aplicaÇÃo do mÉtodo dos elementos de contorno na anÁlise de instabilidade de placas perfuradas
TRANSCRIPT

UNIVERSIDADE ESTADUAL DE CAMPINAS
Faculdade de Engenharia Civil, Arquitetura e Urbanismo
ROMILDO APARECIDO SOARES JUNIOR
APLICAÇÃO DO MÉTODO DOS ELEMENTOS DE
CONTORNO NA ANÁLISE DE INSTABILIDADE DE
PLACAS PERFURADAS
CAMPINAS
2015

ROMILDO APARECIDO SOARES JUNIOR
APLICAÇÃO DO MÉTODO DOS ELEMENTOS DE
CONTORNO NA ANÁLISE DE INSTABILIDADE DE
PLACAS PERFURADAS
Dissertação de Mestrado apresentada à
Faculdade de Engenharia Civil, Arquitetura
e Urbanismo da Unicamp, para obtenção do
título de Mestre em Engenharia Civil na área
de Estruturas e Geotécnica.
Orientador: Prof. Dr. LEANDRO PALERMO JUNIOR

Agência(s) de fomento e nº(s) de processo(s): Não se aplica.
Ficha catalográfica
Universidade Estadual de Campinas Biblioteca da Área de Engenharia e Arquitetura
Luciana Pietrosanto Milla - CRB 8/8129
Soares Junior, Romildo Aparecido, 1988-
So11a SoaAplicação do método dos elementos de contorno na análise de
instabilidade de placas perfuradas / Romildo Aparecido Soares Junior. –
Campinas, SP : [s.n.], 2015.
SoaOrientador: Leandro Palermo Junior. SoaDissertação (mestrado) – Universidade Estadual de Campinas, Faculdade
de Engenharia Civil, Arquitetura e Urbanismo.
Soa1. Placas (Engenharia). 2. Método de elementos de contorno. 3.
Flambagem (Mecânica). I. Palermo Junior, Leandro,1960-. II. Universidade
Estadual de Campinas. Faculdade de Engenharia Civil, Arquitetura e
Urbanismo. III. Título. Informações para Biblioteca Digital
Título em outro idioma: Application of the boundary element method in the instability analysis of perforated plates Palavras-chave em inglês: Plates (Engineering)
Boundary element method
Buckling (Mechanics) Área de concentração: Estruturas e Geotécnica
Titulação: Mestre em Engenharia Civil
Banca examinadora: Leandro Palermo Junior [Orientador]
Cilmar Donizeti Basaglia
Raul Rosas e Silva Data de defesa: 15-12-2015 Programa de Pós-Graduação: Engenharia Civil

UNIVERSIDADE ESTADUAL DE CAMPINAS FACULDADE DE ENGENHARIA CIVIL, ARQUITETURA E
URBANISMO
APLICAÇÃO DO MÉTODO DOS ELEMENTOS DE CONTORNO NA ANÁLISE DE INSTABILIDADE DE PLACAS
PERFURADAS
ROMILDO APARECIDO SOARES JUNIOR
Dissertação de Mestrado aprovada pela Banca Examinadora, constituída por:
Prof. Dr. Leandro Palermo Junior Presidente e Orientador/Universidade Estadual de Campinas
Prof. Dr. Cilmar Donizeti Basaglia Universidade Estadual de Campinas
Prof. Dr. Raul Rosas e Silva Pontifícia Universidade Católica do Rio de Janeiro
A Ata da defesa com as respectivas assinaturas dos membros encontra-se no processo de vida acadêmica do aluno.
Campinas, 15 de dezembro de 2015

DEDICATÓRIA
A Deus, À minha família, Pai, Mãe, Irmão e meus amigos por acreditarem na
possibilidade do desenvolvimento deste trabalho. À Carla, minha companheira de
todos os dias. Também dedico este trabalho ao meu orientador Prof. Dr. Leandro
Palermo Junior, pois este trabalho foi possível de ser realizado graças a seus
ensinamentos. E aos que utilizarem esta obra como fonte de estudo.

AGRADECIMENTOS
Agradeço ao meu orientador Prof. Dr. Leandro Palermo Junior por ter confiado
no meu trabalho e ter estado sempre disposto a ajudar e compartilhar seu
conhecimento. Agradeço também a CAPES pela ajuda financeira no
desenvolvimento deste trabalho.

RESUMO
O método dos elementos de contorno é usado no presente trabalho para obter as
cargas críticas de placas perfuradas. O efeito da deformação por cortante é incluído
no modelo de flexão de placas isotrópicas. O efeito da não linearidade geométrica
relacionado com a carga no plano da placa é introduzido com a adição de duas
integrais na formulação: uma é aplicada no domínio e a outra no contorno. A
equação integral pode ser relacionada a uma das condições naturais de acordo com
o problema de valor de contorno. Elementos de contorno quadráticos contínuos e
descontínuos foram utilizados. Os pontos de colocação foram posicionados no
contorno. A mesma função de mapeamento foi utilizada para as interpolações
conformes e não-conformes, isto é, nós nas extremidades de elementos quadráticos
continuam nas extremidades quando elementos descontínuos são utilizados,
somente o ponto de colocação é movido. A subtração de singularidade e a técnica
da transformação de variáveis foram utilizadas para as singularidades de tipo
Cauchy e fraca, respectivamente, quando é realizada a integração em elementos
contendo o ponto de colocação. Células retangulares foram utilizadas para
discretizar a integral de domínio relacionada com o efeito da não linearidade
geométrica. Resultados para alguns tipos de condições de contorno foram
comparados com os da literatura. Análises de convergência foram feitas em alguns
problemas para mostrar o comportamento da formulação de acordo com o número
utilizado de células de domínio.
Palavras chave: Placas (Engenharia), Método de elementos de contorno, Flambagem (Mecânica)

ABSTRACT
The boundary element method is used in this study to obtain critical loads of
perforated plates. The effect of shear deformation is included in the bending model of
isotropic plates. The effect of geometrical non-linearity related to in-plane loading is
introduced with two additional integrals in the formulation: one is performed on the
domain and other on the boundary. The boundary integral can be related to one of
the natural conditions according to the boundary value problem. Quadratic
continuous or discontinuous boundary elements were used. Collocation points were
always placed on the boundary. The same mapping function was used for conformal
and non-conformal interpolations, i.e. nodes at ends of quadratic elements remain at
ends when discontinuous elements were employed and collocation points are shifted.
The singularity subtraction and the transformation of variable technique were
employed for the Cauchy and the weak type singularity, respectively, when
integrations were performed on elements containing the collocation points.
Rectangular cells were used to discretize the domain integral related to the
geometrical non-linearity effect. Results for some types of boundary conditions were
compared with those from the literature. Convergence analyses were done in some
problems to show the behavior of the formulation according to the number used for
domain cells.
Keywords: Plates (Engineering), Boundary element method, Buckling (Mechanics)

LISTA DE ILUSTRAÇÕES
Figura 3.1 – Estado de deformação de um sólido .................................................... 42
Figura 4.1 – Elemento diferencial de placa .............................................................. 46
Figura 4.2 – Comportamento de um seguimento de reta normal ............................. 49
Figura 5.1 – Posicionando o ponto no contorno ....................................................... 60
Figura 5.2 – Discretização de um problema de placa ............................................... 73
Figura 5.3 – Mudança de coordenadas para o elemento isoparamétrico ................. 74
Figura 5.4 – Plotagem das funções de forma ........................................................... 76
Figura 5.5 – Integração com ponto fonte fora do elemento (placa) .......................... 84
Figura 5.6 – Integração com ponto fonte dentro do elemento (placa) ...................... 84
Figura 5.7 – Ilustração da matriz de coeficientes para problemas de placas ........... 85
Figura 5.8 – Placa engastada em um dos lados ....................................................... 86
Figura 5.9 – Sistema de equações ........................................................................... 87
Figura 5.10 – Sistema de equações com aplicação das condições de contorno...... 88
Figura 5.11 – Sistema de equações linear ............................................................... 89
Figura 5.12 – Sistema de equações linear com integral da carga ............................ 90
Figura 6.1 – Placa com solicitação no plano ............................................................ 93
Figura 6.2 – Placa deformada devido à solicitação no plano ................................... 94
Figura 6.3 – Elemento diferencial com solicitação no plano ..................................... 94
Figura 6.4 – Elemento diferencial deformado ........................................................... 95
Figura 6.5 – Elemento diferencial com forças de cisalhamento no plano ................. 96
Figura 6.6 – Discretização de um problema de instabilidade de placas ................. 100
Figura 6.7 – Discretização de um problema instabilidade de placas com furo ....... 101
Figura 7.1 – Exemplo de problema bidimensional .................................................. 109
Figura 7.2 – Integração com ponto fonte fora do elemento .................................... 113
Figura 7.3 – Integração com ponto fonte dentro do elemento ................................ 113
Figura 7.4 – Ilustração da matriz de coeficientes para problemas bidimensionais . 118
Figura 9.1 – Tipos de vinculação ............................................................................ 139
Figura 9.2 – Vinculação todos os lados simplesmente Apoiados - AAAA .............. 140
Figura 9.3 – Vinculação 2 lados apoiada e engastada em 2 - AEAE .................... 141
Figura 9.4 – Vinculação com quatro lados engastados - EEEE ............................. 143
Figura 9.5 – Tipos de vinculação .......................................................................... 146
Figura 9.6 – Malha com 10 elementos por lado e 25 células de domínio ............. 147
Figura 9.7 – Malha com 32 elementos por lado e 256 células de dominio ........... 147
Figura 9.8 – Placa verificada quanto à instabilidade - AAAA - HARD .................... 148
Figura 9.9 – Parâmetros críticos de acordo com células de domínio - AAAA - HARD ................................................................................................................................ 148
Figura 9.10 – Placa verificada quanto à instabilidade – AAAE - HARD ................. 149

Figura 9.11 – Parâmetros críticos de acordo com células de domínio - AAAE - HARD ................................................................................................................................ 149
Figura 9.12 – Placa verificada quanto à instabilidade - EAAA – HARD .................. 150
Figura 9.13 – Parâmetros críticos de acordo com células de domínio - EAAA - HARD ................................................................................................................................ 150
Figura 9.14 – Placa verificada quanto à instabilidade – AEAE - HARD .................. 151
Figura 9.15 – Parâmetros críticos de acordo com células de domínio - AEAE - HARD ................................................................................................................................ 151
Figura 9.16 – Placa verificada quanto à instabilidade - EAEA - HARD .................. 152
Figura 9.17 – Parâmetros críticos de acordo com células de domínio - EAEA - HARD ................................................................................................................................ 152
Figura 9.18 – Placa verificada quanto à instabilidade – LAAA - HARD .................. 153
Figura 9.19 – Parâmetros críticos de acordo com células de domínio - LAAA - HARD ...................................................................................................................... 153
Figura 9.20 – Placa verificada quanto à instabilidade - LAEA - HARD ................... 154
Figura 9.21 – Parâmetros críticos de acordo com células de domínio - LAEA - HARD ................................................................................................................................ 154
Figura 9.22 – Placa verificada quanto à instabilidade – LALA - HARD .................. 155
Figura 9.23 – Parâmetros críticos de acordo com células de domínio - LALA - HARD ................................................................................................................................ 155
Figura 9.24 – Placa verificada quanto à instabilidade - AEAL - HARD ................... 156
Figura 9.25 – Parâmetros críticos de acordo com células de domínio - AEAL - HARD ................................................................................................................................ 156
Figura 9.26 – Placa verificada quanto à instabilidade – AAAL - HARD .................. 157
Figura 9.27 – Parâmetros críticos de acordo com células de domínio - AAAL - HARD ................................................................................................................................ 157
Figura 9.28 – Placa verificada quanto à instabilidade - EEEE - HARD .................. 158
Figura 9.29 – Parâmetros críticos de acordo com células de domínio - EEEE - HARD ................................................................................................................................ 158
Figura 9.30 – Placa verificada quanto à instabilidade – ALAL - HARD ................. 159
Figura 9.31 – Parâmetros críticos de acordo com células de domínio - ALAL - HARD ................................................................................................................................ 159
Figura 9.32 – Placa verificada quanto à instabilidade – carga biaxial - AAAA - HARD ................................................................................................................................ 160
Figura 9.33 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AAAA ....................................................................................................................... 160
Figura 9.34 – Placa verificada quanto à instabilidade - carga biaxial – AEAL - HARD ................................................................................................................................ 161
Figura 9.35 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AEAL ..................................................................................................................... 161
Figura 9.36 – Placa verificada quanto à instabilidade - carga biaxial - AAAL - HARD ................................................................................................................................ 162

Figura 9.37 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AAAL ....................................................................................................................... 162
Figura 9.38 – Placa verificada quanto à instabilidade - carga biaxial – AALL - HARD ................................................................................................................................ 163
Figura 9.39 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AALL ....................................................................................................................... 163
Figura 9.40 – Placa verificada quanto à instabilidade - carga biaxial - ALAL - HARD ................................................................................................................................ 164
Figura 9.41 – Parâmetros críticos de acordo com células de domínio - carga biaxial - ALAL ....................................................................................................................... 164
Figura 9.42 – Placa verificada quanto à instabilidade - carga biaxial – EEEE - HARD ................................................................................................................................ 165
Figura 9.43 – Parâmetros críticos de acordo com células de domínio - carga biaxial - EEEE ....................................................................................................................... 165
Figura 9.44 – Placa verificada quanto à instabilidade - carga de cisalhamento - AAAA ....................................................................................................................... 166
Figura 9.45 – Parâmetros críticos de acordo com células de domínio - cisalhamento - AAAA .................................................................................................................... 166
Figura 9.46 – Placa verificada quanto à instabilidade - carga de cisalhamento – EEEE ....................................................................................................................... 167
Figura 9.47 – Parâmetros críticos de acordo com células de domínio - cisalhamento - EEEE .................................................................................................................... 167
Figura 9.48 – Placa verificada quanto à instabilidade - carga de cisalhamento – EAEA ....................................................................................................................... 168
Figura 9.49 – Parâmetros críticos de acordo com células de domínio - cisalhamento – EAEA .................................................................................................................... 168
Figura 9.50 – Vinculação para placas com furos .................................................... 171
Figura 9.51 – Malha 1 – cg da célula próximo ao contorno (d/L = 0,1; 0,2; 0,3 e 0,4) ................................................................................................................................ 172
Figura 9.52 – Malha 1 – cg da célula próximo ao contorno (d/L = 0,5; 0,6 e 0,7) ... 173
Figura 9.53 – Malha 1, placa com furo quadrado, relação d/L = 0,1 – Carga Uniaxial ................................................................................................................................ 174
Figura 9.54 – Malha 1, placa com furo quadrado, relação d/L = 0,2 – Carga Uniaxial ................................................................................................................................ 175
Figura 9.55 – Malha 1, placa com furo quadrado, relação d/L = 0,3 – Carga Uniaxial ................................................................................................................................ 176
Figura 9.56 – Malha 1, placa com furo quadrado, relação d/L = 0,4 – Carga Uniaxial ................................................................................................................................ 177
Figura 9.57 – Malha 1, placa com furo quadrado, relação d/L = 0,5 – Carga Uniaxial ................................................................................................................................ 178
Figura 9.58 – Malha 1, placa com furo quadrado, relação d/L = 0,6 – Carga Uniaxial ................................................................................................................................ 179

Figura 9.59 – Malha 1, placa com furo quadrado, relação d/L = 0,7 – Carga Uniaxial ................................................................................................................................ 180
Figura 9.60 – Gráfico para os parâmetros críticos de flambagem – Malha 1 ......... 182
Figura 9.61 – Malha 2 – cg da célula distante do contorno .................................... 183
Figura 9.62 – Malha 2 – cg da célula distante do contorno refinada ...................... 184
Figura 9.63 – Gráfico para os parâmetros críticos de flambagem – Malha 2 ......... 188
Figura 9.64 – Malha com cg da célula distante do contorno 2................................ 189

LISTA DE TABELAS
Tabela 9.1 – Coeficientes para placas comparadas com a solução analítica ......... 139 Tabela 9.2 – Parâmetros de máxima deflexão para a vinculação – AAAA – HARD ................................................................................................................................ 140 Tabela 9.3 – Resultados para o ponto central da placa – AAAA – HARD .............. 141 Tabela 9.4 – Resultados para o ponto central da placa – AAAA – SOFT ............... 141 Tabela 9.5 – Parâmetros de máxima deflexão para a vinculação – AEAE– HARD ................................................................................................................................ 142 Tabela 9.6 – Resultados para o ponto central da placa – AEAE – HARD .............. 142 Tabela 9.7 – Resultados para o ponto central da placa – AEAE – SOFT ............... 143 Tabela 9.8 – Parâmetros de máxima deflexão para a vinculação – EEEE– HARD 143 Tabela 9.9 – Resultados para o ponto central da placa – EEEE – HARD .............. 144 Tabela 9.10 – Resultados para o ponto central da placa – EEEE – SOFT ............ 144 Tabela 9.11 – Coeficientes para problemas de instabilidade .................................. 145 Tabela 9.12 – Parâmetro crítico de flambagem – AAAA – HARD ........................... 148 Tabela 9.13 – Parâmetro crítico de flambagem – AAAE – HARD ........................... 149 Tabela 9.14 – Parâmetro crítico de flambagem – EAAA – HARD ........................... 150 Tabela 9.15 – Parâmetro crítico de flambagem – AEAE – HARD ........................... 151 Tabela 9.16 – Parâmetro crítico de flambagem – EAEA – HARD ........................... 152 Tabela 9.17 – Parâmetro crítico de flambagem LAAA – HARD .............................. 153 Tabela 9.18 – Parâmetro crítico de flambagem – LAEA – HARD ........................... 154 Tabela 9.19 – Parâmetro crítico de flambagem – LALA – HARD ........................... 155 Tabela 9.20 – Parâmetro crítico de flambagem – AEAL – HARD ........................... 156 Tabela 9.21 – Parâmetro crítico de flambagem – AAAL – HARD ........................... 157 Tabela 9.22 – Parâmetro crítico de flambagem – EEEE – HARD ........................... 158 Tabela 9.23 – Parâmetro crítico de flambagem – ALAL – HARD ........................... 159 Tabela 9.24 –Parâmetro crítico de flambagem - carga biaxial – AAAA - HARD ..... 160 Tabela 9.25– Parâmetro crítico de flambagem - carga biaxial – AEAL – HARD ..... 161 Tabela 9.26 – Parâmetro crítico de flambagem - carga biaxial – AAAL – HARD .... 162 Tabela 9.27 – Parâmetro crítico de flambagem - carga biaxial – AALL – HARD .... 163 Tabela 9.28– Parâmetro crítico de flambagem - carga biaxial – ALAL – HARD ..... 164 Tabela 9.29 – Parâmetro crítico de flambagem - carga biaxial – EEEE – HARD ... 165 Tabela 9.30 – Parâmetro crítico de flambagem - carga de cisalhamento – AAAA – HARD ...................................................................................................................... 166 Tabela 9.31 – Parâmetro crítico de flambagem - carga de cisalhamento – EEEE – HARD ...................................................................................................................... 167 Tabela 9.32 – Parâmetro crítico de flambagem - carga de cisalhamento – EAEA – HARD ...................................................................................................................... 168 Tabela 9.33 – Malha 1 – cg da célula próximo ao contorno para placas com furos 170 Tabela 9.34 – Parâmetros críticos de flambagem, placa com furo d/L = 0.1 – Malha 1 ................................................................................................................................ 174 Tabela 9.35 – Parâmetros críticos de flambagem, placa com furo d/L = 0,2 – Malha 1 ................................................................................................................................ 175

Tabela 9.36 – Parâmetros críticos de flambagem, placa com furo d/L = 0,3 – Malha 1 ................................................................................................................................ 176 Tabela 9.37 – Parâmetros críticos de flambagem, placa com furo d/L = 0,4 – Malha 1 ................................................................................................................................ 177 Tabela 9.38 – Parâmetros críticos de flambagem, placa com furo d/L = 0,5 – Malha 1 ................................................................................................................................ 178 Tabela 9.39 – Parâmetros críticos de flambagem, placa com furo d/L = 0,6 – Malha 1 ................................................................................................................................ 179 Tabela 9.40 – Parâmetros críticos de flambagem, placa com furo d/L = 0,7 – Malha 1 ................................................................................................................................ 180 Tabela 9.41 – Parâmetros críticos de flambagem, com relação a d/L – Malha 1.... 182 Tabela 9.42 – Parâmetros críticos de flambagem, placas com furo – Malha 2 ....... 185 Tabela 9.43 – Parâmetros críticos de flambagem, placas com furo – Malha 2 – Comparação ............................................................................................................ 186 Tabela 9.44 – Parâmetros críticos de flambagem, com relação a d/L – Malha 2, h/L = 0,001 ....................................................................................................................... 188 Tabela 9.45 – Parâmetros críticos de flambagem, placas com furo – Malha 2 – Tensão média .......................................................................................................... 190 Tabela 9.46 – Parâmetros críticos de flambagem – Malha 2 – Tensão média – Comparação ............................................................................................................ 191 Tabela 9.47 – Parâmetros críticos de flambagem, comparação de todas as malhas, h/L = 0,01 ................................................................................................................ 192 Tabela 9.48 – Parâmetros críticos de flambagem, comparação da malha 2 e tensão média ...................................................................................................................... 193

LISTA DE ABREVIATURAS E SIGLAS
ABNT – Associação Brasileira de Normas Técnicas MEC – Métdodo dos Elementos de Contorno MEF – Método dos Elementos Finitos
UNICAMP – Universidade Estadual de Campinas

LISTA DE SÍMBOLOS
D = Módulo de Rigidez à Flexão E = Módulo de Young
M = Momento Fletor
N
= Normal
Q = Cortante
h = Espessura L = Comprimento de um lado = Variável intrinsica utilizada na integração
= Variável utilizada na transformação de Telles
= Posição do Ponto Fonte
= Tensão
u = função dos deslocamentos
= Delta de Kronecker
= Grafiente de uma função
= Laplaciano
= Deformação
ijC = Coeficientes para ponto no contorno
n = Cossenos diretores
F = Forças de corpo
= Coeficiente de Reissner

*T = Soluções fundamentais de força de superfície
*U = Soluções fundamentais de deslocamento
q = Carga uniformemente distribuída
w = Deslocamento na direção z

SUMÁRIO
1 INTRODUÇÃO ..................................................................................................... 22
1.1 JUSTIFICATIVA .................................................................................................. 25
1.2 OBJETIVOS ........................................................................................................ 25
1.2.1 Objetivo Geral: ................................................................................................. 26
1.2.2 Objetivos Específicos: ...................................................................................... 26
2 REVISÃO BIBLIOGRÁFICA ................................................................................. 27
2.1 CONSIDERAÇÕES GERAIS SOBRE O MÉTODO DOS ELEMENTOS DE CONTORNO ............................................................................................................. 27
2.2 CONSIDERAÇÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS NÃO PERFURADAS ................................................................................................. 33
2.2.1 Placas solicitadas por cargas uniformes .......................................................... 33
2.2.2 Placas solicitadas por cargas lineares.............................................................. 34
2.2.3 Placas solicitadas por cisalhamento puro......................................................... 34
2.2.4 Placas solicitadas por cargas combinadas ....................................................... 35
2.3 CONSIDERAÇÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS .......................................................................................................... 35
2.3.1 Placas Perfuradas solicitadas por cargas uniformes ........................................ 35
2.3.2 Placas perfuradas solicitadas por cisalhamento puro ...................................... 36
2.3.3 Placas perfuradas solicitadas por cargas combinadas ..................................... 37
2.3.4 Placas perfuradas por múltiplos furos .............................................................. 37
2.4 CONSIDERAÇÕES SOBRE A INSTABILIDADE DE PLACAS QUANDO TRATADAS PELO MÉTODO DOS ELEMENTOS DE CONTORNO ........................ 37
3 REVISÃO MATEMÁTICA ..................................................................................... 39
3.1 INTRODUÇÃO .................................................................................................... 39
3.2 FUNÇÕES MATEMÁTICAS ................................................................................ 39
3.2.1 Notação indicial ................................................................................................ 39
3.2.2 Vetor Gradiente ................................................................................................ 40
3.2.3 Laplaciano ........................................................................................................ 40
3.2.4 Delta de Kronecker ........................................................................................... 41
3.2.5 Delta de Dirac ................................................................................................... 41
3.2.6 Teorema da Divergência .................................................................................. 41
3.3 ELASTICIDADE LINEAR ..................................................................................... 42
3.4 EQUAÇÕES CONSTITUTIVAS .......................................................................... 43

4 TEORIA DE PLACAS ........................................................................................... 44
4.1 INTRODUÇÃO .................................................................................................... 44
4.2 TEORIA DE KIRCHHOFF ................................................................................... 44
4.3 TEORIA DE REISSNER ...................................................................................... 48
5 O MEC APLICADO NO CÁLCULO DE PLACAS DE REISSNER .......................... 53
5.1 INTRODUÇÃO .................................................................................................... 53
5.2 EQUAÇÃO INTEGRAL PARA PONTO NO DOMÍNIO ........................................ 53
5.3 EQUAÇÃO INTEGRAL PARA PONTO NO CONTORNO ................................... 60
5.4 ESFORÇOS GENERALIZADOS A PARTIR DAS SOLUÇÕES FUNDAMENTAIS.. .................................................................................................... 62
5.5 A APLICAÇÃO NUMÉRICA DO MEC PARA PLACAS DE REISSNER .............. 73
6 O EFEITO DA NÃO LINEARIDADE GEOMÉTRICA .............................................. 93
6.1 INTRODUÇÃO .................................................................................................... 93
6.2 AS EQUAÇÕES DE EQUILÍBRIO PARA O PROBLEMA DE INSTABILIDADE .. 94
6.3 AS EQUAÇÃO INTEGRAL DE CONTORNO PARA O PROBLEMA DE INSTABILIDADE ....................................................................................................... 97
6.4 IMPLEMENTAÇÃO NUMÉRICA DA EQUAÇÃO INTEGRAL DE CONTORNO QUE LEVA EM CONTA A NÃO LINEARIDADE GEOMÉTRICA ............................. 102
7 PROBLEMAS DE ELASTICIDADE BIDIMENSIONAL ....................................... 109
8 INTEGRAÇÃO NUMÉRICA ................................................................................ 121
8.1 INTEGRAÇÃO REGULAR .............................................................................. 121
8.2 TRATAMENTO DAS INTEGRAIS SINGULARES ........................................... 121
8.2.1 Singularidade do tipo ln(r) ............................................................................ 122
8.2.2 Aplicação de acordo com o posicionamento do ponto fonte ........................ 129
8.2.3 Singularidade do tipo 1/r ............................................................................... 130
9 RESULTADOS ................................................................................................... 139
9.1 VALIDAÇÃO DO MÉTODO UTILIZADO - RESULTADOS PARA PROBLEMAS DE FLEXÃO EM PLACAS SEM FUROS ................................................................ 139
9.1.1 Comentários sobre os resultados para problemas de flexão de placas ....... 144
9.2 RESULTADOS PARA INSTABILIDADE DE PLACAS SEM FUROS .............. 145
9.2.1 Exemplo 1 – Placa com carga constante uniaxial – Vinculação AAAA ........ 148
9.2.2 Exemplo 2 – Placa com carga constante uniaxial – Vinculação AAAE ........ 149
9.2.3 Exemplo 3 – Placa com carga constante uniaxial – Vinculação EAAA ........ 150
9.2.4 Exemplo 4 – Placa com carga constante uniaxial – Vinculação AEAE ........ 151
9.2.5 Exemplo 5 – Placa com carga constante uniaxial – Vinculação EAEA ........ 152
9.2.6 Exemplo 6 – Placa com carga constante uniaxial – Vinculação LAAA ......... 153

9.2.7 Exemplo 7 – Placa com carga constante uniaxial – Vinculação LAEA ......... 154
9.2.8 Exemplo 8 – Placa com carga constante uniaxial – Vinculação LALA ......... 155
9.2.9 Exemplo 9 – Placa com carga constante uniaxial – Vinculação AEAL ......... 156
9.2.10 Exemplo 10 – Placa com carga constante uniaxial – Vinculação AAAL ..... 157
9.2.11 Exemplo 11 – Placa com carga constante uniaxial – Vinculação EEEE .... 158
9.2.12 Exemplo 12 – Placa com carga constante uniaxial – Vinculação ALAL ..... 159
9.2.13 Exemplo 13 – Placa com carga constante biaxial – Vinculação AAAA ...... 160
9.2.14 Exemplo 14 – Placa com carga constante biaxial – Vinculação AEAL ....... 161
9.2.15 Exemplo 15 – Placa com carga constante biaxial – Vinculação AAAL ....... 162
9.2.16 Exemplo 16 – Placa com carga constante biaxial – Vinculação AALL ....... 163
9.2.17 Exemplo 17 – Placa com carga constante biaxial – Vinculação ALAL ....... 164
9.2.18 Exemplo 18 – Placa com carga constante biaxial – Vinculação EEEE ...... 165
9.2.19 Exemplo 19 – Placa com carga de cisalhamento – Vinculação AAAA ....... 166
9.2.20 Exemplo 20 – Placa com carga de cisalhamento – Vinculação EEEE ....... 167
9.2.21 Exemplo 21 – Placa com carga de cisalhamento – Vinculação EAEA ....... 168
9.2.22 Comentários sobre os problemas de instabilidade de placas sem furos .... 169
9.3 RESULTADOS PARA INSTABILIDADE DE PLACAS COM FUROS – MALHA 1 - CG DA CÉLULA PRÓXIMO AO CONTORNO ........................................................ 170
9.3.1 Vinculação para placas com furos ................................................................ 171
9.3.2 Malha 1 - cg da célula próximo ao contorno para placas com furos pequenos ................................................................................................................................ 172
9.3.3 Malha 1 - cg da célula próximo ao contorno para placas com furos grandes ................................................................................................................................ 173
9.3.4 Exemplo 1 – Malha 1, placa com furo quadrado, relação d/L = 0,1.............. 174
9.3.5 Exemplo 2 – Malha 1, placa com furo quadrado, relação d/L = 0,2.............. 175
9.3.6 Exemplo 3 – Malha 1, placa com furo quadrado, relação d/L = 0,3.............. 176
9.3.7 Exemplo 4 – Malha 1, placa com furo quadrado, relação d/L = 0,4.............. 177
9.3.8 Exemplo 5 – Malha 1, placa com furo quadrado, relação d/L = 0,5.............. 178
9.3.9 Exemplo 6 – Malha 1, placa com furo quadrado, relação d/L = 0,6.............. 179
9.3.10 Exemplo 7 – Malha 1, placa com furo quadrado, relação d/L = 0,7............ 180
9.3.11 Comentários sobre os resultados para placas com furos – Malha 1 – cg próximo ao contorno ................................................................................................ 181
9.3.12 Comparação dos resultados para a malha 1 – cg da célula próximo ao contorno .................................................................................................................. 182
9.4 RESULTADOS PARA INSTABILIDADE DE PLACAS COM FUROS – MALHA 2 – CG DA CÉLULA DISTANTE DO CONTORNO ....................................................... 183

9.4.1 Resultados para placas com furos – Carga Uniaxial – Malha 2 – cg da célula distante do contorno ................................................................................................ 185
9.4.2 Comentários sobre os resultados para placas com furos – Malha 2 – cg distante do contorno ................................................................................................ 187
9.4.3 Comparação dos resultados – Malha 2 – cg da célula distante do contorno ...... ................................................................................................................................ 188
9.5 RESULTADOS PARA INSTABILIDADE DE PLACAS COM FUROS – MALHA 2 – CG DA CÉLULA DISTANTE DO CONTORNO – TENSÃO MÉDIA ........................ 189
9.5.1 Resultados para placas com furos – Carga Uniaxial – Malha 2 – cg da célula distante do contorno – Tensão média ..................................................................... 190
9.5.2 Comentários sobre os resultados para placas com furos – Malha 2 – cg distante do contorno – Tensão média ..................................................................... 192
10 PROGRAMAS DESENVOLVIDOS .................................................................. 194
10.1 PROGRAMA ESTADO PLANO DE TENSÃO/DEFORMAÇÃO ...................... 194
10.2 PROGRAMA PARA PROBLEMAS DE PLACAS ............................................ 194
10.3 MÓDULO – MOD_INP_QP1 ........................................................................... 194
10.4 MÓDULO – MOD_GEO_QP1 ......................................................................... 196
10.5 MÓDULO – MOD_MAT_QP1 .......................................................................... 197
10.6 MÓDULO – MOD_SOL_AUTOVALOR_QP1 .................................................. 198
10.7 MAIN_QP1 ...................................................................................................... 199
10.8 PROGRAMA GERADOR DE MALHAS ........................................................... 199
11 CONCLUSÃO ................................................................................................... 200
11.1 CONCLUSÕES SOBRE O PROBLEMA DE FLEXÃO DE PLACAS ............... 200
11.2 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS NÃO PERFURADAS ........................................................................................................ 200
11.3 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS – MALHA 1 – CG DA CÉLULA PRÓXIMO AO CONTORNO ......... 201
11.4 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS – MALHA 2 – CG DA CÉLULA DISTANTE DO CONTORNO ........ 202
11.5 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS – MALHA 2 – TENSÃO MÉDIA ...................................................... 202
12 PROPOSTAS PARA TRABALHOS FUTUROS ............................................... 203
REFERÊNCIAS ....................................................................................................... 204

22
1 INTRODUÇÃO
O presente trabalho trata da aplicação e desenvolvimento de uma solução
computacional para utilização do método dos elementos de contorno em problemas
de flexão e instabilidade de placas perfuradas utilizando a teoria de REISSNER
(1945), obtendo-se os parâmetros críticos de flambagem. A eficácia do método na
resolução deste tipo de problema já foi comprovada por diversos trabalhos na
literatura como PURBOLAKSONO e ALIABADI (2005), sendo notáveis as vantagens
da utilização do método dos elementos de contorno com relação a outros métodos,
como a discretização apenas do contorno do problema, a boa convergência para
gradientes e derivadas e a menor utilização de processamento. Apesar destes
pontos positivos observa-se algumas desvantagens do método como a necessidade
do cálculo de integrais singulares, a necessidade da solução de matrizes cheias e a
necessidade da utilização das soluções fundamentais previamente obtidas,
conforme descrito por KATSIKADELIS (2002).
Conforme BREBBIA et al. (1991), a precisão dos resultados é de grande
dependência do método de integração utilizado, no presente trabalho é abordada a
técnica da subtração de singularidade para resolução de integrais singulares do tipo
1/r, as quais são chamadas de fortemente singulares ou do tipo Cauchy, sendo
vista nos trabalhos de ALIABADI (2002), PALERMO JR. (2000) e KZAM (2010).
Também é abordada a técnica da transformação de Telles para resolução de
integrais singulares do tipo ln(r), as quais são chamadas de fracamente singulares
conforme o trabalho de KARAM (1986). Também no presente trabalho são
apresentadas as soluções fundamentais obtidas por WEEËN (1982) utilizadas no
método dos elementos de contorno para placas de Reissner. A aplicação do método
de forma numérica também é analisada demonstrando-se a montagem e cálculo
das parcelas de cada solução fundamental. As placas resolvidas serão finas ou
moderadamente espessas, isotrópicas, em regime linear para pequenos
deslocamentos e em diversos tipos de condições de contorno. Um breve resumo
dos capítulos no presente trabalho é encontrado abaixo:
O capítulo 1 inicia o presente trabalho mostrando os objetivos gerais e
específicos, juntamente com a justificativa.

23
O capítulo 2 mostra a revisão da literatura com os principais trabalhos
relacionados com placas e o método dos elementos de contorno. Detalhando desde
os primeiros passos do método no desenvolvimento das equações integrais até a
sua utilização em modelos computacionais.
O capítulo 3 tem uma breve revisão matemática abordando as funções mais
utilizadas no método dos elementos de contorno, também é apresentada a notação
indicial utilizada no presente trabalho. As equações da teoria da elasticidade são
mostradas neste capítulo.
O capítulo 4 é dedicado para a explicação do comportamento de placas de
acordo com as teorias de Kirchhoff e Reissner. Primeiramente será abordada a
teoria de Kirchhoff ou também chamada de teoria clássica de placas, mostrando-se
sua dedução e principais hipóteses. Depois será mostrada a teoria de Reissner, que
difere da teoria clássica por considerar a contribuição do esforço cortante na
deformação da placa.
O capítulo 5 mostra como é aplicado o método dos elementos de contorno no
problema de placas de Reissner. Este capítulo mostra a dedução completa da
equação integral de contorno, sendo feita a partir do teorema da reciprocidade de
Betti. Será feita a dedução das soluções fundamentais de forças de superfície a
partir das soluções fundamentais de deslocamento, multiplicando-se os momentos
pelos cossenos diretores. Também será descrito a aplicação do método de maneira
numérica abordando-se a integração das soluções fundamentais, montagem do
sistema de equações e solução do problema em nós do contorno e em nós internos.
No capítulo 6 é feita uma breve análise do problema de instabilidade de
placas, são desenvolvidas as equações de equilíbrio para este tipo de problema.
Depois é apresentada a teoria de instabilidade de placas utilizando-se o método dos
elementos de contorno, desenvolvendo-se as equações integrais de contorno e os
métodos numéricos para análise. É também mostrada a aplicação do método
numérico quociente de Rayleigh para solução do problema de autovalor utilizado
para encontrar os parâmetros críticos de flambagem das placas analisadas. É
descrito o processo de integração de células de domínio para considerar os efeitos
das tensões de domínio da placa.
24
No capítulo 7 é mostrado o desenvolvimento do método dos elementos de
contorno para problemas de elasticidade em duas dimensões, os quais são usados
para extrair as tensões nas bordas de furos, a fim de promover uma análise mais
precisa dos parâmetros críticos de flambagem. São apresentadas as soluções
fundamentais utilizadas no cálculo e também a aplicação numérica, para encontrar
as soluções em pontos do contorno e também em pontos internos do domínio.
No capítulo 8 são desenvolvidos os métodos de integração singular
utilizados no presente trabalho. É deduzida a técnica da integração de Telles,
necessária quando o problema apresente um tipo de singularidade ln(r). É também
deduzida a técnica da subtração de singularidade, utilizada quando o problema
apresenta o tipo de singularidade 1/r.
No capítulo 9 são apresentados os resultados obtidos para os parâmetros
críticos de flambagem avaliados em diversos tipos de exemplos de placas
quadradas perfuradas e não perfuradas, utilizando-se vários tipos de condições de
contorno diferentes, como borda livre, engastada ou simplesmente apoiada.
No capítulo 10 são apresentados os programas desenvolvidos ao longo do
presente trabalho, explicando os módulos utilizados.
No capítulo 11 é feita uma análise dos resultados obtidos, mostrando as
conclusões obtidas no decorrer do presente trabalho.
No capítulo 12 são feitas algumas propostas para trabalhos futuros.

25
1.1 JUSTIFICATIVA
Os trabalhos que apresentam os parâmetros críticos de flambagem para
placas perfuradas são muito poucos quando comparados com os problemas de
placas não perfuradas. Os resultados da literatura para estes tipos de problemas
também são muito limitadas. Devido a complexidade da geometria, observa-se uma
maior dificuldade na obtenção de soluções analíticas e muitos trabalhos recorrem a
métodos numéricos.
Apesar de existirem trabalhos que avaliam a instabilidade de placas com furos
centrais, como é o caso de SABIR e CHOW (1983), BROWN e YETTRAM (1986),
EL-SAWY e NAZMY (2001) e DOVAL et al. (2013), estes trabalhos não mostram a
influência da espessura da placa no parâmetro crítico de flambagem.
A análise de instabilidade de placas levando em conta o efeito da deformação
por cortante, a partir do estado de tensões iniciais na chapa perfurada obtido pela
elasticidade plana, pode levar à boa convergência dos parâmetros críticos de
flambagem mesmo quando é analisada a influência do tamanho da espessura até
placas moderadamente espessas.
O método dos elementos de contorno para resolução de placas pode ser
também de grande utilidade para softwares de cálculo de estruturas, devido ao
menor uso de processamento e também à melhor precisão das respostas em
problemas de placas se comparado ao método dos elementos finitos, conforme
mencionado por HARTMANN (1989) e KATSIKADELIS (2002). Uma análise mais
precisa dos esforços e cargas críticas das peças delgadas ou de moderada
espessura poderão gerar estruturas mais seguras e baratas.
1.2 OBJETIVOS
O principal objetivo do presente trabalho é calcular os parâmetros críticos de
flambagem de placas perfuradas e não perfuradas utilizando o método dos
elementos de contorno, quando aplicado na teoria de placas que leva em conta o
efeito da deformação por cortante. O presente trabalho também visa mostrar a
metodologia utilizada para realizar a aplicação do método dos elementos de
contorno no problema de instabilidade de placas. Para este propósito foi necessário
o desenvolvimento de um código em uma linguagem matemática, a linguagem

26
escolhida foi o FORTRAN 90 devido à sua fácil implementação, velocidade do
cálculo e alta precisão. O programa foi desenvolvido no ambiente de programação
Visual Studio 2015 Community, integrado ao compilador INTEL FORTRAN 2016
versão para estudantes. Foram obtidos resultados com diversas condições de
contorno e comparados com outros trabalhos para diversos tipos de problemas de
placas, como problemas de flexão e a obtenção do parâmetro crítico de flambagem.
1.2.1 Objetivo Geral:
Obter os parâmetros críticos de placas perfuradas utilizando elementos de contorno.
1.2.2 Objetivos Específicos: • Desenvolver um programa que resolva os problemas de maneira rápida e precisa;
• Demonstrar a aplicação do método numérico passo a passo;
• Analisar as equações dos problemas propostos e suas soluções;
• Apresentar de maneira completa os métodos de integração singular;
• Resolver problemas com diversos tipos de condições de contorno;
• Comparar os resultados obtidos com outros autores

27
2 REVISÃO BIBLIOGRÁFICA
2.1 CONSIDERAÇÕES GERAIS SOBRE O MÉTODO DOS ELEMENTOS DE CONTORNO
A aplicação dos métodos numéricos da maneira que se observa nos dias de
hoje, utilizando-se softwares de computador para resolver problemas de engenharia,
é fruto de anos de progresso da utilização de técnicas matemáticas obtidas por
pesquisadores. Muito antes do aparecimento dos computadores utilizados hoje para
resolução de problemas, LORD KELVIN (1848) resolveu o problema de um corpo
elástico e isotrópico em um espaço em três dimensões solicitado por uma carga
concentrada. A solução encontrada para este problema é chamada de Solução
Fundamental de Kelvin, a qual ainda é usada para solucionar problemas de
elasticidade utilizando-se métodos numéricos, muito anos depois de Kelvin concebê-
la. As soluções analíticas para problemas simplificados de placas e instabilidade de
placas podem ser encontrados na literatura, exemplos destes trabalhos são dos
livros de TIMOSHENKO e WOINOWSKY-KRIEGER (1959) e também
TIMOSHENKO e GERE (1961), contendo soluções analíticas para problemas
simples como placas retangulares ou circulares. Porém, estas soluções podem não
ser suficientes para problemas de engenharia práticos, o que levou a busca de
métodos numéricos para resolução dos problemas de placas mais complexos, já que
estes têm solução analítica de difícil obtenção ou até mesmo impossível. Como já
mencionado a aplicação atual do método vem de um somatório de técnicas obtidas
ao longo do tempo por diversos pesquisadores, como o artigo de HÖRMANDER
(1963) que apresentou os avanços na teoria de operadores diferenciais parciais
lineares, este trabalho teve grande uso mais tarde, na obtenção das soluções
fundamentais. E também o livro de ABRAMOVITZ e STEGUN (1965), o qual detalha
as funções de Bessel modificadas utilizadas em problemas de placas anos depois no
trabalho de WEEËN (1982).
A utilização de equações integrais na resolução de problemas de elasticidade
linear foi introduzida por FREDHOLM (1903). Posteriormente diversos trabalhos
devem ser citados como MUSKHELISHVILI (1953), MIKHLINI (1957) e SMIRNOV
(1964), onde tratam problemas de engenharia utilizando-se equações integrais.
Porém, a popularidade destes métodos foi pouca, devido a não existência de

28
computadores capazes de processar estas técnicas. KUPRADZE (1965) apresentou
os primeiros passos para a utilização da formulação indireta, utilizando-se a solução
fundamental de Lord Kelvin.
A primeira aplicação do método dos elementos de contorno em placas
utilizando-se a teoria clássica foi observada no trabalho de JASWON et al. (1967)
mostrando-se que os problemas demonstrados pela equação bi harmônica podem
ser formulados em termos de equações integrais, utilizando-se o método indireto
para cálculo. CRUSE (1969) apresentou a resolução de problemas de elasticidade
em três dimensões utilizando-se o método dos elementos de contorno e apresentou
a solução de uma placa engastada sendo tracionada.
NIWA et al. (1974) descreveram a primeira solução de problemas de
instabilidade elástica de placas por meio do auxílio de equações integrais. MAITI e
CHAKRABARTY (1974) apresentaram a solução de placas poligonais simplesmente
apoiadas utilizando-se equações integrais de contorno.
HANSEN (1976) apresentou a análise de placas infinitas com furos e contorno
não carregado utilizando duas equaçoes integrais, uma correspondente a expressao
do deslocamento e outra correspondente a sua derivada em relaçao a uma direção
qualquer. ALTIERO e SIKARSKIE (1978) sugeriu o tratamento do problema de
placas mais geral, baseando-se em um problema em que a função de Green é
conhecida, utilizando-se uma placa fictícia.
Os primeiros pesquisadores a utilizar métodos diretos para resolução de
placas foram BEZINE (1978), STERN (1979) e DANSON (1979). Essa técnica foi
mais tarde generalizada para quaisquer condições de contorno por WU e ALTIERO
(1979). TOTTENHAM (1979) discutiu a aplicação de métodos diretos e indiretos em
elementos estruturais de cascas e placas. GOSPODINOC e LJUTSKANOV (1982)
apresentaram uma formulação direta do método dos elementos de contorno para a
teoria clássica, sendo feita também uma análise de instabilidade de placas.
O primeiro pesquisador a aplicar o método dos elementos de contorno na
teoria de placas proposta por REISSNER (1945) foi WEEËN (1982). Weeën deduziu
as soluções fundamentais para os deslocamentos e trações para aplicação do

29
método, mostrando resultados para placas circulares e retangulares. Weeën propôs
para futuros trabalhos uma melhor investigação das quadraturas utilizadas na
integração e expansão das capacidades de calculo do programa como cargas
transversais não uniformes.
KATAYAMA et al. (1983) apresentaram soluções para placas perfuradas com
contorno livre ou engastadas, utilizando-se a teoria clássica e o método dos
elementos de contorno. DU et al. (1984) resolveram problemas de placas com furos
retangulares utilizando-se elementos de contorno e baseando-se na teoria clássica.
BREBBIA et al. (1984) lançam em seu livro diversas técnicas para solução de placas
utilizando-se elementos de contorno e a teoria clássica. COSTA e BREBBIA (1985)
obtém a formulação geral para os problemas de instabilidade de placas utilizando-se
o método dos elementos de contorno. GUO-SHU e MUKHERJEE (1986) resolveram
problemas de placas com furos circulares por elementos de contorno baseando-se
na teoria clássica.
KARAM (1986) apresentou em sua dissertação de mestrado diversas técnicas
para refinamento do método para placas de Reissner, como a transformação
quadrática para resolução de integrais singulares. PARIS e LEÓN (1987)
apresentaram a solução de placas com apoios internos pelo método dos elementos
de contorno baseando-se na teoria clássica. SYNGELLAKIS e KANG (1987)
apresentaram a solução de instabilidades de placas utilizando-se elementos de
contorno e células de domínio triangulares. LIU (1987) apresentou uma nova
formulação para problemas de instabilidade de placas, que envolve apenas dois
tipos de equações integrais, sendo estas semelhantes às utilizadas na análise linear
dos problemas de flexão de placas pelo método dos elementos de contorno e
adequadas para placas com formas arbitrárias no plano. TANAKA e MIYAZAKI
(1988) resolveram diversos problemas de instabilidade de placas utilizando o método
dos elementos de contorno. KARAM e TELLES (1988) analisaram o problema de
placas pelo método direto e mostraram que o problema também pode ser aplicado a
placas infinitas.
HARTMANN (1989) apresentou em seu livro problemas de placas com furos
retangulares utilizando-se a teoria clássica. BREBBIA et al. (1991) lançam um livro

30
introdutório para elementos de contorno contendo a resolução de problemas de
potencial e elasticidade. RIBEIRO (1992) resolveu problemas de placas por
elementos de contorno submetidos a um gradiente de temperatura. BECKER (1992)
lança seu livro com diversos tipos de problemas, disponibilizando o código para um
programa de elementos constantes. VENTURINI e PAIVA (1993) apresentou a
resolução de diversos tipos de problemas de placas utilizando-se diversas condições
de contorno diferentes. KATSIKADELIS e YOTIS (1993) aplicaram o método dos
elementos de contorno para placas espessas utilizando-se a teoria de Reissner, a
solução é expressa em termos de dois potenciais, um bi harmônico e um de Bessel.
KANE (1994) detalhou em seu livro o método de colocação do ponto fonte,
com aplicações em problemas de duas e três dimensões. SYNGELLAKIS e ELZEIN
(1994) apresentaram uma formulação para o cálculo de instabilidade placas
utilizando-se elementos de contorno, resolvendo diversos tipos de problemas. EL-
ZAFRANY et al. (1995) apresentaram uma solução fundamental modificada para
análise de placas finas e espessas com formas arbitrárias. MARCZAK (1995)
apresentou em seu trabalho uma solução para instabilidade de placas de Reissner
utilizando-se o método dos elementos de contorno, mostrando a necessidade de
malhas com celulas de domínio refinadas para verificar a convergência dos
resultados.
RASHED et al. (1997) apresentaram uma formulação hiper singular para o
problema de placas de Reissner utillizando-se elementos de contorno, mostrando o
problema da torção em um cubo. FERNANDES (1998) apresentou em seu trabalho
a solução de placas pela teoria clássica utilizando-se a técnica de sub-elementos
para cálculo das soluções fundamentais de contorno. DUARTE (1999) avaliou a
instabilidade de placas pelo método dos elementos de contorno utilizando-se a
técnica dos nós duplos e células de domínio triangulares. LIN et al. (1999)
resolveram diversos problemas de instabilidade de placas utilizando o método dos
elementos de contorno, inclusive o problema de a placa circular com carga uniforme
ao longo do contorno. FOLTRAN (1999) mostrou que é possível utilizar soluções
analíticas para as integrais das soluções fundamentais para problemas de
elasticidade planos, utilizando-se elementos lineares.

31
RASHED (2000) detalhou o processo de cálculo de placas espessas
utilizando o método dos elementos de contorno, calculando as soluções
fundamentais de singularidade forte de maneira indireta, apresentou também os
métodos para cálculo de placas de fundação. ANDRADE (2001) realizou a
comparação entre as teorias de Reissner, Mindlin e Kirchhoff quando calculadas
utilizando o método dos elementos de contorno. SIMÕES (2001) obteve as cargas
críticas em placas utilizando o método dos elementos de contorno baseando-se na
teoria clássica.
VENTSEL e KRAUTHAMMER (2001) realizaram em seu livro a comparação
entre os métodos direto e indireto da aplicação do método dos elementos de
contorno. KATSIKADELIS (2002) publicou em seu livro diversas técnicas para
utilização no método dos elementos de contorno, como o tratamento de integrais
singulares fortes, podendo ser resolvidas pela técnica dos sub-elementos.
PALERMO JR. (2000) aplicou a integração analítica e elementos lineares
para calcular problemas de placas baseando-se nas teorias de Reissner e Mindlin
utilizando método dos elementos de contorno. ALIABADI (2002) foi pioneiro em
apresentar o método da subtração de singularidade para aplicações em integrais
singulares no método dos elementos de contorno. NERANTZAKI e KATSIKADELIS
(2003) resolveram o problema de grandes deslocamentos de placas com espessura
variável baseado na teoria de Von Karman, utilizando-se o método dos elementos de
contorno. CRESCE (2003) realisou a análise não-linear de pavimentos de concreto
armado considerando a teoria de Reissner, apresentando diversos tipos de
problemas entre eles o problema com carga em linha no centro da placa.
PURBOLAKSONO (2003) apresentou em sua tese a análise de instabilidade de
placas com fissuras utilizando-se o método dos elementos de contorno. WEN et al.
(2005) resolveram o problema de grandes deslocamentos de placas quando
baseado na teoria de Reissner.
PURBOLAKSONO e ALIABADI (2005) apresentaram a resolução de
problemas de instabilidade em placas utilizando o efeito da deformação por cortante,
neste artigo é demonstrado o procedimento de cálculo utilizando o método dos
elementos de contorno utilizando-se células de domínio e também da utilização do

32
método da reciprocidade dual, realizando-se então uma comparação entre os dois
métodos.
PURBOLAKSONO e ALIABADI (2005) resolveram o problema de grandes
deslocamentos de placas quando baseado na teoria de Reissner utilizando-se de
uma formulação hipersingular e também uma função de aproximação para o cálculo
dos termos não-lineares.
SAKANAKA (2006) apresentou os métodos para obtenção das frequências
naturais de vibração livre e cargas críticas de placas de Reissner pelo método dos
elementos de contorno. SANCHES (2009) utilizou pontos de colocação fora do
domínio da placa, a fim de não haver a necessidade de cálculo de integrais
singulares, para calcular placas de Reissner. ALIABADI e SUPRIYONO (2007)
apresentam a resolução de problemas de placas de Reissner considerando os
efeitos da não linearidade física e geométrica, utilizando-se do método dos
elementos de contorno.
RASHED (2008) propôs uma nova formulação para problemas de placas que
levam em conta o efeito da deformação por cortante. Em seu trabalho, ele descreve
a técnica utilizada para diminuir integrais hipersingulares para integrais do tipo valor
principal de Cauchy, diminuindo assim os recursos computacionais necessários para
resolução do problema.
BAIZ e ALIABADI (2009) demonstraram que o problema de instabilidade de
placas pelo método dos elementos de contorno pode ser resolvido utilizando-se
apenas integrais de contorno, utilizando o método da reciprocidade dual e o método
da integração radial. KZAM (2009) apresentou em seu trabalho sobre mecânica da
fratura a solução das integrais singulares pelo método da subtração de
singularidade. KZAM e CODA (2010) demonstraram em detalhes a aplicação do
método da subtração de singularidade utilizando-se a expansão de Taylor em
problemas resolvidos pelo método dos elementos de contorno.
DOVAL et al. (2010) apresentaram a análise de instabilidade de placas uma
formulação que incorpora a flexão clássica de placas e formulacão para elasticidade

33
plana, apresentando um método puro com apenas integrais de contorno, utilizando-
se a integração radial. CHEN e ZHOU (2010) demonstraram a teoria detalhada
sobre o cálculo de placas utilizando a teoria de Kirchhoff e apresentaram a relação
de que, quanto maior o grau da equação diferencial a ser resolvida no problema de
engenharia, maior será a vantagem do método dos elementos de contorno contra o
método dos elementos finitos. BUI et al. (2011) apresentaram em seu artigo sobre a
resolução de problemas sem a utilização de malhas, comparando os resultados da
metodologia apresentada e o método dos elementos de contorno.
OCHIAI e SHIMIZU (2012) apresentam em seu trabalho o método da tripla
reciprocidade para problemas de placas utilizando-se a teoria de Kirchhoff. DOVAL
(2013) apresentou em sua dissertação a solução dos problemas de estabilidade
para placas de materiais compositos laminados, utilizando o método da integração
radial.
FENNER (2014) descreveu com detalhes a integração de integrais singulares
utilizando a quadratura logaritmica, técnica importante no cálculo das integrais
quando o ponto fonte coincide com o elemento a ser integrado. KATSIKADELIS
(2014) lança seu livro abordando os diferentes problemas de placas uttilizando o
método dos elementos de contorno, entre eles a análise de instabilidade e grandes
deslocamentos.
2.2 CONSIDERAÇÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS NÃO PERFURADAS
2.2.1 Placas solicitadas por cargas uniformes
BRYAN (1891) apresentou a análise da carga crítica para uma placa
retangular infinita simplesmente apoiada ao longo de todas as bordas e submetida a
uma carga uniforme de compressão longitudinal. Para problemas de placas de
largura finita, podem-se encontrar soluções analíticas no livro de TIMOSHENKO e
GERE (1961). HINTON (1978) resolveu o problema utilizando-se o método das
faixas finitas. SAKIYAMA e MATSUDA (1987) abordaram diversas condições de
contorno para o problema de instabilidade de uma placa, utilizando-se a teoria de
Mindlin. THAM e SZETO (1990) resolveu problemas com diversos tipos de cargas,

34
utilizando o método das faixas finitas. MIZUSAWA (1993) apresentou soluções para
problemas de instabilidade de placas com diversas espessuras, mostrando a
variação da carga crítica de acordo com a espessura da placa, utilizando-se do
método das faixas finitas. REDDY (2002) apresentou uma solução para placas com
compressão uniforme para diversas condições de contorno. XIANG e WEI (2004)
mostrou a solução para placas com variação de espessura. HOSSEINI-HASHEMI et
al. (2008) apresentou uma solução analítica para os problemas de instabilidade de
placas espessas, quando considerada a teoria de Mindlin. JALALI e NAEI (2010)
resolveu problemas de instabilidade de placas de geometria variada, como placas
circulares. BUI et al. (2011) analisou problemas de placas utilizando um método que
dispensa a utilização de malhas. GHANNADPOUR et al. (2015) realizou o cálculo do
coeficiente de buckling em placas espessas utilizando-se um método das faixas
finitas exato.
2.2.2 Placas solicitadas por cargas lineares
LIBOVE et al. (1949) verificou o problema de instabilidade de placas
simplesmente apoiadas. GERARD e BECKER (1957) resolveu problemas com
diversas condições de contorno. As cargas críticas para placas solicitadas por
cargas lineares são dadas por YOSHIZUKA e NARUOKA (1971).
BROCKENBROUGH e JOHNSTON (1974) apresentaram uma tabela contendo os
valores de carga crítica para diversas condições de contorno com cargas lineares.
PEKÖZ (1987) apresentou a solução para várias condições de contorno. KANG e
LEISSA (2005) mostrou soluções para placas com vários tipos de cargas lineares.
2.2.3 Placas solicitadas por cisalhamento puro
Para placas solicitadas por cargas somente de cisalhamento, as soluções
analíticas para placas simplesmente apoiadas podem ser encontradas em
TIMOSHENKO (1910), BERGMANN e REISSNER (1932). Considerando a placa
engastada em dois lados e simplesmente apoiada nos outros, uma solução para
este problema foi dada por IGUCHI (1938) para o caso geral, e por LEGGETT (1941)
para o caso de a placa quadrada. COOK e ROCKEY (1963) obtiveram soluções
considerando o modo de flambagem não simétrico que não foi considerado por

35
IGUCHI (1938). JOHNS (1971) verificou o problema de placas ortotrópicas. XIANG
(1993) apresentou soluções para placas de diversas espessuras, quando solicitadas
por cargas biaxiais.
2.2.4 Placas solicitadas por cargas combinadas
O caso da placa solicitada por forças de cisalhamento combinado com
compressão longitudinal, com todos os lados simplesmente apoiado, foi tratada por
IGUCHI (1938). BATDORF e STEIN (1947) e também BATDORF e HOUBOLT
(1945) analisaram uma série de problemas deste tipo com outras condições de
contorno. TIMOSHENKO (1932) obteve as soluções para uma placa simplesmente
apoiada nos quatro lados, solicitada pela combinação de cargas de flexão e
cisalhamento. Este problema também foi analisado por STEIN (1936), WAY (1936),
CHWALLA (1936) e MCKENZIE (1964). BROCKENBROUGH e JOHNSTON (1974)
analisaram o problema quando a placa é solicitada por flexão, compressão e
cisalhamento.
PAVLOVIC e BAKER (1989) apresentaram uma solução exata para a
estabilidade de uma placa retangular solicitada por compressão biaxial. LIEW et al.
(1996) calculou placas com espessuras variadas com cargas biaxiais. SHUFRIN e
EISENBERGER (2005) analisaram o problema de placas com cargas biaxiais
utilizando teorias que consideram o efeito da deformação por cortande de primeira e
segunda ordem. HWANG e LEE (2006) abordaram os problemas de placas com
cargas especiais como carga concentrada e senoidal. SHUFRIN e EISENBERGER
(2007) resolveram problemas de placas com cargas combinadas de compressão e
cisalhamento.
2.3 CONSIDERAÇÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS
2.3.1 Placas Perfuradas solicitadas por cargas uniformes
O problema de uma placa quadrada com um furo central e simplesmente
apoiada ou engastada no contorno foi abordado por: LEVY et al. (1947), KUMAI
(1952), SCHLACK (1964), KAWAI e OHTSUBO (1968) e FUJITA et al. (1969).

36
YANG (1969) mostrou que furos retangulares provocam uma redução maior dos
parâmetros críticos de flambagem que furos circulares. VANN (1971) analisou placas
com furo circular tanto numericamente quanto de maneira experimental. BROWN e
YETTRAM (1986) mostraram que os parâmetros críticos de flambgem diminuem ao
se aumentar o tamanho do furo com relação a largura da placa. SHAKERLEY e
BROWN (1996) analisaram problemas de placas com furos com excentricidade com
relação ao centro da placa.
CHANG-JUN e RONG (1996) trataram placas perfuradas utilizando-se o
método dos elementos de contorno. SHANMUGAM et al. (1999) propôs uma fórmula
para dimensionamento de placas perfuradas solicitadas por cargas uniformes. EL-
SAWY e NAZMY (2001) verificou placas com furo circular e quadrado de diversos
tamanhos e em várias posições dentro do domínio da placa, utilizando o método dos
elementos finitos, concluindo que à medida com que se aumenta o furo em uma
placa quadrada, o seu parâmetro crítico também diminui. EL-SAWY e MARTINI
(2007) resolveu problemas de placas retangulares com várias configurações de
geometria. KOMUR e SONMEZ (2008) analisou placas retangulares com diversos
posicionamentos de um furo circular. MAIORANA et al. (2008) verificou placas
perfuradas sujeitas a cargas localizadas. KOMUR et al. (2010) analisou placas com
furo central elíptico. NEJAD e SHANMUGAM (2011) resolveram problemas de
placas inclinadas com furos. JAYASHANKARBABU e KARISIDDAPPA (2013)
analisaram o problema da placa quadrada com furos circulares ou quadrados
centrais com diversas espessuras. KOMUR e SONMEZ (2015) resolveram
problemas com cargas uniformes parciais.
2.3.2 Placas perfuradas solicitadas por cisalhamento puro
SOUTHWELL e SKAN (1924) analisaram placas quando solicitadas por
cisalhamento uniforme. O problema de instabilidade de uma placa quadrada com um
furo circular central solicitada por cisalhamento puro foi examinado por COOK e
ROCKEY (1969). O problema com placas quadradas de furo quadrado foi
investigado por GROSSKURTH et al. (1976). NARAYANAN e CHOW (1984)
analisaram problemas de placas com furos centrais solicitadas por cisalhamento.

37
CHENG e LI (2012) verificaram o problema de placas quadradas com furo circular
central.
2.3.3 Placas perfuradas solicitadas por cargas combinadas
NARAYANAN e CHOW (1984) verificou o coeficiente de flambagem de placas
com furos quadrados solicitadas por cargas biaxiais. CHOW e NARAYANAN (1984)
apresentaram soluções para problemas com furos com diversos tipos de cargas. O
problema de instabilidade de uma placa quadrada com um furo central solicitada por
cargas combinadas de flexão, cisalhamento e compressão foi analisado por BROWN
e YETTRAM (1986), estes também verificaram as placas solicitadas por cargas
biaxiais. SABIR e CHOW (1986) verificou problemas com furos com excentricidade
com relação ao centro da placa. BROWN (1990) tratou problemas de placas com
furos quando solicitadas por cargas concentradas. PAIK (2008) resolveu o problema
da carga perfurada com cargas de cisalhamento e biaxial. MAIORANA et al. (2009)
verificou placas perfuradas sujeitas a cargas combinadas.
2.3.4 Placas perfuradas por múltiplos furos
A placa quadrada com múltiplos furos solicitada por compressão foi analisada
por diversos pesquisadores, como MAY e GANABA (1988), BROWN e YETTRAM
(2000), EL-SAWY e NAZMY (2001). A placa quadrada com múltiplos furos solicitada
por cisalhamento puro foi analisada por MICHAEL (1960). Os problemas com
combinação de cisalhamento e flexão foram abordados por REDWOOD e UENOYA
(1979), MOEN e SCHAFER (2008).
2.4 CONSIDERAÇÕES SOBRE A INSTABILIDADE DE PLACAS QUANDO TRATADAS PELO MÉTODO DOS ELEMENTOS DE CONTORNO
BEZINE et al. (1985) analisou o problema de instabilidade de placas
utilizando-se a teoria de Kirchhoff. MANOLIS et al. (1986) tratou o problema de
instabilidade de placas e vigas fazendo-se uso do teorema da reciprocidade de Betti,
utilizando-se o método direto. LIU (1987) introduziu a resolução do problema
utilizando-se células de domínio, resolvendo placas quadradas e circulares.
IRSCHIK et al. (1987) utilizou o método dos elementos de contorno para resolver

38
problemas de instabilidade utilizando-se a teoria de Mindlin. SYNGELLAKIS e KANG
(1987) resolveu problemas de placas triangulares utilizando-se o método dos
elementos de contorno. TANAKA e MIYAZAKI (1988) analisou o problema de
instabilidade de placas conjuntas, como o perfil retangular tubular. SHI (1990) tratou
o problema de instabilidade de placas ortotrópicas. SYNGELLAKIS et al. (1991)
verificou os resultados numéricos do método dos elementos de contorno com
ensaios experimentais. ELZEIN e SYNGELLAKIS (1992) aplicou com sucesso o
método da reciprocidade dual no problema de instabilidade de placas.
SYNGELLAKIS e ELZEIN (1994) resolveu diversos tipos de problemas de
instabilidade de placas e comparou os resultados com a literatura.
MARCZAK (1995) resolveu problemas com compressão biaxial e com
cisalhamento puro. CHANG-JUN e RONG (1996) resolveu problemas de placas
perfuradas de geometria circular com furo central. NERANTZAKI e KATSIKADELIS
(1996) avaliou problemas de instabilidade de placas com variação de espessura. LIN
et al. (1999) avaliou problemas de instabilidade de placas com cargas lineares.
PURBOLAKSONO e ALIABADI (2005) avaliou problemas de instabilidade de placas
utilizando-se a teoria de Mindlin. WEN et al (2006) resolveu problemas buckling e
pós-buckling de placas utilizando-se a teoria de Reissner.
KATSIKADELIS e BABOUSKOUS (2007) apresentaram um novo método
para tratar problemas de pós-buckling, o método da equação análoga.
CHINNABOON et al. (2007) apresentaram o método da equação análoga para tratar
problemas de buckling. ALBUQUERQUE et al. (2008) resolveram o problema de
instabilidade de placas constituídas de materiais compósitos. YIOTIS e
KATSIKADELIS (2008) apresentaram o método da equação análoga para tratar
problemas de buckling em placas com variação de espessura. BAIZ e ALIABADI
(2009) avaliaram problemas de instabilidade de placas conjuntas, como perfis I e U.
DOVAL et al. (2011) resolveram problemas de placas constituídas de materiais
compósitos solicitadas por cargas não uniformes. DOVAL et al (2012) resolveram
problemas de placas quadradas com furos retangulares de materiais compósitos.
DOVAL (2013) desenvolveu em sua tese a resolução de problemas de instabilidade
de placas com furos retangulares.

39
3 REVISÃO MATEMÁTICA
3.1 INTRODUÇÃO
Neste capítulo são apresentadas as principais funções matemáticas e regras
utilizadas no presente trabalho. São vistos alguns exemplos abordando a notação
indicial e sua utilização, as propriedades de algumas funções importantes como o
delta de Kronecker e o delta de Dirac. Também é feita uma revisão das equações
utilizadas no presente trabalho da teoria da elasticidade, base da análise estrutural
com uso de métodos numéricos. São apresentadas as relações básicas entre tensão
e deformação, as equações constitutivas e as equações de equilíbrio. No presente
trabalho, o material é assumido isotrópico e homogêneo. A teoria da elasticidade
gera um sistema de equações independentes com quinze incógnitas para problemas
tridimensionais onde três provém das equações de equilíbrio, seis das equações de
tensão-deformação e seis das equações constitutivas. Utilizando-se das equações
de equilíbrio será possível deduzir uma equação integral de contorno e aplicar o
método dos elementos de contorno numericamente.
3.2 FUNÇÕES MATEMÁTICAS
3.2.1 Notação indicial
Este trabalho utilizará a notação indicial introduzida por Einstein para facilitar
a visualização de grandes expressões. Serão demonstradas algumas regras, as
quais fazem parte das formulações mostradas. A conversão para notação indicial
pode ser feita em diversas expressões, como a seguinte:
1 11 1 12 2 13 3
2 21 1 22 2 23 3
3 31 1 32 2 33 3
y a x a x a x
y a x a x a x
y a x a x a x
(3.1)
A expressão 3.1 pode ser escrita como:
, 1,2,3 , 1,2,3i ij jy a x i j (3.2)
40
Em que os índices em latin irão variar de 1 até 3, os índices gregos irão variar
de 1 até 2. Quando os índices forem iguais, deve-se realizar o somatório de todas as
substituições de índices, como demonstrado em 3.3:
11 22 33
1 1 2 2 3 3
2 2 2
1 1 2 2 3 3 1 2 3
11 22
ii
i i
i i
a a a a
a b a b a b a b
a a a a a a a a a a a
a a a
(3.3)
No presente trabalho, as derivadas parciais serão demonstradas conforme a
equação 3.4:
11,1
1
22,2
2
11,2
2
;
;
x
y
x
u uu
x x
u uu
y x
u uu
y x
(3.4)
3.2.2 Vetor Gradiente
O vetor gradiente pode ser mostrado da seguinte maneira:
1 1 1
1 2 3
2 2 2,
1 2 3
3 3 3
1 2 3
ii i j
j
u u u
x x x
u u u uu u
x x x x
u u u
x x x
(3.5)
3.2.3 Laplaciano
O laplaciano de uma função pode ser escrito como se segue:
2
,iiu u u (3.6)

41
3.2.4 Delta de Kronecker
A função delta de Kronecker é definida como se segue:
1 se
0 se ij
i j
i j
(3.7)
A função delta de Kronecker é um tensor isotrópico que nos permite converter
ou contrair índices. A conversão de índices é feita da seguinte maneira:
i ij ju u
(3.8)
A contração de índices é feita como se segue:
i j ij i ia b a b (3.9)
3.2.5 Delta de Dirac
A função Delta de Dirac é definida por:
0
1,
0,
t at t
outros valores
(3.10)
A função delta de Dirac possui uma propriedade importante quando utilizada
na obtenção das equações integrais de contorno:
( ´ ) ( ) ( )́i ix x u x d u x
(3.11)
3.2.6 Teorema da Divergência
O teorema da divergência, utilizado para relacionar integrais de domínio com
integrais de contorno, é dado por:

42
, ,Tu d Tun d uT d
(3.12)
3.3 ELASTICIDADE LINEAR
Um corpo sólido e homogêneo, quando é solicitado por alguma ação exterior,
sofre deformação quando a distância entre dois pontos em seu interior é alterada.
Na figura 3.1 se apresenta um sólido inicialmente indeformado que, quando
solicitado, sofre deformação.
Figura 3.1 – Estado de deformação de um sólido
Quando não ocorre a mudança da distância entre dois pontos, é possível
observar o movimento de corpo rígido. Observando-se que (a) desloca-se para (a*),
(b) desloca-se para (b*), o segmento de linha (ab) alonga-se e gira para (a*b*).
Quando a análise do deslocamento levar em conta a não linearidade geométrica,
este comportamento é dado pelo tensor Lagrangeano de deformações, sendo
definido por:
, , , ,
1( )
2ij i j j i k i k ju u u u (3.13)
A equação 3.13 é utilizada na resolução do problema de carga crítica de
placas. Na análise de flexão sem o efeito da não linearidade geométrica, neste
trabalhosão considerados pequenos deslocamentos e os termos quadráticos da
equação 3.13 foram desprezados. A equação 3.13 passa a ser dada por:

43
, ,
1( )
2ij i j j iu u (3.14)
3.4 EQUAÇÕES CONSTITUTIVAS
As equações constitutivas são obtidas ao relacionarem-se linearmente as
tensões e as deformações, obtendo-se tensor de tensões:
ij ijkl klC (3.15)
Para um material sólido linear e isotrópico, pode-se deduzir a partir da
observação física que só há duas constantes de material independentes que se
relacionam com todos os componentes de tensão e deformação. O módulo de
Young (E), definido pela taxa de variação da deformação como função da tensão, ou
seja, a inclinação da reta parte de um diagrama de tensão-deformação. O coeficiente
de Poisson (v) é um coeficiente que relaciona linearmente a deformação transversal
em relação à deformação longitudinal, em um material homogêneo e isotrópico. Este
coeficiente é uma grandeza adimensional. Assumindo-se a relação linear entre
tensão e deformação, pode-se observar:
(1 )(1 2 ) (1 )ij ij kk ij
Ev E
v v v
(3.16)
Onde:
Módulo de Young
Coeficiente de Poisson
Delta de Kroneckerij
E
(3.17)
Esta equação pode ser escrita em termos das deformações:
1ij ij ij kk
v v
E E
(3.18)

44
4 TEORIA DE PLACAS
4.1 INTRODUÇÃO
Neste capítulo são apresentadas as bases e fundamentos para a teoria de
placas que levam em conta o efeito da deformação por cortante. Placas são
elementos estruturais planos, as quais tem sua espessura de ordem menor com
relação as outras dimensões. As teorias de placas são extensões das teorias de
vigas, buscam reduzir o problema de elasticidade em três dimensões para um
problema mais simples, em duas dimensões.
Diversas teorias foram apresentadas para descrever o comportamento de
placas, entre as principais pode-se citar a teoria de KIRCHHOFF (1888), que
também é chamada de teoria clássica, foi desenvolvida para ser utilizada em
problemas de placas finas com pequenos deslocamentos, sem levar em conta o
efeito da deformação por cortante, a teoria de VON-KARMAN (1910), desenvolvida
para descrever grandes deslocamentos em placas finas e a teoria de REISSNER
(1945), sendo esta a teoria de placas que leva em conta o efeito da deformação por
cortante. Esta teoria pode ser utilizada tanto para resolver problemas de placas finas
quanto para placas moderadamente espessas, sendo de grande utilidade em
problemas de engenharia.
Mais tarde MINDLIN (1951) propôs sua teoria similar, mas não idêntica à de
Reissner, pois existem diferenças entre os resultados de Reissner e Mindlin,
segundo WANG et al. (2001). A partir dos conceitos mostrados neste capítulo será
possível deduzir as equações integrais necessárias para aplicação do método dos
elementos de contorno.
4.2 TEORIA DE KIRCHHOFF
Será apresentada a teoria clássica de placas, sendo esta proposta por
KIRCHHOFF (1888). A teoria clássica tem como principal característica o cálculo
dos deslocamentos e rotações em função do deslocamento transversal, interpretada
por uma equação biharmonica.
As principais hipóteses de Kirchhoff são as seguintes, segundo VENTSEL e
KRAUTHAMMER (2001):

45
- Pequenos deslocamentos
- Superfície média indeformável
- A tensão normal ao plano médio, 33 , é pequena em comparação com os
outros componentes de tensão e pode ser negligenciada nas relações tensão-
deformação
- A teoria não leva em conta o efeito da deformação por cortante
- Um segmento de reta normal à superfície média da placa permanece normal
após a deformação da placa
- Material homogêneo, isotrópico e elástico linear
As equações que descrevem o comportamento da teoria clássica são as
seguintes :
3 ,
3 1 2( , )
u x w
u w x x
(4.1)
Nas equações 4.1 é possível observar que as derivadas indicam a variação
angular do deslocamento. No eixo médio da placa, as deformações são nulas, mas
faz-se necessário calcular as deformações fora do eixo médio, utilizando as
seguintes relações :
3 ,x w (4.2)
É possível deduzir as tensões utilizando-se a lei de Hooke generalizada:
3 , ,2
(1 )1
Ex vw v w
v
(4.3)
Deve-se integrar as tensões ao longo da espessura para encontrar os
esforços unitários:

46
/2
3 3/2
/2
3 3 3/2
h
h
h
h
M x dx
Q x dx
(4.4)
Após a integração os momentos e cortantes são dados por:
, ,
,
(1 )M D v w v w
Q Dw
(4.5)
Onde D significa o módulo de rigidez a flexão da placa, definido pela
equação:
3
212(1 )
EhD
v
(4.6)
Encontrados os esforços unitários é necessário equilibrar um elemento
infinitesimal de placa com relação a cada eixo, a figura 4.1 ilustra as forças atuando
na placa:
Figura 4.1 – Elemento diferencial de placa
Realizando-se o equilíbrio do elemento infinitesimal encontra-se:
3
1 2 1 1,1 1 2 2 1 2 2,2 2 1 1 2
0
0
Fx
Q dx Q Q dx dx Q dx Q Q dx dx pdx dx
(4.7)
47
Simplificando-se o equilíbrio das forças vertiais:
1,1 2,2 0Q Q p (4.8)
Fazendo-se o somatório de momento em torno do eixo x1, no ponto 1,
desconsiderando-se os resíduos de dx2/2, encontra-se :
11
12 22 1 22 22,2 2 1
12 12,1 1 2 2 1 2
0
0
M
M dy M dx M M dx dx
M M dx dx Q dx dx
(4.9)
Simplificando-se o equilíbrio de momentos encontra-se a seguinte equação:
12,1 22,2 2M M Q (4.10)
De maneira análoga, fazendo-se o equilíbrio de momentos em relação ao eixo
x2, encontra-se :
12,2 11,1 1M M Q (4.11)
Em notação indicial estas equações ficam da seguinte maneira:
,
,
0
0
M Q
Q p
(4.12)
Substituindo as relações do momento com a cortante, na equação do
equilíbrio das forças verticais é possível obter:
12,21 11,11 12,12 22,22
pM M M M
D (4.13)
Substituindo as relações do momento com os deslocamentos transversais:

48
,1221 ,1111 ,2211 ,1212 ,2222 ,1122
pw w vw w w vw
D (4.14)
Sendo esta chamada equação de Lagrange, podendo ser escrita em notação
indicial:
,
pw
D (4.15)
4.3 TEORIA DE REISSNER
A teoria proposta por REISSNER (1945) considera a deformação por efeito de
cortante. Segundo TIMOSHENKO (1959), para placas moderadamente espessas, a
teoria clássica apresenta um desvio maior em problemas práticos, principalmente
aqueles com furos de ordem da espessura da placa, isso mostra a necessidade de
uma teoria aperfeiçoada. Nesta teoria, segundo KARAM (1986), obtem-se um
problema de integração de sexta ordem, satisfazendo até três condições de
contorno, em contraste com a teoria clássica, a qual satisfaz apenas duas condições
de contorno. As hipóteses de Reissner são as seguintes:
- Pequenos deslocamentos
- Superfície média indeformável
- Um segmento de reta normal à superfície média da placa permanece reta,
mas não necessariamente normal após a deformação da placa
- Material homogêneo, isotrópico e elástico linear
A figura 4.2 ilustra o comportamento de um segmento normal à superfície
média após a deformação da placa:

49
Figura 4.2 – Comportamento de um seguimento de reta normal
De acordo com TIMOSHENKO (1959) as tensões nas faces da placa são
dadas por:
3
33 3
33 3
0
2
02
hq para x
hpara x
(4.16)
Reissner admitiu uma variação linear das tensões ao longo da espessura da
placa, portanto, as equações que descrevem este comportamento são:
33
2
33
2
3 333
12
3 21
2
2 21 13
4 2
Mx
h
Q x
h h
x xq
h h
(4.17)
As equações 4.17 coincidem com a teoria clássica, exceto a última equação.
Segundo TIMOSHENKO (1959) ao se realizar o equilíbrio das forças no elemento
infinitesimal de placa, é possível obter a equação 4.18 (onde Q é a cortante, Mé
o momento e q é a carga distribuída):
50
,
,
0
0
Q q
M Q
(4.18)
Nesta teoria, os deslocamentos transversais e rotações das seções em x e y
são obtidos realizando-se uma média ponderada dos mesmos ao longo da
espessura. Reissner admitiu, supondo um material isotrópico e que os
deslocamentos sejam pequenos com relação a espessura, as seguintes relações
tensão-deformação:
1,1 11 22 33 2,2 22 11 33
1,2 2,1 12
1,3 3,1 13
2,3 3,2 23
3,3 33 11 22
1 1( ) ; ( )
1
1
1
1( )
u v u vE E
u uG
u uG
u uG
u vE
(4.19)
Reissner também indicou que o trabalho realizado pelos esforços solicitantes
pode ser igualado a uma média ponderada entre os deslocamentos e as tensões,
podendo ser verificado na equação 4.20:
/2
3/2
/2
3 3 3/2
h
h
h
h
u dx M
u dx Q w
(4.20)
Utilizando-se a equação 4.17 pode-se substituir as tensões pelos esforços
solicitantes, chegando a uma equação da seguinte maneira:
/2
3 33/2
2/2
33 3
/2
12
23 1
2
h
h
h
h
Mx u dx M
h
Q xu dx Q w
h h
(4.21)

51
Isolando-se os deslocamentos médios, é possível obter as seguintes
equações:
/2
3 33 /2
2/2
33 3
/2
12
231
2
h
h
h
h
u x dxh
xw u dx
h h
(4.22)
Utilizando as equações 4.19 com as relações tensão-deformação é possível
expressar as tensões em função dos deslocamentos em cada eixo, ou seja:
2
, , , , ,2
3
3 3, ,
(1 ) 2 (1 )
1 2 1 (1 )(1 )
2 23 2 1
2(1 ) 4(1 ) 3 3
E v v vu u u u vu
v v v v
x xE qvu vu
v v h h
(4.23)
Integrando-se as tensões ao longo da espessura, é possível encontrar as
equações dos esforços solicitantes.
/2
3 3/2
/2
3 3 3/2
h
h
h
h
x dx M
x dx Q
(4.24)
Substituindo as tensões em função das deformações provenientes das
equações 4.23 nas equações 4.24 e observando as equações dos deslocamentos
médios encontra-se:
3
3 31,1 2,2 32
/2
11 33/2
11 1,1 2,2 2
2 23 2 112
1 4(1 ) 3 3
(1 )
h
h
x xE qvu vu x
v v h hM dx
h
vM D v q
v
(4.25)

52
Em que D significa o módulo de rigidez a flexão da placa, definido pela
equação 4.6 e é o parâmetro que leva em conta o efeito da deformação por
cortante.
Fazendo-se o mesmo para as outras equações de tensões, obtêm-se todas
as equações de momento e cortante, conforme a equação 4.26:
, , , 2
2
,
(1 ) 2
2 1 (1 )
(1 )( )
2
D v v vqM
v v
D vQ w
(4.26)
Para a teoria de Reissner o parâmetro vale:
10
h (4.27)
Para a teoria de Mindlin ele é dado pela equação 4.28:
Mindlin
h
(4.28)

53
5 O MEC APLICADO NO CÁLCULO DE PLACAS DE REISSNER
5.1 INTRODUÇÃO
A aplicação numérica do método é feita a partir da equação integral de
contorno, a qual é desenvolvida neste capítulo. É também demonstrado como é feita
a dedução das soluções fundamentais de forças de superfície, utilizando-se das
soluções fundamentais de deslocamento. É mostrado como é feita a modelagem
numérica do problema, desde a utilização das funções de forma até a resolução do
sistema final de equações.
Segundo CHEN (2010), com relação ao método dos elementos finitos, o
método dos elementos de contorno é de maior viabilidade para cálculo de placas
devido a natureza bi harmônica da equação de placas. Como o método dos
elementos finitos necessita de uma malha de grande refinamento para garantir a
precisão no cálculo de gradientes, este pode necessitar de maior processamento e
uma maior quantidade de avaliações de quadraturas de integração. As primeiras
aplicações do método dos elementos de contorno em placas de Reissner foram
feitas por WEEËN (1982), utilizando o método de HÖRMANDER (1963), ele deduziu
as soluções fundamentais e a equação integral de contorno, para aplica-las no
cálculo do método dos elementos de contorno.
PALERMO JR. (2000) também obteve uma dedução alternativa para as
soluções fundamentais de deslocamento.
5.2 EQUAÇÃO INTEGRAL PARA PONTO NO DOMÍNIO
Existem algumas maneiras diferentes para deduzir-se a equação integral de
contorno para este problema. Vários autores já demonstraram esta dedução,
KARAM (1986) deduziu este problema aplicando o teorema da reciprocidade de Betti
e também o método dos resíduos ponderados, RIBEIRO (1992) deduziu esta
equação pelo método dos resíduos ponderados. No presente trabalho, será feita a
dedução a partir do teorema da reciprocidade de Betti, o qual está escrito na
equação 5.1, representado em integrais de volume:

54
* *
ij ij ij ij
V V
dV dV (5.1)
*
ij e *
ij são as soluções fundamentais de forças de superfície e deformação,
respectivamente. Aplicando-se as hipóteses de Reissner, o segundo membro da
equação 5.1 passa a ser:
* * * * *
1 11 11 22 22 12 12 13 13 23 23
V
I dV (5.2)
Fazendo-se uso das equações 4.17 que relacionam tensões com os esforços
solicitantes e também as equações 4.3 que relacionam as deformações com os
deslocamentos médios é possível obter (por conveniência os deslocamentos médios
são representados pela variável u):
2* * * *3
1 11 1,1 22 2,2 12 2,1 1,23
2 2
* * * *3 31 23,1 1 3,2 2
12( )
2 23 31 1
2 2
V
V
xI M u M u M u u dV
h
x xQ Qu u u u dV
h h h h
(5.3)
Integrando-se os dois membros de 5.3 ao longo da espessura:
2/2
* * * *31 11 1,1 22 2,2 12 2,1 1,2 33/2
2 2/2
* * * *3 31 23,1 1 3,2 2 3
/2
12( )
2 23 31 1
2 2
h
h
h
h
xI M u M u M u u dx
h
x xQ Qu u u u dx
h h h h
(5.4)
Realizando-se a integração da equação 5.4 é possível obter a integral de
domínio dada pela equação 5.5:
* * * *
1 11 1,1 22 2,2 12 2,1 1,2
* * * *
1 3,1 1 2 3,2 2
( )I M u M u M u u d
Q u u Q u u d
(5.5)

55
Uma das diferenças entre as teorias de Reissner e Mindlin é a contribuição
que contém o valor da carga distribuída (q) nos momentos 11M e 22M . Para elaborar
este raciocínio, substituindo-se as relações constitutivas dadas por 4.23, é possível
obter:
* * *
, 3,
*
1,1 1,1 1,1 2,2 1,12
*
2,2 2,2 1,1 2,2 2,22
* *
2,1 1,2 2,1 1,2
2
(1 ) 2( )
2 1 (1 )
(1 ) 2( )
2 1 (1 )
(1 )( )( )
2
(1 )
2
M u Q u u d
D v v vqu u u u u d
v v
D v v vqu u u u u d
v v
D vu u u u d
D v
2
* * * *
3,1 1 3,1 1 3,2 2 3,2 2
(1 )
2
D vu u u u u u u u d
(5.6)
Expandindo-se as duas primeiras integrais de 5.6 é possível obter:
* * * *
1,1 1,1 1,1 1,1 2,2 1,1 1,12
* * * *
2,2 2,2 1,1 2,2 2,2 2,2 2,22
* *
2,1 1,2 2,1 1,2
2
3,1 1 3
(1 ) 2 22
2 1 1 (1 )
(1 ) 2 22
2 1 1 (1 )
(1 )( )( )
2
(1 )
2
D v v v vqu u u u u u u d
v v v
D v v v vqu u u u u u u d
v v v
D vu u u u d
D vu u u
2
* * * *
,1 1 3,2 2 3,2 2
(1 )
2
D vu u u u u d
(5.7)
Tirando os termos que contém a carga distribuída para fora da integral e
rearranjando os que sobraram de maneira conveniente é possível obter:

56
* * *
, 3,
* * *
1,1 1,1 2,2 1,1
* * *
2,2 1,1 2,2 2,2
* *
2,1 1,2 2,1 1,2
2 2* *
3,1 1 3,1 1 3,2 2 3,
(1 ) 22 ( )
2 1
(1 ) 22 ( )
2 1
(1 )( )( )
2
(1 ) (1 )
2 2
M u Q u u d
D v vu u u u d
v
D v vu u u u d
v
D vu u u u d
D v D vu u u u u u u
* *
2 2
* *
1,1 2,22( )
(1 )
u d
vqu u d
v
(5.8)
Observando as equações 5.8 é possível verificar que:
* * * * * *
, 3, , 3, ,2(1 )
vqM u Q u u d M u Q u u u d
v
(5.9)
Portanto, esta é a uma forma do teorema da reciprocidade de Betti quando
consideradas as hipóteses de Reissner. Passando-se o termo da carga distribuída
para a direita:
* * * * * *
, 3, , 3, ,2(1 )
vqM u Q u u d M u Q u u u d
v
(5.10)
Observando 5.10 na equação obtida 5.5, deve-se proceder com a subtração
do termo da carga distribuída (q):
* * * *
1 11 1,1 22 2,2 12 2,1 1,2
* * * * * *
1 3,1 1 1 2 3,2 2 2 1,1 2,22
( )
( )(1 )
I M u M u M u u d
vqQ u Q u Q u Q u d u u d
v
(5.11)
Aplicando-se o teorema da divergência em todas as integrais de 5.11 é
possível obter a equação 5.12, que adiciona integrais de contorno:

57
* * * *
1 11 1 1 11,1 1 22 2 2 22,2 2
* * * *
12 2 1 12,2 1 12 1 2 12,1 2
* * * *
1 1 3 1,1 3 2 2 3 2,2 3
* * * *
1 1 2 2 1,1 2,22( )
(1 )
I M n u d M u d M n u d M u d
M n u d M u d M n u d M u d
Q n u d Q u d Q n u d Q u d
vqQ u Q u d u u d
v
(5.12)
Agrupando-se os termos da equação 5.12 de maneira conveniente, é possível
obter:
* *
1 11 1 12 2 1 22 2 12 1 2
* *
1 1 2 2 3 1 11,1 12,2 1
* *
2 22,2 12,2 2 1,1 2,2 3
* *
1,1 2,22
( ) ( )
( ) ( )
( ) ( )
( )(1 )
I M n M n u d M n M n u d
Q n Q n u d Q M M u d
Q M M u d Q Q u d
vqu u d
v
(5.13)
Utilizando-se as seguintes propriedades dos esforços de superfície da placa:
1 11 1 12 2 2 22 2 12 1 3 1 1 2 2; ;t M n M n t M n M n t Q n Q n (5.14)
Onde n são os cossenos diretores. A equação 5.13 torna-se:
* * * * *
1 1 1 2 2 3 3 1,1 2,22
* * *
1 11,1 12,2 1 2 22,2 12,2 2 1,1 2,2 3
( )(1 )
( ) ( ) ( )
vqI t u d t u d t u d u u d
v
Q M M u d Q M M u d Q Q u d
(5.15)
Utilizando-se as equações de equilíbrio da placa dadas por 4.12:
* * * * * *
1 1 1 2 2 3 3 3 1,1 2,22( )
(1 )
vqI t u d t u d t u d qu d u u d
v
(5.76)

58
Agrupando-se de maneira conveniente e aplicando a notação indicial é
possível obter:
* * *
1 3 ,2(1 )i i
vI t u d q u u d
v
(5.17)
Deve-se então aplicar os mesmos passos no primeiro membro da equação
5.1:
* * * * *
2 11 11 22 22 12 12 13 13 23 23
V
I dV (5.18)
De maneira análoga é possível obter:
* * * *
2 11 1 12 2 1 22 2 12 1 2
* * * * *
1 1 2 2 3 1 11,1 12,2 1
* * * * *
2 22,2 12,2 2 1,1 2,2 3
( ) ( )
( ) ( )
( ) ( )
I M n M n u d M n M n u d
Q n Q n u d Q M M u d
Q M M u d Q Q u d
(5.19)
Aplicando-se as equações de equilíbrio quando consideradas as soluções
fundamentais:
,
, 3
0M Q F
Q F
(5.20)
Na equação 5.20 a variável F indica as forças de domínio unitárias aplicadas.
Aplicando-se a as equações de equilíbrio e as relações das forças de superfície é
possível obter:
* * *
2 1 1 2 2 3 3
* * *
1 1 2 2 3 3
I t u d t u d t u d
F u d F u d F u d
(5.21)
59
Aplicando-se a notação indicial:
* *
2 i i i iI t u d F u d
(5.22)
Do teorema da reciprocidade de Betti:
* * * * *
11 11 22 22 12 12 13 13 23 23
* * * * *
11 11 22 22 12 12 13 13 23 23
V
V
dV
dV
(5.23)
Substituindo as deduções encontradas:
2 1I I (5.24)
Posicionando os termos de maneira conveniente:
* * * * *
3 ,2(1 )i i i i i i
vF u d t u d t u d q u u d
v
(5.25)
A equação 5.25 representa o teorema da reciprocidade de Betti generalizado
para placas de Reissner. As forças de corpo unitárias concentradas aplicadas em
cada uma das três direções de um ponto pertencente ao domínio, que será o ponto
fonte utilizado na aplicação numérica.
Estas forças de domínio podem ser representadas pela função Delta de Dirac:
* *( ')i iF X X P (5.26)
Onde:
* 1iP (5.27)
60
*
iP são as cargas unitárias utilizadas para calcular um problema de estruturas
utilizando o teorema da reciprocidade de Betti. Substituindo as equações 5.26 e 5.27
na equação 5.25 e utilizando a seguinte propriedade da função Delta de Dirac:
( ') ( ) ( ')i iX X u X d u X
(5.28)
A equação 5.21 passa a ser:
* *
* *
3 ,2
( ') ( ) ( ', ) ( ', ) ( )
( ', ) ( ', )(1 )
i i ij ij i
i i
u x t x U X x d T X x u x d
vq U X X U X X d
v
(5.29)
Onde ( ', )ijU X x e ( ', )ijT X x são as soluções fundamentais para os
deslocamentos e as forças de superfície respectivamente, 'x é um ponto fonte
pertencente ao contorno, x é um ponto campo pertencente ao contorno, 'X é um
ponto fonte pertencente ao domínio, X é um ponto campo pertencente ao contorno.
5.3 EQUAÇÃO INTEGRAL PARA PONTO NO CONTORNO
Para resolver o problema no contorno torna-se necessário escrever a
equação integral para um ponto fonte situado na região do contorno. A figura 5.1
mostra o posicionamento de um ponto fonte no contorno:
Figura 5.1 – Posicionando o ponto no contorno
A equação integral fica da seguinte maneira:

61
1 2 1 2
* *
* *
3 ,2
( ') ( ) ( ', ) ( ', ) ( )
( ', ) ( ', )(1 )
i i ij ij i
i i
u x t x U x x T x x u x
vq U x X U x X d
v
(5.30)
Pode-se estudar separadamente o limite para quando 0 , o limite da
segunda integral do lado direito da equação 5.30 é dado por:
1 2 2
1
* *
0 0
*
0
lim ( ', ) ( ) lim ( ', ) ( )
lim ( ', ) ( )
ij i ij i
ij i
T x x u x T x x u x
T x x u x
(5.31)
A segunda integral do lado direito da equação 5.31 deve ser analisada no
sentido do valor principal de Cauchy, cuja existência pode ser demonstrada se o
ponto fonte satisfaz a condição de Holder. A primeira integral do lado direito da
equação é dada por:
2 2
2
* *
0 0
*
0
lim ( ', ) ( ) lim ( ', ) ( ) ( ')
lim ( ') ( ', )
ij i ij i i
i ij
T x x u x T x x u x u x
u x T x x
(5.32)
A primeira integral do lado direito da equação 5.32 se anula devido à
continuidade no ponto fonte. Já a segunda integral da direita pode ser escrita como:
2
*
0lim ( ') ( ', ) ( ')i ij ij iu x T x x C u x
(5.33)
Utilizando esta propriedade, é possível escrever a equação integral de placas
de Reissner para o ponto no contorno, sendo dada a seguir:
* *
* *
3 ,2
( ') ( ) ( ', ) ( ', ) ( )
( ', ) ( ', )(1 )
ij i i ij ij i
i i
C u x t x U x x d T x x u x d
vq U x X U x X d
v
(5.34)

62
Onde ( )iu x e ( )it x são as variáveis no contorno de deslocamentos e forças
de superfície respectivamente. O coeficiente ijC é dado pela equação 5.35:
,
,
0, se o ponto fonte está fora do contorno
1, se o ponto fonte está dentro do contorno
1se o ponto fonte está em uma parte suave do contorno
2
2 1se o ponto fonte está em uma curva do contorno
2
ijC
(5.35)
A integral de domínio de 5.34 pode ser convertida em uma integral de
contorno:
* *
3 ,2
* *
, 2
( ', ) ( ', )(1 )
( ', ) ( ', ) ( )(1 )
i i
i i
vq U x X U x X d
v
q V x x U x x n x d
(5.36)
A solução fundamental *
, ( ', )iV x x é dada por:
2*
, , ,
,* 2
3, 2
( ', ) 4 ln( ) 5 2 4ln( ) 3128
( ', ) 32 2ln( ) 1 1 4ln( ) 5128 (1 )
rV x x z z r r
D
rrV x x z z v z
D v
(5.37)
5.4 ESFORÇOS GENERALIZADOS A PARTIR DAS SOLUÇÕES FUNDAMENTAIS
As soluções fundamentais de deslocamentos encontradas em WEEËN (1982)
ou PALERMO JR. (2000) são dadas por:
, ,
18 ( ) (1 )(2ln 1)
8 (1 )
8 ( ) 2(1 )
U B z zD
A z r r
(5.38)
63
3 3 ,
1(2ln 1)
8U U z rr
D
(5.39)
2
33 2
1(1 ) (ln 1) 8ln
8 (1 )U z z z
D
(5.40)
Onde:
0 1 0 1
2 1 1 1; ( ) ( ) ( ) ; ( ) ( ) ( )z r A z K z K z B z K z K z
z z z z
(5.41)
As funções 0 ( )K z e 1( )K z são funções de Bessel modificadas, para
pequenos argumentos estas funções são dadas por:
2
0 2
22
2
32
2
/ 4( ) ln ln
2 2 (1!)
/ 411 ln
2 2 (2!)
/ 41 11 ln
2 3 2 (3!)
zz zK z
zz
zz
(5.42)
12 2
1
32 2
52 2
/ 41 1( ) ln
2 2 0! 1!
/ 411 ln
4 2 1! 2!
/ 41 11 ln
2 6 2 2! 3!
zzK z
z
zz
zz
(5.43)
Onde é a constante de EULER:
0.5772156649 (5.44)

64
É possível encontrar as soluções fundamentais das forças de superfície,
multiplicando-se os momentos e cortantes pelos cossenos diretores. A dedução de
todas as soluções fundamentais de superfície é feita nas equações abaixo. A
solução de força de superfície 3T é definida por:
3 3T M n (5.45)
Verificando as equações 4.27 o valor de 3M
é definido por:
3 3 , 3 , 3 ,
(1 ) 2( )
2 1
D v vM u u u
v
(5.46)
Nota-se que o valor do momento da equação 5.46 pode ser descrito com
relação às derivadas das soluções fundamentais de deslocamentos, para encontrar
as forças de superfície é necessário calcular estas derivadas. Este processo é
mostrado abaixo para todas as forças de superfície que precisam ser encontradas.
Primeiramente, é necessário calcular as derivadas que fazem parte das soluções
fundamentais:
,
, ,,
, ,
1 12 ;
zr
x
r rr
x r
r rA BzK A zK A
x r x r
(5.47)
Para encontrar 3 ,u
é necessário derivar 3u com relação a :
65
3 ,
3 , , , , , , ,
3 , , , , , , ,
3 , , ,
1 1ln( )
4 2
1 1 1 1 1ln( ) ln( )
4 2 2
1 1 1ln( ) ln( )
4 2 2
1ln(
4
u z rrD
u r r r z r r z r r rD r r
u r r z r r z r rD
u r rD
1
)2
z
(5.48)
Apartir desta derivada é possível apenas substituir os índices e para
encontrar a próxima derivada do deslocamento:
3 , , ,
1 1ln( )
4 2u r r z
D
(5.49)
Para encontrar a ultima derivada do deslocamento basta substituir nos
valores de e , observando os valores indiciais que ficarem iguais, pois estes
indicam somatórios:
3 , , ,
3 , ,1 ,1 ,2 ,2 11 22
3 ,
3 ,
1 1ln( )
4 2
1 1( ) ln( )
4 2
1 11 (2) ln( )
4 2
12ln( )
4
u r r zD
u r r r r zD
u zD
u zD
(5.50)
Substituindo-se na equação dos momentos:

66
3 , ,
, ,
3 , ,
(1 ) 1 1ln( )
2 4 2
1 1 2 1ln( ) 2ln( )
4 2 1 4
(1 ) 1 2ln( ) ln( )
4 2 1
D vM r r z
D
vr r z z
D v D
v vM r r z z
v
(5.51)
Encontrado o momento, basta multiplicar pelo vetor normal :
3 3
3 , ,
3 , ,
3 , ,
3 , ,
(1 ) 1 2ln( ) ln( )
4 2 1
(1 ) 1 2ln( ) ln( )
4 2 1
(1 ) 2ln( ) ln( )
4 2 1
(1 )
4
n
n
n
T M n
v vT r r n n z z n
v
v vT r r n z z n
v
nv vT r r n z z n
v
vT r r
3 , ,
2ln( ) 1
2 1
(1 ) 1ln( )
4 2 1n
n vn z
v
nv vT r r n z
v
(5.52)
Portanto, a solução de força de superfície 3T é definida por:
3 , ,
(1 ) 12 ln( ) 1 2
8 1n
v vT z n r r
v
(5.53)
A solução fundamental 33T é dada por:
33 3T Q n (5.54)
A solução fundamental de 3Q é dada por:

67
2
3 33, 3
(1 )( )
2
D vQ u u
(5.55)
Os deslocamentos para definir a solução da cortante são dados por:
2
33 2
2
33, , , , ,2
33, , ,2
1 1ln( ) 1
8 (1 )
1 1 1 12 ln( ) 2
8 (1 )
1 1 1 1ln( )
4 2 (1 )
u r zD D v
u r z r rr r r rD r D v r
u z rr rD D v r
(5.56)
O próximo deslocamento é dado por:
3 ,
1 1ln( )
4 2u z rr
D
(5.57)
Substituindo-se estes valores na equação 5.55 da cortante é possível obter:
2
3 , ,2
,
2
3 , ,2
(1 ) 1 1 1 1ln( )
2 4 2 (1 )
1 1ln( )
4 2
(1 ) 1 1 1
2 (1 ) 2
D vQ z rr r
D D v r
z rrD
D vQ r r
D v r r
(5.58)
Substituindo-se o valor da cortante na equação 5.54:
33 3
33 ,
1
2
T Q n
T r nr
(5.59)

68
Portanto, a solução fundamental 33T é dada por:
33 ,
1
2nT r
r (5.60)
A solução fundamental 3T é dada por:
3T Q n (5.61)
A solução fundamental da cortante é dada por:
2
3,
(1 )( )
2
D vQ u u
(5.62)
Os deslocamentos são dados por:
3 ,
3, , , , , , ,
3, , ,
1 1ln( )
4 2
1 1 1 1 1ln( ) ln( )
4 2 2
1 1ln( )
4 2
u z rrD
u r rr z r r z r r rD r r
u r r zD
(5.63)
O próximo deslocamento é dado por:
, ,
, ,
18 ( ) (1 )(2ln 1) 8 ( ) 2(1 )
8 (1 )
4 ( )1 1 4 ( )ln( ) 1
4 (1 ) 2 (1 )
u B z z A z r rD
B z A zu z r r
D
(5.64)
Substituindo-se na equação 4.27 da cortante:

69
2
3,
2
, , , ,
2
, ,
(1 )( )
2
4 ( )(1 ) 1 1ln( )
2 4 (1 ) 2
1 4 ( ) 1 11 ln( )
4 (1 ) 4 2
( ) ( )2
D vQ u u
B zD vQ z
D
A zr r r r z
D D
Q B z A z r r
(5.65)
Substituindo-se o valor da cortante encontrado na equação 5.61 de forças de
superfície é possível obter:
3
2
3 , ,( ) ( )2
T Q n
T B z A z r r n
(5.66)
Utilizando as propriedades do delta de Kronecker e multiplicando pelos
cossenos diretores, a solução fundamental 3T é dada pela equação 5.67 :
2
3 , ,( ) ( )2
nT B z n A z r r
(5.67)
A solução fundamental T é dada por:
T M n (5.68)
O esforço M é dado por pela equação 5.69 (será utilizado um coeficiente
auxiliar para o cálculo das derivadas):
, , ,
(1 ) 2( )
2 1
D v vM u u u
v
(5.69)

70
Será necessário encontrar todas as derivadas da equação 5.69, a derivada do
deslocamento ,u
que compõe o momento é dado por:
, ,
,
, 1 ,
, , ,
1 , , ,
18 ( ) (1 )(2 ln 1) 8 ( ) 2(1 )
8 (1 )
1 28 ( ( ) ( )) (1 )
8 (1 )
( )8 ( ( ) 2 ( )) (8 ( ) 2(1 ))
(8 ( ) 2(1 ))
u B z z A z r rD
ru zK z A z r
D r z
r r rzK z A z r r A z r
r r
A z
, ,
,
,
, 1 ,
, ,
1 , , ,
81 2( ( ) ( )) (1 )
8 (1 )
(8 ( ) 2(1 )) (8 ( ) 2(1 ))
8 2(8 ( ) 2(1 ))( ( ) 2 ( ))
r rr
r
ru zK z A z r
D r r
r A z r A z
r r
A zzK z A z r r r
r r
(5.70)
O deslocamento ,u
que compõe o momento é dado por:
,
, 1 ,
, ,
1 , , ,
81 2( ( ) ( )) (1 )
8 (1 )
(8 ( ) 2(1 )) (8 ( ) 2(1 ))
8 2(8 ( ) 2(1 ))( ( ) 2 ( ))
ru zK z A z r
D r r
r A z r A z
r r
A zzK z A z r r r
r r
(5.71)
O deslocamento ,u
é dado por:
71
,
, 1 ,
, ,
1 , , ,
, , 1
81 2( ( ) ( )) (1 )
8 (1 )
(8 ( ) 2(1 )) (8 ( ) 2(1 ))
8 2(8 ( ) 2(1 ))( ( ) 2 ( ))
12 4 ( ) 8 ( ))
8 (1 )
ru zK z A z r
D r r
r A z r A z
r r
A zzK z A z r r r
r r
u r zK z A zrD
, , , 1
, , 1
, 1
,
,
2(1 )
2 (8 ( ) 2(1 )) 2 (8 ( ) 2(1 )) 8 ( ) 2 ( ))
12 4 ( ) 8 ( )) 2(1 )
8 (1 )
8 ( ) 2 ( ))
2
r A z r A z r zK z A z
u r zK z A zrD
r zK z A z
ru
rD
(5.72)
Substituindo-se na equação 5.69:
, , ,
(1 ) 2( )
2 1
D v vM u u u
v
, 1
, 1 ,
,
1 , , ,
, 1
(1 ) 12 4 ( ) 8 ( ) 2(1 )
2 8 (1 )
2 4 ( ) 8 ( ) 2(1 ) 2 8 ( ) 2(1 )
22 8( ( ) 2 ( )) 2 8 ( ) 2(1 )
1 2
14 ( ) 8 ( ) 2(1 )
8
D vM r zK z A z
rD
r zK z A z r A z
rvzK z A z A z r r r
v rD
M r zK z A zr
, 1 ,
1 , , , ,
4 ( ) 8 ( ) 2(1 ) 8 ( ) 2(1 )
8( ( ) 2 ( )) 2 8 ( ) 2(1 ) 4
r zK z A z r A z
zK z A z A z r r r r v
(5.73)
A solução fundamental T é dada por:
T M n (5.74)

72
Substituindo-se o momento temos:
, 1
, 1 ,
1 , , , ,
, 1
, 1 ,
14 ( ) 8 ( ) 2(1 )
8
4 ( ) 8 ( ) 2(1 ) 8 ( ) 2(1 )
8( ( ) 2 ( )) 2 8 ( ) 2(1 ) 4
14 ( ) 8 ( ) 2(1 )
8
4 ( ) 8 ( ) 2(1 ) 8n
T n r zK z A zr
r zK z A z r A z
zK z A z A z r r r r v
T n r zK z A zr
r zK z A z n r A
1 , , , ,
( ) 2(1 )
8( ( ) 2 ( )) 2 8 ( ) 2(1 ) 4n
z
zK z A z A z r r r n r v
(5.75)
Portanto, solução fundamental T é dada por:
1 , ,
, 1
14 ( ) 2 ( ) 1
4
4 ( ) 1 2(8 ( ) 2 ( ) 1 ) , , ,
n
n
T A z zK z r r nr
A z r n A z zK z r r r
(5.76)
Bastando-se apenas substituir por temos:
1 , ,
, 1
14 ( ) 2 ( ) 1
4
4 ( ) 1 2(8 ( ) 2 ( ) 1 ) , , ,
n
n
T A z zK z r r nr
A z r n A z zK z r r r
(5.77)
Deduzidas as expressões, pode-se listar as soluções fundamentais das forças
de superfície, conforme WEEËN (1982):
1 , ,
, 1
14 ( ) 2 ( ) 1
4
4 ( ) 1 2(8 ( ) 2 ( ) 1 ) , , ,
n
n
T A z zK z r r nr
A z r n A z zK z r r r
(5.78)
2
3 ( ) ( ) , ,2
nT B z n A z r r
(5.79)

73
3
(1 ) (1 )2 ln 1 2 , ,
8 (1 )nT z n r r
(5.80)
33
1,
2nT r
r
(5.81)
5.5 A APLICAÇÃO NUMÉRICA DO MEC PARA PLACAS DE REISSNER
Após a determinação da equação integral de contorno e das soluções
fundamentais necessárias, o problema deve ser discretizado em diversos elementos
de contorno, fazendo-se com que a equação integral de contorno se torne um
somatório de todos os elementos, sendo que no presente trabalo são utilizados
elementos quadráticos. A figura 5.2 apresenta uma discretização de uma placa com
elementos de contorno:
Figura 5.2 – Discretização de um problema de placa
As integrais vistas na equação integral de contorno serão agora calculadas ao
longo de cada elemento. Para utilizar os elementos quadráticos será feita uma
mudança de variáveis entre as coordenadas cartesianas e as coordenadas
intrínsecas, a fim de facilitar a integração de cada um ao longo do contorno. As
integrais das soluções fundamentais serão avaliadas no intervalo de -1 até 1, sendo
este o intervalo da coordenada intrínseca. Portanto, serão descritas funções de
forma para realizar a mudança de variáveis e também deve ser calculado o
jacobiano da transformação. A figura 5.3 ilustra a mudança de coordenadas
aplicada:
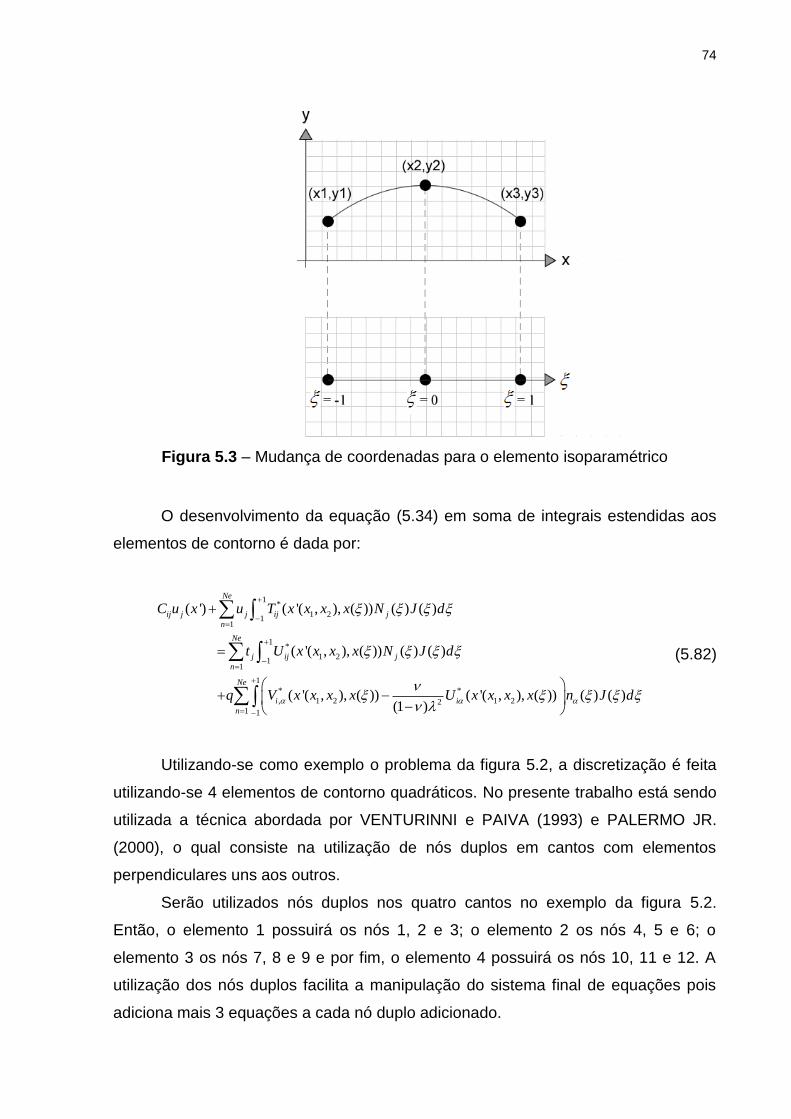
74
Figura 5.3 – Mudança de coordenadas para o elemento isoparamétrico
O desenvolvimento da equação (5.34) em soma de integrais estendidas aos
elementos de contorno é dada por:
1*
1 21
1
1*
1 21
1
1
* *
, 1 2 1 221 1
( ') ( '( , ), ( )) ( ) ( )
( '( , ), ( )) ( ) ( )
( '( , ), ( )) ( '( , ), ( )) ( ) ( )(1 )
Ne
ij j j ij j
n
Ne
j ij j
n
Ne
i i
n
C u x u T x x x x N J d
t U x x x x N J d
q V x x x x U x x x x n J d
(5.82)
Utilizando-se como exemplo o problema da figura 5.2, a discretização é feita
utilizando-se 4 elementos de contorno quadráticos. No presente trabalho está sendo
utilizada a técnica abordada por VENTURINNI e PAIVA (1993) e PALERMO JR.
(2000), o qual consiste na utilização de nós duplos em cantos com elementos
perpendiculares uns aos outros.
Serão utilizados nós duplos nos quatro cantos no exemplo da figura 5.2.
Então, o elemento 1 possuirá os nós 1, 2 e 3; o elemento 2 os nós 4, 5 e 6; o
elemento 3 os nós 7, 8 e 9 e por fim, o elemento 4 possuirá os nós 10, 11 e 12. A
utilização dos nós duplos facilita a manipulação do sistema final de equações pois
adiciona mais 3 equações a cada nó duplo adicionado.
75
Realizada a discretização dos nós e elementos no contorno do problema, faz-
se necessário a aplicação do método da colocação do ponto fonte ao longo do
contorno, conforme os trabalhos de JASWON (1967), BREBBIA (1992) e KANE
(1994). A fim de preencher-se um sistema de equações com incógnitas a serem
resolvidas, este método posiciona o ponto fonte em cada nó do contorno, incluindo
os nós duplos.
As soluções fundamentais são então calculadas a partir da distância entre o
elemento calculado e o ponto fonte, sendo esta distância chamada de raio. O
problema de placas de Reissner possui 3 graus de liberdade, portanto, para cada
ponto fonte haverá 3 equações com as incógnitas dos elementos. O procedimento
do método da colocação do ponto fonte procede-se da seguinte maneira:
Utilizando-se como exemplo a figura 5.2, coloca-se o ponto fonte no nó 1 e,
utilizando-se a distância r entre este ponto e o primeiro elemento, integra-se as
soluções fundamentais utilizando os nós do primeiro elemento.
Depois, integra-se o as soluções fundamentais a partir da distância entre o nó
1 e o segundo elemento, fazendo-se assim sucessivamente até completar todos os
elementos em que foi discretizado o contorno.
Feito isso, obtem-se as primeiras três linhas do sistema de equações
principal, a fim de resolver as incógnitas no contorno. Colocando o ponto fonte em
todos os nós do contorno obtem-se o sistema final de equações. Cada solução
fundamental deve ser calculada a partir das funções de forma estabelecidas. Para
elementos quadráticos, são utilizadas as funções de forma da equação 5.83. Uma
plotagem das funções de forma é feita na figura 5.4:
1
2
3
1( )= ( 1)
2
( )= ( 1)(1 )
1( )= ( 1)
2
N
N
N
(5.83)
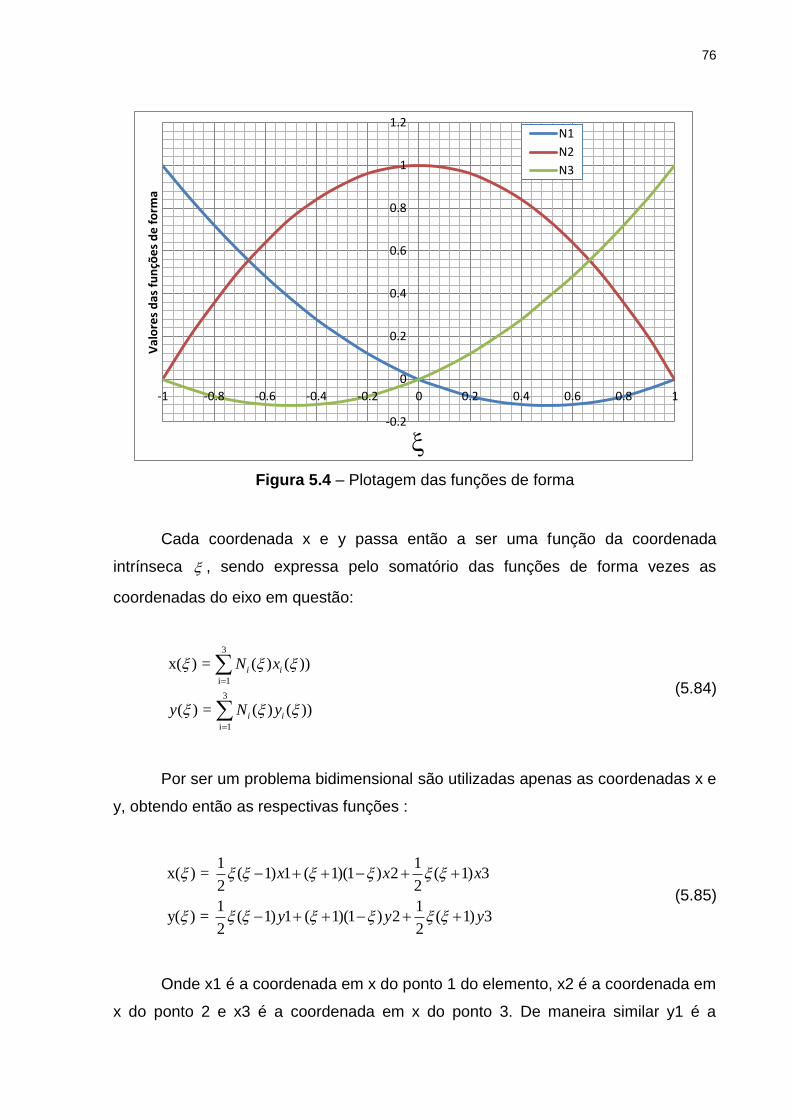
76
Figura 5.4 – Plotagem das funções de forma
Cada coordenada x e y passa então a ser uma função da coordenada
intrínseca , sendo expressa pelo somatório das funções de forma vezes as
coordenadas do eixo em questão:
3
i 1
3
i 1
x( ) = ( ) ( ))
( ) = ( ) ( ))
i i
i i
N x
y N y
(5.84)
Por ser um problema bidimensional são utilizadas apenas as coordenadas x e
y, obtendo então as respectivas funções :
1 1x( ) = ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2
1 1y( ) = ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2
x x x
y y y
(5.85)
Onde x1 é a coordenada em x do ponto 1 do elemento, x2 é a coordenada em
x do ponto 2 e x3 é a coordenada em x do ponto 3. De maneira similar y1 é a
-0.2
0
0.2
0.4
0.6
0.8
1
1.2
-1 -0.8 -0.6 -0.4 -0.2 0 0.2 0.4 0.6 0.8 1
Val
ore
s d
as f
un
çõe
s d
e f
orm
a
N1
N2
N3

77
coordenada em y do ponto 1 do elemento, y2 é a coordenada em y do ponto 2 e y3
é a coordenada em y do ponto 3. Definidas as funções de x( ) e y( ) é necessário
calcular cada parcela da solução fundamental, as quais são definidas pela distância
entre o ponto fonte e o ponto analisado, primeiro em sua componente em x:
dx( ) = ( )x xf (5.86)
Onde xf é a coordenada em x do ponto fonte. A componente em y da
distância entre o ponto fonte e o ponto analisado é dada por:
dy( ) = ( )y yf (5.87)
Onde yf é a coordenada em y do ponto fonte. A distância final do ponto fonte
ao ponto analisado é definida por:
2 2r( ) = dx( ) dy( ) (5.88)
O qual denomina-se raio, valor que determina a distância entre o ponto fonte
e o ponto analisado. Expandindo-se é possível obter:
2 21 1 1 1
r( ) = ( 1) 1 ( 1)(1 ) 2 ( 1) 3 ( 1) 1 ( 1)(1 ) 2 ( 1) 32 2 2 2
x x x xf y y y yf
(5.89)
Encontrado o raio é necessário encontrar suas derivadas, a derivada com
relação a x é dada por:
,1
dx( )r ( ) =
r( )
(5.90)
Expandindo a equação 5.90 é possível obter:
,12 2
1 1 ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2r ( )
1 1 1 1 ( 1) 1 ( 1)(1 ) 2 ( 1) 3 ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2 2 2
x x x xf
x x x xf y y y yf
(5.91)

78
Analogamente a derivada com relação a y fica da seguinte maneira:
,2
dy( )r ( ) =
r( )
(5.92)
Expandindo a equação 5.92 é possível obter:
,22 2
1 1 ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2r ( )
1 1 1 1 ( 1) 1 ( 1)(1 ) 2 ( 1) 3 ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2 2 2
y y y yf
x x x xf y y y yf
(5.93)
O jacobiano da transformação de coordenadas é definido por :
2 2
, ,( ) = ( ) ( )J dx dy (5.94)
Substituindo-se os valores de das derivadas de 5.86 e 5.87:
2 21 1 1 1
( ) = ( ) 1 ( 2 ) 2 ( ) 3 ( ) 1 ( 2 ) 2 ( ) 32 2 2 2
J x x x y y y
(5.95)
Também é necessário calcular as componentes do vetor normal ao contorno,
sendo então a componente em x:
, ,
1( ) ( )
( )ndx nx dy
J
(5.96)
, 2 2
1 1( ) 1 ( 2 ) 2 ( ) 3
2 2( )1 1 1 1
( ) 1 ( 2 ) 2 ( ) 3 ( ) 1 ( 2 ) 2 ( ) 3 2 2 2 2
n
y y ydx nx
x x x y y y
(5.97)
A componente do vetor normal ao contorno com relação a y fica:
, ,
1( ) ( )
( )ndy ny dx
J
(5.98)

79
, 2 2
1 1( 1) ( ) 1 ( 2 ) 2 ( ) 3
2 2( )
1 1 1 1( ) 1 ( 2 ) 2 ( ) 3 ( ) 1 ( 2 ) 2 ( ) 3
2 2 2 2
n
x x x
dy ny
x x x y y y
(5.99)
Também é necessário calcular a derivada normal com relação ao raio, sendo
obtida da seguinte maneira:
, ,1 ,2( ) ( ) ( )nr r nx r ny (5.100)
Cada contribuição da matriz será então multiplicada pela sua variável
correspondente de deslocamento u, no caso da matriz H e pela variável
correspondente de força de superfície t quando o caso for a matriz G. Em 5.101 está
um exemplo dos termos posicionados no sistema de equações:
11 1 12 2 13 3 14 4 15 5 16 6 17 4 18 5 19 6 11 1
21 1 22 2 23 3 24 4 25 5 26 6 27 4 28 5 29 6 21 1
31 1 32 2 33 3 34 4 35 5 36 6 37 4 38 5 39 6 21 1
... ...
... ...
... ...
H u H u H u H u H u H u H u H u H u U t
H u H u H u H u H u H u H u H u H u U t
H u H u H u H u H u H u H u H u H u U t
(5.101)
Nota-se que se tem 3 linhas para cada elemento e 9 valores de soluções
fundamentais para cada nó. Analisando o sistema de equações 5.101, no primeiro
membro da equação é possível observar que os 3 primeiros valores são devido à
contribuição do primeiro nó do elemento (as integrais da solução fundamental foram
multiplicadas por N1), os três valores do meio são devido aos valores do segundo nó
(as integrais da solução fundamental foram multiplicadas por N2), e os valores da
direita são devido à contribuição do terceiro nó do elemento (as integrais da solução
fundamental foram multiplicadas por N3). O mesmo se repete para o membro direito
da equação, porém com as soluções fundamentais de deslocamento.

80
1 1 1
11 11 12 12 13 131 1 1
1 1 1
21 21 22 22 23 231 1 1
1 1
31 31 32 321 1
( ) 1( ) ( ) ( ) 1( ) ( ) ( ) 1( ) ( )
( ) 1( ) ( ) ( ) 1( ) ( ) ( ) 1( ) ( )
( ) 1( ) ( ) ( ) 1( ) ( )
H T N J d H T N J d H T N J d
H T N J d H T N J d H T N J d
H T N J d H T N J d
1
33 331
1 1 1
14 11 15 12 16 131 1 1
1 1 1
24 21 25 22 26 231 1 1
1
34 311
( ) 1( ) ( )
( ) 2( ) ( ) ( ) 2( ) ( ) ( ) 2( ) ( )
( ) 2( ) ( ) ( ) 2( ) ( ) ( ) 2( ) ( )
( ) 2( ) ( )
H T N J d
H T N J d H T N J d H T N J d
H T N J d H T N J d H T N J d
H T N J d
1 1
35 32 36 331 1
1 1 1
17 11 18 12 19 131 1 1
1 1 1
27 21 28 22 29 231 1 1
( ) 2( ) ( ) ( ) 2( ) ( )
( ) 3( ) ( ) ( ) 3( ) ( ) ( ) 3( ) ( )
( ) 3( ) ( ) ( ) 3( ) ( ) ( ) 3( ) ( )
H T N J d H T N J d
H T N J d H T N J d H T N J d
H T N J d H T N J d H T N J d
1 1 1
37 31 38 32 39 331 1 1
( ) 3( ) ( ) ( ) 3( ) ( ) ( ) 3( ) ( )H T N J d H T N J d H T N J d
(5.102)
As equações mostradas em 5.102 demonstram apenas a contribuição de um
elemento quadrático de placa, com 9 soluções fundamentais por nó. Deve-se então
realizar o mesmo procedimento ao longo do contorno, é necessário calcular todos os
elementos com relação ao nó do ponto fonte. Como se utiliza no presente trabalho
elementos contínuos, deve-se somar a contribuição dos elementos que
compartilham o mesmo nó. A contribuição de nós adjacentes é feita nos três últimos
termos da matriz, pois estes elementos estão compartilhando as 9 soluções para o
terceiro nó do primeiro elemento e para o primeiro nó do elemento seguinte. Deve-se
portanto somar a contribuição do ultimo nó do primeiro elemento com a contribuição
do primeiro nó do segundo elemento, quando estes compartilham um nó. A exemplo,
em 5.103 encontra-se o sistema quando calcula-se dois elementos que
compartilham um nó.
1 2 3 4 5 6
1 2 3 4 5 6
1 2 3 4 5 6
7
1 1 1 1 1 1
111 121 131 112 122 132
1 1 1 1 1 1
211 221 231 212 222 232
1 1 1 1 1 1
311 321 331 312 322 332
1 2
113 111( )
e e e e e eu u u u u u
e e e e e eu u u u u u
e e e e e eu u u u u u
e eu
T T T T T T
T T T T T T
T T T T T T
T T
8 9
7 8 9
7 8 9
10 11 12
1 2 1 2
123 121 133 131
1 2 1 2 1 2
213 211 223 221 233 231
1 2 1 2 1 2
313 311 323 321 333 331
2 2 2
112 122 132 11
( ) ( )
( ) ( ) ( )
( ) ( ) ( )
e e e eu u
e e e e e eu u u
e e e e e eu u u
e e eu u u
T T T T
T T T T T T
T T T T T T
T T T T
10 11 12 1
10 11 12 10 11 12 1
10 11 12 10 11 12
2 2 2 1
3 123 133 111
2 2 2 2 2 2 1
212 222 232 213 223 233 211
2 2 2 2 2 2
312 322 332 313 323 333
... ...
... ...
..
e e e eu u u t
e e e e e e eu u u u u u t
e e e e e eu u u u u u
T T U
T T T T T T U
T T T T T T
1
1
311. ...etU
(5.103)

81
Lembrando-se que o sistema 5.103 possui apenas 3 linhas, deve-se observar
que as contribuições do ultimo nó do primeiro elemento somaram-se com as
contribuições do primeiro nó do segundo. Deve-se realizar este procedimento
sempre que elementos compartilharem um nó. Para cada ponto fonte têm-se três
linhas do sistema de equações final a ser resolvido. Nas equações das soluções
fundamentais o nó do ponto fonte não irá mudar, quem irá variar são os nós de cada
elemento, deve-se percorrer todos os elementos para cada ponto fonte. Para cada
elemento calculado teremos uma parte da equação do ponto fonte analisado. Ou
seja, para calcular H11 deve-se utilizar o ponto fonte do nó 1 e as coordenadas de
pontos do elemento 1, integrar a solução fundamental T11 multiplicando a integral
pela primeira função de forma e o jacobiano. Para calcular H12 deve-se utilizar o
ponto fonte do nó 1 e as coordenadas de pontos do elemento 1, integrar a solução
fundamental T12 multiplicando a integral pela primeira função de forma e o jacobiano.
O mesmo vale para H13, H21, H22, H23, H31, H32 e H33. Como está se utilizando
elementos quadráticos é necessário calcular da mesma maneira utilizando-se a
segunda função de forma(contribuições devido ao segundo nó do elemento) e
também utilizando-se a terceira função de forma(contribuições devido ao terceiro nó
do elemento). Ou seja, para calcular H14 deve-se utilizar o ponto fonte do nó 1 e as
coordenadas de pontos do elemento 1,integrar a solução fundamental T11
multiplicando a integral pela segunda função de forma e o jacobiano. Para calcular
H17 deve-se utilizar o ponto fonte do nó 1 e as coordenadas de pontos do elemento
1, integrar a solução fundamental T11 multiplicando a integral pela terceira função de
forma e o jacobiano.
Devido à utilização de nós duplos, quando o ponto fonte estiver no primeiro
nó do elemento e for duplo, a posição do ponto fonte deve ser modificada para -2/3
na coordenada intrínseca. Quando o ponto fonte estiver no último nó do elemento e
for duplo, a posição do ponto fonte deve ser modificada para 2/3 na coordenada
intrínseca. Quando os nós extremos do elemento não forem duplos, utilizar -1 para o
nó inicial e +1 para o nó final, considerando a coordenada intrínseca. Integradas as
27 integrais de soluções fundamentais para o primeiro elemento, passa-se a integrar
o segundo elemento, deixando o ponto fonte ainda no nó 1 e integrando-se
novamente todas as soluções fundamentais para o segundo elemento. Lembrando
que as contribuições deste segundo elemento para a primeira função de forma
somam-se com as contribuições da terceira função de forma do elemento anterior,

82
pois os dois elementos compartilham um mesmo nó. Depois de integrados todos os
elementos, obtem-se as primeiras três linhas do sistema de equações. Deve-se
então colocar o ponto fonte no nó 2 e prosseguir o cálculo de todos os elementos
novamente, agora utilizando as coordenadas do nó 2 como ponto fonte,
encontrando-se as próximas três linhas do sistema de equações, ou seja, as linhas
4, 5 e 6 do sistema. E assim sucessivamente até percorrerem-se todos os pontos
fonte do problema incluindo-se os de nó duplo, cada nó duplo irá gerar 3 equações
para o sistema final. As equações do nó duplo ficam logo após o cálculo do nó de
canto. O sistema final encontrado denomina-se a matriz H. A matriz do método de
elementos de contorno é cheia e exige uma quantidade de processamento maior
que outros métodos numéricos, como o dos elementos finitos. Da mesma maneira
em que foram calculadas as soluções fundamentais de forças de superfície, deve-se
proceder para as soluções fundamentais de deslocamentos. A matriz que contém as
soluções fundamentais de deslocamentos é chamada de matriz G. Depois de
calculadas as matrizes H e G, é necessário adicionar a contribuição do coeficiente C
da equação integral de contorno nas diagonais da matriz H. Este coeficiente
depende do posicionamento do ponto fonte com relação ao problema calculado. O
valor da contribuição do coeficiente C é adicionado de acordo com a equação 5.35.
Lembrando-se que as diagonais são as parcelas da matriz H com coeficiente i
= j, por exemplo H11, H22, H33 e assim sucessivamente sempre de acordo com o
posicionamento do ponto fonte. Se, por exemplo, a contribuição for em H11, H11 = T11
+ C. A matriz H assume a seguinte forma, considerando-se a soma das
contribuições de elementos que dividem o mesmo nó:
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
111 121 131 112 122 132 113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2
211 221 231 212 222 232 213 211 223
e e e e e e e e e e e e e e e
e e e e e e e e e
T T T T T T (T T ) (T T ) (T T ) T T T ...
T T T T T T (T T ) (T
1 2 1 2 2 2 2
221 233 231 212 222 232
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
1 1
111 121
e e e e e e
e e e e e e e e e e e e e e e
e e
T ) (T T ) T T T ...
T T T T T T (T T ) (T T ) (T T ) T T T ...
T T
1 1 1 1 1 2 1 2 1 2 2 2 2
131 112 122 132 113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2 1 2
211 221 231 212 222 232 213 211 223 221 23
e e e e e e e e e e e e e
e e e e e e e e e e
T T T T (T T ) (T T ) (T T ) T T T ...
T T T T T T (T T ) (T T ) (T
1 2 2 2 2
3 231 212 222 232
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
1 1 1 1
111 121 131 112
e e e e e
e e e e e e e e e e e e e e e
e e e e
T ) T T T ...
T T T T T T (T T ) (T T ) (T T ) T T T ...
T T T T
1 1 1 2 1 2 1 2 2 2 2
122 132 113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2 1 2 1 2
211 221 231 212 222 232 213 211 223 221 233 231 2
e e e e e e e e e e e
e e e e e e e e e e e e
T T (T T ) (T T ) (T T ) T T T ...
T T T T T T (T T ) (T T ) (T T ) T
2 2 2
12 222 232
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
1 1 1 1 1 1
111 121 131 112 122 132
e e e
e e e e e e e e e e e e e e e
e e e e e e
T T ...
T T T T T T (T T ) (T T ) (T T ) T T T ...
T T T T T T
1 2 1 2 1 2 2 2 2
113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2 1 2 1 2 2 2
211 221 231 212 222 232 213 211 223 221 233 231 212 222 2
e e e e e e e e e
e e e e e e e e e e e e e e
(T T ) (T T ) (T T ) T T T ...
T T T T T T (T T ) (T T ) (T T ) T T T
1
2
3
4
5
6
7
2
32
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
...
e
e e e e e e e e e e e e e e e
u
u
u
u
u
u
u
...
T T T T T T (T T ) (T T ) (T T ) T T T ...
8
9
10
11
12
13
.
...
u
u
u
u
u
u
(5.104)

83
Deve-se observar que para cada ponto fonte existem 3 linhas do sistema
total, portanto as três primeiras linhas indicam as contribuições do primeiro ponto
fonte, as seis primeiras colunas indicam a contribuição do primeiro e do segundo nó
do primeiro elemento a ser integrado. As próximas colunas indicam as contribuições
somadas do terceiro nó do primeiro elemento e do primeiro nó do segundo elemento
e assim sucessivamente até serem integrados todos os elementos com relação ao
primeiro ponto fonte.
As linhas 4, 5 e 6 pertencem à contribuição devido ao ponto fonte situado no
nó 2, e seus respectivos elementos integrados. O sistema então continua assim até
que o ponto fonte seja posicionado em todos os nós do contorno. No caso de um
problema de 4 elementos de contorno, temos 8 nós de contorno mais 4 nós duplos
de canto, totalizando 12 nós no contorno, o sistema total então terá 36 linhas.
A matriz G assume a seguinte forma, considerando-se a soma das
contribuições de elementos que dividem o mesmo nó:
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
111 121 131 112 122 132 113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2
211 221 231 212 222 232 213 211 223
e e e e e e e e e e e e e e e
e e e e e e e e e
U U U U U U (U U ) (U U ) (U U ) U U U ...
U U U U U U (U U ) (U
1 2 1 2 2 2 2
221 233 231 212 222 232
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
1 1
111 121
e e e e e e
e e e e e e e e e e e e e e e
e e
U ) (U U ) U U U ...
U U U U U U (U U ) (U U ) (U U ) U U U ...
U U
1 1 1 1 1 2 1 2 1 2 2 2 2
131 112 122 132 113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2 1 2
211 221 231 212 222 232 213 211 223 221 23
e e e e e e e e e e e e e
e e e e e e e e e e
U U U U (U U ) (U U ) (U U ) U U U ...
U U U U U U (U U ) (U U ) (U
1 2 2 2 2
3 231 212 222 232
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
1 1 1 1
111 121 131 112
e e e e e
e e e e e e e e e e e e e e e
e e e e
U ) U U U ...
U U U U U U (U U ) (U U ) (U U ) U U U ...
U U U U
1 1 1 2 1 2 1 2 2 2 2
122 132 113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2 1 2 1 2
211 221 231 212 222 232 213 211 223 221 233 231 2
e e e e e e e e e e e
e e e e e e e e e e e e
U U (U U ) (U U ) (U U ) U U U ...
U U U U U U (U U ) (U U ) (U U ) U
2 2 2
12 222 232
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
1 1 1 1 1 1
111 121 131 112 122 132
e e e
e e e e e e e e e e e e e e e
e e e e e e
U U ...
U U U U U U (U U ) (U U ) (U U ) U U U ...
U U U U U U
1 2 1 2 1 2 2 2 2
113 111 123 121 133 131 112 122 132
1 1 1 1 1 1 1 2 1 2 1 2 2 2
211 221 231 212 222 232 213 211 223 221 233 231 212 222 2
e e e e e e e e e
e e e e e e e e e e e e e e
(U U ) (U U ) (U U ) U U U ...
U U U U U U (U U ) (U U ) (U U ) U U U
1
2
3
4
5
6
7
2
32
1 1 1 1 1 1 1 2 1 2 1 2 2 2 2
311 321 331 312 322 332 313 311 323 321 333 331 312 322 332
...
e
e e e e e e e e e e e e e e e
t
t
t
t
t
t
t
...
U U U U U U (U U ) (U U ) (U U ) U U U ...
8
9
10
11
12
13
...
t
t
t
t
t
t
(5.105)
O processo de integração das soluções fundamentais no método dos
elementos de contorno é complexo se comparado com outros métodos numéricos.
Como as integrais são avaliadas conforme a distância do elemento ao ponto fonte,
estas integrais começam a ter singularidades quando o elemento está muito próximo
do ponto fonte. Portanto, deve-se estar atento ao método de integração utilizado
para cada caso. Em elementos de ordem menor como elementos lineares, existe a
possibilidade da utilização da integração analítica nas soluções fundamentais.
Porém, para elementos quadráticos, estas expressões tornam-se
demasiadamente grandes e/ou de difícil acesso. Por este motivo, no presente

84
trabalho é utilizada a integração numérica das integrais das soluções fundamentais.
Observa-se as duas situações onde se deve utilizar diferentes tipos de integração, a
figura 5.5 mostra a integração quando o ponto fonte está fora do elemento a ser
integrado:
Figura 5.5 – Integração com ponto fonte fora do elemento (placa)
Quando o ponto fonte está localizado fora do elemento em que está sendo
realizada a integração, o raio torna-se maior que zero, portanto, as soluções
fundamentais passam a ser funções regulares dentro do intervalo de -1 até 1. Pode-
se então utilizar-se a quadratura de Gauss-legendre para realizar a integração sem
muita dificuldade. A figura 5.6 mostra a integração quando o ponto fonte está fora do
elemento a ser integrado:
Figura 5.6 – Integração com ponto fonte dentro do elemento (placa)

85
Quando o ponto fonte está localizado dentro do elemento que está sendo
integrado, as soluções passam a ter comportamento singular no intervalo de
integração, pois o raio está tendendo a 0. Estas integrais singulares necessitam de
um tratamento especial para serem calculadas corretamente. No caso das soluções
fundamentais de deslocamento a integração é do tipo ln(r), as chamadas de
fracamente singulares, estas são resolvidas aplicando-se a transformação de Telles,
de acordo com o trabalho de KARAM (1986). As soluções fundamentais de força de
superfície têm singularidade do tipo 1/r, estas integrais são do tipo Cauchy, sendo
resolvidas aplicando-se o método da subtração de singularidade desenvolvido por
ALIABADI (2002). O método da subtração de singularidade é chamado de semi-
analitico, pois uma parte será integrada utilizando-se a quadratura de Gauss-
legendre e a outra será feita uma integral analítica no sentido do valor principal de
Cauchy. Os métodos de integração singulares são desenvolvidos no capítulo 8.
A figura 5.7 demonstra graficamente a matriz de coeficientes ijH :
Figura 5.7 – Ilustração da matriz de coeficientes para problemas de placas
Deve-se observar que como o problema de placas de Reissner tem três graus
de liberdade, cada ponto fonte irá gerar três linhas do sistema final.
Outro fator importante é observar o compartilhamento dos nós entre os
elementos, onde as contribuições devem ser somadas para se obter o valor do nó,
um exemplo é o caso de H17, H18, H19, H27, H28, H29, H37, H38, H39, os quais precisam

86
da contribuição do terceiro nó do elemento 1 e a contribuição do primeiro nó do
elemento 2. Deve-se encontrar uma matriz da mesma forma para os coeficientes da
matriz G. O sistema de matrizes fica da seguinte maneira: ( a matriz F será abordada
mais adiante ).
H U G T F (5.106)
Após a montagem das matrizes H e G observa-se necessária a aplicação das
condições de contorno do problema. Cada nó terá três condições de contorno,
sendo a rotação com relação ao eixo x, rotação com relação ao eixo y e o
deslocamento em z. Para exemplificar a aplicação das condições de contorno nas
matrizes, pode-se observar a figura 5.8:
Figura 5.8 – Placa engastada em um dos lados
Levando-se em consideração que o nó inicial seja posicionado no canto
esquerdo superior, como o lado esquerdo está engastado, os nós iniciais terão
deslocamento e rotações prescritos, com valor nulo.
De maneira numérica isto significa que deve-se trocar as colunas nulas da
matriz H com as colunas de G, pois estas terão as incógnitas das reações de apoio
do engaste. O sistema de equações assume a forma da figura 5.9:

87
Figura 5.9 – Sistema de equações
Se for adotado apenas um elemento de contorno no lado esquerdo da placa,
as condições de contorno se aplicariam até o final deste elemento, ou seja, u1, u2,
u3, u4, u5, u6, u7, u8 e u9 serão nulos. Todos os coeficientes da matriz H que são
multiplicados por estes deslocamentos nulos, serão substituídos pelos coeficientes
de mesma posição da matriz G. Se o problema tiver uma condição de contorno com
solicitação de uma força ou momento, os coeficientes da matriz G que sejam
relacionados serão multiplicados pelo valor da solicitação conhecida, no caso
momento em x, momento em y e força em z. Aplicadas as condições de contorno, o
sistema assume a forma da figura 5.10:

88
Figura 5.10 – Sistema de equações com aplicação das condições de contorno
Observa-se necessário realizar o somatório dos coeficientes das linhas de G
já multiplicados pelos valores conhecidos das forças de solicitação, a fim de obter-se
um sistema de equações linear do tipo:
Ax B (5.107)
O sistema fica da maneira ilustrada pela figura 5.11:

89
Figura 5.11 – Sistema de equações linear
Deve-se somar na matriz B a contribuição da carga distribuída prevista na
equação integral. Para cada elemento, a contribuição no primeiro nó é dada por:
21
1 11
1
,1 ,1 121
1
,1 ,2 221
( )(ln( ( )) 1) ( ) ( )
8
18 ( ) (1 )(2ln 1) 8 ( ) 2(1 ) ( ) ( )
(1 ) 8 (1 )
18 ( ) 2(1 ) ( ) ( )
(1 ) 8 (1 )
rF q r n J d
D
vq B z z A z r r n J d
v D
vq A z r r n J d
v D
(5.108)
A contribuição do segundo termo é dada por:
21
2 21
1
,2 ,1 121
1
,2 ,2 221
( )(ln( ( )) 1) ( ) ( )
8
18 ( ) (1 )(2ln 1) 8 ( ) 2(1 ) ( ) ( )
(1 ) 8 (1 )
18 ( ) 2(1 ) ( ) ( )
(1 ) 8 (1 )
rF q r n J d
D
vq B z z A z r r n J d
v D
vq A z r r n J d
v D
(5.109)
A contribuição do terceiro termo é dada por:
31
3 ,21
1
,1 121
1
,2 221
( ) 5 ( ) 1(ln( ( )) ) (ln( ( )) ) ( ) ( )
32 4 2 (1 ) 2
1(2ln 1) ( ) ( )
(1 ) 8
1(2ln 1) ( ) ( )
(1 ) 8
n
r rF q r r r J d
D D v
vq z rr n J d
v D
vq z rr n J d
v D
(5.110)

90
Cada elemento contribuirá com três termos no vetor de cargas, a exemplo, o
elemento 1 contribuirá com F1, F2 e F3, já o elemento 2 contribuirá com F4, F5, F6 e
assim por diante. Ao se completar a integração de todos os elementos para apenas
um ponto fonte o vetor é dado da seguinte maneira:
1
2
3
4
...
F
F
F F
F
(5.111)
Quando a integração passar para o próximo ponto fonte deve-se realizar o
somatório das contribuições dos elementos integrados no primeiro ponto fonte com
este novo ponto fonte. Passando-se por todos os pontos fonte o vetor de cargas é
dado por:
1
1
2
1
3
1
...
n
i
n
i
n
i
F
FF
F
(5.112)
Deve-se então, somar as contribuições da carga distribuída com o vetor de
variáveis conhecidas, obtendo-se um sistema ilustrado pela figura 5.12:
Figura 5.12 – Sistema de equações linear com integral da carga

91
Realizada a soma encontra-se um sistema linear que pode ser resolvido
utilizando-se o método da decomposição LU. As incógnitas obtidas resolvendo este
sistema são os esforços e deslocamentos desconhecidos no contorno.
As soluções fundamentais para pontos internos são dadas por:
* *
*
2
( ) ( , ) ( ) ( ) ( , ) ( ) ( )
( , ) ( )(1 )
k k k kM X U X x p x d x P X x u x d x
q W X x d x q
(5.113)
* *
3 3
*
3
( ) ( , ) ( ) ( ) ( , ) ( ) ( )
( , ) ( )
k k k kQ X U X x p x d x P X x u x d x
q W X x d x
(5.114)
Onde * *,ijk ijkU P e *
iW são dados por ALIABADI (2002):
*
1
1
14 ( ) 2 ( ) 1 , ,
4
2 8 ( ) 2 ( ) 1 , , , 4 ( ) 1 ,
U A z zK z r rr
A z zK z r r r A z r
(5.115)
*
3
(1 ) 12 ln 1 2 , ,
8 1U z r r
(5.116)
2*
3 ( ) ( ) , ,2
U B z A z r r
(5.117)
*
3 3
1,
2U r
r
(5.118)

92
*
2
2
1 0
1
2
1 0
(1 )4 ( ) 2 ( ) 1
4
4 ( ) 1 3 16 ( ) 6 ( ) ( ) 2 2
, , , , , ,
2 8 ( ) 2 ( ) 1 , , , ,
4(24 ( ) 8 ( ) ( ) 2 2 ) , ,
n
n
DP A z zK z n n
r
A z n A z zK z z K z
n r n r r r r r
A z zK z r r n r r
A z zK z z K z r r r
, ,nr
(5.119)
2*
3 1
1
(1 )2 ( ) ( ) , ,
4
2 4 ( ) ( ) , , , 2 ( ) ,n n
DP A z zK z r n r n
r
A z zK z r r r A z r
(5.120)
2*
3 1
1
(1 )2 ( ) ( ) , ,
4
2 ( ) , 2 4 ( ) ( ) , , ,
n
n
DP A z zK z r r n
r
A z n r A z zK z r r r
(5.121)
2* 2 2
3 3 2
(1 )( ) 1 ( ) 2 , ,
4n
DP z B z n z A z r r
r
(5.122)
*
*
2
(4ln 3) (1 )( , , ) (1 3 ) ,64
4 (1 ) , , ,(1 )
n
n
rW z r n r n r
r r r U n
(5.123)
* *
3 32
12ln 1 2 , ,
8 (1 )nW z n r r U n
(5.124)

93
6 O EFEITO DA NÃO LINEARIDADE GEOMÉTRICA
6.1 INTRODUÇÃO
Neste capítulo são deduzidas as equações de equilíbrio utilizadas no
problema de instabilidade de placas. Após esta dedução, é mostrado como é feita a
aplicação deste problema com o método dos elementos de contorno, deduzindo a
equação integral de contorno. Também é mostrado neste capítulo como é feita a
aplicação numérica do problema, demonstrando quais são as soluções
fundamentais utilizadas e como são montadas as matrizes finais. O processo
numérico para a solução de autovalor para obtenção da carga crítica e o parâmetro
crítico de flambagem também é efetuado neste capítulo.
A análise de instabilidade de placas é importante em diversos aspectos da
engenharia, podendo-se citar a análise de estruturas delgadas e elementos
estruturais utilizados na engenharia aeroespacial, segundo PURBOLAKSONO
(2003). A capacidade de análise deste comportamento pode gerar menores custos
com estruturas mais seguras, devido à uma mais precisa análise do modelo
estrutural. Estes elementos estruturais são solicitados por esforços no plano da
placa, como na figura a 6.1:
Figura 6.1 – Placa com solicitação no plano
94
6.2 AS EQUAÇÕES DE EQUILÍBRIO PARA O PROBLEMA DE INSTABILIDADE
Em um problema de instabilidade as cargas no plano da placa podem causar
deslocamentos, assim como demonstrado na figura 6.2:
Figura 6.2 – Placa deformada devido à solicitação no plano
Observando-se um elemento de placa sendo solicitado por tensões no plano
e de cisalhamento na superfície do plano, a figura 6.3 mostra o sistema de forças:
Figura 6.3 – Elemento diferencial com solicitação no plano

95
Realizando-se um corte no eixo x, é possível decompor as forças de tração
para encontrar suas componentes em z, levando em consideração sua dependência
do deslocamento em z. A figura 6.4 mostra o corte e as forças expostas:
Figura 6.4 – Elemento diferencial deformado
Encontrando-se as componentes em z das forças e fazendo-se um somatório
em z, encontra-se a seguinte equação que indica o somatório das componentes por
unidade de área:
2
2
1xx x
N w w wN dx dy dx N dy
x x x x dxdy
(6.1)
Expandindo-se:
2 22
2 2
1x xx x x
N Nw w w w wN dy N dxdy dydx dx dy N dy
x x x x x x x dxdy
(6.2)
Desprezando-se os termos diferenciais elevados ao quadrado por serem
muito pequenos, encontra-se a força em z por unidade de área com relação a x:
2
2
xzx x
Nw wF N
x x x
(6.3)
Análogamente encontra-se a força em z por unidade de área com relação a y:

96
2
2
y
zy y
Nw wF N
y y y
(6.4)
Observando-se as forças de cisalhamento no plano, é possível verificar suas
componentes em z. A figura 6.5 demonstra as forças de cisalhamento:
Figura 6.5 – Elemento diferencial com forças de cisalhamento no plano
Decompondo-se as forças de cisalhamento e realizando-se o somatório em z,
tem-se que o somatório de forças em z por unidade de área é:
2 21 xy yx
xy yx
xy yx
N Nw w w wN dx dx dy N dy dy dx
dxdy x y x y y x x y
w wN dy N dx
y x
(6.5)
Desprezando-se os termos diferenciais elevados ao quadrado por serem
muito pequenos, encontra-se a força em z por unidade de área:
2 2xy yx
zx xy yx
N Nw w w wF N N
x y x y x y y x
(6.6)
Realizando-se o somatório de todas as forças encontradas e considerando
também a carga no plano da placa é possível determinar uma das equações de
equilíbrio do problema:
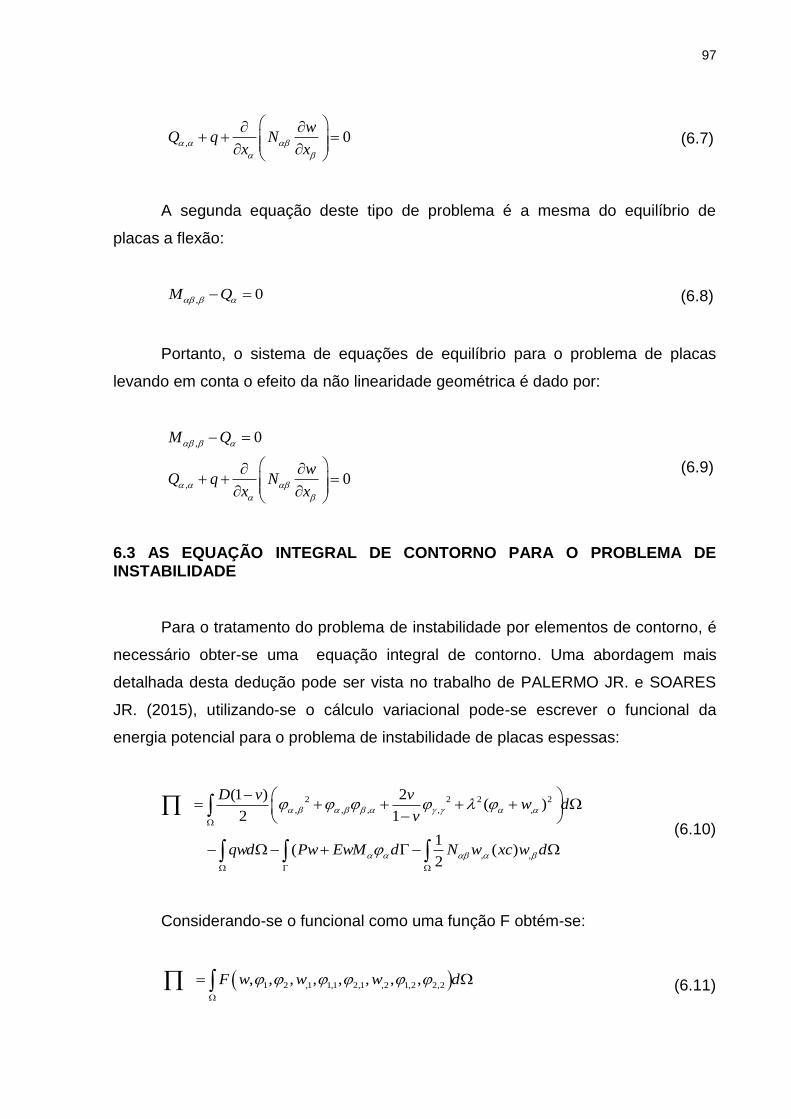
97
, 0w
Q q Nx x
(6.7)
A segunda equação deste tipo de problema é a mesma do equilíbrio de
placas a flexão:
, 0M Q (6.8)
Portanto, o sistema de equações de equilíbrio para o problema de placas
levando em conta o efeito da não linearidade geométrica é dado por:
,
,
0
0
M Q
wQ q N
x x
(6.9)
6.3 AS EQUAÇÃO INTEGRAL DE CONTORNO PARA O PROBLEMA DE INSTABILIDADE
Para o tratamento do problema de instabilidade por elementos de contorno, é
necessário obter-se uma equação integral de contorno. Uma abordagem mais
detalhada desta dedução pode ser vista no trabalho de PALERMO JR. e SOARES
JR. (2015), utilizando-se o cálculo variacional pode-se escrever o funcional da
energia potencial para o problema de instabilidade de placas espessas:
2 2 2 2
, , , , ,
, ,
(1 ) 2( )
2 1
1( ( )
2
D v vw d
v
qwd Pw EwM d N w xc w d
(6.10)
Considerando-se o funcional como uma função F obtém-se:
1 2 ,1 1,1 2,1 ,2 1,2 2,2, , , , , , , ,F w w w d
(6.11)

98
Pode-se minimizar a função F utilizando-se as equações de Euler:
,
,
0
0
F F
x
F F
w x w
(6.12)
Aplicando-se as seguintes condições no funcional minimizado:
, ,
3 ,
, ,
0 0
0 0
F Fn w n
w w
t P n N w
F Fn n
t EM
(6.13)
É possível obter a equação integral de contorno para placas de Reissner,
quando é levado em conta o efeito da não linearidade geométrica. Utilizando-se a
notação de WEEËN (1982):
* *
* 33
1( ') ( ', ) ( ) ( ', ) ( )
2
( ', )
ij i ij i ij j
i
C u x T x x u x d U x x t x d
uU x X q N d
X X
(6.14)
Aplicando o teorema da divergência na integral de domínio:
* 33
* *
3, 3 3, 3,
( ', )
( ) ( ) ( ) ( ', ) ( ) ( ) ( ', )
i
i i
uU x X q N d
X X
n x N x u x U x x d N x u x U x x d
(6.15)
A equação integral de contorno então fica:

99
* *
* *
3 3, 3
*
3, 3,
1( ') ( ', ) ( ) ( ', ) ( )
2
( ', ) ( ) ( ) ( ) ( ', )
( ) ( ) ( ', )
ij i ij i ij j
i i
i
C u x T x x u x d U x x t x d
U x X qd n x N x u x U x x d
N x u x U x x d
(6.16)
Observando-se que:
3, 3 3 3
3 33 3
*
33 3, 3
3,
( ') ( ) [ ( ', )] ( ) ( ) [ ( ', )] ( )
[ ( ', )] ( ) [ ( ', )] ( )
[ ( ', )] ( ) ( ) ( ) [ ( ', )]
( ) ( ) [
i
i
u X n x M X x u x d n x Q X x u x dx x
U X x t x d U X x t x dx x
U X X qd n x N x u x U X x dx x
N X u x Ux
*
3, ( ', )]X X d
(6.17)
A integração no domínio e feita utilizando-se células de domínio constantes,
conforme o trabalho de SIMÕES (1992). A integração é feita ao longo do contorno
de todas as células de domínio, portanto a integral que relaciona a influência da
carga transversal no domínio será dada por:
* *
3, 3, 3, 3
1
( ) ( ) ( ', ) ( ) ( ) ( ) ( ', )Ncel
i i
k k
N X u X U x X d n x N x u x U x x d
(6.18)
A equação integral de contorno para o problema de instabilidade de placas de
Reissner quando levado em consideração o efeito da não linearidade geométrica
passa a ser:
* *
* *
3 3, 3
*
3, 3
1
1( ') ( ', ) ( ) ( ', ) ( )
2
( ', ) ( ) ( ) ( ) ( ', )
( ) ( ) ( ) ( ', )
ij i ij i ij j
i i
Ncel
i
k k
C u x T x x u x d U x x t x d
U x X qd n x N x u x U x x d
n x N x u x U x x d
(6.19)

100
Onde 'x é um ponto fonte pertencente ao contorno, x é um ponto campo
pertencente ao contorno, 'X é um ponto fonte pertencente ao domínio e X é um
ponto campo pertencente ao domínio. Observa-se a presença de duas integrais
iguais, uma no contorno da célula e outra no contorno do domínio. A fim de otimizar
o cálculo, foi adotado que quando os deslocamentos são prescritos no contorno
(condição simplesmente apoiada, por exemplo), o efeito da não linearidade
geométrica é calculado somente nos lados das células dentro do domínio,
excluindo-se os lados presentes no contorno. Quando os deslocamentos não são
prescritos no contorno (como um lado livre, por exemplo) o efeito da não linearidade
geométrica é computado para todos os lados das células e também para o contorno
no domínio.
Os fatores críticos de instabilidade são calculados utilizando-se o quociente
de Rayleigh, método numérico abordado com detalhes em PALERMO JR. (1985):
( 1)
( 1)
( 1) ( 1)
( , )
( , )
k k
k k
k k k
Ax x
x x
x x
(6.20)
Uma ilustração da discretização (com baixo refinamento para facilitar a
visualização) utilizada para placas sem furos pode ser vista na figura 6.6:
Figura 6.6 – Discretização de um problema de instabilidade de placas

101
Deve-se observar na figura 6.6 que, o contorno foi descrito utilizando-se nós
duplos em cada canto. A contagem dos nós começa primeiramente contando os nós
de contorno e depois, os nós de domínio são contados. As células de domínio
utilizam-se quando necessário de nós de contorno e domínio.
Abaixo pode-se observar a figura 6.7 ilustrando a discretização de um
problema de placas com furo:
Figura 6.7 – Discretização de um problema instabilidade de placas com furo
As células de domínio podem ser de geometria quadrática (para problemas de
furos com geometria complexa) onde a mudança de variáveis para integração é feita
da mesma forma da equação 5.85 em diante. Para células de geometria linear (para
problemas de geometria simplificada) apenas as funções de forma são modificadas
para:
11( )= (1 )
2
12( )= (1 )
2
N
N
(6.21)
O cálculo das componentes das soluções fundamentais é feito da mesma
maneira conforme escrito no capítulo 5, somente as funções de forma são
modificadas e cada lado de célula possui apenas dois nós, no caso da célula linear.
As células de domínio podem possuir geometria linear ou quadrática, mas a

102
aplicação das forças é calculada como constante, ou seja, as tensões em x, tensões
em y e tensões de cisalhamento são aplicadas no centro de gravidade das células.
6.4 IMPLEMENTAÇÃO NUMÉRICA DA EQUAÇÃO INTEGRAL DE CONTORNO QUE LEVA EM CONTA A NÃO LINEARIDADE GEOMÉTRICA
Deve-se resolver as soluções fundamentais da equação 6.19 ao longo do
contorno e das bordas das células de domínio, formando-se os coeficientes do
sistema de equações usado para resolver o problema de autovalor. Primeiramente
deve-se resolver as duas últimas integrais da equação 6.19:
* *
3, 3 3, 3
1
( ) ( ) ( ) ( ', ) ( ) ( ) ( ) ( ', )Ncel
i i
k k
n x N x u x U x x d n x N x u x U x x d
(6.22)
Para realizar a integração 6.22 deve-se posicionar o ponto fonte em todos os
pontos de contorno, para cada ponto, uma linha na matriz CDP será criada.
Também, para cada ponto no contorno, deve-se calcular a integração ao longo das
bordas de cada célula. A geometria das células é linear, por isso, deve-se somar as
contribuições da integração dos quatro lados das células de domínio. Como
demonstrado na equação 6.23:
1 2 3 4 1 2 3 4
13 13 13 13 1 13 13 13 13 2
1 2 3 4 1 2 3 4
23 23 23 23 1 23 23 23 23 2
1 2 3 4 1 2 3 4
33 33 33 33 1 23 23 23 23 2
L L L L L L L L
L L L L L L L L
L L L L L L L L
U U U U n U U U U n
U U U U n U U U U n
U U U U n U U U U n
(6.23)
Condensando-se os quatro lados e multiplicando pelas tensões no centro de
gravidade da célula a matriz passa a ser:
13 1 13 211 12
11 12
23 1 23 2 21 22
21 22
31 3233 1 33 2
cel
U n U n MD MDN N
MD U n U n MD MDN N
MD MDU n U n
(6.24)

103
A matriz de 6.24 representa a contribuição de uma célula quando
consideradas as integrais da equação 6.22. Passando-se o ponto fonte por todos os
pontos no contorno e calculando-se as soluções fundamentais em todas as células,
obtém-se a matriz CDP:
11 12 11 12
21 22 21 22
31 32 31 32
11 12 11 12
21 22 21 22
31 32 31 32
MD MD MD MD
MD MD MD MD
MD MD MD MD Células
MD MD MD MDCDP
MD MD MD MD
MD MD MD MD
Pontos Fonte
(6.25)
Cada ponto fonte irá criar três linhas na matriz CDP, cada célula integrada irá
criar duas colunas, as contribuições das células na matriz CDP não podem ser
sobrepostas. Quando um canto de célula coincide com um ponto fonte situado no
contorno deve-se utilizar a técnica de integração singular transformação quadrática
de Telles, podendo ser encontrada em KARAM (1986) e também no capítulo de
integração numérica do presente trabalho.
A incógnita do problema de autovalor 3, ( )u xc receberá um chute inicial com o
valor de 1, iniciando-se então um processo iterativo, este será o valor do vetor DWI
(de tamanho duas vezes o número de células):
1
1
1
...
inicialDWI
(6.26)
Multiplica-se a matriz CDP pelo vetor DWI, encontrando-se a contribuição do
vetor de carga:
TPI DWI CDP (6.27)
104
Esta matriz TPI significa a contribuição da equação integral 6.22. Voltando-se
para as integrais principais, estas são as mesmas do problema de flexão:
* *1( ') ( ', ) ( ) ( ', ) ( )
2ij i ij i ij jC u x T x x u x d U x x t x d
(6.28)
Estas devem ser calculadas da mesma maneira como foi explicado no
capítulo 5, montadas as matrizes H e G, deve-se realizar a troca entre as incógnitas
e não incógnitas do contorno, assim como demonstrado na figura 5.9. A matriz G
agora com somente os termos conhecidos deve ter suas colunas somadas
formando-se o vetor das cargas e deslocamentos conhecidos, assim como na figura
5.10. Utilizando-se este vetor, deve-se multiplica-lo pelo vetor de cargas nos nós de
contorno (as forças aplicadas de compressão ou tração na borda da placa) :
TP G FI (6.29)
A matriz H agora com somente os valores que multiplicam as incógnitas deve
ser processada realizando-se a decomposição LU, resultando-se na matriz Hd. Para
resolver o sistema de equções resultante, deve-se antes realizar a soma dos vetores
de carga TP e TPI:
TPF TPI TP (6.30)
O sistema resultante fica da seguinte maneira:
Hd x TPF (6.31)
Resolvendo-se o sistema da equação 6.31 encontra-se o vetor com os
deslocamentos no contorno já com a influência o autovalor inicial. Os valores dos
deslocamentos devem ser armazenados em uma matriz DS e os valores das forças
devem ser armazenados em uma matriz FICI.

105
Para resolver o problema de autovalor ainda é necessário cálcular as
contribuições do somatório das rotações, 3,u . A primeira parte desta integração é
dada por:
3 3 3
3 33 3
( ) [ ( ', )] ( ) ( ) [ ( ', )] ( )
[ ( ', )] ( ) [ ( ', )] ( )
n x M X x u x d n x Q X x u x dx x
U X x t x d U X x t x dx x
(6.32)
Para integrar esta parte basta calcular as mesmas soluções fundamentais das
matrizes H e G. Na montagem das matrizes a diferença é que coloca-se o ponto
fonte no centro de gravidade de uma célula e integra-se ao longo dos elementos de
contorno obtendo-se as 9 soluções fundamentais por nó. Se o ultimo nó do elemento
for um nó duplo, não se deve sobrepor as contribuições do último nó , se o último nó
do elemento for um nó simples, deve-se realizar a sobreposição das soluções
fundamentais do último nó do elemento com as soluções do primeiro nó do próximo
elemento.
Cada ponto fonte gera uma nova linha na matriz, assim como na figura 5.6.
Realizada a integração de todos os elementos, para todos os pontos fonte, formam-
se as matrizes IH e IG. Apesar da utilização das mesmas soluções fundamentais
que as matrizes H e G, as matrizes IH e IG tem sinal invertido e devem ter seus
coeficientes multiplicados por -1. Observando a equação integral 6.32, pode-se notar
que os termos estão sendo multiplicados pelos resultados de forças e
deslocamentos, portanto, deve-se multiplicar as matrizes IH e IG pelos vetores de
solução no contorno de forças e deslocamentos.
1 2IR IH DS IR IG FICI (6.33)
A última parte da derivada das rotações é dada por:
*
3, 3
*
3, 3,
( ) ( ) ( ) [ ( ', )]
( ) ( ) [ ( ', )]
i
i
n x N x u x U X x dx
N X u x U X X dx
(6.34)

106
A contribuição é feita de maneira similar à matriz MD, integra-se as soluções
fundamentais colocando-se o ponto fonte no centro de gravidade da célula e integra-
se ao longo do contorno de cada célula. A montagem da matriz é dada por:
3,1 1 3,1 211 12
11 12
3,2 1 3,2 2 21 22
21 22
31 3233 1 33 2
2 2
2 2 2
2 2
cel
U n U n MD MDN N
MD U n U n MD MDN N
MD MDU n U n
(6.35)
As soluções fundamentais para as derivadas são dadas por:
3,1 ,1 ,12
3,2 ,2 ,22
1 1 1 1ln( )
4 2 (1 )
1 1 1 1ln( )
4 2 (1 )
U z rr rD D v r
U z rr rD D v r
(6.36)
Por fim, as matrizes MD2 de cada ponto fonte e cada célula de domínio são
montadas de maneira similar à montagem de CDP em uma matriz de nome IDPD:
11 12 11 12
21 22 21 22
31 32 31 32
11 12 11 12
21 22 21 22
31 32 31 32
2 2 2 2
2 2 2 2
2 2 2 2
2 2 2 2
2 2 2 2
2 2 2 2
MD MD MD MD
MD MD MD MD
MD MD MD MD Células
MD MD MD MDIDPD
MD MD MD MD
MD MD MD MD
Pontos Fonte
(6.37)
Multiplicando-se IDPD pelo autovalor encontra-se:
3IR IDPD DWI (6.38)
Realizando-se a soma da contribuição de IR1, IR2 e IR3 obtém-se:

107
2 3 1IRT IR IR IR (6.39)
Extraindo-se do vetor IRT (vetor utilizado para a próxima iteração) somente os
valores correspondentes às duas primeiras solicitações de cada célula, obtêm-se:
1
2 1
3 2
4 4
5 5
6 ...
...
IRT
IRT IRT
IRT IRT
IRT IRT DWA IRT
IRT IRT
IRT
(6.40)
O vetor DWA corresponde ao próximo autovalor da iteração, a carga crítica é
então calculada utilizando o quociente de Rayleigh:
( 1)
( 1)
( 1) ( 1)
( , )
( , )
k k
k k
k k k
crit
Ax x
x x
x x
DWA DWIN
DWA DWA
(6.41)
Este problema é considerado um problema de raiz dupla, sendo necessário
um tratamento especialmente quando se considera problemas com solicitação de
cisalhamento puro. Este tratamento é dado por (quando já se passou a primeira
iteração):
1 1 2critN AUX AUX (6.42)
O valor de AUX1 é dado por:
1
2 1ANTERIOR
DWI DWIAUX
DWA DWA
AUX AUX
(6.43)

108
O valor de AUX2 é o mesmo de AUX1, mas quando calculado na iteração
anterior do problema de autovalor, se o programa estiver na primeira iteração o valor
de N1crit é 0. O valor de DWA é então dividido pela sua norma:
DWADWA
DWA DWA
(6.44)
Deve-se então ir para a segunda iteração, o cálculo deve prosseguir da
mesma maneira começando-se pela equação 1.1, recalculando todos os coeficientes
( as matrizes de soluções fundamentais não são recalculadas, apenas os vetores
que dependem do autovalor DWI ) serão feitas as seguintes substituições:
2 1
ANTERIOR
ANTERIOR
DWI DWA
AUX AUX
(6.45)
São recalculadas as matrizes TPI, FICI, DS, IR1, IR2, IR3 utilizando-se o novo
valor de DWI da iteração anterior, obtendo-se então um novo valor para as cargas
críticas Ncrit e N1crit. A condição de parada é definida de acordo com os recursos
computacionais, no caso do presente trabalho a condição é quando o erro relativo
entre os valores da carga crítica e da carga crítica anterior for menor que 10-4.
Utilizando-se o valor da carga crítica final é possível encontrar o valor do parâmetro
crítico, sendo dado por:
2
2
critNk L
D (6.46)
Em problemas de raiz dupla (como placas solicitadas à apenas carga de
cisalhamento), a segunda carga crítica se torna necessária para calcular o
parâmetro crítico:
2
2
11 critN
k LD
(6.47)

109
7 PROBLEMAS DE ELASTICIDADE BIDIMENSIONAL
Em uma placa quadrada sem furos a distribuição das tensões é constante,
porém, em uma placa com furos a distribuição das tensões passa a ter grandes
variações principalmente perto da borda dos furos. Isto mostra a necessidade da
utilização de um método que calcule estas tensões ao longo do domínio perfurado, a
fim de gerar cargas críticas com menores desvios. O método dos elementos de
contorno pode ser aplicado a problemas de elasticidade linear em duas ou mais
dimensões com grande precisão nos resultados. Será então descrito, conforme o
procedimento encontrado em KANE (1994) e FOLTRAN (1999) como é aplicado o
método dos elementos de contorno para problemas de elasticidade bidimensionais.
Seja o problema dado pela figura 7.1:
Figura 7.1 – Exemplo de problema bidimensional
A figura 7.1 consiste em um problema de elasticidade bidimensional pois ele
tem deslocamentos prescritos e trações prescritas. Para resolver este problema por
elementos de contorno é necessário discretizar o contorno em diversos elementos.
Na figura 7.1, o problema está discretizado em 4 elementos de contorno quadráticos,
que possuem 3 nós por elemento. No caso temos então 8 nós de contorno. Serão
utilizados nós duplos nos quatro cantos do problema, serão adicionados 4 nós
duplos. O elemento 1 possuirá os nós 1, 2 e 3; o elemento 2 os nós 4, 5 e 6; o
elemento 3 os nós 7, 8 e 9 e por fim, o elemento 4 possuirá os nós 10, 11 e 12. A
utilização dos nós duplos facilita a manipulação do sistema final de equações e

110
também proporciona respostas únicas para cada elemento, separando respostas de
força e deslocamento.
É possível resolver o problema não utilizando os nós duplos, conforme KANE
(1994), mas esta solução não será abordada no presente trabalho. As coordenadas
dos nós de cada elemento definem os valores utilizados na integração das soluções
fundamentais. Considerando que o domínio do problema seja um quadrado de lado
2, o elemento 1 portanto, terá as coordenadas em x: x1 = 0, x2 = 1 e x3 = 2. As
coordenadas em y serão: y1 = 0, y2 = 0 e y3 = 0; o elemento 2 terá as coordenadas
em x: x1 = 2, x2 = 2 e x3 = 2. As coordenadas em y serão: y1 = 0, y2 = 1 e y3 = 2; o
elemento 3 terá as coordenadas em x: x1 = 2, x2 = 1 e x3 = 0. As coordenadas em y
serão: y1 = 2, y2 = 2 e y3 = 2; o elemento 4 terá as coordenadas em x: x1 = 0, x2 =
0 e x3 = 0. As coordenadas em y serão: y1 = 2, y2 = 1 e y3 = 0.
Obtidas as informações do problema como condições de contorno,
coordenadas do contorno e propriedades do material, o problema é então dividido
em diversos elementos de contorno. Ao se descrever cada elemento e suas
informações deve-se começar o processo de integração dos elementos. As soluções
fundamentais para elasticidade bidimensional são deduzidas apartir da solução
fundamental obtida por LORD KELVIN (1848). A equação integral de contorno para
os problemas bidimensionais pode ser encontrada em BECKER (1992):
* *( ') ( ) ( ', ) ( ) ( ', )ij iC u x u x T x x d t x U x x d
(7.1)
A solução do problema por elementos de contorno exige o cálculo das
soluções fundamentais ao longo de todos os elementos com relação a cada ponto
fonte. O segundo termo da parte esquerda da equação determina a integral das
soluções fundamentais de forças de superfície que multiplicam a incógnitas de
deslocamento u. O termo da direita da equação determina a integral das soluções
fundamentais de deslocamento que multiplicam a incógnitas de forças de superfície.
Em um problema de elasticidade bidimensional ou se tem incógnitas de força ou
incógnitas de deslocamento. De acordo com uma determinada força, haverá um
determinado deslocamento ou vice versa. Estas determinações devem aparecer no
sistema final como condições de contorno do problema. O parâmetro Cij indica uma
contribuição na matriz final devido ao posicionamento do ponto no contorno, esta

111
contribuição aparece sempre nas diagonais da matriz com as soluções de força de
superfície. Esta contribuição é somada ao valor da solução fundamental que
multiplica a incógnita do ponto fonte avaliado. Os valores de Cij são os mesmos
dados pela equação 5.35. As soluções fundamentais são calculadas em função do
raio que por sua vez está um função da variável . As soluções fundamentais
devem ser integradas ao longo do domínio intrínseco, ou seja, de -1 até 1. As
soluções fundamentais para problemas bidimensionais de elasticidade estão
descritas abaixo :
2
11
1 3 4 ln
8 1
drU v r
v dx
(7.2)
12 21
1
8 1
dr drU U
v dx dy
(7.3)
2
22
1 3 4 ln
8 1
drU v r
v dy
(7.4)
Em notação indicial estas equações podem ser escritas por:
1 3 4 ln
8 1
dr drU v r
v dx dx
(7.5)
As soluções fundamentais de forças de superfície são as seguintes:
2
11
1 1 2 2
4 1
dr drT v
v r dn dx
(7.6)
12
1 2 1 2
4 1
dr dr dr dr drT v nx ny
v r dx dy dn dy dx
(7.7)

112
21
1 2 1 2
4 1
dr dr dr dr drT v nx ny
v r dx dy dn dy dx
(7.8)
2
22
1 1 2 2
4 1
dr drT v
v r dn dy
(7.9)
Em notação indicial estas equações podem ser escritas por:
1 1 2 2 1 2
4 1
dr dr dr dr drT v v n n
v r dx dx dn dx dx
(7.10)
Cada parcela das soluções fundamentais deve ser calculada a partir das
funções de forma estabelecidas, no caso serão utilizadas as funções de forma para
elementos quadráticos. Portanto, as coordenadas cartesianas serão convertidas
para um sistema de coordenadas isoparamétrico e passa a ter domínio de -1 a 1. As
definições de funções de forma, raio, jacobiano e componentes das soluções
fundamentais são os mesmos das equações 5.76 até 5.93. Para calcular cada
solução fundamental, deve-se atentar-se que agora integração está sobre o domínio
da coordenada , então deve-se aplicar na integração o valor do jacobiano e da
função de forma do nó do elemento :
3 1*
1 21
1 1
3 1*
1 21
1 1
( ') ( '( , ), ( )) ( ) ( )
( '( , ), ( )) ( ) ( )
Nelem
ij i j k
n k
Nelem
j k
n k
C u x u T x x x x N J d
t U x x x x N J d
(7.11)
Encontradas todas as componentes, será necessário calcular, para cada
ponto fonte e para cada elemento, as soluções fundamentais de 7.10. No presente
trabalho será utilizado o método da colocação do ponto fonte, conforme KANE
(1994), isto significa montar um sistema de equações que obtêm uma equação para
cada ponto fonte.
Este método consiste em situar um ponto fonte em cada nó do contorno,
incluindo os nós duplos. Situando o ponto fonte no nó 1 do problema por exemplo,
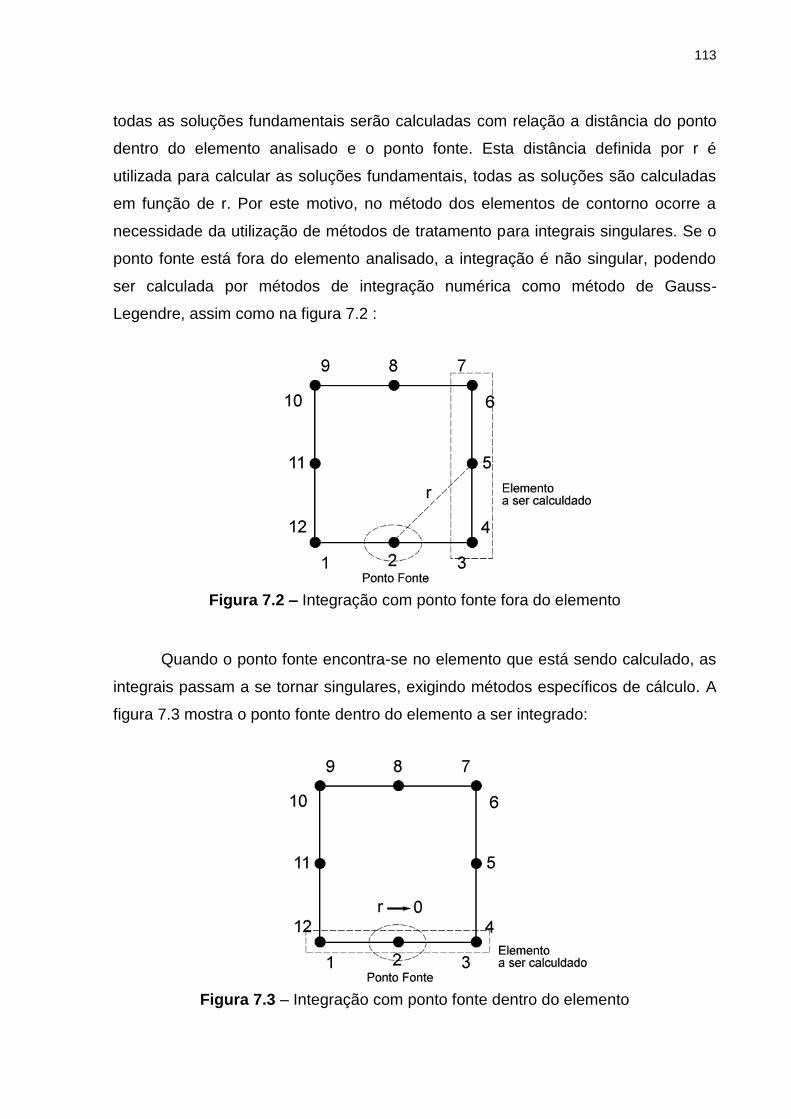
113
todas as soluções fundamentais serão calculadas com relação a distância do ponto
dentro do elemento analisado e o ponto fonte. Esta distância definida por r é
utilizada para calcular as soluções fundamentais, todas as soluções são calculadas
em função de r. Por este motivo, no método dos elementos de contorno ocorre a
necessidade da utilização de métodos de tratamento para integrais singulares. Se o
ponto fonte está fora do elemento analisado, a integração é não singular, podendo
ser calculada por métodos de integração numérica como método de Gauss-
Legendre, assim como na figura 7.2 :
Figura 7.2 – Integração com ponto fonte fora do elemento
Quando o ponto fonte encontra-se no elemento que está sendo calculado, as
integrais passam a se tornar singulares, exigindo métodos específicos de cálculo. A
figura 7.3 mostra o ponto fonte dentro do elemento a ser integrado:
Figura 7.3 – Integração com ponto fonte dentro do elemento

114
Na solução de problemas de elasticidade bidimensionais é necessário
resolver integrais singulares do tipo 1/r, encontradas nas soluções fundamentais de
forças de superfície. As integrais singulares do tipo ln(r) são encontradas nas
soluções fundamentais de deslocamentos. Os métodos de integração para integrais
singulares são abordados com detalhes no capítulo de integração numérica.
Voltando-se ao processo de cálculo do método dos elementos de contorno, situado
então o ponto fonte no nó 1 e calculando-se as soluções fundamentais para todos os
elementos com relação a sua distância com o ponto fonte, obtém-se a primeira e a
segunda linha do sistema de equações do método da colocação do ponto fonte.
Para este propósito, é necessário somar a contribuição de cada nó de cada
elemento, a contribuição de cada nó é definida pela multiplicação da integral pela
função de forma respectiva ao nó. A contribuição de 1 elemento fica da seguinte
maneira no sistema de equações principal, considerando as soluções fundamentais
de força de superfície:
1 1
11 11 1 12 12 11 1
1 1
21 21 1 22 22 11 1
1 1
13 11 2 14 12 21 1
1 1
24 21 2 24 22 21 1
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
H T N J d H T N J d
H T N J d H T N J d
H T N J d H T N J d
H T N J d H T N J d
1 1
15 11 3 16 12 31 1
1 1
25 21 3 26 22 31 1
( ) ( ) ( ) ( ) ( ) ( )
( ) ( ) ( ) ( ) ( ) ( )
H T N J d H T N J d
H T N J d H T N J d
(7.12)
Cada contribuição da matriz será então multiplicada pela sua variável
correspondente de deslocamento, no caso da matriz H e pela variável
correspondente de força quando o caso for a matriz G:
11 1 12 2 13 3 14 4 15 5 16 6 11 1
21 1 22 2 23 3 24 4 25 5 26 6 21 1
... ...
... ...
H u H u H u H u H u H u U t
H u H u H u H u H u H u U t
(7.13)
Nota-se que temos 2 linhas para cada elemento e 6 valores de soluções
fundamentais. Analisando o sistema de equações 7.13, no primeiro termo temos que
os valores da esquerda são devido à contribuição do primeiro nó do elemento (as

115
integrais da solução fundamental foram multiplicadas por N1), os valores do meio
são devido aos valores do segundo nó (as integrais da solução fundamental foram
multiplicadas por N2), e os valores da direita são devido à contribuição do terceiro nó
do elemento (as integrais da solução fundamental foram multiplicadas por N3)
Obtêm-se duas linhas para cada ponto fonte porque o problema de
elasticidade bidimensional contém dois graus de liberdade, no caso, deslocamentos
e trações. Na equação 7.13, encontra-se a contribuição de apenas 1 elemento. Mas
é necessário calcular a contribuição de todos os elementos com relação ao ponto
fonte em questão. A contribuição de nós adjacentes é feita nos dois últimos termos
da matriz, pois estes elementos estão compartilhando as 4 soluções para o terceiro
nó do primeiro elemento e para o primeiro nó do elemento adjacente. Deve-se então
somar a contribuição do ultimo nó do primeiro elemento com a contribuição do
primeiro nó do segundo elemento, quando estes compartilham um nó. A exemplo,
abaixo encontra-se o sistema quando calcula-se dois elementos que compartilham
um nó.
1 1 1 1 1 2 1 2 2 2 21 2 3 4 5 6 7 8 9111 121 112 122 113 111 123 121 112 122 113
1 1 1 1 1 2 1 2 2 21 2 3 4 5 6 7 8211 221 212 222 213 211 223 221 212 222
e e e e e e e e e e eu u u u u u u u u
e e e e e e e e e eu u u u u u u u
T T T T T T T T T T T
T T T T T T T T T T
29213
euT
(7.14)
No problema da figura 7.1, observa-se apenas 4 elementos, portanto seria
necessário realizar este mesmo procedimento para todos os elementos em qual o
problema foi discretizado. Calculadas todas as contribuições dos elementos para o
ponto fonte no nó 1, deve-se mover o ponto fonte para o nó 2 e realizar o mesmo
procedimento, agora posicionando as equações logo abaixo das duas obtidas no
ponto fonte situado no nó dois. Após o cálculo das contribuições do nó dois, haverá
4 linhas no sistema de equações.
No presente trabalho está sendo abordada a técnica da utilização de nós
duplos para cantos com ângulos retos. Em alguns problemas pode-se encontrar
faces que têm uma condição de contorno de deslocamento, enquanto que na face
perpendicular tem-se uma condição de força. A utilização do nó duplo faz com que a
separação das duas variáveis seja mais simples. Quando temos uma situação de nó
de canto com outra face perpendicular utiliza-se o nó duplo, quando se tem uma
junção de dois elementos em uma linha de mesma angulação, não se utiliza o nó

116
duplo. A consequência do nó duplo no sistema de equações é que é adicionada uma
linha a mais correspondente ao nó duplo criado. Então haverá 8 nós de contorno
mais 4 duplos, um para cada nó de canto. Então como tem-se 12 nós no total, será
encontrado um sistema de equações com um total de 24 linhas, considerando-se
que para cada ponto fonte será necessário 2 linhas devido ao número de graus de
liberdade, que também é 2.
Para cada ponto fonte tem-se duas linhas do sistema de equações final a ser
resolvido, para encontrar essas linhas deve-se localizar o ponto fonte no nó inicial e
calcular então as soluções fundamentais para cada elemento. Nas equações das
soluções fundamentais os nós do ponto fonte não irão mudar, quem irá variar são os
nós de cada elemento, deve-se percorrer todos os elementos para cada ponto fonte.
Devido à utilização de nós duplos, quando o ponto fonte estiver no primeiro
nó do elemento e for duplo, a posição do ponto fonte deve ser modificada para -2/3
na coordenada intrínseca. Quando o ponto fonte estiver no último nó do elemento e
for duplo, a posição do ponto fonte deve ser modificada para 2/3 na coordenada
intrínseca. Quando os nós extremos do elemento não forem duplos, utilizar -1 para o
nó inicial e +1 para o nó final, considerando a coordenada intrínseca. Para cada
elemento calculado teremos uma parte da equação do ponto fonte analisado. Ou
seja, para calcular H11 deve-se utilizar o ponto fonte do nó 1 e as coordenadas de
pontos do elemento 1, integrar a solução fundamental T11 multiplicando a integral
pela primeira função de forma e o jacobiano. Para calcular H12 deve-se utilizar o
ponto fonte do nó 1 e as coordenadas de pontos do elemento 1, integrar a solução
fundamental T12 multiplicando a integral pela primeira função de forma e o jacobiano,
multiplicando a integral pela primeira função de forma. Para calcular H21 deve-se
utilizar o ponto fonte do nó 1 e as coordenadas de pontos do elemento 1, integrar a
solução fundamental T21 multiplicando a integral pela primeira função de forma e o
jacobiano. Para calcular H22 deve-se utilizar o ponto fonte do nó 1 e as coordenadas
de pontos do elemento 1, integrar a solução fundamental T22 multiplicando a integral
pela primeira função de forma e o jacobiano. Com isso são calculadas as soluções
fundamentais para a primeira função de forma. Como está se utilizando elementos
quadráticos é necessário calcular da mesma forma para a segunda função de forma
e também para a terceira função de forma. Ou seja, para calcular H13 deve-se utilizar
o ponto fonte do nó 1 e as coordenadas de pontos do elemento 1,integrar a solução
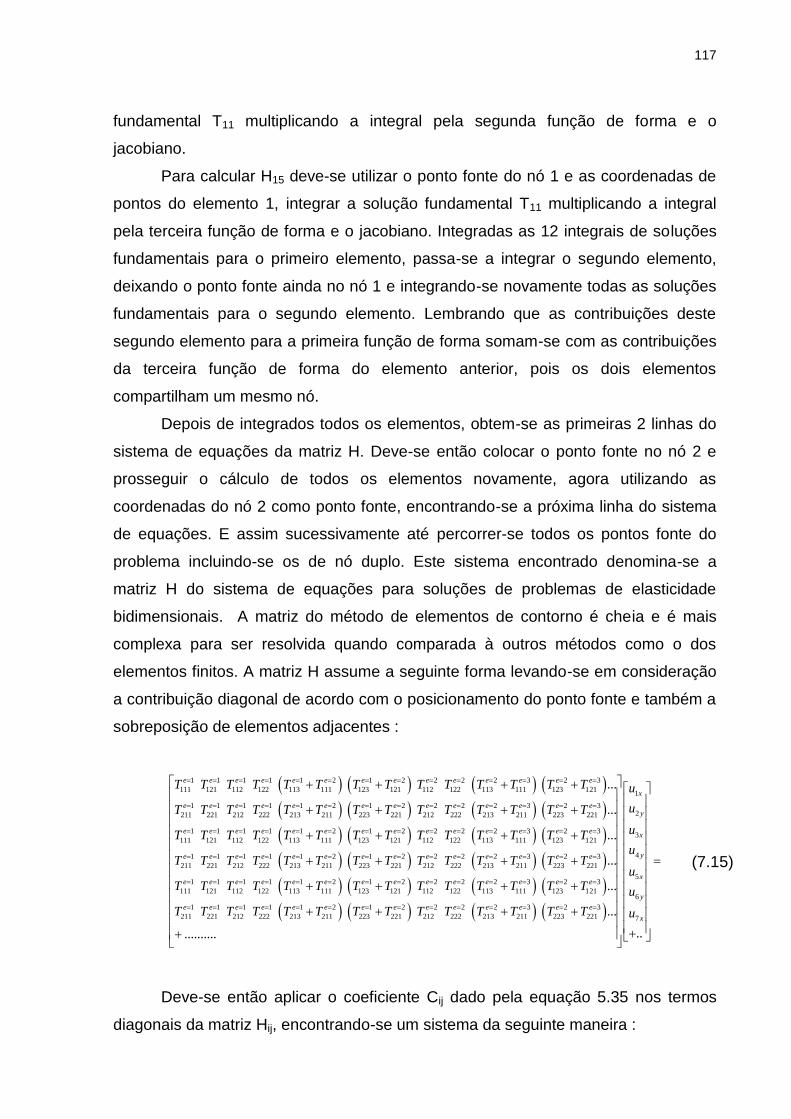
117
fundamental T11 multiplicando a integral pela segunda função de forma e o
jacobiano.
Para calcular H15 deve-se utilizar o ponto fonte do nó 1 e as coordenadas de
pontos do elemento 1, integrar a solução fundamental T11 multiplicando a integral
pela terceira função de forma e o jacobiano. Integradas as 12 integrais de soluções
fundamentais para o primeiro elemento, passa-se a integrar o segundo elemento,
deixando o ponto fonte ainda no nó 1 e integrando-se novamente todas as soluções
fundamentais para o segundo elemento. Lembrando que as contribuições deste
segundo elemento para a primeira função de forma somam-se com as contribuições
da terceira função de forma do elemento anterior, pois os dois elementos
compartilham um mesmo nó.
Depois de integrados todos os elementos, obtem-se as primeiras 2 linhas do
sistema de equações da matriz H. Deve-se então colocar o ponto fonte no nó 2 e
prosseguir o cálculo de todos os elementos novamente, agora utilizando as
coordenadas do nó 2 como ponto fonte, encontrando-se a próxima linha do sistema
de equações. E assim sucessivamente até percorrer-se todos os pontos fonte do
problema incluindo-se os de nó duplo. Este sistema encontrado denomina-se a
matriz H do sistema de equações para soluções de problemas de elasticidade
bidimensionais. A matriz do método de elementos de contorno é cheia e é mais
complexa para ser resolvida quando comparada à outros métodos como o dos
elementos finitos. A matriz H assume a seguinte forma levando-se em consideração
a contribuição diagonal de acordo com o posicionamento do ponto fonte e também a
sobreposição de elementos adjacentes :
1 1 1 1 1 2 1 2 2 2 2 3 2 3
111 121 112 122 113 111 123 121 112 122 113 111 123 121
1 1 1 1 1 2 1 2 2 2 2 3 2
211 221 212 222 213 211 223 221 212 222 213 211 223
...e e e e e e e e e e e e e e
e e e e e e e e e e e e e
T T T T T T T T T T T T T T
T T T T T T T T T T T T T
3
221
1 1 1 1 1 2 1 2 2 2 2 3 2 3
111 121 112 122 113 111 123 121 112 122 113 111 123 121
1 1 1 1 1 2 1 2 2 2 2
211 221 212 222 213 211 223 221 212 222 213 211
...
...
e
e e e e e e e e e e e e e e
e e e e e e e e e e e e
T
T T T T T T T T T T T T T T
T T T T T T T T T T T T
3 2 3
223 221
1 1 1 1 1 2 1 2 2 2 2 3 2 3
111 121 112 122 113 111 123 121 112 122 113 111 123 121
1 1 1 1 1 2 1 2 2 2
211 221 212 222 213 211 223 221 212 222 21
...
...
e e
e e e e e e e e e e e e e e
e e e e e e e e e e
T T
T T T T T T T T T T T T T T
T T T T T T T T T T T
1
2
3
4
5
6
2 3 2 3
3 211 223 221 7...
............
x
y
x
y
x
y
e e e e
x
u
u
u
u
u
u
T T T u
(7.15)
Deve-se então aplicar o coeficiente Cij dado pela equação 5.35 nos termos
diagonais da matriz Hij, encontrando-se um sistema da seguinte maneira :
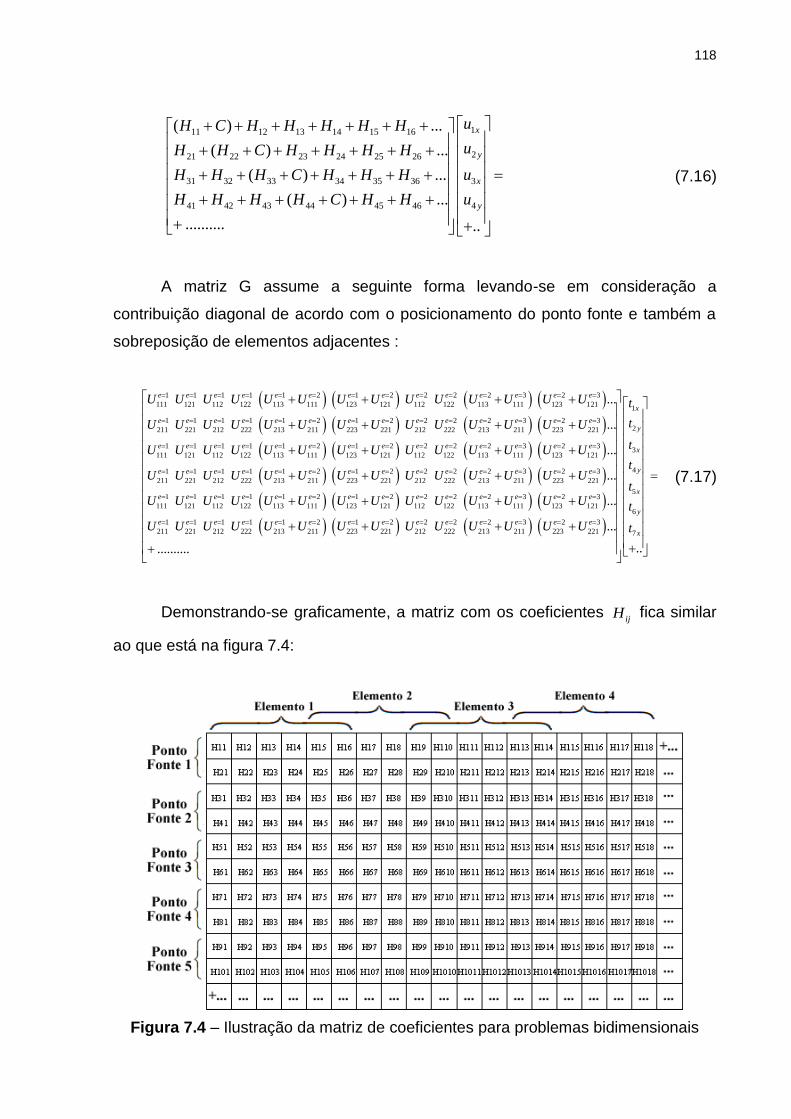
118
111 12 13 14 15 16
221 22 23 24 25 26
31 32 33 34 35 36 3
41 42 43 44 45 46 4
( ) ...
( ) ...
( ) ...
( ) ...
.......... ..
x
y
x
y
uH C H H H H H
uH H C H H H H
H H H C H H H u
H H H H C H H u
(7.16)
A matriz G assume a seguinte forma levando-se em consideração a
contribuição diagonal de acordo com o posicionamento do ponto fonte e também a
sobreposição de elementos adjacentes :
1 1 1 1 1 2 1 2 2 2 2 3 2 3
111 121 112 122 113 111 123 121 112 122 113 111 123 121
1 1 1 1 1 2 1 2 2 2 2 3 2
211 221 212 222 213 211 223 221 212 222 213 211 223
...e e e e e e e e e e e e e e
e e e e e e e e e e e e e
U U U U U U U U U U U U U U
U U U U U U U U U U U U U
3
221
1 1 1 1 1 2 1 2 2 2 2 3 2 3
111 121 112 122 113 111 123 121 112 122 113 111 123 121
1 1 1 1 1 2 1 2 2 2 2
211 221 212 222 213 211 223 221 212 222 213 211
...
...
e
e e e e e e e e e e e e e e
e e e e e e e e e e e e
U
U U U U U U U U U U U U U U
U U U U U U U U U U U U
3 2 3
223 221
1 1 1 1 1 2 1 2 2 2 2 3 2 3
111 121 112 122 113 111 123 121 112 122 113 111 123 121
1 1 1 1 1 2 1 2 2 2
211 221 212 222 213 211 223 221 212 222 21
...
...
e e
e e e e e e e e e e e e e e
e e e e e e e e e e
U U
U U U U U U U U U U U U U U
U U U U U U U U U U U
1
2
3
4
5
6
2 3 2 3
3 211 223 221 7...
............
x
y
x
y
x
y
e e e e
x
t
t
t
t
t
t
U U U t
(7.17)
Demonstrando-se graficamente, a matriz com os coeficientes ijH fica similar
ao que está na figura 7.4:
Figura 7.4 – Ilustração da matriz de coeficientes para problemas bidimensionais
119
Deve-se observar que como o problema de elasticidade bidimensional tem
dois graus de liberdade, cada ponto fonte irá gerar duas linhas do sistema final.
Outro fator importante é observar o compartilhamento dos nós entre os elementos,
onde as contribuições devem ser somadas para se obter o valor do nó, um exemplo
é o caso de H15, H16, H25 e H27, os quais precisam da contribuição do terceiro nó do
elemento 1 e a contribuição do primeiro nó do elemento 2. Deve-se encontrar uma
matriz da mesma forma para os coeficientes da matriz G. Calculando-se todas as
soluções fundamentais para todas as matrizes, obtêm-se um sistema de equações
linear, do qual a solução indica os deslocamentos e trações desconhecidos no
contorno :
H u G t (7.18)
Ainda não deve-se resolver este sistema, pois ainda não foram aplicadas as
condições de contorno do problema. Deve-se alternar os valores de quais variáveis
são conhecidas e quais são desconhecidas. Se por exemplo o deslocamento
conhecido u1 = 0, todos os valores que multiplicam u1 no sistema serão multiplicados
por 0. Se a força conhecida t1 = 10, todos os valores que multiplicam t1 no sistema
serão multiplicados por 10.
Feito este passo, ainda numericamente falando, não se pode resolver o
sistema. Deve-se adequá-lo para que possa ser resolvido por algum método
conhecido, ele deve ficar da seguinte maneira :
A x b (7.19)
Para que o sistema fique desta maneira, deve-se, para cada condição de
contorno de deslocamento conhecida, troca-la com a respectiva condição de força.
Por exemplo, se u2 = 0 e t2 for desconhecido, deve-se trocar u2 na matriz H por t2 da
matriz G, também trocar t2 na matriz G por u2 da matriz H.
Da mesma forma, se t3 = 10 e u3 for desconhecido, deve-se trocar t3 na
matriz G por u3 da matriz H e também trocar u3 na matriz H por t3 da matriz G.
Formando então o sistema linear que pode ser resolvido pelo método da
decomposição LU.

120
As matrizes do método dos elementos de contorno são cheias e necessitam
de maior cautela na seleção do método de resolução, visto que são mais populosas
que as de outros métodos (como o dos elementos finitos), as matrizes do método
dos elementos de contorno necessitam de mais processamento para serem
resolvidas.
Resolvido este sistema final de equações, são encontradas as soluções de
força e deslocamento para cada variável desconhecida. Para encontrar as tensões
em um ponto interno qualquer, basta resolver a seguinte equação integral:
ij kij k kij kD t d S u d
(7.20)
As soluções fundamentais kijD e kijS são dadas por:
2
2
2
2
1 2 1 2
2 1
12 1 2
2 1
12(1 2 ) 1 4
2 1
1(1 2 )
1
kij i jk
j k
j ik
i k
k ij
i j
ij jk ik
k i
r rS n v v
v r x x
r rn v v
v r x x
r rn v v
v r x x
dr r rv v
v r dn x x
4
1 1 (1 2 ) 2
4 1
j i j k
kij jk ik ij
i j k i j k
r r r r
x x x x
r r r r r rD v
v r x x x x x x
(7.21)
Lembrando-se que ku e kt são as soluções para deslocamentos e forças no
contorno.
121
8 INTEGRAÇÃO NUMÉRICA
8.1 INTEGRAÇÃO REGULAR
Quando o ponto fonte está fora do elemento integrado, as integrais de
contorno tornam-se integrais regulares. No presente trabalho, a integração de
integrais regulares foi feita utilizando-se a quadratura de Gauss-Legendre. Este tipo
de integração pode ser definido como o processo de aproximação da integral
definida de uma determinada função.
O resultado deste método tem a forma do somatório entre as avaliações da
função nos pontos de gauss, vezes os seus respectivos pesos de gauss, sendo
então definida por:
1
11
( ) ( ( )) ( )n
i
f d f x i w i
(8.1)
Para computação dos pontos de Gauss utilizou-se a rotina da biblioteca
VISUAL NUMERICS IMSL chamada DGRUL, garantindo-se os pontos e pesos com
dupla precisão nos resultados.
8.2 TRATAMENTO DAS INTEGRAIS SINGULARES
O tratamento das integrais singulares de ordem (1/r) as quais são do tipo
Cauchy e as de ordem ln(r) as quais são chamadas de fracamente singulares
necessitam de uma formulação adequada para serem calculadas com bons
resultados. A integração numérica simples utilizando pontos de Gauss já não é
suficiente para garantir a precisão destas integrais.
As integrais singulares se originam quando o ponto fonte está dentro do
elemento analisado. No presente trabalho está se utilizando elementos quadráticos,
o ponto fonte está em cima de um dos três nós do elemento.
As equações se tornam singulares porque o raio (a distância entre o ponto
fonte e o ponto analisado) tende a 0, gerando as singularidades acima citadas.

122
8.2.1 Singularidade do tipo ln(r)
O tratamento das integrais singulares de ordem ln(r) são feitas utilizando uma
transformação quadrática da variável isoparamétrica utilizada, esta técnica foi
descrita por KARAM (1986) e é chamada de transformação de Telles. Sendo
desenvolvida abaixo, inicialmente integra-se em função de :
1
1( )f d
(8.2)
Será utilizada uma equação quadrática para realizar a transformação de
coordenadas, como a equação 8.3:
2( ) a b c (8.3)
Será feita uma transformação linear de para impondo as seguintes
condições para a equação quadrática:
0 ( );
dpara
d
(8.4)
1 1;para (8.5)
1 1;para
(8.6)
Utilizando a condição 8.5:
1 1;para (8.7)
Aplicando na equação 8.3:
21 1 1a b c
1a b c (8.8)
123
Utilizando a condição 8.6:
1 1;para (8.9)
Aplicando na equação 8.3:
21 ( 1) ( 1)a b c
1a b c
(8.10)
Utilizando 8.8 e 8.10 encontra-se o sistema de equações:
1a b c
1a b c (8.11)
Resolvendo o sistema de equações 8.11, observa-se que:
1b
a c (8.12)
Aplicando a condição 8.4:
0 ( );
dpara
d
(8.13)
Observa-se que :
2a b c
2 0a b c
(8.14)
Resolvendo 8.14 para :

124
2 4 ( )'
2
b b a c
a
2 4 ( )''
2
b b a c
a
(8.15)
Tendo os valores de b=1, ' e
'' é possível substituir (a) por (–c) na equação
8.15 para encontrar o coeficiente que está faltando:
21 1 4( )( )'
2( )
c c
c
(8.16)
Devido a primeira condição 8.4, a derivada de é 0, então basta agora
substituir os valores de ' ou
'' na derivada da equação quadrática adotada,
obtendo-se:
0 ( )
dcondição em
d
(8.17)
Observa-se que :
2
da b
d
(8.18)
Substituindo os valores de a e b em 8.18:
21 1 4( )( )2( ) 1 0
2( )
c cc
c
(8.19)
Simplificando 8.19 é possível obter:
1 4( )( ) 0c c (8.20)

125
Resolvendo para c:
2
1'
2c
2
1''
2c
(8.21)
Deve-se utilizar somente a parte real dos coeficientes, devido ao intervalo de -
1 a 1, o coeficiente (c) fica:
' ''
2c c c
(8.22)
Da equação 8.12 observa-se que a = -c, portanto:
' ''
2a a a
(8.23)
Substituindo os coeficientes na equação quadrática 8.3, é possível obter:
2( ) a b c
2( ) 12 2
2( ) (1 )2
(8.24)
(1 )d d (8.25)
Substituindo o valor de na equação 8.2, é possível obter:

126
1 12
1 1( ) ( (1 ) )(1 )
2f d f d
(8.26)
Esta equação é somente válida para = -1 e = 1. Para encontrar uma
formulação para qualquer entre -1 e 1 deve-se dividir a integral 8.26 em duas:
1 1
1 1( ) ( ) ( )f d f d f d
(8.27)
Cada integral deve ser transformada em uma integral com domínio de -1 até
1, quando os limites de integração são [a, b] em vez de [-1, +1], deve-se realizar as
seguintes transformações:
1
-1
( ) ( - ) -( )
2 2
b
a
b a b a x b af y dy f dx
(8.28)
Será feita a solução desta transformação, primeiramente para a integral da
esquerda no segundo termo da equação (8.27). Assumindo que existe uma variável
que está linearmente relacionada com tal que:
= a0 + a1 (8.29)
Se = a, corresponde à -1 e se = b, corresponde à 1, então
-1 = a0 + a1 (-1)
= a0 + a1 (1)
(8.30)
Resolvendo as duas equações em 8.30 é possível obter:
( 1)a0 =
2
( 1)a1 =
2
(8.31)

127
Simplificando a equação 8.31:
1a0
2
1a1
2
(8.32)
Que dá a mudança de variáveis:
1 1 1 = d =
2 2 2d
(8.33)
Chamando-se de ' para a integral da esquerda teremos:
1( '(1 ) 1 )
2 (8.34)
1( 1) '
2d (8.35)
Então a integral da esquerda de (8.27) convertida para -1 até 1 fica :
1
1 1
1 1( ) ( ( '(1 ) 1 )) ( 1) '
2 2f d f d
(8.36)
De maneira análoga é possível obter para a integral da direita no segundo
termo da equação, assumindo que existe uma variável que está linearmente
relacionada com tal que:
= a0 + a1 (8.37)
Se = a, corresponde à -1 e se = b, corresponde à 1, então:

128
= a0 + a1 (-1)
1 = a0 + a1 (1)
(8.38)
Resolvendo essas duas equações temos:
1 ( ) 1a0 =
2 2
1 ( ) 1a1 =
2 2
(8.39)
Que dá a mudança de variáveis:
= a0 + a1 (8.40)
1 1 1 = d =
2 2 2d
(8.41)
Chamando-se de '' para a integral da direita de (8.27):
1( ''(1 ) 1 )
2 (8.42)
1(1 ) ''
2d (8.43)
E então a integral da direita de 8.27 fica com limite convertido para -1 a 1:
1 1
1
1 1( ) ( ( ''(1 ) 1 )) (1 ) ''
2 2f d f d
(8.44)
Substituímos então essa transformação na equação 8.27, obtendo duas
integrais com domínio de -1 até 1:

129
1 1
1 1
1
1
1 1( ) ( ( '(1 ) 1 )) ( 1) '
2 2
1 1( ( ''(1 ) 1 )) (1 ) ''2 2
f d f d
f d
(8.45)
Deve-se lembrar que já passou por uma primeira transformação, então
deve-se substituir ' pela primeira transformação de (eq. 8.24) e aplicando o
ponto fonte como +1:
21' (1 )
2 (8.46)
' (1 )d d (8.47)
Substituindo-se '' pela equação 8.24 e o ponto fonte como -1:
21'' ( 1)
2 (8.48)
'' (1 )d d (8.49)
Substituindo-se estes novos valores de ' e '' na equação das integrais
8.45, chegando então na transformação final, sendo esta válida para -1 <= <= 1.
1
1
12
1
12
1
( )
1 1 ( 1)(1 )( 1) (1 ) 1
2 2 2
1 1 (1 )(1 )(1 ) ( 1) 1
2 2 2
f d
f d
f d
(8.50)
8.2.2 Aplicação de acordo com o posicionamento do ponto fonte
Se o ponto fonte estiver em 1, substituir o valor de por:

130
1 12
1 1
1 1 ( 1)(1 )( ) ( 1) (1 ) 1
2 2 2f d f d
(8.51)
Se o ponto fonte estiver em -1, substituir o valor de por:
1 12
1 1
1 1 (1 )(1 )( ) (1 ) ( 1) 1
2 2 2f d f d
(8.52)
Se o valor do ponto fonte estiver no intervalo -1< < 1, o valor da integral
será:
1
1
12
1
12
1
( )
1 1 ( 1)(1 )( 1) (1 ) 1
2 2 2
1 1 (1 )(1 )(1 ) ( 1) 1
2 2 2
f d
f d
f d
(8.53)
As integrais 8.51, 8.52 e 8.53 podem ser integradas utilizando a quadratura
de Gauss-Legendre pois possuem um núcleo regular.
8.2.3 Singularidade do tipo 1/r
As integrais geradas pelas soluções fundamentais de força de superfície
apresentam singularidade quando o ponto fonte se aproxima do elemento.
1
1
10dr r
r (8.54)
O tratamento das integrais singulares de ordem (1/r) é realizado aplicando-se
o método da subtração de singularidade, apresentado por ALIABADI (2002). O
método será desenvolvido utilizando-se a seguinte expressão:

131
1 1*
1 1
( ) ( ) ( )
( ) ( )
g g gd dT
(8.55)
O termo da esquerda depois do sinal de igual é um termo regular, podendo
ser calculado com a quadratura de Gauss-Legendre, pois a singularidade está sendo
subtraída da função principal. indica o valor de para o ponto fonte, portando g(
) indica a avaliação da solução fundamental no ponto fonte, isto é possível devido
ao processo de regularização das funções de forma, assim como descrito por
PALERMO JR. (2000). O termo da direita é calculado analiticamente, pois esta
integral precisa ser avaliada no sentido do valor principal de Cauchy, conforme o
trabalho de KZAM e CODA (2010). Portanto, antes da aplicação da subtração de
singularidade é necessário modificar as funções de forma para que a integração seja
apenas considerada quando o ponto esta no elemento, deixando então as funções
de forma em função da distância entre o ponto analisado e o ponto fonte dentro do
elemento. Sejam as funções de forma tradicionais:
1 1x( ) = ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2x x x (8.56)
1 1y( ) = ( 1) 1 ( 1)(1 ) 2 ( 1) 3
2 2y y y
(8.57)
Para calcular o raio e as componentes da solução fundamental com relação a
distância do ponto analisado e o ponto fonte dentro do elemento é necessário
subtrair de cada função de forma a função de forma no ponto singular, com a
coordenada em .
22
22
1 1 1N1( ) 1( ) = ( 1) ( 1) ( )
2 2 2
1 1( ( )) ( )( 1)
2 2
N
(8.58)

132
2
N2( ) 2( ) = ( 1)(1 ) ( 1)(1 )
( )( )( 1)
N
(8.59)
221 1 1N3( ) 3( ) = ( 1) ( 1) ( )
2 2 2
1( )( 1)
2
N
(8.60)
A componente da distância entre o ponto fonte e o ponto avaliado com
relação a x é:
1 1dx( , ) = ( )( 1) 1 ( )( )( 1) 2 ( )( 1) 3
2 2x x x (8.61)
1 1dx( , ) = ( ) ( 1) 1 ( )( 1) 2 ( 1) 3
2 2x x x
(8.62)
A componente com relação a y é:
1 1dy( , ) = ( )( 1) 1 ( )( )( 1) 2 ( )( 1) 3
2 2y y y (8.63)
1 1dy( , ) = ( ) ( 1) 1 ( )( 1) 2 ( 1) 3
2 2y y y
(8.64)
Portanto, a distância entre o ponto fonte e o ponto analisado quando a
formulação considera pontos apenas dentro do elemento é:
2 2r( , ) = dx( , ) dy( , ) (8.65)
2 2
1 1 1 1 r( , ) = ( ) ( 1) 1 ( )( 1) 2 ( 1) 3 ( ) ( 1) 1 ( )( 1) 2 ( 1) 3
2 2 2 2x x x y y y
(8.66)
133
2 2
2 21 1 1 1 r( , ) = ( ) ( 1) 1 ( )( 1) 2 ( 1) 3 ( ) ( 1) 1 ( )( 1) 2 ( 1) 3
2 2 2 2x x x y y y
(8.67)
2 2
2 1 1 1 1 r( , ) = ( ) ( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 3
2 2 2 2x x x y y y
(8.68)
2 21 1 1 1
r( , ) = ( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 32 2 2 2
x x x y y y
(8.69)
A última expressão 8.69 para o raio denomina-se raio regularizado. Apartir do
raio regularizado, é necessário calcular as derivadas que compõe a solução
fundamental, será calculada inicialmente a derivada com relação a x:
dr dx( , )( , ) =
dx r( , )
(8.70)
2 2
1 1 ( ) ( 1) 1 ( )( 1) 2 ( 1) 3
dr 2 2 ( , ) =
dx 1 1 1 1( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 3
2 2 2 2
x x x
x x x y y y
(8.71)
A parcela ( ) se cancela com o módulo , gerando então a função
sinal, ou signum como utilizado nos softwares de matemática.
2 2
1 1signum( ) ( 1) 1 ( )( 1) 2 ( 1) 3
dr 2 2 ( , ) =
dx 1 1 1 1( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 3
2 2 2 2
x x x
x x x y y y
(8.72)
Será calculada a derivada com relação a y:
dr dy( , )( , ) =
dy r( , )
(8.73)
2 2
1 1 ( ) ( 1) 1 ( )( 1) 2 ( 1) 3
dr 2 2 ( , ) =
dy 1 1 1 1( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 3
2 2 2 2
y y y
x x x y y y
(8.74)

134
A parcela ( ) se cancela com o módulo , gerando então a função
sinal, ou signum como utilizado nos softwares de matemática.
2 2
1 1signum( ) ( 1) 1 ( )( 1) 2 ( 1) 3
dr 2 2 ( , ) =
dy 1 1 1 1( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 3
2 2 2 2
y y y
x x x y y y
(8.75)
O jacobiano da transformação é feito com relação às funções de forma não
regularizadas, assim como em 8.76:
2 2
( ) ( )( ) =
dx dyJ
d d
(8.76)
2 21 1 1 1
( ) = ( ) 1 ( 2 ) 2 ( ) 3 ( ) 1 ( 2 ) 2 ( ) 3 2 2 2 2
J x x x y y y
(8.77)
As componentes do vetor normal ao ponto de integração também são
calculadas com relação às funções de forma não regularizadas, portanto:
( ) 1 ( )
( )
dx dynx
dn J d
(8.78)
2 2
1 1( ) 1 ( 2 ) 2 ( ) 3
( ) 2 2
1 1 1 1( ) 1 ( 2 ) 2 ( ) 3 ( ) 1 ( 2 ) 2 ( ) 3
2 2 2 2
y y ydx
nxdn
x x x y y y
(8.79)
A componente do vetor normal ao ponto de integração com relação a y fica:
( ) 1 ( )
( )
dy dxny
dn J d
(8.80)

135
2 2
1 1( 1) ( ) 1 ( 2 ) 2 ( ) 3
( ) 2 2
1 1 1 1( ) 1 ( 2 ) 2 ( ) 3 ( ) 1 ( 2 ) 2 ( ) 3
2 2 2 2
x x xdy
nydn
x x x y y y
(8.81)
A derivada normal com relação ao raio fica:
( ) ( , ) ( , )dr dr drnx ny
dn dx dy
(8.82)
Encontradas todas as componentes da solução fundamental para trações,
será necessário aplicar a subtração de singularidade, assim como descrito por
ALIABADI (2002):
1 1 1
1 1 1
( ) ( ) ( )( )
( )
g g gf d d d
(8.83)
Deve-se então encontrar as funções g( ) e g( ) para se realizar a subtração
de singularidade. Usando-se por exemplo a solução fundamental:
1 1 2 2 1 2
4 1
dr dr dr dr drT v v n n
v r dx dx dn dx dx
(8.84)
Os termos calculados na regularização do raio serão utilizados nesta solução
fundamental. Levando em consideração que todos os termos já foram demonstrados
acima, estes termos serão definidos como a constante k:
1, 1 2 2 1 2
4 1
dr dr dr dr drk v v n n
v dx dx dn dx dx
(8.85)
1
,,
T kr
(8.86)

136
Para se integrar esta solução com os termos regularizados, deve-se
prosseguir da seguinte maneira:
1
1
( , )( ) ( )
( , )i
kN J dT
r
(8.87)
A expressão 8.87 ainda não está regularizada, para regularizar esta
expressão deve-se multiplicar e dividir ao mesmo tempo por ( ) :
1
1
( , )( ) ( ) ( )
( , ) ( )
kNi d
rT J
(8.88)
Lembrando que o raio está sendo multiplicado pelo módulo :
2 21 1 1 1
( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 32 2 2 2
r x x x y y y
(8.89)
Se:
2 21 1 1 1
( 1) 1 ( )( 1) 2 ( 1) 3 ( 1) 1 ( )( 1) 2 ( 1) 32 2 2 2
r x x x y y y
(8.90)
Então:
1
1
( , )( ) ( ) ( )
( , ) ( )
kNi J d
rT
(8.91)
Cancelando o módulo com a diferença no numerador da equação 8.91:
1
1
( , ) ( )( ) ( )
( )
k signumNi J d
rT
(8.92)

137
Pode-se chamar todos os termos da equação 8.92 de g( ) :
1 1
1 1
( , ) ( )( , ) ( ) ( )
k signumg d Ni J d
r
(8.93)
Substituindo-se (8.93) em (8.92) encontra-se a seguinte expressão:
1
1
( , )
( )T
gd
(8.94)
Deve-se levar em consideração que as funções de forma e o jacobiano que
multiplicam a integral estão em suas formas não regularizadas, ou seja, nas formas
tradicionais. Porem, ainda precisa-se subtrair a singularidade da função, então se
avalia a função g( ) no ponto fonte e subtrai-se da integral, lembrando-se que
quando for avaliar a função no ponto fonte tanto o valor de e recebem o valor
de :
1 1
1 1
( , ) ( )( , ) ( ) ( )
k signumg d Ni J d
r
(8.95)
Subtraindo-se então a equação 8.95 de 8.94:
1
1
( , ) ( , )
( )T
g gd
(8.96)
A integral 8.96 pode ser calculada utilizando a quadratura de Gauss-Legendre
pois esta integral tem um núcleo regular. A integral ainda não está completa, é
preciso adicionar o valor subtraído para que o valor da resposta esteja correto e, por
simplicidade, também será contraída a expressão.
1 1*
1 1
( ) ( ) ( )
( ) ( )
g g gd dT
(8.97)

138
A soma do valor subtraído deve ser calculada analiticamente no sentido do
valor principal de Cauchy. Deve-se respeitar as seguintes condições dadas por
KZAM e CODA (2010): Se o ponto fonte estiver no primeiro nó do elemento, ou seja,
se for = -1, o valor da integral será:
1
1
( )( ) ln(2)
( )
gd g
(8.98)
Se o -1< <1, o valor da integral será:
1
1
( )( ) [ln(1 ) ln(1 )]
( )
gd g
(8.99)
Se =1 (último nó do elemento), o valor da integral será:
1
1
( )( ) [ ln(2)]
( )
gd g
(8.100)

139
9 RESULTADOS
9.1 VALIDAÇÃO DO MÉTODO UTILIZADO - RESULTADOS PARA PROBLEMAS DE FLEXÃO EM PLACAS SEM FUROS
Nesta seção são apresentados os resultados obtidos em problemas de flexão
para placas sem furos em diversos tipos de vinculação para se obter uma validação
das matrizes H, G e F as quais são utilizadas para calcular as cargas críticas.. Serão
utilizados 20 elementos quadráticos e 16 pontos de Gauss para a integração das
funções de forma. Os tipos de vinculação utilizados são dados pela figura 9.1:
Figura 9.1 – Tipos de vinculação
As placas analisadas são quadradas de L = 2 m de lado. A espessura é dada
pelo fator h/L nas tabelas de resultados. A carga distribuída é de 400 N. As
condições de contorno hard e soft determinam se a rotação em y no contorno está
travada (hard) ou livre (soft), como definido em HÄGGBLAD e BATHE (1990). As
propriedades dos materiais são dados pela tabela 9.1:
Coeficiente Variável Valor
Módulo de Young E 2,050 1011 N/m²
Coeficiente de Poisson v 0,3
Tabela 9.1 – Coeficientes para placas comparadas com a solução analítica

140
Vinculação tipo 1 – Placa simplesmente apoiada em todos os lados:
Figura 9.2 – Vinculação todos os lados simplesmente Apoiados - AAAA
Os resultados encontrados foram comparados com as soluções analíticas
para as teorias de Reissner e Mindlin. A comparação é feita utilizando-se o
parâmetro de máxima deflexão:
4
wDwp
qL (9.1)
A tabela de resultados 9.2 é dada por:
h/L Lee et al.
(2001)
Salerno e
Goldberg
(1960)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
0,01 0,00406 0,00406 0,00407 0,24630 0,24630
0,05 0,00411 0,00411 0,00411 - -
0,1 0,00427 0,00424 0,00424 -0,70257 -
0,15 0,00454 0,00446 0,00447 -1,5418 0,22421
0,20 0,00490 0,00478 0,00478 -2,4489 -
Obs.: (1) – Diferença com relação a Lee et al. (2001) – Teoria de Mindlin
(2) – Diferença com relação a Salerno e Goldberg (1960) – Teoria de Reissner
Tabela 9.2 – Parâmetros de máxima deflexão para a vinculação – AAAA – HARD
Na tabela 9.2 se observa uma boa convergência dos resultados quando
comparados com as soluções analíticas. Os resultados mostram a diferença entre a
teoria de Reissner e a teoria de Mindlin, mesmo sendo teorias parecidas e com
resultados próximos, elas são teorias diferentes. Também foram comparados os

141
resultados com outros trabalhos que utilizam a formulação do método dos elementos
de contorno, nas tabelas 9.3 e 9.4 estão resultados obtidos para o ponto central da
placa p(x=1, y=1):
Resultados
Vinc. Hard
Andrade
(2001)
Sakanaka
(2006)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
Deslocamento 7,0700E-06 7,0700E-06 7,0692E-06 -0,01131 -0,01131
Mxx 58,940 58,802 58,940 - 0,23468
Myy 58,940 58,802 58,940 - 0,23468
Obs.: (1) – Diferença com relação a Andrade (2001)
(2) – Diferença com relação a Sakanaka (2006)
Tabela 9.3 – Resultados para o ponto central da placa – AAAA – HARD
Os resultados obtidos para a vinculação soft foram:
Resultados
Vinc. Soft
Andrade
(2001)
Sakanaka
(2006)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
Deslocamento 7,3500E-06 7,3500E-06 7,3512E-06 0,01360 0,01360
Mxx 60,700 60,552 60,708 0,01317 0,25762
Myy 60,700 60,552 60,708 0,01317 0,25762
Obs.: (1) – Diferença com relação a Andrade (2001)
(2) – Diferença com relação a Sakanaka (2006)
Tabela 9.4 – Resultados para o ponto central da placa – AAAA – SOFT
Vinculação tipo 2 – Placa simplesmente apoiada e engastada:
Figura 9.3 – Vinculação 2 lados apoiada e engastada em 2 - AEAE

142
Os resultados encontrados foram comparados com as soluções analíticas
para as teorias de Reissner e Mindlin. A comparação é feita utilizando-se o
parâmetro de máxima deflexão, dado pela equação (9.1). A tabela 9.5 com os
resultados é dada por :
h/L Lee et al.
(2001)
Wang et al.
(2001)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
0,01 0,00192 0,00192 0,00192 - -
0,05 0,00199 0,00199 0,00199 - -
0,1 0,00221 0,00220 0,00220 -0,45248 -
0,15 0,00256 0,00254 0,00254 -0,78125 -
0,20 0,00302 0,00298 0,00298 -1,32450 -
Obs.: (1) – Diferença com relação a Lee et al. (2001) – Teoria de Mindlin
(2) – Diferença com relação a Wang et al. (2001) – Teoria de Reissner
Tabela 9.5 – Parâmetros de máxima deflexão para a vinculação – AEAE– HARD
No exemplo com a vinculação 2 o método dos elementos de contorno obteve
excelente performance pois os resultados foram os mesmos da solução analítica
para a precisão de 4 casas decimais. Também foram comparados os resultados com
outros trabalhos que utilizam a formulação do método dos elementos de contorno,
nas tabelas 9.6 e 9.7 estão os resultados obtidos para o ponto central da placa
p(x=1, y=1):
Resultados
Vinc. Hard
Andrade
(2001)
Sakanaka
(2006)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
Deslocamento 3,3590E-06 3,3590E-06 3,3583E-06 -0,02024 -0,02024
Mxx 45,560 45,471 45,552 -0,01584 0,177934
Myy 25,510 25,531 25,506 -0,01524 -0,10077
Obs.: (1) – Diferença com relação a Andrade (2001)
(2) – Diferença com relação a Sakanaka (2006)
Tabela 9.6 – Resultados para o ponto central da placa – AEAE – HARD
Os resultados obtidos para a vinculação soft são dados pela tabela 9.7:

143
Resultados
Vinc. Soft
Andrade
(2001)
Sakanaka
(2006)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
Deslocamento 3,3920E-06 3,3920E-06 3,3926E-06 0,01798 0,01798
Mxx 46,070 45,981 46,091 0,04653 0,23888
Myy 25,420 25,667 25,420 - -0,95795
Obs.: (1) – Diferença com relação a Andrade (2001)
(2) – Diferença com relação a Sakanaka (2006)
Tabela 9.7 – Resultados para o ponto central da placa – AEAE – SOFT
Vinculação tipo 3 – Placa engastada nos quatro lados:
Figura 9.4 – Vinculação com quatro lados engastados - EEEE
Os resultados encontrados foram comparados com as soluções analíticas
para as teorias de Reissner e Mindlin. A comparação é feita utilizando-se o
parâmetro de máxima deflexão, dado pela equação (9.1). A tabela 9.8 mostra os
resultados:
h/L Diaz-C. e Nomura
(1995)
Presente
Trabalho Diferença (%) (1)
0,01 0,00126 0,00126 -
0,05 0,00132 0,00132 -
0,10 0,00150 0,00150 -
0,20 0,00217 0,00217 -
Obs.: (1) – Diferença com relação a Diaz-C. e Nomura (1995)
Tabela 9.8 – Parâmetros de máxima deflexão para a vinculação – EEEE– HARD

144
No exemplo para a placa engastada o método dos elementos de contorno
obteve excelente performance pois os resultados foram os mesmos da solução
analítica para a precisão de 4 casas decimais. Também foram comparados os
resultados com outros trabalhos que utilizam a formulação do método dos elementos
de contorno, nas tabelas 9.9 e 9.10 estão os resultados obtidos para o ponto central
da placa p(x=1, y=1):
Resultados
Vinc. Hard
Andrade
(2001)
Sakanaka
(2006)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
Deslocamento 2,2220E-06 2,2220E-06 2,2221E-06 0,00585 0,00585
Mxx 28,220 28,234 28,223 0,01070 -0,03945
Myy 28,220 28,234 28,223 0,01070 -0,03945
Obs.: (1) – Diferença com relação a Andrade (2001)
(2) – Diferença com relação a Sakanaka (2006)
Tabela 9.9 – Resultados para o ponto central da placa – EEEE – HARD
Os resultados obtidos para a vinculação soft foram:
Resultados
Vinc. Soft
Andrade
(2001)
Sakanaka
(2006)
Presente
Trabalho
Diferença
(%) (1)
Diferença
(%) (2)
Deslocamento 2,2230E-06 2,2230E-06 2,2225E-06 -0,02204 -0,02204
Mxx 28,230 28,236 28,225 -0,01583 -0,03955
Myy 28,230 28,236 28,225 -0,01583 -0,03955
Obs.: (1) – Diferença com relação a Andrade (2001)
(2) – Diferença com relação a Sakanaka (2006)
Tabela 9.10 – Resultados para o ponto central da placa – EEEE – SOFT
9.1.1 Comentários sobre os resultados para problemas de flexão de placas
Foram obtidos resultados para problemas de flexão devido a utilização das
mesmas matrizes H e G também nos problemas de instabilidade, isto permitiu uma
verificação do cálculo das soluções fundamentais.
As teorias de Reissner e Mindlin possuem algumas diferênças em suas
formulações e os resultados que elas mostram também são diferentes, embora a
divergência entre estes resultados seja muito pequena.

145
Os problemas de flexão mostraram uma ótima concordância com as soluções
analíticas obtidas por SALERNO e GOLDBERG (1960), uma vez que estes autores
utilizam a teoria de Reissner em seus resultados.
Quando comparados com WANG et al. (2001) e DIAZ-C. e NOMURA (1995),
os resultados do presente trabalho não apresentaram diferença.
Devido a utilização da teoria de Mindlin no trabalho de LEE et al. (2001), os
resultados do presente trabalho apresentaram uma diferença pequena.
A comparação com outros trabalhos que utilizam elementos de contorno
também mostraram ótimos resultados. Foram avaliados os valores do deslocamento,
do momento em torno do eixo x e momento em torno do eixo y, todos estes valores
apresentaram uma boa aproximação com o trabalho de ANDRADE (2001) o qual foi
baseado na teoria de Reissner e também com o trabalho de SAKANAKA (2006) o
qual foi baseado na teoria de Mindlin.
A boa aproximação com as soluções analíticas mostra que o cálculo das
soluções fundamentais nas matrizes H e G foi feito com boa precisão.
9.2 RESULTADOS PARA INSTABILIDADE DE PLACAS SEM FUROS
Nesta seção são apresentados os resultados obtidos para instabilidade de
placas sem furos. Será mostrado o parâmetro crítico obtido para diversos tipos de
vinculação. Serão utilizados de 16 a 22 pontos de Gauss para a integração das
funções de forma, são utilizados 128 elementos quadráticos no contorno e 256
células para descrever o domínio. As propriedades dos materiais são dados pela
tabela 9.11:
Coeficiente Variável Valor
Módulo de Young E 2,069 1011 N/m²
Coeficiente de Poisson v 0,3
Tabela 9.11 – Coeficientes para problemas de instabilidade
As placas analisadas são quadradas de L = 0.5 m de lado, com diversas
espessuras dadas pelo aspecto h/L. A carga distribuída analisada é de 1 N, normal à

146
seção transversal da placa. Os tipos de vinculação utilizados são dados pela figura
9.5:
Figura 9.5 – Tipos de vinculação
O valor do parâmetro crítico de flambagem é dado pela equação 9.1:
2
2
critNk L
D (9.2)
Onde:
k = Valor do parâmetro crítico de flambagem
L = Tamanho do lado da placa
D = Módulo de rigidez à flexão (dado pela equação 4.6)
Também são apresentadas os parâmetros críticos das placas à medida com
que se aumenta o número de elementos e células de domínio, a visualização desta
convergência foi possível devido ao programa gerador de malhas desenvolvido no
presente trabalho. As malhas testadas variam de 4 até 256 células de domínio. A
cada dois elementos quadráticos de contorno, será utilizada 1 célula de domínio. Um
exemplo de malha pode ser visto na figura 9.6 que mostra uma malha de 10
elementos por lado e 25 células de domínio:

147
Figura 9.6 – Malha com 10 elementos por lado e 25 células de domínio
A malha de 32 elementos por lado e 256 células de dominio está na figura
9.7:
Figura 9.7 – Malha com 32 elementos por lado e 256 células de dominio

148
9.2.1 Exemplo 1 – Placa com carga constante uniaxial – Vinculação AAAA
Figura 9.8 – Placa verificada quanto à instabilidade - AAAA - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 4,0128 4,0000 4,0000 0,3200 0,3200
0,01 4,0105 - 3,9980 - 0,3127
0,05 3,9561 3,9440 3,9280 0,3068 0,7154
0,1 3,7953 3,7864 3,7290 0,2351 1,7780
0,2 3,2643 3,2637 3,1190 0,0184 4,6585 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.12 – Parâmetro crítico de flambagem – AAAA – HARD
Figura 9.9 – Parâmetros críticos de acordo com células de domínio - AAAA - HARD
3
3.2
3.4
3.6
3.8
4
4.2
4.4
4.6
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AAAA - Parâmetros Críticos de acordo com a quantidade de
células de domínio
0.001
0.01
0.05
0.1
0.2

149
9.2.2 Exemplo 2 – Placa com carga constante uniaxial – Vinculação AAAE
Figura 9.10 – Placa verificada quanto à instabilidade – AAAE - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 4,8707 4,8471 4,8470 0,4869 0,4890
0,01 4,8665 - 4,8420 - 0,5060
0,05 4,7681 4,7454 4,7170 0,4784 1,0833
0,1 4,4858 4,4656 4,3720 0,4523 2,6029
0,2 3,6250 3,6115 3,4180 0,3738 6,0562 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.13 – Parâmetro crítico de flambagem – AAAE – HARD
Figura 9.11 – Parâmetros críticos de acordo com células de domínio - AAAE - HARD
3
3.5
4
4.5
5
5.5
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AAAE - Parâmetros Críticos de acordo com a quantidade de
células de domínio
0.001
0.01
0.05
0.1
0.2

150
9.2.3 Exemplo 3 – Placa com carga constante uniaxial – Vinculação EAAA
Figura 9.12 – Placa verificada quanto à instabilidade - EAAA – HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 5,7598 5,7401 5,7400 0,3432 0,3449
0,01 5,7539 - 5,7330 - 0,3646
0,05 5,6164 5,5977 5,5740 0,3341 0,7607
0,1 5,2335 5,2171 5,1400 0,3144 1,8191
0,2 4,1473 4,1364 3,8760 0,2635 6,9995 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.14 – Parâmetro crítico de flambagem – EAAA – HARD
Figura 9.13 – Parâmetros críticos de acordo com células de domínio - EAAA - HARD
3
3.5
4
4.5
5
5.5
6
6.5
7
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
EAAA - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

151
9.2.4 Exemplo 4 – Placa com carga constante uniaxial – Vinculação AEAE
Figura 9.14 – Placa verificada quanto à instabilidade – AEAE - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 6,7967 6,7431 6,7430 0,7949 0,7964
0,01 6,7875 - 6,7310 - 0,8394
0,05 6,5742 6,5238 6,4620 0,7726 1,7363
0,1 5,9910 5,9487 5,7650 0,7111 3,9202
0,2 4,4260 4,4004 4,1090 0,5818 7,7148 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.15 – Parâmetro crítico de flambagem – AEAE – HARD
Figura 9.15 – Parâmetros críticos de acordo com células de domínio - AEAE - HARD
3
3.5
4
4.5
5
5.5
6
6.5
7
7.5
8
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AEAE - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2
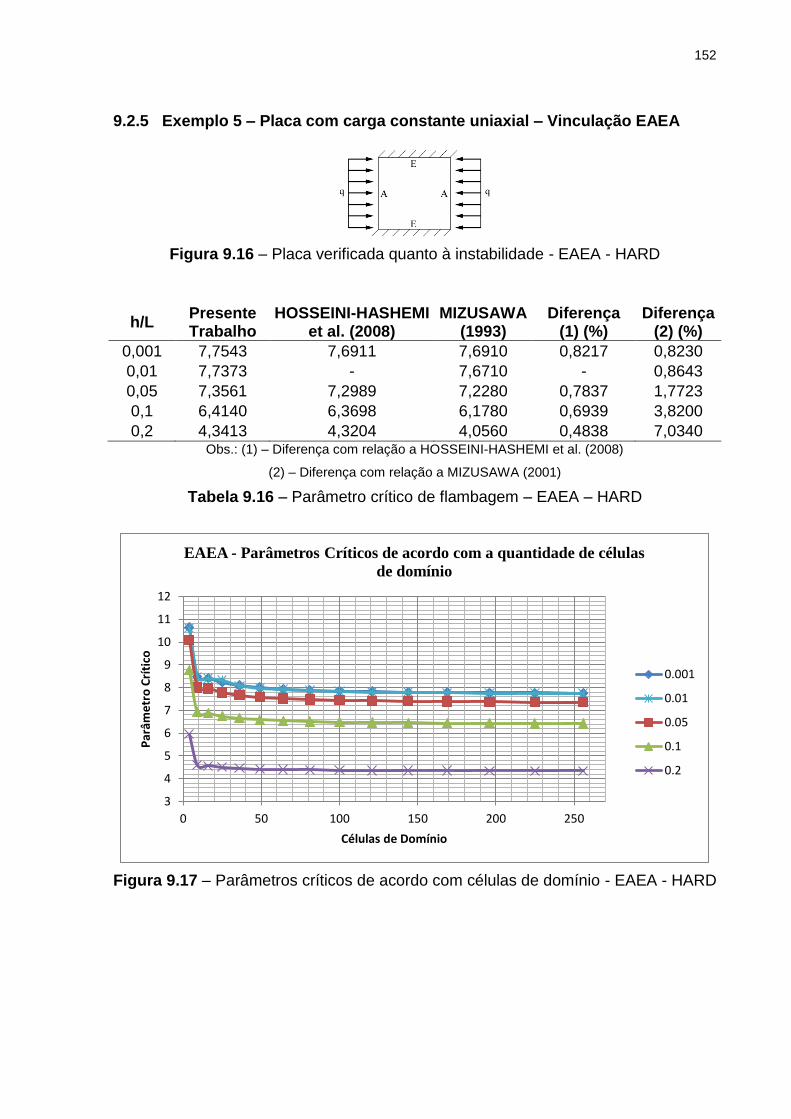
152
9.2.5 Exemplo 5 – Placa com carga constante uniaxial – Vinculação EAEA
Figura 9.16 – Placa verificada quanto à instabilidade - EAEA - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 7,7543 7,6911 7,6910 0,8217 0,8230
0,01 7,7373 - 7,6710 - 0,8643
0,05 7,3561 7,2989 7,2280 0,7837 1,7723
0,1 6,4140 6,3698 6,1780 0,6939 3,8200
0,2 4,3413 4,3204 4,0560 0,4838 7,0340 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.16 – Parâmetro crítico de flambagem – EAEA – HARD
Figura 9.17 – Parâmetros críticos de acordo com células de domínio - EAEA - HARD
3
4
5
6
7
8
9
10
11
12
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
EAEA - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

153
9.2.6 Exemplo 6 – Placa com carga constante uniaxial – Vinculação LAAA
Figura 9.18 – Placa verificada quanto à instabilidade – LAAA - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 1,4038 1,4014 1,4020 0,1713 0,1284
0,01 1,4029 - 1,4000 - 0,2071
0,05 1,3850 1,3813 1,3780 0,2679 0,5080
0,1 1,3442 1,3270 1,3270 1,2962 1,2962
0,2 1,2168 1,2138 1,1730 0,2472 3,7340 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.17 – Parâmetro crítico de flambagem LAAA – HARD
Figura 9.19 – Parâmetros críticos de acordo com células de domínio - LAAA - HARD
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
LAAA - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

154
9.2.7 Exemplo 7 – Placa com carga constante uniaxial – Vinculação LAEA
Figura 9.20 – Placa verificada quanto à instabilidade - LAEA - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 1,6555 1,6522 1,6530 0,1997 0,1512
0,01 1,6536 - 1,6500 - 0,2182
0,05 1,6246 1,6197 1,6150 0,3025 0,5944
0,1 1,5605 1,5558 1,5390 0,3021 1,3970
0,2 1,3738 1,3701 1,3230 0,2701 3,8398 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.18 – Parâmetro crítico de flambagem – LAEA – HARD
Figura 9.21 – Parâmetros críticos de acordo com células de domínio - LAEA - HARD
1
1.1
1.2
1.3
1.4
1.5
1.6
1.7
1.8
1.9
2
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
LAEA - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

155
9.2.8 Exemplo 8 – Placa com carga constante uniaxial – Vinculação LALA
Figura 9.22 – Placa verificada quanto à instabilidade – LALA - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 0,9537 0,9523 0,9523 0,1470 0,1470
0,01 0,9533 - 0,9516 - 0,1786
0,05 0,9450 0,9432 0,9412 0,1908 0,4037
0,1 0,9236 0,9222 0,9146 0,1518 0,9840
0,2 0,8516 0,8512 0,8274 0,0470 2,9248 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.19 – Parâmetro crítico de flambagem – LALA – HARD
Figura 9.23 – Parâmetros críticos de acordo com células de domínio - LALA - HARD
0.8
0.85
0.9
0.95
1
1.05
1.1
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
LALA- Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

156
9.2.9 Exemplo 9 – Placa com carga constante uniaxial – Vinculação AEAL
Figura 9.24 – Placa verificada quanto à instabilidade - AEAL - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 2,3952 2,3901 2,3920 0,2134 0,1338
0,01 2,3788 - 2,3780 - 0,0336
0,05 2,2747 2,2667 2,2600 0,3529 0,6504
0,1 2,1090 2,1010 2,0780 0,3808 1,4918
0,2 1,7274 1,7200 1,6660 0,4302 3,6855 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.20 – Parâmetro crítico de flambagem – AEAL – HARD
Figura 9.25 – Parâmetros críticos de acordo com células de domínio - AEAL - HARD
1.5
1.7
1.9
2.1
2.3
2.5
2.7
2.9
3.1
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AEAL - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

157
9.2.10 Exemplo 10 – Placa com carga constante uniaxial – Vinculação AAAL
Figura 9.26 – Placa verificada quanto à instabilidade – AAAL - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 2,3690 2,3639 2,3660 0,2157 0,1268
0,01 2,3530 - 2,3530 - 0,0000
0,05 2,2520 2,2442 2,2370 0,3476 0,6705
0,1 2,0908 2,0829 2,0600 0,3793 1,4951
0,2 1,7178 1,7105 1,6570 0,4268 3,6693 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.21 – Parâmetro crítico de flambagem – AAAL – HARD
Figura 9.27 – Parâmetros críticos de acordo com células de domínio - AAAL - HARD
1.5
1.7
1.9
2.1
2.3
2.5
2.7
2.9
3.1
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AAAL - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

158
9.2.11 Exemplo 11 – Placa com carga constante uniaxial – Vinculação EEEE
Figura 9.28 – Placa verificada quanto à instabilidade - EEEE - HARD
h/L Presente Trabalho
TIMOSHENKO (1961)
DAWE et al. (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 10,1605 10,0700 - 0,8987 -
0,01 10,1382 - 10,0630 - 0,7473
0,05 9,6326 - 9,5150 - 1,2359
0,1 8,3411 - 8,0840 - 3,1804
0,2 5,3175 - 5,0200 - 5,9263 Obs.: (1) – Diferença com relação a TIMOSHENKO (1961)
(2) – Diferença com relação a DAWE et al. (1993)
Tabela 9.22 – Parâmetro crítico de flambagem – EEEE – HARD
Figura 9.29 – Parâmetros críticos de acordo com células de domínio - EEEE - HARD
5
6
7
8
9
10
11
12
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
EEEE - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

159
9.2.12 Exemplo 12 – Placa com carga constante uniaxial – Vinculação ALAL
Figura 9.30 – Placa verificada quanto à instabilidade – ALAL - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
MIZUSAWA (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 2,0456 2,0413 2,0430 0,2107 0,1273
0,01 2,0308 - 2,0320 - -0,0591
0,05 1,9508 1,9457 1,9420 0,2621 0,4531
0,1 1,8271 1,8216 1,8070 0,3019 1,1123
0,2 1,5389 1,5333 1,4970 0,3652 2,7989 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
(2) – Diferença com relação a MIZUSAWA (2001)
Tabela 9.23 – Parâmetro crítico de flambagem – ALAL – HARD
Figura 9.31 – Parâmetros críticos de acordo com células de domínio - ALAL - HARD
1.5
1.6
1.7
1.8
1.9
2
2.1
2.2
2.3
2.4
2.5
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
ALAL - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

160
9.2.13 Exemplo 13 – Placa com carga constante biaxial – Vinculação AAAA
Figura 9.32 – Placa verificada quanto à instabilidade – carga biaxial - AAAA - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
Diferença (%)
0,001 2,0064 2,0000 0,3200
0,005 2,0061 1,9997 0,3200
0,05 1,9782 1,9718 0,3246
0,1 1,8980 1,8919 0,3224
0,15 1,7780 1,7722 0,3273 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
Tabela 9.24 –Parâmetro crítico de flambagem - carga biaxial – AAAA - HARD
Figura 9.33 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AAAA
1.5
1.7
1.9
2.1
2.3
2.5
0 50 100 150 200 250
Par
âmet
ro C
ríti
co
Células de Domínio
AAAA - Parâmetros Críticos de acordo com a quantidade de
células de domínio
0.001
0.005
0.05
0.1
0.15

161
9.2.14 Exemplo 14 – Placa com carga constante biaxial – Vinculação AEAL
Figura 9.34 – Placa verificada quanto à instabilidade - carga biaxial – AEAL - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
Diferença (%)
0,001 1,1456 1,1431 0,2187
0,005 1,1451 1,1412 0,3417
0,05 1,1157 1,1119 0,3418
0,1 1,0674 1,0641 0,3101
0,15 1,0075 1,0049 0,2587 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
Tabela 9.25– Parâmetro crítico de flambagem - carga biaxial – AEAL – HARD
Figura 9.35 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AEAL
0.9
1
1.1
1.2
1.3
1.4
1.5
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AEAL - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.005
0.05
0.1
0.15

162
9.2.15 Exemplo 15 – Placa com carga constante biaxial – Vinculação AAAL
Figura 9.36 – Placa verificada quanto à instabilidade - carga biaxial - AAAL - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
Diferença (%)
0,001 1,0567 1,0548 0,1801
0,005 1,0566 1,0535 0,2943
0,05 1,0353 1,0322 0,3003
0,1 0,9981 0,9954 0,2712
0,15 0,9497 0,9476 0,2216 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
Tabela 9.26 – Parâmetro crítico de flambagem - carga biaxial – AAAL – HARD
Figura 9.37 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AAAL
0.9
0.95
1
1.05
1.1
1.15
1.2
1.25
1.3
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AAAL - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.005
0.05
0.1
0.15

163
9.2.16 Exemplo 16 – Placa com carga constante biaxial – Vinculação AALL
Figura 9.38 – Placa verificada quanto à instabilidade - carga biaxial – AALL - HARD
h/L Presente Trabalho
HOSSEINI-HASHEMI et al. (2008)
Diferença (%)
0,001 0,9284 0,9321 -0,3970
0,005 0,9270 0,9316 -0,4938
0,05 0,9032 0,9207 -1,9007
0,1 0,8672 0,8977 -3,3976
0,15 0,8235 0,8650 -4,7977 Obs.: (1) – Diferença com relação a HOSSEINI-HASHEMI et al. (2008)
Tabela 9.27 – Parâmetro crítico de flambagem - carga biaxial – AALL – HARD
Figura 9.39 – Parâmetros críticos de acordo com células de domínio - carga biaxial - AALL
0.75
0.8
0.85
0.9
0.95
1
1.05
1.1
1.15
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AALL - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.005
0.05
0.1
0.15

164
9.2.17 Exemplo 17 – Placa com carga constante biaxial – Vinculação ALAL
Figura 9.40 – Placa verificada quanto à instabilidade - carga biaxial - ALAL - HARD
h/L Presente Trabalho
LIEW et al. (1996) Diferença (%)
0,001 1,1937 - -
0,005 1,1907 - -
0,05 1,1492 1,1199 2,6163
0,1 1,0889 1,1010 -1,0990
0,15 1,0186 1,0660 -4,4465 Obs.: (1) – Diferença com relação a LIEW et al. (1996)
Tabela 9.28– Parâmetro crítico de flambagem - carga biaxial – ALAL – HARD
Figura 9.41 – Parâmetros críticos de acordo com células de domínio - carga biaxial - ALAL
0.95
1.05
1.15
1.25
1.35
1.45
1.55
1.65
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
ALAL - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.005
0.05
0.1
0.15

165
9.2.18 Exemplo 18 – Placa com carga constante biaxial – Vinculação EEEE
Figura 9.42 – Placa verificada quanto à instabilidade - carga biaxial – EEEE - HARD
h/L Presente Trabalho
TIMOSHENKO (1961)
DAWE et al. (1993)
Diferença (1) (%)
Diferença (2) (%)
0,001 5,3483 5,3100 - 0,7213 -
0,005 5,3460 - 5,2970 - 0,9251
0,05 5,1254 - - - -
0,1 4,5741 - 4,5460 - 0,6181
0,15 3,8992 - - - - Obs.: (1) – Diferença com relação a TIMOSHENKO (1961)
(2) – Diferença com relação a DAWE et al. (1993)
Tabela 9.29 – Parâmetro crítico de flambagem - carga biaxial – EEEE – HARD
Figura 9.43 – Parâmetros críticos de acordo com células de domínio - carga biaxial - EEEE
3.75
4.25
4.75
5.25
5.75
6.25
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
EEEE - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.005
0.05
0.1
0.15
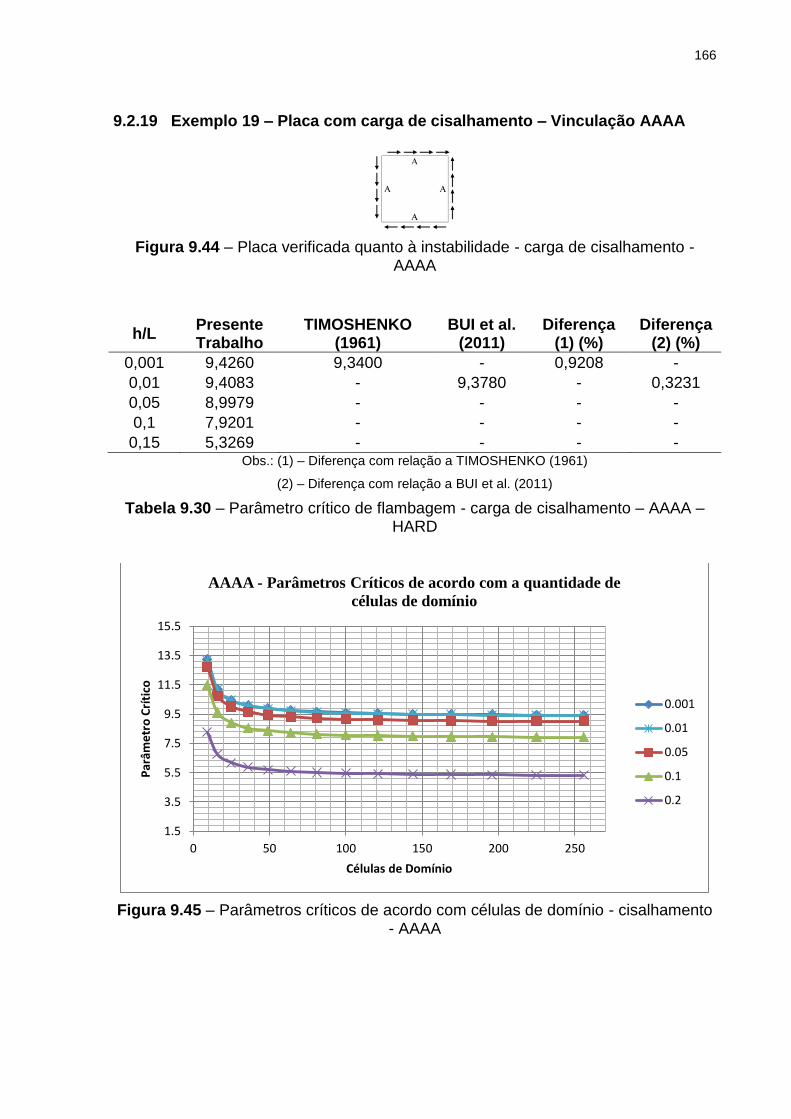
166
9.2.19 Exemplo 19 – Placa com carga de cisalhamento – Vinculação AAAA
Figura 9.44 – Placa verificada quanto à instabilidade - carga de cisalhamento - AAAA
h/L Presente Trabalho
TIMOSHENKO (1961)
BUI et al. (2011)
Diferença (1) (%)
Diferença (2) (%)
0,001 9,4260 9,3400 - 0,9208 -
0,01 9,4083 - 9,3780 - 0,3231
0,05 8,9979 - - - -
0,1 7,9201 - - - -
0,15 5,3269 - - - - Obs.: (1) – Diferença com relação a TIMOSHENKO (1961)
(2) – Diferença com relação a BUI et al. (2011)
Tabela 9.30 – Parâmetro crítico de flambagem - carga de cisalhamento – AAAA – HARD
Figura 9.45 – Parâmetros críticos de acordo com células de domínio - cisalhamento - AAAA
1.5
3.5
5.5
7.5
9.5
11.5
13.5
15.5
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
AAAA - Parâmetros Críticos de acordo com a quantidade de
células de domínio
0.001
0.01
0.05
0.1
0.2

167
9.2.20 Exemplo 20 – Placa com carga de cisalhamento – Vinculação EEEE
Figura 9.46 – Placa verificada quanto à instabilidade - carga de cisalhamento – EEEE
h/L Presente Trabalho
TIMOSHENKO (1961)
BUI et al. (2011)
Diferença (1) (%)
Diferença (2) (%)
0,001 14,8702 14,7100 - 1,0891 -
0,01 14,8109 - 14,6155 - 1,3369
0,05 13,5493 - - - -
0,1 10,8454 - - - -
0,15 6,1663 - - - - Obs.: (1) – Diferença com relação a TIMOSHENKO (1961)
(2) – Diferença com relação a BUI et al. (2011)
Tabela 9.31 – Parâmetro crítico de flambagem - carga de cisalhamento – EEEE – HARD
Figura 9.47 – Parâmetros críticos de acordo com células de domínio - cisalhamento - EEEE
1.5
6.5
11.5
16.5
21.5
26.5
31.5
36.5
41.5
46.5
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
EEEE - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

168
9.2.21 Exemplo 21 – Placa com carga de cisalhamento – Vinculação EAEA
Figura 9.48 – Placa verificada quanto à instabilidade - carga de cisalhamento – EAEA
h/L Presente Trabalho
TIMOSHENKO (1961)
BUI et al. (2011)
Diferença (1) (%)
Diferença (2) (%)
0,001 12,7360 12,5997 - 1,0818 -
0,01 12,6947 - 12,5800 - 0,9118
0,05 11,7923 - - - -
0,1 9,7344 - - - -
0,15 5,8443 - - - - Obs.: (1) – Diferença com relação a TIMOSHENKO (1961)
(2) – Diferença com relação a BUI et al. (2011)
Tabela 9.32 – Parâmetro crítico de flambagem - carga de cisalhamento – EAEA – HARD
Figura 9.49 – Parâmetros críticos de acordo com células de domínio - cisalhamento – EAEA
1.5
6.5
11.5
16.5
21.5
26.5
0 50 100 150 200 250
Par
âme
tro
Crí
tico
Células de Domínio
EAEA - Parâmetros Críticos de acordo com a quantidade de células
de domínio
0.001
0.01
0.05
0.1
0.2

169
9.2.22 Comentários sobre os problemas de instabilidade de placas sem furos
Os resultados obtidos pelo presente trabalho tiveram boa aproximação com
os resultados dados por HOSSEINI-HASHEMI et al. (2008), pois estes autores
utilizaram uma formulação analítica para obter as cargas críticas com o efeito da
deformação por cortante.
Os resultados também tiveram boa aproximação com os resultados obtidos
por MIZUSAWA (1993), mas com uma diferença maior do que quando comparado
com a solução analítica de HOSSEINI-HASHEMI et al. (2008). Isto é devido ao fato
de que Mizusawa considerou termos adicionais para levar em conta o efeito da não
linearidade geométrica. Por outro lado, ele também mostrou que o uso desses
termos adicionais nem sempre reduziam a carga crítica para algumas condições de
vinculação.
O uso de 128 elementos de contorno e 256 células de domínio nesse trabalho
mostrou que é possível obter um erro relativo menor que 0,5% para a solução
analítica. No entanto, existe também a possibilidade de aumentar o refinamento da
malha de contorno e das células de domínio para redução desse erro relativo.
As placas com lados do contorno livres necessitaram de uma integração mais
precisa, sendo necessário aumentar o número de pontos de Gauss para 22 na
integração numérica e também precisaram de um tempo maior de processamento.
As placas com lados somente apoiados ou engastados precisaram de um tempo
menor de processamento e a integração numérica precisou 16 pontos de Gauss. As
placas com espessura muito fina de ordem h/L = 0,001 precisaram de muito mais
tempo de processamento do que as de outras espessuras para solução do
problema.
As malhas com células de domínio maiores ( a cada 2 elementos de contorno
utiliza-se 1 célula de domínio ) tiveram uma convergência mais rápida e precisaram
de menor processamento do que outros tipos de malhas ( a cada 1 elemento de
contorno utiliza-se 1 célula de domínio, por exemplo ) porque não foi usada
nenhuma técnica de subelementos para integração. Foi observado em todas as
placas analisadas que o parâmetro crítico de flambagem diminui à medida que se
aumenta a espessura da placa verificada.

170
9.3 RESULTADOS PARA INSTABILIDADE DE PLACAS COM FUROS – MALHA 1 - CG DA CÉLULA PRÓXIMO AO CONTORNO
São apresentados a seguir os resultados obtidos do parâmetro crítico de
flambagem para placas com furos. São utilizados 22 pontos de Gauss para a
integração das funções de forma. Nestes casos é necessário calcular as tensões
internas no centro de gravidade das células de domínio em um problema de estado
plano de tensão com mesma discretização e mesma solicitação, mas com todas
bordas livres. Retiradas as tensões do programa de estado plano de tensão, estas
são aplicadas no centro de gravidade das células de domínio no programa de
instabilidade de placas. No programa de estado plano de tensão são utilizados 128
elementos quadráticos no contorno e bordas dos furos. As propriedades dos
materiais são as mesmas da tabela 9.1. Em todas as placas perfuradas o contorno
está simplesmente apoiado (hard) e as bordas dos furos estão livres.
No presente trabalho foram testados dois tipos de malhas para elementos de
contorno:
1) Malha 1 - 1 elemento de contorno para cada 2 células de domínio
2) Malha 2 - 2 elementos de contorno para cada célula de domínio.
Primeiramente são apresentados os resultados para a malha 1 com centro de
gravidade da célula próximo ao contorno, as malhas estão descritas na tabela 9.33:
d/L Células de Domínio Elementos de contorno
0,1 396 44
0,2 384 48
0,3 312 52
0,4 280 66
0,5 7200 300
0,6 6080 320
0,7 4760 340
Tabela 9.33 – Malha 1 – cg da célula próximo ao contorno para placas com furos

171
9.3.1 Vinculação para placas com furos
Em todas as placas perfuradas o contorno está simplesmente apoiado (hard)
e as bordas dos furos estão livres. Esta vinculação vale para todos os tipos de
malhas. A figura 9.50 ilustra a vinculação adotada:
Figura 9.50 – Vinculação para placas com furos

172
9.3.2 Malha 1 - cg da célula próximo ao contorno para placas com furos pequenos
Na figura 9.51 pode-se visualizar a malha utilizada para a placa com furo de
largura 0.15m, este padrão de discretização foi utilizado para todos os furos
considerados pequenos (d/L = 0,1; 0,2; 0,3 e 0,4), os quais renderam resultados
satisfatórios. Recomenda-se uma análise de convergência pois uma malha pequena
que pode render resultados bons para furos pequenos mas ao mesmo tempo pode
dar resultados com maiores desvios para furos grandes.
Figura 9.51 – Malha 1 – cg da célula próximo ao contorno (d/L = 0,1; 0,2; 0,3 e 0,4)

173
9.3.3 Malha 1 - cg da célula próximo ao contorno para placas com furos grandes
Na figura 9.52 pode-se visualizar a malha utilizada para a placa com furo de
largura 0.15m, este padrão de discretização foi utilizado para todos os furos
considerados grandes (d/L = 0,5; 0,6 e 0,7) a malha para furos pequenos foi refinada
em cinco vezes mais células de domínio para que a precisão desejada fosse
alcançada.
Figura 9.52 – Malha 1 – cg da célula próximo ao contorno (d/L = 0,5; 0,6 e 0,7)

174
9.3.4 Exemplo 1 – Malha 1, placa com furo quadrado, relação d/L = 0,1
Figura 9.53 – Malha 1, placa com furo quadrado, relação d/L = 0,1 – Carga Uniaxial
h/L Presente Trabalho
JAYASHANKARBABU e KARISIDDAPPA (2014)
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
0,01 3,7969 3,7998 3,7973 -0,0763 -0,0105
0,05 3,7270 3,7382 - -0,2983 -
0,1 3,5748 3,6011 - -0,7301 -
0,15 3,3584 3,3825 - -0,7134 -
0,2 3,0986 3,1150 - -0,5271 - Obs.: (1) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
(2) – Diferença com relação a EL-SAWY e NAZMY (2001)
Tabela 9.34 – Parâmetros críticos de flambagem, placa com furo d/L = 0.1 – Malha 1
A largura do furo é 0,05 m, foi observado que quando o furo é pequeno, a
variação das tensões perto do furo também é pequena. Isto resulta na maior
facilidade numérica do tratamento do problema, ou seja, o problema necessita de
uma menor quantidade de elementos e células de domínio para ser resolvido com
uma precisão aceitável. Os resultados mostraram excelente comparação com os
valores de EL-SAWY e NAZMY (2001) e JAYASHANKARBABU e KARISIDDAPPA
(2014).

175
9.3.5 Exemplo 2 – Malha 1, placa com furo quadrado, relação d/L = 0,2
Figura 9.54 – Malha 1, placa com furo quadrado, relação d/L = 0,2 – Carga Uniaxial
h/L Presente Trabalho
JAYASHANKARBABU e KARISIDDAPPA (2014)
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
0,01 3,4444 3,4785 3,4449 -0,9804 -0,0146
0,05 3,3676 3,4037 - -1,0626 -
0,1 3,2240 3,2749 - -1,5527 -
0,15 3,0319 3,0807 - -1,5832 -
0,2 2,8026 2,8540 - -1,8004 - Obs.: (1) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
(2) – Diferença com relação a EL-SAWY e NAZMY (2001)
Tabela 9.35 – Parâmetros críticos de flambagem, placa com furo d/L = 0,2 – Malha 1
A largura do furo é 0,1 m, este furo ainda pode ser considerado pequeno, a
variação das tensões perto do furo também é pequena.. Os resultados mostraram
excelente comparação com os valores de EL-SAWY e NAZMY (2001), a diferença
com JAYASHANKARBABU e KARISIDDAPPA (2014) ficou menor que 2%.
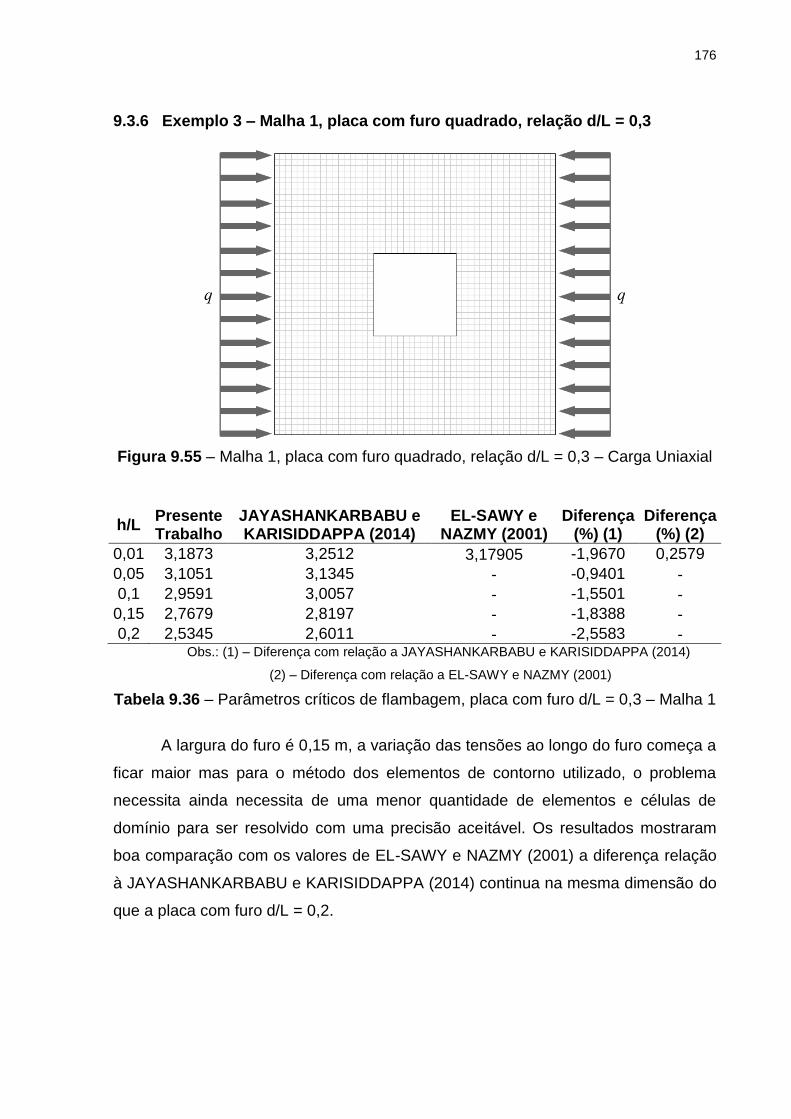
176
9.3.6 Exemplo 3 – Malha 1, placa com furo quadrado, relação d/L = 0,3
Figura 9.55 – Malha 1, placa com furo quadrado, relação d/L = 0,3 – Carga Uniaxial
h/L Presente Trabalho
JAYASHANKARBABU e KARISIDDAPPA (2014)
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
0,01 3,1873 3,2512 3,17905 -1,9670 0,2579
0,05 3,1051 3,1345 - -0,9401 -
0,1 2,9591 3,0057 - -1,5501 -
0,15 2,7679 2,8197 - -1,8388 -
0,2 2,5345 2,6011 - -2,5583 - Obs.: (1) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
(2) – Diferença com relação a EL-SAWY e NAZMY (2001)
Tabela 9.36 – Parâmetros críticos de flambagem, placa com furo d/L = 0,3 – Malha 1
A largura do furo é 0,15 m, a variação das tensões ao longo do furo começa a
ficar maior mas para o método dos elementos de contorno utilizado, o problema
necessita ainda necessita de uma menor quantidade de elementos e células de
domínio para ser resolvido com uma precisão aceitável. Os resultados mostraram
boa comparação com os valores de EL-SAWY e NAZMY (2001) a diferença relação
à JAYASHANKARBABU e KARISIDDAPPA (2014) continua na mesma dimensão do
que a placa com furo d/L = 0,2.

177
9.3.7 Exemplo 4 – Malha 1, placa com furo quadrado, relação d/L = 0,4
Figura 9.56 – Malha 1, placa com furo quadrado, relação d/L = 0,4 – Carga Uniaxial
h/L Presente Trabalho
JAYASHANKARBABU e KARISIDDAPPA (2014)
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
0,01 3,0389 3,2321 3,02365 -5,9780 0,5039
0,05 2,9402 3,0448 - -3,4378 -
0,1 2,7729 2,8670 - -3,2835 -
0,15 2,5573 2,6566 - -3,7382 -
0,2 2,2874 2,3972 - -4,5802 - Obs.: (1) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
(2) – Diferença com relação a EL-SAWY e NAZMY (2001)
Tabela 9.37 – Parâmetros críticos de flambagem, placa com furo d/L = 0,4 – Malha 1
A largura do furo é 0,2 m, a variação das tensões ao longo do furo começa a
ficar maior mas para o método dos elementos de contorno utilizado, o problema
ainda necessita de uma menor quantidade de elementos e células de domínio para
ser resolvido com uma precisão aceitável. Os resultados mostraram boa
comparação com os valores de EL-SAWY e NAZMY (2001) mas a diferença relação
à JAYASHANKARBABU e KARISIDDAPPA (2014) dobrou com relação ao furo d/L =
0,3.

178
9.3.8 Exemplo 5 – Malha 1, placa com furo quadrado, relação d/L = 0,5
Figura 9.57 – Malha 1, placa com furo quadrado, relação d/L = 0,5 – Carga Uniaxial
h/L Presente Trabalho
JAYASHANKARBABU e KARISIDDAPPA (2014)
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
0,01 2,9098 3,3120 2,92568 -12,1438 -0,5429
0,05 2,7811 2,9551 - -5,8875 -
0,1 2,5652 2,7529 - -6,8160 -
0,15 2,2842 2,4935 - -8,3924 -
0,2 1,5337 2,1117 - -27,3736 - Obs.: (1) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
(2) – Diferença com relação a EL-SAWY e NAZMY (2001)
Tabela 9.38 – Parâmetros críticos de flambagem, placa com furo d/L = 0,5 – Malha 1
A largura do furo é 0,25 m, apartir deste tamanho de furo a variação de
tensões ao longo do furo é grande e precisa de uma discretização maior de
elementos e células de domínio. A mesma discretização utilizada em problemas de
furos menores pode gerar desvios grandes. Os resultados mostraram boa
comparação com os valores de EL-SAWY e NAZMY (2001) mas a diferença relação
à JAYASHANKARBABU e KARISIDDAPPA (2014) aumentou consideravelmente, a
explicação para este fato é dada na seção 9.3.11.

179
9.3.9 Exemplo 6 – Malha 1, placa com furo quadrado, relação d/L = 0,6
Figura 9.58 – Malha 1, placa com furo quadrado, relação d/L = 0,6 – Carga Uniaxial
h/L Presente Trabalho
JAYASHANKARBABU e KARISIDDAPPA (2014)
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
0,01 2,8367 4,4132 2,86486 -35,7228 -0,9836
0,05 2,6631 3,2080 - -16,9859 -
0,1 2,3877 2,6713 - -10,6163 -
0,15 1,8360 2,2243 - -17,4583 -
0,2 1,0381 1,2471 - -16,7576 - Obs.: (1) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
(2) – Diferença com relação a EL-SAWY e NAZMY (2001)
Tabela 9.39 – Parâmetros críticos de flambagem, placa com furo d/L = 0,6 – Malha 1
A largura do furo é 0,30 m, a variação de tensões ao longo do furo é grande e
precisa de uma discretização maior de elementos e células de domínio. A mesma
discretização utilizada em problemas de furos menores pode gerar desvios grandes.
Os resultados mostraram boa comparação com os valores de EL-SAWY e NAZMY
(2001) mas a diferença relação à JAYASHANKARBABU e KARISIDDAPPA (2014)
aumentou consideravelmente, a explicação para este fato é dada na seção 9.3.11.

180
9.3.10 Exemplo 7 – Malha 1, placa com furo quadrado, relação d/L = 0,7
Figura 9.59 – Malha 1, placa com furo quadrado, relação d/L = 0,7 – Carga Uniaxial
h/L Presente Trabalho
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
0,01 2,8117 2,8449 -1,1664
0,05 2,5588 - -
0,1 2,2789 - -
0,15 1,1438 - -
0,2 0,6456 - - (1) – Diferença com relação a EL-SAWY e NAZMY (2001)
Tabela 9.40 – Parâmetros críticos de flambagem, placa com furo d/L = 0,7 – Malha 1
A largura do furo é 0,35 m, a variação de tensões ao longo do furo é grande e
precisa de uma discretização maior de elementos e células de domínio. A mesma
discretização utilizada em problemas de furos menores pode gerar desvios grandes.
Os resultados mostraram boa comparação com os valores de EL-SAWY e NAZMY
(2001).

181
9.3.11 Comentários sobre os resultados para placas com furos – Malha 1 – cg próximo ao contorno
Os resultados obtidos pelo presente trabalho para placas com furos utilizando
a malha 1 com cg próximo ao contorno ( a cada 1 elemento de contorno utiliza-se 2
células de domínio ) tiveram boa aproximação com os resultados de EL-SAWY e
NAZMY (2001) o qual utilizaram o método dos elementos finitos para o cálculo. Os
resultados do presente trabalho também estiveram em boa conformidade com os
resultados obtidos por DOVAL et al. (2013) o qual utilizaram o método dos
elementos de contorno para o cálculo.
A não conformidade com os resultados de JAYASHANKARBABU e
KARISIDDAPPA (2014) ( onde foi utilizado o método dos elementos finitos ) é
aparente devido à observação que os parâmetros críticos dados por estes autores
aumentam ao invés de diminuir à medida que o tamanho furo aumenta, este
problema é maior quando observa-se o resultado da placa com d/L = 0,6 onde o
parâmetro crítico de flambagem destes autores foi de 4,4132 mostrando um
problema com o refinamento da malha pois o parâmetro crítico foi maior do que o de
uma placa sem furo, o qual a resposta é 4. Este problema já foi observado por outros
autores como SABIR e CHOW (1983) e EL-SAWY e NAZMY (2001), isto acontece
devido à utilização de uma malha não suficientemente refinada para problemas com
furos grandes o qual d/L > 0,4. Este problema é observado no método dos
elementos finitos e também no método dos elementos de contorno ( quando é
utilizada a malha com cg próximo ao contorno, a malha com cg distante do contorno
não apresenta esse problema ). Isto é devido à grande variação de tensões nas
bordas dos furos, quanto maior o furo, maior a variação de tensões, uma malha
pobre não consegue descrever este comportamento corretamente.
Foi observado que quando é utilizada a malha 1 com cg da célula de domínio
próximo ao contorno começam a aparecer problemas de singularidade na
integração. Isto impossibilita o cálculo para a espessura muito fina h/L = 0,001 sem a
utilização de algum artifício de integração como o método dos sub-elementos. A
tabela 9.41 juntamente com a figura 9.60 mostram a comparação dos resultados
obtidos para a espessura h/L = 0,01 com os resultados de outros trabalhos.

182
9.3.12 Comparação dos resultados para a malha 1 – cg da célula próximo ao contorno
d/L Presente Trabalho Malha 1
EL-SAWY e NAZMY (2001)
DOVAL et al. (2013)
JAYA. e KARIS. (2014)
Diferença (%) (1)
Diferença (%) (2)
Diferença (%) (3)
0 4,0105 4,0000 4,0000 4,0000 0,2625 0,2625 0,2625
0,1 3,7969 3,7973 3,7600 3,7998 -0,0105 0,9813 -0,0763
0,2 3,4444 3,4449 3,4000 3,4785 -0,0146 1,3057 -0,9804
0,3 3,1873 3,1790 3,1500 3,2512 0,2579 1,1825 -1,9670
0,4 3,0389 3,0236 2,9100 3,2321 0,5038 4,4290 -5,9780
0,5 2,9098 2,9256 2,7500 3,3120 -0,5429 5,8108 -12,144
0,6 2,8367 2,8648 2,6500 4,4132 -0,9836 7,0445 -35,723
0,7 2,8117 2,8449 2,6000 - -1,1664 8,1429 - Obs.: (1) – Diferença com relação a EL-SAWY e NAZMY (2001)
(2) – Diferença com relação a DOVAL et al. (2013)
(3) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
Tabela 9.41 – Parâmetros críticos de flambagem, com relação a d/L – Malha 1
Figura 9.60 – Gráfico para os parâmetros críticos de flambagem – Malha 1
2.4
2.9
3.4
3.9
4.4
4.9
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Par
âme
tro
Crí
tico
d/L - Largura do furo/Largura da placa
Comparação de Parâmetros Críticos - Malha 1
Presente Trabalho EL-SAWY e NAZMY (2001)
JAYASHANKARBABU e KARISIDDAPPA (2014) DOVAL et al. (2013)

183
9.4 RESULTADOS PARA INSTABILIDADE DE PLACAS COM FUROS – MALHA 2 – CG DA CÉLULA DISTANTE DO CONTORNO
Para possibilitar o cálculo da espessura muito fina com h/L = 0,001 foi
necessário a utilização de uma malha onde posiciona-se o centro de gravidade das
células de domínio à uma distância maior dos nós de contorno pois quanto mais
próximo o centro de gravidade da célula estiver do contorno, maior será a
possibilidade de ocorrer quase-singularidade, quando não se usa subelementos na
integração. O cálculo para a espessura muito fina foi possível com uma malha em
que a cada 2 elementos de contorno utiliza-se 1 célula de domínio. As tensões do
estado plano são retiradas do cg das células de domínio. A figura 9.61 mostra uma
malha com cg da célula distante do contorno em uma placa com furo com d/L = 0,4.
Esta malha tem 224 elementos de contorno e 336 células de domínio.
Figura 9.61 – Malha 2 – cg da célula distante do contorno
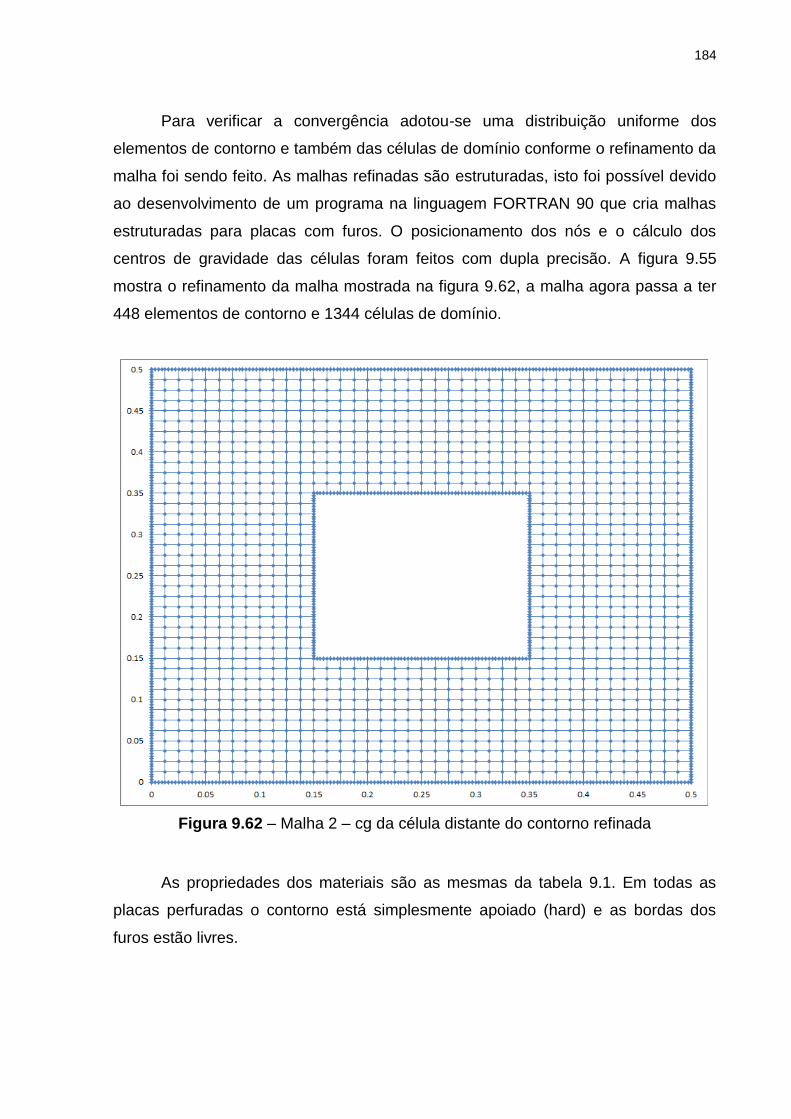
184
Para verificar a convergência adotou-se uma distribuição uniforme dos
elementos de contorno e também das células de domínio conforme o refinamento da
malha foi sendo feito. As malhas refinadas são estruturadas, isto foi possível devido
ao desenvolvimento de um programa na linguagem FORTRAN 90 que cria malhas
estruturadas para placas com furos. O posicionamento dos nós e o cálculo dos
centros de gravidade das células foram feitos com dupla precisão. A figura 9.55
mostra o refinamento da malha mostrada na figura 9.62, a malha agora passa a ter
448 elementos de contorno e 1344 células de domínio.
Figura 9.62 – Malha 2 – cg da célula distante do contorno refinada
As propriedades dos materiais são as mesmas da tabela 9.1. Em todas as
placas perfuradas o contorno está simplesmente apoiado (hard) e as bordas dos
furos estão livres.

185
9.4.1 Resultados para placas com furos – Carga Uniaxial – Malha 2 – cg da célula distante do contorno
A tabela 9.42 mostra a convergência dos parâmetro críticos de flambagem
para as placas analisadas com todos os tamanhos de furos com a malha 2 onde
verificou-se que os resultados sofrem pouca alteração à medida que se aumenta o
número de elementos de contorno e de células de domínio:
d/L N° Elem. N° Cel. h/L = 0.001 0.01 0.05 0.1 0.15 0.2
0,1
176 396 3.8085 3.7999 3.7364 3.5865 3.3699 3.1088
352 1584 3.8024 3.7945 3.7323 3.5828 3.3664 3.1053
528 3564 3.8010 3.7935 3.7316 3.5821 3.3657 3.1046
0,2
192 384 3.4646 3.4535 3.3859 3.2462 3.0537 2.8226
384 1536 3.4546 3.4441 3.3774 3.2373 3.0439 2.8103
576 3456 3.4522 3.4420 3.3754 3.2352 3.0414 2.8068
0,3
208 364 3.2131 3.2003 3.1258 2.9825 2.7902 2.5547
416 1456 3.1961 3.1836 3.1090 2.9640 2.7687 2.5262
624 3276 3.1921 3.1797 3.1050 2.9595 2.7632 2.5179
0,4
224 336 3.0698 3.0533 2.9606 2.7938 2.5751 2.2970
448 1344 3.0411 3.0244 2.9305 2.7607 2.5368 2.2490
672 3024 3.0316 3.0179 2.9234 2.7527 2.5271 2.2342
0,5
240 300 2.9968 2.9739 2.8494 2.6396 2.3698 2.1021
480 1200 2.9481 2.9246 2.7980 2.5847 2.3104 2.0158
720 2700 2.9344 2.9137 2.7864 2.5721 2.2959 1.8552
0,6
256 256 2.9781 2.9457 2.7751 2.5023 2.2413 1.7089
512 1024 2.8933 2.8599 2.6880 2.4148 2.1519 1.4332
768 2304 2.8725 2.8419 2.6695 2.3958 2.1265 1.2794
0,7
272 204 3.0601 3.0130 2.7719 2.4806 1.7783 1.0240
544 816 2.8912 2.8448 2.6070 2.3146 1.3997 0.7966
816 1836 2.8585 2.8119 2.5747 2.2834 1.3565 0.7926
Tabela 9.42 – Parâmetros críticos de flambagem, placas com furo – Malha 2
Todas as placas foram verificadas com à medida que foi feito o refinamento
da malha de contorno e domínio, sempre seguindo o padrão das figuras 9.61 e 9.62
para que as malhas sempre fossem estruturadas e homogêneas.
Observando a tabela 9.42 foi possível verificar a convergência dos
parâmetros críticos de flambagem usando a malha 2 para todos os tamanhos de
furos e espessuras, ocorreu de uma maneira mais eficiente do que quando utilizada
a malha 1.

186
A tabela 9.43 mostra a comparação dos resultados para placa com aspecto
h/L = 0,001 e também h/L = 0,01 com os resultados obtidos por EL-SAWY e NAZMY
(2001).
d/L N° Elem. N° Cel. h/L = 0.001 0.01 EL-SAWY e
NAZMY (2001) Diferença
(%) (1) Diferença
(%) (2)
0,1
176 396 3.8085 3.7999 3.7973 0.2949 0.0691
352 1584 3.8024 3.7945 3.7973 0.1330 -0.0725
528 3564 3.8010 3.7935 3.7973 0.0987 -0.0989
0,2
192 384 3.4646 3.4535 3.4449 0.5713 0.2485
384 1536 3.4546 3.4441 3.4449 0.2802 -0.0228
576 3456 3.4522 3.4420 3.4449 0.2111 -0.0840
0,3
208 364 3.2131 3.2003 3.1791 1.0722 0.6678
416 1456 3.1961 3.1836 3.1791 0.5365 0.1422
624 3276 3.1921 3.1797 3.1791 0.4093 0.0206
0,4
224 336 3.0698 3.0533 3.0237 1.5252 0.9802
448 1344 3.0411 3.0244 3.0237 0.5768 0.0262
672 3024 3.0316 3.0179 3.0237 0.2616 -0.1916
0,5
240 300 2.9968 2.9739 2.9257 2.4305 1.6480
480 1200 2.9481 2.9246 2.9257 0.7677 -0.0379
720 2700 2.9344 2.9137 2.9257 0.2989 -0.4088
0,6
256 256 2.9781 2.9457 2.8649 3.9541 2.8217
512 1024 2.8933 2.8599 2.8649 0.9918 -0.1729
768 2304 2.8725 2.8419 2.8649 0.2653 -0.7998
0,7
272 204 3.0601 3.0130 2.8449 7.5659 5.9091
544 816 2.8912 2.8448 2.8449 1.6264 -0.0021
816 1836 2.8585 2.8119 2.8449 0.4777 -1.1603 Obs.: (1) – Diferença de k para h/L = 0,001 com relação a EL-SAWY e NAZMY (2001)
(2) – Diferença de k para h/L = 0,01 com relação a EL-SAWY e NAZMY (2001)
Tabela 9.43 – Parâmetros críticos de flambagem, placas com furo – Malha 2 – Comparação
É esperado que os valores para as placas com h/L = 0,001 se aproximem dos
valores de EL-SAWY e NAZMY (2001), pois estes autores utilizaram uma teoria que
não leva em conta o efeito da deformação por cortante. Também é esperado que os
valores para as placas com h/L = 0,01 fiquem abaixo dos resultado de El-sawy e
Nazmy pois nesta espessura já começa a ficar aparente o efeito da deformação por
cortante. Observando a tabela 9.43 é possível verificar que ambos os valores
convergiram para o que era esperado com boa aproximação.

187
9.4.2 Comentários sobre os resultados para placas com furos – Malha 2 – cg distante do contorno
Os resultados obtidos pelo presente trabalho para placas com furos utilizando
a malha com cg distante do contorno ( a cada 2 elementos de contorno utiliza-se 1
células de domínio ) tiveram boa aproximação com os resultados de EL-SAWY e
NAZMY (2001).
Foi possível verificar a convergência dos resultados à medida que a malha foi
sendo refinada. Foi observado que os resultados para o parâmetro crítico de
flambagem das placas muito finas com h/L = 0,001 convergiram para os resultados
de EL-SAWY e NAZMY (2001) e os resultados para placas finas com h/L = 0,01
ficaram um pouco abaixo dos resultados destes pesquisadores. Isto é explicado pelo
fato que El-sawy e Nazmy utilizaram uma teoria que não considera o efeito da
deformação por cortante.
A placa com h/L = 0,001 tem muito pouco efeito da deformação por cortante e
por isso ela converge para o valor da teoria clássica. Na placa com h/L = 0,01 já
começa a ser notado o efeito da deformação por cortante e portanto ela deve
convergir para um valor de parâmetro crítico de flambagem menor que o da placa
com h/L = 0,001.
Foi constatado que a malha com centro de gravidade da célula distante do
contorno é melhor do que a malha com centro de gravidade próximo ao contorno.
Isto é devido a várias vantagens verificadas a partir dos resultados:
1) A possibilidade do cálculo do parâmetro crítico de flambagem para a placa
muito fina com h/L = 0,001. Este cálculo foi possível devido à distância maior do cg
da célula com o contorno, diminuindo a singularidade na integração.
2) A diminuição do número de células de domínio para cálculo das placas
com furos considerados grandes (d/L = 0,5; 0,6 e 0,7), a diminuição da singularidade
proporcionou esta vantagem.
3) O aumento do número de elementos de contorno fez com que a
convergência fosse mais rápida e diminuiu a quantidade de células de domínio para
todos os casos.
A tabela 9.44 juntamente com a figura 9.63 mostram a comparação dos
resultados obtidos para a espessura h/L = 0,001 com os resultados de outros
trabalhos.

188
9.4.3 Comparação dos resultados – Malha 2 – cg da célula distante do contorno
d/L Presente Trabalho Malha 2
EL-SAWY e NAZMY (2001)
DOVAL et al. (2013)
JAYA. e KARIS. (2014)
Diferença (%) (1)
Diferença (%) (2)
Diferença (%) (3)
0 4.0105 4.0000 4.0000 4.0000 0.2625 0.2625 0.2625
0,1 3.8010 3.7973 3.7600 3.7998 0.0974 1.0904 0.0316
0,2 3.4522 3.4449 3.4000 3.4785 0.2119 1.5353 -0.7561
0,3 3.1921 3.1791 3.1500 3.2512 0.4105 1.3365 -1.8178
0,4 3.0316 3.0237 2.9100 3.2321 0.2629 4.1787 -6.2034
0,5 2.9344 2.9257 2.7500 3.3120 0.2981 6.7055 -11.4010
0,6 2.8725 2.8649 2.6500 4.4132 0.2667 8.3962 -34.9112
0,7 2.8585 2.8449 2.6000 - 0.4780 9.9423 - Obs.: (1) – Diferença com relação a EL-SAWY e NAZMY (2001)
(2) – Diferença com relação a DOVAL et al. (2013)
(3) – Diferença com relação a JAYASHANKARBABU e KARISIDDAPPA (2014)
Tabela 9.44 – Parâmetros críticos de flambagem, com relação a d/L – Malha 2, h/L = 0,001
Figura 9.63 – Gráfico para os parâmetros críticos de flambagem – Malha 2
2.4
2.9
3.4
3.9
4.4
4.9
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7
Par
âme
tro
Crí
tico
d/L - Largura do furo/Largura da placa
Comparação de Parâmetros Críticos - Malha 2
Presente Trabalho EL-SAWY e NAZMY (2001)
JAYASHANKARBABU e KARISIDDAPPA (2014) DOVAL et al. (2013)
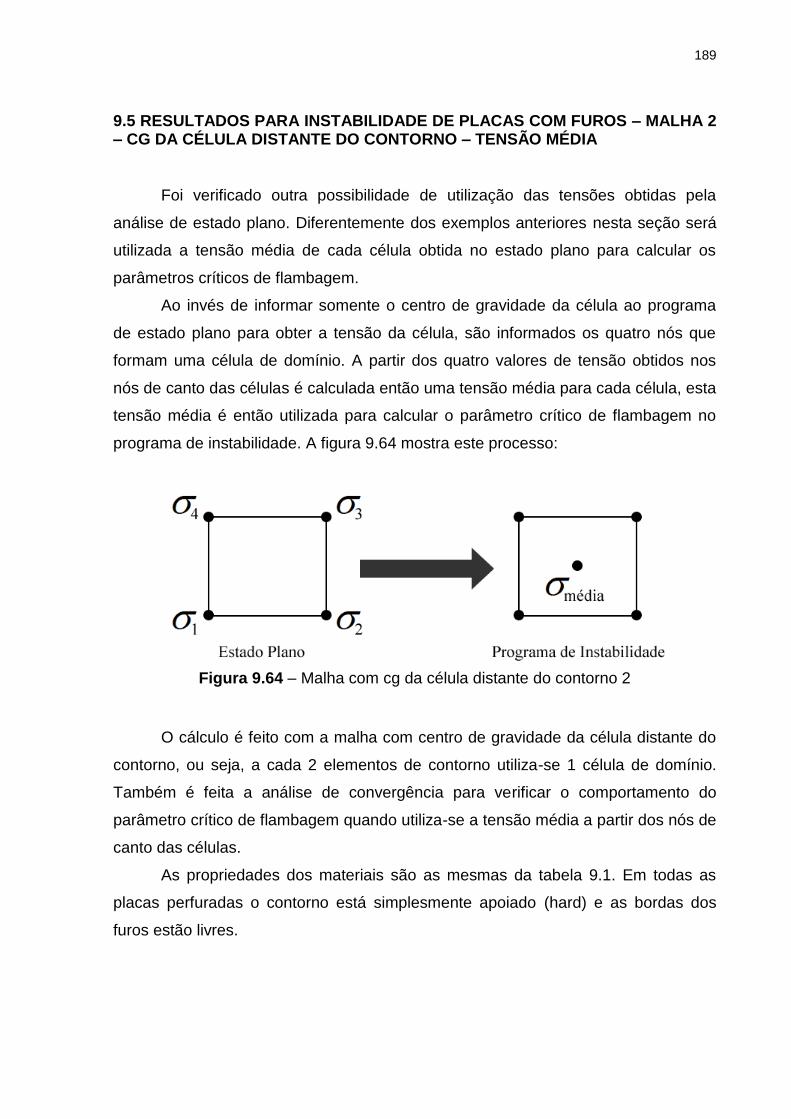
189
9.5 RESULTADOS PARA INSTABILIDADE DE PLACAS COM FUROS – MALHA 2 – CG DA CÉLULA DISTANTE DO CONTORNO – TENSÃO MÉDIA
Foi verificado outra possibilidade de utilização das tensões obtidas pela
análise de estado plano. Diferentemente dos exemplos anteriores nesta seção será
utilizada a tensão média de cada célula obtida no estado plano para calcular os
parâmetros críticos de flambagem.
Ao invés de informar somente o centro de gravidade da célula ao programa
de estado plano para obter a tensão da célula, são informados os quatro nós que
formam uma célula de domínio. A partir dos quatro valores de tensão obtidos nos
nós de canto das células é calculada então uma tensão média para cada célula, esta
tensão média é então utilizada para calcular o parâmetro crítico de flambagem no
programa de instabilidade. A figura 9.64 mostra este processo:
Figura 9.64 – Malha com cg da célula distante do contorno 2
O cálculo é feito com a malha com centro de gravidade da célula distante do
contorno, ou seja, a cada 2 elementos de contorno utiliza-se 1 célula de domínio.
Também é feita a análise de convergência para verificar o comportamento do
parâmetro crítico de flambagem quando utiliza-se a tensão média a partir dos nós de
canto das células.
As propriedades dos materiais são as mesmas da tabela 9.1. Em todas as
placas perfuradas o contorno está simplesmente apoiado (hard) e as bordas dos
furos estão livres.

190
9.5.1 Resultados para placas com furos – Carga Uniaxial – Malha 2 – cg da célula distante do contorno – Tensão média
A tabela 9.45 mostra a convergência dos parâmetro críticos de flambagem
para as placas analisadas com todos os tamanhos de furos com a malha 2
utilizando a tensão média onde verificou-se que os resultados sofrem pouca
alteração à medida que se aumenta o número de elementos de contorno e de
células de domínio:
d/L N° Elem. N° Cel. h/L = 0.001 0.01 0.05 0.1 0.15 0.2
0,1
176 396 3.8052 3.7965 3.7330 3.5835 3.3674 3.1070
352 1584 3.8007 3.7928 3.7306 3.5813 3.3653 3.1047
528 3564 3.8001 3.7926 3.7306 3.5814 3.3652 3.1043
0,2
192 384 3.4498 3.4386 3.3719 3.2345 3.0455 2.8188
384 1536 3.4492 3.4387 3.3724 3.2335 3.0417 2.8105
576 3456 3.4495 3.4393 3.3730 3.2335 3.0407 2.8077
0,3
208 364 3.1909 3.1783 3.1065 2.9686 2.7837 2.5578
416 1456 3.1887 3.1763 3.1030 2.9605 2.7687 2.5313
624 3276 3.1887 3.1764 3.1025 2.9585 2.7644 2.5226
0,4
224 336 3.0437 3.0281 2.9413 2.7847 2.5784 2.3121
448 1344 3.0334 3.0172 2.9258 2.7605 2.5423 2.2599
672 3024 3.0316 3.0153 2.9224 2.7544 2.5323 2.2400
0,5
240 300 2.9698 2.9488 2.8356 2.6425 2.3877 2.0343
480 1200 2.9423 2.9197 2.7979 2.5916 2.3236 1.9438
720 2700 2.9367 2.9136 2.7891 2.5788 2.3066 1.8207
0,6
256 256 2.9554 2.9266 2.7757 2.5258 2.1852 1.6363
512 1024 2.8943 2.8625 2.6983 2.4333 2.0974 1.4039
768 2304 2.8809 2.8483 2.6801 2.4109 2.0670 1.2668
0,7
272 204 3.0448 3.0051 2.8197 2.4484 1.8492 1.1094
544 816 2.9118 2.8670 2.6404 2.2844 1.5660 0.8983
816 1836 2.8803 2.8342 2.6025 2.2435 1.4039 0.7977
Tabela 9.45 – Parâmetros críticos de flambagem, placas com furo – Malha 2 –
Tensão média
A tabela 9.46 mostra a comparação dos resultados para placa com aspecto
h/L = 0,001 e também h/L = 0,01 com os resultados obtidos por EL-SAWY e NAZMY
(2001).

191
d/L N° Elem. N° Cel. h/L = 0.001 0.01 EL-SAWY e
NAZMY (2001) Diferença
(%) (1) Diferença
(%) (2)
0,1
176 396 3.8052 3.7965 3.7973 0.2069 -0.0201
352 1584 3.8007 3.7928 3.7973 0.0886 -0.1178
528 3564 3.8001 3.7926 3.7973 0.0740 -0.1241
0,2
192 384 3.4498 3.4386 3.4449 0.1417 -0.1815
384 1536 3.4492 3.4387 3.4449 0.1237 -0.1792
576 3456 3.4495 3.4393 3.4449 0.1325 -0.1622
0,3
208 364 3.1909 3.1783 3.1791 0.3721 -0.0236
416 1456 3.1887 3.1763 3.1791 0.3044 -0.0852
624 3276 3.1887 3.1764 3.1791 0.3030 -0.0824
0,4
224 336 3.0437 3.0281 3.0237 0.6635 0.1463
448 1344 3.0334 3.0172 3.0237 0.3228 -0.2146
672 3024 3.0316 3.0153 3.0237 0.2625 -0.2773
0,5
240 300 2.9698 2.9488 2.9257 1.5072 0.7885
480 1200 2.9423 2.9197 2.9257 0.5697 -0.2059
720 2700 2.9367 2.9136 2.9257 0.3772 -0.4116
0,6
256 256 2.9554 2.9266 2.8649 3.1608 2.1542
512 1024 2.8943 2.8625 2.8649 1.0283 -0.0819
768 2304 2.8809 2.8483 2.8649 0.5583 -0.5766
0,7
272 204 3.0448 3.0051 2.8449 7.0283 5.6313
544 816 2.9118 2.8670 2.8449 2.3531 0.7764
816 1836 2.8803 2.8342 2.8449 1.2430 -0.3749 Obs.: (1) – Diferença de k para h/L = 0,001 com relação a EL-SAWY e NAZMY (2001)
(2) – Diferença de k para h/L = 0,01 com relação a EL-SAWY e NAZMY (2001)
Tabela 9.46 – Parâmetros críticos de flambagem – Malha 2 – Tensão média – Comparação
É esperado que os valores para as placas com h/L = 0,001 se aproximem dos
valores de EL-SAWY e NAZMY (2001), pois estes autores utilizaram uma teoria que
não leva em conta o efeito da deformação por cortante. Também é esperado que os
valores para as placas com h/L = 0,01 fiquem abaixo dos resultado de El-sawy e
Nazmy pois nesta espessura já começa a ficar aparente o efeito da deformação por
cortante. Observando a tabela 9.46 é possível verificar que ambos os valores
convergiram para o que era esperado com boa aproximação, sendo que os valores
calculados com a tensão média convergem de maneira mais rápida do que com a
malha apenas utilizando o cg da célula.

192
9.5.2 Comentários sobre os resultados para placas com furos – Malha 2 – cg distante do contorno – Tensão média
Observando-se os resultados é possível concluir que a malha 2 utilizando-se
a tensão média convergiu de maneira mais rápida do que a malha 2 que utiliza a
tensão somente do cg da célula. Isto é devido a utilização de mais pontos de tensão
( 4 pontos dos cantos da célula contra apenas 1 do cg ), tornando o programa mais
eficiente na obtenção de parâmetros críticos de flambagem. A tabela 9.47 mostra
uma comparação entre os resultados para h/L = 0,01 obtidos para todas as malhas e
os resultados de EL-SAWY e NAZMY (2001), observando que os resultados na
primeira linha são de uma placa sem furo.
d/L Presente Trabalho Malha 1
Presente Trabalho Malha 2
Presente Trabalho Malha 2-
Tensão Média
EL-SAWY
e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
Diferença (%) (3)
- 4.0105 4.0105 4.0105 4.0000 0.2625 0.2625 0.2625
0,1 3.7969 3.7935 3.7926 3.7973 -0.0105 -0.1001 -0.1238
0,2 3.4444 3.442 3.4393 3.4449 -0.0145 -0.0842 -0.1626
0,3 3.1873 3.1797 3.1764 3.179 0.2611 0.0220 -0.0818
0,4 3.0389 3.0179 3.0153 3.0236 0.5060 -0.1885 -0.2745
0,5 2.9098 2.9137 2.9136 2.9256 -0.5401 -0.4068 -0.4102
0,6 2.8367 2.8419 2.8483 2.8648 -0.9809 -0.7994 -0.5760
0,7 2.8117 2.8119 2.8342 2.8449 -1.1670 -1.1600 -0.3761 Obs.: (1) – Diferença da Malha 1 com relação a EL-SAWY e NAZMY (2001)
(2) – Diferença da Malha 2 com relação a EL-SAWY e NAZMY (2001)
(3) – Diferença da Malha 2 com tensão média com relação a EL-SAWY e NAZMY (2001)
Tabela 9.47 – Parâmetros críticos de flambagem, comparação de todas as malhas, h/L = 0,01
Como a tabela 9.41 mostra os resultados para h/L = 0,01 espera-se que os
parâmetros críticos de flambagem fiquem abaixo de EL-SAWY e NAZMY (2001) pois
nesta espessura já é possível observar a influência do efeito da deformação por
cortante. A malha 1 mesmo com grande refinamento houve dois valores (d/L = 0,3 e
0,4) que ficaram acima de El-sawy e Nazmy. A malha 2 obteve maior sucesso pois
com uma malha menor houve apenas um valor que ficou acima de El-sawy e Nazmy
(d/L = 0,3). Já a malha 2 com tensão média utilizando a mesma discretização da
malha 2 conseguiu que todos os valores ficassem abaixo de El-sawy e Nazmy. A

193
tabela 9.48 mostra uma comparação entre os resultados para h/L = 0,001 obtidos
para todas as malhas e os resultados de EL-SAWY e NAZMY (2001).
d/L Presente Trabalho Malha 2
Presente Trabalho Malha 2-
Tensão Média
EL-SAWY e NAZMY (2001)
Diferença (%) (1)
Diferença (%) (2)
- 4.0105 4.0105 4.0000 0.2625 0.2625
0,1 3.8010 3.8001 3.7973 0.0974 0.0737
0,2 3.4522 3.4495 3.4449 0.2119 0.1335
0,3 3.1921 3.1887 3.179 0.4121 0.3051
0,4 3.0316 3.0316 3.0236 0.2646 0.2646
0,5 2.9344 2.9367 2.9256 0.3008 0.3794
0,6 2.8725 2.8809 2.8648 0.2688 0.5620
0,7 2.8585 2.8803 2.8449 0.4780 1.2443 Obs.: (1) – Diferença da Malha 2 com relação a EL-SAWY e NAZMY (2001)
(2) – Diferença da Malha 2 com tensão média com relação a EL-SAWY e NAZMY (2001)
Tabela 9.48 – Parâmetros críticos de flambagem, comparação da malha 2 e tensão média
Como a tabela 9.48 mostra os resultados para h/L = 0,001 espera-se que os
parâmetros críticos de flambagem passem a convergir para os resultados de EL-
SAWY e NAZMY (2001) pois nesta espessura é muito pequena a influência do efeito
da deformação por cortante e a placa começa a comportar-se de acordo com a
teoria clássica. As duas malhas avaliadas tiveram um comportamento esperado,
convergindo para os resultados de El-sawy e Nazmy, mas a malha 2 com tensão
média obteve uma convergência mais rápida do que a malha 2 que utiliza tensão
apenas do cg da célula. Esta eficiência é dada pela utilização de um número maior
de pontos de tensão obtidos pelo programa de estado plano.

194
10 PROGRAMAS DESENVOLVIDOS
10.1 PROGRAMA ESTADO PLANO DE TENSÃO/DEFORMAÇÃO
Foi desenvolvido um software na linguagem FORTRAN 90 com intuito de
resolver problemas de estado plano de tensão/deformação. Este tipo de programa
foi necessário devido a necessidade de se obter as tensões nas bordas dos furos
das placas perfuradas. O algoritmo deste programa é o mesmo do programa de
placas, somente as soluções fundamentais e a matriz final serão diferentes. Este
programa também se utiliza de elementos de contorno quadráticos e da integração
singular para resolver as soluções fundamentais.
10.2 PROGRAMA PARA PROBLEMAS DE PLACAS
O programa de para problemas de placas também foi desenvolvido linguagem
FORTRAN 90, utilizando-se das tensões originárias do programa de estado plano de
tensão, este programa calcula os valores dos parâmetros críticos de flambagem para
placas com furos ou sem furos. Caso seja necessário, este programa também pode
calcular problemas de flexão, pois as matrizes principais H e G são as mesmas. Os
módulos mostrados abaixo servem tanto para o programa de estado plano quanto o
programa de placas. Estes programas não foram incluídos nesta dissertação devido
ao seu tamanho e complexidade. O compilador utilizado foi o Intel Fortran 2016
versão de Estudantes, o ambiente de desenvolvimento foi o Visual Studio
Community 2015.
10.3 MÓDULO – MOD_INP_QP1
O arquivo de input é lido pelo módulo Mod_Inp_qp1 o qual reúne todas as
informações do arquivo de input em vetores e variáveis a serem utilizadas no
cálculo, neste arquivo estão as variáveis de posicionamento dos nós, tipos de
solicitação, condições de contorno, coeficientes dos materiais entre outros. Este
módulo utiliza as seguintes variáveis :
NND = Número de nós no contorno do problema, incluindo nós de furos
NND2 = 3*NND

195
NIP = Número de nós internos a serem analisados
NDOUB = Número de nós duplos
NE = Número de elementos lineares
NPA = Número de lados retos no contorno, círculos considera-se dois lados
retos
NG = Número de pontos de Gauss a serem utilizados na integração
NLOAD = Número de nós com carga (cortante, momento volvente, momento
normal)
FI(3*J) = Indica presença de cortante no nó 3*J
FI(3*J-2) = Indica presença de Momento normal no nó 3*J
FI(3*J-1) = Indica presença de Momento Volvente no nó 3*J
E = Módulo de Young
TM = Módulo de Rigidez Transversal
PR = Coeficiente de Poisson
LAMB = Coeficiente Lambda
XR() = Vetor com as coordenadas X dos nós do contorno
YR() = Vetor com as coordenadas Y dos nós do contorno
KODE(3*J) = Vetor com os vínculos referentes ao deslocamento em Z
KODE(3*J-2) = Vetor com os vínculos referentes ao momento normal
KODE(3*J-1) = Vetor com os vínculos referentes ao momento volvente (soft
ou hard)
KDOUB() = Vetor com a indicação de nó duplo para cada nó ex.: KDOUB(5) =
1 significa que o nó 5 é duplo
Nada = Variável auxiliar
QD = Valor da carga distribuída
TH = Espessura da placa
AFI = Coeficiente FI
DESL = Deslocamento da Fonte
LIM = Variável Auxiliar
NPE() = Quantidade de elementos para cada parte reta ex.: NPE(1) = 32
elementos
NIF(2K-1) = Vetor com nó inicial dos elementos de uma parte reta
NIF(2K) = Vetor com o nó final dos elementos de uma parte reta

196
JE(K) = Vetor com a soma de elementos de todas as partes retas, contando
até a parte K
XN() = Vetor com as coordenadas X dos nós internos
YN() = Vetor com as coordenadas Y dos nós internos
KN(J,1) = Coeficiente D do nó interno, normalmente 1
KN(J,2) = Coeficiente C do nó interno, normalmente 1
IAUX = Variável auxiliar normalmente 0
10.4 MÓDULO – MOD_GEO_QP1
Este módulo descreve os elementos e nós ao longo do contorno do problema,
ele delimita corretamente cada nó de cada elemento no contorno, separando em nó
inicial, nó médio e nó final, tudo isso a partir dos vetores e variáveis alocadas pelo
módulo de INPUT. Abaixo a lista de variáveis utilizada pelo módulo Mod_Geo_qp1 :
N1 = Variável que auxilia na alocação dos nós que definem os elementos
lineares, N1 faz a soma em todos os elementos de 1 quando é detectado um nó
duplo
N2 = Variável que auxilia na alocação dos nós que definem os elementos
lineares
NOI(K) = Vetor com os nós iniciais de cada elemento linear
NOF(K) = Vetor com os nós finais de cada elemento linear
AX = Comprimento de um elemento linear em x
AY = Comprimento de um elemento linear em y
COMPR = Distância entre um ponto inicial e o final de um elemento linear
CO = Cosseno de cada elemento linear
SE = Seno de cada elemento linear
QNOI() = Vetor com os nós iniciais de cada elemento quadrático
QNOF() = Vetor com os nós finais de cada elemento quadrático
QNOM() = Vetor com os nós médios de cada elemento quadrático
GI, OME = Vetores com pontos e pesos de Gauss calculados
GIK, OMEK = Vetores com pontos e pesos de Gauss calculados (dobro)

197
10.5 MÓDULO – MOD_MAT_QP1
Este módulo calcula as soluções fundamentais posicionando o ponto fonte em
cada nó do contorno e calculando para cada elemento adjacente. São montadas as
matrizes principais a serem processadas e resolvidas. Abaixo a lista de variáveis
utilizada pelo módulo Mod_Mat_qp1 :
FQ = Vetor com as contribuições da carga distribuída
G = Matriz com as soluções fundamentais de deslocamentos
H = Matriz com as soluções fundamentais de forças de superfície
IH = Matriz com as soluções fundamentais de forças de superfície (células de
domínio)
IG = Matriz com as soluções fundamentais de deslocamentos (células de
domínio)
IR = Vetor com as contribuições da carga distribuída (células de domínio)
ISE = Se for 1, indica o comportamento singular
RC = Vetor auxiliar para conversão de coordenadas ns
RF = Vetor auxiliar para conversão de coordenadas ns
XF = Coordenada x do ponto fonte
YF = Coordenada y do ponto fonte
QSI = Posição do ponto fonte na variável intrínseca
AH = Matriz com os valores temporários de coeficientes de H
AG = Matriz com os valores temporários de coeficientes de G
IND_PF = Seleção entre solução com ponto fonte dentro ou fora do contorno
FM = Vetor que auxilia a contribuição dos valores Cij
DN = Vetor com os cossenos diretores
DX = Distância entre o ponto forte e o nó elemento em x
DY= Distância entre o ponto forte e o nó elemento em y
RA = Raio
DR= Vetor com as derivadas do raio
PNR = Derivada normal com relação ao raio
Z= Valor de Lambda vezes o raio
ALO = Logaritmo de Z
K0 = Função de Bessel K0 com o valor de Z

198
K1 = Função de Bessel K1 com o valor de Z
A = Coeficiente A definido na equação 5.40
B = Coeficiente B definido na equação 5.41
ETA = Variável utilizada na transformação de Telles
JETA = Variável utilizada na transformação de Telles
RRA = Raio Regularizado
FM = Funções de forma utilizadas
SGN = Operador para a função sinal
RFM = Funções de forma regularizadas
JAC = Jacobiano para integração
SING_QP1 = Subrotina para calcular integrais singulares
NUM_QP1 = Subrotina para calcular integrais regulares
10.6 MÓDULO – MOD_SOL_AUTOVALOR_QP1
Este módulo aplica as condições de contorno nas matrizes H e G, efetuando o
processamento necessário para se obter um sistema de equações linear que possa
ser resolvido, é então chamada a rotina do IMSL chamada DLFSRG para resolver
um sistema de equações pelo método da decomposição LU. Após a solução o
processo de solução do problema de autovalor se inicia, obtendo-se os valores para
os parâmetros críticos de flambagem. Abaixo a lista de variáveis utilizada pelo
módulo Mod_Sol_ Autovalor_qp1 :
CDP = Matriz com as contribuições das células devido a pontos fonte no
contorno
MD = Matriz temporária com as contribuições das células devido a pontos
fonte no contorno
DWI = Autovalor a ser resolvido
TPI = Vetor que multiplica CDP por DWI
TP = Vetor de carga
LK = Carga crítica
DS = Vetor que armazena os deslocamentos temporarios
FICI = Vetor que armazena as forças temporárias
DWA = Valor do autovalor na próxima iteração

199
CH = Vetor auxiliar para H
NORM = Norma do vetor a ser calculada
PMVS = Subrotina para multiplicação de matrizes
10.7 MAIN_QP1
O arquivo Main_qp1 carrega todos os módulos acima, chamando um de cada
vez na ordem apresentada. Após calculadas todas as soluções, as respostas são
escritas em um arquivo de output de texto.
10.8 PROGRAMA GERADOR DE MALHAS
Também foi desenvolvido um programa gerador de malhas para placas
quadradas, possibilitando a análise de convergência da formulação apresentada. As
malhas criadas são estruturadas em com grande precisão no posicionamento dos
nós. Se houver interesse neste programa o autor do presente trabalho poderá
disponibiliza-lo mediante contato.

200
11 CONCLUSÃO
11.1 CONCLUSÕES SOBRE O PROBLEMA DE FLEXÃO DE PLACAS
Utilizando o método dos elementos de contorno, o problema de flexão de
placas mostrou uma convergência mais rápida do que com relação ao problema de
instabilidade. Com apenas 20 elementos de contorno foi possível obter uma
diferença em média de 0,25% com relação a solução analítica, nos resultados para o
deslocamento no centro da placa.
11.2 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS NÃO PERFURADAS
Quando calculado pelo método dos elementos de contorno, o problema de
placas não perfuradas mostra uma boa convergência utilizando-se de poucos
elementos, com apenas 128 elementos de contorno e 256 células de domínio foi
possível obter uma diferença com o resultado analítico de em média 0,5%, nos
resultados para o parâmetro crítico de flambagem. Com esta quantidade de
elementos, o esforço computacional foi baixo, utilizando em média 15% do CPU em
um computador com processador Intel Core i3 2328M de 2.20GHz.
O esforço computacional se mostrou variável com relação às condições de
contorno, se as bordas estão engastadas ou simplesmente apoiadas o esforço
computacional foi menor do que com relação a utilização de bordas livres.
As placas com h/L = 0,001 mostraram um esforço computacional muito maior
do que com relação às outras espessuras revelando que o método de integração da
transformação de Telles se mostrou sensível à esta configuração, onde foi
necessário aumentar os pontos de Gauss para 22 para que a integração tivesse
bons resultados. Caso não se queira utilizar muitos pontos de Gauss, é possível
utilizar uma técnica de Sub-elemento para realizar a integração.
Com relação a obtenção dos parâmetros críticos de flambagem, os resultados
mostraram que quanto maior for a espessura da placa, menor será o parâmetro
crítico encontrado. Isto ficou válido para todos os testes do presente trabalho.
201
11.3 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS – MALHA 1 – CG DA CÉLULA PRÓXIMO AO CONTORNO
Foi obtido uma diferença em média de 0,5% quando comparados os
resultados para o parâmetro crítico de flambagem com EL-SAWY e NAZMY (2001),
mostrando que o método dos elementos de contorno proporciona boa precisão
quando comparado com o método dos elementos finitos. Com relação a DOVAL et
al. (2013) a diferença média foi de 4%, apesar deste trabalho utilizar o método dos
elementos de contorno, existem grandes diferenças na formulação como a utilização
da integração radial e a formulação somente de contorno. No presente trabalho
utiliza-se células de domínio e o processo de integração é singular.
Os problemas de placas perfuradas precisaram da utilização de um programa
de estado plano de tensão para que as respostas fossem obtidas com boa precisão.
Isto se deve à grande variação das tensões próximas ao local do furo. Os problemas
com furos pequenos (d/L = 0,1, 0,2, 0,3 e 0,4), mostraram que são mais simples de
resolver, pois é possível utilizar uma malha menos refinada e mesmo assim obter
bons resultados para o parâmetro crítico de flambagem.
Os problemas com furos grandes (d/L = 0,5, 0,6, 0,7) precisaram de uma
malha muito mais refinada para que os parâmetros críticos de flambagem tivessem
uma boa precisão. Nos problemas com furo grande, foi observado que os
parâmetros críticos sobem caso seja utilizada uma malha pouco refinada, este tipo
de observação pode ser vista nos trabalhos de SABIR e CHOW (1983), AZIZIAN e
ROBERTS (1983) e também no trabalho de JAYASHANKARBABU e
KARISIDDAPPA (2014), onde o parâmetro crítico de flambagem aumenta ao invés
de diminuir devido à uma placa de furo grande. Este problema também foi observado
por EL-SAWY e NAZMY (2001), os autores especificaram que foi necessária uma
malha de 1490 elementos finitos para modelar a a variação de tensões ao longo de
um furo quadrado e obter a diminuição do parâmetro crítico a medida que o furo
aumenta.
De maneira similar às placas não perfuradas, com relação a obtenção dos
parâmetros críticos de flambagem, quanto maior for a espessura da placa, menor
será o parâmetro crítico encontrado. Isto ficou válido para todos os testes do
presente trabalho.
202
11.4 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS – MALHA 2 – CG DA CÉLULA DISTANTE DO CONTORNO
Os resultados calculados com a malha 2 utilizando o cg da célula distante do
contorno (a cada 2 elementos de contorno utiliza-se 1 célula de domínio)
convergiram com ótima aproximação para os resultados de EL-SAWY e NAZMY
(2001). Este resultado é esperado para os parâmetros críticos de flambagem
calculados para as placas com h/L = 0,001 pois devido a espessura ser muito
pequena, o efeito da deformação por cortante fica muito pequeno e o resultado
passa a convergir para a teoria clássica. As placas com h/L = 0,01 convergiram para
resultados de parâmetros críticos de flambagem inferiores aos de EL-SAWY e
NAZMY (2001), isto também é esperado pois nesta espessura a placa já começa a
apresentar o efeito da deformação por cortante. Pode-se concluir que a malha 2 com
centro de gravidade da célula distante do contorno é mais eficiente do que a malha 1
com centro de gravidade próximo ao contorno, pois constatou-se uma série de
vantagens da malha 2 com relação a malha 1:
1) A possibilidade do cálculo do parâmetro crítico de flambagem para a placa
muito fina com h/L = 0,001 devido ao desaparecimento da singularidade pois o cg
está distante do contorno; 2) A diminuição do número de células de domínio para
cálculo das placas com furos considerados grandes (d/L = 0,5; 0,6 e 0,7) removendo
os problemas mostrados para a malha 1; 3) O aumento do número de elementos de
contorno fez com que a convergência fosse mais rápida e diminuiu a quantidade de
células de domínio para todos os casos.
11.5 CONCLUSÕES SOBRE O PROBLEMA DE INSTABILIDADE DE PLACAS PERFURADAS – MALHA 2 – TENSÃO MÉDIA
Os problemas calculados com a tensão média convergiram mais rapidamente
do que quando é utilizada apenas a tensão do cg da célula. Isto é explicado devido a
utilização mais eficiente do programa de estado plano aumentando o número de
pontos de tensão (4 na tensão média contra apenas 1 da tensão no cg). As mesmas
vantagens obtidas pela malha 2 também são vistas na malha 2 quando utilizada a
tensão média.

203
12 PROPOSTAS PARA TRABALHOS FUTUROS
O aprimoramento dos programas desenvolvidos, pois estes ainda estão com
uma programação voltada para o processamento com um processador, pode-se
realizar a mudança de algumas rotinas para o processamento em vários
processadores.
Outro aprimoramento que pode melhorar a performance é a utilização dos
processadores de placas de video (GPU), auxiliando o trabalho do CPU e diminuindo
o tempo de resolução de problemas.
A implementação de uma visualização gráfica para geração de malhas e input
de dados pode facilitar a utilização dos programas.
A solução de outros tipos de placas perfuradas, com outros tipos de furos e
outras condições de contorno.
Acoplamento do efeito do estado plano de tensões no modelo de flambagem
para estudar a instabilidade com o efeito dos deslocamentos finitos, de acordo com
TIMOSHENKO (1961).
Pode-se incluir as derivadas das rotações, além das derivadas da deflexão,
na análise do efeito da deformação por cortante no problema de instabilidade de
placas, de acordo com MIZUSAWA (1993).
Pode-se estudar alternativas para evitar a integração de células no domínio,
como o Método da Reciprocidade Dual ou o Método da Integração Radial, de acordo
com DOVAL et al. (2013), na modelagem numérica com o MEC.

204
REFERÊNCIAS
ABRAMOWITZ, M.; STEGUN, I. Handbook of mathematical functions. 1965. ALBUQUERQUE, E. L.; BAIZ, P. M.; ALIABADI, M. H. Stability analysis of composite plates by the boundary element method. International Conference on Boundary Element Techniques. 2008. p. 455-460. ALIABADI, M. H. The Boundary Element Method: Applications in Solids and Structures, v. 2 John Wiley & Sons Ltd. West Sussex, 2002. ALIABADI, M. H.; BAIZ, P. M.; ALBUQUERQUE, E. L. Stability analysis of plates. In: Recent Advances in Boundary Element Methods. Springer Netherlands, 2009. p. 1-14. ALIABADI, M. H.; SUPRIYONO, A. Analysis of shear deformable plates with combined geometric and material nonlinearities by boundary element method. International Journal of Solids and Structures, v. 44, n. 3, p. 1038-1059, 2007. ALTIERO, N. J.; SIKARSKIE, D. L. A boundary integral method applied to plates of arbitrary plan form. Computers & Structures, v. 9, n. 2, p. 163-168, 1978. ANDRADE, R. C. , Uma analise das soluções fundamentais aplicaveis as placas espessas pelas teorias de Reissner e Mindlin e suas relações com a teoria classica para uso no metodo dos elementos de contorno. Dissertação (Mestrado em Engenharia Civil) - Universidade Estadual de Campinas, 2001. AZIZIAN, Z. G.; ROBERTS, T. M. Instability and strength of perforated plates. In: ICE Proceedings, p. 761, 1983. BAIZ, P. M.; ALIABADI, M. H. Local buckling of thin-walled structures by the boundary element method. Engineering analysis with boundary elements, v. 33, n. 3, p. 302-313, 2009. BATDORF, S. B.; HOUBOLT, J. C. Critical Combinations of Shear and Transverse Direct Stress for an Infinitely Long Flat Plate with Edges Elastically Restrained Against Rotation. National Advisory Committee for Aeronautics, 1945. BATDORF, S. B.; STEIN, M. Critical combinations of shear and direct stress for simply supported rectangular flat plates. 1947. BECKER, A. A. The boundary element method in engineering: a complete course. London: McGraw-Hill, 1992. BERGMAN, S.; REISSNER, H. Uber die Knickung von rechteckigen Platten bei Schubbeanspruchung. Z. Flugtech Motorluftschiffahrt , v. 23, p. 6, 1932. BETTI, E. Teoria dell’elasticità. Il Nuovo Ciemento. p. 7-10, 1872.
205
BEZINE, G. Boundary integral formulation for plate flexure with arbitrary boundary conditions. Mechanics Research Communications, v. 5, n. 4, p. 197-206, 1978. BEZINE, G.; CIMETIERE, A.; GELBERT, J. P. Unilateral buckling of thin elastic plates by the boundary integral equation method. International journal for numerical methods in engineering, v. 21, n. 12, p. 2189-2199, 1985. BREBBIA, C. A. The boundary element method for engineers. London. Petench Press, 1978. BREBBIA, C. A.; DOMINGUEZ, J.; TASSOULAS, J. L. Boundary Elements: An Introductory Course. Journal of Applied Mechanics, v. 58, p. 860, 1991. BREBBIA, C. A.; TELLES, J. C. F.; WROBEL, L. C. Boundary element techniques—theory and applications in engineering. Springer. New York, 1984. BROCKENBROUGH, R.L.; JOHNSTON, B.G. Steel design manual. Pittsburgh: United States Steel Corporation, 1974. BROWN, C. J. Elastic buckling of perforated plates subjected to concentrated loads. Computers & Structures, v. 36, n. 6, p. 1103-1109, 1990. BROWN, C. J.; YETTRAM, A. L. Factors influencing the elastic stability of orthotropic plates containing a rectangular cut-out. The Journal of Strain Analysis for Engineering Design, v. 35, n. 6, p. 445-458, 2000. BROWN, C. J.; YETTRAM, A. L. The elastic stability of square perforated plates under combinations of bending, shear and direct load. Thin-Walled Structures, v. 4, n. 3, p. 239-246, 1986. BRYAN, G. H. On the stability of a plane plate under thrusts in its own plane, with applications to the ―buckling‖ of the sides of a ship. Proceedings of the London Mathematical Society, v. 1, n. 1, p. 54-67, 1890. BUI, T. Q.; NGUYEN, M. N.; ZHANG, C. Buckling analysis of Reissner–Mindlin plates subjected to in-plane edge loads using a shear-locking-free and meshfree method. Engineering Analysis with Boundary Elements, v. 35, n. 9, p. 1038-1053, 2011. CHANG-JUN, C.; RONG, W. Boundary integral equations and the boundary element method for buckling analysis of perforated plates. Engineering analysis with boundary elements, v. 17, n. 1, p. 57-68, 1996. CHEN, G.; ZHOU, J. Boundary element methods with applications to nonlinear problems. Springer Science & Business Media, 2010. CHENG, B.; LI, C. Buckling behavior of strengthened perforated plates under shear loading. Steel & Composite Structures, v. 13, n. 4, p. 367-382, 2012.

206
CHINNABOON, B.; CHUCHEEPSAKUL, S.; KATSIKADELIS, J. T. A BEM-based meshless method for elastic buckling analysis of plates. International Journal of Structural Stability and Dynamics, v. 7, n. 1, p. 81-99, 2007. CHOW, F.; NARAYANAN, R. Buckling of plates containing openings. In: Seventh international specialty conference on cold-formed steel structures. Missouri S&T (formerly the University of Missouri-Rolla), 1984. CHWALLA, E. Beitrag zur Stabilitãtstheorie des Stegbleches vollwandiger Trager. Stahlbau, v. 9, p. 81, 1936 COOK, I. T.; ROCKEY, K. C. Shear buckling of orthogonally stiffened, infinitely long simply-supported plates- Stiffeners having torsional and flexural rigidities(Shear buckling of simply supported infinitely long plates orthogonally reinforced by stiffeners with flexural and torsional rigidity). AERONAUTICAL QUARTERLY, v. 20, p. 75-87, 1969. COOK, I. T.; ROCKY, K. C. Shear buckling of rectangular plates with mixed boundary conditions. Aeronaut. Q, v. 14, n. 4, p. 349-355, 1963. COSTA, J. A.; BREBBIA, C. A. Elastic buckling of plates using the boundary element method. Boundary elements VII, p. 4-29, 1985. CRESCE, S. H. Análise não-linear de pavimentos de concreto armado pelo método dos elementos de contorno. 2003. Tese (Doutorado). Universidade de São Paulo. CRUSE, T. A. Numerical solutions in three dimensional elastostatics. International journal of solids and structures, v. 5, n. 12, p. 1259-1274, 1969. DANSON, D. J. Analysis of plate bending problems by direct boundary element method. MSc Dissert.(4th edition) Univ. of Southampton, 1979. DAWE, D. J.; ROUFAEIL, O. L. Buckling of rectangular Mindlin plates. Computers & Structures, v. 15, n. 4, p. 461-471, 1982. DIAZ-CONTRERAS, R. E.; NOMURA, S. Green's function applied to solution of Mindlin plates. Computers & structures, v. 60, n. 1, p. 41-48, 1996. DOVAL P. C. M.; ALBUQUERQUE E. L.; SOLLERO P. A boundary element formulation with boundary only discretization for the stability analysis of perforated thin plates. Advances in Boundary Element & Meshless Techniques XIV. 2013. DOVAL, P. C. M. Análise de estabilidade de placas de materiais compósitos laminados usando o método dos elementos de contorno. Dissertação (Mestrado em Engenharia Civil) - Universidade Estadual de Campinas, 2013 DOVAL, P. C. M.; ALBUQUERQUE, E. L.; SOLLERO, P. Análise de estabilidade de estruturas usando o método dos elementos de contorno. Nono Simpósio de Mecânica Computacional, SIMMEC, 2010

207
DOVAL, P. C. M.; ALBUQUERQUE, E. L.; SOLLERO, P. Numerical aspects of the radial integration method in boundary element formulation for stability analysis of thin perforated plates of laminated composites. Blucher Mechanical Engineering Proceedings, v. 1, n. 1, p. 3879-3887, 2012. DOVAL, P. C. M.; ALBUQUERQUE, E. L.; SOLLERO, P. Stability analysis of composite laminate plates under non-uniform stress fields by the boundary element method. EC ltd, p. 156, 2011. DU, Q.; YAO, Z.; SONG, G. Solution of some plate bending problems using the boundary element method. Applied mathematical modelling, v. 8, n. 1, p. 15-22, 1984. DUARTE, J. , Análise de Instabilidade em Placas Finas pelo Método dos Elementos Finitos de Contorno. 1999. Dissertação (Mestrado em Engenharia Civil) - Universidade Estadual de Campinas EL-SAWY, K. M.; MARTINI, M. I. Elastic stability of bi-axially loaded rectangular plates with a single circular hole. Thin-Walled Structures, v. 45, n. 1, p. 122-133, 2007. EL-SAWY, K. M.; NAZMY, A. S. Effect of aspect ratio on the elastic buckling of uniaxially loaded plates with eccentric holes. Thin-Walled Structures, v. 39, n. 12, p. 983-998, 2001. EL-ZAFRANY, A.; FADHIL, S.; DEBBIH, M. An efficient approach for boundary element bending analysis of thin and thick plates. Computers & structures, v. 56, n. 4, p. 565-576, 1995. ELZEIN, A.; SYNGELLAKIS, S. Dual reciprocity in boundary element formulations of the plate buckling problem. Engineering analysis with boundary elements, v. 9, n. 2, p. 175-184, 1992. FENNER, R., Boundary Element Methods for Engineers: Part I. Imperial College London, 2014 FENNER, R., Boundary Element Methods for Engineers: Part II. Imperial College London, 2014 FERNANDES, G. R. O método dos elementos de contorno aplicado à análise não-linear de placas. Dissertação (Mestrado em Engenharia Civil). Universidade de São Paulo, 1998. FOLTRAN, C. E. Análise de problemas planos em regime elasto-plástico pelo método dos elementos de contorno. 1999. Tese (Doutorado). Universidade Estadual de Campinas-Faculdade de Engenharia Civil. FREDHOLM, I. Sur une classe d’équations fonctionnelles. Acta mathematica, v. 27, n. 1, p. 365-390, 1903.

208
FUJITA, Y.; YOSHIDA, K.; ARAI, H. Instability of plates with holes (2nd report). J. Soc. Naval Arch. Japan, v. 126, p. 285-294, 1969. GERARD, G.; BECKER, H. Handbook of Structural Stability. Part I. Buckling of Flat Plates. New York Univ., New York, 1957. GHANNADPOUR, S. A. M.; OVESY, H. R.; ZIA-DEHKORDI, E. Buckling and post-buckling behavior of moderately thick plates using an exact finite strip. Computers & Structures, v. 147, p. 172-180, 2015. GOSPODINOV, G.; LJUTSKANOV, D. The boundary element method applied to plates. Applied Mathematical Modelling, v. 6, n. 4, p. 237-244, 1982. GROSSKURTH, J. F.; GALLAGHER, R. H.; WHITE, R. N. Shear buckling of square perforated plates. Journal of the Engineering Mechanics Division, v. 102, n. 6, p. 1025-1040, 1976. GUO-SHU, S.; MUKHERJEE, S. Boundary element method analysis of bending of elastic plates of arbitrary shape with general boundary conditions. Engineering analysis, v. 3, n. 1, p. 36-44, 1986. HÄGGBLAD, B.; BATHE, K. J. Specifications of boundary conditions for Reissner/Mindlin plate bending finite elements. International Journal for Numerical Methods in Engineering, v. 30, n. 5, p. 981-1011, 1990. HANSEN, E. B. Numerical solution of integro-differential and singular integral equations for plate bending problems. Journal of elasticity, v. 6, n. 1, p. 39-56, 1976. HARTMANN, F. Introduction to boundary elements: theory and applications. Berlin: Springer-Verlag, 1989. HEUER, D. R. A boundary element method for eigenvalue problems of polygonal membranes and plates. Acta mechanica, v. 66, n. 1-4, p. 9-20, 1987. HINTON, E. Buckling of initially stressed Mindlin plates using a finite strip method. Computers & Structures, v. 8, n. 1, p. 99-105, 1978. HÖRMANDER, L. Linear partial differential operators. Springer, 1963. HOSSEINI-HASHEMI, S.; KHORSHIDI, K.; AMABILI, M. Exact solution for linear buckling of rectangular Mindlin plates. Journal of Sound and Vibration, v. 315, n. 1, p. 318-342, 2008. HWANG, I.; LEE, J. S. Buckling of orthotropic plates under various inplane loads. KSCE Journal of Civil Engineering, v. 10, n. 5, p. 349-356, 2006. IGUCHI, S. Die knickung der rechteckigen platte durch Schubkräfte. Archive of Applied Mechanics, v. 9, n. 1, p. 1-12, 1938.

209
IRSCHIK, H.; HEUER, R.; ZIEGLER, F. BEM using Green's functions of rectangular domains: static and dynamic problems of bending of plates. In: Boundary elements IX. Springer-Verlag Berlin, 1987. p. 35-45. IYENGAR, S. R.; KARASIMHAN, K. Y. Buckling of rectangular plates with clamped and simply-supported edges. Publications de l'Institut Mathématique [Elektronische Ressource], v. 19, p. 31-40, 1965. JALALI, S. K.; NAEI, M. H. Elastic Buckling of Moderately Thick Homogeneous Circular Plates of Variable Thickness. Journal of Solid Mechanics, v. 2, n. 1, p. 19-27, 2010. JASWON, M. A.; MAITI, M.; SYMM, G. T. Numerical biharmonic analysis and some applications. International Journal of Solids and Structures, v. 3, n. 3, p. 309-332, 1967. JAYASHANKARBABU, B.; KARISIDDAPPA, K. Stability of Square Plate with Concentric Cutout. International Journal of Emerging Technology and Advanced Engineering, v. 3, n. 8, p. 259 - 267, 2013. JOHNS, D. J.; KIRKPATRICK, D. L. I. Shear buckling of isotropic and orthotropic plates: a review. HM Stationery Office, 1971. KANE, J. H. Boundary element analysis in engineering continuum mechanics. Englewood Cliffs, NJ: Prentice Hall, 1994. KANG, J.; LEISSA, A. W. Exact solutions for the buckling of rectangular plates having linearly varying in-plane loading on two opposite simply supported edges. International Journal of Solids and Structures, v. 42, n. 14, p. 4220-4238, 2005. KARAM, V. J. Aplicação do Método dos Elementos de Contorno à Teoria de Reissner para flexão de placas. Rio de Janeiro. Dissertação (Mestrado) – Universidade Federal do Rio de Janeiro, COPPE, 1986 KARAM, V. J.; TELLES, J. C. F. On boundary elements for Reissner's plate theory. Engineering Analysis, v. 5, n. 1, p. 21-27, 1988. KATAYAMA, T.; SEKIYA, T.; TAI, H. Bending analysis of perforated plates with unsupported or clamped edges by BEM. In: V Intern. Conf. on Boundary Element Methods. Springer-Verlag, 1983. p. 517-526. KATSIKADELIS, J. T. Boundary Elements: Theory and Applications. Elsevier, 2002. KATSIKADELIS, J. T. The boundary element method for plate analysis. Elsevier, 2014. KATSIKADELIS, J. T.; BABOUSKOS, N. The post-buckling analysis of plates. A BEM based meshless variational solution. Facta Universitatis, Series Mechanics, Automatic Control and Robotics, v. 6, p. 113-118, 2007.

210
KATSIKADELIS, J. T.; YOTIS, A. J. A new boundary element solution of thick plates modelled by Reissner's theory. Engineering analysis with boundary elements, v. 12, n. 1, p. 65-74, 1993. KAWAI, T.; OHTSUBO, H. A method of solution for the complicated buckling problems of elastic plates with combined use of Rayleigh-Ritz’s procedure in the finite element method. Proceedings of the 2nd Air Force Conference on Matrix Methods in Structural Mechanics, p. 967-994, 1968. KELVIN, L. (THOMPSON W.). Note on the integration of the equations of equilibrium of an elastic solid. Cambridge and Dublin Mathematical Journal, v. 3, p. 87-89, 1848. KOMUR, M. A. et al. Buckling analysis of laminated composite plates with an elliptical/circular cutout using FEM. Advances in Engineering Software, v. 41, n. 2, p. 161-164, 2010. KOMUR, M. A.; SONMEZ, M. Elastic buckling behavior of rectangular plates with holes subjected to partial edge loading. Journal of Constructional Steel Research, v. 112, p. 54-60, 2015. KOMUR, M. A.; SONMEZ, M. Elastic buckling of rectangular plates under linearly varying in-plane normal load with a circular cutout. Mechanics Research Communications, v. 35, n. 6, p. 361-371, 2008. KUMAI, T. The flexural vibrations of a square plate with a central circular hole. Proceedings of the Second Japanese National Congress on Applied Mechanics. 1952. p. 339-342. KUPRADZE, V. D. Potential methods in the theory of elasticity. Israel program for scientific translations, 1965. KZAM, A. K. L. Formulação dual em mecânica da fratura utilizando elementos de contorno curvos de ordem qualquer. 2009. Tese (Doutorado). Universidade de São Paulo. KZAM, A. K. L.; CODA, H. B. Tratamento das integrais singulares do método dos elementos de contorno. Cadernos de Engenharia de Estruturas, v. 12, n. 54, p. 17-30, 2010. LAWRENCE C. B., JIANSHENG Y. Buckling of orthotropic plates with free and rotationally restrained unloaded edges. Thin-Walled Structures Volume 24, Issue 1, 1996, Pages 83–96 LEE, K. H.; LIM, G. T.; WANG, C. M. Thick Lévy plates re-visited. International Journal of Solids and Structures, v. 39, n. 1, p. 127-144, 2002. LEGGETT, D. The buckling of a square panel under shear when one pair of opposite edges is clamped, and the other pair is simply supported. HM Stationery Office, 1941.

211
LEVY, S.; WOOLLEY, R. M.; KROLL, W. D. Instability of simply supported square plate with reinforced circular hole in edge compression. Journal of Research, p. 571-577, 1947. LIBOVE, C.; FERDMAN, S.; REUSCH, J. J. Elastic buckling of a simply supported plate under a compressive stress that varies linearly in the direction of loading. National Advisory Committee for Aeronautics. Langley Aeronautical Lab, 1949. LIEW K.M.; XIANG Y.; KITIPORNCHAI S., Analytical buckling solutions for mindlin plates involving free edges, International Journal of Mechanical Sciences, v. 38, n. 10, p. 1127-1138, 1996. LIN, J.; DUFFIELD, R. C.; SHIH, H. Buckling analysis of elastic plates by boundary element method. Engineering analysis with boundary elements, v. 23, n. 2, p. 131-137, 1999. LIU, Y. Elastic stability analysis of thin plate by the boundary element method—a new formulation. Engineering analysis, v. 4, n. 3, p. 160-164, 1987. MAIORANA, E.; PELLEGRINO, C.; MODENA, C. Elastic stability of plates with circular and rectangular holes subjected to axial compression and bending moment. Thin-Walled Structures, v. 47, n. 3, p. 241-255, 2009. MAIORANA, E.; PELLEGRINO, C.; MODENA, C. Linear buckling analysis of perforated plates subjected to localised symmetrical load. Engineering Structures, v. 30, n. 11, p. 3151-3158, 2008. MAITI, M.; CHAKRABARTY, S. K. Integral equation solutions for simply supported polygonal plates. International Journal of Engineering Science, v. 12, n. 10, p. 793-806, 1974. MANOLIS, G. D.; BESKO, D. E.; PINEROS, M. F. Beam and plate stability by boundary elements. Computers & structures, v. 22, n. 6, p. 917-923, 1986. MARCZAK, R. J. Análise de estabilidade linear elástica de placas finas e semi-espessas através do método dos elementos de contorno. Revista internacional de métodos numéricos para cálculo y diseño en ingeniería, v. 11, n. 4, p. 625-636, 1995. MAY, I. M.; GANABA, T. H. Elastic stability of plates with and without openings. Engineering computations, v. 5, n. 1, p. 50-52, 1988. MCKENZIE, K. I. The buckling of a rectangular plate under combined biaxial compression, bending and shear(Buckling stresses investigated for simply supported rectangular plate subjected to combined biaxial compression, bending and shear). Aeronautical Quarterly, v. 15, p. 239-246, 1964. MICHAEL, M. E. Critical Shear Stress for Webs with Holes. J. R. Aeronaut. Soc., v. 64, p. 268, 1960.

212
MIKHLINI, S. G. Integral equations. Pergamon Press, New York, 1957. MIZUSAWA, T. Buckling of rectangular Mindlin plates with tapered thickness by the spline strip method, International Journal of Solids and Structures, v. 30, p. 1663–1677, 1993. MOEN, C. D.; SCHAFER, B. W. Elastic buckling of thin plates with holes in compression or bending. Thin-Walled Structures, v. 47, n. 12, p. 1597-1607, 2009. MOEN, C. D.; SCHAFER, B. W. Impact of holes on the elastic buckling of cold-formed steel columns. Eighteenth international specialty conference on cold-formed steel structures. Missouri S&T, 2006. MOEN, C. D.; SCHAFER, B. W. Simplified methods for predicting elastic buckling of cold-formed steel structural members with holes. In: Proceedings of the 19th International Specialty Conference on Cold-Formed Steel Structures. Missouri University of Science and Technology, Rolla, MO, 2008. MUSKHELISHVILI, N. I. Singular Integral Equations: Boundary Problems of Functions Theory and Their Application to Mathematical Physics. P. Noordhoff, 1953. MUSKHELISHVILI, N. I. Some basic problems of the mathematical theory of elasticity. Springer Science & Business Media, 1977. NARAYANAN, R.; CHOW, F. Strength of biaxially compressed perforated plates. In: Seventh international specialty conference on cold-formed steel structures. Missouri S&T, 1984. NARAYANAN, R.; DER AVANESSIAN, N. G. V. Elastic buckling of perforated plates under shear. Thin-Walled Structures, v. 2, n. 1, p. 51-73, 1984. NEJAD A.; SHANMUGAM N.E. Elastic buckling of uniaxially loaded skew plates containing openings. Thin-Walled Structures, v. 49, n. 10, p. 1208-1216, 2011. NERANTZAKI, M. S.; KATSIKADELIS, J. T. Buckling of plates with variable thickness—an analog equation solution. Engineering Analysis with Boundary Elements, v. 18, n. 2, p. 149-154, 1996. NERANTZAKI, M. S.; KATSIKADELIS, J. T. The BEM for large deflection analysis of plates with variable thickness. Advances in Boundary Element Techniques IV, p. 353-358, 2003. NIWA, Y.; KOBAYACHI, S.; FUKUI, T. An application of the integral equation method of plate bending. Faculty of Engineering, Tokio, v. 36, p. l40-158, 1974. OCHIAI, Y.; SHIMIZU, T. Deformation analysis of thin plate with distributed load by triple-reciprocity boundary element method. Engineering Analysis with Boundary Elements, v. 36, n. 5, p. 772-778, 2012.
213
PAIK, J. K. Ultimate strength of perforated steel plates under combined biaxial compression and edge shear loads. Thin-Walled Structures, v. 46, n. 2, p. 207-213, 2008. PALERMO JR., L. A análise de placas e o Método dos Elementos de contorno. Livre docência. Universidade Estadual de Campinas, 2000. PALERMO JR., L. Esforços de Flexão e Flexo-Torção em Teoria de Segunda Ordem - Automatização de Cálculo. Dissertação (Mestrado em Engenharia Civil). Universidade de São Paulo – Escola de engenharia de São Carlos, 1985. PALERMO JR., L. On the harmonic solution for plate bending considering effects of the shear deformation and the forces in the middle plane. Boundary Elements and Other Mesh Reduction Methods XXXVII, p. 241-251, 2014. PALERMO JR., L. Plate bending analysis using the classical or the Reissner–Mindlin models. Engineering analysis with boundary elements, v. 27, n. 6, p. 603-609, 2003. PALERMO JR., L.; SOARES JR., R. A. On the boundary element formulation to compute critical loads considering the effect of shear deformation in the plate bending. Boundary Elements and Other Mesh Reduction Methods XXXVIII, v. 38, 2015. PARIS, F.; LEON, S. Boundary element method applied to the analysis of thin plates. Computers & structures, v. 25, n. 2, p. 225-233, 1987. PAVLOVIC, M. N.; BAKER, G. The effect of non-uniform stress distribution on the stability of biaxially compressed plates. Res mechanica, v. 28, n. 1-4, p. 69-89, 1989. PEKÖZ, T. Development of a Unified Approach to the Design of Cold-formed Steel Members. Research Report CF 87-1, American Iron and Steel Institute, 1987 POZRIKIDIS, C. A practical guide to boundary element methods with the software library BEMLIB. CRC Press, 2002. PURBOLAKSONO, J. Buckling and Post-Buckling Analysis of Cracked Plates by The Boundary Element Method. Tese (Doutorado). University of London, 2003. PURBOLAKSONO, J.; ALIABADI, M. H. Buckling analysis of shear deformable plates by boundary element method. International journal for numerical methods in engineering, v. 62, n. 4, p. 537-563, 2005. PURBOLAKSONO, J.; ALIABADI, M. H. Large deformation of shear-deformable plates by the boundary-element method. Journal of engineering mathematics, v. 51, n. 3, p. 211-230, 2005.

214
RASHED, Y. F. A relative quantity integral equation formulation for evaluation of boundary stress resultants in shear deformable plate bending problems. Engineering analysis with boundary elements, v. 32, n. 2, p. 152-161, 2008. RASHED, Y. F. Boundary element formulations for thick plates. Computational Mechanics Publications, 2000. RASHED, Y. F.; ALIABADI, M. H.; BREBBIA, C. A. Hypersingular boundary element formulation for Reissner plates. International journal of solids and structures, v. 35, n. 18, p. 2229-2249, 1998. RASHED, Y. F.; ALIABADI, M. H.; BREBBIA, C. A. On the evaluation of the stresses in the BEM for Reissner plate-bending problems. Applied Mathematical Modelling, v. 21, n. 3, p. 155-163, 1997. REDDY J. Energy Principles and Variational Methods in Applied Mechanics. 2nd ed. John Wiley & Sons, NY, 2002. REISSNER, E. On the theory of transverse bending of elastic plates. International Journal of Solids and Structures, v. 12, n. 8, p. 545-554, 1976. REISSNER, E. On transverse bending of plates, including the effect of transverse shear deformation. International Journal of Solids and Structures, v. 11, n. 5, p. 569-573, 1975. REISSNER, E. The effect of transverse shear deformation on the bending of elastic plates. Journal of applied Mechanics, v. 12, p. 69-77, 1945. RIBEIRO, G. O. Sobre a formulação do método dos elementos de contorno de placas usando as hipóteses de Reissner. Tese (Doutorado). Escola de Engenharia de São Carlos. Universidade de São Paulo, 1992. SABIR, A. B.; CHOW, F. Y. Elastic buckling of flat panels containing circular and square holes. Granada Publishing Ltd,, p. 311-321, 1983. SABIR, A. B.; CHOW, F. Y. Elastic buckling of plates containing eccentrically located circular holes. Thin-walled structures, v. 4, n. 2, p. 135-149, 1986. SAKANAKA, S. H., Determinação de frequencias naturais e cargas criticas em placas incluindo o efeito da deformação por cortante com o metodo dos elementos de contorno. Dissertação (Mestrado em Engenharia Civil). Universidade Estadual de Campinas, 2006. SAKIYAMA, T.; MATSUDA, H. Elastic buckling of rectangular Mindlin plate with mixed boundary conditions. Computers & Structures, v. 25, n.5, p. 801-808, 1987 SALERNO, V. L.; GOLDBERG, M. A. Effect of shear deformations on the bending of rectangular plates. Journal of applied Mechanics, v. 27, n. 1, p. 54-58, 1960.

215
SANCHES, L. C. F. The Direct Boundary Element Method Applied to Modeling Differential and Integral Elastic Thin and Thick Plates Equations. Synergismus scyentifica UTFPR, v. 4, n. 2, 2009. SCHLACK JR., Alois L. Elastic stability of pierced square plates. Experimental Mechanics, v. 4, n. 6, p. 167-172, 1964. SEYDEL, E. Über das Ausbeulen von rechteckigen, isotropen oder orthogonalanisotropen Platten bei Schubbeanspruchung. Ingenieur-Archiv, v. 4, n. 2, p. 169-191, 1933. SHAKERLEY, T. M.; BROWN, C. J. Elastic buckling of plates with eccentrically positioned rectangular perforations. International journal of mechanical sciences, v. 38, n. 8, p. 825-838, 1996. SHANMUGAM, N. E. et al. Elastic buckling of uniaxially loaded skew plates containing openings. Thin-Walled Structures, v. 49, n. 10, p. 1208-1216, 2011. SHANMUGAM, N. E.; THEVENDRAN, V.; TAN, Y. H. Design formula for axially compressed perforated plates. Thin-Walled Structures, v. 34, n. 1, p. 1-20, 1999. SHI, G. Flexural vibration and buckling analysis of orthotropic plates by the boundary element method. International Journal of Solids and Structures, v. 26, n. 12, p. 1351-1370, 1990. SHUFRIN, I.; EISENBERGER, M. Shear buckling of thin plates with constant in-plane stresses. International Journal of Structural Stability and Dynamics, v. 7, n. 2, p. 179-192, 2007. SHUFRIN, I.; EISENBERGER, M. Stability and vibration of shear deformable plates––first order and higher order analyses. International journal of solids and structures, v. 42, n. 3, p. 1225-1251, 2005. SIMÕES, R. Um estudo de placas sob cargas dinamicas estacionarias e com o efeito da não linearidade geometrica sob cargas estaticas usando o metodo dos elementos de contorno. Dissertação (Mestrado em Engenharia Civil). Universidade Estadual de Campinas, 2001. SMIRNOV, V. I. A Course of Higher Mathematics: Integral equations and partial differential equations. Pergamon, 1964. SOUTHWELL, R. V.; SKAN, S. W. On the stability under shearing forces of a flat elastic strip. Proceedings of the Royal Society of London. Series A, Containing Papers of a Mathematical and Physical Character, p. 582-607, 1924. STEIN, O. Stabilitat ebener rechteckbleche unter biegung and schub, Bauingenieur, v. 17, p. 308, 1936.

216
STERN, M. A general boundary integral formulation for the numerical solution of plate bending problems. International journal of solids and structures, v. 15, n. 10, p. 769-782, 1979. SYNGELLAKIS, S.; ELZEIN, A. Plate buckling loads by the boundary element method. International journal for numerical methods in engineering, v. 37, n. 10, p. 1763-1778, 1994. SYNGELLAKIS, S.; ELZEIN, A.; WALKER, A. C. Comparison between experimental and boundary element predictions of plate buckling behaviour. Engineering Analysis with Boundary Elements, v. 8, n. 2, p. 103-108, 1991. SYNGELLAKIS, S.; KANG, M. A Boundary Element Solution of the Plate Buckling Problem. Engineering Analysis, v.4, n.2, p. 75-81, 1987. SZILARD, R. Theories and applications of plate analysis: classical numerical and engineering methods. John Wiley & Sons, 2004. TANAKA, M.; MIYAZAKI, K. A boundary element method for elastic buckling analysis of assembled plate structures. Computational mechanics, v. 3, n. 1, p. 49-57, 1988. THAM, L.; SZETO, H. Buckling analysis of arbitrarily shaped plates by spline finite strip method, Computers & structures, v. 36, n. 4, p. 729-735, 1990. TIMOSHENKO, S. Einige Stabilitatsprobleme der Elastizitatstheorie. Zeitschrift furMathematik undPhysik, v. 58, p. 337–385, 1910. TIMOSHENKO, S. Stability of Plate Girders Subjected to Bending, Preliminary Publication. Internat. Ass. for Bridge and Structural Eng., Paris, p. 129, 1932. TIMOSHENKO, S.; GERE. J. Theory of elastic stability. McGraw-Hill New York 1961, v. 294, 1961. TIMOSHENKO, S.; WOINOWSKY-KRIEGER, S. Theory of plates and shells. New York: McGraw-hill, 1959. TOTTENHAM, H. The boundary element method for plates and shells. Developments in boundary element methods- 1.(A 80-14763 03-39) London, Applied Science Publishers, Ltd., 1979,, p. 173-205, 1979. VANN, W. P. Compressive buckling of perforated plate elements. Proceedings of the 1st Specialty Conference on Cold-Formed Steel Structures. University of Missouri-Rolla, 1971. VENTSEL, E.; KRAUTHAMMER, T. Thin plates and shells: theory: analysis, and applications. CRC press, 2001. VENTURINI, W. S.; PAIVA, J. B. Boundary element for plate bending analysis. Engineering analysis with boundary elements, v. 11, n. 1, p. 1-8, 1993.

217
VON KARMAN, T. Festigkeitsprobleme im maschinenbau, 1910. WANG, C. M. et al. Relationships between bending solutions of Reissner and Mindlin plate theories. Engineering structures, v. 23, n. 7, p. 838-849, 2001. WAY, S. Stability of rectangular plates under shear and bending forces. Journal of Applied Mechanics, v. 3, n. 4, 1936. WEEËN, F. V. Application of the boundary integral equation method to Reissner's plate model. International Journal for Numerical Methods in Engineering, v. 18, n. 1, p. 1-10, 1982. WEN, P. H.; ALIABADI, M. H.; YOUNG, A. Large deflection analysis of Reissner plate by boundary element method. Computers & structures, v. 83, n. 10, p. 870-879, 2005. WEN, P. H.; ALIABADI, M. H.; YOUNG, A. Post buckling analysis of Reissner plates by the boundary element method. The Journal of Strain Analysis for Engineering Design, v. 41, n. 3, p. 239-252, 2006. WU, B. C.; ALTIERO, N. J. A boundary integral method applied to plates of arbitrary plan form and arbitrary boundary conditions. Computers & Structures, v. 10, n. 4, p. 703-707, 1979.
XIANG, Y. et al. Mindlin Plate Buckling with Prebuckling In‐Plane Deformation. Journal of Engineering Mechanics, v. 119, n. 1, p. 1-18, 1993. XIANG, Y.; WEI, G. W. Exact solutions for buckling and vibration of stepped rectangular Mindlin plates. International journal of solids and structures, v. 41, n. 1, p. 279-294, 2004. YANG, H. T. A finite element formulation for stability analysis of doubly curved thin shell structures, Tese (Ph.D), Cornell University, 1969 YANG, Z. et al. Free vibration and buckling analysis of plates using B-spline wavelet on the interval Mindlin element. Applied Mathematical Modelling, v. 37, n. 5, p. 3449-3466, 2013. YETTRAM, A. L.; BROWN, C. J. The elastic stability of square perforated plates. Computers & structures, v. 21, n. 6, p. 1267-1272, 1985. YETTRAM, A. L.; BROWN, C. J. The elastic stability of square perforated plates under bi-axial loading. Computers & structures, v. 22, n. 4, p. 589-594, 1986. YIOTIS, A. J.; KATSIKADELIS, J. T. The meshless analog equation method for the solution of plate problems. Proceedings of the 6th GRACM International Congress on Computational Mechanics, Thessaloniki, Greece. 2008.

218
YOSHIZUKA, J.; NARUOKA, M. Buckling coefficient of simply supported rectangular plates under combined bending and compressive stresses in two perpendicular directions. Stahlbau, v. 40, n. 7, p. 217-221, 1971.