joystick magnÉtico de dois eixos e software de...
TRANSCRIPT
INSTITUTO FEDERAL DE SANTA CATARINA CAMPUS FLORIANÓPOLIS
DEPARTAMENTO ACADÊMICO DE ELETRÔNICA CURSO DE GRADUAÇÃO EM ENGENHARIA ELETRÔNICA
LEONARDO PERSIKE MARTINS
JOYSTICK MAGNÉTICO DE DOIS EIXOS E SOFTWARE DE DEMONSTRAÇÃO DE FUNCIONAMENTO
FLORIANÓPOLIS, MARÇO DE 2018.

INSTITUTO FEDERAL DE SANTA CATARINA CAMPUS FLORIANÓPOLIS
DEPARTAMENTO ACADÊMICO DE ELETRÔNICA CURSO DE GRADUAÇÃO EM ENGENHARIA ELETRÔNICA
LEONARDO PERSIKE MARTINS
JOYSTICK MAGNÉTICO DE DOIS EIXOS E SOFTWARE DE DEMONSTRAÇÃO DE FUNCIONAMENTO
Trabalho de Conclusão de Curso submetido ao Instituto Federal de Educação, Ciência e Tecnologia de Santa Catarina como parte dos requisitos para obtenção do título de Engenheiro Eletrônico. Professor Orientador: Jony Laureano Silveira, Dr. Ing.
FLORIANÓPOLIS, MARÇO DE 2018.
Ficha de identificação da obra elaborada pelo autor.
Persike Martins, Leonardo
Joystick magnético de dois eixos e software de
demonstração de funcionamento. / Leonardo Persike Martins;
orientação de Jony Laureano Silveira – Florianópolis, SC,
2017.
91 p.
Trabalho de Conclusão de Curso (TCC) – Instituto Federal de
Santa Catarina, Câmpus Florianópolis. Curso de Graduação
em Engenharia Eletrônica. Departamento Acadêmico de
Eletrônica
JOYSTICK MAGNÉTICO DE DOIS EIXOS E SOFTWARE DE DEMONSTRAÇÃO DE FUNCIONAMENTO
LEONARDO PERSIKE MARTINS
Este trabalho foi julgado adequado para a obtenção do título de
Engenheiro Eletrônico e aprovado em sua forma final pela banca examinadora do
Curso de Graduação em Engenharia Eletrônica do Instituto Federal de Educação,
Ciência e Tecnologia de Santa Catarina.
Florianópolis, de de 2018. Banca Examinadora:
Jony Laureano Silveira, Dr. Eng. DAELN / CAMPUS-FLN / IFSC
Orientador
Golberi de Salvador Ferreira, Dr. Eng. DAELN / CAMPUS-FLN / IFSC
Reginaldo Steinbach, M. Sc. DAELN / CAMPUS-FLN / IFSC
Charles Borges de Lima, Dr. Eng. DAELN / CAMPUS-FLN / IFSC
Marcelo Vandresen, Dr. Eng. DAMM / CAMPUS-FLN / IFSC


Dedico este trabalho aos meus pais,
Luciano e Cinthya, por me apoiarem
durante toda minha caminhada.

AGRADECIMENTOS
Agradeço aos meus pais, Luciano e Cinthya, por todo o apoio durante minha
caminhada.
Agradeço aos meus avós e a toda minha família por me apoiar e me ensinar
os valores morais e éticos para que me tornasse a pessoa que hoje sou.
Agradeço ao meu amigo e orientador, Jony Laureano Silveira, que sempre
esteve presente em minha caminhada na Engenharia. Também fica o meu muito
obrigado ao Professor Golberi de Salvador Ferreira, que não mediu esforços para que
tudo isso se tornasse possível.
Agradeço ao IFSC e a todo seu corpo docente por me proporcionar a base
do conhecimento necessário para realizar este projeto.
Agradeço ao meu amigo e supervisor Marcelo Ribeiro, que proporcionou
essa oportunidade em minha vida acadêmica e pessoal, bem como toda a equipe
envolvida no projeto.
Agradeço a empresa Carinthian Tech Research e seus patrocinadores por
proporcionar essa experiência a um estudante, bem como a todos os funcionários por
proporcionarem um ambiente de trabalho agradável.
Por fim, agradeço a todos os meus amigos e colegas que estiveram
presentes e contribuíram de alguma forma com minha vida acadêmica e pessoal.


“O único lugar onde sucesso vem
antes do trabalho é no dicionário”.
Albert Einstein

RESUMO
A aplicação de dispositivos magnéticos tem se mostrado uma ótima área
para pesquisa e desenvolvimento de sistemas eletrônicos, tanto em hardware quanto
em software. Atualmente, muitos equipamentos são compostos por centenas de
sistemas eletrônicos os quais vão desde estruturas simples como aquecedores
elétricos, até aquelas bastante complexas, como é o caso do sistemas de controle de
aeronaves. Uma parcela destes sistemas são controlados pelo usuário através de
diversos botões, sendo que muitos ainda utilizam contatos mecânicos ou mecanismos
diversos que podem ser otimizados.
O presente trabalho descreve o projeto de um joystick magnético de dois
eixos. A primeira etapa do projeto consiste na revisão bibliográfica sobre
eletromagnetismo, com foco em sensores, imãs e seus comportamentos magnéticos.
Em seguida, desenvolveu-se uma estrutura mecânica responsável por movimentar um
imã nas proximidades de um sensor magnético. Posteriormente, realizou-se a
programação de um micro controlador ARM Cortex-M0 para fazer o processamento dos
dados provenientes do sensor e responder a estímulos. Paralelamente, desenvolveu-se
um software de comunicação e demonstração do funcionamento do joystick para
plataformas com sistema operacional Windows.
Palavras-chave: Eletromagnetismo. Instrumentação eletrônica. Sensores
magnéticos. ARM.

ABSTRACT
Magnetic devices applications has been shown as a great area for research
and development of electronic systems, both hardware and software. Nowadays, almost
every object contains hundreds of electronic systems that goes from simple structures,
as electric heaters, to complex ones, as flight controllers. One portion of those systems
are controlled by users and most of them still use mechanical buttons or mechanisms
that could be optimized.
The current paper describes the project of a two axis magnetic joystick. The
first step of the project consists in a review about electromagnetism, focusing on
sensors, magnets and its magnetic field behavior. Subsequently, it was developed a
mechanical structure to move a magnet in the surroundings of a sensor. After that, an
ARM Cortex-M0 microcontroller was programmed to process the sensor data and
response to stimulus. Concomitantly, a software was developed to communicate and
demonstrate the functionalities of the system in a Windows device.
Keywords: Electromagnetism. Electronic instrumentation. Magnetic sensors.
ARM.

LISTA DE FIGURAS
Figura 1 – Placa de desenvolvimento 3D Magnetic Sensor 2Go. .................................. 24
Figura 2 - Fronteira entre domínios. ............................................................................... 28
Figura 3 - Campo em um solenoide sem (a) e com (b) núcleo....................................... 29
Figura 4 - Material diamagnético sem (a) e na presença de campo magnético (b). ....... 31
Figura 5 - Material paramagnético sem (a) e na presença de campo magnético (b). .... 32
Figura 6 - Material ferromagnético. ................................................................................ 33
Figura 7 – Curva típica de histerese magnética. ............................................................ 36
Figura 8 - Histerese em material ferromagnético do tipo mole e duro. ........................... 37
Figura 9 - Domínios desorientados (a) e orientados (b). ................................................ 38
Figura 10 - Campo magnético em imãs tipo U (a) e retangular (b). ............................... 38
Figura 11 - Efeito Hall. .................................................................................................... 39
Figura 12 - 3D Magnetic Sensor 2Go Kit ........................................................................ 44
Figura 13 - TLV493D–A1B6 ........................................................................................... 45
Figura 14 - Mapa magnético simulado. .......................................................................... 47
Figura 15 - Junta esférica. .............................................................................................. 49
Figura 16 – Wireframe das peças do joystick. ................................................................ 49
Figura 17 - Estrutura mecânica real desmontada. .......................................................... 50
Figura 18 - Estrutura mecânica montada visão lateral (a) e inferior (b). ......................... 51
Figura 19 - Mapa magnético real. ................................................................................... 51
Figura 20 - Elipses parametrizadas. ............................................................................... 53
Figura 21 - Coeficiente O (centro). ................................................................................. 54
Figura 22 - Coeficiente a (horizontal). ............................................................................ 55
Figura 23 - Coeficiente b (vertical). ................................................................................ 55
Figura 24 – Gráficos de rotação da haste do joystick. .................................................... 58
Figura 25 - Fluxograma simplificado do firmware. .......................................................... 62
Figura 26 – Intervalo de um ciclo completo: obtenção e envio de dados. ...................... 64
Figura 27 – Aba Configuração. ....................................................................................... 67
Figura 28 – Diagrama de sequência simplificado da aba Configuração. ........................ 68
Figura 29 – Aba Visualização dos dados. ...................................................................... 69
Figura 30 - Fluxograma simplificado da Aba Visualização dos dados. ........................... 70
Figura 31 - Aba Mapa. .................................................................................................... 71
Figura 32 – Diagrama de sequência simplificado da Aba Mapa. .................................... 72
Figura 33 - Aba Jogo. ..................................................................................................... 73
Figura 34 – Diagrama de sequência simplificado da Aba Jogo. ..................................... 74
Figura 35 - Aba Versus .................................................................................................. 75
Figura 36 – Diagrama de sequência simplificado da aba Versus. .................................. 75
Figura 37 - Aba Visualizador de foto panorâmica. .......................................................... 76
Figura 38 - Fluxograma simplificado da Aba Visualizador de foto panorâmica. ............. 76
Figura 39 - Aba configuração (Xeon W3565). ................................................................ 78
Figura 40 - Tempo de processamento da aba gráficos (Xeon W3565). ......................... 78
Figura 41 - Tempo de processamento da aba mapas (Xeon W3565). ........................... 79
Figura 42 - Tempo de processamento da aba jogo (Xeon W3565). ............................... 79
Figura 43 - Tempo de processamento da aba Versus (Xeon W3565). .......................... 80
Figura 44 - Tempo de processamento da aba visualizador de imagens
panorâmicas (Xeon W3565). ......................................................................... 80
Figura 45 - Aba configuração (Pentium N4200). ............................................................ 82
Figura 46 - Tempo de processamento da aba gráficos (Pentium N4200). ..................... 82
Figura 47 - Tempo de processamento da aba mapas (Pentium N4200). ....................... 83
Figura 48 - Tempo de processamento da aba jogo (Pentium N4200). ........................... 83
Figura 49 - Tempo de processamento da aba Versus (Pentium N4200). ...................... 84
Figura 50 - Tempo de processamento da aba visualizador de imagens
panorâmicas (Pentium N4200). ..................................................................... 84
Figura 51 - Sistema em funcionamento com tablet. ....................................................... 86
LISTA DE TABELAS
Tabela 1 – Grandezas das elipses parametrizadas. ...................................................... 54
Tabela 2 - Frequência máxima de operação do software (Xeon W3565). ..................... 81
Tabela 3 - Frequência máxima de operação do software (Pentium N4200). ................. 85

SUMÁRIO
1. INTRODUÇÃO ........................................................................................................... 23
1.1. JUSTIFICATIVA ...................................................................................................... 23
1.2. OBJETIVO GERAL ................................................................................................. 24
1.2.1. Objetivos Específicos ........................................................................................ 25
1.2.2. Objetivos Adicionais .......................................................................................... 25
2. FUNDAMENTAÇÃO TEÓRICA ................................................................................. 26
2.1. MAGNETISMO ........................................................................................................ 26
2.1.1. Eletromagnetismo .............................................................................................. 26
2.2. CONCEITOS BÁSICOS .......................................................................................... 27
2.2.1. Dipolo magnético ............................................................................................... 27
2.2.2. Domínios magnéticos ........................................................................................ 28
2.2.3. Campos magnéticos .......................................................................................... 28
2.3. CLASSIFICAÇÃO DOS MATERIAIS EM RELAÇÃO AO COMPORTAMENTO
MAGNÉTICO .................................................................................................................. 30
2.3.1. Diamagnetismo ................................................................................................... 31
2.3.2. Paramagnetismo ................................................................................................ 31
2.3.3. Ferromagnetismo ............................................................................................... 32
2.3.4. Antiferromagnetismo ......................................................................................... 34
2.3.5. Ferrimagnetismo ................................................................................................ 34
2.4. TEMPERATURA E MAGNETISMO ........................................................................ 34
2.5. HISTERESE MAGNÉTICA ...................................................................................... 35
2.6. IMÃS........................................................................................................................ 37
2.7. EFEITO HALL ......................................................................................................... 39
3. METODOLOGIA ........................................................................................................ 41
4. DEFINIÇÃO DO HARDWARE A SER UTILIZADO ................................................... 43
4.1. 3D MAGNETIC SENSOR 2 GO KIT ........................................................................ 43
4.2. SENSOR MAGNÉTICO TLV493D–A1B6 ................................................................ 44
5. JOYSTICK ................................................................................................................. 46
5.1. REQUISITOS MECÂNICOS DO JOYSTICK ........................................................... 46
5.2. MAPA MAGNÉTICO................................................................................................ 46
5.3. DESENVOLVIMENTO DO JOYSTICK .................................................................... 48
5.4. EQUACIONAMENTO DA INCLINAÇÃO E ROTAÇÃO DO JOYSTICK .................. 52
5.5. ESTABILIDADE DO EQUACIONAMENTO ............................................................. 58
6. HARDWARE E FIRMWARE ...................................................................................... 60
6.1. REQUISITOS DE FUNCIONAMENTO DO HARDWARE E FIRMWARE ................ 60
6.2. DESENVOLVIMENTO DO FIRMWARE .................................................................. 60
6.3. FREQUÊNCIA MÁXIMA DE OPERAÇÃO DO FIRMWARE .................................... 63
7. SOFTWARE ............................................................................................................... 65
7.1. REQUISITOS DE FUNCIONAMENTO DO SOFTWARE ........................................ 65
7.2. DESENVOLVIMENTO DO SOFTWARE ................................................................. 65
7.2.1. Aba Configuração .............................................................................................. 67
7.2.2. Aba Visualização dos dados ............................................................................. 69
7.2.3. Aba Mapa ............................................................................................................ 70
7.2.4. Aba Jogo ............................................................................................................. 73
7.2.5. Aba Versus .......................................................................................................... 74
7.2.6. Aba Visualizador de foto panorâmica............................................................... 76
7.3. FREQUÊNCIA MÁXIMA DE OPERAÇÃO DO SOFTWARE ................................... 77
8. RESULTADOS ........................................................................................................... 86
9. CONCLUSÕES .......................................................................................................... 88
REFERÊNCIAS BIBLIOGRÁFICAS .............................................................................. 91
23
1. INTRODUÇÃO
A exemplo de outras áreas do conhecimento, a eletrônica está limitada pelas
tecnologias disponíveis em sua época. Essas tecnologias têm avançado
exponencialmente e hoje em dia a eletrônica está presente em quase todas as áreas e
aplicações imagináveis, como por exemplo aplicações biomédicas, agrícolas,
telecomunicações, dentre outras.
A aplicação de dispositivos magnéticos tem se mostrado uma área
promissora para pesquisa e desenvolvimento de sistemas eletrônicos, tanto em
hardware quanto em software. Atualmente, muitos equipamentos são compostos por
centenas de sistemas eletrônicos os quais vão desde estruturas simples como
aquecedores elétricos, até aquelas bastante complexas, como é o caso dos sistemas
de controle de aeronaves. Uma parcela destes sistemas são controlados pelo usuário
através de diversos botões, sendo que muitos ainda utilizam contatos mecânicos ou
mecanismos que podem ser otimizados.
Apesar de confiáveis e de projeto e funcionamento de baixa complexidade,
os sistemas constituídos por contatos mecânicos geralmente apresentam problemas
com o passar do tempo, sendo grande parte deles devido a desgastes e à inserção em
ambientes não controlados (poeira, temperatura, etc.). Desta forma, os sistemas
magnéticos vêm se mostrando uma alternativa interessante como solução para estes
problemas.
1.1. JUSTIFICATIVA
Os sistemas magnéticos vêm ganhando espaço em diversos setores, os
quais uma de suas aplicações é a substituição de botões e sensores mecânicos por
sistemas que utilizam apenas a variação do campo magnético para detectar mudanças
de posição e orientação. Estes sistemas possuem diversas vantagens, como:
a) Não sofrem grandes alterações com variação de temperatura;
24
b) Eficiente em ambientes com sujeira, vibração e umidade;
c) Pequenos e fáceis de miniaturizar (NIARCHOS, 2003);
d) Baixo custo de produção;
e) Alta resolução (FERT, 2008);
f) Baixo consumo de energia;
g) Vida útil de até 10 anos (C. P. O., 2001).
Devido a isto, os sistemas magnéticos tem sido alvo de estudo em diversas
empresas, bem como em centros de pesquisa em tecnologia.
1.2. OBJETIVO GERAL
O presente trabalho de conclusão de curso visa o desenvolvimento de um
joystick magnético de dois eixos (movimento linear em um eixo e rotação) e também o
desenvolvimento de um software para demonstração de funcionamento em uma
plataforma com sistema operacional Windows. Será utilizada uma placa de
desenvolvimento “3D Magnetic Sensor 2Go” fabricada pela Infineon Technologies
(Figura 1), a qual possui um microcontrolador ARM Cortex-M0. Também serão
utilizados imãs, sensores magnéticos e uma estrutura mecânica que possibilite a
movimentação do joystick nos eixos desejados.
Figura 1 – Placa de desenvolvimento 3D Magnetic Sensor 2Go.
Fonte: Infineon Technologies (2017).
25
1.2.1. Objetivos Específicos
Os objetivos específicos que compreendem este projeto podem ser divididos
em duas linhas de trabalho:
a) Hardware:
a. Realizar a leitura periódica de um sensor magnético de 3 eixos
(x,y,z);
b. Enviar os dados aferidos por uma interface serial;
c. Enviar e interpretar dados recebidos de um software.
b) Software de demonstração:
a. Deverá ser capaz de enviar dados para o hardware;
b. Interpretar os dados recebidos e determinar a posição do joystick
com base nos mesmos;
c. Apresentar os dados recebidos em forma gráfica para melhor
visualização dos mesmos;
d. Deverá conter aplicações a serem controladas pelo joystick.
1.2.2. Objetivos Adicionais
O desenvolvimento de uma estrutura mecânica também faz parte do projeto
como um objetivo adicional. A estrutura deverá permitir a movimentação de um imã
fixado em um joystick, sendo os ângulos de movimentação e distâncias em relação ao
sensor definidos pela equipe de projeto.
26
2. FUNDAMENTAÇÃO TEÓRICA
2.1. MAGNETISMO
Magnetismo é um fenômeno no qual materiais são atraídos, repelidos ou
influenciados por outros materiais devido a campos magnéticos, os quais surgem com o
movimento de cargas elétricas. Este movimento pode ocorrer de diversas formas, como
por exemplo correntes elétricas em um condutor ou até mesmo o movimento orbital de
um elétron. Este fenômeno também pode ser associado com partículas elementares,
como o elétron, os quais possuem uma propriedade chamada spin (ENCYCLOPÆDIA
BRITANNICA, Magnetism, 2017).
Muito se discute a respeito da descoberta do magnetismo, tal que não se
pode afirmar uma data exata sobre a descoberta de tal fenômeno. Porém, no mundo
antigo, percebeu-se um comportamento peculiar em Lodestones, pedaços do mineral
magnetita naturalmente magnetizados, os quais eram capazes de atrair ferro (DU
TRÉMOLET DE LACHEISSERIE, 2005). Um dos relatos mais antigos sobre
magnetismo na literatura é datado no século 1 depois de Cristo, na China antiga, cujo
nome “A lodestone attracts a needle” faz referência a atração sofrida entre uma agulha
e uma lodestone.
2.1.1. Eletromagnetismo
Durante muito tempo a eletricidade e o magnetismo foram interpretados
como forças completamente distintas. A interligação entre estes dois fenômenos se deu
a partir de uma descoberta acidental, em 1819 por Hans Christian Ørsted, o qual
percebeu a movimentação da agulha de uma bússola quando próxima a um condutor
percorrido por uma corrente elétrica. Este experimento é conhecido até hoje como
experimento de Ørsted.
27
Após tal descoberta, diversos outros experimentos ocorreram em seguida,
sendo muitos deles realizados por cientistas renomados, como André-Marie Ampère,
Carl Friedrich Gauss, Jean-Baptiste Biot and Félix Savart. Porém, uma das descobertas
mais importantes foi realizada por Michael Faraday, um físico inglês, o qual concluiu em
um de seus trabalhos que a variação de um campo magnético produz um campo
elétrico. Esta descoberta é muito importante ainda nos dias atuais, pois é a base de
muitos sistemas geradores de energia.
Por fim, James Clerk Maxwell, um físico escocês, sintetizou as equações que
regem o eletromagnetismo atualmente, conhecidas como equações de Maxwell. Estas
equações unem eletricidade, magnetismo e óptica em um único fenômeno chamado
eletromagnetismo.
2.2. CONCEITOS BÁSICOS
Para uma melhor compreensão deste trabalho, alguns conceitos básicos
sobre magnetismo devem ser compreendidos, os quais serão apresentados a seguir.
2.2.1. Dipolo magnético
Dipolos magnéticos podem ser interpretados como pequenos imãs
compostos por dois polos, norte e sul. É importante ressaltar que até hoje não foi
comprovada a existência de um monopolo magnético, ou seja, os mesmos sempre
serão compostos por dois polos.
Na presença de um campo magnético, os dipolos sofrem uma força
ocasionando a tendência de orientação dos mesmos de acordo com as linhas de
campo.
28
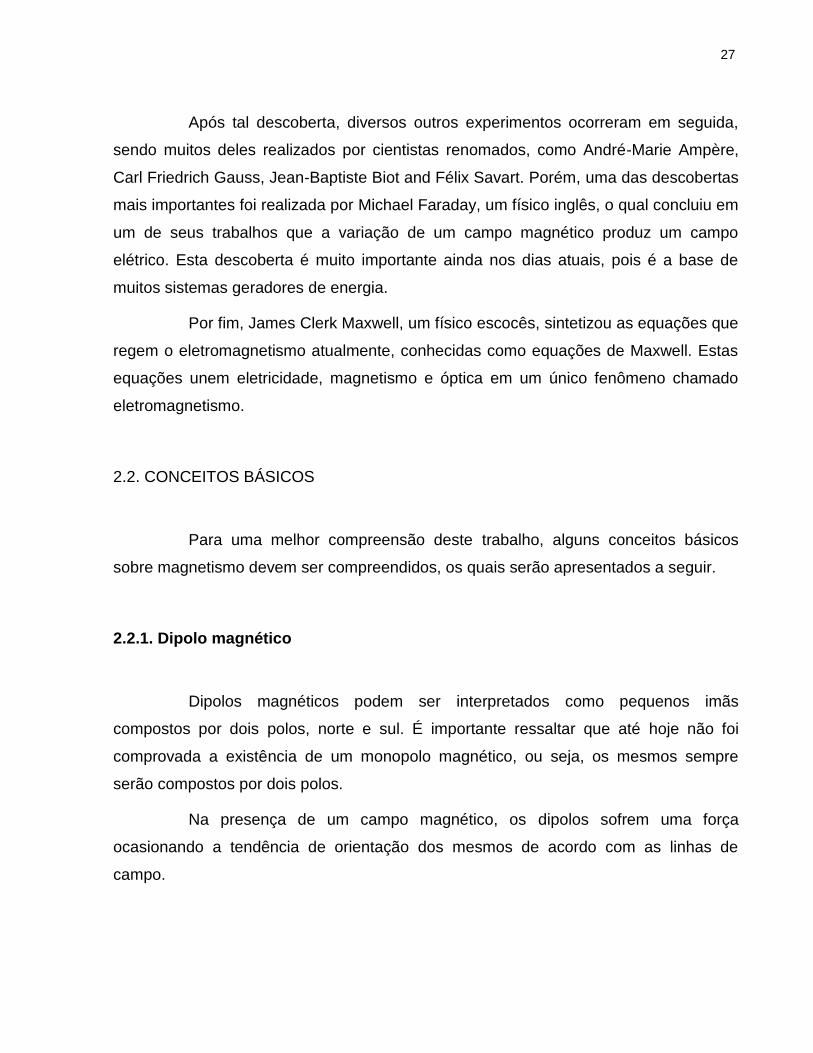
2.2.2. Domínios magnéticos
Domínios são regiões de um material magnético em que há o alinhamento
dos dipolos magnéticos que o compõe. Um material pode conter vários domínios e
pode-se afirmar que cada domínio tem sua magnetização saturada, pois todos os
dipolos estão alinhados. As regiões que separam os domínios são chamadas fronteiras
ou bordas, cujo alinhamento dos dipolos ocorre de forma gradual. A representação de
uma fronteira pode ser visualizada na figura 2.
Figura 2 - Fronteira entre domínios.
Fonte: Modificado de CALLISTER (2007).
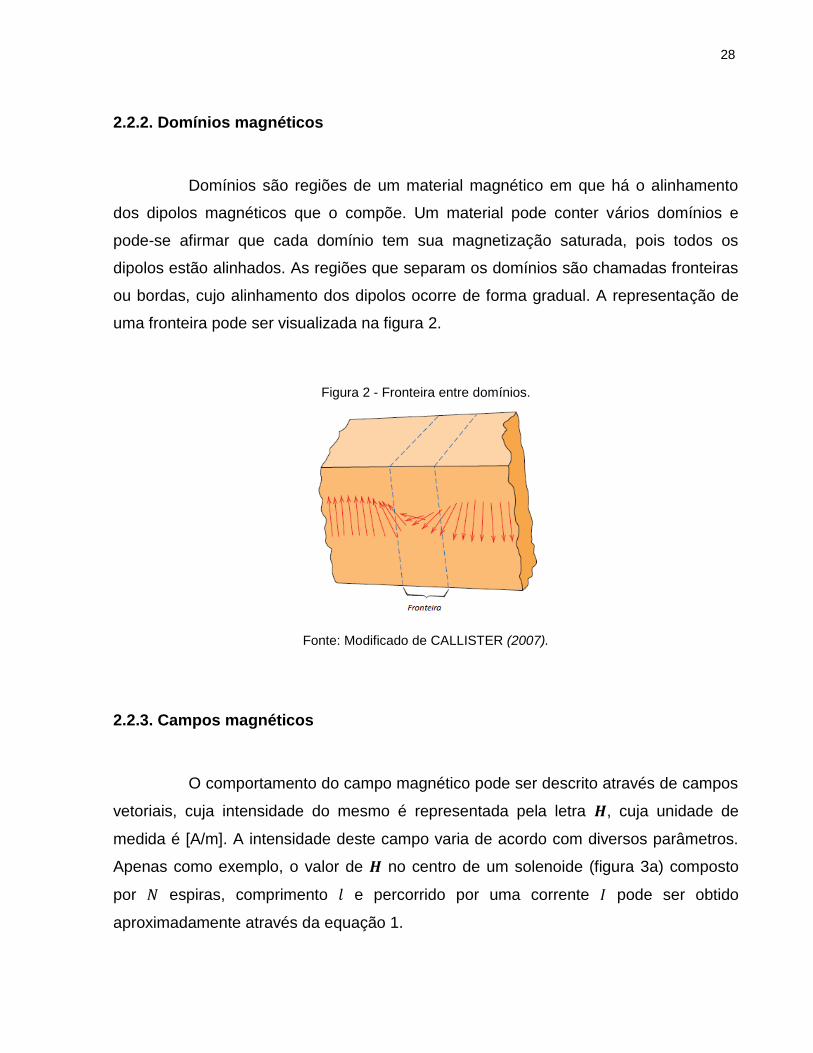
2.2.3. Campos magnéticos
O comportamento do campo magnético pode ser descrito através de campos
vetoriais, cuja intensidade do mesmo é representada pela letra 𝑯, cuja unidade de
medida é [A/m]. A intensidade deste campo varia de acordo com diversos parâmetros.
Apenas como exemplo, o valor de 𝑯 no centro de um solenoide (figura 3a) composto
por 𝑁 espiras, comprimento 𝑙 e percorrido por uma corrente 𝐼 pode ser obtido
aproximadamente através da equação 1.
29
𝑯 =𝑁𝑰
𝑙 [
𝐴
𝑚 ] (1)
Figura 3 - Campo em um solenoide sem (a) e com (b) núcleo.
(a) (b)
Fonte: CALLISTER (2007).
Na Figura 3 nota-se também uma grandeza representada pela letra 𝑩,
denominada densidade de fluxo magnético ou indução magnética. O parâmetro que
relaciona estas duas grandezas é chamado permeabilidade magnética sendo
representado pela letra 𝜇 e seu valor depende do material do núcleo, como pode ser
visualzado na figura 3b. A relação entre estas duas grandezas pode ser visualizada na
equação 2.
𝑩 = 𝜇𝑯 [𝑊𝑏
𝑚² 𝑜𝑢 𝑇] (2)
Em alguns casos, é interessante expressar a permeabilidade do material com
relação a permeabilidade do vácuo (𝜇0 = 4𝜋 ∙ 10−7[𝐻 𝑚⁄ ]), cuja grandeza é chamada
de permeabilidade relativa e pode ser obtida através da equação 3.
𝜇𝑟 =𝜇
𝜇0 (3)

30
A permeabilidade (ou permeabilidade relativa) de um material é uma
grandeza que representa o grau em que um material pode ser magnetizado ou como a
densidade de fluxo pode ser alterada na presença de um campo externo 𝑯.
Um outro parâmetro importante é chamado magnetização (𝑴), o qual
representa o comportamento do campo magnético ao redor do material. Este parâmetro
pode ser obtido com auxílio da equação 4.
𝑩 = 𝜇0𝑯 + 𝜇0𝑴 (4)
Uma outra forma de calcular a magnetização se dá através da
susceptibilidade magnética, conforme pode ser visualizado na equação 5.
𝑴 = 𝑋𝑚𝑯 [𝑨
𝒎] (5)
Onde 𝑋𝑚 pode ser obtido utilizando a equação 6.
𝑋𝑚 = 𝜇𝑟 − 1 (6)
Além das grandezas mencionadas anteriormente, uma característica
importante dos materiais magnéticos é chamada de coercividade. Esta propriedade diz
respeito a capacidade de um material ferromagnético manter sua magnetização quando
inserido em um campo magnético externo (CALLISTER, 2007).
2.3. CLASSIFICAÇÃO DOS MATERIAIS EM RELAÇÃO AO COMPORTAMENTO
MAGNÉTICO
Em relação ao comportamento magnético, existem diversas classificações
entre os materiais, cada qual com suas características quando submetidos a um campo
magnético. As principais classificações destes materiais são: diamagnéticos,

31
paramagnéticos, ferromagnéticos, antiferromagnéticos e ferrimagnéticos. A seguir serão
apresentadas as classificações mencionadas e suas respectivas características.
2.3.1. Diamagnetismo
Os elementos diamagnéticos são aqueles que apresentam comportamento
magnético praticamente nulo, podendo ser considerados elementos não magnéticos.
Quando inseridos em um campo magnético, apresentam uma força oposta ao campo,
porém de intensidade muito pequena, mesmo em campos magnéticos bastante
elevados (CALLISTER, 2007).
Este tipo de material não apresenta dipolos magnéticos quando não há
presença de campo (figura 4a) e dipolos alinhados de forma oposta ao campo quando
inserido no mesmo (figura 4b).
Figura 4 - Material diamagnético sem (a) e na presença de campo magnético (b).
(a) (b)
Fonte: Modificado de CALLISTER (2007).
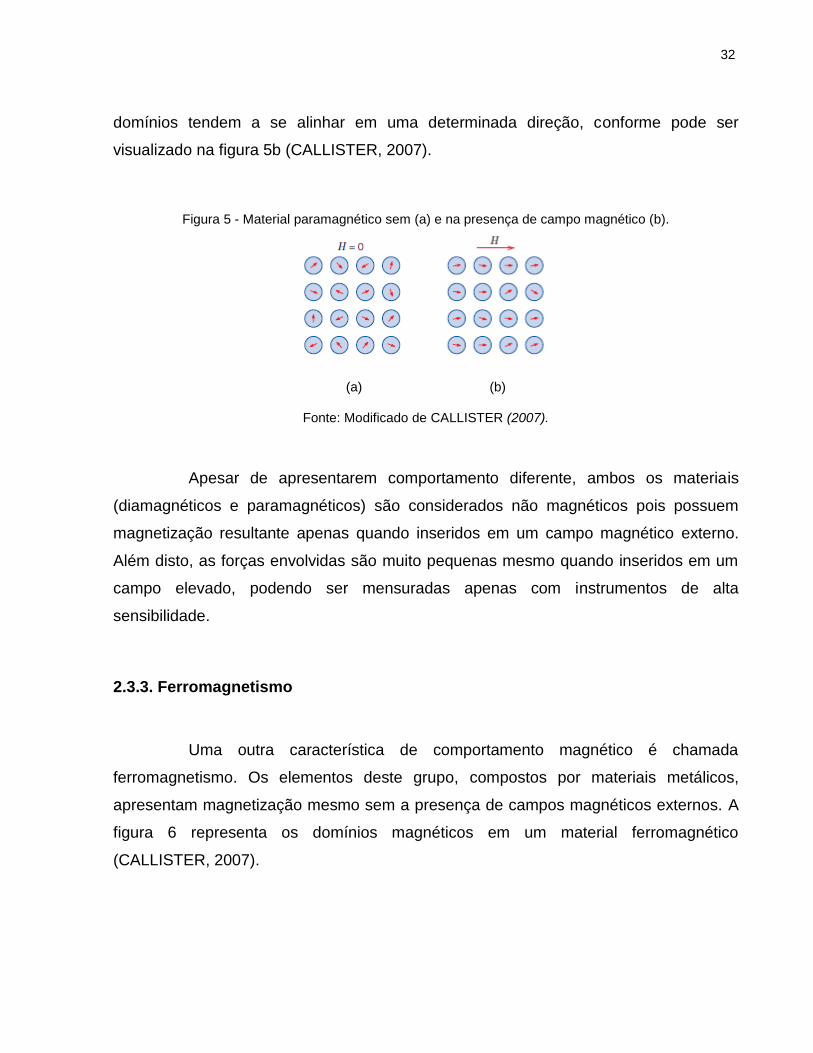
2.3.2. Paramagnetismo
Os elementos paramagnéticos são elementos que possuem domínios
magnéticos desalinhados (de forma aleatória) quando não estão inseridos em um
campo magnético (figura 5a). Porém, quando inseridos em um campo magnético, estes
32
domínios tendem a se alinhar em uma determinada direção, conforme pode ser
visualizado na figura 5b (CALLISTER, 2007).
Figura 5 - Material paramagnético sem (a) e na presença de campo magnético (b).
(a) (b)
Fonte: Modificado de CALLISTER (2007).
Apesar de apresentarem comportamento diferente, ambos os materiais
(diamagnéticos e paramagnéticos) são considerados não magnéticos pois possuem
magnetização resultante apenas quando inseridos em um campo magnético externo.
Além disto, as forças envolvidas são muito pequenas mesmo quando inseridos em um
campo elevado, podendo ser mensuradas apenas com instrumentos de alta
sensibilidade.
2.3.3. Ferromagnetismo
Uma outra característica de comportamento magnético é chamada
ferromagnetismo. Os elementos deste grupo, compostos por materiais metálicos,
apresentam magnetização mesmo sem a presença de campos magnéticos externos. A
figura 6 representa os domínios magnéticos em um material ferromagnético
(CALLISTER, 2007).
33
Figura 6 - Material ferromagnético.
Fonte: CALLISTER (2007).
Neste tipo de material, o momento magnético dos átomos e íons adjacentes
se influenciam de forma com que haja a tendência de alinhamento mesmo sem a
presença de um campo externo. Quando todos os domínios magnéticos do material
estão alinhados, ocorre a chamada saturação magnética (𝑀𝑠), o que também significa a
saturação na densidade de fluxo magnético (𝐵𝑠).
Este tipo de material é certamente o mais importante em relação ao
magnetismo, pois é o único tipo de material que é capaz de criar forças suficientemente
grandes quando submetidos a um campo magnético. Além disso, grande parte dos
imãs são construídos com este tipo de material, os quais ainda podem ser classificados
em duas categorias: mole (soft) e duro (hard).
2.3.3.1. Materiais magnéticos do tipo mole (soft)
Os materiais ferromagnéticos ou ferrimagnéticos classificados como mole,
são aqueles nos quais é possível alcançar a saturação magnética com a aplicação de
um campo magnético de baixa intensidade, e, consequentemente, com menor perda de
energia. Devido a estas características o material é facilmente magnetizado e
desmagnetizado, porém não consegue alcançar grandes níveis de magnetização. Além
disso, os materiais moles tendem a perder sua magnetização facilmente.
34
2.3.3.2. Materiais magnéticos do tipo duro (hard)
Ao contrário dos materiais moles, os materiais duros são utilizados para a
construção de imãs permanentes devido à alta capacidade de reter sua magnetização,
conseguindo alcançar altos valores de magnetização. Porém, o processo de
magnetização e desmagnetização envolve um maior gasto de energia.
2.3.4. Antiferromagnetismo
Os materiais antiferromagnéticos, assim como os ferromagnéticos, também
apresentam o comportamento em que os domínios magnéticos são influenciados por si
próprios, porém, estes tendem a se alinhar de forma antiparalela. Devido a este tipo de
alinhamento, a magnetização resultante nestes materiais é nula (CALLISTER, 2007).
2.3.5. Ferrimagnetismo
Alguns materiais cerâmicos possuem magnetização permanente, assim
como os elementos ferromagnéticos. Este grupo de materiais é chamado de
ferrimagnético.
Apesar de apresentar domínios alinhados, a saturação magnética não será
tão intensa quanto nos elementos ferromagnéticos. Contudo, elementos cerâmicos são
ótimos isolantes elétricos, o que os tornam interessantes para diversas aplicações
(CALLISTER, 2007).
2.4. TEMPERATURA E MAGNETISMO
O aumento da temperatura em objetos sólidos faz com que haja uma maior
agitação nas moléculas que o compõe. Desta forma, o aquecimento de materiais

35
ferromagnéticos, antiferromagnéticos e ferrimagnéticos acarreta na diminuição da
saturação magnética do material devido a maior facilidade de desalinhamento dos
domínios magnéticos, já que os mesmos possuem uma maior energia de vibração.
Com relação a temperatura, dois pontos são importantes no comportamento
magnético. A saturação magnética é máxima na temperatura de 0 K, pois a energia e
consequentemente a vibração das moléculas é mínima. O oposto deste efeito ocorre na
chamada temperatura de Curie (𝑇𝑐), quando a magnetização diminui drásticamente
chegando a 0. Nesta temperatura, os materiais ferromagnéticos e ferrimagnéticos
apresentam comportamento paramagnético.
O comportamento dos elementos antiferromagnéticos também é afetado pela
temperatura. Quando submetidos a temperaturas superiores a temperatura de Néel,
estes elementos passam a apresentar comportamento paramagnético (CALLISTER,
2007).
A intensidade da magnetização resultante (𝑴) está diretamente relacionada
aos domínios de um material, tal que a mesma pode ser obtida através da soma vetorial
da magnetização de todos os domínios, ponderadas pelo devido volume em relação ao
sólido (CALLISTER, 2007).
2.5. HISTERESE MAGNÉTICA
Um comportamento importante em materiais ferromagnéticos e
ferrimagnéticos é o fato de que a relação entre a densidade de fluxo (𝑩) e o campo
magnético (𝑯) não é linear. Estas duas grandezas possuem relação direta com a
permeabilidade magnética (µ) através da equação 4, porém, a mesma varia de acordo
com a magnetização do material. Além disso, as curvas de magnetização e
desmagnetização não são as mesmas, gerando assim a chamada histerese magnética,
a qual pode ser visualizada na figura 7.
36
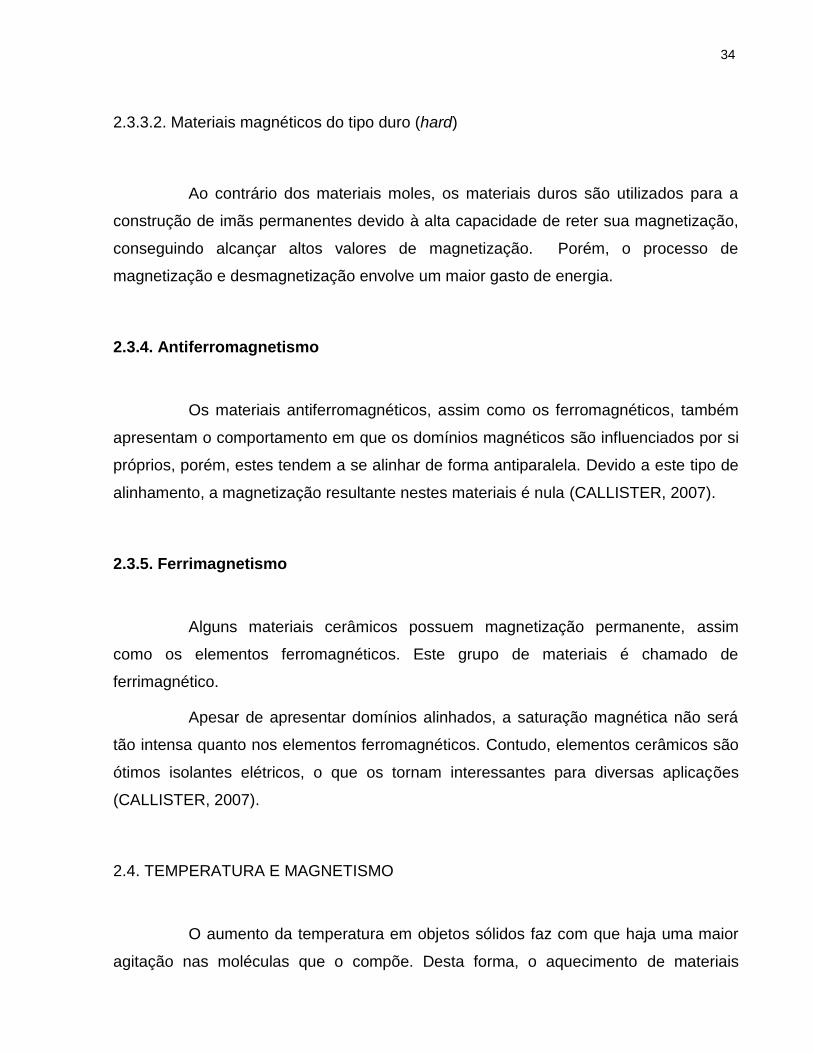
Figura 7 – Curva típica de histerese magnética.
Fonte: Modificado de CALLISTER (2007).
Uma análise da figura 7 permite concluir que o aumento do campo magnético
(𝑯) provoca um aumento na densidade de fluxo magnético (𝑩) até o ponto
representado pela letra 𝑆, o qual representa a saturação magnética positiva do material.
O oposto também é válido, no qual o ponto 𝑆’ representa a saturação magnética
negativa do material. Além disso, pode-se notar também os pontos denotados por 𝐵𝑟 e
𝐻𝑐, respectivamente, magnetização remanescente e campo coercitivo. Quando o
campo magnético (𝑯) é retirado, ou tem valor nulo, o material permanece com uma
densidade de fluxo magnético (𝑩), cuja grandeza é chamada de magnetização
remanescente (𝐵𝑟). Em outras palavras, o material permanece magnetizado mesmo
sem a presença de um campo magnético externo. Caso seja necessário que a
densidade de fluxo magnético (𝑩) volte a ser nula, é preciso aplicar um campo
magnético com direção oposta de magnitude 𝐻𝑐, chamado campo coercitivo.
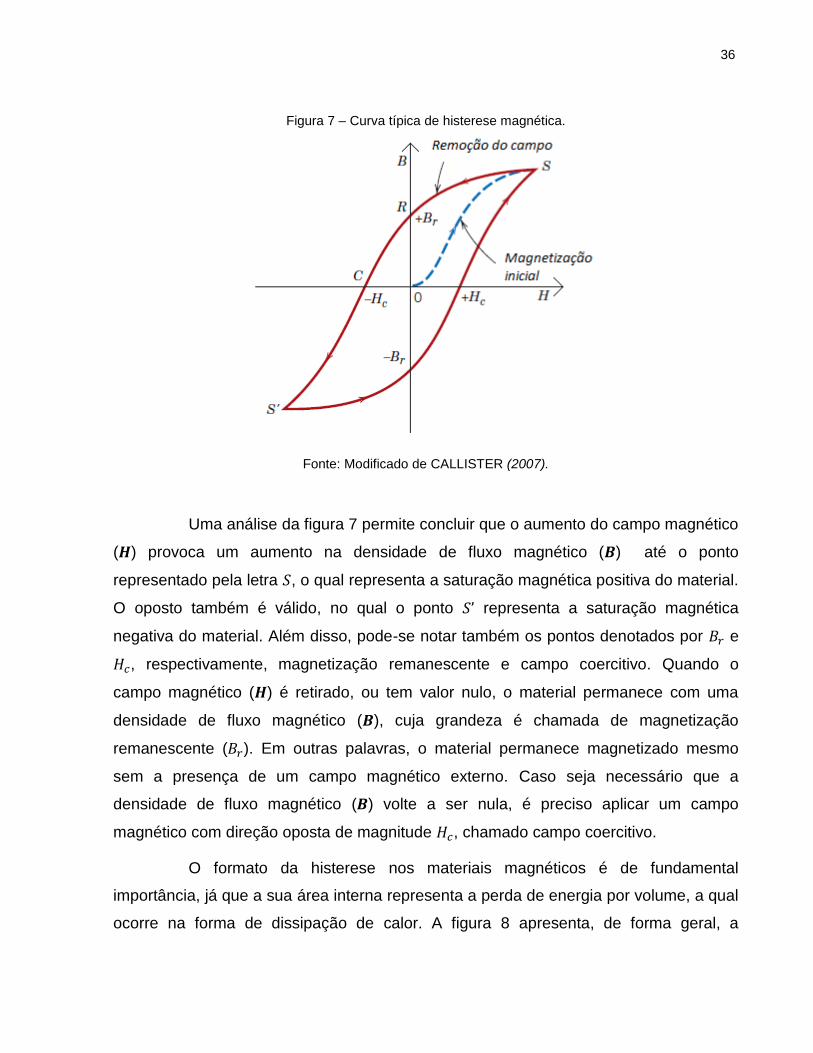
O formato da histerese nos materiais magnéticos é de fundamental
importância, já que a sua área interna representa a perda de energia por volume, a qual
ocorre na forma de dissipação de calor. A figura 8 apresenta, de forma geral, a
37
diferença entre o formato de uma histerese de um material ferromagnético do tipo duro
e do tipo mole (CALLISTER, 2007).
Figura 8 - Histerese em material ferromagnético do tipo mole e duro.
Fonte: Modificado de CALLISTER (2007).
2.6. IMÃS
Um imã é um objeto capaz de produzir campo magnético por si próprio.
Basicamente, os imãs são materiais ferromagnéticos cujos domínios magnéticos
possuem um certo tipo de orientação ou alinhamento. Quando os domínios magnéticos
de um material estão totalmente desalinhados, pode-se dizer que o material não tem
magnetização resultante, representado pela figura 9a. Já quando há uma orientação
dos domínios magnéticos, o mesmo irá apresentar o comportamento de um imã e será
constituído por dois polos, norte e sul, como podem ser visualizados na figura 9b. É
importante ressaltar que se tratando de polos magnéticos, os mesmos sempre
aparecem em pares (norte e sul).

38
Figura 9 - Domínios desorientados (a) e orientados (b).
(a) (b)
Fonte: Modificado de Virginia Commonwealth University (2017).
Um aspecto interessante nestes objetos deve-se ao fato de que o
comportamento do campo magnético produzido pelo mesmo depende de vários fatores,
sendo um deles o formato da peça. Atualmente, existem disponíveis no mercado
diversos modelos com formatos diferentes, os quais devem ser escolhidos de acordo
com a aplicação e característica desejadas. Para fins de comparação da diferença de
comportamento em relação ao formato, o campo magnético dos modelos tipo U
(ferradura) e retangular podem ser visualizados, respectivamente, nas figuras 10a e
10b.
Figura 10 - Campo magnético em imãs tipo U (a) e retangular (b).
(a) (b)
Fonte: https://www.wonkeedonkeetools.co.uk (2017).
39
2.7. EFEITO HALL
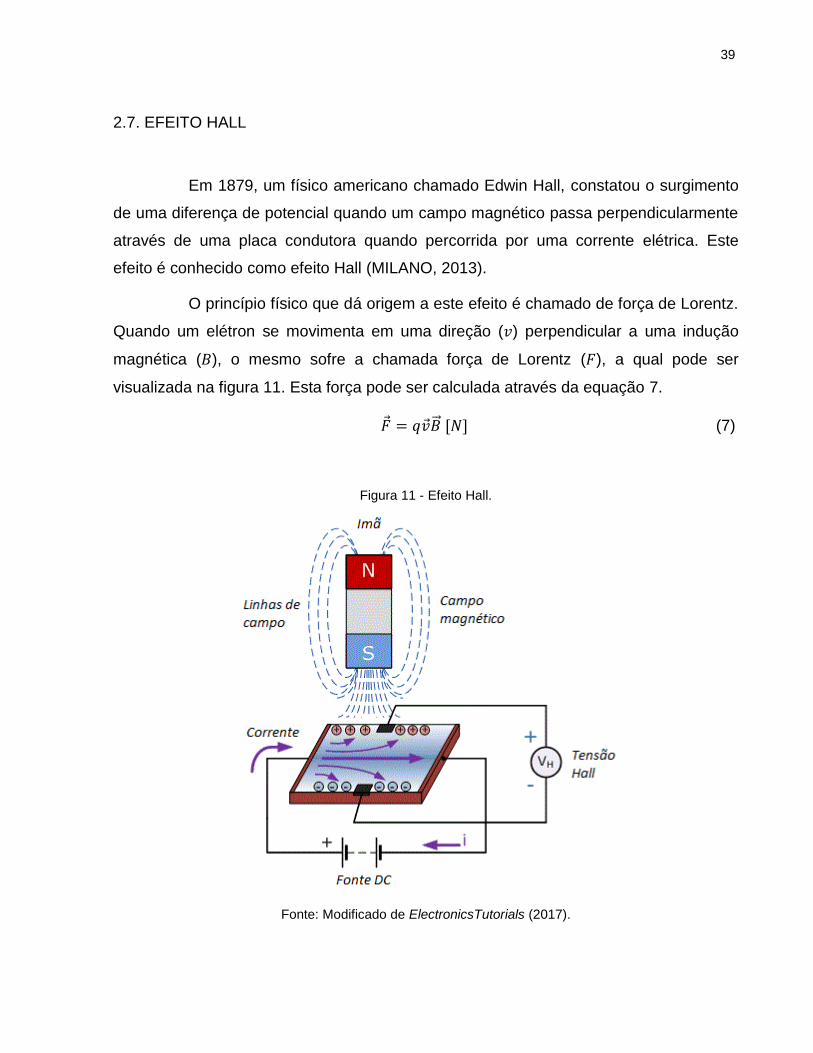
Em 1879, um físico americano chamado Edwin Hall, constatou o surgimento
de uma diferença de potencial quando um campo magnético passa perpendicularmente
através de uma placa condutora quando percorrida por uma corrente elétrica. Este
efeito é conhecido como efeito Hall (MILANO, 2013).
O princípio físico que dá origem a este efeito é chamado de força de Lorentz.
Quando um elétron se movimenta em uma direção (𝑣) perpendicular a uma indução
magnética (𝐵), o mesmo sofre a chamada força de Lorentz (𝐹), a qual pode ser
visualizada na figura 11. Esta força pode ser calculada através da equação 7.
�⃗� = 𝑞�⃗��⃗⃗� [𝑁] (7)
Figura 11 - Efeito Hall.
Fonte: Modificado de ElectronicsTutorials (2017).
40
Devido a esta força, os elétrons se movem em uma trajetória curvilínea na
superfície condutora o que resulta em uma tensão elétrica. A amplitude desta tensão
resultante (𝑉𝐻) depende da intensidade do campo magnético (𝐵⊥), corrente elétrica (𝐼),
magnitude da carga das portadoras de carga (𝑞), densidade de portadoras de carga
(𝜌𝑁) e espessura da placa (𝑡), através de:
𝑉𝐻 =𝐼𝐵⊥
𝜌𝑁𝑞𝑡 [𝑉] (8)
Atualmente existem diversos sensores disponíveis no mercado os quais se
utilizam deste princípio como forma de mensuramento de campos magnéticos, como é
o caso de muitos sensores magnéticos desenvolvidos pelas empresas Infineon, Melexis
e Allegro.
41
3. METODOLOGIA
O trabalho foi desenvolvido na empresa Carinthian Tech Research, situada
na cidade de Villach, Áustria. A empresa possui diversos setores de pesquisa e
desenvolvimento, bem como laboratórios para montagem e testes de protótipos.
A primeira etapa do projeto consistiu em uma revisão bibliográfica sobre
magnetismo, imãs e sensores magnéticos. Além disso, realizaram-se também estudos
sobre os softwares de desenvolvimento necessários para a execução do projeto. Após
esse estudo, decidiu-se pela utilização da interface DAVE™, para a programação do
firmware do microcontrolador, e pelo software Microsoft Visual Studio para a
programação do software de demonstração de funcionamento do joystick em
plataformas com sistema operacional Windows.
Subsequentemente, desenvolveu-se uma estrutura mecânica que permite a
movimentação de um imã nos entornos de um sensor magnético, cuja faixa de
movimentação é definida pelos requisitos de projeto. Para isto, fez-se necessário o
estudo do software Solid Works, o qual utilizou-se durante o desenvolvimento da
estrutura a qual posteriormente foi impressa em impressoras 3D disponíveis na
empresa.
Em seguida desenvolveu-se um firmware a ser utilizado como base, o qual
permite a comunicação entre o microcontrolador e o sensor magnético possibilitando a
leitura dos dados provenientes do sensor bem como a configuração do modo de
operação do mesmo. Além disto, o firmware desenvolvido também permite o envio e
recebimento de dados via interface serial para dispositivos externos.
Paralelamente a atividade anterior, desenvolveu-se uma interface de
utilização gráfica para dispositivos com sistema operacional Windows. A mesma deve
ser capaz de receber e enviar informações via interface serial, bem como interpretar os
dados recebidos, apresentá-los de forma visual e também realizar o controle de
aplicativos utilizando o joystick.
42
Por fim, realizaram-se ajustes finais no firmware, software e joystick de forma
a apresentar o comportamento e características desejadas.

43
4. DEFINIÇÃO DO HARDWARE A SER UTILIZADO
Dentre os diversos tipos de projetos existentes dentro da empresa Carinthian
Tech Research, o projeto referente ao joystick magnético de dois eixos foi resultado de
uma parceria com uma empresa externa, Infineon Technologies, a qual requisitou que o
mesmo fosse desenvolvido utilizando uma placa de desenvolvimento e um sensor
magnético de sua fabricação.
Desta forma, o hardware a ser utilizado para o desenvolvimento do projeto
em questão é previamente conhecido e determinado, não havendo flexibilidade de
alteração por parte dos desenvolvedores. O hardware a ser utilizado foi composto pelos
seguintes itens:
I. 3D Magnetic Sensor 2Go Kit;
II. Sensor TLV493D–A1B6 (incluso no kit de desenvolvimento);
III. Dispositivo com Sistema operacional Windows (tablet, computador,
dentre outros);
4.1. 3D MAGNETIC SENSOR 2 GO KIT
Produzido pela empresa Infineon Technologies, trata-se de um kit de
desenvolvimento compacto com foco na utilização de um sensor para mensuramento
do campo magnético (disponível na própria placa). Além do sensor, a placa conta com
dois microcontroladores, um ARM Cortex-M0 que pode ser programado pelo usuário
para se comunicar com o sensor magnético e um ARM Cortex-M4 responsável por
fazer a depuração e a comunicação USB com o computador. O kit pode ser visualizado
na figura 12.

44
Figura 12 - 3D Magnetic Sensor 2Go Kit
Fonte: Infineon Technologies (2017).
4.2. SENSOR MAGNÉTICO TLV493D–A1B6
O sensor magnético TLV493D–A1B6 é capaz de realizar medições de campo
magnético em três eixos (x, y e z) apresentando um baixo consumo de energia. Trata-
se de um sensor digital no qual se comunica com um microcontrolador através do
protocolo I²C (SANTOS, 2014). O protocolo I²C foi desenvolvido pela Philips na década
de 90, sendo o mesmo muito utilizado para conectar diversos periféricos a um
controlador, o qual utiliza apenas dois fios para a comunicação: SDA (Serial data) e
SCL (Serial clock).
O componente e seus eixos magnéticos podem ser visualizados na figura 13.
45
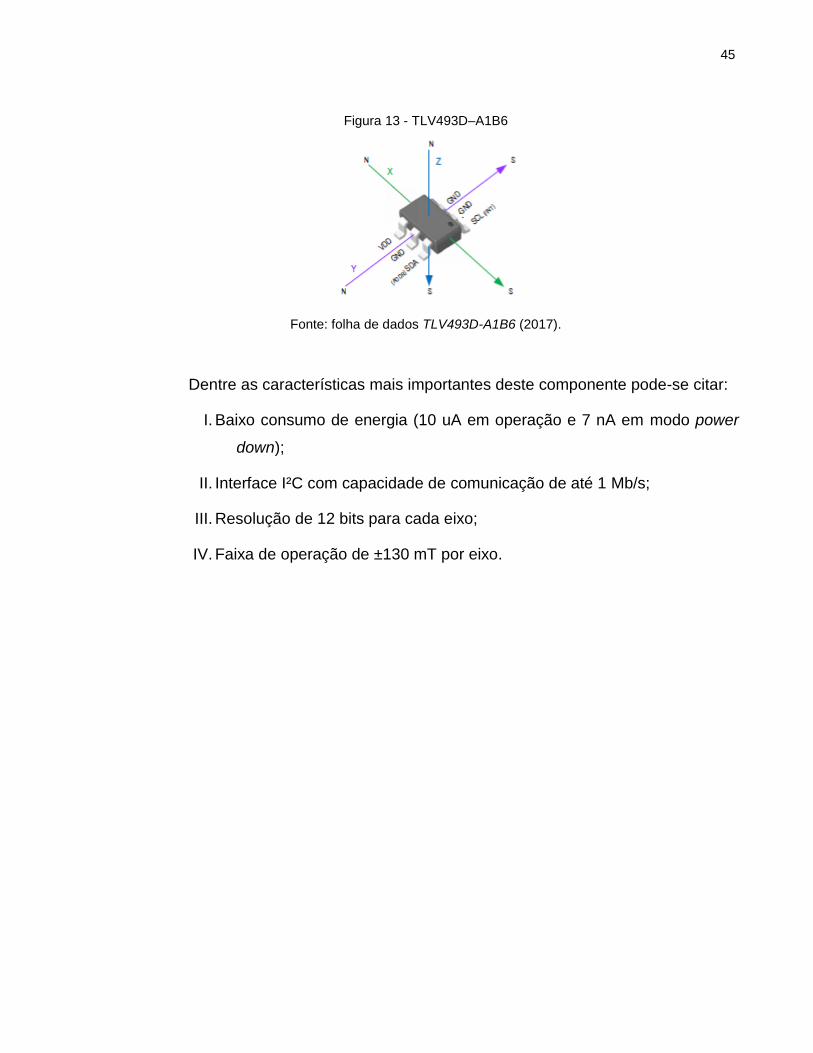
Figura 13 - TLV493D–A1B6
Fonte: folha de dados TLV493D-A1B6 (2017).
Dentre as características mais importantes deste componente pode-se citar:
I. Baixo consumo de energia (10 uA em operação e 7 nA em modo power
down);
II. Interface I²C com capacidade de comunicação de até 1 Mb/s;
III. Resolução de 12 bits para cada eixo;
IV. Faixa de operação de ±130 mT por eixo.
46
5. JOYSTICK
A presente seção tem como objetivo apresentar as etapas de
desenvolvimento do joystick.
5.1. REQUISITOS MECÂNICOS DO JOYSTICK
Apesar de aparentar ser uma das etapas mais simples do projeto, o
desenvolvimento do joystick possui como base uma teoria relativamente complexa, pois
a liberdade de movimento (ângulos, eixos e distâncias) está diretamente atrelada a uma
propriedade chamada mapa magnético, a qual será abordada na seção seguinte.
5.2. MAPA MAGNÉTICO
O mapa magnético é um dos aspectos mais importantes do projeto, pois as
equações que resultam no valor de ângulo e rotação da haste do joystick são obtidas
através da interpretação do mapa magnético. No caso, esta propriedade se refere ao
comportamento do campo magnético de cada eixo quando ocorre a movimentação do
imã, a qual está diretamente ligada a algumas grandezas, como por exemplo:
a) Posicionamento do imã em relação ao sensor;
b) Geometria do imã;
c) Magnetização do imã;
d) Liberdades e tipo de movimentação do joystick.
A pesquisa, estudo e simulação do mapa magnético foi realizada por dois
pesquisadores da equipe de projeto, os quais foram responsáveis por encontrar os
parâmetros que resultam em um mapa magnético que torna possível o mapeamento da
posição do joystick na faixa de movimentação desejada. Após a obtenção dos
47
parâmetros, realizou-se uma simulação utilizando linguagem Python de forma a
visualizar o mapa magnético desejado, o qual pode ser visualizado na figura 14.
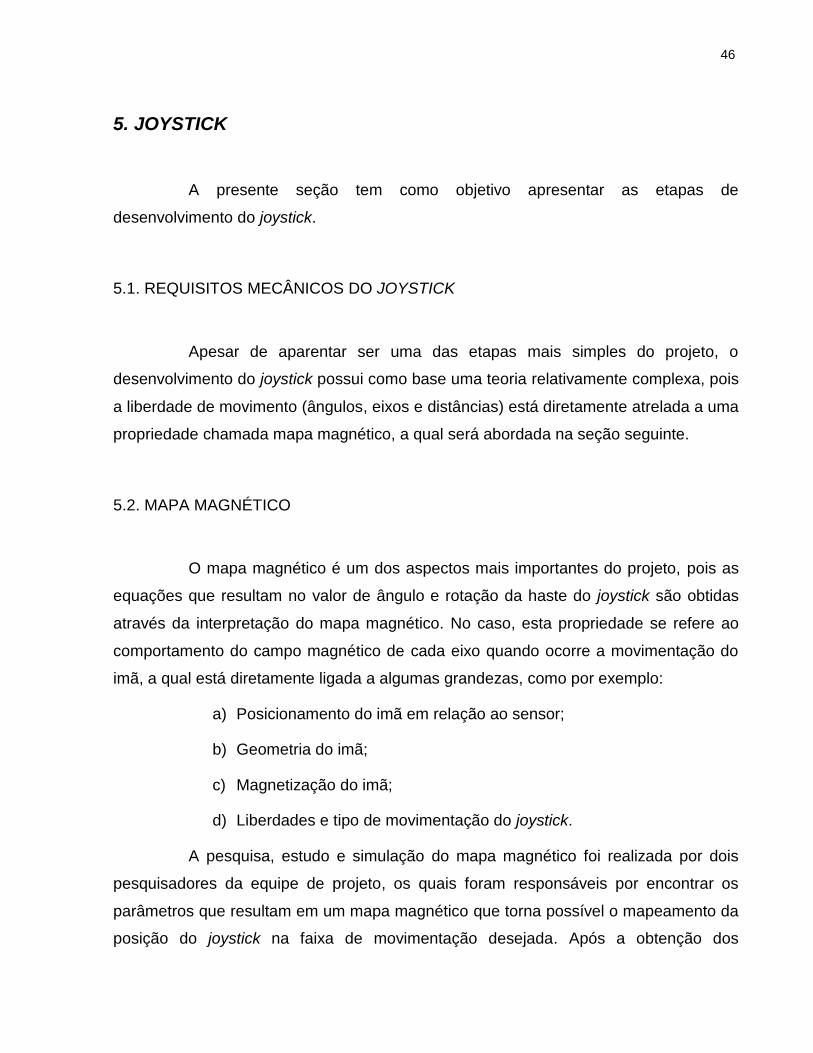
Figura 14 - Mapa magnético simulado.
Fonte: Elaborada pelo autor.
A figura 14 apresenta três gráficos, cada um deles contendo cinco curvas, os
quais representam uma relação entre duas componentes do campo magnético quando
o joystick é inclinado em um determinado ângulo e rotacionado 360 graus. No caso, a
curva externa em vermelho representa o comportamento do campo magnético quando
o joystick é inclinado 15 graus positivamente e rotacionado 360 graus. Seguindo em
direção ao centro, as curvas representam as inclinações de 7,5, 0, -7,5 e -15 graus.
Conhecendo este comportamento, é possível encontrar uma relação direta
entre a posição do joystick e os valores de campo magnético aferidos. Analisando as
curvas By por Bx apresentas na figura 14, conclui-se que as mesmas podem ser
aproximadas por elipses, as quais são descritas basicamente por três parâmetros:
coordenadas do centro, x e y. Com isto, a equipe de projeto desenvolveu
matematicamente uma equação para cálculo dos parâmetros desejados, a qual será
apresentada na seção 5.4.

48
5.3. DESENVOLVIMENTO DO JOYSTICK
Tendo conhecimento do mapa magnético desejado, deu-se início a etapa de
desenvolvimento da estrutura mecânica cuja movimentação deve respeitar os seguintes
requisitos:
a) Liberdade de inclinação em um eixo (tilt): ±15 graus;
b) Liberdade de rotação: 360 graus;
c) Distância horizontal entre o centro do imã e área sensitiva do sensor:
1,2 mm;
d) Distância vertical entre a superfície do imã e área sensitiva do sensor:
2,0 mm;
e) Dimensões do imã: 8,5 x 2,0 x 1,5 mm.
Por se tratar de um movimento relativamente complexo, o qual requer uma
movimentação precisa do imã nas proximidades do sensor, buscou-se conhecer e
estudar estruturas semelhantes disponíveis no mercado, de forma a obter
conhecimento sobre os possíveis tipos de implementação.
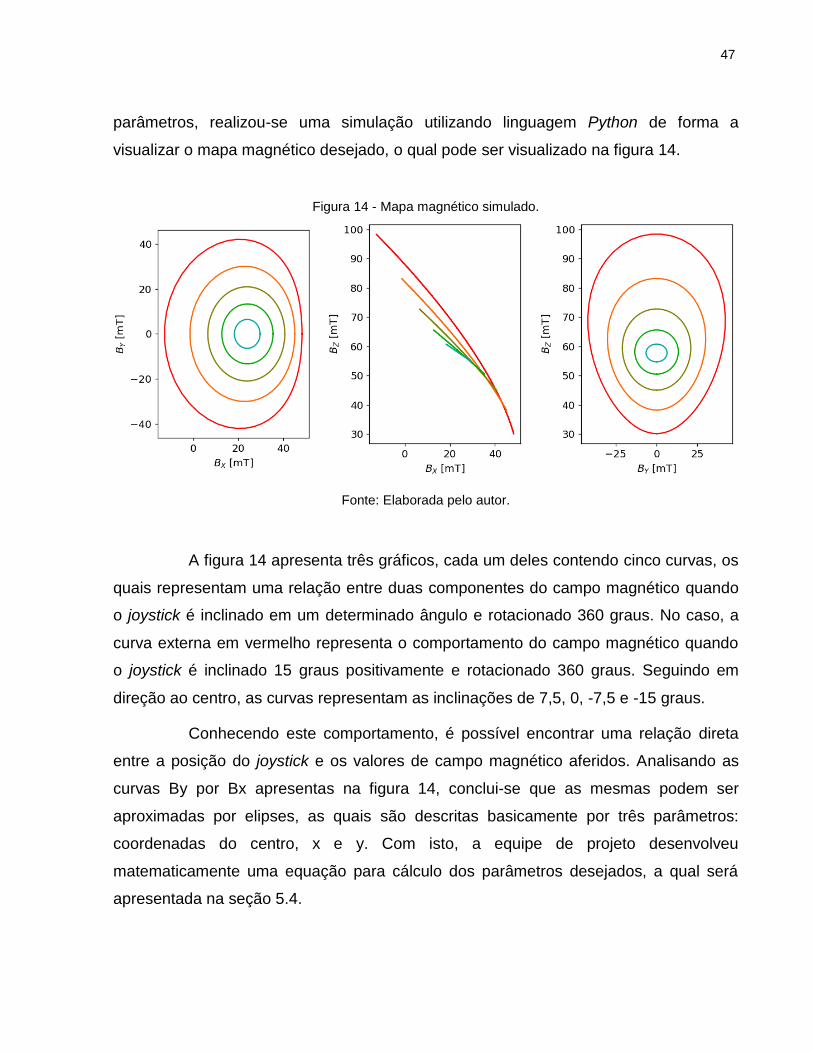
O movimento desejado é simétrico, no qual o ponto central do imã deve
permanecer sempre na mesma posição em relação ao sensor magnético, independente
da inclinação ou rotação do joystick. Desta forma, concluiu-se que a implementação
mais adequada se dá através do princípio de movimentação de uma junta esférica, a
qual pode ser visualizada na figura 15.
49
Figura 15 - Junta esférica.
Fonte: http://clipground.com.
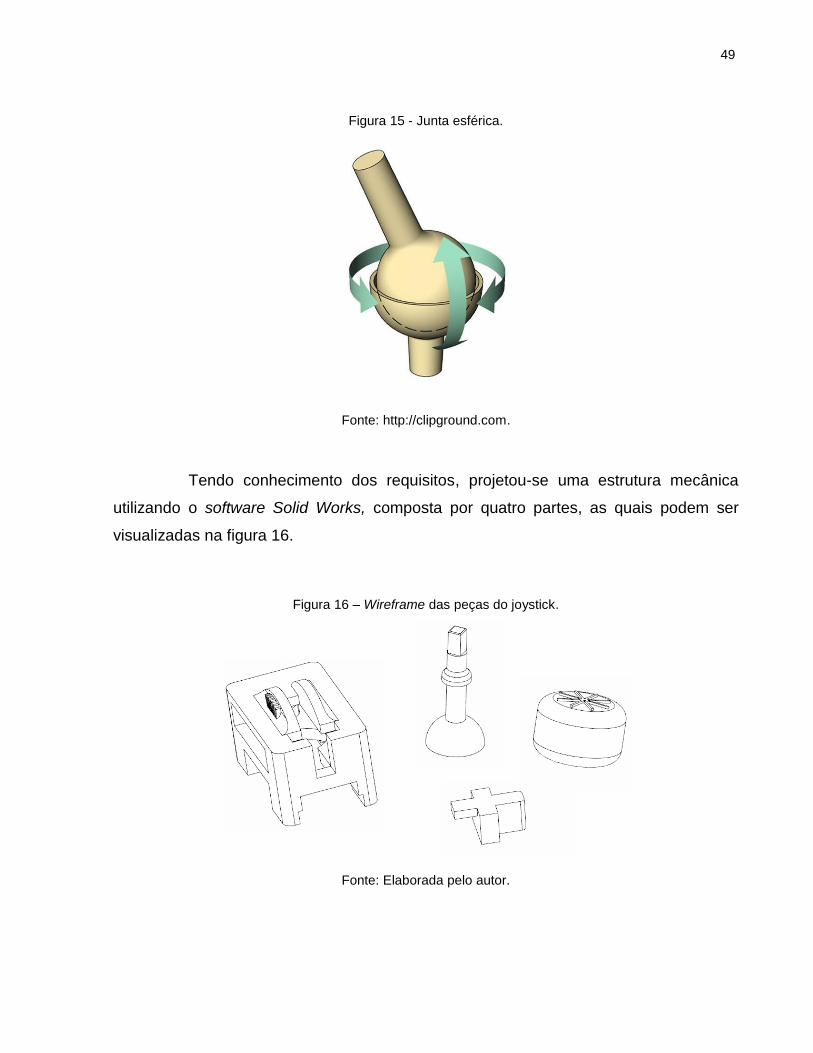
Tendo conhecimento dos requisitos, projetou-se uma estrutura mecânica
utilizando o software Solid Works, composta por quatro partes, as quais podem ser
visualizadas na figura 16.
Figura 16 – Wireframe das peças do joystick.
Fonte: Elaborada pelo autor.
50
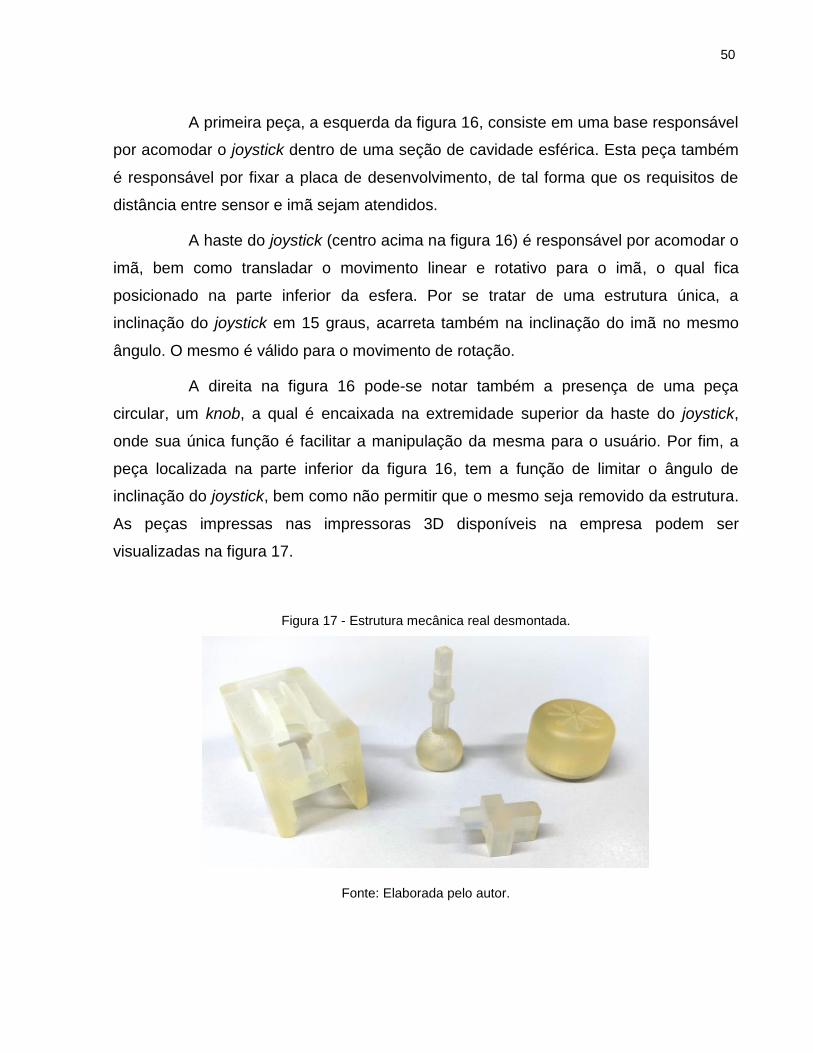
A primeira peça, a esquerda da figura 16, consiste em uma base responsável
por acomodar o joystick dentro de uma seção de cavidade esférica. Esta peça também
é responsável por fixar a placa de desenvolvimento, de tal forma que os requisitos de
distância entre sensor e imã sejam atendidos.
A haste do joystick (centro acima na figura 16) é responsável por acomodar o
imã, bem como transladar o movimento linear e rotativo para o imã, o qual fica
posicionado na parte inferior da esfera. Por se tratar de uma estrutura única, a
inclinação do joystick em 15 graus, acarreta também na inclinação do imã no mesmo
ângulo. O mesmo é válido para o movimento de rotação.
A direita na figura 16 pode-se notar também a presença de uma peça
circular, um knob, a qual é encaixada na extremidade superior da haste do joystick,
onde sua única função é facilitar a manipulação da mesma para o usuário. Por fim, a
peça localizada na parte inferior da figura 16, tem a função de limitar o ângulo de
inclinação do joystick, bem como não permitir que o mesmo seja removido da estrutura.
As peças impressas nas impressoras 3D disponíveis na empresa podem ser
visualizadas na figura 17.
Figura 17 - Estrutura mecânica real desmontada.
Fonte: Elaborada pelo autor.
51
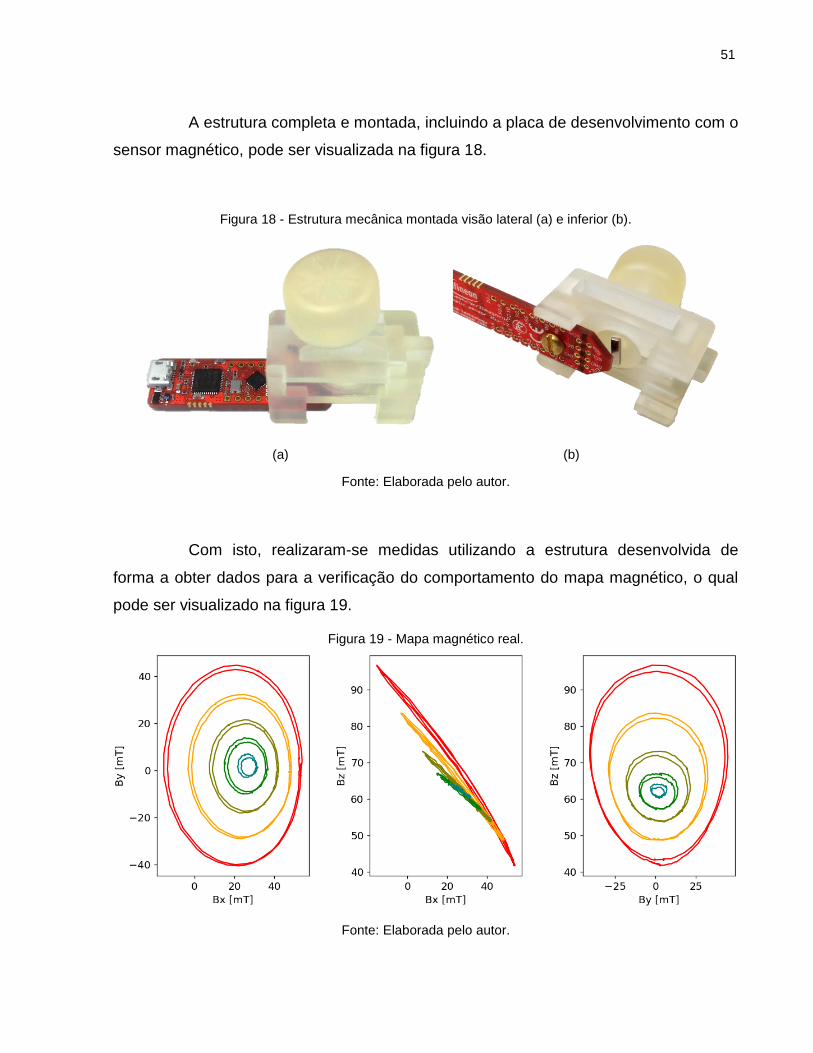
A estrutura completa e montada, incluindo a placa de desenvolvimento com o
sensor magnético, pode ser visualizada na figura 18.
Figura 18 - Estrutura mecânica montada visão lateral (a) e inferior (b).
(a) (b)
Fonte: Elaborada pelo autor.
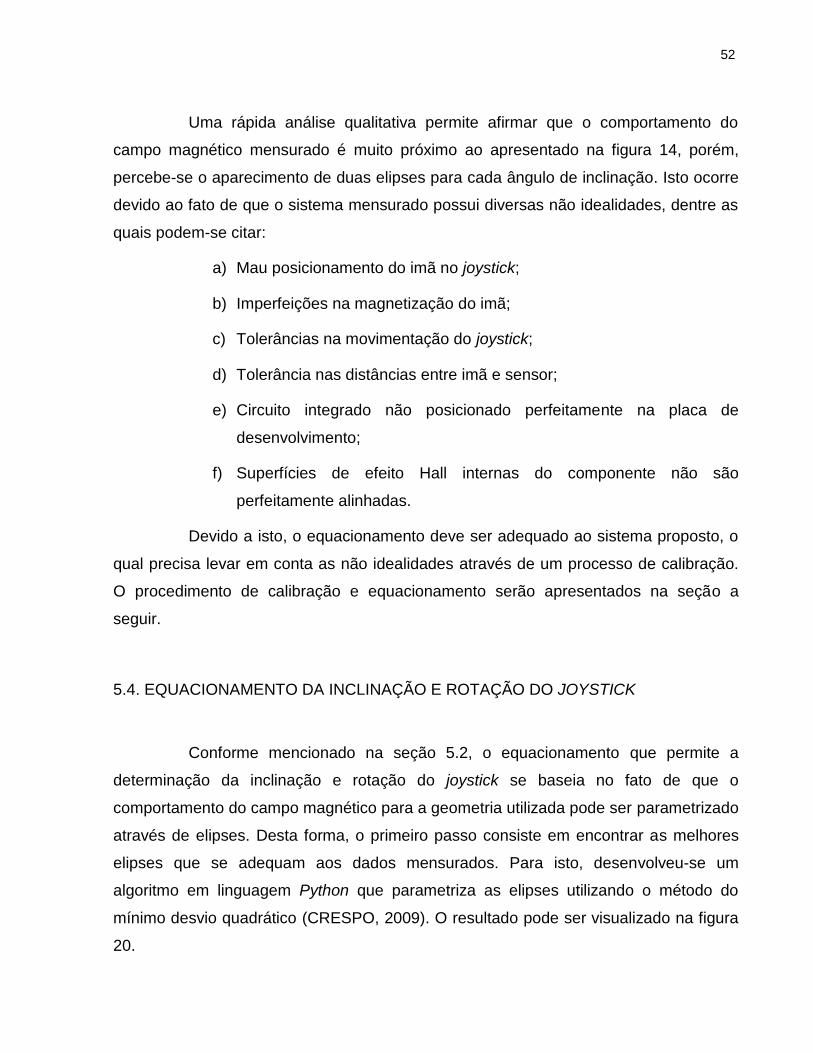
Com isto, realizaram-se medidas utilizando a estrutura desenvolvida de
forma a obter dados para a verificação do comportamento do mapa magnético, o qual
pode ser visualizado na figura 19.
Figura 19 - Mapa magnético real.
Fonte: Elaborada pelo autor.
52
Uma rápida análise qualitativa permite afirmar que o comportamento do
campo magnético mensurado é muito próximo ao apresentado na figura 14, porém,
percebe-se o aparecimento de duas elipses para cada ângulo de inclinação. Isto ocorre
devido ao fato de que o sistema mensurado possui diversas não idealidades, dentre as
quais podem-se citar:
a) Mau posicionamento do imã no joystick;
b) Imperfeições na magnetização do imã;
c) Tolerâncias na movimentação do joystick;
d) Tolerância nas distâncias entre imã e sensor;
e) Circuito integrado não posicionado perfeitamente na placa de
desenvolvimento;
f) Superfícies de efeito Hall internas do componente não são
perfeitamente alinhadas.
Devido a isto, o equacionamento deve ser adequado ao sistema proposto, o
qual precisa levar em conta as não idealidades através de um processo de calibração.
O procedimento de calibração e equacionamento serão apresentados na seção a
seguir.
5.4. EQUACIONAMENTO DA INCLINAÇÃO E ROTAÇÃO DO JOYSTICK
Conforme mencionado na seção 5.2, o equacionamento que permite a
determinação da inclinação e rotação do joystick se baseia no fato de que o
comportamento do campo magnético para a geometria utilizada pode ser parametrizado
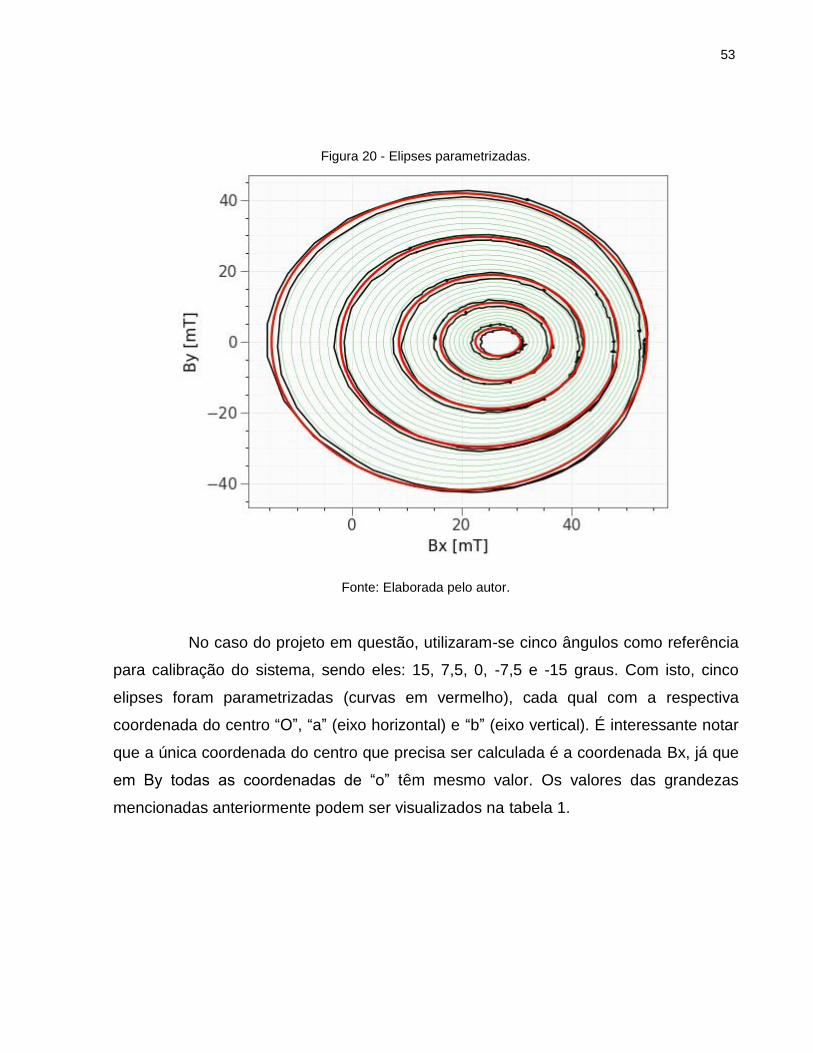
através de elipses. Desta forma, o primeiro passo consiste em encontrar as melhores
elipses que se adequam aos dados mensurados. Para isto, desenvolveu-se um
algoritmo em linguagem Python que parametriza as elipses utilizando o método do
mínimo desvio quadrático (CRESPO, 2009). O resultado pode ser visualizado na figura
20.
53
Figura 20 - Elipses parametrizadas.
Fonte: Elaborada pelo autor.
No caso do projeto em questão, utilizaram-se cinco ângulos como referência
para calibração do sistema, sendo eles: 15, 7,5, 0, -7,5 e -15 graus. Com isto, cinco
elipses foram parametrizadas (curvas em vermelho), cada qual com a respectiva
coordenada do centro “O”, “a” (eixo horizontal) e “b” (eixo vertical). É interessante notar
que a única coordenada do centro que precisa ser calculada é a coordenada Bx, já que
em By todas as coordenadas de “o” têm mesmo valor. Os valores das grandezas
mencionadas anteriormente podem ser visualizados na tabela 1.
54
Tabela 1 – Grandezas das elipses parametrizadas.
Ângulo [°] O a b
-15,0 26,69 4,00 4,16
-7,5 26,31 11,01 10,20
0 25,51 18,90 16,88
7,5 23,29 29,66 25,32
15,0 19,74 41,91 34,10
Fonte: Elaborada pelo autor.
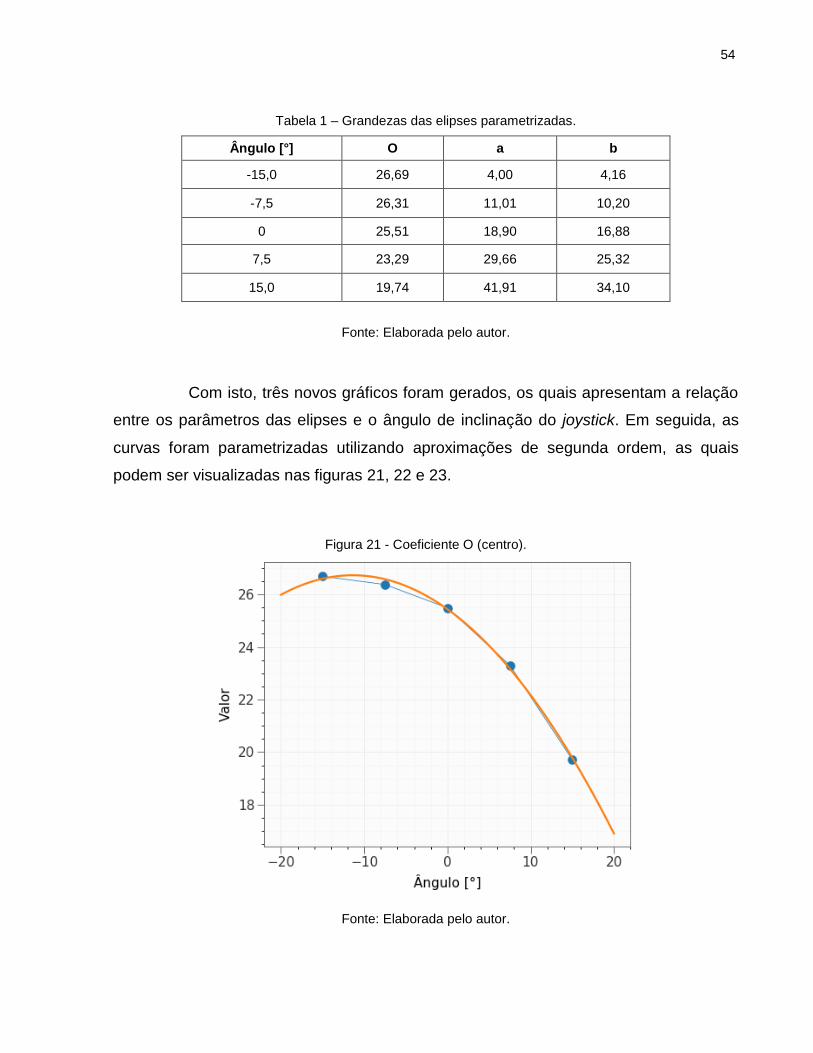
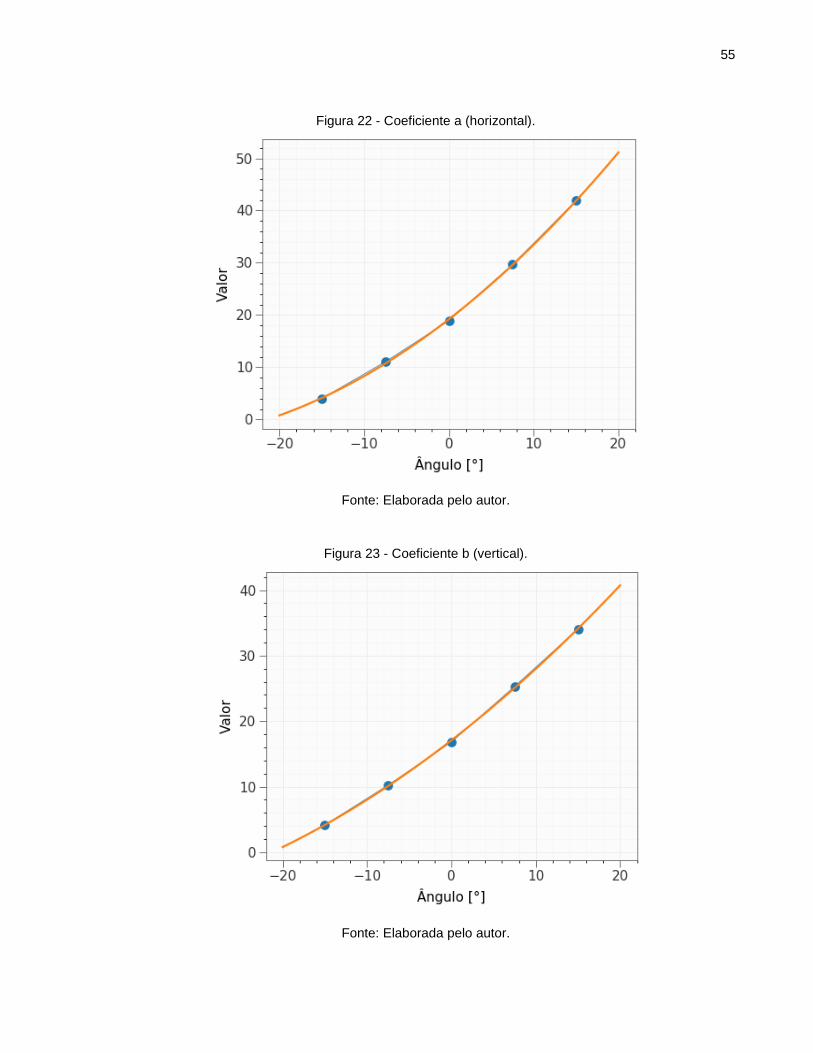
Com isto, três novos gráficos foram gerados, os quais apresentam a relação
entre os parâmetros das elipses e o ângulo de inclinação do joystick. Em seguida, as
curvas foram parametrizadas utilizando aproximações de segunda ordem, as quais
podem ser visualizadas nas figuras 21, 22 e 23.
Figura 21 - Coeficiente O (centro).
Fonte: Elaborada pelo autor.
55
Figura 22 - Coeficiente a (horizontal).
Fonte: Elaborada pelo autor.
Figura 23 - Coeficiente b (vertical).
Fonte: Elaborada pelo autor.

56
Desta forma, as equações que relacionam o ângulo de inclinação do joystick
(𝑢) com os parâmetros da elipse são:
𝑂(𝑢) = −0,0089𝑢2 − 0,228𝑢 + 25,15 (9)
𝑎(𝑢) = 0,0017𝑢² + 1,26𝑢 + 19,13 (10)
𝑏(𝑢) = 0,010𝑢2 + 1,00𝑢 + 16,97 (11)
Matematicamente, uma elipse pode ser descrita através das seguinte
equações:
√𝑎(𝑢) ∗ cos(𝜃) = 𝑥 − 𝑂(𝑢) (12)
1
√𝑏(𝑢)∗ sen(𝜃) = 𝑦 (13)
As equações 12 e 13 podem ser reescritas como:
cos(𝜃) =𝑥−𝑂(𝑢)
√𝑎(𝑢) (14)
sen(𝜃) = 𝑦 ∗ √𝑏(𝑢) (15)
Apesar de simples, as duas equações anteriores possuem duas variáveis
desconhecidas. Este problema pode ser resolvido elevando ao quadrado as duas
equações e as somando, permitindo com que uma relação trigonométrica seja aplicada,
eliminando assim a variável 𝜃, conforme apresentado a seguir:
sen²(𝜃) + cos²(𝜃) =(𝑥−𝑂(𝑢))²
𝑎(𝑢)+ 𝑦² ∗ 𝑏(𝑢) (16)
1 =(𝑥−𝑂(𝑢))²
𝑎(𝑢)+ 𝑦² ∗ 𝑏(𝑢) (17)
𝑎(𝑢) = (𝑥 − 𝑂(𝑢))2
+ 𝑦2 ∙ 𝑏(𝑢) ∙ 𝑎(𝑢) (18)

57
Dessa forma, a equação 18 possui apenas uma variável a ser definida, a
qual consiste exatamente na inclinação do joystick (𝑢). Com algum trabalho
matemático, é possível obter a equação que determina o ângulo de inclinação do
joystick, a qual pode ser resolvida em cinco iterações utilizando o método de Newton-
Raphson (CHAPRA, 2010). As equações utilizadas podem ser visualizas abaixo:
𝑓(𝑢) =(𝑥−𝑜0−𝑢𝑜1−𝑢2𝑜2)2
(𝑎0+𝑢𝑎1+𝑢2𝑎2)²+
𝑦²
(𝑏0+𝑢𝑏1+𝑢2𝑏2)²− 1 (19)
𝑢 = 𝑢 −𝑓(𝑢)
𝑑𝑓(𝑢) (20)
Na equação 19, as variáveis 𝑜, 𝑎 e 𝑏 são os coeficientes da equação de
segunda ordem apresentadas em 9, 10 e 11. No caso deste projeto, os limites de
inclinação do joystick são conhecidos, os quais situam-se entre -15 e +15 graus. Dentro
desse intervalo, optou-se pelo valor inicial de -10 para o parâmetro 𝑢, o qual se mostrou
eficiente para o método utilizado, não sendo necessário novas experimentações.
Por fim, após determinado o valor da inclinação do joystick é possível obter o
valor de rotação (𝑡) através da seguinte equação:
𝑡(𝑢) =180
𝜋∗ arctan (
𝑎(𝑢)∗𝑦∗(𝑥−𝑂(𝑢))
𝑏(𝑢)) + 90 ∗
(𝑥−𝑂(𝑢))
|(𝑥−𝑂(𝑢))| (21)

58
5.5. ESTABILIDADE DO EQUACIONAMENTO
Por se tratar de um sistema não ideal, é esperada a presença de ruído
mecânico devido a pequenas vibrações durante a movimentação. Essas vibrações
podem estar presentes como decorrência da manipulação do operador, precisão do
modelo fabricado, entre outros. Para verificar a estabilidade do mesmo, o
comportamento das equações foi simulado utilizando como entrada os valores de
campo magnético obtidos com a utilização do protótipo desenvolvido. O resultado pode
ser visualizado na figura 24.
Figura 24 – Gráficos de rotação da haste do joystick.
Fonte: Elaborada pelo autor.
Uma análise da figura 24 permite afirmar que o equacionamento se mostrou
bastante eficiente, o qual apresentou erro máximo de 4 graus ao manter o joystick
inclinado em um determinado ângulo e então rotacionado 360 graus. Por se tratar de
uma técnica inovadora, a qual estima os ângulos do joystick diretamente através de
59
equações, o objetivo principal do projeto é a demonstração da viabilidade de uso da
técnica, sendo a precisão um fator que pode ser aprimorado futuramente.
60
6. HARDWARE E FIRMWARE
A presente seção tem como objetivo apresentar as etapas de
desenvolvimento do hardware e firmware.
6.1. REQUISITOS DE FUNCIONAMENTO DO HARDWARE E FIRMWARE
Conforme mencionado na seção 1.2.1, os requisitos de funcionamento do
hardware são:
a. Realizar a leitura periodicamente de um sensor magnético de 3
eixos (x, y, z);
b. Enviar os dados aferidos por uma interface serial a um dispositivo
externo;
c. Enviar e interpretar dados recebidos do software.
6.2. DESENVOLVIMENTO DO FIRMWARE
Atualmente existem diversos métodos de programação e softwares para o
desenvolvimento de firmwares para microcontroladores, principalmente aqueles
bastante conhecidos e utilizados, como é o caso da família ARM. Por se tratar de uma
placa proprietária da Infineon Technologies é interessante a utilização do software
indicado ou desenvolvido pelos mesmos.
Devido a isto, definiu-se o software DAVE™ como a interface a ser utilizada
para o desenvolvimento do firmware, o qual se trata de uma ferramenta para
desenvolvimento e geração de código voltada para microcontroladores desenvolvidos
pela Infineon Technologies. Baseado na interface de desenvolvimento Eclipse, esta
ferramenta permite, além do desenvolvimento e compilação de código, a depuração do
61
mesmo, tornando possível a realização de testes em tempo real sem a necessidade de
outro(s) softwares e/ou periférico(s).
Dentre as principais vantagens na utilização desta ferramenta podem-se
citar:
a. Desenvolvido pela empresa Infineon Technologies, a qual também é a
fabricante da placa de desenvolvimento e sensor a serem utilizados;
b. Alto nível de abstração, sendo frequentemente desnecessário o
conhecimento do funcionamento interno e registradores do
microcontrolador para a utilização dos periféricos;
c. Geração automática de código, otimizando o tempo de projeto;
d. Bibliotecas disponíveis na empresa CTR, provenientes de projetos
anteriores.
A primeira etapa no desenvolvimento do firmware consiste no planejamento
das funcionalidades do mesmo de acordo com os requisitos de projeto. Primeiramente,
determinou-se que o microcontrolador deve ser capaz de se comunicar com o software
através da interface serial. Além disso, também deseja-se que o sistema possa ser
configurável via software, através do envio de comandos pré-determinados.
Em seguida, determinou-se que o comportamento do sistema deve ser
composto por quatro estados: Idle, Single, Auto e Auto Fast. O primeiro estado, Idle,
coloca o sistema em modo de espera, no qual o microcontrolador permanece
aguardando novos comandos do software através da interface serial, sem realizar
quaisquer outras tarefas.
Quando o sistema recebe a mensagem de alteração para o modo Single, o
microcontrolador solicita uma nova leitura no sensor e assim que o mesmo obtém os
novos valores, os dados são empacotados e enviados para o software pela interface
serial. Logo após o envio dos dados, o sistema retorna automaticamente para o modo
Idle, aguardando assim novos comandos.
O modo Auto faz com que o microcontrolador solicite novos dados do sensor
de forma periódica (intervalo de tempo predeterminado), enviando-os para o software
62
ao término de cada nova aquisição. Já o modo Auto Fast realiza o mesmo
procedimento anterior, porém sem aguardar um intervalo de tempo entre as leituras.
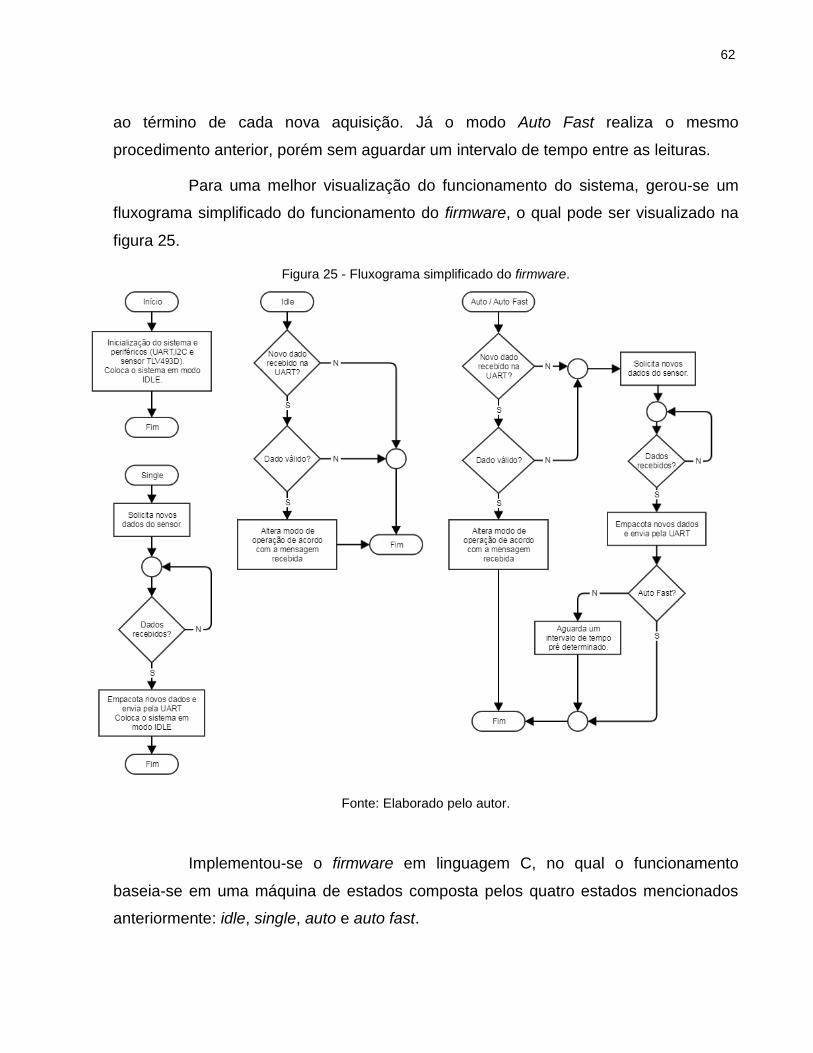
Para uma melhor visualização do funcionamento do sistema, gerou-se um
fluxograma simplificado do funcionamento do firmware, o qual pode ser visualizado na
figura 25.
Figura 25 - Fluxograma simplificado do firmware.
Fonte: Elaborado pelo autor.
Implementou-se o firmware em linguagem C, no qual o funcionamento
baseia-se em uma máquina de estados composta pelos quatro estados mencionados
anteriormente: idle, single, auto e auto fast.
63
Com base na folha de dados do sensor magnético TLV493D-A1B6, definiu-
se que a frequência de comunicação do barramento I²C a ser utilizada é de 400 kHz, o
qual se trata do valor típico deste protocolo. Com relação a comunicação UART entre o
microcontrolador e o software, implementou-se a mesma com baudrate de 115200
kbps, sem paridade, 8 bits de dado e 1 stop bit.
Ambos os protocolos de comunicação podem ser implementados em uma
maior velocidade de transmissão, porém, sabe-se que a limitação de velocidade do
sistema se dá no software, descartando assim a necessidade de um aumento na
velocidade dos barramentos de comunicação.
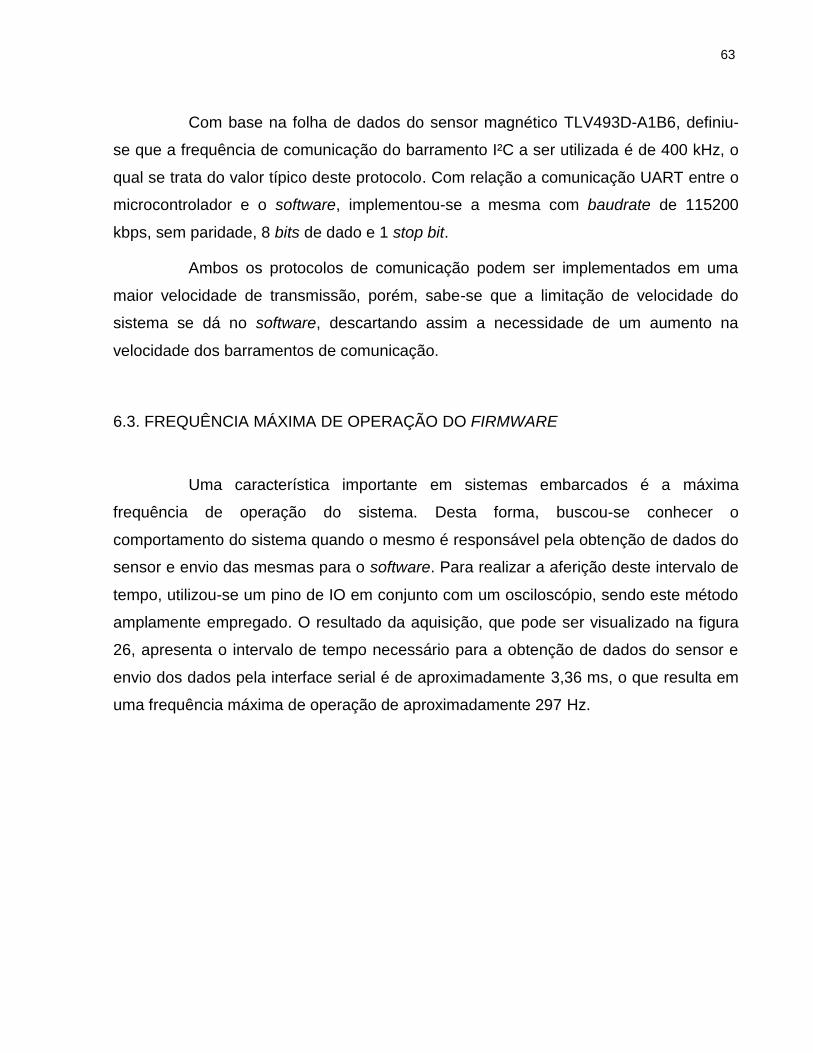
6.3. FREQUÊNCIA MÁXIMA DE OPERAÇÃO DO FIRMWARE
Uma característica importante em sistemas embarcados é a máxima
frequência de operação do sistema. Desta forma, buscou-se conhecer o
comportamento do sistema quando o mesmo é responsável pela obtenção de dados do
sensor e envio das mesmas para o software. Para realizar a aferição deste intervalo de
tempo, utilizou-se um pino de IO em conjunto com um osciloscópio, sendo este método
amplamente empregado. O resultado da aquisição, que pode ser visualizado na figura
26, apresenta o intervalo de tempo necessário para a obtenção de dados do sensor e
envio dos dados pela interface serial é de aproximadamente 3,36 ms, o que resulta em
uma frequência máxima de operação de aproximadamente 297 Hz.
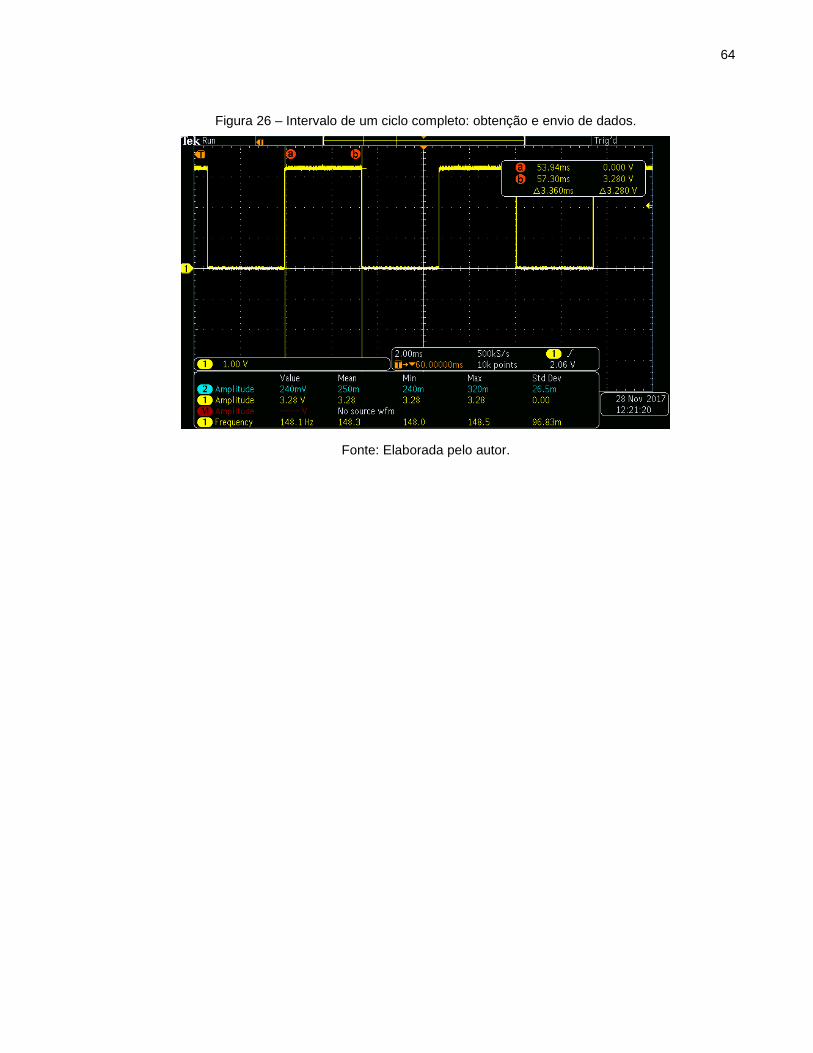
64
Figura 26 – Intervalo de um ciclo completo: obtenção e envio de dados.
Fonte: Elaborada pelo autor.
65
7. SOFTWARE
A presente seção tem como objetivo apresentar as etapas de
desenvolvimento do software.
7.1. REQUISITOS DE FUNCIONAMENTO DO SOFTWARE
Conforme mencionado na seção 1.2.1, os requisitos de funcionamento de
software são:
a. Enviar dados para o hardware;
b. Interpretar os dados recebidos e determinar a posição do joystick com
base nos mesmos;
c. Apresentar os dados recebidos em forma gráfica para melhor
visualização dos mesmos;
d. Conter aplicações a serem controladas pelo joystick.
7.2. DESENVOLVIMENTO DO SOFTWARE
Atualmente existem diversas ferramentas e métodos dedicados ao
desenvolvimento de softwares para dispositivos com sistema operacional Windows. No
caso do projeto relatado neste documento, optou-se pela utilização do software
Microsoft Visual Studio, o qual se trata de uma ferramenta bastante simples, mas com
grande número de recursos, se tornando uma ótima interface de desenvolvimento para
o projeto em questão.
Após a definição da interface de desenvolvimento a ser utilizada, deu-se
início a etapa de projeto do software. Para isto, definiu-se que o mesmo deverá conter
as seguintes abas de utilização:
66
a) Configuração;
b) Visualização dos dados;
c) Mapa;
d) Jogo;
e) Versus;
f) Visualizador de foto panorâmica.
No caso do projeto em questão, utilizou-se o método de programação
chamado Windows Forms Application. Este método consiste na programação do
software utilizando uma interface gráfica em conjunto com linhas de código, sendo a
aparência do software configurável de forma visual, arrastando componentes (botões,
textos, imagens, dentre outros) em uma janela e o funcionamento programado através
de linhas de código em C#.
Neste tipo de projeto, o funcionamento do software é baseado em eventos,
como por exemplo o pressionamento do botão Scan, o qual gera um evento que está
atrelado a um trecho de código responsável pela verificação dos dispositivos
conectados na interface serial e adicionando-os na lista drop-down. Além disso, alguns
eventos também podem ser internos ao software, como por exemplo o estouro de um
temporizador.
67
7.2.1. Aba Configuração
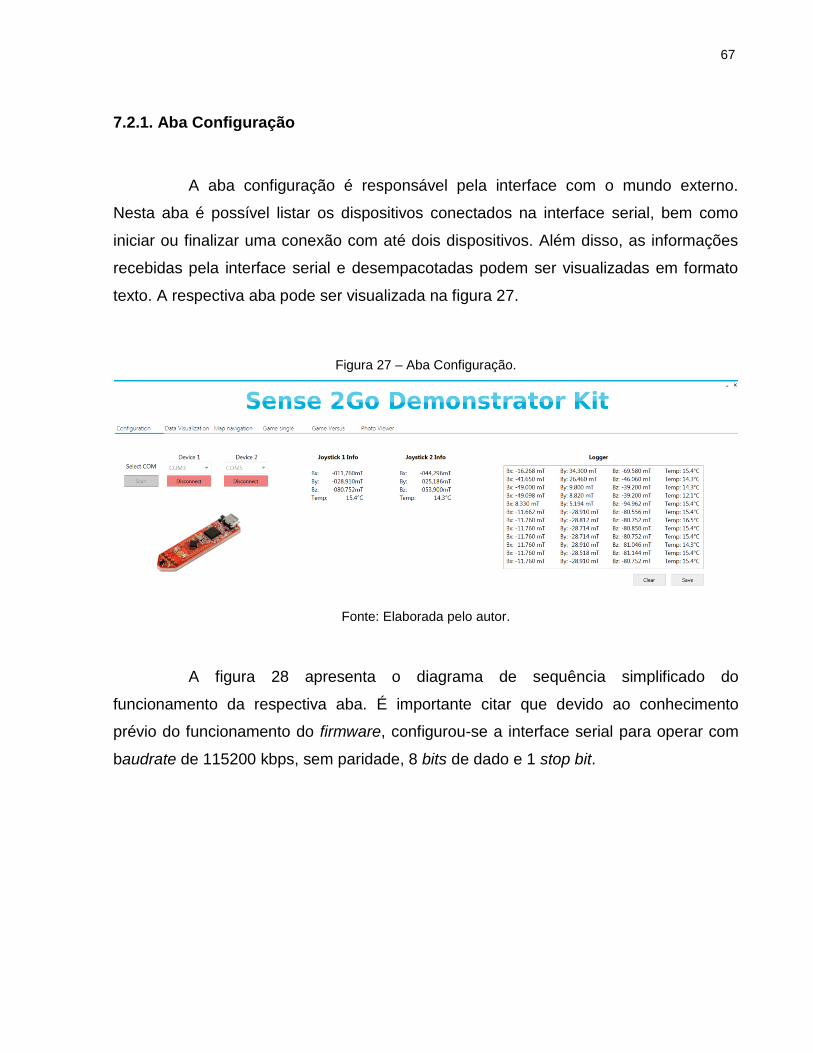
A aba configuração é responsável pela interface com o mundo externo.
Nesta aba é possível listar os dispositivos conectados na interface serial, bem como
iniciar ou finalizar uma conexão com até dois dispositivos. Além disso, as informações
recebidas pela interface serial e desempacotadas podem ser visualizadas em formato
texto. A respectiva aba pode ser visualizada na figura 27.
Figura 27 – Aba Configuração.
Fonte: Elaborada pelo autor.
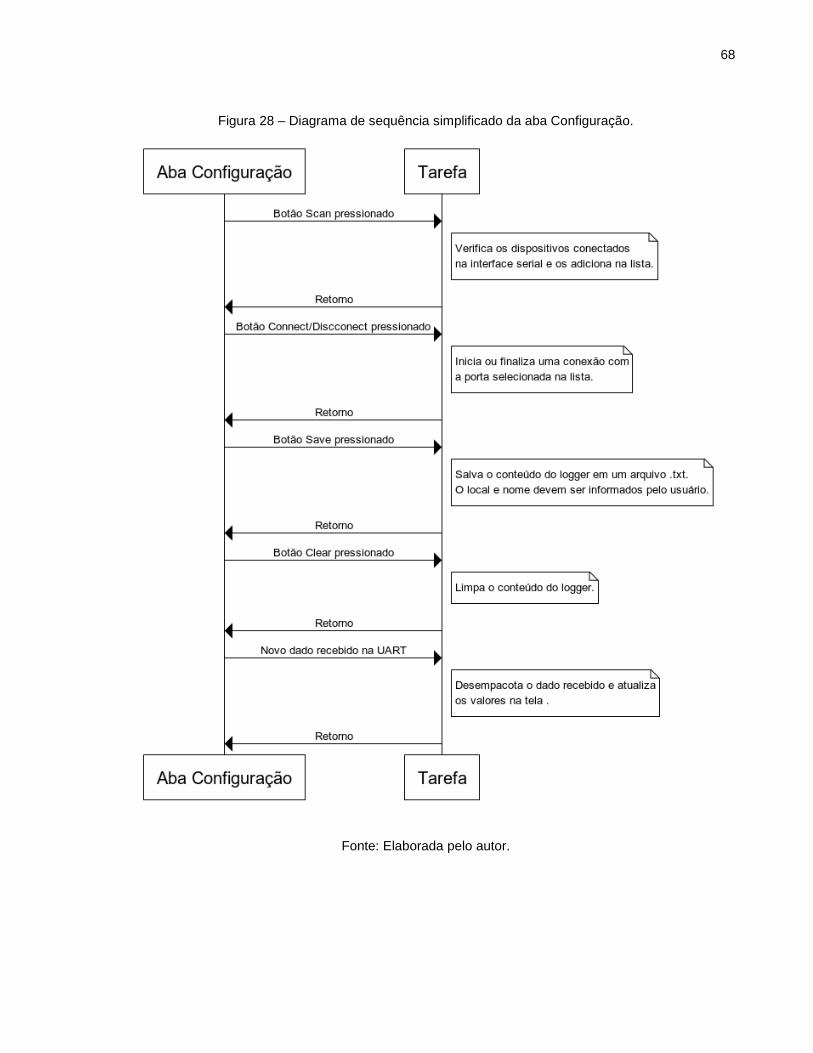
A figura 28 apresenta o diagrama de sequência simplificado do
funcionamento da respectiva aba. É importante citar que devido ao conhecimento
prévio do funcionamento do firmware, configurou-se a interface serial para operar com
baudrate de 115200 kbps, sem paridade, 8 bits de dado e 1 stop bit.
68
Figura 28 – Diagrama de sequência simplificado da aba Configuração.
Fonte: Elaborada pelo autor.
69
7.2.2. Aba Visualização dos dados
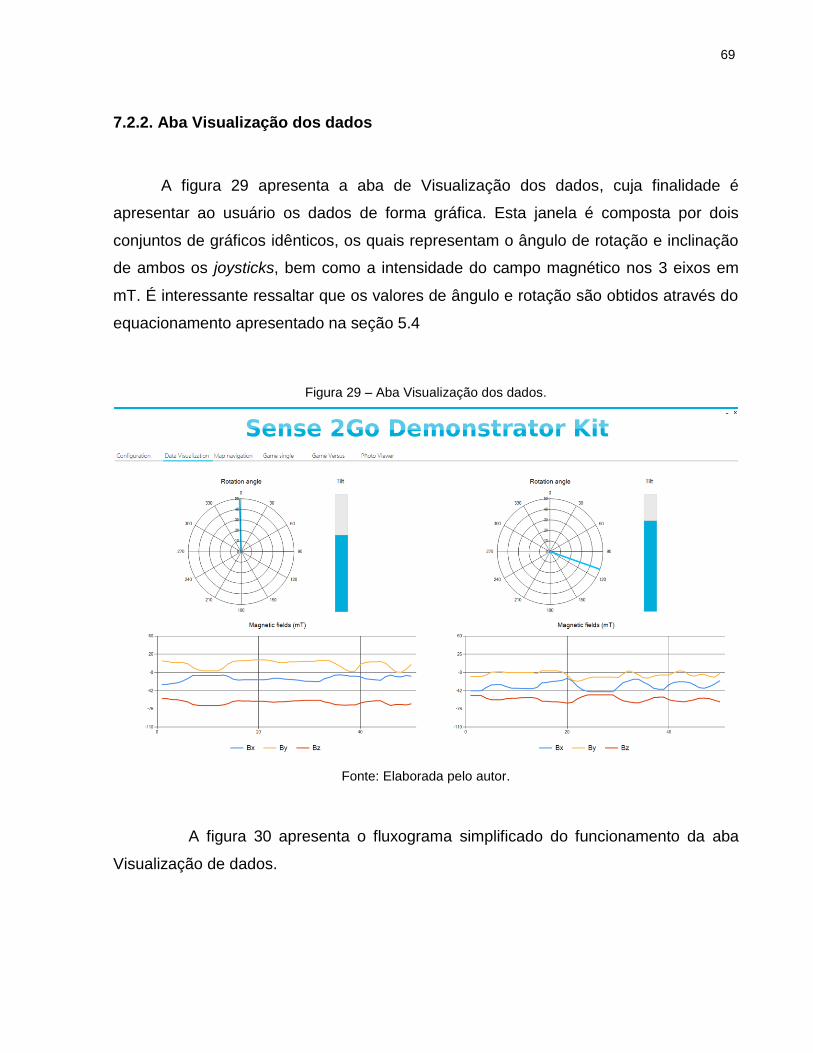
A figura 29 apresenta a aba de Visualização dos dados, cuja finalidade é
apresentar ao usuário os dados de forma gráfica. Esta janela é composta por dois
conjuntos de gráficos idênticos, os quais representam o ângulo de rotação e inclinação
de ambos os joysticks, bem como a intensidade do campo magnético nos 3 eixos em
mT. É interessante ressaltar que os valores de ângulo e rotação são obtidos através do
equacionamento apresentado na seção 5.4
Figura 29 – Aba Visualização dos dados.
Fonte: Elaborada pelo autor.
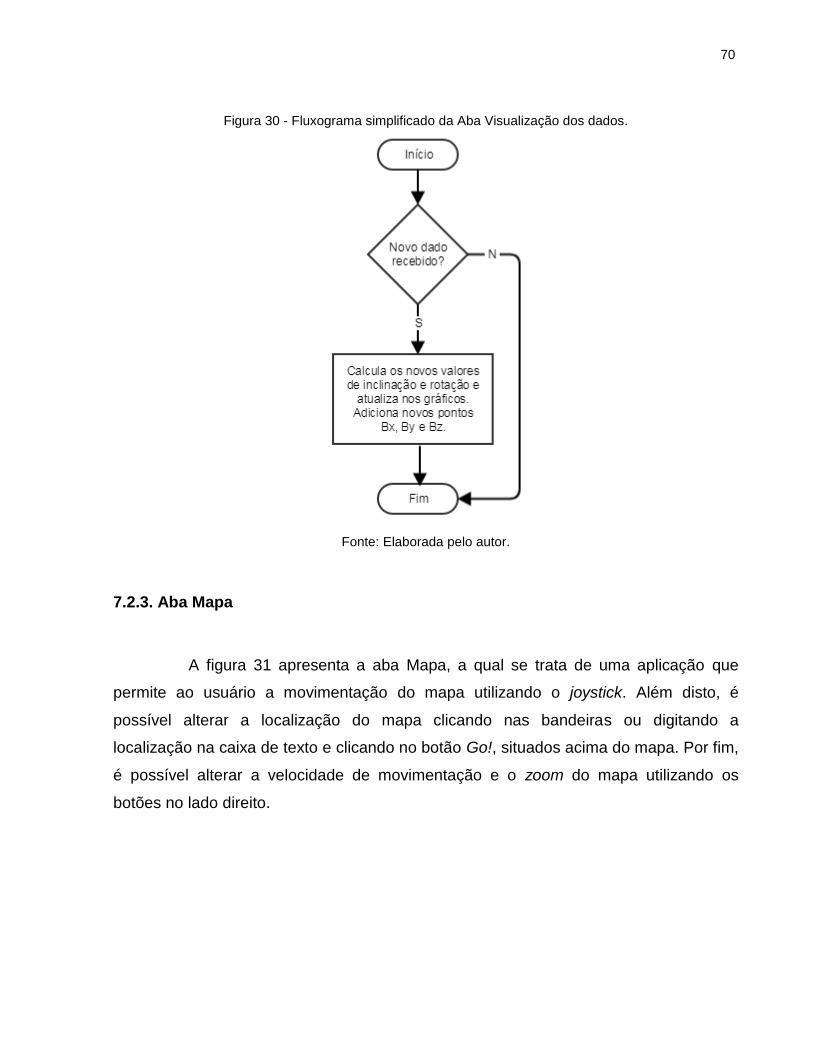
A figura 30 apresenta o fluxograma simplificado do funcionamento da aba
Visualização de dados.
70
Figura 30 - Fluxograma simplificado da Aba Visualização dos dados.
Fonte: Elaborada pelo autor.
7.2.3. Aba Mapa
A figura 31 apresenta a aba Mapa, a qual se trata de uma aplicação que
permite ao usuário a movimentação do mapa utilizando o joystick. Além disto, é
possível alterar a localização do mapa clicando nas bandeiras ou digitando a
localização na caixa de texto e clicando no botão Go!, situados acima do mapa. Por fim,
é possível alterar a velocidade de movimentação e o zoom do mapa utilizando os
botões no lado direito.

71
Figura 31 - Aba Mapa.
Fonte: Elaborada pelo autor.
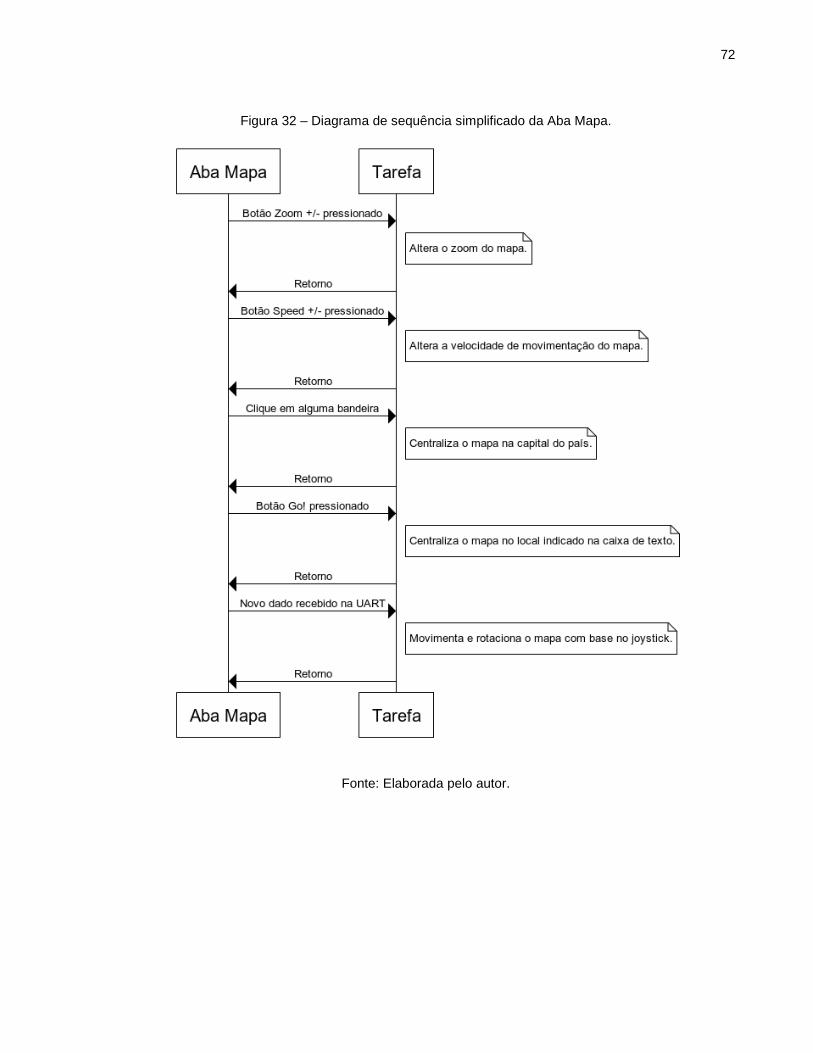
A figura 32 apresenta o diagrama de sequência simplificado do
funcionamento da aba Mapa.
72
Figura 32 – Diagrama de sequência simplificado da Aba Mapa.
Fonte: Elaborada pelo autor.

73
7.2.4. Aba Jogo
Por se tratar de um software demonstração de funcionamento, é interessante
que o mesmo tenha uma vasta área de abrangência, no qual as abas são dedicadas
não apenas a aplicações técnicas ou cotidianas, mas também com foco em
entretenimento, como é o caso da aba Jogo. A figura 33 apresenta a aba Jogo, a qual
permite o usuário movimentar uma nave e atirar utilizando o joystick.
Figura 33 - Aba Jogo.
Fonte: Elaborada pelo autor.
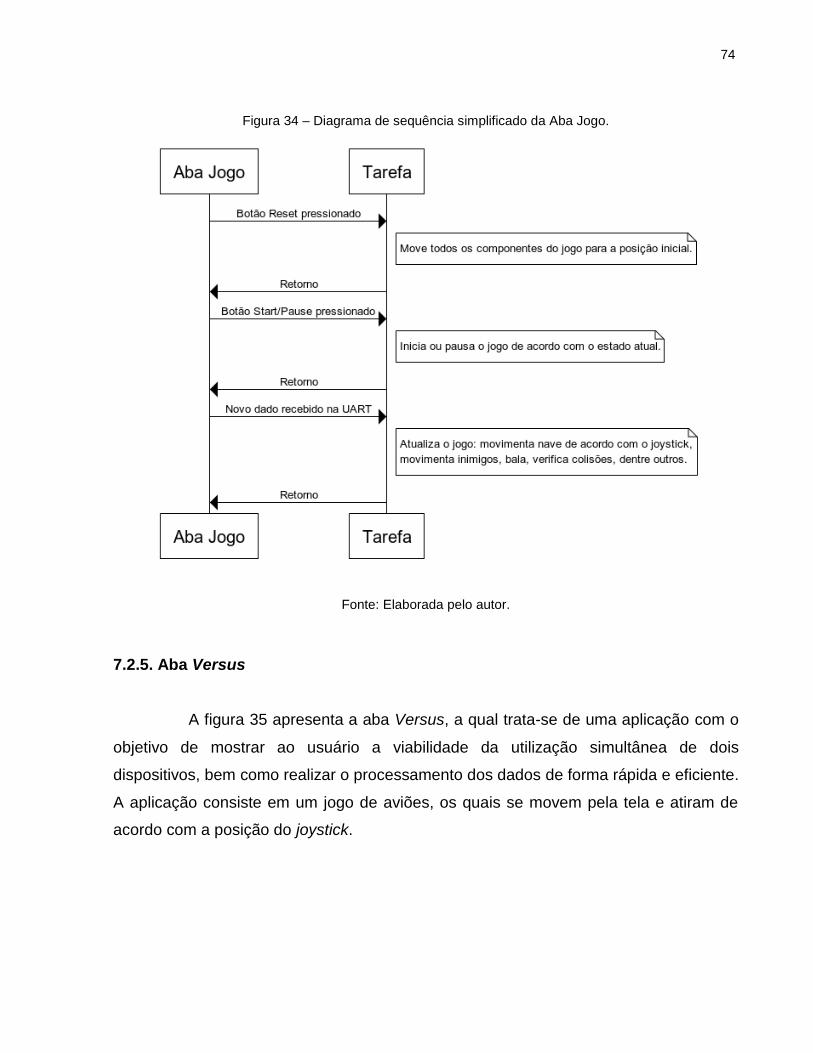
A figura 34 apresenta o diagrama de sequência simplificado do
funcionamento da aba Jogo.
74
Figura 34 – Diagrama de sequência simplificado da Aba Jogo.
Fonte: Elaborada pelo autor.
7.2.5. Aba Versus
A figura 35 apresenta a aba Versus, a qual trata-se de uma aplicação com o
objetivo de mostrar ao usuário a viabilidade da utilização simultânea de dois
dispositivos, bem como realizar o processamento dos dados de forma rápida e eficiente.
A aplicação consiste em um jogo de aviões, os quais se movem pela tela e atiram de
acordo com a posição do joystick.
75
Figura 35 - Aba Versus
Fonte: Elaborada pelo autor.
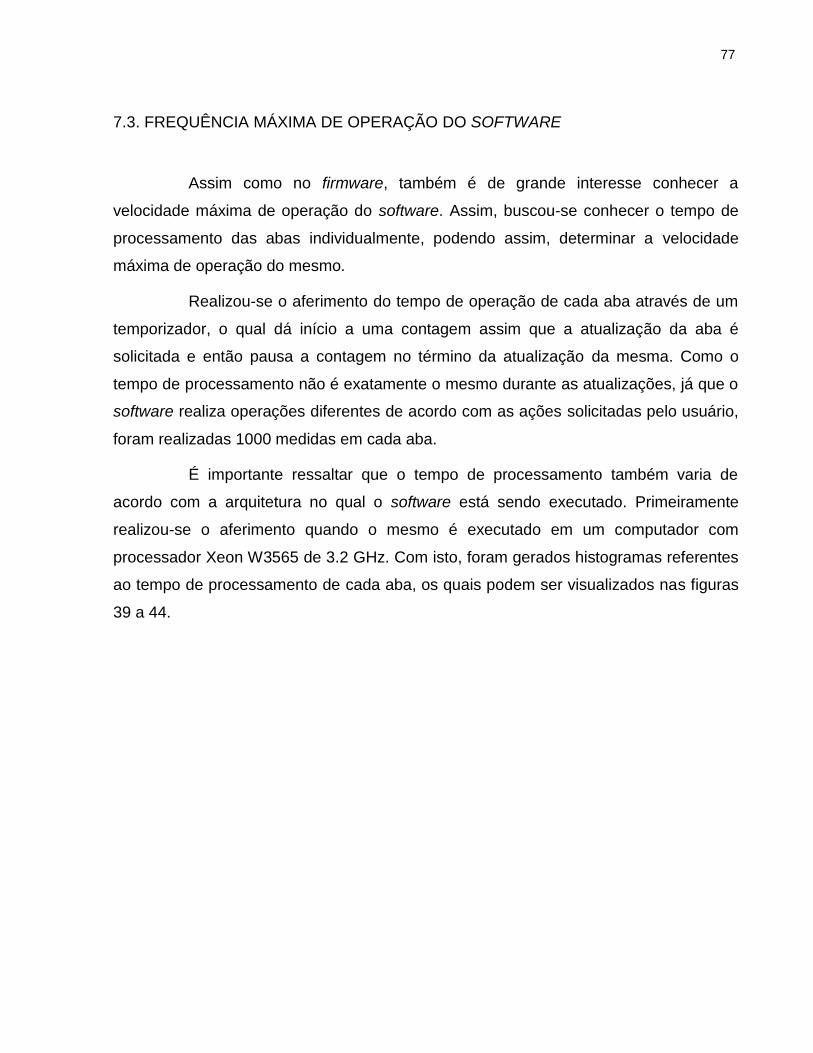
A figura 36 apresenta um diagrama de sequência simplificado do
funcionamento desta aba.
Figura 36 – Diagrama de sequência simplificado da aba Versus.
Fonte: Elaborada pelo autor.

76
7.2.6. Aba Visualizador de foto panorâmica
A figura 37 apresenta a aba Visualizador de foto panorâmica, a qual permite
o usuário a navegação pela imagem utilizando o joystick.
Figura 37 - Aba Visualizador de foto panorâmica.
Fonte: Elaborada pelo autor.
A figura 38 apresenta o fluxograma simplificado do funcionamento da aba
Visualizador de foto panorâmica.
Figura 38 - Fluxograma simplificado da Aba Visualizador de foto panorâmica.
Fonte: Elaborada pelo autor.
77
7.3. FREQUÊNCIA MÁXIMA DE OPERAÇÃO DO SOFTWARE
Assim como no firmware, também é de grande interesse conhecer a
velocidade máxima de operação do software. Assim, buscou-se conhecer o tempo de
processamento das abas individualmente, podendo assim, determinar a velocidade
máxima de operação do mesmo.
Realizou-se o aferimento do tempo de operação de cada aba através de um
temporizador, o qual dá início a uma contagem assim que a atualização da aba é
solicitada e então pausa a contagem no término da atualização da mesma. Como o
tempo de processamento não é exatamente o mesmo durante as atualizações, já que o
software realiza operações diferentes de acordo com as ações solicitadas pelo usuário,
foram realizadas 1000 medidas em cada aba.
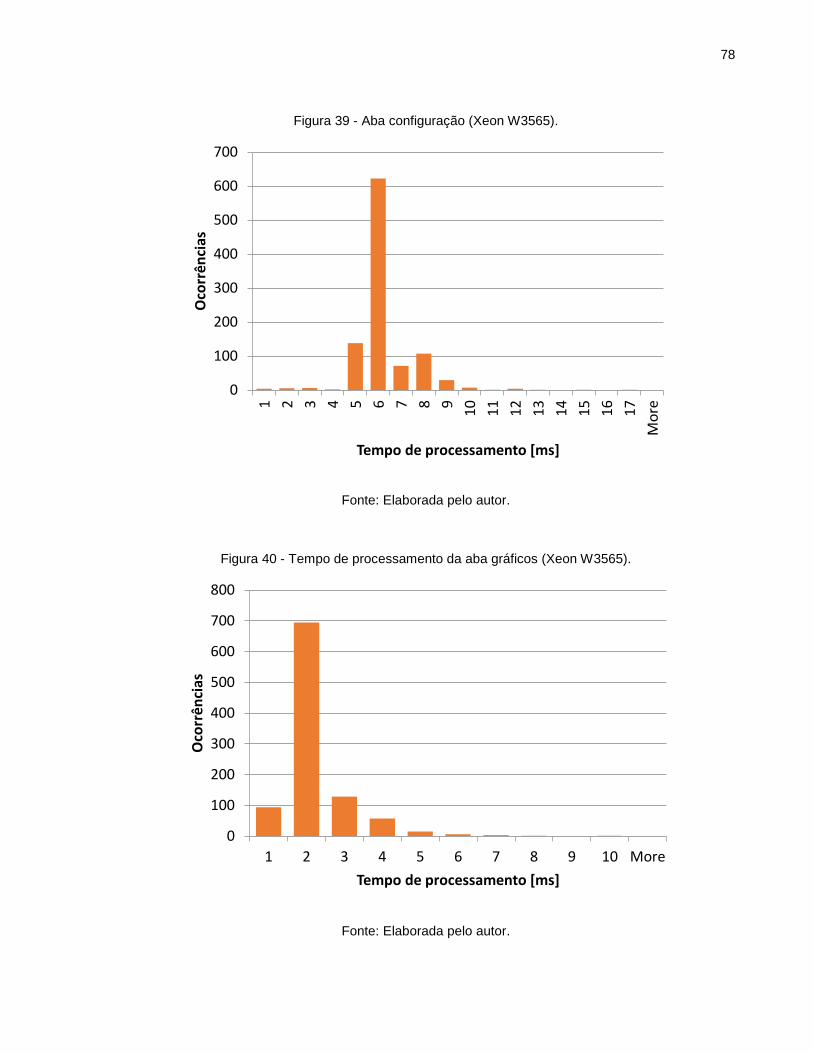
É importante ressaltar que o tempo de processamento também varia de
acordo com a arquitetura no qual o software está sendo executado. Primeiramente
realizou-se o aferimento quando o mesmo é executado em um computador com
processador Xeon W3565 de 3.2 GHz. Com isto, foram gerados histogramas referentes
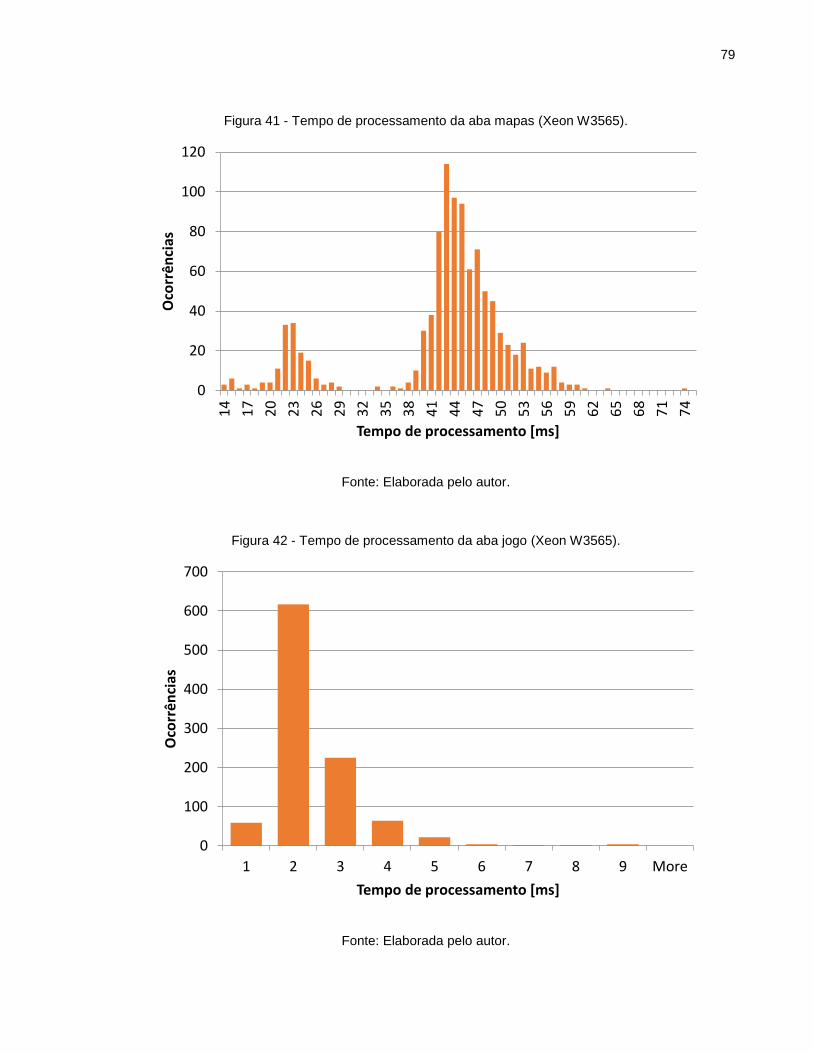
ao tempo de processamento de cada aba, os quais podem ser visualizados nas figuras
39 a 44.
78
Figura 39 - Aba configuração (Xeon W3565).
Fonte: Elaborada pelo autor.
Figura 40 - Tempo de processamento da aba gráficos (Xeon W3565).
Fonte: Elaborada pelo autor.
0
100
200
300
400
500
600
700
1 2 3 4 5 6 7 8 9
10
11
12
13
14
15
16
17
Mo
re
Oco
rrên
cias
Tempo de processamento [ms]
0
100
200
300
400
500
600
700
800
1 2 3 4 5 6 7 8 9 10 More
Oco
rrên
cias
Tempo de processamento [ms]
79
Figura 41 - Tempo de processamento da aba mapas (Xeon W3565).
Fonte: Elaborada pelo autor.
Figura 42 - Tempo de processamento da aba jogo (Xeon W3565).
Fonte: Elaborada pelo autor.
0
20
40
60
80
100
120
14
17
20
23
26
29
32
35
38
41
44
47
50
53
56
59
62
65
68
71
74
Oco
rrên
cias
Tempo de processamento [ms]
0
100
200
300
400
500
600
700
1 2 3 4 5 6 7 8 9 More
Oco
rrên
cias
Tempo de processamento [ms]

80
Figura 43 - Tempo de processamento da aba Versus (Xeon W3565).
Fonte: Elaborada pelo autor.
Figura 44 - Tempo de processamento da aba visualizador de imagens panorâmicas (Xeon W3565).
Fonte: Elaborada pelo autor.
0
100
200
300
400
500
600
700
800
2 3 4 5 6 7 8 More
Oco
rrê
nci
as
Tempo de processamento [ms]
0
100
200
300
400
500
600
Oco
rrên
cias
Tempo de processamento [ms]
81
Analisando os histogramas apresentados anteriormente, é possível obter a
frequência máxima de operação de cada aba, as quais podem ser visualizadas na
tabela 2.
Tabela 2 - Frequência máxima de operação do software (Xeon W3565).
Aba Tempo
mínimo [ms]
Tempo
máximo [ms]
Valor
considerado [ms]
Frequência
máxima [Hz]
Configuração 1 17 9 111,1
Gráficos 1 10 4 250,0
Mapa 14 74 60 16,7
Jogo 1 9 5 200,0
Versus 2 8 5 200,0
Vis. de fotos
panorâmicas 25 40 33 30,3
Fonte: Elaborada pelo autor.
Apesar da frequência máxima ser limitada pelo tempo máximo de execução
de cada aba, considera-se também neste caso a quantidade de ocorrência dos
mesmos, já que trata-se de um sistema de tempo real não crítico cujo deadline pode
não ser atendido esporadicamente.
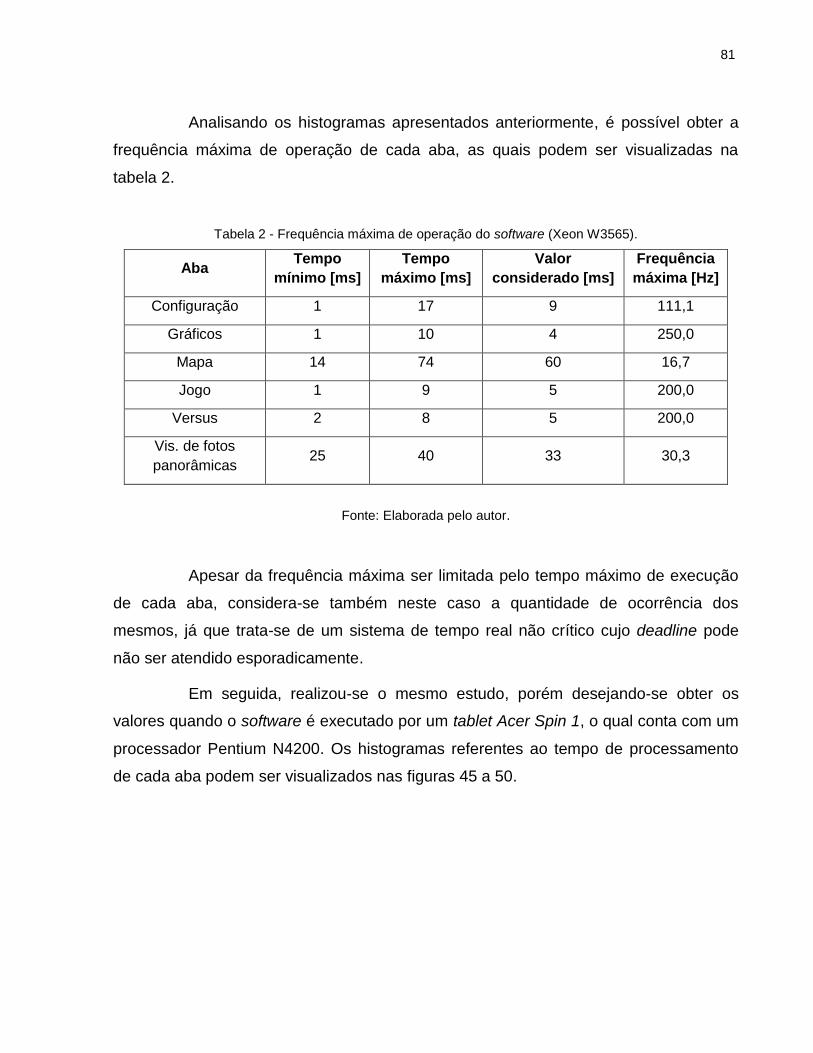
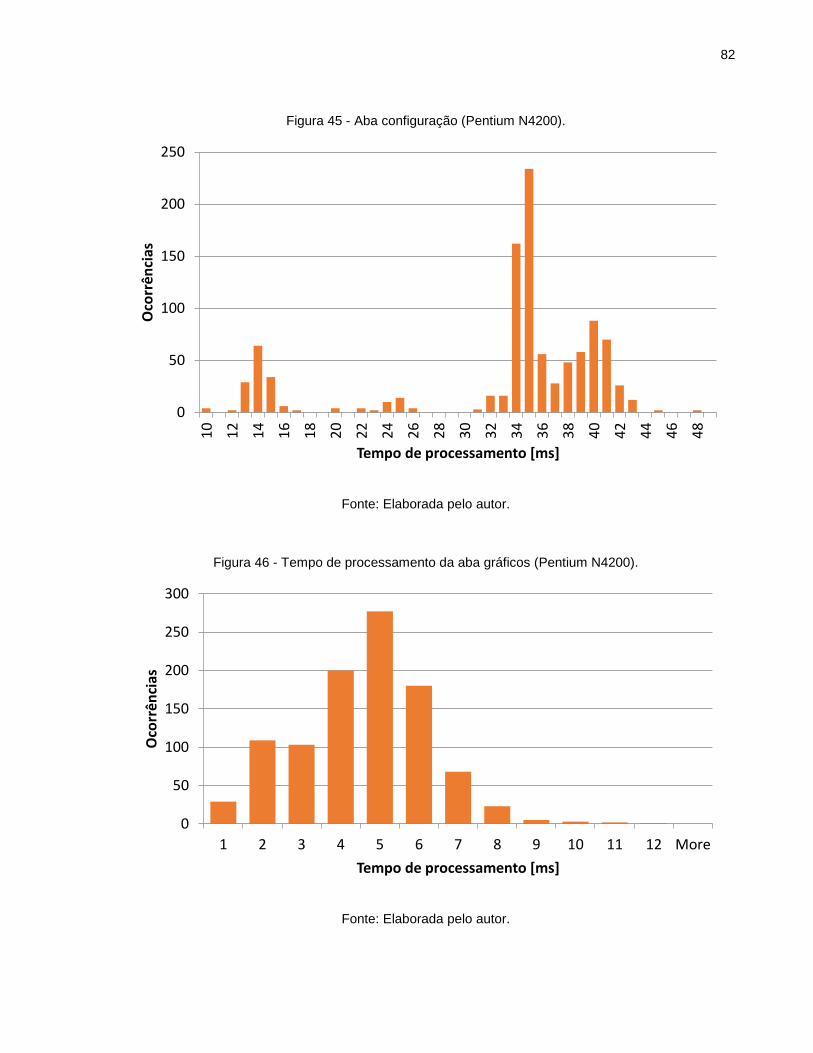
Em seguida, realizou-se o mesmo estudo, porém desejando-se obter os
valores quando o software é executado por um tablet Acer Spin 1, o qual conta com um
processador Pentium N4200. Os histogramas referentes ao tempo de processamento
de cada aba podem ser visualizados nas figuras 45 a 50.
82
Figura 45 - Aba configuração (Pentium N4200).
Fonte: Elaborada pelo autor.
Figura 46 - Tempo de processamento da aba gráficos (Pentium N4200).
Fonte: Elaborada pelo autor.
0
50
100
150
200
250
10
12
14
16
18
20
22
24
26
28
30
32
34
36
38
40
42
44
46
48
Oco
rrên
cias
Tempo de processamento [ms]
0
50
100
150
200
250
300
1 2 3 4 5 6 7 8 9 10 11 12 More
Oco
rrên
cias
Tempo de processamento [ms]
83
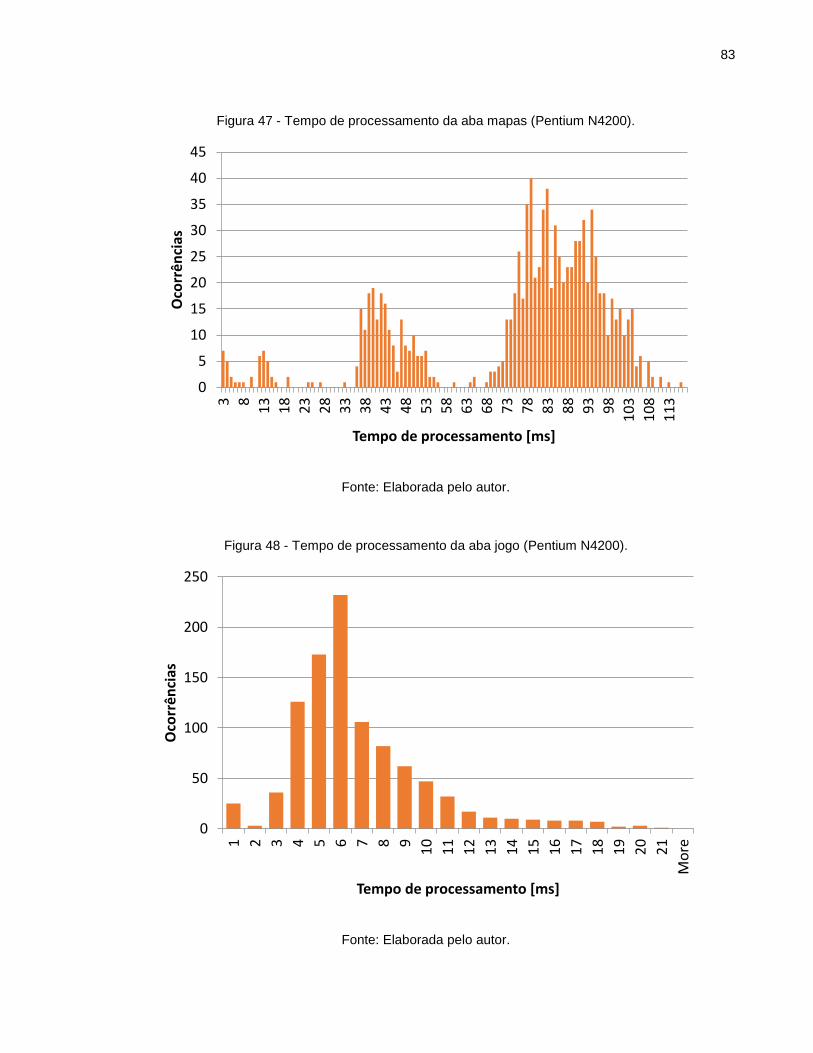
Figura 47 - Tempo de processamento da aba mapas (Pentium N4200).
Fonte: Elaborada pelo autor.
Figura 48 - Tempo de processamento da aba jogo (Pentium N4200).
Fonte: Elaborada pelo autor.
0
5
10
15
20
25
30
35
40
45
3 8
13
18
23
28
33
38
43
48
53
58
63
68
73
78
83
88
93
98
10
3
10
8
11
3
Oco
rrên
cias
Tempo de processamento [ms]
0
50
100
150
200
250
1 2 3 4 5 6 7 8 9
10
11
12
13
14
15
16
17
18
19
20
21
Mo
re
Oco
rrên
cias
Tempo de processamento [ms]
84
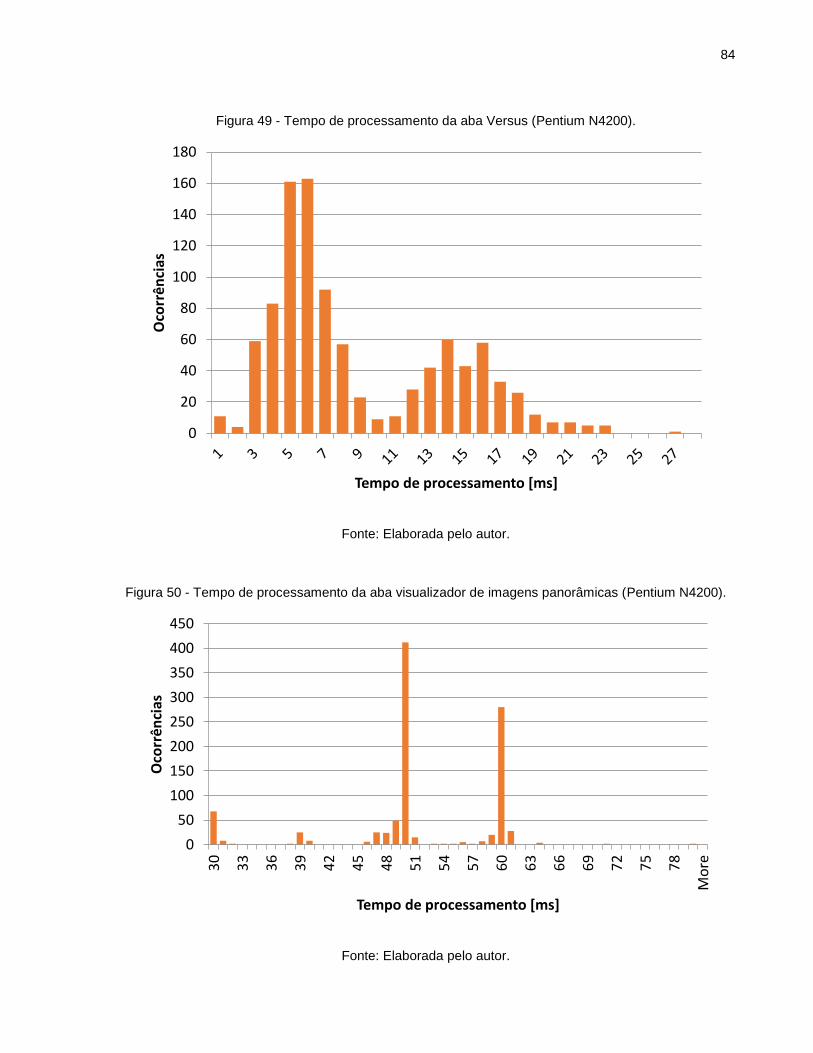
Figura 49 - Tempo de processamento da aba Versus (Pentium N4200).
Fonte: Elaborada pelo autor.
Figura 50 - Tempo de processamento da aba visualizador de imagens panorâmicas (Pentium N4200).
Fonte: Elaborada pelo autor.
0
20
40
60
80
100
120
140
160
180O
corr
ênci
as
Tempo de processamento [ms]
0
50
100
150
200
250
300
350
400
450
30
33
36
39
42
45
48
51
54
57
60
63
66
69
72
75
78
Mo
re
Oco
rrên
cias
Tempo de processamento [ms]
85
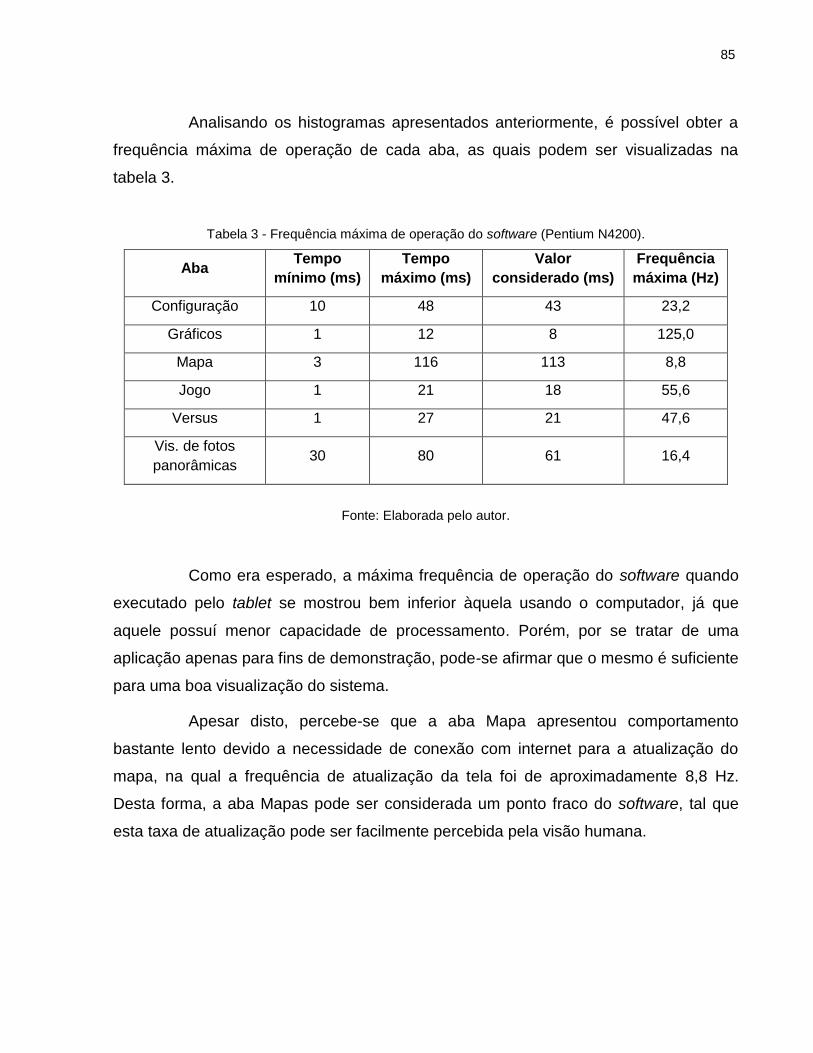
Analisando os histogramas apresentados anteriormente, é possível obter a
frequência máxima de operação de cada aba, as quais podem ser visualizadas na
tabela 3.
Tabela 3 - Frequência máxima de operação do software (Pentium N4200).
Aba Tempo
mínimo (ms)
Tempo
máximo (ms)
Valor
considerado (ms)
Frequência
máxima (Hz)
Configuração 10 48 43 23,2
Gráficos 1 12 8 125,0
Mapa 3 116 113 8,8
Jogo 1 21 18 55,6
Versus 1 27 21 47,6
Vis. de fotos
panorâmicas 30 80 61 16,4
Fonte: Elaborada pelo autor.
Como era esperado, a máxima frequência de operação do software quando
executado pelo tablet se mostrou bem inferior àquela usando o computador, já que
aquele possuí menor capacidade de processamento. Porém, por se tratar de uma
aplicação apenas para fins de demonstração, pode-se afirmar que o mesmo é suficiente
para uma boa visualização do sistema.
Apesar disto, percebe-se que a aba Mapa apresentou comportamento
bastante lento devido a necessidade de conexão com internet para a atualização do
mapa, na qual a frequência de atualização da tela foi de aproximadamente 8,8 Hz.
Desta forma, a aba Mapas pode ser considerada um ponto fraco do software, tal que
esta taxa de atualização pode ser facilmente percebida pela visão humana.
86
8. RESULTADOS
Após o desenvolvimento de todas as etapas que compuseram o projeto, o
sistema foi testado como um todo, de forma a verificar e validar seu funcionamento. A
figura 51 mostra o sistema em funcionamento utilizando um tablet com sistema
operacional Windows como plataforma para a interface gráfica.
Figura 51 - Sistema em funcionamento com tablet.
Fonte: Elaborada pelo autor.
Pode-se afirmar que o sistema desenvolvido se mostrou bastante eficiente
ao controlar as aplicações do software, tal que o mesmo apresentou uma rápida
resposta ao usuário, não sendo perceptível qualquer atraso entre a movimentação do
joystick e a resposta visual. No caso do projeto em questão, a limitação de performance
está atrelada única e exclusivamente a interface gráfica, a qual pode ser aprimorada
utilizando outros softwares de desenvolvimento, técnicas e linguagens de programação,
bem como a implementação em plataformas com maior capacidade de processamento.
87
Por se tratar de um sistema com ruído proveniente de diversas fontes, optou-
se por implementar no software um sistema de média móvel de cinco amostras nos
valores de campo magnético recebidos do microcontrolador, o qual resultou em uma
melhoria significativa na resposta visual para o usuário. No caso, era perceptível uma
vibração nos indicadores dos gráficos de inclinação e rotação do joystick, cujo problema
foi eliminado com a implementação da média móvel. É importante ressaltar que esta
implementação foi realizada apenas no intuito de melhorar visualmente o
comportamento da interface gráfica para o usuário, sendo a mesma não essencial para
o funcionamento do sistema.
Também é interessante citar que devido a diversas não idealidades, a troca
do imã no joystick pode acarretar no mau funcionamento do sistema, já que os
coeficientes a serem utilizados devem ser determinados a partir de dados
experimentais, conforme apresentado na seção 5.4. Portanto, a calibração do sistema é
imprescindível para o bom funcionamento do mesmo.
88
9. CONCLUSÕES
Foi desenvolvido um sistema demonstrativo de um joystick baseado em
tecnologias magnéticas. O sistema desenvolvido é composto por uma placa de
desenvolvimento 3D Magnetic Sensor 2Go Kit (Infineon Technologies), um imã
comercial produzido pela empresa HKCM Engineering, uma estrutura mecânica
desenvolvida especificamente para este projeto e um software para plataforma
Windows.
Diversos imãs e dinâmicas de movimento foram analisadas, sendo que
muitas foram descartadas na etapa de simulação, já que o mapa magnético não era
satisfatório para a aplicação desejada. O tipo de imã e liberdade de movimentação
foram escolhidos com base no mapa magnético, o qual permitiu encontrar uma relação
matemática entre o campo magnético mensurado e a posição do joystick.
É importante ressaltar que a pesquisa do mapa magnético é algo contínuo,
tal que existem infinitas possibilidades de combinações de movimentos, bem como
formato, material e diversas outras propriedades dos imãs, sendo possível um futuro
estudo que resultará em um mapa magnético ainda mais simples e eficiente do que o
apresentado neste documento. Para um estudo futuro, sugere-se também a
implementação de uma calibração automática do sistema, descartando assim a
necessidade do processo manual do cálculo de coeficientes e adaptação do software.
Um dos fatores cruciais neste projeto é o fato de que é possível determinar a
posição do joystick utilizando apenas equacionamentos matemáticos. Em um projeto
anterior na empresa, foi desenvolvido um sistema semelhante o qual utilizava uma
tabela contendo valores de campos magnéticos e a respectiva posição do joystick,
fazendo com que fosse necessário um extensivo processo de varredura e também um
extensivo processamento, já que o microcontrolador precisava percorrer uma tabela
sempre que uma nova medida era aferida. Com isto, o novo sistema proposto se
mostrou mais rápido e eficiente, tal que o mesmo determina a posição e rotação do
joystick através de uma equação que utiliza apenas o campo magnético mensurado
como valores de entrada. Também devido a isso, houve uma diminuição no custo do
89
sistema, pois é possível a utilização de um processador com menor capacidade de
armazenamento e processamento.
Por se tratar de uma tecnologia inovadora, pode-se afirmar que o sistema
desenvolvido apresentou comportamento bastante satisfatório, tal que o mesmo se
mostrou capaz de controlar as aplicações desenvolvidas no software sem dificuldades.
Também pode-se afirmar que o sistema desenvolvido pode ser facilmente
implementado em diversas aplicações cotidianas, como por exemplo o controle
multimídia em veículos. A utilização do sistema proposto resulta na minimização de
diversos problemas que ocorrem com a utilização de sensores mecânicos, tais como
vibração e implementações em ambientes não controlados (poeira, temperatura, dentre
outros).
Diante do aqui exposto, pode-se concluir que a utilização de joysticks
baseados em tecnologias magnéticas é possível. Além disto, o estado da arte que
compreende esta área ainda se encontra nos estágios iniciais, se mostrando uma área
promissora com muito potencial para pesquisa e desenvolvimento.

91
REFERÊNCIAS BIBLIOGRÁFICAS
C.P.O. Treutler. “Sensors and Actuators A”, v. 91, p. 2–6, 2001.
NIARCHOS, D. “Magnetic MEMS: key issues and some applications”, Sensors and Actuators A: Physycal 106, p. 1–3:255–262, 2003.
FERT, A. “The origin, development and future of spintronics”, Soviet Physics Uspekhi 178, p. 12:1336–1348.
ENCYCLOPÆDIA BRITANNICA. Magnetism. Disponível em: <https://www.britannica.com/science/magnetism>. Acesso em: 01 de setembro de 2017.
CALLISTER, William D., RETHWISCH, David G. “Material science and engineering an introduction”. Wiley, 7a ed, 2007.
SANTOS, Max Mauro Dias. Redes de comunicação automotiva. Editora Érica, 1a ed, 2014.
CRESPO, Antônio Arnot. Estatística fácil. Editora Saraiva, 19a ed, 2009.
CHAPRA, Steven. CANALE, Raymong. Numerical methods for engineers. McGrawHill, 2010.
MILANO, S. Allegro Hall-Effect Sensor ICs. 2013. Disponível em <http://www.allegromicro.com/en/Design-Center/Technical-Documents/Hall-Effect-Sensor-IC-Publications/Allegro-Hall-Effect-Sensor-ICs.aspx>. Acesso em 04 de setembro de 2017.
DU TRÉMOLET DE LACHEISSERIE, É.; GIGNOUX, D.; SCHLENKER, M. Magnetism: Fundamentals. Springer, p. 3-6, 2005.
Infineon Technologies, “Low power 3D Magnetic Sensor with I²C Interface” TLV493D-A1B6 datasheet, Rev 1.0 em 29 de Janeiro de 2016.


93
GLOSSÁRIO
Baudrate quantidade de vezes por segundo que um sinal pode mudar em um canal de comunição
CTR Carinthian Tech Research
Deadline Prazo máximo que uma tarefa ocorra
Firmware Conjunto de instruções programados em microcontrolador
Hardware Conjunto dos componentes físicos de um equipamento
Histograma Conjunto de retângulos que têm as bases sobre o eixo x e a área proporcional às frequências de classe
Hz Unidade de medida de frequência
Joystick Dispositivo mecânico que contém uma haste para movimentação
K Unidade de medida de temperatura
Mapa magnético comportamento do campo magnético quando o imã se movimenta ao redor do sensor.
Mensuramento ato ou efeito de medir ou mensurar
militesla Unidade de medida de campo magnético
ms Unidade de medida de tempo
Newton-Raphson Método numérico para resolução de equações utilizando processamento computacional
Ruído Sinal não desejado que interfere nos valores originais
Software Programa, rotina ou conjunto de instruções que controlam o funcionamento de um computador
Tilt Inclinação do joystick