modelagem, controle e simula˙ˆo da din´mica … · instituto militar de engenharia 1o ten josÉ...
TRANSCRIPT

INSTITUTO MILITAR DE ENGENHARIA
1O¯ TEN JOSÉ CARLOS LEÃO VELOSO SILVA
MODELAGEM, CONTROLE E SIMULAÇÃO DA DINÂMICA
ELETROMECÂNICA DE UMA MICRO USINA
HIDRELÉTRICA NA AMAZÔNIA
Dissertação de Mestrado apresentada ao Curso deMestrado em Engenharia Elétrica do Instituto Militarde Engenharia, como requisito parcial para obtenção dotítulo de Mestre em Ciências em Engenharia Elétrica.
Orientador: Paulo César Pellanda, Dr. ENSAE, MajQEMCo-orientador: José Carlos Cesar Amorim, Dr. INPG
Rio de Janeiro
2003

c2003
INSTITUTO MILITAR DE ENGENHARIAPraça General Tibúrcio, 80-Praia VermelhaRio de Janeiro-RJ CEP 22290-270
Este exemplar é de propriedade do Instituto Militar de Engenharia, que poderá incluí-lo em base de dados, armazenar em computador, microfilmar ou adotar qualquer formade arquivamento.
É permitida a menção, reprodução parcial ou integral e a transmissão entre bibliote-cas deste trabalho, sem modificação de seu texto, em qualquer meio que esteja ou venhaa ser fixado, para peqsquisa acadêmica, comentários e citações, desde que sem finalidadecomercial e que seja feita a referência bibliográfica completa.
Os conceitos expressos neste trabalho são de responsabilidade do(s) autor(es) e do(s)orientador(es).
S586 Silva, José Carlos L.V.Modelagem, Controle e Simulação da Dinâmica Eletromecânica de Uma
Micro Usina Hidrelétrica na Amazônia. / José Carlos Leão Veloso Silva. -Rio de Janeiro : Instituto Militar de Engenharia, 2003.
136 p. : il., graf., tab.
Dissertação (mestrado) - Instituto Militar de Engenharia - Rio de Janeiro,2003.
1. Modelagem Matemática de SEP. 2. Projeto de reguladores de tensão ede velocidade. 3. Simulação não-linear. I. Instituto Militar de Engenharia.II. Título.
CDD 629.8312
2

INSTITUTO MILITAR DE ENGENHARIA
1O¯ TEN JOSÉ CARLOS LEÃO VELOSO SILVA
MODELAGEM, CONTROLE E SIMULAÇÃO DA DINÂMICA
ELETROMECÂNICA DE UMA MICRO USINA HIDRELÉTRICA NA
AMAZÔNIA
Dissertação de Mestrado apresentada ao Curso de Mestrado em Engenharia Elétricado Instituto Militar de Engenharia, como requisito parcial para obtenção do título deMestre em Ciências em Engenharia Elétrica.
Orientador: Paulo César Pellanda, Dr. ENSAE, Maj QEMCo-orientador: José Carlos Cesar Amorim, Dr. INPG
Aprovada em 19 de dezembro de 2003 pela seguinte Banca Examinadora:
Paulo César Pellanda, Dr. ENSAE, Maj QEM do IME - Presidente
José Carlos Cesar Amorim, Dr. INPG do IME
Mário Cesar Mello Massa de Campos, Dr. ECP do CENPES
Antonio Eduardo Carrilho da Cunha, Dr. Eng do IME
Rio de Janeiro2003
3

A meus pais, Paulo e Vera; a meus irmãos, Ana Paulae José Paulo; a minha avó Dulce; e a meus familia-res e amigos, por me mostrarem que "Vale a Pena...".
"Os que lançam as sementes entre lágrimas, ceifa-rão com alegria.Chorando de tristeza sairão, espalhando suas semen-tes; cantando de alegria voltarão, carregando os seusfeixes!" (Sl. 125)
4

AGRADECIMENTOS
Ao Exército Brasileiro, ao Instituto Militar de Engenharia, e em especial ao Depar-
tamento de Engenharia Elétrica, pela oportunidade que me deram de realizar este curso
de Mestrado.
Aos professores do Grupo de Sistemas de Controle deste Instituto, e de modo todo
especial aos professores Coronel Geraldo Magela Pinheiro Gomes e Major Roberto Ades,
pelos ensinamentos, paciência, compreensão e amizade. Ao Coronel Pinheiro e ao Major
Ades a minha mais sincera gratidão.
Ao professor Glauco Nery Taranto (COPPE/UFRJ) pelo conhecimento transmitido,
pelas sugestões e esclarecimentos fundamentais dados em relação a sistemas de potência.
Ao professor e membro da banca examinadora, Capitão Antônio Eduardo Carrilho
da Cunha (IME), pelas diversas dúvidas que me sanou, por sua solicitude e pela valiosa
contribuição dada a este trabalho.
Ao professor Mário Cesar Mello Massa de Campos (CENPES) pelos conhecimentos
transmitidos na cadeira de Introdução à Neuro-Computação e durante a confecção desta
dissertação, sobretudo com relação à lógica fuzzy, tópico fundamental deste trabalho.
Por sua amizade e gentileza em aceitar participar da banca, contribuindo em muito para
o aprimoramento desta dissertação.
Aos companheiros de mestrado, e em particular a meus caros amigos 10 Ten Trajano
Alencar de Araújo Costa, do Departamento de Engenharia Mecânica, pelas mais variadas
explicações e conselhos, e por seu apoio; 10 Ten José Julimá Bezerra Júnior e 10 Ten
Alberto Mota Simões, ambos do Grupo de Sistemas de Controle do Departamento de
Engenharia Elétrica, pelo enorme privilégio que me deram de suas amizades.
Aos meus familiares, por me fazerem prosseguir, mesmo quando tudo parece concorrer
para que eu pare.
Ao professor José Carlos Cesar Amorim (IME), por sua co-orientação, sobretudo nos
assuntos relativos ao sistema hidráulico, e por ter acreditado em mim sendo um grande
incentivador deste trabalho.
Ao professor Major Paulo César Pellanda (IME), pela confiança em mim depositada
ao aceitar orientar esta dissertação, e pela forma como a conduziu, estando sempre ao
meu lado nos momentos mais difíceis, sacrificando, inclusive, horas de descanso com sua
família. Ao Major Pellanda o meu mais profundo respeito, admiração e agradecimento.
5

SUMÁRIO
LISTA DE ILUSTRAÇÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
LISTA DE TABELAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
LISTA DE SÍMBOLOS E ABREVIATURAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 14
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.1 Posicionamento e Motivação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
1.2 Objetivos . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 19
1.3 Organização . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2 CONFIGURAÇÃO DO SEP EM ESTUDO E SUA MODELAGEM
MATEMÁTICA . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1 Configuração do SEP . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
2.1.1 Comentários sobre a Carga . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.2 Modelagem do Sistema Elétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.1 Modelo do Gerador Elétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.2.2 Modelo da Rede Elétrica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.3 Modelagem do Sistema Hidráulico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 28
2.4 Valores Base, Especificação de Materiais e Dados de Parâmetros . . . . . . . . . . . 30
2.4.1 Sistema Elétrico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30
2.4.2 Sistema Hidráulico . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3 MODELO LINEARIZADO DO SISTEMA ELÉTRICO - REGU-
LADORES DE TENSÃO E SIMULAÇÕES . . . . . . . . . . . . . . . . . . . . . . 36
3.1 Linearização das Equações do Sistema Elétrico . . . . . . . . . . . . . . . . . . . . . . . . . . 37
3.2 Os Pontos de Operação do SEP e a Solução da Equação de Rede . . . . . . . . . . 39
3.3 As Formulações Aumentada (ou Implícita) e em Espaço de Estados . . . . . . . . 45
3.4 Projeto de Reguladores de Tensão e Simulações . . . . . . . . . . . . . . . . . . . . . . . . . 47
3.4.1 Comparações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 60
3.5 Interpolação de Ganhos dos RAT via Lógica Difusa . . . . . . . . . . . . . . . . . . . . . . 62
3.5.1 Estrutura de Controle com Tabelamento de Ganhos . . . . . . . . . . . . . . . . . . . . . . 63
3.5.2 Montagem da Lógica Fuzzy e Obtenção do Regulador Final . . . . . . . . . . . . . . 64
6

4 MODELAGEM E SIMULAÇÃO DO SISTEMA HIDRÁULICO E
DO REGULADOR VELOCIDADE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71
4.1 Modelo da Turbina Hidráulica e dos Atuadores . . . . . . . . . . . . . . . . . . . . . . . . . . 72
4.2 Modelo do Regulador de Velocidade . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 76
4.3 Partida do Sistema e Simulações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5 MODELO NÃO-LINEAR DO SEP E SIMULAÇÕES . . . . . . . . . . . . . 89
5.1 O Sistema Elétrico e a Solução das EAD . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 89
5.2 Modelo Completo do SEP e Simulações . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 95
5.3 Linearização do Modelo Matemático do Sistema Elétrico por Pertur-
bação Numérica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 109
6 CONCLUSÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
6.1 Resumo e Análise dos Principais Resultados Alcançados . . . . . . . . . . . . . . . . . . 115
6.2 Resumo da Contribuição . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 115
6.3 Críticas e Perspectivas . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 116
7 REFERÊNCIAS BIBLIOGRÁFICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 117
8 APÊNDICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 119
8.1 APÊNDICE 1: Programas Matlab . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
8.1.1 Definição dos Pontos de Operação e Parâmetros do Sistema Elétrico-
Solução da Equação de Rede . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 120
8.1.2 Formulação Aumentada - Obtenção das Matrizes ABCD (Espaço de Estados)124
8.1.3 Programa S-Function para o Modelo Não-Linear do Sistema Elétrico . . . . . . . 127
8.1.4 Programa S-Function para o Modelo do Sistema Elétrico Empregado
na Linearização por Perturbação Numérica . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 130
8.1.5 Cálculo dos Valores das Variáveis do Sistema Elétrico nos Pontos de
Operação considerados e Validação da Linerização Analítica . . . . . . . . . . . . . . 135
7

LISTA DE ILUSTRAÇÕES
FIG.2.1 Diagrama unifilar do sistema elétrico em estudo. . . . . . . . . . . . . . . . . . . . . 22
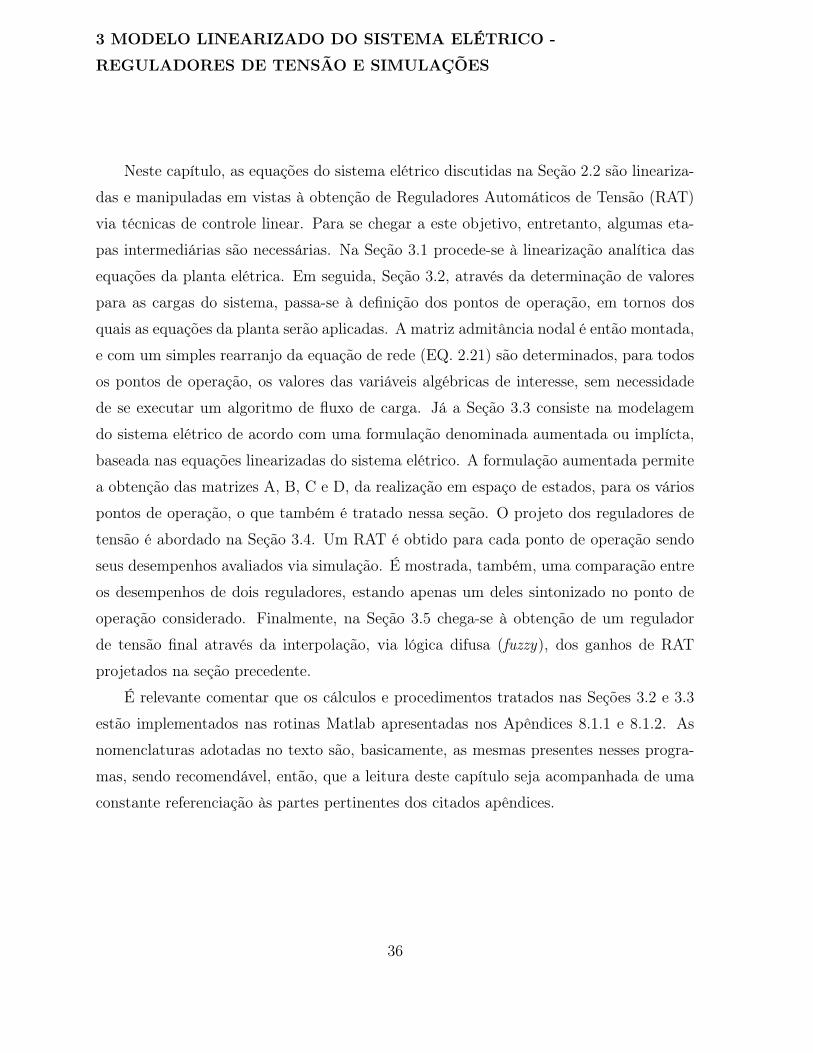
FIG.3.1 Diagrama de pólos e zeros da FT ∆|V1|(s)∆Efd(s)
, do SEP. Primeiro ponto
de operação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
FIG.3.2 Diagrama de pólos e zeros da FT ∆|V1|(s)∆Efd(s)
, do SEP- ampliação da
região do gráfico próxima à origem. Primeiro ponto de operação. . . . . . 48
FIG.3.3 Diagrama em blocos de malha fechada da planta elétrica com o
RAT, mostrando os sinais da tensão de referência (∆Vref ), da
tensão de campo (∆Efd) e da tensão terminal do gerador (∆Vt). . . . . . . 50
FIG.3.4 Modelo em Simulink do sistema elétrico em malha fechada. . . . . . . . . . . . 50
FIG.3.5 Resposta de ∆|V1| para uma entrada ao degrau de 0,05 pu em
∆Vref , com um regulador tipo I (integrador)- primeiro ponto de
operação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
FIG.3.6 Resposta de ∆|V1| para uma entrada ao degrau de 0,05 pu em
∆Vref , com um regulador tipo PI (proporcional - integral)- primeiro
ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
FIG.3.7 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- primeiro ponto de operação. . . . . . . . . . . . . . . . . . . . . . 52
FIG.3.8 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- segundo ponto de operação. . . . . . . . . . . . . . . . . . . . . . . 53
FIG.3.9 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- terceiro ponto de operação. . . . . . . . . . . . . . . . . . . . . . . 54
FIG.3.10 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- quarto ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . 54
FIG.3.11 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- quinto ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . 55
FIG.3.12 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
8
cional - integral)- sexto ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . . 55
FIG.3.13 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- sétimo ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . 56
FIG.3.14 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- oitavo ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . 56
FIG.3.15 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- nono ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . . 57
FIG.3.16 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- décimo primeiro ponto de operação. . . . . . . . . . . . . . . . 57
FIG.3.17 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- décimo segundo ponto de operação. . . . . . . . . . . . . . . . 58
FIG.3.18 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- décimo quarto ponto de operação. . . . . . . . . . . . . . . . . 58
FIG.3.19 Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador tipo PI (propor-
cional - integral)- décimo quinto ponto de operação. . . . . . . . . . . . . . . . . 59
FIG.3.20 Respostas de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador sintonizado no
terceiro e outro no décimo quinto ponto de operação- sistema li-
nearizado no terceiro ponto de operação. . . . . . . . . . . . . . . . . . . . . . . . . . . 60
FIG.3.21 Respostas de ∆|V1| para uma entrada tipo pulso de 0,05 pu e du-
ração de 1 segundo em ∆Vref , com um regulador sintonizado no
terceiro e outro no décimo quinto ponto de operação- sistema li-
nearizado no décimo quinto ponto de operação. . . . . . . . . . . . . . . . . . . . . 61
FIG.3.22 Evolução temporal do erro percentual de ∆|V1| em relação à en-
trada de referência (∆Vref ), com o regulador sintonizado para
o terceiro ponto de operação e o sistema linearizado no décimo
quinto. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
9

FIG.3.23 Diagrama esquemático da estrutura de controle com tabelamentos
de ganhos via lógica fuzzy. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 63
FIG.3.24 Função de pertinência para a variável de entrada potência ativa
(Pa) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 65
FIG.3.25 Função de pertinência para a variável de entrada fator de potência
(FP ) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
FIG.3.26 Função de pertinência para a variável de saída ganho 1 (g1). . . . . . . . . . . 67
FIG.3.27 Superfície de variação do ganho g3. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 68
FIG.3.28 Diagrama em Simulink do regulador de tensão final obtido por
técnica de tabelamento de ganhos via lógica fuzzy. . . . . . . . . . . . . . . . . . . 69
FIG.3.29 Diagrama do subsistema Reguladores. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 70
FIG.4.1 Diagrama em blocos da turbina hidráulica. . . . . . . . . . . . . . . . . . . . . . . . . . 74
FIG.4.2 Diagrama em blocos dos atuadores da turbina hidráulica. . . . . . . . . . . . . . 75
FIG.4.3 Diagrama em blocos do regulador de velocidade em conjunto com
os atuadores da turbina hidráulica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
FIG.4.4 Diagrama em blocos da nova configuração do regulador de veloci-
dade (na malha direta) em conjunto com os atuadores da turbina
hidráulica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
FIG.4.5 Diagrama em blocos responsável pela simulação da abertura inicial
do distribuidor da turbina. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 80
FIG.4.6 Resposta da abertura inicial gi da turbina em pu. . . . . . . . . . . . . . . . . . . . 81
FIG.4.7 Diagrama em blocos da EQ. 2.4 substituindo-se os parâmetros re-
lativos à potência pelos respectivos torques. . . . . . . . . . . . . . . . . . . . . . . . . 82
FIG.4.8 Diagrama do subsistema entitulado partida. . . . . . . . . . . . . . . . . . . . . . . . . 83
FIG.4.9 Diagrama do subsistema contr-servo. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 84
FIG.4.10 Diagrama em blocos completo do sistema hidráulico. . . . . . . . . . . . . . . . . . 85
FIG.4.11 Resposta da velocidade de rotação da turbina (em pu) para uma
abertura inicial do distribuidor de 0,32 pu. . . . . . . . . . . . . . . . . . . . . . . . . 86
FIG.4.12 Resposta da abertura do distribuidor da turbina (em pu) ao longo
da partida do sistema hidráulico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
FIG.4.13 Resposta da potência mecânica de saída da turbina (em pu) ao
longo da partida do sistema hidráulico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 87
FIG.4.14 Ampliação de Pmec em torno de 15,5 segundos. . . . . . . . . . . . . . . . . . . . . . . 87
10

FIG.4.15 Resposta da velocidade da água no conduto forçado (em pu) ao
longo da partida do sistema hidráulico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88
FIG.5.1 Diagrama em Simulink mostrando as saídas e as entradas (com a
realimentação das variáveis algébricas) do bloco S-Function. . . . . . . . . . 93
FIG.5.2 Diagrama em Simulink proposto em SHAMPINE (1999) para a
solução de EAD. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 94
FIG.5.3 Modelo completo, em diagrama de blocos, do SEP em estudo. . . . . . . . . . 97
FIG.5.4 Diagrama em blocos do sistema hidráulico. . . . . . . . . . . . . . . . . . . . . . . . . . 98
FIG.5.5 Diagrama em blocos do subsistema reg-tensao. . . . . . . . . . . . . . . . . . . . . . . 99
FIG.5.6 Diagrama em blocos usado para a definição das potências ativa e
reativa do consumidor- caso do quartel. . . . . . . . . . . . . . . . . . . . . . . . . . . . 100
FIG.5.7 Resposta da freqüência de saída do gerador, ω (em pu)- variações
de carga a cada 45 segundos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 102
FIG.5.8 Resposta da tensão de saída do gerador, Vt (em pu)- variações de
carga a cada 45 segundos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
FIG.5.9 Resposta da abertura do distribuidor, g (em pu)- variações de carga
a cada 45 segundos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
FIG.5.10 Resposta da freqüência de saída do gerador, ω (em pu)- variações
de carga a cada 60 segundos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
FIG.5.11 Resposta da tensão de saída do gerador, Vt (em pu)- variações de
carga a cada 60 segundos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 104
FIG.5.12 Resposta da abertura do distribuidor, g (em pu)- variações de carga
a cada 60 segundos. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
FIG.5.13 Resposta da tensão de saída do gerador, Vt (em pu)- utilização do
RAT projetado para o sétimo ponto de operação (variações de
carga a cada 45 segundos). . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 105
FIG.5.14 Comparação das respostas da tensão de saída do gerador, Vt (em
pu), obtidas com o regulador fuzzy e com o RAT do sétimo ponto
de operação- início da operação do SEP. . . . . . . . . . . . . . . . . . . . . . . . . . . . 106
FIG.5.15 Comparação das respostas da tensão de saída do gerador, Vt (em
pu), obtidas com o regulador fuzzy e com o RAT do sétimo ponto
de operação- primeira variação de carga (45 segundos). . . . . . . . . . . . . . . 107
FIG.5.16 Comparação das respostas da tensão de saída do gerador, Vt (em
pu), obtidas com o regulador fuzzy e com o RAT do sétimo ponto
11

de operação- segunda variação de carga (90 segundos). . . . . . . . . . . . . . . 107
FIG.5.17 Comparação das respostas da tensão de saída do gerador, Vt (em
pu), obtidas com o regulador fuzzy e com o RAT do sétimo ponto
de operação- terceira variação de carga (135 segundos). . . . . . . . . . . . . . . 108
FIG.5.18 Comparação das respostas da tensão de saída do gerador, Vt (em
pu), obtidas com o regulador fuzzy e com o RAT do sétimo ponto
de operação- quarta variação de carga (180 segundos). . . . . . . . . . . . . . . 108
FIG.5.19 Diagrama em blocos do sistema elétrico utilizado para linearização
por perturbação numérica. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 110
FIG.5.20 Diagrama em blocos do subsistema sist-ele utilizado para a linea-
rização do sistema elétrico via perturbação numérica. . . . . . . . . . . . . . . . 113
FIG.5.21 Janela de diálogo do bloco S-Function. Inicialização das variáveis
do sistema elétrico. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
FIG.5.22 Gráfico de σm para Ga(jω) − Gp(jω), em todos os quinze pontos
de operação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 114
12

LISTA DE TABELAS
TAB.2.1 Valores dos parâmetros do gerador elétrico. As grandezas em pu
estão na base 480V/105 KW. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31
TAB.2.2 Valores dos parâmetros do gerador elétrico com as grandezas em
pu na base 179,6V/100 KW. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 33
TAB.2.3 Valores dos parâmetros de interesse da rede elétrica com as grandezas
em pu na base 11.268KV/100KW . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 34
TAB.2.4 Parâmetros de interesse da planta hidráulica. . . . . . . . . . . . . . . . . . . . . . . . 35
TAB.3.1 Pólos e zeros da FT ∆|V1|(s)∆Efd(s)
nos pontos de operação analisados. . . . . . . . 49
TAB.3.2 Valores dos parâmetros dos reguladores. . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
TAB.3.3 Reguladores a serem usados no tabelamento de ganhos e sua re-
presentação. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
13

LISTA DE SÍMBOLOS E ABREVIATURAS
ABREVIATURAS
SEP Sistema Elétrico de Potência
RAT Regulador Automático de Tensão
FT Função de Transferência
EAD Equações Algébrico-Diferenciais
SÍMBOLOS
<+ Conjunto dos Números Reais Não-Negativos
14

RESUMO
Esta dissertação descreve a modelagem da dinâmica eletromecânica de um SistemaElétrico de Potência (SEP) de geração isolada, tendo-se como referência uma Micro UsinaHidrelétrica pertencente ao Exército Brasileiro instalada na Amazônia. O projeto de re-guladores de tensão e de velocidade também é abordado neste trabalho, sendo o desem-penho de ambos avaliado por intermédio de simulações computacionais realizadas combase nos modelos não-lineares das plantas elétrica e hidráulica.
Os desenvolvimentos relacionados ao regulador de tensão dividem-se em três partesprincipais: a linearização analítica do sistema elétrico em diferentes pontos de operação;a obtenção de reguladores para os modelos linearizados do sistema a partir de técnicas decontrole linear; e o emprego de um método de interpolação (ou tabelamento) dos ganhosdesses reguladores via lógica fuzzy.
O projeto do regulador de velocidade envolve a implementação de vários diagramasde bloco e de metodologias que permitem a execução das simulações desejadas.
A simulação não-linear de toda a dinâmica do SEP é baseada no uso do pacote S-Function do programa Matlab/Simulink, responsável por resolver as Equações Algébrico-Diferenciais (EAD) que modelam esse sistema. A S-Function é ainda aplicada na line-arização do sistema elétrico via perturbação numérica. Esse resultado é comparado,com base na teoria referente a valores singulares de matrizes e sistemas, com o obtidoanaliticamente. É constatada a equivalência dos dois métodos.
Com relação ao controle das oscilações eletromecânicas em sistemas elétricos isolados,os resultados deste trabalho mostram claramente que a abordagem normalmente adotadana prática pode não proporcionar a melhor qualidade da energia gerada.
15
ABSTRACT
This dissertation describes the electromechanical dynamics modelling of an IslandingPower System. A Micro Hydroelectric Station belonging to the Brazilian Army installedin the Amazon Forest is used as a reference. The design of voltage and frequency regu-lators is also exploited in this work. Their performance are evaluated through computa-cional simulations that are based on the nonlinear models of the electric and hydraulicplants.
The development related to the voltage regulator is threefold: the analytical line-arization of the electric system at different operating conditions; the design of a set ofregulators corresponding to the set of linearized models through linear control techniques;and the application of a gain scheduling control method to these regulators that is basedon a fuzzy logic approach.
The design of the frequency regulator involve the implementation of several blockdiagrams and methodologies that allow the running of the desired simulations.
The nonlinear simulation of the overall Power System dynamic is performed by usingthe S-Function package, which is responsible for solving the Differential Algebraic Equa-tions (DAE) that model the system. The S-Function is also used to linearize the electricalsystem model via a numerical perturbation strategy. Through the use of singular valueconcept applied to matrices and systems, this result is compared with that obtained bythe analytical method. The equivalency of both methods is verified.
Regarding to the control of electromechanical oscillations in Islanding Power System,the results of this work clearly show that the approach normally adopted in practice maynot provide the best quality of the generated energy.
16

1 INTRODUÇÃO
1.1 POSICIONAMENTO E MOTIVAÇÃO
Um sistema elétrico de potência (SEP) pode ser resumidamente definido como sendo
aquele cuja função essencial é converter uma dada modalidade energética, obtida a par-
tir de uma fonte primária (que pode ser hidráulica, nuclear, fóssil, etc.), em energia
elétrica, transportando-a ao consumidor. Para tanto, uma quantidade significativa de
dispositivos, dinâmicos ou estáticos, são necessários, dentre os quais: turbinas, geradores
elétricos, transformadores, linhas de transmissão e/ou de distribuição. A diversidade
destes elementos e a natureza não linear de alguns deles tornam a modelagem e o con-
trole tarefas complexas. Esta complexidade, quando se trata de SEP de grande porte
com várias unidades geradoras interligadas entre si, é ainda mais crítica.
Vastos são os estudos e trabalhos desenvolvidos e publicados no campo do controle
aplicado à estabilidade de sistemas elétricos de potência interligados, os quais estão pre-
sentes, possivelmente, em quase todos os países do mundo, sendo os responsáveis por
levar energia elétrica aos mais variados tipos de consumidores, movimentando economias
e proporcionando desenvolvimento e conforto a seus povos. Por estes fatos, compreende-
se facilmente porque este tipo de sistema tem sido alvo de tanta pesquisa. Na área de
controle ela se volta, entre outras direções, ao desenvolvimento de teorias, técnicas e
componentes que estabilizem o SEP. A estabilidade pode ser vista como a manutenção
do sincronismo entre máquinas e de níveis de tensão e freqüência próximos a valores
nominais, em situação normal ou não de operação 1.
Há casos, contudo, como o brasileiro, em que o sistema interligado não abrange a
totalidade do território. Povoados ou comunidades são privados de energia elétrica e
de suas benécies e uma fonte local de eletricidade deve ser provida. Muitas vezes, estes
sistemas locais são de pequeno porte e não estão conectados a nenhum outro, sendo então
denominados isolados ou tipo "ilha". As publicações disponíveis referentes a este tipo de
sistema elétrico com geração isolada, particularmente no que se refere ao seu controle,
1Naturalmente, dependendo da natureza e da intensidade do distúrbio ou da anormalidade, a desejada
estabilidade pode não ser conseguida, a não ser através de medidas mais drásticas como, por exemplo, o
corte de cargas.
17

são bem menos pródigas. Se por um lado a questão do sincronismo entre máquinas passa
a não mais existir, por outro, o problema do controle de tensão e de freqüência em níveis
compatíveis permanece.
No contexto acima descrito se insere a presente dissertação: um estudo mais deta-
lhado de sistemas elétricos de potência isolados, passando desde sua modelagem mate-
mática até o projeto de sistemas de controle de tensão e de freqüência, tomando-se como
base um SEP real pertencente ao Exército Brasileiro e instalado na Amazônia.
Em alguns casos não basta uma aplicação direta ou uma mera adaptação ou sim-
plificação das técnicas de controle utilizadas em sistemas interligados. Para estes sis-
temas, por exemplo, trabalha-se muito com a chamada estabilidade a pequenos sinais
ou pequenos distúrbios, situação em que parte-se para uma linearização dos modelos
matemáticos em torno de um determinado número de pontos de operação; o mesmo,
entretanto pode não ser conveniente para SEP isolados, onde grandes distúrbios são mais
comumente encontrados, já que uma única usina geradora terá que "absorver" toda e
qualquer variação na operação, como perdas de cargas, de linhas, faltas, etc. Em virtude
disto, para sistemas com geração isolada, simulações do modelo não-linear são, certa-
mente, mais representativas dos fenômenos reais.
Técnicas de controle aplicáveis em sistemas Lineares Invariantes no Tempo (LIT) são
válidas apenas para pequenas perturbações em torno de pontos de operação. Para sis-
temas não-lineares, dois recursos têm sido utilizados: as simulação no domínio do tempo
através de métodos de integração numérica, e os chamados métodos diretos, que se valem
de funções de energia, estas sendo um tipo possível de função de Lyapunov (ver KUN-
DUR (1994)). Enquanto os métodos diretos oferecem condições de se chegar a modelos
de controladores que atendam aos requisitos estabelecidos para a operação de um SEP,
as simulações constituem-se, apenas, em resultados gráficos, em sua maioria, da resposta
de um sistema. Sua importância, então, está em constatar se determinados controladores
projetados responderam ou não de maneira eficiente. Em caso negativo, ajustes tem que
ser feitos no controle até que as simulações apresentem resultados satisfatórios. Méto-
dos baseados em funções de energia, apesar de suas vantagens evidentes, ainda são muito
conservativos. A tendência atual tem sido buscar um método híbrido que mescle os bene-
fícios dos dois acima citados. Neste trabalho os métodos diretos não-lineares não foram
tratados, sendo os controladores obtidos por métodos lineares e testados em simulações.
Esta dissertação, como já dito, está pautada em um sistema de potência do Exército
18

Brasileiro, uma micro usina hidrelétrica (MUH) 2(ver ELETROBRÁS (2000), HARVEY
(1993)) situada na localidade de Pari-Cachoeira, no extremo oeste do estado do Ama-
zonas, próxima à fronteira com a Colômbia. Ela possui uma capacidade de geração de,
aproximadamente, 100KVA e foi construída com o objetivo de oferecer aos militares e
seus familiares, que lá vivem, um mínimo de infra-estrutura, antes inexistente. Vale
ressaltar que esta usina, a exemplo das demais existentes, a maioria em regiões isoladas
de fronteira da Amazônia, abastece, também, e gratuitamente, comunidades locais, o
que tem provocado, inclusive, um fluxo migratório para esta região, dadas as potenciali-
dades trazidas com a chegada da energia elétrica. Outro fato relevante foram as análises
e experiências feitas pelo Exército com outras fontes de energia locais, como: painéis
fotovoltaicos, grupo-geradores a diesel e usinas termelétricas a lenha, conforme relatado
em HUSS (1994). De todas elas, seja por motivos econômicos e/ou ambientais, a que se
mostrou mais promissora foi a MUH.
Embora o provimento de energia elétrica em regiões tão distantes e carentes já tenha
sido um enorme e importante avanço, isto não impede que melhorias na qualidade desta
tensão gerada sejam buscadas. Sabe-se que em algumas usinas, pelo menos, nas mais
antigas, e portanto, mais rústicas, o sinal elétrico possui oscilações de tensão e freqüência
indesejadas. Isto pode ser explicado pelo fato de parâmetros dos reguladores de tensão,
ou Reguladores Automáticos de Tensão (RAT), ou AVR (Automatic Voltage Regulator),
e dos reguladores de velocidade serem ajustados para, apenas, um determinado ponto de
operação. Ao se afastar deste ponto, o desempenho dos controladores sofre normalmente
um declínio, prejudicando a qualidade dos sinais de saída do gerador elétrico. Assim, a
possibilidade de o estudo desenvolvido nesta dissertação contribuir para um aprimora-
mento da qualidade da energia fornecida, mediante o projeto de controles mais eficientes,
se tornou um importante agente motivador.
1.2 OBJETIVOS
O presente trabalho tem por objetivo modelar e simular o comportamento dinâmico
de um SEP isolado, com vistas ao projeto de reguladores de velocidade e de tensão
que favoreçam a estabilidade e o desempenho do sistema para variadas condições de
operação. Espera-se, também, que os conhecimentos adquiridos possam auxiliar em
2A denominação micro central hidrelétrica (MCH) é equivalentemente adotada em diversas literaturas
referentes a este tema.
19

estudos presentes ou futuros do Exército Brasileiro no que se refere às suas micro usinas
hidrelétricas.
1.3 ORGANIZAÇÃO
Esta dissertação está organizada em seis capítulos, incluindo esta introdução.
No Capítulo 2 é apresentada a configuração do sistema elétrico a partir de um dia-
grama unifilar. É desenvolvida toda a modelagem matemática do SEP, relativa às plantas
elétrica e hidráulica, necessária aos capítulos posteriores, sendo ainda especificados ma-
teriais e parâmetros da MUH do Exército, referência para todo o estudo desenvolvido.
O Capítulo 3 aborda a linearização das equações do sistema elétrico bem como todo
o procedimento necessário, iniciando com a definição dos pontos de operação, para se
chegar às realizações em espaço de estados deste sistema (uma para cada ponto de ope-
ração). Em cima dos modelos linearizados são projetados reguladores de tensão, sendo
seus desempenhos avaliados por simulação. Um RAT final é desenvolvido mediante o
tabelamento (ou interpolação) de ganhos destes reguladores.
A modelagem do sistema hidráulico em diagrama de blocos, no ambiente de simu-
lação Matlab/Simulink, é apresentada no Capítulo 4. Os diagrama são feitos com base
nas equações pertinentes desenvolvidas no Capítulo 2. Também no quarto capítulo é
apresentado o projeto do regulador de velocidade. A resposta da partida deste sistema,
para uma situação de operação em vazio do gerador, é simulada.
O modelo não-linear completo do sistema de potência, também em ambiente Simulink,
é discutido no Capítulo 5. Inicialmente, apresenta-se o método empregado para a solução
das chamadas Equações Algébrico-Diferenciais (EAD) do sistema elétrico. Em seguida,
com todo o SEP modelado, são simuladas as respostas da freqüência e da tensão de
saídas do gerador a partir de variações de carga. Ainda neste capítulo é feita a lineari-
zação do sistema elétrico por perturbação numérica, permitindo uma comparação com a
linearização analítica apresentada no Capítulo 3.
Finalmente, o Capítulo 6 apresenta um resumo conclusivo dos resultados alcançados
ao longo de todo o trabalho, procurando dar uma maior ênfase àqueles que acredita-se
terem uma contribuição maior a dar para trabalhos futuros. Algumas críticas e sugestões
de estudos em torno do mesmo tema são oferecidas.
20
2 CONFIGURAÇÃO DO SEP EM ESTUDO E SUA MODELAGEM
MATEMÁTICA
Este capítulo apresenta a configuração do SEP, com base, conforme já salientado
na introdução, na MUH de Pari-Cachoeira. Isto é feito a partir do chamado diagrama
unifilar. As informações contidas neste diagrama são suficientes para as análises que serão
procedidas e incluem dados dos seguintes elementos: gerador elétrico, transformadores e
impedâncias de linhas e cargas. Com relação ao tipo de carga considerada dispensou-se
uma atenção maior. A seu respeito são feitos alguns comentários explicativos na Seção
2.1.1.
A representação unifilar pressupõe um equilíbrio entre as três fases do sistema, con-
sideração esta que permanecerá válida ao longo do trabalho, e que é comumente utilizada
em trabalhos similares. A partir do unifilar é montada uma matriz denominada admitân-
cia nodal, que estabelece uma relação entre as tensões e correntes injetadas nas diver-
sas barras representadas. Assim são obtidas, facilmente, as equações da rede elétrica,
necessárias para modelagem matemática do SEP. A modelagem completa do sistema de
potência engloba, ainda, equações da dinâmica do gerador elétrico e da turbina hidráulica,
que são também desenvolvidas neste capítulo. São especificados, ainda, materiais e va-
lores de parâmetros da usina geradora, valores estes, em sua maioria, apresentados em
grandezas por unidade (pu), o que exige a definição de determinados valores de refe-
rência ou valores base, o que é feito. A grande parte destes dados foi obtida mediante
informações dos próprios fabricantes, por tabelas constantes em STEVENSON (1978),
ou por profissionais, que, direta ou indiretamente atuaram no projeto e/ou execução da
MUH. Aqueles dados que não puderam ser colhidos de nenhuma fonte foram retirados
de KUNDUR (1994) com as considerações de validade necessárias.
2.1 CONFIGURAÇÃO DO SEP
O diagrama unifilar do sistema elétrico estudado é mostrado na Figura 2.1. Os
símbolos apresentados são representativos dos seguintes elementos, identificados da es-
querda para a direita: gerador elétrico com seus terminais ligados a uma primeira barra;
transformador de distribuição elevador de tensão; linha de distribuição principal com
sua impedância; uma segunda barra de onde partem três derivações; em cada ramal de
21

derivação tem-se a linha com a respectiva impedância, um transformador abaixador de
tensão e a carga. Os três ramais correspondem, respectivamente, à linha que abastece a
unidade militar, à linha que alimenta a vila militar e à linha alimentadora da comunidade
indígena. Vale ressaltar que esta configuração é um retrato muito próximo da realidade
encontrada em Pari-Cachoeira -AM. Uma descrição mais detalhada dos componentes
acima citados é dada na Seção 2.4.1.
1 2
3 4
5
quartel
vila militar
comunidade
FIG. 2.1: Diagrama unifilar do sistema elétrico em estudo.
2.1.1 COMENTÁRIOS SOBRE A CARGA
O conhecimento pleno de todas as cargas que compõe um determinado sistema de
potência é algo difícil de ser alcançado, de tal forma que sua modelagem precisa também
o será. Este fato é facilmente explicável dada a enorme variedade de tipos de cargas e
de regimes de operação possíveis. Assim sendo, torna-se quase imperativa uma série de
simplificações para se chegar a um modelo para as cargas, as quais podem ser divididas
em duas grandes classes: cargas estáticas e dinâmicas.
As cargas estáticas são aquelas que podem ser definidas por funções algébricas da
tensão e da freqüência em qualquer instante de tempo. Três são os tipos básicos que as
representam: cargas à potência constante, à corrente constante ou à impedância cons-
tante. As cargas dinâmicas, por sua vez, são modeladas por equações diferenciais, sendo
um exemplo os motores de indução, muito comuns em consumidores industriais.
Devido às já mencionadas simplificações, e levando-se em conta que os consumidores
da MUH de Pari-Cachoeira têm características muito mais residenciais, o tipo de carga
22

considerado neste trabalho foi impedância constante. As cargas dinâmicas existentes
foram consideradas não significativas.
Cargas a impedância constante podem ser inseridas na própria matriz admitância
nodal facilitando alguns cálculos que se utilizam das equações de rede. Isto poderá ser
melhor compreendido no Capítulo 3.
2.2 MODELAGEM DO SISTEMA ELÉTRICO
O modelo matemático do sistema elétrico está baseado nas equações algébrico -
diferenciais (EAD) do gerador e nas equações algébricas da rede elétrica, ambas pos-
suindo não-linearidades devido à necessária conversão realizada entre dois referenciais:
um síncrono (R− I), do sistema, e outro da máquina (d− q), que gira junto com seu ro-
tor. Esta transformação de referenciais serve para compatibilizar as equações do gerador
e da rede. Uma melhor compreensão destes fatos se dará com o desenvolvimento destas
equações, que passam a ser apresentadas a seguir.
2.2.1 MODELO DO GERADOR ELÉTRICO
As equações da máquina são apresentadas em MARTINS (1990), sendo também
utilizadas em PELLANDA (1993). Elas são as seguintes:
E′
q =1
T′
d0
[
Efd −(
Xd − X′
d
)
Id − E′
q
]
(2.1)
E′′
d =1
T′′
q0
[(
Xq − X′′
q
)
Iq − E′′
d
]
(2.2)
E′′
q =1
T′′
d0
[
E′
q −(
X′
d − X′′
d
)
Id − E′′
q
]
(2.3)
ω =1
2H(Pmec − Pe) (2.4)
δ = ω0 (ω − 1) (2.5)
0 = −E′′
d + Vd + RaId − X′′
q Iq (2.6)
0 = −E′′
q + Vq + RaIq + X′′
d Id (2.7)
A menos das constantes de tempo, que são dadas em mili-segundos (ms), e da veloci-
dade angular síncrona ω0, igual a 2πfs radianos elétricos por segundo (rad/s), sendo fs
a freqüência síncrona em Hertz (no caso 60 Hz), todos os demais parâmetros são dados
em por-unidade (pu). Estes parâmetros são abaixo definidos:
23

• Efd : tensão de campo (no sistema pu não-recíproco3);
• E′′
d e E′′
q : componentes dos eixos d (direto) e q (de quadratura) da tensão subtran-
sitória interna do gerador elétrico;
• E′
q : componente do eixo q da tensão transitória interna da máquina;
• Xd e Xq: reatâncias dos eixos d e q da máquina;
• X′
d: reatância transitória do eixo da máquina;
• X′′
d e X′′
q : reatâncias subtransitórias dos eixos d e q do gerador;
• Vd e Vq: componentes dos eixos d e q da tensão de saída da máquina;
• Id e Iq: componentes dos eixos d e q da corrente de saída do gerador;
• T′′
d0 e T′′
q0: constantes de tempo subtransitórias de circuito aberto dos eixos d e q do
gerador;
• T′
d0: constante de tempo transitória de circuito aberto do eixo d do gerador;
• ω: velocidade angular do rotor do gerador;
• ω0: velocidade angular síncrona (rad/s);
• H: constante de inércia por unidade (pu), definida como a energia cinética (em
Watts.segundos) na velocidade angular síncrona de rotação do rotor do gerador,
ωom (em radianos mecânicos por segundo), dividida pela potência base, Pbase; ou
seja:
H =1
2
Jω20m
Pbase
(2.8)
onde, J é o momento de inércia combinado do gerador e da turbina a ele acoplado;
• Pmec: potência mecânica aplicada ao eixo do rotor do gerador;
• Pe: potência elétrica de entre-ferro do gerador, dada por:
Pe = Pt + RaI2t (2.9)
3Para maiores detalhes a respeito dos sistemas pu recíproco e não-recíproco ver KUNDUR (1994).
24

sendo, Pt a potência ativa de saída do gerador, Ra sua resistência de armadura, e
It o módulo da corrente de saída da máquina; Pt e It são dados, respectivamente,
pelas seguintes expressões:
Pt = VdId + VqIq (2.10)
It =√
(
I2d + I2
q
)
(2.11)
• δ: ângulo do rotor ou de carga, definido como o ângulo entre o eixo R do referencial
(R − I) e o eixo q do referencial (d − q)
Uma observação importante deve ser feita com relação à EQ. 2.4, chamada equação
de movimento ou de swing. Sua formulação mais correta dar-se-ia com a substituição dos
parâmetros Pmec e Pe por Tmec e Te, respectivamente, correspondendo os dois últimos aos
torques mecânico e elétrico. Entretanto, quando se trabalha com o modelo linearizado,
ou quando se considera a velocidade de rotação do rotor igual (ou muito próxima) a sua
velocidade síncrona em pu, os termos potência e torque praticamente se igualam podendo
ser intercambiáveis, sendo que a literatura referente ao assunto costuma apresentar a
equação de movimento como aqui foi visto. Nos Capítulos 4 e 5, que modelam a turbina
hidráulica e o SEP em suas formas não lineares, respectivamente, a devida correção será
feita de tal forma a se trabalhar com Tm e Te.
A conversão entre os sistemas de referência (R − I) e (d − q) é mostrada abaixo:[
Vd
Vq
]
=
[
senδ − cos δ
cos δ senδ
][
VR
VI
]
(2.12)
[
VR
VI
]
=
[
senδ cos δ
− cos δ senδ
][
Vd
Vq
]
(2.13)
[
Id
Iq
]
=
[
senδ − cos δ
cos δ senδ
][
IR
II
]
(2.14)
[
IR
II
]
=
[
senδ cos δ
− cos δ senδ
][
Id
Iq
]
(2.15)
sendo V e I a tensão e a corrente no gerador, respectivamente.
Substituindo as EQ. 2.9, 2.10 e 2.11 na EQ. 2.4 chega-se a uma nova formulação dada
por:
ω =1
2H
[
Pmec − VdId − VqIq − Ra
(
I2d + I2
q
)]
(2.16)
25

e operando com a EQ. 2.12 nas EQ. 2.16, 2.6 e 2.7, com relação aos parâmetros Vd e Vq,
obtêm-se os seguintes resultados:
ω =1
2H[Pmec − (VRsenδ − VI cos δ) Id −
− (VR cos δ + VIsenδ) Iq − Ra
(
I2d + I2
q
)
] (2.17)
0 = −E′′
d + VRsenδ − VI cos δ + RaId − X′′
q Iq (2.18)
0 = −E′′
q + VR cos δ + VIsenδ + RaIq + X′′
d Id (2.19)
As EQ. 2.1, 2.2, 2.3, 2.5, 2.17, 2.18 e 2.19, com as quais se trabalhará ao longo
dos próximos capítulos, modelam completamente, para os propósitos desta dissertação,
o comportamento dinâmico do gerador síncrono.
2.2.2 MODELO DA REDE ELÉTRICA
Através de um olhar mais cuidadoso nas equações do gerador, acima descritas, pode-
se perceber que existem 5 (cinco) equações diferenciais com suas 5 variáveis: E′
q, E′′
d , E′′
q ,
ω e δ; e 2 (duas) equações algébricas com 4 (quatro) variáveis: VR, VI , Id e Iq. Portanto o
número de incógnitas é superior ao número de equações. As responsáveis por solucionar
este problema serão as formulações algébricas da rede elétrica, que justamente relacionam
as tensões e as correntes injetadas nas diversas barras do sistema de potência.
A modelagem matemática da rede elétrica está toda baseada em sua configuração.
Para o caso tratado neste trabalho ela é definida pela FIG. 2.1. Percebe-se que as li-
nhas foram modeladas, apenas, por impedâncias série, o que pode ser feito sem nenhum
problema por tratar-se de linhas curtas, com comprimentos muito inferiores a 80 km.
Ainda a partir desta figura monta-se a expressão a seguir, denominada equação de rede,
que nada mais é do que um conjunto de equações de nó, muito usadas para solução de
circuitos elétricos, formatadas matricialmente:
I = Y V (2.20)
onde o vetor I corresponde às injeções de corrente nas barras, Y é a denominada matriz
admitância nodal, e o vetor V representa as tensões nas barras.
26

A EQ. 2.20 pode ser detalhada para o caso particular do sistema em estudo, resul-
tando em:
I1
0
0
0
0
=
y11 y12 y13 y14 y15
y21 y22 y23 y24 y25
y31 y32 y33 y34 y35
y41 y42 y43 y44 y45
y51 y52 y53 y54 y55
V1
V2
V3
V4
V5
(2.21)
A representação de injeção de corrente só é feita na barra 1 devido à presença do gerador
a ela conectada, ou seja, ela é exatamente a corrente de saída do gerador. Na matriz
admitância nodal estão presentes as admitâncias que chegam ou unem as barras, inclusive
de cargas tipo impedância constante (que é o caso considerado aqui). Salienta-se que os
índices de todos os elementos da expressão acima são uma referência direta à barra ou às
barras correspondentes. Uma explicação detalhada de como é feita a montagem da EQ.
2.21 é dada em KUNDUR (1994). Em ASSIS (2002) tem-se o exemplo para o caso de
um sistema tipo máquina-barra infinita.
As variáveis da EQ. 2.21 (corrente, admitâncias e tensões) podem ser entidades com-
plexas. Neste trabalho é adotada uma abordagem onde as partes real e imaginária são
separadas 4. A separação é possível de ser feita por uma simples manipulação algébrica
conforme exemplificado abaixo:[
IR
II
]
=
[
G −B
B G
][
VR
VI
]
(2.22)
onde, os índices R e I fazem referência às partes real e imaginária, respectivamente,
correspondendo, exatamente, aos eixos do referencial (R− I); G e B são a condutância e
susceptância da admitância considerada. Assim sendo, cada elemento do vetor de injeção
de correntes, inclusive os nulos, passa a ter a dimensão 2x1; da matriz de admitâncias, a
dimensão 2x2; e do vetor de tensões, também a dimensão 2x1.
Aplicando a EQ. 2.22 na EQ. 2.21, chega-se a uma nova formulação a ser empregada,
cuja dimensão será, portanto, o dobro da primeira. Isto poderá ser visto no próximo
capítulo.
4Tal procedimento evita o aparecimento de resíduos imaginários nos valores numéricos dos elementos
das matrizes do modelo de estado do sistema, pois passa-se a manipular somente grandezas reais.
27

Enfatiza-se, ainda, que a equação da rede, EQ. 2.21, é montada com base no referen-
cial externo (R − I).
A equação da rede associada às da máquina, acima discutidas, modelam comple-
tamente o sistema elétrico. Um formato mais adequado, a partir do qual é possível
encontrar a realização em espaço de estados de seu modelo linearizado, será desenvolvido
em um capítulo posterior.
2.3 MODELAGEM DO SISTEMA HIDRÁULICO
O sistema hidráulico de um SEP é composto pelos seguintes elementos básicos: reser-
vatório, conduto forçado, turbina e atuadores (incluindo o regulador de velocidade), res-
ponsáveis pela abertura e fechamento do distribuidor da mesma. O modelo dos atu-
adores será discutido no Capítulo 4. As equações da planta hidráulica estão baseadas
nas seguintes hipóteses simplificadoras: conduto inelástico, fluido (água) incompressível
e inexistência de chaminé de equilíbrio. Dadas as características do SEP do Exército
considerado, estas simplificações mostram-se perfeitamente aceitáveis. Ressalte-se que,
de fato, não há chaminé de equilíbrio na usina.
Duas são as equações principais (KUNDUR, 1994) que modelam o sistema hidráulico
(para maiores detalhes sobre máquinas hidráulicas ver também MACINTYRE (1983)):
a primeira relacionada à coluna d’água, e a segunda à turbina, respectivamente:
U = − 1
TW
(H − H0) = − 1
TW
[
(
U
Atg
)2
− H0
]
(2.23)
Pmec = (P − PL)Pru = (U − UNL) HPru = (U − UNL)
(
U
Atg
)2
Pru (2.24)
Todos os parâmetros das duas formulações acima estão em pu, a menos do tempo de
partida da água, TW , dado em segundos (s). Estes são assim definidos:
• Pmec: potência mecânica de saída da turbina (aplicada ao rotor do gerador);
• PL: perda de potência fixa da turbina, onde:
PL = UNLH (2.25)
• UNL: velocidade da água sem carga; tomando-se o regime de estado estacionário
para uma condição sem carga, da EQ. 2.23 tira-se que:
UNL = AtgNL (H0)1/2 (2.26)
28

• P : potência total da turbina, onde:
P = UH (2.27)
• U : velocidade da água no conduto forçado;
• H: altura da coluna d’água,da superfície do reservatório até o distribuidor da
turbina (não confundir com a constante de inércia H);
• H0: valor nominal de H considerado;
• g: abertura real do distribuidor da turbina;
• At: ganho da turbina dado por:
At =1
gFL − gNL
(2.28)
sendo gFL e gNL as aberturas do distribuidor a plena carga e sem carga, respecti-
vamente. O produto de At por g define um outro parâmetro, G, que é a abertura
ideal do distribuidor, ou seja:
G = Atg (2.29)
• TW : tempo de partida da água ou constante de tempo de inércia da água, dado
por:
TW =LUr
agHr
(s) (2.30)
sendo L o comprimento do conduto (em metros), Ur a velocidade da água de refe-
rência ou base (em m/s), ag a aceleração da gravidade (em m/s2), e Hr a altura
da coluna d’água de referência ou base (em metros);
• Pru: potência de referência (ou base) da turbina por unidade, dada por:
Pru =KWbase(turbina)
KWbase(gerador)=
Pr
Pbase
(2.31)
A modelagem da planta hidráulica estaria completa se, além das EQ. 2.23 e 2.24, fosse
incluído o modelo matemático dos atuadores. A apresentação deste modelo, porém, foi
reservada para o Capítulo 4 para permitir uma abordagem conjunta com o regulador de
velocidade, tratado no mesmo capítulo.
29

2.4 VALORES BASE, ESPECIFICAÇÃO DE MATERIAIS E DADOS DE PARÂME-
TROS
Esta seção define e especifica os materiais e parâmetros do SEP analisado. Estas
informações retratam fielmente a realidade encontrada na MUH em estudo. As grandezas
base consideradas do sistema elétrico e do sistema hidráulico também são explicitadas.
2.4.1 SISTEMA ELÉTRICO
O sistema elétrico possui as seguintes características gerais: geração em baixa tensão
(220 V), transmissão da energia em média tensão (13,8 KV), atendimento às cargas em
baixa tensão (220 V). Estes valores são de linha e nominais. A potência de geração
aproximada é de 100 KW. Com esses dados reais optou-se por escolher os seguintes
valores base:
• potência base (Pbase):
Pbase = 100 KW
• tensão base na baixa tensão (vbase): igual a tensão fase-neutro de pico nominal
vbase =
(
220√3
)√2 ≈ 179, 6 V
• corrente base na baixa tensão (ibase): definida como a corrente de pico de linha
ibase =Pbase
(3/2) vbase
≈ 371, 13 A
• impedância base na baixa tensão(zbase):
zbase =vbase
ibase
≈ 0, 484 Ω
• tensão base na alta (média) tensão (Vbase): obtido pela relação entre as tensões
nominais de linha no primário e no secundário do transformador
Vbase = vbase
13, 8
220103 ≈ 11, 268 KV
• corrente base na alta (média) tensão (Ibase):
Ibase =Pbase
(3/2) Vbase
≈ 5, 916 A
30
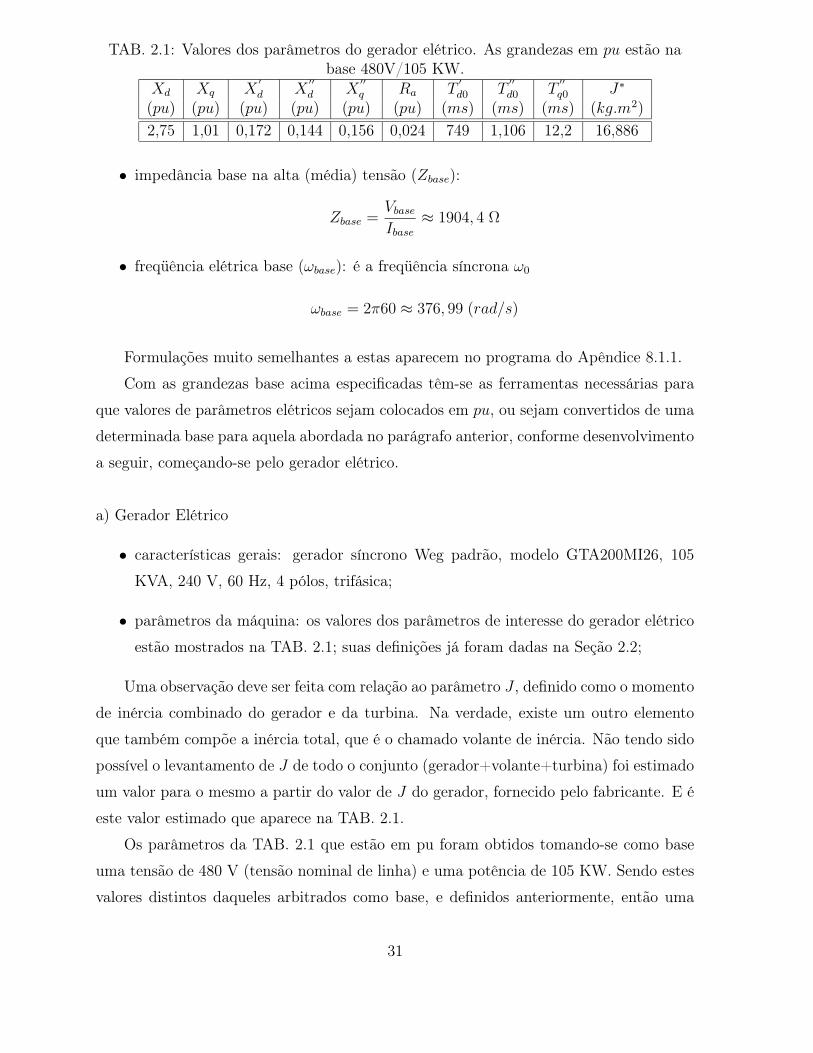
TAB. 2.1: Valores dos parâmetros do gerador elétrico. As grandezas em pu estão nabase 480V/105 KW.
Xd Xq X′
d X′′
d X′′
q Ra T′
d0 T′′
d0 T′′
q0 J∗
(pu) (pu) (pu) (pu) (pu) (pu) (ms) (ms) (ms) (kg.m2)
2,75 1,01 0,172 0,144 0,156 0,024 749 1,106 12,2 16,886
• impedância base na alta (média) tensão (Zbase):
Zbase =Vbase
Ibase
≈ 1904, 4 Ω
• freqüência elétrica base (ωbase): é a freqüência síncrona ω0
ωbase = 2π60 ≈ 376, 99 (rad/s)
Formulações muito semelhantes a estas aparecem no programa do Apêndice 8.1.1.
Com as grandezas base acima especificadas têm-se as ferramentas necessárias para
que valores de parâmetros elétricos sejam colocados em pu, ou sejam convertidos de uma
determinada base para aquela abordada no parágrafo anterior, conforme desenvolvimento
a seguir, começando-se pelo gerador elétrico.
a) Gerador Elétrico
• características gerais: gerador síncrono Weg padrão, modelo GTA200MI26, 105
KVA, 240 V, 60 Hz, 4 pólos, trifásica;
• parâmetros da máquina: os valores dos parâmetros de interesse do gerador elétrico
estão mostrados na TAB. 2.1; suas definições já foram dadas na Seção 2.2;
Uma observação deve ser feita com relação ao parâmetro J , definido como o momento
de inércia combinado do gerador e da turbina. Na verdade, existe um outro elemento
que também compõe a inércia total, que é o chamado volante de inércia. Não tendo sido
possível o levantamento de J de todo o conjunto (gerador+volante+turbina) foi estimado
um valor para o mesmo a partir do valor de J do gerador, fornecido pelo fabricante. E é
este valor estimado que aparece na TAB. 2.1.
Os parâmetros da TAB. 2.1 que estão em pu foram obtidos tomando-se como base
uma tensão de 480 V (tensão nominal de linha) e uma potência de 105 KW. Sendo estes
valores distintos daqueles arbitrados como base, e definidos anteriormente, então uma
31

mudança de bases faz-se necessária. A seguinte expressão é utilizada com este objetivo,
servindo como exemplo o parâmetro Xd:
Xd(nova base)(pu) = Xd(base antiga)(pu)z(base antiga)(Ω)
z(nova base)(Ω)(2.32)
Sendo a tensão de 480 volts um valor nominal de linha, e não uma tensão fase-neutro
de pico, então uma outra equação é usada para se obter a impedância base correspondente:
zbase =v2
base(V )
Pbase(KW )10−3 =
4802
10510−3 ≈ 2, 194 (2.33)
Tendo agora em mente que deseja-se passar da base 480V/105KW, para a base
179,6/100KW, e aplicando a EQ. 2.32 em todos os parâmetros devidos, obtêm-se:
Xd = 2, 752, 194
0, 484≈ 12, 46 (2.34)
Xq = 1, 012, 194
0, 484≈ 4, 58 (2.35)
X′
d = 0, 1722, 194
0, 484≈ 0, 779 (2.36)
X′′
d = 0, 1442, 194
0, 484≈ 0, 653 (2.37)
X′′
q = 0, 1562, 194
0, 484≈ 0, 71 (2.38)
Ra = 0, 0242, 194
0, 484≈ 0, 11 (2.39)
Finalmente, como na modelagem do gerador se trabalha com o parâmetro H, e não
com J , então, empregando-se a EQ. 2.8 e sabendo-se que a máquina possui 4 pólos,
pode-se determinar o valor de H na base desejada de 100KW. Isto é mostrado na equação
abaixo:
H =1
2
(
16, 886 [2π (1800/60)]2
100
)
10−3 ≈ 3 (2.40)
Os valores definitivos dos parâmetros de interesse do gerador, na base 179,6V e
100KW, são listados na TAB. 2.2.
b) Rede Elétrica
• características gerais:
(i) linhas: toda a rede de média tensão é formada pelo mesmo cabo de alumínio,
6 fios, bitola de 4 AWG, espaçamento aproximado entre os fios de 60 cm (2 pés),
32

TAB. 2.2: Valores dos parâmetros do gerador elétrico com as grandezas em pu na base179,6V/100 KW.
Xd Xq X′
d X′′
d X′′
q Ra T′
d0 T′′
d0 T′′
q0 H(pu) (pu) (pu) (pu) (pu) (pu) (ms) (ms) (ms) (pu)
12,46 4,58 0,779 0,653 0,71 0,11 749 1,106 12,2 3
e comprimentos da linha principal, do ramal do quartel, da vila dos militares e da
comunidade de 7, 1, 1,5 e 3 km (quilômetros), respectivamente; as linhas de baixa
tensão foram desconsideradas, isto porque supô-se um modelo no qual todas as
cargas estariam concentradas junto aos transformadores;
(ii) transformadores: transformador elevador de tensão (ligado ao gerador), 112KVA,
classe de tensão 15KV, tensão na baixa de 220/127 V, tensão na alta de 13,8 KV,
ligação estrela/triângulo; transformador abaixador (ligado ao quartel), 45KVA,
classe de tensão 15KV, tensão na alta de 13,8KV, tensão na baixa de 220/127
volts, ligação triângulo/estrela; transformadores da vila militar e da comunidade
com as mesmas características do anterior, mas com uma potência de 30KVA; todos
os transformadores da WEG;
• parâmetros da rede: abaixo são especificados os parâmetros de interesse da rede
elétrica. No caso dos transformadores, sendo seus valores fornecidos em pu, são
feitas as devidas transformações para a base de interesse. As simbologias utilizadas
são as mesmas constantes do programa do Apêndice 8.1.1, e a identificação dos
índices numéricos existentes pode ser feita observando-se a FIG. 2.1.
(i) RL: resistência da linha;
RL = 1, 4 Ω/km
(ii) XL: indutância da linha;
XL = 0, 434 Ω/km
(iii) xt1: indutância do transformador da barra 1 (do gerador) em pu, na base
15KV/112KVA;
xt1 = 0, 035
(iv) xt2: indutância do transformador da barra 3 (do quartel) em pu, na base
15KV/45KVA;
xt2 = 0, 035
33

TAB. 2.3: Valores dos parâmetros de interesse da rede elétrica com as grandezas em puna base 11.268KV/100KW
RL XL xt1 xt2 xt3 xt4
(Ω/km) (Ω/km) (pu) (pu) (pu) (pu)
1,4 0,434 0,0369 0,09189 0,1378 0,1378
(v) xt3 e xt4: indutâncias dos transformadores das barras 4 (vila militar) e 5 (co-
munidade) em pu, na base 15KV/30KVA;
xt3 = xt4 = 0, 035
Com relação aos transformadores dois fatos devem ser salientados: suas resistências
não foram citadas, isto porque elas podem ser consideradas desprezíveis; e suas reatâncias
precisam ser convertidas para a base correta, o que é feito através da EQ. 2.33 com os
devidos ajustes, e da EQ. 2.32, conforme procedimento abaixo.
Z(base)t1 =152
112103 ≈ 2008, 9 Ω (2.41)
Z(base)t2 =152
45103 = 5000 Ω (2.42)
Z(base)t3 = Z(base)t4 =152
30103 = 7500 Ω (2.43)
xt1 = 0, 0352008, 9
1904, 4≈ 0, 0369 (pu) (2.44)
xt2 = 0, 0355000
1904, 4≈ 0, 09189 (pu) (2.45)
xt3 = xt4 = 0, 0357500
1904, 4≈ 0, 1378 (pu) (2.46)
Um resumo dos parâmetros de interesse da rede elétrica com seus respectivos valores
é dado na TAB. 2.3
2.4.2 SISTEMA HIDRÁULICO
A planta hidráulica possui as seguintes especificações abaixo listadas.
• turbina tipo Michel-Banki, com uma potência nominal de saída (Pmec) de 100KW;
• comprimento do conduto forçado (L): 83 m (metros);
• diâmetro do conduto forçado (D): 1,10 m;
34

• velocidade média da água (U0): 1,8 (m/s);
• altura de queda, ou da coluna d’água, nominal (H0): 7,7 m (já considerando a
perda de carga);
• abertura real do distribuidor da turbina a plena carga (gFL): 0,96 (pu);
• abertura real do distribuidor da turbina sem carga (gNL): 0,16 (pu);
• ganho da turbina (At):
At =1
0, 96 − 0, 16= 1, 25 (adimensional)
Com os dados acima citados, foram arbitrados os seguintes valores como base (ou
referência):
• Pr: 100 KW (igual à potência base do gerador elétrico);
• Ur: 1,8 (m/s);
• Hr: 7,7 (m);
• TW : tempo de partida da água;
TW =83 × 1, 8
9, 81 × 7, 7≈ 1, 98 (s)
Através destas informações, e das definições e equações tratadas na Seção 2.3 pode-
se chegar aos valores dos parâmetros de interesse do sistema hidráulico apresentados na
TAB. 2.4. Observe-se que o ganho da turbina At é um termo adimensional (s/d).
TAB. 2.4: Parâmetros de interesse da planta hidráulica.At H0 UNL TW Pru
(s/d) (pu) (pu) (s) (pu)
1,25 1 0,2 1,98 1
35
3 MODELO LINEARIZADO DO SISTEMA ELÉTRICO -
REGULADORES DE TENSÃO E SIMULAÇÕES
Neste capítulo, as equações do sistema elétrico discutidas na Seção 2.2 são lineariza-
das e manipuladas em vistas à obtenção de Reguladores Automáticos de Tensão (RAT)
via técnicas de controle linear. Para se chegar a este objetivo, entretanto, algumas eta-
pas intermediárias são necessárias. Na Seção 3.1 procede-se à linearização analítica das
equações da planta elétrica. Em seguida, Seção 3.2, através da determinação de valores
para as cargas do sistema, passa-se à definição dos pontos de operação, em tornos dos
quais as equações da planta serão aplicadas. A matriz admitância nodal é então montada,
e com um simples rearranjo da equação de rede (EQ. 2.21) são determinados, para todos
os pontos de operação, os valores das variáveis algébricas de interesse, sem necessidade
de se executar um algoritmo de fluxo de carga. Já a Seção 3.3 consiste na modelagem
do sistema elétrico de acordo com uma formulação denominada aumentada ou implícta,
baseada nas equações linearizadas do sistema elétrico. A formulação aumentada permite
a obtenção das matrizes A, B, C e D, da realização em espaço de estados, para os vários
pontos de operação, o que também é tratado nessa seção. O projeto dos reguladores de
tensão é abordado na Seção 3.4. Um RAT é obtido para cada ponto de operação sendo
seus desempenhos avaliados via simulação. É mostrada, também, uma comparação entre
os desempenhos de dois reguladores, estando apenas um deles sintonizado no ponto de
operação considerado. Finalmente, na Seção 3.5 chega-se à obtenção de um regulador
de tensão final através da interpolação, via lógica difusa (fuzzy), dos ganhos de RAT
projetados na seção precedente.
É relevante comentar que os cálculos e procedimentos tratados nas Seções 3.2 e 3.3
estão implementados nas rotinas Matlab apresentadas nos Apêndices 8.1.1 e 8.1.2. As
nomenclaturas adotadas no texto são, basicamente, as mesmas presentes nesses progra-
mas, sendo recomendável, então, que a leitura deste capítulo seja acompanhada de uma
constante referenciação às partes pertinentes dos citados apêndices.
36

3.1 LINEARIZAÇÃO DAS EQUAÇÕES DO SISTEMA ELÉTRICO
As equações algébrico-diferenciais (EAD) do sistema elétrico podem ser escritas nas
seguintes formas genéricas:
˙x = f (x, r, u) (3.1)
0 = g(x, r) (3.2)
onde,
x: vetor de n variáveis diferenciais, ou de estado;
r: vetor de m variáveis algébricas;
u: vetor de k entradas;
f : vetor de funções das equações diferenciais;
g: vetor de funções das equações algébricas;
0: vetor de zeros;
Em um ponto de equilíbrio (ou de operação) tem-se que:
˙x0 = f (x0, r0, u0) = 0 (3.3)
A linearização das EQ. 3.1 e 3.2 em torno de um ponto de operação genérico (x0, r0, u0)
é feita pela expansão em Séries de Taylor, e tomando-se somente o primeiro termo, como
mostrado a seguir.
∆xi =
(
∂fi
∂x1
)
x0,r0,u0
∆x1 + ... +
(
∂fi
∂xn
)
x0,r0,u0
∆xn +
+
(
∂fi
∂r1
)
x0,r0,u0
∆r1 + ... +
(
∂fi
∂rm
)
x0,r0,u0
∆rm +
+
(
∂fi
∂u1
)
x0,r0,u0
∆u1 + ... +
(
∂fi
∂uk
)
x0,r0,u0
∆uk; i = 1, ..., n (3.4)
0 =
(
∂gp
∂x1
)
x0,r0
∆x1 + ... +
(
∂gp
∂xn
)
x0,r0
∆xn +
+
(
∂gp
∂r1
)
x0,r0
∆r1 + ... +
(
∂gp
∂rm
)
x0,r0
∆rm; p = 1, ...,m (3.5)
onde ∆ simboliza uma variação incremental em torno do ponto de operação considerado.
De forma análoga, a linearização das EQ. 2.1, 2.2, 2.3, 2.5, 2.17, 2.18 e 2.19 resulta
em:37

∆E′
q = − 1
T′
d0
∆E′
q −(Xd − X
′
d)
T′
d0
∆Id +1
T′
d0
∆Efd (3.6)
∆E′′
d = − 1
T′′
q0
∆E′′
d +Xq − X
′′
q
T′
d0
∆Iq (3.7)
∆E′′
d = − 1
T′′
d0
∆E′′
q +1
T′′
d0
∆E′
q −(X
′
d − X′′
d )
T′′
d0
∆Id (3.8)
∆ω =(−VR10Id0 cos δ0 − VI10Id0senδ0 + VR10Iq0senδ0 − VI10Iq0 cos δ0)
2H∆δ +
+(−VR10senδ0 + VI10 cos δ0 − 2RaId0)
2H∆Id +
+(−VR10 cos δ0 − VI10senδ0 − 2RaIq0)
2H∆Iq +
+(−Id0senδ0 − Iq0 cos δ0)
2H∆VR1 +
(Id0 cos δ0 − Iq0senδ0)
2H∆VI1 +
+1
2H∆Pmec (3.9)
∆δ = ω0∆ω (3.10)
0 = −∆E′′
d + (VR10 cos δ0 + VI10senδ0)∆δ + Ra∆Id − Xq∆Iq +
+senδ0∆VR1 − cos δ0∆VI1 (3.11)
0 = −∆E′′
q + (−VR10senδ0 + VI10 cos δ0)∆δ + X′′
d ∆Id + Ra∆Iq +
+ cos δ0∆VR1 + senδ0∆VI1 (3.12)
Um ponto a ser enfatizado é que, a partir das formulações acima, passou-se a utilizar
a notação VR1 e VI1 para a tensão terminal do gerador, ao invés de VR e VI , sendo o índice
1 uma referência à barra a qual está ligada a máquina.
Duas equações devem ainda ser linearizadas, fora uma terceira, relacionada ao mó-
dulo da tensão terminal do gerador, que será deixada para a Seção 3.3. Para explicar
as duas primeiras há de se enfatizar o seguinte aspecto: a corrente da rede, I1 (ver EQ.
2.21), é igual à corrente de saída do gerador. A primeira é escrita no referencial (R− I),
enquanto a segunda o é no referencial (d − q). Com isto em mente pode-se intuir que
uma conversão de referenciais se faz necessária, o que ficará evidente na próxima seção,
quando a formulação aumentada for descrita. Assim sendo, da EQ. 2.15 vem que:
IR1 = senδId1 + cos δIq1 (3.13)
II1 = − cos δId1 + senδIq1 (3.14)
38

Sabendo-se que Id1 e Iq1 são o mesmo que Id e Iq, respectivamente, então a linearização
das EQ. 3.13 e 3.14 resulta em:
∆IR1 = (cos δ0Id0 − senδ0Iq0)∆δ + senδ0∆Id + cos δ0∆Iq (3.15)
∆II1 = (senδ0Id0 + cos δ0Iq0)∆δ − cos δ0∆Id + senδ0∆Iq (3.16)
Por um olhar mais atento nas EQ. 3.6 a 3.12, 3.15 e 3.16 percebe-se que devem ser
conhecidos (ou determinados) os valores dos seguintes parâmetros, os quais definem os
pontos de operação do gerador e, conseqüentemente, do sistema elétrico: VR10, VI10, Id0,
Iq0 e δ0. A definição dos pontos de operação e a determinação destes parâmetros são
tratadas na seção a seguir.
3.2 OS PONTOS DE OPERAÇÃO DO SEP E A SOLUÇÃO DA EQUAÇÃO DE
REDE
Conforme citado na seção anterior, a linearização do modelo matemático de um
sistema é feita em torno de um ponto de equilíbrio, o qual define as condições operativas
deste sistema. No caso do SEP abordado neste trabalho, que é do tipo gerador-carga,
a determinação de um ponto de operação depende do conhecimento dos valores das
cargas (consumidor). O método adotado para a especificação das potências das cargas,
bem como todo o desenvolvimento feito para se calcular os parâmetros descritos no
último parágrafo da Seção 3.1 estão presentes nos programas dos Apêndices 8.1.1 e 8.1.2.
As rotinas iniciais do primeiro programa, que se referem à definição das cargas, estão
baseadas em uma série de considerações de caráter eminentemente subjetivo. Por esta
razão, achou-se por bem tecer alguns comentários a respeito destas rotinas visando uma
melhor compreensão por parte do leitor. Isto é feito a seguir.
Com o cuidado de se tentar cobrir situações de operação do sistema com baixos,
médios e elevados níveis de carregamento foram estipulados cinco valores para a potência
ativa total das cargas (em pu), quais sejam: 0,175, 0,425, 0,675, 0,925 e 1. Três foram os
fatores de potência considerados para o conjunto das cargas: 0,6, 0,8 e 1. Desta forma,
para cada valor de potência ativa outros três de potência reativa são obtidos. A matriz
PC ("Potência das Cargas") do programa é responsável por armazenar todos estes dados.
Cada uma de suas colunas define um ponto de operação, em um total de quinze.
Uma outra matriz simbolizada por DP foi criada com o intuito de se determinar
o percentual de carga devido a cada consumidor em cada ponto de operação. Foram
39

especificadas seis distribuições percentuais possíveis, cada uma correspondendo a uma
coluna. A correlação entre as distribuições e os pontos de operação foi feita a partir
de uma estrutura de seleção do tipo "if, elseif, else", que gera duas outras matrizes,
CCP e CCQ, contendo, respectivamente, as potência ativa e reativa de cada um dos
consumidores para todos os pontos de operação. Nesta correlação foi levado em conta
o limite máximo de potência de cada consumidor, dado pelos valores dos respectivos
transformadores (ver Seção 2.4.1).
Seguindo a seqüência do mesmo programa passa-se às definições e cálculos de valores
base e parâmetros da rede elétrica. Praticamente tudo isto já foi apresentado no Capítulo
2 a não ser por dois aspectos que são agora destacados. O primeiro diz respeito à obtenção
da condutância, g, e da susceptância, b, de um elemento, conhecida sua impedância z.
Seja, então, um z genérico dado por: z = r + jx, sendo r a resistência e x a reatância do
elemento, ambos em pu, e j =√−1 . Assim, tem-se que:
g =r
r2 + x2(pu) (3.17)
b = − x
r2 + x2(pu) (3.18)
O segundo trata da relação entre a condutância gc e a susceptância bc, de uma carga tipo
impedância constante, e suas potências ativa e reativa, respectivamente. Não é difícil
mostrar que gc e bc podem ser encontrados pelas seguintes equações:
gc =Pc
v2c
(mho) (3.19)
bc = −Qc
v2c
(mho) (3.20)
onde,
Pc: potência ativa nominal da carga em Watts (W);
Qc: potência reativa nominal da carga em Volt-Ampére-reativo (VAr)
vc: tensão nominal da carga em volts (V); em se tratando de carga trifásica pode-se
inferir que é igual à tensão de linha nominal que a alimenta;
Reescrevendo as EQ. 3.19 e 3.20 em pu, a partir das definições dos valores base
apresentadas em 2.4.1, tem-se que:
gc(pu) =gc
gbase
=gc
1zbase
= gczbase =Pc
v2c
(3/2)v2base
Pbase
(3.21)
40

Da própria definição de vbase pode-se tirar que:
vbase =vL
√2√
3(3.22)
sendo vL a tensão de linha nominal;
Substituindo 3.22 em 3.21, tem-se:
gc =Pc
v2c
32
(
vL
√2√
3
)2
Pbase
=Pcv
2L
Pbasev2c
(3.23)
Considerando que vc seja igual a vL, conclui-se que:
gc =Pc
Pbase
= Pc (pu) (3.24)
O mesmo raciocínio pode ser adotado com relação à susceptância resultando em:
bc = − Qc
Pbase
= −Qc (pu) (3.25)
Neste ponto já se dispõe de todo o subsídio necessário para a montagem da matriz
de admitâncias, Y . Saliente-se a inserção das condutâncias e susceptâncias de cada
consumidor (carga) nesta matriz. Como estes parâmetros das cargas dependem do ponto
de operação considerado, pode-se concluir que serão quinze as matrizes de admitâncias
geradas (uma para cada ponto).
A próxima etapa é a solução da equação de rede (EQ. 2.21) para a determinação das
variáveis algébricas, ou seja, corrente injetada pelo gerador e tensões nas barras. Para
isso, faz-se necessário o arbítrio da tensão de uma barra, de tal forma que ela sirva como
referência para toda a rede. Por conveniência foi escolhida a barra 1, a qual está conec-
tado o gerador, sendo sua tensão V1 especificada da seguinte forma:
V1 =
[
VR1
VI1
]
=
[
1
0
]
(3.26)
ou, equivalentemente
V1 = VR1 + jVI1 = 1 + j0 (3.27)
41

Estando definida a tensão V1, as demais variáveis algébricas da EQ. 2.21 podem ser
determinadas sem necessidade de se executar um programa de fluxo de carga (MONTI-
CELLI, 1983), através de uma simples manipulação algébrica. Trocando I1 e V1 de lugar,
pode-se reestruturar a EQ. 2.21 da seguinte forma:
N1 = N2 ∗ N3 (3.28)
onde,
N1 =
−y11V1
−y21V1
−y31V1
−y41V1
−y51V1
(3.29)
N2 =
−IN y12 y13 y14 y15
0 y22 y23 y24 y25
0 y32 y3(:, :, i) y34 y35
0 y42 y43 y4(:, :, i) y45
0 y52 y53 y54 y5(:, :, i)
(3.30)
N3 =
I1
V2
V3
V4
V5
(3.31)
Levando-se em consideração os diversos elementos nulos das matrizes N1 e N2 (ver
Apêndice 8.1.1), tem-se:
N1 =
−y11V1
−y21V1
0
0
0
(3.32)
42

N2 =
−IN y12 0 0 0
0 y22 y23 y24 y25
0 y32 y3(:, :, i) 0 0
0 y42 0 y4(:, :, i) 0
0 y52 0 0 y5(:, :, i)
(3.33)
Alguns comentários podem ser feitos a respeito das matrizes acima definidas:
(i) por razões de simplificação, os elementos das matrizes N1, N2 e N3 não estão mostra-
dos com a devida expansão em suas partes real e imaginária; se isto fosse feito a
dimensão de cada uma das matrizes dobraria (ver programa do Apêndice 8.1.1);
(ii) o elemento IN representa uma matriz identidade de ordem 2;
(iii) N2 é uma matriz muito semelhante à matriz admitância nodal, com as mudanças
necessárias devido à permutação entre I1 eV1;
(iv) os elementos y3(:, :, i), y4(:, :, i) e y5(:, :, i) são aqueles nos quais os parâmetros das
cargas (condutâncias e susceptâncias) se fazem presentes; o índice i, variando de 1
a 15, indica o ponto de operação;
A solução da equação de rede é então obtida facilmente, pela seguinte expressão:
N3 = N−12 ∗ N1 (3.34)
Naturalmente, ter-se-á um conjunto de soluções (N3) correspondente ao conjunto
de pontos de operação. Na verdade, porém, do conjunto solução, apenas os valores da
variável I1 serão usados nas equações linearizadas do sistema elétrico 5.
Tendo sido definido o valor de V1 (que permanecerá o mesmo para todos os pontos
de operação) e calculados os valores de I1, basta agora encontrar os ângulos δ nos pon-
tos de operação desejados para que as equações linearizadas do sistema elétrico sejam
implementadas.
Os pontos de equilíbrio de um sistema dinâmico, definidos matematicamente pela EQ.
3.3, correspondem a situações de estado estacionário do mesmo. Em regime estacionário
5Para constatação deste fato o leitor deve recorrer ao programa do Apêndice 8.1.2.
43

a seguinte expressão é válida para o gerador elétrico (KUNDUR, 1994), (CHAPMAN,
1991):
Eq = VT + (Ra + jXq)IT (3.35)
sendo,
Eq a tensão interna da máquina;
VT a tensão terminal do gerador, e
IT sua corrente de saída; (os demais parâmetros já foram definidos na Seção 2.2.1).
Expandindo-se os termos do referencial (R−I) em suas componentes real e imaginária
tem-se:
ERq + jEIq = (VRT + jVIT ) + (Ra + jXq)(IRT + jIIT ) (3.36)
Como VT e IT são idênticos a V1 e I1, respectivamente, então, a EQ. 3.36 pode ser
reescrita:
ERq + jEIq = (VR1 + jVI1) + (Ra + jXq)(IR1 + jII1) (3.37)
Separando-se as partes real e imaginária, e indicando-se os diferentes pontos de ope-
ração pelo índice i, chega-se a:
ERq(i) = VR1(i) + RaIR1(i) − XqII1(i) (3.38)
EIq(i) = VI1(i) + XqIR1(i) + RaII1(i) (3.39)
donde pode-se tirar que:
δ(i) = tg−1
(
EIq(i)
ERq(i)
)
(3.40)
Com relação aos procedimentos adotados para a determinação do ângulo δ cabem
algumas observações:
(i) o cálculo do ângulo é feito para cada ponto de operação;
(ii) a EQ. 3.40 foi executada no programa do Apêndice 8.1.2 pelo uso da função angle
do Matlab;
(iii) as seguintes notações do citado programa e deste texto são correspondentes: Eqr
e ERq; Eqm e EIq; V 1(1, i) e VR1(i); V 1(2, i) e VI1(i); I1(1, i) e IR1(i); I1(2, i) e
II1(i);
As considerações, desenvolvimentos e cálculos feitos acima fornecem as informações
necessárias e suficientes para que o modelo do sistema elétrico seja formatado segundo
uma formulação denominada aumentada ou implícita, a partir da qual uma realização
em espaço de estados pode ser obtida. Estes assuntos são abordados a seguir.
44

3.3 AS FORMULAÇÕES AUMENTADA (OU IMPLÍCITA) E EM ESPAÇO DE ES-
TADOS
No momento, o objetivo do trabalho se concentra na obtenção de controladores que
garantam a manutenção da tensão de saída do gerador elétrico dentro de níveis muito
próximos a um valor nominal, para variadas situações de operação do SEP. Para tanto,
naturalmente, há de se empregar técnicas de controle baseadas no modelo matemático
da dinâmica do sistema em questão. Esse modelo, contudo, deve ser trabalhado de tal
forma a se chegar, a partir dele, em uma formatação adequada ao uso destas técnicas
de controle, como a realização em espaço de estados, por exemplo. Em se tratando,
porém, de sistemas cuja modelagem seja dada por EAD parece mais adequado que estas
equações sejam inicialmente configuradas segundo uma formulação denominada aumen-
tada (ou implícita). Isto porque, a partir desta formulação torna-se simples a obtenção
da realização em espaço de estados do sistema. A forma de estado aumentada pode ser
descrita pelas seguintes expressões:
˙x
. . .
0
=
J1... J2
. . . . . .
J3... J4
x
. . .
r
+
Bx
. . .
Br
u (3.41)
y =[
Cx
... Cr
]
x
. . .
r
(3.42)
onde,
x: vetor de variáveis de estado (ou diferenciais);
r: vetor de variáveis algébricas;
u: vetor de entradas;
0: vetor de elementos nulos;
y: vetor de saídas;
Para o caso de equações linearizadas em torno de um ponto de operação i, as EQ.
3.41 e 3.42 podem ser reescritas da seguinte maneira mais representativa:
∆˙x
. . .
0
=
(J1)i
... (J2)i
. . . . . .
(J3)i
... (J4)i
∆x
. . .
∆r
+
(Bx)i
. . .
(Br)i
∆u (3.43)
45

∆y =[
(Cx)i
... (Cr)i
]
∆x
. . .
∆r
(3.44)
As saídas de interesse do sistema em estudo são: a freqüência de rotação do gera-
dor ω, e o módulo de sua tensão terminal |VT |. O primeiro parâmetro é uma variável
de estado, podendo ser obtido diretamente; já o módulo da tensão terminal precisa ser
calculado, o que pode ser conseguido pela seguinte equação:
|VT | = |V1| =√
V 2R1 + V 2
I1 (3.45)
Linearizando a EQ. 3.45 em torno de um ponto de operação i tem-se:
∆|VT | =VR1(i)
√
V 2R1(i) + V 2
I1(i)
∆VR +VI1(i)
√
V 2R1(i) + V 2
I1(i)
∆VI (3.46)
Agora, já se dispondo de todo o conjunto de equações necessárias para a modelagem
do sistema elétrico linearizado (EQ. 3.6, 3.7, 3.8, 3.9, 3.10, 3.11, 3.12, 3.15, 3.16 e 3.46)
basta manipulá-las devidamente para que se transformem na formulação aumentada, com
as variáveis de estado, variáveis algébricas, as entradas e saídas ordenadas da seguinte
maneira (o símbolo ∆ foi omitido apenas para simplificar as notações):
• variáveis de estado ∆x: E′
q, E′′
d , E′′
q , ω e δ;
• variáveis algébricas ∆r: Id, Iq, VR1, VI1, VR2, VI2, VR3, VI3, VR4, VI4, VR5 e VI5;
• entradas ∆u: Efd e Pmec;
• saídas ∆y: ω e |V1|;
Note-se que as componentes IR1 e II1 da corrente injetada na barra 1, I1, não apare-
cem entre as variáveis algébricas, mas sim Id e Iq. Por esta razão tornou-se obrigatória a
conversão entre referenciais feita pelas EQ. 3.13 e 3.14.
A montagem das matrizes da forma de estado aumentada está apresentada no pro-
grama do Apêndice 8.1.2.
A obtenção, a partir da formulação aumentada, das matrizes A, B, C e D da re-
alização em espaço de estados correspondente pode ser conseguida por uma eliminação
numérica-matricial do vetor de variáveis algébricas r, conforme discutido em PELLANDA
46

(1993). Desta eliminação chega-se que:
A = J1 − J2J−14 J3 (3.47)
B = Bx − J2J−14 Br (3.48)
C = Cx − CrJ−14 J3 (3.49)
D = −CrJ−14 Br (3.50)
Esta seção se encerra com a observação de que os modelo em espaço de estados do
SEP são em número de quinze, um para cada ponto de operação.
3.4 PROJETO DE REGULADORES DE TENSÃO E SIMULAÇÕES
O sistema de potência em estudo possui, como pode ser inferido das informações
prestadas na seção anterior, duas entradas e duas saídas, das quais podem ser extraídas
quatro Funções de Transferência (FT). Em se tendo como objetivo o projeto de regu-
ladores de tensão, RAT, apenas uma FT será de interesse, qual seja, ∆|V1|(s)∆Efd(s)
. Ao longo
dos projetos, considerar-se-á a entrada ∆Pmec como sendo nula e a saída ω será ignorada.
Uma observação importante a ser feita é que os pontos de operação 10 (potência
ativa total da carga de 0,925 pu e reativa de 1,23 pu) e 13 (potência ativa total da carga
de 1 pu e reativa de 1,33) foram desconsiderados por ultrapassarem os limites do gerador.
Tome-se, como base, a realização em espaço de estados do SEP para o primeiro ponto
de operação. Como primeiro passo tem-se o levantamento dos pólos e zeros da função de
transferência de interesse. Isto está mostrado nas FIG. 3.1 e 3.2.
A figura FIG. 3.2 é apenas uma ampliação para uma melhor visualização dos pólos
e zeros próximos ou na origem (na verdade, com certa imprecisão por parte das figuras,
sobretudo na origem). Outros comandos do Matlab como o tzero e o eig, podem fornecer
com maior exatidão os valores dos pólos e zeros desta função de transferência, que são:
• pólos: -923,7637; -146,2026; -5,022; 0 e 0;
• zeros: -157,398; 0 e 0;
Com estes resultados algumas conclusões importantes podem ser depreendidas:
(i) devido à ausência de uma barra infinita ou outra(s) máquina(s), não existe um modo
de oscilação eletromecânica; no seu lugar aparecem dois pólos na origem (duplo
integrador);
47
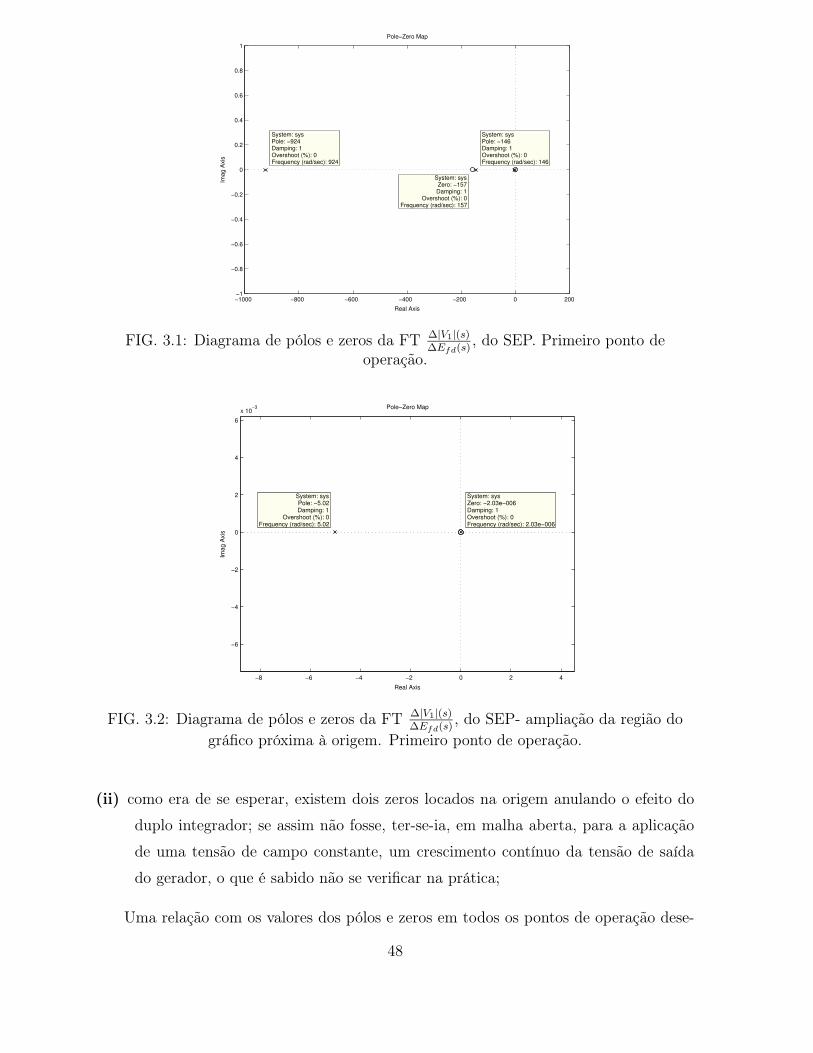
Pole−Zero Map
Real Axis
Imag
Axi
s
−1000 −800 −600 −400 −200 0 200−1
−0.8
−0.6
−0.4
−0.2
0
0.2
0.4
0.6
0.8
1
System: sys Pole: −924 Damping: 1 Overshoot (%): 0 Frequency (rad/sec): 924
System: sys Zero: −157 Damping: 1
Overshoot (%): 0 Frequency (rad/sec): 157
System: sys Pole: −146 Damping: 1 Overshoot (%): 0 Frequency (rad/sec): 146
FIG. 3.1: Diagrama de pólos e zeros da FT ∆|V1|(s)∆Efd(s)
, do SEP. Primeiro ponto deoperação.
Pole−Zero Map
Real Axis
Imag
Axi
s
−8 −6 −4 −2 0 2 4
−6
−4
−2
0
2
4
6
x 10−3
System: sys Pole: −5.02 Damping: 1
Overshoot (%): 0 Frequency (rad/sec): 5.02
System: sys Zero: −2.03e−006 Damping: 1 Overshoot (%): 0 Frequency (rad/sec): 2.03e−006
FIG. 3.2: Diagrama de pólos e zeros da FT ∆|V1|(s)∆Efd(s)
, do SEP- ampliação da região dográfico próxima à origem. Primeiro ponto de operação.
(ii) como era de se esperar, existem dois zeros locados na origem anulando o efeito do
duplo integrador; se assim não fosse, ter-se-ia, em malha aberta, para a aplicação
de uma tensão de campo constante, um crescimento contínuo da tensão de saída
do gerador, o que é sabido não se verificar na prática;
Uma relação com os valores dos pólos e zeros em todos os pontos de operação dese-
48
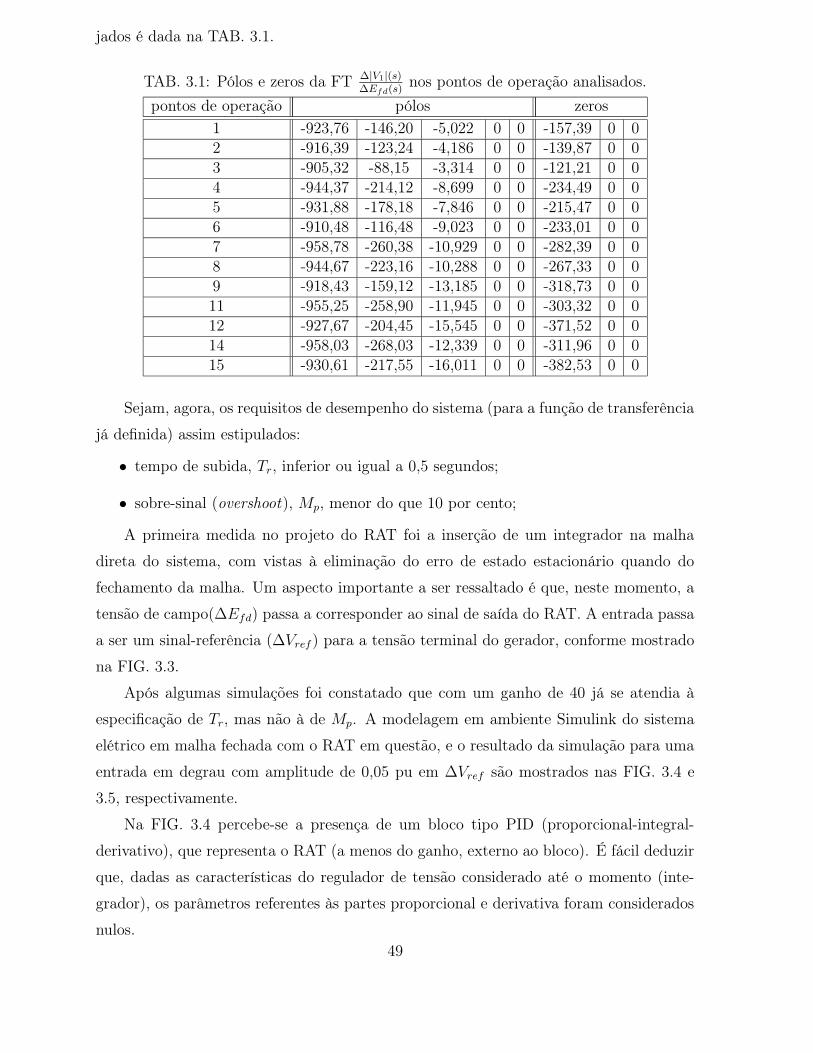
jados é dada na TAB. 3.1.
TAB. 3.1: Pólos e zeros da FT ∆|V1|(s)∆Efd(s)
nos pontos de operação analisados.
pontos de operação pólos zeros1 -923,76 -146,20 -5,022 0 0 -157,39 0 02 -916,39 -123,24 -4,186 0 0 -139,87 0 03 -905,32 -88,15 -3,314 0 0 -121,21 0 04 -944,37 -214,12 -8,699 0 0 -234,49 0 05 -931,88 -178,18 -7,846 0 0 -215,47 0 06 -910,48 -116,48 -9,023 0 0 -233,01 0 07 -958,78 -260,38 -10,929 0 0 -282,39 0 08 -944,67 -223,16 -10,288 0 0 -267,33 0 09 -918,43 -159,12 -13,185 0 0 -318,73 0 011 -955,25 -258,90 -11,945 0 0 -303,32 0 012 -927,67 -204,45 -15,545 0 0 -371,52 0 014 -958,03 -268,03 -12,339 0 0 -311,96 0 015 -930,61 -217,55 -16,011 0 0 -382,53 0 0
Sejam, agora, os requisitos de desempenho do sistema (para a função de transferência
já definida) assim estipulados:
• tempo de subida, Tr, inferior ou igual a 0,5 segundos;
• sobre-sinal (overshoot), Mp, menor do que 10 por cento;
A primeira medida no projeto do RAT foi a inserção de um integrador na malha
direta do sistema, com vistas à eliminação do erro de estado estacionário quando do
fechamento da malha. Um aspecto importante a ser ressaltado é que, neste momento, a
tensão de campo(∆Efd) passa a corresponder ao sinal de saída do RAT. A entrada passa
a ser um sinal-referência (∆Vref ) para a tensão terminal do gerador, conforme mostrado
na FIG. 3.3.
Após algumas simulações foi constatado que com um ganho de 40 já se atendia à
especificação de Tr, mas não à de Mp. A modelagem em ambiente Simulink do sistema
elétrico em malha fechada com o RAT em questão, e o resultado da simulação para uma
entrada em degrau com amplitude de 0,05 pu em ∆Vref são mostrados nas FIG. 3.4 e
3.5, respectivamente.
Na FIG. 3.4 percebe-se a presença de um bloco tipo PID (proporcional-integral-
derivativo), que representa o RAT (a menos do ganho, externo ao bloco). É fácil deduzir
que, dadas as características do regulador de tensão considerado até o momento (inte-
grador), os parâmetros referentes às partes proporcional e derivativa foram considerados
nulos.49
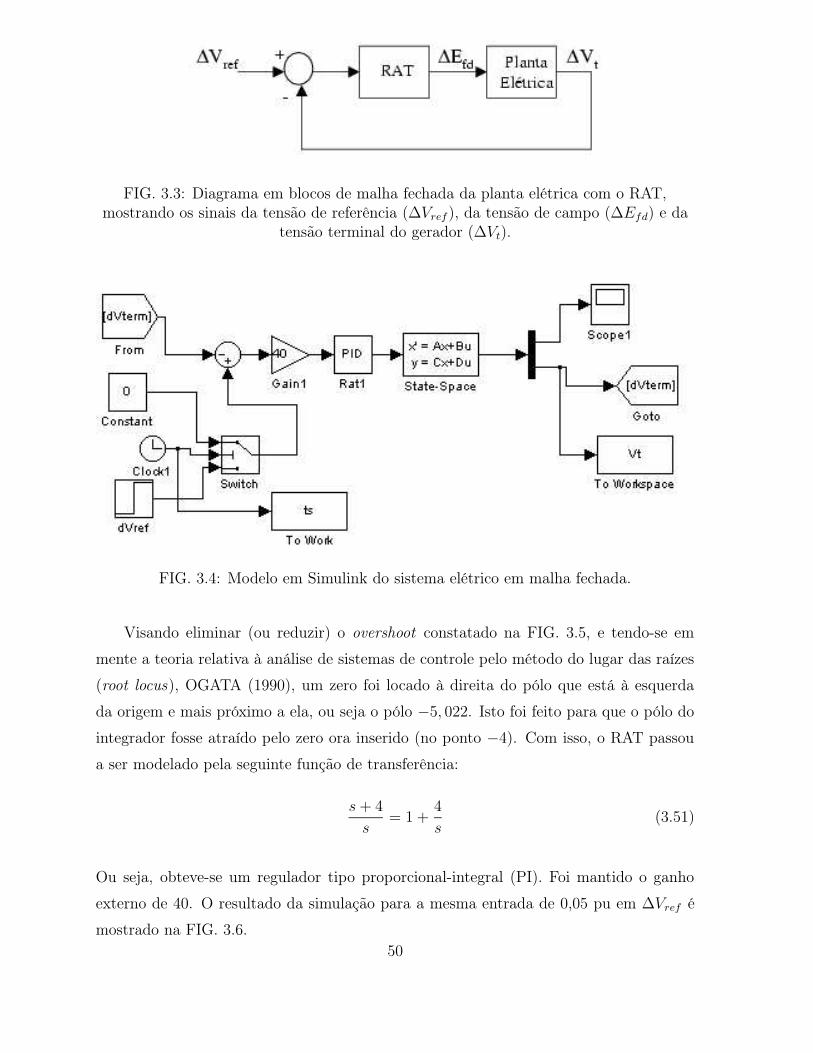
FIG. 3.3: Diagrama em blocos de malha fechada da planta elétrica com o RAT,mostrando os sinais da tensão de referência (∆Vref ), da tensão de campo (∆Efd) e da
tensão terminal do gerador (∆Vt).
FIG. 3.4: Modelo em Simulink do sistema elétrico em malha fechada.
Visando eliminar (ou reduzir) o overshoot constatado na FIG. 3.5, e tendo-se em
mente a teoria relativa à análise de sistemas de controle pelo método do lugar das raízes
(root locus), OGATA (1990), um zero foi locado à direita do pólo que está à esquerda
da origem e mais próximo a ela, ou seja o pólo −5, 022. Isto foi feito para que o pólo do
integrador fosse atraído pelo zero ora inserido (no ponto −4). Com isso, o RAT passou
a ser modelado pela seguinte função de transferência:
s + 4
s= 1 +
4
s(3.51)
Ou seja, obteve-se um regulador tipo proporcional-integral (PI). Foi mantido o ganho
externo de 40. O resultado da simulação para a mesma entrada de 0,05 pu em ∆Vref é
mostrado na FIG. 3.6.50

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 50
0.01
0.02
0.03
0.04
0.05
0.06
0.07
tempo (s)
delta
|V1|
FIG. 3.5: Resposta de ∆|V1| para uma entrada ao degrau de 0,05 pu em ∆Vref , com umregulador tipo I (integrador)- primeiro ponto de operação.
Um segundo teste foi feito a fim de avaliar a eficiência do controle. Foi aplicado um
sinal de entrada tipo pulso, de 0,05 pu de amplitude e largura de 1 segundo. O resultado
pode ser visto na FIG. 3.7.
Percebe-se que os resultados evidenciados nas FIG. 3.6 e 3.7 foram satisfatórios,
atendendo às exigências de desempenho do sistema previamente definidos. Caso se deseje
uma melhoria desse desempenho pode-se aumentar o ganho, ou aproximar ainda mais,
pela direita, o zero (do regulador) do pólo −5, 022 (do sistema).
Exatamente o mesmo raciocínio foi seguido com relação ao demais pontos de opera-
ção. A TAB. 3.2 traz os parâmetros usados para a sintonia dos reguladores de tensão, os
quais estão modelados pela seguinte FT genérica:
G
(
P +I
s
)
(3.52)
onde, G se refere ao ganho externo, P ao termo proporcional, e I ao integral.
Os resultados obtidos com estes reguladores são mostrados da FIG. 3.8 à FIG. 3.19.
Por elas fica claro que a resposta da tensão terminal (módulo) do gerador, para uma
entrada tipo pulso (amplitude de 0,05 pu e duração de 1 segundo) em ∆Vref , atende aos
requisitos de desempenho já definidos, em todos os pontos de operação (à exceção do 100
e 130 pontos, que foram descartados). Observe-se que a saída (∆|V1|) segue, ou rastreia,
a entrada-referência (∆Vref ), como era de se desejar.
51

0 0.2 0.4 0.6 0.8 1 1.2 1.4 1.6 1.8 20
0.01
0.02
0.03
0.04
0.05
0.06
delta
|V1|
tempo (s)
FIG. 3.6: Resposta de ∆|V1| para uma entrada ao degrau de 0,05 pu em ∆Vref , com umregulador tipo PI (proporcional - integral)- primeiro ponto de operação.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.7: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- primeiro ponto
de operação.
52

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.8: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- segundo ponto
de operação.
TAB. 3.2: Valores dos parâmetros dos reguladores.Pontos de operação G P I
1 40 1 42 40 1 43 40 1 34 40 1 85 40 1 76 40 1 87 40 1 108 40 1 109 40 1 1211 40 1 1112 40 1 1414 40 1 1115 40 1 15
53

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.9: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- terceiro ponto
de operação.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.10: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- quarto ponto de
operação.
54

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.11: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- quinto ponto de
operação.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.12: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- sexto ponto de
operação.
55

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.13: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- sétimo ponto de
operação.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.14: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- oitavo ponto de
operação.
56

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.15: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- nono ponto de
operação.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.16: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- décimo primeiro
ponto de operação.
57
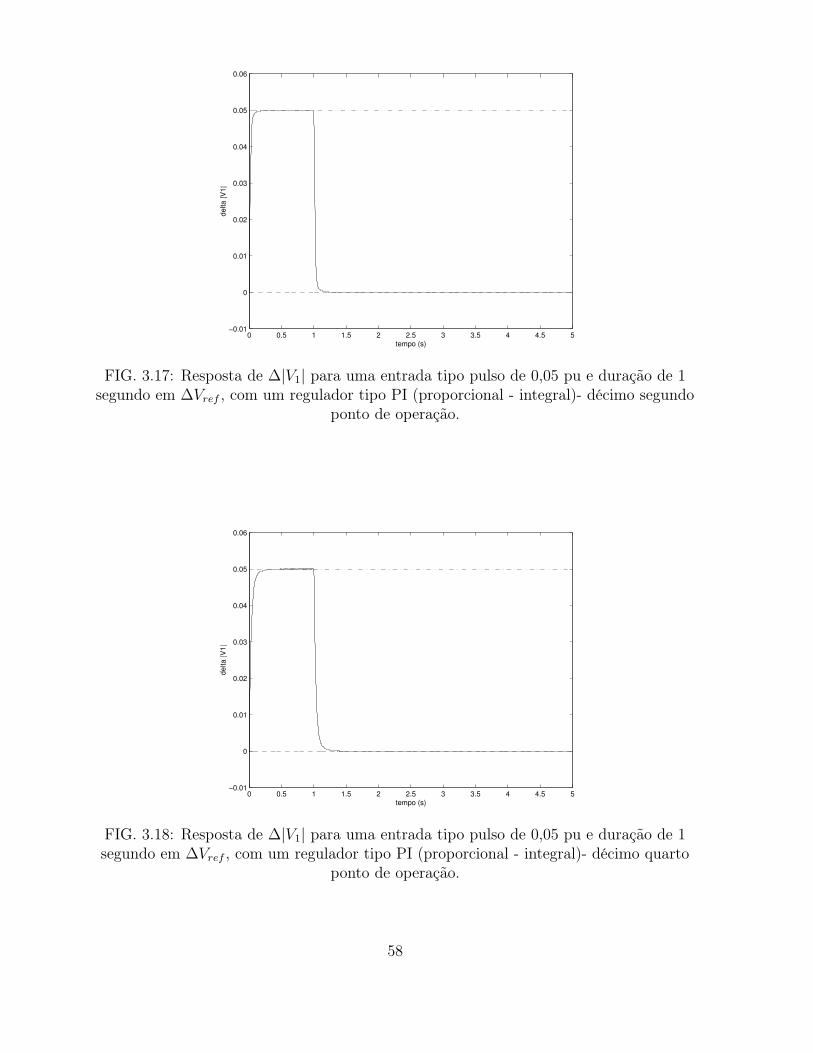
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.17: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- décimo segundo
ponto de operação.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.18: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- décimo quarto
ponto de operação.
58

0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
FIG. 3.19: Resposta de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador tipo PI (proporcional - integral)- décimo quinto
ponto de operação.
59

3.4.1 COMPARAÇÕES
Um resultado interessante a ser apresentado diz respeito à seguinte comparação:
resposta do sistema elétrico com seu regulador sintonizado para o ponto de operação em
questão versus resposta deste sistema quando seu controlador está sintonizado para outro
ponto de operação. Observe-se que os RAT a serem utilizados são aqueles expressos pela
EQ. 3.52 cujos parâmetros foram dados na TAB. 3.2.
Considere-se o seguinte caso para a primeira simulação comparativa, mostrada na
FIG. 3.20:
• entrada tipo pulso, de amplitude 0,05 e largura de 1 segundo, em ∆Vref ;
• resposta (∆|V1|) para o sistema elétrico linearizado no terceiro ponto de operação
com seu RAT sintonizado para ele (linha contínua do gráfico);
• resposta para o sistema elétrico linearizado no terceiro ponto de operação com
seu RAT sintonizado para o décimo quinto ponto de operação (linha tracejada do
gráfico);
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
RAT p/ pnt. op. 15RAT p/ pnt. op 3
FIG. 3.20: Respostas de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador sintonizado no terceiro e outro no décimo quinto
ponto de operação- sistema linearizado no terceiro ponto de operação.
Pela FIG. 3.20 fica evidenciada a deterioração da resposta do sistema pelo surgi-
mento de overshoots indesejáveis no início e no final do pulso, alcançando valores pouco
60

superiores a 13 por cento, quando seu RAT está sintonizado para o décimo quinto ponto
de operação.
Uma segunda comparação é feita nas seguintes condições:
• entrada tipo pulso, com amplitude 0,05 e largura de 1 segundo, em ∆Vref ;
• resposta (∆|V1|) para o sistema elétrico linearizado no décimo quinto ponto de
operação com seu RAT sintonizado para ele (linha contínua do gráfico);
• resposta para o sistema elétrico linearizado no décimo quinto ponto de operação
com seu RAT sintonizado para o terceiro ponto de operação (linha tracejada do
gráfico);
Os resultados estão apresentados na FIG. 3.21.
0 0.5 1 1.5 2 2.5 3 3.5 4 4.5 5−0.01
0
0.01
0.02
0.03
0.04
0.05
0.06
tempo (s)
delta
|V1|
RAT p/ pnt. op. 3RAT p/ pnt. op 15
FIG. 3.21: Respostas de ∆|V1| para uma entrada tipo pulso de 0,05 pu e duração de 1segundo em ∆Vref , com um regulador sintonizado no terceiro e outro no décimo quinto
ponto de operação- sistema linearizado no décimo quinto ponto de operação.
Pode ser tirada a seguinte conclusão da FIG. 3.21: com o regulador ajustado para
o terceiro ponto de operação o sistema respondeu mais lentamente, não alcançando,
sequer, o valor 0, 05 da amplitude do pulso de entrada. O gráfico da FIG. 3.22 mostra a
evolução do erro (percentual) inserido com este RAT, em relação à entrada de referência,
no período de 0, 5 a 1 segundo. Ou seja:
erro (percentual) =0, 05 − ∆|V1|
0, 05× 100 (3.53)
61

0.5 0.55 0.6 0.65 0.7 0.75 0.8 0.85 0.9 0.95 11.5
2
2.5
3
3.5
4
4.5
5
5.5
6
6.5
tempo (s)
erro
(%)
FIG. 3.22: Evolução temporal do erro percentual de ∆|V1| em relação à entrada dereferência (∆Vref ), com o regulador sintonizado para o terceiro ponto de operação e o
sistema linearizado no décimo quinto.
O objetivo destas comparações foi mostrar que a sintonia do RAT em apenas um
ponto de operação, conforme feito na prática nas MUH do Exército Brasileiro, possui o
inconveniente de se ter o desempenho do sistema depreciado quando ele estiver operando
fora deste ponto. Uma solução possível para minimizar este problema é discutida na
seção a seguir.
3.5 INTERPOLAÇÃO DE GANHOS DOS RAT VIA LÓGICA DIFUSA
O método da lógica difusa (fuzzy) pode ser empregado para a interpolação dos ganhos
de reguladores de tensão, projetados por técnicas lineares a partir da linearizção do
modelo dinâmico do sistema em torno de pontos de operação, como discutido na Seção
3.4. Esta é uma técnica que se enquadra dentro de uma classe maior denominada controle
por tabelamento de ganhos (gain scheduling).
Esta seção não tem por finalidade uma discussão mais aprofundada a respeito da
teoria de lógica fuzzy nem de técnicas de tabelamento de ganhos. Conhecimentos especí-
ficos a respeito destes temas foram assimilados em vistas à obtenção de um regulador
de tensão final a ser utilizado nas simulações não lineares de capítulos posteriores. Para
um estudo mais detalhado destes assuntos o leitor pode recorrer às referências citadas:
(PEREIRA, 2001), (ASSIS, 2002), (OLIVEIRA JR., 1999), (RUGH, 2000) e (LEITH,
62

2000) .
3.5.1 ESTRUTURA DE CONTROLE COM TABELAMENTO DE GANHOS
A FIG. 3.23 apresenta um diagrama esquemático da estrutura de controle com tabela-
mento de ganhos via lógica fuzzy adotada neste trabalho.
Nesta figura, o bloco do sistema elétrico representa seu modelo não-linear, e os con-
troladores K1, K2,..., Kk correspondem a reguladores de tensão projetados na Seção 3.4.
As entradas do bloco fuzzy, em número de duas, são a potência ativa total das cargas, Pa,
e o fator de potência do sistema, FP . E as k saídas são os parâmetros de ponderação,
ou ganhos, dos respectivos controladores.
Lógica Fuzzy
Sist. Elétrico
K k
K 1
K 2
X
X
X
-
+ V ref V t +
+
+
g 1
g 2
g k
Pa
FP
FIG. 3.23: Diagrama esquemático da estrutura de controle com tabelamentos de ganhosvia lógica fuzzy.
Pode-se perceber pelos dados da TAB. 3.2 que há casos onde um mesmo regulador de
tensão foi projetado para pontos de operação distintos. Uma outra situação que também
pode ser identificada nessa tabela é a existência de reguladores com parâmetros muito
próximos. Em vista destas constatações optou-se por reduzir o número de RAT a terem
seus ganhos tabelados, da seguinte forma:
• para os pontos de operação 1, 2 e 3 considere-se um único regulador, o RAT 3
(terceiro ponto de operação), representado por K1;
63

TAB. 3.3: Reguladores a serem usados no tabelamento de ganhos e sua representação.Pontos de Operação RAT Considerado Representação
1, 2 e 3 3 K1
4 e 5 5 K2
6 6 K3
7 e 8 8 K4
9 9 K5
11 e 14 11 K6
12 e 15 12 K7
• para os pontos de operação 4 e 5 considere-se o RAT 5, representado por K2;
• para o ponto de operação 6 considere-se o RAT 6, representado por K3;
• para os pontos de operação 7 e 8 considere-se o RAT 8, representado por K4;
• para o ponto de operação 9 considere-se o RAT 9, representado por K5;
• para os pontos de operação 11 e 14 considere-se o RAT 11, representado por K6;
• e finalmente, para os pontos de operação 12 e 15, considere-se o RAT 12, represen-
tado por K7;
Estas considerações a respeito da redução dos reguladores estão sumarizadas na TAB.
3.3.
3.5.2 MONTAGEM DA LÓGICA FUZZY E OBTENÇÃO DO REGULADOR FINAL
A lógica fuzzy utilizada neste trabalho está baseada no sistema de inferência de Man-
dani, conhecido como método MAX-MIN, e no processo de defuzzificação do centróide
ou centro de gravidade. Sua montagem pode ser dividida em duas etapas principais:
a) definição dos conjuntos difusos das entradas e saídas com as respectivas funções de
pertinência;
b) estabelecimento de uma base de regras ou proposições difusas;
As funções de pertinência definidas para as entradas (Pa e FP ) são mostradas nas
FIG. 3.24 e 3.25.
As nomenclaturas presentes na FIG. 3.24, denominadas valores lingüísticos e refe-
rentes aos respectivos conjuntos difusos, têm os seguintes significados:
64

FIG. 3.24: Função de pertinência para a variável de entrada potência ativa (Pa) .
• MB = Muito Baixa;
• B = Baixa;
• ME = Média;
• A = Alta;
• MA = Muito Alta;
As pertinências dos conjuntos difusos MB, B, ME, A e MA estão baseadas nos
seguintes princípios:
• conjunto MB: pertinência máxima (igual a 1) para valores de Pa menores ou iguais
a 0,175; pertinência decrescente para Pa maior que 0,175, e se anulando em 0,425;
• conjunto B: pertinência 1 para Pa igual a 0,425, decrescendo à direita e à esquerda
até se anular em 0,175 e 0,675;
• conjunto ME: pertinência 1 para Pa igual a 0,675, decrescendo à direita e à es-
querda até se anular em 0,425 e 0,925;
• conjunto A: pertinência 1 para Pa igual a 0,925, decrescendo à direita e à esquerda
até se anular em 0,675 e 1;
• conjunto MA: pertinência 1 para Pa maior ou igual a 1 decrescendo à esquerda até
se anular em 0,925;
65

FIG. 3.25: Função de pertinência para a variável de entrada fator de potência (FP ) .
Observe-se que os valores limitantes das pertinências para a potência ativa (Pa),
0,175, 0,425, 0,675, 0,925 e 1, são exatamente aqueles que definiram os pontos de operação
do sistema elétrico (Seção 3.2).
Com relação à variável de entrada FP as seguintes considerações foram feitas, se-
gundo a FIG. 3.25:
• conjunto Baixo: pertinência 1 para FP menor ou igual a 0,8, decrescendo à direita
até se anular em 1;
• conjunto Alto: pertinência 1 para FP igual a 1, decrescendo à esquerda até se
anular em 0,8;
Tendo sido escolhidos sete RAT para o tabelamento de ganhos (Seção 3.5.1) pode-se
concluir que as saídas fuzzy (ganhos) também serão em número de sete. Uma mesma
função de pertinência foi definida para todas elas, conforme apresentado na FIG. 3.26.
Tendo sido escolhido o método de defuzzificação do centróide, pode-se afirmar que cada
uma das saídas fuzzy estará limitada entre 0 e 1.
A base de regras estipulada é descrita a seguir:
• SE (Pa é MB) ENTÃO (g1 é alto), (g2 é baixo), (g3 é baixo), (g4 é baixo), (g5 é
baixo), (g6 é baixo) e (g7 é baixo);
• SE (Pa é B) e (FP é Baixo) ENTÃO (g1 é baixo), (g2 é alto), (g3 é baixo), (g4 é
baixo), (g5 é baixo), (g6 é baixo) e (g7 é baixo);
66

FIG. 3.26: Função de pertinência para a variável de saída ganho 1 (g1).
• SE (Pa é B) e (FP é Alto) ENTÃO (g1 é baixo), (g2 é baixo), (g3 é alto), (g4 é
baixo), (g5 é baixo), (g6 é baixo) e (g7 é baixo);
• SE (Pa é ME) e (FP é Baixo) ENTÃO (g1 é baixo), (g2 é baixo), (g3 é baixo), (g4
é alto), (g5 é baixo), (g6 é baixo) e (g7 é baixo);
• SE (Pa é ME) e (FP é Alto) ENTÃO (g1 é baixo), (g2 é baixo), (g3 é baixo), (g4 é
baixo), (g5 é alto), (g6 é baixo) e (g7 é baixo);
• SE (Pa é A) e (FP é Baixo) ENTÃO (g1 é baixo), (g2 é baixo), (g3 é baixo), (g4 é
baixo), (g5 é baixo), (g6 é alto) e (g7 é baixo);
• SE (Pa é A) e (FP é Alto) ENTÃO (g1 é baixo), (g2 é baixo), (g3 é baixo), (g4 é
baixo), (g5 é baixo), (g6 é baixo) e (g7 é alto);
• SE (Pa é MA) e (FP é Baixo) ENTÃO (g1 é baixo), (g2 é baixo), (g3 é baixo), (g4
é baixo), (g5 é baixo), (g6 é alto) e (g7 é baixo);
• SE (Pa é MA) e (FP é Alto) ENTÃO (g1 é baixo), (g2 é baixo), (g3 é baixo), (g4 é
baixo), (g5 é baixo), (g6 é baixo) e (g7 é alto);
O gráfico da FIG. 3.27 mostra, como exemplo, a superfície de variação do ganho
g3, correspondente a uma das saídas fuzzy. Por esta figura percebe-se que g3 cresce na
medida em que a potência ativa Pa se aproxima do valor 0, 425 e o fator de potência do
FP do valor 1. Este resultado está de acordo com as regras estipuladas.
67

FIG. 3.27: Superfície de variação do ganho g3.
O diagrama em Simulink do regulador de tensão final, obtido pelo tabelamento de
ganhos via lógica difusa, é mostrado na FIG. 3.28. No bloco ganhos está contida toda
lógica fuzzy discutida anteriormente. O diagrama do subsistema Reguladores é visuali-
zado na FIG. 3.29. Já o bloco Modelo Sis. Ele. é discutido mais detalhadamente no
Capítulo 5.
68
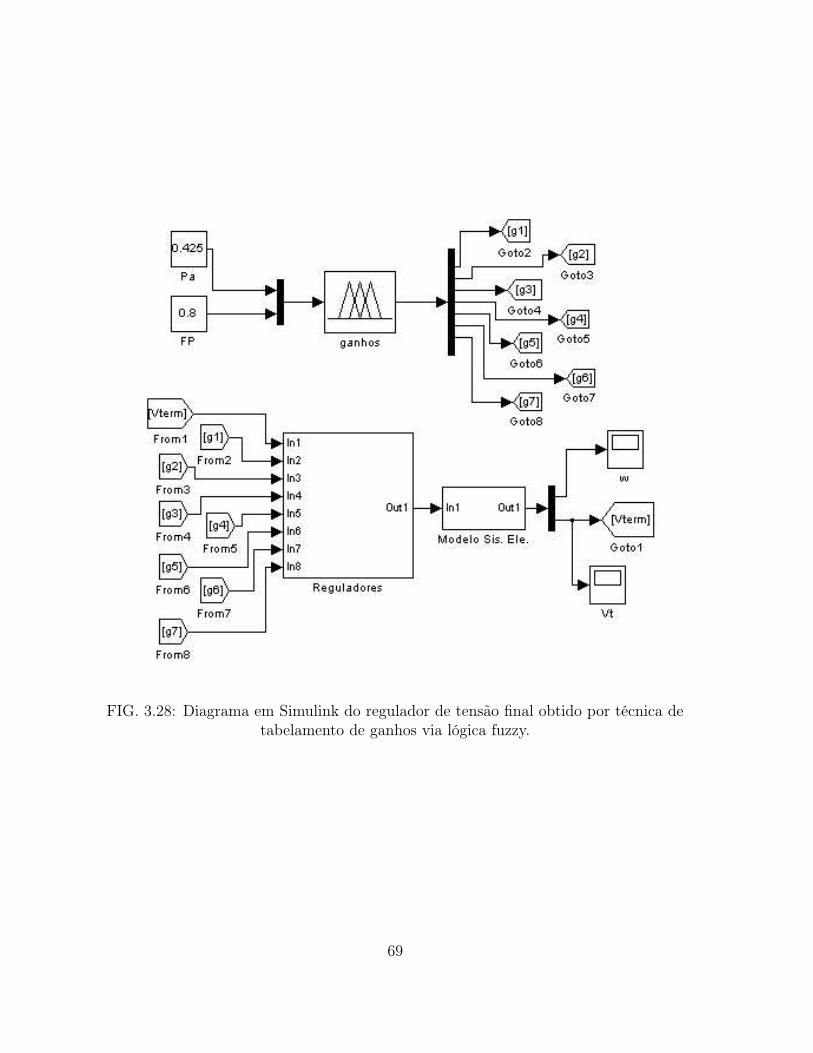
FIG. 3.28: Diagrama em Simulink do regulador de tensão final obtido por técnica detabelamento de ganhos via lógica fuzzy.
69
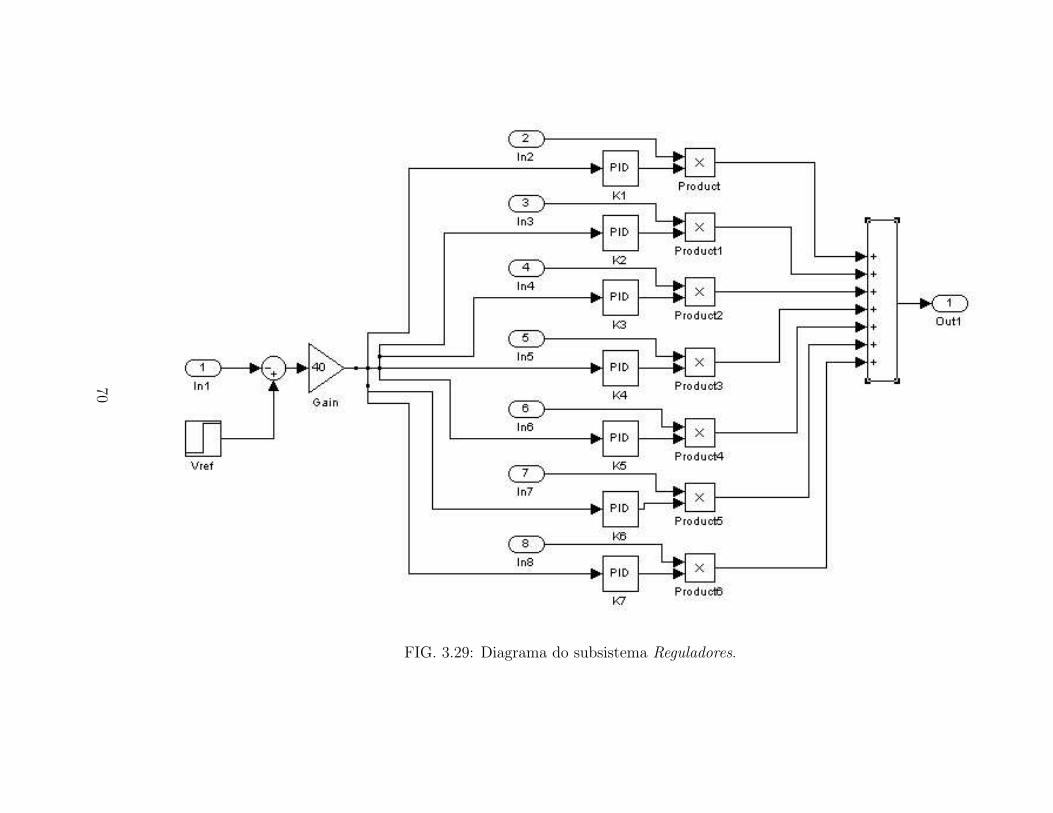
FIG. 3.29: Diagrama do subsistema Reguladores.
70

4 MODELAGEM E SIMULAÇÃO DO SISTEMA HIDRÁULICO E DO
REGULADOR VELOCIDADE
Este capítulo tem por objetivo a modelagem do sistema hidráulico. Os diagramas de
bloco da simulação, montados a partir das equações matemáticas que modelam a planta
hidráulica, serão utilizados dentro de um ambiente próprio de simulação do programa
Matlab chamado Simulik. Uma das grandes vantagens de se trabalhar com o Simulink é
a facilidade de efetuar simulações não-lineares.
No Capítulo 2 já foram apresentadas as expressões referentes à coluna d’água e à
turbina, EQ. 2.23 e 2.24, respectivamente. A partir delas é obtido o diagrama em blocos
correspondente, conforme mostrado em KUNDUR (1994). Ele é apresentado na Seção
4.1 com os valores dos parâmetros pertinentes tirados da Tabela 2.4. Ainda nessa mesma
seção é discutida a modelagem dos atuadores sendo feitas algumas manipulações visando
uma melhor adequação para a simulação. É importante ressaltar que, em virtude da
ausência de dados reais sobre os atuadores do SEP em estudo, seu modelo foi baseado em
suposições possuindo, portanto, um caráter mais didático. Tais hipóteses, no entanto,
não prejudicam a validade das conclusões.
Todo o raciocínio desenvolvido para a obtenção do regulador de velocidade é explicado
na Seção 4.2. Um aspecto muito importante da turbina, e que afeta diretamente o projeto
do regulador é sua característica de fase não-mínima 6. Esse fato e suas implicações são
melhor detalhados nessa seção.
A partida do sistema hidráulico é tratada na Seção 4.3. A discussão a seu respeito
está caracterizada por algumas considerações arbitrárias, as quais acredita-se que sejam
muito semelhantes àquelas encontradas na prática. A resposta da velocidade de rotação
da turbina para uma operação do sistema de potência em vazio é então simulada com
vistas à verificação da eficiência do regulador de velocidade obtido na Seção 4.2.
Se por um lado a falta de informações a respeito de componentes do sistema hidráulico
acabou por prejudicar uma abordagem mais realística, por outro, acredita-se que muitas
das metodologias apresentadas ao longo do capítulo poderão ser utilizadas, com pequenas
adequações, em situações onde dados reais do sistema sejam conhecidos.
6Sistemas que possuem zeros no semi-plano s (de Laplace) da direita são ditos de fase não-mínima.
71

4.1 MODELO DA TURBINA HIDRÁULICA E DOS ATUADORES
O modelo da turbina hidráulica definido pelas EQ. 2.23 e EQ. 2.24, em diagrama
em blocos, é apresentado na FIG. 4.1. Todos os parâmetros nela presentes já foram
identificados na Seção 2.3, exceto ω′′
, que representa o inverso da velocidade de rotação
da turbina (ou do gerador) em pu, ou seja,
ω′′
=1
ω
Os valores dos parâmetros At, H0, UNL, TW e Pr são aqueles apresentados na TAB. 2.4.
Com relação ao conjunto de atuadores, responsável pela abertura e fechamento do
distribuidor da turbina, um esquema muito semelhante ao apresentado em KUNDUR
(1994) é aqui proposto. Ele é constituído pelos seguintes elementos básicos: uma servo-
válvula hidráulica e um servo-motor. A servo-válvula, comandada por sinais elétricos,
controla o sentido e o fluxo de fluido hidráulico; o servo-motor, de acordo com esse
fluxo, comanda diretamente os movimentos do distribuidor da turbina. A amplitude do
sinal elétrico injetado na servo-válvula e seu sentido, positivo ou negativo, são dados
exatamente pelo regulador de velocidade, a ser discutido na seção seguinte.
O diagrama em blocos do conjunto de atuadores é mostrado na FIG. 4.2 sendo os
parâmetros constantes assim definidos:
Ka: ganho dos atuadores;1s: função de transferência (integrador) relacionando as posições do servo-motor e da
servo-válvula;1
1+sTG: função de transferência relacionando a abertura do distribuidor, g, à posição do
servo-motor;
TG: constante de tempo do servo-motor;
g: sinal de saída correspondendo à abertura real do distribuidor (em pu);
u: sinal de controle;
Em vistas a se utilizar o recurso inerente a blocos tipo espaço de estados do Simulink,
que permite a inserção de condições iniciais, são calculadas as matrizes A, B, C e D da re-
alização de estado da função de transferência 11+sTG
. Seus valores são abaixo apresentados:
A = − 1
TG
(4.1)
B =1
TG
(4.2)
72

C = 1 (4.3)
D = 0 (4.4)
A justificativa para tal procedimento se tornará mais clara na Seção 4.3. O mesmo não
foi feito para o bloco integrador pelo fato de nele já ser permitida a inserção de condições
iniciais.
Com base em dados existentes em KUNDUR (1994) foram estipulados os valores dos
parâmetros Ka e TG. São eles:
Ka = 2
TG = 0, 1 (s)
73

FIG. 4.1: Diagrama em blocos da turbina hidráulica.
74

1 s
a K 1
1 G sT +
g u
FIG. 4.2: Diagrama em blocos dos atuadores da turbina hidráulica.
75

4.2 MODELO DO REGULADOR DE VELOCIDADE
Na abertura deste capítulo foi comentado que a turbina hidráulica é um sistema de
fase não-mínima, e que esta característica influi diretamente no projeto de um regulador
de velocidade (ver KUNDUR (1994) e SOUSA (1983)). Em termos práticos ocorre que,
devido à inércia da água, uma mudança na abertura do distribuidor da turbina provoca,
inicialmente, uma variação de potência oposta ao que seria de se esperar. Ou seja, se
houver um aumento na abertura do distribuidor, ao invés de a potência aumentar, ela
irá, de início, sofrer uma redução, e vice-versa. Visando levar este efeito peculiar em
consideração, a função de transferência do regulador de velocidade deverá possuir uma
constante de tempo que retarde seu sinal de saída (sinal de controle), e conseqüentemente,
a atuação do distribuidor, até que a resposta inversa da potência já tenha se extinguido.
Em KUNDUR (1994) esta função de transferência do regulador é dada pela seguinte
expressão:
RT
sTR
1 + sTR
(4.5)
sendo,
RT o chamado droop7 transitório, e
TR o tempo de reset (washout time);
Também em KUNDUR (1994) são apresentadas formulações através das quais são
determinados RT e TR para a operação estável de um SEP de geração isolada. Estas
fórmulas são abaixo reproduzidas:
RT = [2, 3 − (TW − 1)0, 15]TW
TM
(4.6)
TR = [5 − (TW − 1)0, 5] TW (4.7)
sendo,
TW o tempo de partida da água, definido no Capítulo 2, e
TM o tempo de partida mecânico, dado por: TM = 2H, sendo H a constante de inércia
também definida no Capítulo 2;
Substituindo os valores de TW e TM já conhecidos (TW = 1, 98 e TM=6), chega-se a:
RT ≈ 0, 71 e TR ≈ 8, 93 .
A disposição do regulador de velocidade em relação aos atuadores pode ser visua-
lizada no diagrama em blocos da FIG. 4.3. Nela os parâmetros ωref e ω representam,
7Esta palavra foi mantida na língua inglesa devido à dificuldade de se encontrar uma tradução ade-
quada na língua portuguesa.
76

respectivamente, a velocidade de rotação de referência do gerador em pu (portanto igual
a 1) e sua velocidade de rotação real, também em pu. Observe-se que em pu, a velocidade
de rotação do rotor do gerador, ou da turbina, e a freqüência elétrica da tensão gerada
são totalmente equivalentes.
FIG. 4.3: Diagrama em blocos do regulador de velocidade em conjunto com osatuadores da turbina hidráulica.
Como mostra a FIG. 4.3, a entrada do regulador de velocidade é o sinal de saída
do bloco integrador. Este sinal, muito provavelmente, será de difícil observação (ou
medição) em uma situação real. Este contratempo pode, contudo, ser facilmente evitado
locando-se o regulador não mais na malha de realimentação, mas sim na malha direta,
o que pode ser feito a partir do cálculo da Função de Transferência de Malha Fechada
(FTMF) correspondente. O resultado assim obtido está mostrado na FIG. 4.4. Na
verdade, ele é fruto, também, de uma simples manipulação da FTMF, que permitiu seu
desmembramento em três funções de transferência: duas referentes aos atuadores (ganho
e integrador) e uma correspondendo ao "novo" regulador, agora na malha direta.
FIG. 4.4: Diagrama em blocos da nova configuração do regulador de velocidade (namalha direta) em conjunto com os atuadores da turbina hidráulica.
77

Pensando-se em termos da implementação prática do regulador, resolveu-se utilizar
um circuito Proporcional-Integral-Derivativo (PID) que, para tanto, deveria ter a mesma
(FT). Isto foi conseguido com um PD real, cuja FT é dada pela seguinte expressão geral:
KP +KDs
1 + Ns=
KP + (KP N + KD)s
1 + Ns(4.8)
sendo KP , KD e N constantes cuja determinação pode ser obtida comparando-se a EQ.
4.8 com a FT do regulador de velocidade, conforme abaixo mostrado.
1 + sTR
(1 + KaRT TR) + sTR
=KP + (KP N + KD)s
1 + Ns(4.9)
Da EQ. 4.9 pode-se concluir que:
KP =1
1 + KaRT TR
(4.10)
N =TR
1 + KaRT TR
(4.11)
KD = N − KP N =TR
1 + KaRT TR
(
1 − 1
1 + KaRT TR
)
(4.12)
Substituindo os valores já determinados de RT e TR tem-se que:
KP ≈ 0, 073 (4.13)
N ≈ 0, 65 (4.14)
KD ≈ 0, 6 (4.15)
78
4.3 PARTIDA DO SISTEMA E SIMULAÇÕES
As seções anteriores deste capítulo trataram de modelar os diversos componentes
do sistema hidráulico: turbina, atuadores e regulador de velocidade. Com base nesses
modelos é simulada a partida do sistema, sendo levantada a resposta da velocidade de
rotação da turbina, ω, com vistas a se verificar a eficiência do controle considerado. As
respostas de outros parâmetros da planta hidráulica também são plotadas para permitir
uma melhor compreensão dos fenômenos envolvidos no decurso da partida da mesma.
A partida pode ser entendida como sendo a evolução da rotação da turbina, desde uma
situação de completo repouso até o alcance de um regime permanente (o que deverá
ocorrer, pela atuação do regulador de velocidade, no valor nominal), estando o gerador
operando em vazio.
Para viabilizar a simulação, entretanto, outros diagramas de simulação foram criados
no Simulink 8. O primeiro deles tem como objetivo a determinação dos valores das saí-
das dos atuadores para uma dada abertura inicial arbitrária do distribuidor da turbina.
Esse diagrama, FIG. 4.5, funciona da seguinte maneira: com o regulador de velocidade
completamente desconectado é aplicado um sinal de entrada nos atuadores; este sinal se
mantém até que uma abertura pré-determinada do distribuidor da turbina seja alcançada;
quando isto acontece uma chave (switch) tipo relé interrompe este sinal, e conseqüen-
temente, o processo de abertura. Os valores dos atuadores são então armazenados nas
variáveis c0, saída da servo-válvula (bloco integrador), e gi, saída do servo-motor (aber-
tura do distribuidor), as quais servirão de condições iniciais para a simulação pretendida.
No caso deste trabalho, o sinal de entrada aplicado é do tipo degrau com uma amplitude
de 0, 1, sendo o relé ajustado para desacoplar para um valor de 0, 3. A abertura final
do distribuidor, gi, entretanto, acabará sendo um pouco superior, no caso 0, 32, o que se
justifica pelo retardo provocado pela constante de tempo do servo-motor. A resposta da
abertura da turbina obtida é mostrada na FIG. 4.6.
A velocidade de rotação da turbina é obtida a partir da EQ. 2.4. Em vista disto foi
implementado o diagrama em blocos correspondente a essa equação. Ele é apresentado
na FIG. 4.7. Observe-se, porém, que, dada a modelagem não linear da turbina hidráulica
adotada neste trabalho, e considerando a observação feita na Seção 2.2.1 a respeito da
validade dessa equação, os parâmetros Pmec e Pe foram substituídos pelos respectivos
8Procedimentos semelhantes ao descrito neste parágrafo podem ser utilizados em outro programa de
simulação que não o Simulink.
79

FIG. 4.5: Diagrama em blocos responsável pela simulação da abertura inicial dodistribuidor da turbina.
torques.
Em se trabalhando com torques ao invés de potências a EQ. 2.24 deve ser reescrita
da seguinte forma:
Tmec =Pmec
ω=
U − UNL
ω
(
U
Atg
)2
Pru (4.16)
onde, todos os parâmetros estão em pu, a menos do ganho At, sem dimensão.
A aplicação direta da EQ. 4.16 no modelo do sistema hidráulico geraria uma sin-
gularidade na simulação devido ao valor inicialmente nulo do parâmetro ω, que está
no denominador de uma fração. Para contornar este problema uma condição inicial é
atribuída ao integrador mostrado na FIG. 4.7, e por conseqüência à velocidade de rotação
da turbina ω. O valor mais indicado, por questões evidentes, é o nominal, ou seja 1 pu.
Analisando-se a EQ. 4.16 pode-se concluir, também, que o valor do torque é inversa-
mente proporcional à velocidade ω. Isto, no entanto, é sabido não ser uma verdade para
toda faixa de ω. Assim se supõe que tal equação esteja se referindo (de maneira implícita)
a uma situação onde a velocidade de rotação da turbina não esteja distante de seu valor
nominal. Em termos práticos, isto significa que se a simulação for executada para valores
de ω muito distantes do nominal erros serão inseridos. Esta questão é solucionada com a
80

0 1 2 3 4 5 6 7 8 9 100
0.05
0.1
0.15
0.2
0.25
0.3
0.35
tempo (s)
gi
FIG. 4.6: Resposta da abertura inicial gi da turbina em pu.
criação do modelo (subsistema nomeado partida), apresentado na FIG. 4.8, em conjunto
com a condição inicial dada ao integrador, comentada no parágrafo anterior.
O subsistema partida funciona como uma espécie de temporizador, cuja função é
simular o tempo de aceleração da turbina, desde o repouso até uma velocidade próxima
(ou no caso, igual) à nominal. Enquanto isto não ocorre a chave, presente neste subsis-
tema, desacopla o modelo da equação de movimento (FIG. 4.7), mantendo, neste período
de desacoplamento, a velocidade (saída do modelo) em seu valor definido pela condição
inicial do bloco integrador deste mesmo modelo (1 pu). O tempo arbitrado foi de 15
segundos.
O último modelo desenvolvido, correspondendo ao subsistema contr-servo, é mostrado
na FIG. 4.9. Neste o regulador de velocidade (bloco PID) já está conectado aos atuadores.
Sua entrada (sinal de erro ωref − ω), porém, é mantida desconectada mediante um relé
temporizado até que a rotação da turbina tenha ultrapassado o valor nominal. Foi esti-
81

FIG. 4.7: Diagrama em blocos da EQ. 2.4 substituindo-se os parâmetros relativos àpotência pelos respectivos torques.
pulado neste trabalho um tempo de 15,5 segundos para o atracamento do relé. Os valores
das condições iniciais para a servo-válvula (bloco integrado) e para o servo-motor (bloco
em espaço de estados) são aqueles obtidos a partir do modelo da FIG. 4.5.
O modelo completo do sistema hidráulico está apresentado na FIG. 4.10. Nela podem
ser vistos os subsistemas partida, contr-servo e mod-turbina, este último contendo o
modelo da turbina hidráulica. Observe-se o valor nulo atribuído ao torque elétrico, Te,
representando a operação em vazio do SEP.
A resposta da velocidade de rotação da turbina obtida, para uma abertura inicial do
distribuidor de 0,32 pu, é plotada no gráfico da FIG. 4.11
A resposta da abertura do distribuidor, g, é mostrada na FIG. 4.12. Pode-se notar
que a abertura se estabiliza no valor de 0,16, que é justamente aquele correspondente a
uma operação sem carga (em vazio).
A resposta da potência mecânica de saída, Pmec, da turbina é vista na FIG. 4.13. Uma
ampliação em torno do tempo 15,5 segundos, instante em que o regulador de velocidade
começa a comandar o fechamento do distribuidor, é mostrada na FIG. 4.14. Perceba-se o
crescimento inicial de Pmec evidenciando a característica de fase não-mínima da turbina
hidraúlica.
Na FIG. 4.15 é apresentada a resposta da velocidade da água, U . Salienta-se seu
valor de estado estacionário em 0,2, equivalente à velocidade sem carga UNL.
82

FIG. 4.8: Diagrama do subsistema entitulado partida.
83

FIG. 4.9: Diagrama do subsistema contr-servo.
84

FIG. 4.10: Diagrama em blocos completo do sistema hidráulico.
85

0 10 20 30 40 50 600.98
1
1.02
1.04
1.06
1.08
1.1
1.12
tempo (s)
vel.
turb
ina
(w)
FIG. 4.11: Resposta da velocidade de rotação da turbina (em pu) para uma aberturainicial do distribuidor de 0,32 pu.
0 10 20 30 40 50 600.1
0.15
0.2
0.25
0.3
0.35
tempo (s)
aber
tura
dis
trib.
turb
. (g)
FIG. 4.12: Resposta da abertura do distribuidor da turbina (em pu) ao longo dapartida do sistema hidráulico.
86
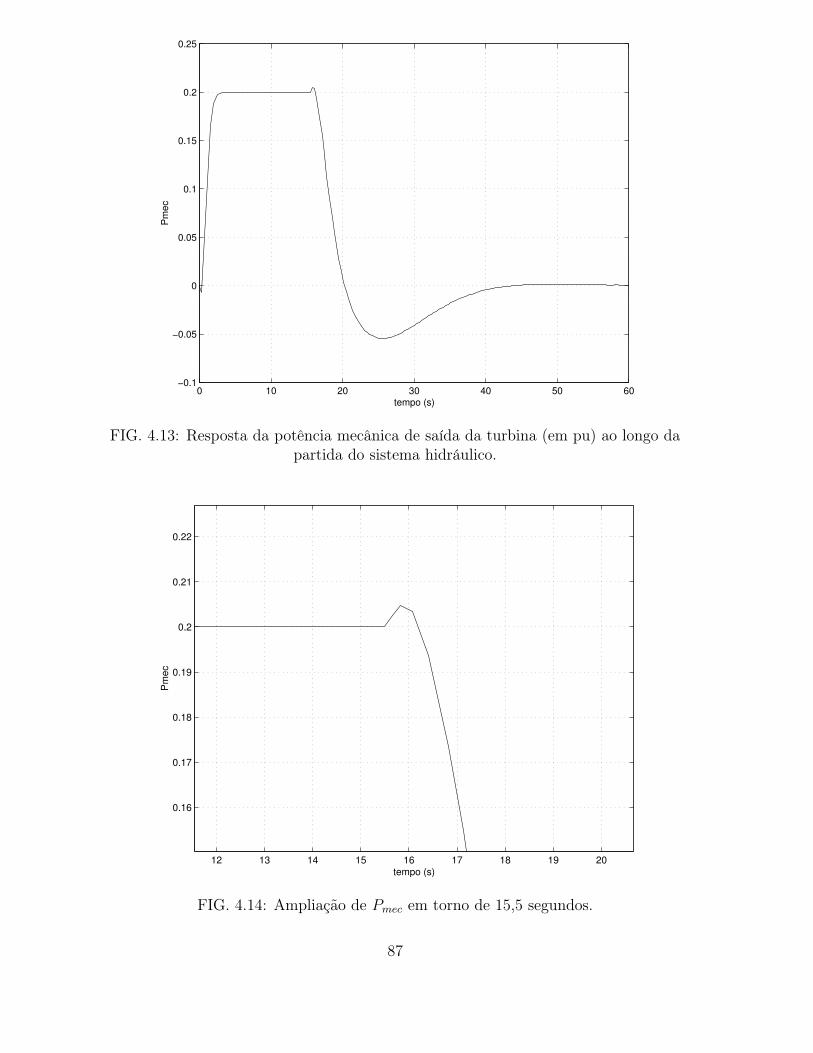
0 10 20 30 40 50 60−0.1
−0.05
0
0.05
0.1
0.15
0.2
0.25
tempo (s)
Pm
ec
FIG. 4.13: Resposta da potência mecânica de saída da turbina (em pu) ao longo dapartida do sistema hidráulico.
12 13 14 15 16 17 18 19 20
0.16
0.17
0.18
0.19
0.2
0.21
0.22
tempo (s)
Pm
ec
FIG. 4.14: Ampliação de Pmec em torno de 15,5 segundos.
87

0 10 20 30 40 50 600
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
tempo (s)
vel.
agua
(U)
FIG. 4.15: Resposta da velocidade da água no conduto forçado (em pu) ao longo dapartida do sistema hidráulico.
88

5 MODELO NÃO-LINEAR DO SEP E SIMULAÇÕES
As informações e os desenvolvimentos dos capítulos precedentes, para os fins deste
trabalho, tiveram como principal objetivo fornecer toda a base necessária para uma mo-
delagem matemática não-linear completa do SEP em estudo, incluindo-se os reguladores
de velocidade e de tensão, para a execução de simulações da resposta do sistema frente a
variações em seu ponto de operação a partir de alterações nas cargas. Estas simulações
visam avaliar a eficiência dos controles projetados.
A Seção 5.1 discute o método empregado para a solução das EAD não-lineares que
modelam o sistema elétrico. Esta tarefa, de certo grau de complexidade, acabou sendo fa-
cilitada pela utilização de uma ferramenta do programa Simulink, denominada S-Function
(MATHWORKS, 2002). Alguns princípios gerais de funcionamento da S-Function são
comentados.
Na seção 5.2 é apresentado o modelo não-linear completo do SEP em ambiente
Simulink. Nele é simulada a resposta (freqüência e tensão) do sistema para variações
de carga. Num primeiro momento é utilizado o RAT desenvolvido por tabelamento de
ganhos via lógica fuzzy (Seção 3.5), para, em um segundo, ser empregado um regulador
de tensão projetado por técnicas de controle linear (Seção 3.4). Um resultado compa-
rativo entre ambos é mostrado. É feita, também, mediante simulação, a verificação do
efeito do valor da potência ativa, inserida ou retirada do sistema, sobre a resposta da
freqüência de saída do gerador.
O capítulo se encerra com a linearização por perturbação numérica do modelo mate-
mático do sistema elétrico, o que é feito, também, com a utilização da S-Function. Uma
comparação com a linearização analítica realizada no Capítulo 3 é apresentada a partir
da teoria envolvendo os chamados valores singulares de uma matriz.
5.1 O SISTEMA ELÉTRICO E A SOLUÇÃO DAS EAD
O sistema elétrico deste trabalho, conforme visto nas Seções 2.2.1 e 2.2.2, está mo-
delado segundo um conjunto de EAD não-lineares. Este tipo de equação não pode ser
resolvido analiticamente, ficando a solução dependente de métodos numéricos computa-
cionais (DIEGUEZ, 1994). A implementação de tais métodos, entretanto, não fez-se
necessária dada a existência de uma ferramenta do Simulink chamada S-Function. O
89
bloco S-Function, basicamente, chama um programa onde o usuário define, seguindo um
padrão específico, as equações desejadas. A solução destas equações é obtida pela exe-
cução de um método numérico do próprio Simulink (a ser escolhido pelo usuário) por
ocasião da simulação.
As equações a serem resolvidas podem ser escritas com a seguinte formatação geral:
˙x = f(x, u, t) (5.1)
y = g(x, u, t) (5.2)
ou, colocando em forma matricial:
[ ˙x] = A(x, u, t)[x] + B(x, u, t)[u] (5.3)
[y] = C(x, u, t)[x] + D(x, u, t)[u] (5.4)
onde,
[x]: vetor de variáveis de estado;
[u]: vetor de variáveis de entrada;
[y]: vetor de variáveis de saída;
A, B, C e D: funções matriciais não-lineares;
Para se obedecer, contudo, ao padrão S-Function as EQ. 5.1 e 5.2 devem sofrer a
seguinte mudança de notação:
sys = f(x, u, t) (5.5)
sys = g(x, u, t) (5.6)
A EQ. 5.5 deve ser definida pelo usuário na área de execução da expressão case1, e
a EQ. 5.6 na área da expressão case3 (verificar o programa do Apêndice 8.1.3).
Observando-se as equações acima citadas percebe-se que variáveis algébricas não
fazem parte de suas formulações, isto porque a S-Function, na verdade, se destina à
solução de equações diferenciais (lineares ou não) e não EAD. Para este tipo de equação,
então, manipulações matemáticas devem ser feitas a fim de solucioná-las. Neste trabalho
foi adotado um método que passa a ser discutida abaixo.
As EAD não lineares do sistema elétrico podem ser escritas segundo a mesma for-
mulação aumentada das EQ. 3.41 e 3.42. A partir destas equações pode-se chegar que:
˙x = J1x + J2r + Bxu (5.7)
0 = J3x + J4r + Bru (5.8)
y = Cxx + Crr (5.9)
90

As EQ. 5.7 e 5.9 devem ser colocadas no padrão correto discutido anteriormente, qual
seja:
sys = J1x + J2r + Bxu (5.10)
sys = Cxx + Crr (5.11)
As matrizes J1, J2, J3, J4, Bx, Cx e Cr estão todas desenvolvidas no programa do
Apêndice 8.1.3. Observe-se que, para este sistema elétrico em estudo, a matriz Br é nula.
Da EQ. 5.8 pode-se tirar que:
r = J−14 (−J3x − Bru) (5.12)
Sendo Br nula então:
r = −J−14 J3x (5.13)
Algumas observações relativas à solução destas EAD fazem-se necessárias:
(i) por motivo de simplificação de formulação optou-se por definir um novo parâmetro,
ω′
, em substituição a ω, onde: ω′
= ω − 1;
(ii) as variáveis algébricas r (Id, Iq, VR1, VI1, VR2, VI2, VR3, VI3, VR4, VI4, VR5 e VI5) são
tratadas como variáveis de entrada; isto é conseguido a partir de uma realimentação
direta de r, como pode ser visto na FIG. 5.1; nela tem-se o bloco S-Function,
onde estão descritas todas as EAD não-lineares do sistema elétrico; à esquerda
deste bloco estão as vinte entradas consideradas, na seguinte ordem (de cima para
baixo): Efd, Tmec, as potências ativa e reativa de cada consumidor (quartel, vila e
comunidade), e as doze variáveis algébricas realimentadas diretamente das saídas
do bloco S-Function; e à direita deste estão as saídas desejadas: o parâmetro ω′
, ao
qual é somado a constante 1 para se obter a freqüência do gerador ω, e as variáveis
algébricas;
(iii) a EQ. 5.10 é inserida na área da expressão case1 ; já as EQ. 5.11 e 5.13 são inseridas
na expressão case3 ;
(iv) a ferramenta S-Function trabalha de tal modo a começar sua execução pela ex-
pressão case3 ;
(v) em se tratando do modelo não-linear do sistema elétrico a EQ. 2.17 teve seus parâ-
metros Pmec e Pe substituídos por Tmec e Te;
91

(vi) o método numérico do Simulink escolhido para a solução das EAD foi o ODE 15s
(stiff/NDF), próprio para este tipo de equação;
Em SHAMPINE (1999) um outro método de solução de EAD em Simulink é proposto,
sem a utilização do pacote S-Function. O diagrama em blocos proposto neste artigo é
mostrado na FIG. 5.2. Nele os dois primeiros blocos implementam as equações diferenciais
u = f1(t, u, v), e os dois últimos implementam as equações algébricas escritas como
v = f2(t, u, v) + v, ou seja, 0 = f2(t, u, v).
92

FIG. 5.1: Diagrama em Simulink mostrando as saídas e as entradas (com a realimentação das variáveis algébricas) do bloco
S-Function.
93

FIG. 5.2: Diagrama em Simulink proposto em SHAMPINE (1999) para a solução deEAD.
94

5.2 MODELO COMPLETO DO SEP E SIMULAÇÕES
O modelo completo, em diagrama de blocos, do sistema de potência em estudo é
mostrado na FIG. 5.3. Por esta figura percebe-se que a modelagem do SEP foi feita a
partir da conjunção dos vários subsistemas que o compõe, quais sejam: sistema elétrico
(sist-ele); sistema hidráulico (sist-hidrau), incluindo o regulador de velocidade e atu-
adores; o regulador de tensão final (reg-tensao), onde se inserem o bloco fuzzy e os
RAT (calculados na Seção 3.4) a terem seus ganhos tabelados; um subsistema onde são
definidas as cargas dos consumidores (cargas); e um outro onde se procede à soma das
potências ativas das cargas (Pa) e o cálculo do fator de potência (FP ), sendo estes dois
parâmetros injetados no bloco reg-tensao.
O diagrama do subsistema sist-ele foi mostrado na FIG. 5.1. O núcleo do diagrama
é a S-Function, que executa o programa entitulado sisele-nlin2 reproduzido no Apêndice
8.1.3. Observe-se a correção de ω′
para se obter a freqüência de saída do gerador ω 9,
bem como a presença do bloco Vterm, onde está inserida a EQ. 3.45, para o cálculo do
módulo da tensão terminal da máquina. As entradas e saídas do bloco S-Function são
abaixo descritas:
entrada 1 tensão de campo, Efd;
entrada 2 torque mecânico, Tmec, fornecido pela turbina hidráulica;
entradas 3 a 8 potência ativa e reativa de cada consumidor na seguinte ordem: quartel,
vila militar e comunidade local;
entradas 9 a 20 variáveis algébricas na seguinte ordenação: Id, Iq, VR1, VI1, VR2, VI2,
VR3, VI3, VR4, VI4, VR5, VI5;
saída 1 velocidade de rotação do gerador, ω′
;
saídas 2 a 13 variáveis algébricas com a mesma seqüência definida para as entradas;
Toda modelagem do sistema hidráulico contida no bloco sist-hidrau foi explanada no
Capítulo 4. O diagrama deste subsistema é apresentado na FIG. 5.4. Comparando-se
esta figura com a FIG. 4.10, duas alterações podem ser verificadas: a não inclusão do
sinal correspondente ao torque elétrico, Te, e a retirada dos blocos (ganho e integrador)
9Lembrar que ω′
foi definido como sendo igual a ω − 1.
95

que modelavam a equação de movimento da turbina, EQ. 2.4 (com a devida substituição
dos parâmetros Pmec e Pe por Tmec e Te). Isto foi feito porque a equação de movimento é
"resolvida" internamente pela S-Function. Um fato importante a observar é que o modelo
mostrado na FIG. 4.5, responsável pela abertura inicial da turbina, não faz parte deste
subsistema sist-hidrau.
O diagrama do subsistema reg-tensao, que modela o regulador de tensão final, é visto
na FIG. 5.5. As principais explicações a respeito deste diagrama foram dadas na Seção
3.5. Os seguintes aspectos, entretanto, podem ser ressaltados:
• a saída do subsistema (ou do RAT final) é um sinal correspondente a tensão de
campo do gerador;
• suas entradas, em número de três, são: a tensão terminal de saída do gerador, Vt,
a potência ativa total da cargas, Pa, e o fator de potência também do total das
cargas, FP .
• o esquema composto por duas chaves (switch) tem por finalidade manter o regulador
de tensão desconectado do circuito de alimentação do campo do gerador até que
sua tensão terminal atinja um determinado valor mínimo (no caso, foi considerado
o valor de 0,5 pu); enquanto isto não acontece o campo é alimentado por uma outra
fonte 10, a ser tirada do circuito tão logo a tensão mínima de saída estabelecida para
a máquina seja alcançada;
No bloco cargas são definidos os valores das potências ativa e reativa de cada con-
sumidor, bem como o instante em que elas são inseridas ou retiradas do sistema. O
diagrama onde tais definições são feitas é mostrado na FIG. 5.6, onde toma-se como
exemplo o caso do quartel. Para os demais consumidores diagramas exatamente iguais
foram utilizados, alterando-se, apenas, os valores de potência especificados.
10Em situações práticas, quando o valor da tensão de saída do gerador ainda é relativamente baixo, o
que normalmente ocorre no início de sua operação, o circuito de campo é alimentado diretamente pela
tensão de saída da máquina. Esta tensão de saída se deve, no instante inicial da operação, ao magnetismo
residual presente no campo do gerador.
96

FIG. 5.3: Modelo completo, em diagrama de blocos, do SEP em estudo.
97

FIG. 5.4: Diagrama em blocos do sistema hidráulico.
98

FIG. 5.5: Diagrama em blocos do subsistema reg-tensao.
99

FIG. 5.6: Diagrama em blocos usado para a definição das potências ativa e reativa do consumidor- caso do quartel.
100

São feitas três simulações para o sistema de potência. A seguir tem-se a descrição de
cada uma delas.
Simulação 1 Operação do SEP considerando a utilização do regulador de tensão final
obtido com a lógica fuzzy. São simuladas quatro etapas: nas três primeiras são
inseridas cargas no sistema, e na última ocorre, além da inserção, a retirada de
carga. A primeira etapa tem início 45 segundos após a partida do sistema, sendo as
demais intercaladas pelo mesmo período de tempo. As respostas da freqüência do
gerador (ω), de sua tensão terminal (Vt), e da abertura do distribuidor (g) frente às
variações de carga são mostradas nas FIG. 5.7, 5.8 e 5.9, respectivamente. Saliente-
se que nos 45 segundos iniciais o sistema de potência está operando em vazio. A
primeira carga elétrica só é inserida aos 45 segundos.
Simulação 2 Segue os mesmos padrões da primeira simulação com a diferença do tempo
de inserção ou retirada de cargas que passa a ocorrer a cada 60 segundos. As
respostas da freqüência do gerador (ω), de sua tensão terminal (Vt), e da abertura
do distribuidor (g) são mostradas nas FIG. 5.10, 5.11 e 5.12, respectivamente.
Perceba-se que até os primeiros 60 segundos o SEP opera em vazio.
Simulação 3 Operação do SEP considerando a utilização de um regulador de tensão
projetado para um único ponto de operação (Seção 3.4). Foi escolhido o RAT
correspondente ao sétimo ponto de operação (ver TAB. 3.2). Com relação às cargas,
segue exatamente os mesmos moldes da Simulação 1. A resposta da tensão terminal
do gerador (Vt) é mostrada na FIG. 5.13.
Os valores das potências ativa e reativa das cargas inseridas e retiradas do sistema
em cada etapa foram considerados iguais para as três simulações. Foram eles (valores em
pu):
Etapa 1 (fator de potência igual a 1)
Quartel: potência ativa (p11)=0,2; potência reativa (q11)=0;
Vila Militar: potência ativa (p21)=0,1; potência reativa (q21)=0;
Comunidade Local: potência ativa (p31)=0,1; potência reativa (q31)=0;
Etapa 2 (fator de potência igual a 0,7)
Quartel: potência ativa (p12)=0,3; potência reativa (q12)=0,306;
Vila Militar: potência ativa (p22)=0,2; potência reativa (q22)=0,204;
Comunidade Local: potência ativa (p32)=0,15; potência reativa (q32)=0,153;
101

Etapa 3 (fator de potência igual a 0,9)
Quartel: potência ativa (p13)=0,4; potência reativa (q13)=0,1937;
Vila Militar: potência ativa (p23)=0,25; potência reativa (q23)=0,121;
Comunidade Local: potência ativa (p33)=0,25; potência reativa (q33)=0,121;
Etapa 4 (fator de potência igual a 0,8)
Quartel: potência ativa (p14)=0,45; potência reativa (q14)=0,3375;
Vila Militar: potência ativa (p24)=0,3; potência reativa (q24)=0,225;
Comunidade Local: potência ativa (p34)=0; potência reativa (q34)=0;
0 50 100 150 200 250 3000.6
0.7
0.8
0.9
1
1.1
1.2
tempo (s)
freq.
ger
ador
(w)
FIG. 5.7: Resposta da freqüência de saída do gerador, ω (em pu)- variações de carga acada 45 segundos.
102

0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1
1.2
1.4
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
FIG. 5.8: Resposta da tensão de saída do gerador, Vt (em pu)- variações de carga acada 45 segundos.
0 50 100 150 200 250 3000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tempo (s)
aber
t. di
strib
. (g)
FIG. 5.9: Resposta da abertura do distribuidor, g (em pu)- variações de carga a cada 45segundos.
103

0 50 100 150 200 250 3000.6
0.7
0.8
0.9
1
1.1
1.2
tempo (s)
freq.
ger
ador
(w)
FIG. 5.10: Resposta da freqüência de saída do gerador, ω (em pu)- variações de carga acada 60 segundos.
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1
1.2
1.4
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
FIG. 5.11: Resposta da tensão de saída do gerador, Vt (em pu)- variações de carga acada 60 segundos.
104

0 50 100 150 200 250 3000.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
tempo (s)
aber
t. di
strib
. (g)
FIG. 5.12: Resposta da abertura do distribuidor, g (em pu)- variações de carga a cada60 segundos.
0 50 100 150 200 250 3000
0.2
0.4
0.6
0.8
1
1.2
1.4
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
FIG. 5.13: Resposta da tensão de saída do gerador, Vt (em pu)- utilização do RATprojetado para o sétimo ponto de operação (variações de carga a cada 45 segundos).
105

Os desempenhos do regulador de tensão fuzzy (Simulação 1) e do RAT (utilizado
para a Simulação 3) são comparados mediante a resposta da tensão de saída do gerador
verificada em cada simulação (FIG. 5.8 e 5.13). O resultado desta comparação é mostrado
nas FIG. 5.14, 5.15, 5.16, 5.17 e 5.18. Cada figura abrange um determinado intervalo de
tempo englobando, principalmente, os momentos de variação das cargas. Desta forma,
uma melhor avaliação comparativa pode ser feita.
1 2 3 4 5 6
0.7
0.8
0.9
1
1.1
1.2
1.3
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
RAT fuzzyRAT pnt. op 7
FIG. 5.14: Comparação das respostas da tensão de saída do gerador, Vt (em pu),obtidas com o regulador fuzzy e com o RAT do sétimo ponto de operação- início da
operação do SEP.
106

41 42 43 44 45 46 47 48 49 50 51
0.5
0.6
0.7
0.8
0.9
1
1.1
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
RAT fuzzyRAT pnt. op 7
FIG. 5.15: Comparação das respostas da tensão de saída do gerador, Vt (em pu),obtidas com o regulador fuzzy e com o RAT do sétimo ponto de operação- primeira
variação de carga (45 segundos).
80 85 90 95 1000.4
0.5
0.6
0.7
0.8
0.9
1
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
RAT fuzzyRAT pnt. op 7
FIG. 5.16: Comparação das respostas da tensão de saída do gerador, Vt (em pu),obtidas com o regulador fuzzy e com o RAT do sétimo ponto de operação- segunda
variação de carga (90 segundos).
107
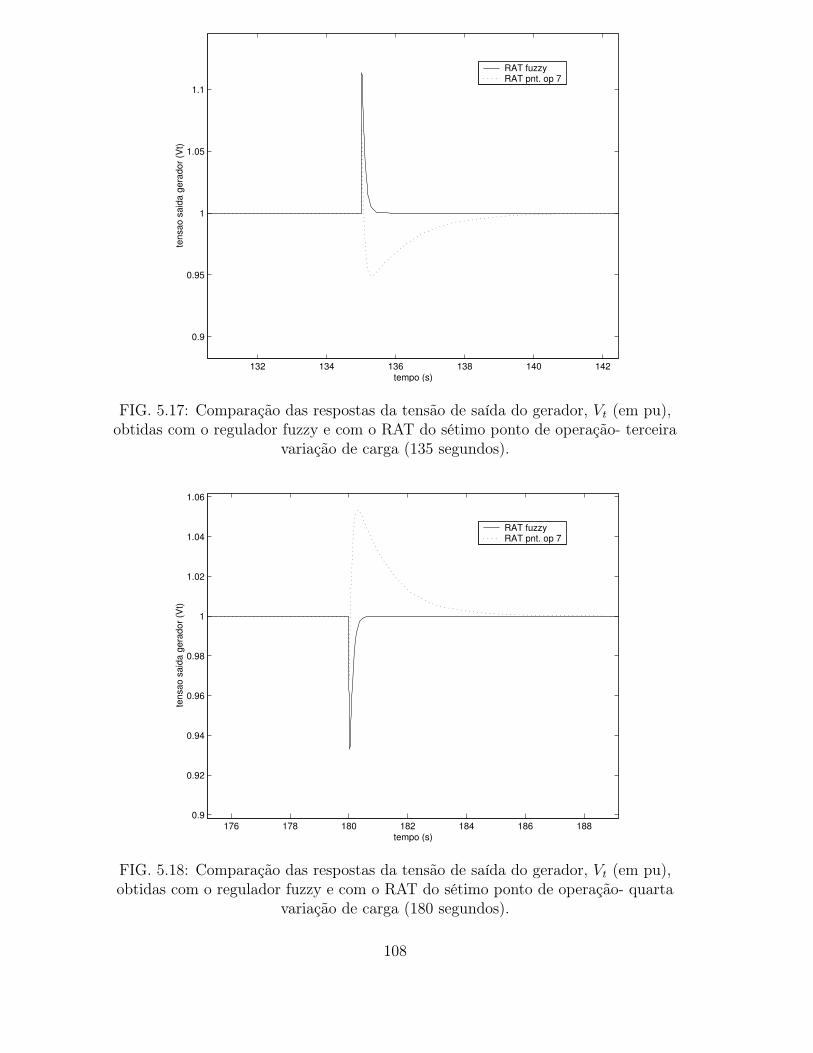
132 134 136 138 140 142
0.9
0.95
1
1.05
1.1
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
RAT fuzzyRAT pnt. op 7
FIG. 5.17: Comparação das respostas da tensão de saída do gerador, Vt (em pu),obtidas com o regulador fuzzy e com o RAT do sétimo ponto de operação- terceira
variação de carga (135 segundos).
176 178 180 182 184 186 1880.9
0.92
0.94
0.96
0.98
1
1.02
1.04
1.06
tempo (s)
tens
ao s
aida
ger
ador
(Vt)
RAT fuzzyRAT pnt. op 7
FIG. 5.18: Comparação das respostas da tensão de saída do gerador, Vt (em pu),obtidas com o regulador fuzzy e com o RAT do sétimo ponto de operação- quarta
variação de carga (180 segundos).
108

Uma análise dos resultados apresentados nas FIG. 5.7 a 5.18 permite que se chegue
a algumas conclusões:
• o regulador de velocidade não apresentou um desempenho muito satisfatório; em-
bora ele tenha sido capaz de estabilizar a freqüência de saída do gerador, ω, em seu
valor nominal (1 pu), percebe-se o surgimento de oscilações neste sinal com picos
de até 25 por cento, aproximadamente (FIG. 5.7 e 5.10); em sistemas de geração
isolada, como o abordado neste trabalho, o controle da velocidade de rotação do
gerador é crítico, merecendo um estudo mais aprofundado;
• o regulador de tensão obtido com o emprego de lógica fuzzy apresentou bons re-
sultados; pelas FIG. 5.8 e 5.11 nota-se o surgimento de picos de tensão apenas nos
momentos de variação de carga;
• a utilização de um RAT projetado para um único ponto de operação (no caso,
sétimo ponto) ocasionou uma piora na resposta da tensão de saída do gerador,
FIG. 5.13, se comparada com a resposta gerada com o RAT implementado com
lógica fuzzy; na FIG. 5.14, por exemplo, tem-se um overshoot de cerca de 28 por
cento e um tempo de acomodação próximo a 4 segundos na resposta de Vt, quando
utiliza-se o RAT do sétimo ponto de operação; já na FIG. 5.15 vê-se um overshoot
de quase 50 por cento e um tempo de acomodação de 3 segundos, aproximadamente,
para a resposta de Vt, contra um overshoot próximo a 10 por cento e um tempo de
acomodação inferior a 1 segundo com o RAT empregando fuzzy;
5.3 LINEARIZAÇÃO DO MODELO MATEMÁTICO DO SISTEMA ELÉTRICO POR
PERTURBAÇÃO NUMÉRICA
Uma outra aplicação para a S-Function diz respeito à linearização de modelos ma-
temáticos por perturbação numérica. No contexto deste trabalho, este recurso numérico
visa, apenas, validar as linearizações das equações do sistema elétrico feitas analitica-
mente(Capítulo 3). Os métodos adotados para se chegar a esta validação, passam a ser
discutidos abaixo.
O diagrama em Simulink utilizado para se proceder à linearização do sistema elétrico
via perturbação numérica é mostrado na FIG. 5.19. Perceba-se que as entradas Efd e Pmec
(o leitor deve atentar para o fato de que, neste instante, voltou-se a utilizar o parâmetro
Pmec e não Tmec; isto se justifica pelo seguinte fato: assim como as linearizações analíticas
abordadas no Capítulo 3, a linearização por perturbação numérica foi feita considerando,
109

para a equação de movimento, os parâmetros relativos às potências mecânica e elétrica,
ao invés dos respectivos torques), e as saídas ω e Vt são definidas por símbolos que
representam portas de entrada e de saída, respectivamente. Dentro do subsistema sist-ele
(FIG. 5.20) encontra-se o bloco S-Function, que executa o programa onde são descritas
as equações não-lineares do sistema elétrico, a exemplo do que foi feito na Seção 5.1.
Este programa é apresentado no Apêndice 8.1.4. Comparando-o com o programa do
Apêndice 8.1.3, algumas pequenas diferenças podem ser notadas. Elas dizem respeito às
inicializações das variáveis de estado, das variáveis de entrada e das variáveis algébricas.
FIG. 5.19: Diagrama em blocos do sistema elétrico utilizado para linearização porperturbação numérica.
Já foi visto que a linearização de um sistema é feita em torno de pontos de operação.
No caso do sistema elétrico tratado neste trabalho estes pontos foram definidos no Capí-
tulo 3. Com base nestas definições podem ser calculados os valores das diversas variáveis
inerentes ao modelo do sistema elétrico para cada ponto de operação de interesse. As
variáveis algébricas são calculadas diretamente pelo programa do Apêndice 8.1.1. Já as
variáveis de estado e de entrada podem ser obtidas a partir das equações não lineares
deste sistema apresentadas na Seção 2.2.1. Tudo isto está implementado no programa
do Apêndice 8.1.5. Saliente-se que, com relação às variáveis de estado e de entrada, as
seguintes notações utilizadas neste programa e na Seção 2.2.1 são equivalentes: efd e Efd;
e2lq e E′′
q ; e2ld e E′′
d ; elq e E′
q. As equivalências para as demais variáveis ou já foram
descritas em capítulos anteriores ou, por serem evidentes, não são comentadas.
110
Os valores destas variáveis são passados para o programa do Apêndice 8.1.4 através
da janela de diálogo do bloco S-Function, mostrada na FIG. 5.21. Observe-se que são
definidos dois vetores: o primeiro contendo as variáveis de estado, e o segundo, R0, as
demais variáveis. Este vetor R0 está descrito no programa do Apêndice 8.1.5.
Estando inicializadas as variáveis do sistema para o ponto de operação considerado, a
linearização é executada pelo comando linmod. Observando-se a sintaxe deste comando,
definido no programa do Apêndice 8.1.5, percebe-se que através dele são obtidas as ma-
trizes Ap, Bp, Cp e Dp da realização em espaço de estados do sistema elétrico linearizado
por perturbação numérica em um dado ponto de operação. Encontrando-se os auto-
valores da matriz Ap em cada ponto de operação, poderá ser constatado que eles são
praticamente idênticos aos autovalores da matriz A, da realização do sistema linearizado
analiticamente (Seção 3.3) para os mesmos pontos de operação.
O método adotado neste trabalho para se comparar os resultados das linearizações
analítica e numérica está baseado no conceito dos chamados valores singulares de uma
matriz ou sistema (ZHOU, 1998).
Dada uma matriz de transferência genérica G(s), para s = jω, o i-ésimo valor singular
de G, em uma dada freqüência ωk, pode ser definido matematicamente por:
σi =√
λiG(jωk)G∗(jωk) (5.14)
sendo, λi o auto valor i da matriz e ∗ o símbolo do transposto conjugado da matriz. O
maior valor singular da matriz G, para a mesma freqüência, é dado por:
σmax = σ =√
λmaxG(jωk)G∗(jωk) (5.15)
Defina-se σm como sendo o limitante superior, ou supremo (sup), do maior valor
singular da matriz G(jω) para toda a faixa de freqüência ω, onde ω ∈ <+. Ou seja:
σm = supσ[G(jω)] , ω ∈ <+ (5.16)
Sejam Ga(i)(jω) e Gp(i)(jω), respectivamente, as matrizes de transferência do sistema
elétrico linearizado analítica e numericamente em torno de um determinado ponto de
operação i. Aplicando a EQ.5.16 para a diferença entre estas duas matrizes tem-se que:
σm(i) = supσ[Ga(i)(jω) − Gp(i)(jω)] , ω ∈ <+ (5.17)
Empregando-se a EQ. 5.17 para todos os quinze pontos de operação definidos na Seção
3.2 pode-se chegar ao gráfico mostrado na FIG. 5.22. Observe-se que os comandos em
111

Matlab referentes à EQ. 5.17, bem como aqueles responsáveis pela plotagem do citado
gráfico constam do programa do Apêndice 8.1.5.
Pode-se mostrar que o valor de σm de uma matriz de transferência genérica G(jω)
é também o limitante superior de |G(jω)| para toda a faixa de freqüência considerada.
Aplicando esta teoria ao resultado apresentado na FIG. 5.22 pode-se concluir que: para
todos os quinze pontos de operação, estando o maior valor de σm em torno de 2 × 10−6,
então |Ga(jω) − Gp(jω)|, para ω ∈ <+, está limitado por este valor para os mesmos
pontos de operação, donde pode-se afirmar que a linearização por perturbação numérica
coincidiu com a limearização analítica de modo a validá-la.
112

FIG. 5.20: Diagrama em blocos do subsistema sist-ele utilizado para a linearização do sistema elétrico via perturbação numérica.
113

FIG. 5.21: Janela de diálogo do bloco S-Function. Inicialização das variáveis do sistemaelétrico.
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
x 10−6
Pontos de Oper.
Sig
ma(
Ga−
Gp)
FIG. 5.22: Gráfico de σm para Ga(jω)−Gp(jω), em todos os quinze pontos de operação.
114
6 CONCLUSÃO
6.1 RESUMO E ANÁLISE DOS PRINCIPAIS RESULTADOS ALCANÇADOS
A presente dissertação teve como objetivo principal a modelagem do comportamento
dinâmico do sistema de potência considerado e o projeto de reguladores de tensão e de
velocidade. O desempenho destes sistemas de controle pôde ser avaliado a partir dos
resultados das simulações realizadas, que passam a ser comentados.
O regulador de tensão final foi obtido pelo tabelamento de ganhos, via lógica fuzzy,
dos reguladores projetados para pontos de operação específicos (Capítulo 3). O desem-
penho deste RAT pôde ser levantado pela simulação da operação do sistema de potência
frente a variações de potência ativa e reativa consideráveis (Capítulo 5). Como visto
nas FIG. 5.8 e 5.11, o desempenho deste regulador pode ser considerado bastante satis-
fatório: tempo de resposta frente às variações de carga em torno de 0, 7 segundos (pior
caso) e overshoot nulo (naturalmente, ocorreram picos de tensão nos instantes de vari-
ação de carga). O resultado positivo deste regulador ficou ainda mais evidente nas FIG.
5.14, 5.15, 5.16, 5.17 e 5.18, que mostraram uma comparação com um outro regulador
projetado para um único ponto de operação.
Pela simulação mostrada na FIG. 5.7 percebe-se uma variação na freqüência de saída
do gerador acentuada, denotando um desempenho relativamente fraco do regulador de
velocidade frente a alterações de carga com aquela magnitude 11. A FIG. 5.10 mostra
que o regulador foi capaz de levar a freqüência a seu valor nominal em um tempo inferior
a 60 segundos.
6.2 RESUMO DA CONTRIBUIÇÃO
Em termos gerais, acredita-se que as ferramentas de modelagem e análise desenvolvi-
das neste trabalho possam servir como subsídio para implementações práticas de novas
estratégias de controle conjunto de freqüência e tensão para as micro usinas hidrelétricas
do Exército Brasileiro, e para o sistema didático existente no Laboratório de Hidráulica
11Deve-se levar em conta, porém, que em sistema de geração isolada como este, as variações de fre-
qüência são bem mais críticas se comparadas com sistemas interligados de grande porte.
115

do Instituto Militar de Engenharia (IME).
Com relação ao controle das oscilações eletromecânicas em sistemas elétricos isolados,
um tema muito pouco abordado na literatura, os resultados deste trabalho mostram
claramente que a abordagem normalmente adotada na prática está longe de proporcionar
a melhor qualidade da energia gerada.
Pode-se ressaltar, também, a descrição do equacionamento do sistema elétrico se-
gundo a formulação aumentada, e a obtenção das matrizes de estado do sistema linea-
rizado (incluindo as rotinas pertinentes em Matlab apresentadas nos Apêndices 8.1.1 e
8.1.2). O emprego da técnica de tabelamento de ganhos via lógica fuzzy para se chegar
ao regulador de tensão final talvez possa ser alvo de mais investigações, inclusive para se
constatar a viabilidade ou não de sua utilização prática em sistemas de potência.
A metodologia proposta para a simulação dos diversos componentes (ou subsistemas)
do SEP e para a integração entre eles (Capítulos 4 e 5) pode ser adotada em trabalhos
correlatos que façam uso do mesmo ambiente de simulação (Simulink).
Outra contribuição desta dissertação está no método de solução de equações algébrico-
diferenciais e de linearização de sistemas (não-lineares) via perturbação numérica, ambos
descritos no Capítulo 5 e baseados na S-Function do Simulink.
6.3 CRÍTICAS E PERSPECTIVAS
Este trabalho foi pautado em um sistema de potência de características simples:
gerador-carga (tipo impedância constante). Estudos baseados em SEP mais complexos,
envolvendo, por exemplo, geradores em paralelo e cargas dinâmicas podem ser feitos.
Simulações mais abrangentes, que levem em conta a ocorrência de curtos-circuitos na
linha e a atuação de relés de proteção nela instalados, também podem ser objeto de
pesquisa.
O controle de freqüência para sistemas de geração isolada se mostrou algo complexo
merecendo estudos mais aprofundados como o apresentado em MANSOOR (2000). As
mesmas técnicas utilizadas para o regulador de tensão (linearização e tabelamento de
ganhos) podem ser empregadas para o regulador de velocidade, por exemplo.
Esta dissertação não abordou técnicas de controle mais sofisticadas indicadas para sis-
temas não-lineares, como os chamados métodos diretos baseados em funções de Lyapunov.
A aplicação de tais métodos em sistemas de potência isolados e uma possível compara-
ção com aqueles aqui adotados fica como sugestão para trabalhos futuros, ressaltando-se,
ainda, a possibilidade de se estudar o desenvolvimento de um método híbrido.
116

7 REFERÊNCIAS BIBLIOGRÁFICAS
ASSIS, A. P. Modelagem de Sistemas Elétricos de Potência para a Síntesede Controladores LPV. Dissertação de Mestrado, Instituto Militar de Engenharia,2002.
CHAPMAN, S. J. Electric Machinery Fundamentals. McGraw-Hill, second edition,1991.
DIEGUEZ, J. P. P. Métodos Numéricos Computacionais para a Engenharia.Âmbito Cultural Edições LTDA., 1994.
ELETROBRÁS. Diretrizes para estudos e projetos de Pequenas CentraisHidrelétricas. Eletrobrás, 2000.
HARVEY, A. Micro-Hydro Design Manual, a guide to small-scale water powerschemes. IT Publications, 1993.
HUSS, D. e PELLANDA, P. C. A Construção das Pequenas Centrais Hidrelétricasnos Pelotões de Fronteira da Amazônia. Desenvolvimento e Tecnologia, (3):51–58,Jul/Set 1994.
KUNDUR, P. Power System Stability and Control. McGrawHill, 1994.
LEITH, D. J. e LEITHEAD, W. E. Survey of Gain-Scheduling Analysis and De-sign. Int. J. Contr., 73(11):1001–1025, 2000.
MACINTYRE, A. J. Máquinas Motrizes Hidráulicas. Editora Guanabara 2, 1983.
MANSOOR, S. P. Modelagem de Sistemas Elétricos de Potência para a Síntesede Controladores LPV. Tese de Doutorado, University of Wales, Bangor, 2000.
MARTINS, N. e LIMA, L. T. G. Eingenvalue and Frequency Domain Anal-isys of Small Signal Electromechanical Stability Problems. Eigenanalisysand Frequency Domain Methods for System Dynamic Performance, IEEE publication90TH0292-3-PWR, (37):663–674, 1990.
MATHWORKS. Simulink Model-Based and System-Based Design. Writing S-Functions. 2002.
MONTICELLI, A. Fluxo de Carga em Redes de Energia Elétrica. Editora EdgardBlücher Ltda., 1983.
OGATA, K. Engenharia de Controle Moderno. PHB, São Paulo, 1990.
OLIVEIRA JR., H. A. E. Lógica Difusa, Aspectos Práticos e Aplicações. Inter-ciência, 1999.
117

PELLANDA, P. C. Controle Robusto Aplicado na Estabilização de SistemasElétricos de Potência. Dissertação de Mestrado, Instituto Militar de Engenharia,1993.
PEREIRA, A. R. Contoladores Robustos com Interpolação de Ganhos via Lóg-ica Difusa-Aplicação em Veículos Autônomos não Tripulados. Dissertação deMestrado, Instituto Militar de Engenharia, 2001.
RUGH, W. J. e SHAMMA, J. S. Research on Gain Scheduling. Automatica, 36(5):1401–1425, 2000.
SHAMPINE, L. F., REICHELT, M. W. e KIERZENKA, J. A. Solving Index-I DAEsin MATLAB and Simulink. SIAM, 41(3):538–552, 1999.
SOUSA, ZULCY DE E FUCHS, R. D. E. S. A. H. M. Centrais Hidro e Termelétricas.Editora Edgard Blücher Ltda., 1983.
STEVENSON, W. D. J. Elementos de Análise de Sistemas de Potência. McGraw-Hill do Brasil, 1978.
ZHOU, K. e DOYLE, J. C. Essentials of Robust Control. Prentice Hall, 1998.
118

8 APÊNDICES
119

8.1 APÊNDICE 1: PROGRAMAS MATLAB
8.1.1 DEFINIÇÃO DOS PONTOS DE OPERAÇÃO E PARÂMETROS DO SISTEMA
ELÉTRICO- SOLUÇÃO DA EQUAÇÃO DE REDE
function [Y,I1,V1]=sol_eqrede
% 1) Relação das Potências das Cargas que Definem os Pontos de Operação
% PC=[P (potência ativa)
% ---
% Q (potência reativa)]
PC=[0.175 0.175 0.175 0.425 0.425 0.425 0.675 0.675 0.675 0.925 0.925 0.925 1 1 1;
0.23 0.13 0 0.566 0.31875 0 0.9 0.506 0 1.23 0.694 0 1.33 0.75 0];
% 2) Distribuição das Potências pelos três consumidores
%(quartel, vila militar, comunidade)
DP=[0.6 0.6 0.5 0.45 0.45 0.40;
0.2 0.15 0.3 0.3 0.25 0.30;
0.2 0.25 0.2 0.25 0.3 0.3];
% 3) Obtenção das Cargas por Consumidor para os vários pontos de operação
CCP=[]; % para potência ativa
CCQ=[]; % para potência reativa
for i=1:15
if i==1|i==5|i==9
for j=1:3
CCP(j,i)=PC(1,i)*DP(j,1);
CCQ(j,i)=PC(2,i)*DP(j,1);
end
elseif i==2|i==6|i==7
for j=1:3
CCP(j,i)=PC(1,i)*DP(j,2);
CCQ(j,i)=PC(2,i)*DP(j,2);
end
elseif i==3|i==4|i==8
for j=1:3
CCP(j,i)=PC(1,i)*DP(j,3);
CCQ(j,i)=PC(2,i)*DP(j,3);
end
elseif i==10|i==15
for j=1:3
CCP(j,i)=PC(1,i)*DP(j,4);
CCQ(j,i)=PC(2,i)*DP(j,4);
end
elseif i==11|i==13
120

for j=1:3
CCP(j,i)=PC(1,i)*DP(j,5);
CCQ(j,i)=PC(2,i)*DP(j,5);
end
else
for j=1:3
CCP(j,i)=PC(1,i)*DP(j,6);
CCQ(j,i)=PC(2,i)*DP(j,6);
end % for
end % if
end % for
%4) Calculo das condutâncias e susceptâncias dos trafos, linhas e cargas
%para os diversos pontos de operação
% Grandezas Base:potencia em kw, tensão em volts, impedância em ohms e corrente
% em amperes
Pbase=100; % potência nominal do gerador; Pot=3/2*Vbase*Ibase = 3/2*vbase*ibase
vbase=(220/sqrt(3))*sqrt(2); % tensão fase-neutro de pico (na baixa tensão)
ibase=(2/3)*(Pbase/vbase)*1e3; % corrente de linha de pico (na baixa tensão)
zbase=vbase/ibase; % impedância base (na baixa tensão)
Vbase=vbase*(13.8/220)*1e3; Ibase=ibase*(220/(13.8*1e3)); % base na alta tensão
Zbase=Vbase/Ibase; % base na alta tensão
% a) admitâncias dos trafos do SEP (resistências desprezadas)-valores por unidade
rt=[]; xt=[];
%(i) trafo de elevação de tensão (112KA, 220V/13.8 KV)
rt(1)=0; xt(1)=0.0369;
% gt1=rt1/(rt1^2+xt1^2); bt1=-xt1/(rt1^2+xt1^2);
%(ii) trafo do quartel (45KVA, 13.8KV/220V)
rt(2)=0; xt(2)=0.09189;
% gt2=rt2/(rt2^2+xt2^2); bt2=-xt2/(rt2^2+xt2^2);
%(iii)trafos da vila militar e da comunidade (30 KVA, 13.8KV/220V)
rt(3)=0; xt(3)= 0.1378; rt(4)=rt(3); xt(4)=xt(3);
% gt3=rt3/(rt3^2+xt3^2); bt3=-xt3/(rt3^2+xt3^2);
% legenda: rt= resistência dos trafos; xt= reatância indutiva; gt= condutância;
% bt=susceptância
% b) impedâncias das linhas de distribuição e admitâncias totais (trafo + linha)
d=[7 1 1.5 3]; %distancias das linhas (em km) : d1=linha principal;
% d2=linha do quartel; d3=linha da vila militar; d4=linha da comunidade
RL=1.4; XL=0.434; %ohm/km; agora, passando para valores por unidade, tem-se:
rL=RL/Zbase; xL=XL/Zbase; %pu/km
% matrizes com as impedâncias totais das linhas
for i=1:4
rl(i)=rL*d(i); xl(i)=xL*d(i);
end
121

% matrizes com as condutâncias e susceptâncias totais (trafos + linhas)
for i=1:4
rtl(i)=rt(i)+rl(i); xtl(i)=xt(i)+xl(i);
gtl(i)=rtl(i)/(rtl(i)^2 + xtl(i)^2);
btl(i)=-xtl(i)/(rtl(i)^2 + xtl(i)^2);
end
% c) admitâncias das cargas para os vários pontos de operação (verificar
% a dissertação);
gc1=[]; gc2=[]; gc3=[]; % condutâncias das cargas do quartel, vila e
% comunidade (em pu)
bc1=[]; bc2=[]; bc3=[]; % susceptâncias das cargas do quartel, vila e
%comunidade (em pu)
gc1=CCP(1,:); gc2=CCP(2,:); gc3=CCP(3,:);
bc1=-CCQ(1,:); bc2=-CCQ(2,:); bc3=-CCQ(3,:);
% 5) Montagem da matriz de admitância nodal (verificar a dissertação)
y11(1,1)=gtl(1); y11(1,2)=-btl(1); y11(2,1)=-y11(1,2); y11(2,2)=y11(1,1);
y12=-y11; y13=zeros(2,2); y14=y13; y15=y13;
y21=-y11;
y22(1,1)=gtl(1)+gtl(2)+gtl(3)+gtl(4);
y22(1,2)=-(btl(1)+btl(2)+btl(3)+btl(4)); y22(2,1)=-y22(1,2); y22(2,2)=y22(1,1);
y23(1,1)=-gtl(2); y23(1,2)=btl(2); y23(2,1)=-y23(1,2); y23(2,2)=y23(1,1);
y24(1,1)=-gtl(3); y24(1,2)=btl(3); y24(2,1)=-y24(1,2); y24(2,2)=y24(1,1);
y25(1,1)=-gtl(4); y25(1,2)=btl(4); y25(2,1)=-y25(1,2); y25(2,2)=y25(1,1);
y31=zeros(2,2); y32=y23;
for i=1:15
y33(1,1)=gtl(2)+gc1(i); y33(1,2)=-(btl(2)+bc1(i)); y33(2,1)=-y33(1,2);
y33(2,2)=y33(1,1); y3(:,:,i)=y33;
y44(1,1)=gtl(3)+gc2(i); y44(1,2)=-(btl(3)+bc2(i)); y44(2,1)=-y44(1,2);
y44(2,2)=y44(1,1); y4(:,:,i)=y44;
y55(1,1)=gtl(4)+gc3(i); y55(1,2)=-(btl(4)+bc3(i)); y55(2,1)=-y55(1,2);
y55(2,2)=y55(1,1); y5(:,:,i)=y55;
end
y34=zeros(2,2); y35=y34; y41=y14; y42=y24; y43=y34; y45=y34;
y51=y34; y52=y25; y53=y35; y54=y45;
% matriz admitância nodal para os vários pontos de operação
for i=1:15
Y(:,:,i)=[y11 y12 y13 y14 y15; y21 y22 y23 y24 y25; y31 y32 y3(:,:,i) y34 y35;
y41 y42 y43 y4(:,:,i) y45; y51 y52 y53 y54 y5(:,:,i)];
end
% 6) Fluxo de carga = calculo das correntes do gerador para
122
% os vários pontos de operação (e das tensões nas barras)
% inicialização da tensão na barra do gerador: V1=[Vr1;Vi1)
V1=[1;0];
% para as definições das matrizes abaixo verificar anotação da dissertação
% N3 =[I;V2;V3;V4;V5]; I1=corrente do gerador=[Ir1,Ii1]
N1=[-y11*V1;-y21*V1; 0;0 ; 0;0 ; 0;0];
for i=1:15
N2(:,:,i)=Y(:,:,i);
N2(1:2,1:2,i)=-eye(2);
N2(3:4,1:2,i)=zeros(2,2);
N3(:,i)=inv(N2(:,:,i))*N1;
I1(:,i)=N3(1:2,i);
V1(:,i)=[1;0]; % redefinindo V1 para todos os pontos de operação
V2(:,i)=N3(3:4,i);
V3(:,i)=N3(5:6,i);
V4(:,i)=N3(7:8,i);
V5(:,i)=N3(9:10,i);
end
123
8.1.2 FORMULAÇÃO AUMENTADA - OBTENÇÃO DAS MATRIZES ABCD (ESPAÇO DE ESTADOS)
% Cálculos das matrizes ABCD do modelo linearizado do SEP para os diversos pontos
% de Operação encontrados a partir da função sol_eqrede.m (a qual é chamada abaixo)
[Y,I1,V1]=sol_eqrede;
% 1) Calculo dos ângulos do rotor (ângulos de carga)
% valores dos parâmetros da maquina em pu (tirados da Weg)
Xd=12.46; Xq=4.58; Xld=0.779; X2ld=0.653; X2lq=0.71; Ra=0.11; Tld0=0.749 ;
T2ld0=0.001106; T2lq0=0.0122; H=3; w0=2*pi*60; Xd=12.46; Xq=4.58; Xld=0.779;
% para compreensão do equacionamento abaixo ver dissertação
% Eqr=[]; Eqm=[]; delta=[];
for i=1:15
Eqr(i)=V1(1,i)+Ra*I1(1,i)-Xq*I1(2,i);
Eqm(i)=V1(2,i)+Ra*I1(2,i)+Xq*I1(1,i);
delta(i)=angle(Eqr(i)+sqrt(-1)*Eqm(i));
end
% 2) Passando a corrente do gerador I1=[Ir1;Ii1] para o referencial d-q:
% Idq=[Id1;Iq1]
for i=1:15
Idq(:,i)=[sin(delta(i)) -cos(delta(i)); cos(delta(i)) sin(delta(i))]*I1(:,i);
end
% 3) Montando as matrizes aumentadas para os vários pontos de operação
% (para a ordenação das variáveis de estado e algébricas, e demais
% esclarecimentos verificar dissertação
% a) matriz A aumentada: Aa=[J1 J2; J3 J4];
J1=[]; J2=[]; J3=[]; J4=[];
124

for i=1:15
J1(:,:,i)=[-1/Tld0 0 0 0 0;
0 -1/T2lq0 0 0 0;
1/T2ld0 0 -1/T2ld0 0 0;
0 0 0 0 ...
(-V1(1,i)*Idq(1,i)*cos(delta(i))-V1(2,i)*Idq(1,i)*sin(delta(i))+V1(1,i)*Idq(2,i)*sin(delta(i))-V1(2,i)*Idq(2,i)*cos(delta(i)))/(2*H);
0 0 0 w0 0];
J2(:,:,i)=[-(Xd-Xld)/Tld0 0 0 0 0 0 0 0 0 0 0 0;
0 (Xq-X2lq)/T2lq0 0 0 0 0 0 0 0 0 0 0;
-(Xld-X2ld)/T2ld0 0 0 0 0 0 0 0 0 0 0 0;
(-V1(1,i)*sin(delta(i))+V1(2,i)*cos(delta(i))-2*Ra*Idq(1,i))/(2*H) ...
(-V1(1,i)*cos(delta(i))-V1(2,i)*sin(delta(i))-2*Ra*Idq(2,i))/(2*H) ...
(-Idq(1,i)*sin(delta(i))-Idq(2,i)*cos(delta(i)))/(2*H)...
(Idq(1,i)*cos(delta(i))-Idq(2,i)*sin(delta(i)))/(2*H) 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0];
J3(:,:,i)=[0 -1 0 0 (V1(1,i)*cos(delta(i))+V1(2,i)*sin(delta(i)));
0 0 -1 0 (-V1(1,i)*sin(delta(i))+V1(2,i)*cos(delta(i)));
0 0 0 0 -(cos(delta(i))*Idq(1,i)-sin(delta(i))*Idq(2,i));
0 0 0 0 -(sin(delta(i))*Idq(1,i)+cos(delta(i))*Idq(2,i));
0 0 0 0 0;
0 0 0 0 0;
0 0 0 0 0;
0 0 0 0 0;
0 0 0 0 0;
0 0 0 0 0;
0 0 0 0 0;
0 0 0 0 0];
J4(1:2,:,i)=[Ra -X2lq sin(delta(i)) -cos(delta(i)) 0 0 0 0 0 0 0 0 ;
X2ld Ra cos(delta(i)) sin(delta(i)) 0 0 0 0 0 0 0 0 ];
J4(3:12,1:2,i)=[-sin(delta(i)) -cos(delta(i));cos(delta(i)) -sin(delta(i));zeros(8,2)];
J4(3:12,3:12,i)=Y(:,:,i);
125

end
% b) matriz B aumentada: Ba=[Bx;Br]
Bx=[]; Br=[];
%Bx=zeros(5,2); %Br=zeros(12,2);
for i=1:15
Bx(:,:,i)=zeros(5,2);
Br(:,:,i)=zeros(12,2);
Bx(1,1,i)=1/Tld0; Bx(4,2,i)=1/(2*H);
end
% c) matriz C aumentada: Ca=[Cx Cr]: as saídas serão, na ordem: w,Vt
%(acompanhar o desenvolvimento na dissertação)
Cx=[]; Cr=[];
for i=1:15
Cx(:,:,i)=zeros(2,5);Cr(:,:,i)=zeros(2,12);
Cx(1,4,i)=1;
Cr(2,3,i)=V1(1,i)/sqrt(V1(1,i)^2+V1(2,i)^2);
Cr(2,4,i)=V1(2,i)/sqrt(V1(1,i)^2+V1(2,i)^2);
end
% d) transformação em espaço de estados
% A=[]; B=[]; C=[]; D=[];
for i=1:15
A(:,:,i)=J1(:,:,i)-J2(:,:,i)*inv(J4(:,:,i))*J3(:,:,i);
B(:,:,i)=Bx(:,:,i)-J2(:,:,i)*inv(J4(:,:,i))*Br(:,:,i);
C(:,:,i)=Cx(:,:,i)-Cr(:,:,i)*inv(J4(:,:,i))*J3(:,:,i);
D(:,:,i)=-Cr(:,:,i)*inv(J4(:,:,i))*Br(:,:,i);
end
126
8.1.3 PROGRAMA S-FUNCTION PARA O MODELO NÃO-LINEAR DO SISTEMA ELÉTRICO
function [sys,x0,str,ts] = sisele_nlin2(t,x,u,flag,INIT)
% Parâmetros da Maquina e Constantes do Sistema Elétrico (condutâncias e susceptâncias)
%a) dados do gerador
Xd=12.46; Xq=4.58; Xld=0.779; X2ld=0.653; X2lq=0.71; Ra=0.11;
Tld0=0.749 ; T2ld0=0.001106; T2lq0=0.0122; H=3; w0=2*pi*60;
%b)constantes do sistema elétrico (calculados no programa sol_eqrede.m)
gtl1=3.4116; btl1=-25.5212; gtl2=0.0866; btl2=-10.8561;
gtl3=0.0578; btl3=-7.2385; gtl4=0.1150; btl4=-7.2192;
%c) montagem da matriz admitância nodal (para compreensão, verificar trabalho escrito)
y11(1,1)=gtl1; y11(1,2)=-btl1; y11(2,1)=-y11(1,2); y11(2,2)=y11(1,1);
y12=-y11; y13=zeros(2,2); y14=y13; y15=y13;
y21=-y11;
y22(1,1)=gtl1+gtl2+gtl3+gtl4;
y22(1,2)=-(btl1+btl2+btl3+btl4); y22(2,1)=-y22(1,2); y22(2,2)=y22(1,1);
y23(1,1)=-gtl2; y23(1,2)=btl2; y23(2,1)=-y23(1,2); y23(2,2)=y23(1,1);
y24(1,1)=-gtl3; y24(1,2)=btl3; y24(2,1)=-y24(1,2); y24(2,2)=y24(1,1);
y25(1,1)=-gtl4; y25(1,2)=btl4; y25(2,1)=-y25(1,2); y25(2,2)=y25(1,1);
y31=zeros(2,2); y32=y23;
y33(1,1)=gtl2; y33(1,2)=-(btl2); y33(2,1)=-y33(1,2); y33(2,2)=y33(1,1);
y44(1,1)=gtl3; y44(1,2)=-(btl3); y44(2,1)=-y44(1,2); y44(2,2)=y44(1,1);
y55(1,1)=gtl4; y55(1,2)=-(btl4); y55(2,1)=-y55(1,2); y55(2,2)=y55(1,1);
y34=zeros(2,2); y35=y34; y41=y14; y42=y24; y43=y34; y45=y34;
y51=y34; y52=y25; y53=y35; y54=y45;
127

Y=[y11 y12 y13 y14 y15; y21 y22 y23 y24 y25; y31 y32 y33 y34 y35;
y41 y42 y43 y44 y45; y51 y52 y53 y54 y55];
switch flag
case 0 % Inicialização
sys = [5, % number of continuous states
0, % number of discrete states
13, % number of outputs
20, % number of inputs
0, % reserved must be zero
1, % direct feedthrough flag
1]; % number of sample times
x0 = INIT;
str = [];
ts = [0 0]; % sample time: [period, offset]
case 1 % Derivativos
wl=x(4);
delta=x(5);
r=u(9:20);
v=u(1:2);
Id=u(9); Iq=u(10);
Vr1=u(11); Vi1=u(12); %Vr2=u(13); Vi2=u(14); Vr3=u(15); Vi3=u(16); Vr4=u(17);
% Vi4=u(18); Vr5=u(19); Vi5=u(20); Id=u(9); Iq=u(10);
% observação: wl=w-1, assim, wl+1=w;
J1=[-1/Tld0 0 0 0 0;
0 -1/T2lq0 0 0 0;
1/T2ld0 0 -1/T2ld0 0 0;
0 0 0 0 0;
0 0 0 w0 0];
128

J2=[-(Xd-Xld)/Tld0 0 0 0 0 0 0 0 0 0 0 0;
0 (Xq-X2lq)/T2lq0 0 0 0 0 0 0 0 0 0 0;
-(Xld-X2ld)/T2ld0 0 0 0 0 0 0 0 0 0 0 0;
-1/(2*H*(wl+1))*(Vr1*sin(delta)-Vi1*cos(delta)+Ra*Id) -1/(2*H*(wl+1))*(Vr1*cos(delta)+Vi1*sin(delta)+Ra*Iq) 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0];
Bx=zeros(5,2); Bx(1,1)=1/Tld0; Bx(4,2)=1/(2*H);
sys = zeros(5,1);
sys=J1*x+J2*r+Bx*v;
case 2 % Atualização de estados discretos
sys = []; % fazer nada
case 3 % Saídas
% definição de parâmetros
delta=x(5);
r=u(9:20);
p1=u(3); q1=u(4); p2=u(5); q2=u(6); p3=u(7); q3=u(8);
% montando as matrizes ;
J3=zeros(12,5); J3(1,2)=-1; J3(2,3)=-1;
J4(1:2,1:12)=[Ra -X2lq sin(delta) -cos(delta) 0 0 0 0 0 0 0 0;
X2ld Ra cos(delta) sin(delta) 0 0 0 0 0 0 0 0];
J4(3:12,1:2)=[-sin(delta) -cos(delta); cos(delta) -sin(delta); zeros(8,2)];
J4(3:12,3:12)=Y;
J4(7,7)=J4(7,7)+p1; J4(7,8)=J4(7,8)+q1; J4(8,7)=J4(8,7)-q1; J4(8,8)=J4(8,8)+p1;
J4(9,9)=J4(9,9)+p2; J4(9,10)=J4(9,10)+q2; J4(10,9)=J4(10,9)-q2; J4(10,10)=J4(10,10)+p2;
J4(11,11)=J4(11,11)+p3; J4(11,12)=J4(11,12)+q3; J4(12,11)=J4(12,11)-q3; J4(12,12)=J4(12,12)+p3;
Cx=zeros(13,5); Cx(1,4)=1;
129

Cr=zeros(13,12); Cr(2:13,1:12)=eye(12);
% atualizando os valores das variáveis algébricas
r=-inv(J4)*J3*x;
% saídas do sistema:wl (wl=w-1) e r
sys = zeros(13,1);
sys=Cx*x+Cr*r;
case 9 % Terminar
sys = []; % fazer nada
otherwise
error([’unhandled flag = ’,num2str(flag)]);
end
8.1.4 PROGRAMA S-FUNCTION PARA O MODELO DO SISTEMA ELÉTRICO EMPREGADO NA LINEARIZAÇÃO POR
PERTURBAÇÃO NUMÉRICA
function [sys,x0,str,ts] = sisele_nlinc(t,x,u,flag,INIT,INITv)
% Parâmetros da Maquina e Constantes do Sistema Elétrico (condutâncias e susceptâncias)
%a) dados do gerador
Xd=12.46; Xq=4.58; Xld=0.779; X2ld=0.653; X2lq=0.71; Ra=0.11;
Tld0=0.749 ; T2ld0=0.001106; T2lq0=0.0122; H=3; w0=2*pi*60;
%b)constantes do sistema elétrico (calculados no programa matriz_nodal.m)
gtl1=3.4116; btl1=-25.5212; gtl2=0.0866; btl2=-10.8561;
gtl3=0.0578; btl3=-7.2385; gtl4=0.1150; btl4=-7.2192;
130

%c) montagem da matriz admitância nodal (para compreensão, verificar trabalho escrito)
y11(1,1)=gtl1; y11(1,2)=-btl1; y11(2,1)=-y11(1,2); y11(2,2)=y11(1,1);
y12=-y11; y13=zeros(2,2); y14=y13; y15=y13;
y21=-y11;
y22(1,1)=gtl1+gtl2+gtl3+gtl4;
y22(1,2)=-(btl1+btl2+btl3+btl4); y22(2,1)=-y22(1,2); y22(2,2)=y22(1,1);
y23(1,1)=-gtl2; y23(1,2)=btl2; y23(2,1)=-y23(1,2); y23(2,2)=y23(1,1);
y24(1,1)=-gtl3; y24(1,2)=btl3; y24(2,1)=-y24(1,2); y24(2,2)=y24(1,1);
y25(1,1)=-gtl4; y25(1,2)=btl4; y25(2,1)=-y25(1,2); y25(2,2)=y25(1,1);
y31=zeros(2,2); y32=y23;
y33(1,1)=gtl2; y33(1,2)=-(btl2); y33(2,1)=-y33(1,2); y33(2,2)=y33(1,1);
y44(1,1)=gtl3; y44(1,2)=-(btl3); y44(2,1)=-y44(1,2); y44(2,2)=y44(1,1);
y55(1,1)=gtl4; y55(1,2)=-(btl4); y55(2,1)=-y55(1,2); y55(2,2)=y55(1,1);
y34=zeros(2,2); y35=y34; y41=y14; y42=y24; y43=y34; y45=y34;
y51=y34; y52=y25; y53=y35; y54=y45;
Y=[y11 y12 y13 y14 y15; y21 y22 y23 y24 y25; y31 y32 y33 y34 y35;
y41 y42 y43 y44 y45; y51 y52 y53 y54 y55];
switch flag
case 0 % Inicialização
sys = [5, % number of continuous states
0, % number of discrete states
13, % number of outputs
20, % number of inputs
0, % reserved must be zero
1, % direct feedthrough flag
1]; % number of sample times
x0 = zeros(1,5);
str = [];
131

ts = [0 0]; % sample time: [period, offset]
case 1 % Derivativos
r0 = INITv(3:14)’;
efd0= INITv(1);
Pmec0=INITv(2);
x0 = INIT’;
x=x+x0;
u(1)=u(1)+efd0;
u(2)=u(2)+Pmec0;
u(9:20)=u(9:20);%+r0; % Aqui(case 1) não se deve somar o pt nominal da
% variável algébrica pois já o foi no case 3 que é
% executado antes.
delta=x(5);
r=u(9:20);
v=u(1:2);
Id=u(9); Iq=u(10);
Vr1=u(11); Vi1=u(12); %Vr2=u(13); Vi2=u(14); Vr3=u(15); Vi3=u(16); Vr4=u(17);
% Vi4=u(18); Vr5=u(19); Vi5=u(20); Id=u(9); Iq=u(10);
J1=[-1/Tld0 0 0 0 0;
0 -1/T2lq0 0 0 0;
1/T2ld0 0 -1/T2ld0 0 0;
0 0 0 0 0;
0 0 0 w0 0];
J2=[-(Xd-Xld)/Tld0 0 0 0 0 0 0 0 0 0 0 0;
0 (Xq-X2lq)/T2lq0 0 0 0 0 0 0 0 0 0 0;
-(Xld-X2ld)/T2ld0 0 0 0 0 0 0 0 0 0 0 0;
-1/(2*H)*(Vr1*sin(delta)-Vi1*cos(delta)+Ra*Id) -1/(2*H)*(Vr1*cos(delta)+Vi1*sin(delta)+Ra*Iq) 0 0 0 0 0 0 0 0 0 0;
0 0 0 0 0 0 0 0 0 0 0 0];
Bx=zeros(5,2); Bx(1,1)=1/Tld0; Bx(4,2)=1/(2*H);
132

sys = zeros(5,1);
sys=J1*x+J2*r+Bx*v;
case 2 % Atualização de estados discretos
sys = []; % fazer nada
case 3 % Saídas
% definição de parâmetros
x0 = INIT’;
r0=INITv(3:14)’;
efd0=INITv(1);
Pmec0=INITv(2);
x=x+x0;
u(1)=u(1)+efd0;
u(2)=u(2)+Pmec0;
u(9:20)=u(9:20)+r0;
delta=x(5);
r=u(9:20);
p1=u(3); q1=u(4); p2=u(5); q2=u(6); p3=u(7); q3=u(8);
% montando as matrizes ;
J3=zeros(12,5); J3(1,2)=-1; J3(2,3)=-1;
J4(1:2,1:12)=[Ra -X2lq sin(delta) -cos(delta) 0 0 0 0 0 0 0 0;
X2ld Ra cos(delta) sin(delta) 0 0 0 0 0 0 0 0];
J4(3:12,1:2)=[-sin(delta) -cos(delta); cos(delta) -sin(delta); zeros(8,2)];
J4(3:12,3:12)=Y;
J4(7,7)=J4(7,7)+p1; J4(7,8)=J4(7,8)+q1; J4(8,7)=J4(8,7)-q1; J4(8,8)=J4(8,8)+p1;
J4(9,9)=J4(9,9)+p2; J4(9,10)=J4(9,10)+q2; J4(10,9)=J4(10,9)-q2; J4(10,10)=J4(10,10)+p2;
J4(11,11)=J4(11,11)+p3; J4(11,12)=J4(11,12)+q3; J4(12,11)=J4(12,11)-q3; J4(12,12)=J4(12,12)+p3;
Cx=zeros(13,5); Cx(1,4)=1;
133

Cr=zeros(13,12); Cr(2:13,1:12)=eye(12);
% atualizando os valores das variáveis algébricas
r=-inv(J4)*J3*x;
% saídas do sistema:wl (wl=w-1) e r
sys = zeros(13,1);
sys=Cx*x+Cr*r;
case 9 % Terminar
sys = []; % fazer nada
otherwise
error([’unhandled flag = ’,num2str(flag)]);
end
134

8.1.5 CÁLCULO DOS VALORES DAS VARIÁVEIS DO SISTEMA ELÉTRICO NOS PONTOS DE OPERAÇÃO CONSIDERA-
DOS E VALIDAÇÃO DA LINERIZAÇÃO ANALÍTICA
% Este programa tem a finalidade de calcular os valores das variáveis de estado, algébricas e de entrada
% nos pontos de operação considerados, e comparar os modelos do sistema elétrico linearizados de duas formas
% distintas: linearização analítica x linearização por perturbação numérica. Isto em vistas a validar
% o primeiro método de linearização.
% 1) Calculo das Condições Iniciais para as Variáveis Algébricas, de Estado e Entradas
% valores dos parâmetros da maquina em pu (tirados da Weg)
Xd=12.46; Xq=4.58; Xld=0.779; X2ld=0.653; X2lq=0.71; Ra=0.11; Tld0=0.749 ;
T2ld0=0.001106; T2lq0=0.0122; H=3; w0=2*pi*60;
[Y,I1,V1,V2,V3,V4,V5,gc1,bc1,gc2,bc2,gc3,bc3]=sol_eqredec; %variáveis da rede elétrica
[A,B,C,D]=ABCD_c(Y,I1,V1,V2,V3,V4,V5); %obtenção das matrizes A,B,C e D
% a corrente I1 corresponde a [Ir1;Ii1]; deseja-se obter id e iq, o que e feito da seguinte forma:
for i=1:15
Eqr=V1(1,i)+Ra*I1(1,i)-Xq*I1(2,i);
Eqm=V1(2,i)+Ra*I1(2,i)+Xq*I1(1,i);
delta=angle(Eqr+sqrt(-1)*Eqm);
% passando a corrente do gerador I1=[Ir1;Ii1] para o referencial d-q:
id=[sin(delta) -cos(delta)]*I1(:,i);
iq=[cos(delta) sin(delta)]*I1(:,i);
% redefinindo as variáveis:
vr1=V1(1,i); vi1=V1(2,i); vr2=V2(1,i); vi2=V2(2,i); vr3=V3(1,i); vi3=V3(2,i); vr4=V4(1,i);
vi4=V4(2,i); vr5=V5(1,i); vi5=V5(2,i);
135

% calculando as demais variáveis de estado
wl=0 ; % wl=w-1 (na S-Function, se esta trabalhando com wl e nao com w) e w=1 pu
e2lq=vr1*cos(delta)+vi1*sin(delta)+X2ld*id+Ra*iq;
e2ld=(Xq-X2lq)*iq; % ou e2ld= vr1*sin(delta)-vi1*cos(delta)-X2lq*iq+Ra*id
elq=(Xld-X2ld)*id+e2lq;
efd=(Xd-Xld)*id+elq;
% calculando a potência mecânica
Pmec=(vr1*sin(delta)-vi1*cos(delta))*id + (vr1*cos(delta)+vi1*sin(delta))*iq + Ra*(id^2+iq^2);
% definindo as cargas
P1=gc1(i); Q1=-bc1(i); P2=gc2(i); Q2=-bc2(i); P3=gc3(i); Q3=-bc3(i);
% definindo o vetor de condições iniciais para as entradas e variáveis algébricas
R0=[efd,Pmec,id,iq,vr1,vi1,vr2,vi2,vr3,vi3,vr4,vi4,vr5,vi5];
[Ap(:,:,i),Bp(:,:,i),Cp(:,:,i),Dp(:,:,i)]=linmod(’sist_potc’);
Pa=pck(A(:,:,i),B(:,:,i),C(:,:,i),D(:,:,i));
Pp=pck(Ap(:,:,i),Bp(:,:,i),Cp(:,:,i),Dp(:,:,i));
Ps=msub(Pa,Pp);
[nninf,f]= sigma(Ps);
nninf=max(max(nninf));
ninf(i)=nninf;
Pt(i)=P1+P2+P3;
Qt(i)=Q1+Q2+Q3;
keyboard
end
136