sistema de projeÇÃo de vista em corte por … · i sbai -unesp -rio claro/sp -brasil sistema de...
TRANSCRIPT
I SBAI - UNESP - Rio Claro/SP - Brasil
SISTEMA DE PROJEÇÃO DE VISTA EM CORTE POR COMPUTADOR
Prof. Dr. CLAUDIO DA ROCHA BRITO JAMIL KALIL NAUFAL JÚNIOR ALEXANDRE FERNANDES DE MORAES
Escola Politécnica da Universidade de São Paulo - EPUSP Depto. de Engenharia de Computação e Sistemas Digitais Av. Professor Luciano Gualberto - travessa 3 - nº 158 Cidade Universitária "Armando Salles de Oliveira" CEP 05508 - 900 - São Paulo - SP - Brasil E-Mail: [email protected]
RESUMO
O Sistema de PROJEÇÃO de vistas em corte por computador e um protótipo que visa permitir a retroprojeção de vistas em corte de conjuntos mecanlCOS diversos. As imagens reproduzidas são imagens espaciais de cortes transversais de tais conjuntos mecânicos. Assim tal protótipo e de grande auxílio a equipes de desenvolvimento de equipamentos mecânicos, pois permite um estudo minucioso de seus projetos, bem como o armazenamento em forma de banco de dados de imagens gráficas de seus projetos que podem ser reproduzidos através de CAD/CAM no momento da fabricação. O Sistema apresenta-se de grande auxílio a qualidade de produto, pois possibilita identificação de defeitos originados no fabricação dos equipamentos.
setores de uma fácil
momento da
O Sistema de PROJEÇÃO de imagens em corte por computador apresenta grande variedade de aplicações além das apresentadas acima, nas quais serão futuramente utilizadas.
1 INTRODUÇÃO
Basicamente o Sistema de PROJEÇÃO de vistas em corte por computador, reproduz imagens de perfis de conjuntos mecânicos em vista transversal. O sistema utiliza raios X como emissor, o qual é absorvido em níveis diferentes dependendo da espessura e do material que é composto cada elemento dentro do conjunto mecânico em análise. Para tanto um feixe colimado, bastante estreito define um plano vertical no conjunto mecânico, tão fino quanto ao próprio feixe. A radiação é aumentada para vários feixes colimados paralelos, formando um facho estreito, em forma de leque, podendo cobrir toda área que interessa do conjunto mecânico. A radiação que carrega as informações de imagens é enviada a um conjunto de transdutores, tendo se uma seqüência de sinais elétricos, que são processados por meio de um computador, e apresentado em um terminal de vídeo. O facho varre um palmo vertical de área para onde esta direcionado.
- 3Rl -
I SBAI - UNESP - Rio Claro/SP - Bras il
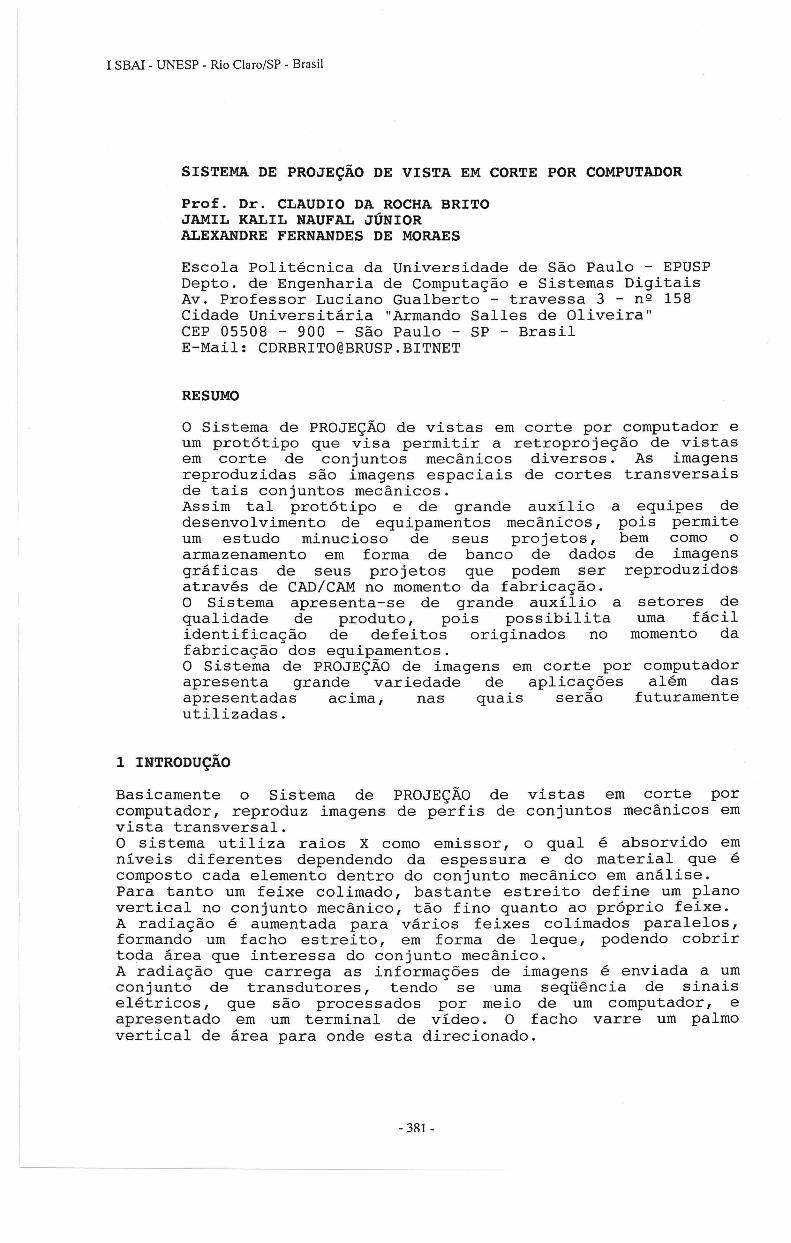
o sistema deve efetuar sua aplicação de raios X em vários ângulos, em torno do conjunto mecânico; com isso, teremos uma imagem espacial daquele plano, que poderá ser reconstruída matematicamente pelo computador. Desta forma com a ajuda do computador poderá se localizar vistas internas de conjuntos mecânicos como máquinas e equipamentos de formas variadas utilizando uma única varredura, modificando o contraste entre áreas, alterando a resolução de imagens, ampliando determinadas regiões com qualquer formato, sempre com indicação do tamanho da área; sobrepor setas e cursores indicativos e grades; e, depois de selecionar as imagens desejadas, passa-las diretamente a uma máquina reprodutora, que imprimirá em papel ou película. A figura 1.1 apresenta o principio básico de medição.
TUBO DE RAll'J X
PEÇA I~Edt-lICA
Figura 1.1 Funcionamento Básico do Sistema de projeção de Vistas em Corte por Computador
2 PRINCÍPIO DE OPERAÇÃO
o tubo de raios X e o detector, rigidamente acoplados, giram em torno do conjunto mecânico. O sistema, assim, realiza várias projeções angulares, sendo a dosagem de radiação muito pequena. Com o auxílio de colimadores, consegue-se um feixe finíssimo de radiação, que o detector converte em sinais elétricos. Estes, por sua vez, são amplificados e em seguida convertidos em sinais digitais, para que o computador possa manipula-los mais facilmente. O computador, por fim, recebe esses dados transformados, processa-os e os transforma em imagens, montada ponto por ponto em um terminal de vídeo e apresentado numa gradação de tons cinza. A imagem por fim é transformada em uma figura colorida, num terminal especial, que estabelece para cada tom de cinza uma cor determinada.
- 382-
I SBAI - UNESP - Rio Claro/SP - Brasil
3 O SISTEMA DE MEDIÇÃO
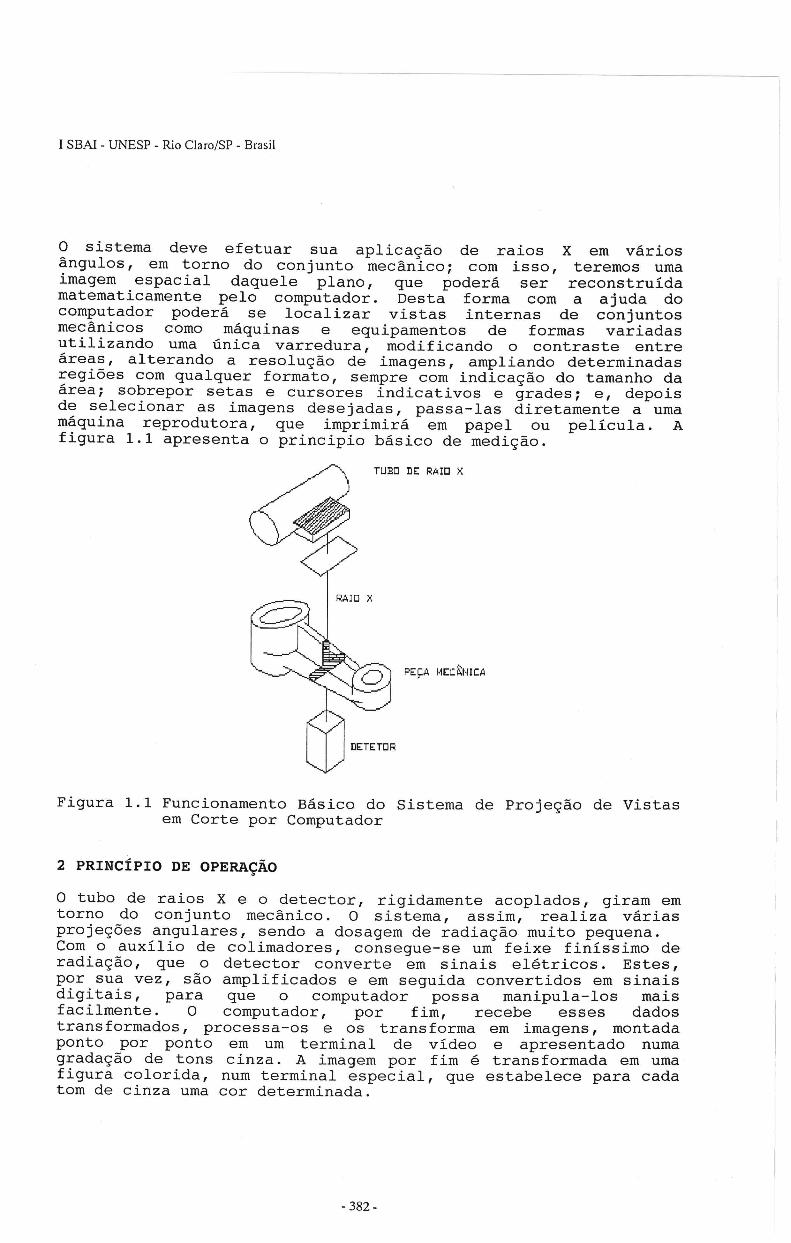
o esquema mostrado é apenas uma simplificação, sendo que os detectores contam-se às centenas e o feixe é sempre em forma de leque. Além disso, a parte de medição, é formada por uma câmara. E, por fim, não estão representadas as memorlas externas do sistema, compostas por discos e fitas magnéticas, cuja função é armazenar as imagens obtidas. A figura 3.1 nos mostra o princípio de medição comum ao sistema.
Figura 3.1 Varredura em Vários Ângulos é o Princípio Básico do Sistemas de Projeção de vistas em Corte
o conjunto mecânico é varrido por um feixe colimado, em forma de leque, sob vários ângulos, essa varredura é efetuada num espaço de 360 graus. A cada ângulo de varredura é feita uma medição completa da área visada, e os detectores recebem a informação dos fatores de absorção ali encontrados; para cada "corte" efetuado, o sistema recolhe mais de cem mil níveis de absorção, sob a forma de sinais elétricos. A medida que a exploração vai evoluindo, reunindo medições sobre todos os ângulos, o computador recebe esses milhares de níveis diferentes de absorção e os processa para formar uma matriz, que é guardada em sua memória; essa matriz de níveis vai se transformar, depois, numa outra com milhares de elementos de imagem, na tela do monitor. Na figura 3.2 é apresentado o Sistema com seus componentes principais.
- 383-
I SBAI - UNESP - Rio Claro/SP - Brasil
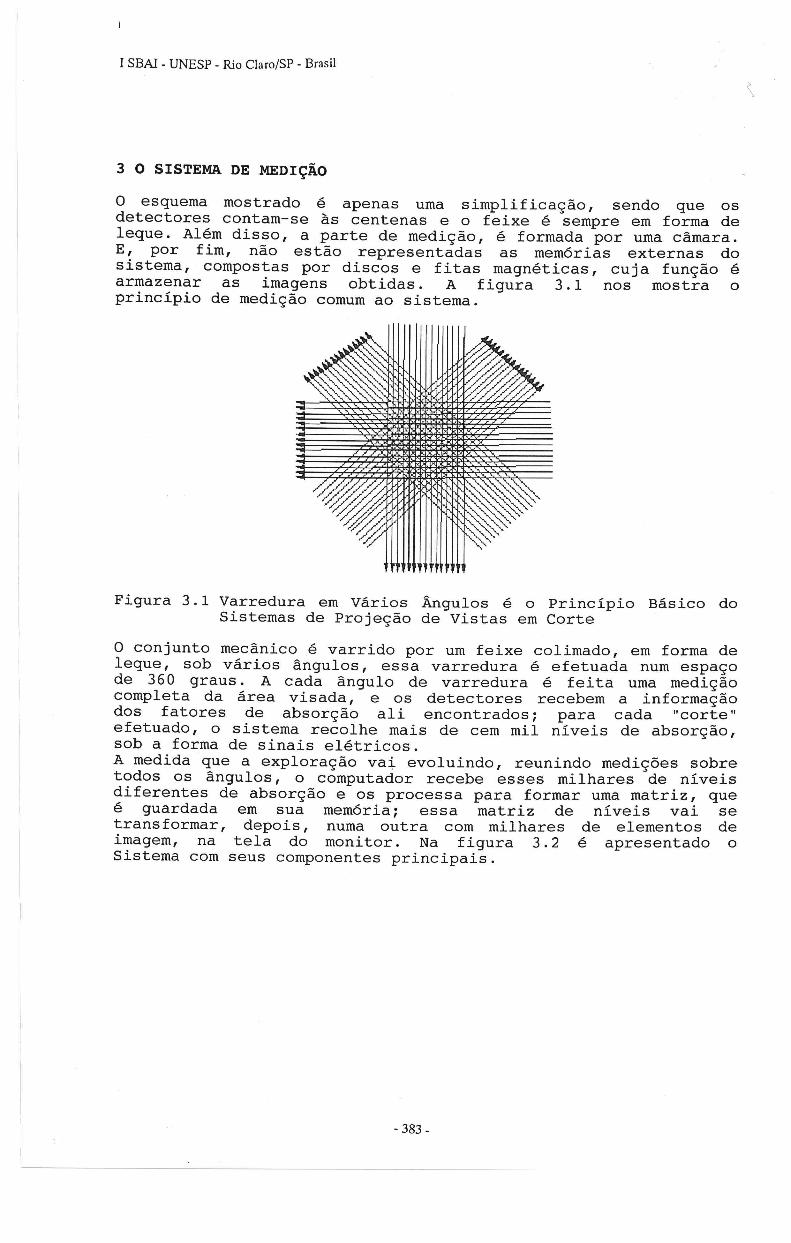
Figura 3.2 Esquema Básico de um Sistema de Projeção de Vistas em Corte por Computador com seus Componentes Principais
Existem várias formas de se realizar a varredura, que podem ser vistas na figura 3.3, juntamente com algumas de suas características principais.
DE:TE:TOR S:IMPLE:S: DET. MUL TIPLOS: M LEQUE
A E c D
Figura 3.3 Modos de Medição Utilizados Pelo Sistema de Projeção de Vista em Corte por Computador
M O D O A B C D
TEMPO DE MEDIÇÃO 5 MINUTOS 20/60 seg 1 a 5 seg 1 a 5 seg
PRINCIP. MEDIÇÃO TRANSLAÇÃO E ROTAÇÃO ROTAÇÃO
SIST. DETECTORES DETECTORES E T.M6vEIS D.ESTACION D.T.M6vEIS
FONTE RAIO X PROJEÇÃO PARALELA PROJEÇÃO CENTRAL
TIPO PROJEÇÃO ANGULARES NO SISTEMA DE RADIAÇ.
FONTE DE RAIO X RADIAÇÃO CONTÍNUA R.PULSADA
VALORES MEDIDOS AMOSTRA FEITA PELOS DETECTORES No.DETECT.
Tabela 3.1 Parâmetros dos Modos de Medição Utilizados Pelo Sistema de Projeção de Vista em Corte por Computador
- 384-
I SBAI - UNESP - Rio Claro/SP - Brasil
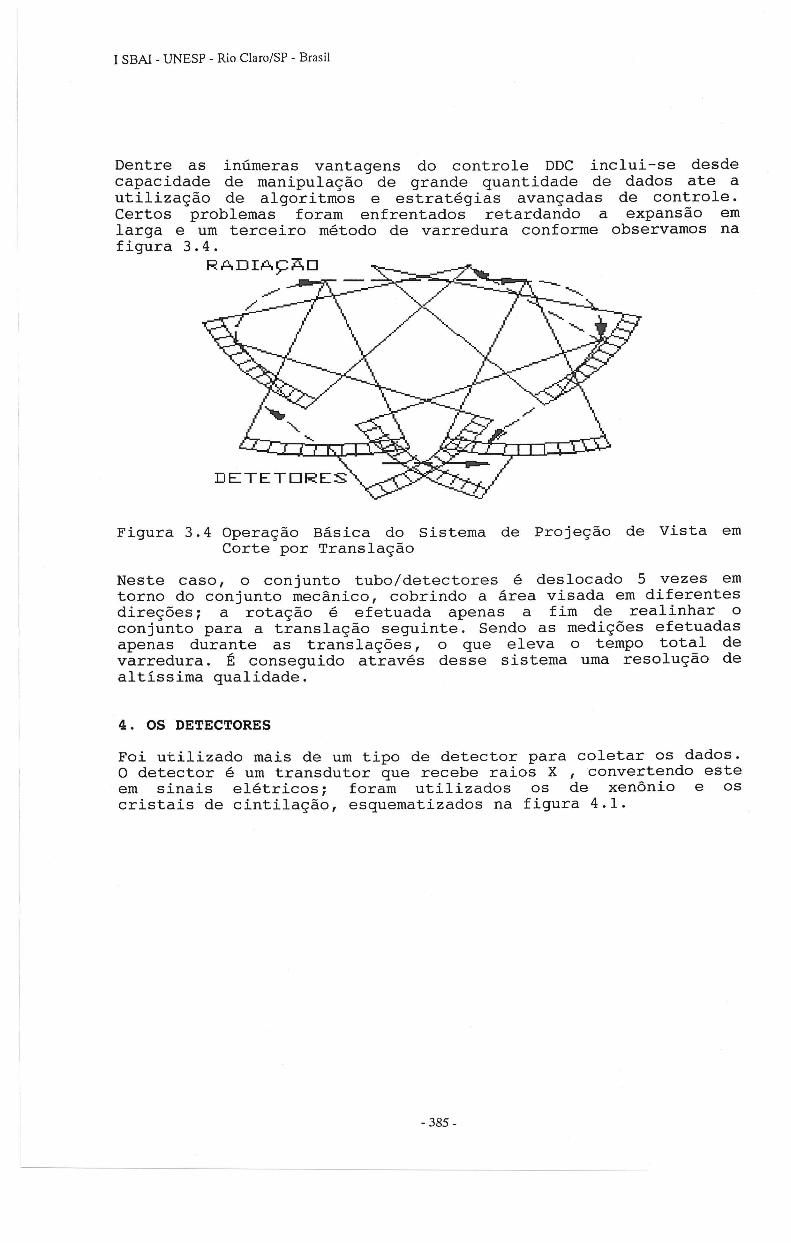
Dentre as inúmeras vantagens do controle DDC inclui-se desde capacidade de manipulação de grande quantidade de dados ate a utilização de algoritmos e estratégias avançadas de controle. Certos problemas foram enfrentados retardando a expansão em larga e um terceiro método de varredura conforme observamos na figura 3.4.
RADIA~ÃD
DETETDRES
Figura 3.4 Operação Básica do Sistema de Projeção de Vista em Corte por Translação
Neste caso, o conjunto tubo/detectores é deslocado 5 vezes em torno do conjunto mecânico, cobrindo a área visada em diferentes direções; a rotação é efetuada apenas a fim de realinhar o conjunto para a translação seguinte. Sendo as medições efetuadas apenas durante as translações, o que eleva o tempo total de varredura. t conseguido através desse sistema uma resolução de altíssima qualidade.
4. OS DETECTORES
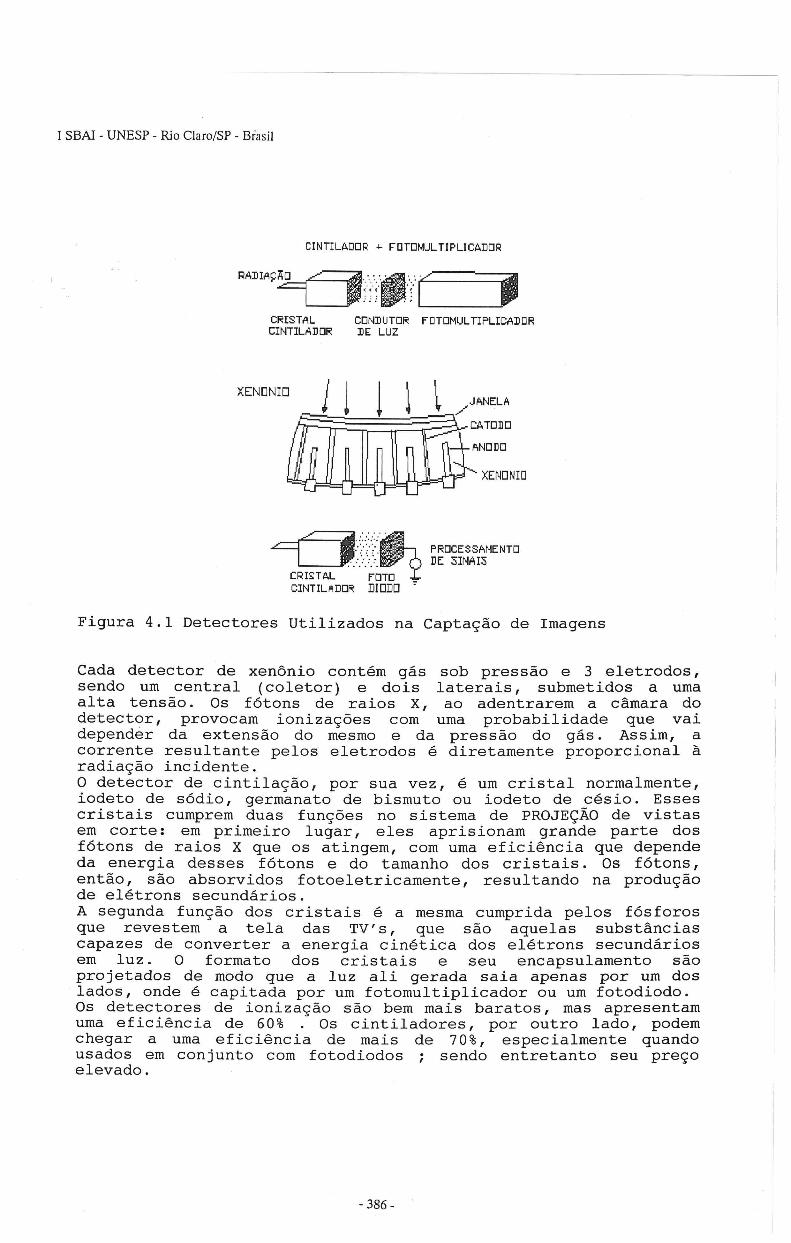
Foi utilizado mais de um tipo de detector para coletar os dados. O detector é um transdutor que recebe raios X , convertendo este em sinais elétricos; foram utilizados os de xenônio e os cristais de cintilação, esquematizados na figura 4.1.
- 385-
I SBAI - UNESP - Rio Claro/SP - Brasil
CINTILADOR .j... FOTOMUL TIPLICADOR
CR!STAL CON]UTOR FOTOMULTIFL!CA]OR CINTILADOR ][ LUZ
XENONID
./ ' :':'::P2 ~ . . . . . CRISTAL FOTO CINTILADOR DIODO ~
XENONID
PROCE SSAMENTO DE SINAIS
Figura 4.1 Detectores Utilizados na Captação de Imagens
Cada detector de xenonlO contém gás sob pressão e 3 eletrodos, sendo um central (coletor) e dois laterais, submetidos a uma aI ta tensão. Os fótons de raios X, ao adentrarem a câmara do detector, provocam ionizações com uma probabilidade que vai depender da extensão do mesmo e da pressão do gás. Assim, a corrente resultante pelos eletrodos é diretamente proporcional à radiação incidente. O detector de cintilação, por sua vez, é um cristal normalmente, iodeto de sódio, germanato de bismuto ou iodeto de césio. Esses cristais cumprem duas funções no sistema de PROJEÇÃO de vistas em corte: em primeiro lugar, eles aprisionam grande parte dos fótons de raios X que os atingem, com uma eficiência que depende da energia desses fótons e do tamanho dos cristais. Os fótons, então, são absorvidos fotoeletricamente, resultando na produção de elétrons secundários. A segunda função dos cristais é a mesma cumprida pelos fósforos que revestem a tela das TV's, que são aquelas substâncias capazes de converter a energia cinética dos elétrons secundários em luz. O formato dos cristais e seu encapsulamento são projetados de modo que a luz ali gerada saia apenas por um dos lados, onde é capitada por um fotomultiplicador ou um fotodiodo. Os detectores de ionização são bem mais baratos, mas apresentam uma eficiência de 60% Os cintiladores, por outro lado, podem chegar a uma eficiência de mais de 70%, especialmente quando usados em conjunto com fotodiodos ; sendo entretanto seu preço elevado.
- 386-
I SBAI - UNESP - Rio Claro/SP - Brasil
5. ANÁLISE MATEMÁTICA
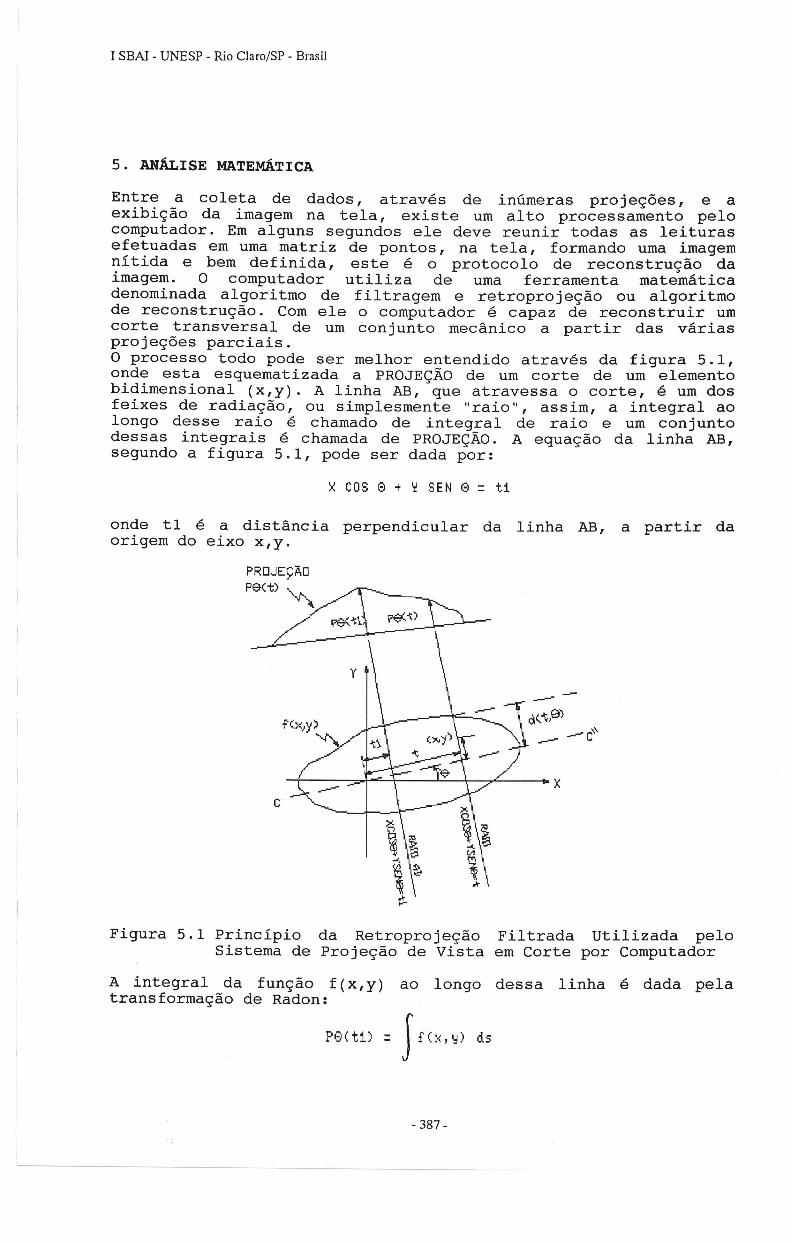
Entre a coleta de dados, através de inúmeras projeções, e a exibição da imagem na tela, existe um alto processamento pelo computador. Em alguns segundos ele deve reunir todas as leituras efetuadas em uma matriz de pontos, na tela, formando uma imagem nítida e bem definida, este é o protocolo de reconstrução da imagem. O computador utiliza de uma ferramenta matemática denominada algoritmo de filtragem e retroprojeção ou algoritmo de reconstrução. Com ele o computador é capaz de reconstruir um corte transversal de um conjunto mecânico a partir das várias projeções parciais. O processo todo pode ser melhor entendido através da figura 5.1, onde esta esquematizada a PROJEÇÃO de um corte de um elemento bidimensional (x,y). A linha AB, que atravessa o corte, é um dos feixes de radiação, ou simplesmente "raio", assim, a integral ao longo desse raio é chamado de integral de raio e um conjunto dessas integrais é chamada de PROJEÇÃO. A equação da linha AB, segundo a figura 5 . 1, pode ser dada por:
~ cos e + ~ SEN e = ti
onde tI é a distância perpendicular da linha AB, a partir da origem do eixo x,y.
-+------~~~----~-4--~----~ x
Figura 5 . 1 Princípio da Retroprojeção Filtrada Utilizada pelo Sistema de Projeção de Vista em Corte por Computador
A integral da função f (x,y) ao longo dessa linha é dada pela transformação de Radon:
P0(t1l = J f (x, y) ds
- 387-
I SBAI - UNESP - Rio Claro/SP - Brasil
__ ~ +00 J +00 P0 ( ti)
-(() -cQ
f ( x , y ) 6 CxCOS0+'tSEN0-H) dxdy
Essa fórmula indica que a função P0(t) define a PROJEÇÃO paralela de f(x,y) para um determinado ângulo 0. A totalidade de projeções, portanto, vai permitir a reconstrução da função original, segundo a equação:
(II f (x ,y ) = J Q0 <>':C OS0+'t'SEH0) de
o
onde ,0_ ,chamada de PROJEÇÃO filtrada, esta relacionada com a PROJEÇAO P0(t) da seguinte forma:
Q0<t) = P0( o;:) h( t-o;: ) do;:
onde h(t), por sua vez, é a chamada inversa de Fourier da função jwJ, no domínio da frequência, por toda a banda passante do sistema. Podemos dizer que w é a fr~quência além da qual a energia espectral, em qualquer PROJEÇAO, pode ser considerada nula. Se a dimensão t for medida em centímetros, w será medida em ciclos/cm. Baseado nessas equações, o computador realiza a implementação digital do algoritmo de reconstrução, em duas etapas principais: filtragem e retroprojeção. O processo de filtragem é feito por convolução matemática, através da equação já apresentada. A filtragem ou convolução, corno também é chamada, tem corno principal objetivo realçar a nitidez da imagem final, sendo aplicada antes da retroprojeção final. A necessidade dessa filtragem pode ser percebida intuitivamente, ao observarmos corno cada vista retroprojetada de um determinado ponto do objeto contribui com valores positivos para a área que circunda aquele ponto, com amplitude cada vez menores quanto maiores forem as distâncias "t" . Sendo assim, a imagem reconstruída por meio de urna retroprojeção simples jamais é de urna perfeita cópia do original, aparecendo toda borrada ou desfocada. Para que a imagem apareça nítid~, os dados de transmissão devem ser modificados pela INTRODUÇAO de valores negativos, que cancelem parte dos positivos criados pela retroprojeção. Essa é urna verdadeira filtragem espacial, obtida através de um processo de integração (a convolução), que convolui os valores originais de cada PROJEÇÃO por intermédio de um conjunto de valores conhecido corno "função filtragem" ou "núcleo de convolução". Urna vez filtrada, a PROJEÇÃO pode ser apresentada, surgindo com urna definição quase perfeita.
- 388-
I SBAI- UNESP - Rio Claro/SP - Brasil
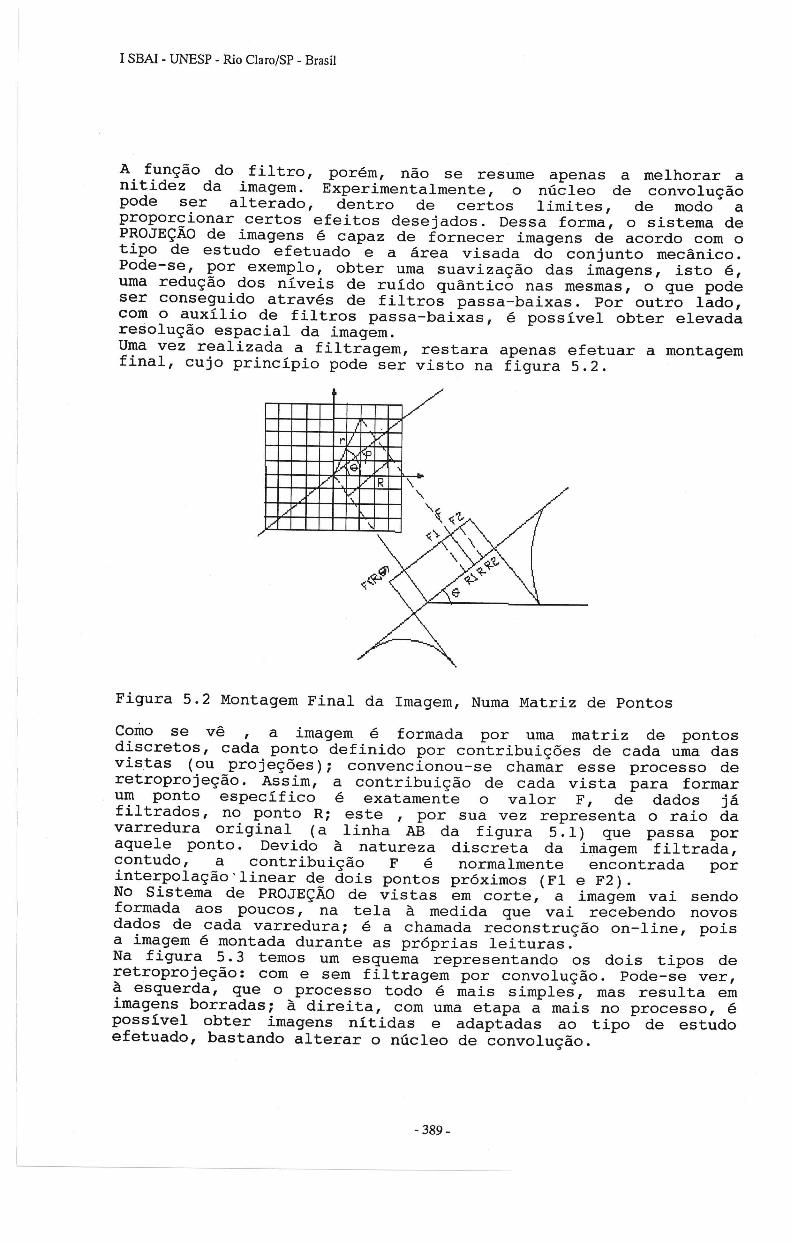
A função do filtro, porém, não se resume apenas a melhorar a nitidez da imagem. Experimentalmente, o núcleo de convolução pode ser alterado, dentro de certos limites, de modo a proporcionar certos efeitos desejados. Dessa forma, o sistema de PROJEÇÃO de imagens é capaz de fornecer imagens de acordo com o tipo de estudo efetuado e a área visada do conjunto mecânico. Pode-se, por exemplo, obter uma suavização das imagens, isto é, uma redução dos níveis de ruído quântico nas mesmas, o que pode ser conseguido através de filtros passa-baixas. Por outro lado, com o auxílio de filtros passa- baixas, é possível obter elevada resolução espacial da imagem. Uma vez realizada a filtragem, restara apenas efetuar a montagem final, cujo princípio pode ser visto na figura 5.2.
Figura 5.2 Montagem Final da Imagem, Numa Matriz de Pontos
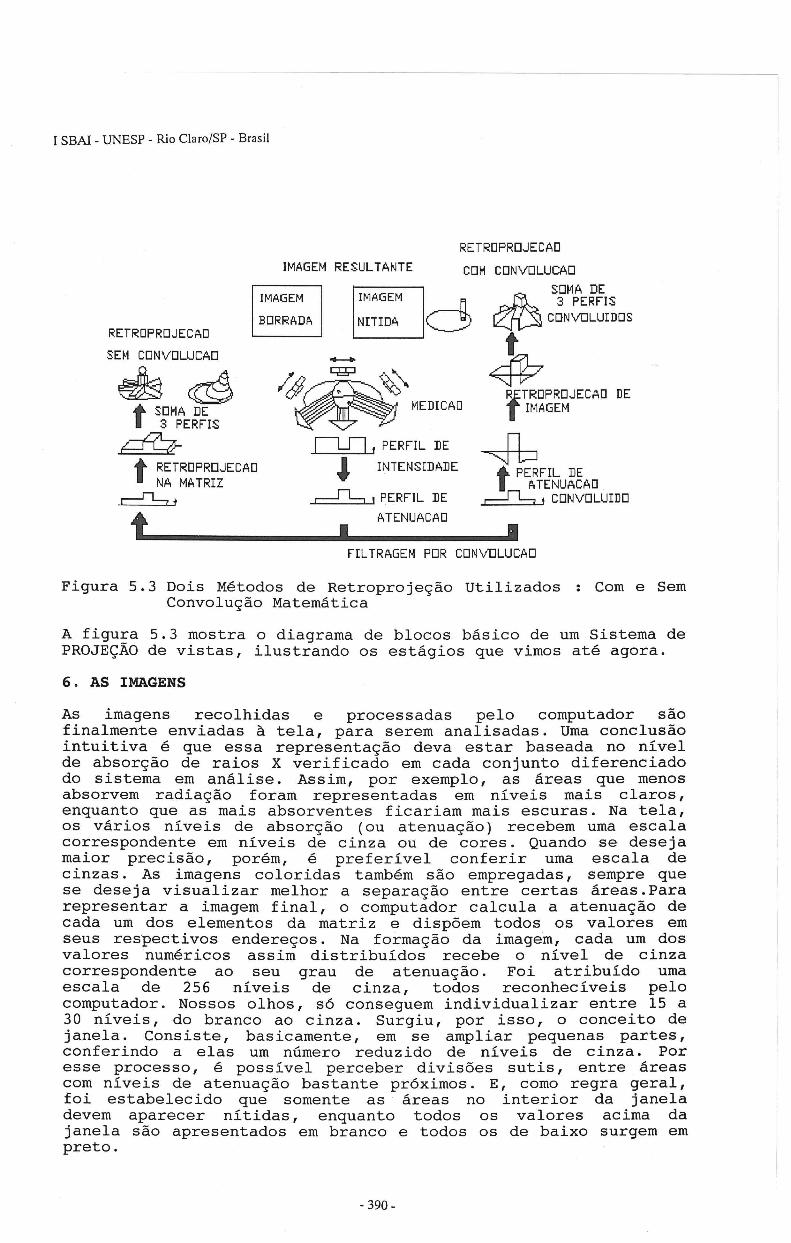
Como se vê , a imagem é formada por uma matriz de pontos discretos, cada ponto definido por contribuições de cada uma das vistas (ou projeções); convencionou-se chamar esse processo de retroprojeção. Assim, a contribuição de cada vista para formar um ponto específico é exatamente o valor F, de dados já filtrados, no ponto R; este , por sua vez representa o raio da varredura original (a linha AB da figura 5.1) que passa por aquele ponto. Devido à natureza discreta da imagem filtrada, contudo, a contribuição F é normalmente encontrada por interpolação ' linear de dois pontos próximos (FI e F2). No Sistema de PROJEÇÃO de vistas em corte, a imagem vai sendo formada aos poucos, na tela à medida que vai recebendo novos dados de cada varredura; é a chamada reconstrução on-line, pois a imagem é montada durante as próprias leituras. Na figura 5.3 temos um esquema representando os dois tipos de retroprojeção: com e sem filtragem por convolução. Pode-se ver, à esquerda, que o processo todo é mais simples, mas resulta em imagens borradas; à direita, com uma etapa a mais no processo, é possível obter imagens nítidas e adaptadas ao tipo de estudo efetuado, bastando alterar o núcleo de convolução.
- 389-
I SBAI - UNESP - Rio Claro/SP - Brasil
RETRDPRDJECAD IMAGEM RESULTANTE COt-l CONVOLUCAO
RETRDPROJECAD
SEM CONVOLUCAD
~c® t SOMA DE
3 PERFIS
~ t RETRDPRDJECAD
NA MATRIZ ~t
t
IMAGEM
BORRADA
-IMAGEM
NITIDA d
nn I PERFIL ]E J. INTENSITIA]E
db ! PERFIL ]E ATENUACAD
I
SOMA DE ~ 3 PERFIS ~ CDNVOLUIDOS
Jp ~TRDPROJECAD DE T IMAGEM
~ t PERFIL TIE
ATENUACAD ~ 4 CONVOLUIDO
• FILTRAGEM POR CONVOLUCAO
Figura 5.3 Dois Métodos de Retroprojeção Utilizados Convolução Matemática
Com e Sem
A figura 5.3 mostra o diagrama de blocos básico de um Sistema de PROJEÇÃO de vistas, ilustrando os estágios que vimos até agora.
6. AS IMAGENS
As imagens recolhidas e processadas pelo computador são finalmente enviadas à tela, para serem analisadas. Uma conclusão intuitiva é que essa representação deva estar baseada no nivel de absorção de raios X verificado em cada conjunto diferenciado do sistema em análise. Assim, por exemplo, as áreas que menos absorvem radiação foram representadas em niveis mais claros, enquanto que as mais absorventes ficariam mais escuras. Na tela, os vários niveis de absorção (ou atenuação) recebem uma escala correspondente em niveis de cinza ou de cores. Quando se deseja maior preclsao, porém, é preferivel conferir uma escala de cinzas. As imagens coloridas também são empregadas, sempre que se deseja visualizar melhor a separação entre certas áreas.Para representar a imagem final, o computador calcula a atenuação de cada um dos elementos da matriz e dispõem todos os valores em seus respectivos endereços. Na formação da imagem, cada um dos valores 'numéricos assim distribuidos recebe o nivel de cinza correspondente ao seu grau de atenuação. Foi atribuido uma escala de 256 niveis de cinza, todos reconheciveis pelo computador. Nossos olhos, só conseguem individualizar entre 15 a 30 niveis, do branco ao cinza. Surgiu, por isso, o conceito de janela. Consiste, basicamente, em se ampliar pequenas partes, conferindo a elas um número reduzido de niveis de cinza. Por esse processo, é possivel perceber divisões sutis, entre áreas com niveis de atenuação bastante próximos. E, como regra geral, foi estabelecido que somente as áreas no interior da janela devem aparecer nitidas, enquanto todos os valores acima da janela são apresentados em branco e todos os de baixo surgem em preto.
- 390-
I SBAI - UNESP - Rio Claro/SP - Brasil
7. OUTROS RECURSOS
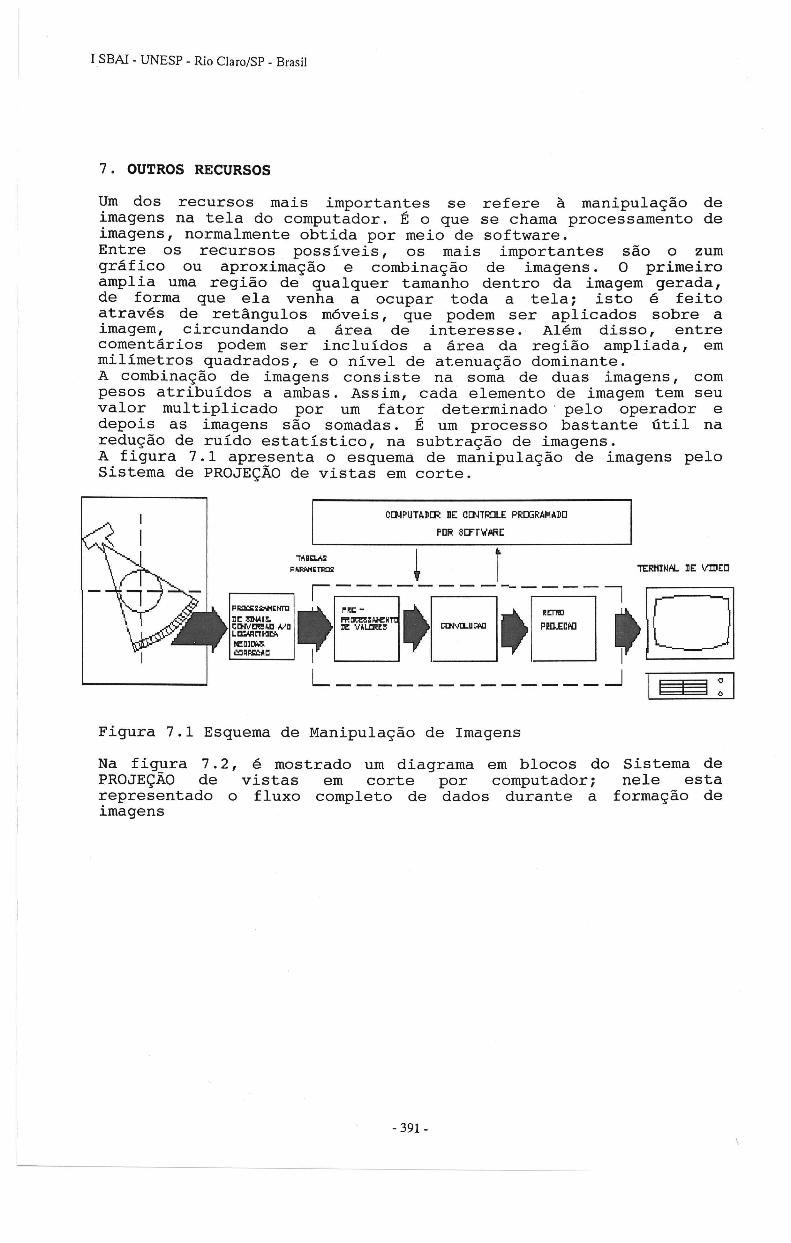
Um dos recursos mais importantes se refere à manipulação de imagens na tela do computador. É o que se chama processamento de imagens, normalmente obtida por meio de software. Entre os recursos possíveis, os mais importantes são o zum gráfico ou aproximação e combinação de imagens. O primeiro amplia uma região de qualquer tamanho dentro da imagem gerada, de forma que ela venha a ocupar toda a tela; isto é feito através de retângulos móveis, que podem ser aplicados sobre a imagem, circundando a área de interesse. Além disso, entre comentários podem ser incluídos a área da região ampliada, em milímetros quadrados, e o nível de atenuação dominante. A combinação de imagens consiste na soma de duas imagens, com pesos atribuídos a ambas. Assim, cada elemento de imagem tem seu valor multiplicado por um fator determinado ' pelo operador e depois as imagens são somadas. É um processo bastante útil na redução de ruído estatístico, na subtração de imagens. A figura 7.1 apresenta o esquema de manipulação de imagens pelo Sistema de PROJEÇÃO de vistas em corte.
c[}.tpunl1I:R DE CCNTROLE PRD:iRAM,I,DD
PD~ S[]:T\i,ilfõ!E
~ i 1--------------1 D I ,~- 8tCJ~D
TE:RHJlU ..... DE VIDE:C
L _____________ ~ ~ I I ~ .
Figura 7.1 Esquema de Manipulação de Imagens
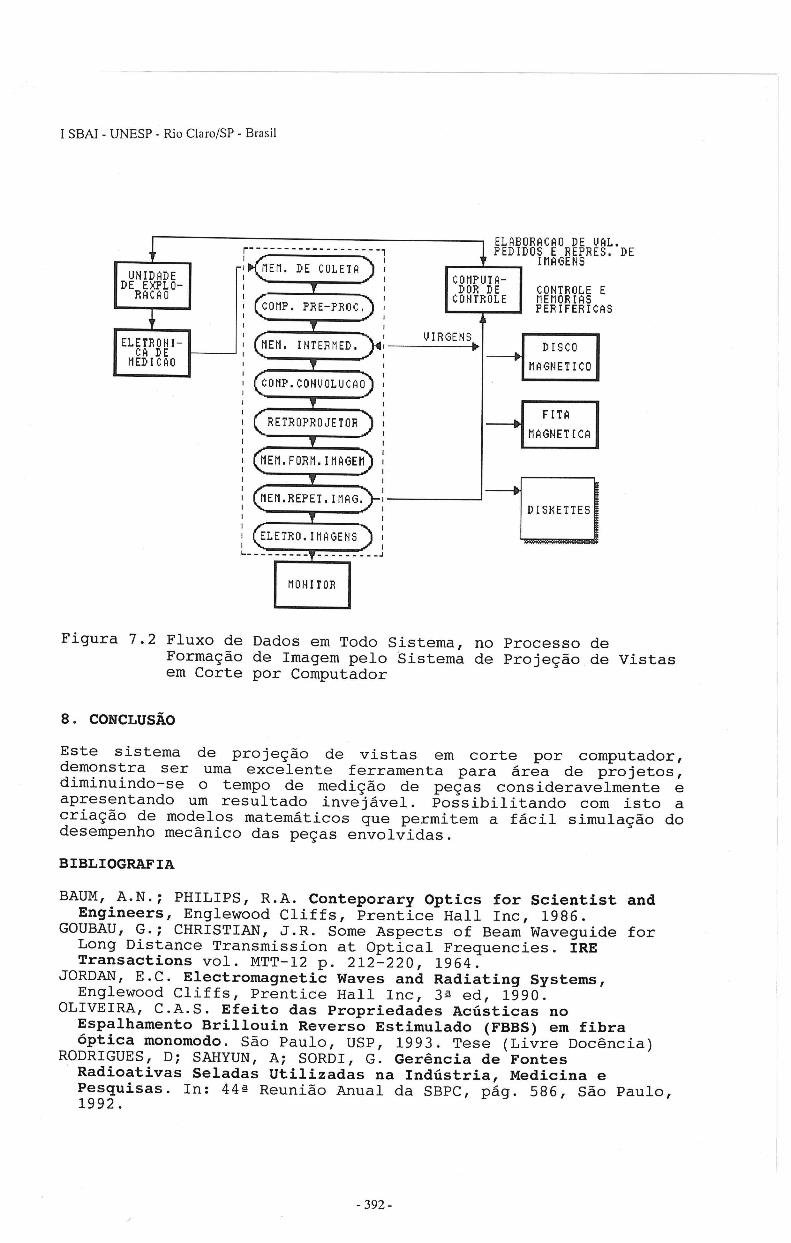
Na figura 7.2, é mostrado um diagrama em blocos do Sistema de PROJEÇÃO de vistas em corte por computador; nele esta representado o fluxo completo de dados durante a formação de imagens
- 391 -
I SBAI - UNESP - Rio Claro/SP - Brasil
UHIDADE DE EXPLO
RACAO
ELETR O H 1-CA DE J----'
MEDICA0
r-------------------, I
MOHITOR
ELABO~ACAO DE VAL. PEDIDOS E ~EPRES. DE
IMAGENS COMPUTA
DOR DE COHTROLE
VIRGEHS !lo
CONTROLE E MEMORIAS PEJUFERICAS
DISCO MAGNETICO
FITA
MAGNET ICA
D IS~ETTES
Figura 7.2 Fluxo de Dados em Todo Sistema, no Processo de Formação de Imagem pelo Sistema de Projeção de Vistas em Corte por Computador
8. CONCLUSÃO
Este sistema de projeção de vistas em corte por computador, demonstra ser uma excelente ferramenta para área de projetos, diminuindo-se o tempo de medição de peças consideravelmente e apresentando um resultado invejável. Possibilitando com isto a criação de modelos matemáticos que permitem a fácil simulação do desempenho mecânico das peças envolvidas.
BIBLIOGRAFIA
BAUM, A.N.; PHILIPS, R.A. Conteporary Optics for Scientist and Engineers, Englewood Cliffs, Prentice Hall Inc, 1986.
GOUBAU, G.; CHRISTIAN, J.R. Some Aspects of Beam Waveguide for Long Distance Transmission at Optical Frequencies. IRE Transactions vol. MTT-12 p. 212-220, 1964.
JORDAN, E.C. Electromagnetic Waves and Radiating Systems, Englewood Cliffs, Prentice Hall Inc, 3ª ed, 1990.
OLIVEIRA, C.A.S. Efeito das Propriedades Acústicas no Espalhamento Brillouin Reverso Estimulado (FBBS) em fibra óptica monomodo. São Paulo, USP, 1993. Tese (Livre Docência)
RODRIGUES, D; SAHYUN, Ai SORDI, G. Gerência de Fontes Radioativas Seladas Utilizadas na Indústria, Medicina e Pesquisas. In: 44ª Reunião Anual da SBPC, pág. 586, São Paulo, 1992.
- 392-/