física 1 (1)
TRANSCRIPT

©2005 by Pearson Education 16-1
Professor Marcelo CabeçaEngenheiro Mecânico / Doutorando em Vibrações Mecânicas
Engenharias
Física 1 (Mecânica)
Apresentação
Física 1 (60 horas)
Disciplina: 37111Segundas/Terças-feiras: 08:30 – 11:15
©2005 by Pearson Education 16-2
Os seguintes conceitos de física deverão ser tratados progressivamente ao
longo da disciplina: Cinemática, Dinâmica, Equilíbrio de Partícula e Corpo
Rígido e Colisões.
Dentro desta perspectiva, será dada ênfase especial aos seguintes tópicos:
1. A experimentação: observação de fenômenos e sua quantificação;
2. Descrição matemática do movimento, envolvendo grandezas tempo,
posição, velocidade e aceleração;
3. A representação vetorial de grandezas físicas; a força como grandeza
vetorial;
4. Leis de Newton para o movimento e suas aplicações;
5. Equilíbrio estático: força e momento;
6. Impulso, Quantidade de Movimento e Colisões.
Engenharias
Física 1 (Mecânica)
EMENTA
©2005 by Pearson Education 16-3
UE – 1) Cinemática – 15 horas
Conteúdo: conceitos preliminares, velocidade média e instantânea, equações do
movimento, movimento uniforme e variado e queda livre, representação gráfica.
UE – 2) Dinâmica – 15 horas
Conteúdo: vetores, massa, força, tipos de forças (contato e campo), forças peso,
normal, tração e de atrito, Leis de Newton.
UE – 3) Equilíbrio – 15 horas
Conteúdo: equilíbrio de partícula, equilíbrio de corpo rígido
UE – 4) Colisões – 15 horas
Conteúdo: Impulso, quantidade de movimentos.
Engenharias
Física 1 (Mecânica)
Conteúdo
©2005 by Pearson Education 16-4
Observar e analisar os fenômenos físicos pela experimentação;
Desenvolver o raciocínio lógico e crítico na resolução de
problemas;
Aprender a utilizar modelos para a análise de situações reais;
Familiarizar-se com o uso de instrumentos de medidas;
Desenvolver habilidade na confecção de relatórios, incluindo a
apresentação gráfica e análise estatísticas das grandezas físicas
envolvidas;
Desenvolver habilidade na realização de atividades em equipes.
Engenharias
Física 1 (Mecânica)
OBJETIVOS

©2005 by Pearson Education 16-5
Adquirir prévia compreensão básica de Matemática (números,
potenciação, regra de três, funções – equações e gráficos) e
cálculo (derivação e integração);
Familiarizar-se com o uso de instrumentos de medida, tenham
desenvolvido habilidade na confecção de relatórios e que sejam
capazes de relacionar os diversos problemas da sua profissão
com os conceitos da Física;
Contribuir para um melhor entendimento de outras disciplinas:
Mecânica Geral, Resistência dos Materiais, Fenômenos dos
Transportes, Estática de Estruturas, Teoria das Estruturas,
Metrologia, etc.
Engenharias
Física 1 (Mecânica)
COMPETÊNCIAS
©2005 by Pearson Education 16-6
• Atua no desenvolvimento e aplicação de tecnologias que protejam o
ambiente dos danos causados pelas atividades humanas. Ele zela pelo
desenvolvimento sustentável, respeitando os limites dos recursos
naturais.
• Na prática: o profissional pode atuar em departamentos de
planejamento e gestão ambiental de grandes indústrias, no setor público,
em prefeituras e órgãos do meio ambiente ou como consultor em
empresas especializadas.
Engenharias
Física 1 (Mecânica)
Perfis – Engenharia Ambiental
©2005 by Pearson Education 16-7
• Projeta e acompanha as etapas de uma obra a partir da análise das
condições do ambiente e solo. Ele responde pela segurança da edificação,
monitora o funcionamento de todos os tipos de instalações elétricas,
hidráulicas e de saneamento. Além disso, chefia as equipes de trabalho,
acompanha custos, prazos, cumprimento das normas de segurança, saúde e
meio ambiente e ainda os padrões de qualidade.
• Na prática: o engenheiro civil atua em construções pesadas e leves;
gerenciamento, supervisão, coordenação, planejamento, projetos e
manutenção nas áreas de construção civil, mineração, indústria petrolífera,
barragens, edifícios, pontes, túneis etc.
Engenharias
Física 1 (Mecânica)
Perfis – Engenharia Civil
©2005 by Pearson Education 16-8
• Atuar como profissional capacitado a identificar, formular e solucionar
problemas ligados às atividades de projeto, operação e gerenciamento
do trabalho e de sistemas de produção de bens e serviços.
Engenharias
Física 1 (Mecânica)
Perfis – Engenharia de Produção
©2005 by Pearson Education 16-9
• É responsável pelo projeto, produção, operação e manutenção de máquinas,
equipamentos e componentes mecânicos. Ele responde pela segurança,
qualidade e eficiência operacional e energética de tais equipamentos e
componentes. Além disso, gerencia equipes de trabalho, acompanha custos,
prazos, cumprimento das normas de segurança, saúde e meio ambiente e ainda
os padrões de qualidade.
• Na prática: o engenheiro mecânico atua na indústria pesada com projetos,
montagens, manutenção, produção e qualidade, em indústrias automobilísticas,
metalúrgicas, siderúrgicas, cimenteiras, petrolíferas etc. Atua também nas áreas
de bioengenharia, engenharia térmica, mecatrônica, mecânica computacional,
nanotecnologia, desenvolvimento de fontes renováveis de energia, processos de
fabricação etc.
Engenharias
Física 1 (Mecânica)
Perfis – Engenharia Mecânica
©2005 by Pearson Education 16-10
Aula expositiva através de Data-show;
Aulas em quadro branco;
Resolução de exercícios individualmente e em grupos.
Engenharias
Física 1 (Mecânica)
METODOLOGIA

©2005 by Pearson Education 16-11
Engenharias
Física 1 (Mecânica)
AVALIAÇÕES
1ª. bimestral (oficial e parcial) = 10 pontos;
2ª. bimestral (oficial e parcial) = 10 pontos;
Exame Final = 10 pontos (TODA A MATÉRIA);
2ª. Chamada (referente à 1ª. ou 2ª. Bimestrais);
Freqüência e participação;
©2005 by Pearson Education 16-12
Engenharias
Física 1 (Mecânica)
CRONOGRAMA DAS AVALIAÇÕES
As avaliações ocorrerão a cada 1/2 da carga horária total
lecionada;
A avaliação FINAL terá como conteúdo TODOS os tópicos da
DISCIPLINA;
Todas as avaliações só serão com consulta se assim o professor
determinar.

©2005 by Pearson Education 16-13
Engenharias
Física 1 (Mecânica)CRONOGRAMA DAS AVALIAÇÕES - OFICIAIS
1ª AVALIAÇÃO OFICIAL BIMESTRAL:
Engenharia Civil: 17/09/2012
Engenharia Mecânica, A/C e Produção: 18/09/2012
Capítulos: 1 e 2
2ª AVALIAÇÃO OFICIAL BIMESTRAL:
Engenharia Civil: 03/12/2012
Engenharia Mecânica, A/C e Produção: 04/12/2012
Capítulos: 3 a 4
AVALIAÇÃO da 2ª. CHAMADA OFICIAL:
Engenharia Civil: 10/12/2012 (12/12/2012)
Engenharia Mecânica, A/C e Produção: 11/12/2012
AVALIAÇÃO FINAL: Engenharia Civil (17/12/2012) / Engenharia Mecânica, A/C e Produção
(18/12/2012)
Capítulos: TODOS
©2005 by Pearson Education 16-14
Engenharias
Física 1 (Mecânica)CRONOGRAMA DAS AVALIAÇÕES - PARCIAIS
1ª AVALIAÇÃO BIMESTRAL:
Engenharia Civil: 27/08/2012
Engenharia Mecânica, A/C e Produção: 28/08/2012
Capítulos: 1 e 2
2ª AVALIAÇÃO BIMESTRAL:
Engenharia Civil: xx/11/2012
Engenharia Mecânica, A/C e Produção: yy/11/2012
Capítulos: 3 a 4

©2005 by Pearson Education 16-15
Engenharias
Física 1 (Mecânica)
Outras datas importantes
01/08/2012 – Início das Aulas
15/12/2012 – Último dia letivo
©2005 by Pearson Education 16-16
Engenharias
Física 1 (Mecânica)
IMPORTANTE1. Cada dia perdido de aula corresponde a 3 (três) faltas;
2. O aluno tem direito a faltar 25% do total da carga horária. Falta REPROVA;
3. Falta não se justifica – faltou porque tem direito como descrito no item 2.
4. As discussões de grupo sobre os exercícios e demais atividades ajudarão na
composição da nota quando o professor assim o determinar;
5. O professor não falta. Quando for faltar comunicará com antecedência o líder
da turma;
6. As datas das avaliações são marcadas com antecedência porque não serão
mudadas. Só mudarão em casos excepcionais;
7. Todas as avaliações só serão com consulta se o professor assim o determinar.
8. Avaliação com consulta tira o direito de revisão da nota obtida na
mesma.
©2005 by Pearson Education 16-17
Engenharias
Física 1 (Mecânica)
BIBLIOGRAFIA ADOTADA TIPLER, P.A., MOSCA, G., Física para Cientistas e Engenheiros: Mecânica,
Oscilações e Ondas, Termodinâmica. Editora LTC, Volume 1, 5ª. Edição. Rio de Janeiro.
2006.
YOUNG,H.D., FREEDMAN, R.A., Física I. Editora Pearson–Addison Wesley, 12ª.
Edição. São Paulo. 2008.
HEWITT, P.G., Física Conceitual. Editora Brookman, 9ª. Edição. Porto Alegre. 2002
HALLIDAY, D., RESNICK, R., WALKER, J., Fundamentos da Física – Mecânica.
Editora LTC. Volume 1. 8ª. Edição. Rio de Janeiro. 2009.
KELLER, F.J., GETTYS, W.E., SKOVE, M.J., Física. Editora Makron Books. Volume 1.
São Paulo. 2009.
BEER, F.P., Mecânica Vetorial para Engenheiros: Dinâmica. Editora McGraw-Hill. 7ª.
Edição. 2006.
SERWAY, R.A., JR, J.W.J., Princípios de Física: Mecânica Clássica. Editora Thonson
Learning. Volume 1. São Paulo. 2004
Segundas/Terças-feiras – 08:30 às 11:15 horas
©2005 by Pearson Education 16-18
Engenharias
Física 1 (Mecânica)
Medição
Quando um terremoto atinge
uma região habitada, pode fazer
edifícios e outras construções
racharem ou tombarem.
Como pode um edifício
afundar no chão?
©2005 by Pearson Education 16-19
Engenharias
Física 1 (Mecânica)
O que é Física?
A ciência e a engenharia se
baseiam em medições e comparações.
Assim precisamos de regras para
estabelecer de que forma as
grandezas devem ser medidas e
comparadas.
Exemplo: desenvolvimento de
relógios extremamente precisos.
©2005 by Pearson Education 16-20
Engenharias
Física 1 (Mecânica)
Medindo grandezas! Descobrimos a física aprendendo a medir e
comparar grandezas como:
comprimento;
tempo;
massa;
temperatura;
pressão e
corrente elétrica.
Medimos cada grandeza física em unidades
apropriadas, por comparação com um padrão.
A unidade é um nome particular que
atribuímos às medidas dessas grandezas.

©2005 by Pearson Education 16-21
Engenharias
Física 1 (Mecânica)
O Sistema Internacional de Unidades - SI Em 1971, na 14ª. Conferência Geral de Pesos e Medidas, foram selecionadas
sete (7) grandezas fundamentais, as quais constituem a base do SI ou sistema
métrico.
©2005 by Pearson Education 16-22
Engenharias
Física 1 (Mecânica)
O Sistema Internacional de Unidades - SI
Muitas unidades derivadas do SI são definidas em termos dessas
unidades fundamentais.
Assim, por exemplo, a unidade de potência no SI, chamada watt (W),
é definida em termos das unidades fundamentais de massa,
comprimento e tempo.
©2005 by Pearson Education 16-23
Engenharias
Física 1 (Mecânica)
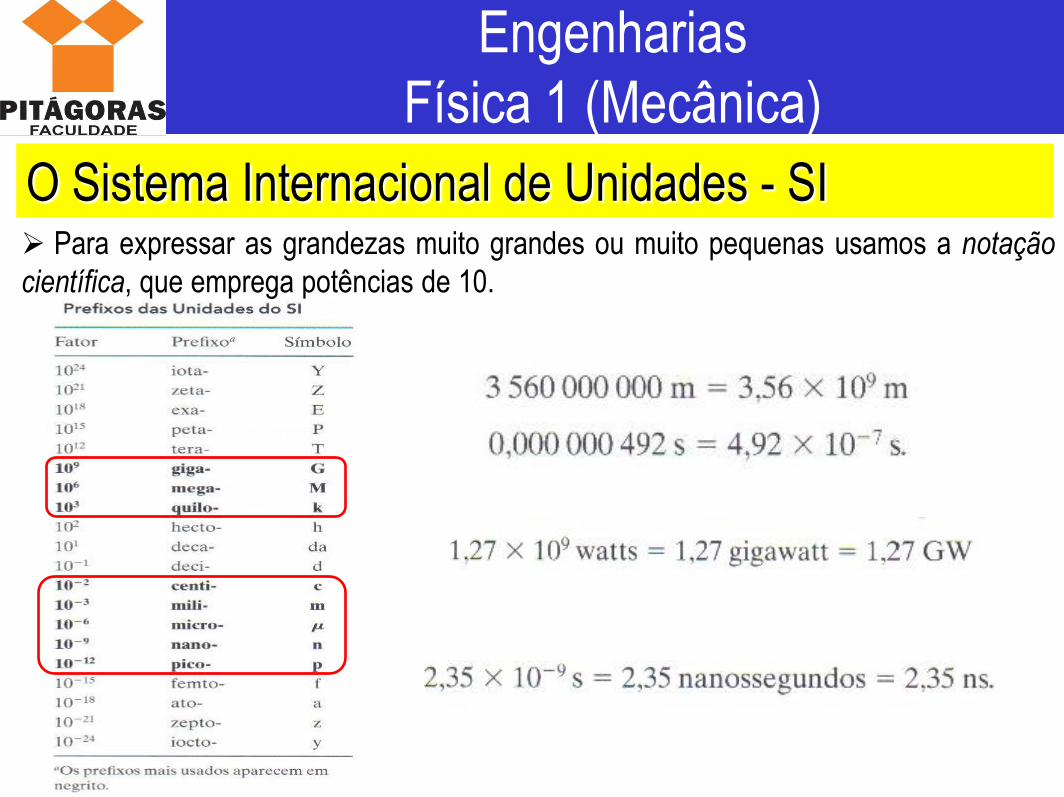
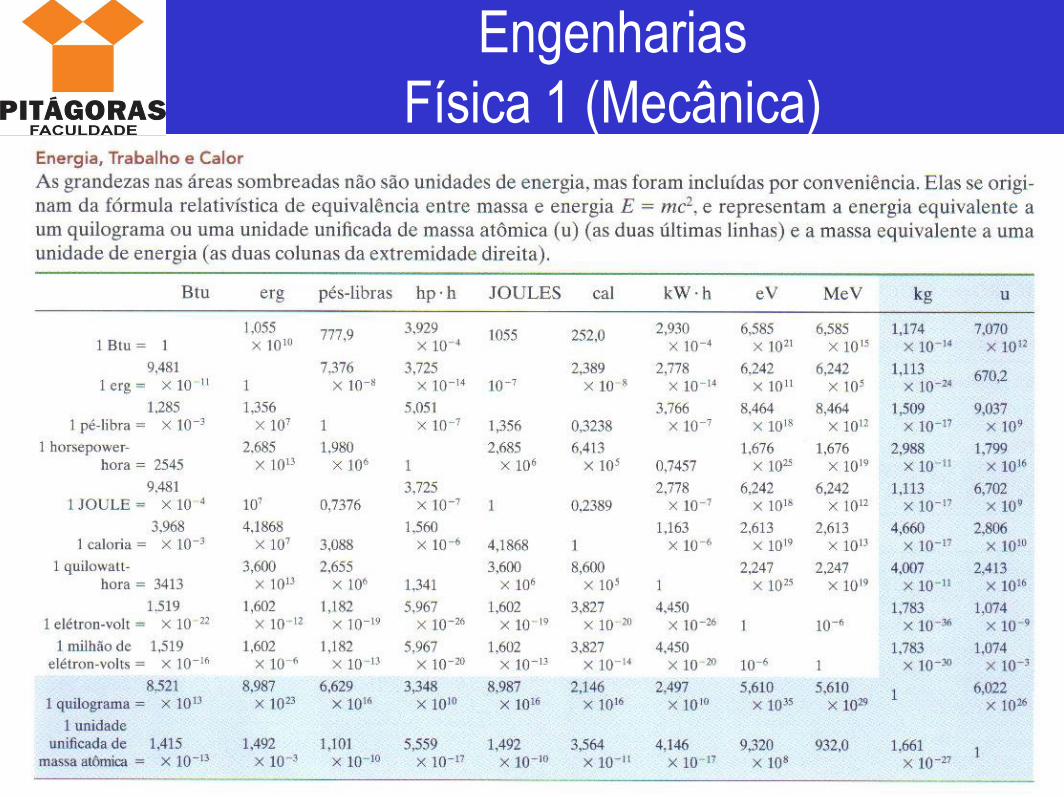
O Sistema Internacional de Unidades - SI Para expressar as grandezas muito grandes ou muito pequenas usamos a notação
científica, que emprega potências de 10.

©2005 by Pearson Education 16-24
Engenharias
Física 1 (Mecânica)
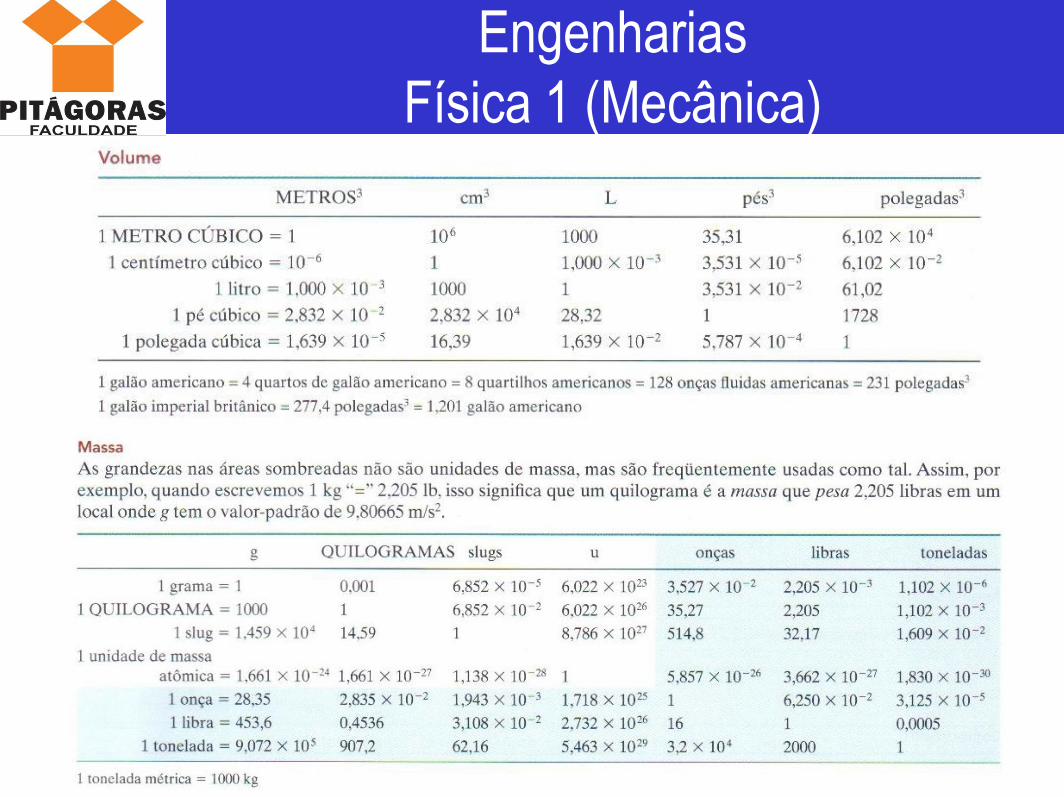
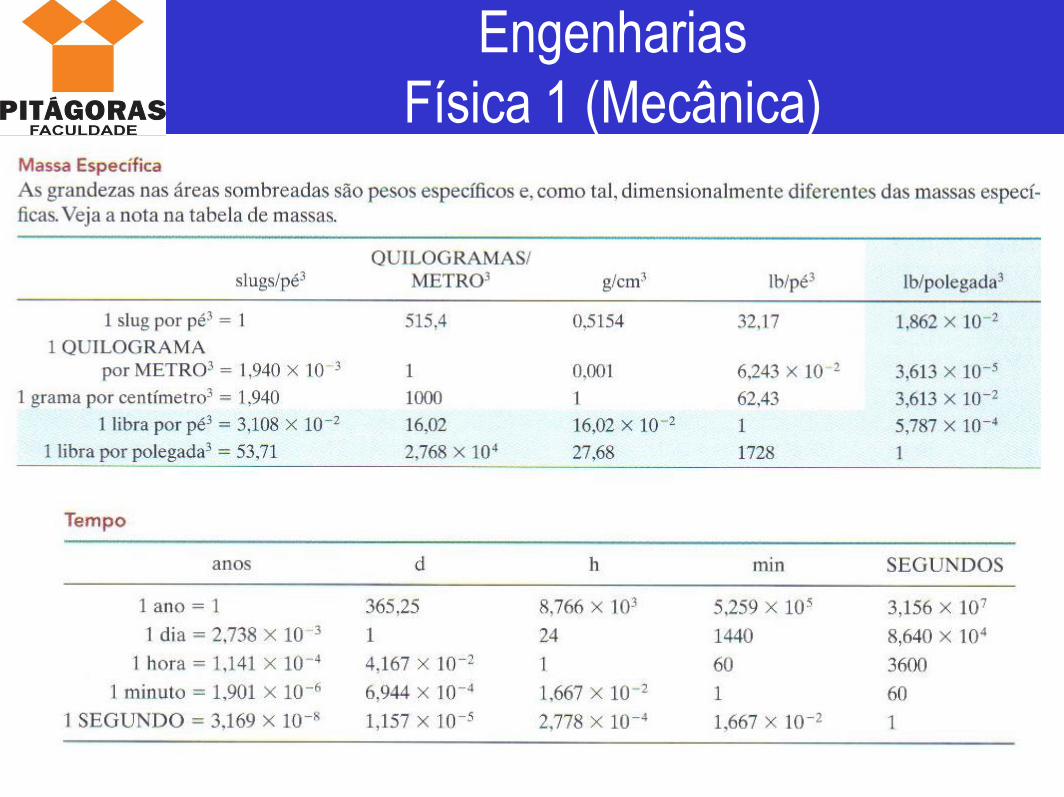
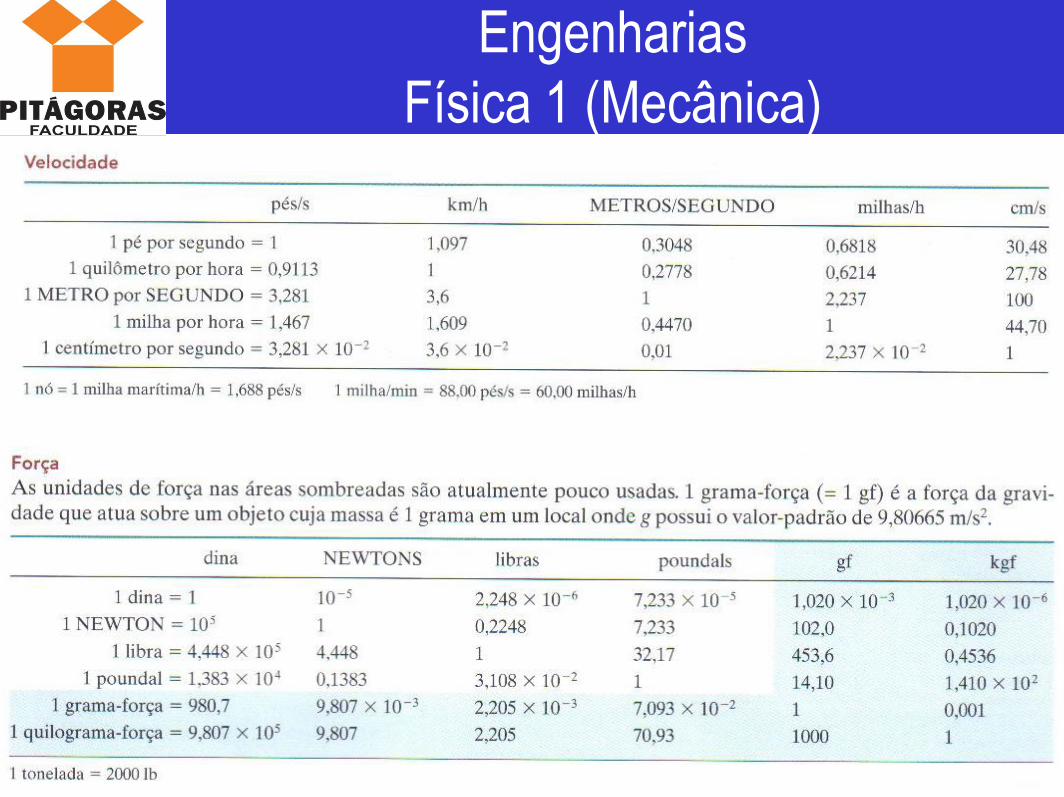
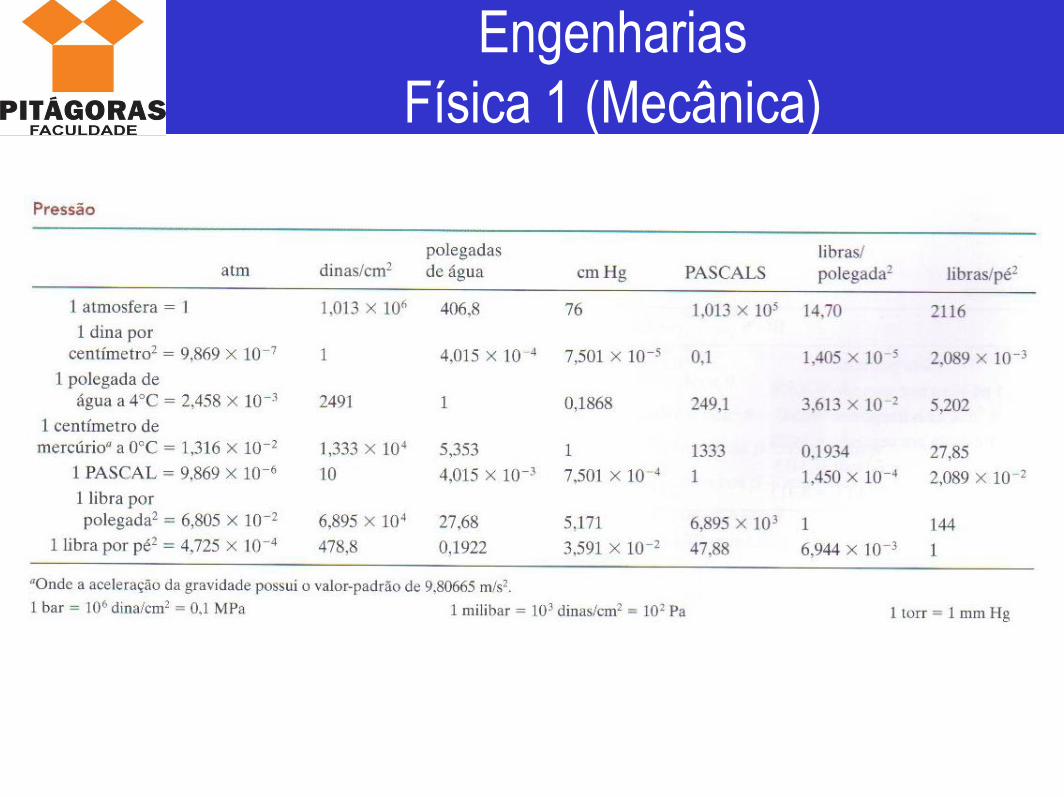
Mudança de unidade
©2005 by Pearson Education 16-25
Engenharias
Física 1 (Mecânica)

©2005 by Pearson Education 16-26
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-27
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-28
Engenharias
Física 1 (Mecânica)
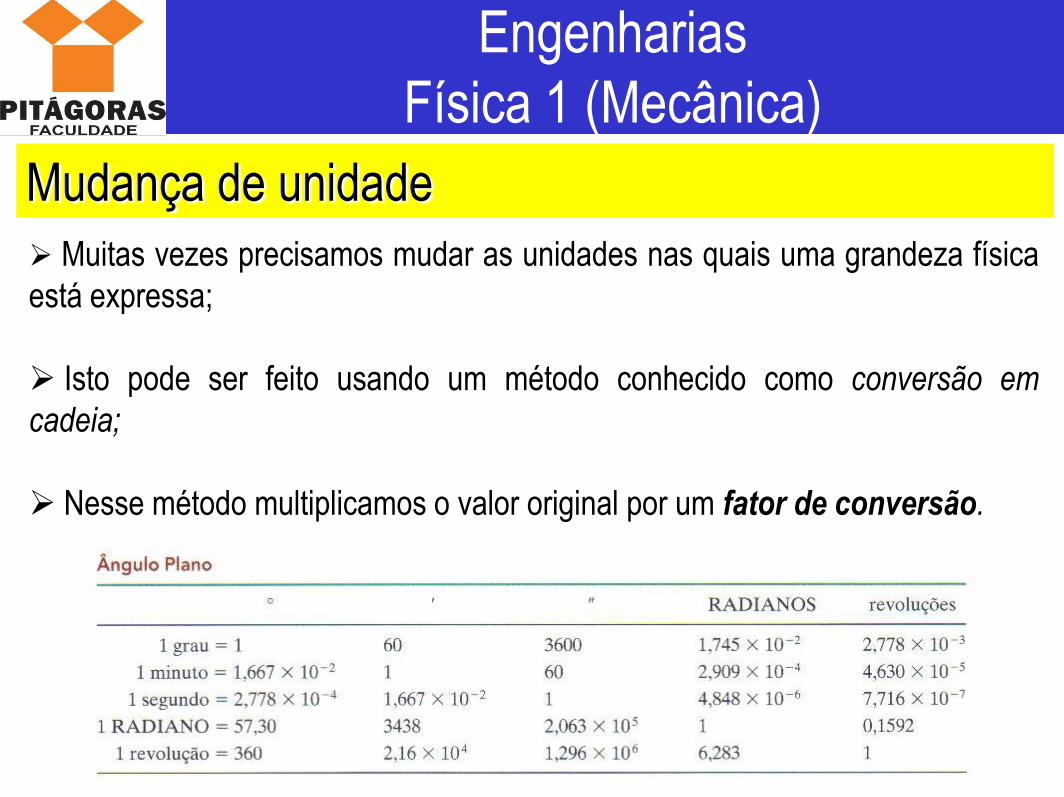
Mudança de unidade
Muitas vezes precisamos mudar as unidades nas quais uma grandeza física
está expressa;
Isto pode ser feito usando um método conhecido como conversão em
cadeia;
Nesse método multiplicamos o valor original por um fator de conversão.

©2005 by Pearson Education 16-29
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-30
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-31
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-32
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-33
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-34
Engenharias
Física 1 (Mecânica)

©2005 by Pearson Education 16-35
Engenharias
Física 1 (Mecânica)
©2005 by Pearson Education 16-36
Engenharias
Física 1 (Mecânica)
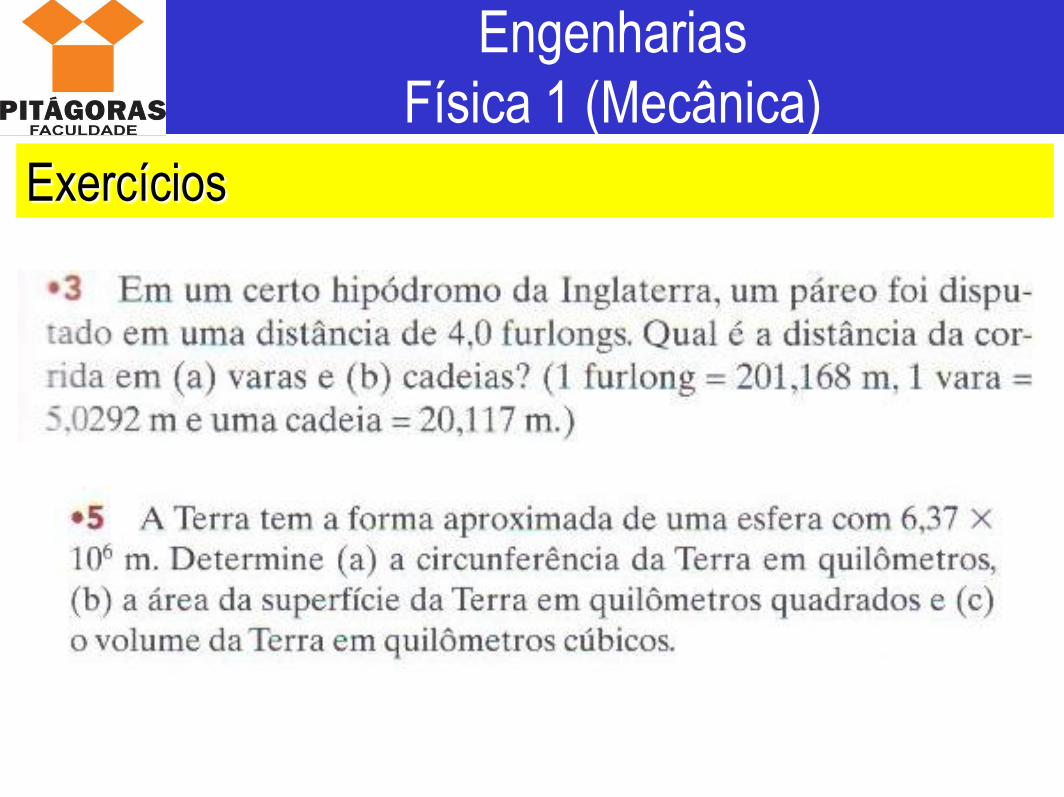
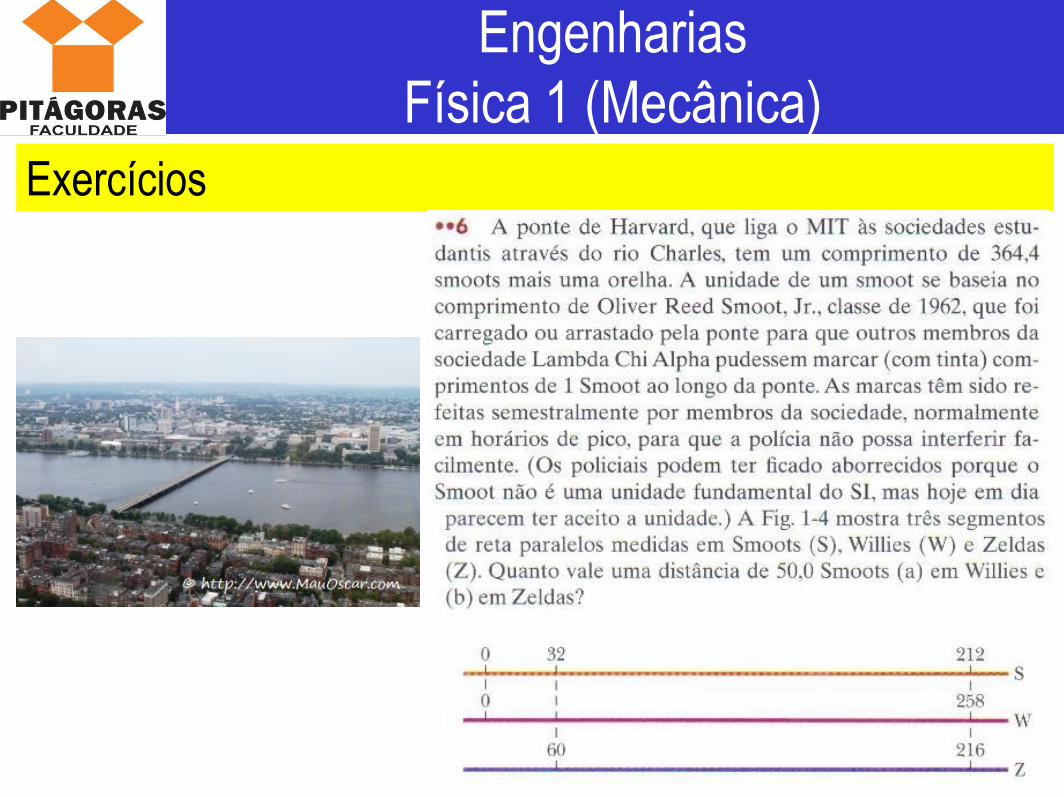
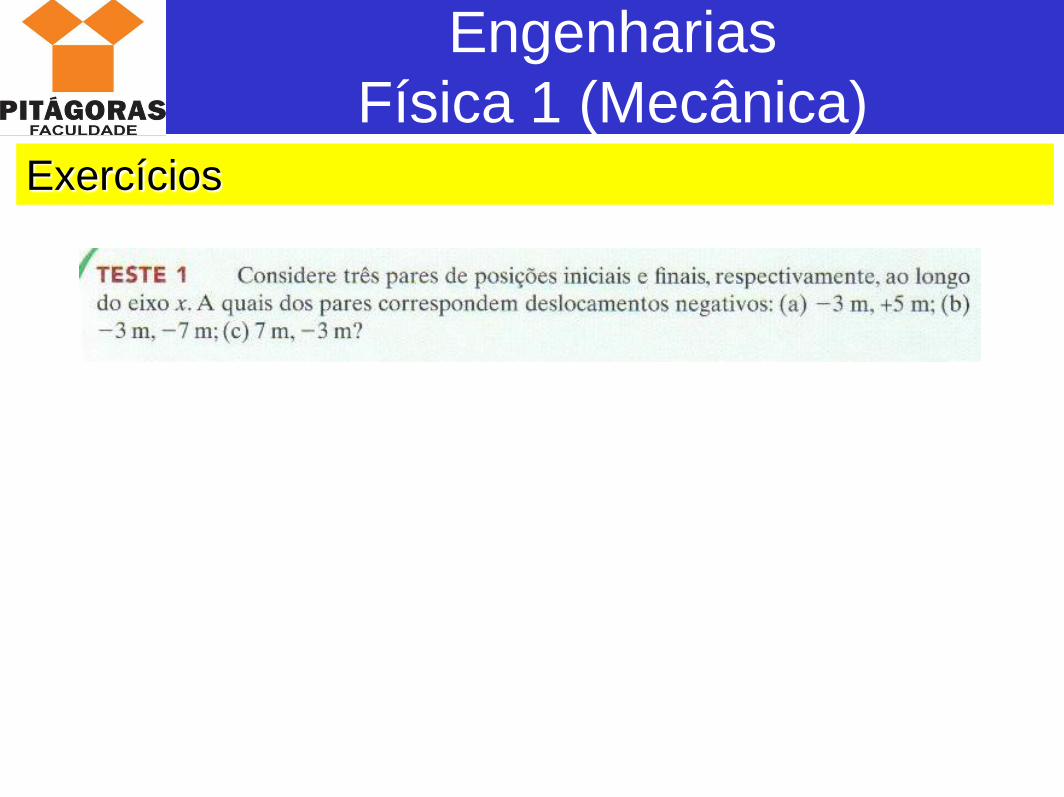
Exercícios
©2005 by Pearson Education 16-37
Engenharias
Física 1 (Mecânica)
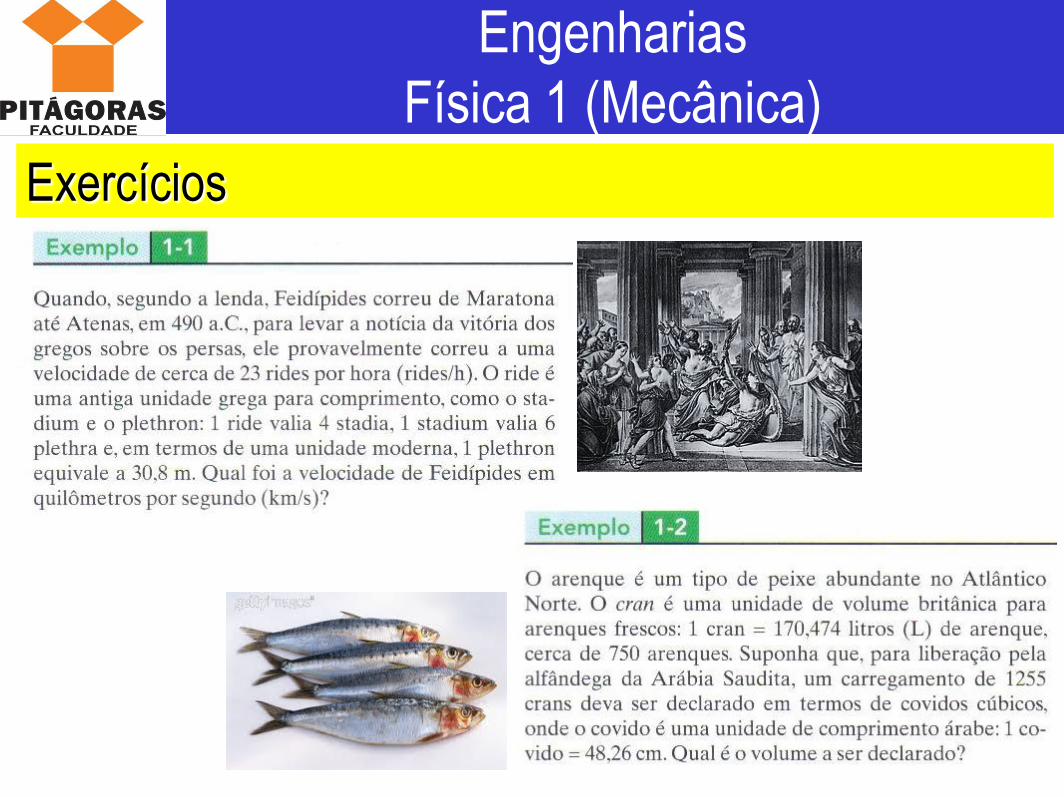
Algarismos Significativos e Casas Decimais Se você calculou a resposta do Exemplo 1.1 sem que a sua calculadora tenha
arredondado automaticamente o resultado, o número 4,72266667 x 10-³ deve ter
aparecido no visor.
Arredondamos a resposta para 4,7 x 10-³ km/s para não dar a impressão de que ela é
mais precisa que os dados fornecidos.
A velocidade conhecida de 23 rides/h contém dois algarismos, que são chamados de
algarismos significativos.
Quando o primeiro dígito à direita a ser descartado é maior ou igual a 5, o último
dígito mantido é acrescido de uma unidade;
Assim por exemplo 11,3516 (arredondando para três algarismos significativos): ?
Assim por exemplo 11,3279 (arredondando para três algarismos significativos): ?
Quantos algarismos significativos os respectivos números possuem: 3,15; 3,15 x 10³;
3000
Quantas casas decimais os seguintes números possuem: 35,6 mm; 3,56 m; 0,00356
m

©2005 by Pearson Education 16-38
Engenharias
Física 1 (Mecânica)
O padrão de comprimento

©2005 by Pearson Education 16-39
Engenharias
Física 1 (Mecânica)
O padrão de tempo

©2005 by Pearson Education 16-40
Engenharias
Física 1 (Mecânica)
O padrão de massa
©2005 by Pearson Education 16-41
Engenharias
Física 1 (Mecânica)
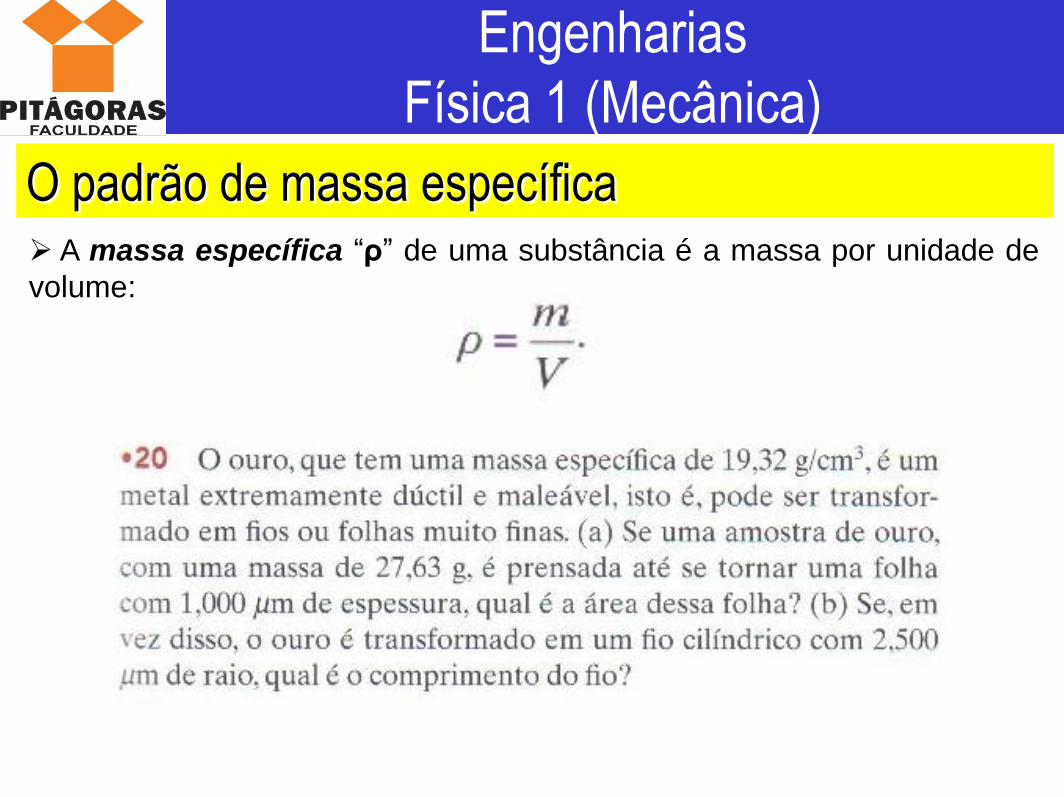
O padrão de massa específica A massa específica “ρ” de uma substância é a massa por unidade de
volume:
©2005 by Pearson Education 16-42
Engenharias
Física 1 (Mecânica)
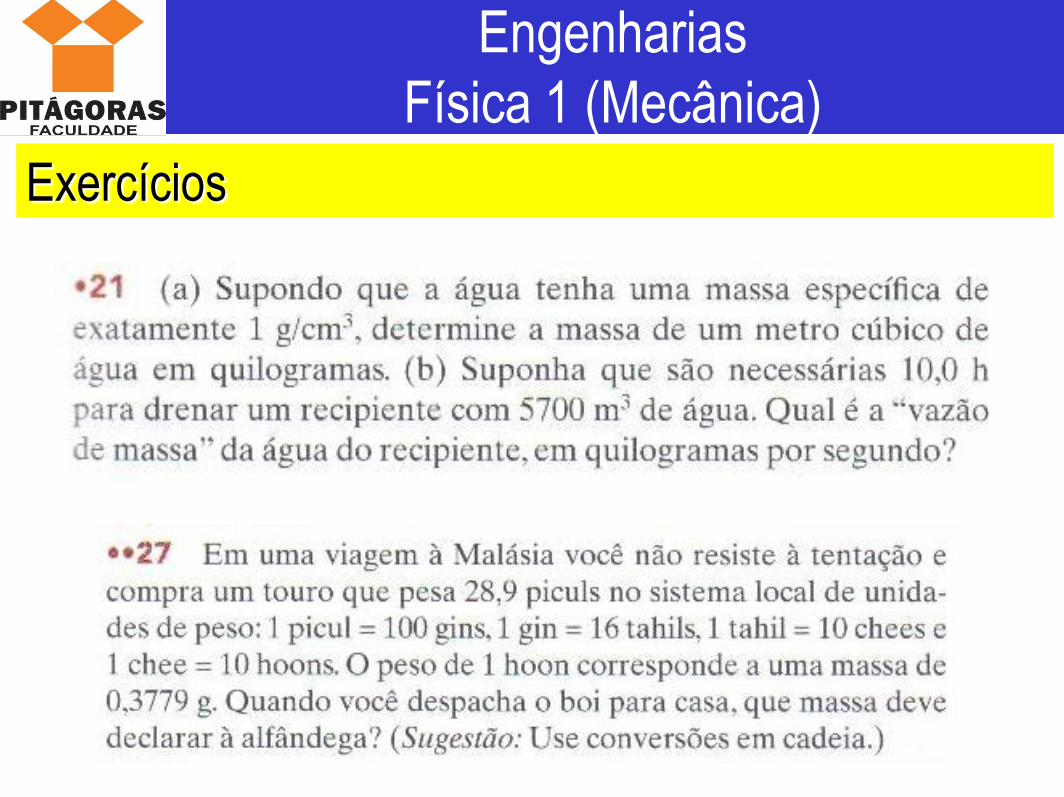
Exercícios
©2005 by Pearson Education 16-43
Engenharias
Física 1 (Mecânica)
Exercícios
©2005 by Pearson Education 16-44
Engenharias
Física 1 (Mecânica)
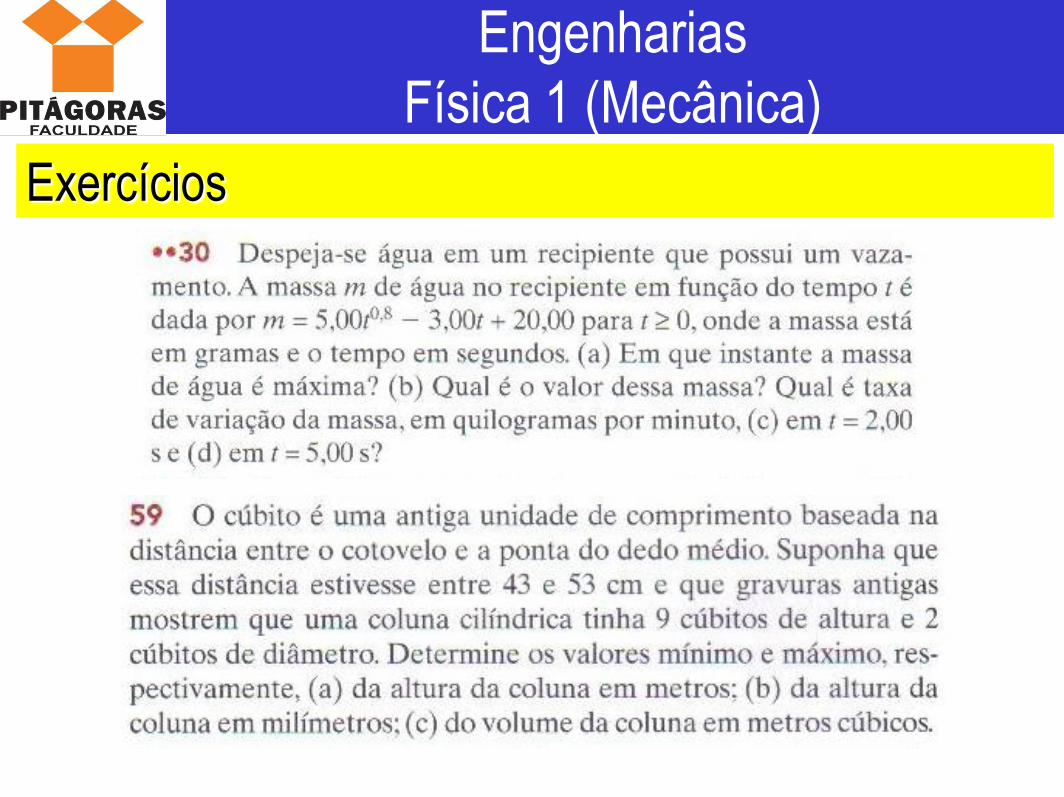
Exercícios

©2005 by Pearson Education 16-45
Engenharias
Física 1 (Mecânica)
Exercícios
©2005 by Pearson Education 16-46
Engenharias
Física 1 (Mecânica)
Exercícios
©2005 by Pearson Education 16-47
Engenharias
Física 1 (Mecânica)
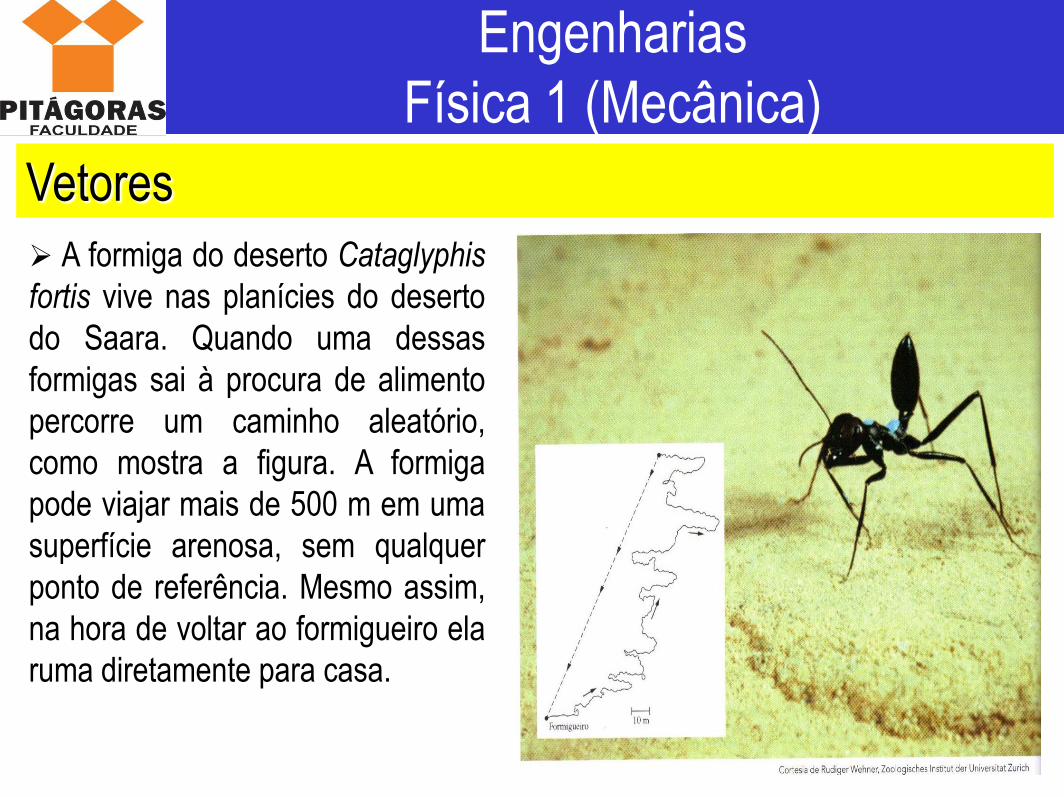
Vetores
A formiga do deserto Cataglyphis
fortis vive nas planícies do deserto
do Saara. Quando uma dessas
formigas sai à procura de alimento
percorre um caminho aleatório,
como mostra a figura. A formiga
pode viajar mais de 500 m em uma
superfície arenosa, sem qualquer
ponto de referência. Mesmo assim,
na hora de voltar ao formigueiro ela
ruma diretamente para casa.
©2005 by Pearson Education 16-48
Engenharias
Física 1 (Mecânica)
Vetores
©2005 by Pearson Education 16-49
Engenharias
Física 1 (Mecânica)
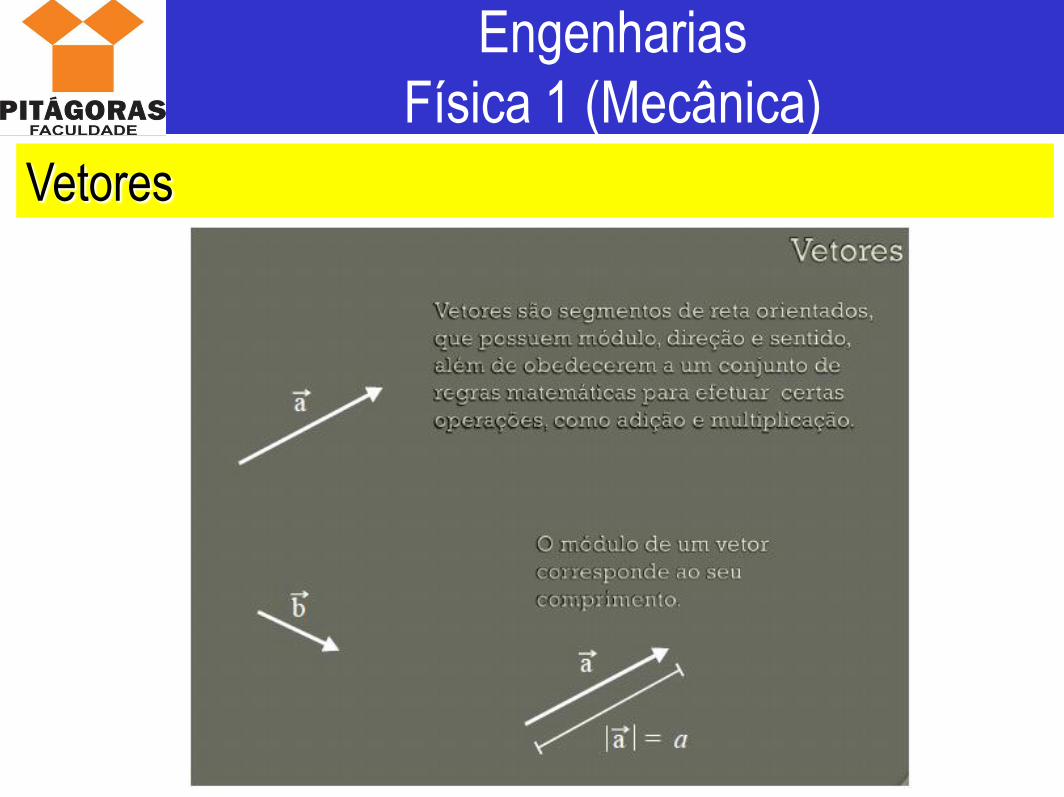
Vetores

©2005 by Pearson Education 16-50
Engenharias
Física 1 (Mecânica)
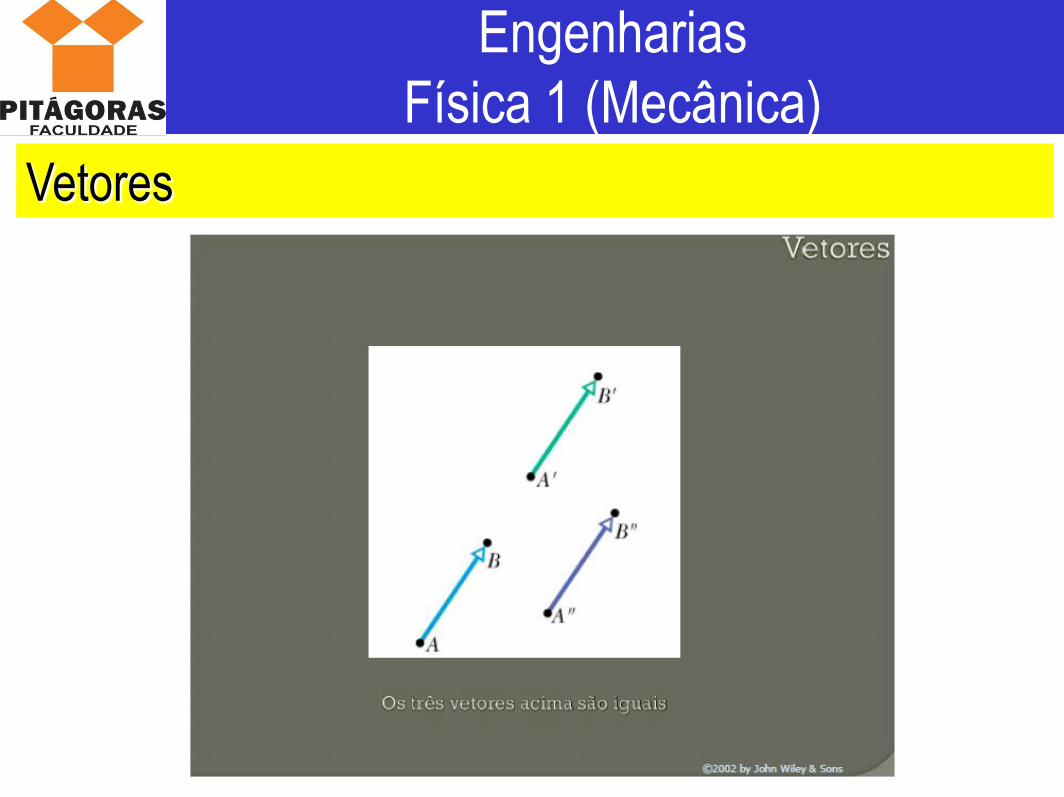
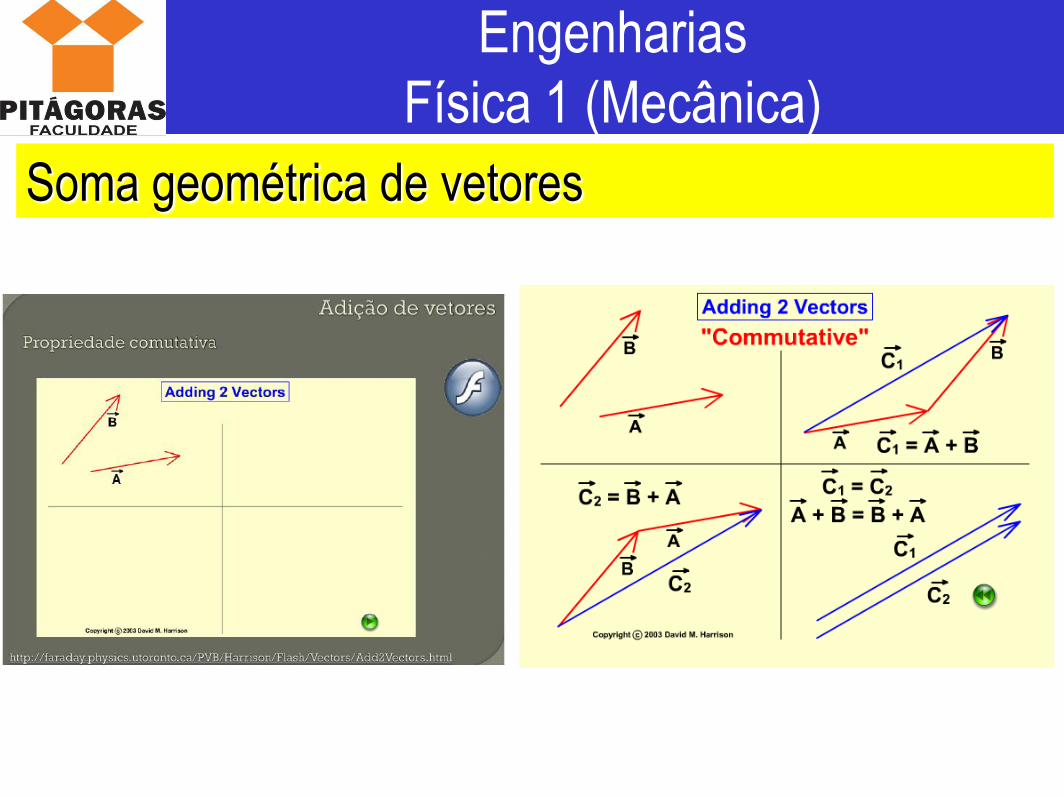
Vetores e escalares / Soma geométrica de vetores
O vetor
deslocamento nada
nos diz sobre a
trajetória percorrida
por uma partícula.
Um vetor
deslocamento
representa apenas o
resultado final do
movimento, não o
movimento
propriamente dito.
©2005 by Pearson Education 16-51
Engenharias
Física 1 (Mecânica)
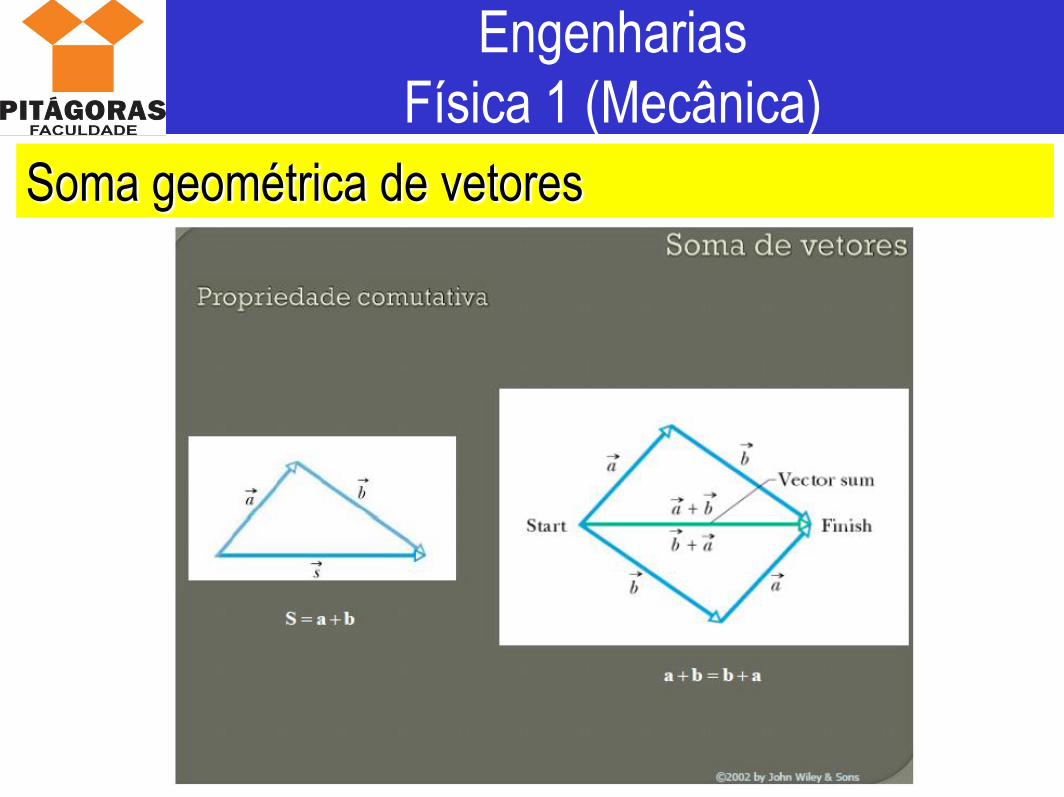
Soma geométrica de vetores
©2005 by Pearson Education 16-52
Engenharias
Física 1 (Mecânica)
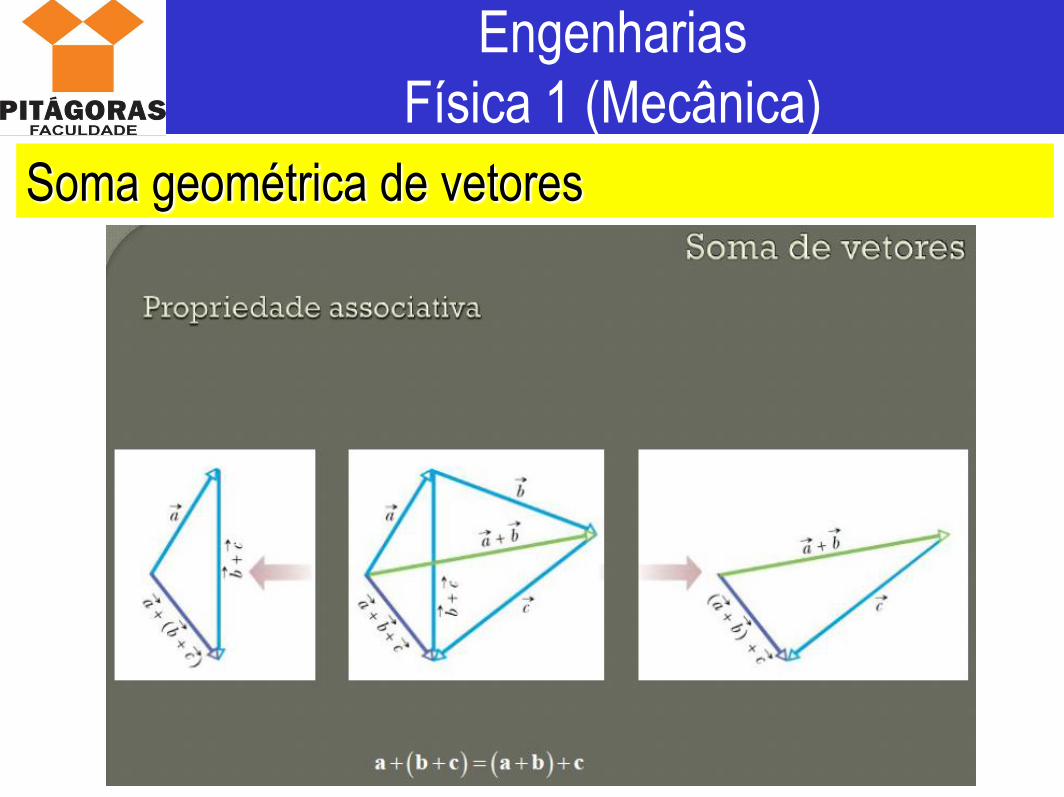
Soma geométrica de vetores
©2005 by Pearson Education 16-53
Engenharias
Física 1 (Mecânica)
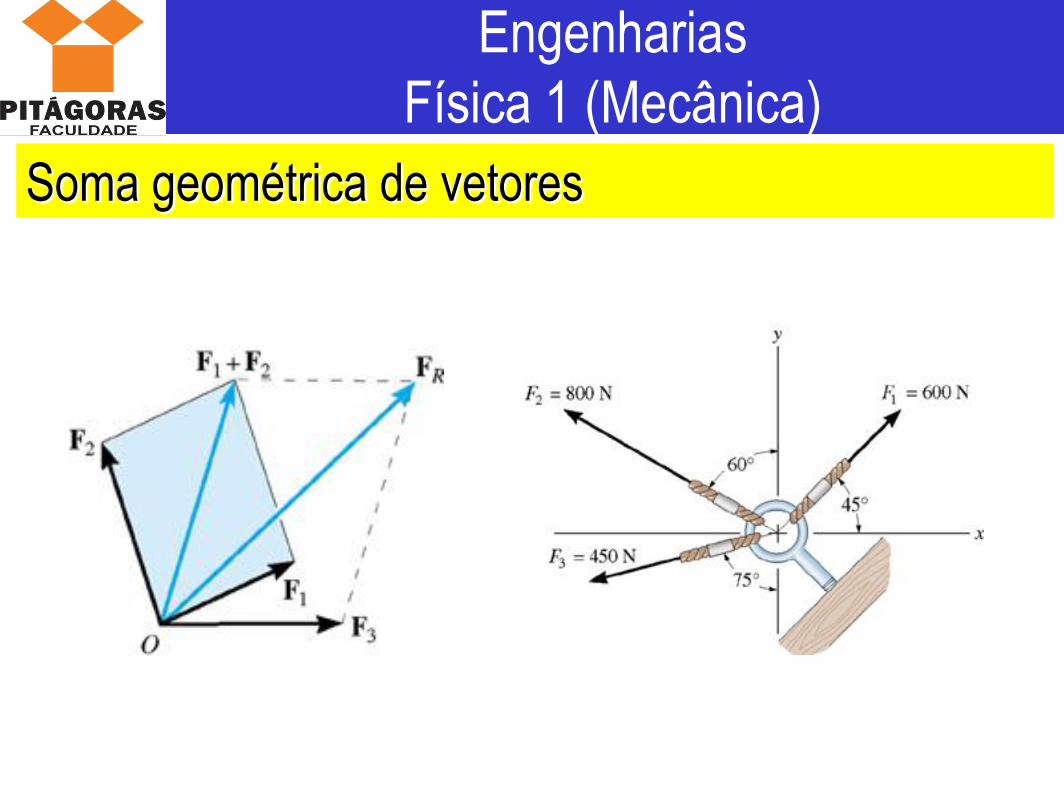
Soma geométrica de vetores
©2005 by Pearson Education 16-54
Engenharias
Física 1 (Mecânica)
Soma geométrica de vetores
©2005 by Pearson Education 16-55
Engenharias
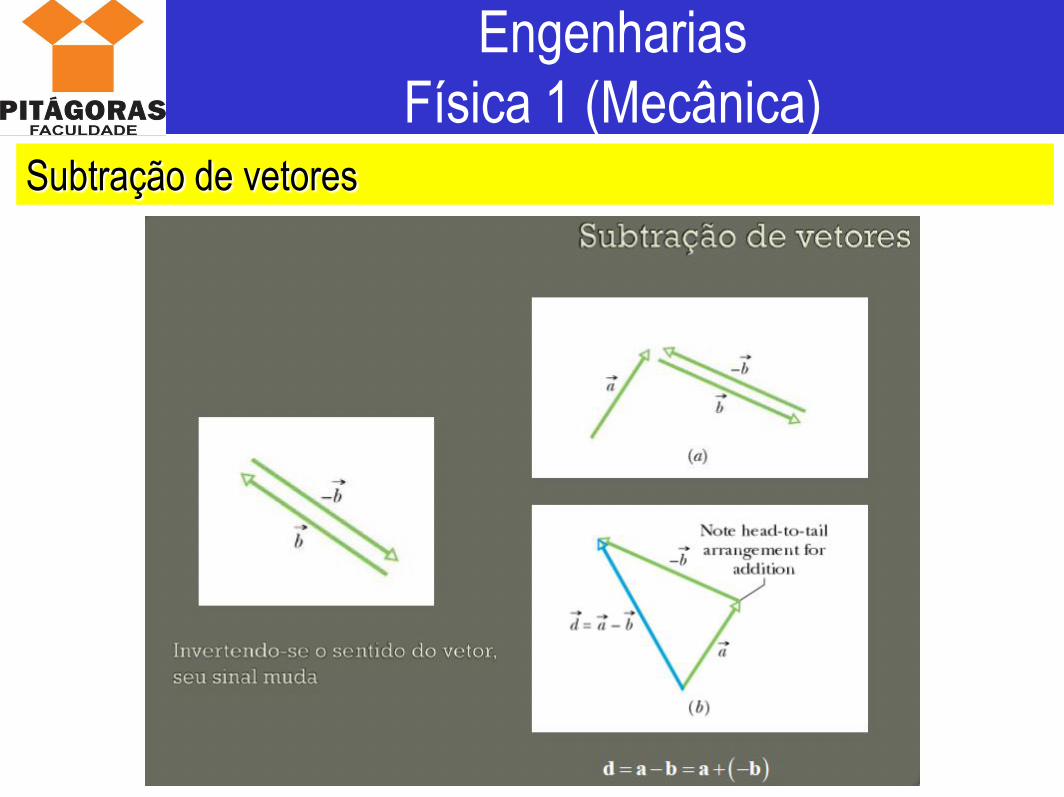
Física 1 (Mecânica)Subtração de vetores
©2005 by Pearson Education 16-56
Engenharias
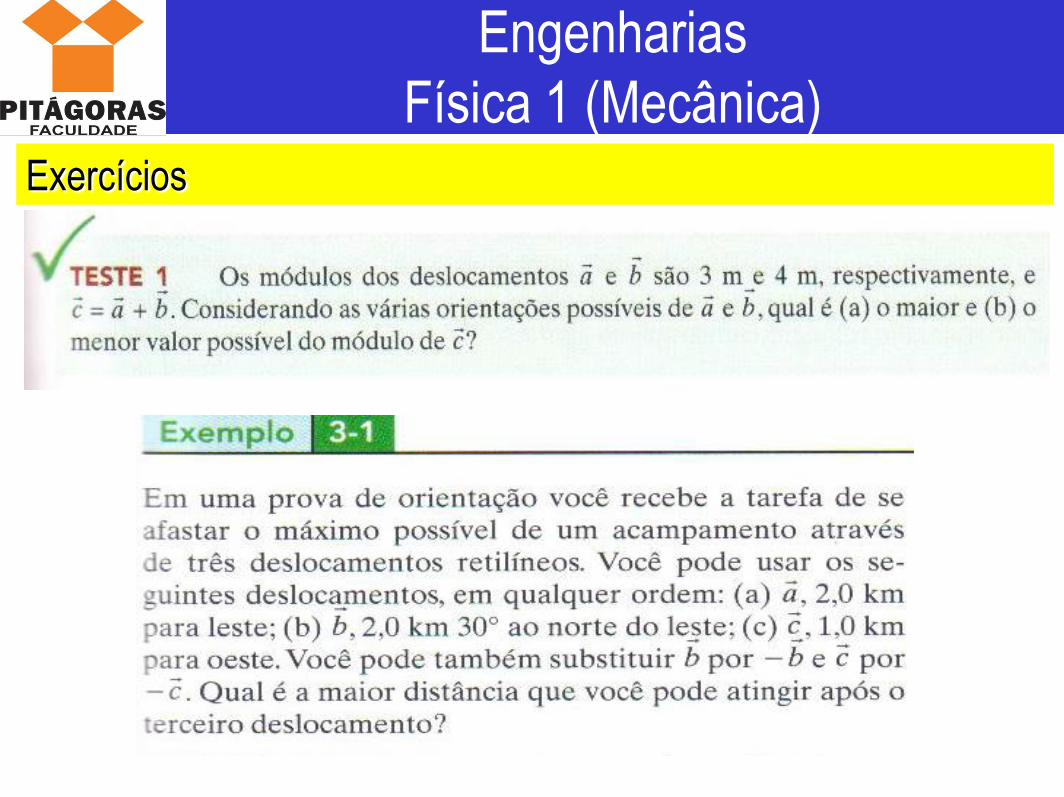
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-57
Engenharias
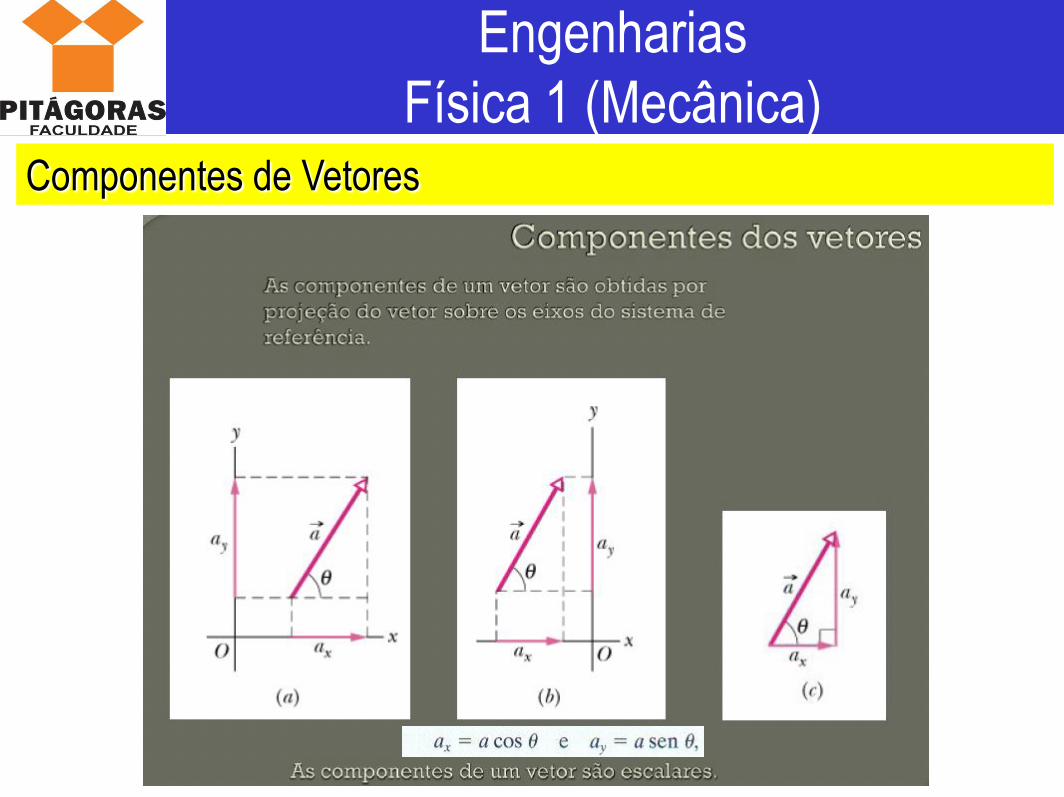
Física 1 (Mecânica)Componentes de Vetores
©2005 by Pearson Education 16-58
Engenharias
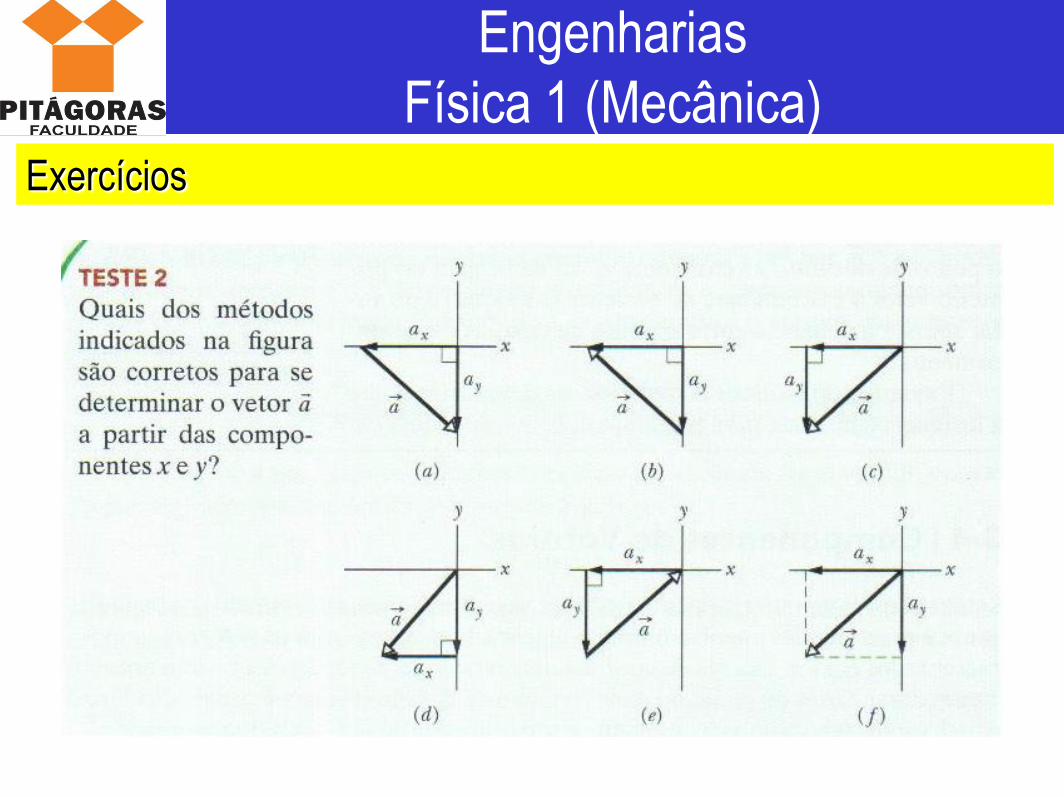
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-59
Engenharias
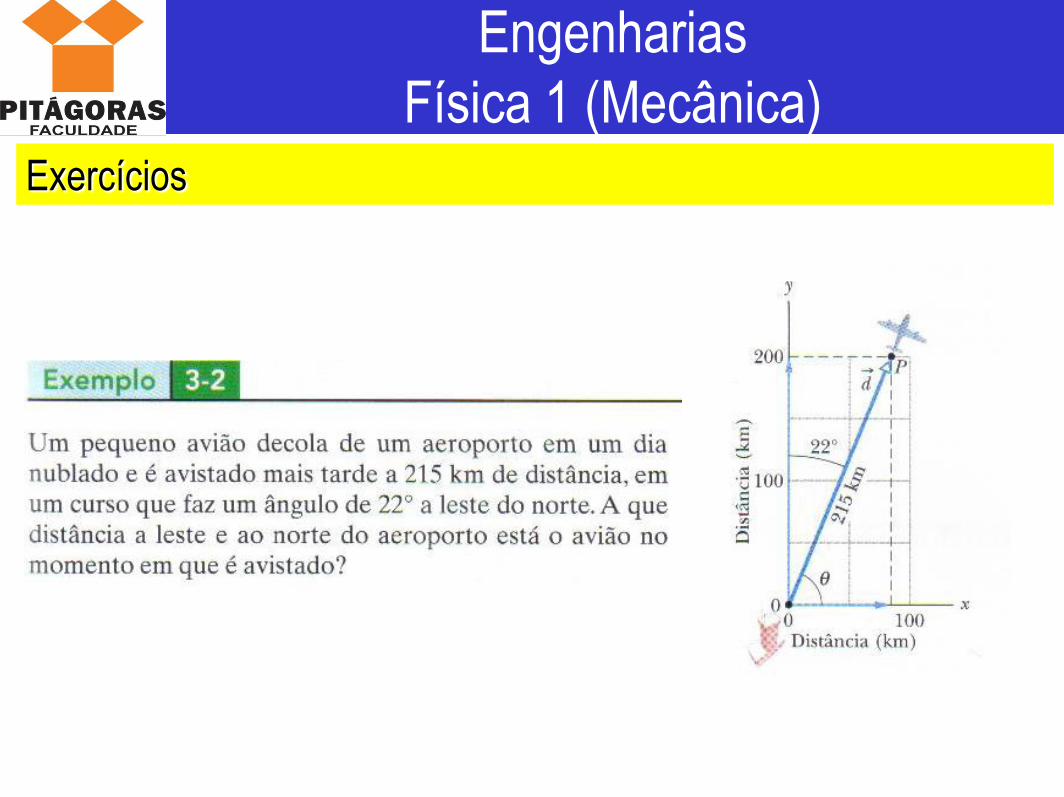
Física 1 (Mecânica)Exercícios

©2005 by Pearson Education 16-60
Engenharias
Física 1 (Mecânica)Exercícios

©2005 by Pearson Education 16-61
Engenharias
Física 1 (Mecânica)Exercícios

©2005 by Pearson Education 16-62
Engenharias
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-63
Engenharias
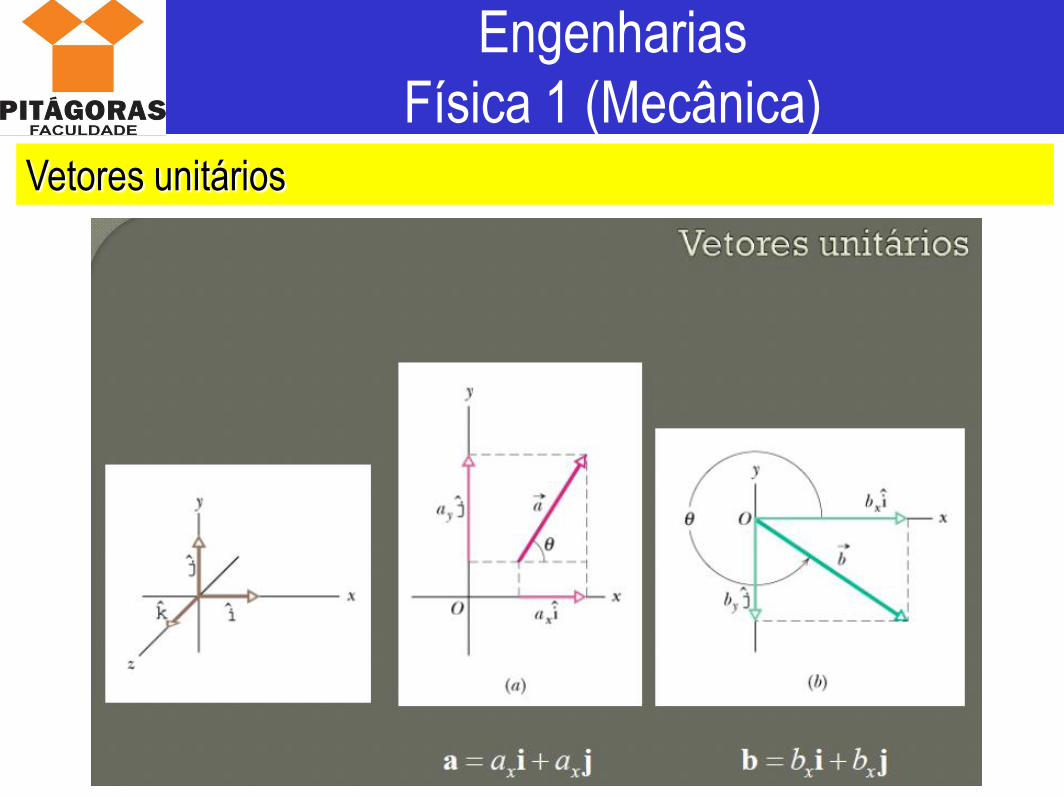
Física 1 (Mecânica)Vetores unitários
©2005 by Pearson Education 16-64
Engenharias
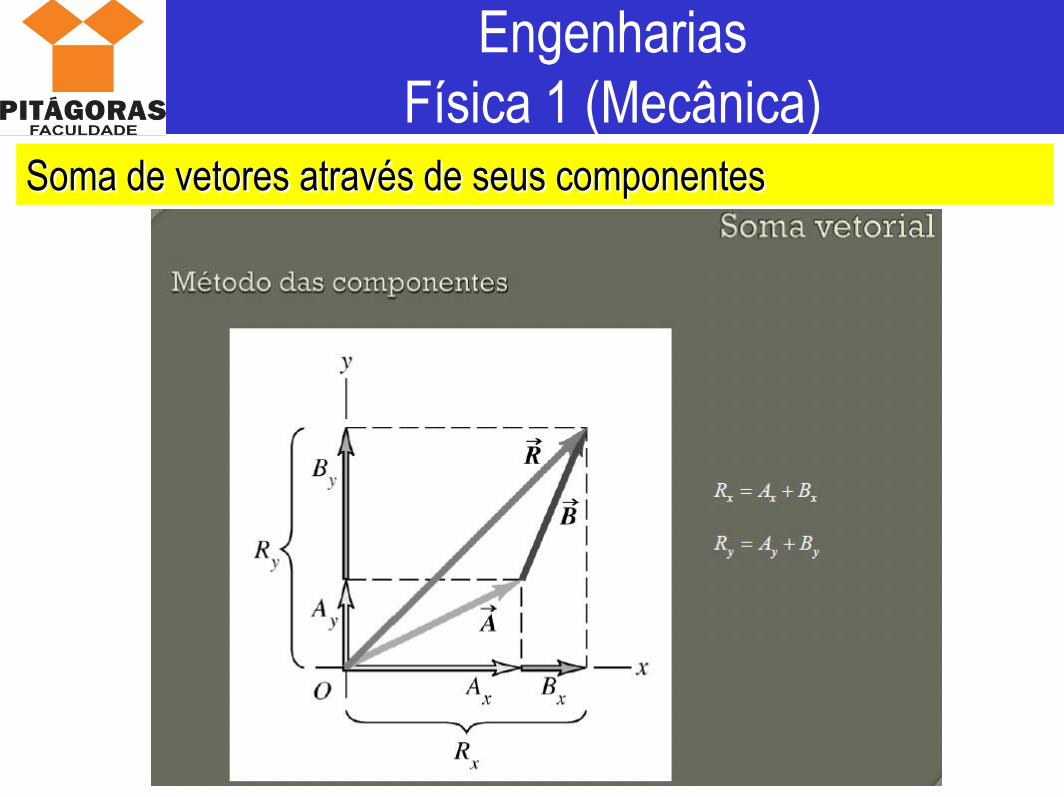
Física 1 (Mecânica)Soma de vetores através de seus componentes
©2005 by Pearson Education 16-65
Engenharias
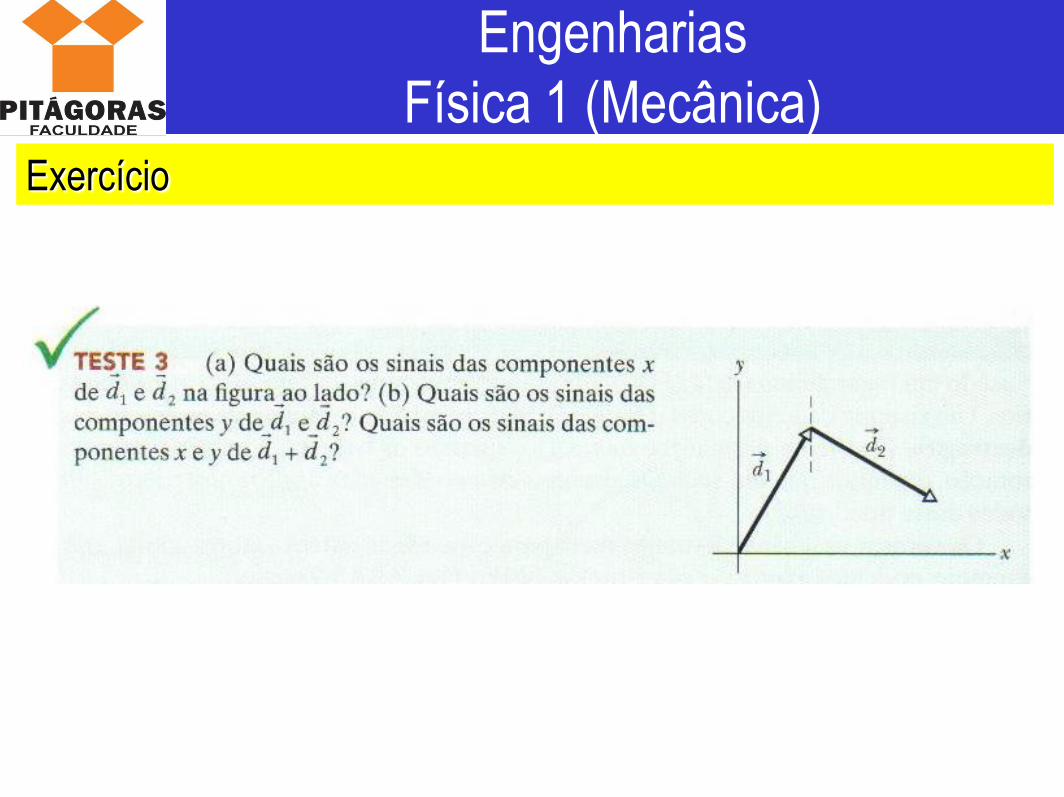
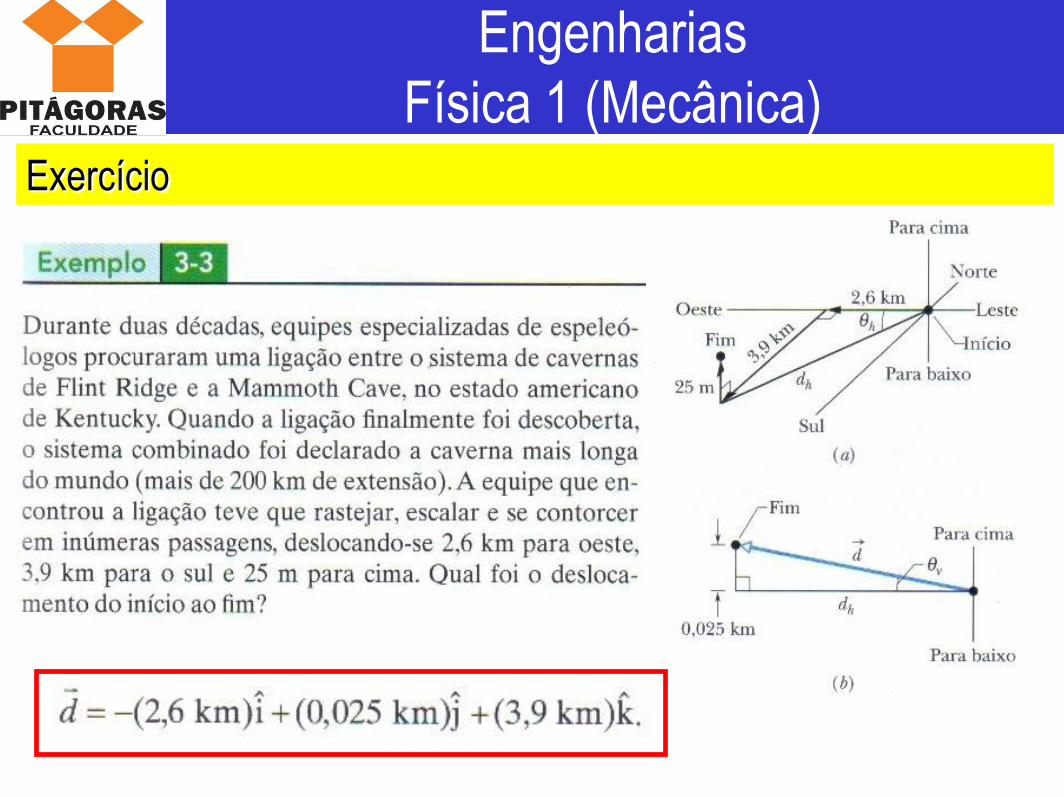
Física 1 (Mecânica)Exercício
©2005 by Pearson Education 16-66
Engenharias
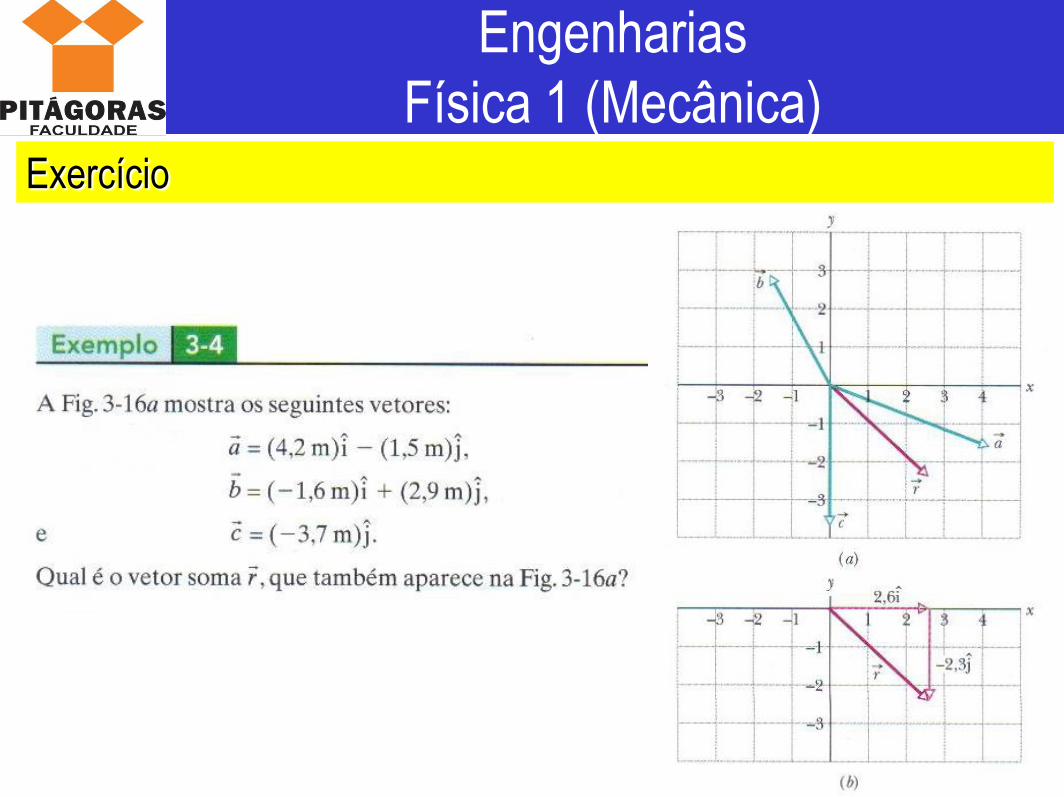
Física 1 (Mecânica)Exercício
©2005 by Pearson Education 16-67
Engenharias
Física 1 (Mecânica)Exercício

©2005 by Pearson Education 16-68
Engenharias
Física 1 (Mecânica)Exercício

©2005 by Pearson Education 16-69
Engenharias
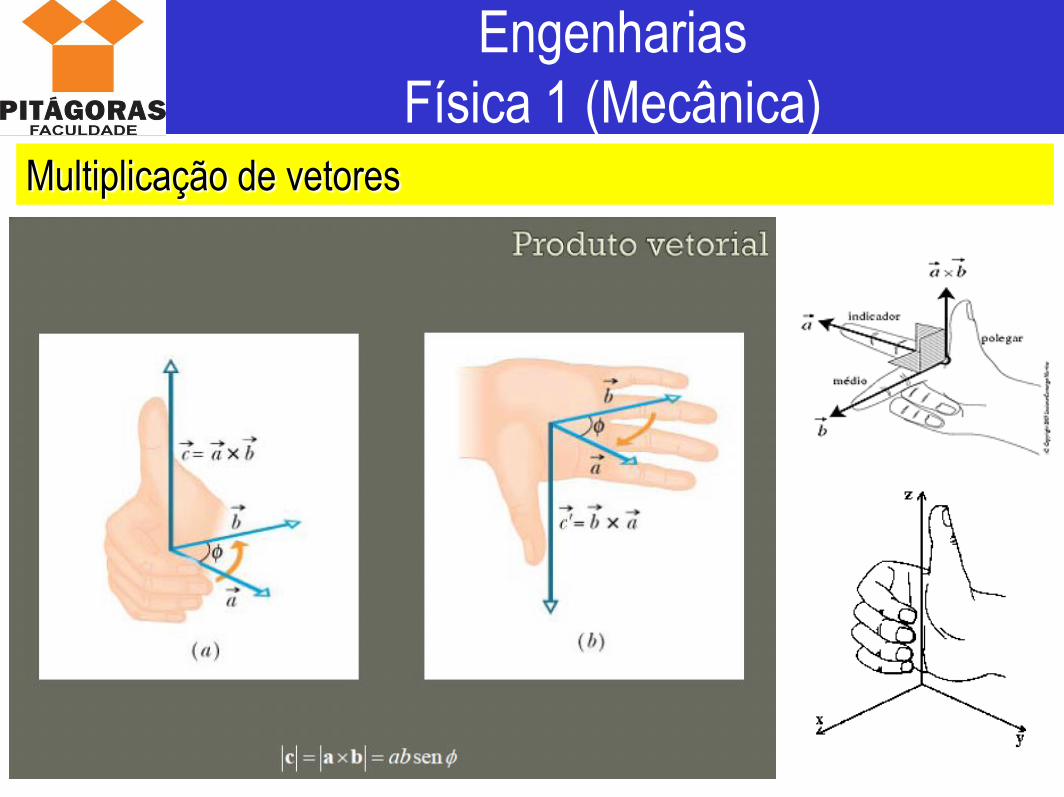
Física 1 (Mecânica)Multiplicação de vetores
©2005 by Pearson Education 16-70
Engenharias
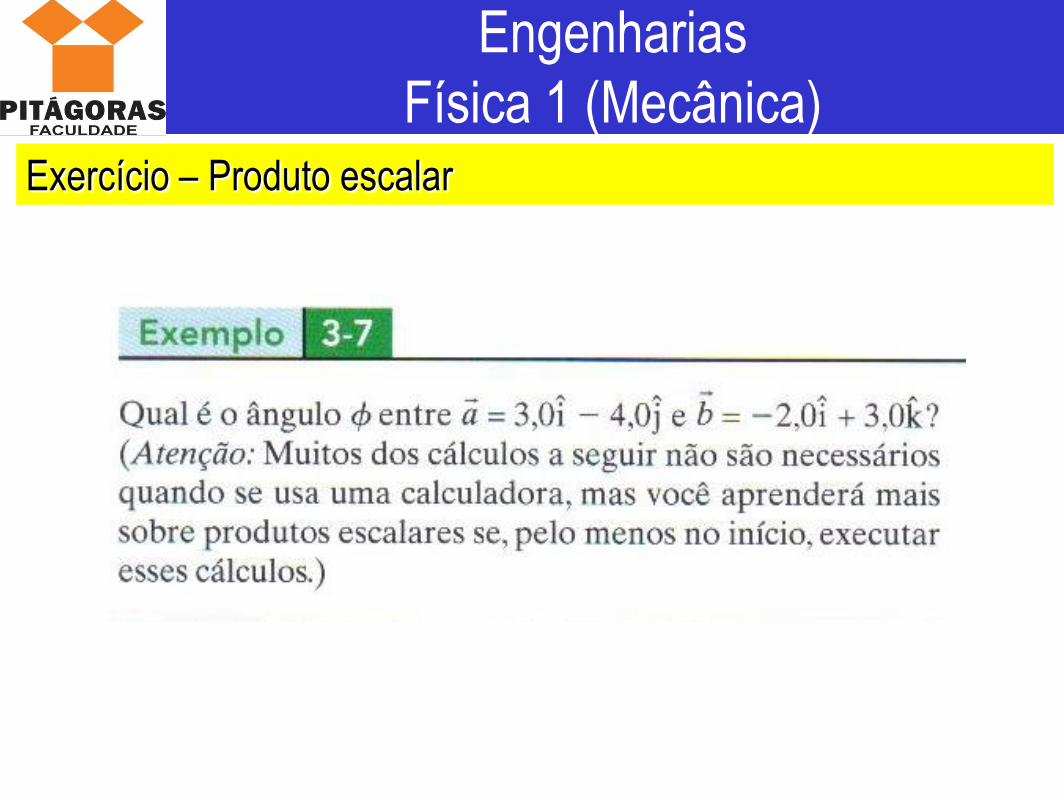
Física 1 (Mecânica)Exercício – Produto escalar
©2005 by Pearson Education 16-71
Engenharias
Física 1 (Mecânica)Multiplicação de vetores
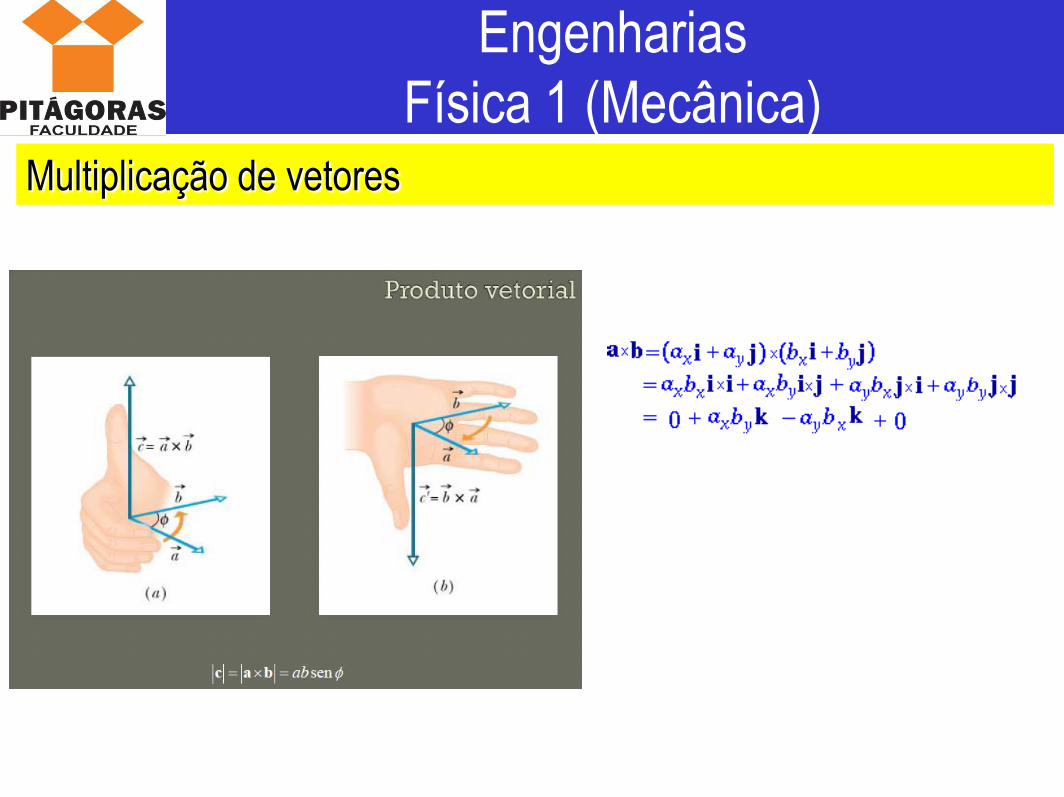
©2005 by Pearson Education 16-72
Engenharias
Física 1 (Mecânica)Multiplicação de vetores
©2005 by Pearson Education 16-73
Engenharias
Física 1 (Mecânica)Exercício – Produto vetorial
©2005 by Pearson Education 16-74
Engenharias
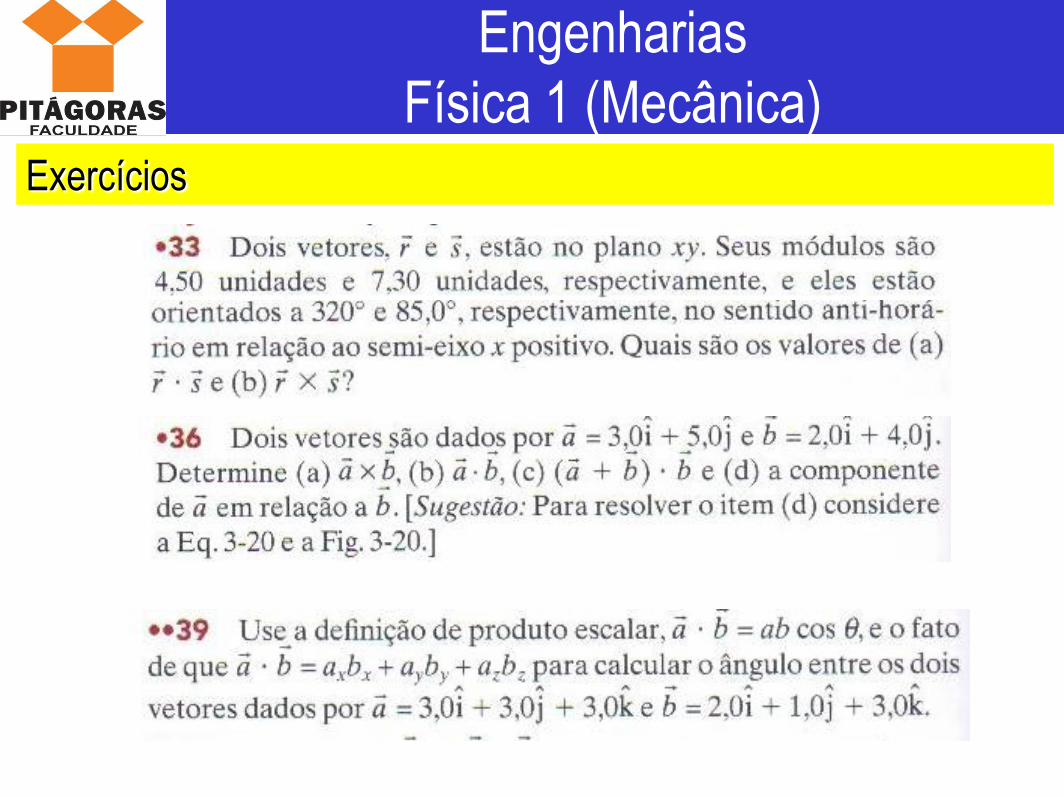
Física 1 (Mecânica)Exercícios

©2005 by Pearson Education 16-75
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo

©2005 by Pearson Education 16-76
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo
©2005 by Pearson Education 16-77
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo
O mundo, e tudo que nele existe, está sempre em movimento. Mesmo
objetos aparentemente estacionários, como uma estrada, estão em
movimento.
©2005 by Pearson Education 16-78
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo
Propriedades gerais do Movimento Retilíneo:
Vamos supor que o movimento se dá ao longo de uma linha reta. A
trajetória pode ser vertical, horizontal ou inclinada, mas deve ser retilínea;
Vamos discutir apenas o movimento em si e suas mudanças, sem nos
preocuparmos com as causas;
Vamos supor que o objeto em movimento é uma partícula (ou seja, um
objeto pontual).

©2005 by Pearson Education 16-79
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo / Posição e deslocamento
A mudança de uma posição x1
para uma posição x2 é associado
um deslocamento Δx.
©2005 by Pearson Education 16-80
Engenharias
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-81
Engenharias
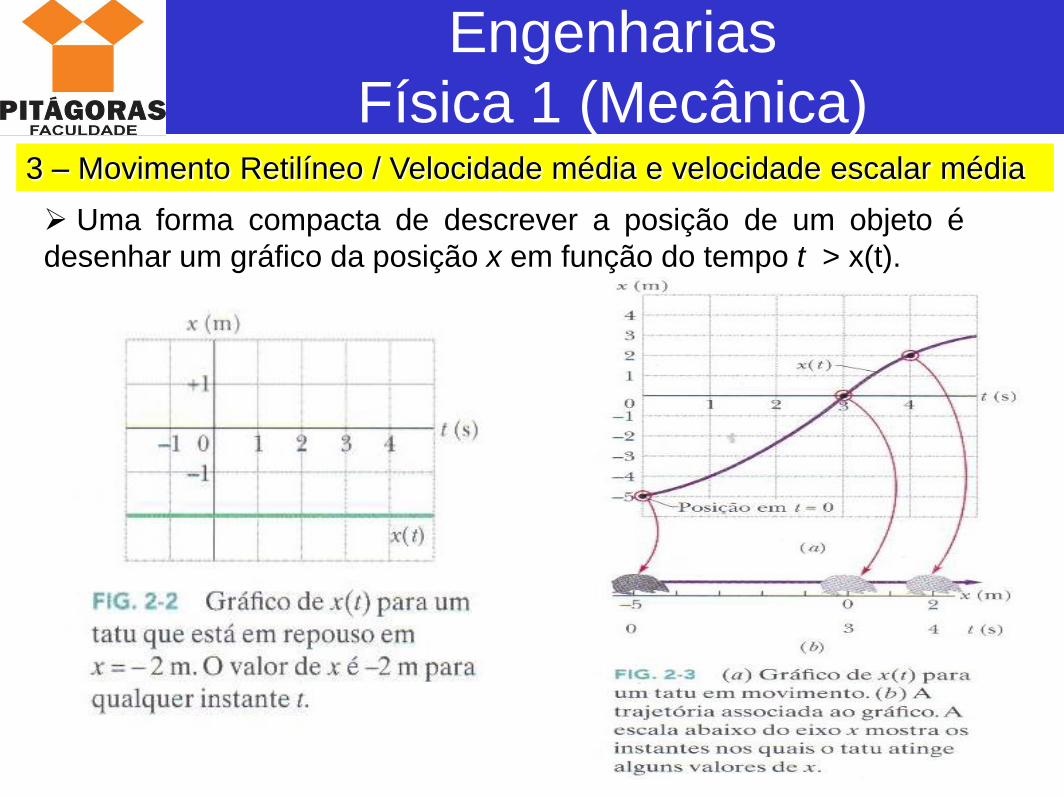
Física 1 (Mecânica)3 – Movimento Retilíneo / Velocidade média e velocidade escalar média
Uma forma compacta de descrever a posição de um objeto é
desenhar um gráfico da posição x em função do tempo t > x(t).
©2005 by Pearson Education 16-82
Engenharias
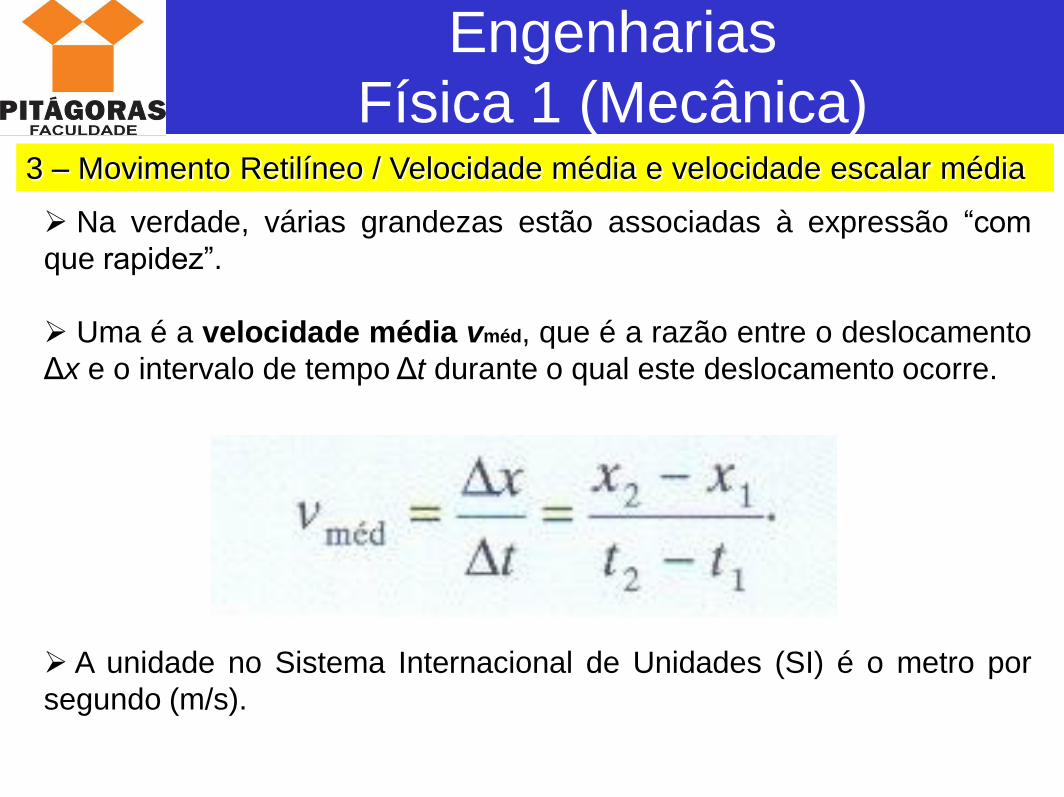
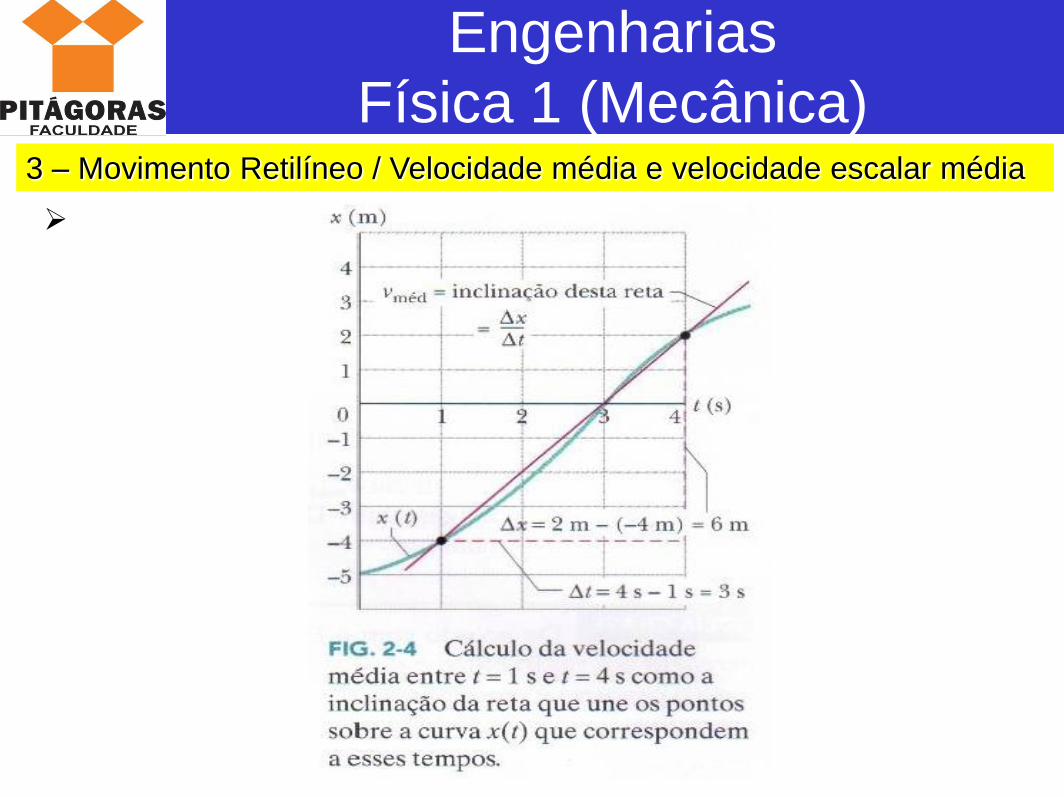
Física 1 (Mecânica)3 – Movimento Retilíneo / Velocidade média e velocidade escalar média
Na verdade, várias grandezas estão associadas à expressão “com
que rapidez”.
Uma é a velocidade média vméd, que é a razão entre o deslocamento
Δx e o intervalo de tempo Δt durante o qual este deslocamento ocorre.
A unidade no Sistema Internacional de Unidades (SI) é o metro por
segundo (m/s).
©2005 by Pearson Education 16-83
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo / Velocidade média e velocidade escalar média
©2005 by Pearson Education 16-84
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo / Velocidade média e velocidade escalar média
A velocidade escalar média (s méd) é uma forma diferente de
descrever “com que rapidez” uma partícula está se movendo.
A velocidade escalar média é definida em termos da distância total
percorrida, independentemente da direção.
©2005 by Pearson Education 16-85
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo / Velocidade média e velocidade escalar média
©2005 by Pearson Education 16-86
Engenharias
Física 1 (Mecânica)3 – Movimento Retilíneo / Velocidade instantânea e velocidade escalar instantânea
Quando falamos em “rapidez” em geral estamos pensando na rapidez
com a qual um objeto está se movendo em um certo instante, ou seja,
em sua velocidade instantânea (ou simplesmente, velocidade), v.

©2005 by Pearson Education 16-87
Engenharias
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-88
Engenharias
Física 1 (Mecânica)Aceleração
Quando a velocidade de uma partícula varia, diz-se que a partícula
sofreu uma aceleração (ou foi acelerada).
Para movimentos ao longo de um eixo, a aceleração média améd em
um intervalo de tempo Δt é:
A aceleração instantânea (ou simplesmente aceleração) é dada por:
©2005 by Pearson Education 16-89
Engenharias
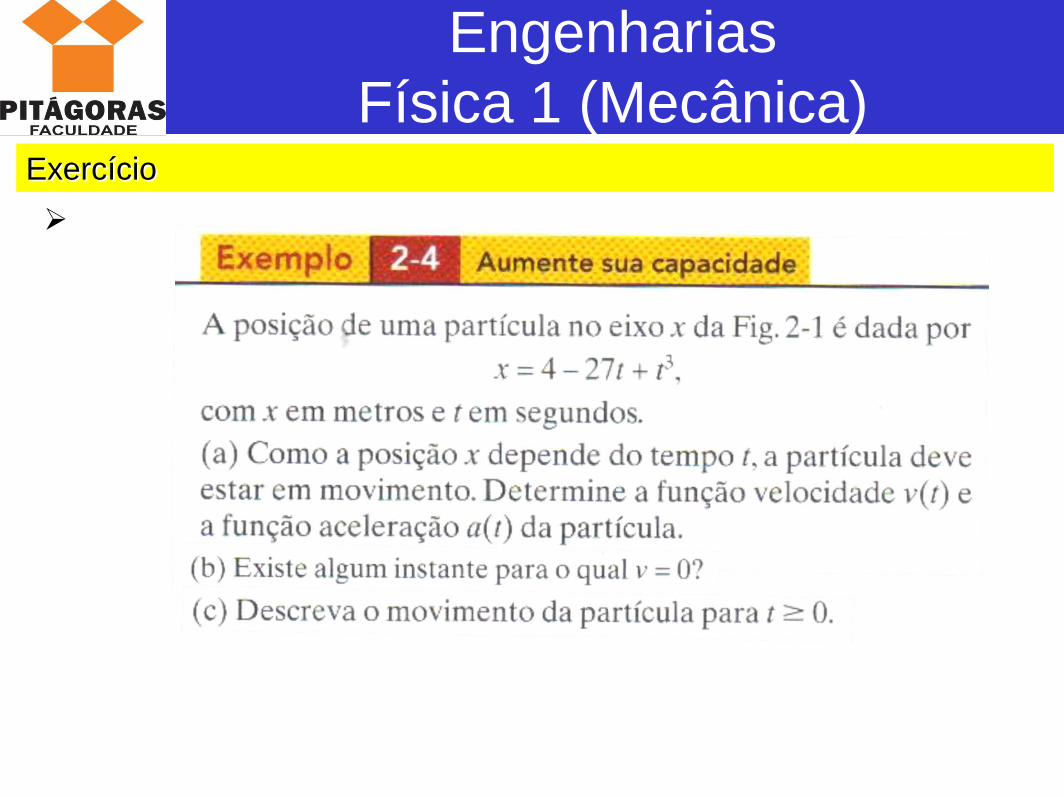
Física 1 (Mecânica)Exercício
©2005 by Pearson Education 16-90
Engenharias
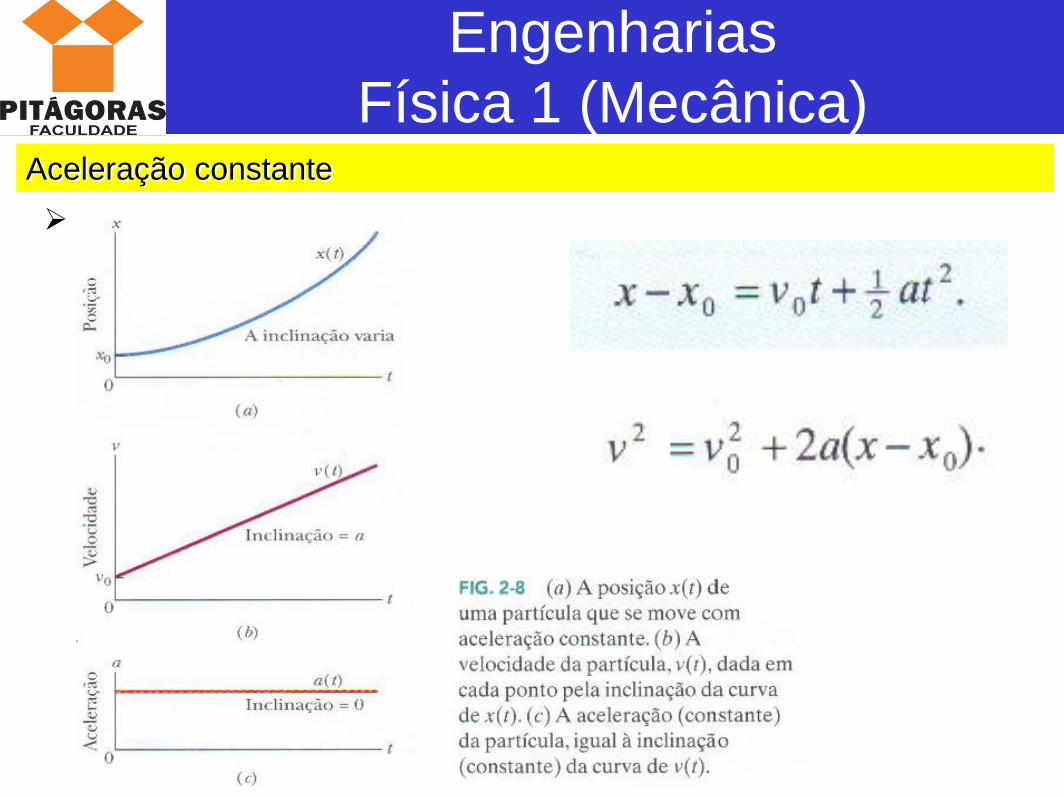
Física 1 (Mecânica)Aceleração constante
©2005 by Pearson Education 16-91
Engenharias
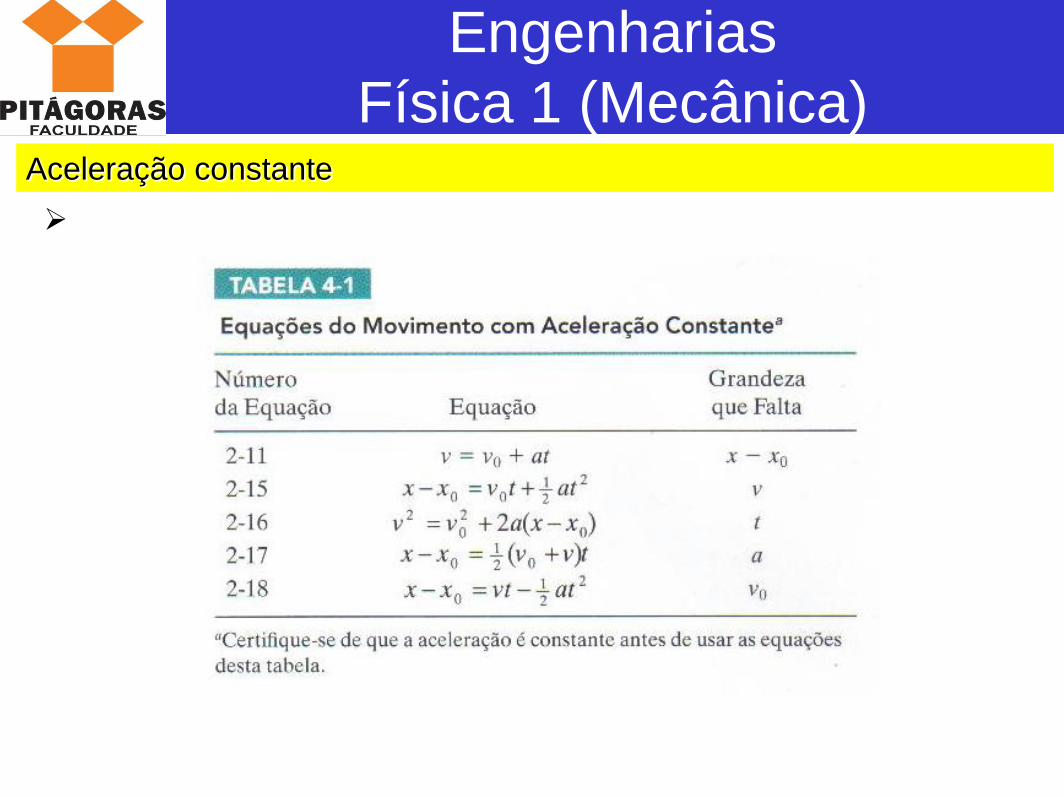
Física 1 (Mecânica)Aceleração constante
©2005 by Pearson Education 16-92
Engenharias
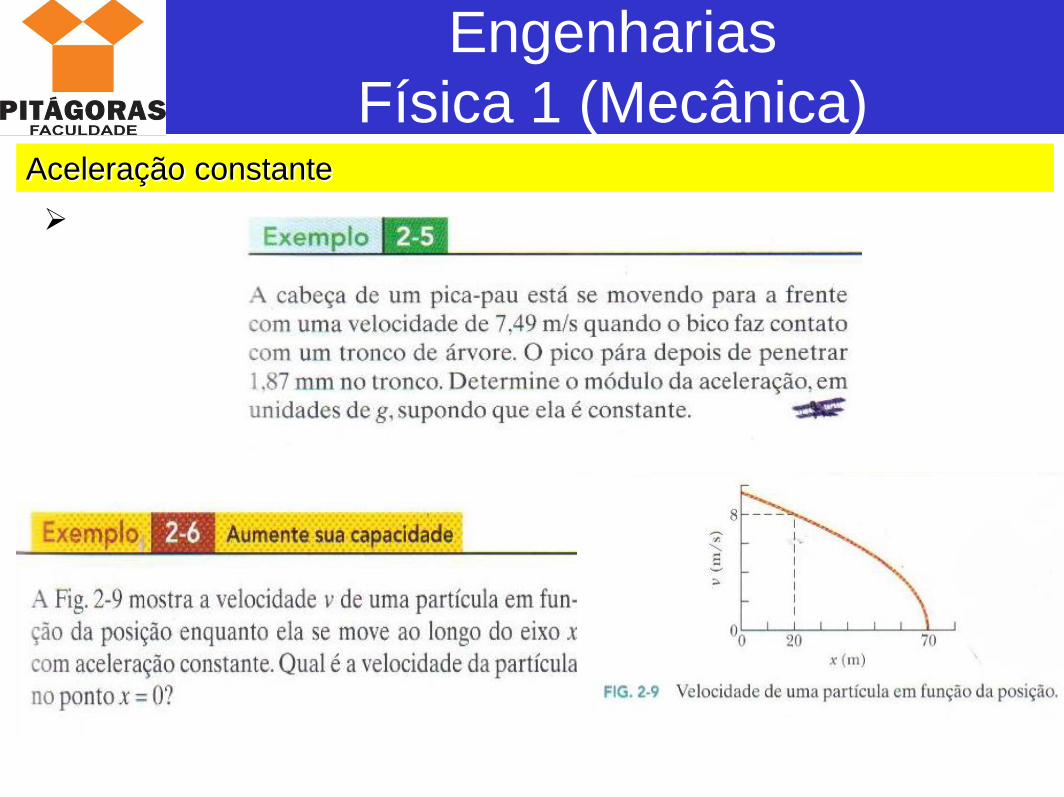
Física 1 (Mecânica)Aceleração constante

©2005 by Pearson Education 16-93
Engenharias
Física 1 (Mecânica)Aceleração em queda livre
©2005 by Pearson Education 16-94
Engenharias
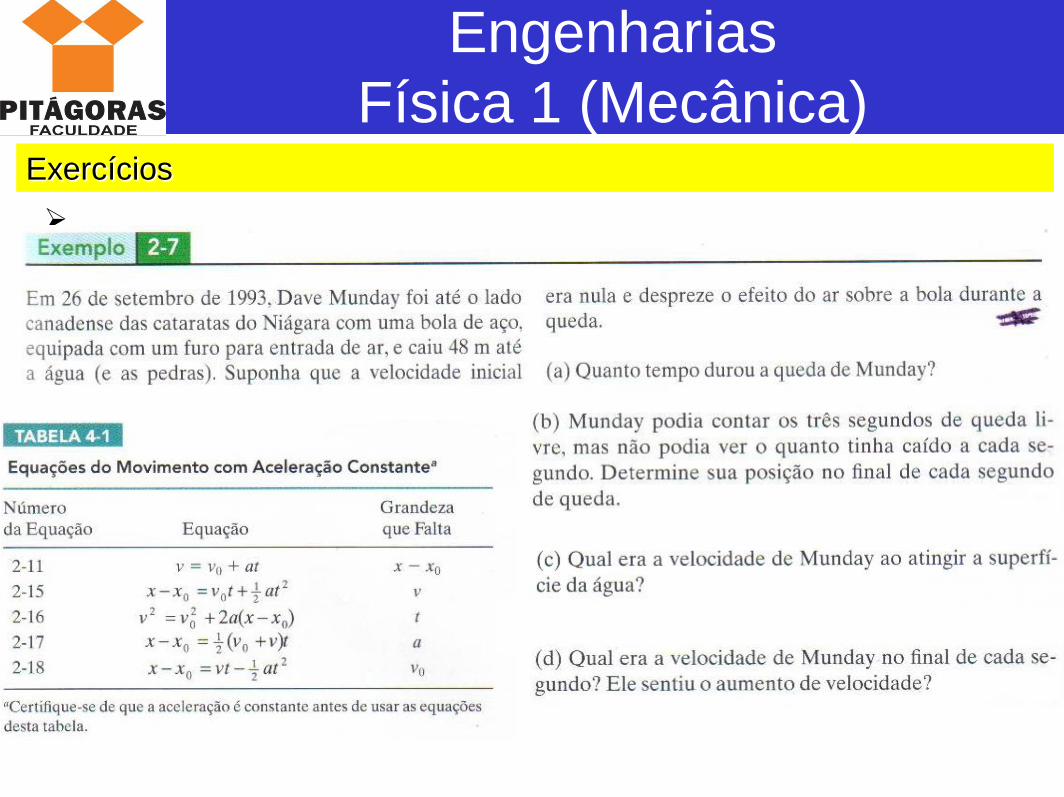
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-95
Engenharias
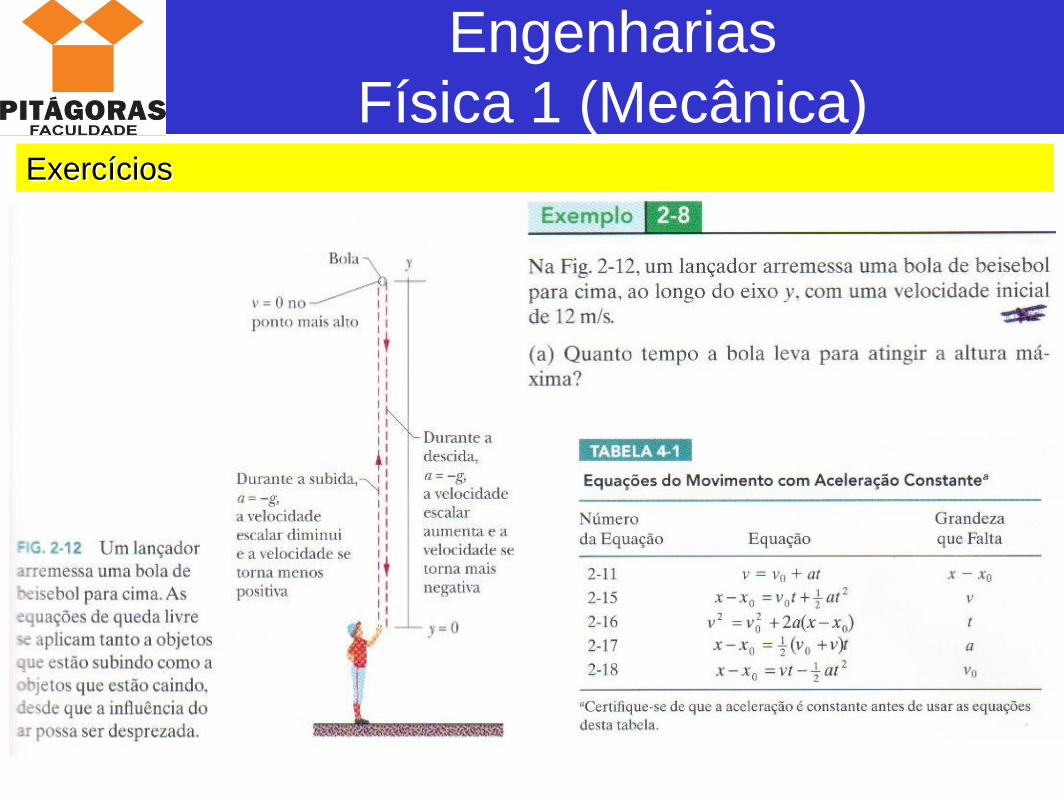
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-96
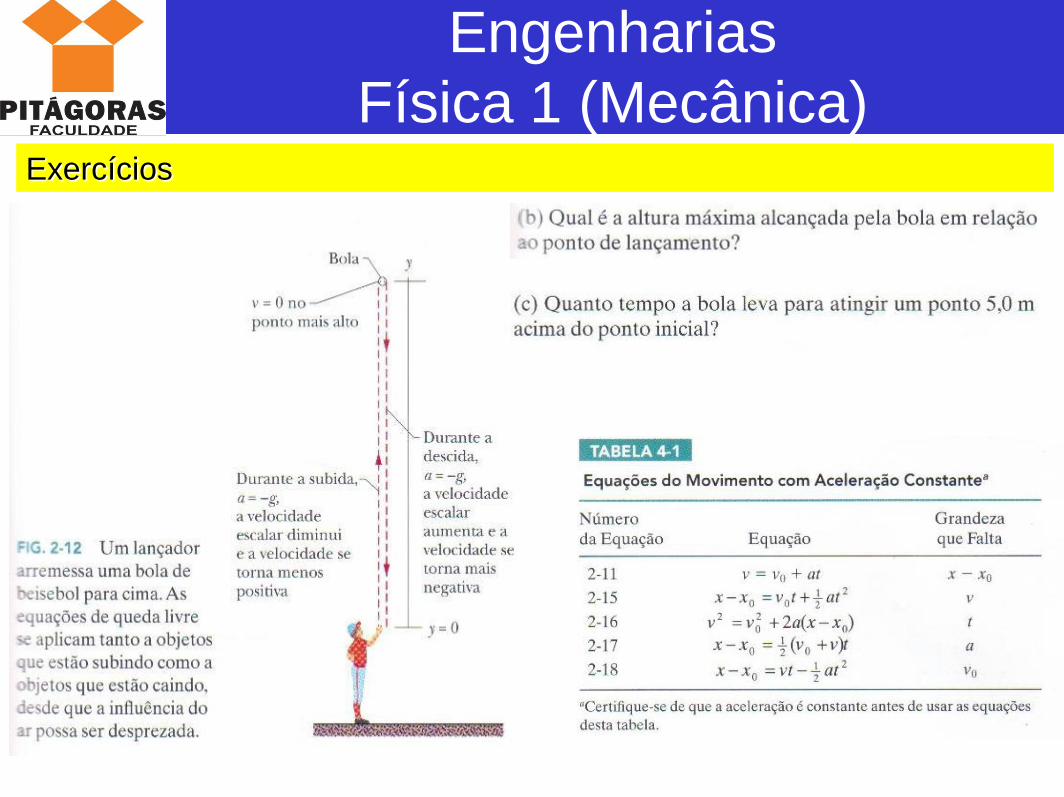
Engenharias
Física 1 (Mecânica)Exercícios
©2005 by Pearson Education 16-97
Engenharias
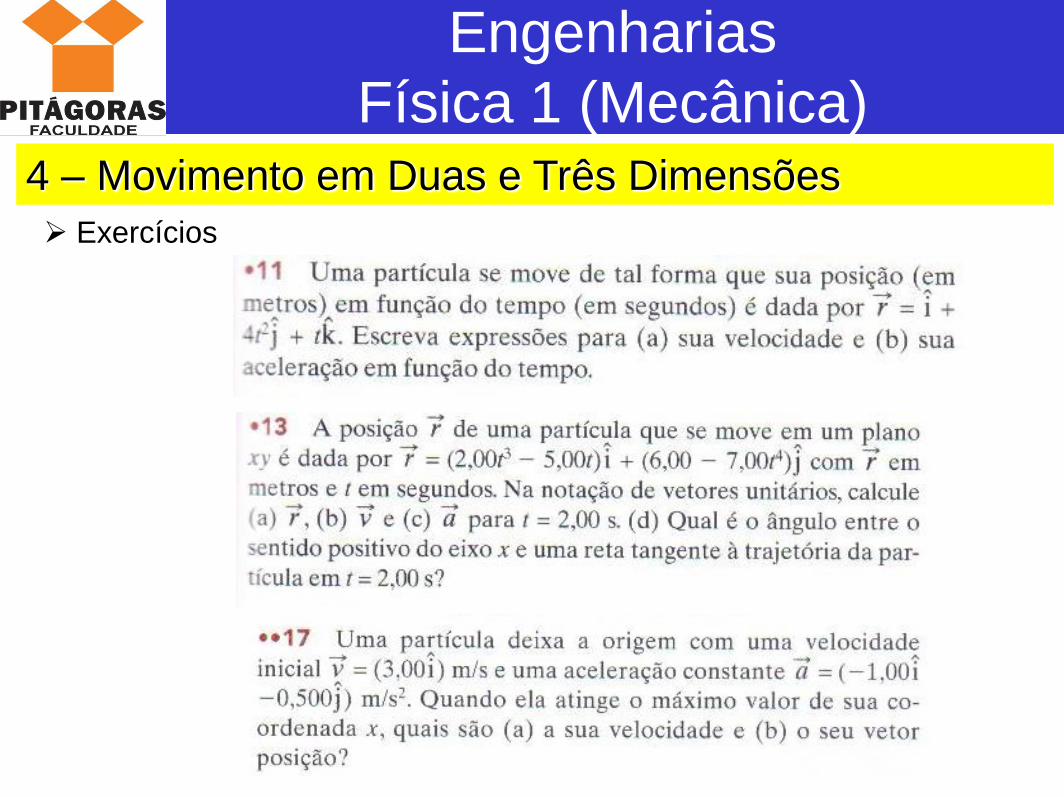
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões
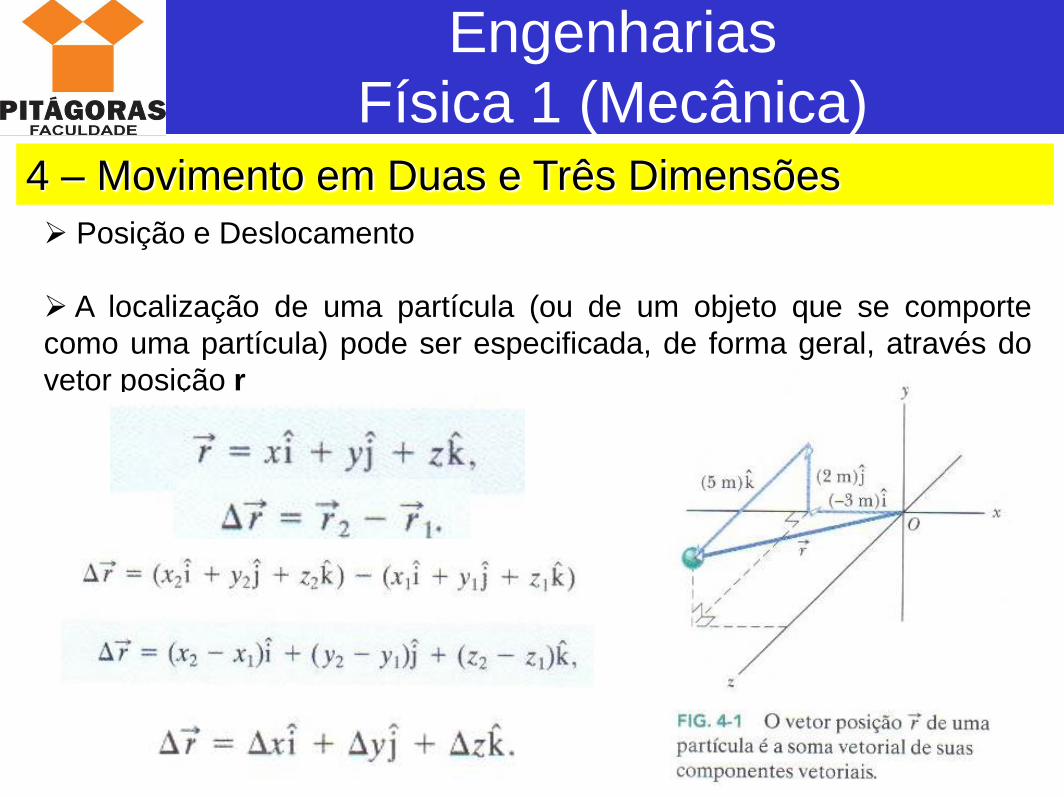
Posição e Deslocamento
A localização de uma partícula (ou de um objeto que se comporte
como uma partícula) pode ser especificada, de forma geral, através do
vetor posição r
©2005 by Pearson Education 16-98
Engenharias
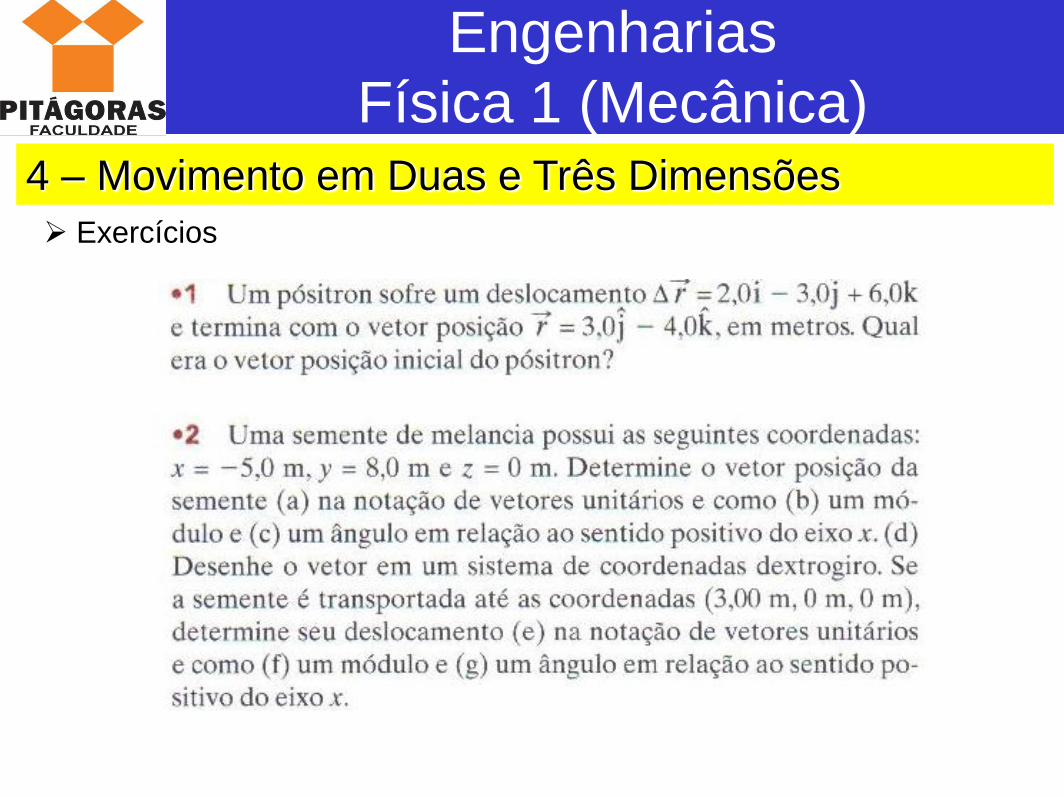
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões
Exercícios
©2005 by Pearson Education 16-99
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões
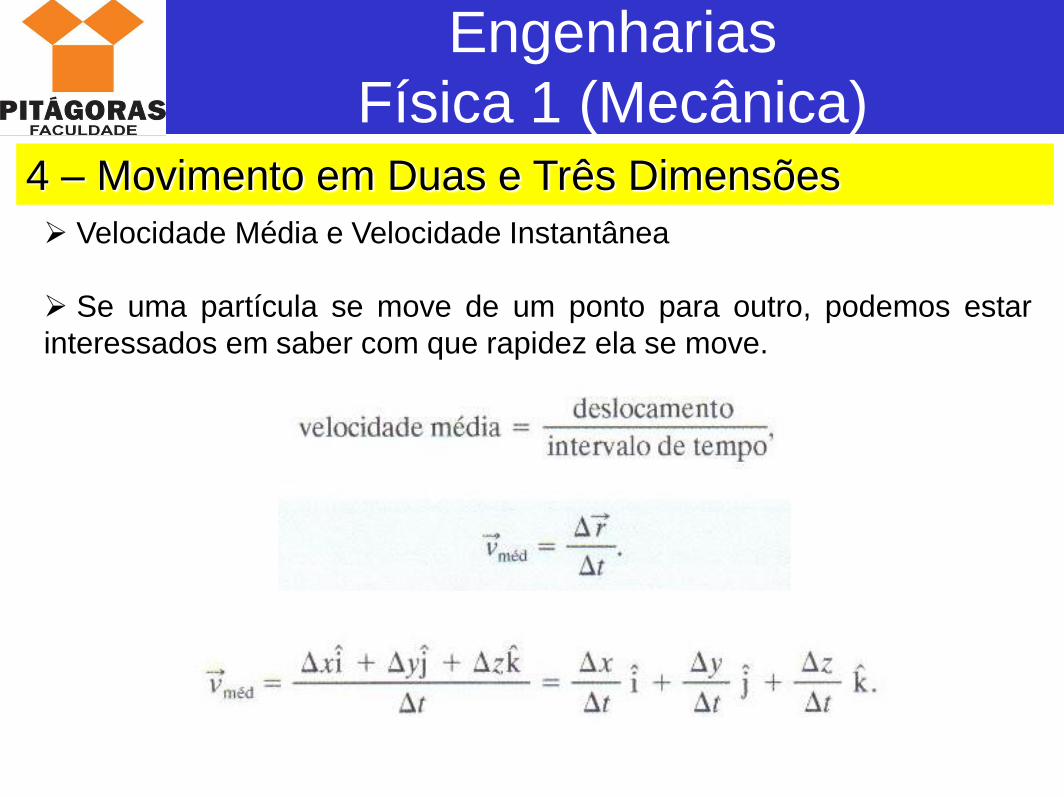
Velocidade Média e Velocidade Instantânea
Se uma partícula se move de um ponto para outro, podemos estar
interessados em saber com que rapidez ela se move.
©2005 by Pearson Education 16-100
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões
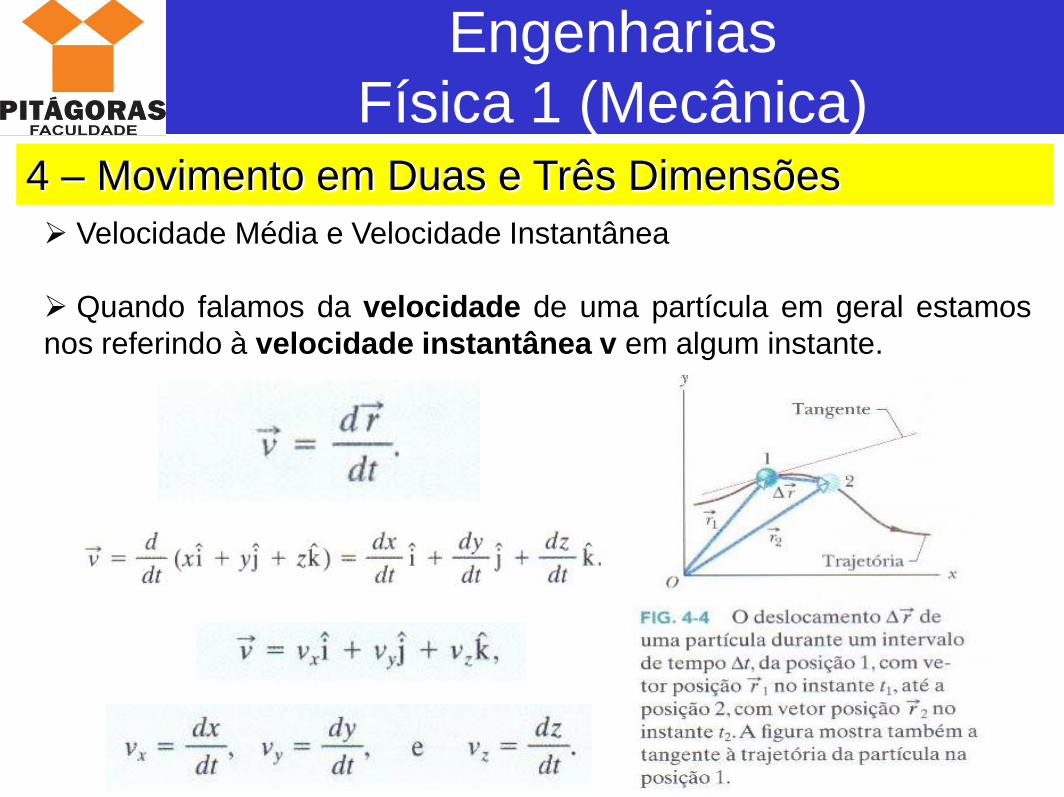
Velocidade Média e Velocidade Instantânea
Quando falamos da velocidade de uma partícula em geral estamos
nos referindo à velocidade instantânea v em algum instante.
©2005 by Pearson Education 16-101
Engenharias
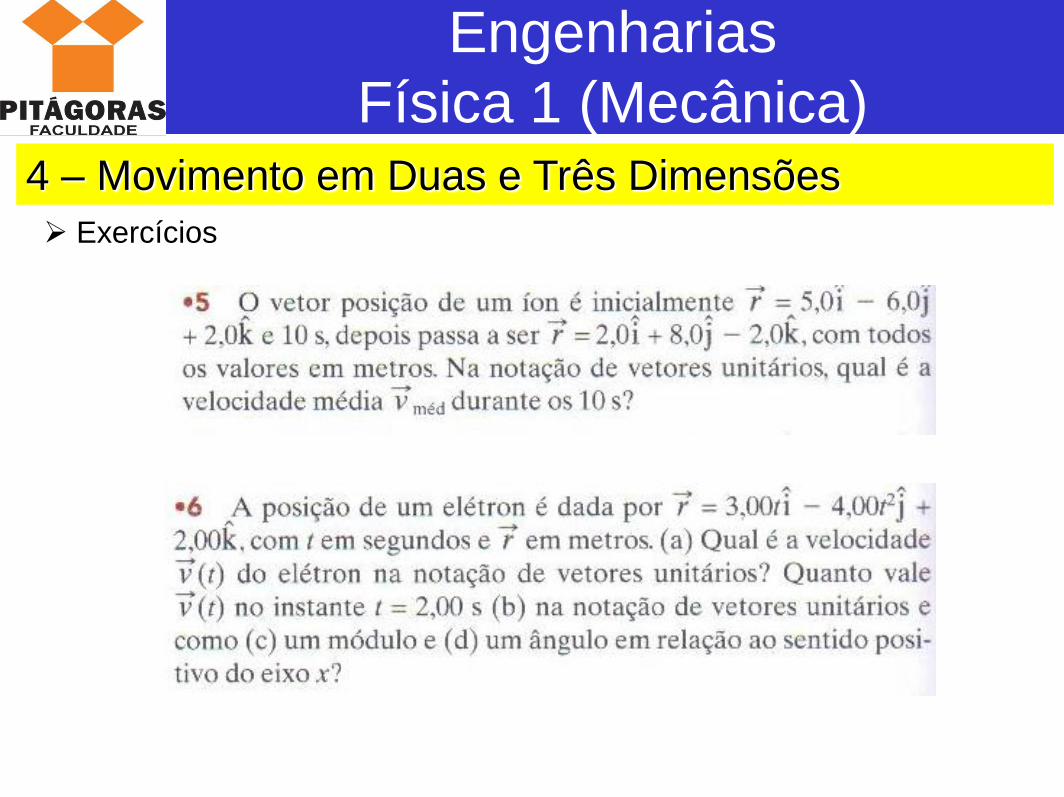
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões
Exercícios

©2005 by Pearson Education 16-102
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões
Aceleração Média e Aceleração Instantânea
Quando a velocidade de uma partícula varia de v1 para v2 em um
intervalo de tempo Δt, sua aceleração média améd durante o intervalo
de tempo Δt é:
©2005 by Pearson Education 16-103
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões
Exercícios
©2005 by Pearson Education 16-104
Engenharias
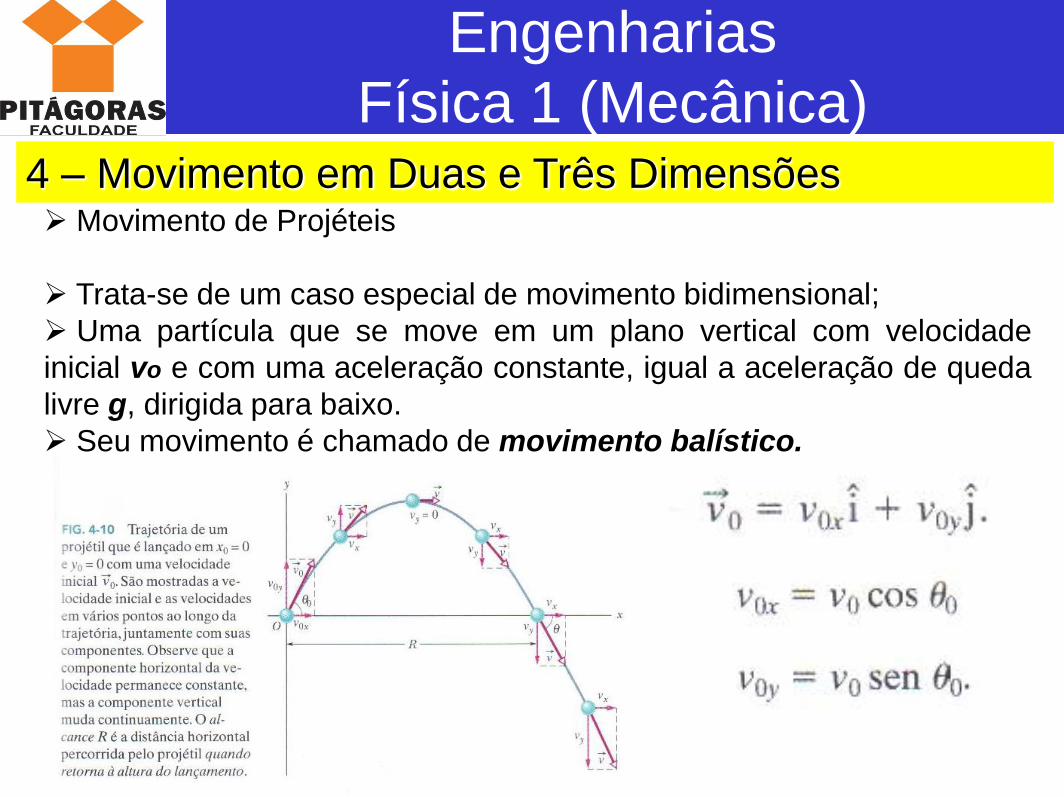
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões Movimento de Projéteis
Trata-se de um caso especial de movimento bidimensional;
Uma partícula que se move em um plano vertical com velocidade
inicial vo e com uma aceleração constante, igual a aceleração de queda
livre g, dirigida para baixo.
Seu movimento é chamado de movimento balístico.
©2005 by Pearson Education 16-105
Engenharias
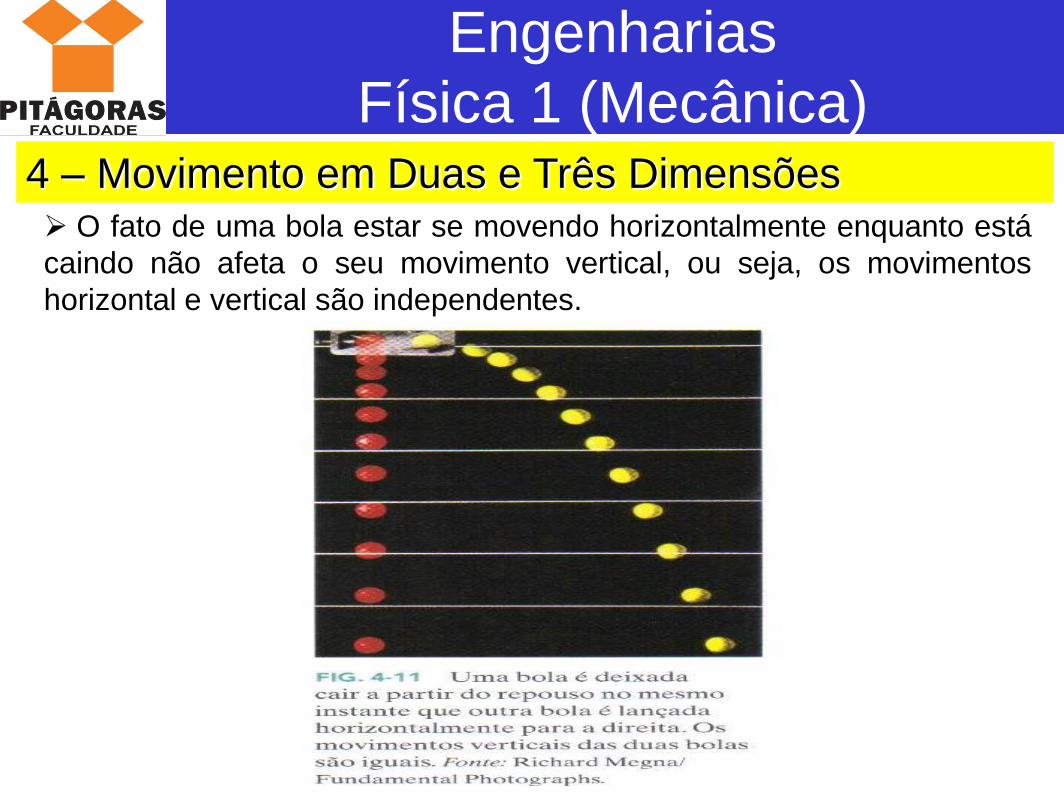
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões O fato de uma bola estar se movendo horizontalmente enquanto está
caindo não afeta o seu movimento vertical, ou seja, os movimentos
horizontal e vertical são independentes.
©2005 by Pearson Education 16-106
Engenharias
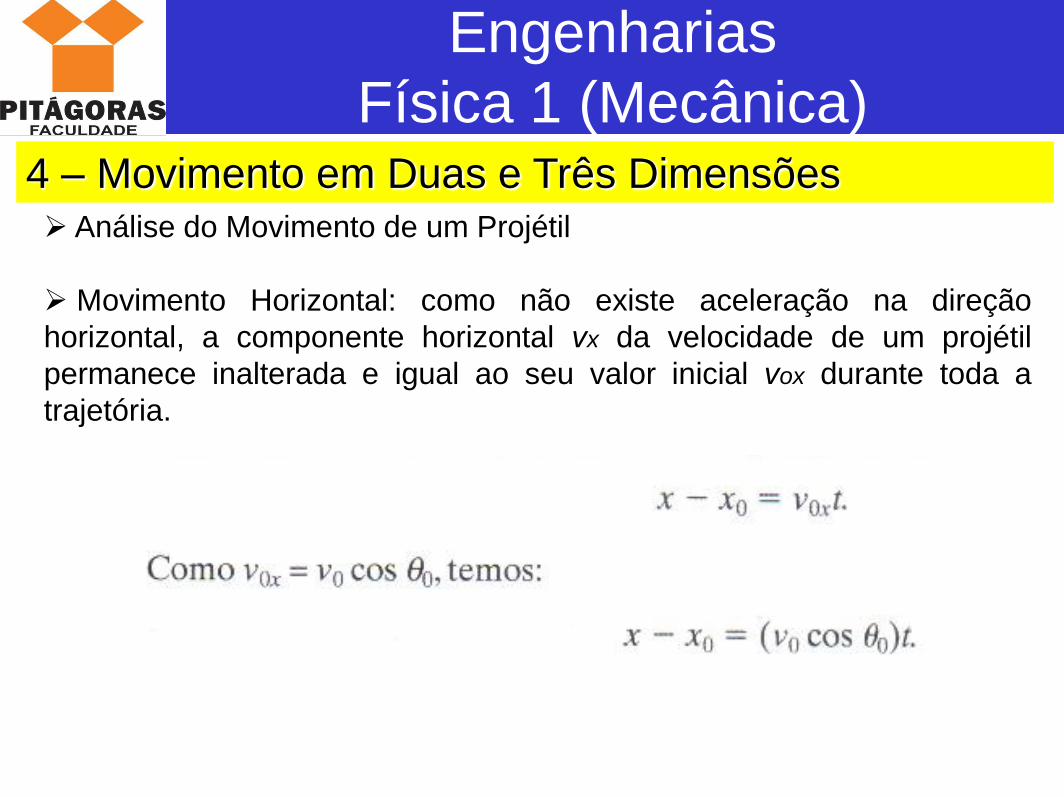
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões Análise do Movimento de um Projétil
Movimento Horizontal: como não existe aceleração na direção
horizontal, a componente horizontal vx da velocidade de um projétil
permanece inalterada e igual ao seu valor inicial vox durante toda a
trajetória.
©2005 by Pearson Education 16-107
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões Análise do Movimento de um Projétil
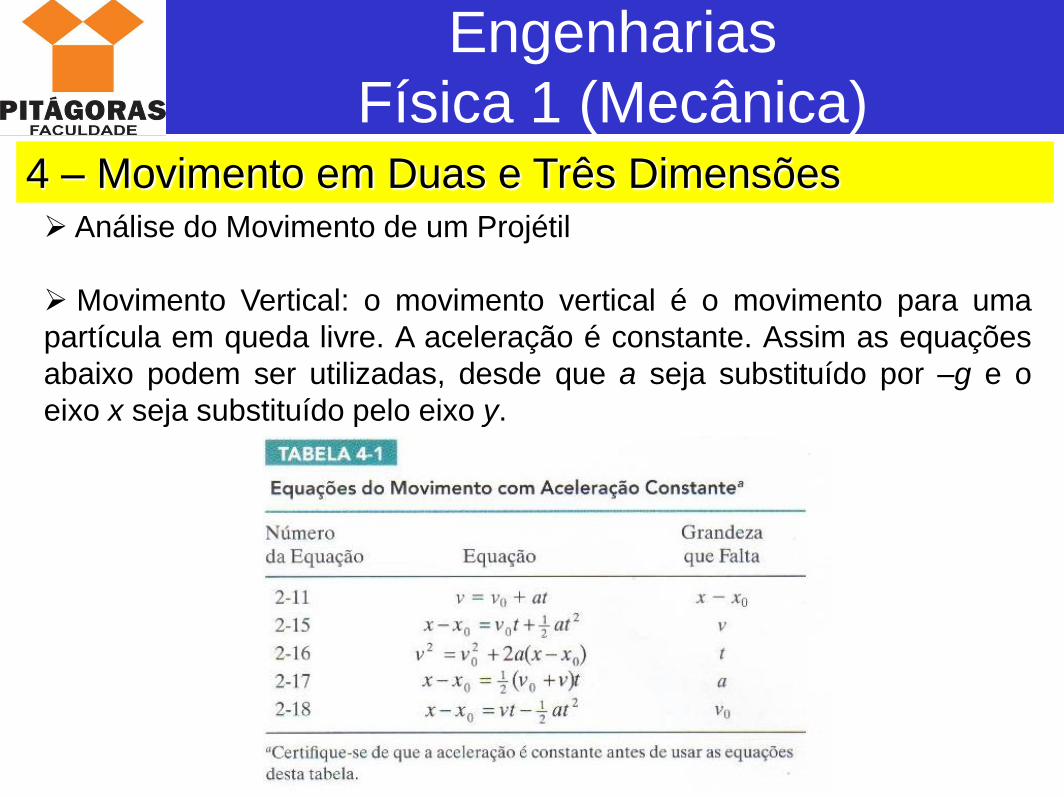
Movimento Vertical: o movimento vertical é o movimento para uma
partícula em queda livre. A aceleração é constante. Assim as equações
abaixo podem ser utilizadas, desde que a seja substituído por –g e o
eixo x seja substituído pelo eixo y.

©2005 by Pearson Education 16-108
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões Equação da Trajetória (y)
Alcance Horizontal (R): O alcance horizontal R de um projétil é a
distância horizontal percorrida pelo projétil até voltar à sua altura inicial
(altura de lançamento).

©2005 by Pearson Education 16-109
Engenharias
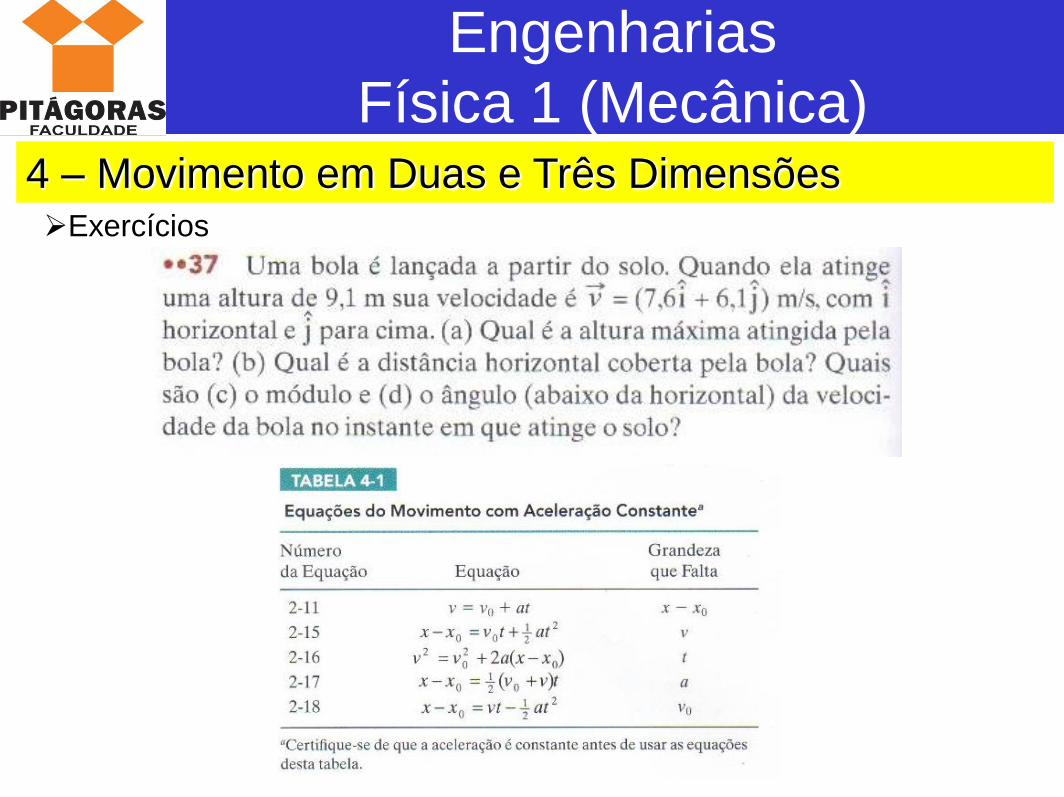
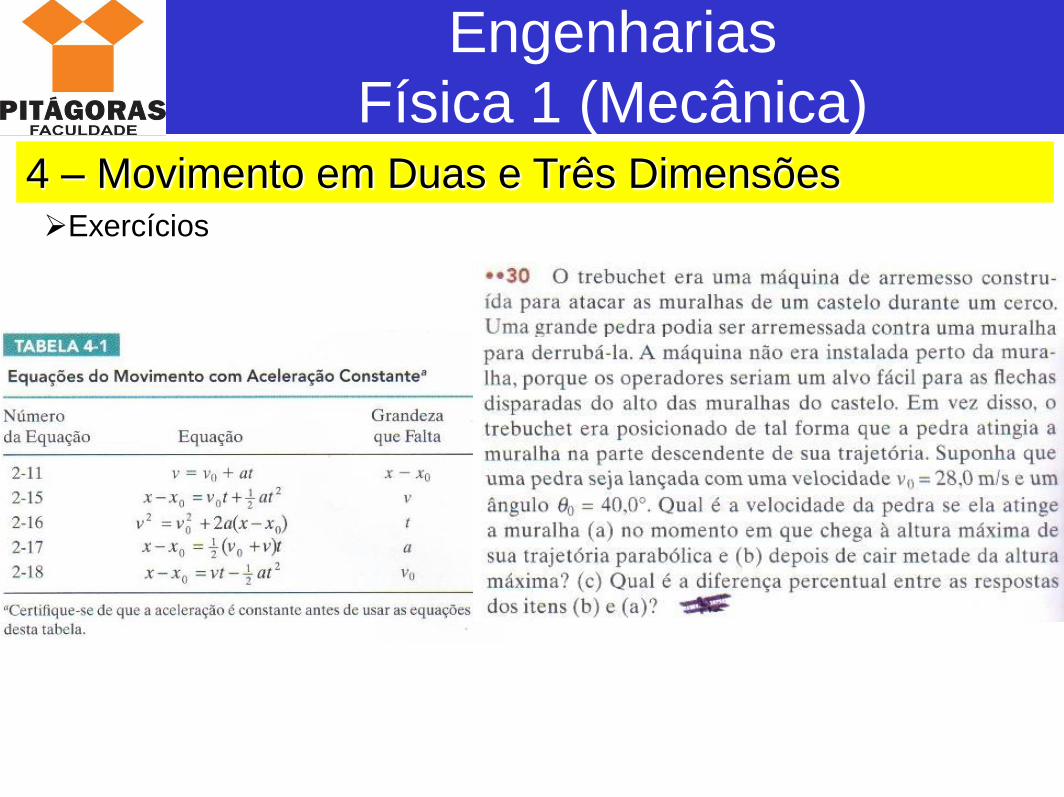
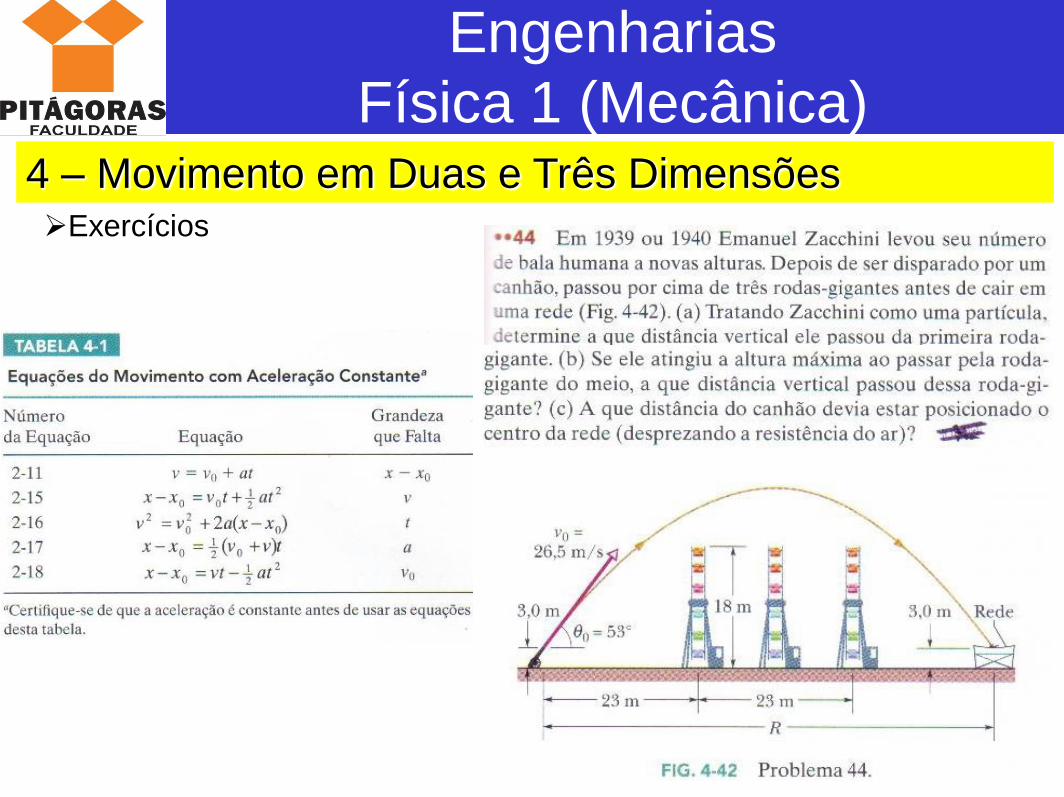
Física 1 (Mecânica)4 – Movimento em Duas e Três DimensõesExercícios
©2005 by Pearson Education 16-110
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três DimensõesExercícios
©2005 by Pearson Education 16-111
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três DimensõesExercícios
©2005 by Pearson Education 16-112
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três DimensõesExercícios
©2005 by Pearson Education 16-113
Engenharias
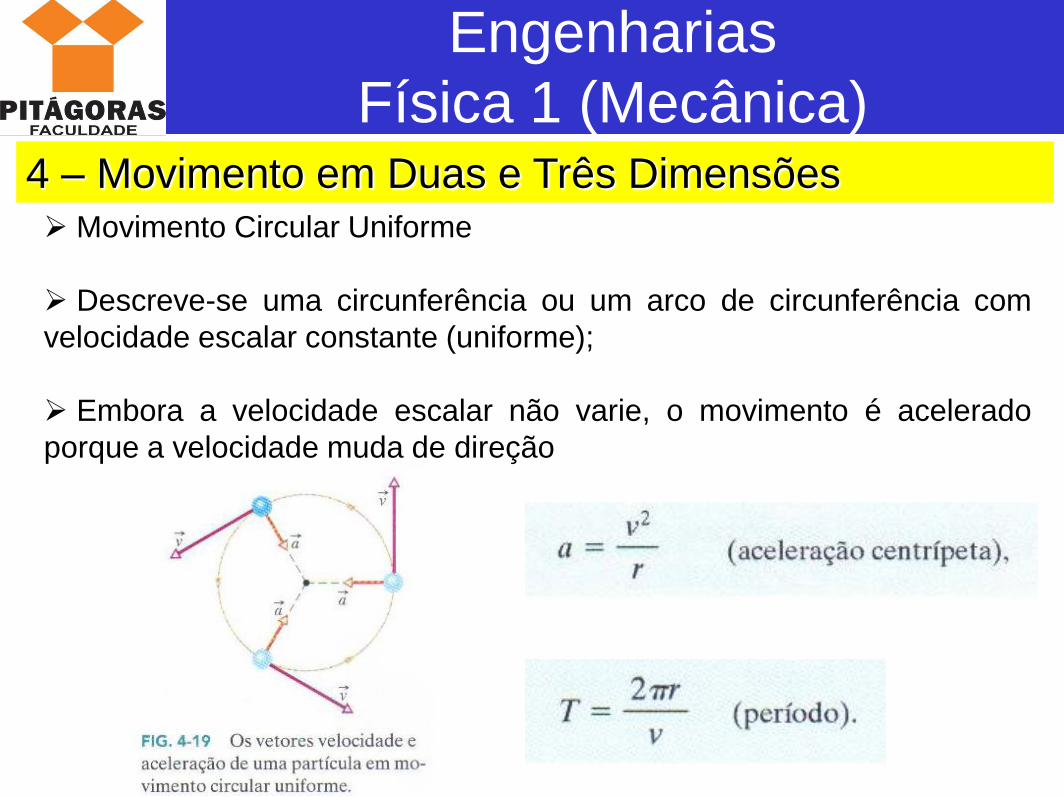
Física 1 (Mecânica)4 – Movimento em Duas e Três Dimensões Movimento Circular Uniforme
Descreve-se uma circunferência ou um arco de circunferência com
velocidade escalar constante (uniforme);
Embora a velocidade escalar não varie, o movimento é acelerado
porque a velocidade muda de direção

©2005 by Pearson Education 16-114
Engenharias
Física 1 (Mecânica)4 – Movimento em Duas e Três DimensõesExercícios
©2005 by Pearson Education 16-115
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I Vimos que Física envolve o estudo dos movimentos dos objetos…
A Física também envolve o estudo do que causa a acelaração dos
objetos. A causa é sempre uma força.

©2005 by Pearson Education 16-116
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
Dizemos que a força age sobre o objeto mudando sua velocidade.
©2005 by Pearson Education 16-117
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
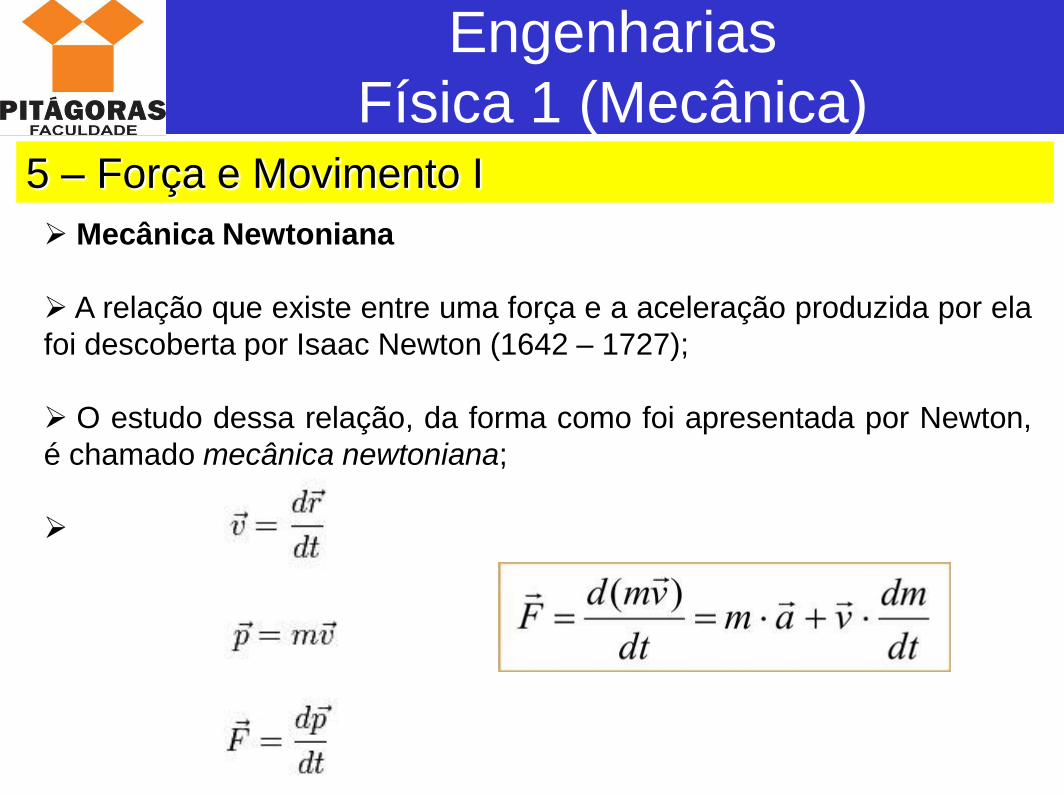
Mecânica Newtoniana
A relação que existe entre uma força e a aceleração produzida por ela
foi descoberta por Isaac Newton (1642 – 1727);
O estudo dessa relação, da forma como foi apresentada por Newton,
é chamado mecânica newtoniana;
©2005 by Pearson Education 16-118
Engenharias
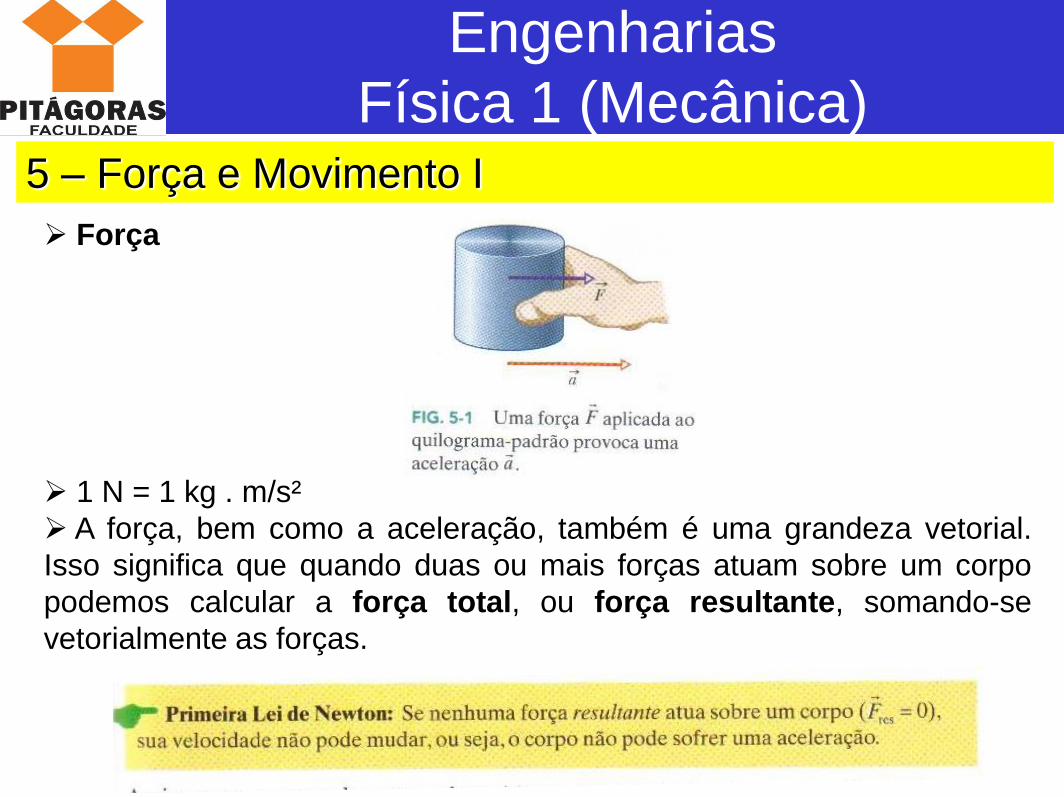
Física 1 (Mecânica)5 – Força e Movimento I
A Primeira Lei de Newton
Se o corpo está em repouso ele permanece em repouso. Se ele está
em movimento, continua com a mesma velocidade (mesmo módulo e
mesma orientação);
©2005 by Pearson Education 16-119
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
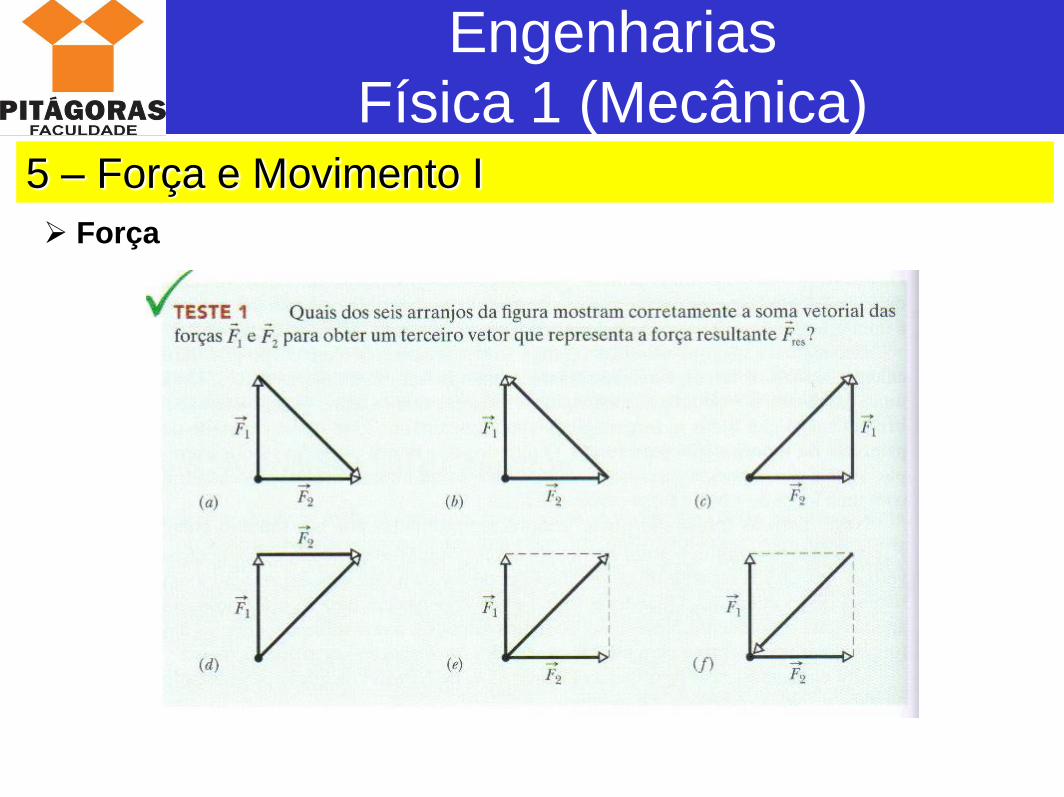
Força
1 N = 1 kg . m/s²
A força, bem como a aceleração, também é uma grandeza vetorial.
Isso significa que quando duas ou mais forças atuam sobre um corpo
podemos calcular a força total, ou força resultante, somando-se
vetorialmente as forças.
©2005 by Pearson Education 16-120
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
Força

©2005 by Pearson Education 16-121
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
Massa
A massa de um corpo é a propriedade que relaciona uma força que
age sobre o corpo à aceleração resultante.
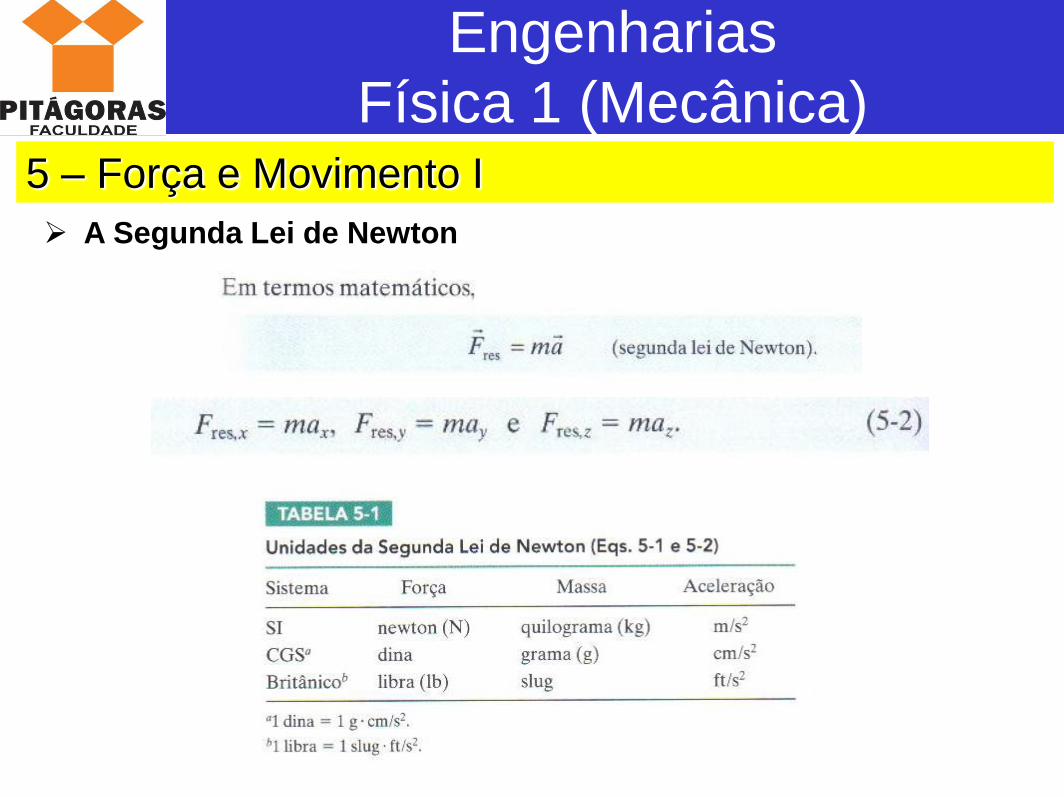
A Segunda Lei de Newton
Todas as definições, experimentos e observações que discutimos até
aqui podem ser resumidos em uma única sentença.
©2005 by Pearson Education 16-122
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
A Segunda Lei de Newton
©2005 by Pearson Education 16-123
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
A Segunda Lei de Newton
Para resolver problemas que envolvam a segunda lei de Newton
frequentemente desenhamos um diagrama de corpo livre.
Um sistema é formado por um ou mais corpos, e qualquer força
exercida sobre os corpos do sistema por corpos for a do sistema é
chamado de força externa.
©2005 by Pearson Education 16-124
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
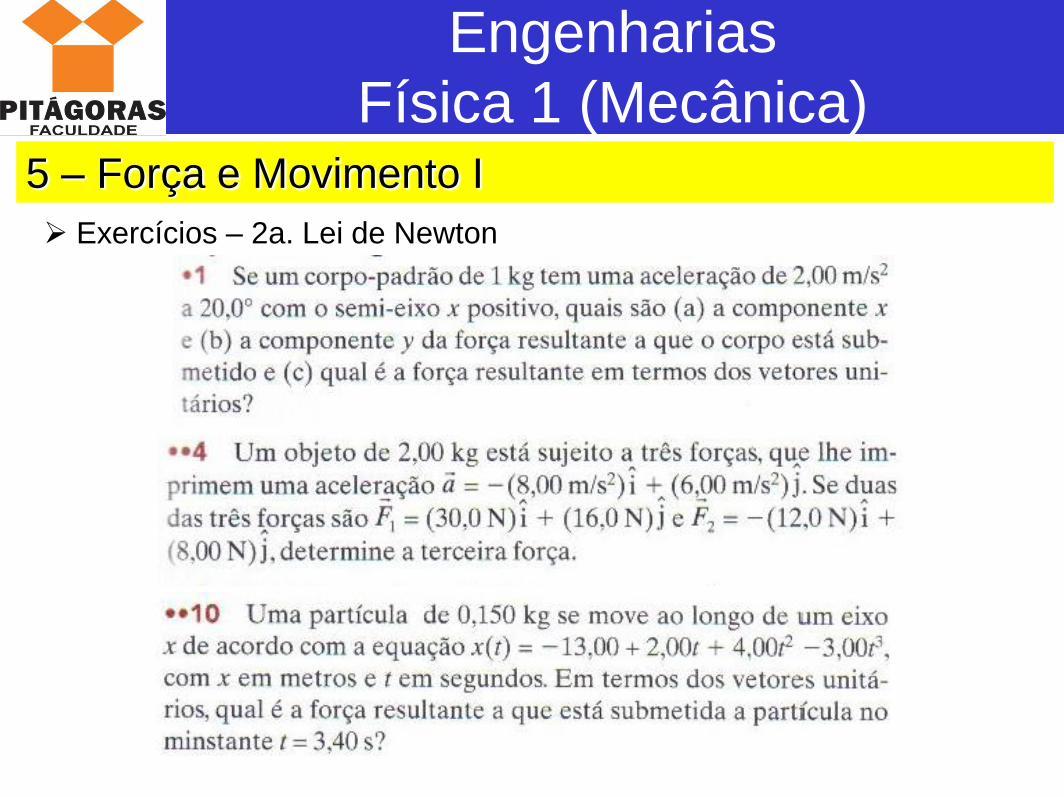
Exercícios – 2a. Lei de Newton
©2005 by Pearson Education 16-125
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
Algumas Forças Especiais / Força Gravitacional
A força gravitacional Fg exercida sobre um corpo é um tipo especial
de atração que um segundo corpo exerce sobre o primeiro;
Considere um corpo de massa m em queda livre, submetido, portanto,
a uma aceleração de módulo g;
Podemos relacionar essa força à aceleração correspondente através
da segunda lei de Newton (F = m.a). Colocamos um eixo y vertical ao
longo da trajetória do corpo, com o sentido positivo para cima.
©2005 by Pearson Education 16-126
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
Algumas Forças Especiais / Peso
O peso P de um corpo é o módulo da força necessária para impedir
que o corpo caia livremente medida em relação ao solo;

©2005 by Pearson Education 16-127
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I
Algumas Forças Especiais / Força Normal
©2005 by Pearson Education 16-128
Engenharias
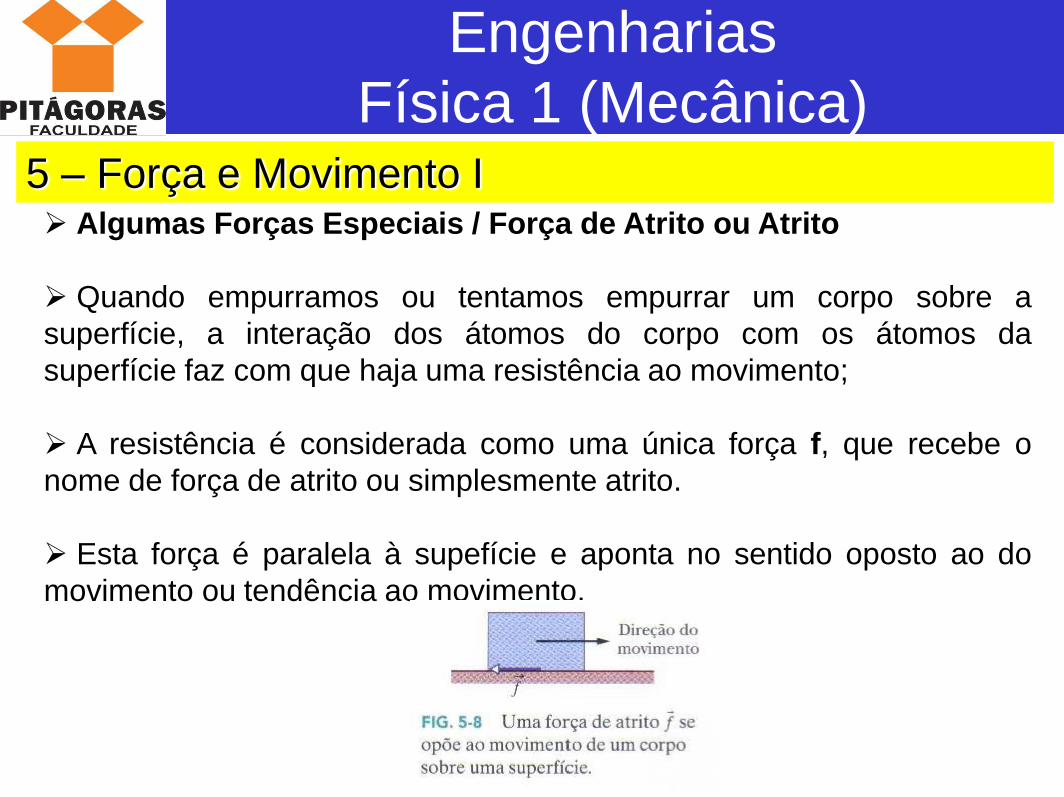
Física 1 (Mecânica)5 – Força e Movimento I Algumas Forças Especiais / Força de Atrito ou Atrito
Quando empurramos ou tentamos empurrar um corpo sobre a
superfície, a interação dos átomos do corpo com os átomos da
superfície faz com que haja uma resistência ao movimento;
A resistência é considerada como uma única força f, que recebe o
nome de força de atrito ou simplesmente atrito.
Esta força é paralela à supefície e aponta no sentido oposto ao do
movimento ou tendência ao movimento.

©2005 by Pearson Education 16-129
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I Algumas Forças Especiais / Tração
Quando uma corda é presa a um corpo e esticada aplica ao corpo
uma força T orientada ao longo da corda (inestensível e sem massa);
Essa força é chamada de força de tração por que a corda está sendo
tracionada (puxada).
©2005 by Pearson Education 16-130
Engenharias
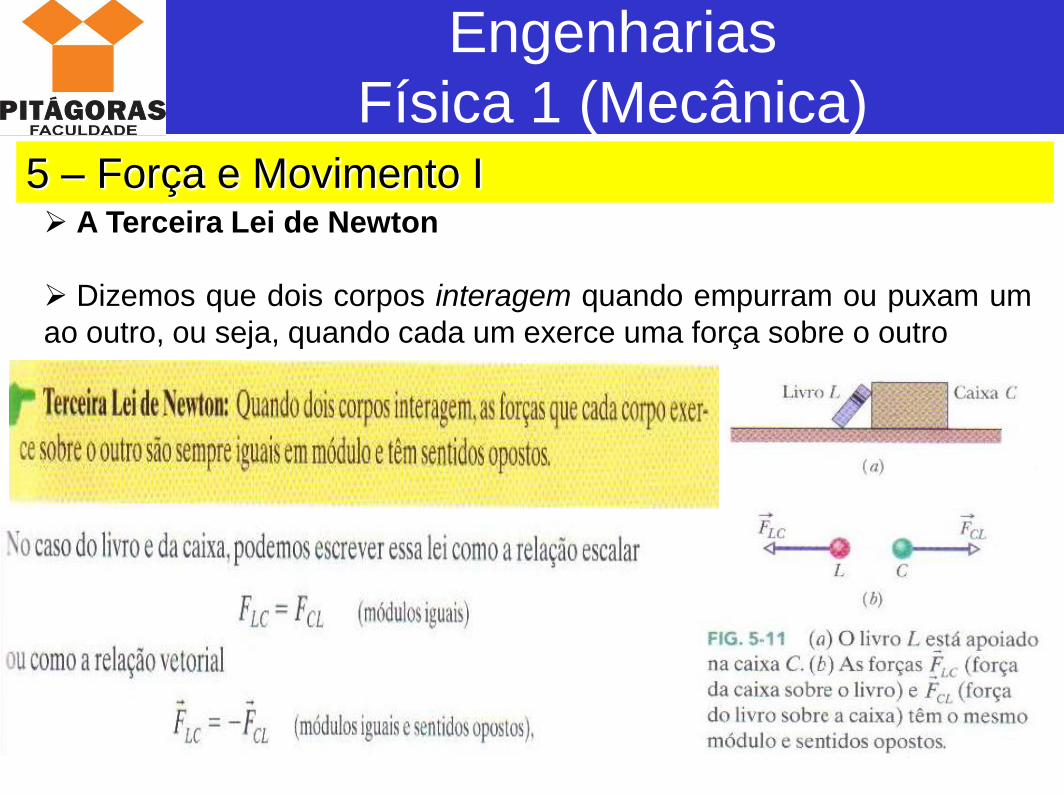
Física 1 (Mecânica)5 – Força e Movimento I A Terceira Lei de Newton
Dizemos que dois corpos interagem quando empurram ou puxam um
ao outro, ou seja, quando cada um exerce uma força sobre o outro
©2005 by Pearson Education 16-131
Engenharias
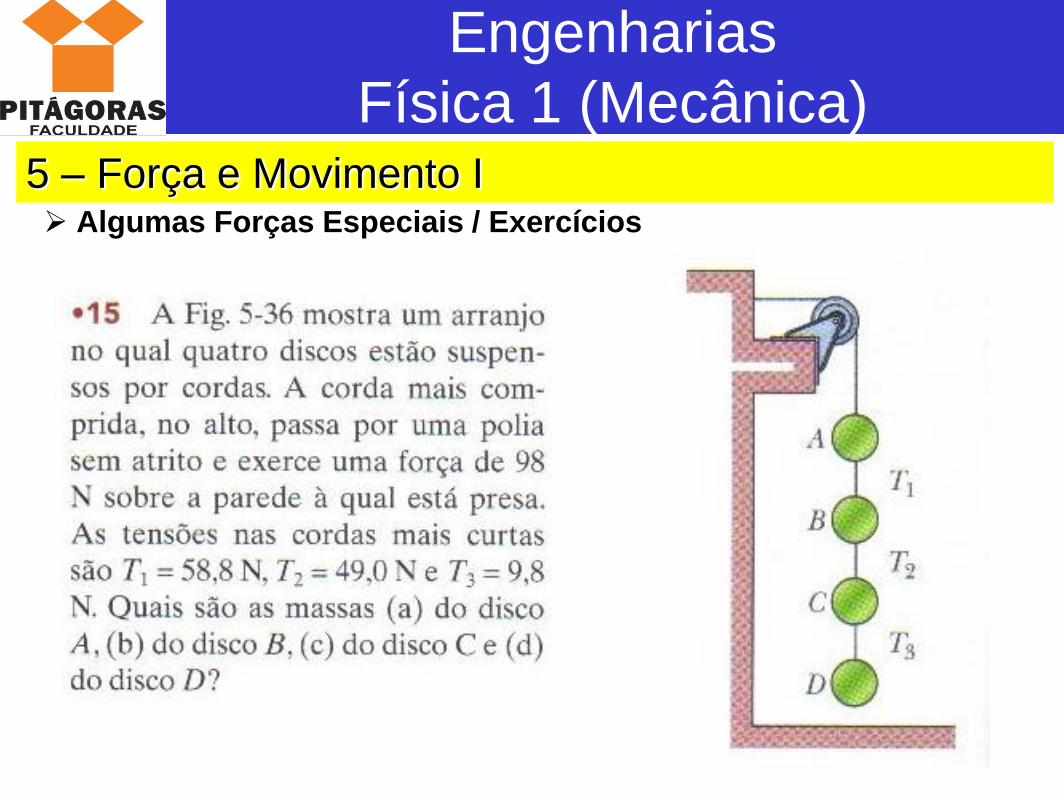
Física 1 (Mecânica)5 – Força e Movimento I Algumas Forças Especiais / Exercícios
©2005 by Pearson Education 16-132
Engenharias
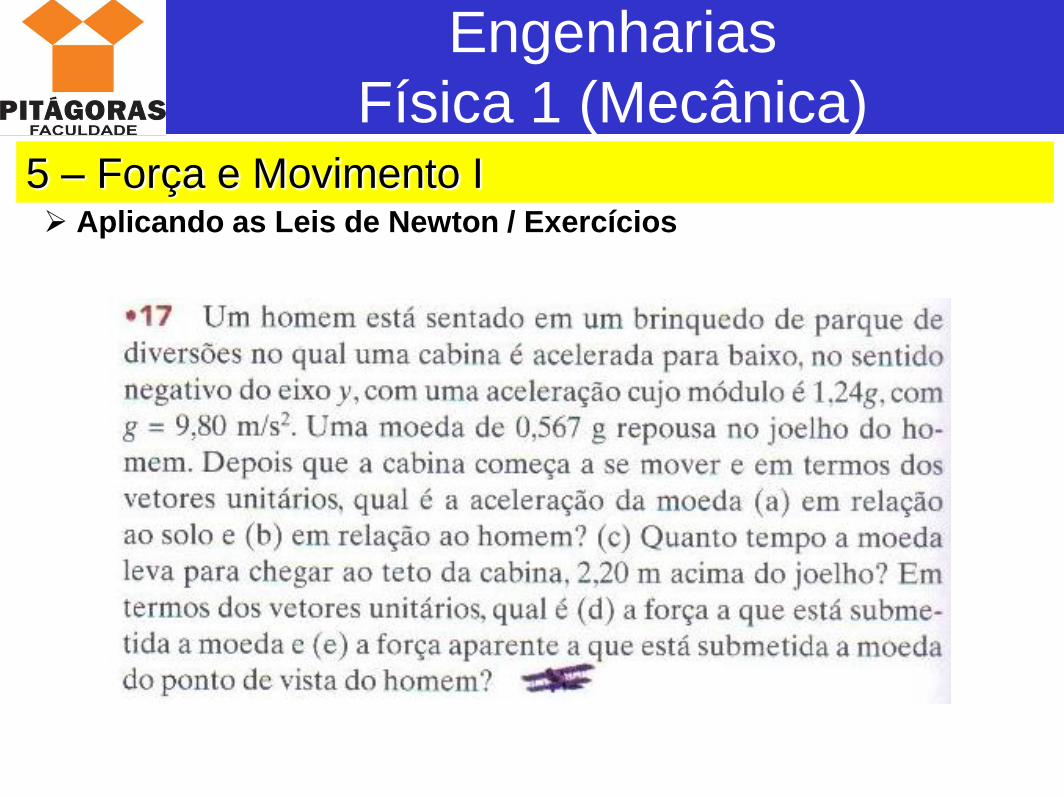
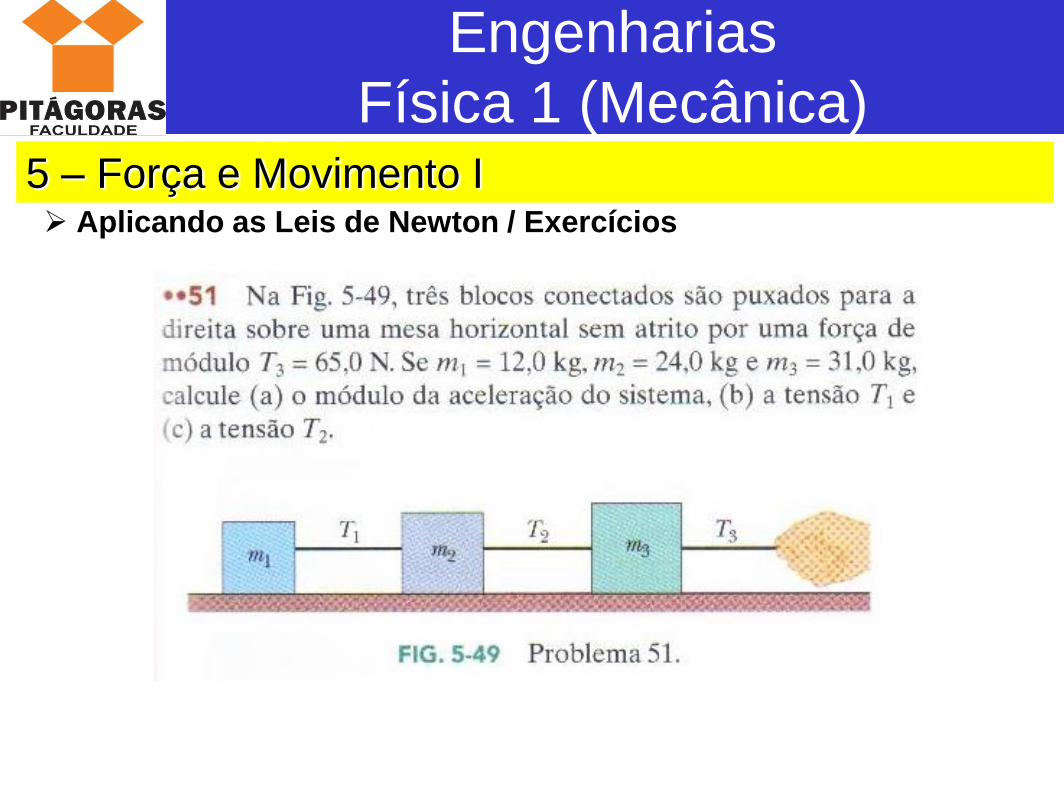
Física 1 (Mecânica)5 – Força e Movimento I Aplicando as Leis de Newton / Exercícios
©2005 by Pearson Education 16-133
Engenharias
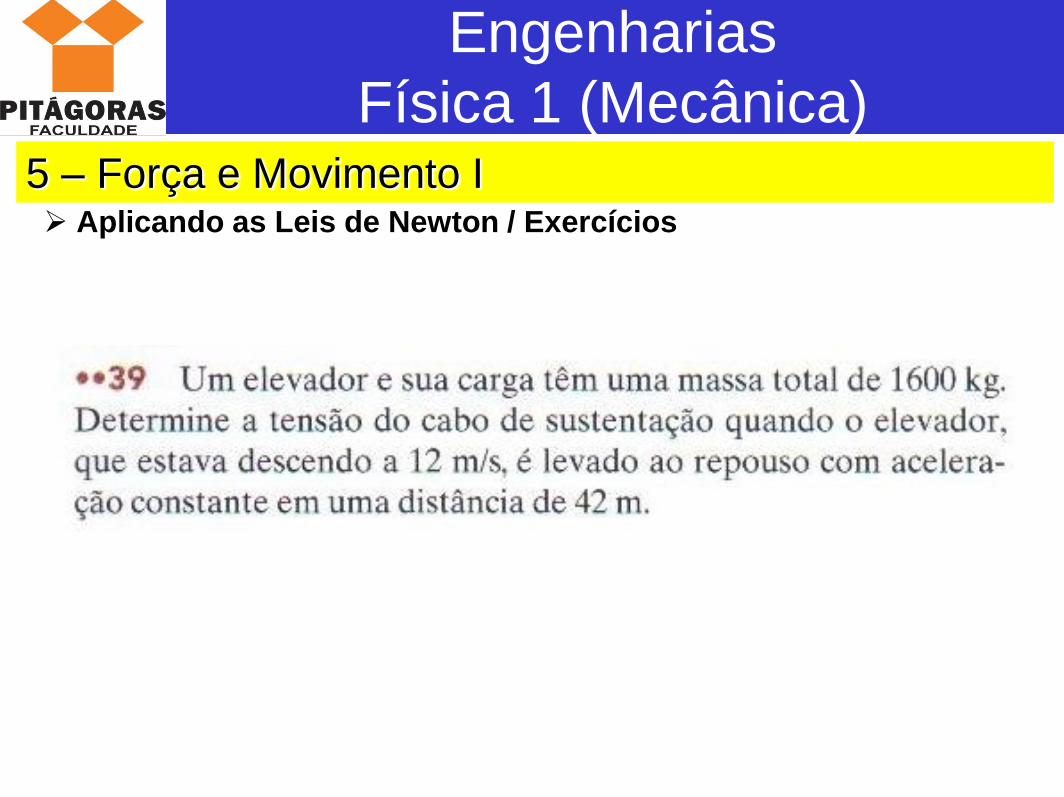
Física 1 (Mecânica)5 – Força e Movimento I Aplicando as Leis de Newton / Exercícios

©2005 by Pearson Education 16-134
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I Aplicando as Leis de Newton / Exercícios
©2005 by Pearson Education 16-135
Engenharias
Física 1 (Mecânica)5 – Força e Movimento I Aplicando as Leis de Newton / Exercícios
©2005 by Pearson Education 16-136
Engenharias
Física 1 (Mecânica)6 – Força e Movimento II
©2005 by Pearson Education 16-137
Engenharias
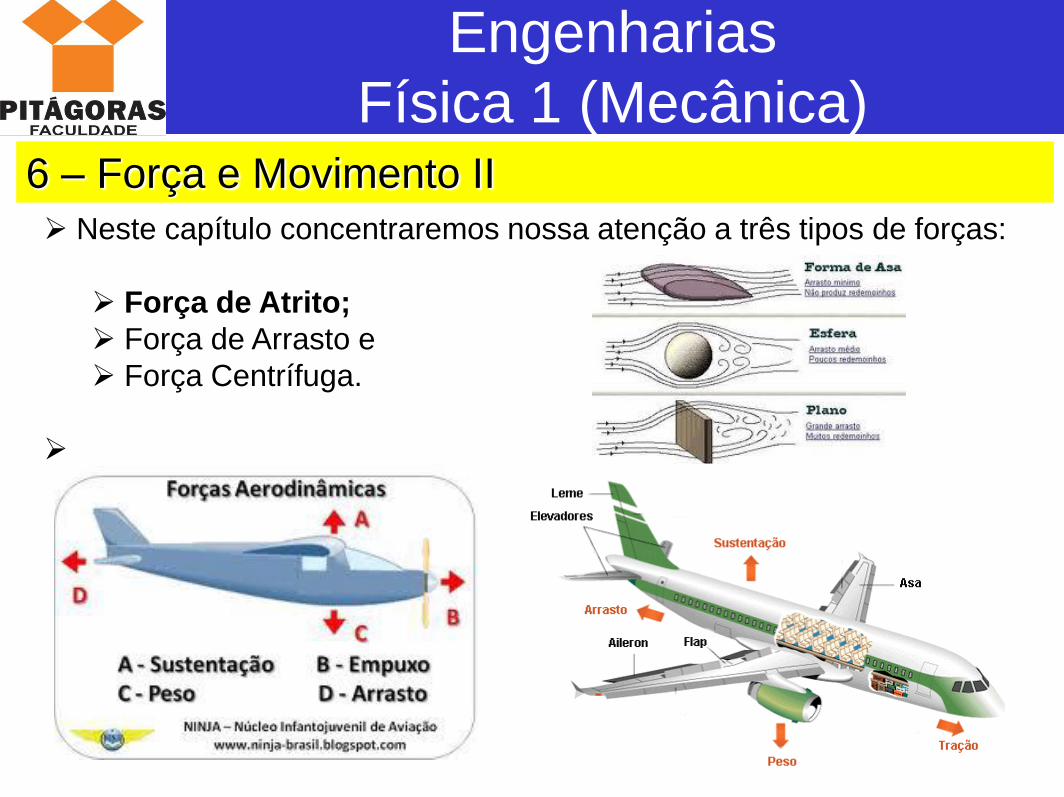
Física 1 (Mecânica)6 – Força e Movimento II
Neste capítulo concentraremos nossa atenção a três tipos de forças:
Força de Atrito;
Força de Arrasto e
Força Centrífuga.
©2005 by Pearson Education 16-138
Engenharias
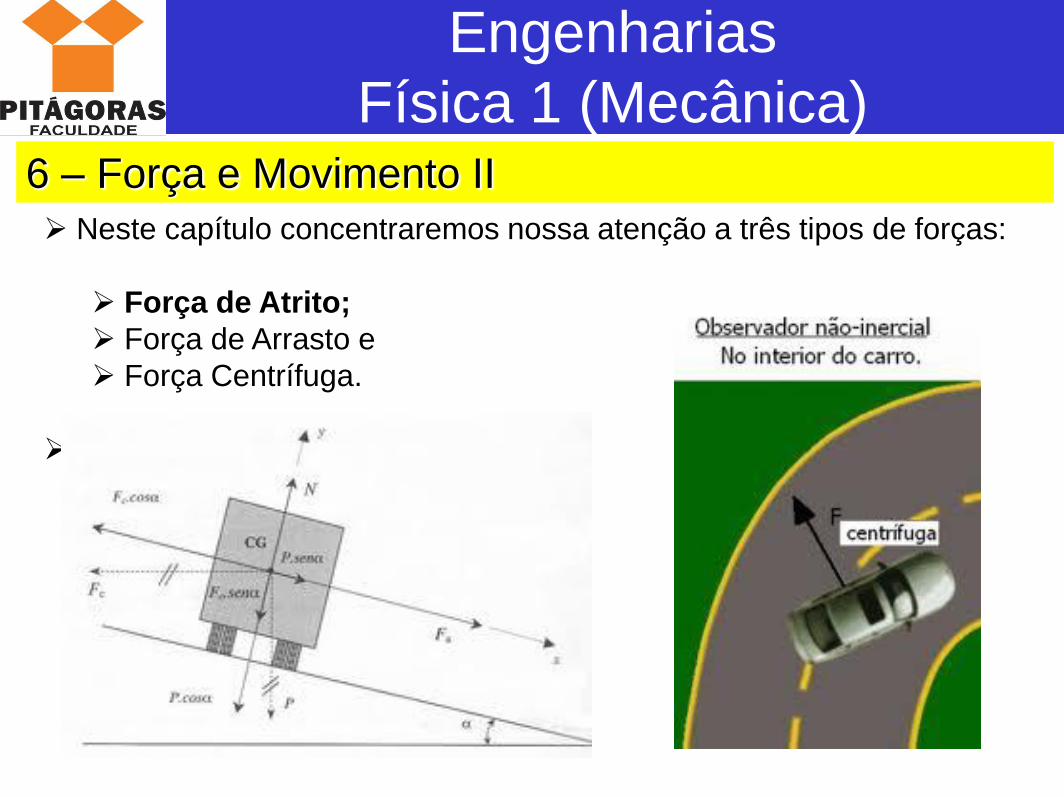
Física 1 (Mecânica)6 – Força e Movimento II
Neste capítulo concentraremos nossa atenção a três tipos de forças:
Força de Atrito;
Força de Arrasto e
Força Centrífuga.
©2005 by Pearson Education 16-139
Engenharias
Física 1 (Mecânica)6 – Força e Movimento II
Atrito:
As forças de atrito são inevitáveis na vida diária. Se não fossem
capazes de vencê-las elas fariam parar todos os objetos que estivessem
se movendo e todos os eixos que estivessem girando;
Cerca de 20% da gasolina consumida por um automóvel são usados
para compensar o atrito das peças do motor e da transmissão;
Por outro lado sem o atrito não poderíamos fazer o automóvel ir a
lugar algum, nem poderíamos caminhar ou andar de bicicleta;
Trataremos neste capítulo de forças de atrito que existem entre duas
superfícies sólidas estacionárias ou se movendo uma em relação a outra
em baixa velocidade.
©2005 by Pearson Education 16-140
Engenharias
Física 1 (Mecânica)6 – Força e Movimento II
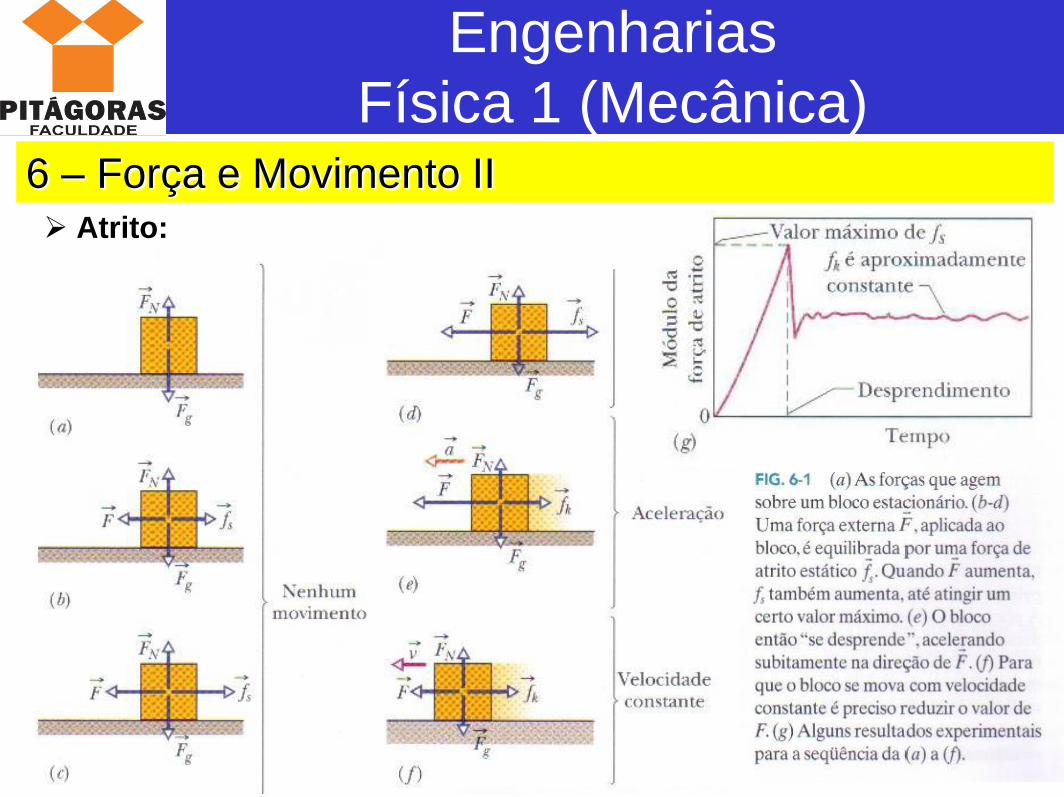
Atrito:
©2005 by Pearson Education 16-141
Engenharias
Física 1 (Mecânica)6 – Força e Movimento II
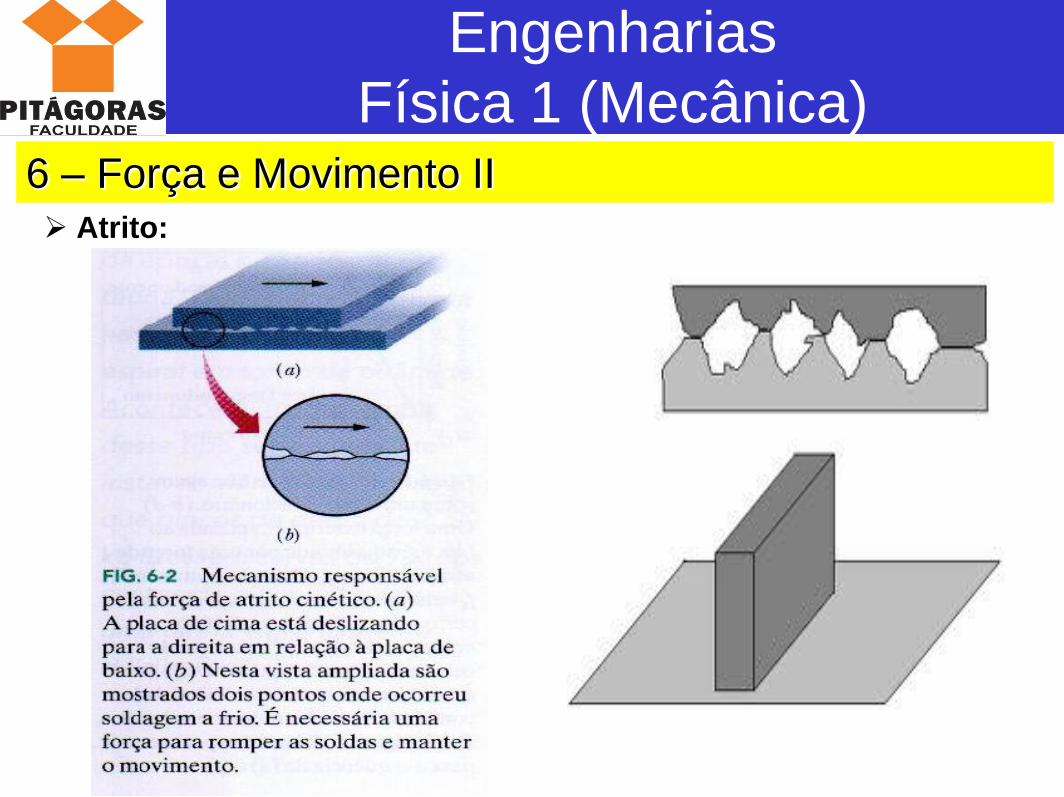
Atrito:
©2005 by Pearson Education 16-142
Engenharias
Física 1 (Mecânica)6 – Força e Movimento II
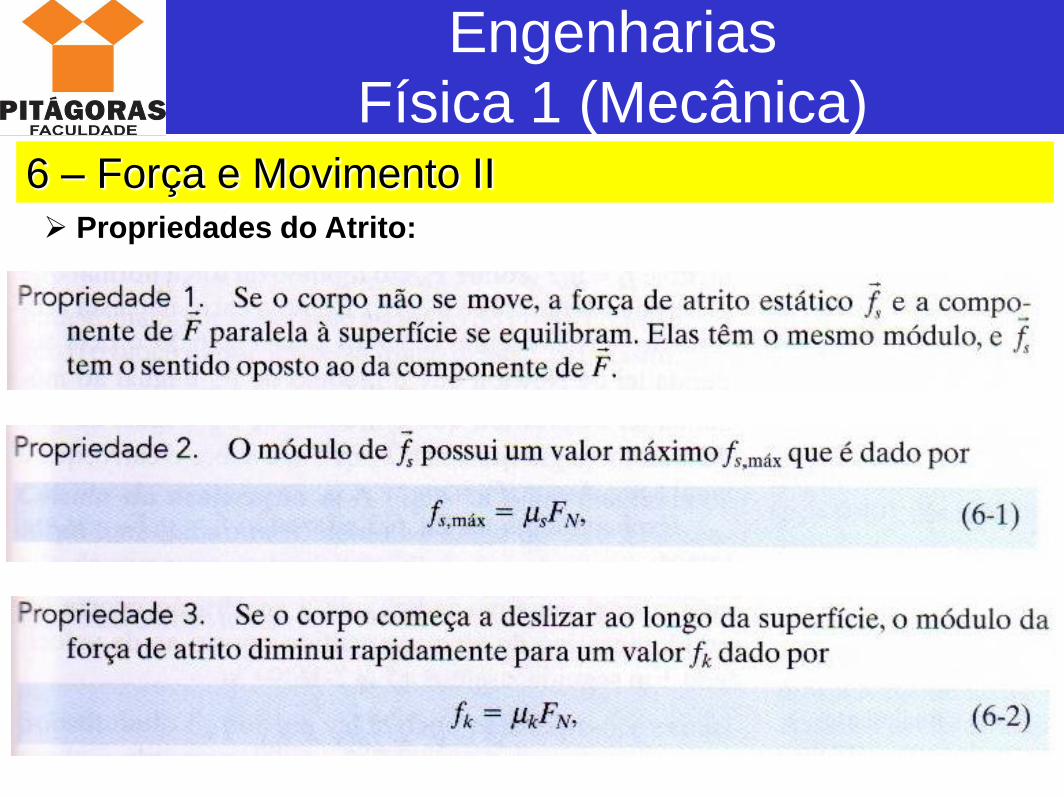
Propriedades do Atrito:
©2005 by Pearson Education 16-143
Engenharias
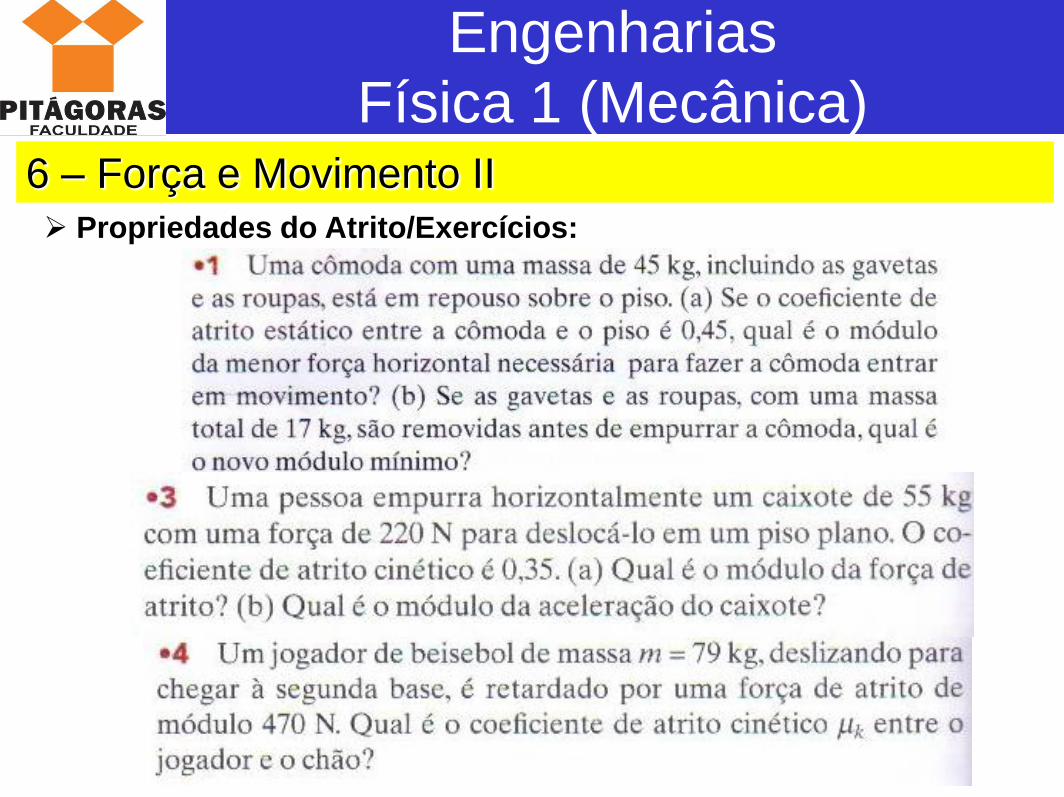
Física 1 (Mecânica)6 – Força e Movimento II
Propriedades do Atrito/Exercícios:
©2005 by Pearson Education 16-144
Engenharias
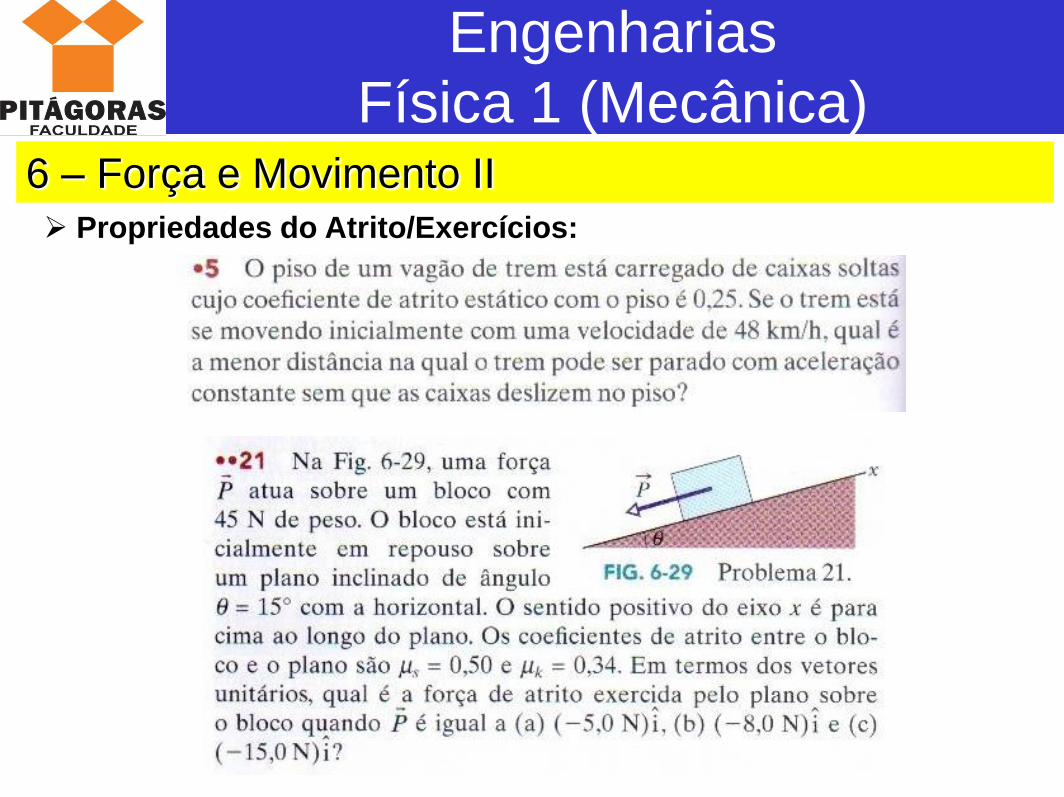
Física 1 (Mecânica)6 – Força e Movimento II
Propriedades do Atrito/Exercícios:
©2005 by Pearson Education 16-145
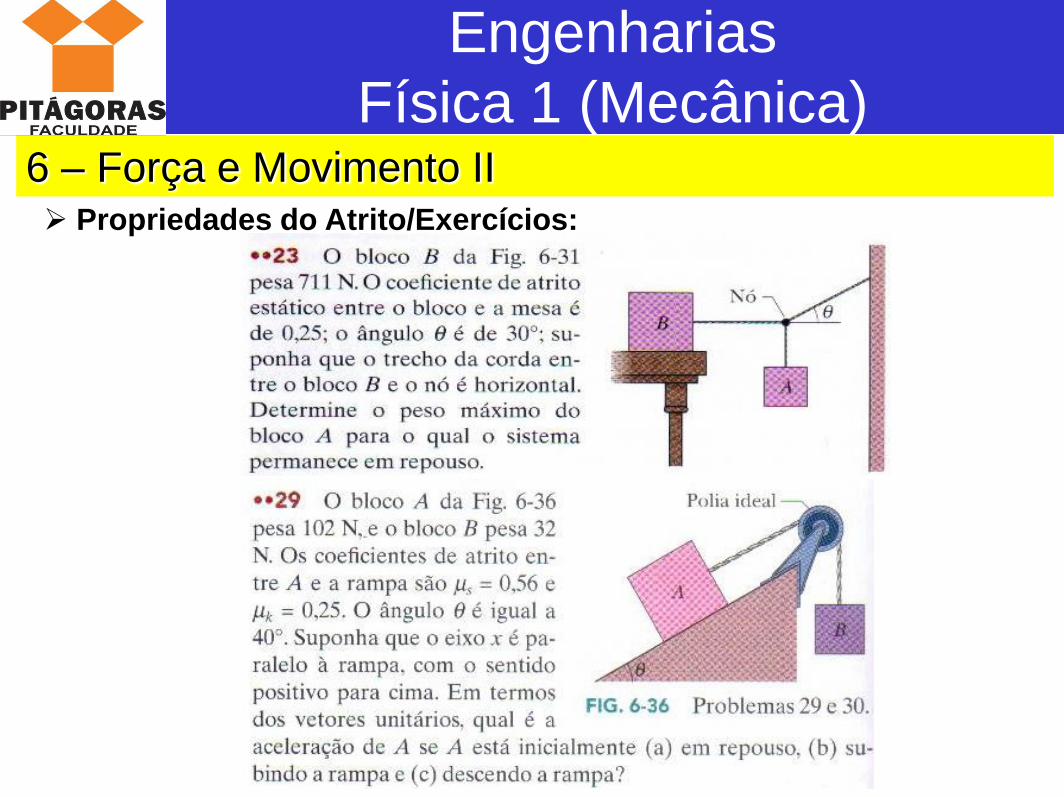
Engenharias
Física 1 (Mecânica)6 – Força e Movimento II Propriedades do Atrito/Exercícios:
©2005 by Pearson Education 16-146
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Princípios Gerais
©2005 by Pearson Education 16-147
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Princípios Gerais

©2005 by Pearson Education 16-148
Engenharias
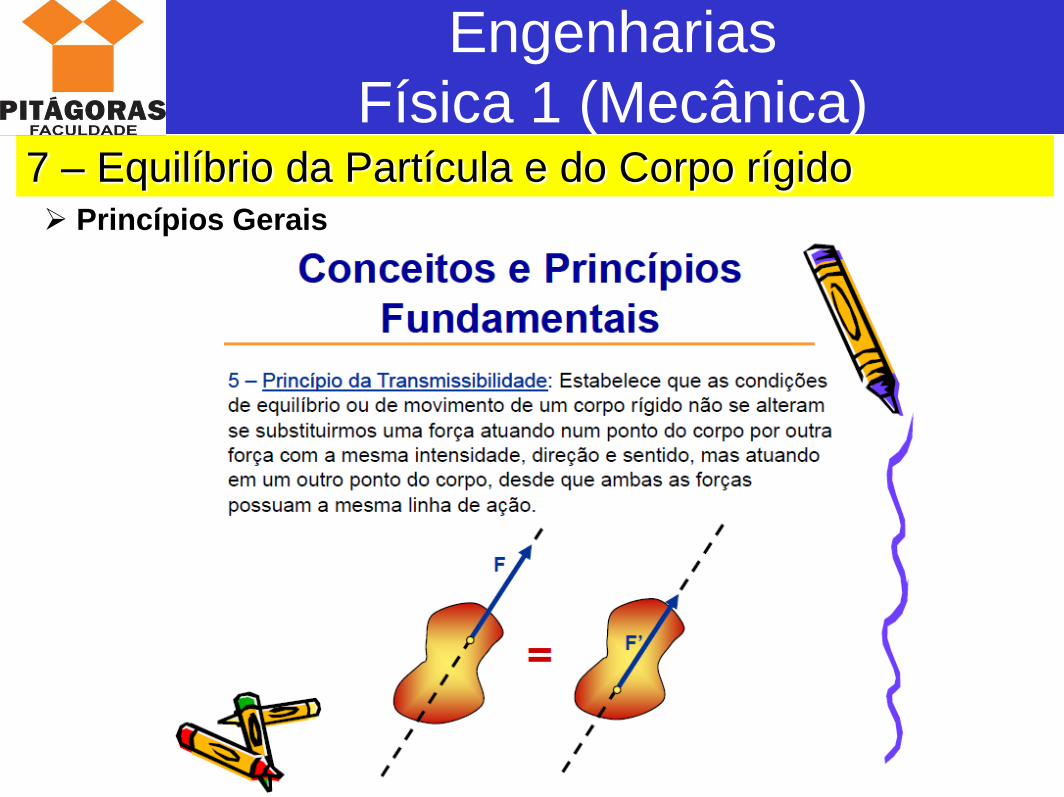
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Princípios Gerais

©2005 by Pearson Education 16-149
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Princípios Gerais
©2005 by Pearson Education 16-150
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Princípios Gerais
©2005 by Pearson Education 16-151
Engenharias
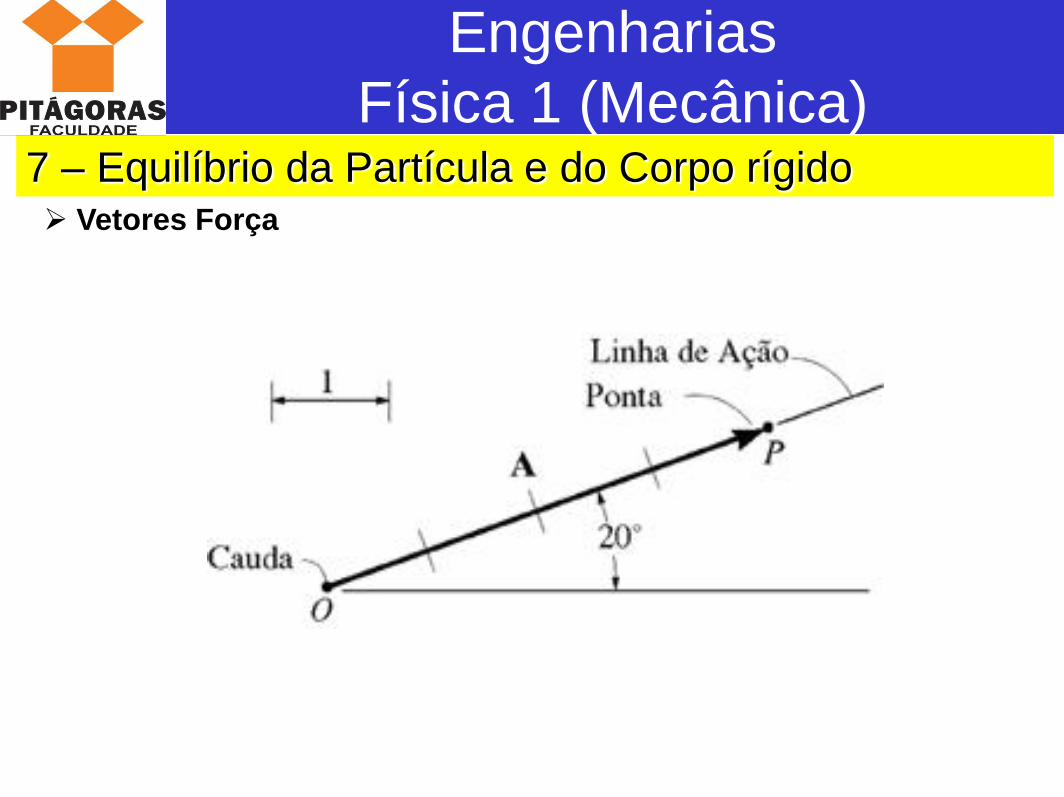
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Vetores Força
©2005 by Pearson Education 16-152
Engenharias
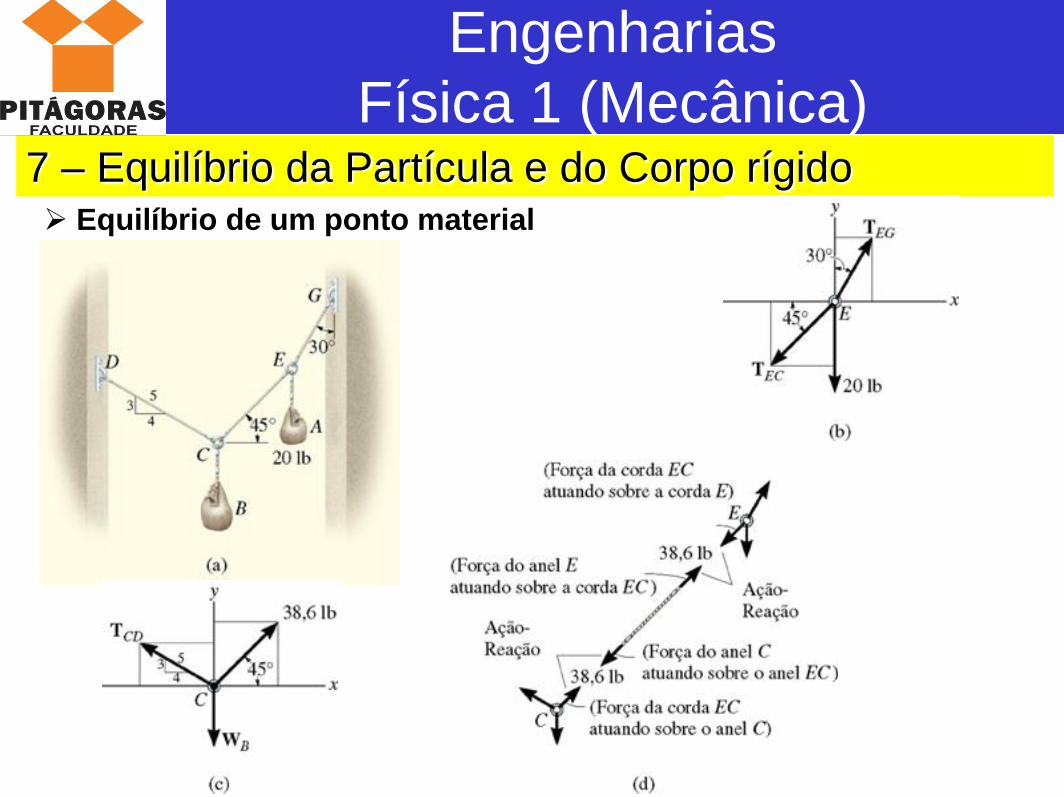
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material
Objetivos
Introduzir o conceito de corpo livre para
o ponto material;
Mostrar com resolver problemas de
equilíbrio usando as equações de
equilíbrio.
©2005 by Pearson Education 16-153
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido
Equilíbrio de um ponto material
Condições de equilíbrio de um
Ponto Material
Um ponto material encontra-se em
equilíbrio desde que esteja em repouso –
repouso - ou tenha velocidade constante
– movimento;
Entretanto o termo equilíbrio ou mais
equilíbrio estático é usado para descrever
um objeto em repouso;
©2005 by Pearson Education 16-154
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido
Equilíbrio de um ponto material
Condições de equilíbrio de um
Ponto Material
Para manter o equilíbrio, é necessário
que seja satisfeita a primeira lei do
movimento de Newton, pela qual a força
resultante que atua sobre um ponto
material deve ser igual a zero.
ΣF = 0
ΣF é o vetor soma de todas as forças
que atuam sobre o ponto material

©2005 by Pearson Education 16-155
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material

©2005 by Pearson Education 16-156
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material
©2005 by Pearson Education 16-157
Engenharias
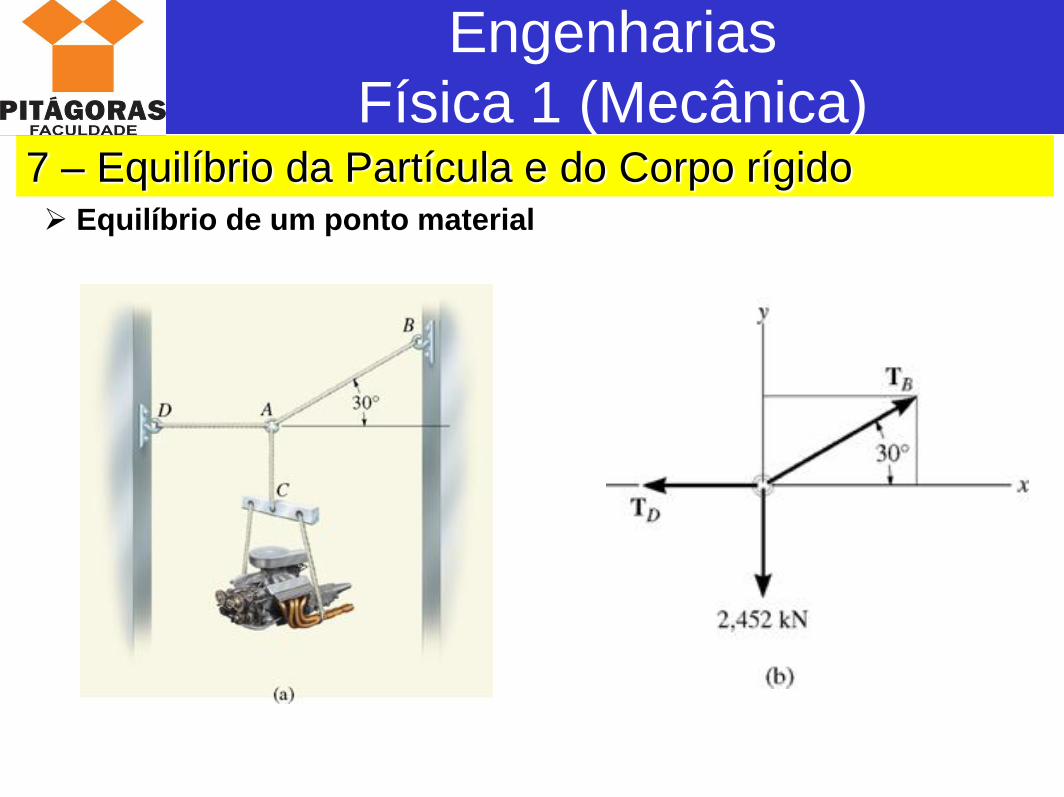
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido
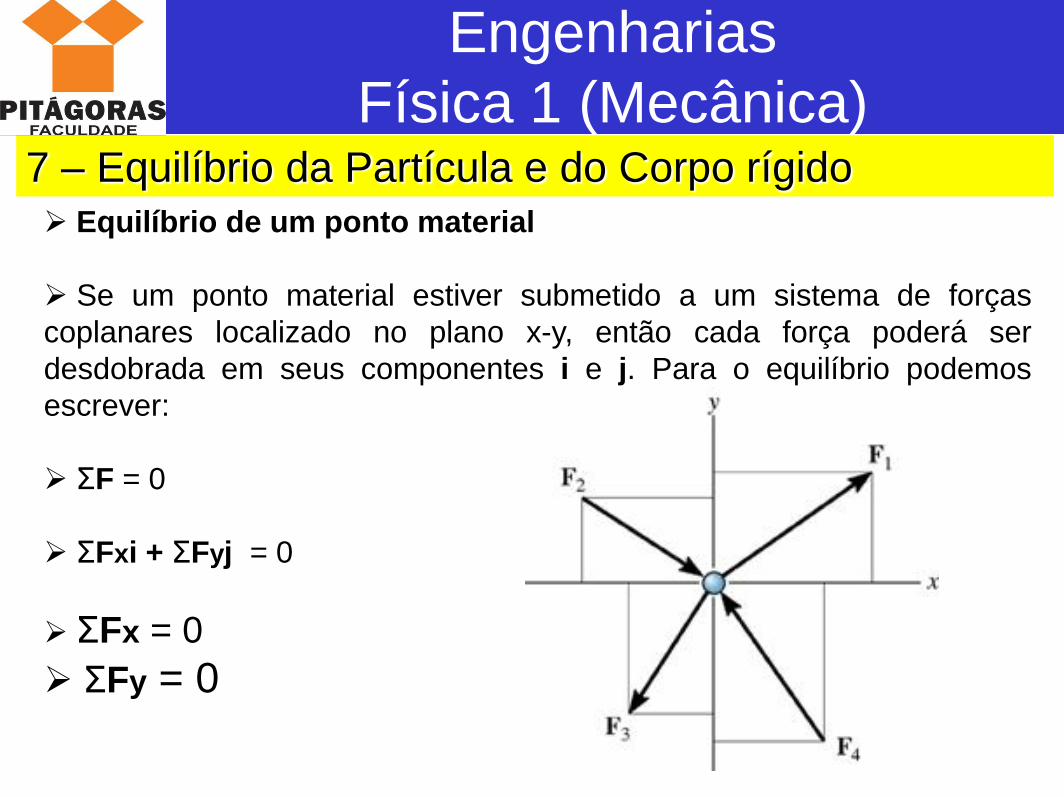
Equilíbrio de um ponto material
Se um ponto material estiver submetido a um sistema de forças
coplanares localizado no plano x-y, então cada força poderá ser
desdobrada em seus componentes i e j. Para o equilíbrio podemos
escrever:
ΣF = 0
ΣFxi + ΣFyj = 0
ΣFx = 0
ΣFy = 0

©2005 by Pearson Education 16-158
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material
©2005 by Pearson Education 16-159
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material
©2005 by Pearson Education 16-160
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material
©2005 by Pearson Education 16-161
Engenharias
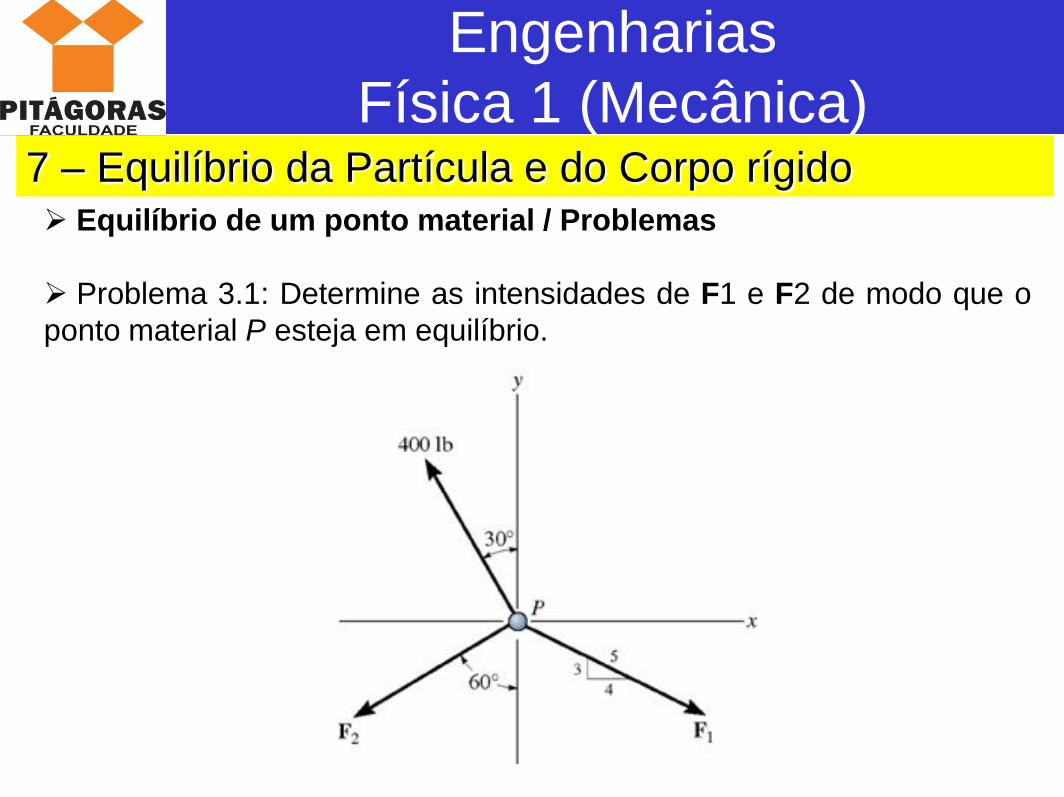
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
Problema 3.1: Determine as intensidades de F1 e F2 de modo que o
ponto material P esteja em equilíbrio.
©2005 by Pearson Education 16-162
Engenharias
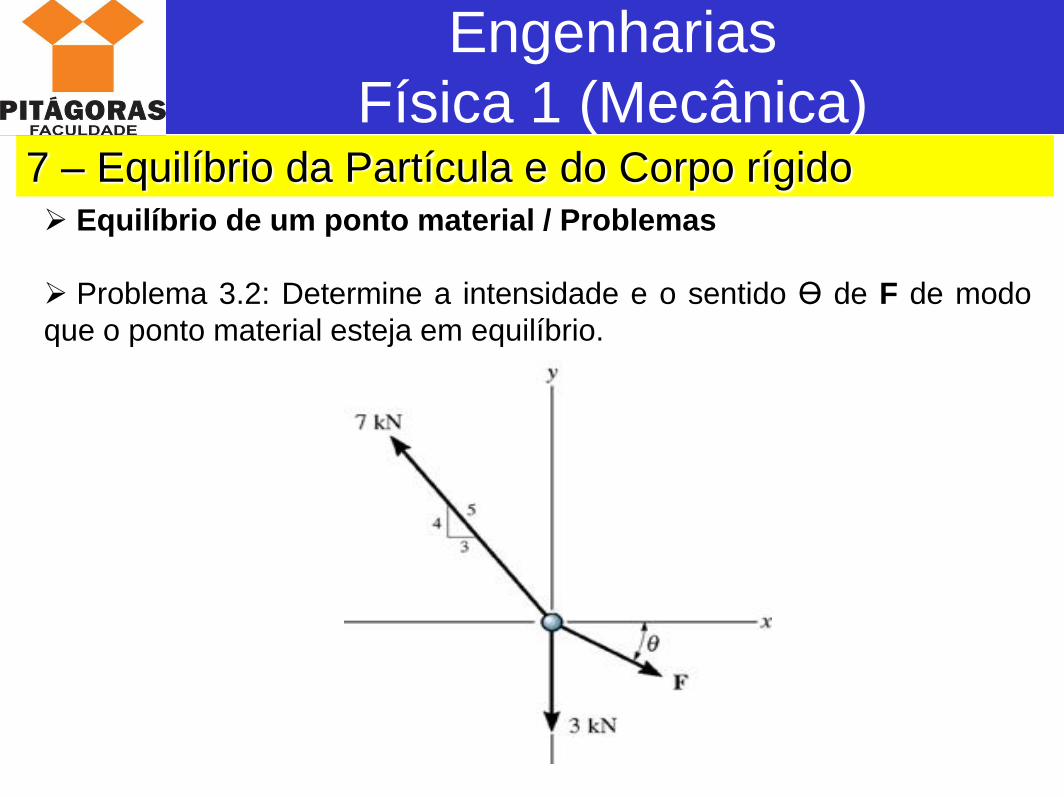
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
Problema 3.2: Determine a intensidade e o sentido Ɵ de F de modo
que o ponto material esteja em equilíbrio.
©2005 by Pearson Education 16-163
Engenharias
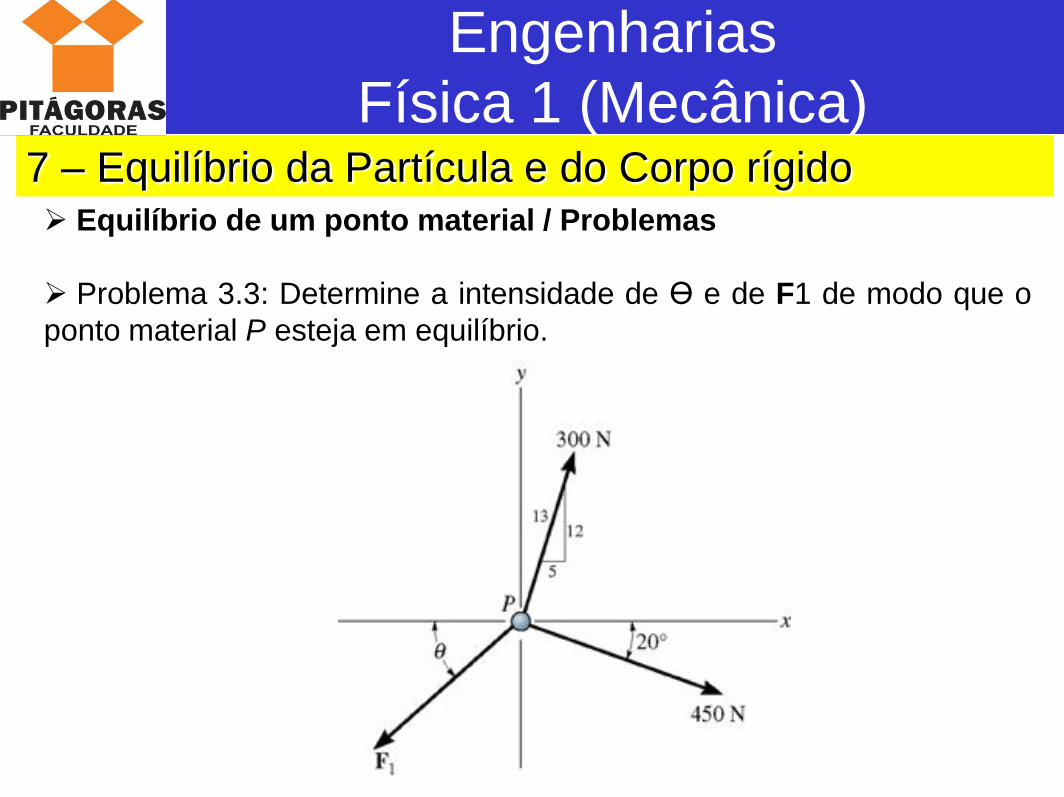
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
Problema 3.3: Determine a intensidade de Ɵ e de F1 de modo que o
ponto material P esteja em equilíbrio.

©2005 by Pearson Education 16-164
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
Problema 3.4: Determine a intensidade e o ângulo Ɵ de F de modo
que o ponto material P esteja em equilíbrio.

©2005 by Pearson Education 16-165
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
Problema 3.5: As partes de uma treliça são acopladas por pinos na
junta O, como mostra a figura. Determine as intensidades de F1 e F2
para o equilíbrio. Suponha que Ɵ = 60°.
©2005 by Pearson Education 16-166
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
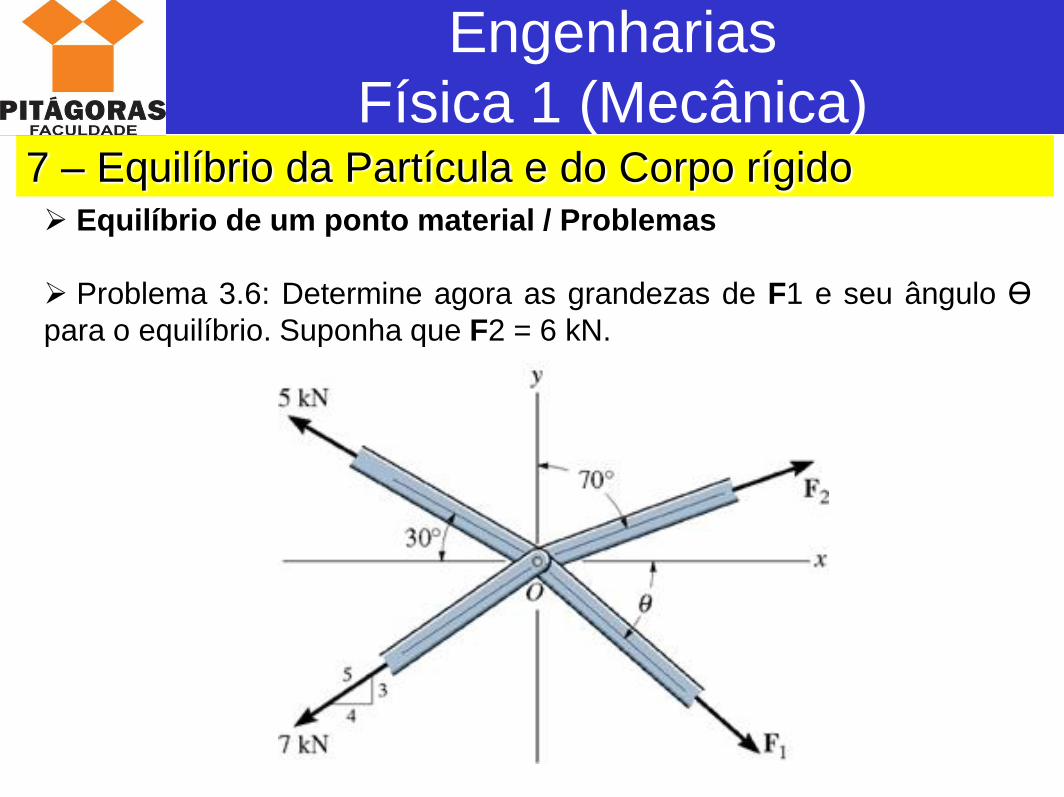
Problema 3.6: Determine agora as grandezas de F1 e seu ângulo Ɵ
para o equilíbrio. Suponha que F2 = 6 kN.
©2005 by Pearson Education 16-167
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
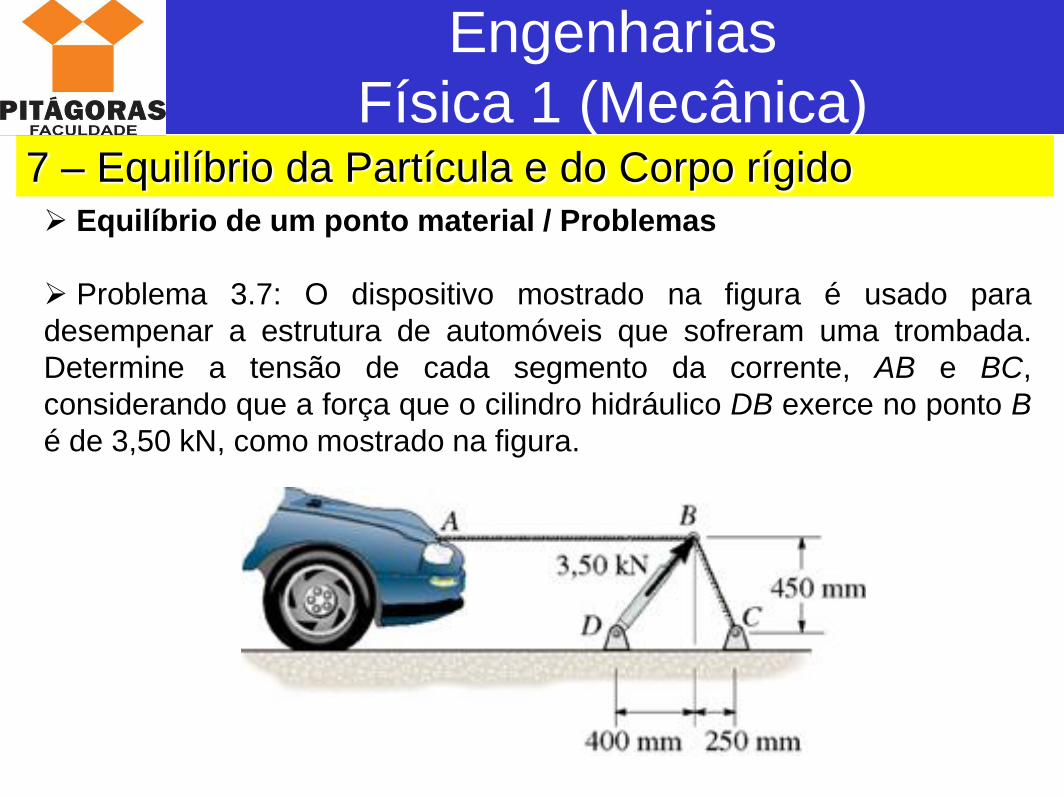
Problema 3.7: O dispositivo mostrado na figura é usado para
desempenar a estrutura de automóveis que sofreram uma trombada.
Determine a tensão de cada segmento da corrente, AB e BC,
considerando que a força que o cilindro hidráulico DB exerce no ponto B
é de 3,50 kN, como mostrado na figura.
©2005 by Pearson Education 16-168
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
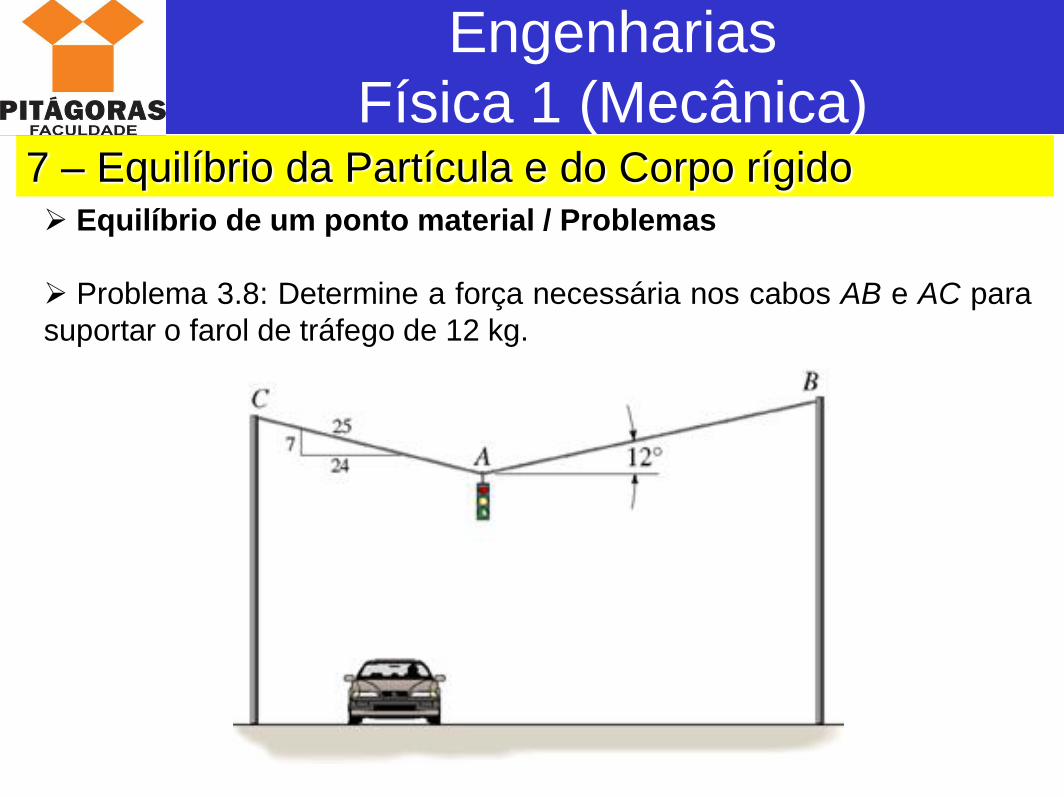
Problema 3.8: Determine a força necessária nos cabos AB e AC para
suportar o farol de tráfego de 12 kg.
©2005 by Pearson Education 16-169
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um ponto material / Problemas
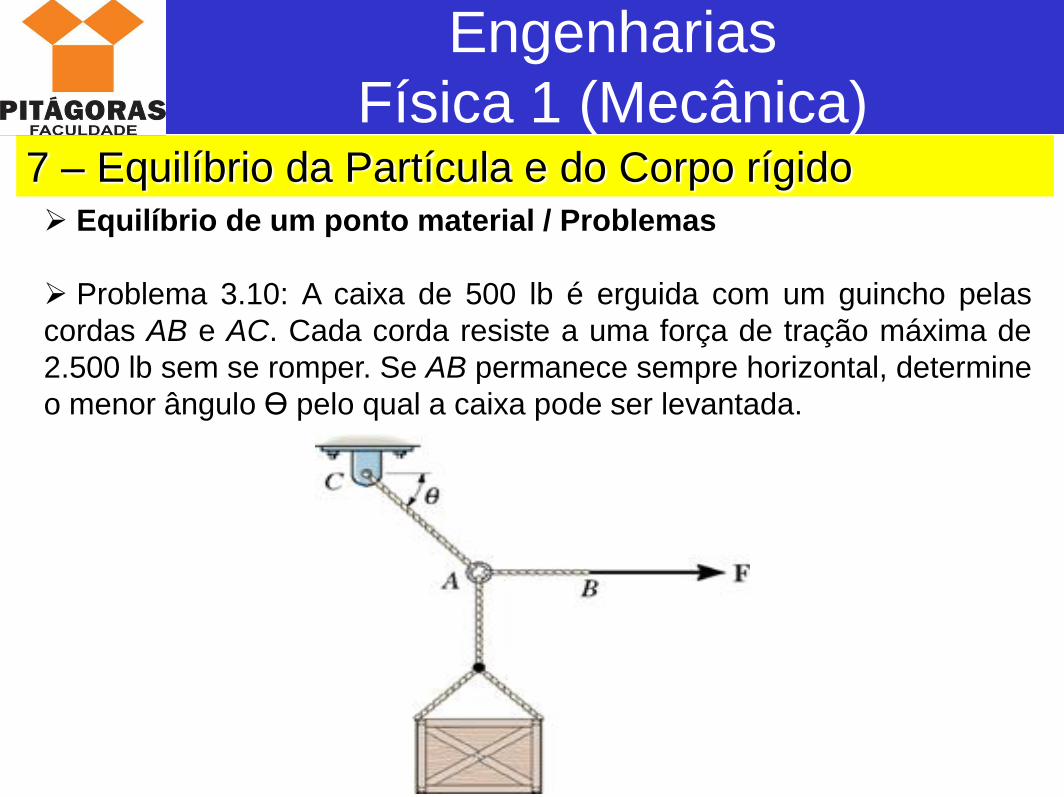
Problema 3.10: A caixa de 500 lb é erguida com um guincho pelas
cordas AB e AC. Cada corda resiste a uma força de tração máxima de
2.500 lb sem se romper. Se AB permanece sempre horizontal, determine
o menor ângulo Ɵ pelo qual a caixa pode ser levantada.
©2005 by Pearson Education 16-170
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido
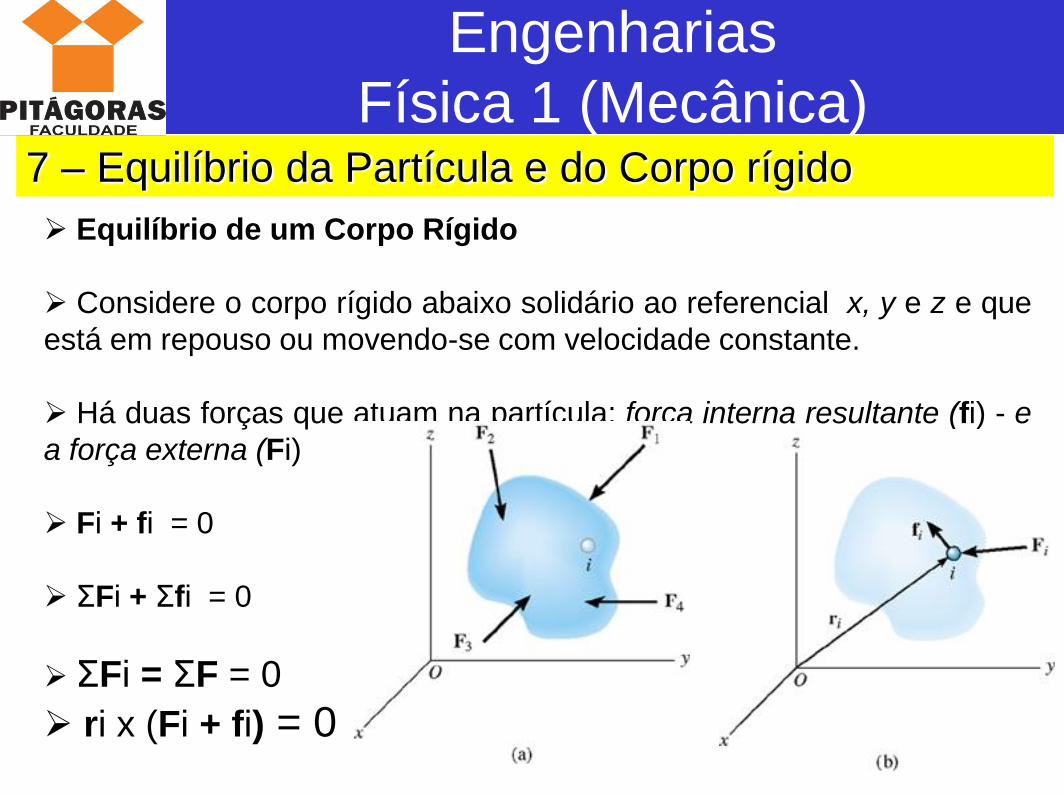
Equilíbrio de um Corpo Rígido
Considere o corpo rígido abaixo solidário ao referencial x, y e z e que
está em repouso ou movendo-se com velocidade constante.
Há duas forças que atuam na partícula: força interna resultante (fi) - e
a força externa (Fi)
Fi + fi = 0
ΣFi + Σfi = 0
ΣFi = ΣF = 0
ri x (Fi + fi) = 0
©2005 by Pearson Education 16-171
Engenharias
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido
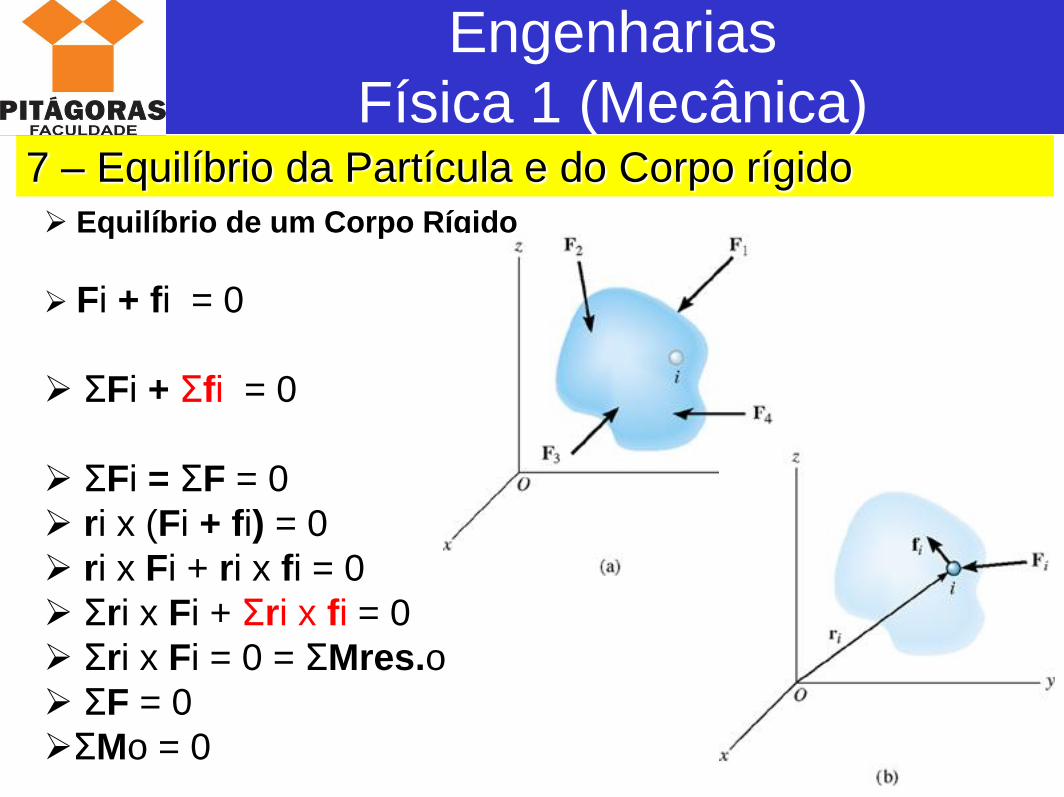
Equilíbrio de um Corpo Rígido
Fi + fi = 0
ΣFi + Σfi = 0
ΣFi = ΣF = 0
ri x (Fi + fi) = 0
ri x Fi + ri x fi = 0
Σri x Fi + Σri x fi = 0
Σri x Fi = 0 = ΣMres.o
ΣF = 0
ΣMo = 0
©2005 by Pearson Education 16-172
Engenharias
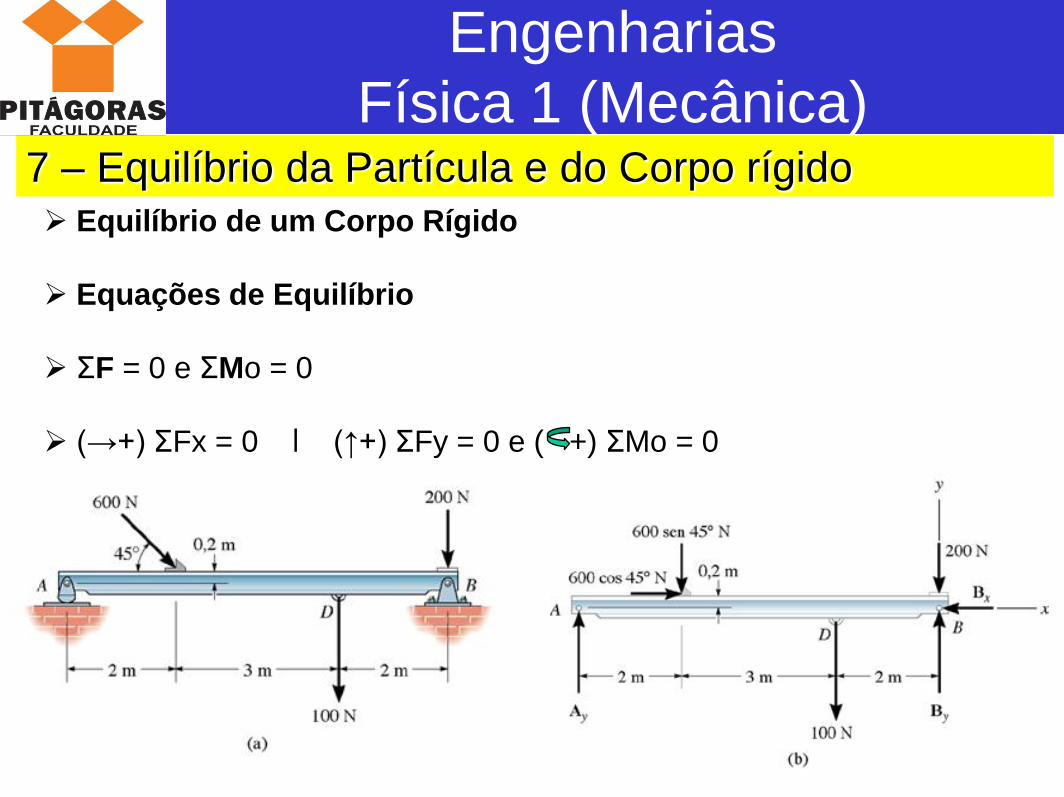
Física 1 (Mecânica)7 – Equilíbrio da Partícula e do Corpo rígido Equilíbrio de um Corpo Rígido
Equações de Equilíbrio
ΣF = 0 e ΣMo = 0
(→+) ΣFx = 0 ا (↑+) ΣFy = 0 e ( +) ΣMo = 0
©2005 by Pearson Education 16-173
Engenharias
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico
Centro de Massa
Definimos o centro de massa (CM) de um sistema de partículas
(uma pessoa por exemplo) para podermos prever com facilidade o
movimento do sistema.
Começaremos com um sistema de poucas partículas, e em seguida,
consideraremos sistemas com um número muito grande de partículas.
Mais adiante discutiremos como o centro de massa de um sistema de
um sistema se move quando o sistema é submetido à forças externas.
©2005 by Pearson Education 16-174
Engenharias
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico
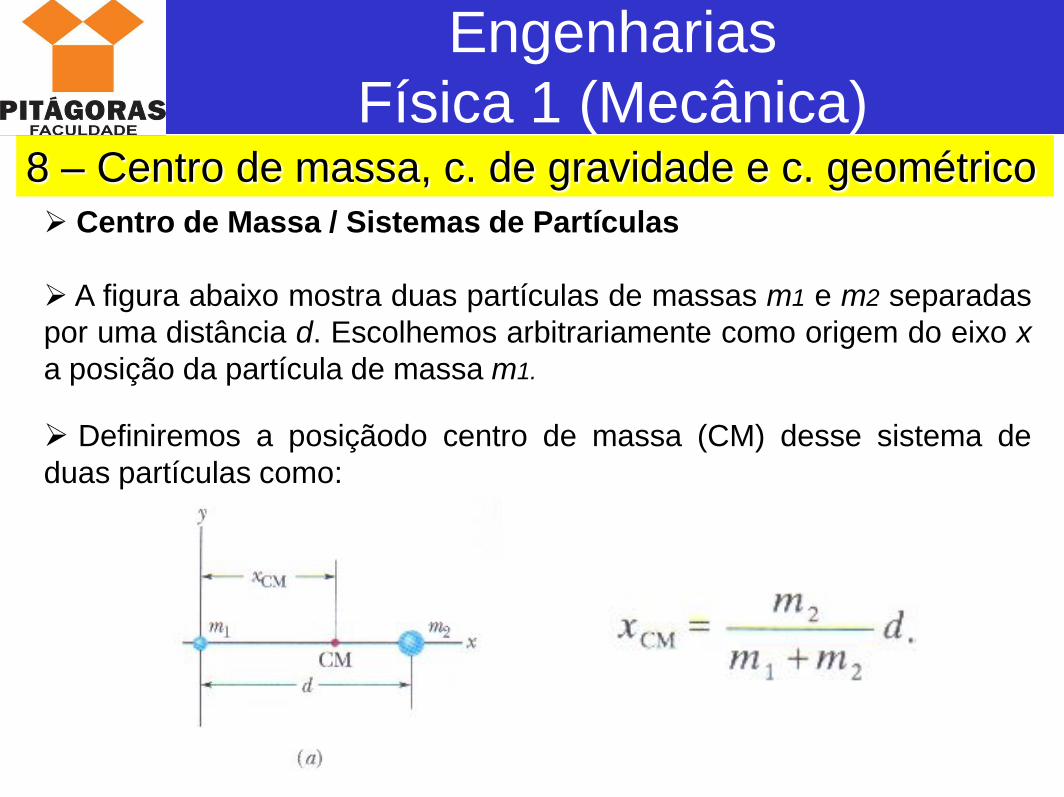
Centro de Massa / Sistemas de Partículas
A figura abaixo mostra duas partículas de massas m1 e m2 separadas
por uma distância d. Escolhemos arbitrariamente como origem do eixo x
a posição da partícula de massa m1.
Definiremos a posiçãodo centro de massa (CM) desse sistema de
duas partículas como:
©2005 by Pearson Education 16-175
Engenharias
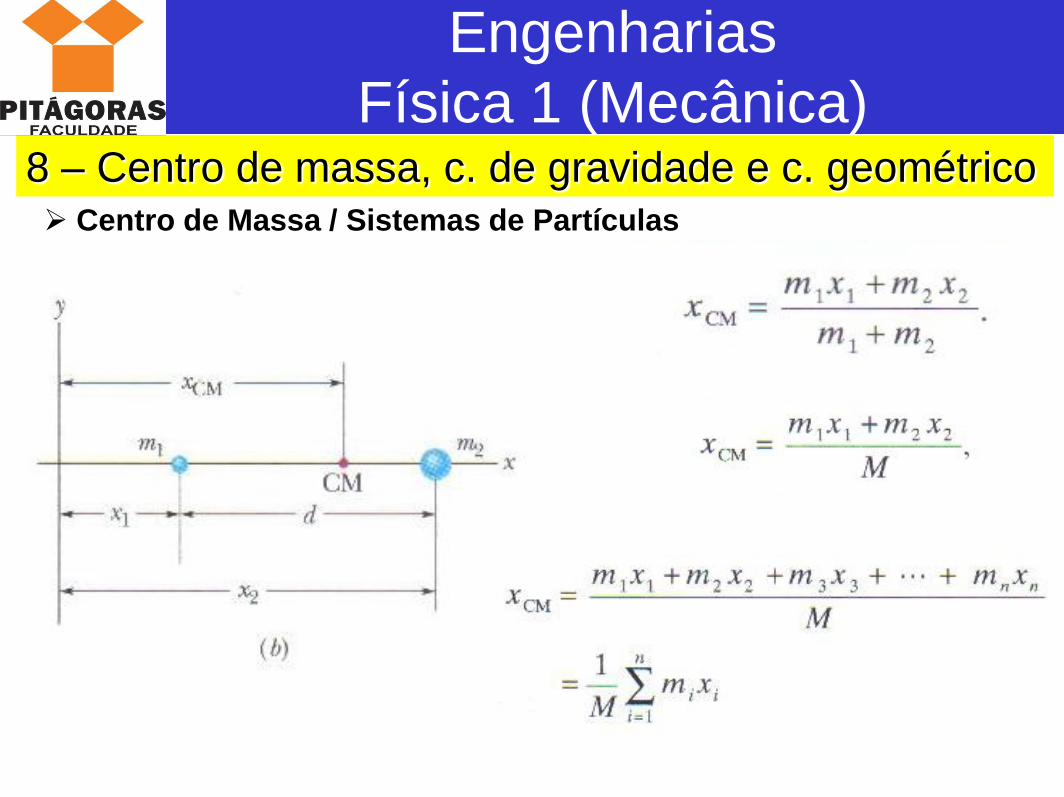
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico Centro de Massa / Sistemas de Partículas
©2005 by Pearson Education 16-176
Engenharias
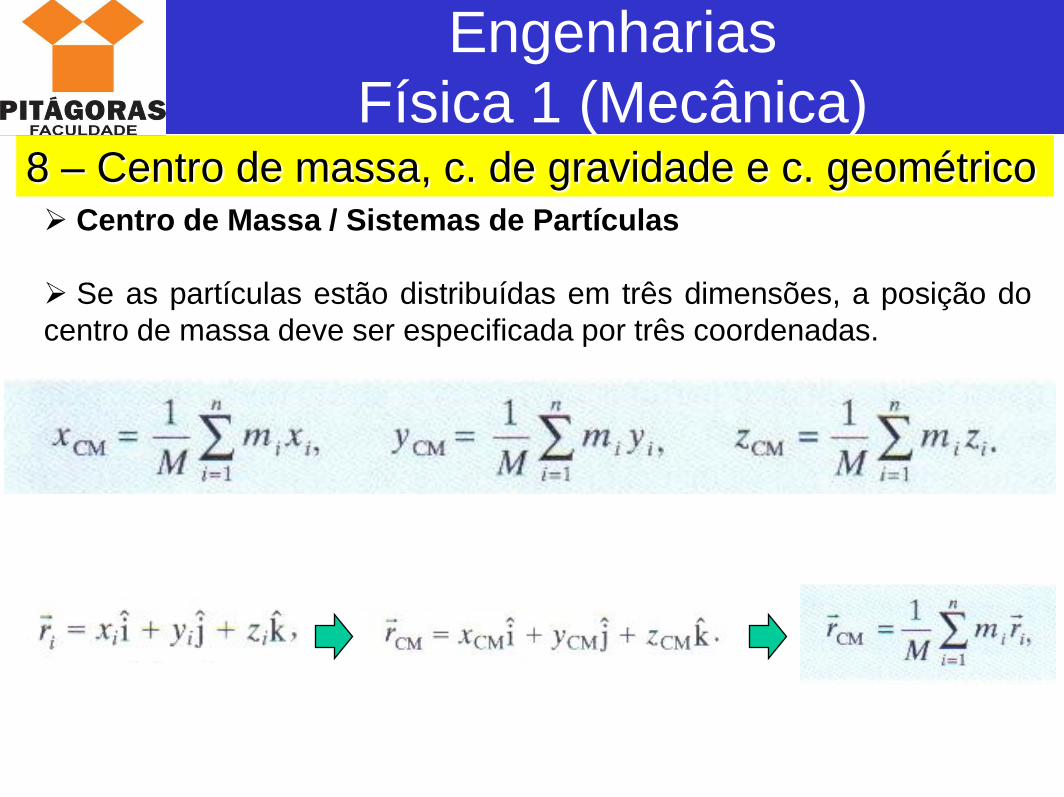
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico Centro de Massa / Sistemas de Partículas
Se as partículas estão distribuídas em três dimensões, a posição do
centro de massa deve ser especificada por três coordenadas.
©2005 by Pearson Education 16-177
Engenharias
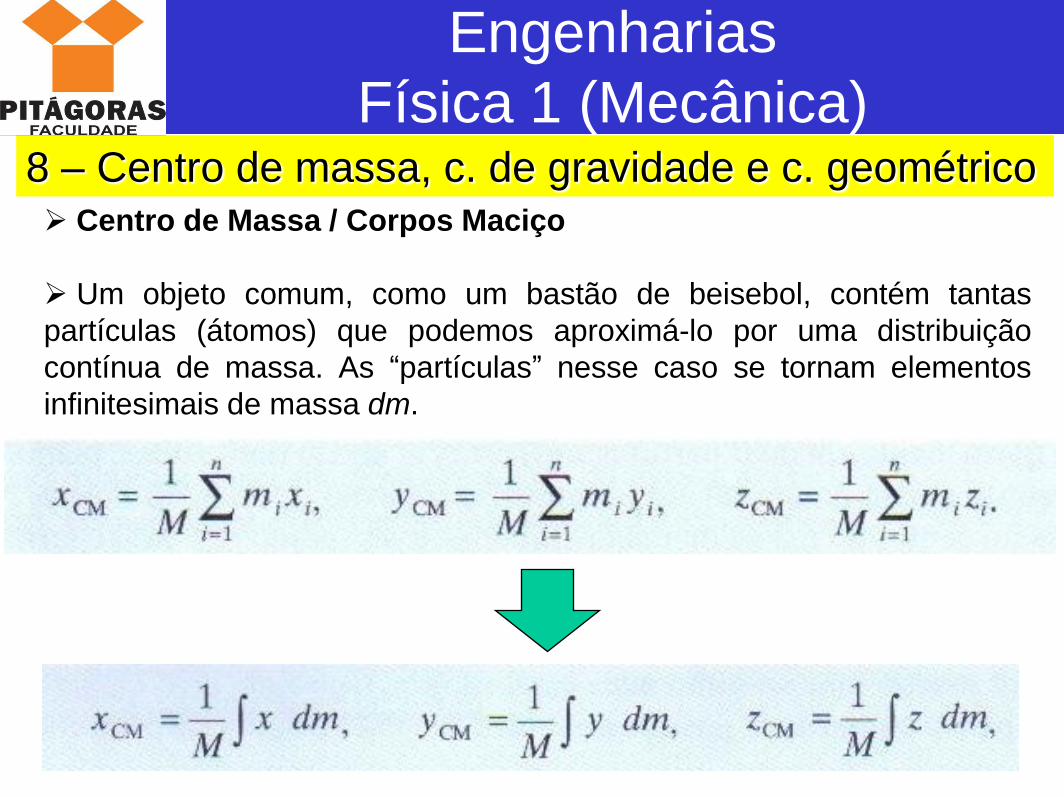
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico Centro de Massa / Corpos Maciço
Um objeto comum, como um bastão de beisebol, contém tantas
partículas (átomos) que podemos aproximá-lo por uma distribuição
contínua de massa. As “partículas” nesse caso se tornam elementos
infinitesimais de massa dm.

©2005 by Pearson Education 16-178
Engenharias
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico Centro de Massa / Corpos Maciço
©2005 by Pearson Education 16-179
Engenharias
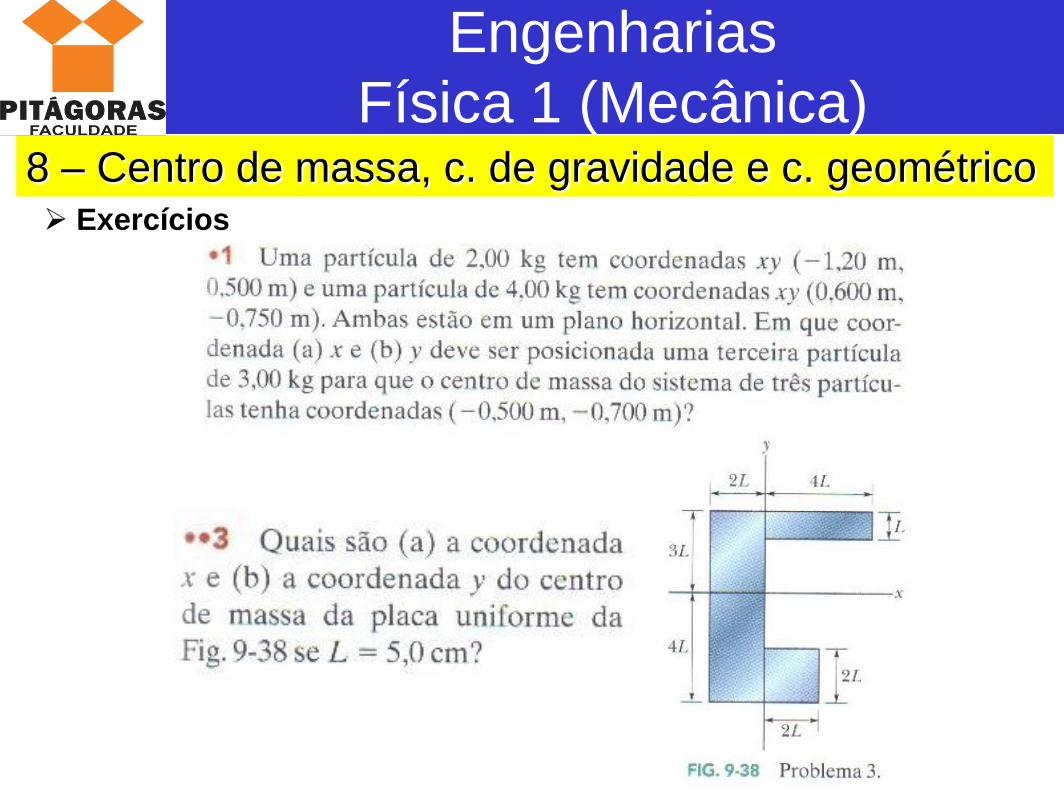
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico Exercícios
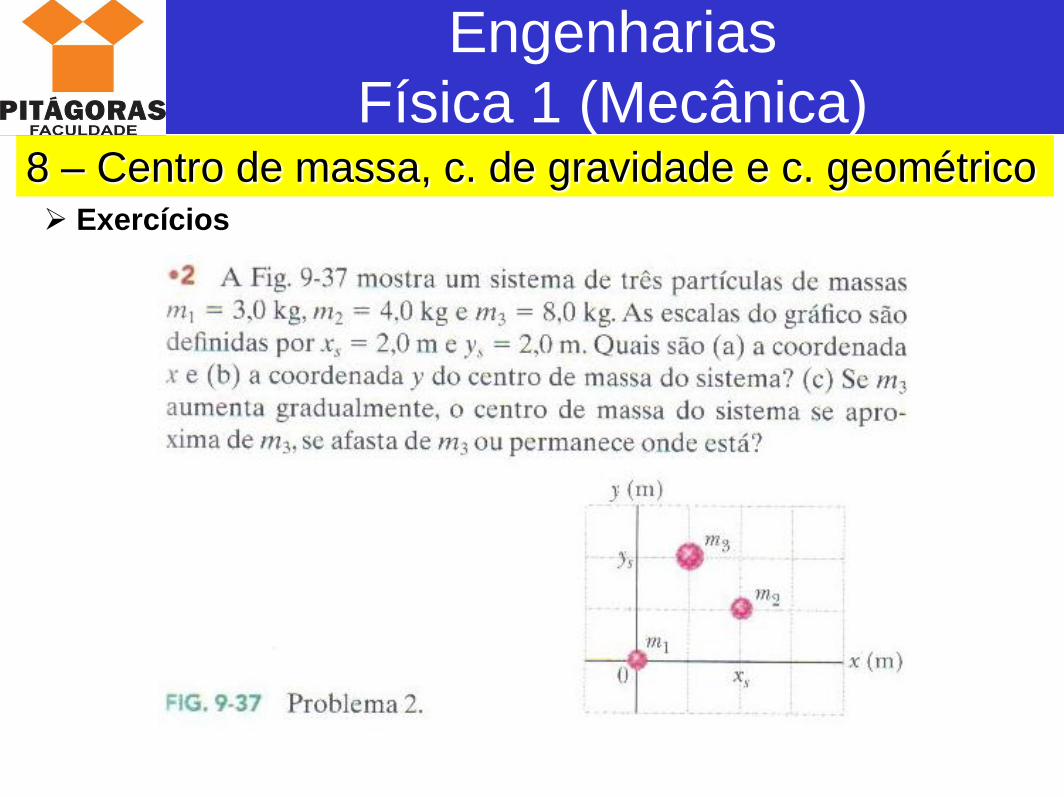
©2005 by Pearson Education 16-180
Engenharias
Física 1 (Mecânica)8 – Centro de massa, c. de gravidade e c. geométrico Exercícios