sistema vibrotÁtil para auxiliar deficientes … · neste intuito, trataremos da fisiologia do...
TRANSCRIPT

UNIVERSIDADE POSITIVO
NÚCLEO DE CIÊNCIAS EXATAS E TECNOLÓGICAS
CURSO DE ENGENHARIA DA COMPUTAÇÃO
CRETAN PIRES DE OLIVEIRA
RAFAEL PUSTILNICK
SISTEMA VIBROTÁTIL PARA AUXILIAR DEFICIENTES AUDITIVOS NO APRENDIZADO DA VOCALIZAÇÃO
Trabalho de Conclusão de Curso Prof. José Carlos da Cunha Orientador
Curitiba, novembro de 2009.

UNIVERSIDADE POSITIVO Reitor: Prof. Oriovisto Guimarães Vice-Reitor: Prof. José Pio Martins Pró-Reitor de Graduação: Prof. Renato Casagrande Diretor do Núcleo de Ciências Exatas e Tecnológicas: Prof. Marcos José Tozzi Coordenador do Curso de Engenharia da Computação: Prof. Edson Pedro Ferlin

TERMO DE APROVAÇÃO
Cretan Pires de Oliveira Rafael Pustilnick
SISTEMA VIBROTÁTIL PARA AUXILIAR DEFICIENTES AUDITIVOS NO APRENDIZADO DA VOCALIZAÇÃO
Monografia aprovada como requisito parcial à conclusão do curso de Engenharia da Computação da Universidade Positivo, pela seguinte banca examinadora:
_______________________________________________ Prof. José Carlos da Cunha (Orientador) _______________________________________________ Prof. Marcelo Mickosz Gonçalves ______________________________________________ Prof. Edson Pedro Ferlin
Curitiba, dezembro 2009.
AGRADECIMENTOS
Durante o curso de graduação somos motivados pelos desafios,
enfrentamos dificuldades inimagináveis, conhecemos pessoas importantes em
nossa trajetória e recebemos força principalmente da família e amigos.
Agradeço muito meus pais pelo amor, carinho e apoio, pelo esforço em se
privar para que possamos realizar um curso de graduação, por ouvirem em
momentos difíceis e por incentivarem a sempre seguir em frente.
Aos amigos e seus pais, mantenho um carinho e amor especial por
ajudarem a realizar um sonho e por confiarem no nosso potencial, em especial
ao Eduardo Sentone e Rodrigo Villaverde que tanto contribuíram para que fosse
possível a execução desse trabalho.
À esposa Andressa Bonetto e à noiva Rebeca Jakobson, pelo amor e
carinho inestimável, pela imensa paciência, por sempre apoiar nos momentos de
dificuldade e alegria e incentivando nos momentos mais necessários.
À Janaina Pires de Oliveira, que sem sua ajuda seria impossível a
conclusão dessa empreitada árdua.
Aos colegas de profissão em que nos espelhamos para sermos cada vez
melhor como pessoas e profissionais.
Aos professores que tanto ouviram, ensinaram e mostraram como viver
como engenheiro, em especial ao José Carlos da Cunha, professor orientador
que incansavelmente luta para melhorarmos continuamente e a Maurício
Perreto, professor que incessantemente, e sempre com muita boa vontade e bom
humor, tanto ajudou no processo de implementação, dedicando seu tempo e
conhecimento a este projeto.

SUMÁRIO
RESUMO............................................................................................................ 8 ABSTRACT ........................................................................................................ 9 INTRODUÇÃO ................................................................................................. 10 FUNDAMENTAÇÃO TEÓRICA ....................................................................... 11 1.1 Percepção sensorial e neurociência ................................................................................................... 11 1.2 Sistema auditivo .................................................................................................................................. 11 1.2.1 Tipos de deficiência auditiva ............................................................................................................. 14 1.3 Pele ....................................................................................................................................................... 15 1.3.1 Mecanorreceptores ............................................................................................................................ 16 1.3.2 Resposta sensorial à estimulação da pele .......................................................................................... 18 1.4 Neurociência ........................................................................................................................................ 19 1.4.1 Neuroplasticidade .............................................................................................................................. 20 1.5 Recursos Tecnológicos ........................................................................................................................ 21 1.5.1 Filtro passa baixa ............................................................................................................................... 22 1.5.2 FFT .................................................................................................................................................... 22 IMPLEMENTAÇÃO .......................................................................................... 23 2.1 Especificação técnica FFT ................................................................................................................. 23 2.2 Tactores ............................................................................................................................................... 23 2.3 Conversor analógico digital ............................................................................................................... 24 2.4 Microprocessador dsPIC ................................................................................................................... 24 2.5 Amplificador Operacional ................................................................................................................. 24 2.6 Filtro Passa Baixa ............................................................................................................................... 25 2.7 Amplificador de Ganho ½ .................................................................................................................. 26 2.8 Grampeador de Sinal ......................................................................................................................... 27 2.9 Somador de sinal ................................................................................................................................ 28 2.10 Gerador de Onda Senoidal Ponte de Wien ..................................................................................... 28 2.11 dsPIC ................................................................................................................................................. 29 2.12 Potenciômetro Digital ....................................................................................................................... 30 2.13 Seguidor de tensão ............................................................................................................................ 31 2.14 Ganho de Corrente ........................................................................................................................... 31 2.15 Implementação do Firmware .......................................................................................................... 32 TESTE E VALIDAÇÃO DOS RESULTADOS DO SISTEMA ........................... 34 CONCLUSÃO .................................................................................................. 36 REFERÊNCIAS BIBLIOGRÁFICAS ................................................................ 37 ANEXO A: ARTIGO CIENTÍFICO .................................................................... 39 ANEXO B: MANUAL DO SISTEMA ................................................................ 42

LISTA DE ABREVIATURAS E SIGLAS
Hz Hertz
V Volt
A Ampér
PA Potencial de Ação
Amp. Op Amplificador Operacional
Vpp Tensão Pico-a-Pico
A/D Analógico-Digital
FFT Fast Fourier Transform
dB Decibél
kg Kilograma
mm Milímetro
cm Centímetro
m Metros
ml Mililítros
mg Miligramas
L Litros
DSP Digital Signal Processor
Av Ganho de tensão diferencial
F Frequência
mW MiliWatt
SPI Serial Peripheral Interface

LISTA DE FIGURAS
Figura 1.2.1: Etapas do sistema auditivo ............................................................................................. 12 Figura 1.2.2: Audiograma .................................................................................................................... 14 Figura 1.3.1:Estrutura da pele ............................................................................................................. 18 Figura 1.3.2.1: Componentes funcionais dos neurônios motores e dos neurônios sensoriais ............. 19 Figura 2.5.1: Amplificador de entrada ................................................................................................. 25 Figura 2.6.1: Frequências da voz humana ........................................................................................... 26 Figura 2.6.2: Filtro passa baixa 8ª ordem 2300Hz. ............................................................................. 26 Figura 2.7.1: Amplificador de ganho ½ ................................................................................................ 27 Figura 2.8.1: Grampeador de sinal. ..................................................................................................... 27 Figura 2.9.1: Somador de sinal ............................................................................................................ 28 Figura 2.10.1: Gerador de onda senoidal ponte de Wien ..................................................................... 29 Figura 2.11.1: Esquemático do módulo dsPIC ..................................................................................... 30 Figura 2.12.1: Potenciômetro digital, seguidor de tensão e ganho de corrente. ................................. 31 Figura 2.15.1: Fluxograma do circuito do sistema. ............................................................................. 32 Figura 3.1: Imagens de topo, mostrando a correta posição da mão .................................................... 34 Figura 3.2: Imagem perspectiva do projeto .......................................................................................... 35

LISTA DE TABELAS
Tabela 1.3.1: Mecanoreceptores e suas faixas de sensibilidade .......................................................................... 18

8
RESUMO
Este projeto tem como objetivo prover o deficiente auditivo com uma alternativa de
ferramenta para o aprendizado da vocalização e para a compreensão da informação sonora.
A deficiência auditiva é classificada segundo uma escala de sons de acordo com a
percepção do indivíduo e tem variações entre leve, moderada, severa e profunda; das quais,
para leve e moderada, existem inúmeras possibilidades de reabilitação disponíveis no
mercado, como aparelhos auditivos externos. Para severa e profunda existe a opção de
implante coclear, no entanto o resultado desse método varia para cada caso e não se aplica a
todas as formas de deficiência, tampouco propicia o aprendizado da vocalização ou a
interpretação da informação sonora por si só. De qualquer maneira, há uma parcela da
população portadora de deficiência auditiva que não se enquadra nos requisitos das
alternativas existentes, sendo este estudo voltado justamente para eles. Buscou-se uma
forma de processar informações sonoras matematicamente para que estas pudessem ser
interpretadas e aplicadas no controle de um dispositivo que transmitisse tais informações de
maneira alternativa à original. Para tanto usou-se o método de cálculo de FFT (Fast Fourier
Transform) no sinal de áudio discretizado para obtenção dos componentes de frequência do
sinal de entrada no quadro de tempo analisado. A resposta da FFT é o ponto de partida para
o cálculo dos valores de controle dos dispositivos de atuação que transmitirão a informação.
Cada valor do conjunto de resultados da FFT representa um intervalo de frequência
referente à forma como o sinal foi adquirido. A partir desses valores definiu-se cinco
regiões de frequência e, para cada região, é extraído um valor que será usado no cálculo de
controle de potenciômetros digitais, responsáveis por controlar o sinal dos tactores. Como
alternativa, optou-se pelo sentido do tato como meio de transmissão da informação gerada
pelo sistema. Escolheu-se o vibrotátil como dispositivo de atuação pela facilidade de
controle e segurança para o usuário. Utilizou-se cinco tactores, cada um representando uma
região de frequência gerada a partir do resultado da FFT. O conjunto de atuação dos
tactores representa o sinal de áudio de entrada de modo a permitir ao usuário sua
interpretação. Nesse sentido o projeto concluiu-se de maneira satisfatória, possibilitando sua
aplicação prática a partir do desenvolvimento, por profissionais das áreas afins, de uma
metodologia adequada ao ensino da vocalização e interpretação da fala.
Palavras-chave: Sistema vibrotátil. Vocalização. Deficiência Auditiva. Tactor.

9
ABSTRACT
This project aims to provide the deaf with an alternative tool for vocalization learning
and spoken information understanding. Hearing impairment is classified through a
range of sounds according to the individual's perception and varies between mild,
moderate, severe and deep, and there are numerous opportunities for rehabilitation
available for mild to moderate, such as external hearing aids. For severe and deep there
is the option of a cochlear implant, but the result of this method varies for each case and
does not apply to all forms of disability, nor conducive to the learning of vocalization or
the interpretation of sound information by itself. Either way, there is a portion of the
population with hearing loss that does not meet the requirements of the alternatives, as
this study is focused just for them. We sought a way to process auditory information
mathematically so that they could be interpreted and applied in the control of a device to
convey information such as alternatives to the original. For this we used the FFT (Fast
Fourier Transform) calculation method in the audio signal discretized to obtain the
frequency components of the input signal in the time frame examined. The response of
the FFT is the starting point for the calculation of the control actuation devices that
transmit the information. Each value of the FFT result is a frequency range on the way
the signal was acquired. From these values we defined five regions of frequency and for
each region a value is extracted to be used in calculating control digital potentiometers,
which are responsible for controlling the sign of the tactors. Alternatively, we opted for
the sense of touch as a means of transmission of information generated by the system.
Was chosen as the vibrotactile device performance for ease of control and security for
the user. We used five tactors, each representing a region of frequency generated from
the output of the FFT. The set of actions of the tactors is the audio signal input to enable
the user interpretation. In this sense the project was concluded satisfactorily, enabling
practical application from the development of professionals from related fields, a
suitable methodology for the teaching of vocalization and interpretation of speech.
Key words: Vibrotactile System. Vocalization. Hearing impairment. Tactor.

10
INTRODUÇÃO
Constatamos a realidade da profissão de engenheiro da computação no
desenvolvimento desse projeto; a necessidade constante de buscar informações em
especialidades de outras áreas e, a partir dessas pesquisas adquirir o conhecimento
necessário para solução do problema proposto.
Por este prisma, abordaremos temas como audição, tato e neurociência, além de
temas técnicos concernentes ao desenvolvimento da tecnologia que propomos.
Para este projeto partimos do pressuposto de que existe uma parcela da
população de deficientes auditivos que, por diversos motivos, não possui uma
alternativa de cura, tratamento ou compensação de seu problema, fazendo-se necessário
o desenvolvimento de uma alternativa viável para esses indivíduos.
Neste intuito, trataremos da fisiologia do ouvido, tipos e características de
deficiências auditivas para melhor compreender a delimitação do usuário final.
A partir da proposta de substituir o som por informação vibrotátil, faz-se
necessário o estudo da estrutura da pele e da forma com que são percebidos os
estímulos.
Referindo-se à resposta de aprendizagem e a adaptação dos usuários,
relacionando e processando a transformação das informações, faz-se necessário uma
pesquisa sobre a capacidade de interpretar uma nova fonte de informação, disso trata a
neurociência e a neuroplasticidade.
Alem dos aspectos fisiológicos, é necessário pesquisas sobre tecnologias que
serão úteis no desenvolvimento do projeto, como FFT e filtros de sinal.
11
FUNDAMENTAÇÃO TEÓRICA
1.1 Percepção sensorial e neurociência
O ser humano possui cinco sentidos principais para perceber a realidade à sua
volta e para comunicar-se: visão, audição, olfato, paladar e tato. Estes sentidos
conferem a possibilidade de receber mensagens e funcionam como transmissores de
estímulos a serem interpretados pelo cérebro, segundo a especificação de cada um. Lent
(2001) diz:
A percepção começa quando uma forma qualquer de energia incide sobre as interfaces entre o corpo e o ambiente, sejam Elas externas ou internas. Nessas interfaces se localizam células especiais capazes de traduzir a linguagem do ambiente para a linguagem do sistema nervoso: os receptores sensoriais. São eles que definem o que comumente chamamos de sentidos: visão, audição, sensibilidade corporal, olfação e gustação. Mas nosso cérebro é capaz de sentir muito mais – consciente e inconscientemente – do que esses cinco sentidos clássicos permitem supor. Ele detecta alterações sutis da posição do corpo quando nem nos damos conta disso, mudanças sutis da pressão, composição e temperatura do sangue que jamais chegam à nossa consciência, imperceptíveis movimentos viscerais.
Os receptores são específicos, isto é, especializados na detecção de
certas formas de energia: energia mecânica (mecanorreceptores), luminosa (fotorreceptores), térmica (termorreceptores) e química (quimiorreceptores). Isso porque apresentam, em sua membrana plasmática, proteínas capazes de absorver seletivamente uma única forma de energia. Cada tipo, além disso, subdivide-se em subtipos ainda mais específicos: há mecanorreceptores que detectam sons, há os que detectam estímulos sobre a pele, há os que detectam alongamento dos músculos e vários outros.
A perda, ou deficiência, de qualquer dessas funções sensoriais acarreta em
dificuldade da interpretação e da comunicação com o mundo à sua volta. No caso da
perda ou deficiência auditiva há a inviabilidade de controle da vocalização por falta de
um parâmetro de retorno (audição), impossibilitando que o deficiente se expresse de
maneira inteligível, gerando-se a barreira da linguagem oral.
1.2 Sistema auditivo
O ouvido humano é divido em (REDONDO, CARVALHO, 2001):

12
Ouvido externo: é a porta de entrada do som; composto pelo pavilhão
auricular e pelo canal auditivo. Nesse canal, certas glândulas produzem cera para
proteger o ouvido.
Ouvido médio: transmite as vibrações sonoras para o ouvido interno
através da membrana timpânica, em contato com o ouvido interno e três ossos
minúsculos, chamados martelo, bigorna e estribo, assim chamados pela similaridade
em forma com estes objetos.
Ouvido interno: é onde está localizado a cóclea, em forma de caracol,
que é a parte mais importante do ouvido, responsável pela percepção auditiva. Os
sons recebidos na cóclea são transformados em impulsos elétricos e, através do nervo
auditivo, conduzidos ao cérebro, onde são interpretados.
Vejamos o processo auditivo na Figura 1.2.1:
Figura 1.2.1: Etapas do sistema auditivo (FRANÇA, 2008)

13
O sistema auditivo tem como objetivo converter as alterações na pressão do ar,
associadas às ondas sonoras, em atividade neural transmitida para o cérebro (BEAR et
al, 2002).
Os neurônios da cóclea formam um mapa dos tons que codificam as frequências
em um som. Esses mapas estão em todo o sistema auditivo. As mesmas células
cocleares podem codificar a frequência e amplitude variando em tensão. A detecção da
localização de um som é uma função dos neurônios na oliva superior e corpo trapezoide
do tronco encefálico. Esses neurônios realizam essa função computando as diferenças
na altura e no tempo de chegada de um som aos dois ouvidos. A compreensão do
significado é realizada pela comparação de padrões que é feita pelos neurônios corticais
(KOLB; WHISHAW, 2002 apud FRANÇA, 2008). Tal compreensão é afetada pela
sensibilidade do sistema auditivo, que é classificada de acordo com os níveis de
audição.
Considera-se, em geral, que a audição normal corresponde à habilidade para
detecção de sons até 20 dB N.A. (decibéis, nível de audição). Qualquer diminuição
desta habilidade é considerada uma deficiência, classificada de acordo com o nível de
diminuição da sensibilidade auditiva (DEFICIÊNCIA AUDITIVA, 2008):
Perda leve: capacidade de ouvir entre 20 e 40 dB.
Perda moderada: capacidade de ouvir entre 40 e 60 dB.
Perda severa: capacidade de ouvir entre 60 e 80 dB.
Perda profunda: capacidade de ouvir somente acima de 90 dB, ou a
incapacidade total de ouvir.
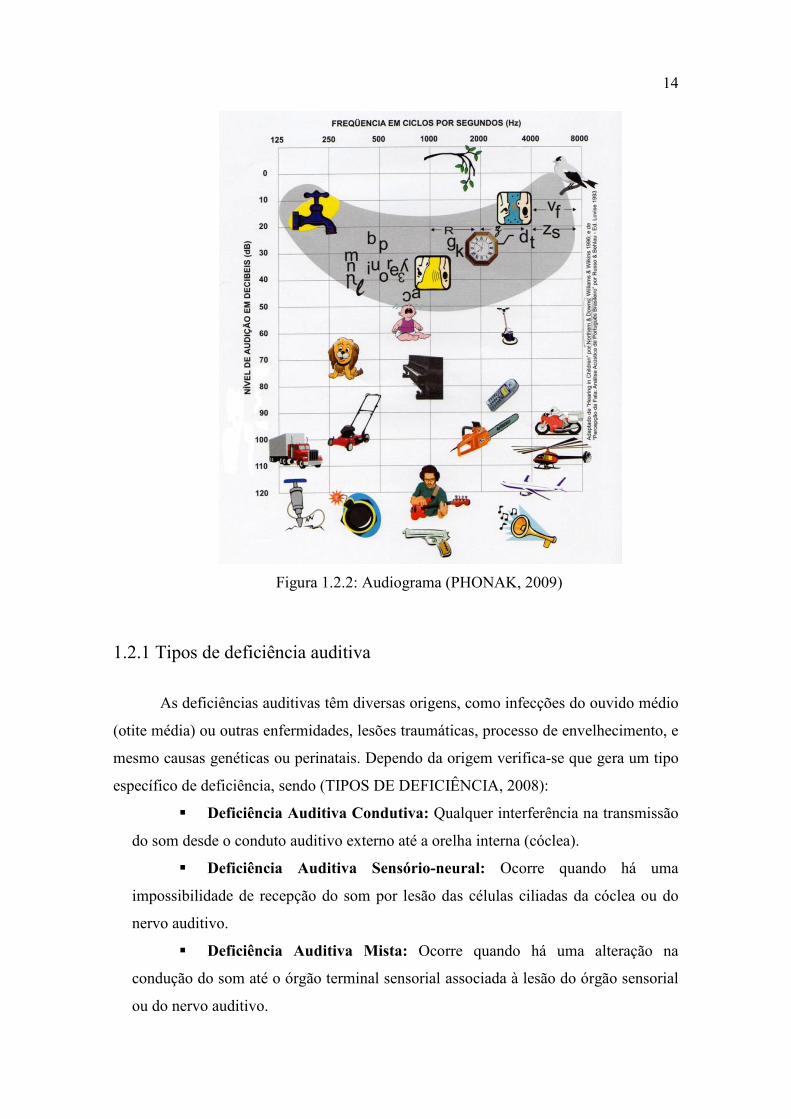
Vejamos, na Figura 1.2.2, exemplos de sons cotidianos e os níveis sonoros em
que se encontram:
14
Figura 1.2.2: Audiograma (PHONAK, 2009)
1.2.1 Tipos de deficiência auditiva
As deficiências auditivas têm diversas origens, como infecções do ouvido médio
(otite média) ou outras enfermidades, lesões traumáticas, processo de envelhecimento, e
mesmo causas genéticas ou perinatais. Dependo da origem verifica-se que gera um tipo
específico de deficiência, sendo (TIPOS DE DEFICIÊNCIA, 2008):
Deficiência Auditiva Condutiva: Qualquer interferência na transmissão
do som desde o conduto auditivo externo até a orelha interna (cóclea).
Deficiência Auditiva Sensório-neural: Ocorre quando há uma
impossibilidade de recepção do som por lesão das células ciliadas da cóclea ou do
nervo auditivo.
Deficiência Auditiva Mista: Ocorre quando há uma alteração na
condução do som até o órgão terminal sensorial associada à lesão do órgão sensorial
ou do nervo auditivo.

15
Deficiência Auditiva Central: Este tipo de deficiência auditiva não é,
necessariamente, acompanhado de diminuição da sensitividade auditiva, mas
manifesta-se por diferentes graus de dificuldade na compreensão das informações
sonoras. Decorre de alterações nos mecanismos de processamento da informação
sonora no tronco cerebral Sistema Nervoso Central.
Além da detecção do tipo de deficiência, a potencialidade de reabilitação, ou
adaptação, de pessoas com deficiência auditiva depende de alguns fatores, como por
exemplo a idade do indivíduo e o tempo decorrido desde a deficiência. A partir desses
parâmetros define-se o método de reabilitação desse paciente.
1.3 Pele
A pele é o maior órgão do corpo, com superfície total que ultrapassa 1,5 m²
embora seja pouco espessa – entre 0,5 mm nas pálpebras e cerca de 4 a 5 mm nas
palmas e plantas. Seu peso global, incluindo a hipoderme, chega a representar de 16 a
18% do peso corporal. Assim, para um indivíduo adulto com 75 Kg, o peso da pele
ultrapassa os 12 Kg (PELE, 1998).
A resistência à rotura é muito elevada: suporta uma tração superior a 1 Kg/cm².
Simultaneamente revela capacidade considerável de distensão – cerca de 10 a 15% das
suas dimensões, na pele do adulto. Possui uma vascularização extremamente rica: em
cada cm² de superfície cutânea existem mais de 0,5 m de vasos. O débito circulatório
médio global da pele foi calculado em 500 ml/minuto. Caracteriza-se, ainda, por
elevada capacidade de eliminar suor; mediante estímulo térmico elevado, em período
curto, perde entre 2 a 3 mg/cm²/minuto, em situações extremas, a eliminação total de
suor pode atingir 10 L/dia (PELE, 1998).
É um órgão estratificado constituído por epiderme e derme e hipoderme. A
epiderme é formada pelas células epiteliais (ceratinócitos), onde reside uma das
principais defesas do órgão contra a penetração de produtos exteriores. Integradas na
epiderme encontram-se ainda os melanócitos (responsáveis pela cor da pele), as células
de Langerhans (constituem a primeira linha de “identificação” imunitária das
substâncias que franqueiam a epiderme) e células sensoriais denominadas células de
Merkel (PELE, 1998).

16
A derme, camada localizada entre a epiderme e a hipoderme, é responsável pela
resistência e elasticidade da pele. É constituída por tecido conjuntivo (fibras colágenas e
elásticas envoltas por substância fundamental), vasos sanguíneos e linfáticos, nervos e
terminações nervosas. Os folículos pilossebáceos e glândulas sudoríparas, originadas na
epiderme, também localizam-se na derme. A faixa na qual a epiderme e a derme se
unem é chamada de junção dermoepidérmica. Nesta área, a epiderme se projeta em
forma de dedos na direção da derme, formando as cristas epidérmicas. Estas aumentam
a superfície de contato entre as 2 camadas, facilitando a nutrição das células
epidérmicas pelos vasos sanguíneos da derme (PELE, 1998).
A hipoderme, também chamada de tecido celular subcutâneo, é a porção mais
profunda da pele. É composta por feixes de tecido conjuntivo que envolvem células
gordurosas (adipócitos) e formam lobos de gordura. Sua estrutura fornece proteção
contra traumas físicos, além de ser um depósito de calorias (PELE NORMAL, 2009).
A pele é o mais antigo e sensível dos órgãos e o primeiro meio de comunicação
do homem; formada no primeiro período da gestação, onde já possui o sentido do tato.
Esse é o primeiro sentido desenvolvido e o principal da pele (MONTAGU, 1988).
O tato é percebido por diversos tipos de receptores sensoriais com características
específicas de funcionamento, e é capaz de distinguir diferentes formas de informação,
como calor, pressão, dor, textura, etc. (CUNHA et al., 2009).
1.3.1 Mecanorreceptores
Embora pressão, vibração e estiramento possam ser classificados como
sensações distintas, são detectados pela mesma classe de receptores táteis, os
mecanorreceptores. Há pelo menos seis tipos de mecanorreceptores (RECEPTORES,
2009):
Terminações nervosas livres: são os receptores sensoriais mais
numerosos, encontrados com densidade variável em todas as áreas da pele, inclusive
na córnea do olho; e podem detectar pressão e dor.
Corpúsculo de Meissner: é um receptor tátil. Possui uma terminação
nervosa encapsulada que estimula uma grande fibra nervosa sensitiva mielinizada.
No interior da cápsula existem muitas circunvalações de filamentos nervosos
17
terminais. Esses receptores são responsáveis pela capacidade de reconhecer
exatamente qual o ponto do corpo foi tocado e a textura dos objetos que tocaram.
Esses corpúsculos possuem adaptação rápida; são encontrados nas pontas dos dedos,
lábios e áreas que são muito sensíveis, mesmo à mais leve estimulação tátil.
Discos de Merkel: conhecidos como receptores de extremidades
dilatadas. Diferem dos corpúsculos de Meissner, pois, primeiramente transmitem um
sinal forte parcialmente adaptável e, em seguida, um sinal contínuo mais fraco, que
se adapta lentamente. Acredita-se que sinalizem o toque contínuo de objetos contra a
pele. Encontrados nas áreas não pilosas da pele (glabra) e também, em menor
número nas partes pilosas do corpo.
Órgãos terminais de pelo: adaptam-se facilmente, detectando
principalmente movimentos de objetos na superfície do corpo que desloca os pelos.
São emaranhados em torno da base de cada pelo na superfície corporal.
Órgãos terminais de Ruffini: são terminações nervosas,
multirramificadas, encapsuladas que se localizam na pele e nos tecidos mais
profundos, bem como nas cápsulas articulares. Adaptam-se muito pouco, sinalizando
a pressão e tato contínuo aplicados à pele, ou o movimento em torno da articulação
onde estão localizados.
Corpúsculos de Pacini: localizam-se na pele e nos tecidos mais
profundos. Como seus receptores adaptam-se em frações de segundo, esses
corpúsculos são estimulados apenas por movimentos muito rápidos dos tecidos. São
importantes para detectar a vibração ou outras alterações rápidas do estado mecânico
dos tecidos.
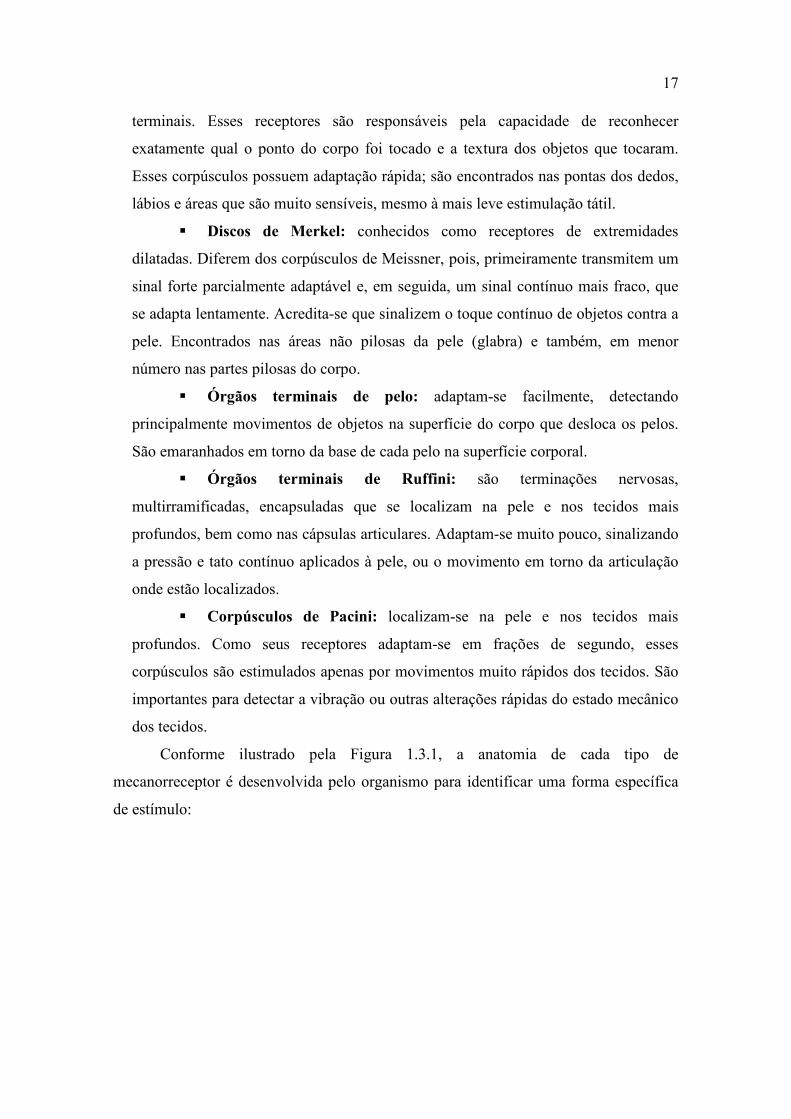
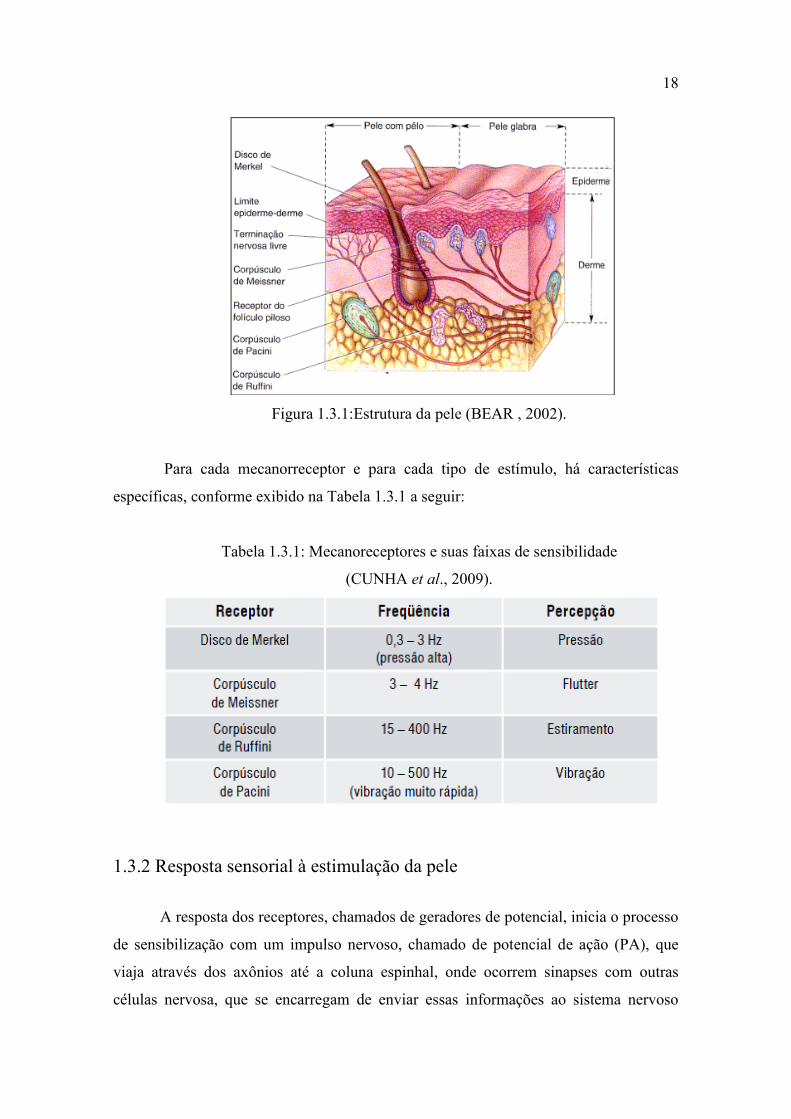
Conforme ilustrado pela Figura 1.3.1, a anatomia de cada tipo de
mecanorreceptor é desenvolvida pelo organismo para identificar uma forma específica
de estímulo:
18
Figura 1.3.1:Estrutura da pele (BEAR , 2002).
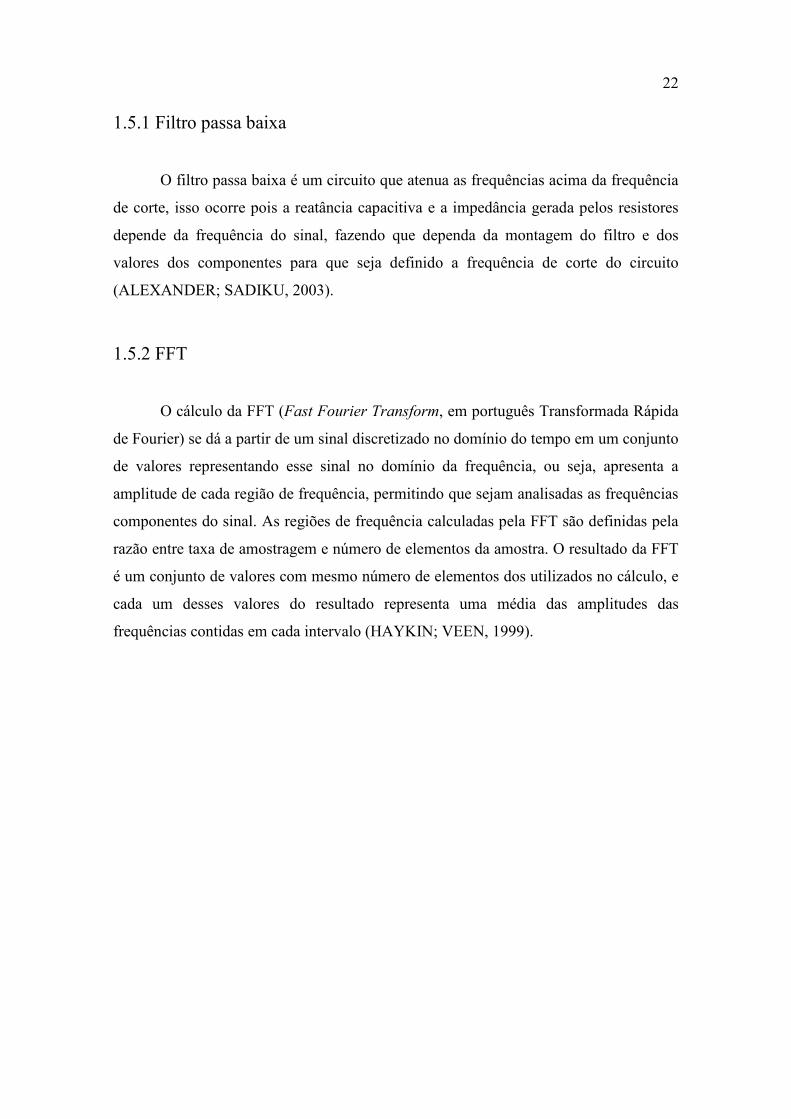
Para cada mecanorreceptor e para cada tipo de estímulo, há características
específicas, conforme exibido na Tabela 1.3.1 a seguir:
Tabela 1.3.1: Mecanoreceptores e suas faixas de sensibilidade
(CUNHA et al., 2009).
1.3.2 Resposta sensorial à estimulação da pele
A resposta dos receptores, chamados de geradores de potencial, inicia o processo
de sensibilização com um impulso nervoso, chamado de potencial de ação (PA), que
viaja através dos axônios até a coluna espinhal, onde ocorrem sinapses com outras
células nervosa, que se encarregam de enviar essas informações ao sistema nervoso

19
central (REILLY, 1992 apud CUNHA et al., 2009). O caminho percorrido desde a
região do estímulo até o cérebro pode variar de poucos centímetros até mais de um
metro, como no caso de um estímulo gerado nas extremidades de nossos membros. A
Figura 1.3.2.1 mostra esses dois mecanismos de resposta motora e sensorial:
Figura 1.3.2.1: Componentes funcionais dos neurônios motores e dos neurônios
sensoriais (REILLY, 1992, apud CUNHA et al., 2009).
1.4 Neurociência
Todos os dias, pessoas que experienciaram uma lesão encefálica ou medular,
defeitos congênitos e doenças neurológicas se veem obrigadas a conviver com seus
efeitos. Até mesmo tarefas aparentemente simples ou cotidianas, como sentar, andar,
vestir-se, lembrar de um nome, falar, podem representar desafios incríveis. A
fisioterapia e a terapia ocupacional desempenham papel crucial na ajuda às pessoas para
que possam recuperar a capacidade de funcionar de forma tão independente quanto for
possível. Segundo Lundy-Ekman (2000), o planejamento do tratamento fisioterápico e
da terapia ocupacional, bem como o modo de conduzir cada caso individual depende de
nossa compreensão do sistema nervoso e da continuidade da pesquisa. A pesquisa

20
científica rigorosa sobre o funcionamento neural, chamada neurociência, é
relativamente recente, começando no fim do século XIX (LUNDY-EKMAN, 2000).
A neurociência é o estudo do sistema nervoso; sua estrutura, seu
desenvolvimento, funcionamento, evolução, relação com o comportamento e com a
mente, e também suas alterações (NEUROCIÊNCIA, 2007). Pode ser dividida em cinco
grandes disciplinas neurocientíficas. A neurociência molecular tem como objeto de
estudo as diversas moléculas de importância funcional do sistema nervoso; pode ser
também chamada de neuroquímica ou neurobiologia molecular. A neurociência celular
aborda as células que formam o sistema nervoso, sua estrutura e sua função; pode ser
chamada também de neurocitologia ou neurobiologia celular. A neurociência sistêmica
considera populações de células nervosas situadas em diversas regiões do sistema
nervoso que constituem sistemas funcionais como o visual, o auditivo, o motor etc.;
quando apresenta uma abordagem mais morfológica é chamada neuro-histologia ou
neuroanatomia, e quando lida com aspectos funcionais é chamada neurofisiologia. A
neurociência comportamental dedica-se a estudar as estruturas neurais que produzem
comportamentos e outros fenômenos psicológicos como o sono, os comportamentos
sexuais, os comportamentos emocionais etc. é às vezes conhecida também como
psicofisiologia ou psicobiologia. Finalmente, a neurociência cognitiva trata das
capacidades mentais mais complexas, geralmente típicas do homem, como a linguagem,
a autoconsciência, a memória etc. pode ser também chamada de neuropsicologia
(LENT, 2001).
1.4.1 Neuroplasticidade
Os estudos da neurociência levaram a um maior entendimento da
neuroplasticidade, que é a capacidade dinâmica do cérebro adaptar-se e reestruturar-se
em função de novas exigências ambientais ou das limitações funcionais impostas por
lesões (HAASE, LACERDA, 2004).
As células do sistema nervoso são dotadas de plasticidade. Embora os neurônios
maduros não sejam capazes de se dividir e replicar, o sistema nervoso central é capaz de
apresentar alto grau de neuroplasticidade e, portanto, os neurônios podem transformar,
de modo permanente ou pelo menos prolongado, a sua função e a sua forma, em

21
resposta à ação do ambiente externo. A plasticidade é maior durante o desenvolvimento,
e declina gradativamente, sem se extinguir, na vida adulta.
Há várias formas de plasticidade, como a regeneração, a plasticidade axônica, a
sináptica, a dendrítica e a somática. A plasticidade regenerativa consiste no
recrescimento de axônios lesados; é forte no sistema nervoso periférico, facilitada pelas
células não neurais que compõem o microambiente dos tecidos do corpo, porém no
sistema nervoso central a regeneração é bloqueada pelas células de glia que produzem a
mielina.
A neuroplasticidade pode ter valor compensatório, mas nem sempre isso ocorre,
porque as transformações neuronais que respondem ao ambiente nem sempre restauram
funções perdidas. Ao contrário, às vezes produzem funções mal-adaptativas ou
patológicas (LENT, 2001).
O conhecimento dos mecanismos da neuroplasticidade e de vários processos
patológicos levou, subsequentemente, ao desenvolvimento de novos procedimentos
terapêuticos para os pacientes em distúrbios neurológicos. Por meio destes estudos
descobriu-se a possibilidade de utilizar tecnologia assistiva através da computação e da
eletrônica para aumentar a inclusão social de muitos deficientes; como é o caso dos
deficientes auditivos, tema deste projeto, que tem por intenção suprir a ausência de um
sentido (audição) com sentido tátil, transformando os sinais sonoros em estímulos táteis
possibilitando que, com treinamento, o portador de necessidades especiais interprete
mensagens sonoras.
1.5 Recursos Tecnológicos
Dentre todos os recursos tecnológicos utilizados neste projeto, os que
apresentam maior relevância e um estudo mais detalhado para sua aplicação e
entendimento é o filtro passa baixa e a FFT.
Os outros recursos dispostos nesse projeto partiram de aplicações práticas, não
carecendo um estudo aprofundado de sua concepção e aplicabilidade.
22
1.5.1 Filtro passa baixa
O filtro passa baixa é um circuito que atenua as frequências acima da frequência
de corte, isso ocorre pois a reatância capacitiva e a impedância gerada pelos resistores
depende da frequência do sinal, fazendo que dependa da montagem do filtro e dos
valores dos componentes para que seja definido a frequência de corte do circuito
(ALEXANDER; SADIKU, 2003).
1.5.2 FFT
O cálculo da FFT (Fast Fourier Transform, em português Transformada Rápida
de Fourier) se dá a partir de um sinal discretizado no domínio do tempo em um conjunto
de valores representando esse sinal no domínio da frequência, ou seja, apresenta a
amplitude de cada região de frequência, permitindo que sejam analisadas as frequências
componentes do sinal. As regiões de frequência calculadas pela FFT são definidas pela
razão entre taxa de amostragem e número de elementos da amostra. O resultado da FFT
é um conjunto de valores com mesmo número de elementos dos utilizados no cálculo, e
cada um desses valores do resultado representa uma média das amplitudes das
frequências contidas em cada intervalo (HAYKIN; VEEN, 1999).

23
IMPLEMENTAÇÃO
2.1 Especificação técnica FFT
A taxa de amostragem utilizada no sistema é 4600Hz com 128 amostras,
portanto cada região de frequência do resultado do cálculo da FFT é de
aproximadamente de 36Hz. O grupo de elementos gerados pelo cálculo da FFT com
informações relevantes é a primeira metade do conjunto de elementos, pois no processo
de cálculo é gerado um espelhamento dos elementos na segunda metade do conjunto em
relação com a primeira, resultando em um conjunto de 64 valores válidos para análise.
O cálculo da FFT no dsPIC é o resultado de três funções de cálculo das
bibliotecas do compilador C30 da Microchip©. A primeira função utilizada é a
FFTComplexIP que calcula a FFT propriamente dita, a seguinte função é a
BitReverseComplex que reordena os dados previamente embaralhados no cálculo da
função anterior e, por fim é utilizado a função SquareMagnitudeCplx que converte os
valores do formato complexo em um conjunto de números reais (HAYKIN; VEEN,
1999).
2.2 Tactores
O dispositivo vibrotátil, também conhecido como tactor, transforma um sinal
alternado em vibração. Os tactores utilizados no projeto são transdutores para
estimulação da pele cujo modelo é VBW32 da empresa Audiological Engineering
Corporation®. Esses tactores possuem sua frequência de atuação ótima à 250Hz, que
coincide com a frequência de maior sensibilidade dos mecanorreceptores da pele. Esse
tactor tem seu melhor desempenho quando estimulado com sinal do tipo senoidal; com
funcionamento similar ao de um solenoide ou um alto-falante, movimenta o eixo
conforme a corrente elétrica presente em sua bobina. Esse deslocamento depende da
amplitude do sinal aplicado. Os sinais positivos deslocam o núcleo para um sentido
enquanto os negativos o deslocam para o sentido contrário, gerando assim uma vibração
na frequência do sinal aplicado.

24
Especificações técnicas do tactor:
Resistência da bobina - 32Ω;
Frequência de atuação ótima – 250 Hz, 100Hz a 800Hz a níveis reduzidos;
Consumo potência – 200mW a um Duty Cicle de 100%.
2.3 Conversor analógico digital
O conversor A/D (analógico para digital) é o periférico responsável pela
discretização do sinal de áudio de entrada, gerando a partir da tensão aplicada a sua
entrada um valor proporcional, relativo à precisão do mesmo. O conversor A/D no
projeto está configurado para operação com precisão de 10bits e taxa de amostragem de
4600Hz. Tal taxa de amostragem é definida pelo teorema de Nyquist (ALEXANDER;
SADIKU, 2003), que diz que a taxa de amostragem de um sinal deve ser no mínimo
duas vezes a frequência de interesse quando o sinal está livre de ruídos.
2.4 Microprocessador dsPIC
O dsPIC é um microprocessador de 16-bit que oferece uma boa capacidade de
processamento, um sofisticado e flexível controle de interrupção, uma vasta opção de
periféricos analógicos e digitais, controle de consumo de energia, controle de clock
(relógio de máquina) flexível, proteção de sob-tensão, watchdog timer (monitor de
continuidade de execução da aplicação), code security (proteção contra leitura do
firmware gravado no dsPIC), emulação e debugação do código em tempo real, fluxo de
dados comparáveis ao de DSP (em português, Processador Digital de Sinais)
(MICROCHIP, 2009).
2.5 Amplificador Operacional
O amplificador operacional é um dispositivo largamente utilizado no projeto, por
ser um componente utilizado em muitas aplicações na instrumentação eletrônica, é
imprescindível na construção de sistemas de processamento de sinais (CATHEY, 2002).

25
No projeto os amplificadores são utilizados em amplificadores de sinal,
grampeadores de sinal, somadores de sinal e geradores de onda senoidal.
Dentre os módulos que utilizam amplificadores operacionais desenvolvidos no
projeto está o amplificador de entrada, com objetivo de controlar a amplitude do sinal
de áudio para níveis que se adéquem a necessidade do sistema. A Figura 2.5.1 mostra
como se deu a implementação de tal módulo:
Figura 2.5.1: Amplificador de entrada
2.6 Filtro Passa Baixa
Outro módulo que faz uso de amplificadores operacionais é o filtro passa baixa
chebyshev de 8ª ordem com frequência de corte de 2300Hz, responsável por atenuar as
componentes de frequência que comprometem o ideal funcionamento do projeto, como
ruídos e frequências sem interesse de análise. A frequência de corte foi definida pelo
intervalo de frequência utilizada pela fala humana em condições normais de
conversação. Esse intervalo de frequência pode se alterar em condições especiais como
canto lírico por exemplo (ALEXANDER; SADIKU, 2003). Esse intervalo é
demonstrado na Figura 2.6.1:

26
Figura 2.6.1: Frequencias da voz humana (FREQUÊNCIAS DA VOZ, 2009)
A implementação desse módulo se dá como ilustrado na Figura 2.6.2:
Figura 2.6.2: Filtro passa baixa 8ª ordem 2300Hz
2.7 Amplificador de Ganho ½
Outro amplificador de sinal utilizado é um amplificador de ganho ½ que, como o
nome sugere, divide a amplitude do sinal pela metade como parte do processo de
27
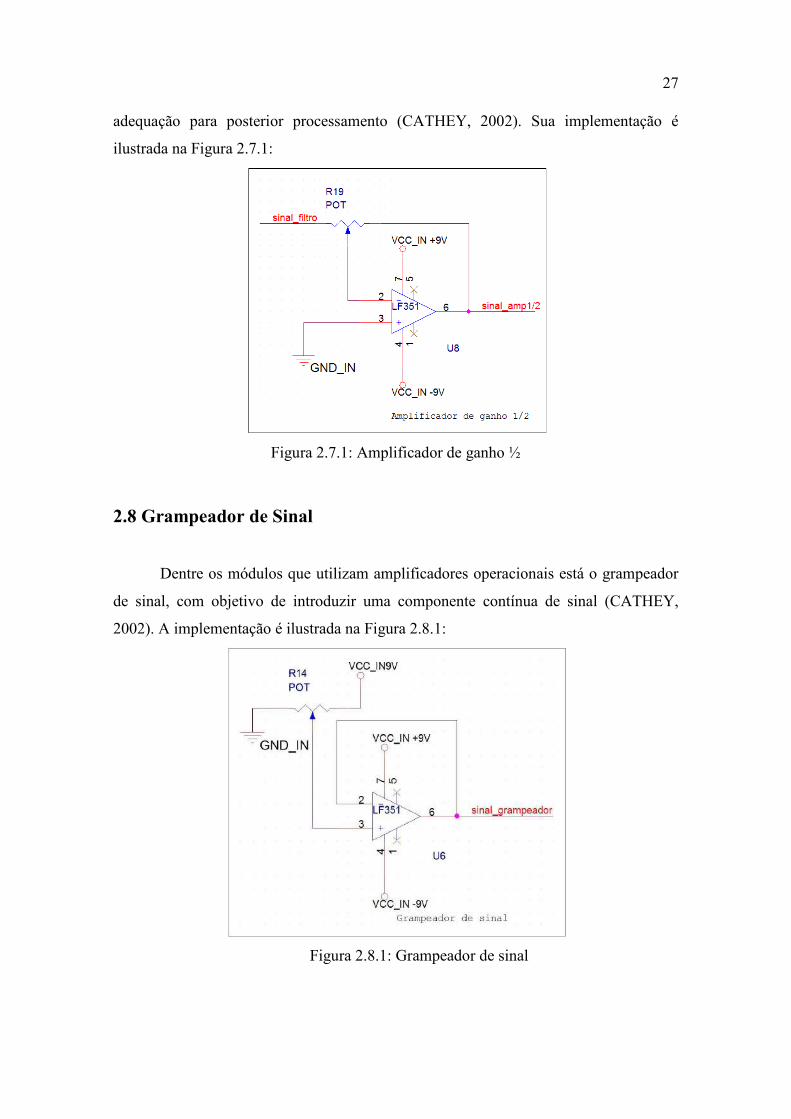
adequação para posterior processamento (CATHEY, 2002). Sua implementação é
ilustrada na Figura 2.7.1:
Figura 2.7.1: Amplificador de ganho ½
2.8 Grampeador de Sinal
Dentre os módulos que utilizam amplificadores operacionais está o grampeador
de sinal, com objetivo de introduzir uma componente contínua de sinal (CATHEY,
2002). A implementação é ilustrada na Figura 2.8.1:
Figura 2.8.1: Grampeador de sinal
28
2.9 Somador de sinal
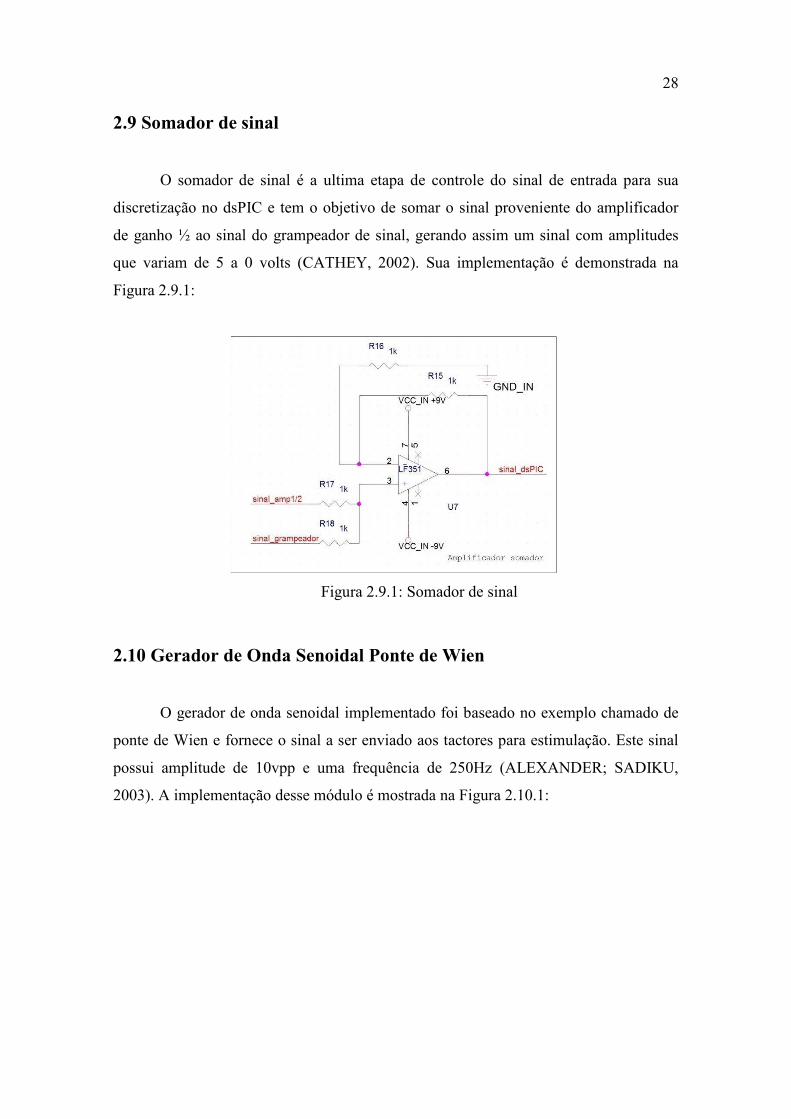
O somador de sinal é a ultima etapa de controle do sinal de entrada para sua
discretização no dsPIC e tem o objetivo de somar o sinal proveniente do amplificador
de ganho ½ ao sinal do grampeador de sinal, gerando assim um sinal com amplitudes
que variam de 5 a 0 volts (CATHEY, 2002). Sua implementação é demonstrada na
Figura 2.9.1:
Figura 2.9.1: Somador de sinal
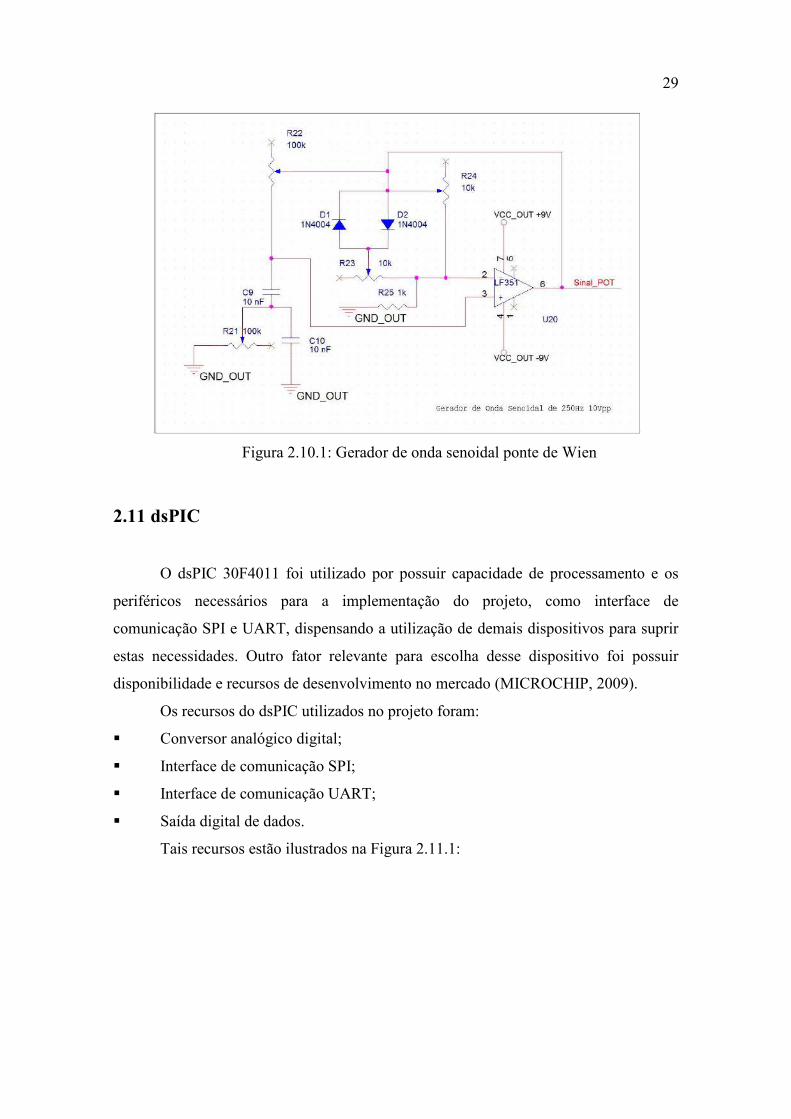
2.10 Gerador de Onda Senoidal Ponte de Wien
O gerador de onda senoidal implementado foi baseado no exemplo chamado de
ponte de Wien e fornece o sinal a ser enviado aos tactores para estimulação. Este sinal
possui amplitude de 10vpp e uma frequência de 250Hz (ALEXANDER; SADIKU,
2003). A implementação desse módulo é mostrada na Figura 2.10.1:
29
Figura 2.10.1: Gerador de onda senoidal ponte de Wien
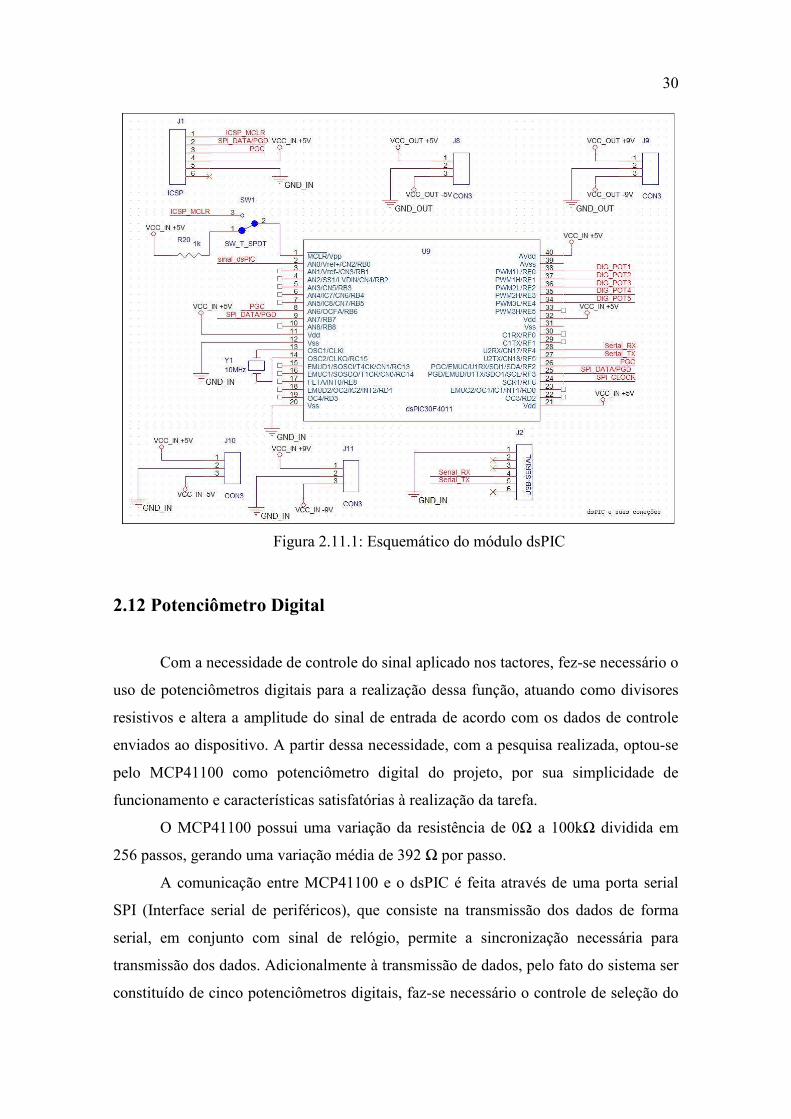
2.11 dsPIC
O dsPIC 30F4011 foi utilizado por possuir capacidade de processamento e os
periféricos necessários para a implementação do projeto, como interface de
comunicação SPI e UART, dispensando a utilização de demais dispositivos para suprir
estas necessidades. Outro fator relevante para escolha desse dispositivo foi possuir
disponibilidade e recursos de desenvolvimento no mercado (MICROCHIP, 2009).
Os recursos do dsPIC utilizados no projeto foram:
Conversor analógico digital;
Interface de comunicação SPI;
Interface de comunicação UART;
Saída digital de dados.
Tais recursos estão ilustrados na Figura 2.11.1:
30
Figura 2.11.1: Esquemático do módulo dsPIC
2.12 Potenciômetro Digital
Com a necessidade de controle do sinal aplicado nos tactores, fez-se necessário o
uso de potenciômetros digitais para a realização dessa função, atuando como divisores
resistivos e altera a amplitude do sinal de entrada de acordo com os dados de controle
enviados ao dispositivo. A partir dessa necessidade, com a pesquisa realizada, optou-se
pelo MCP41100 como potenciômetro digital do projeto, por sua simplicidade de
funcionamento e características satisfatórias à realização da tarefa.
O MCP41100 possui uma variação da resistência de 0Ω a 100kΩ dividida em
256 passos, gerando uma variação média de 392 Ω por passo.
A comunicação entre MCP41100 e o dsPIC é feita através de uma porta serial
SPI (Interface serial de periféricos), que consiste na transmissão dos dados de forma
serial, em conjunto com sinal de relógio, permite a sincronização necessária para
transmissão dos dados. Adicionalmente à transmissão de dados, pelo fato do sistema ser
constituído de cinco potenciômetros digitais, faz-se necessário o controle de seleção do

31
dispositivo através de saídas digitais do processador. Essa implementação, assim como
a etapa de seguidor de tensão e ganho de corrente, é mostrada na Figura 2.12.1:
Figura 2.12.1: Potenciômetro digital, seguidor de tensão e ganho de corrente
2.13 Seguidor de tensão
O seguidor de tensão tem como objetivo minimizar o consumo de corrente na
saída do gerador de onda senoidal; caso contrário este deveria fornecer corrente
suficiente para suprir a demanda de um total de dez transistores na etapa de ganho de
corrente. Utilizando um seguidor de tensão para cada potenciômetro digital, o consumo
de corrente é restringido para apenas dois transistores, e a corrente é fornecida agora
pelo seguidor de tensão, não mais pelo gerador de onda senoidal. Dessa forma tem-se
uma garantia de não sobrecarga no gerador de onda senoidal propiciando um correto
funcionamento do mesmo. A implementação dessa etapa é exemplificada na Figura
2.12.1.
2.14 Ganho de Corrente
O ganho de corrente faz-se necessário devido à demanda de corrente dos
tactores. Por esse motivo, foi desenvolvido um amplificador de corrente com objetivo
de fornecer na saída da etapa de ganho de corrente o sinal de entrada mas com
capacidade de fornecer corrente suficiente para o correto funcionamento dos tactores.
Foi utilizado transistores do tipo NPN e PNP, com configuração Darlington para

32
compreender a fase positiva e a fase negativa do sinal e fornecer a corrente necessária
aos tactores. Essa implementação é mostrada na Figura 2.12.1.
2.15 Implementação do Firmware
O firmware foi desenvolvido utilizando-se a IDE de desenvolvimento MPLAB
da Microchip© e o compilador utilizado em conjunto com a IDE é o C30, também da
Microchip©. O uso do compilador C30 se fez necessário pelo fato de possibilitar total
manipulação dos parâmetros de controle dos periféricos, necessário para a correta
discretização do sinal dentro da necessidade para os cálculos do projeto. Outro motivo
para o uso do C30 é ele possuir as bibliotecas necessárias para o cálculo da FFT, recurso
necessário para execução do projeto e pelo fato dessa biblioteca estar disponível pelo
fabricante do dispositivo, torna maior a confiabilidade na resposta e estabilidade no
processamento do sistema.
A discretização do sinal é realizada utilizando uma taxa de amostragem (número
de amostras por segundo) de 4600Hz, sendo o dobro da maior frequência presente no
sinal após seu tratamento na etapa inicial do hardware. Essa taxa de amostragem é
suportada pelo teorema de Nyquist para que não apresente inconsistências nos valores
calculados. Outro ponto importante a ser definido é o número de amostras do sistema,
que define a precisão nos resultados encontrados. No projeto foi utilizado 128 amostras,
o que dá uma precisão suficiente para análise dos resultados. Depois de realizada a
discretização das 128 amostras, esses valores são transformados em domínio complexo
para possibilitar o cálculo nas bibliotecas disponíveis. As bibliotecas utilizadas foram
respectivamente FFTComplexIP, BitReverseComplex e SquareMagnitudeCplx, todas
necessárias para o cálculo da FFT, reordenação dos dados e conversão dos valores para
os números reais. De posse do conjunto de dados retornados do cálculo da FFT, é
realizada uma separação desse conjunto por região de frequência e calculado dentro de
cara região separadamente os valores que serão enviados para controle do
potenciômetro digital. Uma vez calculados os valores a serem utilizados nos
potenciômetros digitais, estes são enviados pela porta SIP do dsPIC para seu respectivo
potenciômetro, programando-o para adequar a amplitude do sinal gerado para
estimulação dos tactores. Ao término dessa etapa o processo se reinicia, gerando a cada

intervalo de tempo uma nov
acontecimentos do circuito
Figura 2.15.1: Fl
intervalo de tempo uma nova configuração de estimulação dos tactores.
acontecimentos do circuito ocorrem conforme ilustrado na Figura 2.15.1:
Figura 2.15.1: Fluxograma do circuito do sistema
33
a configuração de estimulação dos tactores. As etapas de
Figura 2.15.1:
uxograma do circuito do sistema
34
TESTE E VALIDAÇÃO DOS RESULTADOS DO SISTEMA
Para que fosse comprovado o correto funcionamento do sistema foi aplicado um
teste modular, validando a resposta de cada etapa contida no processo de execução do
projeto. Primeiramente, controlando o sinal a ser aplicado na entrada, foi verificado se
este possuía as características de um sinal de áudio convencional que seria utilizado
durante o funcionamento real. Confirmadas essas características, foram analisadas as
etapas de condicionamento do sinal para garantir seu correto funcionamento.
Verificadas as tensões do sinal que seria aplicado no dsPIC dentro das exigências para
seu funcionamento, iniciou a análise do processo de discretização do sinal, averiguando
os valores adquiridos durante o processo de depuração do firmware. Ainda na
depuração do firmware foi verificada a resposta da FFT, confirmando os valores
esperados para o sinal aplicado no sistema e em seguida foi analisado os resultados
calculados dos valores de controle dos tactores. Analisando as amplitudes dos sinais de
saída dos potenciômetros digitais, constatou-se a configuração correta dos
potenciômetros e o controle adequado do sinal gerado de 250Hz, além da correta
atuação dos tactores.
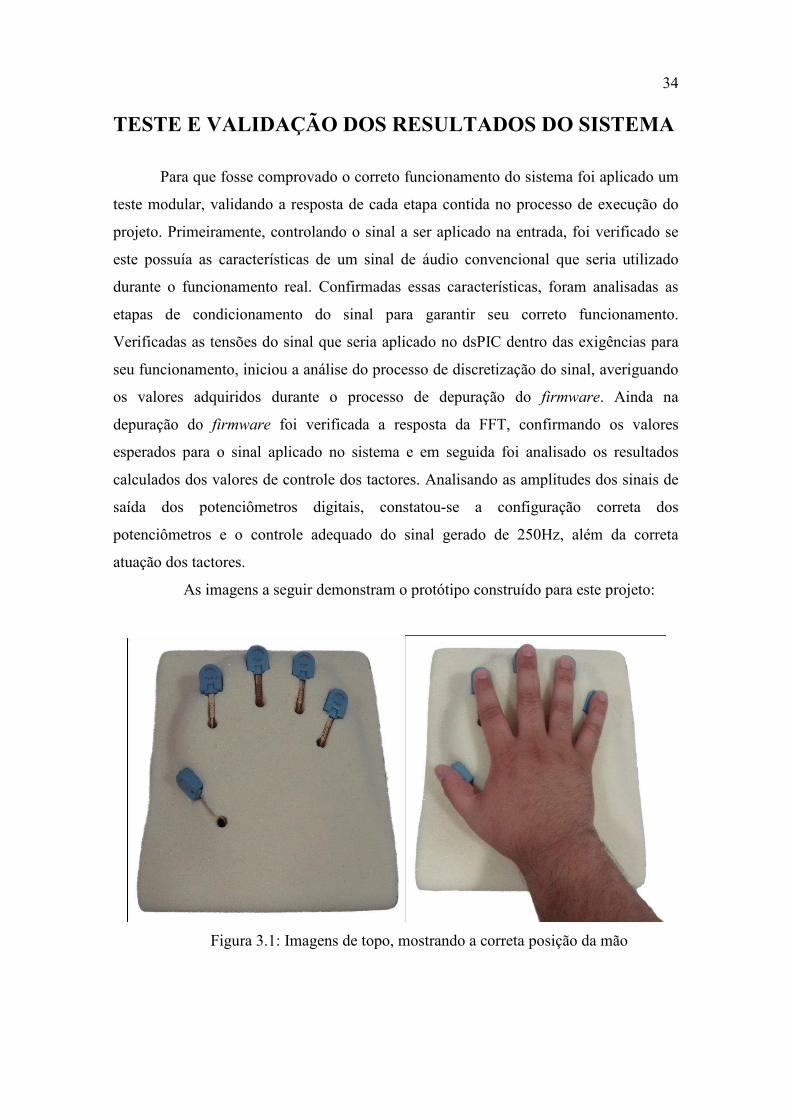
As imagens a seguir demonstram o protótipo construído para este projeto:
Figura 3.1: Imagens de topo, mostrando a correta posição da mão

35
Figura 3.2: Imagem perspectiva do projeto
36
CONCLUSÃO
De acordo com os testes e análises efetivados constatou-se o correto
funcionamento de todas as etapas do circuito, dentre as analógicas e as digitais, gerando
uma estimulação confiável e um sistema de boa estabilidade de funcionamento.
A partir dos resultados obtidos, o projeto torna-se apto para uso por profissionais
da área de fonoaudiologia e neurologia que poderão desenvolver uma metodologia de
ensino da vocalização e da compreensão da fala valendo-se das capacidades do projeto.

37
REFERÊNCIAS BIBLIOGRÁFICAS
ALEXANDER, Charles K.; SADIKU, Matthew N. O. Fundamentos de circuitos elétricos. Porto Alegre: Bookman, 2003.
BEAR, Mark F.; CONNORS, Barry W.; PARADISO, Michael A. Neurociências: Desvendando o sistema nervoso. Porto Alegre: Artmed Editora, 2002.
CATHEY, Jimmie J. Dispositivos e circuitos eletrônicos. Coleção Shaum, 2ª ed. Porto Alegre: Bookman, 2002.
CUNHA, José Carlos; CENDON, Rodrigo Villaverde; NOHAMA, Percy. Tecnologias assistivas para indivíduos surdo-cegos. Jornal Brasileiro de Neurocirurgia, v. 20, nº 1, p. 53-72, jan. 2009.
DEFICIÊNCIA AUDITIVA. Fiocruz, 2008. Disponível em <http://www.fiocruz.br/biosseguranca/ Bis/infantil/deficiencia-auditiva.htm>, acesso em 2 set. 2009
FRANÇA, Rafael Ferreira. Indutor de ondas cerebrais por batimento binaural. Trabalho de Conclusão de Curso. Universidade Positivo. Curitiba, 2008.
FREQUÊNCIAS DA VOZ. Disponível em: <http://www.answers.com/topic/vocal-range>, acesso em 1 nov. 2009.
HAASE, Vitor Geraldi; LACERDA, Shirley Silva. Neuroplasticidade, variação interindividual e recuperação funcional em neuropsicologia. Temas de Psicologia da Sociedade Brasileira de Psicologia, v. 12, nº 1, 28-42. 2004.
HAYKIN, Simon; VEEN, Barry Van. Sinais e sistemas. São Paulo: Bookman, 1999.
LENT, Roberto. Cem bilhões de neurônios. São Paulo: Atheneu, 2001.
LUNDY-EKMAN, Laurie. Neurociência: fundamentos para a reabilitação. Rio de Janeiro: Elsevier, 2000.
MICROCHIP. 2009. Disponível em <http://ww1.microchip.com/downloads/en/DeviceDoc/ 01032f.pdf>, acesso em 2 nov. 2009.
MONTAGU, Ashley. Tocar: o significado humano da pele. 9ª ed. São Paulo: Summus Editorial, 1988.
NEUROCIÊNCIA. O Cérebro Nosso de Cada Dia. HERCULANO-HOUZEL, Suzana. 2007. Disponível em < http://www. cerebronosso.bio.br/o-que-neurocincia/>, acesso em 1 nov. 2009.
38
PELE NORMAL. 2009. Disponível em <http://www.dermatologia.net/novo/base/ pelenormal.shtml>, acesso em 1 nov. 2009.
PELE. A Enfermagem na Dermatologia. Vol. 55. SOCIEDADE PORTUGUESA DE DERMATOLOGIA. Lisboa, nov. 1998. Disponível em <http://www.dermo.pt>, acesso em 1 nov. 2009.
PHONAK. Audiograma de sons familiares. Folheto ilustrativo com distribuição para fonoaudiólogos representantes. Sistemas Audiológicos Phonak, São Paulo, 2009.
RECEPTORES. 2009. Disponivel em <http://www.nutrimais.com/nutri/trabalho/trab_receptores.asp>, acesso em 1 nov. 2009.
REDONDO, Maria Cristina da Fonseca; CARVALHO Josefina Martins. Deficiência auditiva. Nº 1, Ministério da Educação, 2001.
TIPOS DE DEFICIÊNCIA. Campanha Nacional da Saúde Auditiva. Sociedade Brasileira de Otologia. 2009. Disponível em <http://www.saudeauditiva.org.br/ novo_site/index.php?s=sobre_audicao.php> , acesso em 1 nov. 2009.

39
ANEXO A: Artigo Científico
Sistema Vibrotátil para auxiliar deficientes auditivos no aprendizado da vocalização
Cretan Pires de Oliveira Rafael Pustilnick
José Carlos da Cunha (Orientador) Resumo Partindo do princípio de que há uma parcela da população de deficientes auditivos que não possue nenhuma alternativa de reverter o quadro, nem disponibilidade de uma tecnologia que compense a disfunção da fala, foi desenvolvida uma maneira de interpretar o som por meio do tato. Pesquisando o som, o tato e a neuroplasticidade, foi possível desenvolver um projeto que prevê a análise matemática do som e sua aplicação de forma vibrotátil. Dessa forma, os profissionais de áreas como neurologia e fonoaudiologia poderão desenvolver metodologias que assistam o ensino da vocalização e da interpretação da fala. Palavras chave: Sistema vibrotátil. Vocalização. Deficiência Auditiva. Tactor. Vibrotactile System to help hearing impairment on learning of vocalization Abstract Assuming that there is a portion of the population of deaf people who have no alternative to reverse the situation, or availability of a technology that compensates for the speech disorder, we developed a way of playing the sound through touch. Researching for the sound, touch, and neuroplasticity, it was possible to develop a project that provides a mathematical analysis of sound and its application in a vibrotactile. This way, professionals in areas such as neurology and speech therapy may develop methodologies to assist the teaching of vocalization and interpretation of speech. Key words: Vibrotactile System. Vocalization. Hearing impairment. Tactor.
40
Sistema Vibrotátil para auxiliar deficientes auditivos no aprendizado da vocalização
Neste trabalho foi desenvolvida uma tecnologia alternativa de transformação de um sinal para sua interpretação de um modo diferente do original. O tema abordado no estudo é a transformação de um sinal de áudio para um estímulo vibrotátil, visando possibilitar aos deficientes auditivos a interpretação e aprendizado da vocalização, diminuindo a exclusão ou marginalização desses indivíduos.
De todos os sentidos, a audição é o mais relevante no ato de comunicar-se verbalmente, por ser esse sentido que possibilita o controle da vocalização e o entendimento da informação sonora à sua volta (LENT, 2001). A deficiência auditiva pode ser causada por diversos motivos, de origem genética a traumas nos órgãos ou nervo auditivo (TIPOS DE DEFICIÊNCIA, 2009). Pelo fato da deficiência auditiva ser classificada em diversos níveis de perda sensorial, as diferenças entre esses níveis condiciona a um específico método para suprir, tratar ou adaptar-se à deficiência (DEFICIÊNCIA AUDITIVA, 2008). O objetivo principal, mas não exclusivo, desse estudo é abordar e trabalhar as perdas de audição consideradas como severa e profunda, por serem os níveis mais afetados e com menor facilidade em tratamento e tecnologia disponível. Diante desse quadro avaliou-se a substituição sensorial da audição pelo tato, por ser o sentido mais tradicional e o primeiro desenvolvido no ser humano (MONTAGO, 1988).
O tato é um sentido com diversas características, como os tipos de informação que é capaz de
perceber; calor, textura, pressão, contato e vibração (CUNHA et al., 2009). Dentre as informações interpretadas pelo tato, a que interessa ao estudo é a vibração, por existir dispositivos específicos à estimulação de certos corpúsculos contidos na derme com objetivo de perceberem a vibração. O corpúsculo de Pacini é o de real relevância neste estudo por ser o responsável por perceber os estímulos vibrotáteis. Com seu ápice de sensibilidade a frequências de 250Hz é ideal sua interação com os tactores utilizados no projeto (CUNHA et al., 2009).
Essa substituição sensorial é possibilitada por uma característica fisiológica do ser humano de adaptar-se a nova realidade, reaprendendo antigas funções em novas regiões do cérebro ou simplesmente aprendendo algo novo, diferente do usual com muita determinação e treinamento. Dá-se a essa capacidade o nome de neuroplaticidade (HAASE; LACERDA, 2004).
O principal recurso de cálculo utilizado no projeto para possibilitar essa tafera é a FFT (Fast Fourier Transform, em português Transformada Rápida de Fourier). A FFT é capaz de transformar um sinal discretizado no domínio do tempo em um conjunto de valores pertencentes ao domínio da frequência, possibilitando a análise das componentes de frequência contidas no sinal analisado (HAYKIN; VEEN, 1999).
Outro recurso utilizado no projeto é o filtro passa baixa, possibilitando que o sinal a ser processado pudesse estar livre de ruídos e componentes de frequência
41
indesejadas para o correto cálculo da FFT (ALEXANDER; SADIKU, 2003).
Em conjunto com o filtro passa baixa, foram implementados amplificadores de sinal, grampeadores de sinal e somadores para compor a etapa de controle do sinal de entrada para processamento no dsPIC30F4011, microcontrolador utilizado no projeto (CATHEY, 2002).
O firmware desenvolvido para o dsPIC foi escrito em linguagem C ANSI e utilizado a IDE de desenvolvimento MPLAB em conjunto com o compilador C30. O objetivo do firmware é configurar os periféricos do dsPIC e executar as rotinas de discretização do sinal resultante da etapa analógica anterior, realizar o cálculo da FFT e posteriormente calcular e enviar os valores de configuração dos potenciômetros digitais responsáveis pela adequação do sinal proveniente do gerador de onda senoidal de 250Hz e 10Vpp. Cada potenciômetro digital tem como objetivo controlar a amplitude do sinal recebido a fim de representar na sua saída um sinal com amplitude referente ao valor recebido por ele. Esse sinal após passar por uma etapa de ganho de corrente é aplicado aos tactores, dispositivos responsáveis por atuar na estimulação vibrotátil da pele (MICROCHIP, 2009).
Baseado em teste e análises efetivadas constatou-se o correto funcionamento de todas as etapas do circuito, dentre as analógicas e as digitais, gerando uma estimulação confiável e um sistema de boa estabilidade de funcionamento. REFERÊNCIAS BIBLIOGRÁFICAS ALEXANDER, Charles K.; SADIKU, Matthew N. O. Fundamentos de
circuitos elétricos. Porto Alegre: Bookman, 2003.
CATHEY, Jimmie J. Dispositivos e circuitos eletrônicos. Coleção Shaum, 2ª ed. Porto Alegre: Bookman, 2002.
CUNHA, José Carlos; CENDON, Rodrigo Villaverde; NOHAMA, Percy. Tecnologias assistivas para indivíduos surdo-cegos. Jornal Brasileiro de Neurocirurgia, v. 20, nº 1, p. 53-72, jan. 2009. DEFICIÊNCIA AUDITIVA. Fiocruz, 2008. Disponível em <http://www.fiocruz.br /biosseguranca/Bis/infantil/deficiencia-auditiva.htm>, acesso em 2 set. 2009. HAASE, Vitor Geraldi; LACERDA, Shirley Silva. Neuroplasticidade, variação interindividual e recuperação funcional em neuropsicologia. Temas de Psicologia da Sociedade Brasileira de Psicologia, v. 12, nº 1, 28-42. 2004. HAYKIN, Simon; VEEN, Barry Van. Sinais e sistemas. São Paulo: Bookman, 1999. LENT, Roberto. Cem bilhões de neurônios. São Paulo: Atheneu, 2001. MICROCHIP. 2009. Disponível em <http://ww1.microchip.com /downloads/en/DeviceDoc/ 0103 2f.pdf>, acesso em 2 nov. 2009. MONTAGU, Ashley. Tocar: o significado humano da pele. 9ª ed. São Paulo: Summus Editorial, 1988. TIPOS DE DEFICIÊNCIA. Campanha Nacional da Saúde Auditiva. Sociedade Brasileira de Otologia. 2009. Disponível em <http://www.saudeauditiva.org.br/ novo_site/index.php?s=sobre_audicao.php> , acesso em 1 nov. 2009.
ANEXO B: Manual do Sistema
Sistema Vibrotátil para Auxiliar Deficientes Auditivos no Aprendizado da Vocalização
Manual
Sistema Vibrotátil

43
Aviso Legal
Esta publicação, incluindo todas as imagens, é de propriedade intelectual dos alunos
formandos da Universidade Positivo do curso de Engenharia da Computação Cretan Pires de
Oliveira e Rafael Pustilnick. Nenhum conteúdo deste manual pode ser reproduzido sem o
expresso consentimento dos alunos.
44
ÍNDICE
Introdução .......................................................................................................... 45
Equipamento....................................................................................................... 46

45
Introdução
Este manual visa orientar o manuseio do sistema vibrotátil para auxiliar deficientes
auditivos no aprendizado da vocalização para que o instrutor ou o fonoaudiólogo possa
utilizar corretamente o equipamento.
O sistema foi projetado para enviar amostras de áudio ao deficiente auditivo por meio
de um microfone, computador, celular ou qualquer dispositivo capaz de fornecer amostras de
áudio. Esta amostra é processada pelo sistema, gerados os valores de amplitude e estes serão
aplicados ao portador de necessidade especial por meio dos tactores. O deficiente auditivo
após receber o estímulo, tentará reproduzi-lo no microfone para que o áudio fornecido por ele
seja também processado e gerado os valores de amplitude que serão aplicados no PNE para
que seja possível comparar com o exemplo inicial.
46
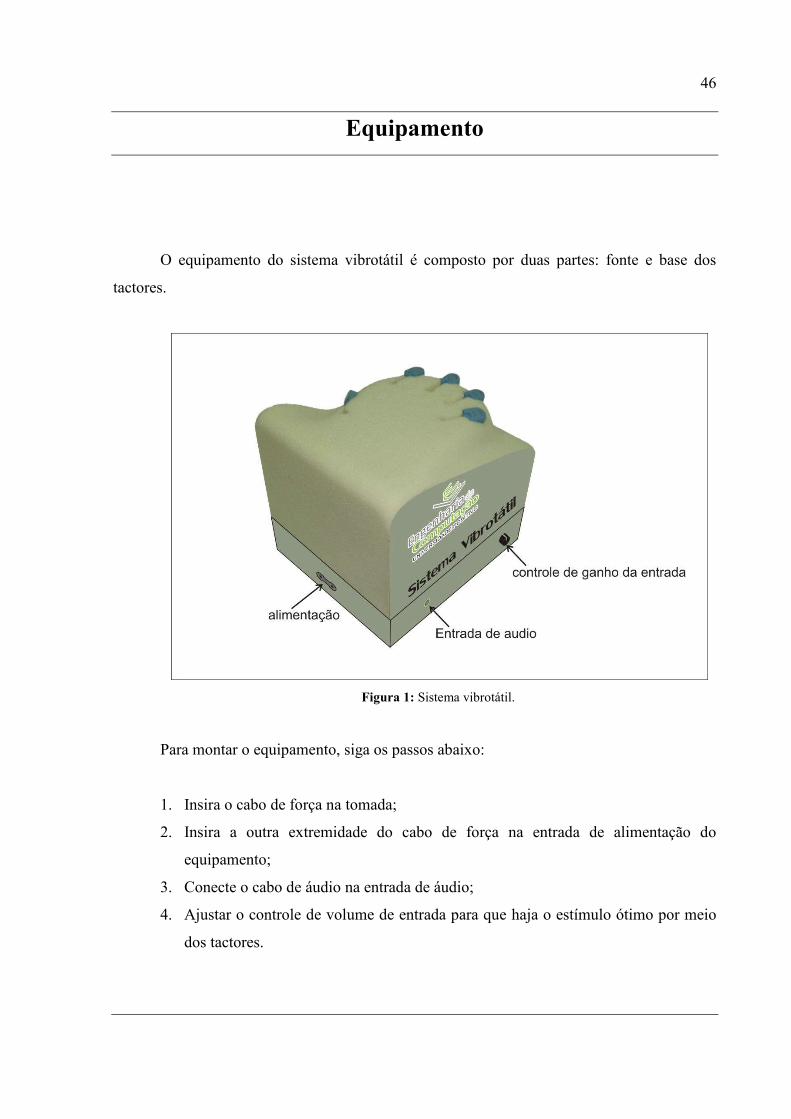
Equipamento
O equipamento do sistema vibrotátil é composto por duas partes: fonte e base dos
tactores.
Figura 1: Sistema vibrotátil.
Para montar o equipamento, siga os passos abaixo:
1. Insira o cabo de força na tomada;
2. Insira a outra extremidade do cabo de força na entrada de alimentação do
equipamento;
3. Conecte o cabo de áudio na entrada de áudio;
4. Ajustar o controle de volume de entrada para que haja o estímulo ótimo por meio
dos tactores.

47
Para que o usuário receba o estímulo vibrotátil posicione os dedos da mão direita
na base que transmitirá o estímulo vibrotátil conforme abaixo:
a. Dedo polegar;
b. Dedo indicador;
c. Dedo médio;
d. Dedo anelar;
e. Dedo mínimo.
Figura 2: Base dos tactores.
Figura 3: Base dos tactores com o usuário.