anÁlise comparativa entre diferentes tipos de...
TRANSCRIPT
ANÁLISE COMPARATIVA ENTRE DIFERENTES TIPOS DE MODELAGENS DE
UMA FUNDAÇÃO DE MÁQUINA PARA EQUIPAMENTOS EM UMA
TERMOELÉTRICA
Juliana Correia Ferreira
Projeto de Graduação apresentado ao Curso de
Engenharia Civil da Escola Politécnica,
Universidade Federal do Rio de Janeiro, como
parte dos requisitos necessários à obtenção do
título de Engenheiro.
Orientador: Sergio Hampshire de Carvalho Santos
Rio de Janeiro
Fevereiro de 2017
ii
ANÁLISE COMPARATIVA ENTRE DIFERENTES TIPOS DE MODELAGENS DE
UMA FUNDAÇÃO DE MÁQUINA PARA EQUIPAMENTOS EM UMA
TERMOELÉTRICA
Juliana Correia Ferreira
PROJETO DE GRADUAÇÃO SUBMETIDO AO CORPO DOCENTE DO CURSO DE
ENGENHARIA CIVIL DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS
NECESSÁRIOS PARA A OBTENÇÃO DO GRAU DE ENGENHEIRO CIVIL.
Examinada por:
__________________________________________
Prof. Sergio Hampshire de Carvalho Santos, D. Sc.
__________________________________________
Prof. Silvio de Souza Lima, D. Sc.
__________________________________________
Prof. Bruno Martins Jacovazzo, D. Sc.
RIO DE JANEIRO, RJ – BRASIL
FEVEREIRO DE 2017

iii
Ferreira, Juliana Correia
Análise comparativa entre diferentes tipos de
modelagens de uma fundação de máquina para
equipamentos em uma termoelétrica/ Juliana Correia
Ferreira. – Rio de Janeiro: UFRJ/Escola Politécnica, 2017.
XIII, 59 p.: Il.; 29,7 cm.
Orientador: Sergio Hampshire de Carvalho Santos
Projeto de Graduação – UFRJ/ Escola Politécnica/ Curso
de Engenharia Civil, 2017.
Referências Bibliográficas: p. 58 e 59
1. Fundações de máquinas. 2. Análise dinâmica 3.
Equipamentos industriais 4. Modelagem dinâmica
computacional
I. Santos, Sergio Hampshire de Carvalho II. Universidade
Federal do Rio de Janeiro, Escola Politécnica, Curso de
Engenharia Civil. III. Análise comparativa entre diferentes
tipos de modelagens de uma fundação de máquina para
equipamentos em uma termoelétrica.
iv
AGRADECIMENTOS
Primeiramente, à minha família. Aos meus pais Gloria e Luis, e ao meu irmão,
Matheus, que durante esse tempo inteiro me deram a liberdade necessária para tomar as
minhas próprias decisões, o apoio para concluir os meus estudos, e as melhores condições
possíveis para que eu pudesse me dedicar e cumprir os meus compromissos com a
universidade.
Em segundo lugar, gostaria de agradecer aos amigos que eu encontrei durante os
meus seis anos na UFRJ; desde os que eu conheci nos quatro primeiros períodos de ciclo
básico, até os que eu conheci durante a graduação de Engenharia Civil, no ciclo
profissional e na ênfase: Ingrid, Bruno, Clara, Ana, Marcus, Beatriz, Ana Beatriz, Karine,
Renan, Peleta, Rodrigo, Bruna, Carol, Erica e Aline. Vocês transformaram a UFRJ em
uma segunda casa para mim. Vocês estiveram do meu lado desde os dias bons, cheios de
piadas, risadas e conversas nos corredores. Até os dias ruins, cheios de preocupações e
estresses com provas, trabalhos, e enfim a entrega do Projeto Final de Graduação.
Obrigada por toda a ajuda nos estudos, por todas as conversas nos intervalos e no transito
voltando para casa, ou indo para o estágio. Obrigada por terem sido uma segunda família
e um porto seguro durante todo esse tempo.
Também gostaria de agradecer à Patricia e Tatiana, por estarem comigo desde a
época do ensino médio. Vocês não podiam estar fisicamente do meu lado na UFRJ, já que
depois da nossa formatura da escola, nós seguimos caminhos diferentes. Mas isso não
diminui a importância do apoio e da presença de vocês durante esses anos para que eu
pudesse chegar até aqui hoje.
Gostaria de agradecer a todos os professores que fizeram parte da minha história,
tanto os que eu tive o prazer de conhecer e dividir com as salas de aula na universidade,
quanto os que fizeram parte da minha educação básica durante os meus anos de escola;
Ilza Santoro e toda a equipe do Kumon por terem me ensinado a gostar de matemática
pela primeira vez. Fernanda Amante, que me mostrou que nem sempre o professor que
mais vai te marcar é o que leciona a sua matéria preferida; obrigada por sempre me fazer
entender que não é preciso escolher um lado entre humanas e exatas, e por acreditar em
partes de mim que nem eu mesma acredito.
À Cláudia Eboli, Flavia Moll e Elaine Garrido Vasquez por sempre terem sido
exemplos e referências quando penso em qualidade de ensino e didática em sala de aula.
Ao professor Paulo Renato Diniz Junqueira Barbosa, que foi o meu primeiro contato com
v
um professor da UFRJ, ainda nas aulas de Introdução à Engenharia no Ciclo básico. Por
todo esforço e paciência empregados na coordenação desse curso, sempre tentando fazer
o seu melhor para ajudar e guiar os alunos na escolha e alocação nas suas futuras
engenharias.
Principalmente, ao meu orientador, Sergio Hampshire, por toda paciência e apoio
ao longo do desenvolvimento desse projeto. Por sempre se mostrar disponível e presente
durante os meses que antecederam a entrega e apresentação. Pela qualidade de ensino e
por todo o conteúdo passado durante as várias matérias ministradas ao longo do meu
período de graduação. E também ao professor Silvio de Souza Lima por toda assistência
prestada.
Aos meus antigos colegas de empresa, por terem me recebido de braços abertos no
meu primeiro estágio e por terem me apresentando pela primeira vez à engenharia na
prática do dia a dia. Especialmente à Patricia Fontes, Katia Huse e Daniella Michel,
minhas supervisoras ao longo desses dois anos, por tudo que me ensinaram, por toda a
confiança e por toda a paciência. Rafael Costa, por ter sido como um mentor e
praticamente um segundo orientador no início desse projeto, me ajudando desde o
primeiro dia, e sempre se colocando disponível para tirar qualquer dúvida de análise
dinâmica.
Por fim, mas não menos importante, gostaria de agradecer a todos os artistas que
produzem as músicas que tocaram nos meus ouvidos durante todos esses anos, os filmes,
as séries que eu assisti, e os livros que eu li. Mesmo de longe, vocês me ensinaram a
sonhar, e provavelmente me deram a melhor parte de mim. Mesmo de longe, vocês foram
fundamentais para me acalmar e me divertir nos meus melhores e nos meus piores dias.
Eu sei que nós não nos conhecemos pessoalmente e talvez nunca vamos chegar a nos
conhecer, mas eu não conseguiria negar que vocês também foram uma parte fundamental
dessa caminhada. Obrigada por toda sanidade e por toda insanidade que, de um jeito ou
de outro, vocês sempre conseguem colocar na minha vida. O meu universo com certeza
seria muito mais vazio, silencioso e desbotado sem vocês.

vi
Resumo do Projeto de Graduação apresentado à Escola Politécnica/ UFRJ como parte
dos requisitos necessários para a obtenção do grau de Engenheiro Civil.
ANÁLISE COMPARATIVA ENTRE DIFERENTES TIPOS DE MODELAGENS DE
UMA FUNDAÇÃO DE MÁQUINA PARA EQUIPAMENTOS EM UMA
TERMOELÉTRICA
Juliana Correia Ferreira
Fevereiro/2017
Orientador: Sergio Hampshire de Carvalho Santos
Curso: Engenharia Civil
A Dinâmica é um ramo de estudo e pesquisa que pode ser aplicado em diferentes campos
da engenharia. Contudo, no campo da Engenharia Civil, este assunto é principalmente
abordado em projetos que envolvem esforços gerados pela vibração de equipamentos.
Um dos principais exemplos de um caso onde é necessário utilizar os conceitos e os
conhecimentos existentes de análise dinâmica é na concepção de fundações para
equipamentos industriais. Este trabalho aborda a análise de uma fundação projetada em
um caso real de uma termoelétrica, que funciona como base para três máquinas diferentes.
O principal objetivo é apresentar os tipos de modelo distintos que foram elaborados para
o mesmo problema, utilizando dois softwares, SAP2000 e Blocksolver. O escopo consiste
das etapas básicas da modelagem, o estudo das informações disponíveis do projeto, pela
avaliação dos resultados e pela análise comparativa das respostas obtidas em cada caso.
Palavras-chave: Análise dinâmica, fundações de máquinas, vibrações, fundação direta.

vii
Abstract of Undergraduate Project presented to POLI/UFRJ as a partial fulfillment of the
requirements for the degree of Engineer.
COMPARATIVE ANAYLSIS OF DIFFERENT COMPUTER MODELS OF A
MACHINE FOUNDATION FOR EQUIPMENTS IN A THERMOELETRIC POWER
PLANT
Juliana Correia Ferreira
February/2017
Advisor: Sergio Hampshire de Carvalho Santos
Course: Civil engineering
The Dynamic Analysis is a research and study field that can be used in different
Engineering areas. However, in Civil Engineering, this subject is mainly applied in
analyses that present stresses generated by equipment vibrations. One of the most
important cases in which it is necessary to apply the existing theory and knowledge in the
dynamic analysis area, is on the conception of industrial equipment foundations. This
undergraduate project consists of the analysis of a foundation, developed from a real
thermoelectric power plant, supporting three different machines. The main goal is to
present the distinct computer models that were developed to solve the same problem,
using two different softwares, SAP2000 and Blocksolver. The scope consists of the basic
steps developed during the modeling process, the analysis of available information and
the evaluation and comparison of the results obtained in each case.
Keywords: Dynamic analysis, equipment foundations, vibrations, shallow foundations.
viii
SUMÁRIO
1. INTRODUÇÃO ........................................................................................................ 1
1.1. MOTIVAÇÃO ................................................................................................... 1
1.2. OBJETIVOS ...................................................................................................... 2
2. METODOLOGIA DE ANÁLISE ............................................................................. 3
2.1. CONCEITOS BÁSICOS ................................................................................... 3
2.1.1. Projeto de fundações de máquinas ..................................................................... 3
2.1.2. Tipos de Fundação ............................................................................................. 5
2.2. ANÁLISE DINÂMICA DE ESTRUTURAS .................................................... 6
2.2.1. Avaliação das cargas dinâmicas ........................................................................ 8
2.2.2. Análise dinâmica computacional – SAP2000 .................................................. 10
2.2.3. Análise dinâmica computacional – Blocksolver .............................................. 12
2.3. ESTUDO DOS PARÂMETROS DO SOLO ................................................... 13
2.4. CARACTERÍSTICAS DA FUNDAÇÃO ....................................................... 16
2.4.1. Avaliação da rigidez ........................................................................................ 16
2.4.2. Avaliação dos coeficientes de amortecimento ................................................. 17
2.5. CRITÉRIOS DE PROJETO ............................................................................ 18
3. MODELAGEM ....................................................................................................... 21
3.1. GEOMETRIA .................................................................................................. 21
3.2. PROPRIEDADES DOS EQUIPAMENTOS E FORÇAS DINÂMICAS ....... 24
3.3. PARÂMETROS DO SOLO ............................................................................ 25
3.4. MODELAGEM COM ELEMENTOS SÓLIDOS – SAP2000 ....................... 26
3.4.1. Geometria e propriedades do modelo .............................................................. 26
3.4.2. Materiais – Propriedades do Concreto ............................................................. 28
3.4.3. Propriedades de rigidez e amortecimento ........................................................ 29
3.4.4. Forças aplicadas e carregamentos dinâmicos .................................................. 31
ix
3.5. MODELAGEM – BLOCKSOLVER .............................................................. 37
4. APRESENTAÇÃO E ANÁLISE DOS RESULTADOS ........................................ 41
5. CONSIDERAÇÕES FINAIS .................................................................................. 56
REFERÊNCIAS BIBLIOGRÁFICAS ........................................................................... 58
x
LISTA DE FIGURAS
Figura 2.1 – Comportamento transiente e comportamento Steady State[8]. .................... 4
Figura 2.2 – Fundação em bloco [4]. ................................................................................ 5
Figura 2.3 – Fundação em ................................................................................................ 5
Figura 2.4 – Fundação em pórtico [4]. ............................................................................. 6
Figura 2.5 – Fundação sobre molas .................................................................................. 6
Figura 2.6 – Bloco de inércia ........................................................................................... 6
Figura 2.7 – Fundação sobre estacas [4]........................................................................... 6
Figura 2.8 – Sistema massa-mola [5]. .............................................................................. 7
Figura 2.9 – Diagrama de um sistema com ...................................................................... 8
Figura 2.10 – Valores de Q de acordo com o tipo de equipamento [4]. ......................... 10
Figura 2.11 – Sistema de eixos e variáveis ..................................................................... 12
Figura 2.12 – Curva G x NSPT [2]. .................................................................................. 15
Figura 2.13 – Problema Físico [5]. ................................................................................. 16
Figura 2.14 – Modelo Aproximado (Conjunto massa-mola) [5]. ................................... 16
Figura 2.15 – Parâmetros para fundações retangulares, WOLF [10] e GAZETAS [11].
........................................................................................................................................ 17
Figura 2.16 – Parâmetros para fundações circulares [5]. ............................................... 18
Figura 2. 17 – Valores dos amortecedores [5]. ............................................................... 18
Figura 2.18 – Tabela de faixas de velocidade, classe de equipamentos e faixas de
operação. ......................................................................................................................... 19
Figura 2.19 – Ábaco de deslocamentos x Frequência de operação x Velocidades
efetivas. ........................................................................................................................... 20
Figura 3.1 – Forma da fundação (Vista superior - Planta). ............................................ 21
Figura 3.2 – Forma da fundação (Vista inferior – Planta da base). ................................ 22
Figura 3.3 –Forma da fundação (Corte longitudinal). .................................................... 22
Figura 3.4 – Forma da fundação (Corte transversal A). ................................................. 23
Figura 3.5 – Forma da fundação (Corte transversal B). ................................................. 23
Figura 3.6 – Forma da fundação (Corte transversal C). ................................................. 23
Figura 3.7 – Forma da fundação (Corte transversal D). ................................................. 23
Figura 3.8 – Equipamentos e fundação. ......................................................................... 24
Figura 3.9 – Ponto de aplicação das cargas do conjunto motor/rotor............................. 25
xi
Figura 3.10 – Ponto de aplicação das cargas do ventilador. .......................................... 25
Figura 3.11 – Modelo de elementos sólidos (SAP2000). ............................................... 26
Figura 3.12 – Tabela de lista de materiais (Peso total da fundação no modelo). ........... 27
Figura 3.13 – Resumo das massas aplicadas (em unidades de massa). .......................... 28
Figura 3.14 – Definição de material no SAP2000. ......................................................... 29
Figura 3.15 – Valores dos coeficientes de rigidez e amortecimento por nó. .................. 31
Figura 3.16 – Componente horizontal da carga gerada pelo motor................................ 32
Figura 3.17 – Componente vertical da carga gerada pelo motor. ................................... 32
Figura 3.18 – Componente horizontal da carga gerada pelo rotor. ................................ 33
Figura 3.19 – Componente vertical da carga gerada pelo rotor...................................... 33
Figura 3.20 – Componente horizontal da carga gerada pelo ventilador. ........................ 34
Figura 3.21 – Componente vertical da carga gerada pelo ventilador. ............................ 34
Figura 3.22 – Resumo das cargas aplicadas. .................................................................. 35
Figura 3.23 – Função Tempo (s) x Variação da amplitude da carga (kN). .................... 36
Figura 3.24 – Combinação dinâmica das cargas (Time-History). .................................. 36
Figura 3.25 – Geometria da fundação. ........................................................................... 37
Figura 3.26 – Massas aplicadas. ..................................................................................... 38
Figura 3.27 – Propriedades do solo. ............................................................................... 38
Figura 3.28 – Coeficientes de Rigidez............................................................................ 39
Figura 3.29 – Coeficientes de amortecimento. ............................................................... 39
Figura 3.30 – Cargas aplicadas e ângulos de fase. ......................................................... 40
Figura 3.31 – Frequências analisadas. ............................................................................ 40
Figura 4.1 – Matriz de rigidez. ....................................................................................... 41
Figura 4.2 – Matriz de massa. ........................................................................................ 41
Figura 4.3 – Matriz de amortecimento. .......................................................................... 42
Figura 4.4 – Resultantes das forças aplicadas. ............................................................... 42
Figura 4.5 – Coordenadas do centro geométrico da base e do centro de massa da
fundação.......................................................................................................................... 42
Figura 4.6 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo X..... 43
Figura 4.7 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Y..... 44
Figura 4.8 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Z. .... 44
Figura 4.9 – Curva amortecida Deslocamentos (m) x Frequência (Hz); Eixo X. .......... 45
Figura 4.10 – Curva amortecida Deslocamentos (m) x Frequência (Hz); Eixo Y. ........ 46
Figura 4.11 – Curva amortecida Deslocamentos (m) x Frequência (Hz); Eixo Z. ......... 46
xii
Figura 4.12 – Deslocamentos do centro de gravidade da fundação na frequência do
equipamento. .................................................................................................................. 47
Figura 4.13 – Frequências naturais de vibração. ............................................................ 48
Figura 4.14 – Deslocamentos do centro de gravidade em Y. ......................................... 49
Figura 4.15 – Deslocamentos do centro de gravidade em Z. ......................................... 49
Figura 4.16 – Tabela de faixas de velocidade, classe de equipamentos e faixas de
operação (Resultados)..................................................................................................... 51
Figura 4.17 – Ábaco de deslocamentos x Frequência de operação x Velocidades efetivas
(Resultados). ................................................................................................................... 52
Figura 4.18 – Modelo de Verificação (Rijezas rotacionais X e Y reduzidas). ............... 53
Figura 4.19 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo X
(verificação). ................................................................................................................... 53
Figura 4.20 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Y
(verificação). ................................................................................................................... 54
Figura 4.21 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Z
(verificação). ................................................................................................................... 54
xiii
LISTA DE TABELAS
Tabela 2.1 – Valores estimados do peso específico, coeficiente de Poisson e fração de
amortecimento crítica de acordo com o tipo de solo [5] ................................................ 15
Tabela 3.1 – Valores da massa, frequência e velocidade angular de cada equipamento.24
Tabela 3.2 – Valores das forças dinâmicas aplicadas. .................................................... 25
Tabela 3.3 – Propriedades do solo. ................................................................................. 26
Tabela 3.4 – Valores dos coeficientes de rigidez da fundação. ...................................... 30
Tabela 3.5 – Valores dos coeficientes de amortecimento da base.................................. 30
Tabela 4.1 – Frequências naturais da estrutura............................................................... 50
Tabela 4.2 – Valores dos deslocamentos do CG. ........................................................... 50
Tabela 4.3 – Frequências naturais de vibração adaptadas. ............................................. 55
1
1. INTRODUÇÃO
1.1.MOTIVAÇÃO
A análise dinâmica ainda não é um assunto comumente abordado nos cursos de
graduação de Engenharia Civil. As construções mais típicas encontradas no dia a dia de
um engenheiro, como edificações e obras de infraestrutura, normalmente não exigem esse
tipo de estudo e conhecimento específico do profissional. Na maioria das vezes, é possível
aproximar as cargas dinâmicas presentes nesses projetos mais recorrentes para problemas
mais simples, ou carregamentos equivalentes estáticos que gerem resultados satisfatórios
quando comparados com a análise dinâmica clássica [1]. Ainda assim, existem casos onde
um estudo mais profundo do efeito da dinâmica em uma estrutura deve ser realizado. Um
exemplo clássico onde a dinâmica é utilizada no campo da Engenharia Civil são os
projetos onde as estruturas (fundações, bases, lajes) estão submetidas a vibrações geradas
por máquinas ou equipamentos.
Toda máquina que gera algum tipo de impacto, ou que possui massas
desbalanceadas giratórias, devem ser apoiadas em bases e fundações com capacidade
estrutural de absorver esses esforços. A maior parte desses equipamentos se encontra no
meio industrial e a falha ou o dimensionamento incorreto de uma fundação de máquina
pode gerar uma série de consequências, desde acidentes de trabalho e prejuízos
econômicos, com a interrupção total do funcionamento ou com a geração de danos
permanentes no equipamento, até mesmo prejuízos ambientais de grandes proporções
[1,2].
Além da limitação causada pela escassez de estudos nessa área, e pela pouca
quantidade de normas oficiais brasileiras e internacionais que guiem o projeto dinâmico
de estruturas, outro desafio quando lidamos com a análise dinâmica, ou mais
especificamente, com fundações de máquinas, é a interdisciplinaridade que envolve esse
assunto. Para a realização de um bom projeto de uma base para equipamentos, o
engenheiro civil precisa de informações precisas que podem depender tanto do
proprietário ou do operador da máquina, quanto do próprio fornecedor do equipamento.
Vale também ressaltar que o engenheiro estrutural não é o único profissional responsável
por esse tipo de projeto, já que a interface entre várias disciplinas se mistura no
desenvolvimento e elaboração de uma fundação de máquinas [1,3].
2
Os fatores que afetam diretamente um projeto de uma base para um equipamento
variam desde as cargas e massas das máquinas, as suas características físicas e
geométricas, como o seu centro de gravidade, a localização do ponto de aplicação das
forças, a configuração e dimensões da base, e o posicionamento da fundação na planta.
Mas, outros parâmetros que nem sempre estão dentro da especialidade do engenheiro
estrutural, também influenciam nos estudos desse tipo de problema, como por exemplo,
as características e topografia do solo local, limitações de operação da máquina
determinadas pelo cliente e pelo fornecedor, e também fatores econômicos e ambientais
[4]. Por esse motivo, a participação de outros profissionais como engenheiros geotécnicos
ou engenheiros mecânicos também é fundamental. E é mais importante ainda garantir a
comunicação eficaz entre todas as partes envolvidas nesse tipo de projeto [3].
1.2.OBJETIVOS
Esse trabalho tem como objetivo principal apresentar a análise de um caso real de
uma base de fundação para três equipamentos diferentes, um conjunto rotor/motor e um
ventilador, presentes no projeto de uma usina termoelétrica. Para a elaboração dos estudos
foram feitas avaliações preliminares para a determinação dos parâmetros do solo, cálculos
da rigidez da base e dos coeficientes de amortecimento, e uma análise das cargas
dinâmicas geradas por cada equipamento. Esses dados foram utilizados para a elaboração
de duas abordagens diferentes em modelos computacionais distintos, nos softwares
SAP2000 [9] e Blocksolver [15]. Então, foi feita a comparação entre os resultados obtidos
em cada modelo, e a análise final das respostas encontradas.
3
2. METODOLOGIA DE ANÁLISE
2.1.CONCEITOS BÁSICOS
2.1.1. Projeto de fundações de máquinas
O projeto de uma fundação para um equipamento consiste em uma série de etapas,
desde a análise do equipamento e das informações normalmente provenientes do
fornecedor ou do cliente, como a massa total, o centro de gravidade da máquina, o ponto
de aplicação das cargas, e sua a frequência ou faixas de frequências de funcionamento,
passando também pela avaliação das cargas dinâmicas impostas à estrutura, o estudo do
material de fundação e dos parâmetros do solo, a determinação da melhor solução em
fundação profunda ou rasa, em bloco ou pórtico, entre outras opções, a estimativa prévia
das dimensões da fundação, a elaboração de um modelo computacional, e a análise
dinâmica, até finalmente chegar aos resultados, e à verificação dos critérios de projeto
determinado por normas, como a limitação de deslocamentos, velocidades, da tensão
máxima no solo, e as próprias análises de esforços que devem ser feitas em qualquer
projeto estrutural [5].
Contudo, as principais preocupações quando se trata de um projeto de fundação de
máquina são os efeitos causados pelo movimento do equipamento. Uma vez determinadas
as ações impostas à fundação, devem ser analisando os esforços gerados e
consequentemente o dimensionamento estrutural. Também deve ser feita a verificação
dos deslocamentos, garantindo que estes estejam dentro dos limites tolerados pelas
normas, não prejudicando o bom funcionamento da máquina e garantindo o conforto dos
usuários e dos operadores. Além disso, o projeto inicial de uma fundação desse tipo deve
prever que a frequência natural da estrutura se afaste da frequência de funcionamento da
máquina, evitando assim os efeitos de ressonância [1].
A ressonância é um efeito que surge quando a frequência de excitação coincide com
uma das frequências naturais do sistema elástico. A principal consequência desse efeito
é o surgimento de deslocamentos muito grandes e amplitudes de vibração com valores
muito elevados. Uma das possíveis soluções quando essa situação ocorre é alterar a
4
rigidez ou a massa do conjunto, consequentemente mudando também a frequência natural
da fundação [1,6].
A avaliação das vibrações de uma fundação rígida pode ser dividida entre quatro
análises em diferentes direções: oscilação vertical, oscilação horizontal com rotação
(contidas em um plano vertical), oscilação horizontal com rotação (em um plano vertical,
ortogonal ao primeiro), e torção segundo um eixo vertical [2].
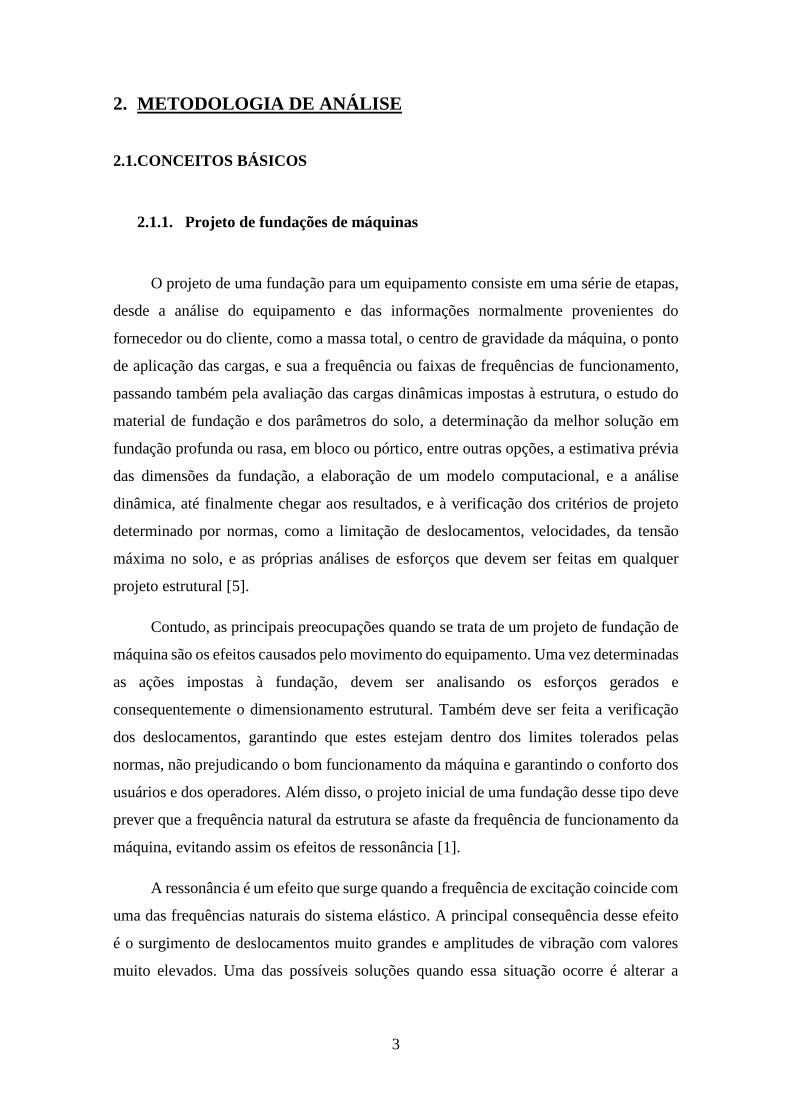
Além disso, o comportamento dinâmico de uma fundação de máquina pode ser
comparado com o comportamento generalizado de um sistema massa-mola. Um modelo
massa-mola, quando excitado com uma excitação harmônica, sempre tende a convergir
para os mesmos resultados, independente das condições iniciais do problema, como a
velocidade de partida. Esse comportamento que representa o resultado para qual o sistema
converge é chamado de Steady State. Por sua vez, o comportamento do sistema que se
apresenta antes de alcançar o Steady State é chamado de comportamento transiente, como
apresentado na Figura 2.1 [7,8].
Figura 2.1 – Comportamento transiente e comportamento Steady State [8].
Se o coeficiente de amortecimento for reduzido, o sistema demora mais a sair da
faixa de comportamento transiente e alcançar o Steady State. O mesmo pode ser
observado quando alteramos outras condições iniciais do problema. Eventualmente, o
sistema irá alcançar o comportamento estabilizado (Steady State), mas o tempo que ele
demora para chegar até lá, depende das condições de contorno apresentadas inicialmente
5
[7]. Essa mesma lógica pode ser aplicada para vibração em equipamentos que passam por
um estado transiente antes de chegar ao seu comportamento padrão.
2.1.2. Tipos de Fundação
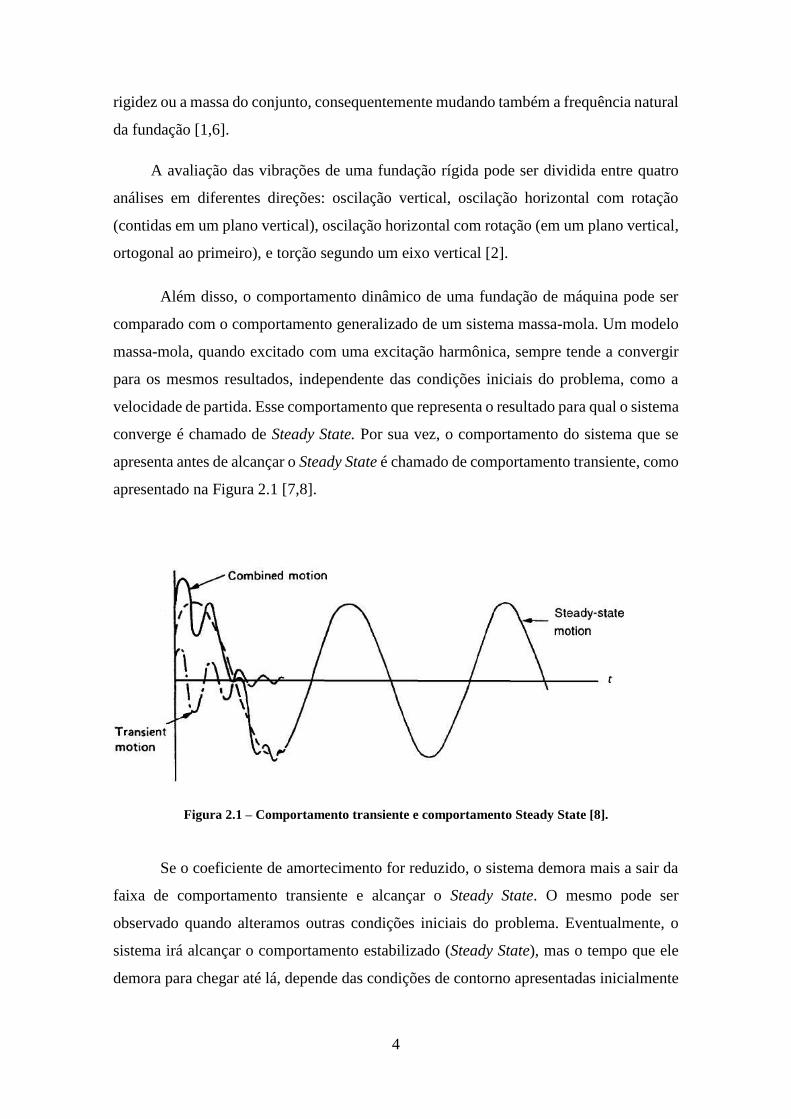
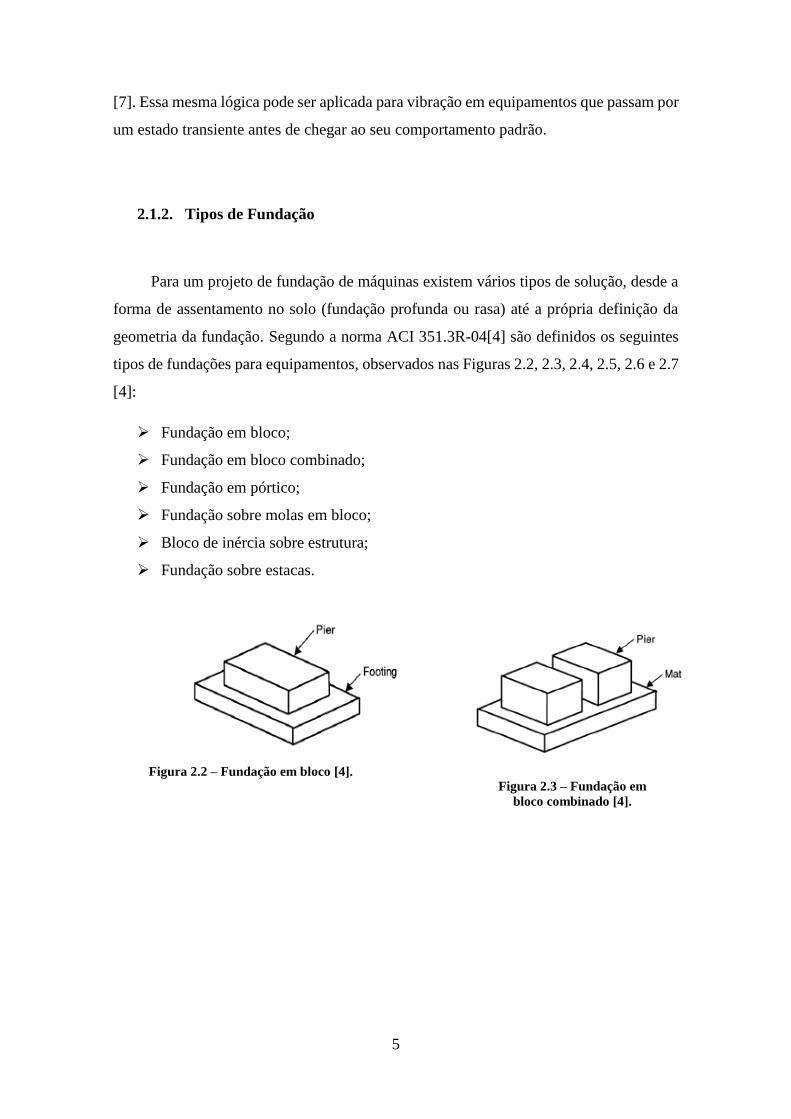
Para um projeto de fundação de máquinas existem vários tipos de solução, desde a
forma de assentamento no solo (fundação profunda ou rasa) até a própria definição da
geometria da fundação. Segundo a norma ACI 351.3R-04[4] são definidos os seguintes
tipos de fundações para equipamentos, observados nas Figuras 2.2, 2.3, 2.4, 2.5, 2.6 e 2.7
[4]:
Fundação em bloco;
Fundação em bloco combinado;
Fundação em pórtico;
Fundação sobre molas em bloco;
Bloco de inércia sobre estrutura;
Fundação sobre estacas.
Figura 2.2 – Fundação em bloco [4].
Figura 2.3 – Fundação em
bloco combinado [4].
6
Figura 2.4 – Fundação em pórtico [4].
Figura 2.5 – Fundação sobre molas
em bloco[4].
Figura 2.6 – Bloco de inércia sobre estrutura [4].
Figura 2.7 – Fundação sobre estacas [4].
2.2.ANÁLISE DINÂMICA DE ESTRUTURAS
A Equação 2.2-1 representa a formulação básica de um sistema dinâmico com N
graus de liberdade [5]:
M u''(t)+C u'(t)+K u(t)=F(t) (2.2-1)
Onde, os símbolos ‘ e “ significam primeiras e segundas derivadas no tempo,
M – matriz de massa;
C – matriz de amortecimento;
K – matriz de rigidez;
u’’(t) – vetor de aceleração;
u’(t) – vetor de velocidade;
u(t) – vetor de deslocamentos;
F(t) – vetor de forças e momentos aplicados.
7
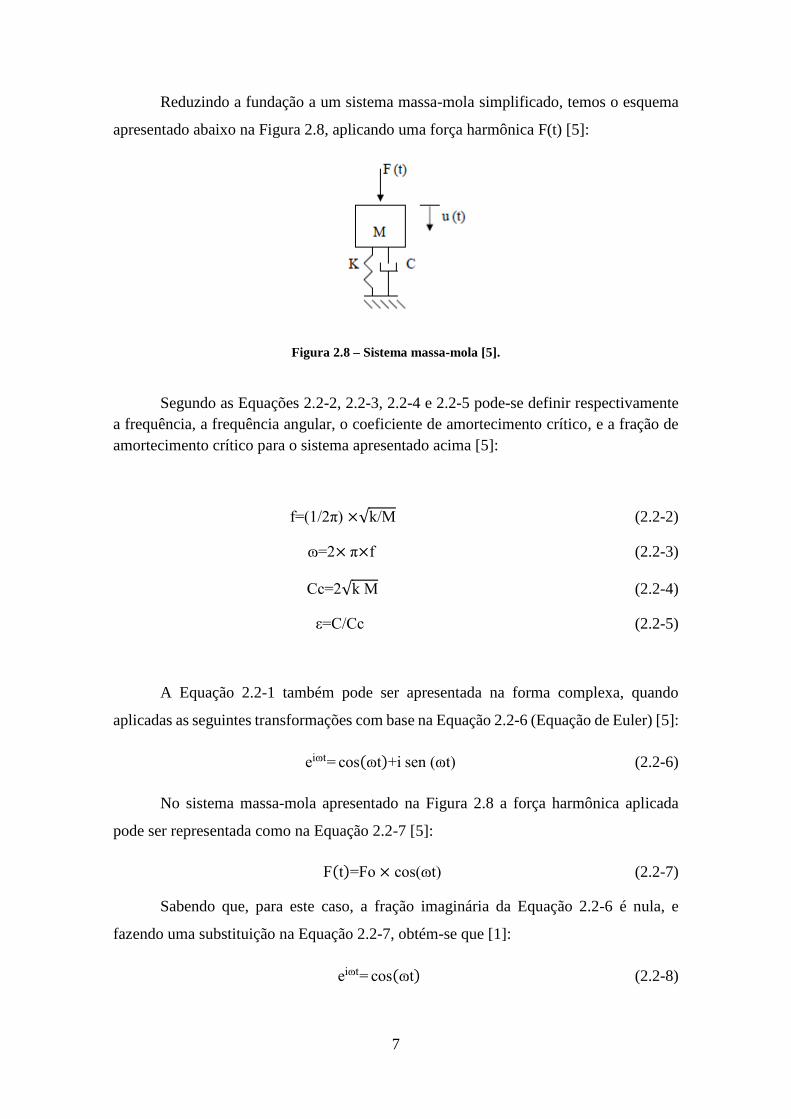
Reduzindo a fundação a um sistema massa-mola simplificado, temos o esquema
apresentado abaixo na Figura 2.8, aplicando uma força harmônica F(t) [5]:
Figura 2.8 – Sistema massa-mola [5].
Segundo as Equações 2.2-2, 2.2-3, 2.2-4 e 2.2-5 pode-se definir respectivamente
a frequência, a frequência angular, o coeficiente de amortecimento crítico, e a fração de
amortecimento crítico para o sistema apresentado acima [5]:
f=(1/2π) ×√k/M (2.2-2)
ɷ=2× π×f (2.2-3)
Cc=2√k M (2.2-4)
ε=C/Cc (2.2-5)
A Equação 2.2-1 também pode ser apresentada na forma complexa, quando
aplicadas as seguintes transformações com base na Equação 2.2-6 (Equação de Euler) [5]:
eiɷt= cos(ɷt)+i sen (ɷt) (2.2-6)
No sistema massa-mola apresentado na Figura 2.8 a força harmônica aplicada
pode ser representada como na Equação 2.2-7 [5]:
F(t)=Fo × cos(ɷt) (2.2-7)
Sabendo que, para este caso, a fração imaginária da Equação 2.2-6 é nula, e
fazendo uma substituição na Equação 2.2-7, obtém-se que [1]:
eiɷt= cos(ɷt) (2.2-8)

8
F(t)=Fo×eiɷt (2.2-9)
M u''(t)+Cu'(t)+Ku(t)=Fo×eiɷt (2.2-10)
A solução da Equação 2.2-10 pode ser representada na seguinte forma:
u(t)=uo×eiɷt (2.2-11)
Logo, a solução Equação 2.2-1 expressa na sua forma imaginária é:
(-Mɷ² +iɷC+K)uo × eiɷt=Fo × eiɷt (2.2-12)
2.2.1. Avaliação das cargas dinâmicas
Para um sistema de uma máquina rotativa, a força dinâmica devido à carga
desbalanceada pode ser definida com base na Figura 2.9 e nas Equações 2.2-13, 2.2-14 e
2.2-15 [5]:
Figura 2.9 – Diagrama de um sistema com
massa desbalanceada giratória [5].
FR= mrot× r ×ɷ² (2.2-13)
FH= mrot× r ×ɷ² ×sen(ɷt) (2.2-14)
FV= mrot× r ×ɷ² × cos (ɷt) (2.2-15)
9
Em alguns casos, as forças dinâmicas geradas pelo equipamento são dados
disponibilizados pelo fornecedor da máquina. Em outros casos, essas forças podem ser
avaliadas com base em equações encontradas em normas. Segundo a norma ACI 351.3R-
04 [4], as forças dinâmicas para um equipamento cuja massa é conhecida podem ser
calculadas segundo a Equação 2.2-16.
Fd= mr× Q ×ɷo× Sf/1000 (2.2-16)
Fd: amplitude da força dinâmica (N);
mr: massa giratória (kg);
Q: constante de qualidade do balanceamento, representada pelo produto da
excentricidade pela velocidade angular (mm/s);
ɷo: velocidade angular de operação (rad/s);
Sf: fator de segurança utilizado para considerar um eventual aumento no
desbalanceamento da máquina ao longo do seu tempo de serviço (normalmente maior ou
igual a 2,0).
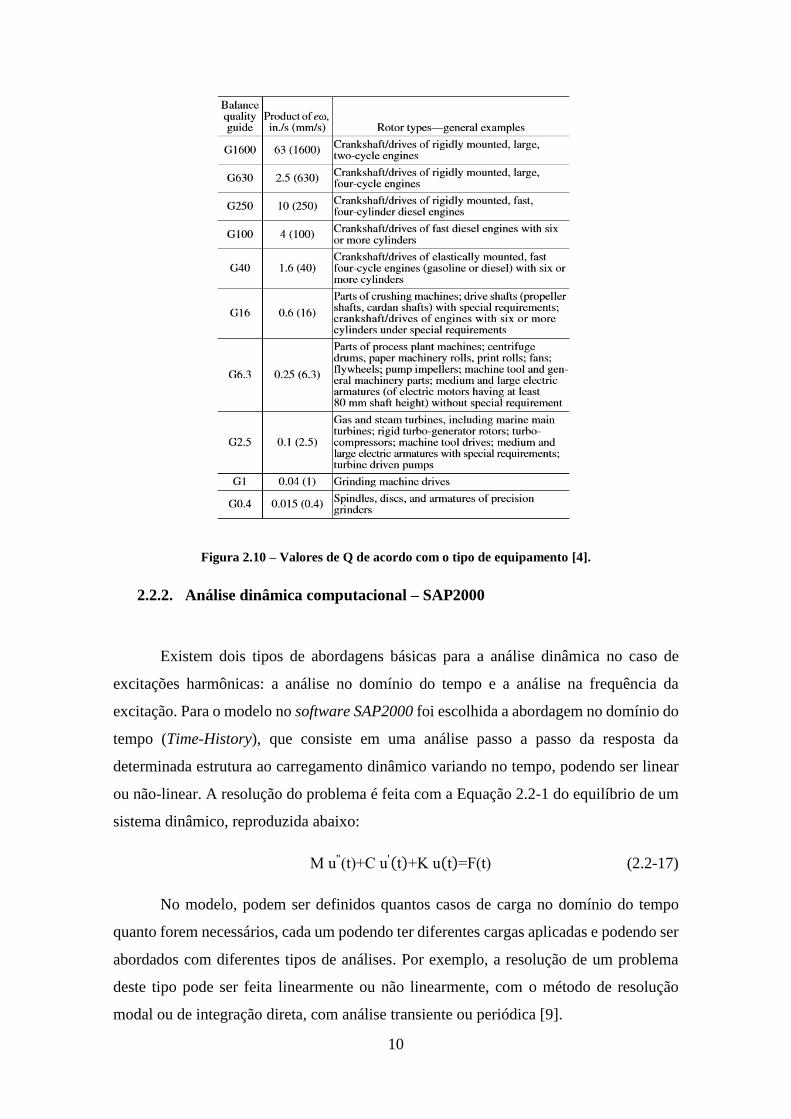
Ainda de acordo com a ACI 351.3R-04 [4], o valor de Q pode ser determinado
através da tabela da Figura 2.10.
10
Figura 2.10 – Valores de Q de acordo com o tipo de equipamento [4].
2.2.2. Análise dinâmica computacional – SAP2000
Existem dois tipos de abordagens básicas para a análise dinâmica no caso de
excitações harmônicas: a análise no domínio do tempo e a análise na frequência da
excitação. Para o modelo no software SAP2000 foi escolhida a abordagem no domínio do
tempo (Time-History), que consiste em uma análise passo a passo da resposta da
determinada estrutura ao carregamento dinâmico variando no tempo, podendo ser linear
ou não-linear. A resolução do problema é feita com a Equação 2.2-1 do equilíbrio de um
sistema dinâmico, reproduzida abaixo:
M u''(t)+C u'(t)+K u(t)=F(t) (2.2-17)
No modelo, podem ser definidos quantos casos de carga no domínio do tempo
quanto forem necessários, cada um podendo ter diferentes cargas aplicadas e podendo ser
abordados com diferentes tipos de análises. Por exemplo, a resolução de um problema
deste tipo pode ser feita linearmente ou não linearmente, com o método de resolução
modal ou de integração direta, com análise transiente ou periódica [9].
11
A análise transiente consiste em considerar o carregamento com um início de
aplicação e final definidos no tempo. A análise periódica considera o carregamento sendo
aplicado indefinidamente. A superposição modal é um método eficiente, considerando a
decomposição do problema nos diversos modos de vibração, assumindo resposta linear
das funções no tempo. Já a integração direta utiliza a integração das equações de
movimento por processos numéricos [9].
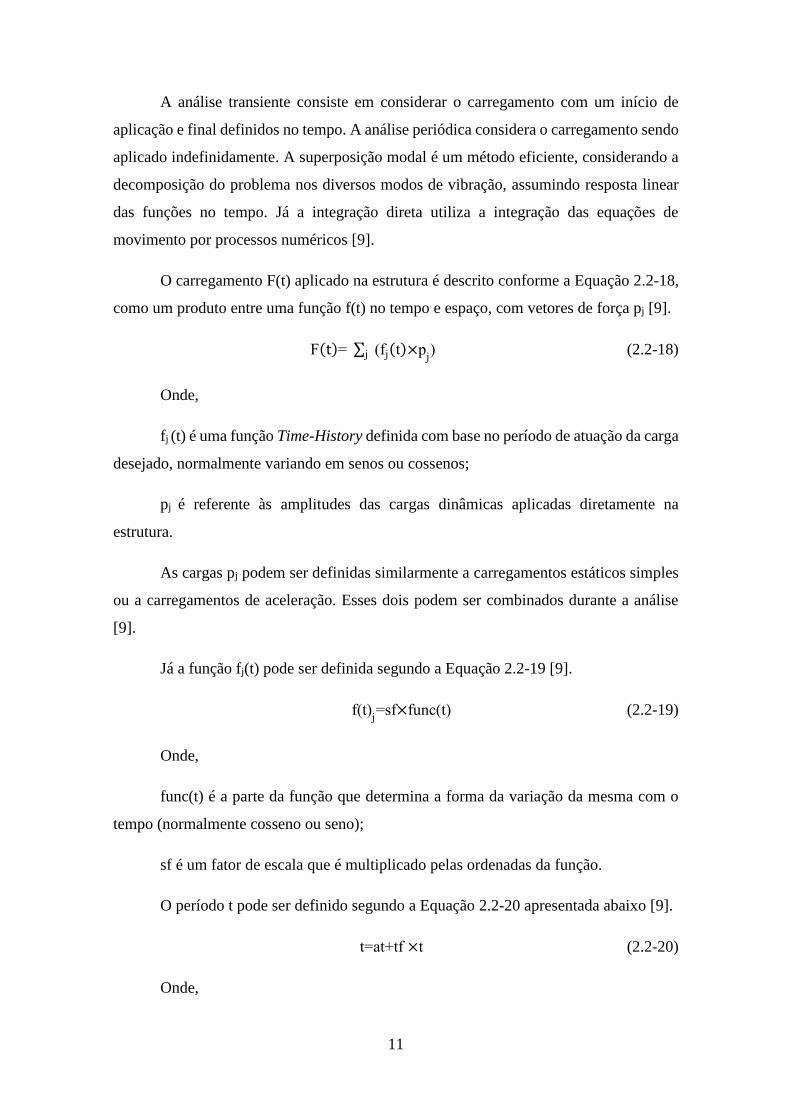
O carregamento F(t) aplicado na estrutura é descrito conforme a Equação 2.2-18,
como um produto entre uma função f(t) no tempo e espaço, com vetores de força pj [9].
F(t)= ∑ (fj(t)×pj) j (2.2-18)
Onde,
fj (t) é uma função Time-History definida com base no período de atuação da carga
desejado, normalmente variando em senos ou cossenos;
pj é referente às amplitudes das cargas dinâmicas aplicadas diretamente na
estrutura.
As cargas pj podem ser definidas similarmente a carregamentos estáticos simples
ou a carregamentos de aceleração. Esses dois podem ser combinados durante a análise
[9].
Já a função fj(t) pode ser definida segundo a Equação 2.2-19 [9].
f(t)j=sf×func(t) (2.2-19)
Onde,
func(t) é a parte da função que determina a forma da variação da mesma com o
tempo (normalmente cosseno ou seno);
sf é um fator de escala que é multiplicado pelas ordenadas da função.
O período t pode ser definido segundo a Equação 2.2-20 apresentada abaixo [9].
t=at+tf ×t (2.2-20)
Onde,
12
at é conhecido como o arrival time, definindo em que momento a função começa
a agir na estrutura;
tf é um fator de escala multiplicado pelas abcissas.
A análise Time-History é feita com base em intervalos de tempos discretos que
são definidos pelo número de intervalos considerados (nstep) e o tamanho de cada
intervalo (dt). O intervalo de tempo final para qual a análise é feita, é definido como o
produto entre o número de intervalos (nstep) e o tamanho de cada um deles (dt). As
respostas são calculadas para cada intervalo dt, gerando um total de nstep+1 valores em
cada análise [9].
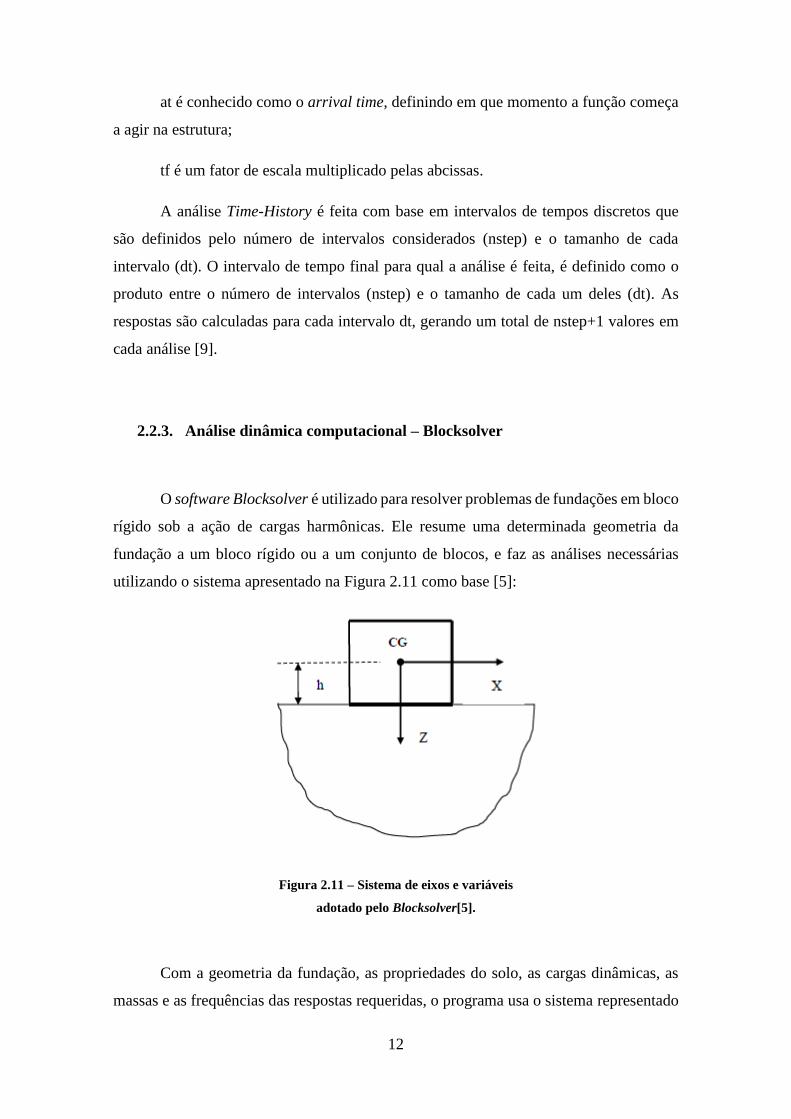
2.2.3. Análise dinâmica computacional – Blocksolver
O software Blocksolver é utilizado para resolver problemas de fundações em bloco
rígido sob a ação de cargas harmônicas. Ele resume uma determinada geometria da
fundação a um bloco rígido ou a um conjunto de blocos, e faz as análises necessárias
utilizando o sistema apresentado na Figura 2.11 como base [5]:
Figura 2.11 – Sistema de eixos e variáveis
adotado pelo Blocksolver[5].
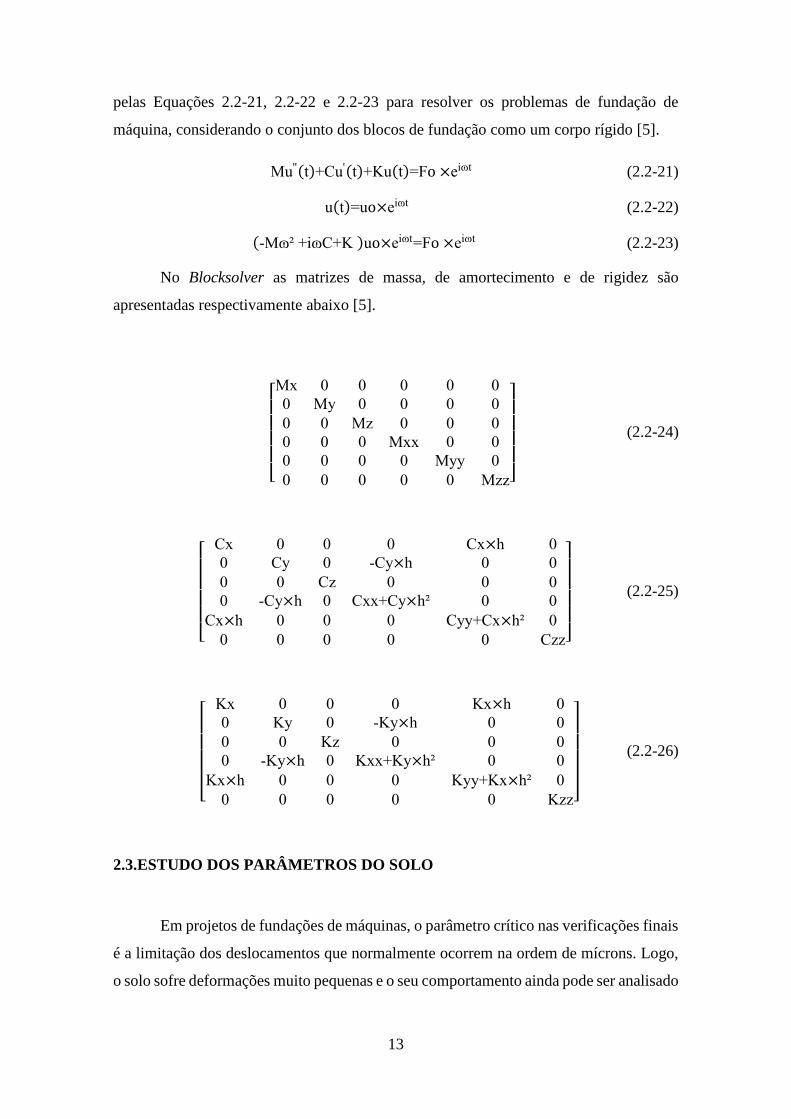
Com a geometria da fundação, as propriedades do solo, as cargas dinâmicas, as
massas e as frequências das respostas requeridas, o programa usa o sistema representado
13
pelas Equações 2.2-21, 2.2-22 e 2.2-23 para resolver os problemas de fundação de
máquina, considerando o conjunto dos blocos de fundação como um corpo rígido [5].
Mu''(t)+Cu'(t)+Ku(t)=Fo ×eiɷt (2.2-21)
u(t)=uo×eiɷt (2.2-22)
(-Mɷ² +iɷC+K )uo×eiɷt=Fo ×eiɷt (2.2-23)
No Blocksolver as matrizes de massa, de amortecimento e de rigidez são
apresentadas respectivamente abaixo [5].
[ Mx 0 0 0 0 0
0 My 0 0 0 0
0 0 Mz 0 0 0
0 0 0 Mxx 0 0
0 0 0 0 Myy 0
0 0 0 0 0 Mzz]
(2.2-24)
[
Cx 0 0 0 Cx×h 0
0 Cy 0 -Cy×h 0 0
0 0 Cz 0 0 0
0 -Cy×h 0 Cxx+Cy×h² 0 0
Cx×h 0 0 0 Cyy+Cx×h² 0
0 0 0 0 0 Czz]
(2.2-25)
[
Kx 0 0 0 Kx×h 0
0 Ky 0 -Ky×h 0 0
0 0 Kz 0 0 0
0 -Ky×h 0 Kxx+Ky×h² 0 0
Kx×h 0 0 0 Kyy+Kx×h² 0
0 0 0 0 0 Kzz]
(2.2-26)
2.3.ESTUDO DOS PARÂMETROS DO SOLO
Em projetos de fundações de máquinas, o parâmetro crítico nas verificações finais
é a limitação dos deslocamentos que normalmente ocorrem na ordem de mícrons. Logo,
o solo sofre deformações muito pequenas e o seu comportamento ainda pode ser analisado
14
dentro de modelos elástico-lineares [5]. Os parâmetros que devem ser determinados para
as análises são:
G: Módulo de deformação transversal (kN/m²);
ν: Coeficiente de Poisson;
ρ: massa específica (t/m³);
ɛ: fração de amortecimento crítico.
Além disso, algumas outras informações que também são relevantes para um
projeto de fundação são: a posição e a natureza das camadas do perfil do solo, a cota do
nível d’água e a capacidade de resistência das camadas [3]. Para a determinação
cuidadosa desses parâmetros e a obtenção das informações necessárias para a elaboração
do projeto devem ser realizados ensaios de campo. Por exemplo, o ensaio SPT (Standard
Penetration Test) é fundamental para a determinação do perfil do solo em questão, a sua
resistência e a cota do lençol freático. Contudo, o parâmetro mais difícil de ser avaliado
e que tem mais influência nos resultados é o módulo de deformação transversal. O ensaio
normalmente indicado para a determinação do valor de G, assim como o valor do
coeficiente de Poisson, é o conhecido como ensaio Cross-hole [5].
Na impossibilidade da realização de ensaios para a avaliação do valor do módulo
de deformação transversal, este pode ser determinado com base em algumas correlações
empíricas. O seu valor pode ser correlacionado ao do módulo de elasticidade e do
coeficiente de Poisson, conforme apresentado na Equação 2.3-1, e pode ser avaliado de
acordo com a simples caracterização do solo ou com os resultados do ensaio SPT, como
expresso na Equação 2.3-2. As propriedades que afetam no valor de G são: a forma e
dimensão dos grãos, o índice de vazios, a densidade relativa e a pressão efetiva média
[2,5].
G=E/ [2×(1+ν)] (2.3-1)
G=11,5 ×NSPT0,8 (2.3-2)
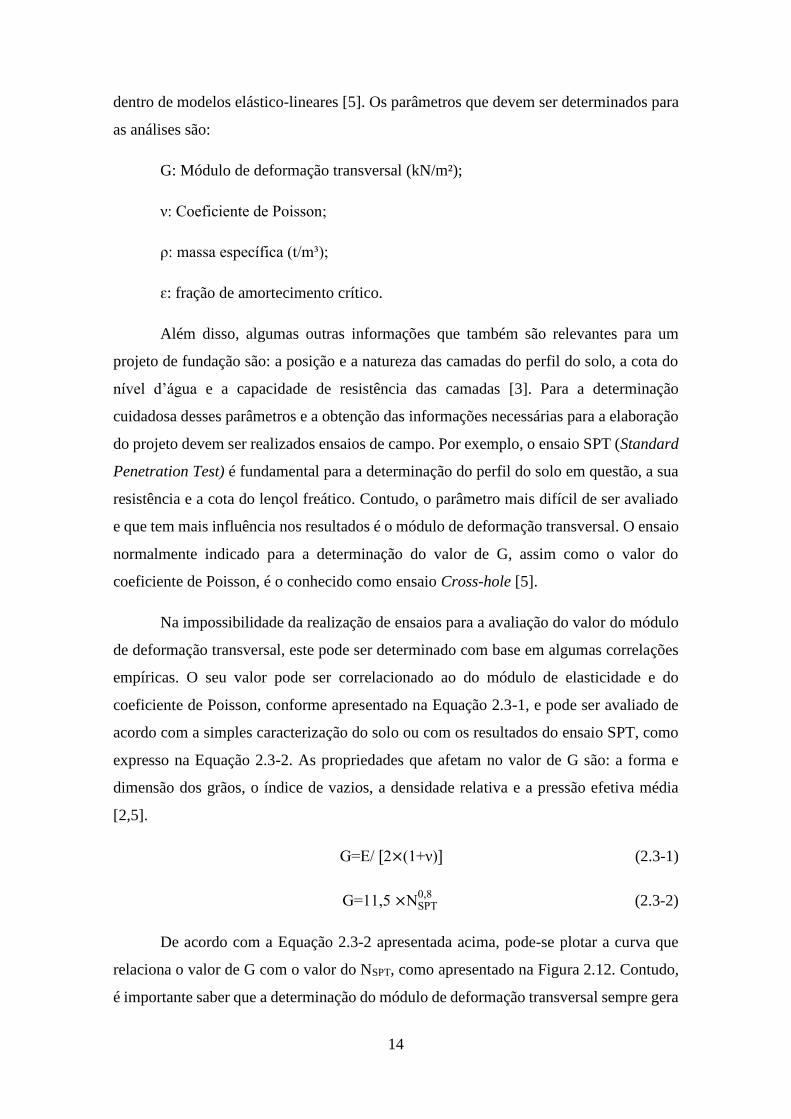
De acordo com a Equação 2.3-2 apresentada acima, pode-se plotar a curva que
relaciona o valor de G com o valor do NSPT, como apresentado na Figura 2.12. Contudo,
é importante saber que a determinação do módulo de deformação transversal sempre gera
15
incertezas, e por esse motivo, na avaliação do mesmo, deve sempre ser feita uma
avaliação paramétrica para investigar como os resultados das análises variam em função
das propriedades do solo. Normalmente, faz-se essa avaliação considerando valores
máximos e mínimos de G com uma determinada variação percentual em torno dos valores
mais prováveis [5], usualmente ± 50%.
Figura 2.12 – Curva G x NSPT [2].
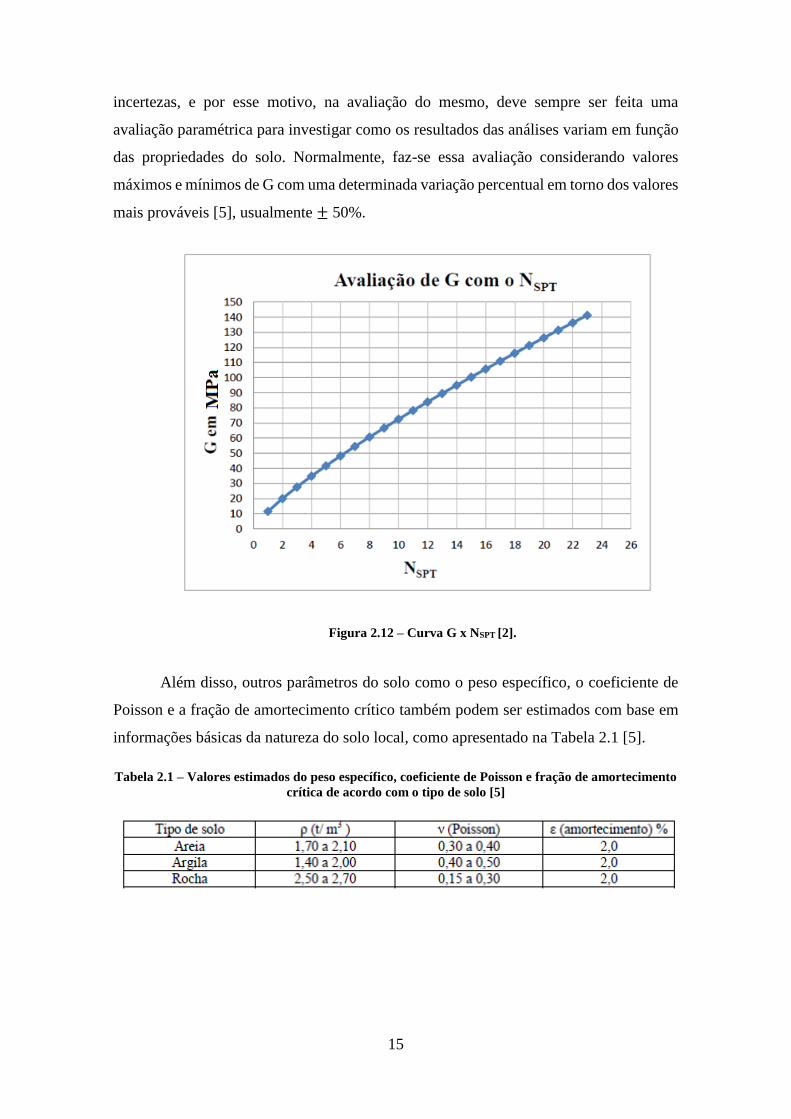
Além disso, outros parâmetros do solo como o peso específico, o coeficiente de
Poisson e a fração de amortecimento crítico também podem ser estimados com base em
informações básicas da natureza do solo local, como apresentado na Tabela 2.1 [5].
Tabela 2.1 – Valores estimados do peso específico, coeficiente de Poisson e fração de amortecimento
crítica de acordo com o tipo de solo [5]
16
2.4.CARACTERÍSTICAS DA FUNDAÇÃO
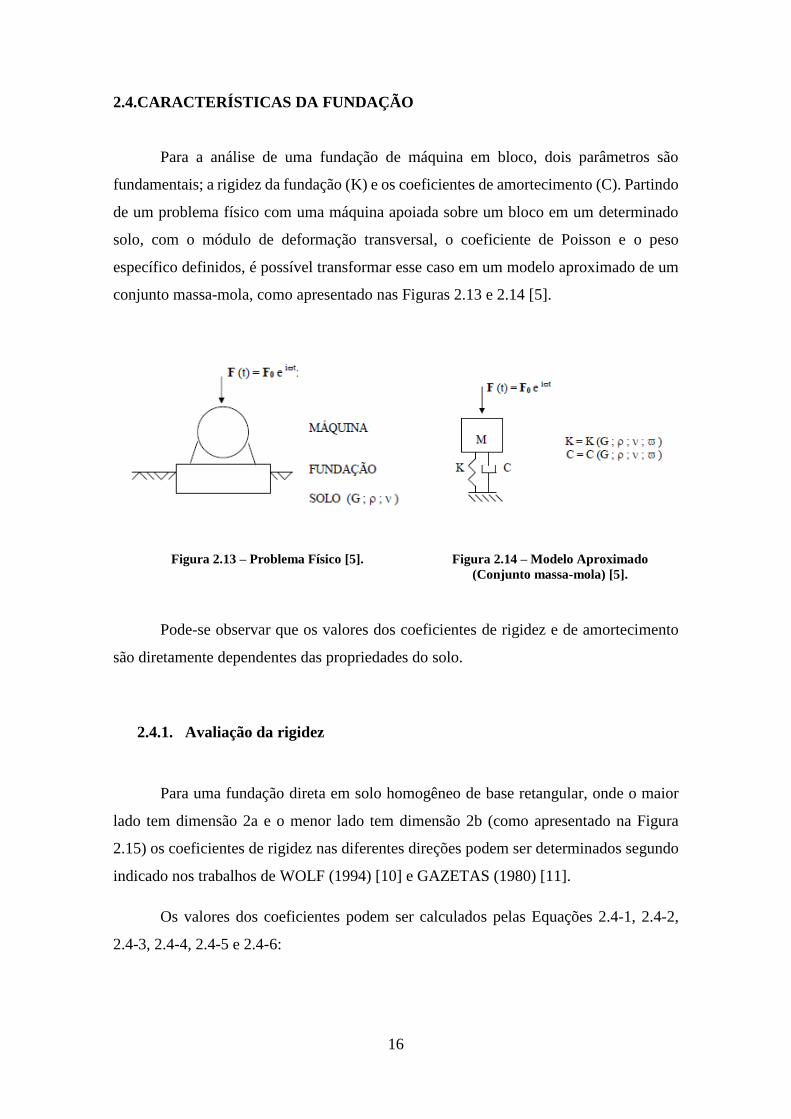
Para a análise de uma fundação de máquina em bloco, dois parâmetros são
fundamentais; a rigidez da fundação (K) e os coeficientes de amortecimento (C). Partindo
de um problema físico com uma máquina apoiada sobre um bloco em um determinado
solo, com o módulo de deformação transversal, o coeficiente de Poisson e o peso
específico definidos, é possível transformar esse caso em um modelo aproximado de um
conjunto massa-mola, como apresentado nas Figuras 2.13 e 2.14 [5].
Figura 2.13 – Problema Físico [5]. Figura 2.14 – Modelo Aproximado
(Conjunto massa-mola) [5].
Pode-se observar que os valores dos coeficientes de rigidez e de amortecimento
são diretamente dependentes das propriedades do solo.
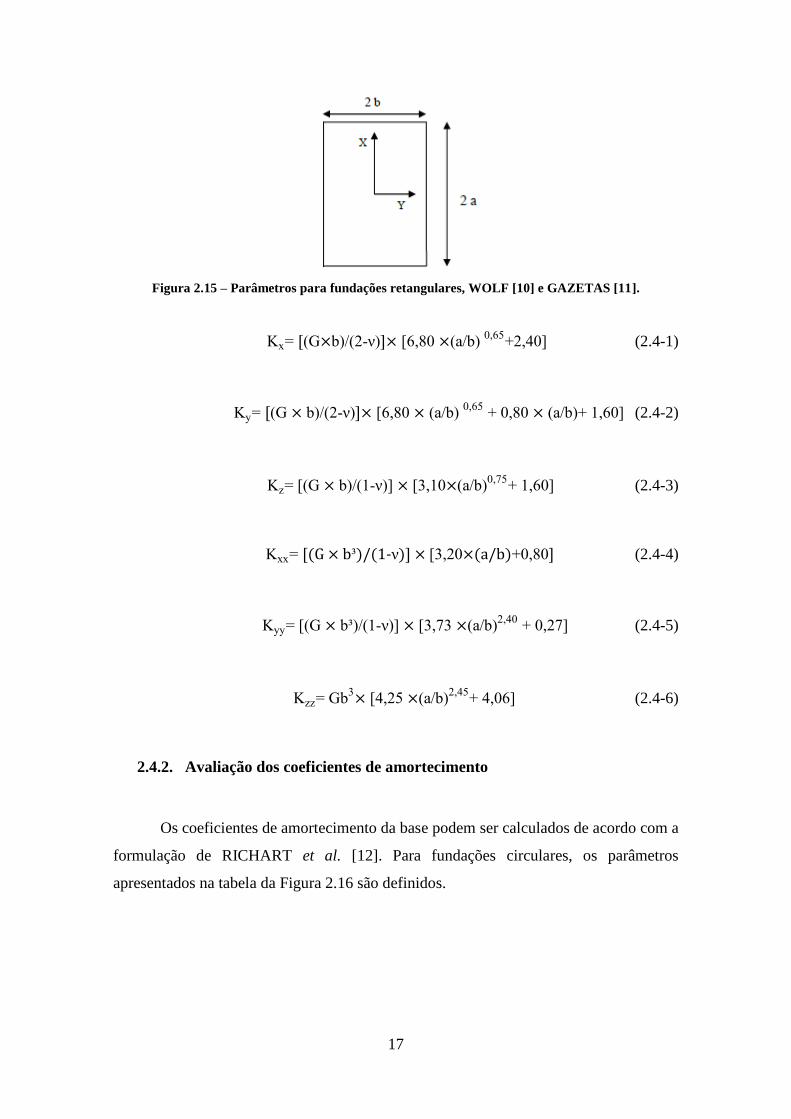
2.4.1. Avaliação da rigidez
Para uma fundação direta em solo homogêneo de base retangular, onde o maior
lado tem dimensão 2a e o menor lado tem dimensão 2b (como apresentado na Figura
2.15) os coeficientes de rigidez nas diferentes direções podem ser determinados segundo
indicado nos trabalhos de WOLF (1994) [10] e GAZETAS (1980) [11].
Os valores dos coeficientes podem ser calculados pelas Equações 2.4-1, 2.4-2,
2.4-3, 2.4-4, 2.4-5 e 2.4-6:
17
Figura 2.15 – Parâmetros para fundações retangulares, WOLF [10] e GAZETAS [11].
Kx= [(G×b)/(2-ν)]× [6,80 ×(a/b) 0,65
+2,40] (2.4-1)
Ky= [(G × b)/(2-ν)]× [6,80 × (a/b) 0,65
+ 0,80 × (a/b)+ 1,60] (2.4-2)
Kz= [(G × b)/(1-ν)] × [3,10×(a/b)0,75
+ 1,60] (2.4-3)
Kxx= [(G × b³)/(1-ν)] × [3,20×(a/b)+0,80] (2.4-4)
Kyy= [(G × b³)/(1-ν)] × [3,73 ×(a/b)2,40
+ 0,27] (2.4-5)
Kzz= Gb3× [4,25 ×(a/b)
2,45+ 4,06] (2.4-6)
2.4.2. Avaliação dos coeficientes de amortecimento
Os coeficientes de amortecimento da base podem ser calculados de acordo com a
formulação de RICHART et al. [12]. Para fundações circulares, os parâmetros
apresentados na tabela da Figura 2.16 são definidos.

18
Figura 2.16 – Parâmetros para fundações circulares [5].
Os amortecedores podem ser diretamente calculados segundo as equações da
tabela apresentada na Figura 2.17.
Figura 2.17 – Valores dos amortecedores [5].
Quando a fundação estudada é retangular, as equações apresentadas acima nas
Figuras 2.16 e 2.17 podem ser utilizadas, contanto que sejam calculados os raios
equivalentes para translações, rotações e torções, respectivamente apresentados nas
Equações 2.4-7, 2.4-8 e 2.4-9 abaixo.
r, translação =[(4 × c × d)/π]1/2 (2.4-7)
r, rotação =[(16 × c × d3)/ 3 × π]
1
4 (2.4-8)
r, torção = {[16 × c × d × (c² + d²)]/ 6 × π}1/4
(2.4-9)
2.5.CRITÉRIOS DE PROJETO
Como citado no item 2.1.1, para a avaliação de um projeto de fundações de
máquinas, além dos esforços e da capacidade estrutural, outros aspectos também devem
ser analisados, como o limite dos deslocamentos na estrutura e as velocidades. Segundo
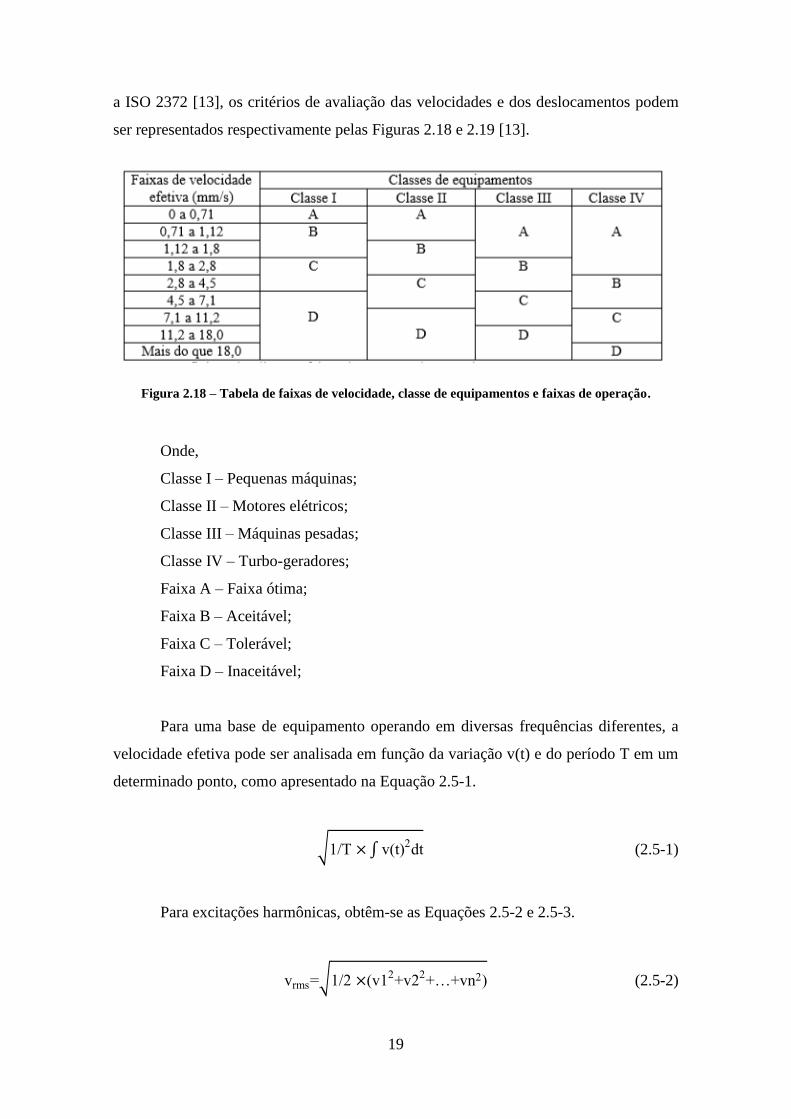
19
a ISO 2372 [13], os critérios de avaliação das velocidades e dos deslocamentos podem
ser representados respectivamente pelas Figuras 2.18 e 2.19 [13].
Figura 2.18 – Tabela de faixas de velocidade, classe de equipamentos e faixas de operação.
Onde,
Classe I – Pequenas máquinas;
Classe II – Motores elétricos;
Classe III – Máquinas pesadas;
Classe IV – Turbo-geradores;
Faixa A – Faixa ótima;
Faixa B – Aceitável;
Faixa C – Tolerável;
Faixa D – Inaceitável;
Para uma base de equipamento operando em diversas frequências diferentes, a
velocidade efetiva pode ser analisada em função da variação v(t) e do período T em um
determinado ponto, como apresentado na Equação 2.5-1.
√1/T ×∫ v(t)2dt (2.5-1)
Para excitações harmônicas, obtêm-se as Equações 2.5-2 e 2.5-3.
vrms=√1/2 ×(v12+v2
2+…+vn2) (2.5-2)
20
Onde,
v= δ ×ω (2.5-3)
Com,
ɷ, frequência circular (rad/s);
δ, deslocamentos (mm);
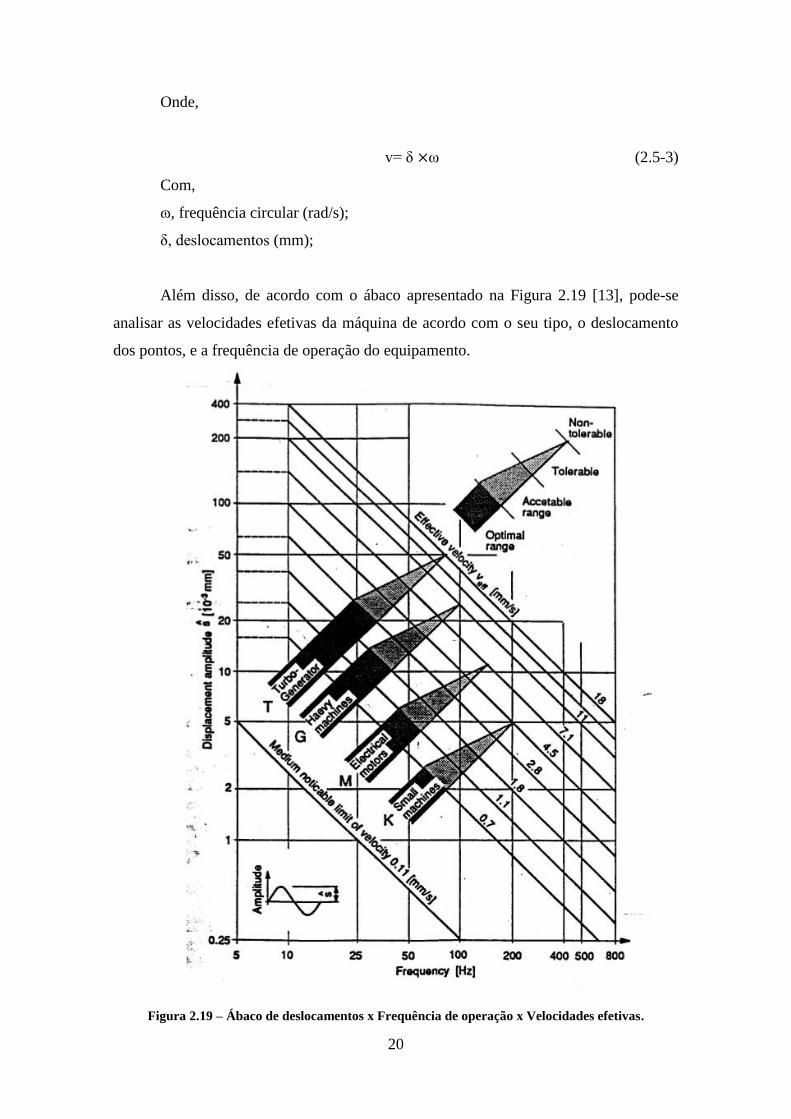
Além disso, de acordo com o ábaco apresentado na Figura 2.19 [13], pode-se
analisar as velocidades efetivas da máquina de acordo com o seu tipo, o deslocamento
dos pontos, e a frequência de operação do equipamento.
Figura 2.19 – Ábaco de deslocamentos x Frequência de operação x Velocidades efetivas.
21
3. MODELAGEM
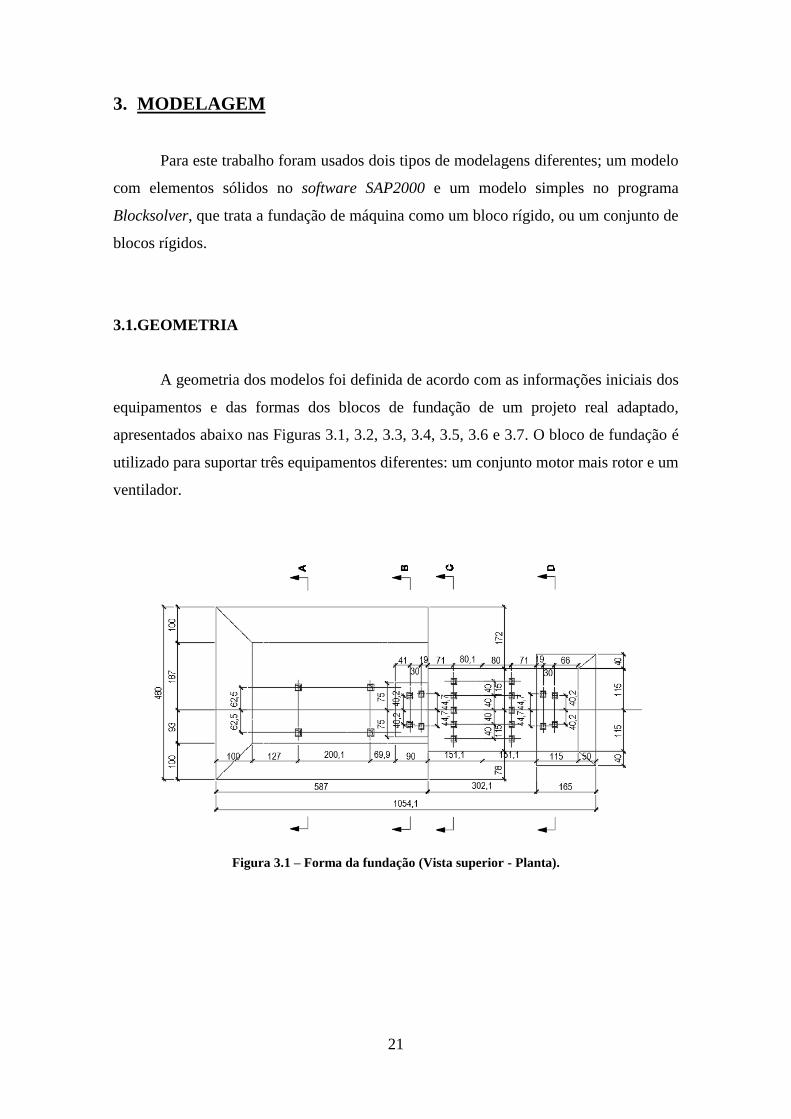
Para este trabalho foram usados dois tipos de modelagens diferentes; um modelo
com elementos sólidos no software SAP2000 e um modelo simples no programa
Blocksolver, que trata a fundação de máquina como um bloco rígido, ou um conjunto de
blocos rígidos.
3.1.GEOMETRIA
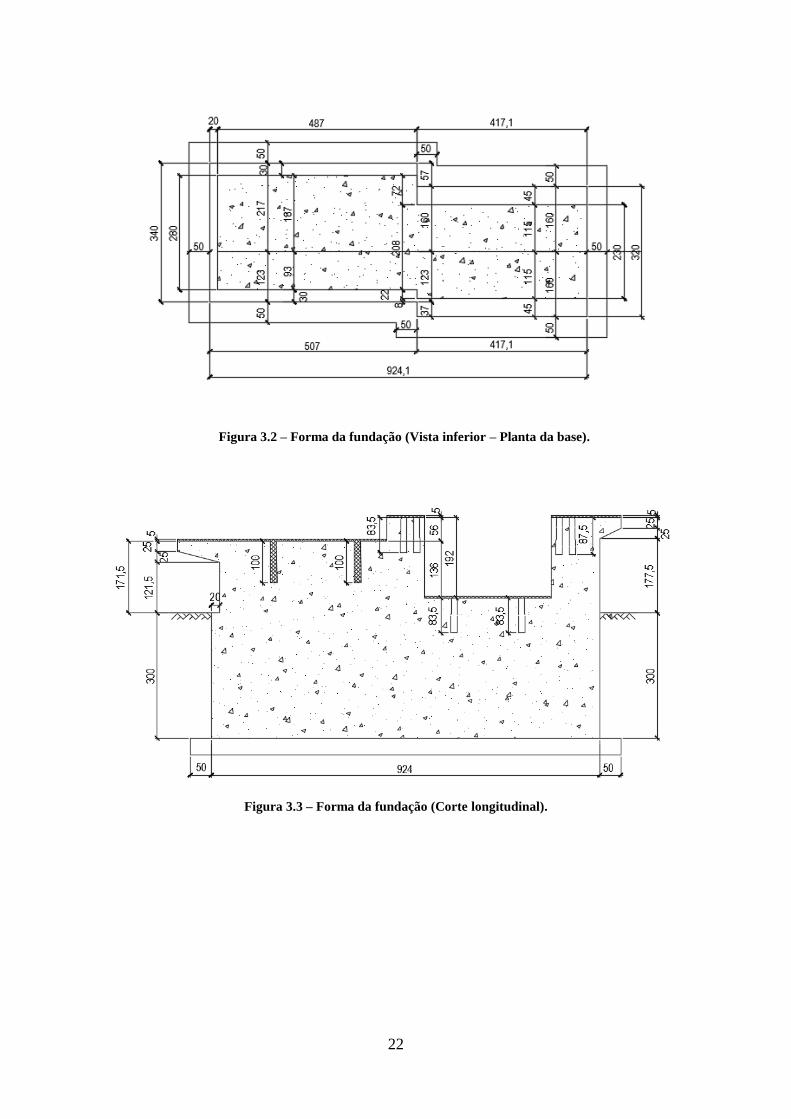
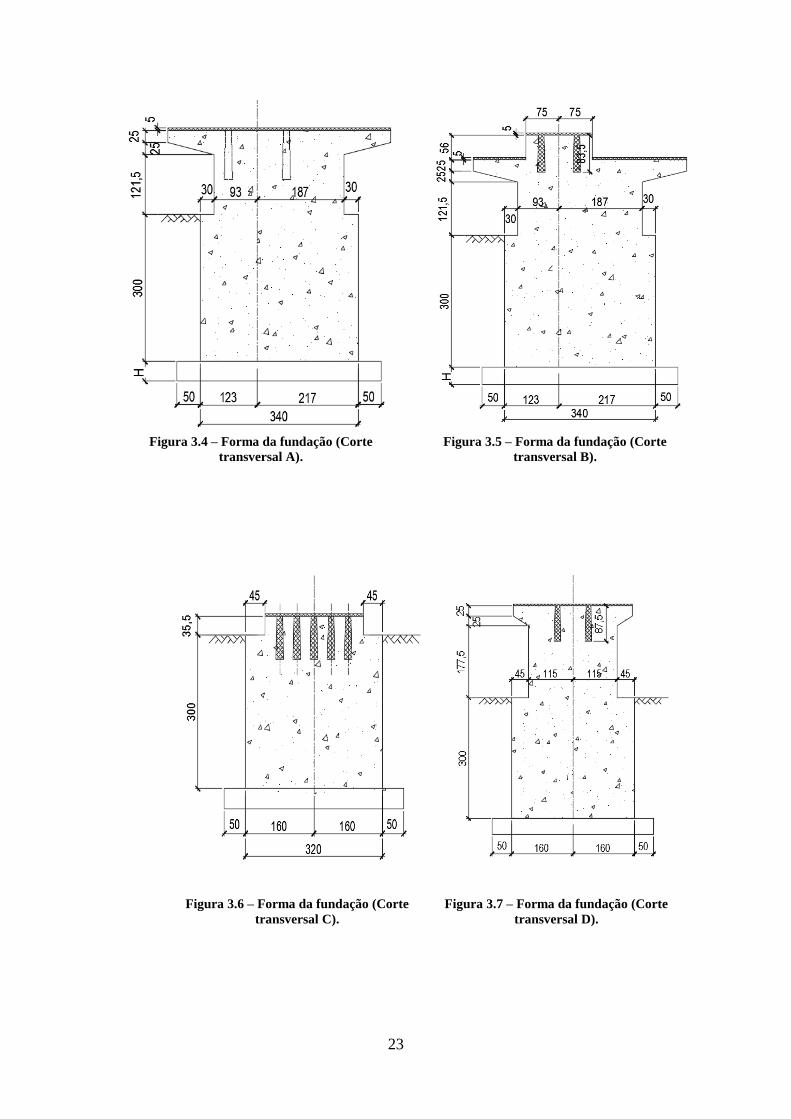
A geometria dos modelos foi definida de acordo com as informações iniciais dos
equipamentos e das formas dos blocos de fundação de um projeto real adaptado,
apresentados abaixo nas Figuras 3.1, 3.2, 3.3, 3.4, 3.5, 3.6 e 3.7. O bloco de fundação é
utilizado para suportar três equipamentos diferentes: um conjunto motor mais rotor e um
ventilador.
Figura 3.1 – Forma da fundação (Vista superior - Planta).
22
Figura 3.2 – Forma da fundação (Vista inferior – Planta da base).
Figura 3.3 – Forma da fundação (Corte longitudinal).
23
Figura 3.4 – Forma da fundação (Corte
transversal A).
Figura 3.5 – Forma da fundação (Corte
transversal B).
Figura 3.6 – Forma da fundação (Corte
transversal C).
Figura 3.7 – Forma da fundação (Corte
transversal D).
24
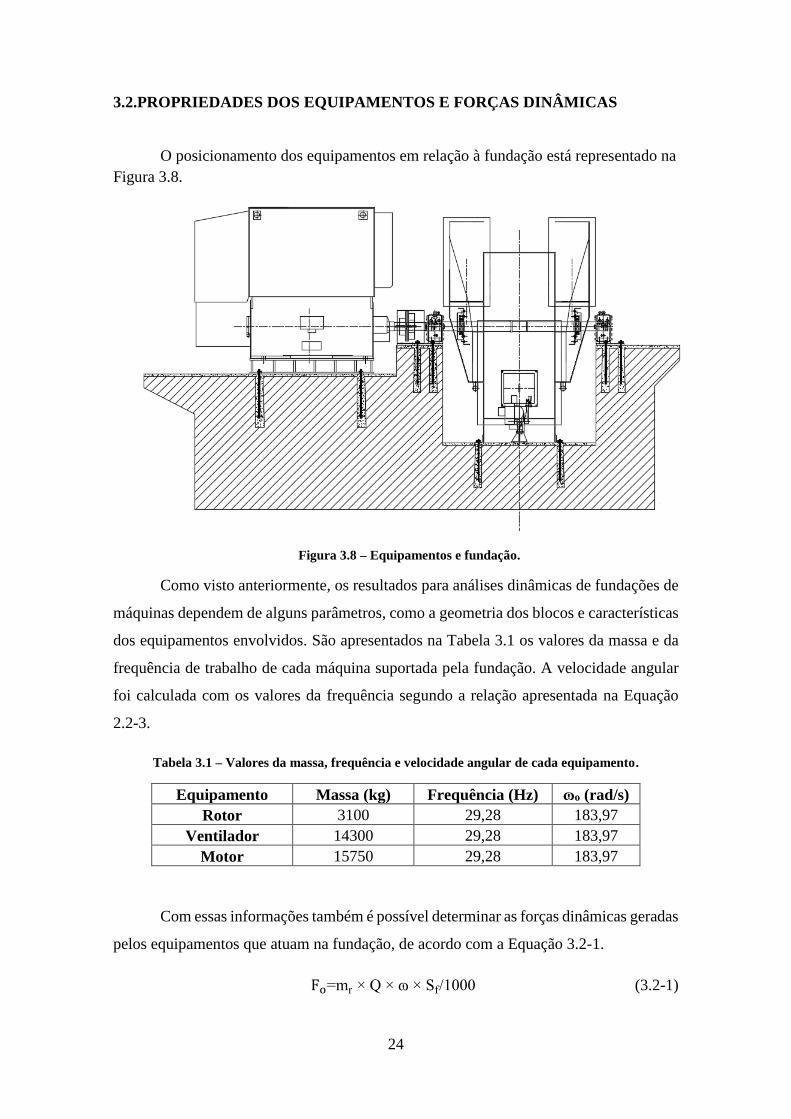
3.2.PROPRIEDADES DOS EQUIPAMENTOS E FORÇAS DINÂMICAS
O posicionamento dos equipamentos em relação à fundação está representado na
Figura 3.8.
Figura 3.8 – Equipamentos e fundação.
Como visto anteriormente, os resultados para análises dinâmicas de fundações de
máquinas dependem de alguns parâmetros, como a geometria dos blocos e características
dos equipamentos envolvidos. São apresentados na Tabela 3.1 os valores da massa e da
frequência de trabalho de cada máquina suportada pela fundação. A velocidade angular
foi calculada com os valores da frequência segundo a relação apresentada na Equação
2.2-3.
Tabela 3.1 – Valores da massa, frequência e velocidade angular de cada equipamento.
Equipamento Massa (kg) Frequência (Hz) ɷo (rad/s)
Rotor 3100 29,28 183,97
Ventilador 14300 29,28 183,97
Motor 15750 29,28 183,97
Com essas informações também é possível determinar as forças dinâmicas geradas
pelos equipamentos que atuam na fundação, de acordo com a Equação 3.2-1.
Fo=mr × Q × ɷ × Sf/1000 (3.2-1)
25
Os valores das massas e das frequências angulares foram fornecidos pelos
fabricantes e estão apresentados na Tabela 3.1. O valor de Sf, de acordo com a ACI
351.3R-04 [4] deve ser no mínimo 2,0. Os valores de Q podem ser determinados pela
tabela da Figura 2.10. Como os equipamentos em questão são motores e ventiladores, o
valor de Q estipulado é de 6,3mm/s. Logo, com essas informações, foram determinadas
as forças dinâmicas de cada máquina, que estão apresentadas na Tabela 3.2.
Tabela 3.2 – Valores das forças dinâmicas aplicadas.
Equipamento Fo (N) Fo (kN)
Rotor 7185,93 7,19
Ventilador 33148,01 33,15
Motor 36509,18 36,51
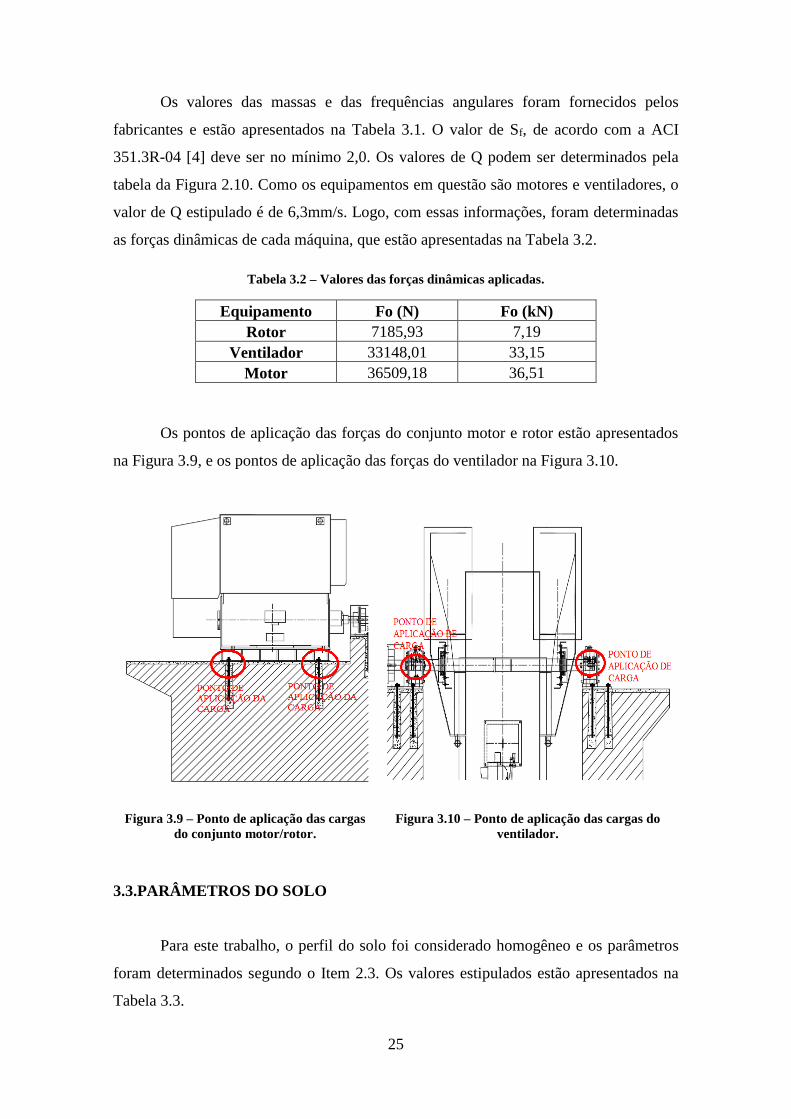
Os pontos de aplicação das forças do conjunto motor e rotor estão apresentados
na Figura 3.9, e os pontos de aplicação das forças do ventilador na Figura 3.10.
Figura 3.9 – Ponto de aplicação das cargas
do conjunto motor/rotor.
Figura 3.10 – Ponto de aplicação das cargas do
ventilador.
3.3.PARÂMETROS DO SOLO
Para este trabalho, o perfil do solo foi considerado homogêneo e os parâmetros
foram determinados segundo o Item 2.3. Os valores estipulados estão apresentados na
Tabela 3.3.
26
Tabela 3.3 – Propriedades do solo.
G (MPa) ν γ (kN/m³)
120 0,3 21
3.4.MODELAGEM COM ELEMENTOS SÓLIDOS – SAP2000
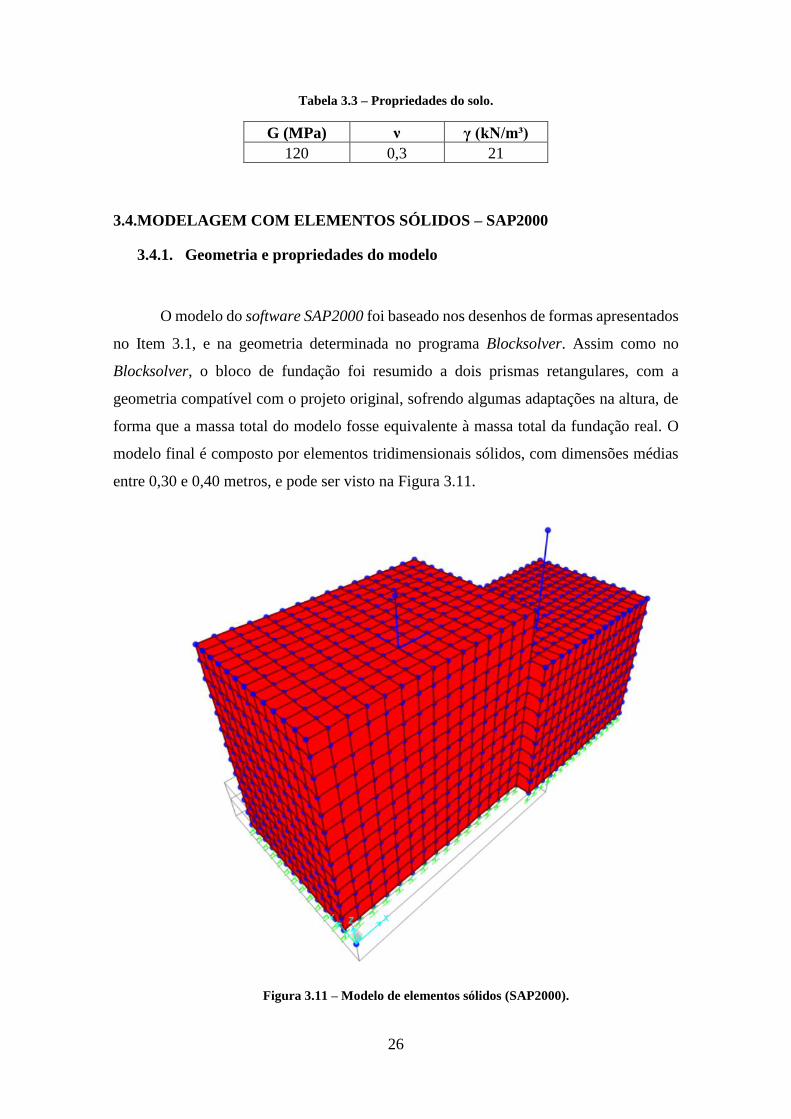
3.4.1. Geometria e propriedades do modelo
O modelo do software SAP2000 foi baseado nos desenhos de formas apresentados
no Item 3.1, e na geometria determinada no programa Blocksolver. Assim como no
Blocksolver, o bloco de fundação foi resumido a dois prismas retangulares, com a
geometria compatível com o projeto original, sofrendo algumas adaptações na altura, de
forma que a massa total do modelo fosse equivalente à massa total da fundação real. O
modelo final é composto por elementos tridimensionais sólidos, com dimensões médias
entre 0,30 e 0,40 metros, e pode ser visto na Figura 3.11.
Figura 3.11 – Modelo de elementos sólidos (SAP2000).
27
Os pontos de aplicação das cargas das Figuras 3.9 e 3.10 foram representados no
modelo como o ponto médio entre as coordenadas reais dos nós onde os carregamentos
são transferidos para a fundação. Esses pontos médios foram ligados até o eixo giratório
dos equipamentos com barras rígidas. As propriedades de massa dessas barras foram
zeradas para não ocorrer nenhuma alteração na massa total da fundação. Assim como em
ALBUQUERQUE [1], para reduzir a interferência do carregamento concentrado e os
efeitos de rotação não restritos pelos elementos sólidos, as barras foram prolongadas por
dois nós para o interior da estrutura, e nos encontros dos elementos lineares com os
sólidos, foram colocadas barras perpendiculares, também rígidas.
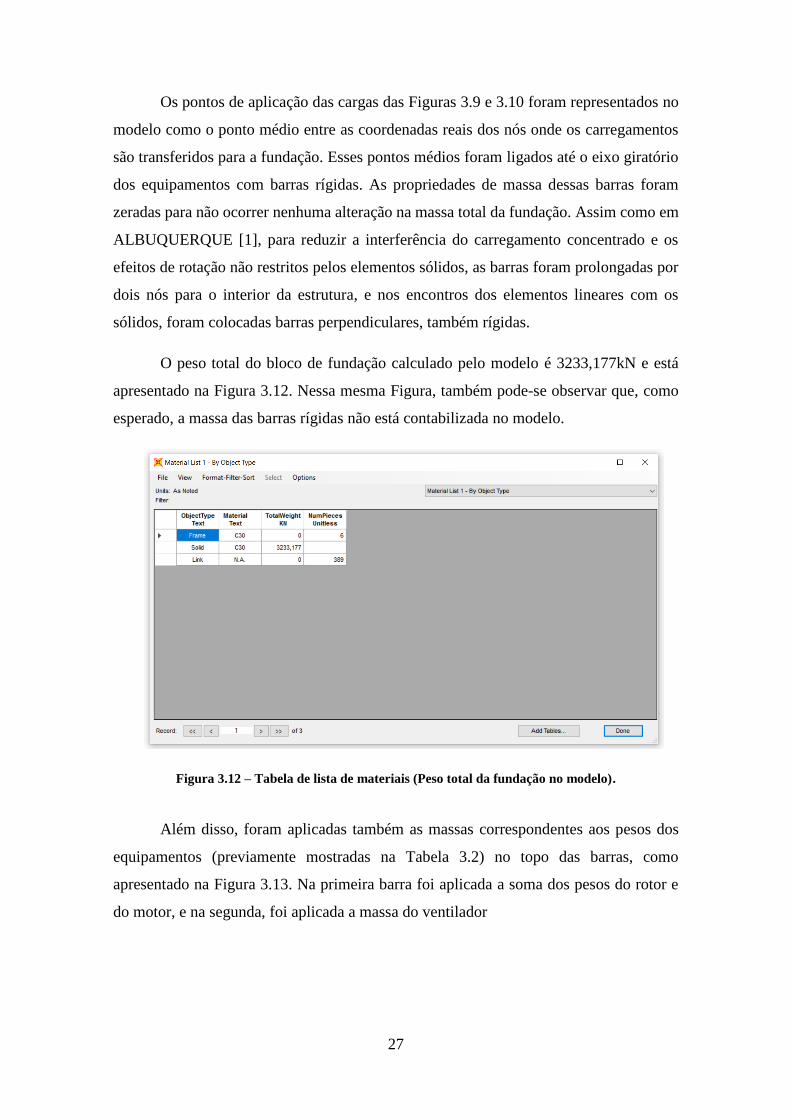
O peso total do bloco de fundação calculado pelo modelo é 3233,177kN e está
apresentado na Figura 3.12. Nessa mesma Figura, também pode-se observar que, como
esperado, a massa das barras rígidas não está contabilizada no modelo.
Figura 3.12 – Tabela de lista de materiais (Peso total da fundação no modelo).
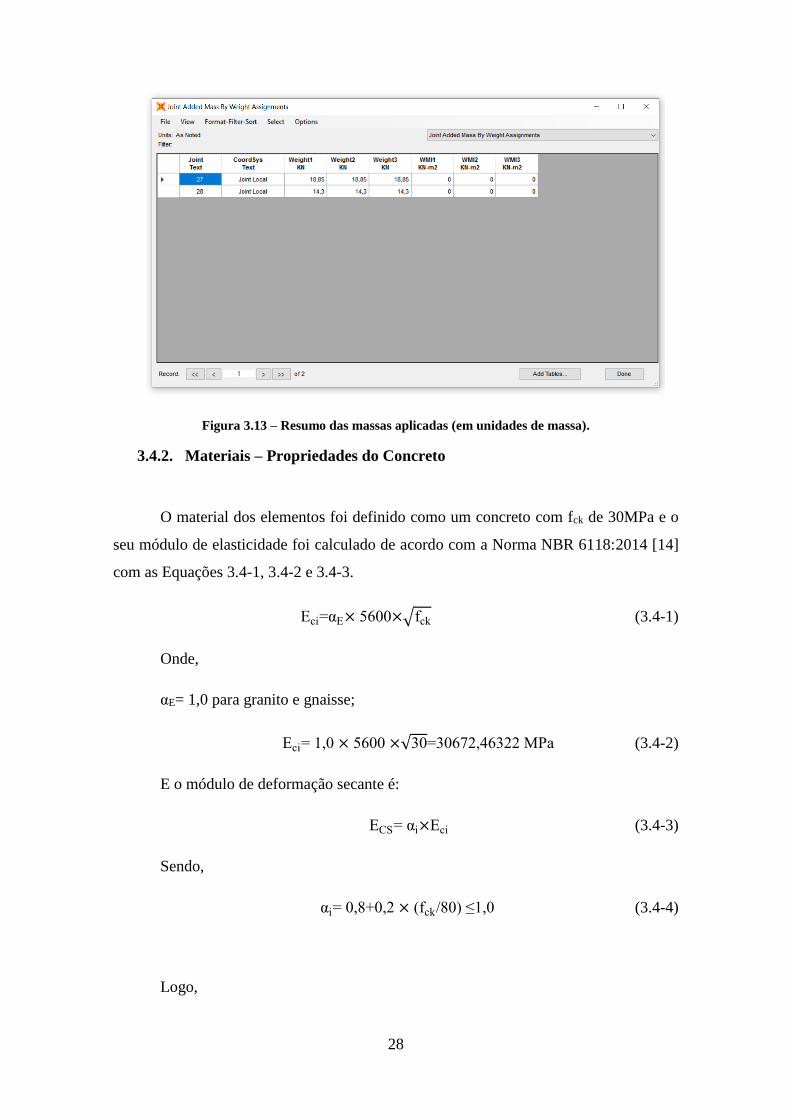
Além disso, foram aplicadas também as massas correspondentes aos pesos dos
equipamentos (previamente mostradas na Tabela 3.2) no topo das barras, como
apresentado na Figura 3.13. Na primeira barra foi aplicada a soma dos pesos do rotor e
do motor, e na segunda, foi aplicada a massa do ventilador
28
Figura 3.13 – Resumo das massas aplicadas (em unidades de massa).
3.4.2. Materiais – Propriedades do Concreto
O material dos elementos foi definido como um concreto com fck de 30MPa e o
seu módulo de elasticidade foi calculado de acordo com a Norma NBR 6118:2014 [14]
com as Equações 3.4-1, 3.4-2 e 3.4-3.
Eci=αE× 5600×√fck (3.4-1)
Onde,
αE= 1,0 para granito e gnaisse;
Eci= 1,0 × 5600 ×√30=30672,46322 MPa (3.4-2)
E o módulo de deformação secante é:
ECS= αi×Eci (3.4-3)
Sendo,
αi= 0,8+0,2 × (fck/80) ≤1,0 (3.4-4)
Logo,
29
αi=0,8+0,2 × (30/80)= 0,875 ≤1,0 (3.4-5)
ECS= 0,875 ×Eci=26838,405 MPa (3.4-6)
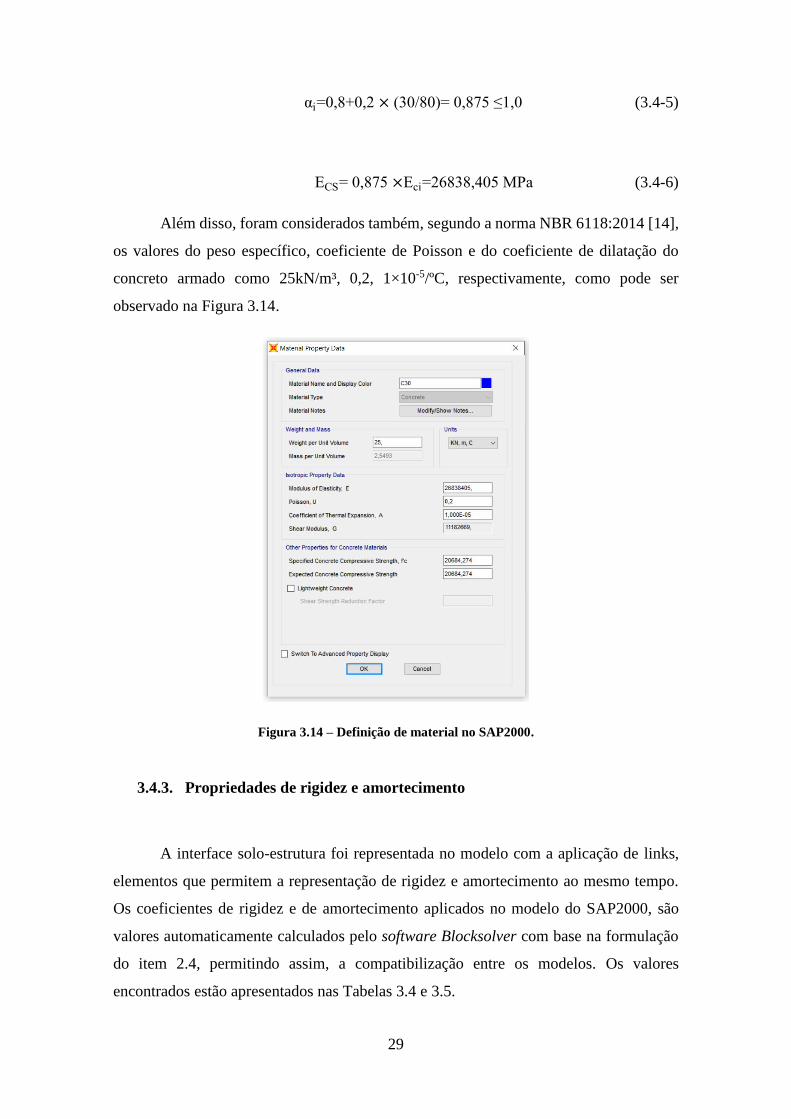
Além disso, foram considerados também, segundo a norma NBR 6118:2014 [14],
os valores do peso específico, coeficiente de Poisson e do coeficiente de dilatação do
concreto armado como 25kN/m³, 0,2, 1×10-5/ºC, respectivamente, como pode ser
observado na Figura 3.14.
Figura 3.14 – Definição de material no SAP2000.
3.4.3. Propriedades de rigidez e amortecimento
A interface solo-estrutura foi representada no modelo com a aplicação de links,
elementos que permitem a representação de rigidez e amortecimento ao mesmo tempo.
Os coeficientes de rigidez e de amortecimento aplicados no modelo do SAP2000, são
valores automaticamente calculados pelo software Blocksolver com base na formulação
do item 2.4, permitindo assim, a compatibilização entre os modelos. Os valores
encontrados estão apresentados nas Tabelas 3.4 e 3.5.
30
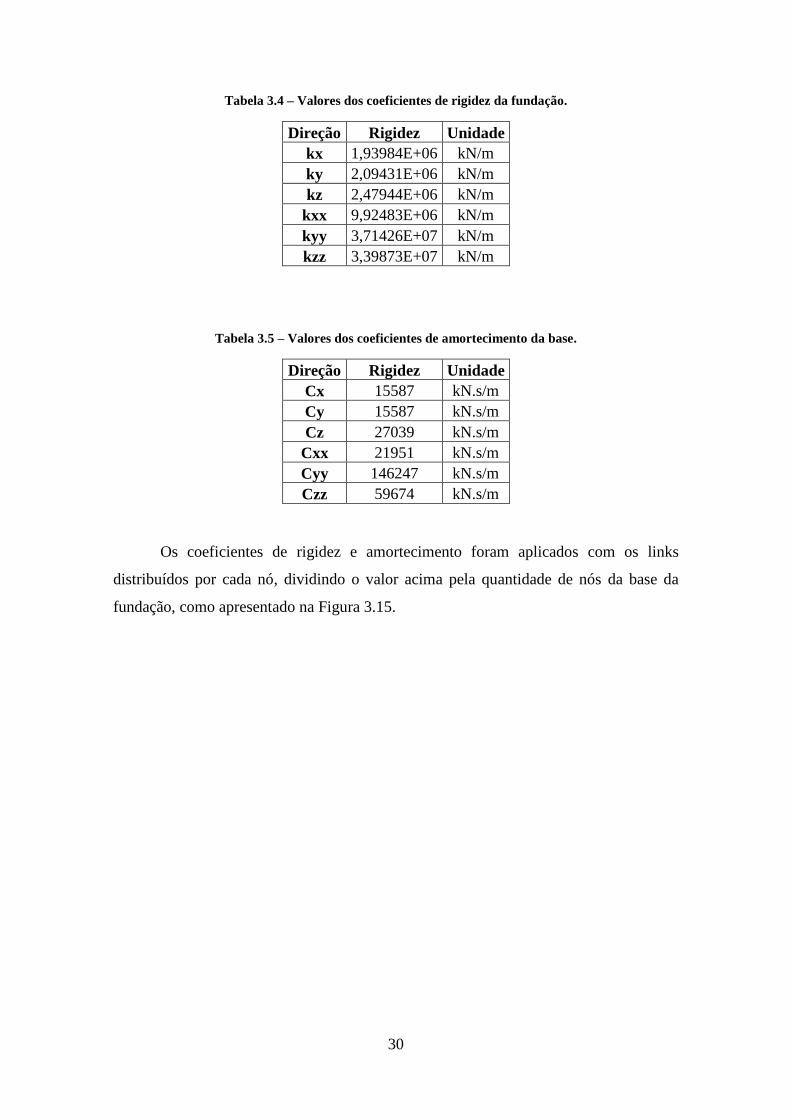
Tabela 3.4 – Valores dos coeficientes de rigidez da fundação.
Direção Rigidez Unidade
kx 1,93984E+06 kN/m
ky 2,09431E+06 kN/m
kz 2,47944E+06 kN/m
kxx 9,92483E+06 kN/m
kyy 3,71426E+07 kN/m
kzz 3,39873E+07 kN/m
Tabela 3.5 – Valores dos coeficientes de amortecimento da base.
Direção Rigidez Unidade
Cx 15587 kN.s/m
Cy 15587 kN.s/m
Cz 27039 kN.s/m
Cxx 21951 kN.s/m
Cyy 146247 kN.s/m
Czz 59674 kN.s/m
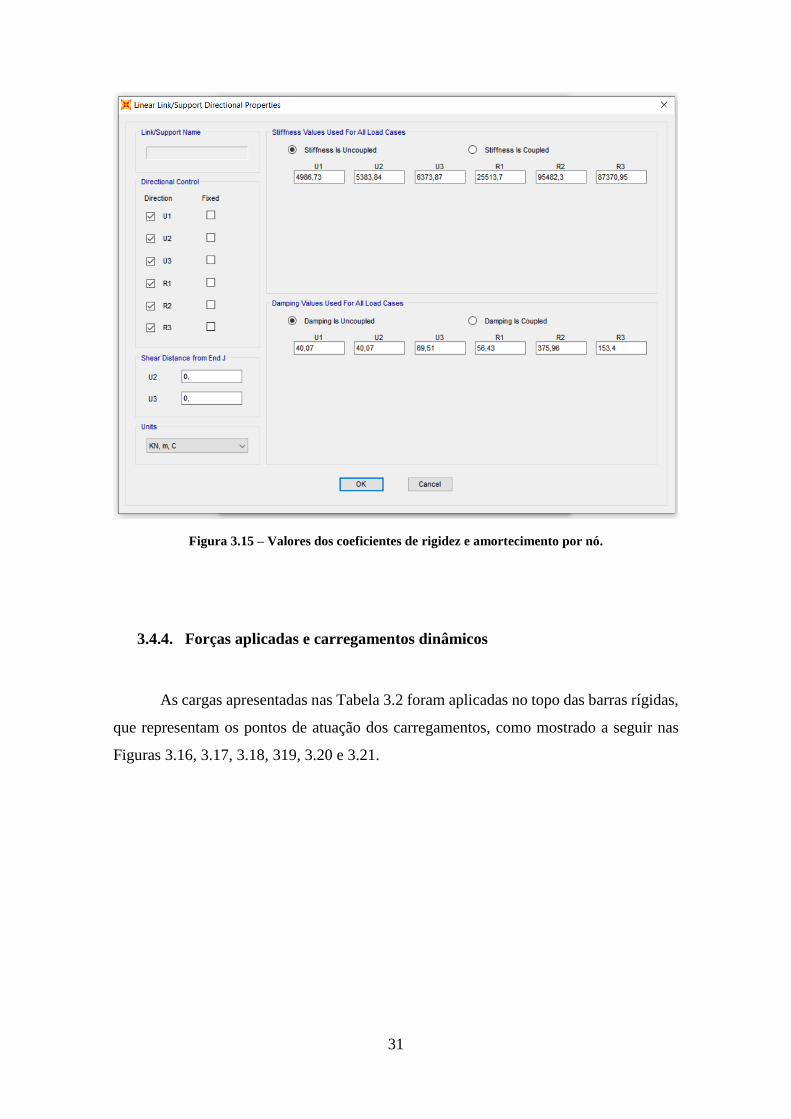
Os coeficientes de rigidez e amortecimento foram aplicados com os links
distribuídos por cada nó, dividindo o valor acima pela quantidade de nós da base da
fundação, como apresentado na Figura 3.15.
31
Figura 3.15 – Valores dos coeficientes de rigidez e amortecimento por nó.
3.4.4. Forças aplicadas e carregamentos dinâmicos
As cargas apresentadas nas Tabela 3.2 foram aplicadas no topo das barras rígidas,
que representam os pontos de atuação dos carregamentos, como mostrado a seguir nas
Figuras 3.16, 3.17, 3.18, 319, 3.20 e 3.21.
32
Figura 3.16 – Componente horizontal da carga gerada pelo motor.
Figura 3.17 – Componente vertical da carga gerada pelo motor.
33
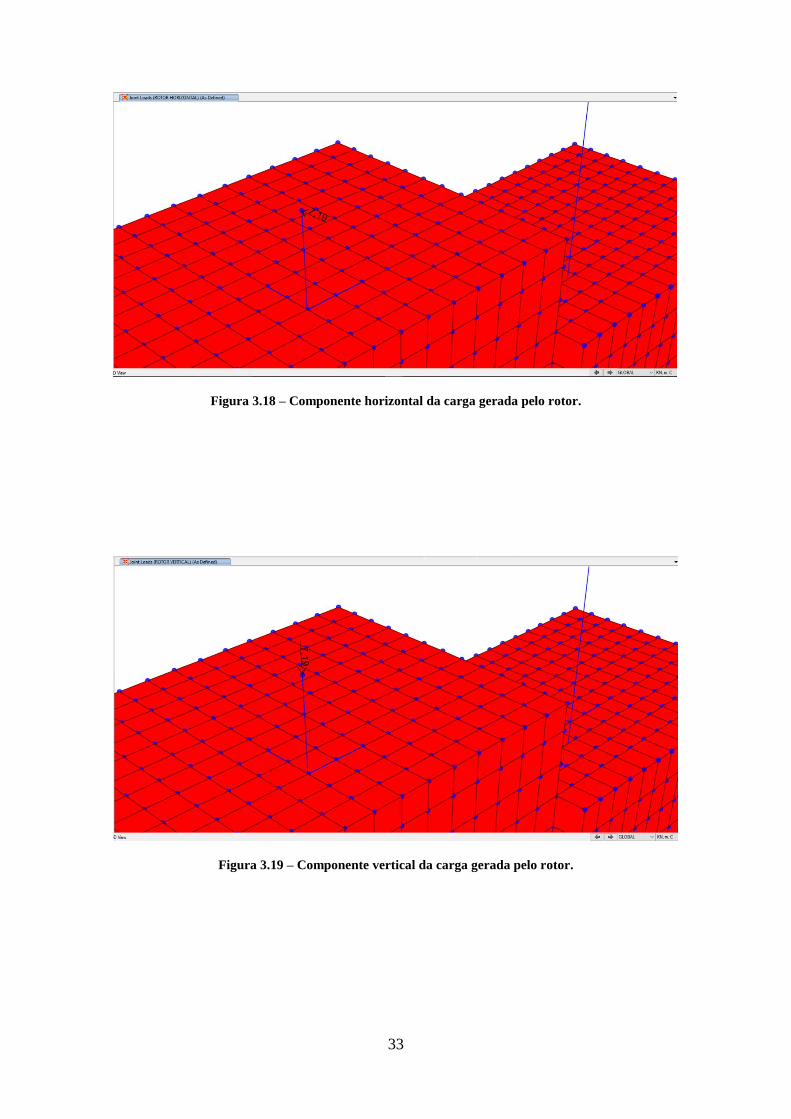
Figura 3.18 – Componente horizontal da carga gerada pelo rotor.
Figura 3.19 – Componente vertical da carga gerada pelo rotor.
34
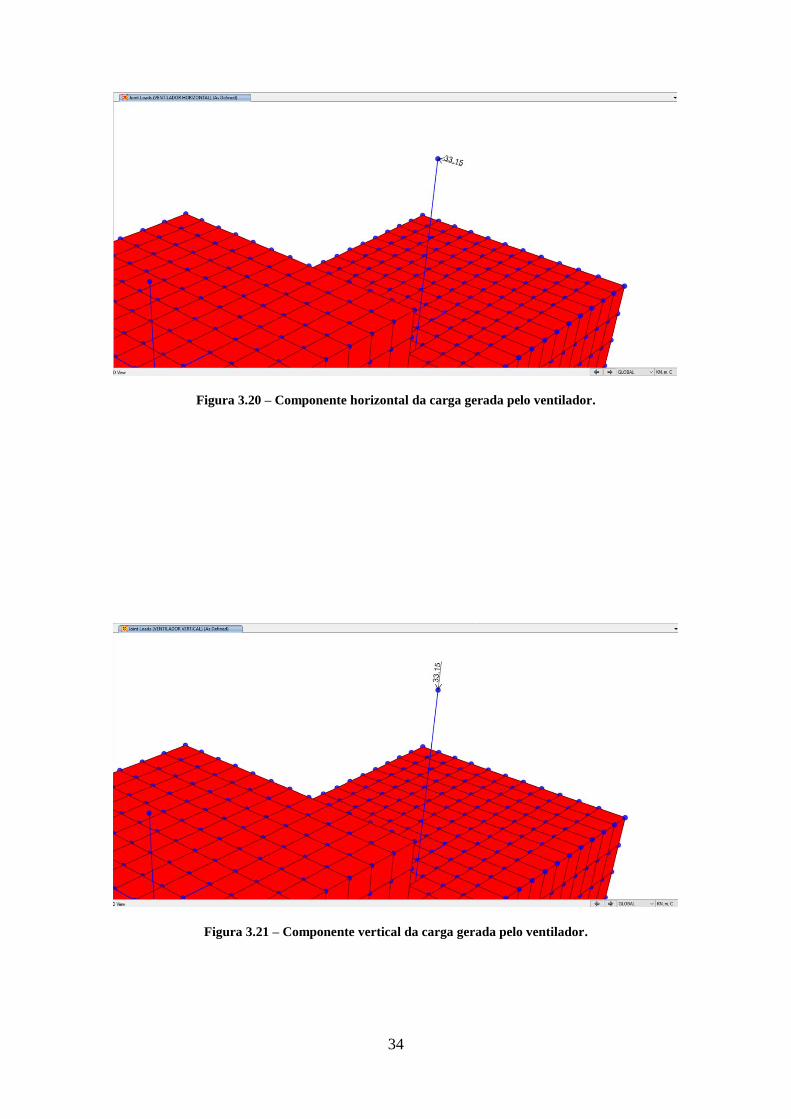
Figura 3.20 – Componente horizontal da carga gerada pelo ventilador.
Figura 3.21 – Componente vertical da carga gerada pelo ventilador.
35
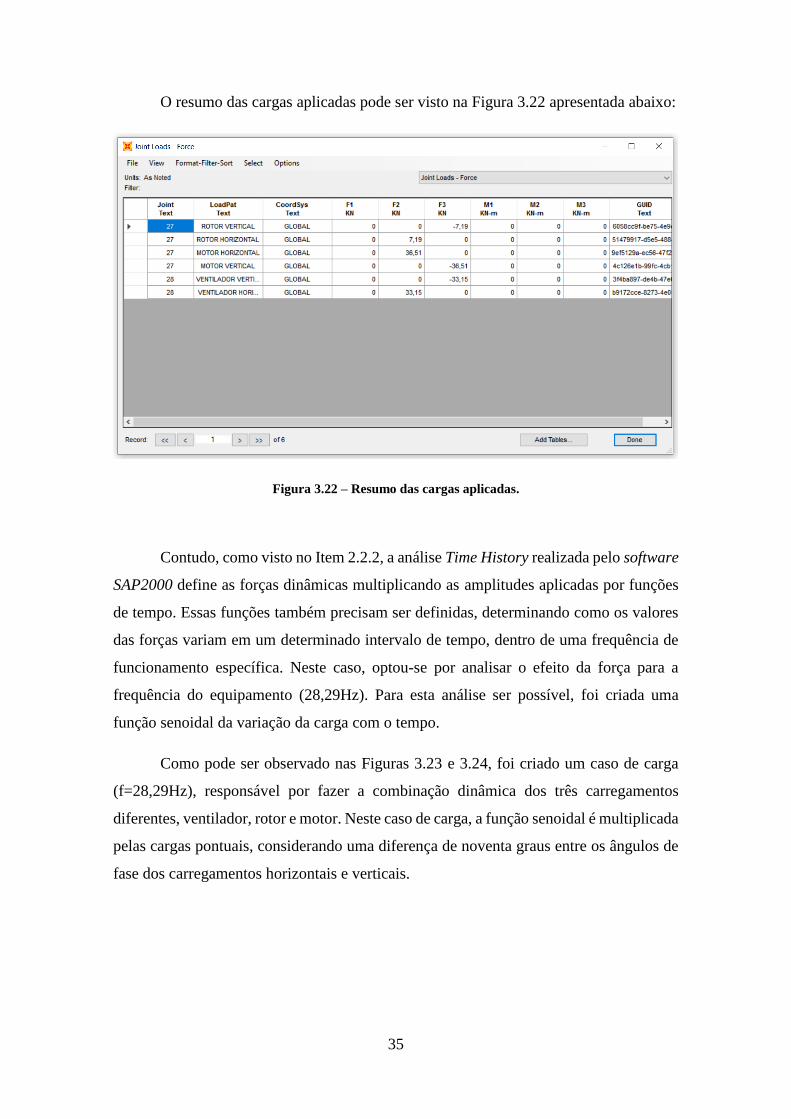
O resumo das cargas aplicadas pode ser visto na Figura 3.22 apresentada abaixo:
Figura 3.22 – Resumo das cargas aplicadas.
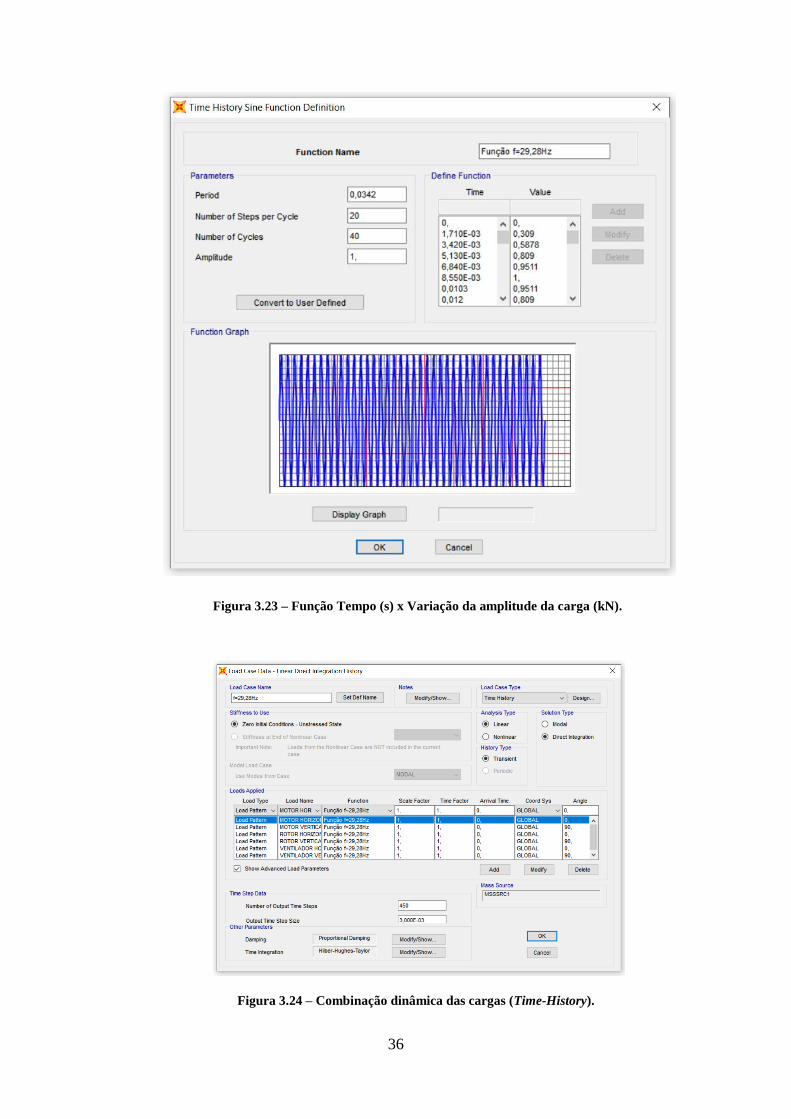
Contudo, como visto no Item 2.2.2, a análise Time History realizada pelo software
SAP2000 define as forças dinâmicas multiplicando as amplitudes aplicadas por funções
de tempo. Essas funções também precisam ser definidas, determinando como os valores
das forças variam em um determinado intervalo de tempo, dentro de uma frequência de
funcionamento específica. Neste caso, optou-se por analisar o efeito da força para a
frequência do equipamento (28,29Hz). Para esta análise ser possível, foi criada uma
função senoidal da variação da carga com o tempo.
Como pode ser observado nas Figuras 3.23 e 3.24, foi criado um caso de carga
(f=28,29Hz), responsável por fazer a combinação dinâmica dos três carregamentos
diferentes, ventilador, rotor e motor. Neste caso de carga, a função senoidal é multiplicada
pelas cargas pontuais, considerando uma diferença de noventa graus entre os ângulos de
fase dos carregamentos horizontais e verticais.
36
Figura 3.23 – Função Tempo (s) x Variação da amplitude da carga (kN).
Figura 3.24 – Combinação dinâmica das cargas (Time-History).
37
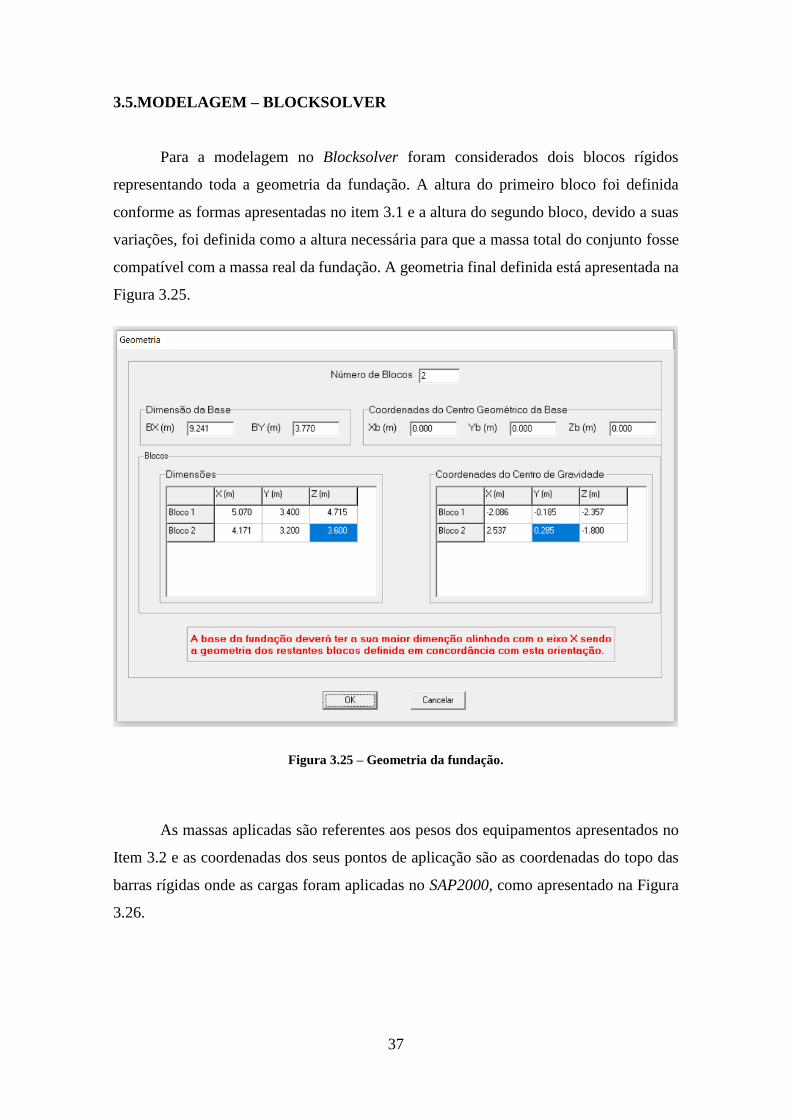
3.5.MODELAGEM – BLOCKSOLVER
Para a modelagem no Blocksolver foram considerados dois blocos rígidos
representando toda a geometria da fundação. A altura do primeiro bloco foi definida
conforme as formas apresentadas no item 3.1 e a altura do segundo bloco, devido a suas
variações, foi definida como a altura necessária para que a massa total do conjunto fosse
compatível com a massa real da fundação. A geometria final definida está apresentada na
Figura 3.25.
Figura 3.25 – Geometria da fundação.
As massas aplicadas são referentes aos pesos dos equipamentos apresentados no
Item 3.2 e as coordenadas dos seus pontos de aplicação são as coordenadas do topo das
barras rígidas onde as cargas foram aplicadas no SAP2000, como apresentado na Figura
3.26.
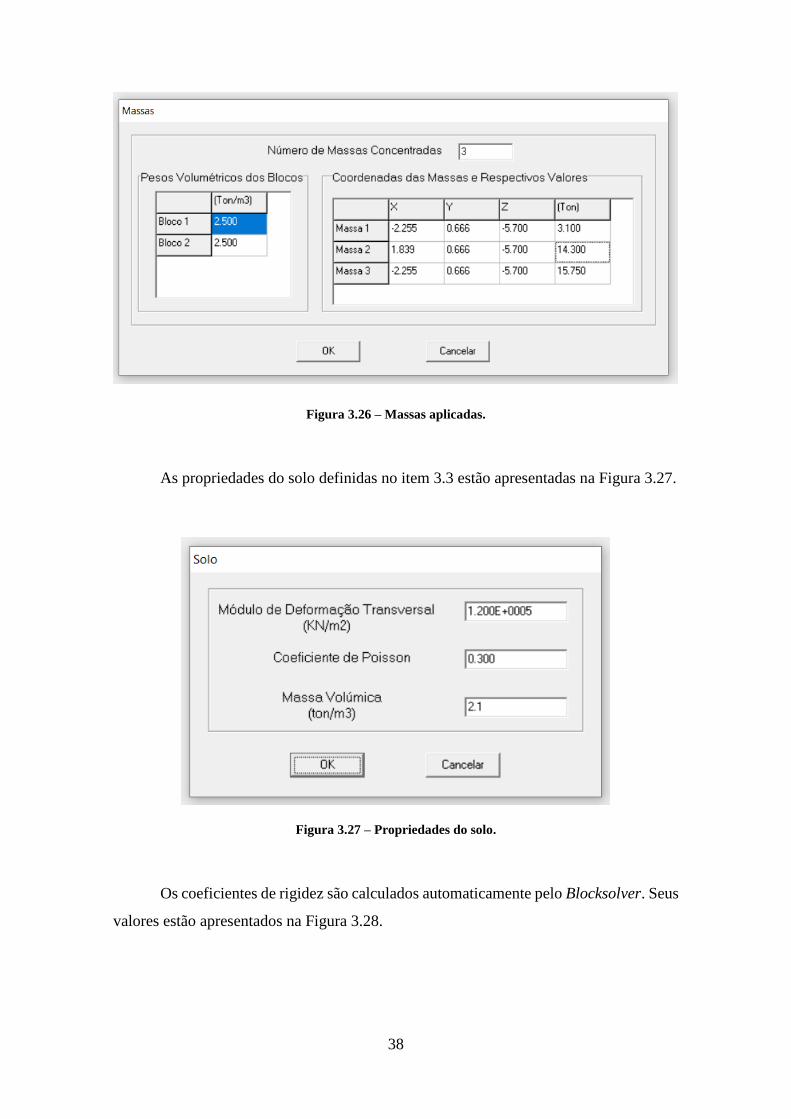
38
Figura 3.26 – Massas aplicadas.
As propriedades do solo definidas no item 3.3 estão apresentadas na Figura 3.27.
Figura 3.27 – Propriedades do solo.
Os coeficientes de rigidez são calculados automaticamente pelo Blocksolver. Seus
valores estão apresentados na Figura 3.28.
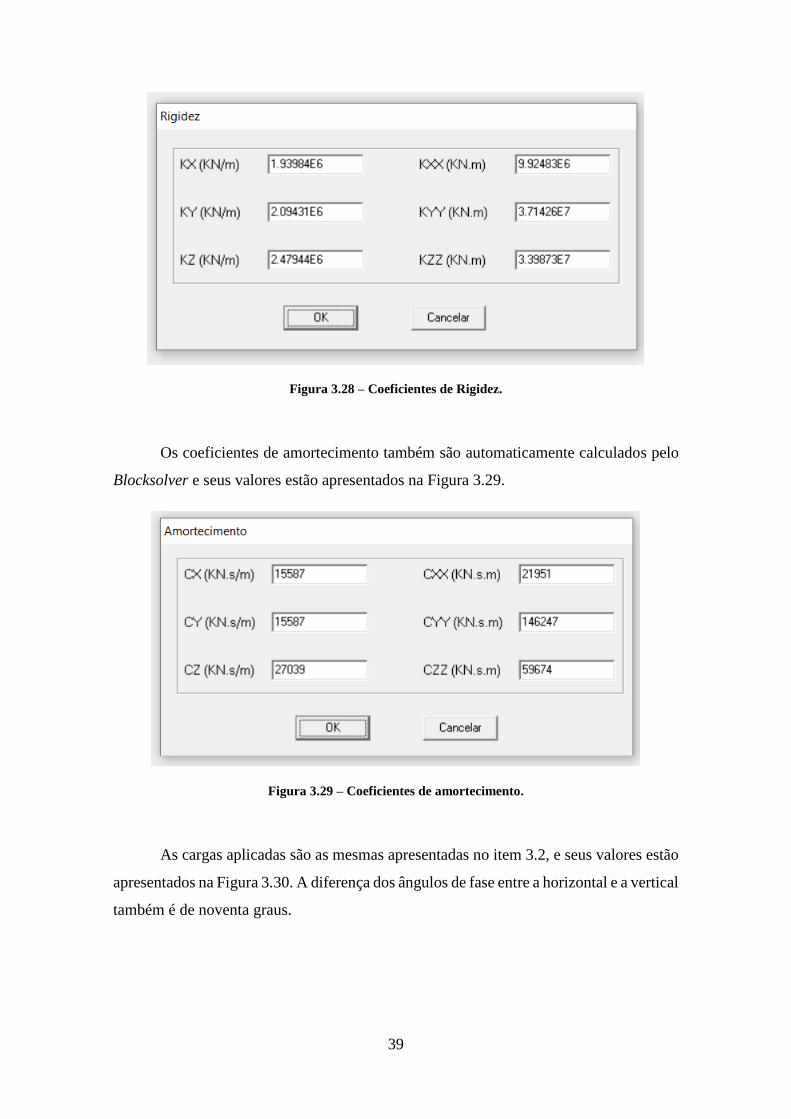
39
Figura 3.28 – Coeficientes de Rigidez.
Os coeficientes de amortecimento também são automaticamente calculados pelo
Blocksolver e seus valores estão apresentados na Figura 3.29.
Figura 3.29 – Coeficientes de amortecimento.
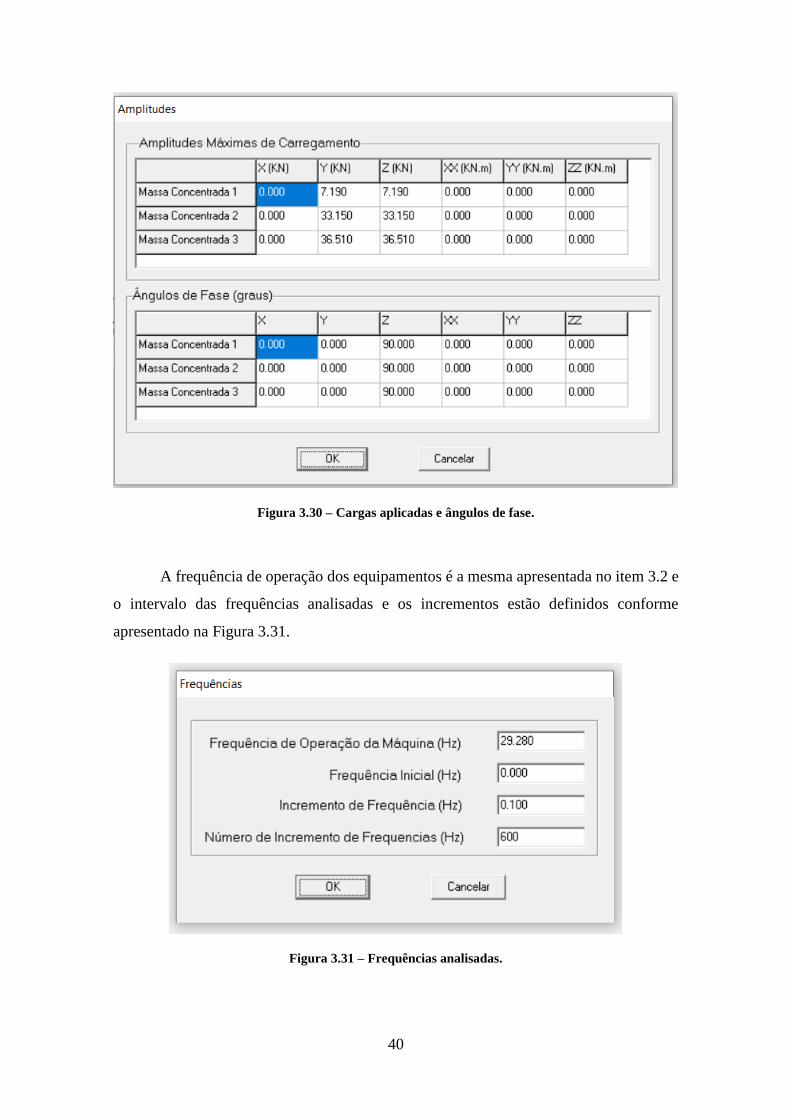
As cargas aplicadas são as mesmas apresentadas no item 3.2, e seus valores estão
apresentados na Figura 3.30. A diferença dos ângulos de fase entre a horizontal e a vertical
também é de noventa graus.
40
Figura 3.30 – Cargas aplicadas e ângulos de fase.
A frequência de operação dos equipamentos é a mesma apresentada no item 3.2 e
o intervalo das frequências analisadas e os incrementos estão definidos conforme
apresentado na Figura 3.31.
Figura 3.31 – Frequências analisadas.
41
4. APRESENTAÇÃO E ANÁLISE DOS RESULTADOS
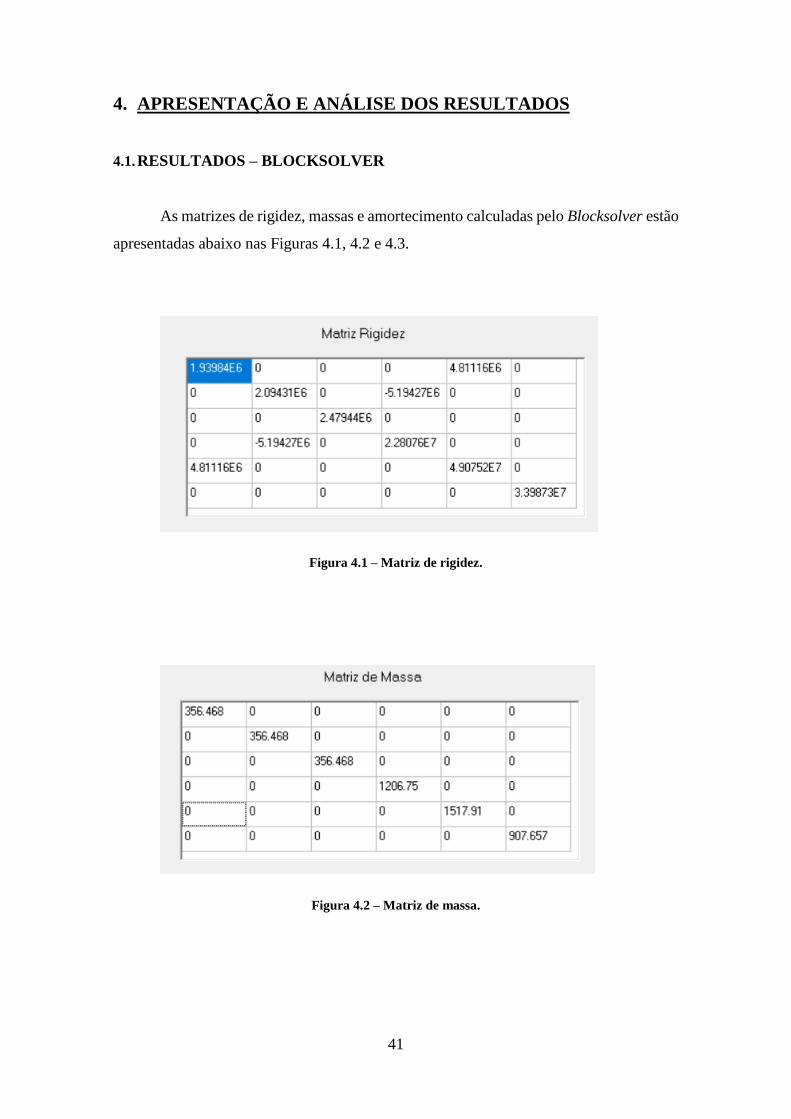
4.1. RESULTADOS – BLOCKSOLVER
As matrizes de rigidez, massas e amortecimento calculadas pelo Blocksolver estão
apresentadas abaixo nas Figuras 4.1, 4.2 e 4.3.
Figura 4.1 – Matriz de rigidez.
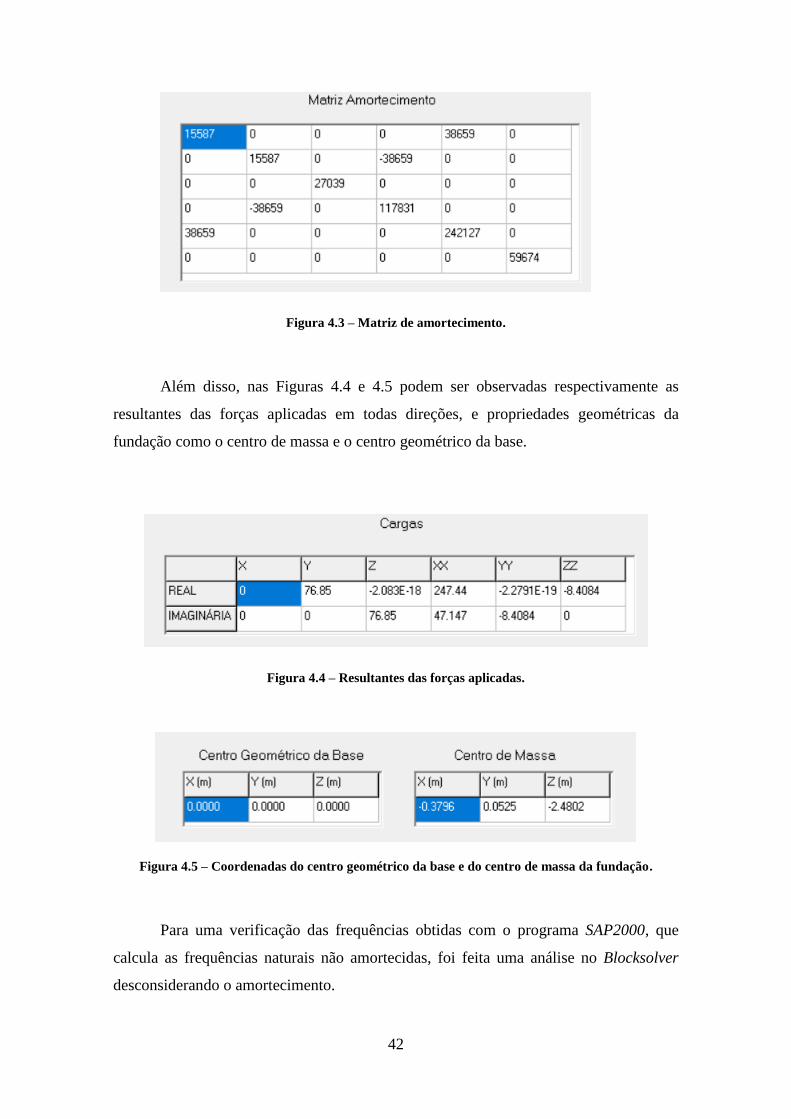
Figura 4.2 – Matriz de massa.
42
Figura 4.3 – Matriz de amortecimento.
Além disso, nas Figuras 4.4 e 4.5 podem ser observadas respectivamente as
resultantes das forças aplicadas em todas direções, e propriedades geométricas da
fundação como o centro de massa e o centro geométrico da base.
Figura 4.4 – Resultantes das forças aplicadas.
Figura 4.5 – Coordenadas do centro geométrico da base e do centro de massa da fundação.
Para uma verificação das frequências obtidas com o programa SAP2000, que
calcula as frequências naturais não amortecidas, foi feita uma análise no Blocksolver
desconsiderando o amortecimento.
43
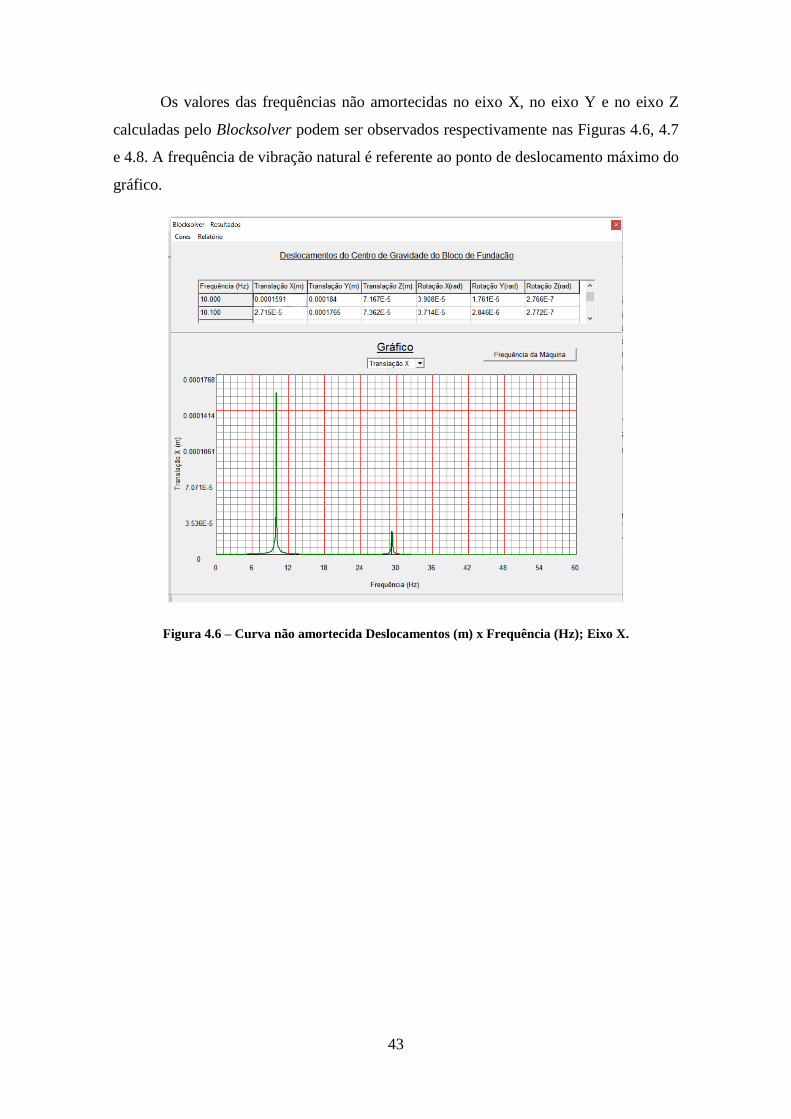
Os valores das frequências não amortecidas no eixo X, no eixo Y e no eixo Z
calculadas pelo Blocksolver podem ser observados respectivamente nas Figuras 4.6, 4.7
e 4.8. A frequência de vibração natural é referente ao ponto de deslocamento máximo do
gráfico.
Figura 4.6 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo X.

44
Figura 4.7 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Y.
Figura 4.8 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Z.
45
Das Figuras 4.6, 4.7 e 4.8 pode-se observar que as frequências de vibração naturais
da estrutura no eixo X, no eixo Y e no eixo Z, são respectivamente 10Hz, 7,40Hz e
13,30Hz.
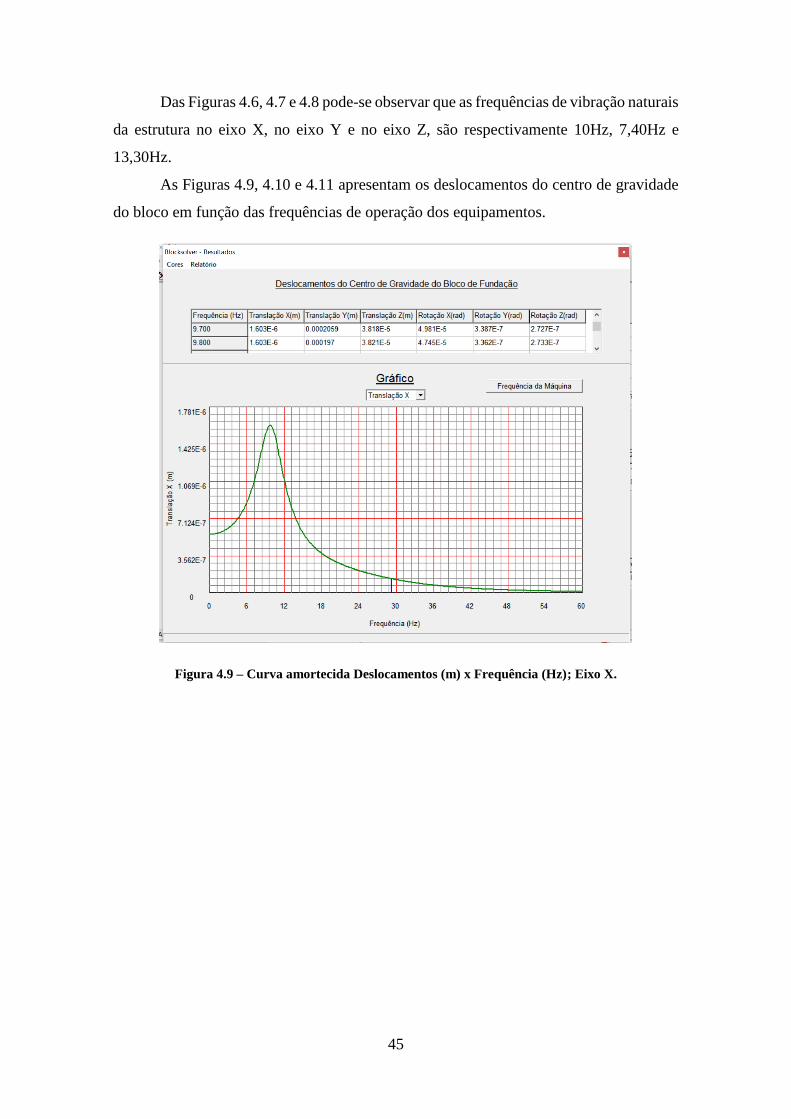
As Figuras 4.9, 4.10 e 4.11 apresentam os deslocamentos do centro de gravidade
do bloco em função das frequências de operação dos equipamentos.
Figura 4.9 – Curva amortecida Deslocamentos (m) x Frequência (Hz); Eixo X.
46
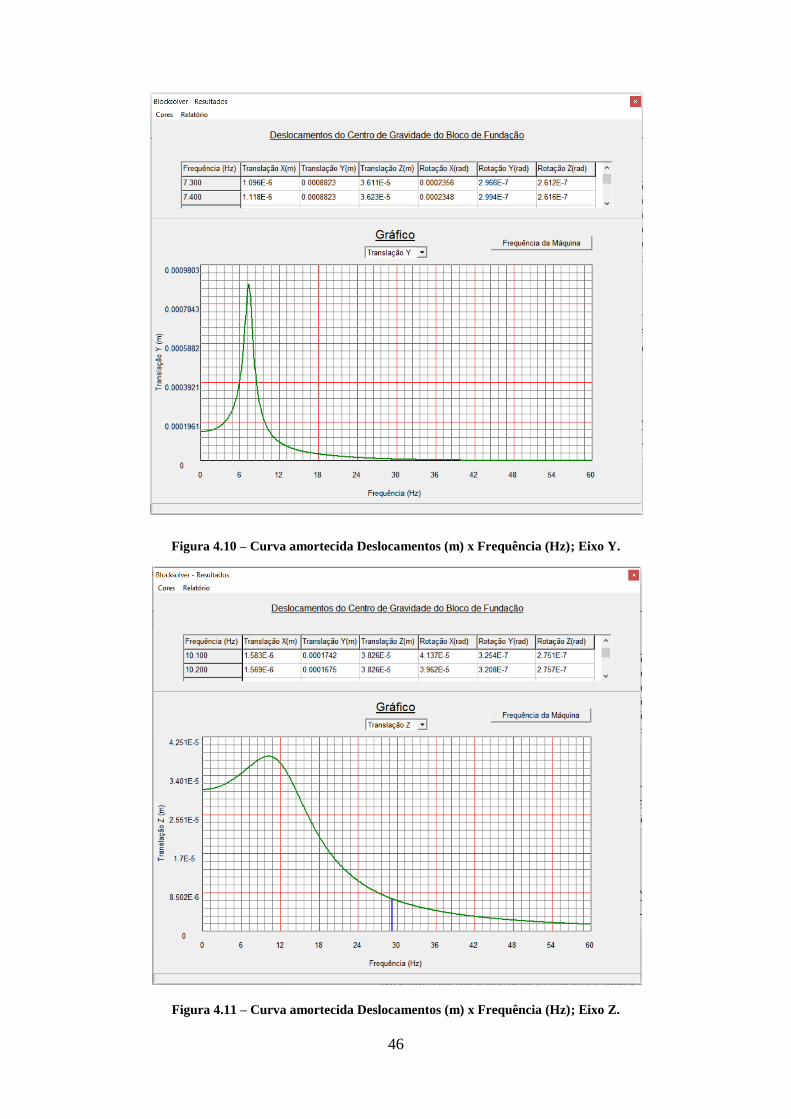
Figura 4.10 – Curva amortecida Deslocamentos (m) x Frequência (Hz); Eixo Y.
Figura 4.11 – Curva amortecida Deslocamentos (m) x Frequência (Hz); Eixo Z.
47
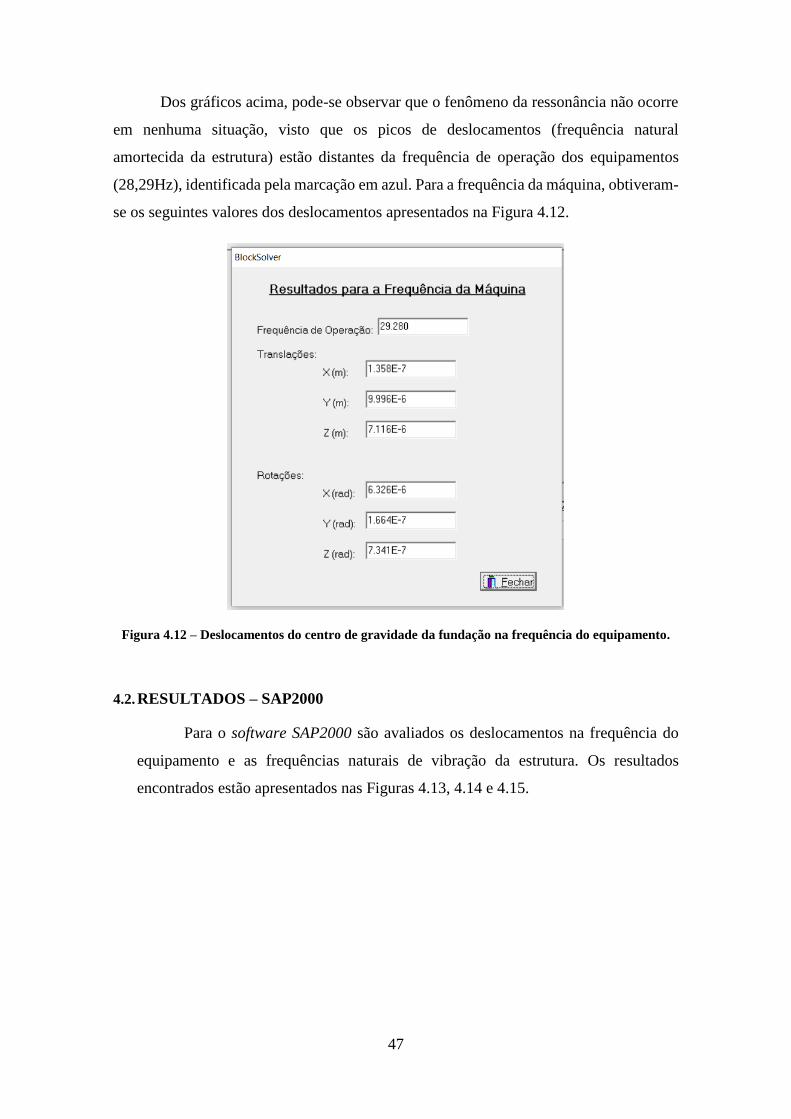
Dos gráficos acima, pode-se observar que o fenômeno da ressonância não ocorre
em nenhuma situação, visto que os picos de deslocamentos (frequência natural
amortecida da estrutura) estão distantes da frequência de operação dos equipamentos
(28,29Hz), identificada pela marcação em azul. Para a frequência da máquina, obtiveram-
se os seguintes valores dos deslocamentos apresentados na Figura 4.12.
Figura 4.12 – Deslocamentos do centro de gravidade da fundação na frequência do equipamento.
4.2. RESULTADOS – SAP2000
Para o software SAP2000 são avaliados os deslocamentos na frequência do
equipamento e as frequências naturais de vibração da estrutura. Os resultados
encontrados estão apresentados nas Figuras 4.13, 4.14 e 4.15.
48
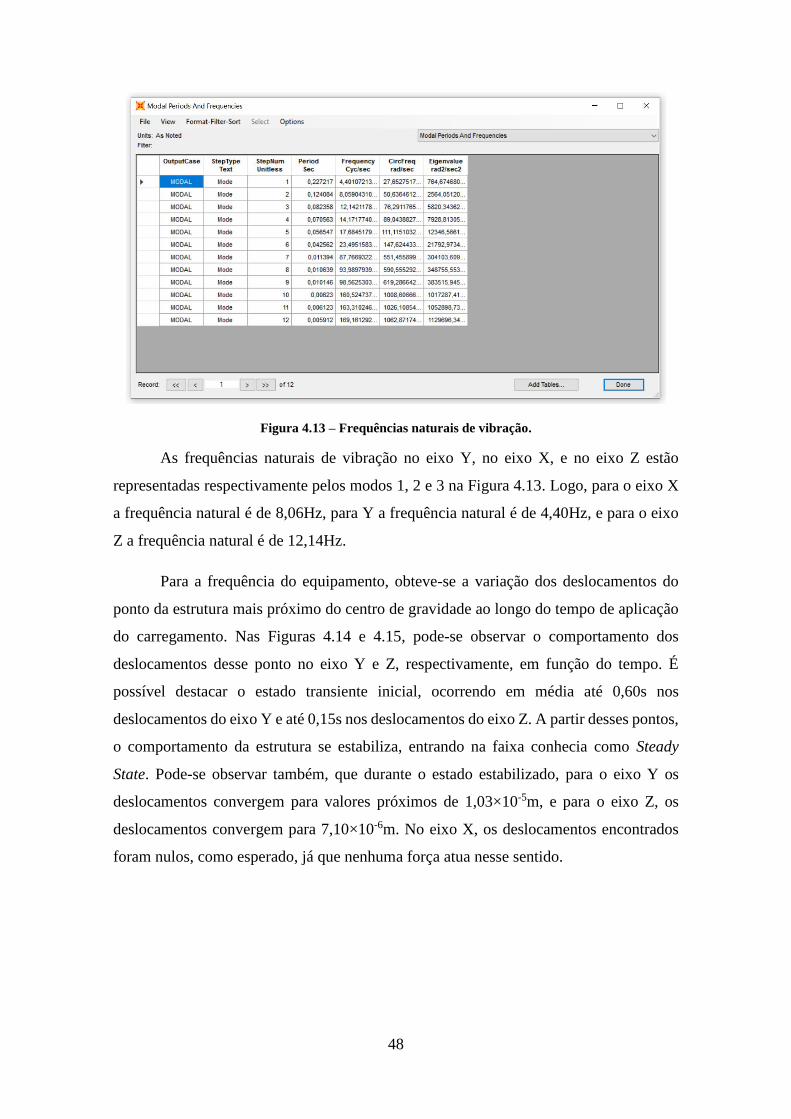
Figura 4.13 – Frequências naturais de vibração.
As frequências naturais de vibração no eixo Y, no eixo X, e no eixo Z estão
representadas respectivamente pelos modos 1, 2 e 3 na Figura 4.13. Logo, para o eixo X
a frequência natural é de 8,06Hz, para Y a frequência natural é de 4,40Hz, e para o eixo
Z a frequência natural é de 12,14Hz.
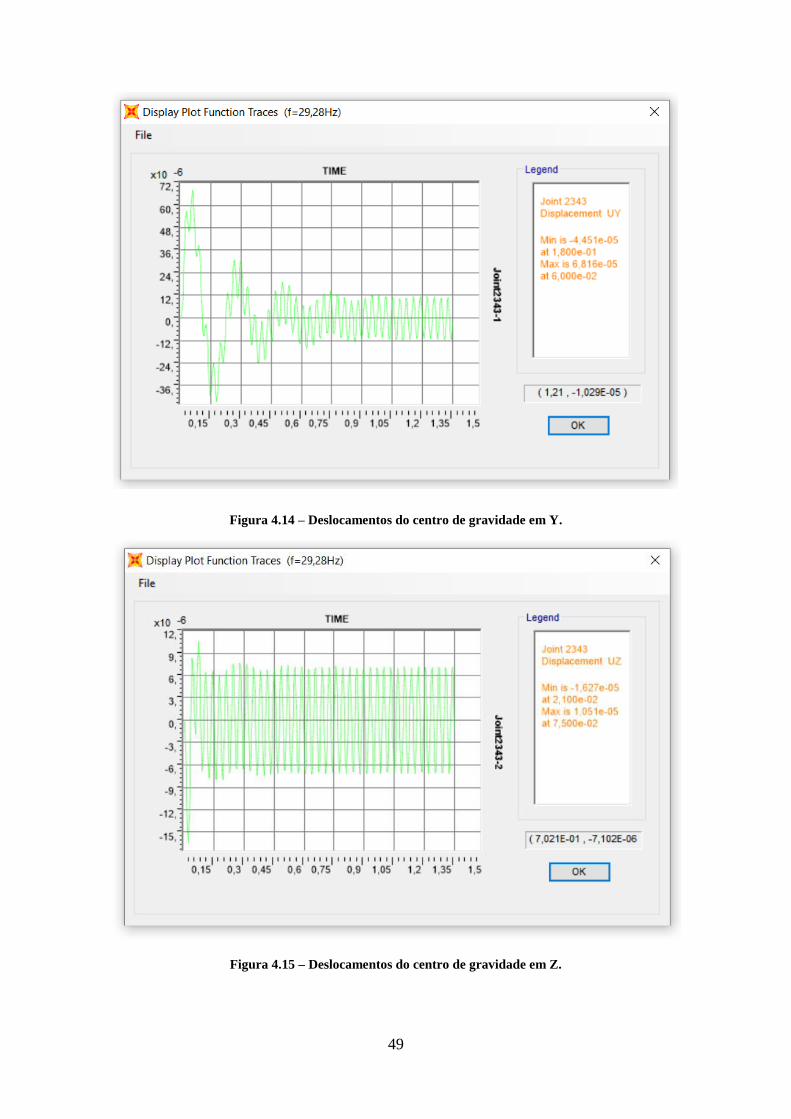
Para a frequência do equipamento, obteve-se a variação dos deslocamentos do
ponto da estrutura mais próximo do centro de gravidade ao longo do tempo de aplicação
do carregamento. Nas Figuras 4.14 e 4.15, pode-se observar o comportamento dos
deslocamentos desse ponto no eixo Y e Z, respectivamente, em função do tempo. É
possível destacar o estado transiente inicial, ocorrendo em média até 0,60s nos
deslocamentos do eixo Y e até 0,15s nos deslocamentos do eixo Z. A partir desses pontos,
o comportamento da estrutura se estabiliza, entrando na faixa conhecia como Steady
State. Pode-se observar também, que durante o estado estabilizado, para o eixo Y os
deslocamentos convergem para valores próximos de 1,03×10-5m, e para o eixo Z, os
deslocamentos convergem para 7,10×10-6m. No eixo X, os deslocamentos encontrados
foram nulos, como esperado, já que nenhuma força atua nesse sentido.
49
Figura 4.14 – Deslocamentos do centro de gravidade em Y.
Figura 4.15 – Deslocamentos do centro de gravidade em Z.
50
4.3. COMPARAÇÃO ENTRE OS MODELOS
Para as frequências naturais da estrutura, os resultados obtidos por cada modelo
estão apresentados na Tabela 4.1.
Tabela 4.1 – Frequências naturais da estrutura.
Frequências naturais de vibração
SAP2000
(Hz)
Blocksolver
(Hz) Diferença percentual (%)
Eixo X 8,06 10,0 19,40
Eixo Y 4,40 7,40 40,54
Eixo Z 12,14 13,30 8,72
Dos valores encontrados, pode-se observar que os resultados são compatíveis no
eixo Z, com diferença percentual de aproximadamente 9% (aproximadamente 1Hz). Já
nos eixos X e Y, a frequência encontrada no SAP2000 tem diferenças significativas, entre
19 e 40% em relação as frequências encontradas no Blocksolver.
Para os deslocamentos, os resultados obtidos por cada modelo estão apresentados
na Tabela 4.2.
Tabela 4.2 – Valores dos deslocamentos do CG.
Deslocamentos do CG
SAP2000 (m) Blocksolver (m) Diferença percentual (%)
Eixo Y 1,03×10-5 9,99×10-6 3,01
Eixo Z 7,10×10-6 7,11×10-6 0,14
Pode-se observar que os valores encontrados pelos dois modelos são compatíveis,
com diferenças percentuais de até aproximadamente 3%.
Outro ponto que deve ser analisado é se as velocidades e os deslocamentos
encontrados estão na faixa aceitável dentro dos limites impostos pelos critérios de projeto
apresentados no Item 2.5.
Primeiramente, de acordo com os deslocamentos e a frequência de funcionamento
das máquinas, foi calculada e velocidade efetiva com as Equações 4.3-1 e 4.3-2.
vrms=√1/2 × (v12+v2
2+…+vn2) (4.3-1)
Onde,
v = δ × ω (4.3-2)
51
Como, neste caso, só existe uma frequência específica sendo analisada, pode-se
resumir as expressões acima à equação 4.3-3. A velocidade efetiva para o deslocamento
máximo encontrado (1,03×10-5m) foi calculada com a Equação 4.3-4:
vrms= √1/2 × ω × δ (4.3-3)
vrms= √1/2 × 2 × π × f × δ =
√1/2 × 2 × π × 29,28 × 1,03 ×10-2
= 1,34mm/s (4.3-4)
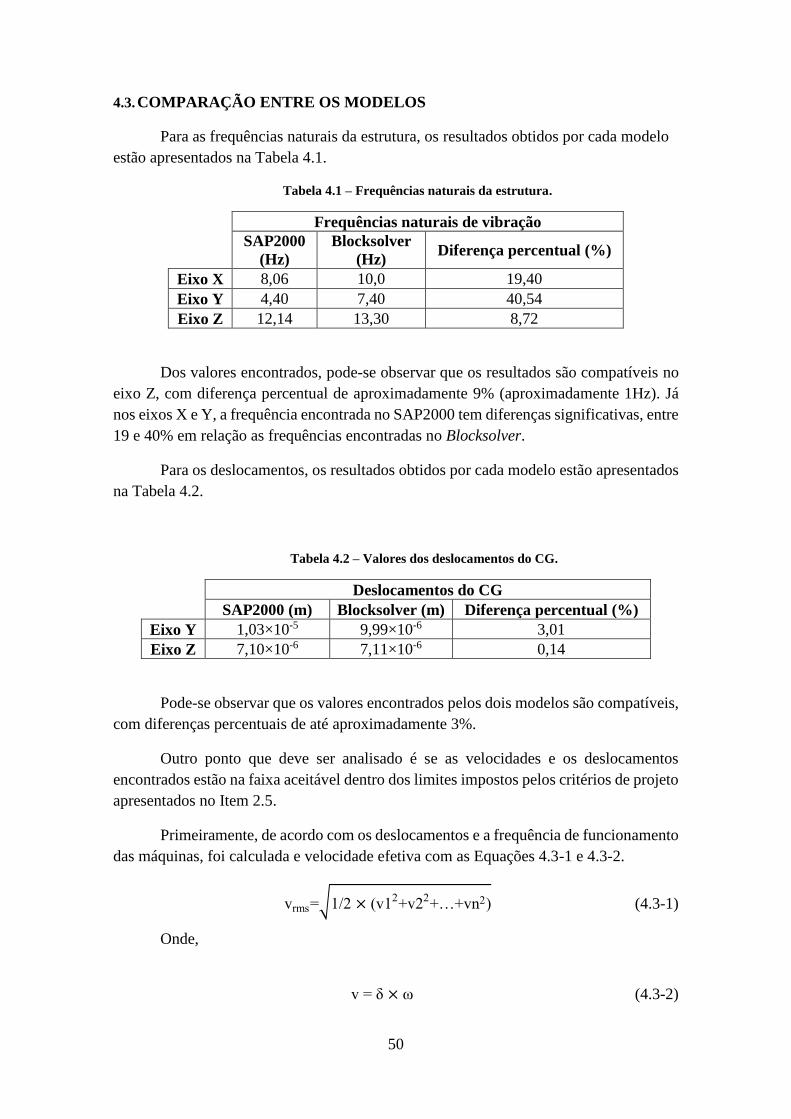
Figura 4.16 – Tabela de faixas de velocidade, classe de equipamentos e faixas de operação
(Resultados).
Com o valor da velocidade calculado pela Equação 4.3-4 (1,34mm/s) e sabendo
que os equipamentos apoiados no bloco de fundação são máquinas pesadas, pode-se
observar que para este caso, a faixa de funcionamento é a Faixa A (Faixa ótima).
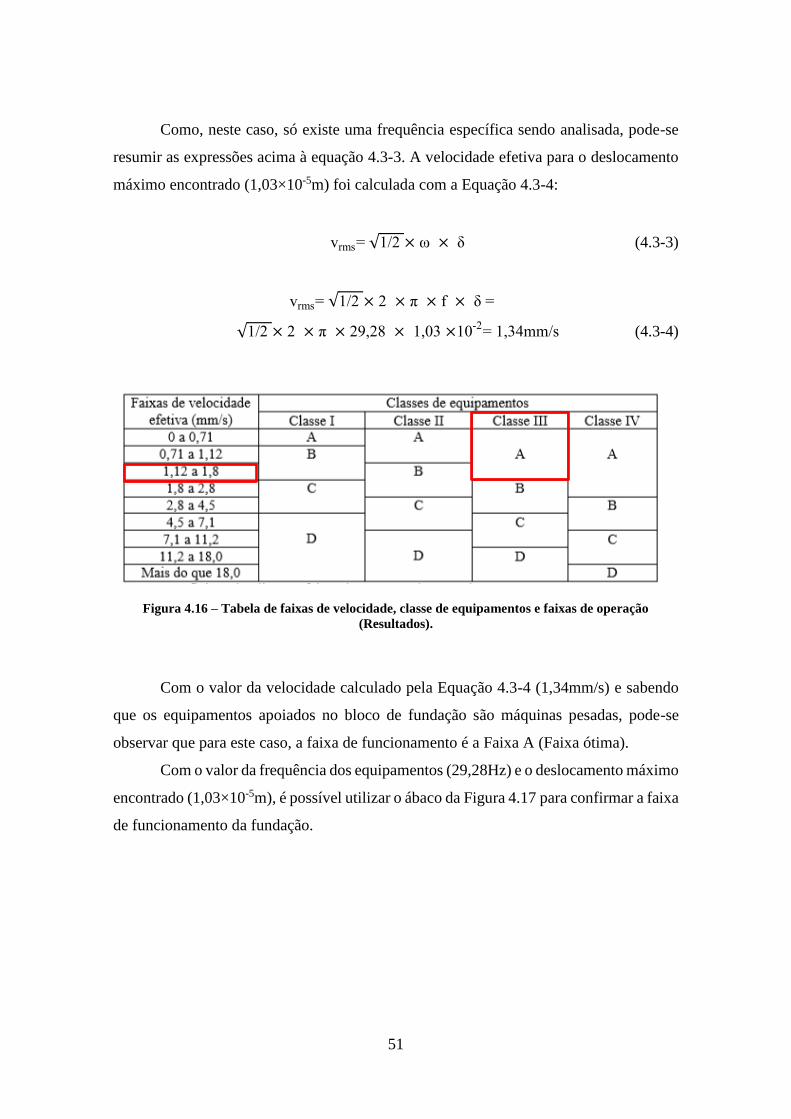
Com o valor da frequência dos equipamentos (29,28Hz) e o deslocamento máximo
encontrado (1,03×10-5m), é possível utilizar o ábaco da Figura 4.17 para confirmar a faixa
de funcionamento da fundação.
52
Figura 4.17 – Ábaco de deslocamentos x Frequência de operação x Velocidades efetivas
(Resultados).
Como pôde ser observado, pelo ábaco a faixa encontrada para os deslocamentos
também é a faixa ótima, confirmando graficamente a avaliação anterior.
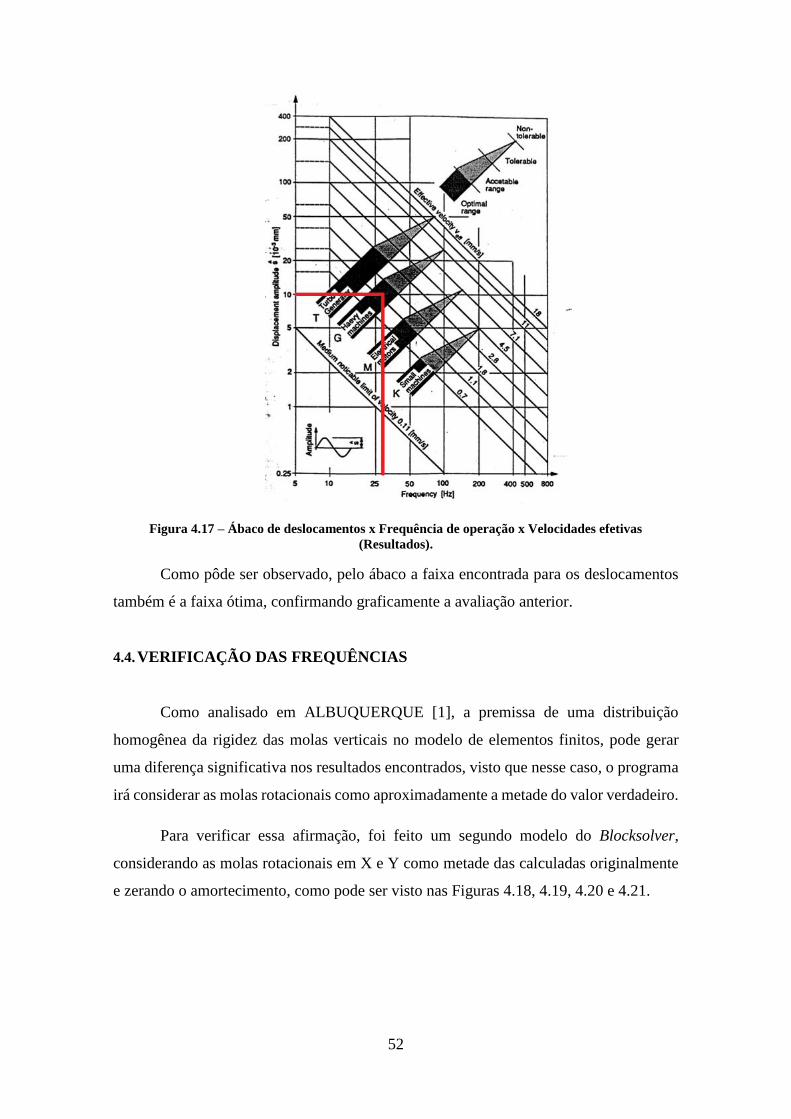
4.4. VERIFICAÇÃO DAS FREQUÊNCIAS
Como analisado em ALBUQUERQUE [1], a premissa de uma distribuição
homogênea da rigidez das molas verticais no modelo de elementos finitos, pode gerar
uma diferença significativa nos resultados encontrados, visto que nesse caso, o programa
irá considerar as molas rotacionais como aproximadamente a metade do valor verdadeiro.
Para verificar essa afirmação, foi feito um segundo modelo do Blocksolver,
considerando as molas rotacionais em X e Y como metade das calculadas originalmente
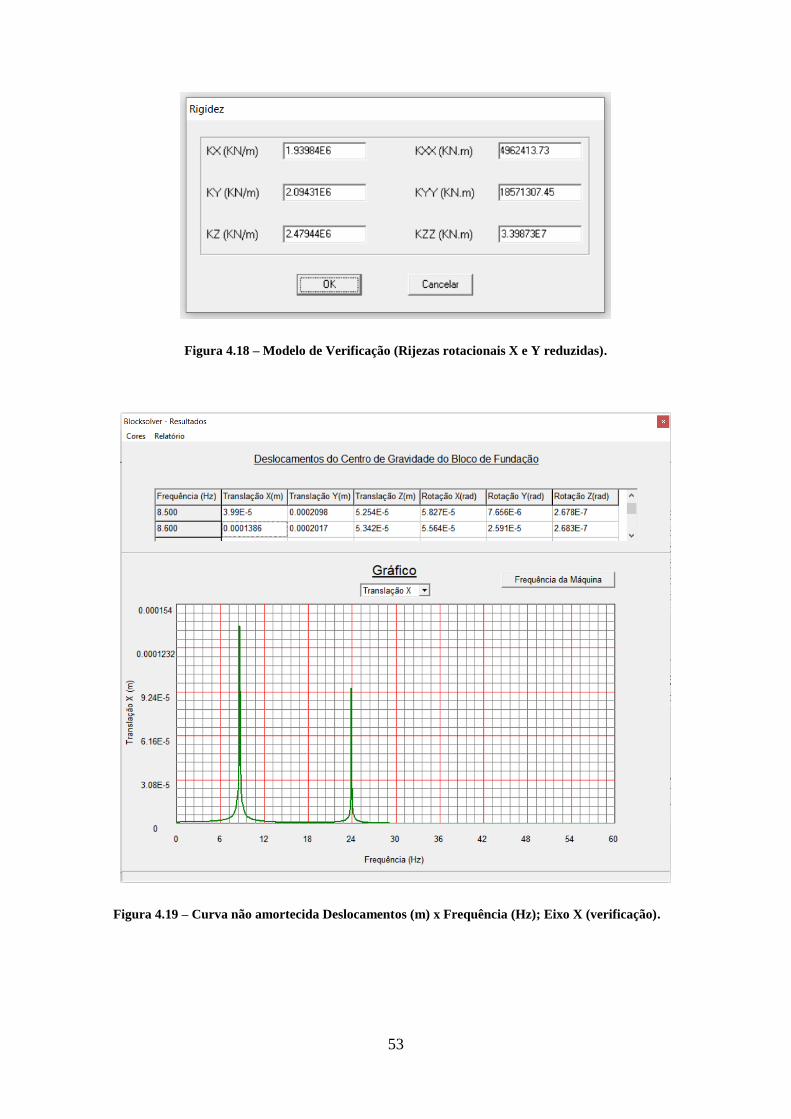
e zerando o amortecimento, como pode ser visto nas Figuras 4.18, 4.19, 4.20 e 4.21.
53
Figura 4.18 – Modelo de Verificação (Rijezas rotacionais X e Y reduzidas).
Figura 4.19 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo X (verificação).
54
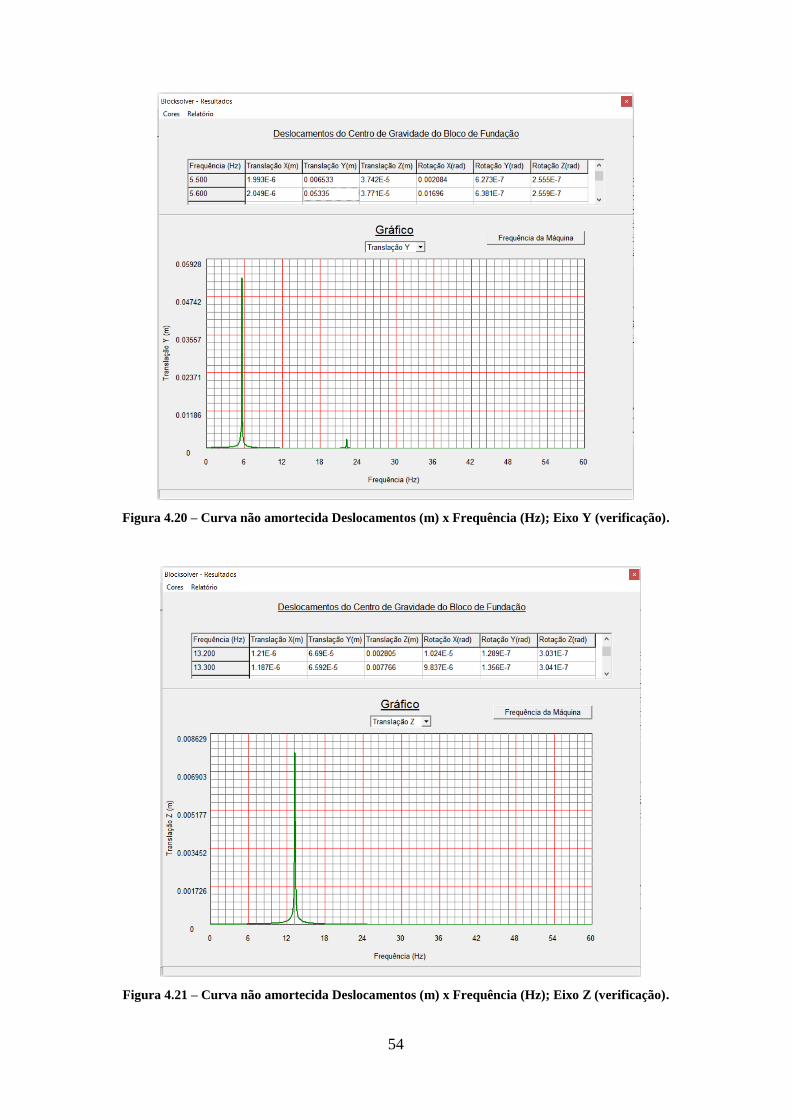
Figura 4.20 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Y (verificação).
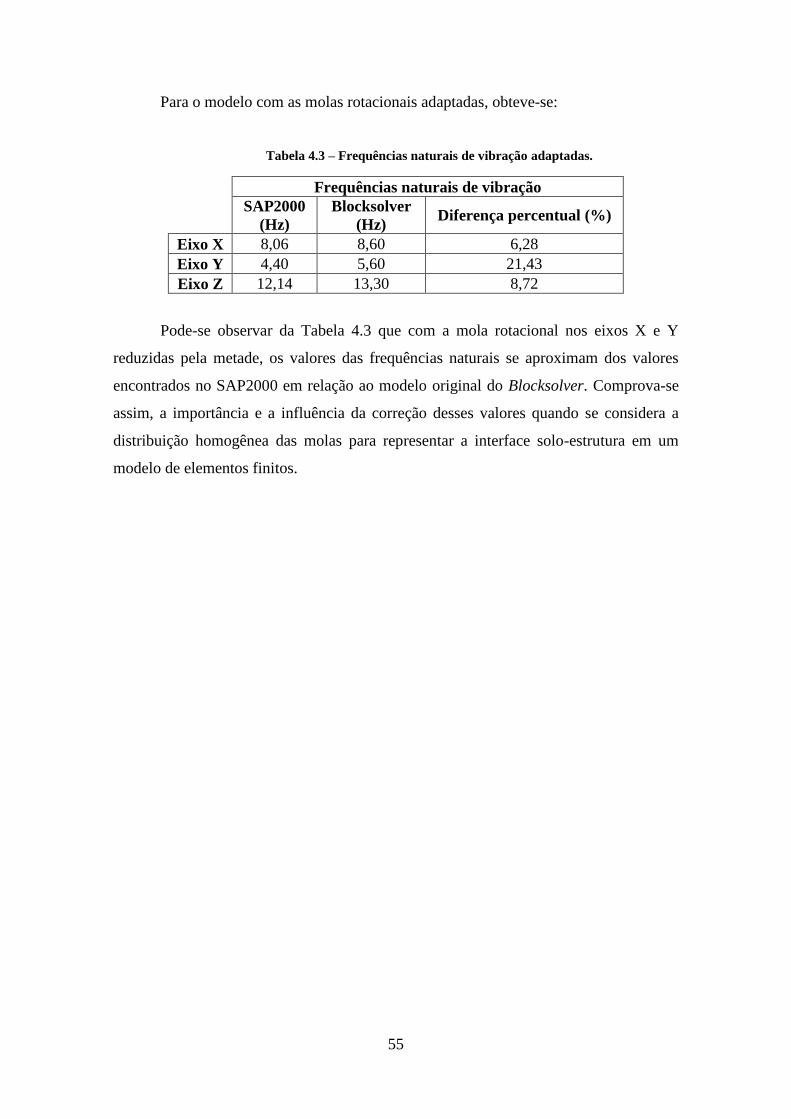
Figura 4.21 – Curva não amortecida Deslocamentos (m) x Frequência (Hz); Eixo Z (verificação).
55
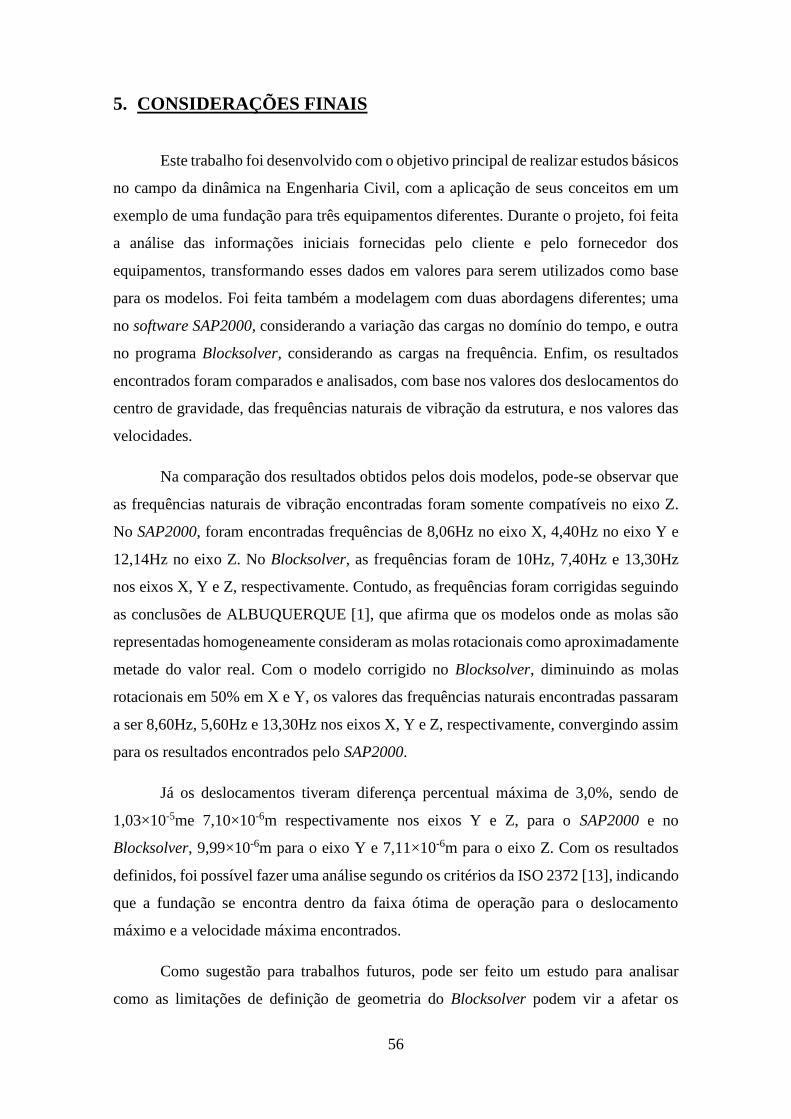
Para o modelo com as molas rotacionais adaptadas, obteve-se:
Tabela 4.3 – Frequências naturais de vibração adaptadas.
Frequências naturais de vibração
SAP2000
(Hz)
Blocksolver
(Hz) Diferença percentual (%)
Eixo X 8,06 8,60 6,28
Eixo Y 4,40 5,60 21,43
Eixo Z 12,14 13,30 8,72
Pode-se observar da Tabela 4.3 que com a mola rotacional nos eixos X e Y
reduzidas pela metade, os valores das frequências naturais se aproximam dos valores
encontrados no SAP2000 em relação ao modelo original do Blocksolver. Comprova-se
assim, a importância e a influência da correção desses valores quando se considera a
distribuição homogênea das molas para representar a interface solo-estrutura em um
modelo de elementos finitos.
56
5. CONSIDERAÇÕES FINAIS
Este trabalho foi desenvolvido com o objetivo principal de realizar estudos básicos
no campo da dinâmica na Engenharia Civil, com a aplicação de seus conceitos em um
exemplo de uma fundação para três equipamentos diferentes. Durante o projeto, foi feita
a análise das informações iniciais fornecidas pelo cliente e pelo fornecedor dos
equipamentos, transformando esses dados em valores para serem utilizados como base
para os modelos. Foi feita também a modelagem com duas abordagens diferentes; uma
no software SAP2000, considerando a variação das cargas no domínio do tempo, e outra
no programa Blocksolver, considerando as cargas na frequência. Enfim, os resultados
encontrados foram comparados e analisados, com base nos valores dos deslocamentos do
centro de gravidade, das frequências naturais de vibração da estrutura, e nos valores das
velocidades.
Na comparação dos resultados obtidos pelos dois modelos, pode-se observar que
as frequências naturais de vibração encontradas foram somente compatíveis no eixo Z.
No SAP2000, foram encontradas frequências de 8,06Hz no eixo X, 4,40Hz no eixo Y e
12,14Hz no eixo Z. No Blocksolver, as frequências foram de 10Hz, 7,40Hz e 13,30Hz
nos eixos X, Y e Z, respectivamente. Contudo, as frequências foram corrigidas seguindo
as conclusões de ALBUQUERQUE [1], que afirma que os modelos onde as molas são
representadas homogeneamente consideram as molas rotacionais como aproximadamente
metade do valor real. Com o modelo corrigido no Blocksolver, diminuindo as molas
rotacionais em 50% em X e Y, os valores das frequências naturais encontradas passaram
a ser 8,60Hz, 5,60Hz e 13,30Hz nos eixos X, Y e Z, respectivamente, convergindo assim
para os resultados encontrados pelo SAP2000.
Já os deslocamentos tiveram diferença percentual máxima de 3,0%, sendo de
1,03×10-5me 7,10×10-6m respectivamente nos eixos Y e Z, para o SAP2000 e no
Blocksolver, 9,99×10-6m para o eixo Y e 7,11×10-6m para o eixo Z. Com os resultados
definidos, foi possível fazer uma análise segundo os critérios da ISO 2372 [13], indicando
que a fundação se encontra dentro da faixa ótima de operação para o deslocamento
máximo e a velocidade máxima encontrados.
Como sugestão para trabalhos futuros, pode ser feito um estudo para analisar
como as limitações de definição de geometria do Blocksolver podem vir a afetar os
57
resultados finais no caso de fundações com uma forma mais detalhada, já que este
programa resume as estruturas a blocos rígidos, o que nem sempre é verdade, podendo
gerar algum tipo de discrepância em relação a modelos com a geometria mais complexa
desenvolvidos em programas estruturais comerciais, que permitem uma maior precisão
no desenvolvimento geométrico do modelo.
58
REFERÊNCIAS BIBLIOGRÁFICAS
[1]ALBUQUERQUE, Igor Mastrianni, Modelagem numérica da fundação de uma
máquina rotativa considerando rigidez e amortecimento do solo com distribuição não
homogênea. M.Sc. – Dissertação, UFRJ – Universidade Federal do Rio de Janeiro, Escola
Politécnica, Programa de Projeto de Estruturas, Rio de Janeiro - RJ, Brasil, 2015.
[2]MACABÚ, Larissa Pereira, Análise Comparativa de Soluções em Fundação Direta e
sobre Estacas para um Equipamento em uma Instalação Industrial, Projeto Final de
Graduação, UFRJ - Universidade Federal do Rio de Janeiro, Escola Politécnica, Rio de
Janeiro, 2011.
[3]MACHADO, Flávia Gandra, Estudo do Comportamento de Fundações Submetidas a
Vibrações de Máquinas, M.Sc. – Dissertação, UFRJ – Universidade Federal do Rio de
Janeiro, COPPE, Programa de Engenharia Civil, Rio de Janeiro - RJ, Brasil, 2010.
[4] ACI 351.3R-04, Foundations for Dynamic Equipment.
[5] SANTOS, S.H.C Fundações de Máquinas. 2011. 95f. UFRJ, Rio de Janeiro.
[6] PETROBRAS, N-1848 - Projeto de Fundações de Máquinas, Rio de Janeiro, Brasil,
2011.
[7] Disponível em
<http://www.brown.edu/Departments/Engineering/Courses/En4/Notes/vibrations_force
d/vibrations_forced.htm>, acesso em 13 Jan. 2017.
[8] Disponível em
<http://help.scia.net/webhelplatest/fr/tb/dynamics/harmonic_loading.htm>, acesso em
28 Jan. 2017;
[9] Computer and Structures, Inc. – Structural and Earthquake Engineering Software,
SAP2000 Integrated Solution For Structural Analysis and Deisgn – CSI Analysis
Reference Manual.
[10] WOLF, John P., Foundation Vibration Analysis using Simple Physical Models. 1ª
ed. – PTR Prentice Hall, University of Michigan –MI, USA, 1994.
[11] GAZETAS, George, “Static and Dynamic Displacements of Foundations on
Heterogeneous Multilayered Soils”,Geotechnique v. 30, nº2,p. 159, 1980;
59
[12] RICHART Jr., Frank E., WOODS, Richard D., HALL Jr., J.R, Vibrations of Soils
and Foundations,1ªed. - Prentice-Hall, Inc., The University of Michigan, Ann Arbor -
MI, USA, 1970;
[13] ISO 2372 – Mechanical Vibration of Machines with Operation Speeds from 10 to
200 rev/s;
[14] NBR 6118:2014, Projeto de estruturas de concreto, procedimento.
[15] COUTINHO, Diogo Simões do Amaral e MENDES, Cláudio Henrique Florença,
Projecto Automatizado de Fundações de Máquinas, Projeto Final de Graduação, UFRJ
– Universidade Federal do Rio de Janeiro, Escola Politécnica, Rio de Janeiro-RJ, Brasil,
2007.