simulaÇÃo de escoamentos em meios porosos … · dÁrio monte alegre simulaÇÃo de escoamentos...
TRANSCRIPT
PROGRAMA FRANCISCO EDUARDO MOURÃO SABOYA DE PÓS-GRADUAÇÃO EM ENGENHARIA MECÂNICAESCOLA DE ENGENHARIAUNIVERSIDADE FEDERAL FLUMINENSE
Tese de Doutorado
SIMULAÇÃO DE ESCOAMENTOS EM
MEIOS POROSOS QUASE INDEFORMÁVEIS
COM MUDANÇA DE CONDIÇÃO DE
SATURAÇÃO E RELAÇÃO CONSTITUTIVA
NÃO DIFERENCIÁVEL PARA A PRESSÃO
DO CONSTITUINTE LÍQUIDO
DÁRIO MONTE ALEGRE
JULHO DE 2017
DÁRIO MONTE ALEGRE
SIMULAÇÃO DE ESCOAMENTOS EM MEIOS POROSOSQUASE INDEFORMÁVEIS COM MUDANÇA DE
CONDIÇÃO DE SATURAÇÃO E RELAÇÃO CONSTITUTIVANÃO DIFERENCIÁVEL PARA A PRESSÃO DO
CONSTITUINTE LÍQUIDO
Tese de Doutorado apresentada ao Programa
Francisco Eduardo Mourão Saboya de Pós-
Graduação em Engenharia Mecânica da UFF
como parte dos requisitos para a obtenção do
título de Doutor em Ciências em Engenharia
Mecânica
Orientadores: Maria Laura Martins Costa (PGMEC/UFF)
Felipe Bastos de Freitas Rachid (PGMEC/UFF)
UNIVERSIDADE FEDERAL FLUMINENSE
Ficha Catalográfica elaborada pela Biblioteca da Escola de Engenharia e Instituto de Computação da UFF
A366 Alegre, Dário Monte
Simulação de escoamentos em meios porosos quase
indeformáveis com mudança de condição de saturação e relação
constitutiva não diferenciável para a pressão do constituinte líquido
/ Dário Monte Alegre. – Niterói, RJ : [s.n.], 2017.
146 f.
Tese (Doutorado em Engenharia Mecânica) - Universidade
Federal Fluminense, 2017.
Orientadores: Maria Laura Martins Costa, Felipe Bastos de Freitas
Rachid.
1. Escoamento de fluido. 2. Problema de Reimman. 3.Método de
Glimm. 4. Porosidade. I. Título.
CDD 620.106
NITERÓI, 11 DE JULHO DE 2017
SIMULAÇÃO DE ESCOAMENTOS EM MEIOS POROSOSQUASE INDEFORMÁVEIS COM MUDANÇA DE
CONDIÇÃO DE SATURAÇÃO E RELAÇÃO CONSTITUTIVANÃO DIFERENCIÁVEL PARA A PRESSÃO DO
CONSTITUINTE LÍQUIDO
Esta Tese é parte dos pré-requisitos para a obtenção do título de
DOUTOR EM ENGENHARIA MECÂNICA
Área de concentração: Termociências
Aprovada em sua forma final pela Banca Examinadora formada pelos professores:
Prof. Maria Laura Martins Costa (D.Sc.)Universidade Federal Fluminense
(Orientadora)
Prof. Felipe Bastos de Freitas Rachid (D.Sc.)Universidade Federal Fluminense
(Orientador)
Prof. Heraldo Silva da Costa Mattos (D.Sc.)Universidade Federal Fluminense
Prof. Daniel Rodríguez Álvarez (D.Sc.)Universidade Federal Fluminense
Prof. Rogério Martins Saldanha da Gama (D.Sc.)Universidade do Estado do Rio de Janeiro
Prof. Gustavo César Rachid Bodstein (PhD.)Universidade Federal do Rio de Janeiro
Agradecimentos
Agradeço ao Deus Todo Poderoso, por sua Graça e pelos talentos dados.
À minha esposa pelo apoio incondicional e paciência ao longo desse Doutorado e
momentos difíceis.
Aos meus familiares pelo apoio, motivação e torcida.
Agradeço à professora Dra. Maria Laura Martins Costa e ao Professor Dr. Felipe
Bastos de Freitas Rachid por toda a ajuda com esse Doutorado. E também aos professores
do PGMEC que contribuíram para minha formação.
Agradeço aos meus amigos Oficiais da Marinha do Brasil, que me apoiaram,
contribuíram e facilitaram meu trabalho até aqui.
RESUMO
Este trabalho modela o enchimento de uma matriz porosa quase indeformável
insaturada por um fluido, identificando a transição do escoamento insaturado para saturado.
A descrição utilizada é feita de um ponto de vista da Teoria de Misturas e trata o
escoamento como uma superposição de constituintes contínuos – um constituinte gasoso
com densidade muito baixa (que permite considerar a compressibilidade da mistura como
um todo), um constituinte líquido (representando um fluido newtoniano), que é denotado
como constituinte fluido e um constituinte sólido (que representa a matriz porosa quase
indeformável).
Neste trabalho considera-se uma matriz porosa fracamente deformável, de tal forma
que a fração de fluido pode ser ligeiramente maior que a porosidade, admitindo uma
pequena supersaturação, que equivale a permitir uma deformação muito pequena na matriz
porosa, de modo a poder considerar uma relação constitutiva contínua para a pressão. Esta
relação constitutiva, proposta no trabalho, origina um modelo matemático que garante que
o problema permaneça hiperbólico mesmo quando a saturação é atingida, preservando
dessa forma a natureza física do problema.
A vantagem do problema permanecer hiperbólico é a possibilidade de empregar um
método para aproximar sistemas hiperbólicos, como o método de Glimm e marchar no
tempo através da solução de um certo número previamente determinado de problemas de
Riemann.
As soluções completas para o problema de Riemann associado são apresentadas,
assim como a implementação do Método de Glimm, com base no qual várias simulações
numéricas são conduzidas para descreve a mudança da condição de saturação do meio
poroso.
Palavras-Chave: Escoamento em meio poroso insaturado, transição insaturado-saturado,matriz porosa quase rígida, problema de Riemann, método de Glimm.

ABSTRACT
This work models the filling up of an unsaturated almost undeformable porous
medium by a liquid, identifying the transition from unsaturated to saturated flow.
The description presented uses a mixture theory approach and deals the flow as
three overlapping continuous constituents – a very low-density gas (to account the mixture
compressibility), a liquid (Newtonian fluid), which is denoted by fluid constituent and a
solid (almost undeformable porous matrix).
In this work the porous matrix is considered as slightly deformable, in such a way
that the fluid fraction can be slightly larger then the porosity, allowing a small
supersaturation and a very small deformation in the porous medium, in a way that a
continuous constitutive relation for the pressure can be considered. This constitutive
relation, proposed in the work, gives rise to a mathematical model that assures that the
problem remains hyperbolic even when the saturation is reached and the physics of the
phenomenon are preserved.
The advantage of the problem remaining hyperbolic is the possibility of employing
a method to approximate hyperbolical systems, such as Glimm's method and advancing in
time using a solution of a certain number of Riemann's problem previously determined.
The complete solutions for the associated Riemann's Problem and the Glimm's
method implementation are presented. These are the basis for several numerical simulations
conducted to describe the change of saturation condition in the porous medium.
Keywords: Flows in unsaturated medium, unsaturated-saturated transition, almostrigid porous matrix, Riemann's Problem, Glimm's method.
SUMÁRIO
Lista de Figuras ......................................................................................................................i
Lista de Tabelas ....................................................................................................................vi
Lista de Símbolos ................................................................................................................vii
Capítulo 1. Introdução
1.1. Considerações Gerais ......................................................................................................1
1.2. Revisão Bibliográfica ......................................................................................................5
1.2.1. Teoria de Misturas …..................................................................................................5
1.2.2. O Problema de Riemann e o Método de Glimm …....................................................8
1.2.3. Escoamentos com Restrições em Meios Porosos ….................................................11
1.3. Objetivos …...................................................................................................................13
Capítulo 2. Modelagem Mecânica
2.1. Introdução .....................................................................................................................15
2.2. Balanço de Massa .........................................................................................................16
2.3. Balanço de Momentum Linear ….................................................................................19
2.4. Modelo Mecânico Considerado …............................................................................... 22

Capítulo 3. Solução Completa do Problema de Riemann
3.1. Introdução .................................................................................................................... 31
3.2. Condições de Entropia e Invariantes de Riemann …................................................... 36
3.3. Solução do Problema de Riemann associado ….......................................................... 38
3.4. Soluções Completas do problema de Riemann Associado …...................................... 55
3.5. Determinação das soluções do Problema de Riemann …............................................ 58
Capítulo 4. Método de Glimm
4.1. Introdução .....................................................................................................................69
4.2. O Método de Glimm ....................................................................................................71
4.3. Aplicação ao Problema de Riemann Associado …........................................................77
Capítulo 5. Resultados
5.1. Solução do Problema de Riemann ............................................................................... 86
5.1.1. Choque-1/Choque-2 ….............................................................................................. 86
5.1.2. Rarefação-1/Rarefação-2 …...................................................................................... 93
5.1.3. Rarefação-1/Choque-2 e Choque-1/Rarefação-2 …................................................. 95
5.2. Método de Glimm ….................................................................................................... 98
5.2.1. Choque-1/Choque-2 ….............................................................................................. 99
5.2.1.1. Exemplo 1 ….......................................................................................................... 99
5.2.1.2. Exemplo 2 …........................................................................................................ 103
5.2.2. Rarefação-1/Rarefação-2 ….................................................................................... 107
5.2.2.1. Exemplo 1 …........................................................................................................ 107
5.2.2.2. Exemplo 2 …........................................................................................................ 112

5.2.3. Choque-1/Rarefação-2 …........................................................................................ 116
5.2.3.1. Exemplo 1 …........................................................................................................ 116
5.2.3.2. Exemplo 2 …........................................................................................................ 121
5.2.4. Rarefação-1/Choque-2 …........................................................................................ 125
5.2.4.1. Exemplo 1 ….........................................................................................................125
5.2.4.2. Exemplo 2 …........................................................................................................ 130
Capítulo 6. Conclusões e Sugestões ................................................................................ 134
Referências Bibliográficas .............................................................................................. 138
Lista de Figuras
Figura 2.1 - Escoamento através da matriz porosa considerada …................................ 26
Figura 2.2 - Pressão versus fração do fluido em um escoamento supersaturado através
de uma matriz porosa …............................................................................... 28
Figura 2.3 - Pressão versus saturação em um escoamento supersaturado através de uma
matriz porosa …............................................................................................ 30
Figura 3.1 - Possível solução para o Problema de Riemann Associado ….................... 39
Figura 4.1 - Divisão do domínio para o emprego do Método de Glimm ….................. 72
Figura 4.2 - Solução do Problema de Riemann para emprego do Método de Glimm .. 73
Figura 4.3 - Amostragem da Solução do Problema de Riemann ….............................. 74
Figura 4.4 - Atualização da variável u mediante o método de Glimm …..................... 75
Figura 4.5 - Amostragem do Problema de Riemann Associado …............................... 78
Figura 4.6 - Análise da amostragem em relação à primeira descontinuidade
(choque-1) …................................................................................................ 80
Figura 4.7 - Análise da amostragem em relação à primeira descontinuidade
(rarefação-1) …............................................................................................. 81
Figura 4.8 -Análise da amostragem em relação à segunda descontinuidade
(choque-2) …................................................................................................ 83
Figura 4.9 - Análise da amostragem em relação à segunda descontinuidade
(rarefação-2) ................................................................................................ 84
Figura 5.1 - Pressão (a) e Saturação (b) versus ξ=x /t para os problemas com
restrição (linhas contínuas) e sem restrição (linhas pontilhadas),
considerando ωC=1,0, ψC=0,5 e cW=10. …................................. 91
i
Figura 5.2 - Pressão (a) e Saturação (b) versus ξ=x /t para os problemas com
restrição (linhas contínuas) e sem restrição (linhas pontilhadas),
considerando ωC=2,0, ψC=0,2 e cW=10000. …........................... 91
Figura 5.3 - Pressão (a) e Saturação (b) versus =x / t para os problemas com
restrição (linhas contínuas) e sem restrição (linhas pontilhadas),
considerando C=2,0, C=0,4 e cW=10000. …............................ 92
Figura 5.4 - Pressão (a) e Saturação (b) versus ξ=x /t para os problemas com
restrição (linhas contínuas) e sem restrição (linhas pontilhadas),
considerando ωC=3,0, ψC=0,6 e cW=1000. ….............................. 92
Figura 5.5 - Velocidade (a) e Saturação (b) versus ξ=x /t para a solução contínua com
condições iniciais em (5.2) …....................................................................... 95
Figura 5.6 - Evolução da saturação ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com restrição cW=10 e sem restrição
cW=1 , e ψC=0,5 e ωC=1,0. ….................................................. 100
Figura 5.7 - Evolução da velocidade ao longo do tempo para o caso Choque-1/Choque-
2, considerando os problemas com restrição cW=10 e sem restrição
cW=1 , e ψC=0,5 e ωC=1,0. ….................................................. 101
Figura 5.8 - Evolução da pressão ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com restrição (CW=10) e sem restrição
(CW=1), e ψC=0,5 e ωC=1,0. …................................................. 102
ii
Figura 5.9 - Evolução da saturação ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com ψC=0,6, ωC=1,0, cW=1,
cW=10, cW=100, e cW=200. …................................................... 104
Figura 5.10 - Evolução da velocidade ao longo do tempo para o caso Choque-1/Choque-
2, considerando os problemas com ψC=0,6, ωC=1,0, cW=1,
cW=10, cW=100, e cW=200. …................................................... 105
Figura 5.11 - Evolução da pressão ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com ψC=0,6, ωC=1,0, cW=1,
cW=10, cW=100, e cW=200. …................................................... 106
Figura 5.12 - Evolução da saturação ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas com restrição cW=10 e sem
restrição cW=1 , para ψE=ψD=1,02, e ωE=−ωD=−2,0. …...... 109
Figura 5.13 - Evolução da velocidade ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas com restrição cW=10 e sem
restrição cW=1 , para ψE=ψD=1,02, e ωE=−ωD=−2,0. …....... 110
Figura 5.14 - Evolução da pressão ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas com restrição cW=10 e sem
restrição cW=1 , para ψE=ψD=1,02, e ωE=−ωD=−2,0. …..... 111
Figura 5.15 - Evolução da saturação ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas ψE=ψD=1,02,
ωE=−ωD=−2,0. e cW=1, cW=10 e cW=100. …................... 113
iii
Figura 5.16 - Evolução da velocidade ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas ψE=ψD=1,02,
ωE=−ωD=−2,0. e cW=1, cW=10 e cW=100. ….....................114
Figura 5.17 - Evolução da pressão ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas ψE=ψD=1,02,
ωE=−ωD=−2,0. e cW=1, cW=10 e cW=100. …................... 115
Figura 5.18 – Evolução da saturação ao longo do tempo para o caso Choque-
1/Rarefação-2, considerando os problemas com restrição cW=10 e sem
restrição cW=1 , e ψE=0,2, ψD=1,15 e ωE=ωD=0,0. …...... 118
Figura 5.19 - Evolução da velocidade ao longo do tempo para o caso Choque-
1/Rarefação-2, considerando os problemas com restrição cW=10 e sem
restrição cW=1 , e ψE=0,2, ψD=1,15 e ωE=ωD=0,0. …...... 119
Figura 5.20 - Evolução da pressão ao longo do tempo para o caso Choque-1/Rarefação-2,
considerando os problemas com restrição cW=10 e sem restrição
cW=1 , e ψE=0,2, ψD=1,15 e ωE=ωD=0,0. ….................... 120
Figura 5.21 - Evolução da saturação ao longo do tempo para o caso Choque-1/Rarefação-
2, considerando os problemas com cW=1, cW=10, cW=100,
ψE=0,2, ψD=1,15 e ωE=ωD=0,0. ….......................................... 122
Figura 5.22 - Evolução da velocidade ao longo do tempo para o caso Choque-
1/Rarefação-2, considerando os problemas com cW=1, cW=10,
cW=100, ψE=0,2, ψD=1,15 e ωE=ωD=0,0. …...................... 123
iv
Figura 5.23 - Evolução da pressão ao longo do tempo para o caso Choque-1/Rarefação-2,
considerando os problemas com cW=1, cW=10, cW=100,
ψE=0,2, ψD=1,15 e ωE=ωD=0,0. ….......................................... 124
Figura 5.24 - Evolução da saturação ao longo do tempo para o caso Rarefação-1/Choque-
2, considerando os problemas com restrição cW=10 e sem restrição
cW=1 , e ψE=1,15, ψD=0,2 e ωE=ωD=0,0. …................... 127
Figura 5.25 - Evolução da velocidade ao longo do tempo para o caso Rarefação-
1/Choque-2, considerando os problemas com restrição cW=10 e sem
restrição cW=1 , e ψE=1,15, ψD=0,2 e ωE=ωD=0,0. …..... 128
Figura 5.26 - Evolução da pressão ao longo do tempo para o caso Rarefação-1/Choque-2,
considerando os problemas com restrição cW=10 e sem restrição
cW=1 , e ψE=1,15, ψD=0,2 e ωE=ωD=0,0. ….................. 129
Figura 5.27 - Evolução da saturação ao longo do tempo para o caso Rarefação-1/Choque-
2, considerando os problemas com cW=1, cW=10, cW=100,
ψE=1,15, ψD=0,2 e ωE=ωD=0,0. ….........................................131
Figura 5.28 - Evolução da velocidade ao longo do tempo para o caso Rarefação-
1/Choque-2, considerando os problemas com cW=1, cW=10,
cW=100, ψE=1,15, ψD=0,2 e ωE=ωD=0,0. …..................... 132
Figura 5.29 - Evolução da pressão ao longo do tempo para o caso Rarefação-1/Choque-2,
considerando os problemas com cW=1, cW=10, cW=100,
ψE=1,15, ψD=0,2 e ωE=ωD=0,0. ….......................................... 133
v
Lista de Tabelas
Tabela 3.1 - Condições para as possíveis soluções para o problema (3.15)-(3.18) … 54
Tabela 3.2 - Determinação das Soluções para o problema de Riemann …................. 67
Tabela 5.1 - Alguns resultados envolvendo a solução Choque-1/Choque-2 associada à
equação (5.1) …......................................................................................... 88
Tabela 5.2 - Alguns resultados obtidos com ωE=ωD=0 e ψE>ψD (Rarefação-
1/Choque-2) ….......................................................................................... 97
Tabela 5.3 - Alguns resultados obtidos com ωE=ωD=0 e ψE<ψD (Choque-
1/Rarefação-2) …...................................................................................... 98
vi
Lista de Símbolos
a - Velocidade máxima de propagação, em valor absoluto, da descontinuidade
considerando todos os problemas de Riemann no tempo t n
A - Área da superfície da Região R
A(u) - Matriz Jacobiana de f(u)
cW , c - Constantes da relação constitutiva entre pressão e fração de fluido
cW - Constante da relação constitutiva entre pressão e saturação
D - Coeficiente de difusão
D - Matriz diagonal, cujos componentes são os autovalores λ i de A(u)
DF - Parte simétrica do gradiente da velocidade do constituinte fluido
f α - Forças externas agindo no constituinte α de uma mistura, medidas por unidade
de massa de α
f F - Forças externas (por unidade de massa) agindo no constituinte fluido
f - Força de corpo externa total
f 1 - Saturação dentro da onda de rarefação-1
f 2 - Saturação dentro da onda de rarefação-2
f(u) - Fluxo de u
F(ψ*) - Função usada para determinar ψ* numericamente
g1 - Velocidade dentro da onda de rarefação-1
g2 - Velocidade dentro da onda de rarefação-2
h - Comprimento das divisões espaciais do domínio
vii
I - Tensor identidade
jα - Momentum Linear fornecido a α devido a reações químicas e/ou mudanças de
fase com outros constituintes
jF - Momentum Linear fornecido ao constituinte fluido devido a reações químicas
- com outros constituintes
k - Número de divisões espaciais do domínio para aplicar o método de Glimm
K - Porosidade específica do meio poroso
m1 - Número inteiro primo
m2 - Número inteiro primo
mα - Taxa temporal de produção de massa do constituinte α surgindo a partir da
reação com os outros constituintes
mF - Taxa temporal de produção de massa do constituinte fluido surgindo a partir
da reação com os outros constituintes
n - Vetor unitário normal à superfície ∂R
ni - Sequência de números primos gerados para distribuir mais uniformemente os
valores aleatórios do método de Glimm
p - Pressão adimensional
p̂ - Pressão
p - Pressão
pα - Força difusiva exercida em um constituinte α pelos demais constituintes
pE - Pressão inicial à esquerda (x < 0)
viii
pD - Pressão inicial à direita (x > 0)
p* - Pressão no estado intermedário (*)
pF - Fonte de Momentum Linear que atua sobre o constituinte fluido devido à sua
interação com os demais constituintes da mistura
R - Região arbitrária fixa dentro de uma mistura
R - Matriz cujas colunas são os autovetores R i à direita de A(u)
R i - Autovetores à direita de A(u)
s i - Velocidade de propagação de choques
t - Instante de tempo
Tα - Tensor Parcial de Tensões agindo no constituinte α de uma mistura
TF - Tensor parcial de tensões associado ao constituinte fluido
T - Tensor Parcial de tensões atuando sobre a mistura
u - Vetor com as variáveis do problema a ser resolvido
u0 - Solução fraca de um sistema hiperbólico
uE - Vetor com condições iniciais à esquerda (x < 0)
uD - Vetor com condições iniciais à direita (x > 0)
v α - Velocidade do constituinte α de uma mistura
v F - Velocidade do constituinte fluido na mistura
v - Componente na direção x da velocidade do constituinte fluido
v i - Variáveis características
v - Velocidade do baricentro da mistura
ix
V - Volume da Região R
V - Vetor das variáveis características
V0 - Vetor de condições iniciais das variáveis características
x - Vetor posição
α - Constituinte qualquer de uma mistura
δ - Número muito pequeno
Δ t - Intervalo de tempo utilizado para aplicar o método de Glimm
Δx - Comprimento das divisões espaciais do domínio para aplicar o método de
Glimm
ξ - Variável de similaridade
ρα - Densidade do constituinte α de uma mistura
ρf - Densidade mássica real do fluido
ρF - Densidade mássica do constituinte fluido
ρ - Densidade de uma mistura
∂R - Superfície da região R
ψ - Saturação
ψC - Constante positiva
ψD - Saturação inicial à direita (x > 0)
ψE - Saturação inicial à esquerda (x < 0)
ψ* - Saturação no estado intermediário (*)
φ - Fração de fluido
φ - Função vetorial teste
x
θ - Número gerado aleatoriamente entre -1 e +1
ε - Porosidade da matriz porosa
μ f - Viscosidade do fluido
λ - Constante positiva
λ i - Autovalores de A(u)
ω - Velocidade adimensional
ωC - Constante positiva
ωD - Velocidade inicial à direita (x > 0)
ωE - Velocidade inicial à esquerda (x < 0)
ω* - Velocidade no estado intermediário (*)
τ - Tempo adimensional
xi
Capítulo 1
Introdução
1.1. Considerações Iniciais
O presente trabalho apresenta um estudo de escoamentos em meios porosos,
considerando a transição insaturado/saturado, e apresentando uma nova relação constitutiva
contínua para a pressão como função da saturação, porém não diferenciável.
Entre as aplicações práticas de fenômenos de transporte em meios porosos, os
escoamentos subterrâneos, os processos de recuperação de petróleo, a contaminação de
solos por resíduos tóxicos, o armazenamento de lixo nuclear em profundas camadas
rochosas do leito marítimo e a dispersão de poluentes, podem ser mencionados como
1
exemplos. O interesse crescente relacionado a tais fenômenos pode ser explicado pela
importância dada a problemas que impactam na auto-suficiência energética e no meio
ambiente [1-4].
Os escoamentos em meios porosos, em muitos casos, podem ser tratados como uma
mistura líquido-gás-sólido. No presente trabalho, a matriz porosa é considerada levemente
deformável, de forma a dar origem a uma nova relação constitutiva entre pressão e
saturação. Além disso, é considerado que a deformação da matriz porosa é tão pequena que
não é levada em conta. Desta forma não é necessário satisfazer as equações de movimento
para o constituinte sólido da mistura. Além disso, como o constituinte gasoso tem, por
hipótese, uma densidade muito pequena, quando comparada à do líquido, sendo incluído
apenas para levar em conta a compressibilidade da mistura, é necessário resolver as
equações de movimento somente para o constituinte líquido da mistura.
A ferramenta utilizada para obter um modelo mecânico que represente tais
escoamentos foi a Teoria Contínua de Misturas. Combinando esta teoria com hipóteses
constitutivas apropriadas, obtém-se uma descrição matemática do problema. Essa descrição
é representada por um sistema hiperbólico não-linear de equações diferenciais parciais,
representando as equações de massa e de momentum linear (combinadas às relações
constitutivas pertinentes) para o constituinte líquido e para a mistura.
A descrição de grande parte dos fenômenos de transporte envolve a aplicação de
equações diferenciais parciais elípticas ou parabólicas que, em geral, admitem soluções
regulares e cujas simulações podem ser implementadas através de métodos numéricos
conhecidos, tais como elementos finitos, volumes finitos ou diferenças finitas.
Os sistemas hiperbólicos, por outro lado, permitem uma descrição mais realista de
2
certos fenômenos do transporte, uma vez que a propagação de qualquer quantidade ou
informação presente nestes fenômenos pode ser caracterizada por uma velocidade finita. No
entanto, tais sistemas podem não admitir soluções regulares, mas sim soluções
descontínuas, que se caracterizam por soluções generalizadas envolvendo ondas de choque,
o que requer o emprego de ferramentas numéricas específicas, tais como o esquema de
Glimm [5] ou o esquema de Godunov [6] para tratar a natureza descontínua do problema.
Assim, um dos grandes desafios que envolvem o tratamento de soluções descontínuas
reside no fato que técnicas analíticas eficientes que predominam na teoria de equações
diferenciais parciais dissipativas não podem ser diretamente aplicadas àquelas situações.
A relação constitutiva proposta para a pressão permite que a saturação da matriz
porosa seja alcançada e o sistema de equações diferenciais parciais não-lineares, permaneça
hiperbólico mesmo quando a supersaturação é atingida. Dessa forma é possível empregar o
Método de Glimm para o problema estudado.
O Método de Glimm [5], que é um esquema de escolha aleatória, especialmente
desenvolvido para tratar de problemas envolvendo propagação de descontinuidades e ondas
de choque, tem sido usado para descrever fenômenos distintos caracterizados por
velocidades de propagação finitas. Exemplos são os estudos das equações de águas rasas do
problema de quebra de barragem [7], propagação de onda em tubulações elasto-visco-
plásticas [8], escoamentos de gases em tubulações [9], propagação de ondas em fluidos
[10], redução de vazios de ar em concreto asfáltico [11], transporte de poluentes na
atmosfera [12-14] e escoamentos em meios porosos insaturados [1-2].
Para a utilização do Método de Glimm, no entanto, é necessário conhecer a priori, a
solução do problema de Riemann associado ao sistema hiperbólico originado pelo modelo
3
proposto. A solução do problema de Riemann associado a um sistema hiperbólico é uma
ferramenta importante em muitos campos de pesquisa distintos como escoamentos
magneto-gás-dinâmicos, escoamentos bifásicos compressíveis isoentrópicos não ideais,
sistemas hiperbólicos não conservativos modelando elasto-dinâmica, ou um modelo
hiperbólico incompressível para fluidos, por exemplo. Algumas aplicações podem ser vistas
em [15-21].
Em resumo, este trabalho propõe uma descrição via Teoria de Misturas para o
escoamento unidimensional transiente de um fluido através de uma matriz porosa, com
transição insaturado/saturado, considerando a matriz porosa como levemente deformável,
sempre dando origem a um sistema de equações hiperbólico não-linear, que tem como
incógnitas a velocidade e a saturação do constituinte líquido. Dessa forma, após obter a
solução completa do problema de Riemann associado, pode-se aplicar o método de Glimm
ao modelo proposto, obtendo-se evolução da solução do problema com o tempo para
quaisquer condições iniciais.
O modelo utilizado nesse trabalho (escoamento unidimensional em uma matriz
porosa), apesar de simplificado, serve como base para a descrição de situações práticas
muito comuns e importantes, como, por exemplo, escoamentos em reservatórios de
petróleo, ou contaminação do solo por poluentes. Na abordagem empregada no presente
trabalho supõe-se que uma das direções do escoamento é de ordem de grandeza superior às
demais, o que justifica empregar uma abordagem unidimensional.
4
1.2. Revisão Bibliográfica
1.2.1. Teoria de Misturas
Neste trabalho, os escoamentos em meios porosos são descritos empregando uma
modelagem de Teoria de Misturas, uma generalização da Mecânica do Contínuo clássica,
especialmente desenvolvida para tratar fenômenos multifásicos [4].
O primeiro trabalho conhecido, no qual foi estudado escoamento através de meios
porosos foi publicado por Darcy em 1856 [22], no qual foi postulada a conhecida lei de
Darcy. Com esta lei é possível estudar a porosidade, a vazão da água e a permeabilidade em
aquíferos. Ao longo da história alguns autores publicaram trabalhos empregando a lei de
Darcy, dentre os quais podemos citar Sundaravadivelu e Tso [23], que estudaram a
influência da viscosidade na transferência de calor por convecção forçada. Estes autores
estudaram analiticamente o problema empregando a lei de Darcy e concluíram que o perfil
de velocidade é fortemente afetado pela variação das características da matriz porosa e da
viscosidade do fluido.
O trabalho analítico publicado por Kelly [24], apresenta as tradicionais equações de
balanço de massa, momentum, energia e entropia além de introduzir equações de balanço
de carga elétrica e fluxo magnético, considerando reações químicas. Neste trabalho são
introduzidos termos que levam em conta a interação entre os constituintes existentes antes
ou depois dessas reações. O autor afirma que as equações postuladas por ele são as mais
gerais existentes na literatura.
5
A Teoria de Misturas foi empregada por Bowen [25] para apresentar modelos que
descrevem a mistura de sólidos e fluidos. Os modelos propostos foram postulados a partir
da cinemática e das equações de balanço de massa e de momentum. Também é feita uma
análise termodinâmica para os casos de mistura de sólidos elásticos incompressíveis e
fluidos incompressíveis, mistura de sólidos rígidos e fluidos incompressíveis.
Saldanha da Gama e Martins-Costa [26] simularam a transferência de momentum e
de energia num meio poroso insaturado por um fluido incompressível, modelado via Teoria
de Misturas levando a uma descrição matemática de quarto equações diferenciais não
lineares. A simulação do problema foi feita através da aplicação de um esquema de Glimm,
combinado a uma técnica de fatoração do operador para o problema hidrodinâmico, que
permite transformar um problema complexo em dois sequenciais mais simples.
Jiang e Ren [27] postularam equações para um fluido bidimensional escoando
através de um meio poroso, a partir do modelo de Darcy. O problema foi estudado
considerando as condições de contorno postuladas em [28-31] a fim de calcular
aproximações numéricas que permitissem a comparação com resultados experimentais,
permitindo observar que o modelo proposto apresenta boa exatidão.
O estudo de múltiplos fluidos imiscíveis escoando através de um meio poroso foi
estudado por Wei e Muraleetharan [32], usando a Teoria de Misturas. Os autores provaram
que a Teoria de Misturas pode ser deduzida a partir do princípio de potências virtuais.
Hanyga [33] empregou a Teoria de Misturas para estudar o escoamento de dois (ou
mais) fluidos imiscíveis através de uma matriz porosa. Foram introduzidas equações
constitutivas para a energia, o tensor tensão, o momentum e o fluxo de calor. Efeitos como
6
a capilaridade e as forças de arrasto responsáveis pelo aumento da difusão foram incluídos
na formulação apresentada para descrever o problema.
Massoudi [34] explicou a importância das condições de contorno para resolver
problemas empregando a Teoria de Misturas. O trabalho estuda o caso de misturas de um
sólido e um líquido. O caso de condições de contorno nas paredes sólidas foi estudado,
sendo introduzida uma velocidade de deslizamento, considerando que, de fato, alguns
fluidos escorregam na parede.
A Teoria de Misturas foi empregada por Ristinmaa et al. [35] para estudar o
escoamento em um sólido poroso termoelasto-plástico. No modelo proposto são
consideradas as trocas de massa entre as fases líquida e vapor. As equações de balanço de
massa, de momentum e também a equação da energia livre de Helmholtz foram postuladas
para cada fase. Foram considerados os efeitos térmicos, os efeitos da deformação tanto na
fase sólida quanto na fase líquida, da difusão e condução, evolução plástica e a troca de
massa. Como resultados, foram obtidas as curvas de equilíbrio considerando os seguintes
casos: que o sólido absorve massa, que o sólido cede massa e que o sólido nem absorve
nem cede massa.
Um modelo macroscópico, considerando rochas insaturadas e isotérmicas, foi
postulado por Chen e Hicks [36], que usaram a teoria de Biot e elementos de não equilíbrio
termodinâmico para obter um modelo que considera três fases: sólida, líquida e gasosa.
Esses autores afirmam ser possível com seu modelo descrever o grau de saturação, a
pressão nos poros, a tensão e a deformação em função do tempo e da distância.
Outra relação que dever ser levada em conta no escoamento através de meios
porosos é a relação entre porosidade e permeabilidade. Na bibliografia encontram-se
7
estudos deste tipo onde a equação de Kozeny-Carman é empregada [37-40]. Essa expressão
que relaciona a porosidade e a permeabilidade requer uma constante que depende do
material e do tamanho dos grãos que compõem a matriz porosa. Esta constante tem um
papel fundamental na aplicação da equação, o valor deste parâmetro muda para cada tipo de
material poroso.
Os modelos matemáticos obtidos a partir da Teoria de Misturas podem resultar em
sistemas hiperbólicos de equações diferenciais. Tais sistemas possuem soluções e
implementações numéricas muito características, uma vez que essas podem ser
descontínuas. A solução de tais sistemas envolve a solução do Problema de Riemann
associado ao sistema, que é utilizada como dado de entrada para o Método de Glimm.
1.2.2. O Problema de Riemann e o Método de Glimm
O estudo matemático de soluções descontínuas teve início com o trabalho pioneiro
de Riemann [41], que primeiro resolveu um problema de valor inicial, para as condições
isoentrópicas unidimensionais de Euler. Riemann estudou a solução das equações de Euler
para um tubo longo contendo gás, inicialmente a condições diferentes de densidade e
pressão, separados por uma membrana. Após o rompimento dessa membrana, ele observou
que o comportamento do gás era tal que suas propriedades apresentavam ondas (choques ou
rarefações) ao longo do comprimento do tubo. Esse problema hoje é conhecido por seu
nome e desempenha um papel essencial na análise numérica e computacional de soluções
descontínuas.
8
Inúmeros métodos para resolver as equações de Euler foram propostos desde o
início dos anos cinquenta, quando Courant et al. [42] e Lax [43] desenvolveram métodos de
primeira ordem de precisão, sendo este último um dos primeiros a utilizar a ideia de
diferenças finitas para provar a existência de soluções fracas, obtendo soluções auto-
similares para o problema de Riemann e o conceito de admissibilidade para choques, o qual
hoje leva seu nome. Posteriormente, diversos outros métodos foram propostos, como os de
Lax e Wendroff [44] e MacCormack [45], os quais foram desenvolvidos empregando
esquemas centrados e ambos apresentam segunda ordem de precisão no tempo e no espaço.
Entretanto, os esquemas centrados não levam em consideração as características físicas de
direção de propagação de informações presentes no escoamento.
A partir da metade do século passado, o estudo analítico da teoria de leis de
conservação teve um grande desenvolvimento devido a renomados matemáticos, como
Hopf [46], um dos precursores na utilização do método de viscosidade nula, seguido por
Oleinik [47], que provou existência, unicidade, comportamento assintótico e decaimento de
soluções para equações escalares em uma variável espacial.
Em 1959, Godunov [6] propôs um esquema upwind de primeira ordem de precisão,
como uma extensão aos métodos desenvolvidos por Courant et al. [42] para sistemas
hiperbólicos não lineares de leis de conservação, no qual resolve um problema de Riemann
exato para cada intervalo da malha, em função das descontinuidades dos valores das
variáveis de estado nas interfaces desta mesma malha. Nesta mesma linha, podemos citar os
esquemas de Engquist e Osher [48], Osher [49] e Roe [50], que são métodos de separação
de diferenças de fluxos.
9
Em 1965, Glimm [5] introduziu o Método de Escolha Aleatória (Random Choice
Method). Este esquema surge como uma prova construtiva da existência de soluções para
uma classe de sistemas hiperbólicos não lineares de leis de conservação, onde se provou a
existência global de soluções para estes sistemas. Glimm amostrou a solução de um
problema de Riemann de forma a obter a solução de escoamentos com descontinuidade
para um tempo qualquer. Em 1976, Chorin [51] implementou com sucesso uma versão
modificada deste esquema como uma ferramenta computacional para resolver as equações
de Euler de dinâmica de gases. Além disso, Chorin propôs uma alteração no processo de
amostragem, de forma a distribuir uniformemente as amostras, dando origem a resultados
mais precisos. Outros exemplos de aplicação com sucesso do Método de Glimm podem ser
encontrados em [52,53].
Entre as principais características do método de Glimm estão a sua capacidade de
não dissipar o choque, preservando, assim, a sua magnitude e posição, além do baixo custo
computacional se comparado a outros métodos de aproximação de problemas não lineares
como o método de elementos finitos associado a uma técnica de captura de choques, por
exemplo. Além disto, quando o comprimento dos passos tomados em relação à variável
espacial tende a zero, a aproximação obtida tende a solução exata do problema,
considerando, neste caso, a sua solução fraca [3, 52].
Atualmente, vários matemáticos chineses têm dado relevantes contribuições ao
problema de Riemann e problemas correlatos. Basta ver, por exemplo, os trabalhos de Gu et
al. [54] e Ding et al. [55], bem como as contribuições mais recentes em Chang e Hsiao [56],
Ding e Liu [57], Li et al. [58] e Li e Yu [59].
10
1.2.3. Escoamentos com restrição em meios porosos
O problema de Riemann e o Método de Glimm são ferramentas importantes na
resolução de problemas de escoamentos em meios porosos, os quais podem apresentar
propagação de descontinuidades. Buscando encontrar modelos fisicamente realistas para
tais problemas, foram desenvolvidos sucessivos modelos para o preenchimento de um meio
poroso utilizando Teoria de Misturas [60, 61].
Daganzo [62], Aw e Rascle [63], Berthelin e Bouchut. [64], Colombo e Goatin [65],
Berthelin et al. [66], Herty e Schleper [67], e Colombo et al. [68] utilizaram modelos de
escoamento de tráfico (traffic flow models) para estudar escoamentos com restrição e
propagação de descontinuidades. Esse modelos, no entanto, podem apresentar resultados
não realistas, tais como densidades negativas [69].
Bouchut et al. [70] discutiram escoamentos bifásicos de um gás e um líquido, e
propuseram um modelo a partir de uma restrição para a fração volumétrica. A metodologia
proposta pelos autores captura as fortes diferenças entre a dinâmica de regiões
congestionadas e livres, assim como permite determinar sua transição.
Rossmanith [71] utilizou um método de volumes finitos, baseado em um método de
propagação de ondas, empregando um artefato de restrição para aproximar um sistema de
equações hiperbólicas não-lineares para problemas de hidrodinâmica magnética, sujeito a
ondas de choque e outras descontinuidades.
Saldanha da Gama [72], propôs uma restrição ao sistema hiperbólico, na qual a
rigidez da matriz porosa e a incompressibilidade do fluido dão origem a uma relação
constitutiva para a pressão parcial do constituinte líquido que leva em conta uma fronteira
11
geométrica, a qual admite soluções realistas. A relação constitutiva para a pressão parcial é
uma restrição geométrica unilateral para a fração do fluido, válida em todo o domínio. Na
sequência, Martins Costa e Saldanha da Gama [73] consideraram uma restrição geométrica
unilateral para a fração do fluido em uma vizinhança conveniente da porosidade, garantindo
continuidade para a pressão e sua primeira derivada e calcularam analiticamente os
Invariantes de Riemann associados com o problema.
Després et al. [74] observaram que entender as restrições impostas aos modelos
matemáticos e o desenvolvimento de soluções para equações diferenciais parciais não
lineares permanecem grandes desafios até os dias atuais. Esses autores apresentaram um
desenvolvimento matemático para soluções fracas de sistemas hiperbólicos com restrições,
com a finalidade de modelar a plasticidade compressível com choques, a qual dá origem a
soluções descontínuas. Os modelos foram propostos nos sistemas de Friedrich com uma
restrição geral convexa, provando que essas soluções fracas são únicas.
Saldanha da Gama et al. [69] impuseram matematicamente uma restrição
geométrica unilateral e apresentaram a solução exata de um Problema de Riemann não
linear com restrição, garantindo que o maior valor da fração do fluido fosse a porosidade e
identificando claramente a transição do escoamento insaturado para o escoamento saturado.
No entanto, quando a saturação era alcançada o problema deixava de ser hiperbólico
impedindo, por exemplo, a utilização do esquema de Glimm, que permite obter soluções
numéricas para quaisquer condições iniciais. Em outras palavras, o esquema de Glimm só
poderia ser aplicado antes da saturação ser atingida. Para superar essa deficiência, o
presente trabalho empregará um artifício matemático: permitir uma pequena saturação –
levando a fração do fluido a exceder levemente a porosidade. Isso é equivalente a permitir
12
uma saturação muito pequena na matriz porosa. Este artifício matemático garante que o
problema permaneça hiperbólico mesmo quando a saturação é alcançada. É importante
notar que a descrição hiperbólica permite implementar um método como o de Glimm para
avançar no tempo (qualquer condição inicial pode ser considerada).
1.3. Objetivos
O presente trabalho foi motivado por [69] no qual a transição entre escoamentos
insaturados e saturados foi identificada e uma restrição física associada ao enchimento de
uma matriz porosa insaturada foi imposta: a porosidade nominal como um limite superior
para a fração de fluido. A referida restrição imposta em [69] fazia com que a
hiperbolicidade do sistema fosse perdida quando a saturação era atingida. No presente
trabalho é apresentada uma restrição que permite definir uma relação constitutiva inédita
para a pressão, a qual garante que o problema permaneça hiperbólico mesmo para
escoamentos saturados.
Utilizando a relação constitutiva proposta, foi simulado o enchimento de uma
matriz porosa unidimensional, que representa problemas práticos nos quais uma das
dimensões é muito maior que as outras, como é o caso de escoamentos em reservatórios de
petróleo ou o caso da contaminação do solo por poluentes.
A descrição utilizada é feita de um ponto de vista da Teoria de Misturas e trata o
escoamento como uma superposição de constituintes contínuos – um constituinte gasoso
com densidade muito baixa (que permite considerar a compressibilidade da mistura como
um todo), um constituinte líquido (representando um fluido newtoniano), que é denotado
13
como constituinte fluido e um constituinte sólido (que representa a matriz porosa quase
indeformável).
Em geral, quando o escoamento torna-se saturado, o modelo matemático deixa de
ser hiperbólico. Neste trabalho considera-se uma matriz porosa fracamente deformável, de
tal forma que a fração de fluido pode ser ligeiramente maior que a porosidade, admitindo
uma pequena supersaturação, que equivale a permitir uma deformação muito pequena na
matriz porosa, de modo a poder considerar uma relação constitutiva contínua e convexa
para a pressão. Este artifício matemático garante que o problema permaneça hiperbólico
mesmo quando a saturação é atingida, além disso, a física do problema é preservada.
A vantagem do problema permanecer hiperbólico é a possibilidade de empregar
uma metodologia apropriada para simular sistemas hiperbólicos, como o método de Glimm,
e marchar no tempo através da solução de um certo número previamente determinado de
problemas de Riemann.
O Capítulo 2 apresenta o Modelo Mecânico do problema discutido nesta tese.
Inicialmente são apresentados os conceitos de Teoria de Misturas e, em seguida, as
hipóteses constitutivas empregadas, permitindo o desenvolvimento equações do Modelo
Mecânico para o problema analisado.
No Capítulo 3, a solução completa para o problema de Riemann associado é
apresentada e, no Capítulo 4 é apresentado o procedimento adotado para a implementação
do método de Glimm ao modelo matemático proposto.
No capítulo 5 são apresentados os resultados numéricos e, por fim, no capítulo 6
são apresentadas as conclusões do trabalho e algumas sugestões para o desenvolvimento de
trabalhos futuros.
14
Capítulo 2
MODELAGEM MECÂNICA
2.1. Introdução
Nesse capítulo serão apresentadas as equações básicas da teoria contínua de
misturas, empregada na descrição do processo de enchimento de um meio poroso
insaturado por um líquido. Quando descreve-se o comportamento de materiais tais como
água, borracha ou polímeros, os mesmos são observados como um único meio contínuo, no
entanto, existem muitas substâncias, como por exemplo, misturas de gases ideais, misturas
de líquidos, líquidos com bolhas, suspensões, meios porosos ou ligas metálicas, para as
quais seria mais apropriado assumir que o meio consiste de mais de um constituinte. Dessa
15
forma, serão apresentadas as equações para o Balanço de Massa e Balanço de Momentum
Linear para cada um dos constituintes e para uma mistura qualquer.
Uma das formas de apresentar as equações para as leis de balanço para um único
constituinte envolve a introdução do conceito de região material. Essa região é definida de
forma que a mesma sempre contenha as mesmas partículas assim, em geral, a fronteira
dessa região varia com o tempo. Esse método pode ser estendido para a dedução de
equações de balanço para misturas.
Uma forma alternativa de apresentar as equações de balanço para um único
constituinte é utilizar uma região arbitrária fixa e regular no espaço. Essa segunda
alternativa também pode ser aplicada para misturas e será utilizada nas subseções seguintes.
Nas próximas subseções será considerada uma região fixa R de volume V delimitada por
uma superfície ∂R também regular de área A. Todas as equações são deduzidas para o
instante de tempo t e todos os campos são funções de x e t. Quando considerado um
constituinte da mistura, será suposto que o mesmo pode ser isolado do restante da mistura,
desde que o efeito dos demais constituintes sobre o mesmo seja considerado.
2.2. Balanço de Massa
A ocorrência de reações químicas e/ou mudanças de fase entre os constituintes pode
alterar a quantidade de qualquer um dos constituintes presentes na mistura.
Consequentemente a massa de um constituinte α não necessariamente é conservada e o
balanço de massa para esse constituinte pode ser escrito como [60]
16
∂∂ t∫V
ραdV +∫∂Vραvα⋅n dA=∫V
mαdV (2.1)
sendo mα a taxa temporal de produção de massa do constituinte α surgindo a partir da
reação com os outros constituintes, n é o vetor unitário normal à superfície ∂R,
apontando para fora da mesma, ρα é a densidade do constituinte α de tal forma que a
densidade da mistura é dada por ρ=∑α
ρα e v α é a velocidade do constituinte α.
Para a mistura como um todo, postula-se a conservação de massa. Em outras palavras,
enquanto consideramos o intercâmbio de massa entre os constituintes, para a mistura, a
criação de massa adicional não ocorre [60]. A equação (2.2) a seguir apresenta a
conservação de massa para a mistura
∂∂ t∫V∑
α
ρα dV+∫∂V ∑
α
ρα vα⋅ndA=0. (2.2)
As equações (2.1) e (2.2) são as formulações integrais para o balanço de massa de
um constituinte e para a mistura, respectivamente. Para obter essas equações em sua forma
diferencial, é necessário utilizar o Teorema da Divergência (Teorema de Gauss1). Aplicando
o Teorema da Divergência à equação (2.1), tem-se
1 O Teorema de Gauss converte uma integral de superfície em uma integral de volume, da seguinte forma:
∫∂ Rv⋅n dA=∫V
(∇⋅v )dV .
17

∫V [∂ ρα
∂ t+∇⋅( ρα vα )−mα]dV= 0. (2.3)
Como R é uma região arbitrária fixa sendo ocupada integralmente pela mistura e,
considerando que o integrando é um campo regular na região R, tem-se que
∂ ρα
∂ t∇⋅ ρα v α =mα . (2.4)
A equação (2.4) é a equação diferencial para o Balanço de Massa de um constituinte
em uma mistura.
Aplicando procedimento semelhante à equação (2.2), tem-se
∂ ρ∂ t
+∇⋅( ρ v )=0 . (2.5)
sendo v a velocidade do baricentro da mistura, e ρ a densidade de mistura, definidos por
(2.6) e (2.7), respectivamente
v ρ=∑α
v α ρα (2.6)
ρ=∑α
ρα (2.7)
18
Realizando a soma em (2.4) observa-se que uma equação equivalente para a
equação (2.5) é
∑α
mα=0 (2.8)
As equações (2.6) e (2.8) são formas equivalentes do Balanço de Massa para a
mistura.
2.3. Balanço de Momentum Linear
Antes de deduzir a equação do Balanço de Momentum Linear para um dado
constituinte α, consideremos as forças agindo nesse constituinte na região R. Assim como
as força de campo (como, por exemplo, o campo gravitacional), devem ser levados em
consideração os efeitos da mistura fora da região R. Isso é feito mediante um tensor
Tα (n , x , t ) definido em toda a região R, que expressa localmente o estado de tensão
decorrente da força de contato exercida sobre o constituinte α pelo exterior a ∂R. Esse
tensor é chamado Tensor Parcial de Tensões e possui uma função na Teoria das Misturas,
análoga ao Tensor Tensão na Mecânica do Contínuo. Dois outros efeitos a serem
considerados no balanço de Momentum Linear de α são (1) o Momentum Linear fornecido
a α devido a reações químicas e/ou mudanças de fase com outros constituintes e (2) a
transferência de Momentum Linear devido a outras interações, como por exemplo, o
movimento relativo entre os constituintes e os efeitos devido a uma distribuição não
19
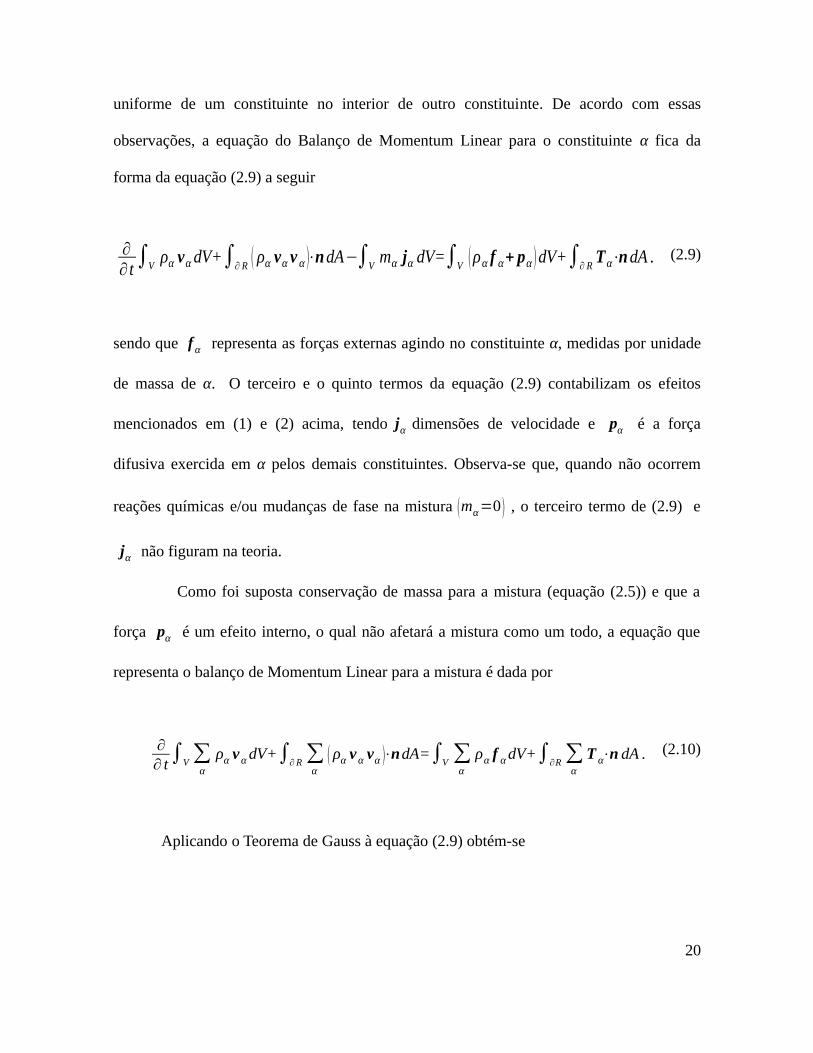
uniforme de um constituinte no interior de outro constituinte. De acordo com essas
observações, a equação do Balanço de Momentum Linear para o constituinte α fica da
forma da equação (2.9) a seguir
∂∂ t∫V
ρα vα dV+∫∂ R ( ρα vα v α )⋅n dA−∫Vmα jα dV=∫V (ρα f α+ pα )dV+∫∂ R
Tα⋅n dA . (2.9)
sendo que fα representa as forças externas agindo no constituinte α, medidas por unidade
de massa de α. O terceiro e o quinto termos da equação (2.9) contabilizam os efeitos
mencionados em (1) e (2) acima, tendo jα dimensões de velocidade e pα é a força
difusiva exercida em α pelos demais constituintes. Observa-se que, quando não ocorrem
reações químicas e/ou mudanças de fase na mistura (mα=0) , o terceiro termo de (2.9) e
jα não figuram na teoria.
Como foi suposta conservação de massa para a mistura (equação (2.5)) e que a
força pα é um efeito interno, o qual não afetará a mistura como um todo, a equação que
representa o balanço de Momentum Linear para a mistura é dada por
∂∂ t∫V∑
α
ρα vα dV+∫∂R∑
α ρα vα vα ⋅ndA=∫V ∑
α
ρα f α dV+∫∂R∑
α
T α⋅n dA . (2.10)
Aplicando o Teorema de Gauss à equação (2.9) obtém-se
20

∫V [∂ ρα vα
∂ t+∇⋅( ρα v α vα )−mα jα−(ρα f α+ pα )−∇⋅Tα] dV=0 . (2.11)
Como R é uma região arbitrária fixa no interior da mistura e, considerando que o
integrando é regular na região R, tem-se que
∂ ρα v α
∂ t∇⋅ρα vα v α =∇⋅T αmα jαρα f αpα (2.12)
que é a equação do Balanço do Momentum Linear para um constituinte α da mistura.
Aplicando-se um procedimento semelhante à equação (2.10) obtém-se a equação do
Balanço de Momentum Linear para a Mistura, dada pela equação (2.13) a seguir
∑α[∂ ρα v α
∂ t+∇⋅( ρα v α v α)]=∇⋅T+ ρ f (2.13)
sendo f=∑
α
ρα f α
ρ a força de corpo externa total e T=∑
α
T α o tensor de tensões atuando
sobre a mistura.
Somando (2.12) para todos constituintes, obtém-se uma equação equivalente a
(2.13), dada por
∑α
( pα +mα jα )=0 (2.14)
21
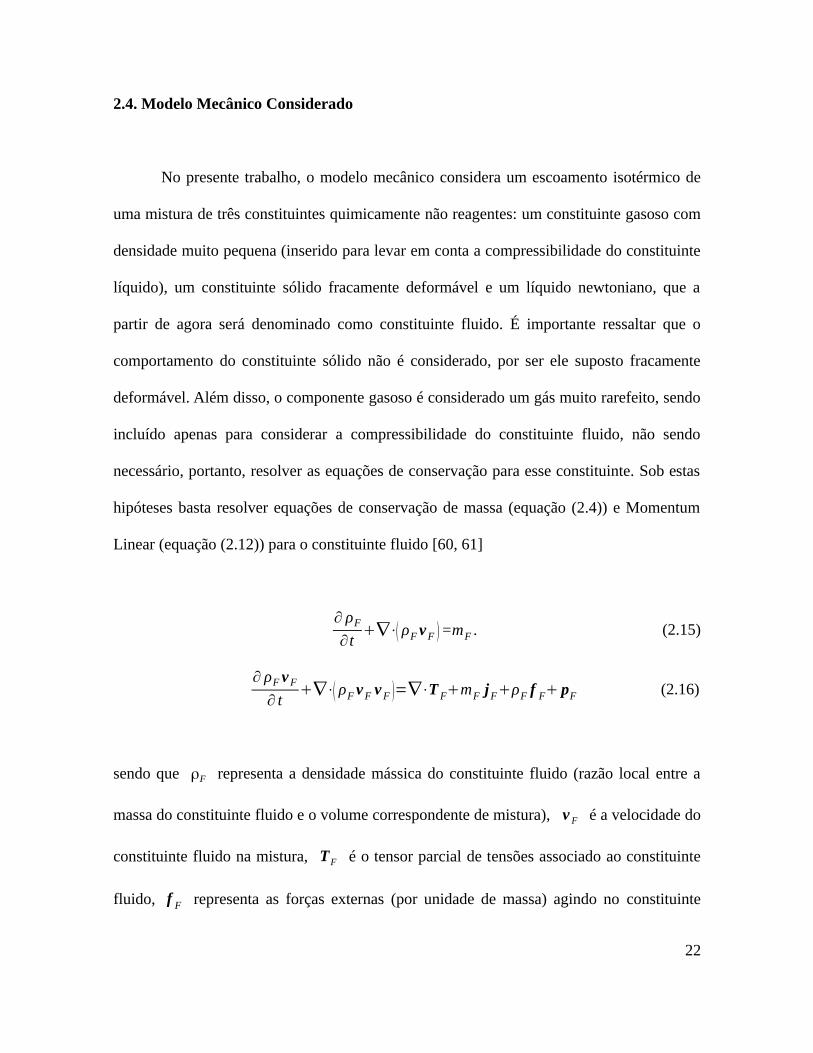
2.4. Modelo Mecânico Considerado
No presente trabalho, o modelo mecânico considera um escoamento isotérmico de
uma mistura de três constituintes quimicamente não reagentes: um constituinte gasoso com
densidade muito pequena (inserido para levar em conta a compressibilidade do constituinte
líquido), um constituinte sólido fracamente deformável e um líquido newtoniano, que a
partir de agora será denominado como constituinte fluido. É importante ressaltar que o
comportamento do constituinte sólido não é considerado, por ser ele suposto fracamente
deformável. Além disso, o componente gasoso é considerado um gás muito rarefeito, sendo
incluído apenas para considerar a compressibilidade do constituinte fluido, não sendo
necessário, portanto, resolver as equações de conservação para esse constituinte. Sob estas
hipóteses basta resolver equações de conservação de massa (equação (2.4)) e Momentum
Linear (equação (2.12)) para o constituinte fluido [60, 61]
∂ ρF
∂t∇⋅ ρF vF =mF . (2.15)
∂ ρF vF
∂ t∇⋅ ρF vF v F =∇⋅T FmF jFρF f F pF (2.16)
sendo que ρF representa a densidade mássica do constituinte fluido (razão local entre a
massa do constituinte fluido e o volume correspondente de mistura), v F é a velocidade do
constituinte fluido na mistura, TF é o tensor parcial de tensões associado ao constituinte
fluido, f F representa as forças externas (por unidade de massa) agindo no constituinte
22
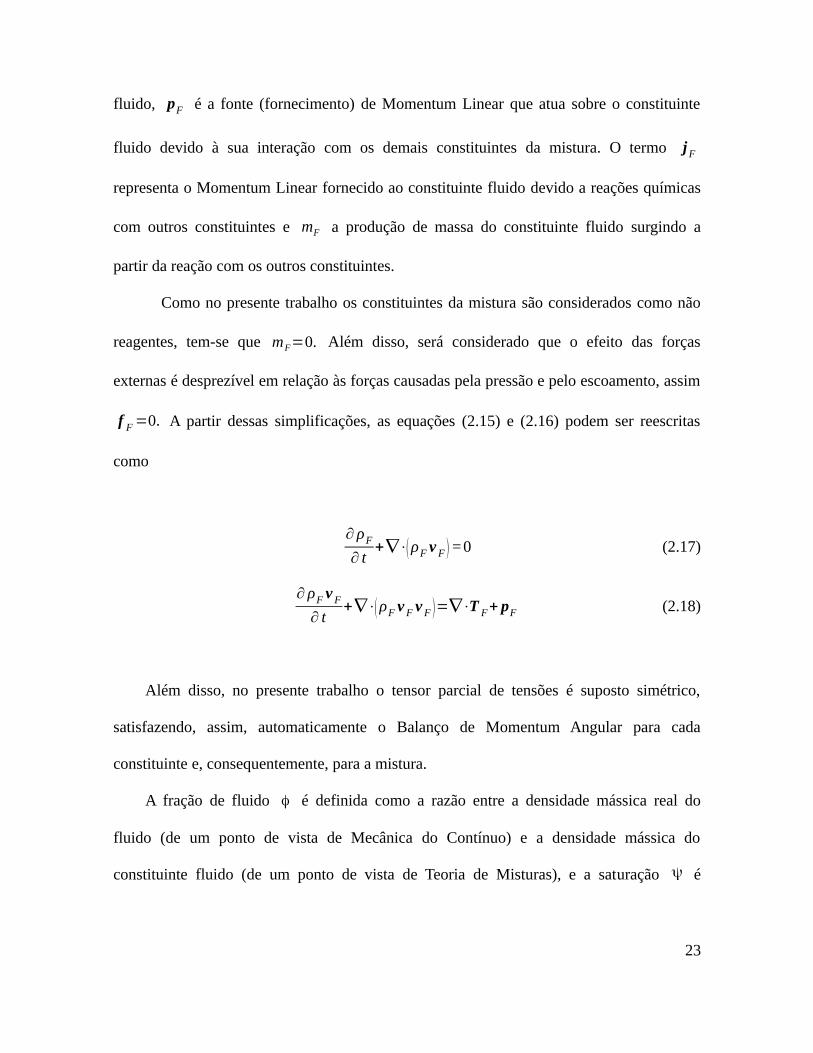
fluido, pF é a fonte (fornecimento) de Momentum Linear que atua sobre o constituinte
fluido devido à sua interação com os demais constituintes da mistura. O termo jF
representa o Momentum Linear fornecido ao constituinte fluido devido a reações químicas
com outros constituintes e mF a produção de massa do constituinte fluido surgindo a
partir da reação com os outros constituintes.
Como no presente trabalho os constituintes da mistura são considerados como não
reagentes, tem-se que mF=0. Além disso, será considerado que o efeito das forças
externas é desprezível em relação às forças causadas pela pressão e pelo escoamento, assim
f F=0. A partir dessas simplificações, as equações (2.15) e (2.16) podem ser reescritas
como
∂ ρF
∂ t+∇⋅(ρF v F )=0 (2.17)
∂ ρF v F
∂ t+∇⋅(ρF v F v F )=∇⋅T F+ pF (2.18)
Além disso, no presente trabalho o tensor parcial de tensões é suposto simétrico,
satisfazendo, assim, automaticamente o Balanço de Momentum Angular para cada
constituinte e, consequentemente, para a mistura.
A fração de fluido φ é definida como a razão entre a densidade mássica real do
fluido (de um ponto de vista de Mecânica do Contínuo) e a densidade mássica do
constituinte fluido (de um ponto de vista de Teoria de Misturas), e a saturação ψ é
23
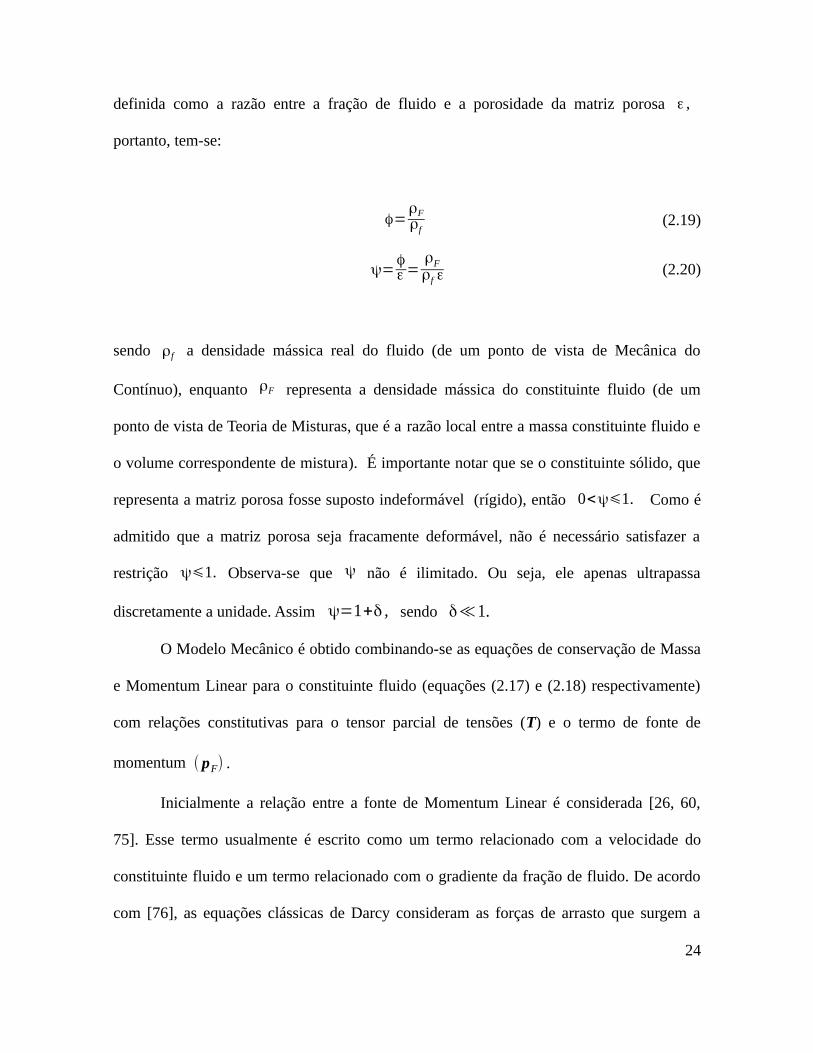
definida como a razão entre a fração de fluido e a porosidade da matriz porosa ε ,
portanto, tem-se:
φ=ρFρf
(2.19)
ψ=φε=
ρFρf ε
(2.20)
sendo ρf a densidade mássica real do fluido (de um ponto de vista de Mecânica do
Contínuo), enquanto ρF representa a densidade mássica do constituinte fluido (de um
ponto de vista de Teoria de Misturas, que é a razão local entre a massa constituinte fluido e
o volume correspondente de mistura). É importante notar que se o constituinte sólido, que
representa a matriz porosa fosse suposto indeformável (rígido), então 0<ψ⩽1. Como é
admitido que a matriz porosa seja fracamente deformável, não é necessário satisfazer a
restrição ψ⩽1. Observa-se que ψ não é ilimitado. Ou seja, ele apenas ultrapassa
discretamente a unidade. Assim ψ=1+δ , sendo δ≪1.
O Modelo Mecânico é obtido combinando-se as equações de conservação de Massa
e Momentum Linear para o constituinte fluido (equações (2.17) e (2.18) respectivamente)
com relações constitutivas para o tensor parcial de tensões (T) e o termo de fonte de
momentum ( pF) .
Inicialmente a relação entre a fonte de Momentum Linear é considerada [26, 60,
75]. Esse termo usualmente é escrito como um termo relacionado com a velocidade do
constituinte fluido e um termo relacionado com o gradiente da fração de fluido. De acordo
com [76], as equações clássicas de Darcy consideram as forças de arrasto que surgem a
24
partir da velocidade relativa entre os constituintes de uma mistura. Assim, o termo
relacionado com a velocidade do constituinte fluido é usualmente chamado termo darciano.
O termo relacionado com o gradiente da fração de fluido representa o efeito das forças
capilares que surgem devido a distribuição não-uniforme do fluido na matriz porosa não-
saturada. Dessa forma o termo pF é dado por [1]
pF=−μf
Kφ
2 v F−μf D
K∇φ (2.21)
sendo μ f a viscosidade do fluido, K a porosidade específica do meio poroso (ambas
medidas sob um ponto de vista de Mecânica do Contínuo), e D é um coeficiente de difusão
(análogo ao coeficiente de difusão de massa). Neste trabalho o termo darciano é
desprezado, portanto pF depende apenas do gradiente de concentração.
A seguinte relação é assumida para o tensor parcial de tensões [1, 2, 26]
TF=−φ p̂ I+2λφ2μ f DF (2.22)
sendo p̂ a pressão, I o tensor identidade, μf a viscosidade do fluido, λ é um
parâmetro sempre positivo que depende da microestrutura da matriz porosa [9] e DF é a
parte simétrica do gradiente da velocidade do constituinte fluido.
De acordo com [77] as tensões normais são dominantes em relação às cisalhantes e
às trações interfaciais, permitindo que o tensor parcial de tensões (2.22) seja escrito como
25
TF=−φ p̂ I . (2.23)
Substituindo as equações (2.20), (2.21) e (2.23) nas equações (2.17) e (2.18),
tem-se
∂φ
∂ t+∇⋅(φ v F )= 0 (2.24)
ρf [ ∂φ v F
∂ t+∇⋅(φ v F v F)]=−∇(φ p̂)−
μf D
K∇ φ . (2.25)
Nesse ponto será considerado que o escoamento ocorre em uma matriz porosa que
apresenta uma dimensão muito maior que as demais, como ilustrado na Figura 2.1, a seguir.
Nessa figura, o escoamento ocorrerá na direção x e as equações poderão ser modificadas
para contemplar apenas as variações nessa direção. Destaca-se que o modelo da Figura 2.1
pode representar um escoamento em um reservatório de petróleo, ou mesmo a dispersão de
poluentes no solo.
Figura 2.1 - Escoamento através da matriz porosa considerada.
26

Redefinindo a pressão p̄= p̄(φ) como p̄=p̂ρfφ+
μf D
K ρf
φ , supondo que todas as
quantidades dependem apenas da posição x e do tempo t, e que a única componente não
nula da velocidade do constituinte fluido v F seja v, pode-se reescrever o sistema não-
linear formado pelas equações (2.24) e (2.25) como
∂φ
∂ t+ ∂∂ x
(φ v )= 0 (2.26)
∂∂ t
(φ v )+ ∂∂ x
(φv2+ p̄ )=0 . (2.27)
Nesse ponto uma relação constitutiva contínua e convexa para a pressão é proposta.
A seguinte relação assegura que o problema permaneça hiperbólico para escoamentos
insaturados e saturados
p̄={ c̄ ²φ , φ<ε
c̄ ² ε+ c̄W2(φ−ε) , φ⩾ε} (2.28)
sendo que c̄W>c̄>0 e ε>0 são constantes.
A definição da pressão em (2.28) garante que os autovalores da matriz jacobiana
do sistema associado sejam sempre reais e distintos, o que caracteriza um sistema
hiperbólico. Isso será melhor explicado no capítulo 3. Além disso, a pressão como definida
em (2.28) é função apenas de uma variável, assim sua derivada será denotada por p̄' .
Além disso, observa-se que p̄' é sempre positiva.
27
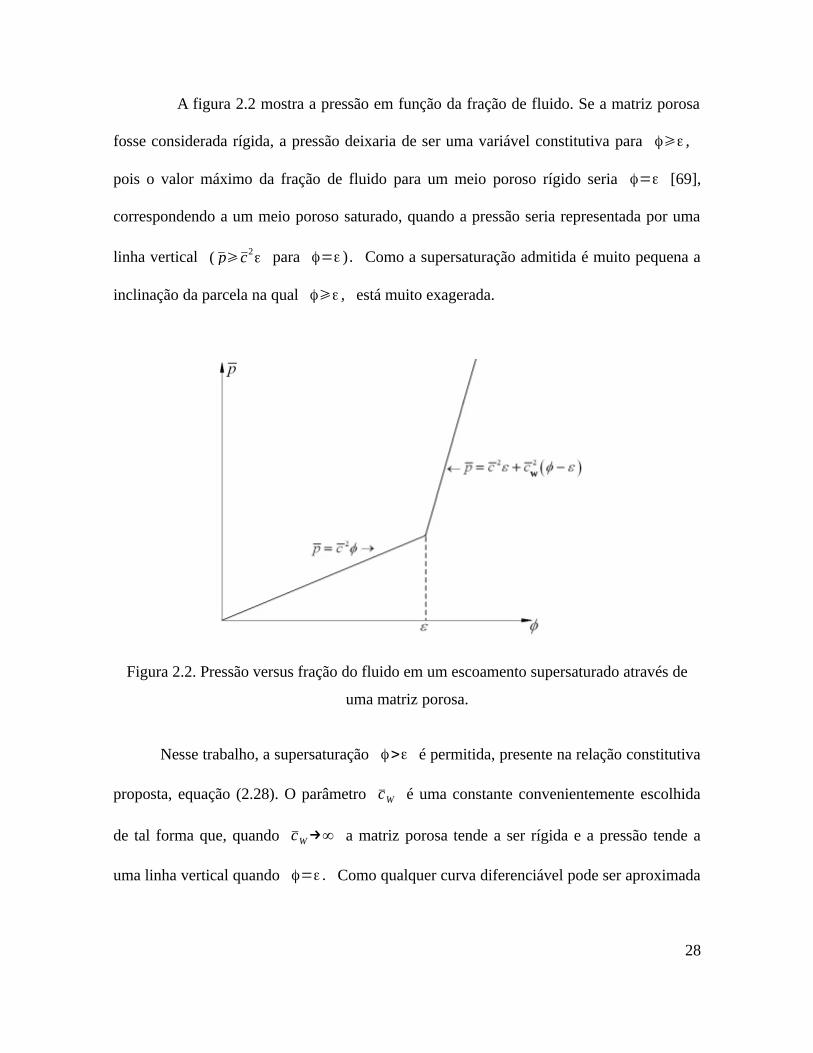
A figura 2.2 mostra a pressão em função da fração de fluido. Se a matriz porosa
fosse considerada rígida, a pressão deixaria de ser uma variável constitutiva para φ⩾ε ,
pois o valor máximo da fração de fluido para um meio poroso rígido seria φ=ε [69],
correspondendo a um meio poroso saturado, quando a pressão seria representada por uma
linha vertical ( p̄⩾ c̄2ε para φ=ε ) . Como a supersaturação admitida é muito pequena a
inclinação da parcela na qual φ⩾ε , está muito exagerada.
Figura 2.2. Pressão versus fração do fluido em um escoamento supersaturado através de
uma matriz porosa.
Nesse trabalho, a supersaturação φ>ε é permitida, presente na relação constitutiva
proposta, equação (2.28). O parâmetro c̄W é uma constante convenientemente escolhida
de tal forma que, quando c̄W→∞ a matriz porosa tende a ser rígida e a pressão tende a
uma linha vertical quando φ=ε . Como qualquer curva diferenciável pode ser aproximada
28
por uma linha reta, será suposto que δ>φ−ε⩾0 , sendo δ um número muito pequeno,
assim, o parâmetro c̄W não depende da fração de fluido. De fato, considerar δ muito
pequeno corresponde a considerar o parâmetro c̄W muito grande, que é o procedimento
adotado no presente trabalho.
O parâmetro c̄W pode ser escolhido livremente, desde que não seja menor que 1.
Quanto maior o valor desse parâmetro, mais próximo do problema real. No entanto, para as
simulações numéricas, esse parâmetro fica limitado, uma vez que, valores elevados para
c̄W geram valores pequenos para φ−ε , sendo esses limitados pela precisão do
computador (que normalmente é em torno de 1x 10−8 ) .
A hipótese da supersaturação busca preservar a hiperbolicidade das equações
diferenciais parciais, enquanto não descarta qualquer variação não desprezível na
permeabilidade e na porosidade. Tal hipótese é válida apenas para pequenas deformações
na matriz porosa e dá origem a velocidades de propagação muito altas, quando a fração de
fluido é maior ou igual à porosidade. Esse ponto de vista foi baseado nas considerações
clássicas de elasticidade infinitesimal (na qual as configurações de referência e deformada
são praticamente coincidentes).
Observa-se que, se fosse adotado uma curva parabólica para a pressão, que
aproximasse a curva da Figura 2.2, a solução analítica do Problema de Riemann associado
seria muito mais complexa, devido à álgebra associada.
Neste ponto é conveniente introduzir as seguintes quantidades adimensionais:
29

ω=vc̄
, p=p̄
ε c̄2 , τ=c̄ t , e cW=c̄W
c̄(2.29)
as quais, combinadas com a definição de saturação (equação (2.20)), originam o problema
∂ψ∂ τ +
∂∂ x
(ψω)=0 (2.30)
∂∂ τ (ψω)+
∂∂ x
( p+ψω2)=0 (2.31)
p={ ψ , seψ<11+cw
2(ψ−1) , seψ⩾1}, cw
2>1 (2.32)
A pressão dada pela equação (2.32) fica da forma apresentada na Figura 2.3, a
seguir.
Figura 2.3. Pressão versus saturação em um escoamento supersaturado através de uma
matriz porosa.
30
Capítulo 3
Solução Completa do Problema de Riemann
3.1. Introdução
O Problema de Riemann trata da um sistema hiperbólico de equações diferenciais
sujeito a um tipo particular de condições iniciais. O sistema em questão é representado por
∂u∂ t+∂ f (u)∂ x
=0, x∈ℝ , t>0 (3.1)
sendo que:
• u é um vetor de dimensão m x 1, cujas componentes são as variáveis do
problema a ser resolvido;
31

• f(u) representa o fluxo de u.
Se o sistema definido em (3.1) estiver sujeito a uma condição inicial do tipo degrau,
então esse é um problema de Riemann. A condição inicial do tipo degrau é definida como
u(x ,0)={uE=const , para x<0uD=const ,para x>0} (3.2)
Um sistema de equações diferenciais é dito estritamente hiperbólico se a matriz
Jacobiana de f(u) possui apenas autovalores reais e distintos [79]. Para encontrar a matriz
Jacobiana do sistema dado por (3.1) aplica-se a regra da cadeia, da seguinte forma
∂u∂ t+∂ f (u)∂ x
=∂u∂ t+∂ f (u)∂u
∂u∂ x=∂u∂ t+A(u)
∂u∂ x=0 (3.3)
sendo A(u) a matriz Jacobiana de f(u), definida por
A(u)=∂ f (u)∂u
=[∂ f 1 /∂u1 ∂ f 1 /∂u2 ⋯ ∂ f 1/∂um
∂ f 2 /∂u1 ∂ f 2 /∂u2 ⋯ ∂ f 2/∂um
⋯ ⋯ ⋱ ⋯∂ f m /∂u1 ∂ f m /∂u2 ⋯ ∂ f m /∂um
] (3.4)
Se a matriz A(u) definida em (3.4) é uma matriz constante, o sistema (3.1) é um
sistema linear. Caso contrário, esse sistema é não-linear.
32

Consideremos inicialmente o caso de sistemas lineares. Definindo-se a matriz D
como a matriz diagonal, cujos componentes são os autovalores λ i de A(u), e a matriz R,
cujas colunas são os autovetores R(i ) à direita de A(u), pode-se escrever
A=RDR−1 ou D=R−1 AR . (3.5)
A existência da matriz inversa R−1 permite definir um novo conjunto de variáveis
dependentes V=(v1 , v2 , ... , vm)T , chamadas variáveis características, dadas pela seguinte
transformação
V=R−1 u ou u=RV (3.6)
Substituindo (3.5) e (3.6) em (3.3), tem-se que
∂RV∂ t
+RD R−1 ∂RV∂ x
=R∂V∂ t+RD R
−1R∂V∂ x=R(∂V
∂ t+D∂V∂ x )=
∂V∂ t+D∂V∂ x=0 (3.7)
Escrevendo (3.7) em forma matricial, tem-se
∂∂ t [
v1
v2
⋮v m]+[λ1 0 ... 00 λ2 ... 0⋮ ⋮ ⋱ ⋮0 0 ... λm
] ∂∂ x [v1
v2
⋮vm]=[
00⋮0] (3.8)
33

A equação (3.8) pode ser desacoplada em m equações diferenciais da seguinte forma
∂v i
∂ t+λ i
∂ v i
∂ x=0, i=1, ...,m (3.9)
Observa-se que a equação (3.9) é análoga à equação da advecção linear, cuja
solução é uma onda que se desloca com velocidade λ i . Ou seja, o seguinte problema de
valor inicial
∂V∂ t+D∂V∂ x=0
V (x , t=0)=V 0(x)
é formado por m equações escalares da forma de (3.9), cujas soluções são
v i(x , t)=v i(x−λ i t ,0) .
Dessa forma, a solução do sistema (3.3)-(3.2) é dada por
u(x , t)=RV (x , t)=∑p=1
m
v p(x , t)Rp=∑p=1
m
v p(x−λp t ,0)R p .
34
Assim, a solução para u pode ser vista como a superposição de m ondas, que se
propagam sem que suas formas sofram qualquer deformação. Logo, a i-ésima onda tem a
forma v i(x , t=0) e se propaga com velocidade λ i .
Para sistemas não-lineares, ou seja, aqueles cuja matriz A(u) definida em (3.4) não é
constante, a velocidade característica λ i é função da própria solução u, o que provoca
distorções na forma de propagação das ondas.
Embora possam existir soluções generalizadas para todo o tempo para sistemas não
lineares, elas podem deixar de ser diferenciáveis a partir de um certo instante. Para
equações lineares, as singularidades na condição inicial são propagadas ao longo das
características (que são curvas no plano x-t). No caso não linear isto em geral não ocorre,
uma vez que as singularidades (no caso de serem choques) são propagadas ao longo das
curvas do espaço-tempo que não são necessariamente características.
Algumas vezes, ao invés da singularidade na condição inicial ser propagada ao
longo das características, ela é suavizada instantaneamente, de modo que no instante
imediatamente posterior, ou seja, para qualquer t > 0, a solução já é contínua.
Exigir que uma solução u, para um sistema não linear, seja C1 (classe das funções
continuamente diferenciáveis) é uma condição muito forte. Logo, para aumentar o conjunto
que contemple tais soluções é preciso diminuir as restrições sobre a regularidade das
mesmas. Tal procedimento dá origem às chamadas soluções fracas para (3.1)-(3.2).
35
Definição: A função u0 é uma solução fraca de (3.1)-(3.2) se
∫0
∞
∫−∞∞
[φ t⋅u0+φ x⋅f (u0)]dx dt+∫−∞∞
φ( x ,0)⋅u0(x ,0)dx=0 (3.10)
para toda função teste φ∈C10 [79]. Observa-se que φ é uma função vetorial. Assim,
escolhendo-se φ=(0,0,…,0 ,φi ,0 ,…,0 ,0) com φi∈C10 e i = 1, …, m, a equação (3.10)
define uma solução fraca para a i-ésima componente do problema de Riemann (3.1)-(3.2).
As soluções fracas podem ser suaves. No caso de não serem suaves, isto ocorrerá
para um número finito de conjuntos. No entanto, existe uma restrição que deve ser satisfeita
pelas soluções fracas. Tal condição é chamada de condição de salto ou condição de
Rankine- Hugoniot.
3.2. Condições de Entropia e Invariantes de Riemann
Para que ocorra um choque, a condição de Rankine-Hugoniot deve ser satisfeita.
Essa condição também é chamada de condição de salto e estabelece que, se u é uma
solução para o problema de Riemann associado, então a condição de choque é dada por
[f ]=[u] dxdt
(3.11)
36
sendo [f ]=f (u+)−f (u-) , [u]=u+−u- . , u+ e u- respectivamente os valores de u
à direita e à esquerda do choque e dxdt=s é a velocidade do choque, ou seja a velocidade
de propagação da descontinuidade [3,79].
Adicionalmente à condição de Rankine-Hugoniot, a condição de entropia de Lax
estabelece condições para a ocorrência de choque. Dado um problema de Riemann com m
equações, para que ocorra um choque-k, as seguintes condições devem ser satisfeitas
[3,79]
ku+skk1u+ (3.12)
λk−1(u-)<sk<λk (u-) (3.13)
As Eqs. (3.12) e (3.13) originam a condição k u+k u- .
Os invariantes de Riemann são utilizados para determinar as rarefações. Um
invariante-k de Riemann é uma função suave w, de tal forma que
R(k)⋅∇w (u)=0 (3.14)
sendo que o gradiente de w é tomado em relação a u [79].
37

3.3. Solução do Problema de Riemann associado
No presente trabalho o problema estudado é representado pelo seguinte sistema
hiperbólico, que representa um problema de Riemann
∂ψ∂ τ +
∂∂ x(ψω)=0 (3.15)
∂∂ τ (ψω)+
∂∂ x( p+ψω2
)=0 (3.16)
p={ ψ , seψ<11+cw
2(ψ−1) , seψ⩾1}, cw
2>1 (3.17)
(ψ,ω)={(ψE ,ωE) ,−∞<x<0, τ=0(ψD ,ωD) ,0<x<∞ , τ=0 } (3.18)
sendo ψE e ψD valores positivos.
A solução do Problema de Riemann apresentado pelas equações (3.15) a (3.18) não
é trivial. Como visto na seção anterior, a solução desse problema apresenta duas ondas que
se deslocam com velocidades diferentes. Os estados iniciais à esquerda e à direita são então
conectados por um estado intermediário, denominado estado *. As ondas que conectam os
estados à esquerda ou à direita ao estado intermediário podem ser choques ou rarefações.
Dessa forma, para construir a solução do problema, é necessário, inicialmente, determinar
os tipos de ondas que ocorrem entre esses estados. Em seguida, é necessário determinar
equações para as variáveis no estado intermediário (ψ* ,ω*) apenas em função das
variáveis iniciais (ψE ,ωE) e (ψD ,ωD). A Figura 3.1 abaixo resume um exemplo de
38

solução do problema de Riemann, no qual tem-se um estado à esquerda (E), seguido de um
leque de rarefação associado ao autovalor λ1, depois um estado intermediário, seguido de
um choque associado ao autovalor λ2 e, finalmente, um estado à direita D.
Figura 3.1 – Possível solução para o Problema de Riemann Associado.
O primeiro passo para encontrar as soluções desse problema de Riemann é deixar as
equações (3.15) e (3.16) no formato da equação (3.3). Para tal, modificaremos a equação
(3.16) utilizando a derivada do produto e a regra da cadeia, da seguinte forma
∂∂ τ(ψω)+ ∂
∂ x( p+ψω
2)= ∂∂ τ(ψω)+
d pd ψ
∂ ψ
∂ x+ω
2 ∂ψ
∂ x+2ψω ∂ω
∂ x=0 (3.19)
Observa-se que
∂∂ x(ψω)
2=2ψω ∂
∂ x(ψω)=2ψ2
ω ∂ω∂ x+2ψω2 ∂ψ
∂ x⇒ψ∂ω
∂ x= ∂∂ x(ψω)−ω
∂ψ
∂ x. (3.20)
39

Substituindo (3.20) em (3.19), tem-se
∂∂ τ (ψω)+( p '−ω2
)∂ψ
∂ x+2ω ∂
∂ x(ψω)=0, (3.21)
sendo p' a primeira derivada de p em relação a ψ. Pela equação (3.17) verifica-se que a
pressão é função apenas de ψ. Assim, essa diferencial é uma derivada ordinária sendo
denotada por p'.
Assim (3.15) e (3.21) podem ser reescritas como
∂∂ τ [ ψψω]+[ 0 1
p '−ω2 2ω] ∂∂ x [ψψω ]=0. (3.22)
É importante notar que o vetor u que representa os estados é dado por [ ψψω] .
Os autovalores associados à matriz da equação (3.22), em ordem crescente,
λ1<λ2, são
λ1=ω−√ p ' (3.23)
λ2=ω+√ p ' (3.24)
Pela definição da pressão em (3.17) verifica-se que, como a pressão é crescente, a
sua derivada é sempre positiva. Assim, os autovalores definidos em (3.23) e (3.24) são
sempre reais. Além disso, como a pressão em (3.17) é uma função convexa e crescente, os
40
autovalores serão sempre distintos e crescentes, garantindo, assim, a hiperbolicidade do
problema. A convexidade da pressão também garante a unicidade da solução do problema
de Riemann.
Assim, os autovalores λ1 e λ2 são respectivamente as velocidades de
propagação das ondas 1 e 2, na Figura 3.1. É necessário, no entanto, determinar quais os
tipos de ondas que podem acontecer.
Rarefação-1
Uma onda de rarefação é uma solução contínua de (3.1)-(3.2) na forma
u=u(x / τ) . No caso do estado à esquerda (E) ser conectado ao estado intermediário (*)
por uma onda de rarefação, não ocorre descontinuidade na solução. Dessa forma, para que
ocorra rarefação, é necessário que a velocidade característica λ1 aumente com x / τ . Ou
seja, é necessário que λ1(u(x / τ)) aumente com x / τ [3,79].
Fazendo ξ=x / τ , uma variável de similaridade, tem-se que
∂ξ
∂ x=
1τ (3.25)
∂ξ∂ τ=−
x
τ2
(3.26)
41
Considerando que ∂u∂ τ=
dud ξ∂ ξ∂ τ
e que ∂u∂ x=
dud ξ∂ξ
∂ x, pode-se, com base em
(3.25) e (3.26) reescrever a equação (3.22) como
−ξd
d ξ [ψψω]+[ 0 1
p '−ω2 2ω] dd ξ [
ψψω]=0, (3.27)
ou
[( 0 1p '−ω2 2ω)−ξ I ] d
d ξ [ψψω ]=[ −ξ 1
p '−ω2 2ω−ξ] dd ξ [
ψψω]=0 (3.28)
Sed
d ξ [ψψω ]≠0 então
dd ξ [
ψψω ] é um autovetor de [ 0 1
p '−ω2 2ω ] e ξ um
autovalor. Observa-se que os autovalores da equação (3.28) são os mesmos da equação
(3.22) e são dados pelas equações (3.23) e (3.24). Como existem dois autovalores, duas
ondas de rarefação são possíveis.
Foquemos, inicialmente, na rarefação associada ao primeiro autovalor λ1. A
equação (3.28) pode ser reescrita como
[ −λ1 1
p '−ω2 2ω−λ1][
d ψd ξ
dψωd ξ
]=0 (3.29)
42
o que leva a
−λ1
dψd ξ+
d ψωd ξ
=0 (3.30)
( p '−ω2)
dψd ξ+(2ω−λ1)
d ψωd ξ
=0 (3.31)
Da equação (3.30), tem-se que
−λ1 dψ+d ψω=0 (3.32)
ou
−(ω−√ p ')dψ+ψdω+ωdψ=√ p ' d ψ+ψdω=0. (3.33)
A equação (3.33) pode ser integrada da seguinte forma
∫ωE
ω*
dω=−∫ψE
ψ*
√ p 'dψψ (3.34)
ou
ω*−ωE=−∫ψE
ψ*
√ p 'dψψ . (3.35)
43

Assim, para que os estados à esquerda (E) e intermediário (*) sejam conectados por
uma rarefação-1, é necessário que ω aumente com ξ . Verifica-se, pela equação (3.35),
que isso ocorrerá quando a função do lado direito da igualdade for uma função crescente de
ξ . Com base na equação (3.17), o lado direito da equação (3.35) pode ser reescrito como
ω*−ωE=√ p ' (ψE) ln (ψE)−√ p ' (ψ*) ln(ψ*) (3.36)
sendo que
{p ' (ψ)=1, se ψ<1p ' (ψ)=cW
2, se ψ⩾1}
Como p'>0, a função em (3.36) será uma função crescente se e somente se
ψE>ψ* . Assim, para que ocorra rarefação-1 é necessário que ωE<ω* e ψE>ψ* .
O estado intermediário (*) é obtido a partir da equação (3.35), da seguinte forma
ω*−ωE=−∫ψE
1
√ p 'dψψ −∫
1
ψ*
√ p 'dψψ . (3.37)
Resolvendo a integral do lado direito de (3.37), e levando em conta a definição de p
em (3.17), tem-se os seguintes resultados
ω*−ωE=ln (ψE)−ln(ψ*) se ψE ,ψ*<1 (3.38)
44
ou
ω*−ωE=cW ( ln (ψE)−ln(ψ*)) se ψE ,ψ*⩾1 (3.39)
ou
ω*−ωE=cW ln(ψE)−ln(ψ*) se ψ*<1 e ψE⩾1 (3.40)
Para o caso de rarefação-1, a solução varia suavemente ao longo da onda e, cada
valor de (ψ,ω) entre ψE ,ωE e ψ* ,ω* se move com λ1(ψ ,ω) . Para determinar a
solução dentro da onda de rarefação, é necessário determinar (ψ,ω)=( f 1, g1) , de tal
forma que λ1(ψE ,ωE)<λ1( f 1, g1)<λ1(ψ* ,ω*) .
Pela equação (3.28) verifica-se que ξ=xτ é um autovalor da equação (3.22).
Assim, considerando-se rarefação-1, pode-se reescrever a equação (3.23) como
xτ=λ1( f 1 , g1)=g1−√ p '( f 1) (3.41)
sendo x e τ referentes ao ponto em que se deseja determinar f1 e g1.
A equação (3.41) apresenta duas incógnitas (f1 e g1). É necessário, portanto, uma
segunda equação. Inserindo f1 e g1 em (3.32), e integrando essa equação, obtém-se
45

g1−ωE=−∫ψE
f 1
√ p '(ψ)d ψψ . (3.42)
Por fim, considerando a equação (3.17), substitui-se a equação (3.41) em (3.42),
obtendo-se
√ p ' (f 1)[1+ ln ( f 1)]−√ p ' (ψE)[ ln (ψE)]+xτ −ωE=0 . (3.43)
sendo que
{p ' (f 1)=1, se f 1<1
p ' (f 1)=cW2 , se f 1⩾1}.
Esta equação é solucionada para encontrar f1. Em seguida, utiliza-se a equação
(3.41) para determinar-se g1.
Rarefação-2
A rarefação-2 ocorre quando o estado à direita (D) é conectado ao estado
intermediário (*) por uma onda contínua. Nesse caso, é utilizado um um procedimento
análogo ao usado para determinar a solução para rarefação-1. Assim, substitui-se o segundo
autovalor (equação 3.24) na equação (3.32), da seguinte forma
46
−λ2 dψ+d ψω=−(ω+√ p ')dψ+ψdω+ωdψ=−√ p ' dψ+ψdω=0. (3.44)
Em seguida, integra-se a equação (3.44), obtendo-se
ωD−ω*=∫ψ*
ψD
√ p 'd ψψ =√ p ' (ψD) ln (ψD)−√ p '(ψ*) ln (ψ*). (3.45)
Para que os estados à direita (D) e intermediário (*) sejam conectados por uma
rarefação, é necessário que a função do lado direito da igualdade em (3.45) seja crescente.
Verifica-se que ω será crescente (ωD>ω*) somente se ψD>ψ* . Assim, os estados à
direita (D) e intermediário (*) serão conectados por uma rarefação-2, se e somente se
ψD>ψ* . Nesse caso, o estado intermediário (*) é determinado por
ωD−ω*=∫ψ*
1
√ p 'd ψψ +∫
1
ψD
√ p 'd ψψ . (3.46)
Resolvendo a integral do lado direito de (3.46), e levando em conta a definição de p
em (3.17), tem-se os seguintes resultados
ωD−ω*=ln(ψD)−ln(ψ*) se ψD ,ψ*<1 (3.47)
ou
ωD−ω*=cW ( ln(ψD)−ln(ψ*)) se ψD ,ψ*⩾1 (3.48)
47

ou
ωD−ω*=cW ln(ψD)−ln (ψ*) se ψ*<1 e ψD⩾1 (3.49)
De forma análoga ao caso de rarefação-1, a solução varia suavemente ao longo da
onda e, a solução dentro da onda de rarefação (ψ,ω)=( f 2, g2) , deve ser tal que
λ2(ψ* ,ω*)<λ2( f 2 , g2)<λ2(ψD ,ωD) . Adotando procedimento semelhante ao feito para a
rarefação-1, obtém-se as seguinte equações, para a determinação de f2 e g2
xt=g2+√ p' ( f 2) (3.50)
−√ p ' ( f 2)[1+ ln( f 2)]+√ p ' (ψD)[ ln(ψD)]+xt−ωD=0 . (3.51)
Inicialmente, resolve-se a equação (3.51) para f2 e, em seguida, insere-se f2 em
(3.50) para obter-se g2.
Choque-1
Para que o estado à esquerda (E) seja conectado ao estado intermediário (*) por um
choque-1, a condição de salto de Rankine-Hugoniot (equação 3.11) deve ser satisfeita.
Assim
48

s1=[ψω][ψ]
=[ p+ψω2
][ψω]
(3.52)
sendo s a velocidade de propagação do choque. Para que ocorra choque entre o estado à
esquerda e o estado intermediário, a equação (3.52) é reescrita como
s1=ψ*ω*−ψEωE
ψ*−ψE=
p*+ψ*ω*2−pE−ψEωE
2
ψ*ω*−ψEωE(3.53)
Além da equação (3.53) as condições de entropia de Lax, equações (3.12) e (3.13),
também devem ser satisfeitas. Assim
s1<λ1(ψE ,ωE) :=λ1 E e λ1* :=λ1(ψ* ,ω*)<s1<λ2(ψ* ,ω*) (3.54)
logo λ1E>s1>λ1 * (3.55)
A equação da pressão garante a segunda equação de (3.54), uma vez que p' > 0.
Resolvendo a equação (3.53) para ω* tem-se
ω*=ωE±√( ψ*−ψE
ψ*ψE )( p*−pE) . (3.56)
Inicialmente é necessário definir o sinal na equação (3.56). Para tal, substitui-se a
primeira equação de (3.53) na primeira equação de (3.54), resultando em
49

ψ*ω*−ψEωE
ψ*−ψE<λ1(ψE ,ωE). (3.57)
Substituindo (3.23) em (3.57), obtém-se
ψ*ω*−ψEωE
ψ*−ψE<ωE−√ p ' (ψE). (3.58)
Para resolver a equação (3.58) existem duas possibilidades: ψ*−ψE>0 ou
ψ*−ψE<0. Ou seja, ψ*>ψE ou ψ*<ψE .
Analisando inicialmente ψ*−ψE>0 observa-se que a equação (3.58) pode ser
manipulada, obtendo-se a seguinte equação
ω*−ωE<−(ψ*−ψE
ψ*)√ p ' (ψE). (3.59)
Como ψ*−ψE>0 e p'>0, o lado direito da equação (3.59) apresenta valor
negativo. Assim, ω*−ωE<0. Ou ainda ω*<ωE .
Observa-se que ψ*>ψE e ω*<ωE satisfazem a condição de entropia de Lax,
apresentada pela primeira equação de (3.54), uma vez que
ω*−√ p ' (ψ*)<ωE−√ p ' (ψE) (3.60)
50
ou
ω*−ωE<√ p ' (ψ*)−√ p ' (ψE) . (3.61)
O lado esquerdo da equação (3.61) apresenta valor negativo, uma vez que
ω*<ωE . O lado direito dessa equação apresenta valor nulo se ψE<ψ* (ambos menores
ou ambos maiores que um) ou positivo, se ψE<1<ψ* .
Analisando, agora, o caso em que ψ*−ψE<0 observa-se que a equação (3.58)
pode ser manipulada, obtendo-se a seguinte equação
ω*−ωE>−(ψ*−ψE
ψ*)√ p ' (ψE). (3.62)
Como ψ*−ψE<0 e p'>0, o lado direito da equação (3.62) apresenta valor
positivo. Assim, ω*>ωE .
No entanto, ψ*<ψE e ω*>ωE não satisfazem a condição de entropia de Lax,
apresentada pela primeira equação de (3.54) e reescrita em (3.61). Analisando a equação
(3.61), observa-se que o lado esquerdo dessa equação apresenta valor positivo se
ω*>ωE . Por outro lado, o lado direito dessa equação apresenta valor nulo se ψE>ψ*
(ambos menores ou ambos maiores que um) ou apresenta valor negativo, se ψ*<1<ψE .
Assim, é impossível que um valor positivo seja menor que zero ou um valor negativo.
Dessa forma, ψE>ψ* e ω*>ωE não satisfazem a condição de entropia de Lax.
51

Finalmente, para que ocorra choque-1, as equações (3.53) e (3.54) devem ser
satisfeitas e deve ocorrer ψE<ψ* e ω*<ωE . Nesse caso, o estado intermediário (*) é
determinado por
ω*=ωE−√( ψ*−ψE
ψ* ψE )( p*−pE) . (3.63)
Choque-2
Para determinar condições para a ocorrência de choque-2, o procedimento é análogo
ao adotado para choque-1. Assim, para que o estado intermediário (*) seja conectado ao
estado à direita (D) por um choque, a condição de salto de Rankine-Hugoniot (equação
3.11) deve ser satisfeita, assim
s2=ψDωD−ψ*ω*
ψD−ψ*=
pD+ψDωD2−p*−ψ*ω*
2
ψDωD−ψ*ω*(3.64)
sendo s2 a velocidade de propagação do choque.
Além da equação (3.64) as condições de entropia de Lax, equações (3.12) e (3.13) ,
também devem ser satisfeitas. Assim
λ2 D :=λ2(ψD ,ωD)<s2 e λ1(ψ* ,ω*)<s2<λ2(ψ* ,ω*) :=λ2* (3.65)
52

logo λ2 *>s2>λ2 D (3.66)
A equação da pressão garante a segunda equação de (3.65), uma vez que p' > 0.
Resolvendo a equação (3.64) para ω* tem-se
ω*=ωD±√( ψ*−ψD
ψ*ψD )( p*−pD) . (3.67)
Como feito para a equação (3.56), é necessário definir o sinal em (3.65). Para tal,
substitui-se a primeira equação de (3.64) na primeira equação de (3.65), resultando em
λ2(ψD ,ωD)<ψDωD−ψ*ω*
ψD−ψ*. (3.68)
Substituindo (3.24) em (3.66), tem-se
ωD+√ p' (ψD)<ψDωD−ψ*ω*
ψD−ψ*. (3.69)
Fazendo uma análise semelhante àquela feita para a equação (3.58), obtém-se que
ocorrerá choque somente se ψD<ψ* e ω*>ωD . Nesse caso, o sinal da equação (3.67)
deve ser positivo e essa equação é reescrita como
53
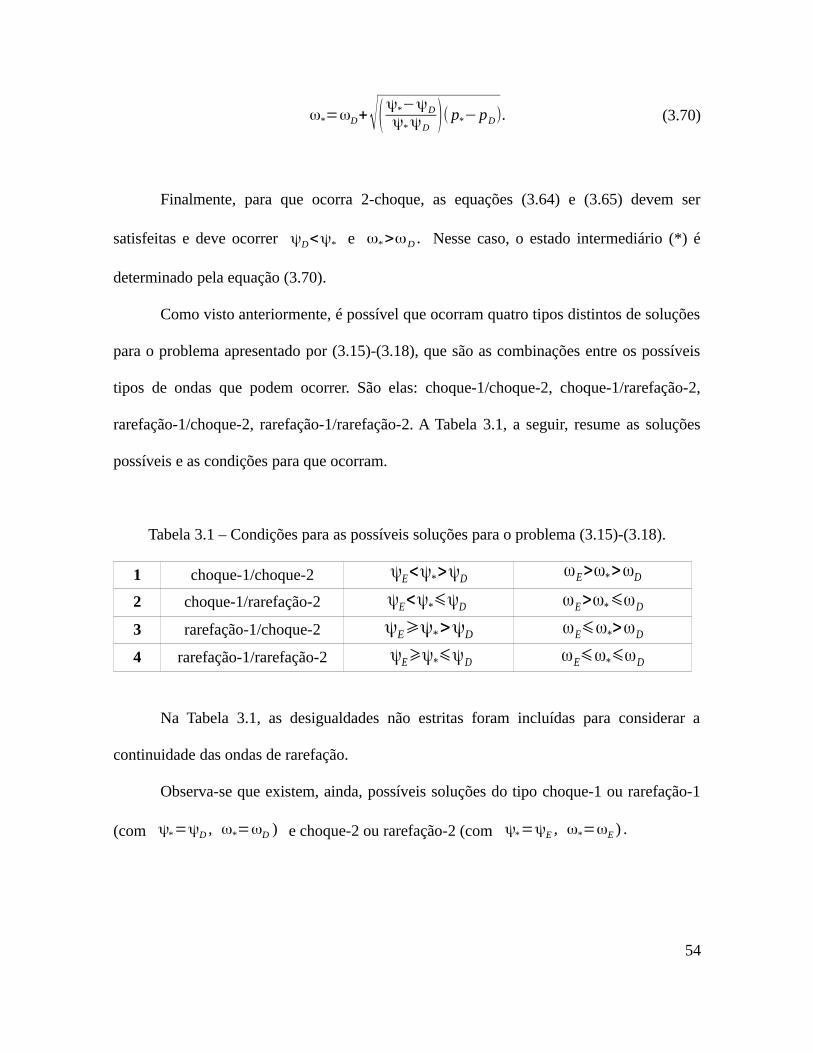
ω*=ωD+√(ψ*−ψD
ψ*ψD )( p*−pD). (3.70)
Finalmente, para que ocorra 2-choque, as equações (3.64) e (3.65) devem ser
satisfeitas e deve ocorrer ψD<ψ* e ω*>ωD . Nesse caso, o estado intermediário (*) é
determinado pela equação (3.70).
Como visto anteriormente, é possível que ocorram quatro tipos distintos de soluções
para o problema apresentado por (3.15)-(3.18), que são as combinações entre os possíveis
tipos de ondas que podem ocorrer. São elas: choque-1/choque-2, choque-1/rarefação-2,
rarefação-1/choque-2, rarefação-1/rarefação-2. A Tabela 3.1, a seguir, resume as soluções
possíveis e as condições para que ocorram.
Tabela 3.1 – Condições para as possíveis soluções para o problema (3.15)-(3.18).
1 choque-1/choque-2 ψE<ψ*>ψD ωE>ω*>ωD
2 choque-1/rarefação-2 ψE<ψ*⩽ψD ωE>ω*⩽ωD
3 rarefação-1/choque-2 ψE⩾ψ*>ψD ωE⩽ω*>ωD
4 rarefação-1/rarefação-2 ψE⩾ψ*⩽ψD ωE⩽ω*⩽ωD
Na Tabela 3.1, as desigualdades não estritas foram incluídas para considerar a
continuidade das ondas de rarefação.
Observa-se que existem, ainda, possíveis soluções do tipo choque-1 ou rarefação-1
(com ψ*=ψD , ω*=ωD ) e choque-2 ou rarefação-2 (com ψ*=ψE , ω*=ωE ) .
54
3.4. Soluções Completas do problema de Riemann Associado
Em qualquer das possíveis soluções da Tabela 3.1, é necessário determinar as
variáveis do estado intermediário (ψ* ,ω*). Como a pressão é relacionada à saturação
pela equação (3.17), são necessárias apenas duas equações para determinar todas essas
variáveis. Essas equações, vêm das soluções encontradas para cada tipo de onda.
Rarefação-1/Rarefação-2
No caso da solução contínua, quando os estado à esquerda e intermediário são
conectados por rarefação-1, enquanto os estados à direita e intermediário são conectados
por rarefação-2, a velocidade do estado intermediário (ω*) é determinada pelas equações
(3.35) ou (3.45). Combinando essas equações obtém-se
ωD−ωE−∫ψ*
ψD
√ p 'dψψ +∫
ψE
ψ*
√ p 'd ψψ =0. (3.71)
Para esta solução, ψ* é a única raiz da equação (3.71). A partir do valor de ψ*
determina-se o valor de ω* utilizando-se (3.35) ou (3.45).
55
Choque-1/Choque-2
Se os estado à esquerda e intermediário são conectados por choque-1, enquanto os
estados à direita e intermediário são conectados por choque-2, a velocidade do estado
intermediário (ω*) é determinada pelas equações (3.63) ou (3.70). Igualando essas
equações obtém-se
ωE−ωD−√( ψ*−ψD
ψ*ψD )( p*−pD)−√(ψ*−ψE
ψ*ψE )(p*−pE)=0 . (3.72)
Assim, ψ* é a única raiz da equação (3.72). A partir do valor de ψ* determina-se
o valor de ω* a usando-se (3.63) ou (3.70).
Rarefação-1/Choque-2
Se os estado à esquerda e intermediário são conectados por rarefação-1, enquanto os
estados à direita e intermediário são conectados por choque-2, a velocidade do estado
intermediário (ω*) é determinada pelas equações (3.35) ou (3.70). Combinando essas
equações obtém-se
ωD−ωE+√(ψ*−ψD
ψ*ψD )( p*−pD)+∫ψE
ψ*
√ p 'dψψ =0. (3.73)
56
Neste caso, ψ* é a única raiz da equação (3.73). A integral da equação (3.73)
pode apresentar três resultados distintos, se ψE ,ψ*<1 ou ψE ,ψ*>1 ou ψ*<1 e
ψE>1. A partir do valor de ψ* determina-se o valor de ω* utilizando-se de (3.35) ou
(3.70).
Choque-1/Rarefação-2
Se os estado à esquerda e intermediário são conectados por choque-1, a velocidade
do estado intermediário é determinada por (3.63). Se o estado à direita e o estado
intermediário são conectados por rarefação-2, então a velocidade do estado intermediário
pode ser determinada pela equação (3.45). Combinando essas equações obtém-se
ωD−ωE+√(ψ*−ψE
ψ*ψE )( p*−pE)−∫ψ*
ψD
√ p 'dψψ =0. (3.74)
Assim, ψ* é a única raiz da equação (3.74). A integral da equação (3.74) pode
apresentar três resultados distintos, se ψD ,ψ*<1 ou ψD ,ψ*>1 ou ψ*<1 e ψD>1. A
partir do valor de ψ* determina-se o valor de ω* a usando-se (3.45) ou (3.63).
57
3.5. Determinação das soluções do Problema de Riemann
A Tabela 3.1 apresenta condições para as possíveis soluções do problema de
Riemann, esses resultados, no entanto, não podem ser usados para resolver esse problema,
uma vez que, inicialmente, não se conhece ω* ou ψ* . É necessário encontrar uma
forma de determinar a priori, qual situação irá ocorrer, a partir dos dados iniciais.
A partir da Tabela 3.1, observa-se que as relações entre os dados iniciais não são
suficientes para determinar qual caso irá ocorrer. Por exemplo, se ωD>ωE e ψD>ψE , é
possível que ocorram os casos de rarefação-1/rarefação-2 ou choque-1/rarefação-2. Dessa
forma, é necessário obter condições adicionais para determinar qual dos casos da Tabela 3.1
ocorrerá.
1ª Hipótese:
Considerando inicialmente que ψE>ψD e ωE>ωD , verifica-se que podem
ocorrer os casos 1 ou 3. Ou seja, pode ocorrer choque-1/choque-2 ou rarefação-1/choque-2.
Em ambos os casos, a segunda onda será sempre um choque. A análise para diferenciar os
casos deve partir, portanto, da análise da primeira onda. Para a ocorrência de choque-1,
tem-se pela equação (3.63) e tabela 3.1, que
ω*=ωE−√( ψ*−ψE
ψ*ψE )( p*−pE)>ωD . (3.75)
58
A equação (3.75) pode ser manipulada, de tal forma que
ωD−ωE<−√(ψ*−ψE
ψ*ψE )( p*−pE)=−√( 1ψE−
1ψ* )( p*−pE). (3.76)
Como para choque-1/choque-2 tem-se ψE<ψ*>ψD então
ωD−ωE<−√( 1ψE−
1ψ* )( p*−pE)<−√( 1
ψE−
1ψD )( pD−pE) . (3.77)
A equação (3.77) pode ser reescrita como
ωD−ωE<−√(ψD−ψE
ψDψE )( pD−pE) . (3.78)
A equação (3.78) é uma condição para que ocorra choque-1/choque-2. Assim, se
ocorrerem ψE>ψD e ωE>ωD e a equação (3.78) for satisfeita, então ocorre choque-
1/choque-2 . Caso ocorra ψE>ψD e ωE>ωD e na equação (3.78) a desigualdade for
invertida, então não ocorrerá choque-1. Nesse caso ocorrerá rarefação-1/choque-2. Dessa
forma, a equação (3.78) pode ser usada para diferenciar os dois casos em análise.
59
Deve-se analisar agora os casos em que ψE=ψD e ωE=ωD . Esses casos não
podem ocorrer simultaneamente, pois então não haveria descontinuidade inicial, e não se
teria um problema de Riemann.
Inicialmente observa-se que, se ψE=ψD o lado direito da equação (3.78) se anula
e, se ωE>ωD então a equação (3.78) sempre será satisfeita. Nesse caso, tem-se choque-
1/choque-2. Se ωE=ωD então o lado esquerdo de (3.78) se anula e essa equação não é
satisfeita. Nesse caso, tem-se rarefação-1/choque-2.
Assim, conclui-se, que se ψE⩾ψD e ωE>ωD e a equação (3.78) é satisfeita,
então tem-se choque-1/choque-2. Se ψE>ψD e ωE⩾ωDe a equação (3.78) não é
satisfeita, então tem-se rarefação-1/choque-2.
Ainda para essa hipótese, ou seja, ψE>ψD e ωE>ωD , verifica-se que pode
ocorrer apenas Choque-2. Pois, se ocorre apenas Choque-2, tem-se ωE=ω* e ψE=ψ* e,
pela Tabela 3.1, verifica-se que ψE>ψD e ωE>ωD . Além disso, se for substituído
ωE=ω* e ψE=ψ* na equação (3.70), equação que determina o estado intermediário
para Choque-2, tem-se
ωE−ωD=√( ψE−ψD
ψEψD )( pE−pD)
que é uma condição para ocorrência do caso somente com Choque-2.
60

2ª Hipótese:
Considerando que ψE>ψD e ωE<ωD , verifica-se que podem ocorrer os casos 3
ou 4. Ou seja, pode ocorrer rarefação-1/choque-2 ou rarefação-1/rarefação-2. Em ambos os
casos, a primeira onda será sempre uma rarefação. A análise para diferenciar os casos deve
partir, portanto, da análise da segunda onda. Para a ocorrência de rarefação-2, tem-se pela
equação (3.45) e tabela 3.1, que
ω*=ωD−∫ψ*
ψD
√ p 'd ψψ >ωE . (3.79)
A equação (3.79) pode ser manipulada, de tal forma que
ωE−ωD<−∫ψ*
ψD
√ p 'dψψ . (3.80)
Como para rarefação-1/rarefação-2 tem-se ψE>ψ*<ψD então
ωE−ωD<∫ψE
ψD
√ p 'dψψ . (3.81)
A equação (3.81) é uma condição para que ocorra rarefação-1/rarefação-2. Assim, se
ocorrerem ψE>ψD , ωE<ωD e a equação (3.81) for satisfeita, então ocorre rarefação-
61
1/rarefação-2 . Caso ocorra ψE>ψD , ωE<ωD e na equação (3.81) a desigualdade for
invertida, então não ocorrerá rarefação-2. Nesse caso ocorrerá rarefação-1/choque-2. Dessa
forma, a equação (3.81) pode ser usada para diferenciar os dois casos em análise.
Deve-se analisar agora os casos em que ψE=ψD e ωE=ωD . Esses casos não
podem ocorrer simultaneamente, pois então não haveria descontinuidade inicial, e não se
teria um problema de Riemann.
Inicialmente observa-se que, se ψE=ψD o lado direito da equação (3.81) se anula
e, se ωE<ωD então a equação (3.81) sempre será satisfeita. Nesse caso, tem-se rarefação-
1/rarefação-2. Se ωE=ωD então o lado esquerdo de (3.81) se anula e essa equação não é
satisfeita para ψE>ψD . Nesse caso, tem-se rarefação-1/choque-2.
Assim, conclui-se, que se ψE⩾ψD e ωE<ωD e a equação (3.81) é satisfeita,
então tem-se rarefação-1/rarefação-2. Se ψE>ψD e ωE⩽ωDe a equação (3.81) não é
satisfeita, então tem-se rarefação-1/choque-2.
Ainda para essa hipótese, ou seja, ψE>ψD e ωE<ωD , verifica-se que pode
ocorrer apenas Rarefação-1. Pois, se ocorre apenas Rarefação-1, tem-se ωD=ω* e
ψD=ψ* e, pela Tabela 3.1, verifica-se que ψE⩾ψD e ωE⩽ωD . Além disso, se for
substituído ωD=ω* e ψD=ψ* na equação (3.35), equação que determina o estado
intermediário para Rarefação-1, tem-se
ωD−ωE=−∫ψE
ψD
√ p 'dψψ
62
que é uma condição para ocorrência do caso somente com Rarefação-1.
3ª Hipótese:
Considerando que ψE<ψD e ωE>ωD , verifica-se pela tabela 3.1, que podem
ocorrer os casos 1 ou 2. Ou seja, pode ocorrer choque-1/choque-2 ou choque-1/rarefação-2.
Em ambos os casos, a primeira onda será sempre um choque. A análise para diferenciar os
casos deve partir, portanto, da análise das equações da segunda onda. Para a ocorrência de
choque-2, tem-se pela equação (3.70) e tabela 3.1, que
ω*=ωD+√(ψ*−ψD
ψ*ψD )( p*−pD)<ωE . (3.82)
A equação (3.82) pode ser manipulada, de tal forma que
ωE−ωD>√(ψ*−ψD
ψ*ψD )( p*−pD)=√( 1ψD−
1ψ* )( p*−pD). (3.83)
Como para choque-1/choque-2 tem-se ψE<ψ*>ψD então pode-se concluir que
ωE−ωD>√(ψE−ψD
ψEψD )( pE−pD). (3.84)
63
A equação (3.84) é uma condição para que ocorra choque-1/choque-2. Assim, se
ocorrerem ψE<ψD , ωE>ωD , e a equação (3.84) for satisfeita, então ocorre choque-
1/choque-2. Caso ocorra ψE<ψD , ωE>ωD , e na equação (3.84) a desigualdade for
invertida, então não ocorrerá choque-2. Nesse caso ocorrerá choque-1/rarefação-2. Dessa
forma, a equação (3.84) pode ser usada para diferenciar os dois casos em análise.
Deve-se analisar agora os casos em que ψE=ψD e ωE=ωD . Esses casos não
podem ocorrer simultaneamente, pois então não haveria descontinuidade inicial, e não se
teria um problema de Riemann.
Inicialmente observa-se que, se ψE=ψD o lado direito da equação (3.84) se anula
e, se ωE>ωD então a equação (3.84) sempre será satisfeita. Nesse caso, tem-se choque-
1/choque-2. Se ωE=ωD então o lado esquerdo de (3.84) se anula e essa equação não é
satisfeita. Nesse caso, tem-se choque-1/rarefação-2.
Assim, conclui-se, que se ψE⩽ψD e ωE>ωD e a equação (3.84) é satisfeita,
então tem-se choque-1/choque-2. Se ψE<ψD e ωE⩾ωDe a equação (3.84) não é
satisfeita, então tem-se choque-1/rarefação-2.
Ainda para essa hipótese, ou seja, ψE<ψD e ωE>ωD , verifica-se que pode
ocorrer apenas Choque-1. Pois, se ocorre apenas Choque-1, tem-se ωD=ω* e ψD=ψ*
e, pela Tabela 3.1, verifica-se que ψE<ψD e ωE>ωD . Além disso, se for substituído
ωD=ω* e ψD=ψ* na equação (3.63), equação que determina o estado intermediário
para Choque-1, tem-se
64
ωD−ωE=−√(ψD−ψE
ψDψE )( pD−pE)
que é uma condição para ocorrência do caso somente com Choque-1.
4ª Hipótese:
Considerando que ψE<ψD e ωE<ωD , verifica-se pela Tabela 3.1, que podem
ocorrer os casos 2 ou 4. Ou seja, pode ocorrer choque-1/rarefação-2 ou rarefação-
1/rarefação-2. Em ambos os casos, a segunda onda será sempre uma rarefação. A análise
para diferenciar os casos deve partir, portanto, da análise das equações da primeira onda.
Para a ocorrência de rarefação-1, tem-se pela equação (3.37) e Tabela 3.1, que
ω*=ωE−∫ψE
ψ*
√ p 'dψψ <ωD . (3.85)
A equação (3.85) pode ser manipulada, de tal forma que
ωE−ωD<−∫ψ*
ψE
√ p 'dψψ . (3.86)
Como para rarefação-1/rarefação-2 tem-se ψE>ψ*<ψD então
ωE−ωD<−∫ψE
ψD
√ p 'dψψ . (3.87)
65
A equação (3.87) é uma condição para que ocorra rarefação-1/rarefação-2. Assim, se
ocorrerem ψE<ψD , ωE<ωD e a equação (3.87) for satisfeita, então ocorre rarefação-
1/rarefação-2. Caso ocorra ψE<ψD , ωE<ωD e a equação (3.87) não for satisfeita,
então não ocorrerá 1-rarefação. Nesse caso ocorrerá choque-1/rarefação-2. Dessa forma, a
equação (3.87) pode ser usada para diferenciar os dois casos em análise.
Deve-se analisar agora os casos em que ψE=ψD e ωE=ωD . Esses casos não
podem ocorrer simultaneamente, pois então não haveria descontinuidade inicial, e não se
teria um problema de Riemann.
Inicialmente observa-se que, se ψE=ψD o lado direito da equação (3.87) se anula
e, se ωE<ωD então a equação (3.87) sempre será satisfeita. Nesse caso, tem-se rarefação-
1/rarefação-2. Se ωE=ωD então o lado esquerdo de (3.87) se anula e essa equação não é
satisfeita para ψE<ψD . Nesse caso, tem-se choque-1/rarefação-2.
Assim, conclui-se, que se ψE⩽ψD e ωE<ωD e a equação (3.87) é satisfeita,
então tem-se rarefação-1/rarefação-2. Se ψE<ψD e ωE⩽ωDe a equação (3.87) não é
satisfeita, então tem-se choque-1/rarefação-2.
Ainda para essa hipótese, ou seja, ψE<ψD e ωE<ωD , verifica-se que pode
ocorrer apenas Rarefação-2. Pois, se ocorre apenas Rarefação-2, tem-se ωE=ω* e
ψE=ψ* e, pela Tabela 3.1, verifica-se que ψE⩽ψD e ωE⩽ωD . Além disso, se for
substituído ωE=ω* e ψE=ψ* na equação (3.45), equação que determina o estado
intermediário para Rarefação-2, tem-se
66
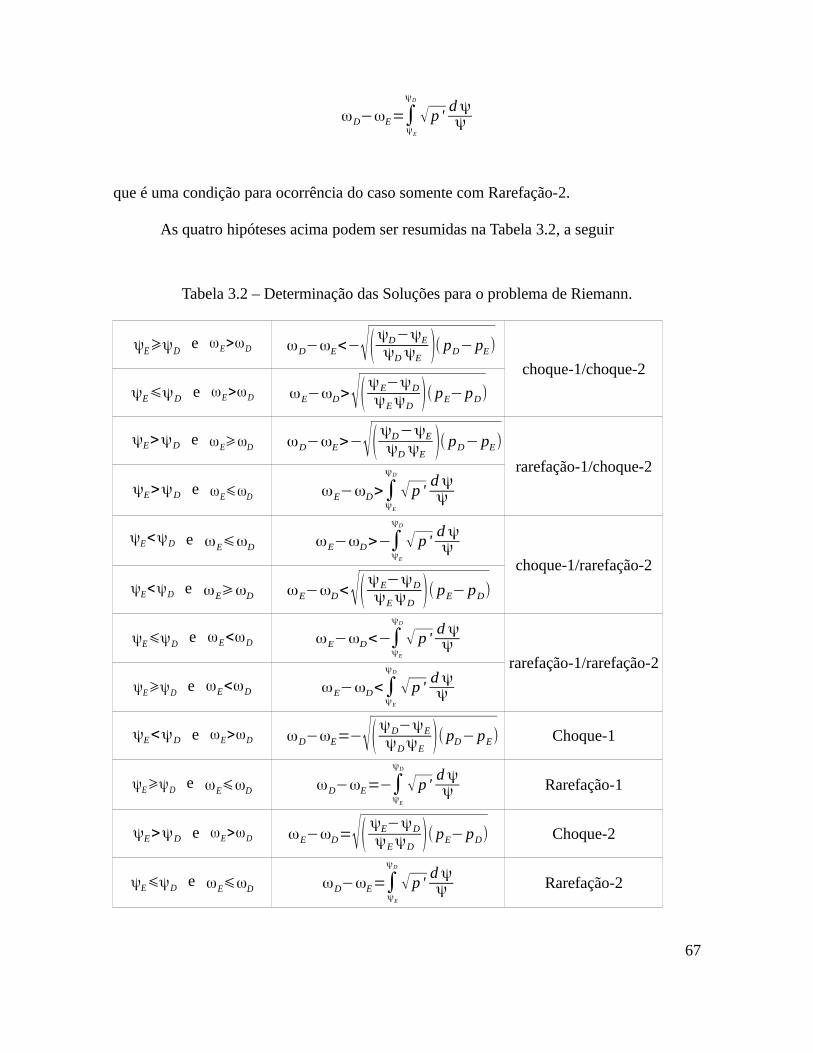
ωD−ωE=∫ψE
ψD
√ p 'dψψ
que é uma condição para ocorrência do caso somente com Rarefação-2.
As quatro hipóteses acima podem ser resumidas na Tabela 3.2, a seguir
Tabela 3.2 – Determinação das Soluções para o problema de Riemann.
ψE⩾ψDe ωE>ωD ωD−ωE<−√(ψD−ψE
ψDψE )( pD−pE)
choque-1/choque-2
ψE⩽ψD e ωE>ωD ωE−ωD>√(ψE−ψD
ψEψD )( pE−pD)
ψE>ψD e ωE⩾ωD ωD−ωE>−√(ψD−ψE
ψDψE )( pD−pE)
rarefação-1/choque-2
ψE>ψD e ωE⩽ωD ωE−ωD>∫ψE
ψD
√ p 'dψψ
ψE<ψD e ωE⩽ωD ωE−ωD>−∫ψE
ψD
√ p 'dψψ
choque-1/rarefação-2
ψE<ψD e ωE⩾ωD ωE−ωD<√(ψE−ψD
ψEψD )( pE−pD)
ψE⩽ψD e ωE<ωD ωE−ωD<−∫ψE
ψD
√ p 'dψψ
rarefação-1/rarefação-2
ψE⩾ψD e ωE<ωD ωE−ωD<∫ψE
ψD
√ p 'dψψ
ψE<ψD e ωE>ωD ωD−ωE=−√(ψD−ψE
ψDψE )( pD−pE) Choque-1
ψE⩾ψD e ωE⩽ωD ωD−ωE=−∫ψE
ψD
√ p 'dψψ Rarefação-1
ψE>ψD e ωE>ωD ωE−ωD=√( ψE−ψD
ψEψD )( pE−pD) Choque-2
ψE⩽ψD e ωE⩽ωD ωD−ωE=∫ψE
ψD
√ p 'dψψ Rarefação-2
67
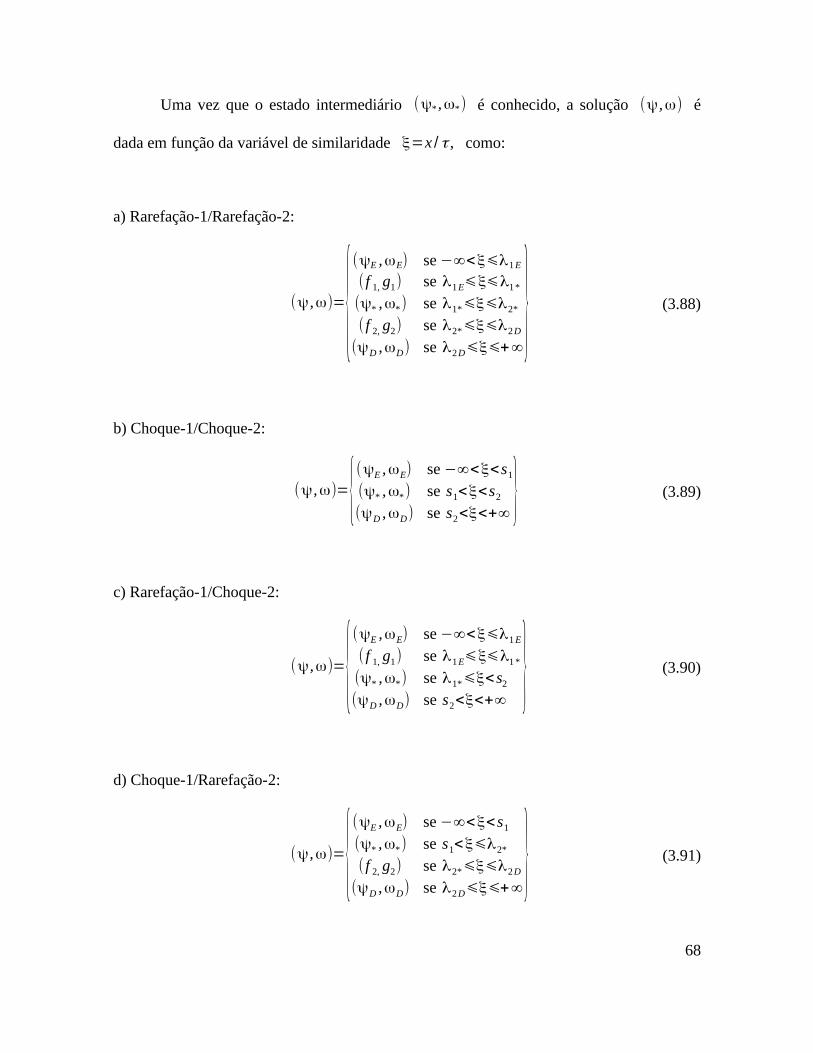
Uma vez que o estado intermediário (ψ* ,ω*) é conhecido, a solução (ψ,ω) é
dada em função da variável de similaridade ξ=x / τ , como:
a) Rarefação-1/Rarefação-2:
(ψ,ω)={(ψE ,ωE) se −∞<ξ⩽λ1 E
( f 1, g1) se λ1 E⩽ξ⩽λ1 *
(ψ* ,ω*) se λ1*⩽ξ⩽λ2*
( f 2, g2) se λ2*⩽ξ⩽λ2 D
(ψD ,ωD) se λ2 D⩽ξ⩽+∞} (3.88)
b) Choque-1/Choque-2:
(ψ,ω)={(ψE ,ωE) se −∞<ξ<s1
(ψ* ,ω*) se s1<ξ<s2
(ψD ,ωD) se s2<ξ<+∞} (3.89)
c) Rarefação-1/Choque-2:
(ψ,ω)={(ψE ,ωE) se −∞<ξ⩽λ1 E
( f 1, g1) se λ1 E⩽ξ⩽λ1 *
(ψ* ,ω*) se λ1*⩽ξ<s2
(ψD ,ωD) se s2<ξ<+∞} (3.90)
d) Choque-1/Rarefação-2:
(ψ,ω)={(ψE ,ωE) se −∞<ξ<s1
(ψ* ,ω*) se s1<ξ⩽λ2*
( f 2, g2) se λ2*⩽ξ⩽λ2 D
(ψD ,ωD) se λ2 D⩽ξ⩽+∞} (3.91)
68

Capítulo 4
Método de Glimm
4.1. Introdução
O Método de Glimm é uma técnica semi-analítica de natureza estatística para obter
soluções aproximadas de sistemas hiperbólicos de leis de conservação, as quais são
representadas por funções constantes por partes [3]. Em contraste com outros métodos
numéricos, tais como diferenças finitas ou elementos finitos, o Método de Glimm resolve
problemas com ondas de choque e outras descontinuidades com relativa facilidade e sem
necessidade de adicionar termos de viscosidade artificial [52]. Uma desvantagem deste
método é ser restrito à simulação de problemas unidimensionais, ou seja, o Método de
69
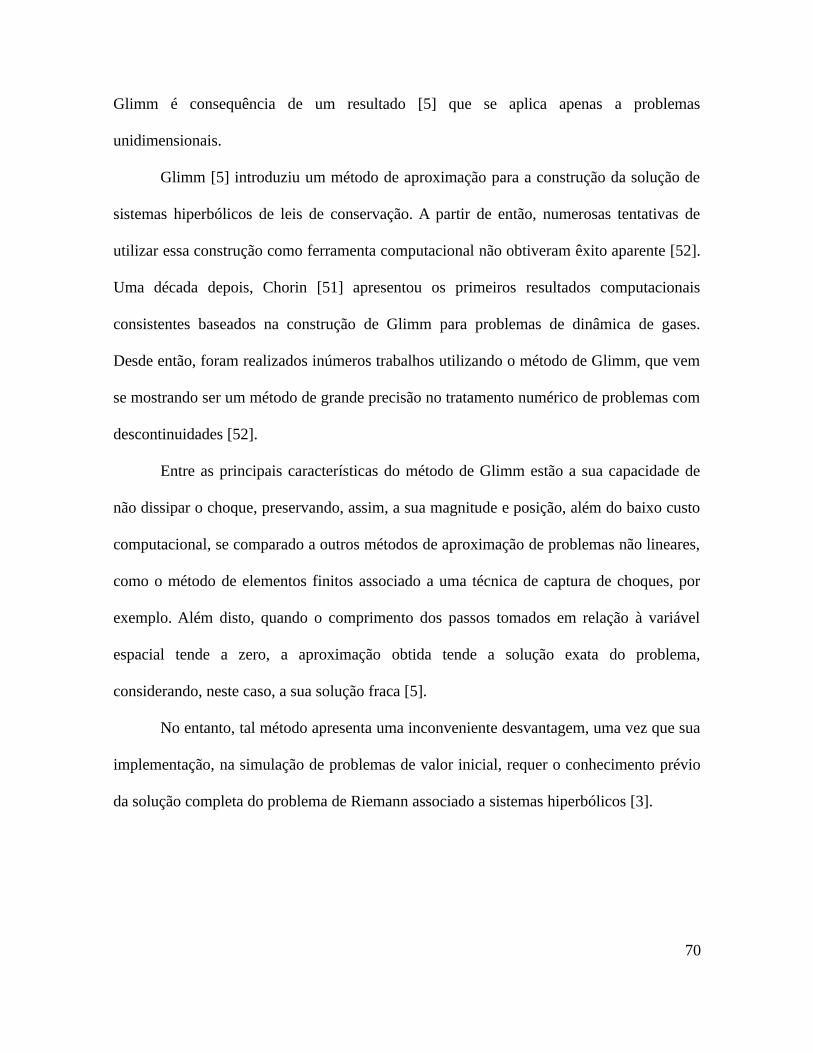
Glimm é consequência de um resultado [5] que se aplica apenas a problemas
unidimensionais.
Glimm [5] introduziu um método de aproximação para a construção da solução de
sistemas hiperbólicos de leis de conservação. A partir de então, numerosas tentativas de
utilizar essa construção como ferramenta computacional não obtiveram êxito aparente [52].
Uma década depois, Chorin [51] apresentou os primeiros resultados computacionais
consistentes baseados na construção de Glimm para problemas de dinâmica de gases.
Desde então, foram realizados inúmeros trabalhos utilizando o método de Glimm, que vem
se mostrando ser um método de grande precisão no tratamento numérico de problemas com
descontinuidades [52].
Entre as principais características do método de Glimm estão a sua capacidade de
não dissipar o choque, preservando, assim, a sua magnitude e posição, além do baixo custo
computacional, se comparado a outros métodos de aproximação de problemas não lineares,
como o método de elementos finitos associado a uma técnica de captura de choques, por
exemplo. Além disto, quando o comprimento dos passos tomados em relação à variável
espacial tende a zero, a aproximação obtida tende a solução exata do problema,
considerando, neste caso, a sua solução fraca [5].
No entanto, tal método apresenta uma inconveniente desvantagem, uma vez que sua
implementação, na simulação de problemas de valor inicial, requer o conhecimento prévio
da solução completa do problema de Riemann associado a sistemas hiperbólicos [3].
70
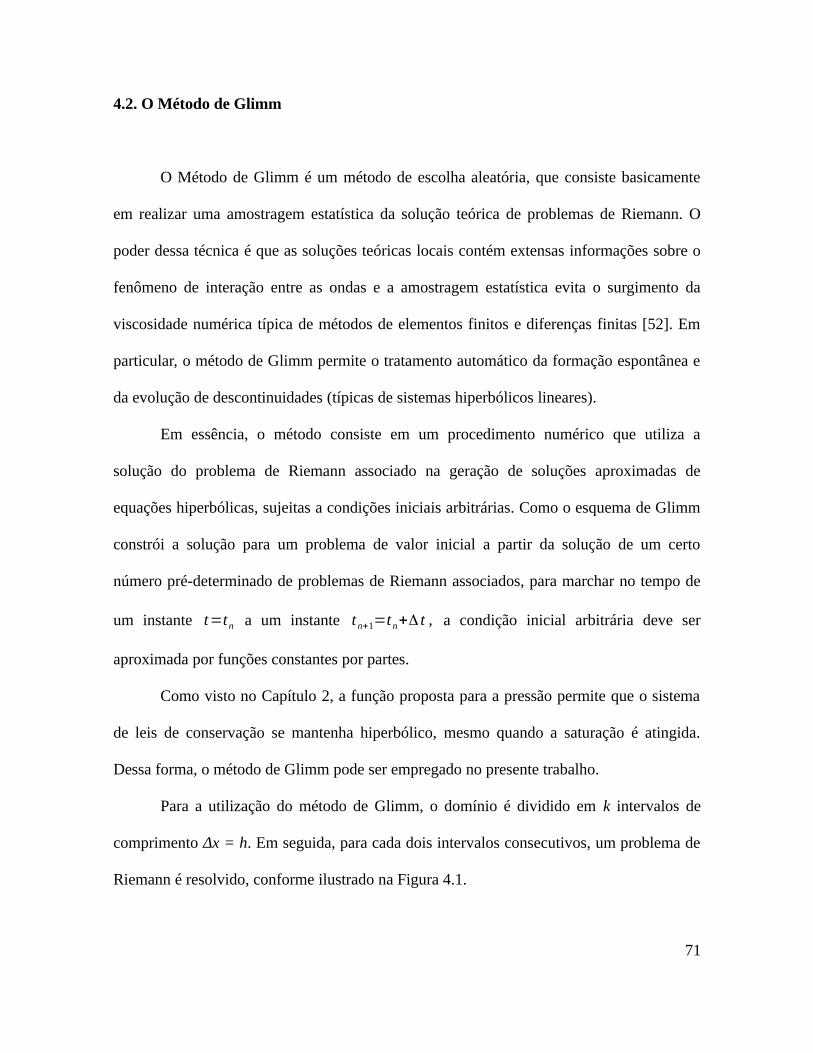
4.2. O Método de Glimm
O Método de Glimm é um método de escolha aleatória, que consiste basicamente
em realizar uma amostragem estatística da solução teórica de problemas de Riemann. O
poder dessa técnica é que as soluções teóricas locais contém extensas informações sobre o
fenômeno de interação entre as ondas e a amostragem estatística evita o surgimento da
viscosidade numérica típica de métodos de elementos finitos e diferenças finitas [52]. Em
particular, o método de Glimm permite o tratamento automático da formação espontânea e
da evolução de descontinuidades (típicas de sistemas hiperbólicos lineares).
Em essência, o método consiste em um procedimento numérico que utiliza a
solução do problema de Riemann associado na geração de soluções aproximadas de
equações hiperbólicas, sujeitas a condições iniciais arbitrárias. Como o esquema de Glimm
constrói a solução para um problema de valor inicial a partir da solução de um certo
número pré-determinado de problemas de Riemann associados, para marchar no tempo de
um instante t=tn a um instante t n+1=t n+Δ t , a condição inicial arbitrária deve ser
aproximada por funções constantes por partes.
Como visto no Capítulo 2, a função proposta para a pressão permite que o sistema
de leis de conservação se mantenha hiperbólico, mesmo quando a saturação é atingida.
Dessa forma, o método de Glimm pode ser empregado no presente trabalho.
Para a utilização do método de Glimm, o domínio é dividido em k intervalos de
comprimento Δx = h. Em seguida, para cada dois intervalos consecutivos, um problema de
Riemann é resolvido, conforme ilustrado na Figura 4.1.
71
Figura 4.1 – Divisão do domínio para o emprego do Método de Glimm.
O Método de Glimm permite resolver um sistema hiperbólico para uma condição
inicial qualquer. Dessa forma, o valor da variável u no instante t=tn é tomado como
constante em cada intervalo formado por dois subintervalos consecutivos de comprimento
h. Assim, na posição ih, o valor da variável é igual ao valor de u na posição ih, no tempo n.
Esse valor é representado por uin e é constante em todo o intervalo (i-1)h e (i+1)h, sendo
que o índice i se refere ao intervalo em que a amostra é tomada e n indica o instante de
tempo considerado, conforme mostrado na Figura 4.1. O mesmo é feito para o intervalo
(i+1)h e (i+3)h, no qual o valor da variável é tomada como constante e igual a ui+2n , ou
seja, igual ao valor da variável na posição i+2, no instante de tempo n.
Realizando esse procedimento em todo o domínio, o mesmo será formado por
sucessivos problemas de Riemann, sendo que cada Problema de Riemann se forma a cada
72
x=i hih (i+2)h(i+1)h
uin
ui+2nu
(i−1)h (i+3)h
dois subintervalos consecutivos de comprimento h. Em cada um dos problemas de Riemann
tem-se o estado constante à esquerda dado por uin e à direita dado por ui+2
n .
Para cada um desses problemas de Riemann, a solução analítica deve ser calculada.
A Figura 4.2 apresenta um exemplo de solução (Rarefação-1/Choque-2) para o problema de
Riemann apresentado na Figura 4.1.
Figura 4.2 – Solução do Problema de Riemann para emprego do Método de Glimm.
Como pode ser visto na Figura 4.2, a cada dois intervalos consecutivos, tem-se uma
solução de um problema de Riemann. Nesse momento, deve-se atualizar o valor da variável
u. Tomando-se como exemplo o nó (i+1), isso é feito utilizando-se um valor aleatório no
intervalo entre ih e (i+2)h. Dessa forma o valor de ui+1n+1 será igual ao valor da solução
teórica do problema de Riemann na posição (i+1+θ)h , sendo θ um número gerado
aleatoriamente entre -1 e +1, com densidade de probabilidade uniforme, no instante de
tempo n. A Figura 4.3 ilustra esse procedimento.
Observa-se que, de acordo com [51], utilizar um valor de θ para cada um dos
problemas de Riemann das Figuras 4.1 ou 4.4, leva a resultados pouco precisos. Portanto,
73
x=i hih (i+2)h(i+1)h(i−1)h (i+3)h
n+1
n
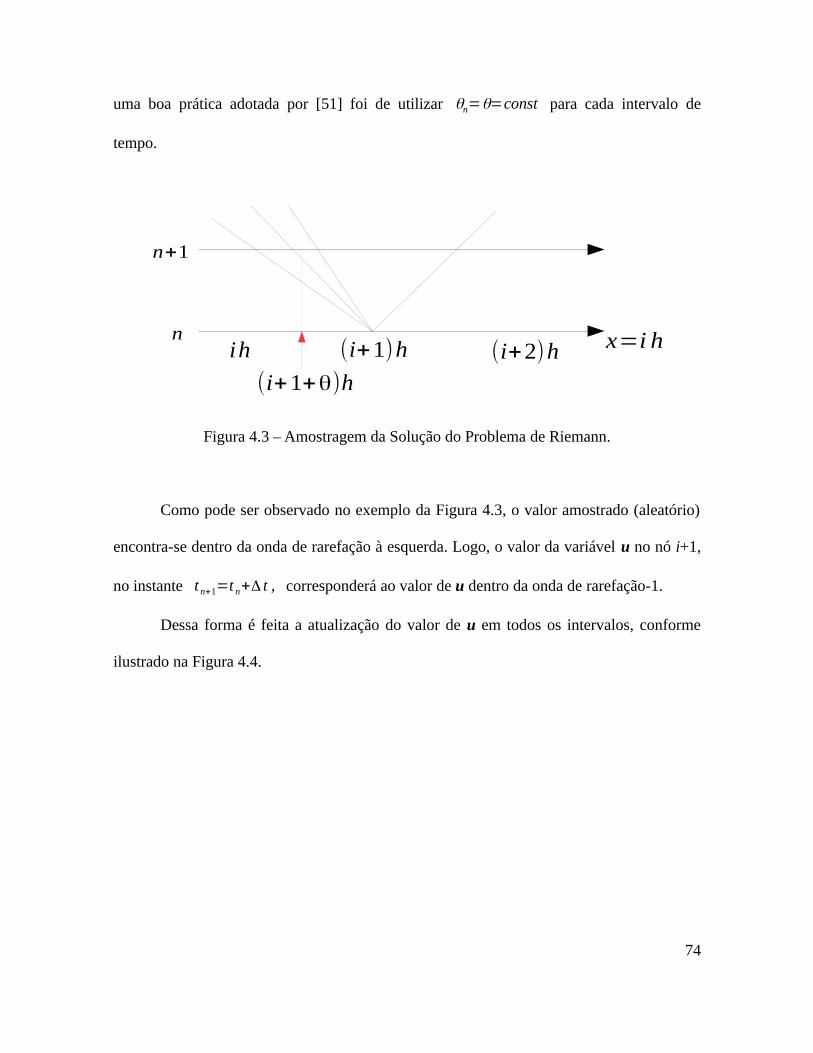
uma boa prática adotada por [51] foi de utilizar θn=θ=const para cada intervalo de
tempo.
Figura 4.3 – Amostragem da Solução do Problema de Riemann.
Como pode ser observado no exemplo da Figura 4.3, o valor amostrado (aleatório)
encontra-se dentro da onda de rarefação à esquerda. Logo, o valor da variável u no nó i+1,
no instante t n+1=t n+Δ t , corresponderá ao valor de u dentro da onda de rarefação-1.
Dessa forma é feita a atualização do valor de u em todos os intervalos, conforme
ilustrado na Figura 4.4.
74
x=i hih (i+2)h(i+1)h
n+1
n
(i+1+θ)h
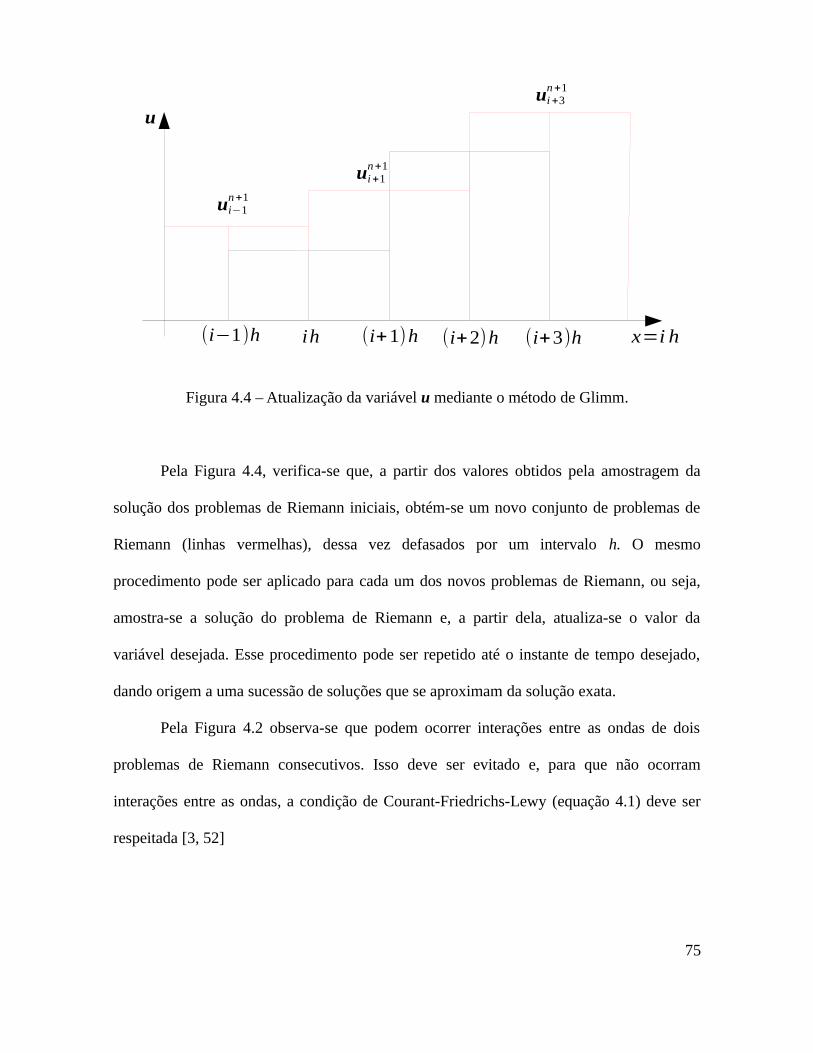
Figura 4.4 – Atualização da variável u mediante o método de Glimm.
Pela Figura 4.4, verifica-se que, a partir dos valores obtidos pela amostragem da
solução dos problemas de Riemann iniciais, obtém-se um novo conjunto de problemas de
Riemann (linhas vermelhas), dessa vez defasados por um intervalo h. O mesmo
procedimento pode ser aplicado para cada um dos novos problemas de Riemann, ou seja,
amostra-se a solução do problema de Riemann e, a partir dela, atualiza-se o valor da
variável desejada. Esse procedimento pode ser repetido até o instante de tempo desejado,
dando origem a uma sucessão de soluções que se aproximam da solução exata.
Pela Figura 4.2 observa-se que podem ocorrer interações entre as ondas de dois
problemas de Riemann consecutivos. Isso deve ser evitado e, para que não ocorram
interações entre as ondas, a condição de Courant-Friedrichs-Lewy (equação 4.1) deve ser
respeitada [3, 52]
75
x=i hih (i+2)h(i+1)h
ui−1n+1
ui+3n+1
u
(i−1)h (i+3)h
ui+1n+1
Δ t⩽Δ x2|a|
(4.1)
sendo que a é a velocidade máxima de propagação, em valor absoluto, da descontinuidade
considerando todos os problemas de Riemann no tempo t n. Em outras palavras, a norma
de a é a norma do valor máximo dos autovalores do sistema.
A equação (4.1) garante que não haja interações entre as ondas de dois problemas de
Riemann consecutivos e, quando o comprimento dos passos tomados em relação à variável
espacial tende a zero, a aproximação obtida tende a solução exata do problema,
considerando, neste caso, a sua solução fraca [3, 52].
Como pode ser visto acima, o número aleatório θ representa um papel fundamental
nesse método. Chorin [51] propôs outra melhoria para a escolha de θ, que consiste em
adotar um procedimento para que θ seja distribuído igualmente no intervalo [-1, +1] mais
rapidamente.
O procedimento adotado em [51] consiste, inicialmente, em adotar m1<m2 dois
números inteiros primos (serão adotados m1=3 e m2=7 , no presente trabalho,
conforme referência [52]). Em seguida, considere a seguinte sequência
ni+ 1=mod (m2 ,m1+ni) . (4.2)
sendo n0m2 um número primo qualquer e mod representa o resto da divisão entre
(m1+ni) e m2.
76
Se for considerada uma sequência de números aleatórios θ1 ,θ2 ,…,θn , com
θi∈(0,1) , a seguinte alteração produz melhorias significativas no método de Glimm:
θ 'i=((ni+θi+1)/m2)−1, para i=1,2,…, n . (4.3)
Assim, ao utilizar θ ' ao invés de θ , obtém-se valores aleatórios com
distribuição mais uniforme no intervalo entre -1 e +1. Dessa forma a solução obtida
mediante o método de Glimm produz resultados mais precisos, e as posições das ondas (de
choque ou de rarefação) se aproximam da solução real.
4.3. Aplicação ao Problema de Riemann Associado
Para a resolução do problema de Riemann representado pelas equações (3.15) a
(3.18) através do Método de Glimm, é necessário, inicialmente obter-se a solução analítica
desse problema, a qual é apresentada no capítulo 3.
Como foi visto no Capítulo 3, o problema de Riemann estudado possui quatro
soluções possíveis: Choque-1/Choque-2, Choque-1/Rarefação-2, Rarefação-1/Choque-2
ou Rarefação-1/Rarefação-2, as quais dependem das condições iniciais, isto é, dos valores
de (ψE ,ωE) e (ψD ,ωD).
Em seguida, faz-se uma discretização espacial e uma aproximação por partes das
condições iniciais desse problema (conforme a Figura 4.1), dando origem à Figura 4.5, na
qual u representa um propriedade qualquer ( ψ ,ω ) .
77
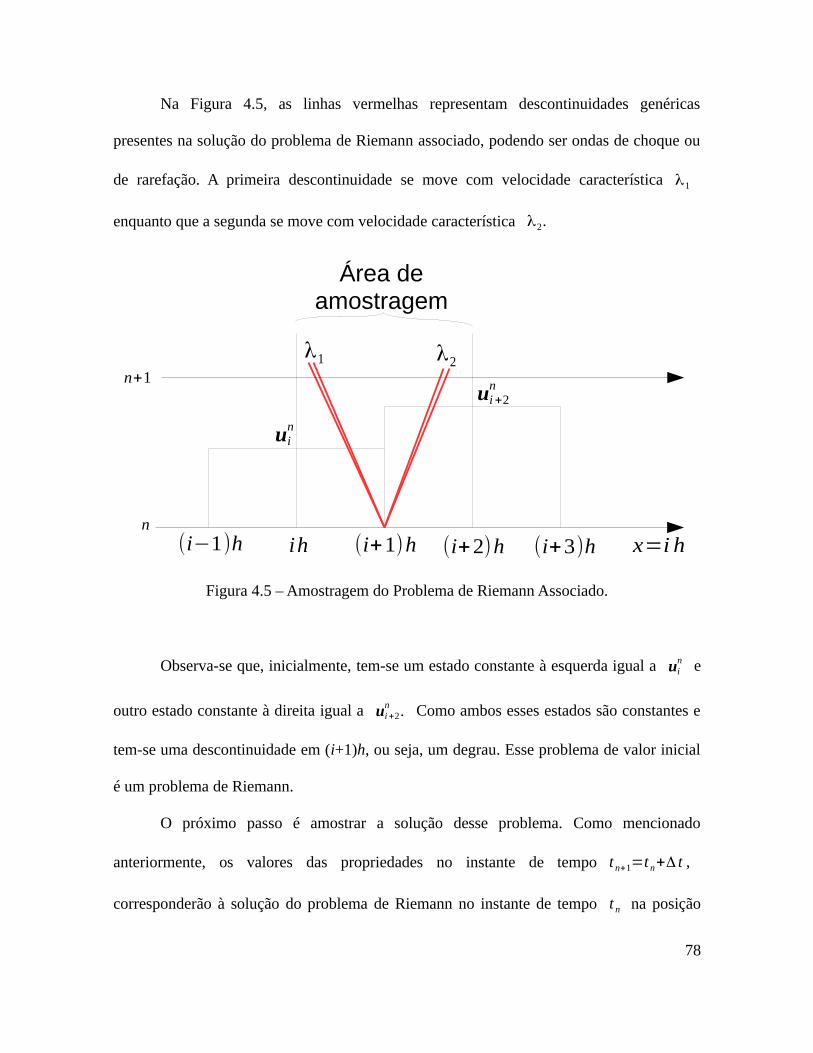
Na Figura 4.5, as linhas vermelhas representam descontinuidades genéricas
presentes na solução do problema de Riemann associado, podendo ser ondas de choque ou
de rarefação. A primeira descontinuidade se move com velocidade característica λ1
enquanto que a segunda se move com velocidade característica λ2 .
Figura 4.5 – Amostragem do Problema de Riemann Associado.
Observa-se que, inicialmente, tem-se um estado constante à esquerda igual a uin e
outro estado constante à direita igual a ui+2n . Como ambos esses estados são constantes e
tem-se uma descontinuidade em (i+1)h, ou seja, um degrau. Esse problema de valor inicial
é um problema de Riemann.
O próximo passo é amostrar a solução desse problema. Como mencionado
anteriormente, os valores das propriedades no instante de tempo t n+1=t n+Δ t ,
corresponderão à solução do problema de Riemann no instante de tempo t n na posição
78
x=i hih (i+2)h(i+1)h
uin
ui+2n
(i−1)h (i+3)h
λ1 λ2
n
n+1
Área de amostragem
(i+1+θ)h , sendo θ um número aleatório entre -1 e 1. Dessa forma, a posição amostrada
estará dentro do intervalo compreendido por x=ih e x=(i+2)h , conforme mostrado na
Figura 4.5. Se θ = - 1, o valor amostrado coincide com x=ih . Enquanto que, se θ = + 1,
o valor amostrado coincide com x=(i+2)h .
Independente do tipo de descontinuidade encontrado na solução do problema de
Riemann (Figura 4.5), as seguintes situações são possíveis para o valor amostrado:
1. O valor amostrado encontra-se à esquerda da primeira descontinuidade;
2. O valor amostrado encontra-se à direita da segunda descontinuidade;
3. O valor amostrado encontra-se entre as duas descontinuidades;
4. O valor amostrado encontra-se dentro da primeira onda de rarefação; e
5. O valor amostrado encontra-se dentro da segunda onda de rarefação.
Observa-se que as duas últimas situações somente podem ocorrer se existirem
rarefações na solução do problema de Riemann.
Inicialmente, verifica-se se o valor amostrado encontra-se à esquerda ou à direita da
primeira descontinuidade, com velocidade característica λ1. Caso a amostragem
encontre-se à direita da primeira descontinuidade, deve ser analisada a sua posição em
relação à segunda descontinuidade. Dessa forma, é possível concluir qual das cinco
situações acima ocorre.
Se a primeira descontinuidade for um choque (choque-1), a velocidade λ1 é
calculada pela equação (3.53). Esse caso é representado pela Figura 4.6 a seguir.
79

Figura 4.6 – Análise da amostragem em relação à primeira descontinuidade (choque-1).
Caso o valor amostrado esteja à esquerda do choque-1 após um intervalo de tempo
Δ t , ou seja, dentro da região 1 da Figura 4.6, tem-se
(i+1+θ)h<S1 Δ t (4.4)
e o valor de ui+1n+1 será atualizado para ui
n . Caso o valor amostrado esteja à direita do
choque-1 (região 2 da Figura 4.6) é necessário analisar a segunda descontinuidade, antes de
concluir sua posição.
A Figura 4.7 representa o caso da primeira descontinuidade ser uma rarefação-1.
80
x
t
1
2
S1

Figura 4.7 – Análise da amostragem em relação à primeira descontinuidade (rarefação-1).
Se a primeira descontinuidade for uma rarefação (rarefação-1), a velocidade de
propagação do início dessa onda é dada por (3.23), sendo reescrita como
λ1(ψE ,ωE)=λ1(ψin ,ωi
n)=ω i
n−√ p ' (ψi
n) (4.5)
Caso o valor amostrado esteja à esquerda do início da rarefação-1 após um intervalo
de tempo Δ t , ou seja, dentro da região 3 da Figura 4.7, tem-se
(i+1+θ)h<λ1(ψin ,ωi
n)Δ t (4.6)
e o valor de ui+1n+1 será atualizado para ui
n .
Ainda no caso de rarefação-1, o término da onda tem velocidade de propagação
dada por
81
x
t
3
54
λ1(ψin ,ωi
n)
λ1(ψi+1n ,ωi+1
n)

λ1(ψ* ,ω*)=λ1(ψi+1n ,ω i+1
n)=ωi+1
n−√ p ' (ψi+1
n) . (4.7)
Se o valor amostrado estiver entre o início e o término dessa onda, ou seja, dentro
da região 4 da Figura 4.7, tem-se
λ1(ψin ,ωi
n)Δ t<(i+1+θ)h<λ1(ψi+1
n ,ωi+1n
)Δ t (4.8)
e o valor amostrado encontra-se dentro da onda de rarefação-1. Os valores de ωi+1n+1 e
ψi +1n+1 são calculados pelas equações (3.41) e (3.43) respectivamente.
Caso o valor amostrado não se encontre nem na região 3, nem na região 4 da Figura
4.7, isto é, o ponto amostrado encontra-se na região 5 dessa Figura, deve ser analisada a
segunda descontinuidade, com velocidade característica λ2 .
Se a descontinuidade da direita for um choque (choque-2) a velocidade λ2 é
calculada pela equação (3.64). Esse caso é representado pela Figura 4.8, a seguir.
82
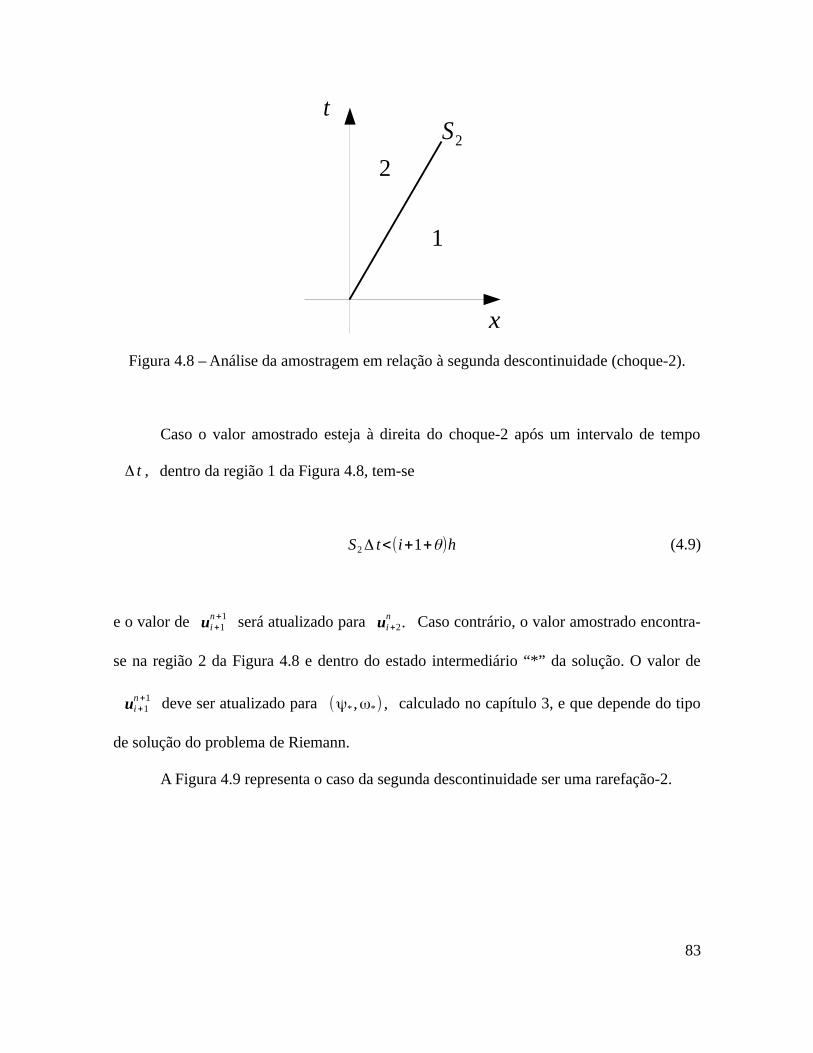
Figura 4.8 – Análise da amostragem em relação à segunda descontinuidade (choque-2).
Caso o valor amostrado esteja à direita do choque-2 após um intervalo de tempo
Δ t , dentro da região 1 da Figura 4.8, tem-se
S2 Δ t<(i+1+θ)h (4.9)
e o valor de ui+1n+1 será atualizado para ui+2
n . Caso contrário, o valor amostrado encontra-
se na região 2 da Figura 4.8 e dentro do estado intermediário “*” da solução. O valor de
ui+1n+1 deve ser atualizado para (ψ* ,ω*) , calculado no capítulo 3, e que depende do tipo
de solução do problema de Riemann.
A Figura 4.9 representa o caso da segunda descontinuidade ser uma rarefação-2.
83
x
t
1
2
S2

Figura 4.9 – Análise da amostragem em relação à segunda descontinuidade (rarefação-2).
Caso a descontinuidade da direita seja uma rarefação (rarefação-2), sua velocidade
de propagação é dada por (3.24), sendo reescrita como
λ2(ψD ,ωD)=λ2(ψi+2n ,ω i+2
n)=ωi+2
n+√ p '(ψi+2
n) . (4.10)
Se o valor amostrado estiver à direita da segunda onda após um intervalo de tempo
Δ t , ou seja, na região 3 da Figura 4.9, tem-se
λ2(ψi+2n ,ω i+2
n)Δ t <( i+1+θ)h (4.11)
e o valor de ui+1n+1 será atualizado para ui+2
n .
Ainda no caso de rarefação-2, o início da onda tem velocidade de propagação dada
por
84
x
t
3
54
λ2(ψi+2n ,ωi+2
n)
λ2(ψi+1n ,ωi+1
n)
λ2(ψ* ,ω*)=λ2(ψi+1n ,ω i+1
n)=ωi+1
n+√ p '(ψi+1
n) . (4.12)
Se o valor amostrado estiver entre o início e o término da onda rarefação-2 (região 4
da Figura 4.9), ou seja
λ2(ψi+1n ,ω i+1
n)Δ t <(i+1+θ)h<λ2(ψi+2
n ,ωi+2n
)Δ t (4.13)
então o valor amostrado encontra-se dentro da onda de rarefação-2 e os valores de ωi+1n+1 e
ψi +1n+1 são calculados pelas equações (3.50) e (3.51) respectivamente.
Por fim, caso o valor amostrado não se encontre nas regiões 3 ou 4 da Figura 4.9,
então ele se encontra entre as duas descontinuidades (região 5) e os valores das
propriedades são determinados pelo valor das propriedades no estado intermediário “*”. Ou
seja, o valor de ui +1n+1 deve ser atualizado para (ψ*,ω* , p*) , calculado no capítulo 3, e
que depende do tipo de solução do problema de Riemann.
85
Capítulo 5
Resultados
5.1. Solução do Problema de Riemann
Nessa seção são apresentados alguns resultados numéricos para ilustrar a solução do
Problema de Riemann, a partir dos resultados obtidos no capítulo 3.
5.1.1. Choque-1/Choque-2
Para ilustrar as conexões Choque-1/Choque-2, serão utilizadas as seguintes
condições iniciais
86
ωE=ωC>0 para −∞< x<0
ωD=−ωC<0 para 0<x<∞ (5.1)
ψE=ψD=ψC<1 para −∞< x<∞
sendo ωC e ψC duas constantes positivas e os subíndices “E” e “D” denotam os valores
à esquerda e à direita de x=0.
Nesse caso tem-se que ωE>ωD e, pela Tabela 3.2, verifica-se que o único caso
possível de ocorrer, para essas condições iniciais é Choque-1/Choque-2. As velocidades das
ondas de choque no estado intermediário podem ser obtidas pelas equação (3.63) ou (3.70).
A saturação no estado intermediário é obtida pela equação (3.72), sendo a única raiz
desta equação. Uma vez conhecida esta saturação ψ* , volta-se à Eq. (3.63) ou à Eq.(3.70)
para determinar ω* . Devido à não linearidade dessa equação, adotou-se um processo
iterativo para a sua determinação. Foi utilizado o método de Newton-Raphson para a
obtenção da raiz (ψ*) de forma que F(ψ*)=0, sendo a função F(ψ*) dada por
(3.72). Como foi utilizado um procedimento iterativo, a tolerância utilizada (critério de
parada) foi o erro de 1x 10−8 .
A Tabela 5.1, obtida a partir da equação (3.89), apresenta alguns resultados para os
dados iniciais propostos pela equação (5.1). Para cada dado inicial associado com (5.1),
tem-se os valores de ψC e ωC respectivamente nas colunas 1 e 2. A coluna 3 apresenta
o valor considerado para cW . Esta variável é associada à rigidez da matriz porosa, de tal
forma que no limite, quando cW ∞ a matriz porosa é rígida, além de estar associada à
87
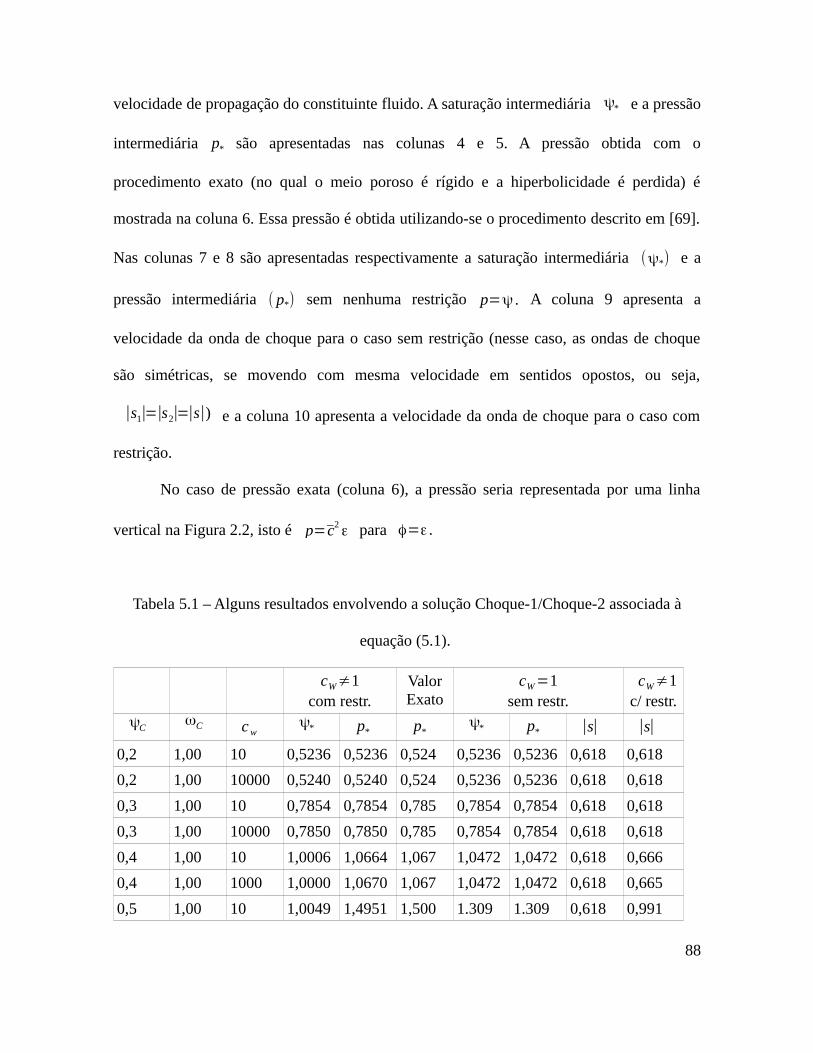
velocidade de propagação do constituinte fluido. A saturação intermediária ψ* e a pressão
intermediária p* são apresentadas nas colunas 4 e 5. A pressão obtida com o
procedimento exato (no qual o meio poroso é rígido e a hiperbolicidade é perdida) é
mostrada na coluna 6. Essa pressão é obtida utilizando-se o procedimento descrito em [69].
Nas colunas 7 e 8 são apresentadas respectivamente a saturação intermediária (ψ*) e a
pressão intermediária ( p*) sem nenhuma restrição p=ψ . A coluna 9 apresenta a
velocidade da onda de choque para o caso sem restrição (nesse caso, as ondas de choque
são simétricas, se movendo com mesma velocidade em sentidos opostos, ou seja,
|s1|=|s2|=|s|) e a coluna 10 apresenta a velocidade da onda de choque para o caso com
restrição.
No caso de pressão exata (coluna 6), a pressão seria representada por uma linha
vertical na Figura 2.2, isto é p= c̄2ε para φ=ε .
Tabela 5.1 – Alguns resultados envolvendo a solução Choque-1/Choque-2 associada à
equação (5.1).
cW≠1com restr.
ValorExato
cW=1sem restr.
cW≠1c/ restr.
ψCωC c w
ψ* p* p*ψ* p* ∣s∣ ∣s∣
0,2 1,00 10 0,5236 0,5236 0,524 0,5236 0,5236 0,618 0,618
0,2 1,00 10000 0,5240 0,5240 0,524 0,5236 0,5236 0,618 0,618
0,3 1,00 10 0,7854 0,7854 0,785 0,7854 0,7854 0,618 0,618
0,3 1,00 10000 0,7850 0,7850 0,785 0,7854 0,7854 0,618 0,618
0,4 1,00 10 1,0006 1,0664 1,067 1,0472 1,0472 0,618 0,666
0,4 1,00 1000 1,0000 1,0670 1,067 1,0472 1,0472 0,618 0,665
0,5 1,00 10 1,0049 1,4951 1,500 1.309 1.309 0,618 0,991
88
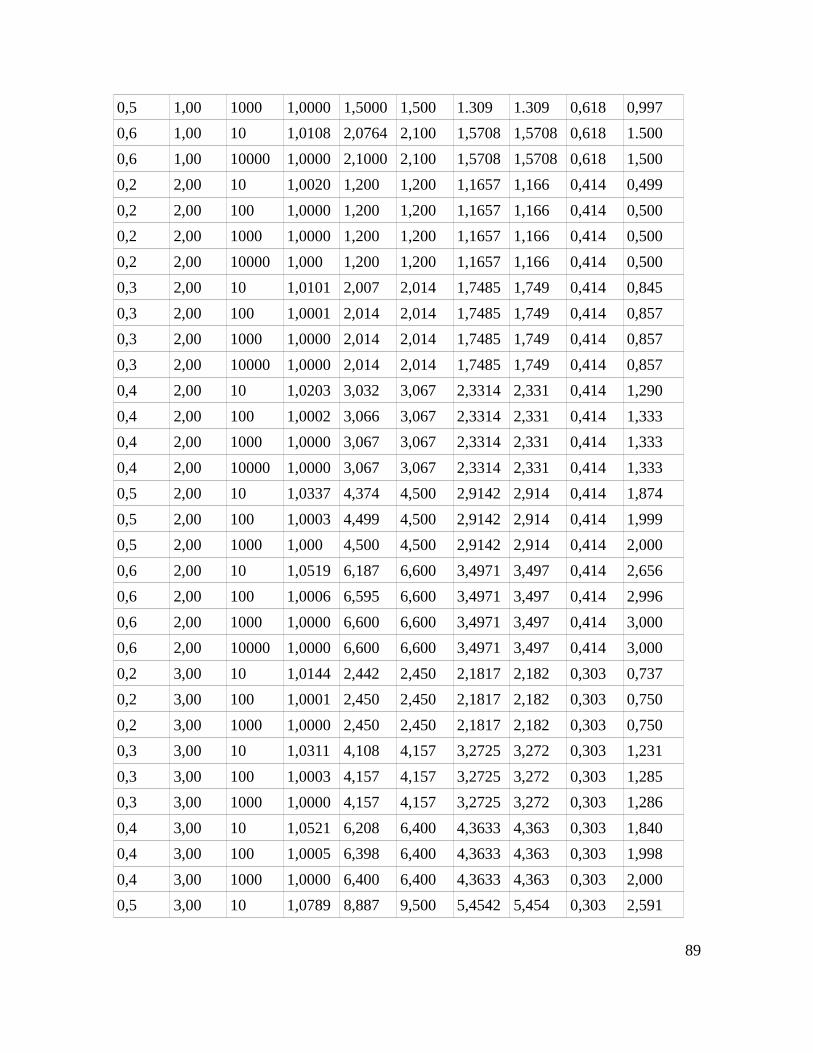
0,5 1,00 1000 1,0000 1,5000 1,500 1.309 1.309 0,618 0,997
0,6 1,00 10 1,0108 2,0764 2,100 1,5708 1,5708 0,618 1.500
0,6 1,00 10000 1,0000 2,1000 2,100 1,5708 1,5708 0,618 1,500
0,2 2,00 10 1,0020 1,200 1,200 1,1657 1,166 0,414 0,499
0,2 2,00 100 1,0000 1,200 1,200 1,1657 1,166 0,414 0,500
0,2 2,00 1000 1,0000 1,200 1,200 1,1657 1,166 0,414 0,500
0,2 2,00 10000 1,000 1,200 1,200 1,1657 1,166 0,414 0,500
0,3 2,00 10 1,0101 2,007 2,014 1,7485 1,749 0,414 0,845
0,3 2,00 100 1,0001 2,014 2,014 1,7485 1,749 0,414 0,857
0,3 2,00 1000 1,0000 2,014 2,014 1,7485 1,749 0,414 0,857
0,3 2,00 10000 1,0000 2,014 2,014 1,7485 1,749 0,414 0,857
0,4 2,00 10 1,0203 3,032 3,067 2,3314 2,331 0,414 1,290
0,4 2,00 100 1,0002 3,066 3,067 2,3314 2,331 0,414 1,333
0,4 2,00 1000 1,0000 3,067 3,067 2,3314 2,331 0,414 1,333
0,4 2,00 10000 1,0000 3,067 3,067 2,3314 2,331 0,414 1,333
0,5 2,00 10 1,0337 4,374 4,500 2,9142 2,914 0,414 1,874
0,5 2,00 100 1,0003 4,499 4,500 2,9142 2,914 0,414 1,999
0,5 2,00 1000 1,000 4,500 4,500 2,9142 2,914 0,414 2,000
0,6 2,00 10 1,0519 6,187 6,600 3,4971 3,497 0,414 2,656
0,6 2,00 100 1,0006 6,595 6,600 3,4971 3,497 0,414 2,996
0,6 2,00 1000 1,0000 6,600 6,600 3,4971 3,497 0,414 3,000
0,6 2,00 10000 1,0000 6,600 6,600 3,4971 3,497 0,414 3,000
0,2 3,00 10 1,0144 2,442 2,450 2,1817 2,182 0,303 0,737
0,2 3,00 100 1,0001 2,450 2,450 2,1817 2,182 0,303 0,750
0,2 3,00 1000 1,0000 2,450 2,450 2,1817 2,182 0,303 0,750
0,3 3,00 10 1,0311 4,108 4,157 3,2725 3,272 0,303 1,231
0,3 3,00 100 1,0003 4,157 4,157 3,2725 3,272 0,303 1,285
0,3 3,00 1000 1,0000 4,157 4,157 3,2725 3,272 0,303 1,286
0,4 3,00 10 1,0521 6,208 6,400 4,3633 4,363 0,303 1,840
0,4 3,00 100 1,0005 6,398 6,400 4,3633 4,363 0,303 1,998
0,4 3,00 1000 1,0000 6,400 6,400 4,3633 4,363 0,303 2,000
0,5 3,00 10 1,0789 8,887 9,500 5,4542 5,454 0,303 2,591
89
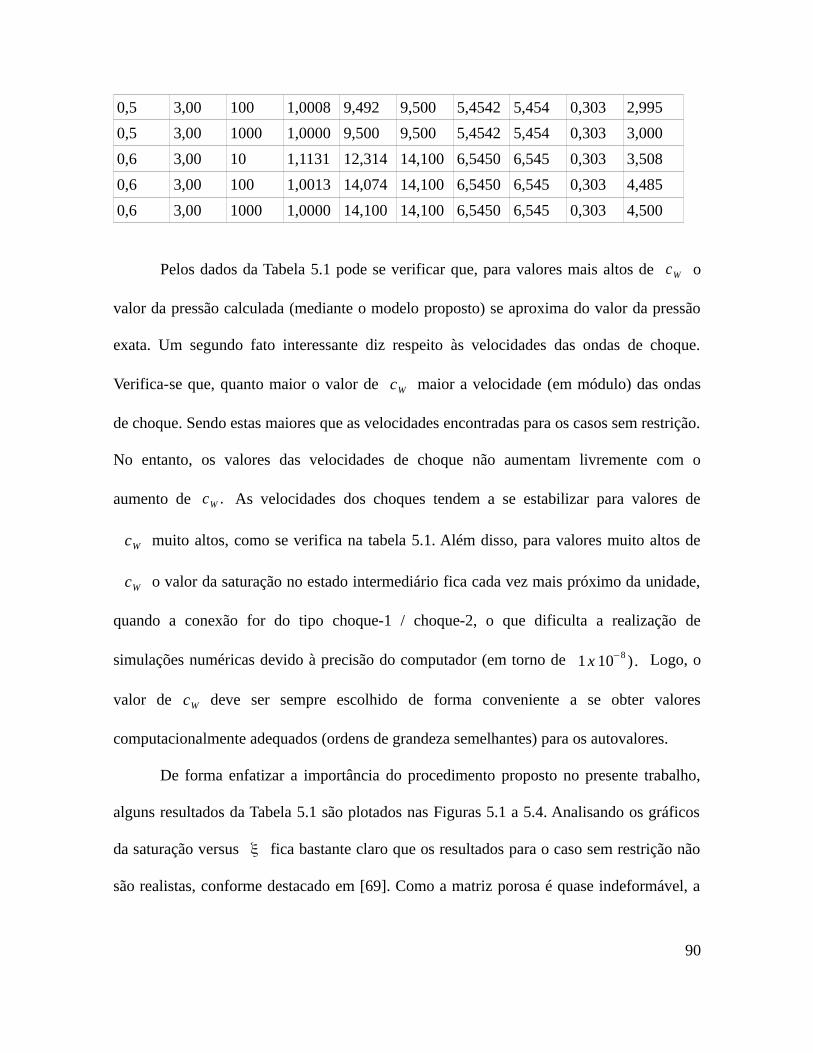
0,5 3,00 100 1,0008 9,492 9,500 5,4542 5,454 0,303 2,995
0,5 3,00 1000 1,0000 9,500 9,500 5,4542 5,454 0,303 3,000
0,6 3,00 10 1,1131 12,314 14,100 6,5450 6,545 0,303 3,508
0,6 3,00 100 1,0013 14,074 14,100 6,5450 6,545 0,303 4,485
0,6 3,00 1000 1,0000 14,100 14,100 6,5450 6,545 0,303 4,500
Pelos dados da Tabela 5.1 pode se verificar que, para valores mais altos de cW o
valor da pressão calculada (mediante o modelo proposto) se aproxima do valor da pressão
exata. Um segundo fato interessante diz respeito às velocidades das ondas de choque.
Verifica-se que, quanto maior o valor de cW maior a velocidade (em módulo) das ondas
de choque. Sendo estas maiores que as velocidades encontradas para os casos sem restrição.
No entanto, os valores das velocidades de choque não aumentam livremente com o
aumento de cW . As velocidades dos choques tendem a se estabilizar para valores de
cW muito altos, como se verifica na tabela 5.1. Além disso, para valores muito altos de
cW o valor da saturação no estado intermediário fica cada vez mais próximo da unidade,
quando a conexão for do tipo choque-1 / choque-2, o que dificulta a realização de
simulações numéricas devido à precisão do computador (em torno de 1 x 10−8 ) . Logo, o
valor de cW deve ser sempre escolhido de forma conveniente a se obter valores
computacionalmente adequados (ordens de grandeza semelhantes) para os autovalores.
De forma enfatizar a importância do procedimento proposto no presente trabalho,
alguns resultados da Tabela 5.1 são plotados nas Figuras 5.1 a 5.4. Analisando os gráficos
da saturação versus ξ fica bastante claro que os resultados para o caso sem restrição não
são realistas, conforme destacado em [69]. Como a matriz porosa é quase indeformável, a
90
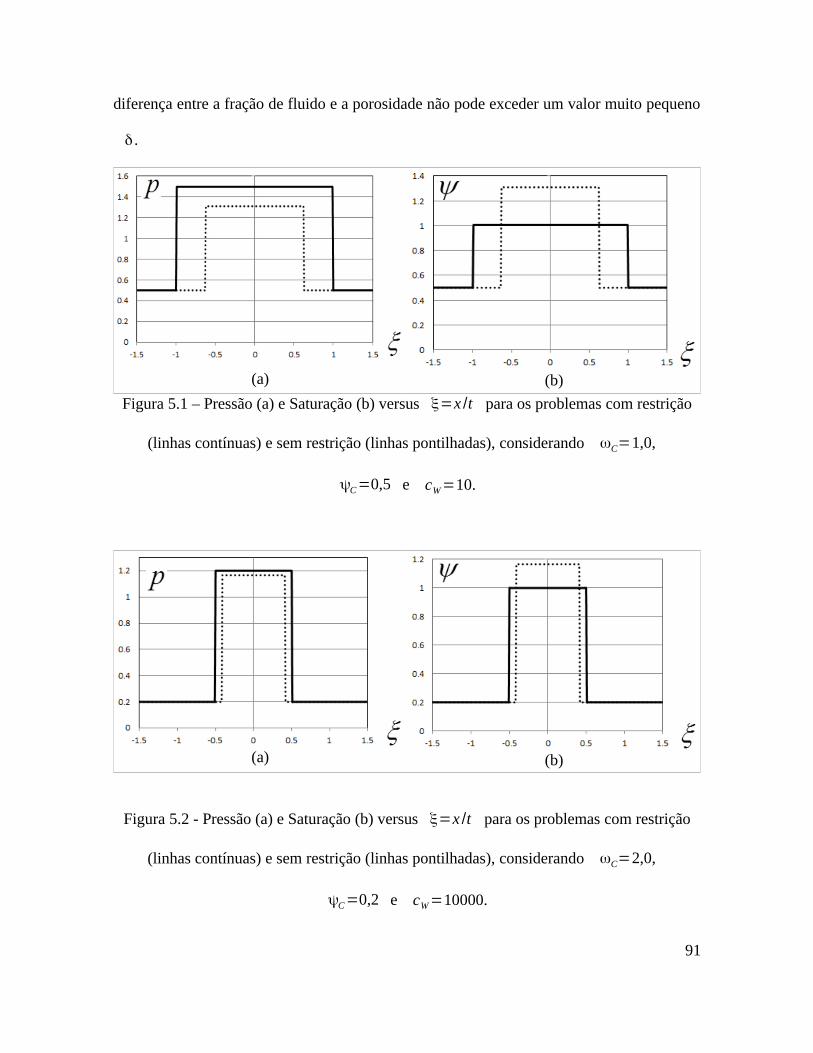
diferença entre a fração de fluido e a porosidade não pode exceder um valor muito pequeno
δ .
(a) (b)
Figura 5.1 – Pressão (a) e Saturação (b) versus ξ=x /t para os problemas com restrição
(linhas contínuas) e sem restrição (linhas pontilhadas), considerando ωC=1,0,
ψC=0,5 e cW=10.
(a) (b)
Figura 5.2 - Pressão (a) e Saturação (b) versus ξ=x /t para os problemas com restrição
(linhas contínuas) e sem restrição (linhas pontilhadas), considerando ωC=2,0,
ψC=0,2 e cW=10000.
91
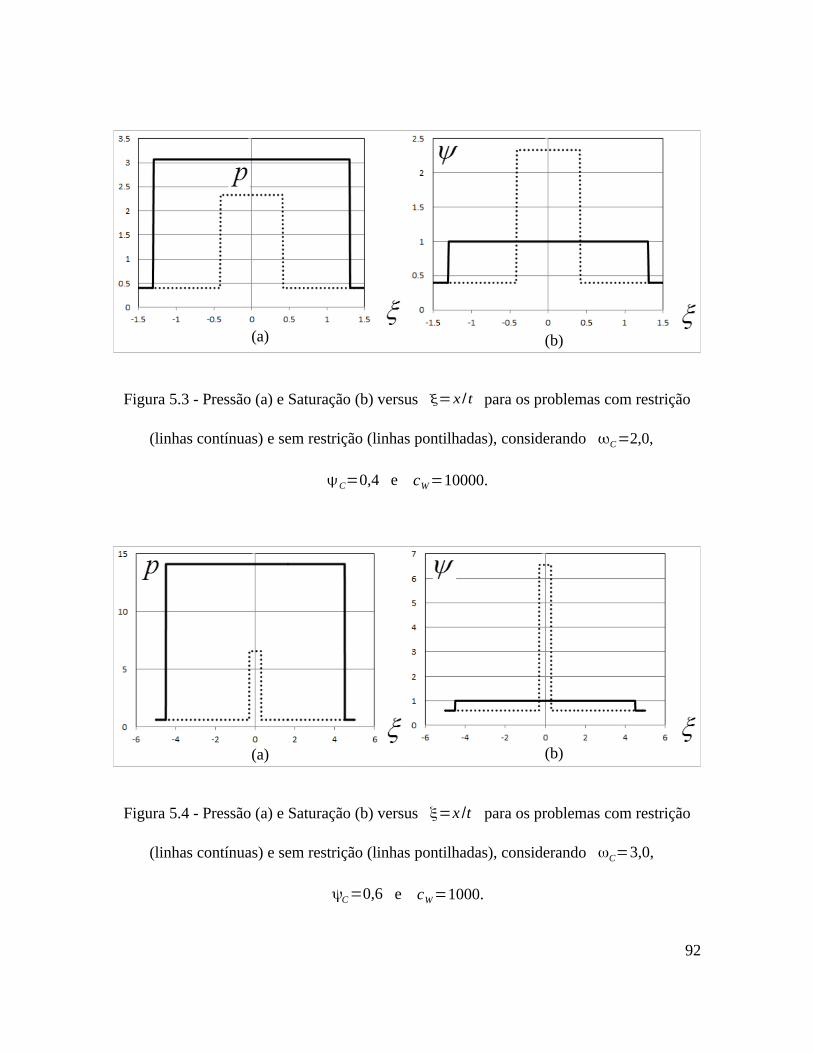
(a) (b)
Figura 5.3 - Pressão (a) e Saturação (b) versus =x / t para os problemas com restrição
(linhas contínuas) e sem restrição (linhas pontilhadas), considerando C=2,0,
C=0,4 e cW=10000.
(a) (b)
Figura 5.4 - Pressão (a) e Saturação (b) versus ξ=x /t para os problemas com restrição
(linhas contínuas) e sem restrição (linhas pontilhadas), considerando ωC=3,0,
ψC=0,6 e cW=1000.
92
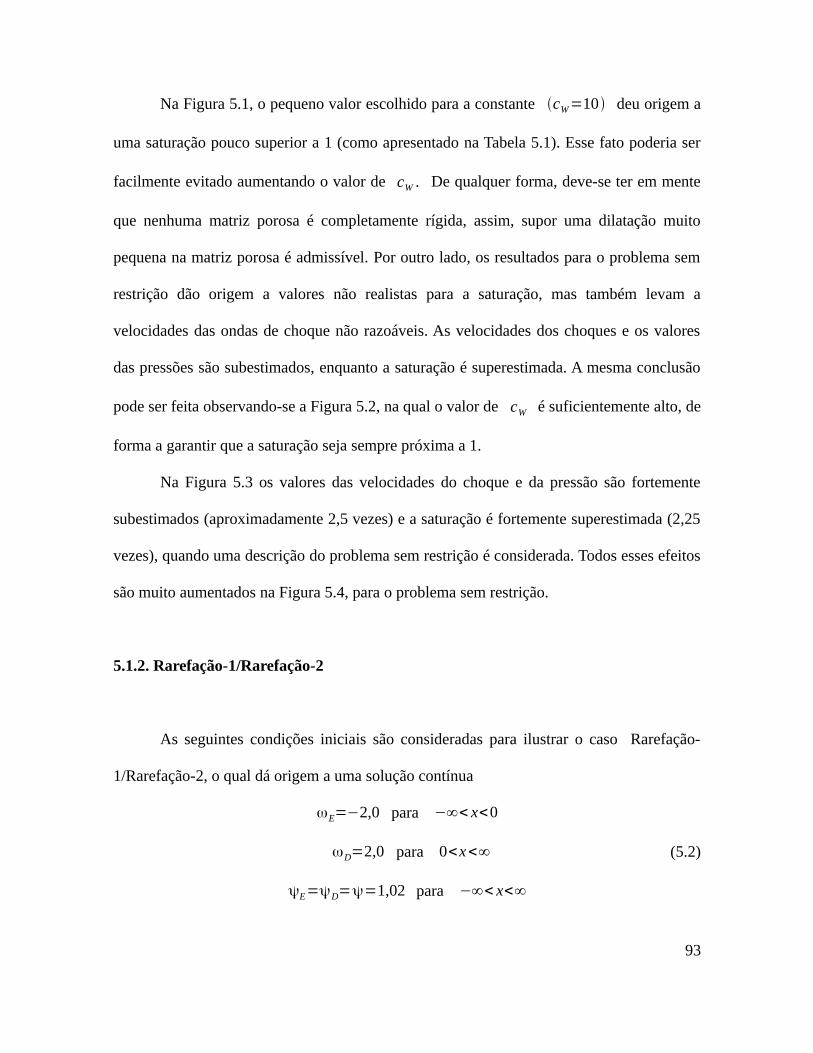
Na Figura 5.1, o pequeno valor escolhido para a constante cW=10 deu origem a
uma saturação pouco superior a 1 (como apresentado na Tabela 5.1). Esse fato poderia ser
facilmente evitado aumentando o valor de cW . De qualquer forma, deve-se ter em mente
que nenhuma matriz porosa é completamente rígida, assim, supor uma dilatação muito
pequena na matriz porosa é admissível. Por outro lado, os resultados para o problema sem
restrição dão origem a valores não realistas para a saturação, mas também levam a
velocidades das ondas de choque não razoáveis. As velocidades dos choques e os valores
das pressões são subestimados, enquanto a saturação é superestimada. A mesma conclusão
pode ser feita observando-se a Figura 5.2, na qual o valor de cW é suficientemente alto, de
forma a garantir que a saturação seja sempre próxima a 1.
Na Figura 5.3 os valores das velocidades do choque e da pressão são fortemente
subestimados (aproximadamente 2,5 vezes) e a saturação é fortemente superestimada (2,25
vezes), quando uma descrição do problema sem restrição é considerada. Todos esses efeitos
são muito aumentados na Figura 5.4, para o problema sem restrição.
5.1.2. Rarefação-1/Rarefação-2
As seguintes condições iniciais são consideradas para ilustrar o caso Rarefação-
1/Rarefação-2, o qual dá origem a uma solução contínua
ωE=−2,0 para −∞< x<0
ωD=2,0 para 0<x<∞ (5.2)
ψE=ψD=ψ=1,02 para −∞< x<∞
93
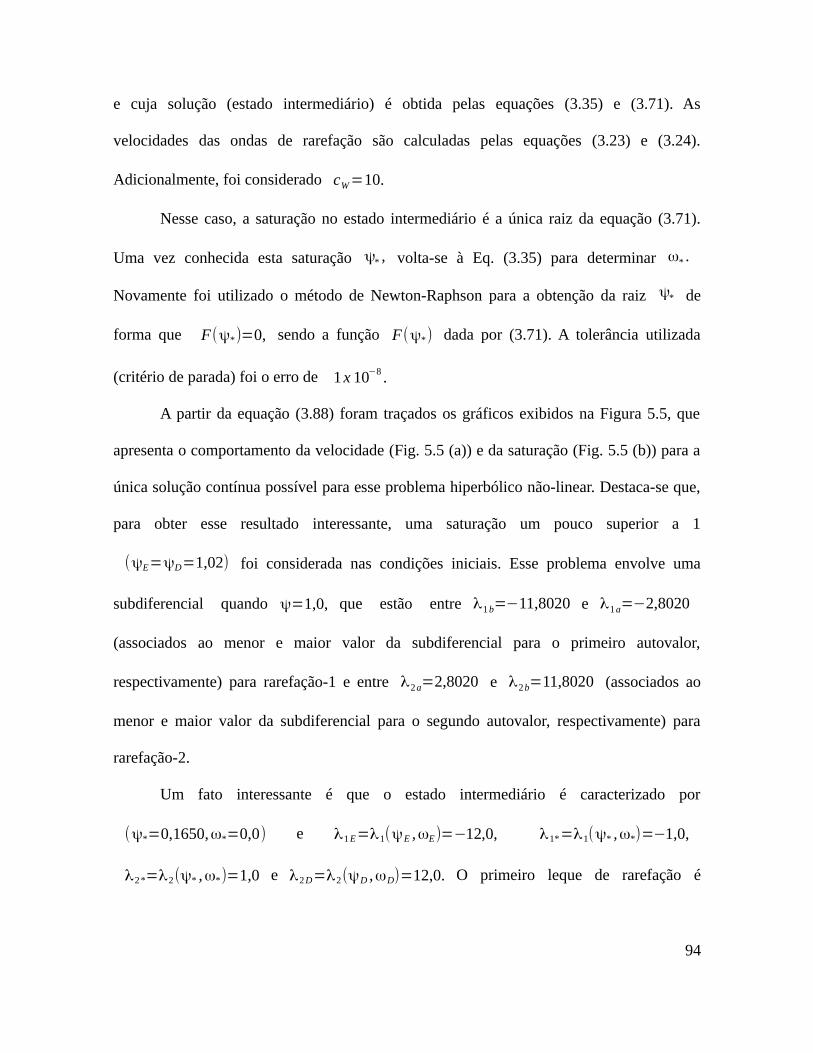
e cuja solução (estado intermediário) é obtida pelas equações (3.35) e (3.71). As
velocidades das ondas de rarefação são calculadas pelas equações (3.23) e (3.24).
Adicionalmente, foi considerado cW=10.
Nesse caso, a saturação no estado intermediário é a única raiz da equação (3.71).
Uma vez conhecida esta saturação ψ* , volta-se à Eq. (3.35) para determinar ω* .
Novamente foi utilizado o método de Newton-Raphson para a obtenção da raiz ψ* de
forma que F(ψ*)=0, sendo a função F(ψ*) dada por (3.71). A tolerância utilizada
(critério de parada) foi o erro de 1x 10−8 .
A partir da equação (3.88) foram traçados os gráficos exibidos na Figura 5.5, que
apresenta o comportamento da velocidade (Fig. 5.5 (a)) e da saturação (Fig. 5.5 (b)) para a
única solução contínua possível para esse problema hiperbólico não-linear. Destaca-se que,
para obter esse resultado interessante, uma saturação um pouco superior a 1
(ψE=ψD=1,02) foi considerada nas condições iniciais. Esse problema envolve uma
subdiferencial quando ψ=1,0, que estão entre λ1b=−11,8020 e λ1a=−2,8020
(associados ao menor e maior valor da subdiferencial para o primeiro autovalor,
respectivamente) para rarefação-1 e entre λ2a=2,8020 e λ2b=11,8020 (associados ao
menor e maior valor da subdiferencial para o segundo autovalor, respectivamente) para
rarefação-2.
Um fato interessante é que o estado intermediário é caracterizado por
(ψ*=0,1650,ω*=0,0) e λ1E=λ1(ψE ,ωE)=−12,0, λ1*=λ1(ψ* ,ω*)=−1,0,
λ2*=λ2(ψ* ,ω*)=1,0 e λ2D=λ2(ψD ,ωD)=12,0. O primeiro leque de rarefação é
94
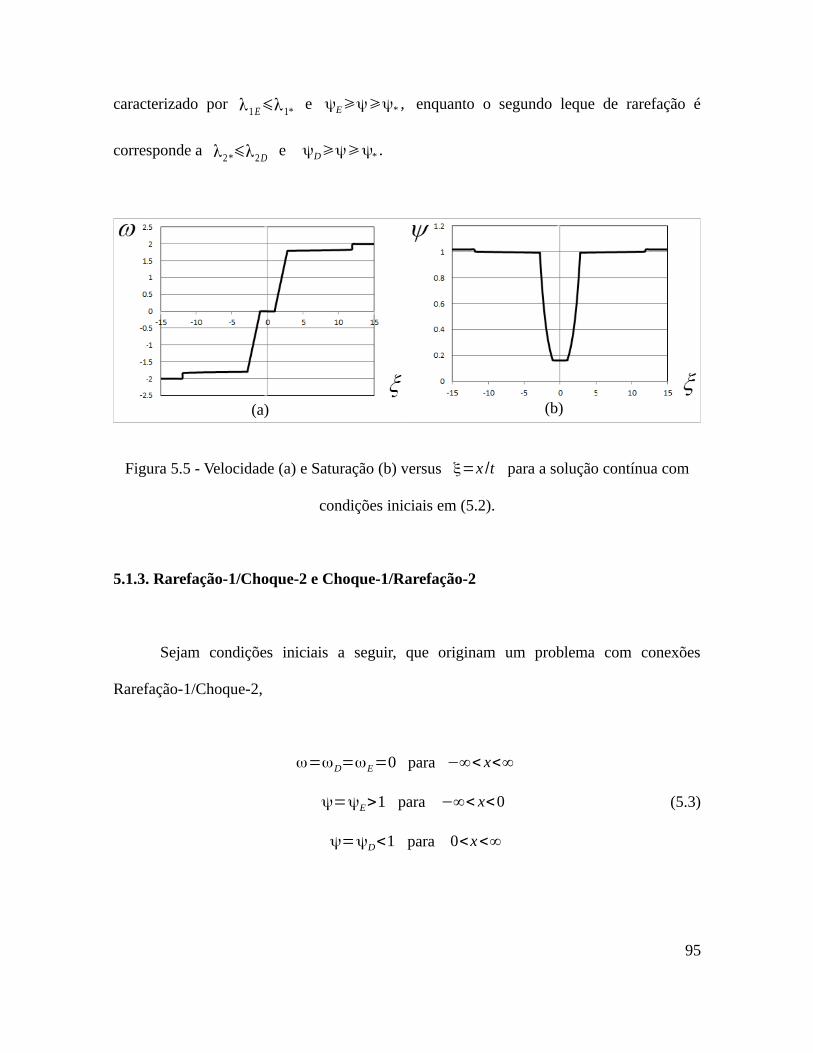
caracterizado por λ1 E⩽λ1*e ψE⩾ψ⩾ψ* , enquanto o segundo leque de rarefação é
corresponde a λ2 *⩽λ2De ψD⩾ψ⩾ψ* .
(a) (b)
Figura 5.5 - Velocidade (a) e Saturação (b) versus ξ=x /t para a solução contínua com
condições iniciais em (5.2).
5.1.3. Rarefação-1/Choque-2 e Choque-1/Rarefação-2
Sejam condições iniciais a seguir, que originam um problema com conexões
Rarefação-1/Choque-2,
ω=ωD=ωE=0 para −∞< x<∞
ψ=ψE>1 para −∞< x<0 (5.3)
ψ=ψD<1 para 0<x<∞
95
A Tabela 5.2 apresenta alguns resultados para o caso Rarefação-1/Choque-2,
associadas aos dados iniciais da equação (5.3), enquanto a Tabela 5.3 apresenta resultados
para as conexões do tipo Choque-1/Rarefação-2. Observa-se que foi forçado um valor
ligeiramente superior a 1 para a saturação à esquerda. Este resultado poderia ser
proveniente de um passo intermediário no caso do uso do esquema de Glimm, por exemplo,
ou ainda de uma pressão excessivamente alta imposta a uma matriz porosa que houvesse
sido suposta rígida. A solução do sistema é obtida pelas equações (3.35) e (3.73) para o
caso Rarefação-1/Choque-2, e pelas equações (3.45) e (3.74) para o caso Choque-
1/Rarefação-2. Neste último caso, é forçado um valor inicial para a saturação um pouco
superior a 1 à direita.
Todas saturações (nos estados intermediários) das Tabelas 5.2 e 5.3 foram obtidas
utilizando-se o método de Newton-Raphson, considerando-se um critério de parada (erro)
de 1x 10−8 .
Observa-se pelas Tabelas 5.2 e 5.3 que os casos são simétricos, isto é, apresentam as
mesmas velocidades de ondas, mas em sentidos opostos. Novamente nesses casos, pode-se
verificar que, quanto maior o valor de cW , maiores são as velocidades de propagação das
ondas.
Além disso, verifica-se que as condições da Tabela 3.1 são verificados para os
resultados obtidos para ψ* e ω* , para os casos Rarefação-1/Choque-2 e Choque-
1/Rarefação-2.
96
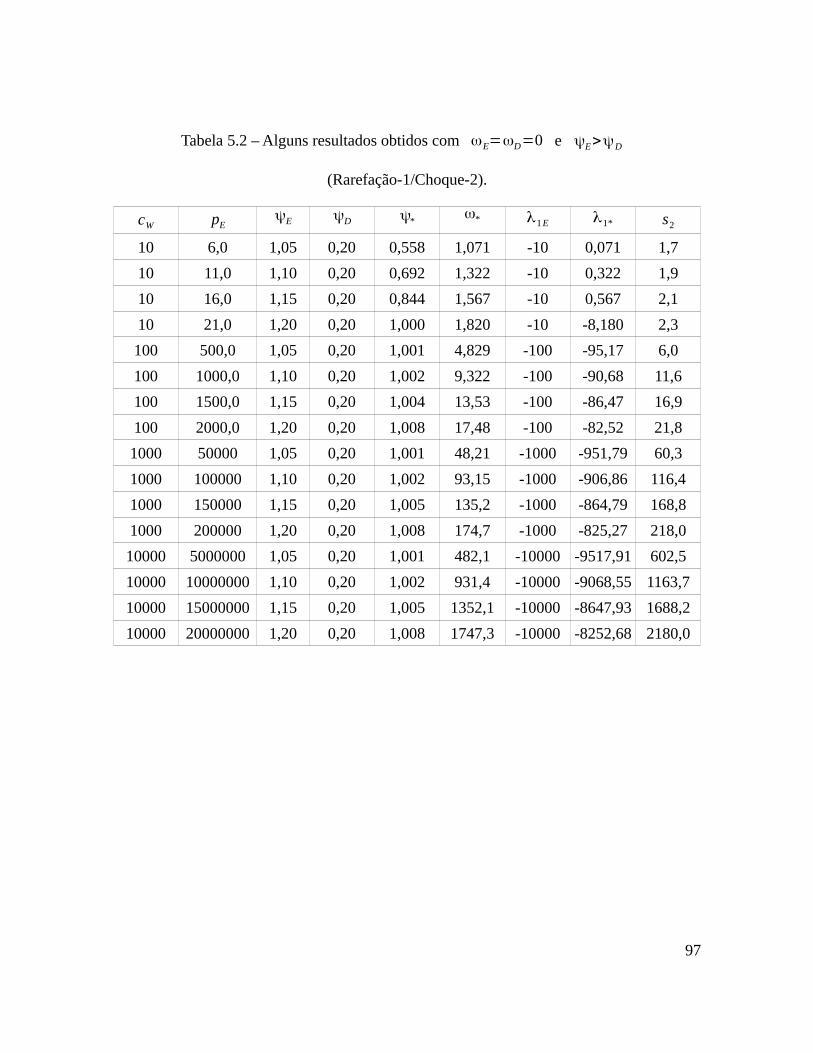
Tabela 5.2 – Alguns resultados obtidos com ωE=ωD=0 e ψE>ψD
(Rarefação-1/Choque-2).
cW pEψE ψD ψ*
ω* λ1E λ1* s2
10 6,0 1,05 0,20 0,558 1,071 -10 0,071 1,7
10 11,0 1,10 0,20 0,692 1,322 -10 0,322 1,9
10 16,0 1,15 0,20 0,844 1,567 -10 0,567 2,1
10 21,0 1,20 0,20 1,000 1,820 -10 -8,180 2,3
100 500,0 1,05 0,20 1,001 4,829 -100 -95,17 6,0
100 1000,0 1,10 0,20 1,002 9,322 -100 -90,68 11,6
100 1500,0 1,15 0,20 1,004 13,53 -100 -86,47 16,9
100 2000,0 1,20 0,20 1,008 17,48 -100 -82,52 21,8
1000 50000 1,05 0,20 1,001 48,21 -1000 -951,79 60,3
1000 100000 1,10 0,20 1,002 93,15 -1000 -906,86 116,4
1000 150000 1,15 0,20 1,005 135,2 -1000 -864,79 168,8
1000 200000 1,20 0,20 1,008 174,7 -1000 -825,27 218,0
10000 5000000 1,05 0,20 1,001 482,1 -10000 -9517,91 602,5
10000 10000000 1,10 0,20 1,002 931,4 -10000 -9068,55 1163,7
10000 15000000 1,15 0,20 1,005 1352,1 -10000 -8647,93 1688,2
10000 20000000 1,20 0,20 1,008 1747,3 -10000 -8252,68 2180,0
97
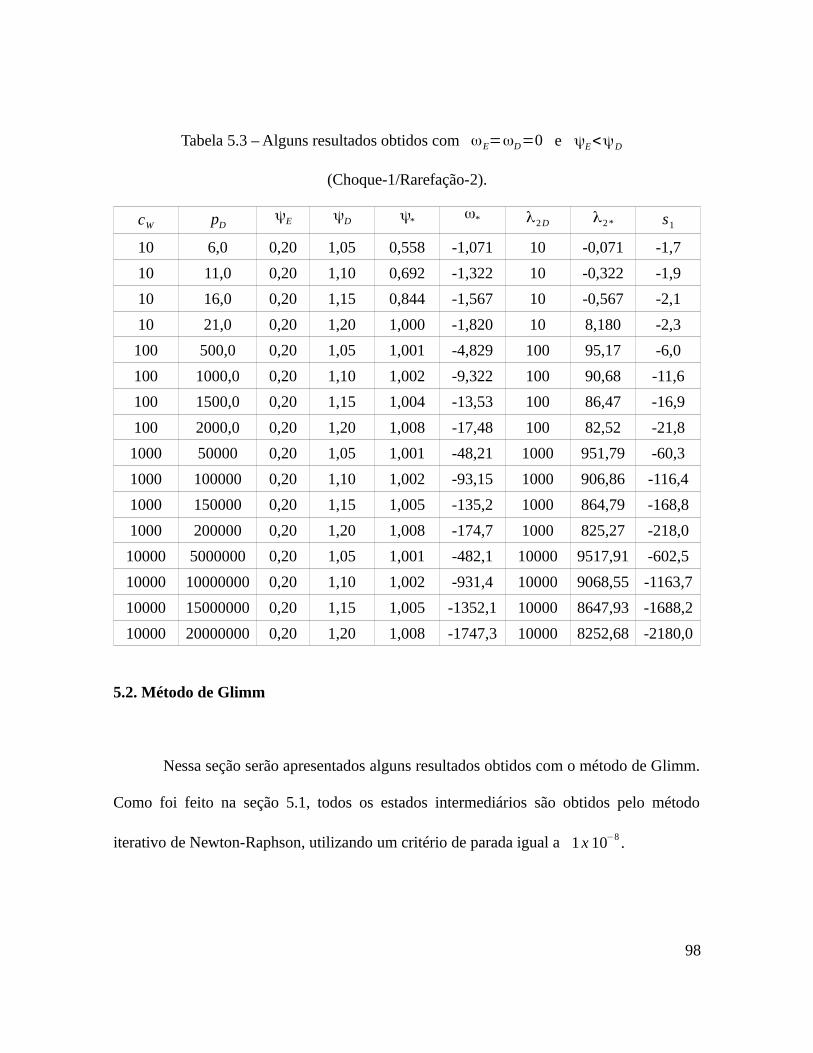
Tabela 5.3 – Alguns resultados obtidos com ωE=ωD=0 e ψE<ψD
(Choque-1/Rarefação-2).
cW pDψE ψD ψ*
ω* λ2D λ2* s1
10 6,0 0,20 1,05 0,558 -1,071 10 -0,071 -1,7
10 11,0 0,20 1,10 0,692 -1,322 10 -0,322 -1,9
10 16,0 0,20 1,15 0,844 -1,567 10 -0,567 -2,1
10 21,0 0,20 1,20 1,000 -1,820 10 8,180 -2,3
100 500,0 0,20 1,05 1,001 -4,829 100 95,17 -6,0
100 1000,0 0,20 1,10 1,002 -9,322 100 90,68 -11,6
100 1500,0 0,20 1,15 1,004 -13,53 100 86,47 -16,9
100 2000,0 0,20 1,20 1,008 -17,48 100 82,52 -21,8
1000 50000 0,20 1,05 1,001 -48,21 1000 951,79 -60,3
1000 100000 0,20 1,10 1,002 -93,15 1000 906,86 -116,4
1000 150000 0,20 1,15 1,005 -135,2 1000 864,79 -168,8
1000 200000 0,20 1,20 1,008 -174,7 1000 825,27 -218,0
10000 5000000 0,20 1,05 1,001 -482,1 10000 9517,91 -602,5
10000 10000000 0,20 1,10 1,002 -931,4 10000 9068,55 -1163,7
10000 15000000 0,20 1,15 1,005 -1352,1 10000 8647,93 -1688,2
10000 20000000 0,20 1,20 1,008 -1747,3 10000 8252,68 -2180,0
5.2. Método de Glimm
Nessa seção serão apresentados alguns resultados obtidos com o método de Glimm.
Como foi feito na seção 5.1, todos os estados intermediários são obtidos pelo método
iterativo de Newton-Raphson, utilizando um critério de parada igual a 1 x 10−8 .
98

5.2.1. Choque-1/Choque-2
5.2.1.1. Exemplo 1
Para a simulação do caso Choque-1/Choque-2 foi utilizado um caso presente na
Tabela 5.1. Foi considerado o caso em que ψC=0,5, ωC=1,0 e cW=10.
Foi considerado um domínio de 1 metro de comprimento, com a descontinuidade
inicial inserida na posição x = 0,5 m (a metade do domínio). O domínio foi dividido em
1000 divisões espaciais. A simulação foi realizada para um intervalo de tempo igual a 1,0
segundo, o qual foi dividido em 4000 sub-intervalos. Dessa forma, foi obtido
x t
=1,0/10001,0 /4000
=42s1≈2 (5.4)
mostrando que a condição de Courant- Friedrichs-Lewy (equação (4.1)) foi atendida.
As Figuras 5.6 a 5.8 apresentam a evolução da saturação, velocidade e pressão, para
os primeiros instantes de tempo. Para efeito de comparação, nessas figuras também foi
plotado o caso sem a restrição, ou seja, cW=1.
99
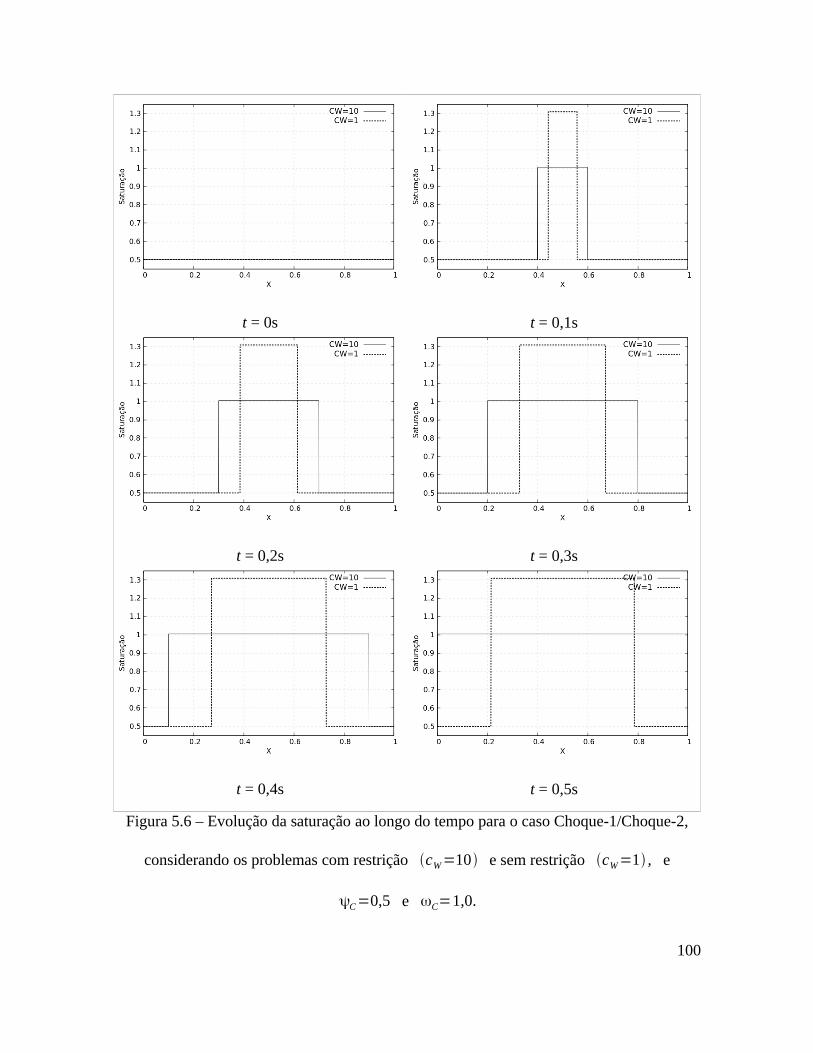
t = 0s t = 0,1s
t = 0,2s t = 0,3s
t = 0,4s t = 0,5s
Figura 5.6 – Evolução da saturação ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψC=0,5 e ωC=1,0.
100
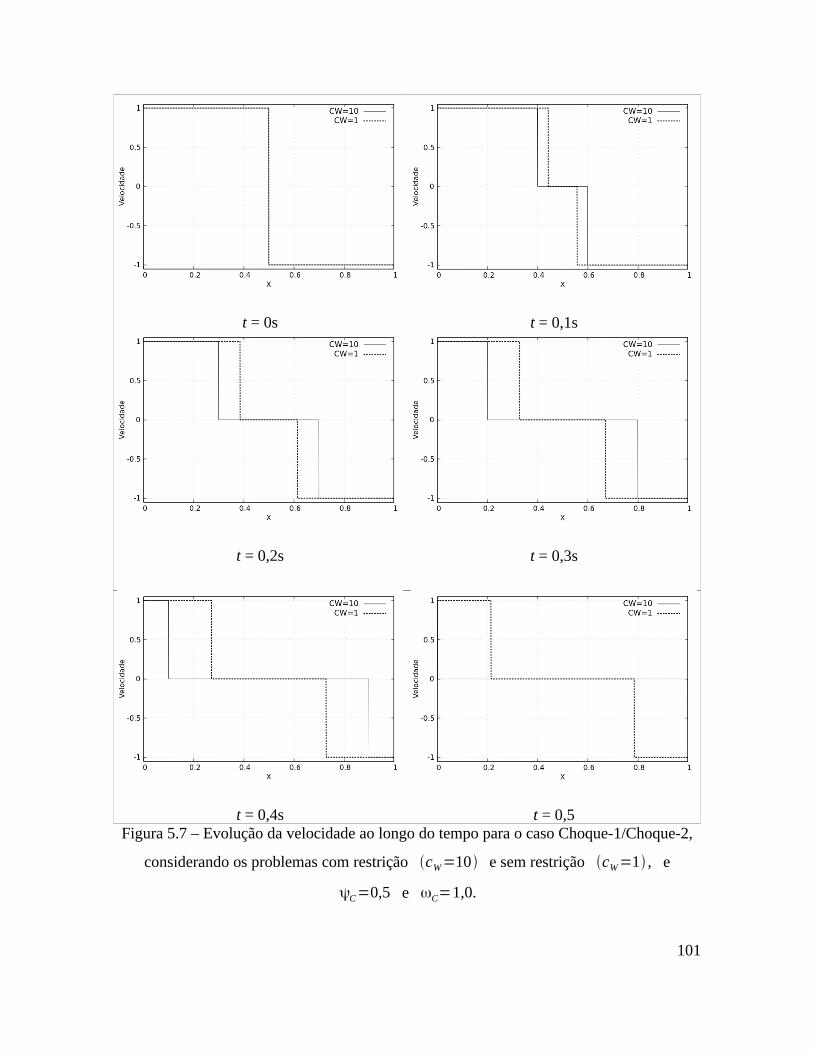
t = 0s t = 0,1s
t = 0,2s t = 0,3s
t = 0,4s t = 0,5Figura 5.7 – Evolução da velocidade ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψC=0,5 e ωC=1,0.
101
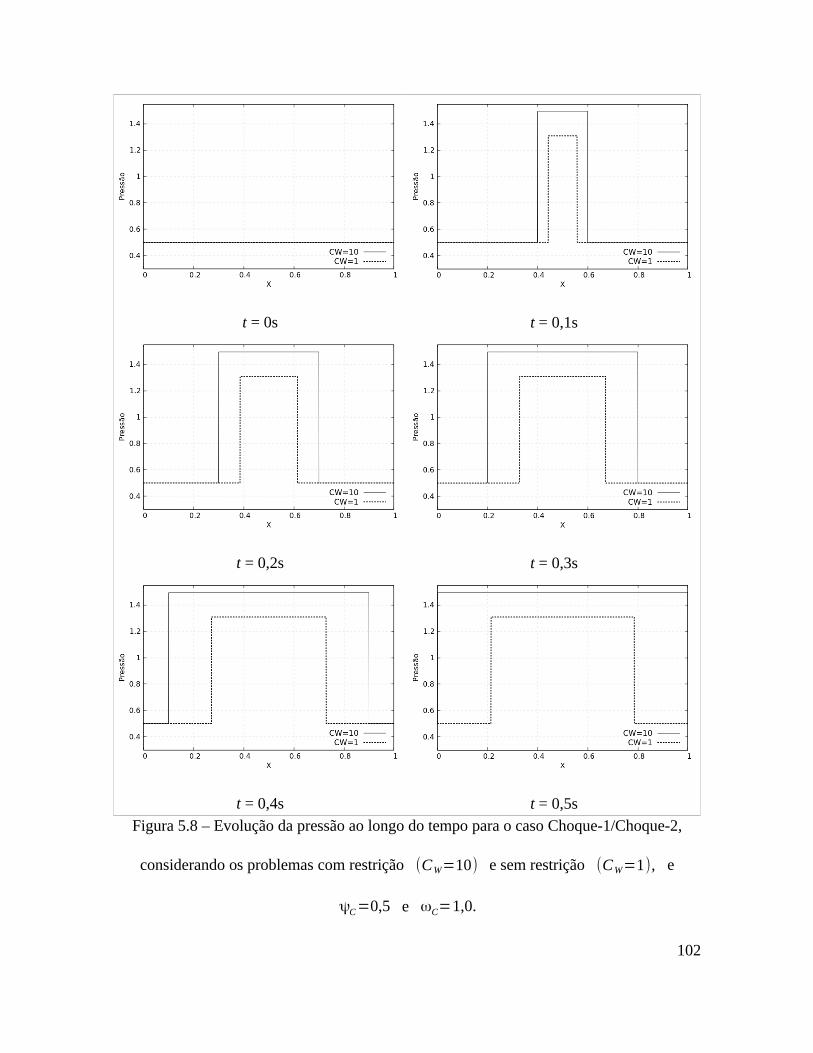
t = 0s t = 0,1s
t = 0,2s t = 0,3s
t = 0,4s t = 0,5sFigura 5.8 – Evolução da pressão ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com restrição (CW=10) e sem restrição (CW=1), e
ψC=0,5 e ωC=1,0.
102
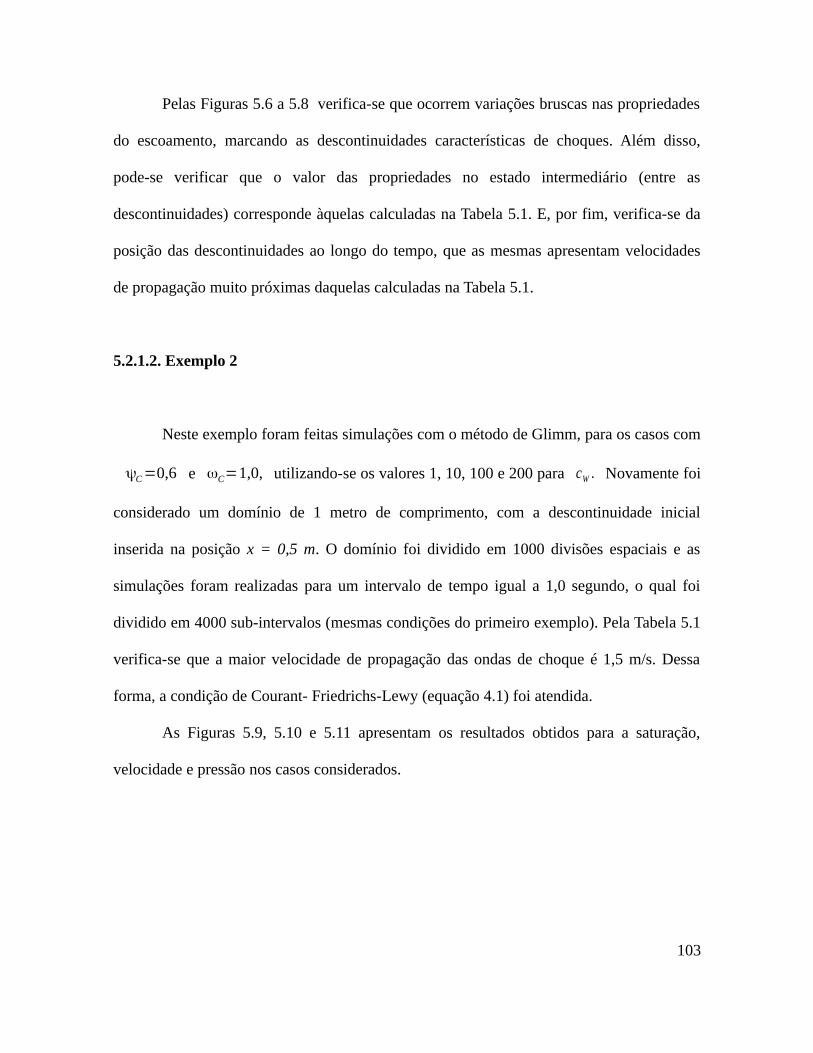
Pelas Figuras 5.6 a 5.8 verifica-se que ocorrem variações bruscas nas propriedades
do escoamento, marcando as descontinuidades características de choques. Além disso,
pode-se verificar que o valor das propriedades no estado intermediário (entre as
descontinuidades) corresponde àquelas calculadas na Tabela 5.1. E, por fim, verifica-se da
posição das descontinuidades ao longo do tempo, que as mesmas apresentam velocidades
de propagação muito próximas daquelas calculadas na Tabela 5.1.
5.2.1.2. Exemplo 2
Neste exemplo foram feitas simulações com o método de Glimm, para os casos com
ψC=0,6 e ωC=1,0, utilizando-se os valores 1, 10, 100 e 200 para cW . Novamente foi
considerado um domínio de 1 metro de comprimento, com a descontinuidade inicial
inserida na posição x = 0,5 m. O domínio foi dividido em 1000 divisões espaciais e as
simulações foram realizadas para um intervalo de tempo igual a 1,0 segundo, o qual foi
dividido em 4000 sub-intervalos (mesmas condições do primeiro exemplo). Pela Tabela 5.1
verifica-se que a maior velocidade de propagação das ondas de choque é 1,5 m/s. Dessa
forma, a condição de Courant- Friedrichs-Lewy (equação 4.1) foi atendida.
As Figuras 5.9, 5.10 e 5.11 apresentam os resultados obtidos para a saturação,
velocidade e pressão nos casos considerados.
103
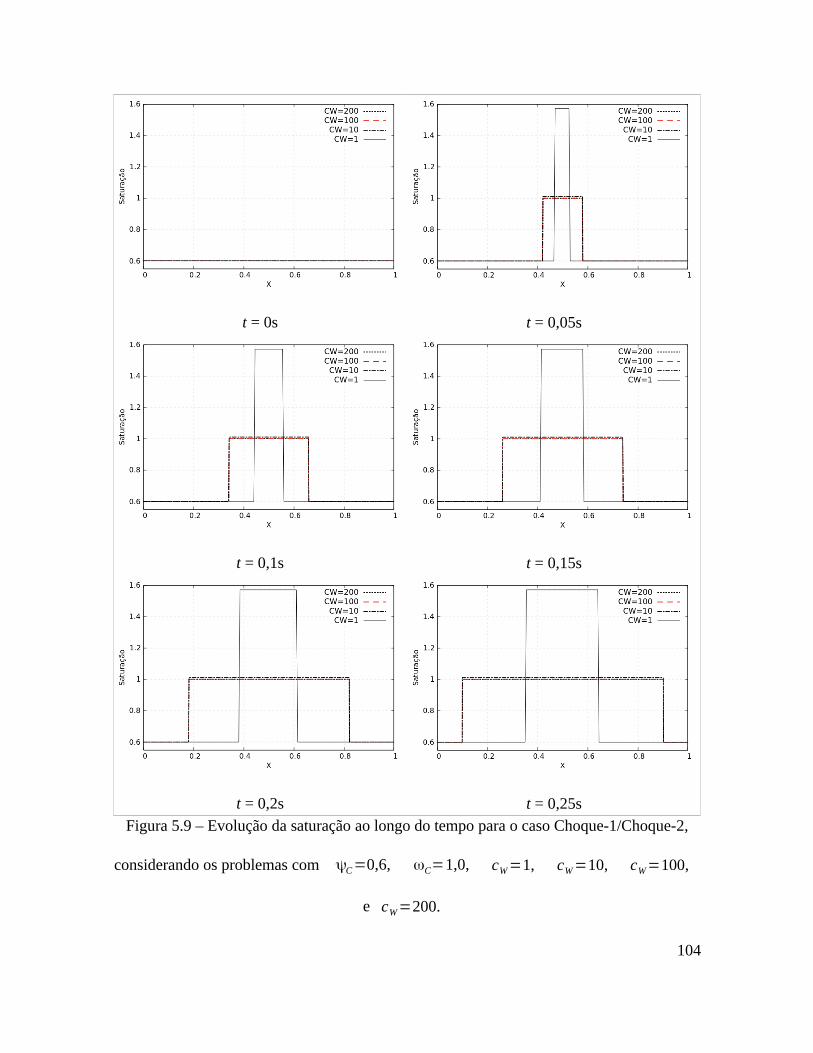
t = 0s t = 0,05s
t = 0,1s t = 0,15s
t = 0,2s t = 0,25sFigura 5.9 – Evolução da saturação ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com ψC=0,6, ωC=1,0, cW=1, cW=10, cW=100,
e cW=200.
104
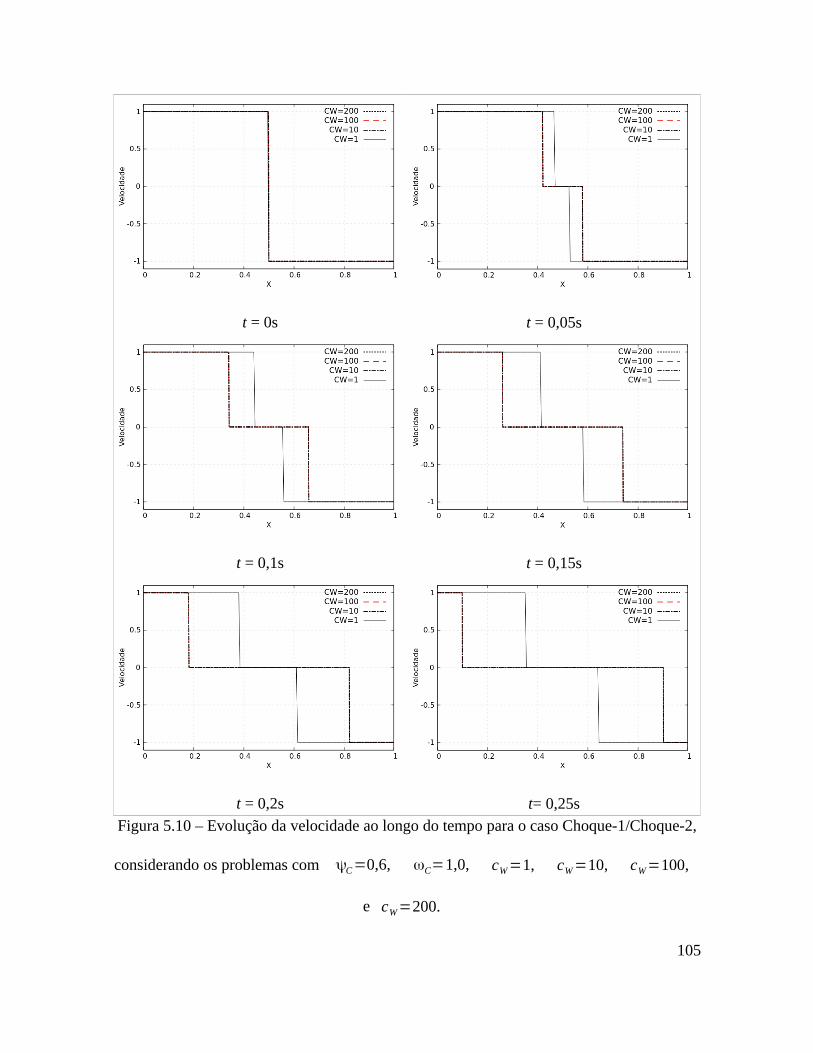
t = 0s t = 0,05s
t = 0,1s t = 0,15s
t = 0,2s t= 0,25sFigura 5.10 – Evolução da velocidade ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com ψC=0,6, ωC=1,0, cW=1, cW=10, cW=100,
e cW=200.
105
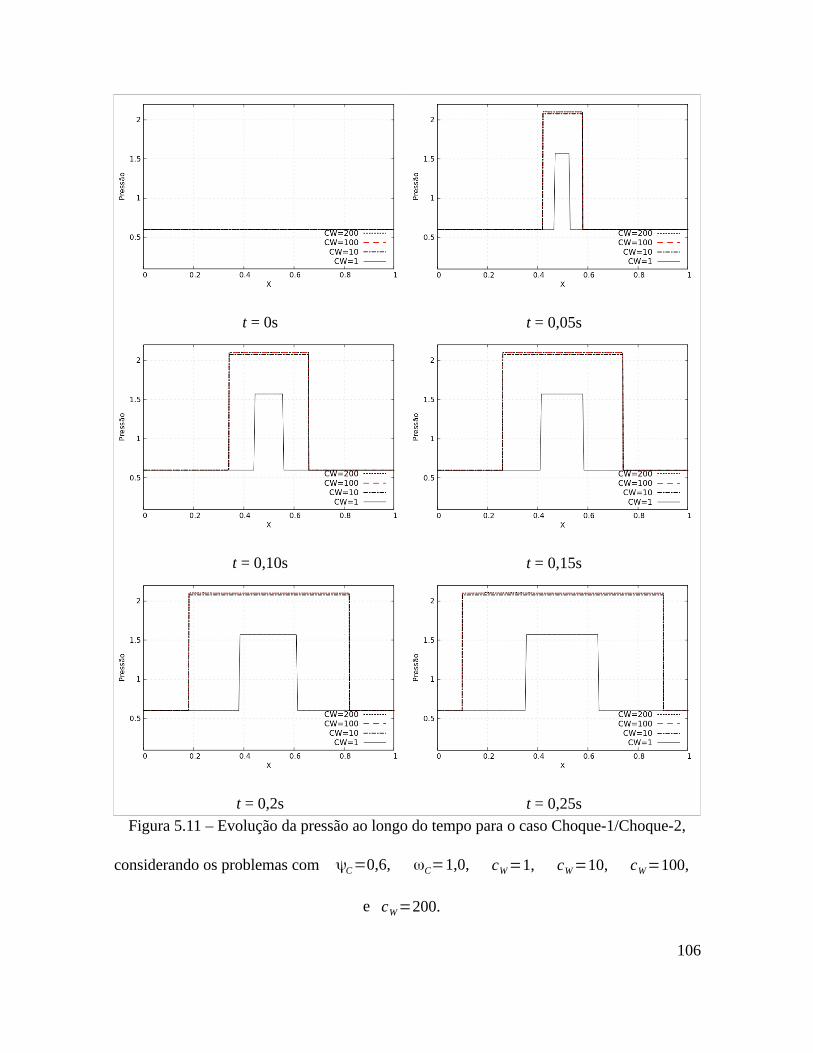
t = 0s t = 0,05s
t = 0,10s t = 0,15s
t = 0,2s t = 0,25sFigura 5.11 – Evolução da pressão ao longo do tempo para o caso Choque-1/Choque-2,
considerando os problemas com ψC=0,6, ωC=1,0, cW=1, cW=10, cW=100,
e cW=200.
106
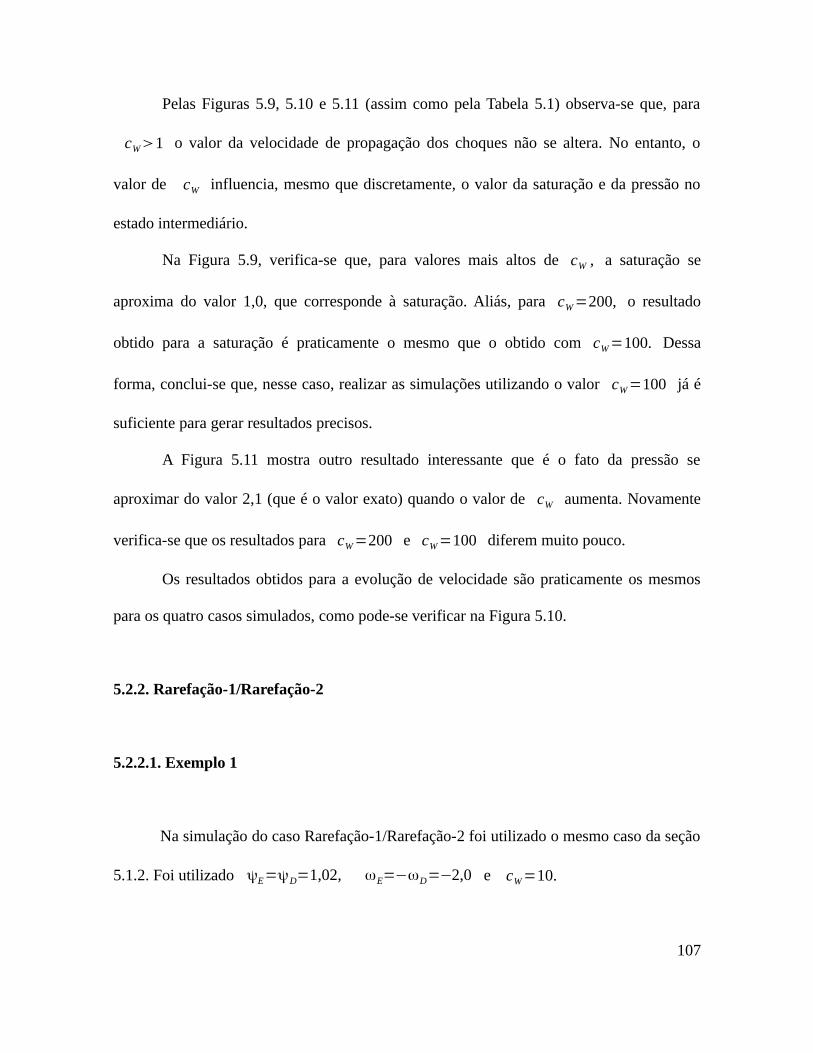
Pelas Figuras 5.9, 5.10 e 5.11 (assim como pela Tabela 5.1) observa-se que, para
cW1 o valor da velocidade de propagação dos choques não se altera. No entanto, o
valor de cW influencia, mesmo que discretamente, o valor da saturação e da pressão no
estado intermediário.
Na Figura 5.9, verifica-se que, para valores mais altos de cW , a saturação se
aproxima do valor 1,0, que corresponde à saturação. Aliás, para cW=200, o resultado
obtido para a saturação é praticamente o mesmo que o obtido com cW=100. Dessa
forma, conclui-se que, nesse caso, realizar as simulações utilizando o valor cW=100 já é
suficiente para gerar resultados precisos.
A Figura 5.11 mostra outro resultado interessante que é o fato da pressão se
aproximar do valor 2,1 (que é o valor exato) quando o valor de cW aumenta. Novamente
verifica-se que os resultados para cW=200 e cW=100 diferem muito pouco.
Os resultados obtidos para a evolução de velocidade são praticamente os mesmos
para os quatro casos simulados, como pode-se verificar na Figura 5.10.
5.2.2. Rarefação-1/Rarefação-2
5.2.2.1. Exemplo 1
Na simulação do caso Rarefação-1/Rarefação-2 foi utilizado o mesmo caso da seção
5.1.2. Foi utilizado ψE=ψD=1,02, ωE=−ωD=−2,0 e cW=10.
107

Foi considerado um domínio de 1 metro de comprimento, com a descontinuidade
inicial inserida na posição x = 0,5 m. O domínio foi dividido em 400 divisões espaciais. A
simulação foi realizada para um intervalo de tempo igual a 1,0 segundo, o qual foi dividido
em 10400 sub-intervalos. Dessa forma, foi obtido
Δ xΔ t
=
1,04001,0
10400
=26>2λ1(ψE ,ωE)≈24 (5.5)
o que mostra que a condição de Courant- Friedrichs-Lewy (equação 4.1) foi atendida.
As Figuras 5.12 a 5.14, a seguir, apresentam a evolução da saturação, velocidade e
pressão para os instantes de tempo iniciais. Para efeito de comparação, nessas figuras
também foi plotado o caso sem a restrição, ou seja, cW=1.
108
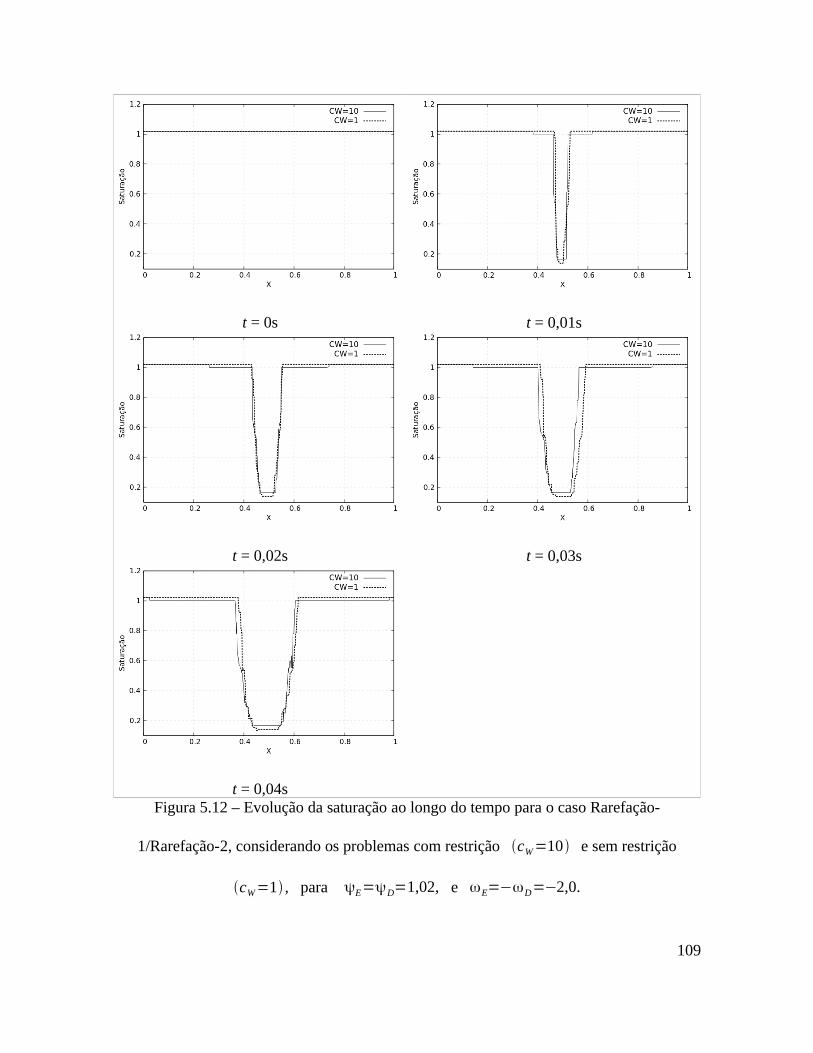
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.12 – Evolução da saturação ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas com restrição cW=10 e sem restrição
cW=1 , para ψE=ψD=1,02, e ωE=−ωD=−2,0.
109
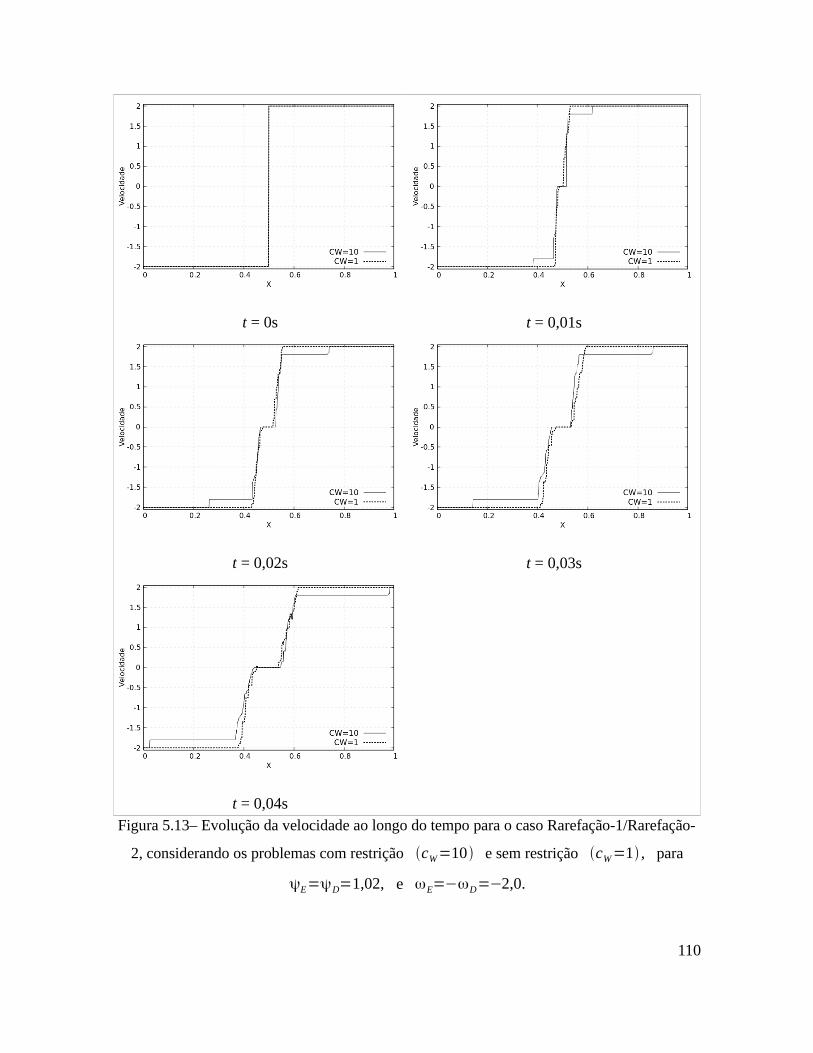
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.13– Evolução da velocidade ao longo do tempo para o caso Rarefação-1/Rarefação-
2, considerando os problemas com restrição cW=10 e sem restrição cW=1 , para
ψE=ψD=1,02, e ωE=−ωD=−2,0.
110
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.14 – Evolução da pressão ao longo do tempo para o caso Rarefação-1/Rarefação-
2, considerando os problemas com restrição cW=10 e sem restrição cW=1 , para
ψE=ψD=1,02, e ωE=−ωD=−2,0.
111
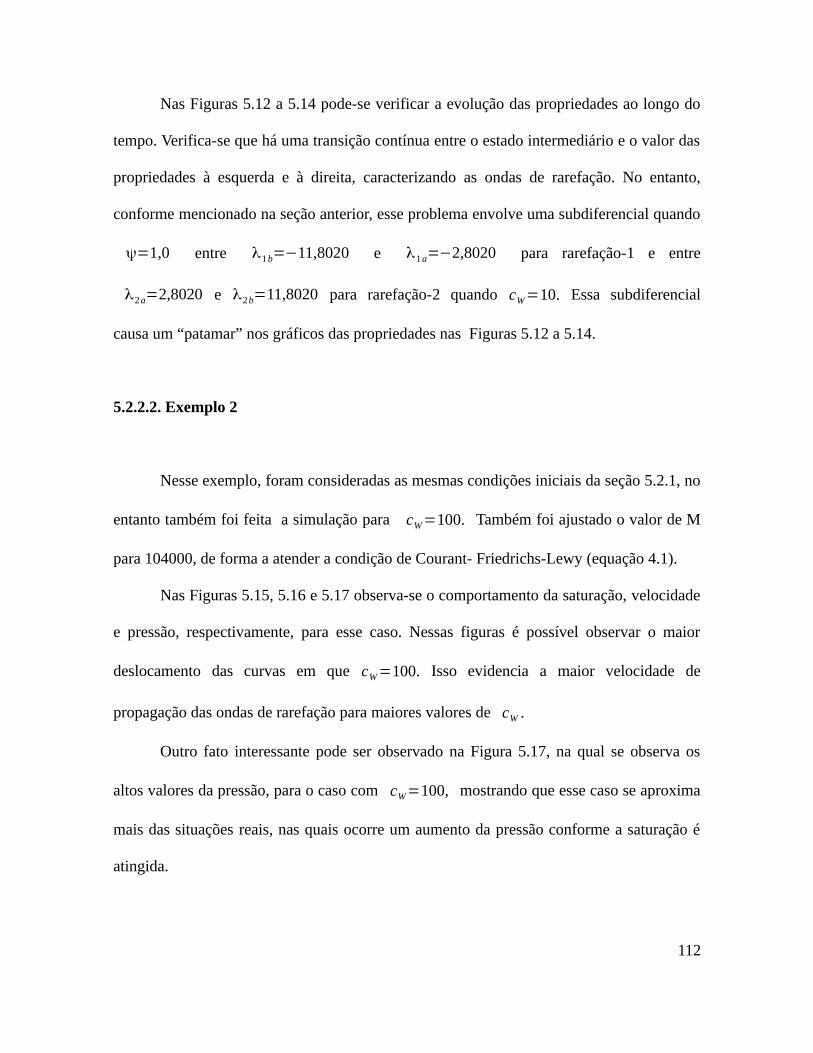
Nas Figuras 5.12 a 5.14 pode-se verificar a evolução das propriedades ao longo do
tempo. Verifica-se que há uma transição contínua entre o estado intermediário e o valor das
propriedades à esquerda e à direita, caracterizando as ondas de rarefação. No entanto,
conforme mencionado na seção anterior, esse problema envolve uma subdiferencial quando
ψ=1,0 entre λ1b=−11,8020 e λ1a=−2,8020 para rarefação-1 e entre
λ2a=2,8020 e λ2b=11,8020 para rarefação-2 quando cW=10. Essa subdiferencial
causa um “patamar” nos gráficos das propriedades nas Figuras 5.12 a 5.14.
5.2.2.2. Exemplo 2
Nesse exemplo, foram consideradas as mesmas condições iniciais da seção 5.2.1, no
entanto também foi feita a simulação para cW=100. Também foi ajustado o valor de M
para 104000, de forma a atender a condição de Courant- Friedrichs-Lewy (equação 4.1).
Nas Figuras 5.15, 5.16 e 5.17 observa-se o comportamento da saturação, velocidade
e pressão, respectivamente, para esse caso. Nessas figuras é possível observar o maior
deslocamento das curvas em que cW=100. Isso evidencia a maior velocidade de
propagação das ondas de rarefação para maiores valores de cW .
Outro fato interessante pode ser observado na Figura 5.17, na qual se observa os
altos valores da pressão, para o caso com cW=100, mostrando que esse caso se aproxima
mais das situações reais, nas quais ocorre um aumento da pressão conforme a saturação é
atingida.
112
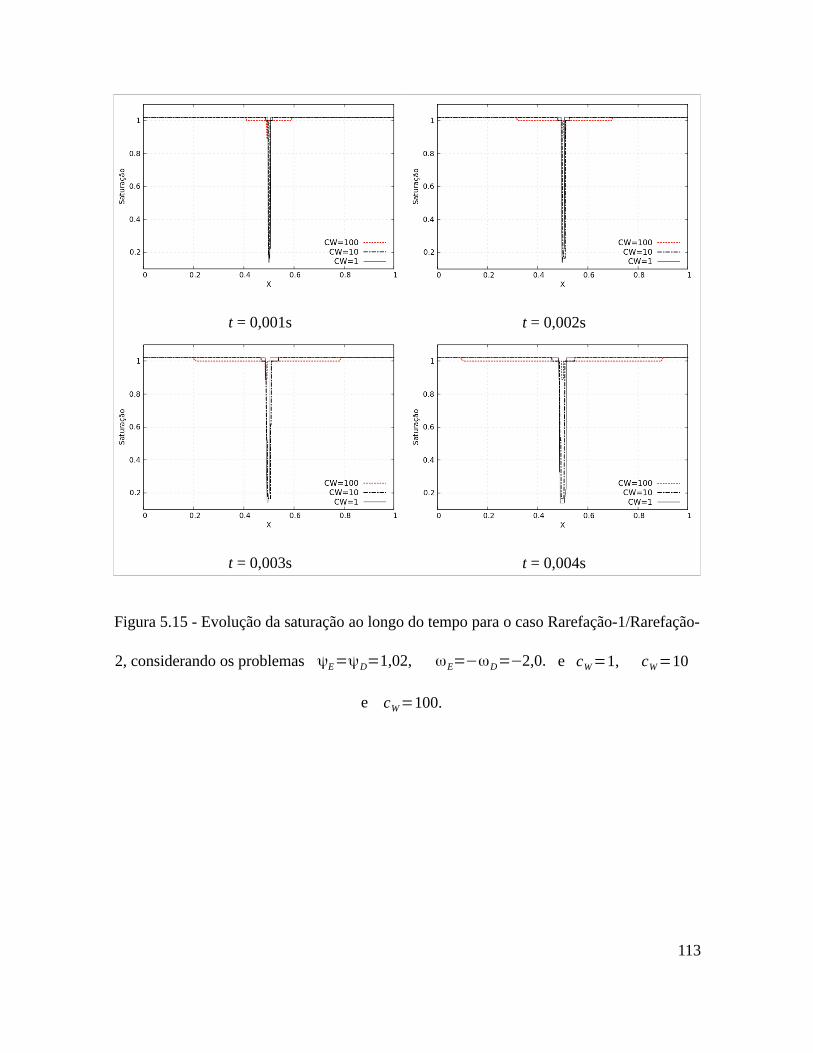
t = 0,001s t = 0,002s
t = 0,003s t = 0,004s
Figura 5.15 - Evolução da saturação ao longo do tempo para o caso Rarefação-1/Rarefação-
2, considerando os problemas ψE=ψD=1,02, ωE=−ωD=−2,0. e cW=1, cW=10
e cW=100.
113
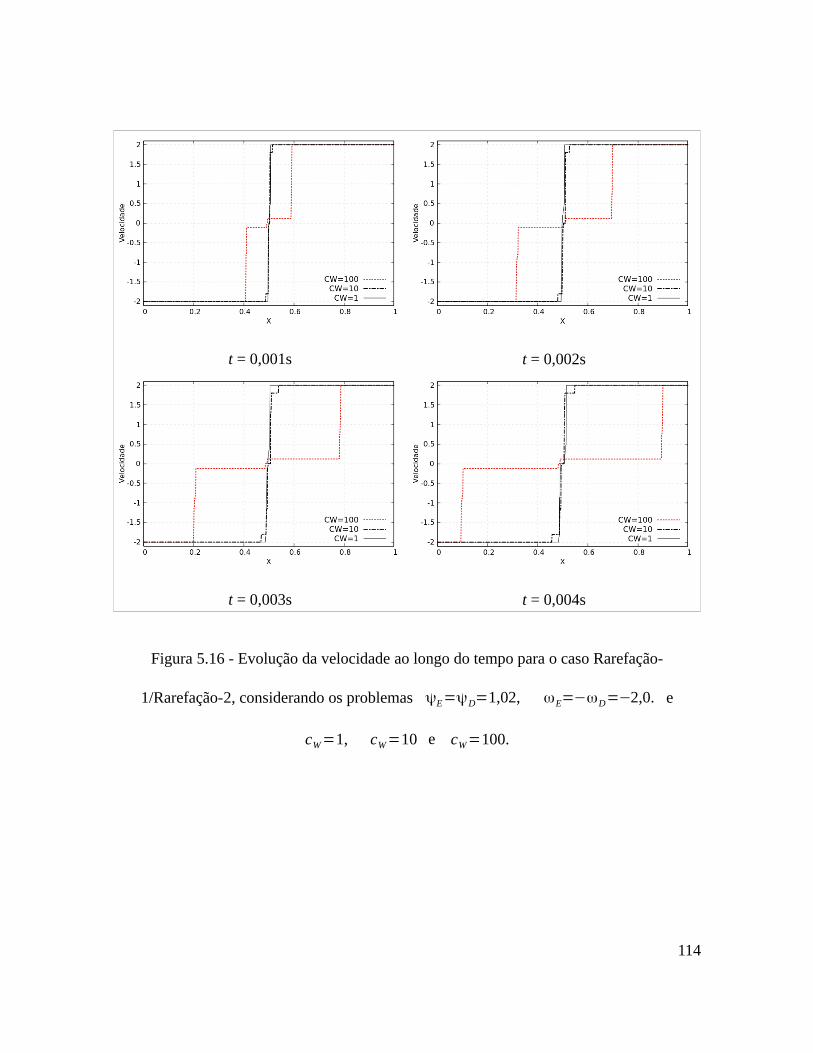
t = 0,001s t = 0,002s
t = 0,003s t = 0,004s
Figura 5.16 - Evolução da velocidade ao longo do tempo para o caso Rarefação-
1/Rarefação-2, considerando os problemas ψE=ψD=1,02, ωE=−ωD=−2,0. e
cW=1, cW=10 e cW=100.
114
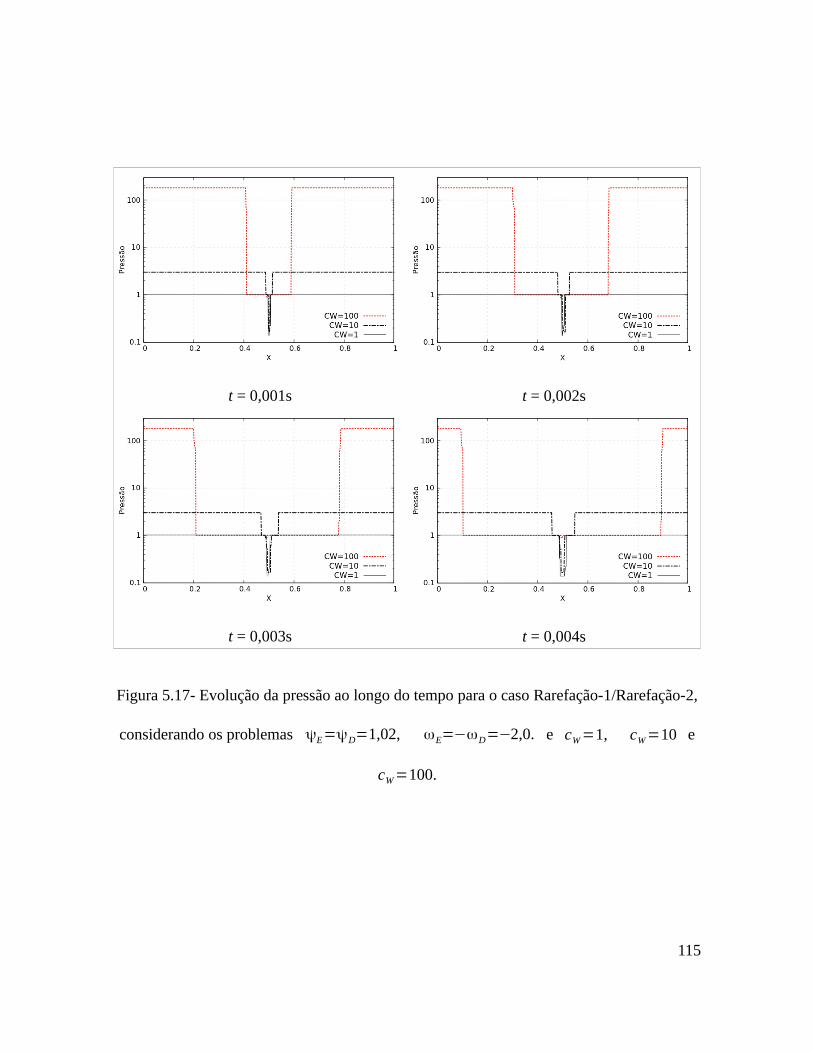
t = 0,001s t = 0,002s
t = 0,003s t = 0,004s
Figura 5.17- Evolução da pressão ao longo do tempo para o caso Rarefação-1/Rarefação-2,
considerando os problemas ψE=ψD=1,02, ωE=−ωD=−2,0. e cW=1, cW=10 e
cW=100.
115

5.2.3. Choque-1/Rarefação-2
5.2.3.1. Exemplo 1
Para a simulação do caso Choque-1/Rarefação-2 foi utilizado, nesse exemplo,
ψE=0,2, ψD=1,15, ωE=ωD=0,0 e cW=10.
Foi considerado um domínio de 1 metro de comprimento, com a descontinuidade
inicial inserida na posição x = 0,5 m. O domínio foi dividido em 400 divisões espaciais. A
simulação foi realizada para um intervalo de tempo igual a 1,0 segundo, o qual foi dividido
em 10400 sub-intervalos. Dessa forma, foi obtido
Δ xΔ t
=
1,04001,0
10400
=26>2λ2(ψD ,ωD)=20 (5.6)
o que mostra que a condição de Courant- Friedrichs-Lewy (equação (4.1)) foi atendida.
As Figuras 5.18 a 5.20 apresentam a evolução da saturação, velocidade e pressão
para os instantes de tempo iniciais. Para efeito de comparação, nessas Figuras também foi
plotado o caso sem a restrição, ou seja, cW=1.
Nas Figuras 5.18 a 5.20 pode-se verificar a evolução das propriedades ao longo do
tempo. Verifica-se que há uma transição contínua entre o estado intermediário e o valor das
propriedades à direita, caracterizando a onda rarefação-2, enquanto há uma transição
descontínua entre o estado intermediário e o estado à esquerda. Novamente verifica-se que
116
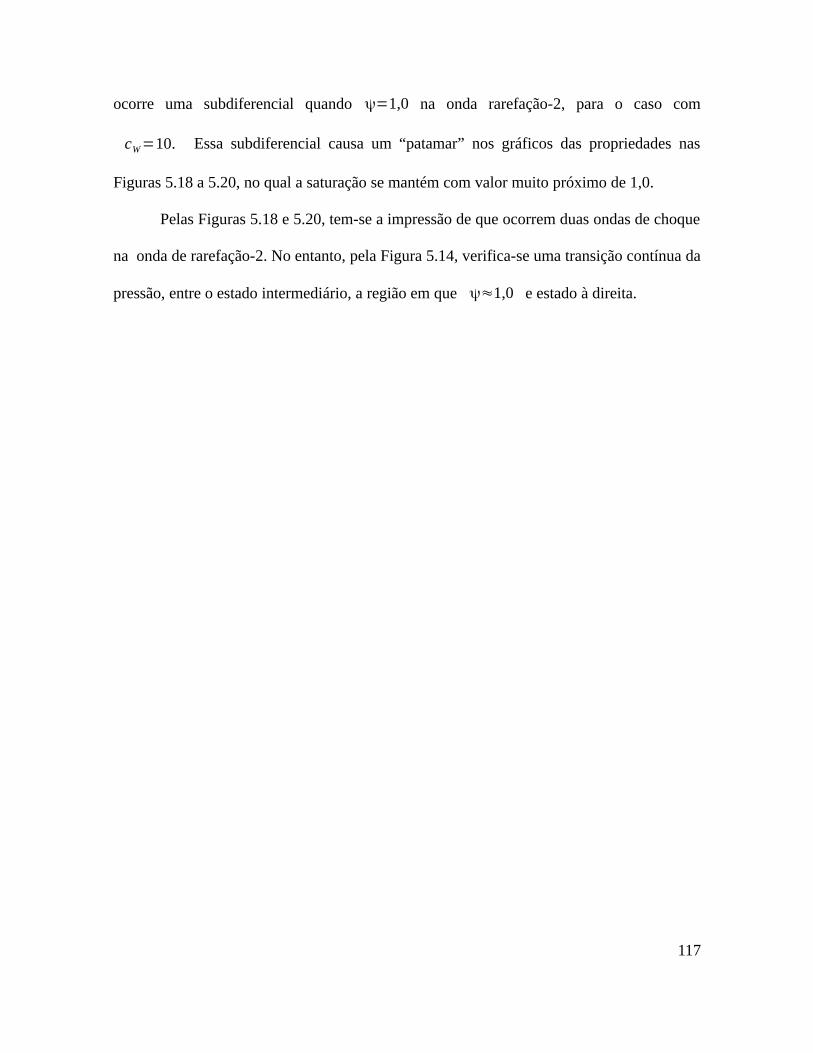
ocorre uma subdiferencial quando ψ=1,0 na onda rarefação-2, para o caso com
cW=10. Essa subdiferencial causa um “patamar” nos gráficos das propriedades nas
Figuras 5.18 a 5.20, no qual a saturação se mantém com valor muito próximo de 1,0.
Pelas Figuras 5.18 e 5.20, tem-se a impressão de que ocorrem duas ondas de choque
na onda de rarefação-2. No entanto, pela Figura 5.14, verifica-se uma transição contínua da
pressão, entre o estado intermediário, a região em que ψ≈1,0 e estado à direita.
117
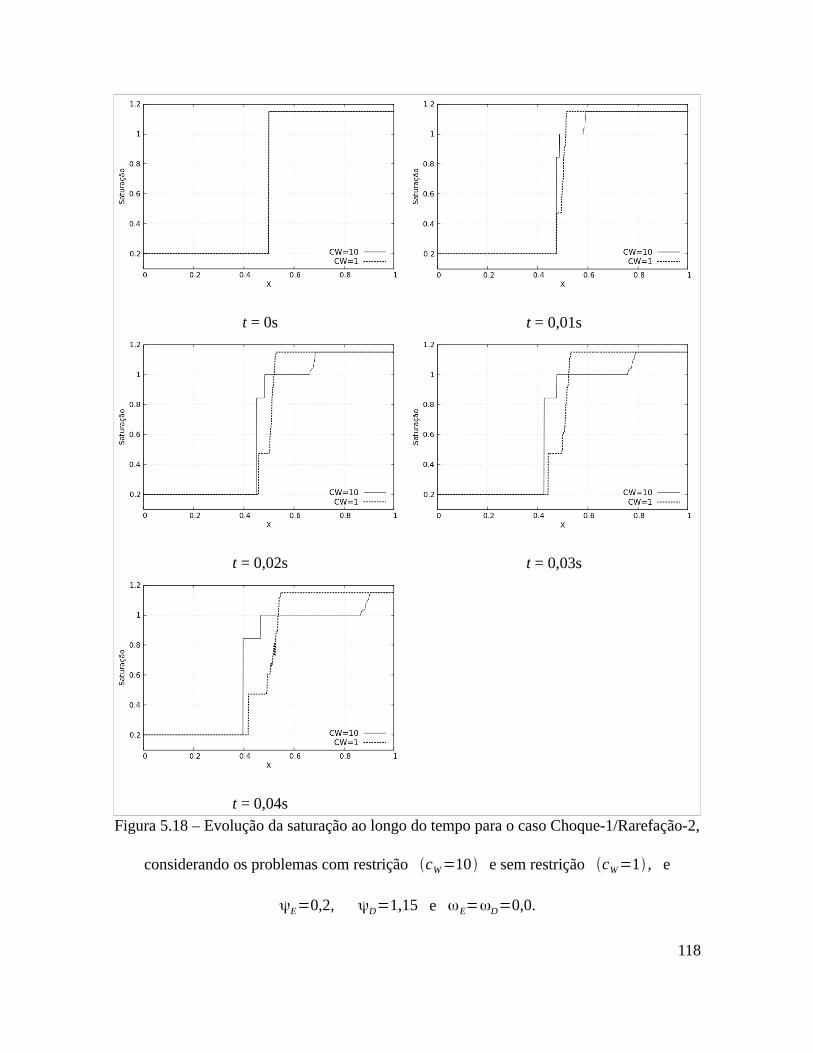
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.18 – Evolução da saturação ao longo do tempo para o caso Choque-1/Rarefação-2,
considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψE=0,2, ψD=1,15 e ωE=ωD=0,0.
118
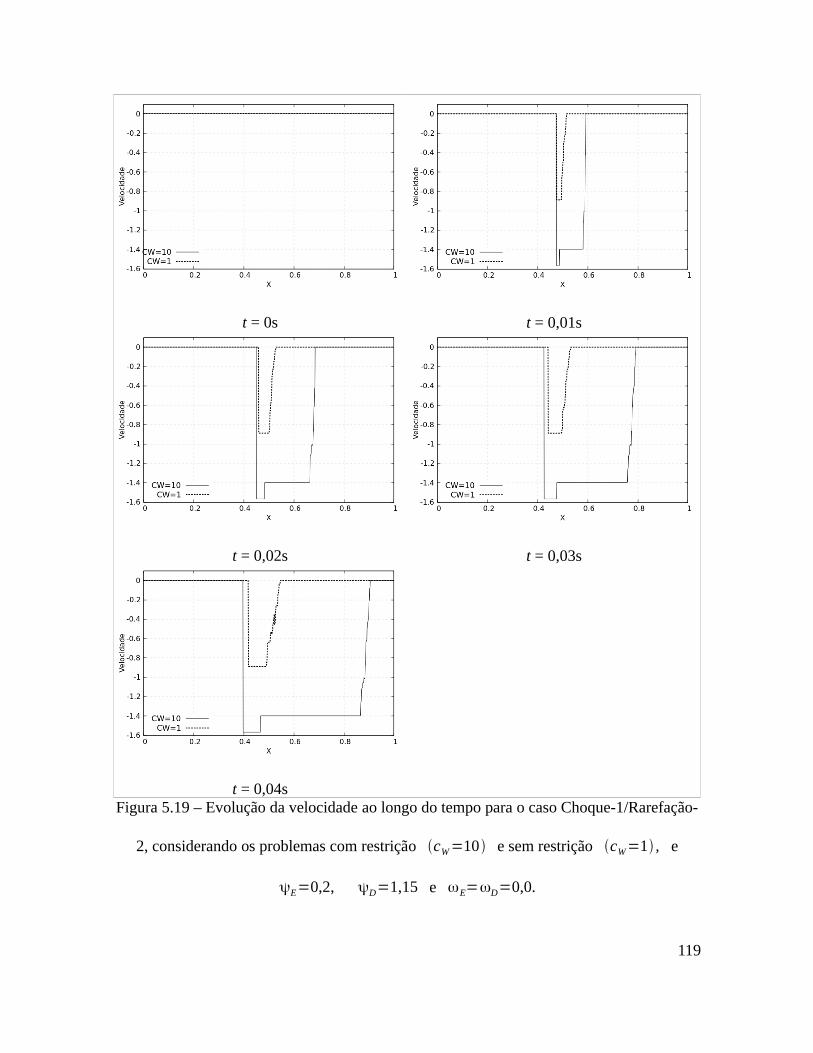
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.19 – Evolução da velocidade ao longo do tempo para o caso Choque-1/Rarefação-
2, considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψE=0,2, ψD=1,15 e ωE=ωD=0,0.
119
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.20 – Evolução da pressão ao longo do tempo para o caso Choque-1/Rarefação-2,
considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψE=0,2, ψD=1,15 e ωE=ωD=0,0.
120
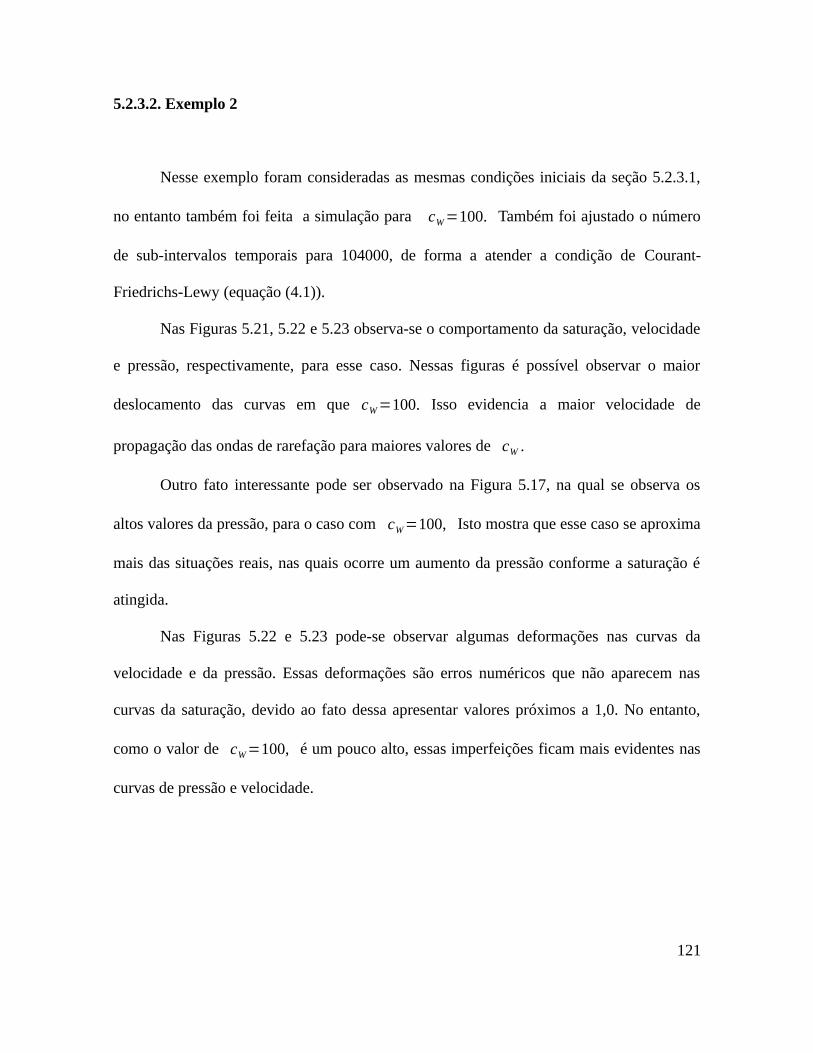
5.2.3.2. Exemplo 2
Nesse exemplo foram consideradas as mesmas condições iniciais da seção 5.2.3.1,
no entanto também foi feita a simulação para cW=100. Também foi ajustado o número
de sub-intervalos temporais para 104000, de forma a atender a condição de Courant-
Friedrichs-Lewy (equação (4.1)).
Nas Figuras 5.21, 5.22 e 5.23 observa-se o comportamento da saturação, velocidade
e pressão, respectivamente, para esse caso. Nessas figuras é possível observar o maior
deslocamento das curvas em que cW=100. Isso evidencia a maior velocidade de
propagação das ondas de rarefação para maiores valores de cW .
Outro fato interessante pode ser observado na Figura 5.17, na qual se observa os
altos valores da pressão, para o caso com cW=100, Isto mostra que esse caso se aproxima
mais das situações reais, nas quais ocorre um aumento da pressão conforme a saturação é
atingida.
Nas Figuras 5.22 e 5.23 pode-se observar algumas deformações nas curvas da
velocidade e da pressão. Essas deformações são erros numéricos que não aparecem nas
curvas da saturação, devido ao fato dessa apresentar valores próximos a 1,0. No entanto,
como o valor de cW=100, é um pouco alto, essas imperfeições ficam mais evidentes nas
curvas de pressão e velocidade.
121
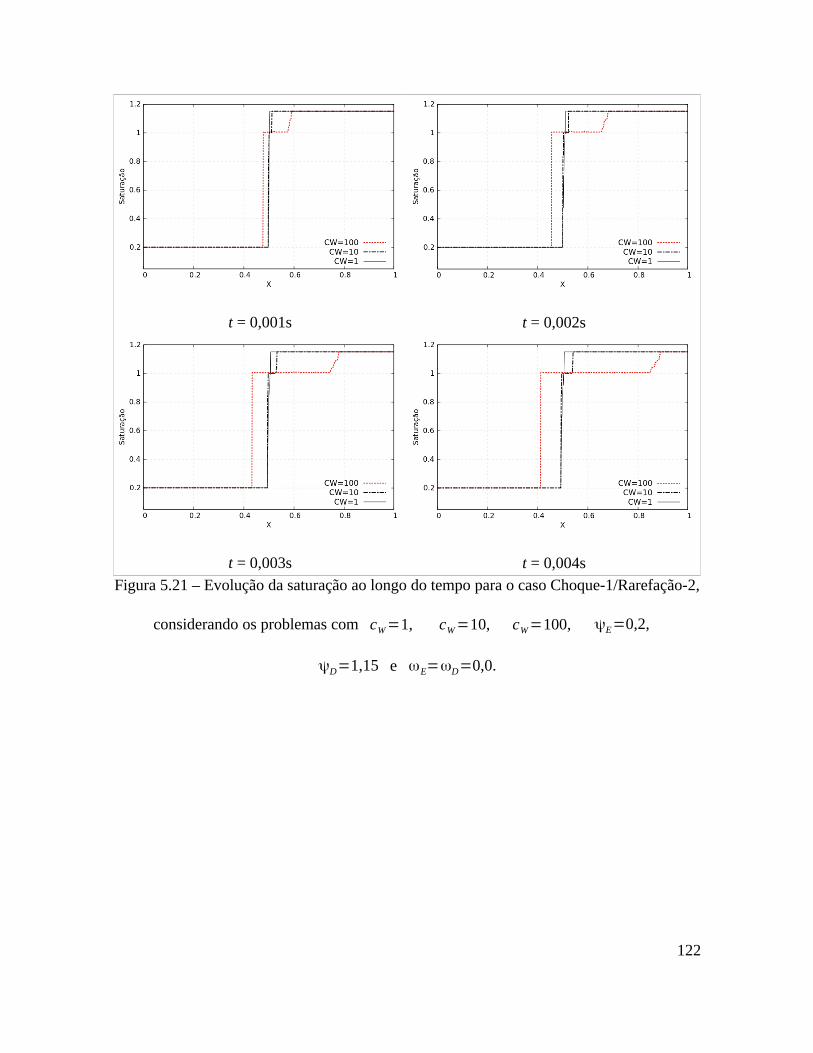
t = 0,001s t = 0,002s
t = 0,003s t = 0,004sFigura 5.21 – Evolução da saturação ao longo do tempo para o caso Choque-1/Rarefação-2,
considerando os problemas com cW=1, cW=10, cW=100, ψE=0,2,
ψD=1,15 e ωE=ωD=0,0.
122
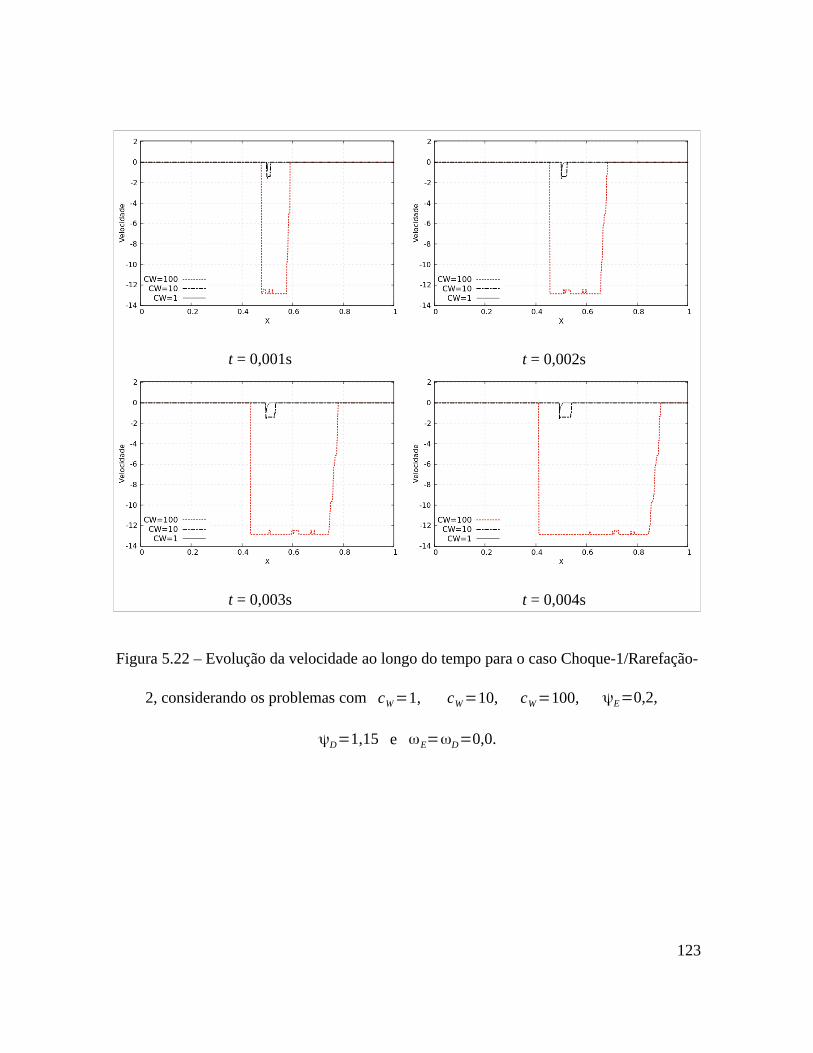
t = 0,001s t = 0,002s
t = 0,003s t = 0,004s
Figura 5.22 – Evolução da velocidade ao longo do tempo para o caso Choque-1/Rarefação-
2, considerando os problemas com cW=1, cW=10, cW=100, ψE=0,2,
ψD=1,15 e ωE=ωD=0,0.
123
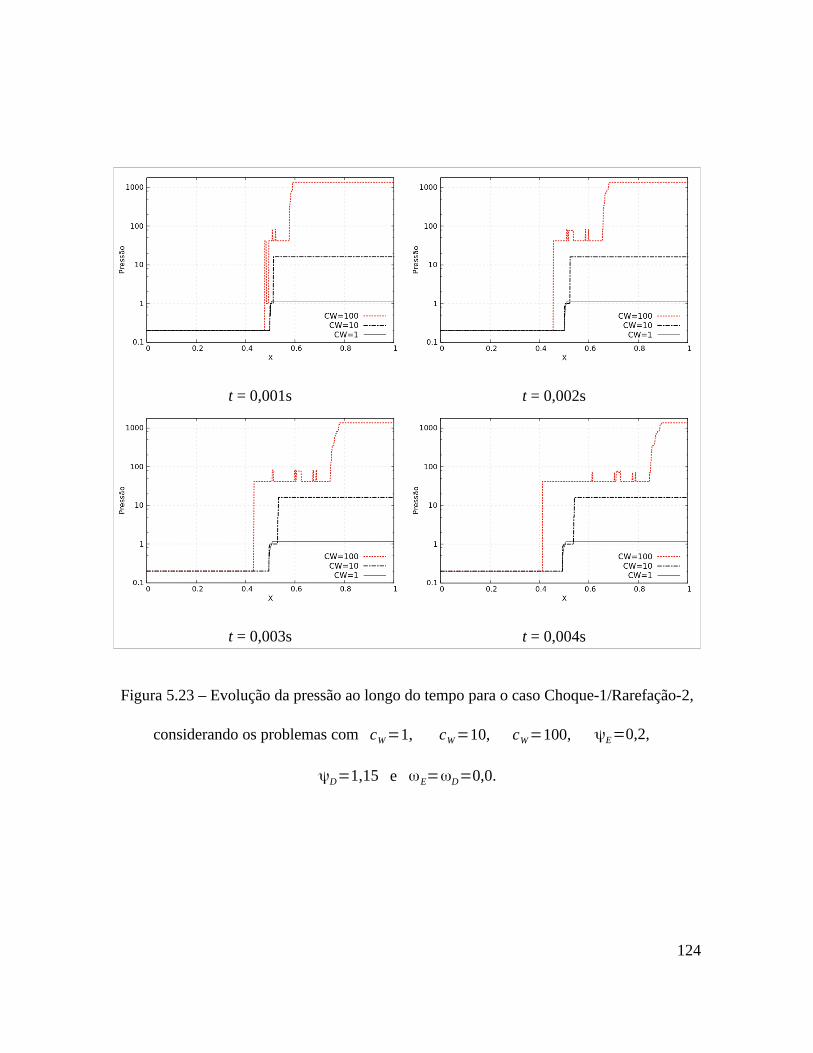
t = 0,001s t = 0,002s
t = 0,003s t = 0,004s
Figura 5.23 – Evolução da pressão ao longo do tempo para o caso Choque-1/Rarefação-2,
considerando os problemas com cW=1, cW=10, cW=100, ψE=0,2,
ψD=1,15 e ωE=ωD=0,0.
124
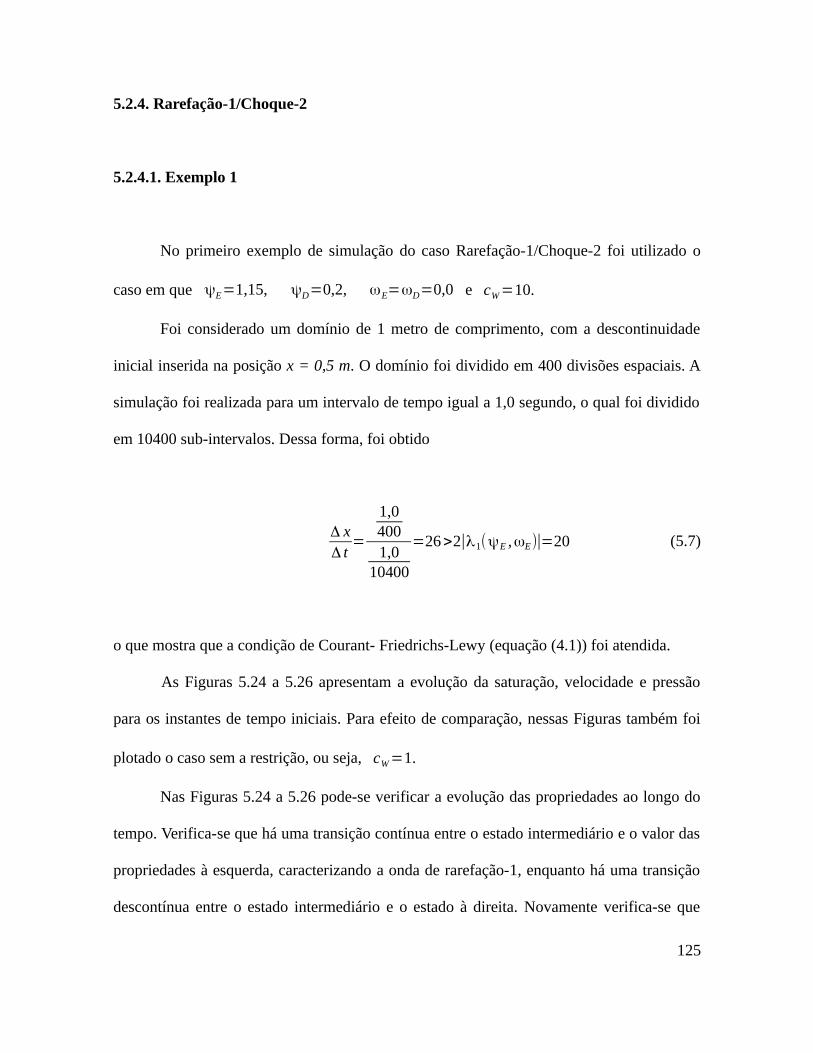
5.2.4. Rarefação-1/Choque-2
5.2.4.1. Exemplo 1
No primeiro exemplo de simulação do caso Rarefação-1/Choque-2 foi utilizado o
caso em que ψE=1,15, ψD=0,2, ωE=ωD=0,0 e cW=10.
Foi considerado um domínio de 1 metro de comprimento, com a descontinuidade
inicial inserida na posição x = 0,5 m. O domínio foi dividido em 400 divisões espaciais. A
simulação foi realizada para um intervalo de tempo igual a 1,0 segundo, o qual foi dividido
em 10400 sub-intervalos. Dessa forma, foi obtido
Δ xΔ t
=
1,04001,0
10400
=26>2|λ1(ψE ,ωE)|=20 (5.7)
o que mostra que a condição de Courant- Friedrichs-Lewy (equação (4.1)) foi atendida.
As Figuras 5.24 a 5.26 apresentam a evolução da saturação, velocidade e pressão
para os instantes de tempo iniciais. Para efeito de comparação, nessas Figuras também foi
plotado o caso sem a restrição, ou seja, cW=1.
Nas Figuras 5.24 a 5.26 pode-se verificar a evolução das propriedades ao longo do
tempo. Verifica-se que há uma transição contínua entre o estado intermediário e o valor das
propriedades à esquerda, caracterizando a onda de rarefação-1, enquanto há uma transição
descontínua entre o estado intermediário e o estado à direita. Novamente verifica-se que
125
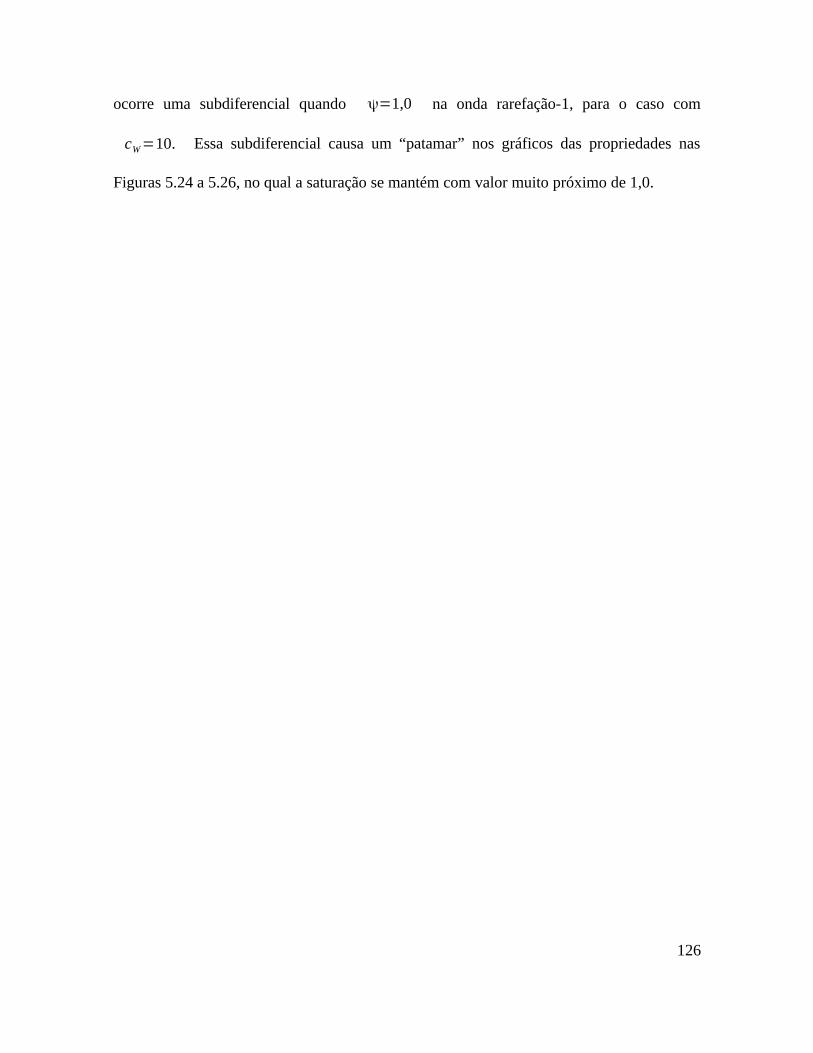
ocorre uma subdiferencial quando ψ=1,0 na onda rarefação-1, para o caso com
cW=10. Essa subdiferencial causa um “patamar” nos gráficos das propriedades nas
Figuras 5.24 a 5.26, no qual a saturação se mantém com valor muito próximo de 1,0.
126
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.24 – Evolução da saturação ao longo do tempo para o caso Rarefação-1/Choque-2,
considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψE=1,15, ψD=0,2 e ωE=ωD=0,0.
127
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.25 – Evolução da velocidade ao longo do tempo para o caso Rarefação-1/Choque-
2, considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψE=1,15, ψD=0,2 e ωE=ωD=0,0.
128
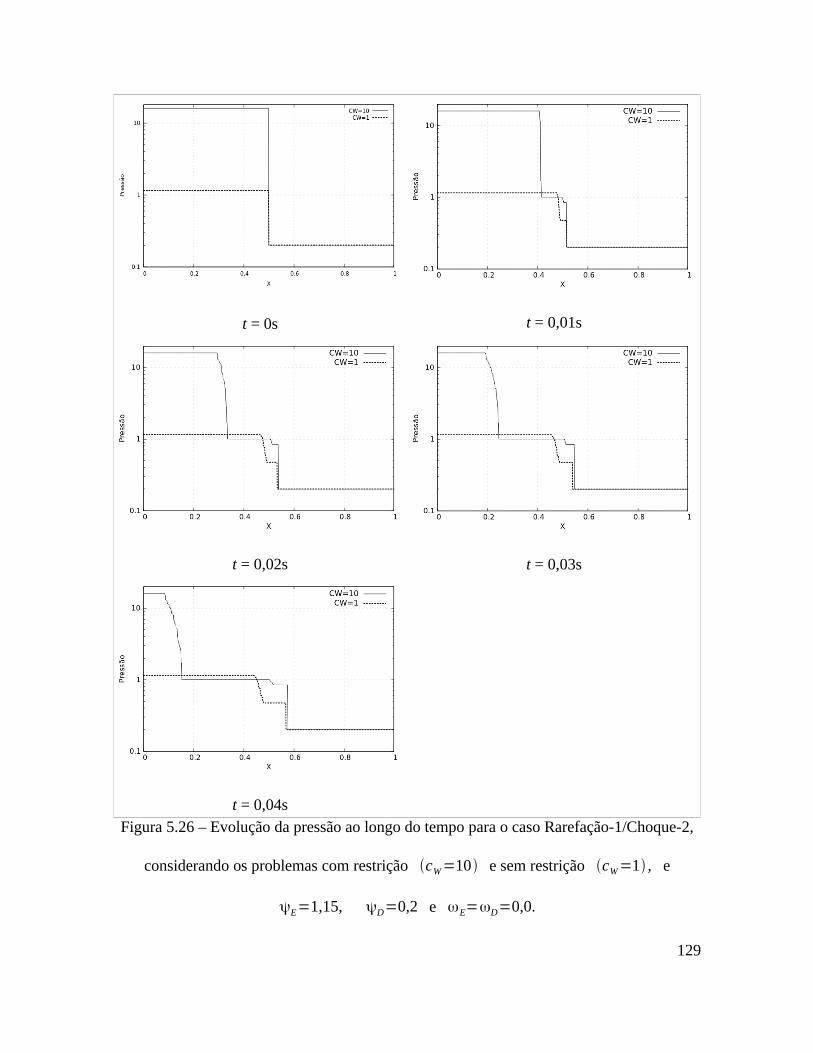
t = 0s t = 0,01s
t = 0,02s t = 0,03s
t = 0,04sFigura 5.26 – Evolução da pressão ao longo do tempo para o caso Rarefação-1/Choque-2,
considerando os problemas com restrição cW=10 e sem restrição cW=1 , e
ψE=1,15, ψD=0,2 e ωE=ωD=0,0.
129
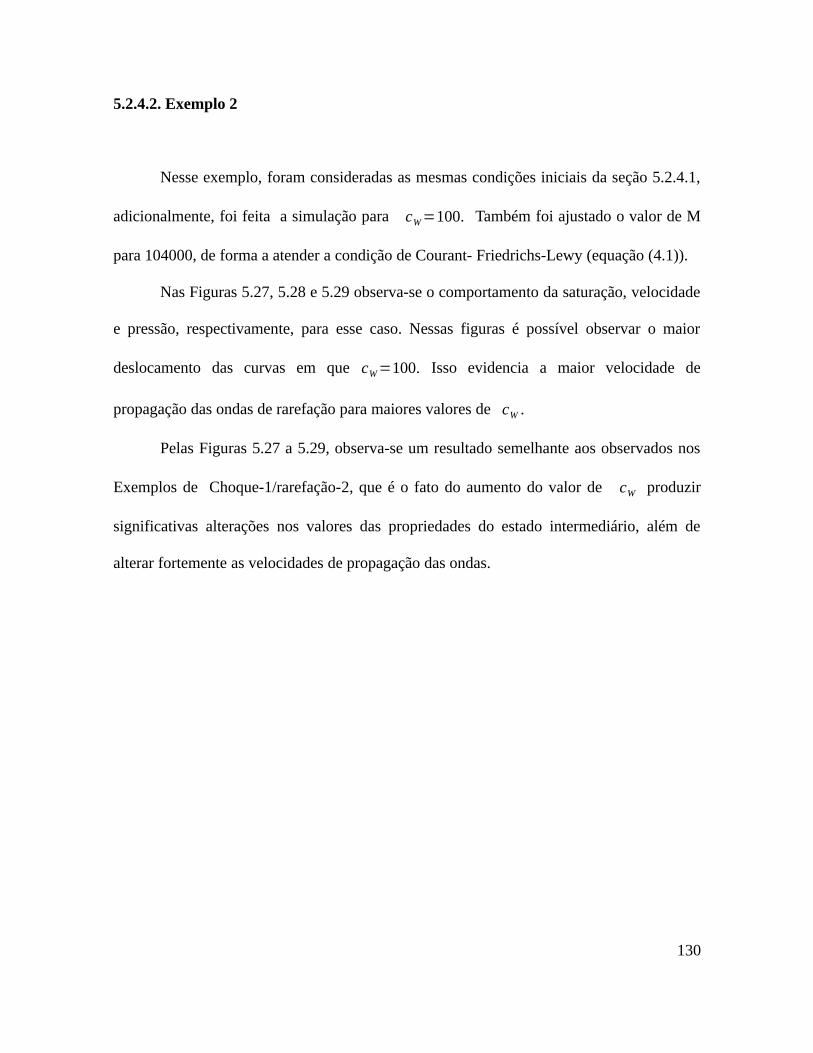
5.2.4.2. Exemplo 2
Nesse exemplo, foram consideradas as mesmas condições iniciais da seção 5.2.4.1,
adicionalmente, foi feita a simulação para cW=100. Também foi ajustado o valor de M
para 104000, de forma a atender a condição de Courant- Friedrichs-Lewy (equação (4.1)).
Nas Figuras 5.27, 5.28 e 5.29 observa-se o comportamento da saturação, velocidade
e pressão, respectivamente, para esse caso. Nessas figuras é possível observar o maior
deslocamento das curvas em que cW=100. Isso evidencia a maior velocidade de
propagação das ondas de rarefação para maiores valores de cW .
Pelas Figuras 5.27 a 5.29, observa-se um resultado semelhante aos observados nos
Exemplos de Choque-1/rarefação-2, que é o fato do aumento do valor de cW produzir
significativas alterações nos valores das propriedades do estado intermediário, além de
alterar fortemente as velocidades de propagação das ondas.
130
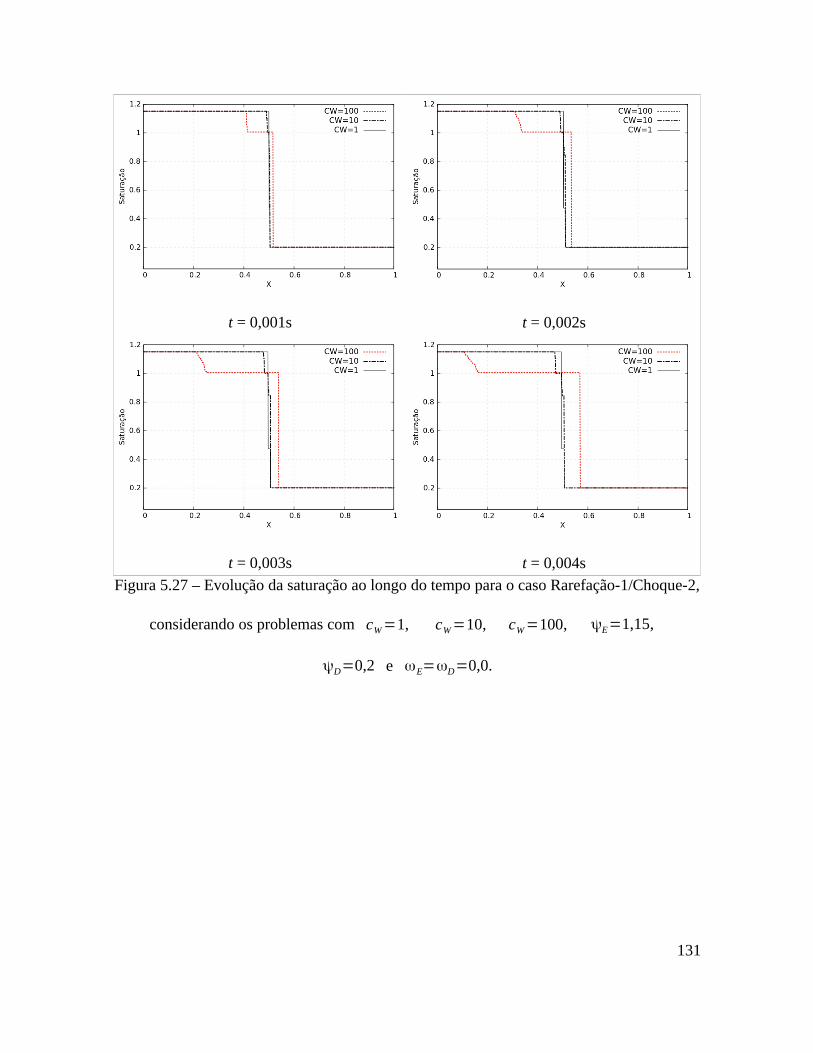
t = 0,001s t = 0,002s
t = 0,003s t = 0,004sFigura 5.27 – Evolução da saturação ao longo do tempo para o caso Rarefação-1/Choque-2,
considerando os problemas com cW=1, cW=10, cW=100, ψE=1,15,
ψD=0,2 e ωE=ωD=0,0.
131
t = 0,001s t = 0,002
t = 0,003 t = 0,004sFigura 5.28– Evolução da velocidade ao longo do tempo para o caso Rarefação-1/Choque-
2, considerando os problemas com cW=1, cW=10, cW=100, ψE=1,15,
ψD=0,2 e ωE=ωD=0,0.
132
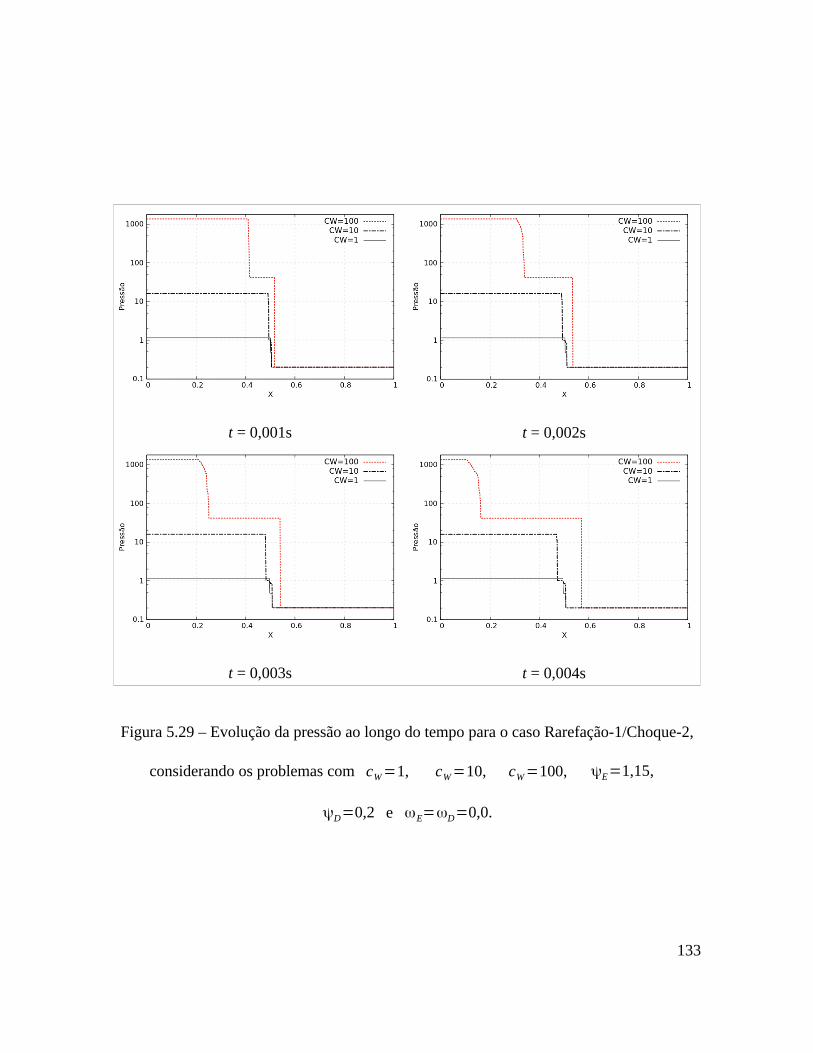
t = 0,001s t = 0,002s
t = 0,003s t = 0,004s
Figura 5.29 – Evolução da pressão ao longo do tempo para o caso Rarefação-1/Choque-2,
considerando os problemas com cW=1, cW=10, cW=100, ψE=1,15,
ψD=0,2 e ωE=ωD=0,0.
133
Capítulo 6
Conclusões e Sugestões
No presente trabalho foi proposta uma relação constitutiva contínua para a pressão
como função da saturação, como uma continuação do trabalho de Saldanha da Gama et al.
[69], que identificava a transição entre escoamentos insaturados e saturados, impondo uma
restrição física associada ao enchimento de uma matriz porosa insaturada: a porosidade
nominal como um limite superior para a fração de fluido. Essa restrição imposta em [69]
faz com que a hiperbolicidade do sistema seja perdida quando a saturação é atingida.
A metodologia proposta consiste em supor um meio poroso levemente deformável,
com uma deformação tão pequena que não seja necessário analisar o movimento do
134
constituinte sólido. Ou seja, a física do escoamento é preservada. No entanto, a deformação
do meio poroso permite definir uma nova equação constitutiva para a pressão do
constituinte fluido. A relação constitutiva para a pressão é uma função contínua da
saturação, e é definida de forma que o sistema hiperbólico resultante permaneça hiperbólico
mesmo quando a saturação é atingida. Na verdade, o modelo matemático permite uma
pequena supersaturação da matriz porosa, correspondendo a admitir uma matriz porosa
fracamente deformável.
Foram obtidas as soluções completas para o problema de Riemann associado ao
modelo proposto. A partir da solução do problema de Riemann, foi possível analisar
resultados numéricos para os casos choque-1/choque-2, choque-1/rarefação-2, rarefação-
1/choque-2 e rarefação-1/rarefação-2. Esses resultados, quando comparados com resultados
propostos na literatura, se mostrou eficiente para tratar escoamentos insaturados e
saturados. Além disso, esses resultados se mostraram realistas ao abordar problemas dessa
natureza, uma vez que foram obtidos valores para a pressão próximos de valores reais, sem
que fosse necessário supor uma supersaturação exagerada (saturação obtida somente
ultrapassava discretamente a porosidade).
O modelo proposto permitiu implementar o método de Glimm para o sistema
hiperbólico estudado, utilizando a solução do problema de Riemann associado. Dessa
forma, foi possível analisar a variação das propriedades dos escoamentos ao longo do
tempo.
Com o método de Glimm foi possível realizar simulações numéricas para os casos
choque-1/choque-2, choque-1/rarefação-2, rarefação-1/choque-2 e rarefação-1/rarefação-2.
135
Além disso, foi possível comparar a evolução das propriedades do escoamento para
diferentes valores da constante proposta cW .
A partir dos resultados numéricos obtidos com o método de Glimm, observou-se
que o modelo proposto gerou valores mais realistas para as propriedades intermediárias,
isto é, as propriedades do escoamento entre duas descontinuidades. Além disso, utilizando o
modelo proposto, verificou-se que as velocidades de propagação das descontinuidades
aumentavam quando a saturação era atingida.
Foi observado que, o aumento da constante definida cW permitiu que o modelo
estudado produzisse resultados mais realistas, de forma que os escoamentos, quando
atingiam a saturação, também apresentavam altos valores para a pressão e velocidades de
propagação de descontinuidades mais altas.
Nos resultados obtidos, foram encontrados valores bastante elevados para a pressão,
os quais podem ser utilizados como uma forma de verificar a fratura em um meio poroso.
Se for estabelecido um critério para a ocorrência de uma fratura (um valor de pressão
máxima, por exemplo), pode-se analisar os valores da pressão, de forma que se garanta a
não ocorrência de quebra (fratura) do meio poroso. A partir do momento em que ocorre a
quebra, as equações diferenciais deixam de ser aplicáveis e o problema mecânico deve ser
reformulado.
Como sugestões para trabalhos futuros, a primeira será implementar o método de
Glimm para resolver problemas de valor inicial e de contorno mais realistas, aproveitando
todas as potencialidades do método.
136
Outras sugestões para trabalhos futuros seriam não desprezar o atrito ou o
aquecimento decorrentes do escoamento. Esse tipo de problema envolve a redefinição do
tensor das tensões e, principalmente, levar em conta o termo darciano na força de interação
entre os constituintes da matriz porosa, para o caso de se considerar o atrito, e a inclusão de
equações diferencias adicionais (conservação da energia) tanto para o constituinte fluido
como para o constituinte sólido, para solucionar o problema com variação de temperatura.
Destaca-se que, para solucionar o problema com atrito pode-se utilizar uma técnica de
fatoração do operador, como aquela utilizada em [3]. No caso de se considerar um
problema de convecção forçada, a solução do problema hidrodinâmico pode ser usada
como dado de entrada para o problema térmico, que pode ser aproximado por diferenças
finitas [2].
Uma outra sugestão seria tratar adequadamente a classe de problemas considerados
nesse trabalho, permitindo-se relações não-convexas entre a pressão e a saturação. Para tal,
pretende-se utilizar o procedimento proposto em [80]. Quando a relação entre a pressão e a
saturação não é convexa, o problema de Riemann associado requer procedimentos mais
complexos para a sua solução, pois não é garantido o mesmo comportamento para cada
autovalor entre dois estados, devido à mudança de sinal na segunda derivada da pressão.
Esse procedimento é ilustrado em [80].
137
Referências Bibliográficas:
[1] Martins-Costa, M.L., Saldanha da Gama, R.M., Numerical simulation of one-
dimensional flows through porous media with shock waves, Int. J. Numer. Meth.
Eng., vol. 52/10, 2001.
[2] Martins-Costa, M.L., Saldanha da Gama, R.M., A mixture theory model for the
forced convection flow through an unsaturated wellbore, Int. J. Heat and Fluid Flow,
vol. 26, pp. 141-155, 2005.
[3] Porto, E. M., Um novo aproximante de Riemann para simulação de escoamentos
com ondas de choque. Tese de Doutorado. Universidade Federal Fluminense, 2009.
[4] Angulo, J. A. P., Escoamento em meios porosos: Efeito da temperatura a altas
pressões e baixa permeabilidade; Dependência da permeabilidade/porosidade em
misturas sólido-fluido. Tese de Doutorado. Universidade Federal Fluminense, 2015.
[5] Glimm, J. Solutions in the Large for Nonlinear Hyperbolic Systems of Equations,
Comm. Pure Appl. Math., vol 18, pp. 697-715, 1965.
[6] Godunov, S. K., A Finite Difference Method for the Computation of Discontinuous
Solutions of the Equations of Fluid Dynamics, Mat. Sb., vol. 47, pp. 357-393, 1959.
[7] Gupta, H., Singh, L.P., Simulation of Dam-Break Problem using Random Choice
Method, Computers & Fluids, vol. 111, pp. 187-196, 2015.
[8] Rachid, F. B. F., Saldanha da Gama, R.M., Costa Mattos, H., Modelling the
Hydraulic Transients in Damageable Elasto-Viscoplastic Piping Systems, Appl.
Math. Modelling, vol. 182, pp. 207-215, 1994.
[9] Marchesin, D., Paes-Leme, P. J., Shocks in Gas Pipelines, SIAM J. Sci. Stat.
Comput., vol. 4, pp. 105-116, 1983.
138
[10] Sod, G. A., A Numerical Study of a Converging Cylindrical Shock, J. Fluid Mech.
Vol 83, pp. 785-794, 1977.
[11] Krishnan, J. M., Rao, C. L., Mechanics of air void reduction of asphalt concrete
using mixture theory, Int. J. Engineering Science, vol. 38, pp. 1331-1354, 2000.
[12] Martins-Costa, M. L., Saldanha da Gama, R. M., Glimm’s method simulation for
pollutant transport in an isothermal atmosphere, Comput. Mech., vol. 32, pp. 214-
223, 2003.
[13] Martins-Costa, M. L., Saldanha da Gama, R. M., Simulation of a pollutant motion
and decay in polytropic atmospheres with spherical symmetry, Int. Comm. Heat
Mass Transfer vol. 33, pp. 872-879, 2006.
[14] Saldanha da Gama, R. M., Martins-Costa, M. L., An alternative procedure for
approximating hyperbolic systems of conservation laws, Nonlinear Analysis: Real
World Applications, vol. 9, pp. 1310-1322, 2008.
[15] Singh, R., Singh, L.P,. Solution of the Riemann problem in magnetogasdynamics,
Int. J. Non-Linear Mechanics, vol. 67, pp. 326-330, 2014.
[16] Sekhar, T. R., Sharma, V. D., Riemann problem and elementary wave interactions
in isentropic magneto gasdynamics, Nonlinear Anal. Real World Appl., vol 11(2),
pp. 619-636, 2010.
[17] S.J. Huang, K.R. Rajagopal, H.H. Dai, Wave patterns in a nonclassic nonlinearly
elastic bar under Riemann data, Int. J. Non-Linear Mechanics, vol. 91, pp. 76-85,
2017.
[18] Kuila , S., Sekhar, T. R., Shit, G. C., The Riemann problem for non-ideal isentropic
compressible two phase flows, Int. J. Non-Linear Mechanics, vol. 81, pp. 197-206,
2016.
139
[19] Gupta, R. K., Nath, T., Singh, L. P., Solution of Riemann problem for dusty gas
flow, Int. J. Non-Linear Mechanics, vol 82, pp. 83-92, 2016.
[20] Joseph, K. T., Sachdev, P. L., Exact solutions for some non-conservative hyperbolic
systems, Int. J. Non-Linear Mechanics, vol. 38, pp. 1377-1386, 2003.
[21] Mentrelli, A., Ruggeri, T., The Riemann problem for a hyperbolic model of
incompressible fluids, Int. J. Non-Linear Mechanics, vol. 51, pp. 87-96, 2013.
[22] D. Montiel, “Darcy H (translated by Bobeck P): The public fountains of the city of
Dijon,” Environ. Earth Sci., vol. 70, no. 6, pp. 2929–2930, 2013.
[23] Sundaravadivelu, K., Tso, C., Influence of viscosity variations on the forced
convection flow through two types of heterogeneous porous media with isoflux
boundary condition, Int. J. Heat Mass Transf., vol. 46, no. 13, pp. 2329–2339,
2003.
[24] Kelly, P. D., A reacting continuum, Int. J. Engng. Sci., vol. 2, pp. 129–153, 1964.
[25] Bowen, R. M., Incompressible porous media models by use of the Theory of
Mixtures, Int. J. Engng Sci., vol. 18, pp. 1129–1148, 1980.
[26] Saldanha da Gama, R. M., Martins-Costa, M. L., Simulation of Momentum and
Energy Transfer in a Porous Medium Nonsaturated by an Incompressible Fluid, Int.
Comm. Heat Mass Transf. Transf., vol. 23, no. 3, pp. 407–416, 1996.
[27] Jiang, P. X., Ren, Z. P., Numerical investigation of forced convection heat transfer
in porous media using a thermal non-equilibrium model, Int. J. Heat Fluid Flow, vol.
22, no. 1, pp. 102–110, 2001.
[28] Velázquez-Ortega, L., Rodríguez-Romo, S., Local effective permeability
distributions for non-Newtonian fluids by the lattice Boltzmann equation, Chem.
Eng. Sci., vol. 64, no. 12, pp. 2866–2880, 2009.
140
[29] Civan, F., Porous Media Transport Phenomena. John Wiley and Sons, 2011.
[30] Perkins, T. K., Kern, L. R., Widths of Hydraulic Fractures, J. Pet. Technol., vol. 13,
no. 09, pp. 937–949, 2013.
[31] England, A. H., Green, A. E. Some two-dimensional punch and crack problems in
classical elasticity, Math. Proc. Cambridge Philos. Soc., vol. 59, no. 02, pp. 489,
2008.
[32] Wei, C., Muraleetharan, K. K., A continuum theory of porous media saturated by
multiple immiscible fluids: II. Lagrangian description and variational structure, Int.
J. Eng. Sci., vol. 40, pp. 1835–1854, 2002.
[33] Hanyga, A., Two-fluid porous flow in a single temperature approximation, Int. J.
Engng Sci., vol. 42, no. 13–14, pp. 1521–1545, 2004.
[34] Massoudi, M., Boundary conditions in mixture theory and in CFD applications of
higher order models, Comput. Math. Appl., vol. 53, pp. 156–167, 2007.
[35] Ristinmaa, M., Ottosen, N. S., Johannesson, B., Mixture theory for a thermoelasto-
plastic porous solid considering fluid flow and internal mass exchange, Int. J. Engng
Sci., vol. 49, pp. 1185–1203, 2011.
[36] Chen, X., Hicks, M. A., A constitutive model based on modified mixture theory for
unsaturated rocks, Comput. Geotech., vol. 38, no. 8, pp. 925–933, 2011.
[37] Rahm, D., Regulating hydraulic fracturing in shale gas plays: The case of Texas,
Energy Policy, vol. 39, no. 5, pp. 2974–2981, 2011.
[38] Chris, H., EPA Issues New Standards for Hydraulic Fracturing, [Online]. Available:
http://www.texastribune.org/. 2011.
[39] Whitaker, S., Advances in theory of fluid motion in porous media, Ind. Eng. Chem.,
vol. 61, pp. 14–28, 1969.
141
[40] Vafai, K., Whitaker, S., Simultaneous heat and mass transfer accompanied by phase
change in porous insulation, J. Heat Transf., vol. 108, pp. 132–140, 1986.
[41] Riemann, B., Gesammelte mathematische Werke, Druck und Verlag von B. G.
Teubner, Leipzig, 1986.
[42] Courant, R. I. E., Rees, M., On the solution of Nonlinear Hyperbolic Differential
Equations by Finite Differences, Comm. Pure and Applied Mathematics, vol 5, pp.
243-255, 1952.
[43] Lax, P. D., Weak Solutions of Non-Linear Hyperbolic Equations and their
Numerical computation. Comm. Pure and Applied Mathematics, vol 7, pp. 159-193,
1954.
[44] Lax, P. D., Wendorff, B., Difference Schemes for Hyperbolic Equations with High
Order of Accuracy, Comm. Pure and Applied Mathematics, vol. 17, pp. 381-398,
1964.
[45] MacCormack, R. W., The Effect of Viscosity in Hypervelocity Impact Cratering,
AIAA Paper, No. 69-354, IAA, Cincinnatti, 1969.
[46] Hopf, E., The Partial Differential Equation u(u)t + u(u)x = μ(u)xx, Comm. Pure Appl.
Math., vol. 3, pp. 201-230, 1950.
[47] Oleinik, O. Discontinuous Solutions of Nonlinear Differential Equations, Amer.
Math. Soc. Trans. Ser. 2, vol. 26, pp. 95-172, 1957.
[48] Engquist, B. E., Osher, S., Stable and Entropy Satisfying Approximations for
Transonic Flows Calculations, Mathematics of Computation, vol. 34, pp. 45-75,
1980.
[49] Osher, S., Shock Modelling in Aeronautics, Numerical Methods for Fluid
Dynamics, pp. 179-218, 1982.
142
[50] Roe, P. L. Approximate Riemann Solvers, Parameter Vectors, and Difference
Schemes, Journal of Computational Physics, vol 43/2, pp. 200-212, 1981.
[51] Chorin, A. J. Random Choice Solution of Hyerbolic Systems, Journal of Comput.
Physics, vol. 22, pp. 517-533, 1976.
[52] Marshall, G., Menendez, A., El Metodo de Glimm. Revista internacional de
métodos numéricos para cálculo y diseño en ingeniería, Vol. 2, 3 , pp. 231-252,
1986.
[53] Toro, E. F., The Random Choice Method on a non-staggered grid utilising an
efficient Riemann Solver, College of Aeronautics Report No 8708, Cranfield, 1987.
[54] Gu, C. H., Li, T. T., Yu, W. C., Hou, Z. Y., Discontinuos Initial Value Problems for
Systems of Quasilinear Hyperbolic Equations (I)-(III) – Acta Maths. Simics, vol. 11,
pp. 314-327, 1961.
[55] Ding, X., Chang, T., Wang, C. H., Hsiao, L., Li, T. C., A Study of the Global
Solutions for Quasi-linear Hyperbolic Systems of Conservation Laws, Sci. Simics,
vol. 16, pp. 317-335, 1973.
[56] Chang, T., Hsiao, L., The Riemann Problem and Interaction of Waves in Gas
Dynamics, Longman Scientific & Technical Harlow; John Wiley & Sons, Inc. New
York, 1989.
[57] Ding, X., Liu, T.P., Nonlinear Evolutionary Partial Differencial Equations, AMS/IP
Studies in Advanced Mathematics, 3, AMS Providence, IP, Cambridge, MA, 1997.
[58] Li, J., Zhang, T., Yang, S., The Two-Dimensional Riemann Problem in Gas
Dynamics, Longman, Essex, 1998.
[59] Li, T. T., Yu, W. C., Boundary Value Problem for Quasilinear Hyperbolic Systems,
Duke University, Mathematics Series, 5, Duke University, Durbam, N.C., 1985.
143
[60] Atkin, R. J., Craine, R. E., Continuum Theories of Mixtures. Basic Theory and
Historical Development, Quart. J. Mech. Appl. Math., vol. 29, pp. 209-244, 1976.
[61] Rajagopal, K. R., Tao., L., Mechanics of Mixtures, Series Advances in Math. Appl.
Sci., vol. 35, World Scientific, Singapore, 1995.
[62] Daganzo, C. Requiem for second order fluid approximations of traffic flow, Transp.
Res. B, vol. 29, pp. 277–286, 1995.
[63] Aw, A., Rascle, M. Resurrection of “second order” models of traffic flow, SIAM J.
Appl. Math., vol. 60(3), pp. 916–938, 2000.
[64] Berthelin F., Bouchut, F., Weak solutions for a hyperbolic system with unilateral
constraint and mass loss, Ann. Inst. H. Poincaré, Anal. Non Linéaire, vol. 20(6), pp.
975–997, 2003.
[65] Colombo, R. M., Goatin, P., A well posed conservation law with a variable unilateral
constraint, J. Differ. Equ., vol. 234, pp. 654–675, 2007.
[66] Berthelin, F., Degond, P., Delitala, M., Rascle, M. A model for the formation and
evolution of traffic jams, Arch. Ration. Mech. V Anal., vol. 187, pp. 185–220, 2008.
[67] Herty , M., Schleper, V., Traffic flow with unobservant drivers, Z. Angew. Math.
Mech. 91(10), pp. 763–776, 2011.
[68] Colombo, R. M., Goatin, P., Rosini, M. D., Conservation Laws with Unilateral
Constraints in Traffic Modelling, Communications to SIMAI Congress, Vol. 3,
2009.
[69] Saldanha da Gama, R. M., Pedrosa Filho, J. J., Martins-Costa, M. L. Modelling the
saturation process of flows through rigid porous media by the solution of a
nonlinear hyperbolic system with one constrained unknown, ZAMM. Z. Angew.
Math. Mech. 92, No. 11-12, pp. 921-936, 2012.
144
[70] Bouchut, F., Brenier, Y., Cortes, J., Ripoll, J.F. A hierarchy of models for two-phase
flows, J. Nonlinear Sci. 10, pp. 639–660, 2000.
[71] Rossmanith, J. A., A high-resolution constrained transport method with adaptive
mesh refinement for ideal MHD, Comput. Phys. Commun., vol. 164, pp. 128–133,
2004.
[72] Saldanha da Gama, R. M., A new mathematical modelling for describing the
unsaturated flow of an incompressible liquid through a rigid porous medium,
International Journal of Non-Linear Mechanics, vol. 40, pp. 59-68, 2005.
[73] Martins-Costa, M. L., Saldanha da Gama, R. M., A new constrained constitutive
equation for unsaturated flows of incompressible liquids through rigid porous
media, J. Porous Media, vol. 14, pp. 205-217, 2011.
[74] Després,B., Lagoutière, F., Seguin, N., Weak solutions to Friedrichs systems with
convex constraints, Nonlinearity, 24, pp. 3055– 3081, 2011.
[75] Martins-Costa, M. L., Sampaio, R., Saldanha da Gama, R. M., Modelling and
simulation of energy transfer in a saturated flow through a porous medium, Appl.
Math. Modelling, vol. 16, pp. 589-597, 1992.
[76] Rajagopal, K. R., On a hierarchy of approximate models for flows of incompressible
fluids through porous solids, Math. Models Meth. Appl. Sci., vol. 17, pp. 215-252,
2007.
[77] Allen, M. B., Mechanics of Multiphase Fluid Flows in Variably Saturated Porous
Media, Int. J. Engineering Science, vol 24, pp. 339-351, 1986.
[78] Williams, W. O., Constitutive equations for a flow of an incompressible viscous
fluid though a porous medium, Quart. Appl. Math., vol. 36, pp. 255-267, 1978.
[79] Smoller, J., Shock-Waves and Reaction-Diffusion Equations, Cambridge University
Press, New York, 1983.
145

[80] Huang, S. J., Rajagopal, K. R., Dai, H. H., Wave patterns in a nonclassic nonlinearly
elastic bar under Riemann data, Int. J. Non-Linear Mechanics, vol 91, pp. 76-85,
2017.
146