1 cÁlculo - fotonica.ifsc.usp.br · por outro lado, o módulo do vetor é ... evitá-la costuma-se...
TRANSCRIPT

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 1
1.1 Introdução aos vetores
Existem grandezas físicas que podem ser especificadas fornecendo-se
apenas um número. Assim, por exemplo, quando dizemos que a temperatura
de uma sala é de 20 0C temos a informação completa, não sendo necessário
nenhum dado adicional. Grandezas deste tipo são conhecidas como escalares.
Por outro lado, se estivermos discutindo o deslocamento de um corpo, é
necessário indicar a distância percorrida entre dois pontos, a direção e o
sentido do deslocamento. A grandeza que descreve este movimento é
denominada de vetor e será o objeto de estudo desta seção. Existem ainda
grandezas chamadas tensores que necessitam de um número maior de
informações, em geral dadas na forma de matrizes, que fogem à abrangência
deste texto.
Geometricamente, os vetores são representados por uma seta, cujo
comprimento é chamado de módulo (escolhendo-se uma determinada escala).
A direção e o sentido da seta fornecem a direção e sentido do vetor.
Usualmente, ele é representado por uma letra em negrito (a, AB, etc.) ou com
uma seta sobre a letra ( ar,AB→, etc.). Por outro lado, o módulo do vetor é
representado apenas por uma letra ou com o vetor colocado entre barras (a,
ar, AB
→, etc.)
Consideremos uma partícula deslocando-se de A para B. Este
deslocamento é representado por uma seta indo de A até B, como a mostrada
na Fig. 1.1(a). O caminho efetivamente seguido pela partícula pode não
coincidir com o seu deslocamento (vetor), conforme ilustra a Fig. 1.1(b). Se
considerarmos pontos intermediários (P), tais como o mostrado na Fig. 1.1(c),
1 UM POUCO DE
CÁLCULO
S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
2 Um pouco de cálculo
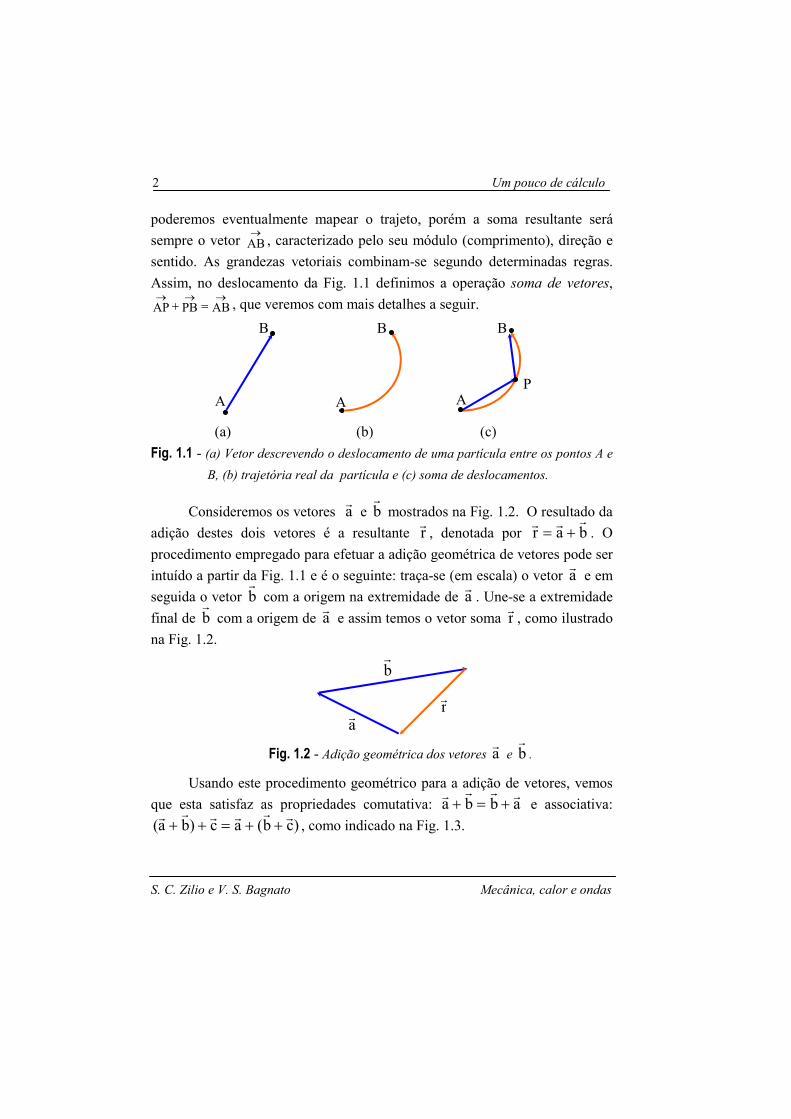
poderemos eventualmente mapear o trajeto, porém a soma resultante será
sempre o vetor AB→, caracterizado pelo seu módulo (comprimento), direção e
sentido. As grandezas vetoriais combinam-se segundo determinadas regras.
Assim, no deslocamento da Fig. 1.1 definimos a operação soma de vetores,
ABPBAP→→→
=+ , que veremos com mais detalhes a seguir.
Fig. 1.1 - (a) Vetor descrevendo o deslocamento de uma partícula entre os pontos A e
B, (b) trajetória real da partícula e (c) soma de deslocamentos.
Consideremos os vetores ar e b
r mostrados na Fig. 1.2. O resultado da
adição destes dois vetores é a resultante rr, denotada por bar
rrr+= . O
procedimento empregado para efetuar a adição geométrica de vetores pode ser
intuído a partir da Fig. 1.1 e é o seguinte: traça-se (em escala) o vetor ar e em
seguida o vetor br com a origem na extremidade de a
r. Une-se a extremidade
final de br com a origem de a
r e assim temos o vetor soma r
r, como ilustrado
na Fig. 1.2.
Fig. 1.2 - Adição geométrica dos vetores ar e br.
Usando este procedimento geométrico para a adição de vetores, vemos
que esta satisfaz as propriedades comutativa: abbarrrr
+=+ e associativa:
)cb(ac)ba(rrrrrr
++=++ , como indicado na Fig. 1.3.
A
B B
A
B
A P
(a) (b) (c)
ar
br
rr

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 3
A subtração de vetores é facilmente introduzida definindo-se o
“negativo” de um vetor como sendo o vetor com sentido oposto ao original.
Assim, )b(abarrrr−+=− , como ilustrado na Fig. 1.4. Note que tanto a adição
como a subtração podem ser representadas simultaneamente pela construção
do paralelogramo representado na Fig. 1.5.
(a) (b)
Fig. 1.3 - Propriedades (a) comutativa e (b) associativa.
Fig. 1.4 - Subtração geométrica dos vetores ar e br.
Fig. 1.5 - Regra do paralelogramo para a adição e subtração geométrica dos vetores
ar e br.
A adição geométrica de vetores tridimensionais é muito mais difícil e para
evitá-la costuma-se utilizar o método analítico, que consiste na decomposição
espacial dos vetores e na manipulação individual de seus componentes. A
decomposição de um vetor só pode ser efetuada com relação a um sistema de
ar
br
cr
barr
+
cbarrr
++
cbrr
+ ar
br
rr
ar
br
ar
br
br
−
ar
barr
−
br
−
ar
barr
−
ar
br
ar
br
barr
+

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
4 Um pouco de cálculo
coordenadas de orientação conhecida no espaço. Considere a decomposição de
um vetor no plano, conforme mostra a Fig. 1.6, onde θ é o ângulo entre ar e
o semi-eixo positivo x. Dependendo do ângulo θ, as componentes podem ser positivas ou negativas. Por definição, este ângulo aumenta quando o vetor
roda no sentido anti-horário. O conhecimento dos componentes de um vetor é
suficiente para especificá-lo completamente, além de possibilitar a
manipulação matemática simultânea de vários vetores. De acordo com a Fig.
1.6 temos ax = a cosθ e ay = a senθ, de onde sai que:
2y
2x aaaa +==
r
tg θ = ay/ax
Fig. 1.6 - Decomposição do vetor ar num sistema de coordenadas cartesianas.
Muitas vezes é conveniente a introdução de um vetor de módulo
unitário, chamado versor, na direção de um determinado vetor, que pode então
ser escrito como aeaa =r
. Assim separamos o módulo do vetor (a) de sua
direção e sentido ( ae ). Da mesma forma, é conveniente traçar versores
paralelos aos eixos do sistema de coordenadas escolhido, como mostra a Fig.
1.7. Normalmente, no sistema de coordenadas cartesianas eles são chamados
de i , j e k . Costumamos dizer que estes versores formam uma base completa
porque qualquer vetor pode ser expresso como combinação linear deles, da
forma:
y
ay
ax
θ x
ar

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 5
kajaiaa zyx ++=r
Fig. 1.7 - Versores no sistema de coordenadas cartesianas.
onde kaeja,ia zyx são denominadas de componentes vetoriais do vetor ar.
Note que se estivermos tratando com vetores contidos no plano xy, temos az =
0. A soma analítica de vetores pode ser efetuada da forma:
( ) ( )kbjbibkajaiabar zyxzyx +++++=+=rrr
( ) ( ) ( ) krjrirkbajbaiba zyxzzyyxx ++=+++++=
Assim, rx = ax+ bx, ry = ay+ by, rz = az+ bz. Logo: “O vetor resultante tem como
componentes a soma das respectivas componentes dos vetores individuais”.
Como exemplo, considere 3 vetores coplanares dados por: j1i2a −=r
,
j2i3b +=r
e i1.5c −=r
. As componentes do vetor resultante são: rx = 2 + 3 -
1.5 = 3.5 e ry = -1 + 2 + 0 = 1, de modo que j1i5.3r +=r
. O ângulo θ pode
ser encontrado de acordo com:
tg θ = ry/rx = 1/3.5 = 0.286 ⇒ θ = 15.90
e o módulo é:
( ) 3.6413.5rr 2 =+==r
Uma operação que veremos aparecer com freqüência nos próximos
capítulos é a multiplicação envolvendo vetores, que pode ser de três tipos:
k i
j
x
y
z

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
6 Um pouco de cálculo
a) Multiplicação de um vetor por um escalar - resulta num outro vetor paralelo
ao primeiro, porém com o módulo multiplicado por uma constante. Se esta
constante for negativa existe a inversão do sentido do vetor.
b) Produto escalar - o produto escalar entre ar e b
r resulta num número (e não
num vetor) que é definido como φcosabb.a =rr
, onde ϕ é o ângulo entre eles. Geometricamente, temos o produto do módulo de um vetor pela projeção do
outro sobre si. Este tipo de produto aparece no cálculo do trabalho mecânico,
potência de uma força, etc.
Fig. 1.8 - Produto escalar entre dois vetores ar e b
r.
c) Produto vetorial – É representado por b acrrr
×= . O vetor resultante tem o
módulo dado por c = ab senϕ, e direção perpendicular ao plano que contém ar
e br. Novamente, ϕ é o ângulo entre a
r e b
r. O sentido de c
r pode ser
determinado pela regra da mão direita, ilustrada na Fig. 1.9. Usa-se a seguinte
receita: “Empurre com as pontas dos dedos o vetor ar no sentido de superpô-
lo ao vetor br. O polegar indicará o sentido do vetor c
r”.
Fig. 1.9 - Regra da mão direita para a realização do produto vetorial.
φ
ar
br
cr
br
ar

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 7
Ao contrário do produto escalar, o produto vetorial não é comutativo,
isto é, ele muda de sinal ao mudarmos a ordem dos vetores, isto é,
a b b arrrr
×−=× . Este fato pode ser comprovado pela regra da mão direita.
Algumas propriedades interessantes dos produtos escalar e vetorial são:
1. distributiva (escalar): c.a b.a )cb.( arrrrrrr
+=+
2. distributiva (vetorial): c a b a )cb( x arrrrrrr
×+×=+
3. produto misto: )b a.(c ) a c( .b )c b( . arrrrrrrrr
×=×=×
4. duplo produto vetorial: c)b. a( b) c . a( )c b( x arrrrrrrrr
−=×
Para o cálculo do produto vetorial, notamos que: j j i i =×=×
0 k k =×= , pois o ângulo entre dois vetores iguais é nulo e
i k j ,k j i =×=× e j i k =× , como pode ser visto pela regra da mão
direita. Vejamos a seguir alguns exemplos de multiplicação vetorial.
(i) k8ba j2b e i4a =×⇒==rrrr
(ii) j- ib e j3i2a 2
1=+=rr
=×⇒ barr
( ) =
−×+ jij3i22
1
k-jj3 - i j j i2 - i i 2
7
2
3 =××+××= .
Uma outra maneira de se fazer o produto vetorial é pelo uso de
matrizes. Considere kj3i2a −+=r
e k2jib +−=r
. Podemos calcular o vetor resultante pela co-fatora da matriz:
( ) ( ) ( ) )kji5(k 32j 14i 16
2 1- 1
1- 3 2
k j i
ba −−=−−++−−==×rr
Este mesmo resultado pode ser encontrado utilizando-se a propriedade
distributiva (vetorial).
A variação dos vetores é um fato extremamente importante. Vamos
analisar, por exemplo, o movimento circular uniforme, esquematizado na Fig.
1.10.

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
8 Um pouco de cálculo
Fig. 1.10 - Representação do movimento circular.
Durante um intervalo de tempo ∆t extremamente curto (infinitesimal), a distância percorrida é ∆s = ωr ∆t. O vetor velocidade é dado por:
t∆/s∆vrr
=
e para calculá-lo tomamos, de acordo com a Fig. 1.10:
( ) ( ) jttsenrittcosrrrs 12 ∆ω+ω+∆ω+ω=−=∆rrr
[ ] itsentsentcostcosrjtsenritcosr ∆ωω−∆ωω=ω−ω−
[ ] jtsenritcosrjtsentcostcostsenr ω−ω−∆ωω+∆ωω+
Para ∆t muito pequeno ( 0t→∆ ) temos 1tcos ≈∆ω e
ttsen ∆ω≈∆ω , e assim,
jtcostritsentrs ω∆ω+ω∆ω−=∆r
jtcosritsenrv ωω+ωω−=⇒r
Desta forma, a variação temporal do vetor posição rr nos leva a um
vetor velocidade vr que é tangencial à órbita do movimento circular. Note que
se definirmos um vetor kω=ωr
, podemos escrever
jtcosritsenr
0t rsen t rcos
0 0
k j i
v ωω+ωω−=
ωω
ω=r
ωt rr
x
y
sr
∆ s
r 1
ω∆t
r 2

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 9
Como vemos, o conhecimento de como as grandezas físicas variam é tão
importante quanto o conhecimento da própria grandeza. Como o vetor é
caracterizado pelo módulo, direção e sentido, ele apresentará variação sempre
que um destes elementos mudar. Podemos ter:
a) Variação do módulo, como indicado na Fig. 1.11:
12 v-vv∆rrr
=
Fig. 1.11 – Variação do módulo de um vetor .
b) Variação da direção, como no movimento circular visto anteriormente:
21 aarr
=
12 aaarrr
−=∆
Fig. 1.12 - Variação da direção de um vetor .
Este tipo de cálculo que fizemos, considerando a variação do vetor em
intervalos pequenos, é extremamente útil em Física e nos leva ao chamado
cálculo infinitesimal (válido quando 0t→∆ ). Abordaremos este tópico a
seguir.
1.2 Introdução às derivadas
Em Física, a manipulação matemática das várias grandezas é tão
importante quanto o conhecimento da própria grandeza. Nem sempre as
operações elementares de álgebra são suficientes para tais manipulações,
sendo necessária a introdução de novas operações e conceitos matemáticos.
Dentre estes, são de extrema importância os de derivada e integral.
Como ilustração, consideremos um corpo que se desloca a uma
distância ∆d num intervalo de tempo ∆t. Com estes dados, o máximo que
1vr
2vr
vr
∆
1ar
2ar
ar
∆

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
10 Um pouco de cálculo
podemos fazer é calcular a velocidade média do corpo no intervalo
mencionado. Se quisermos conhecer a velocidade instantânea do corpo num
determinado ponto de sua trajetória, deveremos analisar seu comportamento
nas vizinhanças deste ponto e tão mais exata será a resposta quanto mais
limitada for a vizinhança. É comum nesta situação que descrevemos
encontrarmos divisões de números quase nulos e, neste caso, tais divisões
devem ser feitas de uma maneira especial.
Vamos iniciar a abordagem deste assunto pelo conceito intuitivo de
limite. Consideremos a função ( ) 1x4xf 2 += . Queremos estudar seu
comportamento quando a variável x assume valores cada vez mais próximos
de 1. Para isto, vamos construir a seguinte tabela:
x f(x) x f(x)
0.6
0.7
0.8
0.9
0.95
0.99
2.44
2.96
3.56
4.24
4.61
4.92
1.4
1.3
1.2
1.1
1.01
1.001
8.84
7.76
6.76
5.84
5.08
5.008
Ela mostra claramente que quando x tende a 1, f(x) tende a 5 e estará
mais próximo de 5 quanto menor for a diferença entre x e 1. Este fato é
expresso matematicamente da seguinte forma:
( ) 5xflim 1x =→
que quer dizer que “o limite da função f(x) quando x tende a 1 é 5. Outros
exemplos que podemos citar são:
11x2lim 1x =−→

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 11
∞=→ x1lim 0x
( ) 1x/11limx =+∞→
Para funções polinomiais, isto é, funções que tenham dependência do
tipo xn, vale a seguinte propriedade:
( ) ( )cfxflim cx =→
Existem outros limites que são um pouco mais difíceis de serem
demonstrados e que são melhor discutidos nos livros de Cálculo. Por exemplo
temos:
1x
xsenlim 0x =
→
( ) ...718.2ex/11lim xx ==+∞→
Vamos a seguir usar o conceito de limite para introduzir a operação de
diferenciação (derivadas). Seja a função f(x) definida num intervalo do eixo x,
no qual o ponto x0 está contido, como mostra a Fig. 1.13. Chamaremos de
razão incremental da função f(x) relativa ao ponto x0, a quantidade:
( ) ( )0
0
xx
xfxf
−−
Fig. 1.13 - Definição da razão incremental.
x
f(x)
x0 x
f(x)-f(x0)

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
12 Um pouco de cálculo
A razão incremental da função f(x) representa o quanto a função é
incrementada quando x é variado de x0 a x. Esta razão pode ser positiva,
negativa ou nula dependendo se a função é crescente, decrescente ou constante
no intervalo considerado. A derivada de uma função é definida como:
( ) ( )
−−
= →0
0xx0 xx
xfxflim)x('f
0
É também comum escrevermos dx/df)x('f 0 = . Fazendo x = x0 +
,x∆ temos:
( ) ( )
∆
−∆+= →∆ x
xfxxflim)x('f 00
ox0
A derivada da função num ponto representa a taxa de variação da
função ao nos afastarmos deste ponto. Vamos, a seguir, obter a derivada de
algumas funções.
1) f(x) = x2 + 3x ⇒ ( ) ( ) ( )x
x3xxx3xx
x
)x(fxxf 22
∆−−∆++∆+
=∆
−∆+
x3x2x
x3xx3x3xxx2x 222
∆++=∆
−−∆++∆+∆+=
Logo: ( ) ( ) 3x2x3x2limx'f 0x +=∆++= →∆
2) ( ) ( ) ( )x
xxx
x
xfxxfxxf
∆−∆+
=∆
−∆+⇒=
( ) ( )( ) ( ) xxx
1
xxxx
xxx
xxx
xxx
x
xxx
+∆+=
+∆+∆
−∆+=
+∆+
+∆+∆
−∆+=
E assim, x2
1
xxx
1lim)x('f ox =
+∆+= →∆

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 13
3) ( ) ( ) ( )
x
xcosxxcos
x
xfxxfxcos)x(f
∆−∆+
=∆
−∆+⇒=
( )( )2
2
x
x
2
x senxsen
∆
∆∆
+−=
onde utilizamos cos(a+b) - cos(a-b) = -2 sena senb, com a = x + ∆x/2 e b = ∆x/2. Desta forma temos:
( )( ) xsen
senxsenlim)x(f
2
2
x
x
2
x0x
' −=
+−=
∆
∆∆→∆
Geometricamente, podemos verificar que a derivada da função f(x)
num determinado ponto x0 representa a tangente do ângulo formado pela reta
tangente à curva em x0 com o eixo das abcissas (x). Este fato está ilustrado na
Fig. 1.14. É fácil verificar quando fazemos x tender a x0, a reta que passa por
estes dois pontos confunde-se cada vez mais com a tangente à curva no ponto
x0. Logo:
( ) ( )α=
−−
= →∆ tgxx
)x(fxflimx'f
0
00x0
Fig. 1.14 – Interpretação geométrica da derivada.
Uma vez visto o significado matemático da derivada, passemos a
apresentação de certas regras que facilitam bastante os cálculos:
1) função constante: ( ) 0dx
dfcxf =⇒=
x
f(x)
f(x)
f(x0)
x0 x
tangente
α

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
14 Um pouco de cálculo
2) função potência: ( ) 1nn nxx'fx)x(f −=⇒= (regra do tombo)
3) função soma: f(x) = u(x) + v(x) ⇒ f’(x) = u’(x) + v’(x)
Ex.: f(x) = x4 – x3 + 3x2 + 1 ⇒ f’(x) = 4x3 – 3x2 + 6x
4) função produto: f(x) = u(x). v(x) ⇒ f’(x) = u’(x) v(x) + u(x). v’(x) Ex.: f(x) = 3x2(4x+1) ⇒ f’(x) = 6x (4x+1) + 3x2(4)
5) função quociente: ( ) )x(v/)x(uxf = ⇒
( ) ( ) ( ) ( )( )2xv
x'vxuxvx'u)x('f
−=
6) funções trigonométricas:
( ) ( ) xcosx'fxsenxf =⇒=
f(x) = cos x ⇒ f’(x) = - sen x
f(x) = tg x ⇒ f’(x) = sec2x
7) função exponencial: f(x) = ax ⇒ f’(x) = ax lna
Todas estas propriedades que acabamos de mencionar podem ser
demonstradas a partir da definição da derivada em termos da razão
incremental. Demonstraremos aqui apenas uma delas, a da função produto f(x)
= u(x) v(x), e deixaremos as outras para o curso de Cálculo. Neste caso
temos: ( ) ( ) ( ) ( ) ( )
xxvxuxxvxxu
x)x(fxxf
∆−∆+∆+
=∆
−∆+
( ) ( ) ( ) ( ) ( ) ( ) ( ) ( )x
xvxxuxvxxuxvxuxxvxxu∆
∆++∆+−−∆+∆+=
( ) ( ) ( ) ( ) ( ) ( )[ ]x
xuxxuxv]xvxxv[xxu∆
−∆++−∆+∆+=
Tomando o limite para ∆x tendendo a zero:

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 15
( ) ( )[ ]
( ) ( ) ( )[ ]
∆−∆+
+
∆−∆+
∆+=
→∆
→∆
xxuxxu
xvlim
xxv)xx(v
xxulim)x('f
0x
ox
de onde obtemos: ( ) ( ) ( ) ( ) ( )x'uxvx'vxux'f +=
Regra da cadeia: Muitas vezes, durante o uso de derivadas em Física,
encontramos a situação em que )y(g)x(F = , com y = f(x), o que
corresponde à chamada função composta, isto é, função de uma outra função.
Por exemplo, F(x) = sen (x2), de onde temos g(y) = siny e y = x2 . Neste caso,
devemos usar a regra da cadeia, dada por:
dx
dy
dy
dg
dx
dF =
No presente exemplo F(x) = sen x2, com g(y) = siny e y = x2. Logo, ycosdy/dg = e )x(cosx2)x('Fx2dx/dy 2=⇒=
Tomemos um outro exemplo onde 432 )x3x21()x(F ++= .
Chamando x3x21y 32 ++= , temos g(y) = y4 de forma que a derivada é:
F’(x) = 4y3 (4x + 9x2) = 4(1+2x2 + 3x3)3 (4x + 9x2)
1.3 Integração
Como acabamos de ver, conhecendo-se a função f(x) é possível
calcular sua taxa de variação f’(x) (derivada). Uma pergunta lógica a ser feita
neste ponto é: conhecendo-se f’(x) é possível encontrar-se f(x), ou em outras
palavras, existe a operação inversa, ou anti-derivada? A resposta é sim e a
operação inversa denominada integração será discutida a seguir de uma forma
bastante intuitiva, deixando-se o rigor matemático para o curso de Cálculo.
Vamos considerar a função f(x) mostrada na Fig. 1.15 e supor
conhecidas as derivadas em todos os pontos x (x0, x1, x2, ...). Pela definição de
taxa de variação (ou razão incremental) temos:

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
16 Um pouco de cálculo
Fig. 1.15 – Função f(x) usada para a demonstração da operação inversa da derivada.
1taxaxx
)x(f)x(f
01
01 =−−
tal que f(x1) = f(x0) + taxa 1.(x1 – x0). Assim, conhecendo-se a taxa de
variação e a função no ponto x0, temos condições de determinar a função no
ponto x1. Da mesma forma, conhecendo-se a função no ponto x1 e a taxa 2,
que é a taxa entre x1 e x2, podemos determinar a função em x2. Se dividirmos o
eixo x em vários intervalos sucessivos nos quais conhecemos a taxa de
variação da função f(x), podemos mostrar que:
f(xn) = f(x0) + taxa 1.(x1 – x0) + taxa 2.(x2 – x1) + ... taxa n.(xn – xn-1)
de forma que podemos encontrar a função f(x) e sabermos as várias taxas de
variação ao longo do eixo x. Vamos, a seguir, tomar todos os intervalos com o
mesmo tamanho, ou seja:
x1 – x0 = x2 – x1 = ... = xn – xn-1 = ∆x
de modo que:
f(xn) = f(x0) + (taxa1 + taxa 2 + ... + taxa n). ∆x
Tomando o limite em que ∆x tende a zero, as várias taxas de variação transformam-se nas derivadas, de modo que:
x
f(x)
x1 x2 x3 x0 = 0
taxa 1
taxa 3
taxa 2

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 17
( ) ( ) ( ) xdxdfxfxf
s'stodos
0n ∆+= ∑∆
Como fizemos ∆x → 0, temos agora um número infinito de intervalos
e, consequentemente, infinitos termos na somatória. Além disto, estamos
somando números df/dx que variam continuamente. Neste caso, ao invés de
usarmos a soma ∑ de números discretos, introduzimos a operação ∫ ,
denominada integração, que representa uma soma contínua. A partir desta
definição, podemos escrever:
( )∫+=n
0
x
x0n dx
dxdf)x(f)x(f
onde usamos dx ≡ ∆x como notação no caso em que ∆x → 0. Como vemos,
esta operação permite encontrar-se f(x) a partir de f’(x) e por isso dizemos que
a integração é a operação inversa da diferenciação. Se quisermos, por
exemplo, calcular a integral:
( ) ( )∫ ∫ ++
=+
==+
+ C1m
xdxxdxd
1m1dxxI
1m1mm
onde a constante C está representando f(x0), que deve ser conhecido. A regra
acima é bastante importante na integração de polinômios. Alguns exemplos
simples são:
∫ += C3
xdxx
32
( )∫ +++=++ Cx2x
3xdx1xx
232
( )∫ ++=+ Cx4x85dxx8x5 287
A integral de uma determinada função também possui uma
interpretação geométrica como no caso da derivada. Para vermos tal

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
18 Um pouco de cálculo
interpretação, vamos considerar ∫n
0
x
x.dx)x(g Para cada ponto x, multiplicamos
o valor da função g(x) por uma largura dx mostrada na Fig. 1.16
(infinitesimalmente pequena) e somamos todos os produtos. Em cada ponto
temos a área de um retângulo infinitesimal de base dx e altura g(x). Baseados
neste fato, podemos interpretar geometricamente a integral de uma função g(x)
como sendo a área sob a curva, isto é, ( )∫ =n
0
x
xdxxg área sob a função g(x)
entre os pontos x0 e xn.
Fig. 1.16 - Interpretação geométrica da integral.
Podemos verificar este fato calculando a integral de g(x) = 4x entre 0
e 1, e comparando o valor obtido com a área da função neste intervalo. Temos:
( )∫ ∫ =−===1
0
1
0
1
0
2
201.22x4dxx4dxx4
Nesta última passagem introduzimos os limites de integração,
substituindo a constante de integração C.
( )∫ −==b
a
b
a
)a(F)b(FxFdx)x(g
Calculando a área do triângulo sombreado da Fig. 1.17 obtemos: área = ½ .4.1 = 2, que coincide com o resultado obtido por integração.
g(x)
dx xn x0
g(x)
x

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 19
Fig. 1.17 – Área da função g(x) = 4x entre 0 e 1.
Algumas propriedades importantes das integrais são:
(1) ∫ c g(x) dx = c ∫ g(x) dx onde c é uma constante (2) ∫ [g1 (x) + g2 (x)] = ∫ g1 (x) dx + ∫ g2 (x) dx (3) ∫ senx dx = ∫ dx
d (-cos x) dx = - cosx + C
(4) ∫ cosx dx = ∫ dxd (senx) dx = senx + C
1.4 Interpretação cinemática das derivadas e integrais
Na cinemática encontramos várias aplicações do cálculo de derivadas
e integrais. Analisando o movimento de um corpo, estas idéias fluem
espontaneamente dos argumentos físicos. Vamos considerar um corpo
deslocando-se numa trajetória S, conforme mostra a figura abaixo. Chamamos
de i e f os pontos inicial e final do movimento. O conhecimento específico da
trajetória não é suficiente para predizermos a velocidade do corpo para cada
posição. É necessário o conhecimento das posições sucessivas S(t) com o
decorrer do tempo. Suponha que a trajetória do corpo seja dividida em
pedaços sr
∆ , como mostra a Fig. 1.18. Um sr
∆ particular liga o ponto Sj ao
ponto Sj+1 e o intervalo de tempo decorrido para que o corpo execute este
deslocamento é ∆t. A velocidade média neste intervalo de tempo é t/sv ∆∆=
rr. Esta velocidade será tão mais próxima da velocidade real
0.0 0.5 1.0 1.5 2.00
1
2
3
4
x
g(x)

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
20 Um pouco de cálculo
(instantânea) do corpo na posição Sj quanto mais próximos forem os pontos j e
j +1. Isto ocorre porque neste caso sr
∆ confunde-se cada vez mais com a
trajetória real do corpo. No limite em que ∆t (e consequentemente, sr
∆ ) tende
a zero, temos a definição da velocidade instantânea:
dtsd
tslimv 0ti
rrr
=
∆∆= →∆
que é derivada da posição em relação ao tempo. Suponha agora que queremos
encontrar a distância total percorrida pelo corpo. Isto pode ser feito dividindo-
se a trajetória em pequenos segmentos ∆Sj e realizando a soma ∑∆Sj.
Fig. 1.18 - Corpo deslocando-se numa trajetória S.
É óbvio que quanto menores forem os segmentos ∆Sj , mais a soma acima se aproximará da distância real percorrida pelo corpo, porque,
novamente, quanto menores forem os ∆Sj, melhor eles se encaixam na trajetória. No limite em que ∆Sj → 0 eles se confundem completamente com a
trajetória e assim:
distância percorrida = lim ∆Sj → 0 ∑ ∆Sj
É usual no caso em que ∆Sj → 0 definirmos ∆S = ds e substituirmos a somatória pela integral:
distância percorrida = ∫j
i
S
Sds
x
y
i
f
sj
sj+1 sr
∆
Sj
Sj+1 ∆Sj

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 21
Exercícios
1 – Uma sala tem dimensões 3 x 4 x 5 m3. Uma mosca parte de um de seus
cantos e voa para o canto diametralmente oposto. Qual é o módulo do
deslocamento? Poderia sua trajetória ser menor do que este deslocamento?
Escolha um sistema de coordenadas convenientes e escreva este
deslocamento na forma vetorial.
2 – Considere os vetores .kbjbibb e kajaiaa zyxzyx ++=++=rr
Mostre que zzyyxx bababab.a ++=rr
e que ( ) ibababa yzzy −=×rr
( ) ( ) kbabajbaba xyyxzxz x−+−+ .
3 – Podemos combinar dois vetores de módulos diferentes e ter resultante
nula? E no caso de 3 vetores?
4 – Considere um corpo em movimento cujo vetor posição é dado (em cm) por
.jtsen4itcos3r ω+ω=r
Usando procedimento semelhante ao utilizado
no texto para o movimento circular, a) mostre num gráfico em escala o vetor r
r num determinado instante t; b) após um intervalo de tempo ∆t
pequeno, mostre no mesmo gráfico o novo vetor rr; c) calcule o
deslocamento )t(r)tt(rsrrr
−∆+=∆ sofrido pelo corpo no intervalo ∆t; d) calcule t/sv ∆∆=
rre verifique sua orientação para ωt = 0, π/2, π e 3π/2;
e) calcule v . rrre discuta o resultado; f) calcule v r
rr× e discuta o resultado.
5 – Considere os vetores .k3j2ib e k4j3i2a +−−=++=rr
a) determine: .ba e ba,ba,b.arrrrrrrr
×−+
b) qual é a componente de ar paralela a b
r?
c) qual é a componente de ar perpendicular a b
r?
6 – Considere o vetor ar do problema anterior.
a) faça um gráfico em escala mostrando o vetor e os ângulos θ e φ, definidos na Fig. 1.19.
b) calcule o módulo do vetor e os valores de θ e φ.
c) calcule a componente de ar paralela ao versor ( ) 3/kjie ++= .
d) calcule a componente perpendicular a este vetor.

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
22 Um pouco de cálculo
Fig. 1.18
7 – Faça a adição e subtração geométrica dos seguintes vetores:
ji3b e ji2a 23
21 +−=−=
r.
8 – Faça os produtos escalar e vetorial dos vetores: k3j2ia ++=r
e k2j4i2b +−=r
.
9 – Encontre a projeção do vetor k3j2ia ++=r
na direção paralela ao versor
( ) .3/k2j2ie +−= Faça o mesmo para a projeção perpendicular.
10 – Mostre que o produto vetorial rvrr
× é um vetor constante quando o
movimento é circular.
11 – Mostre que 0r.v =rr
para o movimento circular. O que isto significa?
12 – Calcule a derivada das seguintes funções:
a) f(x) = 3x2 + 1
b) f(x) = senx/x2
c) f(x) = ex (1+ x2 + x3)
d) f(x) = (x2 + 2)/(x3 + 3)
13 – Calcule a derivada das funções acima nos pontos:
a) x = 0
b) x = π c) x = 0
d) x = 1
θ y
y
z
z
ar
r
x x
φ
P

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
Um pouco de cálculo 23
14 – Procure num “handbook” de matemática:
a) a derivada de f(x) = lnx
b) a integral de f(x) = 1/x
15 – Determinar a derivada das seguintes funções: a) y = 4x5 b) y = 2x3 + 4x2 – 5x –2 c) y = sen x + cos x d) y = x2 + 1 e) y = x sen x f) y = 1/x2 g) y = ( )1x/x2 2 +
h) y = x ex i) y = cotg x
j) y = x
k) y = x/1
16 – Calcule as derivadas das funções:
a) f(x) = tgx
b) f(x) = eax (no ponto x = 0)
c) f(x) = sen2x (no ponto x = π) d) f(x) = xn + cosx
e) f(x) = sen (cosx)
f) f(x) = esenx (no ponto x = 0)
17 – Calcule ∫ +
1
0 2x1dx . Sugestão: Faça x = tgθ ⇒ 1 + x2 = 1 + tg2θ =
sec2θ. Por outro lado, dx/dθ = sec2θ ⇒ dx = sec2θ dθ. Como x = tgθ, os limites de integração ficam: quando x = 0 ⇒ θ = 0 e quando x = 1 ⇒ θ = 4
π .
18 – Calcule as seguintes integrais indefinidas:
a) I = ∫ dxx3
b) I = ( )∫ −+ dx2x4x7 32

S. C. Zilio e V. S. Bagnato Mecânica, calor e ondas
24 Um pouco de cálculo
c) I = ( ) dxx8x15 210∫ +−
19 – Calcule as integrais definidas:
a) I = ( )∫π
+0
dxxcosxsen3
b) I = dx)x25(1
1
2∫− +
c) I = ∫1
0
x2 dxe
d) I = ∫π4
0dxxcosxsen
20 - Considere a parábola y = 2x2+x-3.
a) Usando o conceito de derivada, encontre a posição x0 que corresponde
ao extremo (máximo ou mínimo);
b) Substituta o valor de x0 na equação da parábola para encontrar o valor
de y0;
c) Complete quadrados para encontrar os pontos do vértice, x0 e y0;
d) Encontre os pontos para os quais a parábola cruza o eixo x;
e) Faça um esboço (gráfico com poucos detalhes) da parábola;
f) Usando integração, encontre a área sob a parábola compreendida entre
os pontos 1 e 2.