6.1: transformada de laplace - ufjf.br§ões-diferenciais... · a transformada de laplace seja f...
TRANSCRIPT

6.1: Transformada de Laplace
Muitos problemas práticos da engenharia envolvem sistemas mecânicos ou elétricos sob ação de forças descontínuas ou de impulsos.Para estes tipos de problemas, os métodos visto em Equações Diferenciais I, são difíceis de serem aplicados.Neste capítulo, usaremos a transformada de Laplace para desenvolver um outro método para resolver uma EDO.Transformada Integrais: Dada uma função conhecida K(s,t), Transformada Integrais de uma função f é uma função da forma
F (s )=∫α
βK (s , t ) f ( t )dt , −∞≤ α< β≤+ ∞

A Transformada de LaplaceSeja f uma função definida para t ≥ 0 e que f satisfaz certas
condições que veremos mais adiante . A Transformada de Laplace de f é definida por
onde, a função K(s,t) = e-st é chamada de núcleo da transformada. Como as soluções das EDO lineares com coeficientes constantes são baseada na função exponencial, a transformada de Laplace é particularmente útil para essas equações. Note que a Transformada de Laplace é definida por uma integral imprópria, portanto temos que estudar sua convergência. Vamos rever alguns exemplos de integrais impróprias e funções contínuas por partes.
L { f ( t )}=F ( s )=∫ 0
∞e−st f ( t )dt

Exemplo 1Considere a seguinte integral imprópria.
Note que para s=0 a integral acima é divergente. Então vamos supor .Podemos calcular esta integral da seguinte forma:
Assim, podemos concluir que:
∫0
∞est dt= lim
b→∞∫0
be st dt=lim
b→∞
est
s∣0b=1
slimb→∞
(esb−1)
∫0
∞est dt
Converge: ∫0
∞est dt=−
1s
, se s< 0; e
Diverge: ∫0
∞e st dt , se s≥ 0 .
s≠0

Exemplo 2
Dada a integral imprópria
Usando integração por partes
Este limite é divergente, portanto a integral original é divergente.
[ ]( )[ ]1cossinlim
cossinlim
sinsinlim
coslimcos
00
00
00
−+=
+=
−=
=
∞→
∞→
∞→
∞→
∞
∫
∫∫
bsbsb
tstst
tdtstst
tdtsttdtst
b
bb
b
bb
b
b
b
∫0
∞st cos tdt

Função Contínua por Partes
Uma função f é contínua por partescontínua por partes em um intervalo [a, b] se este intervalo pode ser particionado por um número finito de pontos,a = t0 < t1 < … < tn = b tal que (1) f é contínua em cada (tk, tk+1)
Em outras palavras, f é contínua por partescontínua por partes em [a, b] , se ela é contínua nesse intervalo exceto por um número finito de saltos.
(2) ∣ limt →tk
+f (t )∣< ∞ , k=0,… , n−1
(3) ∣ limt → tk + 1
−f ( t )∣< ∞ , k=1,… , n

Exemplo 3Considere a seguinte função f definida por partes:
Pela definição de f e pelo seu gráfico abaixo, vemos que f é contínua por partes em [0, 3].
f ( t )={ t2 , 0≤t≤13−t , 1< t≤2t+ 1 2< t≤3

Exemplo 4
f ( t )={ t2+ 1, 0≤t≤1(2−t )−1 , 1< t≤2
4, 2< t≤3
Considere a seguinte função f definida por partes:
Pela definição de f e pelo seu gráfico abaixo, vemos que f não é contínua por partes em [0, 3].

Teorema 6.1.2Suponha que f é uma função com as seguintes propriedades:
(1) f é contínua por partes em [0, b] para todo b > 0. (2) | f(t) | ≤ Keat quando t ≥ M, onde a, K, M são constantes, com K, M > 0.
Então a Transformada de Laplace de f existe para s > a.
Obs. Funções, f , que satisfaz a condição (2) acima é dita de ordem exponencial quando t → ∞. Esta condição é suficiente mas não necessária para a existência da Transformada de Laplace. Veja os seguintes exemplos, ambos não são de ordem exponencial.
1) , não existe a Transformada de Laplace
2) , existe a Transformada de Laplace
L { f ( t )}=F ( s )=∫0
∞e−st f ( t )dt (finito)
2
)( tetf =
)cos(2)(22 tt etetf =

Exemplo 5
Seja f (t) = 1 para t ≥ 0. Então a Transformada de Laplace F(s) de f é:
L { 1 }=∫0
∞e−st dt=
= limb→∞
∫0
be−st dt =
=−limb→∞
e−st
s∣0b =
=1s
, s> 0
Assim, L { 1 }=1s
, s> 0.

Exemplo 6Seja f (t) = eat para t ≥ 0. Então a Transformada de Laplace F(s) de f é:
L { eat }=∫0
∞e−st eat dt =
= limb→∞
∫ 0
be−( s−a ) t dt =
=− limb→∞
e−( s−a) t
s−a∣0b=
=1s−a
, s> a
Assim, L { eat }= 1s−a
, s> 0.

Exemplo 7Seja f (t) = sin(at) para t ≥ 0. Usando integração por partes duas vezes, a Transformada de Laplace F(s) de f é encontrada como se segue:
{ }
0,)()(1
sin/)sin(lim1
coslim1
cos/)cos(lim
sinlimsin)sin()(
222
2
00
0
00
00
>+
=⇒−=
+−=
−=
−−=
===
∫
∫
∫
∫∫
−−
∞→
−
∞→
−−
∞→
−
∞→
∞ −
sas
asFsFas
a
ateasaate
as
a
ateas
a
ateasaate
atdteatdteatLsF
b stbst
b
b st
b
b stbst
b
b st
b
st

A Linearidade da Transformada de LaplaceVamos supor que para as funções f e g, existam as suas Transformadas de Laplace para s > a1 e s > a2, respectivamente.Então, para s maior que o máximo entre a1 e a2, a Transformada de Laplace de c1 f (t) + c2g(t) existe. Isto é,
logo
L { c1 f (t )+ c2 g ( t ) }=∫0
∞e−st [c1 f ( t )+ c2 g ( t )]dt é finito
{ }{ } { })( )(
)( )()()(
21
020121
tgLctfLc
dttgecdttfectgctfcL stst
+=
+=+ ∫∫∞ −∞ −

Exemplo 8Seja f (t) = 5e-2t - 3sin(4t) para t ≥ 0. Então pela linearidade da Transformada de Laplace, e usando os resultados anteriores dos exemplos(6 e 7), a Transformada de Laplace F(s) de f é:
{ }{ } { }
0,16
122
5)4sin(35
)4sin(35)}({)(
2
2
2
>+
−+
=
−=−=
=
−
−
sss
tLeLteL
tfLsF
t
t

6.2: Resolvendo Problema de Valor Inicial A Transformada de Laplace tem este nome devido ao matemático franses Laplace, que estudou esta transformada em 1782.A técnica descrita aqui foi desenvolvida primeiramente por Oliver Heaviside (1850-1925), um engenheiro elétrico ingles.A Transformada de Laplace será usada para resolver PVI de EDO lineares com coeficientes constantes. A utilidade da Transformada de Laplace nesse contexto reside no fato de que a transformada de f ' está relacionada de maneira simples com à transformada de f, esta relação é dada pelo Teorema 6.2.1 que veremos a seguir.

Teorema 6.2.1Suponha que f é uma função que satisfaz as seguintes condições:
(1) f é contínua e f ' é contínua por partes em [0, b] para todo b > 0. (2) | f(t) | ≤ Keat quando t ≥ M, para constantes a, K, M com K, M > 0.
Então a Transformada de Laplace f ' exite para s > a, além disso
Prof (ídeia): Supondo, f e f ' contínua em [0, b], nós temos
Sem Perda de Generalidade(SPG), para f ' contínua por partes em [0, b], obtemos o mesmo resultado.
L { f ' ( t )}=sL { f ( t )}− f (0 )
limb→∞
∫ 0
be−st f ' ( t )dt = lim
b→∞[e−st f ( t )∣0
b−∫ 0
b(−s )e−st f ( t )dt ]
= limb→∞
[e−sb f (b)− f (0)+ s∫ 0
be−st f ( t )dt ]

A Transformada de Laplace f ' Portanto se f e f ' satisfazem as hipoteses do Teorema 6.2.1, então
Agora supondo f ' e f '' satisfazendo as condições especificadas para f e f ' , respequitivamente, do Teorema 6.2.1. Nós obtemos então
Analogamente, podemos obter uma expressão para L{f (n)}, desde que f e suas derivadas satisfação condições similares do teorema 6.2.1. Este resultado é visto no Corolário 6.2.2
L { f ' ' ( t )}=sL { f ' ( t )}− f ' (0)=s [sL { f ( t )}− f (0 )]− f ' (0)=s2 L { f ( t )}−sf (0)− f ' (0 )
L { f ' ( t )}=sL { f ( t )}− f (0 )

Corolário 6.2.2Suponha que f é uma função com as seguintes propriedades:
(1) f , f ', f '' ,…, f (n-1) são contínuas, e f (n) contínuas por partes, em [0, b] para todo b > 0.
(2) | f(t) | ≤ Keat, | f '(t) | ≤ Keat , …, | f (n-1)(t) | ≤ Keat para t ≥ M, e constantes a, K, M, com K, M > 0.
Então a Transformada de Laplace f (n) existe para s > a, e é dada porL { f (n)( t )}=sn L { f ( t )}−sn−1 f (0 )−sn−2 f ' (0 )−⋯−sf (n−2)(0)− f (n−1 )(0 )

Exemplo 1: (1 de 4)
Considere o PVI
Fazendo:
Tem-se r1 = -2 e r2 = -3, e a solução é:
Usandoas Condições Iniciais:
Portanto,
Agora vamos resolver o Pvi usando a Transformada de Laplace.
y ' '+ 5 y '+ 6y=0, y (0)=2, y ' (0)=3
y ( t )=ert ⇒ r 2+ 5r+ 6=0 ⇔ (r+ 2) (r+ 3)=0
y ( t )=c1 e−2 t+ c2 e−3 t
y ( t )=9 e−2 t−7 e−3 t
7,93322
2121
21 −==⇒
=−−=+
cccccc

Exemplo 1:O MetodoTransformada de Laplace (2 de 4)Assumindo que o PVI tem uma solução φ e que φ'(t) e φ''(t) satisfazem as condições do Corolário 6.2.2. Então
e onde
Fazendo Y(s) = L{y}, nós temos
Substituindo as condições iniciais, nos obtemos
Assim
y ' '+ 5 y '+ 6y=0, y (0)=2, y ' (0)=3
L {y ' '+ 5 y'+ 6y}=L{y ' ' }+ 5L{y ' }+ 6L{y }=L {0}=0
[s2 L {y }−sy (0 )− y ' (0 )]+ 5 [ sL {y }− y (0) ]+ 6L {y }=0
(s2+ 5s+ 6) Y ( s )−( s+ 5) y (0 )− y ' (0 )=0
(s2+ 5s+ 6) Y ( s )−2( s+ 5)−3=0
L {y}=Y ( s )= 2s+ 13(s+ 3) (s+ 2)

Fazendo a decomposição da fração parcial, Y(s) é reescrita como:
Portanto
2s+ 13( s+ 3) (s+ 2)
=A( s+ 3)
+B( s+ 2)
2s+ 13=A (s+ 2)+ B (s+ 3)2s+ 13=( A+ B )s+ (2A+ 3B)A+ B=2, 2A+ 3B=13A=−7, B=9
L {y}=Y ( s )=−7
( s+ 3)+
9( s+ 2)
Exemplo 1: Fração Parcial (3 de 4)

Da sesção 6.1:
Portanto
Reescrevendo Y(s) = L{y}, obtemos pela linearidade
e assim chegamos a solução do PVI
Y (s )=−7
(s+ 3)+
9(s+ 2)
=−7L{e−3t }+ 9L {e−2t }, s>−2,
L { eat }=F (s )=∫0
∞e−st eat dt=∫0
∞e−( s−a )t dt= 1
s−a, s> a
L {y}=L {−7e−3t+ 9 e−2t }
y ( t )=−7e−3t+ 9e−2t
Exemplo 1: Solução (4 de 4)

O Método Geral da Transformada de LaplaceConsidere uma EDO de coeficientes constantes
Assuma que esta equação tem uma solução y = φ(t), e que φ'(t) e φ''(t) satisfazem as condições do Corolário 6.2.2. Então
Faça Y(s) = L{y} e F(s) = L{ f }, então
a y ' '+ b y '+ cy= f ( t )
L {a y' '+ b y '+ cy }=aL {y ' ' }+ bL {y' }+ cL {y }=L{ f ( t )}
a [s2 L{y }−sy (0)− y ' (0)]+ b [ sL {y}− y (0 )]+ cL {y }=F (s )(as2+ bs+ c ) Y ( s )−(as+ b) y (0)−a y ' (0 )=F ( s )
Y (s )=(as+ b) y (0 )+ a y ' (0)as2+ bs+ c
+ F (s )as 2+ bs+ c

Problema Algébrico Assim a EDO foi transformada na equação algébrica abaixo
portanto devemos encontrar y = φ(t) tal que L{φ(t)} = Y(s).
Note que não necessitamos resolver a equação homogênea e a não homogênea separadamente, nem temos um passo a mais em que usamos as condições iniciais para determinar os coeficientes da solução geral.
Y (s )= (as+ b ) y (0)+ a y' (0 )as2+ bs+ c
+ F (s )as2+ bs+ c

Polinômio Característico
Usando a Transformada de Laplace, no PVI
Obtemos
O polinômio do denominador é o polinômio característico associado à equação diferencial. A expansão em frações parciais de Y(s) usado para determinar φ obriga-nos a encontrar as raízes da equação característica. Equações de ordem superior, isto pode ser muito difícil, especialmente se as raízes são irracionais ou complexas.
Y (s )= (as+ b ) y (0)+ a y' (0 )as2+ bs+ c
+ F (s )as2+ bs+ c
a y ' '+ b y '+ cy= f ( t ) , y (0 )= y0 , y ' (0)= y0'

Problema InversoA principal dificuldade em usar o método da transformada de Laplace é determinar a função y = φ(t) tal que L{φ(t)} = Y(s). Este é um problema inverso, em que tentamos encontrar φ tal que φ(t) = L-1{Y(s)}. Existe uma fórmula geral para encontrar L-1, mas requer conhecimentos da teoria das funções complexas de uma variável, e nós não consideraremos aqui.Pode ser mostrado que se f é contínua com L{f(t)} = F(s), então f é a única função contínua com f (t) = L-1{F(s)}. Tabelas podem ser construídas, onde podemos encontrar muitas das funções que serão tratadas aqui. No nosso texto temos a tabela 6.2.1

Linearidade da Transformada InversaFrequentemente a Transformada de Laplace F(s) pode ser expressada como
Seja
Então a função
será a Transformada de Laplace F(s), desde que L seja linear. Por resultado de unicidade, não existe outra função contínua f que tem a mesma transformada F(s). Assim L-1 é um operador linear com
F (s )=F1 (s )+ F 2( s )+ ⋯+ F n( s )
f 1( t )=L−1 {F 1( s )}, … , f n( t )=L−1 {F n( s )}
f ( t )= f 1( t )+ f 2( t )+⋯+ f n( t )
f ( t )=L−1 {F ( s )}=L−1 {F 1( s )}+⋯+ L−1 {F n( s )}


Exemplo 2Encontrar a inversa da Transformada de Laplace da função.
Para encontrar y(t) tal que y(t) = L-1{Y(s)}, nos primeiro reescrevemos Y(s):
Usando a Tabela 6.2.1,
Assim
Y (s )=2s
Y (s )= 2s=2(1
s )
L−1 {Y (s )}=L−1{2s }=2L−1{1
s }=2(1)=2
y ( t )=2

Exemplo 3
Y (s )= 3s−5
Y (s )= 3s−5
=3( 1s−5)
L−1 {Y (s )}=L−1{ 3s−5 }=3L−1{ 1
s−5}=3 e5t
y ( t )=3 e5t
Encontrar a inversa da Transformada de Laplace da função.
Para encontrar y(t) tal que y(t) = L-1{Y(s)}, nos primeiro reescrevemos Y(s):
Usando a Tabela 6.2.1,
Assim

Exemplo 4
Y (s )= 6s4
Y (s )= 6s4=
3 !s4
L−1 {Y (s )}=L−1{3 !s4 }=t 3
y ( t )=t3
Encontrar a inversa da Transformada de Laplace da função.
Para encontrar y(t) tal que y(t) = L-1{Y(s)}, nos primeiro reescrevemos Y(s):
Usando a Tabela 6.2.1,
Assim

Exemplo 5
Y (s )= 8s3=( 8
2 ! )( 2 !s3 )=4( 2 !
s3 )
L−1 {Y (s )}=L−1{4( 2 !s3 )}=4L−1{2 !
s3 }=4t2
y ( t )=4t2
Y (s )= 8s3
Encontrar a inversa da Transformada de Laplace da função.
Para encontrar y(t) tal que y(t) = L-1{Y(s)}, nos primeiro reescrevemos Y(s):
Usando a Tabela 6.2.1,
Assim

Exemplo 6
Y (s )=4s+ 1s2+ 9
=4[ ss2+ 9 ]+ 1
3 [ 3s2+ 9 ]
L−1 {Y (s )}=4L−1{ ss2+ 9}+ 1
3L−1{ 3
s2+ 9}=4 cos3t+ 13
sin 3t
y ( t )=4 cos3t+ 13
sin 3t
Y (s )=4s+ 1s2+ 9
Encontrar a inversa da Transformada de Laplace da função.
Para encontrar y(t) tal que y(t) = L-1{Y(s)}, nos primeiro reescrevemos Y(s):
Usando a Tabela 6.2.1,
Assim

Exemplo 7
Y (s )=4s+ 1s2−9
=4[ ss2−9 ]+ 1
3 [ 3s2−9 ]
L−1 {Y (s )}=4L−1{ ss2−9}+ 1
3L−1{ 3
s2−9}=4 cosh3t+ 13
sinh 3t
y ( t )=4 cosh3t+ 13
sinh 3t
Y (s )=4s+ 1s2−9
Encontrar a inversa da Transformada de Laplace da função.
Para encontrar y(t) tal que y(t) = L-1{Y(s)}, nos primeiro reescrevemos Y(s):
Usando a Tabela 6.2.1,
Assim

Exemplo 8
L−1 {Y (s )}=−5L−1{ 2 !( s+ 1)3}=−5t2e−t
y ( t )=−5t2 e−t
Y (s )=−10(s+ 1)3
Y (s )=−10(s+ 1)3
=−102 ! [ 2 !
( s+ 1)3 ]=−5[ 2 !( s+ 1)3]
Encontrar a inversa da Transformada de Laplace da função.
Para encontrar y(t) tal que y(t) = L-1{Y(s)}, nos primeiro reescrevemos Y(s):
Usando a Tabela 6.2.1,
Assim

Exemplo 9
Para a função Y(s) abaixo, nos encontramos y(t) = L-1{Y(s)} usando um expansão em frações parciais, como segue.
Y (s )=3s+ 1s2+ s−12
=3s+ 1(s+ 4)( s−3 )
=As+ 4
+Bs−3
3s+ 1=A( s−3)+ B( s+ 4 )3s+ 1=(A+ B) s+ ( 4B−3A)A+ B=3, 4B−3A=1A=11/7, B=10/7
Y (s )=117 [1s+ 4 ]+ 10
7 [1s−3 ] ⇒ y ( t )=117
e−4t+ 107
e3t

Exemplo 10
Para a função Y(s) abaixo, encontramos y(t) = L-1{Y(s)} completando quadrados no denominador e reorganizando o numerador, como segue.
Usando a Tabela 6.2.1, obtemos
y ( t )=4e3t cos t+ 2e3t sin t
( ) ( )( )
( ) ( ) ( )
+−
+
+−
−=+−+−=
+−+−=
++−−=
+−−=
1312
1334
13234
132124
196104
106104)(
222
222
sss
ss
ss
sss
ssssY

Exemplo 11: PVI (1 de 2)
Considere o PVI
Aplicando a transformada de Laplace na equação diferencial, e assumindo que as condições do Corolário 6.2.2 são satisfeitas, temos
Fazendo Y(s) = L{y}, temos
Substituindo as condições iniciais, obtém-se
Assim
y ' '−8 y'+ 25 y=0, y (0)=0, y ' (0 )=6
[s2 L {y }−sy (0 )− y ' (0 )]−8 [sL {y }− y (0) ]+ 25 L{y }=0
(s2−8s+ 25) Y ( s )−( s−8) y (0 )− y ' (0 )=0
L {y}=Y ( s )= 6s2−8s+ 25
(s2−8s+ 25) Y ( s )−6=0

Completando quadrados, tem-se
Assim
Usando a Tabela 6.2.1, obtemos
Portanto nossa solução do PVI é
Y (s )= 6s2−8s+ 25
=6
(s2−8s+ 16)+ 9
Y (s )=2 [ 3(s−4)2+ 9 ]
L−1 {Y ( s )}=2 e4t sin 3t
y ( t )=2 e4t sin 3t
Exemplo 11: Solução (2 de 2)

Exemplo 12: Ploblema não Homogêneo (1 de 2)
y ' '+ y=sin 2t , y (0)=2, y' (0)=1
[s2 L {y }−sy (0 )− y ' (0 )]+ L {y }=2 /(s 2+ 4 )
(s2+ 1) Y ( s )−sy (0 )− y ' (0 )=2 /(s2+ 4)
Y (s )= 2s3+ s2+ 8s+ 6(s2+ 1 )(s2+ 4)
(s2+ 1) Y ( s )−2s−1=2 /(s2+ 4)
Considere o PVI
Aplicando a transformada de Laplace na equação diferencial, e assumindo que as condições do Corolário 6.2.2 são satisfeitas, temos
Fazendo Y(s) = L{y}, temos
Substituindo as condições iniciais, obtém-se
Assim

Usando frações parciais,
Então
Resolvendo, obtemos A = 2, B = 5/3, C = 0, e D = -2/3. Então
Onde
Exemplo 12: Solução (2 de 2)
Y (s )= 2s3+ s2+ 8s+ 6(s2+ 1 )(s2+ 4)
= As+ Bs2+ 1
+ Cs+ Ds2+ 4
Y (s )= 2ss2+ 1
+5/3
s2+ 1−
2/3s2+ 4
y ( t )=2 cos t+ 53
sin t−13
sin 2t
( ) ( ) ( ) ( ))4()4()()(
1468223
2223
DBsCAsDBsCAsDCssBAssss
+++++++=+++++=+++

6.3: Função DegrauAlgumas das mais interessantes aplicações elementares do método da Transformada de Laplace ocorre em solução de equações lineares descontínuas ou como funções de forças de impulso. Nesta seção, assumiremos que todas as funções aqui consideradas são contínuas por partes e de ordem exponencial, e que existe sua Transformada de Laplace, para s suficientemente grande.

Definição da função degrauSeja c ≥ 0. A função degrau unitário, ou função Heaviside, é definido por
Um degrau negativo pode ser representado por
uc( t )={0, t< c1, t≥c
y ( t )=1−uc( t )={1, t< c0, t≥c

Exemplo 1Esborçando o gráfico de
Lembre que uc(t) é definido por
Assim
e portanto o gráfico h(t) é um pulso retangular.
h ( t )=uπ ( t )−u2π( t ) , t≥0
uc( t )={0, t< c1, t≥c
h ( t )={0, 0≤t< π1, π≤t< 2π0 2π≤t< ∞

Transformada de Laplace da Função DegrauA transformada de Laplace de uc(t) é
{ }
se
se
se
es
dte
dtedttuetuL
cs
csbs
b
b
c
st
b
b
c
st
b
c
stc
stc
−
−−
∞→
−
∞→
−
∞→
∞ −∞ −
=
+−=
−==
==
∫
∫∫
lim
1limlim
)()(0

Funções Transladada Dada uma função f (t) definida para t ≥ 0, nós vamos considerar a função transladada na relação: g(t) = uc(t) f (t - c):
Assim g representa uma translação de f a uma distância c na direção positiva de t.Na figura abaixo, o gráfico de f é o da esquerda e o gráfico de g é o da direita.
g ( t )={ 0, t< cf ( t−c ) , t≥c
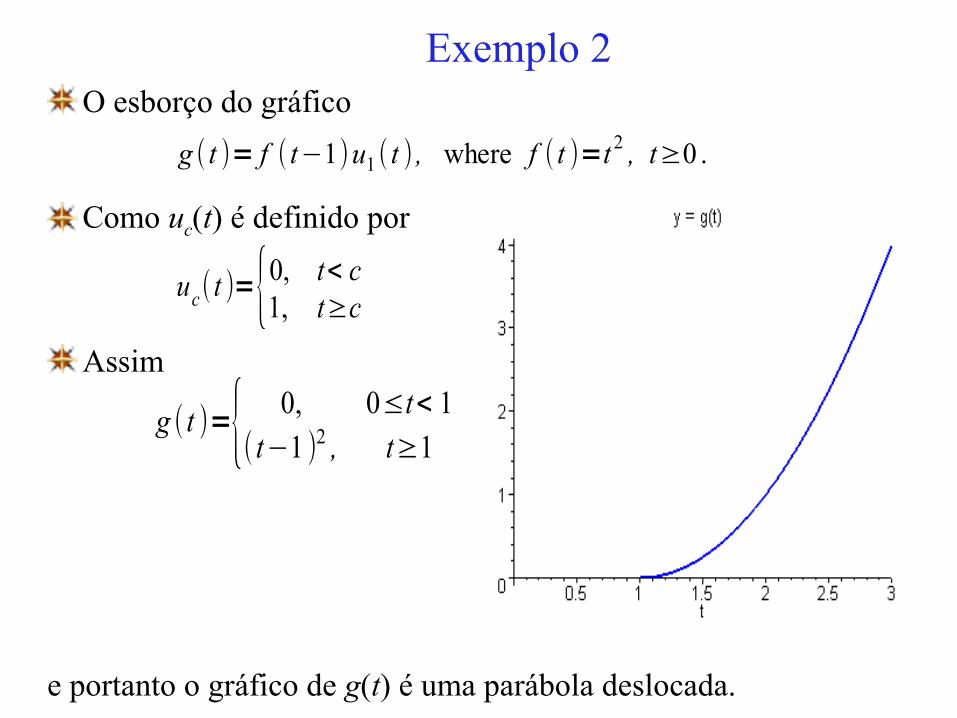
Exemplo 2O esborço do gráfico
Como uc(t) é definido por
Assim
e portanto o gráfico de g(t) é uma parábola deslocada.
g ( t )= f ( t−1)u1 ( t ) , where f ( t )=t2 , t≥0 .
uc( t )={0, t< c1, t≥c
g ( t )={ 0, 0≤t< 1( t−1 )2 , t≥1

Teorema 6.3.1Se F(s) = L{f (t)} existe para s > a ≥ 0, e se c > 0, então
Reciprocamente, se f (t) = L-1{F(s)}, então
Assim a translação de f (t) a uma distancia c positiva na direção de t
corresponde por uma multiplicação de F(s) por e-cs.
L { uc( t ) f ( t−c )}=e−cs L { f (t )}=e−cs F ( s )
uc( t ) f ( t−c )=L−1 { e−cs F ( s )}

Teorema 6.3.1: Ideia da provaNós precisamos mostrar que
Usando a definição da Transformada de Laplace, nós temos
L { uc( t ) f ( t−c )}=e−cs F (s )
{ }
)(
)(
)(
)(
)()()()(
0
0
)(
0
sFe
duufee
duufe
dtctfe
dtctftuectftuL
cs
sucs
cusctu
c
st
cst
c
−
∞ −−
∞ +−−=
∞ −
∞ −
=
=
=
−=
−=−
∫∫
∫∫

Exemplo 3Encontrar a Transformada de Laplace de
Note que
Assim
f ( t )=( t−1)2 u1( t )
f ( t )={ 0, 0≤t< 1( t−1)2 , t≥1
L { f ( t )}=L {u1( t )( t−1 )2}=e− s L {t2}=2 e− s
s3

Exemplo 4Encontrar L{ f (t)}, onde f é
Note que f (t) = sin(t) + uπ/4(t) cos(t - π/4), e
f ( t )={sin t , 0≤t< π /4sin t+ cos( t−π / 4) , t≥π /4
{ } { } { }{ } { }
11
111
cossin
)4/cos()(sin)(
2
4/
24/
2
4/4/
++=
++
+=
+=
−+=
−
−
−
sse
sse
s
tLetLttuLtLtfL
s
s
s
π
π
ππ π

Exemplo 5
Encontrar L-1{F(s)}, onde
Solução:
F (s )=3+ e−7s
s4
( ) 37
3
471
41
4
71
41
7)(61
21
!361!3
21
3)(
−+=
⋅+
=
+
=
−−−
−−−
ttut
seL
sL
seL
sLtf
s
s

Teorema 6.3.2
Se F(s) = L{f (t)} existe para s > a ≥ 0, e se c é uma constante, então
Reciprocamente, se f (t) = L-1{F(s)}, então
Assim multiplicar f (t) por ect resulta em transladar F(s) a uma distancia c na direção positiva de t, e reciprocamente.Ideia da prova:
L { ect f ( t )}=F ( s−c ) , s> a+ c
ect f ( t )=L−1 {F ( s−c )}
L { ect f ( t )}=∫0
∞e−st ect f ( t )dt=∫0
∞e−( s−c )t f ( t )dt =F (s−c )

Exemplo 4
Encontrar a Transformada Inversa de
Para resolver, primeiramente completaremos quadrados:
Desde que
segue que
G( s )= s+ 1s2+ 2s+ 5
G( s )= s+ 1s2+ 2s+ 5
=s+ 1
(s2+ 2s+ 1)+ 4=
(s+ 1)(s+ 1)2+ 4
L−1 {G( s )}=L−1 {F (s+ 1 )}=e−t f ( t )=e−t cos (2t )
f ( t )=L−1 {F ( s )}=L−1{ ss2+ 4}=cos (2t )

6.4: Equações Diferenciais com Forçamentos Descontínuos.
Nesta seção estudaremos casos de PVI no qual a função de forças é descontínuas.
a y ' '+ b y '+ cy=g ( t ) , y (0)= y0 , y ' (0)= y0'

Exemplo 1: PVI (1 de 12)Encontrar a solução do PVI
Esse problema representa a carga em um capacitor em um circuito elétrico onde a voltagem é um pulso unitário em [5,20). Pode representar, também, a resposta de um oscilador amortecido sob a ação de uma força g(t).
2y'' +y '+ 2y=g (t ) , y (0)=0, y' (0)=0onde
g ( t )=u5( t )−u20( t )={1, 5≤t< 200, 0≤t<5 and t≥20}

Assumindo as condições do Corolário 6.2.2 são satisfeitas. Então
ou
Fazendo Y(s) = L{y},
Substituindo as condições iniciais, obtemos
Assim
2L {y' ' }+ L{y ' }+ 2L {y }=L {u5( t )}−L{u20( t )}
[2s2 L {y}−2 sy (0)−2 y ' (0)]+ [sL {y }− y (0 )]+ 2L{y}=e−5s−e−20 s
s
(2s2+ s+ 2) Y ( s )−(2s+ 1) y (0 )−2 y ' (0 )=(e−5s−e−20 s) /s
Exemplo 1: Transformada de Laplace (2 de 12)
(2s2+ s+ 2) Y ( s )=(e−5s−e−20 s) /s
Y (s )= (e−5s−e−20 s)s (2s2+ s+ 2)
2 y ' '+ y'+ 2y=u5 ( t )−u20( t ) , y (0)=0, y ' (0 )=0

Temos
onde
Se tomarmos h(t) = L-1{H(s)}, então
pelo Teorema 6.3.1.
y=φ( t )=u5 ( t )h( t−5)−u20(t )h ( t−20 )
Exemplo 1: Fatorando Y(s) (3 de 12)
Y (s )= (e−5s−e−20 s)s (2s2+ s+ 2)
=(e−5s−e−20 s )H ( s )
H ( s )= 1s (2s2+ s+ 2)

Reescrevendo H(s), como.
Esta expansão em frações parciais produz as equações
Assim
Exemplo 1: Frações Parciais (4 de12)
H ( s )= 1s (2s2+ s+ 2)
=As+
Bs+ C2s2+ s+ 2
(2A+ B) s2+ (A+C )s+ 2A=1⇒ A=1/2, B=−1, C=−1/ 2
H ( s )= 1/2s
−s+ 1 /2
2s2+ s+ 2

Fazendo as contas,
Exemplo 1: Completando quadrados (5 de 12)
( )( )
( )
++++−=
++
+−=
++++−=
+++−=
+++−=
16/154/14/14/1
212/1
16/154/12/1
212/1
16/1516/12/2/1
212/1
12/2/1
212/1
222/12/1)(
2
2
2
2
2
ss
s
ss
s
sss
s
sss
s
sss
ssH

Assim
e onde
Para h(t) como dado acima, e do nosso resultado já determinado em função de h(t), a solução do PVI é então
Exemplo 1: Solução (6 de 12)
h( t )=L−1{H ( s )}=12−1
2e−t / 4cos(√15
4t)− 1
2√15e−t /4 sin( √15
4t)
φ( t )=u5( t )h ( t−5)−u20( t )h( t−20)
( )( )
( )( ) ( )
++
−
++
+−=
++++−=
16/154/14/15
1521
16/154/14/1
212/1
16/154/14/14/1
212/1)(
22
2
sss
s
ss
ssH

Assim a solução do PVI é
E o gráfico desta solução é dado abaixo.
Exemplo 1: Gráfico da Solução (7 de 12)
φ( t )=u5 (t )h ( t−5)−u20( t )h (t−20 ) , onde
h( t )=12−1
2e−t /4 cos (√15 t / 4)−1
2√15e−t /4sin (√15t /4 )

A solução original do PVI pode ser vista como a composição de três PVIs separados:
Exemplo 1: Composição dos PVIs (8 de 12)
0≤t< 5 : 2 y1' '+ y1
' + 2y1=0, y1(0 )=0, y1' (0 )=0
5< t< 20 : 2 y2' '+ y2
' + 2y2=1, y2(5 )=0, y2' (5 )=0
t> 20: 2 y3' '+ y3
' + 2y3=0, y3(20 )= y2 (20 ) , y3' (20 )= y2
' (20 )

Considere o primeiro PVI
Do ponto de vista físico, o sistema está inicialmente em repouso, e uma vez que não existe nenhuma força externa, ele permanece em repouso. Assim a solução sob o intervalo [0, 5) é y1 = 0, e isto pode ser verificado analiticamente.
Exemplo 1: Primeiro PVI (9 de 12)
2 y1' '+ y1
' + 2y1=0, y1 (0)=0, y1' (0)=0 ; 0≤t< 5

Considere o segundo PVI
Usando métodos do Capítulo 3, a solução é
Fisicamente, o sistema responde como a soma de uma constante (à resposta a função constante força) e uma oscilação amortecida, durante o intervalo de tempo (5, 20).
Exemplo 1: Segundo PVI (10 de 12)
2 y2' '+ y2
' + 2y2=1, y2 (5)=0, y2' (5)=0 ; 5< t< 20
y2=c1 e−t /4 cos(√15 t /4)+ c2 e−t /4 sin (√15t /4 )+ 1/2

Considere o terceiro PVI
Usando o método do Capítulo 3, a solução é
Fisicamente, já que não há forças externas, a resposta é uma oscilação amortecida sobre y = 0, para t > 20.
Exemplo 1: Terceiro PVI (11 de 12)
y3=c1 e−t /4 cos ( √15 t / 4)+ c2e−t /4sin (√15 t /4)
2 y3' '+ y3
' + 2y3=0, y3( 20)= y2(20 ) , y3' (20 )= y 2
' (20 ) ; t> 20

Nossa Solução é
Podemos mostrar que φ e φ' são contínuas em t = 5 e t = 20, e φ'' tem um salto de 1/2 em t = 5 e um salto de –1/2 em t = 20:
Assim, o salto no termo de força g(t) nestes pontos é equilibrado por um salto no termo, 2y'' , de maior ordem da EDO.
Exemplo 1: Suavidade da Solução (12 de 12)
φ( t )=u5( t )h ( t−5)−u20( t )h( t−20)
limt → 5−
φ' ' ( t )=0, limt → 5+
φ' ' ( t )=1/2
limt → 20−
φ' ' ( t )≃−. 0072 , limt → 20+
φ' ' ( t )≃−. 5072

Considere uma EDO de segunda ordem linear
onde p e q são contínuas em algum intervalo (a, b) mas g é somente contínua por partes. Se y = ψ(t) é uma solução, então ψ e ψ ' são contínuas em (a, b) mas ψ '' tem saltos de descontinuidades nos mesmos pontos da g. Analogamente para equações de ordem n, onde a derivada da solução de ordem n terá saltos de descontinuidades nos mesmos pontos da função força g(t), mas a solução e suas derivadas de ordem menor que n serão contínuas sobre (a, b).
Suavidade da Solução Geral
y ' '+ p( t ) y'+ q (t ) y=g ( t )

Encontrar a solução do PVI
O gráfico da função força g(t) é dado ao lado, e é
conhecido como rampa de carga.
y ''+ 4y=g( t ) , y(0 )=0, y' (0)=0onde
g ( t )=u5 ( t ) t−55
−u10( t ) t−105
={0, 0≤t<5(t−5)/5 5≤t<101, t≥10 }
Exemplo 2: PVI (1 de 12)

Assumindo que esta EDO possui solução y = φ(t) e que φ'(t) e φ''(t) satisfaz as condições do Corolário 6.2.2. Então
ou
Fazendo Y(s) = L{y}, e substituindo as condições inicial,
Assim
L {y ' ' }+ 4L {y }=[L {u5( t )(t−5)}]/5−[L {u10( t )(t−10)}]/5
[s2 L {y}−sy (0 )− y ' (0 )]+ 4L{y }= e−5s−e−10 s
5s2
Exemplo 2: Transformada de Laplace (2 de 12)
(s2+ 4 ) Y ( s )=(e−5s−e−10 s)/5s2
Y (s )= (e−5s−e−10 s)5s2 (s2+ 4)
y ' '+ 4y=u5( t )t−5
5−u10(t )
t−105
, y( 0)=0, y ' (0 )=0

Temos
onde
Tomando h(t) = L-1{H(s)}, então
pelo Teorema 6.3.1.
y=φ( t )=15 [u5( t )h (t−5)−u10( t )h( t−10 )]
Exemplo 2: Fatorando Y(s) (3 de 12)
Y (s )= (e−5s−e−10 s)5s2 (s2+ 4)
= e−5s−e−10 s
5H ( s )
H ( s )= 1s2 (s2+ 4)

Exemplo 2: Frações Parciais (4 de 12)
H ( s )= 1s2( s2+ 4)
=As+
Bs2+
Cs+ Ds2+ 4
(A+ C )s3+ (B+ D )s2+ 4 As+ 4B=1⇒ A=0, B=1/4, C=0, D=−1 /4
H ( s )= 1/4s2 −
1/4s2+ 4
Reescrevendo H(s), como.
Esta expansão em frações parciais produz as equações
Assim

Exemplo 2: Solução (5 de 12)
h( t )=L−1{H ( s )}=14
t−18
sin (2t )
y=φ( t )=15 [u5( t )h (t−5)−u10( t )h( t−10 )]
Assim
e onde
Para h(t) como dado acima, e do nosso resultado já determinado em função de h(t), a solução do PVI é então
+−
=
+−=
42
811
41
44/14/1)(
22
22
ss
sssH

Exemplo 2: Gráfico da Solução (6 de 12)
φ( t )=15 [u5( t )h( t−5)−u10( t )h( t−10)] , onde
h ( t )=14
t−18
sin (2t )
Assim a solução do PVI é
E o gráfico desta solução é dado abaixo.

Exemplo 2: Composição em PVIs (7 de 12)
0≤t< 5 : y1' '+ 4y1=0, y1(0 )=0, y1
' (0 )=05< t< 10: y2
' '+ 4y2=( t−5)/5, y2 (5 )=0, y2' (5)=0
t> 10 : y3' '+ 4y3=1, y 3(10)= y2(10 ) , y3
' (10)= y2' (10 )
A solução original do PVI pode ser vista como a composição de três PVIs separados:

Exemplo 2: Primeiro PVI (8 de 12)
y1' '+ 4y1=0, y1(0 )=0, y1
' (0 )=0 ; 0≤t< 5Considere o primeiro PVI
Do ponto de vista físico, o sistema está inicialmente em repouso, e uma vez que não existe nenhuma força externa, ele permanece em repouso. Assim a solução sob o intervalo [0, 5) é y1 = 0, e isto pode ser verificado analiticamente. Veja gráficos abaixo.

Considere o segundo PVI
Usando métodos do Capítulo 3, a solução é da forma
Assim a solução é uma oscilação sobre a reta (t – 5)/20, sob o intervalo de de tempo (5, 10).
Exemplo 2: Segundo PVI (9 de 12)
y2' '+ 4y2=(t−5)/5, y2(5 )=0, y2
' (5 )=0 ; 5< t< 10
y2=c1 cos (2t )+ c2 sin (2t )+ t /20−1/4

Considere o terceiro PVI
Usando métodos do capítulo 3, a solução é da forma
Assim a solução é uma oscilação sobre y = 1/4, para t > 10.
Exemplo 2: Terceiro PVI (10 de 12)
y3' '+ 4y3=1, y3(10 )= y2(10 ) , y3
' (10)= y2' (10 ); t> 10
y3=c1 cos (2t )+ c2 sin (2t )+ 1/ 4

Portanto a solução do PVI é
Para encontrar a amplitude oscilatória do estado estácionário, devemos localizar um ponto de máximo ou mínimo para t > 10. Resolvendo y' = 0, o primeiro máximo é (10.642, 0.2979). Assim a amplitude da oscilação é aprox. 0.0479.
Exemplo 2: Amplitude (11 de 12)
y=φ( t )=15 [u5( t )h (t−5)−u10( t )h( t−10 )] , h (t )=1
4t−1
8sin (2t )

Nossa solução é
Neste exemplo, a função força g é contínua mas g' é descontínua em t = 5 e t = 10.Segue que φ e sua primeria e segunda derivadas são contínuas em toda parte, mas φ''' possui descontinuidade em t = 5 e t = 10 que são os mesmos pontos de descontinuidade de g' em t = 5 e t = 10.
Exemplo 2: Suavidade da Solução (12 de 12)
y=φ( t )=15 [u5( t )h (t−5)−u10( t )h( t−10 )] , h (t )=1
4t−1
8sin (2t )

6.5: Função ImpulsoEm algumas aplicações, é necessário tratar fenômenos de natureza impulsiva. Por exemplo, um circuito elétrico ou sistema mecânico sujeitos a uma voltagem ou força g(t) de grande magnitude que agem em um período curto de tempo t0. Tais problemas levam a equação diferencial da forma
ay'' +by' +cy=g ( t ) ,onde
g ( t )={K , t0−τ<t<t0 +τ0, caso contrário }
e τ>0 é pequeno e K> 0 grande.

Medindo ImpulsoEm um sistema mecânico, onde g(t) é uma força, o total de impulso desta força é medida pela integral
Note que se g(t) tem a forma
Então
Em particular, se c = 1/(2τ), então I(τ) = 1 (independente de τ ).
I (τ )=∫−∞
∞g ( t )dt=∫ t0−τ
t 0+ τg ( t )dt
g ( t )={c, t0−τ<t<t0 +τ0, caso contrário }
I (τ )=∫−∞
∞g ( t )dt=∫ t0−τ
t 0+ τg ( t )dt =2τ c , τ> 0

Função Impulso Unitário
Suponha a função força dτ(t) tenha a forma
Então como já vimos, I(τ) = 1.
Queremos que dτ(t) aja em intervalosde tempo cada vez mais curtos
(i.e., τ → 0). Veja gráfico.
Note que dτ(t) fica mais alto e mais
estreito com τ → 0. Assim para t ≠ 0, temos
d τ( t )={1/2τ , −τ<t<τ0, caso contrário }
limτ →0
d τ( t )=0, e limτ → 0
I ( τ )=1

Função Delta de Dirac Assim para t ≠ 0, temos
A Função impulso unitário δ é definida com as propriedades
A função impulso unitário é um exemplo de uma função generalizada e é usualmente chamada de a função dela de Dirac. Em geral, para um impulso unitário em um ponto arbitrário t0,
δ (t )=0 para t≠0, e∫ δ ( t )dt=1
δ (t−t 0)=0 para t≠t 0 , e ∫ δ( t−t0 )dt=1
limτ → 0
d τ( t )=0, e limτ → 0
I ( τ )=1

Transformada de Laplace de δ (1 de 2)
A transformada de Laplace de δ é definida por
e assim
L {δ( t−t0 )}=limτ → 0
L {d τ ( t−t0 )}, t0> 0
L {δ( t−t0 )}=limτ →0∫0
∞e−st d τ (t−t0)dt=lim
τ →0
12τ∫ t0−τ
t0+ τe−st dt
=limτ → 0
−e−st
2sτ∣t0−τ
t0+ τ=lim
τ →0
12sτ
[−e−s( t0+ τ)+ e
−s (t 0−τ )]
=limτ → 0
e−st0
sτ [esτ−e− sτ
2 ]=e−st 0[limτ→0
sinh (sτ )sτ ]
=e−st0[limτ→0
scosh (sτ )s ]=e
−st0

Assim a Transformada de Laplace de δ é
Para a Transformada de Laplace de δ em t0= 0, tome limites da seguinte forma:
Por exemplo, quando t0= 10, temos L{δ(t -10)} = e-10s.
L {δ( t )}= limt0 → 0
L {d τ ( t−t 0)}= limτ0 →0
e−st 0=1
Transformada de Laplace de δ (2 de 2)
{ } 0,)( 000 >=− − tettL stδ

Produto de Funções Contínuas por δO produto da função delta e uma função contínua f pode ser integrável, usando o teorema do valor médio para integrais:
Assim
∫−∞
∞δ ( t− t0 ) f ( t )dt= f ( t0)
[ ]
)(
*)(lim
)* where( *)(221lim
)(21lim
)()(lim)()(
0
0
000
0
000
0
0
tf
tf
ttttf
dttf
dttfttddttftt
t
t
=
=
+<<−=
=
−=−
→
→
+
−→
∞
∞−→
∞
∞−
∫
∫∫
τ
τ
τ
ττ
ττ
ττττ
τ
δ

Considere a solução do PVI
Então
Seja Y(s) = L{y},
Substituindo as condições iniciais, obtemos
ou
2L {y' ' }+ L{y ' }+ 2L {y }=L {δ( t−7)}
[2s2 Y ( s )−2 sy (0)−2 y' ( 0)]+ [sY ( s )− y (0 )]+ 2Y( s )=e−7s
Exemplo 1: PVI (1 de 3)
(2s2+ s+ 2) Y ( s )=e−7s
Y (s )= e−7s
2s2+ s+ 2
2 y ' '+ y '+ 2y=δ( t−7 ) , y (0)=0, y ' (0 )=0

Nos temos
A expansão em frações parcial de Y(s) nos dá
e portanto
Exemplo 1: Solução (2 de 3)
Y (s )= e−7s
2s2+ s+ 2
Y (s )= e−7s
2√15 [ √15 /4( s+ 1/4)2+ 15 /16 ]
y ( t )= 12√15
u7( t )e−(t−7)/4sin √15
4 (t−7)

Como as condições iniciais em t=0 são homogêneas e não existe excitação externa até t = 7, não há resposta no intervalo (0, 7). O impulso em t = 7 produz uma oscilação que decai, mas persiste indefinidamente. A Resposta é contínua em t = 7, apesar da singularidade do termo não homogêneo. No entanto y' tem uma descontinuidade em salto neste ponto t = 7, y'' tem uma descontinuidade infinita ai. Assim singularidade da função força é balanceada por uma singularidade correspondente com em y''.
Exemplo 1: Comentários da Solução (3 of 3)

6.6: A Convolução Algumas vezes é possível escrever a Transformada de Laplace H(s) como H(s) = F(s)G(s), onde F(s) e G(s) são as transformadas de funções conhecidas f e g, respectivamente.Neste caso podemos esperar que H(s) seja a transformada do produto de f e g. Isto é,
H(s) = F(s)G(s) = L{f }L{g} = L{f g}? Veremos a seguir um exemplo que mostra que esta igualdade não é verdadeira, a transformada de Laplace não comuta com a multiplicação usual. Nesta seção estudaremos a convolução de f e g, o qual pode ser visto como um produto generalizado, e para o qual a Transformada de Laplace faz comutar.

Exemplo 1
Sejam f (t) = 1 e g(t) = sin(t). Calculando a Transformada de Laplace de f e g
Assim
e
Portanto para estas funções não vale a igualdade
L { f ( t ) g ( t )}=L { sin t }= 1s2+ 1
L { f ( t )}=L { 1 }=1s
, L { g ( t ) }=L { sin t }= 1s2+ 1
L { f ( t ) g ( t )}≠L { f ( t ) } L { g ( t ) }
L { f ( t ) } L { g ( t ) }= 1s (s2+ 1)

Teorema 6.6.1Suponham F(s) = L{f (t)} e G(s) = L{g(t)} ambas existem para s > a ≥ 0. Então H(s) = F(s)G(s) = L{h(t)} para s > a, onde
A função h(t) é chamada como a convolução de f e g e a integral acima são conhecidas como integrais de convolução.Note que a igualdade das duas integrais de convolução pode ser obtidas fazendo a substituição u = t - τ. A integral de convolução é uma definição de um “produto generalizado” e pode ser escrito como h(t) = ( f *g)(t).
f*g = g*f (comutatividade) f*(g1+g2) = f*g1 + f*g2 (distributividade) (f*g)*h) = f*(g*h) (associatividade) Ainda temos, f*0=0*f=0 ; (f*1)(t) f(t) e pode ser que f*f <0.
∫∫ −=−tt
dτtgfτ)g(τ)dτf(t=h(t)00
)()( ττ
≠

Teorema 6.6.1 Ideia da prova
{ })(
)()(
)()(
)()(
)()()(
)()(
)()()()(
00
0 0
0
0
0 0
)(
0 0
thL
dtdgtfe
dtdgtfe
ddttfge
utdttfedg
duufedg
dgeduufesGsF
tst
t st
st
st
us
ssu
=
−=
−=
−=
+=−=
=
=
∫∫
∫ ∫∫ ∫∫ ∫∫ ∫∫ ∫
∞ −
∞ −
∞ ∞ −
∞ ∞ −
∞ ∞ +−
∞ ∞ −−
τττ
τττ
τττ
ττττ
ττ
ττ
τ
τ
τ
τ

Exemplo 2Encontre a Transformada de Laplace da função h abaixo.
Solução: Note que f (t) = t e g(t) = sin2t, com
Assim pelo Teorema 6.6.1,
F (s )=L { f (t )}=L {t }=1s2
G( s )=L {g ( t )}=L {sin 2t}=2s2+ 4
h ( t )=∫0
t( t−τ )sin 2 td τ
L {h (t )}=H ( s )=F ( s )G (s )= 2s2 (s2+ 4)

Exemplo 3: Encontre a Transformada Inversa (1 de 2)Encontre Transformada de Laplace inversa de H(s), abaixo.
Solução: Seja F(s) = 2/s2 e G(s) = 1/(s - 2), com
Assim pelo Teorema 6.6.1,
f ( t )=L−1 {F ( s )}=2tg ( t )=L−1 {G( s )}=e2t
H ( s )= 2s2( s−2 )
L−1 {H ( s )}=h( t )=2∫0
t( t−τ )e2τ dτ

Exemplo 3: Solução h(t) (2 de 2)Podemos simplesmente integrar para h(t), como segue.
[ ] [ ]
21
21
21
21
1211
22)(2)(
2
222
222
0
2
0
2
0
2
0
2
0
2
0
2
−−=
−+−−=
−−−−=
−−=
−=−=
∫
∫∫∫
te
eettte
eetet
deete
dedetdetth
t
ttt
ttt
ttt
ttt
ττ
τττττ
τττ
τττ

Encontre a solução do PVI
Solução:
ou
Seja Y(s) = L{y}, e substituindo as condições iniciais,
Assim
L {y ' ' }+ 4L {y }=L {g ( t )}
[s2 L {y }−sy (0 )− y ' (0 )]+ 4L{y }=G( s )
Exemplo 4: PVI (1 de 4)
(s2+ 4 ) Y ( s )=3s−1+ G (s )
Y (s )=3s−1s2+ 4
+G( s )s2+ 4
y ' '+ 4y=g ( t ) , y( 0)=3, y ' (0)=−1

Temos
Assim
Noteque se g(t) é dado, então a integral de convolução pode ser calculada.
y ( t )=3cos 2t−12
sin 2t+ 12∫0
tsin 2 ( t−τ )g (τ )dτ
Exemplo 4: Solução (2 de 4)
)(4
221
42
21
43
4)(
413)(
222
22
sGsss
ss
sGs
ssY
++
+−
+=
++
+−=

Lembrem que a Transformada de Laplace da solução y é
Note Φ (s) depende somente do sistema de coeficientes e das condições iniciais, enquanto Ψ (s) depende somente do sistema de coeficientes e da função força g(t). Mas, φ(t) = L-1{Φ (s)} resolve o PVI homogêneo
enquanto ψ(t) = L-1{Ψ (s)} resolve o PVI não homogêneo
Exemplo 4: Solução da Transformada Laplace (3 de 4)
Y (s )=3s−1s2+ 4
+G( s )s2+ 4
=Φ( s )+ Ψ ( s )
y ' '+ 4y=g ( t ) , y( 0)=3, y ' (0)=−1
y ' '+ 4y=0, y (0 )=3, y' (0 )=−1
y ' '+ 4y=g ( t ) , y( 0)=0, y ' (0 )=0

Examinando Ψ (s) mais de perto,
A função H(s) éconhecida como a função de transferência, e depende somente do sistema de coeficientes. A função G(s) depende somente da excitação externa g(t) aplicada no sistema.Se G(s) = 1, então g(t) = δ(t) e por isso h(t) = L-1{H(s)} resolve solves o PVI não homogêneo
Assim h(t) é a resposta do sistema para um impulso unitário aplicado em t = 0, e por isso h(t) é chamada de resposta ao impulso do sistema.
Exemplo 4: Função de Transferência (4 de 4)
Ψ (s )=G (s )s2+ 4
=H (s )G( s ) , onde H ( s )= 1s2+ 4
y ' '+ 4y=δ( t ) , y (0)=0, y ' (0 )=0

Considere o PVI geral
Este PVI é também chamado de um Problema input-output. Os coeficientes a, b, c descreve propriedade físicas de um sistema, e g(t) é um input do sistema. Os valores y0 e y0' descreve o estado inicial, e a solução y é o output no tempo t. Usando a Transformada de Laplace, obtemos
ou
Problema de entrada-saída (Input-Output) (1 de 3)
a y ' '+ b y '+ cy=g ( t ) , y (0 )= y0 , y ' (0 )= y0'
a [ s2Y (s )−sy (0)− y ' (0)]+ b [ sY ( s )− y (0 )]+ cY (s )=G ( s )
Y (s )=(as+ b ) y0+ a y0
'
as2+ bs+ c+
G( s )as2+ bs+ c
=Φ (s )+ Ψ ( s )

Temos
Como antes, Φ (s) depende somente do sistema de coeficientes e das condições inicial, enquanto Ψ (s) depende somente do sistema de coeficientes e da função força g(t). Mas, φ(t) = L-1{Φ (s)} resolve o PVI homogêneo
Enquanto ψ(t) = L-1{Ψ (s)} resolve o PVI não homogêneo
Solução da Transformada de Laplace (2 de 3)
a y ' '+ b y '+ cy=0, y(0 )= y0 , y ' (0)= y0'
a y ' '+ b y '+ cy=g ( t ) , y (0 )=0, y' (0 )=0
a y ' '+ b y '+ cy=g ( t ) , y (0 )= y0 , y ' (0 )= y0'
Y (s )=(as+ b ) y0+ a y0
'
as2+ bs+ c+
G( s )as2+ bs+ c
=Φ (s )+ Ψ ( s )

Examinando Ψ (s) mais de perto,
Como antes, H(s) é a função de transferência, e depende somente do sistema de coeficientes, enquanto G(s) depende somente da excitação externa g(t) aplicada no sistema.Assim se G(s) = 1, então g(t) = δ(t) e por isso h(t) = L-1{H(s)} resolve o PVI não homogêneo
Assim h(t) é a resposta do sistema para um impulso unitário aplicado em t = 0, e por isso h(t) é chamada a resposta ao impulso do sistema, com
Função de Transferência (3 de 3)
a y ' '+ b y '+ cy=δ( t ) , y (0 )=0, y ' (0)=0
Ψ (s )= G (s )as2 +bs+c
=H (s )G( s ) , onde H ( s )= 1as2 +bs+c
ψ ( t )= L−1 {H ( s )G (s )} =∫0
th( t−τ ) g ( τ )dτ