sistema de posicionamento por satélitesulgas.usuarios.rdc.puc-rio.br/empreendimento/gps_1c.pdf ·...
TRANSCRIPT

TALES SIMÕES MATTOS- SULGAS 2012
Engenharia de Faixa de Dutos TerrestresImplantação de Faixa de Dutos
Sistema de Posicionamento por Satélite
Resumo dos conhecimentos necessários para o entendi mento e uso dos Sistemas de Posicionamento por Satélites e seus equipamentos.

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
1 Introdução
– Os sistemas de posicionamento por satélites se baseiam em uma constelação de satélites em órbita na Terra emitindo ondas de rádio, sendo captadas por receptores específicos utilizados pelos usuários na superfície terrestre.
– É necessário o mínimo de 4 satélites para se obter o posicionamento.
– O ponto de partida é o conhecimento preciso da distância entre o receptor e cada um dos satélites em órbita, obtida pelo tempo que o sinal gasta para viajar do satélite até o receptor.
– Conhecendo o momento exato que o sinal foi emitido pelo satélite e o momento que o receptor recebeu este sinal, tem-se o tempo de viagem do sinal e como o sinal viaja a velocidade da luz, pode-se calcular a distância do satélite até o receptor.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
2 Sistemas Existentes e Projetados
– GPS – Global Positioning System – EUA (em operação)
– GLONASS – Russia (parcialmente em operação)
– GALILEO – Europa (em implementação)
– COMPASS (China)
– QZSS – Quase Zenith Satellite System (Japão)
– GAGAN – Aided Geo-Stationary Satellite Audment Navigation (Índia)
TALES SIMÕES MATTOS- SULGAS 2012
Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS
– TRANSIT
• Primeiro sistema de rastreamento, implantado na déc ada de 1960.• NNSS - TRANSIT (Navy Navigation / Satellite System)
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS
– TRANSIT
• Predecessor imediato do GPS• Geoposicionamento por ondas eletromagnéticas a part ir de satélites
artificiais.• Inicialmente concebido para navegação, foi amplamen te utilizado para
aplicações geodésicas.• Composto de 08 satélites, orbitas elípticas com alt itude média de 1100 Km
• Possuía grandes problemas:- Desprovido de cobertura mundial.- Lapso de tempo considerável entre as passagens sucessivas de satélites para um mesmo ponto na terra .- Precisão: Desvio-Padrão de 1 à 10 metros, dependend o da técnica utilizada, (muito utilizado no AM, pelo IBGE ).- Período de observação: 2 à 3 dias.- Desativado em 1996.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS
– TRANSIT
• Aplicações• Demarcação de fronteiras• Impossibilidade de transporte convencional• Rede geodésica preliminar• Provou a viabilidade do GPS
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS
– TRANSIT x GPS
• Rastreamento de Satélites GPS– 1973: estudos iniciais do sistema GPS– O novo sistema deveria atender a correção dos probl emas do
sistema NNSS - TRANSIT
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS
• Os principais objetivos do GPS são:
- auxílio à navegação em três dimensões.- navegação em tempo real.- alta imunidade a interferências.- cobertura global, 24 horas por dia.- rápida obtenção das informações transmitidas pelos satélites.
• 1978: lançamento dos primeiros satélites NAVSTAR, d ando origem ao GPS como é conhecido hoje.
• 1995: foi declarado operacional ( 25 satélites ).
• O Sistema possui 3 componentes:– Componente Espacial;– Componente de Controle Terrestre;– Componente de Usuário.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS
• Componentes do Sistema Espacial
– 4 satélites sempre visíveis em qualquer parte do gl obo (15º acima do horizonte), 24h/dia, inclusive nos Pólos
– 24 satélites ativos– Órbitas elípticas (quase circulares), com 55º de inc linação em relação ao
Equador– Intervalos longitudinais de 60º– Cada órbita suporta 04 satélites, defasados de 90º– Altitude média de 20.200 Km Elipsóide próprio GRS80 associado ao
Sistema de referência WGS - 84 “World Geodetic System - 84”
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Características do Sinal do Satélite
– Os sinais GPS são gerados por osciladores atômicos de alt a estabilidade e com a seguinte configuração:
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS
• Componentes de Controle Terrestre
– Constituída por 5 estações de rastreio distribuídas ao lo ngo do globo e umaestação de controle principal;
– Esta estação de controle rastreia os satélites, atualiza as suas posiçõesorbitais, calibra e sincroniza seus relógios, atualiza periodicamente as mensagens de navegação;
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Componente do Usuário
– Inclui todos que se utilizam de receptor GPS para recebe r e converter o sinalGPS em posição, velocidade e tempo.
– Inclui ainda todos os elementos necessários neste processo como as antenas e software de processamento.
– Em termos gerais: SOMOS NÓS
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Componentes do Sistema
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Princípio de Funcionamento
• O monitoramento é baseado no raio de ação dos satéli tes.• Transmissão de sinais GPS ( códigos, portadoras e m ensagens de
navegação ).• Conhecimento preciso da órbita dos satélites.• Posicionamento com pelo menos 4 satélites, podendo- se resolver as
incógnitas X,Y,Z e T.• Para navegação aérea e marítima geralmente 3 satéli tes para resolver
X,Y e T.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Princípio de Funcionamento
– Trilateração de Satélites
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Princípio de Funcionamento
– Trilateração de Satélites
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Princípio de Funcionamento
– Trilateração de Satélites
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Satélite: Erros Orbitais
• Erros relacionados com a posição dos satélites.
• As informações orbitais são transmitidas pelos saté lites para os receptores, que podem ser pós-processadas (denomina das efemérides precisas).
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Satélite: Erros nos Relógios dos Satélites
• Apesar da precisão do relógio atômico dos satélites , este estásujeito a variações que para o sistema são signific ativas.
• Estes erros relacionados com a manipulação da frequ ência do relógio do satélite resultam em erros da ordem de 8 0 nanosegundos, correspondendo a um erro da ordem de 24 metros.
• Estes efeitos podem ser eliminados através da técni ca de posicionamento diferencial.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Satélite: Relatividade
• O relógio também varia em razão da relatividade ger al e espacial.
• Os receptores estão situados em campos gravitaciona is diferentes, além de se deslocarem em velocidades di ferentes, provocando uma aparente alteração na frequência nomi nal dos relógios dos satélites em relação aos relógios dos receptores.
• Estes efeitos são compensados, antes do lançamento dos satélites, pela redução da frequência nominal dos re lógios dos satélites e, 0,00455 Hz.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Propagação do Sinal: Refração Troposférica e Refração i onosférica
• As partículas carregadas eletricamente afetam a vel ocidade da luz e também a velocidade dos sinais de rádio do GPS.
• Essas variações podem fazer com que o receptor perc a a sintonia com o satélite, pelo enfraquecimento do sinal.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Propagação do Sinal: Multicaminhamento
• Ocorre quando o sinal ricocheteia de um lado para o utro antes de entrar no receptor.
• Os sinais podem se refletidos por superfícies incli nadas, verticais ou horizontais: ruas, árvores, lagos, veículos, etc. E assim percorrem caminhos mais longos, chegando atrasados quando com parados aos sinais diretos.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Propagação do Sinal: Perdas de Ciclos
• Quando um receptor é ligado a parte fracionária da f ase de batimento da onda portadora, ou seja, a diferença entre a portad ora recebida do satélite e sua réplica gerada no receptor, é observada, e um co ntador de ciclos inteiros é inicializado.
• No início do levantamento o número de ciclos inteir os entre o satélite e o receptor é desconhecido.
• Este número de ciclos inteiros é denominado ambígua e se não houver interrupção na contagem do número de ciclos durante a observação, este número permanece constante.
• Assim, para “resolver a ambiguidade”, ou seja, reso lver a diferença de número de ciclos entre o satélite e o receptor, são necessários alguns minutos de observação.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Propagação do Sinal: Rotação da Terra
• Torna-se necessário a correção do movimento da rota ção da Terra, uma vez que durante a propagação do sinal o sistema de coo rdenadas terrestres rotaciona em relação ao satélite.
• As coordenadas originais do satélite devem ser rota cionadas sobre o eixo Z em um ângulo alfa, definido como o produto do tempo de propagação do sinal pela velocidade de rotação da Terra.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Fontes de Erro
– Geometria dos Satélites
GEOMETRIA NÃO FAVORÁVEL GEOMETRIA FAVORÁVEL
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Classificação dos Receptores
– Navegação
• GPS de código C/A• Precisão - +-10 m
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Classificação dos Receptores
– Receptor Topográfico
• GPS de código C/A• Precisão de 30 cm a 5 cm dependendo da técnica util izada.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS• Classificação dos Receptores
– Receptor Geodésico
• GPS de ondas L1, L2 e códigos C/A e P• Precisão de 5 mm + 1 ppm
Obs: 5 mm +1 ppm => 5 mm + 1 mm por km de distância;
Logo em 10 km => 5 mm + 1 x 10 mm = 15 mm = 1,5 cm
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Introdução
– O posicionamento está relacionado à determinação das coo rdenadas X, Y, Z com relação a um referencial específico.
– Pode ser ABSOLUTO, quando associadas diretamente ao geoc entro ouRELATIVO, quando relacionadas a uma referencial materia lizado por um oumais vértices de coordenadas conhecidas. (São utilizad os mais de um receptor).
– Também pode-se classificar o posicionamento como em temp o real ou pós-processado.
– Outra classificação refere-se ao estado em que se encontr a o objeto a ser observado: em repouso (estático) ou em movimento (cinemá tico).
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento por Ponto ou Absoluto - Convencional
– Usado em navegação de baixa precisão.
– Uso de apenas um receptor.
– As coordendas são influenciadas pelos erros dos relógios e também dos erros de refração da ionosfera.
– Erro aproximado de 10 metros.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento por Ponto ou Absoluto - Preciso
– Usado com dados pós-processados.
– São corrigidos os dados espaciais dos satélites e corri gidos os erros dos relógios contidos na mensagem de navegação.
– Estas correções podem fornecer precisões abaixo do metro.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento por Ponto ou Absoluto – Alta Precisão
– Usado com dados pós-processados.
– São corrigidos os dados espaciais dos satélites e corri gidos os erros dos relógios contidos na mensagem de navegação.
– São utilizados equipamentos de dupla frequência, permi tindo precisãoabaixo do decímetro.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento Relativo
– Necessidade de dois ou mais receptores.
– Caso seja utilizado os dados de uma rede de monitoramento contínuo o usuário pode usar apenas um dispositivo e associar aos dad os disponíveisda rede.
– O conceito é de que os dois ou mais receptores envolvidos po ssam rastrear, ao mesmo tempo, dois ou mais satélites comuns.
TALES SIMÕES MATTOS- SULGAS 2012
Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
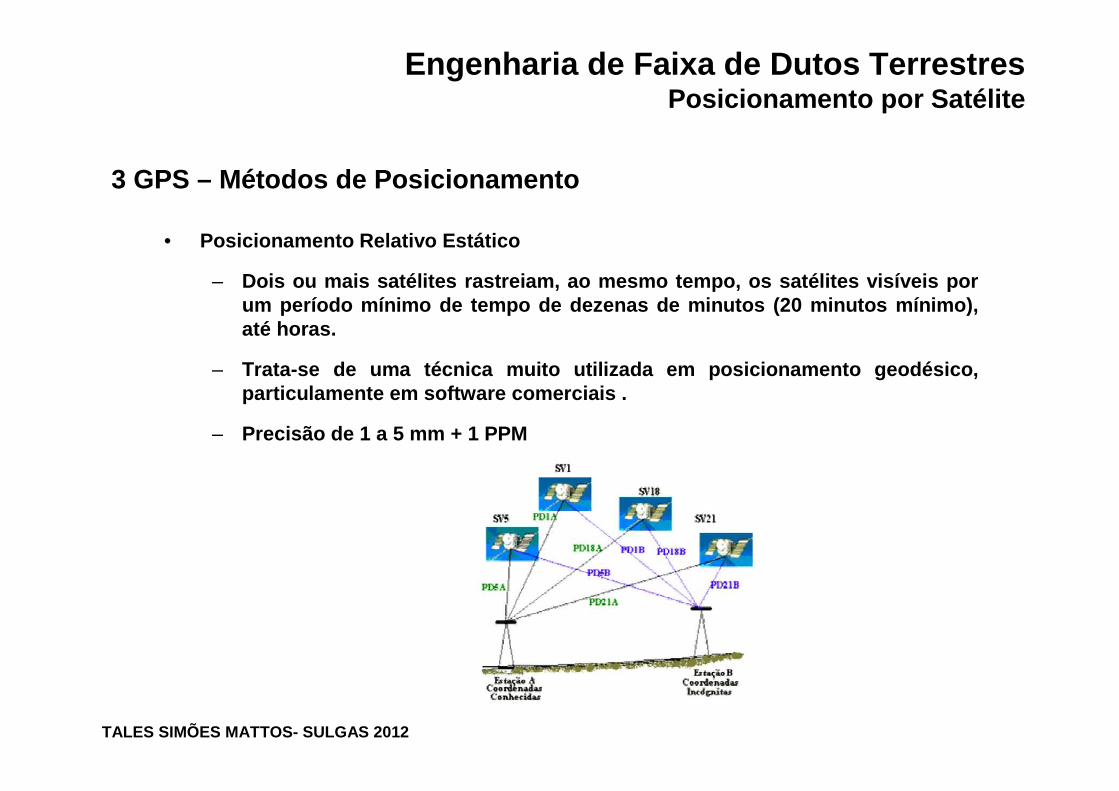
• Posicionamento Relativo Estático
– Dois ou mais satélites rastreiam, ao mesmo tempo, os satél ites visíveis porum período mínimo de tempo de dezenas de minutos (20 mi nutos mínimo), até horas.
– Trata-se de uma técnica muito utilizada em posicionament o geodésico, particulamente em software comerciais .
– Precisão de 1 a 5 mm + 1 PPM
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento Relativo Estático Rápido
– Em linhas gerais segue os mesmos procedimentos do Estátic o.
– A principal diferença está no tempo de ocupação, que f ica no máximo em 20 minutos.
– É utilizado em levantamentos em que se deseja alta produtiv idade.
– Adequado para levantamentos com linha de base de até 10 km.
– Precisão de 5 a 10 mm + 2 PPM
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento Relativo Semicinemático
– Também conhecido como pseudo-estático ou Stop and Go.
– Baseia-se na solução do vetor de ambiguidades, present e numa linha de base a determinar, requer que a geometria entre as duas esta ções e os satélites se altere..
– Este método requer que o receptor continue rastreando o s mesmos satélitesdurante as ocupações das estações.
– As coletas são separadas por um período de tempo entre 2 0 e 30 minutos.
– Um receptor está fixo e o outro está móvel, é necessário o rastreamentocontínuo, definir a ambiguidade no início e retornar à p osição inicial.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento Relativo Cinemático ou Pós-processado
– Um receptor ocupa uma estação de coordenadas conhecidas enquanto o outrose desloca sobre as feições de interesse e as observaçõ es simultâneas dos dois receptores geram duplas diferenças, onde vários erro s envolvidos sãoreduzidos.
– Baseia-se na solução do vetor de ambiguidades, present e numa linha de base a determinar, requer que a geometria entre as duas esta ções e os satélites se altere..
– Este método requer que o receptor continue rastreando o s mesmos satélitesdurante as ocupações das estações.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
• Posicionamento DGPS
– GPS diferencial, sendo muito parecido com o RTK
– A precisão do levantamento é da ordem do metro, utilizan do as pseudodistências para correção do posicionamento.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
3 GPS – Métodos de Posicionamento
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
4 GLONASS
• É um Sistema de Posicionamento geográfico, similar a o GPS, o qual conta com uma constelação de 24 satélites divididos em três órbit as. Pertence à Federação Russa.
• O primeiro satélite foi lançado em outubro de 1992.
• Os planos tem inclinação de 64,8º, sendo maior que os planos orbitais do GPS (55º).
• Da mesma forma que o sistema GPS, cada satélite GLO NASS transmite sinais em duas bandas denominadas de L1 e L2, com frequências diferentes.
•L1 = 1602 + 0,562n (MHz)
•L2 = 1246 + 0,4375n (MHz)
• Os satélites GLONASS orbitam a uma altitude de 19.1 00 km – mais baixo que o GPS (20.200 km).
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
5 GALILEO
• É o Sistema de Posicionamento Geográfico europeu, de aplicação civil, ao contrário do GPS e GLONASS.
• Pretende proporcionar maiores precisões e segurança nos dados que os sistemas GPS e GLONASS (ainda a ser comprovado).
• O sistema será inter-operável com os outros dois sis temas existentes, permitindo uma maior cobertura de satélites. Previsão de opera ção em 2010.
• O sistema completa incluirá 30 satélites (colocados em órbita a 24.000 km), dos quais três ficarão em reserva.
TALES SIMÕES MATTOS- SULGAS 2012
Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
6 REDE DE MONITORAMENTO CONTÍNUO
• O IBGE mantém uma RBMC ( Rede Brasileira de Monitor amento Contínuo) de estações GPS permanentes compostas por 9 estações.
• Cada uma tem o alcance de 500 km de raio para corre ção do código C/A e de até 50 km para correção da Fase Portadora L1.
• Com a permanente coleta de observações ela permite o cálculo contínuo das coordenadas sobre a superfície terrestre, e seus re sultados são disponibilizados na internet, nas frequências L1 e L2.
TALES SIMÕES MATTOS- SULGAS 2012

Engenharia de Faixa de Dutos TerrestresPosicionamento por Satélite
7 Posicionamento por Satélite – Referências Bibliográ ficas
•CHAVES, J. C. Notas de Aula – Disciplina de Geodésia I. Curso de Graduação em Engenharia Cartográfica. Faculdade de Ciências e Te cnologia – UNESP, Campus de Presidente Prudente. 2001.
•Marcos A. Timbó – Levantamentos Através do Sistema GP S – Departamento de Cartografia – UFMG.
•Edgar Nogueira Demarqui – Topografia II – Universidade do Estado do Mato Grosso
TALES SIMÕES MATTOS- SULGAS 2012