sistemas de controle 2 - professor | puc...
TRANSCRIPT

Sistemas de Controle 2Cap.9 – Projeto por Intermédio do Lugar das Raízes
Pontifícia Universidade Católica de Goiás
Escola de Engenharia
Prof. Dr. Marcos Lajovic Carneiro

Sistemas de Controle 2Prof. Dr. Marcos Lajovic Carneiro
Cap.9 – Projeto por Intermédio do Lugar das Raízes
9. Projeto por Intermédio do Lugar das Raízes
9.1 Introdução
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
9.4 Melhorando o Erro de Estado Estacionário e a Resposta Transitória
9.5 Compensação por Retroação
9.6 Realização Física da Compensação
Bibliografia principal:
Engenharia de Sistemas de Controle – Norman S. Nise

Aula anterior
9. Projeto por Intermédio do Lugar das Raízes
9.1 Introdução
Compensadores Mudança no local geométrico das raízes Adição de pólos e zeros no sistema Circuitos eletrônicos ativos e passivos de compensação
9.2 Melhorando o Erro de Estado Estacionário Através da Compensação em Cascata
Compensação Integral Ideal (PI)- Inserção de um pólo exatamente na origem- Inserção de um zero próximo do pólo na origem
Compensação por Atraso de Fase (passivo)- Inserção de um pólo próximo da origem- Inserção de um zero próximo deste pólo

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Objetivo:
Projetar uma resposta que tenha uma ultrapassagem percentual desejada e um tempo de acomodação menor que o sistema sem compensação.
Técnicas:
Controlador proporcional e derivativo (PD) Compensação derivativa ideal (derivador puro) Um derivador puro é adicionado ao caminho à frente do sistema de controle com realimentação Acréscimo de um zero
Compensador de avanço de fase (passivo) Adiciona à função de transferência do caminho à frente um zero e um polo mais distante.

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Compensação Derivativa Ideal (Controlador PD)
• Projetar uma resposta que tenha uma ultrapassagem percentual desejada e um tempo de acomodação menor que o sistema sem compensação.
• Acelera a resposta do sistema
Realizado através da soma de um derivador e de um ganho puro.• Adição de um único zero

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Sistema sem compensaçãoAdição de um zero movimenta o ponto de operação
Zero em -2

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Comparando 3 zeros em posições diferentes
Zero em -2 Zero em -3 Zero em -4
Em todos os sistemas compensados os pólos dominantes estão mais distantes ao longo da reta de amortecimento do que o sistema sem compensação

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
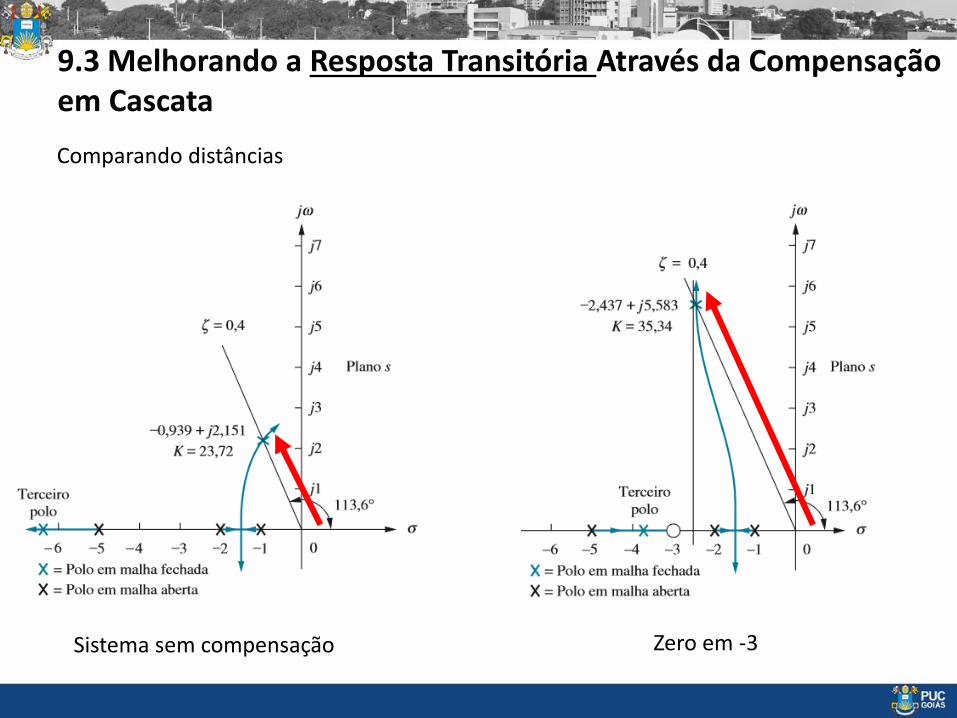
Comparando distâncias
Sistema sem compensação Zero em -2
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Comparando distâncias
Sistema sem compensação Zero em -3

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Comparando distâncias
Sistema sem compensação Zero em -4
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
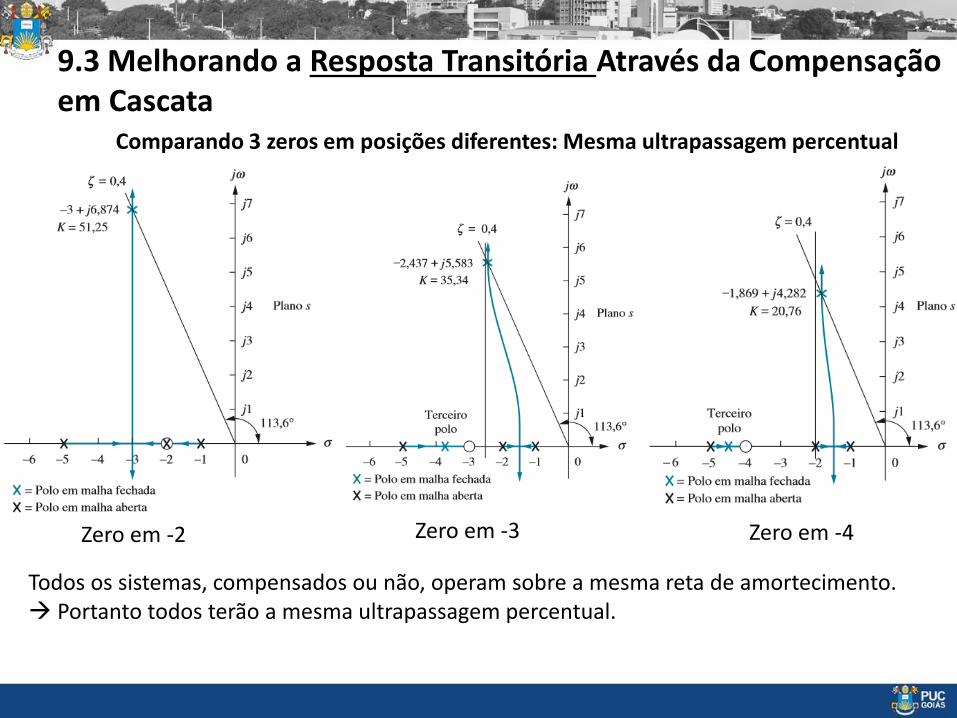
Comparando 3 zeros em posições diferentes: Mesma ultrapassagem percentual
Zero em -2 Zero em -3 Zero em -4
Todos os sistemas, compensados ou não, operam sobre a mesma reta de amortecimento. Portanto todos terão a mesma ultrapassagem percentual.
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
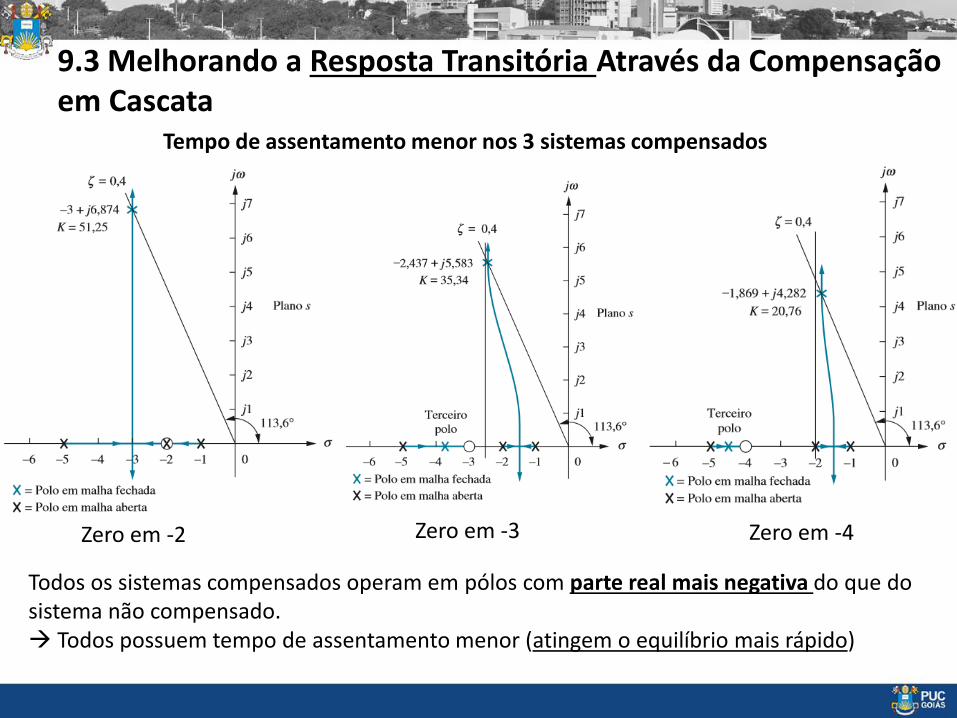
Tempo de assentamento menor nos 3 sistemas compensados
Zero em -2 Zero em -3 Zero em -4
Todos os sistemas compensados operam em pólos com parte real mais negativa do que do sistema não compensado. Todos possuem tempo de assentamento menor (atingem o equilíbrio mais rápido)

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Tempo de pico menor nos 3 sistemas compensados
Zero em -2 Zero em -3 Zero em -4
Todos os sistemas compensados operam em pólos com parte imaginária mais negativa do que do sistema não compensado.

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Tempo de pico menor nos 3 sistemas compensados
Zero em -2 Zero em -3 Zero em -4
A medida que os zeros se distanciam dos pólos dominantes, o ponto de operação (pólosdominantes em malha fechada) se aproxima da origem.
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata

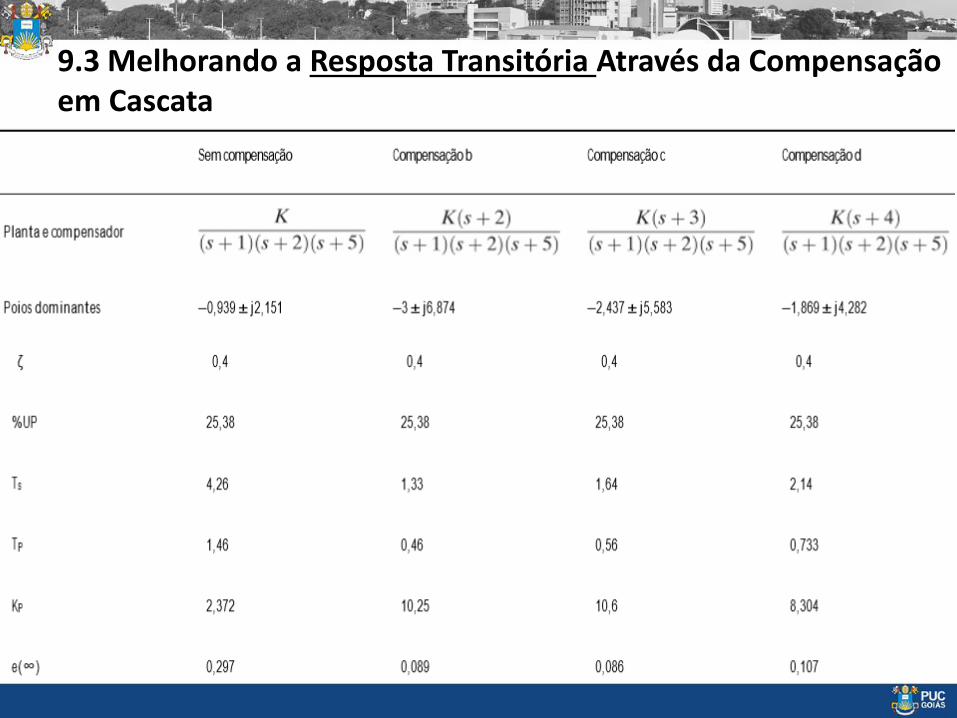
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Tempo de acomodamento reduziu mais de 2x em todos os sistemas compensados

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Tempo de pico reduziu mais de 2x em todos os sistemas compensados

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Compensação também reduziu o erro de regime permanente

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Desvantagens do controlador PD
Requer um circuito ativo para realizar a derivação
A derivação é um processo ruidoso• O nível de ruído é baixo• Frequência do ruído é alta comparada com o sinal
• Pode gerar grandes sinais indesejados• Pode saturar amplificadores e outros componentes
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
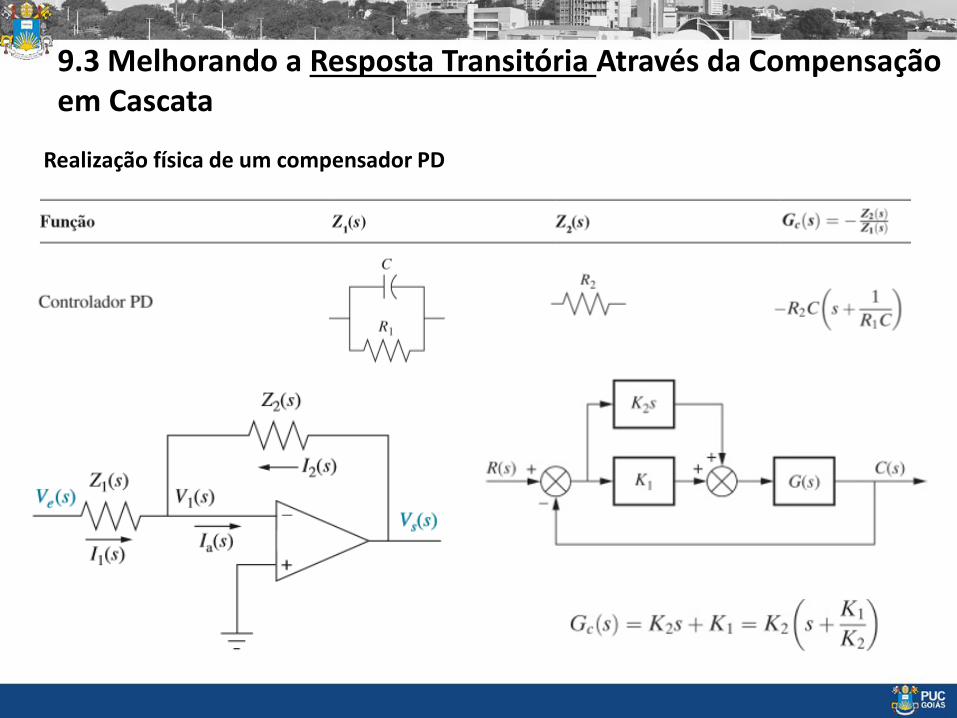
Realização física de um compensador PD

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Laboratório 1 do capítulo 9

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Compensação de Avanço de Fase (passivo)
• Estrutura passiva que se aproxima do controlador PD• Como é passivo um único zero não pode ser gerado gera-se um polo e um zero
• Se o polo produzido estiver distante do eixo imaginário do que o zero produzido sua ação ainda é positiva.
• A contribuição angular do polo compensador é subtraída da contribuição angular do zero, portanto é preciso haver um saldo positivo.
Vantagens em relação ao controlador PD
• Fontes de alimentação adicionais não são requeridas• O ruído produzido é menor
Desvantagens em relação ao controlador PD
• O polo adicional não reduz o número de ramos do lugar geométrico das raízes que cruzam o eixo imaginário para o semiplano da direita, enquanto que o controlador PD tende a reduzir esses ramos.
9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
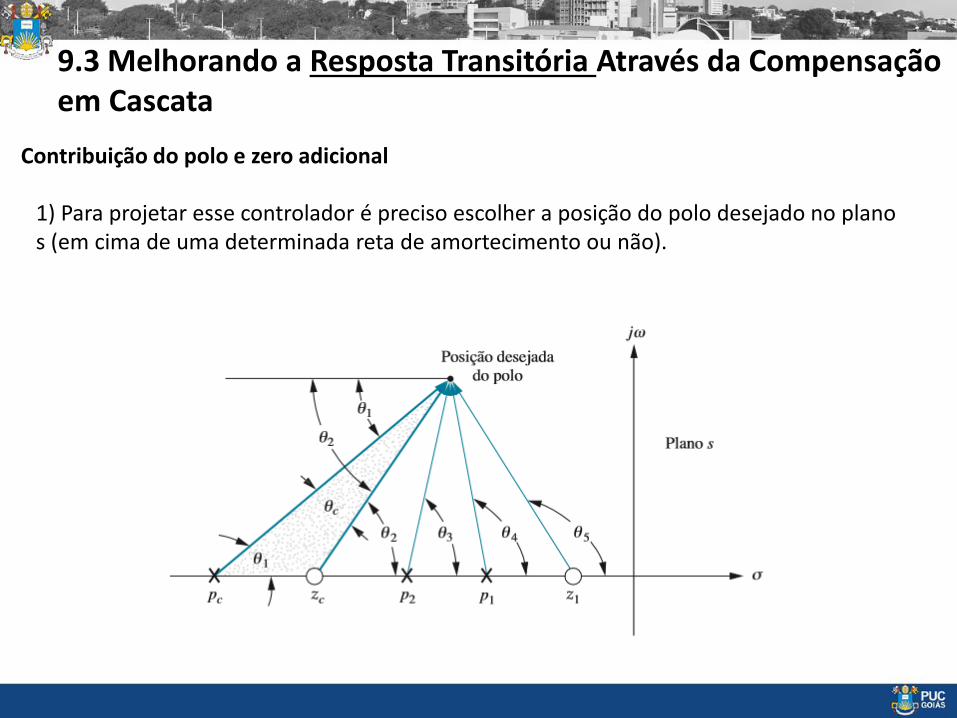
Contribuição do polo e zero adicional
1) Para projetar esse controlador é preciso escolher a posição do polo desejado no plano s (em cima de uma determinada reta de amortecimento ou não).

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Contribuição do polo e zero adicional
1) Para projetar esse controlador é preciso escolher a posição do polo desejado no plano s (em cima de uma determinada reta de amortecimento ou não).
2) A soma dos ângulos a partir dos polos e zeros do sistema sem compensação até o ponto escolhido menos 180 graus fornece a contribuição angular do compensador
Exemplo:
Polos possuem ângulos negativosZeros possuem ângulos positivos
Contribuição angular do polo e zero adicionais:

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Contribuição do polo e zero adicional
𝜃𝑐 : Contribuição angular ângulo do feixe que parte do ponto de projeto e intercepta o eixo real nos valores do polo e do zero compensador.

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Contribuição do polo e zero adicional
Como a contribuição angular é sempre o ângulo desse feixe, se ele deslocar, a contribuição angular matematicamente continua sendo a mesma.
Portanto o número de soluções é infinita.
A diferença entre as soluções está:- na constante de erro estático- no ganho - na dificuldade de se justificar a aproximação de segunda ordem - na resposta transitória.

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Projeto
- Escolher arbitrariamente o polo ou zero do compensador de avanço de fase- Somar ângulos de todos os polos e zeros em relação ao ponto escolhido.
- A diferença entre 180 graus e essa soma será a contribuição angular necessária para compensar o sistema.
- Encontrar o segundo ponto (polo ou zero) de acordo com o ponto arbitrariamente escolhido.
- Verificar cada projeto através de simulação
Exemplo:

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Exemplo
É preciso simular para selecionar qual compensação é capaz de fornecer a resposta desejada.

Observar a posição do zero arbitrário para verificar possíveis cancelamentos de polos e se a aproximação se segunda ordem esta OK
Comparando sistemas:
Nenhum zero
Nenhum zero
Zero em -5
Zero em -2

Observar melhora no erro de regime permanente
Comparando sistemas:
Erro de regime permanente
0.38
0.145
0.173
0.312

Observar ganho necessário
Comparando sistemas:
Ganho
63.21
1423
698.1
345.6

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Realização física de um compensador por avanço de fase
Função de transferência

9.3 Melhorando a Resposta Transitória Através da Compensação em Cascata
Laboratório 2 do capítulo 9
9.4 Melhorando o Erro em Regime Permanente e a Resposta Transitória
Combinação das técnicas anteriores para melhorar o erro de regime permanente e a resposta transitória de forma independente.
Método
1) Primeiro, melhorar a resposta transitória com as técnicas de- Controle PD- Compensação por avanço de fase
2) Depois, melhorar erro de regime permanente com as técnicas de:- Controle PI- Compensação por atraso de fase
Desvantagem
Pequena redução na velocidade da resposta quando o erro de regime permanente é melhorado

9.4 Melhorando o Erro em Regime Permanente e a Resposta Transitória
É possível seguir outra sequência de projeto, corrigindo primeiro o erro e depois a resposta transitória, as consequências podem ser:
- Correção da resposta transitória pode degradar a correção do erro.- Melhoria na resposta transitória resulta em melhoria adicional na correção do
erro provocando superdimensionamento do sistema de controle (projeto em excesso)
Normalmente não é um problema para o funcionamento Pode afetar o custo ou gerar outros problemas de projeto.

9.4 Melhorando o Erro em Regime Permanente e a Resposta Transitória
Projeto do Controlador PID
Função de transferência

9.4 Melhorando o Erro em Regime Permanente e a Resposta Transitória
Projeto do Controlador PID
- Possui 2 zeros e um polo na origem- 1 zero e 1 polo na origem Podem ser projetados como controlador PI- Outro zero Pode ser projetado como controlador PD

9.4 Melhorando o Erro em Regime Permanente e a Resposta Transitória
Projeto do Controlador PID
8 Passos da Técnica de Projeto
1. Avalie o desempenho do sistema sem compensação para determinar quanta melhoria na resposta transitória é requerida.
2. Projete o controlador PD para atender às especificações de resposta transitória. O projeto inclui a posição do zero e o ganho de malha.
3. Simule o sistema para ter certeza de que todos os requisitos foram atendidos. 4. Projete novamente se a simulação mostrar que os requisitos não foram atendidos. 5. Projete o controlador PI para resultar no erro em regime permanente desejado6. Determine os ganhos K1, K2 e K3. 7. Simule o sistema para ter certeza de que todos os requisitos foram atendidos. 8. Projete novamente se a simulação mostrar que os requisitos não foram atendidos.

Projeto do Controlador PID
Exemplo

Projeto do Controlador PID
Passo 1 Avaliar o sistema sem compensação operando com 20% de ultrapassagem.
• %UP=20% 𝜁 = 0.456
• Polos dominantes em −5.415 ± 𝑗10.57com ganho de 121.5
• Terceiro polo em -8.169

Projeto do Controlador PID
Passo 1 Avaliar o sistema sem compensação operando com 20% de ultrapassagem.
Previsão de resultados
Curva simulada
Reduzir para zero
OK
Reduzir para 2/3 deste valor
Projeto do Controlador PID
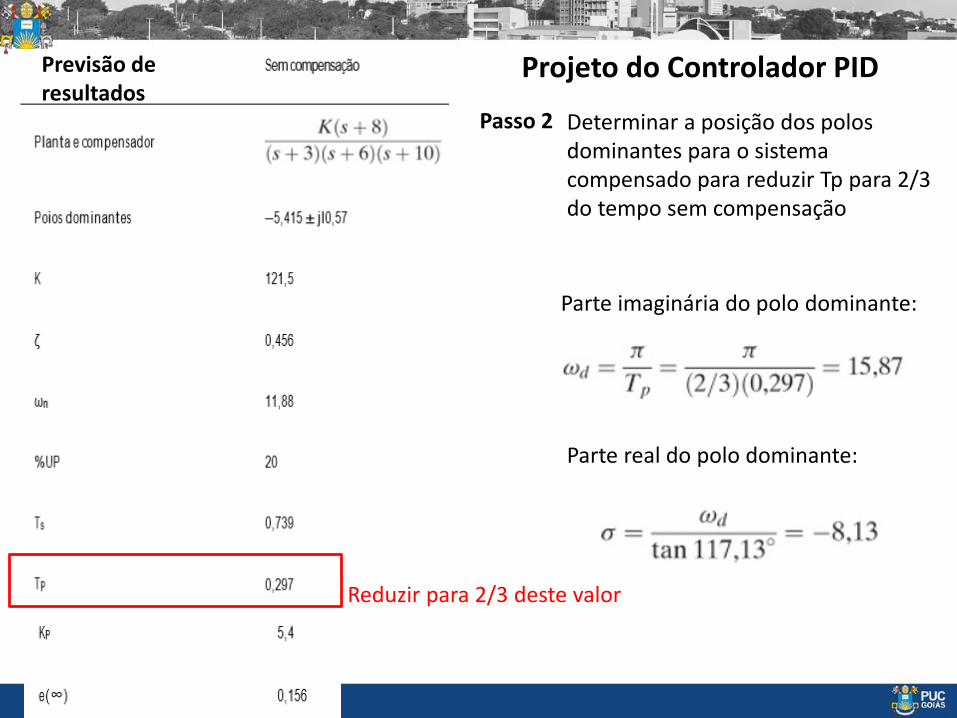
Passo 2 Determinar a posição dos polos dominantes para o sistema compensado para reduzir Tp para 2/3 do tempo sem compensação
Previsão de resultados
Reduzir para 2/3 deste valor
Parte imaginária do polo dominante:
Parte real do polo dominante:

Projeto do Controlador PIDPasso 2 Determinar a posição dos polos
dominantes para o sistema compensado para reduzir Tp para 2/3 do tempo sem compensação
Parte imaginária do polo dominante:
Parte real do polo dominante:
x j15,87
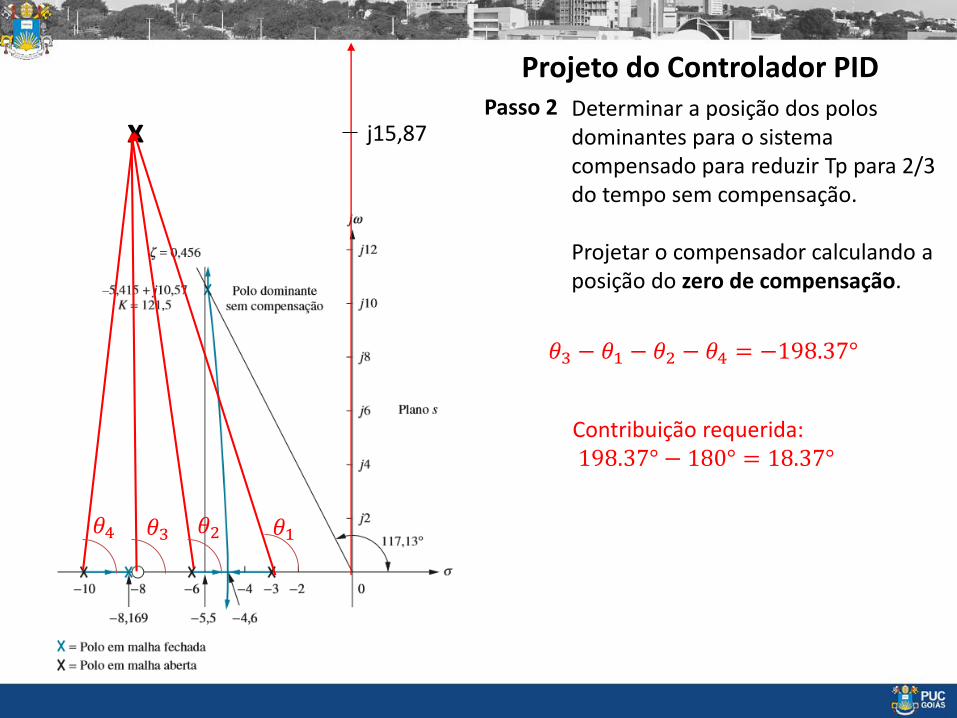
Projeto do Controlador PIDPasso 2 Determinar a posição dos polos
dominantes para o sistema compensado para reduzir Tp para 2/3 do tempo sem compensação.
Projetar o compensador calculando a posição do zero de compensação.
x j15,87
𝜃1𝜃2𝜃3𝜃4
𝜃3 − 𝜃1 − 𝜃2 − 𝜃4 = −198.37°
Contribuição requerida:198.37° − 180° = 18.37°

Projeto do Controlador PIDPasso 2 Projetar o compensador calculando a
posição do zero de compensação.x j15,87
Contribuição requerida:198.37° − 180° = 18.37°
𝜃𝑐 = 18.37°-8.13
Controlador PD:

Projeto do Controlador PID
Novo local das raízes com o controlador PD

Projeto do Controlador PID
Previsão de resultados
OK
Reduzir para 2/3 deste valor: OK
Simulamos o sistema compensado com PD e observamos a redução do instante de pico e a melhoria no erro em regime permanente em relação ao sistema sem compensação.
Passos 3 e 4
Reduzir para zero (mas já reduziu bastante)

Projeto do Controlador PID
Passos 5 Projetar o controlador PI para reduzir o erro em regime permanente para zero quando a entrada é um degrau.
Posicionar o zero próximo da origem:
- Esboçar o lugar geométrico das raízes para o sistema compensado com PID- Procurar na reta de fator de amortecimento de 0.456 os polos dominantes e seu ganho associdado.

Projeto do Controlador PID
Passos 5 Projetar o controlador PI para reduzir o erro em regime permanente para zero quando a entrada é um degrau.
Polos: 7,516 ± 𝑗14.67Ganho: 4.6

Previsão de resultados
OK
Reduzir para 2/3 deste valor: degradou um pouco
Reduziu para zero
Previsão de resultados, é
preciso simular a curva

Projeto do Controlador PID
Passos 6 Agora determinamos os ganhos K1, K2 e K3
Controlador PD
Controlador PI
Controlador PID

Projeto do Controlador PID
Passos 7 e 8 Simulando a curva e verificando resultados no tempo
• A compensação PD melhorou a resposta transitória, reduzindo o tempo necessário para alcançar o primeiro pico e também resultou em alguma melhoria no erro em regime permanente.
• O controlador PID completo melhorou ainda mais o erro em regime permanente sem alterar significativamente a resposta transitória projetada com o controlador PD.
• Controlador PID apresenta uma resposta mais lenta.
Caso isso seja indesejável, a velocidade do sistema deve ser aumentada projetando-se novamente o compensador derivativo ideal ou movendo-se o zero do controlador PI para mais longe da origem.

Projeto do Controlador PID
Passos 7 e 8 Simulando a curva e verificando resultados no tempo
• A compensação PD melhorou a resposta transitória, reduzindo o tempo necessário para alcançar o primeiro pico e também resultou em alguma melhoria no erro em regime permanente.
• O controlador PID completo melhorou ainda mais o erro em regime permanente sem alterar significativamente a resposta transitória projetada com o controlador PD.
• Controlador PID apresenta uma resposta mais lenta.
Caso isso seja indesejável, a velocidade do sistema deve ser aumentada projetando-se novamente o compensador derivativo ideal ou movendo-se o zero do controlador PI para mais longe da origem.

9.4 Melhorando o Erro em Regime Permanente e a Resposta Transitória
Função de transferência
Realização física do compensador PID