estudo de caso: proposta de otimização no controle de inventário numa empresa de varejo
TRANSCRIPT

USCS – UNIVERSIDADE MUNICIPAL DE SÃO CAETANO DO SUL
TRABALHO DE CONCLUSÃO DE CURSO EM COMPUTAÇÃO
DEMETRIO FONTES DE LOS RIOS
JONATA TADEU RIBEIRO
LEANDRO DE MOURA FÉ
LEANDRO POSTIGO ZANOLLA
ESTUDO DE CASO: PROPOSTA DE OTIMIZAÇÃO NO
CONTROLE DE INVENTÁRIO NUMA EMPRESA DE
VAREJO
SÃO CAETANO DO SUL
2012

USCS – UNIVERSIDADE MUNICIPAL DE SÃO CAETANO DO SUL
TRABALHO DE CONCLUSÃO DE CURSO EM COMPUTAÇÃO
DEMETRIO FONTES DE LOS RIOS
JONATA TADEU RIBEIRO
LEANDRO DE MOURA FÉ
LEANDRO POSTIGO ZANOLLA
ESTUDO DE CASO: PROPOSTA DE OTIMIZAÇÃO NO
CONTROLE DE INVENTÁRIO NUMA EMPRESA DE
VAREJO
Monografia apresentada no curso de
graduação à Universidade Municipal de
São Caetano do Sul, para conclusão do
curso de Ciências da Computação.
Orientação: Professor Oswaldo Fernandes
SÃO CAETANO DO SUL
2012

Ficha Catalográfica

DEMETRIO FONTES DE LOS RIOS
JONATA TADEU RIBEIRO
LEANDRO DE MOURA FÉ
LEANDRO POSTIGO ZANOLLA
ESTUDO DE CASO: PROPOSTA DE OTIMIZAÇÃO NO
CONTROLE DE INVENTÁRIO NUMA EMPRESA DE
VAREJO
Área de Concentração
Data de Defesa:
Resultado: ____________________________
BANCA EXAMINADORA

RESUMO
Este trabalho apresenta um estudo de caso numa empresa de varejo, onde será
proposta a automatização no processo de controle de inventário de estoque.
Inicialmente foi feito um estudo sobre o cenário atual, ou seja, a metodologia de
controle de inventário de estoque vigente. Baseado nessa análise identificou-se alguns
fatores que podem ser melhorados com a proposta de otimização, atacando o problema
foco desta monografia. A fim de aperfeiçoar o processo, será proposto um controle
rígido da quantidade física dos produtos, para que não tenha defasagem dos mesmos
no saldo de estoque e principalmente que não haja intervenção humana acarretando
possíveis erros humanos. Por fim, para tornar o processo mais funcional, serão
acoplados aos produtos etiquetas RFID, onde serão lidas por uma antena móvel que
será acoplada a um robô móvel, que percorrerá todo o espaço físico da loja.
Palavras-chave: robô móvel; RFID; inventário.

ABSTRACT
This paper presents a case study in a retail company, where it is proposed to automate
the process of inventory control inventory. Initially a study was done on the current
scenario, ie the method of inventory control inventory current. Based on this analysis
we can identify some factors that can be improved with the proposed optimization,
attacking the problem focus of this monograph. In order to improve the process, will
be proposed strict control of the physical quantity of the products, so you do not have
the same gap in the balance of stock and especially that no manual intervention
leading to possible human errors. Finally, to make the process more functional
products are coupled to the RFID tags, which are read by a mobile antenna which is
coupled to a mobile robot, which traverse the whole space of the store.
Keywords: mobile robot; RFID; inventory

Lista de Figuras
Figura 1 – Comparação entre RFID x Código de Barras....................................................................... 13
Figura 2 – Tags RFID Passivos e Tags RFID Ativos ............................................................................ 14
Figuras 3 – Tags RFID –Especiais para Plástico ................................................................................... 15
Figura 4 – Classes Padrão EPC ............................................................................................................. 16
Figura 5 – Leitor RFID .......................................................................................................................... 17
Figura 6 – Funcionamento do RFID ...................................................................................................... 18
Figura 7 – Funcionamento da cadeia do RFID ...................................................................................... 18
Figura 8 – Tag RFID ATIVA ................................................................................................................ 19
Figura 9 – Placa Micro controlador Arduíno ......................................................................................... 22
Figura 10 – Características do micro controlador Arduíno ................................................................... 23
Figura 11 – Placa Seguidora de Linha ................................................................................................... 23
Figura 12 – Leitor de RFID ................................................................................................................... 24
Figura 13 – Base Móvel ........................................................................................................................ 25
Figura 14 – PenBs ................................................................................................................................. 26
Figura 15 – Especificação das Correntes dos Componentes do Robô ................................................... 28
Figura 16 – Pilha Sony .......................................................................................................................... 29
Figura 17 – Layout Rebal ...................................................................................................................... 32
Figura 18 – Detalhamento de Custos ..................................................................................................... 33
Figura 19– Organograma de Empresas ................................................................................................. 34
Figura 20 – Seqüência de Recebimento de Material ou Produto ........................................................... 35
Figura 21– Layout de estoque ............................................................................................................... 36
Figura 22– Layout de estoque com definição do trajeto do robô contador .......................................... 37
Figura 23 – Layout de estoque com a linha base .................................................................................. 38
Figura 24 – Linhas guias ....................................................................................................................... 39
Figura 25 – Layout com linhas guias..................................................................................................... 40
Figura 26 – Identificação/Representação de um Checkpoint ................................................................ 41
Figura 27 – Layout com os Checkpoints ............................................................................................... 41
Figura 28 – Cenário de exemplo do funcionamento da ferramenta ....................................................... 47
Figura 29 – Cenário de exemplo com robô posicionado no inicio da trilha .......................................... 48
Figura 30 – Robô em funcionamento e recebendo informações das TAGs RFID ................................ 49
Figura 31 – Consolidação das informações ........................................................................................... 50
Figura 32 – Representação das linhas guias para identificação do fim do processo ............................. 50

Figura 33 – Identificação na trilha para representar o fim do processo ................................................. 51
Figura 34 – Fluxograma do processo da proposta ................................................................................. 52

GLOSSARIO
A - Ampère, unidade de corrente elétrica.
API - Application Program Interface, interface de Programação de Aplicativos.
ASCII - American Standard Code for Information Interchange, cógido padrão americano
para troca de informações.
B - Byte, geralmente unidade de memória de dispositivos.
c - centi, multiplicador por 10^-2, ex: 1cm = 0,01m.
CLP - Controlador Lógico Programável.
DC - Direct Current, Corrente contínua.
EAN - European Article Numeric, equivalente ao UPC (código universal do produto)
americano.
EPC - Eletronic Product Code, código do produto eletrônico.
f - força, conceito da física.
FAT - File Allocation Table, tabela de alocação de arquivos.
g - grama, unidade de massa.
G - Giga, multiplicador por 10^9, ex: 1 GHz = 1000000000Hz.
Hz - Unidade de medida de Frequência.
IBM - International Business Machines, empresa americana.
ICSP - In Circuit Serial Program, programação serial no circuito.
IFF - Identify Friend or Foe - identificador ativo de contra inimigo.
ISM - Industrial-Scientific-Medical, indústria científica-médica.
ISO - International Organization for Standardization, norma internacional de
padronização.
K - Kilo, multiplicador por 10^3, ex: 1 KHz = 1000Hz.
LED - light-emitting diode, diodo emissor de luz.
m - metro, unidade de medida.
m - mili, multiplicador por 10^-3, ex: 1mA = 0,001A.
M - Mega, multiplicador por 10^6, ex: 1 MHz = 1000000Hz.
PWM - Pulse Width Modulation, modulação por largura de pulso.
SDK - Software Development Kit, kit de desenvolvimento de software.
SMA - Shape Memory Alloy, Liga com Memória de Forma.
RF - Radio Frequency - Radio frequência.

RFID - Radio Frequency Identify, Identificador de rádio frequência.
rpm - Rotações por minuto, unidade de medição de rotação de motores.
TAG - o Transponder da tecnologia RFID.
UHF - Ultra High Frequency - Ultra alta frequência.
USB - Universal Serial Bus, conexão de barramento universal para dispositivos.
v - Volts, unidade de tensão elétrica.
Sumário
1 INTRODUÇÃO .................................................................................................................................. 9 1.1OBJETIVOS ....................................................................................................................................... 9 1.2 IDEIA CENTRAL DO TRABALHO ............................................................................................... 9 1.3 PROBLEMA FOCO DO ESTUDO .................................................................................................. 9 1.4ASPECTOS ABORDADOS .............................................................................................................. 9 1.4.1 Acurácia x Nível de Serviço ao Cliente ............................................................................................ 9 1.4.2 Tecnologia RFID ............................................................................................................................ 10 2 RFID ............................................................................................................................................... 10 2.1 HISTÓRIA DO RFID ........................................................................................................................... 10 2.2 RFID X CÓDIGO DE BARRAS .................................................................................................... 12 2.3 COMPONENTES ............................................................................................................................ 13 2.3.1 Transponder (tag) ......................................................................................................................... 14
2.3.1.1 Características ................................................................................................................... 14 2.3.1.2 Padrão de Comunicação .................................................................................................... 15 2.3.1.3 Frequências de Operação .................................................................................................. 16
2.3.2 Transceiver (Leitor) ....................................................................................................................... 17 2.4 ENTENDENDO O FUNCIONAMENTO DO RFID ...................................................................... 17 2.5 ETIQUETA UTILIZADA E CUSTO ............................................................................................. 19 3 ROBÓTICA ...................................................................................................................................... 20 3.1 PLATAFORMA ARDUÍNO ........................................................................................................... 20 3.2 O ROBÔ MÓVEL APLICADO AO PROJETO ............................................................................. 21 3.2.1 Micro Controlador Arduíno UNO.................................................................................................. 21 3.2.2 Placa Seguidora de Linha .............................................................................................................. 23 3.2.3 Leitor de RFID ............................................................................................................................... 24 3.2.4 Base Móvel ................................................................................................................................... 25 3.2.5 Armazenamento de Dados ........................................................................................................... 26 3.3 CUSTOS .......................................................................................................................................... 27 3.4 CONSUMO TOTAL DE ENERGIA DO ROBÔ............................................................................... 27 3.4.1 Bateria Utilizada ........................................................................................................................... 28 3.4.2 Calculo da Duração da Pilha x Consumo do robô ......................................................................... 29 4. ESTUDO DE CASO DE CONTROLE DE INVENTÁRIO EM UMA EMPRESA DE
VAREJO ............................................................................................................................................... 29 4.1 CONHECENDO A EMPRESA ...................................................................................................... 30 4.2 CENÁRIO ATUAL ......................................................................................................................... 31 4.3 METODOLOGIA DE INVENTÁRIO APLICADA ....................................................................... 32 4.3.1 Tempo ........................................................................................................................................... 33 4.3.2 Custos ........................................................................................................................................... 33 5 PROPOSTA PRINCIPAL DA APLICAÇÃO DA TECNOLOGIA NO NEGÓCIO ................. 33 5.1 A APLICAÇÃO DA TECNOLOGIA NO NEGÓCIO ................................................................... 34 5.2 APLICANDO A PROPOSTA ......................................................................................................... 34

5.2.1 Etiquetagem ................................................................................................................................. 35 5.2.2 – Navegação do Robô ................................................................................................................... 36
5.2.2.1 – Aplicação e funcionalidade da linha base ....................................................................... 37 5.2.2.2 – Aplicação e funcionalidade das linhas guias ................................................................... 38 5.2.2.3 – Aplicação e Funcionalidades dos Checkpoints ................................................................ 40
5.2.3 – Utilizando Antenas Fixas ............................................................................................................ 42 5.2.4 – Funcionamento geral da proposta ............................................................................................ 43
5.2.4.1 – Funcionamento da rotina. .............................................................................................. 43 6 CONCLUSÃO .................................................................................................................................. 53 Referências Bibliografias .................................................................................................................... 54



9
1 INTRODUÇÃO
1.1OBJETIVOS
O objetivo é estabelecer um meio seguro, confiável e eficaz de contagem de
produtos utilizando etiquetas RFID (Radio Frequency Identify) de rádio frequência e um
robô móvel que realizará a função de leitura e organização dos dados obtidos.
1.2 IDEIA CENTRAL DO TRABALHO
A ideia central é obter informações consistentes com maior precisão, praticidade,
dinamismo na contagem de produtos para realização do inventário de estoque de uma
forma que reduza o tempo de resposta e a mão de obra.
1.3 PROBLEMA FOCO DO ESTUDO
É possível estabelecer um controle de inventário implementado por um robô móvel
e/ou antenas de rádio frequência sendo prático, rápido e funcional?
1.4 ASPECTOS ABORDADOS
1.4.1 ACURÁCIA X NÍVEL DE SERVIÇO AO CLIENTE

10
Este trabalho visa abordar aspectos mercadológicos, nos quais serão abordados
mais profundamente em Acurácia e Nível de serviço ao cliente. Segundo [ Bertaglia 2009,
pag. 335-336] o nível de confiabilidade do sistema gerenciador da empresa em relação ao
seu próprio inventário físico, é definido por Acurácia. E de forma a garantir que esta
acurácia integre as necessidades do cliente, garante-se o nível de serviço ao cliente, que
significa uma acurácia de 100%. Nos próximos capítulos serão abordados esses assuntos
com mais ênfase, relacionando com o objetivo.
1.4.2 Tecnologia RFID
“RFID trata-se um método de identificação automática através de sinais de rádio, onde
é possível recuperar e armazenar dados remotamente através de dispositivos chamados
de tags RFID.” [Ramos & Nascimento, 2007]
Segundo [Santini, 2008], o RFID (Radio Frequency Identify) pode vir a substituir
o código de barras na etiquetagem de produtos no mercado. De acordo com [Junior, 2006,
pag.7] RFID é composto de três partes: antenas, tags e leitores.
2 RFID
RFID (Radio Frequency Identify) é o sistema que será empregado neste estudo de
caso, a seguir um pouco da história e suas especificações.
2.1 HISTÓRIA DO RFID
Segundo [Santos, 2011], RFID tem suas raízes nos sistemas de radares utilizados na
Segunda Guerra Mundial. Os alemães, japoneses, americanos e ingleses utilizavam
radares, que foram descobertos em 1937 por Sir Robert Alexander Watson- Watt, um
físico escocês, para avisá-los com antecedência de aviões enquanto eles ainda estavam bem
distantes. O problema era identificar dentre esses aviões, qual era inimigo e qual era aliado.

11
Os alemães então descobriram que se os seus pilotos girassem seus aviões quando
estivessem retornando à base iriam modificar o sinal de rádio que seria refletido de volta
ao radar. Esse método simples alertava os técnicos responsáveis pelo radar que se tratava
de aviões alemães (esse foi, essencialmente, considerado o primeiro sistema passivo de
RFID).
Sob o comando de Watson - Watt, que liderou um projeto secreto, os ingleses
desenvolveram o primeiro identificador ativo de contra inimigo (IFF – Identify Friend or
Foe). Foi colocado um transmissor em cada avião britânico. Quando esses transmissores
recebiam sinais das estações de radar no solo, começavam a transmitir um sinal de
resposta, que identificava o aeroplano como Friendly (amigo).
Os RFID funcionam no mesmo princípio básico. Um sinal é enviado a um
transponder, um dispositivo de comunicação eletrônico que amplifica e retransmite um
sinal em uma frequência diferente ou transmite de uma fonte uma mensagem pré-
determinada em resposta à outra fonte pré-definida, o qual é ativado e reflete de volta o
sinal (sistema passivo) ou transmite seu próprio sinal (sistemas ativos).
Avanços na área de radares e de comunicação RF (Radio Frequency) continuaram
através das décadas de 50 e 60. Cientistas e acadêmicos dos Estados Unidos, Europa e
Japão realizaram pesquisas e apresentaram estudos explicando como a energia RF poderia
ser utilizada para identificar objetos remotamente.
Companhias começaram a comercializar sistemas antifurto que utilizavam ondas de
rádio para determinar se um item havia sido roubado ou pago normalmente. Era o advento
das etiquetas RFID denominado de “etiquetas de vigilância eletrônica” as quais ainda são
utilizadas até hoje. Cada etiqueta utiliza um bit. Se a pessoa paga pela mercadoria, o bit é
posto em 0 (Zero). E os sensores não dispararam o alarme. Caso o contrário, o bit continua
em 1 (Um) e caso a mercadoria saia através dos sensores, um alarme será disparado.
Mario W. Cardullo requereu a patente para uma etiqueta ativa de RFID com uma
memória regravável em 23 de janeiro de 1973. Nesse mesmo ano, Charles Walton, um
empreendedor da Califórnia, recebeu a patente por um transponder passivo usado para
destravar uma porta sem a utilização de uma chave. Um cartão com um transponder
embutido comunicava com um leitor/receptor localizado perto da porta. Quando o receptor
detectava um número de identificação válido armazenado na etiqueta RFID, a porta era
destravada através de um mecanismo.
O governo dos Estados Unidos também tem voltado atenção para os sistemas
RFID. Na década de 1970, o laboratório nacional de Los Alamos, teve um pedido do

12
departamento de energia para desenvolver um sistema para rastrear materiais nucleares.
Um grupo de cientistas idealizou um projeto onde seria colocado um transponder em cada
caminhão transportador, o qual corresponderia com uma identificação e potencialmente
outro tipo de informação, como, por exemplo, a identificação do motorista.
No começo da década de 90, engenheiros da IBM desenvolveram e patentearam um
sistema de RFID baseado na tecnologia UHF (Ultra High Frequency). O UHF oferece um
alcance de leitura muito maior (aproximadamente 6 metros sobre condições boas) e
transferência de dados mais velozes. Apesar de realizar testes com a rede de
supermercados Wal-Mart, não chegou a comercializar essa tecnologia. Em meados de
1990, a IBM vendeu a patente para a Intermec, um provedor de sistemas de código de
barras. Após isso, o sistema de RFID da Intermec tem sido instalado em inúmeras
aplicações diferentes, desde armazéns até o cultivo. Mas a tecnologia era muito custosa
comparada ao pequeno volume de vendas, e a falta de interesse internacional.
O RFID utilizando UHF teve uma melhora na sua visibilidade em 1999, quando o
Uniform Code Concil, o EAN internacional, a Procter & Gamble e a Gillette se uniram e
estabeleceram o Auto-ID Center, no Instituto de Tecnologia de Massachusetts. Dois
professores, David Brock e Sanjay Sarma, têm realizado pesquisas para viabilizar a
utilização de etiquetas de RFID de baixo custo em todos os produtos feitos, e rastreá-los. A
ideia consiste em colocar apenas um número serial em cada etiqueta para manter o preço
baixo (utilizando-se apenas de um microchip simples que armazenaria apenas pouca
informação). A informação associada ao número serial de cada etiqueta pode ser
armazenada em qualquer banco de dados externo, acessível inclusive pela Internet.
2.2 RFID X CÓDIGO DE BARRAS
RFID possui uma tecnologia de identificação por sinais de rádio, mais conhecido
como radio frequência, sem a necessidade de fios para troca de dados entre dispositivos
móveis. RFID fisicamente falando, é uma etiqueta com uma antena e um chip mantido por
algum material específico. Código de barras, segundo [Rocha, entre 2005 e 2010], é um
conjunto de barras monocromáticas que representam letras e números que o leitor os
interpreta.

13
A maior diferença entre eles está em seus conceitos, enquanto o código de barras
armazena pouca informação e o leitor tem que estar próximo para realizar a leitura, o RFID
pode armazenar grandes quantidades de informações e não necessariamente o leitor precisa
estar próximo da TAG (Bastos; Silva, 2007). Segue abaixo a figura 1 que demonstra um
comparativo entre etiquetas RFID e Código de Barras.
Figura 1 – Comparação entre RFID x Código de Barras
Fonte: (UNIVERSIDADE FEDERAL DO RIO DE JANEIRO... [entre 2005 e 2010]).
Nesse comparativo entre RFID e Código de Barras, apresenta-se uma série de
fatores favoráveis à tecnologia RFID, como por exemplo, alta vida útil e segurança dos
dados.
2.3 COMPONENTES
Concordamos com [UNIVERSIDADE FEDERAL DO RIO DE JANEIRO... (entre
2005 e 2010)] quando foi dito:
“o RFID é composto basicamente por elementos de captação dos dados,
executado por um leitor, e um elemento que emite sinais para o leitor tanto ativamente
como passivamente, o transponder, ou tag.”

14
2.3.1 Transponder (tag)
“O transponder representa o dispositivo que carrega os dados reais de um sistema de
RFID. Consiste normalmente de uma antena e um microchip eletrônico.”
[UNIVERSIDADE FEDERAL DO RIO DE JANEIRO... (entre 2005 e 2010)]
2.3.1.1 Características
Os transponders ou tags são os equivalentes ao código de barras, com a função de
armazenar os dados reais dos produtos. São construídos por uma antena e um microchip
(micro placa eletrônica) e dependendo se emitem ou não sinais espontaneamente são
classificados como ativos ou passivos, conforme figura 2 abaixo:
Figura 2 – Tags RFID Passivos e Tags RFID Ativos
Fonte: (UNIVERSIDADE FEDERAL DO RIO DE JANEIRO [entre 2005 e 2010])
No mercado existe uma enorme variedade de tags para diversos ramos, pode-se
citar: Hospitais (Controle de Enxovais), Logística e Distribuição (Controle de
Recebimento), Varejo (Controle de Ativos) e Tecnologia da Informação (Controle de
Acesso de Pessoas). Ressalta-se também que existem etiquetas especificas para

15
determinadas características de produtos. Abaixo um exemplo de uma tag que é muito
utilizada no mercado na figura 3.
Exemplo: Tag específica para Plástico
Figuras 3 – Tags RFID –Especiais para Plástico
Fonte: RRETIQUETAS, 2012.
Essa figura demonstra uma Tag especifica para materiais plásticos na sua
aplicabilidade e suas dimensões. Abaixo as especificações:
Produto: Carrier
Aplicação: Caixas retornáveis, palletes e contêineres
Memória de usuário (bits): 512
Faixa de freqüência: 860-960 MHz
Superfícies aplicáveis: Plásticas
Fabricante: Confidex
2.3.1.2 Padrão de Comunicação
“o EPC (Eletronic Product Code) foi um padrão criado para tentar padronizar o RFID
visando a troca de informações entre indústria – distribuição - varejo – consumidor.
Existem outros padrões como a norma ISO, por exemplo, mas por disponibilidade de
fontes de consulta, o padrão EPC foi definido para elaboração do projeto. O EPC é um
padrão dividido em várias classes, conforme mostra a figura abaixo:” (JUNIOR, 2006)
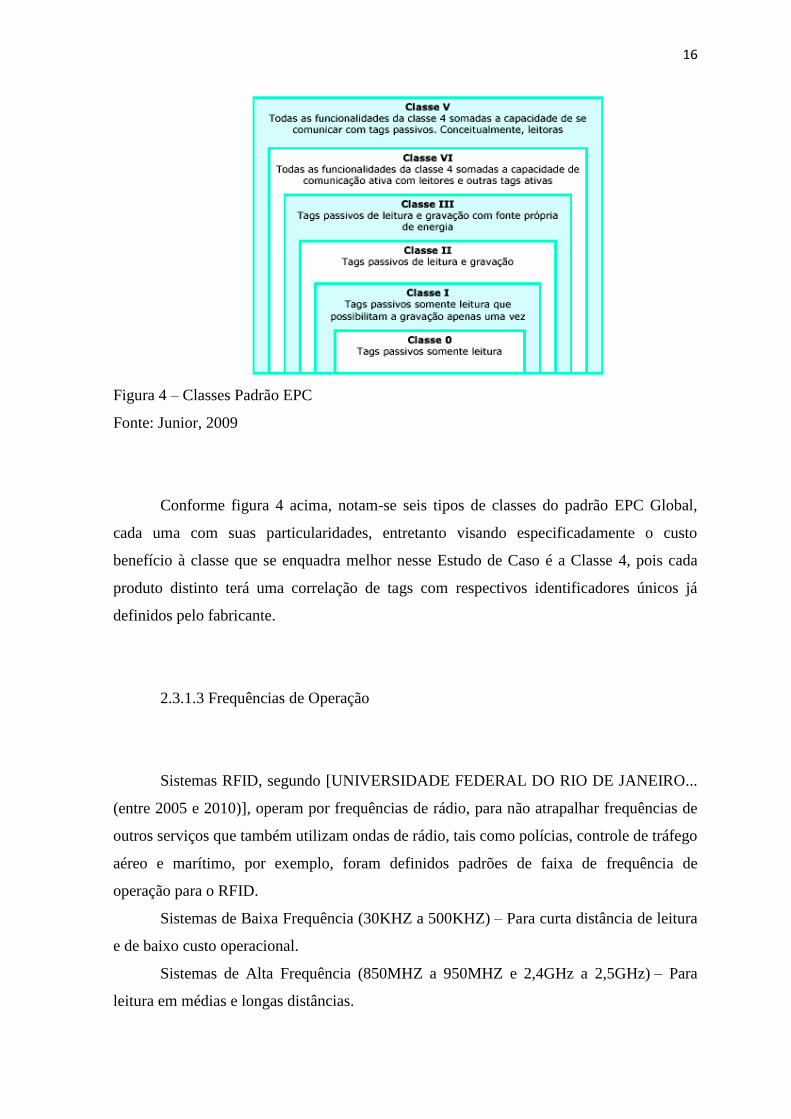
A figura 4 abaixo representa as classes do padrão EPC Global.
16
Figura 4 – Classes Padrão EPC
Fonte: Junior, 2009
Conforme figura 4 acima, notam-se seis tipos de classes do padrão EPC Global,
cada uma com suas particularidades, entretanto visando especificadamente o custo
benefício à classe que se enquadra melhor nesse Estudo de Caso é a Classe 4, pois cada
produto distinto terá uma correlação de tags com respectivos identificadores únicos já
definidos pelo fabricante.
2.3.1.3 Frequências de Operação
Sistemas RFID, segundo [UNIVERSIDADE FEDERAL DO RIO DE JANEIRO...
(entre 2005 e 2010)], operam por frequências de rádio, para não atrapalhar frequências de
outros serviços que também utilizam ondas de rádio, tais como polícias, controle de tráfego
aéreo e marítimo, por exemplo, foram definidos padrões de faixa de frequência de
operação para o RFID.
Sistemas de Baixa Frequência (30KHZ a 500KHZ) – Para curta distância de leitura
e de baixo custo operacional.
Sistemas de Alta Frequência (850MHZ a 950MHZ e 2,4GHz a 2,5GHz) – Para
leitura em médias e longas distâncias.

17
2.3.2 Transceiver (Leitor)
De acordo com a publicação em [UNIVERSIDADE FEDERAL DO RIO DE
JANEIRO... (entre 2005 e 2010)].
“[...] o leitor é o dispositivo que ativa a tag para extrair suas informações
localizadas na memória. Seu funcionamento não difere muito do leitor de código de
barras, a grande vantagem está no fato do leitor de RFID não precisar estar próximo da
tag para realizar a leitura e a capacidade de ler várias tags por vez.”
Abaixo a figura 5 ilustra um leitor RFID.
Figura 5 – Leitor RFID
Fonte: [UNIVERSIDADE FEDERAL DO RIO DE JANEIRO (entre 2005 e 2010)]
2.4 ENTENDENDO O FUNCIONAMENTO DO RFID
Basicamente o funcionamento do RFID segundo [CONGRESSO BRASILEIRO
DE RFID, 2012] é composto por um transceptor ou leitora que transmite uma onda de
frequência de rádio através de uma antena para um transponder, mais conhecido por tag. O
tag absorve a onda de RF e responde com alguma informação que é gerenciada por um
sistema computacional. As leitoras, ou transceptores, operam em conjunto com antenas e,
através de um sinal de rádio, conversam com os transponder, ou tags, para a troca de
informações. Abaixo se encontra a figura 6 mostrando um exemplo ilustrativo do
funcionamento citado.

18
Figura 6 – Funcionamento do RFID
Fonte: [CONGRESSO BRASILEIRO DE RFID, 2012]
A ilustração citada acima é um exemplo do funcionamento teórico, atualmente
existem funcionamentos mais robustos onde se pode mapear a comunicação em cadeia
desde a tag em um produto no estoque até o usuário final em velocidade real, demonstrado
na figura 7 abaixo.
Figura 7 – Funcionamento da cadeia do RFID
Fonte: [CONGRESSO BRASILEIRO DE RFID, 2012]

19
2.5 ETIQUETA UTILIZADA E CUSTO
Dentre todas as opções de etiquetas disponíveis no mercado, a equipe optou por
uma etiqueta ATIVA, pois comparada com as tags PASSIVAS tem-se várias vantagens
quando relacionado com a proposta de aplicação.
A principal vantagem é à distância em que o leitor poderá identificar a tag ativa,
diferentemente da tag passiva onde essa distância é bem limitada. Além de que a etiqueta
abaixo foi praticamente a única encontrada no mercado com uma versão especifica para
metais, pois de acordo com a necessidade da aplicação utilizando um caso de uso de uma
empresa de equipamentos industriais, isso é extremamente importante.
Quando se imagina a aplicação, considerando que a leitora RFID estará localizada
em um robô móvel, ou até mesmo em pontos fixos e estratégicos, necessitasse que a tag
RFID fosse ATIVA, pois a distância da leitora RFID sempre será considerável.
Assim, definimos utilizar a Tag RFID de modelo ATIVE50.
Figura 8 – Tag RFID ATIVA
Fonte: [RFID CONTROL, 2012]
Detalhes:
Baixo Custo
Bateria longa duração.

20
Comunicação Criptografada (alta segurança).
Funcionamento na banda ISM de 2.4 GHZ (não necessita licença).
Sensor de deslocamento / vibração opcional- aumentando assim a segurança do ativo
monitorado.
Aviso de autonomia de bateria (enviado à leitora).
3 ROBÓTICA
Concordamos com [FERREIRA, 2008] quando ele afirma que a robótica é a ciência
ou o estudo da tecnologia associado com o projeto, fabricação, teoria e aplicação dos
robôs. A palavra robótica foi utilizada primeiramente impressa na história de ficção
científica de Isaac Asimov "Liar!" (1941). Nela, o autor se refere às 'três regras da robótica'
que posteriormente se tornaram as "Três Leis da Robótica" na publicação de ficção Eu,
Robô.
A robótica requer conhecimentos sobre eletrônica, mecânica e software. A parte
mecânica requer conhecimentos sobre cinemática, pneumática, hidráulica e a parte
eletrônica e de programação, conhecimentos sobre o tipo de unidade processadora a ser
utilizado, que podem ser micro controlador ou CLPs ( Controlador Lógico Programável ).
O processo padrão de criação de robôs começa pela exploração dos sensores, algoritmos e
atuadores que serão requeridos para o projeto. Algumas ideias como a relação entre o peso
do robô e sua fonte de alimentação primária também são decisivas para o projeto.
Após a base mecânica estar montada, os sensores e as outras entradas e saídas do
robô são conectados a um dispositivo que tomará as decisões, sendo mais comum o uso de
um micro controlador como unidade de processamento. Este circuito avalia os sinais de
entrada e calcula a resposta apropriada para cada combinação, enviando sinais aos
atuadores de modo a causar uma ação ou reação.
3.1 PLATAFORMA ARDUÍNO

21
Conforme [BENTES, 2011], o Arduíno é uma ferramenta que torna os
computadores capazes de detectar e controlar elementos do mundo físico. É uma
plataforma open-source de computação física baseada em um micro controlador a bordo de
uma placa simples, além de um ambiente de desenvolvimento para escrever softwares para
a placa. O Arduíno pode ser utilizado para desenvolver objetos autônomos ou iterativos
(como um sistema de controle que necessita de acesso aos objetos do mundo físico),
tomando as entradas a partir de uma variedade de sensores ou switches e controlando
atuadores como LEDs, servos-motores, relés ou outros tipos de saída. Os projetos podem
ser autônomos baseados na rotina escrita para o micro controlador ou podem se comunicar
com um software em execução no computador.
Essa tecnologia tende a crescer no mercado, pois existe uma série de vantagens que
o beneficiam ex: Preço relativamente baixo, programação em multiplataforma, Open
Source e capacidade de expansão.
Segundo [André, 2010], O Arduíno Uno é uma placa de micro controlador baseado
no ATMEGA328 (datasheet). Ele tem 14 pinos de entrada/saída digital (dos quais 6 podem
ser usados como saídas PWM), 6 entradas analógicas, um cristal oscilador de 16MHz, uma
conexão USB, uma entrada de alimentação uma conexão ICSP e um botão de reset. Ele
contém todos os componentes necessários para suportar o micro controlador, basta
conectar a um computador pela porta USB ou alimentar com uma fonte adequada.
3.2 O ROBÔ MÓVEL APLICADO AO PROJETO
Para o projeto propõe-se implementar um robô que realizará o inventário da loja.
Acoplado ao robô estará o leitor das etiquetas RFID instalada nos produtos unitariamente e
no topo estará a antena para identificação das etiquetas. A sua locomoção será através de
uma base móvel com rodas, que seguirão uma linha já determinada preta e branca,
percorrendo todo o espaço da loja. A seguir a especificação de todos os componentes que
possuem total integração com o Arduíno necessário para a construção do robô que será
utilizado nesse estudo de caso.
3.2.1 Micro Controlador Arduíno UNO

22
Abaixo na figura 9 encontra-se a imagem de um micro controlador Arduíno.
Figura 9 – Placa Micro controlador Arduíno
Fonte: ANDRÉ, 2010
Responsável por todo o processamento e controle de entradas e saídas. Abaixo a
figura 10 com as principais características do micro controlador Arduíno.
Micro Controlador ATmega 328
Voltagem Operacional 5V
Voltagem de entrada (recomendada) 7-12V
Voltagem de entrada (limites) 6-20V
Pinos E/S digitais 14 (dos quais 6 podem ser saídas PWM)
Pinos de entrada analógica 6
Corrente CC por pino E/S 40 mA
Corrente CC para o pino 3,3V 50 mA
Flash Memory 32 KB (ATmega328) dos quais 0,5KB
são utilizados pelo bootloader
SRAM 2 KB (ATmega328)
EEPROM 1 KB (ATmega328)
Velocidade de Clock 16 MHz
23
Figura 10 – Características do micro controlador Arduíno
Fonte: ANDRÉ, 2010
Esse micro controlador pode ser alimentado pela conexão USB ou com uma fonte
de alimentação externa (pilha).
Segundo [André, 2010] O ambiente de desenvolvimento do Arduíno torna fácil
escrever o código e enviar para a placa de entrada e saída. Pode ser codificado em
Windows, Mac OS X e Linux. O ambiente de programação é escrito em Java e baseado em
Processing, avr-gcc e outros softwares de código livre.
3.2.2 Placa Seguidora de Linha
A figura 11 a seguir representa um exemplo de uma placa seguidora de linha.
Figura 11 – Placa Seguidora de Linha
Fonte: Mercado Livre (2012a).
Com esse sensor pode-se construir um robô que segue uma linha no chão e
consegue detectar as cores pretas. Acompanham 3 sensores infrared em um mesmo
circuito o que facilita bastante a programação.

24
Especificação:
Alimentação: +5 v
Temperatura de funcionamento: 0° C
5 Fios de cobre
Tipo de Saída: Digital.
3.2.3 Leitor de RFID
A seguir a figura 12 ilustra um exemplo de leitor de RFID.
Figura 12 – Leitor de RFID
Fonte: [RFID CONTROL, 2012]
Principal componente responsável pela captura de todas as tags, esse leitor é
composto basicamente por dois elementos. O primeiro é a antena que possui um alcance de
50m de raio, esse componente é responsável por captar todas as tags que emitirem o sinal
para a antena e o segundo componente é o leitor que trata todas as informações emitidas
pela antena que são convertidas em caracteres ASCII.
Segundo [RFID CONTROL, 2012] o leitor de RFID possui conexão direta à porta
USB, não necessitando assim de alimentação externa, operação é plug and play (basta
conectar o dispositivo que ele já funcionará adequadamente), saída para antena adicional
com conector SMA (Shape Memory Alloy ou Liga com Memória de Forma), permite
aplicações de leitura setorial (combinada com antena adequada) e API/SDK (Application

25
Program Interface/ Software development kit ou Interface de Programa Aplicativo/ Kit de
Desenvolvimento de Software) de comunicação abertos.
3.2.4 Base Móvel
A seguir a figura 13 demonstra exemplos de Base Móvel utilizadas em Robôs.
Figura 13 – Base Móvel
Fonte: [TATO EQUIPAMENTOS ELETRÔNICOS, 2012]
Especificações:
2 Chapas de Acrílico uma superior e outra inferior
2 Rodas com pneu de borracha, sendo o diâmetro 6,5cm e a largura de 3cm
1 Roda Omni Direcional de Metal
Parafusos e espaçadores
2 Motores
Suporte p ara Pilhas (4 Pilhas AA)
Especificações dos motores:
Tensão: 4.5V DC
Velocidade sem carga: 90+-10rpm
Corrente sem carga: 190mA
Torque: 800 gf.cm min.

26
Máxima corrente requerida: 1 A
Responsável pela locomoção do robô, esse componente é totalmente preparado para
comportar todos os demais componentes citados para o projeto.
3.2.5 Armazenamento de Dados
A seguir a figura 14 representa um exemplo de uma placa que pode ser acoplada ao
Arduíno e assim adquire função de armazenamento de dados.
Figura 14 – PenBs
Fonte: [TATO EQUIPAMENTOS ELETRÔNICOS, 2012]
Com a necessidade de armazenar dados de forma flexível e portátil. O componente
citado acima é especifico para a plataforma Arduíno.
Segundo [TATO EQUIPAMENTOS ELETRÔNICOS, 2012], o PenBS foi criado
para permitir o uso de pen drives como forma de armazenamento de massa para micro
controladores. Com a popularização dos pen drives no mercado, o seu preço caiu muito e
hoje um modelo com 16GB de memória pode ser encontrado por menos de R$ 50,00. Esta
alta capacidade de armazenamento, aliado ao seu preço baixo o torna muito atraente para o
armazenamento de dados em micro controladores. E um problema que parecia insolúvel
era como interligar um micro controlador e um pen drive. O pen drive funciona como se
27
fosse um disco rígido para o Windows, ou seja, possui FAT, diretórios, arquivos e etc.
Além destes detalhes, a sua ligação é USB o que dificulta ainda mais o seu uso em um
micro controlador. O PenBS veio para fazer esta interligação entre os dois. Ele se
encarrega de fazer todo o trabalho e conversões necessárias.
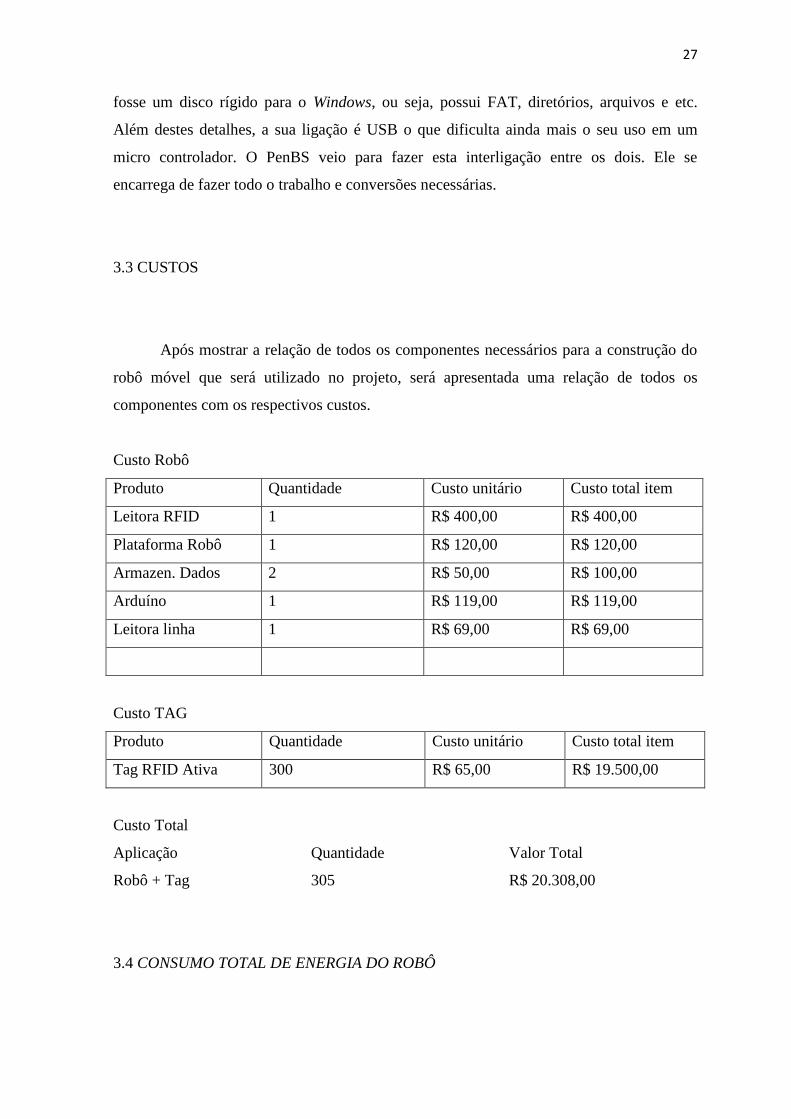
3.3 CUSTOS
Após mostrar a relação de todos os componentes necessários para a construção do
robô móvel que será utilizado no projeto, será apresentada uma relação de todos os
componentes com os respectivos custos.
Custo Robô
Produto Quantidade Custo unitário Custo total item
Leitora RFID 1 R$ 400,00 R$ 400,00
Plataforma Robô 1 R$ 120,00 R$ 120,00
Armazen. Dados 2 R$ 50,00 R$ 100,00
Arduíno 1 R$ 119,00 R$ 119,00
Leitora linha 1 R$ 69,00 R$ 69,00
Custo TAG
Produto Quantidade Custo unitário Custo total item
Tag RFID Ativa 300 R$ 65,00 R$ 19.500,00
Custo Total
Aplicação Quantidade Valor Total
Robô + Tag 305 R$ 20.308,00
3.4 CONSUMO TOTAL DE ENERGIA DO ROBÔ

28
A figura 15 abaixo demonstra o consumo máximo de cada componente a fim de
determinar a carga total do robô para especificar a fonte necessária de alimentação.
Componente Especificação elétrica máxima (fabricante)
Leitora RFID 500mA ( 5V )
Plataforma Robô ( 2 Motores ) 2000mA ( 4,5V )
Arduíno 800mA ( 5V )
Placa Seguidora de Linha 10mA ( 5V )
Total 3310mA
Figura 15 – Especificação das Correntes dos Componentes do Robô
Fonte do autor
Baseado nos dados fornecidos acima a carga total que o circuito necessita é a soma
de todas as correntes especificadas, num total de 3310mA.
3.4.1 Bateria Utilizada
Após estudo sobre uma forma de obter maior rendimento de carga elétrica e de
baixo custo, o grupo definiu a pilha que será utilizada nessa monografia.
Levando em conta as cargas necessárias, a pilha ideal para a carga seria uma de
3310mAh. Entretanto o grupo pesquisou pilhas recarregáveis e o produto fornecido mais
próximo é de 2500mAh as quais fornecerão 4,8 V para todo o sistema. O capítulo 3.2.3 a
seguir ilustra que a capacidade desta pilha atende os requisitos de funcionamento. Pode-se
ilustrar abaixo a pilha utilizada na figura 16.

29
Figura 16 – Pilha Sony
Fonte: Mercado Livre (2012b)
3.4.2 Calculo da Duração da Pilha x Consumo do robô
Calculando a durabilidade obtém-se o valor da duração da pilha em relação do
consumo estimado do robô:
min45min60*75,0
75,0)arg(3310
)(2500
horaduracao
horaaCmA
pilhamAduracao
Com base no calculo acima, chega-se ao valor de 45min de autonomia do robô com
as pilhas utilizadas.
4. ESTUDO DE CASO DE CONTROLE DE INVENTÁRIO EM UMA
EMPRESA DE VAREJO
A seguir um detalhamento sobre a empresa foco de estudo de caso dessa monografia.

30
4.1 CONHECENDO A EMPRESA
A Empresa foco de estudo de caso se chama Rebal. Fundada em 1971, atualmente
localizada na cidade de São Caetano do Sul no Estado de São Paulo. Varejista desde sua
fundação, com uma gama de produtos podendo citar: Equipamentos e Utensílios para
Cozinhas Industriais, Comerciais e Domésticas, Bares, Lanchonetes, Restaurantes,
Açougues, Padarias, Hotéis, Hospitais, Supermercados, Ambulantes entre outros,
atendendo assim a toda área alimentícia.
Controle de inventário físico e estoque vão além de simples entradas e saídas, nosso
estudo de caso aborda a um supermercado de médio porte, onde teremos um terreno pré-
disposto com algumas prateleiras de produtos, e contaremos com dois estoques, o estoque
entre o fornecedor e a loja, onde efetuaremos etiquetagem de unidades, e o estoque entre a
loja e o consumidor final, onde efetuaremos a baixa de unidades do estoque.
Nosso controle de estoque se arrebata em cálculo de resultados focados na acurácia,
segundo [Bertaglia, 2009, pág. 335]. É uma relação entre a quantidade existente, ou
quantidade física e aquela existente no sistema ou nos controles de registros. Esses
registros podem estar contidos em sistemas ou em pequenos formulários.
“Manter a acurácia dos estoques em um nível elevado, ou seja, isento de erros,
trará vantagens significativas para a organização” – [Bertaglia, 2009, pág. 336].
Tendo como foco ou resultado da implantação de tal tecnologia, visando trazer
números mais confiáveis e facilidade para obter tal controle, com mais precisão.
Segundo [Bertaglia, 2009, pág. 336]. A Determinação da acurácia e dada pela
seguinte fórmula:
Acurácia = (Quantidade Física / Quantidade Teórica) * 100
31
O principal quesito que será trabalhado em cima deste fator acima citado, segundo
[Bertaglia, 2009 pág. 334], será o nível de serviço ao cliente, que consiste em uma relação
dos produtos existentes em sua prateleira e a demanda do mercado ou consumo, ou seja,
tendo números reais com a tecnologia implantada, a empresa terá em mãos uma fonte de
dados muito confiável, podendo tomar decisões com maior precisão e objetividade.
Abaixo, um exemplo real do Conceito de Acurácia aplicado ao último Controle de
Inventário realizado pela Rebal.
Informações de Itens não contabilizados
Tipos de Prod. Utensílios não localizados: 56 Produtos
Quantidade Total não localizada: 196 unidades
Total de Prejuízo: R$ 19.313,20
4.2 CENÁRIO ATUAL
A empresa Rebal realiza o controle de inventário de estoque dos produtos apenas
uma vez por ano, para ser mais especifico, esse processo acontece nos dois últimos dias
úteis do ano. Para conclusão desse processo é estipulado um tempo máximo de 48 horas,
ou seja, dois dias para inventariar toda a empresa, sendo que durante esse processo toda a
loja fica fechada.
Nesse estudo de caso será abordado somente o inventário de produtos disponíveis
nas prateleiras da loja, onde acontece o contato dos produtos com o consumidor final.
Abaixo uma figura que ilustra o Layout da empresa em especifico a loja, onde contêm
diversas prateleiras no centro da figura e na parte inferior os caixas para efetuar o
pagamento dos produtos. Conforme figura 17 abaixo:

32
Figura 17 – Layout Rebal
Fonte – Empresa Rebal
4.3 METODOLOGIA DE INVENTÁRIO APLICADA
O conceito que será abordado é aplicado por diversos mercados não exclusivamente
do ramo de varejo, mas também por outros segmentos. A contagem dos produtos é feita
manualmente por duplas de pessoas que se intercalam para obter uma visão diferente sobre
a contagem nas prateleiras de forma unitária, ou seja, uma prateleira por vez. Para cada
prateleira pode ser realizada até três contagens de produtos, onde a 1° e 2° contagem são
obrigatórias, caso haja alguma diferença em relação a quantidade informada então uma
terceira dupla realizara a 3° contagem e o resultado dessa contagem será registrada como a
quantidade final contagem.
Ao final da contagem de todas as prateleiras é realizado um somatório de todas as
quantidades por produtos para obter o saldo final de cada produto, após isso é feito um
comparativo do saldo contado com o saldo vigente dos produtos já imputados em algum

33
controle especifico e a partir de uma possível diferença, é ajustado o saldo vigente ao novo
saldo.
4.3.1 Tempo
Utilizando este método convencional de controle de inventário, para esta empresa
em especifico o tempo total do processo, desde o início das contagens até obter o número
final dos resultados é de 48 horas.
4.3.2 Custos
Abaixo a figura 18 com o detalhamento sobre os custos.
Faturamento de Dezembro/2011: R$ 2.338.418,16
Total de Dias Úteis no Mês de Dezembro: 22 Dias
Faturamento Diário (Faturamento Mensal /
Dias Úteis):
2.338.418,16 / 22 = R$106.291,73
Figura 18 – Detalhamento de Custos
Fonte: Empresa Rebal
Considerando que o tempo do inventário seja de 48 horas, ou seja, durante este
período a loja estará fechada por conta dessa contagem, a Rebal deixará de faturar em
torno de R$ 212.583,46.
5 PROPOSTA PRINCIPAL DA APLICAÇÃO DA TECNOLOGIA NO NEGÓCIO

34
5.1 A APLICAÇÃO DA TECNOLOGIA NO NEGÓCIO
Segundo [Gomes et. al, 2004]. A implantação da Tecnologia de RFID para controle
de estoques e inventariados visa em um ambiente de fortes mudanças, onde a
competitividade é constante, sempre gerar números confiáveis para o crescimento do
negócio. A obtenção de informação é de suma importância, ou vital para a adaptabilidade
estratégica.
Segundo [Ching, 2001, pág. 90 (Nossa tradução)]. A apuração da Logística envolve
duas etapas: A Primeira etapa envolve o processo que parte da venda da mercadoria do
estoque 1 do fornecedor até a compra da mercadoria pela empresa, a segunda etapa se
inicia pela venda dos produtos do estoque 2 à empresa e a compra dos mesmos pelo cliente
final. A figura 19 abaixo mostra essa organização em organograma.
Figura 19– Organograma de Empresas
Fonte Ching (2002)
5.2 – APLICANDO A PROPOSTA

35
Dividiremos a implementação da proposta em 3 partes. Sendo elas, a etiquetagem
das TAGs RFID nos produtos, a preparação física do ambiente para a navegação do robô e
o funcionamento geral da proposta.
5.2.1 Etiquetagem
Será necessária a mão de obra para efetuar a etiquetagem dos produtos, e que as
etiquetas sejam mais resistentes e rígidas a fim de suprir os deslocamentos e a interação da
embalagem com o meio externo. O trabalho de etiquetagem dos produtos será de suma
importância para manter a organização e o controle automático, ela define o resultado da
implantação da nossa ferramenta.
A Etiquetagem será efetuada quando o produto chegar do fornecedor a empresa
sendo abertos os Pallets e etiquetando todos os produtos onde seria cadastrada juntamente
com a contagem de entrada, a figura 20 demonstra esse conceito.
Figura 20 – Seqüência de Recebimento de Material ou Produto
Fonte: Ching (2002)
É muito importante que as etiquetas estejam disponíveis nos produtos de uma forma
otimizada, visando a melhor forma de onde estará o percurso do robô contador.
36
Identificamos como melhoria a questão da segurança das TAGs RFID, pois através
dessa proposta, a garantia de que a TAG estará “instalada” ao produto é de inteira
responsabilidade da empresa cliente.
5.2.2 – Navegação do Robô
Nossa proposta é que a navegação do robô seja definida através de linhas guias, que
serão avaliadas e instaladas a partir do estudo de cada layout, ou seja, dependerá muito da
disposição física de paletes/prateleiras de cada local aonde a proposta será implementada.
Assim, primeiramente será necessário definir qual será o trajeto do robô contador.
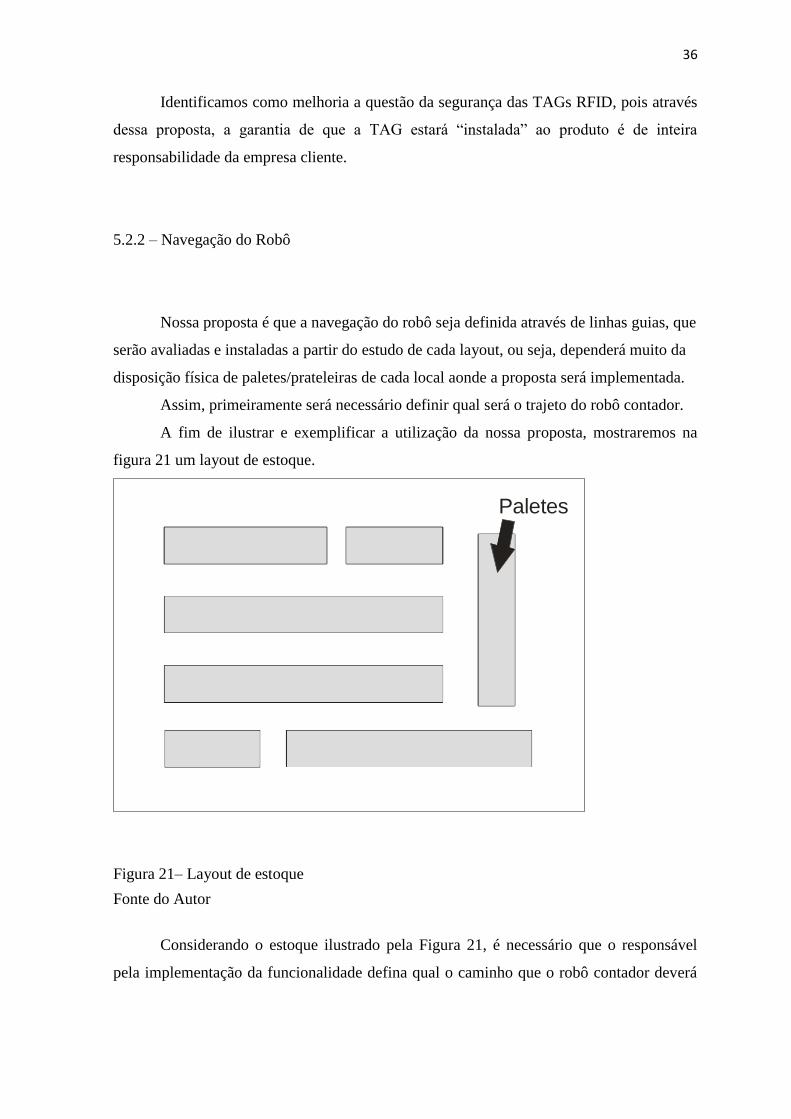
A fim de ilustrar e exemplificar a utilização da nossa proposta, mostraremos na
figura 21 um layout de estoque.
Paletes
Figura 21– Layout de estoque
Fonte do Autor
Considerando o estoque ilustrado pela Figura 21, é necessário que o responsável
pela implementação da funcionalidade defina qual o caminho que o robô contador deverá

37
seguir garantindo a leitura de todas as etiquetas. A figura 22 a seguir define o caminho
traçado pelo robô.
Figura 22– Layout de estoque com definição do trajeto do robô contador
Fonte do Autor
Assim que definido qual o percurso que o robô irá percorrer partimos para
aplicação física.
5.2.2.1 – Aplicação e funcionalidade da linha base
Deverá ser aplicada uma linha base (podendo ser pintura ou adesiva) em toda a
trajetória do robô. Essa linha base é essencial para as próximas aplicações (linhas guias e
checkpoints). Pois ela ajudará à distinguir as linhas guias do chão do estoque, conforme
mostra a figura 23.

38
Figura 23 – Layout de estoque com a linha base
Fonte do Autor
Definimos como dimensão dessa linha base pelo menos 90cm de largura.
Lembrando que a linha base deverá ser utilizada como linha contraste das linhas
guias, ou seja, a linha base das linhas guias brancas deverá ser uma linha base preta, e a
linha base para as linhas guias pretas, deverá ser uma linha base branca.
5.2.2.2 – Aplicação e funcionalidade das linhas guias
Já com a linha base instalada, partiremos para as linhas guias. As linhas guias como
o próprio nome diz, servirá para guiar o robô contador. Conforme descrito no item 3.2.2.2,
o robô contador utilizara uma placa seguidora que identifica 3 linhas, podendo ser pretas
ou brancas.
Assim, para exemplificar adotaremos como linha principal central a linha de cor
preta, e as linhas laterais, linhas de cor branca. Conforme mostra a figura 24 abaixo.

39
B. Linhas Laterais Brancas
A. Linha Central Preta
Figura 24 – Linhas guias
Fonte do Autor
A. Linha Central (Preta)
A linha central de cor preta é simplesmente a linha guia mestre, que definira o
percurso do robô contador.
É a partir dela que o robô irá se basear para seguir o caminho definido.
B. Linhas Laterais (Brancas)
Essas linhas laterais podem ser consideradas como linhas delimitadoras para
orientação do robô. São elas que orientam se o robô deve se ajustar para direita ou
esquerda.
Assim, acima da linha base (figura 23) deverão ser instaladas as linhas guias,
conforme exemplifica a Figura 25 abaixo:

40
Figura 25 – Layout com linhas guias
Fonte do Autor
Definimos como dimensão dessas linhas base pelo menos 3cm de largura.
5.2.2.3 – Aplicação e Funcionalidades dos Checkpoints
Os Checkpoints são “pontos” de consolidação de informações. A ideia dos
checkpoints é garantirmos leituras parciais das informações, consolidando essas
informações de leitura ainda na memória do robô-contador para o arquivo consolidado.
Com esse mecanismo conseguimos garantir percentuais de leitura do processo total,
podendo assim retomar a contagem de ultimo ponto salvo, ou seja, do ultimo checkpoint.
A representação dos checkpoints será nas linhas guias, num mecanismo simples de
inversão das cores.
Conforme comentamos no item 5.2.2.2 acima, as linhas guias são representadas por
uma linha preta central e linhas brancas laterais.
Para criação/identificação de um checkpoint, basta invertemos as cores das linhas
guias.
Assim, um checkpoint deve ser representado por uma linha branca no centro, e
linhas pretas nas laterais, conforme mostra a figura 26
B. Linhas Laterais Pretas
A. Linha Central Branca

41
Figura 26 – Identificação/Representação de um Checkpoint
Fonte do Autor
Cada checkpoint deverá ser devidamente identificado (numerados). Nossa proposta
é identifica-los através de adesivos colados no chão, ao lado da representação do
checkpoint na trilha, contendo a numeração do mesmo, conforme exemplificamos na figura
27.
Figura 27 – Layout com os Checkpoints
Fonte do Autor
A definição da dimensão das linhas do Checkpoint também acompanha 3cm de largura.
Nossa recomendação é que no mínimo a cada 350 metros de percurso da trilha do
robô, seja implementado um checkpoint. Chegamos a essa conclusão com base nas
informações abaixo:

42
Conforme descrito no item 3.2.4 o raio R da roda do carrinho é de 3,25cm e seu
RPM sem carga é de 100 RPM, portanto com carga admitem-se 50% da rotação, 50 RPM.
Calculando o perímetro da circunferência da roda com a fórmula 2 * π * R e convertendo
as rotações por minuto em metros por segundo obtém-se:
smRPMR
/17,06000
50*25,3**2
6000
***2
De acordo com as informações obtidas, e baseadas no cálculo da duração da pilha I
no item 3.2.3, que resultou em 45 minutos ou 2700 segundos, adquire-se:
min)45(2700/4592700*17,0 sms
Sendo assim, para fins práticos, considerando uma margem de segurança de 20%,
calculamos 459m - 20% e obtemos os 350m de percurso a cada checkpoint.
Quando a rotina identificar um checkpoint através da inversão das linhas guias, ira
consolidar todas as informações contidas em memória (do arduíno) para o arquivo
magnético na memória flash.
Abordaremos com mais detalhes esse mecanismo no próximo item 5.2.4 –
Funcionamento geral da proposta.
5.2.3 – Utilizando Antenas Fixas
Também identificamos a possibilidade de viabilizar o projeto utilizando antenas
fixas. Tais antenas ficariam fixadas no teto ou parede do ambiente.
As antenas utilizadas para essa proposta é a mesma antena utilizada no robô,
conforme descreve o item 3.2.3.
As TAGs RFID utilizadas também seriam as mesmas apresentadas no projeto.
Porém, focamos no funcionamento do robô pois entendemos ser mais flexível, podendo ler

43
áreas maiores utilizando apenas uma antena, tornando desnecessário investimento em
diversas antenas e estudos de cobertura de área.
5.2.4 – Funcionamento geral da proposta
Considerando todas as informações e especificações do projeto, a idéia principal é
etiquetar todos os produtos desejados com as TAGs RFID ativas, em seguida preparar todo
o ambiente físico para o funcionamento da leitura.
Salientamos que o a dimensão da linha base 90cm de largura é o espaço necessário
entre as prateleiras ou paletes para a navegação do robô.
Assim, quando desejado dar início ao processo de contagem, basta posicionar o
robô no início da trilha e liga-lo.
Nesse momento entrará em execução a rotina de funcionamento do robô. Essa
rotina será desenvolvida numa linguagem a definir, simpatizamos com a linguagem C ou
Java, pois ambas são compatíveis com a tecnologia Arduíno.
5.2.4.1 – Funcionamento da rotina
Iniciado a rotina, o primeiro passo será verificar o último arquivo criado na
memória flash. Caso não existir nenhum, cria o arquivo magnético na memória flash
incrementando um sequencial no fim do arquivo.
Quanto à estrutura do arquivo magnético que conterá as informações recebidas,
definimos que será de extensão TXT seguindo as definições abaixo.
Padrão de nome do arquivo criado: ARQINFO_000000001.txt
Onde “ARQINFO_” será sempre um nome fixo, definido pela rotina e
“000000001” será sempre um numero sequencial, ou seja, sempre o numero do último
arquivo na memória flash + 1 (mais um).

44
Este arquivo também conterá TAGs de identificação para abertura (início de
leitura), além das informações também existirá identificação dos Checkpoints realizados e
a TAG de encerramento.
1. Criação do arquivo com numeração sequencial.
Exemplo: ARQINF_000000002.txt
2. Escrever no arquivo magnético TAG de abertura, definida como [READ] (abre
chaves, “READ”, fecha chaves)
Exemplo: [READ]
3. Ao passar pelos Checkpoints, consolidar as informações obtidas, escrever
informação do Checkpoint realizado e limpar a memória do Arduíno.
A principio adotamos como conteúdo obtido pelas TAGs RFID Ativas que estarão
nos produtos, apenas um código de identificação.
Também definido como identificação do Checkpoint a TAG: [CP_999999], onde
“CP_” será uma define fixa (representa “Checkpoint”) e 999999 será um numero
sequencial de Checkpoint, onde representa a identificação do Checkpoint realizado.
Exemplo: ID0001
ID0002
ID0003
[CP_000001]
Informações do arquivo:
Informação Conteúdo Observação
Nome do
Arquivo
ARQINF_ Define fixa, representa ARQUIVO DE
INFORMAÇÕES
999999999
Numero sequencial, sempre se baseia no ultimo
arquivo criado + 1 (mais um). Caso não encontrado
nenhum arquivo na memória FLASH, considerar
como número inicial “000000001”
Extensão do TXT -

45
arquivo
Informações do conteúdo do arquivo:
Registro Conteúdo Observação Exemplo
ABERTURA [READ] Tag de identificação
de abertura do
arquivo.
[READ]
DADOS IDXXXXXXX Identificação da
TAG RFID
recebida. Definimos
que essa
identificação será de
acordo com o
código de
identificação da
TAG RFID
disponibilizada pelo
fabricante
ID0000001
ID0000002
ID0000003
.
.
.
ID0000016
ID0000017
.
.
.
CHECKPOINT [CP_999999] Tag de identificação
de um Checkpoint.
[CP_000001]
.
.
.
[CP_000002]
ENCERRAMENTO [/READ] Tag de
encerramento do
arquivo. Sabemos
identificar assim um
arquivo finalizado
por essa Tag.
[/READ]
Para exemplificar, mostraremos um exemplo de um arquivo com uma leitura
completa com 3 checkpoints:

46
5.4.2.2 – Exemplo da proposta em funcionamento
Para melhor entendimento, vamos demonstrar um caso de uso da ferramenta.

47
Considerando o ambiente de layout/configuração da Figura 28 abaixo:
Figura 28 – Cenário de exemplo do funcionamento da ferramenta
Fonte do Autor
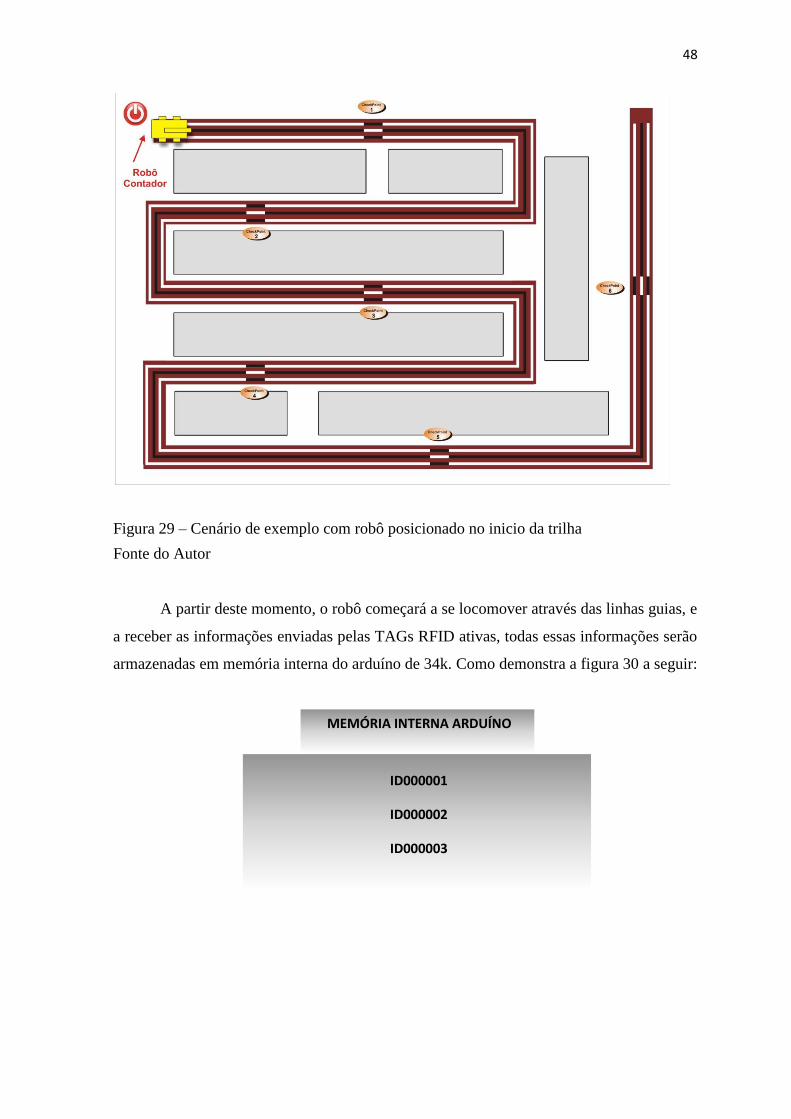
Posicionaremos o robô contador no inicio da trilha e ligamos (figura 29):
48
Figura 29 – Cenário de exemplo com robô posicionado no inicio da trilha
Fonte do Autor
A partir deste momento, o robô começará a se locomover através das linhas guias, e
a receber as informações enviadas pelas TAGs RFID ativas, todas essas informações serão
armazenadas em memória interna do arduíno de 34k. Como demonstra a figura 30 a seguir:
MEMÓRIA INTERNA ARDUÍNO
ID000001
ID000002
ID000003

49
Figura 30 – Robô em funcionamento e recebendo informações das TAGs RFID
Fonte do Autor
Quando passar por um checkpoint, consolida-se as informações no arquivo TXT
contido na memória FLASH, ilustrada na figura 31 abaixo:
MEMÓRIA INTERNA ARDUÍNO
ID000001
ID000002
ID000003
ARQUIVO TXT – MEMÓRIA FLASH
ID000001
ID000002
ID000003
MEMÓRIA INTERNA ARDUÍNO
[LIMPA]

50
Figura 31 – Consolidação das informações
Fonte do Autor
Para identificar o fim do processo de contagem e parada do robô, proponhamos
utilizar as linhas guias, assim como fazemos para identificação dos Checkpoints, porém,
para identificar o fim do processo, utilizaremos as 3 linhas guias na cor branca, conforme
mostra figura 32 abaixo:
B. Linhas Laterais Brancas
A. Linha Central Branca
Figura 32 – Representação das linhas guias para identificação do fim do processo
Fonte do Autor
Quanto a rotina do robô contador identificar essas 3 linhas guias, interpretará que é
o fim do processo de contagem, realizará o ultimo Checkpoint consolidando as
informações contidas em memória no arquivo na memória Flash e por conta da linha guia
branca o robô para.

51
Figura 33 – Identificação na trilha para representar o fim do processo
Fonte do Autor
Quando houver qualquer tipo de interrupção no processo, seja por questões de
bateria ou qualquer outro motivo, o desenho do nosso processo é identificar aonde foi a
parada do robô, solucionar o problema, como por exemplo substituindo as pilhas, recolocar
o robô antes do ultimo Checkpoint passado e religá-lo.
Assim a rotina identificará o arquivo na memória flash ainda em aberto, sem a TAG
de identificação de fechamento [/READ] e voltará o processo de contagem quando
identificar o primeiro Checkpoint da trilha.
Para entendimento do processo da rotina utilizando o robô contador, vejamos o
fluxograma abaixo:

52
Figura 34 – Fluxograma do processo da proposta
Fonte do Autor

53
6 CONCLUSÃO
Após realizarmos o estudo de caso identificamos fatores que podem ser melhorados
visando os aspectos financeiros, baseado em algumas informações concluímos que com a
sugestão da proposta para otimização do controle de inventário, garantimos que a
contagem dos produtos pode ser agendada para o horário em que não há clientes, sendo
assim podendo reverter o prejuízo dos R$ 212.583,46 por a loja estar fechada
acrescentando o valor de R$ 19.313,20 pelos produtos não contabilizados, ou seja, não
localizados no último Inventário. Em contrapartida com a implantação do robô móvel e as
tags RFID no custo aproximado de R$ 20.308,00, será possível realizar a contagem de
forma rápida e descartando a possibilidade de erros humanos no resultado da contagem.

54
Referências Bibliografias
ANDRÉ, Arduíno Uno. 2010. Disponível em http://multilogica-shop.com/Arduino-Uno.
Acesso em 23/01/2012.
BASTOS, Débora A; SILVA, Flávia M. Estudo e implementação de controladores para
sistema RFID. 2007. Disponível em
http://bdm.bce.unb.br/bitstream/10483/859/1/2007_D%C3%A9boraBastos_Fl%C3%A1via
Silva.pdf. Acesso em 3/01/2012.
BENTES, Arduíno: hardware e software open-source. 2011. Disponível em
http://www.hardware.com.br/artigos/arduino/. Acesso em 23/01/2012.
BERTAGLIA, Paulo Roberto Logística e gerenciamento da cadeia de abastecimento. 2.
Ed. Ver. E atual. – São Paulo: Saraiva 2009. Pág. 334 – 337.
CONGRESSO BRASILEIRO DE RFID, RFID "Identificação por freqüência de radio"
2012. Disponível em http://www.congressorfid.com.br/rfid/.Acesso em 20/03/2012.
CHING, Hong Yuh. Gestão de Estoques na Cadeia de logística integrada: Supply
Chain. 2.ed. São Paulo: Atlas S.A. 2001.
GOMES, Carlos Francisco Simões; RIBEIRO, Priscilla Cristina Cabral – Gestão da cadeia
de suprimentos integrada à tecnologia da informação [Em linha]. São Paulo: Pioneira
Thomson Learning, 2004. [Consult. 1 Abr. 2008]. Disponível em
http://books.google.com/books?id=B06QoZ8jB8IC&hl=pt-PT. Acesso em 15/12/2011.
FERREIRA, Quais são as novidades tecnológicas na robótica? 2008. Disponível em
http://www.jornallivre.com.br/15386/quais-sao-as-novidades-teclogicas-na-
robotica.html. Acesso em 23/01/2012.
HARRIS, TOM. How Stuff Works - Como funcionam os robôs. Publicado em 16 de
abril de 2002 (atualizado em 04 de junho de 2008). Disponível em
http://informatica.hsw.uol.com.br/robos.htm. Acesso em 3/01/2012.
JUNIOR, Levi F. L. A tecnologia de RFID no padrão EPC e soluções para
implementação desta tecnologia em empilhadeiras. São Paulo 2006. Disponível
emhttp://www.mbis.pucsp.br/monografias/Monografia_-_Levi_Ferreira.pdf. Acesso em
27/12/2011.
MERCADO LIVRE, Arduíno Line Track - Seguidor De Linha - Robótica. 2012a.
Disponível em http://produto.mercadolivre.com.br/MLB-227707474-arduino-line-track-
seguidor-de-linha-robotica_JM?redirectedFromParent=MLB218184075.Acesso em
13/02/2012.

55
MERCADO LIVRE, Pilha Recarregável. 2012b. Disponível em:
http://produto.mercadolivre.com.br/MLB-449755970-pilha-recarregavel-aa-sony-2500-
mah-original-4-unidades-_JM. Acessado em 03/12/2012.
RAMOS, L.F.; NASCIMENTO, R.G. Redes RFID. Cuiabá – MT, 2007. – Centro federal
de educação tecnológica de Mato Grosso, Departamento de Pós-graduação, Cuiabá, 2007.
ROCHA, Luiz Cláudio C. V. Código de barras sem mistérios. Entre 2005 e 2010.
Disponível em http://msdn.microsoft.com/pt-br/library/cc580676.aspx. Acesso em
3/01/2012.
RRETIQUETAS, RFID. 2012. Disponível em
http://www.rretiquetas.com.br/produtos/tecnologia/rfid/tags-especiais-para-
plasticos/. Acesso em 13/02/2012.
SANTINI, Arthur G. RFID: Conceitos, Aplicabilidades e Impactos. Rio de Janeiro:
Editora Ciência Moderna, 2008.
SANTOS, Leidson. RFID?2011. Disponível em
http://tudosemfio.blogspot.com/2011/06/rfid.html. Acesso em 15/12/2011.
TAIOLI, Flavio. Utilizando bem a rede de distribuição – Controle de Estoques.
Disponível em www.alfacastelo.br/download/3_operacional_estoques. pps, 2011.Slides 09
– 12. Acesso em 10/10/2011.
TATO EQUIPAMENTOS ELETRÔNICOS, CHASSIS TG007. 2012. Disponível em
http://tato.ind.br/detalhe_produto.php?codigo_chave=135.Acesso em 13/03/2012.
TATO EQUIPAMENTOS ELETRÔNICOS, LEITOR DE RFID. 2012. Disponível em
http://www.tato.ind.br/detalhe_produto.php?codigo_chave=118#.Acesso em
13/03/2012.
UNIVERSIDADE FEDERAL DO RIO DE JANEIRO, RFID, Disponível em
http://www.gta.ufrj.br/grad/07_1/rfid/RFID_arquivos/Index.htm, [entre 2005 e 2010], acesso
em 15/01/2012.