cap. 1. tensores cartesianos e cálculo tensorial€¦ · disciplina mmc, z. dimitrovová,...
TRANSCRIPT
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
Cap. 1. Tensores cartesianos e cálculo tensorial
1. Grandezas (Quantidades) físicas 1.1 Classificação das quantidades físicas
1.2 Descrição matemática dos tensores
1.3 Definição dos tensores
2. Álgebra tensorial
3. Tensores cartesianos em 2D simétricos 3.1 Dedução da lei de transformação de vectores
3.2 A lei de transformação de tensores de segunda ordem
3.3 Valores próprios
3.4 Circunferência de Mohr 3.4.1 Convenções e consequências
3.4.2 Determinação dos valores e das direcções principais
3.4.3 Determinação das componentes para uma rotação arbitrária
3.4.4 Determinação do referencial ligado a componentes especificadas
3.5 Verificações dos valores principais
3.6 Determinação das componentes sabendo valores em 3 direcções
4. Tensores cartesianos em 3D simétricos 4.1 Valores e vectores próprios ou valores e direcções principais
4.2 Determinação e propriedades
4.3 Casos particulares
4.4 Valores extremos fora de diagonal
4.5 O tensor de inércia
5. Análise tensorial
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
1. Grandezas (Quantidades) físicas
Escalares
Vectores
Tensores de segunda ordem
...
Tensores de ordem zero
Tensores de primeira ordem
Tensores de segunda ordem
...
1.1 Classificação das quantidades físicas
Escalares
1 dado é suficiente para a descrição completa
Exemplos: temperatura, massa, densidade, tempo

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
Representação geométrica
Vectores
direcção
intensidade
sentido
O vector é plenamente
determinado
quando sabemos: Sentido
Ponto de aplicação
Direcção
Intensidade
F
Necessitamos de 3 dados para a descrição completa
Exemplos: força, deslocamento, velocidade, aceleração
Neste caso tratou-se de um vector livre, ou seja de um vector no sentido matemático
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
Tensores de segunda ordem
O tensor de segunda ordem é plenamente determinado no ponto P
quando se conhecem 3 vectores com ponto de aplicação P, actuantes
em 3 planos diferentes, não paralelos, que se intersectam no ponto P
É necessário 9 dados para a descrição completa
Representação geométrica dos tensores ...
mais tarde de acordo com o significado físico
Da disciplina Estática já se sabe que de acordo com o significado físico
é necessário distinguir vectores de 3 tipos
Livre (exemplo: vector associado a um binário)
Deslizante ou seja fixo à sua linha de acção (exemplo: força na mecânica dos corpos rígidos)
Fixo ou seja fixo ao ponto de aplicação (exemplo: força na mecânica dos corpos deformáveis)
Exemplo: tensão, deformação, tensor de momentos de inércia
Tensores de quarta ordem
Exemplo: tensor de rigidez e de flexibilidade

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
1.2 Descrição matemática dos tensores
A descrição matemática dos tensores baseia-se em
3n em 3D 2n em 2D
onde n corresponde à ordem do tensor
necessárias para a descrição completa dos tensores:
Euclid (ca. 325-ca. 270 BC)
Espaço
Para poder definir as componentes, é necessário definir o espaço e o referencial
Espaço de Euclid: 1D, 2D, 3D
Também chamado espaço cartesiano
1D – espaço dos números reais
mD – espaço de combinações de m
números reais
componentes
Número de componentes

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
Sistema de coordenadas ou referencial
Três eixos rectos mutuamente perpendiculares
Vectores base têm a norma unitária
Nas aplicações desta disciplina sempre directo
Verificação de acordo com a regra da mão direita
x
y z
Dedos de x para y Polegar mostra orientação positiva de z
Dedos de y para z Polegar mostra orientação positiva de x
Dedos de z para x Polegar mostra orientação positiva de y
René Descartes (1596-1650)
1kji
Referencial cartesiano:
É necessário introduzir para poder efectuar representações geométricas
É definido pela origem 0 e pelos vectores base
i
xy
z
k
j
0
Permutação positiva

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
332211zyxzyx eFeFeFkFjFiFFFFF
)F,F,F(F zyx
Tzyx
z
y
x
F,F,F
F
F
F
F
vectorial
matricial
3z2y1x eekeejeei
Vectores
x
z
yF
i
j
k
xFyF
zF
0
Vector F
zyx F,F,Ftem componentes
Representação matemática Representação geométrica
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
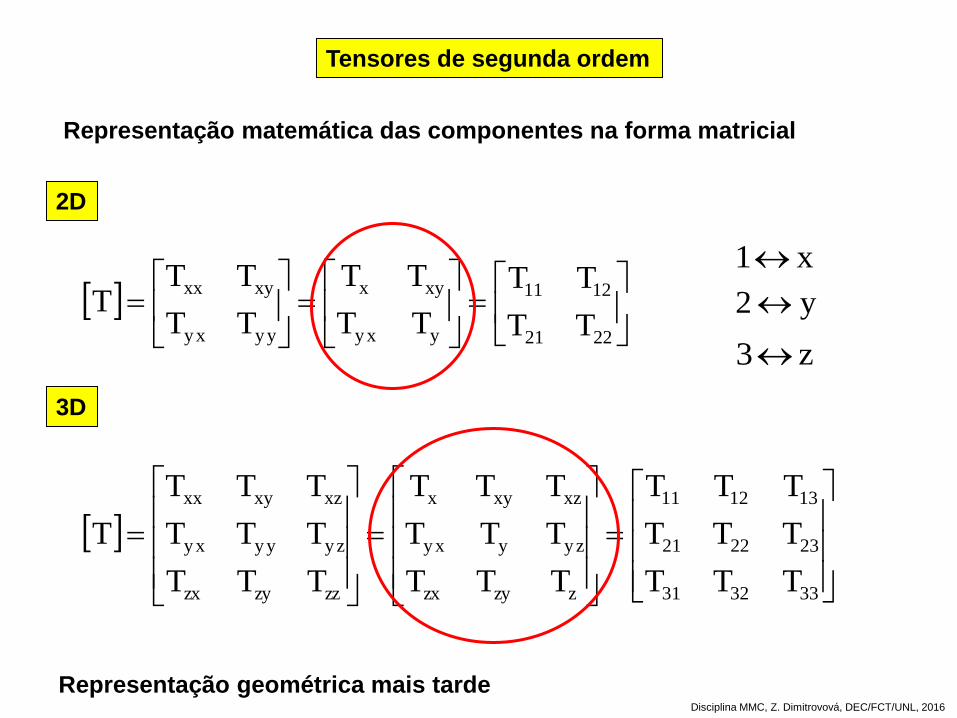
Tensores de segunda ordem
Representação matemática das componentes na forma matricial
333231
232221
131211
zzyzx
yzyyx
xzxyx
zzzyzx
yzyyyx
xzxyxx
TTT
TTT
TTT
TTT
TTT
TTT
TTT
TTT
TTT
T
2221
1211
yyx
xyx
yyyx
xyxx
TT
TT
TT
TT
TT
TTT
Representação geométrica mais tarde
3D
2D
x1
y2
z3
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
1.3 Definição dos tensores
A grandeza física chama-se tensor quando as suas componentes obedecem
a lei de transformação. Esta lei descreve a definição das componentes no
referencial transformado Tensores cartesianos
Tensores cartesianos são tensores definidos no referencial cartesiano,
consequentemente a lei de transformação é especificada apenas no
referencial cartesiano e representa uma rotação do referencial
As quantidades físicas têm por componentes números
As quantidades físicas habitualmente referem-se a uma dada posição (ponto)
Campos físicos
Quando as componentes são funções de posição, chamamos-lhes
Campo escalar
Campo vectorial
Campo tensorial de segunda ordem
...
z,y,xF,z,y,xF,z,y,xF zyx
Exemplo: o campo vectorial z,y,xF
tem as componentes
; temos assim:

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
2. Álgebra tensorial
até tensores de segunda ordem coincide com o cálculo matricial e vectorial
Qualquer tensor pode ser escrito como a soma
da sua parte simétrica e antisimétrica
AST 2/TTS jiijij 2/TTA jiijij
jiij TT 0TTT iijiij
Tensor simétrico Tensor antisimétrico
Tensores cartesianos de segunda ordem
Qualquer tensor pode ser escrito como a soma da sua parte esférica
(isotrópica, volúmica, volumétrica) e desviatórica (tangencial)
DITT m jiTD ijij miiii TTD
D3em3/TTTT zyxm Valor médio D2em2/TTT yxm
Propriedade: o tensor antisimétrico tem zeros na diagonal principal
Propriedade: o tensor desviador tem traço nulo
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
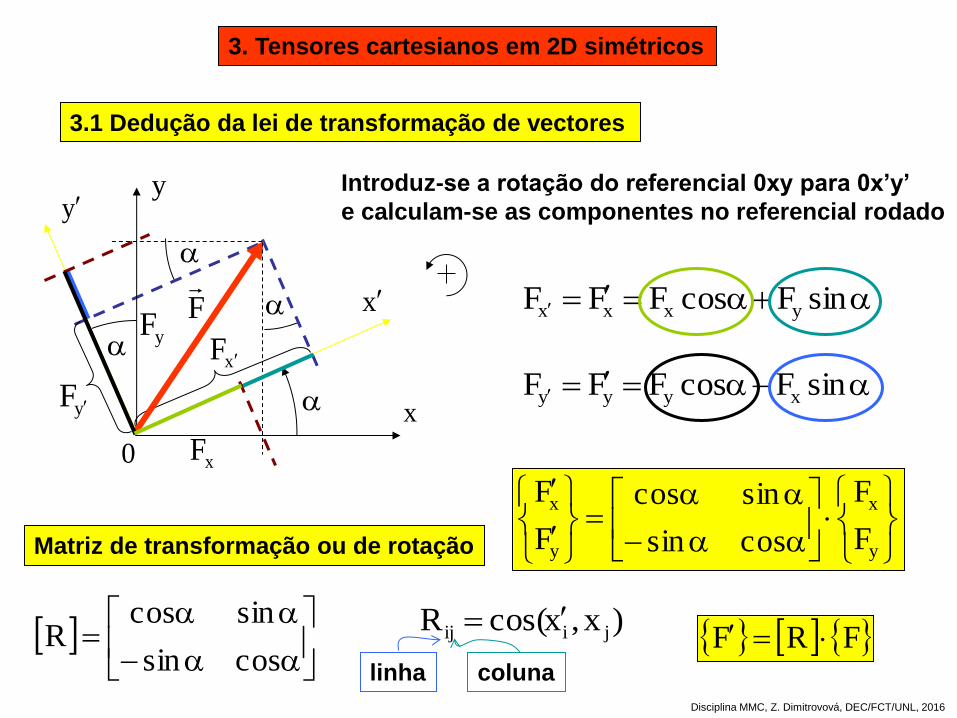
Introduz-se a rotação do referencial 0xy para 0x’y’
e calculam-se as componentes no referencial rodado
y
x
y
x
F
F
cossin
sincos
F
F
3.1 Dedução da lei de transformação de vectores
sinFcosFFF yxxx
sinFcosFFF xyyy
3. Tensores cartesianos em 2D simétricos
x
y
xF
yF
F
y
x
xF
yF
0
Matriz de transformação ou de rotação
FRF )x,xcos(R jiij
linha coluna
cossin
sincosR
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
x
y
y
x
0
i
j
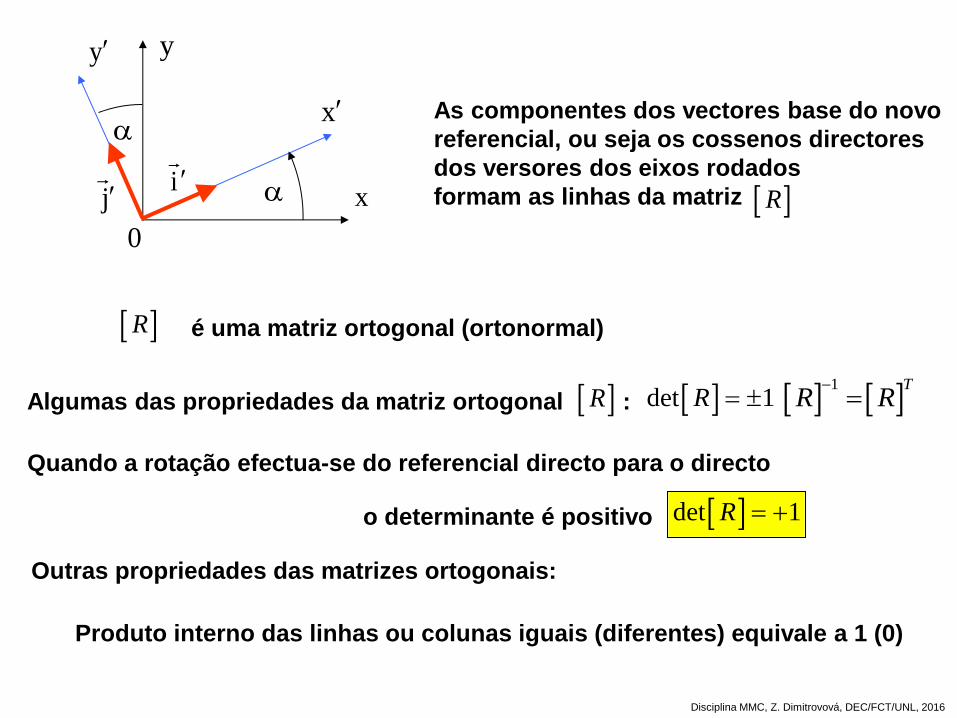
é uma matriz ortogonal (ortonormal)
Quando a rotação efectua-se do referencial directo para o directo
det 1R
As componentes dos vectores base do novo
referencial, ou seja os cossenos directores
dos versores dos eixos rodados
formam as linhas da matriz R
1 T
R R det 1R Algumas das propriedades da matriz ortogonal : R
R
o determinante é positivo
Outras propriedades das matrizes ortogonais:
Produto interno das linhas ou colunas iguais (diferentes) equivale a 1 (0)

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
3.2 A lei de transformação de tensores de segunda ordem
TRTRT RTRT
T
Tensores de ordem maior
É necessário usar a designação “indicial” que não será dada
A prova será dada no Cap. Tensão para se poder usufruir o significado físico
Nota:
Voltando aos tensores de segunda ordem, considerando apenas os tensores
simétricos e desenvolvendo as multiplicações,
as componentes no referencial rodado escrevem-se:
cossinT2sinTcosTT xy
2
y
2
xx
cossinT2cosTsinTT xy
2
y
2
xy
22
xyyxxy sincosTcossinTTT
A propriedade de simetria mantém-se, qualquer que seja o referencial
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
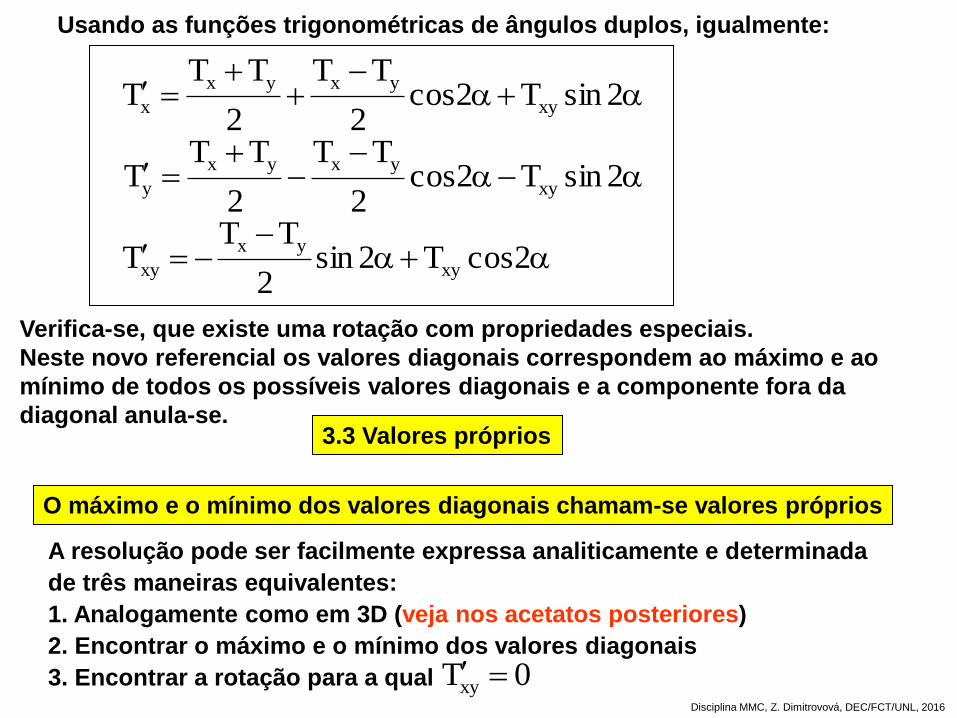
Verifica-se, que existe uma rotação com propriedades especiais.
Neste novo referencial os valores diagonais correspondem ao máximo e ao
mínimo de todos os possíveis valores diagonais e a componente fora da
diagonal anula-se.
O máximo e o mínimo dos valores diagonais chamam-se valores próprios
A resolução pode ser facilmente expressa analiticamente e determinada
de três maneiras equivalentes:
1. Analogamente como em 3D (veja nos acetatos posteriores)
2. Encontrar o máximo e o mínimo dos valores diagonais
3. Encontrar a rotação para a qual 0Txy
Usando as funções trigonométricas de ângulos duplos, igualmente:
2sinT2cos2
TT
2
TTT xy
yxyx
x
2sinT2cos2
TT
2
TTT xy
yxyx
y
2cosT2sin2
TTT xy
yx
xy
3.3 Valores próprios
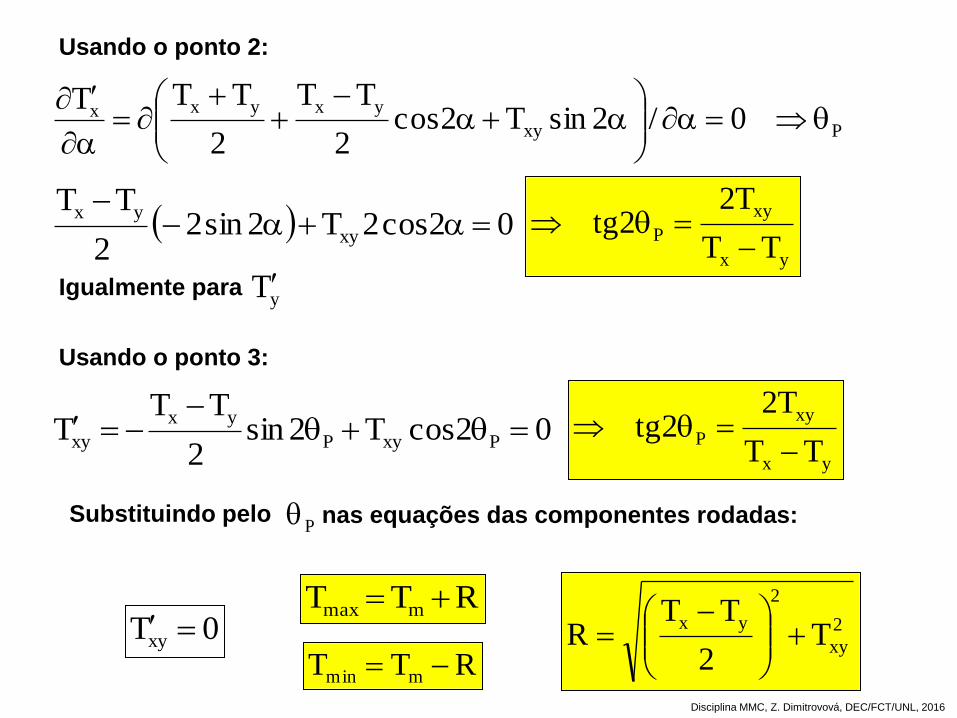
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
Pxy
yxyxx 0/2sinT2cos2
TT
2
TTT
Usando o ponto 2:
Usando o ponto 3:
02cosT2sin2
TTT PxyP
yx
xy
yx
xy
PTT
T22tg
02cos2T2sin22
TTxy
yx
yx
xy
PTT
T22tg
Igualmente para yT
Substituindo pelo P
2
xy
2
yxT
2
TTR
RTT mmax
RTT mmin 0Txy
nas equações das componentes rodadas:

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
0xyparaT
maxmin
x
y
Por convenção os valores
principais ordenam-se de acordo
com a sua grandeza, por isso o
valor do máximo está na matriz
de componentes na posição (1,1)
e o valor do mínimo na posição
(2,2). Isso implica que o eixo do
máximo é o “primeiro” eixo, tal
como por exemplo x, a o eixo do
mínimo é o “segundo” eixo tal
como por exemplo y.
x
ymaxx ou
min
max
T0
0T
Depois de terminar os cálculos
é necessário distinguir qual dos eixos rodados
corresponde ao eixo do máximo e
qual ao eixo mínimo.
Pode-se provar uma regra simples
representada na figura ao lado.
Os eixos do máximo e do mínimo
definem o referencial principal, e este
referencial tem que ser directo
miny ou

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
Cristian Otto Mohr (1835-1918)
2 2 2
x m xyT T T R
3.4 Circunferência de Mohr
2
2 2
y m xyT T T R
que são as equações de uma circunferência
0,Tm e raio R, em que visualizam-se no
eixo horizontal e no eixo vertical xyTyx T,T de centro
Substituindo, verifica-se facilmente:
As componentes de um tensor associadas a todas as possíveis
rotações do referencial original,
compõem uma circunferência
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
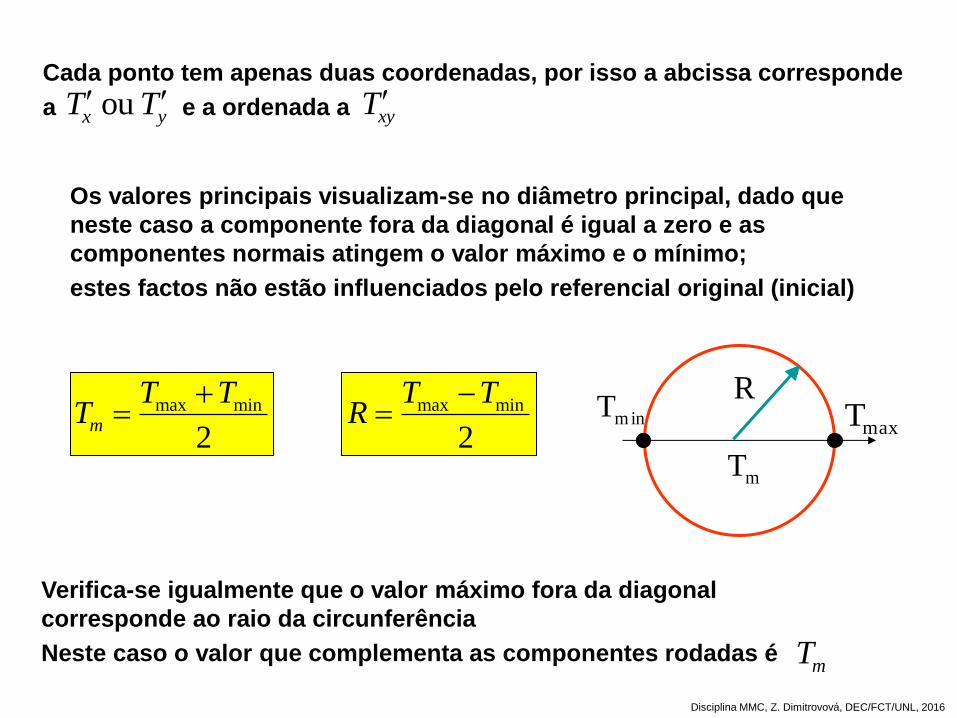
Cada ponto tem apenas duas coordenadas, por isso a abcissa corresponde
a e a ordenada a xyT oux yT T
Os valores principais visualizam-se no diâmetro principal, dado que
neste caso a componente fora da diagonal é igual a zero e as
componentes normais atingem o valor máximo e o mínimo;
estes factos não estão influenciados pelo referencial original (inicial)
maxTminT
mT
Rmax min
2m
T TT
max min
2
T TR
Verifica-se igualmente que o valor máximo fora da diagonal
corresponde ao raio da circunferência
Neste caso o valor que complementa as componentes rodadas é mT

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
2cosRTT mx
Assume-se que o referencial original é coincidente com o principal, ou seja que:
2cosRTT my
2sinRTxy
maxx TT
0Txy
miny TT
maxx
miny x
y
negativo
3.4.1 Convenções e consequências
introduz-se uma rotação
x xy
xy y
T Tx
T T y
mT
maxTminTR
2
R
;x xyx T T
cos 2mT R
;y xyy T T
cos 2mT R
sin 2R
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
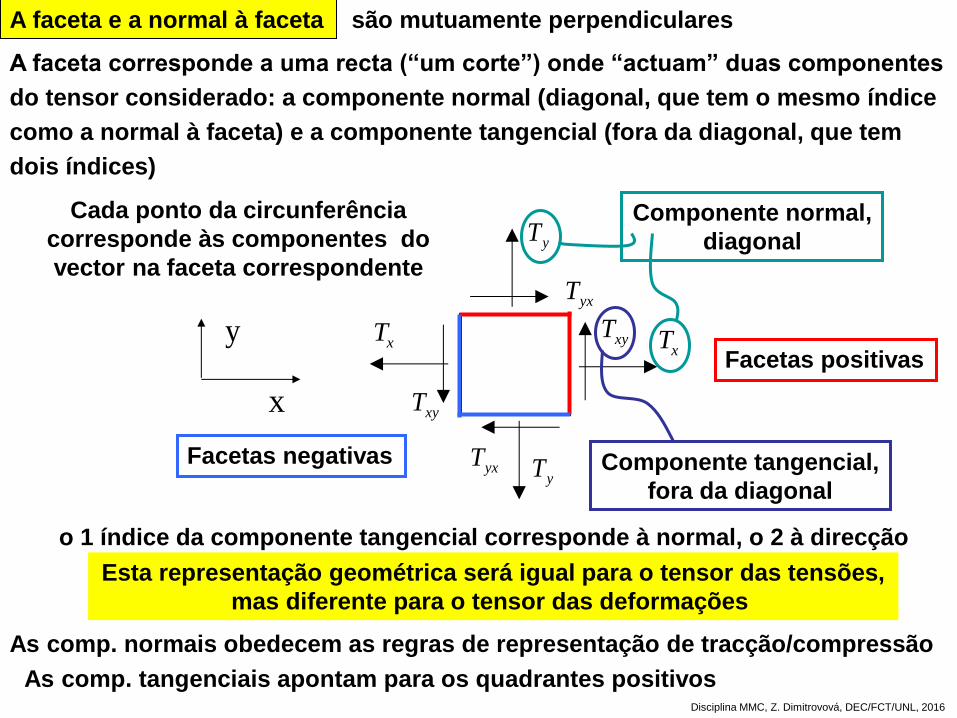
x
yxTxyT
xT
xyT
yT
yxT
yTyxT
Cada ponto da circunferência
corresponde às componentes do
vector na faceta correspondente
Componente normal,
diagonal
Componente tangencial,
fora da diagonal
o 1 índice da componente tangencial corresponde à normal, o 2 à direcção
Esta representação geométrica será igual para o tensor das tensões,
mas diferente para o tensor das deformações
Facetas positivas
Facetas negativas
As comp. tangenciais apontam para os quadrantes positivos
A faceta e a normal à faceta
A faceta corresponde a uma recta (“um corte”) onde “actuam” duas componentes
do tensor considerado: a componente normal (diagonal, que tem o mesmo índice
como a normal à faceta) e a componente tangencial (fora da diagonal, que tem
dois índices)
são mutuamente perpendiculares
As comp. normais obedecem as regras de representação de tracção/compressão
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
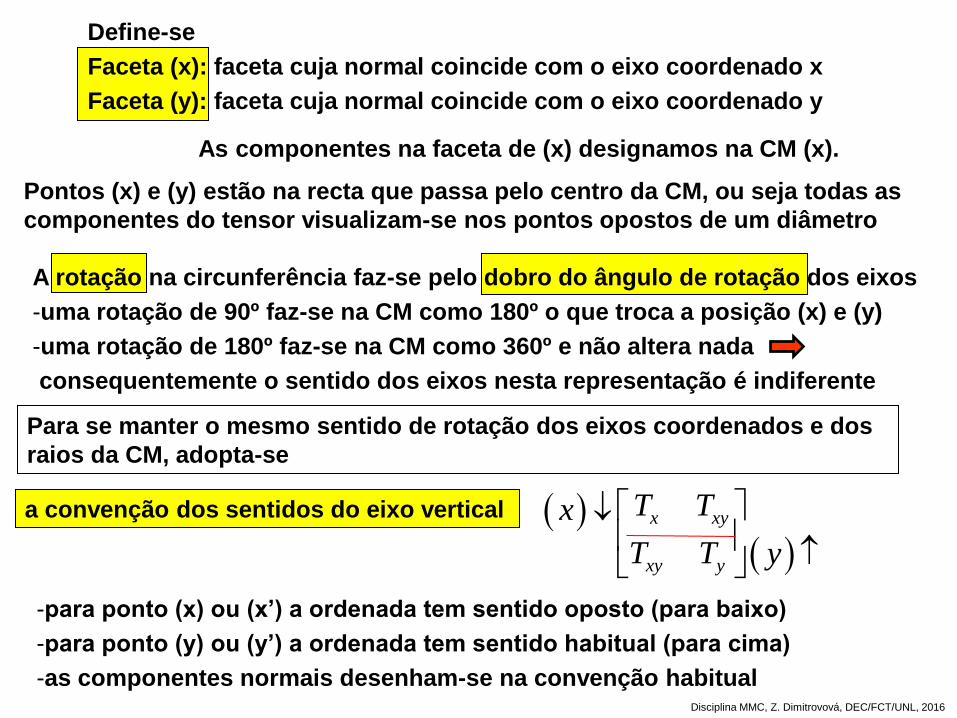
A rotação na circunferência faz-se pelo dobro do ângulo de rotação dos eixos
-uma rotação de 90º faz-se na CM como 180º o que troca a posição (x) e (y)
-uma rotação de 180º faz-se na CM como 360º e não altera nada
consequentemente o sentido dos eixos nesta representação é indiferente
-para ponto (x) ou (x’) a ordenada tem sentido oposto (para baixo)
-para ponto (y) ou (y’) a ordenada tem sentido habitual (para cima)
-as componentes normais desenham-se na convenção habitual
Define-se
Faceta (x): faceta cuja normal coincide com o eixo coordenado x
Faceta (y): faceta cuja normal coincide com o eixo coordenado y
a convenção dos sentidos do eixo vertical
x xy
xy y
T Tx
T T y
Para se manter o mesmo sentido de rotação dos eixos coordenados e dos
raios da CM, adopta-se
As componentes na faceta de (x) designamos na CM (x).
Pontos (x) e (y) estão na recta que passa pelo centro da CM, ou seja todas as
componentes do tensor visualizam-se nos pontos opostos de um diâmetro
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
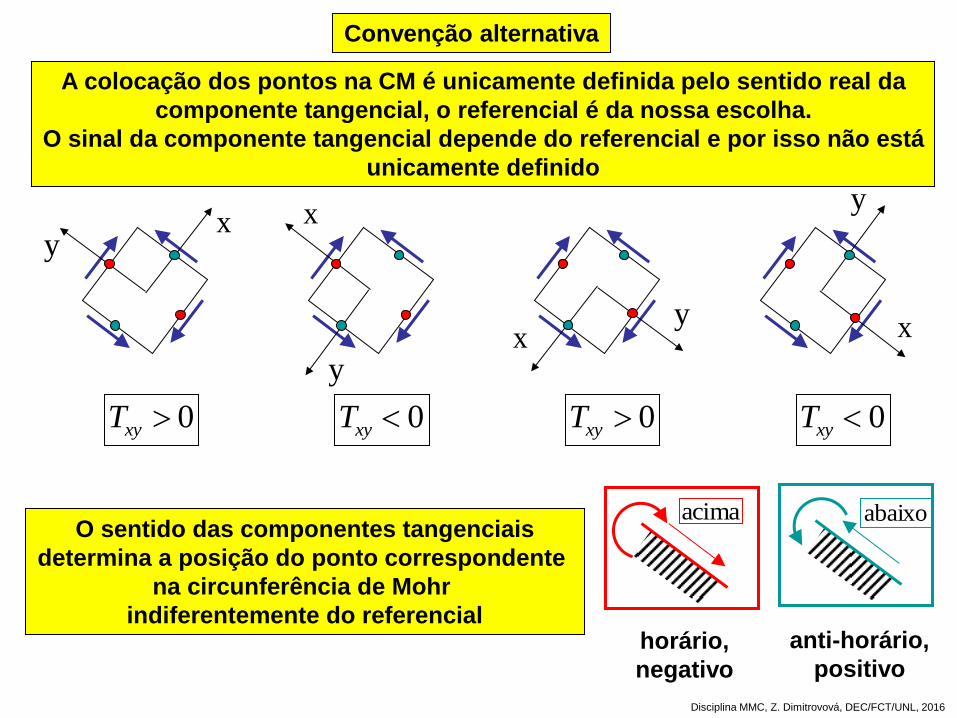
acimaO sentido das componentes tangenciais
determina a posição do ponto correspondente
na circunferência de Mohr
indiferentemente do referencial
abaixo
x
0xyT
yx
yx
y x
y
0xyT 0xyT 0xyT
horário,
negativo
Convenção alternativa
anti-horário,
positivo
A colocação dos pontos na CM é unicamente definida pelo sentido real da
componente tangencial, o referencial é da nossa escolha.
O sinal da componente tangencial depende do referencial e por isso não está
unicamente definido

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
x xy
xy y
T TT
T T
2
xy
2
yxT
2
TTR
yx
xy
pTT
T22tg
3.4.2 Determinação dos valores e das direcções principais
o referencial original x
y
x
0Txy
xT
yT
y
0Txy
mT
p2minT
maxT
Valores fora da diagonal, tangenciais
Valores diagonais, normais 0
xyT
2/TT yx
R
p2
x
yx
y
Justificação das fórmulas
Sentido de rotação
da componente
tangencial
p
p
max
min
componentes positivas
x yT T
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
x
y
x
y
mT
min max
0
p
p
max
min
00
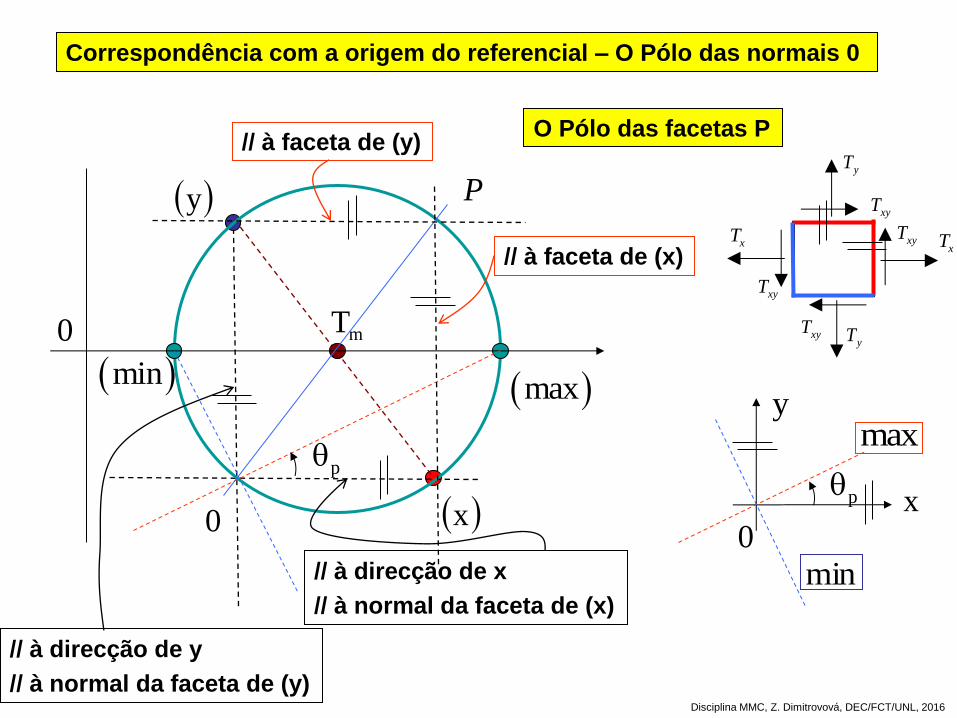
Correspondência com a origem do referencial – O Pólo das normais 0
P
O Pólo das facetas P
// à faceta de (x)
// à faceta de (y)
// à direcção de x
// à normal da faceta de (x)
// à direcção de y
// à normal da faceta de (y)
xTxyTxT
xyT
yT
xyT
yTxyT

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
2
Propriedades das circunferências conhecidas do ensino secundário
Achar centro de uma circunferência
sabendo 3 pontos que pertencem
a esta circunferência
ângulo central e inscrito
2
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
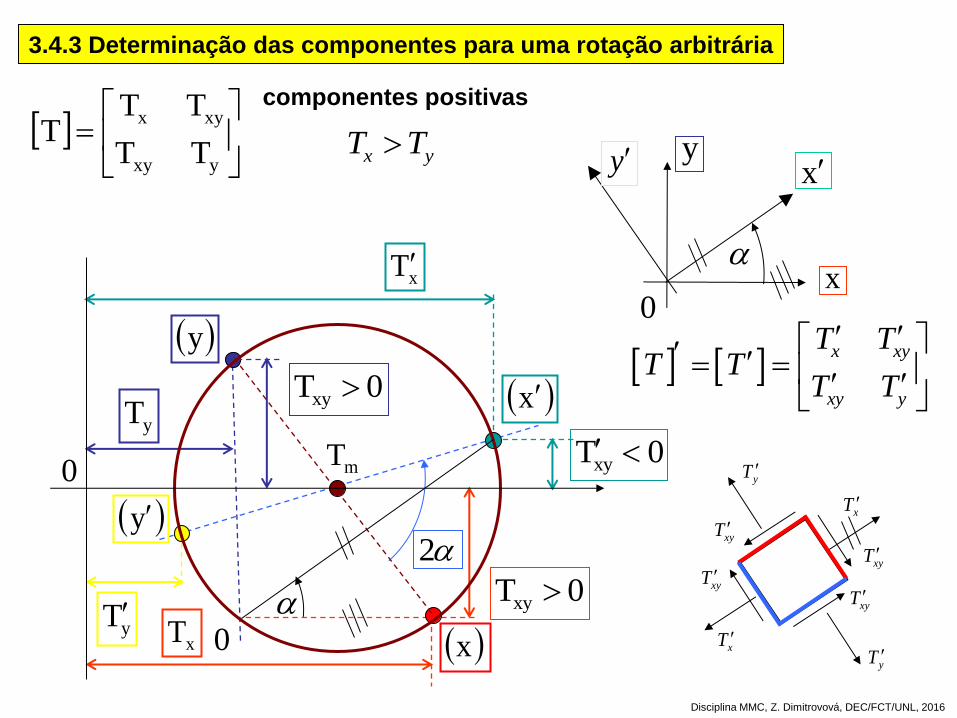
x xy
xy y
T TT T
T T
x
2
x
0Txy
xT
x
xT
0Txy
y
yT
3.4.3 Determinação das componentes para uma rotação arbitrária
yT
y
0Txy
mT0
yxy
xyx
TT
TTT
x
y
0
0
componentes positivas
x yT T
xT
xyT
xT
xyT
xyT
xyT
yT
yT
y
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
x
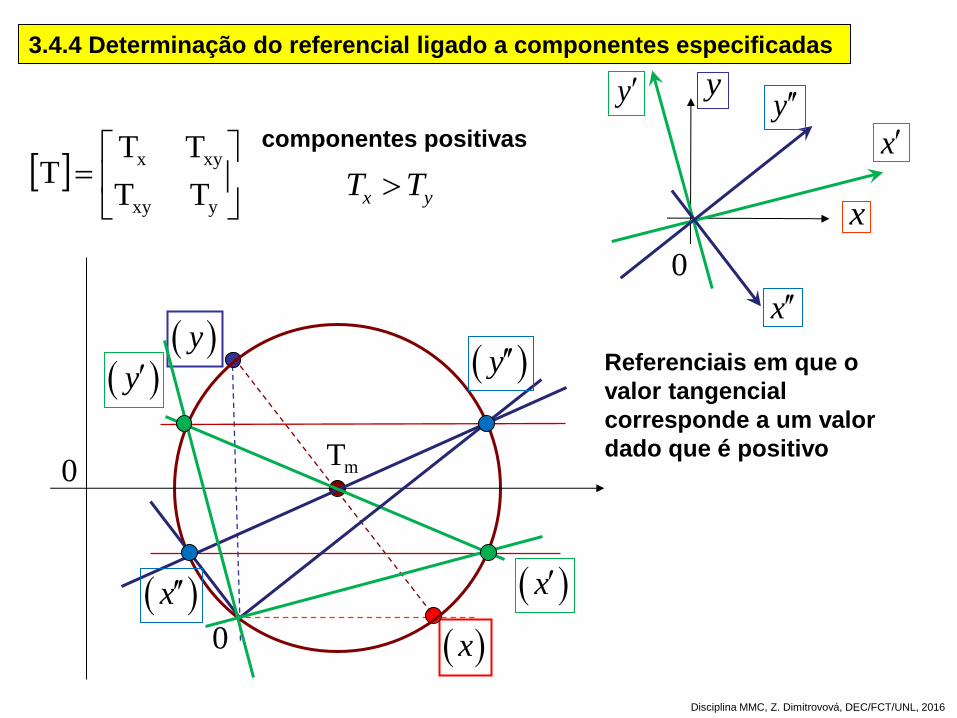
3.4.4 Determinação do referencial ligado a componentes especificadas
y
mT0
yxy
xyx
TT
TTT
x
y
componentes positivas
0
x yT T
0
x
y
x
x
y
y
x
y
Referenciais em que o
valor tangencial
corresponde a um valor
dado que é positivo

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
R = máximo da componente
fora da diagonal, neste caso as
componentes diagonais não se
anulam, ambas têm o valor Tm
RT max,xy
min
max
T0
0T
m
m
T RT
R T
m
m
T RT
R T
max
min x
x
3.4.5 Rotações de 45º a partir do referencial principal
maxT
x
mTminT
x max
min

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
Invariantes Referencial original Referencial principal
yx TT minmax TT
minmax TT 2
xyyx TTT
Depois da resolução dos valores principais convém verificar os invariantes
Tdet
Ttraço
3.5 Verificações dos valores principais
Invariantes
Escalares que não alteram o seu valor com a rotação do referencial
TtraçoI1 TdetI2
são invariantes fundamentais,
também chamados invariante linear e invariante quadrático
todos os restantes invariantes podem exprimir-se usando os fundamentais,
por exemplo os valores próprios são igualmente invariantes
21 I,I

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
O referencial introduzido é arbitrário,
convém fazê-lo na forma mais vantajosa
xa TT
cossinT2sinTcosTTT xy
2
y
2
abx
cossinT2sinTcosTTT xy
2
y
2
acx
Sabemos: , incógnitas: cba T,T,T xyyx T,T,T
3.6 Determinação das componentes sabendo valores em 3 direcções
Resolver xyy T,T
Cada tensor tem 3 componentes, por isso cada 3 valores, mesmo de
referenciais diferentes, permitem sempre determinar as componentes.
O caso em baixo tem uma aplicação útil nas medições de deformações
e além disso permite uma resolução gráfica simples
aTbT
cT x
xx
x
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
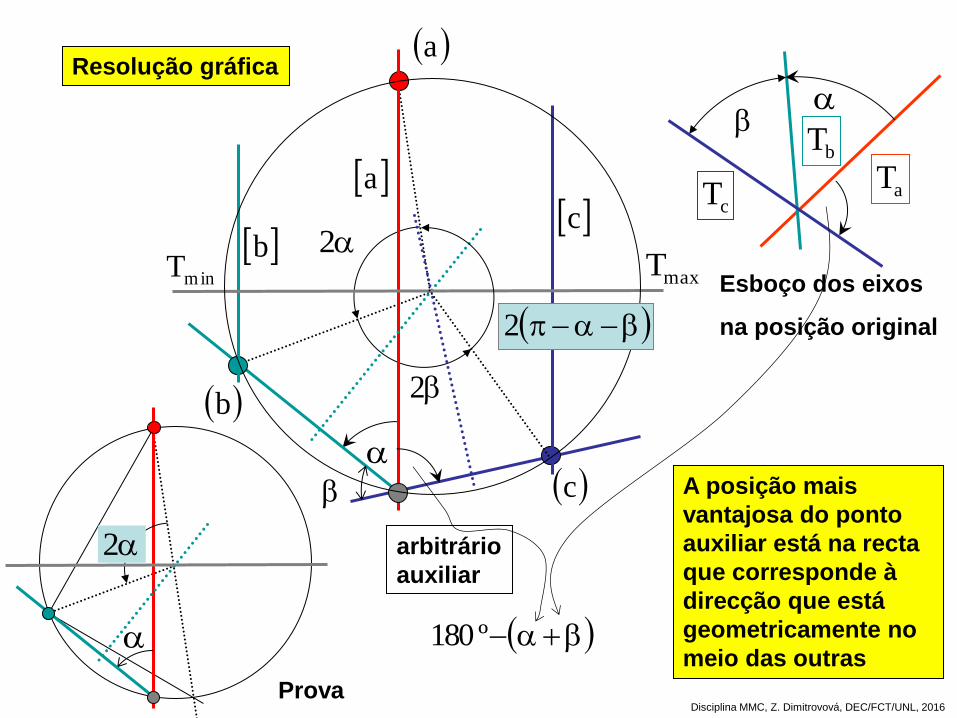
Resolução gráfica
2
2
a
b
c
a
arbitrário
auxiliar
b c
maxTminT
Esboço dos eixos
na posição original
aTbT
cT
Prova
2
2
º180
A posição mais
vantajosa do ponto
auxiliar está na recta
que corresponde à
direcção que está
geometricamente no
meio das outras

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
a
b
c
a
arbitrário
auxiliar
b c
Esboço dos eixos
na posição original
aT
bT
cT
º180
00
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
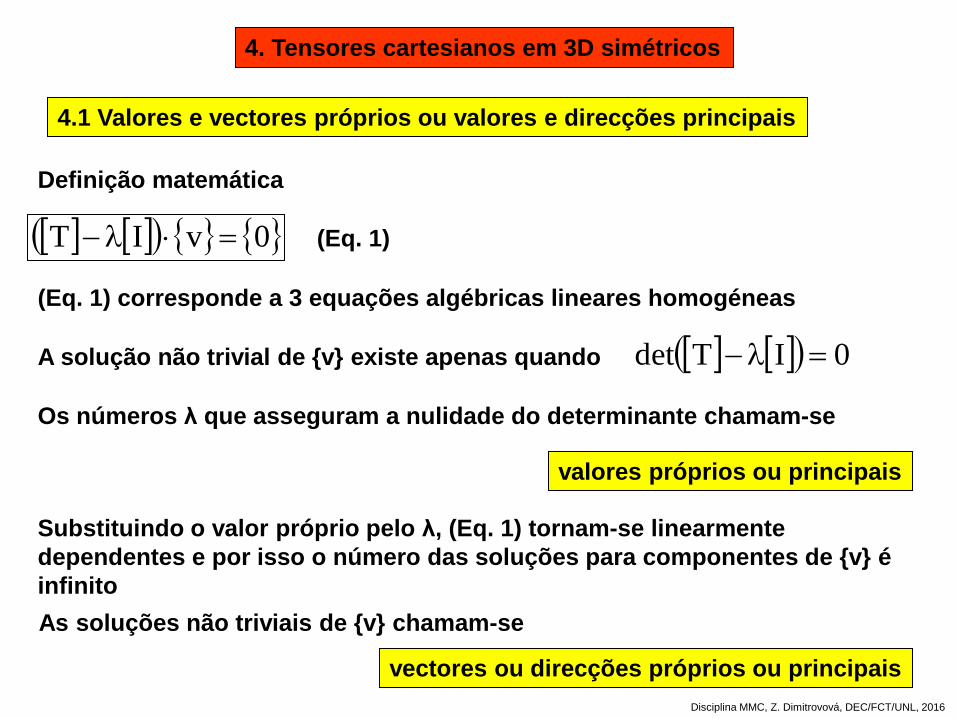
4.1 Valores e vectores próprios ou valores e direcções principais
A solução não trivial de {v} existe apenas quando 0ITdet
Os números λ que asseguram a nulidade do determinante chamam-se
Substituindo o valor próprio pelo λ, (Eq. 1) tornam-se linearmente
dependentes e por isso o número das soluções para componentes de {v} é
infinito
0vIT (Eq. 1)
(Eq. 1) corresponde a 3 equações algébricas lineares homogéneas
4. Tensores cartesianos em 3D simétricos
Definição matemática
valores próprios ou principais
As soluções não triviais de {v} chamam-se
vectores ou direcções próprios ou principais
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
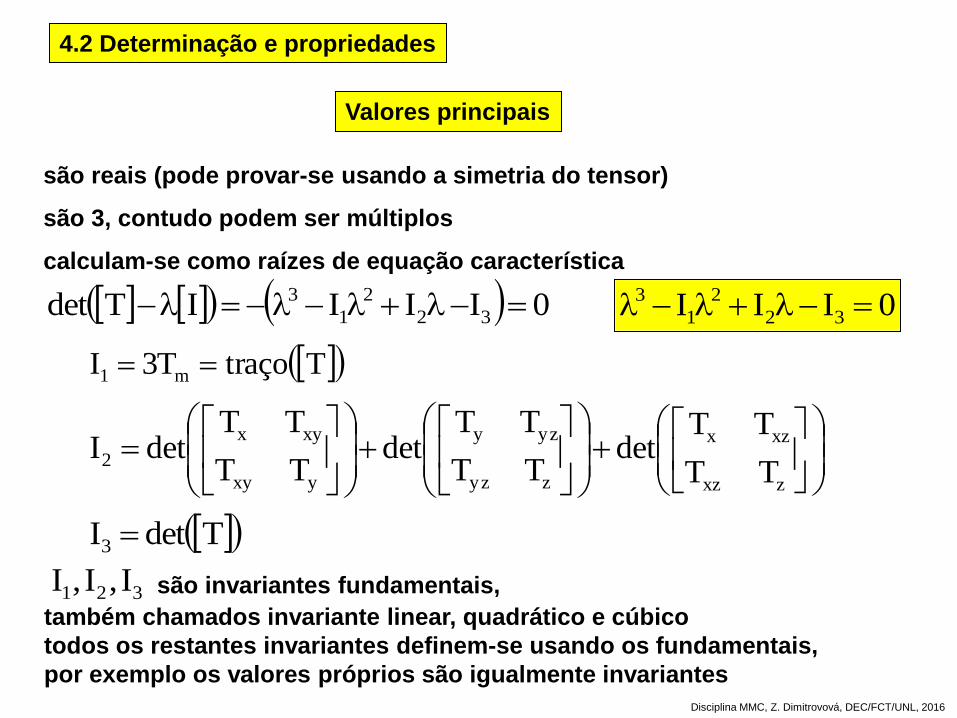
zxz
xzx
zyz
yzy
yxy
xyx
2TT
TTdet
TT
TTdet
TT
TTdetI
TtraçoT3I m1
4.2 Determinação e propriedades
são reais (pode provar-se usando a simetria do tensor)
são 3, contudo podem ser múltiplos
calculam-se como raízes de equação característica
0III 32
2
1
3 0IIIITdet 32
2
1
3
TdetI3
Valores principais
são invariantes fundamentais,
também chamados invariante linear, quadrático e cúbico
todos os restantes invariantes definem-se usando os fundamentais,
por exemplo os valores próprios são igualmente invariantes
321 I,I,I
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
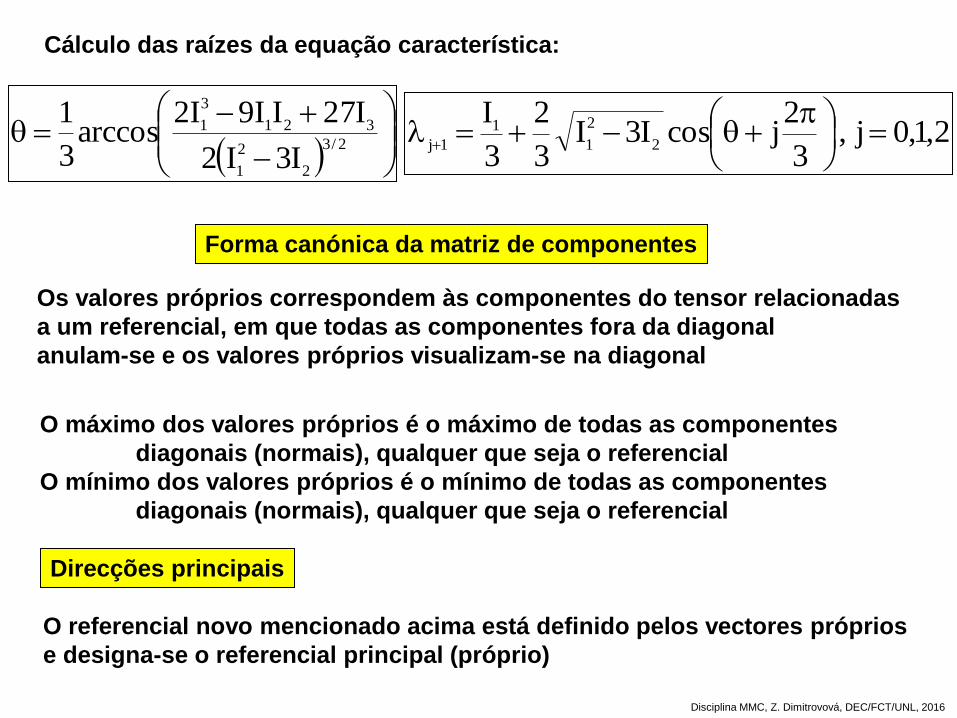
Direcções principais
Cálculo das raízes da equação característica:
2/3
2
2
1
321
3
1
I3I2
I27II9I2arccos
3
12,1,0j,
3
2jcosI3I
3
2
3
I2
2
1
1
1j
Os valores próprios correspondem às componentes do tensor relacionadas
a um referencial, em que todas as componentes fora da diagonal
anulam-se e os valores próprios visualizam-se na diagonal
Forma canónica da matriz de componentes
O máximo dos valores próprios é o máximo de todas as componentes
diagonais (normais), qualquer que seja o referencial
O mínimo dos valores próprios é o mínimo de todas as componentes
diagonais (normais), qualquer que seja o referencial
O referencial novo mencionado acima está definido pelos vectores próprios
e designa-se o referencial principal (próprio)
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
A matriz de transformação (rotação) [R]
tem as linhas formadas pelos vectores próprios normalizados.
Para assegurar que o referencial novo é directo, é necessário ter o det([R])=1
A solução é única, por isso encontrando uma matriz diagonal,
pode concluir-se que os valores na diagonal são principais e o referencial
correspondente é também principal
Depois de calcular os valores próprios, o sistema de equações (Eq. 1) usa-se com
cada valor próprio separadamente para calcular o vector próprio correspondente
Quando os valores próprios são diferentes, a cada um correspondem
infinitas soluções do vector principal correspondente, estes vectores formam
uma única direcção no espaço. Assumindo o vector normalizado, existem apenas
duas soluções com sentidos opostos.
Pode dizer-se que existem apenas 3 vectores próprios normalizados,
unicamente definidos excepto do sentido, mutuamente perpendiculares.
Estes vectores definem o novo referencial, em que a matriz de componentes é
diagonal, contendo na diagonal os valores próprios.
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
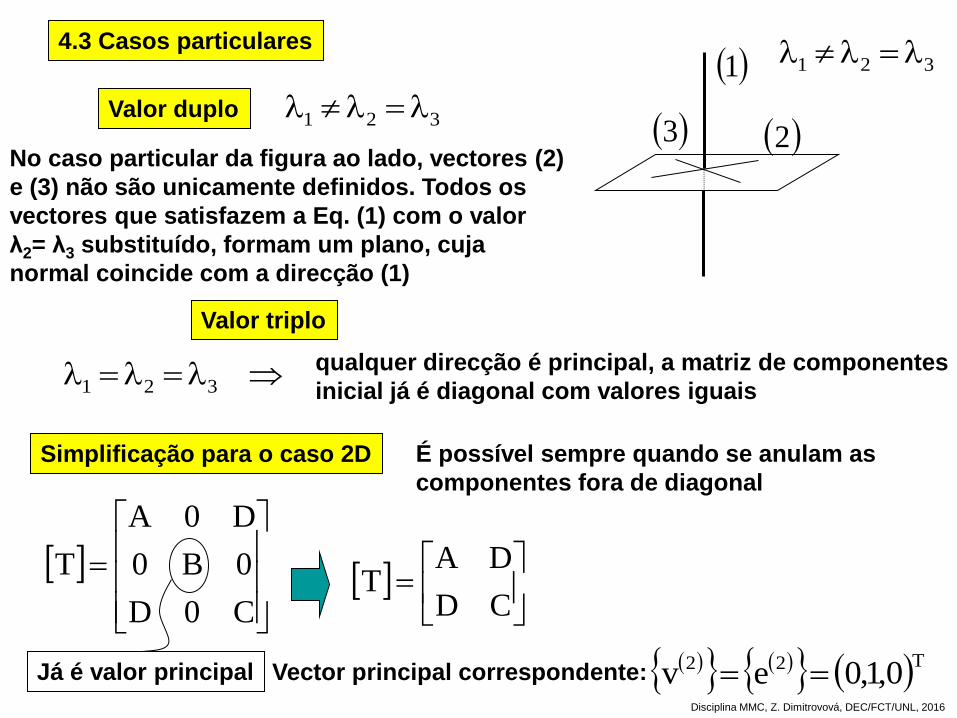
4.3 Casos particulares
No caso particular da figura ao lado, vectores (2)
e (3) não são unicamente definidos. Todos os
vectores que satisfazem a Eq. (1) com o valor
λ2= λ3 substituído, formam um plano, cuja
normal coincide com a direcção (1)
321
qualquer direcção é principal, a matriz de componentes
inicial já é diagonal com valores iguais
Simplificação para o caso 2D
CD
DAT
C0D
0B0
D0A
T
Já é valor principal Vector principal correspondente: T22 0,1,0ev
Valor duplo
Valor triplo
321
321 1
3 2
É possível sempre quando se anulam as
componentes fora de diagonal

Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
4.4 Valores extremos fora de diagonal
1 3
,max2
xz
T TT
1
2
3
3211 TTTI 3132212 TTTTTTI 3213 TTTI
Invariantes no referencial principal
Usando as conclusões de 2D
1 3 1 3
2
1 3 1 3
02 2
0 0
02 2
T T T T
T
T T T T
Círculo de Mohr
1T2T3T
Círculos fundamentais
Depois da resolução dos valores e direcções principais convém verificar
os invariantes e a ortogonalidade dos vectores próprios
Verificações
Disciplina MMC, Z. Dimitrovová, DEC/FCT/UNL, 2016
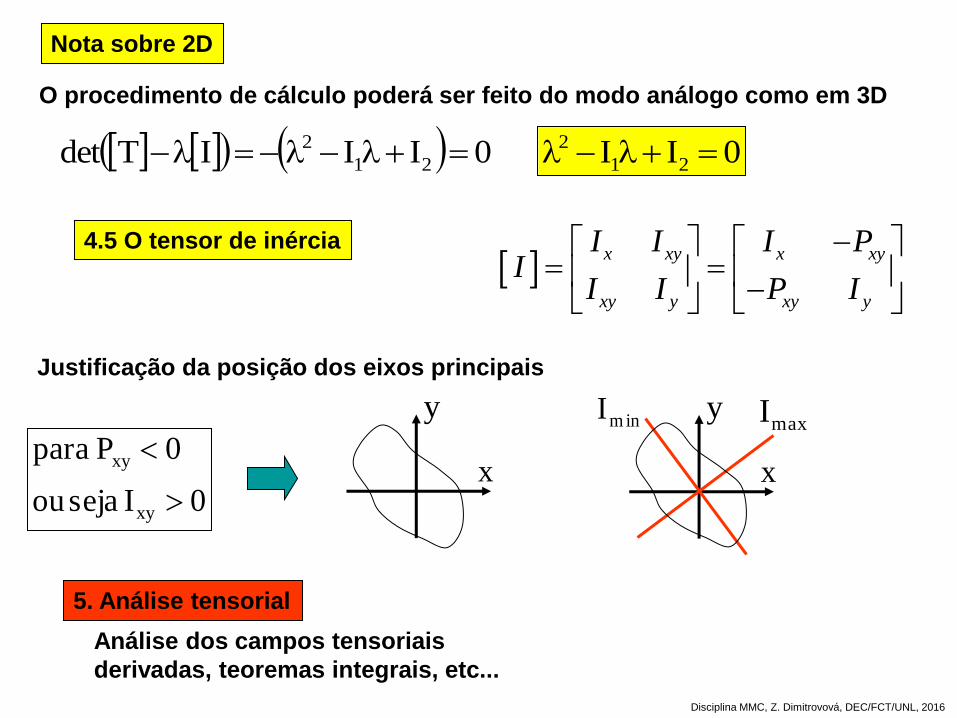
Nota sobre 2D
0II 21
2 0IIITdet 21
2
O procedimento de cálculo poderá ser feito do modo análogo como em 3D
4.5 O tensor de inércia
x xy x xy
xy y xy y
I I I PI
I I P I
Justificação da posição dos eixos principais
0Isejaou
0Ppara
xy
xy
x
y
x
ymaxIm inI
5. Análise tensorial
Análise dos campos tensoriais
derivadas, teoremas integrais, etc...