descrição discreta no tempo de sinais e sistemas · 2016-08-02 · processamento de sinais...
TRANSCRIPT

Processamento de sinais digitais
Aula 2:
Descrição discreta no tempo de sinais e sistemas

Tópicos
• Sequências discretas no tempo.
• Princípio da superposição para sistemas lineares.
• Sequência de resposta de amostra unitária.
• Sistemas invariantes no tempo.
• Critério de estabilidade para sistemas discretos no tempo.
• Critério de causalidade para sistemas discretos no tempo.
• Equações de diferenças lineares de coeficiente constante.
2

Sequências discretas no tempo
Nomenclatura: {x(n)} ou x(n) para N1 ≤ n ≤ N2 x(k): valor particular da sequência no instante k. Serão vistas as sequências: - de amostra unitária - de degrau unitária - senoidais - exponenciais complexas
3
Sequência de amostra unitária
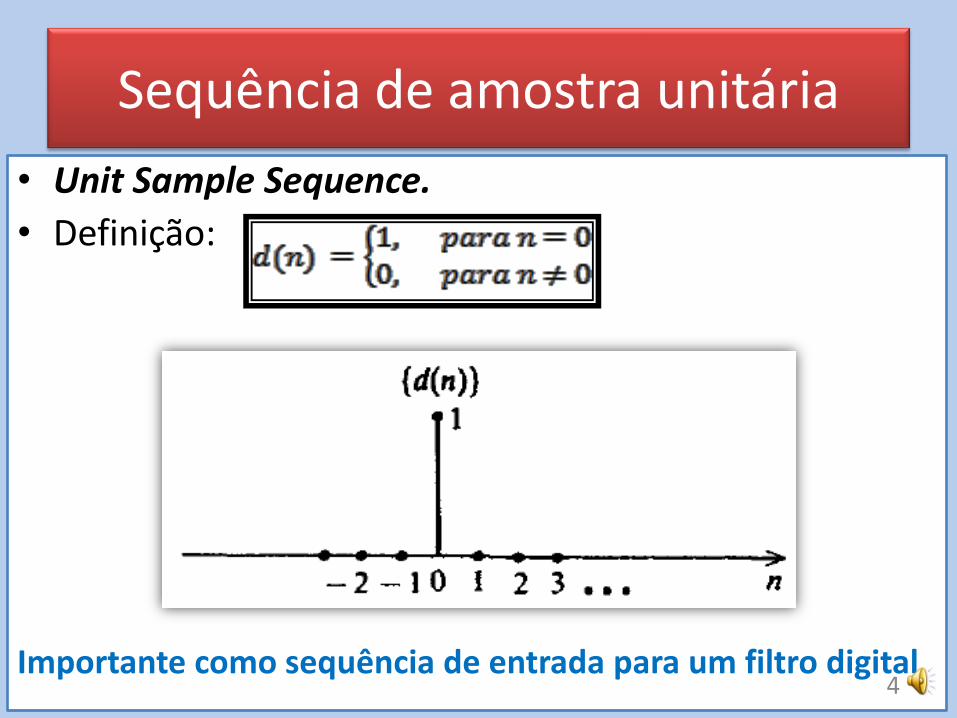
• Unit Sample Sequence.
• Definição:
Importante como sequência de entrada para um filtro digital
4

Sequência de amostra unitária
• Delayed Unit Sample Sequence.
• Definição:
5

Sequência de amostra unitária
PROPRIEDADE SIFTING (seleção): extrair um elemento particular de toda a sequência.
• d(n - k) é não zero apenas quando o seu argumento é zero, quando n = k.
• Será importante na derivação da relação de convolução entre as sequências de entrada e saída do filtro digital.
6

Sequência degrau unitária
• Unit Step Sequence.
• Definição:
• Usada para definir o ponto de partida de uma sequência em expressões analíticas:
7

Sequência senoidal
• Sinusoidal Sequence.
• Importante em análises no domínio da frequência de filtros digitais.
Exemplo de sequências
senoidais discretas
no tempo:
𝝎: radianos por intervalo de
amostragem ou simplesmente
radianos.
8
Sequência senoidal
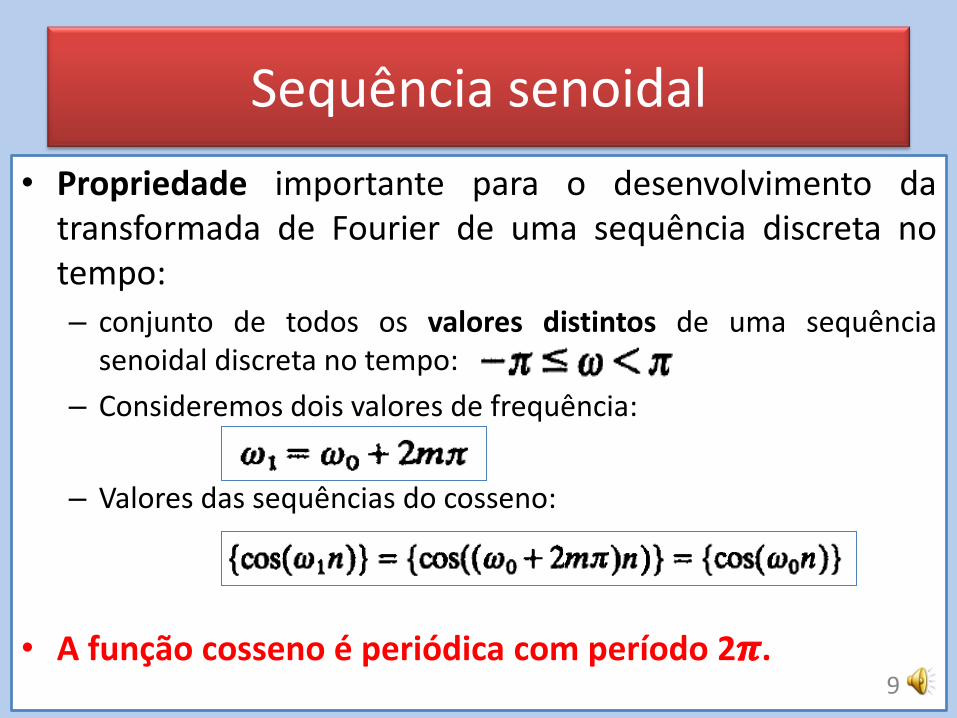
• Propriedade importante para o desenvolvimento da transformada de Fourier de uma sequência discreta no tempo:
– conjunto de todos os valores distintos de uma sequência senoidal discreta no tempo:
– Consideremos dois valores de frequência:
– Valores das sequências do cosseno:
• A função cosseno é periódica com período 2𝝅.
9
Sequência senoidal
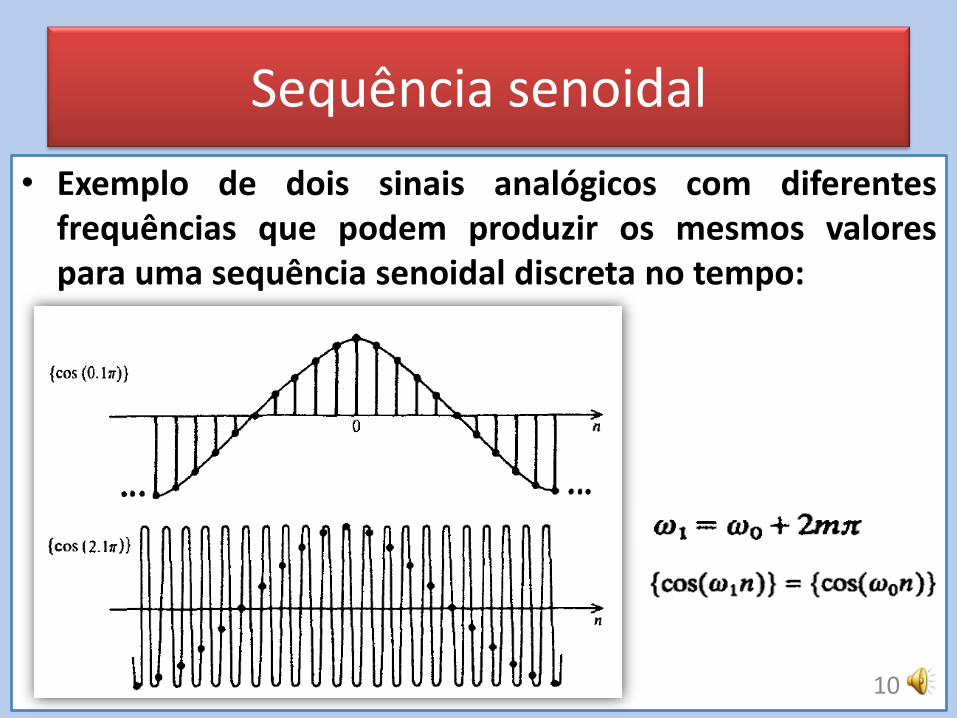
• Exemplo de dois sinais analógicos com diferentes frequências que podem produzir os mesmos valores para uma sequência senoidal discreta no tempo:
10

Sequência exponencial complexa
• Plano complexo Notação em vetor complexo
• onde:
• |c|: magnitude
• Arg[c]: argumento ou fase
11

Sequência exponencial complexa
• Identidades de Euler:
• Sequência importante para análise compacta de uma frequência de filtros digitais: magnitude fase
12

Sequência exponencial complexa
• Identidades de Euler
• Interpretação no plano complexo de senos e cossenos:
13

Sequência exponencial complexa
• A propriedade de sequências senoidais, de que todos os valores podem ser representados com 𝝎 na faixa [-𝝅, 𝝅] também é válida para exponenciais complexas.
– Consideremos:
, onde m é um valor inteiro.
– Então:
14

Princípio da superposição para sistemas lineares
• Sistema de tempo discreto:
• Características de um filtro linear:
– Para uma dada sequência de entrada, uma alteração na escala de amplitude da sequência de entrada resulta na mesma mudança de escala em amplitude na sequência de saída.
– Se duas sequências são adicionadas e a soma é aplicada ao sistema, a saída resultante é a soma das respostas das entradas individuais.
{x(n)} {y(n)} G{.}
15

Princípio da superposição
• Sistema linear:
onde e
• Dadas duas constantes 𝜶 e 𝜷:
{x1(n) + x2(n)}
{y1(n) + y2(n)}
G{.}
{𝜶 x1 (n) + 𝜷x2 (n)}
𝜶{y1 (n) }+ 𝜷 {y2(n)}
G{.}
16
Princípio da superposição
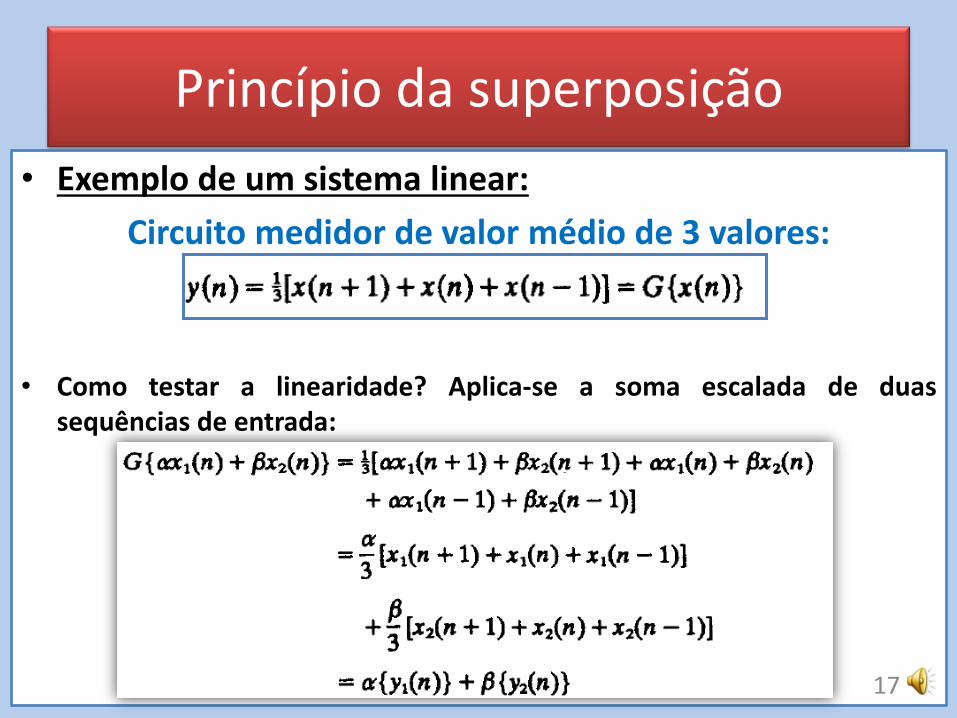
• Exemplo de um sistema linear:
Circuito medidor de valor médio de 3 valores:
• Como testar a linearidade? Aplica-se a soma escalada de duas
sequências de entrada:
17

Princípio da superposição
• Exemplo de um sistema não linear:
saída igual ao quadrado da entrada:
• Aplicando a soma escalada de duas sequências de entrada:
que não é igual a , a saída que o sistema precisa para ser linear.
18

Sequência de resposta de amostra unitária
• Unit Sample Response Sequence • Princípio da superposição: permite estabelecer uma relação entre
a entrada e saída de um sistema linear no domínio do tempo. • Propriedade sifting da sequência da amostra unitária:
• O sistema opera através de sua transformação G{ . } em sequências. • Saída: superposição de respostas a sequências de amostras
unitárias deslocadas e escaladas. • A sequência de amostra unitária com seu elemento não zero em
n = k, d(n - k), é escalada por x(k).
19

Sequência de resposta de amostra unitária
• Sequência de entrada a um sistema linear: superposição no tempo de um conjunto de sequências de amostras unitárias escaladas.
• Sequência de saída: superposição das respostas de amostras unitárias escaladas.
Se:
Então:
20
Sequência de resposta de amostra unitária
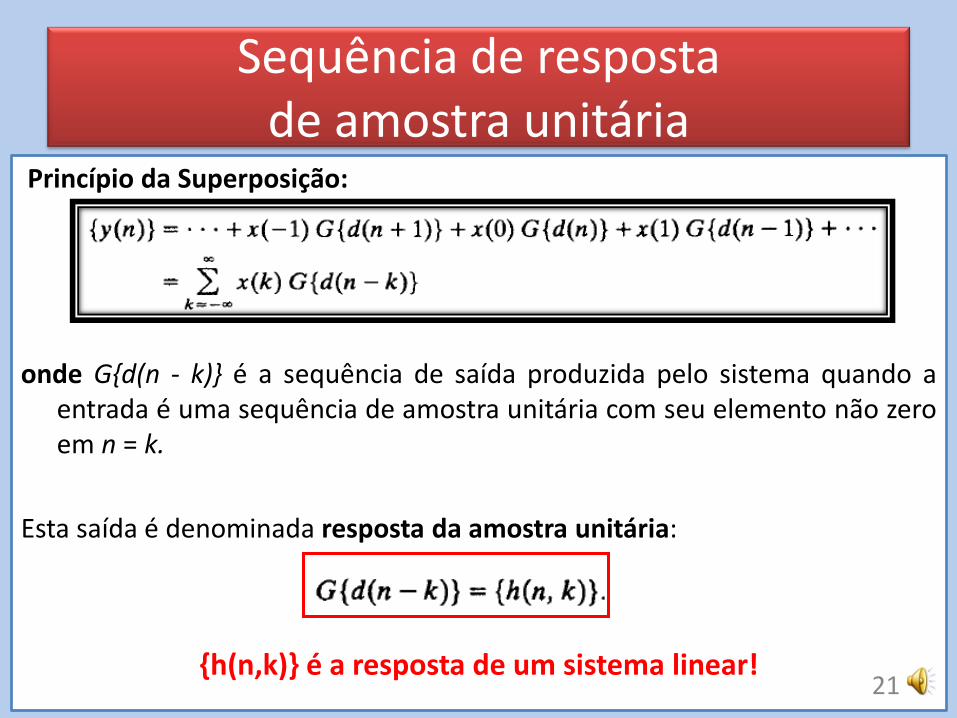
Princípio da Superposição:
onde G{d(n - k)} é a sequência de saída produzida pelo sistema quando a entrada é uma sequência de amostra unitária com seu elemento não zero em n = k.
Esta saída é denominada resposta da amostra unitária:
{h(n,k)} é a resposta de um sistema linear!
21

Sequência de resposta de amostra unitária
(a) (b)
22
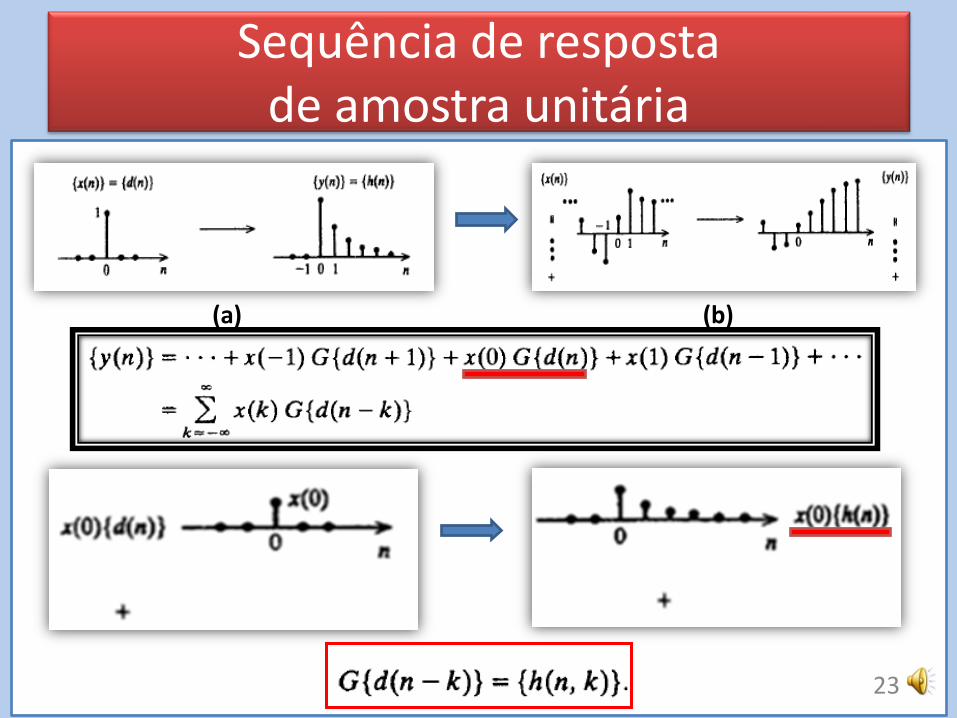
Sequência de resposta de amostra unitária
(a) (b)
23

Sequência de resposta de amostra unitária
(a) (b)
24
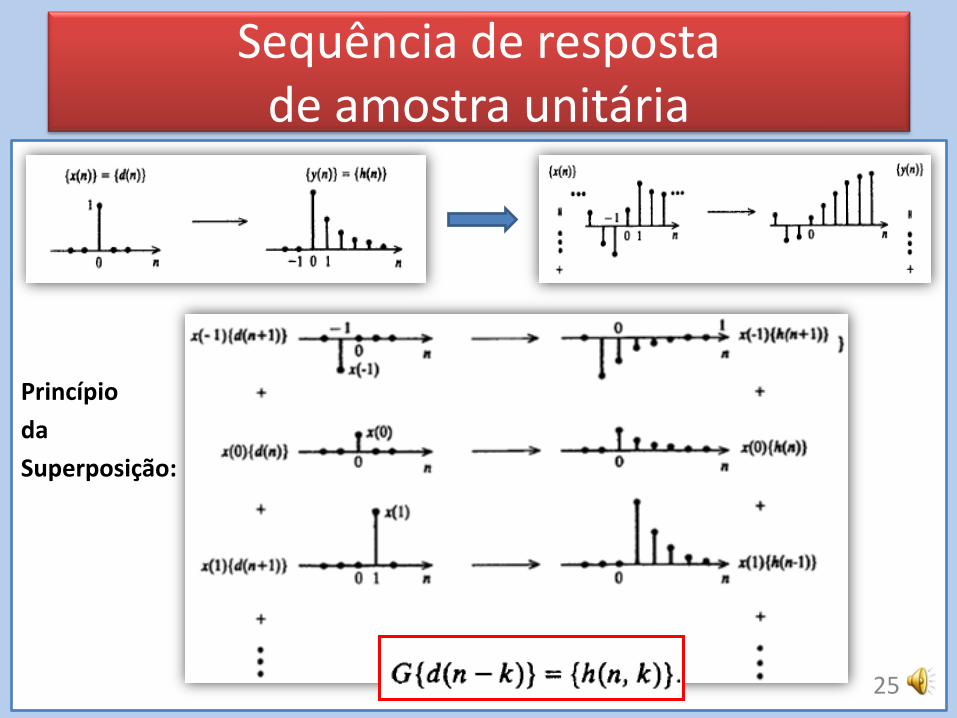
Sequência de resposta de amostra unitária
Princípio
da
Superposição:
25
Resposta de amostra unitária
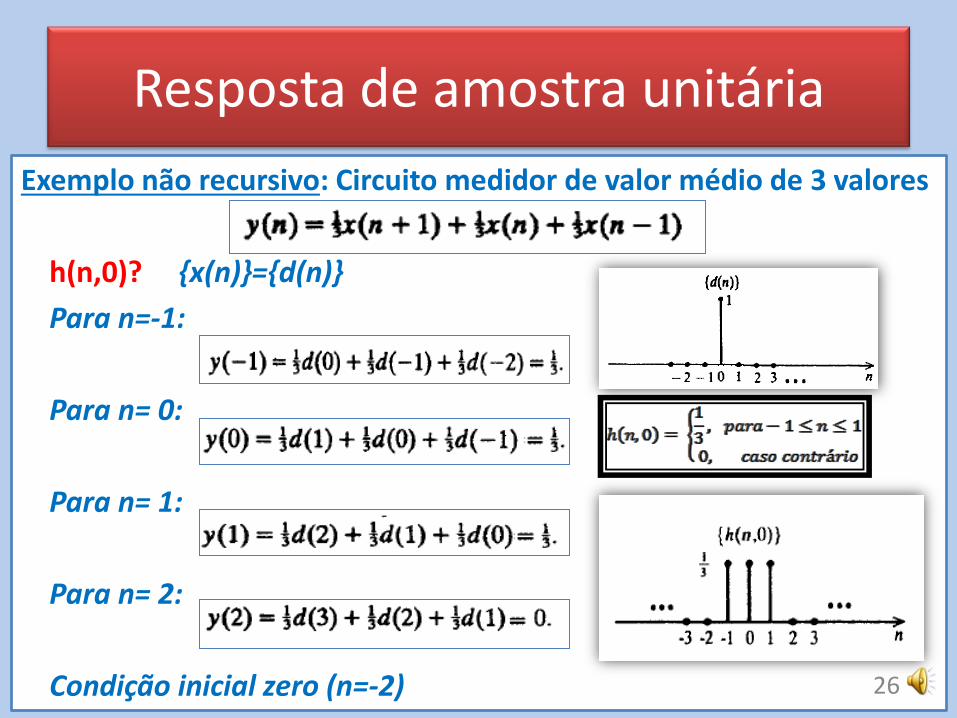
Exemplo não recursivo: Circuito medidor de valor médio de 3 valores
h(n,0)? {x(n)}={d(n)}
Para n=-1:
Para n= 0:
Para n= 1:
Para n= 2:
Condição inicial zero (n=-2)
26

Resposta de amostra unitária
Exemplo recursivo: Filtro de primeira ordem
h(n,0)?
{x(n)}={d(n)} e aplica-se a condição inicial zero.
Para n=0:
Para n=1: Unit Step Sequence
Para n=2:
. . .
Para n=k:
27

Resposta de amostra unitária
Exemplo de sequências para diferentes valores de a
28
Resposta de amostra unitária
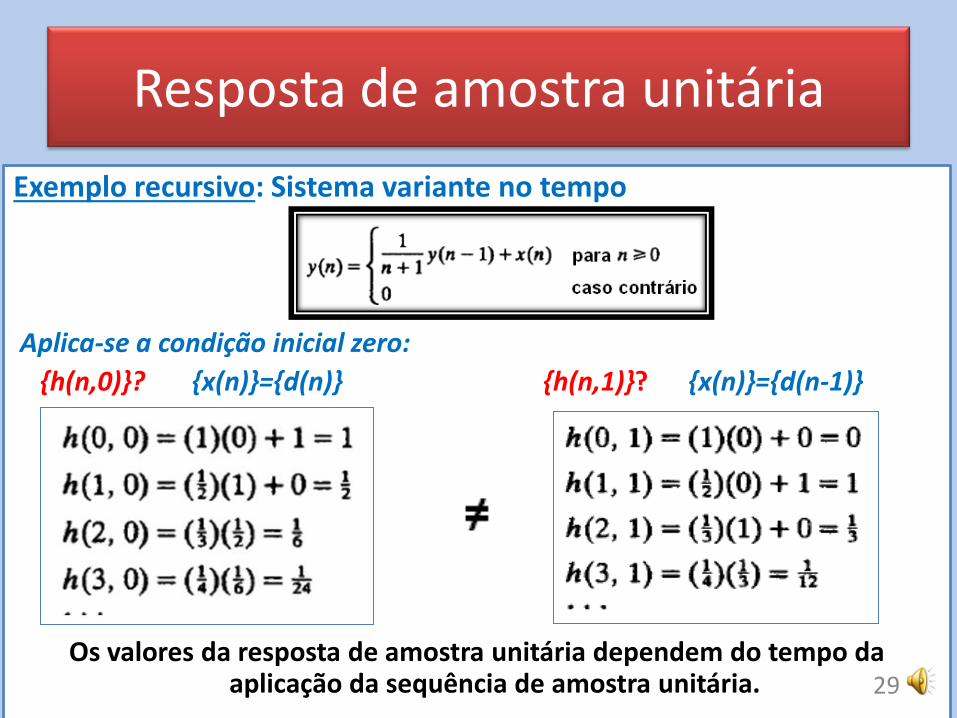
Exemplo recursivo: Sistema variante no tempo
Aplica-se a condição inicial zero:
{h(n,0)}? {x(n)}={d(n)} {h(n,1)}? {x(n)}={d(n-1)}
Os valores da resposta de amostra unitária dependem do tempo da aplicação da sequência de amostra unitária.
29

Sistema linear invariante no tempo
LTI – Linear Time Invariant System
Se: Então:
Um deslocamento no tempo aplicado a uma sequência de amostra unitária resulta APENAS em um deslocamento correspondente no tempo na sua
resposta de amostra unitária.
30

Sistema linear invariante no tempo
Relação de CONVOLUÇÃO: e x(n) y(n)
*: Operação de convolução Operação matemática de como um sistema linear opera sobre um sinal.
Sinal de saída: resultado da convolução do sinal de entrada x(n) com a resposta a impulso do sistema h(n).
h(n)
31

Sistema linear invariante no tempo
Operação de CONVOLUÇÃO
Comutativa
Substituição de variáveis: m=n-k Obtemos:
Distributiva
32

Sistema linear invariante no tempo
Conexão em cascata de sistemas: Dois sistemas LTI em cascata correspondem a um sistema LTI com uma resposta impulso que é a convolução das respostas impulso dos dois sistemas.
Exemplo de três sistemas LTI com respostas impulso idênticas:
Resposta impulso de saída:
Consequência da propriedade comutativa da convolução - a resposta impulso de uma combinação em cascata de um sistema LTI independe da ordem em que aparecem.
33
Sistema linear invariante no tempo
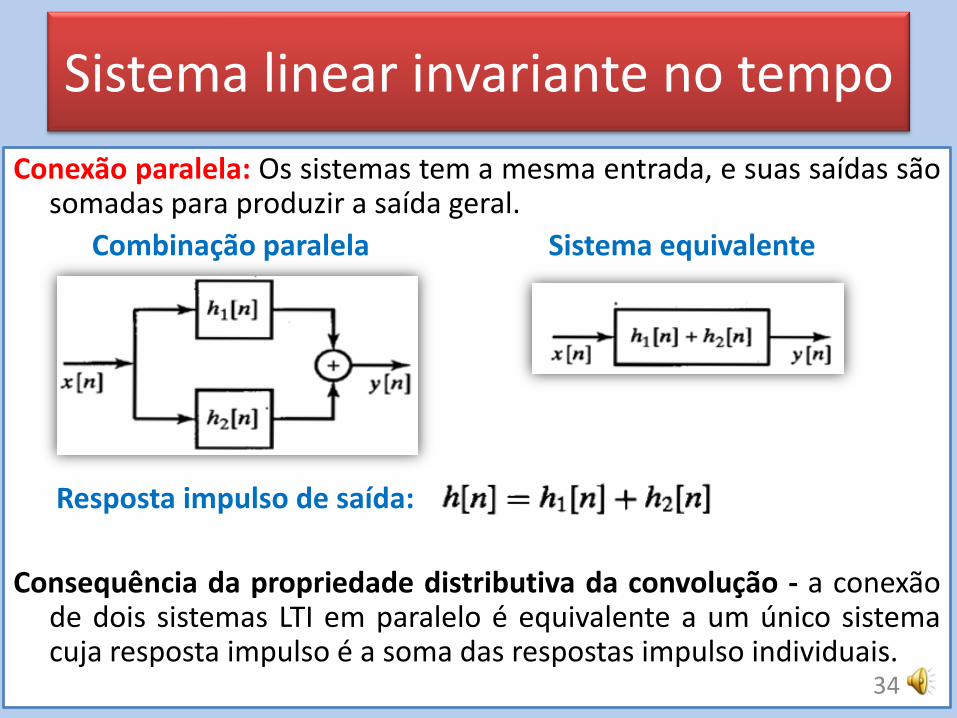
Conexão paralela: Os sistemas tem a mesma entrada, e suas saídas são somadas para produzir a saída geral.
Combinação paralela Sistema equivalente
Resposta impulso de saída:
Consequência da propriedade distributiva da convolução - a conexão de dois sistemas LTI em paralelo é equivalente a um único sistema cuja resposta impulso é a soma das respostas impulso individuais.
34
Operação de convolução de tempo discreto
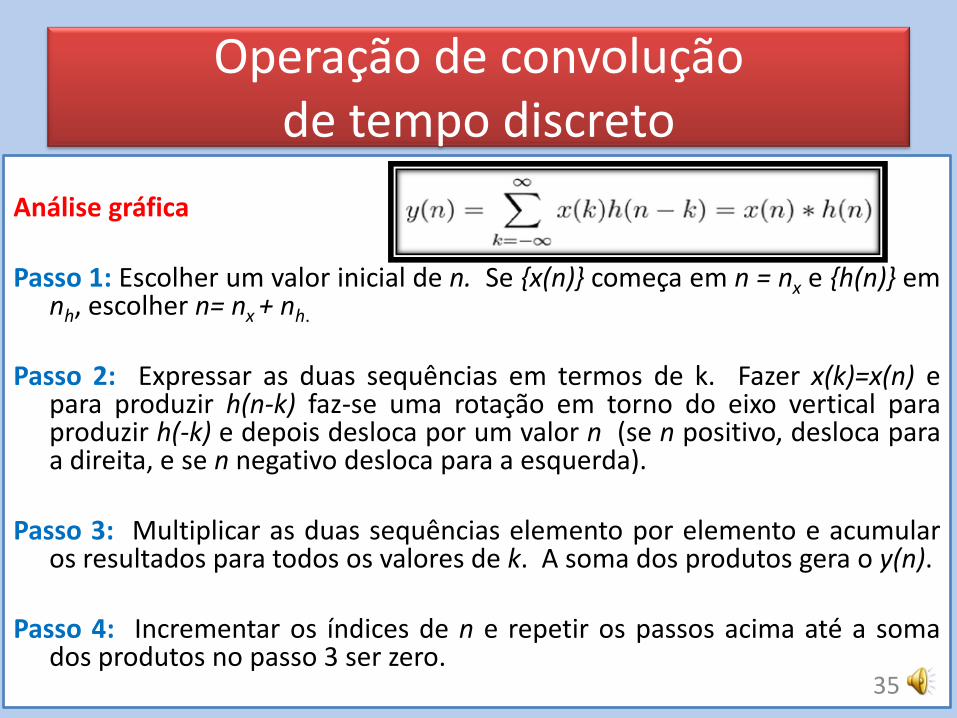
Análise gráfica Passo 1: Escolher um valor inicial de n. Se {x(n)} começa em n = nx e {h(n)} em
nh, escolher n= nx + nh.
Passo 2: Expressar as duas sequências em termos de k. Fazer x(k)=x(n) e
para produzir h(n-k) faz-se uma rotação em torno do eixo vertical para produzir h(-k) e depois desloca por um valor n (se n positivo, desloca para a direita, e se n negativo desloca para a esquerda).
Passo 3: Multiplicar as duas sequências elemento por elemento e acumular
os resultados para todos os valores de k. A soma dos produtos gera o y(n). Passo 4: Incrementar os índices de n e repetir os passos acima até a soma
dos produtos no passo 3 ser zero.
35
Operação de convolução de tempo discreto
Análise gráfica
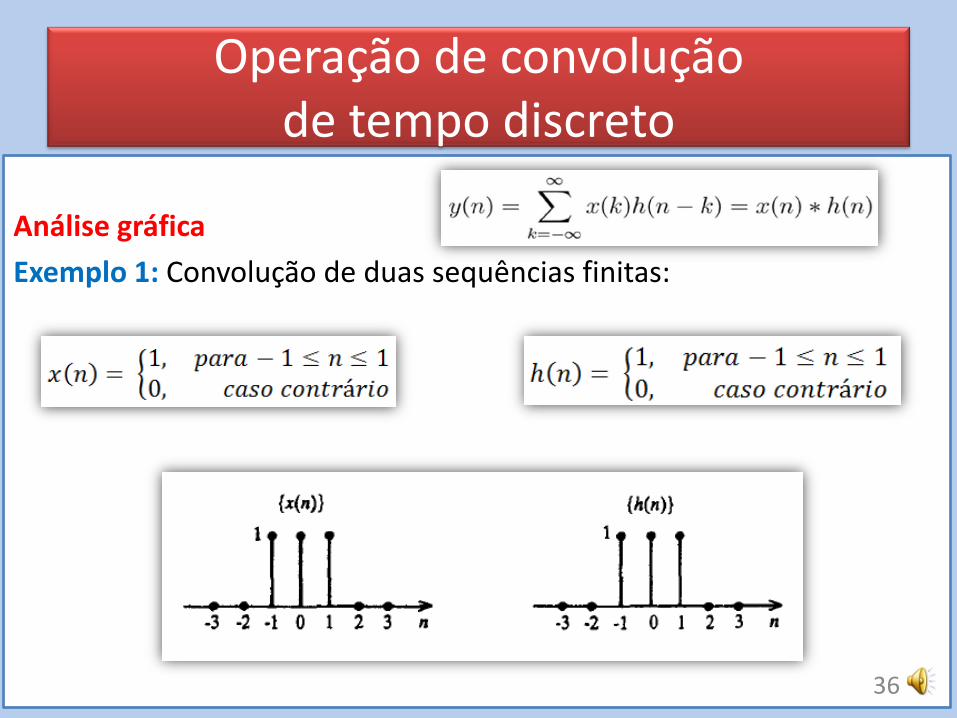
Exemplo 1: Convolução de duas sequências finitas:
36
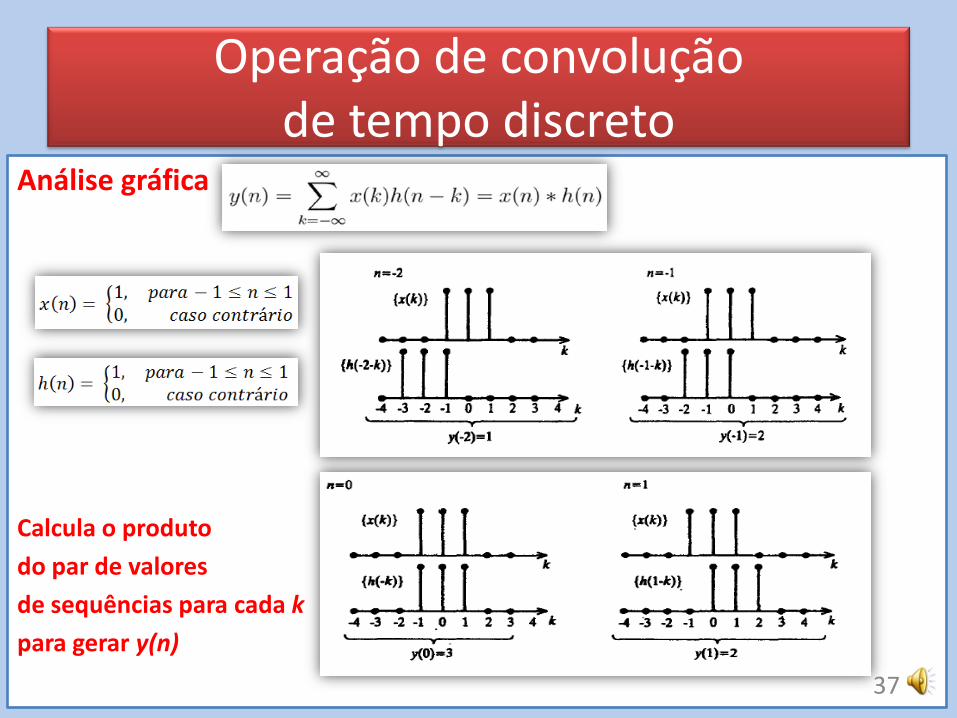
Operação de convolução de tempo discreto
Análise gráfica
Calcula o produto
do par de valores
de sequências para cada k
para gerar y(n)
37
Operação de convolução de tempo discreto
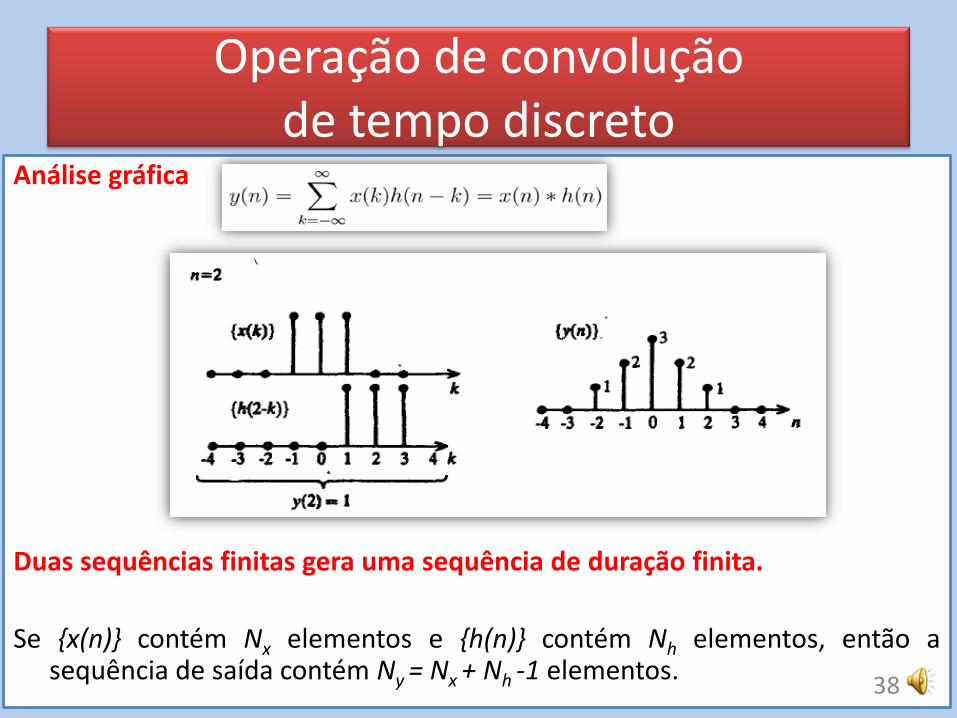
Análise gráfica
Duas sequências finitas gera uma sequência de duração finita.
Se {x(n)} contém Nx elementos e {h(n)} contém Nh elementos, então a sequência de saída contém Ny = Nx + Nh -1 elementos.
38

Operação de convolução de tempo discreto
Análise gráfica
Resultado da convolução de duas sequências finitas:
* =
Valores calculados para os cinco valores de n:
y(-2)=1 , y(-1)=2, y(0)=3, y(1)=2, y(2)=1
39
Operação de convolução de tempo discreto
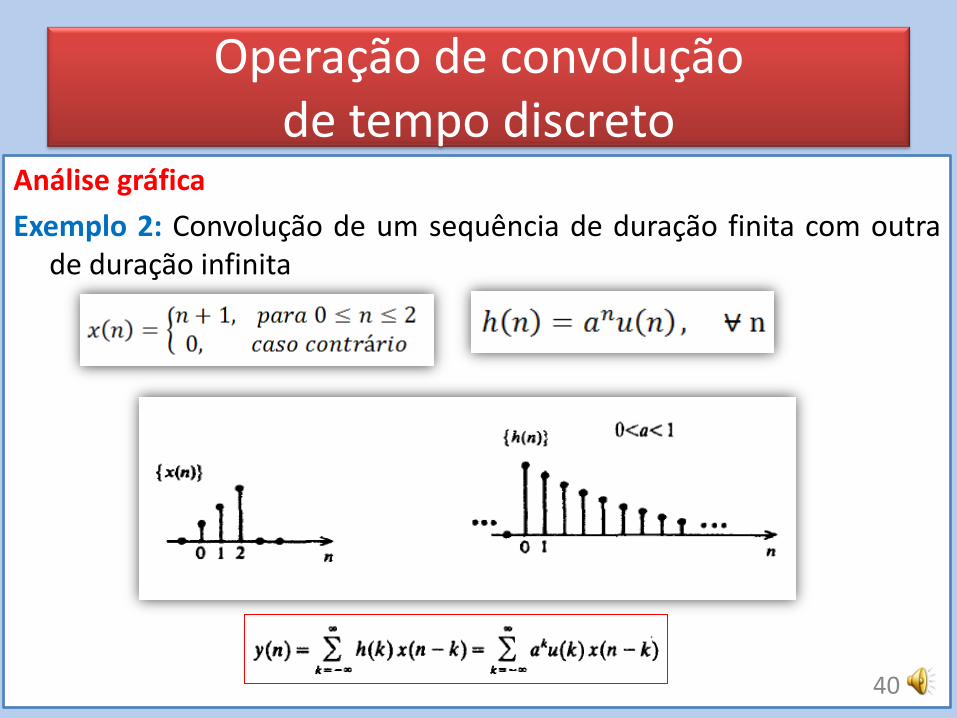
Análise gráfica
Exemplo 2: Convolução de um sequência de duração finita com outra de duração infinita
40

Operação de convolução de tempo discreto
Exemplo 2: Convolução de um sequência de duração finita com outra de duração infinita
Únicos termos não-zero:
3 2
1
2 1
3
41
Operação de convolução de tempo discreto
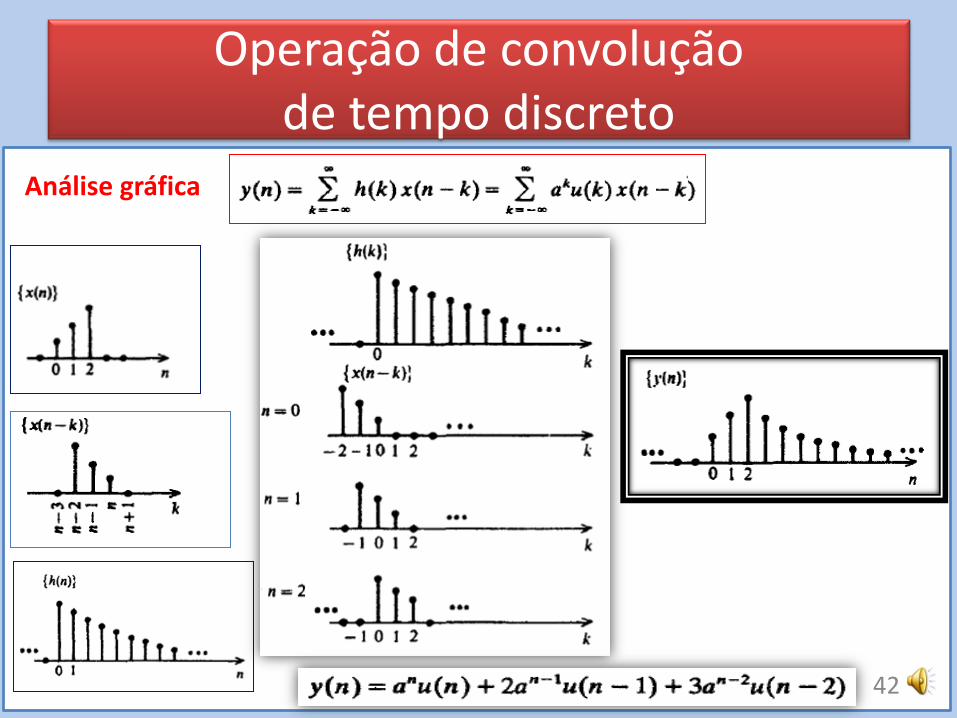
Análise gráfica
42
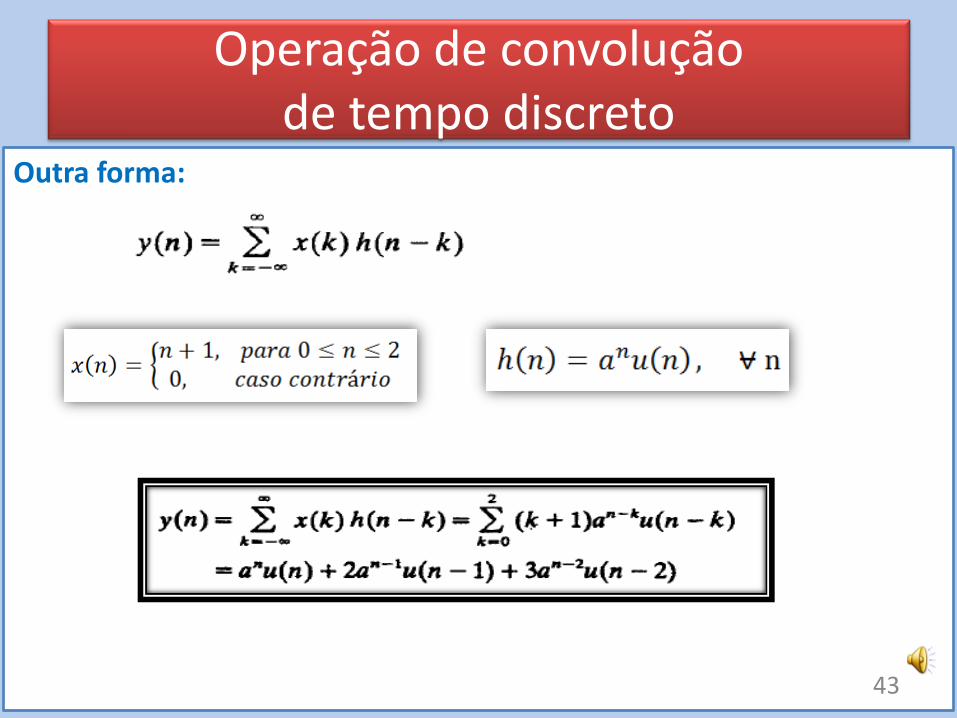
Operação de convolução de tempo discreto
Outra forma:
43

Operação de convolução de tempo discreto
Análise gráfica
Exemplo 3: Convolução de duas sequências infinitas:
44

Operação de convolução de tempo discreto
Análise gráfica
45
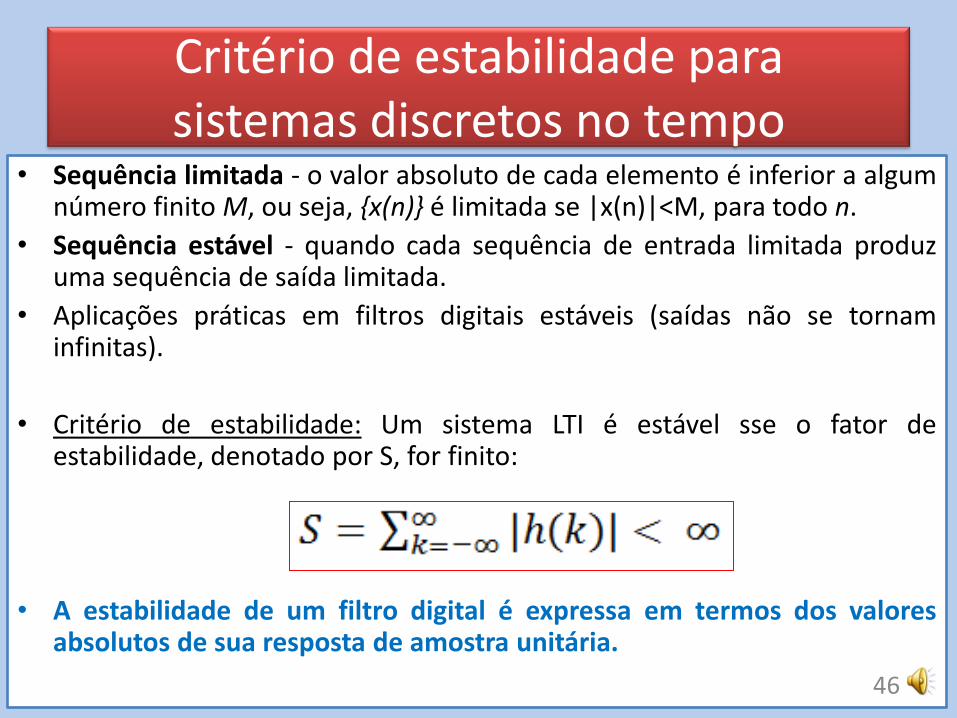
Critério de estabilidade para sistemas discretos no tempo
• Sequência limitada - o valor absoluto de cada elemento é inferior a algum número finito M, ou seja, {x(n)} é limitada se |x(n)|<M, para todo n.
• Sequência estável - quando cada sequência de entrada limitada produz uma sequência de saída limitada.
• Aplicações práticas em filtros digitais estáveis (saídas não se tornam infinitas).
• Critério de estabilidade: Um sistema LTI é estável sse o fator de estabilidade, denotado por S, for finito:
• A estabilidade de um filtro digital é expressa em termos dos valores absolutos de sua resposta de amostra unitária.
46

Critério de estabilidade para sistemas discretos no tempo
• Critério de estabilidade: suficiente e necessário
Suficiente: se S é finito, então o sistema é estável. Demonstração: a saída é limitada quando S for finito.
Valor absoluto da saída, expresso pela equação de convolução: Como: Temos: ou como M e N são finitos, a saída também é limitada.
47

Critério de estabilidade para sistemas discretos no tempo
• Critério de estabilidade: suficiente e necessário
Necessário: que S seja finito para o filtro ser estável.
É preciso encontrar uma sequência de entrada limitada que produza uma saída ilimitada.
Exemplo:
valor de saída para n=0:
Para y(0) ser limitado, é necessário que S seja finito.
48

Critério de estabilidade para sistemas discretos no tempo
Exemplo 1: Estabilidade do circuito de média de 3 valores:
• Como testar se o filtro é estável?
• S é finito para valores finitos dos coeficientes b-1, b0 e b1.
Qualquer filtro com resposta de amostra unitária com um número finito de elementos não zero é sempre estável.
49
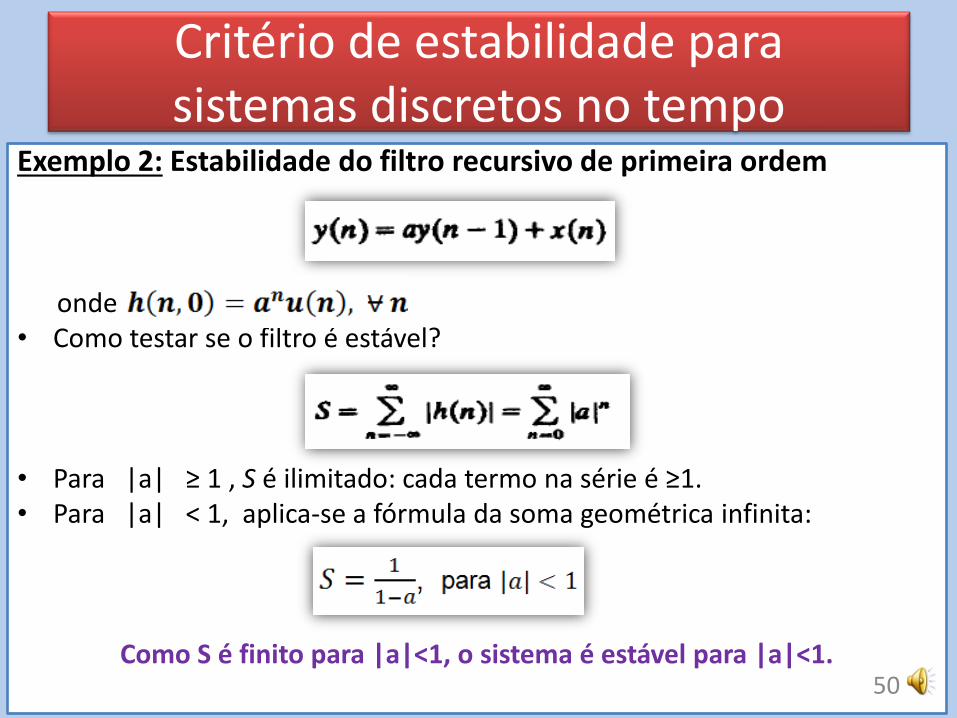
Critério de estabilidade para sistemas discretos no tempo
Exemplo 2: Estabilidade do filtro recursivo de primeira ordem
onde • Como testar se o filtro é estável?
• Para |a| ≥ 1 , S é ilimitado: cada termo na série é ≥1. • Para |a| < 1, aplica-se a fórmula da soma geométrica infinita:
Como S é finito para |a|<1, o sistema é estável para |a|<1.
50
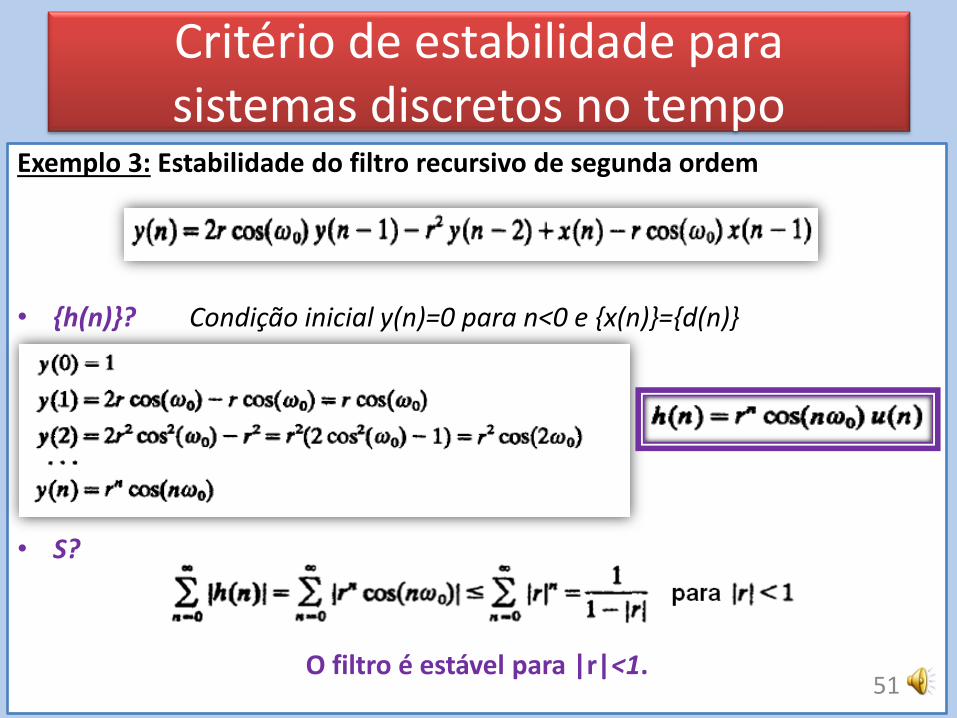
Critério de estabilidade para sistemas discretos no tempo
Exemplo 3: Estabilidade do filtro recursivo de segunda ordem
• {h(n)}? Condição inicial y(n)=0 para n<0 e {x(n)}={d(n)}
• S?
O filtro é estável para |r|<1.
51
Critério de causalidade para sistemas discretos no tempo
Sistema causal – resposta não precede a excitação.
• Todos os sistemas físicos são causais: não reagem até a aplicação de um estímulo.
• Sistema LTI causal:
• Por definição, {h(n)} é a resposta de um sistema a uma sequência de amostra unitária, cujo elemento não zero ocorre em n=0 .
• Filtros digitais causais – geralmente usados em aplicações em que as amostras de dados são processadas a medida em que são recebidas (sem acesso a valores futuros da amostra).
• Filtros digitais não-causais: tem elementos não zero para n<0 (exemplo: circuito medidor de média de 3 amostras).
52

Equações de diferenças lineares de coeficientes constantes
• Formalização da notação para descrever o comportamento no domínio do tempo de filtros digitais.
• Saída de um sistema LTI de ordem finita no instante n:
combinação linear de entradas e saídas onde: ak : coeficiente de realimentação (feedback) dependente do delay bk : coeficiente de alimentação (feedforward) dependente do delay Np: Número de amostras do passado Nf :Número de amostras do futuro (Filtro causal: Nf ≤0, Filtro não-causal: Nf>0) Exemplo: n=3, M=3, Nf=3 e Np = 2 y(3) = a1y(2) + a2y(1) + a3y(0) + (Valores passados de y)
b-3x(6) + b-2x(5) + b-1x(4) + b0x(3) + b1x(2)+b2x(1) (Valores futuros de x) (Valor atual de x) (Valores passados de x)
53
Equações de diferenças lineares de coeficientes constantes
• Como implementar um filtro digital com base na equação de diferenças geral?
• Exemplo:
Combinação das equações do circuito de média de 3 amostras não recursivo e o filtro recursivo de primeira ordem e não causal.
• Passo 1: desenhar dois pontos – entrada atual e saída atual
54

Equações de diferenças lineares de coeficientes constantes
• Passo 2: conectar elementos de retardo aos pontos de entrada e saída, para obter acesso a valores passados das sequências de entrada e saída. Valores futuros da sequência de entrada são obtidos conectando avanços ao ponto de entrada.
55

Equações de diferenças lineares de coeficientes constantes
• Passo 3: conectar multiplicadores às saídas dos elementos do retardo para produzir os produtos necessários.
56

Equações de diferenças lineares de coeficientes constantes
• Passo 4: obter um filtro digital ao se conectar as saídas dos multiplicadores a dois somadores. O primeiro gera a soma dos produtos das entradas e dos coeficientes de feedforward, e o outro da saída e dos coeficientes de feedback.
57

Equações de diferenças lineares de coeficientes constantes
• Exemplo: Implementação do filtro digital de segunda ordem a partir da equação de diferenças dada por:
58

Referências
1- Introduction to Digital Signal Processing
Roman Kuc.
BS Publication, 2008.
2- Discrete-Time Signal Processing
Alan V. Oppenheim, Ronald W. Schafer.
Prentice Hall, 1998.
59

Obrigada
E até a próxima aula.
60