estimaÇÃo de canais de hf usando o ... - pgee.ime.eb.br · rsr de 10, 20 e 30 db. ..... 46...
TRANSCRIPT

INSTITUTO MILITAR DE ENGENHARIA
CAP CLAUDIO CANTO DOS SANTOS
ESTIMAÇÃO DE CANAIS DE HF USANDO O ALGORITMOLMS PARA APLICAÇÃO EM EQUALIZAÇÃO DFE
Dissertação de Mestrado apresentada ao Curso deMestrado em Engenharia Elétrica do Instituto Militarde Engenharia, como requisito parcial para obtenção dotítulo de Mestre em Ciências em Engenharia Elétrica.
Orientador: Ernesto Leite Pinto, D.C.Co-orientador: Maj Juraci Ferreira Galdino, D.C.
Rio de Janeiro2007

c2007
INSTITUTO MILITAR DE ENGENHARIAPraça General Tibúrcio, 80-Praia VermelhaRio de Janeiro-RJ CEP 22290-270
Este exemplar é de propriedade do Instituto Militar de Engenharia, que poderá incluí-loem base de dados, armazenar em computador, microfilmar ou adotar qualquer forma dearquivamento.
É permitida a menção, reprodução parcial ou integral e a transmissão entre bibliote-cas deste trabalho, sem modificação de seu texto, em qualquer meio que esteja ou venhaa ser fixado, para pesquisa acadêmica, comentários e citações, desde que sem finalidadecomercial e que seja feita a referência bibliográfica completa.
Os conceitos expressos neste trabalho são de responsabilidade do(s) autor(es) e do(s)orientador(es).
S194 Santos, Claudio Canto dosEstimação de Canais de HF Usando o Algoritmo
LMS para Aplicação em Equalização DFE / ClaudioCanto dos Santos. – Rio de Janeiro: Instituto Militar deEngenharia, 2007.
69 p.: il., graf., tab.
Dissertação (mestrado) – Instituto Militar de Engen-haria – Rio de Janeiro, 2007.
1. Algoritmo LMS. 2. Estimação de Canal. 3. Co-municações em HF. 4. Canais WSS-US. 5. Equalização.
CDD 005.1
2

INSTITUTO MILITAR DE ENGENHARIA
CAP CLAUDIO CANTO DOS SANTOS
ESTIMAÇÃO DE CANAIS DE HF USANDO O ALGORITMO LMSPARA APLICAÇÃO EM EQUALIZAÇÃO DFE
Dissertação de Mestrado apresentada ao Curso de Mestrado em Engenharia Elétricado Instituto Militar de Engenharia, como requisito parcial para obtenção do título deMestre em Ciências em Engenharia Elétrica.
Orientador: Ernesto Leite Pinto, D.C.Co-orientador: Maj Juraci Ferreira Galdino, D.C.
Aprovada em 21 de Dezembro de 2007 pela seguinte Banca Examinadora:
Ernesto Leite Pinto, D.C. do IME - Presidente
Maj Juraci Ferreira Galdino, D.C. do IME
Marco Antônio Grivet Mattoso Maia, Ph.D. da PUC-Rio
Maj Alberto Gaspar Guimarães, D.C. do IME
Rio de Janeiro2007
3

Aos meus pais, Carlos e Cleuza, aos quais devo tudoque sou.
À minha esposa, Roberta, por todo seu amor,carinho e compreensão.
4

AGRADECIMENTOS
Aos meus pais, Carlos Ribeiro dos Santos e Cleuza do Canto Santos, por toda a base
e estrutura que me proporcionaram durante a minha vida, tornando possível a minha
chegada até aqui, por toda a sua paciência, pelo seu apoio, pelos conselhos e por sua
experiência, que incentivaram a minha busca contínua de crescimento.
À minha querida esposa, Roberta de Lima Santos, por seu amor, incentivo e com-
panheirismo incondicionais.
Ao meu orientador, Dr. Ernesto Leite Pinto, por todo o apoio e incentivo durante
todo o curso de mestrado e por todo o ensinamento e o tempo disponibilizados em prol
da conclusão deste trabalho.
Ao professor Dr. Juraci Ferreira Galdino, por todo o valioso apoio e tempo disponi-
bilizados, orientando-me e contribuindo de várias maneiras para a realização e conclusão
desta pesquisa.
A todos os meus professores do mestrado, pela rica convivência e ensinamentos pre-
ciosos, que, significativamente, contribuíram para a minha formação profissional como
acadêmico, abrindo novos horizontes de compreensão e realidade.
Aos amigos Stefan e David, por sua amizade, por sua disponibilidade e prontidão em
ajudar, por seu apoio irrestrito, por sua paciência, por suas reflexões críticas, por seus
ensinamentos, por toda a colaboração teórica e prática durante todo o curso de mestrado.
Aos colegas Flávio Duarte, Jorge Frederico, Sebastian, Gilberto e Arthur, por sua
amizade, companheirismo, solidariedade, ensinamentos e, além de tudo, por seu apoio
irrestrito em todos os momentos em que precisei.
5
SUMÁRIO
LISTA DE ILUSTRAÇÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
LISTA DE TABELAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
LISTA DE ABREVIATURAS E SÍMBOLOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1 INTRODUÇÃO . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 17
2 MODELO DO SISTEMA DE COMUNICAÇÃO . . . . . . . . . . . . . . . . . 20
2.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.2 Sistema de Comunicação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 20
2.3 Modelagem de Canais de HF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 22
2.3.1 Modelo do Canal de Propagação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 23
2.3.2 Modelo de Canal de HF em Tempo Discreto . . . . . . . . . . . . . . . . . . . . . . . . . . . . 25
3 DESEMPENHO DO ALGORITMO LMS NA ESTIMAÇÃO DE
CANAIS DE HF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2 O Algoritmo LMS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.3 MSWE na Estimação de Canais Variantes no Tempo . . . . . . . . . . . . . . . . . . . . . 27
3.4 MSWE na Estimação de Canais de HF em Regime Permanente . . . . . . . . . . . 29
3.5 Efeitos dos Filtros de Transmissão e Recepção no MSWE em Regime
Permanente . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
4 EQUALIZAÇÃO DFE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.2 O Equalizador DFE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 35
4.3 Método de Ajuste Direto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 37
4.4 Método de Ajuste Indireto Para Canal Conhecido . . . . . . . . . . . . . . . . . . . . . . . 38
4.5 Método de Ajuste Indireto Para Canal Estimado . . . . . . . . . . . . . . . . . . . . . . . . 41
4.6 Resumo . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43
5 RESULTADOS . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.1 Introdução . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
5.2 Condições Básicas de Simulação . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 44
6

5.3 Influência do Passo no MSWE em Regime Permanente para Modelos
ITU-R Modificados . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 45
5.4 Influência do Passo no MSWE em Regime Permanente para Modelos
ITU-R . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
5.5 Desempenho do algoritmo LMS na Estimação de Canais de HF uti-
lizando o Passo Ótimo Aproximado . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 50
5.6 Influência do Passo no Desempenho de um Equalizador DFE Aplicado
a Canais de HF . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
6 CONCLUSÕES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 62
7 REFERÊNCIAS BIBLIOGRÁFICAS . . . . . . . . . . . . . . . . . . . . . . . . . . . . 64
8 APÊNDICES . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 66
8.1 APÊNDICE 1 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 67
7

LISTA DE ILUSTRAÇÕES
FIG.2.1 Diagrama de blocos simplificado do sistema de comunicação. . . . . . . . . . . 20
FIG.2.2 Diagrama de blocos da representação em banda básica do modu-
lador. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21
FIG.2.3 Diagrama de bloco em banda básica do receptor. . . . . . . . . . . . . . . . . . . . . 22
FIG.2.4 Ilustração da Resposta ao Impulso Conjunta do Canal. . . . . . . . . . . . . . . . 25
FIG.3.1 Configuração Básica de um Filtro Adaptativo . . . . . . . . . . . . . . . . . . . . . . . 27
FIG.3.2 Modelo aproximado para associação em cascata de filtros e canal. . . . . . 33
FIG.4.1 Estrutura do Equalizador DFE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 36
FIG.4.2 Configuração de uma estrutura DFE utilizando o método de ajuste
direto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 38
FIG.4.3 Configuração de uma estrutura DFE utilizando o método de ajuste
indireto . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 39
FIG.5.1 MSWE em regime permanente em função do passo para o canal
ITU-R moderado modificado obtido por análise e simulação, com
RSR de 10, 20 e 30 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 46
FIG.5.2 MSWE em regime permanente em função do valor de passo do
algoritmo LMS para o modelo modificado de canal ITU-R pobre.
São mostrados resultados analíticos e de simulação para RSR de
10, 20 e 30 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 47
FIG.5.3 MSWE em regime permanente em função do passo para o modelo
ITU-R bom, obtido por análise e simulação, para RSR de 10 e 30
dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 48
FIG.5.4 MSWE em regime permanente em função do passo do algoritmo
LMS para o canal ITU-R moderado. Obtidos por análise e simu-
lação, para RSR de 10 e 30 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
FIG.5.5 MSWE em regime permanente em função do passo para o modelo
ITU-R pobre, obtidos por análise e simulação, para RSR de 10 e
30 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
FIG.5.6 MSWE em regime permanente em função do passo obtido ana-
liticamente, para o modelo ITU-R bom. Em destaque os pontos
correspondentes ao passo ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . 51
8

FIG.5.7 MSWE em regime permanente obtido analiticamente para o mo-
delo ITU-R moderado. Em destaque os pontos correspondentes
ao passo ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51
FIG.5.8 MSWE em regime permanente obtido analiticamente para o mo-
delo ITU-R pobre. Em destaque os pontos correspondentes ao
passo ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
FIG.5.9 Curvas de Aprendizagem (MSWE) para canal ITU-R moderado
modificado e RSR = 30 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 52
FIG.5.10 Curvas de Aprendizagem (MSWE) para canal ITU-R pobre modi-
ficado e RSR = 30 dB. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 53
FIG.5.11 EQM na saida do equalizador em função do passo para o canal
ITU-R bom. Em destaque os valores correspondentes ao passo
ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 54
FIG.5.12 EQM na saida do equalizador em função do passo para o canal
ITU-R moderado. Em destaque os valores correspondentes ao
passo ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 55
FIG.5.13 EQM na saida do equalizador em função do passo para o modelo
de canal ITU-R pobre. Em destaque os valores correspondentes
ao passo ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
FIG.5.14 BER na saida do equalizador em função do passo para o modelo
ITU-R bom. Em destaque os valores correspondentes ao passo
ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 56
FIG.5.15 BER na saida do equalizador em função do passo para o modelo
canal ITU-R moderado. Em destaque os valores correspondentes
ao passo ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
FIG.5.16 BER na saida do equalizador em regime permanente utilizando o
modelo de canal ITU-R pobre. Em destaque os valores de BER
para o passo ótimo aproximado. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 57
FIG.5.17 MSWE e EQM na saida do equalizador em regime permanente,
para o modelo ITU-R moderado com RSR = 20 dB. . . . . . . . . . . . . . . . . 58
FIG.5.18 MSWE e EQM na saida do equalizador em regime permanente,
para o modelo ITU-R pobre com RSR = 20 dB. . . . . . . . . . . . . . . . . . . . . 59
FIG.5.19 EQM na saida do equalizador em função do MSWE para os mo-
delos do ITU-R pobre e moderado, com RSR = 20 dB. . . . . . . . . . . . . . . 59
9
FIG.5.20 EQM na saida do equalizador em função do passo para o modelo
ITU-R pobre e RSR = 10 dB. A curva contínua foi levantada
utilizando o método de ajuste indireto para canal estimado. . . . . . . . . . . 60
FIG.5.21 EQM na saida do equalizador em função do passo, para o mo-
delo ITU-R bom e RSR = 10 dB. A curva contínua foi levantada
utilizando o método de ajuste indireto para canal estimado. . . . . . . . . . . 61
10

LISTA DE TABELAS
TAB.2.1 Parâmetros dos canais de teste previstos pelo ITU-R. . . . . . . . . . . . . . . . . 24
11
LISTA DE ABREVIATURAS E SÍMBOLOS
ABREVIATURAS
BER - Bit Error Rate
BLOS - Beyond Line Of Sight
BPSK - Binary Phase Shift Keying
CC - Canal Conhecido
CE - Canal Estimado
CV - Canal Variante no Tempo
DFE - Decision Feedback Equalizer
EMQ - Erro Médio Quadrático
FIR - Finite Impulse Response
HF - High Frequency
IES - Interferência Entre Símbolos
IIR - Infinite Impulse Response
IME - Instituto Militar de Engenharia
ITU - International Telecommunications Union
ITU-R - ITU Radiocommunication Sector
LMS - Least Mean-Square Error
MLSE - Maximum Likelihood Sequence Estimator
MMSE - Minimum Mean-Square Error
MSWE - Mean Squared Weight estimation Error
QPSK - Quadrature Phase Shift Keying
RI - Resposta ao Impulso
RSR - Relação Sinal-Ruído
RLS - Recursive Least Square
WSS-US - WideSense Stationary - Uncorrelated Scattering
12

SÍMBOLOS
, - igual, por definição
k - índice de tempo
n - vetor com parcela de ruído presente nos símbolos recebidos
r - vetor sinal de entrada do equalizador
sk - vetor de símbolos transmitidos
σ2s - variância dos símbolos transmitidos
σ2n - variância do ruído aditivo
σ2h - variância do canal
m - quantidade de bits associados a cada símbolo da modulação
hk - resposta ao impulso do canal
qk - resposta ao impulso conjunta do canal
ν - quantidade de coeficientes da resposta ao impulso do canal
L - quantidade de coeficientes da resposta ao impulso conjunta do canal
Le - quantidade de coeficientes do estimador de canais
Ts - duração de símbolo
Tb - duração de bit
Rs - taxa de transmissão de símbolo
H - matriz de convolução
H - matriz de convolução estimada
Y - matriz de autocorrelação do sinal de entrada
ck - vetor de correlação cruzada
Q - conjunto de símbolos de uma constelação
wk - coeficientes do filtro avante do equalizador
fd - taxa de desvanecimento
Nw - quantidade de coeficientes do filtro avante
Nb - quantidade de coeficientes do filtro de realimentação
µ - passo de adaptação do algoritmo LMS
Rh - matriz de autocorrelação dos coeficientes do canal
D - erro médio quadrático dos coeficientes
Sh - densidade espectral de potência dos coeficientes
4 - retardo do sistema de comunicação
d - retardo de decisão
13

1i×j - matriz de dimensão i× j com todos os elementos de valor unitário
0i×j - matriz de dimensão i× j com todos os elementos de valor nulo
Ii - matriz identidade de dimensão i× i
E(·) - valor esperado de um vetor de variáveis aleatórias
14

RESUMO
A transmissão digital na faixa de HF viabiliza características tais como mobilidade detransceptores, baixo custo operacional, baixa demanda de tempo para operação, cober-tura de longas distâncias (milhares de quilômetros) por reflexão ionosférica, assim comocobertura de distâncias de até uma centena de quilômetros através de ondas terrestres,sem a necessidade de visada direta. Por outro lado, também se caracteriza pela ocorrênciade interferência intersimbólica severa e ruído aditivo, apresentando ainda característicasde desvanecimento variante no tempo, dificultando seu uso eficiente.
Neste trabalho será investigado o desempenho do algoritmo Least Mean Square(LMS) na estimação de canais com tais características, tendo como indicador de desem-penho, o erro médio quadrático nos coeficientes (MSWE, de Mean Square Weight estima-tion Error) em regime permanente. A análise aqui desenvolvida contempla a otimizaçãodo passo (no sentido de minimizar o valor de MSWE em regime permanente) e os efeitosdos filtros de transmissão e de recepção na estimação do canal em tempo discreto.
É também discutido o desempenho de equalizadores DFE (Decision Feedback Equal-izer) com ajuste de coeficientes baseado numa estimativa dos coeficientes da resposta aoimpulso do canal em tempo discreto.
Além disso, este trabalho visa analisar o impacto dos erros de estimação de canalno desempenho do equalizador assim ajustado, particularmente para canais de HF, uti-lizando o critério de erro quadrático médio (EQM) na saída do equalizador e empregandoo algorimto LMS na estimação de canais.
Finalmente, propõe-se o uso de um novo mapeamento como um possível caminhopara melhorar a adaptação dos coeficientes do DFE baseada na estimação do canal decomunicação.
15

ABSTRACT
Digital transmission over the HF band has several advantages such as mobility, lowoperational cost, fast deployment equipment, communications coverage of long distances(thousand of kilometers) through ionospheric reflection (skywaves), as well as coverageof distances up to a hundred kilometers or more through ground wave propagation. Onthe other hand, this band is also characterized by the occurrence of time-varying andfrequency-selective fading that causes severe inter-symbol interference, besides noisesand interferences of several types.
This work addresses a performance analysis of the LMS algorithm in the estimationof HF channels, taking as performance index the mean square error estimation weight(MSWE) under steady state conditions. An approximate analytical expression is derivedfor the optimum value of the LMS step-size parameter, in the sense of minimizing thesteady-state MSWE. The role of transmission and reception filters in the establishmentof the FIR model used for channel estimation is also analyzed. Besides, a performanceevaluation of a Decision Feedback Equalizer (DFE) adjusted on the basis of HF channelestimates obtained with the LMS algorithm is presented. Among other indexes, the meansquare error (MSE) in the output of the equalizer as a function of the LMS step-sizeparameter is carefully evaluated. Finally, a simple alternative is presented for includingthe MSWE in the mapping of channel estimates into DFE coefficients, as a means toimprove the equalizer performance.
16
1 INTRODUÇÃO
A comunicação rádio na faixa de HF (High Frequency), caracterizada pelo uso de
frequências na faixa de 3 a 30 MHz, oferece um forte atrativo por ser capaz de cobrir
grandes distâncias devido aos diferentes modos de propagação presentes. Em particular,
o interesse nesta faixa surge devido à propagação por ondas celestes (ionosféricas) que,
através do fenômeno de reflexão virtual (múltiplas refrações) permite a comunicação
BLOS (Beyond Line of Sight).
Porém a ionosfera é um canal físico que apresenta diversas limitações à comunicação
rádio, tais como propagação multipercurso, desvanecimento e ruídos aditivos.
O sinal que chega ao receptor passa por diversos caminhos oriundos de múltiplas
reflexões na ionosfera, ou até mesmo no solo. Isto faz com que o tempo de propagação
referente a cada caminho seja diferente, podendo o espalhamento temporal chegar à ordem
de vários milissegundos (TÜCHLER,2002). Além disso, ao longo do dia as alturas das
camadas ionosféricas variam, o que introduz variações de retardo. Em cada componente
multicaminho ocorre ainda desvanecimento variante no tempo, devido a variações na
ionização, produzindo o efeito de espalhamento Doppler.
O espalhamento temporal entre as componentes multicaminho provoca interferência
entre símbolos (IES), degradando a qualidade do sinal recebido e levando à necessidade
de técnicas eficazes de equalização para evitar a ocorrência de taxas de erro de bit (BER,
de Bit Error Rate) excessivamente elevadas.
Diversas técnicas de equalização têm sido propostas ao longo das últimas décadas,
destacando-se, pelas suas características de desempenho, os equalizadores não lineares,
tais como os do tipo MLSE (de Maximum Likelihood Sequence Estimator) e do tipo DFE
(de Decision Feedback Equalizer) (ELEFTHERIOU,1987). Tem sido mais freqüente o
interesse pela equalização DFE, pelo fato de requerer menor complexidade computacional
do que os equalizadores MLSE, com perda de desempenho considerada compensadora
diante da redução de complexidade (TÜCHLER,2002).
Uma técnica comumente empregada para ajuste dos coeficientes do equalizador DFE
advém da aplicação da teoria de filtragem de Wiener, supondo conhecidos os coeficientes
da resposta ao impulso (RI) do canal em tempo discreto (BENVENUTO, 2002; SHUKLA,
1991). O impacto dos erros de estimação de canal no desempenho do equalizador assim
17

ajustado pode ser significativo, especialmente quando se trata de canais variantes no
tempo, como é o caso das transmissões em HF.
O algoritmo LMS (Least Mean Square) é bastante interessante para aplicação na es-
timação de canais. Além de ter complexidade computacional muito baixa, este algoritmo
apresenta rápida convergência quando a seqüência de entrada do filtro empregado para
adaptação é um processo estocástico branco. Isto efetivamente ocorre na estimação de
canais, pois na grande maioria dos sistemas de comunicações os símbolos transmitidos po-
dem ser considerados perfeitamente descorrelacionados. Essa afirmação é particularmente
verdadeira no caso das transmisssões em HF, devido ao freqüente uso de entrelaçadores
e desentrelaçadores associados a esquemas de codificação para correção automática de
erros.
As características de desempenho do algoritmo LMS são controladas pelo valor do
seu passo de adaptação, o qual determina as propriedades de convergência, a estabili-
dade e o nível de erro médio quadrático em regime permanente. O desenvolvimento de
ferramentas analíticas que permitam a escolha criteriosa deste valor de passo é de grande
interesse, sendo tema de diversos trabalhos publicados (GALDINO, 2004; YOUSEF, 2001;
LINDBOM, 2001, 2002).
Em (GALDINO, 2004) é feita uma análise de desempenho do algoritmo LMS na es-
timação de canais modelados como WSS-US (PARSONS, 1992). São obtidas expressões
analíticas para as curvas de erro quadrático médio nos coeficientes (MSWE, de Mean
Square Weight estimation Error) em regime permanente, em função de valores do passo e
de parâmetros típicos de sistemas de comunicação. Além disso, são apresentados aprox-
imações analíticas para o cálculo do valor ótimo do passo no sentido de minimizar o
MSWE na condição de regime permanente para alguns modelos de espectro Doppler,
dentre os quais o modelo de Jakes.
O presente trabalho busca estender a análise apresentanda em (GALDINO, 2004)
para o contexto de canais de HF e do ajuste de equalizadores DFE com base na estimação
de canal.
Em particular, considera-se aqui o modelo específico de Espalhamento Doppler usual-
mente associado à propagação ionosférica em HF, e também o efeito dos filtros de trans-
missão e recepção na composição do modelo em tempo discreto utilizado para estimação
de canal e posterior ajuste dos coeficientes do equalizador. São obtidas e validadas ex-
pressões analíticas para o MSWE em regime permantente para estas condições, bem
como se obtém uma aproximação do valor de passo ótimo no sentido da minimização do
18

MSWE. Além disso, o trabalho também apresenta uma alternativa simples para incluir
o valor de MSWE no ajuste dos coeficientes do equalizador DFE.
O trabalho está dividido em 6 capítulos e um apêndice.
No Capítulo 2 é descrito o modelo do sistema de comunicação, introduzindo-se a
notação empregada. Algumas características do modelo do canal de propagação na faixa
de HF são apresentadas, além do modelo do canal, tendo como base a modelagem ap-
resentada em (WATTERSON,1970). Os blocos constituintes do sistema são descritos,
salientando-se características e importância de cada um deles.
No Capítulo 3 são sumarizados resultados da análise de desempenho do algoritmo
LMS na estimação de canais variantes no tempo, realizadas em (GALDINO, 2004). Tam-
bém é apresentada uma extensão deste trabalho, utilizando-se modelos de canal de HF,
culminando na obtenção analítica do valor de passo ótimo no sentido de minimizar o
MSWE em regime permanente. Por fim, é realizada uma análise dos efeitos dos filtros
de transmissão e de recepção na composição do modelo de filtro FIR (Finite Impulse
Response) usado para estimação do canal em tempo discreto.
O Capítulo 4 apresenta, de forma sucinta, o funcionamento de um equalizador com
estrutura DFE (Decision Feedback Equalization), discutindo-se métodos usuais de ajuste
de seus coeficientes. Em seguida, é mostrada uma proposta simples de utilização do
conhecimento prévio do MSWE na determinação dos coeficientes do equalizador com
base numa estimativa da RI do canal.
O Capítulo 5 apresenta os resultados de simulação realizadas para validar as análises
aqui apresentadas, tendo por base o padrão MIL-STD-188-110/B para modems de HF e
os modelos de canais ionosféricos do ITU-R.
Por fim, no Capítulo 6 são apresentadas as conclusões do trabalho e sugeridos temas
para a sua continuação. No Apêndice são apresentados alguns detalhes da análise.
19

2 MODELO DO SISTEMA DE COMUNICAÇÃO
2.1 INTRODUÇÃO
Neste capítulo é descrito o modelo de sistema de comunicação adotado no trabalho,
apresentando a notação utilizada ao longo do texto e as características básicas de cada
um dos blocos constituintes do sistema. Por fim, algumas características do modelo do
canal de propagação na faixa de HF são discutidas.
2.2 SISTEMA DE COMUNICAÇÃO
De forma a facilitar o acompanhamento do texto, introduz-se agora a notação a ser
utilizada. Vetores são representados por letras minúsculas em negrito e matrizes por
letras maiúsculas também em negrito. Quantidades variantes no tempo são denotadas
por um índice de tempo subscrito. A notação E(·) representa o operador esperado, IN é
a matriz identidade ordem N , enquanto 0N×M e 1N×M são, respectivamente, uma matriz
nula e uma matriz cujos elementos são todos iguais a 1, ambas de dimensão N por M .
O modelo do sistema de comunicação em banda básica aqui considerado tem seu
diagrama em blocos representado na FIG. 2.1. Nele destacam-se três blocos principais:
o modulador, o canal de comunicação e o receptor, os quais serão discutidos a seguir de
forma bastante suscinta.
FIG. 2.1: Diagrama de blocos simplificado do sistema de comunicação.
A estrutura do modulador, que é mostrado na FIG. 2.2, é composta basicamente de
dois blocos: o mapeamento bit/símbolo e o filtro de transmissão. Assume-se que a fonte
20

FIG. 2.2: Diagrama de blocos da representação em banda básica do modulador.
de informação gera dígitos binários (bits) estatisticamente independentes e identicamente
distribuídos, numa taxa de Rb bits por segundo.
No modulador é realizado primeiramente um mapeamento bit/símbolo, de modo que
cada grupo de B bits da seqüência binária gerada é associado a um símbolo sk. Os sím-
bolos podem assumir Q = 2B valores e ao seu conjunto é dado o nome de constelação.
Considerando que cada bit possui uma duração de Tb = 1/Rb segundos, o símbolo cor-
respondente a uma quantidade M de bits será gerado a cada Ts = Tb × M , ou seja, a
uma taxa de Rs = 1/Ts símbolos por segundo.
Com a finalidade de gerar o sinal contínuo a ser transmitido, o modulador utiliza
uma forma de onda gT (t), aqui chamada de pulso básico de transmissão ou de resposta
ao impulso do filtro de transmissão. A envoltória complexa do sinal de saída deste filtro,
aqui denotada por x(t), é dada por:
x(t) =∑
k
skgT (t− kTs) (2.1)
O canal de comunicação é modelado como um filtro linear variante no tempo com ν
coeficientes e resposta ao impulso h(t, τ). Especificamente h(t, τ) é a resposta do canal
no instante t a um impulso aplicado no instante t− τ .
O sinal na entrada do filtro de recepção é da forma:
y(t) =ν−1∑j=0
h(t)x(t− τj) + n(t) (2.2)
onde n(t) é um ruído aditivo modelado por um processo estocástico Gaussiano de média
21
nula e densidade espectral de potência plana em toda a faixa de freqüências, estatistica-
mente independente do sinal transmitido e do canal de comunicação.
O modelo de canal de HF a ser investigado nesta dissertação é discutido com maiores
detalhes na Seção 2.3.
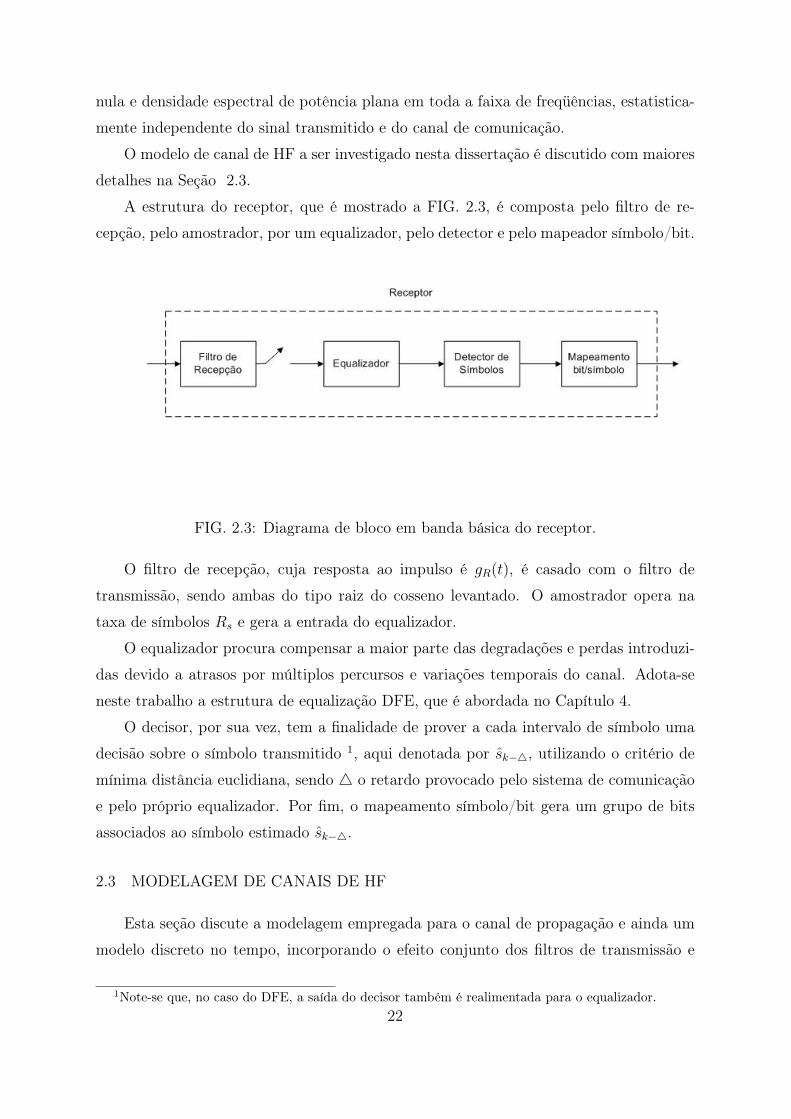
A estrutura do receptor, que é mostrado a FIG. 2.3, é composta pelo filtro de re-
cepção, pelo amostrador, por um equalizador, pelo detector e pelo mapeador símbolo/bit.
FIG. 2.3: Diagrama de bloco em banda básica do receptor.
O filtro de recepção, cuja resposta ao impulso é gR(t), é casado com o filtro de
transmissão, sendo ambas do tipo raiz do cosseno levantado. O amostrador opera na
taxa de símbolos Rs e gera a entrada do equalizador.
O equalizador procura compensar a maior parte das degradações e perdas introduzi-
das devido a atrasos por múltiplos percursos e variações temporais do canal. Adota-se
neste trabalho a estrutura de equalização DFE, que é abordada no Capítulo 4.
O decisor, por sua vez, tem a finalidade de prover a cada intervalo de símbolo uma
decisão sobre o símbolo transmitido 1, aqui denotada por sk−4, utilizando o critério de
mínima distância euclidiana, sendo 4 o retardo provocado pelo sistema de comunicação
e pelo próprio equalizador. Por fim, o mapeamento símbolo/bit gera um grupo de bits
associados ao símbolo estimado sk−4.
2.3 MODELAGEM DE CANAIS DE HF
Esta seção discute a modelagem empregada para o canal de propagação e ainda um
modelo discreto no tempo, incorporando o efeito conjunto dos filtros de transmissão e
1Note-se que, no caso do DFE, a saída do decisor também é realimentada para o equalizador.22
recepção.
2.3.1 MODELO DO CANAL DE PROPAGAÇÃO
O canal de HF é modelado como um sistema linear, cuja resposta ao impulso é
caracterizada por ganhos variantes no tempo associados a diferentes valores de retardos.
Estes ganhos são usualmente modelados como processos estocásticos, estacionários em
sentido amplo e descorrelacionados entre si (modelo WSS-US, de Wide Sense Stationary
- Uncorrelated Scattering).
Define-se o espectro Doppler Sh(λ, τi) do ganho h(t, τi) do i-ésimo caminho como
sendo a transformada de Fourier da função autocorrelação Rh(l, τi) , E(h(t, τi)h∗(t −
l, τi)). Logo, são válidas as relações:
Sh(λ, τi) =
∫ ∞
−∞Rh(l, τi)e
−j2πλldl (2.3)
Rh(l, τi) =
∫ ∞
−∞Sh(λ, τi)e
j2πλldλ (2.4)
Como acontece com a maior parte dos modelos WSS-US usuais, os ganhos do canal
de HF são modelados por processos estocásticos com o mesmo formato de espectro de
potência. Um modelo específico fica então caracterizado pelo formato de espectro (que
modela o efeito de espalhamento Doppler), e pelo perfil de intensidade de múltiplos
percursos, que define as potências dos diferentes ganhos e modela o efeito de espalhamento
de atrasos.
A largura aproximada do espectro Doppler é chamada de espalhamento Doppler ou
taxa de desvanecimento. O espectro Doppler pode ainda ser visto como uma densidade
de probabilidade dos desvios Doppler introduzidos por um canal.
Conforme verificado experimentalmente em (WATTERSON, 1970), o desvio Doppler
em canais na faixa de HF possui uma distribuição Gaussiana. Devido à importância desta
verificação, a modelagem correspondente passou-se a ser chamada modelo de Watterson,
em referência ao primeiro autor deste trabalho.
Um espectro Doppler Gaussiano de média λ e variância σ2λ é aqui expresso por:
Sh(λ) =1√2πσ2
λ
e−(λ−λ)2
2σ2λ (2.5)
Para tal espectro, o espalhamento Doppler Bd é definido como sendo duas vezes o
desvio padrão do espectro Doppler:
23

Bd = 2σλ (2.6)
Considerando λ sendo nulo, e lembrando que a transformada Fourier de uma função
Gaussiana é também Gaussiana tem-se:
Rh(l) =
√2
πB2d
∫ ∞
−∞e−2λ2
B2d ej2πλldλ = e
−(πBdl)2
2 (2.7)
Para realização de testes de desempenho na faixa de HF existem modelos padroniza-
dos internacionalmente. Alguns destes padrões foram estabelecidos pelo setor de comuni-
cações via rádio da International Telecommunications Union (ITU-R, sucessor do antigo
CCIR). A norma ITU-R F.520 (ITU-R,1992) previa três modelos de canal: ITU-R bom,
ITU-R moderado e ITU-R pobre, os quais têm sido usados há vários anos e são até hoje
conhecidos como "canais CCIR". Esta norma foi substituída no ano de 2000 pela ITU-R
F.1487(ITU-R,2000), que prevê dez canais de teste, incluindo os três citados da norma
F.520.
Todos os canais de teste possuem apenas dois caminhos. Cada coeficiente do canal
é modelado por um processo Gaussiano complexo, com espectro Doppler de formato
Gaussiano centrado na origem. O espalhamento Doppler Bd = 2σ é o mesmo para os
dois coeficientes, e τm representa o retardo do segundo raio em relação ao primeiro. A
Tabela 2.1 apresenta os parâmetros dos canais previstos nas duas normas.
TAB. 2.1: Parâmetros dos canais de teste previstos pelo ITU-R.
Norma Canal τm Bd
ITU-R bom 0,5 ms 0,1 HzF.520 ITU-R moderado 1 ms 0,5 Hz
ITU-R pobre 2 ms 1 HzBaixa Lat. quieto 0,5 ms 0,5 HzBaixa Lat. moderado 2 ms 1,5 HzBaixa Lat. perturbado 6 ms 10 HzMédia Lat. quieto 0,5 ms 0,1 Hz
F.1487 Média Lat. moderado 1 ms 0,5 HzMédia Lat. perturbado 2 ms 1 HzMédia Lat. perturbado NVIS 7 ms 1 HzAlta Lat. quieto 1 ms 0,5 HzAlta Lat. moderado 7 ms 10 HzAlta Lat. perturbado 3 ms 30 Hz
24

2.3.2 MODELO DE CANAL DE HF EM TEMPO DISCRETO
Neste trabalho denomina-se de resposta ao impulso (RI) conjunta ou equivalente do
canal, a resposta ao impulso do sistema composto pelo canal e pelos filtros de transmissão
e de recepção, de acordo com a FIG. 2.4.
FIG. 2.4: Ilustração da Resposta ao Impulso Conjunta do Canal.
Para fins de operação do estimador de canal, admite-se que a RI conjunta do canal
em tempo discreto é modelada por um filtro FIR com L coeficientes variantes no tempo
denotados pelo vetor
hk = [hk,0 hk,1 . . . hk,L−1]T (2.8)
A seqüência de amostras na entrada do equalizador é modelada por:
rk =L−1∑i=0
hk,isk−i + nk (2.9)
onde nk são amostras do ruído Gaussiano complexo filtrado e sk = [sk sk−1 · · · sk−L+1]T
é o vetor de símbolos transmitidos.
25

3 DESEMPENHO DO ALGORITMO LMS NA ESTIMAÇÃO DE CANAIS
DE HF
3.1 INTRODUÇÃO
Neste capítulo é apresentada de forma resumida, uma análise de desempenho do al-
goritmo LMS na estimação de canais variantes no tempo do tipo WSS-US. Em seguida é
realizada uma extensão desta análise para modelos de canais de HF. Por fim, é apresen-
tada uma avaliação dos efeitos do filtros de transmissão e de recepção na composição do
modelo de canal em tempo discreto usado para fins de estimação, quando os coeficientes
da RI do canal não apresentam valores de retardos múltiplos do período de transmissão
de símbolos.
3.2 O ALGORITMO LMS
Uma configuração básica de um filtro adaptativo discreto no tempo está ilustrada
na FIG. 3.1. Nela observa-se que rk é o sinal de entrada representado na forma vetorial,
sk é o sinal de referência, zk é a saída do filtro adaptativo e ξk é o erro medido entre o
sinal de referência e a saída do filtro. Este sinal de erro é utilizado para ajustar o vetor
de coeficientes do filtro, hk, por meio de um algoritmo de adaptação.
O algoritmo LMS é amplamente utilizado em aplicações práticas por duas razões
principais: a sua simplicidade, implicando em um baixo custo computacional, e a garantia
de sua convergência, para escolha apropriada do seu passo de adaptação. Este algoritmo é
baseado no algoritmo Steepest−Descent, para o qual a adaptação do vetor de coeficientes
fica dada por (DINIZ, 2002; PROAKIS, 1995; HAYKIN, 1996):
hk+1 = hk − µ∇hξk, (3.1)
onde µ é o passo de adaptação utilizado para ponderar o gradiente do erro (∇hξ(k)), que
por sua vez é dado por −2c + 2Yhk, sendo Y a matriz de autocorrelação do sinal de
entrada e c o vetor de correlação cruzada entre o sinal desejado e o de entrada. Na prática
este gradiente não pode ser obtido com exatidão, uma vez que a matriz de autocorrelação
Y e o vetor de correlação cruzada c são desconhecidos e devem ser estimados. O algoritmo
LMS usa estimativas simples e despolarizada do gradiente, dada por
26

FIG. 3.1: Configuração Básica de um Filtro Adaptativo
∇hξ(k) = −2ξ∗krk. (3.2)
Substituindo esta estimativa na Equação 3.1 do algoritmo Steepest−Descent obte-
mos a seguinte regra de atualização do vetor de coeficientes:
hk+1 = hk + 2µξ∗krk, (3.3)
que é a equação de adaptação do algoritmo LMS.
Vale ressaltar que o LMS apresenta convergência lenta em relação a outros algoritmos
mais complexos, como o RLS, e sensibilidade ao problema de espalhamento de autovalores
da matriz de autocorrelação dos dados de entrada Y. Por outro lado apresenta baixa
complexidade computacional (DINIZ, 2002; PROAKIS, 1995; HAYKIN, 1996).
3.3 MSWE NA ESTIMAÇÃO DE CANAIS VARIANTES NO TEMPO
O algoritmo LMS é largamente utilizado em diversas aplicações que envolvem canais
de comunicações móveis, a fim de estimar a resposta ao impulso de canais variantes no
27

tempo. A análise de seu desempenho e a escolha de passo são freqüentemente obtidos
por simulação computacional, sendo que um indicador de desempenho muito utilizado
para realizar esta escolha é o erro quadrático médio nos coeficientes (MSWE, de Mean
Square Weight estimation Error).
Em primeiro lugar, o valor de µ deve ser escolhido de tal forma que garanta a con-
vergência do algoritmo. Um valor alto de passo gera um MSWE em regime permanente
elevado, enquanto que um valor pequeno faz com que a convergência seja lenta, além de
prejudicar o rastreio de parâmetros que variam rapidamente com o tempo. Assim, o passo
de adaptação utilizado pelo algoritmo LMS determina as propriedades de convergência,
a estabilidade e o nível de MSWE em regime permanente.
Diversos trabalhos na literatura realizaram análise do LMS na identificação de canais
variantes no tempo (EWEDA, 1994; YOUSEF, 2001; L. LINDBOM, 2001, 2002).
A referência (GALDINO,2004) apresenta expressões analíticas para as curvas de
MSWE em função dos valores do passo e de parâmetros típicos de sistemas de comu-
nicações, admitindo canais WSS-US variantes no tempo do tipo WSS-US (PARSONS,
1992) com retardos discretos, múltiplos do intervalo de símbolos e com L coeficientes.
Em particular, mostra-se nesta referência que o MSWE, no instante (k+1) denotado por
D(k + 1, µ) , E||h(k + 1, µ)− h(k + 1, µ)||2, pode ser recursivamente dado por
D(k + 1, µ) = (1− 2µσ2s + µ2Lσ4
s)D(k, µ) + µ2σ2nσ
2sL +
2µσ2sσ
2h
∞∑l=0
(1− µσ2s)
l[R(l)−R(l + 1)], (3.4)
onde R(l) ≡ R(lTs) e R(.) denota a função autocorrelação normalizada dos coeficientes
do canal. A soma das variâncias dos coeficientes do canal é denotada por σ2h, os símbolos
de entrada são considerados independentes e equiprováveis com média zero e variância
σ2s e o ruído é modelado por um processo gaussiano branco complexo com variância σ2
n.
Sob condições de regime estacionário, mostra-se que a expressão analítica do MSWE
em termos de µ fica dada por
D(µ) =1
(2− µLσ2s)
{µσ2
nL + 2σ2h
∞∑l=0
(1− µσ2s)
l[R(l)−R(l + 1)]
}, (3.5)
Além disso, são apresentados em (GALDINO, 2004) aproximações analíticas para o
cálculo do valor ótimo do passo no sentido de minimizar o MSWE na condição de regime
permanente, para alguns modelos de espectro Doppler.
28

O trabalho aqui proposto estende o trabalho realizado em (GALDINO, 2004) para
canais de comunicações na faixa de HF, utilizando o modelo de canal discutido na
Seção 2.3.
3.4 MSWE NA ESTIMAÇÃO DE CANAIS DE HF EM REGIME PERMANENTE
Nesta seção se analisa o desempenho do algoritmo LMS na estimação de canais de
HF, tendo como indicador de desempenho o MSWE em regime permanente. A análise
contempla a otimização do passo, no sentido de minimizar o valor de MSWE atingido
após a convergência do LMS.
A partir da Equação 2.7 verifica-se que a função de autocorrelação referente ao modelo
do canal de HF aqui adotado pode ser escrito como
Rh(l) = e−(πBdTsl)2
2 (3.6)
em que Ts é o intervalo de símbolo e Bd é o espalhamento Doppler.
Substituindo a Equação 3.6 na Equação 3.5, o valor de MSWE em regime permanente,
como função do passo, fica dado por:
D(µ) =1
(2− µLσ2s)
{µσ2
nL + 2σ2h
∞∑l=0
βl[e−αl2 − e−α(l+1)2
]}(3.7)
onde
β = 1− µσ2s (3.8)
e
α =(πBdTs)
2
2(3.9)
Para fins de obtenção do passo ótimo, a expressão de D(µ) acima pode ser apresen-
tada como:
D(µ) =1
(2− µLσ2s)
{µσ2
nL +2σ2
h
β− 2σ2
hµσ2sP1
β
}(3.10)
onde
P1 =∞∑l=0
βle−αl2 (3.11)
29

Denotando por Sh(λ) a densidade espectral de potência dos coeficientes do canal,
como discutido na Seção 2.3.1, tem-se
P1 =∞∑l=0
βlR(l)
=∞∑l=0
βl
∫ ∞
−∞Sh(λ)ej2πλTsldλ
=
∫ ∞
−∞Sh(λ)
∞∑l=0
(βej2πλTs
)ldλ (3.12)
Considerando que |β| < 1 tem-se no somatório da Equação 3.12 uma progressão
geométrica infinita decrescente, logo:
P1 =
∫ ∞
−∞Sh(λ)p(λ)dλ (3.13)
sendo
p(λ) =1
1− βej2πλTs(3.14)
Como Sh(λ) tem formato gaussiano e é normalizado, a expressão de P1 dada acima
pode ser vista como o valor esperado de uma função de variável aleatória.
Especificamente, P1 corresponde ao valor esperado da variável aleatória p(λ), sendo
λ vista como uma variável aleatória gaussiana com função densidade de probabilidade
Sh(λ).
Supondo que p(λ) pode ser bem aproximada por uma expansão em Série de Taylor
truncada no termo de ordem a, dada por:
p(λ) ∼= p(η) + p′(η)(λ− η) + . . . + pa(η)(λ− η)a
a!(3.15)
obtém-se a seguinte aproximação para o valor esperado de p(λ), dada em termos dos
momentos de variável aleatória λ até a ordem a
P1 = E[p(λ)] ∼= p(η) + p”(η)σ2
2+ . . . + pa(η)
ma
a!(3.16)
No caso em questão, o valor do espalhamento Doppler (duas vezes o desvio padrão
da variável aleatória λ) é usualmente bem menor que a taxa de símbolos, e por isso é
razoável supor que S(λ) pode ser bem aproximada com a = 2.30

Considerando que tem média nula e variância B2d
4(Seção 2.3.1) tem-se
P1 = E[p(λ)] ∼= p(0) + p”(0)B2
d
8(3.17)
Utilizando a Equação 3.17 na Equação 3.10, calculando a derivada parcial de D(µ)
com relação a µ e igualando o resultado a zero, obtém-se seguinte polinômio (ver
APÊNDICE 1)
A3µ3 + A2µ
2 + A1µ + A0 = 0 (3.18)
cujos coeficientes são dados por:
A3 = σ2nLσ4
s
A2 = −2σ2hσ
4sKL
A1 = 2σ2hσ
2sK + 6Lσ2
hσ2sK
A0 = −8σ2hK (3.19)
onde
K = (πTsBd)2. (3.20)
Verifica-se que o passo ótimo pode ser obtido encontrando-se as raízes do polinômio
da Equação 3.18. É importante mencionar que esta equação tem apenas uma solução
real e positiva, que é o valor aproximado do passo ótimo (µot.aprox) e pode ser expressa
como:
µot.aprox =3√
W1
6A0
−(
2A2 −2A2
1
3A0
)1
3√
W1
− A1
3A0
W1 = 36A0A1A2 − 108A3A20 − 8A3
1 + 12√
3A0W2
W2 =√
4A0A32 − A2
2A21 − 18A0A1A2A3 + 27A2
3A20 + 4A3
1A3 (3.21)
Diversos resultados de avaliação numérica em condições típicas das transmissões em
HF foram levantados e mostraram ser esta uma aproximação bastante útil para obtenção
do passo ótimo, no sentido de minimização do MSWE em regime permanente. Alguns
desses resultados são discutidos no Capítulo 5.31

3.5 EFEITOS DOS FILTROS DE TRANSMISSÃO E RECEPÇÃO NO MSWE EM
REGIME PERMANENTE
Na análise desenvolvida em (GALDINO, 2004) admite-se que o canal é modelado
por um perfil de intensidade de múltiplos percursos discreto, com retardos múltiplos do
intervalo de símbolo. Nas condições de transmissão consideradas neste trabalho esta
hipótese nem sempre é válida, o que leva à necessidade de uma extensão da análise
anterior, visando a considerar o efeito conjunto do canal de propagação e dos filtros de
transmissão e recepção no estabelecimento de um modelo de canal em tempo discreto a
ser utilizado no receptor, para fins de estimação e equalização.
No presente trabalho, os filtros de transmissão e de recepção têm resposta ao im-
pulso raiz de cosseno levantado, apresentando um decaimento assintótico com o tempo
e gerando uma resposta ao impulso conjunta do canal de mesma natureza. No entanto,
devido a limitações de implementação no receptor, o estimador de canal opera com um
modelo de canal em tempo discreto de duração finita, com uma quantidade de coeficientes
Le muitas vezes bastante limitada. Ocorre assim um "truncamento" no modelo de canal
a ser estimado, gerando um acréscimo de erro no MSWE, que será aqui denominado de
erro de truncamento, e denotado por ε.
Para se obter uma aproximação analítica deste erro de truncamento, considera-se que
a associação em cascata do filtro de recepção e do canal pode ser alterada, obtendo-se o
modelo equivalente mostrado na FIG. 3.2. Nesta figura, g(t) é uma resposta cosseno le-
vantado resultado da convolução entre as respostas impulsionais dos filtros de transmissão
gT (t) e de recepção gR(t).
Em (PINTO, 1999) verificou-se que esta aproximação é satisfatória, quando a res-
posta ao impulso do canal de propagação pode ser considerada aproximadamente invari-
ante em intervalos de tempo de ordem da duração efetiva 2 da resposta ao impulso do
filtro de recepção. Uma análise dos parâmetros dos sistemas de transmissão e dos mo-
delos do canal de propagação aqui adotados mostra ser esta condição satisfatoriamente
atendida nos ambientes de transmissão investigados neste trabalho, que estão descritos
em detalhe no Capítulo 5.
Note-se agora, com base na Figura 3.2, que a resposta ao impulso conjunta do canal é
uma soma de impulsos com atrasos múltiplos do intervalo de símbolo. Estes impulsos são
ponderados por coeficientes (pesos) determinados pelos ganhos do canal de propagação
2Por duração efetiva de um pulso de duração ilimitada entende-se a largura de uma janela de tempo
no qual estão contidos 99% de sua energia.32

FIG. 3.2: Modelo aproximado para associação em cascata de filtros e canal.
e pela resposta ao impulso dos filtros de transmissão e recepção.
Denota-se por h(m,n) um destes coeficientes (arbitrário), o qual pode ser associado à
resposta observada no instante t = nTs (na saída do amostrador) a um impulso aplicado
em t = (n − m)Ts. Com base na aproximação mostrada na Figura 3.2 verifica-se que
h(m, n) pode ser expresso por:
h(m,n) =ν−1∑j=0
hj(nTs)g(mTs − τj) (3.22)
onde g(t) ≡ gT (t) ∗ gR(t) é um pulso do tipo cosseno levantado.
Como os ganhos do canal de propagação são por hipótese estacionários em sentido
amplo, mutuamente descorrelacionados e de média nula, a potência (variância) do coefi-
ciente h(m, n) não depende de n e pode ser dada por
σ2hm
≡ E[|h(m, n)|2] =ν−1∑j=0
σ2j g
2(mTs − τj), (3.23)
onde σ2j é a potência do j -ésimo ganho do modelo WSS-US do canal de propagação.
Cabe notar neste ponto que, como g(t) é ilimitado no tempo, há em princípio um
número infinito de coeficientes h(m, n) com variância σ2hm
não nula.
Note-se ainda que, para estabelecimento de um bom modelo em tempo discreto, é
interessante escolher o índice do primeiro coeficiente (aqui denotado por m0) de modo a
maximizar a soma das variâncias dos coeficientes.
Admitindo que o canal de propagação e a resposta em cosseno levantado g(t) são
normalizados, o erro de truncamento ε correspondente a um modeldo com L coeficientes
33

fica dado por:
ε = 1−m0+L−1∑m=m0
σ2hm
, (3.24)
sendo σ2hm
dado em (3.23).
Note-se que ε representa de fato a contribuição de um erro de modelagem na com-
posição do MSWE, e, como tal, deve ser levado em conta na avaliação de desempenho
de qualquer estimador de canal, nas condições aqui analisadas.
Portanto, para contemplar o efeito de truncamento no modelo de canal em tempo
discreto, é necessário que o valor ε seja adicionado ao valor de MSWE analisado nas seções
anteriores. Para um determinado canal, quanto menor a quantidade de coeficientes L,
maior será a influência do valor do erro de truncamento ε no MSWE.
Cabe notar qua análise acima se aplica a qualquer modelo de canal WSS-US com
perfil de retardos discutidos, desde que a aproximação ilustrada na Figura 3.2 seja satis-
fatória.
Resultados numéricos de validação desta análise do efeito do erro de truncamento
na composição do MSWE produzido pelo LMS na estimação de de canais de HF são
apresentados no Capítulo 5. Excelentes ajustes entre resultados analíticos e de simulação
são obtidos, sob diferentes condições do meio de transmissão.
34

4 EQUALIZAÇÃO DFE
4.1 INTRODUÇÃO
Na maioria dos sistemas de comunicação digital ocorre a dispersão temporal do sinal
transmitido, fazendo com que dados transmitidos num certo instante venham a interferir
com dados transmitidos em outros instantes. Esse fenômeno, chamado de interferência
intersimbólica (IES), provoca a redução da confiabilidade e/ou da taxa com as quais os
dados são transmitidos. A fim de minorar a IES, faz-se uso de equalizadores.
Todavia, tendo em vista a necessidade de equalizar canais desconhecidos ou variantes
no tempo, faz-se imperativo o uso de equalizadores adaptativos. Esses equalizadores são
usualmente implementados na forma de filtros digitais com resposta ao impulso finita
(FIR - Finite Impulse Response) e/ou resposta infinita ao impulso (IIR - Infinite Impulse
Response). Estes filtros são comumente adaptados usando uma sequência de treinamento
conhecida no receptor, que é tida como resposta desejada do equalizador. A diferença
entre a sequência de treinamento e a saída do equalizador é utilizada para ajustar seus
coeficientes.
Neste capítulo, aborda-se a estrutura de equalização DFE (Decision Feedback Equa-
lization) e algumas formas de adaptação de seus coeficientes, com ênfase na adap-
tação baseada na estimação de canal, que usualmente é feita usando expressões obtidas
supondo-se que o canal é perfeitamente estimado. Com base na análise do MSWE reali-
zada no capítulo anterior, propõe-se uma maneira simples de levar em conta os erros de
estimação do canal no ajuste dos coeficientes do DFE.
4.2 O EQUALIZADOR DFE
O objetivo desta seção é descrever de forma sucinta o funcionamento de um equali-
zador DFE.
Este tipo de equalizador é mostrado na Figura 4.1. Ele é composto basicamente de
dois filtros adaptativos de duração finita (filtros transversais): um filtro avante com Nw
coeficientes, aqui representados pelo vetor wk, que opera sobre as amostras do sinal na
entrada do receptor, e um filtro de realimentação com Nb coeficientes bk, que opera sobre
símbolos que foram detectados previamente. Os vetores de coeficientes destes filtros são
35

FIG. 4.1: Estrutura do Equalizador DFE
dados explicitamente por:
wk = [w0, w1, . . . , wNw−1]T
bk = [b1, b2, . . . , bNb]T (4.1)
Conjuntamente, estes filtros permitem combater o efeito de IES sem implementar
uma aproximação do tipo "canal inverso", como ocorre para os equalizadores lineares, o
que provocaria o conhecido efeito de fortalecimento do ruído em canais que apresentam
severas atenuações dentro da faixa de passagem.
Nas próximas seções são mostradas duas formas de realizar o ajuste dos coeficientes
do equalizador DFE. No primeiro método, os coeficientes são adaptados no sentido de
minimizar o valor quadrático médio do erro entre o símbolo transmitido sk e o sinal
de saída do equalizador sk, utilizando algum tipo de algoritmo adaptativo, como por
exemplo o algoritmo RLS (Recursive Least Square). Aqui este método é chamado de
método de ajuste direto.
No segundo método, o algoritmo adaptativo é utilizado para obter uma estimativa de
RI do canal e a partir desta estimativa é realizado o ajuste dos coeficientes do equalizador.
Aqui este processo é chamado de método de ajuste indireto.
Nas seções 4.3 e 4.4, os dois procedimentos são descritos de forma mais detalhada.
Na seção 4.5 é apresentada um nova forma de mapeamento, que procura melhorar o
método de ajuste indireto, utilizando o valor do MSWE analisado no capítulo anterior.
Em (SHUKLA, 1991) comparou-se o desempenho de um equalizador DFE num canal
de HF utilizando os dois métodos. Os critérios utilizados para a avaliação de desempenho
36

foram a probabilidade de erros de símbolos e o erro quadrático médio na saída do equa-
lizador em regime permanente. Verificou-se que o método indireto não apenas apresenta
um desempenho superior nestes critérios, como também apresenta convergência mais
rápida do que o método convencional.
Além disso, apesar do artigo supracitado utilizar o algoritmo RLS, foram realizadas
simulações computacionais que mostraram que o desempenho dos algoritmos RLS e LMS
são semelhantes utilizando o método indireto.
4.3 MÉTODO DE AJUSTE DIRETO
Nesta seção, discute-se o método que utiliza a minimização do valor quadrático médio
do erro entre o símbolo transmitido sk e o sinal de saída do equalizador sk como critério
de ajuste dos coeficientes do DFE.
Note-se primeiramente que o sinal equalizado é dado pela soma dos sinais de saída
dos filtros avante e de realimentação, ou seja
sk =Nw−1∑
i=0
wirk−i +Nb∑i=1
bj sk−∆−j (4.2)
sendo ∆ o retardo global do sistema.
O erro em relação à saída do decisor sk−∆ é dado por:
ek = sk−∆ − sk. (4.3)
O algoritmo adaptativo, por sua vez, tem por objetivo minimizar o valor quadrático
médio deste erro. Este procedimento é ilustrado na FIG. 4.2.
Para melhor exemplificar o método, é mostrada esta forma de ajuste dos coeficientes
do equalizador utilizando o algoritmo LMS.
Definindo o vetor de coeficientes
ϕk = [w0, w1, . . . , wNw−1, b1, b2, . . . , bNb]T (4.4)
e o vetor de entrada
γk = [rk, rk−1, . . . , rk−Nw+1, sk−∆−1, sk−∆−2, . . . , sk−∆−Nb]T (4.5)
tem-se que a Equação 4.2 pode ser expressa da seguinte forma
sk = ϕTk γk. (4.6)
37
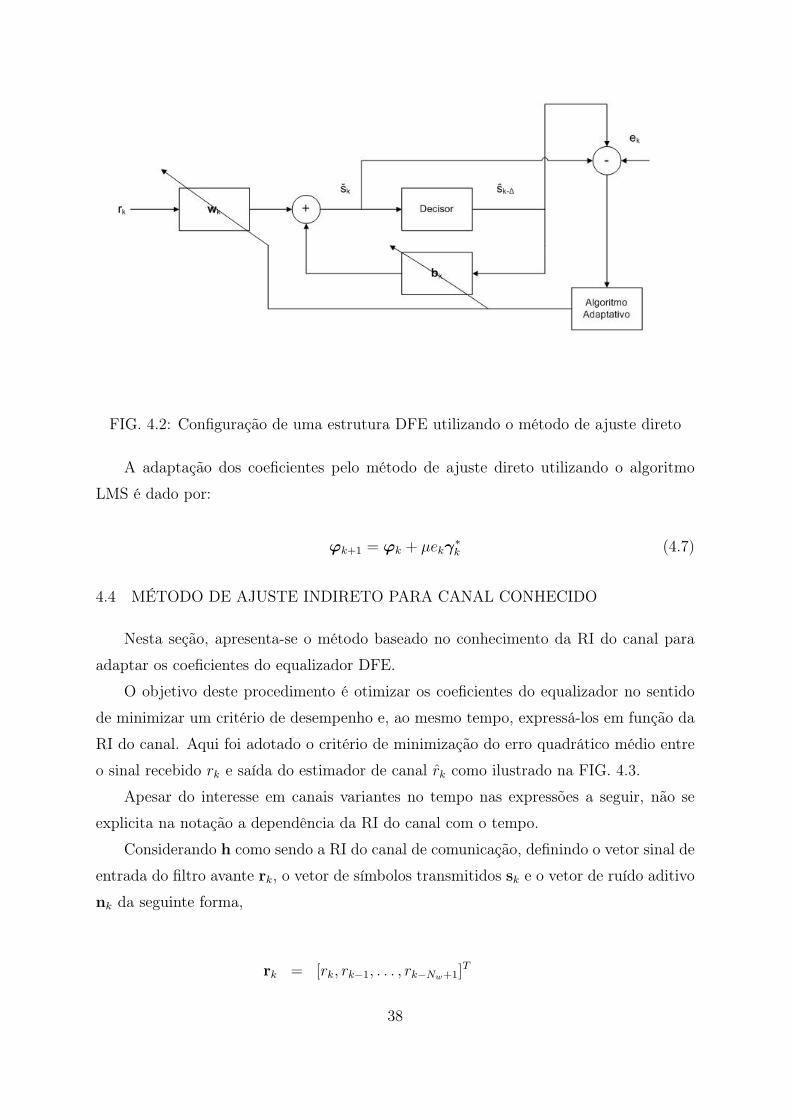
FIG. 4.2: Configuração de uma estrutura DFE utilizando o método de ajuste direto
A adaptação dos coeficientes pelo método de ajuste direto utilizando o algoritmo
LMS é dado por:
ϕk+1 = ϕk + µekγ∗k (4.7)
4.4 MÉTODO DE AJUSTE INDIRETO PARA CANAL CONHECIDO
Nesta seção, apresenta-se o método baseado no conhecimento da RI do canal para
adaptar os coeficientes do equalizador DFE.
O objetivo deste procedimento é otimizar os coeficientes do equalizador no sentido
de minimizar um critério de desempenho e, ao mesmo tempo, expressá-los em função da
RI do canal. Aqui foi adotado o critério de minimização do erro quadrático médio entre
o sinal recebido rk e saída do estimador de canal rk como ilustrado na FIG. 4.3.
Apesar do interesse em canais variantes no tempo nas expressões a seguir, não se
explicita na notação a dependência da RI do canal com o tempo.
Considerando h como sendo a RI do canal de comunicação, definindo o vetor sinal de
entrada do filtro avante rk, o vetor de símbolos transmitidos sk e o vetor de ruído aditivo
nk da seguinte forma,
rk = [rk, rk−1, . . . , rk−Nw+1]T
38

FIG. 4.3: Configuração de uma estrutura DFE utilizando o método de ajuste indireto
sk = [sk+L1 , . . . , sk, . . . , sk−L2−Nw+1]T
nk = [nk, nk−1, . . . , nk−Nw+1]T (4.8)
onde L1 e L2 são as quantidades de pré-cursores e pós-cursores da RI do canal, respecti-
vamente, o vetor rk pode ser expresso como:
rk = Hsk + nk (4.9)
onde
H =
h−L1 h−L1+1 · · · hL2 0 · · · 0
0 h−L1 h−L1+1 · · · hL2 0 · · · 0... . . . . . . ...
0 0 0 · · · h−L1 h−L1+1 · · · hL2
Nw×(L1+L2+Nw)
(4.10)
é uma Matriz Toeplitz (Matriz de Convolução).
Supondo que as decisões realimentadas são corretas, é possível expressar as operações
do filtro de realimentação assumindo como entrada o vetor sk, dado pela Equação 4.8.
Com essa finalidade é definido um vetor b′ tal que
39

b′ = [01×(L1+d+1),bT ,01×N3 ]
T (4.11)
onde d é o retardo de decisão e N3 = Nw + L2 − d− 1−Nb.
Logo, a entrada do decisor pode ser expressa como
sk = wT rk + b′Tsk = wTHsk + b′
Tsk + wTnk = (wTH + b′
T)sk + wTnk (4.12)
Para se obter o cancelamento da parcela da IES devida aos símbolos sk−d−i, i =
1, . . . , Nb, os coeficientes do filtro de realimentação devem ser dados por
b′ = [01×(L1+d+1),−(wTH)L1+d+Nb+1L1+d+2 ,01×N3 ]
T (4.13)
Usando as Equações 4.12 e 4.13, a entrada do decisor fica dada por
sk = wT (H′sk + nk) (4.14)
onde
H′ = [HL1+d+1•,1 ,0Nw×Nb
,HL1+L2+Nw
•,L1+d+Nb+2] (4.15)
ou seja,
H′ =
h−L1 h−L1+1 · · · hd 0 · · · 0 0 · · · 0
0 h−L1 · · · hd−1 0 · · · 0 0 · · · 0... . . . ...
......
......
0 · · · 0 0 · · · 0 hL2−N3+1 · · · hL2
(4.16)
Os coeficientes do filtro avante são determinados pela minimização do erro médio
quadrático, dado por
J = E[|sk − sk−d|2] (4.17)
Da Teoria de Filtragem de Wiener, sabe-se que para encontrar a solução deve-se computar
a matriz de autocorrelação Rr do sinal de entrada e o vetor de correlação cruzada p entre
o sinal de saída desejado e o sinal de entrada. Temos portanto:40

Rr = E[(H′sk + nk)∗(H′sk + nk)
T ] (4.18)
Admitindo que os símbolos sk são descorrelacionados, de média nula e variância σ2s ,
que os coeficientes do canal hk são conhecidos que o ruído nk é branco e descorrelacionado
de sk, com variância σ2n, tem-se:
Rr = σ2sH
′∗H′T + σ2nI (4.19)
p = E[sk−d(H′sk + nk)
∗] = H′∗E[sk−ds∗k] (4.20)
Nessas condições o vetor E[sk−∆s∗k] tem todos os elementos iguais a zero, exceto na
posição N1 + D + 1, logo
p = σ2sH
′∗•,L1+d+1 (4.21)
O vetor de coeficientes do filtro avante que minimiza J é dado por
wopt = R−1r p
= (σ2sH
′∗H′T + σ2nI)
−1σ2sH
′∗•,L1+d+1 (4.22)
O vetor de coeficientes do filtro de realimentação é obtido substituindo a Equação 4.22
na Equação 4.13.
As Equações 4.22 e 4.13 constituem então a essência deste método de ajuste de
coeficientes do DFE.
Note-se mais uma vez que as referidas equações foram obtidas supondo que o canal
em tempo discreto é conhecido, ou seja, supondo que a estimação do canal é perfeita. Na
prática o mesmo equacionamento é usado para mapear estimativas imperfeitas de RI do
canal nos coeficientes do DFE, desconsiderando a ocorrência de erros de estimação.
4.5 MÉTODO DE AJUSTE INDIRETO PARA CANAL ESTIMADO
Nesta seção, propõe-se o uso de um novo mapeamento, utilizando o conhecimento do
MSWE analisado no Capítulo 3, como um possível caminho para melhorar o ajuste dos
coeficientes e, por conseqüência, o desempenho do equalizador DFE.41

Primeiramente, considerando H a matriz de convolução do canal, H a matriz de
convolução do canal estimado e denotando por 4H a matriz de erro (diferença entre H
e H), tem-se
rk = Hsk + nk = (H + 4H)sk + nk
= Hsk + 4Hsk + nk
= Hsk + nk (4.23)
onde
nk = 4Hsk + nk (4.24)
Admitindo a descorrelação entre 4H e sk, e que a média de 4H é uma matriz nula,
a matriz de autocorrelação do vetor de entrada do filtro avante fica dada por
Rr = E[(H∗s∗k + n∗k)(HTsT
k + nTk )]
= σ2sH
∗HT + Rn (4.25)
onde
Rn = E[(4∗Hs∗k + n∗k)(4T
HsTk + nT
k )]
= σ2sE[4∗
H4TH ] + σ2
nI (4.26)
Nota-se na expressão acima a necessidade de se conhecer a matriz de correlação do
erro de estimação do canal para determinar a matriz E[4∗H4T
H ] e, conseqüentemente,
determinar Rn. Uma expressão extremamente simples para Rn pode ser obtida supondo
que a matriz E[4∗H4T
H ] seja dada por
E[4∗H4T
H ] = σ2eI (4.27)
onde σ2e é o valor do MSWE dividido pela quantidade de coeficientes Le do estimador de
canal, ou seja
σ2e =
MSWE
Le
(4.28)
42
Obtém-se o novo mapeamento dos coeficientes do equalizador DFE, substituindo os
resultados das Equações 4.25, 4.26, 4.27 e 4.28 nas Equações 4.22 e Equação 4.13.
Trata-se de fato de uma pequena modificação do mapeamento usual, que tem como
aspecto interessante o fato de incorporar um indicador de qualidade das estimativas de
canal empregadas, qual seja, o valor do MSWE.
Este método é interessante para uso em conjunto com os resultados analíticos antes
apresentados, relativos à análise do MSWE na estimação de canais WSS-US, e de canais
de HF em particular.
Note-se que uma versão um pouco mais elaborada deste mapeamento pode ser em-
pregada, utilizando a expressão da Equação. 4.26, desde que se disponha da matriz au-
tocorrelação do vetor erro de estimação do canal.
Por fim, como citado anteriormente, em situações práticas o canal de comunicação é
desconhecido e os coeficientes do equalizador devem ser ajustados antes que o processo de
deteção de informação transmitida seja iniciado. No entanto, quando o canal é variante no
tempo, esses coeficientes devem ser adaptados durante a fase de detecção de informação,
do contrário a taxa de erro do sistema de comunicação pode aumentar.
4.6 RESUMO
Neste capítulo foi discutido o funcionamento de um equalizador com estrutura DFE
e algumas formas de ajuste de seus coeficientes. Além disso, foi proposto um novo tipo de
ajuste, bastante simples, como uma forma de utilizar o conhecimento do valor de MSWE
analisado no capítulo anterior para se tentar melhorar o desempenho do equalizador DFE
quando do emprego de estimativas imperfeitas do canal para ajuste de seus coeficientes.
43

5 RESULTADOS
5.1 INTRODUÇÃO
Neste capítulo são apresentados alguns resultados de avaliação de desempenho obti-
dos através de simulações e com o uso das análises descritas anteriormente, utilizando o
software Matlab.
Quatro conjuntos de resultados são apresentados e discutidos. Os três primeiros
procuram validar os resultados analíticos apresentados no Capítulo 3 por meio de simu-
lação computacional, enquanto que o quarto contempla a influência da escolha do passo
no desempenho de um equalizador DFE utilizando os métodos de ajuste indireto, tanto
para canal conhecido quanto para canal estimado, conforme discutido no Capítulo 4.
5.2 CONDIÇÕES BÁSICAS DE SIMULAÇÃO
Utilizou-se em geral os três modelos de canal de HF da norma ITU-R F.520 (ITU-
R bom, ITU-R moderado e ITU-R pobre). A taxa de símbolos Rs foi de 2400 baud e
empregou-se um esquema de modulação Quadrature Phase Shift Keying (QPSK), e filtros
de transmissão e de recepção casados do tipo raiz quadrada de cosseno levantado, com
fator de rool off igual a 0,5.
Como os valores de retardo do modelo de canal de propagação não são, em geral,
múltiplos do intervalo de símbolos, utiliza-se superamostragem para viabilizar a sua si-
mulação. Os símbolos de entrada sk são interpolados por um fator M através de inserção
de M − 1 zeros entre símbolos sucessivos. A seqüência assim obtida passa então por um
filtro de transmissão que possui resposta raiz de cosseno levantado, e sofre efeito do canal
simulado aproximando-se o intervalo entre coeficientes por múltiplos de Ts
M. Finalmente
a seqüência passa pelo filtro de recepção, que possui a mesma resposta que o de trans-
missão. A seqüência na saída deste filtro é, então, decimada por um fator M antes de
ser somado o ruído.
Para gerar os modelos de canais de teste previstos pela ITU-R são necessários apenas
dois coeficientes de igual potência, com espalhamento Doppler e retardos entre os raios
de acordo com a Tabela 2.1.
Para fins de simplificação, algumas vezes se utiliza uma modificação do valor de re-
44
tardo entre os raios dos modelos de canais da ITU-R F.520. Esta alteração tem como ob-
jetivo aproximar a este valor de retardo por um múltiplo do período de símbolo. Quando
isto ocorre, os filtros de transmissão e de recepção não influenciam na obtenção da RI
conjunta do canal, e assim a IES resulta apenas do efeito do canal de comunicação. Para o
caso do canal ITU-R pobre, por exemplo, tem-se retardo entre os raios de 2 ms. Para uma
taxa de símbolos de 2400bps, o canal pode ser aproximado para um retardo de 2,1 ms,
ficando o vetor de coeficientes da RI conjunta do canal da forma hk = [hk,0 0 0 0 0 hk,1]T .
Aqui estes modelos são aqui denominados de canais ITU-R modificados.
A geração de cada raio do canal foi feita através do método de Monte-Carlo
(MÜLLER,1994). Cada coeficiente simulado é da forma
h(t) =
√1
N
N−1∑k=0
akej2πθkt (5.1)
onde N é a ordem de simulação do modelo, ak são variáveis aleatórias complexas Gaus-
sianas com variância unitária e média nula, e θk são variáveis aleatórias Gaussianas de
média nula e desvio padrão igual à metade do espalhamento Doppler, de acordo com a
Equação(2.6).
O valor de N na Equação 5.1 tem importância fundamental para que a resposta do
canal possua, instantaneamente, componentes em quadratura com distribuição aproxi-
madamente gaussiana para qualquer valor fixo de atraso entre os coeficientes do canal. O
trabalho apresentado em (GUIMARÃES,1997) avalia a escolha adequada deste parâmetro
e, com base nele, N foi tomado como 20.
O canal foi normalizado multiplicando-se cada componente hi(t) por√
12, fornecendo
um perfil de intensidade de múltiplos percursos com raios de mesma potência, adotado
nos modelos de canal do ITU-R.
Para gerar uma realização de um raio do canal são sorteadas N variáveis ak e θk,
k = 1, . . . , N . Com este conjunto de variáveis gera-se um raio ao longo do tempo,
variando-se apenas a variável t. As realizações de cada raio são geradas através de
sorteios similares (independentes).
5.3 INFLUÊNCIA DO PASSO NO MSWE EM REGIME PERMANENTE PARA MO-
DELOS ITU-R MODIFICADOS
Nesta seção são mostrados as curvas de MSWE em regime permanente em função
do passo. Foram utilizados os modelos modificados de canais de HF, onde se utiliza raios
45
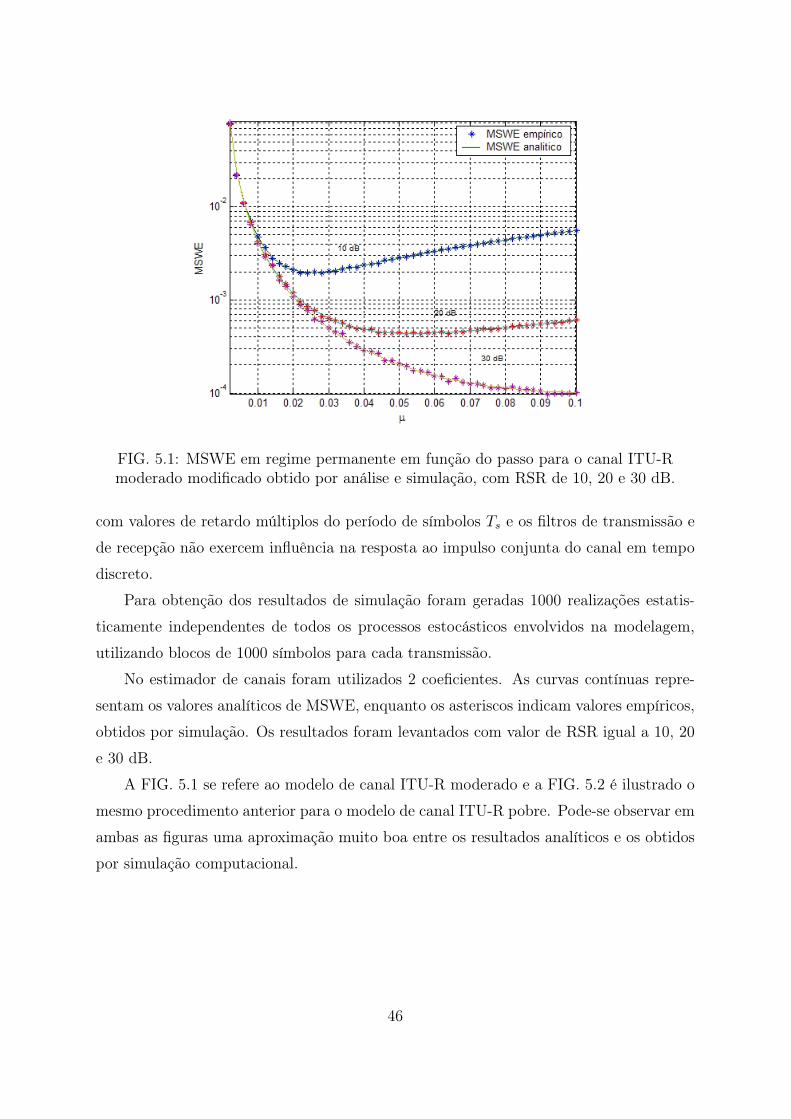
FIG. 5.1: MSWE em regime permanente em função do passo para o canal ITU-Rmoderado modificado obtido por análise e simulação, com RSR de 10, 20 e 30 dB.
com valores de retardo múltiplos do período de símbolos Ts e os filtros de transmissão e
de recepção não exercem influência na resposta ao impulso conjunta do canal em tempo
discreto.
Para obtenção dos resultados de simulação foram geradas 1000 realizações estatis-
ticamente independentes de todos os processos estocásticos envolvidos na modelagem,
utilizando blocos de 1000 símbolos para cada transmissão.
No estimador de canais foram utilizados 2 coeficientes. As curvas contínuas repre-
sentam os valores analíticos de MSWE, enquanto os asteriscos indicam valores empíricos,
obtidos por simulação. Os resultados foram levantados com valor de RSR igual a 10, 20
e 30 dB.
A FIG. 5.1 se refere ao modelo de canal ITU-R moderado e a FIG. 5.2 é ilustrado o
mesmo procedimento anterior para o modelo de canal ITU-R pobre. Pode-se observar em
ambas as figuras uma aproximação muito boa entre os resultados analíticos e os obtidos
por simulação computacional.
46

FIG. 5.2: MSWE em regime permanente em função do valor de passo do algoritmoLMS para o modelo modificado de canal ITU-R pobre. São mostrados resultados
analíticos e de simulação para RSR de 10, 20 e 30 dB.
5.4 INFLUÊNCIA DO PASSO NO MSWE EM REGIME PERMANENTE PARA MO-
DELOS ITU-R
Nesta seção são apresentadas curvas de MSWE em regime permanente em função do
passo do algoritmo LMS, obtidas analiticamente por simulação computacional.
Primeiramente, alguns testes empíricos foram realizados a fim de se avaliar o mínimo
de coeficientes significativos da RI conjunta do canal em tempo discreto, para os 3 modelos
de canal de propagação aqui utilizados. Para tanto, simulou-se a convolução de um
impulso em tempo discreto δk com o conjunto formado pelo canal e pelos filtros de
transmissão e de recepção. Realizou-se amostragem da saída do filtro de recepção na
taxa de símbolos. Verificou-se que a RI conjunta apresenta uma quantidade aproximada
de 9, 9 e 14 coeficientes significativos para os canais ITU-R bom, moderado e pobre,
respectivamente.
Os resultados apresentados em cada uma das figuras que se seguem foram obtidos
com valor de RSR igual a 10 e 30 dB. Para obtenção destes resultados foram gerados 1000
realizações estatisticamente independentes de todos os processos estocásticos envolvidos
na modelagem, utilizando blocos de 600 símbolos em cada transmissão.
No estimador de canais, foram utilizados 5, 5 e 7 coeficientes para estimar os canais
47

ITU-R bom, moderado e pobre, respectivamente. Estas quantidades de coeficientes foram
definidas para uma melhor visualização do erro de truncamento nas figuras subseqüentes.
A FIG. 5.3 ilustra os valores analíticos e empíricos de MSWE em regime permanente
para o modelo de canal ITU-R bom. As curvas contínuas representam valores analíticos
de MSWE obtidos com o erro de truncamento incorporado, enquanto as curvas tracejadas
indicam valores analíticos de MSWE levantados sem o acréscimo deste erro.
FIG. 5.3: MSWE em regime permanente em função do passo para o modelo ITU-Rbom, obtido por análise e simulação, para RSR de 10 e 30 dB.
Nesta figura fica evidenciado o efeito do erro de truncamento devido ao limitado
número de coeficientes empregados no modelo utilizado para estimação de canal.
A FIG. 5.4 ilustra os valores analíticos e empíricos de MSWE em regime permanente
para o modelo de canal ITU-R moderado. Observa-se nesta curva uma degradação de
desempenho em relação ao modelo de canal ITU-R bom, em virtude do espalhamento
doppler deste modelo ser um pouco maior, ocasionando uma maior dificuldade de ras-
treamento dos parâmetros do canal.
A FIG. 5.5 ilustra os resultados obtidos com o modelo de canal ITU-R pobre. Verifica-
se que o efeito do erro de truncamento é mais intenso neste modelo. Isto se deve ao fato
do valor de retardo (2 ms) entre os raios ser maior do que o dos outros dois modelos
(ITU-R bom e ITU-R moderado), causando um aumento da quantidade de coeficientes
significativos da resposta ao impulso conjunta do canal. Assim sendo, observa-se uma
48

FIG. 5.4: MSWE em regime permanente em função do passo do algoritmo LMS para ocanal ITU-R moderado. Obtidos por análise e simulação, para RSR de 10 e 30 dB.
FIG. 5.5: MSWE em regime permanente em função do passo para o modelo ITU-Rpobre, obtidos por análise e simulação, para RSR de 10 e 30 dB.
maior intensidade de erro de truncamento em relação aos casos anteriores, mesmo com o
aumento (de 5 para 7) no número de coeficientes do modelo empregado para estimação
do canal equivalente em tempo discreto.
49
Por fim, pode-se observar nessas três figuras uma aproximação muito boa entre os
resultados analíticos e os obtidos por simulação computacional, indicando a validade
das análises desenvolvidas e a pertinência das suposições adotadas. Em particular, cabe
destacar que a avaliação da contribuição do erro de truncamento na composição do MSWE
viabilizou que se alcançasse um excelente nível de aproximação entre valores empíricos e
analíticos, em todos os casos considerados.
5.5 DESEMPENHO DO ALGORITMO LMS NA ESTIMAÇÃO DE CANAIS DE HF
UTILIZANDO O PASSO ÓTIMO APROXIMADO
Nesta seção são apresentados resultados numéricos relacionados com a questão da
otimização do passo do LMS, no sentido de minimizar o MSWE em regime permanente.
As condições de simulação da seção anterior foram mantidas nesta avaliação.
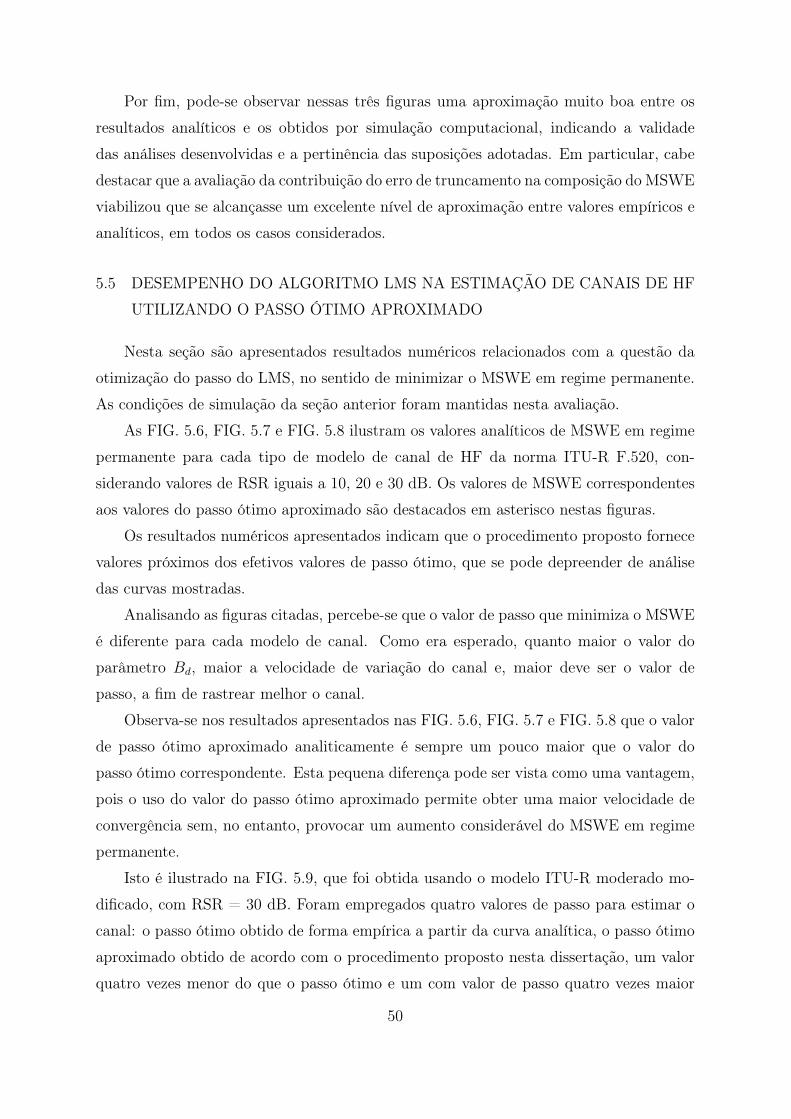
As FIG. 5.6, FIG. 5.7 e FIG. 5.8 ilustram os valores analíticos de MSWE em regime
permanente para cada tipo de modelo de canal de HF da norma ITU-R F.520, con-
siderando valores de RSR iguais a 10, 20 e 30 dB. Os valores de MSWE correspondentes
aos valores do passo ótimo aproximado são destacados em asterisco nestas figuras.
Os resultados numéricos apresentados indicam que o procedimento proposto fornece
valores próximos dos efetivos valores de passo ótimo, que se pode depreender de análise
das curvas mostradas.
Analisando as figuras citadas, percebe-se que o valor de passo que minimiza o MSWE
é diferente para cada modelo de canal. Como era esperado, quanto maior o valor do
parâmetro Bd, maior a velocidade de variação do canal e, maior deve ser o valor de
passo, a fim de rastrear melhor o canal.
Observa-se nos resultados apresentados nas FIG. 5.6, FIG. 5.7 e FIG. 5.8 que o valor
de passo ótimo aproximado analiticamente é sempre um pouco maior que o valor do
passo ótimo correspondente. Esta pequena diferença pode ser vista como uma vantagem,
pois o uso do valor do passo ótimo aproximado permite obter uma maior velocidade de
convergência sem, no entanto, provocar um aumento considerável do MSWE em regime
permanente.
Isto é ilustrado na FIG. 5.9, que foi obtida usando o modelo ITU-R moderado mo-
dificado, com RSR = 30 dB. Foram empregados quatro valores de passo para estimar o
canal: o passo ótimo obtido de forma empírica a partir da curva analítica, o passo ótimo
aproximado obtido de acordo com o procedimento proposto nesta dissertação, um valor
quatro vezes menor do que o passo ótimo e um com valor de passo quatro vezes maior
50

FIG. 5.6: MSWE em regime permanente em função do passo obtido analiticamente,para o modelo ITU-R bom. Em destaque os pontos correspondentes ao passo ótimo
aproximado.
FIG. 5.7: MSWE em regime permanente obtido analiticamente para o modelo ITU-Rmoderado. Em destaque os pontos correspondentes ao passo ótimo aproximado.
do que o ótimo.
Nota-se na FIG. 5.9 que a curva de aprendizagem produzida pelo algoritmo utilizando
51

FIG. 5.8: MSWE em regime permanente obtido analiticamente para o modelo ITU-Rpobre. Em destaque os pontos correspondentes ao passo ótimo aproximado.
FIG. 5.9: Curvas de Aprendizagem (MSWE) para canal ITU-R moderado modificado eRSR = 30 dB.
o passo ótimo, converge após o processamento de 55 amostras, aproximadamente, com
nível de MSWE em regime permanente muito próximo do obtido com o uso do passo
ótimo aproximado. O uso deste, no entanto, produz convergência mais rápida, que se
52

FIG. 5.10: Curvas de Aprendizagem (MSWE) para canal ITU-R pobre modificado eRSR = 30 dB.
dá após o processamento de 40 amostras, aproximadamente. Comportamentos similares
foram verificados para outras situações, como por exemplo, mostrada na FIG. 5.10, que
foi obtida com o modelo ITU-R pobre modificado, e demais condições idênticas às da
FIG. 5.10.
Outra observação acerca das FIG. 5.9 e FIG. 5.10 é que, o uso de valores mais elevados
do que o passo ótimo aproximado, pode aumentar a velocidade de convergência em casos
onde o período de treinamento é reduzido. A conseqüência disto, no entanto, é o aumento
de nível de MSWE que, por sua vez, acarretaria uma degradação de desempenho de um
equalizador baseado na estimação do canal.
O impacto do MSWE no desempenho de um sistema utilizando um equalizador DFE
no receptor é discutido na próxima seção.
5.6 INFLUÊNCIA DO PASSO NO DESEMPENHO DE UM EQUALIZADOR DFE
APLICADO A CANAIS DE HF
Nesta seção avalia-se o efeito do ajuste do passo do algoritmo LMS aplicado à esti-
mação do canal sobre o desempenho de um equalizador DFE com coeficientes adaptados
através do método de ajuste indireto para canal conhecido, discutido na Seção 4.4. As
medidas de desempenho aqui utilizadas foram o EMQ na saída do equalizador e a taxa
53
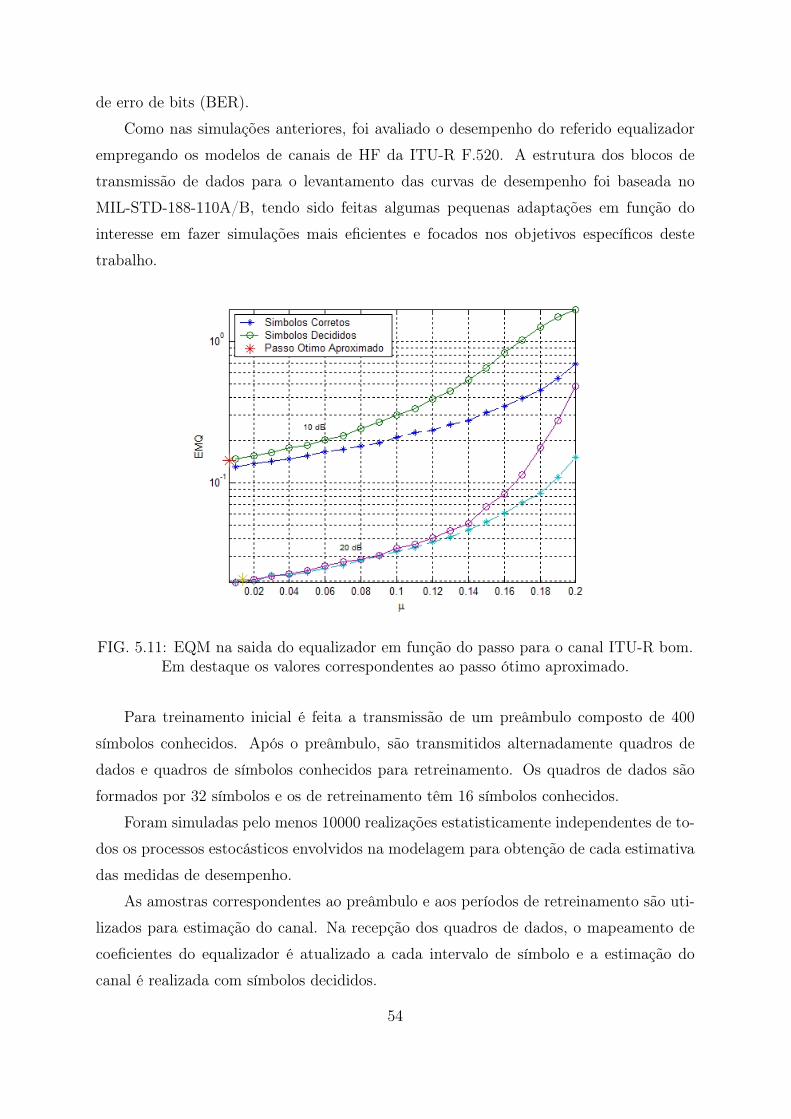
de erro de bits (BER).
Como nas simulações anteriores, foi avaliado o desempenho do referido equalizador
empregando os modelos de canais de HF da ITU-R F.520. A estrutura dos blocos de
transmissão de dados para o levantamento das curvas de desempenho foi baseada no
MIL-STD-188-110A/B, tendo sido feitas algumas pequenas adaptações em função do
interesse em fazer simulações mais eficientes e focados nos objetivos específicos deste
trabalho.
FIG. 5.11: EQM na saida do equalizador em função do passo para o canal ITU-R bom.Em destaque os valores correspondentes ao passo ótimo aproximado.
Para treinamento inicial é feita a transmissão de um preâmbulo composto de 400
símbolos conhecidos. Após o preâmbulo, são transmitidos alternadamente quadros de
dados e quadros de símbolos conhecidos para retreinamento. Os quadros de dados são
formados por 32 símbolos e os de retreinamento têm 16 símbolos conhecidos.
Foram simuladas pelo menos 10000 realizações estatisticamente independentes de to-
dos os processos estocásticos envolvidos na modelagem para obtenção de cada estimativa
das medidas de desempenho.
As amostras correspondentes ao preâmbulo e aos períodos de retreinamento são uti-
lizados para estimação do canal. Na recepção dos quadros de dados, o mapeamento de
coeficientes do equalizador é atualizado a cada intervalo de símbolo e a estimação do
canal é realizada com símbolos decididos.
54
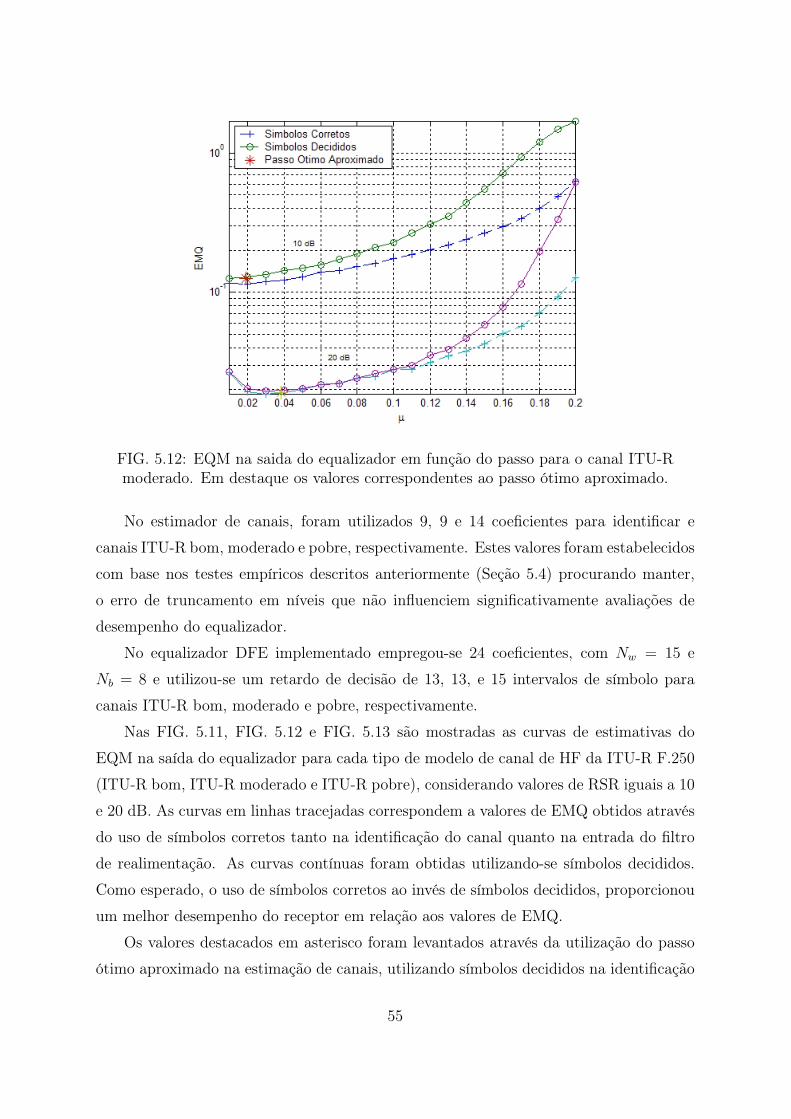
FIG. 5.12: EQM na saida do equalizador em função do passo para o canal ITU-Rmoderado. Em destaque os valores correspondentes ao passo ótimo aproximado.
No estimador de canais, foram utilizados 9, 9 e 14 coeficientes para identificar e
canais ITU-R bom, moderado e pobre, respectivamente. Estes valores foram estabelecidos
com base nos testes empíricos descritos anteriormente (Seção 5.4) procurando manter,
o erro de truncamento em níveis que não influenciem significativamente avaliações de
desempenho do equalizador.
No equalizador DFE implementado empregou-se 24 coeficientes, com Nw = 15 e
Nb = 8 e utilizou-se um retardo de decisão de 13, 13, e 15 intervalos de símbolo para
canais ITU-R bom, moderado e pobre, respectivamente.
Nas FIG. 5.11, FIG. 5.12 e FIG. 5.13 são mostradas as curvas de estimativas do
EQM na saída do equalizador para cada tipo de modelo de canal de HF da ITU-R F.250
(ITU-R bom, ITU-R moderado e ITU-R pobre), considerando valores de RSR iguais a 10
e 20 dB. As curvas em linhas tracejadas correspondem a valores de EMQ obtidos através
do uso de símbolos corretos tanto na identificação do canal quanto na entrada do filtro
de realimentação. As curvas contínuas foram obtidas utilizando-se símbolos decididos.
Como esperado, o uso de símbolos corretos ao invés de símbolos decididos, proporcionou
um melhor desempenho do receptor em relação aos valores de EMQ.
Os valores destacados em asterisco foram levantados através da utilização do passo
ótimo aproximado na estimação de canais, utilizando símbolos decididos na identificação
55

FIG. 5.13: EQM na saida do equalizador em função do passo para o modelo de canalITU-R pobre. Em destaque os valores correspondentes ao passo ótimo aproximado.
FIG. 5.14: BER na saida do equalizador em função do passo para o modelo ITU-Rbom. Em destaque os valores correspondentes ao passo ótimo aproximado.
do canal e na entrada do filtro de realimentação.
Para as condições de simulação aqui descritas, pode-se observar através destas figuras
que o uso do valor de passo ótimo aproximado proporciona um valor de EQM na saída do
56
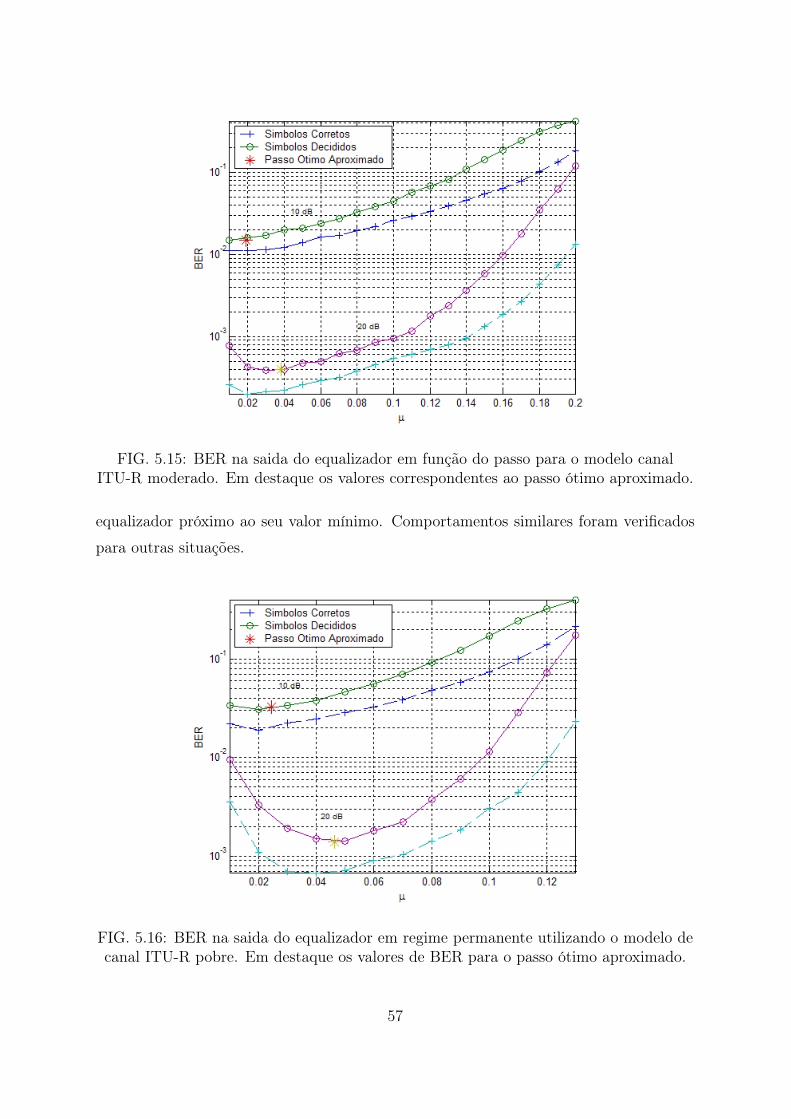
FIG. 5.15: BER na saida do equalizador em função do passo para o modelo canalITU-R moderado. Em destaque os valores correspondentes ao passo ótimo aproximado.
equalizador próximo ao seu valor mínimo. Comportamentos similares foram verificados
para outras situações.
FIG. 5.16: BER na saida do equalizador em regime permanente utilizando o modelo decanal ITU-R pobre. Em destaque os valores de BER para o passo ótimo aproximado.
57

Nas FIG. 5.14, FIG. 5.15 e FIG. 5.16 são mostradas as curvas de BER (de "bit error
rate") em função do passo, para cada modelo de canal, considerando valores de RSR
iguais a 10 e 20 dB. As curvas tracejadas correspondem a valores obtidos através do uso
de símbolos corretos (na identificação do canal e na entrada do filtro de realimentação),
enquanto as curvas contínuas foram levantadas utilizando símbolos decididos. Como
esperado, o uso de símbolos corretos, ao invés de símbolos decididos, proporcionou um
melhor desempenho em relação à taxa de erros de bits (BER).
FIG. 5.17: MSWE e EQM na saida do equalizador em regime permanente, para omodelo ITU-R moderado com RSR = 20 dB.
Os valores destacados em asterisco foram obtidos através da utilização do passo
ótimo aproximado e simbolos decididos (na identificação do canal e na entrada do filtro
de realimentação).
Estas figuras comprovam que o desempenho de BER do sistema é diretamente influ-
enciado pela escolha do passo, como esperado. Mostram também que o uso do valor do
passo ótimo aproximado leva a valores de BER próximos dos valores mínimos correspon-
dentes, comprovando mais uma vez a utilidade da análise desenvolvida.
A FIG 5.17 mostra a relação entre os valores de MSWE e EQM na saída do equali-
zador com os valores de passo do algoritmo LMS. Utilizou-se para obtenção desta figura
o modelo ITU-R moderado com RSR = 20 dB. Nota-se que, minimizando o MSWE,
o EQM na saída do equalizador também é minimizado. Resultados semelhantes foram
58
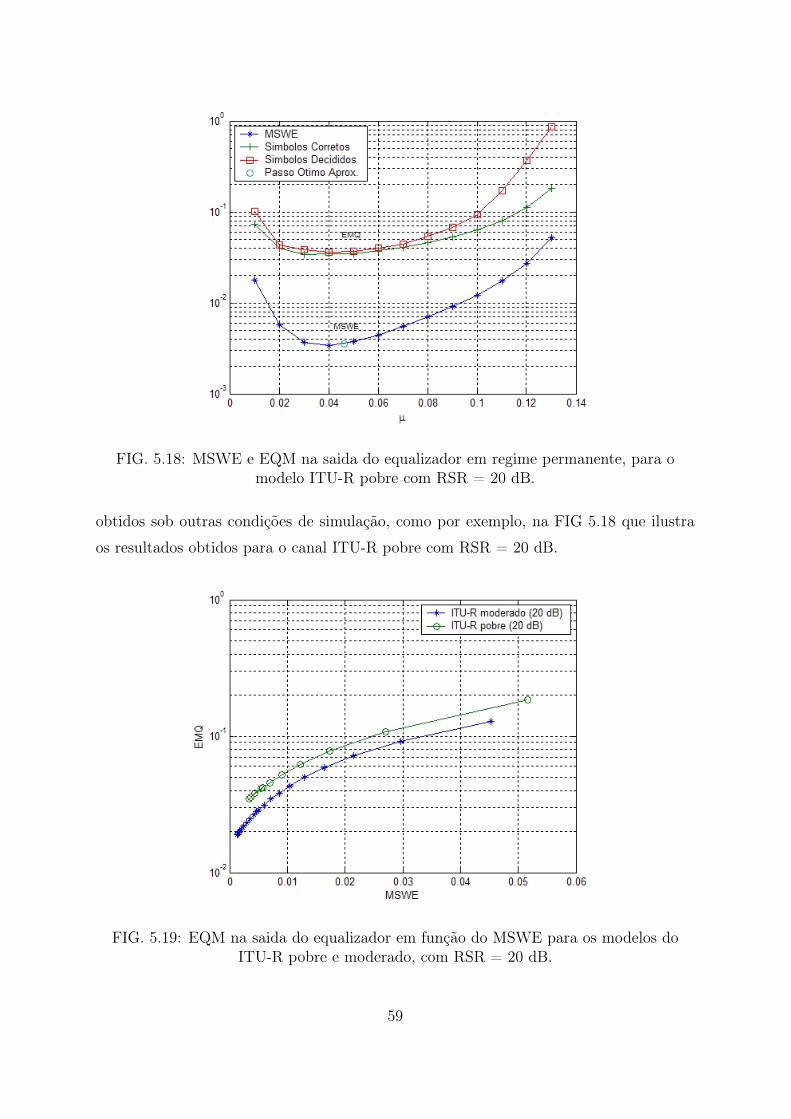
FIG. 5.18: MSWE e EQM na saida do equalizador em regime permanente, para omodelo ITU-R pobre com RSR = 20 dB.
obtidos sob outras condições de simulação, como por exemplo, na FIG 5.18 que ilustra
os resultados obtidos para o canal ITU-R pobre com RSR = 20 dB.
FIG. 5.19: EQM na saida do equalizador em função do MSWE para os modelos doITU-R pobre e moderado, com RSR = 20 dB.
59

Observa-se também que, no caso do uso de símbolos corretos (na identificação do
canal e na entrada do filtro de realimentação), valores de passo diferentes que produzem
os mesmos níveis de MSWE em regime permanente também produzem níveis idênticos
de EQM na saída do equalizador. Pode-se afirmar, desta forma, que o EQM é função do
MSWE, apenas, e isto é ilustrado na FIG 5.19. Esta figura foi obtida com os modelos de
canais ITU-R moderado e pobre para RSR = 20 dB e reforça a idéia de que, ao minimizar
o MSWE, o EQM também é minimizado.
FIG. 5.20: EQM na saida do equalizador em função do passo para o modelo ITU-Rpobre e RSR = 10 dB. A curva contínua foi levantada utilizando o método de ajuste
indireto para canal estimado.
Vale mencionar ainda que, no caso de uso de símbolos decididos (na identificação do
canal e na entrada do filtro de realimentação) não se verifica que o MSE é função apenas do
MSWE, pois utiliza-se valores analíticos de MSWE baseados no uso de símbolos corretos
na estimação de canais. Além disso, empregando-se o algoritmo LMS na estimação de
canal, o MSWE sofre menos influência de erros de decisão para valores pequenos de
passo, pois nestes casos o LMS é mais "conservador" na atualização dos coeficientes das
estimativas de canal.
A FIG. 5.20 mostra o desempenho de EQM do equalizador DFE com coeficientes
estabelecidos pelos métodos de ajuste indireto para canal conhecido e canal estimado,
utilizando o modelo de canal ITU-R pobre e RSR = 10 dB. Nota-se uma melhoria de
desempenho muito pequena, obtida com acréscimo desprezível de complexidade com-60

FIG. 5.21: EQM na saida do equalizador em função do passo, para o modelo ITU-Rbom e RSR = 10 dB. A curva contínua foi levantada utilizando o método de ajuste
indireto para canal estimado.
putacional associada a este procedimento. Verifica-se resultados similares para outros
casos, como, por exemplo, as da FIG. 5.21, que foram obtidas utilizando modelo de canal
ITU-R bom e RSR = 10 dB.
Esta melhoria pouco siginificativa se deve, provavelmente, às aproximações realizadas
para se encontrar o valor da matriz de correlação do erro de estimação E[4∗H4T
H ].
Em particular supôs-se que os elementos do vetor erro de estimação 4H são des-
correlacionados, o que de fato não ocorre. Além disso, a contribuição dos L coeficientes
deste vetor para o valor do MSWE não se dá de forma homogênea como foi admitido.
Uma maior elaboração na análise desta matriz de correlação pode proporcionar melhoria
significativa para o método de ajuste indireto para canal estimado.
A complexidade computacional não foi objeto de estudo deste trabalho. No entanto,
é importante salientar que em (TÜCHLER, 2002) verificou-se que, em casos de canais
variantes no tempo, a ordem da complexidade computacional do ajuste dos coeficientes
do filtro avante pode ser diminuída de N3w para N2
w para cada intervalo de símbolo, sendo
Nw a quantidade de coeficientes do filtro avante.
61
6 CONCLUSÕES
O presente trabalho teve como objetivos principais analisar matematicamente o prob-
lema de otimização do passo do algoritmo LMS (Least Mean Square) na estimação de
canais de propagação ionosféricos no sentido de minimização do MSWE em regime per-
manente, e aplicar essas estimativas no cálculo dos coeficientes da técnica de equalização
DFE.
Estendeu-se a canais em HF a análise de desempenho do algoritmo LMS na estimação
de canais apresentada em (GALDINO, 2004), no que se refere a determinação do passo
ótimo. Considerou-se nesta otimização não apenas o canal de propagação propriamente
dito, mas também o efeito dos filtros de transmissão e recepção no modelo de canal em
tempo discreto a ser estimado. A necessidade de limitar o número de coeficientas deste
modelo implica um erro de modelagem, que foi aqui denominado erro de truncamento,
e tem impacto significativo na avaliação analítica do MSWE de (Mean Square Weight
estimation Error).
Diversos resultados numéricos de avaliação do MSWE obtidos por simulação e via ex-
pressões analíticas foram apresentados, utilizando-se modelos de canais da ITU-R F.520
e parâmetros do MIL-STD-188-110A/B, que é um dos padrões internacionais para inter-
operabilidade de modems na faixa de HF. Estes resultados indicam a validade e utilidade
das análises desenvolvidas, tendo sido em geral observada uma aproximação muito boa
entre os resultados analíticos e de simulação.
A partir dos resultados numéricos apresentados, verificou-se que o valor de passo
ótimo aproximado obtido é um pouco maior que o valor do passo ótimo obtido a partir das
curvas analíticas de MSWE. Esta pequena diferença pode ser vista como uma vantagem,
pois o uso do valor do passo ótimo aproximado permite obter uma maior velocidade de
convergência sem produzir, no entanto, um aumento considerável do MSWE em regime
permanente.
Verificou-se, como esperado, que o uso dos valores do passo ótimo aproximado me-
lhora o desempenho de esquemas de recepção baseados em equalizadores DFE adaptativos
cujos coeficientes são ajustados com base em estimativas da RI do canal equivalente em
tempo discreto.
Com base no conhecimento do MSWE, este trabalho ainda propõe uma forma muito
62
simples de ajuste dos coeficientes do equalizador DFE, como um possível caminho para
incluir neste ajuste um indicador da qualidade das estimativas de canal empregadas e
assim obter alguma melhoria de desempenho.
Este trabalho pode ser prosseguida através dos seguintes temas, sugeridas para
pesquisas futuras:
• Investigação de uma nova forma de adaptação dos coeficientes do equalizador DFE,
utilizando estimação de canais de HF, com base no conhecimento da matriz de
correlação do erro de estimação;
• Avaliação do desempenho de equalizadores DFE aqui apresentados usando outros
modelos de canais, previstos pelo ITU-R ou não;
• Avaliação de desempenho com utilização de outros padrões para modems em HF;
• Investigação da viabilidade de obter uma solução analítica para o erro médio
quadrático na saída do equalizador DFE, utilizando a análise de desempenho do
algoritmo LMS na estimação de canais de HF;
• Análise de desempenho do algoritmo LMS para canais de HF em regime transitório
com o propósito de obter o valor de passo fixo que minimize o MSWE após um
período de treinamento bastante curto (inferior ao que seria necessário para atingir
o valor de MSWE mínimo em regime estacionário).
63

7 REFERÊNCIAS BIBLIOGRÁFICAS
BENVENUTO, N. e CHERUBINI, G. Algorithms for Communications Systemsand their Applications. John Wiley, 2002.
DINIZ, P. S. R. Adaptive Filtering: Algorithms and Practical Implementations.Kluwer Academic Publishers, Boston, 2 edition, 2002.
ELEFTHERIOU, E. e FALCONER, D. D. Adaptive equalization techniques forHF channels. IEEE Journal on Selected Areas in Communications, págs. 238–247,February 1987.
GALDINO, J. F., PINTO, E. L. e ALENCAR, M. S. Analytical performance ofthe LMS algorithm on estimation of wide sense stationary channels. IEEETransactions on Communications, 50(1):156–167, June 2004.
GUIMARÃES, A. G., SILVA, C. J. A., GALDINO, J. F. e PINTO, E. L. Comparação dedesempenho de simuladores de canais com desvanecimento rápido - parte I - avaliaçãonumérica. Em Anais do XV Simpósio Brasileiro de Telecomunicações, volume 1, págs.426–430, Recife-PE, 1997.
HAYKIN, S. Adaptive Filter Theory. Prentice-Hall, 3 edition, 1996.
ITU-R. Rec. ITU-R F.520 (withdrawn): Use of high frequency ionosphericchannel simulators. 1992.
ITU-R. Rec. ITU-R F.1487: Testing of HF modems with bandwidths of up toabout 12 khz using ionospheric channel simulators. 2000.
LINDBOM, L., STERNAD, M., AHLÉN, A. e FALKENSTROM, M. Tracking of time-varying mobile radio channels - part I: The Wiener LMS algorithm. IEEETransactions on Communications, 49(12):2207–2217, December 2001.
LINDBOM, L., STERNAD, M., AHLÉN, A. e FALKENSTROM, M. Tracking of time-varying mobile radio channels - part II: A case study. IEEE Transactions onCommunications, 50(1):156–167, January 2002.
MÜLLER, A. Simulation of multipath fading channels using the monte-carlomethod. IEEE International Conference on Communications, 3:1536–1540, May 1994.
PARSONS, J. D. The Mobile Radio Propagation Channel. John Wiley, 1992.
PINTO, E. L. e MAIA, M. A. G. M. Ca model for the oversampled received signal in awss-us transmission environment. Em Proceedings of the 2nd Conference on Telecom-munications, volume 1, págs. 137–141, Sesimbra, Portugal, 1999.
PROAKIS, J. G. Digital Communications. McGraw-Hill, 3 edition, 1995.
64

SHUKLA, P. K. e TURNER, L. F. Channel estimation based adaptive DFE forfading multipath radio channels. IEEE Proceedings-I, 1380:525–543, December1991.
TÜCHLER, M. e OTNES, R. Low-complexity turbo equalization for time-varying chanels.Em Proc. 55th IEEE Vehicular Technology Conf., Birmingham, AL, USA, May 2002.
WATTERSON, C. C., JUROSHEK, J. R. e BENSEMA, W. D. Experimental confir-mation of an HF channel model. IEEE Trans. on Communication Technology,COM-18(6):792–803, December 1970.
YOUSEF, N. R. e SAYED, A. H. A unified approach to the steady-state andtracking analyses of adaptive filters. IEEE Transactions on Signal Processing, 49(2):314–324, February 2001.
65

8 APÊNDICES
66

8.1 APÊNDICE 1
Da Equação 3.7 tem-se que o valor de MSWE em regime permanente, como função
do passo, fica dado por:
D(µ) =1
(2− µLσ2s)
{µσ2
nL +2σ2
h
β− 2σ2
hµσ2sP1
β
}(8.1)
onde
P1 = E[p(λ)] ∼= p(0) + p”(0)B2
d
8(8.2)
e
p(λ) =1
1− βej2πλTs(8.3)
Desta forma tem-se que
P1 =1
µσ2s
+ K
[−2β2
(µσ2s)
3− −β
(µσ2s)
2
](8.4)
onde
K = (πTsBd)2. (8.5)
Substituindo a Equação 8.4 na Equação 8.1 obtém-se
D(µ) =1
(2− µLσ2s)(µσ2
s)2
{µσ2
nL(µσ2s)
2 + 4σ2hK − 2σ2
hK(µσ2s)
}= ε
{µσ2
nL(µσ2s)
2 + 4σ2hK − 2σ2
hK(µσ2s)
}(8.6)
onde
ε =1
(2− µLσ2s)(µσ2
s)2
(8.7)
Desta forma
ε′ =−2
(2− µLσ2s)(σ
2s)
2µ3+
Lσ2s
(2− µLσ2s)
2µ2σ4s
(8.8)
67

ε′
ε=
−2
µ+
Lσ2s
(2− µLσ2s)
(8.9)
ε′ =
{−2
µ+
Lσ2s
(2− µLσ2s)
}ε (8.10)
Derivando D(µ)
D′(µ) =
{−2
µ+
Lσ2s
(2− µLσ2s)
}ε{µσ2
nL(µσ2s)
2 + 4σ2hK − 2σ2
hK(µσ2s)
}+
ε{3σ2
nL(µσ2s)
2 − 2σ2hKσ2
s
}(8.11)
D′(µ) =ε
(2− µLσ2s)µ
{(2σ2
nLσ4s)µ
3 + (−4σ2hσ
4sKL)µ2 + (4σ2
hσ2sK + 12Lσ2
sσ2hKµ)− 16σ2
hK}
(8.12)
Igualando a zero a Equação 8.12, obtém-se o seguinte polinômio
A3µ3 + A2µ
2 + A1µ + A0 = 0 (8.13)
cujos coeficientes são dados por:
A3 = σ2nLσ4
s
A2 = −2σ2hσ
4sKL
A1 = 2σ2hσ
2sK + 6Lσ2
hσ2sK
A0 = −8σ2hK (8.14)
68