capítulo ii relaxações em polímeros - gppol.iqm.unicamp.brgppol.iqm.unicamp.br/qp832/cap ii -...
TRANSCRIPT
1
Capítulo II – Relaxações em Polímeros
Mudanças conformacionais
1
Relaxações
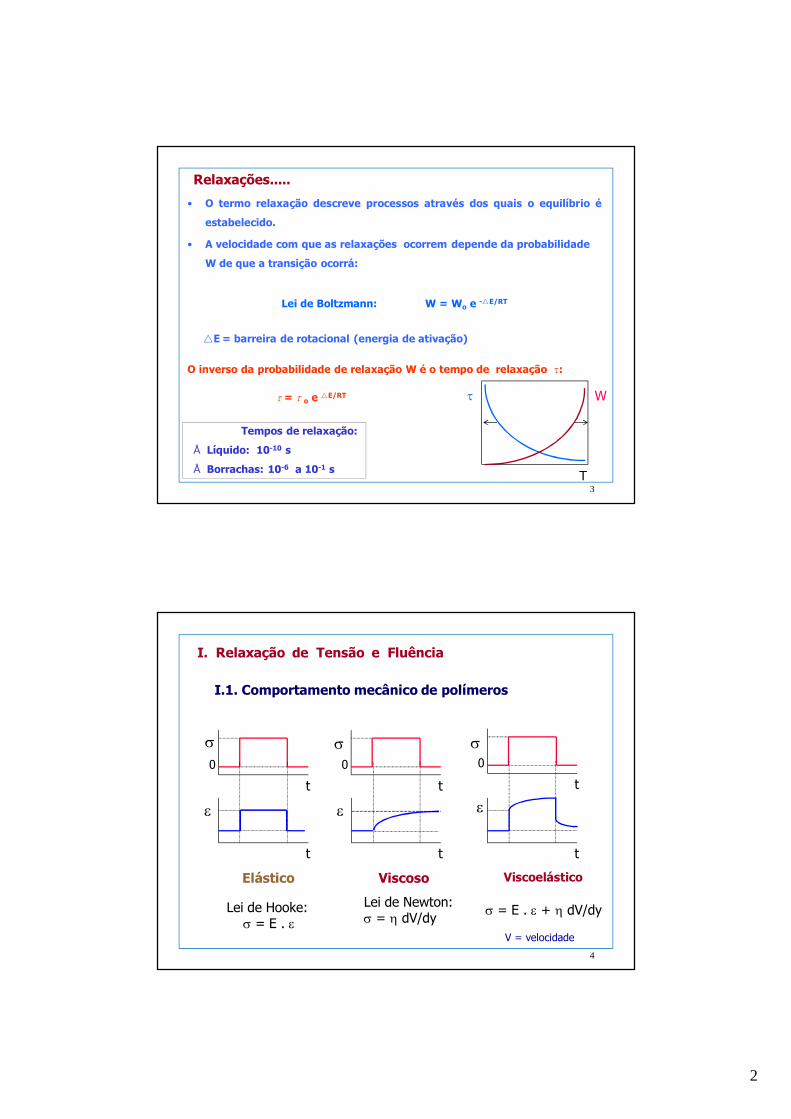
1. características da estrutura química
2. ângulo e comprimento de ligação
3. Interações intra e intermoleculares
Fatôres que determinam a flexibilidade das macromoléculas
• Termodinâmicos: “flexibilidade termodinâmica” = f(rU,T)
• Cinéticos:“flexibilidade cinética” = f(rE, T, massa molar)
ϕ
U
∆U
∆E
Fatôres que determinam as diferenças de energia (rU) entre os confôrmeros
2
2
Relaxações.....
• O termo relaxação descreve processos através dos quais o equilíbrio é
estabelecido.
• A velocidade com que as relaxações ocorrem depende da probabilidade
W de que a transição ocorrá:
Lei de Boltzmann: W = Wo e -rE/RT
rE = barreira de rotacional (energia de ativação)
O inverso da probabilidade de relaxação W é o tempo de relaxação τ:
τ = τ o e rE/RT
T
τ W
Tempos de relaxação:
• Líquido: 10-10 s
• Borrachas: 10-6 a 10-1 s
3
I. Relaxação de Tensão e Fluência
I.1. Comportamento mecânico de polímeros
Elástico
t
ε
0
t
ε
0
t
σ
t
σ
t
ε
0
t
σ
Viscoso Viscoelástico
Lei de Hooke:σ = E . ε
Lei de Newton:σ = η dV/dy σ = E . ε + η dV/dy
4
V = velocidade
3
FA
SF
F
F
F F F
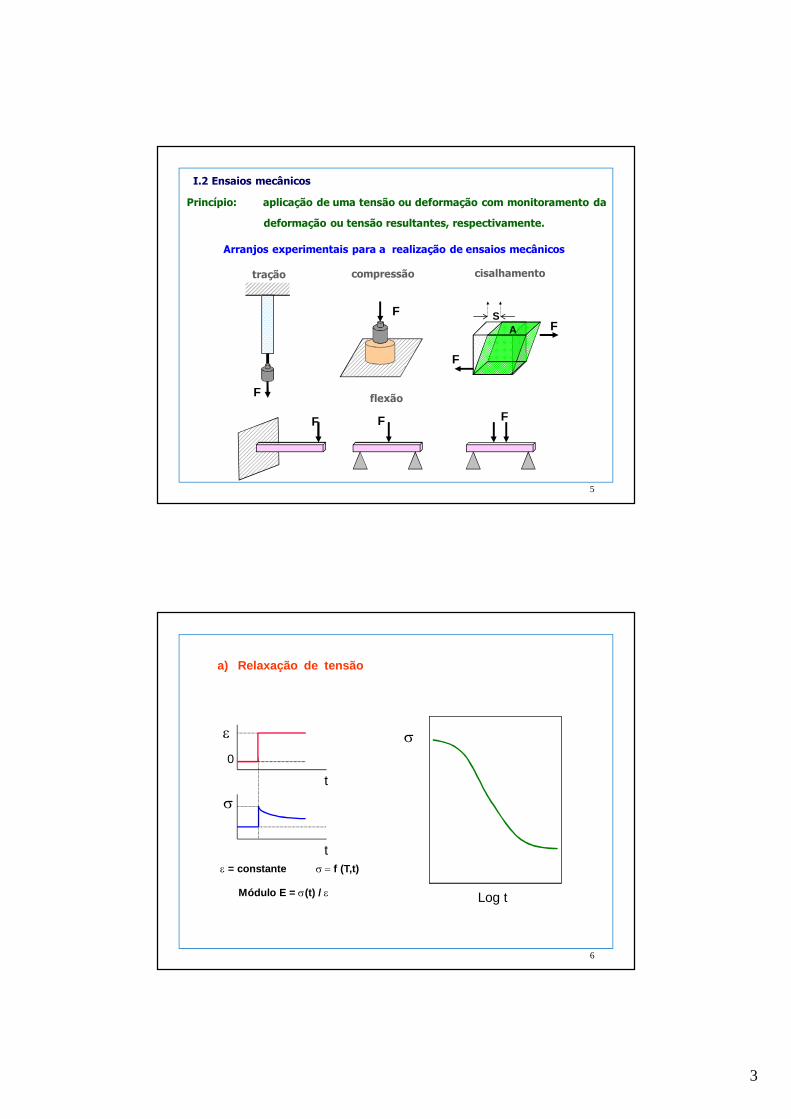
tração
flexão
cisalhamentocompressão
Arranjos experimentais para a realização de ensaios mecânicos
I.2 Ensaios mecânicos
Princípio: aplicação de uma tensão ou deformação com monitoramento da
deformação ou tensão resultantes, respectivamente.
5
t
σt
ε
0
ε = constante σ = f (T,t)
Módulo E = σ(t) / ε
σ
Log t
a) Relaxação de tensão
6
4
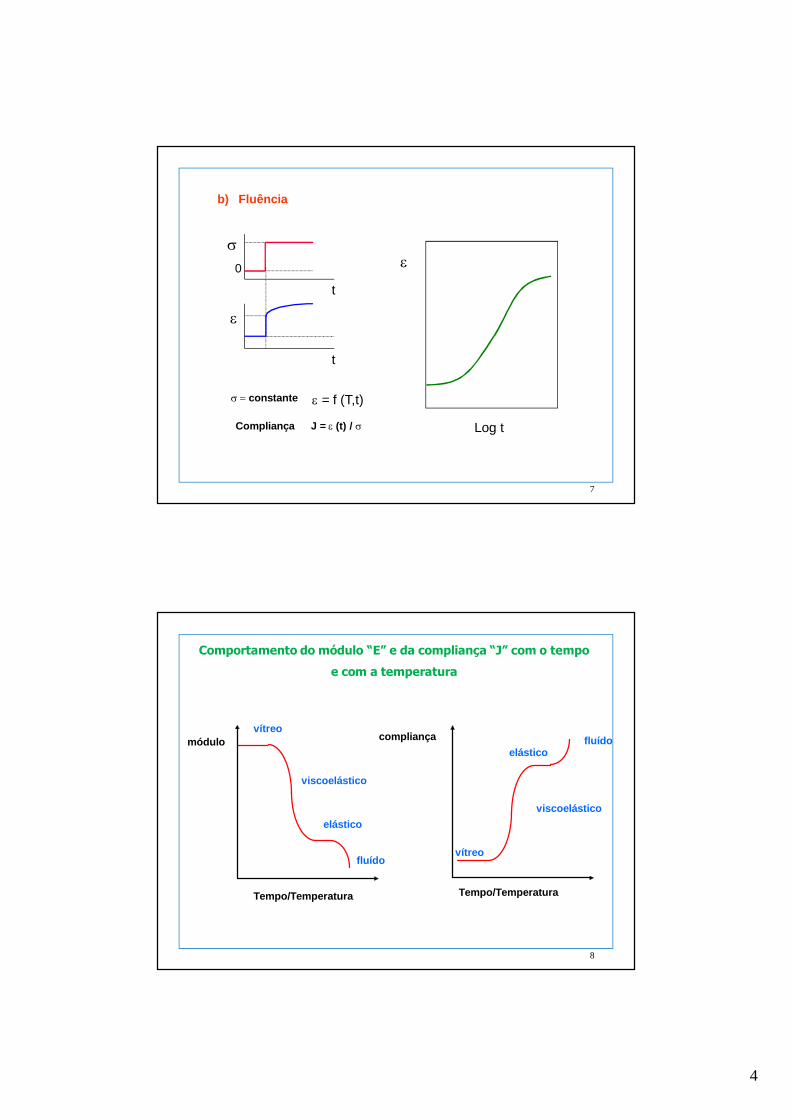
b) Fluência
σ
t
ε
0
t
ε = f (T,t)σ = constante
Compliança J = ε (t) / σ
ε
Log t
7
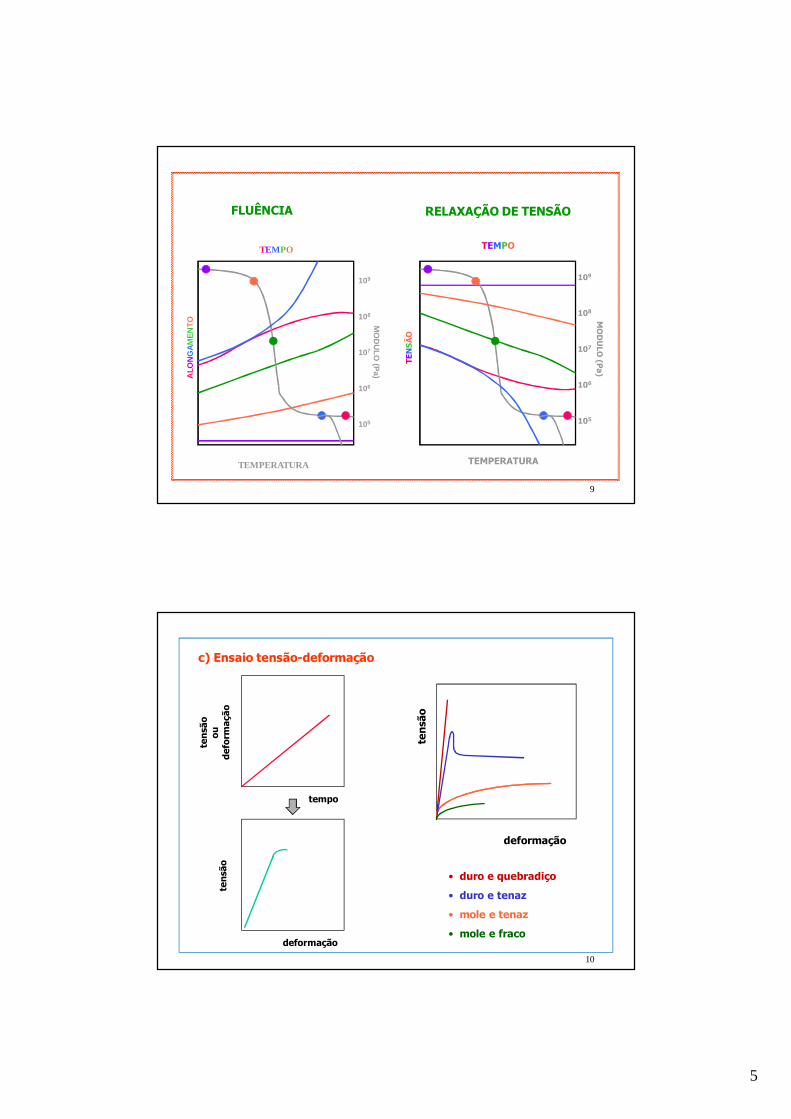
Tempo/Temperatura
módulovítreo
viscoelástico
elástico
Tempo/Temperatura
compliança
vítreo
viscoelástico
elástico
fluído
fluído
Comportamento do módulo “E” e da compliança “J” com o tempo
e com a temperatura
8
5
FLUÊNCIA RELAXAÇÃO DE TENSÃO
MO
DU
LO (P
a)
TEN
SÃO
TEMPERATURA
TEMPO
109
108
107
106
105
109
108
107
106
105
ALO
NG
AMEN
TO
TEMPERATURA
TEMPO
MO
DU
LO (Pa)
9
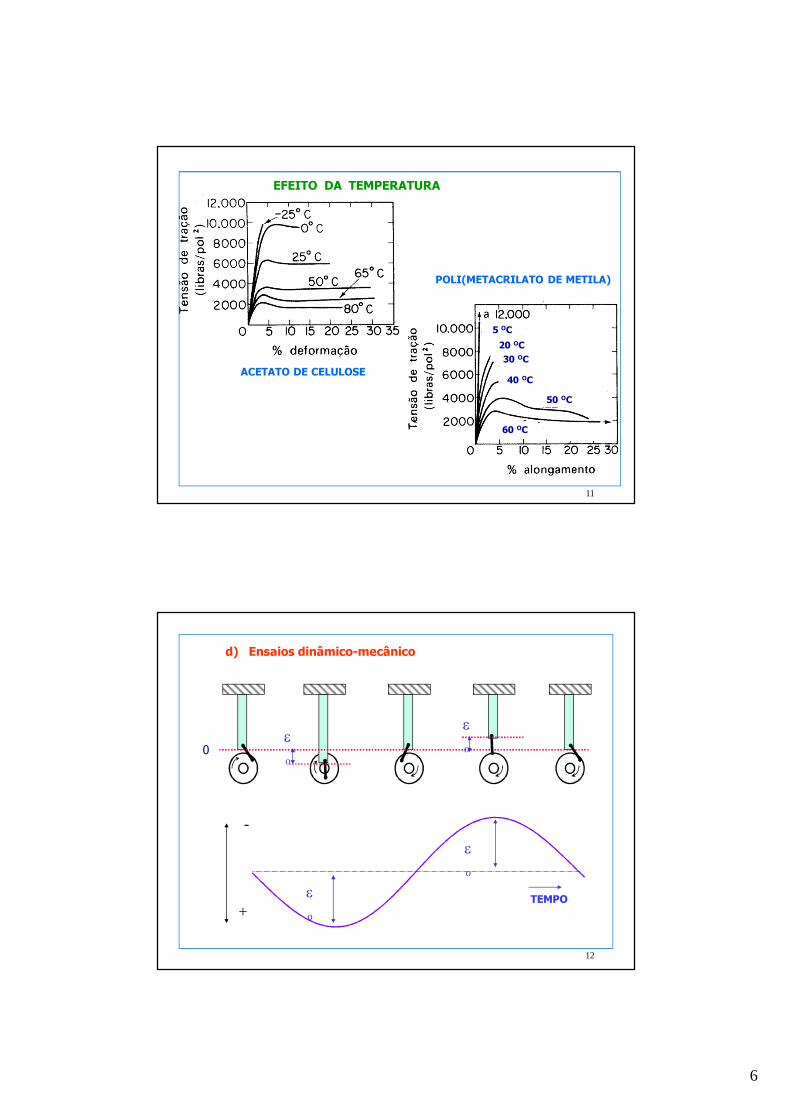
c) Ensaio tensão-deformação
tens
ão
ou
defo
rmaç
ão
tempo
tens
ão
deformação
tens
ão
deformação
• duro e quebradiço
• duro e tenaz
• mole e tenaz
• mole e fraco
10
6
η
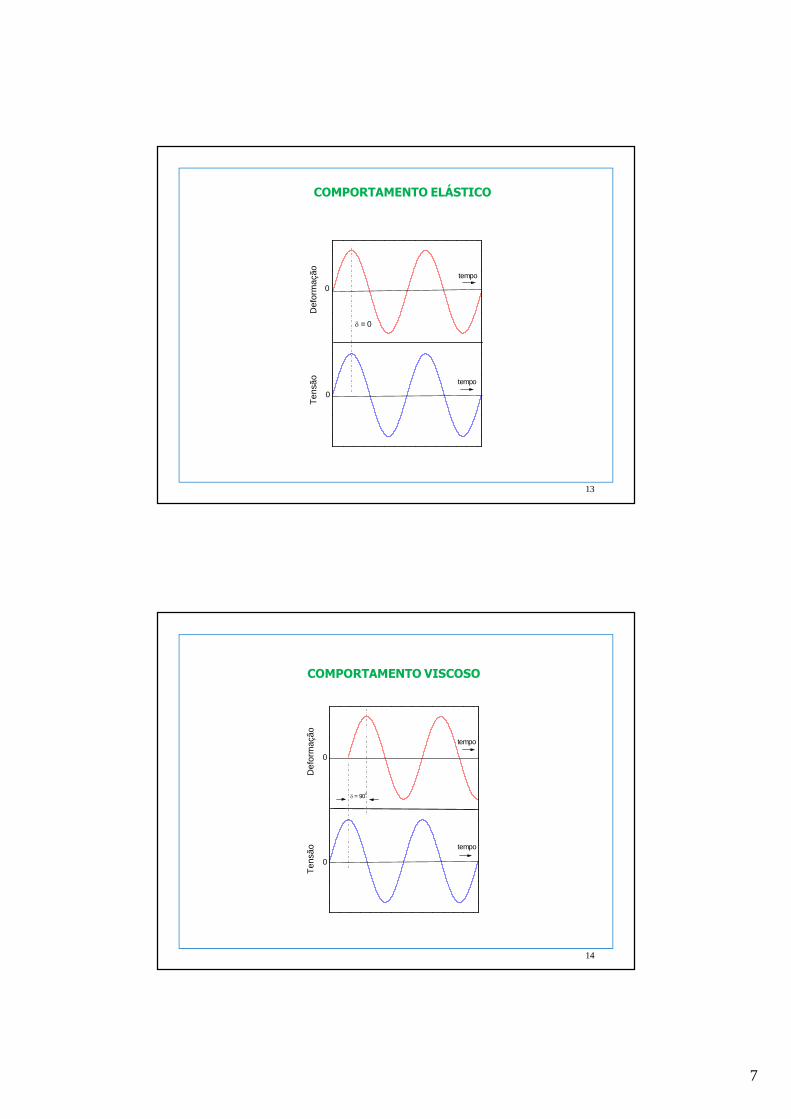
EFEITO DA TEMPERATURA
ACETATO DE CELULOSE
5 OC
20 OC30 OC
40 OC
50 OC
60 OC
POLI(METACRILATO DE METILA)
11
TEMPO+
-
0εo
εo
εo
εo
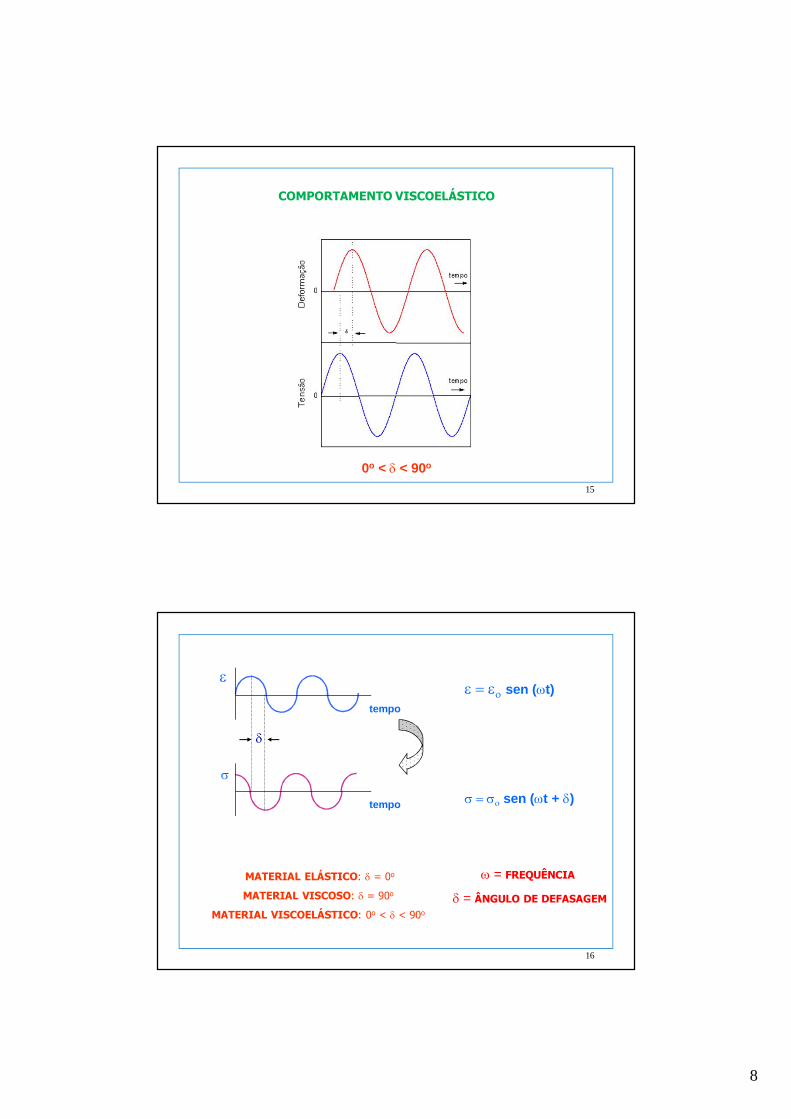
d) Ensaios dinâmico-mecânico
12
7
δ = 0
0
0
tempo
tempo
Tens
ão
D
efor
maç
ão
COMPORTAMENTO ELÁSTICO
13
0
0
tempo
tempo
δ = 90o
Tens
ão
Def
orm
ação
COMPORTAMENTO VISCOSO
14
8
COMPORTAMENTO VISCOELÁSTICO
0o < δ < 90o
15
ε = εο sen (ωt)
MATERIAL ELÁSTICO: δ = 0o
MATERIAL VISCOSO: δ = 90o
MATERIAL VISCOELÁSTICO: 0o < δ < 90o
δ
σ
ε
tempo
tempo
ω = FREQUÊNCIA
δ = ÂNGULO DE DEFASAGEM
σ = σο sen (ωt + δ)
16
9
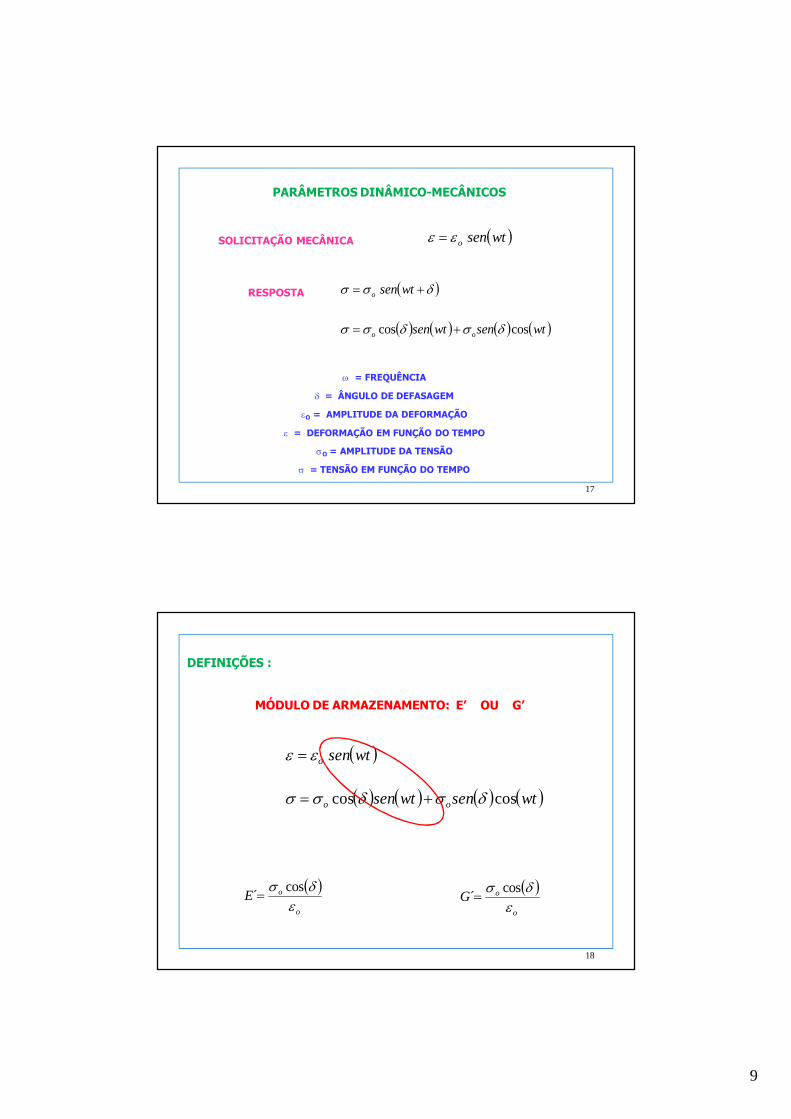
ω = FREQUÊNCIA
δ = ÂNGULO DE DEFASAGEM
εO = AMPLITUDE DA DEFORMAÇÃO
ε = DEFORMAÇÃO EM FUNÇÃO DO TEMPO
σO = AMPLITUDE DA TENSÃO
σ = TENSÃO EM FUNÇÃO DO TEMPO
PARÂMETROS DINÂMICO-MECÂNICOS
SOLICITAÇÃO MECÂNICA
RESPOSTA
( )wtseno εε =
( )
( ) ( ) ( ) ( )wtsenwtsen
wtsen
oo
o
coscos
δσδσσ
δσσ
+=
+=
17
DEFINIÇÕES :
MÓDULO DE ARMAZENAMENTO: E’ OU G’
( )wtseno εε =
( ) ( ) ( ) ( )wtsenwtsen oo coscos δσδσσ +=
( )o
oEε
δσ cos´= ( )o
oGε
δσ cos´=
18
10
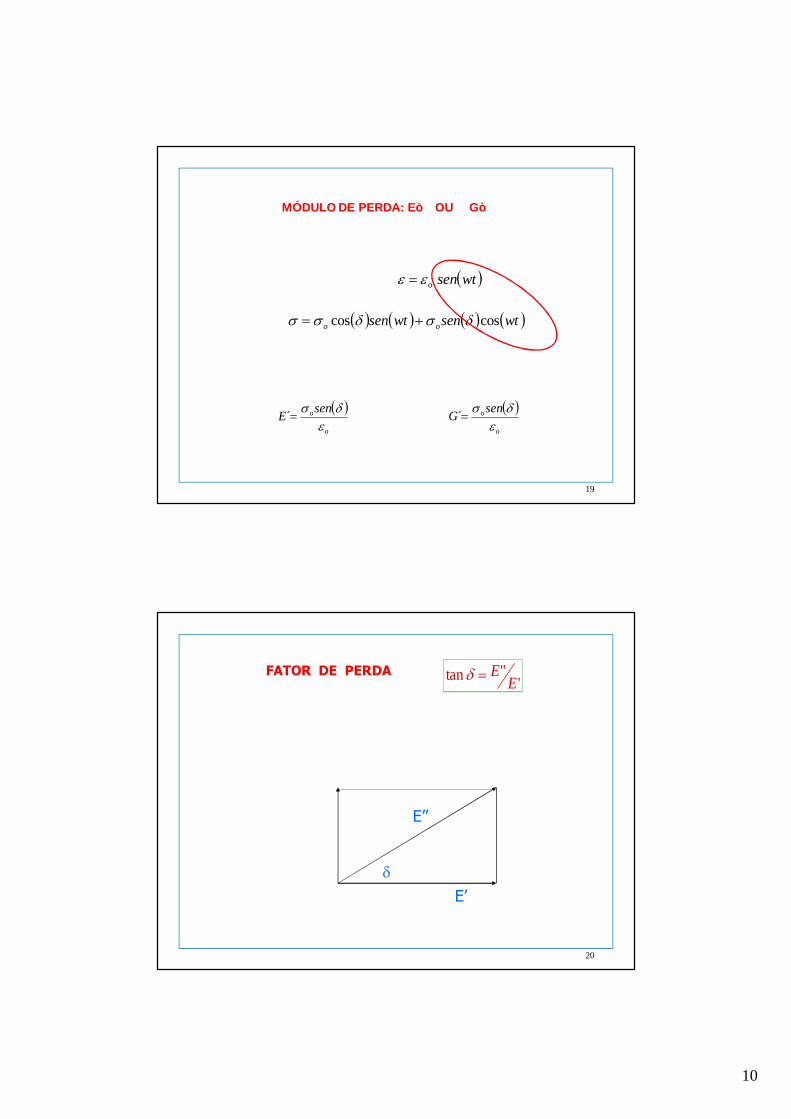
MÓDULO DE PERDA: E” OU G”
( )wtseno εε =
( ) ( ) ( ) ( )wtsenwtsen oo coscos δσδσσ +=
( )o
osenEε
δσ=´ ( )
o
osenGε
δσ=´
19
FATOR DE PERDA'
"tan EE=δ
E’
E”
δ
20
11
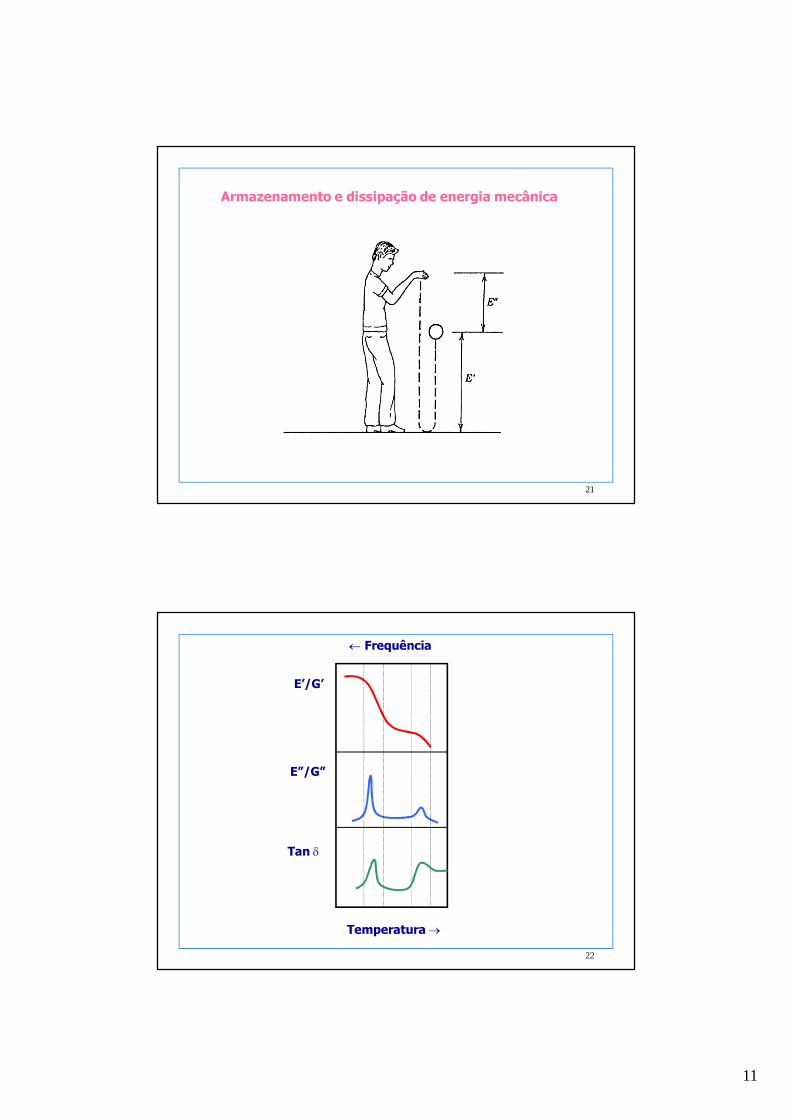
Armazenamento e dissipação de energia mecânica
21
Temperatura →
E’/G’
E”/G”
Tan δ
← Frequência
22
12
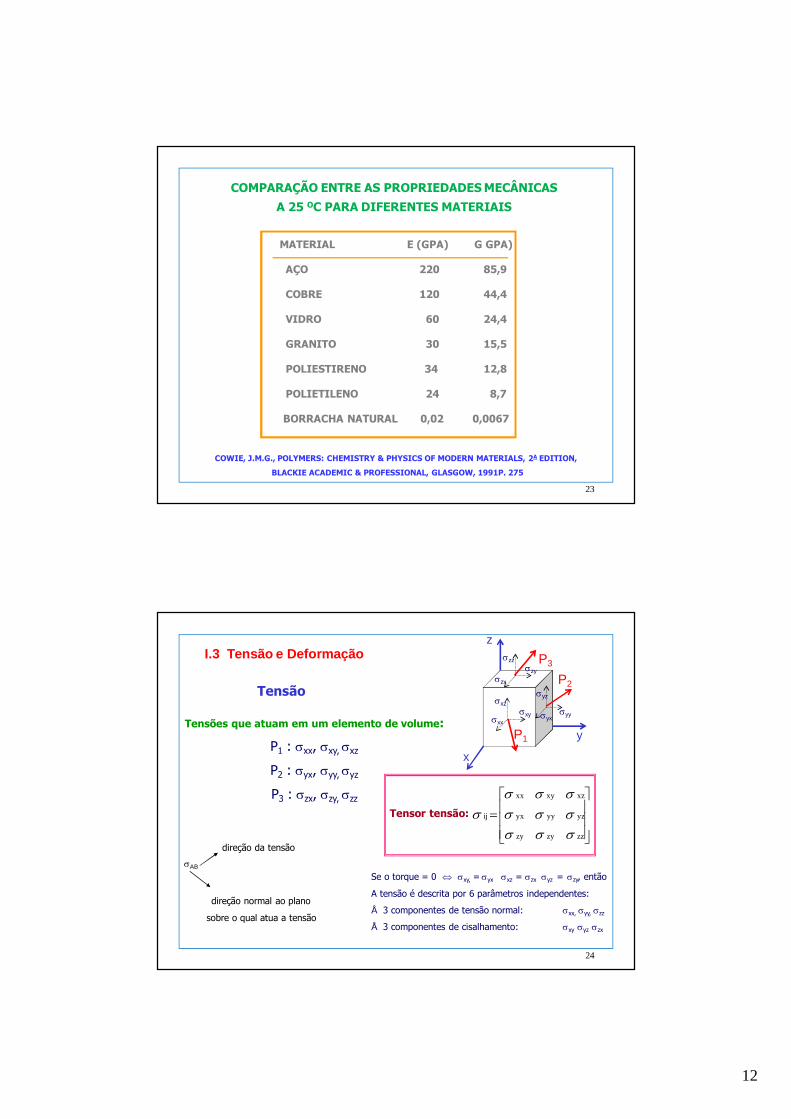
COWIE, J.M.G., POLYMERS: CHEMISTRY & PHYSICS OF MODERN MATERIALS, 2A EDITION,
BLACKIE ACADEMIC & PROFESSIONAL, GLASGOW, 1991P. 275
MATERIAL E (GPA) G GPA)
AÇO 220 85,9
COBRE 120 44,4
VIDRO 60 24,4
GRANITO 30 15,5
POLIESTIRENO 34 12,8
POLIETILENO 24 8,7
BORRACHA NATURAL 0,02 0,0067
COMPARAÇÃO ENTRE AS PROPRIEDADES MECÂNICAS A 25 OC PARA DIFERENTES MATERIAIS
23
I.3 Tensão e Deformação
Tensão
Tensões que atuam em um elemento de volume:
P1 : σxx, σxy, σxz
P2 : σyx, σyy, σyz
P3 : σzx, σzy, σzz
σAB
Se o torque = 0 ⇔ σxy, = σyx σxz = σzx σyz = σzy, então
A tensão é descrita por 6 parâmetros independentes:
• 3 componentes de tensão normal: σxx, σyy, σzz
• 3 componentes de cisalhamento: σxy σyz σzx
direção normal ao plano
sobre o qual atua a tensão
direção da tensão
=
zzzyzy
yzyyyx
xzxyxx
ij
σσσσσσσσσ
σTensor tensão:
z
y
x
P3
P1
P2 σzx
σyxσxx
σzy
σzz
σyyσxy
σxzσyz
24
13
25
lab
l
a b
F
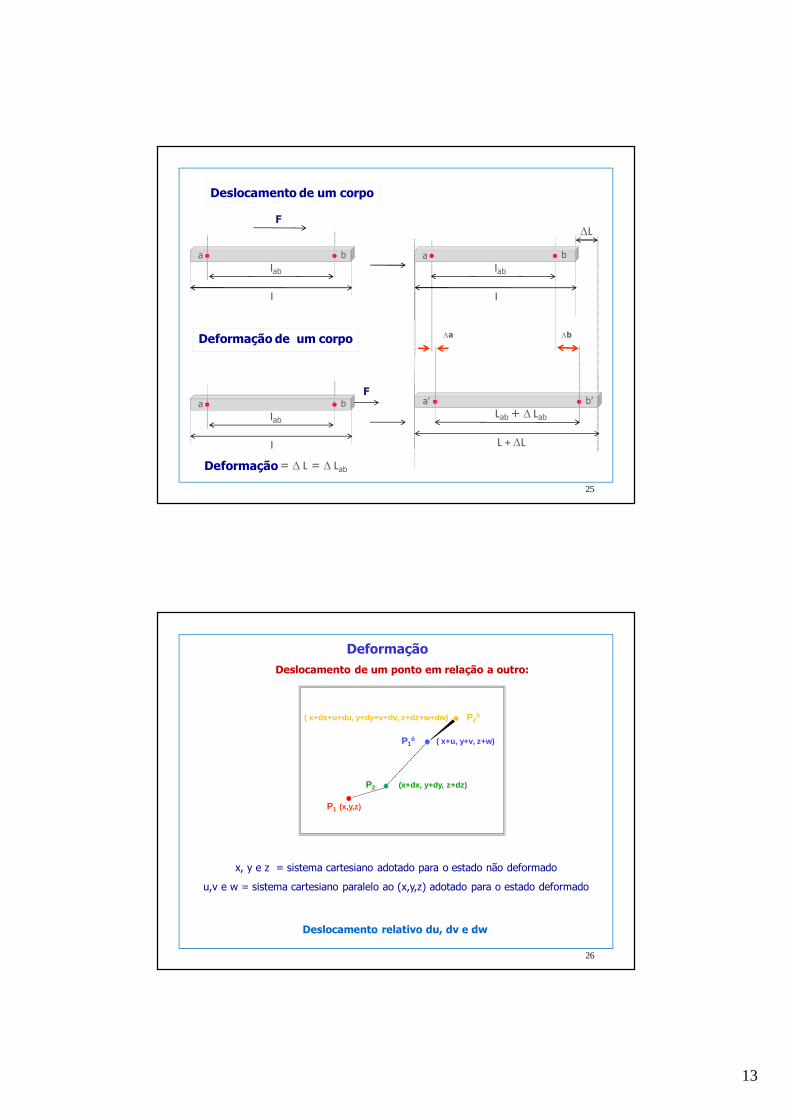
Deslocamento de um corpo
lab
l
a bF
∆L
lab
l
a b
Deformação de um corpo
Lab + ∆ Lab
L + ∆L
a’ b’
Deformação = ∆ L = ∆ Lab
∆a ∆b
DeformaçãoDeslocamento de um ponto em relação a outro:
P1 (x,y,z)
P1’ ( x+u, y+v, z+w)
P2 (x+dx, y+dy, z+dz)
P2’( x+dx+u+du, y+dy+v+dv, z+dz+w+dw)
Deslocamento relativo du, dv e dw
x, y e z = sistema cartesiano adotado para o estado não deformado
u,v e w = sistema cartesiano paralelo ao (x,y,z) adotado para o estado deformado
26
14
dz dy dx xw
dz dy v dx xv
dz u dy u dx xu
zw
ywdw
zv
ydv
zydu
∂∂
+∂∂
+∂∂
=
∂∂
+∂∂
+∂∂
=
∂∂
+∂∂
+∂∂
=
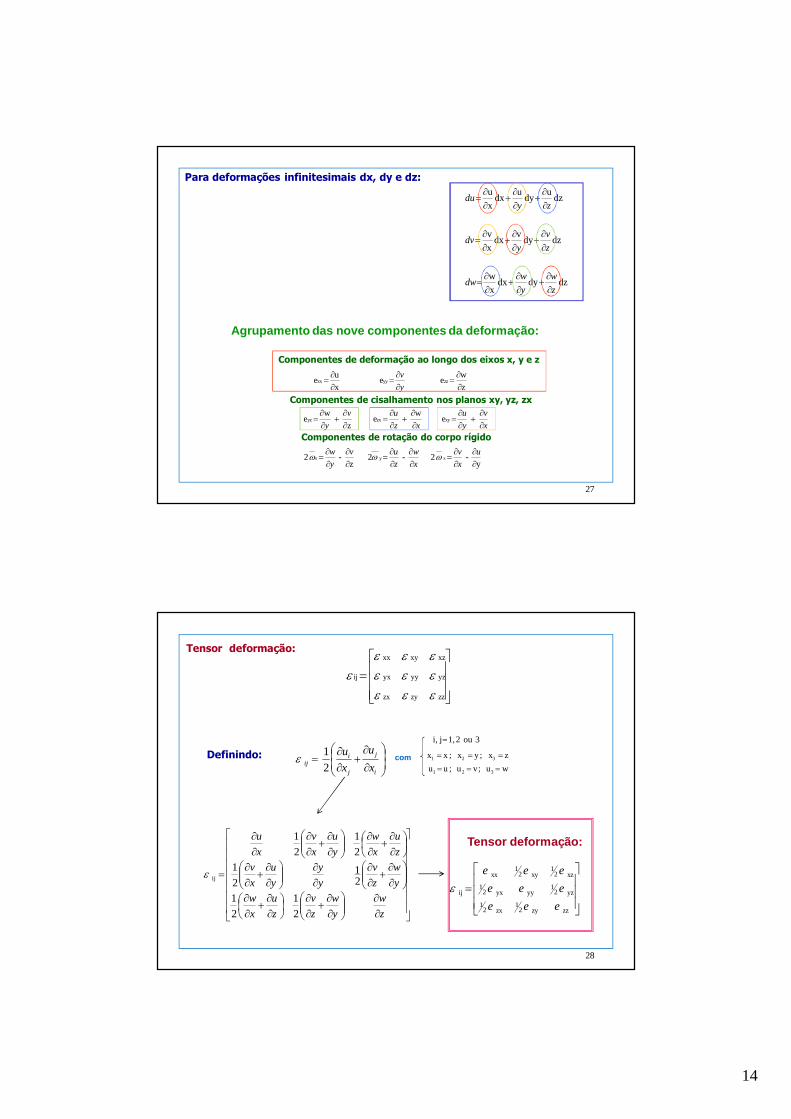
Agrupamento das nove componentes da deformação:
y - 2 - 2
z - 2
e w e z
w e
zw e e
xu e
zyx
xyzxyz
zzyyxx
∂∂
∂∂
=∂∂
∂∂
=∂∂
∂∂
=
∂∂
+∂∂
=∂∂
+∂∂
=∂∂
+∂∂
=
∂∂
=∂∂
=∂∂
=
uxv
xw
zuv
yw
xv
yu
xzuv
y
yv
ωωω
Componentes de deformação ao longo dos eixos x, y e z
Componentes de cisalhamento nos planos xy, yz, zx
Para deformações infinitesimais dx, dy e dz:
Componentes de rotação do corpo rígido
27
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
+∂∂
∂∂
=
zw
yw
zv
zu
xw
yw
zv
yy
yu
xv
zu
xw
yu
xv
xu
21
21
21
21
21
21
ijε
=
zzzyzx
yzyyyx
xzxyxx
ij
εεεεεεεεε
ε
∂
∂+
∂∂
=i
j
j
iij x
uxu
21 ε com z x;y x; x x 3 2 1 ===
w u ; v u ;u u 321 ===
=
zzzy21
zx21
yz21
yyyx21
xz21
xy21
xx
ij
eeeeeeeee
ε
Tensor deformação:
Tensor deformação:
Definindo:3ou 2 1, j i, =
28
15
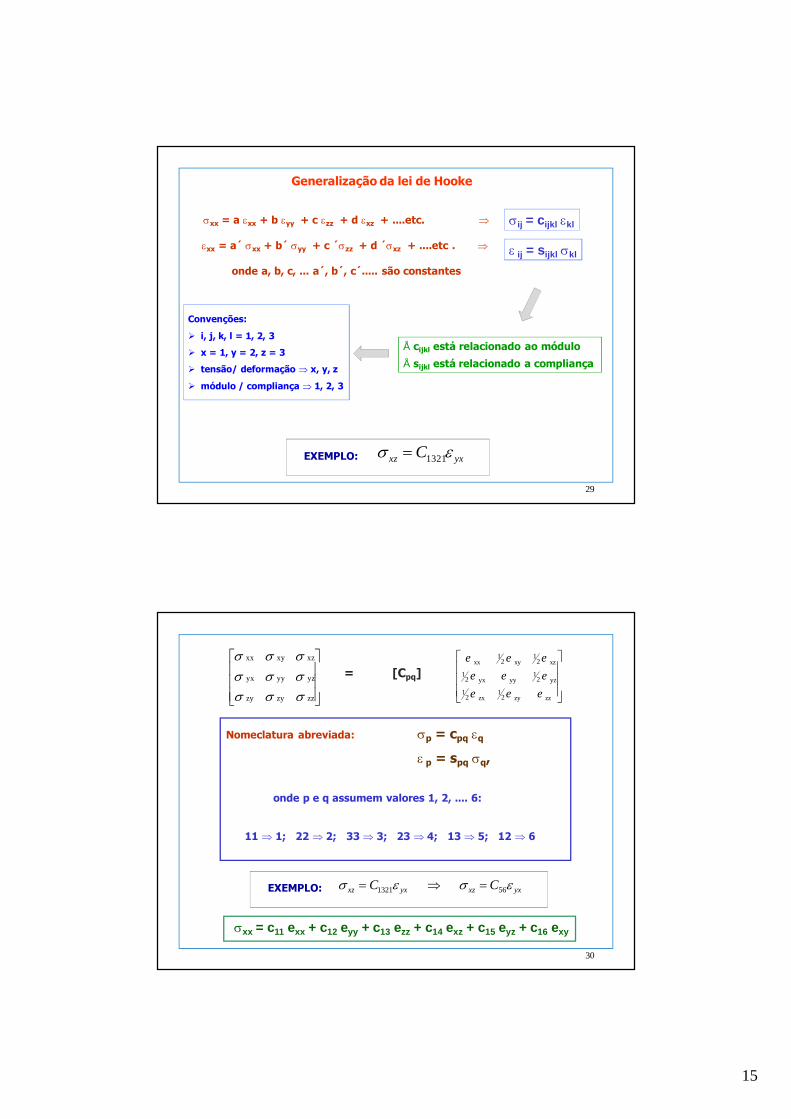
Generalização da lei de Hooke
σxx = a εxx + b εyy + c εzz + d εxz + ....etc. ⇒
εxx = a´ σxx + b´ σyy + c ´σzz + d ´σxz + ....etc . ⇒
onde a, b, c, ... a´, b´, c´..... são constantes
σij = cijkl εkl
ε ij = sijkl σkl
• cijkl está relacionado ao módulo
• sijkl está relacionado a compliança
Convenções:
Ø i, j, k, l = 1, 2, 3
Ø x = 1, y = 2, z = 3
Ø tensão/ deformação ⇒ x, y, z
Ø módulo / compliança ⇒ 1, 2, 3
29
EXEMPLO: yxxz C εσ 1321=
Nomeclatura abreviada: σp = cpq εq
ε p = spq σq,
onde p e q assumem valores 1, 2, .... 6:
11 ⇒ 1; 22 ⇒ 2; 33 ⇒ 3; 23 ⇒ 4; 13 ⇒ 5; 12 ⇒ 6
σxx = c11 exx + c12 eyy + c13 ezz + c14 exz + c15 eyz + c16 exy
zzzy21
zx21
yz21
yyyx21
xz21
xy21
xx
eeeeeeeee
zzzyzy
yzyyyx
xzxyxx
σσσσσσσσσ
= [Cpq]
30
yxxzyxxz CC εσεσ 561321 =⇒=EXEMPLO:
16
=
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
pq
cccccccccccccccccccccccccccccccccccc
c
=
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
pq
ssssssssssssssssssssssssssssssssssss
s
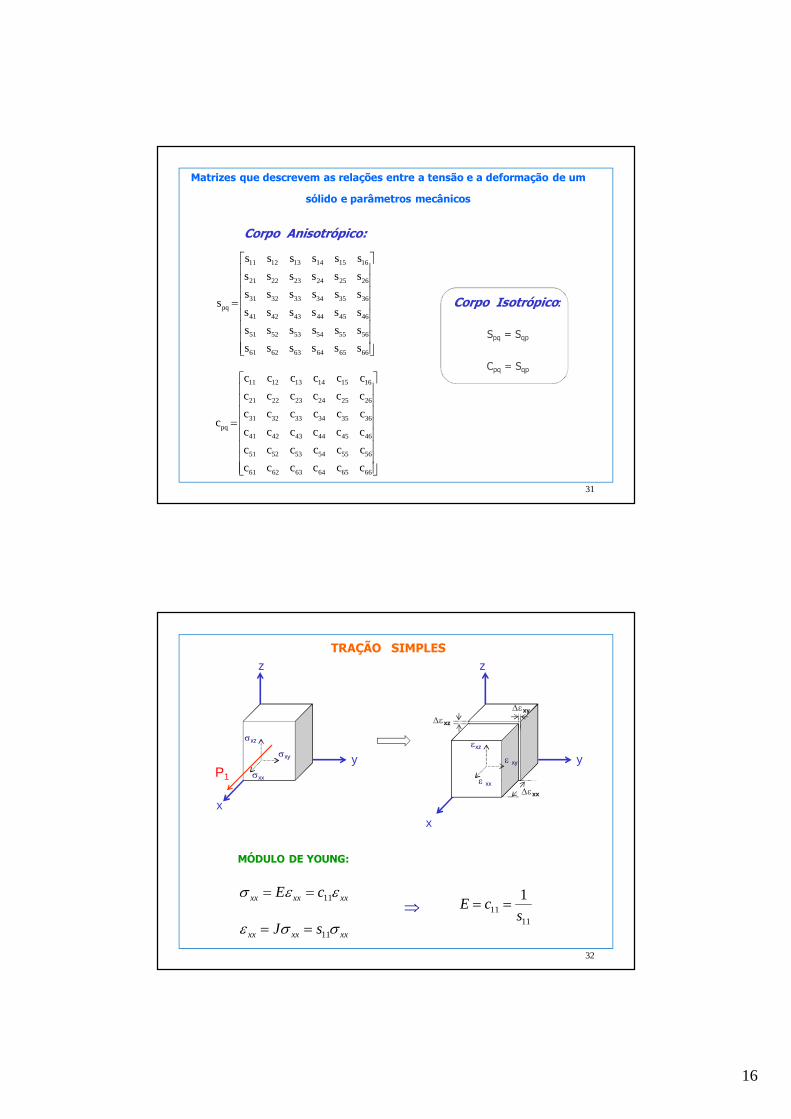
Matrizes que descrevem as relações entre a tensão e a deformação de um
sólido e parâmetros mecânicos
31
Corpo Isotrópico:
Spq = Sqp
Cpq = Sqp
Corpo Anisotrópico:
32
z
y
x
P1 σxx
σxy
σxz
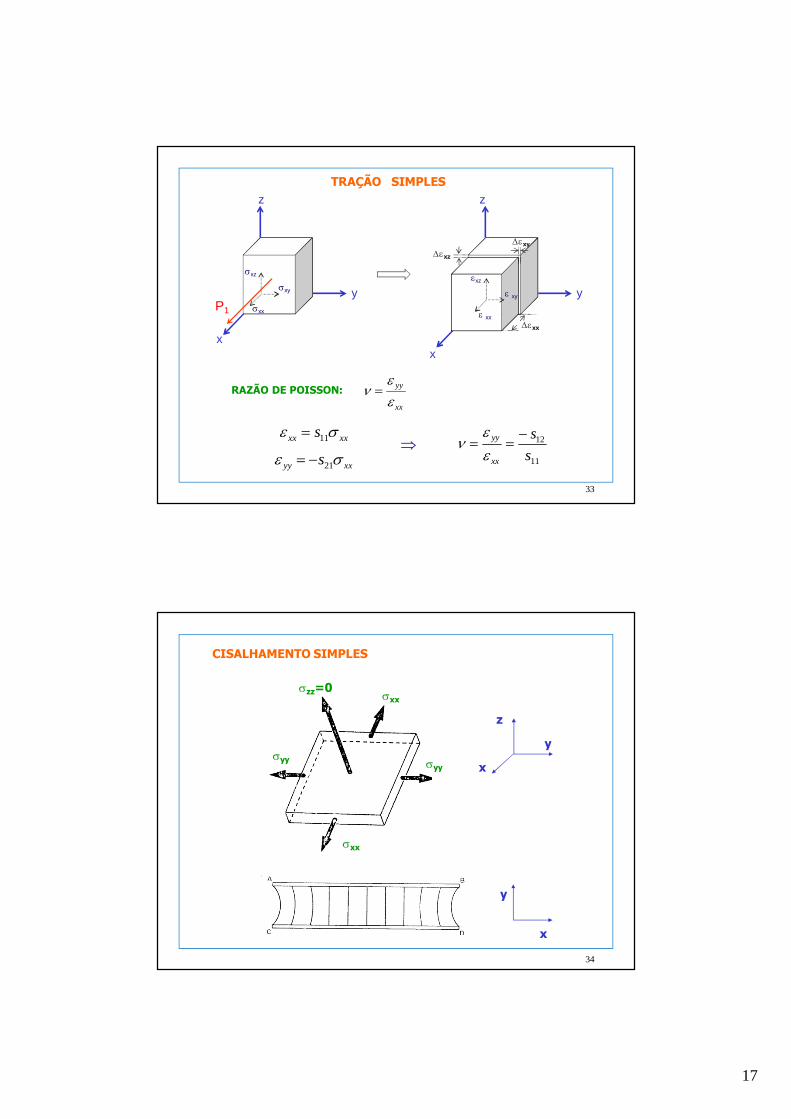
TRAÇÃO SIMPLESz
y
x
ε xx
ε xy
εxz
∆εxx
∆εxz
∆εxy
MÓDULO DE YOUNG:
xxxxxx cE εεσ 11==
xxxxxx sJ σσε 11==⇒
1111
1s
cE ==
17
33
z
y
x
P1 σxx
σxy
σxz
TRAÇÃO SIMPLESz
y
x
ε xx
ε xy
εxz
∆εxx
∆εxz
∆εxy
RAZÃO DE POISSON:
xxxx s σε 11=
xxyy s σε 21−=⇒
xx
yy
εε
ν =
11
12
ss
xx
yy −==
εε
ν
34
y
x
y
x
z
σzz=0σxx
σxx
σyyσyy
CISALHAMENTO SIMPLES
18
35
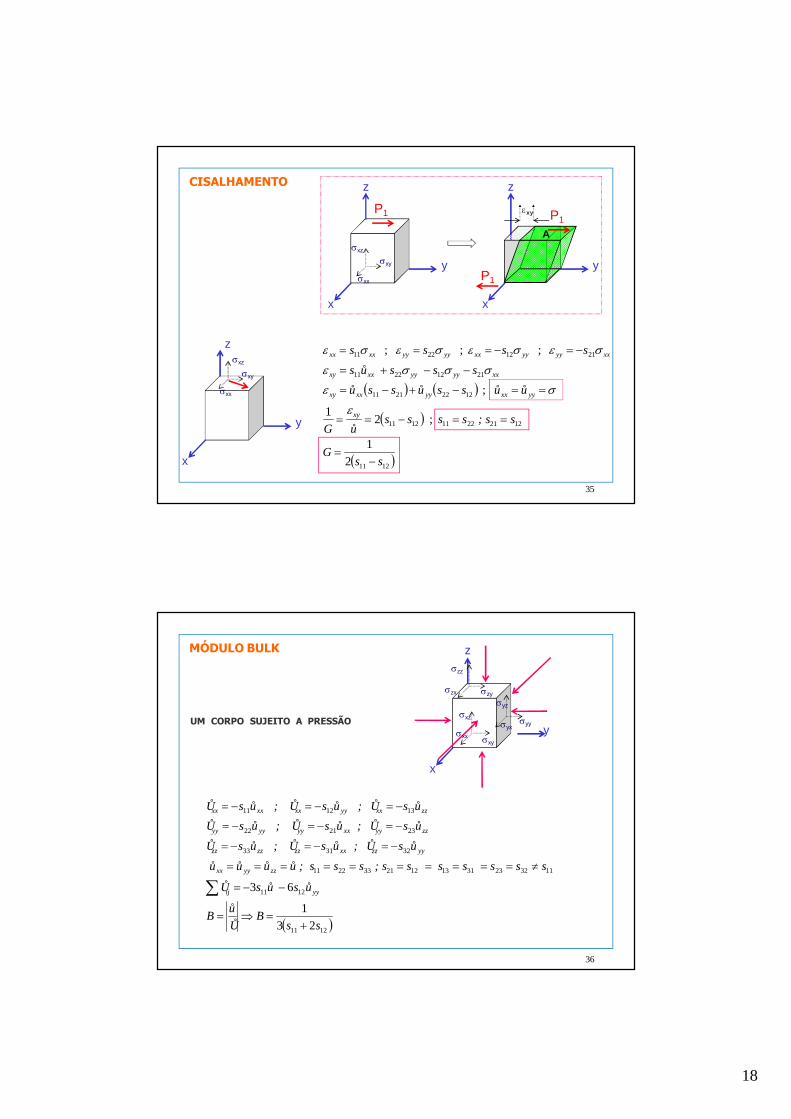
CISALHAMENTO
z
y
x
σxx
σxy
σxz
z
y
x
P1
σxx
σxy
σxz
A
εxy P1
P1
z
y
x
( ) ( )
( )
( )1211
122122111211
12222111
21122211
21122211
21
; 21
;
; ; ;
ssG
s ; sss ssσG
σ σssσssσsss σs
ssss
xy
yyxxyyxxxy
xxyyyyxxxy
xxyyyyxxyyyyxxxx
−=
==−==
==−+−=
−−+=
−=−===
ε
σεσσσε
σεσεσεσε
36
MÓDULO BULK z
y
x
( )1211
1211
11322331131221332211
323133
232122
131211
231
63
ssB
εσB
σsσ sε
sss s s s ; sssσ ; sσσ σσs ; εσs ; εσsεσs ; εσs ; εσsε
σs ; εσs ; εσsε
yyij
zzyyxx
yyzzxxzzzzzz
zzyyxxyyyyyy
zzxxyyxxxxxx
+=⇒=
−−=
≠==========
−=−=−=
−=−=−=
−=−=−=
∑
UM CORPO SUJEITO A PRESSÃO
σzx σzy
σzz
σxx σxy
σxzσyx
σyy
σyz
19
37
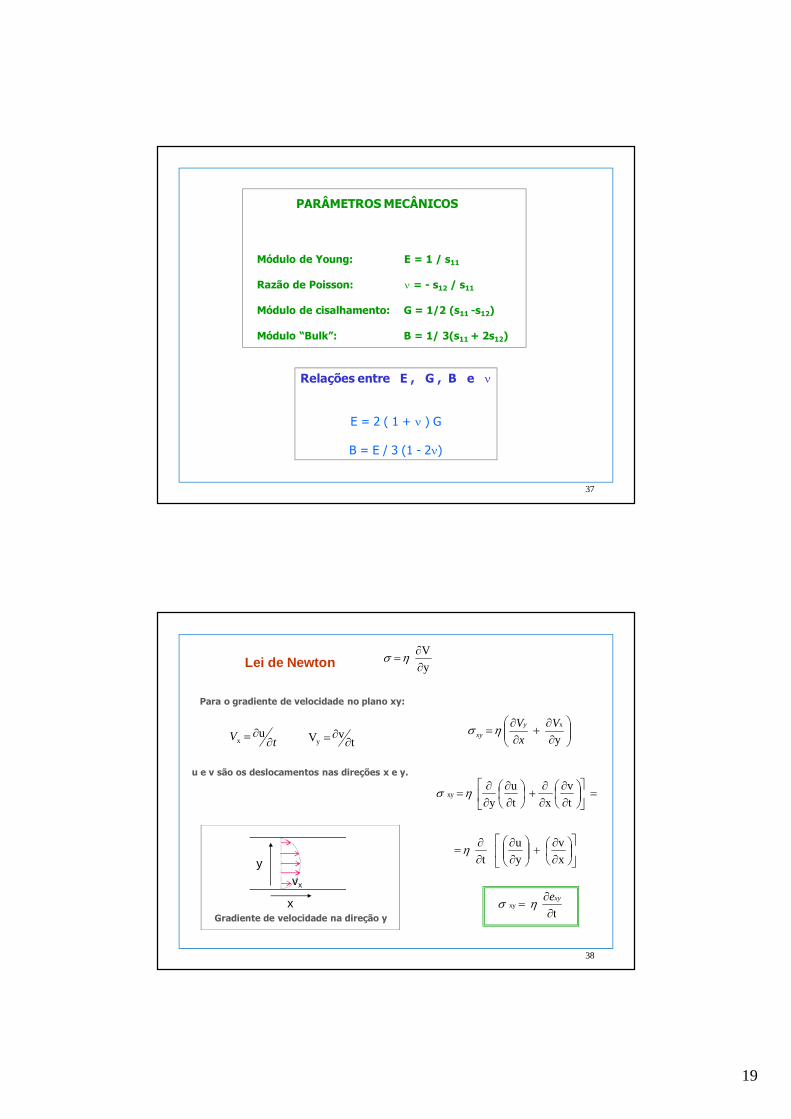
PARÂMETROS MECÂNICOS
Módulo de Young: E = 1 / s11
Razão de Poisson: ν = - s12 / s11
Módulo de cisalhamento: G = 1/2 (s11 -s12)
Módulo “Bulk”: B = 1/ 3(s11 + 2s12)
Relações entre E , G , B e ν
E = 2 ( 1 + ν ) G
B = E / 3 (1 - 2ν)
38
Lei de Newton
x
yvx
yV
∂∂
=ησ
∂∂
+∂∂
=y
xVxVy
xy ησtV ∂
∂= u x tv Vy ∂
∂=
t
xy∂
∂=
xyeησ
xv
yu
t
tv
x
tu
y xy
∂∂
+
∂∂
∂∂
=
=
∂∂
∂∂
+
∂∂
∂∂
=
η
ησ
u e v são os deslocamentos nas direções x e y.
Gradiente de velocidade na direção y
Para o gradiente de velocidade no plano xy:
20
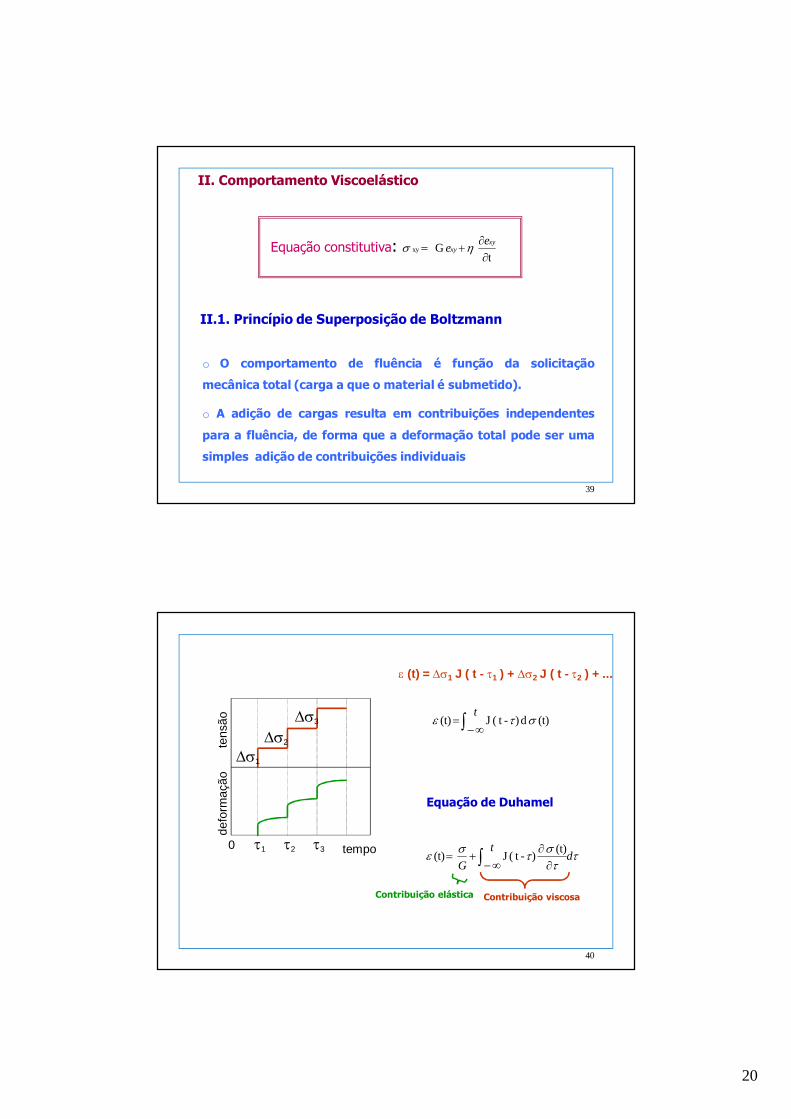
II. Comportamento Viscoelástico
Equação constitutiva: t
G xy∂
∂+=
xyxy
ee ησ
II.1. Princípio de Superposição de Boltzmann
o O comportamento de fluência é função da solicitação
mecânica total (carga a que o material é submetido).
o A adição de cargas resulta em contribuições independentes
para a fluência, de forma que a deformação total pode ser uma
simples adição de contribuições individuais
39
tempoτ3τ2
∆σ1
τ1
∆σ2
∆σ3
0
tens
ãode
form
ação
ε (t) = ∆σ1 J ( t - τ1 ) + ∆σ2 J ( t - τ2 ) + ...
∫ ∞−= (t) d ) - t ( J (t) στε
t
ττ
στσε dt
G ∫ ∂∂
∞−+=
(t) ) - t ( J (t)
Contribuição elástica Contribuição viscosa
Equação de Duhamel
40
21
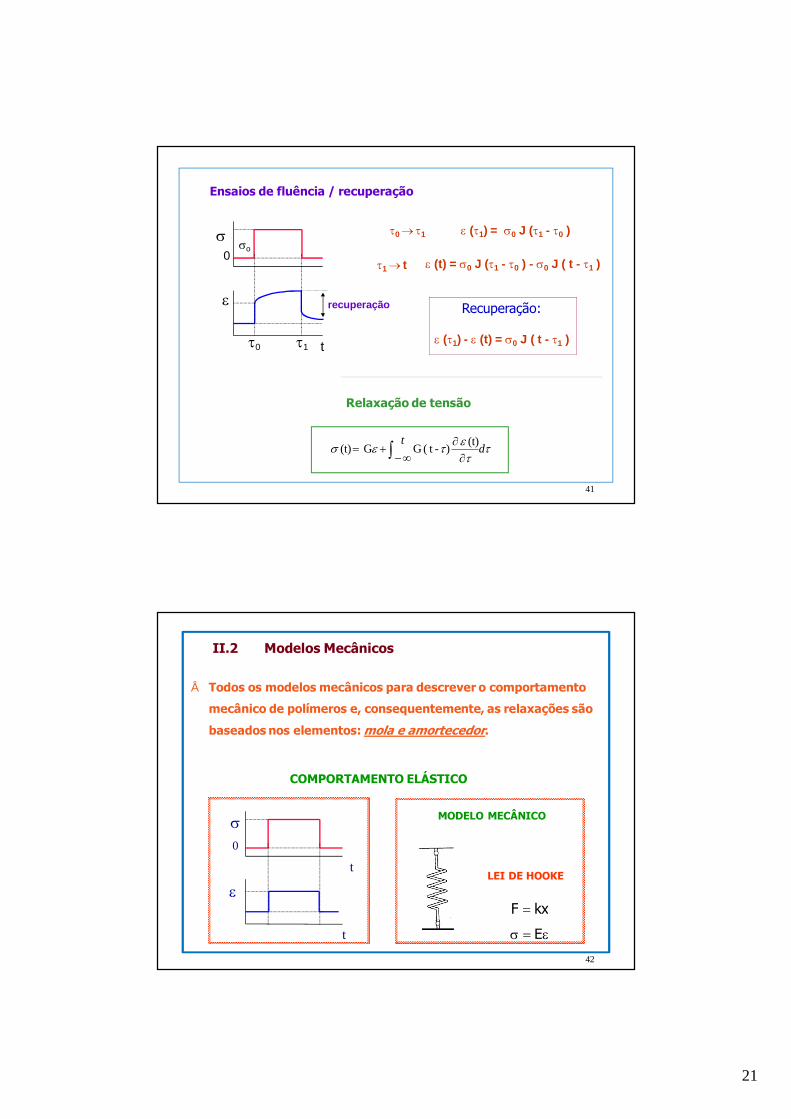
Ensaios de fluência / recuperação
ε
0
t
σ
recuperação
τ1τ0
σo
Recuperação:
ε (τ1) - ε (t) = σ0 J ( t - τ1 )
ε (τ1) = σ0 J (τ1 - τ0 )
ε (t) = σ0 J (τ1 - τ0 ) - σ0 J ( t - τ1 )
τ0 → τ1
τ1 → t
Relaxação de tensão
ττ
ετεσ dt
∫ ∂∂
∞−+=
(t) ) - t (G G (t)
41
t
ε
0
t
σ
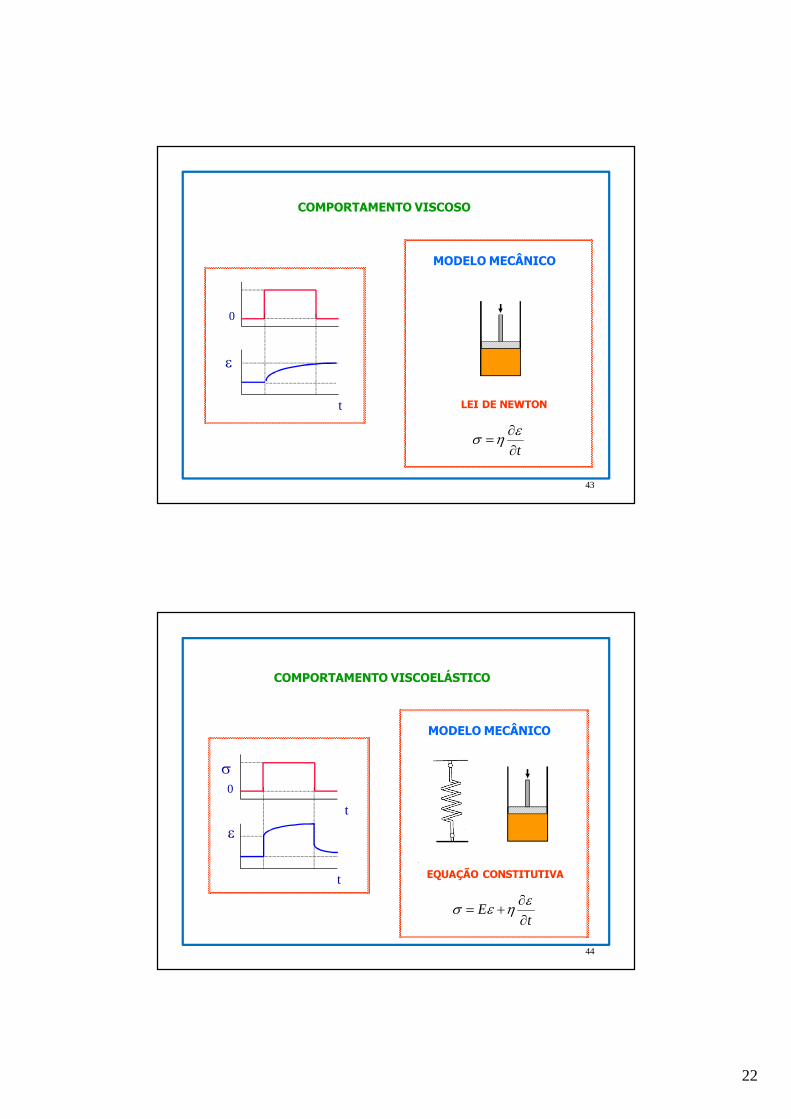
COMPORTAMENTO ELÁSTICO
LEI DE HOOKE
ε=σ E
MODELO MECÂNICO
kxF =
II.2 Modelos Mecânicos
• Todos os modelos mecânicos para descrever o comportamento
mecânico de polímeros e, consequentemente, as relaxações são
baseados nos elementos: mola e amortecedor.
42
22
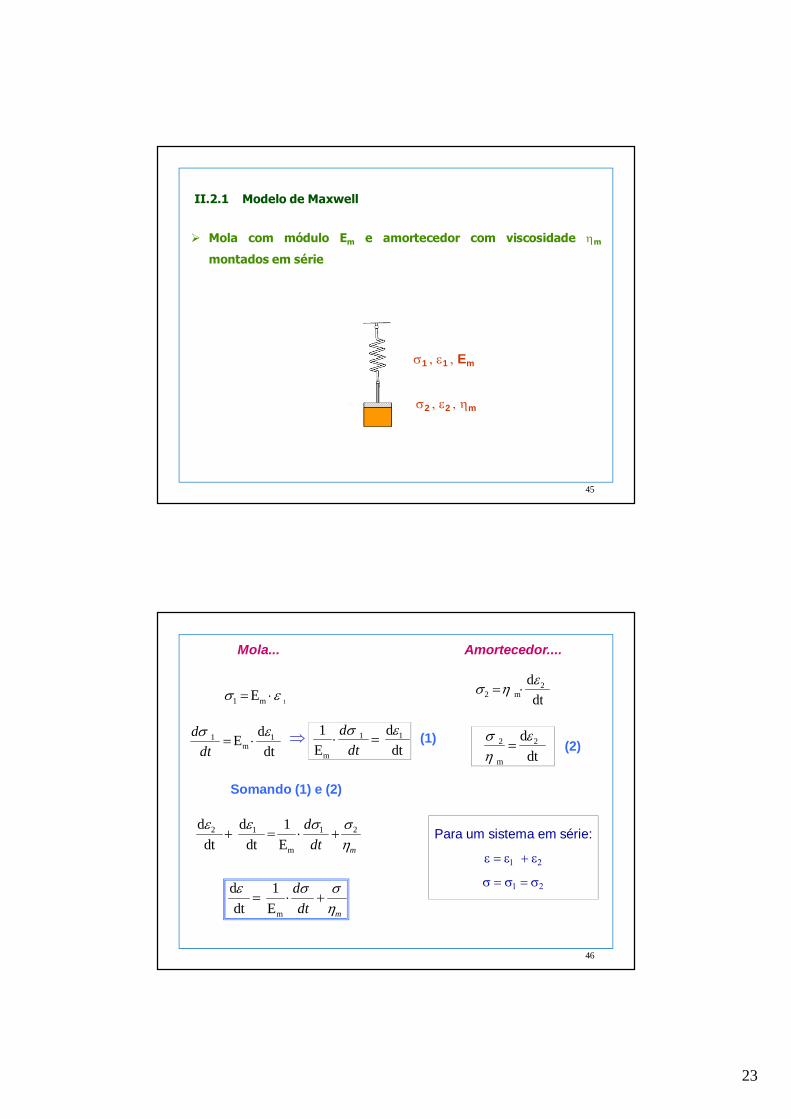
COMPORTAMENTO VISCOSO
ε
0
t
MODELO MECÂNICO
LEI DE NEWTON
t∂∂
=εησ
43
t
ε
0
t
σ
COMPORTAMENTO VISCOELÁSTICO
MODELO MECÂNICO
tE
∂∂
+=εηεσ
EQUAÇÃO CONSTITUTIVA
44
23
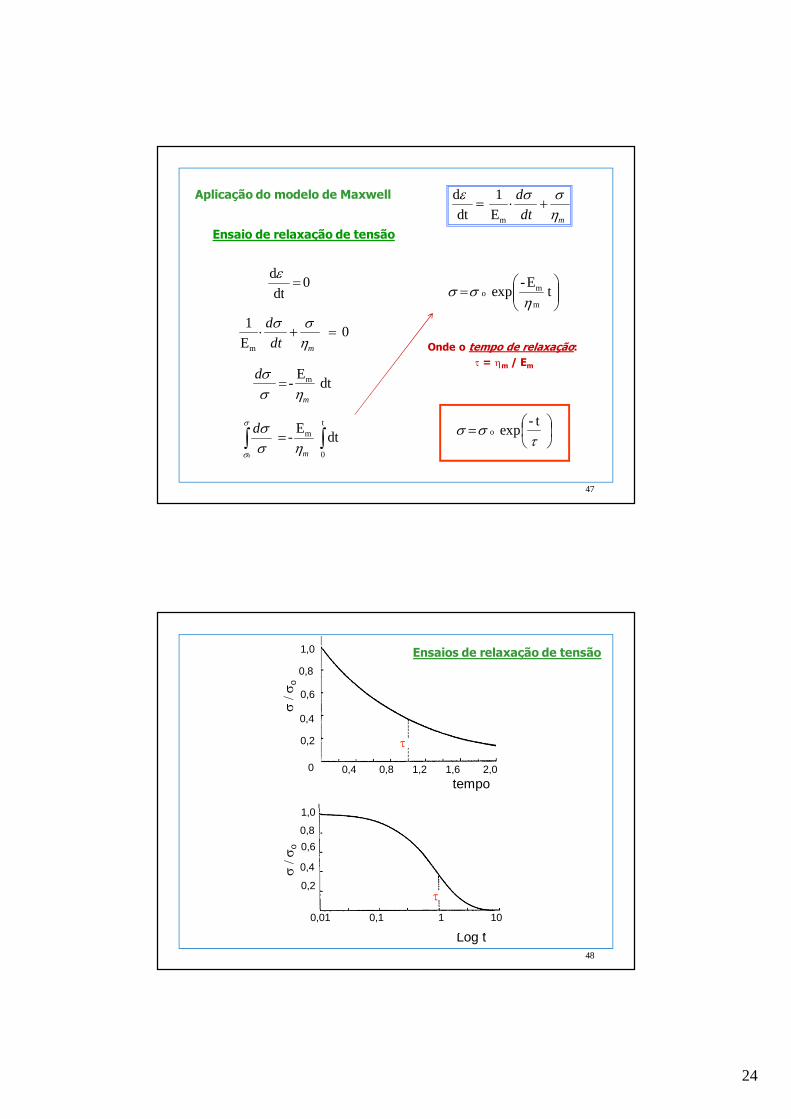
II.2.1 Modelo de Maxwell
Ø Mola com módulo Em e amortecedor com viscosidade ηm
montados em série
σ1 , ε1 , Em
σ2 , ε2 , ηm
45
E1
dt d
dt d 2 1
m
1 2
mdtd
ησσεε
+⋅=+
Somando (1) e (2)
Para um sistema em série:
ε = ε1 + ε2
σ = σ1 = σ2
E 1 m 1 εσ ⋅= dt d 2
m 2εησ ⋅=
Mola... Amortecedor....
dt d E 1
m 1 εσ
⋅=dt
ddt
d E1 1 1
m
εσ=⋅
dtd⇒ (1) (2)
E1
dt d
m
mdtd
ησσε
+⋅=
dt d
2
m
2 εησ
=
46
24
Aplicação do modelo de Maxwell
Ensaio de relaxação de tensão
0 dt
d =
ε
0
E1
m
=+⋅mdt
dησσ
E1
dt d
m
mdtd
ησσε
+⋅=
dt
E- m
m
dησ
σ=
∫∫ =t
0
m dt
E- o m
dησ
σσ
σ
= tE- exp
m
moη
σσ
Onde o tempo de relaxação:τ = ηm / Em
= t- exp o
τσσ
47
τ
tempo0 0,4 0,8 1,2 1,6 2,0
σ / σ
o
0,4
0,2
0,6
0,8
1,0
Log t
τ
σ / σ
o
0,4
0,2
0,60,8
1,0
0,01 100,1 1
Ensaios de relaxação de tensão
48
25
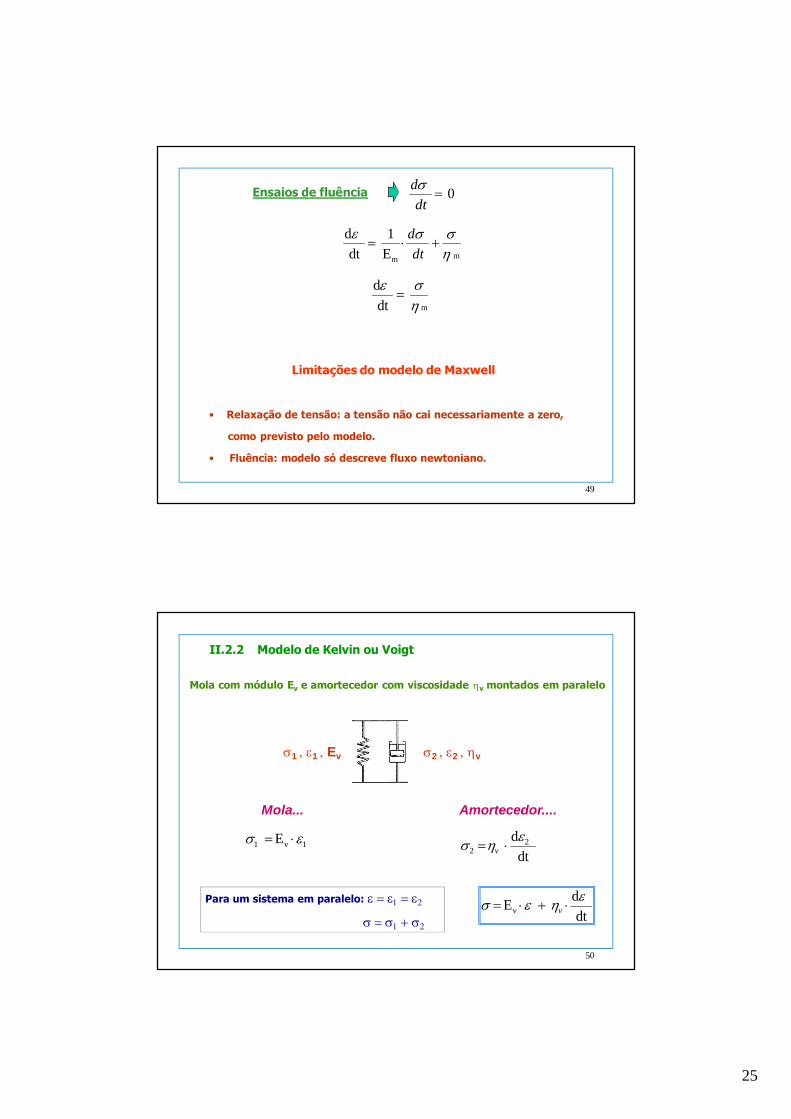
Ensaios de fluência
m
m
E1
dt d
ησσε
+⋅=dt
d
0 =
dtdσ
m
dt d
ησε
=
Limitações do modelo de Maxwell
• Relaxação de tensão: a tensão não cai necessariamente a zero,
como previsto pelo modelo.
• Fluência: modelo só descreve fluxo newtoniano.
49
II.2.2 Modelo de Kelvin ou Voigt
Mola com módulo Ev e amortecedor com viscosidade ηv montados em paralelo
σ1 , ε1 , Ev σ2 , ε2 , ηv
Mola... Amortecedor....
1v 1 E εσ ⋅=dt
d 2 2
εησ ⋅= v
Para um sistema em paralelo: ε = ε1 = ε2
σ = σ1 + σ2dt
d E v
εηεσ ⋅+⋅= v
50
26
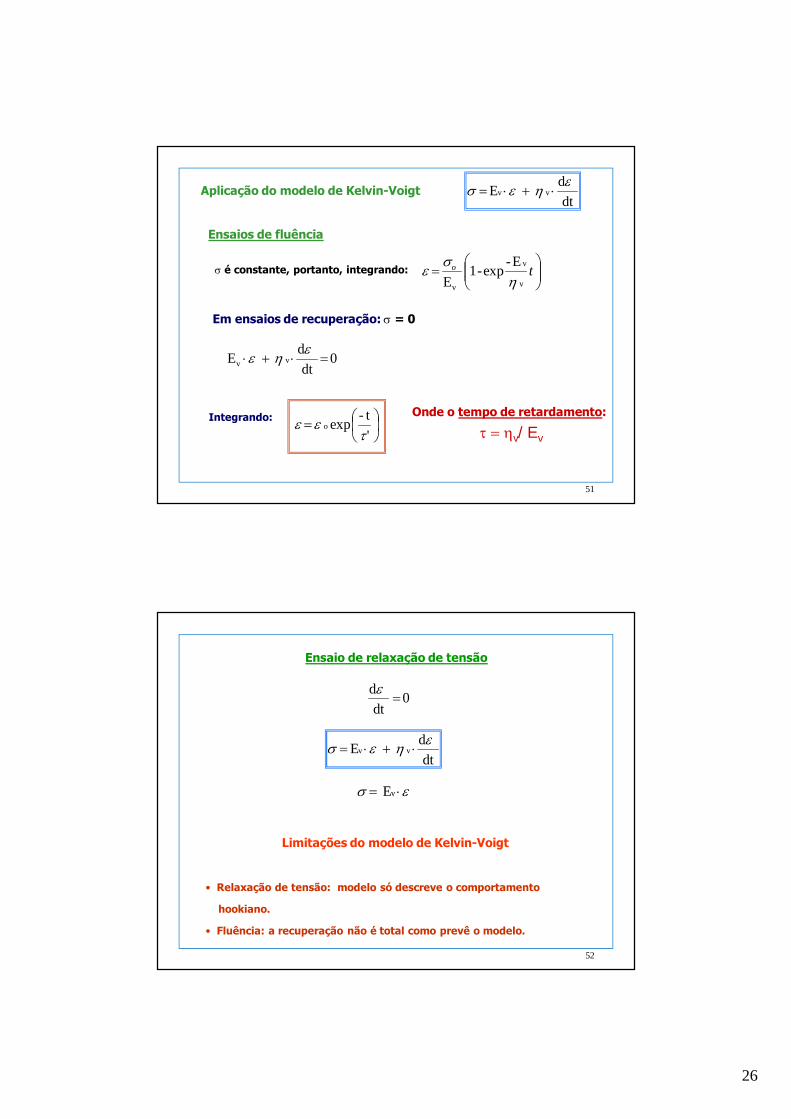
dt d E
v v εηεσ ⋅+⋅=Aplicação do modelo de Kelvin-Voigt
Ensaios de fluência
σ é constante, portanto, integrando:
= to
v
v
v E- exp- 1
E
ησε
Onde o tempo de retardamento:
τ = ηv/ Ev
Em ensaios de recuperação: σ = 0
0 dt
d E v v =⋅+⋅
εηε
=
't- exp o
τεεIntegrando:
51
Ensaio de relaxação de tensão
0 dt
d =
ε
v E εσ ⋅=
Limitações do modelo de Kelvin-Voigt
• Relaxação de tensão: modelo só descreve o comportamento
hookiano.
• Fluência: a recuperação não é total como prevê o modelo.
dt d E
v v εηεσ ⋅+⋅=
52
27
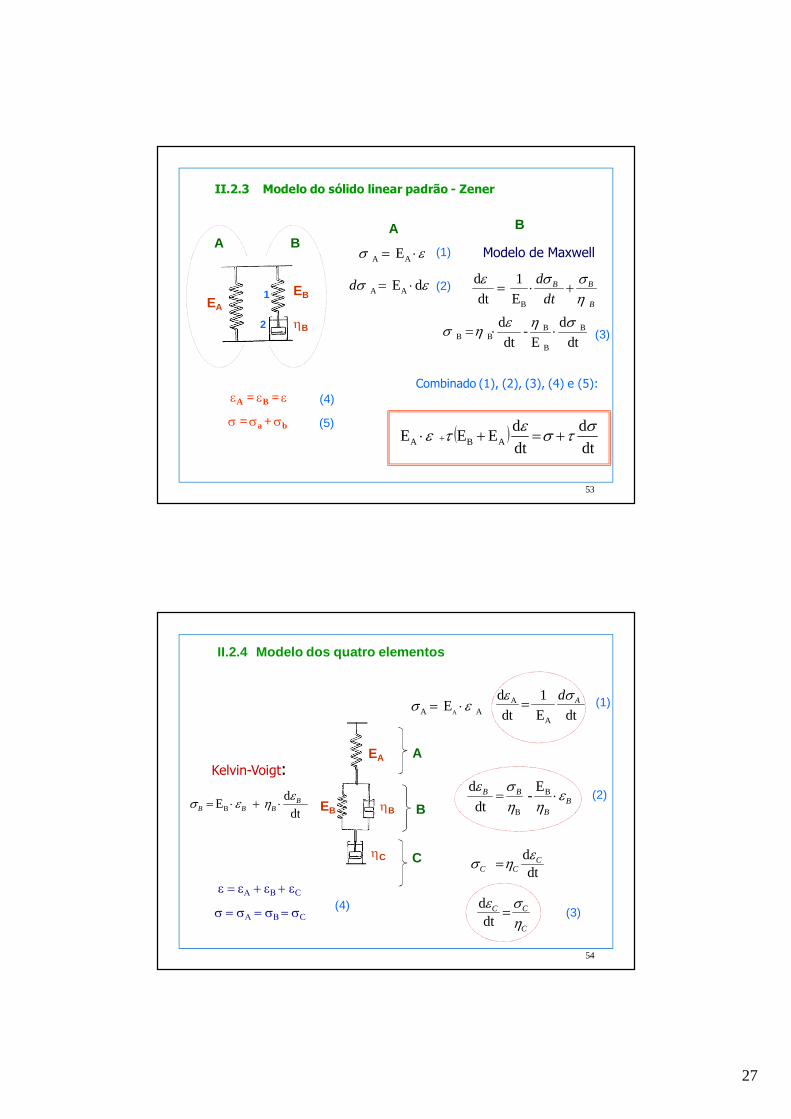
A
II.2.3 Modelo do sólido linear padrão - Zener
AA E εσ ⋅=
B
B
BB
dtd
E1
dt d
B
ησσε
+⋅=
Modelo de Maxwell
dt d
E -
dt d B
B
B B B
σηεησ ⋅⋅=
εA = εB = ε
σ = σa + σb
AA d E εσ ⋅=d
ηB
EBEA
BA
2
1
( )dtd
dtd E E E AB A
στσετε +=+⋅ +
(1)
(2)
(3)
(4)
(5)
Combinado (1), (2), (3), (4) e (5):
53
II.2.4 Modelo dos quatro elementos
EB
EA
ηB
ηC C
B
A
AA E A εσ ⋅= dt
E 1
dtd
A
A Adσε=
Kelvin-Voigt:
dt d E
B BBBB
εηεσ ⋅+⋅= B
B
E - dt
dB
B
BB εηη
σε⋅=
dtd
C
CC
ησε
=
dtd C
CCεησ =
ε = εΑ + εΒ + εC
σ = σΑ = σΒ = σC
(1)
(2)
(3)(4)
54
28
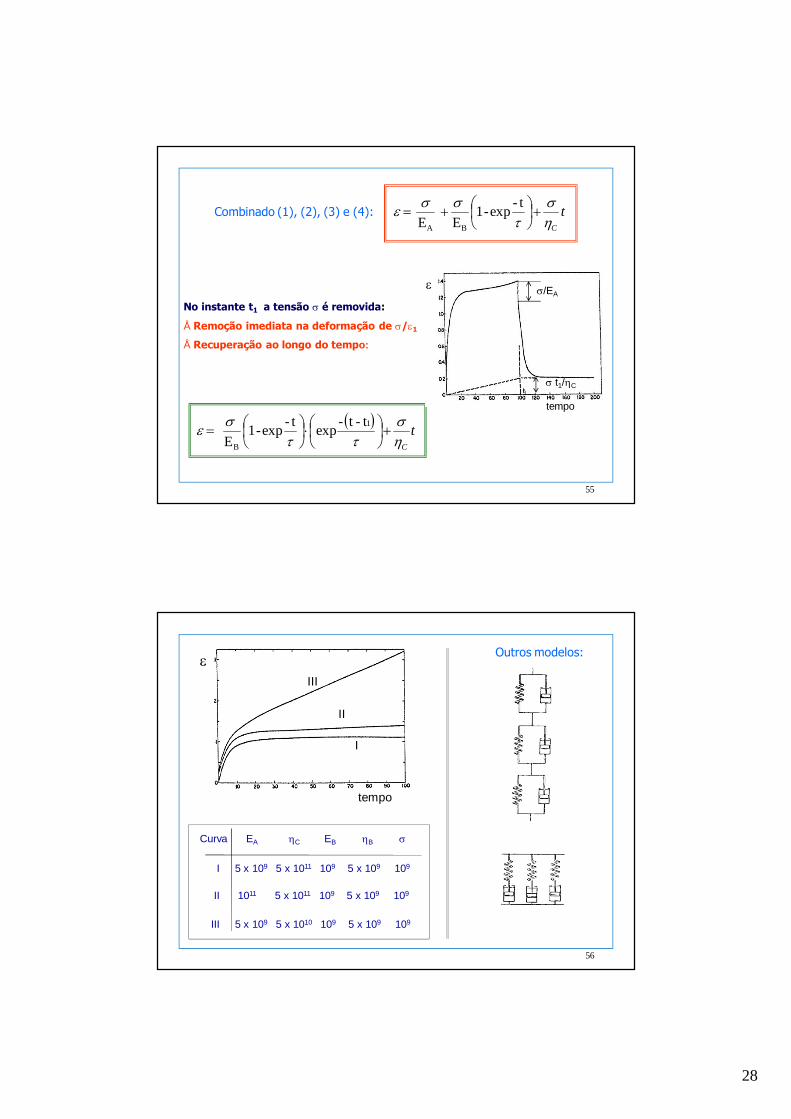
Combinado (1), (2), (3) e (4): tCη
στ
σσε t- exp- 1 E
E
BA
+
+=
No instante t1 a tensão σ é removida:
• Remoção imediata na deformação de σ/ε1
• Recuperação ao longo do tempo:
( ) tCη
σττ
σε t-t - exp t- exp- 1 E
1
B
+
⋅
=
tempo
ε σ/EA
σ t1/ηC
55
tempo
ε
II
I
III
Curva EA ηC EB ηB σ
I 5 x 109 5 x 1011 109 5 x 109 109
II 1011 5 x 1011 109 5 x 109 109
III 5 x 109 5 x 1010 109 5 x 109 109
Outros modelos:
56
29
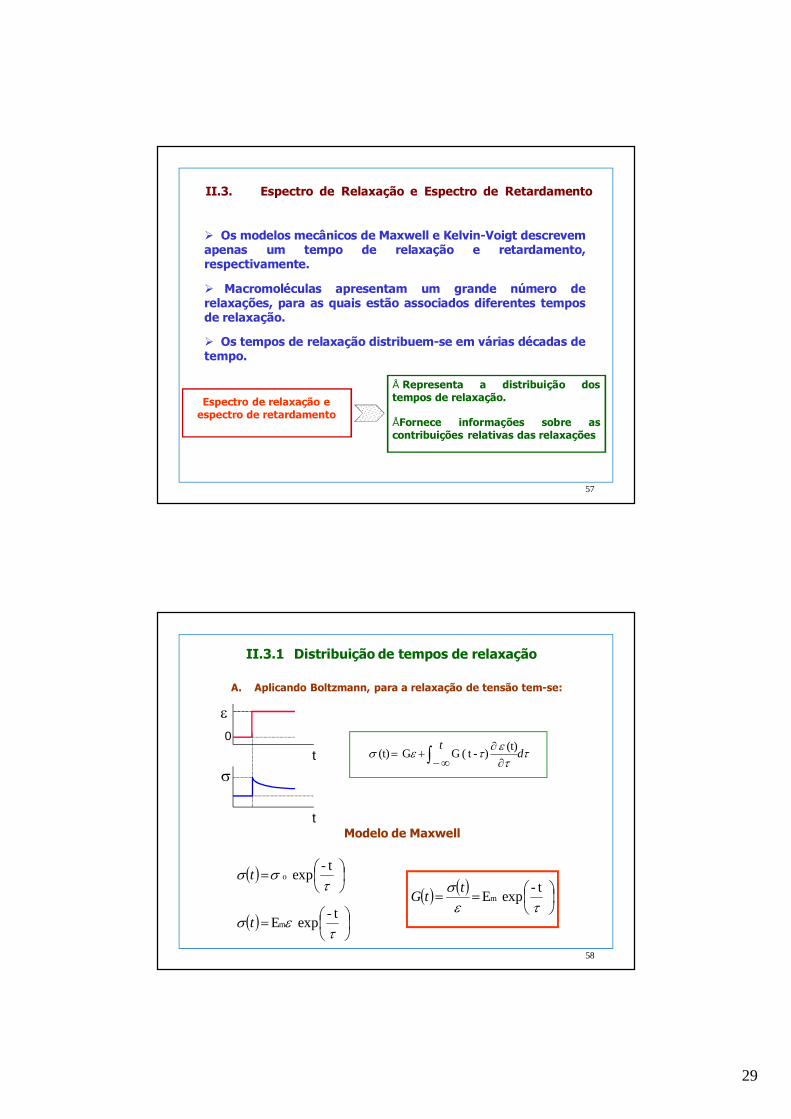
II.3. Espectro de Relaxação e Espectro de Retardamento
Ø Os modelos mecânicos de Maxwell e Kelvin-Voigt descrevemapenas um tempo de relaxação e retardamento,respectivamente.
Ø Macromoléculas apresentam um grande número derelaxações, para as quais estão associados diferentes temposde relaxação.
Ø Os tempos de relaxação distribuem-se em várias décadas detempo.
Espectro de relaxação e espectro de retardamento
• Representa a distribuição dostempos de relaxação.
• Fornece informações sobre ascontribuições relativas das relaxações
57
II.3.1 Distribuição de tempos de relaxação
A. Aplicando Boltzmann, para a relaxação de tensão tem-se:
ττ
ετεσ dt
∫ ∂∂
∞−+=
(t) ) - t (G G (t)
( )
= t- exp o
τσσ t
Modelo de Maxwell
( )
= t- exp E m
τεσ t
t
σt
ε0
( ) ( )
== t- exp E m
τεσ ttG
58

30
Para vários elementos de Maxwell em paralelo.....
( )
Σ=
t- exp E n
nn
0 τtG
En = constante da mola
τ n = tempo de relaxação
ττ
ετεσ dt
∫ ∂∂
∞−+=
(t) ) - t (G G (t)
Combinando 1 e 2:
( ) ττ
τεεσ dt
∫+= t- exp f0
G (t) F(t) é o espectro de
tempos de relaxação
59
ττ
ετ
εσ dt
n∫ ∑ ∂
∂
+=
(t) t-expE 0
G (t) n
on
Boltzmann:
(1)
(2)
( ) )(ln t- exp H G (t) ττ
τ dG ∫ ∞−∞
+=
Na prática é mais conveniente trabalhar com log τ. Portanto, define-se
um novo espectro de relaxação H(τ), que fornece as contribuições para
a relaxação de tensão associadas a tempos de relaxação
compreendidos entre ln τ e ln τ + d(ln τ)
Ø G é a contribuição para a relaxação de tensão com τ →∞
Ø Η(τ) é o espectro de relaxação
60
( ) ττ
τ dt
G ∫+= t- exp f0
G (t)
31
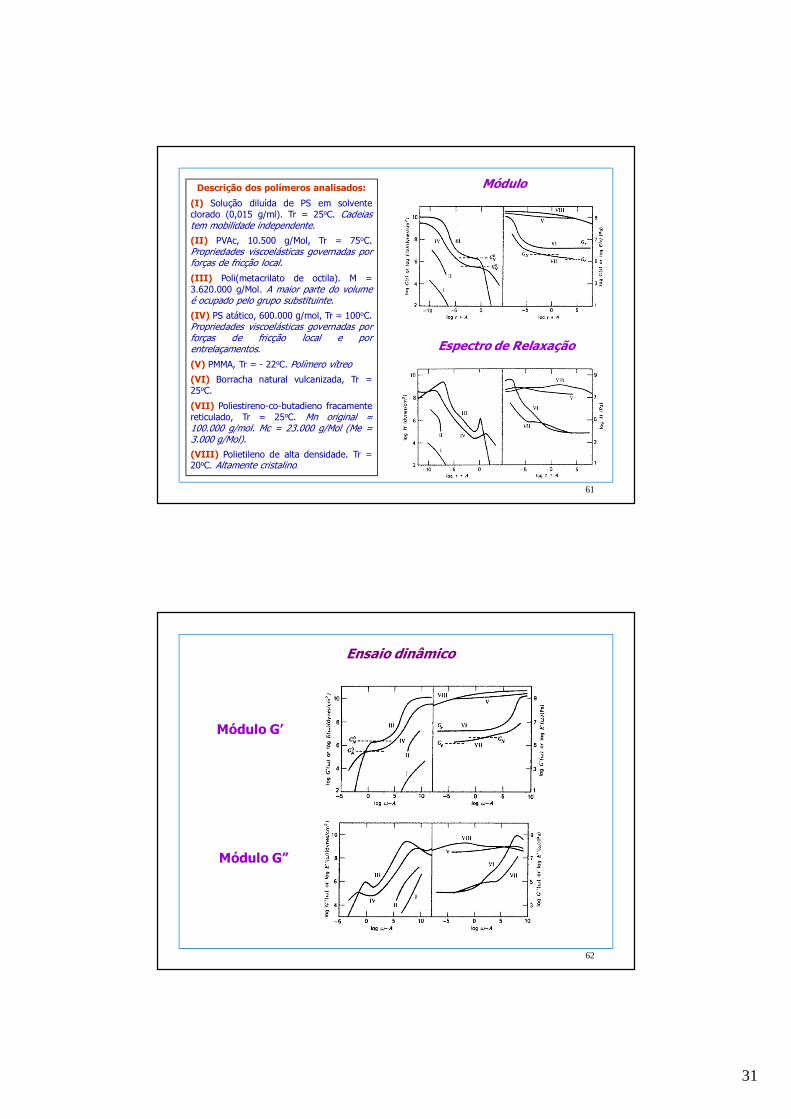
Descrição dos polímeros analisados:
(I) Solução diluída de PS em solventeclorado (0,015 g/ml). Tr = 25oC. Cadeiastem mobilidade independente.(II) PVAc, 10.500 g/Mol, Tr = 75oC.Propriedades viscoelásticas governadas porforças de fricção local.(III) Poli(metacrilato de octila). M =3.620.000 g/Mol. A maior parte do volumeé ocupado pelo grupo substituinte.(IV) PS atático, 600.000 g/mol, Tr = 100oC.Propriedades viscoelásticas governadas porforças de fricção local e porentrelaçamentos.(V) PMMA, Tr = - 22oC. Polímero vítreo(VI) Borracha natural vulcanizada, Tr =25oC.
(VII) Poliestireno-co-butadieno fracamentereticulado, Tr = 25oC. Mn original =100.000 g/mol. Mc = 23.000 g/Mol (Me =3.000 g/Mol).(VIII) Polietileno de alta densidade. Tr =20oC. Altamente cristalino.
Módulo
Espectro de Relaxação
61
Módulo G’
Módulo G”
Ensaio dinâmico
62
32
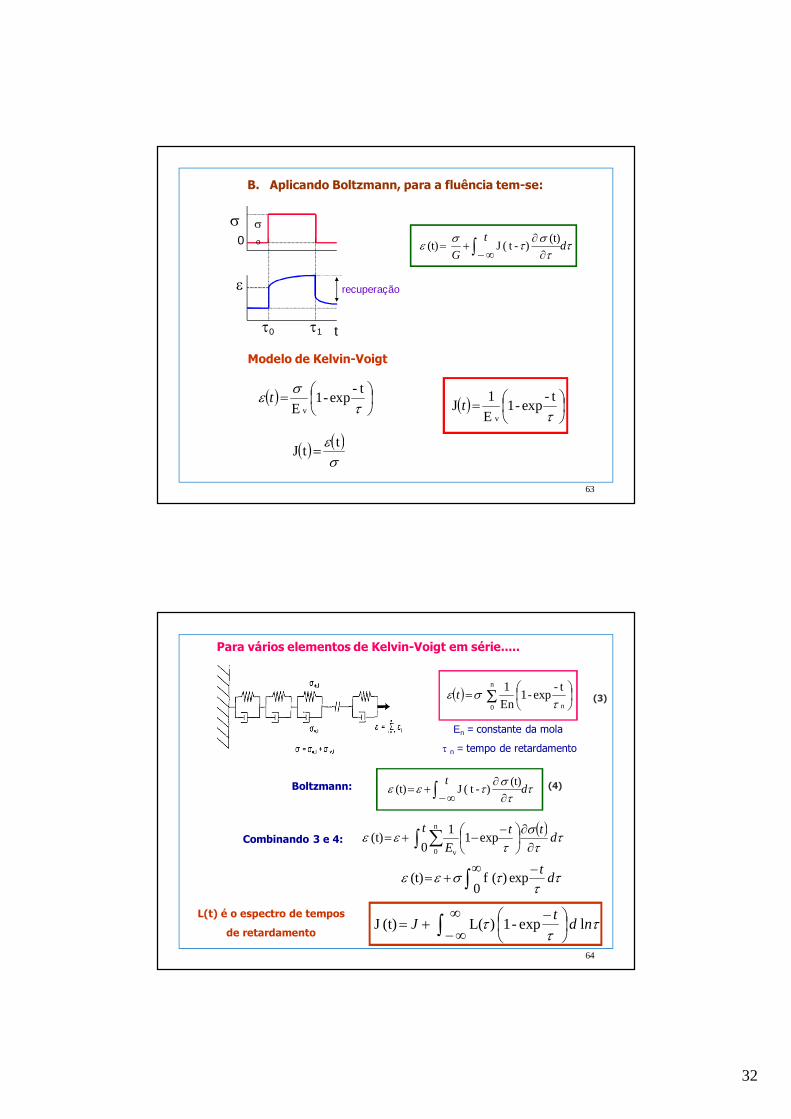
B. Aplicando Boltzmann, para a fluência tem-se:
ττ
στσε dt
G ∫ ∂∂
∞−+=
(t) ) - t ( J (t)
ε
0
t
σ
recuperação
τ1τ0
σo
( )
=
τσε t- exp- 1
E v
t
Modelo de Kelvin-Voigt
( ) ( )σ
ε t tJ =
( )
=
τt- exp- 1
E1 J
vt
63
Para vários elementos de Kelvin-Voigt em série.....
( )
= Σ
n
n
0 t- exp- 1
En1
τσε t
En = constante da mola
τ n = tempo de retardamento
ττ
στεε dt
∫ ∂∂
∞−+=
(t) ) - t ( J (t)
( ) ττ
στ
εε dttE
t∫ ∑ ∂
∂
−
−+= exp11 0
(t) n
0 v
ττ
τ ndtJ l exp - 1 )L( (t) J ∫
−
∞−∞
+=
Boltzmann:
L(t) é o espectro de tempos
de retardamento
64
(3)
(4)
Combinando 3 e 4:
ττ
τσεε dt∫
−∞+= exp )( f
0 (t)
33
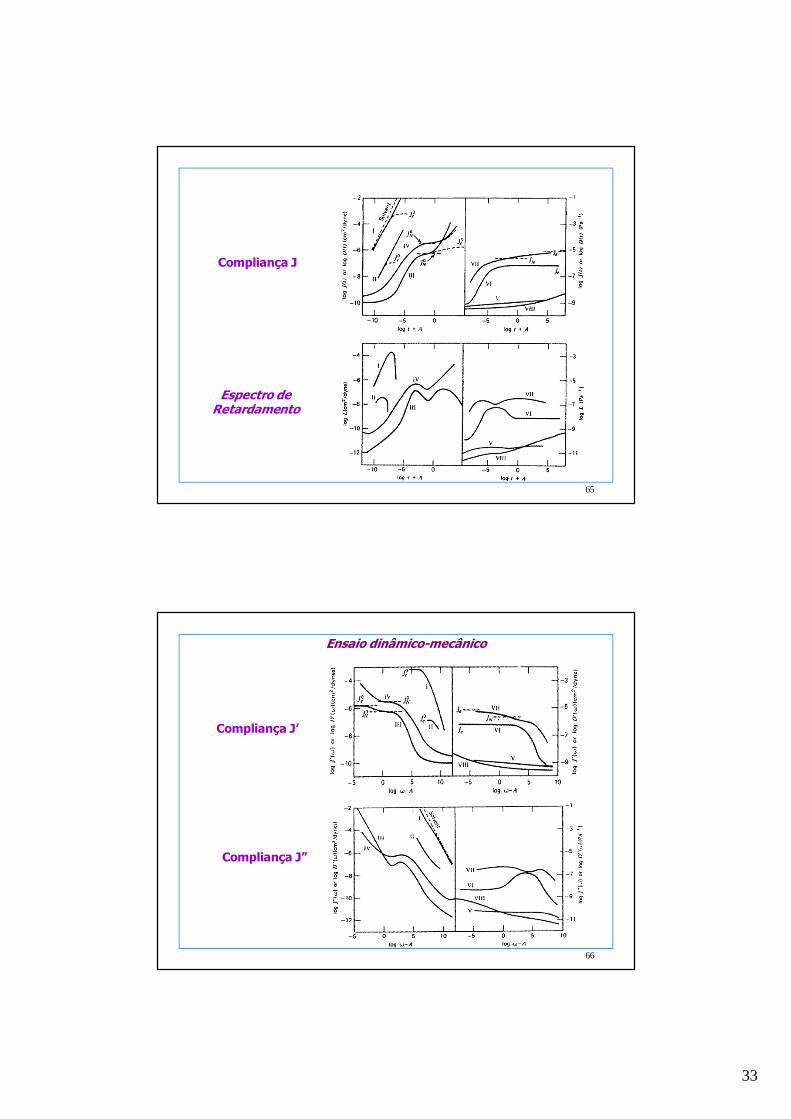
Compliança J
Espectro de Retardamento
65
Ensaio dinâmico-mecânico
Compliança J’
Compliança J”
66
34
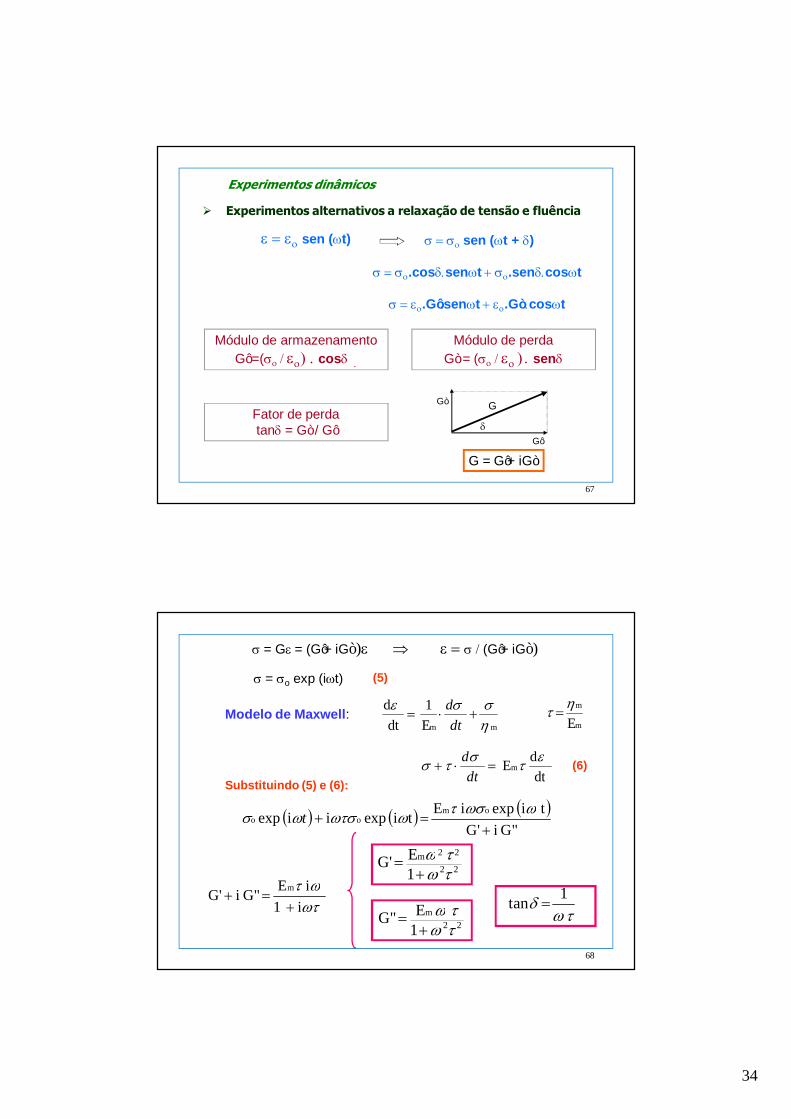
σ = σο sen (ωt + δ)ε = εο sen (ωt)
σ = σο.cosδ.senωt + σο.senδ.cosωt
Módulo de armazenamentoG’ =(σο / εο) . cosδ .
Módulo de perdaG” = (σο / εο ) . senδ
Fator de perdatanδ = G” / G’
Experimentos dinâmicos
Ø Experimentos alternativos a relaxação de tensão e fluência
σ = εο.G’.senωt + εο.G”.cosωt
δ
G”
G’
G
G = G’+ iG”
67
m
m
E1
dt d
ησσε
+⋅=dt
dModelo de Maxwell:m
m
E ητ =
dt d E
m ετστσ =⋅+
dtd
σ = Gε = (G’+ iG”)ε ⇒ ε = σ / (G’+ iG”)
( ) ( ) ( )G" i G'
ti exp i E ti exp i i exp o moo
+=+
ωωστωωτσωσ t
i 1i E G" i G' m
ωτωτ
+=+
σ = σo exp (iωt) (5)
(6)Substituindo (5) e (6):
22
22 m
1 E G'τωτω
+=
22m
1 E G"
τωτω
+= τω
δ 1 tan =
68
35
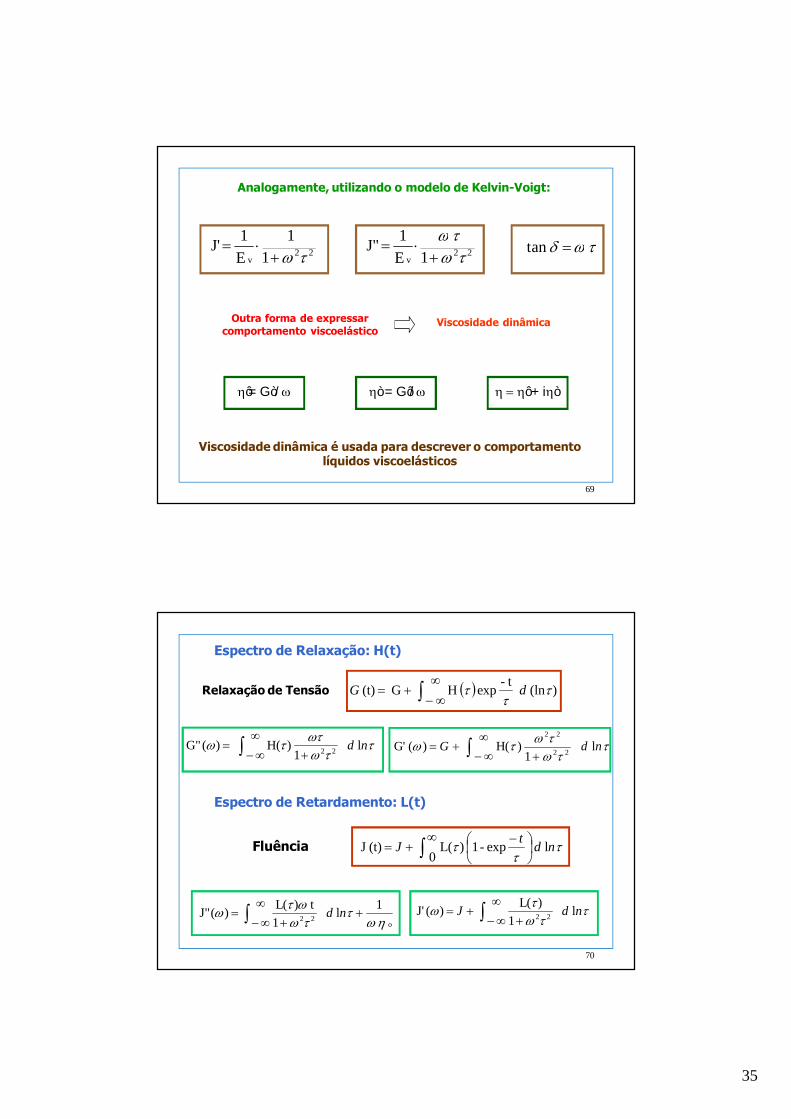
Analogamente, utilizando o modelo de Kelvin-Voigt:
22 v 1
E1 J"
τωτω
+⋅=22
v 11
E1 J'
τω+⋅= τωδ tan =
Outra forma de expressar comportamento viscoelástico
Viscosidade dinâmica
η’= G”/ ω η” = G’/ ω η = η’ + iη”
Viscosidade dinâmica é usada para descrever o comportamento líquidos viscoelásticos
69
Espectro de Relaxação: H(t)
Espectro de Retardamento: L(t)
( ) )(ln t- exp H G (t) ττ
τ dG ∫ ∞−∞
+=
ττ
τ ndtJ l exp - 1 )L( 0
(t) J ∫
−∞
+=
o22
1 l 1
t)L( )(J"ηω
ττω
ωτω ++∞−
∞= ∫ nd τ
τωτω ndJ l
1)L( )( J' 22∫ +∞−
∞+=
ττω
ωττω nd l 1
)H( )( G" 22∫ +∞−∞
= ττω
τωτω ndG l 1
)H( )( G' 22
22
∫ +∞−∞
+=
Relaxação de Tensão
Fluência
70
36
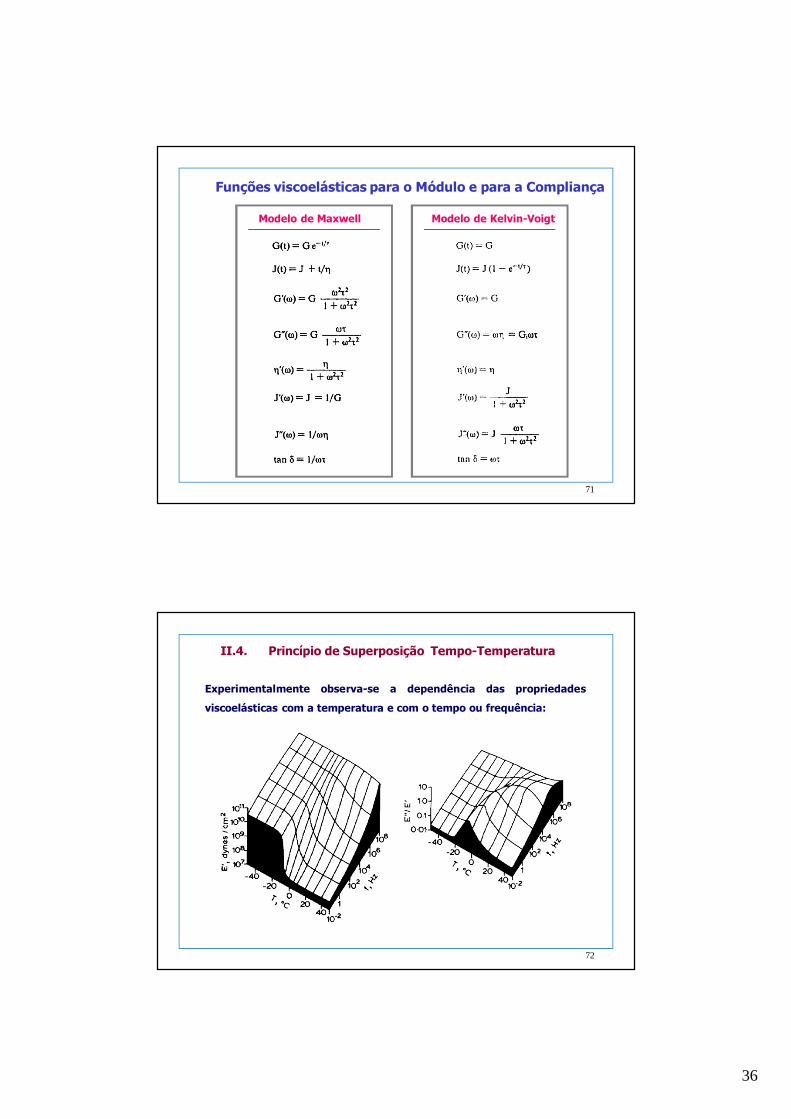
Funções viscoelásticas para o Módulo e para a Compliança
Modelo de Maxwell Modelo de Kelvin-Voigt
71
II.4. Princípio de Superposição Tempo-Temperatura
Experimentalmente observa-se a dependência das propriedades
viscoelásticas com a temperatura e com o tempo ou frequência:
72
37
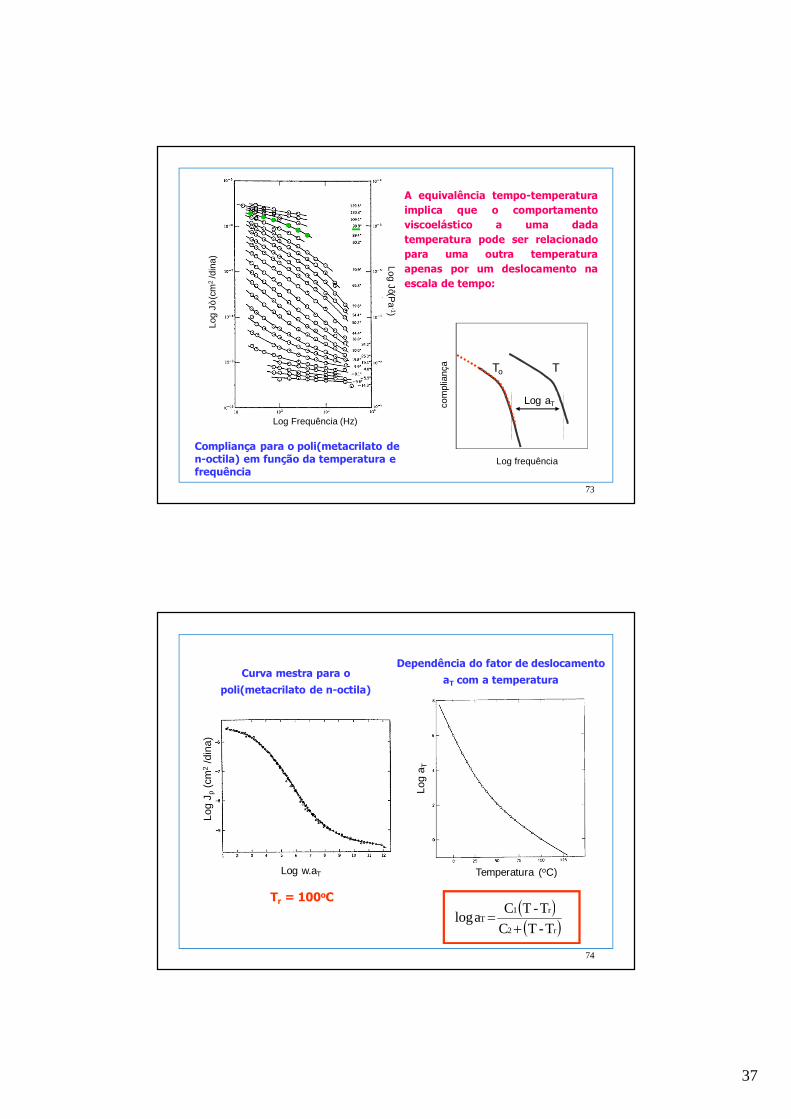
A equivalência tempo-temperaturaimplica que o comportamentoviscoelástico a uma dadatemperatura pode ser relacionadopara uma outra temperaturaapenas por um deslocamento naescala de tempo:
Compliança para o poli(metacrilato de n-octila) em função da temperatura e frequência
Log Frequência (Hz)
Log
J” (c
m2
/din
a) Log J’ (Pa
-1)
TTo
Log aT
Log frequência
com
plia
nça
73
Curva mestra para o poli(metacrilato de n-octila)
Log w.aT
Log
J p(c
m2
/din
a)
Temperatura (oC)
Log
a T
Tr = 100oC
Dependência do fator de deslocamento aT com a temperatura
( )( )r2
r1T
T - T CT - T C a log
+=
74
38
Log ω (rad/s)
Log
G’[P
a]
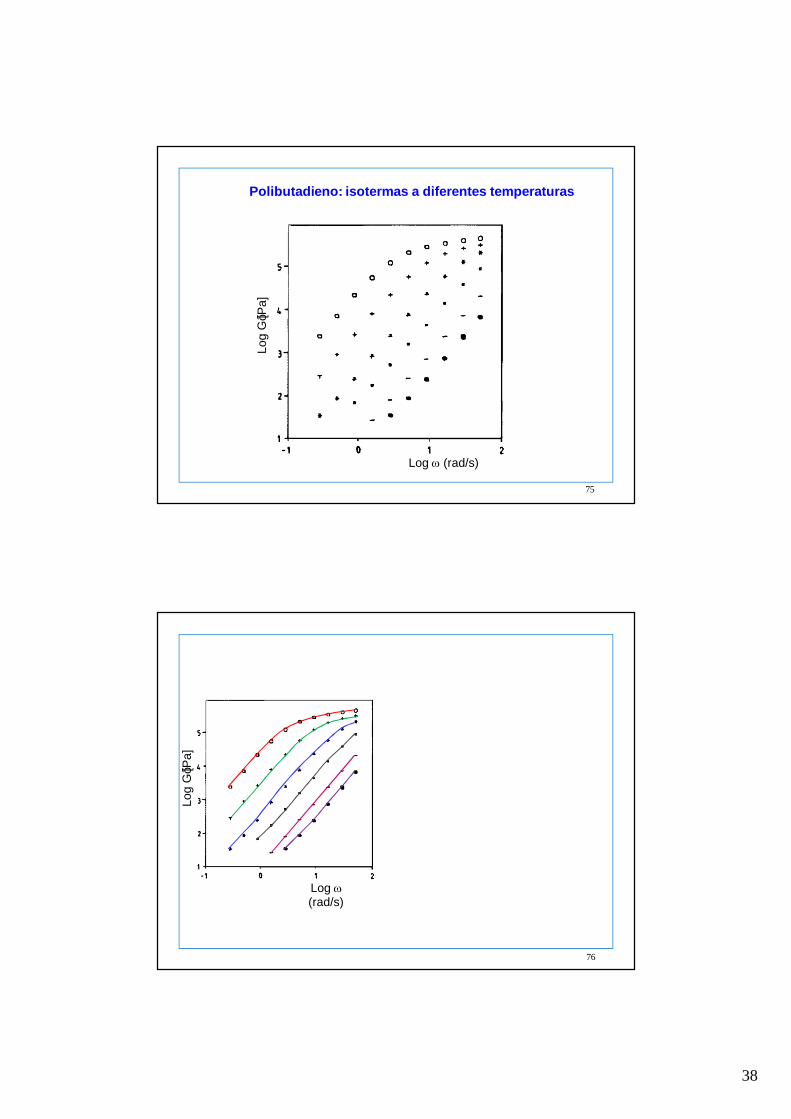
Polibutadieno: isotermas a diferentes temperaturas
75
76
Log ω(rad/s)
Log
G’[P
a]
39
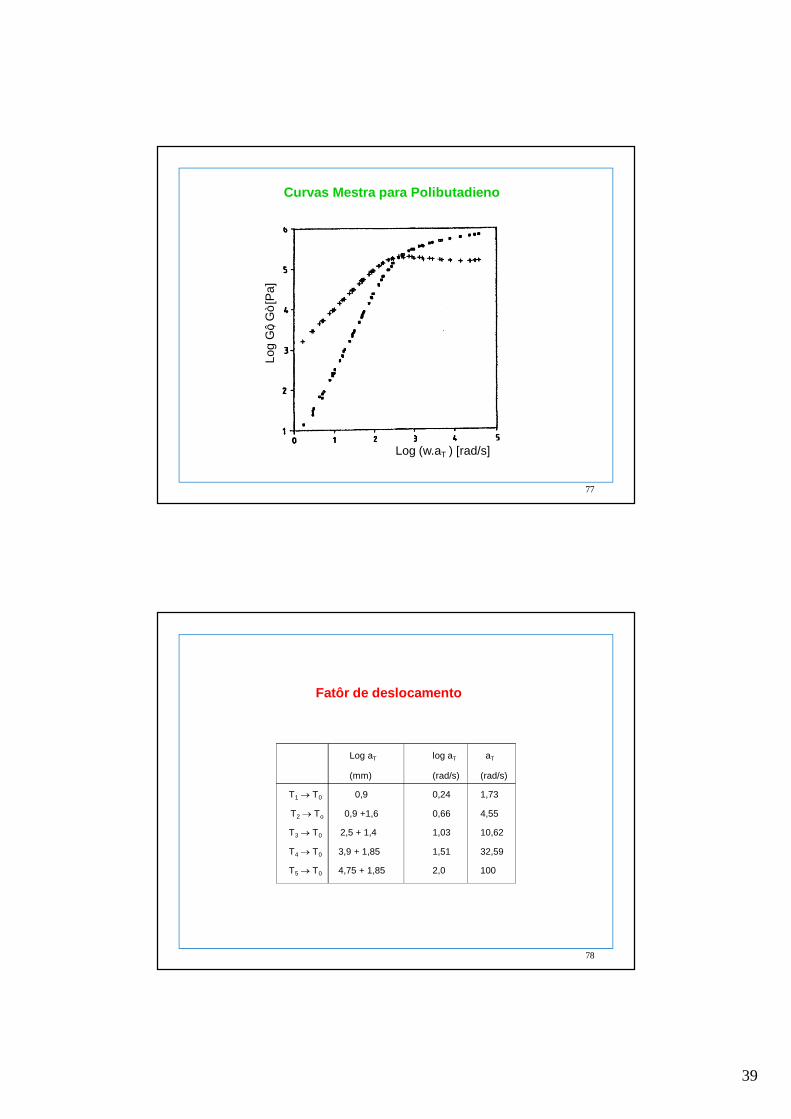
Curvas Mestra para Polibutadieno
Log (w.aT ) [rad/s]
Log
G’,
G” [
Pa]
77
Log aT log aT aT
(mm) (rad/s) (rad/s)
T1 → T0 0,9 0,24 1,73
T2 → To 0,9 +1,6 0,66 4,55
T3 → T0 2,5 + 1,4 1,03 10,62
T4 → T0 3,9 + 1,85 1,51 32,59
T5 → T0 4,75 + 1,85 2,0 100
Fatôr de deslocamento
78
40
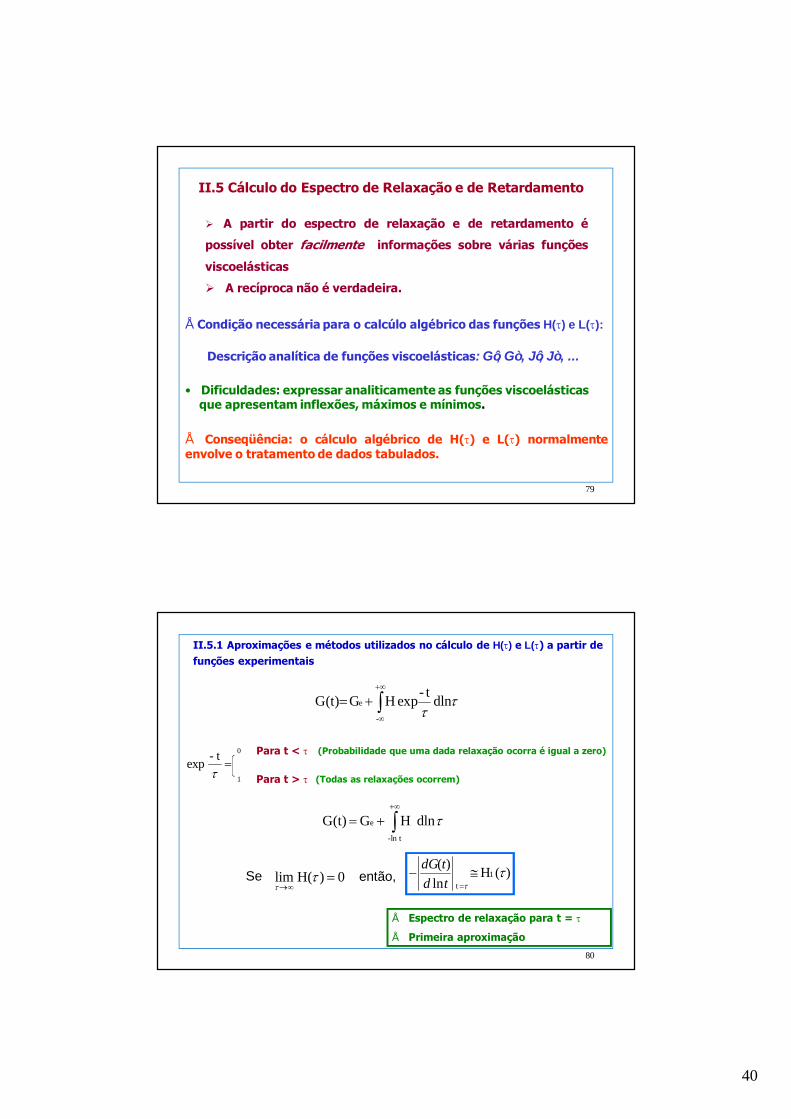
II.5 Cálculo do Espectro de Relaxação e de Retardamento
Ø A partir do espectro de relaxação e de retardamento é
possível obter facilmente informações sobre várias funções
viscoelásticas
Ø A recíproca não é verdadeira.
• Condição necessária para o calcúlo algébrico das funções H(τ) e L(τ):
Descrição analítica de funções viscoelásticas: G’, G”, J’, J”, ...
• Dificuldades: expressar analiticamente as funções viscoelásticasque apresentam inflexões, máximos e mínimos.
• Conseqüência: o cálculo algébrico de H(τ) e L(τ) normalmenteenvolve o tratamento de dados tabulados.
79
II.5.1 Aproximações e métodos utilizados no cálculo de H(τ) e L(τ) a partir de funções experimentais
ττ
dln t-exp H G G(t)-
e ∫+∞
∞
+=
τdln H G G(t)ln t-
e ∫+∞
+=
)( H ln
)(1
t τ
τ≅−
=tdtdG
Se 0 )H( lim =∞→
ττ
então,
• Espectro de relaxação para t = τ
• Primeira aproximação
80
0
1
t-exp =τ
Para t < τ
Para t > τ
(Probabilidade que uma dada relaxação ocorra é igual a zero)
(Todas as relaxações ocorrem)
41
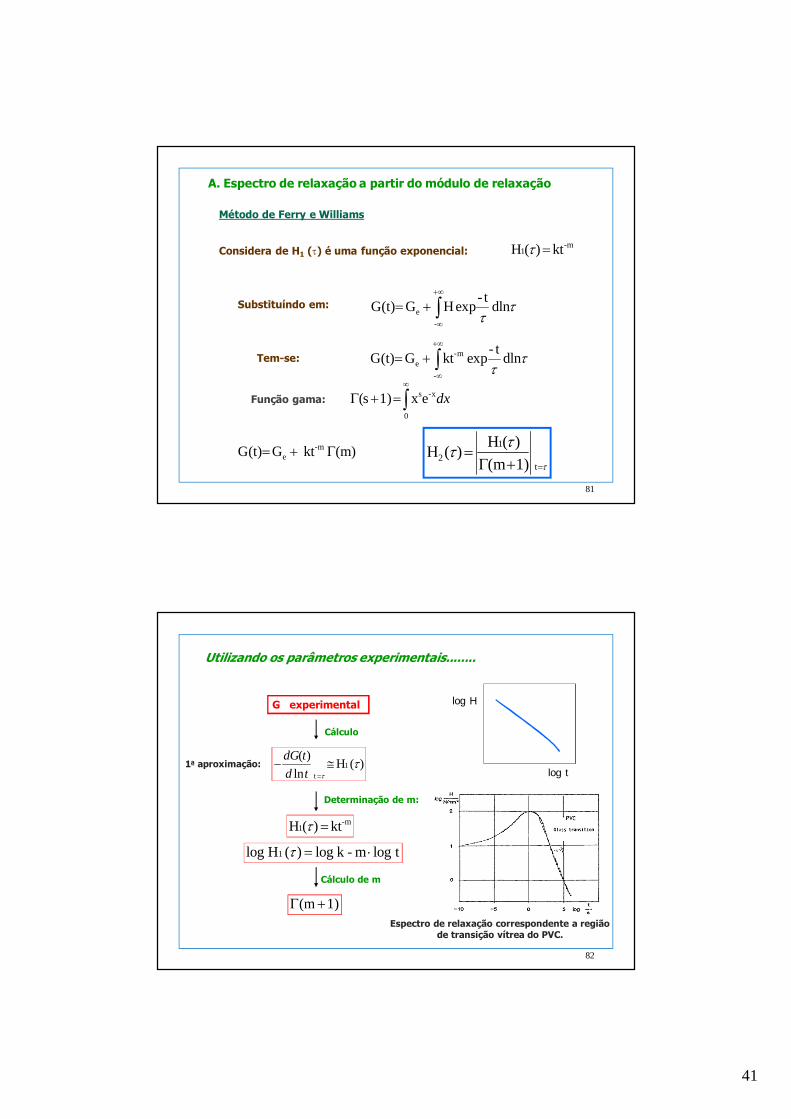
A. Espectro de relaxação a partir do módulo de relaxação
Método de Ferry e Williams
Considera de H1 (τ) é uma função exponencial:
Substituíndo em:
Tem-se:
-m1 kt )(H =τ
ττ
dln t-exp H G G(t)-
e ∫+∞
∞
+=
ττ
dln t-exp kt G G(t)-
m-e ∫
+∞
∞
+=
Função gama: dxx-
0
sex 1) s( ∫∞
=+Γ
(m) kt G G(t) -me Γ+=
τ
ττ=+Γ
=t
12
1)(m)(H )(H
81
-m1 kt )(H =τ
tlogm -k log )( H log 1 ⋅=τ
Determinação de m:
log H
log t
Utilizando os parâmetros experimentais........
G experimental
)( H ln
)(1
t τ
τ≅−
=tdtdG
1a aproximação:
Cálculo
Cálculo de m
1)(m +ΓEspectro de relaxação correspondente a região
de transição vítrea do PVC.
82
42
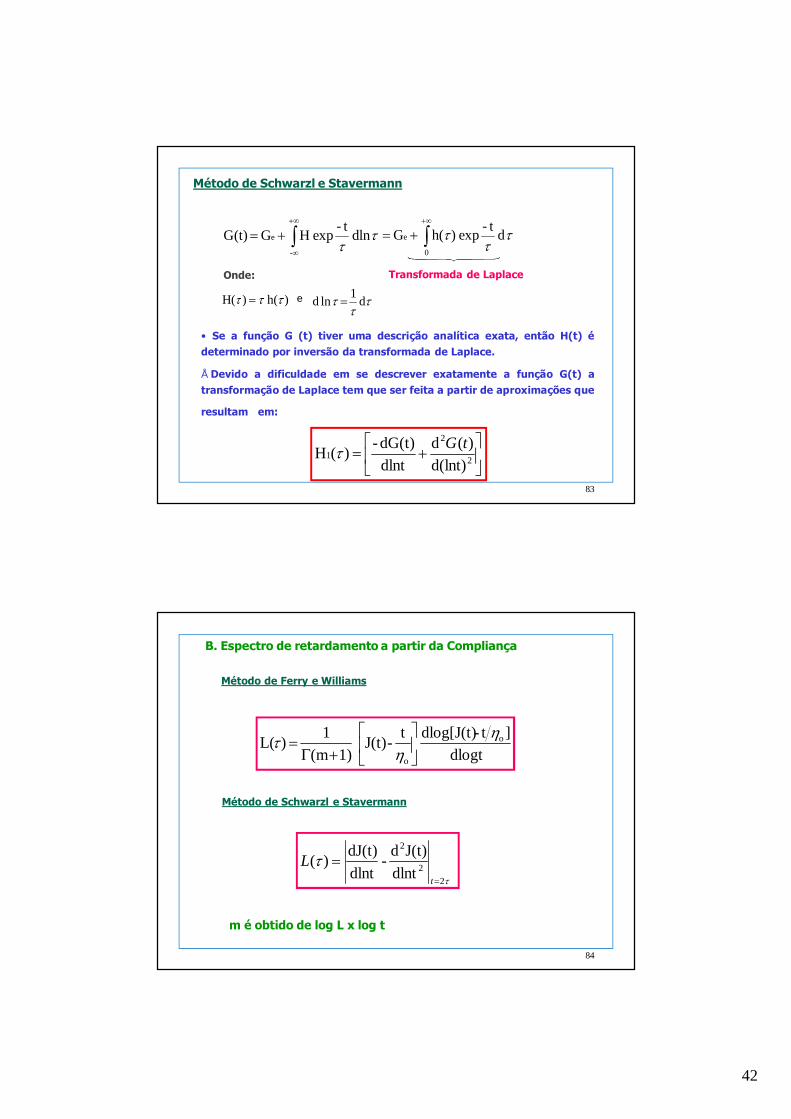
Método de Schwarzl e Stavermann
ττ
dln t-exp H G G(t)-
e ∫+∞
∞
+= ττ
τ d t-exp )h( G 0
e ∫+∞
+=
)h( )H( τττ = ττ
τ d 1 ln d =
Onde: Transformada de Laplace
• Se a função G (t) tiver uma descrição analítica exata, então H(t) édeterminado por inversão da transformada de Laplace.
• Devido a dificuldade em se descrever exatamente a função G(t) atransformação de Laplace tem que ser feita a partir de aproximações que
resultam em:
+= 2
2
1d(lnt)
)(ddlntdG(t)- )(H tGτ
e
83
B. Espectro de retardamento a partir da Compliança
Método de Ferry e Williams
dlnt
J(t)d - dlntdJ(t) )(
22
2
τ
τ=
=t
L
dlogt]t-dlog[J(t) t - J(t)
1)(m1 )L( o
o
ηη
τ
+Γ
=
Método de Schwarzl e Stavermann
m é obtido de log L x log t
84
43
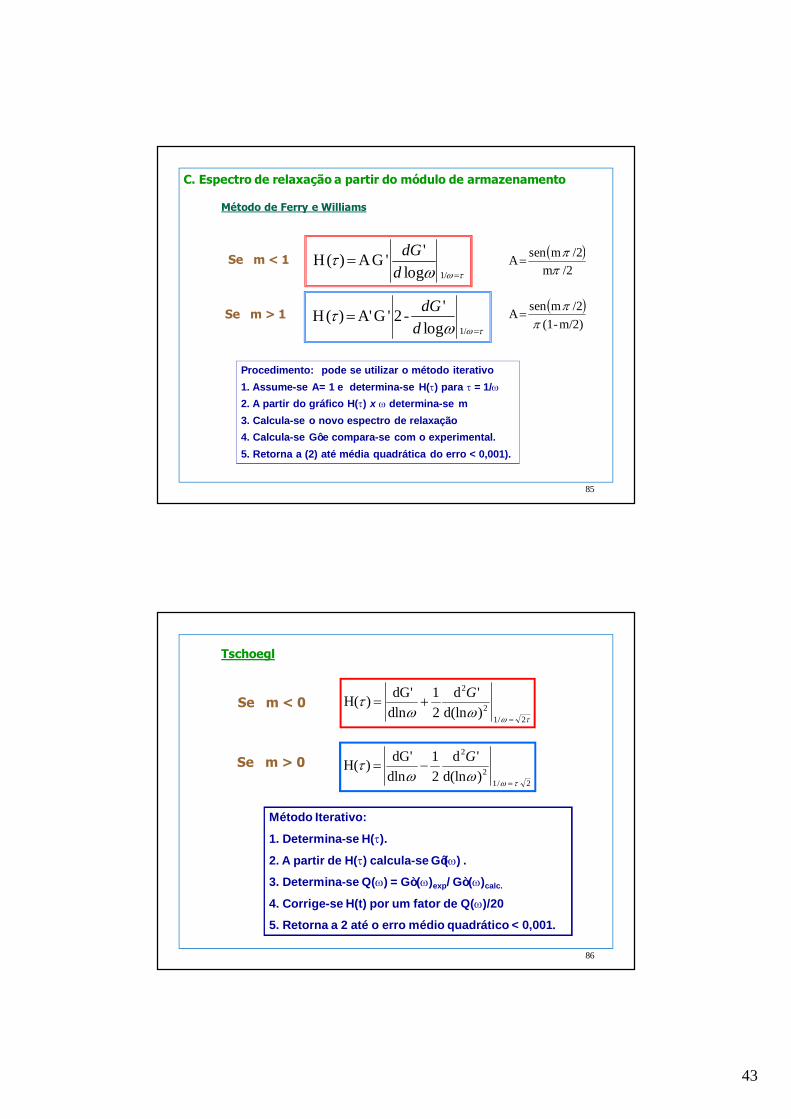
C. Espectro de relaxação a partir do módulo de armazenamento
Método de Ferry e Williams
Se m < 1 log
' ' G A )( H 1/ τωω
τ=
=d
dG ( ) /2m
/2 msen A π
π=
Se m > 1 log
' - 2' G A' )( H 1/ τωω
τ=
=d
dG ( )m/2)- (1
/2 msen A π
π=
Procedimento: pode se utilizar o método iterativo1. Assume-se A= 1 e determina-se H(τ) para τ = 1/ω2. A partir do gráfico H(τ) x ω determina-se m3. Calcula-se o novo espectro de relaxação4. Calcula-se G’ e compara-se com o experimental.5. Retorna a (2) até média quadrática do erro < 0,001).
85
Tschoegl
τωωωτ
2 /12
2
)d(ln'd
21
dlndG' )H(
=
+=G
2 /12
2
)d(ln'd
21
dlndG' )H(
τωωωτ
=
−=G
Método Iterativo:
1. Determina-se H(τ).
2. A partir de H(τ) calcula-se G’(ω) .
3. Determina-se Q(ω) = G”(ω)exp/ G”(ω)calc.
4. Corrige-se H(t) por um fator de Q(ω)/20
5. Retorna a 2 até o erro médio quadrático < 0,001.
Se m < 0
Se m > 0
86
44
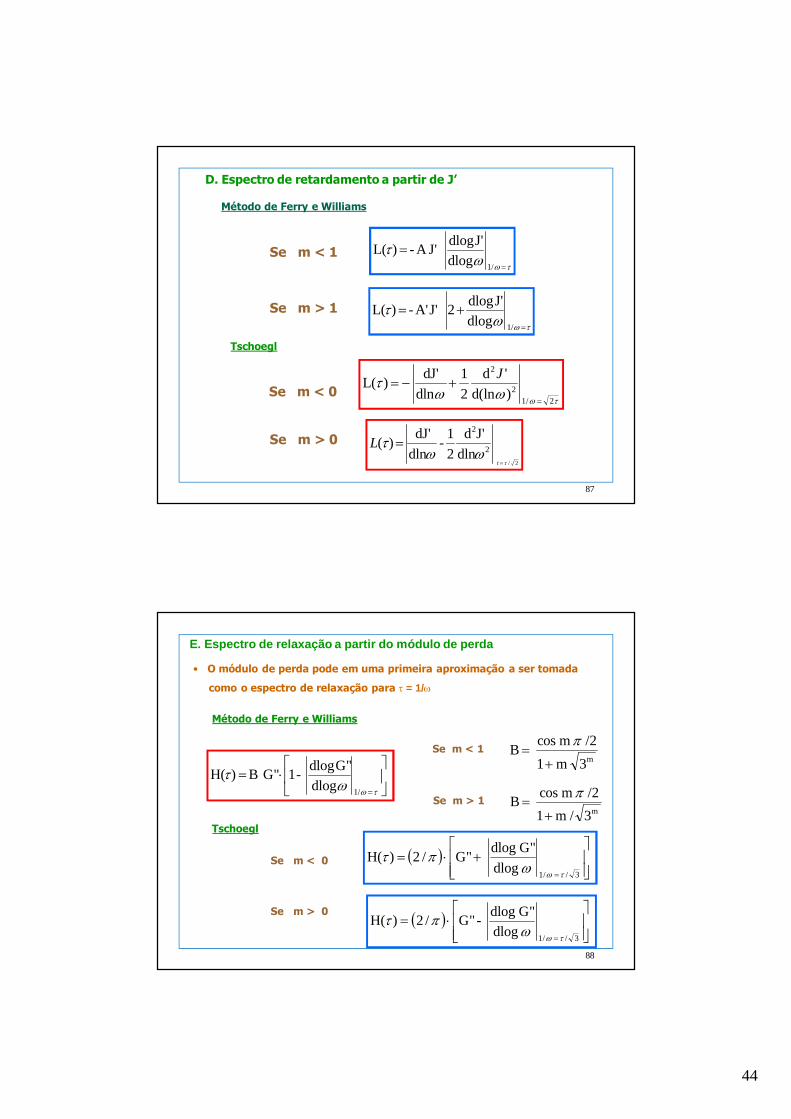
D. Espectro de retardamento a partir de J’
Método de Ferry e Williams
τωωτ
/1 dlogJ' dlog J'A - )L(
=
=
τωωτ
/1 dlogJ' dlog 2 J' A' - )L(
=
+=
Se m < 1
Se m > 1
Tschoegl
2 /
dln
J'd21 -
dlndJ' )( 2
2
τωω
τ=
=t
L
τωωωτ
2 /12
2
)d(ln'd
21
dlndJ' )L(
=
+−=J
Se m < 0
Se m > 0
87
E. Espectro de relaxação a partir do módulo de perda
• O módulo de perda pode em uma primeira aproximação a ser tomada
como o espectro de relaxação para τ = 1/ω
Método de Ferry e Williams
dlogG" dlog - 1 G" B )H(
/1
⋅=
=τωωτ
m3 m 1 /2 m cos B
+=
πSe m < 1
Se m > 1m3 /m 1
/2 m cos B+
=π
Tschoegl
Se m < 0
Se m > 0 ( ) dlogG" dlog - G" /2)H(
3/ /1
⋅=
=τωωπτ
( ) dlogG" dlog G" /2)H(
3/ /1
+⋅=
=τωωπτ
88
45
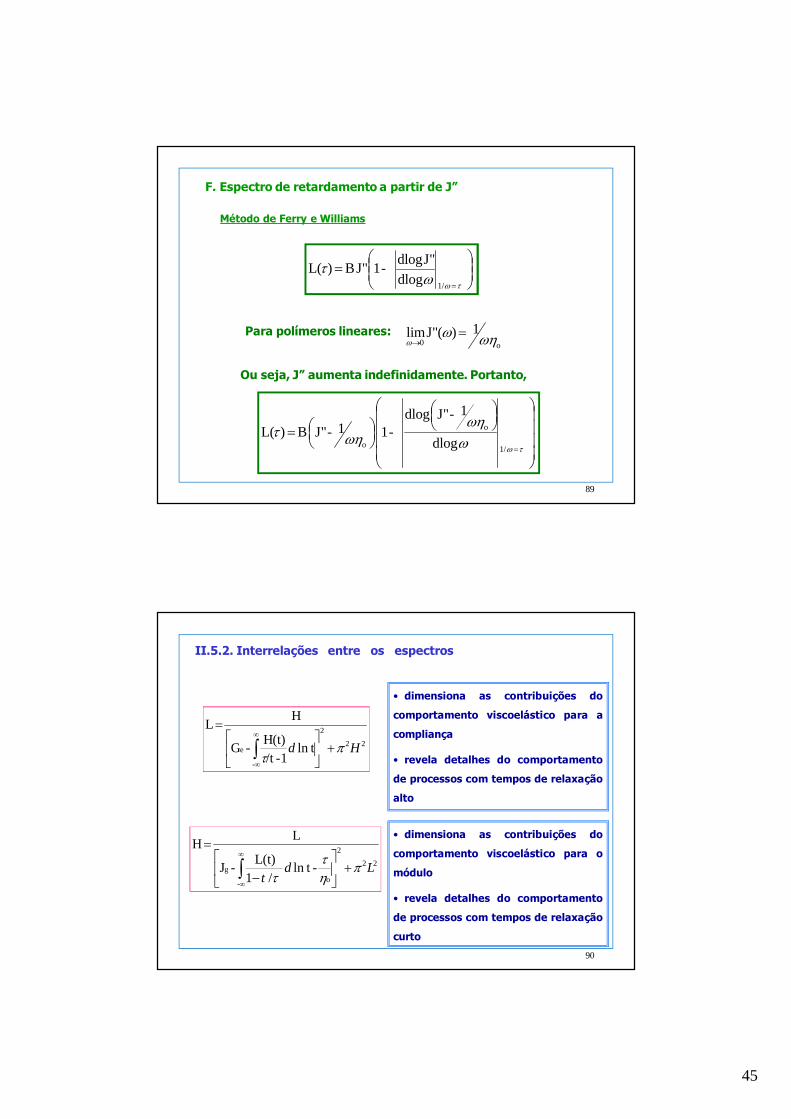
F. Espectro de retardamento a partir de J”
dlogJ" dlog - 1 J" B )L(
/1
=
=τωωτ
Método de Ferry e Williams
Para polímeros lineares:o0
1 )(J" lim ωηωω
=→
Ou seja, J” aumenta indefinidamente. Portanto,
dlog
1 - J" dlog - 1 1 - J" B )L(
/1
o
o
=
=τωωωη
ωητ
89
II.5.2. Interrelações entre os espectros
22
2
-
e tln1-/t
H(t) - G
H L
Hd πτ
+
=
∫∞
∞
22
2
- og - t ln
/1L(t) - J
L H
Ldt
πητ
τ+
−
=
∫∞
∞
• dimensiona as contribuições do
comportamento viscoelástico para o
módulo
• revela detalhes do comportamento
de processos com tempos de relaxação
curto
• dimensiona as contribuições do
comportamento viscoelástico para a
compliança
• revela detalhes do comportamento
de processos com tempos de relaxação
alto
90
46
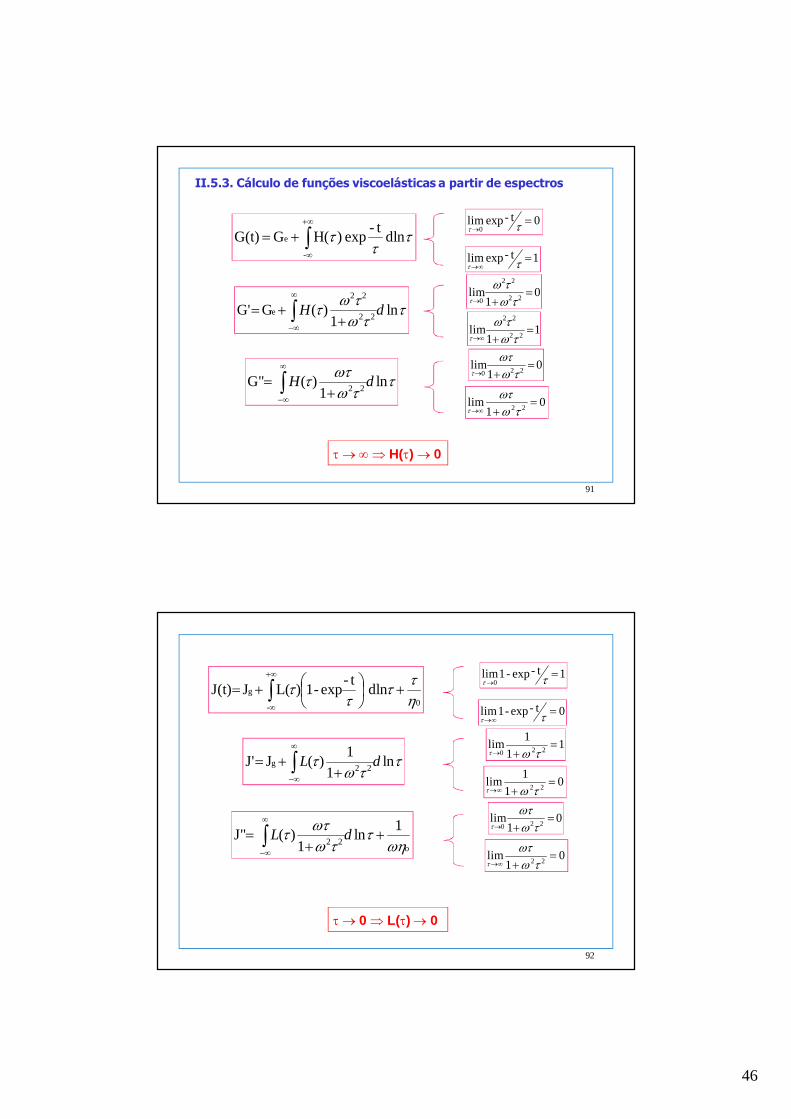
II.5.3. Cálculo de funções viscoelásticas a partir de espectros
ττ
τ dln t-exp )H( G G(t)-
e ∫+∞
∞
+=0 t-exp lim
0=
→ ττ
1 t-exp lim =∞→ ττ
ττω
ωττ ln 1
)( G" 22 dH∫∞
∞− +=
0 1
lim 22 =+∞→ τωωτ
τ
0 1
lim 220=
+→ τωωτ
τ
ττω
τωτ ln 1
)( G G' 22
22
e dH∫∞
∞− ++=
0 1
lim 22
22
0=
+→ τωτω
τ
1 1
lim 22
22
=+∞→ τω
τωτ
τ → ∞ ⇒ H(τ) → 0
91
0-
g dln t-exp - 1)L( J J(t)ηττ
ττ +
+= ∫
+∞
∞
1 t-exp - 1 lim0
=→ ττ
0 t-exp- 1 lim =∞→ ττ
o22
1 ln 1
)( J"ωη
ττω
ωττ ++
= ∫∞
∞−
dL0
1 lim 22 =
+∞→ τωωτ
τ
0 1
lim 220=
+→ τωωτ
τ
ττω
τ ln 11 )( J J' 22g dL∫
∞
∞− ++=
1 11 lim 220
=+→ τωτ
0 11 lim 22 =
+∞→ τωτ
τ → 0 ⇒ L(τ) → 0
92
47
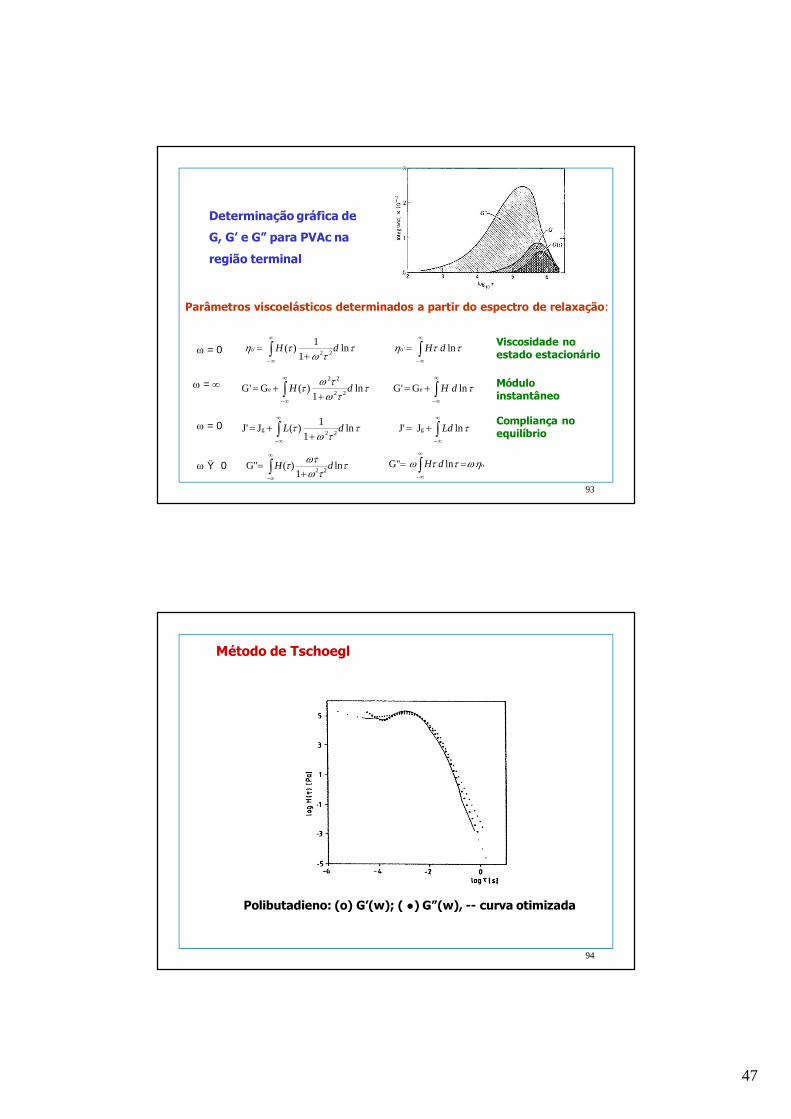
Parâmetros viscoelásticos determinados a partir do espectro de relaxação:
ττω
τη ln 11 )( 22' dHo ∫
∞
∞− += ττη ln ' dHo ∫
∞
∞−
=
ττω
τωτ ln 1
)( G G' 22
22
e dH∫∞
∞− ++= τln G G' e dH∫
∞
∞−
+=
ττω
τ ln 11 )( J J' 22g dL∫
∞
∞− ++= τln J J' g dL∫
∞
∞−
+=
Determinação gráfica de
G, G’ e G” para PVAc na
região terminal
ω = 0Viscosidade no estado estacionário
Módulo instantâneo
Compliança no equilíbrio
ττω
ωττ ln 1
)( G" 22 dH∫∞
∞− += o ln G" ηωττω == ∫
∞
∞−
dH
ω = 0
ω → 0
ω = ∞
93
Método de Tschoegl
Polibutadieno: (o) G’(w); ( l) G”(w), -- curva otimizada
94
48
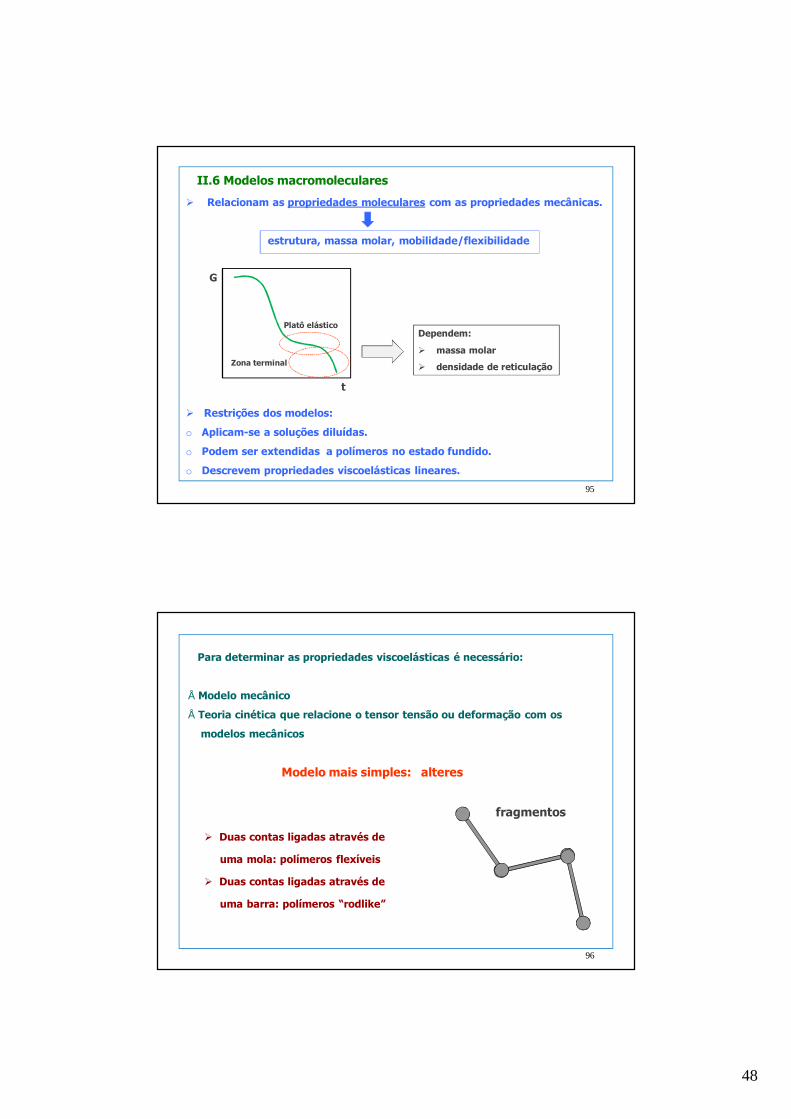
II.6 Modelos macromoleculares
Ø Relacionam as propriedades moleculares com as propriedades mecânicas.
estrutura, massa molar, mobilidade/flexibilidade
Ø Restrições dos modelos:
o Aplicam-se a soluções diluídas.
o Podem ser extendidas a polímeros no estado fundido.
o Descrevem propriedades viscoelásticas lineares.
95
G
t
Platô elástico
Zona terminal
Dependem:
Ø massa molar
Ø densidade de reticulação
Para determinar as propriedades viscoelásticas é necessário:
• Modelo mecânico
• Teoria cinética que relacione o tensor tensão ou deformação com os
modelos mecânicos
Modelo mais simples: alteres
Ø Duas contas ligadas através de
uma mola: polímeros flexíveis
Ø Duas contas ligadas através de
uma barra: polímeros “rodlike”
fragmentos
96
49
Macromolécula em solução
novelo
Mudanças conformacionais
Energia térmica
Interação polímero-solvente
Energia mínima relativa entre os confôrmeros
Conformação média
97
• A descrição das conformações pode ser feita estatisticamente.
• Considera-se que a distância entre dois pontos na macromolécula
separados por 50 ou mais unidades repetitivas, ou seja, o comprimento dos
segmentos, pode ser descrita por uma distribuição de Gauss, quando em
solução em um solvente θ, não considerando ângulo e comprimento de
ligação.
Assim, tem-se:22 /r C nl
o=∞
Onde:
Ø C∞ é a razão característica
Ø <r2>o é a distância média quadrática de ponta a ponta da cadeia
Ø n é o número de unidades repetitivas
Ø l é o comprimento da ligação
98
50
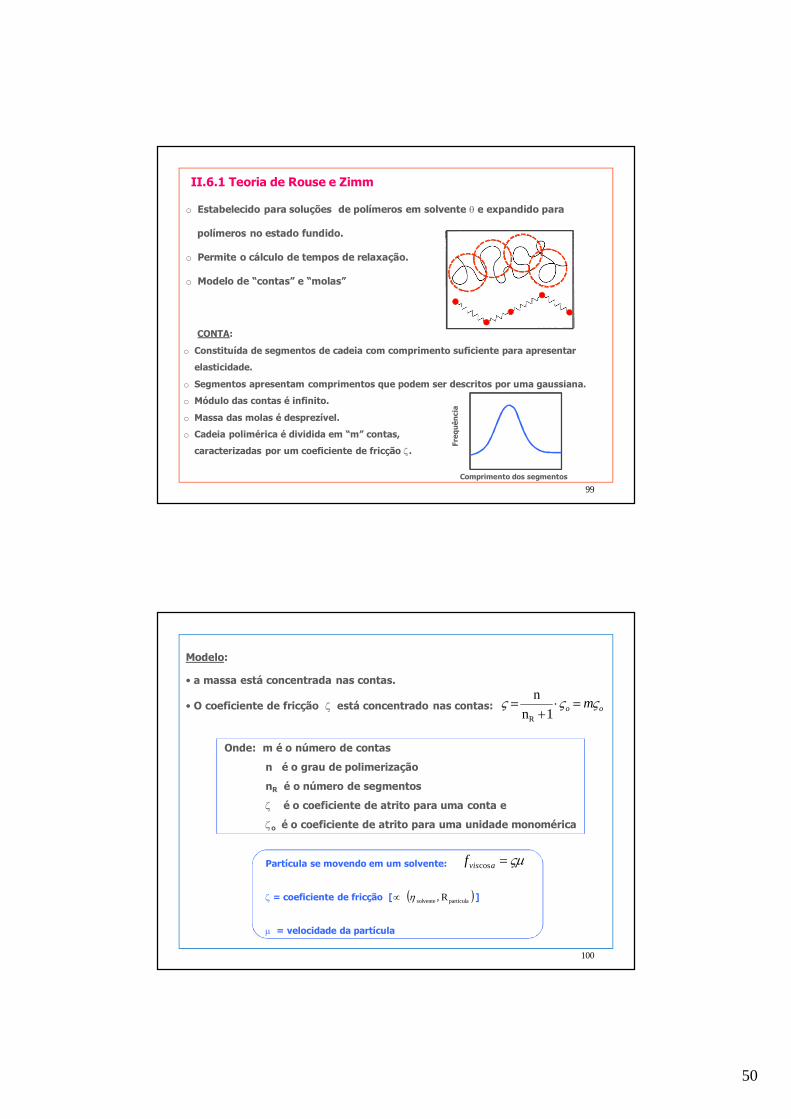
II.6.1 Teoria de Rouse e Zimm
99
o Estabelecido para soluções de polímeros em solvente θ e expandido para
polímeros no estado fundido.
o Permite o cálculo de tempos de relaxação.
o Modelo de “contas” e “molas”
CONTA:
o Constituída de segmentos de cadeia com comprimento suficiente para apresentar
elasticidade.
o Segmentos apresentam comprimentos que podem ser descritos por uma gaussiana.
o Módulo das contas é infinito.
o Massa das molas é desprezível.
o Cadeia polimérica é dividida em “m” contas,
caracterizadas por um coeficiente de fricção ζ.
Comprimento dos segmentos
Freq
uênc
ia
100
Modelo:
• a massa está concentrada nas contas.
• O coeficiente de fricção ζ está concentrado nas contas: oo mςςς =⋅+
= 1 n
n R
Partícula se movendo em um solvente:
ζ = coeficiente de fricção [ ]
µ = velocidade da partícula
ςµ=avisf cos
( )partículasolvente R, η∝
Onde: m é o número de contas
n é o grau de polimerização
nR é o número de segmentos
ζ é o coeficiente de atrito para uma conta e
ζo é o coeficiente de atrito para uma unidade monomérica

51
101
Paralelo com o comportamento de partículas coloidais em um líquido:
Uma partícula submetida a uma força externa se moverá a velocidade constante (µ)
como consequência da resistência do líquido (“força viscosa”):
Na ausência de força externa, as partículas se movem aleatoriamente (movimento Browniano ou
difusivo), sendo que o deslocamento da partícula é proporcional ao coeficiente de Difusão (D):
Equação de Einstein:
O próprio movimento browniano resulta em dissipação de energia.
Tempo τ requerido para uma partícula avançar de uma distância igual ao seu raio R:
Lei de Stokes:
Raio Hidrodinâmico: (determinado por espalhamento de luz ou RMN)
ςµ=avisf cos
( ) ( ) Dtrtr 60 =
−
→→
ςkTD =
kTR
DR ςτ
22
≈≈
RkTDπη6
=
DkTRh πη6
=
102
Uma macromolécula em movimento experimenta a força viscosa:
O coeficiente de Difusão de uma macromolécula de Rouse é:
E o tempo de relaxação da macromolécula de Rouse será:
(tempo para uma molécula difundir uma distância da ordem de suas dimensões)
t <<< τR : macromoléculas apresentam comportamento elástico.
t >>> τR : o principal movimento das macromoléculas é o difusional (macromolécula=líquido).
τo < t < τR : o movimento das unidades repetitivas torna-se importante, caracterizando-se
como comportamento viscoelástico.
µςoavis mf =cos
oRR m
kTkTDςς
==
222
mRkTmkT
RDR o
oRR
ςς
τ =≈≈
2222 mmbkT
mRkT oe
ooR τςςτ ==≈
τo : tempo para que uma unidade repetitiva difunda a uma distancia da ordem de suas dimensões (be)
52
103
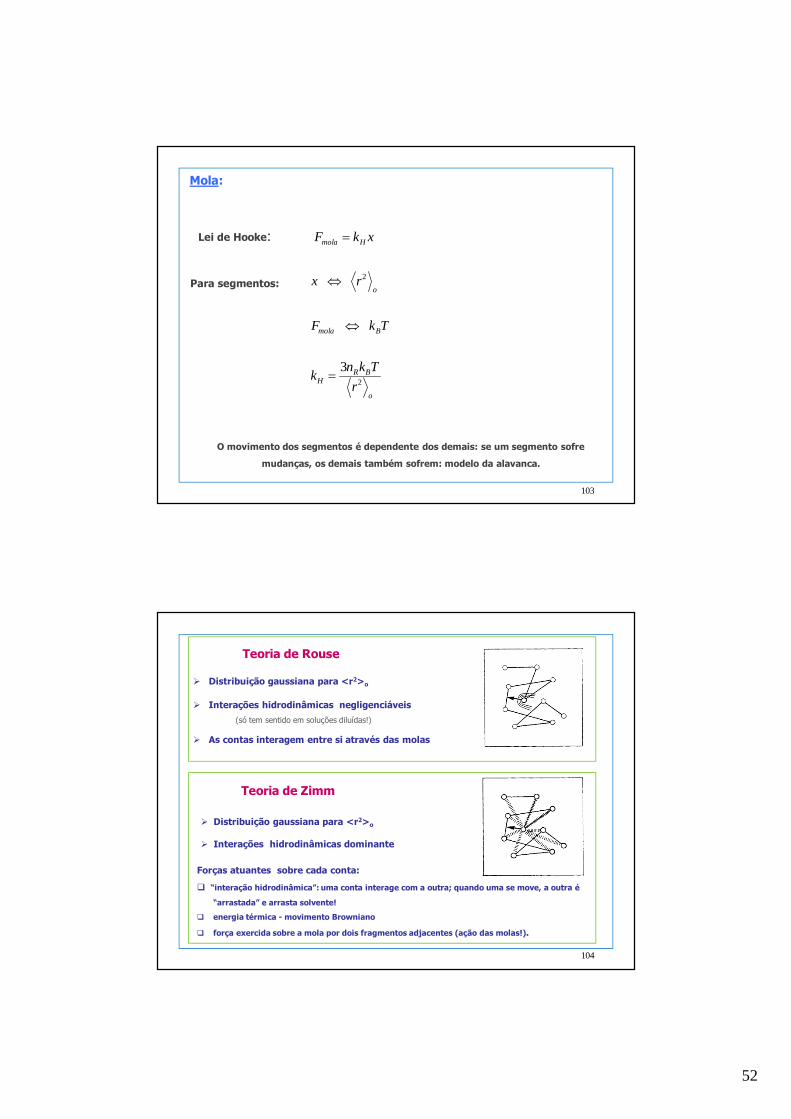
Mola:
Lei de Hooke:
Para segmentos:
o
BRH
Bmola
o
Hmola
rTknk
TkF
rx
xkF
2
2
3
=
⇔
⇔
=
O movimento dos segmentos é dependente dos demais: se um segmento sofre
mudanças, os demais também sofrem: modelo da alavanca.
Ø Distribuição gaussiana para <r2>o
Ø Distribuição gaussiana para <r2>o
Ø Interações hidrodinâmicas negligenciáveis(só tem sentido em soluções diluídas!)
Ø Interações hidrodinâmicas dominante
Teoria de Rouse
Teoria de Zimm
Forças atuantes sobre cada conta:
q “interação hidrodinâmica”: uma conta interage com a outra; quando uma se move, a outra é
“arrastada” e arrasta solvente!
q energia térmica - movimento Browniano
q força exercida sobre a mola por dois fragmentos adjacentes (ação das molas!).
104
Ø As contas interagem entre si através das molas
53
105
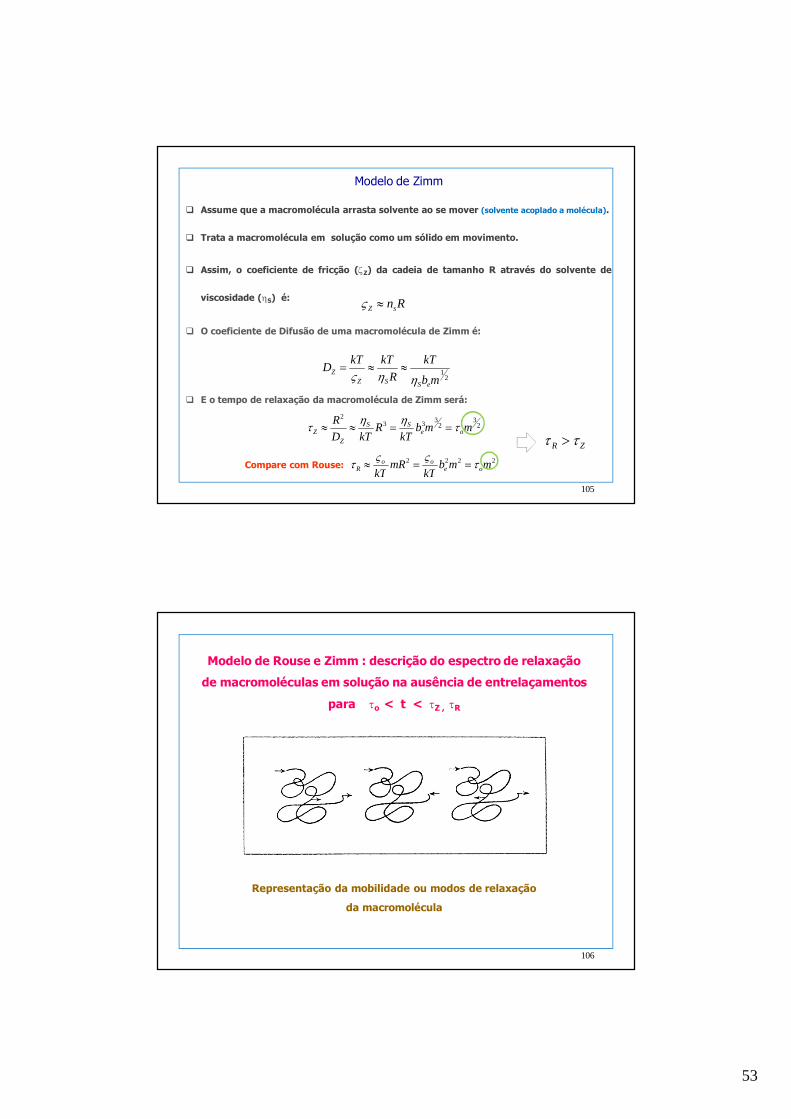
Modelo de Zimm
q Assume que a macromolécula arrasta solvente ao se mover (solvente acoplado a molécula).
q Trata a macromolécula em solução como um sólido em movimento.
q Assim, o coeficiente de fricção (ζZ) da cadeia de tamanho R através do solvente de
viscosidade (ηS) é:
q O coeficiente de Difusão de uma macromolécula de Zimm é:
q E o tempo de relaxação da macromolécula de Zimm será:
RnsZ ≈ς
21
mb
kTR
kTkTDeSSZ
Zηης
≈≈=
23
2333
2
mmbkT
RkTD
Roe
SS
ZZ τηητ ==≈≈
2222 mmbkT
mRkT oe
ooR τςςτ ==≈Compare com Rouse:
ZR ττ >
Modelo de Rouse e Zimm : descrição do espectro de relaxação
de macromoléculas em solução na ausência de entrelaçamentos
para τo < t < τZ , τR
Representação da mobilidade ou modos de relaxação
da macromolécula
106
54
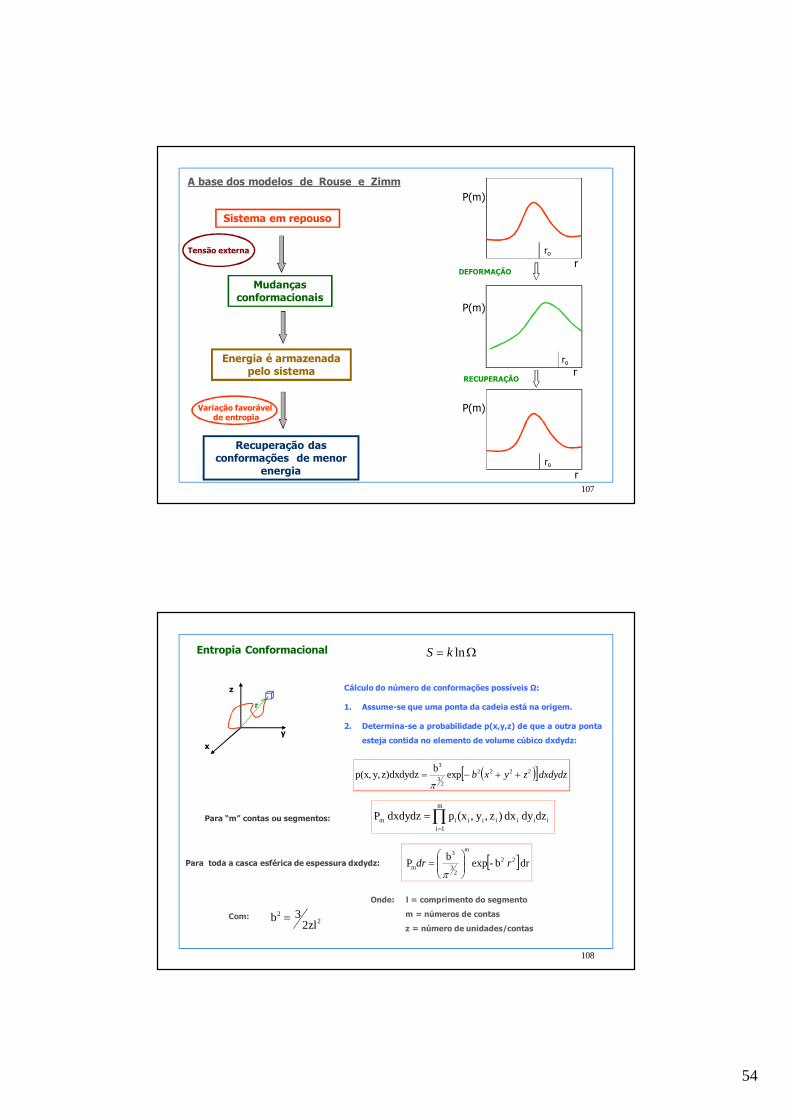
Tensão externa
Sistema em repouso
Mudanças conformacionais
Energia é armazenada pelo sistema
Recuperação das conformações de menor
energia
Variação favorávelde entropia
107
r
P(m)
ro
r
P(m)
ro
DEFORMAÇÃO
r
P(m)
ro
RECUPERAÇÃO
A base dos modelos de Rouse e Zimm
dzdy dx )z , y,(xp dxdydz Pm
1iiiiiiiim ∏
=
=
[ ]dr b-exp b P 22
23
3
m rdrm
=
π
Entropia Conformacional
Com:
Onde: l = comprimento do segmento
m = números de contas
z = número de unidades/contas2
2
2zl3 b =
108
x
z
y
r
Ω= lnkS
Cálculo do número de conformações possíveis Ω:
1. Assume-se que uma ponta da cadeia está na origem.
2. Determina-se a probabilidade p(x,y,z) de que a outra ponta
esteja contida no elemento de volume cúbico dxdydz:
( )[ ]dxdydzzyxb expb z)dxdydzy,p(x, 2222
23
3
++−=π
Para toda a casca esférica de espessura dxdydz:
Para “m” contas ou segmentos:
55
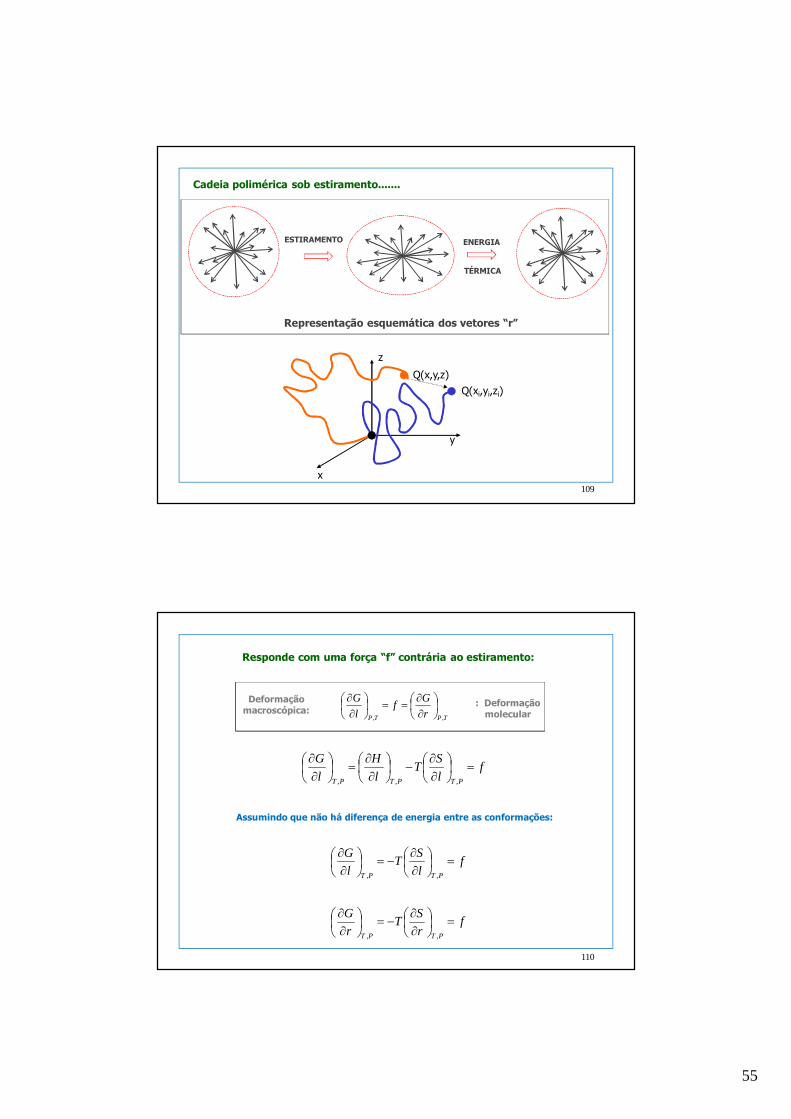
Cadeia polimérica sob estiramento.......
x
y
z
Q(x,y,z)Q(xi,yi,zi)
109
Representação esquemática dos vetores “r”
ESTIRAMENTO ENERGIA
TÉRMICA
110
Deformação macroscópica:
TPTP rGf
lG
,,
∂∂
==
∂∂ : Deformação
molecular
flST
lH
lG
PTPTPT
=
∂∂
−
∂∂
=
∂∂
,,,
Assumindo que não há diferença de energia entre as conformações:
flST
lG
PTPT
=
∂∂
−=
∂∂
,,
frST
rG
PTPT
=
∂∂
−=
∂∂
,,
Responde com uma força “f” contrária ao estiramento:
56
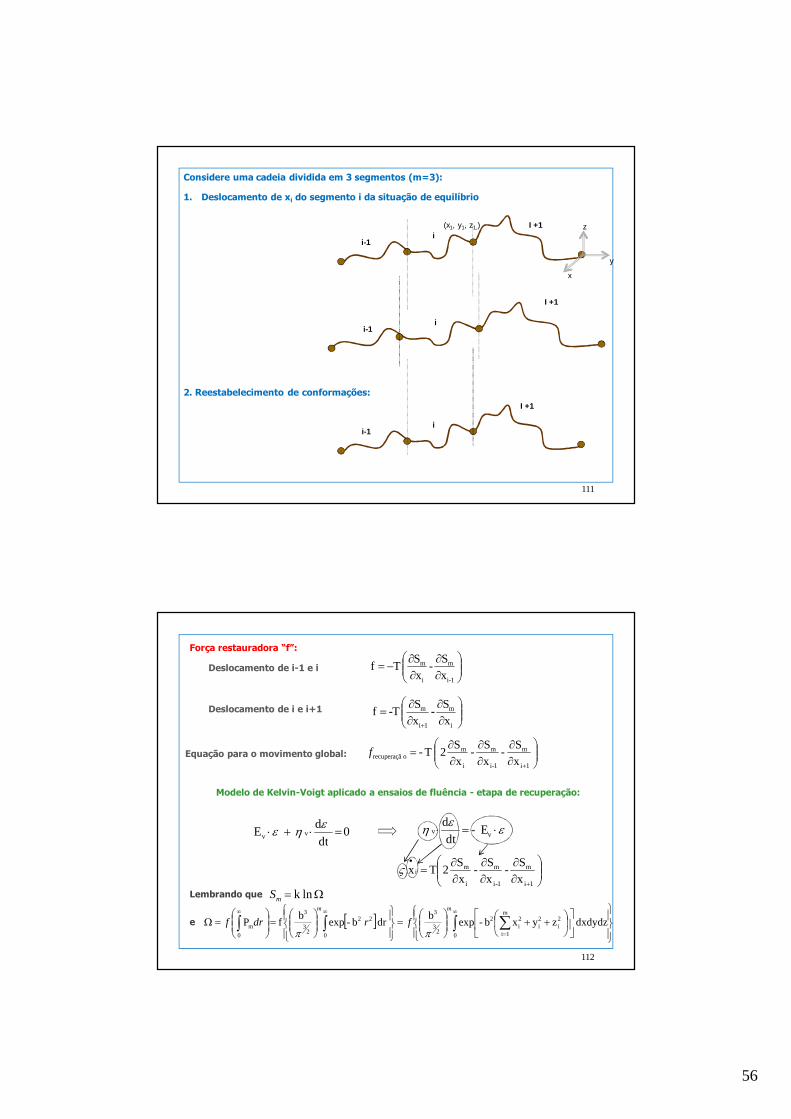
Considere uma cadeia dividida em 3 segmentos (m=3):
1. Deslocamento de xi do segmento i da situação de equilíbrio
2. Reestabelecimento de conformações:
111
i-1i
I +1
x
y
z(x1, y1, z1,)
i-1i
I +1
i-1i
I +1
Força restauradora “f”:
∂∂
∂∂
−=1-i
m
i
m
xS -
xS Tf
∂∂
∂∂
=+ i
m
1i
m
xS -
xS -Tf
Deslocamento de i-1 e i
Deslocamento de i e i+1
∂∂
∂∂
∂∂
=+1i
m
1-i
m
i
morecuperaçã x
S - xS -
xS2 T- fEquação para o movimento global:
Lembrando que
e
Ω= lnk mS
112
∂∂
∂∂
∂∂
=+
•
1i
m
1-i
m
i
mi
xS -
xS -
xS2T x ς
Modelo de Kelvin-Voigt aplicado a ensaios de fluência - etapa de recuperação:
0 dt
d E v v =⋅+⋅
εηε E- dt
d v
v εεη ⋅=⋅
[ ]
++
=
=
=Ω ∫ ∑∫∫
∞
=
∞∞
0
m
1i
2i
2i
2i
2
23
3
0
22
23
3
0m dxdydz zyxb-expb dr b-expbf P
mm
frdrfππ
57
∑= +
⋅⋅⋅=m
p
p
1p22
22
1TkN )(G'
τωτω
ω
Onde:
( )1
2212sen kT 24
−
+⋅⋅⋅= mplzp
πςτ
N = número de moléculas / cm3
T = Temperaturat = tempoτp = tempo de relaxaçãob = comprimento da ligaçãop = modo de relaxação; elemento
de Kelvin-Voigt (1,2...m)
Descrição macroscópica para a deformação – modelo de Kelvin-Voigt:
∑=
⋅⋅⋅=
m
p1p
t-expTkN G(t)τ ∑
= +⋅⋅⋅=
m
p
p
1p22 1
TkN )(G"τω
ωτω
113
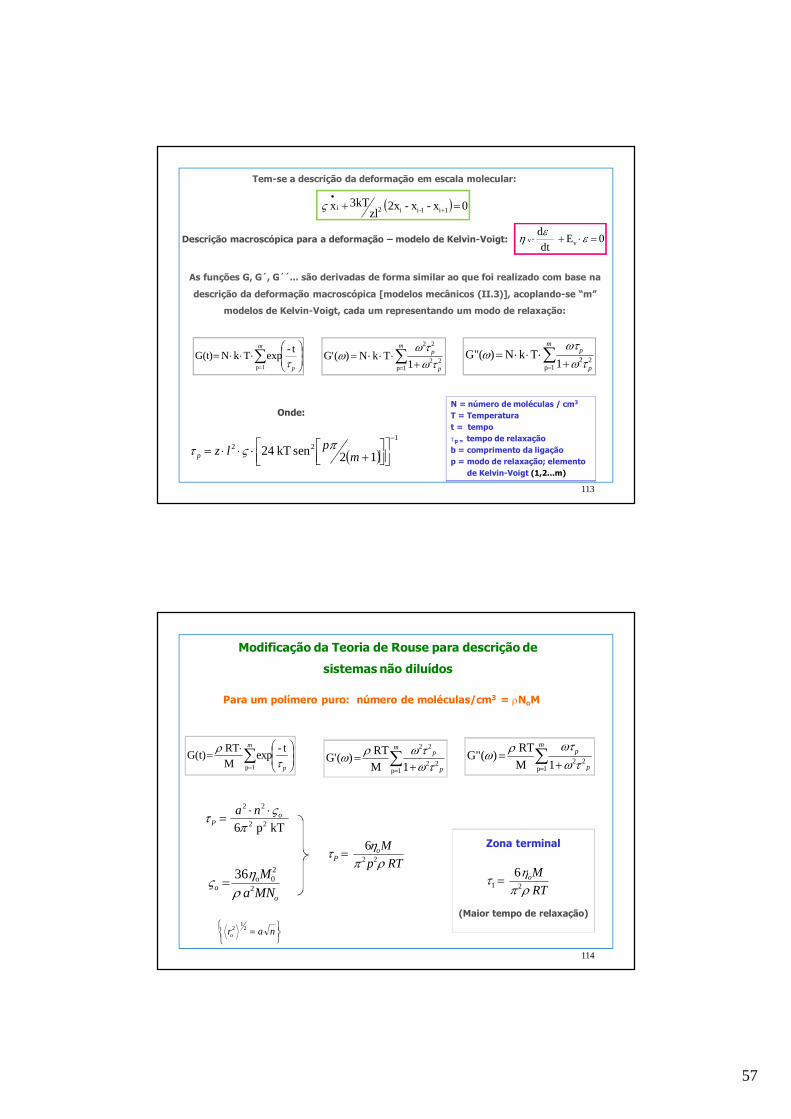
Tem-se a descrição da deformação em escala molecular:
As funções G, G´, G´´... são derivadas de forma similar ao que foi realizado com base na
descrição da deformação macroscópica [modelos mecânicos (II.3)], acoplando-se “m”
modelos de Kelvin-Voigt, cada um representando um modo de relaxação:
( ) 0 x- x- 2x zl3kT x 1i1-ii2i =+ +
•
ς
0 E dt
d v
v =⋅+⋅ εεη
Modificação da Teoria de Rouse para descrição de
sistemas não diluídos
∑= +
=m
p
p
1p22
22
1M RT )(G'
τωτωρω ∑
= +=
m
p
p
1p22 1M
RT )(G"τω
ωτρω∑=
⋅=
m
p1p
t-expM RT G(t)
τρ
kT p 6 22
22
πςτ o
Pna ⋅⋅
=
Para um polímero puro: número de moléculas/cm3 = ρNoM
oo MNa
M2
20o
36
ρης =
RTpMo
P 6 22 ρπητ =
114
Zona terminal
RTMo
6 21 ρπητ =
(Maior tempo de relaxação)
= naro
21
2
58
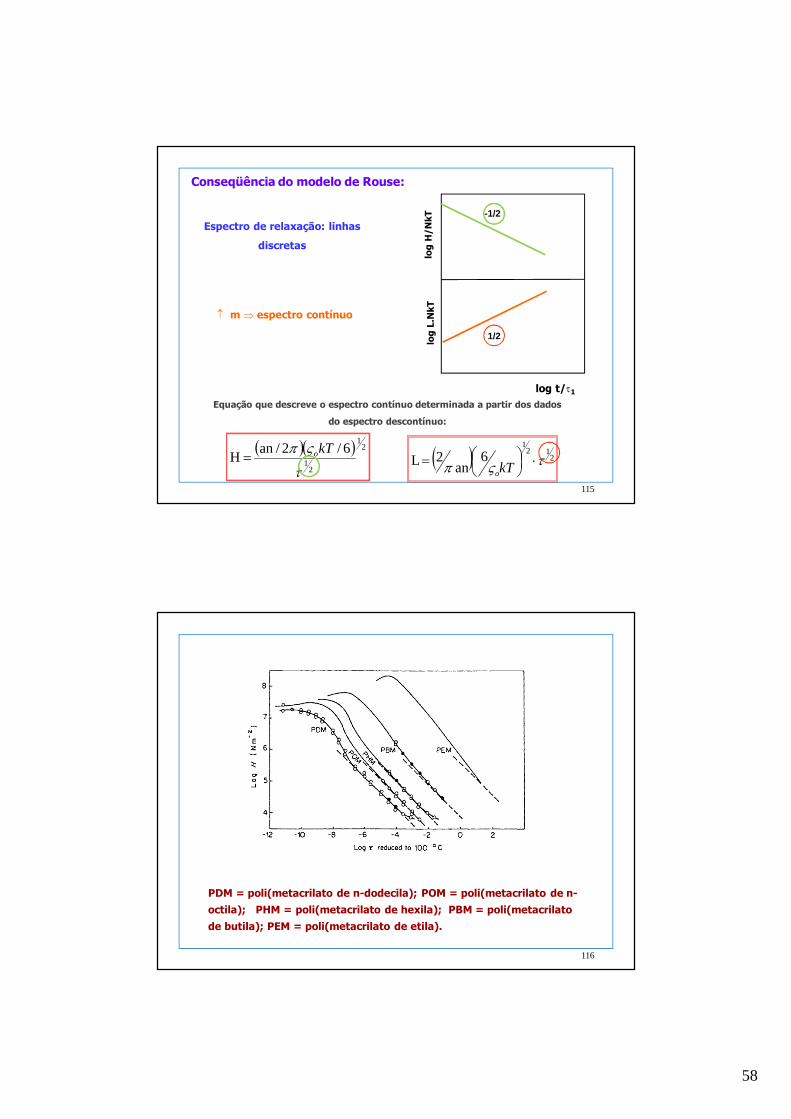
Conseqüência do modelo de Rouse:
Espectro de relaxação: linhas
discretas
↑ m ⇒ espectro contínuo
Equação que descreve o espectro contínuo determinada a partir dos dados
do espectro descontínuo:
( )( ) 21
21
6/2/an H τ
ςπ kTo= ( ) 212
1
6an
2 L τςπ ⋅
= kTo
115
1/2
-1/2
log t/τ1
log
L.N
kTlo
g H
/NkT
PDM = poli(metacrilato de n-dodecila); POM = poli(metacrilato de n-octila); PHM = poli(metacrilato de hexila); PBM = poli(metacrilato de butila); PEM = poli(metacrilato de etila).
116
59
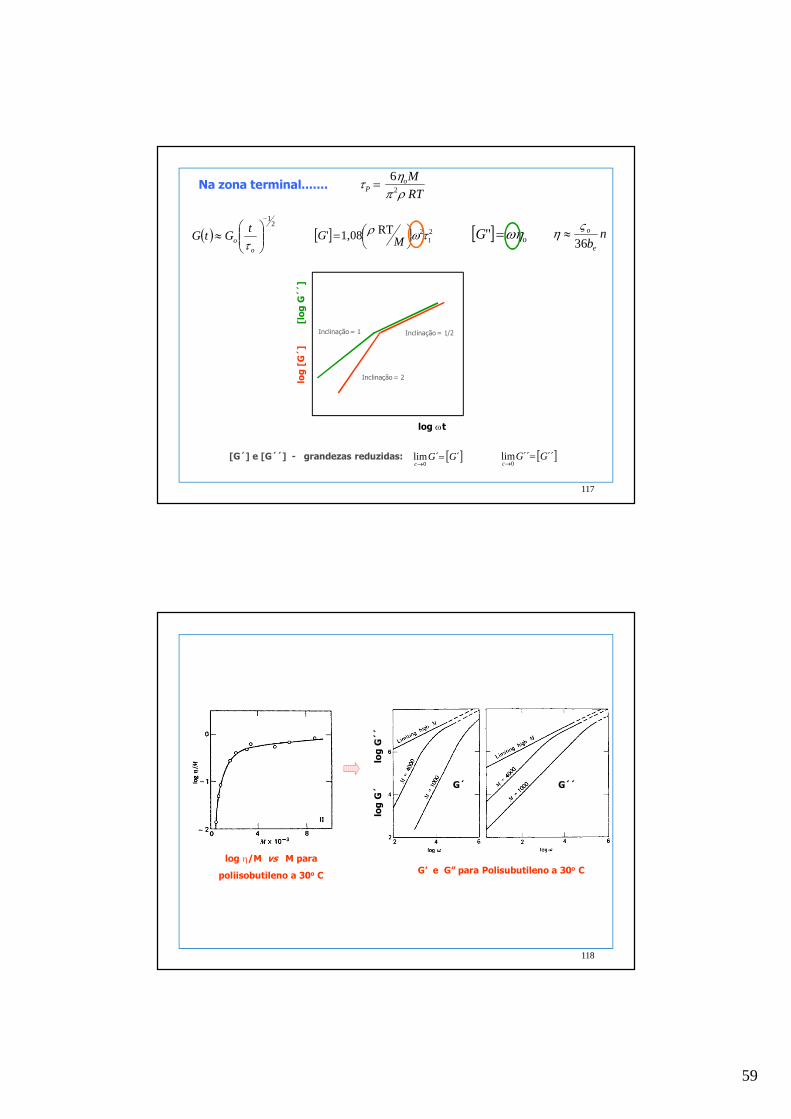
Na zona terminal.......RTMo
P 6 2ρπητ =
[ ] 21
2 RT 1,08 ' τωρ
= MG [ ] o " ωη=G
117
log ωt
log
[G´]
[lo
g G
´´]
Inclinação = 1/2
Inclinação = 2
Inclinação = 1
[G´] e [G´´] - grandezas reduzidas: [ ]´´lim0
GGc
=→
[ ]´´´´lim0
GGc
=→
( )2
1−
≈
oo
tGtGτ
nbe
o
36ςη ≈
118
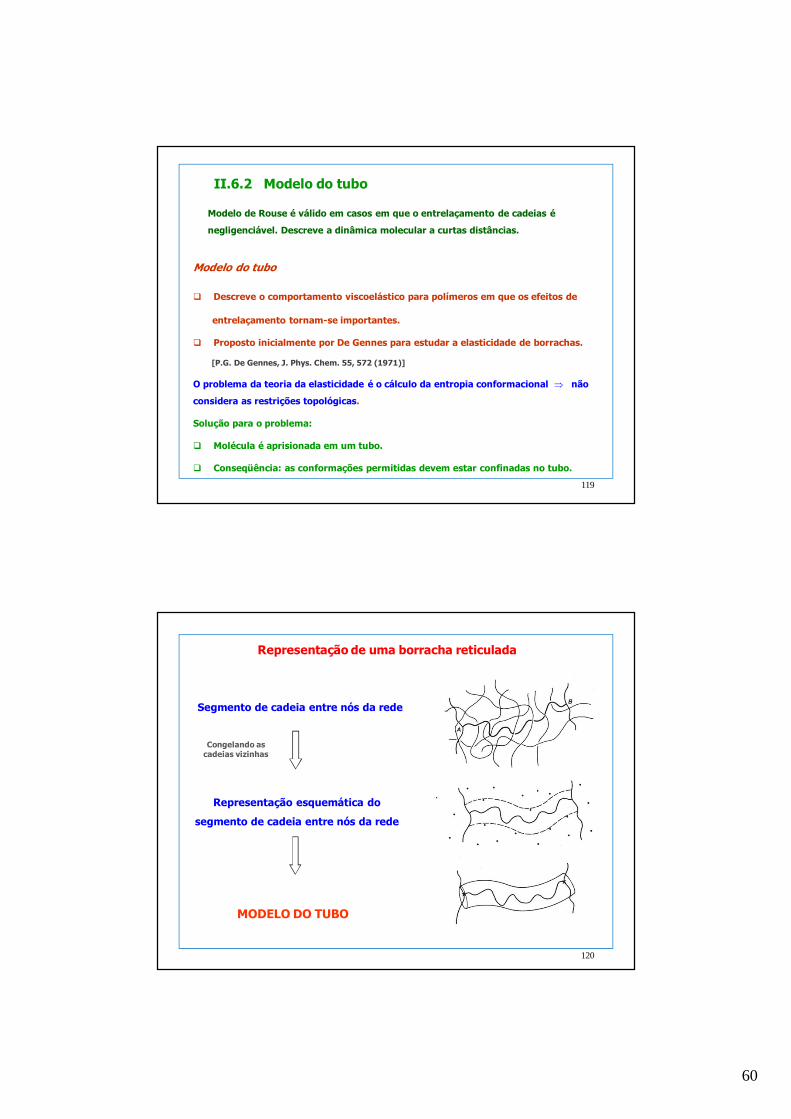
log η/M vs M para
poliisobutileno a 30o C G’ e G” para Polisubutileno a 30o C
log
G´
log
G´´
G´ G´´
60
II.6.2 Modelo do tubo
Modelo de Rouse é válido em casos em que o entrelaçamento de cadeias é
negligenciável. Descreve a dinâmica molecular a curtas distâncias.
Modelo do tubo
q Descreve o comportamento viscoelástico para polímeros em que os efeitos de
entrelaçamento tornam-se importantes.
q Proposto inicialmente por De Gennes para estudar a elasticidade de borrachas.
[P.G. De Gennes, J. Phys. Chem. 55, 572 (1971)]
O problema da teoria da elasticidade é o cálculo da entropia conformacional ⇒ não
considera as restrições topológicas.
Solução para o problema:
q Molécula é aprisionada em um tubo.
q Conseqüência: as conformações permitidas devem estar confinadas no tubo.
119
Representação de uma borracha reticulada
Segmento de cadeia entre nós da rede
Representação esquemática do
segmento de cadeia entre nós da rede
MODELO DO TUBO
Congelando as cadeias vizinhas
120
61
121
Diâmetro do tubo “a” : ee nba =
Comprimento do tubo “L” : e
e
e nbn
anb
nnaL ≈≈≈
2
Número de unidades repetitivas confinadas no tubo : ne
L
a
Massa molar entre os nós fixos ou entrelaçamentos: Me
Volume ocupado pela cadeia confinada : (vo = volume do monômero)eoav
e nvNMv ==
ρ
Número de cadeias dentro do volume a3 : eoeo
e nvb
nvaP
33
≈≈
122
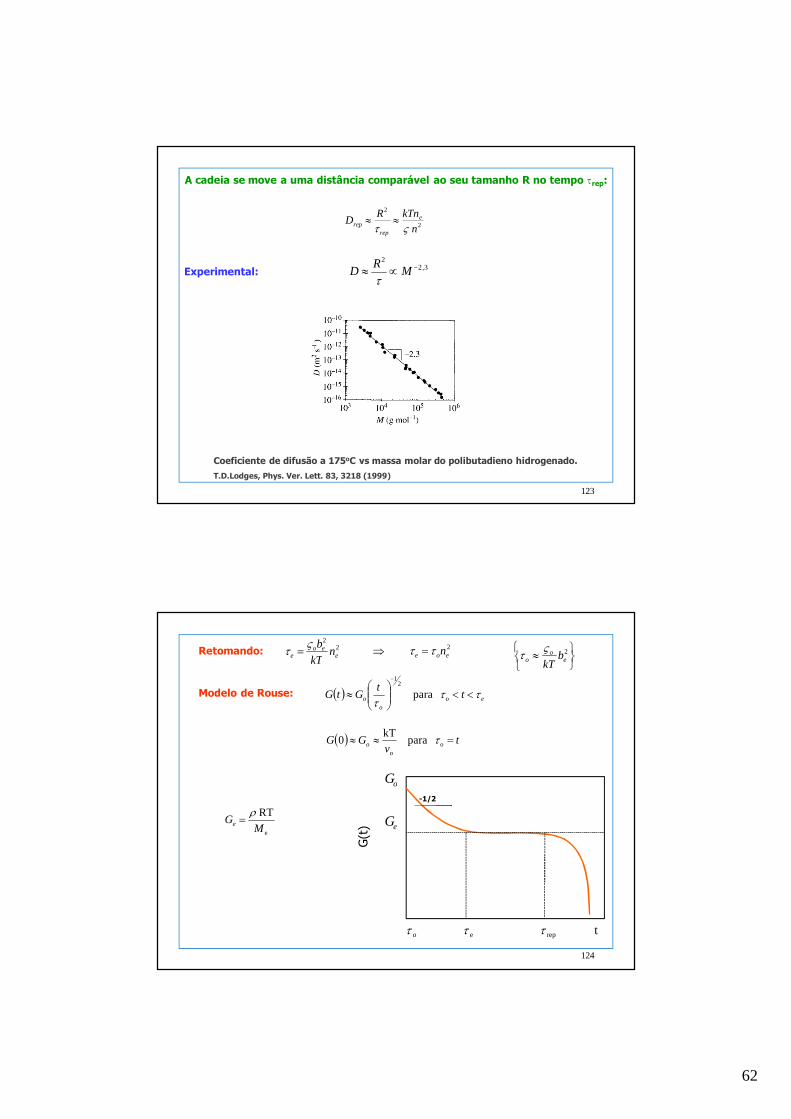
Tempo de relaxação e difusão
O movimento de macromoléculas no estado fundido é difusional.
Aplicando-se a descrição de Rouse:
Tempo que a cadeia leva para difundir através do tubo de comprimento L:
Experimental:
ςnkTDrep =
4,3
32
2322
M
nnn
kTb
nn
kTb
DL
ee
eo
e
eo
reprep
∝
≈≈≈
τ
ςςτ
Rouse: 22
eeo
e nkTbςτ =
3
≈
ee
rep
nn
ττ
62
123
A cadeia se move a uma distância comparável ao seu tamanho R no tempo τrep:
2
2
nkTnRD e
reprep ςτ
≈≈
Experimental: 3,22
−∝≈ MRDτ
Coeficiente de difusão a 175oC vs massa molar do polibutadieno hidrogenado.T.D.Lodges, Phys. Ver. Lett. 83, 3218 (1999)
124
22
eeo
e nkT
bςτ =Retomando: 2 eoe nττ =⇒
Modelo de Rouse: ( ) eo
o ttGtG τττ
<<
≈
−
o
21
para
≈ 2
eo
o bkTςτ
( ) tv
GG o =≈≈ oo
para kT0 τ
t repe τττ o
e
o
G
G
G(t
) RT
eMGe
ρ=
-1/2
63
125
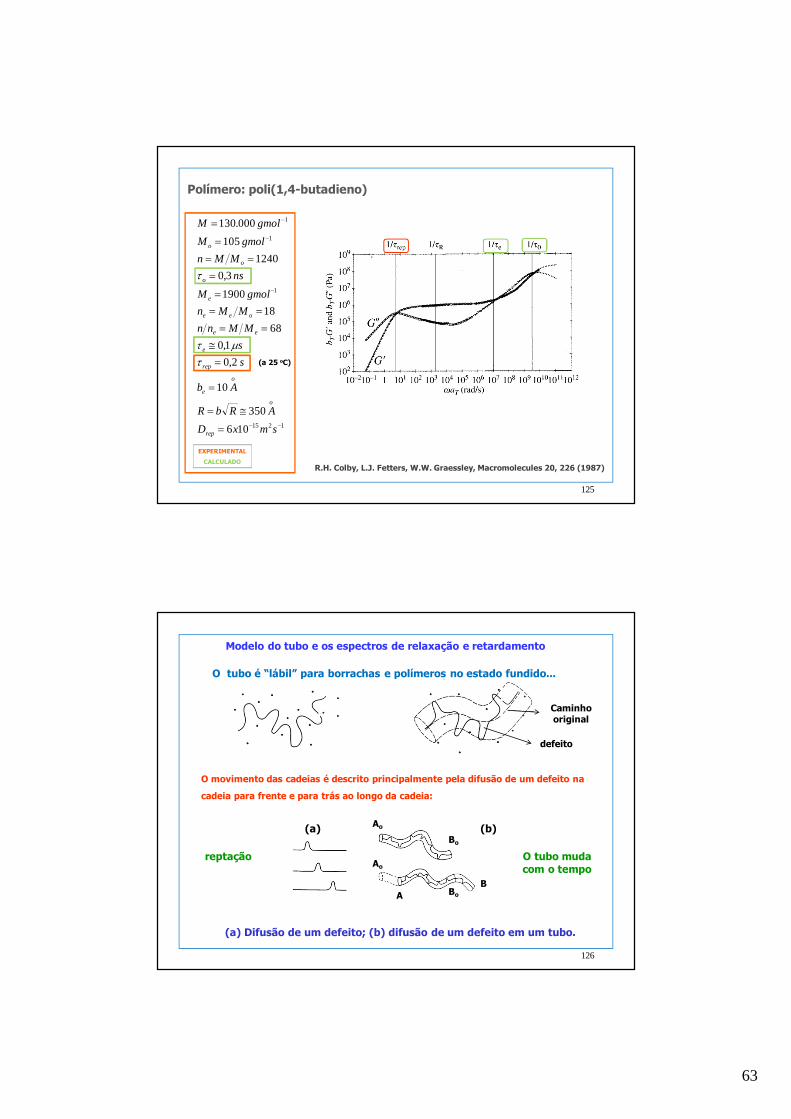
Polímero: poli(1,4-butadieno)
1215
1
1
1
106 350
10
2,0 1,0
6818
1900
3,01240
105 000.130
−−
−
−
−
=
≅=
=
=≅
==
===
===
=
=
smxDARbR
Ab
ss
MMnnMMn
gmolMns
MMngmolM
gmolM
rep
o
o
e
rep
e
ee
oee
e
o
o
o
τµτ
τ
R.H. Colby, L.J. Fetters, W.W. Graessley, Macromolecules 20, 226 (1987)
EXPERIMENTAL
CALCULADO
(a 25 oC)
Ao
Ao
Bo
Bo
BA
(a) Difusão de um defeito; (b) difusão de um defeito em um tubo.
O movimento das cadeias é descrito principalmente pela difusão de um defeito na
cadeia para frente e para trás ao longo da cadeia:
O tubo é “lábil” para borrachas e polímeros no estado fundido...
defeito
Caminho original
reptação
(a) (b)
O tubo muda com o tempo
126
Modelo do tubo e os espectros de relaxação e retardamento
64
Doi e Edwards
Os movimentos moleculares em polímeros lineares também ocorre
através de reptação:
Uma macromolécula se
movendo em uma direção....
Afasta as demais do caminho ⇒
encontra alta resistência
∴ o principal processo de
relaxação é a reptação
A cadeia comporta-se como um líquido, desde
que esteja dentro do tubo uma direção
Extensão do modelo do tubo para polímeros não-reticulados.....
127
[M.Doi, S.F. Edwards, J. Chem. Soc. Faraday Trans. 2, 74, 1789,1802, 1818 (1978)]
Modelo:
1. Propriedades moleculares da cadeia são descritas pelo modelo deRouse (n, be, ζ) ⇒ O entrelaçamento não influencia a propriedadesestatísticas, mas sim as dinâmicas.
2. Considerações:
A. O caminho original é determinado pela conexão mais curta entre aspontas da cadeia de mesma topologia
B. Para tempos curtos, a mobilidade da cadeia é restrita a flutuações nocaminho original.
C. Para tempos longos as mudanças conformacionais devido a reptaçãoconduzem a uma variação do caminho original
128
65
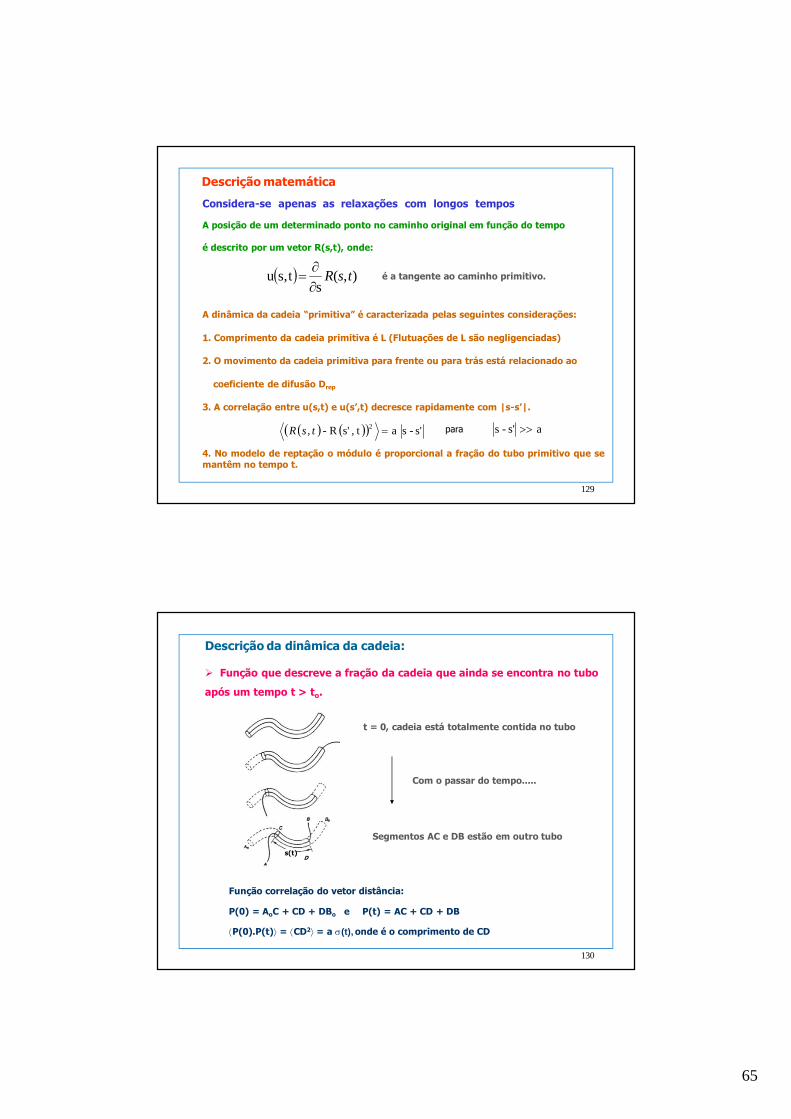
Descrição matemática
Considera-se apenas as relaxações com longos tempos
A posição de um determinado ponto no caminho original em função do tempo
é descrito por um vetor R(s,t), onde:
( ) ),(s
ts,u tsR∂∂
=
A dinâmica da cadeia “primitiva” é caracterizada pelas seguintes considerações:
1. Comprimento da cadeia primitiva é L (Flutuações de L são negligenciadas)
2. O movimento da cadeia primitiva para frente ou para trás está relacionado ao
coeficiente de difusão Drep
3. A correlação entre u(s,t) e u(s’,t) decresce rapidamente com |s-s’|.
4. No modelo de reptação o módulo é proporcional a fração do tubo primitivo que semantêm no tempo t.
é a tangente ao caminho primitivo.
129
( ) ( )( ) s'-s a t,s'R - , 2 =tsR a s'-s >>para
Descrição da dinâmica da cadeia:
Ø Função que descreve a fração da cadeia que ainda se encontra no tubo
após um tempo t > to.
t = 0, cadeia está totalmente contida no tubo
Com o passar do tempo.....
s(t)D
Segmentos AC e DB estão em outro tubo
Função correlação do vetor distância:
P(0) = AoC + CD + DBo e P(t) = AC + CD + DB
⟨P(0).P(t)⟩ = ⟨CD2⟩ = a σ(t), onde é o comprimento de CD
130
66
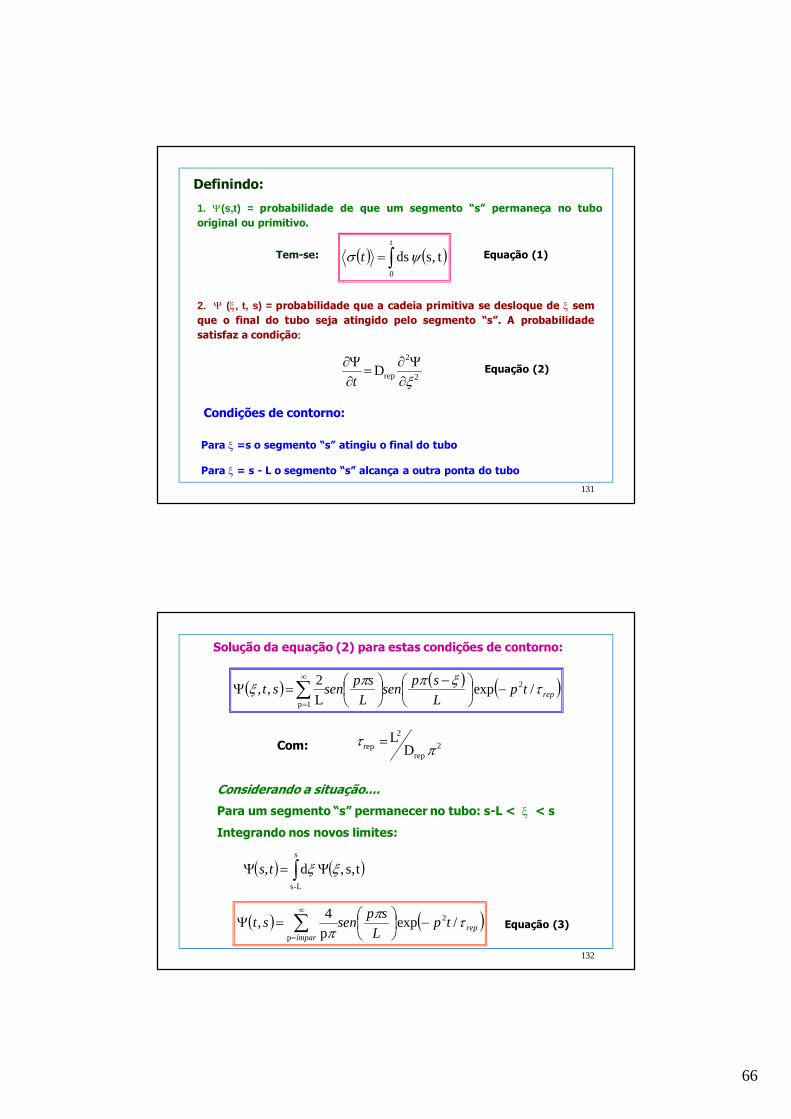
1. Ψ(s,t) = probabilidade de que um segmento “s” permaneça no tubooriginal ou primitivo.
Definindo:
Tem-se:
2. Ψ (ξ, t, s) = probabilidade que a cadeia primitiva se desloque de ξ semque o final do tubo seja atingido pelo segmento “s”. A probabilidadesatisfaz a condição:
2
2
repD ξ∂Ψ∂=
∂Ψ∂t
Condições de contorno:
Para ξ =s o segmento “s” atingiu o final do tubo
Para ξ = s - L o segmento “s” alcança a outra ponta do tubo
( ) ( )∫=t
0
ts, ds ψσ t Equação (1)
Equação (2)
131
Solução da equação (2) para estas condições de contorno:
( ) ( ) ( )reptpLspsen
Lspsenst τξππξ /exp
L2 ,, 2
1p−
−
=Ψ ∑
∞
=
2rep
2 ep D
L πτ =rCom:
Considerando a situação....
Para um segmento “s” permanecer no tubo: s-L < ξ < s
Integrando nos novos limites:
( ) ( )∫ Ψ=Ψs
L-s
ts, , d , ξξts
( ) ( )repímpar
tpL
spsenst τππ
/expp4 , 2
p−
=Ψ ∑
∞
=Equação (3)
132
67
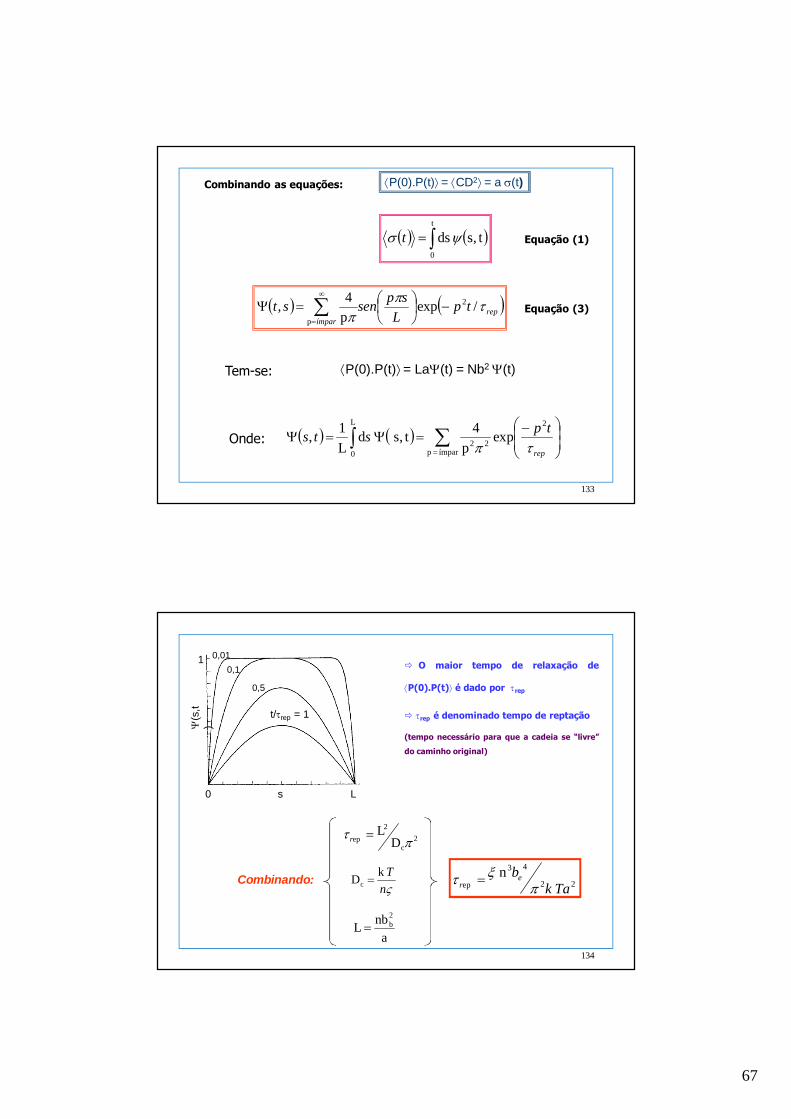
Combinando as equações:
( ) ( )∫=t
0
ts, ds ψσ t Equação (1)
( ) ( )repímpar
tpL
spsenst τππ
/expp4 , 2
p−
=Ψ ∑
∞
=Equação (3)
Tem-se:
⟨P(0).P(t)⟩ = ⟨CD2⟩ = a σ(t)
⟨P(0).P(t)⟩ = LaΨ(t) = Nb2 Ψ(t)
Onde: ( ) ( )
−=Ψ=Ψ ∑∫
= rep
tpstsτπ
2
ímpar p22
L
0
expp
4 ts, dL1 ,
133
ð O maior tempo de relaxação de
⟨P(0).P(t)⟩ é dado por τrep
ð τrep é denominado tempo de reptação
(tempo necessário para que a cadeia se “livre”
do caminho original)
s L0
Ψ(s
,t)
10,1
0,01
0,5
t/τrep = 1
134
ςnTk Dc =
anb L
2b=
2c
2 ep D
L πτ =r
Combinando: 22
43
ep n Tak
ber π
ξτ =

68
A) Para t < τrep o modelo de Rouse descreve a dinâmica macromolecular
∑=
⋅=
m
p1p
t-expM RT G(t)
τρ
B) Para t > τrep o “comportamento de Rouse” é barrado pelo tubo, começando
a ocorrer reptação.
Considerando que somente a fração de cadeia que se encontra em um tubodeformado contribui para a tensão tem-se:
Cálculo do módulo pelo modelo de reptação
Polímero em repouso submetido a uma tensão
⇒ Rexala para retornar ao equilíbrio
( ) ( ) ) (t G ee τ≥Ψ= ttG
Onde é uma constante dada por: (0)NG ( )
MRT G G e
≅≅
rep
Re τ
τρτ
135
2
2e
e anb
MRT G ρ
≅
MRT G
ee
ρ≅
eMR nb MM a
21
2e
e ≡
≅
Resultados teóricos
136
69
Log ωaT
Log
G’(d
ina/
cm2 )
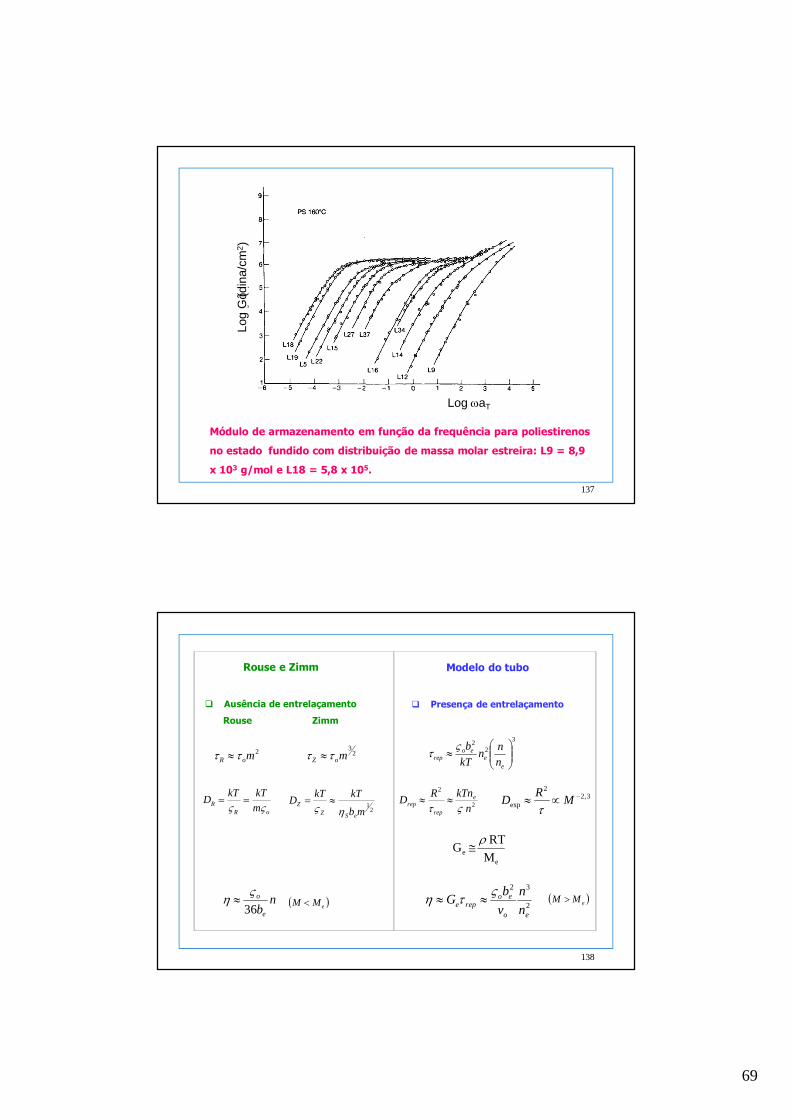
Módulo de armazenamento em função da frequência para poliestirenos
no estado fundido com distribuição de massa molar estreira: L9 = 8,9
x 103 g/mol e L18 = 5,8 x 105.
137
138
Rouse e Zimm
q Ausência de entrelaçamento
Rouse Zimm
23
moZ ττ ≈2moR ττ ≈
nbe
o
36ςη ≈
MRT G
ee
ρ≅
2
32
eo
eorepe n
nvbG ςτη ≈≈
32
2
≈
ee
eorep n
nnkTbςτ
Modelo do tubo
q Presença de entrelaçamento
2
2
nkTnRD e
reprep ςτ
≈≈ 3,22
exp−∝≈ MRD
τ21
mb
kTkTDeSZ
Zης
≈=oR
R mkTkTDςς
==
( )eMM < ( )eMM >
70
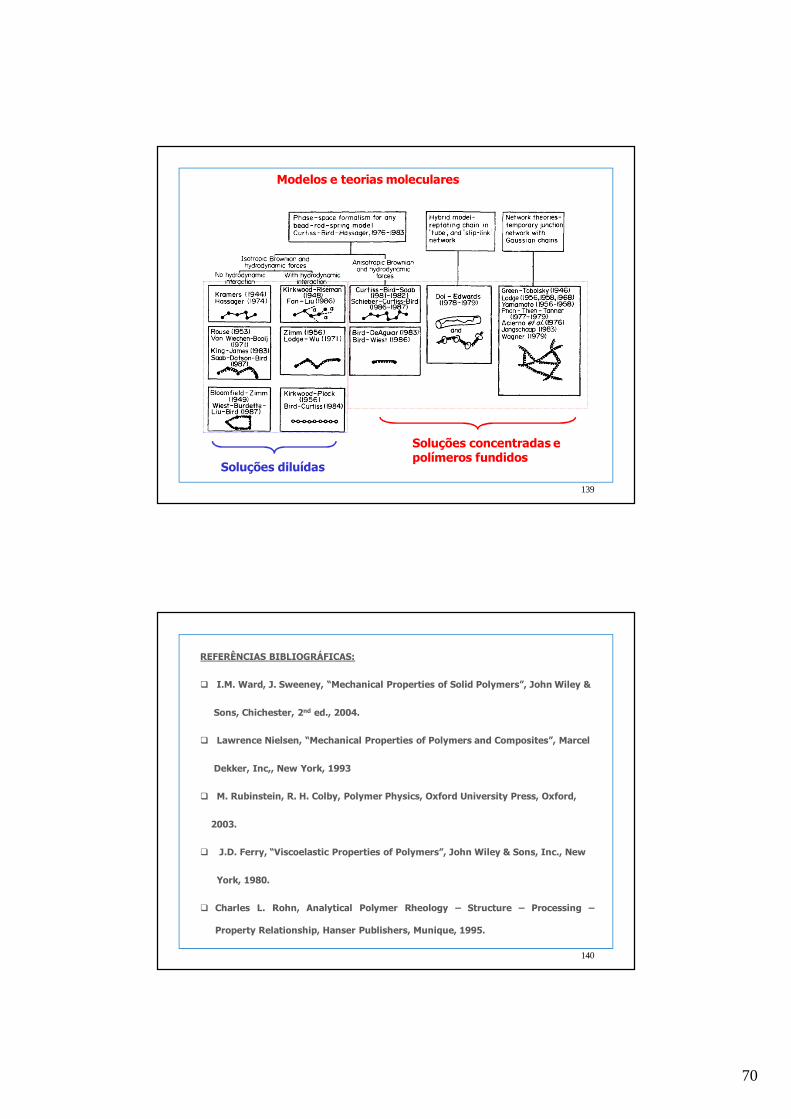
Modelos e teorias moleculares
Soluções diluídas
Soluções concentradas e polímeros fundidos
139
140
REFERÊNCIAS BIBLIOGRÁFICAS:
q I.M. Ward, J. Sweeney, “Mechanical Properties of Solid Polymers”, John Wiley &
Sons, Chichester, 2nd ed., 2004.
q Lawrence Nielsen, “Mechanical Properties of Polymers and Composites”, Marcel
Dekker, Inc,, New York, 1993
q M. Rubinstein, R. H. Colby, Polymer Physics, Oxford University Press, Oxford,
2003.
q J.D. Ferry, “Viscoelastic Properties of Polymers”, John Wiley & Sons, Inc., New
York, 1980.
q Charles L. Rohn, Analytical Polymer Rheology – Structure – Processing –
Property Relationship, Hanser Publishers, Munique, 1995.