sp campus piracicaba robÓtica · definido como a coleção de uma sequência de configurações...
TRANSCRIPT

ROBÓTICAProfa. Dra. GIOVANA TRIPOLONI TANGERINO
Tecnologia em Automação Industrial
PLANEJAMENTO DE TRAJETÓRIAS
SP – CAMPUS PIRACICABA
https://giovanatangerino.wordpress.com

Estudo da cinemática e da dinâmica de robôs:
utilizando equações de movimento do robô, podemos determinar onde o robô
estará se tivermos as variáveis articulares ou determinar o que as variáveis
articulares devem ser para colocar o robô em uma posição e orientação desejadas
com uma velocidade desejada.
Planejamento de percurso e trajetória:
refere-se à forma como um robô é movido de um local para outro de forma
controlada.
requer o uso tanto de cinemática quanto de dinâmica de robôs.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Percurso:
Definido como a coleção de uma sequência de configurações que um robô faz para
ir de um lugar ao outro sem se referir ao instante desses configurações
A sequência de configurações entre A, B e C constitui um percurso.
Trajetória:
Está relacionada com o momento em que cada parte do percurso deve ser atingida.
Independentemente de quando os pontos B e C forem alcançados, o percurso é o mesmo,
ao passo que dependendo de quão rápido é atravessada cada parte do percurso, a
trajetória pode diferir.
Os pontos em que o robô pode estar em um percurso de uma trajetória em um
determinado momento podem ser diferentes, mesmo que o robô percorra os mesmos
pontos.
Em uma trajetória, dependendo das velocidades e acelerações, os pontos B e C
podem ser alcançados em momentos diferentes, criando diferentes trajetórias.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)
PLANEJAMENTO DE TRAJETÓRIA
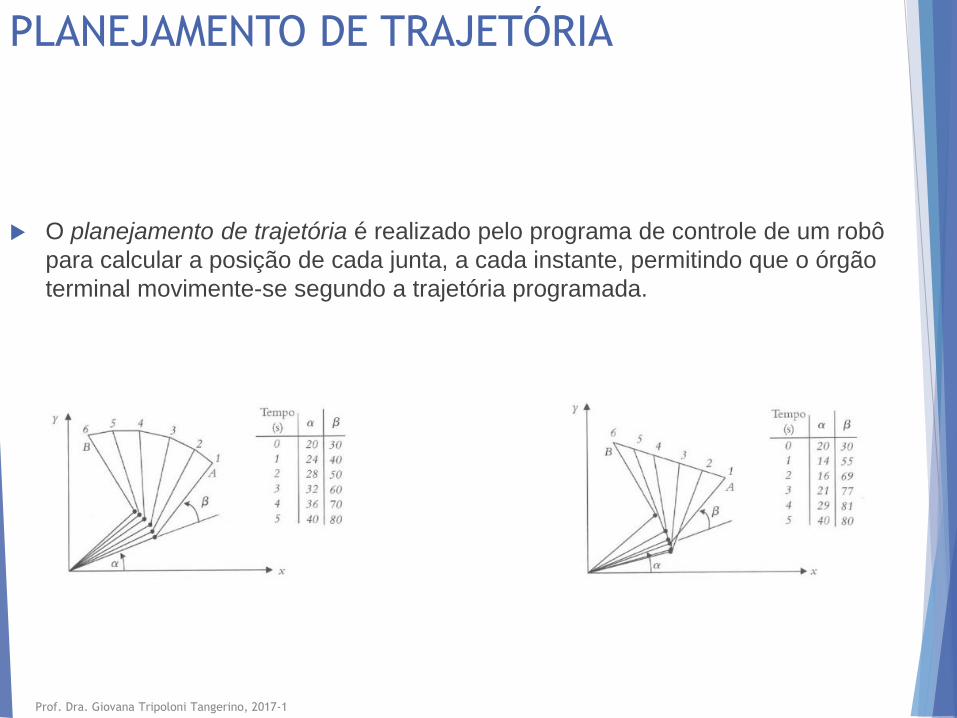
O planejamento de trajetória é realizado pelo programa de controle de um robô
para calcular a posição de cada junta, a cada instante, permitindo que o órgão
terminal movimente-se segundo a trajetória programada.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1
Trajetórias podem ser planejadas no espaço articular ou no espaço cartesiano
por uma série de métodos diferentes.
Muitos desses métodos podem realmente ser utilizados tanto para o espaço
cartesiano como para o espaço articular.
Na prática, requisitos de movimentos precisos são tão complexos que
aproximações são sempre necessárias.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Espaço Articular x Espaço Cartesiano
Espaço articular
No espaço articular os valores gerados no planejamento de trajetórias estão
diretamente relacionados com valores articulares.
descrição do movimento feita pelos valores articulares.
Utilizando as equações cinemáticas inversas do robô, podemos calcular os deslocamentos
articulares totais que o robô precisa fazer para sair de um ponto A e chegar no ponto B.
Os valores articulares calculados podem ser usados pelo controlador para conduzir as
articulações do robô para seus novos valores e, consequentemente, mover o braço
robótico para sua nova posição.
Embora o robô eventualmente atingirá a posição desejada, o movimento entre os
dois pontos é imprevisível.
Se o robô não tiver de seguir um caminho específico, trajetórias no espaço articular
são mais fáceis de calcular e gerar.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Espaço Articular x Espaço Cartesiano
Espaço cartesiano
O caminho é conhecido e controlado em todos os momentos.
As trajetórias são muito fáceis de visualizar
Quando se deseja um percurso específico, cada movimento deve ser planejado no espaço cartesiano.
a sequência de movimentos que o robô faz está descrita no espaço cartesiano e é convertida para o espaço articular em cada segmento.
Geram trajetórias mais realistas que podem ser visualizadas com mais facilidade, mas são mais difíceis de calcular e planejar.
É difícil se assegurar visualmente que não ocorrerão singularidades.
é impossível saber se o robô pode realmente chegar a um local e uma orientação específicos antes que o movimento seja feito.
Podemos especificar uma trajetória que requer que o robô se mova para si mesmo ou chegue a um ponto fora do envelope de trabalho e produz uma solução não satisfatória;
O movimento entre dois pontos pode exigir uma mudança instantânea de ângulos articulares, o que é impossível de prever.
Alguns desses problemas podem ser resolvidos, especificando por que pontos o robô deve passar de modo a evitar obstáculos e outras singularidades semelhantes.
Para levar o robô do ponto A ao ponto B seguindo uma linha reta, é necessário dividir a linha em pequenas porções, e mover o robô através de todos os pontos intermediários.
Para realizar essa tarefa, em cada local intermediário, as equações cinemáticas inversas do robô são resolvidas, um conjunto de variáveis articulares é calculado e o controlador é dirigido para conduzir o robô para esses valores. Quando todos os seguimentos forem concluídos, o robô vai estar no ponto B, conforme desejado.
Trajetórias no espaço cartesiano são computacionalmente mais dispendiosas e requerem um tempo de processamento mais rápido para um resolução semelhante à das trajetórias no espaço articular.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Exemplo
Consideremos um robô simples 2GDL.
Desejamos mover o robô do ponto A ao ponto B.
A configuração do robô no ponto A é 𝛼 = 20𝑜 e 𝛽 = 30𝑜.
Para o robô estar no ponto B, ele deve estar em 𝛼 = 40𝑜 e 𝛽 = 80𝑜.
As articulações do robô podem se mover à taxa máxima de 10º/s.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Exemplo
Na trajetória calculada no espaço articular:
estamos preocupados com os valores das articulações, não com o local da
extremidade do mecanismo.
Diferentes estratégias resultam em diferentes trajetórias (caminho e momentos).
O único cálculo necessário é o dos valores articulares e a velocidade articulares.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Exemplo
Na trajetória calculada no espaço cartesiano:
queremos que a mão do robô siga um caminho determinado: uma linha reta.
Método de interpolação entre pontos: traçar uma reta entre os pontos A e B, dividir
a linha em segmentos e calcular os ângulos necessários 𝛼 e 𝛽 em cada ponto.
É necessário calcular os valores articulares em cada ponto.
Para melhor precisão: muitos pontos
Todos os segmentos do movimento devem ser calculados com base na informação
expressa em um referencial cartesiano.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Exemplo
Problemas do planejamento cartesiano
Presume-se que os atuadores do robô são fortes o suficiente para fornecer as grandes forças necessárias para acelerar e desacelerar as articulações, numa velocidade constante desejada. Se isso não for verdade, o robô seguirá uma trajetória diferente da nossa hipótese, ele ficará um pouco atrasado, uma vez que tem de acelerar até a velocidade desejada.
A diferença entre dois valores consecutivos é maior que a velocidade articular máxima especificada de 10º/s (por exemplo, entre os tempos 0 e 1, a articulação deve se mover 25º).
Para melhorar a situação, podemos dividir os segmentos de forma diferente, iniciando o braço com segmentos menores e, à medida que aceleramos o braço, indo a uma taxa constante de cruzeiro e, finalmente desacelerando com segmentos menores ao nos aproximarmos do ponto B. (Figura 5.7)
Assim, ao invés de dividir a reta AB em segmentos iguais, podemos dividi-lo com base em 𝑥 =
1
2𝑎𝑡2 (aceleração) até o momento em que alcançarmos a velocidade de cruzeiro v =
𝑎𝑡. A parte final do movimento pode ser dividida de acordo com um regime de desaceleração.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Exemplo
Na trajetória calculada no espaço cartesiano:
Outras variações desse planejamento de trajetória é planejar um percurso que não
é reto, mas segue um caminho desejado, por exemplo, uma equação quadrática.
Para isso, as coordenadas de cada segmento são calculadas com base no percurso
desejado e usadas para calcular as variáveis articulares em cada segmento; assim,
a trajetória do robô pode ser calculada para qualquer percurso desejado.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Métodos de planejamento de trajetória
Polinômios de primeira ordem (Interpolação linear):
𝜃 𝑡 = 𝑐0 + 𝑐1𝑡
Polinômios de terceira ordem (Polinômio cubico):
𝜃 𝑡 = 𝑐0 + 𝑐1𝑡 + 𝑐2𝑡2 + 𝑐3𝑡
3
Polinômios de quinta ordem:
𝜃 𝑡 = 𝑐0 + 𝑐1𝑡 + 𝑐2𝑡2 + 𝑐4𝑡
4 + 𝑐5𝑡5
Segmentos lineares combinados com parábolas:
𝜃 𝑡 = 𝑐0 + 𝑐1𝑡 +1
2𝑐2𝑡
2
Trajetórias de ordem superior:
𝜃 𝑡 = 𝑐0 + 𝑐1𝑡 + 𝑐2𝑡2 +⋯+ 𝑐𝑛−1𝑡
𝑛−1 + 𝑐𝑛𝑡𝑛
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)
• Articular x cartesiano
• Todos os esquemas usados para planejamento de trajetória no espaço articular podem também ser usados para trajetórias no
espaço cartesiano.
• Diferença básica: no espaço cartesiano os valores articulares devem ser repetidamente calculados por meio das equações
cinemáticas inversas do robô.
• No espaço cartesiano, os valores calculados a partir das funções são as posições (e orientações) da mão, e eles devem ser
convertidos em valores articulares através das equações cinemáticas inversas.

Polinômio
Polinômios são expressões algébricas formadas pela adição de monômios.
Monômios são constituídos pelo produto entre número conhecidos e incógnitas.
Polinômios de ordem superior
São geralmente usados para atingir as posições, velocidades e acelerações em cada
ponto entre os dois segmentos
Quando o percurso está planejado, o controlador usa as informações de percurso
(coordenadas) no cálculo das variáveis articulares a partir das equações
cinemáticas inversas e comanda o robô em conformidade.
Interpolação
Definimos um novo conjunto de pontos a partir de pontos já conhecidos
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Interpolação linear (Polinômios de primeira ordem)
A forma mais simples de se mover uma junta rotativa da posição inicial θi até
a posição final θf em um tempo td é usando uma interpolação linear, usando
uma velocidade angular constante
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1
Exemplo:
Suponha que a posição inicial θi = 0° e que
deseja-se atingir a posição final θf = 90° em
um intervalo de tempo de 10 segundos.
• Posição: 𝜃 𝑡 = 𝑐0 + 𝑐1𝑡
• Velocidade: 𝜃 𝑡 = 𝑐1• Aceleração: 𝜃 𝑡 = 0
• incógnitas:
• 𝑐0 = 𝜃𝑖
• 𝑐1 =𝜃𝑓−𝜃𝑖
𝑡𝑓−𝑡𝑖

Polinômios de terceira ordem
Características
A localização e a orientação iniciais do robô são conhecidas.
Usando as equações cinemáticas inversas, os ângulos articulares finais para a
posição e orientação desejadas são encontrados.
Os movimentos de cada articulação do robô devem ser planejados individualmente.
Supondo que:
Uma das articulações está no início do movimento em 𝜃𝑖 no instante 𝑡𝑖
Queremos movê-la para um novo valor 𝜃𝑓 no instante 𝑡𝑓
Uma maneira de fazer isso é usando um polinômio para planejar a trajetória
de tal forma que as condições de contorno inicial e final coincidam com o que
já sabemos, ou seja:
𝜃𝑖 e 𝜃𝑓 são conhecidos;
As velocidades no início e no final do segmento de movimentação são zero (ou
outros valores conhecidos)
Esses quatro itens de informação nos permitem calcular quatro incógnitas (ou um
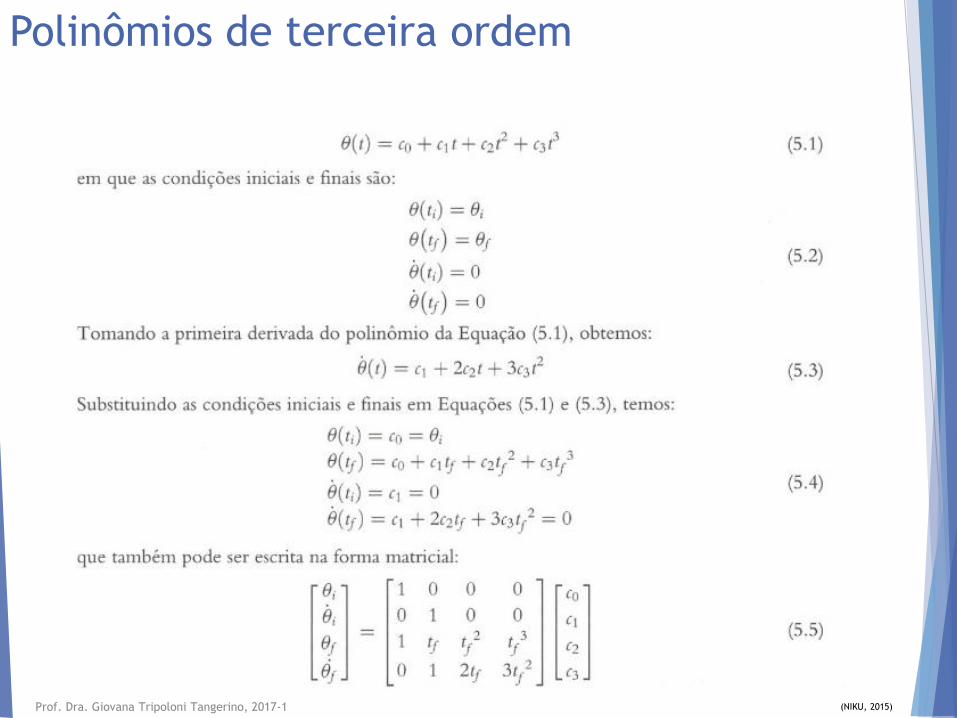
polinômio de terceira ordem) na forma:
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)
Polinômios de terceira ordem
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

Polinômios de terceira ordem
Resolvendo essas quatro equações simultaneamente, obtemos os valores
necessários para as constantes.
Isso nos permite calcular a posição articular em qualquer intervalo de tempo,
que pode ser utilizada pelo controlador para conduzir a articulação para a
posição.
O mesmo processo deve ser usado para cada articulação individualmente, mas
todas elas são conduzidas em conjunto do início ao fim.
Obviamente, se as velocidades inicial e final não são zero, os valores
indicados podem ser usados nessas equações.
Portanto, a aplicação deste polinômio de terceira ordem a cada movimento da
articulação cria um perfil de movimento que pode ser usado para conduzir
cada articulação.
Se mais de dois pontos são especificados, de tal forma que o robô irá
percorrer os pontos sucessivamente, as velocidades e posições finais na
conclusão de cada segmento podem ser utilizadas como valores iniciais para
os seguimentos seguintes.
Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)
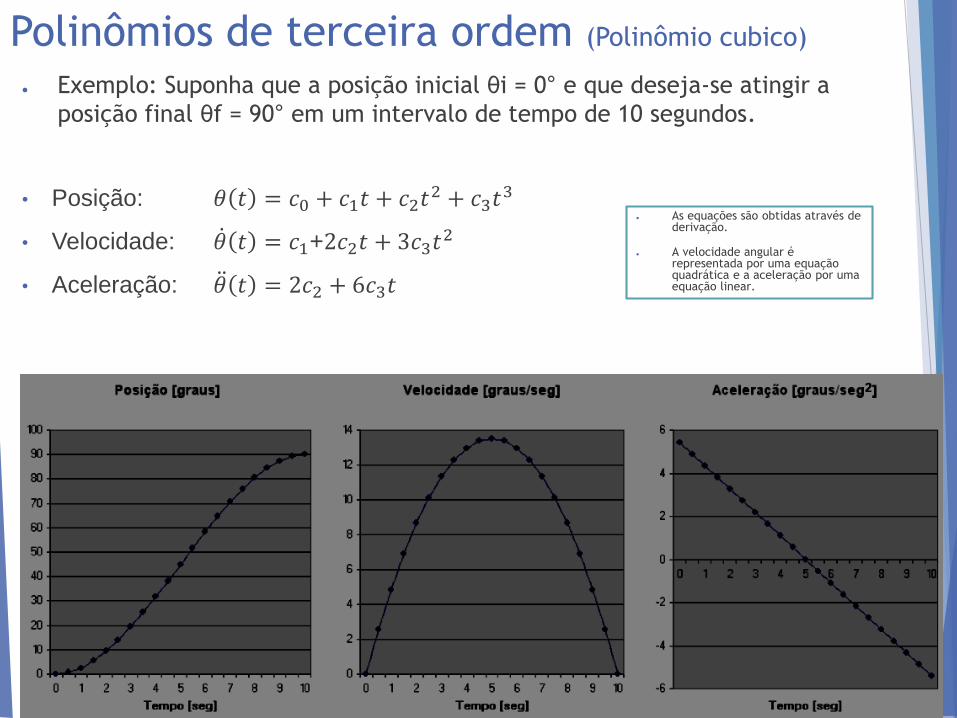
Polinômios de terceira ordem (Polinômio cubico)
● Exemplo: Suponha que a posição inicial θi = 0° e que deseja-se atingir a
posição final θf = 90° em um intervalo de tempo de 10 segundos.
• Posição: 𝜃 𝑡 = 𝑐0 + 𝑐1𝑡 + 𝑐2𝑡2 + 𝑐3𝑡
3
• Velocidade: 𝜃 𝑡 = 𝑐1+2𝑐2𝑡 + 3𝑐3𝑡2
• Aceleração: 𝜃 𝑡 = 2𝑐2 + 6𝑐3𝑡
● As equações são obtidas através de derivação.
● A velocidade angular é representada por uma equação quadrática e a aceleração por uma equação linear.

Prof. Dra. Giovana Tripoloni Tangerino, 2017-1 (NIKU, 2015)

EXERCÍCIOS
● Calcule a equação linear para a posição inicial θi = 0° e que deseja-se
atingir a posição final θf = 45° em um intervalo de tempo de 10 segundos.
Faça o gráfico.
● Calcule a equação cúbica para a posição inicial θi = 0° e que deseja-se
atingir a posição final θf = 45° em um intervalo de tempo de 10 segundos.
Faça o gráfico.
● Calcule a equação cubica para a posição inicial θi = 0° e que deseja-se
atingir a posição final θf = 60° em um intervalo de tempo de 10 segundos.
Faça o gráfico.