w s 2p s p
s
∂ = − + θ + η θ ∂
(5.73)
A partir de (5.70) determinam-se as expressões de j j1k 2kF e F .
j j
j * * *i1k 1 k j i i i s i i n k j
pF h F d h w s 2p s p d
sΓ Γ
∂ = φ Γ = − + θ + η θ φ Γ ∂ ∫ ∫ (5.74)
As cargas pi podem ser aproximadas linearmente em função de seus valores
nodais da seguinte forma:

141
i ip p ; 1,2= φ =
(5.75)
Da Figura 5.17 obtém-se:
s s
∂φ ∂φ ∂ξ=
∂ ∂ξ ∂ (5.76)
s2
= ξ
(5.77)
2
sξ =
(5.78)
De acordo com as expressões (5.25) a (5.29) há diferentes expressões para (5.76)
dependendo do elemento que for considerado, contínuo, descontínuo ou misto.
1
s
2
s
DFI1
DFI2
∂φ=
∂
∂φ=
∂
(5.79)
e substituindo-se (5.79) em (5.74) obtém-se:
( )j
j * 1 2 * *1k i i i i i s i i n k jF h w s p DFI1 p DFI2 2 p s p d
Γ = − + + φ θ + φ η θ φ Γ ∫
(5.80)
que pode ser escrita como,
Figura 5.17 – Transformação de coordenadas.
s2
=
1+=ξ
1−=ξ
ξ
s2
= −
s

142
( )
( )
( )
j
j
j
j * * * |1k 1 s 1 1 n 1 1 k j |
| * * * || 2 s 2 1 n 2 1 k j |
| * * * || 1 s 1 2 n 1 2 k j |
F h w s DFI1 2 s d
h w s DFI1 2 s d
h w s DFI2 2 s d
Γ
Γ
Γ
= − + θ φ + θ η φ φ Γ
− + θ φ + θ η φ φ Γ
− + θ φ + θ η φ φ Γ
∫
∫
∫
( )
1
1
1
2
2
1
2
2
j
|| * * *| 2 s 2 2 n 2 2 k j
|
p
ph w s DFI2 2 s d
p
p
Γ
− + θ φ + θ η φ φ Γ
∫
(5.81)
ou
1112j j1 j1 j2 j2
1k 1k1 1k2 1k1 1k2 2122
p
pF F F F F
p
p
=
(5.82)
onde, jt1kdF tem os seguintes índices e expoentes:
j ⇒ elemento Γj
t ⇒ nó da carga pi (nó 1, t =1; nó 2, t =2
1 ⇒ corresponde à incógnita w e quando for 2 à θn
k ⇒ nó da resposta (1 e 2)
d ⇒ direção da carga ( )1 2p d 1;p d 2⇒ = ⇒ =
então, pode-se escrever:
( )jt
1kdj
* * *d t s d t n d t k jF h w s DFI 2 s n d
Γ= − + θ φ + θ φ φ Γ∫ (5.83)
Quando for possível integrar numericamente, ou seja, quando não houver
singularidade, é necessário transformar as coordenadas, Figura 5.18.

143
Da Figura 5.18. têm-se:
r
2
d d2
= ξ
Γ = ξ
(5.84)
Substituindo-se (5.84) em (5.83) resulta,
( )1
jt
1kd1
* * *d t s d t n d t k
hF w s DFI 2 s n d
2
+
−
= − + θ φ + θ φ φ ξ∫
(5.85)
Analogamente, determina-se a expressão de j
2kF . Segundo (5.70) e (5.72), obtém-
se:
j2k
j j
*2 k j i i k jF h F d h p w d
Γ Γ= φ Γ = η φ Γ∫ ∫ (5.86)
Aproximando-se ip pela equação (5.75), resulta,
( ) ( )j2k
j
* 1 2 1 21 1 1 1 2 2 2 1 2 2 k jF h w p p p p d
Γ = η φ + φ + η φ + φ φ Γ ∫ (5.87)
que pode ser escrita como,
Figura 5.18 – Transformação de coordenadas.
r2
=
1+=ξ
1−=ξ
ξ
r2
= −
r

144
1112j j1 j1 j2 j2
2k 2k1 2k2 2k1 2k2 2122
p
pF F F F F
p
p
=
(5.88)
onde,
jt2kdF , tem o mesmo significado de (5.82), porém são coeficientes relacionados à
incógnita nθ , que corresponde ao índice 2 de jt2kdF , e é dado por:
jt2kd
j
*d t kF h w d
Γ= η ϕ ϕ Γ∫ (5.89a)
ou, se a integração for numérica, com (5.84) em (5.89a) tem-se:
jt2kd
1 *1 d t k
hF w d
2+−= η ϕ ϕ ξ∫
(5.89b)
5.5.3.1.4 Terceira parcela da equação (5.48)
Da expressão (5.48) tem-se a seguinte parcela:
f
i
*i ih w p s w (5.90)
Considerando-se a Figura 5.19 e levando-se em conta apenas a contribuição dos
lados "a" e "b" na expressão (5.90), chega-se a
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( )( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )( )
* *i i i i
* *i i i i
h w k w k p k s k w k 1 w k 1 p k 1 s k 1
w k 1 w k 1 p k 1 s k 1 w k w k p k s k
− − − − + + + +
− − − − + + + +
− − − − −
+ + + + + −
(5.91)
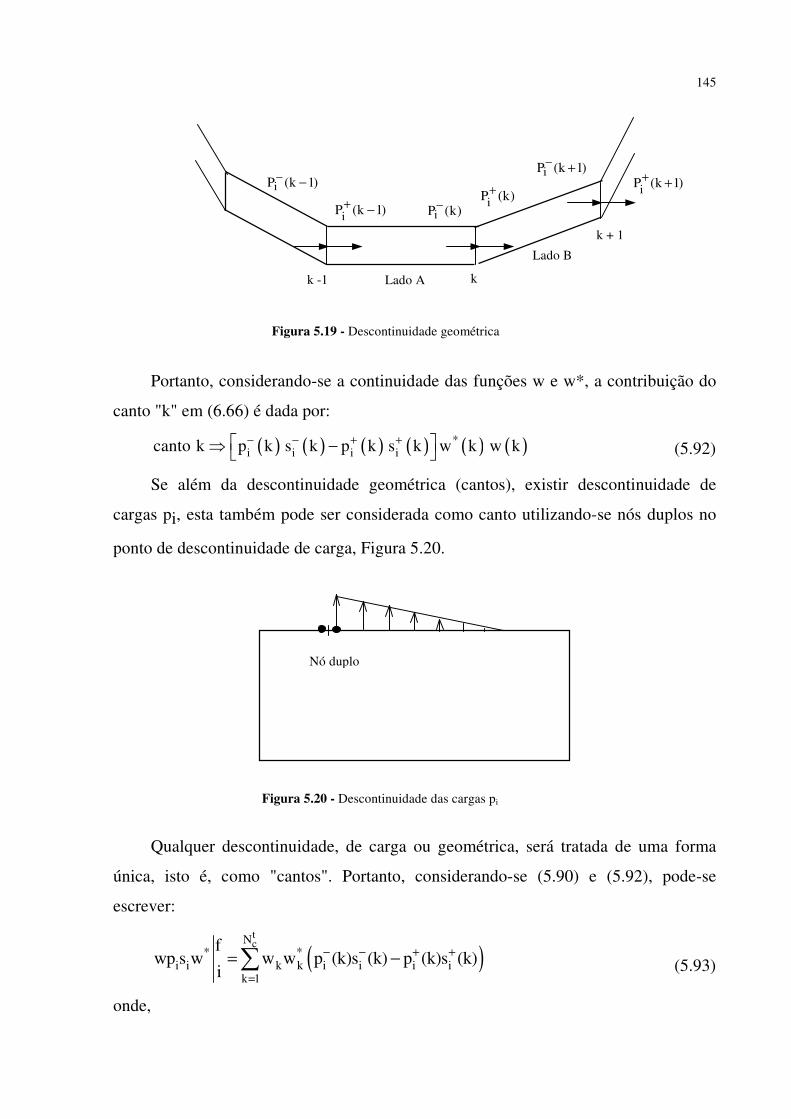
145
Portanto, considerando-se a continuidade das funções w e w*, a contribuição do
canto "k" em (6.66) é dada por:
( ) ( ) ( ) ( ) ( ) ( )*i i i icanto k p k s k p k s k w k w k− − + + ⇒ − (5.92)
Se além da descontinuidade geométrica (cantos), existir descontinuidade de
cargas pi, esta também pode ser considerada como canto utilizando-se nós duplos no
ponto de descontinuidade de carga, Figura 5.20.
Qualquer descontinuidade, de carga ou geométrica, será tratada de uma forma
única, isto é, como "cantos". Portanto, considerando-se (5.90) e (5.92), pode-se
escrever:
( )tcN
* *i i k k i i i i
k 1
fwp s w w w p (k)s (k) p (k)s (k)
i− − + +
=
= −∑ (5.93)
onde,
Figura 5.19 - Descontinuidade geométrica
)1k(Pi −−
k + 1
k k -1
)1k(Pi −+)k(Pi
+
)k(Pi−
)1k(Pi +−
)1k(Pi ++
Lado A
Lado B
Figura 5.20 - Descontinuidade das cargas pi
Nó duplo

146
t cargasc c cN N N= +
cN = número de cantos geométricos
cargascN =número de cantos de cargas
A parcela (5.93) poderá contribuir nos coeficientes relativos, tanto nas incógnitas
"wc" dos cantos quanto nas incógnitas "w" do contorno.
Finalmente, considerando-se (5.51), (5.70) e (5.93), a expressão (5.43) pode ser
escrita na seguinte forma:
( )
e c
j
e c
j
ce e
tc
N N* T N *
j ci cij 1 i 1
N N* T N *
j ci cij 1 i 1
`N `Nm j N
m jm 1 j 1
N*
k k i i i ik 1
K(Q)w(Q) (Q,P) (P)d (P) R (Q,P) w (P)
(Q,P) (P)d (P) w (Q,P)R (P)
(Q) (Q)
w w p (k)s (k) p (k)s (k)
Γ= =
Γ= =
α
= =
− − + +
=
+ Φ Γ +
= Φ Γ +
+λ +
+ −
∑ ∑∫
∑ ∑∫
∑ ∑
∑
p U
u P
f W F U (5.94)
Após a consideração de todos os elementos do contorno e de todas as células
internas, a equação (5.94) fica:
f
c c c c
d d
K(Q)w(Q) (Q) (Q) (Q) (Q) (Q)
(Q) (Q)
+ = + λ
+λ + λ
H U + H W G P + G R f W
F U F W
(5.95)
O deslocamento ( )w Q pode ser escrito em função dos deslocamentos U do
elemento ao qual pertence o ponto "Q". Com isso, a equação (5.95) fica,
f
c c c c
d d
(Q) (Q) (Q) (Q) (Q)
(Q) (Q)
= + λ
+λ + λ
H U + H W G P + G R f W
F U F W
(5.96)
onde,
1 n nN NT 1n nw ........w = θ θU (5.97)
nNT 11 n n nV M ........V M=P (5.98)
cNT 1 2c c c cw w ........w=W (5.99)

147
cNT 1 2c c c cR R ........R=R (5.100)
Tf i
c = W W W W (5.101)
com,
⇒W deslocamentos nos pontos nodais do contorno
c ⇒W deslocamentos nos cantos
i ⇒W deslocamentos nos pontos internos
Td
c = W W W (5.102)
5.5.3.2 Equações integrais para os pontos externos ao contorno
Estas equações são análogas à equação (5.95). A única diferença, segundo a
equação (5.6), está no valor de K(Q). Chamando o ponto externo de "A" tem-se:
( )K A 0=
5.5.3.3 Equações integrais para os cantos da placa
Também aqui, a única diferença de (5.95) está no coeficiente K(Q). Chamando o
canto "i" da placa de "ci", da equação (5.6), tem-se:
( )K ci2
β=
π
onde,
β é o ângulo interno ao ponto ci
5.5.3.4 Equações integrais para os pontos internos
Analogamente aos casos anteriores, a única diferença em relação à equação
(5.95), segundo a equação (5.6), está no coeficiente K(Q). Denominando-se o ponto
interno de "q", tem-se:
( )K q 1=

148
5.5.3.5 Integração sobre os elementos
A análise feita aqui se refere às integrais sobre o contorno multiplicadas pelo
fator de carga λ, da equação (5.48), já que as demais integrações sobre os elementos se
encontram analisadas em Calderón (1991).
Estas integrais são tratadas no item 5.6.1.3. Neste item verifica-se a necessidade
de determinar as integrais dadas por (5.83) e (5.89a), reescritas abaixo:
( )j
j * * *1kd d t s d n d k jF h w s DFI 2 s d
Γ= − + θ φ + θ η φ φ Γ∫
(5.83)
j
j *2kd d kF h w d
Γ= η φ φ Γ∫
(5.89a)
De acordo com a Figura 5.21 não haverá singularidade nas integrais anteriores,
enquanto o elemento que se está integrando Γj for diferente do elemento que contém o
ponto de carga Q no contorno. Neste caso, estas integrais podem ser avaliadas
numericamente, por exemplo, através da quadratura de Gauss, por meio das expressões
(5.84) e (5.89b). Caso contrário, se Q ∈ Γj, a integração será feita analiticamente.
Figura 5.21 - Pontos de carga Q no contorno e integração dos elementos Γj
Q
P
r = (Q,P)
jΓ

149
Para avaliar analiticamente as integrais (5.83) e (5.89) utilizam-se as funções
keφ φ
correspondentes ao elemento descontínuo, dados pelas equações (5.27). Estas
funções têm a vantagem de representar tanto o elemento descontínuo quanto os
elementos contínuo e misto, dependendo dos valores de ξ1 e ξ2
Quanto a DFI , dado por (5.79), têm-se:
1 11DFI
s s
∂φ ∂φ ∂ξ= =
∂ ∂ξ ∂ (5.103a)
2 22DFI
s s
∂φ ∂φ ∂ξ= =
∂ ∂ξ ∂ (5.103b)
Considerando-se, a Figura 5.22 e as expressões (5.27), têm-se:
( )1
2 1
2DFI
−=
ξ − ξ (5.104a)
( )21 2
2DFI
−=
ξ − ξ (5.104b)
onde,
1 2,ξ ξ são as posições dos pontos nodais
é o comprimento do elemento
Figura 5.22 – Transformação de coordenadas de sparaξ
s2
=
1+=ξ
1−=ξ
ξ
s2
= −
s
2ξ
1ξ
s2
2s
= ξ
ξ =

150
Como as funções keφ φ
são escritas em função da coordenada admensional ξ
e as soluções fundamentais w*, * *s neθ θ são funções de r(Q,P), então é necessário
transformar as coordenadas de ξ para r(Q,P). Para este fim utiliza-se a Figura 5.23.
Da Figura 5.23, têm-se:
1o trecho: r a
2r a então, (r a)
2
Γ = += Γ + ⇒ ξ = + Γ = ξ
2o trecho: a r
2r a entao, (a r)
2
Γ = −= − Γ ⇒ ξ = − Γ = ξ
As soluções fundamentais são dadas a seguir:
* 21w r (ln r 1 / 2)
8 D= −
π (5.105)
* *
*s
w w r
s r s
∂ ∂ ∂θ = =
∂ ∂ ∂ (5.106a)
FIGURA 5.23 - Transformação de coordenadas de ξ para r(Q,P)
• • • • *
Q ξΓ,
η
1ξ 2ξ
1
2
ξ = −
Γ = −
1
2
ξ = +
Γ =
a2
= ξ
Γ−= ar
Γ−= ddrΓ= ddr
r r
1o trecho 2o trecho
•
r a= Γ +
OBS. “a” é a coordenada do ponto de carga “Q”
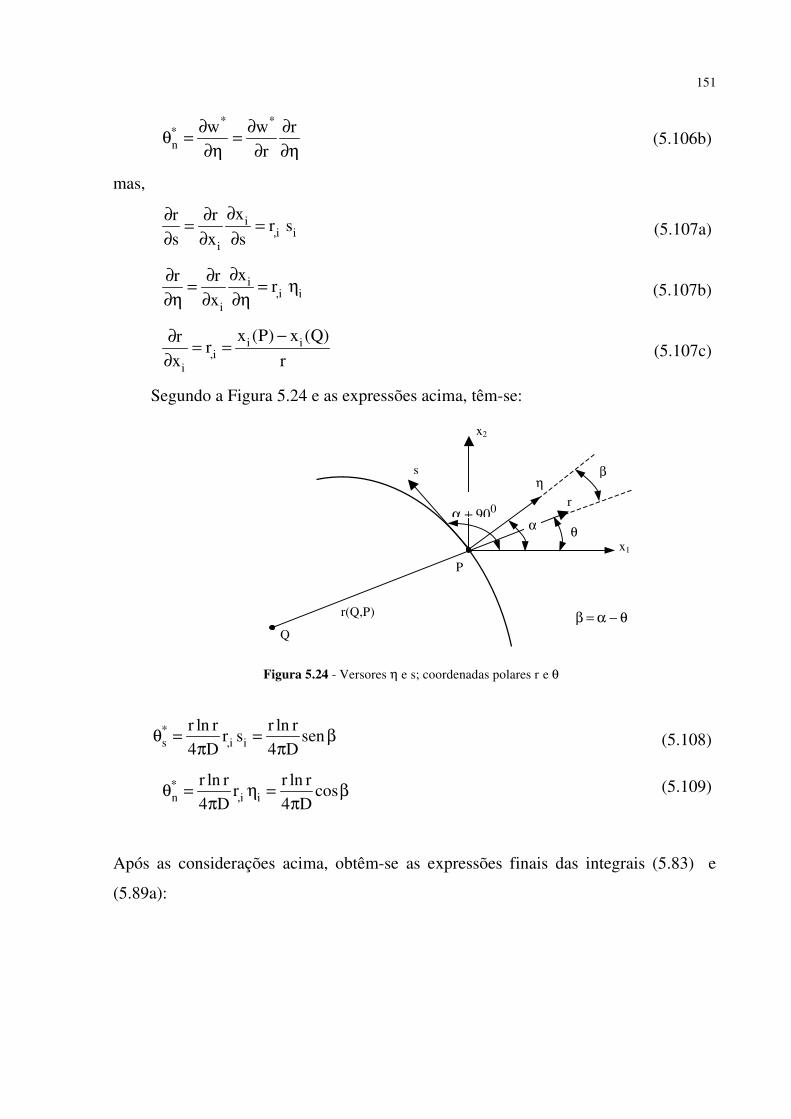
151
* *
*n
w w r
r
∂ ∂ ∂θ = =
∂η ∂ ∂η (5.106b)
mas,
i,i i
i
xr rr s
s x s
∂∂ ∂= =
∂ ∂ ∂ (5.107a)
i,i i
i
xr rr
x
∂∂ ∂= = η
∂η ∂ ∂η (5.107b)
i i,i
i
x (P) x (Q)rr
x r
−∂= =
∂ (5.107c)
Segundo a Figura 5.24 e as expressões acima, têm-se:
*s ,i i
r ln r r ln rr s sen
4 D 4 Dθ = = β
π π
(5.108)
*n ,i i
r ln r r ln rr cos
4 D 4 Dθ = η = β
π π (5.109)
Após as considerações acima, obtêm-se as expressões finais das integrais (5.83) e
(5.89a):
Figura 5.24 - Versores η e s; coordenadas polares r e θ
x2
x1
Q
P
r(Q,P)
s
r
η
P090α + α
θ
θ−α=β
β

152
A) Expressões jt1kdF
( )( ) ( )
( ) ( ) ( ) ( )
( ) ( )
2j1 3d
11d 2 1 122 1
23 2 22 2 2 1 1 2 2
4 41 2
1 2
s 7F 3 ln
184 D
7 1ln ln ln
18 2
120ln 7 20ln 7
2 8 8
= ξ − ξ φ φ − π ξ − ξ
+φ φ − − ξ − ξ φ φ − − φ φ
φ φ − − φ − + φ −
(5.110a)
( )( ) ( )
( ) ( ) ( ) ( )
( ) ( )
2j2 3d
12d 1 1 121 2
23 2 22 2 1 1 1 2 2
4 41 2
1 2
s 7F 3 ln
184 D
7 1ln ln ln
18 2
120ln 7 20ln 7
2 8 8
= ξ − ξ φ φ − π ξ − ξ
+φ φ − − ξ − ξ φ φ − − φ φ
φ φ − − φ − + φ −
(5.110b)
( )
( )( )
( ) ( )( ) ( ) ( )
( ) ( ) ( )
( )
22j2 3d
11d 1 122 1
3 2 22 2 2 1 1 1 2 2
3 31 2 1 1 2 2
4 41 2
1
s 5F ln
3 64 D
5 1ln ln ln
6 2
1 4 1 12 ln ln
2 3 3 3
20ln 7 20ln8 8
ξ − ξ = − φ φ − π ξ − ξ
+φ φ − − ξ − ξ ξ − ξ φ φ − − φ φ
− + ξ + ξ − ξ φ θ − + φ φ −
φ φ − φ − +
( )2 7
φ −
(5.110c)

153
( )
( )( )
( ) ( )( ) ( ) ( )
( ) ( ) ( )
( )
21j1 3d
12d 1 122 1
3 2 22 2 2 1 1 1 2 2
3 31 2 1 1 2 2
4 41 2
1
s 5F ln
3 64 D
5 1ln ln ln
6 2
1 4 1 12 ln ln
2 3 3 3
20ln 7 20ln8 8
ξ − ξ = − φ φ − π ξ − ξ
+φ φ − − ξ − ξ ξ − ξ φ φ − − φ φ
− + ξ + ξ − ξ φ θ − + φ φ −
φ φ − φ − +
( )2 7
φ −
(5.110d)
B) Expressões jt2kdF
( )( ) ( )
( ) ( ) ( ) ( )
( ) ( )
3 32j1 d 1
21d 2 122 1
34 42
2 2 1 1 2 2
5 51 2
1 2
F 6ln 5188 D
36ln 5 ln ln
18 4
320ln 14 20ln 14
4 25 25
η φ = − ξ − ξ φ −
π ξ − ξ
φ + φ − − ξ − ξ φ φ − − φ φ
φ φ − + φ − + φ −
(5.111a)
( )( ) ( )
( ) ( ) ( ) ( )
( ) ( )
3 32j2 d 1
22d 1 122 1
34 42
2 1 1 1 2 2
5 51 2
1 2
F 6ln 5188 D
36ln 5 ln ln
18 4
320ln 14 20ln 14
4 25 25
η φ = − ξ − ξ φ −
π ξ − ξ
φ + φ − − ξ − ξ φ φ − − φ φ
φ φ − + φ − + φ −
(5.111b)

154
( )( )( ) ( )
( ) ( ) ( ) ( )
] ( ) ( )
3 3j1 j1 d 1
22d 21d 2 1 122 1
3 4 42 1 2
2 1 2 1 2
5 51 2
1 2
F F 6ln 5188 D
6ln 5 2 ln 3 ln18 8 8
3 20ln 14 20ln 1425 25
η φ = = − ξ − ξ ξ − ξ φ −
π ξ − ξ
φ φ φ + φ − − ξ + ξ − ξ φ − − φ
φ φ − + φ − + φ −
(5.111c)
onde,
11
(1 )2
φ = − ξ (5.112a)
21
(1 )2
φ = + ξ , (5.112b)
1 2eξ ξ representam as posições dos pontos nodais no elemento do contorno,
ξ , representa a posição do ponto de carga no elemento de contorno, neste trabalho
adota-se 0.35ξ = ξ = ± ,
d = 1,2 (direções da carga dp ),
t = como expoente vale 1,2 (ponto nodal onde está aplicada dp ),
k = 1,2 (pontos nodais da incógnita w ou θn),
j = o elemento de contorno.

155
5.6 SISTEMAS DE EQUAÇÕES ALGÉBRICAS DO PROBLEMA DE
FLAMBAGEM DE PLACAS
5.6.1 Introdução
Da exposição do item 5.5.1 verifica-se que as incógnitas do problema são: w e
nθ para cada ponto nodal do contorno, wc para cada canto da placa e wi para cada
vértice das células interno ao domínio da placa.
Conseqüentemente, como serão utilizadas apenas equações integrais de
deslocamento vertical "w", para que o sistema de equações seja determinado serão
necessárias escrever: Nn equações integrais nos pontos de carga do contorno, Nn
equações integrais para pontos de carga externos ao domínio, Nc equações integrais
nos pontos de cargas correspondentes aos cantos, e Ni equações integrais nos pontos
de carga internos ao domínio. Sendo que, Nn é o número de pontos nodais do
contorno. Nc é o número de cantos da placa e Ni é o número de vértices de células que
estão internos ao domínio da placa. Na Figura 5.25. encontram-se todos esses pontos
de cargas.
5.6.2 Sistema de equações
Considerando-se a equação (5.96) e as seções 5.6.2 a 5.6.4 e 5.7.1, podem-se
escrever:
a) Equações integrais para os pontos "Q" do contorno
f
c c c c
d d
(Q) (Q) (Q) (Q) (Q)
(Q) (Q)
+ = + + λ
+λ + λ
H U H W G P G R f W
F U F W
(5.113)
b) Equações integrais para os pontos "A" e externos ao domínio
f
c c c c
d d
(A) (A) (A) (A) (A)
(A) (A)
+ = + + λ
+λ + λ
H U H W G P G R f W
F U F W
(5.114)

156
c) Equações integrais para os cantos "ci" da placa
f
c c c c
d d
(ci) (ci) (ci) (ci) (ci)
(ci) (ci)
+ = + + λ
+λ + λ
H U H W G P G R f W
F U F W
(5.115)
d) Equações integrais para os pontos "q" internos ao domínio
f
c c c
d d
w(q) (q) (q) (q) (q) (q)
(q) (q)
+ + = + + λ
+λ + λ
cH U H W G P G R f W
F U F W
(5.116)
Para a definição do sistema de equações é necessário utilizar: Nn equações
(5.113), Nn equações (5.114), Nc equações (5.115) e Ni equações (5.116). Agrupando-
se estas equações, exceto as Ni últimas, obtém-se:
Figura 5.25 – Pontos de carga ("load point")
c1
c2
c3
c4
c5
A
A
A
A
A
Q
Q Q
Q Q
q
q
q
2Ω
7Ω
4Ω
6Ω
7Ω
9Ω
6Ω
8Ω
iΩ domínio i
A ponto de carga externo Q ponto de carga no contorno ci ponto de carga no canto i q ponto de carga interno

157
c c c
c ccc c c
d dcc i
c d dcc i cc
i
= + λ
+λ + λ
H H G G F FU P U
W R WH H G G F F
UF Ff f f U
WWf f f F FW
(5.117)
Ou pode-se escrever:
c c
c ccc c c
d dcc i
id dcc ic cc
= + λ
+λ + λ + λ
cH H G G F FU P U
W R WH H G G F F
F Ff f fU UW
W Wf f fF F
(5.118)
onde, as colunas pares de ddc, , , f f F F da expressão (5.118) são nulas, pois
correspondem aos coeficientes de nθ .
Denominando-se:
1
1
Nn
Nnc
1c
Ncc
w
.
.
.
w
w
.
.
.
w
θ
= = θ
UU
W
(5.119a)

158
1n
1n
Nnn
Nnc n
1c
Ncc
V
M
.
.
.
V
M
R
.
.
.
R
= =
PP
R
(5.119b)
1i
i
Nii
w
.
.
.
w
=
W (5.119c)
c
c
=
H HH
H H
(5.119d)
c
c
=
G GG
G G
(5.119e)
d d
cc cd d
c cc
= + +
t
F FF F f fF
F F f fF F (5.119f)
it
i
=
ff
f
(5.119g)
159
Levando-se as equações (5.119) em (5.118), obtém-se:
t i i = + λ + λHU GP F U f W (5.120)
ou,
( ) i iiλ = + λH - F U GP f W (5.121)
Como na equação (5.121) há incógnitas wi, correspondentes aos pontos internos,
então devem-se escrever Ni equações (5.116) para a definição do sistema.
Procedendo-se de forma análoga à equação (5.120), pode-se escrever, após a
consideração de todos os pontos de carga internos:
i i i i i i i ic c c c
c c c c
i di dii i c
c
i
+ = + + λ
+λ + λ
U P U UW H H G G F F f f
W R W W
Uf W F F
W
(5.122)
i i ic = H H H (5.123a)
i i ic = G G G (5.123b)
i i i i i di dit c c c = + + F F F f f F F (5.123c)
a equação (5.122) fica,
i i i ii t i i+ = + λ λW H U G P F U + f W
ou
i i i ii t i i( )+ − λ = + λW H F U G P f W
(5.124)
Reescrevendo-se as equações (5.121) e (5.124), vem,
t i i
i i i ii t i i
( )
( )
− λ = λ
+ − λ = + λ
H F U GP + f W
W H F U G P f W
(5.125)
Após a imposição das condições de contorno no sistema (5.125), isto é,
efetuando-se a troca de colunas entre os coeficientes de e PU , obtêm-se:

160
i i
i ii t i i
( )
( )
ΓΓ ΓΓ ΓΩ
ΩΓ ΩΓ ΩΩ
+ λ = λ
+ + λ = λ
A F X f W
W A F X f W
(5.126)
ou, em forma matricial:
i
i iit i
( )
( ) ( )
ΓΓ ΓΓ ΓΩ
ΩΓ ΩΓ ΩΩ
+ λ −λ =
+ λ − λ
A F f X0
WA F I f
(5.127)
que pode ser escrita de outra maneira:
ii i
i it i
ΓΓ ΓΩΓΓ
ΩΓ ΩΓ ΩΩ
− = λ
−
F fA 0 X X
A I W WF f
(5.128)
ou,
1
ii i
i it i
−
ΓΓ ΓΩ ΓΓ
ΩΓΩΓ ΩΩ
− = λ
−
F f A 0 X X
A I W WF f (5.129)
ou, de forma sucinta:
= λAX X (5.130)
onde,
1
i it i
−
ΓΓ ΓΩ ΓΓ
ΩΓΩΓ ΩΩ
− =
−
F f A 0A
A IF f
(5.131)
i
=
XX
W (5.132)
A equação (5.130) representa um problema de auto-valor que pode ser resolvida
da seguinte forma:
= λAX IX
ou
( ) 0− λ =A I X
(5.133)
Para que o sistema (5.133) tenha solução não trivial, deve-se ter:
det( ) 0− λ =A I (5.134)
Caso a matriz,

161
1
i it i
−
ΓΓ ΓΩ
ΩΓ ΩΩ
− −
F f
F f (5135)
da equação (5.131) não seja inversível, procede-se como segue. Da equação (5.128),
tem-se:
1
i ii it i
−
ΓΓ ΓΩΓΓ
ΩΓ ΩΓ ΩΩ
− = λ
−
F fX A 0 X
W A I WF f
(5.136)
ou, pode-se escrever:
= λX BX
ou,
1
=λ
X BX
(5.137)
1
( )− =λ
B I X 0 (5.138)
Para que o sistema (5.138) tenha solução não trivial, deve-se ter:
1
det( )−λ
B I (5.139)
onde o auto-valor do problema será 1
λ.

162
6 RESULTADOS COMPUTACIONAIS
6.1 INTRODUÇÃO
Neste capítulo apresentam-se as implementações das teorias desenvolvidas
nessa pesquisa, que possibilitarão a obtenção de resultados numéricos. Todas as
implementações foram realizadas em Linguagem Fortran.
6.2 SISTEMA DE APLICAÇÃO DO MEC EM PLACAS (SAMECP)
A consideração dos efeitos de segunda ordem em placas envolve, inicialmente,
as análises das teorias de primeira ordem em chapas e placas e posteriormente o
acoplamento das duas teorias. De forma a se ter segurança na implementação da teoria
de segunda elaborou-se, primeiramente, três programas de primeira ordem. Com a
confiabilidade obtida por esses programas desenvolveu-se o programa de segunda
ordem. Figura 6.1 apresenta a arquitetura do Sistema SAMECP.
Figura 6.1- Arquitetura do sistema de solução dos efeitos de segunda ordem em placas pelo
SISTEMA DE APLICAÇÃO DO MEC EM PLACAS (SAMECP)
Esse sistema é composto por quatro sistemas independentes que geram resultados para várias aplicações e ainda permite a comparação entre os resultados da teoria de primeira ordem e os da segunda ordem.
SISTEMA LINEAR CHAPA (SLC) Esse sistema gera deslocamentos, tensões e deformações de chapas com qualquer condição de contorno.
SISTEMA LINEAR PLACA1 (SLP1)Esse sistema gera deslocamentos, esforços, tensões e deformações de placas com qualquer condição de contorno. Considera na implementação as equações integrais de
ww e
n
∂
∂.
SISTEMA LINEAR PLACA2 (SLP2) Esse sistema gera deslocamentos, esforços, tensões e deformações de placas com qualquer condição de contorno. Considera na implementação apenas a equação integral de w .
SISTEMA NÃO-LINEAR PLACA (SNLP) Esse sistema gera deslocamentos, esforços, tensões e deformações de placas com qualquer condição de contorno, considerando os efeitos de segunda ordem. Na implementação utiliza-se apenas a equação integral de w .

163
6.2.1 SISTEMA LINEAR CHAPA (SLC)
Para resolver problemas de chapas em teoria de primeira ordem pelo Método dos
Elementos de Contorno foi elaborado um programa ELASTO. FOR, contendo em
torno de 1300 linhas, constituído pelas seguintes sub-rotinas:
a) Entrada de dados: ENTRANO.FOR
Esta sub-rotina faz a leitura do arquivo de dados que definem o problema:
- Dados referentes à discretização pretendida: Número de nós e de elementos,
coordenadas nodais, incidência dos elementos e dos nós e tipo de elemento (linear,
constante ou parabólico);
- Carregamentos e condições de contorno: valor da carga, região da aplicação da carga,
vinculação dos pontos do contorno;
- Características dos materiais: Módulo de Elasticidade do material, E, coeficiente de
Poisson, ν;
- Tipo de Análise: Estado plano de tensões ou de deformações.
b) Montagem do Sistema de Equações: sub-rotina MATRIZD.FOR
As matrizes H e G, da equação 2.33, são geradas através da sub-rotina
MATRIZD.FOR. As integrações necessárias são realizadas pela sub-rotina
INTEGRD.FOR. Após a obtenção daquelas matrizes são impostas as condições de
contorno do problema, o que permite a obtenção das matrizes A e B, da equação 2.34.
c) Resolução do Sistema de Equações Algébricas: sub-rotina RESOLVE.FOR
O sistema de equações 2.34 é resolvido pelo processo de Gauss, obtendo-se
assim o vetor das incógnitas no contorno, X. Este vetor pode conter esforços ou
deslocamentos nos nós do contorno.
d) Cálculo dos esforços e deslocamentos nos pontos internos: sub-rotina
SAINCOG.FOR
Após a obtenção das incógnitas no contorno, X, a sub-rotina SAINCOG.FOR
gera os esforços e deslocamentos nos pontos internos.

164
6.2.2 SISTEMA LINEAR PLACAS1 (SLP1) E SISTEMA LINEAR PLACAS2
(SLP2)
Para resolver problemas de placas em teoria de primeira ordem pelo Método dos
Elementos de Contorno foram elaborados dois programas em linguagem Fortran:
PLACAS1.FOR (2300 linhas): que utiliza as equações integrais de w e w n ∂ ∂ , e
considera c cw e R como contribuições dos nós vizinhos em cada canto. Os pontos
fontes são considerados apenas no contorno;
PLACAS2.FOR (2500 linhas): que utiliza apenas equações integrais de w, e considera
c cw e R como incógnita em cada canto. Os pontos fontes são considerados no
contorno e fora do domínio, para estes, com o parâmetro, relativo à distância do ponto
externo ao ponto do contorno, a= 0,50 da expressão definida como:
md a= (6.1)
onde,
a : coeficiente maior que zero;
m : média dos comprimentos dos elementos concorrentes no nó, ou
simplesmente o comprimento do elemento, no caso de nó duplo.
Segundo SILVA, N.A. (1988) o valor do coeficiente "a" pode estar situado
convenientemente entre 0,5 e 1,5.
Os sistemas SLP1 e SLP2 representados pelos programas PLACAS1.FOR e
PLACAS2.FOR apresentam-se basicamente estruturados de forma semelhante,
diferenciando-se apenas na entrada de dados, no tratamento dado aos cantos da placa e
nas integrações necessárias para obter as matrizes coeficientes H e G.
Portanto, expõe-se a seguir apenas a estrutura do programa PLACAS2.FOR.
a) Entrada de Dados: sub-rotina DADPLAC2.FOR É feita a leitura de todos os dados para definir o problema:
- Sobre a discretização pretendida: Número de nós, de elementos, coordenadas nodais,
incidência dos elementos, dos nós e tipo de elemento (linear, constante ou parabólico)
e condições de contorno;
- Carregamentos e condições de contorno: valor da carga, região da aplicação da carga;

165
- Características dos materiais: Módulo de Elasticidade do material, E, coeficiente de
Poisson, ν;
b) Montagem do Sistema de Equações: sub-rotina MATPD2.FOR
As matrizes c c , , e H G H G são geradas através da sub-rotina MATPD2.FOR.
As integrações necessárias são realizadas pela sub-rotina INTPD.FOR. Após a
obtenção dessas matrizes são impostas as condições de contorno do problema, o que
permite a obtenção das matrizes c c e A B .
c) Resolução do Sistema de Equações Algébricas: sub-rotina GAUPD.FOR
A resolução do sistema de equações (3.124) é feita pelo processo de Gauss, obtendo-se assim o vetor das incógnitas no contorno, cX . Este vetor pode conter
esforços ou deslocamentos nos nós do contorno e de canto. d) Cálculo dos Esforços e Deslocamentos nos Pontos Internos e do Contorno.
Após a obtenção das incógnitas no contorno, realizado pela sub-rotina GAUPD2,
obtêm-se os deslocamentos em pontos internos, realizados pela sub-rotina
SAINCOG.FOR.
Após o conhecimento das incógnitas no contorno, os momentos fletores e de
torção nos pontos internos são obtidos pela sub-rotina ESFORIND2.FOR. As
integrações necessárias são realizadas através da sub-rotina INTIND.FOR.
6.2.3 SISTEMA NÃO-LINEAR PLACAS (SNLP)
Para resolver os problemas de segunda ordem foi elaborado um programa em
linguagem Fortran, denominado FLAMPLA.FOR.
Esse programa foi obtido pelo acoplamento, após modificações, dos dois
programas de primeira ordem obtidos nos capítulos 2 e 3, respectivamente,
ELASTO.FOR e PLACAS2.
Expõe-se abaixo a estrutura do programa FLAMPLA.FOR, com suas sub-
rotinas:

166
PROGRAMA FLAMPLA.FOR (4500 linhas) C ******************************************************** C ****** METODO DOS ELEMENTOS DE CONTORNO ****** C ****** PROBLEMA : FLAMBAGEM DE PLACAS ****** C ****** PROGRAMA PRINCIPAL ****** C ****** ****** C ******************************************************** C PROGRAM FLAMPLA C PARAMETER (L1=200,L2=100,L3=300,L4=200,L5=5,L6=5,L7=5,L8=5,L9=200) C C **** L1= NUMERO DE NOS DO CONTORNO, NNC C **** L2= NUMERO DE NOS INTERNOS, NNI C **** L3= N1+N2 C **** L4= NUMERO DE ELEMENTOS ,NE C **** L5= NUMERO DE REGIOES CARREGADAS,NRC C **** L6= NUMERO DE CANTOS,NC C **** L7= NUMERO DE NOS DO CONTORNO DE CARGA, NNCC C **** L8= NUMERO DE ELEMENTOS DO CONTORNO DE CARGA,NECC C **** L9= NUMERO DE CELULAS C INTEGER DAD,SAI1 C COMMON /DISCRETIZACAO/NNC,NNI,NE,NRC X /NOS /X(L3),Y(L3),IEL(L4,2),IDUP(L3,2) X /ELEMENTOS /COMPR(L4),CO(L4),SE(L4),JNO(L1,2) X /CARGAS /CARGA(L5),NECC(L7),NNCC(L7),XC(L7,L5),YC(L7,L5) X ,IELC(L8,2),COC(L8,L5),SEC(L8,L5),COMPRC(L8,L5) X /MATERIAL /AM,PSI,E,POI,T X /CONTORNOS /KODE(2*L1+2*L6),FI(2*L1+2*L6) X /CELULAS/KCEL(L9,3) COMMON /TENSOES/SIGMAE11(L3),SIGMAE12(L3),SIGMAE22(L3), * SIGMA11(L9,L3),SIGMA12(L9,L3),SIGMA22(L9,L3) C CHARACTER ARQDAD*15,ARQSAI*15 DAD=1 SAI1=2 C TENSAO=15 C CALL ELASTO(dad,arqdad,sai1,arqsai) CALL DADFLA(dad,arqdad,sai1) CALL MATFLA(dad,arqdad) CALL GAUFLA(dad,arqdad) CALL INCOFLA(sai1,saie) CALL ESFIFLA(sai1,saie) PAUSE STOP END
a) ELASTO.FOR
Esta sub-rotina calcula todos os esforços e deslocamentos no plano da placa.

167
b) DADFLA.FOR
Esta sub-rotina faz a leitura dos dados de um arquivo de dados externo e também
gera um arquivo de saída.
c) MATFLA.FOR
Esta sub-rotina calcula os termos das matrizes dos coeficientes do sistema de
equações algébricas.
d) GAUFLA.FOR
Esta sub-rotina resolve o sistema de equações algébricas, obtendo as incógnitas
no contorno.
e) INCOFLA.FOR
Esta sub-rotina fornece a saída dos resultados: 1) vetores de deslocamentos e
cargas/reações nos nós do contorno. 2) deslocamentos nos pontos internos. 3) reações
de canto.
f) ESFIFLA.FOR
Esta sub-rotina fornece os esforços internos da placa.

168
6.3 RESULTADOS COMPUTACIONAIS 6.3.1 Sistema Linear de Chapa (SLC) 6.3.1.1 Aplicação 1
Determinação do deslocamento vertical do ponto de aplicação da carga em uma
viga-parede, como mostrada na Figura 6.2. Considera-se o material elástico-linear,
homogêneo e isótropo e com as seguintes propriedades:
Foram feitas várias discretizações e aplicado o programa ELASTO.FOR. Os
resultados apresentados na Tabela 6.1 podem ser comparados com aqueles fornecidos
pelo Método dos Elementos Finitos (MEF), em Zagotti (1980):
Tabela 6.1 – Resultados da aplicação 1
v = deslocamento vertical na extremidade do balanço v (m)
Resistência dos Materiais -0,3840
Teoria da Elasticidade -0,4950
no de elementos no de nós v (m)
4 6 -0,1390
16 15 -0,2652
64 45 -0,3916
256 153 -0,4602
Método dos Elementos Finitos (MEF)
1024 561 -0,4936
no de elementos no de nós v (m)
6 11 -0,2791
12 17 -0,4380
24 29 -0,4756
Método dos Elementos de Contorno (MEC) 48 52 -0,4933
P = 120 kN
x, u
y, v
Figura 6.2 – Viga-parede em balanço com carga concentrada na extremidade
E = 10 MPa
ν = 0 1 m
2 m

169
Nota-se nos resultados a vantagem, neste exemplo, do MEC sobre o MEF.
Para a obtenção de resultado próximo do exato são necessários no MEC apenas 48
elementos e 52 nós enquanto que no MEF são necessários 1024 elementos e 561
nós.
Salienta-se também, através do conhecimento de métodos numéricos, a
possibilidade de resolver problemas, cujos resultados são precários quando se
utiliza a resistência dos materiais.
6.3.1.1 Aplicação 2
Este exemplo tem o objetivo de mostrar a diferença de resultados entre os da
resistência dos materiais e os da teoria da elasticidade (utilizada no Método dos
Elementos de Contorno), quando se varia a altura em relação ao vão de uma viga
biapoiada submetida à uma carga concentrada no meio do vão.
Estudou-se uma viga biapoiada com as seguintes características físicas e
geométricas, Figura 6.3:
fck = 18 MPa
2ckE 21000 f 35 307.920,0 kgf / cm 3079,2 MPa= + = =
ν = 0,20
4,00 m
100 kN
0,80 m
0,20 m
2,00 m
Figura 6.3 – Viga biapoiada com carga concentrada no meio do vão

170
O deslocamento vertical (v) da viga no centro do vão, pela resistência dos
materiais, é dado pela seguinte expressão:
3P
v48EI
−=
(6.1)
Apresenta-se a seguir o tipo de discretização utilizada para o estudo deste
exemplo, com 25 elementos de contorno, 31 nós e três pontos internos ao contorno.
Visto que a carga, no programa ELASTO.FOR, é considerada como sendo
distribuída por unidade de comprimento, a carga concentrada é considerada como
sendo aplicada em um trecho (elemento) muito pequeno do contorno, resultado em
uma carga distribuída neste elemento, como mostra a Figura 6.4. Além disso, o
programa calcula os deslocamentos admitindo a espessura da chapa como sendo
unitária, para espessuras diferentes deve-se dividir o resultado encontrado pela
espessura real da chapa, já que deslocamento e espessura são inversamente
proporcionais.
Na Tabela 6.2 têm-se os resultados da Resistência dos Materiais e do Método dos
Elementos de Contorno, para alturas de viga de 0,40m, 0,60m, 0,80m, 1,00m, 2,00m,
23
4,00 m
0,40
1 2 3 4 5 6 7 8
12
11
15 16 17 19
9 10
14 13
25
24
23 22 21 20 18
1000 kN/m
0,20 m
1
2 3 4 5 6 7 10
11
12
13
14 15 16 17 18 19
21 22
8 9
20 24 25 26 27 28
29
30
31
34
32
33
Figura 6.4 – Contorno da viga discretizada
0,40 m
0,40 m
0,10 m

171
4,00m, ou seja, varia-se a relação entre o vão e a altura da viga objetivando a
verificação da validade da utilização da Teoria da Resistência dos Materiais, ou seja,
até que valor da relação anterior pode-se tratar as estrutura lineares sem comprometer
seu dimensionamento.
Tabela 6.2 – Resultados da aplicação 2
v = deslocamento vertical no centro do vão (m)(x 210− )
h = altura da viga (m)
0,40 0,60 0,80 1,00 2,00 4,00
Resistência dos Materiais 0,40595 0,12028 0,05074 0,02598 0,00325 0,00041
31 0,20154 0,09176 0,04628 0,02628 0,00453 0,00085
55 0,32463 0,11517 0,05279 0,02880 0,00493 0,00111
103 0,38784 0,12389 0,05513 0,02982 0,00529 0,00142
Método dos Elementos de
Contorno
Nº de Nós
185 0,40883 0,12632 0,05571 0,03006 0,00540 0,00153
Analisando-se a Tabela 6.2, pode-se notar que com o aumento da altura da viga
há um distanciamento do resultado obtido pelo Método dos Elementos de Contorno em
relação ao obtido pela resistência dos materiais, essa diferença de resultados é maior
para valores de 2h
≤
. Isto está de acordo com a hipótese da Resistência dos
Materiais, 2h
≥
, pela qual a viga é tratada como elemento estrutural linear.
Para valores de 2h
≤
, o comportamento da viga já não é de estrutura linear e
sim bidimensional e deve-se utilizar a Teoria da Elasticidade que na falta de solução
analítica, recorre-se aos métodos numéricos, tal como o Método dos Elementos de
Contorno.
Nota-se também que uma discretização relativamente com poucos elementos
conduz a resultados com precisão adequada.

172
6.3.2 Sistema Linear de Placa (SLP) 6.3.2.1 Aplicação 1
Placa quadrada apoiada no contorno com carga distribuída uniformemente,
Figura 6.5.
Comparam-se os resultados obtidos pelas duas formulações desenvolvidas,
aquela utilizando as equações integrais de deslocamento w e de sua derivada direcional
PLACAS1.FOR com aquela utilizando apenas a equação integral de deslocamento w
PLACAS2.FOR. Além disso, estes resultados são comparados com a solução analítica
encontrado em Timoshenko e Woinowsky-Krieger (1981).
A placa é quadrada de dimensões 200cm x 200cm , espessura h 7cm= e
simplesmente apoiada no contorno, submetida a um carregamento uniformemente
distribuído em toda a placa de 2g 0,0007 kN / cm= . Considera-se o coeficiente de
Poisson 0,30ν = e o módulo de elasticidade longitudinal 2E 2.560,0kN / cm= .
A placa foi discretizada em 8, 16, 40 e 80 elementos. A Figura 6.6 mostra, para o
caso do programa PLACAS2.FOR, levando em conta a equação integral de
deslocamento e a equação integral de sua derivada direcional, a discretização do
200,
0 cm
x
y
Mx
My
200,0 cm
g
g
Figura 6.5 - Placa quadrada simplesmente apoiada no contorno sob carga
uniformemente distribuída em todo o domínio.

173
contorno da placa em 16 elementos com os pontos nodais do contorno e o ponto
interno no centro da placa.
1 2 3 4 5
6
7
8
9
10
11 12 13 14 15
16
17
18
19
20
Figura 6.6 - Discretização da placa do exemplo 1, para PLACAS1.FOR: 16
elementos, 20 nós do contorno, e 1 nó interno.
x
7
11 12 10 9
8
6
5
4 3 2
16
15
14
13
1
21
50 c
m
50 c
m
50 c
m
50 c
m
50 cm 50 cm 50 cm 50 cm y
y
1 2 3 4 5
6
7
8
9
10 11 12 13 14 15
16
17
18
19
20
c1 c2
c3 c4
Figura 6.7 - Discretização da placa do exemplo 1 para PLACAS2.FOR: 16 elementos,
20 nós do contorno, 1 nó interno e 4 nós de canto.
x
7
11 12 10 9
8
6
5
4 3 2
16
15
14
13
1
21
50 c
m
50 c
m
50 c
m
50 c
m
50 cm 50 cm 50 cm 50 cm

174
A Figura 6.7 mostra, para o caso do programa PLACAS2.FOR, considerando
apenas a equação integral de deslocamento, a discretização da placa em 16 elementos
com os pontos nodais do contorno e dos cantos, e o ponto interno no centro da placa.
Os resultados obtidos estão listados na Tabela 6.3.
Tabela 6.3 - Resultados do Aplicação 1
Exemplo1 - Placa quadrada apoiada de 200 cm x 200 cm
h 7 cm= ; 2g 0, 0007 kN / cm= ; 0, 30ν = 2E 2.560, 0 kN / cm= .
Alternativas Número de elementos
wmáx = w21 [cm]
Mmáx [kN cm]
Vmáx [KN]
Rc [kN]
8 0,05525 1,33492 0,07189 5,2314 16 0,05649 1,33951 0,06551 2,6536 40 0,05658 1,34079 0,05877 2,0543
PLACAS1.FOR
80 0,05658 1,34082 0,05859 1,8947 8 0,05467 1,30663 0,05794 3,9643 16 0,05628 1,33420 0,06351 2,4425 40 0,05655 1,34015 0,05900 1,9526
PLACAS2.FOR
80 0,05658 1,34068 0,05874 1,8587 Solução Analítica (TIMOSHENKO, 1981)
0,05655 1,34120 0,05880 1,8200
Observa-se na tabela 6.3 que os resultados, tanto do programa PLACAS1.FOR
quanto do programa PLACAS2.FOR são precisos em relação aos da solução analítica,
exceto as reações de canto, que se distanciam um pouco dos mesmos, porém
consegue-se uma precisão melhor com o refinamento da discretização.

175
6.3.2.2 Aplicação 2
Placa de contorno irregular, engastada em dois lados adjacentes e apoiada três
lados com carga distribuída uniformemente , Figura 6.8.
O objetivo deste exemplo é calcular os esforços de uma placa de contorno
qualquer, que não se encontra tabelado, pelo MEC e pelo Método dos Elementos
Finitos (MEF), do trabalho de Katsuragi (2000) e comparar seus resultados com o de
uma placa retangular aproximada de mesma área, calculada com as tabelas de Czerny.
Dados da laje:
Espessura (h) = 0,15 m ; Carga distribuída (g) = 12 kN/m²
Concreto fck = 1,5x104 kN/m2
Ec = 2554,89x104 kN/m2
ν = 0,20
Para resolver o problema pelo MEC através do programa PLACAS2.FOR, o
contorno da placa real, Figura 6.8, foi discretizada em 28 elementos de acordo com a
Figura 6.9. Nos cantos considera-se nós duplos(mesmas coordenadas) um para cada
lado do canto e um nó em cada canto. São considerados 25 pontos internos, para
avaliar os momentos fletores e deslocamentos transversais da placa.
Mye
Mxe
X
y
4,0 m
Figura 6.8 – Placa de contorno irregular engastada em dois lados
adjacentes e apoiada em três outros.
2,0 m
2,0 m
4,0 m
Mx
My
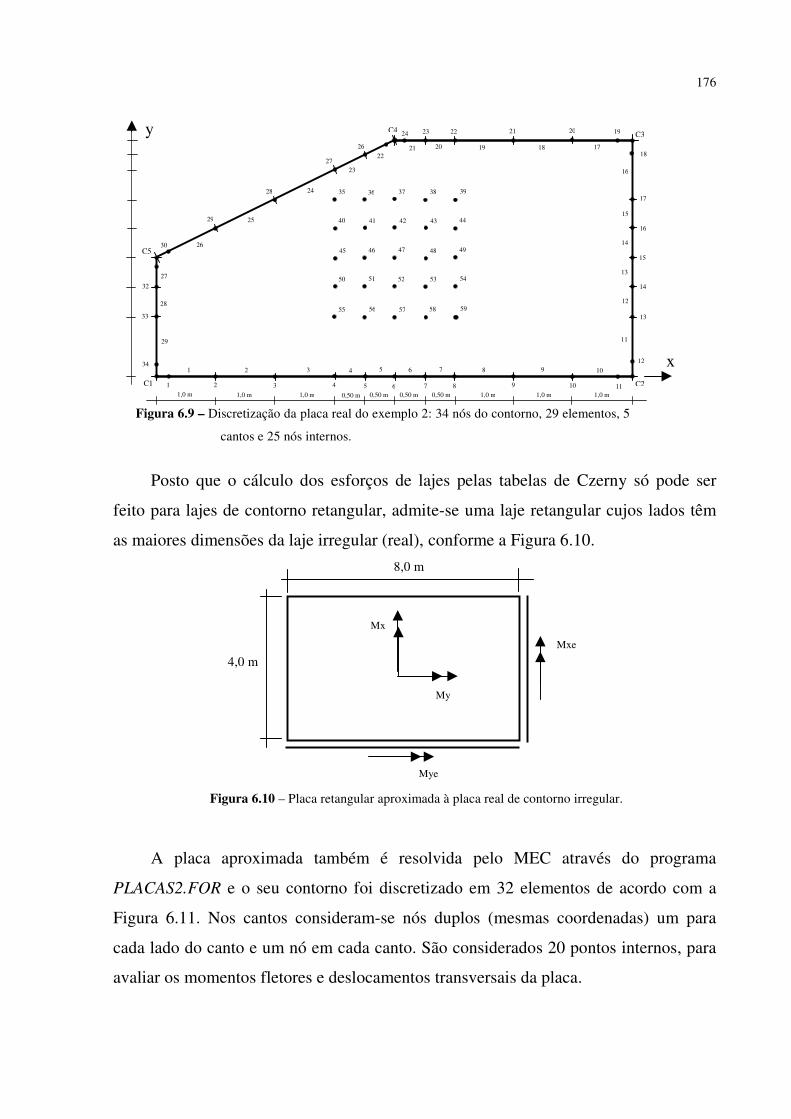
176
Posto que o cálculo dos esforços de lajes pelas tabelas de Czerny só pode ser
feito para lajes de contorno retangular, admite-se uma laje retangular cujos lados têm
as maiores dimensões da laje irregular (real), conforme a Figura 6.10.
A placa aproximada também é resolvida pelo MEC através do programa
PLACAS2.FOR e o seu contorno foi discretizado em 32 elementos de acordo com a
Figura 6.11. Nos cantos consideram-se nós duplos (mesmas coordenadas) um para
cada lado do canto e um nó em cada canto. São considerados 20 pontos internos, para
avaliar os momentos fletores e deslocamentos transversais da placa.
y
x
13
14
15
16
17
18
1 5
1 2 3 4 5 6 7 8 9 10 11
2 3 4 6 7 8 9 10
C1
11
12
12
13
14
15
16
19202122
17 18
24
26
23
19 20 2122
2327
28 24
25
32
30
34
33
29
26
27
28
29
43
48
54
39
49
38
4442
47
37
52 53
36
41
46
5150
45
40
35
55 56 57 58 59
1,0 m 1,0 m 1,0 m 0,50 m 0,50 m 0,50 m 0,50 m 1,0 m 1,0 m 1,0 m
C5
C4 C3
C2
Figura 6.9 – Discretização da placa real do exemplo 2: 34 nós do contorno, 29 elementos, 5
cantos e 25 nós internos.
8,0 m
4,0 m
Mx
My
Mxe
Mye
Figura 6.10 – Placa retangular aproximada à placa real de contorno irregular.

177
Na Tabela 6.4 explicitam-se os resultados da aplicação 2 utilizando-se, para a
placa retangular aproximada, as tabelas de Czerny. O programa PLACAS2.FOR -
Método dos Elementos de Contorno (MEC) para as placas irregular e aproximada.
Apresenta-se também os resultados da placa irregular pelo Método dos Elementos
Finitos, segundo Katsuragi (2000), que discretizou a placa em 40 elementos de 8 nós.
Tabela 6.4 – Resultados do aplicação 2 Mxe
(kNm/m) Mye (kNm/m)
Mx (kNm/m)
My (kNm/m)
wmáx (cm)
Tabela de Czerny -15,74 21,82 4,78 10,43 0,1772 Placa retangular Aproximada MEC (32 elementos) -14,95 -22,08 4,18 10,32 0,1778
MEF (40 elementos de 8 nós) -10,10 -14,00 5,45 10,10 0,1572 Placa Real Irregular
M EC (29 elementos) -15,42 -20,22 4,25 9,24 0,1553
Pode-se observar que os valores obtidos, para a placa retangular aproximada,
utilizando-se as tabelas de Czerny estão bem próximos dos obtidos pela utilização do
MEC. Porém, ao aplicar o MEC na placa irregular (real) os resultados são bem
diferentes, resultando em uma placa superdimensionada quando se utiliza a
aproximação de placa retangular. Quanto aos resultados de momentos fletores de
engastamento fornecidos pelo MEF (Katsuragi, 2000) são bem diferentes aos obtidos
pelo MEC, necessitando de uma discretização mais refinada.
y
Figura 6.11 – Discretização da placa aproximada da aplicação 2 (Figura 6.10) : 36 nós do
contorno, 32 elementos, 4 cantos e 20 nós internos.
20
1 5
1 2 3 4 5 6 7 8 9 10
2 3 4 6 7 8 9 10
21
23
2224 262728 29 25
19 17 18202122
23
242526
27
28
29
30
32
30
31
31
32
35
33
36
38 39 37 4140
4443
53
4542 46
5654 55
47 48 5049
52
51
1,0 m
0,25 m
0,50 m
0,50 m
1,0 m
1,0 m 0,25 0,50 m 0,50 m 0,50 m 0,50 m 0,50 m 0,50 m 1,0 m 1,0 m
C3
C1
0,25 0,25 0,25
x
19
15
16
18
11
13
14
11
12
12
13
15
16
14
17
C2
C3

178
6.3.2.3 Aplicação 3
Placa quadrada simplesmente apoiada no contorno sob carga uniformemente
distribuída em pequena região central, Figura 6.12.
Comparam-se os resultados obtidos pelo programa PLACAS2.FOR, que utiliza apenas
a equação integral de deslocamento w, com a solução analítica encontrada em
Timoshenko e Woinowsky-Krieger (1981).
A placa é quadrada de dimensões a x a e simplesmente apoiada no contorno,
submetida a um carregamento g, uniformemente distribuído em uma pequena área de
dimensões u x v , cuja resultante é igual a P guv= . Considera-se no exemplo:
coeficiente de Poisson 0,30ν = ,
3
2
EhD
12(1 )=
− ν .
onde, E = módulo de elasticidade longitudinal do material
h = espessura da placa.
Resolve-se a placa para diferentes relações de u / a v / a= , de tal modo que a
resultante P permaneça constante, ou seja, quando varia a relação anterior, varia o
valor da carga uniformemente distribuída g.
A placa foi discretizada em 8, 16, 32 e 40 elementos. A Figura 6.13 mostra a
discretização da placa em 16 elementos iguais com os pontos nodais do contorno e dos
cantos, e o ponto interno no centro da placa. Os resultados obtidos estão listados na
Tabela 6.5.

179
x
y
Mx
My
a/2 a/2
u/2 u/2
v/2
v/2
a/2
a/2
Figura 6.12 - Placa quadrada simplesmente apoiada no contorno sob carga g uniformemente
distribuída em pequena região central, cuja resultante vale P = guv.
g
g
y
1 2 3 4 5
6
7
8
9
10
11 12 13 14 15
16
17
18
19
20
c1c2
c3 c4
Figura 6.13 - Discretização da placa da aplicação 3 , para PLACAS2: 16 elementos, 20
nós do contorno, 1 nó interno e 4 nós de canto.
x
7
11 12 10 9
8
6
5
4 3 2
16
15
14
13
1
21
a/4
a/4 a/4 a/4 a/4
a/4
a/4
a/4

180
Tabela 6.5 - Resultados da aplicação 3
Coeficientes α na expressão : 2máxw Pa / D= α ; P = guv
u / a v / a= 8 16 32 40 Solução analítica
0,005 0,01138 0,01157 0,01159 0,01160 0,01160 0,010 0,01138 0,01157 0,01159 0,01159 ____ 0,100 0,01115 0,01134 0,01136 0,01137 ____
Coeficientes β na expressão : 2máxM Pa / D= β ; P = guv
u / a v / a= 8 16 32 40 Solução analítica
0,005 0,59201 0,59363 0,59395 0,59397 ____ 0,010 0,52031 0,52192 0,52224 0,52227 ____ 0,100 0,28211 0,28372 0,28404 0,28406 0,28400
Observa-se na Tabela 6.5 a boa concordância dos resultados obtidos pelo MEC
através do programa PLACAS2.FOR com os da solução analítica, mesmo para
discretizações com poucos elementos. Além disso, nota-se que, para se atingir
resultados satisfatórios, no tratamento de cargas concentradas são necessários adotar
relações u / a v / a= muito pequenas, menor do que 0,01, principalmente para o
cálculo dos momentos fletores.

181
6.3.2.4 Aplicação 4
Placa quadrada engastada em duas bordas adjacentes e livre em outras duas sob
carga, q, distribuída em uma área parcial da placa, Figura 6.14, discretizada segundo a
Figura 6.15.
Em construções civis podem ocorrer casos de placas parcialmente carregadas,
então, este exemplo tem o intuito de obter resultados desses tipos de carregamento. A
placa quadrada foi resolvida pela formulação proposta, PLACAS2, com aproximação
linear das variáveis, e comparadas com os resultados de Paiva (1987), que utilizou a
aproximação cúbica dos deslocamentos. Os resultados estão indicados na Tabela 6.6.
Figura 14 - Placa quadrada engastada em dois lados
adjacentes e livre nos outros dois, sob carga q
uniformemente distribuída em uma área parcial da
placa.
q x
y
a Mx
My
a
q
Figura 15 - Discretização da placa da Figura 16
em 48 elementos, 52 nós do contorno, 1
nó interno e 4 nós de canto.
1 7
12
1314
15
20
26
27 28 33 38
39
40 41
46
52 c1 c2
c3 c4
37 25
48
1
60
51
25
122
a/2 a/3 a/12 a/12
a/12
a/12
a/6
a/6
a/6
a/6
13
36
24
a/6
50
48
44
42 53 58
54
55
56
57 62
61
59

182
Tabela 6.6 - Resultados da aplicação 4
Placa quadrada engastada em dois lados adjacentes e livres em outros dois, submetida a carregamento
parcial uniformemente distribuído, 0.20ν =
OBS. MEF (Paiva, 1987)-utilizou 144 elementos triangulares com seis parâmetros por nó MEC (Paiva, 1987)-utilizou 44 elementos com aproximação cúbica da variável “w”
Alternativas MEF MEC
(44 elementos)
MEC
PLACAS 2 (48 elementos)
Fatores de multiplicação
w53 0.0009 0.0009 0.0009
w54 0.0009 0.0009 0.0009
w58 0.0059 0.0054 0.00526
w60 0.0041 0.0039 0.00394
w61 0.0026 0.0024 0.00248
wc3 0.0154 0.0137 0.0139
4wf qa D=
mx42 –0.0836 –0.0772 –0.0801
mx44 –0.0825 –0.0784 –0.0805
mx46 –0.0762 –0.0732 –0.0750
mx48 –0.0518 –0.0512 –0.0523
mx50 –0.0181 –0.0188 –0.0189
mx53 –0.0422 –0.0409 –0.0410
mx54 –0.0354 –0.0337 –0.0338
mx55 –0.0252 –0.0238 –0.0242
mx56 –0.0146 –0.0138 –0.0140
my59 0.0126 0.0137 0.0137
my60 0.0187 0.0200 0.0199
my61 0.0066 0.0081 0.0079
my62 –0.0265 –0.0244 –0.0249
2mf qa=
Observa-se na Tabela 6.6, que o programa PLACAS2, mesmo com a
aproximação linear das variáveis, conduz a bons resultados quando comparado com os
outros Métodos, o que é adequado devido à simplicidade da aproximação utilizada e a
formulação utilizando apenas equações integrais de w.

183
6.3.3 Sistema Não-Linear de Placa (SNLP) A formulação teórica dos efeitos de segunda ordem em placas pelo Método dos
Elementos de Contorno foi apresentada e discutida em detalhe no Capítulo 5. Desta
forma torna-se viável implementá-la em qualquer linguagem computacional. O
programa FLAMPLA.FOR foi elaborado e encontra-se em fase de testes. Em futuro
breve, serão publicados os resultados de aplicações deste programa.

184
7 CONSIDERAÇÕES FINAIS
O objetivo principal deste trabalho foi apresentar uma nova metodologia de tratar
os efeitos de segunda ordem em placas pelo MEC, que consiste em inicialmente fazer
um estudo da teoria de primeira ordem de estruturas envolvidas no entendimento dos
efeitos de segunda ordem. Nesse aspecto, a metodologia adotada se diferencia da de
outros autores, pois os mesmos tratam do problema diretamente a partir da equação
diferencial governante de placas de Von Kármán, enquanto que, por sua vez, este
trabalho tratou do problema desde os conceitos básicos mostrando as diferenças entre
a teoria de primeira ordem e a de segunda ordem, após explicitar as hipóteses e as
deduções das equações que conduzem a uma teoria de segunda ordem simplificada, da
qual uma das aplicações é a equação da flambagem de Von Kármán.
Outra contribuição foi utilizar uma formulação alternativa para o estudo de
efeitos de segunda ordem de placas pelo Método dos Elementos de Contorno. Nesta
formulação, o sistema de equações algébricas foi obtido utilizando-se apenas a
equação integral de deslocamento transversal e considerando-se os termos
relacionados com os cantos da placa, wc e Rc, como variáveis do problema. Com essa
formulação obtém-se maior precisão dos resultados, eliminam-se algumas singularidades nas
integrações e, o tratamento dispensado à derivada direcional descrita a seguir, mantém a
coerência na formulação, pois se escrevem apenas equações do deslocamento transversal.
Outra contribuição inédita se deve ao fato da solução fundamental do problema
em questão ser desconhecida e, usualmente se utiliza aquela da teoria de primeira ordem
de placas. Como conseqüência, surge na equação integral governante, uma integral do
domínio onde o integrando é função da curvatura "wij". Neste trabalho, foi dado um
tratamento diferenciado para esta integral de domínio, cujo resultado consiste em ter
como variável no domínio apenas o deslocamento transversal "w". Desta forma, na
formulação do problema foi possível utilizar somente equações integrais de
deslocamento transversal, tanto no domínio quanto no contorno.
A preocupação didática no entendimento do assunto foi sanada no decorrer do
desenvolvimento do trabalho devido à metodologia utilizada no tratamento do tema,
pela seqüência e pela explicitação dos pormenores dos conceitos.

185
Com o objetivo de produzir alguns resultados práticos do trabalho desenvolvido
foram elaborados vários programas computacionais em linguagem Fortran. Foram
apresentados os resultados confiáveis relativos aos problemas de primeira ordem. Com
relação aos resultados de segunda ordem, elaborou-se um programa computacional,
que encontra-se em fase de testes. Espera-se, em breve, obter com este programa,
resultados confiáveis para os problemas de segunda ordem.
Para trabalhos futuros, sugere-se o aperfeiçoamento do programa
FLAMPLA.FOR para produzir resultados confiáveis de modo a testar a eficiência da
formulação proposta. Esse programa pode ser ampliado para resolver outros problemas
além do da flambagem, pois a teoria de segunda ordem desenvolvida com todos os
conceitos importantes detalhados de forma explicita torna plausível esta tarefa. Dentre
os problemas importantes que podem ser analisados sugere-se o de obter os esforços e
deslocamentos com a configuração deformada da estrutura e compará-los com os
obtidos com a teoria de primeira ordem. Espera-se que os resultados obtidos com este
programa proporcionem projetos mais realísticos.

186
REFERÊNCIAS BIBLIOGRÁFICAS
ABDEL-AZIZ, M.R. Safeguarded use of the implicit restarted Lanczos technique for solving non-linear structural eigensystems. Int. J. Num Methods Eng. v.37, p.3117-3133, 1994. ALIABAD, M.H. Analysis of shear deformable plates with combined geometric and material nonlinearities by boundary element method. International Journal of Solids and Strutures, v.44 (3-4), p.1038-1059, 2007. ALIABAD, M.H. Boundary element method for shear deformable plates with combined geometric and material nonlinearities. Engineering Analysis with Boundary Elements, v.30 (1), p.31-42, 2006. BADAWI, M.; CUSENS, A.R. Symmetry of the stifiness matrices for geometrically non-linear analysis. Communications in Aplied Numerical Methods, v.8, n.2, p.135-140, 1992. BÉZINE, G. Boundary integral formulation for plate flexure with arbitrary boundary conditions. Mech. Res. Comm. 5(4):197-206, 1978. BREBBIA, C.A. The Boundary Element Method for Engineers. London: Pentech Press, 1978. 188p. BREBBIA, C.A.; TELLES, J.C.F.; WROBEL, L.C. Boundary Element Techniques: Theory and Applications in Engineering. London: Springer - Verlag, 1984. 352p. BREBBIA, C.A.; VENTURINI, W.S. - Boundary Techniques: Applications in fluid flow and computational aspects. Southampton: Computational Mechanics Publications, 1987. 251p. CALDERÓN, E. T. Uma formulação alternativa para o estudo de placas sobre fundações elástica pelo Método dos Elementos de Contorno. São Carlos-USP, 1991. 191p. Dissertação (Mestrado em Engenharia de Estruturas) - Escola de Engenharia de São Carlos-USP, 1991. CHANDENDUANG, C.; BECKER, A.A. boundary element method formulation for two-dimensional creep problems using isoparametric quadratic elements. Computer & Structures, 81 (16), p.1611-1618, 2003. COSTA JR., J.A. The Boundary Element Method Applied to Plate Problems. Southampton, 1985. 200p. Thesis (doctor of Philosophy) - Civil Engineering, University of Southampton, 1985.
187
DANSON, D.J. Analysis of plate bending problems by direct boundary element method. M.Sc. Dissertation, University of Southampton. Southampton, England, 1979. FERNANDES, G.R.; VENTURINI, W.S. Stiffened plate bending analysis by the boundary element method. Computational Mechanics, 28(3-4), p.275-281, 2002. GUO, M.W.; HARIK, I.E.; REN, W.X. Buckling behavior of stiffened laminated plates. International journal of solids and structures, 39(11), p.3039-3055, 2002. HASEBE, N.; WANG, X. Green’s functions for the bending of thin plates under various boundary conditions and applications: a review. Thin-Walled Structures, v.40, p.611-624, 2002. HASHED, Y.F. A coupled BEM-flexibility force method for bending analysis of internally supported plates. Journal of applied mechanics- transactions of the ASME, 54 (10), p.1431-1457, 2002. KAMIYA, N.; SAWAKY, Y. An integral equation approach to finite deflection of elástic plates. Int. J. Non-linear mechanics, v.17, n.3, p187-194, 1982. KAMIYA, N.; SAWAKY, Y. The Boundary Integral Formulation for Some Inhomogeneous Differential Equations. Engineering Analysis, v.1, n.4, p188-194, 1984. KATSIKADELIS, J.T. Large deflection analysis of plates on elastic foundation by the boundary element method. International Journal of Solids and Strutures, v.27 (15), p.1867-1878, 1991. KITA, E.; KAMIYA, N. Error estimation and adaptive mesh refinement in boundary element method, an overview. Engineering Analysis with Bondary Elements, v.25, p.479-495, 2001. KOUHIA, R.; MEUREN, C.M. On the Solution of Second-Order Post-Buckling Fields. Communications in Aplied Numerical Methods, v.11, n.5, p.443-453, 1995. LIU, Y. Elastic Stability Analysis of Thin Plate by the Boundary Element Method - A New Formulation. Engineering Analysis, v.4, n.3, p160-164, nov. 1987. MIRASSO, A.E.; GODOY, L.A. Iterative techuniques for non-linear eigenvalue buckling problems. Communications in Aplied Numerical Methods, v.8, n.5, p.311-317, 1992. NOVOZHILOV, V.V. Foundations of the nonlinear theory of elasticity. New York: Graylock Press, 1953.

188
NICHOLSON, D.W.; KASSAB. A.J. Explicit boundary element method for nonlinear solid mechanics using domain integral reduction. Engineering Analysis with Bondary Elements, v.24, p.707-713, 2000. PALERMO JR., L. Estudo de estruturas tubulares pelo método dos elementos de contorno. São Carlos-USP, 1990. 220p. Tese (Doutorado em Engenharia de Estruturas) - Escola de Engenharia de São Carlos-USP, 1990. PAIVA, J.B. Formulação do método dos elementos de contorno para flexão de placas e suas aplicações em engenharia de estrutura. São Carlos-USP, 1987. 195p. Tese (Doutorado em Engenharia de Estruturas) - Escola de Engenharia de São Carlos-USP, 1987. PAN, E.; YANG, B; CAI, G.; YUAN, F.G. Stress analyses around holes in composite laminates using boundary element method. Engineering Analysis with Bondary Elements, v.25, p.31-40, 2000. SOUZA LIMA, V.M.; VENANCIO FILHO, F. Considerações sobre a não-linearidade geométrica em estruturas reticuladas. III Escola de Matemática Aplicada, Laboratório de Computação Científica (CNPq), Rio de Janeiro, 1982.. STERN, M. A General Boundary Integral Formulations for the Numerical Solution of Plate Bending Problems. Int. J. Sol. Struct. 15:769-782, 1979. SYNGELLAKIS, S & KANG, M. A Boundary Element Solution of the Plate Buckling Problem. Engineering Analysis, v.4, n.2, p. 75-81, aug.. 1987. TAFRESH, A. Buckling and post-buckling analysis of composite cylindrical shells with cutouts subjected to internal pressure and axial compression loads. International journal of pressure vessels and piping, 79 (5), p.351-359, 2002. TANAKA, M. - Large deflection analysis of thin elastic plates. In: Banerjee, P.K. & Mukherjee, S. eds. Developments in boundary elements methods, v.3. London, Elsevier, 1984, p.1102-1123. TANAKA, M.; MATSUMOTO, T.; OIDA, S. A boundary element method applied to the elatostatic bending problem of beam-stiffened plates. Engineering Analysis with Bondary Elements, v.24, p.751-758, 2000. TANAKA, M.; MATSUMOTO, T.; ZHENG, Z. Application of the boundary-domain element method to the pre/post-buckling problem of von Kármán plates. Engineering Analysis with Boundary Elements, v.23 (5-6), p.399-404, 1999. TIMOSHENKO, S.P.; GOODIER, J.N. Teoria da Elasticidade. 3.ed. Rio de Janeiro: Guanabara dois, 1980. 545p.

189
TIMOSHENKO, S.P.; WOINOWSKY-KRIEGER, S. Theory of plates and shells. 2.ed. Tokyo: Macgraw-Hill, 1981. 580p. TIMOSHENKO, S.P.; GERE, J.M. Theory of elastic stability. 2.ed. Tokyo: Mcgraw-Hill, Koga Kusha, Ltda., 1961. 541p. VENTURINI, W.S. Um estudo sobre o método dos elementos de contorno e suas aplicações em engenharia. São Carlos-USP, 1988. 184p. Tese (Livre-Docência em Engenharia de Estruturas) - Escola de Engenharia de São Carlos-USP, 1988. ZAGOTTIS, D. Pontes e Grandes Estruturas. v.1: Elasticidade/Elementos Finitos. São Paulo, USP – Escola Politécnica, 1980. 271p.

190
T128m
Taguti, Yzumi Método dos elementos de contorno na resolução do problema de segunda ordem em placas delgadas / Yzumi Taguti.- Guaratinguetá : [s.n.], 2010 189 f.: il. Bibliografia: f. 186-189 Tese (Doutorado) – Universidade Estadual Paulista, Faculdade de Engenharia de Guaratinguetá, 2010 Orientador: Prof. Dr. Edson Luiz França Senne Co-orientador: Prof. Dr. Webe João Mansur 1. Estrutura 2. Placas e cascas elásticas 3. Método dos elementos de contorno I. Título
CDU 624.073.2

Livros Grátis( http://www.livrosgratis.com.br )
Milhares de Livros para Download: Baixar livros de AdministraçãoBaixar livros de AgronomiaBaixar livros de ArquiteturaBaixar livros de ArtesBaixar livros de AstronomiaBaixar livros de Biologia GeralBaixar livros de Ciência da ComputaçãoBaixar livros de Ciência da InformaçãoBaixar livros de Ciência PolíticaBaixar livros de Ciências da SaúdeBaixar livros de ComunicaçãoBaixar livros do Conselho Nacional de Educação - CNEBaixar livros de Defesa civilBaixar livros de DireitoBaixar livros de Direitos humanosBaixar livros de EconomiaBaixar livros de Economia DomésticaBaixar livros de EducaçãoBaixar livros de Educação - TrânsitoBaixar livros de Educação FísicaBaixar livros de Engenharia AeroespacialBaixar livros de FarmáciaBaixar livros de FilosofiaBaixar livros de FísicaBaixar livros de GeociênciasBaixar livros de GeografiaBaixar livros de HistóriaBaixar livros de Línguas

Baixar livros de LiteraturaBaixar livros de Literatura de CordelBaixar livros de Literatura InfantilBaixar livros de MatemáticaBaixar livros de MedicinaBaixar livros de Medicina VeterináriaBaixar livros de Meio AmbienteBaixar livros de MeteorologiaBaixar Monografias e TCCBaixar livros MultidisciplinarBaixar livros de MúsicaBaixar livros de PsicologiaBaixar livros de QuímicaBaixar livros de Saúde ColetivaBaixar livros de Serviço SocialBaixar livros de SociologiaBaixar livros de TeologiaBaixar livros de TrabalhoBaixar livros de Turismo