apostila de robotica - rev 0
DESCRIPTION
Apostila de Robotica - Rev 0TRANSCRIPT
1
ROBÓTICA
Federação das Indústrias do Estado de Minas Gerais - FIEMG
Juiz de Fora
2
Presidente da FIEMG
Olavo Machado Júnior
Diretor Regional do SENAI
Lúcio José de Figueiredo Sampaio
Gerente de Educação Profissional
Edmar Fernando de Alcântara Federação das Indústrias do Estado de Minas Gerais - FIEMG Serviço Nacional de Aprendizagem Industrial - SENAI Departamento Regional de Minas Gerais CIDT-LAS Juiz de Fora
SENAI/MG Centro Integrado de Desenvolvimento do Trabalhador - Luiz Adelar Scheuer Juiz de Fora
3
Sumário
1 – Robótica Robôs realidade ou ficção ---------------------------------------------------- 7 Anatomia dos robôs industriais ---------------------------------------------- 7 Braço Mecânico ------------------------------------------------------------------ 8 Sensoriamento ------------------------------------------------------------------- 8 Programação. -------------------------------------------------------------------- 8 Tipos de Juntas ------------------------------------------------------------------ 9 Graus de Liberdade ----------------------------------------------------------- 10 Classificação dos Robôs pelo tipo de Articulação ----------------------10 Atuadores ------------------------------------------------------------------------- 13 Controle -------------------------------------------------------------------------- 14 Sistema de Movimentação --------------------------------------------------- 17 Características do Robô ------------------------------------------------------ 19 Teach Pendant ------------------------------------------------------------------ 19 Programação --------------------------------------------------------------------- 22 Criar um Programa ------------------------------------------------------------- 23 Comandos ------------------------------------------------------------------------ 24 Exercícios de Programação -------------------------------------------------- 26
4
PPrreeffáácciioo
“Muda a forma de trabalhar, agir, sentir, pensar na chamada sociedade do conhecimento”.
Peter Drucker O ingresso na sociedade da informação exige mudanças profundas em todos os perfis profissionais, especialmente naqueles diretamente envolvidos na produção, coleta, disseminação e uso da informação. O SENAI, maior rede privada de educação profissional do país, sabe disso, e ,consciente do seu papel formativo , educa o trabalhador sob a égide do conceito da competência:” formar o profissional com responsabilidade no processo produtivo, com iniciativa na resolução de problemas, com conhecimentos técnicos aprofundados, flexibilidade e criatividade, empreendedorismo e consciência da necessidade de educação continuada.” Vivemos numa sociedade da informação. O conhecimento, na sua área tecnológica, amplia-se e se multiplica a cada dia. Uma constante atualização se faz necessária. Para o SENAI, cuidar do seu acervo bibliográfico, da sua infovia, da conexão de suas escolas à rede mundial de informações – internet- é tão importante quanto zelar pela produção de material didático. Isto porque, nos embates diários, instrutores e alunos, nas diversas oficinas e laboratórios do SENAI, fazem com que as informações, contidas nos materiais didáticos, tomem sentido e se concretizem em múltiplos conhecimentos. O SENAI deseja, por meio dos diversos materiais didáticos, aguçar a sua curiosidade, responder às suas demandas de informações e construir links entre os diversos conhecimentos, tão importantes para sua formação continuada !
Gerência de Educação Profissional
5
Robótica
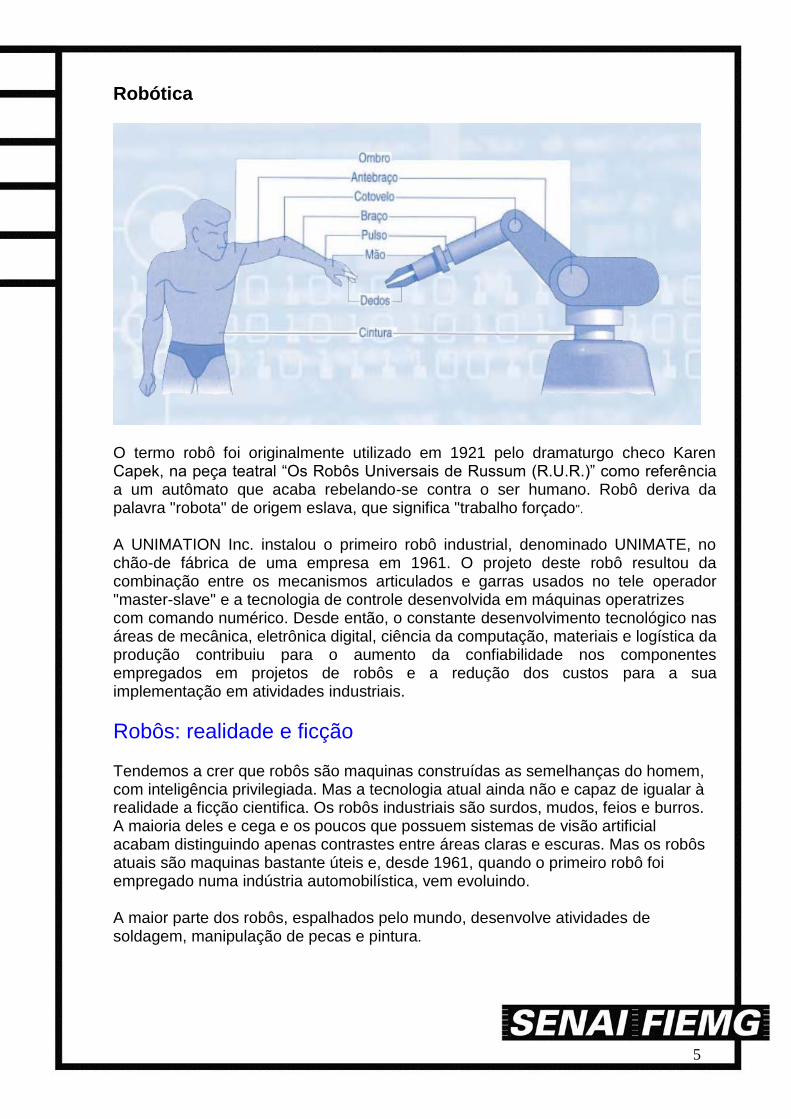
O termo robô foi originalmente utilizado em 1921 pelo dramaturgo checo Karen Capek, na peça teatral “Os Robôs Universais de Russum (R.U.R.)” como referência a um autômato que acaba rebelando-se contra o ser humano. Robô deriva da palavra "robota" de origem eslava, que significa "trabalho forçado".
A UNIMATION Inc. instalou o primeiro robô industrial, denominado UNIMATE, no chão-de fábrica de uma empresa em 1961. O projeto deste robô resultou da combinação entre os mecanismos articulados e garras usados no tele operador "master-slave" e a tecnologia de controle desenvolvida em máquinas operatrizes com comando numérico. Desde então, o constante desenvolvimento tecnológico nas áreas de mecânica, eletrônica digital, ciência da computação, materiais e logística da produção contribuiu para o aumento da confiabilidade nos componentes empregados em projetos de robôs e a redução dos custos para a sua implementação em atividades industriais.
Robôs: realidade e ficção Tendemos a crer que robôs são maquinas construídas as semelhanças do homem, com inteligência privilegiada. Mas a tecnologia atual ainda não e capaz de igualar à realidade a ficção cientifica. Os robôs industriais são surdos, mudos, feios e burros. A maioria deles e cega e os poucos que possuem sistemas de visão artificial acabam distinguindo apenas contrastes entre áreas claras e escuras. Mas os robôs atuais são maquinas bastante úteis e, desde 1961, quando o primeiro robô foi empregado numa indústria automobilística, vem evoluindo. A maior parte dos robôs, espalhados pelo mundo, desenvolve atividades de soldagem, manipulação de pecas e pintura.
6
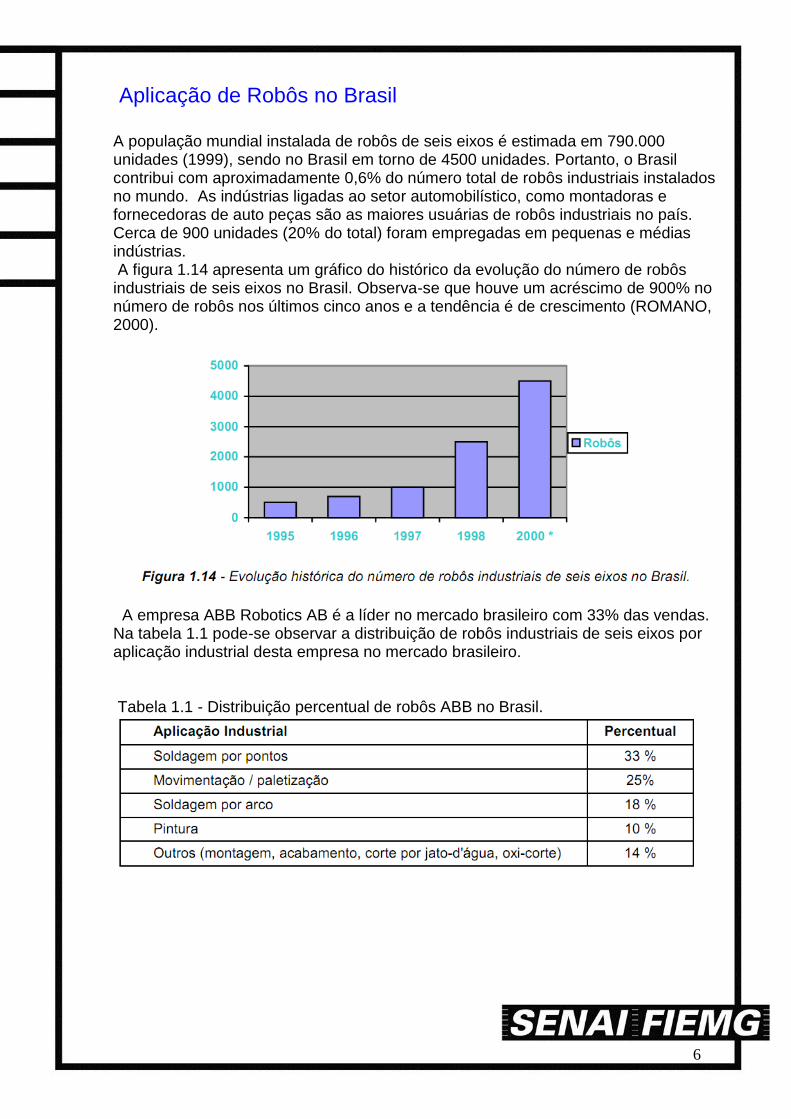
Aplicação de Robôs no Brasil A população mundial instalada de robôs de seis eixos é estimada em 790.000 unidades (1999), sendo no Brasil em torno de 4500 unidades. Portanto, o Brasil contribui com aproximadamente 0,6% do número total de robôs industriais instalados no mundo. As indústrias ligadas ao setor automobilístico, como montadoras e fornecedoras de auto peças são as maiores usuárias de robôs industriais no país. Cerca de 900 unidades (20% do total) foram empregadas em pequenas e médias indústrias. A figura 1.14 apresenta um gráfico do histórico da evolução do número de robôs industriais de seis eixos no Brasil. Observa-se que houve um acréscimo de 900% no número de robôs nos últimos cinco anos e a tendência é de crescimento (ROMANO, 2000).
A empresa ABB Robotics AB é a líder no mercado brasileiro com 33% das vendas. Na tabela 1.1 pode-se observar a distribuição de robôs industriais de seis eixos por aplicação industrial desta empresa no mercado brasileiro. Tabela 1.1 - Distribuição percentual de robôs ABB no Brasil.
7
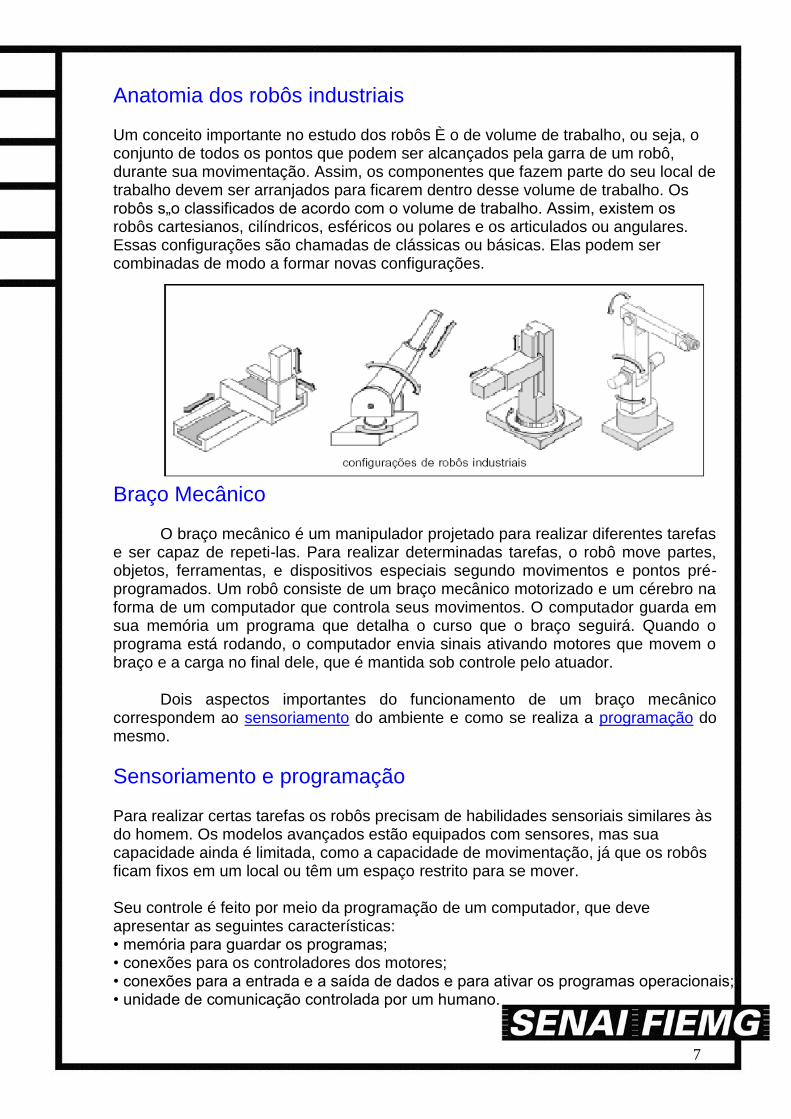
Anatomia dos robôs industriais Um conceito importante no estudo dos robôs È o de volume de trabalho, ou seja, o conjunto de todos os pontos que podem ser alcançados pela garra de um robô, durante sua movimentação. Assim, os componentes que fazem parte do seu local de trabalho devem ser arranjados para ficarem dentro desse volume de trabalho. Os robôs s„o classificados de acordo com o volume de trabalho. Assim, existem os robôs cartesianos, cilíndricos, esféricos ou polares e os articulados ou angulares. Essas configurações são chamadas de clássicas ou básicas. Elas podem ser combinadas de modo a formar novas configurações.
Braço Mecânico O braço mecânico é um manipulador projetado para realizar diferentes tarefas
e ser capaz de repeti-las. Para realizar determinadas tarefas, o robô move partes, objetos, ferramentas, e dispositivos especiais segundo movimentos e pontos pré-programados. Um robô consiste de um braço mecânico motorizado e um cérebro na forma de um computador que controla seus movimentos. O computador guarda em sua memória um programa que detalha o curso que o braço seguirá. Quando o programa está rodando, o computador envia sinais ativando motores que movem o braço e a carga no final dele, que é mantida sob controle pelo atuador.
Dois aspectos importantes do funcionamento de um braço mecânico correspondem ao sensoriamento do ambiente e como se realiza a programação do mesmo.
Sensoriamento e programação Para realizar certas tarefas os robôs precisam de habilidades sensoriais similares às do homem. Os modelos avançados estão equipados com sensores, mas sua capacidade ainda é limitada, como a capacidade de movimentação, já que os robôs ficam fixos em um local ou têm um espaço restrito para se mover. Seu controle é feito por meio da programação de um computador, que deve apresentar as seguintes características: • memória para guardar os programas; • conexões para os controladores dos motores; • conexões para a entrada e a saída de dados e para ativar os programas operacionais; • unidade de comunicação controlada por um humano.

8
Classificação Os robôs industriais podem ser classificados de acordo com o número de juntas, o tipo de controle, o tipo de acionamento e a geometria. É usual classificar os robôs de acordo com o tipo de junta, ou, mais exatamente, pelas três juntas mais próximas da base do robô. Também podem ser classificados em relação ao espaço de trabalho (workspace), ao grau de rigidez, à extensão de controle sobre o curso do movimento e de acordo com as aplicações, adequado ou inadequado. Os diferentes graus de liberdade de um robô podem ser encontrados em várias combinações de configurações rotacionais e lineares, dependendo da aplicação. Tais combinações são denominadas geometria do robô. Existem cinco classes principais de manipuladores, segundo o tipo - de junta de rotação ou revolução (R), ou de translação ou prismática - o que permite diferentes possibilidades de posicionamento no volume de trabalho. As cinco classes ou geometrias principais de um robô igualmente chamadas sistemas geométricos coordenados, posto que descrevem o tipo de movimento que o robô executa - são cartesiana, cilíndrica, esférica (ou polar), de revolução (ou articulada) e Scara (Selective Compliant Articulated Robot for Assembly). O código usado para essas classificações consiste numa seqüência de três letras, que representam os tipos de junta (R = revolução e P = deslizante, do inglês prismatic na ordem em que ocorrem, começando da junta mais próxima até a base.
Robô de Coordenadas Cartesianas Um robô de coordenadas cartesianas, ou robô cartesiano (veja figura abaixo), pode se movimentar em linha reta, em deslocamentos horizontais e verticais. As coordenadas cartesianas especificam um ponto do espaço em função de suas coordenadas x, y e z. Esses robôs têm três articulações deslizantes e são codificados como PPP.
Os robôs cartesianos caracterizam-se pela pequena área de trabalho, pelo elevado grau de rigidez mecânica e pela grande exatidão na localização do atuador. Seu controle é simples em razão do movimento linear dos vínculos e de o momento de inércia da carga ser fixo em toda a área de atuação.
9
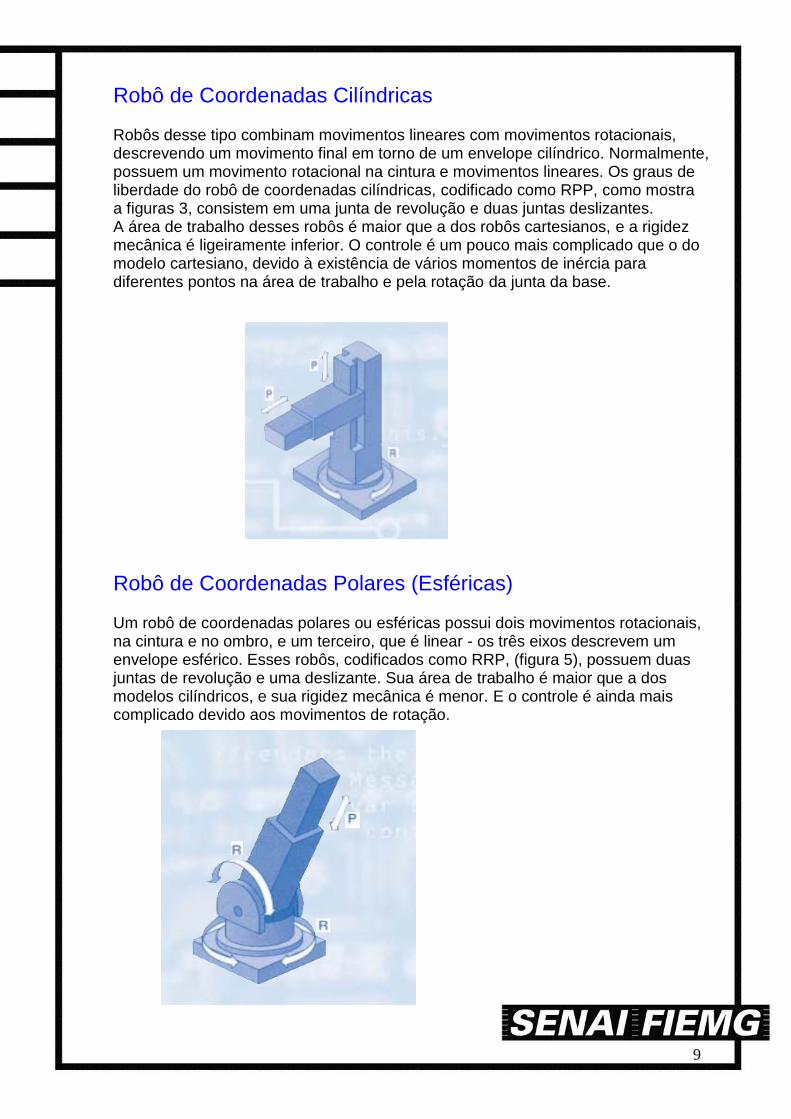
Robô de Coordenadas Cilíndricas Robôs desse tipo combinam movimentos lineares com movimentos rotacionais, descrevendo um movimento final em torno de um envelope cilíndrico. Normalmente, possuem um movimento rotacional na cintura e movimentos lineares. Os graus de liberdade do robô de coordenadas cilíndricas, codificado como RPP, como mostra a figuras 3, consistem em uma junta de revolução e duas juntas deslizantes. A área de trabalho desses robôs é maior que a dos robôs cartesianos, e a rigidez mecânica é ligeiramente inferior. O controle é um pouco mais complicado que o do modelo cartesiano, devido à existência de vários momentos de inércia para diferentes pontos na área de trabalho e pela rotação da junta da base.
Robô de Coordenadas Polares (Esféricas) Um robô de coordenadas polares ou esféricas possui dois movimentos rotacionais, na cintura e no ombro, e um terceiro, que é linear - os três eixos descrevem um envelope esférico. Esses robôs, codificados como RRP, (figura 5), possuem duas juntas de revolução e uma deslizante. Sua área de trabalho é maior que a dos modelos cilíndricos, e sua rigidez mecânica é menor. E o controle é ainda mais complicado devido aos movimentos de rotação.

10
Robô de Coordenadas de Revolução (Articulado) As juntas e os movimentos de um robô de coordenadas de revolução se assemelham aos de um braço humano. O robô Puma (Programmable Universal Machine for Assembly), um dos projetos mais populares de robôs articulados, foi projetado inicialmente para atender aos requerimentos da indústria automobilística. Caracterizam-se por possuir três juntas de revolução e são codificados como RRR, como mostra a figura .
Sua área de atuação é maior que a de qualquer tipo de robô, e apresentam baixa rigidez mecânica. Seu controle é complicado e difícil em razão das três juntas de revolução e das variações no momento de carga e no de inércia.
Robô Scara O robô Scara, uma configuração recente utilizada para tarefas de montagem, é codificado como RRP e caracteriza-se por possuir duas juntas de revolução e uma deslizante. Embora na configuração sejam encontrados tipos de junta idênticos aos de uma configuração esférica, ela se diferencia da esférica tanto pela aparência como pela faixa de aplicação (figura 7).
11
Outros Tipos de Robô
Robôs spine - O robô Spine assemelha-se a uma cobra em aparência e está projetado para imitar espinhas animais. Nós, humanos, temos cerca de vinte vértebras móveis, as quais nos permitem permanecer eretos, curvar, girar, levantar peso (e também ter dores nas costas, vértebras deslocadas e coisas afins). O robô Spine tem vários sólidos em forma de ovo (chamados ovóides) conectados por quatro cabos que podem ser encurtados ou estendidos para produzir movimentos curvos. Robôs pórtico - O robô pórtico tem um quadro muito grande de movimentos em ângulos retos. Eles aparecem em duas formas, e nenhum deles aparenta, à primeira vista, braço com juntas. O robô pórtico com quatro colunas suporta dois trilhos elevados e paralelos sobre os quais está montada uma ponte rolante. A ponte pode mover-se, muita precisamente, para qualquer posição ao longo do comprimento dos trilhos. A ponte serve ainda como trilhos ao longo dos quais viaja um carro móvel que pode mover-se, também com precisão, para qualquer ponto na ponte, indo próximo de um trilho ou de outro para qualquer ponto entre eles. O carro pode então mover-se para qualquer ponto da área compreendida entre as quatro colunas. Ligado ao carro, parecendo um periscópio de submarino de cabeça rara baixo, está um braço de robô que pode abaixar e subir (isto é, retrair ou estender). O robô pórtico aparece também em versão com duas colunas, onde a ponte rolante viaja ao longo de um trilho simples, com a metade da ponte estendendo para cada lado do trilho. De qualquer forma, o robô pórtico pode ser muito grande estendendo-se os trilhos. Robôs de mesa - Um robô de mesa (tabletop) é um pequeno robô, às vezes usado paraoperações simples de montagem, onde não é necessário força, ou para ensino, onde o uso da força seria perigoso para os estudantes. Robôs móveis - Existem também robôs móveis, tais como o robô doméstico com rodas. A máquina móvel e seis pernas controladas, chamadas functionoids, podem ser incluídas nessa classe de robô. Acionamentos de robôs Os acionamentos mais utilizados pelos robôs são dos tipos: hidráulico, pneumático e elétrico. Acionamento hidráulico - São usados nos robôs mais potentes. São, entretanto, de custo mais elevado do que os demais acionamentos de igual capacidade. Necessitam, também, de uma bomba e um reservatório para o fluido, além de conexões e válvulas projetadas para operarem sob altas pressões. Os robôs com acionamento hidráulico são muito usados em pintura, devido ao ambiente inflamável, o que torna perigoso, por exemplo, o emprego de robôs com acionamento elétrico (perigo de faísca).
12
Acionamento pneumático - São os menos caros e mais práticos acionamentos para operações simples de manuseio de peças, bem como para disponibilidade de ar comprimido a pressões de aproximadamente 90 psi (libra por polegada quadrada). São bastante convenientes para o emprego de tais acionamentos. Acionamento elétrico - Os robôs elétricos são mais populares por causa da fácil disponibilidade desse tipo de fonte de energia, além de os acionamentos elétricos proporcionam uma maior precisão. Eles são mais indicados para robôs de configuração articulada. Os robôs elétricos podem ser divididos em dois grupos, de acordo com o tipo de motor elétrico que comanda cada um de seus eixos: os comandados por motores de passo e os comandados por servo motores de corrente contínua. Motores de Passo Os motores de passo proporcionam movimentos angulares precisos para cada pulso de voltagem emitido pelo computador que controla o robô. Em geral, os motores de passo são usados em robôs que trabalham segundo um sistema de controle em malha aberta, isto é, o computador calcula o número de pulsos necessários para um movimento desejado e envia o comando ao robô, sem verificar se o robô realmente executou o movimento comandado. Infelizmente, se por alguma razão (encontro com um obstáculo, por exemplo) o robô não cumprir o comando, ele “se perderá” tornando, o restante da operação inútil e mesmo perigosa. Como remédio, poder-se-ia usar um codificador ótico para monitorar o deslocamento angular do componente acionado, sendo tal informação enviada ao computador de controle que faria a correção, transformando, assim, o sistema de controle em malha fechada. Entretanto, devido ao fato de que os deslocamentos angulares do motor de passo são discretos e não contínuos, a precisão obtida seria menor do que aquela fornecida pelo servo motor de corrente contínua. Servo motor de corrente continua - Os robôs com servo motor de corrente contínua são os mais populares e trabalham, invariavelmente, em sistema de controle em malha fechada (com feedback), ou seja, o computador, monitora constantemente a posição do robô, compara-a com a posição desejada e calcula o erro cometido. Em seguida, envia um comando (uma corrente elétrica contínua) ao robô que é proporcional ao erro cometido. Tal procedimento é continuamente seguido, até que o erro caia a zero, isto é, até que a posição executada seja igual à desejada. Tal tipo de controle é mais adequado ao motor de corrente contínua devido ao fato de que o movimento de rotação do mesmo é contínuo.
13
Graus de Liberdade
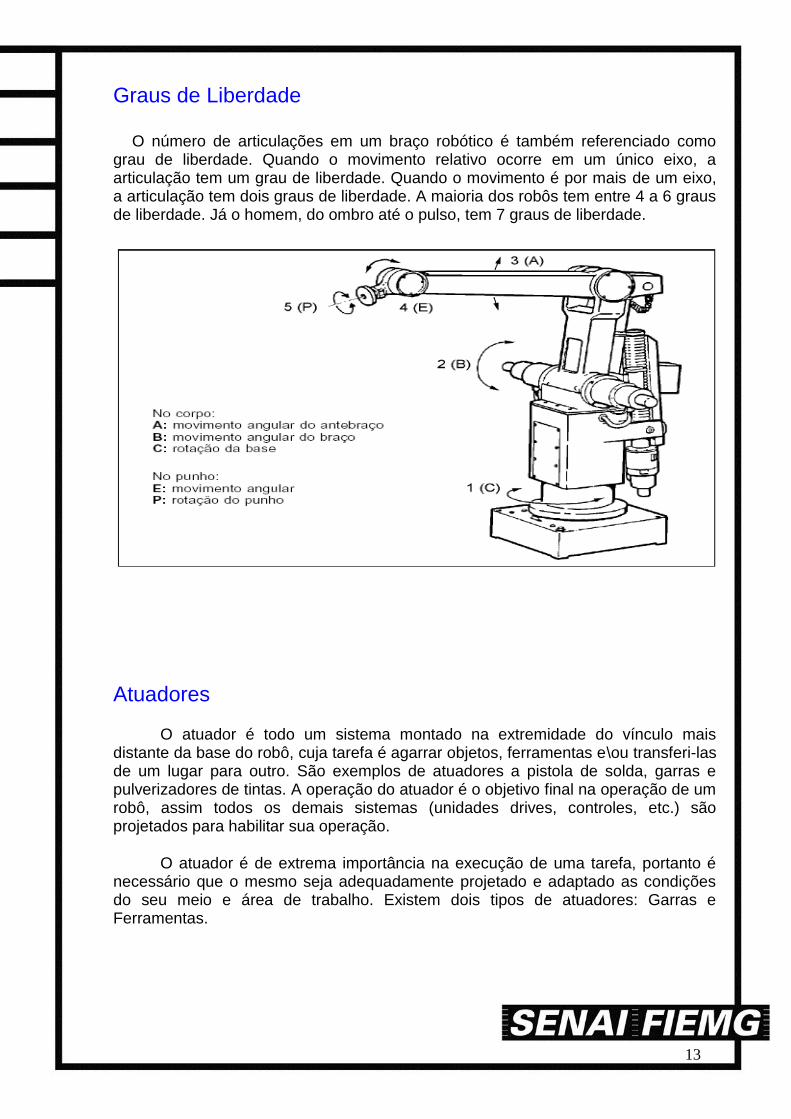
O número de articulações em um braço robótico é também referenciado como grau de liberdade. Quando o movimento relativo ocorre em um único eixo, a articulação tem um grau de liberdade. Quando o movimento é por mais de um eixo, a articulação tem dois graus de liberdade. A maioria dos robôs tem entre 4 a 6 graus de liberdade. Já o homem, do ombro até o pulso, tem 7 graus de liberdade.
Atuadores
O atuador é todo um sistema montado na extremidade do vínculo mais distante da base do robô, cuja tarefa é agarrar objetos, ferramentas e\ou transferi-las de um lugar para outro. São exemplos de atuadores a pistola de solda, garras e pulverizadores de tintas. A operação do atuador é o objetivo final na operação de um robô, assim todos os demais sistemas (unidades drives, controles, etc.) são projetados para habilitar sua operação.
O atuador é de extrema importância na execução de uma tarefa, portanto é necessário que o mesmo seja adequadamente projetado e adaptado as condições do seu meio e área de trabalho. Existem dois tipos de atuadores: Garras e Ferramentas.
14
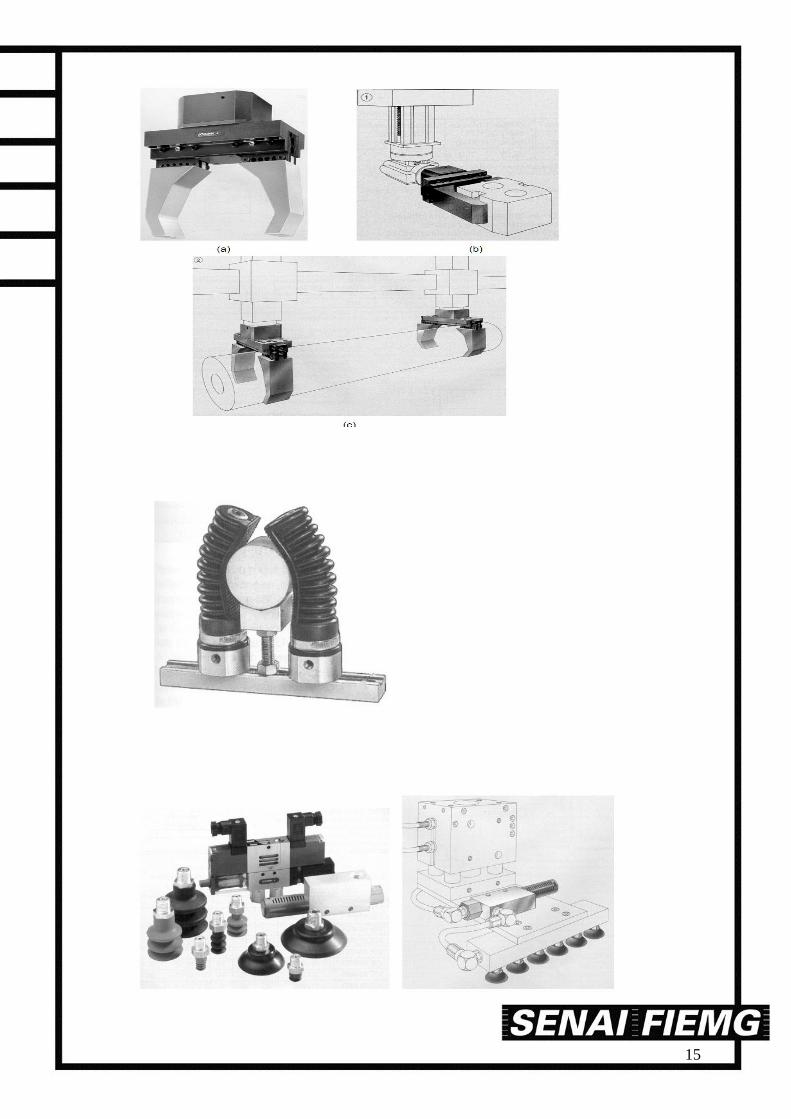
Atuadores tipo Garra
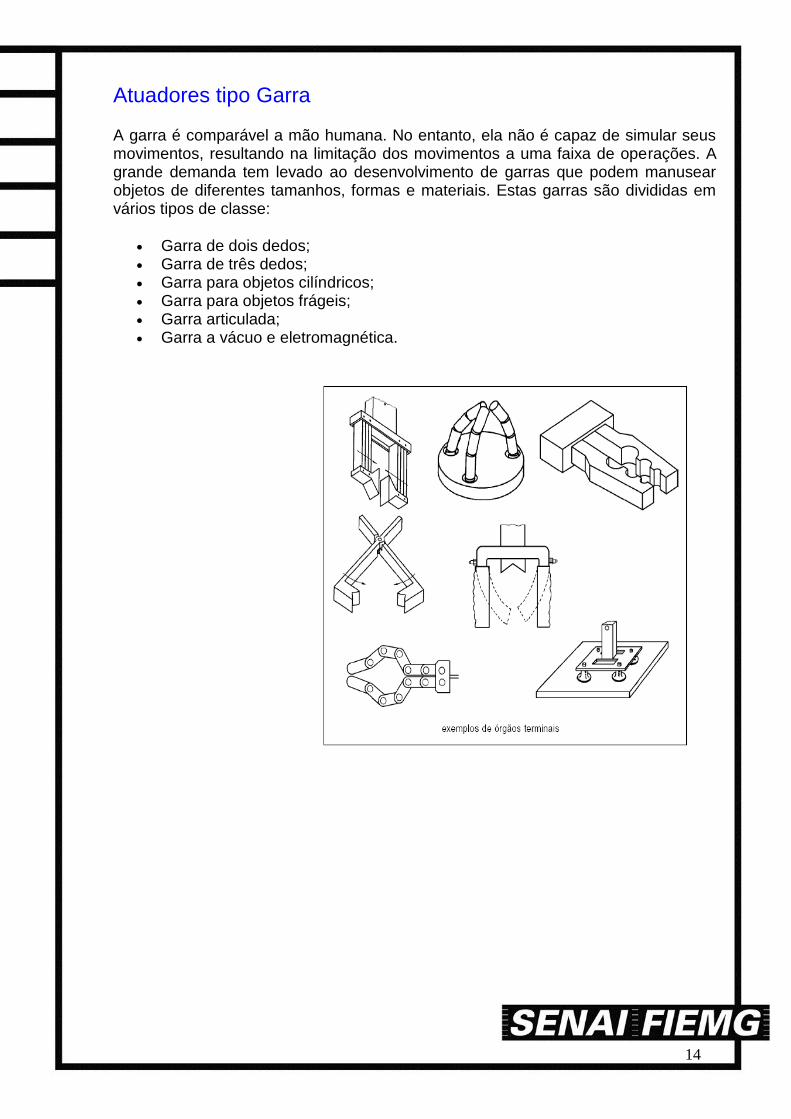
A garra é comparável a mão humana. No entanto, ela não é capaz de simular seus movimentos, resultando na limitação dos movimentos a uma faixa de operações. A grande demanda tem levado ao desenvolvimento de garras que podem manusear objetos de diferentes tamanhos, formas e materiais. Estas garras são divididas em vários tipos de classe:
Garra de dois dedos; Garra de três dedos; Garra para objetos cilíndricos; Garra para objetos frágeis; Garra articulada; Garra a vácuo e eletromagnética.
15
16
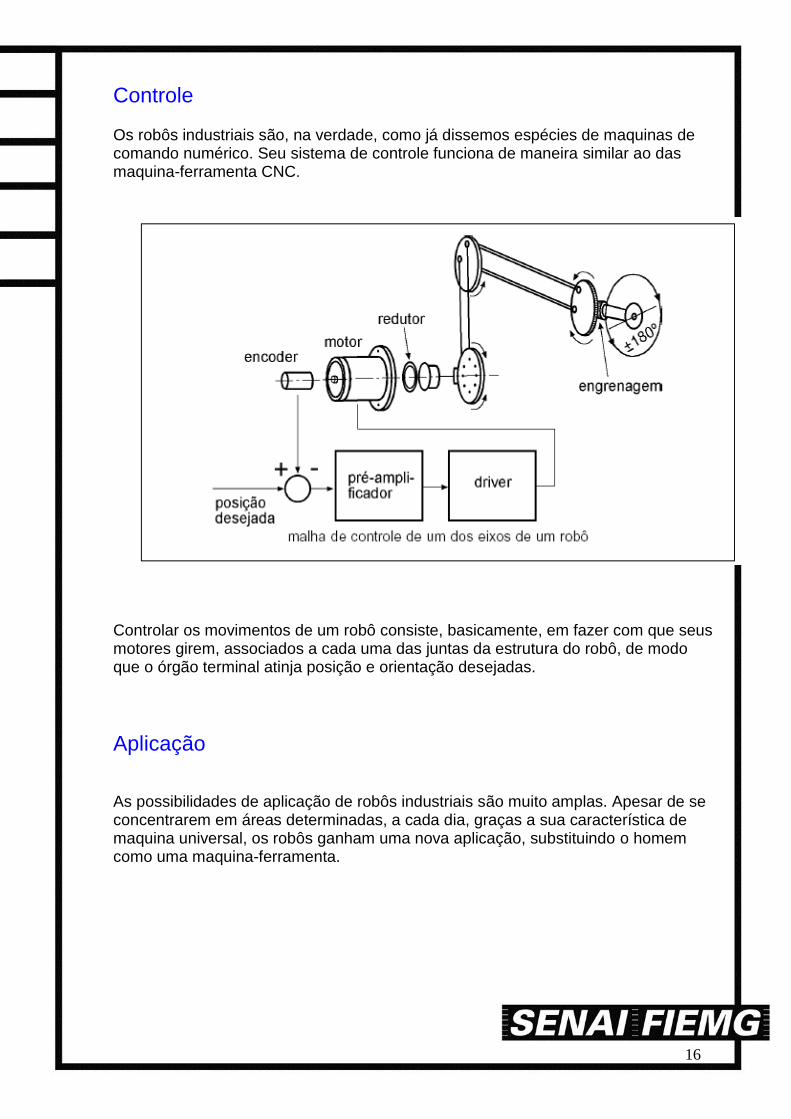
Controle Os robôs industriais são, na verdade, como já dissemos espécies de maquinas de comando numérico. Seu sistema de controle funciona de maneira similar ao das maquina-ferramenta CNC.
Controlar os movimentos de um robô consiste, basicamente, em fazer com que seus motores girem, associados a cada uma das juntas da estrutura do robô, de modo que o órgão terminal atinja posição e orientação desejadas.
Aplicação As possibilidades de aplicação de robôs industriais são muito amplas. Apesar de se concentrarem em áreas determinadas, a cada dia, graças a sua característica de maquina universal, os robôs ganham uma nova aplicação, substituindo o homem como uma maquina-ferramenta.

17
Manipulação de material A função principal de um robô e manipular materiais. Isto não acrescenta valor ao produto, mas somente custo. Portanto, deve ser cuidadosamente estudado para se obter uma forma de manuseio eficiente e barata. Entre as operações de manuseio mais comuns, realizadas pelos robôs, estão as de carregamento e descarregamento de maquinas, bem como as de paletização e despaletizacao. Paletizar significa distribuir ou arranjar pecas sobre um pallet. Pallet e o nome que se da a bandeja ou estrado sobre o qual podem ser dispostos elementos como pecas, sacos, caixas. Despaletizar e retirar esses elementos do pallet, para serem processados, armazenados, embalados.
Soldagem Os processos de soldagem MIG e por resistência elétrica (solda a ponto) são as aplicações mais populares dos robôs industriais. O principal usuário dos robôs de solda a ponto e a indústria automobilística. A figura mostra, esquematicamente, uma estação de soldagem de carrocerias de automóveis formada por robôs. Em algumas das linhas, e possível associar se a cada carroceria um sistema de identificação. A carroceria, ao passar pela estação, e identificada como sendo deste ou daquele veículo. Com essa informação, aciona-se o programa de soldagem apropriado. Assim, uma mesma linha pode trabalhar com tipos diferentes de automóveis, de modo flexível.
18
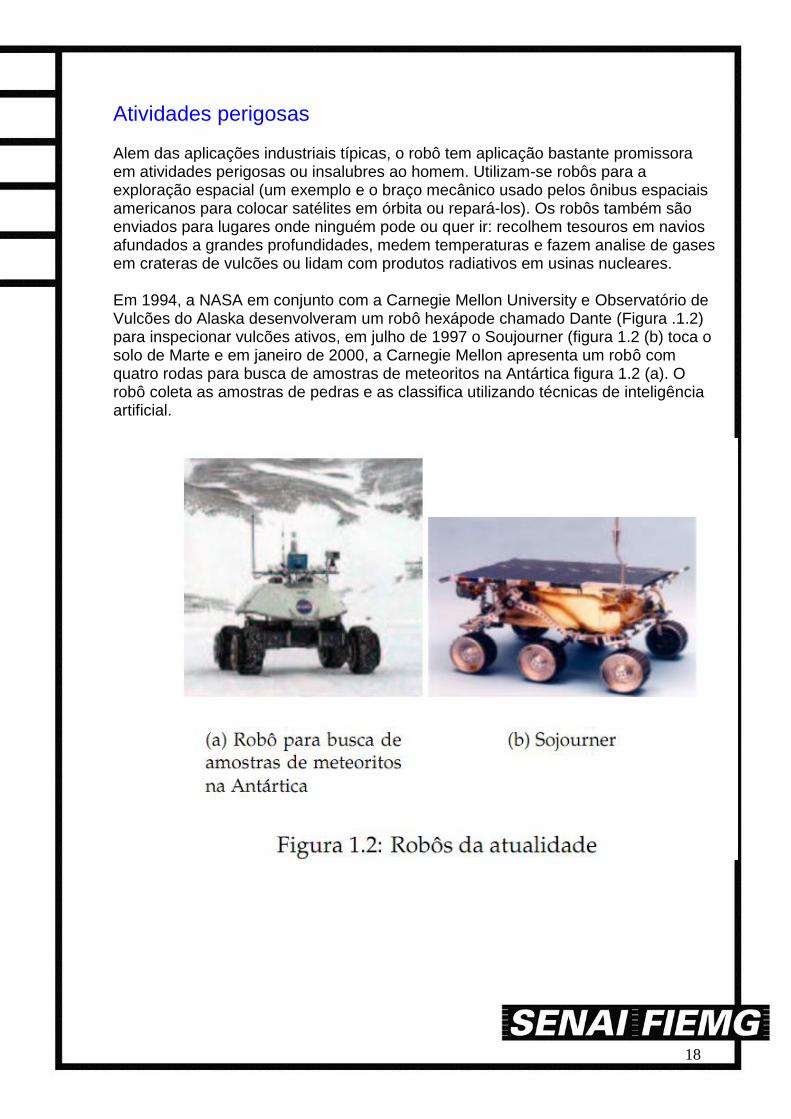
Atividades perigosas Alem das aplicações industriais típicas, o robô tem aplicação bastante promissora em atividades perigosas ou insalubres ao homem. Utilizam-se robôs para a exploração espacial (um exemplo e o braço mecânico usado pelos ônibus espaciais americanos para colocar satélites em órbita ou repará-los). Os robôs também são enviados para lugares onde ninguém pode ou quer ir: recolhem tesouros em navios afundados a grandes profundidades, medem temperaturas e fazem analise de gases em crateras de vulcões ou lidam com produtos radiativos em usinas nucleares. Em 1994, a NASA em conjunto com a Carnegie Mellon University e Observatório de Vulcões do Alaska desenvolveram um robô hexápode chamado Dante (Figura .1.2) para inspecionar vulcões ativos, em julho de 1997 o Soujourner (figura 1.2 (b) toca o solo de Marte e em janeiro de 2000, a Carnegie Mellon apresenta um robô com quatro rodas para busca de amostras de meteoritos na Antártica figura 1.2 (a). O robô coleta as amostras de pedras e as classifica utilizando técnicas de inteligência artificial.
19
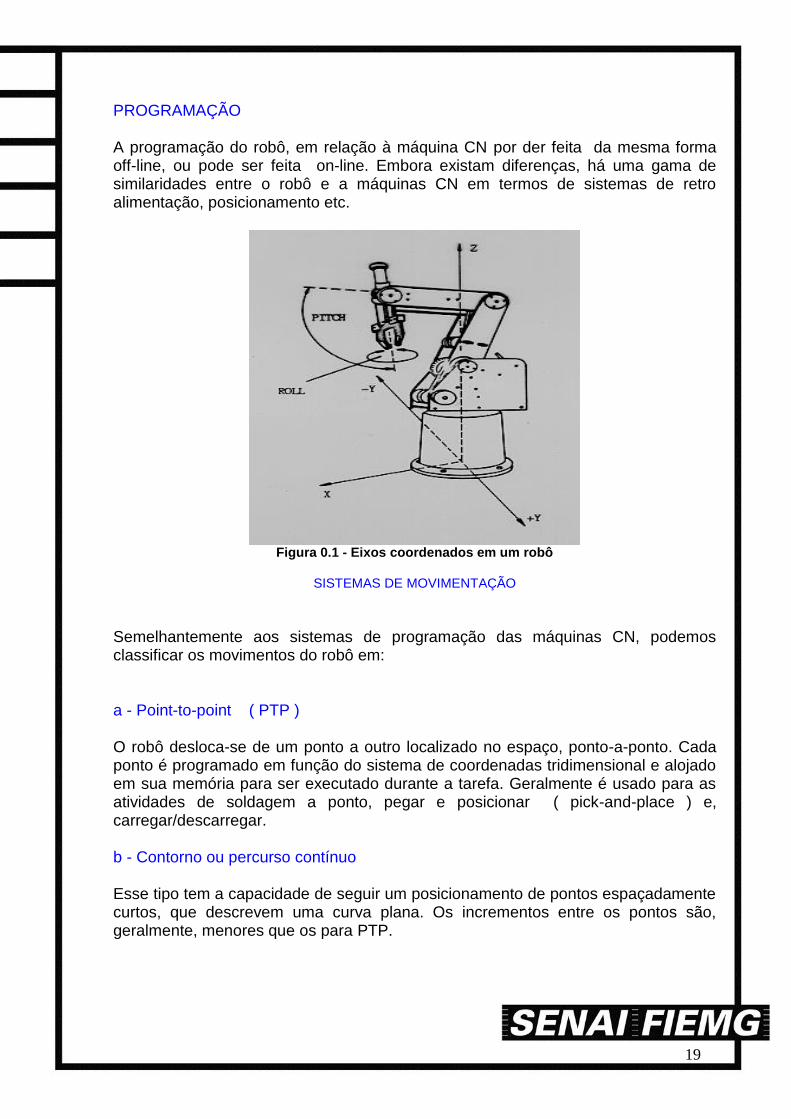
PROGRAMAÇÃO A programação do robô, em relação à máquina CN por der feita da mesma forma off-line, ou pode ser feita on-line. Embora existam diferenças, há uma gama de similaridades entre o robô e a máquinas CN em termos de sistemas de retro alimentação, posicionamento etc.
Figura 0.1 - Eixos coordenados em um robô
SISTEMAS DE MOVIMENTAÇÃO
Semelhantemente aos sistemas de programação das máquinas CN, podemos classificar os movimentos do robô em: a - Point-to-point ( PTP ) O robô desloca-se de um ponto a outro localizado no espaço, ponto-a-ponto. Cada ponto é programado em função do sistema de coordenadas tridimensional e alojado em sua memória para ser executado durante a tarefa. Geralmente é usado para as atividades de soldagem a ponto, pegar e posicionar ( pick-and-place ) e, carregar/descarregar. b - Contorno ou percurso contínuo Esse tipo tem a capacidade de seguir um posicionamento de pontos espaçadamente curtos, que descrevem uma curva plana. Os incrementos entre os pontos são, geralmente, menores que os para PTP.

20
VELOCIDADE DE MOVIMENTAÇÃO (VM) A VM de um robô é representada pela capacidade de movimentar a mão. Tem-se como máximo, uma velocidade igual a 3.0 m/s. Além de ser estipulada especificamente para a tarefa, é, ainda, influenciada pelo peso do objeto ( ou da ferramenta ) a ser movido, distância a percorrer e a precisão com a qual deverá atingir o alvo. Em termos de peso, inclui-se na capacidade total, o peso da mão.
ROBÔS (ESHED ROBOTEC) Os movimentos executados pelos robôs, bem como os programas executados pelas máquinas, podem ser programados de forma a automatizar determinada tarefa; isto é, a execução de uma determinada peça pode ser estabelecida em um programa. Esse programa pode ser chamado a qualquer instante para a geração da mesma. Para que a peça possa ser manipulada, algumas condições são essenciais: - As posições que serão utilizadas pelo robô já deverão estar armazenadas na memória do controlador. - No nosso caso trabalharemos com o ROBO SCORBOT ER V plus . Apresenta-se com cinco eixos (grupo A), uma pinça(GRIPER).
Grupo A - Eixo 1 base de rotação (movimento da cintura humana)
giro 310 - Eixo 2 movimento do ombro
giro +130 / - 35° - Eixo 3 movimento do cotovelo
giro + ou - 130 - Eixo 4 movimento do punho
giro + ou - 130 - Eixo 5 giro do punho
giro 360 - Pinça (garra) abertura máxima 75mm peso máximo 1kg
21
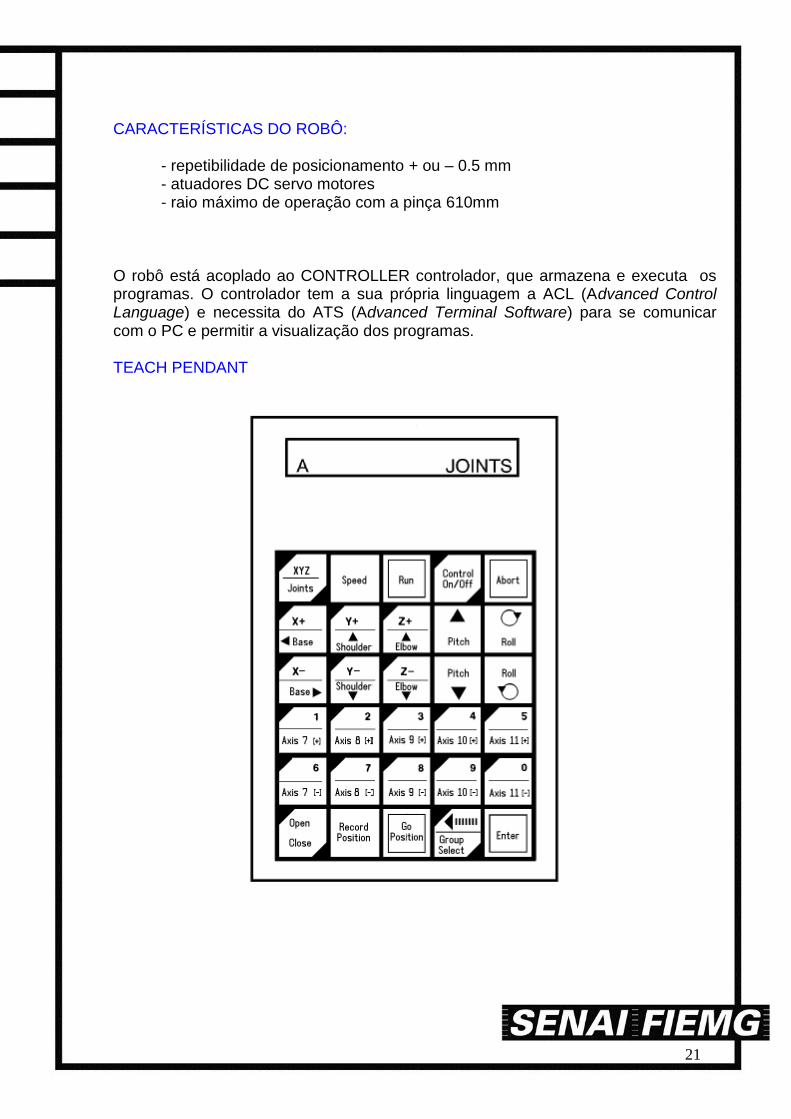
CARACTERÍSTICAS DO ROBÔ:
- repetibilidade de posicionamento + ou – 0.5 mm - atuadores DC servo motores - raio máximo de operação com a pinça 610mm
O robô está acoplado ao CONTROLLER controlador, que armazena e executa os programas. O controlador tem a sua própria linguagem a ACL (Advanced Control Language) e necessita do ATS (Advanced Terminal Software) para se comunicar com o PC e permitir a visualização dos programas. TEACH PENDANT
22
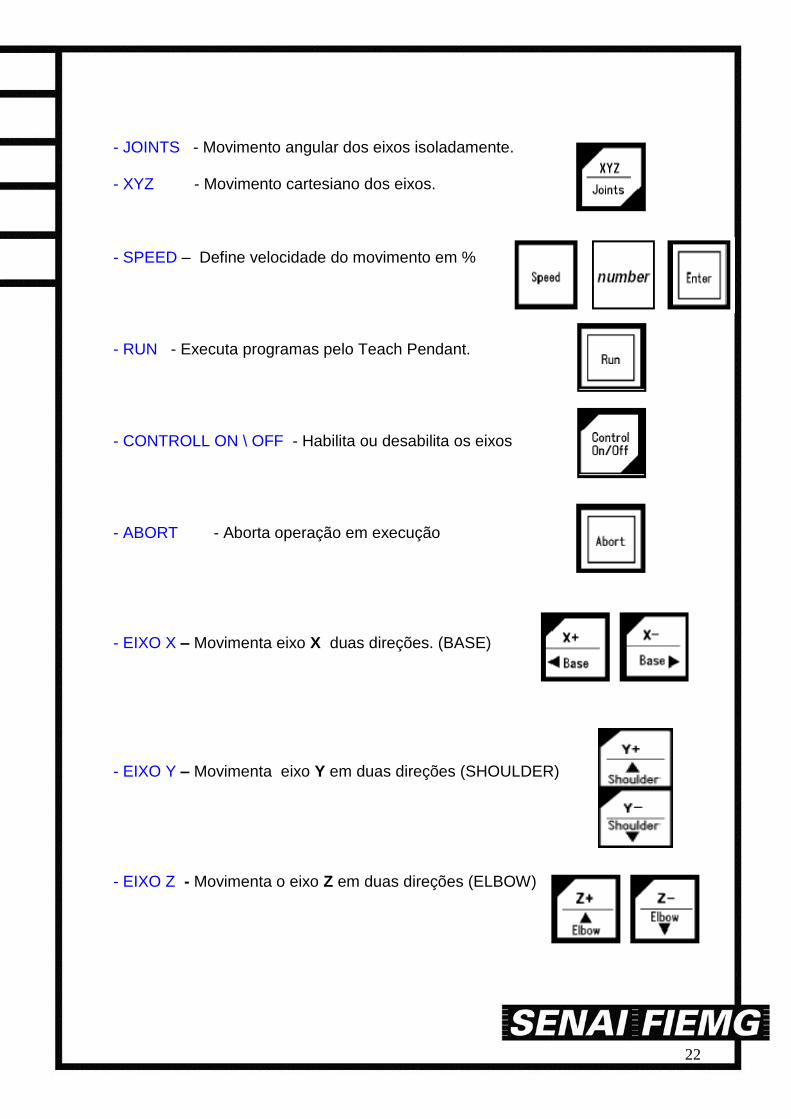
- JOINTS - Movimento angular dos eixos isoladamente. - XYZ - Movimento cartesiano dos eixos.
- SPEED – Define velocidade do movimento em %
- RUN - Executa programas pelo Teach Pendant.
- CONTROLL ON \ OFF - Habilita ou desabilita os eixos
- ABORT - Aborta operação em execução
- EIXO X – Movimenta eixo X duas direções. (BASE) - EIXO Y – Movimenta eixo Y em duas direções (SHOULDER) - EIXO Z - Movimenta o eixo Z em duas direções (ELBOW)
23
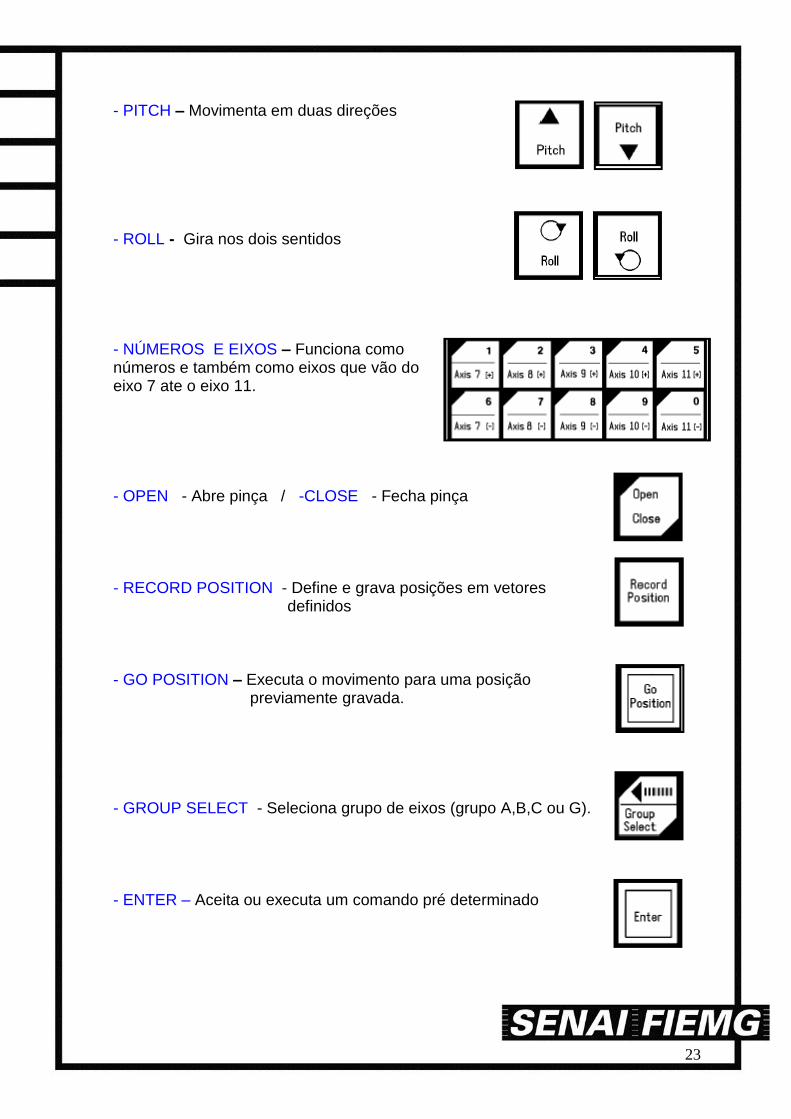
- PITCH – Movimenta em duas direções - ROLL - Gira nos dois sentidos - NÚMEROS E EIXOS – Funciona como números e também como eixos que vão do eixo 7 ate o eixo 11. - OPEN - Abre pinça / -CLOSE - Fecha pinça - RECORD POSITION - Define e grava posições em vetores
definidos - GO POSITION – Executa o movimento para uma posição
previamente gravada. - GROUP SELECT - Seleciona grupo de eixos (grupo A,B,C ou G). - ENTER – Aceita ou executa um comando pré determinado
24
PROGRAMAÇÃO DE ROBÔS (ESHED ROBOTEC)
ENTRAR NO PROGRAM ( ATS) . Clicar sobre o ícone ATS no desktop do computador
REFENCIAR
. HOME + enter - (ROBO) – Vai referenciar todos os 5 eixos . HOME 7 + enter – (ESTEIRA) . HOME 8 + enter – (MESA)
CRIAR OS VETORES DE PONTOS NO ROBÔ USANDO ATS Criar o vetor DIMP - cria vetor de ponto para o grupo A (robô) DIMPB - cria vetor de pontos para o grupo B Ex.: DIMP + nome do vetor + [30] (tamanho do vetor) + enter Obs. O nome do vetor, usar no maximo 5 caracteres. Gravar os pontos dentro de um vetor usando o Teach Pendant ATTACH + nome do vetor + enter - chamada do grupo do vetor . No teach pendant movimentar o robô ate a posição desejada . Record position . Escrever o numero da posição . Enter Fazer teste dos pontos já feitos . SPEED + 10 + enter (diminuir a velocidade de movimento) . GO POSITION + numero do ponto + enter Obs. Qualquer problema pressionar ABORT obs. Repetir os mesmos passos para o outro PONTO
25
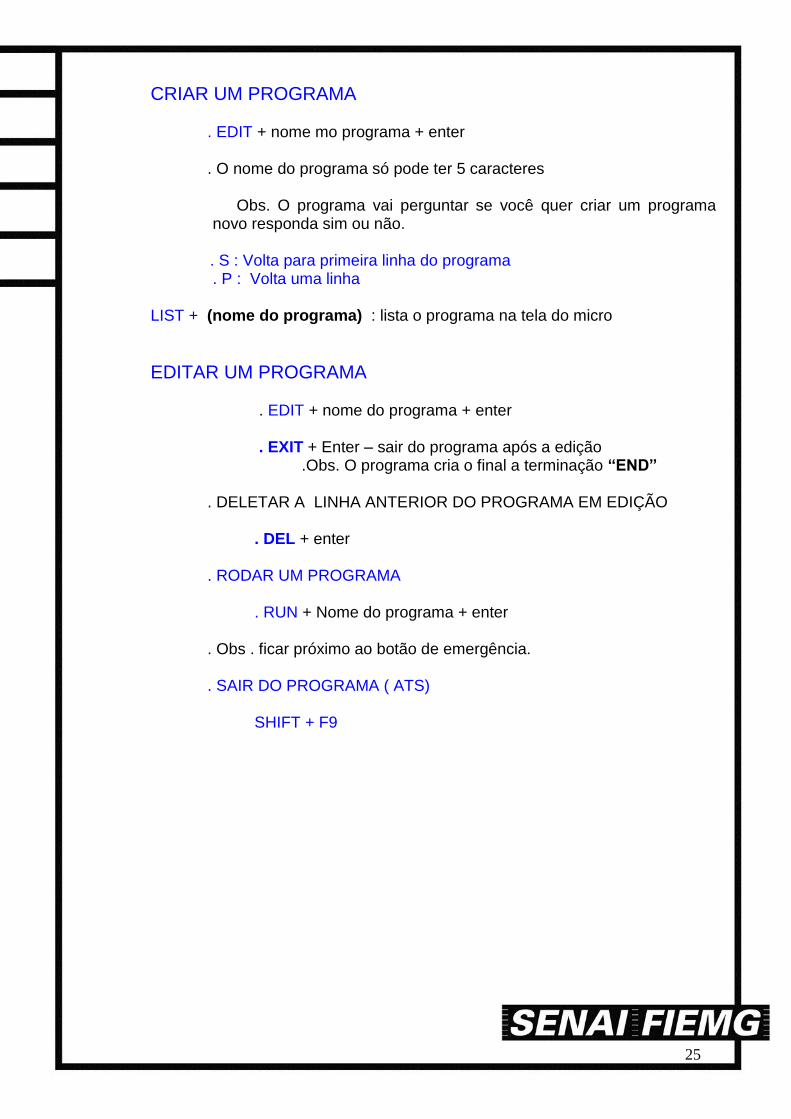
CRIAR UM PROGRAMA . EDIT + nome mo programa + enter . O nome do programa só pode ter 5 caracteres Obs. O programa vai perguntar se você quer criar um programa
novo responda sim ou não. . S : Volta para primeira linha do programa . P : Volta uma linha
LIST + (nome do programa) : lista o programa na tela do micro
EDITAR UM PROGRAMA . EDIT + nome do programa + enter . EXIT + Enter – sair do programa após a edição .Obs. O programa cria o final a terminação “END”
. DELETAR A LINHA ANTERIOR DO PROGRAMA EM EDIÇÃO . DEL + enter
. RODAR UM PROGRAMA . RUN + Nome do programa + enter . Obs . ficar próximo ao botão de emergência.
. SAIR DO PROGRAMA ( ATS)
SHIFT + F9
26
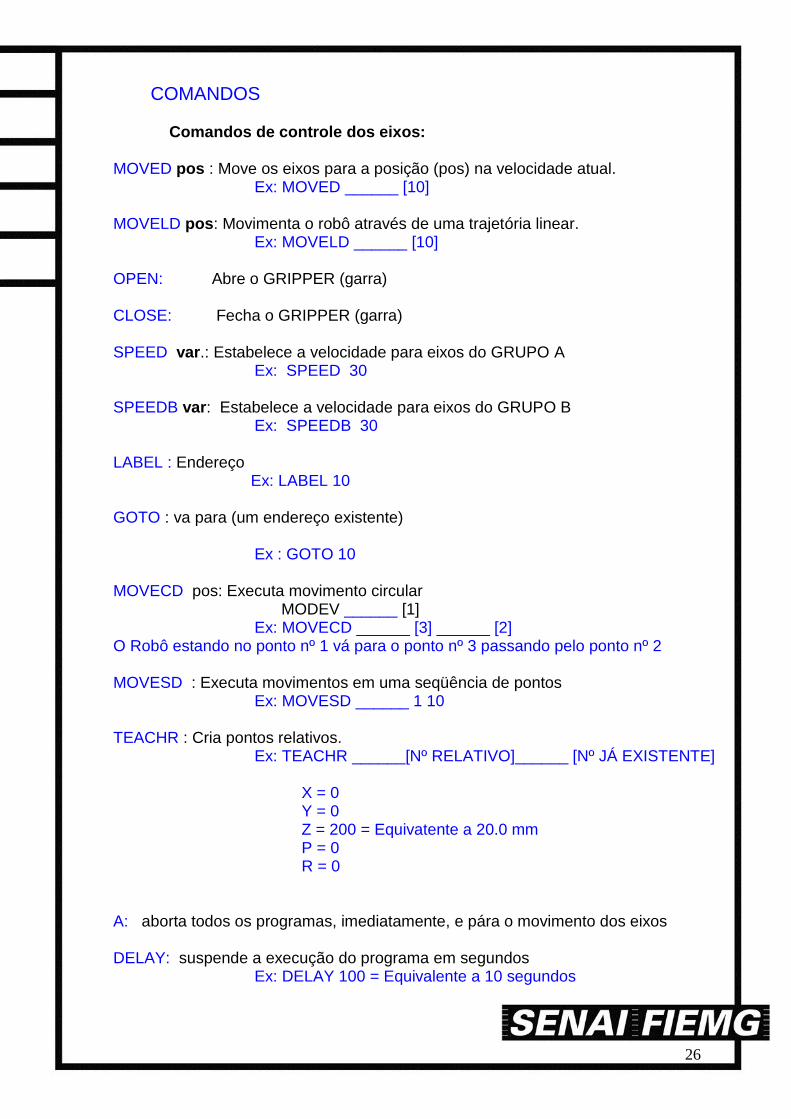
COMANDOS Comandos de controle dos eixos: MOVED pos : Move os eixos para a posição (pos) na velocidade atual. Ex: MOVED ______ [10] MOVELD pos: Movimenta o robô através de uma trajetória linear. Ex: MOVELD ______ [10] OPEN: Abre o GRIPPER (garra) CLOSE: Fecha o GRIPPER (garra) SPEED var.: Estabelece a velocidade para eixos do GRUPO A Ex: SPEED 30 SPEEDB var: Estabelece a velocidade para eixos do GRUPO B Ex: SPEEDB 30 LABEL : Endereço Ex: LABEL 10 GOTO : va para (um endereço existente)
Ex : GOTO 10 MOVECD pos: Executa movimento circular MODEV ______ [1] Ex: MOVECD ______ [3] ______ [2] O Robô estando no ponto nº 1 vá para o ponto nº 3 passando pelo ponto nº 2 MOVESD : Executa movimentos em uma seqüência de pontos Ex: MOVESD ______ 1 10 TEACHR : Cria pontos relativos. Ex: TEACHR ______[Nº RELATIVO]______ [Nº JÁ EXISTENTE]
X = 0 Y = 0 Z = 200 = Equivatente a 20.0 mm P = 0 R = 0 A: aborta todos os programas, imediatamente, e pára o movimento dos eixos DELAY: suspende a execução do programa em segundos Ex: DELAY 100 = Equivalente a 10 segundos
27
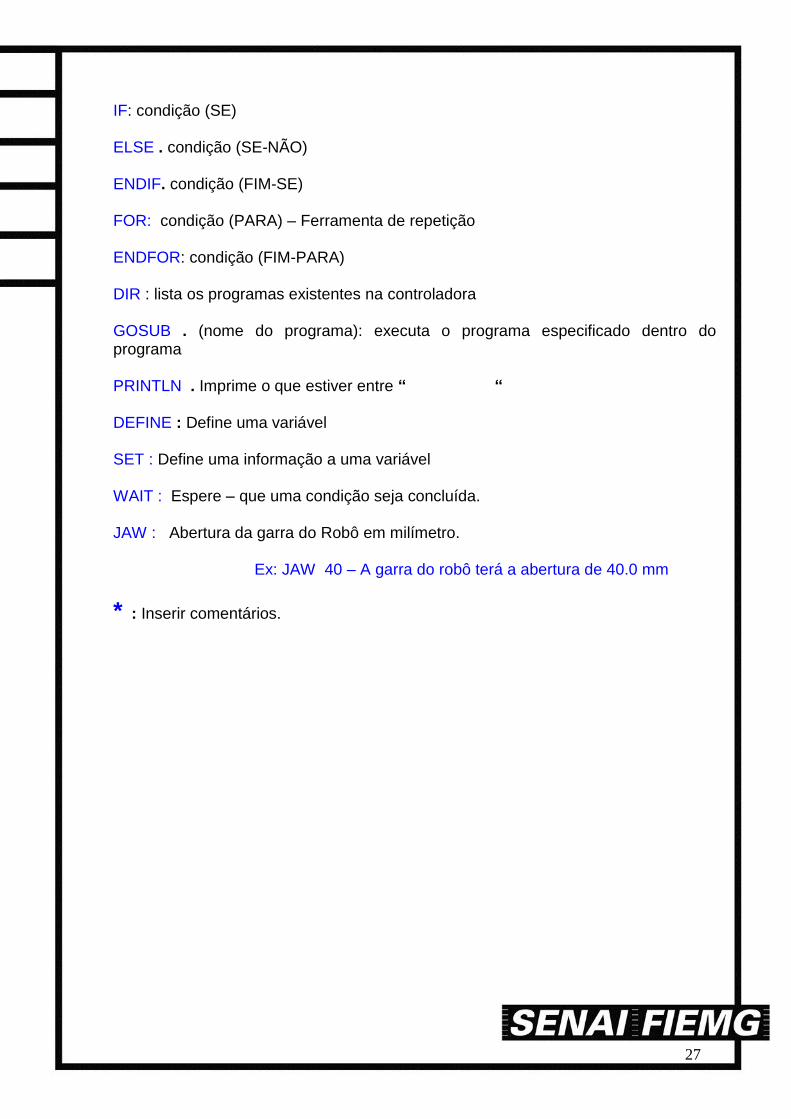
IF: condição (SE) ELSE . condição (SE-NÃO) ENDIF. condição (FIM-SE) FOR: condição (PARA) – Ferramenta de repetição ENDFOR: condição (FIM-PARA) DIR : lista os programas existentes na controladora GOSUB . (nome do programa): executa o programa especificado dentro do programa PRINTLN . Imprime o que estiver entre “ “ DEFINE : Define uma variável SET : Define uma informação a uma variável WAIT : Espere – que uma condição seja concluída. JAW : Abertura da garra do Robô em milímetro. Ex: JAW 40 – A garra do robô terá a abertura de 40.0 mm
* : Inserir comentários.
28
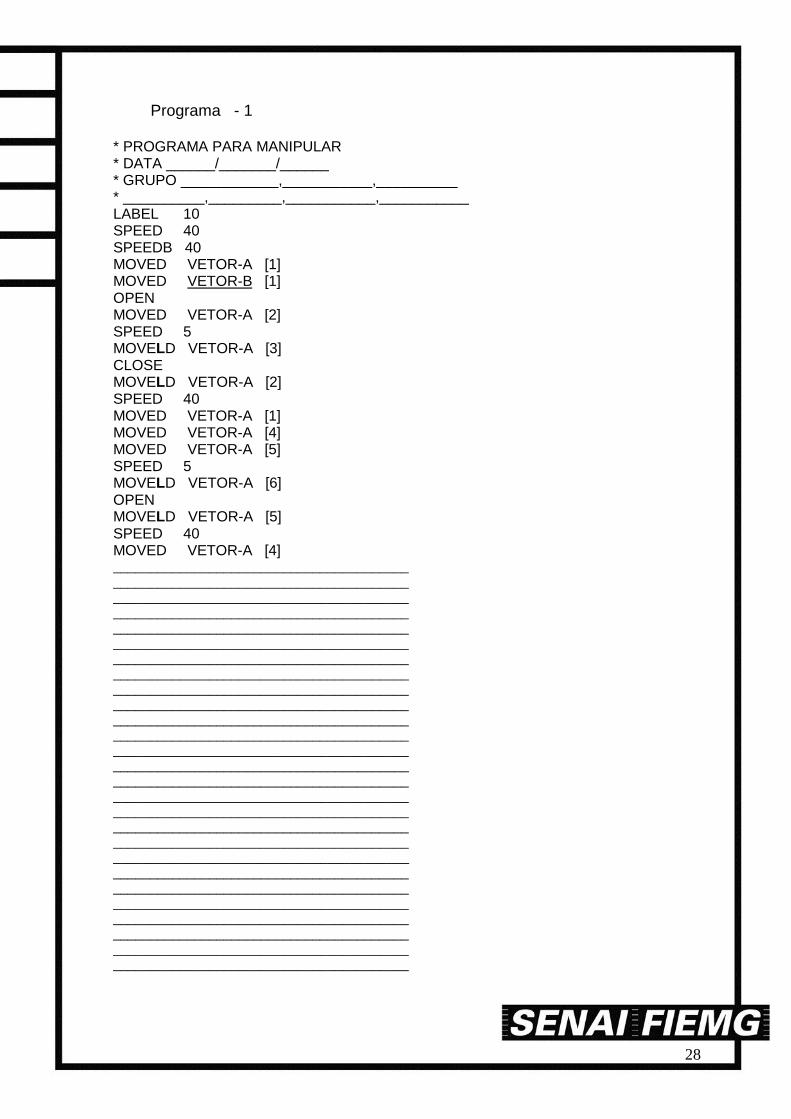
Programa - 1
* PROGRAMA PARA MANIPULAR * DATA ______/_______/______ * GRUPO ____________,___________,__________ * __________,_________,___________,___________ LABEL 10 SPEED 40 SPEEDB 40 MOVED VETOR-A [1] MOVED VETOR-B [1] OPEN MOVED VETOR-A [2] SPEED 5 MOVELD VETOR-A [3] CLOSE MOVELD VETOR-A [2] SPEED 40 MOVED VETOR-A [1] MOVED VETOR-A [4] MOVED VETOR-A [5] SPEED 5 MOVELD VETOR-A [6] OPEN MOVELD VETOR-A [5] SPEED 40 MOVED VETOR-A [4] ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________
29
________________________________________ GOTO 10________________________________ EXIT____________________________________
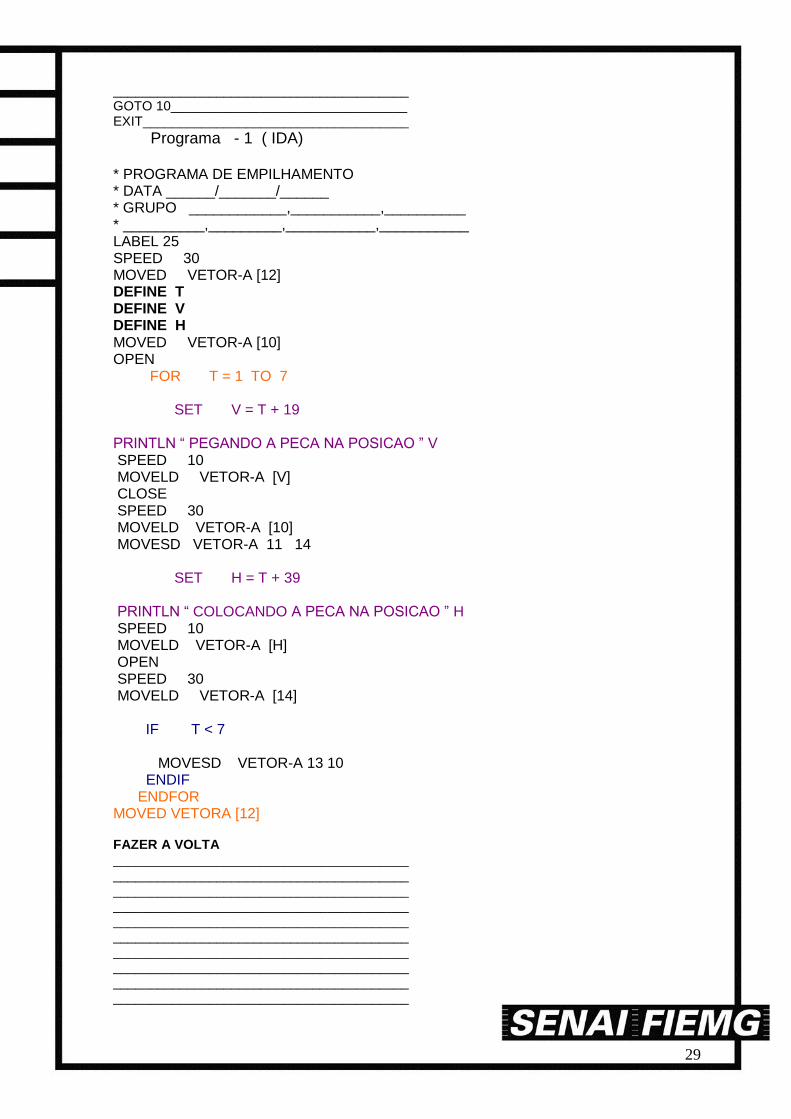
Programa - 1 ( IDA) * PROGRAMA DE EMPILHAMENTO * DATA ______/_______/______ * GRUPO ____________,___________,__________ * __________,_________,___________,___________ LABEL 25 SPEED 30 MOVED VETOR-A [12] DEFINE T DEFINE V DEFINE H MOVED VETOR-A [10] OPEN FOR T = 1 TO 7 SET V = T + 19 PRINTLN “ PEGANDO A PECA NA POSICAO ” V SPEED 10 MOVELD VETOR-A [V] CLOSE SPEED 30 MOVELD VETOR-A [10] MOVESD VETOR-A 11 14 SET H = T + 39 PRINTLN “ COLOCANDO A PECA NA POSICAO ” H SPEED 10 MOVELD VETOR-A [H] OPEN SPEED 30 MOVELD VETOR-A [14] IF T < 7 MOVESD VETOR-A 13 10 ENDIF ENDFOR MOVED VETORA [12] FAZER A VOLTA ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________
30
________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ ________________________________________ GOTO 25________________________________ EXIT____________________________________
31
Referências Bibliográficas
Manual Técnico dos Robôs da ESHED ROBOTEC