universidade estadual de campinas …lotavio/tgs/2015_projeto_e... · autor: gabriel barros zanoni...
TRANSCRIPT
i
Campinas, Novembro de 2015.
UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICA
Relatório Final
Trabalho de Conclusão de Curso
Projeto e Caracterização de Bancada para Demonstração
de Sistema Inductrack
Autor: Gabriel Barros Zanoni Lopes Moreno
Orientador: Prof. Dr. Luiz Otávio Saraiva Ferreira
ii
Campinas, Novembro de 2015.
UNIVERSIDADE ESTADUAL DE CAMPINAS
FACULDADE DE ENGENHARIA MECÂNICA
Relatório Final II
Trabalho de Conclusão de Curso
Projeto e Caracterização de Bancada para Demonstração
de Sistema Inductrack
Autor: Gabriel Barros Zanoni Lopes Moreno
Orientador: Prof. Dr. Luiz Otávio Saraiva Ferreira
Curso: Engenharia de Controle e Automação
Trabalho de Conclusão de Curso, apresentado à Comissão de Graduação da
Faculdade de Engenharia Mecânica, como requisito para a obtenção de título de
Engenheiro de Controle e Automação.
iii
Campinas, Novembro de 2015.
Agradecimentos
Este trabalho não poderia ser terminado sem a ajuda de diversas pessoas às quais presto
minha homenagem:
Minha família e amigos, que me apoiaram durante todos os momentos difíceis e estiveram
sempre ao meu lado nas dores e alegrias.
Prof. Dr. Luiz Otávio Saraiva Ferreira, meu orientador e coordenador do grupo de pesquisa
na qual se baseia este projeto, pela paciência e solicitude durante o período de desenvolvimento
deste trabalho.
Prof. Dr. Pablo Siqueira Meirelles, meu co-orientador, pela paciência e conselhos durante a
fase de fabricação das pistas do sistema de levitação, bem como pelo contato com o Laboratório
de Ensaios Dinâmicos (LabEDin) para a primeira discussão sobre a fabricação das peças.
Marcílio Messias da Silveira, técnico do Laboratório de Mecatrônica, pelo comprometimento
com o sucesso dos experimentos desenvolvidos neste trabalho, prestando suporte a estes.
Bruno Baroni, técnico da Oficina do LNLS (Laboratório Nacional de Luz Síncrotron), por ter
aceitado a colaboração com a Unicamp para a fabricação das peças na máquina de corte a Laser
do CNPEM.
Prof. Dr. Niederauer Mastelari, coordenador do curso de Engenharia de Controle e
Automação.
Daniel Silva Kantor, meu colega de turma e grande amigo, pelo companheirismo e
perseverança no desenvolvimento do sistema de aquisição e na realização dos experimentos
envolvidos neste trabalho.
iv
Campinas, Novembro de 2015.
Índice
Resumo 0
Capítulo 1 Introdução 1
Capítulo 2 Revisão Bibliográfica 2
2.1. O Arranjo de Halbach 2
2.2. A Tecnologia Inductrack 3
2.2.1. Histórico 3
2.2.2. Tipos de Pista Indutiva 4
2.2.3. Interações entre a Pista e o Arranjo Magnético 5
2.2.4. Parâmetros de Projeto da Pista Inductrack 7
Capítulo 3 Projeto da Pista 9
3.1. Projeto em Simulador MATLAB 9
3.2. Projeto Mecânico 10
3.3. Projetos Alternativos 10
3.4 Fabricação das Pistas 13
3.5 Software de Simulação Magnetostática 3D 13
Capítulo 4 Testes de Validação em Bancada 19
4.1. Setup Experimental 19
4.2. Refino do Controlador de Velocidade do Motor 19
4.3 Resultados Experimentais 20
Capítulo 5 Sugestões para desenvolvimento Futuro 21
Capítulo 6 Conclusões 21
Referências Bibliográficas 22
Anexos 23
v
Campinas, Novembro de 2015.
Resumo
MORENO, Gabriel B. Z. L., Projeto e Caracterização de Bancada para Demonstração de Sistema
Inductrack. Universidade Estadual de Campinas, Trabalho de Conclusão de Curso, (2015), 38 pp.
A tecnologia Inductrack, usada na maioria dos trens modernos de alta velocidade,
conhecidos como Maglevs, faz uso da Levitação magnética dinâmica. Ela foi demonstrada por
Richard Post através da interação da pista de indutores com arranjos de Halbach magnéticos,
inicialmente idealizado para aplicações em aceleradores de partículas. Para o bom funcionamento
do sistema, o campo magnético gerado pelos imas móveis deve ser maximizado, o que justifica o
uso do arranjo de Halbach por este promover um campo senoidal em uma das faces do arranjo, ao
mesmo tempo que minimiza o campo gerado na face oposta. As trilhas indutivas devem permitir
passagem orientada de corrente, de forma a minimizar o arrasto magnético durante a levitação do
corpo ligado aos arranjos de Halbach.
Este projeto envolve a continuação dos trabalhos realizados em semestres anteriores,
visando a revisão do projeto mecânico da bancada para caracterização dinâmica de um sistema do
tipo Inductrack. O estudo da teoria envolvendo o funcionamento da bancada e programas de
simulação magnetostática 3D foram realizados. O sistema de aquisição de dados e controle de
velocidade da bancada foi revisado e refinado em conjunto com o trabalho de graduação de Daniel
Silva Kantor e testes de validação foram concluídos ao final deste trabalho.
Possíveis melhorias são indicadas para tornar o sistema mais didático e seguro.
Palavras Chave: Inductrack; Levitação Magnética; Simulação Magnetorstática 3D, Instrumentação;
Controle de Velocidade.
1
1. Introdução
Na busca constante por maior eficiência energética, tanto para transporte, quanto para
sistemas mecânicos industriais, o magnetismo oferece uma alternativa viável aos elementos
rolantes e lubrificantes atualmente presentes no mercado para a redução de atrito. A
redução ou eliminação do contato entre partes de um sistema dinâmico diminui perdas
energéticas, aumenta a vida útil do sistema e, consequentemente, permite que novos
limites sejam alcançados. No caso de trens de alta velocidade, eliminar o contato dos vagões
com os trilhos permitiu até agora que velocidades de 581 km/h fossem atingidas [1]. Estes
trens modernos e de alta velocidade são conhecidos como Maglevs.
A tecnologia Inductrack (de inductive track ou pista indutiva) usada na maioria dos
Maglevs, faz uso da Levitação magnética dinâmica. Ela foi demonstrada por Post e Ryutov,
do Laboratório Nacional Lawrence Livermore, em 1996 [2] e funciona através da interação
de uma pista metálica indutiva com arranjos de Halbach magnéticos. Inicialmente
idealizados para aplicações em aceleradores de partículas [3], os arranjos de Halbach
possuem aplicações que hoje distribuem-se pelas áreas de transporte, aeroespacial e em
mancais e suspensões de máquinas de grande porte [4], passando até mesmo por baterias
eletromecânicas de alta eficiência [5] e dispositivos de nano-posicionamento [17]. Para o
bom funcionamento do sistema Inductrack, o campo magnético gerado pelos imas móveis
deve ser maximizado, o que justifica o uso do arranjo de Halbach: este promove um campo
senoidal em uma das faces do arranjo, ao mesmo tempo que minimiza o campo gerado na
face oposta.
Submetidas ao campo senoidal do arranjo de Halbach, trilhas indutivas devem permitir
passagem orientada de corrente de forma a provocar a indução de um segundo campo
magnético durante o movimento. Este campo, ao interagir com o campo do arranjo de
Halbach, provoca a levitação magnética dinâmica e deve minimizar o arrasto magnético a
que o corpo suspenso é submetido na direção de movimento. Uma vez que a autoindução
nos trilhos depende da frequência do campo alternado observada pela pista indutiva, a
velocidade do vagão móvel influencia diretamente no desempenho do sistema.
Para demonstrar o funcionamento do sistema Inductrack e exemplificar a influência dos
principais parâmetros de projeto no desempenho da levitação magnética, foi construída
uma bancada de testes no laboratório de Mecatrônica da Faculdade de Engenharia
Mecânica. Este projeto deverá envolver a revisão e finalização do projeto eletromecânico da
bancada, projetada e construída ao longo de vários trabalhos anteriores, tanto de Conclusão
de Curso [6 a 10] quanto dissertação de mestrado [11]. Esta fase de projeto visa a
compilação e refino das etapas anteriores e a especificação de pistas indutivas para a
bancada para a fabricação das mesmas. O presente trabalho deve ainda complementar o
trabalho de fim de curso do aluno Daniel Silva Kantor, orientado pelo Prof. Dr. Pablo
Siqueira Meirelles e co-orientado pelo Prof. Dr. Luiz Otávio Saraiva Ferreira. O projeto das
pistas tem como objetivo principal fornecer parâmetros para comparação adequada de
desempenho do sistema Inductrack e promover a confirmação dos dados teóricos através
de testes experimentais.

2
2. Revisão bibliográfica
2.1. O Arranjo de Halbach
Como já discutido anteriormente, um sistema de levitação magnética do tipo Inductrack,
precisa de um campo oscilante para funcionar corretamente. Inicialmente idealizado para
criar imas monopolares, a distribuição de conjuntos de dipolos magnéticos do arranjo de
Halbach dobra a intensidade do campo magnético em um dos lados do conjunto, enquanto
cancela quase por completo a intensidade de campo no lado oposto. No plano longitudinal
do arranjo, cada dipolo é posicionado de forma que o campo magnético emitido por ele seja
posicionado perpendicularmente ao campo magnético emitido pelos dipolos adjacentes, de
forma a ficarem sucessivamente deslocados 90° um do outro. O produto da combinação de
dipolos no arranjo de Halbach pode ser facilmente compreendido através do diagrama de
Mallinson, que segmenta o comportamento dos conjuntos de imas que compõem o arranjo.
Os esquemáticos abaixo mostram a imagem do arranjo de Halbach, bem como o diagrama
de Mallinson para o mesmo:
Figura 1 - Arranjo de Halbach com 5 imas (à esquerda) e diagrama de Mallinson
correspondente (à direita) [8]
Assim como está exemplificado em alguns trabalhos de graduação anteriores, pode-
se obter equações simplificadas para os componentes do campo magnético gerado pelo
arranjo de Halbach. Considerando por exemplo, que o espaçamento entre os imãs é nulo, e
reduzindo a análise para a primeira harmônica do campo magnético, foi indicado o seguinte
conjunto de equações no trabalho de Ademir Teles [8]:
(1)
(2)
(3)
Nestas, o campo resultante foi decomposto nas direções paralela (Bx) e
perpendicular (By) ao arranjo, k é a constante de Halbach, igualada à equação (3), λ é o
comprimento de onda do campo senoidal, e B0 é o valor de pico do campo magnético
gerado. Por sua vez o valor de B0, dado pela equação (4), depende do campo remanente de
3
cada imã, Br, e da espessura de cada imã, di. O valor de λ também pode ser admitido como
N vezes a distância di somada aos espaçamentos de, entre os imãs. Abaixo, N é o número de
imãs por comprimento de onda do arranjo de Halbach.
(4)
(5)
É importante ressaltar a introdução do fator de preenchimento, , equivalente ao
percentual do comprimento de onda que está ocupado por imãs. Ele corrige os parâmetros
de comprimento de onda e, consequentemente, o valor de pico do campo magnético
produzido pelo arranjo.
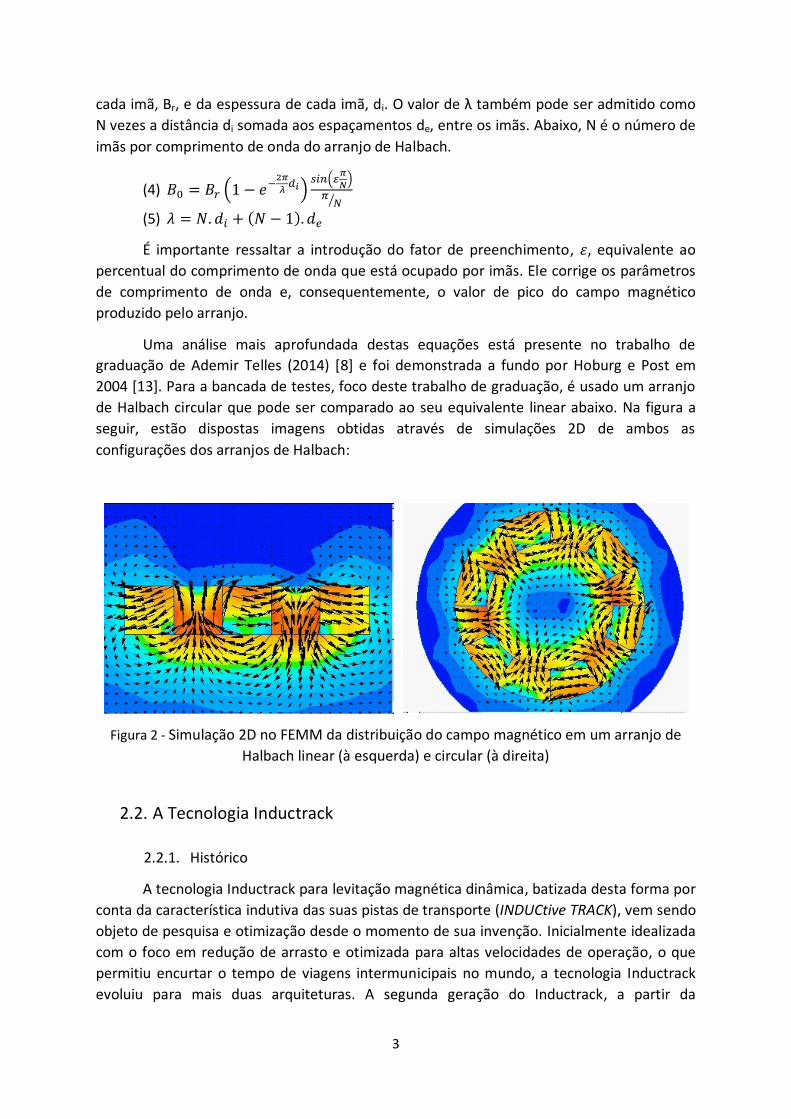
Uma análise mais aprofundada destas equações está presente no trabalho de
graduação de Ademir Telles (2014) [8] e foi demonstrada a fundo por Hoburg e Post em
2004 [13]. Para a bancada de testes, foco deste trabalho de graduação, é usado um arranjo
de Halbach circular que pode ser comparado ao seu equivalente linear abaixo. Na figura a
seguir, estão dispostas imagens obtidas através de simulações 2D de ambos as
configurações dos arranjos de Halbach:
Figura 2 - Simulação 2D no FEMM da distribuição do campo magnético em um arranjo de
Halbach linear (à esquerda) e circular (à direita)
2.2. A Tecnologia Inductrack
2.2.1. Histórico
A tecnologia Inductrack para levitação magnética dinâmica, batizada desta forma por
conta da característica indutiva das suas pistas de transporte (INDUCtive TRACK), vem sendo
objeto de pesquisa e otimização desde o momento de sua invenção. Inicialmente idealizada
com o foco em redução de arrasto e otimizada para altas velocidades de operação, o que
permitiu encurtar o tempo de viagens intermunicipais no mundo, a tecnologia Inductrack
evoluiu para mais duas arquiteturas. A segunda geração do Inductrack, a partir da
4
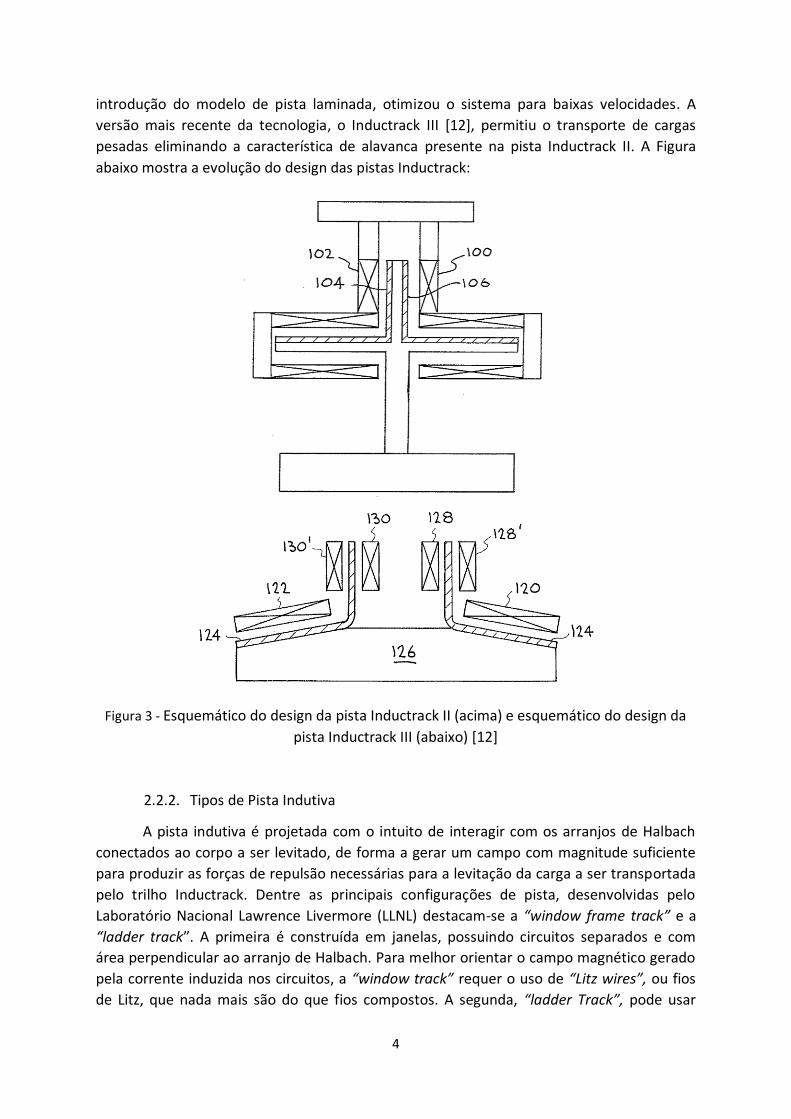
introdução do modelo de pista laminada, otimizou o sistema para baixas velocidades. A
versão mais recente da tecnologia, o Inductrack III [12], permitiu o transporte de cargas
pesadas eliminando a característica de alavanca presente na pista Inductrack II. A Figura
abaixo mostra a evolução do design das pistas Inductrack:
Figura 3 - Esquemático do design da pista Inductrack II (acima) e esquemático do design da
pista Inductrack III (abaixo) [12]
2.2.2. Tipos de Pista Indutiva
A pista indutiva é projetada com o intuito de interagir com os arranjos de Halbach
conectados ao corpo a ser levitado, de forma a gerar um campo com magnitude suficiente
para produzir as forças de repulsão necessárias para a levitação da carga a ser transportada
pelo trilho Inductrack. Dentre as principais configurações de pista, desenvolvidas pelo
Laboratório Nacional Lawrence Livermore (LLNL) destacam-se a “window frame track” e a
“ladder track”. A primeira é construída em janelas, possuindo circuitos separados e com
área perpendicular ao arranjo de Halbach. Para melhor orientar o campo magnético gerado
pela corrente induzida nos circuitos, a “window track” requer o uso de “Litz wires”, ou fios
de Litz, que nada mais são do que fios compostos. A segunda, “ladder Track”, pode usar
5
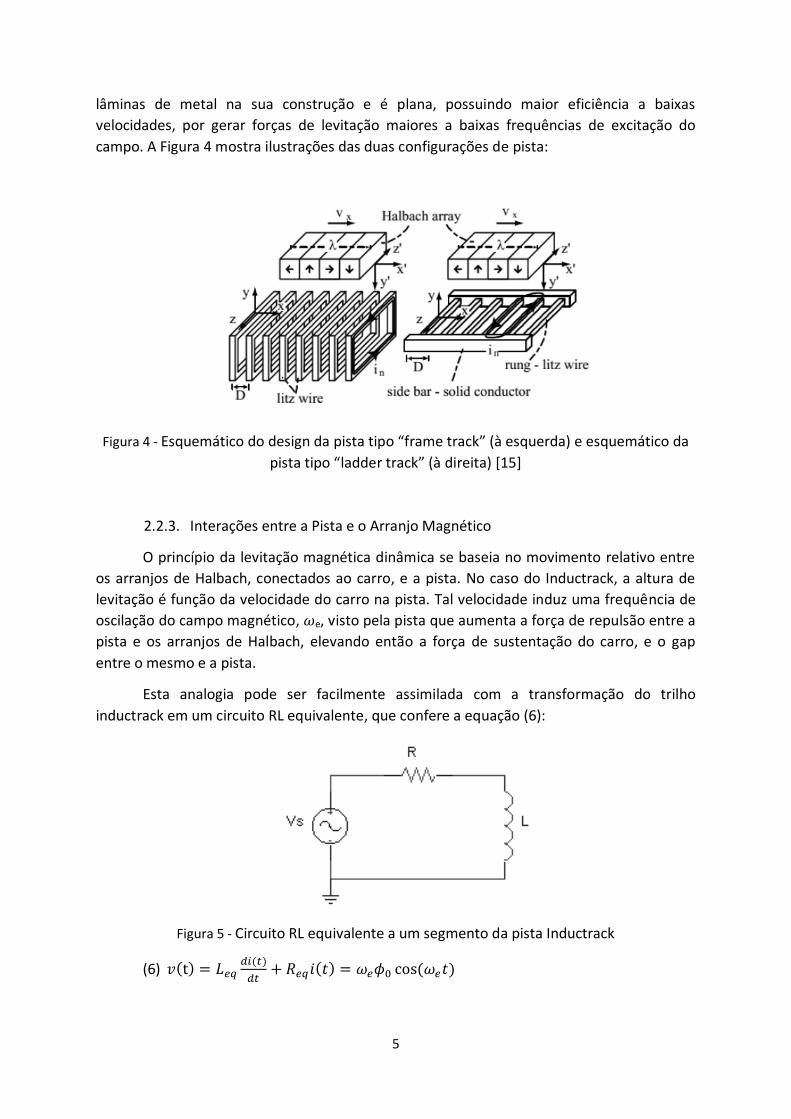
lâminas de metal na sua construção e é plana, possuindo maior eficiência a baixas
velocidades, por gerar forças de levitação maiores a baixas frequências de excitação do
campo. A Figura 4 mostra ilustrações das duas configurações de pista:
Figura 4 - Esquemático do design da pista tipo “frame track” (à esquerda) e esquemático da
pista tipo “ladder track” (à direita) [15]
2.2.3. Interações entre a Pista e o Arranjo Magnético
O princípio da levitação magnética dinâmica se baseia no movimento relativo entre
os arranjos de Halbach, conectados ao carro, e a pista. No caso do Inductrack, a altura de
levitação é função da velocidade do carro na pista. Tal velocidade induz uma frequência de
oscilação do campo magnético, e, visto pela pista que aumenta a força de repulsão entre a
pista e os arranjos de Halbach, elevando então a força de sustentação do carro, e o gap
entre o mesmo e a pista.
Esta analogia pode ser facilmente assimilada com a transformação do trilho
inductrack em um circuito RL equivalente, que confere a equação (6):
Figura 5 - Circuito RL equivalente a um segmento da pista Inductrack
(6)
6
Nesta equação, v é a força eletromotriz induzida pelo campo magnético sobre o
trilho, Leq a reatância indutiva equivalente e Req a resistência equivalente do trilho. O valor
de φ0 é o valor de pico do fluxo magnético sobre o trilho. Aplicando ainda a transformada de
Laplace na primeira parte da equação e analisando o polo da função de transferência no
domínio da frequência, pode-se obter uma ideia clara da defasagem entre a corrente e a
tensão do circuito equivalente:
(7)
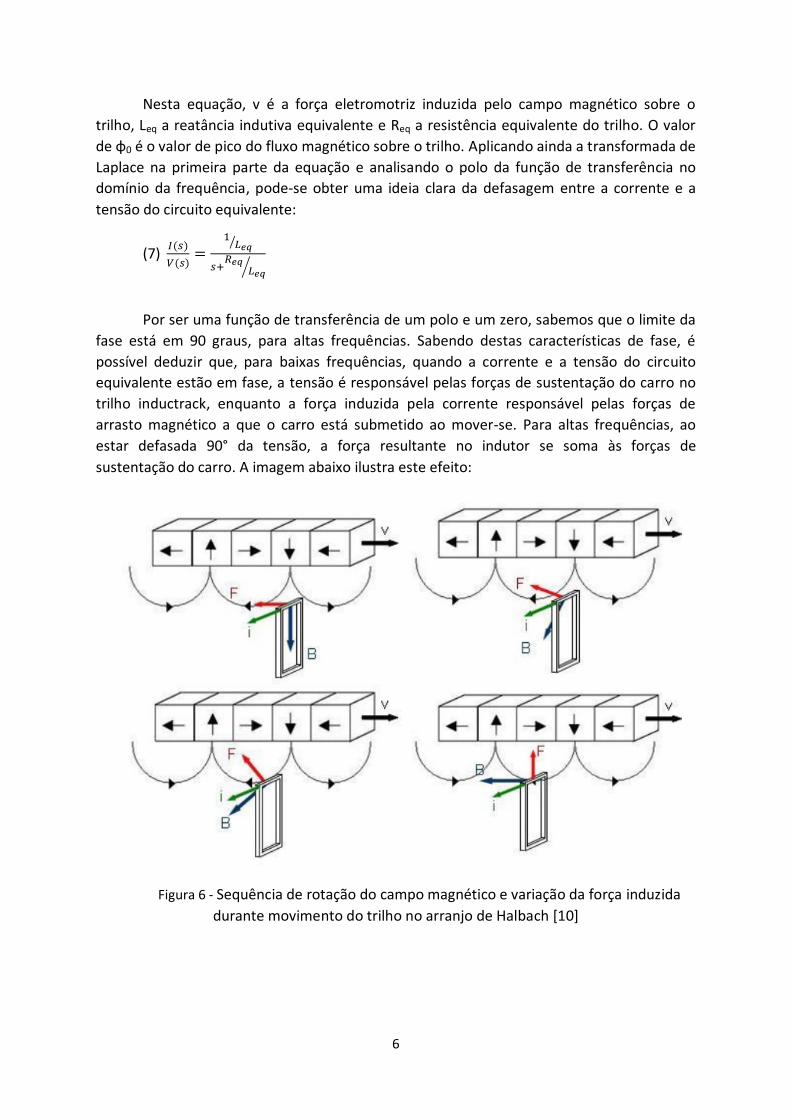
Por ser uma função de transferência de um polo e um zero, sabemos que o limite da
fase está em 90 graus, para altas frequências. Sabendo destas características de fase, é
possível deduzir que, para baixas frequências, quando a corrente e a tensão do circuito
equivalente estão em fase, a tensão é responsável pelas forças de sustentação do carro no
trilho inductrack, enquanto a força induzida pela corrente responsável pelas forças de
arrasto magnético a que o carro está submetido ao mover-se. Para altas frequências, ao
estar defasada 90° da tensão, a força resultante no indutor se soma às forças de
sustentação do carro. A imagem abaixo ilustra este efeito:
Figura 6 - Sequência de rotação do campo magnético e variação da força induzida
durante movimento do trilho no arranjo de Halbach [10]
7
Sendo assim, as forças de sustentação e arrasto a que o carro está submetido são
função da frequência de oscilação do campo, e, e da distância do trilho, y, podendo ser
apresentadas como:
(8)
(9)
Onde wc é a largura do trilho Inductrack, dc a distância entre os trilhos, e Ac a área de
seção do circuito formado, no caso da pista “ladder”, wc.dc. Vale ressaltar que, segundo
recomendação feita por [8], no caso da pista tipo “wire frame” o termo wc deve ser
substituído por Pc, que é o perímetro do circuito de cada janela do trilho.
A relação da frequência de oscilação do campo com as forças de sustentação e
arrasto prova que o período das trilhas da pista, o período do arranjo de Halbach, e
principalmente a velocidade do corpo em levitação em relação ao trilho influenciam
diretamente no desempenho do sistema.
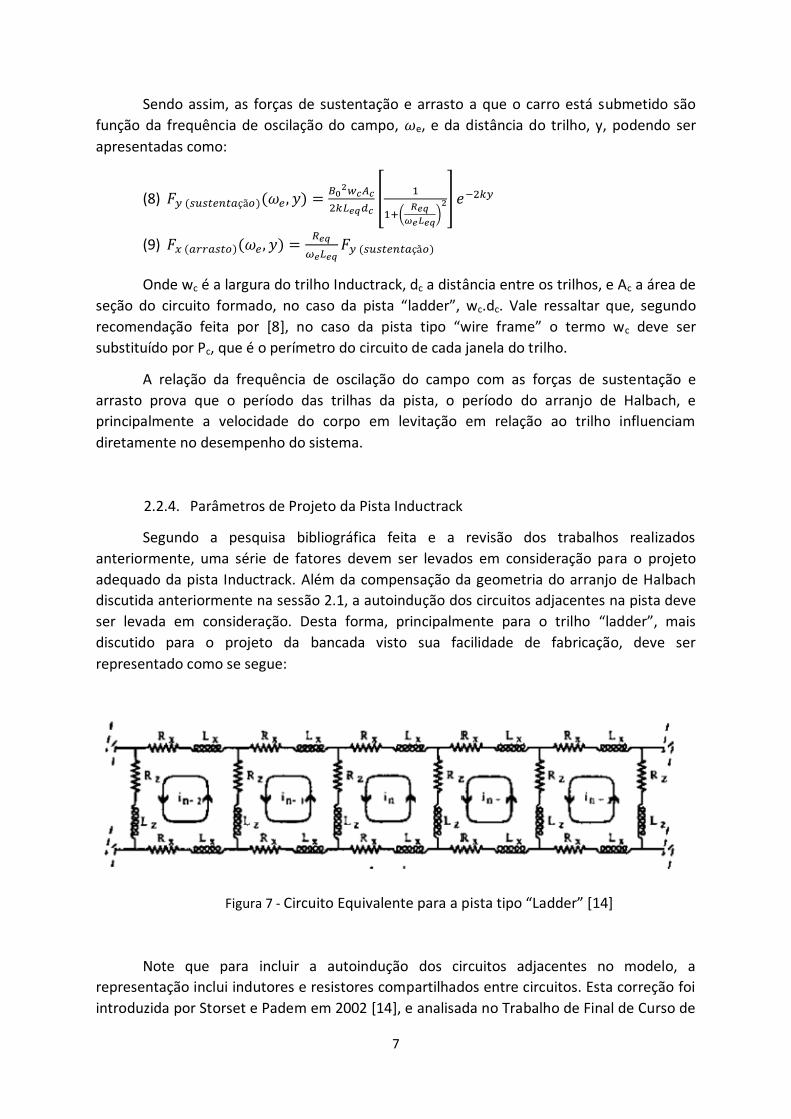
2.2.4. Parâmetros de Projeto da Pista Inductrack
Segundo a pesquisa bibliográfica feita e a revisão dos trabalhos realizados
anteriormente, uma série de fatores devem ser levados em consideração para o projeto
adequado da pista Inductrack. Além da compensação da geometria do arranjo de Halbach
discutida anteriormente na sessão 2.1, a autoindução dos circuitos adjacentes na pista deve
ser levada em consideração. Desta forma, principalmente para o trilho “ladder”, mais
discutido para o projeto da bancada visto sua facilidade de fabricação, deve ser
representado como se segue:
Figura 7 - Circuito Equivalente para a pista tipo “Ladder” [14]
Note que para incluir a autoindução dos circuitos adjacentes no modelo, a
representação inclui indutores e resistores compartilhados entre circuitos. Esta correção foi
introduzida por Storset e Padem em 2002 [14], e analisada no Trabalho de Final de Curso de

8
Ademir Teles em 2014 [8]. Sendo assim, as equações finais para o cálculo da resistência e
reatância indutiva equivalentes, são apresentadas a seguir:
(10)
(11)
Onde l0 é a indutância própria de cada segmento transversal da pista e lm é a
indutância mútua entre um segmento individual e seus segmentos adjacentes. Vale ressaltar
que para estes cálculos, a influência dos segmentos paralelos ao movimento do carro na
pista foi desprezada, e a influência das correntes circulando nos segmentos fora da área
diretamente abaixo do arranjo de Halbach foram negligenciados [8]. Isto possibilitou a
simplificação da formula.
Os trabalhos de graduação de Rafael Seminari [10] e Ademir Teles [8] também
apresentaram análises mais simplificadas para o cálculo das resistências e reatâncias
indutivas equivalentes tanto para a pista “wire frame” quanto para a pista “ladder”, que
podem ser usadas tanto para calcular os valores de Rx e Rz ou Lx e Lz, quanto para realizar
uma aproximação do design da pista:
(12)
(13)
Com os parâmetros elétricos de resistência e reatância indutiva da pista, é possível
encontrar os indicadores de performance do sistema de levitação. Como discutido
anteriormente, a velocidade do carro em relação à pista é de suma importância para o
projeto. Desta forma, destacam-se a velocidade de transição, em que as forças de arrasto e
sustentação se igualam, e a velocidade crítica, em que as forças de sustentação são
suficientes para proporcionar a levitação.
Igualando as forças de arrasto e levitação na equação (8), podemos obter a
igualdade
, o que fornece a seguinte equação para a velocidade de transição:
(14)
Da mesma formula, pode ser obtido o fator Levitação/Arrasto, que se iguala a:
(15)
Sendo assim, para obter-se uma boa eficiência do sistema, fica claro que deve ser
buscada alta reatância indutiva e baixa resistência, com alta frequência de oscilação relativa
do campo magnético produzido pelo arranjo de Halbach.
Como demonstrado na etapa anterior deste trabalho de fim de curso, pode-se
encontrar também a equação para a velocidade crítica, em função de uma distância
predefinida entre o carro e a pista:
9
(16)
3. Projeto da Pista
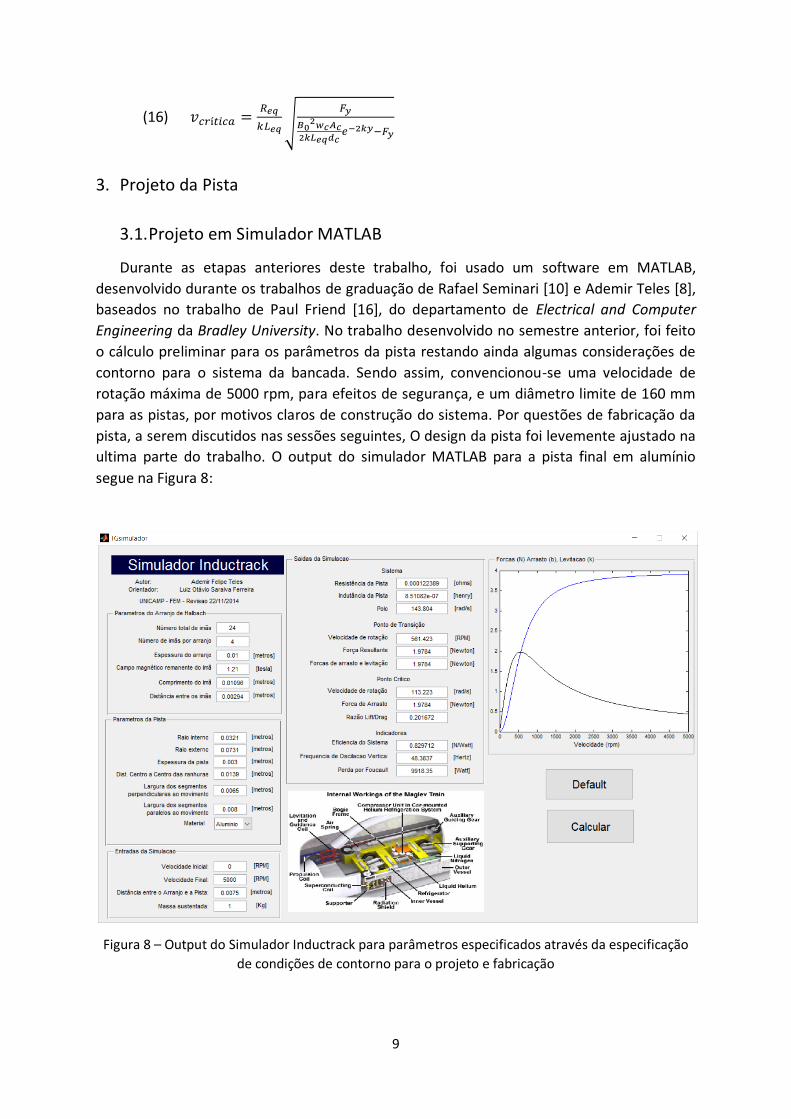
3.1. Projeto em Simulador MATLAB
Durante as etapas anteriores deste trabalho, foi usado um software em MATLAB,
desenvolvido durante os trabalhos de graduação de Rafael Seminari [10] e Ademir Teles [8],
baseados no trabalho de Paul Friend [16], do departamento de Electrical and Computer
Engineering da Bradley University. No trabalho desenvolvido no semestre anterior, foi feito
o cálculo preliminar para os parâmetros da pista restando ainda algumas considerações de
contorno para o sistema da bancada. Sendo assim, convencionou-se uma velocidade de
rotação máxima de 5000 rpm, para efeitos de segurança, e um diâmetro limite de 160 mm
para as pistas, por motivos claros de construção do sistema. Por questões de fabricação da
pista, a serem discutidos nas sessões seguintes, O design da pista foi levemente ajustado na
ultima parte do trabalho. O output do simulador MATLAB para a pista final em alumínio
segue na Figura 8:
Figura 8 – Output do Simulador Inductrack para parâmetros especificados através da especificação
de condições de contorno para o projeto e fabricação
10
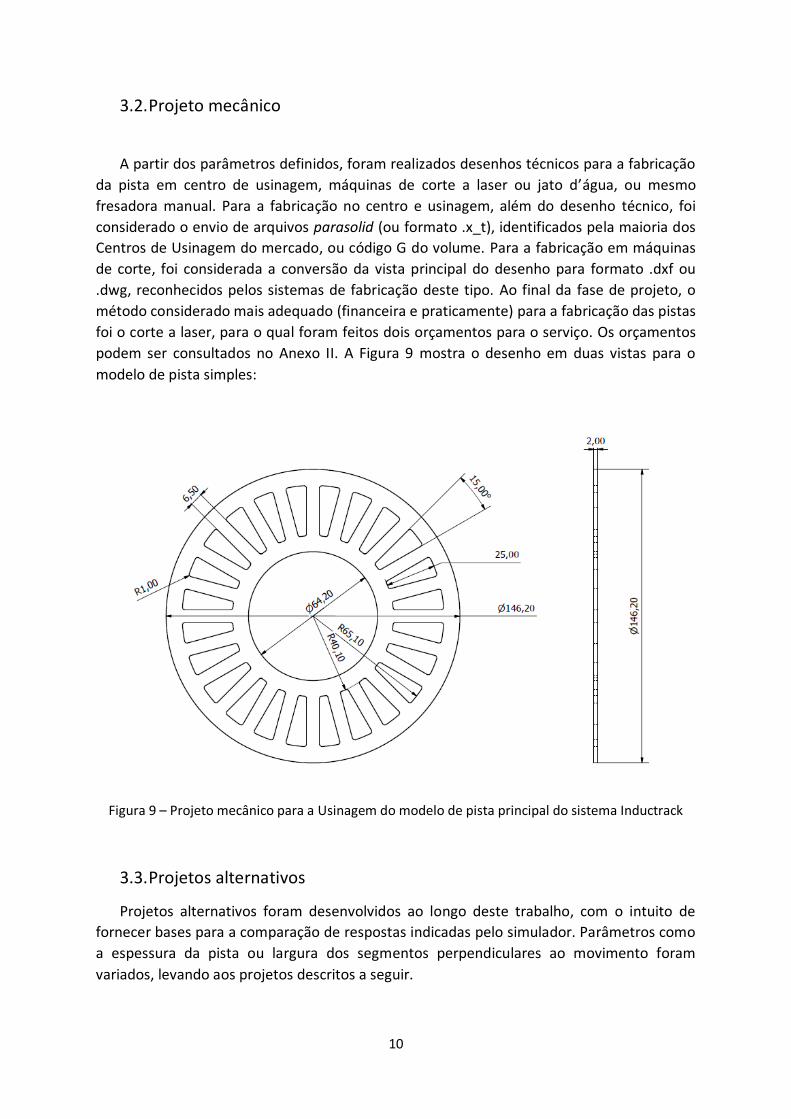
3.2. Projeto mecânico
A partir dos parâmetros definidos, foram realizados desenhos técnicos para a fabricação
da pista em centro de usinagem, máquinas de corte a laser ou jato d’água, ou mesmo
fresadora manual. Para a fabricação no centro e usinagem, além do desenho técnico, foi
considerado o envio de arquivos parasolid (ou formato .x_t), identificados pela maioria dos
Centros de Usinagem do mercado, ou código G do volume. Para a fabricação em máquinas
de corte, foi considerada a conversão da vista principal do desenho para formato .dxf ou
.dwg, reconhecidos pelos sistemas de fabricação deste tipo. Ao final da fase de projeto, o
método considerado mais adequado (financeira e praticamente) para a fabricação das pistas
foi o corte a laser, para o qual foram feitos dois orçamentos para o serviço. Os orçamentos
podem ser consultados no Anexo II. A Figura 9 mostra o desenho em duas vistas para o
modelo de pista simples:
Figura 9 – Projeto mecânico para a Usinagem do modelo de pista principal do sistema Inductrack
3.3. Projetos alternativos
Projetos alternativos foram desenvolvidos ao longo deste trabalho, com o intuito de
fornecer bases para a comparação de respostas indicadas pelo simulador. Parâmetros como
a espessura da pista ou largura dos segmentos perpendiculares ao movimento foram
variados, levando aos projetos descritos a seguir.
11
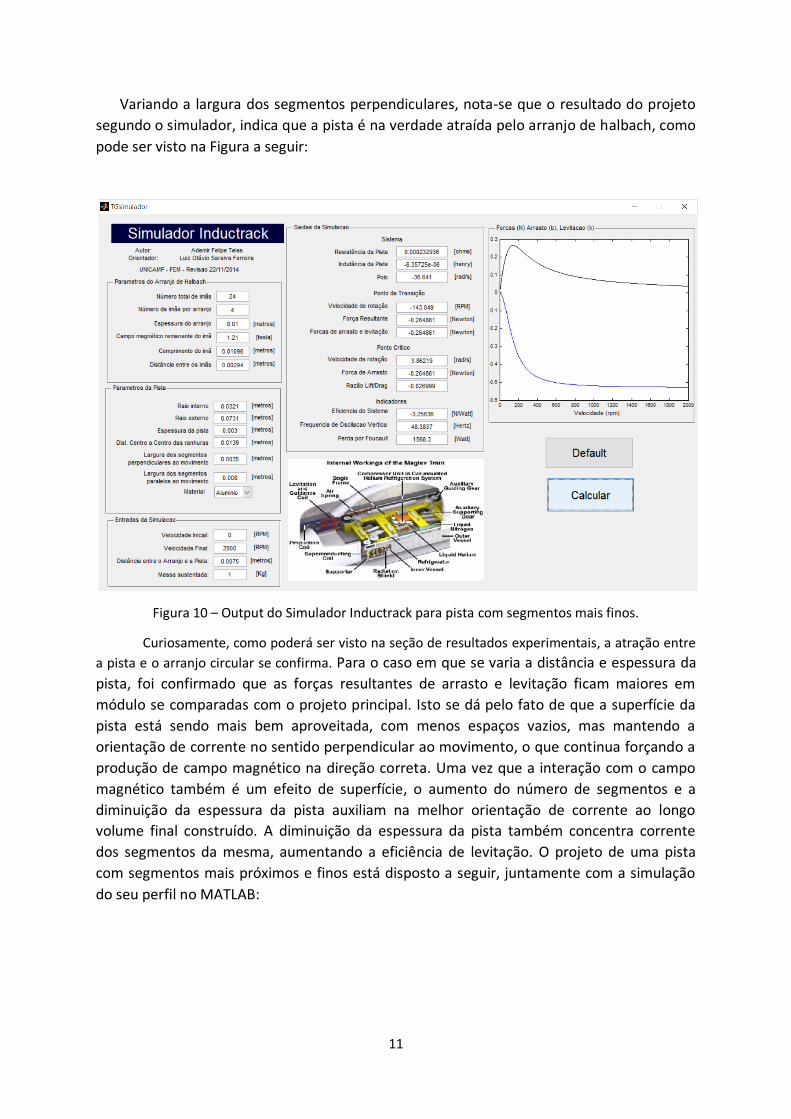
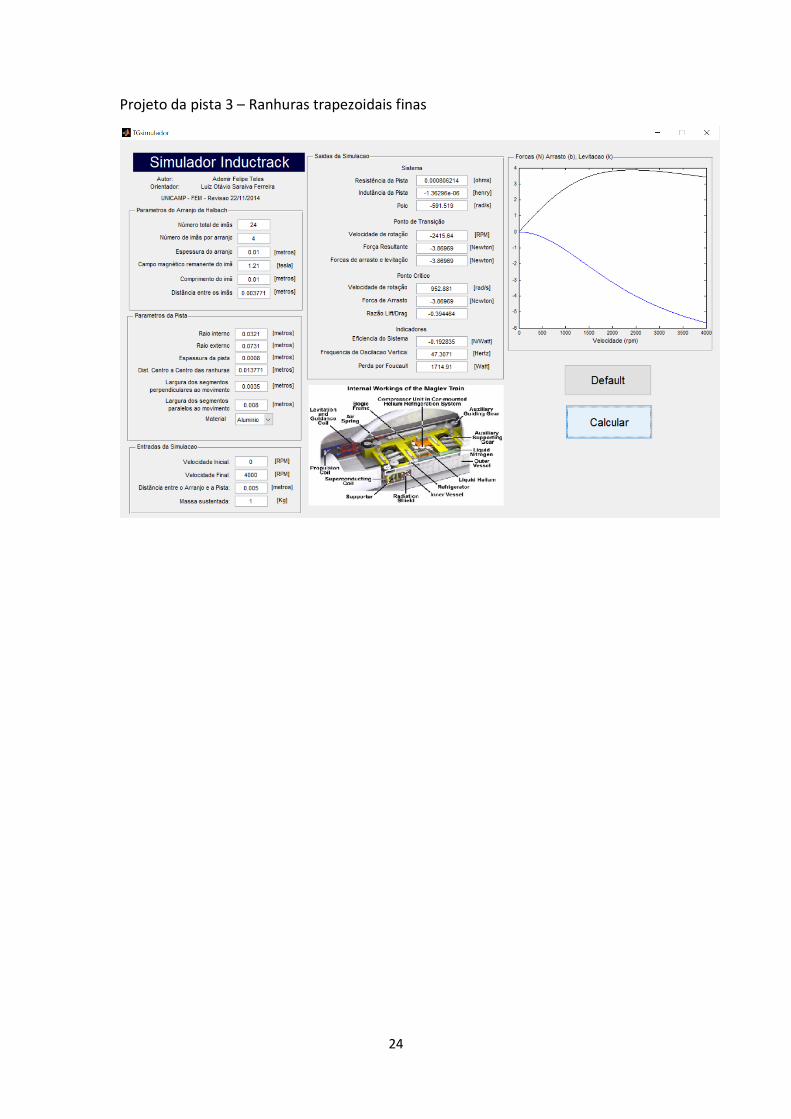
Variando a largura dos segmentos perpendiculares, nota-se que o resultado do projeto
segundo o simulador, indica que a pista é na verdade atraída pelo arranjo de halbach, como
pode ser visto na Figura a seguir:
Figura 10 – Output do Simulador Inductrack para pista com segmentos mais finos.
Curiosamente, como poderá ser visto na seção de resultados experimentais, a atração entre
a pista e o arranjo circular se confirma. Para o caso em que se varia a distância e espessura da
pista, foi confirmado que as forças resultantes de arrasto e levitação ficam maiores em
módulo se comparadas com o projeto principal. Isto se dá pelo fato de que a superfície da
pista está sendo mais bem aproveitada, com menos espaços vazios, mas mantendo a
orientação de corrente no sentido perpendicular ao movimento, o que continua forçando a
produção de campo magnético na direção correta. Uma vez que a interação com o campo
magnético também é um efeito de superfície, o aumento do número de segmentos e a
diminuição da espessura da pista auxiliam na melhor orientação de corrente ao longo
volume final construído. A diminuição da espessura da pista também concentra corrente
dos segmentos da mesma, aumentando a eficiência de levitação. O projeto de uma pista
com segmentos mais próximos e finos está disposto a seguir, juntamente com a simulação
do seu perfil no MATLAB:
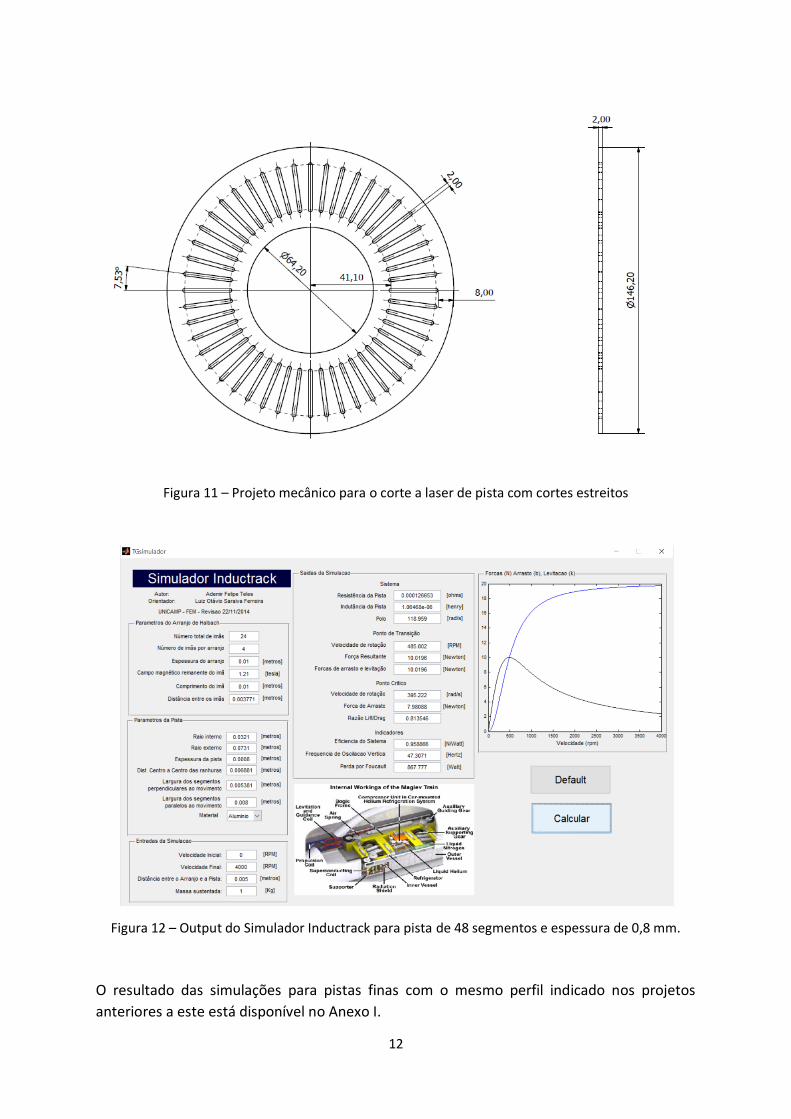
12
Figura 11 – Projeto mecânico para o corte a laser de pista com cortes estreitos
Figura 12 – Output do Simulador Inductrack para pista de 48 segmentos e espessura de 0,8 mm.
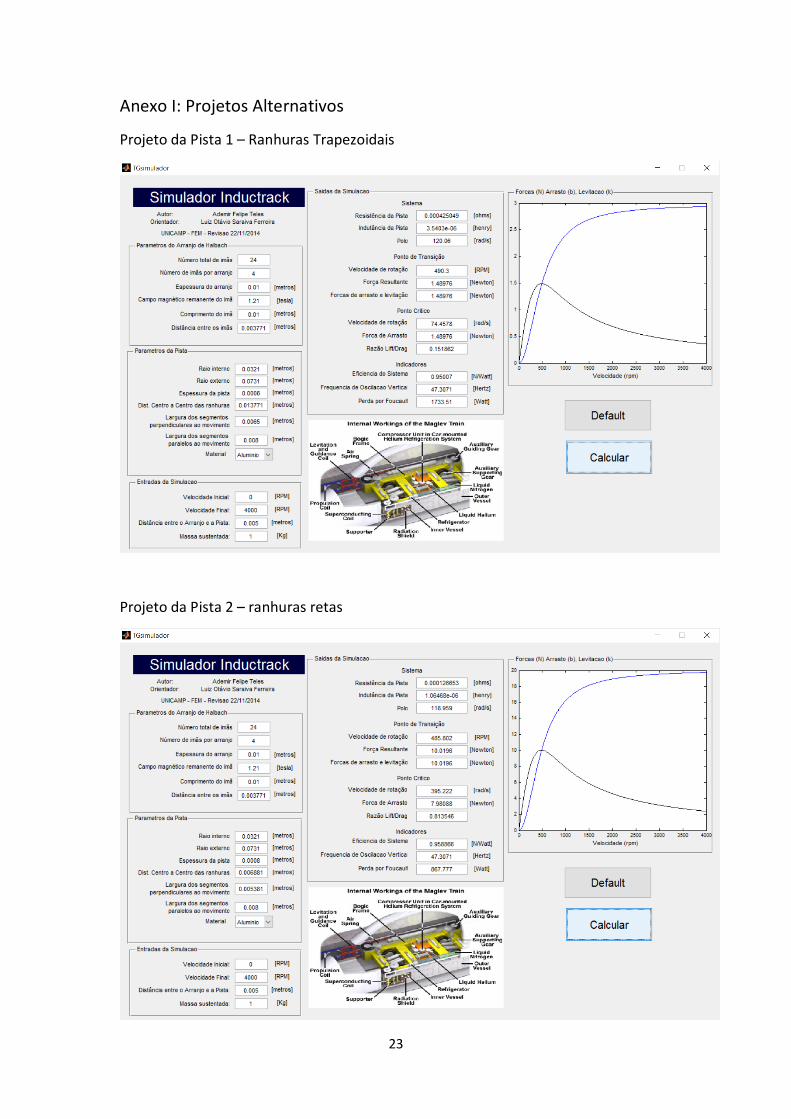
O resultado das simulações para pistas finas com o mesmo perfil indicado nos projetos
anteriores a este está disponível no Anexo I.
13
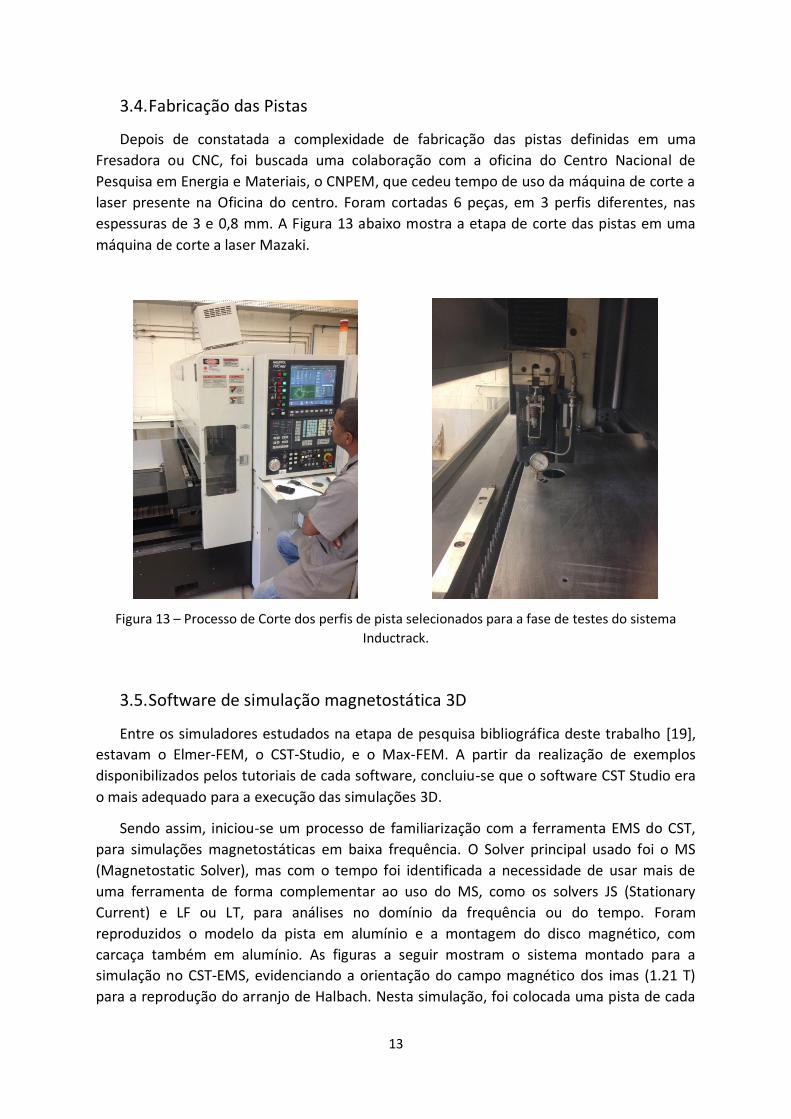
3.4. Fabricação das Pistas
Depois de constatada a complexidade de fabricação das pistas definidas em uma
Fresadora ou CNC, foi buscada uma colaboração com a oficina do Centro Nacional de
Pesquisa em Energia e Materiais, o CNPEM, que cedeu tempo de uso da máquina de corte a
laser presente na Oficina do centro. Foram cortadas 6 peças, em 3 perfis diferentes, nas
espessuras de 3 e 0,8 mm. A Figura 13 abaixo mostra a etapa de corte das pistas em uma
máquina de corte a laser Mazaki.
Figura 13 – Processo de Corte dos perfis de pista selecionados para a fase de testes do sistema
Inductrack.
3.5. Software de simulação magnetostática 3D
Entre os simuladores estudados na etapa de pesquisa bibliográfica deste trabalho [19],
estavam o Elmer-FEM, o CST-Studio, e o Max-FEM. A partir da realização de exemplos
disponibilizados pelos tutoriais de cada software, concluiu-se que o software CST Studio era
o mais adequado para a execução das simulações 3D.
Sendo assim, iniciou-se um processo de familiarização com a ferramenta EMS do CST,
para simulações magnetostáticas em baixa frequência. O Solver principal usado foi o MS
(Magnetostatic Solver), mas com o tempo foi identificada a necessidade de usar mais de
uma ferramenta de forma complementar ao uso do MS, como os solvers JS (Stationary
Current) e LF ou LT, para análises no domínio da frequência ou do tempo. Foram
reproduzidos o modelo da pista em alumínio e a montagem do disco magnético, com
carcaça também em alumínio. As figuras a seguir mostram o sistema montado para a
simulação no CST-EMS, evidenciando a orientação do campo magnético dos imas (1.21 T)
para a reprodução do arranjo de Halbach. Nesta simulação, foi colocada uma pista de cada
14
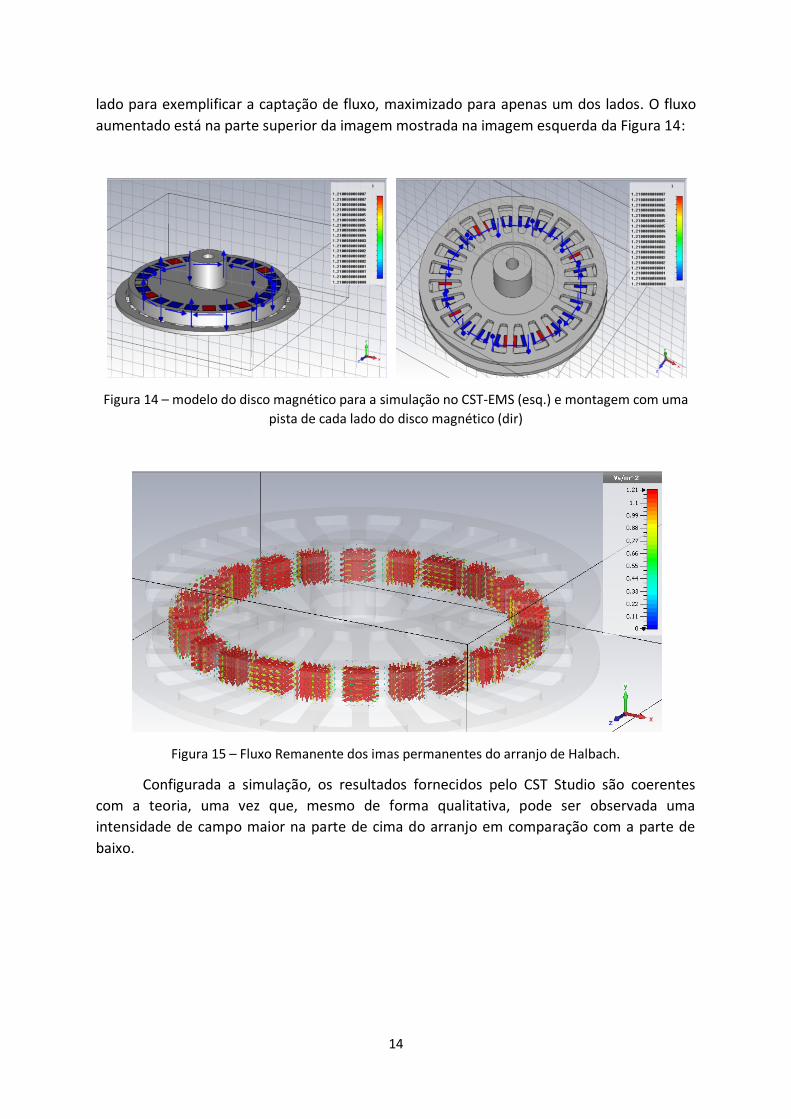
lado para exemplificar a captação de fluxo, maximizado para apenas um dos lados. O fluxo
aumentado está na parte superior da imagem mostrada na imagem esquerda da Figura 14:
Figura 14 – modelo do disco magnético para a simulação no CST-EMS (esq.) e montagem com uma
pista de cada lado do disco magnético (dir)
Figura 15 – Fluxo Remanente dos imas permanentes do arranjo de Halbach.
Configurada a simulação, os resultados fornecidos pelo CST Studio são coerentes
com a teoria, uma vez que, mesmo de forma qualitativa, pode ser observada uma
intensidade de campo maior na parte de cima do arranjo em comparação com a parte de
baixo.
15
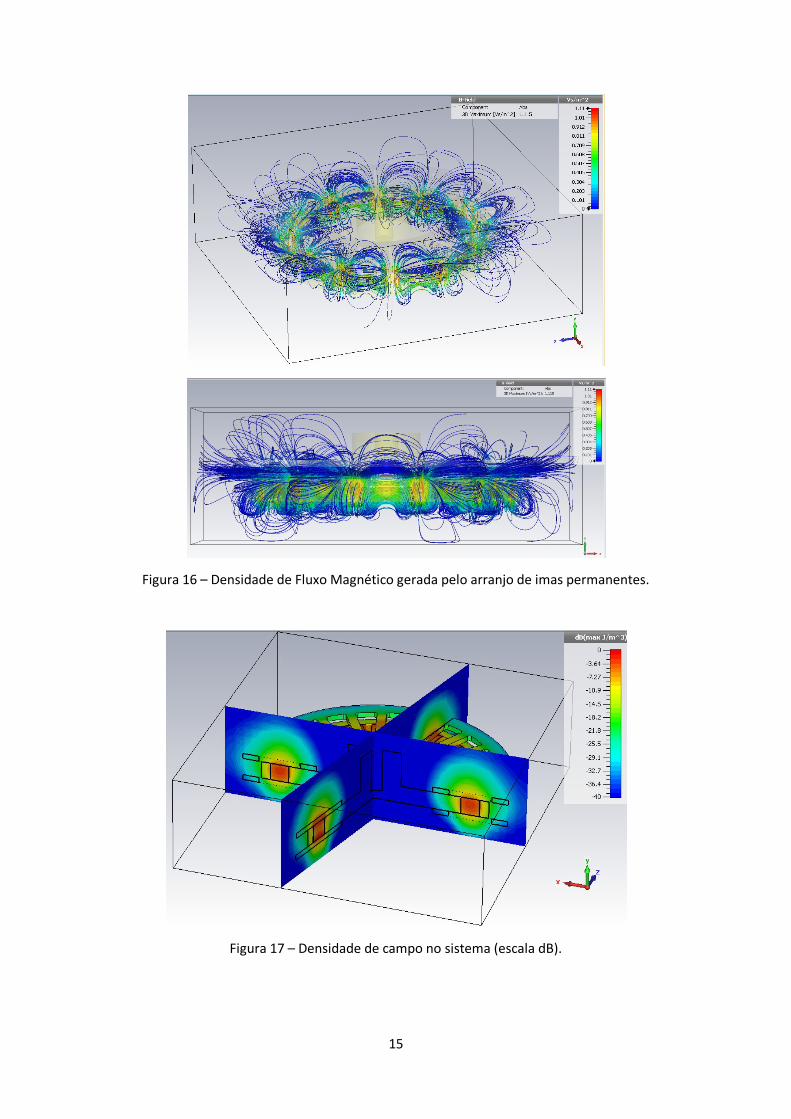
Figura 16 – Densidade de Fluxo Magnético gerada pelo arranjo de imas permanentes.
Figura 17 – Densidade de campo no sistema (escala dB).
16
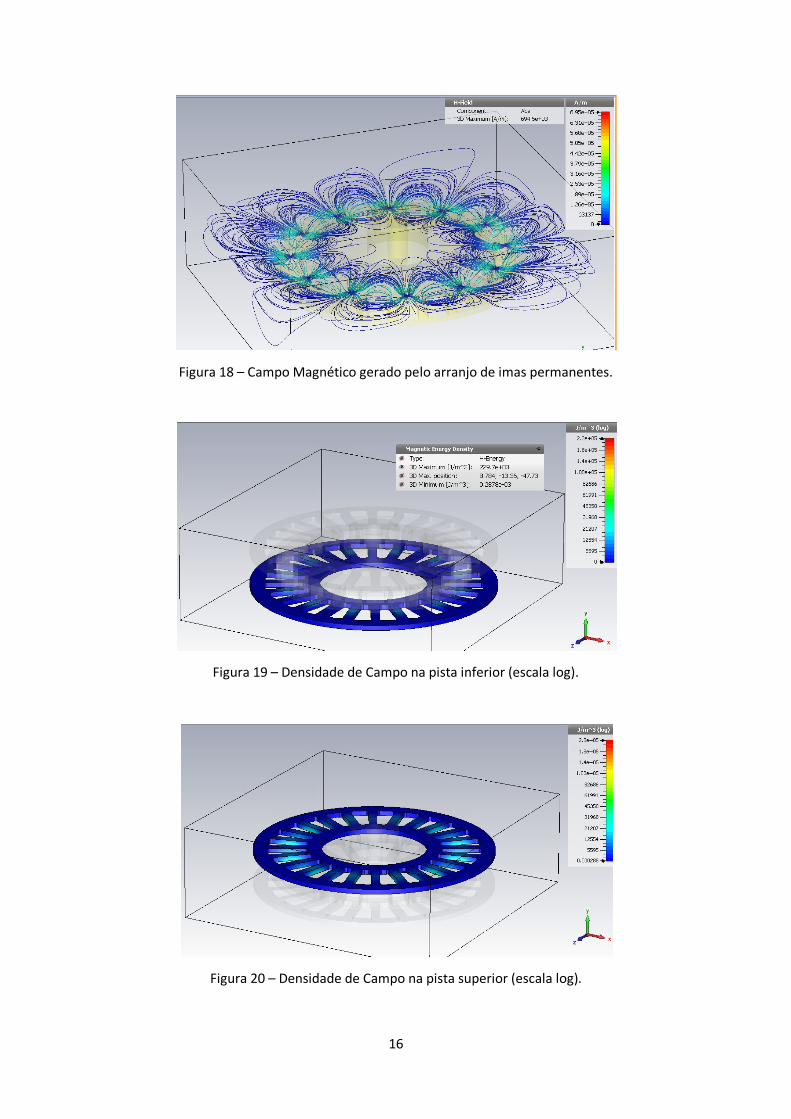
Figura 18 – Campo Magnético gerado pelo arranjo de imas permanentes.
Figura 19 – Densidade de Campo na pista inferior (escala log).
Figura 20 – Densidade de Campo na pista superior (escala log).

17
De forma complementar, pode-se analisar ainda a densidade de fluxo magnético
entre as pistas e o disco, como ilustrado a seguir, de forma a visualizar os valores de pico em
cada situação.
Figura 21 – Campo magnético acima do Arranjo (aparência senoidal).
Figura 22 – Campo magnético abaixo do Arranjo (aparência irregular em torno de zero).
Testes com os Solvers de Corrente estacionária (JS) e Corrente no domínio da
frequência e no tempo (LF e LT) foram iniciados e estruturados. O objetivo final era simular
a autoindução dos elementos da pista e monitorar assim as forças entre a pista e o arranjo
circular de Halbach. No entanto, não foi possível obter resultados satisfatórios com eles até
o momento. Inúmeros testes foram feitos, procurando representar a pista como
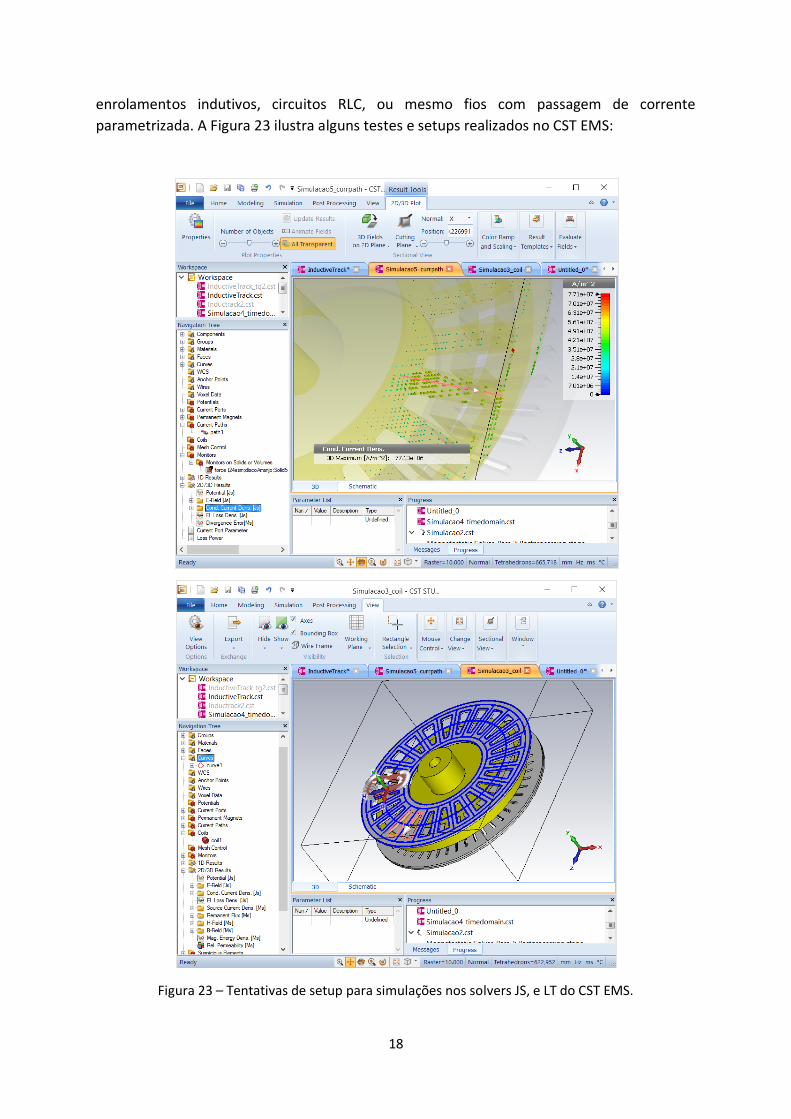
18
enrolamentos indutivos, circuitos RLC, ou mesmo fios com passagem de corrente
parametrizada. A Figura 23 ilustra alguns testes e setups realizados no CST EMS:
Figura 23 – Tentativas de setup para simulações nos solvers JS, e LT do CST EMS.
19
Mesmo assim, as simulações realizadas mostraram o poder de processamento do CST
Studio, e foram fundamentais para a fixação dos conceitos relacionados ao sistema
Inductrack de levitação magnética.
4. Testes de Validação em Bancada
4.1. Setup Experimental
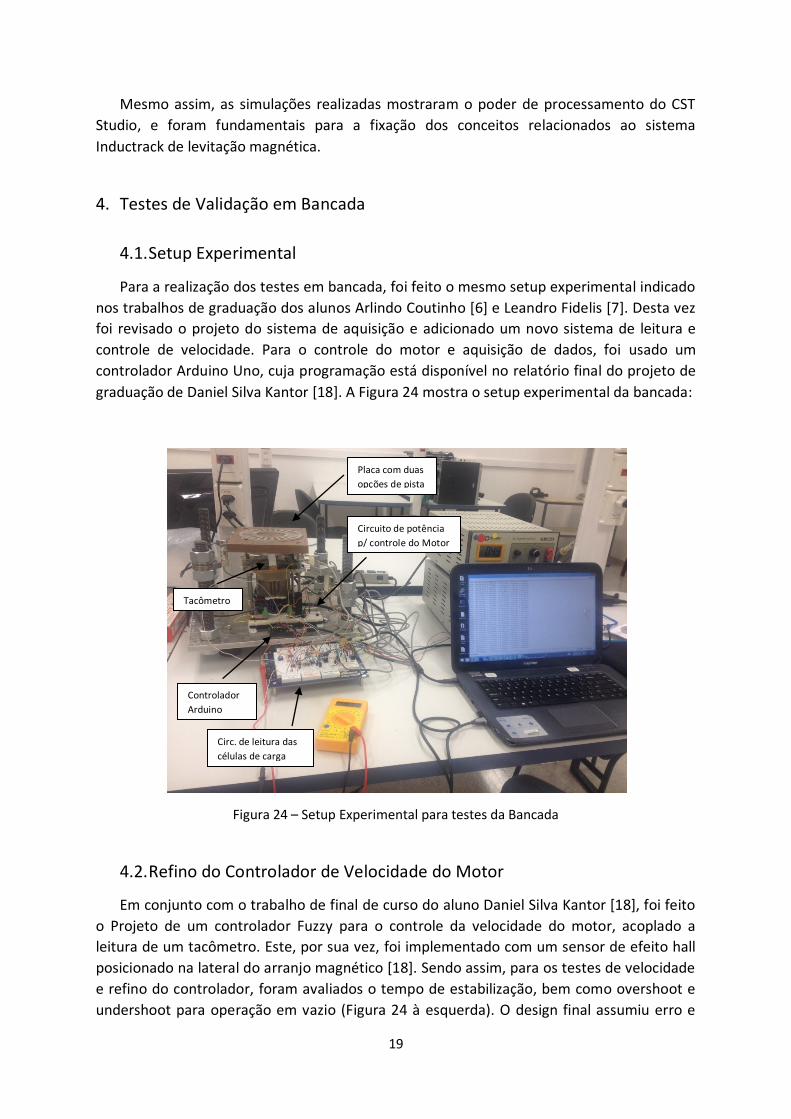
Para a realização dos testes em bancada, foi feito o mesmo setup experimental indicado
nos trabalhos de graduação dos alunos Arlindo Coutinho [6] e Leandro Fidelis [7]. Desta vez
foi revisado o projeto do sistema de aquisição e adicionado um novo sistema de leitura e
controle de velocidade. Para o controle do motor e aquisição de dados, foi usado um
controlador Arduino Uno, cuja programação está disponível no relatório final do projeto de
graduação de Daniel Silva Kantor [18]. A Figura 24 mostra o setup experimental da bancada:
Figura 24 – Setup Experimental para testes da Bancada
4.2. Refino do Controlador de Velocidade do Motor
Em conjunto com o trabalho de final de curso do aluno Daniel Silva Kantor [18], foi feito
o Projeto de um controlador Fuzzy para o controle da velocidade do motor, acoplado a
leitura de um tacômetro. Este, por sua vez, foi implementado com um sensor de efeito hall
posicionado na lateral do arranjo magnético [18]. Sendo assim, para os testes de velocidade
e refino do controlador, foram avaliados o tempo de estabilização, bem como overshoot e
undershoot para operação em vazio (Figura 24 à esquerda). O design final assumiu erro e
Circuito de potência
p/ controle do Motor
Placa com duas
opções de pista
Circ. de leitura das
células de carga
Controlador
Arduino
Tacômetro
20
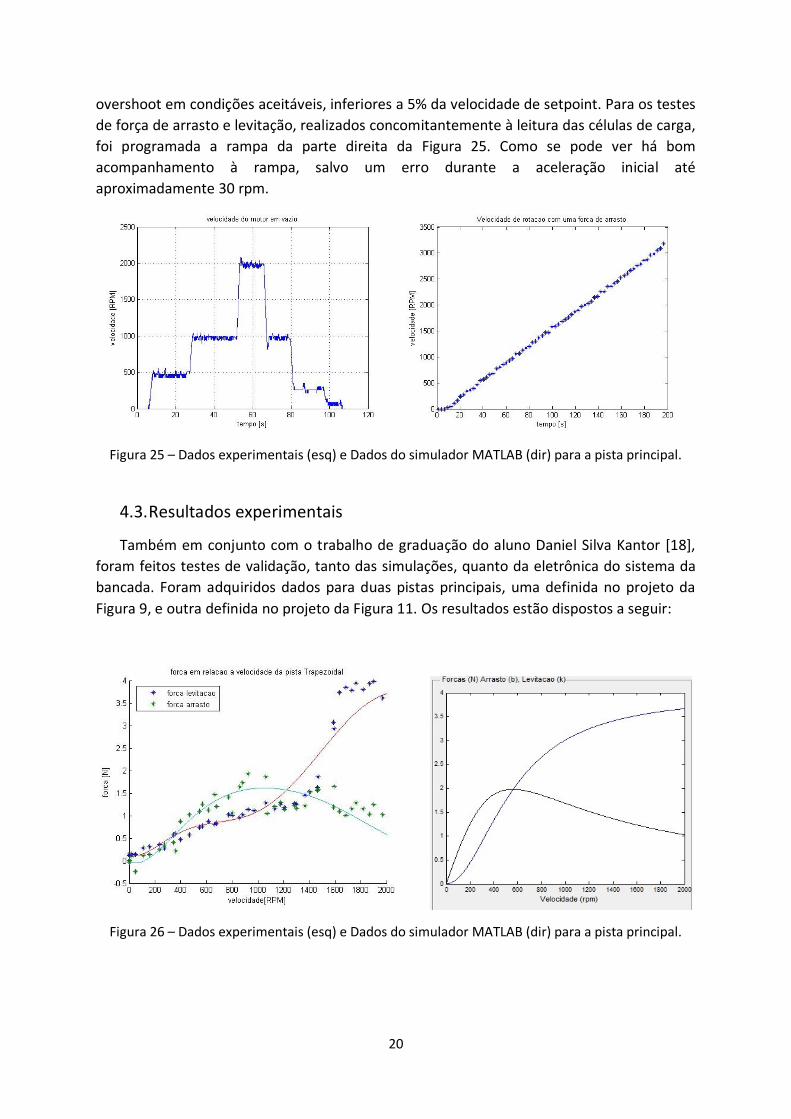
overshoot em condições aceitáveis, inferiores a 5% da velocidade de setpoint. Para os testes
de força de arrasto e levitação, realizados concomitantemente à leitura das células de carga,
foi programada a rampa da parte direita da Figura 25. Como se pode ver há bom
acompanhamento à rampa, salvo um erro durante a aceleração inicial até
aproximadamente 30 rpm.
Figura 25 – Dados experimentais (esq) e Dados do simulador MATLAB (dir) para a pista principal.
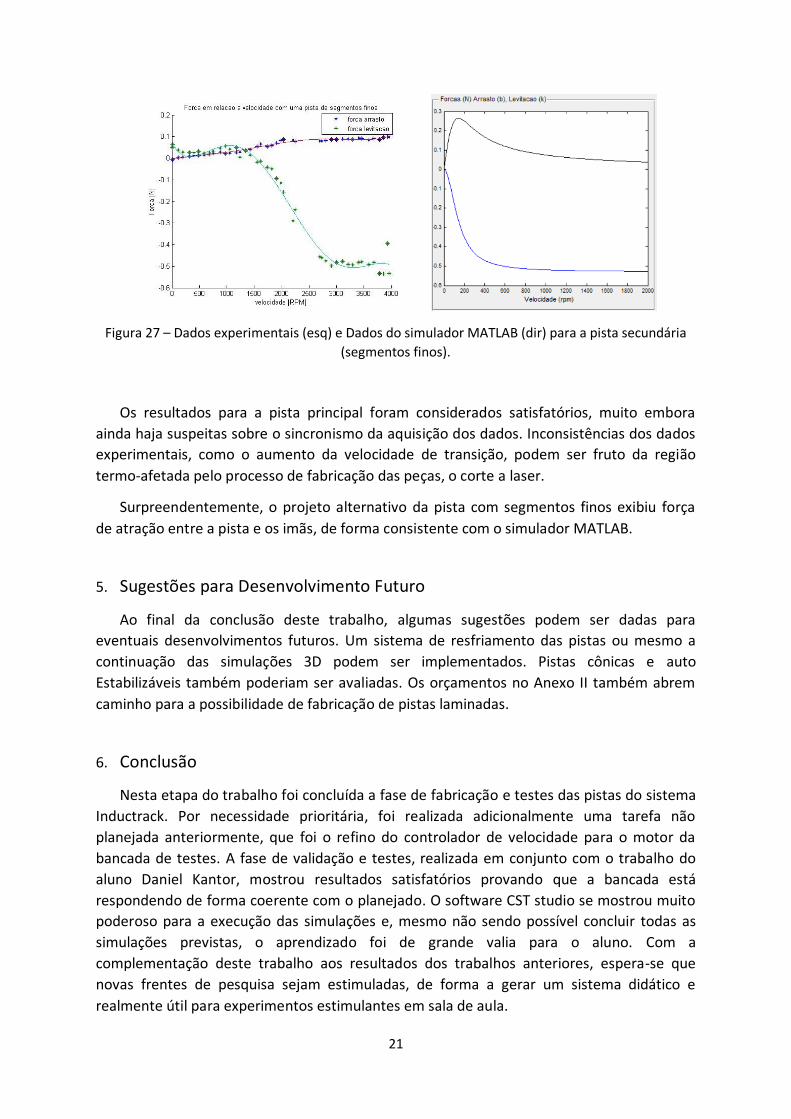
4.3. Resultados experimentais
Também em conjunto com o trabalho de graduação do aluno Daniel Silva Kantor [18],
foram feitos testes de validação, tanto das simulações, quanto da eletrônica do sistema da
bancada. Foram adquiridos dados para duas pistas principais, uma definida no projeto da
Figura 9, e outra definida no projeto da Figura 11. Os resultados estão dispostos a seguir:
Figura 26 – Dados experimentais (esq) e Dados do simulador MATLAB (dir) para a pista principal.
21
Figura 27 – Dados experimentais (esq) e Dados do simulador MATLAB (dir) para a pista secundária
(segmentos finos).
Os resultados para a pista principal foram considerados satisfatórios, muito embora
ainda haja suspeitas sobre o sincronismo da aquisição dos dados. Inconsistências dos dados
experimentais, como o aumento da velocidade de transição, podem ser fruto da região
termo-afetada pelo processo de fabricação das peças, o corte a laser.
Surpreendentemente, o projeto alternativo da pista com segmentos finos exibiu força
de atração entre a pista e os imãs, de forma consistente com o simulador MATLAB.
5. Sugestões para Desenvolvimento Futuro
Ao final da conclusão deste trabalho, algumas sugestões podem ser dadas para
eventuais desenvolvimentos futuros. Um sistema de resfriamento das pistas ou mesmo a
continuação das simulações 3D podem ser implementados. Pistas cônicas e auto
Estabilizáveis também poderiam ser avaliadas. Os orçamentos no Anexo II também abrem
caminho para a possibilidade de fabricação de pistas laminadas.
6. Conclusão
Nesta etapa do trabalho foi concluída a fase de fabricação e testes das pistas do sistema
Inductrack. Por necessidade prioritária, foi realizada adicionalmente uma tarefa não
planejada anteriormente, que foi o refino do controlador de velocidade para o motor da
bancada de testes. A fase de validação e testes, realizada em conjunto com o trabalho do
aluno Daniel Kantor, mostrou resultados satisfatórios provando que a bancada está
respondendo de forma coerente com o planejado. O software CST studio se mostrou muito
poderoso para a execução das simulações e, mesmo não sendo possível concluir todas as
simulações previstas, o aprendizado foi de grande valia para o aluno. Com a
complementação deste trabalho aos resultados dos trabalhos anteriores, espera-se que
novas frentes de pesquisa sejam estimuladas, de forma a gerar um sistema didático e
realmente útil para experimentos estimulantes em sala de aula.
22
Referências Bibliográficas
[1]. Diane Mccarthy, D.. Maglev 309 Success Secrets. Emereo Publishing, 2014
disponível em http://app.folha.uol.com.br/#noticia/543468
[2]. Post, R.F., Ryutov, D. The Inductrack Concept: A new approach to magnetic
levitation, 1996;
[3]. Halbach, K. Application of permanent magnets in accelerators and electron
storage rings, Journal of Applied Physics, 1985
[4]. Investigation of Passive Magnetic Bearing with Halbach Array
[5]. Post, R.F., Fowler, T.K., Post, S.F. A High-Efficiency Electromechanical Battery,
Proceedings of the IEEE, Vol. 81, no 3, 1993
[6]. Coutinho, A.A.O. Projeto de Bancada para Caracterização de Sistema
Inductrack. Universidade Estadual de Campinas, 2014
[7]. Fidelis, L.V. Caracterizacão de Indutores para Sistema de Levitação Inductrack.
Universidade Estadual de Campinas, 2014
[8]. Teles, A F. Implementação de Simulador de Sistemas de Levitação Inductrack.
Universidade Estadual de Campinas, 2014
[9]. Diane Mccarthy, D.. Maglev 309 Success Secrets. Emereo Publishing, 2014
disponível em http://app.folha.uol.com.br/#noticia/543468
[10]. Seminari, R.S. Estudo de Levitação magnética Passiva por meio da Tecnologia
Inductrack. Universidade Estadual de Campinas, 2009
[11]. Gasparoto, H.F. Simulaçao Magnetostática 3D por Dipolos Magnéticos
Equivalentes. Universidade Estadual de Campinas, 2013
[12]. Post, R.F.. Inductrac III configuration – A Maglev System for High Loads.
Patente numero 20100064929 A1, Estados Unidos, 2010
[13]. Post, R.F., Hoburg, J.F.. A Laminated Track for the Inductrack System: Theory
and Experiment. 18th International Conference on Magnetically Levitated Systems
and Linear Drives, 2004.
[14]. Storset, O.F., Paden, B.E.. Infinite Dimensional Models for Perforated Track
Electrodynamic Magnetic levitation. Conference of Decision and Control, 2002
[15]. Storset, O.F., Paden, B.E.. Electrodynamic magnetic levitation with discrete
track Part II: Periodic track model for numerical simulation and lumped parameter
model. IEEE Transactions on Magnetics, 2005.
[16]. Friend, P., Magnetic Levitation Train Technology 1, Bradley University, ECE
Department, 2004.
[17]. Rudolf, C. et al., 6D Magnetic Levitation Positioning System with Compact
Integrated 6D Sensor. 12th EUSPEN International Conference Proceedings P7.04 Vol
II, 2012
[18]. Kantor, D. S. Projeto de Aprimoramento de Bancada para caracterização
Sistema Inductrack. Universidade Estadual de Campinas, 2015
[19]. Moreno, G. B. Z. L. Projeto e Caracterização de Bancada para Demonstração
de Sistema Inductrack. Universidade Estadual de Campinas, 2015.
23
Anexo I: Projetos Alternativos
Projeto da Pista 1 – Ranhuras Trapezoidais
Projeto da Pista 2 – ranhuras retas
24
Projeto da pista 3 – Ranhuras trapezoidais finas

25
Anexo II: Orçamentos
26
27
28