nÍvel de estabilizaÇÃo do desempenho e padrÃo da ... · f676n 2015 fonseca, fabiano de souza...
TRANSCRIPT
Fabiano de Souza Fonseca
NÍVEL DE ESTABILIZAÇÃO DO DESEMPENHO E PADRÃO DA
VELOCIDADE DO OBJETO MÓVEL: EFEITOS SOBRE O
CONTROLE VISUO-MOTOR NA INTERCEPTAÇÃO
Belo Horizonte
Escola de Educação Física, Fisioterapia e Terapia Ocupacional - UFMG
2015

Fabiano de Souza Fonseca
NÍVEL DE ESTABILIZAÇÃO DO DESEMPENHO E PADRÃO DA
VELOCIDADE DO OBJETO MÓVEL: EFEITOS SOBRE O
CONTROLE VISUO-MOTOR NA INTERCEPTAÇÃO
Tese apresentada ao Programa de Pós-Graduação em Ciências do Esporte da Universidade Federal de Minas Gerais como requisito parcial à obtenção do título de Doutor em Ciências do Esporte.
Área de concentração: Comportamento Motor
Orientador: Dr. Herbert Ugrinowitsch
Belo Horizonte
Escola de Educação Física, Fisioterapia e Terapia Ocupacional - UFMG
2015

F676n
2015
Fonseca, Fabiano de Souza
Nível de estabilização do desempenho e padrão da velocidade do objeto móvel: efeitos sobre o controle visuo-motor na interceptação. [manuscrito] / Fabiano de
Souza Fonseca – 2015.
102f., enc.: il.
Orientador: Herbert Ugrinowitsch
Doutorado (tese) – Universidade Federal de Minas Gerais, Escola de Educação
Física, Fisioterapia e Terapia Ocupacional.
Bibliografia: f. 93-100
1. Capacidade motora - Teses. 2. Desempenho psicomotor – Teses. I. Ugrinowitsch, Herbert. II. Universidade Federal de Minas Gerais. Escola de
Educação Física, Fisioterapia e Terapia Ocupacional. III. Título.
CDU: 796.015
Ficha catalográfica elaborada pela equipe de bibliotecários da Biblioteca da Escola de Educação Física,
Fisioterapia e Terapia Ocupacional da Universidade Federal de Minas Gerais.

DEDICATÓRIA
Dedico esta tese aos meus avós (pais), Ana e Nozinho pelo amor incondicional
e devoção na difícil arte de educar que me permitiu chegar até aqui.
Para sempre na memória. Gratidão eterna...

AGRADECIMENTOS
A Deus, pela luz, conforto, serenidade e força nos momentos mais difíceis
dessa caminhada.
Ao longo desses anos, recebi o apoio e o incentivo de várias pessoas. E eu
gostaria de agradecer sinceramente a todos aqueles que diretamente ou
indiretamente contribuíram para a minha formação acadêmica, profissional e
humana.
À Família Fonseca por ser essencial na minha formação como ser humano. Os
valores e princípios que aprendi com vocês em cada dia de convivência
mudaram uma perspectiva de vida. Serei eternamente grato a tudo que fizeram
por mim!
Obrigado Rafa! Quando eu fraquejei, você fez tudo ganhar sentido novamente.
Kris, obrigado pela sua paciência, amor, incentivo e assistência. A melhor
maneira de te agradecer será em forma de cuidado e amor em todos os dias
das nossas vidas. Te amo!
À Família Mousinho por me receber como um filho!
Ao Prof. Herbert Ugrinowitsch, meu agradecimento e gratidão. Obrigado por
aceitar o desafio, pelos conselhos e lições ao longo desses onze anos de
convivência. Quando tudo parecia desmoronar, você me trouxe de volta.
Obrigado por tudo!
Ao Prof. Rodolfo Benda, por me apresentar a área de Comportamento Motor e
ser o grande motivador na minha caminhada científica. Ao meu parceiro
Rodolfo, pela amizade, companheirismo, apoio e força. Os anos de convivência
renderam lembranças para toda a vida, mas acima de tudo: amizade e
lealdade.
Aos membros do GEDAM, em especial aos contemporâneos: Maria Flávia,
Lívia, Marcelão, Crislaine, Carlinhos, Tércio, Lucas Savassi, Cláudio, Suzi, Léo,
Silvana, Guilherme Van Keulen, Nádia, Thábata, Vitão e Márcio. Como é bom
fazer parte dessa família e ter vocês como irmãos acadêmicos! Obrigado por
serem elementos propulsores da minha formação acadêmica!
Thábata e Nádia, eu acredito em amizade incondicional por vocês! Não
importou a distância, o tempo, as reviravoltas da vida ou até mesmo alguns
erros. Quando fomos colocados à prova, a amizade prevaleceu e se fortaleceu.
Ao Prof. Israel Teoldo, pela prontidão e auxílio desde o primeiro contato. Sua
ajuda foi crucial para tornar possível a execução dos experimentos dessa tese.
Obrigado por abrir as portas do NUPEF e não medir esforços em me apoiar,
mesmo quando estava fora do Brasil.
Felippe Cardoso, obrigado apoio e suporte ao longo desse processo. Colhi o
melhor fruto de uma parceria acadêmica: um grande amigo. Mas não se
esqueça da sua dívida: você me deve uma visita!
Maicon Albuquerque, agradeço o auxílio durante as visitas à UFV e ajuda na
coleta de dados. Te devo essa parceiro!
A Danielle Campos que me deu todo o suporte durante o período de coleta de
dados na UFV. Sem palavras para agradecer a sua ajuda. Prepara... que você
vai longe Danita!
Ao Prof. Sérgio Tosi, por me receber de forma excepcional em Bauru, dedicar
seu tempo e reorganizar sua agenda para me ajudar. Sua colaboração foi
fundamental na construção dessa tese!
Ao Prof. Umberto Correa, pelas contribuições nas etapas de avaliações. Seus
questionamentos me fizeram refletir e buscar melhorar a qualidade do trabalho.
Ao Prof. Guilherme Lage, pelo apoio de sempre e referência que se tornou
dentro do GEDAM. Grande parte desse caminho foi modelando seus passos!
Ao Centro Universitário Cesmac, pelo apoio para conciliar a atuação
profissional e formação acadêmica. Prof. Douglas Apratto, sua
responsabilidade com a educação e seu amor pela instituição são
contagiantes.
Em especial aos amigos da PROAG: Prof. Mauro, Profa. Lucélia, Profa. Sônia,
Profa. Ana Lydia e demais membros. A amizade e o companheirismo de vocês
tornaram essa jornada possível. Vocês são minha referência de que ninguém
consegue nada sozinho.
Por fim, aos amigos docentes do Curso de Educação Física do CESMAC.
Obrigado pelo suporte durante o período de doutoramento. João, é bom ter
você de volta e por perto! Agradeço a amizade e parceria de sempre.

EPÍGRAFE
“Seja você quem for, seja qual for a posição social que você tenha na vida, a mais alta ou a mais baixa, tenha sempre como meta muita força, muita determinação e faça tudo com muito amor e com muita fé em Deus, que um dia você chega lá. De alguma maneira você chega lá...”
Ayrton Senna da Silva

RESUMO
O propósito deste estudo foi investigar os efeitos do nível de estabilização do desempenho e do padrão de velocidade do objeto móvel sobre o controle visuo-motor da interceptação. A investigação foi conduzida em três experimentos com dois grupos experimentais: estabilização e superestabilização do desempenho. O nível de estabilização do desempenho foi determinado a partir de critérios de desempenho durante a prática. Na fase de prática, os grupos praticaram uma sequência pré-determinada de toques em cinco sensores de forma a coincidir o toque no último sensor com a chegada de um estímulo visual que deslocava com velocidade constante (81,3 cm.s-1) e tempo total de 2250 ms. O estímulo visual simulava um objeto móvel durante o deslocamento para a zona de interceptação. Após a fase de prática, ambos os grupos foram testados durante a execução de interceptações diante de objetos móveis com diferentes padrões de velocidade. No experimento 1, os participantes executaram interceptações a objetos que se moviam em velocidade constante sob três condições: velocidade aumentada (91,5 cm.s-1), velocidade controle (81,3 cm.s-1) e velocidade reduzida (73,2 cm.s-1). O tempo total de deslocamento do objeto móvel em cada condição de velocidade foi 2000 ms, 2250 ms e 2500 ms, respectivamente. No experimento 2, as interceptações ocorreram diante de objetos móveis com padrão de velocidade variável, mas sem mudança no tempo total de deslocamento (2250 ms). Três condições de velocidade do objeto foram testadas: velocidade aumentada-reduzida (157 cm.s-1 e 41,41 cm.s-1), velocidade controle (81,3 cm.s-1), velocidade reduzida-aumentada (78 cm.s-1 e 88,90 cm.s-1). O experimento 3 também consistiu em interceptações a objetos com padrão de velocidade variável, porém o tempo total de deslocamento do objeto foi manipulado. As condições de velocidade e seus respectivos tempos totais na fase de teste foram: velocidade aumentada-reduzida (141,3 cm.s-1 e 37,27 cm.s-1 - 2000 ms), velocidade controle (81,3 cm.s-1 – 2250 ms) e velocidade reduzida-aumentada (85,8 cm.s-1 e 97,79 cm.s-1 - 2500 ms). A fase de teste dos três experimentos consistiu em 15 interceptações em cada condição de velocidade, distribuídas de forma pseudoaleatória. Os dados referentes ao erro temporal, à duração dos componentes das interceptações (tempo de reação e tempo parcial dos submovimentos) e ao comportamento visual foram analisados. Os resultados revelaram que a superestabilização propiciou melhor desempenho nas interceptações nos diferentes padrões de velocidade do objeto móvel. Além disso, foram encontrados indicativos que o controle visuo-motor da interceptação foi mediado pelo nível de estabilização do desempenho, independente do padrão de velocidade do objeto móvel. Os resultados mostraram que não houve mudança no controle visuo-motor das interceptações em função do padrão de velocidade do objeto. As interceptações parecem ter sido executadas pela combinação de controle preditivo e feedback corrente. Esses achados sugerem que a superestabilização do desempenho promove aquisição de competências que resultam maior eficiência na combinação de controle preditivo e feedback corrente nas interceptações a objetos que se deslocam com velocidade constante e variável. E ainda, o controle visuo-motor da interceptação não parece ser influenciado pelo padrão de velocidade do objeto móvel.
Palavras-chave: Nível de estabilização; Velocidade do objeto móvel; Controle visuo-motor; Interceptação; Feedforward; Feedback.

ABSTRACT
The purpose of this study was to investigate the effects of performance stabilization level and the speed pattern of moving objects on the visuomotor control of interception. The investigation was conducted in three experiments with two experimental groups: stabilization and superestabilization of performance. The level of performance stabilization was determined from a criteria of performance during the practice. In the practice phase, the groups practiced a pre-determined sequence of five sensors touches in order of touching the last sensor in accordance to the visual stimulus arrival that moved to a constant speed (81,3 cm.s-1) and total displacement time of 2250 ms. The visual stimulus simulates a moving object during displacement to the interception zone. After the practice phase, both groups were tested during execution of interceptions facing moving objects with different speed patterns. In experiment 1, participants performed interceptions with objects that moved at a constant speed under three conditions: increased speed (91,5 cm.s-1), control speed (81,3 cm.s-1) and decreased speed (73,2 cm.s-1). The total time of moving object displacement at each speed condition was 2000 ms, 2250 ms and 2500 ms, respectively. In experiment 2, interceptions occurred facing moving objects with variable speed, but with no change in the total displacement time (2250 ms). Three conditions of object speeds were tested: increased-decreased speed (157 cm.s-1 and 41,41 cm.s-1), control speed (81,3 cm.s-1), and decreased-increased speed (78 cm.s-1 and 88,90 cm.s-1). The experiment 3 also consisted in interceptions facing objects with variable speed pattern, but the total time of object displacement was manipulated. The speed conditions and their total times in testing phase were increased-decreased speed (141,3 cm.s-1 and 37,27 cm.s-1 - 2000 ms), control speed (81,3 cm.s-1 - 2250 ms), and decreased-increased speed (85,8 cm.s-1 and 97,79 cm.s-1 - 2500 ms). The test phase of the 3 experiments consisted in 15 interceptions in each speed condition, distributed in pseudo-random order. The data regarding the temporal error, the duration of movement components (reaction time and partial time of submovements) and visual behavior were analyzed. The results revealed that the superestabilization provided better performance in interceptions in different patterns of the moving object velocity. Moreover, were found indicating that the visuomotor control interception was mediated by the level of performance stabilization, regardless of the pattern of moving object speed. The results showed that there was no change in visuomotor control of interceptions as function of speed pattern. Interceptions seems to have been performed by combining predictive and online feedback control. These findings suggest that superestabilization of performance promotes acquisition of competences that lead to greater efficiency in combining predictive and online feedback control for interceptions of moving objects with constant and variable speed. Besides, the visuomotor control in interception does not appear to be influenced by the speed pattern of the moving object.
Keywords: Level of stabilization; Moving object’s speed; Visuomotor Control; Interception; Feedfoward; Feedback.

LISTA DE ILUSTRAÇÕES
Figura 1 - Desenho esquemático da atuação dos modelos internos no controle motor............................................................................................................... 24 Figura 2 - Ilustração do aparelho de timing coincidente em tarefas complexas......................................................................................................................... 40
Figura 3 - Sistema de rastreamento visual. ..................................................... 41
Figura 4 - Desenho experimental do experimento 1. ....................................... 43
Figura 5 - Representação das áreas para classificação da localização das fixações visuais. .............................................................................................. 47
Figura 6 - Desenho experimental do experimento 2. ....................................... 58
Figura 7 - Desenho experimental do experimento 3. ....................................... 69
Gráfico 1 – Média do erro constante no primeiro e último bloco da fase de prática................................................................................................................49
Gráfico 2 – Média do erro variável no primeiro e último bloco da fase de prática.. ........................................................................................................... 49
Gráfico 3 – Média da duração dos componentes da tarefa no primeiro e último bloco da fase de prática. ................................................................................. 50
Gráfico 4 – Média das fixações visuais por local da tarefa no primeiro e último bloco da fase de prática. ................................................................................. 51
Gráfico 5 – Média do erro constante nas diferentes velocidades do objeto móvel: controle (CONT), aumentada (AUM) e reduzida (RED) ....................... 52
Gráfico 6 - Média do erro variável nas diferentes velocidades do objeto móvel: controle (CONT), aumentada (AUM) e reduzida (RED) ................................... 53
Gráfico 7– Média da duração dos componentes da tarefa nas diferentes velocidades (AUM, CONT e RED). ................................................................. 54
Gráfico 8 – Número de fixações visuais por local da tarefa nas diferentes velocidades (AUM, CONT e RED). ................................................................. 55
Gráfico 9 – Média do erro constante no primeiro e último bloco da fase de prática. ............................................................................................................ 60
Gráfico 10 – Média do erro variável no primeiro e último bloco da fase de prática. ............................................................................................................ 60
Gráfico 11 – Média da duração dos componentes da tarefa no primeiro e último bloco da fase de prática .................................................................................. 61
Gráfico 12 – Média das fixações visuais por local da tarefa no primeiro e último bloco da fase de prática. ................................................................................. 62
Gráfico 13 – Média do erro constante nas diferentes velocidades do objeto móvel: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM). ................................................................................. 63
Gráfico 14 – Média do erro variável nas diferentes velocidades do objeto móvel: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM). .................................................................................................... 64
Gráfico 15 - Média da duração dos componentes da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM). ................................................ 65
Gráfico 16 - Número de fixações visuais por local da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM).. ............................................... 66
Gráfico 17– Média do erro constante no primeiro e último bloco da fase de prática.. ........................................................................................................... 71
Gráfico 18 – Média do erro variável no primeiro e último bloco da fase de prática ............................................................................................................. 71

Gráfico 19 – Média da duração dos componentes da tarefa no primeiro e último bloco da fase de prática. ................................................................................. 72
Gráfico 20 – Média das fixações visuais por local da tarefa no primeiro e último bloco da fase de prática. ................................................................................. 73
Gráfico 21 – Média do erro constante nas diferentes velocidades: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM)......................................................................................................................... 74
Gráfico 22 – Média do erro variável nas diferentes velocidades: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM)......................................................................................................................... 75
Gráfico 23 - Média da duração dos componentes da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM) ................................................. 76
Gráfico 24 - Número de fixações visuais por local da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM). ................................................ 77
Quadro 1 - Distribuição das diferentes velocidades do objeto móvel na fase de teste do experimento 1......................................................................................44
Quadro 2 - Distribuição das diferentes velocidades do objeto móvel na fase de teste do experimento 2. ................................................................................... 58
Quadro 3- Distribuição das diferentes velocidades do objeto móvel na fase de teste do experimento 3. ................................................................................... 69
LISTA DE ABREVIATURAS E SIGLAS
ANOVA – Análise de Variância
AUM - Velocidade Aumentada
AUM-RED - Velocidade Aumentada-Reduzida
COEP/UFMG - Comitê de Ética em Pesquisa da Universidade Federal de
Minas Gerais
CONT – Velocidade Controle
CR - Conhecimento de Resultados
EC – Erro Constante
EV - Erro Variável
GE – Grupo Estabilização
GS – Grupo Superestabilização
RED – Velocidade Reduzida
RED-AUM - Velocidade Reduzida-Aumentada
TCLE - Termo de Consentimento Livre e Esclarecido
TEN - Tentativas
Tpar - Tempo Parcial do Componente
TR – Tempo de reação
TT - Tempo Total
VEL – Velocidade
SUMÁRIO
1. INTRODUÇÃO......................................................................................... 14 2. REVISÃO DE LITERATURA ................................................................... 17
2.1 O controle visuo-motor em ações de interceptação ............................... 17
2.2 Controle e regulação dos movimentos ................................................... 21
2.3 O padrão de velocidade do objeto móvel e o controle da interceptação 28
2.4 Efeitos do nível de estabilização do desempenho no controle da interceptação ............................................................................................... 33
3. OBJETIVOS ............................................................................................ 37
3.1 Objetivo Geral........................................................................................ 37
3.2 Objetivos Específicos ............................................................................ 37 4. HIPÓTESES DE ESTUDO ....................................................................... 38
5. EXPERIMENTO 1 .................................................................................... 39
5.1 Método .................................................................................................. 39
5.1.1 Amostra .......................................................................................... 39
5.1.2 Instrumentos e tarefa ...................................................................... 39
5.1.3 Delineamento .................................................................................. 41
5.1.4 Procedimentos ................................................................................ 44
5.1.5 Análise dos dados ........................................................................... 45
5.2 Resultados ............................................................................................ 48
5.2.1 Síntese dos resultados .................................................................... 55 6. EXPERIMENTO 2 .................................................................................... 56
6.1 Método .................................................................................................. 56
6.1.1 Amostra .......................................................................................... 56
6.1.2 Instrumento e tarefa ........................................................................ 57
6.1.3 Delineamento .................................................................................. 57
6.1.4 Procedimentos ................................................................................ 59
6.1.5 Análise dos dados ........................................................................... 59
6.2 Resultados ............................................................................................ 59
6.2.1 Síntese dos resultados .................................................................... 66 7. EXPERIMENTO 3 .................................................................................... 67
7.1 Método .................................................................................................. 67
5.3.1 Amostra .......................................................................................... 67
5.3.2 Instrumento e tarefa ........................................................................ 68
5.3.3 Delineamento .................................................................................. 68
5.3.4 Procedimentos ................................................................................ 70
5.3.5 Análise dos dados ........................................................................... 70
7.2 Resultados ............................................................................................ 70
7.2.1 Síntese dos resultados .................................................................... 77 8. DISCUSSÃO ........................................................................................... 79
9. CONCLUSÕES ........................................................................................ 89
REFERÊNCIAS .............................................................................................. 90

14
1. INTRODUÇÃO
As ações de interceptação são muito comuns em nosso cotidiano
particularmente quando desejamos fazer contato com algum objeto em
movimento (TRESILIAN, 2012). Agarrar um objeto para evitar sua queda,
rebater a bola durante uma partida de tênis ou golpear um inseto em pleno vôo
são exemplos de interceptações. As interceptações dependem da precisão
espaço-temporal, ou seja, o efetor deve alcançar o objeto móvel no local
correto e no momento exato (TRESILIAN, 2004, 2005). Para isso, o executante
necessita obter informações sobre o objeto (posição, direção, velocidade) e
organizar os movimentos baseados nessas informações para garantir uma
execução precisa (DAVIDS et al., 2002). Então, a integração entre mecanismos
perceptivos e motores, especialmente aqueles envolvidos no controle visuo-
motor, pode ser considerada essencial para o sucesso das interceptações.
De fato, tem sido bem estabelecido na literatura o papel crítico da
informação visual no planejamento e correções dos movimentos direcionados a
objetos (DESMURGET et al., 1998; SAUNDERS; KNILL, 2003, 2005). A
precisão dos movimentos guiados pela visão depende da captação apropriada
de informações através de movimentos oculares (LAND, 1999, 2009), o que
resulta em padrões específicos de comportamento ocular. A análise do
comportamento dos olhos e dos aspectos motores tem sido uma importante
ferramenta na busca pela compreensão dos mecanismos de controle visuo-
motor envolvidos na interceptação. A elucidação desses mecanismos tem sido
tema de intenso debate na literatura (PANCHUK; VICKERS, 2009;
KATSUMATA; RUSSELL, 2012; ZHAO; WARREN, 2015).
As proposições sobre como o Sistema Nervoso Central (SNC)
realiza a regulação das interceptações tem sido baseada em mecanismos de
controle preditivo (feedforward), feedback sensorial e na combinação entre eles
(SEIDLER; NOLL; THIERS, 2004; LA SCALEIA; ZAGO; LACQUANITI, 2015;
ZHAO; WARREN, 2015). No controle preditivo, é proposto que o SNC usa
modelos internos para a regulação adequada das interceptações
predominantemente por mecanismos de pré-programação (WOLPERT;
FLANAGAN, 2001; ZAGO et al., 2005, 2009). Por outro lado, no controle via

15
feedback corrente é sugerido que as ações de interceptação são
continuamente ajustadas usando informações provenientes do feedback visual
(DESSING et al., 2002; BASTIN; CRAIG; MONTAGNE, 2006). Há evidências
na literatura que dão suporte às duas formas de controle durante a
interceptação (DESSING et al., 2002; ZAGO et al., 2009). Têm sido também
encontrados resultados que sugerem a função complementar entre as formas
de controle, apontando para a regulação da interceptação a partir da
combinação do controle preditivo e feedback corrente (MÜLLER; ABERNETHY,
2006; BOSCO; MONACHE; LACQUANITI, 2012; DE LA MALLA; LÓPEZ-
MOLINER, 2015). Entretanto, não está claro na literatura como o controle
visuo-motor da interceptação é modificado em função do padrão de velocidade
do objeto móvel e nem a influência da prática nos mecanismos visuais e
motores que propiciam a precisão espaço-temporal da interceptação em
contextos variáveis.
Há que se considerar a característica dinâmica dos contextos que
envolvem as ações de interceptação (TRESILIAN, 2005; MERCHANT et al.,
2009). Mudanças sistemáticas na velocidade do objeto móvel são muito
comuns nesses contextos e podem ocasionar no deslocamento do objeto para
a zona de contato com distintos padrões, tais como, velocidade constante ou
variável. Nessas distintas situações, o controle visuo-motor deve ser
adequadamente modificado em função das características do padrão de
velocidade do objeto. Assim, o controle durante a interceptação pode ser
influenciado pelo padrão de velocidade do objeto móvel (LEE; PORT;
GEORGOPOULOS, 1997; DUBROWSKI; CARNAHAN, 2001; TEIXEIRA et al.,
2006a). Em contextos envolvendo objetos móveis em velocidade constante, há
resultados que apontam para o uso de controle via feedback corrente (LEE;
PORT; GEORGOPOULOS, 1997), mas também para a combinação do
controle preditivo e feedback (DUBROWSKI; CARNAHAN, 2001). Já nas
interceptações com objetos que se movem com velocidade variável, são
encontrados resultados que sugerem o controle preditivo (DUBROWSKI; LAM;
CARNAHAN, 2000) e também a associação de controle preditivo e feedback
corrente (TEIXEIRA et al., 2006a). As divergências desses resultados não
esclarecem como o controle visuo-motor na interceptação é modificado em
função do padrão de velocidade do objeto móvel.
16
Já em relação aos efeitos da prática no controle visuo-motor, há
também algumas lacunas que merecem ser investigados, como por exemplo,
compreender como as competências sensório-motoras necessárias à
interceptação são adquiridas ao longo da prática. Ao longo da prática,
competências sensório-motoras são adquiridas e culminam com a
consolidação de um conjunto de soluções adequadas para a tarefa. Quando
isso acontece, performances precisas e consistentes são observadas no
comportamento. Esse fenômeno é conhecido como estabilização do
desempenho (UGRINOWITSCH et al., 2014). Há evidências que o nível de
estabilização do desempenho alcançado durante a prática é capaz de modular
as competências adquiridas com a prática (UGRINOWITSCH et al., 2011,
2014; FONSECA et al., 2012). Nesse contexto, o nível de estabilização pode
ser entendido como o estado funcional do sistema motor que reflete seu grau
de competência para executar determinada tarefa. Alguns estudos têm
questionado se o nível de estabilização do desempenho está associado à
capacidade de executar ações de interceptação sob diferentes circunstâncias
ambientais (UGRINOWITSCH et al., 2011, 2014; FONSECA et al., 2012). Os
resultados demonstram os níveis mais avançados de estabilização possibilitam
maior capacidade de regulação das ações de interceptação em variadas
situações (UGRINOWITSCH et al., 2011; COUTO, 2012; FONSECA et al.,
2012). Porém, não está totalmente esclarecido como essas competências são
adquiridas e sua influência no controle visuo-motor na interceptação em
contextos dinâmicos.
Assim, com o intuito de elucidar como o controle visuo-motor da
interceptação é modificado em função do padrão de velocidade do objeto
móvel e como o nível de estabilização alcançado na prática modula o controle
visuo-motor das interceptações em contextos dinâmicos, o propósito dessa
tese foi investigar os efeitos do nível de estabilização do desempenho e do
padrão de velocidade do objeto móvel sobre o controle visuo-motor da
interceptação.
17
2. REVISÃO DE LITERATURA
2.1 O controle visuo-motor em ações de interceptação
O movimento é considerado o principal meio de interação entre o ser
humano e o ambiente (MANOEL, 1994; WOLPERT; GHAHRAMANI;
FLANAGAN, 2001). O ambiente consiste em um contexto dinâmico onde as
pessoas usualmente devem interagir com objetos em deslocamento
(TRESILIAN, 2005; MERCHANT et al., 2009). Nessas situações, o indivíduo
pode agir de duas formas: evitando a colisão ou realizando uma interceptação
(TRESILIAN, 2005, 2012). As interceptações são compreendidas como
habilidades motoras cujo objetivo é realizar contato com o alvo móvel (objetos
que se deslocam no campo visual) usando um efetor (segmento corporal ou
implemento) (TRESILIAN, 2012).
As ações de interceptação são categorizadas em duas classes:
interceptações de captura e interceptações de rebatida do objeto móvel
(TRESILIAN, 2005; MERCHANT et al., 2009). Essas duas classes são comuns
em inúmeras atividades cotidianas e esportivas, tais como, agarrar um objeto
no ar para evitar sua queda ou rebater a bola durante a partida de tênis. Devido
ao seu papel crítico para o desempenho bem sucedido em diferentes contextos
e também para a adaptação do ser humano ao ambiente, as ações de
interceptação tem sido o foco de investigação em diversas áreas de
conhecimento (DAVIDS et al., 2002).
O sucesso da interceptação depende da precisão espaço-temporal,
ou seja, é necessário que o efetor atinja o objeto móvel no local correto
(coincidência espacial) e no momento exato (coincidência temporal)
(TRESILIAN, 2005). Esse processo de sincronização espaço-temporal
representa um grande desafio para o Sistema Nervoso Central (SNC). Isso
porque a interceptação não exige apenas a coordenação precisa dos
segmentos corporais envolvidos na ação, mas também depende da integração
ótima entre mecanismos perceptivos e motores para que os movimentos sejam
organizados adequadamente em sintonia com o objeto móvel (DAVIDS et al.,
2002; TRESILIAN, 2012). A complexidade desses processos de controle motor

18
durante a interceptação pode ser ilustrada usando como exemplo a rebatida do
tênis.
A precisão da rebatida depende da captação apropriada de
informações visuais relevantes sobre as propriedades do objeto móvel (bola em
aproximação), tais como sua distância, direção e velocidade. Em seguida, os
movimentos devem ser planejados combinando as informações visuais acerca
do ambiente e do próprio corpo. Por fim, os comandos motores devem ser
gerados e os movimentos regulados coordenadamente com a bola em
aproximação para o ponto de contato. Nesse exemplo, fica evidente que a
sincronização apropriada entre mecanismos visuais e motores é essencial para
desempenho bem sucedido da interceptação. Portanto, deve-se tentar integrar
o papel da visão com o controle de movimentos, pois o planejamento, a
organização e a regulação das ações de interceptação são dependentes desta
informação (DAVIDS et al., 2002).
A visão é um importante meio de obtenção de informação para nos
movermos pelo mundo e guiar nossas ações (GOODALE, 2014). Isso porque a
visão não é responsável somente pela obtenção de informação capaz de
propiciar a percepção de objetos, eventos e o nosso entendimento do mundo,
mas ela também é usada no planejamento e regulação dos movimentos
(GOODALE, 2011; 2014). Nas últimas três décadas têm crescido o número de
pesquisas com o intuito de aprofundar a compreensão do papel da visão no
controle dos movimentos (GOODALE, 2011).
Uma das formas de entender a atuação da visão no controle motor é
que existem dois sistemas visuais com distintas funções: “a visão para
percepção” e a “visão para a ação” (GOODALE; MILNER, 1992; GOODALE;
HUMPHREY, 1998; MILNER; GOODALE, 2008). Goodale e seus colegas têm
sugerido que a informação visual é processada no SNC por duas vias corticais
distintas, mas que estão em interação. A distinção de ambas acontece através
do mapeamento das projeções visuais oriundas do córtex visual primário,
denominadas de via visual ventral (visão para percepção) e via visual dorsal
(visão para a ação).
A via ventral tem como principal papel propiciar a construção das
representações visuais detalhadas do mundo e que nos permite reconhecer
objetos, atribuir significados, identificar eventos (GOODALE; MILNER, 1992;
19
MILNER; GOODALE, 2008). Além disso, a via ventral fornece a base
perceptiva para o controle motor off-line (controle antecipatório) que depende
das experiências passadas e armazenamento de informações (GOODALE,
2014). Já a via dorsal, tem função essencialmente centrada no controle de
movimentos, atuando no processo de transformação momento a momento da
informação visual em movimentos coordenados (GOODALE; MILNER, 1992;
MILNER; GOODALE, 2008).
O controle preciso dos movimentos guiados pela visão depende da
captação adequada de informações visuais através dos movimentos dos olhos
(LAND, 1999; TRESILIAN, 2012). Os movimentos oculares têm como principais
propósitos a estabilização da imagem na retina e o direcionamento do olhar
para outro objeto ou área de interesse (LAND, 1999, 2009). A estabilização da
imagem na retina propicia tempo para que os fotorreceptores (cones e
bastonetes) presentes na retina processem os estímulos luminosos, realizem a
transdução sensorial e enviem os sinais através do nervo ótico para as regiões
especializadas do córtex para processamento (WERNER; CHULAPA, 2014). Já
o direcionamento do olhar para outro objeto propicia maior acuidade visual
devido ao aumento no número de cones na região central da retina
denominada de fóvea (DUCHOWSKI, 2007; TRESILIAN, 2012; WERNER;
CHULAPA, 2014). Como a distribuição dos cones na retina diminui
consideravelmente da região da fóvea em direção à periferia, os olhos
necessitam se movimentar ativamente para direcionar a informação para a
fóvea (RODRIGUES, 2001; TRESILIAN, 2012). Em ações de interceptação que
possuem como particularidade a presença do objeto móvel, os executantes
devem ajustar continuamente os olhos a fim de adquirir informações relevantes
sobre o mesmo, estabilizar a imagem na retina e conseguir ótima acuidade
visual (DAVIDS et al., 2002). Essa necessidade resulta em padrões específicos
de comportamento dos olhos durante a execução dos movimentos.
O padrão de comportamento dos olhos consiste basicamente de três
movimentos oculares: fixações visuais, movimentos sacádicos e rastreamentos
visuais (DUCHOWSKI, 2007). Os movimentos sacádicos são movimentos
rápidos dos olhos com o intuito de posicionar o olhar em outra área de
interesse no campo visual (DUCHOWSKI, 2007; BLASCHECK et al., 2014).
Devido aos vários estímulos visuais, os olhos se movem muito rapidamente

20
durante os movimentos sacádicos e não há tempo para o processamento
visual. Esse fenômeno é denominado de supressão sacádica (DUCHOWSKI,
2007). Por outro lado, o processamento visual se torna possível se o olhar
estiver relativamente estacionário em um objeto ou área de interesse por um
período superior a 100 ms, ou seja, período mínimo para considerar como uma
fixação visual. Os movimentos de rastreamento são identificados quando os
olhos perseguem um objeto móvel com velocidade abaixo de 30º/s, pois em
velocidades superiores serão implementados movimentos sacádicos
(DUCHOWSKI, 2007; BLASCHECK et al., 2014). O estudo do comportamento
visual tem sido usado como ferramenta para investigação dos mecanismos de
controle visuo-motor em ações de interceptação (LAND; MCLEOD, 2000;
DAVIDS et al., 2002; RODRIGUES; VICKERS; WILLIAMS, 2002). Entender
como mecanismos visuais e motores são regulados pelo SNC durante a
interceptação tem sido um grande desafio para os pesquisadores.
Apesar da aparente complexidade do controle visuo-motor durante a
interceptação, a eficiência nas ações de interceptação demonstram a
capacidade do SNC de regular esses mecanismos. Por exemplo, em
modalidades como críquete e beisebol, as rebatidas exigem precisão espacial
de 2 cm e temporal de 2,5 ms, aproximadamente (REGAN, 1997; LAND;
MCLEOD, 2000; TRESILIAN, 2004). E mesmo assim, há evidências de atletas
de críquete capazes de desempenhar as rebatidas com precisão temporal
próxima de 4 ms (MCLEOD; JENKINS, 1991). Outros estudos demonstram que
sujeitos sem experiência no beisebol são capazes de executar rebatidas com
precisão temporal abaixo de 6 ms (BRENNER et al., 2012).
A explicação dessa capacidade do ser humano em executar
precisamente as ações de interceptação, bem como, a elucidação dos
mecanismos de controle visuo-motor envolvidos na interceptação tem sido
tema de intenso debate na literatura (PANCHUK; VICKERS, 2009; ZAGO et al.,
2009; KATSUMATA; RUSSELL, 2012; LA SCALEIA; ZAGO; LACQUANITI,
2015). As proposições explicativas do controle visuo-motor na interceptação
são baseadas em duas perspectivas: controle preditivo e controle via feedback
corrente. Essas perspectivas se diferenciam basicamente sobre o papel
desempenhado pela informação visual no planejamento e regulação dos

21
movimentos (DESSING et al., 2002; MERCHANT et al., 2009; ZAGO et al.,
2009; SARLEGNA; MUTHA, 2014) que serão discutidas a seguir.
2.2 Controle e regulação dos movimentos
A organização e regulação dos movimentos voluntários podem ser
descritas por um continuum, que se baseia essencialmente no controle via
mecanismos de feedback sensorial até mecanismos de feedforward (SEIDLER;
NOLL; THIERS, 2004). Esses mecanismos também podem ser combinados
para o controle de movimentos conhecido como controle ótimo (DESMURGET;
GRAFTON, 2000). As proposições explicativas sobre como as ações de
interceptação são reguladas pelo SNC se apoiam nesses distintos mecanismos
de controle.
A ideia central do controle preditivo é que os movimentos de
interceptação são organizados por pré-programação (feedforward) (ZAGO et
al., 2009; LA SCALEIA; ZAGO; LACQUANITI, 2015). A abordagem de controle
preditivo parte da premissa que o uso da informação visual para a regulação
on-line das interceptações rápidas torna-se inviável devido aos atrasos visuo-
motores. Esses atrasos são decorrentes dos processos de transdução
sensorial, condução neural, processamento central e ativação muscular (ZAGO
et al., 2009; WOLPERT; DIEDRICHSEN; FLANAGAN, 2011). Nesse sentido, o
tempo para realização de ajustes do movimento durante a execução é
considerado relativamente longo quando comparado à breve duração de
algumas ações de interceptações.
Por exemplo, o tempo necessário para fazer correções baseadas em
feedback visual pode variar de 150 e 250 ms (BRENNER; SMEETS; DE
LUSSANET, 1998; SAUNDERS; KNILL, 2003, 2005). Mas em esportes como
críquete e beisebol as interceptações são realizadas com movimentos
balísticos cuja duração é de aproximadamente 200 ms (LAND; MCLEOD, 2000;
TRESILIAN, 2004). A abordagem de controle preditivo considera que se as
interceptações fossem controladas baseadas em feedback visual nessas
situações, os movimentos seriam sempre atrasados em relação ao alvo. A
presença de modelos internos no SNC é vista como uma solução plausível
para solucionar os problemas de atrasos referentes ao processamento

22
sensorial, transmissão de sinais e ativação neuromuscular durante a
interceptação.
Baseado no paradigma de controle computacional, nas últimas
décadas tem emergido a proposição de que o SNC possui conhecimento sobre
as propriedades do corpo e sua relação com o meio externo, o que possibilita
simular internamente a dinâmica do controle sensório-motor (WOLPERT;
GHAHRAMANI; JORDAN, 1995; WOLPERT; KAWATO, 1998; ITO, 2008).
Essa simulação é mediada por representações denominadas de modelos
internos (KAWATO, 1999). Vários estudos apontam para a existência dos
modelos internos tanto nas análises em nível comportamental (FLANAGAN;
WING, 1997; ZAGO et al., 2004; AZEVEDO NETO; TEIXEIRA, 2009; LA
SCALEIA; ZAGO; LACQUANITI, 2015) quanto em nível neurofisiológico
(IMAMIZU et al., 2000, 2003; KAWATO et al., 2003). A proposição dos modelos
internos é um referencial teórico coerente na busca pela compreensão dos
mecanismos de controle motor (WOLPERT; GHAHRAMANI; JORDAN, 1995;
MIALL; JENKINSON; KULKARNI, 2004).
Wolpert e Ghahramani (2000) descrevem os modelos internos como
sendo sistemas neurais que simulam sistemas físicos fora do cérebro, e assim,
atuam na predição do comportamento do corpo e dos eventos externos. Os
modelos internos têm como principal função estimar as transformações
sensório-motoras a partir da relação causal entre os sinais de entrada (input) e
saída (output) ou o seu inverso (FLANAGAN; WING, 1997; KAWATO, 1999;
WOLPERT; FLANAGAN, 2001). Ou seja, os modelos internos são capazes
predizer as consequências de determinado comando motor considerando o
estado atual, bem como, inverter esse fluxo causal e estimar o comando motor
necessário para alcançar um estado desejado (WOLPERT; GHAHRAMANI;
JORDAN, 1995; KAWATO, 1999). Esses modelos são classificados em duas
categorias (modelo inverso e modelo forward) e serão detalhados a seguir.
Os modelos inversos utilizam como sinal de entrada o estado
desejado (objetivo do movimento) para produzir como saída os comandos
motores necessários para alcançá-lo (Figura 1) (MIALL; WOLPERT, 1996;
WOLPERT; KAWATO, 1998; CISEK, 2009). Desta forma, os modelos inversos
são considerados controladores do movimento que atuam a partir de
mecanismos de feedforward (WOLPERT; KAWATO, 1998; ITO, 2008). Essa

23
forma de controle é considerada determinante em situações que requerem a
execução de movimentos rápidos, ou seja, quando o tempo é relativamente
curto para a atuação do feedback sensorial (WOLPERT; FLANAGAN, 2001).
Por outro lado, essa forma de controle é vista como pouco efetiva em durante
movimentos rápidos em contextos dinâmicos (BASTIN; CRAIG; MONTAGNE,
2006). Devido ao tempo de atraso para o processamento de feedback sensorial
para a correção desses movimentos durante a sua execução, o desempenho
se torna dependente da capacidade do controlador em gerar comandos
motores precisos. Pois se os comandos motores enviados pelos modelos
inversos forem inadequados, não haveria tempo para ajustes dos movimentos
via feedback corrente (BASTIN; CRAIG; MONTAGNE, 2006). Essa possível
limitação pode ser compensada pela atuação em conjunto dos modelos
inversos e modelos forward (MIALL; WOLPERT, 1996; WOLPERT; KAWATO,
1998).
Os modelos forward têm como principal função a realização de
predições dos comandos motores gerados via modelo inverso, conforme
demonstrado na figura 1. Esses modelos usam a cópia eferente dos comandos
motores oriundos do modelo inverso e a informação sensorial sobre o estado
atual do sistema controlado (ex. posição e velocidade do membro executante)
para gerar predições do próximo estado (WOLPERT; GHAHRAMANI;
JORDAN, 1995; WOLPERT; KAWATO, 1998; KAWATO, 1999). Tais predições
incluem informações em vários níveis de detalhamento, tais como, o feedback
sensorial resultante do comando motor, os torques articulares que serão
produzidos e os efeitos do movimento no ambiente (MIALL; WOLPERT, 1996;
CISEK, 2009). Essa estimativa do estado futuro pode compensar os atrasos
decorrentes do processamento de feedback sensorial (DESMURGET;
GRAFTON, 2000). Isso é possível porque o modelo forward atua como
regulador do modelo inverso a partir de um mecanismo denominado de
feedback interno (figura 1). As informações para a recalibração do modelo
inverso são geradas com tempo relativamente curto, considerando os atrasos
decorrentes do processamento de feedback sensorial que chegam a 250 ms
(MIALL; WOLPERT, 1996). Além disso, essas funções dos modelos internos
no controle motor podem ser aprimoradas mediante a experiência (WOLPERT;
KAWATO, 1998; KAWATO, 1999; ITO, 2008).

24
Figura 1 - Desenho esquemático da atuação dos modelos internos no controle motor (adaptado de Miall e Wolpert, 1996).
As estimativas dos modelos inversos para a geração de comandos
motores adequados, quanto as predições dos modelos forward sobre as
consequências desses comandos são imprecisas nas primeiras tentativas de
prática (WOLPERT; KAWATO, 1998; KAWATO, 1999; ITO, 2008). Mas o
refinamento desses modelos internos, e consequentemente, o aperfeiçoamento
das suas funções são esperados com o decorrer das execuções (CISEK,
2009). A cada tentativa, as informações provenientes do feedback predito pelo
modelo forward e o feedback corrente são confrontadas, e assim, acarretam
em uma nova estimativa de estado em caso de discrepância entre as
informações (WOLPERT, 1997). Isso permite que o modelo forward se torne
gradativamente mais competente em suas predições ao longo das
oportunidades de prática (MIALL; WOLPERT, 1996; WOLPERT, 1997). O
aprimoramento do modelo forward tem implicações positivas também para o
modelo inverso. Como o modelo forward assume a função de traduzir as
informações de erro no estado do sistema provenientes do feedback sensorial
em erros de programação e enviá-las ao modelo inverso para recalibração, o
mesmo se torna mais competente em gerar comandos precisos com o decorrer
da prática (MIALL; WOLPERT, 1996). O refinamento do modelo inverso
propicia a execução precisa dos movimentos quando há restrições de
disponibilidade de tempo o uso do feedback sensorial (MIALL; WOLPERT,
1996), ou ainda reduzir a dependência das correções dos comandos motores
pelo feedback sensorial quando houver tempo para ajustes durante a
execução.
25
O controle via feedback corrente apresenta proposições na direção
oposta ao controle preditivo para explicar o controle visuo-motor, pois, assume
que o movimento do efetor é continuamente regulado exclusivamente por
mecanismos de feedback corrente (DESSING et al., 2002; SARLEGNA;
MUTHA, 2014). Em outras palavras, os comandos motores são gerados em
tempo real como consequência direta do monitoramento sensorial do
movimento. Nessa forma de controle, a execução bem sucedida não depende
da capacidade de antecipatória, já que propõe correções on-line no movimento
diante de mudanças na cinemática do objeto móvel. Assim, se houver falha no
planejamento e/ou caso ocorram mudanças repentinas no contexto que exijam
modificações para garantir a precisão, esses ajustes motores podem ser
realizados durante a execução (DESSING et al., 2002; MONTAGNE, 2005).
O controle via feedback corrente é visto como explicação plausível
especialmente para as ações de interceptações com durações relativamente
longas. Pois, ao invés de depender da precisão dos julgamentos prévios
especificados antes do movimento que são bastante susceptíveis a erros, o
controle através do feedback propõe o uso de informação visual atualizada de
forma constante sobre o objeto móvel, consequentemente, permite maior
adaptabilidade dos movimentos frente às mudanças na cinemática do mesmo
(MONTAGNE, 2005).
Embora possa ser observado um consenso emergente na literatura
de que o controle preditivo parece ser usado predominantemente em ações de
interceptações rápidas e o controle via feedback sensorial se aplica às
interceptações com durações longas, as divergências entre essas duas
abordagens explicativas para o controle visuo-motor na interceptação também
são evidentes (ZHAO; WARREN, 2015). Parte disso pode ser devido ao grande
número evidências que fornecem suportes tanto para ambas as formas de
controle. Por outro lado, a discrepância entre os resultados pode estar
associada aos distintos modelos experimentais adotados em cada abordagem
(PANCHUK; VICKERS, 2009).
A maioria dos estudos que usam como paradigma experimental a
oclusão visual para suportar o controle preditivo remove intencionalmente parte
da informação visual sobre objeto móvel. Já os estudos baseados na
abordagem de controle via feedback corrente, não incluem qualquer

26
informação que permita a pré-programação, o que pode induzir a regulação do
movimento predominantemente através de feedback corrente (PANCHUK;
VICKERS, 2009). As restrições metodológicas que são impostas nas
investigações podem determinar a forma de controle, e assim, dificultar ou
favorecer a predominância de uma forma de controle em detrimento a outra, ou
até mesmo anular possíveis efeitos complementares entre o controle preditivo
e via feedback corrente. As informações provenientes do feedback sensorial
podem auxiliar a recalibração dos modelos inversos pelo modelo forward em
situações em que não há restrições temporais impostas pelos atrasos sensório-
motores (MIALL; WOLPERT, 1996; WOLPERT; KAWATO, 1998). Isso sugere
a possibilidade de complementariedade entre o controle preditivo e via
feedback corrente no planejamento e regulação dos movimentos. Ou seja, a
possibilidade dos comandos motores serem gerados pelos modelos inversos
via pré-programação e o uso do feedback corrente para recalibrar esses
comandos quando necessário (TEIXEIRA et al., 2006a).
Alguns estudos que incluíram fontes de informações capazes de
propiciar a adoção do controle preditivo e/ou através de feedback têm
observado possíveis efeitos complementares. Müller e Abernethy (2006)
compararam o desempenho das rebatidas entre jogadores de críquete com
diferentes níveis de habilidade (qualificados e pouco qualificados). Os
jogadores executaram rebatidas sob três condições: oclusão da visão antes da
liberação da bola; oclusão da visão pouco antes do quique da bola e visão
completa do deslocamento da bola. Os resultados mostraram que os jogadores
de ambos os níveis de habilidade tiveram degradação do desempenho quando
a oclusão ocorreu antes da liberação da bola. Esse resultado sugere que a
ausência de informação prévia pode ter afetado o uso de controle preditivo, e
consequentemente, influenciado negativamente no desempenho. Além disso,
as informações visuais que antecederam o quique da bola parecem ter sido
usadas para guiar o movimento do pé, enquanto as informações prévias e
posteriores ao quique foram usadas para os ajustes do contato do taco com a
bola em ambos os grupos. No entanto, os jogadores com nível de habilidade
superior foram capazes de combinar as informações pré e pós quique da bola
para melhorar o desempenho. Os autores concluíram que a combinação do
controle preditivo e via feedback pode ter sido usada nas rebatidas: o controle
27
preditivo para guiar o planejamento a rebatida e o feedback sensorial para os
ajustes finais da rebatida. Resultados similares são vistos em outros estudos e
também sugerem a coexistência e combinação entre os mecanismos de
controle em ações interceptativas (PANCHUK; VICKERS, 2009; BOSCO;
MONACHE; LACQUANITI, 2012; DE LA MALLA; LÓPEZ-MOLINER, 2015).
Entretanto, o nível de complementariedade entre os mecanismos preditivos e
feedback corrente durante a interceptação ainda não está totalmente
esclarecido.
Em suma, há uma intensa discussão na literatura pela busca de
explicações sobre o controle visuo-motor em ações de interceptação. Essa
discussão tem sido centrada particularmente nas características específicas do
tipo de interceptação (rápidas e lentas) para explicar os mecanismos de
controle das ações de interceptação. Durante as interceptações rápidas, cuja
duração do movimento é relativamente curta em relação ao tempo de atraso
para processamento sensório-motor, tem sido evidenciada a atuação de
modelos internos preditivos para a geração de comandos motores sem a
necessidade de atuação do feedback corrente. Por outro lado, quando as
interceptações envolvem movimentos com durações mais longas, a regulação
dos movimentos pode ocorrer através do feedback corrente. Entretanto, têm
sido evidenciados possíveis efeitos complementares que sugerem a
associação entre esses mecanismos durante a interceptação. Ou seja, os
comandos motores podem ser gerados pelos modelos inversos por pré-
programação e em caso de necessidade de correções do movimento, o modelo
forward usaria informações do feedback corrente para recalibrar o modelo
inverso.
Essa discussão tem sido centrada particularmente nas
características específicas do tipo de interceptação (rápidas e lentas) para
explicar como o controle visuo-motor é regulado pelo SNC durante as ações de
interceptação. Porém, outros fatores são capazes de determinar o controle
visuo-motor durante as interceptações, tais como, as características
cinemáticas do objeto móvel e aspectos associados à experiência prática.
Ainda não está claro como o controle visuo-motor é modificado em função de
diferentes mudanças na velocidade do objeto móvel e nem a influência da
prática nos mecanismos visuais e motores durante a interceptação. Possíveis

28
efeitos desses fatores no controle visuo-motor durante a interceptação serão
abordados nas duas próximas seções.
2.3 O padrão de velocidade do objeto móvel e o controle da interceptação
O controle visuo-motor em ações de interceptação é afetado por
vários fatores perceptivos associados ao objeto móvel (BRENNER; SMEETS,
2015), dentre eles a sua posição (BROUWER; BRENNER; SMEETS, 2002;
WIJDENES; BRENNER; SMEETS, 2014), a sua distância da zona de contato
(DUBROWSKI; CARNAHAN, 2001; WIJDENES; BRENNER; SMEETS, 2013) e
a sua velocidade (BRENNER; SMEETS; DE LUSSANET, 1998; BROUWER;
BRENNER; SMEETS, 2000; DUBROWSKI; CARNAHAN, 2001). Deve ser
considerado que as interceptações muitas vezes são executadas em contextos
dinâmicos que tem como característica marcante as variações ambientais. Tais
variações frequentemente ocorrem em aspectos cinemáticos do objeto móvel,
como por exemplo, em sua velocidade. É comum em modalidades esportivas
como o tênis, os jogadores realizarem as rebatidas para interceptar bolas que
modificam constantemente a sua aceleração. Isso implica assumir que o
controle visuo-motor deve ser adequadamente ajustado em função da
velocidade ou aceleração do objeto móvel para garantir a precisão do
desempenho.
Na literatura há um considerável conjunto de evidências
demonstrando a que o controle da interceptação é regulado em consonância
com a velocidade do objeto móvel (BRENNER; SMEETS; DE LUSSANET,
1998; DUBROWSKI; CARNAHAN, 2001; TRESILIAN; OLIVER; CARROLL,
2003). Por exemplo, Tresilian e seus colegas têm consistentemente
demonstrado que os movimentos de interceptação são modulados pela
velocidade do alvo. Eles têm identificado uma relação entre a duração da
interceptação e a velocidade de deslocamento do alvo: interceptações com
durações breves e rápidas são observadas para alvos que se movem em alta
velocidade (TRESILIAN; LONERGAN, 2002; TRESILIAN; OLIVER; CARROLL,
2003; TRESILIAN; PLOOY, 2006). Resultados semelhantes também são
observados em interceptações envolvendo alvos móveis em velocidade
reduzida, porém com uma relação inversa: menores picos de velocidade,
29
menores tempos de movimento, iniciação tardia do movimento, além de maior
tempo para alcançar o pico de velocidade são observados em interceptações
com alvos móveis em baixa velocidade (DUBROWSKI; CARNAHAN, 2001).
Partindo do pressuposto que o controle da interceptação deve ser ajustado
precisamente para adequar à velocidade do objeto em deslocamento, uma
questão que pode ser levantada é se o controle visuo-motor na interceptação é
modificado em função das características do padrão de velocidade do objeto
móvel.
O deslocamento do objeto móvel para a zona de contato pode
ocorrer com diferentes padrões de velocidade, tais como, movendo-se em
velocidade constante ou variável. Quando o deslocamento ocorre sem qualquer
alteração da velocidade ao longo do percurso até a zona de contato assume-se
que o alvo se move com velocidade constante. Já quando a velocidade é
variável, o objeto modifica a sua velocidade no decorrer do percurso em função
da aceleração ou desaceleração do mesmo. Esses padrões distintos de
velocidade do objeto móvel parecem ter diferentes implicações no
planejamento e regulação da interceptação (LEE; PORT; GEORGOPOULOS,
1997; DUBROWSKI; LAM; CARNAHAN, 2000; DUBROWSKI; CARNAHAN,
2001; TEIXEIRA et al., 2006a).
Lee, Port e Georgopoulos (1997) verificaram que nas interceptações
direcionadas a alvos com velocidade constante ou aceleração constante, a
análise cinemática da mão exibiu vários picos até o momento da interceptação.
Esse padrão de comportamento sugere o uso do feedback corrente, já que os
submovimentos discretos corretivos podem estar associados à extração
contínua de informação visual sobre o alvo como forma de garantir a
coordenação precisa do movimento da mão com o alvo. Tais resultados
sugerem que o controle das ações interceptativas envolvendo alvos com
velocidade constante pode ser baseado na aquisição contínua de informação
visual sobre a cinemática do objeto móvel, consistente com o controle via
feedback corrente.
Porém, os resultados do estudo de Dubrowski e Carnahan (2001)
contrariam essa visão. Nesse estudo foram conduzidos três experimentos para
investigar e descrever o controle dos movimentos de interceptação diante de
alvos que se deslocavam com velocidade constante. Os participantes usaram o

30
cursor do mouse para acertar alvos que se moviam com diferentes velocidades
na tela do computador para uma zona de contato pré-estabelecida. No
experimento 1, foram manipuladas 6 velocidades do alvo: 40, 49, 61, 82, 124, e
256 mm/s que resultaram em diferentes tempos de deslocamento do alvo até a
zona de contato (1484, 1234, 984, 734, 484 e 234 ms), respectivamente. A
ordem de interceptação nas diferentes velocidades foi randomizada entre os
sujeitos. Os resultados indicaram que a regulação do movimento da
interceptação foi diretamente associada à velocidade de deslocamento do alvo.
À medida que a velocidade do alvo aumentava, maiores picos de velocidade da
mão e menores tempos de movimento, início mais rápido dos movimentos e
redução no tempo para o pico de velocidade foram observados. Resultados
semelhantes também foram observados no experimento 2 que envolveu a
manipulação da distância da interceptação e outras velocidades do alvo. Com
base nos resultados dos experimentos 1 e 2, os autores hipotetizaram que os
participantes poderiam ter usado o feedback sensorial para acertar os alvos
com velocidade constante e reduzida, similarmente ao que ocorre em tarefas
de rastreamento. Para testar essa hipótese, o experimento 3 foi conduzido com
o objetivo de comparar a cinemática da interceptação com uma tarefa de
rastreamento. Se os mecanismos entre as tarefas fossem similares, eles
esperavam encontrar um perfil cinemático semelhante entre as duas. Apesar
de algumas semelhanças gerais, foram observadas diferenças em vários
aspectos do controle. Os autores sugeriram que a programação e a regulação
parecem ser diferentes entre as ações de interceptação e rastreamento. Eles
propuseram que nas interceptações de objetos com velocidade reduzida e
constante, a regulação do movimento pode não ser baseada exclusivamente
em feedback corrente, mas também em controle preditivo. Tais suposições são
consistentes com a combinação do controle preditivo e feedback, e ainda,
sugerem a possibilidade de correções dos comandos motores gerados pelos
modelos inversos através de feedback sensorial quando não há restrições
temporais para o seu processamento.
Já em relação às interceptações de alvos com velocidade variável,
Dubrowski, Lam e Carnahan (2000) encontraram resultados que sugerem o
uso de controle preditivo. Foram conduzidos dois experimentos cujos
participantes tinham que interceptar alvos na tela do computador que mudavam

31
a velocidade durante o trajeto para a zona de contato. O alvo atingia o seu pico
de velocidade durante o primeiro terço, segundo terço ou o último terço do
deslocamento. No experimento 1, os participantes visualizaram o alvo nos
primeiros 316, 633, 950, 1267 ou 1583 ms do deslocamento antes de
desaparecer. No experimento 2, o alvo não podia ser visualizado na parte
inicial do seu percurso, mas os participantes puderam visualizá-lo nos últimos
316, 633, 950, 1267 ou 1583 ms antes da interceptação. O tempo total de
deslocamento foi o mesmo nas diferentes condições (1583 ms). Os resultados
indicaram que a visualização de períodos curtos da fase inicial do
deslocamento (316 ms) propiciou desempenho similar aos longos períodos de
visualização do alvo. Não houve diferença no desempenho entre as três
condições de velocidade variável do alvo quando a visão na fase final do
deslocamento foi disponibilizada (950, 1267 e 1583 ms). Assim, parece que a
visão da parte final da trajetória não foi necessária para o controle da
interceptação de alvos com velocidade variável. Tais resultados apontam para
o controle preditivo na regulação da interceptação de alvos com velocidade
variável. Ou seja, a participação de modelos internos capazes de guiar
precisamente a interceptação (ZAGO et al., 2005, 2009).
Teixeira et al. (2006a) investigaram o controle da interceptação
diante de objetos móveis com velocidade variada. A tarefa consistiu em acertar
um alvo móvel na tela do monitor com o cursor guiado por um manipulador.
Três condições de velocidade do alvo foram criadas: constante, reduzida,
aumentada. Na condição constante a velocidade foi de 8 cm/s e tempo total de
deslocamento 1500 ms. Nas condições de velocidade variada, a velocidade de
8cm/s foi subitamente aumentada ou reduzida em 50% da velocidade inicial (12
cm/s e 4 cm/s, respectivamente). As mudanças de velocidade ocorreram
quando restavam 800 ms para o alvo chegar na zona de interceptação. Os
pesquisadores manipularam a informação visual sobre o deslocamento do alvo
através de 4 situações experimentais: visão total, oclusão nos 200, 400 ou 600
ms que antecederam o momento da interceptação. Os resultados evidenciaram
que a oclusão visual não afetou a velocidade dos movimentos ou precisão
temporal, mas influenciaram a variabilidade. Os resultados revelaram que a
oclusão entre 400 e 600 ms antes do contato resultou em maior variabilidade
do erro em relação à visão total e oclusão em 200 ms. Parece que a ausência

32
de visão em momentos precedentes à interceptação reduziu os ajustes finos da
interceptação, que na visão total são realizados com base em feedback visual.
Os autores concluíram que esses achados suportam a ideia de que a
interceptação a alvos com velocidade variada é baseada em um modelo
interno, formado na porção inicial que precede a mudança de velocidade e que
pode ser atualizado por informação visual adicional sobre o deslocamento do
alvo. Em outras palavras, os resultados foram interpretados em favor de uma
possível combinação de controle preditivo e prospetivo nas interceptações a
alvos com velocidade variável.
Em suma, os resultados dos estudos acima não possibilitam uma
clareza sobre quais formas de controle são usadas na interceptação de alvos
com velocidade constante ou variada. Em situações que envolvem objetos com
velocidade constante, há resultados apontando para a regulação através de
feedback sensorial (LEE; PORT; GEORGOPOULOS, 1997), assim como para
a combinação de controle preditivo e feedback corrente (DUBROWSKI;
CARNAHAN, 2001). Já nas situações envolvendo objetos com velocidade
variável, são encontradas evidências de controle preditivo (DUBROWSKI; LAM;
CARNAHAN, 2000) e também da combinação de controle preditivo e feedback
corrente (TEIXEIRA et al., 2006a). Alguns pontos podem ser levantados, pois
parecem ter implicações importantes na busca de evidências mais conclusivas
a esse respeito.
Primeiramente, deve-se ressaltar que esses estudos não incluíram
medidas que permitissem fazer inferências mais robustas sobre como a
informação visual da cinemática do objeto móvel foi adquirida e usada para
guiar as interceptações (ex. análise das estratégias de busca visual). A análise
em conjunto do comportamento visual e do controle motor possibilita identificar
como o controle visuo-motor é influenciado pela cinemática do objeto móvel, e
assim, propiciar o entendimento dos mecanismos de controle envolvidos na
interceptação.
Além disso, não foram analisados nos estudos supracitados se o
controle da interceptação é definido somente pelo padrão de velocidade do
objeto móvel ou se elas também podem ser modificadas em função do tempo
total de deslocamento do objeto. O tempo disponível para a regulação dos
movimentos é considerado crucial para a regulação das interceptações,

33
especialmente diante de alvos com velocidade variável (TEIXEIRA; LIMA;
FRANZONI, 2005; TEIXEIRA et al., 2006b). É possível então supor que o
controle visuo-motor na interceptação a alvos móveis com velocidade
constante e variada seja passível de modificação em função do tempo total de
deslocamento. No presente estudo, os aspectos acima serão considerados
com o intuito de buscar evidências sobre como o controle visuo-motor na
interceptação é modificado em função do perfil de velocidade do objeto móvel.
Como o controle visuo-motor da interceptação em diferentes condições de
velocidade do objeto móvel pode depender do nível de aprendizagem do
executante, esse aspecto também será explorado neste estudo. Na próxima
seção serão apresentados os subsídios teóricos para possíveis influências do
nível de experiência no controle visuo-motor.
2.4 Efeitos do nível de estabilização do desempenho no controle da
interceptação
É consenso na literatura que a experiência prática auxilia a aquisição
de competências sensório-motoras que garantem o sucesso no desempenho
de habilidades motoras (LEE; SWANSON; HALL, 1991; CORRÊA et al., 2007;
UGRINOWITSCH; BENDA, 2011), pois através da prática acontece a
exploração de soluções para os problemas motores decorrentes da interação
entre o ser humano e o ambiente (TANI, 1999). Isto porque a prática
representa um processo de esforço consciente de organização, execução,
avaliação e modificação das habilidades motoras a cada tentativa (TANI, 1999;
BENDA, 2006; UGRINOWITSCH; BENDA, 2011). O envolvimento nesse
processo conduz a mudanças internas relativamente permanentes e promovem
melhora no desempenho motor (ROSE, 1997; SCHMIDT; WRISBERG, 2010).
Em outras palavras, a prática desencadeia uma sucessão de mudanças
comportamentais, na qual ocorre a passagem de um estado desorganizado,
com desempenho ineficiente e instável para um estado organizado, eficiente e
com desempenho estável (BENDA, 2006).
As primeiras tentativas de prática são marcadas pelo elevado
número de erros, ineficiência e instabilidade, tanto no padrão da habilidade
quanto no resultado da ação (TANI, 2000, 2005; BENDA, 2006; TANI et al.,

34
2014). Todavia, com o avanço da prática, a organização e a regulação dos
movimentos são aprimoradas, as interações entre os componentes da
habilidade são fortalecidas (padronização espaço-temporal) e ocorre a
consolidação de um conjunto de soluções adequadas para a tarefa (TANI,
2005; TANI et al., 2014), o que possibilita a reprodutibilidade de performances
com precisão e consistência. A coexistência de precisão e consistência é vista
como indicativo da ocorrência de um fenômeno comportamental denominado
de estabilização do desempenho (TANI, 2000, 2005; TANI et al., 2014).
A estabilização do desempenho tem sido proposta como uma etapa
do processo cíclico e contínuo de aquisição de competências (TANI et al.,
2014; CORRÊA et al., 2015). Nessa perspectiva, a estabilização do
desempenho parece refletir o estado funcional do sistema motor que denota as
competências adquiridas ao longo da prática (UGRINOWITSCH, 2003; TANI,
2005; TANI et al., 2014). De fato, a prática insuficiente para alcançar a
estabilização do desempenho pode não propiciar as competências necessárias
à adaptação das interceptações diante de perturbações (UGRINOWITSCH,
2003; UGRINOWITSCH et al., 2011). Por outro lado, a continuidade da prática
até níveis avançados de estabilização pode promover aquisição de
competências adicionais capazes de promover desempenho superior. Tem sido
então questionado, se o nível de estabilização do desempenho alcançado
durante a prática é capaz de influenciar na capacidade superar demandas
causadas por mudanças ambientais (ex. variações na velocidade do objeto
móvel durante a interceptação).
Na maioria dos estudos sobre essa temática, o nível de estabilização
do desempenho tem sido definido experimentalmente pelo estabelecimento de
critérios de desempenho (UGRINOWITSCH, 2003; UGRINOWITSCH et al.,
2011, 2014; FONSECA et al., 2012). Os critérios de desempenho implicam na
prática da tarefa até que determinado número de tentativas corretas seja
executado consecutivamente (conciliando-se precisão, consistência e
flexibildiade). Três níveis de estabilização do desempenho têm sido
manipulados: 1) pré-estabilização, que tem como critério a prática da tarefa em
quantidade insuficiente para alcançar a estabilidade; 2) estabilização, quando a
prática possibilita alcançar a estabilidade do desempenho; 3)
superestabilização, quando a tarefa é praticada em quantidade suficiente para
35
reproduzir a condição de estabilidade repetidas vezes (UGRINOWITSCH,
2003; PROFETA, 2009; UGRINOWITSCH et al., 2011, 2014; FONSECA et al.,
2012), mesmo diante de execuções que apresentam variabilidade no
desempenho. Essa variabilidade presente após a estabilização do desempenho
pode ter papel funcional importante que garante a flexibilidade do
comportamento, ou seja, propicia a capacidade de adaptação diante de
perturbações (BENDA, 2001; CORRÊA et al., 2015).
Os estudos realizados sob esse paradigma são consistentes em
demonstrar que o nível de estabilização do desempenho alcançado na prática
afeta o desempenho e o controle da interceptação inclusive diante mudanças
de velocidade do objeto móvel (COUTO, 2012; FONSECA et al., 2012;
UGRINOWITSCH et al., 2014). Ugrinowitsch e colaboradores têm conduzido
uma série de experimentos para investigar essa temática (UGRINOWITSCH,
2003; UGRINOWITSCH et al., 2011, 2014; FONSECA et al., 2012). No estudo
de Ugrinowitsch et al. (2014), três níveis de estabilização do desempenho
foram investigados: pré-estabilização, estabilização e superestabilização. Na
primeira fase do experimento, cada grupo praticou uma série de interceptações
de acordo com critério de desempenho pré-estabelecido para cada nível de
estabilização. Na segunda fase do experimento, foi estabelecida uma nova
velocidade de deslocamento do estímulo visual que simulava o objeto móvel a
ser interceptado, mas de maneira constante e previsível. Isso possibilitava que
os ajustes fossem planejados previamente ao início de cada execução. Os
resultados indicaram que os participantes do nível pré-estabilização
demoraram mais tempo que os níveis estabilização e superestabilização para
ajustar os movimentos adequadamente e assim garantir interceptações
precisas diante das mudanças de velocidade. Não foram verificadas diferenças
na interceptação entre os níveis estabilização e superestabilização.
Em conjunto, os resultados acima sugerem que alcançar a
estabilização do desempenho durante a prática favorece a organização da
interceptação quando ocorrem mudanças na velocidade do objeto móvel. A
natureza previsível das mudanças de velocidade do objeto desses dois estudos
pode ter contribuído para a ausência de diferença entre os níveis de
estabilização. Isto porque em outros estudos com o mesmo paradigma
experimental, mas envolvendo interceptações com objetos móveis com

36
velocidade variável e de natureza imprevisível, o nível superestabilização do
desempenho promoveu melhor desempenho na interceptação em comparação
ao nível estabilização (COUTO, 2012; FONSECA et al., 2012). Esses achados
indicam que a aquisição de competências sensório-motora continua após a
estabilização do desempenho. Dessa forma é plausível supor que o nível de
estabilização do desempenho pode afetar o controle da interceptação sob os
diferentes padrões de mudanças na velocidade do objeto móvel em situações
de imprevisibilidade. Suportes a essa suposição são encontrados no estudo de
Couto (2012).
Especificamente em relação à interceptação, somente um estudo foi
encontrado na literatura que investigou essa temática (COUTO, 2012). Os
resultados mostraram que a superestabilização do desempenho propiciou
melhor desempenho na interceptação e maior capacidade de ajustes dos
movimentos diante de objetos móveis que modificavam a velocidade após o
movimento ser iniciado em relação ao nível de estabilização. O desempenho
superior do nível superestabilização foi associado ao uso predominantemente
do feedback corrente. Como este tipo de tarefa depende do controle visuo-
motor, que altera em função de diferentes características dos estímulos visuais,
o desempenho deve sofrer efeito do comportamento visual e da estratégia de
controle.
Apesar dos indicativos na literatura que apontam para os possíveis
efeitos do nível de estabilização do desempenho sobre o controle durante a
interceptação, algumas questões ainda não estão totalmente esclarecidas,
dentre elas: 1) como o nível de estabilização do desempenho afeta o controle
visuo-motor durante a interceptação a objetos móveis? 2) as estratégias de
controle da interceptação frente a objetos móveis com diferentes padrões de
velocidade são modificadas em função do nível estabilização do desempenho
da mesma maneira?

37
3. OBJETIVOS
3.1 Objetivo Geral
Investigar a influência do nível de estabilização do desempenho e do
padrão de velocidade do objeto móvel sobre o controle visuo-motor da
interceptação.
3.2 Objetivos Específicos
1) Verificar a influência do nível de estabilização do desempenho sobre o
controle preditivo e feedback corrente da interceptação diante de objetos
móveis que se deslocam em velocidade constante.
2) Verificar a influência do nível de estabilização do desempenho sobre o
controle preditivo e feedback corrente da interceptação a objetos com
velocidade variável, mas sem alteração no tempo total de deslocamento.
3) Verificar a influência do nível de estabilização do desempenho sobre o
controle preditivo e feedback corrente da interceptação a objetos com
velocidade variável, mas com modificação no tempo total de deslocamento.

38
4. HIPÓTESES DE ESTUDO
Hipótese 1: A superestabilização do desempenho resultará em melhor
desempenho e maior eficiência no controle preditivo e feedback corrente das
interceptações em relação à estabilização do desempenho, independente do
padrão de velocidade do objeto móvel.
Hipótese 2: O controle visuo-motor será diferente durante as interceptações
diante de objetos com velocidade constante e variável. As interceptações
envolvendo objetos com velocidade constante serão reguladas
predominantemente a partir do feedback corrente e as interceptações a objetos
que se movem em velocidade variável serão reguladas pela combinação de
estratégias de controle preditivo e feedback corrente.

39
5. EXPERIMENTO 1
O experimento 1 foi conduzido para investigar os efeitos do nível
de estabilização do desempenho sobre o controle visuo-motor durante a
interceptação a objetos móveis que se deslocam em velocidade constante. E
ainda, analisar como o controle visuo-motor da interceptação é organizado
diante de objetos móveis com velocidade constante.
5.1 Método
5.1.1 Amostra
A amostra foi composta por 34 universitários de ambos os sexos
(masculino n=17; feminino n=17), destros, com faixa etária entre 18 e 35 anos
(média 21,3 ± 2,89) e inexperientes na tarefa. Todos os participantes
declararam ter visão normal ou corrigida e assinaram o termo de
consentimento livre e esclarecido. Todos os procedimentos foram aprovados
pelo Comitê de Ética em Pesquisa da Universidade Federal de Minas Gerais -
COEP/UFMG (CAAE: 42616515.0.0000.5149 - Parecer: 1.018.866).
5.1.2 Instrumentos e tarefa
Foi utilizado um aparelho de timing coincidente de tarefas complexas
similar ao desenvolvido por Correa e Tani (2004) e previamente utilizado em
outros estudos (FONSECA et al., 2012; LEITE, 2014; TANI et al., 2014). O
aparelho é composto por uma canaleta com diodos luminosos e uma mesa de
resposta com sensores infravermelhos (FIGURA 1). A canaleta mede 1,83 m
de comprimento e possui 97 diodos luminosos (1 amarelo e 96 vermelhos). A
canaleta ficava posicionada à frente do executante com uma inclinação de 30º
em relação ao plano horizontal. A mesa de resposta com dimensões de 1,50 m
de largura x 0,20 de altura x 1,00 m de profundidade possui 6 orifícios
quadrados (0,11 m x 0,11 m) com sensores infravermelhos. Esses sensores
são capazes de registar o tempo de reação, os tempos parciais dos
movimentos entre os sensores e o erro temporal referente ao toque no último
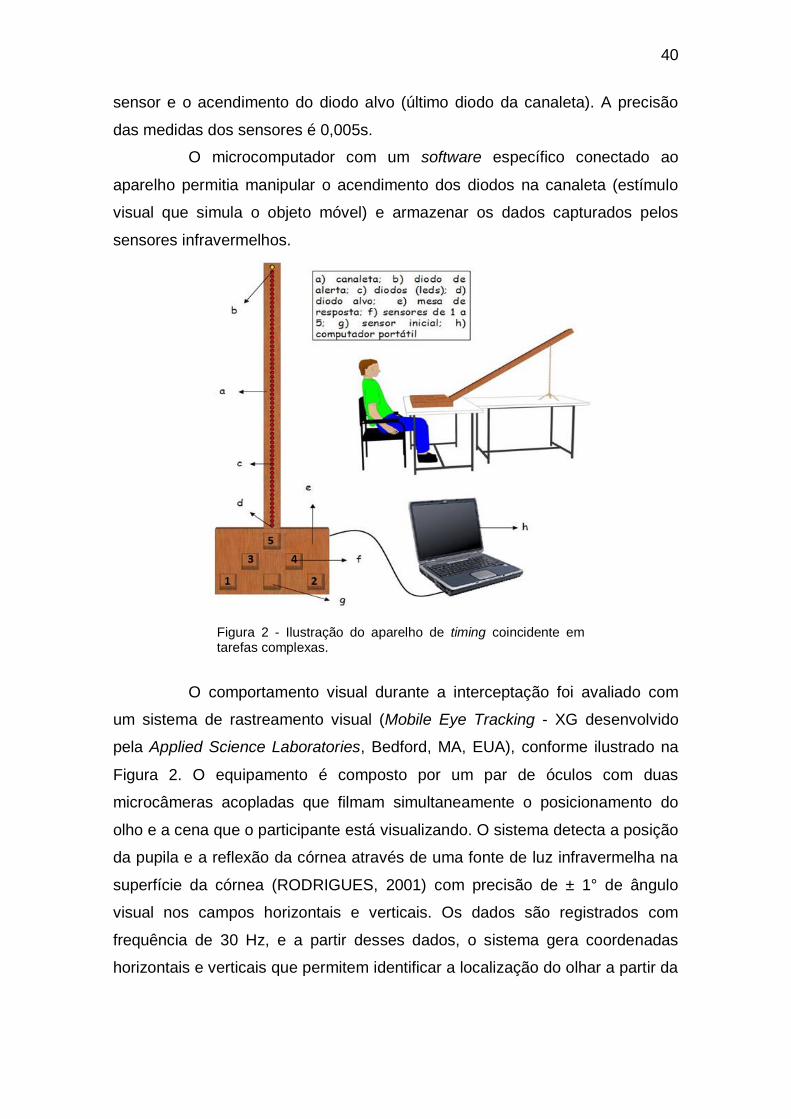
40
sensor e o acendimento do diodo alvo (último diodo da canaleta). A precisão
das medidas dos sensores é 0,005s.
O microcomputador com um software específico conectado ao
aparelho permitia manipular o acendimento dos diodos na canaleta (estímulo
visual que simula o objeto móvel) e armazenar os dados capturados pelos
sensores infravermelhos.
Figura 2 - Ilustração do aparelho de timing coincidente em tarefas complexas.
O comportamento visual durante a interceptação foi avaliado com
um sistema de rastreamento visual (Mobile Eye Tracking - XG desenvolvido
pela Applied Science Laboratories, Bedford, MA, EUA), conforme ilustrado na
Figura 2. O equipamento é composto por um par de óculos com duas
microcâmeras acopladas que filmam simultaneamente o posicionamento do
olho e a cena que o participante está visualizando. O sistema detecta a posição
da pupila e a reflexão da córnea através de uma fonte de luz infravermelha na
superfície da córnea (RODRIGUES, 2001) com precisão de ± 1° de ângulo
visual nos campos horizontais e verticais. Os dados são registrados com
frequência de 30 Hz, e a partir desses dados, o sistema gera coordenadas
horizontais e verticais que permitem identificar a localização do olhar a partir da
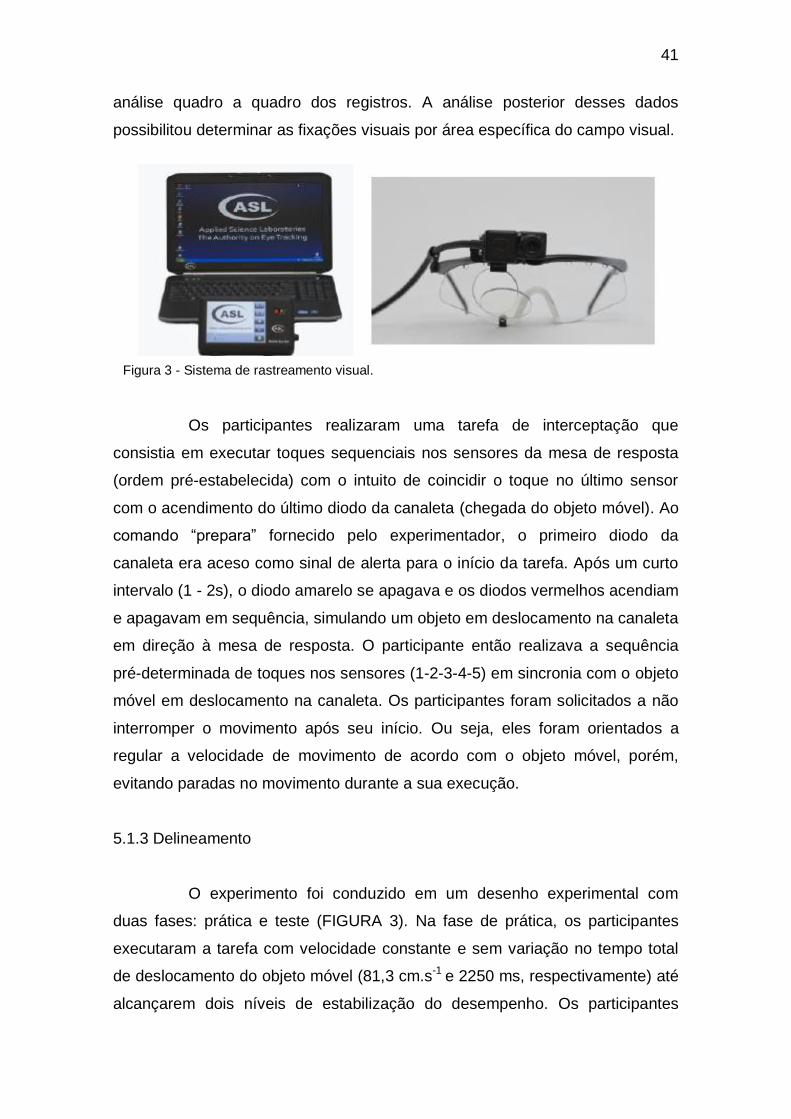
41
análise quadro a quadro dos registros. A análise posterior desses dados
possibilitou determinar as fixações visuais por área específica do campo visual.
Os participantes realizaram uma tarefa de interceptação que
consistia em executar toques sequenciais nos sensores da mesa de resposta
(ordem pré-estabelecida) com o intuito de coincidir o toque no último sensor
com o acendimento do último diodo da canaleta (chegada do objeto móvel). Ao
comando “prepara” fornecido pelo experimentador, o primeiro diodo da
canaleta era aceso como sinal de alerta para o início da tarefa. Após um curto
intervalo (1 - 2s), o diodo amarelo se apagava e os diodos vermelhos acendiam
e apagavam em sequência, simulando um objeto em deslocamento na canaleta
em direção à mesa de resposta. O participante então realizava a sequência
pré-determinada de toques nos sensores (1-2-3-4-5) em sincronia com o objeto
móvel em deslocamento na canaleta. Os participantes foram solicitados a não
interromper o movimento após seu início. Ou seja, eles foram orientados a
regular a velocidade de movimento de acordo com o objeto móvel, porém,
evitando paradas no movimento durante a sua execução.
5.1.3 Delineamento
O experimento foi conduzido em um desenho experimental com
duas fases: prática e teste (FIGURA 3). Na fase de prática, os participantes
executaram a tarefa com velocidade constante e sem variação no tempo total
de deslocamento do objeto móvel (81,3 cm.s-1 e 2250 ms, respectivamente) até
alcançarem dois níveis de estabilização do desempenho. Os participantes
Figura 3 - Sistema de rastreamento visual.

42
foram divididos aleatoriamente em dois grupos experimentais (n=17): Grupo
Estabilização (GE) e Grupo Superestabilização (GS). Os níveis de
estabilização do desempenho foram definidos através de dois critérios de
desempenho distintos. O critério de desempenho estipulado para o GE foi
praticar a tarefa até realizar um bloco de três tentativas consecutivas com erro
absoluto menor ou igual a 30 ms. Já o critério de desempenho definido para o
GS foi executar a tarefa até alcançar seis blocos de três tentativas
consecutivas com erro absoluto menor ou igual a 30 ms. Os critérios de
desempenho foram criados com o objetivo de diferenciar os níveis de
estabilização do desempenho e foram previamente testados em outras
pesquisas com a mesma tarefa (UGRINOWITSCH, 2003; FONSECA et al.,
2012).
O número máximo de tentativas para alcançar o critério de
desempenho do GE foi de 150 tentativas. Os participantes do GS tiveram o
mesmo número de tentativas para alcançar o primeiro bloco do critério de
desempenho. Após alcançarem o primeiro bloco, eles tiveram mais 200
tentativas para alcançar os cinco blocos restantes. Os participantes que não
alcançaram os critérios definidos para seus respectivos grupos não foram
incluídos nas análises descritivas e estatísticas.
Aproximadamente dez minutos após o término da fase de prática foi
conduzida a fase de teste para verificar o efeito da variável independente
manipulada na primeira fase no controle visual e na estratégia de controle com
diferentes velocidades constantes. Nessa fase do experimento, os participantes
realizaram interceptações com constantes mudanças na velocidade de
deslocamento do objeto móvel (FIGURA 3). Em tentativas pseudoaleatórias,
ocorreram duas variações na velocidade do estímulo visual: aumento ou
redução em sua velocidade em comparação à fase de prática. Nas duas
condições, o deslocamento do objeto móvel ocorreu sempre em velocidade
constante.
Na condição de velocidade aumentada (AUM), a velocidade do
objeto móvel foi maior em comparação à fase de prática e o tempo total de
deslocamento menor (91,50 cm.s-1 e 2000 ms, respectivamente). Na condição
de velocidade reduzida (RED), a velocidade do objeto móvel foi menor e o
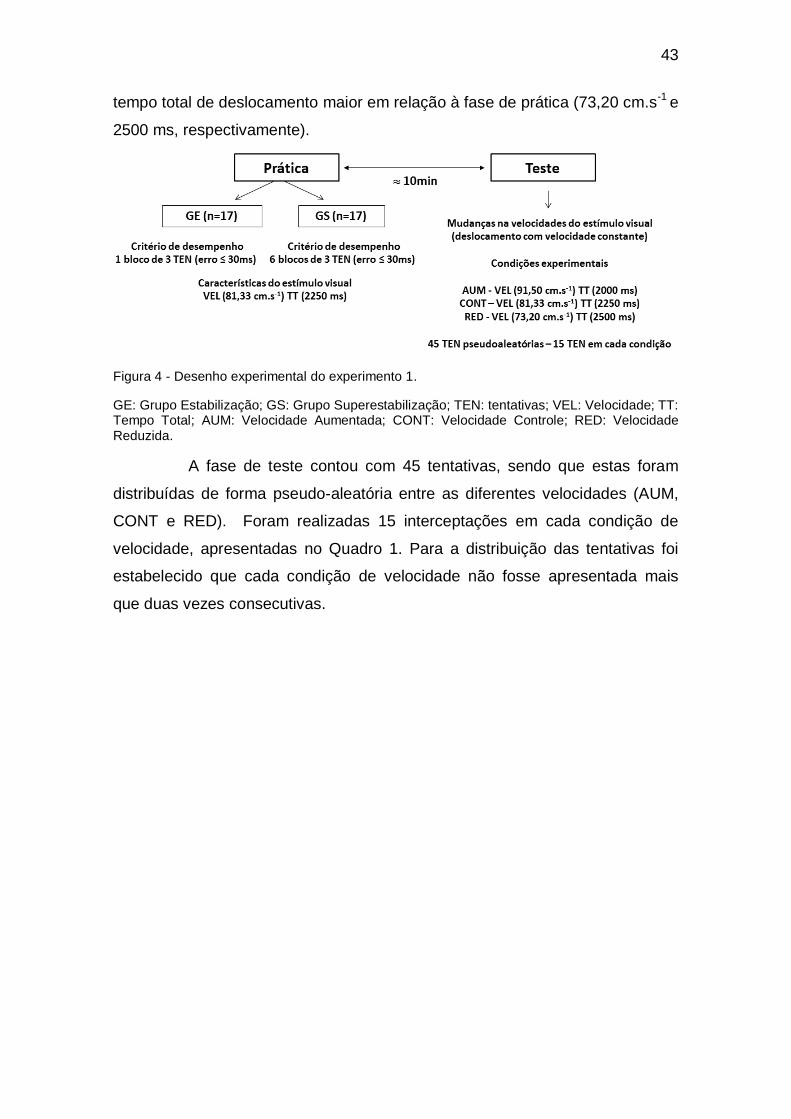
43
tempo total de deslocamento maior em relação à fase de prática (73,20 cm.s-1 e
2500 ms, respectivamente).
Figura 4 - Desenho experimental do experimento 1.
GE: Grupo Estabilização; GS: Grupo Superestabilização; TEN: tentativas; VEL: Velocidade; TT: Tempo Total; AUM: Velocidade Aumentada; CONT: Velocidade Controle; RED: Velocidade Reduzida.
A fase de teste contou com 45 tentativas, sendo que estas foram
distribuídas de forma pseudo-aleatória entre as diferentes velocidades (AUM,
CONT e RED). Foram realizadas 15 interceptações em cada condição de
velocidade, apresentadas no Quadro 1. Para a distribuição das tentativas foi
estabelecido que cada condição de velocidade não fosse apresentada mais
que duas vezes consecutivas.

44
Quadro 1 - Distribuição das diferentes velocidades do objeto móvel na fase de teste do experimento 1.
Velocidade Aumentada (AUM); Velocidade Controle (CONT) e Velocidade Reduzida (RED). AUM – Velocidade (91,5 cm.s
-1) e tempo total (2000 ms). CONT – Velocidade (81,3 cm.s
-1) e
tempo total (2250ms); RED – Velocidade (73,2 cm.s-1
) e tempo total (2500ms).
5.1.4 Procedimentos
A coleta de dados foi realizada individualmente em sala reservada
sem interferência externa e com luminosidade controlada. Os participantes
foram recebidos pelo experimentador na sala de coleta de dados e
acomodados confortavelmente. Em seguida, receberam informações sobre o
caráter da pesquisa e os procedimentos de coleta de dados. Após a assinatura
do Termo de Consentimento Livre e Esclarecido (TCLE), os mesmos foram
acomodados em uma cadeira em frente ao aparelho para os preparativos finais
para o início da coleta.
Foram fornecidas informações sobre o sistema de rastreamento
visual e o equipamento foi confortavelmente ajustado e o procedimento de
calibração realizado junto aos participantes. A calibração do equipamento foi
realizada utilizando nove pontos posicionados ao longo da canaleta e campo
visual, de modo que os participantes pudessem visualizar esses pontos sem a
necessidade de movimentar a cabeça. A coleta só foi iniciada após o
esclarecimento de todas as dúvidas em relação ao experimento e à tarefa. A

45
calibração do sistema de rastreamento visual foi conferida periodicamente
como forma de garantir a precisão das medidas.
Após todas as tentativas do experimento, os participantes receberam
conhecimento de resultados (CR) qualitativo verbal da seguinte maneira sobre
a precisão das interceptações: erro entre 0 e 30 ms “Ok, você acertou!”; erro
entre 31 e 50 ms “Você foi um pouco adiantado!” ou “Você foi um pouco
atrasado!”; erro entre 51 e 100 ms o CR foi “Você foi adiantado!”, ou “Você foi
atrasado!” e erro maior que 100 ms o CR foi “Você foi muito adiantado!”, ou
“Você foi muito atrasado!”. Foi atribuído “adiantado” quando o toque no último
sensor foi anterior ao acendimento do diodo alvo e “atrasado” quando o toque
no último sensor foi posterior ao acendimento do diodo alvo.
5.1.5 Análise dos dados
Foram utilizadas como variáveis dependentes, medidas de
desempenho, controle motor e comportamento visual, conforme descritas a
seguir:
Medidas de desempenho:
› Erro Constante (EC): indica a precisão temporal do desempenho
e a direção do erro, ou seja, representado pela diferença entre o
toque no último sensor e o acendimento do último diodo, além de
indicar se a resposta foi adiantada ou atrasada.
› Erro variável (EV): representa a consistência do desempenho
durante a execução da tarefa, indicado pela variabilidade do
comportamento obtida pelo desvio padrão do EC.
Medidas de controle da interceptação:
› Tempos parciais dos componentes (Tpar): se refere à duração de
cada sub-movimento que constitui a ação de interceptação além
do tempo de reação (TR). O TR foi considerado o período de
tempo entre apagar o diodo de alerta e a perda de contato com o
sensor inicial e os Tpar dos sub-movimentos foram definidos pelo
intervalo de tempo do toque entre cada sensor da mesa resposta.

46
Medidas de comportamento visual:
› Número de fixações visuais por local da tarefa: quantidade de
fixações visuais (permanência dos olhos relativamente estáticos
por um tempo superior a 100 ms) em cada área específica do
campo visual durante a interceptação.
Para definir a classificação da localização das fixações visuais, o
campo visual foi dividido em áreas específicas da tarefa: primeiro terço da
canaleta (1), segundo terço da canaleta (2), terceiro terço da canaleta (3),
mesa de resposta (4) e espaço (5), conforme ilustrado na figura 4.
O software de análise dos resultados do sistema foi programado
para identificar as fixações visuais a cada tentativa, definida pelo intervalo de
tempo compreendido entre o apagar do primeiro diodo e o acendimento do
último diodo. Após as identificações das fixações nos vídeos (quadro de início e
quadro de fim) em cada tentativa pelo software, foi conduzida a classificação
da sua localização por área da tarefa.
O sistema de rastreamento visual indica a localização do olhar nos
vídeos através de um cursor. Portanto, a partir de uma análise quadro a quadro
foi possível identificar a localização espacial das fixações identificadas pelo
software do sistema de rastreamento. Marcadores reflexivos foram
posicionados na canaleta para demarcar as áreas específicas da tarefa
(FIGURA 4) e facilitar a classificação da localização das fixações. Para efeitos
de avaliação da localização das fixações durante a execução da tentativa,
foram analisados os quadros compreendidos no intervalo de tempo entre o
apagar do primeiro diodo e acendimento do último diodo. Correlações intra e
inter-avaliadores foram realizadas para garantir a confiabilidade dos dados. Os
percentuais de concordância foram de 94% na avaliação intra-avaliadores e
91% na avaliação inter-avaliadores. Essas concordâncias foram superiores aos
valores preconizados para a validade dos dados que equivalem a 85%.

47
1) 1
o terço da canaleta; 2) 2
o terço da
canaleta; 3) 3o terço da canaleta; 4) mesa
de resposta; 5) espaço.
Os dados foram organizados em média e desvio-padrão, e em
seguida, foram testados os pressupostos de normalidade, homocedasticidade e
esfericidade. Os dados foram tratados através de análises de variância
(ANOVA), sendo que as comparações entre as variáveis e o número de
medidas repetidas foram definidas conforme a fase do experimento e propósito
da análise. Para detalhamento das diferenças e interações detectadas pelas
ANOVAS foi utilizado o post-hoc de Tukey.
Na fase de prática, foram realizadas comparações intergrupos no
início e final da prática. Para isso, foi conduzida uma ANOVA two-way (2
grupos x 2 blocos) para as medidas de desempenho (erro constante e erro
variável). Nas medidas de número de fixações por área da tarefa, as
comparações foram conduzidas através de uma ANOVA three-way (2 grupos x
2 blocos x 5 locais). Já para as medidas de tempos parciais dos componentes,
as comparações foram realizadas também através da ANOVA three-way (2
grupos x 2 blocos x 6 componentes).
Figura 5 - Representação das áreas para classificação da localização das fixações visuais.

48
Na fase de teste, foram realizadas comparações intergrupos nas
diferentes condições de velocidades. Nas medidas de desempenho (erro
constante e erro variável), as análises foram feitas através da ANOVA two-way
(2 grupos x 3 velocidades). As análises das medidas de número de fixações
por área da tarefa foram feitas através de uma ANOVA three-way (2 grupos x 3
velocidades x 5 locais). Outra ANOVA three-way (2 grupos x 3 velocidades x 6
componentes) foi conduzida para as medidas de tempos parciais dos
componentes. Foi adotado nível de significância de 5% (p≤0,05) em todas as
análises realizadas no estudo.
5.2 Resultados
Fase de Prática
Medidas de Desempenho
Os resultados referentes ao erro constante dos grupos durante a
fase de prática são apresentados no gráfico 1. Como já era esperado, houve
uma melhora da precisão de ambos os grupos do início para o fim da prática. A
ANOVA two-way (2 grupos x 2 blocos) detectou diferença significativa no fator
blocos [F(1, 32)=45,541, p=0,00001]. Os participantes apresentaram maior
precisão no último bloco da fase de prática em comparação ao primeiro bloco
(p<0,0001). Não foi detectada diferença significante entre os grupos [F(1,
32)=0,02342, p=0,87933] e nem interação significante [F(1, 32)=0,03583,
p=0,85105].

49
Gráfico 1 – Média do erro constante no primeiro e último bloco da fase de prática. * indica diferença entre os blocos (p<0,0001).
No gráfico 2 são apresentados os resultados referentes ao erro
variável dos grupos durante a fase de prática. Os dados evidenciaram um
aumento da consistência do desempenho dos grupos ao longo da prática. A
ANOVA two-way (2 grupos x 2 blocos) detectou diferença significativa entre os
blocos [F(1, 32)=68,382, p=0,00001]. A consistência do desempenho no último
bloco da prática foi maior em relação ao primeiro bloco (p<0,0001). Não foram
evidenciadas diferenças significantes intergrupos [F(1, 32)=0,02545,
p=0,87425] e nem interação significante entre grupos e blocos [F(1,
32)=0,02720, p=0,87005].
Gráfico 2 – Média do erro variável no primeiro e último bloco da fase de prática. * indica diferença entre os blocos (p<0,0001).
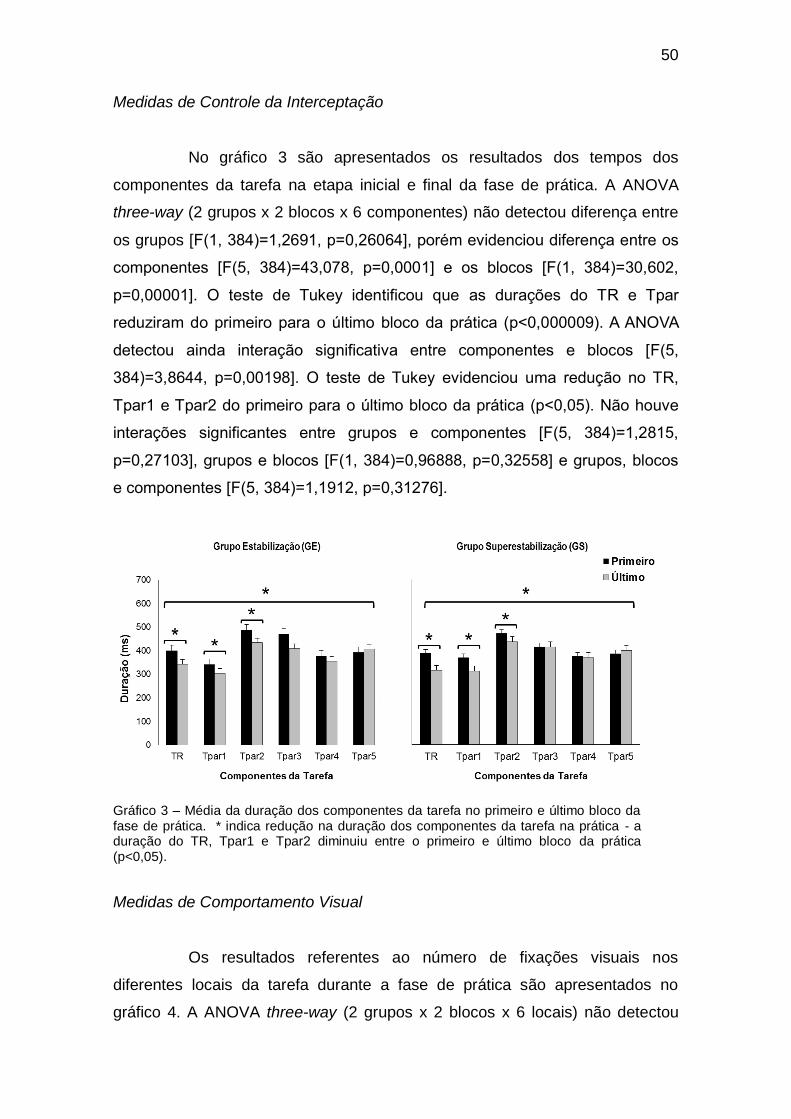
50
Medidas de Controle da Interceptação
No gráfico 3 são apresentados os resultados dos tempos dos
componentes da tarefa na etapa inicial e final da fase de prática. A ANOVA
three-way (2 grupos x 2 blocos x 6 componentes) não detectou diferença entre
os grupos [F(1, 384)=1,2691, p=0,26064], porém evidenciou diferença entre os
componentes [F(5, 384)=43,078, p=0,0001] e os blocos [F(1, 384)=30,602,
p=0,00001]. O teste de Tukey identificou que as durações do TR e Tpar
reduziram do primeiro para o último bloco da prática (p<0,000009). A ANOVA
detectou ainda interação significativa entre componentes e blocos [F(5,
384)=3,8644, p=0,00198]. O teste de Tukey evidenciou uma redução no TR,
Tpar1 e Tpar2 do primeiro para o último bloco da prática (p<0,05). Não houve
interações significantes entre grupos e componentes [F(5, 384)=1,2815,
p=0,27103], grupos e blocos [F(1, 384)=0,96888, p=0,32558] e grupos, blocos
e componentes [F(5, 384)=1,1912, p=0,31276].
Gráfico 3 – Média da duração dos componentes da tarefa no primeiro e último bloco da fase de prática. * indica redução na duração dos componentes da tarefa na prática - a duração do TR, Tpar1 e Tpar2 diminuiu entre o primeiro e último bloco da prática (p<0,05).
Medidas de Comportamento Visual
Os resultados referentes ao número de fixações visuais nos
diferentes locais da tarefa durante a fase de prática são apresentados no
gráfico 4. A ANOVA three-way (2 grupos x 2 blocos x 6 locais) não detectou

51
diferença entre os grupos [F(1, 320)=0,26395, p=0,60777] e blocos [F(1,
320)=0,69700, p=0,40442]. Contudo foi detectada diferença significativa no
número de fixações visuais nos diferentes locais da tarefa [F(4, 320)=37,833,
p=0,0001]. O teste de Tukey evidenciou redução no número de fixações na
parte inicial do deslocamento do objeto (primeiro terço da canaleta) e aumento
no trecho final de deslocamento (terceiro terço da canaleta) ao longo da fase
de prática (p<0,00004 e p<0,00001, respectivamente). Não houve interação
significante entre grupos e locais [F(4, 320)=0,28715, p=0,88624], grupos e
blocos [F(1, 320)=0,20209, p=0,65335]. Contudo a ANOVA identificou interação
significativa entre locais e blocos [F(4, 320)=23,125, p=0,00000] e grupos,
locais e blocos [F(4, 320)=3,2824, p=0,01174]. O teste de Tukey revelou que o
número de fixações no primeiro bloco da prática foi similarmente distribuído
entre os locais da tarefa para o GE e GS (p>0,05). Mas somente o GS reduziu
o número de fixações no primeiro terço da canaleta do início para o fim da
prática (p<0,00008). Ambos os grupos aumentaram o número de fixações no
trecho final de deslocamento do objeto móvel do início para o fim da prática
(p<0,005 e p<0,00004, respectivamente).
Gráfico 4 – Média das fixações visuais por local da tarefa no primeiro e último bloco da fase de prática. * indica diferença no número de fixações por local da tarefa na etapa inicial e final da prática – somente o GS reduziu as fixações no trecho inicial do deslocamento, mas ambos os grupos aumentaram as fixações no trecho final do deslocamento; as fixações no trecho final foram em maior número que nos demais locais (p<0,05).

52
Fase de Teste
Medidas de Desempenho
O gráfico 5 se refere aos resultados da precisão dos grupos nas
diferentes condições de velocidade do objeto móvel na fase de teste. A ANOVA
two-way (2 grupos x 3 velocidades) detectou diferença significativa entre as
velocidades [F(2, 64)=139,26, p=0,0001], mas nenhuma diferença intergrupos
foi verificada [F(1, 32)=3,6708, p=0,06435]. O post-hoc identificou uma piora na
precisão das interceptações durante a AUM e RED em comparação à CONT
(p<0,0001). A ANOVA também detectou interação significativa [F(2,
64)=11,924, p=0,00004]. O post-hoc evidenciou que o GS apresentou maior
precisão no desempenho em comparação ao GE durante as velocidades AUM
(p<0,001) e RED (p<0,04).
Gráfico 5 – Média do erro constante nas diferentes velocidades do objeto móvel: controle (CONT), aumentada (AUM) e reduzida (RED). * indica diferença entre as velocidades: a precisão em RED e AUM foi menor em relação a CONT e a precisão em AUM e RED foi diferente (p<0,0001). ** indica diferença entre os grupos: o GS foi mais preciso que o GE em AUM e RED (p<0,04).
Os resultados da consistência dos grupos nas diferentes velocidades
do objeto móvel na fase de teste são representados no gráfico 6. A ANOVA
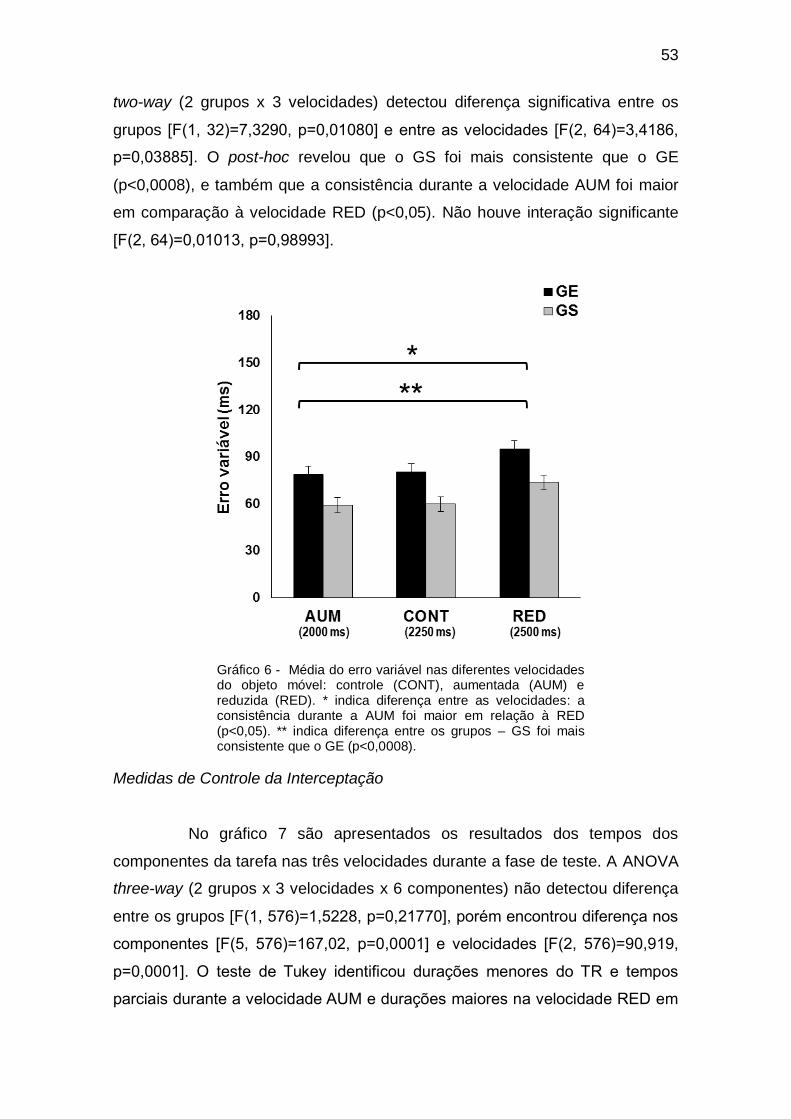
53
two-way (2 grupos x 3 velocidades) detectou diferença significativa entre os
grupos [F(1, 32)=7,3290, p=0,01080] e entre as velocidades [F(2, 64)=3,4186,
p=0,03885]. O post-hoc revelou que o GS foi mais consistente que o GE
(p<0,0008), e também que a consistência durante a velocidade AUM foi maior
em comparação à velocidade RED (p<0,05). Não houve interação significante
[F(2, 64)=0,01013, p=0,98993].
Gráfico 6 - Média do erro variável nas diferentes velocidades do objeto móvel: controle (CONT), aumentada (AUM) e reduzida (RED). * indica diferença entre as velocidades: a consistência durante a AUM foi maior em relação à RED (p<0,05). ** indica diferença entre os grupos – GS foi mais consistente que o GE (p<0,0008).
Medidas de Controle da Interceptação
No gráfico 7 são apresentados os resultados dos tempos dos
componentes da tarefa nas três velocidades durante a fase de teste. A ANOVA
three-way (2 grupos x 3 velocidades x 6 componentes) não detectou diferença
entre os grupos [F(1, 576)=1,5228, p=0,21770], porém encontrou diferença nos
componentes [F(5, 576)=167,02, p=0,0001] e velocidades [F(2, 576)=90,919,
p=0,0001]. O teste de Tukey identificou durações menores do TR e tempos
parciais durante a velocidade AUM e durações maiores na velocidade RED em

54
comparação à velocidade CONT (p<0,00002). A ANOVA encontrou ainda
interação significativa entre grupos e componentes [F(5, 576)=7,4991,
p=0,00001] e componentes e velocidades [F(10, 576)=49,694, p=0,0001]. O
teste de Tukey revelou redução no Tpar5 durante a velocidade AUM e aumento
no Tpar5 durante a RED (p<0,00003). E ainda, o GS demonstrou menor TR em
comparação ao GE (p<0,00003). Não houve interações significantes entre
grupos e velocidades [F(2, 576)=0,69906, p=0,49747], grupos, componentes e
velocidades [F(10, 576)=0,65099, p=0,77001].
Gráfico 7– Média da duração dos componentes da tarefa nas diferentes velocidades (AUM, CONT e RED). * indica diferença entre o Tpar5 da velocidade CONT e o Tpar 5 da velocidade AUM e RED (p<0,00003). ** indica que menor TR do GS em relação ao GE (p<0,00003).
Medidas de Comportamento Visual
O gráfico 8 apresenta os resultados referentes ao número de
fixações visuais dos grupos em cada local da tarefa nas três velocidades
durante a fase de teste. A ANOVA three-way (2 grupos x 3 velocidades x 6
locais) detectou diferença entre os grupos [F(1, 480)=7,7803, p=0,00549], os
locais [F(4, 480)=378,96, p=0,0001] e as velocidades [F(2, 480)=8,1460,
p=0,00033]. O post-hoc evidenciou que o GS apresentou maior número de
fixações que o GE (p<0,005). O número de fixações na parte final do
deslocamento do objeto (terceiro terço da canaleta) foi superior aos demais
locais (p<0,00001), assim como o número de fixações na parte inicial do
deslocamento (primeiro terço da canaleta) foi superior à parte intermediária
(segundo terço da canaleta) (p<0,002). Por fim, também foi verificado que o
número de fixações durante a velocidade AUM foi menor em relação à
velocidade CONT e RED (p<0,02 e p<0,0002, respectivamente). A ANOVA não

55
detectou interação significante entre grupos e velocidades [F(2, 480)=0,43920,
p=0,64481] e grupos, locais e velocidades [F(8, 480)=0,43544, p=0,89977].
Mas houve interação significativa entre grupos e locais [F(4, 480)=15,409,
p=0,00001] e locais e velocidades [F(8, 480)=8,7160, p=0,00001]. O teste de
Tukey detectou que o GS apresentou maior número de fixações que o GE no
trecho final do deslocamento do objeto móvel (p<0,00001). Durante a
velocidade AUM, o número de fixações no trecho final do deslocamento do
objeto móvel foi menor em relação à velocidade CONT e RED (p<0,0002).
Gráfico 8 – Número de fixações visuais por local da tarefa nas diferentes velocidades (AUM, CONT e RED). * indica que o número de fixações no trecho inicial do deslocamento foi superior ao trecho intermediário e também que o número de fixações no trecho final de deslocamento do objeto foi maior que nos demais locais (p<0,00001). ** indica o maior número de fixações do GS em relação ao GE no trecho final de deslocamento do objeto móvel (p<0,00001).
5.2.1 Síntese dos resultados
Os dois níveis de estabilização do desempenho (estabilização e
superestabilização) resultaram em melhora na precisão e consistência do
desempenho. O aprimoramento do desempenho dos grupos foi acompanhado
por redução na duração dos componentes da tarefa (tempo de reação e sub-
movimentos) durante a prática, especialmente para os componentes iniciais da
interceptação (TR, Tpar1 e Tpar2). O número de fixações no primeiro bloco da
prática foi similarmente distribuído entre os locais da tarefa para o GE e GS.
Todavia, pôde ser verificado que ao longo da prática, o GE e GS aumentaram o
número de fixações visuais no trecho próximo à zona de interceptação (parte
final do deslocamento do objeto). E ainda, o GS reduziu a quantidade de
fixações no local onde se iniciava o deslocamento do objeto móvel (trecho
inicial do deslocamento) do início par ao fim da fase de prática.

56
O GS apresentou desempenho superior em comparação ao GE
durante as interceptações a alvos móveis que se deslocamento em velocidade
constante. O GS demonstrou interceptações mais precisas mesmo quando
ocorreram mudanças na velocidade do objeto (AUM ou RED) e foi mais
consistente que o GE ao longo do teste. Também foi verificado menor TR e
maior número de fixações visuais do GS em relação ao GE durante o teste. O
maior número de fixações do GS em relação ao GE ocorreu no trecho final do
deslocamento do objeto móvel.
Os ajustes diante das mudanças de velocidade ocorreram no
componente final da interceptação (Tpar5). Durante a velocidade aumentada, a
duração do Tpar5 reduziu e diante da velocidade reduzida a duração do Tpar
aumentou. O número de fixações no trecho final do deslocamento foi maior que
nos demais locais. O aumento da velocidade do objeto resultou em menor
número de fixações no trecho final de deslocamento do objeto móvel em
relação à condição de velocidade controle e reduzida.
6. EXPERIMENTO 2
No experimento 2 foram investigados os efeitos do nível de
estabilização do desempenho sobre o controle visuo-motor durante a
interceptação a objetos móveis com velocidade variável, mas sem mudanças
no tempo total de deslocamento. Foi também analisado como o controle visuo-
motor da interceptação é organizado diante objetos que se deslocam com
velocidade variável, mas sem qualquer alteração no tempo total de
deslocamento.
6.1 Método
6.1.1 Amostra
Os participantes do experimento 2 (n=34) foram diferentes do
experimento 1. A amostra foi constituída de indivíduos de ambos os sexos
(masculino n=18; feminino n=16) e a idade média da amostra foi de 22,11 ±
2,08. Apesar dos participantes serem diferentes do experimento anterior, a

57
amostra foi composta por indivíduos com as mesmas caraterísticas em ambos
os experimentos. Os procedimentos e critérios para a seleção dos participantes
foram os mesmos.
6.1.2 Instrumento e tarefa
Os instrumentos e a tarefa foram idênticos ao experimento 1.
6.1.3 Delineamento
Os mesmos procedimentos adotados na fase de prática do
experimento 1 para definição dos grupos experimentais (GE e GS) foram
conduzidos no presente experimento. Contudo, a fase de teste foi conduzida
para verificar o efeito da variável independente manipulada na primeira fase no
controle visual e na estratégia de controle com diferentes velocidades variáveis,
mas sem modificação do tempo total de deslocamento. Neste experimento, os
participantes executaram interceptações envolvendo objetos móveis com
velocidade variável. Duas combinações de velocidade do objeto foram
manipuladas, mas sem qualquer alteração no tempo total de deslocamento
(FIGURA 4). Na primeira combinação, o deslocamento do objeto ocorreu
inicialmente com velocidade aumentada e na parte final a velocidade foi
reduzida (AUM-RED). Mais especificamente, a velocidade do objeto móvel foi
88,90 cm.s-1 nos 2/3 iniciais do deslocamento e 78 cm.s-1 no 1/3 final. Na
segunda combinação, esse procedimento foi invertido. Assim, o deslocamento
do objeto móvel ocorreu inicialmente com velocidade reduzida e na parte final a
velocidade foi aumentada (RED-AUM). Nessa condição, a velocidade do objeto
móvel foi 157 cm.s-1
nos 2/3 iniciais do deslocamento e 41,41 cm.s-1
no 1/3
final. Com essas combinações de velocidade, o tempo total de deslocamento
do objeto móvel em todas as tentativas foi mantido o mesmo (2250 ms).

58
Figura 6 - Desenho experimental do experimento 2.
GE: Grupo Estabilização; GS: Grupo Superestabilização; TEN: tentativas; VEL: Velocidade; TT: Tempo Total; AUM-RED: Velocidade Aumentada-Reduzida; CONT: Velocidade Controle; RED-AUM: Velocidade Reduzida-Aumentada.
Assim como no experimento 1, a fase de teste consistiu em um total
de 45 tentativas distribuídas de forma pseudoaleatória. Os participantes
executaram 15 interceptações em cada condição de velocidade, distribuídas
conforme o Quadro 2.
Quadro 2 - Distribuição das diferentes velocidades do objeto móvel na fase de teste do experimento 2.
Velocidade Aumentada-Reduzida (AUM-RED); Velocidade Controle (CONT); Velocidade
Reduzida-Aumentada (RED-AUM). AUM-RED – Velocidade (157 cm.s-1
e 41,41 cm.s-1
); CONT – Velocidade (81,3 cm.s
-1); RED-AUM – Velocidade (78 cm.s
-1 e 88,90 cm.s
-1). O tempo total de
deslocamento do objeto foi igual em todas as tentativas (2250 ms).

59
6.1.4 Procedimentos
Os procedimentos foram os mesmos adotados no experimento 1.
6.1.5 Análise dos dados
Como a tarefa e o delineamento dos experimentos foram similares,
foram adotadas as mesmas medidas e procedimentos de análise dos dados do
experimento 1.
6.2 Resultados
Fase de Prática
Medidas de Desempenho
A precisão dos grupos durante a prática pode ser verificada no
gráfico 9. A ANOVA two-way (2 grupos x 2 blocos) encontrou diferença
significativa entre os blocos [F(1, 32)=55,996, p=0,00001]. A precisão dos
grupos foi aprimorada do primeiro bloco para o último bloco da prática
(p<0,0001). Não houve diferença entre os grupos [F(1, 32)=0,00000,
p=0,99876] e nem interação significante entre grupos e blocos [F(1,
32)=0,03560, p=0,85154].

60
Gráfico 9 – Média do erro constante no primeiro e último bloco da fase de prática. * indica diferença entre os blocos (p<0,0001).
Quanto à consistência do desempenho dos grupos (gráfico 10), a
ANOVA two-way (2 grupos x 2 blocos) mostrou diferença significativa entre
blocos [F(1, 32)=54,828, p=0,00001], evidenciando uma melhora da
consistência do desempenho ao longo da prática (p<0,0001). Não foi detectada
diferença entre os grupos [F(1, 32)=0,01944, p=0,88998] e nem interação
significante entre os dois fatores [F(1, 32)=0,02269, p=0,88121].
Gráfico 10 – Média do erro variável no primeiro e último bloco da fase de prática. * indica diferença entre os blocos (p<0,0001).

61
Medidas de Controle da Interceptação
São apresentados no gráfico 11, os resultados referentes aos
tempos dos componentes da tarefa na etapa inicial e final da prática. A ANOVA
three-way (2 grupos x 2 blocos x 6 componentes) não detectou diferença entre
os grupos [F(1, 384)=0,80727, p=0,36949], mas foram encontradas diferenças
entre os componentes [F(5, 384)=60,983, p=0,0001] e os blocos [F(1,
384)=60,085, p=0,00001]. O teste de Tukey revelou que o TR e os tempos
parciais dos sub-movimentos reduziram do primeiro para o último bloco da fase
de prática (p<0,000009). A ANOVA detectou também interação significativa
entre componentes e blocos [F(5, 384)=3,8644, p=0,00198]. O teste de Tukey
evidenciou reduções temporais no TR, Tpar1 e Tpar2 do primeiro para o último
bloco da prática (p<0,05). Não foram verificadas interações significantes entre
grupos e componentes [F(5, 384)=1,0723, p=0,37523], componentes e blocos
[F(5, 384)=1,3637, p=0,23711], grupos e blocos [F(1, 384)=1,1922, p=0,27557]
e grupos, blocos e componentes [F(5, 384)=0,30307, p=0,91095].
Gráfico 11 – Média da duração dos componentes da tarefa no primeiro e último bloco da fase de prática. * indica redução na duração dos componentes da tarefa na prática - a duração do TR, Tpar1 e Tpar2 reduziu entre o primeiro e último bloco da prática (p<0,05).
Medidas de Comportamento Visual
No gráfico 12 estão os resultados do número de fixações visuais nos
diferentes locais da tarefa durante a fase de prática. A ANOVA three-way (2

62
grupos x 2 blocos x 6 locais) não detectou diferença entre os grupos [F(1,
320)=0,09908, p=0,75314] e blocos [F(1, 320)=0,01101, p=0,91650]. Mas foi
detectada diferença no número de fixações nos diferentes locais [F(4,
320)=38,462, p=0,0001]. O teste de Tukey revelou maior número de fixações
no primeiro terço da canaleta em relação ao segundo terço (p<0,0005).
Também foi verificado que o número de fixações no terceiro terço da canaleta
foi maior que os demais locais (p<0,00001). Não houve interação significante
entre grupos e locais [F(4, 320)=0,63014, p=0,64132], grupos e blocos [F(1,
320)=0,20673, p=0,64965]. Mas a ANOVA encontrou interação significativa
entre locais e blocos [F(4, 320)=29,843, p=0,0001] e grupos, locais e blocos
[F(4, 320)=2,7786, p=0,02702]. O teste de Tukey revelou que a quantidade de
fixações no primeiro bloco da prática foi distribuída similarmente entre os locais
da tarefa para o GE e GS (p>0,05) e somente o GS reduziu o número de
fixações no primeiro terço da canaleta do início para o fim da prática (p<0,01).
Mas ambos os grupos aumentaram o número de fixações no terceiro terço da
canaleta do início para o fim da prática (p<0,0002 e p<0,00004,
respectivamente).
Gráfico 12 – Média das fixações visuais por local da tarefa no primeiro e último bloco da fase de prática. * indica diferença no número de fixações por local da tarefa na etapa inicial e final da prática – somente o GS reduziu as fixações no trecho inicial do deslocamento, mas ambos os grupos aumentaram as fixações no trecho final do deslocamento; as fixações no trecho final foram em maior número que nos demais locais (p<0,01).

63
Fase de Teste
Medidas de Desempenho
Os resultados referentes à precisão dos grupos nas diferentes
condições de velocidade do objeto móvel são apresentados no gráfico 13. A
ANOVA two-way (2 grupos x 3 velocidades) não identificou diferença
significativa entre os grupos [F(1, 32)=1,3872, p=0,24756], mas encontrou
diferença significativa entre as velocidades [F(2, 64)=197,80, p=0,0001]. O
post-hoc de Tukey revelou que o erro constante na velocidade controle (CONT)
foi menor em relação à velocidade aumentada-reduzida (AUM-RED) e
reduzida-aumentada (RED-AUM) e a precisão durante a velocidade
aumentada-reduzida (AUM-RED) foi maior em relação à velocidade reduzida-
aumentada (RED-AUM) (p<0,0001). Foi identificada ainda interação
significativa [F(2, 64)=4,6974, p=0,01249]. O post-hoc revelou que o GS foi
mais preciso que o GE na velocidade RED-AUM (p<0,03).
Gráfico 13 – Média do erro constante nas diferentes velocidades do objeto móvel: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM). * indica diferença entre as velocidades: a precisão na CONT foi maior que nas demais e a precisão durante a AUM-RED foi maior em relação à RED-AUM (p<0,0001). ** indica diferença entre os grupos na condição RED-AUM: o GS foi mais preciso que o GE (p<0,03).
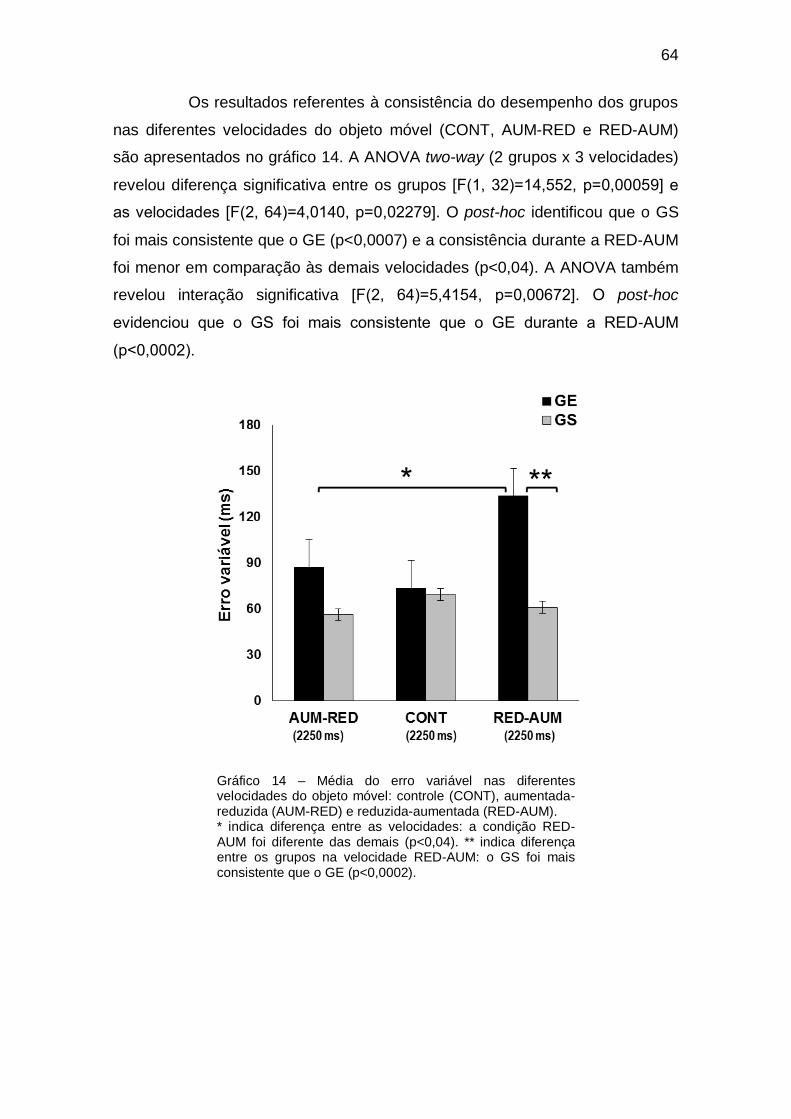
64
Os resultados referentes à consistência do desempenho dos grupos
nas diferentes velocidades do objeto móvel (CONT, AUM-RED e RED-AUM)
são apresentados no gráfico 14. A ANOVA two-way (2 grupos x 3 velocidades)
revelou diferença significativa entre os grupos [F(1, 32)=14,552, p=0,00059] e
as velocidades [F(2, 64)=4,0140, p=0,02279]. O post-hoc identificou que o GS
foi mais consistente que o GE (p<0,0007) e a consistência durante a RED-AUM
foi menor em comparação às demais velocidades (p<0,04). A ANOVA também
revelou interação significativa [F(2, 64)=5,4154, p=0,00672]. O post-hoc
evidenciou que o GS foi mais consistente que o GE durante a RED-AUM
(p<0,0002).
Gráfico 14 – Média do erro variável nas diferentes velocidades do objeto móvel: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM). * indica diferença entre as velocidades: a condição RED-AUM foi diferente das demais (p<0,04). ** indica diferença entre os grupos na velocidade RED-AUM: o GS foi mais consistente que o GE (p<0,0002).

65
Medidas de Controle da Interceptação
Os resultados dos tempos dos componentes da tarefa nas três
velocidades durante a fase de teste estão representados no gráfico 15. A
ANOVA three-way (2 grupos x 3 velocidades x 6 componentes) detectou
diferença entre os grupos [F(1, 576)=6,1845, p=0,01317], componentes [F(5,
576)=171,40, p=0,0001] e velocidades [F(2, 576)=28,411, p=0,00001]. O teste
de Tukey revelou durações mais curtas dos componentes do GS em relação ao
GE (p<0,01) e durações mais longas dos componentes durante a velocidade
RED-AUM em comparação à velocidade CONT (p<0,00002). A ANOVA não
detectou interação significante entre grupos e componentes [F(5, 576)=1,3725,
p=0,23285], grupos e velocidades [F(2, 576)=0,04589, p=0,95515] e grupos,
componentes e velocidades [F(10, 576)=0,39563, p=0,94869]. Porém foi
identificada interação significativa entre componentes e velocidades [F(10,
576)=3,4644, p=0,00019]. O teste de Tukey revelou aumento no Tpar5 durante
a velocidade RED-AUM em comparação à velocidade CONT (p<0,02).
Gráfico 15 - Média da duração dos componentes da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM). * indica diferença entre o Tpar5 da velocidade CONT e o Tpar 5 da velocidade RED-AUM. ** indica que menores durações dos componentes do GS em relação ao GE (p<0,01).
Medidas de Comportamento Visual
No gráfico 16 estão demonstrados os resultados referentes ao
número de fixações visuais nos diferentes locais da tarefa durante nas três
velocidades na fase de teste. A ANOVA three-way (2 grupos x 3 velocidades x
6 locais) detectou diferença entre os grupos [F(1, 480)=6,6035, p=0,01048],

66
locais [F(4, 480)=176,55, p=0,0001], mas não foi verificada diferença entre as
velocidades [F(2, 480)=0,25253, p=0,77694]. O teste de Tukey revelou que o
GS apresentou maior número de fixações que o GE (p<0,01). O número de
fixações na parte final do deslocamento do objeto (terceiro terço da canaleta)
foi superior aos demais locais (p<0,00001), assim como o número de fixações
na parte inicial do deslocamento (primeiro terço da canaleta) foi superior à
parte intermediária (segundo terço da canaleta) (p<0,04). A ANOVA não
detectou interação significante entre grupos e velocidades [F(2, 480)=0,40205,
p=0,66917], locais e velocidades [F(8, 480)=1,2466, p=0,26983] e grupos,
locais e velocidades [F(8, 480)=0,58160, p=0,79330]. Houve interação
significativa entre grupos e locais [F(4, 480)=6,7047, p=0,00003]. O teste de
Tukey detectou que o número de fixações realizadas pelo GS foi maior que o
GE no trecho final do deslocamento do objeto móvel (p<0,00001).
Gráfico 16 - Número de fixações visuais por local da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM). * indica que o número de fixações no trecho inicial do deslocamento foi superior ao trecho intermediário e também que o número de fixações no trecho final de deslocamento do objeto foi maior que nos demais locais (p<0,00001). ** indica o maior número de fixações do GS em relação ao GE no trecho final de deslocamento do objeto móvel (p<0,00001).
6.2.1 Síntese dos resultados
Como já era esperado, os diferentes níveis de estabilização do
desempenho propiciaram aumento da precisão e consistência das
interceptações. A melhora do desempenho ocorreu mediante redução no
tempo de reação e sub-movimentos iniciais que constituíam a ação de
interceptação (Tpar1 e Tpar2). A quantidade de fixações no primeiro bloco da
prática foi distribuída similarmente entre os locais da tarefa para o GE e GS
p>0,05. Mas ambos os grupos aumentaram as fixações no local próximo à
zona de interceptação (trecho final da aproximação do objeto) do início para o
67
fim da prática. Todavia, somente o GS reduziu o número de fixações na parte
inicial do deslocamento do objeto móvel ao longo da prática.
O GS apresentou melhor desempenho que o GE durante a
interceptação a alvos móveis com velocidade variável, particularmente quando
o deslocamento ocorreu com combinação de velocidade reduzida e
aumentada. As durações do TR e sub-movimentos da interceptação foram mais
curtas para o GS em relação ao GE, bem como, o número de fixações visuais
no trecho final do deslocamento do objeto móvel foi maior para o GS em
comparação ao GE.
Foi verificado que durante o deslocamento do objeto com a
combinação de velocidade reduzida-aumentada, a duração do componente
final (Tpar5) aumentou em relação à velocidade controle. O número de fixações
no trecho final do deslocamento foi maior que nos demais locais.
7. EXPERIMENTO 3
O propósito do experimento 3 foi investigar a influência do nível de
estabilização do desempenho sobre o controle visuo-motor durante a
interceptação a objetos móveis com velocidade variável e alteração no tempo
total de deslocamento. Foi também analisado como o controle visuo-motor da
interceptação é organizado diante de objetos móveis com velocidade variável,
mas que modificam o tempo total de deslocamento.
7.1 Método
5.3.1 Amostra
Os participantes do experimento 3 (n=34) foram diferentes dos
experimento 1 e 2. Participaram do experimento indivíduos de ambos os sexos
(masculino n=24; feminino n=10) e a idade média da amostra foi de 23,22 ±
2,50. Apesar dos participantes serem diferentes dos experimentos anteriores, a
amostra foi constituída por indivíduos com as mesmas caraterísticas. Os
procedimentos e critérios para a seleção dos participantes foram idênticos.
68
5.3.2 Instrumento e tarefa
Os instrumentos e a tarefa foram os mesmos utilizados nos
experimentos 1 e 2.
5.3.3 Delineamento
Os procedimentos adotados na fase de prática dos experimentos 1 e
2 para definição dos grupos experimentais (GE e GS) foram os mesmos
utilizados no presente experimento. Já a fase de teste foi conduzida para
verificar o efeito da variável independente manipulada na primeira fase no
controle visual e na estratégia de controle com diferentes velocidades variáveis,
mas com alteração do tempo total de deslocamento. Neste experimento, os
participantes executaram interceptações envolvendo objetos com velocidade
variável, assim como no experimento 2. Similarmente ao experimento 2, duas
combinações de velocidade do objeto móvel foram manipuladas. Todavia, o
tempo total de deslocamento também foi manipulado (FIGURA 5). Na primeira
combinação, o deslocamento do objeto ocorreu inicialmente com velocidade
aumentada e na parte final a velocidade foi reduzida (AUM-RED) e o tempo
total de deslocamento foi menor. Assim, a velocidade do objeto foi 141,2 cm.s-1
nos 2/3 iniciais do percurso e 37,27 cm.s-1 no 1/3 final e o tempo total do
deslocamento foi 2000 ms. Na segunda combinação, o padrão de velocidade
foi o inverso. A parte inicial do percurso do objeto móvel ocorreu com
velocidade reduzida e a parte final com velocidade aumentada (RED-AUM),
sendo que o tempo total de deslocamento foi maior. Nessa condição, a
velocidade do objeto móvel foi 85,8 cm.s-1 nos 2/3 iniciais e 97,79 cm.s-1 no 1/3
final, mas com tempo total de deslocamento de 2500 ms.

69
Figura 7 - Desenho experimental do experimento 3.
GE: Grupo Estabilização; GS: Grupo Superestabilização; TEN: tentativas; VEL: Velocidade; TT: Tempo Total; AUM-RED: Velocidade Aumentada-Reduzida; CONT: Velocidade Controle; RED-AUM: Velocidade Reduzida-Aumentada.
A fase de teste consistiu em um total de 45 tentativas distribuídas de
forma pseudoaleatória. (QUADRO 3). Os participantes executaram 15
interceptações para cada condição de velocidade, distribuídas conforme o
Quadro 3.
Quadro 3- Distribuição das diferentes velocidades do objeto móvel na fase de teste do experimento 3.
Velocidade Aumentada-Reduzida (AUM-RED); Velocidade Controle (CONT); Velocidade
Reduzida-Aumentada (RED-AUM). AUM-RED – Velocidade (157 cm.s-1
e 41,41 cm.s-1
) e tempo total (2000 ms); CONT – (81,3 cm.s
-1) e tempo total (2250 ms); RED-AUM –
Velocidade (78 cm.s-1
e 88,90 cm.s-1
) e tempo total (2500 ms).

70
5.3.4 Procedimentos
Os procedimentos de coleta de dados foram os mesmos adotados
nos experimentos 1 e 2.
5.3.5 Análise dos dados
Como a tarefa e o delineamento dos experimentos são similares,
foram utilizadas as mesmas medidas e procedimentos de análise dos dados
dos experimentos 1 e 2.
7.2 Resultados
Fase de Prática
Medidas de Desempenho
Na análise da precisão dos grupos durante a prática (gráfico 17), a
ANOVA two-way (2 grupos x 2 blocos) detectou diferença entre os blocos [F(1,
32)=45,037, p=0,00001]. Os grupos se tornaram mais precisos do primeiro para
o último bloco da prática (p<0,0001). Não foi verificada diferença na
comparação intergrupos [F(1, 32)=0,10309, p=0,75025] e nem na interação
entre grupos e blocos [F(1, 32)=0,24286, p=0,62552].
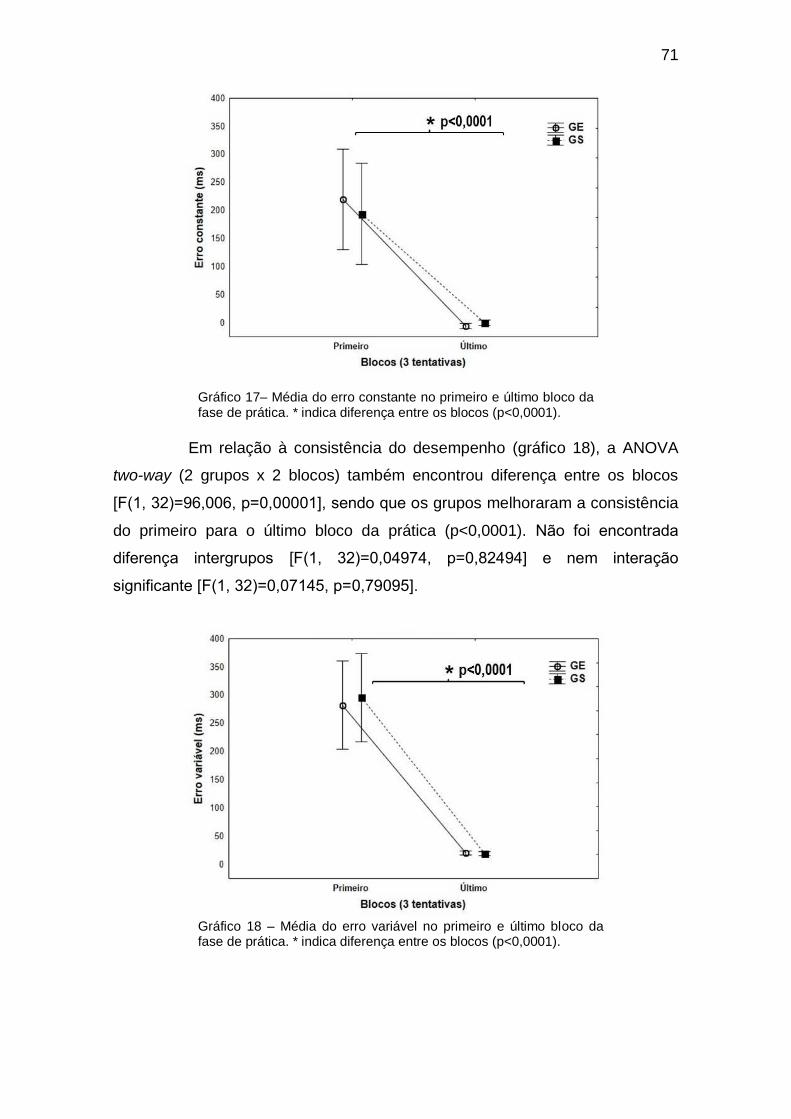
71
Gráfico 17– Média do erro constante no primeiro e último bloco da fase de prática. * indica diferença entre os blocos (p<0,0001).
Em relação à consistência do desempenho (gráfico 18), a ANOVA
two-way (2 grupos x 2 blocos) também encontrou diferença entre os blocos
[F(1, 32)=96,006, p=0,00001], sendo que os grupos melhoraram a consistência
do primeiro para o último bloco da prática (p<0,0001). Não foi encontrada
diferença intergrupos [F(1, 32)=0,04974, p=0,82494] e nem interação
significante [F(1, 32)=0,07145, p=0,79095].
Gráfico 18 – Média do erro variável no primeiro e último bloco da fase de prática. * indica diferença entre os blocos (p<0,0001).

72
Medidas de Controle da Interceptação
No gráfico 19 estão demonstrados os resultados dos tempos dos
componentes da tarefa na parte inicial e final da prática. A ANOVA three-way (2
grupos x 2 blocos x 6 componentes) não detectou diferença entre os grupos
[F(1, 384)=0,04542, p=0,83134], mas encontrou diferenças entre componentes
[F(5, 384)=47,852, p=0,0001] e blocos [F(1, 384)=15,723, p=0,00009]. O teste
de Tukey identificou menores durações do TR e tempos parciais no primeiro
bloco da prática em comparação ao último bloco (p<0,000008). A ANOVA não
detectou interações significantes entre grupos e componentes [F(5,
384)=0,67736, p=0,64084], grupos e blocos [F(1, 384)=0,14142, p=0,70708] e
grupos, blocos e componentes[F(5, 384)=1,0864, p=0,36735]. Mas houve
interação significativa entre componentes e blocos [F(5, 384)=3,7056,
p=0,00275]. O teste de Tukey revelou redução no TR e Tpar3 do primeiro para
o último bloco da prática (p<0,05).
Gráfico 19 – Média da duração dos componentes da tarefa no primeiro e último bloco da fase de prática. * indica redução na duração dos componentes da tarefa na prática - a duração do TR e Tpar3 reduziu entre o primeiro e último bloco da prática (p<0,05).
Medidas de Comportamento Visual
Os resultados do número de fixações visuais nos diferentes locais da
tarefa dos grupos durante a fase de prática estão demonstrados no gráfico 20.
A ANOVA three-way (2 grupos x 2 blocos x 6 locais) não detectou diferença
entre os grupos [F(1, 320)=0,64901, p=0,42107] e os blocos [F(1,

73
320)=0,17807, p=0,67332]. Porém, foi detectada diferença no número de
fixações entre os diferentes locais da tarefa [F(4, 320)=37,463, p=0,0001]. O
teste de Tukey revelou que houve maior número de fixações no primeiro terço
da canaleta em relação ao segundo terço (p<0,0005), e ainda, o número de
fixações no terceiro terço da canaleta foi maior que nos demais locais
(p<0,00001). Não houve interação significante entre grupos e blocos [F(1,
320)=0,03679, p=0,84801]. Mas a ANOVA encontrou interação significativa
entre grupos e locais [F(4, 320)=5,6306, p=0,00022], locais e blocos [F(4,
320)=32,386, p=0,0001] e grupos, locais e blocos [F(4, 320)=3,2965,
p=0,01146]. O teste de Tukey revelou que número de fixações na parte inicial
do deslocamento do objeto no bloco inicial da prática foi maior que no trecho
intermediário de deslocamento, mesa de resposta e espaço (p<0,05), porém
igual ao trecho final de deslocamento para ambos os grupos (p>0,05). Houve
ainda redução no número de fixações no primeiro terço da canaleta e aumento
no terceiro terço da etapa inicial para a final da prática (p<0,00001). Além
disso, os grupos reduziram as fixações no primeiro terço da canaleta (p<0,009
e p<0,00004, respectivamente) e aumentaram as fixações no terceiro terço da
canaleta do início para o fim da prática (p<0,02 e p<0,00004, respectivamente).
Por fim, o GS apresentou maior número de fixações no terceiro terço da em
comparação ao GE na parte final da prática (p<0,00005).
Gráfico 20 – Média das fixações visuais por local da tarefa no primeiro e último bloco da fase de prática. * indica diferença no número de fixações por local da tarefa na etapa inicial e final da prática – as fixações no trecho inicial foram em maior número que no trecho intermediário do deslocamento e ambos os grupos reduziram as fixações no trecho inicial e aumentaram no trecho final do deslocamento; as fixações no trecho final foram em maior número que nos demais locais (p<0,01). ** indica maior número de fixações do GS em relação ao GE no 3º terço da canaleta ao final da prática (p<0,00005).
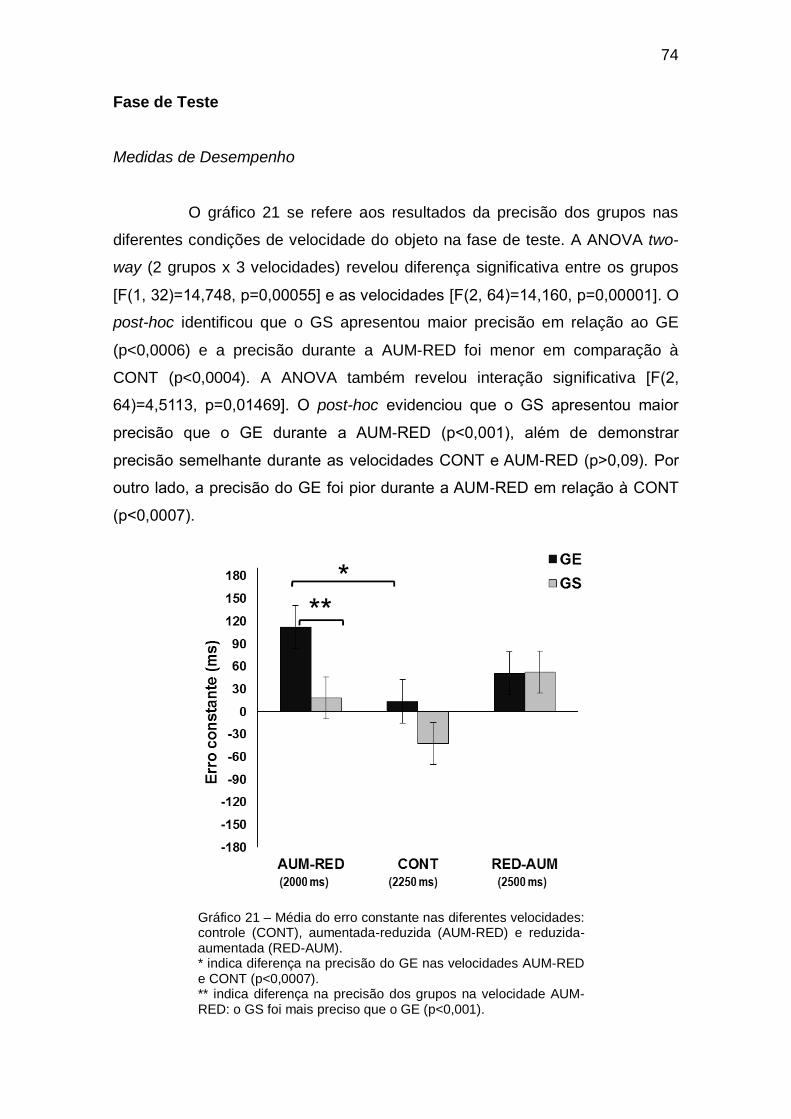
74
Fase de Teste
Medidas de Desempenho
O gráfico 21 se refere aos resultados da precisão dos grupos nas
diferentes condições de velocidade do objeto na fase de teste. A ANOVA two-
way (2 grupos x 3 velocidades) revelou diferença significativa entre os grupos
[F(1, 32)=14,748, p=0,00055] e as velocidades [F(2, 64)=14,160, p=0,00001]. O
post-hoc identificou que o GS apresentou maior precisão em relação ao GE
(p<0,0006) e a precisão durante a AUM-RED foi menor em comparação à
CONT (p<0,0004). A ANOVA também revelou interação significativa [F(2,
64)=4,5113, p=0,01469]. O post-hoc evidenciou que o GS apresentou maior
precisão que o GE durante a AUM-RED (p<0,001), além de demonstrar
precisão semelhante durante as velocidades CONT e AUM-RED (p>0,09). Por
outro lado, a precisão do GE foi pior durante a AUM-RED em relação à CONT
(p<0,0007).
Gráfico 21 – Média do erro constante nas diferentes velocidades: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM). * indica diferença na precisão do GE nas velocidades AUM-RED e CONT (p<0,0007). ** indica diferença na precisão dos grupos na velocidade AUM-RED: o GS foi mais preciso que o GE (p<0,001).

75
Os resultados da consistência dos grupos nas diferentes velocidades
do objeto móvel na fase de teste estão ilustrados no gráfico 22. A ANOVA two-
way (2 grupos x 3 velocidades) revelou diferença significativa entre os grupos
[F(1, 32)=14,139, p=0,00068]. Não foi verificada diferença entre as velocidades
[F(2, 64)=2,7973, p=0,06845]. O post-hoc detectou que o GS foi mais
consistente que o GE (p<0,0008). A ANOVA também revelou interação
significativa [F(2, 64)=3,8713, p=0,02588]. O post-hoc evidenciou que o GS
apresentou desempenho mais consistente que o GE durante a AUM-RED
(p<0,004). E ainda, o GE demonstrou desempenho menos consistente na
AUM-RED em relação à CONT (p>0,08).
Gráfico 22 – Média do erro variável nas diferentes velocidades: controle (CONT), aumentada-reduzida (AUM-RED) e reduzida-aumentada (RED-AUM). * indica diferença na consistência do desempenho do GE nas velocidades AUM-RED e CONT (p<0,008). ** indica diferença na consistência dos grupos na velocidade AUM-RED: o GS foi mais consistente que o GE (p<0,004).
Medidas de Controle da Interceptação
São apresentados no gráfico 23, os resultados dos tempos dos
componentes da tarefa dos grupos nas três velocidades durante a fase de

76
teste. A ANOVA three-way (2 grupos x 3 velocidades x 6 componentes)
detectou diferença entre os grupos [F(1, 576)=7,6126, p=0,00598],
componentes [F(5, 576)=180,31, p=0,0001] e velocidades [F(2, 576)=205,33,
p=0,0001]. O teste de Tukey revelou que o GS apresentou durações mais
curtas dos componentes em relação ao GE (p<0,005). E ainda, foram
verificadas durações mais longas dos componentes durante a velocidade RED-
AUM e mais curtas durante a velocidade AUM-RED em relação à velocidade
CONT (p<0,00002). A ANOVA detectou também interação significativa entre
grupos e componentes [F(5, 576)=6,8816, p=0,00001], componentes e
velocidades [F(10, 576)=70,824, p=0,0001] e grupos, componentes e
velocidades [F(10, 576)=2,6539, p=0,00358]. Não houve interações
significantes entre grupos e velocidades [F(2, 576)=2,0433, p=0,13054]. O teste
de Tukey revelou que o GS apresentou menor Tpar2 e maior Tpar5 em relação
ao GE (p<0,009). E ainda, identificou redução no Tpar4 e Tpar5 durante a
velocidade AUM-RED e aumento na velocidade RED-AUM (p<0,03) em relação
à velocidade controle. O post-hoc detectou ainda que o GS apresentou maior
Tpar5 em relação ao GE na velocidade RED-AUM (p<0,00003).
Gráfico 23 - Média da duração dos componentes da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM). * indica diferença no Tpar4 e Tpar5 da velocidade CONT e velocidades AUM-RED e RED-AUM (p<0,03). ** indica que o GS apresentou menores duração dos componentes em relação ao GE (p<0,005).
Medidas de Comportamento Visual
O gráfico 24 se refere aos resultados do número de fixações visuais
por local da tarefa dos grupos nas três velocidades ao longo da fase de teste. A
ANOVA three-way (2 grupos x 3 velocidades x 6 locais) detectou diferença
entre os grupos [F(1, 480)=6,6035, p=0,01048], locais [F(4, 480)=176,55,
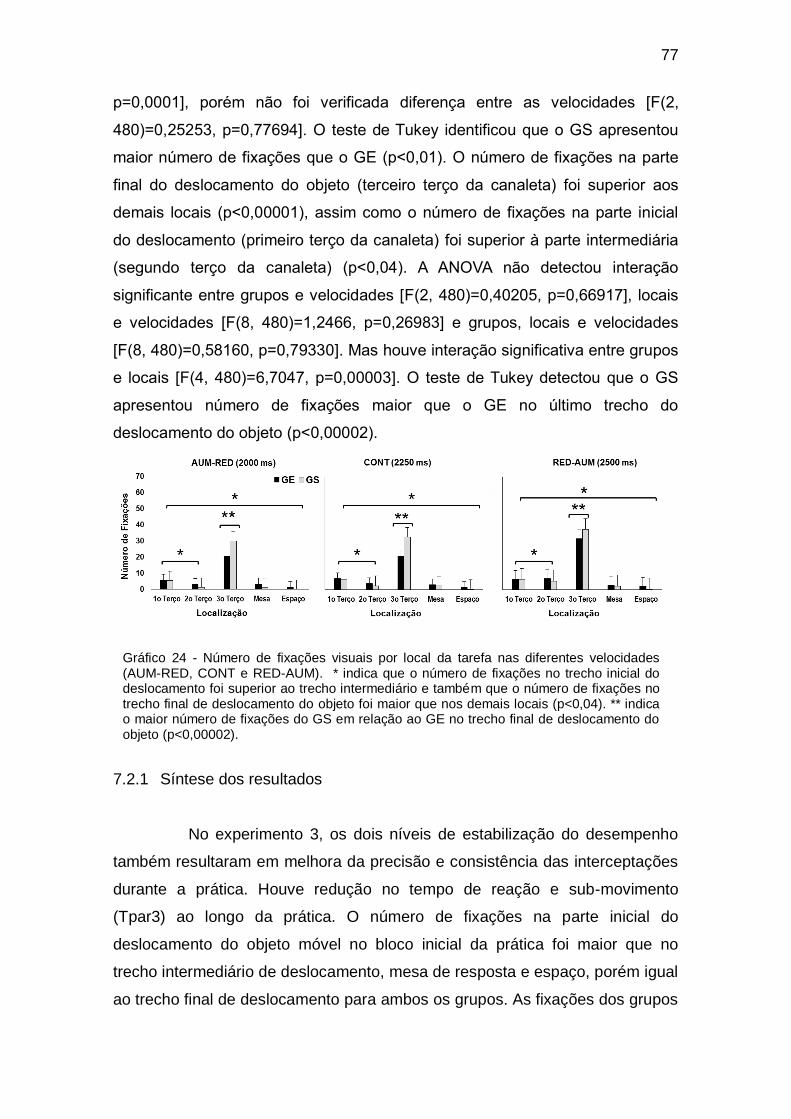
77
p=0,0001], porém não foi verificada diferença entre as velocidades [F(2,
480)=0,25253, p=0,77694]. O teste de Tukey identificou que o GS apresentou
maior número de fixações que o GE (p<0,01). O número de fixações na parte
final do deslocamento do objeto (terceiro terço da canaleta) foi superior aos
demais locais (p<0,00001), assim como o número de fixações na parte inicial
do deslocamento (primeiro terço da canaleta) foi superior à parte intermediária
(segundo terço da canaleta) (p<0,04). A ANOVA não detectou interação
significante entre grupos e velocidades [F(2, 480)=0,40205, p=0,66917], locais
e velocidades [F(8, 480)=1,2466, p=0,26983] e grupos, locais e velocidades
[F(8, 480)=0,58160, p=0,79330]. Mas houve interação significativa entre grupos
e locais [F(4, 480)=6,7047, p=0,00003]. O teste de Tukey detectou que o GS
apresentou número de fixações maior que o GE no último trecho do
deslocamento do objeto (p<0,00002).
Gráfico 24 - Número de fixações visuais por local da tarefa nas diferentes velocidades (AUM-RED, CONT e RED-AUM). * indica que o número de fixações no trecho inicial do deslocamento foi superior ao trecho intermediário e também que o número de fixações no trecho final de deslocamento do objeto foi maior que nos demais locais (p<0,04). ** indica o maior número de fixações do GS em relação ao GE no trecho final de deslocamento do objeto (p<0,00002).
7.2.1 Síntese dos resultados
No experimento 3, os dois níveis de estabilização do desempenho
também resultaram em melhora da precisão e consistência das interceptações
durante a prática. Houve redução no tempo de reação e sub-movimento
(Tpar3) ao longo da prática. O número de fixações na parte inicial do
deslocamento do objeto móvel no bloco inicial da prática foi maior que no
trecho intermediário de deslocamento, mesa de resposta e espaço, porém igual
ao trecho final de deslocamento para ambos os grupos. As fixações dos grupos
78
aumentaram no local próximo à zona de interceptação (parte final da
aproximação do objeto) do início para o fim da prática. Porém, o GS realizou
mais fixações no trecho final do deslocamento do objeto móvel que o GE no
último bloco da fase de prática.
O GS demonstrou melhor desempenho que o GE durante a
interceptação a alvos móveis com velocidade variável com variações na
restrição temporal, particularmente quando o deslocamento ocorreu com
combinação de velocidade aumentada e reduzida e com menor tempo total. O
GS demonstrou durações mais curtas no Tpar2 e mais longas no Tpar5 em
comparação ao GE. O GS apresentou ainda, maior número de fixações visuais
no trecho final do deslocamento do objeto em relação ao GE.
Os ajustes na interceptação durante as duas combinações de
velocidade do objeto móvel, variaram em função do tempo total de
deslocamento. Durante a velocidade AUM-RED (tempo total menor), foram
verificadas durações mais curtas do Tpar4 e Tpar5. Por outro lado, diante da
velocidade RED-AUM (tempo total maior), foram observadas as durações mais
longas do Tpar4 e Tpar5. O número de fixações no trecho final do
deslocamento foi maior que nos demais locais.
79
8. DISCUSSÃO
O presente estudo teve como propósito investigar a influência do
nível de estabilização do desempenho e das características do padrão de
velocidade de deslocamento do objeto móvel sobre o controle visuo-motor da
interceptação. Os resultados mostraram que ambos os fatores, o nível de
estabilização e a característica do padrão da velocidade de deslocamento
influenciam o desempenho, o mecanismo de controle e as estratégias de busca
visual utilizadas. Mais especificamente, a primeira hipótese testada foi que o
grupo superestabilização (GS) apresentaria desempenho superior em relação
ao grupo estabilização (GE) durante as interceptações independentemente do
padrão de velocidade do objeto móvel. Assumindo que a continuidade da
prática até o nível de superestabilização do desempenho pode promover
aquisição adicional de competências sensório-motoras (FONSECA et al., 2012;
UGRINOWITSCH et al., 2014), o melhor desempenho do GS estaria associado
à maior eficiência no controle visuo-motor nos diferentes padrões de velocidade
do objeto móvel. Já a segunda hipótese de estudo considerava que as
estratégias de controle envolvidas na interceptação seriam determinadas pelas
características do padrão de velocidade do objeto móvel. Assim, interceptações
envolvendo objetos com velocidade constante seriam executadas
predominantemente via feedback corrente. Por outro lado, as interceptações
diante de objetos que se movem em velocidade variável seriam reguladas pela
combinação de estratégias de controle preditivo e feedback corrente. Em uma
análise global, os resultados dos três experimentos fornecem evidências que
confirmam parcialmente a primeira hipótese e a segunda hipótese.
Os resultados do experimento 1 mostraram que o GS apresentou
desempenho superior ao GE durante as interceptações envolvendo objetos
móveis com velocidade constante, tanto em condições de velocidade
aumentada e quanto em condições de velocidade reduzida. Os resultados do
experimento 2 também evidenciaram melhor desempenho do GS em relação
ao GE nas interceptações a objetos móveis com velocidade variável,
particularmente quando a condição de velocidade representou maior grau de
exigência aos grupos (velocidade reduzida-aumentada). Na condição de menor
exigência (velocidade aumentada-reduzida), atingir o nível de estabilização foi

80
suficiente para obter bom desempenho. Já no experimento 3, os resultados
também revelaram melhor desempenho do GS em relação ao GE durante as
interceptações aos objetos com velocidade variável, mais especificamente, na
condição de velocidade aumentada-reduzida que envolvia menor tempo total
de deslocamento do objeto móvel. Novamente, na condição de maior exigência
o GS teve melhor desempenho. Ou seja, a prática até a superestabilização do
desempenho propiciou maior eficiência nas interceptações, conforme previsto
pela primeira hipótese de estudo, mas os resultados foram observados
principalmente na situação de maior exigência para o sistema visuo-motor.
Atingir o nível de superestabilização do desempenho propiciou
capacidade diferenciada para lidar com problemas motores decorrentes das
mudanças de velocidade no objeto móvel que requerem modificações precisas
nos movimentos para garantir o sucesso na interceptação. De fato, há
evidências demonstrando que a superestabilização do desempenho propicia
maior capacidade de executar interceptações diante de modificações na
velocidade do objeto móvel (FONSECA, 2009; COUTO, 2012; FONSECA et al.,
2012). Contudo, talvez os aspectos mais importantes que o presente estudo
pode ajudar a esclarecer são os motivos que levaram à superioridade do grupo
superestabilização em relação ao grupo estabilização nas interceptações a
objetos móveis com os distintos padrões de velocidade. Essa é uma lacuna
que ainda não está totalmente esclarecida na literatura. A análise dos
resultados relacionados ao controle visuo-motor deste estudo pode fornecer
indicativos para elucidar essa questão.
Era esperado que durante a fase de prática, o controle visuo-motor
da interceptação fosse aprimorado. Isto porque, a prática é capaz de
desencadear mudanças em mecanismos de controle, e consequentemente,
possibilitar a ocorrência da estabilização do desempenho (TANI, 1999; BENDA,
2006; TANI et al., 2014). Então, a identificação de diferenças no controle visuo-
motor entre os grupos ainda durante a prática pode fornecer evidências sobre
as competências sensório-motoras que são adquiridas pelos dois níveis de
estabilização do desempenho testados.
Os resultados da fase de prática dos três experimentos foram
consistentes em mostrar que os dois níveis de estabilização do desempenho
promoveram mudanças no controle visuo-motor da interceptação. A fase inicial

81
da prática, marcada pela imprecisão e inconsistência do desempenho, também
foi caracterizada pela distribuição similar das fixações entre os trechos de
deslocamento do objeto móvel (parte inicial, intermediária e final da canaleta).
Esse comportamento sugere que as primeiras tentativas das interceptações
foram reguladas via feedback corrente. O controle feedback sensorial é
caraterizado pelo monitoramento visual contínuo do objeto em deslocamento
para a regulação do movimento (DESSING et al., 2002; BASTIN; CRAIG;
MONTAGNE, 2006; SARLEGNA; MUTHA, 2014). Porém, essa estratégia de
controle foi modificada com o decorrer do processo de aprendizagem,
observada pela redução no tempo de reação e na diminuição no número de
fixações visuais no trecho inicial do percurso do objeto móvel (GS -
experimentos 1, 2 e 3; GE - experimento 3). Além disso, o número de fixações
visuais no trecho final do deslocamento do objeto aumentou para ambos os
grupos. No geral, esses resultados revelam que quando a estabilização do
desempenho foi alcançada, as interceptações foram executadas mediante a
combinação de estratégias de controle preditivo e feedback corrente. O baixo
número de fixações visuais no trecho inicial e intermediário do deslocamento e
a redução no tempo de reação são indicativos de pré-programação. Já o maior
número de fixações próximo à zona de contato aponta para um
acompanhamento visual contínuo na fase final da interceptação, o que pode
representar a predominância do uso de feedback corrente nesta parte do
percurso do objeto.
Mas os resultados mais interessantes dessa análise foram as
evidências de possíveis efeitos do nível de estabilização no controle visuo-
motor ao final da fase de prática. Avaliando somente os resultados referentes
aos erros temporais, o GE e GS apresentaram desempenho semelhante no
último bloco da prática. A ausência de diferença entre os grupos já era
esperada devido aos critérios de desempenho adotados. Como o critério de
desempenho envolvia a execução de três tentativas consecutivas em uma faixa
de erro relativamente estreita (±30 ms), é provável que esse procedimento
tenha nivelado o desempenho dos grupos no último bloco de prática. Fato este
que também já ocorreu em outros estudos que utilizaram esse mesmo
procedimento metodológico para diferenciar os níveis de estabilização
(FONSECA et al., 2012; UGRINOWITSCH et al., 2014).
82
Apesar da semelhança em relação à precisão temporal e
consistência, a análise do comportamento visual dos experimentos 1 e 2
evidenciou que somente o GS reduziu o número de fixações no primeiro terço
da canaleta do início para o final da prática. No experimento 3, ambos os
grupos reduziram as fixações no primeiro terço da canaleta, porém, o GS
realizou maior número de fixações que o GE no terceiro terço da canaleta ao
final da prática. Esses achados sugerem os grupos atingiram o mesmo patamar
desempenho ao final da prática, mas com processos de controle do movimento
distintos. A distinção no comportamento visual entre os grupos ainda na fase
de prática pode ser interpretada como os primeiros sinais de efeitos do nível de
estabilização do desempenho no controle visuo-motor da interceptação, o que
pode auxiliar no entendimento sobre como as competências sensório-motoras
são adquiridas com a experiência, o que explica as diferenças dos estudos
encontrados anteriormente.
A utilização de menor quantidade de informação visual pelo GS na
etapa inicial da interceptação indica o aprimoramento da capacidade preditiva
proporcionada pela prática até a superestabilização do desempenho. A
capacidade preditiva está associada à atuação de modelos internos nos
processos de controle do movimento (WOLPERT; KAWATO, 1998; ITO, 2008).
Os modelos internos simulam internamente a dinâmica do controle sensório-
motor sem a necessidade de participação de feedback sensorial (WOLPERT;
GHAHRAMANI; JORDAN, 1995; KAWATO, 1999). Esses modelos atuam
essencialmente na predição das consequências dos comandos motores a partir
do estado atual (modelo forward) ou na predição dos comandos motores
necessários a partir do estado desejado (modelo inverso). Um dos
pressupostos dessa abordagem teórica é que os modelos internos são
formados e ajustados com o decorrer da prática (WOLPERT; GHAHRAMANI;
JORDAN, 1995; KAWATO, 1999; ITO, 2008). Com a prática, o modelo forward
se torna gradativamente mais eficiente em realizar predições das
consequências dos comandos motores (CISEK, 2009), através do confronto
entre as informações do feedback predito e do feedback real. A cada execução
é gerada uma nova estimativa de estado, que realimenta o próprio modelo
forward. Como o modelo forward possui informações referentes à ação
realizada, o mesmo é capaz de se tornar mais competente em suas predições

83
futuras com a prática (MIALL; WOLPERT, 1996; WOLPERT, 1997). Além
disso, tem sido proposto que o modelo forward usa as informações de erro do
estado atual do sistema provenientes do feedback sensorial para calibrar o
controlador (modelo inverso) (MIALL; WOLPERT, 1996; WOLPERT; KAWATO,
1998). Com o decorrer das tentativas de prática, é esperado que o modelo
inverso se torne mais competente em gerar comandos precisos de acordo com
o estado desejado (MIALL; WOLPERT, 1996).
Essa proposição justifica a gradativa redução da participação da
visão na parte inicial da interceptação, especialmente para o GS (experimento
1 e 2). Se a prática leva à formação e ao refinamento dos modelos internos, é
esperado o aprimoramento da competência preditiva com o avanço da prática,
principalmente com a sua continuidade após a estabilização do desempenho.
Isso implica em reduzida necessidade do uso da visão no planejamento e
controle inicial da interceptação, pois com o progresso da aprendizagem o
controle ocorre prioritariamente por pré-programação através dos comandos
motores gerados pelo modelo inverso (ZAGO et al., 2009; WOLPERT;
DIEDRICHSEN; FLANAGAN, 2011; LA SCALEIA; ZAGO; LACQUANITI, 2015).
Os resultados da fase de prática do experimento 1 e 2 fornecem evidências na
direção dessa premissa. A análise dos tempos parciais vão ao encontro da
estratégia visual utilizada, pois não houve aumento do tempo parcial dos
últimos componentes, o que evidenciaria o controle via feedback corrente.
Esses achados corroboram o estudo de Profeta (2010), que mesmo usando
uma tarefa com características distintas da interceptação também verificou
efeitos da superestabilização do desempenho no controle preditivo. Assim, a
superestabilização do desempenho parece ter potencializado a capacidade de
regular o movimento através de pré-programação, especialmente na fase inicial
da interceptação.
O maior número de fixações na parte final da ação observado no GS
ao final da prática em relação ao GE no experimento 3 aponta para a
predominância de participação da visão na regulação dos ajustes finais da
interceptação. Esse comportamento pode estar associado ao desenvolvimento
de competências relacionadas à capacidade de regulação dos movimentos
baseadas no feedback visual, ou seja, possíveis indícios de aprimoramento do
controle via feedback corrente decorrentes da prática até a superestabilização

84
do desempenho. Isso porque o controle do movimento baseado em feedback
corrente prevê a participação ativa da visão na regulação dos movimentos
(DESSING et al., 2002; MONTAGNE, 2005; SARLEGNA; MUTHA, 2014).
Esses achados são consistentes com o estudo de Couto (2012) que
previamente demonstrou que a superestabilização do desempenho é capaz de
melhorar o controle de ações de interceptação via feedback corrente, mas são
contrários aos dados do tempo parcial, conforme citado anteriormente. Uma
possível explicação é que os comandos motores gerados pelo modelo inverso
não necessitaram ser corrigidos na fase final da interceptação através do
feedback visual, o que também sugere o aperfeiçoamento da capacidade
preditiva com o processo de aprendizagem.
Em suma, as diferenças observadas entre os grupos no
comportamento visual durante a interceptação ainda na fase de prática
fornecem os primeiros sinais que o nível de estabilização pode influenciar o
controle visuo-motor da interceptação, mais precisamente, afetar os
mecanismos associados à combinação do controle preditivo e feedback
corrente. Porém, as evidências mais fortes para essa proposição e confirmação
da primeira hipótese do estudo foram verificadas na fase de testes, quando as
interceptações foram executadas sob diferentes padrões de velocidade do
objeto móvel.
Na fase de teste, o GS teve desempenho superior ao GE nos três
experimentos. No experimento 1, essa superioridade do GS foi verificada nas
interceptações aos objetos móveis com velocidade constante, tanto em
velocidade reduzida quanto em velocidade aumentada. No experimento 2, o
melhor desempenho do GS foi observado diante de objetos móveis com
velocidade variável e sem mudança no tempo total de deslocamento. Mais
especificamente, durante a combinação de velocidade reduzida-aumentada. Já
no experimento 3, o desempenho do GS foi superior também sob
circunstâncias de velocidade variável do objeto móvel, mas com modificação
do tempo total de deslocamento. Isso ocorreu na combinação de velocidade
aumentada-reduzida quando houve redução no tempo total de deslocamento
do objeto para a zona de contato. Esses achados estão em consonância com
estudos prévios que tem verificado melhor performance nas interceptações

85
após a prática até um nível de superestabilização do desempenho (COUTO,
2012; FONSECA et al., 2012).
Entretanto, um dos pontos mais importantes deste estudo é auxiliar
na elucidação dos mecanismos de controle afetados pelo nível de estabilização
do desempenho e também mapear as competências sensório-motoras que são
aprimoradas com a continuidade da prática até a superestabilização. Alguns
comportamentos interessantes relativos ao controle visuo-motor da
interceptação foram identificados em associação com o melhor desempenho do
GS nos três experimentos. Primeiramente, pôde ser observado que os grupos
parecem ter usado uma mesma estratégia de controle nas interceptações
(combinação de controle preditivo e feedback corrente) nos diferentes padrões
de velocidade do objeto, corroborando os achados de estudos prévios
(MÜLLER; ABERNETHY, 2006; TEIXEIRA et al., 2006a; DE LA MALLA;
LÓPEZ-MOLINER, 2015). No geral, as interceptações foram realizadas com
pequeno número de fixações visuais em sua etapa inicial, mas com maior
número de fixações na fase final da ação. Esse comportamento é tipicamente
característico da combinação do controle preditivo para iniciar o movimento e
feedback corrente no seu final, o que aponta para a interação entre um modelo
interno preditivo e a informação visual adicional para os ajustes dos comandos
gerados por esse modelo quando necessário.
Tem sido proposto que a interação entre o modelo original e a
informação visual adicional pode ser importante para garantir a precisão
espaço-temporal das interceptações (TEIXEIRA et al., 2006a). Na presença de
erros de predição dos modelos internos, a informação visual possibilita
correções precisas do movimento previamente planejado (TEIXEIRA et al.,
2006a). Então, a diferença observada no desempenho pode ter ocorrido devido
à maior eficiência do GS na combinação desses mecanismos. Diante dos
objetos com velocidade constante (experimento 1) foi verificado menor tempo
de reação e maior número de fixações na etapa final da interceptação do GS
em relação ao GE. Quando as interceptações envolveram objetos com
velocidade variável (experimentos 2 e 3), os resultados mostraram durações
mais breves nos tempos parciais dos componentes (TR e sub-movimentos)
aliadas com maior número de fixações na etapa final da interceptação do GS
em relação ao GE.

86
Considerando os resultados do experimento 1, a superestabilização
do desempenho pode ter promovido aprimoramento da capacidade preditiva. O
GS apresentou menor tempo de reação e maior número de fixações na fase
final da interceptação em relação ao GE. Apesar do monitoramento visual mais
evidente do GS na parte final da interceptação, não foram encontradas
diferenças entre os grupos na duração dos últimos sub-movimentos da
interceptação (Tpar4 e Tpar5), que indicariam correções mais pronunciadas
momentos antes do contato. Isso leva a crer que a diferença no desempenho
nas interceptações durante a velocidade aumentada e reduzida foi devido à
predição mais eficiente do GS em relação ao GE. Esses resultados fortalecem
as evidências encontradas na fase de prática que já apresentavam indicativos
dos efeitos da superestabilização na aquisição de competências preditivas.
O padrão de velocidade variável do objeto móvel nos experimentos 2
e 3 tem como particularidade a exigência de correções nas interceptações com
a ação em andamento. A mudança da velocidade do objeto durante o
deslocamento para a zona de interceptação pode causar erros se os
movimentos não forem compensados. Assim, o padrão de velocidade variável
induz a ativação de mecanismos de feedback para produzir as correções da
itnerceptação (TEIXEIRA; LIMA; FRANZONI, 2005; TEIXEIRA et al., 2006b).
Se a capacidade de regular apropriadamente a interceptação baseada no
feedback corrente foi exigida nesses dois experimentos, as diferenças entre os
grupos podem estar relacionados às competências envolvidas no controle via
feedback corrente.
O desempenho superior do GS em relação ao GE foi observado sob
duas condições distintas de combinação da velocidade, ou seja, durante a
velocidade reduzida-aumentada (experimento 2) e velocidade aumentada-
reduzida (experimento 3). Embora as combinações de velocidades sejam
opostas, elas possuem um aspecto em comum: o tempo relativamente curto
para realização dos ajustes. Nas duas situações em que o GS apresentou
melhor desempenho, o tempo disponível para correções foi reduzido. O tempo
para realizar correções após o início da interceptação pode ser considerado
fundamental para a precisão espaço-temporal, especialmente devido aos
problemas de atrasos decorrentes da transdução sensorial, processamento

87
neural, condução neural e ativação muscular (TEIXEIRA et al., 2006b; ZAGO et
al., 2009; WOLPERT; DIEDRICHSEN; FLANAGAN, 2011).
De fato, a redução no tempo disponível para implementação de
correções em virtude da manipulação da combinação de velocidade
(experimento 2) ou do tempo total de deslocamento do objeto (experimento 3)
parecem ter afetado negativamente a precisão temporal dos grupos. Os erros
foram maiores quando o tempo para os ajustes foi reduzido, como por
exemplo, nas condições de velocidade reduzida-aumentada (experimento 2) e
aumentada-reduzida (experimento 3). Apesar da maior exigência nessas
condições devido à disponibilidade de tempo para as correções das
interceptações após as mudanças na velocidade do objeto, o GS demonstrou
desempenho superior ao GE. Os resultados também revelaram durações mais
curtas nos tempos parciais dos componentes (TR e sub-movimentos)
associadas com maior número de fixações na etapa final da interceptação do
GS em comparação ao GE.
Embora os resultados dos experimentos 2 e 3 tenham também
evidenciado o uso da combinação de estratégias de controle preditivo e
feedback corrente, diferentemente do experimento 1, não foram encontradas
evidências de efeitos do nível de estabilização nos mecanismos relacionados à
competência preditiva. Isso pode ser explicado pelas diferentes características
do padrão de velocidade do objeto entre os experimentos. Como na
interceptação envolvendo objetos com velocidade variável requerem o
envolvimento predominantemente do feedback corrente, seria pouco provável
encontrar diferença em relação à competência preditiva. Por outro lado, os
achados dos experimentos 2 e 3 fornecem fortes indícios que o nível de
estabilização do desempenho modulou a eficiência do controle mediante
feedback corrente da interceptação a objetos com velocidade variável,
especialmente quando o tempo para implementação de correções foi reduzido.
A explicação para esses resultados pode ser atribuída à influência
do nível de estabilização do desempenho nos atrasos visuo-motores típicos do
controle através do feedback corrente. Os atrasos sensório-motores são
apontados como um dos maiores problemas do controle através do feedback
corrente (ZAGO et al., 2009; WOLPERT; DIEDRICHSEN; FLANAGAN, 2011).
Esses atrasos podem variar entre 150 e 250 ms (BRENNER; SMEETS; DE
88
LUSSANET, 1998; SAUNDERS; KNILL, 2003, 2005). Isso significa que as
correções nos movimentos não podem ser realizadas instantaneamente em
resposta às mudanças ambientais ou detecção de erros motores. Porém, tem
sido demonstrado que a experiência prévia pode minimizar os efeitos negativos
dos atrasos visuo-motores durante o controle via feedback sensorial (MCLEOD,
1987; LE RUNIGO; BENGUIGUI; BARDY, 2005). Por exemplo, há evidências
de que sujeitos com maior nível de experiência são mais precisos durante a
interceptação de objetos que se movem com velocidade variável (aceleração e
desaceleração) em comparação aos sujeitos pouco experientes. O
desempenho superior foi atribuído aos menores atrasos visuo-motores dos
sujeitos mais experientes em relação aos sujeitos menos experientes, o que
aumenta a possibilidade de correções bem sucedidas na interceptação durante
a sua execução (LE RUNIGO; BENGUIGUI; BARDY, 2005). Portanto, a
superestabilização do desempenho pode ter potencializado os mecanismos de
controle via feedback corrente de forma a minimizar os problemas de atrasos
visuo-motores, e assim, parece ter possibilitado maior eficiência nas correções
da interceptação quando a restrição temporal foi maior.

89
9. CONCLUSÕES
O presente estudo foi conduzido para investigar a influência do nível
de estabilização do desempenho e do padrão de velocidade do objeto móvel
sobre o controle visuo-motor da interceptação. Compreender como o nível de
estabilização do desempenho modula o controle visuo-motor durante a
interceptação em contextos dinâmicos e como o controle visuo-motor da
interceptação é modificado diante de diferentes padrões de velocidade do
objeto móvel ainda é um desafio na literatura sobre o tema.
Os achados deste estudo permitem concluir o nível de estabilização
do desempenho alcançado na prática afeta o controle visuo-motor da
interceptação de objetos móveis em contextos dinâmicos. A prática até a
superestabilização do desempenho proporciona aquisição de competências
sensório-motoras que melhora a eficiência da combinação de estratégias de
controle preditivo e prospetivo na interceptação, e consequentemente, resulta
em desempenho superior durante as ações de interceptação,
independentemente do padrão de velocidade do objeto móvel. Ou seja, a
superestabilização resulta em aprimoramento dos mecanismos de controle via
pré-programação e feedback corrente. As estratégias de busca visual quando a
superestabilização do desempenho é alcançada podem fornecer indicativos
ainda durante o processo de aprendizagem de aprimoramento desses
mecanismos.
Além disso, o padrão de velocidade do alvo móvel não influencia o
controle visuo-motor nas ações de interceptação. Os resultados aqui
encontrados sugerem que as interceptações na presença de objetos móveis
com velocidade constante ou variada são realizadas pela combinação de
estratégias de controle preditivo e feedback corrente. Além disso, essa forma
de controle não parece ser modificada diante de mudanças no padrão de
velocidade do objeto móvel, mesmo quando ocorrem modificações no tempo
total de deslocamento durante a aproximação para a zona de contato.

90
REFERÊNCIAS
AZEVEDO NETO, R. M.; TEIXEIRA, L. A. Control of interceptive actions is based on expectancy of time to target arrival. Experimental Brain Research, v. 199, n. 2, p. 135–143, 2009.
BASTIN, J.; CRAIG, C.; MONTAGNE, G. Prospective strategies underlie the control of interceptive actions. Human Movement Science, v. 25, n. 6, p. 718–732, 2006.
BENDA, R. N. Variabilidade e processo adaptativo na aquisição de habilidades motoras. 2001. Universidade de São Paulo, 2001.
BENDA, R. N. Sobre a natureza da aprendizagem motora: mudança e estabilidade ... e mudança. Revista Brasileira de Educação Física e Esporte, v. 20, n. 5, p. 43–45, 2006.
BLASCHECK, T.; KURZHALS, K.; RASCHKE, M.; BURCH, M.; WEISKOPF, D.; ERTL, T. State-of-the-art of visualization for eye tracking data. EuroVis, p. 63–82, 2014.
BOSCO, G.; MONACHE, S. D.; LACQUANITI, F. Catching what we can’t see: Manual interception of occluded fly-ball trajectories. Plos One, v. 7, n. 11, p. e49381, 2012.
BRENNER, E.; SMEETS, J. B. J. How people achieve their amazing temporal precision in interception. Journal of Vision, v. 15, n. 3, p. 1–21, 2015.
BRENNER, E.; SMEETS, J. B. J.; DE LUSSANET, M. H. Hitting moving targets. Continuous control of the acceleration of the hand on the basis of the target’s velocity. Experimental Brain Research, v. 122, n. 4, p. 467–474, 1998.
BRENNER, E.; VAN DAM, M.; BERKHOUT, S.; SMEETS, J. B. J. Timing the moment of impact in fast human movements. Acta Psychologica, v. 141, n. 1, p. 104–111, 2012.
BROUWER, A. M.; BRENNER, E.; SMEETS, J. B. Hitting moving objects: the dependency of hand velocity on the speed of the target. Experimental Brain Research, v. 133, n. 2, p. 242–8, 2000.
BROUWER, A. M.; BRENNER, E.; SMEETS, J. B. J. Hitting moving objects: is target speed used in guiding the hand? Experimental Brain Research, v. 143, p. 198–211, 2002.
CISEK, P. Internal models. In: BINDER, M. D.; HIROKAWA, N.; WINDHORST, U. (Ed.). Encyclopedia of Neuroscience. [s.l.] Springer, 2009. p. 2009–2012.
CORRÊA, U. C.; BARROS, J. A. D. C.; MASSIGLI, M.; GONÇALVES, L. A.; TANI, G. A prática constante-aleatória e o processo adaptativo de

91
aprendizagem motora: efeitos da quantidade de prática constante. Revista Brasileira de Educação Física e Esporte, v. 21, n. 4, p. 301–314, 2007.
CORRÊA, U. C.; BENDA, R. N.; UGRINOWITSCH, H.; LUSTOSA DE OLIVEIRA, D.; FREUDENHEIM, A. M.; TANI, G. Different faces of variability in the adaptive process of motor skill learning. Nonlinear Dynamics, Psychology, and Life Sciences, v. 19, n. 4, p. 465–487, 2015.
CORREA, U. C.; TANI, G. Aparelho de timing coincidente em tarefas complexasSão Paulo, 2004. .
COUTO, C. R. Efeitos do nível de estabilização do desempenho na adaptação a perturbações imprevisíveis inseridas após o início do movimento. 2012. Universidade Federal de Minas Gerais, 2012.
DAVIDS, K.; SALVESBERGH, G.; BENNETT, S. J.; VAN DER KAMP, J. Interceptive actions in sport: information and movement. London: Routledge, 2002.
DE LA MALLA, C.; LÓPEZ-MOLINER, J. Predictive plus online visual information optimizes temporal precision in interception. Journal of Experimental Psychology: Human Perception and Performance, v. 41, n. 3, p. 1–10, 2015.
DESMURGET, M.; GRAFTON, S. Forward modeling allows feedback control for fast reaching movements. Trends in cognitive sciences, v. 4, n. 11, p. 423–431, 2000.
DESMURGET, M.; PÉLISSON, D.; ROSSETTI, Y.; PRABLANC, C. From eye to hand: planning goal-directed movements. Neuroscience and Biobehavioral Reviews, v. 22, n. 6, p. 761–788, 1998.
DESSING, J. C.; BULLOCK, D.; PEPER, C. L. E.; BEEK, P. J. Prospective control of manual interceptive actions: comparative simulations of extant and new model constructs. Neural Networks, v. 15, n. 2, p. 163–79, 2002.
DUBROWSKI, A.; CARNAHAN, H. Control strategies when intercepting slowly moving targets. Journal of Motor Behavior, v. 33, n. 1, p. 37–48, 2001.
DUBROWSKI, A.; LAM, J.; CARNAHAN, H. Target velocity effects on manual interception kinematics. Acta Psychologica, v. 104, n. 1, p. 103–118, 2000.
DUCHOWSKI, A. T. Eye tracking methodology: theory and practice. London: Springer, 2007.
FLANAGAN, J. R.; WING, A. M. The role of internal models in motion planning and control: evidence from grip force adjustments during movements of hand-held loads. The Journal of Neuroscience, v. 17, n. 4, p. 1519–28, 1997.
92
FONSECA, F. D. S.; BENDA, R. N.; PROFETA, V. L. D. S.; UGRINOWITSCH, H. Extensive practice improves adaptation to unpredictable perturbations in a sequential coincident timing task. Neuroscience Letters, v. 517, n. 2, p. 123–127, 2012.
FONSECA, F. S. Os efeitos do nível de estabilização do desempenho na adaptação a perturbações perceptivas imprevisíveis. 2009. Universidade Federal de Minas Gerais, 2009.
GOODALE, M. A. Transforming vision into action. Vision Research, v. 51, n. 13, p. 1567–1587, 2011.
GOODALE, M. A. How (and why) the visual control of action differs from visual perception. Proceedings of the Royal Society B, v. 281, p. 01–09, 2014.
GOODALE, M. A.; HUMPHREY, G. K. The objects of action and perception. Cognition, v. 67, p. 181–207, 1998.
GOODALE, M. A.; MILNER, A. D. Separate visual pathways for perception and action. Trends in Neurosciences, v. 15, n. 1, p. 20–25, 1992.
IMAMIZU, H.; KURODA, T.; MIYAUCHI, S.; YOSHIOKA, T.; KAWATO, M. Modular organization of internal models of tools in the human cerebellum. Proceedings of the National Academy of Sciences of the United States of America, v. 100, n. 9, p. 5461–5466, 2003.
IMAMIZU, H.; MIYAUCHI, S.; TAMADA, T.; SASAKI, Y.; TAKINO, R.; PÜTZ, B.; YOSHIOKA, T.; KAWATO, M. Human cerebellar activity reflecting an acquired internal model of a new tool. Nature, v. 403, n. 6766, p. 192–195, 2000.
ITO, M. Control of mental activities by internal models in the cerebellum. Nature Reviews, v. 9, n. 4, p. 304–13, 2008.
KATSUMATA, H.; RUSSELL, D. M. Prospective versus predictive control in timing of hitting a falling ball. Experimental Brain Research, v. 216, n. 4, p. 499–514, 2012.
KAWATO, M. Internal models for motor control and trajectory planning. Current Opinion in Neurobiology, v. 9, p. 718–727, 1999.
KAWATO, M.; KURODA, T.; IMAMIZU, H.; NAKANO, E.; MIYAUCHI, S.; YOSHIOKA, T. Internal forward models in the cerebellum: fMRI study on grip force and load force coupling. Progress in Brain Research, v. 142, p. 171–188, 2003.
LA SCALEIA, B.; ZAGO, M.; LACQUANITI, F. Hand interception of occluded motion in humans: a test of model-based versus on-line control. Journal of Neurophysiology, v. 114, n. 3, p. 1577–1592, 2015.

93
LAND, M. F. Motion and vision: why animals move their eyes. Journal of Comparative Physiology, v. 185, n. 4, p. 341–352, 1999.
LAND, M. F. Vision, eye movements, and natural behavior. Visual Neuroscience, v. 26, n. 1, p. 51–62, 2009.
LAND, M. F.; MCLEOD, P. From eye movements to actions: how batsmen hit the ball. Nature Neuroscience, v. 3, n. 12, p. 1340–5, 2000.
LE RUNIGO, C.; BENGUIGUI, N.; BARDY, B. G. Perception-action coupling and expertise in interceptive actions. Human Movement Science, v. 24, n. 3, p. 429–445, 2005.
LEE, D.; PORT, L.; GEORGOPOULOS, A. P. Manual interception of moving targets. Experimental Brain Research, v. 116, p. 421–433, 1997.
LEE, T. D.; SWANSON, L. R.; HALL, A. L. What is repeated in a repetition? Effects of practice conditions on motor skill acquisition. Physical Therapy, v. 71, n. 2, p. 150–156, 1991.
LEITE, C. M. F. Efeitos da organização da prática variada sobre a adaptação motora a perturbações previsíveis e imprevisíveis. 2014. Universidade Federal de Minas Gerais, 2014.
MANOEL, E. J. Desenvolvimento motor: implicações para a Educação Física Escolar I. Revista Paulista de Educação Física, v. 8, n. 1, p. 82–97, 1994.
MCLEOD, P. Visual reaction time and high-speed ball games. Perception, v. 16, n. 1, p. 49–59, 1987.
MCLEOD, P.; JENKINS, S. Timing accuracy and decision time in high-speed ball games. International Journal of Sport Psychology, v. 22, n. 3, p. 279–295, 1991.
MERCHANT, H.; ZARCO, W.; PRADO, L.; PÉREZ, O. Behavioral and neurophhysiological aspects of target interception. In: STERNAD, D. (Ed.). Progress in Motor Control. Chicago: Springer, 2009. 629p. 201–220.
MIALL, R. C.; JENKINSON, N.; KULKARNI, K. Adaptation to rotated visual feedback: a re-examination of motor interference. Experimental Brain Research, v. 154, n. 2, p. 201–210, 2004.
MIALL, R. C.; WOLPERT, D. M. Forward models for physiological motor control. Neural Networks, v. 9, n. 8, p. 1265–1279, 1996.
MILNER, A. D.; GOODALE, M. A. Two visual systems re-viewed. Neuropsychologia, v. 46, n. 3, p. 774–785, 2008.
MONTAGNE, G. Prospective control in sport. International Journal of Sport Psychology, v. 36, n. 2, p. 127, 2005.
94
MÜLLER, S.; ABERNETHY, B. Batting with occluded vision: an in situ examination of the information pick-up and interceptive skills of high- and low-skilled cricket batsmen. Journal of Science and Medicine in Sport, v. 9, n. 6, p. 446–458, 2006.
PANCHUK, D.; VICKERS, J. N. Using spatial occlusion to explore the control strategies used in rapid interceptive actions: predictive or prospective control? Journal of Sports Sciences, v. 27, n. 12, p. 1249–1260, 2009.
PROFETA, V. L. D. S. Nível de estabilização na resposta a perturbações imprevisíveis: efeitos sobre o feedback corrente e o feedforward. 2009. Universidade Federal de Minas Gerais, 2009.
REGAN, D. Visual factors in hitting and catching. Journal of Sports Sciences, v. 15, n. 6, p. 533–558, 1997.
RODRIGUES, S. T. O movimento dos olhos e a relação percepção-ação. In: TEIXEIRA, L. A. (Ed.). Avanços em Comportamento Motor. São Paulo: Movimento, 2001. p. 122–146.
RODRIGUES, S. T.; VICKERS, J. N.; WILLIAMS, A. M. Head, eye and arm coordination in table tennis. Journal of Sports Sciences, v. 20, n. 3, p. 187–200, 2002.
ROSE, G. J. A multi level approach to the study of motor control and learning. Boston: Allyn and Bacon, 1997.
SARLEGNA, F. R.; MUTHA, P. K. The influence of visual target information on the online control of movements. Vision Research, v. 110, p. 144–154, 2014.
SAUNDERS, J. A.; KNILL, D. C. Humans use continuous visual feedback from the hand to control fast reaching movements. Experimental Brain Research, v. 152, n. 3, p. 341–352, 2003.
SAUNDERS, J. A.; KNILL, D. C. Humans use continuous visual feedback from the hand to control both the direction and distance of pointing movements. Experimental Brain Research, v. 162, n. 4, p. 458–473, 2005.
SCHMIDT, R. A.; WRISBERG, C. A. Aprendizagem e performance motora: uma abordagem da aprendizagem baseada no problema. 4a. ed. Porto Alegre: Artmed, 2010.
SEIDLER, R. D.; NOLL, D. .; THIERS, G. Feedforward and feedback processes in motor control. NeuroImage, v. 22, n. 4, p. 1775–1783, 2004.
TANI, G. Criança e movimento: o conceito de prática na aquisição de habilidades motoras. In: KREBS, R. J.; COPPETTI, F.; BELTRAME, T.; ULSTRA, M. (Ed.). Perspectivas no estudo do desenvolvimento infantil. Santa Maria: SIEC, 1999. p. 121–139.

95
TANI, G. Processo adaptativo em aprendizagem motora: o papel da variabilidade. Revista Paulista de Educação Física, n. 3, p. 55–61, 2000.
TANI, G. Processo adaptativo: uma concepção de aprendizagem motora além da estabilização. In: TANI, G. (Ed.). Comportamento motor: aprendizagem e desenvolvimento. Rio de Janeiro: Guanabara Koogan, 2005. p. 60–67.
TANI, G.; CORREA, U. C.; BASSO, L.; BENDA, R. N.; UGRINOWITSCH, H.; CHOSHI, K. An adaptive process model of motor learning: insights for the teaching of motor skills. Nonlinear Dynamics, Psychology, and Life Sciences, v. 18, n. 1, p. 47–65, 2014.
TEIXEIRA, L. A.; CHUA, R.; NAGELKERKE, P.; FRANKS, I. M. Use of visual information in the correction of interceptive actions. Experimental Brain Research, v. 175, n. 4, p. 758–763, 2006a.
TEIXEIRA, L. A.; CHUA, R.; NAGELKERKE, P.; FRANKS, I. M. Reprogramming of interceptive actions: time course of temporal corrections for unexpected target velocity change. Journal of Motor Behavior, v. 38, p. 467–477, 2006b.
TEIXEIRA, L. A.; LIMA, E. D. S.; FRANZONI, M. M. The continuous nature of timing reprogramming in an interceptive task. Journal of Sports Sciences, v. 23, n. 9, p. 943–950, 2005.
TRESILIAN, J. R. The accuracy of interceptive action in time and space. Exercise and Sport Sciences Reviews, v. 32, p. 167–173, 2004.
TRESILIAN, J. R. Hitting a moving target: perception and action in the timing of rapid interceptions. Perception and Psychophysics, v. 67, n. 1, p. 129–149, 2005.
TRESILIAN, J. R. Sensorimotor control and learning: an introduction to the behavioral neuroscience of action. London: Palgrave Macmillan, 2012.
TRESILIAN, J. R.; LONERGAN, A. Intercepting a moving target: effects of temporal precision constraints and movement amplitude. Experimental Brain Research, v. 142, n. 2, p. 193–207, 2002.
TRESILIAN, J. R.; PLOOY, A. Systematic changes in the duration and precision of interception in response to variation of amplitude and effector size. Experimental Brain Research, v. 171, n. 4, p. 421–35, 2006.
TRESILIAN, R.; OLIVER, J.; CARROLL, J. Temporal precision of interceptive action: differential effects of target size and speed. Experimental Brain Research, v. 148, n. 4, p. 425–38, 2003.
UGRINOWITSCH, H. Efeito do nível de estabilização do desempenho e do tipo de perturbação no processo adaptativo em aprendizagem motora. 2003. Universidade de São Paulo, 2003.

96
UGRINOWITSCH, H.; BENDA, R. N. Contribuições da aprendizagem motora: a prática na intervenção em educação física. Revista Brasileira de Educação Física e Esporte, v. 25, n. spe, p. 25–35, 2011.
UGRINOWITSCH, H.; BENDA, R. N.; CORRÊA, U. C.; TANI, G. Extensive Practice Improves Adaptation to Predictable Perturbations in a Sequential Coincidente Timing Task. American Journal of Life Sciences, v. 2, n. 2, p. 90–95, 2014.
UGRINOWITSCH, H.; DOS SANTOS-NAVES, S. P.; CARBINATTO, M. V; BENDA, R. N.; TANI, G. Motor skill adaptation depends on the level of learning. World Academy of Science, Engineering and Technology, v. 77, p. 956–960, 2011.
WERNER, J. S.; CHULAPA, L. M. The new visual neurosciences. Cambridge: MIT Press, 2014.
WIJDENES, L. O.; BRENNER, E.; SMEETS, J. Comparing online adjustments to distance and direction in fast pointing movements. Journal of Motor Behavior, v. 45, n. 5, p. 395–404, 2013.
WIJDENES, L. O.; BRENNER, E.; SMEETS, J. B. J. Online Manual Movement Adjustments in Response to Target Position Changes and Apparent Target Motion. Motor Control, v. 18, p. 44–54, 2014.
WOLPERT, D. M. Computational approaches to motor control. Trends in Cognitive Sciences, v. 1, n. 6, p. 209–216, 1997.
WOLPERT, D. M.; DIEDRICHSEN, J.; FLANAGAN, J. R. Principles of sensorimotor learning. Nature Reviews Neuroscience, v. 12, p. 1–13, 2011.
WOLPERT, D. M.; FLANAGAN, J. R. Motor prediction. Current Biology, v. 11, n. 18, p. R729–R732, 2001.
WOLPERT, D. M.; GHAHRAMANI, Z. Computational principles of movement neuroscience. Nature Neuroscience, v. 3, n. Suppl, p. 1212–1217, 2000.
WOLPERT, D. M.; GHAHRAMANI, Z.; FLANAGAN, J. R. Perspectives and problems in motor learning. Trends in Cognitive Sciences, v. 5, n. 11, p. 487–494, 2001.
WOLPERT, D. M.; GHAHRAMANI, Z.; JORDAN, M. I. An internal model for sensorimotor integration. Science, v. 269, p. 1880–1892, 1995.
WOLPERT, D. M.; KAWATO, M. Multiple paired forward and inverse models for motor control. Neural Networks, v. 11, n. 7-8, p. 1317–1329, 1998.
ZAGO, M.; BOSCO, G.; MAFFEI, V.; IOSA, M.; IVANENKO, Y. P.; LACQUANITI, F. Internal models of target motion: expected dynamics overrides

97
measured kinematics in timing manual interceptions. Journal of Neurophysiology, v. 91, n. 4, p. 1620–1634, 2004.
ZAGO, M.; BOSCO, G.; MAFFEI, V.; IOSA, M.; IVANENKO, Y. P.; LACQUANITI, F. Fast adaptation of the internal model of gravity for manual interceptions: evidence for event-dependent learning. Journal of Neurophysiology, v. 93, n. 2, p. 1055–1068, 2005.
ZAGO, M.; MCINTYRE, J.; SENOT, P.; LACQUANITI, F. Visuo-motor coordination and internal models for object interception. Experimental Brain Research, v. 192, n. 4, p. 571–604, 2009.
ZHAO, H.; WARREN, W. H. On-line and model-based approaches to the visual control of action. Vision Research, v. 110, p. 190–202, 2015.

98
ANEXOS
99
ANEXO A – Parecer de aprovação do Comitê de Ética em Pesquisa da
Universidade Federal de Minas Gerais – COEP/UFMG