universidade sÃo francisco -...
TRANSCRIPT
UNIVERSIDADE SÃO FRANCISCO – USF
CENTRO DE CIÊNCIAS EXATAS E TECNOLÓGICAS
ENGENHARIA CIVIL
OTÁVIO LÚCIO DE OLIVEIRA CAMARGO
UTILIZAÇÃO DE GPS DE NAVEGAÇÃO PARA ELABORAÇÃO DE
MAPAS DE ESTRADAS RURAIS
Dezembro de 2006

OTÁVIO LÚCIO DE OLIVEIRA CAMARGO
UTILIZAÇÃO DE GPS DE NAVEGAÇÃO PARA ELABORAÇÃO DE
MAPAS DE ESTRADAS RURAIS
Monografia apresentada junto à Universidade São
Francisco – USF como parte dos requisitos para a
aprovação na disciplina Trabalho de Conclusão de
Curso.
Área de concentração: Topografia
Orientador: Susumu Morigaki
Itatiba SP, Brasil
Dezembro de 2006
ii
“Defeitos não fazem mal, quando há vontade e poder de os corrigir”.
Machado de Assis

iii
AGRADECIMENTOS
Ao concluir este trabalho, meus agradecimentos a prefeitura Municipal da Estância de
Socorro que gentilmente cedeu parte dos equipamento utilizados na concretização do
presente.
Em especial aos funcionários da Casa do Agricultor

iv
SUMÁRIO
LISTA DE FIGURAS .................................................................................................... ...vii
LISTA DE TABELAS ................................................................................................... ...ix
LISTA DE SÍMBOLOS E ABREVIATURAS............................................................ ....x
RESUMO......................................................................................................................... ...xii
PALAVRAS-CHAVE..................................................................................................... ...xii
1 INTRODUÇÃO...............................................................................................................1
1.1 O GPS............................................................................................................................1
1.2 Finalidade do material obtido.....................................................................................2
1.3 Objetivos .......................................................................................................................2
2 REVISÃO BIBLIOGRÁFICA 3
2.1 Funcionamento Do Gps ...............................................................................................3
2.1.1 Segmento Espacial ....................................................................................................3
2.1.2 Segmento De Controle ..............................................................................................5
2.1.3 Segmento De Usuário................................................................................................7
2.1.4. Receptores Gps.........................................................................................................8
2.2 Posicionamento Com Gps............................................................................................9
2.2.1 Trilateração Eletrônica ............................................................................................9
2.2.2 Posicionamento Básico..............................................................................................11
2.2.3 Calculo Do Posicionamento......................................................................................15
2.2.4 Tipos De Posicionamento .........................................................................................16
2.3 Erros Do Gps ................................................................................................................17
2.3.1 Erro Do Relógio.........................................................................................................18
2.3.2 Multicaminhamento..................................................................................................19
2.3.3 Erro Orbital...............................................................................................................19
2.3.4 Erro De Propagação .................................................................................................20
2.4 Diluição Da Precisão ....................................................................................................20
2.5 Sistemas Cartográficos ................................................................................................22
2.5.1 Superfície Terrestre ..................................................................................................22
2.5.2 Datum.........................................................................................................................24
2.5.3 Latitude E Longitude Geográfica............................................................................25
2.5.4 Sistema De Projeção ................................................................................................26

v
2.5.4.1 Sistema De Projeção Cônicas................................................................................27
2.5.4.2 Sistemas De Projeções Planas ...............................................................................27
2.5.4.3 Sistemas De Projeções Cilíndricas........................................................................28
2.6 Sistema De Coordenadas Utm ....................................................................................28
2.7 Dados Rinex..................................................................................................................31
3 METODOLOGIA DE GPS...........................................................................................33
3.1 Posicionamento Pontual ..............................................................................................33
3.2 Posicionamento Relativo ............................................................................................33
3.3 Posicionamento Em Tempo Real................................................................................34
3.4 Distâncias Entre Receptores .......................................................................................34
3.5 Gps Diferencial.............................................................................................................35
4 EQUIPAMENTOS E PROCEDIMENTOS EM CAMPO..........................................36
4.1 Descrição Dos Equipamentos......................................................................................36
4.2 Procedimento De Campo.............................................................................................38
5 CÁLCULOS EFETUADOS...........................................................................................41
5.1 Dados Do Gps Rhino 120.............................................................................................41
5.2 Dados Do Gtra E Garmin............................................................................................41
6 COMPARAÇÃO DOS RESULTADOS .......................................................................45
7 CONCLUSÃO............................................................................................ 48
8 REFERÊNCIAS BIBLIOGRÁFICAS..........................................................................49
APÊNDICE 1 – PLANTA DE ARTICULAÇÃO TRECHO 1 ......................................51
APÊNDICE 2 – ARTICULAÇÃO A TRECHO 1 ..........................................................52
APÊNDICE 3 – ARTICULAÇÃO B TRECHO 1 ..........................................................53
APÊNDICE 4 – ARTICULAÇÃO C TRECHO 1 ..........................................................54
APÊNDICE 5 – ARTICULAÇÃO D TRECHO 1 ..........................................................55
APÊNDICE 6 – ARTICULAÇÃO E TRECHO 1 ..........................................................56
APÊNDICE 7 – ARTICULAÇÃO F TRECHO 1...........................................................57
APÊNDICE 8 – ARTICULAÇÃO G TRECHO 1..........................................................58
APÊNDICE 9 – ARTICULAÇÃO H TRECHO 1..........................................................59
APÊNDICE 10 – ARTICULAÇÃO I TRECHO 1..........................................................60
APÊNDICE 11 – ARTICULAÇÃO J TRECHO 1 .........................................................61
APÊNDICE 12 - ARTICULAÇÃO K TRECHO 1........................................................62
APÊNDICE 13 - ARTICULAÇÃO L TRECHO 1 ........................................................63

vi
APÊNDICE 14 - PLANTA DE ARTICULAÇÃO TRECHO 2....................................64
APÊNDICE 15 – ARTICULAÇÃO A TRECHO 2 ........................................................65
APÊNDICE 16 – ARTICULAÇÃO B TRECHO 2 ........................................................66
APÊNDICE 17 - ARTICULAÇÃO C TRECHO 2........................................................67
APÊNDICE 18 - ARTICULAÇÃO D TRECHO 2........................................................68
APÊNDICE 19 – ARTICULAÇÃO E TRECHO 2 ........................................................69
APÊNDICE 20 – ARTICULAÇÃO F TRECHO 2.........................................................70
APÊNDICE 21 - ARTICULAÇÃO G TRECHO 2........................................................71
APÊNDICE 22 - ARTICULAÇÃO H TRECHO 2........................................................72
APÊNDICE 23 – ARTICULAÇÃO I TRECHO 2..........................................................73
APÊNDICE 24 – ARTICULAÇÃO J TRECHO 2 .........................................................74

vii
LISTA DE FIGURAS
2.1 Segmentos GPS.............................................................................................................3
2.2 Órbitas dos Satélites ....................................................................................................4
2.3 Segmento de controle GPS ..........................................................................................6
2.4 Localização na superfície com um satélite.................................................................10
2.5 Localização na superfície com dois satélites..............................................................10
2.6 Localização na superfície com dois satélites..............................................................11
2.7- Distância com dois satélites (situação ideal).............................................................13
2.8 Distância com dois satélites e erro no relógio do receptor .......................................13
2.9 Distância com três satélites (situação ideal)...............................................................14
2.10 Distância com três satélites e erro no relógio do receptor......................................14
2.11 Determinação da posição...........................................................................................15
2.12 Multicaminhamento...................................................................................................19
2.13 Alteração na propagação pela atmosfera ................................................................20
2.14 Diluição da precisão..................................................................................................21
2.15 PDOP...........................................................................................................................22
2.16 Conceito de Geóide e elipsóide..................................................................................23
2.17 Parâmetros de um elipsóide ......................................................................................23
2.18 Ajustamento de elipsóide local..................................................................................24
2.19 Visualização da latitude e longitude........................................................................25
2.20 Incremento de latitude e longitude ..........................................................................26
2.21 Transformação da superfície global para plana .....................................................26
2.22 Projeções cilindro e cone para planos ......................................................................27
2.23 Tipos de projeção cônica ...........................................................................................27
2.24 Tipos de projeções planas..........................................................................................28
2.25 Projeção cilíndrica .....................................................................................................28
2.26 Projeção UTM ............................................................................................................29
2.27 Detalhe do fuso e projeção UTM ..............................................................................30
2.28 Coordenadas UTM.....................................................................................................31
3.1 Linha Base ....................................................................................................................34
4.1 Receptor GTR-A ..........................................................................................................36
4.2 GPS Garmim Rhino 120..............................................................................................37
4.3 Garmin GPS12 .............................................................................................................37
viii
4.4 Obtenção dos dados de Campo...................................................................................38
4.5 Localização da Base Fixa.............................................................................................39
5.1 Resíduos da correção do trecho 1 – GPS Garmin.....................................................41
5.2 Resíduos da correção do trecho 2 – GPS Garmin.....................................................42
5.3 Resíduos da correção do trecho 1 – GPS GTRA.......................................................42
5.4 Resíduos da correção do trecho 2 – GPS GTRA.......................................................43
6.1 Erros absolutos em metros. Trecho 1.........................................................................45
6.2 Parte do trecho 1 ..........................................................................................................46
6.3 Parte do trecho 1 ..........................................................................................................46
6.2 Erros absolutos em metros. Trecho 2.........................................................................46

ix
LISTA DE TABELAS
2.1 Disponibilidade das efemérides precisas....................................................................7
2.2 Erros do GPS................................................................................................................18
2.3 Quantificação dos erros do GPS.................................................................................18
2.4 Elipsópide......................................................................................................................24
3.1 Média das discrepâncias..............................................................................................35
6.1 Médias dos erros obtidas no trecho 1, após o posicionamento relativo ..................45
6.2 Médias dos erros obtidas no trecho 2, após o posicionamento relativo ..................46
6.3 Médias dos erros obtidas no trecho 2, com o posicionamento relativo ...................46

x
LISTA DE SÍMBOLOS E ABREVIATURAS
Letras gregas:
φ : Latitude Geodésica
λ : Longitude Geodésica
Abreviaturas:
NAVSTAR : NAVigation Satellite with Time And Ranging
GPS : Global Position System
GNSS : Global Navigation Satellite System
GLONASS : Global Navigation Satellite System
AS : Selective Availability – Disponibilidade Seletiva
DGPS : Diferencial GPS
PRN : Pseudo Random Noise
SVID : Space Vehicle Identif
C/A : Coarse/Aquisition – Facil Aquisição
CÓDIGO P : código Precise – Precisão
AS : Anti-spoofing Anti fraude
MCS : Máster Control Station
AAF : American Air Force
NIMA : National Imagery and Mapping Agency
IGS : International GNSS Service
DOP: Diluition of Precision Diluição de Precisão
SGB : Sistema Geográfico Brasileiro
SCN : Sistema Cartográfico Nacional
SAD69 : Sout America Datum de 1969 – Datum da América do Sul de 169
SISGRA200 : Sistema Geocêntrico para as Américas de 2000
IBGE : Instituuto Brasileiro de Geografia e Estatística (IBGE).

xi
N : Norte
S : Sul
E : Leste
W : Oeste
UTM : Universal Transverse Mercator
WGS-84 : World Geodetic System of 1984- Sistema Geodésico Mundial de 1984
RINEX : Receiver Independent Exchange Format
INCRA : Instituto Nacional de Colonização e Reforma Agrária
MS-DOS : Direct Operational System
CA : Computer Aid Design
GIS: Sistema de informações Geográficas

xii
RESUMO
O trabalho aqui proposto tem por objetivo melhorar a qualidade dos dados obtidos mediante o
uso de GPS de navegação para a elaboração de plantas de eixo de estradas rurais, com a
finalidade de se preparar plantas para cadastros de pequenas propriedades e pontos notáveis
das referidas estradas, com o propósito de auxiliar uma administração municipal a gerenciar a
área rural de pequenos municípios, a um custo baixo. Para atingir este objetivo será utilizado
uma técnica de correção dos dados coletados pelos aparelhos de GPS de navegação, técnica
conhecida por posicionamento relativo. Este presente trabalho não pretende de forma alguma
substituir os GPS, com precisão sub-métrica, pelos GPS de navegação, entretanto deseja-se
melhorar a precisão obtida com a utilização dos GPS de navegação, que são de fácil operação
e apresentam um custo reduzido.
PALAVRAS-CHAVE: GPS de Navegação, Rinex, Posicionamento Relativo

1
1 INTRODUÇÃO
1.1 O GPS
O Sistema de Posicionamento Global, em inglês “Global Posicion System”, também
conhecido pela sigla NAVSTAR (NAVigation Satellite with Time And Ranging) ou
simplesmente GPS como conhecido pela população em geral, é uma das técnicas existentes
para navegação e posicionamento global denominada de “Global Navigation Satellite
System.” (GNSS). Também existem, além do GPS, o “Global Navigation Satellite System”
(GLONASS) de propriedade dos russos e o GALILEU, em implantação pelos europeus, quais
não serão abordados no presente trabalho.
Segundo Figueiredo (2005), o GPS foi concebido pelo governo americano, no ano de 1973. O
primeiro satélite foi colocado em órbita em 1978, com a finalidade de uso militar, porém na
década de 90 seu uso foi difundido para a população em geral. A função deste sistema é a de
se determinar a posição de um ponto na superfície terrestre (coordenadas geográficas e
altitude), a qualquer horário e em qualquer lugar do planeta, independentemente das
condições meteorológicas.
Inicialmente, quando foi criado este sistema, introduziu-se um aumento proposital do erro de
posicionamento dos GPS, mas em maio de 2002, o governo norte americano retirou esse erro
chamado de Selective Availability – Disponibilidade Seletiva (SA), melhorando a precisão
posicional, de aproximadamente 150 m para 30 m, valores médios apresentados pelos
aparelhos conhecidos como GPS de navegação, ou recreacional. Deve-se ressaltar que
existem outros tipos de GPS, chamados de topográficos, e geodésicos, que apresentam
precisão sub-métrica, utilizando-se uma técnica chamada de posicionamento relativo, onde se
utilizam dois GPS.
No presente trabalho aplica-se esta técnica posicionamento relativo, porém, com a utilização
de aparelhos GPS de navegação, marca Garmin, devido ao seus custos serem muito menor,
em comparação com os GPS topográficos. Esses últimos por sua vez apresentam custo menor
que os GPS chamados de geodésicos, que são os aparelhos de melhor precisão existente no
mercado. Os resultados obtidos com o GPS de navegação serão comparados com os obtidos
com os dois GPS topográficos, no caso um par de GPS modelo GTR-A da empresa nacional
Tecgeo, com a posicionamento relativo executado pelo programa chamado Ezsurv da empresa
Viasat.

2
1.2 Finalidade do material obtido
Com a precisão pretendida, os mapas, podem ser utilizados, como por exemplo, para indicar
pontos de adensamento populacional na zona rural, trechos das estradas comumente sujeitos a
degradação, otimização de coleta de lixo e transporte de alunos, auxiliando uma
administração municipal a organizar a sua operação junto a área rural, sem a necessidade de
alto investimento na elaboração da planta de uma área rural.
Estes dados de posicionamento global são de extrema importância para um Sistema de
informações Geográficas (GIS), que é uma a ferramenta de grande auxílio a qualquer
administrador público, indiferentemente da esfera em que ele atue e do tamanho do local a ser
administrado.
Pretende-se criar uma planta, de um trecho, de uma estrada municipal, localizada no
município de Socorro, estado de São Paulo.
1.3 Objetivos
O objetivo principal do presente trabalho é a elaboração de mapas de estradas rurais,
utilizando-se do “Global Posicion System” (GPS) de navegação, com uma precisão aceitável,
da ordem de 1 a 3 metros, quanto à localização dos eixos das estradas, para que, em uma
segunda etapa, possam ser indicados nestes mapas, a localização das propriedades rurais e
pontos notáveis existentes ao longo de uma estrada.

3
2 REVISÃO BIBLIOGRÁFICA
2.1 Funcionamento do GPS
O GPS é composto de três segmentos principais, como ilustrado na fig 2.1, sendo o segmento
espacial a constelação de satélites artificiais existentes na órbita da terra; o segmento de
controle, são as unidades terrestres responsáveis pela manutenção e operação do sistema, e o
segmento de usuário que é formado pelos receptores comerciais (ROCHA 2002).
Figura 2.1 – Segmentos GPS
Fonte: Figueiredo (2006)
2.1.1 Segmento espacial
O segmento espacial é composto por um grupo de 24 satélites, distribuídos em 6 planos
igualmente separados, com quatro satélites cada um, conforme Fig. 2.2, a uma altitude de
aproximadamente 20.200 km. Estes planos estão distribuídos a 55° em relação ao Equador,
formando uma constelação de satélites com órbita de 12 horas siderais. Com esta formação,
sempre é possível a captação dos sinais de pelo menos quatro satélites, a qualquer hora do dia
e em qualquer posição do globo terrestre, permitindo, assim, que o GPS possa ser usado
globalmente a qualquer hora e em qualquer local.

4
Figura 2.2 Órbitas dos Satélites
Fonte: Figueiredo (2006)
Como um dos princípios dos GPS é a medição de tempo, para que possa ser medida a
distância do ponto da superfície até o satélite, cada satélite possui relógio atômico de altíssima
precisão, baseado em pulsos atômicos de césio e rubídio.
Conforme cita Figueiredo (2005), a identificação de cada satélite faz-se mediante um sinal
conhecido por PRN (Pseudo Random Noise), que em português pode ser traduzido como
ruído falsamente aleatório ou pelo SVID (Space Vehicle Identificaton) é por meio deste sinal
que os aparelhos de GPS identificam os números dos satélites e os indicam no visor.
Publicações técnicas e os dados disponíveis na internet, geralmente utilizam o PRN para a
indicação do satélite.
Cada satélite emite dois sinais de ondas de rádio que são conhecidos por observáveis, que
apresentam duas freqüências portadoras diferentes, chamadas de L1 e L2.
O código PRN está modulado nas duas portadoras, já o sinal chamado de C/A (Coarse/
Aquisition – Facil Aquisição), está disponível apenas na portadora L1. É mediante o C/A que
os usuários civis determinam seu posicionamento, atualmente este sinal não possui
criptografia, era mediante a inserção S/A (Selectiv Availabilit – disponibilidade seletiva),
desligado em maio de 2002, no sinal C/A, que o governo norte-americano degradava a
precisão dos aparelhos de GPS.
Como citado por Mônico (2000), também, existe o código P (Precise – Precisão) de uso
restrito aos militares e usuários autorizados, o qual possui comprimento de onda menor que o
do código C/A, melhorando assim a precisão das medidas. Este código pode estar

5
criptografado, chamado então de código Y, não disponível para uso civil, este modo de
operação é denominado de modo AS (Anti-spoofing Anti fraude).
Também estão presentes nas portadoras, as mensagens de navegação que são sinais com
informações da posição do satélite a cada instante, referentes a propagação dos sinais pela
ionosfera, informações para correção dos erros dos relógios dos satélites e situação
operacional dos mesmos, esses dados são conhecidos como efemérides. Como nestas
mensagens contém a posição dos satélites e uma informação temporal, os receptores
conseguem determinar a distância entre o GPS e os satélites, e desta maneira determinam a
posição do receptor na superfície terrestre.
2.1.2 Segmento de Controle
O segmento de controle operacional (Operational Control System OCS) é composto de uma
estação principal, diversas estações de controle, localizadas próximas a linha do equador, Fig
2.3, que, segundo Albuquerque (2003), tem por finalidade executar as seguintes tarefas:
O monitoramento e controle contínuo dos satélites
Determinar o Tempo GPS
Prever as efemérides dos satélites, calcular as correções dos respectivos relógios e
atualizar sistematicamente as mensagens de navegação de cada satélite
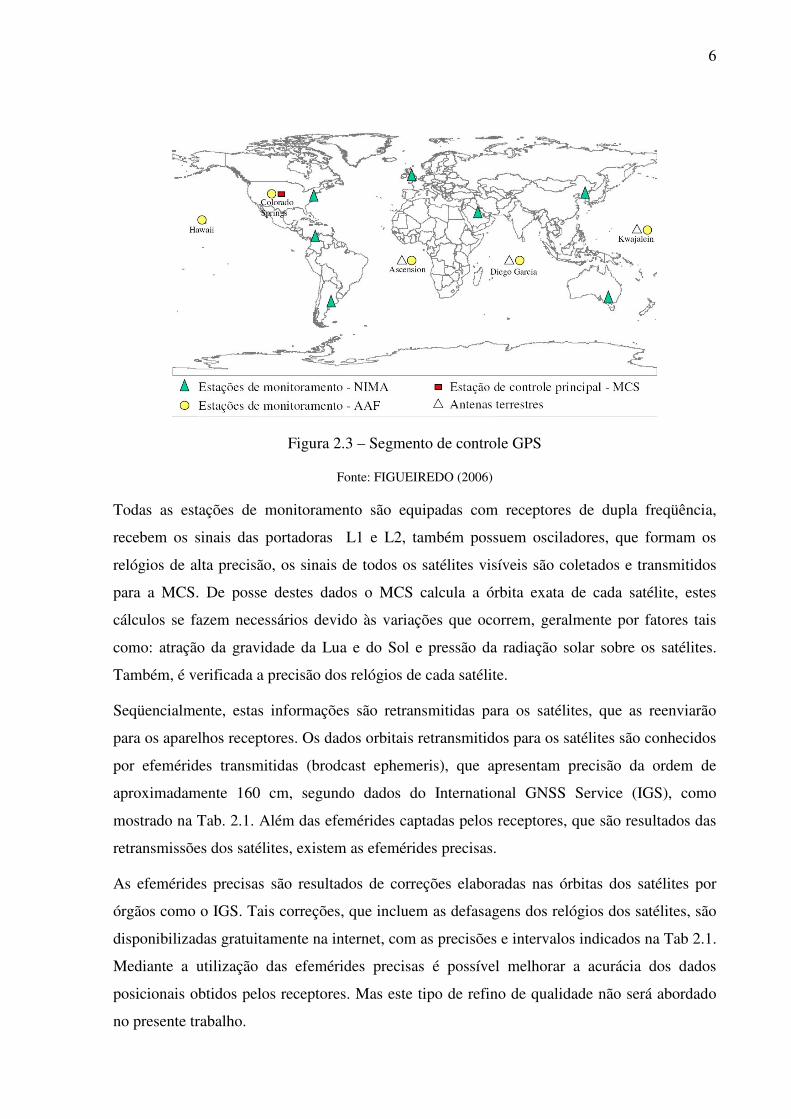
Como cita Figueiredo (2005), o sistema de controle possui uma estação principal (MCS
Master Control Station) situada em Colorado Springs, Colorado; cinco estações de
monitoramento, localizadas no Hawaii, Colorado Springs, Ascension Island, Diego Garcia e
Kwajalein, sendo que estas últimas três possuem antenas para transmissão de informações
para os satélites. Estas cincos estações são de propriedade da AAF (American Air Force).
Também existem mais sete estações de monitoramento do NIMA (National Imagery and
Mapping Agency).
6
Figura 2.3 – Segmento de controle GPS
Fonte: FIGUEIREDO (2006)
Todas as estações de monitoramento são equipadas com receptores de dupla freqüência,
recebem os sinais das portadoras L1 e L2, também possuem osciladores, que formam os
relógios de alta precisão, os sinais de todos os satélites visíveis são coletados e transmitidos
para a MCS. De posse destes dados o MCS calcula a órbita exata de cada satélite, estes
cálculos se fazem necessários devido às variações que ocorrem, geralmente por fatores tais
como: atração da gravidade da Lua e do Sol e pressão da radiação solar sobre os satélites.
Também, é verificada a precisão dos relógios de cada satélite.
Seqüencialmente, estas informações são retransmitidas para os satélites, que as reenviarão
para os aparelhos receptores. Os dados orbitais retransmitidos para os satélites são conhecidos
por efemérides transmitidas (brodcast ephemeris), que apresentam precisão da ordem de
aproximadamente 160 cm, segundo dados do International GNSS Service (IGS), como
mostrado na Tab. 2.1. Além das efemérides captadas pelos receptores, que são resultados das
retransmissões dos satélites, existem as efemérides precisas.
As efemérides precisas são resultados de correções elaboradas nas órbitas dos satélites por
órgãos como o IGS. Tais correções, que incluem as defasagens dos relógios dos satélites, são
disponibilizadas gratuitamente na internet, com as precisões e intervalos indicados na Tab 2.1.
Mediante a utilização das efemérides precisas é possível melhorar a acurácia dos dados
posicionais obtidos pelos receptores. Mas este tipo de refino de qualidade não será abordado
no presente trabalho.

7
Tabela 2.01- Disponibilidade das efemérides precisas
Fonte: igscb.jpl.nasa.gov/components/prods (2006)
2.1.3 Segmento de Usuário
O segmento usuário é formado por todos os que se utilizam de equipamento de GPS,
independentemente de sua finalidade, seja ela civil ou militar.
Como já citado, basicamente, neste segmento tem-se um equipamento capaz de fornecer o
posicionamento e a altitude imediata, em qualquer parte do globo a qualquer hora, porém, a
precisão e exatidão deste cálculo de posicionamento varia de acordo com o equipamento e a
técnica utilizada para este cálculo.
No mercado existe uma vasta gama de receptores GPS, com preço variando poucas centenas
de dólares a milhares de dólares. Este trabalho, em síntese, está focado no cálculo com
receptores de baixo custo, conhecidos por GPS de navegação, ou recreacional, mesmo nesta
família de equipamentos existe uma grande variação de preços, pois além da precisão do
equipamento, muitos trazem uma grande quantidade de recursos, fato que influencia
diretamente no custo do equipamento.
Como exemplo, utilização de GPS de navegação para fins que não o de posicionamento
global, pode-se citar a medição, porém imprecisa, de área rural para fins de agricultura.
Atualmente muitos pequenos agricultores utilizam-se dos modelos de GPS de navegação, que

8
apresentam dentre muitas outras funções, o cálculo de área para a estimativa dos insumos
necessários para uma lavoura, seja ela de pequeno, médio ou grande porte. De acordo com
Salomoni (200?, p 2) “Em geral, o que se sabe é que quanto maior a área, menor o erro
percentual”.
2.1.4. Receptores GPS
Como uma primeira distinção dos receptores pode-se classifica-los em: (MÔNICO 2000)
Receptores de uso militar
Receptores de uso civil
No quesito aplicação temos:
Receptor de navegação, ou recreacional, também conhecido por GPS de “mão”
Receptor Topográfico
Receptor Geodésico
Receptor de sistema de informações geográficas
Receptores de aquisição de tempo
Quanto ao tipo de dados recebidos pode ser encontrado:
Receptor de código C/A
Receptor de portadora L1
Receptor de código C/A e portadora L1
Receptor de portadoras L1 e L2
Receptor de código C/A e portadoras L1 e L2
Receptor de código C/A e P e portadoras L1 e L2
Receptor de portadora L1; e
Receptor de portadora L1 e l2
Deve-se salientar que o importante é que o usuário tenha conhecimento exato de precisão que
irá obter, para que o resultado final do levantamento atinja seu objetivo, dentro dos limites de
erros aceitável para tal aplicação.
9
Os receptores de navegação, que são os de menor custo, diferem, dentre outras características,
do fato de tais aparelhos não registrarem as observações dos satélites de maneira bruta, estas
observações são utilizadas no cálculo do posicionamento, geralmente mostrado em um visor,
e em seguida são descartadas. Devido a esta característica, neste trabalho será utilizado um
computador para armazenar estas observações, de maneira que no laboratório, possam ser
resgatadas e processadas com a finalidade de obtenção de um posicionamento mais preciso.
Outra diferença significativa entre aparelhos é a qualidade, entenda-se precisão, dos relógios
dos receptores, sendo que quanto mais inferior esta qualidade, maior o erro obtido no
posicionamento. Também, os GPS ditos de navegação não apresentam determinados filtros,
que em função das informações recebidas dos satélites, rejeitam dados com qualidades
duvidosas, ou inferior a determinados parâmetros programáveis, segundo Salomoni (200?).
2.2 Posicionamento com GPS
O GPS, embora seja um sistema relativamente novo e que utiliza alta tecnologia para sua
construção e operação, tem seu princípio baseado na triangulação de distâncias. O receptor
GPS determina sua localização usando como referência o posicionamento dos satélites no
espaço cartesiano. O equipamento no solo calcula a distância entre a posição do receptor e a
posição dos satélites na órbita terrestre, ou seja, os satélites operam como pontos referênciais,
como relata Figueiredo (2005, p 17) “se determinarmos as distâncias de um ponto de posição
desconhecida a três outros pontos de posição conhecida, então podemos determinar a posição
do ponto desconhecido”, este processo é chamado de trilateração eletrônica.
2.2.1 Trilateração eletrônica
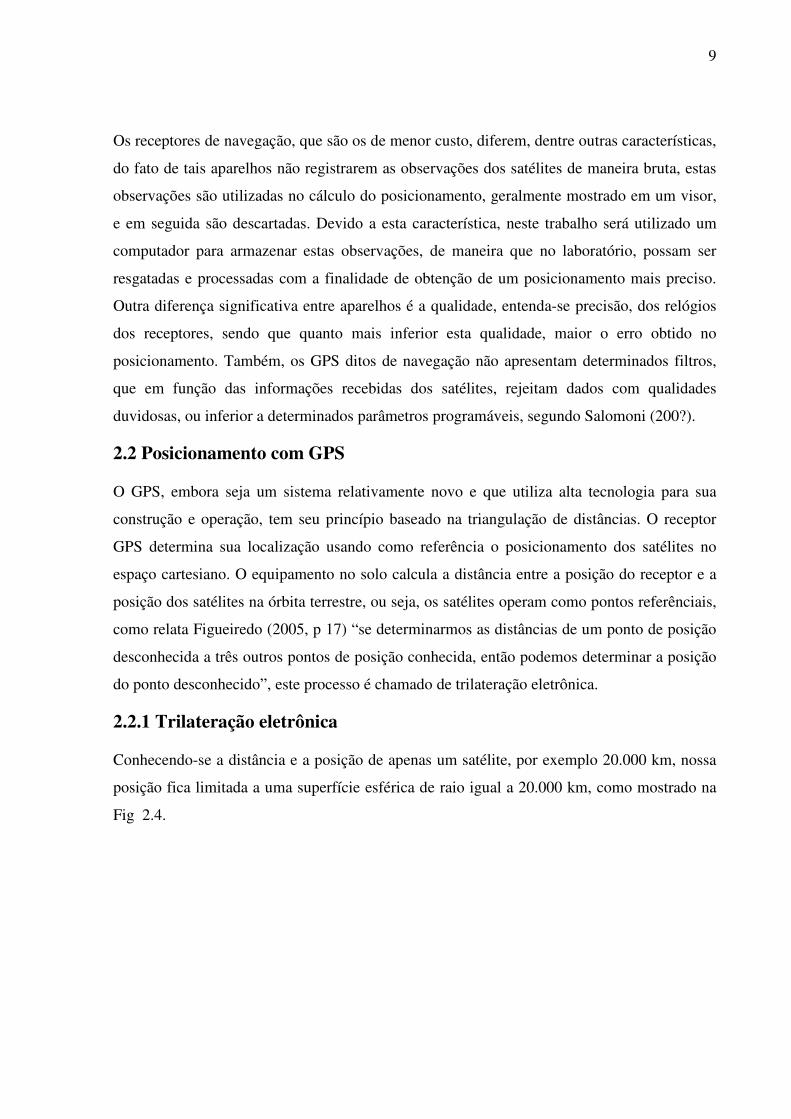
Conhecendo-se a distância e a posição de apenas um satélite, por exemplo 20.000 km, nossa
posição fica limitada a uma superfície esférica de raio igual a 20.000 km, como mostrado na
Fig 2.4.
10
Figura 2.4 Localização na superfície com um satélite
Fonte: Figueiredo (2005)
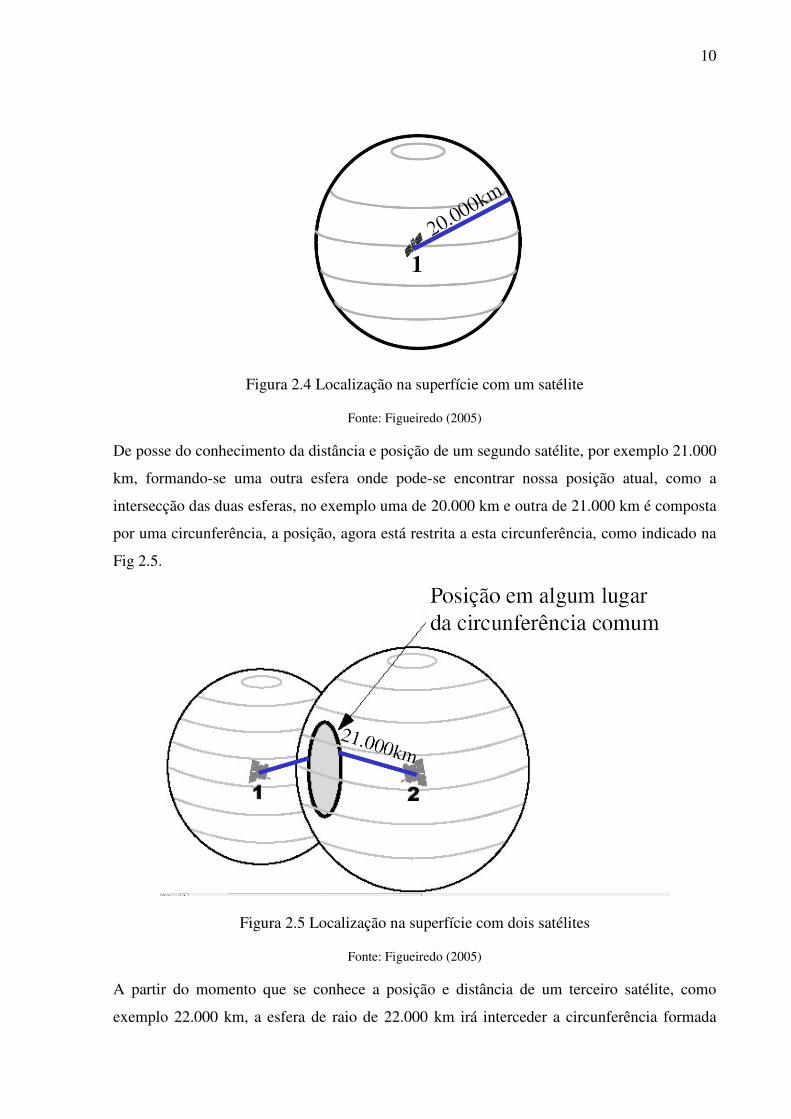
De posse do conhecimento da distância e posição de um segundo satélite, por exemplo 21.000
km, formando-se uma outra esfera onde pode-se encontrar nossa posição atual, como a
intersecção das duas esferas, no exemplo uma de 20.000 km e outra de 21.000 km é composta
por uma circunferência, a posição, agora está restrita a esta circunferência, como indicado na
Fig 2.5.
Figura 2.5 Localização na superfície com dois satélites
Fonte: Figueiredo (2005)
A partir do momento que se conhece a posição e distância de um terceiro satélite, como
exemplo 22.000 km, a esfera de raio de 22.000 km irá interceder a circunferência formada

11
pelas esferas de 20.000 km e 21.000 km em apenas dois pontos, como pode ser visto na Fig
2.6.
Figura 2.6 Localização na superfície com três satélites
Fonte: Figueiredo (2005)
Mas como pode-se notar, resta ainda um problema, não se pode estar em dois lugares ao
mesmo tempo, porém, esta dúvida é facilmente sanada, pois em uma destas posições é
impossível de estar e geralmente está localizada no espaço. Os equipamentos GPS estão
programados para identificar qual dos dois pontos deve ser descartado. Será informado,
adiante, que se faz necessário um quarto satélite para um posicionamento correto, mas não
com a finalidade de resolver a distinção entre estes dois pontos.
Mesmo em movimento na órbita da terra, os satélites enviam sua posição instantânea para os
receptores, pois tais satélites calculam, com ajuda do segmento de controle, localizado na
superfície, sua posição no espaço e a enviam para os receptores, que realizam os cálculos no
solo terrestre quase que instantaneamente.
2.2.2 Posicionamento básico.
A distância entre o receptor e o satélite é determinada usando-se o conceito básico de física:
“distância é igual a velocidade vezes tempo”. A velocidade de propagação de uma onda
eletromagnética é de 300.000 km/s, para o vácuo total, porém precisa-se determinar o tempo

12
com uma grande precisão, pois um erro de 1/100 de segundo pode-se gerar um erro de até
3.000 km na determinação de uma distância (FIGUEIREDO 2005).
Os satélites possuem relógios de altíssima precisão, da ordem de 10-12 segundos, conhecidos
por relógios atômicos, pois esta precisão é obtida mediante a contagem dos pulsos atômicos
de cristais de Césio ou Rúbio. Estes relógios chegam a custar até centenas de milhares de
dólares, cada satélite possue até quatro destes relógios, que sempre trabalham em conjunto
com os relógios dos outros satélites, devido ao sincronismo coordenado pelas estações de
controle terrestre. Este sincronismo entre todos os satélites e dos receptores que deveriam
serem iguais, são conhecidos por tempo GPS.
Devido ao alto custo, obviamente, os receptores não são equipados com relógios atômicos, e
sim com relógios com erros da ordem de 10-9 segundos, o que é considerado grande para o
posicionamento, porém, estes erros são quase que completamente eliminados com a utilização
de um quarto satélite. Pois, apenas três satélites seriam suficientes para que possa se
determinar a posição cartesiana do receptor.
Para melhor compreensão da importância do quarto satélite, o sistema tri-dimensional será
simplificado para um sistema bi-dimensional (um plano), também ao invés de se analisar as
distâncias, será mostrado o tempo que na realidade, como já explanado, é através dele que se
determina as distâncias entre receptores e satélites. Neste exemplo está sendo utilizado
grandezas da ordem de segundos, no sistema real, estes valores são da ordem de milésimos de
segundo. Na prática o sinal de um satélite, localizado a cerca de 20.200 km da superfície
terrestre, leva cerca de 0,066 segundo para atingir um receptor no solo (FIGUEIREDO 2005)..
Supondo-se um satélite a 3 segundos e outro a 2 segundos, estes tempos são os que
representam a distância real, o posicionamento obtido é mostrado na Fig 2.7, porém ,isto só
ocorreria se todos os relógios dos satélites e do receptor estiverem em perfeito sincronismo,
fato que não ocorre na prática.

13
3 seg 2 s
eg
Posição real
Figura 2.7- Distância com dois satélites (situação ideal)
Fonte: Adaptado de Figueiredo (2005)
Admitindo-se um atraso no relógio do receptor de 0,5 segundos, lembrando-se que este valor
é hipotético, pois na prática este valor é da ordem de milesegundos, este valor acarretará um
erro, como indicado na Fig 2.8. As distâncias, aqui representadas por grandezas temporais,
são denominadas no linguajar dos GPS de pseudo-distâncias, pois trata-se de uma distância
que apresenta erro em sua determinação.
tempo correto
t em
po
er ra
do
3,5
se
g
Posição real
3 seg
tem
po c
orr
eto
Posição errada
2 s
eg
2,5 seg
tempo errado3 seg 2
seg
Figura 2.8 Distância com dois satélites e erro no relógio do receptor
Fonte: Adaptado de Figueiredo (2005)
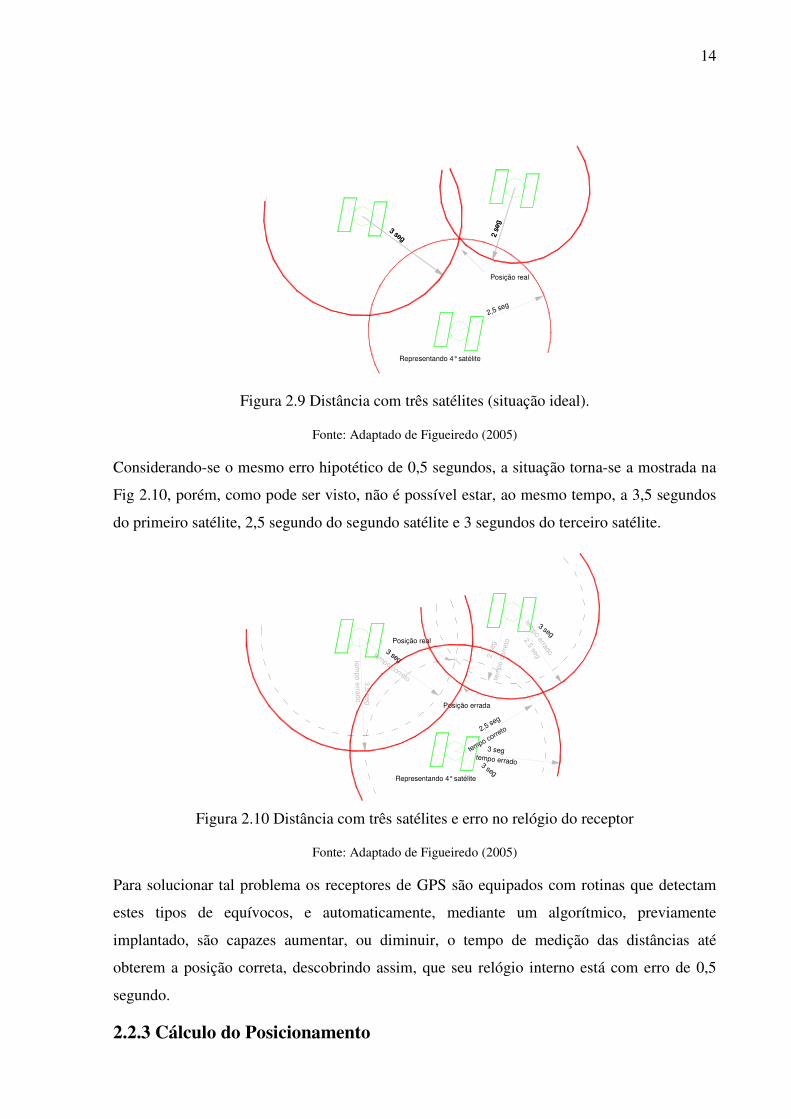
Introduzindo-se um terceiro satélite, no sistema bi-dimensional, que na prática é o quarto
satélite necessário para o posicionamento, uma situação ideal pode ser visualizada na Fig 2.9.
14
Representando 4° satélite
2,5 seg
3 seg 2 s
eg
3 seg 2 s
eg
Posição real
Figura 2.9 Distância com três satélites (situação ideal).
Fonte: Adaptado de Figueiredo (2005)
Considerando-se o mesmo erro hipotético de 0,5 segundos, a situação torna-se a mostrada na
Fig 2.10, porém, como pode ser visto, não é possível estar, ao mesmo tempo, a 3,5 segundos
do primeiro satélite, 2,5 segundo do segundo satélite e 3 segundos do terceiro satélite.
tempo correto3
,5 s
eg
t em
po
err a
do
Posição errada
Representando 4° satélite
tempo correto
tempo errado
2,5 seg
3 seg
Posição real
3 seg
tempo errado
tem
po c
orr
eto
2 s
eg
2,5 seg3 seg
3 seg
3 seg
Figura 2.10 Distância com três satélites e erro no relógio do receptor
Fonte: Adaptado de Figueiredo (2005)
Para solucionar tal problema os receptores de GPS são equipados com rotinas que detectam
estes tipos de equívocos, e automaticamente, mediante um algorítmico, previamente
implantado, são capazes aumentar, ou diminuir, o tempo de medição das distâncias até
obterem a posição correta, descobrindo assim, que seu relógio interno está com erro de 0,5
segundo.
2.2.3 Cálculo do Posicionamento

15
Adotando-se a mesma simplificação do item 2.2.2, ou seja, resumindo-se um sistema
cartesiano de três eixos para um de dois eixos. Sendo conhecida duas coordenadas, pontos S1
e S2, correspondente a dois satélites, e um ponto com coordenadas desconhecidas, ponto P,
Fig 2.11, o qual deseja-se determinara suas coordenadas.
Figura 2.11 Determinação da posição
Fonte: Figueiredo (2005).
Na Fig 2.11, pode-se visualizar dois triângulos, PAS1 e PBS2 , sendo um de seus lados, d1 e
d2, correspondentes as pseudo distâncias calculadas pelo GPS Os demais lados são
determinados pelas Eq 2.1 a 2.4:
PA= |x-x1| (2.1)
AS1= |y-y1| (2.2)
PB= |x-x2| (2.3)
BS2= |y-y2| (2.4)
Utilizando-se a relação de triângulos retângulos obtêm-se as Eq 2.5 e 2.6:
d12= (x-x1)
2+( y-y1) 2 (2.5)
d22= (x-x2)
2+( y-y2) 2 (2.6)
A solução de sistema de duas equações, Eq 2.5 e 2.6, e duas incógnitas x e y, determinam a
posição onde se encontra o receptor de GPS. Embora, por se tratar de um sistema de segundo

16
grau, encontram-se duas soluções para cada incógnita, o receptor possui meios para desprezar
uma das soluções, pois será correspondente a uma posição absurda. (FIGUEIREDO 2005).
Utilizando-se para três eixos o mesmo raciocínio, tem-se as Eq 2.7 a 2.9:
d12= (x-x1)
2+( y-y1) 2+( z-z1)
2 (2.7)
d22= (x-x2)
2+( y-y2) 2+( z-z2)
2 (2.8)
d32= (x-x3)
2+( y-y3) 2+( z-z3)
2 (2.9)
Onde x, y e z são as coordenadas do ponto de localização do equipamento receptor, tendo
como centro do sistema de eixo, um ponto correspondente ao centro de massa da terra.
Porém, o que ocorre na realidade é um sistema com quatro satélites, que resultam em quatro
equações no mínimo, como indicada pelas Eq 2.10 a 2.13:
d12= (x-x1)
2+( y-y1) 2+( z-z1)
2 +v.dtrec (2.10)
d22= (x-x2)
2+( y-y2) 2+( z-z2)
2 +v.dtrec (2.11)
d32= (x-x3)
2+( y-y3) 2+ ( z-z3)
2 + v.dtrec (2.12)
d42= (x-x4)
2+( y-y4) 2+ ( z-z4)
2 + v.dtrec (2.13)
Sendo v a velocidade de propagação das ondas eletromagnéticas e, dtrec a quarta variável
correspondente ao erro de sincronismo entre o relógio do receptor e do satélite.
Na prática, os receptores possuem capacidade para receber mais de quatro satélites ao mesmo
tempo, a grande maioria recebe 12 satélites ao mesmo tempo. Isto faz com que o tempo para o
cálculo de posicionamento seja reduzido e, também melhore significativamente a precisão do
posicionamento
2.2.4 Tipos de Posicionamento
A técnica que se utiliza para a determinação da localização do GPS, instantaneamente,
utilizando-se a metodologia descrita no item 2.2.2 é denominada de “Posicionamento por
código” ou “Posicionamento por pseudo-distâncias” ou mesmo “Posicionamento absoluto”.
Neste caso, utiliza-se os códigos C/A, disponível na portadora L1, para os cálculos das
pseudo-distâncias, mede-se apenas o tempo de propagação das ondas eletromagnéticas. Esta
metodologia de cálculo é suficientemente precisa para a determinação do posicionamento com
uma precisão métrica, sendo imprópria para aplicações topográficas ou geodésicas.

17
Para melhorar este posicionamento deve se utilizar da técnica conhecida por “Posicionamento
por fase da portadora” ou “Posicionamento relativo interferométrico”. Esta técnica determina
a distância verdadeira entre o receptor e o satélite, utilizando a própria onda portadora, na
verdade a diferença de fase entre as portadoras L1 e L2, contando-se os ciclos das mesmas
para a determinação da distância entre receptor e satélite. Como este processo envolve
receptores de alto custo, seu funcionamento não será abordado no presente trabalho
(ALBUQUERQUE 2003).
2.3 Erros do GPS
Pelo exposto até o presente momento, viu-se que o sistema apresenta um erro devido a
diferença da precisão entre os relógios do receptor e do satélites, o que pode ser facilmente
reduzido, inclusive os dos relógios satélites. Porém, na prática de fato tem-se mais erros, além
destes dos relógios, que são de difícil determinação e minimização.
Os erros podem ser do tipo sistemáticos, grosseiros e os aleatórios. Os grosseiros são
facilmente eliminados, pois são de fácil percepção. Os erros sistemáticos são parametrizados
e depois são reduzidos mediante a utilização de técnicas apropriadas, como exemplo tem-se a
correção dos atrasos dos relógios.
Ainda restam os erros aleatórios que são inevitáveis, e de difícil redução, sendo eles os
maiores responsáveis pela imprecisão final do GPS.
Também ocorrem erros resultantes da maneira com que os equipamentos são operados, sendo
assim de extrema importância o treinamento dos operadores, caso se deseje uma precisão
maior.
Conforme indica Figueiredo (2005), os principais erros inerentes ao sistema, estão listado na
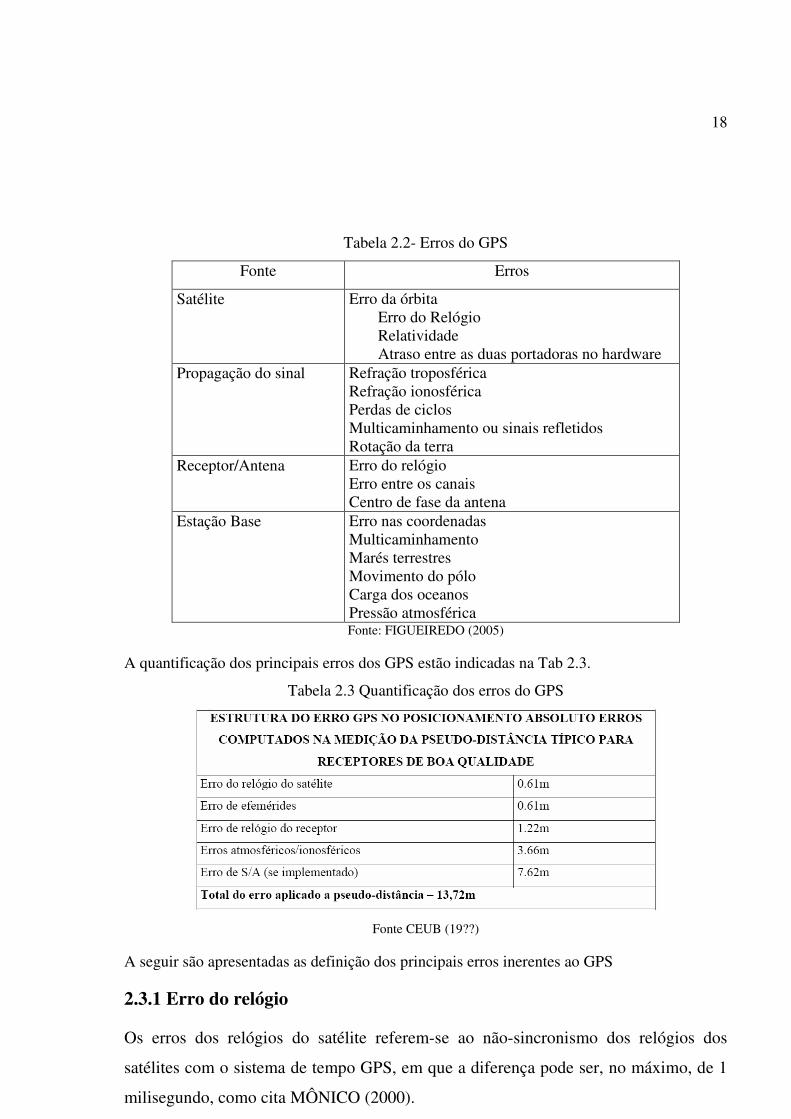
Tab 2.2.
18
Tabela 2.2- Erros do GPS
Fonte Erros
Satélite Erro da órbita Erro do Relógio Relatividade Atraso entre as duas portadoras no hardware
Propagação do sinal Refração troposférica Refração ionosférica Perdas de ciclos Multicaminhamento ou sinais refletidos Rotação da terra
Receptor/Antena Erro do relógio Erro entre os canais Centro de fase da antena
Estação Base Erro nas coordenadas Multicaminhamento Marés terrestres Movimento do pólo Carga dos oceanos Pressão atmosférica Fonte: FIGUEIREDO (2005)
A quantificação dos principais erros dos GPS estão indicadas na Tab 2.3.
Tabela 2.3 Quantificação dos erros do GPS
Fonte CEUB (19??)
A seguir são apresentadas as definição dos principais erros inerentes ao GPS
2.3.1 Erro do relógio
Os erros dos relógios do satélite referem-se ao não-sincronismo dos relógios dos
satélites com o sistema de tempo GPS, em que a diferença pode ser, no máximo, de 1
milisegundo, como cita MÔNICO (2000).

19
Nos receptores o erro do relógio, provém da deriva (marcha) dos osciladores internos
desses relógios, que diferem do tempo GPS. Estes erros são eliminados no
posicionamento relativo.
2.3.2 Multicaminhamento
Este tipo de erro ocorre devido a reflexão do sinal do satélite em uma superfície próxima ao
receptor, vide Fig 2.12, que somado ao sinal original pode degradar a qualidade do
posicionamento.
Uma maneira de se reduzir este erros é a utilização de um conjunto especial de antenas, como
cita Mônico (2000).
Figura 2.12. Multicaminhamento
Fonte CEUB (19??)
2.3.3 Erro orbital
O erro orbital ou erro de efemérides, compreende as discrepâncias entre a órbita verdadeira
dos satélites e as efemérides transmitidas, em tempo real, para a o usuário.
Para a redução deste erros basta que se utilize as efemérides precisas, o inconveniente é que
tais dados só são disponíveis com um determinado tempo de atraso, como mostrado na Tab
2.1.

20
2.3.4 Erro de propagação
Os sinais emitidos pelos satélites são ondas eletromagnéticas, que se propagam na velocidade
igual a 300.000 km/s no vácuo. Porém, a nossa atmosfera não é um vácuo. Essas ondas
atravessam a ionosfera e a troposfera. Como cada uma destas camadas possuem
características diferentes, o que acarreta propagações não uniformes, como exemplificado na
Fig 2.13, alterando a velocidade de propagação dos sinais. Como o GPS trabalha com
medição de tempo isto causa um erro no posicionamento (SEEBER & ROMÃO 1997)
Figura 2.13 Alteração na propagação pela atmosfera
Fonte : Macedo et al (200?)
Monico (2000), cita que somente o erro da refração troposférica, pode variar de poucos
metros até cerca de 30 m, dependendo da densidade da atmosfera e posição dos satélites.
Para a redução dos erros provocados pela atmosfera existem modelos matemáticos que
simulam estes erros, mediante programas computacionais, estas simulações são aplicadas aos
dados recebidos, de maneira a reduzirem tais erros.
2.4 Diluição da precisão
Diluition of Precision DOP é uma grandeza adimensional, cuja finalidade é a de uma contínua
avaliação da melhor ou pior, disposição da geometria espacial dos satélites, que influenciarão

21
diretamente a precisão das coordenadas de posicionamento obtidas pelo receptor (ROCHA
2002)
Os DOPs são divididos em:
GDOP: Efeito combinado da geometria e tempo
HDOP: precisão da determinação do posicionamento horizontal;
VDOP: precisão da determinação do posicionamento vertical;
PDOP: precisão da determinação tridimensional e
TDOP: precisão da determinação do tempo;
O DOP é interpretado como o inverso do volume de um tetraedro formado pelas posições de 4
satélites tendo como vértice o ponto onde encontra-se receptor, como mostrado na Fig 2.14.
Sendo que, um valor maior indica que o resultado da medição poderá ser pior
Figura 2.14 Diluição da precisão
Fonte :adaptado de MONICO (2000) por MACEDO et al (200?)
Na prática, entre os DOP, o mais observado é o PDOP, é principalmente através dele que
pode se planejar uma melhor coleta de dados em campo. Este planejamento é feito mediante
programas, que em função das coordenadas aproximadas, do local onde se pretende coletar
dados, indicam dias e horários onde a geometria dos satélites estarão melhor, mediante o
fornecimento dos valores de PDOP, bom ou ruim, como mostrado na Fig 2.15

22
Figura 2.15 - PDOP
Fonte :adaptado de Monico (2000) por MACEDO et al. (200?)
2.5 Sistemas cartográficos
Até o presente momento, fora citadas por diversas vezes que o GPS determina a posição do
receptor na superfície da terra, porém, não foram indicados os critérios que regem este
posicionamento. Esses critérios são definidos pela cartografia, sendo que a seguir serão
explanados alguns conceitos básicos de cartografia, pertinentes ao GPS.
2.5.1 Superfície Terrestre
A superfície terrestre é formadas pelos oceanos, vales, montanhas, planícies e demais
ambientes naturais, não possui características que possam ser perfeitamente expressas em uma
fórmula matemática, como a que define uma “circunferência achatadas nos pólos”, que é a
definição usual da forma da terra.
Para representar a crosta terrestre usa-se o conceito de geóide, sendo este definido como a
linha média das mares, mesmo esta linha média é difícil de ser matematicamente definida.
Como representação do geóide, tem-se uma superfície matematicamente definida conhecida
por elipsóide. Porém para cada trecho da superfície terrestre temos um elipsóide que mais se
aproxima do geóide, como pode ser visto na Fig 2.16 (SANTOS 2006).
23
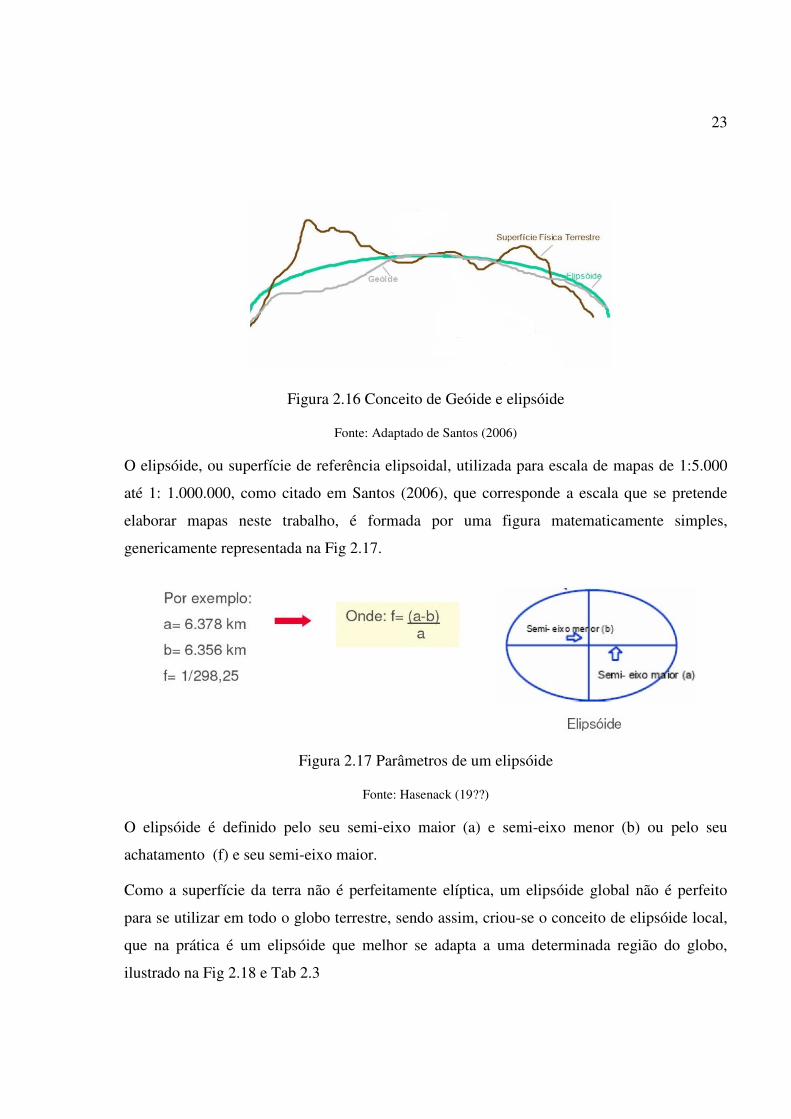
Figura 2.16 Conceito de Geóide e elipsóide
Fonte: Adaptado de Santos (2006)
O elipsóide, ou superfície de referência elipsoidal, utilizada para escala de mapas de 1:5.000
até 1: 1.000.000, como citado em Santos (2006), que corresponde a escala que se pretende
elaborar mapas neste trabalho, é formada por uma figura matematicamente simples,
genericamente representada na Fig 2.17.
Figura 2.17 Parâmetros de um elipsóide
Fonte: Hasenack (19??)
O elipsóide é definido pelo seu semi-eixo maior (a) e semi-eixo menor (b) ou pelo seu
achatamento (f) e seu semi-eixo maior.
Como a superfície da terra não é perfeitamente elíptica, um elipsóide global não é perfeito
para se utilizar em todo o globo terrestre, sendo assim, criou-se o conceito de elipsóide local,
que na prática é um elipsóide que melhor se adapta a uma determinada região do globo,
ilustrado na Fig 2.18 e Tab 2.3

24
Figura 2.18 Ajustamento de elipsóides local
Fonte: Figueiredo (2005).
Os parâmetros dos principais elipsóides, utilizados no Brasil, são mostrados na Tab. 2.4.
Tabela 2.4 – Elipsóide
Fonte: HASENACK (19??)
Atualmente o SISTEMA GEOGRÁFICO BRASILEIRO (SGB) e o SISTEMA
CARTOGRÁFICO NACIONAL (SCN), encontram-se em transição do SOUT AMERICA
DATUM de 1969 (SAD69) para ao Sistema Geocêntrico para as Américas de 2000
(SISGRA2000), conforme indica a resolução n° 1/2005 do presidente do Instituto Brasileiro
de Geografia e Estatística (IBGE).
2.5.2 Datum
Como define Beraldo & Soares (1996, p. 113) “Datum horizontal é o sistema de coordenadas
terrestres, referenciadas a um determinado elipsóide. Essas coordenadas podem ser
geográficas, cartesianas ou planas.”
A localização ideal desse ponto é onde haja coincidência entre as superfícies do Geóide e do
Elipsóide. (h = 0)
Datum Altimétrico é a superfície formada pelo nível médio do mar, definida através do
marégrafo estável, a partir de longos períodos de observação para estabelecer a altitude zero.
As altitudes são calculadas partindo-se do Datum Altimétrico.

25
No Brasil, uma das referências verticais é o Marégrafo de Imbituba (Santa Catarina) – 1958
representa a altitude origem em relação ao nível médio do mar local.
2.5.3 Latitude e Longitude geodésica
Uma maneira de se posicionar no globo terrestre é mediante a utilização de latitude e
longitude, cuja definição utilizada por Silveira (200?) é:
Latitude Geodésica (φ)
É o ângulo diedro formado entre o plano do equador e a normal que passa pelo ponto
Longitude Geodésica (λ)
É o ângulo diedro formado entre o meridiano de Greenwich e a linha meridiana do
ponto
Isto pode melhor ser visualizado na Fig 2.19
Figura 2.19 Visualização da latitude e longitude
Fonte: Silveira (200?)
A latitude tem origem no equador e varia de 0o a +90 o para o hemisfério norte e de 0o a –90o
no hemisfério sul. Pode-se também suprimir os sinais de +/- utilizando-se das letras N e S,
respectivamente, devendo-se apenas lembrar que para cálculos os sinais devam ser
respeitados.
A longitude tem seu início no meridiano de Greenwich, variando de 0o a 180o para o leste do
meridiano de Greenwich e de 0o a –180o para o oeste do mesmo meridiano, como mostrado

26
na Fig 2.20. Neste caso, também pode-se substituir os sinais +/- , respectivamente, pelas letras
E e W.
No Brasil todas as longitudes são do lado oeste do meridiano de Greenwich.
Figura 2.20 Incremento de latitude e longitude
Fonte: Hasenack et al (200?)
Como este modo de posicionamento é esférico, seu manuseio torna-se complexo, para
facilitar o manuseio das coordenadas de posicionamento, utiliza-se sistema de projeções,
como mostrado a seguir.
2.5.4 Sistema de projeção
A principal finalidade de um mapa é a indicação, em um meio plano (superfície bi-
dimensional) da superfície terrestre, que é formada por uma superfície tri-dimensional, Fig
2.21. Isto torna mais fácil seu manuseio, pois é mais fácil manipular uma folha de papel do
que uma miniatura do globo.
Figura 2.21 Transformação da superfície global para plana
Fonte: Hasenack et al (200?)
Esta transformação de um sistema esférico para um plano é denominada de projeção
cartográfica, gerando um mapa bi-dimensional que pode ser visto em folha de papel, ou
mesmo em uma tela de computador.

27
Tais superfícies de projeções podem ser do tipo cônicas, planas ou cilíndricas, gerando-se
mapas denominados cônicos, planos ou cilíndricos, respectivamente.
Até mesmos, as projeções geradas por cilindros e cones podem são representadas em planos,
facilitando seu manuseio, como mostrado na Fig. 2.22
Figura 2.22 Projeções cilindro e cone para planos
Fonte: Hasenack et al (200?)
2.5.4.1 – Sistema de projeções cônicas
A projeção cônica pode ser desenvolvida em um plano sem que hajam distorções e, funciona
como superfície auxiliar na obtenção de uma representação. A sua posição em relação à
superfície de referência pode ser normal, transversal e oblíqua, como pode ser observada na
Fig 2.23.
Figura 2.23 Tipos de projeção cônica
Fonte: Hasenack et al (200?)
2.5.4.2 – Sistema de projeção planas
As projeções planas ou horizontais são obtidas pela transposição das coordenadas sobre um
plano colocado em posição determinada em relação à esfera. A superfície do globo é, então,
projetada sobre um plano a partir de um centro de perspectiva ou ponto de vista, como
indicada na Fig. 2.24.

28
`
Figura 2.24 Tipos de projeção planas
Fonte: Adaptado de Silveira (200?)
2.5.4.3 – Sistema de projeção cilíndrica
A projeção cilíndrica, também pode ser normal, transversal e oblíqua, como pode ser
observada na Fig 2.25
Figura 2.25 Projeção cilíndrica
Fonte: Hasenack et al (200?)
2.6 Sistema de coordenadas UTM
O sistema UTM (Universal Transverse Mercator), é o sistema plano de coordenadas mais
utilizado na prática, pois, além de ser mais fácil de se determinar uma distância utilizando-se
suas coordenadas, são os mais solicitados pelos órgãos oficiais do governo brasileiro para
mapeamento de área.
Pelas informações de Silveira (200?), no sistema UTM o Globo é dividido em 60 fusos, cada
um com amplitude de 6° de longitude. Cada um dos fusos é considerado uma Zona UTM
numeradas de um a sessenta a partir do meridiano 180° em direção leste. A zona UTM1
compreende a área entre os meridianos 180°W e 174°W. Cada um destes fusos é gerado a
partir de uma rotação do cilindro de forma que o Meridiano de tangência divide o fuso em
duas partes iguais de 3° de amplitude. O cilindro transverso, mostrado na Fig 2.26, adotado
como superfície de projeção assume 60 posições diferentes, já que seu eixo mantém-se
sempre perpendicular ao meridiano central de cada fuso.
NORMAL TRANSVERSO OBLÍQUO

29
Figura 2.26 Projeção UTM
Fonte: Moura (2001)
O quadriculado UTM está associado a um sistema de coordenadas plano-retangulares no
sistema métrico decimal, no qual um eixo coincide com a projeção do Meridiano Central do
fuso ( eixo N apontando para Norte) e o outro eixo, com o do Equador. Assim, cada ponto do
elipsóide de referência (descrito por latitude, longitude) estará associado ao Meridiano
Central, coordenada E e ao Equador, coordenada N.
Por Moura (2001), avaliando-se a deformação de escala em um fuso UTM, pode-se verificar
que o fator de escala é igual a 1 (verdadeira grandeza) no Meridiano Central e,
aproximadamente igual a 1,0015 (1/666) nos extremos do fuso. Desta forma, atribuindo-se um
fator de escala k=0,.9996 ao meridiano central do sistema UTM, o que faz com que o cilindro
tangente se torne secante, torna-se possível assegurar um padrão mais favorável de
deformação em escala ao longo do fuso, o que pode ser visto na Fig 2.27. Como
conseqüência, existem duas linhas aproximadamente retas, uma a leste e outra a oeste,
distantes cerca de 1°37' do meridiano central, representadas em verdadeiras grandezas. O erro
de escala fica limitado a 1/2.500 no meridiano central, e a 1/1030 nos extremos do fuso.

30
Figura 2.27 Detalhe do fuso e projeção UTM
Fonte: Silveira (200?)
A cada fuso é associado um sistema cartesiano métrico de referência, atribuindo à origem do
sistema as coordenadas 500.000 m, para contagem de coordenadas perpendiculares ao
Equador, e 10.000.000 m ou 0 m, para contagem de coordenadas perpendiculares ao
meridiano central, para os hemisférios Sul e Norte, respectivamente. Isto elimina a
possibilidade de ocorrência de valores negativos de coordenadas, como indicado na Fig 2.28.

31
Figura 2.28 Coordenadas UTM
Fonte: Adaptado de Moura (2001)
Como o sistema UTM utiliza-se de um elipsóide de referência, juntamente com a indicação de
qual fuso pertence as coordenadas, faz-se necessário a indicação do elipsóide utilizado como
referência. Pois as coordenadas N e E de um ponto podem variar até centenas de unidades em
função de troca de elipsóide.
No Brasil muitas cartas foram elaboradas com a utilização dos data SAD69 e Córrego Alegre.
O GPS utiliza o datum WGS-84 (World Geodetic System of 1984- Sistema Geodésico
Mundial de 1984). Sendo necessária a conversão para um mesmo sistema, caso se deseje
comparar dados entre si, que originalmente estavam em sistemas distintos.
2.7 Dados RINEX
Os dados recebidos pelos receptores GPS, podem ser armazenados em diversos formatos
criados pelos fabricantes. Porém, existe um padrão universal conhecido como RINEX
(Receiver Independent Exchange Format). Neste padrão os dados coletados são armazenados
em arquivos texto, que são definidos em seis tipos de arquivos, mas para o posicionamento só
será criado dois tipos de arquivos. Um arquivo conterá os dados de observação e outro
armazenará os dados de navegação.

32
Como cita Silva (2005), o arquivo de navegação é composto por um cabeçalho, contendo
informações sobre o programa que gerou o arquivo, parâmetros para calcular o tempo, e as
informações sobre cada satélite, contendo sua órbita e dados sobre sua condição de operação.
É este padrão que será usado para se coletar os dados das observações de um GPS de
navegação. Para executar esta coleta utiliza-se um programa chamado de ASYNC. Este
programa é de livre distribuição.
O programa ASYNC apenas coleta, mediante uma conexão através de uma porta serial, os
dados recebidos pelos GPS de navegação da marca Garmim. Após estes dados serem
coletados utiliza-se o programa GAR2RNX, também de livre distribuição, que converte os
dados das observações coletados pelo GPS Garmin, para o padrão RINEX.
Ambos os programas foram desenvolvidos pelo professor Antonio Tabernero Galan, da
Universidade Politécnica de Madri, Espanha, este professor disponibiliza livremente o seu
uso.

33
3 METODOLOGIA DO GPS
As técnicas de posicionamento por GPS podem ser: pontual, também chamado de absoluto ou
isolado; relativo ou diferencial em tempo real.
3.1 Posicionamento Pontual
Este é o método que se utiliza as pseudo-distâncias, fase da portadora ou ambos, para o
cálculo da posição. Os GPS ditos de navegação utilizam as pseudo-distâncias para a
determinação de sua localização. O posicionamento pontual é utilizado quando não se deseja
uma precisão elevada.
3.2 Posicionamento relativo
Nesta prática faz-se necessária a utilização de dois receptores GPS, para um melhor
refinamento do posicionamento. Este tipo de posicionamento consiste em se fixar um
equipamento GPS, em um ponto com coordenadas conhecidas, bem como utilizar o segundo
equipamento para coletar os dados do ponto que se deseja determinar suas coordenadas. De
posse dos dados coletados pelos dois receptores, o do local conhecido chamado de base e do
local a ser determinado conhecido por rover, ou móvel, executam-se cálculos de correção
geralmente no escritório. Esta correção é conhecida por pós processamento, e, deve ser
elaborada por programas específicos.
Atualmente existem bases fixas que disponibilizam seus dados recebidos. O usuário se
cadastra e pode ter acesso a esses dados pela internet. Com este procedimento basta o usuário
adquirir apenas um receptor, e utilizar essas bases, chamadas de bases comunitárias para
elaborar o processamento dos dados coletados pelo seu equipamento, acarretando uma
redução significativa no investimento para se operar com o GPS, caso ele opere próximo a
estas bases.
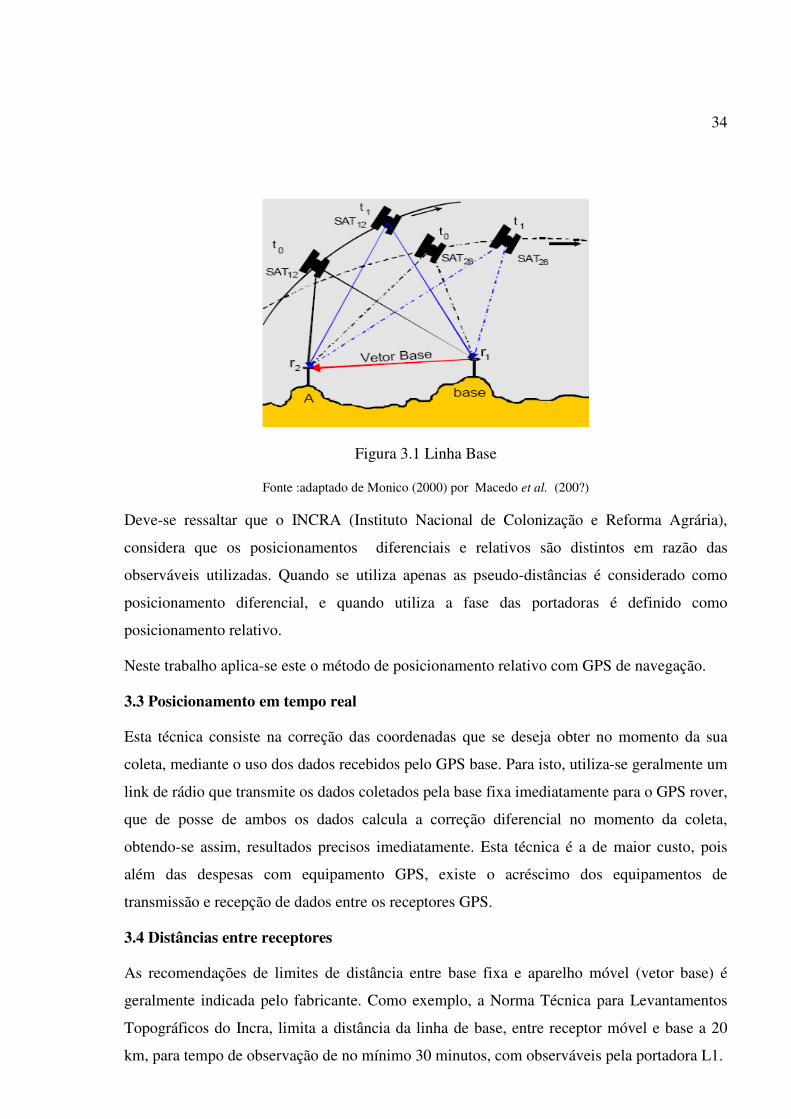
Pelas informações de Matsuoka et al. (200?), a distância entre os receptores é de fundamental
importância para a determinação da precisão das coordenadas obtidas, quanto menor esta
distância melhor será a qualidade destas coordenadas. Pois os receptores estarão sujeitos as
mesma interferências. A distância de separação entre os receptores é denominada de linha
base, ou vetor base, como indicada na Fig 3.1
34
Figura 3.1 Linha Base
Fonte :adaptado de Monico (2000) por Macedo et al. (200?)
Deve-se ressaltar que o INCRA (Instituto Nacional de Colonização e Reforma Agrária),
considera que os posicionamentos diferenciais e relativos são distintos em razão das
observáveis utilizadas. Quando se utiliza apenas as pseudo-distâncias é considerado como
posicionamento diferencial, e quando utiliza a fase das portadoras é definido como
posicionamento relativo.
Neste trabalho aplica-se este o método de posicionamento relativo com GPS de navegação.
3.3 Posicionamento em tempo real
Esta técnica consiste na correção das coordenadas que se deseja obter no momento da sua
coleta, mediante o uso dos dados recebidos pelo GPS base. Para isto, utiliza-se geralmente um
link de rádio que transmite os dados coletados pela base fixa imediatamente para o GPS rover,
que de posse de ambos os dados calcula a correção diferencial no momento da coleta,
obtendo-se assim, resultados precisos imediatamente. Esta técnica é a de maior custo, pois
além das despesas com equipamento GPS, existe o acréscimo dos equipamentos de
transmissão e recepção de dados entre os receptores GPS.
3.4 Distâncias entre receptores
As recomendações de limites de distância entre base fixa e aparelho móvel (vetor base) é
geralmente indicada pelo fabricante. Como exemplo, a Norma Técnica para Levantamentos
Topográficos do Incra, limita a distância da linha de base, entre receptor móvel e base a 20
km, para tempo de observação de no mínimo 30 minutos, com observáveis pela portadora L1.

35
Mesmo sem a pretensão de se obter alta precisão, no presente trabalho, operou-se com
distância máxima de 3 Km. Este valor foi determinado pela posição da base com coordenadas
geográficas conhecidas.
Para visualizar as discrepâncias que ocorrem devido a distância de linha de base, é mostrada
na Tab 3.1, o aumento do erro em função da distância. Esta tabela também indica a
necessidade de se corrigir os dados coletados pelos GPS, independente do modelo, pois estes
dados foram coletados com GPS topográficos.
Tabela 3.1 Média das discrepâncias
Médias Sem correção Médias com correção Distância Linha base
Estações X Y Z X Y Z
430 km PARA 16,149 17,519 11,990 0,854 2,352 1,221 897 km VICO 18,851 17,547 11,656 3,943 1,576 0,842 880 km POAL 13,417 15,813 12,560 2,765 3,771 2,833 2288 km MANA 14,744 24,724 7,431 3,146 9,520 9,584
Adaptada de Matsuoka et al (200?)
3.5 GPS diferencial
Existem autores, como Monico (2000), que definem o posicionamento em tempo real como
DGPS (diferencial GPS) e outros, como Albuquerque (2003), que consideram o
posicionamento relativo, como DGPS. Por este motivo optou-se por não mencionar o
posicionamento diferencial em nenhuma das duas técnicas de posicionamento.

36
4 EQUIPAMENTOS E PROCEDIMENTOS EM CAMPO
4.1 Descrição dos Equipamentos
No campo foram utilizados quatro receptores GPS, como receptor de base foi utilizado um
GPS GTR-A, fabricado no Brasil pela empresa Tech Geo. O GPS rover, que gerou os mapas
considerados corretos, foi outro GPS GTR-A. Esses aparelhos apresentam custo relativamente
alto, da ordem de R$ 25.000,00 (vinte e cinco mil reais), incluindo o programa de pós–
processamento chamado Ezsurv. O equipamento GTR-A já possui um coletor interno
acoplado ao receptor. Basta que o equipamento seja ligado ele já começa a armazenar os
dados para processamento. Este equipamento pode ser visto na Fig 4.1
Figura 4.1 – Receptor GTR-A
Como equipamento de baixo custo foi utilizado o GPS Rino 120 da Garmin, que possui valor
de aproximadamente R$ 1.000,00 (um mil reais). Este receptor tem capacidade de receber até
12 satélites ao mesmo tempo, como a maioria dos receptores do mercado. Como pode ser
notado na Fig 4.2 que o centro da antena não é identificável.

37
Figura 4.2 GPS Garmim Rhino 120
Inicialmente tentou-se coletar, via interface serial, as observáveis com este equipamento, mas
o programa Async, não foi capaz de se comunicar com o receptor. O referido programa,
operando na plataforma Direct Operational System (MS-DOS), foi desenvolvido para se
comunicar com outro modelo de receptor, do mesmo fabricante, mais precisamente o modelo
Garmin GPS12.
O equipamento Garmin GPS12, pode ser visto na Fig 4.3, trata-se de um equipamento
obsoleto, mas foi o único, disponível e compatível com o programa Async. Deve-se salientar
que como o arquivo fonte, do citado programa, é de livre uso, sendo assim é possível a sua
alteração para a comunicação com os GPS atualmente disponíveis no mercado.
Figura 4.3 Garmin GPS12
38
Estes equipamentos foram escolhidos devido ao fato de serem os únicos disponíveis, no
momento, sendo que no mercado existem muitos outros que também podem ser utilizados.
Inclusive, o GPS de navegação deve ser um cuja antena possa ser destacável para que possa
ser melhor conhecida sua posição. Um modelo, bastante difundido, que atende a este quesito é
o Garmin GPS III, embora este receptor, também, está fora de linha de produção.
No mercado, atualmente, a empresa Garmin disponibiliza outros modelo que apresentam a
possibilidade de se operar com antena externa, como os da linha GPS 76, que possuem preços
equivalentes ao da linha GPS III, iniciando na faixa dos 200 dólares norte-americanos, nos
Estados Unidos. Para este equipamento já esta disponível outro programa de utilização livre
que é capaz de coletar os dados necessários para pós processamento do sinal.
4.2 Procedimentos de Campo
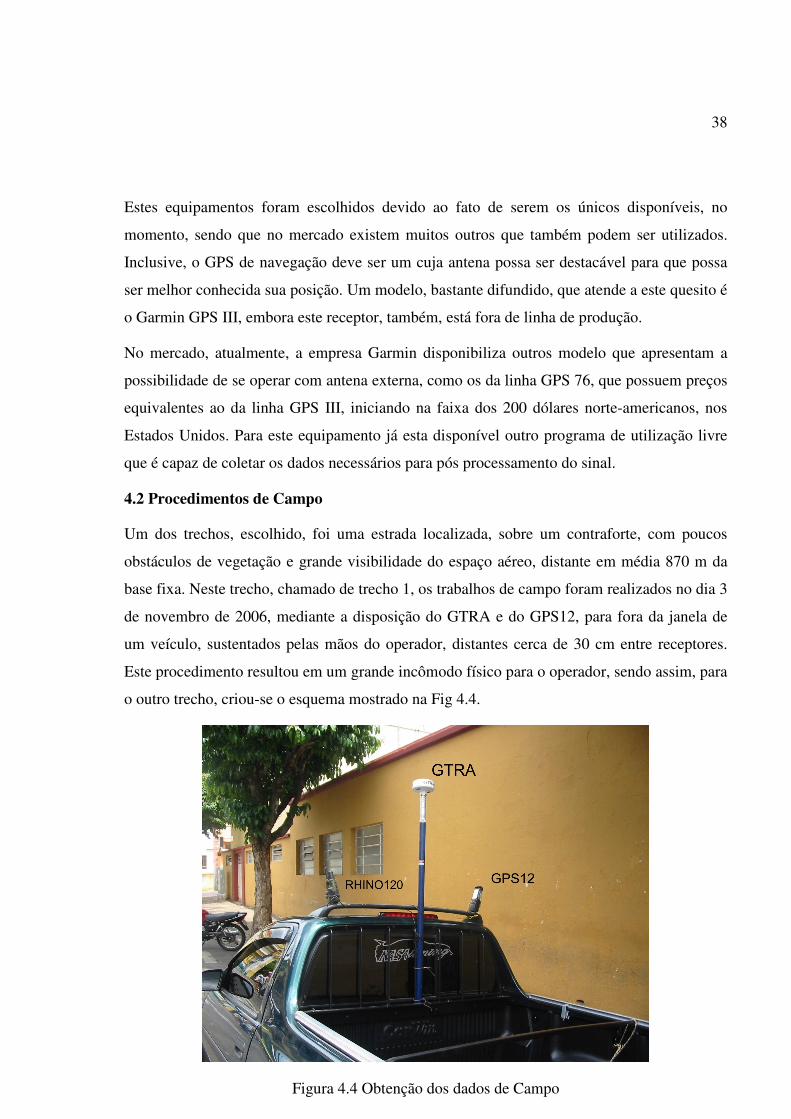
Um dos trechos, escolhido, foi uma estrada localizada, sobre um contraforte, com poucos
obstáculos de vegetação e grande visibilidade do espaço aéreo, distante em média 870 m da
base fixa. Neste trecho, chamado de trecho 1, os trabalhos de campo foram realizados no dia 3
de novembro de 2006, mediante a disposição do GTRA e do GPS12, para fora da janela de
um veículo, sustentados pelas mãos do operador, distantes cerca de 30 cm entre receptores.
Este procedimento resultou em um grande incômodo físico para o operador, sendo assim, para
o outro trecho, criou-se o esquema mostrado na Fig 4.4.
Figura 4.4 Obtenção dos dados de Campo

39
Deve-se observar que com este segundo método, já na coleta de dados em campo, as
antenas/receptores, estão distantes aproximadamente 0,60 metros entre si, valores medidos
com trena de metal. Isto já acarreta um erro deste valor nas coordenadas a serem obtidas, pois
esta distância é perpendicular ao eixo medido, diferentemente da distância de 30 cm para o
trecho 1, que ocorreu no sentido do eixo da estrada.
Outro trecho escolhido, para efetuar o mapeamento, situa-se no bairro das lavras de Cima,
zona Rural do município de Socorro, o motivo desta escolha é de que o bairro, mesmo sendo
rural, é densamente populoso, sendo formado por diversas propriedades com tamanho de um
simples lote, com centenas de metros quadrados, até imóveis com dezenas de milhares de
metros quadrados.
Neste trecho, distante em média 2.500 m da base fixa, apresenta bastante vegetação nas
margens da estrada, e devido ao fato de ser localizada em um vale, possui pouca visibilidade
do espaço aéreo, por estes motivos espera-se erro maior que para o trecho 1.
O GPS que operou como base, foi instalado em um marco com coordenadas conhecidas,
localizado na laje de um edifício, no centro da cidade de Socorro. Este ponto foi
estrategicamente escolhido, anteriormente a elaboração do presente trabalho, devido a
existência de poucos obstáculos ao seu redor, como pode ser notado na Fig 4.5.
Figura 4.5 Localização da Base Fixa

40
Como não foi possível a utilização do GPS Rhino 120, usou-se um outro GPS GTRA, mas se
manteve a utilização do Garmin Rhino 120, sem qualquer tipo de correção dos dados, apenas
no trecho 2, obtendo-se um mapa elaborado no modo Track, comum a maioria dos GPS de
navegação.
Dos procedimentos de campo, foram gerados dois arquivos pelo programa Async, que depois
foram transformados outros dois arquivos do tipo RINEX, mediante a utilização do programa
Gar2rnx.
O receptor GTRA base gerou dois arquivos, um em cada dia de operação, o GTRA móvel
gerou dois arquivos, todos foram gravados em seu formato nativo e no formato RINEX.

41
5 CÁLCULOS EFETUADOS
5.1 Dados do GPS Rhino 120
Devido ao fato do GPS Rhino 120, ter sido operado sem qualquer técnica para melhorar seu
desempenho, foi necessário a utilização do programa GPS TrackMaker, para descarregar as
coordenadas por ele coletadas.
Estes dados não foram possíveis de serem comparados com os demais, pois não foi possível
obter um programa, sem custo, que transformasse os dados gerados pelo programa GPS
TrackMaker para o padrão DXF.
5.2 Dados dos GTRA e Garmin
Os dados coletados pelos GPS, foram corrigidos pelo programa Ezsury da Viasat. Com este
critério adotado, todos os dados móveis foram corrigidos, usando-se os dados da mesma base.
Considerando-se que as interferências ocorreram igualmente para os dois receptores móveis, o
de navegação e o GTRA, pois dois bancos de dados foram coletados simultaneamente.
O programa Ezsurv, dentre outros resultados, gera um gráfico que indica os resíduos dos
cálculos de processamento, encontrados durante o cálculo do posicionamento relativo. Esses
resíduos, para o GPS garmin, estão disponibilizados na Fig 5.1 e Fig 5.2, para o trecho 1 e 2,
respectivamente.
Figura 5.1 Resíduos da correção do trecho1- GPS Garmin

42
Figura 5.2 Resíduos da correção trecho 2 – GPS Garmin
Os resíduos encontrados com o GTRA estão indicados nas Fig’s 5.3 e 5.4, indicando trecho 1
e 2 respectivamente.
Figura 5.3 Resíduos da correção trecho 1 – GPS GTRA

43
Figura 5.4 Resíduos da correção trecho 2 – GPS GTRA
O programa Ezsurv, apresenta a possibilidade de se retirar os dados coletados por um
determinado satélite, com a finalidade de se obter uma média melhor nos resultados finais,
como o intuito do presente trabalho é precisão da ordem de metros, este procedimento não foi
empregado.
Dos cálculos foram obtidos dois arquivos, um para cada trecho, contendo data, horário da
coleta e coordenadas UTM, apenas as coordenadas foram transportadas para um programa
tipo Computer Aid Design (CAD), estes desenhos estão disponíveis nos Apêndices de 1 a 24.
O trecho 1 possui, 1.783 metros de comprimento, neste trecho foram processados 44 pontos
coletados com o GTRA e, 238 coletados pelo GPS12, todos estes pontos foram inseridos em
CAD. Os 238 pontos foram unidos, gerando uma linha considerada como sendo eixo da
estrada. Os 44 pontos foram unidos, perpendicularmente a esta linha, criando-se 44 segmentos
de retas, que tiveram seus comprimentos determinados e inseridos em uma planilha, para
cálculo da média destes valores, que foram considerados como erro do GPS Garmin.
Com relação ao trecho 2, que possui 1.570 metros, o procedimento foi o mesmo, resultando
em 105 pontos coletados pelo GPS Garmin e 22 pelo GTRA, gerando 22 segmentos de retas.
A quantidade menor de pontos do trecho 2 é resultante do trecho ser ligeiramente menor, e
principalmente devido ao fato do veículo estar trafegando em velocidade maior do que a
utilizada durante a coleta de dados do trecho 1.

44
Neste trecho ocorreram pontos onde o espaçamento entre os dados foram maiores, causa
atribuída a grande quantidade de vegetação existente às margens da estrada e, também, a
posição geográfica da estrada ser localizada no fundo de um vale.
É de extrema importância salientar que todos estes cálculos, que indicam os supostos erros,
foram obtidos em um programa de CAD, portando não se tratam de cálculos geodésicos, são
simplesmente valores encontrados para se determinar diferenças visíveis em uma planta, na
escala de até 1:5.000
45
6 COMPARAÇÃO DOS RESULTADOS
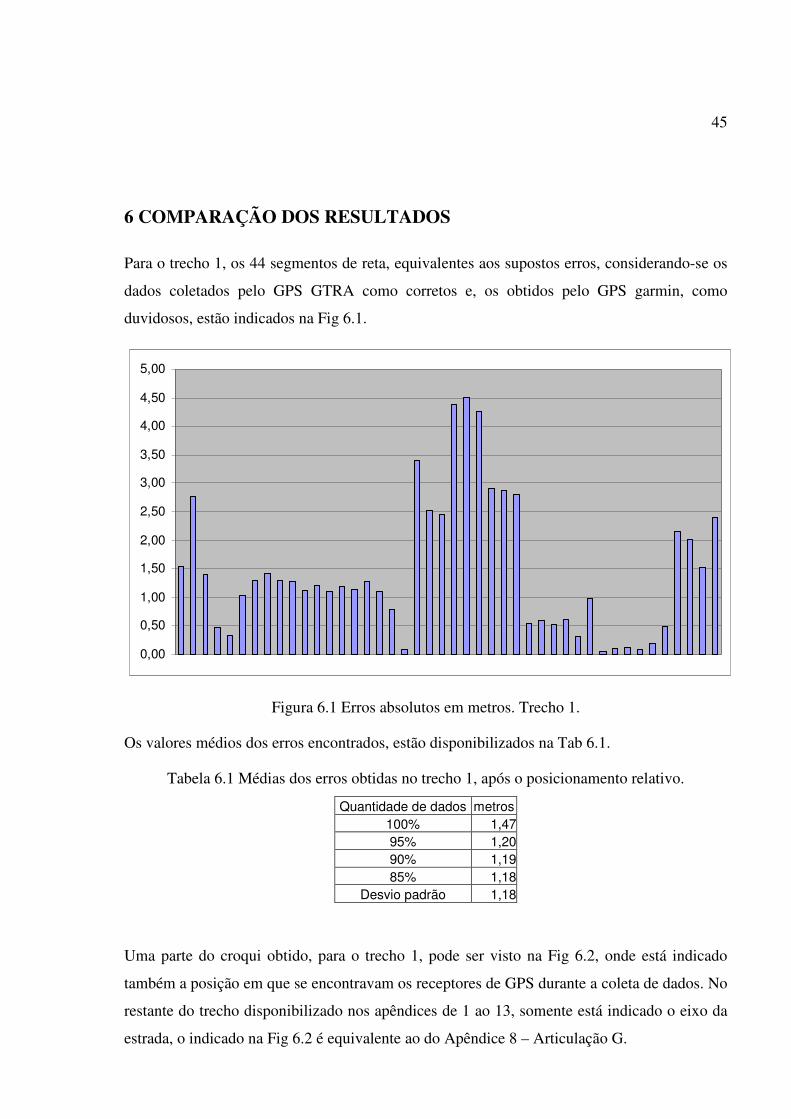
Para o trecho 1, os 44 segmentos de reta, equivalentes aos supostos erros, considerando-se os
dados coletados pelo GPS GTRA como corretos e, os obtidos pelo GPS garmin, como
duvidosos, estão indicados na Fig 6.1.
0,00
0,50
1,00
1,50
2,00
2,50
3,00
3,50
4,00
4,50
5,00
Figura 6.1 Erros absolutos em metros. Trecho 1.
Os valores médios dos erros encontrados, estão disponibilizados na Tab 6.1.
Tabela 6.1 Médias dos erros obtidas no trecho 1, após o posicionamento relativo.
Quantidade de dados metros
100% 1,47
95% 1,20
90% 1,19
85% 1,18
Desvio padrão 1,18
Uma parte do croqui obtido, para o trecho 1, pode ser visto na Fig 6.2, onde está indicado
também a posição em que se encontravam os receptores de GPS durante a coleta de dados. No
restante do trecho disponibilizado nos apêndices de 1 ao 13, somente está indicado o eixo da
estrada, o indicado na Fig 6.2 é equivalente ao do Apêndice 8 – Articulação G.

46
O intuito de detalhamento da planta, indicando largura da estrada, pontos notáveis e divisas
de imóveis, deve ser feito em uma segunda etapa, após a constatação de que a metodologia
empregada para a confecção do mapa da estrada é válida, sendo apenas este o propósito do
presente trabalho. Por este motivo não estão indicados nos croquis, disponibilizados nos
apêndices, as malhas com coordenadas e a direção do norte, obrigatórios em um mapa.
Figura 6.2 Parte do trecho 1
Com relação aos 22 segmentos de retas, oriundos do trecho 2, o resultado dos erros calculados
estão indicados na Fig 6.3, seus respectivos desenhos disponíveis nos apêndices 14 a 24. Para
este trecho foi necessário a análise visual de cada erro, pois além do erro na captura dos
dados, foi necessário considerar a distância entre os receptores, fato não considerado no
trecho 1, pois neste trecho a distância ocorreu no mesmo sentido do percurso, enquanto que
no trecho 2, ela ocorria perpendicular ao eixo percorrido.
Ocorreram situações em que o ponto coletado pelo GPS Garmin, encontrava-se ao lado
esquerdo do GTRA, e pelo sistema de coleta implantado, em nenhum momento, durante a
coleta, o GPS Garmin deixou de se localizar ao lado direito do GPS GTRA.

47
0,00
1,00
2,00
3,00
4,00
5,00
6,00
7,00
Figura 6.2 Erros absolutos em metros. Trecho 2.
Os valores médios calculados, com as mesmas considerações do outro trecho, estão indicadas
na Tab 6.2.
Tabela 6.2 Médias dos erros obtidas no trecho 2, após posicionamento relativo
Quantidade de dados metros
100% 2,29
95% 2,31
90% 2,31
85% 2,28
Desvio padrão 1,25
Como cálculo complementar, devido ao fato deste trecho ter apresentado uma amplitude de
erro vasta, de 0,13 m a 6,18 m, desprezando-se estes valores, as médias foram recalculadas, e
os resultados estão disponíveis na Tab 6.3.
Tabela 6.3 Médias dos erros obtidas no trecho 2, com omissão de valores
Quantidade de dados metros
100% 2,21
95% 2,31
90% 2,31
85% 2,28
Desvio padrão 0,87
Mesmo com a exclusão dos dados discrepantes, as médias se mantiveram praticamente as
mesmas.

48
7 CONCLUSÃO
Para uma utilização, na prática, desta metodologia aqui analisada, sugere-se a substituição dos
notebook utilizados como coletores, por equipamentos do tipo Palm, pois apresentam, além de
um custo de aquisição muito menor, comparando-se com os computadores portáteis, são
significativamente menores e mais leves, facilitando assim o seu manuseio no campo. Para a
utilização destes pequenos equipamentos, como coletores, o programa utilizado para a coleta
de dados do GPS Garmin deve ser reescrito, para a linguagem compatível com o equipamento
portátil escolhido.
Quanto ao programa de correção posicionamento relativo, pode-se utilizar o mesmo aqui
testado, pois esta correção é executada independentemente da técnica de coleta de dados
utilizada, pois, geralmente é executada em um computador no escritório.
Finalmente conclui que, com erro da ordem de 2 metros, é perfeitamente viável a utilização de
GPS de navegação, juntamente com GPS topográfico, operando como base, para a
elaboração de mapas visuais dos eixos de estradas rurais, podendo, ainda estes mapas
conterem informações sobre as obras de artes nestas estradas, pois se dados coletados no
modo “cinemático” apresentaram estes erros, dados no modo “estáticos”, tendem a apresentar
erros menores.
Finalmente, como citado no corpo do presente trabalho, pode-se analisar a mesma técnica,
aqui testada, usando-se das efemérides precisas, esperando-se assim uma redução nos erros
encontrados, aumentado assim a confiabilidade dos dados a serem utilizados por um GIS.
49
8 REFERÊNCIAS BIBLIOGRÁFICAS
ALBUQUERQUE, Paulo César Gurgel; SANTOS, Claudia Cristina dos. GPS para iniciantes Mini curso - XI Simpósio brasileiro de sensoramento. Instituto Nacional de Pesquisas Espaciais.Belo Horizonte. 05 a 09 de abril 2003.
BERALDO, Paulo; SOARES; Sérgio Monteiro. GPS Introdução e aplicações práticas. 2a Ed. Editora e Livraria Luana Ltda. Novembro/1996.
CEUB, Instituto de Pesquisa e Desenvolvimento. Curso de GPS e cartografia básica. 19??. disponível em <http://www.stt.eesc.usp.br/felex/0mario/Cartografia&Geodesia/cartografia_e_gps.pdf> acessado em 29.08.2006
FIGUEIREDO, Divino Cristino. Curso básico de GPS. setembro 2005, São Paulo 2005
HASENACK, Heinrich; CORDEIRO, José Luis Passos; WAZLAWIK, William. GPS, orientação e noções de cartografia- Notas de Aula. Universidade Federal do Rio Grande do Sul, Centro de Ecologia. Porto Alegre disponível em <http://www.ecologia.ufrgs.br/labgeo/downloads/dados/apostila.pdf> acessado em 29.08.2006
MACEDO, Fábio Campos; SILVEIRA, Augusto César da; FRAGASSI, Antônio de Pádua M.; NOGUEIRA, Antônio Moacir R. Volume II Geodésia Celeste. Centro de Treinamento Educacional e Tecnológico Faculdade de Engenharia de Agrimenssura Pós-Graduação em Georreferenciamento (200?)
MATSUOKA, André Tadashi; et all. Gps Diferencial: Conceitos Básicos, Implementação E Análise De Resultados. Anais do III Colóquio Brasileiro de Ciências Geodésicas 200?.
MONICO, João Francisco Galera. Posicionamento pelo NAVSTAR-GPS. Capítulo 1, 3, 4 e 6. 1a Ed. Editora UNESP. São Paulo 2000
MOURA, Ana clara Mourão. Cartografia II. Departamento de Cartografia UFMG 2001,.
Normas Técnicas para Levantamentos Topográficos. Instituto Nacional de Colonização e Reforma Agrária – INCRA. julho 2001. Disponível em <http://geo.cav.udesc.br/~geo/ensino/downloads/manual_incra_cartografia.pdf> acessado em 10.08.2006.
SALOMONI, Rodrigo. Diferença entre os receptores GPS de levantamento e os receptores GPS de navegação em aplicações técnicas. artigo disponível em < http://www.spg.com.br/informacoes/artigos_gps/Dif_equip_GPS.pdf> acessado em 08.08.2206
SANTOS, Patrícia Azevedo dos. Notas de aula Geoprocessamento aplicado. Escola técnica federal de Palmas. Palmas 2006. disponível em <http://lab.etfto.gov.br/~patricia/Geoprocessamnto/Apostila_GEOP.pdf>. Acessado em 28.08.2006.
SEEBER, Günter, Hannover (Alemanha); ROMÃO, Verônica Maria Costa (Recife PE, Brasil). Princípios Básicos do GPS nas medições Geodésicas. Geodésia online. Revista da Comissão Brasileira de Geodésia, 2/1997

50
SILVA, Luiz Henrique Souza; CÂMARA, Mario Jorge Costa. Avaliação das coordenadas pós-processadas com dados Rinex obtidos por meio de um GPS de navegação. Universidade Católica Dom Bosco. maio 2005.
SILVEIRA, L. C.Os sistemas de coordenadas UTM, RTM e LTM. Módulo 9. Tomo único. Lucas Eventos Ltda.Criciúma. SC, 200?.
ROCHA, José Antônio M. R.. GPS uma abordagem prática.Capitulo 6 “O sistema de posicionamento global”,.3a Ed. Edições Bagaço. Recife 2002.

51
52

53

54

55

56

57

58

59

60

61

62

63
64

65

66

67

68

69

70

71

72

73

74

75