utilizaÇÃo do software anarede para a anÁlise da
TRANSCRIPT

SÃO PAULO
2019
UNIVERSIDADE CIDADE DE SÃO PAULO.
ENGENHARIA ELÉTRICA
JUNIOR DE OLIVEIRA SAMPAIO
LORENA TAYLINI VITURINO DE LIMA
REGINALDO MARCELINO DA SILVA
UTILIZAÇÃO DO SOFTWARE ANAREDE PARA A ANÁLISE DA ESTABILIDADE DE TENSÃO EM REGIME PERMANENTE, NA
GERAÇÃO DE ENERGIA EÓLICA

2
JUNIOR DE OLIVEIRA SAMPAIO
LORENA TAYLINI VITURINO DE LIMA
REGINALDO MARCELINO DA SILVA
UTILIZAÇÃO DO SOFTWARE ANAREDE PARA A ANÁLISE DA
ESTABILIDADE DE TENSÃO EM REGIME PERMANENTE, NA
GERAÇÃO DE ENERGIA EÓLICA
Trabalho de Conclusão de Curso de
Engenharia Elétrica da Universidade
Cidade de São Paulo, como requisito
parcial para obtenção do diploma de
graduação.
Orientador:
Prof. Engº Eduardo Ferreira da Silva.
SÃO PAULO
2019

3
UNIVERSIDADE CIDADE DE SÃO PAULO
ENGENHARIA ELÉTRICA
JUNIOR DE OLIVEIRA SAMPAIO
LORENA TAYLINI VITURINO DE LIMA
REGINALDO MARCELINO DA SILVA
Esta Monografia foi julgada adequada para a obtenção do Grau de Bacharel
em Engenharia Elétrica, e aprovada na sua forma final pela Universidade Cidade de
São Paulo.
_________________________________________
Orientador: Prof. Eng. Eduardo Ferreira da Silva
_________________________________________
Avaliador 1
_________________________________________
Avaliador 2
SÃO PAULO
2019

4
DEDICATÓRIA
Dedicamos este trabalho a todos nossos
familiares e amigos, que contribuíram
para a realização deste projeto.

5
AGRADECIMENTOS
Agradecemos primeiramente a Deus pelo dom da vida, e por nos proporcionar
perseverança ao longo de toda essa caminhada.
Agradecemos aos nossos pais, Sra. Leonice e Sr. Arnaldo, Sra. Rosa Maria e
Sr. Carlos César, Sra. Maria de Lourdes e Sr. Reginaldo que sempre nos apoiaram,
seja de longe ou de perto, e nos deram todo o suporte para que toda luta fosse
possível.
Agradecemos aos nosso orientador Prof. Eng. Eduardo Ferreira da Silva, que
nos suportou diretamente em todas as etapas do projeto, para que o mesmo fosse
concluído.
Agradecemos ao Sr. Antônio e ao Sr. Silvio, responsáveis pelo laboratório da
UNICID, por nos disponibilizar horários para utilização da estrutura.
Enfim, agradecemos a todas as pessoas fizeram que parte dessa etapa
decisiva em nossas vidas.

6
EPÍGRAFE
“Há uma força motriz mais poderosa que o
vapor, a eletricidade e a energia atômica: a
vontade.”
(Albert Einstein)
7
RESUMO
Este projeto tem por objetivo, analisar através do programa ANAREDE a
estabilidade de tensão em regime permanente causados pela inserção de
aereogeradores síncronos ou de indução no sistema elétrico de potência. Nesse
projeto é utilizado o método do fluxo de potência continuado para a realização de
simulações e análise do colapso de tensão pela curva PV gerada pelo próprio
software. Com base nas análises realizadas, é possível perceber que o gerador
síncrono muito contribui para o máximo carregamento e na estabilidade de tensão,
que o gerador de indução contribui para o carregamento, mas não tanto para a
estabilidade de tensão. Por fim, é possível afirmar que o programa ANAREDE,
desenvolvido pelo grupo CEPEL, contribui amplamente para as análises de estudo
de estabilidade de tensão. Propiciando ao operador uma visão completa sobre o
comportamento do sistema.
Palavras – chave: ANAREDE. Estabilidade. Tensão. Colapso. Fluxo. Potência.
Regime. Permanente. Eólica.

8
ABSTRACT
This project aims to analyze, through the ANAREDE program, a steady state
voltage stability, applied by the insertion of synchronous wind turbines or induction in
the electric power system. In this project, the continuous power flow method is used
to perform simulations and voltage collapse analysis by the PV curve generated by
the software itself. Based on the analyses performed, it is possible to realize that the
synchronous generator greatly contributes to maximum loading and voltage stability,
that the induction generator contributes to the loading, but not so much to the stability
of voltage. Finally, it is possible to affirm that the ANAREDE program, developed by
the CEPEL group, contributes extensively to the stress stability study analyses.
Providing the operator with a complete view of the system's behavior.
Keywords: ANAREDE. Stability. Voltage. Collapse. Flow. Regime. Power. Wind.

9
LISTA DE FIGURAS
Figura 1 - Turbina eixo horizontal .............................................................................. 19 Figura 2 - Atlas do Potencial Eólico Brasileiro ........................................................... 23 Figura 3 -Complexo Eólico do Alto do Sertão I.......................................................... 25 Figura 4- Modelo equivalente de linha de transmissão ............................................. 27 Figura 5 - Representação geral dos transformadores ............................................... 29 Figura 6 - Curva PV ................................................................................................... 31 Figura 7 - Diagrama da bifurcação ............................................................................ 32 Figura 8 - Margem de carregamento ......................................................................... 33 Figura 9 - Margem de estabilidade de tensão ........................................................... 34 Figura 10 - Identificação da MET e da MST na curva PV ......................................... 35 Figura 11 - Gerador Síncrono.................................................................................... 36 Figura 12 - Curva de conjugado x escorregamento .................................................. 39 Figura 13 - Diagrama de ligação ............................................................................... 40 Figura 14 - Estabilidade em sistemas ....................................................................... 42 Figura 15 - Diagrama de Blecaute ............................................................................. 45 Figura 16 - Janela de comandos: Cálculo do fluxo de potência continuado .............. 51 Figura 17 – Janela de definição das constantes de fluxo de potência continuado .... 52 Figura 18 – Janela dos dados de monitoração .......................................................... 53 Figura 19 – Janela dos dados de incremento de Carga ............................................ 54 Figura 20 - Diagrama de 14 barras ........................................................................... 55 Figura 21 - Parâmetro ONS....................................................................................... 61 Figura 22 - Gerador Síncrono com contingência caso 2 ........................................... 62 Figura 23 - Gerador de Indução com contingência caso 2 ........................................ 63 Figura 24 - Caso base IEEE 14 barras sem contingência ......................................... 64 Figura 25 - Caso base gerador síncrono sem contingência ...................................... 65 Figura 26 - Caso base gerador de indução sem contingência .................................. 66

10
LISTA DE EQUAÇÕES
Equação 1 - Potência mecânica ................................................................................ 20 Equação 2 - Potência elétrica .................................................................................... 21 Equação 3 - Impedância em série ............................................................................. 27 Equação 4 - Admitância em série .............................................................................. 27 Equação 5 – Suceptância ......................................................................................... 28 Equação 6 - Perdas ôhmicas .................................................................................... 28 Equação 7 - Perdas reativas ..................................................................................... 28 Equação 8 - Corrente Ikm ......................................................................................... 28 Equação 9 - Tensão no terminal k ............................................................................. 28 Equação 10 - Tensão no terminal m ......................................................................... 28 Equação 11 - Corrente Imk ....................................................................................... 28 Equação 12 - Relação entre o terminal k e o nó p. ................................................... 29 Equação 13 - Relação do transformador ideal .......................................................... 29 Equação 14 - Cálculo de velocidade síncrona. ......................................................... 38 Equação 15 - Cálculo de escorregamento/ velocidade do rotor. ............................... 38 Equação 16 - Método iterativo ................................................................................... 49

11
LISTA DE TABELA
Tabela 1 -Legenda .................................................................................................... 21 Tabela 2 - Empreendimentos em operação no Brasil ............................................... 22 Tabela 3 - Empreendimentos em construção. ........................................................... 22 Tabela 4 - Empreendimentos com construção não iniciada. ..................................... 22 Tabela 5 - IEEE 14 barras sob critério N-1 ................................................................ 57 Tabela 6 - IEEE 14 barras: equipamentos desconectados ....................................... 57 Tabela 7 - Gerador síncrono sob critério N-1 ............................................................ 58 Tabela 8 - Gerador síncrono: equipamentos desconectados .................................... 59 Tabela 9 - Gerador de indução sob critério N-1 ........................................................ 60 Tabela 10 - Gerador de indução: equipamentos desconectados .............................. 60 Tabela 11 -Comparativo dos resultados da variação de penetração. ....................... 61 Tabela 12 – Médias: tensão e carregamento das simulações................................... 69

12
SUMÁRIO
1 INTRODUÇÃO ................................................................................................... 14
1.1 Objetivo Geral ................................................................................................ 16
1.2 Objetivo Específico. ...................................................................................... 16
2 GERAÇÃO EÓLICA ........................................................................................... 17
2.1 Aspectos construtivos de uma turbina. ...................................................... 17
2.2 Relação da velocidade dos ventos com a potência gerada....................... 20
2.3 Capacidade de geração de energia eólica no Brasil. ................................. 21
2.4 Principais usinas eólicas no Brasil. ............................................................. 23
3 FLUXO DE POTÊNCIA E FLUXO DE POTÊNCIA COTINUADO. ..................... 26
3.1 Modelagem de linhas de transmissão. ........................................................ 27
3.2 Modelagem dos transformadores ................................................................ 29
4 CURVA PV ......................................................................................................... 31
4.1 Teoria da Bifurcação – Ponto de sela-nó .................................................... 32
4.2 Ponto de cela ou máximo carregamento ..................................................... 32
4.3 Margem de Estabilidade de Tensão e Margem de Segurança de Tensão
(MET-MST) ................................................................................................................ 33
5 GERADOR SÍNCRONO ..................................................................................... 35
6 GERADOR DE INDUÇÃO COM ROTOR GAIOLA DE ESQUILO (SCIG) ......... 38
7 ESTABILIDADE DE TENSÃO. .......................................................................... 41
7.1 Colapso de tensão e instabilidade. .............................................................. 43
7.1.1 Blecautes ..................................................................................................... 43

13
7.2 Equipamentos para compensação de reativos e controle de tensão. ...... 46
8 ANAREDE .......................................................................................................... 48
8.1 Utilizando o ANAREDE.................................................................................. 49
8.2 Parâmetros utilizados ................................................................................... 50
9 RESULTADOS ................................................................................................... 55
10 CONCLUSÃO ................................................................................................. 71
11 REFERÊNCIAS ............................................................................................... 73

14
1 INTRODUÇÃO
Umas das maiores preocupações, independente do segmento, é a
sustentabilidade. Aproveitar recursos naturais para a produção de manufaturados
não significa escassez, mas sim transformação, e, no setor elétrico não é diferente, a
transformação de recursos naturais próprios em energia é um passo de consagração
para a sociedade e ao meio ambiente. Atualmente em decorrência de seu maior
recurso natural, a água, a maior parte da energia elétrica produzida e distribuída no
Brasil é proveniente das hidrelétricas, o que caracteriza o Brasil como uma matriz
energética limpa (Belico dos Reis, 2003).
Esta necessidade é uma das principais promotoras dos avanços dos estudos
e aplicações de fontes renováveis para geração de energia elétrica, bem como a
dificuldade burocrática para liberação de construções de novas hidrelétricas. Na
realidade este é um fato sólido que está ganhando cada vez mais espaço no
segmento. São exemplos de fontes renováveis (Reis, 2019):
Energia Hídrica;
Energia Solar;
Energia Geotérmica;
Energia das Ondas e Marés;
Energia da Biomassa;
Energia Eólica;
A energia eólica vem crescendo exponencialmente na matriz de geração de
energia elétrica (ANEEL, 2019). A inserção com mais intensidade de energia eólica
iniciou com o PROINFA (Ramos, Tavares, & de Sena, 2012). Então a partir desse
avanço, é de suma importância compreender e analisar os impactos que a inserção
dessa fonte renovável exerce no Sistema Elétrico de Potência (SEP).
Essa análise se inicia ao se observar os tipos de aerogeradores empregados, que
são de quatro principais modelos:
1. Gerador de indução rotor a gaiola;
2. Gerador de indução com controle de resistência externa do rotor.
15
3. Gerador de indução duplamente alimentado.
4. Gerador síncrono com conversor (Elo CC)
Neste trabalho estuda-se os modelos 1 e 4.
A geração distribuída é algo positivo para o sistema elétrico de potência, entretanto
deve-se analisar e até modificar a rede para que não haja impactos na estabilidade
do sistema (Camponogara, 2017). Atualmente essas análises são possíveis por
meio de programas específicos para Sistemas Elétricos de Potências. Existem
diversos programas disponíveis, para a execução deste estudo como o ANATEM,
ANAFAS, ANAREDE e outros. Para as análises feitas nos estudos que serão
apresentados posteriormente, foi utilizado o ANAREDE.
No decorrer deste trabalho será possível compreender como é gerado a energia
eólica, e como suas características construtivas interferem direta ou indiretamente
nas características do Sistema Elétrico de potência.
Conforme estudos já existentes, a estabilidade de tensão pode estar relacionada aos
problemas de curto e longo prazo.
Em problemas de curto prazo está relacionada com o projeto e aos ajustes
de Reguladores Automáticos de Tensão (RAT) dos geradores, Compensadores
Estáticos de Reativos (CER), mudanças rápidas de tensão referente as
características de resposta do conversor, e pequenas perturbações. Essas
características são analisadas com o uso de ferramenta de simulação no domínio do
tempo e são efetuadas no modo off-line para realização de planejamento.
Os problemas de longo prazo, referem-se a colapso de tensão, tais como
fenômenos de pequenas e grandes perturbações, nesse caso o estudo é realizado
por meio de técnicas de análise em regime permanente, baseadas no fluxo de
potência (Gómez-Expósito, J. Conejo, & Cañizares, 2015).
Estes tipos de situações podem ser observados e analisados através das
simulações gráficas por meio de programas específicos. Com os resultados será
possível analisar a resposta dos geradores em falhas na rede e auxiliará na
determinação da situação física das máquinas de forma a se planejar manutenções.

16
1.1 Objetivo Geral
Usar o programa ANAREDE para demonstrar a influência da operação dos
aerogeradores sobre a estabilidade de tensão do sistema elétrico de potência (SEP),
em regime permanente
1.2 Objetivo Específico.
Entender o comportamento do fenômeno da estabilidade de tensão na
operação do Sistema Elétrico de Potência (SEP), em regime permanente.
Conhecer os tipos de aerogeradores mais utilizados, suas características
construtivas e seus mecanismos de operação e controle, no ponto de vista da
estabilidade de tensão.
Estabelecer um primeiro contato com as ferramentas do programa ANAREDE,
que possibilitam o estudo do Sistema Elétrico de Potência (SEP) referido à
estabilidade de tensão, em regime permanente.
Conhecer e aplicar o método do fluxo de potência continuado.

17
2 GERAÇÃO EÓLICA
Para entender como a inserção da fonte renovável eólica influência na
estabilidade de tensão no Sistema Elétrico de Potência (SEP), é necessário
conhecer os principais componentes estruturais que compõem o aerogerador, cuja
funções segundo Kagan (2005) são:
- Rotor: Transforma a energia cinética dos ventos em energia mecânica por
meio da rotação do eixo;
- Transmissão: Transmite a energia mecânica gerada pelo eixo até o gerador.
Em alguns aerogeradores a caixa multiplicadora não se faz necessário;
- Gerador elétrico: Converte da energia mecânica em energia elétrica;
- Mecanismo de orientação e controle: Responsável pela orientação do rotor,
controle de velocidade, controle de carga etc.
- Torre: Sustenta e posiciona o rotor na altura adequada;
2.1 Aspectos construtivos de uma turbina.
Para explicação dos aspectos construtivos, esse trabalho toma como base a
turbina de eixo horizontal, que é uma das mais aplicáveis em usinas eólicas. Abaixo
encontra-se a figura que a representa:
- Pás do rotor: Capturam a energia do vento e converte em energia rotacional
da ponta do eixo. Podem ser rígidos, em balanço ou com dobradiças. O número de
pás define a eficiência da turbina. Elas podem apresentar dois tipos de controles,
sendo:
Controle de passo: Permite a alteração do ângulo de ataque das pás
Stall: É uma característica construtiva da própria pá. Onde, caso o vento
ultrapasse o valor nominal definido ocorrerá uma perda de sustentação e maior
arrasto aerodinâmico.
Porém na prática uma quantidade muito grande de pás pode interferir
diretamente na turbina, tornando-a menos eficiente do que se esperava.
- Cubo do rotor: Conectar as pás ao eixo principal.

18
- Eixo: Transfere a energia rotacional para o gerador;
- Nacele: É a Carcaça, aonde se encontram os principais componentes da
turbina. Sua principal função é proteger os equipamentos contra a chuva, gelo, sol
etc.
- Torre: Sustenta o rotor e a nacele, garante a altura adequada para que as
pás girem com segurança; Material: Concreto e aço. No interior do suporte estrutural
encontra-se a caixa de engrenagens, gerador elétrico e componentes elétricos;
- Freios: Detêm a rotação do eixo em caso de falha ou sobrecarga, tipos de
freios;
- Disco: Um disco rígido de aço é fixado no eixo a ser freado. Durante a
frenagem, um atuador pressiona as pastilhas contra o disco. A força resultante gera
um torque que se opõe ao movimento do disco, desacelerando o rotor;
- Embreagem: São freios dinâmicos, acionados por molas de pressão e soltas
através de mecanismos eletromecânicos ou ativos.
- Engrenagens: Aumentam a velocidade do eixo entre o cubo, rotor e o
gerador;
- Gerador: Converte a energia mecânica proveniente do eixo em energia
elétrica;
19
Figura 1 - Turbina eixo horizontal (Fonte: WMF 2015, p.25)
Além dos componentes descritos acima e representados na figura 1 abaixo,
também temos:
- Equipamentos elétricos: Controlam os elementos de segurança da turbina e
transmitem a energia elétrica do gerados através da torre;
- Unidade de controle eletrônico: Realiza todo o monitoramento do sistema, e,
desliga a turbina em caso de mau funcionamento e controla o ajuste para
alinhamento da turbina com o vento;
- Controlador: Movimenta o rotor para alinhá-lo com a direção do vento;

20
2.2 Relação da velocidade dos ventos com a potência gerada.
O movimento das massas de ar gera potência cinética. Esse movimento, que
é o vento, quando se choca nas pás dos aerogeradores causa a rotação das
turbinas, ocorrendo a transformação de parte da energia cinética em energia
mecânica.
Logo, pode se definir a potência mecânica como a potência mecânica
extraída dos ventos (Jardim, 2014) e a turbina ligada ao gerador elétrico a
transforma em potência elétrica.
Segundo Rosa, Bolson e Moraes (2013) a velocidade do vento após a turbina
sempre será menor que a velocidade antes da turbina, afinal parte dessa velocidade
foi transformada em potência mecânica. O eixo da turbina é conectado diretamente
ou indiretamente ao eixo do gerador elétrico.
Há aerogeradores onde esse acoplamento entre a turbina e o gerador é
direto, que é o caso dos aerogeradores síncronos, em que o rotor está diretamente
ligado ao eixo das pás.
Há também os aerogeradores, onde os acoplamentos não são diretamente
conectados, estes são os aerogeradores de indução, que são ligados através de
uma caixa multiplicadora.
A potência mecânica poder ser expressa pela equação (1), dada em Watts
(𝑊).
Pm =1
2ρ. A. V3. Cp (1)
Sendo:
ρ é a densidade do ar, representa a massa de ar num determinado volume,
dada em 𝑘𝑔/𝑚3.
A é a área varrida pelas pás, para se determinar esse valor, deve se ter o
diâmetro das pás, dada em 𝑚2.
V é a velocidade das pás, dada em 𝑚/𝑠.
Cp é o coeficiente de potência da Turbina – esse valor depende das
características aerodinâmicas.

21
O coeficiente de potência expressa em porcentagem que não é possível
absorver 100% da energia dos ventos (Jardim, 2014). Pois se fosse assim não
haveria mais vento após a turbina, e isso não é real, Bettz determinou que o máximo
que pode se absorver é 59%.
Através dessa equação é possível observar que a potência mecânica é
diretamente proporcional a velocidade dos ventos. E a potência varia com o cubo da
velocidade. Logo pequenas variações de potência podem gerar grandes alterações
na potência gerada.
A potência elétrica é gerada, através da mecânica, como pode-se observar na
equação (2), dada em Watts (𝑊):
𝐏𝐞 = 𝐏𝐦. 𝛈 (2)
Equação 3 - Potência elétrica Onde:
𝐏𝐦 é a potência mecânica dada em Watts (𝑊)
η é o rendimento dos componentes do sistema
Através dessas duas equações é possível observar que a potência elétrica é
diretamente proporcional ao cubo da velocidade dos ventos.
2.3 Capacidade de geração de energia eólica no Brasil.
Atualmente o Brasil possui no total 7.429 empreendimentos em geração,
totalizando 163.895.721kW de potência instalada, vide tabela 2. Está prevista para
os uma adição de 20.080.868 kW na capacidade de geração do País, proveniente
dos 206 empreendimentos, que atualmente estão em construção e mais 382 em
Empreendimentos com Construção não iniciada (ANEEL, 2019).
Tabela 1 -Legenda
CGH Central Geradora Hidrelétrica
CGU Central Geradora Undi-elétrica
EOL Central Geradora Eólica
PCH Pequena Central Hidrelétrica
UFV Central Geradora Solar Fotovoltaica
UHE Usina Hidrelétrica
UTE Usina Termelétrica
UTN Usina Termonuclear

22
Tabela 2 - Empreendimentos em operação no Brasil
Tipo Quantidade Potência Outorgada
(kW) Potência Fiscalizada (kW) %
CGH 699 710.968 710.782 0,43
CGU 1 50 50 0
EOL 610 15.004.289 14.958.393 9,13
PCH 425 5.221.329 5.179.256 3,16
UFV 2.469 2.076.252 2.074.002 1,27
UHE 217 102.529.978 98.581.478 60,15
UTE 3.006 41.959.689 40.401.760 24,65
UTN 2 1.990.000 1.990.000 1,21
Total 7.429 169.492.555 163.895.721 100
Tabela 3 - Empreendimentos em construção.
Tipo Quantidade Potência
Outorgada (kW) %
CGH 4 8.512 0,11
EOL 55 984.400 12,36
PCH 33 394.979 4,96
UFV 18 490.234 6,16
UHE 4 609.780 7,66
UTE 91 4.125.245 51,8
UTN 1 1.350.000 16,95
Total 206 7.963.150 100
Tabela 4 - Empreendimentos com construção não iniciada.
Tipo Quantidade Potência
Outorgada (kW) %
CGH 4 10.100 0,08
EOL 155 4.260.860 35,16
PCH 102 1.450.151 11,97
UFV 60 1.955.196 16,14
UHE 7 694.180 5,73
UTE 54 3.747.231 30,92
Total 382 12.117.718 100
A potência outorgada refere-se à quantidade de potência que o
empreendimento está autorizado a produzir, já a potência fiscalizada corresponde

23
aquela considerada a partir da operação comercial realizada pela primeira unidade
geradora.
Figura 2 - Atlas do Potencial Eólico Brasileiro (Fonte: Ministério de Minas e Energia, 2010)
A figura 2 acima representa o potencial eólico distribuído em todo território
nacional no ano de 2001, onde as áreas destacadas em amarelo, laranja e vermelho
são os locais onde a velocidade dos ventos são maiores (A. Camargo do Amarante,
Brower, Zack, & Leite de Sá, 2001). Visualizando está imagem é possível
compreender a razão pela qual os principais parques eólicos do Brasil se localizam
nas regiões Nordeste e Sul do país.
2.4 Principais usinas eólicas no Brasil.
Segundo a ANEEL (2019), hoje o Brasil produz 15.004.289kW de energia
eólica, conforme dados apresentados na tabela 2, esse valor corresponde a 9,13%
de toda a energia gerada no país provenientes de outros tipos de fontes.

24
Devido a sua localização, no Brasil a região Nordeste é a que mais gera
energia eólica, sendo o Rio Grande do Norte e a Bahia os maiores estados
produtores deste importante tipo de energia renovável. Abaixo encontram-se os
principais parques eólicos do Brasil (Barbosa Leite Filipe, de Melo Lobato, & Contilio
Quintan, 2003):
- Parque Eólico Giribatu - Localização: Santa Vitória do Palmar (RS)
Capacidade instalada: 258 MW;
- Complexo Eólico do Alto do Sertão I - Localização: Caetité, Guanambi
e Igaporã (BA). Capacidade instalada: 293,6 MW;
- Parque Eólico de Osório - Localização: Osório (RS). Capacidade instalada:
300 MW;
- Complexo Eólico Desenvix Bahia - Localização: Macaúbas, Novo Horizonte
e Seabra (BA). Capacidade instalada: 95,2 MW;
- Parque Eólico Sangradouro - Localização: Arroio Sangradouro (RS).
Capacidade instalada: 50 MW;
- Parque Eólico Elebrás Cidreira 1 - Localização: Tramandaí (RS).
Capacidade instalada: 70 MW;
- Parque Eólico Enacel - Localização: Aracati (CE). Capacidade instalada:
31,5 MW;
- Parque Eólico Giruá - Localização: Giruá (RS). Capacidade instalada:11
MW;
- Parque Eólico Beberibe - Localização: Beberibe (CE). Capacidade instalada:
25,6 MW;
- Parque Eólico Cabeço Preto - Localização: João Câmara (RN). Capacidade
instalada: 19,8 MW;
- Parque Eólico Lanchina - Localização: Tenente Laurentino Cruz (RN).
Capacidade instalada: 28 MW;
- Complexo Eólico Calango - Localização: Bodó (RN). Capacidade instalada:
150 MW;

25
- Parque Eólico Volta de Rio - Localização: Acaraú (CE). Capacidade
instalada: 42,4 MW;
- Parque Eólico Bons Ventos - Localização: Aracati (CE). Capacidade
instalada: 50 MW;
- Parque Eólico de Praia Formosa - Localização: Camocim (CE). Capacidade
instalada: 104,4 MW.
Figura 3 -Complexo Eólico do Alto do Sertão I (Fonte: Exame, 2017)

26
3 FLUXO DE POTÊNCIA E FLUXO DE POTÊNCIA COTINUADO.
A análise do fluxo de potência em um sistema elétrico tem como objetivo
conhecer os valores das grandezas elétricas em pontos distintos do sistema, tais
como:
- Ângulo de tensão;
- Modulo de tensão;
- Potência Ativa;
- Potência Reativa;
Entende-se por “Estudo do fluxo de potência na rede” como a resolução do
circuito elétrico representado pela rede, cuja topologia se dispõe das demandas de
carga, das tensões dos geradores que o excitam, e das constantes elétricas de seus
elementos. O estudo do fluxo de potência, tem por finalidade:
- Cálculo das tensões nas barras da rede, que permite a verificação
do atendimento dos níveis de tensão tecnicamente corretos;
- Cálculo da corrente, e potência, que fluem pelos trechos da rede, o
que permite a verificação da obediência aos seus limites de carregamento;
- Cálculo das perdas, em termos de potência e energia, o que permite
que da comparação da demanda com a energia de cargas, defina-se a
necessidade de novos estudos visando alcançar uma condição operativa de
melhor desempenho técnico e econômico;
- Para redes assimétricas ou com cargas desequilibradas o que
permite determinar os desequilíbrios de corrente e tensão, avaliando-se a
partir desses valores, a necessidade de realização de novos estudos para a
condução dos desequilíbrios a valores tecnicamente aceitáveis;
- Representando-se os paramentos da rede em função da frequência
é possível estabelecer a distorção harmônica originada da injeção de
harmônicas em barras especificas. (KAGAN, OLIVEIRA E ROBBA, 2005,
p.149)
Uma das coisas mais importantes para o funcionamento do sistema elétrico
de potência (SEP) é o regime permanente, ou seja, o estado normal de
funcionamento do sistema. O fluxo de potência é realizado considerando essa

27
situação, permitindo que sejam analisadas as condições de funcionamento do
sistema por inteiro.
Para a análise do fluxo de potência a modelagem do sistema é em regime
permanente, e a rede é representada por uma série de equações. Tais conjuntos de
equações se justificam devido a análise se referir a situações onde as variações das
grandezas no tempo são bem lentas, de modo que o efeito transitório pode ser
desconsiderado (Maxwel, 2009)
3.1 Modelagem de linhas de transmissão.
Para linhas de transmissão o equacionamento é feito através de equação
diferenciais da corrente e tensão ao longo de todo o comprimento da linha. A figura
4, refere-se ao modelo equivalente da linha de transmissão;
Figura 4- Modelo equivalente de linha de transmissão (Fonte: Kagan, Oliveira e Robba ,2005)
Onde a impedância é dada pela equação (3):
Zkm = rkm + jxkm (3)
A admitância é dada pela equação (4):
ykm = gKm + jbkm = Zkm−1 =
rkm
rkm2 +xkm
2 − jxkm
rkm2 +xkm
2 (4)
Onde:
𝑟𝑘𝑚 é a resistência em série, dada em Ω;
𝑋𝑘𝑚 é a reatância série, dada em Ω;
𝑏𝑘𝑚𝑠ℎ é a susceptância shunt, dada em Siemens (S);

28
𝑧𝑘𝑚 é a impedância em série, dada em Ω;
𝑔𝑘𝑚 são as perdas ôhmicas;
𝑏𝑘𝑚 são as perdas reativas no elemento em série;
A suceptância 𝑏𝑘𝑚𝑠ℎ é dada pela equação (5):
bkm = (Vk2 + Vm
2 ) (5)
As perdas ôhmicas 𝑔𝑘𝑚 é dada pela equação (6):
gkm = |Ek − Em|² (6)
As perdas reativas 𝑏𝑘𝑚 no elemento em série, são dadas pela equação (7):
bkm = |Ek − Em|² (7)
Já a corrente 𝐼𝑘𝑚, dada pela equação (8), é formada por um componente
shunt e uma componente em série, calculada a partir das tensões terminais 𝑘 e 𝑚 e
dos parâmetros do modelo equivalente.
Ikm = ykm (Ek − Em) + jbkmsh ∗ Em (8)
Onde 𝐸𝑘 representa a tensão no terminal k, e 𝐸𝑚 representa a tensão no
terminal m, são dadas em Volts, respectivamente, pelas equações (9) e (10):
𝐸𝑘 = 𝑉𝑘 ∗ 𝑒𝑗𝜃𝑘 (9)
Em = Vm ∗ ejθm (10)
Pela análise, a corrente 𝐼𝑚𝑘 é dada pela equação (11):
Imk = ymk (Em − Ek) + jbmksh ∗ Em (11)

29
3.2 Modelagem dos transformadores
A representação dos transformadores dada na figura 5, consiste em uma
admitância em série 𝑦𝑘𝑚 e um transformador ideal seria 1:t. De acordo com Kagan,
Oliveira e Robba (2009), para o transformador em fase, considera-se t um número
real (𝑡 = 𝑎). Esse será o modelo tratado nas simulações, que serão apresentadas
posteriormente, realizadas nesse trabalho.
Figura 5 - Representação geral dos transformadores (Fonte: Kagan, Oliveira e Robba ,2005)
Para os transformadores em fase, a relação dada entre o terminal k e o nó p é
dada pela equação (12):
Vp
Vk= a (12)
A relação do transformador ideal é dada pela equação (13):
Ep
Ek=
Vp∗ejθp
Vk∗ejθp= a (13)
Onde:
𝑉𝑘 é o módulo de tensão na barra k;
𝑉𝑝 é o módulo de tensão na barra p;
𝜃𝑘 é o ângulo da tensão na barra k;
Conforme mencionado no capítulo 3, pode-se concluir que o cálculo do fluxo
de potência é de suma importância para o sistema elétrico. É considerado um
instrumento determinante, que auxiliam na escolha de investimentos para melhoria

30
ou ampliação na geração. De acordo de como essas grandezas são aplicadas nos
problemas o fluxo de potência, são definidos os tipos de barras:
Barra PQ: Conhecida como barra de carga. Nesse modelo de barra não existe
controle de tensão. São conhecidas as grandezas potência ativa (𝑃) e
potência reativa (𝑄) liquidas. Calculam-se | 𝑉| e o ângulo de defasagem da
tensão (θ).
Barra PV: Nesse modelo de barra existem dispositivos de controle que
permitem a estabilidade do módulo de tensão e a injeção de potência ativa.
São exemplos geradores e compensadores síncronos. São conhecidas as
grandezas potência ativa liquida (𝑃) e tensão (𝑉) . Calculam-se θ e potência
reativa liquida (𝑄);
Barra swing ou barra de referência: Como próprio nome diz, essa barra
fornece referência angular, e fecha fluxo de potência ativa e reativa, levando
em conta as perdas do sistema. São conhecidas as grandezas tensão (𝑉) o
ângulo de defasagem da tensão (θ). Calculam-se a potência ativa (𝑃) e
potência reativa (𝑄) liquidas.

31
4 CURVA PV
A curva PV é um indicativo do carregamento máximo de potência ativa num
sistema, barra ou área em relação a tensão do mesmo. Essa curva é obtida dos
resultados dos problemas de fluxo de potência continuado que é o incremento de
carga. Também pode ser definida como a distância entre o ponto de operação do
sistema e o ponto de limite de carregamento da rede (Abreu, 2017).
O Operador Nacional do Sistema Elétrico (ONS) adota as curvas PV como
metodologia principal para obtenção das margens de estabilidade de tensão estática
(a fins de planejamento da operação, não sendo adequado ao uso em tempo real)
(Abreu, 2017).
A figura 6 abaixo, representa a curva PV. Onde a tensão está no eixo Y
variando em relação ao aumento de carregamento que está no eixo X. E um dos
dados principais a ser observado na curva é o Ponto de máximo carregamento que é
também conhecido como ponto do nariz. A linha da tensão que segue após o ponto
de nariz indica a condição de instabilidade de tensão.
Figura 6 - Curva PV (Fonte: UNIFEI, 2013)

32
4.1 Teoria da Bifurcação – Ponto de sela-nó
A teoria da bifurcação demonstra que um sistema qualquer representado por
um conjunto de curvas ou equações em que um dos parâmetros seja variado
lentamente esse mesmo sistema se torna tipicamente instável.
A teoria da bifurcação está relacionada ao desaparecimento do equilíbrio do
sistema quando acontece uma lenta variação de um ou mais parâmetros (Lemos,
2000). No sistema de potência a teoria de bifurcação é aplicada na curva PV, ou
seja, a partir do fluxo de potência. O ponto de máxima transferência visto na curva
PV é o ponto de bifurcação.
A consequência do ponto de sela nó, é a perda de equilíbrio do sistema, isso
se traduz através da queda rápida dos níveis de tensão, configurando o colapso de
tensão.
A figura 7 abaixo, representa a bifurcação sela-nó. Também conhecida como
bifurcação tangente ou de dobra, ocorrem quando dois pontos de equilibro colidem
e se anulam.
Figura 7 - Diagrama da bifurcação (Fonte: Thalles, 2008)
4.2 Ponto de cela ou máximo carregamento
No estudo relacionado a estabilidade de tensão, um ponto importante e que
traz informações extremamente valiosas, capazes de permitir a análise e prevenção
de futuras falhas ou colapsos por parte do sistema de potência, chama-se margem
de carregamento (Pataca, 2012).
33
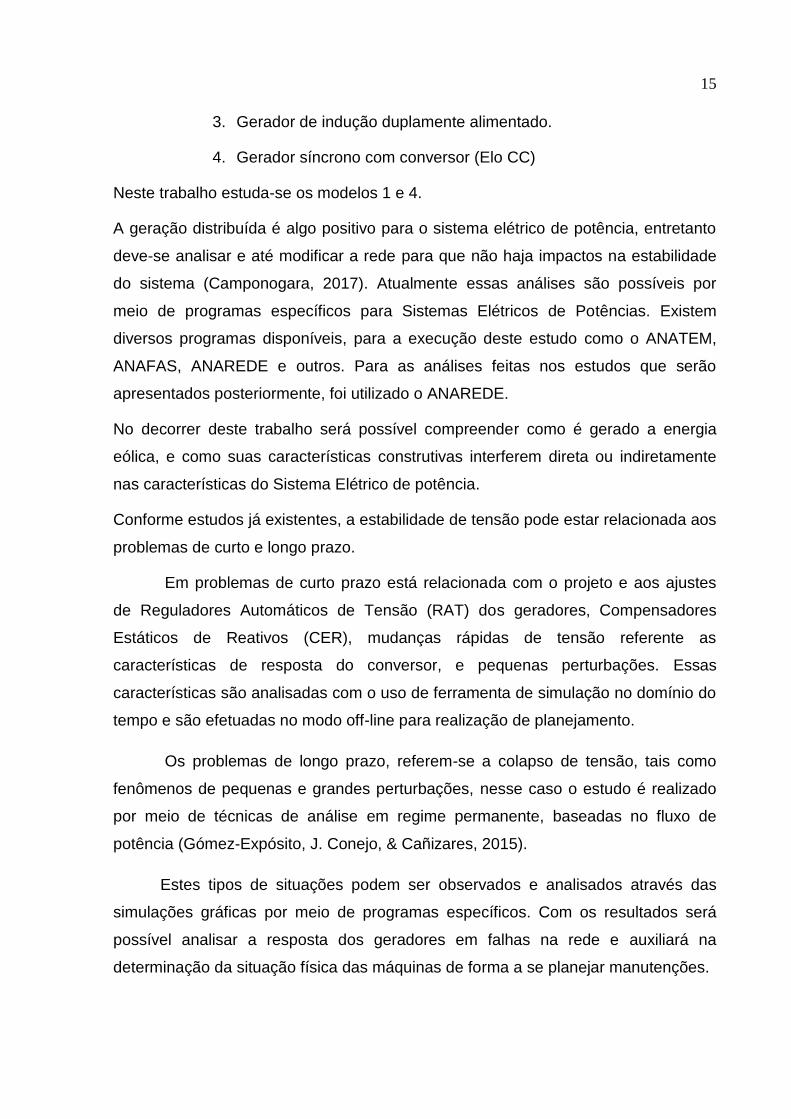
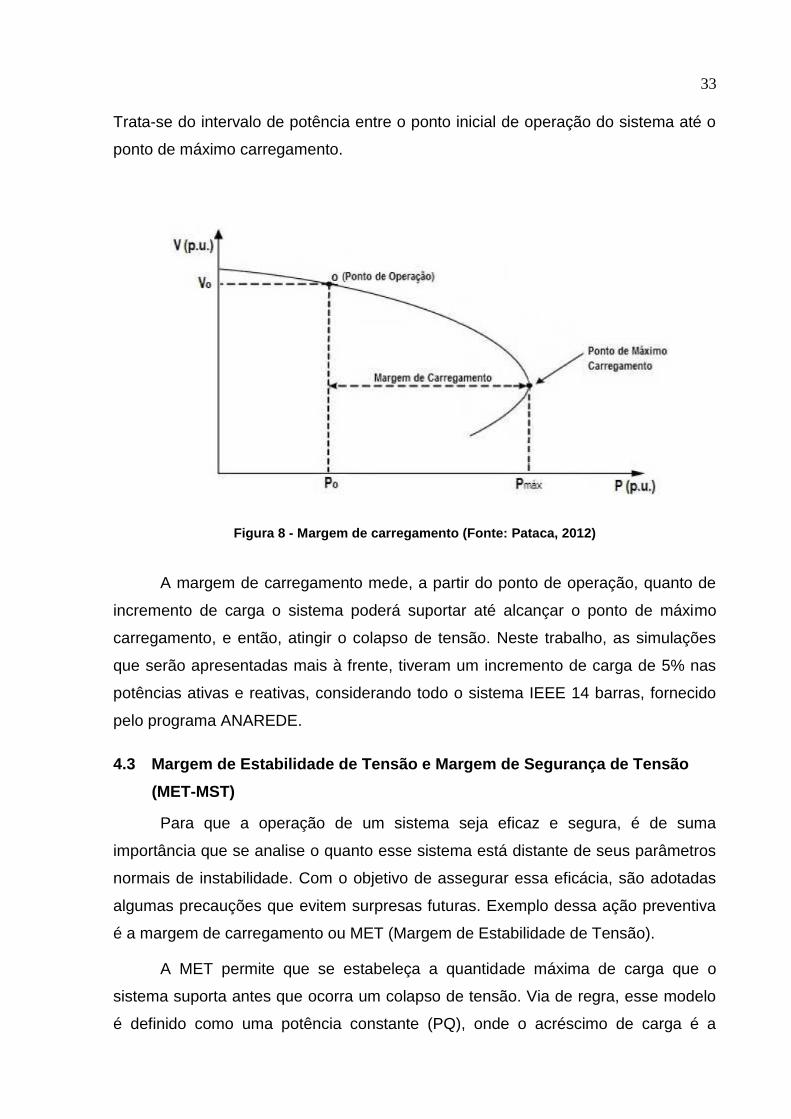
Trata-se do intervalo de potência entre o ponto inicial de operação do sistema até o
ponto de máximo carregamento.
Figura 8 - Margem de carregamento (Fonte: Pataca, 2012)
A margem de carregamento mede, a partir do ponto de operação, quanto de
incremento de carga o sistema poderá suportar até alcançar o ponto de máximo
carregamento, e então, atingir o colapso de tensão. Neste trabalho, as simulações
que serão apresentadas mais à frente, tiveram um incremento de carga de 5% nas
potências ativas e reativas, considerando todo o sistema IEEE 14 barras, fornecido
pelo programa ANAREDE.
4.3 Margem de Estabilidade de Tensão e Margem de Segurança de Tensão
(MET-MST)
Para que a operação de um sistema seja eficaz e segura, é de suma
importância que se analise o quanto esse sistema está distante de seus parâmetros
normais de instabilidade. Com o objetivo de assegurar essa eficácia, são adotadas
algumas precauções que evitem surpresas futuras. Exemplo dessa ação preventiva
é a margem de carregamento ou MET (Margem de Estabilidade de Tensão).
A MET permite que se estabeleça a quantidade máxima de carga que o
sistema suporta antes que ocorra um colapso de tensão. Via de regra, esse modelo
é definido como uma potência constante (PQ), onde o acréscimo de carga é a

34
própria injeção de potência mantendo o valor do fator da potência inicial. Assim,
pode-se traçar uma curva P-V do sistema.
Já a MST (Margem de Segurança de tensão), refere-se a distância mínimo
que deve ser respeita com relação ao ponto de máxima transferência de potência ou
máximo carregamento.
Neste trabalho utiliza-se o fluxo de potência continuado fornecido pelo
programa ANAREDE, onde o máximo carregamento é gerado automaticamente com
base na simulação que o sistema foi submetido.
Na figura 9 e 10 abaixo encontra- se a representação dessas margens:
Figura 9 - Margem de estabilidade de tensão (Fonte: SENDI, 2016)
Em definição, a Margem de Segurança de Tensão (MST) corresponde ao
valor mínimo (7% e 4%) que a Margem de Estabilidade de Tensão (MET) pode
chegar para que o sistema possa ser considerado seguro, sem que ocorra o colapso
de tensão (Maxwel, 2009).

35
Figura 10 - Identificação da MET e da MST na curva PV (Fonte: Afrânio ,2014)
5 GERADOR SÍNCRONO
Este aerogerador diferentemente de alguns modelos não utiliza a caixa de
engrenagens e a velocidade das hélices é variável. Essas duas diferenças são
possíveis devido à eletrônica embarcada. A turbina eólica é ligada diretamente ao
gerador síncrono, e este é construído com vários polos (60 a 70) com o objetivo de
possibilitar a baixa rotação da hélice; algo em torno de 10-22 ou 18-36 RPM.
(Pavinatto, 2005)
Essa máquina é composta de dois enrolamentos, o enrolamento do estator e
o enrolamento do rotor.
O enrolamento do Estator do gerador síncrono trifásico, é denominado de
“enrolamento de armadura”, pois nele será induzida a tensão oriunda do campo
magnético gerado pelo enrolamento do rotor. Enquanto o rotor é equipado com um
enrolamento excitado com corrente contínua DC, denominado “enrolamento de
Campo”, que age como um eletroímã, ou seja, produz um fluxo magnético constante
por polo. Quando o rotor gira e o seu respectivo enrolamento for excitado, surge um
campo magnético girante no entreferro da máquina, isto é, entre o rotor e o estator.

36
Logo que o enrolamento do estator é envolvido nesse campo girante surge
em seus terminais uma FEM (força eletromotriz) (Toro, 1994).
A figura 11 a seguir demonstra um gerador síncrono:
Figura 11 - Gerador Síncrono (Fonte: WEG, 2010)
O enrolamento do estator é conectado à rede elétrica através de um
conversor de frequência, que é a eletrônica embarcada (Pavinatto, 2005). Esse
conversor é basicamente um conjunto de um retificador (AC/DC) e um inversor
(DC/AC). Enquanto no rotor há um enrolamento, conhecido como enrolamento de
campo, que é alimentado por uma fonte externa de corrente contínua, nesse caso o
gerador síncrono é identificado como eletricamente excitado (Londero, 2014).
Visto que esse modelo utiliza o conversor de frequência, não há a
necessidade de caixa de engrenagens, pois a mesma era necessária para transmitir
ao gerador elétrico uma rotação que gerasse um sinal elétrico compatível com a
frequência da rede.
A caixa de engrenagem como dito anteriormente era necessária para garantir
que o sinal atendesse os padrões da rede, visto que ela foi eliminada, cabe ao
conversor essa função. As hélices agora têm um maior “range” de velocidades se

37
comparado às hélices com caixa de engrenagens, pois não há mais a necessidade
que as mesmas girem a uma velocidade fixa, pois todo o sinal será retificado no
conversor, e só depois de invertido que será injetado na rede elétrica.
Devido a presença do conversor de frequência esse aerogerador possui um
excelente controle de potência ativa e reativa entregue a rede, esse processo é feito
da seguinte forma, o inversor que é o responsável pela entrega da potência elétrica
a rede mede o valor de tensão instantaneamente e calcula o valor de corrente
necessários para atingir a potência ativa e reativa pré-determinada.
Os parques eólicos que operam com geradores síncronos podem além de
injetar potência ativa, também podem injetar reativa como um serviço auxiliar ao
operador do sistema (Rondero, 2014)
Devido a retirada da caixa de engrenagens esse aerogerador tem menor
complexidade mecânica e tem menores perdas mecânicas do que os outros
modelos. Pois ao reduzir a quantidade de componentes rotativos, diminuem-se as
sobrecargas mecânicas e há o aumento na vida útil da máquina (ENERCON).

38
6 GERADOR DE INDUÇÃO COM ROTOR GAIOLA DE ESQUILO (SCIG)
Inicialmente os primeiros parques eólicos utilizavam de aerogeradores de
velocidade constante, compostos por geradores de indução com rotor gaiola de
esquilo (SCIG), devido se tratar de um equipamento simples, econômico e robusto,
já disseminado em diversas áreas da indústria. A velocidade constante da máquina
está ligada à frequência de rede na qual o equipamento está conectado. Como a
quantidade de polos da máquina é constante, assim como sua defasagem em 120°,
apenas seria possível variar a velocidade em caso de controle da frequência,
utilizando inversores, por exemplo. O gerador de gaiola, ou máquina assíncrona,
também conta com um fenômeno conhecido como escorregamento. O
escorregamento trata-se da diferença entre a velocidade síncrona, referente ao
campo girante, e a velocidade do rotor (Alves de Aguiar Junior, 2018).
Com um motor com 4 polos, por exemplo, conectado ao sistema de
frequência 60Hz, resulta em uma velocidade síncrona, ou também velocidade do
campo girante, de 1800 RPM, como monstra a equação (14):
Ns =(120∗F)
p→ Ns =
(120∗60)
4→ NS = 1800rpm (14)
Agora, para chegarmos ao valor de escorregamento, ainda levando em
consideração o exemplo acima, teremos a equação (15):
S =(Ns−N)
Ns∗ 100 → S =
(1800−1748)
1800∗ 100 → S = 2,88% (15)
Sendo Ns a velocidade síncrona, N a velocidade medida no rotor e S como
sendo a componente resultante de escorregamento. Analisando o resultado
podemos dizer que a velocidade do motor está 2,88% defasada em relação a
velocidade do campo girante. O escorregamento é componente importante e
indispensável na análise da máquina de indução, pois, a partir dele é possível
apontar e identificar se a máquina está trabalhando como motor ou gerador,
conforme mostra o gráfico abaixo.

39
Figura 12 - Curva de conjugado x escorregamento (Fonte: UFRJ, 2008)
A partir do momento em que o rotor passa a girar em uma velocidade maior que o
campo girante (velocidade síncrona), o escorregamento passa a ser negativo e
então a máquina estará em operação como gerador.
A utilização deste equipamento em aerogeradores traz consigo uma
vantagem: a possibilidade de efetuar a conexão direto com a rede.
Esta conexão também se faz necessária para que seja efetuada a
alimentação do enrolamento de campo (estator), que irá gerar às correntes induzidas
no enrolamento de armadura (rotor) necessárias para magnetização e
funcionamento do gerador (Toro, 1990). Isso quer dizer que, para o seu
funcionamento, o gerador de indução consome potência reativa da rede de forma
contínua. Este consumo se faz necessário para que a máquina não seja
desmagnetizada e perca sua funcionalidade.
Para compensar o consumo de reativos da rede são utilizados bancos de
capacitores automáticos, STATCOM ou compensadores síncronos. Esses
equipamentos fornecem o nível de reativo equivalente ao consumo do gerador e,
desta forma, auxiliando para que o FP unitário seja alcançado (Ramos, Tavares, &
de Sena, 2012).

40
Na conexão entre as pás do aerogerador e o gerador são utilizados caixas de
engrenagem, ou como mostrado abaixo, caixa de velocidades. Esta caixa é
responsável por transmitir a energia mecânica gerada pela rotação das pás para o
eixo do gerador com velocidade constante. A figura a seguir demonstra o formato da
conexão.
Figura 13 - Diagrama de ligação (Fonte: Aguiar Junior, 2007)
O gerador com rotor gaiola de esquilo também traz algumas desvantagens
práticas. Uma delas, conforme já citado anteriormente, é o fato deste modelo de
máquinas consumir potência reativa da rede de forma constante, para manter a
magnetização. Um outro fator a se considerar é que, em momentos pós curto-
circuito, na tentativa de restabelecimento, estes geradores necessitam de uma boa
quantidade de corrente elétrica para nova magnetização da máquina, chegando a
valores de 20% a 40% da corrente nominal (Toro, 1990). De modo geral, por não ter
como característica de funcionamento a possibilidade de fornecer reativo à rede, o
gerador com rotor gaiola de esquilo se torna pouco eficiente, principalmente no
conceito de estabilidade de tensão.
41
7 ESTABILIDADE DE TENSÃO.
A estabilidade de tensão, é definida pelo como a capacidade que o sistema
de potência possui em manter estáveis os níveis de tensão em todas as barras, após
a ocorrência de uma perturbação grande (falhas nas linhas transmissão, perda de
geração), ou pequena perturbação (elevação de carga). Um dos problemas
relacionados a estabilidade de tensão são os de curto e longo prazo, ou seja,
fenômenos rápidos ou lentos (Gómez-Expósito, J. Conejo, & Cañizares, 2015).
Para que haja uma operação segura e eficaz do sistema de potência, de acordo com
Kundur (1994), o controle de reativos e tensão devem atender aos seguintes
objetivos:
- A tensão apresentada nos terminais dos equipamentos do sistema deve
estar dentro dos limites aceitáveis. A utilização dos dispositivos fora dos valores
aceitáveis pode causar danos no equipamento e influenciar em sua performance.
- A estabilidade do sistema é ajustada para potencializar a utilização do
sistema de transmissão.
- Se reduz o fluxo de potência reativa afim de diminuir as perdas na
transmissão. Assim, assegurando que a transmissão do sistema seja eficaz, em
especial para o transporte de potência ativa.
Neste trabalho está sendo analisado a estabilidade de tensão em regime
permanente. Na figura 14 a seguir, pode-se observar, resumidamente os principais
causadores deste fenômeno como um todo.

42
Figura 14 - Estabilidade em sistemas (Fonte: Kundur, 1994)
A estabilidade de tensão está diretamente relacionada a geração de potência
reativa, no sistema elétrico de potência (SEP). De acordo com a natureza das
perturbações pode-se classificar a estabilidade em:
- Regime Permanente: refere-se à habilidade dos geradores síncronos
possuem em permanecerem em sincronismo após uma pequena perturbação. Neste
caso, é analisado se a partir da pequena perturbação origina-se oscilações de
amplitudes crescente que propiciam a perda de sincronismo do gerador (Gómez-
Expósito, J. Conejo, & Cañizares, 2015).
Segundo o IEEE define-se um sistema estável, o sistema que após a
ocorrência de uma grande perturbação consegue alcançar uma condição de
operação aceitável. Outras análises apontam a classificação de estabilidade, de
acordo com o tempo em que esses fenômenos ocorrem (Gómez-Expósito, J.
Conejo, & Cañizares, 2015), sendo:
- Curto prazo/Transitório: 0 - 10s.
- Longo Prazo: >5min – 10min.
As ocorrências em curto prazo estão relacionadas aos componentes de carga
de ação rápida, como por exemplo os motores de indução. Esta categoria sofre
influência das características de cargas, controles discretos/contínuos em um dado
43
tempo o que caracteriza a capacidade do sistema em se reestabelecer após uma
mudança no sistema, sua resposta é linear o que permite a captura de informações
que auxiliam na identificação dos fatores que influenciam na estabilidade.
Já as ocorrências em longo prazo estão relacionadas aos componentes de
ação lenta, como por exemplo tap’s de transformadores, motores e limitadores de
corrente do gerador síncrono. Sofrendo a influência das características da carga, do
sistema e pela interação do sistema de controle e proteção. Sua resposta é dada de
forma não linear durante um dado tempo, tempo suficiente para enxergar as
interações e desempenho dos componentes de ação lenta.
7.1 Colapso de tensão e instabilidade.
A instabilidade de tensão ocorre quando o sistema atende uma carga muito
maior do que ele suporta, principalmente quando não se tem fontes de potências
reativas suficientes para manter o nível de tensão em determinado ponto ou nó.
Quando a carga em um dado barramento aumenta, a tensão desse barramento
tende a diminuir até seu valor limite, se carga continuar em elevação ocorrerá uma
alteração na tensão, resultando na instabilidade, por exemplo.
Colapso de tensão acontece quando uma serie de ocorrências somados a
instabilidade de tensão, provoca no sistema níveis de tensão inaceitáveis conforme
os parâmetros estabelecidos pela ONS, vide figura 21. Exemplo, quando a potência
reativa demandada é muito grande, as linhas de transmissão excedem sua
capacidade, dificultando o transporte dessa potência de uma região a outra.
Principais causas do colapso:
- Sobrecarga nas linhas de transmissão;
- Compensação insuficiente de reativos;
- Centros consumidores distantes das unidades geradoras;
- Perdas de unidades geradoras ou de linhas de transmissão;
- Adição excessiva de solicitação de carga (carregamento);
7.1.1 Blecautes
Diversos incidentes afetaram a distribuição de energia elétrica em sistemas
de potência no Brasil e no Mundo. Dentre os causadores, a estabilidade de tensão,
44
foi responsável por desencadear diversos eventos posteriores que resultaram no
colapso de tensão. Abaixo estão descritos alguns destes incidentes.
França - dezembro de 1978 – Aumento de carga inesperado;
Flórida, EUA – dezembro de 1982 – Perda de gerador;
Suécia - dezembro de 1983 – Falha de disjuntor em subestação;
Flórida, EUA – maio de 1985 – Falha em linha de transmissão;
Brasil/Paraguai - novembro de 1986 - Interrupção no sistema de corrente
alternada;
França - janeiro de 1987 – Falha em unidades de geração térmica;
Japão - julho de 1987 – Aumento na demanda de carga;
Como já visto anteriormente, a potência reativa é fator importantíssimo para
se manter níveis aceitáveis de tensão nas barras do sistema elétrico de potência e, a
falta dela, afetam diretamente a estabilidade de tensão.
No Brasil, podemos destacar algumas ocorrências de colapso envolvendo
problemas de estabilidade (Maciel, 2006).
Em abril de 1997, mais precisamente no dia 24, o nível insuficiente de reativo
disponível no sistema gerou uma interrupção de aproximadamente 7,6GW. Esta
interrupção atingiu as regiões Sul, Sudeste e Centro-Oeste.
Um nível recorde de demanda em conjunto com manutenção de importantes
equipamentos, contribuíram para a falha. Um compensador síncrono (300Mvar)
localizado na subestação de Ibiúna, um banco de capacitores (200Mvar) em Tijuco
Preto e capacitores da transmissão (208Mvar) da Eletropaulo, deixaram a reserva de
reativos incapaz de manter os níveis de tensão no sistema.
O evento causou, posteriormente, diversos desligamentos. Inclusive, perdas
em equipamentos de controle de tensão, geração de potência ativa – 3000MW
proveniente do Elo CC Itaipu 50Hz – e 900Mvar de reativos, deixaram a operação
em níveis de tensão e frequência muito baixos.
Tudo isso ocorria enquanto a demanda de carga crescia, já que o problema
de instaurou em um período de ponta, o que dificultou ainda mais a normalização do

45
sistema. Os cortes de carga continuaram e 2 estágios do Esquema Regional de
Alívio de Carga (ERAC) foram acionados.
O sistema levou cerca de 75 minutos para ser restabelecido em condições
normais de operação, porém, aproximadamente 23 horas depois, uma nova
ocorrência com as mesmas características levou o sistema a passar por nova
instabilidade de tensão e posterior colapso.
Desta vez, o restabelecimento do sistema levou aproximadamente 60
minutos, mas deixou, novamente, usuários das regiões Sul, Sudeste e Centro-Oeste
com quase 7MW de cargas interrompidas.
Abaixo encontra-se diagrama contendo os coadjuvantes dos eventos ocorridos.
Figura 15 - Diagrama de Blecaute (Fonte: Maciel, 2006)
Em novembro do mesmo ano, uma sobrecarga na linha de transmissão de
230kV, em Governador Valadares, provocou seu desligamento ao atingir um nível de
224,7kV, após atuação do sistema de proteção. O problema se agravou quando a

46
interligação entre os estados de Minas Gerais e Rio de Janeiro foi interrompida,
levando a quedas bruscas nos níveis de tensão, levando cidades a operar com 50%
da tensão, como foi o caso de Campos. São José com 81%, Carapina com 78%,
Adrianópolis com 67%, foram outros exemplos de cidades que sofreram com a
operação em subtensão.
Além disso, o fato levou a rejeição de cargas no nível de 1210MW. Da mesma
forma que no caso anterior, uma reincidência ocorreu cerca de 4 horas após o
primeiro evento e, novamente, afetando usuários de Rio de Janeiro e Espírito Santo,
interrompendo o mesmo nível de carga da vez anterior.
7.2 Equipamentos para compensação de reativos e controle de tensão.
Em geral o sistema elétrico de potência (SEP) é operado de modo que as
quedas de tensão nas linhas sejam pequenas, como no chamado perfil de tensão
plano quando as tensões nas barras do sistema são quase iguais. Nessa situação,
inicialmente o sistema de transmissão é efetivamente aproveitado para a
transmissão de potência ativa e não da potência reativa.
No que se refere ao controle de tensão a potência reativa é primordial, pois a
partir do controle da potência reativa pode-se controlar os módulos de tensão nas
barras ao valor que se almeja. O aumento da produção de potência reativa provoca
tensões mais altas, próximo ao valor da fonte de produção, em contrapartida o
aumento de consumo de potência reativa provoca tensões mais baixas (De Oliveira
Rêgo, 2017).
A produção de potência ativa é realizada apenas pelos geradores do sistema,
em contrapartida há vários geradores e consumidores de potência reativa. Ao
contrário da potência ativa, a potência ativa não pode ser transportada em distâncias
muito longas, porque, em geral, o fluxo de potência ativa é muito maior do que a
reativa no sistema.
Em decorrência a essa limitação no transporte de potência reativa, ao longo
do sistema são instalados alguns equipamentos que auxiliam no controle de tensão.
Abaixo encontra-se uma breve conceituação desses dispositivos:
- Compensadores síncronos: São usados para controle e regulação de
potência reativa e tensão, podendo consumir ou gerar reativos por meio do controle

47
da excitação do campo. Sua principal finalidade é manter a tensão constante nos
terminais.
- Capacitores Shunt: Também são usados para controle e regulação de
reativos e tensão, porém mais econômicos e práticos de serem instalados, podendo
ser conectadas em diferentes locais do sistema.
- Capacitores em série: São usados em linhas mais curtas para controlar as
reatâncias indutivas nas linhas de transmissão. Indiretamente, auxiliam no controle
de tensão por meio da redução das perdas reativas.
- Reatores Shunt: São dispositivos usados para limitar a elevação de tensão e
compensar os efeitos capacitivos nas linhas de transmissão.
- Compensadores estáticos de reativos: São tipo de compensadores shunt,
formado por reatores e capacitores (em derivação). A partir da variação de suas
saídas controlam a tensão e o fluxo de reativos, podendo assim absorver e gerar
reativos.
- Taps de transformadores: Possibilitam o ajuste do número de espiras sem
interromper o funcionamento do transformador, o que permite o controle de tensão e
potência reativa de forma automática ou manual. Esses modelos de transformadores
são mais utilizados devido a sua capacidade de variação de carga.
- Controle automático de tensão (AVR): Refere-se a um sistema automático
de compensação das variações de tensão nas saídas no gerador síncrono, quando
há variação de carga. Sua principal função é a proteção e controle no processo de
excitação as máquinas síncronas, garantindo que o nível de tensão de saída do
gerador esteja dentro dos limites desejáveis de tensão e corrente.
Em alguns desses dispositivos a potência reativa é mais fácil de se controlar. Como
por exemplo:
Chaveamento de capacitores (shunt) e reatores, podem ser
utilizados para controles de reativos;
Máquinas síncronas, onde a potência reativa é controlada por meio
do sistema de excitação.

48
Os dispositivos FACTS, que são dispositivos de controle da
flexibilidade (amplitude) de corrente alternada em sistemas de
transmissão, exemplo: STATCOM, AVR e etc, também oferecem
essa possibilidade de controle.
No Brasil, existem algumas tarifas que incentivam grandes consumidores e
empresas de distribuição a compensarem eficientemente sua carga reativa (Gómez-
Expósito, J. Conejo, & Cañizares, 2015). Em geral essas tarifas são projetadas para
que o incremento da potência reativa seja realizado até atingir uma porcentagem da
potência ativa, caso esse percentual seja ultrapassado o consumidor deve pagar por
essa potência reativa a mais.
As perdas de reativos em transformadores e em linhas de transmissão
dependem exclusivamente do valor da reatância, sendo que para as linhas de
transmissão aéreas, a reatância poder ser levemente reduzida pelo uso de
condutores múltiplos. Por outro lado, a única forma de se reduzir bruscamente a
reatância em uma linha de transmissão é conectá-la a um dispositivo FACT ou
capacitores, ambos em série (Belico dos Reis, 2003).
8 ANAREDE
O ANAREDE (Programa de Análise de Redes) apresenta na forma de
diagrama unifilar todas as informações para simulação de fluxo de potência, e
possibilita a identificação de elementos de sobretensão, sobrecarga e subtensão em
regime permanente. Desenvolvido pelo grupo CEPEL, neste programa é
disponibilizado dois métodos para análise da rede, o método de desacoplado rápido
e método de Newton - Raphson. Neste trabalho foi utilizado o segundo.
O método Newton - Raphson consiste em estimar as raízes de uma função,
para isso é dado uma aproximação inicial. A partir dessa aproximação inicial, é
calculada por meio de uma derivada, a equação da reta tangente dessa função e a
intersecção com o eixo das abcissas. Com o objetivo de encontrar a melhor
aproximação da raiz por meio de repetições, criando iterações. Conforme
demonstrado na equação (16)

49
Xn + 1 = Xn −f (xn)
f′(Xn), n ∈ ℕ (16)
Nesse método, existem situações onde as iterações podem não convergir. A
não convergência significa que as iterações não encontraram um ponto em comum
para que o sistema permaneça em operação.
Dentre os principais usuários do programa computacional ANAREDE estão a
ONS, Ministério de Minas e Energia (MME), Empresa de Pesquisa Energética (EPE),
Grupo Eletrobrás, agentes de geração, transmissão de distribuição, universidades
(versão acadêmica), empresa de consultorias e afins.
8.1 Utilizando o ANAREDE.
As simulações foram realizadas na versão 10.02.03 do programa
computacional ANAREDE, na versão acadêmica disponibilizada a UNICID.
Conforme mencionado anteriormente, o uso do programa é bem aceito no setor
elétrico visto que segue os procedimentos destacados na ONS, citado no capítulo 4
do submódulo 18.2.
No que se refere a estabilidade tensão, conforme mencionado anteriormente
nesse trabalho, está intrínseca ao programa a função de cálculo do fluxo de potência
continuado por meio do método iterativo de Newton - Raphson. De acordo com o
CEPEL (2015), o fluxo de potência continuado permite que seja feito o
processamento de vários casos de fluxo por meio de aumento de carga nas barras.
Segundo o manual ANARADE (2019), o software possui quatro critérios de parada:
1 – Quando o número máximo de problemas de fluxo de potência resolvidos
é atingido. Este número é especificado através da constante ICIT.
2 – Quando o máximo incremento de carga, especificado através de
execução DINC, é atingido.
3 - Quando o incremento de carga a ser aplicado em uma barra do sistema
é menor que o especificado que é especificado através da constante ICMN.
4 – Quando o programa de fluxo de potência deixar de encontrar solução,
consecutivamente, mais vezes do que especificado na constante DMAX.
ICIT Corresponde ao máximo de soluções que serão feitas/calculadas de
fluxo de potência durante a execução da função de fluxo de potência continuado.

50
DINC Corresponde às leituras dos fatores que estabelecem a direção de
crescimento automático do carregamento das barras no sistema.
ICMN Corresponde ao valor mínimo do incremento de carga.
DMAX Corresponde à quantidade máxima de vezes que o fator de redução
do incremento de carga (FDIV) pode ser aplicado.
8.2 Parâmetros utilizados
Para a realização das simulações foram considerados alguns parâmetros.
Conforme mencionado anteriormente, no ANAREDE está intrínseco a função do
cálculo do fluxo de potência continuado.
No que se diz respeito a análise da estabilidade de tensão, três parâmetros
são essenciais, são eles:
QLIM Aplica ao sistema o controle de limite de geração de potência reativa
durante o processo de solução do problema do fluxo de potência. Nessa condição,
são comparados os valores de geração de potência reativa com seus respectivos
limites. Quando um desses limites for ultrapassado a geração de potência reativa é
fixada no valor atingido e a magnitude de tensão deixa de ser controlada.
PARM Ativa o fluxo de potência continuado parametrizado, que permite a
possibilidade de obter-se a parte instável da curva PV, conhecida como ´parte
inferior.
PVQV O software gera automaticamente as curvas VxQ das 10 barras com
maior variação de tensão.
A figura 16 a seguir refere-se à janela de comando da inserção dos
parâmetros a serem inclusos no sistema, para o cálculo do fluxo de potência
continuado.

51
Figura 16 - Janela de comandos: Cálculo do fluxo de potência continuado (Fonte: Autoria própria)
Após a definição dos parâmetros para o fluxo de potência continuado no
ANAREDE, define-se os valores das constantes que serão utilizados para o cálculo
do fluxo de potência.
Na figura 17 a seguir, encontra-se a janela de comando para inserção das
constantes.

52
Figura 17 – Janela de definição das constantes de fluxo de potência continuado (Fonte: Autoria própria)
Onde, conforme o manual ANAREDE (2009), correspondem a:
- Nº Máx de Soluções (ICIT): corresponde ao número máximo de iterações de
fluxo de potência a serem calculadas.
- Mín Incremento Automático (ICMN): valor mínimo de incremento automático
de carga. Também determina o valor do passo a partir do qual o fluxo de potência
continuado passa a ser parametrizado.
- Fator de Redução (FDIV): valor pelo qual o incremento de carga é dividido
quando o fluxo de potência não encontrar convergência.
- Variação de Tensão (VART): variação de tensão, em relação ao caso base,
a partir da qual uma barra passa a ser automaticamente monitorada no problema de
fluxo de potência continuado.
- Fator de Divisão (DMAX): número máximo de vezes consecutivas que o fator
de divisão FDIV pode ser aplicado. Também utilizado como critério de parada.
- Passo Inicial (ICMV): tamanho do passo inicial quando o parâmetro de continuação
muda do carregamento para o módulo de tensão.
53
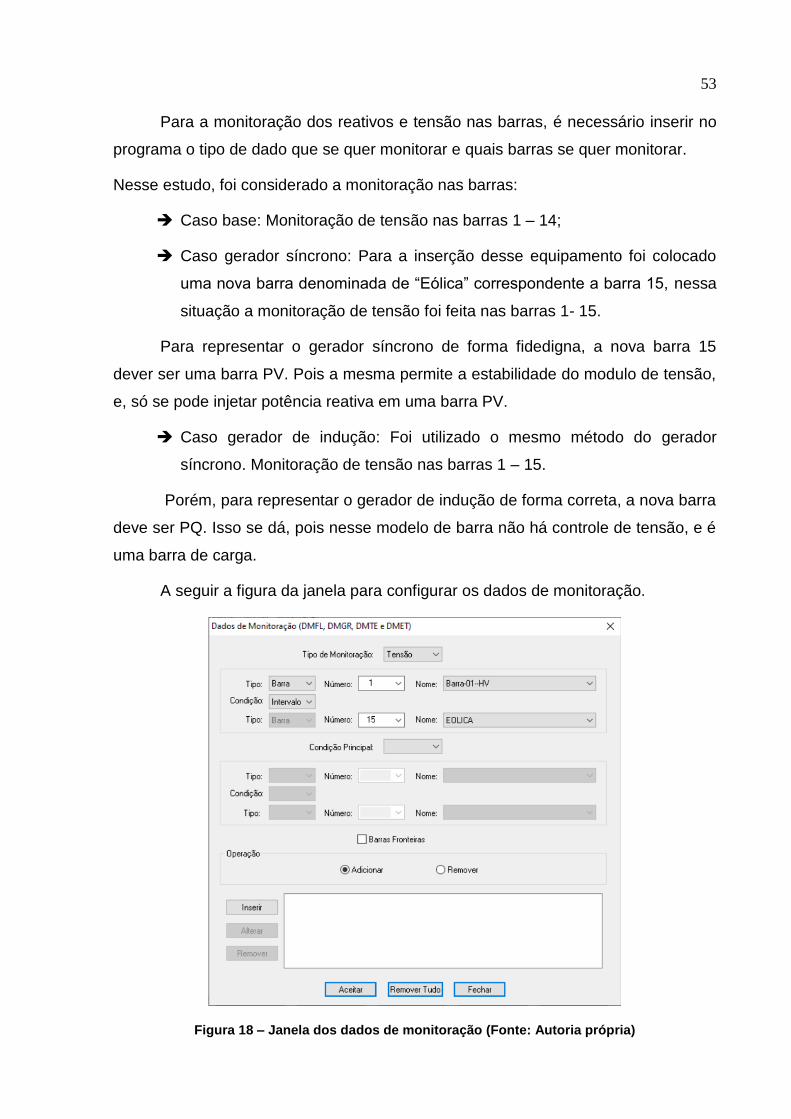
Para a monitoração dos reativos e tensão nas barras, é necessário inserir no
programa o tipo de dado que se quer monitorar e quais barras se quer monitorar.
Nesse estudo, foi considerado a monitoração nas barras:
Caso base: Monitoração de tensão nas barras 1 – 14;
Caso gerador síncrono: Para a inserção desse equipamento foi colocado
uma nova barra denominada de “Eólica” correspondente a barra 15, nessa
situação a monitoração de tensão foi feita nas barras 1- 15.
Para representar o gerador síncrono de forma fidedigna, a nova barra 15
dever ser uma barra PV. Pois a mesma permite a estabilidade do modulo de tensão,
e, só se pode injetar potência reativa em uma barra PV.
Caso gerador de indução: Foi utilizado o mesmo método do gerador
síncrono. Monitoração de tensão nas barras 1 – 15.
Porém, para representar o gerador de indução de forma correta, a nova barra
deve ser PQ. Isso se dá, pois nesse modelo de barra não há controle de tensão, e é
uma barra de carga.
A seguir a figura da janela para configurar os dados de monitoração.
Figura 18 – Janela dos dados de monitoração (Fonte: Autoria própria)

54
Após os dados de monitoração, são definidos os dados do incremento
automático de carga. Nesse passo definiu-se um incremento de 5% da carga total
que será aplicado em todo o sistema. A seguir a figura que apresenta a janela de
para definir os valores de incremento de carga.
Figura 19 – Janela dos dados de incremento de Carga (Fonte: Autoria própria)
55
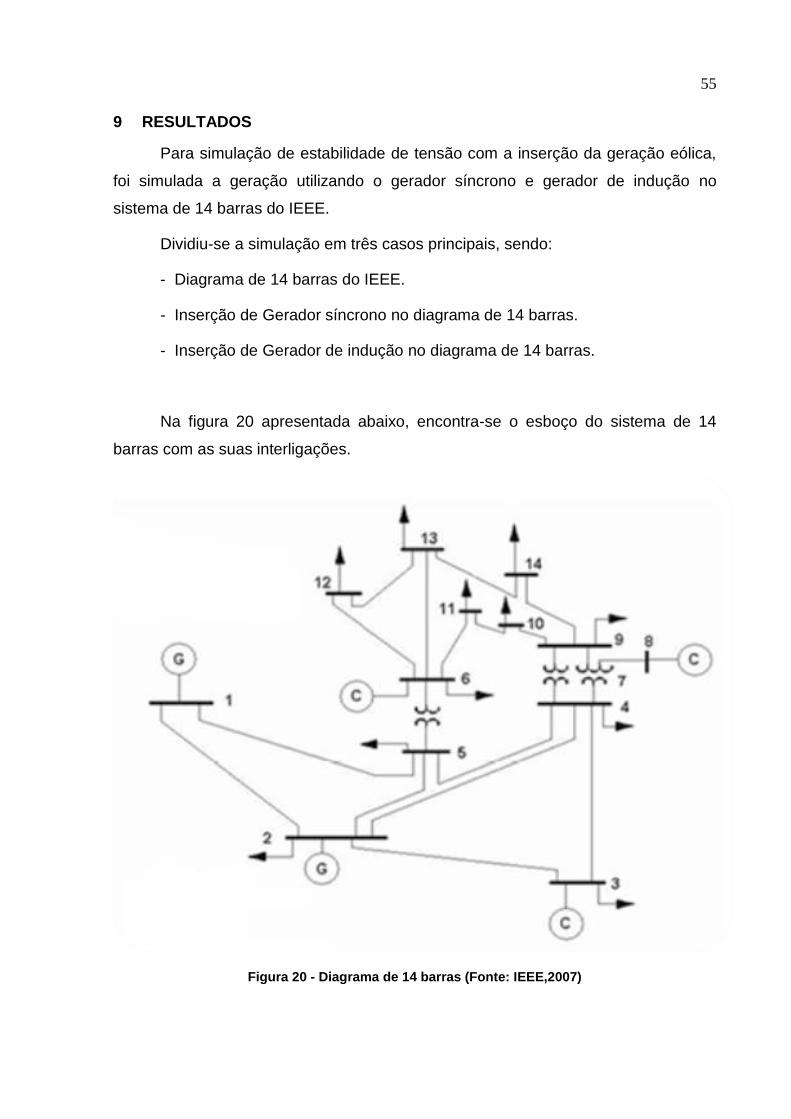
9 RESULTADOS
Para simulação de estabilidade de tensão com a inserção da geração eólica,
foi simulada a geração utilizando o gerador síncrono e gerador de indução no
sistema de 14 barras do IEEE.
Dividiu-se a simulação em três casos principais, sendo:
- Diagrama de 14 barras do IEEE.
- Inserção de Gerador síncrono no diagrama de 14 barras.
- Inserção de Gerador de indução no diagrama de 14 barras.
Na figura 20 apresentada abaixo, encontra-se o esboço do sistema de 14
barras com as suas interligações.
Figura 20 - Diagrama de 14 barras (Fonte: IEEE,2007)

56
Para todas as simulações, em primeira instância, foi considerado o critério de
N-1, esse critério refere-se à remoção de um elemento qualquer dos sistemas.
Nesse trabalho o critério N-1 foi aplicado incialmente removendo a conexão entre
uma barra e outra, e na sequência excluindo-se elementos conectados as barras.
Em segunda instância, foi considerada a variação da injeção de potência de
ambos os geradores eólicos. No gerador de indução apenas a potência ativa, pois o
mesmo só pode injetar potência ativa. Enquanto no gerador síncrono foi tanto para a
potência ativa quanto para a potência reativa.
Para comparação de resultados foram adotados dados comuns para os dois
tipos de gerador incluídos no sistema.
Para a primeira instância: Potência Ativa: 30MW
Potência Reativa: 75MVAr
Os valores apresentados acima correspondem a 10% do valor nominal de um
sistema real. Para a segunda instância, foram consideradas as seguintes variações:
Potência Ativa: 5% 15MW; 3% 9MW; 1% 0,3MW
Potência Reativa: 5% 37,5MVAr; 3% 22,5MVAR; 1% 0,75MVAr
Lembrando que a variação de reativo ocorre apenas no gerador síncrono,
devido ao fato da alimentação do rotor ser externa. Ressaltando que, nesse
trabalho, estamos tratando apenas dos geradores síncronos e geradores de
indução.
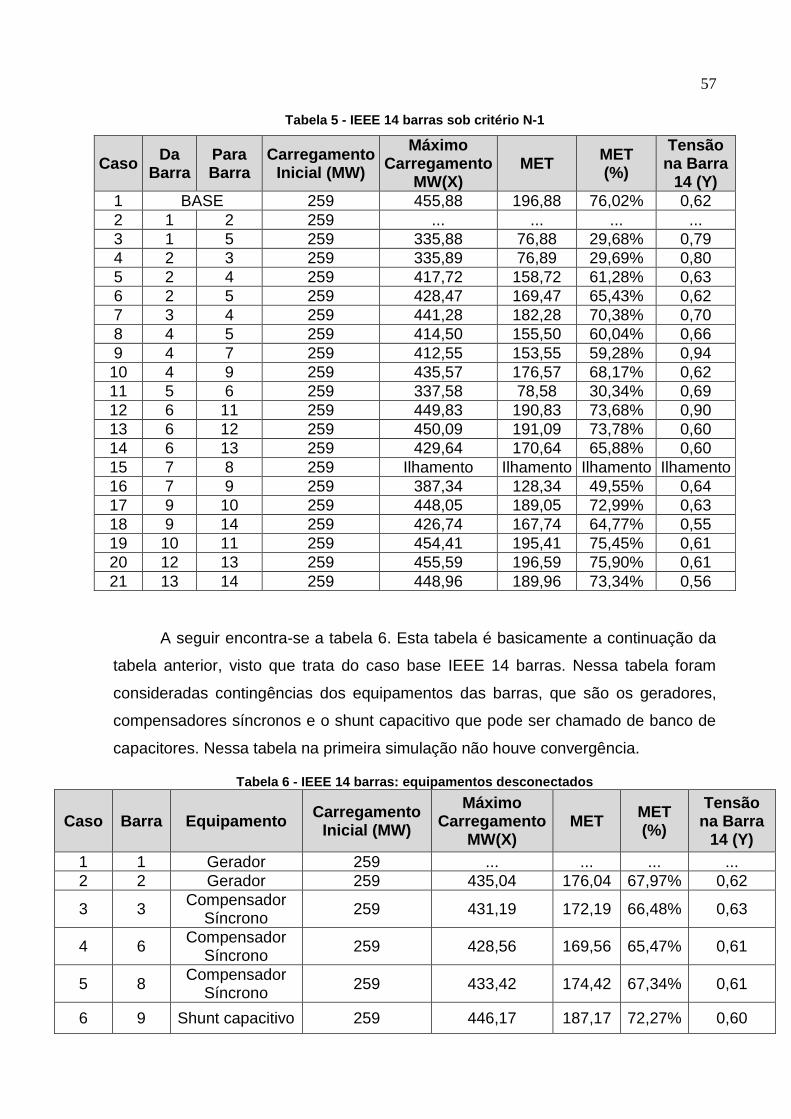
A seguir, a tabela 5, que demonstra os primeiros resultados obtidos. Nessa
série de simulações foi considerado o caso base, isso é o IEEE 14 barras. Foram
feitas as contingências sob o critério n-1, eliminando uma conexão entre as barras
do sistema. Foram anotados os valores de máximo carregamento e tensão da barra
14. Com esses valores é possível calcular a MET que está listada na tabela.
Nessa série de simulações, na simulação dois houve um caso de não
convergência. A não convergência se deu pois no diagrama de 14 barras utilizado,
existe apenas uma única barra de referência, justamente a Barra 1. Ao remover a
linha de transmissão que a conectava com a Barra 2 o sistema perdeu sua
referência angular.
57
Tabela 5 - IEEE 14 barras sob critério N-1
A seguir encontra-se a tabela 6. Esta tabela é basicamente a continuação da
tabela anterior, visto que trata do caso base IEEE 14 barras. Nessa tabela foram
consideradas contingências dos equipamentos das barras, que são os geradores,
compensadores síncronos e o shunt capacitivo que pode ser chamado de banco de
capacitores. Nessa tabela na primeira simulação não houve convergência.
Tabela 6 - IEEE 14 barras: equipamentos desconectados
Caso Barra Equipamento Carregamento
Inicial (MW)
Máximo Carregamento
MW(X) MET
MET (%)
Tensão na Barra
14 (Y)
1 1 Gerador 259 ... ... ... ...
2 2 Gerador 259 435,04 176,04 67,97% 0,62
3 3 Compensador
Síncrono 259 431,19 172,19 66,48% 0,63
4 6 Compensador
Síncrono 259 428,56 169,56 65,47% 0,61
5 8 Compensador
Síncrono 259 433,42 174,42 67,34% 0,61
6 9 Shunt capacitivo 259 446,17 187,17 72,27% 0,60
Caso Da
Barra Para Barra
Carregamento Inicial (MW)
Máximo Carregamento
MW(X) MET
MET (%)
Tensão na Barra
14 (Y)
1 BASE 259 455,88 196,88 76,02% 0,62
2 1 2 259 ... ... ... ...
3 1 5 259 335,88 76,88 29,68% 0,79
4 2 3 259 335,89 76,89 29,69% 0,80
5 2 4 259 417,72 158,72 61,28% 0,63
6 2 5 259 428,47 169,47 65,43% 0,62
7 3 4 259 441,28 182,28 70,38% 0,70
8 4 5 259 414,50 155,50 60,04% 0,66
9 4 7 259 412,55 153,55 59,28% 0,94
10 4 9 259 435,57 176,57 68,17% 0,62
11 5 6 259 337,58 78,58 30,34% 0,69
12 6 11 259 449,83 190,83 73,68% 0,90
13 6 12 259 450,09 191,09 73,78% 0,60
14 6 13 259 429,64 170,64 65,88% 0,60
15 7 8 259 Ilhamento Ilhamento Ilhamento Ilhamento
16 7 9 259 387,34 128,34 49,55% 0,64
17 9 10 259 448,05 189,05 72,99% 0,63
18 9 14 259 426,74 167,74 64,77% 0,55
19 10 11 259 454,41 195,41 75,45% 0,61
20 12 13 259 455,59 196,59 75,90% 0,61
21 13 14 259 448,96 189,96 73,34% 0,56

58
Nas tabelas 5 e 6 acima que se referem ao caso base (IEEE – 14 barras,
puro), na simulação em que a linha de transmissão entre as barras 1 e 2 é
interrompida e na simulação em que o gerador 1 foi excluído não houve
convergência para o cálculo do fluxo de potência. Isto indica que o programa não
encontrou uma solução para as iterações do sistema sem essa conexão e sem o
gerador.
Na sequência, a tabela 7 que demonstra as simulações das contingências sob
o critério N – 1 com a inserção do gerador síncrono, que é o gerador em que há a
possibilidade de controle de potência reativa. Os resultados desse gerador
apresentaram melhora em relação aos resultados do caso base.
Tabela 7 - Gerador síncrono sob critério N-1
Caso Da
Barra Para Barra
Carregamento Inicial (MW)
Máximo Carregamento
MW(X) MET
MET (%)
Tensão na Barra
14 (Y)
1 BASE 259 585,52 326,52 126,07% 0,88
2 1 2 259 307,56 48,56 18,75% 1,14
3 1 5 259 437,06 178,06 68,75% 0,96
4 2 3 259 382,03 123,03 47,50% 1,08
5 2 4 259 499,48 240,48 92,85% 0,90
6 2 5 259 521,44 262,44 101,33% 0,90
7 3 4 259 476,78 217,78 84,09% 1,08
8 4 5 259 489,47 230,47 88,98% 0,89
9 4 7 259 527,71 268,71 103,75% 0,91
10 4 9 259 538,23 279,23 107,81% 0,90
11 5 6 259 469,24 210,24 81,17% 0,91
12 6 11 259 541,73 282,73 109,16% 0,88
13 6 12 259 542,89 283,89 109,61% 0,90
14 6 13 259 537,43 278,43 107,50% 0,88
15 7 8 259 Ilhamento Ilhamento Ilhamento Ilhamento
16 7 9 259 516,79 257,79 99,53% 0,88
17 9 10 259 537,43 278,43 107,50% 0,93
18 9 14 259 533,18 274,18 105,86% 1,05
19 10 11 259 543,90 284,90 110,00% 0,92
20 12 13 259 545,58 286,58 110,65% 0,89
21 13 14 259 539,85 280,85 108,44% 0,98
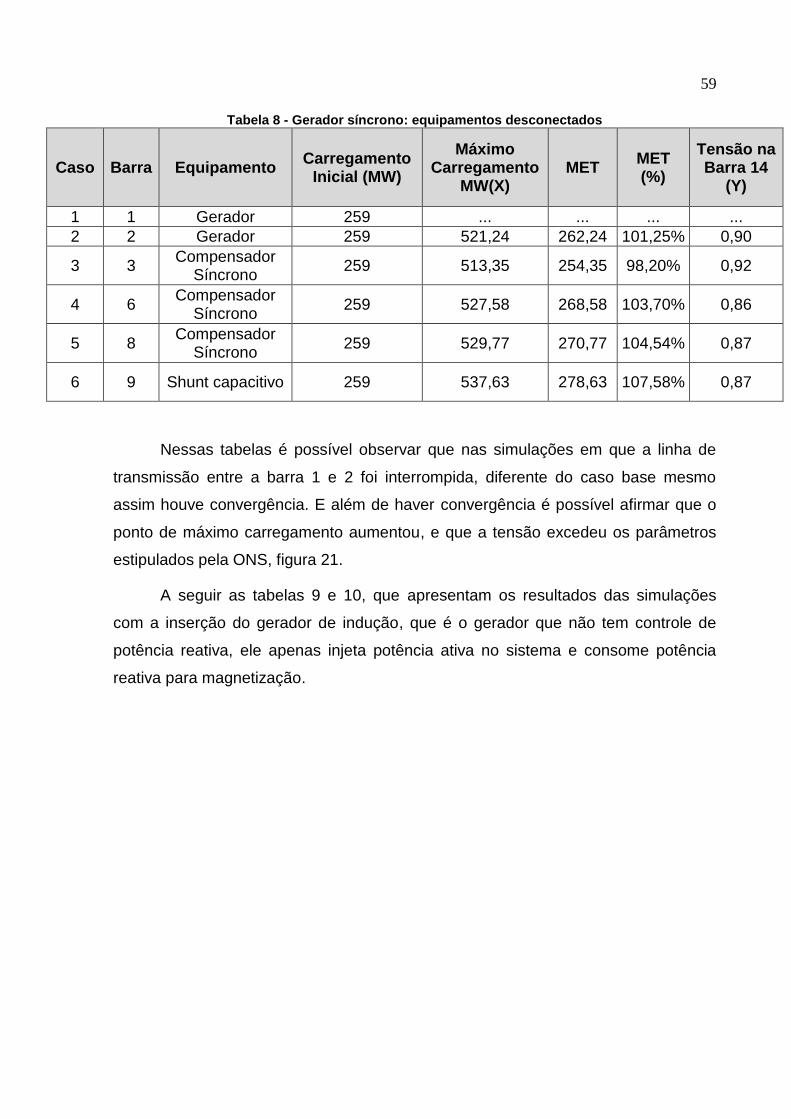
A tabela 8 é uma continuação da tabela 7, pois apresenta os dados das
simulações com o gerador síncrono. E nesse momento as contingências foram
retirar os equipamentos ligados as barras.
59
Tabela 8 - Gerador síncrono: equipamentos desconectados
Caso Barra Equipamento Carregamento
Inicial (MW)
Máximo Carregamento
MW(X) MET
MET (%)
Tensão na Barra 14
(Y)
1 1 Gerador 259 ... ... ... ...
2 2 Gerador 259 521,24 262,24 101,25% 0,90
3 3 Compensador
Síncrono 259 513,35 254,35 98,20% 0,92
4 6 Compensador
Síncrono 259 527,58 268,58 103,70% 0,86
5 8 Compensador
Síncrono 259 529,77 270,77 104,54% 0,87
6 9 Shunt capacitivo 259 537,63 278,63 107,58% 0,87
Nessas tabelas é possível observar que nas simulações em que a linha de
transmissão entre a barra 1 e 2 foi interrompida, diferente do caso base mesmo
assim houve convergência. E além de haver convergência é possível afirmar que o
ponto de máximo carregamento aumentou, e que a tensão excedeu os parâmetros
estipulados pela ONS, figura 21.
A seguir as tabelas 9 e 10, que apresentam os resultados das simulações
com a inserção do gerador de indução, que é o gerador que não tem controle de
potência reativa, ele apenas injeta potência ativa no sistema e consome potência
reativa para magnetização.

60
Tabela 9 - Gerador de indução sob critério N-1
Caso Da
Barra Para Barra
Carregamento Inicial (MW)
Máximo Carregamento
MW(X) MET
MET (%)
Tensão na Barra
14 (Y)
1 BASE 259,00 509,29 250,29 96,64% 0,68
2 1 2 259,00 285,25 26,25 10,13% 0,80
3 1 5 259,00 393,45 134,45 51,91% 0,65
4 2 3 259,00 351,47 92,47 35,70% 0,80
5 2 4 259,00 444,76 185,76 71,72% 0,63
6 2 5 259,00 462,66 203,66 78,63% 0,63
7 3 4 259,00 457,40 198,40 76,60% 0,76
8 4 5 259,00 443,65 184,65 71,29% 0,66
9 4 7 259,00 450,81 191,81 74,06% 0,66
10 4 9 259,00 468,21 209,21 80,78% 0,63
11 5 6 259,00 373,47 114,47 44,20% 0,69
12 6 11 259,00 480,57 221,57 85,55% 0,63
13 6 12 259,00 483,38 224,38 86,63% 0,63
14 6 13 259,00 465,39 206,39 79,69% 0,63
15 7 8 259,00 Ilhamento Ilhamento Ilhamento Ilhamento
16 7 9 259,00 414,22 155,22 59,93% 0,66
17 9 10 259,00 477,36 218,36 84,31% 0,66
18 9 14 259,00 ... ... ... ...
19 10 11 259,00 486,61 227,61 87,88% 0,63
20 12 13 259,00 488,16 229,16 88,48% 0,63
21 13 14 259,00 ... ... ... ...
Tabela 10 - Gerador de indução: equipamentos desconectados
Caso Barra Equipamento Carregamento
Inicial (MW)
Máximo Carregamento
MW(X) MET
MET (%)
Tensão na Barra
14 (Y)
1 1 Gerador 259 ... ... ... ...
2 2 Gerador 259 466,13 207,13 79,97% 0,62
3 3 Compensador
síncrono 259 461,08 202,08 78,02% 0,63
4 6 Compensador
síncrono 259 455,67 196,67 75,93% 0,62
5 8 Compensador
síncrono 259 461,93 202,93 78,35% 0,62
6 9 Shunt
capacitivo 259 476,57 217,57 84,00% 0,61

61
A seguir a tabela 11, que compara os resultados de máximo carregamento, a
margem de estabilidade de tensão e o nível de tensão na barra 14. É possível
observar que mesmo com valores pequenos em relação a potência já entregue ao
sistema, demonstra que os geradores contribuem no máximo carregamento.
Tabela 11 -Comparativo dos resultados da variação de penetração.
Tipo de Gerador
Carregamento Inicial (MW)
Máximo Carregamento
MW(X) MET
MET (%)
Tensão na Barra
14 (Y)
5% Indução 259 494,91 235,91 91,09% 0,62
Síncrono 259 545,92 286,92 110,78% 0,97
3% Indução 259 494,77 235,77 91,03% 0,62
Síncrono 259 540,00 281,00 108,49% 0,97
1% Indução 259 493,59 234,59 90,58% 0,63
Síncrono 259 545,00 286,00 110,42% 0,90
A figura 21 abaixo, refere-se as diretrizes e critérios para estudos elétricos
estabelecidos pela ONS.
Figura 21 - Parâmetro ONS (Fonte: ONS Submódulo 23.3, 2016)
Analisando todas as tabelas pode-se afirmar que a suportabilidade do
sistema, que com as inserções do gerador síncrono ou de indução,
independentemente do modelo de gerador inserido, ocasionou um aumento no PMC
(Ponto de máximo carregamento) e o aumento da tensão nas barras, e
principalmente na barra 14.

62
Ainda observando todas as tabelas, na simulação 15, nos três casos, gerou a
resposta ilhamento, isto se deve a conexão da barra 7 e 8 ter sido interrompida e a
barra 8 ficar sem uma barra de referência.
Abaixo as figuras 21 e 22 referem-se ao caso 2, que é o primeiro teste em
contingência (remoção da linha de transmissão entre as barras 1 e 2). No mesmo
teste realizado sem a inserção dos geradores eólicos, não houve convergência. Com
a inserção do gerador síncrono e do gerador de indução, houve convergência e os
resultados de máximo carregamento e nível de tensão na barra 14, foram obtidos.
Para o gerador síncrono segundo a tabela 7 na segunda linha 2, o valor de
carregamento foi 307,5625MW. Enquanto no gerador de indução, segundo a tabela
9. Na linha 2 o máximo carregamento foi 285,2492MW.
Figura 22 - Gerador Síncrono com contingência caso 2 (Fonte: Autoria própria)

63
Figura 23 - Gerador de Indução com contingência caso 2 (Fonte: Autoria própria)
A estabilidade de tensão em geral é um efeito local, devido as cargas
localizadas naquela região. O ideal é que esse efeito seja tratado localmente, para
evitar que o sistema como um todo seja carregado com a carga de corrente elétrica
necessária para o transporte desse reativo. Por essa razão, os geradores foram
colocados na barra 14, que antes da inserção dos geradores chegava a níveis de
tensão menores que o limite inferior estabelecido pela ONS.
A barra 14 antes da adição dos geradores era considerada uma barra crítica,
devido aos valores de tensão que ela atinge no momento de uma contingência. A
imagem a seguir, refere ao resultado da simulação do caso base, sem nenhuma
contingência e nenhum gerador adicionado e o gráfico demonstra que no máximo
ponto de carregamento da barra 14 a tensão atingiu pouco mais que 0,6pu, e o limite
inferior de tensão do ONS é 0,9pu, então observa-se que a tensão na barra 14
atingiu valores menores que os limites do ONS antes do máximo carregamento.

64
Figura 24 - Caso base IEEE 14 barras sem contingência (Fonte: Autoria própria)
O gráfico a seguir é o resultado da simulação do caso base com a inserção do
gerador síncrono sem nenhuma contingência. Nesse caso é possível observar que
os resultados aumentaram.
O nível de tensão no máximo carregamento também ficou abaixo dos valores
estabelecidos no ONS, vide figura 21, como no gráfico anterior apresentado na
figura 24. Porém só atingiu esse valor no máximo carregamento.
Segundo a tabela 7 na primeira linha atingiu 585,8157MW. Logo a barra 14
deixou de ser considerada uma barra crítica. Entretanto a barra 10, se tornou crítica.

65
Figura 25 - Caso base gerador síncrono sem contingência (Fonte: Autoria própria)
A figura 26 a seguir, se refere ao resultado da simulação do caso base com a
inserção do gerador de indução. Nesse caso, segundo a tabela 9 na primeira linha, o
máximo carregamento foi de aproximadamente 509,2924MW, melhor que o caso
base sem o gerador, entretanto o nível de tensão foi menor, e atingiu os limites
inferiores antes do máximo carregamento.

66
Figura 26 - Caso base gerador de indução sem contingência (Fonte: Autoria própria)
No que diz respeito às simulações onde houve a exclusão dos itens
conectados, pode-se afirmar que:
1 – Excluindo o gerador conectado na barra 1, nota-se que:
Nos três modelos de simulação: Caso Base, caso com a inserção do
gerador síncrono e caso com a inserção do gerador de indução não
houve convergência.
Isso ocorreu, pois o gerador excluso estava conectado a única barra de
referência do sistema tornando-o assim o gerador principal.
2 – Excluindo o gerador conectado na barra 2, nota-se que:
Caso base: O nível de carregamento cai cerca de 5% e a tensão
praticamente se mantém a mesma, quando comparada à simulação
sem contingência, conforme tabelas 5 e 6.
Caso com a inserção do gerador síncrono: O nível de carregamento
aumenta aproximadamente 15% e a tensão 44,9% quando comparado
com o caso base do IEEE14 sem contingência, (vide tabelas 5 e 8).

67
Quando comparados ao carregamento do caso base sem o gerador da barra
2, o aumento foi de 19,8% para o carregamento e 46% para a tensão, (vide tabelas
6 e 8).
Esse aumento significativo, mesmo com retirada de um gerador, se dá
justamente pela inserção do gerador síncrono na barra 14. Essa condição, permite
que o sistema suporte um maior nível de carregamento e tensão devido a geração
de reativos criado pelo gerador inserido.
Entretanto, ao comparar o nível de carregamento do caso base contido na
tabela 7 e a mesma simulação com a exclusão do gerador conectado a barra 2,
tabela 8, observa-se que:
Houve uma queda de 12,3%, enquanto a tensão teve uma sutil elevação de
aproximadamente 3%. Nessa condição pode-se constatar que o gerador síncrono
consegue exercer um melhor controle de tensão mantendo o sistema estabilizado,
mesmo diante de uma grande perturbação.
Caso com a inserção do gerador de indução: O nível de carregamento
aumentou sutilmente cerca de 2,2% e a tensão se manteve a mesma,
quando comparado com o caso base do IEEE14 sem contingência (vide
tabela 5 e 10).
Quando comparado ao carregamento do case base sem o gerador da barra 2,
o aumento foi de 7% e a tensão se manteve a mesma, (vide tabelas 6 e 10). Esse
aumento não foi tão significativo quanto o descrito anteriormente, pois o gerador de
indução consome reativos. Porém, mesmo com essa condição o sistema teve maior
suportabilidade, ou seja, a capacidade de se manter estável por um determinado
período aumento.
3 – Excluindo os compensadores síncronos, que estão conectados nas barras 3, 6 e
8 nota-se que:
Caso base: Em média, houve uma queda no nível de carregamento de
aproximadamente 5% no sistema, enquanto a tensão se manteve
praticamente a mesma, conforme tabelas 5 e 6.
68
Isso ocorre, pois os compensadores síncronos controlam a regulação de
potência reativa e tensão, podendo consumir ou gerar reativos por meio do controle
da excitação do campo. Sua principal finalidade é manter a tensão constante nos
terminais.
Caso com inserção do gerador síncrono: Em média, o nível de
carregamento aumenta aproximadamente 12,5% e a tensão de
aproximadamente 50%, vide tabelas 5 e 8.
Quando comparado ao carregamento do caso base da tabela 6, em média,
houve um aumento no nível de carregamento de 22% e de 42% na tensão, vide
tabela 8. Nessa condição a ausência do compensador síncrono não acarretou um
impacto negativo na estabilidade de tensão, visto que foi adicionado um novo
gerador na barra de referência 14, ocorreu um aumento na suportabilidade do
sistema.
O grande impacto da influência da ausência do compensador síncrono, pode
ser notada comparando os resultados das tabelas 7 e 8. Nessa condição, houve
uma queda de 9,5% no carregamento, mas em contrapartida, a tensão se manteve
estável.
Caso com inserção do gerador de indução: Em média, o nível de
carregamento não sofre influência de aproximadamente 1,32%,
enquanto a tensão se manteve estável, conforme tabelas 5 e 10.
Quando comparado ao carregamento do caso base da tabela 6, em média,
houve um aumento no nível de carregamento de 6% enquanto a tensão se manteve
estável, vide tabela 10.
Ao comparar os resultados encontrados nas tabelas 9 e 10, observa-se que
houve uma queda no nível de carregamento de 10%, e que a queda no valor da
tensão também se aproximou dos 10%.

69
Isso ocorre pois, sem o compensador síncrono não há o controle de reativos.
O que faz com que o consumo de reativos proveniente do gerador de indução
reduza a suportabilidade do sistema.
Após a inserção dos geradores a barra 14 passa a ser uma barra estável, isto
é, os níveis de tensão já não diminuem tanto.
1 - As primeiras simulações do gerador síncrono foram realizadas com três
capacidades diferentes de geração reativa, um dos testes com 45MVAr, a segunda
com 60MVAr e 75MVAr, a última simulação demonstrou resultados melhores tanto
no carregamento quanto nos valores de tensão.
Segue tabela comparativa das médias de tensão e máximo carregamentos
das simulações:
Tabela 12 – Médias: tensão e carregamento das simulações
Base Síncrono Indução
Média carregamento 419MW 503MW 440MW
Média valor de tensão 0,6715pu 0,94pu 0,6702pu
O gerador de indução pouco contribui para a estabilidade de tensão,
entretanto contribui para o máximo carregamento. O gerador de indução em geral
tem resultados menores que o caso base, conforme apresentado nas tabelas 5 e 9.
Analisa-se que esse fato seja em decorrência ao consumo de reativo para sua
própria magnetização, que é peculiaridade da máquina de indução.
2 - A tensão com o gerador de indução fica abaixo do limite inferior do manual
do ONS. Enquanto com o gerador síncrono em apenas alguns casos o limite inferior
não é atingido, conforme apresentado nas tabelas 7 e 9
3 - Para valores diferentes de injeção de potência ativa e reativa diferentes do
caso base, é possível observar que o carregamento apresenta uma melhora,
entretanto a tensão é menor.
Conforme tabelas 11 e 12, a tensão fica abaixo do limite inferior. Enquanto a
potência ativa atinge o dobro da potência inicial. A tensão excedeu o limite inferior
do ONS em 69% da potência original do sistema, enquanto na barra 14 não há essa
extrapolação.

70
Com exceção das barras próximas aos geradores, todas as barras ficaram
com valores abaixo do limite inferior. No caso em que a penetração foi de 1%,
quando comparado com o caso base das tabelas 7 e 9, a contribuição foi pequena,
mas houve melhora nos níveis de tensão e carregamento.
71
10 CONCLUSÃO
Os teste e resultados obtidos neste trabalho, com base nos valores de MET,
PMC e nível de tensão, com ênfase na barra 14, nos trazem conteúdo suficiente
para, em um caso real, atuar de forma preventiva para manter o sistema operando
de forma estável.
Após analisar os gráficos e tabelas, pode-se verificar que a inserção de
geradores próximos à carga ou centro de consumo, contribuem muito para
estabilidade de tensão na barra 14. Essa condição, permite que o sistema suporte
um maior nível de carregamento e tensão devido à geração de reativos criado pelo
gerador inserido.
Operando em três configurações distintas, sendo o caso base com diagrama
de 14 barras puro, segundo modelo adicionando mais uma barra ao sistema para a
inclusão do gerador síncrono, e o terceiro modelo adicionando mais uma barra ao
sistema para a inclusão gerador de indução. Em cada uma das situações foi possível
analisar os diferentes tipos de respostas fornecidas pelo programa, e como esses
novos modelos auxiliam na estabilidade de tensão do sistema.
O gerador síncrono contribuiu para a estabilidade de tensão, visto que injetou
potência reativa, e esse é o avanço para o sistema elétrico de potência, poder injetar
reativos perto da carga, pois a questão da estabilidade de tensão é local, logo o
ideal é tratá-la localmente. Nessa condição pode-se constatar que o gerador
síncrono consegue exercer um melhor controle de tensão mantendo o sistema
estabilizado, mesmo diante de uma contingência.
O gerador de indução, apenas contribuiu para a potência ativa, pois não pode
gerar potência reativa e o agravante é que a consome. Esse aumento não foi tão
significativo quanto o descrito anteriormente, pois o gerador de indução consome
reativos. Porém, mesmo com essa condição do próprio gerador o sistema teve maior
suportabilidade.
Pode se verificar que a barra 14 é a mais sensível, visto a distância da
geração, quando foram inseridos os geradores, ela deixou de ser uma barra crítica,
apresentou melhora, atingindo os valores máximos do limite de tensão estabelecidos
pelo ONS. Com a melhoria de fornecimento de potência reativa na barra 14, ela

72
deixou de ser a barra crítica dando o lugar a barra 3, que ficou com valores de
tensão menores que o estabelecido pelo ONS.
Nas contingências onde foram removidos os compensadores síncronos, é
possível compreender que a queda no nível de carregamento se dá, pois sem o
compensador síncrono não há o controle de reativos. Pincipalmente no gerador de
indução, que ao contrário do gerador síncrono que produz reativos, consome
reativos. O que impacta diretamente na capacidade do sistema em se manter
estável por um determinado período.
Logo, a inserção de geração distribuída, mais precisamente energia eólica,
próxima ao centro de carga, contribui diretamente para a estabilidade de tensão na
barra que, anteriormente, apresentava uma maior instabilidade. Contudo, é preciso
verificar que diferentes tipos de máquinas resultam em respostas e necessidades
operacionais distintas, como mostrado neste trabalho.
Por fim, é possível afirmar que o programa ANAREDE, desenvolvido pelo
grupo CEPEL, contribui amplamente para as análises de estudo de estabilidade de
tensão. Propiciando ao operador uma visão completa sobre o comportamento do
sistema
73
11 REFERÊNCIAS
Alves de Aguiar Junior, E. Análise básica de operação do gerador de dupla alimentação para aproveitamento eólico. 2007. 85p. Trabalho de conclusão de curso – Universidade federal do Rio de Janeiro, Rio de Janeiro, 2007. ANEEL. (06 de Abril de 2019). Agência Naciona de Energia Elétrica. Fonte:ANEEL. Banco de Informações de Geração. Disponivel em : http://www2.aneel.gov.br/aplicacoes/capacidadebrasil/capacidadebrasil.cfm Barbosa Leite Filipe, D., de Melo Lobato, E., & Contilio Quintan, V. (2003). Energia eólica: Análise sobre o potencial eólica brasileiro. Bolsista de valor:Revista de divulgação do Projeto Universidade Petrobras e IF Fluminense, 268-278.
Belico dos Reis, L. (2003). Geração de energia elétrica: Técnologia, inserção ambiental, planejamento, operação e análise de viabilidade. Barueri, SP: Manole.
Camponogara, M. (15 de Novembro de 2017). Estudo do impacto de sistemas de geração distribuida na estabilidade angular de sistemas elétricos de potência com o software . Ijuí, Rio Grande do Sul, Brasil: CRICTE - Congresso Regional de Iniciação Cientifica e Tecnologia em Engenharia.
Cândida Pataca, L. (22 de Junho de 2012). Análise de Contigências com Critério N-1 em Sistemas Elétricos de Potência Utilizando Computação Paralela em MATLAB. São Carlos, SP, Brasil.
Cardoso Ferraz, A. P. (Março de 2010). Avaliação da Operação de Geradores Eólicos em Regime Estacionário Considerando a Conexao Direta á Rede Elétrica.. Rio de Janeiro, RJ, Brasil.
Cortez do Prado, C. (13 de Março de 2017). Metodologia para análise da influência de pequenas centrais de geração síncrona na margem de estabilidade de tensão. Santa Maria, RS, Brasil.
Custódio Leão Nunes Silva, L. N. (Dezembro de 2016). Desenvolvimento de um tutorial do programa ANAREDE com base em configurações típicas de sistema elétrico de potência. Pato Branco, Paraná, Brasil: Universidade Tecnológica Federal do Paraná .
de Souza Francisco, G. (Outubro de 2005). Aspectos Práticos e Teóricos na Análise de Estabilidade de Tensão. Itajuba, MG, Brasil.
74
Fiorino Pavinatto, E. (Abril de 2005). Ferramenta para auxilio á analise de viabilidade técnica da conexão de parques eólicos á rede elétrica. Rio de Janeiro,RJ, Brasil.
Fretitas de Paiva, D. (Setembro de 2018). Análise e tomada de decisão em geradores elétricos aplicados em turbinas eólicas. Itajuba, MG, Brasil.
Gómez-Expósito, A., J. Conejo, A., & Cañizares, C. (2015). Sistemas de energia elétrica- Análise e Operação. Rio de Janeiro: LTC.
Kagan, N., Barioni de Oliveira, C. C., & Robba, E. J. (2005). Introdução aos sistemas de distribuição de energia elétrica. São Paulo : Edgar Blucher.
Kundur, P. (1994). Power System Stability and Control. New York: McGraw-HIII, Inc. Martins Rosa, D., Bolson, M. A., & Motta de Moraes, L. A. (11 de Setembro de 2013). Comportamento dos Geradores de Indução Duplamente alimentados em turbinas eólicas de 1,5MW. Curitiba, PR, Brasil.
Submódulo 23.2 - Diretrizes e Critérios para estudos elétricos. ONS, 2002.Disponível
no site:
http://www.ons.org.br/%2FProcedimentosDeRede%2FM%C3%B3dulo%2023%2FSu
bm%C3%B3dulo%2023.2%2FSubm%C3%B3dulo%2023.2_Rev_0.1.pdf
Submódulo 18.2 - Procedimentos de rede. ONS, 2016. Disponível no site:
http://www.ons.org.br/%2FProcedimentosDeRede%2FM%C3%B3dulo%2018%2FSu
bm%C3%B3dulo%2018.2%2FSubm%C3%B3dulo%2018.2%202016.12.pdf
Submódulo 10.22 – Manual de procedimentos da operação. ONS, 2019. Disponível
no site:
http://www.ons.org.br/%2FMPO%2FDocumento%20Normativo%2F4.%20Rotinas%2
0Operacionais%20-
%20SM%2010.22%2F4.1.%20Rotinas%20Gerais%2F4.1.1.%20Cadastros%20de%2
0Informa%C3%A7%C3%B5es%20Operacionais%2FRO-CD.BR.01_Rev.03.pdf
Ramos, A. J., Tavares, C., & de Sena, D. (2012). Impacto da geração distribuida eólica nos sistema de distribuição e transmissão. O setor elétrico, 51-59.
Rorato Londero, R. (2014). Avaliação do Impacto da Integração de Aerogeradores na Estabilidade de Tensão de Longo-Prazo em Sistemas Elétricos de Potência.Belém, PA, Brasil.

75
Techio de Melo, G. (28 de Novembro de 2017). Análise da estabilidade de tensão em um alimentador de distribuição sob a influência de geração distribuida. Ijui, RS, Brasil.
Walantus, L. A. (Maio de 2014). Análise da estabilidade de sistema elétrciso de potência com inserção de fontes renováveis. Itajuba, Rio Grande do Sul, Brasil.