tÍtulo: futebol de robÔs inteligentes: estudo e...
TRANSCRIPT

TÍTULO: FUTEBOL DE ROBÔS INTELIGENTES: ESTUDO E ELABORAÇÃO DE UMA SIMULAÇÃOPARA O TORNEIO DA ROBOCUP.TÍTULO:
CATEGORIA: EM ANDAMENTOCATEGORIA:
ÁREA: ENGENHARIAS E ARQUITETURAÁREA:
SUBÁREA: ENGENHARIASSUBÁREA:
INSTITUIÇÃO: UNIVERSIDADE DO SAGRADO CORAÇÃOINSTITUIÇÃO:
AUTOR(ES): LEONARDO AUGUSTO ARRUDAAUTOR(ES):
ORIENTADOR(ES): PATRICK PEDREIRA SILVAORIENTADOR(ES):
COLABORADOR(ES): LUIZ GUILHERMECOLABORADOR(ES):
CATEGORIA CONCLUÍDO
1
FUTEBOL DE ROBÔS INTELIGENTES: ESTUDO E ELABORAÇÃO DE UMA
SIMULAÇÃO PARA O TORNEIO DA ROBOCUP.
1. RESUMO
Este projeto de iniciação científica apresenta como seu principal objetivo estudar as
regras, o funcionamento do time e as ferramentas relacionadas à RoboCup, - um torneio
internacional de futebol de robôs. Além de estimular pesquisas relacionadas a Inteligência
Artificial, da qual na simulação robôs inteligentes são capazes de jogar futebol de forma
autônoma, determinando suas próprias decisões, posicionamento, estratégias de jogo, visão de
campo e comunicação entre os outros jogadores, esta investigação visa dar os primeiros
passos para a criação de uma equipe que possa representar futuramente a Universidade do
Sagrado Coração na Competição Brasileira de Robótica (CBR), apoiada pela Sociedade
Brasileira de Automática (SBA) e da própria Robocup.
2. INTRODUÇÃO
Segundo Bittencourt (2006), o objetivo da Inteligência Artificial (IA) envolve aspectos
teóricos – a criação de teorias e modelos para a capacidade cognitiva – e práticos – a
implementação de sistemas computacionais baseados nesses modelos. A Inteligência
Artificial faz com que a máquina tenha a capacidade de criar estratégias, aprender, reconhecer
padrões ou encontrar as melhores soluções possíveis, simulando a forma de raciocínio de um
ser humano, porém este raciocínio é implementado em um computador.
Segundo Russel e Norvig (2003), a inteligência pode ser vista ainda como um
conjunto de capacidades mentais que nos permite perceber, compreender, prever e manipular
um mundo muito maior e mais complicado que ela própria. Diante de toda essa complexidade
a inteligência humana vem sendo foco de diversos estudos ao longo dos anos e, mais que isso,
vem sendo uma inspiração para outras ciências que procuram de alguma forma melhor
entende-la e imitá-la. Como exemplo, podemos citar a área de Inteligência Artificial que
busca na inteligência a inspiração para construir entidades (agentes) inteligentes, que se
caracterizam por apresentar comportamentos racionais durante a resolução de problemas.
Deste modo, a Inteligência Artificial (IA) pode ser definida, em sentido amplo, como a área
da Computação que se ocupa da automação do comportamento inteligente por meio da
modelagem de agentes inteligentes. (RUSSEL; NORVIG, 2003). O comportamento
CATEGORIA CONCLUÍDO
2
inteligente desses agentes envolve a execução de tarefas relacionadas à percepção, raciocínio,
aprendizado, comunicação, ação e reação diante de ambientes complexos. (NILSSON, 1998).
Winston (1992) define Inteligência Artificial como o estudo que torna possível
perceber, raciocinar e agir computacionalmente. Pode ainda ser entendida como o estudo de
agentes que recebem percepções do ambiente e executam ações. Sohoham (apud COSTA,
1999) define agente como sendo uma entidade de software funcionando continuamente e de
forma autônoma em um ambiente particular, frequentemente habitado por outros agentes e
processos. Cada agente implementa uma função que mapeia sequências de percepções em
ações. No entanto, neste conceito de agentes inteligentes espera-se que essas entidades
tenham outros atributos que possam distingui-los de meros “programas computacionais”, tais
como operar sob controle autônomo, perceber seu ambiente, adaptar-se a mudanças e ser
capaz de assumir metas (RUSSEL; NORVIG, 2003).
Neste contexto existe uma forte relação entre a Inteligência Artificial e a área de
Robótica, uma vez que robôs são na verdade, um tipo de agente inteligente. Segundo
Camargo (2002), a Robótica é definida como a área da engenharia que estuda a construção de
máquinas capazes de realizar certas tarefas de modo autônomo. Por envolver conhecimentos
das áreas de computação, matemática, física, engenharia, etc.; a robótica é uma área a qual
permite que máquinas se tornem vivas e realize movimento ou funções que qualquer outro
humano poderia realizar.
As áreas de IA e Robótica juntas permitem a construção de agentes inteligente (robôs)
capazes de tomar decisões dentro de ambientes não estruturados ou diante de situações novas.
Desta forma, pesquisas nestas áreas podem ser usadas como laboratório para testes das
técnicas de construção de sistemas inteligentes e, mais ainda, como um estímulo ao
aprendizado dos alunos das áreas de computação.
As competições da RoboCup são divididas em três categorias principais:
RoboCup Soccer (Futebol de Robôs): o futebol foi o foco principal das
competições por ser um esporte popular em todo mundo (atraindo grande
número de pessoas para o a competição). Tem como objetivo o
desenvolvimento de agentes autônomos em ambientes dinâmicos. Esta
categoria é dividida em 5 ligas:
o Humanóides;
o Middle Size;
o Simulação (dividida em simulação 2D e 3D);
CATEGORIA CONCLUÍDO
3
o Small Size;
o Plataforma padrão.
RoboCup Rescue (Robôs de Resgate): O objetivo desta competição é promover
pesquisa e desenvolvimento em resgate em situações de desastres em um
ambiente hostil. Nesta categoria podem ser desenvolvidos robôs reais ou
simulações.
RoboCup @Home (Robôs Domésticos): Esta competição visa desenvolver
aplicações reais de robôs autônomos que possam ajudar as pessoas em tarefas
do dia a dia.
Diante deste potencial da Robótica no final da década de 90 surgiu o torneio Robocup.
Este torneio teve sua primeira edição em 1997, em Nagoya (Japão) e tem como objetivo ser
um veículo para promover a pesquisa em Robótica e IA, pois oferece um grande desafio para
os seus participantes: fazer com que robôs (reais ou simulados) joguem futebol tão bem
quanto o melhor time de futebol formado por humanos (ROBOCUP, 2013).
No Brasil, existe a competição Brasileira de Robótica (CBR), que classifica as equipes
para a RoboCup Internacional. Esta competição é apoiada pela Sociedade Brasileira de
Automática (SBA), “uma sociedade científica de âmbito nacional, cujo objetivo primordial é
promover a ciência e a tecnologia de controle automático e suas aplicações, no seu sentido
mais amplo, no Brasil” (SBA, 2013). O evento é anual e inclui a publicação de um artigo,
descrevendo as estratégias utilizadas pelas equipes no desenvolvimento dos robôs,
devidamente relacionando as regras e formatos de participação da competição.
3. OBJETIVOS
O objetivo dessa pesquisa é estudar as regras da subliga Simulation 3D League e criar
uma simulação simples de forma que seja possível entender o funcionamento do simulador.
4. METODOLOGIA
A RoboCup consiste em diversas ligas conforme pode ser visto em ROBOCUP (2013).
Considerando-se as descrições de cada uma delas e os objetivos deste projeto a investigação
aqui proposta recairá sobre categoria RoboCup Soccer, que é dividida em 5 ligas. Dentre
essas ligas, a mais adequada ao projeto é a liga de simulação cujo foco é a Inteligência
CATEGORIA CONCLUÍDO
4
Artificial e o desenvolvimento de estratégias de equipe (ROBOCUP, 2013). Nesta
competição, softwares de simulação são utilizados para recriar os jogadores (agentes) e o
campo de futebol (virtual) em dois tipos de subliga: 2D e 3D. Como este projeto tem o
objetivo de compreender como esses simuladores funcionam e a dinâmica da competição,
optou-se por focar a pesquisa na subliga 2D. O desenvolvimento deste projeto compreenderá
quatro fases:
1. Fase 1: Estudo da Competição.
O torneio da RoboCup possui diversas regras relacionadas a diferentes ligas e
categorias. Desta forma, será necessário um estudo de todas as regras gerais e as
regras específicas da Liga de Simulação 2D. O resultado desta fase será a primeira
publicação desta pesquisa que consistirá em um relatório técnico, em forma de
tutorial, apresentando as etapas de participação na competição.
2. Etapa 2: Estudo do Simulador.
Após conhecer a dinâmica da competição, será realizado um estudo sobre o
simulador para a liga de simulação (RoboCup Soccer Simulator). Este simulador é
uma ferramenta de pesquisa, com fins educacionais, para sistemas multi-agentes e
de Inteligência Artificial e permite que duas equipes de jogadores robóticos
autônomos sejam simuladas em uma partida de futebol. Por se tratar de um
ambiente de simulação não é necessário criar o hardware do robô, garantido que o
foco fique apenas no desenvolvimento de estratégia da equipe (ROBOCUP, 2013).
O resultado desta fase será um manual de utilização do simulador.
3. Fase 3: Simulação.
Após o estudo o simulador RoboCup Soccer Simulator, serão iniciados os estudos
referentes às simulações de um jogo de futebol. Considerando o período de
duração deste projeto de iniciação científica (aproximadamente 1 ano), pretende-se
criar uma simulação simples, de forma que seja possível entender o funcionamento
do simulador. O resultado desta etapa será outro relatório técnico contendo a
descrição da simulação implementada.
4. Fase 4: Documentação, Relatório e Divulgação de Resultados.
Nesta etapa, será elaborado o relatório final de iniciação científica, além da
divulgação dos resultados, que será realizada através da documentação específica
de cada uma das etapas anteriores. A ideia é promover a divulgação da experiência
e resultados obtidos em eventos técnicos e científicos, publicações correlatas, e
CATEGORIA CONCLUÍDO
5
participar do Congresso Anual de Iniciação Científica e Desenvolvimento
Tecnológico e Inovação da USC.
5. DESENVOLVIMENTO
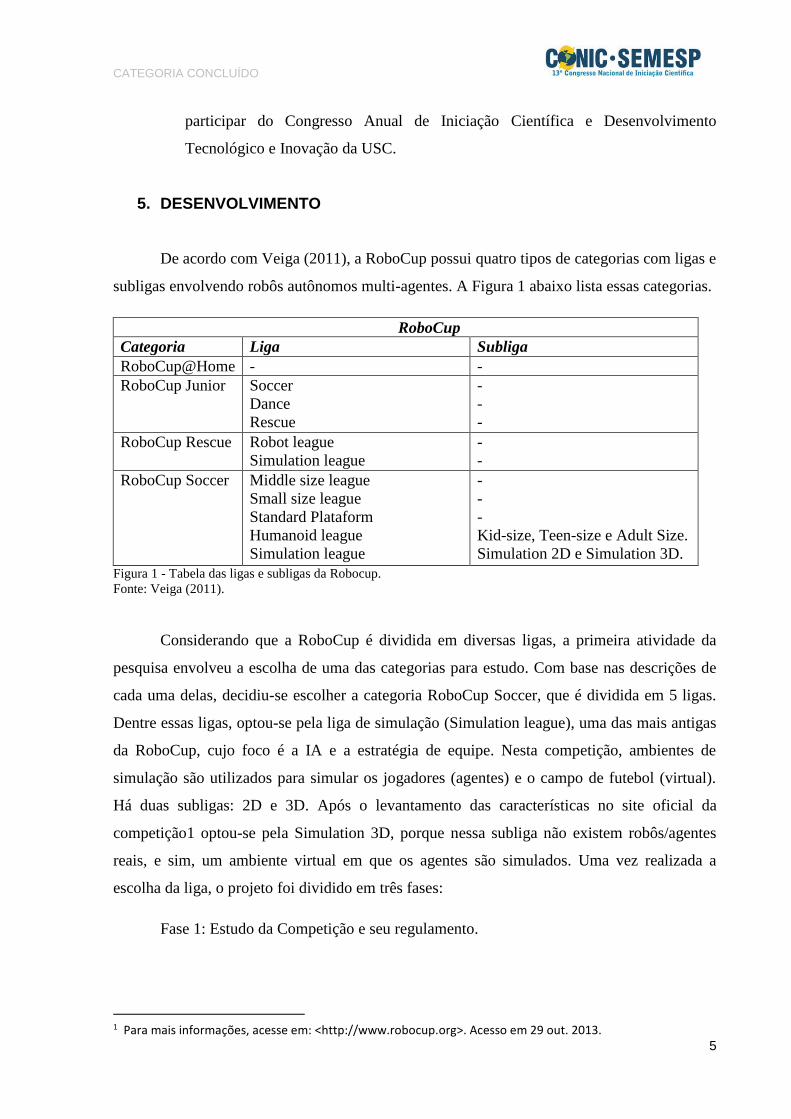
De acordo com Veiga (2011), a RoboCup possui quatro tipos de categorias com ligas e
subligas envolvendo robôs autônomos multi-agentes. A Figura 1 abaixo lista essas categorias.
RoboCup
Categoria Liga Subliga
RoboCup@Home - -
RoboCup Junior Soccer
Dance
Rescue
-
-
-
RoboCup Rescue Robot league
Simulation league
-
-
RoboCup Soccer Middle size league
Small size league
Standard Plataform
Humanoid league
Simulation league
-
-
-
Kid-size, Teen-size e Adult Size.
Simulation 2D e Simulation 3D.
Figura 1 - Tabela das ligas e subligas da Robocup.
Fonte: Veiga (2011).
Considerando que a RoboCup é dividida em diversas ligas, a primeira atividade da
pesquisa envolveu a escolha de uma das categorias para estudo. Com base nas descrições de
cada uma delas, decidiu-se escolher a categoria RoboCup Soccer, que é dividida em 5 ligas.
Dentre essas ligas, optou-se pela liga de simulação (Simulation league), uma das mais antigas
da RoboCup, cujo foco é a IA e a estratégia de equipe. Nesta competição, ambientes de
simulação são utilizados para simular os jogadores (agentes) e o campo de futebol (virtual).
Há duas subligas: 2D e 3D. Após o levantamento das características no site oficial da
competição1 optou-se pela Simulation 3D, porque nessa subliga não existem robôs/agentes
reais, e sim, um ambiente virtual em que os agentes são simulados. Uma vez realizada a
escolha da liga, o projeto foi dividido em três fases:
Fase 1: Estudo da Competição e seu regulamento.
1 Para mais informações, acesse em: <http://www.robocup.org>. Acesso em 29 out. 2013.
CATEGORIA CONCLUÍDO
6
A competição estabelecida pela RoboCup possui diversas regras, cada categoria e liga
possui um regulamento específico. Deste modo, foi necessário um estudo de todas as regras
gerais e as regras específicas da Liga de Simulação 3D, visando estabelecer o passo-a-passo
de como participar da competição.
Fase 2: Estudo do Simulador.
Após o estudo sobre a competição, realizou-se um estudo sobre o simulador para a liga
de simulação, o RoboCup Soccer Simulator (3D). Este simulador é uma ferramenta de
pesquisa e educacional para sistemas multi-agentes e de Inteligência Artificial que permite
que equipes de 11 jogadores robóticos autônomos sejam simuladas para jogar futebol, sem a
necessidade de criar o hardware do robô: o foco desta liga é a IA e a estratégia da equipe.
Conforme Mendes (2010), o ambiente virtual informa todos os dados que seriam
obtidos a partir de um robô físico real, através dos sensores de movimento, camadas de
comunicação, camadas de protocolo de rede, camadas de controle e camadas de decisão; os
quais são definidos pelos pacotes de programação de cada time.
Fase 3: Simulação.
Após o estudo sobre o simulador, a próxima etapa consistiu no estudo sobre as
simulações de um jogo de futebol. Conforme o objetivo principal deste projeto, procurou-se
criar uma simulação simples, apenas para que fosse possível entender o funcionamento do
simulador, visando uma descrição da simulação implementada.
Conforme Veiga (2011), a simulação multi-agente dos robôs é feita pelo simulador
simspark e o ambiente virtual rcsserver3d, que tem como objetivo oferecer maior grau de
flexibilidade para elaborar novas simulações multi-agentes. Para a criação do ambiente e a
simulação dos robôs, a Robocup oferece os softwares e os manuais de configurações oficiais
da liga, de acordo com o sistema operacional escolhido.
Nesta etapa do projeto foi decido qual sistema operacional seria escolhido para dar
início as atividades planejadas. Os testes começaram com a preparação do ambiente
Windows, porém, no decorrer das configurações da máquina, ocorreram certos problemas na
instalação dos pacotes e utilitários de um dos softwares requeridos. Desta forma, mudando
para a utilização e configuração do ambiente Linux.
CATEGORIA CONCLUÍDO
7
Além dos manuais oficiais das ferramentas disponíveis, outros documentos, fóruns e
grupos online, foram encontrados. Conforme Veiga (2011) explica, dentre muitos sistemas
baseados em Linux, os principais usados para o Robocup Simulation 3D é o Fedora e Ubuntu.
Deste modo, optou-se pela versão do Ubuntu 12.04, por ser uma versão mais recente e possuir
uma forma mais fácil de instalar o simspark e o rcsserver3d através dos repositórios do
Robocup no Ubuntu. Outros softwares também foram necessários serem instalados para a
simulação do ambiente virtual, dos agentes e a virtualização do ambiente Linux. Esses
softwares foram:
Eclipse – Ambiente para programação dos robôs;
SimSpark – Servidor de comunicação entre os jogadores (agentes);
Código de algum time base (MagmaOfferburng);
Virtual Box – Ambiente para virtualização do sistema Ubuntu;
Bibliotecas básicas como Boost (a instalação já está atrelada ao SimSpark).
Optou-se pelo uso do VirtualBox, por ser gratuito e possuir ferramentas de
virtualização que seriam úteis para o avanço das pesquisas. No entanto, a escolha pela
virtualização do ambiente Linux foi por questões de regras no uso dos computadores da
universidade. Sendo assim, foi definido as seguintes configurações de sistema e de rede para a
máquina virtual:
Configuração do sistema:
o Memória base: 1 gigabyte (GB);
o Espaço de disco rígido: 80 GB;
o Sistema: ISO Ubuntu Linux 12.04 (32 bits).
Configurações de rede:
o Modo de placa: Placa em modo Brigde;
o Tipo de placa: PCnet-FAST III (Am 79C973);
o Modo promíscuo: Permitir tudo.
Depois de realizada a virtualização do sistema Linux, deu-se início as configurações e
instalações dos pacotes de softwares da liga. Segundo Veiga (2011), antes de iniciar o
processo de instalação, é necessário habilitar os repositórios Universe e Multiverse pelo
terminal do Linux (INSTRUÇÃO 1, em anexo).
CATEGORIA CONCLUÍDO
8
De acordo com o manual oficial INSTALLATION (2013), é preciso baixar os
repositórios do rcssserver3d (INSTRUÇÃO 2) e depois instalar as dependências do servidor
de simulação dando um comando no terminal (COMANDO 1, em anexo).
Feitas as instalações, é necessário fazer o download dos pacotes mais recentes do
simspark e rcsserver3d, disponível no link SVN (COMANDO 2). Após isso, basta configurar
os pacotes baixados através das instruções (INSTRUÇÃO 3) e (INSTRUÇÃO 4). Antes de
executar o servidor e o simulador, verifica se o linker pode encontrar as bibliotecas
compartilhadas (INSTRUÇÃO 5). Depois das configurações prontas, basta digitar o comando
(COMANDO 3) para rodar o simspark, o agente de teste (COMANDO 4) e o rcssserver3d
(COMANDO 5).
Com o ambiente preparado, é necessário instalar a IDE Eclipse (COMANDO 6) que é
a ferramenta que vai suportar todos os códigos-fontes de programação de cada time. Depois
de instalado, é preciso atualizar uma dependência do pacote do eclipse com o comando
(COMANDO 7).
Nesta etapa do projeto foram selecionados dois times com o código-fonte aberto e
desenvolvidos em diferentes linguagens de programação. No entanto, um dos times, cujo
nome é Apollo3D2, que havia sido desenvolvido na linguagem C, não foi escolhido devido à
sua complexidade de estrutura e por falta de documentos para a pesquisa. Deste modo,
selecionou-se como time base, a versão disponibilizada de 2009 do time MagmaOffenburg3.
De acordo com Dorer (2001), o time é baseado na linguagem Java e possuí diversos manuais
oficiais explicando toda a sua estrutura, seus pacotes de programação, ação dos agentes, as
camadas que são criadas, entre outros. Depois de concluída a configuração do ambiente e a
escolha do time, começaram as pesquisas sobre o mecanismo de iniciação de um agente,
conexão com o servidor e interação com os outros jogadores amigos e adversários.
Para a realização dos testes no ambiente virtual, foi necessário criar outra máquina
virtual com o Ubuntu para simular o servidor do evento da Robocup, o qual serve para
carregar os times e dar início à partida. Com isso, a máquina virtual do servidor possuiu as
mesmas configurações de sistema, rede e do ambiente, porém, este sem a instalação do IDE
Eclipse.
2 Pacote do time Apollo3D disponível para o download no link: <http://sourceforge.net/projects/apollo3d/>. Acesso em: 2 dez. 2013. 3 Para mais informações do MagmaOffenburg, acesse em: <http://www.hs-offenburg.de/magma/>. Acesso em: 4 dez. 2013.
CATEGORIA CONCLUÍDO
9
Os testes iniciais da simulação dos agentes e o estudo da criação do ambiente virtual foram
feitos na máquina virtual principal para o desenvolvimento. De acordo com Dorer (2011), o
time do magmaOffenburg cria camadas.
6. RESULTADOS
De acordo com os regulamentos do Robocup Simulation 3D, para uma partida é
preciso primeiro iniciar os pacotes do rcsserver3d com o comando (COMANDO 8) e o
simspark com o comando (COMANDO 3) pelo terminal do Linux, o qual cria um servidor de
simulação tridimensional onde os agentes são carregados de forma vetorial definida pelos
desenvolvedores do time, sendo cada robô um processo.
Segundo Green (2007), o servidor de simulação do SimSpark cria um modelo de
campo de futebol retangular, conhecido como SoccerField, com dimensão de 50m x 32m de
comprimento e largura, sendo o tamanho padronizado pelo evento. Além do modelo de
campo, ele possui também um modelo de agente baseado no robô NAO4, conhecido como
SoccerBot, que simula as características humanas.
Dessa forma, para iniciar o time MagmaOffenburg no ambiente virtual do servidor
Robocup, os pacotes de programação do time são carregados no IDE Eclipse conforme a
Figura 2, mostra. Como o time base usado foi o MagmaOffenburg, então as informações
encontradas e que serão retratadas nessa pesquisa são especificas do time.
Como Dorer (2001) diz, para carregar os jogadores era preciso executar um arquivo
dentro do pacote src/magma.agent chamado IMagmaConstants.java cujo arquivo cria as
características de jogador por jogador, definindo o nome do time, a posição do mesmo de uma
forma vetorial, seu campo de visão e suas estratégicas de campo básicas.
Após os robôs criados e carregados (Figura 2), foi possível realizar testes e análises de
seus comportamentos diante de suas funções.
4 Para mais informações sobre o modelo do robô NAO, veja em: <http://www.aldebaran.com/en>. Acesso em: 25 jul. 2014.
CATEGORIA CONCLUÍDO
10
Figura 2 - Time do magmaOffenburg carregado.
Fonte: Elaborado pelo autor.
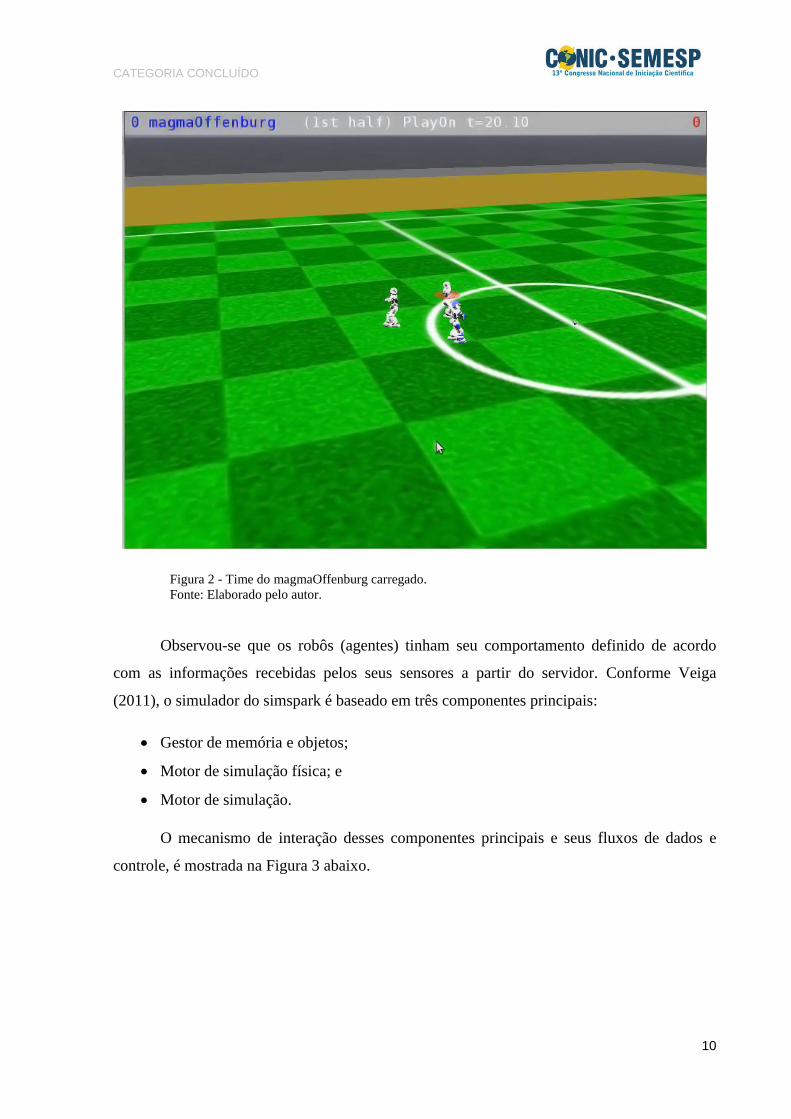
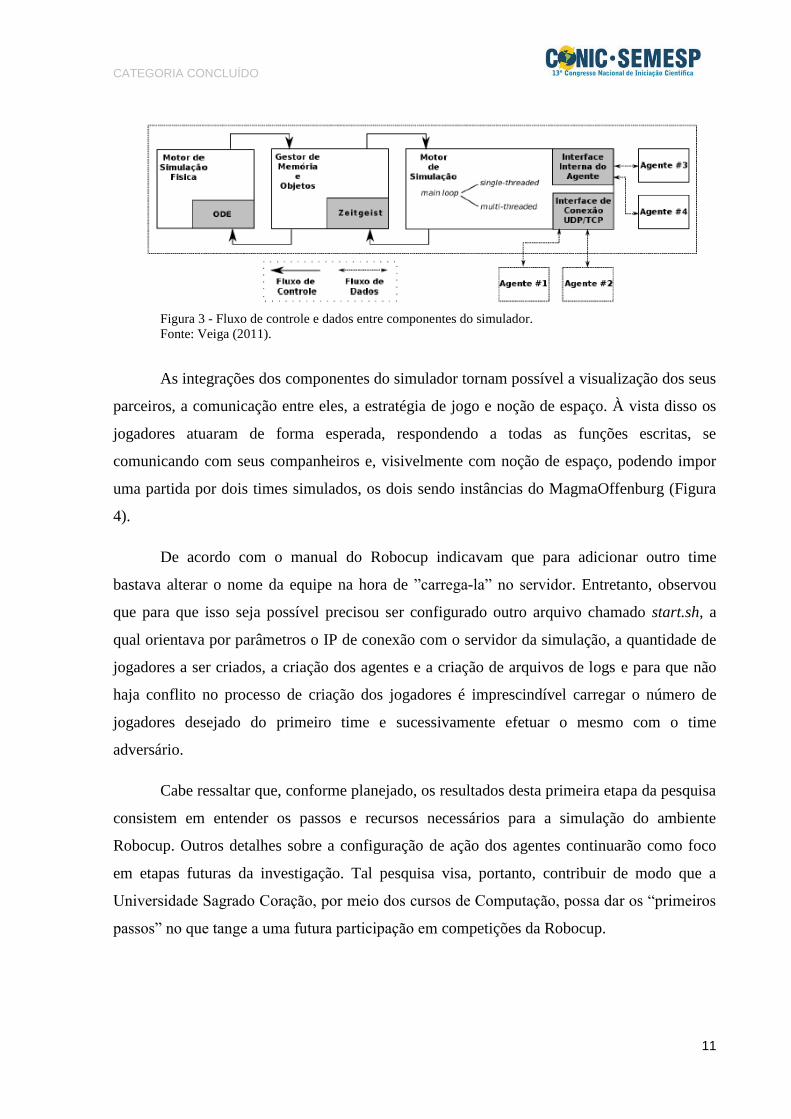
Observou-se que os robôs (agentes) tinham seu comportamento definido de acordo
com as informações recebidas pelos seus sensores a partir do servidor. Conforme Veiga
(2011), o simulador do simspark é baseado em três componentes principais:
Gestor de memória e objetos;
Motor de simulação física; e
Motor de simulação.
O mecanismo de interação desses componentes principais e seus fluxos de dados e
controle, é mostrada na Figura 3 abaixo.
CATEGORIA CONCLUÍDO
11
Figura 3 - Fluxo de controle e dados entre componentes do simulador.
Fonte: Veiga (2011).
As integrações dos componentes do simulador tornam possível a visualização dos seus
parceiros, a comunicação entre eles, a estratégia de jogo e noção de espaço. À vista disso os
jogadores atuaram de forma esperada, respondendo a todas as funções escritas, se
comunicando com seus companheiros e, visivelmente com noção de espaço, podendo impor
uma partida por dois times simulados, os dois sendo instâncias do MagmaOffenburg (Figura
4).
De acordo com o manual do Robocup indicavam que para adicionar outro time
bastava alterar o nome da equipe na hora de ”carrega-la” no servidor. Entretanto, observou
que para que isso seja possível precisou ser configurado outro arquivo chamado start.sh, a
qual orientava por parâmetros o IP de conexão com o servidor da simulação, a quantidade de
jogadores a ser criados, a criação dos agentes e a criação de arquivos de logs e para que não
haja conflito no processo de criação dos jogadores é imprescindível carregar o número de
jogadores desejado do primeiro time e sucessivamente efetuar o mesmo com o time
adversário.
Cabe ressaltar que, conforme planejado, os resultados desta primeira etapa da pesquisa
consistem em entender os passos e recursos necessários para a simulação do ambiente
Robocup. Outros detalhes sobre a configuração de ação dos agentes continuarão como foco
em etapas futuras da investigação. Tal pesquisa visa, portanto, contribuir de modo que a
Universidade Sagrado Coração, por meio dos cursos de Computação, possa dar os “primeiros
passos” no que tange a uma futura participação em competições da Robocup.
CATEGORIA CONCLUÍDO
12
Figura 4 - Imagem dos robôs iniciados.
Fonte: Elaborado pelo autor.
7. CONSIDERAÇÕES FINAIS
Durante o período do projeto foram realizadas as pesquisas necessárias para o
entendimento da competição da RoboCup. Conforme as atividades relatadas, houve um
levantamento sobre as regras da competição (gerais e específicas da categoria escolhida).
Também foram desenvolvidas atividades que permitiram conhecer e dar os primeiros
passos com o simulador oficial disponibilizado para as competições, sendo possível conhecer
o seu funcionamento e realizar experimentos com agentes virtuais autônomos por meio de
simulações. Durante essa investigação foi verificada uma série de dificuldades no que tange
ao processo de simulação, indo desde as limitações associadas às atividades de escolha e
instalação das ferramentas em um sistema operacional até mesmo à disponibilização e
movimentação dos agentes (robôs) no ambiente simulado (campo de futebol virtual).
Entretanto, considerando o objetivo principal desta pesquisa verifica-se que o mesmo
foi alcançado considerando que esta investigação traz um estudo inicial do simulador, bem
CATEGORIA CONCLUÍDO
13
como os passos necessários realizar uma simulação simples no ambiente da Robocup. A partir
dos dados gerados por essa pesquisa e do conhecimento adquirido durante o projeto, será
possível planejar as algumas ações para que seja possível, futuramente, enviar uma equipe
simulada, para uma competição oficial da RoboCup.
8. FONTES CONSULTADAS
BITTENCOURT, Guilherme. Inteligência artificial: ferramentas e teorias. 3. ed. rev.
Florianópolis, SC: Ed. Da UFSC, 2006.
CAMARGO, M. A. A. Planejamento de Trajetórias de um Manipulador Robótico
Usando Redes Neurais Artificiais. Universidade Estadual de Campinas (Faculdade de
Engenharia Mecânica), Campinas, Agosto 2002.
DORER, K. et al. The magmaOffenburg RoboCup 3D Simulation Framework Manual
2011. Hochschule Offenburg, Elektrotechnik-Informationstechnik, Germany, 2011.
GREEN, L. RoboCup 3D Simulation HowTo, c2007. Disponível em:
<http://read.pudn.com/downloads169/doc/project/780648/howtorobocop.pdf>. Acesso em: 4
jan. 2014;
INSTALLATION on Linux. Installation on Linux – Simspark, c2013. Disponível em:
<http://simspark.sourceforge.net/wiki/index.php/Installation_on_Linux > Acesso em: 20 nov.
2013;
NILSSON, N. J. Artificial Intelligence: A New Synthesis. San Francisco, CA: Morgan
Kaufmann Publishers, Inc., 1998.
RUSSEL, S.; NORVIG, P. Artificial Intelligence: A Modern Approach. New Jersey:
Prentice Hall. Upper Saddle River, 2003.
ROBOCUP. About RoboCup. Disponível em: <http://www.robocup.org>. Acesso em:
22 ago. 2013.
SBA. Sociedade Brasileira de Automática. Disponível em: <http://www.sba.org.br>.
Acesso em: 22 ago. 2013.
VEIGA, A. et al. Virtualização de robôs, c2013. Disponível em:
<http://www.acso.uneb.br/erbase2011/Anais/Anais/02_Laboratorios/01%20LB_01_Marco.pdf>
Acesso em: 21 nov. 2013.
WINSTON, P. H. "Artificial Intelligence". 3rd edition. Addison Wesley, 1992.