seminário de elaboração do projecto de...
TRANSCRIPT
i
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM
FUSÃO SENSORIAL PARA ANÁLISE DE MOVIMENTO - APLICAÇÕES EM BIOMECÂNICA
Seminário de Elaboração do Projecto de Investigação
Programa Doutoral em Engenharia Mecânica
António Filipe Nunes Gomes
Programa Doutoral em Engenharia Mecânica
Dezembro de 2012

ii

iii
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM
FUSÃO SENSORIAL PARA ANÁLISE DE MOVIMENTO - APLICAÇÕES EM BIOMECÂNICA
Relatório realizado no âmbito da Unidade Curricular de Seminário de Elaboração do Projecto de Investigação do Programa Doutoral em Engenharia
Mecânica da Faculdade de Engenharia da Universidade do Porto
António Filipe Nunes Gomes
Licenciado em Engenharia Electrotécnica e de Computadores pela
Faculdade de Engenharia da Universidade do Porto
Mestre em Automação, Instrumentação e Controlo pela
Faculdade de Engenharia da Universidade do Porto
Seminário realizado sob a orientação de:
João Manuel R. S. Tavares
Prof. Associado do Departamento de Engenharia Mecânica da
Faculdade de Engenharia da Universidade do Porto
Co-orientação de:
Joaquim Gabriel M. Mendes
Prof. Auxiliar do Departamento de Engenharia Mecânica da
Faculdade de Engenharia da Universidade do Porto

iv

v
Agradecimentos
A realização deste trabalho contou, em primeiro lugar, com a preciosa ajuda e
orientação demonstradas pelos Professores João Manuel Tavares e Joaquim Gabriel Mendes,
sem as quais o presente trabalho não teria sido possível.
A todos aqueles que, de alguma forma, contribuíram para a realização deste trabalho,
quero deixar aqui os meus sinceros agradecimentos.
António Filipe Nunes Gomes

vi
vii
Resumo
Este relatório surge no âmbito da Unidade Curricular de Seminário de Elaboração do
Projecto de Investigação do Programa Doutoral em Engenharia Mecânica com a finalidade
principal de fazer um enquadramento ao projecto de Doutoramento que se pretende
desenvolver.
Este projecto insere-se na área da Visão por Computador, mais especificamente no
domínio da análise biomecânica de movimento humano em marcha e em actividades
desportivas. O objectivo principal prende-se com a realização do estudo sobre o estado da arte
relativamente às metodologias existentes e aos sistemas normalmente utilizados para tal fim.
Assim, a realização deste trabalho pode ser encarado como uma introdução ao tema da
Tese de Doutoramento prevista.

viii

ix
Índice
Capítulo 1 ................................................................................................................................. 9
1. Enquadramento ............................................................................................................... 3
1.1 Objectivos .................................................................................................................. 5 1.2 Estrutura do Relatório ............................................................................................... 5 1.3 Contribuições Principais ........................................................................................... 6
Capítulo 2 ................................................................................................................................. 7
2 Seguimento de Movimento ............................................................................................. 9
2.1 Introdução .................................................................................................................. 9
2.2 Metodologias de Seguimento de Movimento .......................................................... 10 2.2.1 Homographic Occupancy .................................................................................... 11 2.2.2 Seguimento de Movimento de Humanos em Sequências de Imagem ................ 12 2.2.3 Seguimento de Múltiplas Pessoas e Estimação da Pose 3D ................................ 15
2.2.4 Métodos Bayesianos ............................................................................................ 20 2.2.5 Programação Linear ............................................................................................ 26 2.2.6 Medição da Discrepância entre Observações e a Superfície ............................... 31
2.2.7 Algoritmo MMC (Markerless Motion Capture) ................................................. 33 2.2.8 Algoritmo de Seguimento HumanEva I e HumanEva II ..................................... 37
2.3 Métodos Estocásticos .............................................................................................. 42 2.3.1 Filtro de KALMAN .............................................................................................. 42 2.3.2 Filtro de Partículas .............................................................................................. 44
2.3.3 Filtro de Partículas Anelado (APF) ..................................................................... 45 2.3.4 Filtragem e Alisamento de Partículas .................................................................. 50
2.4 Sumário ................................................................................................................... 53
Capítulo 3 ............................................................................................................................... 55
3 Análise Clínica da Marcha ........................................................................................... 57
3.1 Introdução ................................................................................................................ 57
3.2 Análise de Vídeos .................................................................................................... 58 3.3 Cinemática Linear ................................................................................................... 59
3.3.1 Obtenção de Dados Cinemáticos ......................................................................... 60
3.3.2 Sistemas de Referência ........................................................................................ 61 3.3.2.1 Sistema de Referência Bidimensional ......................................................... 62
3.3.2.2 Sistema de Referência Tridimensional ........................................................ 63 3.3.3 Marcadores para Análise Cinemática .................................................................. 65 3.3.4 Parâmetros gerais que descrevem a Marcha ....................................................... 67
3.4 Cinemática Angular ................................................................................................. 69 3.4.1 Ângulo Absoluto ................................................................................................. 69 3.4.2 Ângulo Relativo .................................................................................................. 69 3.4.3 Ângulos das Articulações Inferiores ................................................................... 70
3.5 Cinética Linear ........................................................................................................ 73 3.5.1 Força de Reacção do Solo ................................................................................... 73 3.5.2 Força de Reacção da Articulação ........................................................................ 75 3.5.3 Análise Estática e Dinâmica ................................................................................ 76

x
3.5.4 Força Centrípta .................................................................................................... 77
3.5.5 Pressão Plantar .................................................................................................... 78 3.6 Cinética Angular ..................................................................................................... 80
3.6.1 Características de um Binário ............................................................................. 80
3.6.2 Par de Forças ....................................................................................................... 81 3.6.3 Cálculo do Centro de Massa de um Segmento .................................................... 82 3.6.4 Cálculo do Centro de Massa total do Corpo ....................................................... 83 3.6.5 Tipos de Binário .................................................................................................. 84 3.6.6 Representação de Binários .................................................................................. 85
3.6.7 Análise Estática e Dinâmica ................................................................................ 86 3.7 Combinação de Sistemas Cinemático/Cinético ....................................................... 88 3.8 Sistemas de Medição do Movimento ...................................................................... 89
3.8.1 Plataforma de Força ............................................................................................ 89 3.8.2 Electromiografia .................................................................................................. 91
3.8.3 Electrogoniómetro ............................................................................................... 92
3.8.4 Dispositivo Potenciométrico ............................................................................... 92
3.8.5 Calibres de Tensão Flexíveis ............................................................................... 93 3.8.6 Acelerómetro ....................................................................................................... 93 3.8.7 Giroscópio ........................................................................................................... 94
3.9 Modelos Biomecânicos para Análise de Movimento do Corpo Humano ............... 94
3.10 Sumário ................................................................................................................. 114
Capítulo 4 ............................................................................................................................. 115
4 Soluções Comerciais para Análise de Movimento .................................................... 117
4.1 Simi Motion ........................................................................................................... 117 4.1.1 Simi Aktisys ....................................................................................................... 117
4.2 Vicon ..................................................................................................................... 121 4.2.1 Vicon Tracker .................................................................................................... 121
4.2.2 Vicon Motus Vídeo ............................................................................................ 122 4.2.2.1 Vídeo em 2D ............................................................................................. 122
4.2.2.2 Vídeo em 3D ............................................................................................. 122 4.2.3 Vicon MX ........................................................................................................... 123 4.2.4 Câmara Vicon Bonita ........................................................................................ 124
4.3 Qualisys ................................................................................................................. 125 4.4 Northern Digital .................................................................................................... 127
4.4.1 Sistema de Captura Optotrack Smart Markers. ................................................ 127 4.4.2 Sistema de Captura de Movimento 3D Investigator ......................................... 128 4.4.3 Software de Análise Biomecânica Visual 3D .................................................... 129
4.5 Zebris ..................................................................................................................... 130 4.5.1 Sistema de Treino do Movimento de Balanço do Jogo de Golfe ...................... 130
4.5.1.1 SAM PuttLab ............................................................................................. 132 4.5.1.2 SAM BalanceLab ....................................................................................... 134
4.5.2 Sistema de Treino Interactivo da Corrida no Tapete Rolante ........................... 135 4.5.3 Sistema de Treino do Salto ................................................................................ 136
4.6 Sumário ................................................................................................................. 137
Capítulo 5 ............................................................................................................................. 139
5 Conclusões e Perspectivas de Trabalho Futuro ........................................................ 141
Referências ........................................................................................................................... 145

xi

xii

Capítulo 1
Enquadramento


Capítulo 1 – Enquadramento
António Gomes Página 3
1. Enquadramento
A análise de movimento através de técnicas Visão Computacional tem vindo a
desenvolver-se ao longo dos últimos anos, com grande incidência na análise de movimento
envolvendo seres humanos, com particular interesse no reconhecimento da pose, de acções e
no seguimento dos mesmos [Gavrila, 1999; Pinho, 2004, 2005a].
As áreas de aplicação da análise de movimento por Visão Computacional são extensas
e variadas, podendo salientar-se algumas, como: sistemas de vídeovigilância (controlo de
acessos, áreas comerciais, etc.), controlo de tráfego automóvel, estudos clínicos de pacientes
com dispositivos ortopédicos, sistemas automatizados de inspecção industrial, sistemas de
interface homem/máquina, sistemas de realidade virtual (jogos, estúdios virtuais,
teleconferência, etc.) [Gavrila, 1999; Pinho, 2004; Tavares, 2000; Vasconcelos, 2008;
Zimmermann, 2009].
As metodologias utilizadas na análise da marcha são geralmente compostas pela
aquisição e respectivo tratamento de dados experimentais, formulação geral das equações de
equilíbrio de movimento e sua resolução numérica. Assim, na análise da marcha humana o
interesse centraliza-se na obtenção pormenorizada do movimento de segmentos corporais dos
sujeitos no espaço. O procedimento geral utilizado na análise clínica da marcha é composto
pelas seguintes etapas principais: captura de imagens de movimento, seguimento de pontos-
chave durante o movimento e, finalmente, reconhecimento da pose do sujeito em análise, para
posterior estudo cinemático e cinético do movimento envolvido. Um dos problemas inerentes
ao seguimento dos marcadores passivos usualmente colocados no corpo do sujeito em estudo,
geralmente sobre a pele em zonas anatómicas de interesse, prende-se com as dificuldades
associadas ao seguimento destas múltiplas entidades devido a problemas de desaparecimento
(oclusão) e ao reaparecimento das mesmas nas imagens em análise. Estes casos devem-se,
sobretudo, aos constantes movimentos dos vários segmentos corporais durante o movimento
adquirido. Para a análise clínica da marcha, mesmo simplificando o seguimento do
movimento articulado para o seguimento de marcadores, o seguimento totalmente automático
e sem intervenção humana destas múltiplas entidades é, ainda hoje, uma meta a atingir
[Sousa, 2008; 2007a].
Recentemente, diversos investigadores têm procurado desenvolver e implementar
metodologias e sistemas para análise biomecânica de atletas em actividades desportivas, tendo
como objectivo a melhoria do seu rendimento, da sua performance e da sua prestação.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 4
Uma parte fundamental da análise biomecânica consiste na construção de modelos
biomecânicos para avaliação das forças musculares internas que dão origem aos movimentos
envolvidos [Ambrósio, 2008].
Em [Ivancevic, 2008] é realizada uma análise dinâmica 3D, baseada nas equações de
Newton-Euler, dos movimentos associados a uma raquete de ténis. Mais concretamente, é
realizada uma analogia fisiológica, anatómica e biomecânica das etapas correspondentes à
realização do serviço de ténis comparativamente aos lances de um jogador de andebol. Este
investigador indica como objectivo futuro, a simulação computacional, com base nas
equações Newton-Euler, do movimento da raquete de ténis, para vários valores dos
parâmetros, condições iniciais e entradas (forças musculares), velocidades e acelerações de
seguimento na realização de um serviço de ténis. Encontrava-se, ainda, em fase de
desenvolvimento a possibilidade de efectuar a simulação computacional, com base nas
equações de Newton-Euler, dos movimentos da raquete de ténis, assim como a possibilidade
de estimar/calcular todos os parâmetros inerciais associados; nomeadamente, parâmetros
elásticos e biomecânicos, a determinação das trajectórias 3D dos movimentos translacionais e
rotacionais, bem como efectuar a medição experimental, através da colocação de micro
sensores inerciais (MEMS - micro-electro-mechanica), acelerómetros e giroscópios
tridimensionais, embebidos na raquete de ténis para a medição de velocidades e acelerações
de seguimento no serviço do jogo de ténis.
Também considerando o domínio do ténis, em [Chow, 2009] pode-se encontrar um
estudo cinemático para melhor se compreender os mecanismos subjacentes aos movimentos
da parte inferior do tronco e da actividade dos músculos em diferentes tipos de serviço de
ténis. Neste estudo, os jogadores foram filmados com marcadores colocados nas suas costas,
para assim ser possível estimar o valor dos ângulos anatómicas entre a zona média e a mais
baixa do tronco para quatro tipos de movimento do tronco: extensão, flexão lateral esquerda e
torção direita e esquerda. Foi utilizada electromiografia (EMG) de superfície para monitorizar
a actividades de alguns músculos, como abdominais esquerdos e direitos (LRA – left rectus
abdominis e RRA – right rectur abdominis), eretor direito e esquerdo da coluna vertebral
(LEO – left erector spinae e REO – right erector spinae), os músculos interno e externo
oblíquo (LEO – left external oblique e REO - right external oblique). Foram, também,
estimados os valores dos ângulos máximos para diferentes movimentos do tronco durante um
serviço e os níveis médios de EMG para diferentes músculos e diferentes fases (conclusão
ascendente e descendente, aceleração e seguimento) de um serviço de ténis.

Capítulo 1 – Enquadramento
António Gomes Página 5
1.1 Objectivos
Este trabalho teve como objectivo principal fazer uma introdução ao tema definido
para a Tese de Doutoramento prevista e apresentar possíveis linhas de trabalho a serem
seguidas, tendo em vista a consecução dos objectivos delineados para a mesma. O trabalho
exposto neste relatório, teve assim como primeiro objectivo a realização do levantamento
bibliográfico sobre o estado de arte de metodologias existentes e sistemas para efectuar a
análise biomecânica do movimento humano, nomeadamente em marcha e em actividades
desportivas. Mais especificamente, os objectivos foram os seguintes:
Identificar, estudar e apresentar metodologias computacionais para o seguimento e
análise biomecânica de movimento humano;
Caracterizar o procedimento geral utilizado na análise clínica da marcha e de
actividades desportivas, designadamente o processo de captura do movimento, o
seguimento de pontos-chave durante o movimento e o reconhecimento da pose do
sujeito;
Apresentar metodologias de análise das forças internas do corpo através de modelos
biomecânicos do corpo humano;
Apresentação de soluções comerciais existentes para análise do movimento.
1.2 Estrutura do Relatório
A organização adoptada para este relatório visa facilitar o acesso aos diversos temas
abordados, apresentando-se por isso dividida em cinco capítulos. De seguida descreve-se,
sucintamente, cada um deles:
Capítulo 2 – Seguimento de Movimento
Neste capítulo são apresentadas algumas das metodologias existentes para
seguimento de movimento humano com recurso a técnicas de Visão Computacional.
Capítulo 3 – Análise Clínica da Marcha
Posteriormente, e no capítulo três, é abordada uma aplicação específica do
seguimento de movimento humano, que é a análise clínica da marcha. Assim, são
apresentados os conceitos base de engenharia e clínicos subjacentes a esta aplicação.
Também são apresentadas as metodologias predominantes na análise clínica da marcha,
bem como alguns dos sistemas utilizados na medição do movimento.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 6
Neste capítulo são ainda enumeradas algumas metodologias de análise das forças
internas do corpo através de modelos biomecânicos do corpo humano construídos para o
efeito.
Capítulo 4 – Soluções Comerciais para Análise de Movimento
No capítulo quatro são apresentados algumas das soluções existentes no mercado
para o diagnóstico e estudo clínico da marcha.
Capítulo 5 – Conclusões e Trabalho Futuro
No quinto capítulo inclui-se uma conclusão final, bem como uma perspectiva geral
do trabalho de projecto de Doutoramento que se pretende desenvolver.
1.3 Contribuições Principais
Como principal contribuição deste relatório salienta-se o estudo aprofundado e a
revisão bibliográfica de metodologias e sistemas considerados pertinentes para esta área do
conhecimento.

Capítulo 2
Seguimento de Movimento


Capítulo 2 – Seguimento de Movimento
António Gomes Página 9
2 Seguimento de Movimento
O presente capítulo tem como objectivo principal a apresentação de metodologias
frequentemente usadas no seguimento de movimento humano com recurso a técnicas de
Visão Computacional. Assim, é realizada uma breve introdução à análise de movimento,
sendo de seguida apresentadas algumas das metodologias existentes para o seguimento de
movimento humano e estimação da pose. Note-se que o objectivo não foi efectuar um estudo
exaustivo das diversas metodologias existentes, mas sim apresentar as suas ideias base.
2.1 Introdução
A análise de movimento usando técnicas Visão Computacional tem sido uma área em
constante expansão ao longo dos últimos anos, com grande incidência na análise de
movimento envolvendo seres humanos, com particular interesse no reconhecimento da sua
pose, de acções e no seguimento dos mesmos. Este domínio é designado, por vezes, por
“looking at people” [Gavrila, 1999; Pinho, 2004, 2005a].
A análise de movimento pode ser caracterizada pela fase de detecção, de seguimento e
de reconhecimento da pose ao longo de sequências de imagens [Aggarwal, 1999; Pinho,
2004].
As áreas de aplicação da análise de movimento por Visão Computacional são
extensas, como por exemplo a sua utilização em sistemas de vídeo vigilância (controlo de
acessos, áreas comerciais, etc.), controlo de tráfego automóvel, estudo clínico de doentes com
dispositivos ortopédicos, sistemas automatizados de inspecção industrial, sistemas de
interface homem/máquina, em sistemas de realidade virtual (jogos, estúdios virtuais,
teleconferência, etc.), entre outros [Gavrila, 1999; Pinho, 2004; Tavares, 2000; Vasconcelos,
2008].
Recentemente, diversos investigadores têm procurado desenvolver e implementar
metodologias computacionais para analisar o movimento do corpo humano na área da
biomecânica, particularmente na análise da marcha e de actividades desportivas.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 10
2.2 Metodologias de Seguimento de Movimento
O seguimento de movimento utilizando técnicas de Visão Computacional tem tido um
enorme crescimento ao longo dos últimos anos, Este crescimento resulta não só pela
diversidade de aplicações, bem como pela potenciação de recursos promovidos pelos
inúmeros desenvolvimentos tecnológicos. A crescente necessidade de realizar de forma
automática os processos manuais de análise de movimento, tem-se recorrido de forma
crescente à análise de movimento utilizando técnicas de Visão Computacional [Aggarwal,
1999; Vasconcelos, 2008; Moeslund, 2001; Pinho, 2005a, 2005b, 2004].
O seguimento é frequentemente suportado por predição, especialmente quando os
objectos estão previamente detectados e há um conhecimento prévio de algumas das suas
características. A predição introduz uma região de interesse no espaço de imagem e no espaço
de estados, facilitando, assim, o processamento total necessário. A predição de vários
parâmetros de estado é baseada em modelos de evolução temporal. São usados modelos de
velocidade e de aceleração ou modelos mais avançados de movimento, tal como de andar no
caso do movimento humano. Uma aproximação alternativa, consiste em aprender modelos
probabilísticos do movimento em causa [Vasconcelos, 2008; Moeslund, 2001; Pinho, 2004].
Segundo [Aggarwal, 1999; Wang, 2003; Pinho, 2004] o seguimento pode ser
considerado como sendo um processo individual ou como um meio de pré-processamento dos
dados, para operações destinadas ao reconhecimento de objectos, estimação de pose, análise
médica, etc. Desta forma, e dependendo do objectivo do seguimento, são escolhidas as
diferentes características que melhor se coadunam com o seguimento pretendido. O critério de
selecção destas características deve ter em consideração a robustez, o ruído, as alterações de
intensidade, o nível de contraste e a dimensão das imagens a analisar. As características,
designadas de baixo nível, são mais fáceis de serem extraídas, mas, mais difíceis de seguir,
face às de alto nível, como linhas, áreas, polígonos, ou volumes 3D, dificultando, assim, a sua
análise em tempo real. Se o seguimento, propriamente dito, constituir o pré-processamento da
análise de movimento, designadamente no reconhecimento, então o seu objectivo principal é
o de extrair informação específica acerca de cada imagem, tanto de baixo nível, como a
detecção de orlas de intensidade ou de alto nível, como o reconhecimento das mãos e da
cabeça dos sujeitos nas imagens.
Seguidamente são apresentadas as ideias base que caracterizam algumas das
metodologias de seguimento de movimento basedas em técnicas de Visão Computacional.

Capítulo 2 – Seguimento de Movimento
António Gomes Página 11
2.2.1 Homographic Occupancy
Em [Khan, 2009] é apresentada uma metodologia para a detecção e o seguimento de
pessoas em locais onde estas se encontram organizadas em aglomerados e estão
desordenadas. Esta metodologia é particularmente orientada para situações onde a cena é
suficientemente densa, sendo comum a oclusão parcial ou total das pessoas envolvidas, não
havendo, assim, a garantia destas poderem ser vistas de forma isolada. A Figura 2.1 mostra
alguns exemplos de cenas onde existem aglomerados de pessoas. Pode-se ver que existem
algumas pessoas isoladas e que, em certos casos, há oclusão quase total das mesmas.
Figura 2.1 – Exemplos de cenas com aglomerados de pessoas (adaptado de [Khan, 2009]).
Para resolver o problema de oclusão em diferentes planos da cena e ser possível o
seguimento de múltiplas pessoas, este autor apresenta uma metodologia denominada de
“homographic occupancy”. A metodologia utiliza a informação de múltiplas vistas, usando
construções geométricas, localizando, assim, pessoas em diferentes planos da cena. Assim,
são procurados os pontos da cena, em várias posições da imagem onde, garantidamente,
possam ser ocupadas por pessoas. Segundo este autor, o princípio da referida metodologia é o
seguinte: considere-se uma cena que contém um plano de referência e que está a ser visto por
um conjunto de câmaras fixas. Os modelos do fundo de cena, em cada vista, estão disponíveis
e quando aparece um objecto na cena, este pode ser detectado como um objecto de primeiro
plano, em cada vista, usando a diferença de fundo de cena. Algum ponto da cena que se
encontre dentro do objecto, do primeiro plano, será projectado a um pixel de primeiro plano
em todas as vistas. Isto aplica-se, igualmente, para todos os pontos dentro do objecto que se
encontram no plano de referência; contudo, as posições da imagem projectada, em cada vista,
serão relacionados pela homografia induzida do plano de referência. Desta forma, é possível
resolver os problemas de oclusão, Figura 2.1. As regiões de primeiro plano são mostradas em
cada vista em cor branca num fundo de cena preto.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 12
Figura 2.2 – Em a) e b) as pessoas são visualizadas por diversas câmaras em diferentes vistas
(adaptado de [Khan, 2009]).
Os raios azuis na Figura 2.2a) representam os pixels que satisfazem as condições
impostas pela metodologia e que são projectados corretamente para a região de primeiro plano
de cada vista. Na Figura 2.2b) é demonstrado como é resolvido o problema de oclusão através
da vista 1. Os pixels pertencentes à região do torso, de primeiro plano da pessoa azul, estão a
ocultar os pixels pertencentes à região do pé da pessoa verde que, também, cumprem as
condições da metodologia (raios verdes). Os pixels, de primeiro plano, que não satisfazem as
condições da metodologia, devido à paralaxe do plano, são imagens que não pertencem ao
plano de terra (“ground plane”) e estão assinalados pelos raios vermelhos da Figurab). Este
processo cria um efeito convenientemente translúcido que detecta regiões dos pés, da pessoa
verde, mesmo se estiverem ocultos por outras pessoas. Assim, se existirem mais pessoas entre
a pessoa verde e a azul, não afectará a localização da pessoa verde no plano à terra. Esta
metodologia não é limitada apenas a um único plano na cena. De facto, pode ser executada a
fusão entre múltiplos planos aumentando, assim, a robustez do processo de localização [Khan,
2009].
2.2.2 Seguimento de Movimento de Humanos em Sequências de Imagem
Em [Sundaresan, 2009] é apresentado um algoritmo para o seguimento de movimento
articulado de seres humanos em sequências de imagem obtidas a partir de múltiplas câmaras.
É usado um modelo articulado do corpo humano, composto por dezasseis segmentos rígidos
que permitem a translação e rotação das junções. Os autores apresentam um algoritmo para
estimar o modelo do corpo humano, bem como para efectuar o seguimento e estimar a pose
do mesmo. Na Figura 2.3 é ilustrado um diagrama representativo do algoritmo de seguimento
de movimento proposto usando os modelos de forma e de movimento, sendo este algoritmo
composto por três etapas, nas caixas a tracejado do lado direito, e pelas sugestões indicadas
para trabalho futuro do lado esquerdo.
a) b)
Ponto “piercing”

Capítulo 2 – Seguimento de Movimento
António Gomes Página 13
Ranhuras Espaciais Registadas
Ranhuras Temporais Registadas
Forma 3D
Movimento 2D
Resíduos de Movimento
Forma 2D
Silhuetas
Inicialização da Pose
Inicialização da Pose
Seguimento da Pose
Predição
Correção
Estimação do Modelo
Modelo do Corpo
Humano
Deslocamento do pixel
Trabalho actual
Modelo Guiado de Segmentação e Registo de Articulações Humanas
Figura 2.3 – Diagrama representativo do algoritmo de seguimento e análise de movimento proposto
(adaptado de [Sundaresan, 2009]).
Neste algoritmo é realizada a integração do modelo de seguimento com o de estimação
e inicialização da pose para executar, de forma automática, o sistema de captura de
movimento. O algoritmo de inicialização de pose trabalha, tipicamente, numa fracção dos
vários quadros (frames) das sequências de imagem. O algoritmo de registo, usado na
inicialização, falha em casos em que os segmentos corporais estão demasiado próximos entre
eles ou quando existem erros na estimação da silhueta a 2D, causando, assim, aberturas na
avaliação da silhueta e na reconstrução do modelo volumétrico representativo do corpo
humano (voxel) [Sundaresan, 2009].
Figura 2.4 – a) Modelo volumétrico do corpo humano; b) Modelo de esqueleto; c) Modelo correspondente
super-quádrico (adaptado de [Sundaresan, 2009]).
Pode-se encontrar em [Sundaresan, 2009] a metodologia utilizada na construção do
modelo que representa o corpo humano, bem como a forma de reconstrução do sujeito a partir
dos parâmetros desse mesmo modelo e dos dados correspondentes ao vector de pose. A
modelação do corpo humano pode ser efectuada através de seis correntes articuladas, a saber:
Cabeça
Pescoço
Úmero Esquerdo
Palma da mão esquerda
Antebraço esquerdo
Tronco (zona superior)
Tronco (zona inferior)
Coxa esquerda
Perna esquerda
Pé esquerdo
b) a) c)

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 14
a cabeça (cabeça e pescoço), o tronco (parte superior e inferior), dois braços (úmero,
antebraço, palma) e os dois pés (coxa, perna, pé) como ilustrado na Figura 2.4c).
Este modelo é baseado numa estrutura de esqueleto e considera a flexibilidade do
corpo humano. O modelo consiste na junção das posições e dos parâmetros comuns, dos
segmentos super-quádricos, que descrevem cada segmento rígido. O modelo pode ser
simplificado por um modelo de esqueleto usando apenas a linha central do segmento rígido,
como ilustrado na Figura 2.4b.
Este mesmo autor apresenta no seu trabalho a forma de como é realizada a
recuperação do modelo do corpo humano, a descrição do vector de pose e os algoritmos
utilizados no seguimento da pose usando o algoritmo do deslocamento do pixel e as curvas do
modelo do esqueleto. O seguimento foi efectuado em sequências de imagem em que o sujeito
executa diferentes tipos de movimentos, usando imagens em escala de cinza obtidas a partir
de oito câmaras com uma definição espacial de 648 x 484 pixels por quadro, com uma taxa de
30 frames por segundo [Sundaresan, 2009].
Na Figura 2.5 são apresentados os resultados para a primeira sequência de seguimento,
em sequências de imagem que incluem o sujeito a caminhar em linha recta (65 frames, 2 s). A
Figura 2.6 ilustra o movimento do sujeito a balançar os braços descrevendo arcos largos e
abertos (300 frames, 10 s). A Figura 2.7 mostra o movimento segundo um caminho circular
(300 frames, 10 s). A calibração das câmaras, parâmetros externos e internos, foram
efectuados utilizando o algoritmo descrito em [Svoboda , 2005].
Figura 2.5 – Resultado de seguimento para a sequência 1: a) Imagem da câmara 1; b) Imagem da câmara 3
(retirado de [Sundaresan, 2009]).
Figura 2.6 – Resultado de seguimento para a sequência 2: a) Imagem da câmara 1; b) Imagem da câmara 3
(retirado de [Sundaresan, 2009]).
a)
b)
a)
b)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 15
Figura 2.7 – Resultado de seguimento para a sequência 3: a) Imagem da câmara 1; b) Imagem da câmara 3
(retirado de [Sundaresan, 2009]).
2.2.3 Seguimento de Múltiplas Pessoas e Estimação da Pose 3D
Em [Lee, 2009] é apresentada uma metodologia que utiliza uma aproximação
composta por três estágios, sendo realizado o seguimento de múltiplas pessoas numa
sequência monocular de imagens e estima a pose 3D das mesmas, Figura 2.8.
Figura 2.8 – Aproximação de três estágios: a) Entrada; b) Seguimento de blobs; c) Inferência de 2D; d)
inferência de 3D. A cena consiste em três pessoas num ambiente de sala de reunião. As poses
são estimadas de maneira hierárquica (retirado de [Lee, 2009]).
No primeiro estágio, as pessoas em movimento são detectadas e seguidas como blobs
elípticos. Cada elipse contém cinco parâmetros, que são os seguintes: posição-x, posição-y,
largura, altura, e rotação. Quando uma pessoa está oculta por outra, é instruído um histograma
de um modelo de aparência durante o seguimento, para cada pessoa, permitindo, assim,
determinar a profundidade necessária de cada uma delas, através da combinação da região
visível com o modelo de aparência. Esta etapa permite obter, para cada pessoa, uma
estimativa da posição, tamanho e a uma eventual camada de oclusão da mesma. No segundo
estágio, são usados vários módulos para a detecção das diversas partes que constituem o
corpo humano, tais como: a face, os ombros e os membros. No terceiro estágio é utilizado um
método baseado na cadeia de Markov – Monte Carlo (DD-MCMC) para estimar a pose 3D do
corpo em cada frame. Nestes três estágios são estimados múltiplas hipóteses de poses em cada
frame. As trajectórias e a pose dos sujeitos podem ser estimadas pela combinação dos
resultados de cada frame. É utilizada a técnica de programação dinâmica para processar as
a)
b)
b) a) c) d)

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 16
trajectórias óptimas de movimento dos membros. Os resultados experimentais, obtidos em
locais fechados e em sequências de imagens, mostram que é possível o seguimento de
múltiplas pessoas a descreverem movimentos complexos, tais como o sentar; o rodopiar e
outros movimentos, que possam originar a oclusão de pessoas por intermédio de outras. São
usados diversos módulos de detecção para extrair candidatos com várias junções de corpo
como a cabeça, os ombros e os membros, Figura 2.9 [Lee, 2009].
Figura 2.9 – Exemplo de módulos de detecção: a) Teste padrão de cara; b) Contorno da Cabeça-ombro;
c) Blob da cor da pele (para a cara e a mão); d) Seguimento da cara-corpo; e) Candidatos para o pé
(retirado de [Lee, 2009]).
Segundo [Lee, 2009], as características da cor da pele fornecem informações
importantes sobre as posições da cara, dos braços, e, por vezes, dos pés. Os blobs
correspondentes às zonas da pele são detectados em quatro fases que são as seguintes:
A imagem é dividida em regiões usando a segmentação de imagem baseada na cor;
Para cada região segmentada, a probabilidade de ser pele é avaliada usando um
histograma baseado num modelo de cor de pele;
As elipses são ajustadas aos limites dessas regiões para formar possíveis elipses de cor
de pele;
As regiões adjacentes com probabilidades elevadas de ser pele são fundidas para
formarem regiões e, assim, se poderem extrair as maiores elipses (ver Figura 2.9c).
As elipses extraídas são usadas para inferir as posições da cabeça e dos membros [Lee,
2009, 2004].
b) a)
c) d) e)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 17
Figura 2.10 – Detecção de partes: a) Seguimento da cara-corpo; b) Contorno do cabeça-ombro; Blobs
da cor da pele (para a cara e a mão) (retirado de [Lee, 2009]).
No segundo estágio desta metodologia é prevista a criação de uma inferência eficiente
da imagem 2D relativamente à posição das junções do corpo, usando os resultados de várias
detecções de componentes do corpo, assim como a dependência entre elas. Nesta fase é
utilizado um modelo gráfico para representar o modelo do corpo humano para um único
frame. Este modelo gráfico é uma árvore, em que cada nó corresponde à posição da imagem
de uma junção do corpo e cada limite representa, por pares, a dependência entre as junções
adjacentes, como mostrado na Figura 2.11.
Figura 2.11 – a) Modelo gráfico do segundo estágio; b) Extensão a dois frames do modelo gráfico
(retirado de [Lee, 2009]).
No terceiro estágio desta metodologia é estimada a pose 3D. É importante estimar os
parâmetros dos objectos para obter o reconhecimento da pose e inferir as relações espaciais
entre os objectos da cena; por exemplo, se uma pessoa está a apontar para algo, é importante
conseguir estimar a orientação do corpo e do braço, por a forma a ser possível o
reconhecimento do gesto. É usado um modelo articulado do corpo humano, definindo, assim,
os parâmetros da pose, ou seja na posição e orientação do torso, como nos ângulos formados
pelas junções dos vários membros. Os parâmetros latentes adicionais que descrevem a forma
do torso, dos membros e do tipo de roupa são incluídos, igualmente, para sintetizar,
exactamente, a aparência humana e, assim, estimar a pose [Lee, 2009].
b)
a)
c)
b) a)

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 18
Como referido em [Lee, 2009] o modelo humano, ilustrado na Figura 2.12, representa
a estrutura articulada do corpo e é caracterizado por três componentes: cinemático, forma e
roupa.
Figura 2.12 – Modelo humano representativo da estrutura articulada do corpo: a) Descrição cinemática
caracterizada pela posição das junções do corpo; b) Aproximação da forma do corpo humano através
de cilindros orientados; c) Roupa da pessoa (retirado de [Lee, 2009]).
A forma humana varia significativamente de pessoa para pessoa originando, assim, a
deformação do modelo humano. É utilizado um modelo probabilístico para codificar a
variabilidade da forma humana. Assim, cada componente do corpo (torso, membros, etc.) é
aproximado por um cilindro cónico 3D orientado. Cada cilindro cónico é definido por três
parâmetros: comprimento, largura da parte superior e da base do cilindro. Assume-se que a
relação de crescimento da secção transversal é constante. As bases dos cilindros que que estão
interligadas através de junções, têm a mesma largura. No total, existem 16 parâmetros da
forma mas, alguns deles, têm pequenas variações e estão correlacionados. Assim, é utilizada
uma análise de componentes principais (principal component analysis – PCA) para inferir as
dependências dos dados pertencentes ao conjunto de treino considerado [Lee, 2009].
Em [Lee, 2009] está descrito o modelo matemático representativo das inferências das
posições 2D das junções, bem como o procedimento utilizado para efectuar o seguimento do
corpo humano e estimar a pose 3D.
A Figura 2.13, Figura 2.14 e Figura 2.15 ilustram os resultados experimentais obtidos
no seguimento e estimação da pose de pessoas em diferentes situações. O sistema recupera
após auto-oclusão parcial ou inter-oclusão do sujeito.
a) b) c)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 19
Figura 2.13 – Estimação da pose do sujeito: a) Imagens originais; b) Pose estimada com base na imagem
original; c) Modelo detalhado da pose. Os erros incluem os braços (frame 72); confusão entre o pé esquerdo e o
direito no (frame 147, 152); os pés estão demasiado baixos (frame 162). Nos últimos frames algumas partes do
corpo estão escondidas pelo braço da cadeira. A máscara de oclusão é fornecida como informação prévia da
cena. A câmara esteve estática no momento em que as imagens foram obtidas (retirado de [Lee, 2009]).
Figura 2.14 – Seguimento durante um segmento vídeo que inclui o movimento de duas pessoas e da porta. Para
a pessoa lado esquerdo, os erros incluem: os braços (frame 360, 412); confusão dos braços esquerdo e direito e
dos pés (frame 377), do cotovelo (frame 397). Para a pessoa do lado direito erros incluem: o pé direito (frame
350), o braço esquerdo (frame 350) e ambos os braços (frame 360) (retirado de [Lee, 2009]).
Figura 2.15 – Seguimento da pose de múltiplas pessoas numa sala de reunião (retirado de [Lee, 2009]).
a)
b)
c)
frame 72 102 132 142 147 152 162 177
frame 350 360 377 397 412
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 20
2.2.4 Métodos Bayesianos
Pode-se encontrar em [Li, 2010] um método para o seguimento de movimento humano
e estimação da pose através de métodos Bayesianos. Esta metodologia efectua uma redução
de dimensão da representação em espaço de estados através de um vector de dimensão
reduzida conseguindo, assim, um seguimento Bayesiano eficiente; para efectuar esta redução
de dimensão o método deverá contemplar as seguintes especificações:
Minimizar a perda de informação durante o processo de redução da dimensão, de
modo que, a representação da pose humana de baixa dimensão capture a informação
cinemática necessária;
Preservar a continuidade, para que as poses similares sejam traçadas em posições
próximas no espaço latente dimensional baixo;
Aproximar as densidades do movimento de treino humano;
Fornecer as funções de mapeamento bidireccionais não lineares, de modo que, os
dados que residem no espaço latente possam ser mapeados de volta ao espaço da
pose de elevada dimensão;
As séries de dados de treino sejam facilmente acessíveis pelos sistemas de captura
de movimento.
Para satisfazer estas especificações, foi desenvolvido um procedimento denominada de
“globally coordinated mixture of factor analizers – GCMFA”. Esta ferramenta é eficaz em
preservar a informação de dados relativos à captura de movimento humano. Como descrito
em [Li, 2010; Sminchisescu , 2001; Urtasun, 2005] a relação entre os parâmetros da pose de
dimensão elevada e os da dimensão reduzida são não lineares. Em [Li, 2010] pode ser
encontrado o desenvolvimento dos algoritmos de redução de dimensão não-linear (Non-
Linear Dimensionality Reduction Algorithms – NLDR) em espaço de estados do vector de
estado da pose do corpo. Em trabalhos de outros investigadores [Mori, 2002; Poppe, 2007a;
Shakhnarovich, 2003; Stenger, 2003] é utilizada uma base de dados onde são guardadas as
informações relativas aos pares de imagens de treino e as respectivas correspondências de
poses 3D. Para uma determinada imagem de entrada, é estimada a pose 3D correspondente a
partir da procura de imagens de treino similares nessa base de dados, sendo realizada uma
interpolação usando essas correspondências de poses 3D. Em [Poppe, 2007a] podem ser
encontrados alguns resultados utilizando a lista de dados do algoritmo HumanEva-I [Sigal,
2009]. No algoritmo de seguimento proposto, existem dois tipos de componentes principais
como mostrados na Figura 2.16.

Capítulo 2 – Seguimento de Movimento
António Gomes Página 21
Captura de Dados de
Movimento Humano 3D
Estracção dos Ângulos
de Junção
Procedimento
GCMFA
Representação dos
Dados de Treino de
Baixa Dimensão
Sequências de ImagemActualização Xt+1
Baseada na
Probabilidade da Imagem
Predição X’t+1 Estado Xt
Geração de Hipóteses
baseadas em Xt
Estimação da Pose de Saída e Processamento da
Instância de Tempo Seguinte (t=t+1)
Online
Offline
Figura 2.16 – Arquitectura do algoritmo se seguimento proposto (adaptado de [Li, 2010]).
Como referido em [Li, 2010], o primeiro componente é um algoritmo que opera em
modo offline; este componente utiliza uma função de mapeamento bidireccional entre a
representação da pose humana de dimensão reduzida e a de elevada dimensão. O segundo
componente opera em modo online, é destinado ao seguimento de movimento articulado
humano que utiliza um algoritmo de seguimento de hipóteses múltiplas; a representação de
espaço de estados é realizada através de uma representação de dimensão reduzida.
Um das etapas utilizadas no método de seguimento de hipóteses múltiplas, consiste em
efectuar a actualização de estado a partir da determinação da probabilidade baseada na
imagem, usando as hipóteses geradas a partir da representação em espaço de estados de
dimensão reduzida. Assim, é necessária uma função de mapeamento que vai mapear as várias
hipóteses das poses 3D do corpo humano, representadas em dimensão reduzida, numa
representação em elevada dimensão. Assim, x denota a representação em elevada dimensão e
g é o ponto correspondente na dimensão reduzida.
O objectivo do algoritmo offline é procurar uma função de mapeamento fg→x, em que
x= fg→x(g)+nx, nx corresponde à média nula do processo de ruído branco Gaussiano. Esta
função de mapeamento pode ser vista como sendo a função de medida no filtro de Kalman
[Li, 2010]. Em [Li, 2010] é realizada uma comparação quantitativa entre a metodologia
proposta com a metodologia APF (annealed particle filter) [Deutscher, 2005, 2000] e a
metodologia GPLVM (Gaussian process latent variable model) [Tian, 2005b].
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 22
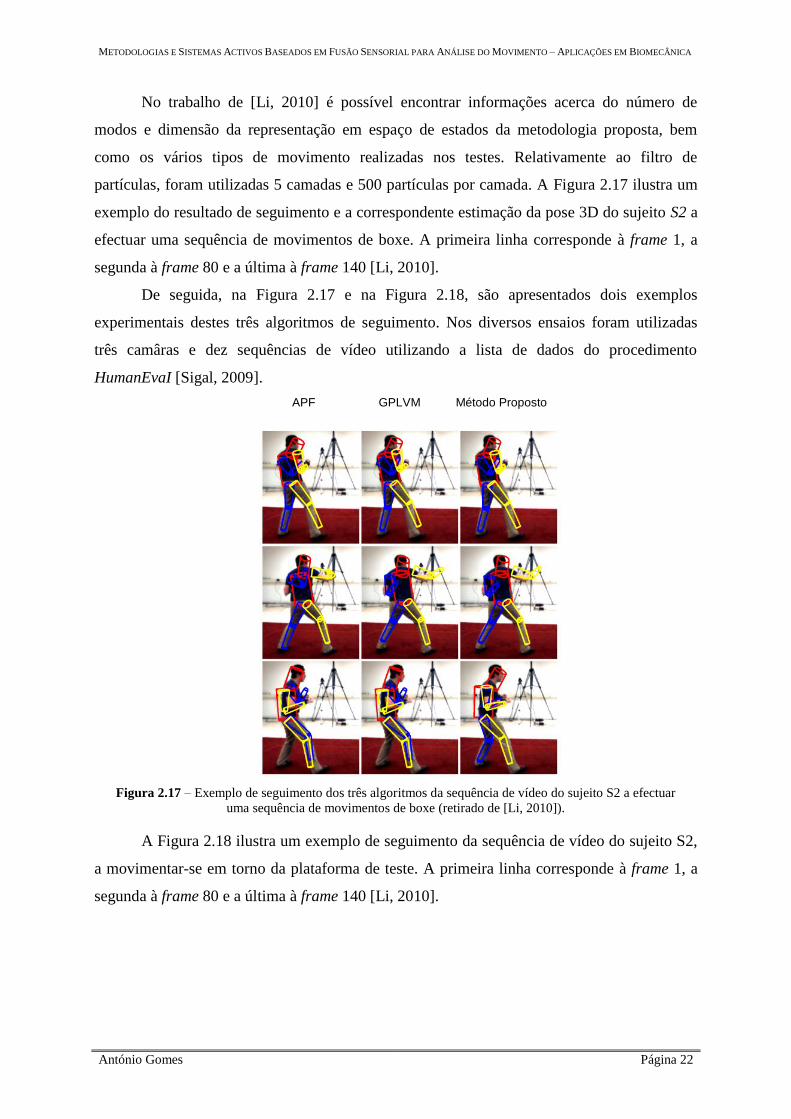
No trabalho de [Li, 2010] é possível encontrar informações acerca do número de
modos e dimensão da representação em espaço de estados da metodologia proposta, bem
como os vários tipos de movimento realizadas nos testes. Relativamente ao filtro de
partículas, foram utilizadas 5 camadas e 500 partículas por camada. A Figura 2.17 ilustra um
exemplo do resultado de seguimento e a correspondente estimação da pose 3D do sujeito S2 a
efectuar uma sequência de movimentos de boxe. A primeira linha corresponde à frame 1, a
segunda à frame 80 e a última à frame 140 [Li, 2010].
De seguida, na Figura 2.17 e na Figura 2.18, são apresentados dois exemplos
experimentais destes três algoritmos de seguimento. Nos diversos ensaios foram utilizadas
três camâras e dez sequências de vídeo utilizando a lista de dados do procedimento
HumanEvaI [Sigal, 2009].
Figura 2.17 – Exemplo de seguimento dos três algoritmos da sequência de vídeo do sujeito S2 a efectuar
uma sequência de movimentos de boxe (retirado de [Li, 2010]).
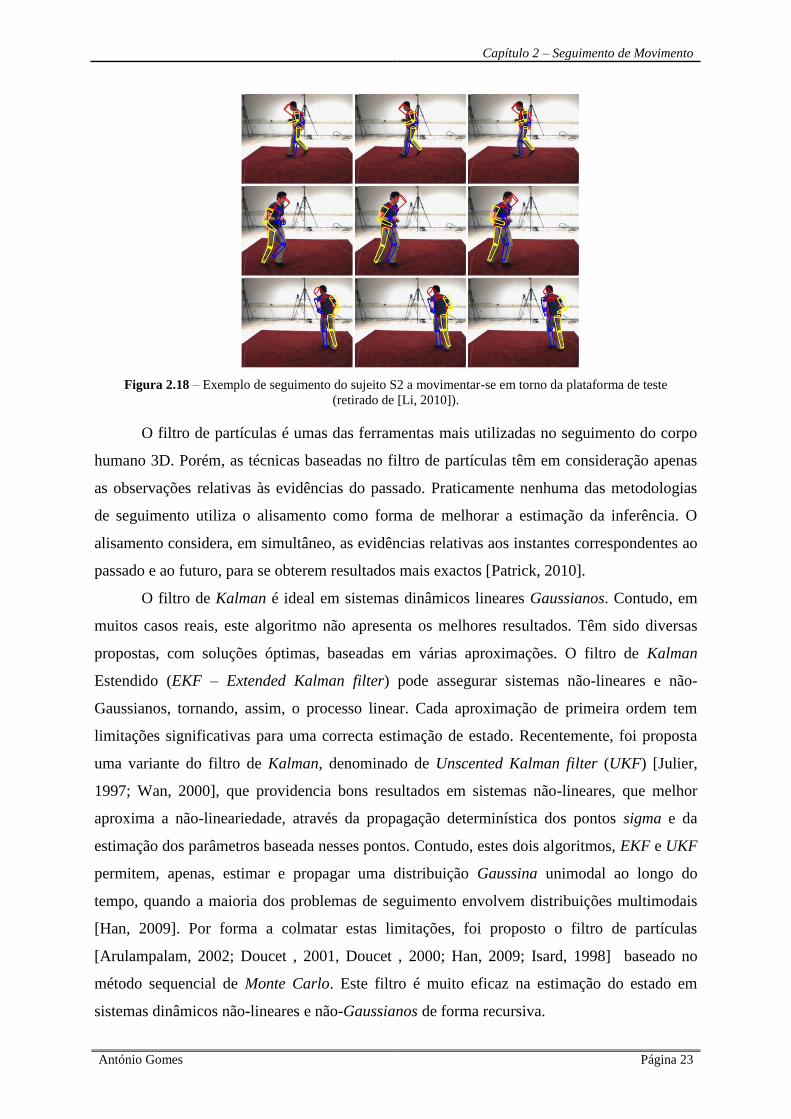
A Figura 2.18 ilustra um exemplo de seguimento da sequência de vídeo do sujeito S2,
a movimentar-se em torno da plataforma de teste. A primeira linha corresponde à frame 1, a
segunda à frame 80 e a última à frame 140 [Li, 2010].
APF GPLVM Método Proposto
Capítulo 2 – Seguimento de Movimento
António Gomes Página 23
Figura 2.18 – Exemplo de seguimento do sujeito S2 a movimentar-se em torno da plataforma de teste
(retirado de [Li, 2010]).
O filtro de partículas é umas das ferramentas mais utilizadas no seguimento do corpo
humano 3D. Porém, as técnicas baseadas no filtro de partículas têm em consideração apenas
as observações relativas às evidências do passado. Praticamente nenhuma das metodologias
de seguimento utiliza o alisamento como forma de melhorar a estimação da inferência. O
alisamento considera, em simultâneo, as evidências relativas aos instantes correspondentes ao
passado e ao futuro, para se obterem resultados mais exactos [Patrick, 2010].
O filtro de Kalman é ideal em sistemas dinâmicos lineares Gaussianos. Contudo, em
muitos casos reais, este algoritmo não apresenta os melhores resultados. Têm sido diversas
propostas, com soluções óptimas, baseadas em várias aproximações. O filtro de Kalman
Estendido (EKF – Extended Kalman filter) pode assegurar sistemas não-lineares e não-
Gaussianos, tornando, assim, o processo linear. Cada aproximação de primeira ordem tem
limitações significativas para uma correcta estimação de estado. Recentemente, foi proposta
uma variante do filtro de Kalman, denominado de Unscented Kalman filter (UKF) [Julier,
1997; Wan, 2000], que providencia bons resultados em sistemas não-lineares, que melhor
aproxima a não-lineariedade, através da propagação determinística dos pontos sigma e da
estimação dos parâmetros baseada nesses pontos. Contudo, estes dois algoritmos, EKF e UKF
permitem, apenas, estimar e propagar uma distribuição Gaussina unimodal ao longo do
tempo, quando a maioria dos problemas de seguimento envolvem distribuições multimodais
[Han, 2009]. Por forma a colmatar estas limitações, foi proposto o filtro de partículas
[Arulampalam, 2002; Doucet , 2001, Doucet , 2000; Han, 2009; Isard, 1998] baseado no
método sequencial de Monte Carlo. Este filtro é muito eficaz na estimação do estado em
sistemas dinâmicos não-lineares e não-Gaussianos de forma recursiva.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 24
Tipicamente, é necessário um número considerável de partículas para uma estimação mais
exacta, especialmente em problemas de dimensão elevada [Han, 2009]. Em [Han, 2009] é
proposto um procedimento baseado no filtro sequencial Bayesiano – Kernel-based Baysian
filtering – onde são utilizadas representações analíticas, para a aproximação de funções de
densidade relevantes. São utilizadas técnicas de interpolação e de aproximação de densidade
para efectuar a representação das funções de densidade em espaço de estados. Em ambas as
técnicas, as funções de densidade são representadas por misturas Gaussianas onde o número
de componentes e os seus pesos, médias e covariâncias, são determinados de forma
automática.
A principal vantagem em efectuar uma representação analítica das funções de
densidade, é a obtenção duma amostragem eficiente, o que é importante para resolver os
problemas de dimensão elevada. É introduzida uma estratégia de amostragem de vários
estágios, dentro da técnica de interpolação da densidade, para obter uma aproximação exacta
da medida da função de densidade. A representação baseada na probabilidade de cada
amostra, aumenta a cobertura de espaço de estados com um número reduzido de amostras. O
algoritmo é aplicado no seguimento em tempo real [Han, 2009].
Como descrito em [Han, 2009], num sistema dinâmico os modelos do processo e de
medida são dados por:
),( 1 ttt uxgx , (1)
),( 1 tt vxhz . (2)
em que vt e ut representa o processo e os ruído de medida, respectivamente. A variável de
estado xt (t = 0,…,n) é caracterizada por uma função de probabilidade (pdf) estimada a partir
de uma sequência de medidas zt (t = 1, … ,n). Em [Han, 2009] é possível encontrar uma
descrição, pormenorizada do procedimento de filtragem proposto, bem como os métodos de
interpolação da densidade e da aproximação. Seguidamente serão apresentados alguns
resultados de seguimento realizado. Os resultados do algoritmo proposto KBF (Kernel Based
Bayesian Filtering) [Han, 2009], são apresentados através de uma comparação com o
algoritmo SIR (Sampling Importance Resampling Filter), Figura 2.19 [Arulampalam, 2002].
Capítulo 2 – Seguimento de Movimento
António Gomes Página 25
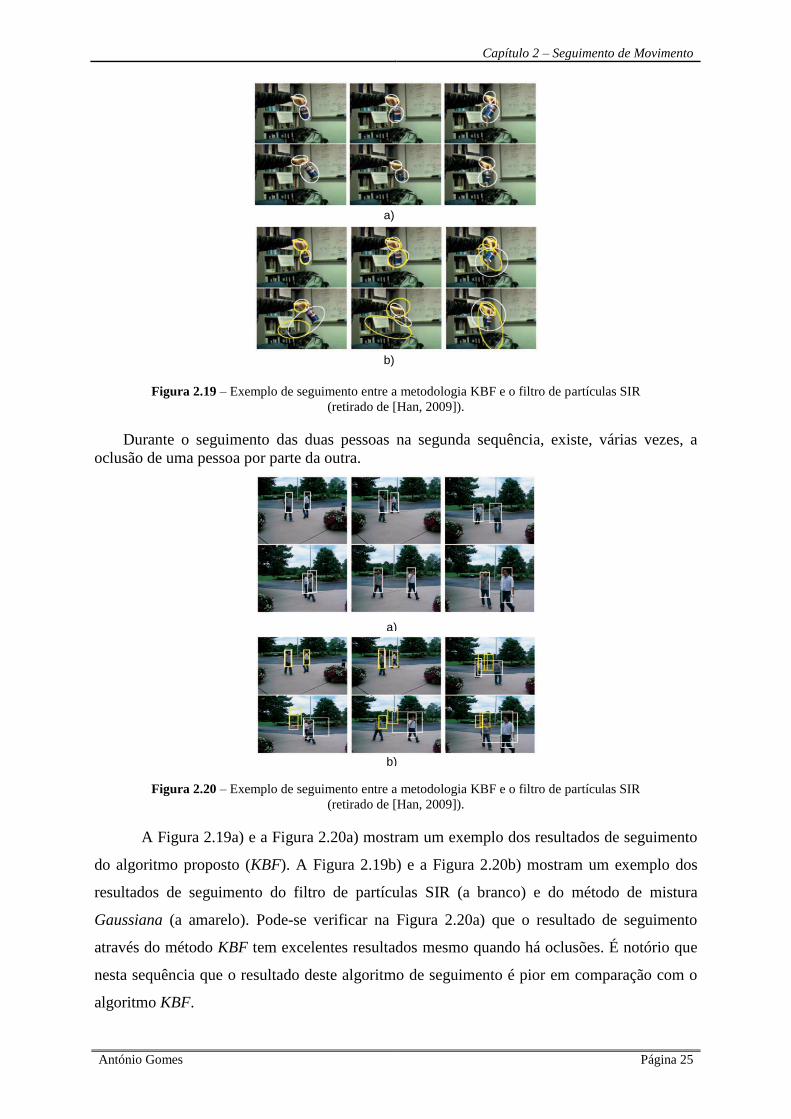
Figura 2.19 – Exemplo de seguimento entre a metodologia KBF e o filtro de partículas SIR
(retirado de [Han, 2009]).
Durante o seguimento das duas pessoas na segunda sequência, existe, várias vezes, a
oclusão de uma pessoa por parte da outra.
Figura 2.20 – Exemplo de seguimento entre a metodologia KBF e o filtro de partículas SIR
(retirado de [Han, 2009]).
A Figura 2.19a) e a Figura 2.20a) mostram um exemplo dos resultados de seguimento
do algoritmo proposto (KBF). A Figura 2.19b) e a Figura 2.20b) mostram um exemplo dos
resultados de seguimento do filtro de partículas SIR (a branco) e do método de mistura
Gaussiana (a amarelo). Pode-se verificar na Figura 2.20a) que o resultado de seguimento
através do método KBF tem excelentes resultados mesmo quando há oclusões. É notório que
nesta sequência que o resultado deste algoritmo de seguimento é pior em comparação com o
algoritmo KBF.
a)
b)
a)
b)
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 26
2.2.5 Programação Linear
Em [Jiang, 2008] é proposta uma aplicação para o seguimento de objectos, designado
de Sistema MyView – MyView System – com base num método de Programação Linear (LP –
Linear Programmimg) e num algoritmo para a obtenção da melhor vista da sequência de
imagens (videos). Este sistema tem como princípio a selecção do melhor algoritmo de
pesquisa de objectos em múltiplas vistas. Neste sistema, a captura de imagens é realizada
através de múltiplas câmaras. Uma das principais aplicações deste sistema é em eventos
desportivos. O seguimento de objectos, nos diversos vídeos, é realizado de forma automática
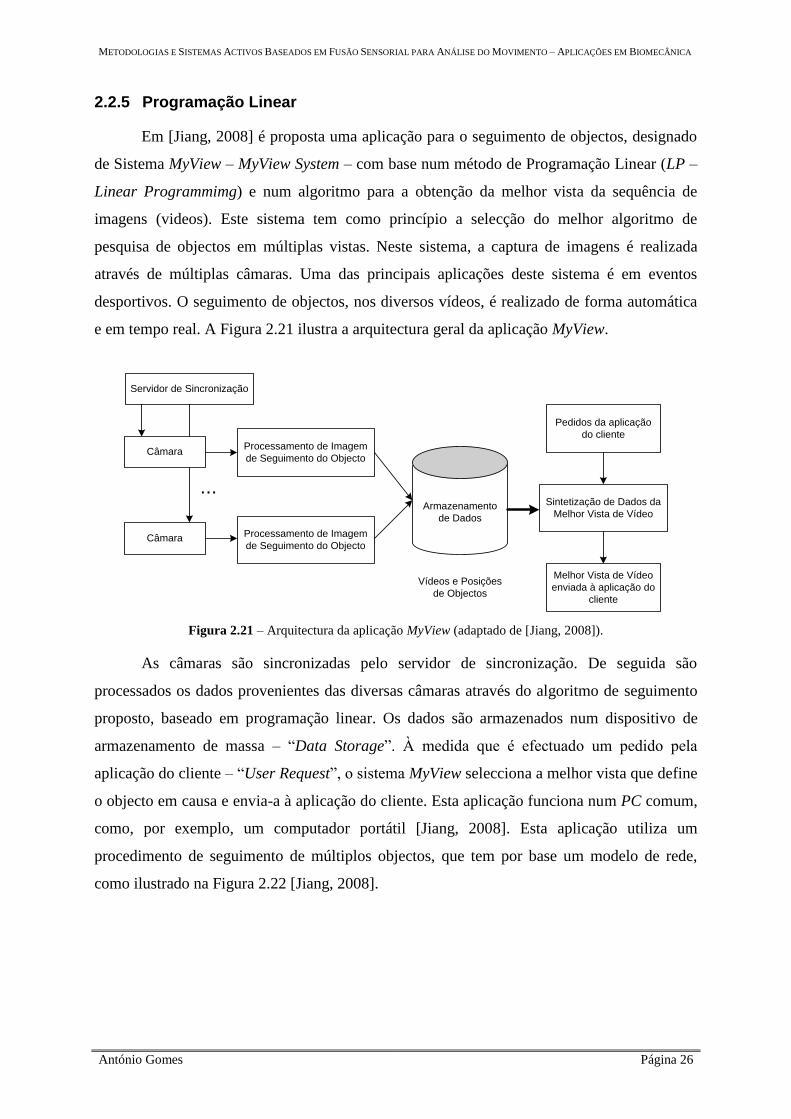
e em tempo real. A Figura 2.21 ilustra a arquitectura geral da aplicação MyView.
Servidor de Sincronização
Câmara
Câmara
Processamento de Imagem
de Seguimento do Objecto
Processamento de Imagem
de Seguimento do Objecto
Armazenamento
de Dados
Sintetização de Dados da
Melhor Vista de Vídeo
Pedidos da aplicação
do cliente
...
Melhor Vista de Vídeo
enviada à aplicação do
cliente
Vídeos e Posições
de Objectos
Figura 2.21 – Arquitectura da aplicação MyView (adaptado de [Jiang, 2008]).
As câmaras são sincronizadas pelo servidor de sincronização. De seguida são
processados os dados provenientes das diversas câmaras através do algoritmo de seguimento
proposto, baseado em programação linear. Os dados são armazenados num dispositivo de
armazenamento de massa – “Data Storage”. À medida que é efectuado um pedido pela
aplicação do cliente – “User Request”, o sistema MyView selecciona a melhor vista que define
o objecto em causa e envia-a à aplicação do cliente. Esta aplicação funciona num PC comum,
como, por exemplo, um computador portátil [Jiang, 2008]. Esta aplicação utiliza um
procedimento de seguimento de múltiplos objectos, que tem por base um modelo de rede,
como ilustrado na Figura 2.22 [Jiang, 2008].

Capítulo 2 – Seguimento de Movimento
António Gomes Página 27
Figura 2.22 – Modelo de Rede para o seguimento de múltiplos objectos (adaptado de [Jiang, 2008]).
Os nós redondos representam as posições e estados possíveis de aparência dos
objectos. Os nós representados por retângulos representam o estado de algum objecto que não
se encontre no frame devido a uma oclusão. Para um dado frame, as hipotéticas posições de
cada objecto podem ser diferentes e, consequentemente, a sub-rede de cada objecto pode
conter um número diferente de nós. Os nós representados por rectângulos, são nós de oclusão
que fornecem um nó, para denotar um objecto que está tapado e não tem uma posição
espacial. Os nós redondos e conflituosos, estão assinalados por uma elipse. As posições
espaciais dos objectos, em cada instante de tempo, estão sujeitas a um confinamento de
posição. Uma trajectória espacial de um dado objecto, é o trajecto representado através de um
arco. Os arcos grossos, entre nós, indicam as transições de estado possíveis. O conjunto de
nós ligados por setas orientadas, entre a origem e o destino do nó, representam a trajectória
espacial de um objecto. O conflito espacial do conjunto de nós definidos por vn,m,i, inclui o
próprio nó e os nós representados por elipses, nas sub-redes de outros objectos, levando à
sobreposição da região de vn,m,i. O conflito espacial é definido para cada nó na rede. Os nós
em conflito espacial, correspondem aos estados do objecto que ocupam a mesma posição
espacial. O nó de oclusão para cada objecto nunca está envolvido num conflito espacial
[Jiang, 2008]. A Figura 2.23 ilustra um exemplo de dois objectos, 1 e 2, inseridos num espaço
de conflito, caso as duas caixas que definem o limite estiverem suficientemente fechadas.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 28
Figura 2.23 – Regiões sobrepostas: a) Região parcialmente sobreposta, b) Região totalmente sobreposta
(adaptado de Jiang, 2008]).
Na definição do problema utilizando o procedimento de programação linear (LP –
Linear Programming) é utilizada a seguinte notação: para um determinado objecto n, o nó de
origem é denotado por vn e o nó de destino por tn; sn corresponde à posição e à aparência do
objecto n na frame 0. O nó de origem fornece um template para o nó inicial para o
processamento da função de custo da trajectória. Para cada frame são inseridos os nós que
correspondem a todas as observações do objecto n a cada instante de tempo, juntamente com
algum nó oculto. O parâmetro vn,m,i denota o nó que está associado a um objecto atribuído a
um estado i numa frame m. O nó de oclusão tem sempre o número de estado i mais elevado.
O nó de origem sn é denotado por vn,0,0 e o nó de destino tn por vn,M+1,0 , em que M é o
comprimento da sequência de vídeo. Os nós são ligados nas frames sucessivas por arcos como
ilustrado na Figura 2.22. É associado, a cada arco, uma função custo c(vn,m,i, vn,m+1,j) que
indica o custo do estado i ao tempo m e o estado j ao tempo m+1 que inicia a trajectória do
objecto n. Usualmente, o custo de um arco é composto por duas partes, o custo da escolha de
um estado de um detrrminado instante de tempo e o custo da transição de estado do instante i
para o j (em [Jiang, 2008] está descrita a função custo utilizada, bem como a descrição do
procedimento baseado em programação linear e o algoritmo da selecção da melhor-vista –
“Best View” – da sequência de vídeo [Jiang, 2008]. Seguidamente são apresentados alguns
resultados experimentais com a utilização da aplicação MyView, Figura 2.24.
Figura 2.24 – Exemplo de seguimento de movimento rápido de dois jogadores de squash
(algumas frames de um conjunto de 1351 frames) (retirado de [Jiang, 2008]).
Observação do objecto 1
Observação do objecto 1
Observação do objecto 2
Observação do objecto 2
a) b)
Capítulo 2 – Seguimento de Movimento
António Gomes Página 29
Os sujeitos foram detectados utilizando a metodologia de subtracção do fundo de cena.
Esta metodologia foi utilizada de forma similar em [Berclaz, 2006]. A imagem binária
segmentada, a partir da subtracção do fundo de cena, é envolvida através de uma caixa
rectangular, com uma relação de largura-altura da pose de um ser humano em escalas
diferentes. O resultado é uma imagem 3D com uma escala e coordenadas em x-y. É aplicada
à imagem 3D uma supressão de não-máximo a fim de procurar todas as escalas e posições
possíveis do objecto. As caixas contornam de forma ajustada os limites do objecto. O vídeo
inclui uma interacção complexa do objecto e oclusão mútua. A subtracção ruidosa do fundo
de cena, faz com que o seguimento de objecto seja uma tarefa difícil. Neste exemplo, e na
frame 1351, o objecto 0 tem sete atribuições erradas da etiqueta e o objecto 1 tem cinco
detecções erradas da etiqueta. Para este exemplo, a taxa de erro média do seguimento do
objecto é aproximadamente de 0.01 por frame [Jiang, 2008].
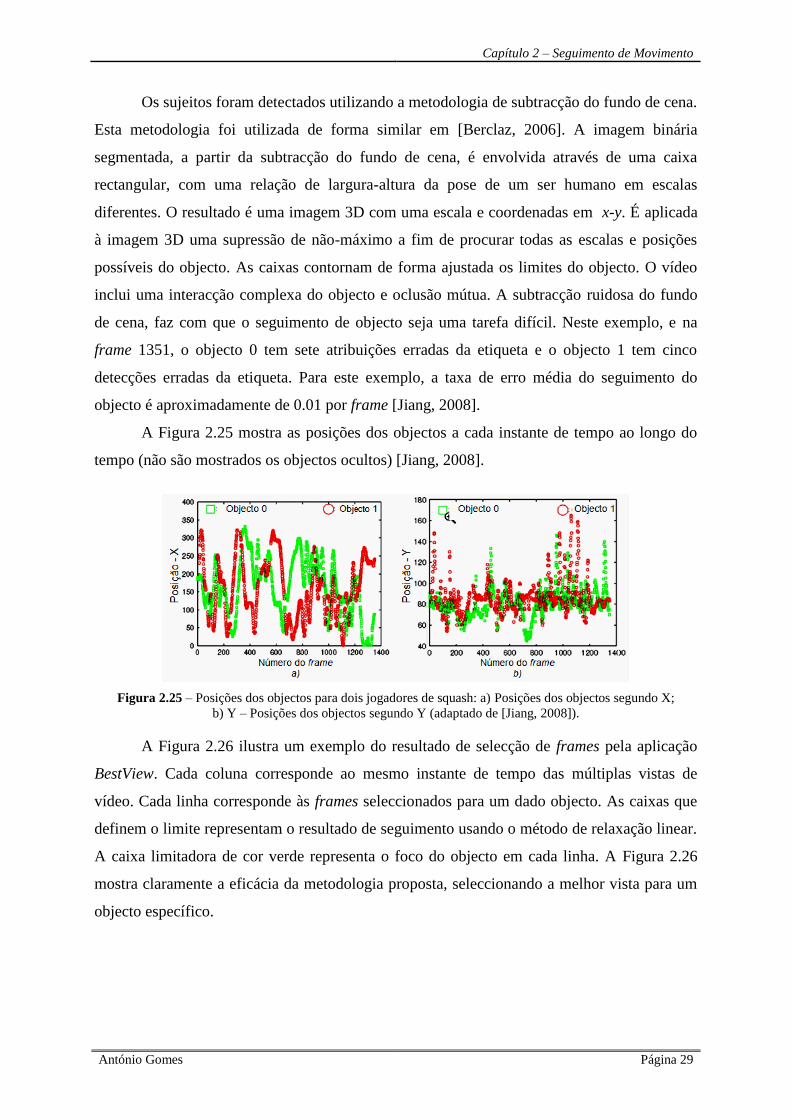
A Figura 2.25 mostra as posições dos objectos a cada instante de tempo ao longo do
tempo (não são mostrados os objectos ocultos) [Jiang, 2008].
Figura 2.25 – Posições dos objectos para dois jogadores de squash: a) Posições dos objectos segundo X;
b) Y – Posições dos objectos segundo Y (adaptado de [Jiang, 2008]).
A Figura 2.26 ilustra um exemplo do resultado de selecção de frames pela aplicação
BestView. Cada coluna corresponde ao mesmo instante de tempo das múltiplas vistas de
vídeo. Cada linha corresponde às frames seleccionados para um dado objecto. As caixas que
definem o limite representam o resultado de seguimento usando o método de relaxação linear.
A caixa limitadora de cor verde representa o foco do objecto em cada linha. A Figura 2.26
mostra claramente a eficácia da metodologia proposta, seleccionando a melhor vista para um
objecto específico.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 30
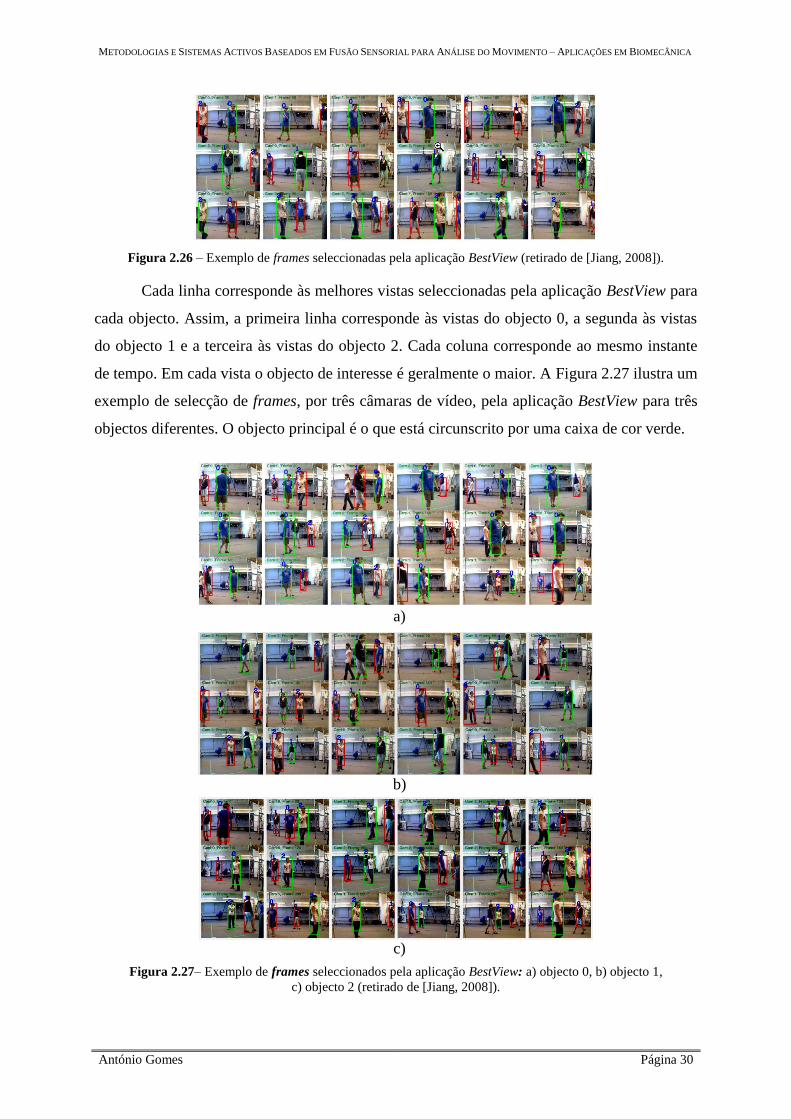
Figura 2.26 – Exemplo de frames seleccionadas pela aplicação BestView (retirado de [Jiang, 2008]).
Cada linha corresponde às melhores vistas seleccionadas pela aplicação BestView para
cada objecto. Assim, a primeira linha corresponde às vistas do objecto 0, a segunda às vistas
do objecto 1 e a terceira às vistas do objecto 2. Cada coluna corresponde ao mesmo instante
de tempo. Em cada vista o objecto de interesse é geralmente o maior. A Figura 2.27 ilustra um
exemplo de selecção de frames, por três câmaras de vídeo, pela aplicação BestView para três
objectos diferentes. O objecto principal é o que está circunscrito por uma caixa de cor verde.
Figura 2.27– Exemplo de frames seleccionados pela aplicação BestView: a) objecto 0, b) objecto 1,
c) objecto 2 (retirado de [Jiang, 2008]).
a)
b)
c)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 31
2.2.6 Medição da Discrepância entre Observações e a Superfície
Em [Horaud, 2009] é proposto um método para o seguimento de movimento
articulado com a utilização de múltiplas câmaras. Este método utiliza um procedimento de
cálculo onde é realizada a medição da discrepância entre as observações (composta por pontos
e normais 3D) e uma superfície implícita articulada. Esta metodologia é mais poderosa
através da utilização de funções de distância, pois permite efectuar associações menos
ambíguas entre os dados e o modelo. A modelação de objectos, tais como o corpo humano, é
realizada através da definição de correntes cinemáticas abertas (kinematic chains), que vai
efectuar a ligação entre os vários segmentos corporais. A modelação dos segmentos é
realizada através da utilização de elipses, e são medidos os dados 3D: vectores de pontos e de
orientação. Têm de ser definidas, de forma correcta, as medidas da discrepância entre os
dados e o modelo. Esta medida será usada para definir a função de distância como sendo uma
superfície implícita probabilística [Horaud, 2009]. Em [Horaud, 2009] está disponível a
formulação dos modelos matemáticos que descrevem essas mesmas distâncias, bem como o
procedimento para a definição das diversas partes do corpo humano e a modelação do mesmo.
Seguidamente, serão apresentados alguns resultados experimentais através de dados
obtidos por seis câmaras a cores devidamente calibradas e sincronizadas. Cada câmara
fornece uma imagem a cores com uma resolução de 780 x 580 pixels, 28 frames por segundo
e uma precisão de sincronização de 1 ms. O seguimento de movimento humano segue duas
sequências de imagens múltiplas, a sequência taekwondo mostrada na Figura 2.28 e a leaning
mostrada na Figura 2.29. Estas sequências de imagens foram obtidas com uma taxa de 14
frames por segundo. A primeira lista de dados é composta por 6 x 700 frames e a segunda por
6 x 200 [Horaud, 2009].
Figura 2.28 – Sequência taekwondo (retirado de [Horaud, 2009]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 32
As imagens e as silhuetas associadas foram obtidas a partir da primeira e da quarta
câmara.
Figura 2.29 – Sequência leaning (retirado de [Horaud, 2009]).
Como se pode observar, existem silhuetas que apresentam falhas e falta de peças,
resultante da presença de outliers 3D: A Figura 2.30a) mostra os pontos e normais 3D
reconstruídas a partir das silhuetas imperfeitas. Por seu lado, a Figura 2.30b) mostra a
superfície articulada implícita resultante da aplicação da metodologia proposta. Já a Figura
2.30c) mostra a aplicação desta metodologia em conjunção com a distância algébrica. O
movimento recuperado do pé direito e da coxa direita estão incorrectos [Horaud, 2009].
Figura 2.30 – Pontos e normais 3D reconstruídas a partir de silhuetas imperfeitas (adaptado de [Horaud, 2009]).
a)
b)
c)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 33
2.2.7 Algoritmo MMC (Markerless Motion Capture)
Em [Corazza, 2010] é apresentada uma metodologia para efectuar o seguimento de
movimento humano através de uma aproximação designada de Captura de Movimento
Markerless (MMC – Markerless Motion Capture). Esta metodologia utiliza múltiplas câmaras
de imagem a cores, utilizando um algoritmo de seguimento exacto e anatómico para gerar, de
forma automática, os modelos de sujeitos específicos. Esta aproximação de seguimento,
emprega um esquema de minimização de Levenberg-Marquardt, sobre um algoritmo iterativo
com seis graus de liberdade para cada segmento corporal. A consistência anatómica foi
mantida, reforçando o intervalo de movimento de cada junção rotacional e translacional, para
cada junção específica. Este algoritmo aproveita a estrutura da série de dados HumanEva-II
para fornecer uma avaliação qualitativa e quantitativa de um método markerless.
Em [Corazza, 2010] é possível encontrar informações acerca da obtenção dos modelos
3D a partir dos dados provenientes das várias câmaras de imagem. É possível encontrar
também as características e configurações das múltiplas câmaras utilizadas, bem como as
especificações de sincronização das mesmas, em cada ensaio das listas de dados utilizadas. O
processo automático de geração de modelos fornece uma resolução adequada para estudos
biomecânicos, Figura 2.31.
Figura 2.31 – Exemplos de modelos gerados para sujeitos (retirado de [Corazza, 2010]).
a) b)
c) d)

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 34
Na Figura 2.31 é possível visualizar os vários modelos gerados para sujeitos. Na
Figura 2.31a) é mostrado o modelo criado para o sujeito A. Na Figura 2.31b) o modelo para o
sujeito S4 usando um scanner laser e na Figura 2.31c) o modelo para o sujeito S2 usando a
abordagem vista de camada (“visual hull”). A Figura 2.31d) mostra o scan do sujeito B, com
marcadores na pose de referência, usada para o registar as posições dos centros das junções
dos marcadores e na validação dos métodos markerless. O modelo específico do sujeito é
completado pela localização exacta das posições centrais dos centros de junção relativamente
à superfície. De um modo geral, uma descrição anatómica complexa pode fornecer
informação com uma maior fidelidade de um movimento natural 3D, mas requer mais graus
de liberdade na formulação do corpo [Corazza, 2010].
No trabalho de [Corazza, 2010], os modelos gerados, Figura 2.31, incluem 15
segmentos de corpo e 14 junções, para um total de 90 graus de liberdade, incluindo o
movimento do corpo rígido do segmento da raiz (13 segmentos de corpo e 12 junções),
atingindo os 78 graus de liberdade nos sujeitos S2 e S4 utilizados na série de dados
HumanEva-II. Neste mesmo trabalho, pode-se encontrar informações acerca do processo de
registo multi-segmento, bem como a técnica de validação dos métodos markerless para
estimação das posições do centro de junção e as rotações dos membros durante o movimento
humano. A localização do centro de junção inicial e o sistema de coordenadas dos segmentos
corporais são registados na pose de referência, Figura 2.31d).
A Figura 2.32 e a Figura 2.33 ilustram exemplos de seguimento de atletas a efectuar
diversos movimentos de ginástica.
Figura 2.32 – Exemplo de uma sequência de movimentos de ginástica (retirado de [Corazza, 2010]).

Capítulo 2 – Seguimento de Movimento
António Gomes Página 35
Figura 2.33 – Exemplo de reconhecimento da pose do modelo correspondente (retirado de [Corazza, 2010]).
Figura 2.34 – Exemplo de sequência do sujeito S4. Vídeo obtido pela câmara 1 com o correspondente modelo
de pose calculado (retirado de [Corazza, 2010]).
O algoritmo de seguimento utilizado é completamente automático. De qualquer modo,
a partir da frame número 150, o algoritmo HumanEva-II necessita de ser reinicializado para
completar de forma correcta a tarefa de seguimento [Corazza, 2010].
A Figura 2.35a) ilustra o erro médio na estimação dos centros de junção em função do
número de câmaras e a respectiva taxa de número de frames. O erro absoluto médio, durante
toda a sequência da série de dados 2 (2160 frames), e para os diferentes números de câmaras
está representado na Figura 2.35b) [Corazza, 2010].

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 36
Figura 2.35– Erro de seguimento médio (adaptado de [Corazza, 2010]).
Considerando a série de dados HumanEva-II, e em termos de um ponto de vista
quantitativo, é apreciável que o erro é sensivelmente mais elevado pelas seguintes razões: 1) a
configuração das câmaras (número e posição) não são apropriadas para os métodos baseados
na forma de representação da silhueta, que exige um número mínimo de 8 câmaras, para
trabalharem optimamente, além disso, se for utilizada uma configuração de câmaras oposta é
gerado um par de silhuetas muito similares; 2) a colocação errada dos marcadores de posição
para identificação dos centros de junção comuns; 3) o movimento relativo da roupa em
relação à pele subjacente e da pele em relação ao osso subjacente, que é a peça rígida final
conectada com os centros comuns [Corazza, 2010].
número de câmaras a)
Err
o m
édio
absolu
to (
mm
)
Err
o m
édio
absolu
to (
mm
)
frame b)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 37
2.2.8 Algoritmo de Seguimento HumanEva I e HumanEva II
Em [Sigal, 2009] é apresentado um algoritmo, com base em séries de dados, para o
seguimento de movimento articulado 3D denominado de HumanEva. Este algoritmo é
baseado num procedimento que tem por base um método baseado num filtro Bayesiano com
uma optimização de ordem de importância das amostras do tipo sequencial, que utiliza o
Filtro de Partículas. Neste algoritmo – “baseline” – é explorada uma variedade de funções de
probabilidade, modelos prévios de movimento humano e os efeitos dos parâmetros do
algoritmo. É possível encontrar em [Sigal, 2009] uma descrição, por ordem cronológica, dos
vários algoritmos desenvolvidos na área de seguimento de movimento humano e estimação da
pose. Foram desenvolvidos dois algoritmos, o primeiro chamado de HumanEva-I e o segundo
de HumanEva- II. O algoritmo HumanEva-I contém os dados de quatro objectos que
executam um movimento de seis acções predefinidas em três repetições: duas vezes com a
captação de vídeo e de movimento, e uma vez, unicamente, com a captação de movimento. A
Figura 2.36 ilustra o sistema de hardware utilizado na captura de imagens para estimar a pose
3D do corpo de um sujeito a caminhar em cima de um tapete de teste.
Espaço de
Captura
3m
2mC2
C1
BW 1
BW 4
C2
BW 3
BW 2
Figura 2.36 – Estação de controlo utilizada pelo algoritmo HUMANEVA-I: As câmaras de imagem a cores RGB
são denotadas pela letra C; As câmaras de imagem em escala de cinza são denotadas pelas letras BW;
As câmaras utilizadas para a captação de movimento são as que estão marcadas por um
pequeno círculo de cor cinza (adaptado de [Sigal, 2009]).
A Figura 2.37 ilustra um exemplo de imagens capturadas através de sete câmaras de
vídeo sincronizadas. São utilizadas três câmaras de imagem a cores RGB (C1, C2 e C3) e
quatro câmaras de imagem em escala de cinza (BW1, BW2, Bw3 e BW4) [Sigal, 2009].
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 38
Figura 2.37 – Exemplo de um sujeito a caminhar num tapete de teste (algoritmo HUMANEVA-I)
(retirado de [Sigal, 2009]).
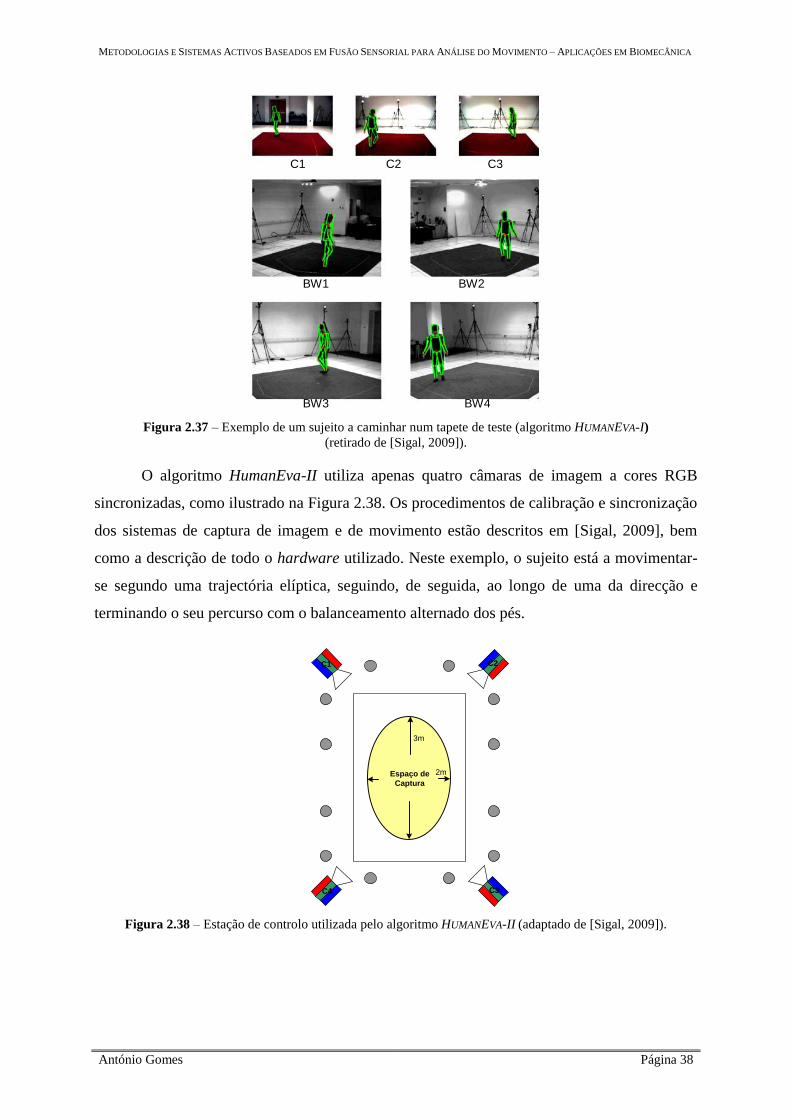
O algoritmo HumanEva-II utiliza apenas quatro câmaras de imagem a cores RGB
sincronizadas, como ilustrado na Figura 2.38. Os procedimentos de calibração e sincronização
dos sistemas de captura de imagem e de movimento estão descritos em [Sigal, 2009], bem
como a descrição de todo o hardware utilizado. Neste exemplo, o sujeito está a movimentar-
se segundo uma trajectória elíptica, seguindo, de seguida, ao longo de uma da direcção e
terminando o seu percurso com o balanceamento alternado dos pés.
Espaço de
Captura
3m
2m
C1
C4 C3
C2
Figura 2.38 – Estação de controlo utilizada pelo algoritmo HUMANEVA-II (adaptado de [Sigal, 2009]).
C1 C2 C3
BW1 BW2
BW3 BW4
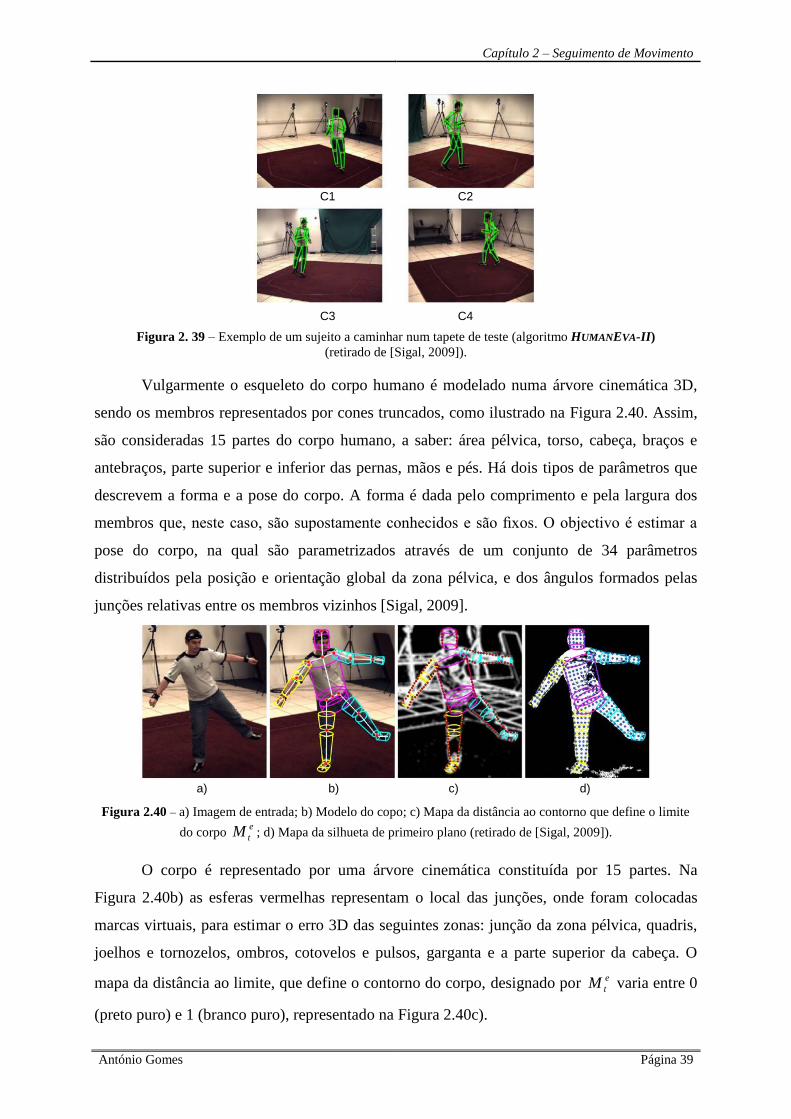
Capítulo 2 – Seguimento de Movimento
António Gomes Página 39
Figura 2. 39 – Exemplo de um sujeito a caminhar num tapete de teste (algoritmo HUMANEVA-II)
(retirado de [Sigal, 2009]).
Vulgarmente o esqueleto do corpo humano é modelado numa árvore cinemática 3D,
sendo os membros representados por cones truncados, como ilustrado na Figura 2.40. Assim,
são consideradas 15 partes do corpo humano, a saber: área pélvica, torso, cabeça, braços e
antebraços, parte superior e inferior das pernas, mãos e pés. Há dois tipos de parâmetros que
descrevem a forma e a pose do corpo. A forma é dada pelo comprimento e pela largura dos
membros que, neste caso, são supostamente conhecidos e são fixos. O objectivo é estimar a
pose do corpo, na qual são parametrizados através de um conjunto de 34 parâmetros
distribuídos pela posição e orientação global da zona pélvica, e dos ângulos formados pelas
junções relativas entre os membros vizinhos [Sigal, 2009].
Figura 2.40 – a) Imagem de entrada; b) Modelo do copo; c) Mapa da distância ao contorno que define o limite
do corpo e
tM ; d) Mapa da silhueta de primeiro plano (retirado de [Sigal, 2009]).
O corpo é representado por uma árvore cinemática constituída por 15 partes. Na
Figura 2.40b) as esferas vermelhas representam o local das junções, onde foram colocadas
marcas virtuais, para estimar o erro 3D das seguintes zonas: junção da zona pélvica, quadris,
joelhos e tornozelos, ombros, cotovelos e pulsos, garganta e a parte superior da cabeça. O
mapa da distância ao limite, que define o contorno do corpo, designado por e
tM varia entre 0
(preto puro) e 1 (branco puro), representado na Figura 2.40c).
C1 C2
C3 C4
a) b) c) d)
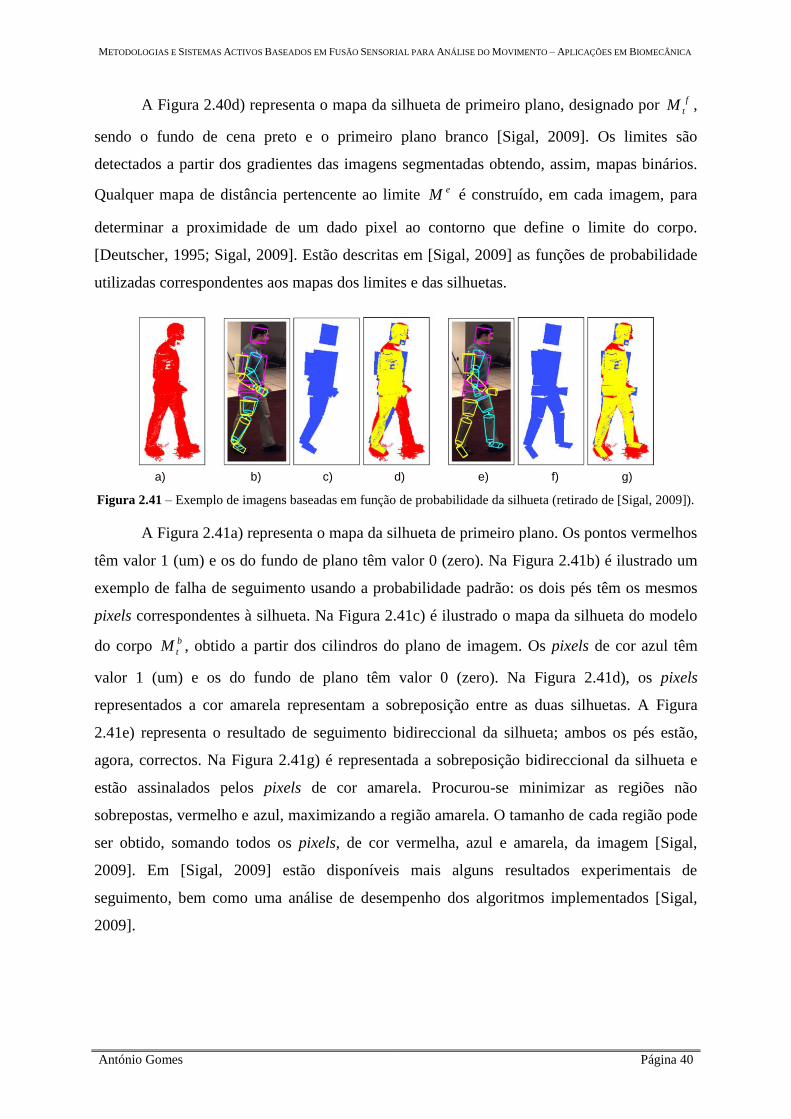
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 40
A Figura 2.40d) representa o mapa da silhueta de primeiro plano, designado por f
tM ,
sendo o fundo de cena preto e o primeiro plano branco [Sigal, 2009]. Os limites são
detectados a partir dos gradientes das imagens segmentadas obtendo, assim, mapas binários.
Qualquer mapa de distância pertencente ao limite eM é construído, em cada imagem, para
determinar a proximidade de um dado pixel ao contorno que define o limite do corpo.
[Deutscher, 1995; Sigal, 2009]. Estão descritas em [Sigal, 2009] as funções de probabilidade
utilizadas correspondentes aos mapas dos limites e das silhuetas.
Figura 2.41 – Exemplo de imagens baseadas em função de probabilidade da silhueta (retirado de [Sigal, 2009]).
A Figura 2.41a) representa o mapa da silhueta de primeiro plano. Os pontos vermelhos
têm valor 1 (um) e os do fundo de plano têm valor 0 (zero). Na Figura 2.41b) é ilustrado um
exemplo de falha de seguimento usando a probabilidade padrão: os dois pés têm os mesmos
pixels correspondentes à silhueta. Na Figura 2.41c) é ilustrado o mapa da silhueta do modelo
do corpo b
tM , obtido a partir dos cilindros do plano de imagem. Os pixels de cor azul têm
valor 1 (um) e os do fundo de plano têm valor 0 (zero). Na Figura 2.41d), os pixels
representados a cor amarela representam a sobreposição entre as duas silhuetas. A Figura
2.41e) representa o resultado de seguimento bidireccional da silhueta; ambos os pés estão,
agora, correctos. Na Figura 2.41g) é representada a sobreposição bidireccional da silhueta e
estão assinalados pelos pixels de cor amarela. Procurou-se minimizar as regiões não
sobrepostas, vermelho e azul, maximizando a região amarela. O tamanho de cada região pode
ser obtido, somando todos os pixels, de cor vermelha, azul e amarela, da imagem [Sigal,
2009]. Em [Sigal, 2009] estão disponíveis mais alguns resultados experimentais de
seguimento, bem como uma análise de desempenho dos algoritmos implementados [Sigal,
2009].
a) b) c) d) e) f) g)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 41
A Figura 2.42 ilustra um exemplo dos resultados de seguimento utilizando a
metodologia de seguimento “baseline” (BC).
Figura 2.42 – Exemplo de frames com os resultados de seguimento através da configuração de seguimento
“baseline” (retirado de [Sigal, 2009]).
O modelo estimado do corpo está projectado nas imagens com o correspondente erro
3D indicado em baixo da frame repectiva. Estes fornecem uma estimativa dos diferentes
níveis de erro (em milímetros). Para distinguir entre os lados esquerdo e direito, o lado
esquerdo foi extraído a cor azul e o lado direito a cor amarela. Por exemplo, na Figura 2.42 o
frame 656 tem um erro elevado pelo facto de ter confundido um pé pelo outro [Sigal, 2009].

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 42
2.3 Métodos Estocásticos
Segundo uma perspectiva bayesiana, o seguimento de movimento consiste na
dicotomia previsão/correcção. O seguimento tem como base o cálculo recursivo do grau de
certeza associado a cada estado em cada instante, tendo em consideração os dados obtidos até
esse momento. A previsão permite ter uma estimativa da função de densidade de
probabilidade do estado do sistema no instante seguinte. Dado que o estado está sujeito a
perturbações, que são usualmente modeladas como ruído aleatório, a previsão poderá
contemplar a translação, a deformação e a difusão da função de densidade de probabilidade.
Por outro lado, a correcção prevê a correcção dos dados previstos através da inclusão de
dados obtidos a posteriori no quadro seguinte num vector de medições. A inclusão dessas
medições, pressupõe o estabelecimento correcto dos dados medidos, para que a informação
recolhida seja atribuída correctamente à respectiva entidade [Maybeck, 1979; Pinho, 2005a,
2005b, 2005c, 2004]. Em [Maybeck, 1979; Pinho, 2005a, 2005b, 2005c, 2004] pode-se
encontrar informação mais detalhada acerca da utilização de métodos estocásticos para o
seguimento de movimento.
As secções seguintes apresentam o filtro de Kalman, o filtro de partículas, bem como
duas das suas variantes, que são o filtro de partículas anelado e o algoritmo de alisamento e
filtragem de partículas.
2.3.1 Filtro de KALMAN
Com base em [Arulampalam, 2002; Greg, 2006; Pinho, 2005a, 2005b, 2005c, 2005d,
2004] será realizada uma introdução ao filtro de Kalman. Este filtro permite obter o estado do
sistema de forma a minimizar o quadrado da média de erro, sendo assim uma solução para
obter a estimativa incremental do seguimento, uma vez que o seu algoritmo é recursivo. De
qualquer forma, nem sempre os resultados esperados são os melhores, pelo que se conciliaram
técnica com o filtro de Kalman e foram desenvolvidos variantes do mesmo. O filtro de
Kalman pressupõe que sejam satisfeitas algumas restrições, tais como a linearidade do
sistema e que o ruído envolvido seja do tipo branco. Neste filtro, a primeira fase, corresponde
à fase de predição, é obtida através da equação de Chapman-Kolmogorov, considerando que
se utiliza um processo de Markov de primeira ordem, obtém-se:
1tt xx , (3)

Capítulo 2 – Seguimento de Movimento
António Gomes Página 43
onde
1tx corresponde ao vector de variáveis de estado do sistema no instante t-1 posterior à
fase de medição deste instante e
txcorresponde à estimativa para o instante t antes da
medição da imagem do instante considerado nesse momento, sendo a transição dada por .
A estimativa para a incerteza associada à previsão do vector é dada por:
QPP T
tt
1 , (
(4)
onde P é a matriz de covariância (+ e – são relativos à incorporação, ou não, das medições
nesta iteração do filtro) e Q é a matriz de covariância do ruído do processo modelado.
A segunda fase deste filtro, que corresponde à fase de correcção das estimativas, é
realizada com a incorporação, ou não, de nova medições ut nesta iteração do filtro:
1][ t
T
t
T
tt RHHPHPK , (
(5)
][ ttttt HxuKxx , (
(6)
ttt PHKIP ][ , (
(7)
onde K é o ganho do filtro, H é a matriz que transforma o sistema de coordenadas do vector
de características estimadas no vector de características medido e R é a matriz de variância
medida [Arulampalam, 2002; Pinho, 2005a, 2005b, 2005c, 2005d, 2004].
Assim sendo, o filtro de Kalman é uma solução óptima para ser utilizada no processo
de seguimento. Contudo, se as restrições mencionadas anteriormente não forem satisfeitas, os
resultados obtidos nem sempre serão os desejáveis. De forma a superar as dificuldades
mencionadas, foram desenvolvidas algumas variantes do filtro de Kalman, nomeadamente o
filtro de Kalman estendido. A Figura 2.43 ilustra a aplicação do filtro de Kalman. Em
[Arulampalam, 2002; Greg, 2006; Pinho, 2005a, 2005b, 2005c, 2005d, 2004] é possível
encontrar informação mais detalhada acerca deste filtro, bem como alguns resultados
experimentais da sua utilização.
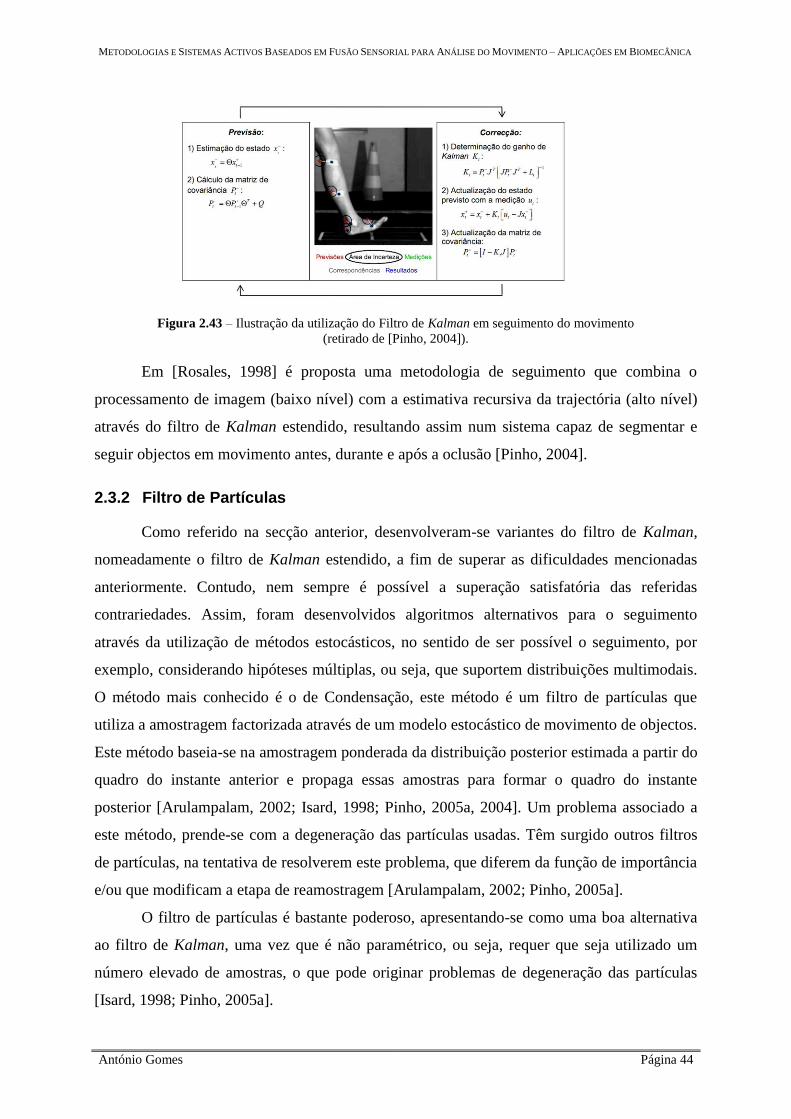
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 44
Figura 2.43 – Ilustração da utilização do Filtro de Kalman em seguimento do movimento
(retirado de [Pinho, 2004]).
Em [Rosales, 1998] é proposta uma metodologia de seguimento que combina o
processamento de imagem (baixo nível) com a estimativa recursiva da trajectória (alto nível)
através do filtro de Kalman estendido, resultando assim num sistema capaz de segmentar e
seguir objectos em movimento antes, durante e após a oclusão [Pinho, 2004].
2.3.2 Filtro de Partículas
Como referido na secção anterior, desenvolveram-se variantes do filtro de Kalman,
nomeadamente o filtro de Kalman estendido, a fim de superar as dificuldades mencionadas
anteriormente. Contudo, nem sempre é possível a superação satisfatória das referidas
contrariedades. Assim, foram desenvolvidos algoritmos alternativos para o seguimento
através da utilização de métodos estocásticos, no sentido de ser possível o seguimento, por
exemplo, considerando hipóteses múltiplas, ou seja, que suportem distribuições multimodais.
O método mais conhecido é o de Condensação, este método é um filtro de partículas que
utiliza a amostragem factorizada através de um modelo estocástico de movimento de objectos.
Este método baseia-se na amostragem ponderada da distribuição posterior estimada a partir do
quadro do instante anterior e propaga essas amostras para formar o quadro do instante
posterior [Arulampalam, 2002; Isard, 1998; Pinho, 2005a, 2004]. Um problema associado a
este método, prende-se com a degeneração das partículas usadas. Têm surgido outros filtros
de partículas, na tentativa de resolverem este problema, que diferem da função de importância
e/ou que modificam a etapa de reamostragem [Arulampalam, 2002; Pinho, 2005a].
O filtro de partículas é bastante poderoso, apresentando-se como uma boa alternativa
ao filtro de Kalman, uma vez que é não paramétrico, ou seja, requer que seja utilizado um
número elevado de amostras, o que pode originar problemas de degeneração das partículas
[Isard, 1998; Pinho, 2005a].

Capítulo 2 – Seguimento de Movimento
António Gomes Página 45
2.3.3 Filtro de Partículas Anelado (APF)
Em [Gall, 2010, 2007] é proposta uma metodologia para o seguimento de movimento
humano 3D. Este algoritmo é baseado num procedimento multi-camada que efectua a
combinação das seguintes operações: optimização global, filtragem e optimização local. Na
Figura 2.44 é possível ver a arquitectura geral do procedimento proposto.
Optimização
Global
Imagem
Filtragem
Optimização
Local
t-1
t
t-dCamada 1
Camada 2
Pose t
Pose t-d
Figura 2.44 – Procedimento multi-camada para seguimento (adaptado de [Gall, 2010, 2007]).
Como descrito em [Gall, 2010, 2007], a primeira camada é baseada numa optimização
global estocástica que fornece estimativas robustas e, relativamente, exactas. Na segunda
camada é realizado um refinamento dessa estimativa através de uma filtragem e uma
optimização local. Desta forma é aumentada a exactidão e reduzido o tremor e a polarização
da primeira camada com um pequeno atraso de tempo d, com 0d frames. Nesta camada
são processadas as imagens e extraídas as silhuetas. No procedimento multi-camada a
optimização global e local são aplicadas na mesma imagem, Figura 2.44. Assumindo o
modelo de esqueleto 3D a pose pode ser representada por um vector x que contêm a posição,
orientação e os ângulos das junções, onde as rotações são convertidas para a representação do
ângulo da linha central. Para cada frame, a pose x̂ é obtida procurando o valor mínimo da
função de energia usada.
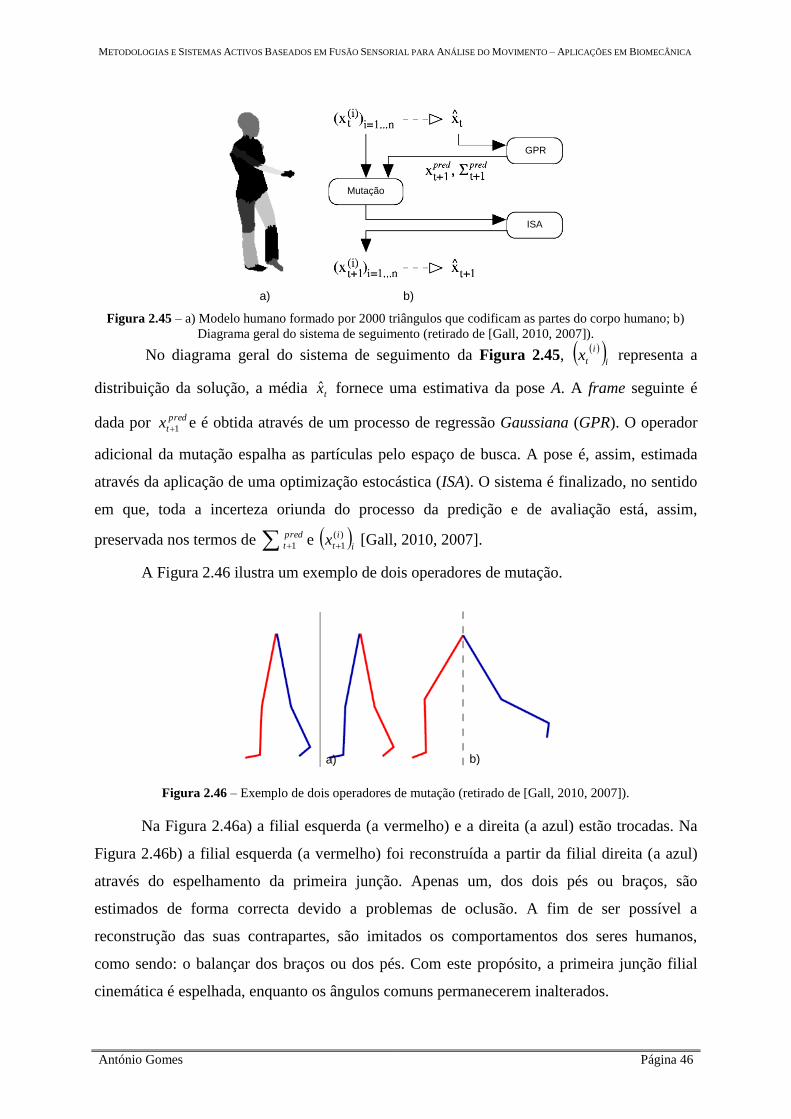
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 46
Mutação
GPR
ISA
Figura 2.45 – a) Modelo humano formado por 2000 triângulos que codificam as partes do corpo humano; b)
Diagrama geral do sistema de seguimento (retirado de [Gall, 2010, 2007]).
No diagrama geral do sistema de seguimento da Figura 2.45,
i
i
tx representa a
distribuição da solução, a média tx̂ fornece uma estimativa da pose A. A frame seguinte é
dada por pred
tx 1 e é obtida através de um processo de regressão Gaussiana (GPR). O operador
adicional da mutação espalha as partículas pelo espaço de busca. A pose é, assim, estimada
através da aplicação de uma optimização estocástica (ISA). O sistema é finalizado, no sentido
em que, toda a incerteza oriunda do processo da predição e de avaliação está, assim,
preservada nos termos de
pred
t 1 e i
i
tx )(
1 [Gall, 2010, 2007].
A Figura 2.46 ilustra um exemplo de dois operadores de mutação.
Figura 2.46 – Exemplo de dois operadores de mutação (retirado de [Gall, 2010, 2007]).
Na Figura 2.46a) a filial esquerda (a vermelho) e a direita (a azul) estão trocadas. Na
Figura 2.46b) a filial esquerda (a vermelho) foi reconstruída a partir da filial direita (a azul)
através do espelhamento da primeira junção. Apenas um, dos dois pés ou braços, são
estimados de forma correcta devido a problemas de oclusão. A fim de ser possível a
reconstrução das suas contrapartes, são imitados os comportamentos dos seres humanos,
como sendo: o balançar dos braços ou dos pés. Com este propósito, a primeira junção filial
cinemática é espelhada, enquanto os ângulos comuns permanecerem inalterados.
a) b)
a) b)
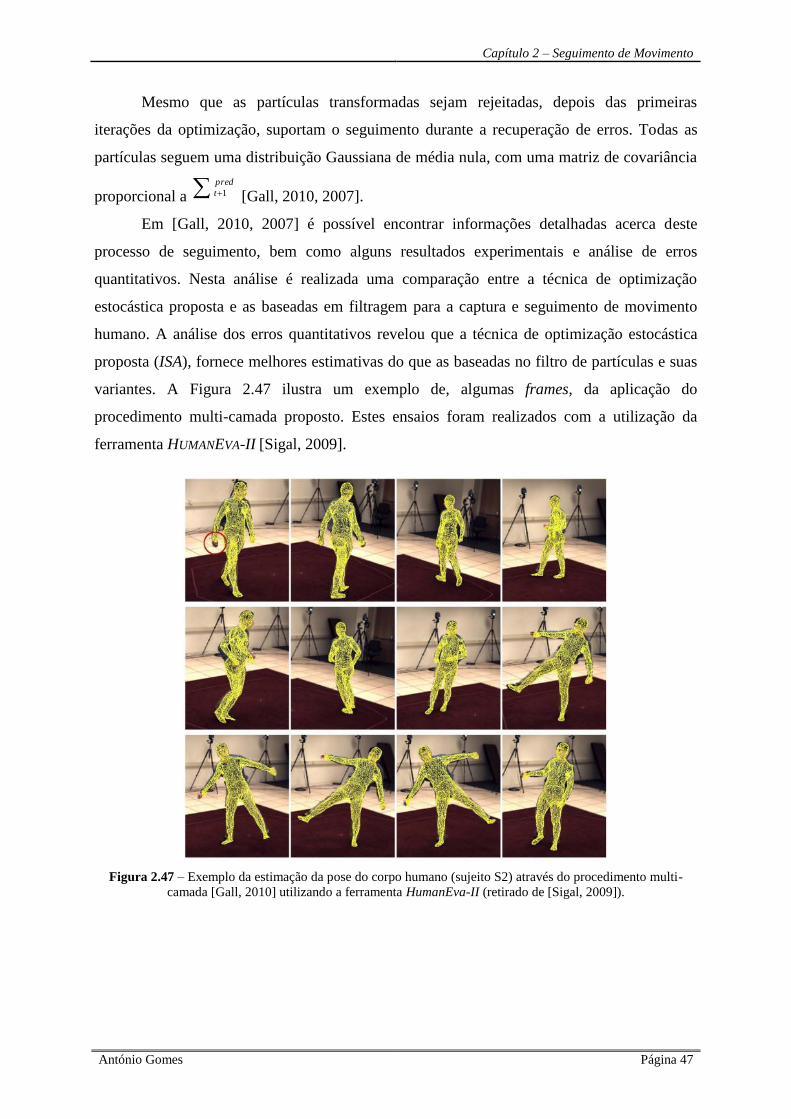
Capítulo 2 – Seguimento de Movimento
António Gomes Página 47
Mesmo que as partículas transformadas sejam rejeitadas, depois das primeiras
iterações da optimização, suportam o seguimento durante a recuperação de erros. Todas as
partículas seguem uma distribuição Gaussiana de média nula, com uma matriz de covariância
proporcional a
pred
t 1 [Gall, 2010, 2007].
Em [Gall, 2010, 2007] é possível encontrar informações detalhadas acerca deste
processo de seguimento, bem como alguns resultados experimentais e análise de erros
quantitativos. Nesta análise é realizada uma comparação entre a técnica de optimização
estocástica proposta e as baseadas em filtragem para a captura e seguimento de movimento
humano. A análise dos erros quantitativos revelou que a técnica de optimização estocástica
proposta (ISA), fornece melhores estimativas do que as baseadas no filtro de partículas e suas
variantes. A Figura 2.47 ilustra um exemplo de, algumas frames, da aplicação do
procedimento multi-camada proposto. Estes ensaios foram realizados com a utilização da
ferramenta HUMANEVA-II [Sigal, 2009].
Figura 2.47 – Exemplo da estimação da pose do corpo humano (sujeito S2) através do procedimento multi-
camada [Gall, 2010] utilizando a ferramenta HumanEva-II (retirado de [Sigal, 2009]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 48
Este ensaio foi realizado em três etapas, cada uma correspondente a uma linha da
imagem da Figura 2.47, e organizadas da seguinte forma: na primeira, o sujeito está apenas a
caminhar; na segunda, o sujeito está a caminhar e a rodopiar; e na terceira, o sujeito está a
caminhar, a rodopiar e a balançar [Gall, 2010].
Em [Gall, 2006a, 2006b] é realizada uma aproximação prévia do estado dos
parâmetros, tais como os ângulos de junção de objectos 3D, para através do filtro de
partículas efectuar o seguimento 3D. A probabilidade dos estados do objecto, incluindo as
correlações entre os parâmetros de estado, é instruída, à priori, a partir das amostras obtidas
nas imagens de treino. O seguimento baseado em modelos 3D, consiste em estimar a pose do
objecto 3D. A pose é determinada por um valor que é representado num espaço de estados E.
No caso do modelo articulado do corpo humano, a pose é descrita pelo movimento do corpo
rígido 3D com 6 graus de liberdade e um conjunto de ângulos de junção, neste caso foram
utilizados 12. Isto origina uma representação em espaço de estados, cujo modelo dimensional
é elevado e vai dificultar o processo de seguimento.
O filtro de partículas, baseado no método da condensação, é poderoso no seguimento
do contorno mas não é muito eficiente no seguimento 3D. Um método heurístico, baseado no
filtro de partículas, utilizado no seguimento 3D (multi-vista) é o denominado filtro de
partículas anelado ( “annealed particle filter – APF)” [Deutscher, 2005; Gall, 2007, 2006a,
2006b].
Seguidamente são apresentadas alguns exemplos da aplicação da metodologia de
seguimento multi-vista 3D, nos quais foi seguida a parte inferior do corpo de uma pessoa e
utilizadas quatro câmaras calibradas e sincronizadas. As sequências foram capturadas em
simultâneo e foi utilizado um sistema de análise de movimento comercial (8 câmaras Falcon).
Os dados de treino, conhecidos à priori, são integrados nos parâmetros da densidade de
probabilidade ppose são compostas por 480 amostras, obtidas a partir das sequências de uma
mesma pessoa a caminhar. Os dados foram capturados antes de serem gravadas as sequências
de teste. Os parâmetros utilizados pela metodologia APF durante os ensaios foram os
seguintes: aplicação de 10 execuções repetidas com )6.11(8 11 m
mB e 250 partículas [Gall,
2006a, 2006b]. Em [Gall, 2006a, 2006b] pede-se encontrar a formulação matemática das
funções utilizadas pela metodologia APF.

Capítulo 2 – Seguimento de Movimento
António Gomes Página 49
A Figura 2.48 ilustra um exemplo do resultado de seguimento através da metodologia
APF sem o conhecimento prévio dos dados de treino utilizados.
Figura 2.48 – Comparação de resultados: a) e b) Sem conhecimento prévio dos dados de treino; c) Com
conhecimento da distância ponderada (retirado de [Gall, 2006a]).
Em [Gall, 2006a] é possível encontrar informações acerca da comparação de
resultados nos diversos ensaios efectuados. A Figura 2.49 mostra a robustez da metodologia
APF na presença de ruído e de oclusões. Cada frame, foi distorcida de forma independente
por 25% de ruído do pixel e a oclusão realizada através de rectângulos de tamanho, posição e
de valor cinzento aleatório.
Figura 2.49 – Exemplo de sequenciais com distorção (4 de 181 frames), apenas é visualizada a vista de uma
câmara (retirado de [Gall, 2006a]).
a) b) c)

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 50
2.3.4 Filtragem e Alisamento de Partículas
Em [Patrick, 2010] são apresentadas três técnicas de alisamento aproximadas para
efectuar o seguimento 3D do corpo humano em ambientes controlados e também em
ambientes reais. No segundo caso existem objectos que provocam oclusão tais como cadeiras
e quadros. Tais cenas realísticas raramente são consideradas no seguimento do corpo humano.
Pois, tais oclusões provocam erros de observação que, frequentemente, originam a falha do
seguimento durante o tempo em que dura a oclusão. A Figura 2.50 mostra as séries de dados e
os algoritmos de seguimento apresentados em [Patrick, 2010], bem como a relação entre
estes.
Filtro de Partículas Repetido
APF
Filtro de Partículas
PF
FS-HHMM
Alisamento de Partículas
Inferência Variacional
Inferência de “Gibbs”
HUMANEVA
DADOS DOS
ALGORITMOS
PROPOSTOS
HUMANEVA
HUMANEVA
DADOS DOS
ALGORITMOS
PROPOSTOS FILTRAGEM
APROXIMAÇÃO DA
MISTURA ALISAMENTO RESULTADO
VÍDEOS
Figura 2.50 – Arquitectura geral das séries de dados e dos algoritmos de seguimento estudados em [Patrick,
2010] e do relacionamento entre os mesmos (adaptado de [Patrick, 2010]).
São utilizadas três modelos baseados nos algoritmos do filtro de partículas. Dois deles,
o filtro de partículas com um modelo simples (Simple-Particle Filter) e o filtro de partículas
anelado com um modelo simples (Simple-APFl), utilizam um modelo genérico de movimento
onde a postura seguinte é assumida de acordo com uma distribuição de difusão Gaussiana das
rotações comuns da postura actual. Estes modelos diferem apenas no facto de um utilizar um
filtro de partículas standard [Doucet , 2000] e o outro utilizar o filtro de partículas anelado
[Deutscher, 2005; Patrick, 2010].
As técnicas de alisamento propostas no trabalho de [Patrick, 2010] são as seguintes:
filtro de alisamento de partículas (“particle-filtered back-wards smoothing”), aproximação
variacional (“variational approximation”) e amostragem de Gibbs (“Gibbs sampling”). Como
se pode ver na Figura 2.50, as técnicas de alisamento são utilizadas após as de filtagrem. No
trabalho de [Patrick, 2010] está disponível a formulação dos algoritmos de filtragem e de
alisamento utilizados.
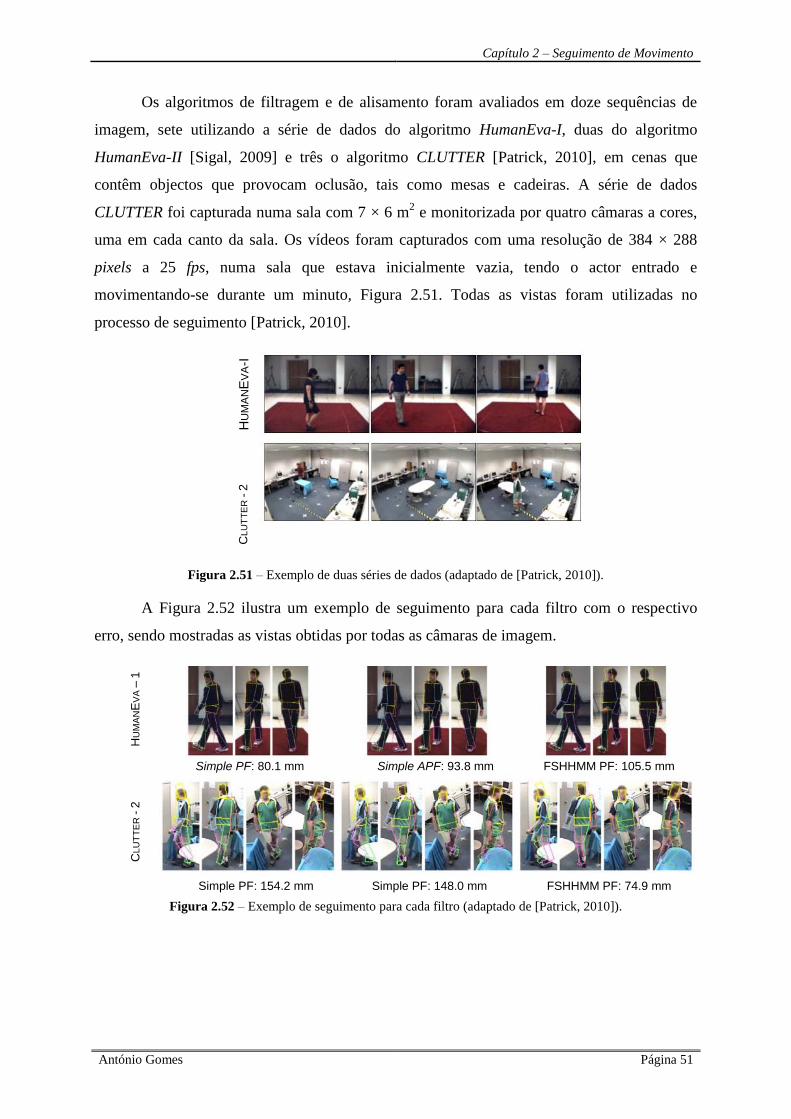
Capítulo 2 – Seguimento de Movimento
António Gomes Página 51
CLU
TT
ER
- 2
Os algoritmos de filtragem e de alisamento foram avaliados em doze sequências de
imagem, sete utilizando a série de dados do algoritmo HumanEva-I, duas do algoritmo
HumanEva-II [Sigal, 2009] e três o algoritmo CLUTTER [Patrick, 2010], em cenas que
contêm objectos que provocam oclusão, tais como mesas e cadeiras. A série de dados
CLUTTER foi capturada numa sala com 7 × 6 m2 e monitorizada por quatro câmaras a cores,
uma em cada canto da sala. Os vídeos foram capturados com uma resolução de 384 × 288
pixels a 25 fps, numa sala que estava inicialmente vazia, tendo o actor entrado e
movimentando-se durante um minuto, Figura 2.51. Todas as vistas foram utilizadas no
processo de seguimento [Patrick, 2010].
Figura 2.51 – Exemplo de duas séries de dados (adaptado de [Patrick, 2010]).
A Figura 2.52 ilustra um exemplo de seguimento para cada filtro com o respectivo
erro, sendo mostradas as vistas obtidas por todas as câmaras de imagem.
Figura 2.52 – Exemplo de seguimento para cada filtro (adaptado de [Patrick, 2010]).
HU
MA
NE
VA-I
HU
MA
NE
VA
– 1
C
LU
TT
ER
- 2
Simple PF: 154.2 mm
Simple PF: 80.1 mm Simple APF: 93.8 mm FSHHMM PF: 105.5 mm
FSHHMM PF: 74.9 mm Simple PF: 148.0 mm
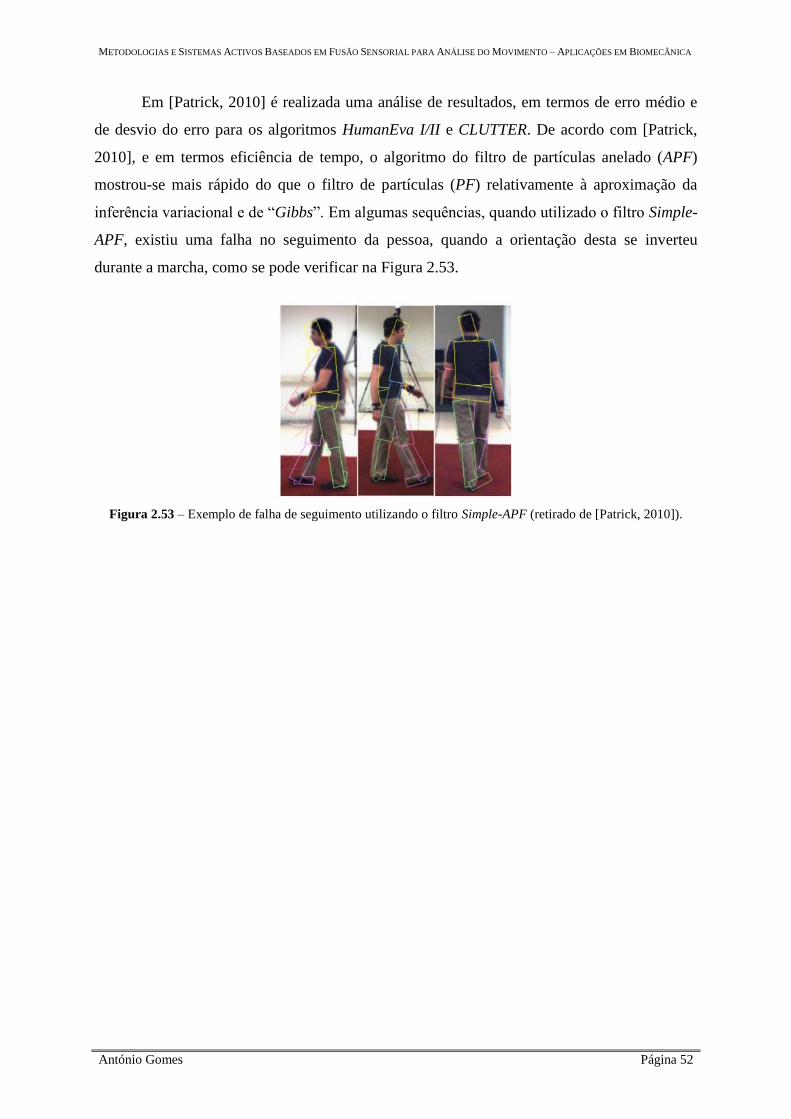
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 52
Em [Patrick, 2010] é realizada uma análise de resultados, em termos de erro médio e
de desvio do erro para os algoritmos HumanEva I/II e CLUTTER. De acordo com [Patrick,
2010], e em termos eficiência de tempo, o algoritmo do filtro de partículas anelado (APF)
mostrou-se mais rápido do que o filtro de partículas (PF) relativamente à aproximação da
inferência variacional e de “Gibbs”. Em algumas sequências, quando utilizado o filtro Simple-
APF, existiu uma falha no seguimento da pessoa, quando a orientação desta se inverteu
durante a marcha, como se pode verificar na Figura 2.53.
Figura 2.53 – Exemplo de falha de seguimento utilizando o filtro Simple-APF (retirado de [Patrick, 2010]).

Capítulo 2 – Seguimento de Movimento
António Gomes Página 53
2.4 Sumário
O presente capítulo expôs metodologias existentes para o seguimento de movimento
humano com recurso a técnicas de Visão Computacional. Assim, em termos de resumo, pode-
se indicar o seguinte:
A metodologia “homographic occupancy”, apresentada na secção 2.2.1, é especialmente
utilizada no seguimento de pessoas em situações onde estas se encontram organizadas
em aglomerados e estão desordenadas. Esta metodologia é particularmente orientada
para situações onde a cena é suficientemente densa, sendo comum a oclusão parcial ou
total de pessoas, não havendo a garantia destas serem vistas pelas câmras de imagem de
forma isolada.
O algoritmo de “Seguimento de Movimento de Humanos em Sequências de imagem”,
proposto na secção 2.2.2, permite efectuar o seguimento de movimento e estimação da
pose 3D em sequências de imagem obtidas a partir de múltiplas câmaras. É utilizado um
modelo composto por dezasseis segmentos rígidos que permitem a rotação e a
translação das juntas anatomicas. O algoritmo falha em situações em que os segmentos
corporais estão demasiado próximos entre si ou quando existem erros na estimação da
silhueta 2D;
O algoritmo de ”Seguimento de Múltiplas Pessoas e Estimação da Pose 3D”,
apresentado na secção 2.2.3, permite efectuar o seguimento de múltiplas pessoas e a
estimação da pose 3D. Esta metodologia utiliza uma aproximação composta por três
etapas: na primeira, as pessoas são detectadas e seguidas através de blobs elípticos; na
segunda, são detectadas as diversas partes que constituem o corpo (a face , os ombros e
os membros); na terceira e última etapa é utilizado um método baseado na cadeia de
Markov para estimar a pose 3D do corpo. Neste método é possível o seguimento de
múltiplas pessoas mesmo havendo a situações de oclusão;
O algoritmo baseado em “Métodos Bayesianos”, apresentado na secção 2.2.4, permite o
efectuar o seguimento de movimento humano e estimação da pose através de métodos
Bayesianos. Esta metodologia efectua a redução de dimensão da representação em
espaço de estados conseguindo assim um seguimento Bayesiano eficiente;
O algoritmo de “Programação Linear”, apresentada na secção 2.2.5, efectua o
seguimento de objectos, designado de Sistema MyView (“MyView System”) com base
num método de Programação Linear. Este sistema tem como princípio a selecção do
melhor algoritmo de pesquisa de objectos em múltiplas vistas. Neste sistema, a captura

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 54
de vídeo é realizada através de múltiplas câmaras. Uma das principais aplicações deste
sistema tem sido no estudo de actividades em eventos desportivos;
A metodologia baseada na “Medição da Discrepância entre Observações e a Superfície”,
proposta na secção 2.2.6, permite efectuar o seguimento de movimento articulado com a
utilização de múltiplas câmaras através da medição da discrepância entre observações e
a superfície. Este método utiliza um procedimento de cálculo onde é efectuada a
medição da discrepância entre as observações (composta por pontos e normais 3D) e
uma superfície implícita articulada. Esta metodologia é mais poderosa com a a
utilização de funções de distância, pois permite efectuar associações menos ambíguas
entre os dados e o modelo. A modelação de objectos, tais como o corpo humano, é
realizada através da definição de correntes cinemáticas abertas (kinematic chains) que
vai efectuar a ligação entre os vários segmentos corporais. A modelação dos segmentos
é realizada através de elipses;
O algoritmo MMC (Markerless Motion Capture), apresentado na secção 2.2.7, permite
efectuar o seguimento de movimento humano através de uma aproximação designada de
Captura de Movimento Markerless (MMC – Markerless Motion Capture). Esta
metodologia utiliza múltiplas câmaras de imagem a cores e combina um algoritmo de
seguimento exacto e anatómico para gerar de forma automática modelos de sujeitos
específicos. Esta aproximação de seguimento, emprega um esquema de minimização de
Levenberg-Marquardt, sobre um algoritmo iterativo com seis graus de liberdade para
cada segmento corporal. O processo automático de geração de modelos fornece um
modelo com fidelidade para estudos biomecânicos de movimento. Este algoritmo de
seguimento é completamente automático e utiliza a série de dados HumanEva-II;
Os dois algoritmos de seguimento apresentados na secção 2.2.8, têm por base as séries
de dados e efectuam o seguimento de movimento e estimação da pose 3D. O primeiro
denominado de HumanEva-I e o segundo de HumanEva- II. Estes algoritmos são
baseados num procedimento baseado num filtro Bayesiano com uma optimização de
ordem de importância das amostras do tipo sequencial, que utiliza o Filtro de Partículas;
Na secção 2.3 foi realizada uma breve introdução aos métodos estocásticos para o seguimento
de movimento. Assim, foram apresentados o filtro de Kalman, o filtro de partículas, bem
como duas das suas variantes: o filtro de partículas anelado e o algoritmo de alisamento e
filtragem de partículas.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 55
Capítulo 3
ANÁLISE CLÍNICA DA MARCHA


Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 57
3 Análise Clínica da Marcha
Este capítulo tem como objectivo fazer uma introdução ao que se tem vindo a
desenvolver no domínio da análise clínica da marcha. Neste seguimento, são referidos os
diversos equipamentos utilizados e é apresentado um exemplo de um laboratório de análise da
marcha com aquisição de parâmetros que descrevem a marcha. Posteriormente é feita uma
revisão das áreas de estudo ligadas à análise cinemática linear, análise cinemática angular,
análise cinética linear e análise cinética angular. A análise cinemática linear permite efectuar
a medição do movimento sem contemplar as forças que lhe dão origem. Por outro lado, a
análise cinemática angular permite analisar os vários tipos de ângulos calculados em
biomecânica. Já a análise cinética linear permite avaliar as forças (internas e externas) que
originam o movimento. Finalmente, a análise cinética angular permite avaliar a causa de
movimento de rotação de um objecto por aplicação de uma força. Finalmente, no final do
capítulo são apresentadas algumas das metodologias existentes que utilizam modelos
biomecânicos do corpo humano para o estudo das forças internas que dão origem ao
movimento.
3.1 Introdução
A análise clínica da marcha é, vulgarmente, considerada como sendo a medição, o
processamento e a interpretação sistemática dos parâmetros biomecânicos que caracterizam a
locomoção humana, de forma a facilitar a identificação das limitações do movimento, para
que se possam aplicar procedimentos adequados de reabilitação [Baker, 2006; Davis,
1991;Sousa 2008, 2007a, 2007b, 2007c].
Como descrito em [Sutherland 2005; Sousa 2008; 2007a, 2007b, 2007c; Whittle,
1996; Whittle, 2007], a análise clínica da marcha deve ser realizada por laboratórios capazes
de adquirir e tratar, de forma instrumentada, toda a informação relativa aos parâmetros
cinemáticos, cinéticos, energéticos e mioeléctricos do movimento, integrando pessoal
especializado capaz de interpretar clinicamente esta informação. As metodologias
predominantes na análise clínica da marcha são: análise de sequencias de imagem (vídeos),
medição de parâmetros gerais da marcha, análise cinemática, análise cinética e
electromiografia.
Por seu lado, a pressão plantar pode não ser considerada como sendo uma componente
básica da análise clínica da marcha [Sousa, 2007a; Sutherland , 2005]. Contudo, a distribuição
da pressão plantar permite analisar, de forma pormenorizada, a distribuição da carga entre a

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 58
planta do pé e a respectiva superfície de contacto. A cinemática consiste na caracterização do
movimento sem contemplar as forças envolvidas, em termos de deslocamentos, velocidades e
acelerações [Whittle, 1996; Whittle, 2003]. A cinética descreve as forças internas e externas
que actuam num corpo em movimento. A electromiografia consiste na medição eléctrica da
actividade muscular durante o ciclo de marcha.
3.2 Análise de Vídeos
Recentemente, a utilização de sistemas computacionais e de imagem tem tido um
papel cada vez mais fundamental na análise da marcha. A utilização deste tipo de
equipamento veio colmatar duas grandes limitações na análise visual da marcha, ou seja, a
capacidade de gravação permanente e a capacidade de observação de eventos que ocorrem a
elevada velocidade. A análise da marcha através de gravação de vídeo não é um método
objectivo, pois não fornece dados quantitativos. Durante a fase de gravação de vídeo, o sujeito
que está a ser filmado, deverá caminhar o mais “normalmente” possível e, preferivelmente,
em peúgas ou descalço. Antes de iniciar a gravação é ajustada a posição da(s) câmara(s) e o
zoom da(s) lente(s), de forma a ser visível a totalidade do corpo desde a cabeça até aos pés.
Usualmente, são definidos caminhos para o sujeito caminhar. Alguns investigadores permitem
que seja o sujeito a escolher a velocidade de marcha, já outros controlam o tempo de ciclo (ou
cadência), por exemplo, com o sujeito a caminhar ao ritmo de um metrónomo. Contudo, é
pouco provável que o sujeito possa caminhar, da forma mais normal possível, quando
obrigado a caminhar a uma determinada cadência. Da mesma forma, é improvável, ou até
mesmo impossível, que pacientes com problemas de controlo motor, possam caminhar com
um ciclo de marcha imposto [Whittle, 2007; Whittle, 1996].
A Figura 3.1 ilustra um exemplo de um laboratório de análise de marcha, com
aquisição de vídeo e medição de parâmetros gerais da marcha.
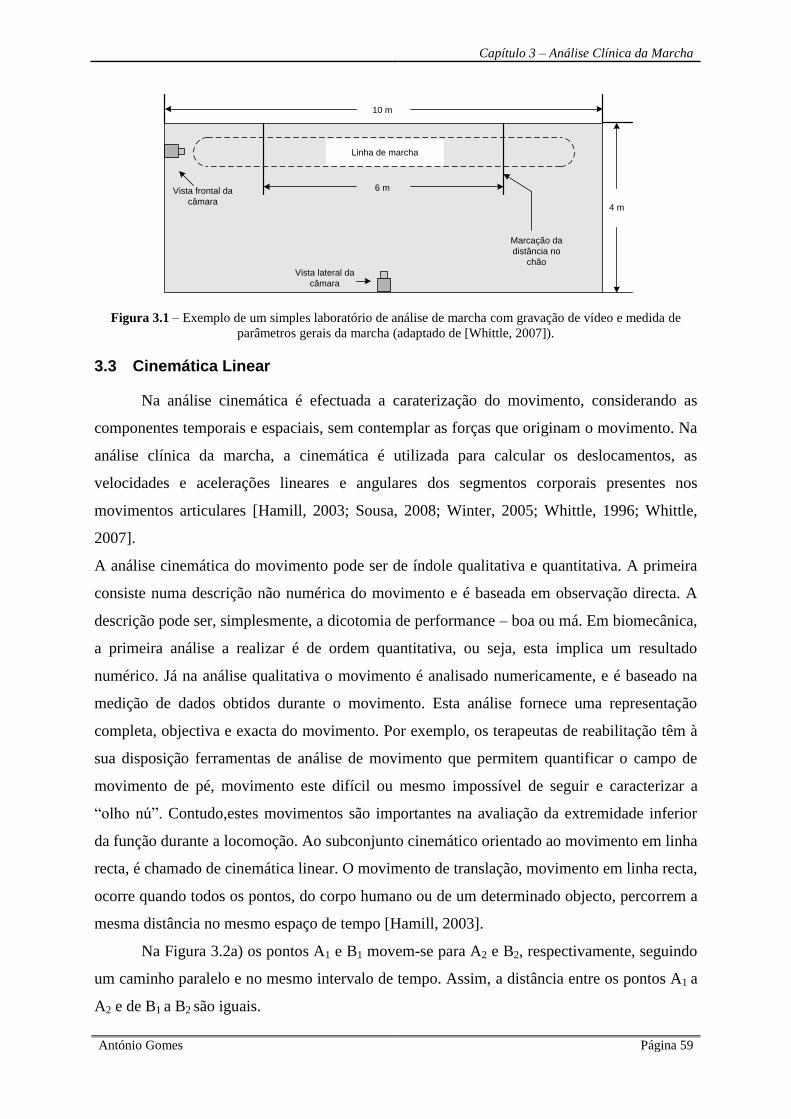
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 59
10 m
4 m
Vista frontal da
câmara
Vista lateral da
câmara
Marcação da
distância no
chão
Linha de marcha
6 m
Figura 3.1 – Exemplo de um simples laboratório de análise de marcha com gravação de vídeo e medida de
parâmetros gerais da marcha (adaptado de [Whittle, 2007]).
3.3 Cinemática Linear
Na análise cinemática é efectuada a caraterização do movimento, considerando as
componentes temporais e espaciais, sem contemplar as forças que originam o movimento. Na
análise clínica da marcha, a cinemática é utilizada para calcular os deslocamentos, as
velocidades e acelerações lineares e angulares dos segmentos corporais presentes nos
movimentos articulares [Hamill, 2003; Sousa, 2008; Winter, 2005; Whittle, 1996; Whittle,
2007].
A análise cinemática do movimento pode ser de índole qualitativa e quantitativa. A primeira
consiste numa descrição não numérica do movimento e é baseada em observação directa. A
descrição pode ser, simplesmente, a dicotomia de performance – boa ou má. Em biomecânica,
a primeira análise a realizar é de ordem quantitativa, ou seja, esta implica um resultado
numérico. Já na análise qualitativa o movimento é analisado numericamente, e é baseado na
medição de dados obtidos durante o movimento. Esta análise fornece uma representação
completa, objectiva e exacta do movimento. Por exemplo, os terapeutas de reabilitação têm à
sua disposição ferramentas de análise de movimento que permitem quantificar o campo de
movimento de pé, movimento este difícil ou mesmo impossível de seguir e caracterizar a
“olho nú”. Contudo,estes movimentos são importantes na avaliação da extremidade inferior
da função durante a locomoção. Ao subconjunto cinemático orientado ao movimento em linha
recta, é chamado de cinemática linear. O movimento de translação, movimento em linha recta,
ocorre quando todos os pontos, do corpo humano ou de um determinado objecto, percorrem a
mesma distância no mesmo espaço de tempo [Hamill, 2003].
Na Figura 3.2a) os pontos A1 e B1 movem-se para A2 e B2, respectivamente, seguindo
um caminho paralelo e no mesmo intervalo de tempo. Assim, a distância entre os pontos A1 a
A2 e de B1 a B2 são iguais.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 60
A1
B1
A2
B2
A1
B1
A2
B2
Figura 3.2 – Exemplo de um movimento de translação: a) Movimento rectilíneo; b) Movimento curvilíneo
(adaptado de [Hamill, 2003]).
O movimento de translação ocorre apenas em linha recta, Figura 3.2a). Este tipo de
movimento é designado de movimento linear; podendo ocorrer, também, ao longo de um
caminho curvo, sendo neste caso designado de movimento curvilíneo Figura 3.2b) [Hamill,
2003].
3.3.1 Obtenção de Dados Cinemáticos
Os dados cinemáticos a utilizar na análise quantitativa, podem ser obtidos de diversas
formas. Por exemplo, em laboratórios de biomecânica são utilizados acelerómetros para a
medição directa das acelerações dos segmentos corporais. Contudo, a forma mais usual na
obtenção deste tipo de dados é através da utilização de sistemas de captura de movimento
baseados em sistemas de aquisição de imagem de alta velocidade ou optoelectrónicos. Os
dados obtidos a partir de sistemas deste tipo, descrevem a posição dos segmentos corporais
com respeito ao tempo. No caso de sistemas de captura de vídeo de alta velocidade, os dados
são adquiridos a partir de câmaras de vídeo digitais. Nos sistemas optoelectrónicos de captura
de movimento, é realizado o seguimento de marcadores rectroreflectivos (sistema de
marcador passivo) colocados no corpo através de uma ou mais câmaras. Cada câmara faz o
scan dos sinais emitidos por díodos de luz infravermelha (sistema de marcador activo). Em
todos os sistemas, as câmaras são calibradas com uma frame de referência, permitindo, assim,
a conversão entre as coordenadas da câmara e uma lista de coordenadas dos marcadores
existentes no campo de visão [Hamill, 2003].
Para a realização do cálculo cinemático é necessário obter a trajectória 3D dos
marcadores colocados no corpo do sujeito, usualmente sobre a pele, usando três ou mais
câmaras de imagem. Geralmente são recolhidas imagens do sujeito em posição estática
(aquisição estática) e em movimento (aquisição dinâmica). Seguidamente, as imagens são
processadas por um sistema computacional e é apresentada a informação cinemática obtida
[Sousa, 2008, 2007a; Whittle, 1996; Whittle, 2007].
a) b)

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 61
3.3.2 Sistemas de Referência
Antes de efectuar qualquer análise, é necessário determinar o sistema de referência
espacial. Existem diversas opções de representação do sistema de referência, mas, a maioria
dos laboratórios utilizam o sistema de coordenadas cartesiano. Este sistema de coordenadas é
geralmente considerado como sendo um sistema de referência rectangular, podendo ser
bidimensional ou tridimensional [Hamill, 2003].
Como descrito em [Whittle, 2007], um sistema tridimensional requer, usualmente, a
utilização de duas ou mais câmaras. A utilização de uma só câmara dificulta a obtenção de
medidas tridimensionais. As medidas cinemáticas mais simples são obtidas apenas com uma
câmara num sistema não calibrado. Tais medidas podem ser razoavelmente imprecisas, mas
úteis para algumas finalidades. Sem ser efectuada a calibração das câmaras, é impossível
obter distâncias de forma precisa e absoluta. Tal sistema é usado apenas para medir os
ângulos de junção num plano sagital. A câmara é posicionada perpendicularmente em relação
ao plano de movimento, minimizando, assim, distorções introduzidas pela perspectiva. Um
sistema com uma só câmara pode ser usado para obter medidas aproximadas de distâncias,
caso seja utilizada alguma forma de calibração do objecto, como uma grelha com dimensões
previamente conhecidas do objecto. A exactidão das medidas vai-se perdendo, à medida que
os movimentos se vão afastando da zona calibrada. Este efeito pode ser minimizado, caso a
câmara se encontre afastada do objecto, com a utilização de lentes. Para conseguir uma
exactidão razoável, nas medidas cinemáticas, é necessário usar um sistema tridimensional
previamente calibrado, o que envolve efectuar medições de diferentes pontos de vista. A
maioria dos sistemas comerciais usa a calibração tridimensional de um objecto visto por todas
as câmaras, em simultâneo ou em sequência. Todos os sistemas de medição, incluindo os
sistemas de medição cinemáticos, sofrem de erros de medida. A exactidão das medidas
depende do campo de visão das câmaras, embora possa diferir entre diferentes sistemas de
medição. Habitualmente, é utilizado um software para calcular a relação entre as posições
tridimensionais dos “marcadores” na calibração do objecto e as posições bidimensionais
desses mesmos nos vários campos de vistas das diferentes câmaras. Quando um sujeito
caminha em frente das câmaras, o processo de calibração é invertido e as posições
tridimensionais são calculadas para os marcadores colocados nos membros do sujeito,
contando que são visíveis, pelo menos, por duas câmaras. Seguidamente, são apresentados
estes dois tipos de sistemas de referência.
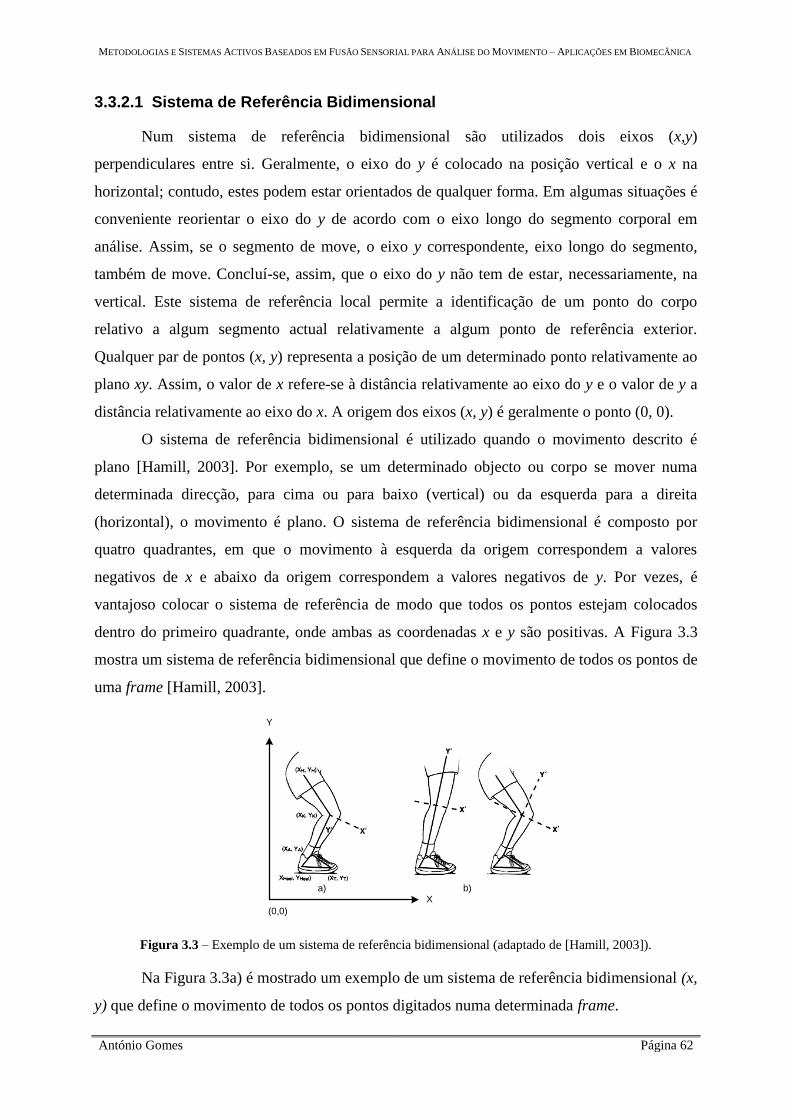
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 62
3.3.2.1 Sistema de Referência Bidimensional
Num sistema de referência bidimensional são utilizados dois eixos (x,y)
perpendiculares entre si. Geralmente, o eixo do y é colocado na posição vertical e o x na
horizontal; contudo, estes podem estar orientados de qualquer forma. Em algumas situações é
conveniente reorientar o eixo do y de acordo com o eixo longo do segmento corporal em
análise. Assim, se o segmento de move, o eixo y correspondente, eixo longo do segmento,
também de move. Concluí-se, assim, que o eixo do y não tem de estar, necessariamente, na
vertical. Este sistema de referência local permite a identificação de um ponto do corpo
relativo a algum segmento actual relativamente a algum ponto de referência exterior.
Qualquer par de pontos (x, y) representa a posição de um determinado ponto relativamente ao
plano xy. Assim, o valor de x refere-se à distância relativamente ao eixo do y e o valor de y a
distância relativamente ao eixo do x. A origem dos eixos (x, y) é geralmente o ponto (0, 0).
O sistema de referência bidimensional é utilizado quando o movimento descrito é
plano [Hamill, 2003]. Por exemplo, se um determinado objecto ou corpo se mover numa
determinada direcção, para cima ou para baixo (vertical) ou da esquerda para a direita
(horizontal), o movimento é plano. O sistema de referência bidimensional é composto por
quatro quadrantes, em que o movimento à esquerda da origem correspondem a valores
negativos de x e abaixo da origem correspondem a valores negativos de y. Por vezes, é
vantajoso colocar o sistema de referência de modo que todos os pontos estejam colocados
dentro do primeiro quadrante, onde ambas as coordenadas x e y são positivas. A Figura 3.3
mostra um sistema de referência bidimensional que define o movimento de todos os pontos de
uma frame [Hamill, 2003].
b)
(0,0)
Y
X
a)
Figura 3.3 – Exemplo de um sistema de referência bidimensional (adaptado de [Hamill, 2003]).
Na Figura 3.3a) é mostrado um exemplo de um sistema de referência bidimensional (x,
y) que define o movimento de todos os pontos digitados numa determinada frame.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 63
Na Figura 3.3b) é mostrado um exemplo de um sistema de referência bidimensional (x’, y’)
aplicado no centro da articulação do joelho, em que o eixo dos y foi reorientado de acordo
com o segmento da tíbia [Hamill, 2003]. A Figura 3.4 ilustra os diversos quadrantes e
respectivos sinais das coordenadas de um sistema de coordenadas bidimensional.
I Quadrante (+, +)
IV Quadrante (+, -)III Quadrante (-, -)
II Quadrante (-, +)
Origem (0, 0)
+ X- X
+ Y
-Y
Figura 3.4– Representação dos quadrantes e sinais das coordenadas de um sistema
de coordenadas bidimensional.
Se num determinado movimento, por exemplo, no balançar lateral da coxa e perna, o
movimento não somente para a frente e para trás, o movimento envolvido não é plano mas
sim tridimensional. Assim, a análise cinemática do movimento tem de ser realizada através da
utilização de um sistema de referência tridimensional. A análise cinemática tridimensional do
movimento humano é muito mais complexa do que a análise bidimensional [Hamill, 2003].
3.3.2.2 Sistema de Referência Tridimensional
O sistema de referência tridimensional é composto por três eixos perpendiculares entre
si. Como no sistema de referência bidimensional, o eixo horizontal e o vertical corresponde ao
eixo do x e do y, respectivamente, e o eixo médio corresponde ao z. A intersecção dos três
eixos define a origem do sistema correspondente à posição (0, 0, 0) [Hamill, 2003]. A Figura
3.5 ilustra os diversos quadrantes, e respectivos sinais das coordenadas de um sistema típico
de coordenadas tridimensional

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 64
Figura 3.5 – Representação dos quadrantes e sinais das coordenadas de um sistema
de coordenadas tridimensional.
Relativamente aos sinais das coordenadas nos diversos quadrantes, o eixo do x e do y
têm os mesmos sinais como no sistema de referência bidimensional. Relativamente ao eixo do
z, este assume valores negativos na zona anteriore valores positivos na zona posterior. Neste
sistema de referência é possível definir qualquer ponto no espaço e não somente num plano,
como acontece no sistema de referência bidimensional [Hamill, 2003].
Origem (0, 0, 0)
+ X- X
+ Y
-Y
- Z
+ Z
I Quadrante
(+, +, -)
IV Quadrante
(+, -, +)
III Quadrante
(-, -, +)
II Quadrante
(-, +, -)
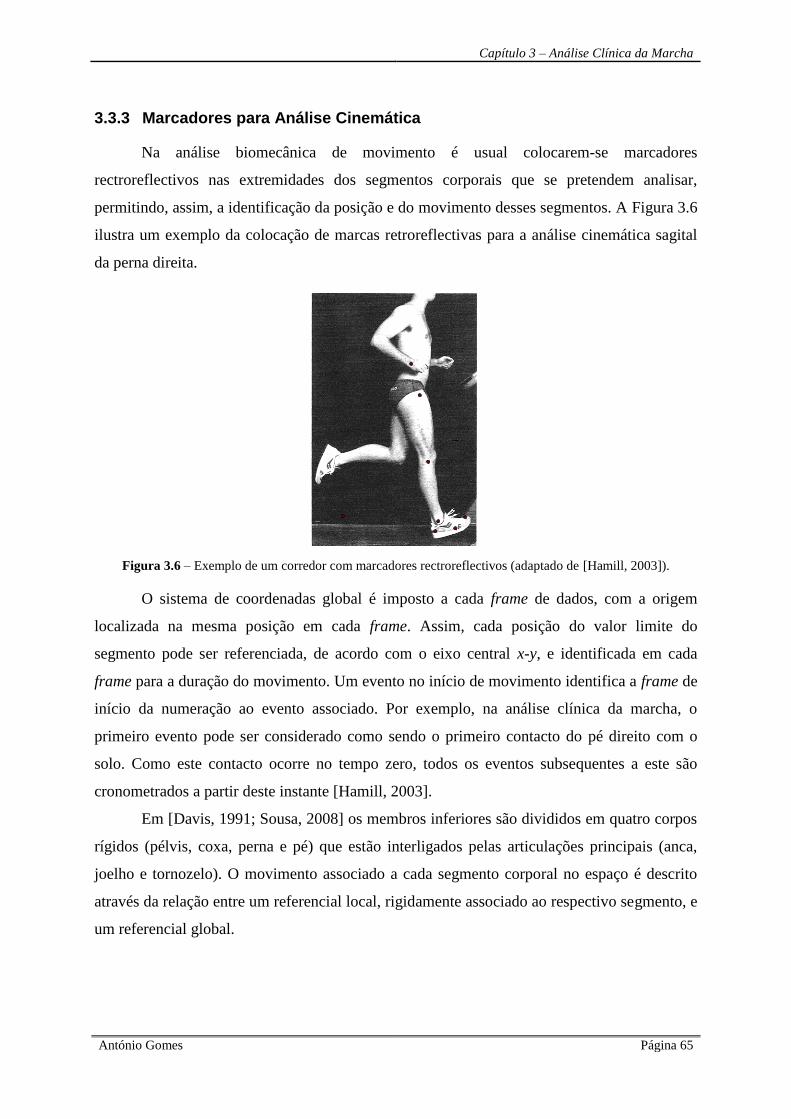
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 65
3.3.3 Marcadores para Análise Cinemática
Na análise biomecânica de movimento é usual colocarem-se marcadores
rectroreflectivos nas extremidades dos segmentos corporais que se pretendem analisar,
permitindo, assim, a identificação da posição e do movimento desses segmentos. A Figura 3.6
ilustra um exemplo da colocação de marcas retroreflectivas para a análise cinemática sagital
da perna direita.
Figura 3.6 – Exemplo de um corredor com marcadores rectroreflectivos (adaptado de [Hamill, 2003]).
O sistema de coordenadas global é imposto a cada frame de dados, com a origem
localizada na mesma posição em cada frame. Assim, cada posição do valor limite do
segmento pode ser referenciada, de acordo com o eixo central x-y, e identificada em cada
frame para a duração do movimento. Um evento no início de movimento identifica a frame de
início da numeração ao evento associado. Por exemplo, na análise clínica da marcha, o
primeiro evento pode ser considerado como sendo o primeiro contacto do pé direito com o
solo. Como este contacto ocorre no tempo zero, todos os eventos subsequentes a este são
cronometrados a partir deste instante [Hamill, 2003].
Em [Davis, 1991; Sousa, 2008] os membros inferiores são divididos em quatro corpos
rígidos (pélvis, coxa, perna e pé) que estão interligados pelas articulações principais (anca,
joelho e tornozelo). O movimento associado a cada segmento corporal no espaço é descrito
através da relação entre um referencial local, rigidamente associado ao respectivo segmento, e
um referencial global.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 66
Figura 3.7 – Exemplo de configuração de marcadores (retirado de [Davis, 1991]).
Pode-se encontrar em [Whittle, 2007] a descrição de dois métodos fundamentais para
a colocação das marcas nos membros a analisar. Um método consiste em colocar cada marca
directamente sobre a pele do indivíduo (Figura 3.8, lado direito), geralmente sobre um marco
anatómico ósseo. A posição e orientação do segmento do membro são definidas pelas
posições das marcas, sendo a posição do centro de junção calculado a partir dessas posições.
Outro método consiste em colocar um conjunto, de pelo menos três marcas, em cada
segmento corporal, colocados directamente na pele através de numa estrutura rígida, chamado
de “pod” (Figura 3.8, lado esquerdo), de modo que a sua posição e orientação possa ser
determinada no espaço tridimensional. O movimento de um determinado segmento corporal
relativamente ao próximo segmento e a posição do centro de junção podem ser derivados
matematicamente. Ambos os métodos têm vantagens e desvantagens, mas ambos sofrem de
erros devido a movimentos erróneos das marcas.
Figura 3.8 – Configuração típica de marcas para a zona pélvica e membros inferiores
(retirado de [Whittle, 2007]).

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 67
3.3.4 Parâmetros gerais que descrevem a Marcha
A análise cinemática descreve as posições, velocidades e acelerações dos corpos em
movimento. Esta análise é das mais básicas que se pode efectuar, sendo somente usada para
descrever o movimento sem referenciar a causa que lhe deu origem. Os dados cinemáticos são
geralmente obtidos através de câmaras de imagem de alta velocidade, sendo as posições dos
segmentos corporais obtidas através da identificação ou outras técnicas de reconhecimento de
marcadores.
Nas diversas formas de locomoção as acções do corpo são cíclicas, pois envolvem sequências
em que uma vez o corpo é essencialmente suportado por uma das pernas e, depois, pela outra.
Estas sequências são definidas por alguns parâmetros, sendo o mais vulgar o passo e a
passada. Um ciclo locomotor é definido pelos eventos que ocorrem nessas sequências. Uma
passada é uma parcela de um passo, que ocorre quando um pé toca o solo, até que ocorra o
mesmo evento pelo pé oposto. Geralmente, um evento inicia no instante em que se dá o
contacto do pé com o solo, dando-se, assim, o início a uma passada. Uma passada é
subdividida em passos. Assim, dois passos equivalem a uma passada, sendo chamado de ciclo
de marcha (gait cycle) [Hamill, 2003; Sousa, 2008; Whittle, 2007]. A Figura 3.9 ilustra um
exemplo da diferença entre uma passada e um passo.
1 passada 1 passo
contacto do pé direito contacto do pé direito
contacto do pé esquerdo contacto do pé esquerdo
contacto do pé direito
Figura 3.9 – Diferença entre passo e passada (adaptado de [Hamill, 2003]).
O comprimento e taxa (ou cadência) do passo são dos parâmetros lineares cinemáticos
mais estudados e mais adoptados. A distância coberta por um passo é o comprimento do passo
e o número de passos por minuto é a taxa de passo. A velocidade da corrida (VCorrida) e do
caminhar é o resultado da relação entre a taxa de passo (TaxaPasso) e o comprimento do passo
(CompPasso). Assim:
PassoPassoCorrida TaxaCompV (8)
A velocidade pode decrescer se diminuir o comprimento do passo, a taxa de passo ou ambas.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 68
O tempo de ciclo (TCiclo) é dado pela seguinte expressão:
Contadas
sCicloEtapas
stempoT
2)()(
, (9)
em que o factor 2 deve-se ao passo ser composto por duas etapas. A taxa do passo (TaxaPasso)
é dada pela seguinte expressão:
)(
60
stempo
EtapasT Contadas
Passo
, (10)
em que 60 representa o facto de que um minuto ter 60 segundos.

Capítulo 3 – Análise Clínica da Marcha
3.4 Cinemática Angular
Em biomecânica de movimento humano são normalmente calculados os seguintes
ângulos: ângulo absoluto, ângulo relativo e ângulos das articulações inferiores. Seguidamente,
e com base em [Hamill, 2003], é feita uma caracterização geral destes ângulos.
3.4.1 Ângulo Absoluto
O ângulo absoluto corresponde ao ângulo de inclinação do segmento corporal
relativamente a um sistema de referência fixo. Assim, descreve a orientação do segmento no
espaço. Existem duas convenções primárias no cálculo de ângulos absolutos. A primeira,
consiste em colocar um sistema de coordenadas próximo do ponto final do segmento. A
segunda, a convenção mais usada no cálculo do ângulo absoluto, consiste em colocar o
sistema de coordenadas no ponto mais afastado da origem, sendo medido no sentido anti-
horário relativamente à linha horizontal. Os ângulos absolutos são calculados usando a razão
trigonométrica da tangente. Pode-se ver na Figura 3.10 os ângulos absolutos de um corredor.
Figura 3.10 – Ângulos absolutos do: braço a), tronco b), coxa c) e da perna d) de um corredor
(retirado de [Hamill, 2003]).
3.4.2 Ângulo Relativo
O ângulo relativo está compreendido entre os eixos longitudinais de dois segmentos
corporais, sendo, normalmente, chamado de intersegmental ou ângulo da articulação, e pode
ser calculado através da lei dos cosenos, Figura 3.11.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 70
2
2 21
ângulo relativo Centro de articulação do pulso
Centro de articulação do cotovelo
Centro de articulação do úmero
a)
b)
Figura 3.11 – a) Ângulo relativo do cotovelo; b) O mesmo ângulo com o braço e antebraço em posições
distintas (adaptado de [Hamill, 2003]).
O ângulo relativo pode ser calculado a partir dos valores dos ângulos absolutos,
obtendo-se, assim, um resultado de valor similar ao calculado através da lei dos cosenos. O
ângulo relativo entre dois segmentos pode ser calculado pela subtracção do ângulo absoluto
do segmento afastado do ponto de origem e o próximo segmento. Por exemplo, usando o
ângulo absoluto da coxa e da parte inferior da perna, o cálculo do ângulo relativo é realizado
da seguinte forma:
pernaabsolutocoxaabsolutorelativo . (11)
3.4.3 Ângulos das Articulações Inferiores
Como descrito em [Hamill, 2003], os ângulos das articulações das extremidades
inferiores podem ser calculados de forma similar ao procedimento descrito anteriormente.
Usualmente, estes ângulos são somente analisados no plano sagital bidimensional. Numa
análise biomecânica, assume-se usualmente que a vista a ser analisada é a do lado sagital
direito. Assim, o lado direito do corpo do sujeito está próxima da câmara e considera-se que
pertence ao plano (x, y); senão, os dados têm de ser convertidos para assim se representar a
vista do lado direito. A Figura 3.12 ilustra a vista sagital dos ângulos absolutos do tronco,
coxa, perna e pé.
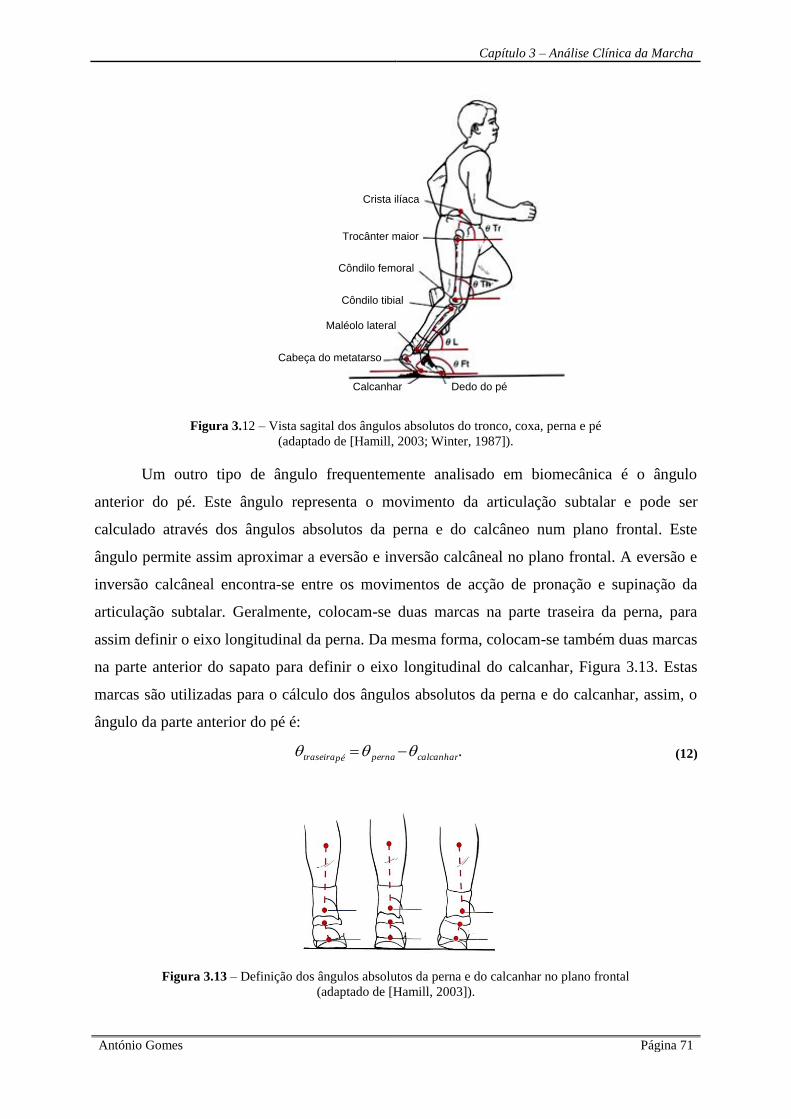
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 71
Côndilo femoral
Côndilo tibial
Maléolo lateral
Crista ilíaca
Cabeça do metatarso
Dedo do pé
Trocânter maior
Calcanhar
Figura 3.12 – Vista sagital dos ângulos absolutos do tronco, coxa, perna e pé
(adaptado de [Hamill, 2003; Winter, 1987]).
Um outro tipo de ângulo frequentemente analisado em biomecânica é o ângulo
anterior do pé. Este ângulo representa o movimento da articulação subtalar e pode ser
calculado através dos ângulos absolutos da perna e do calcâneo num plano frontal. Este
ângulo permite assim aproximar a eversão e inversão calcâneal no plano frontal. A eversão e
inversão calcâneal encontra-se entre os movimentos de acção de pronação e supinação da
articulação subtalar. Geralmente, colocam-se duas marcas na parte traseira da perna, para
assim definir o eixo longitudinal da perna. Da mesma forma, colocam-se também duas marcas
na parte anterior do sapato para definir o eixo longitudinal do calcanhar, Figura 3.13. Estas
marcas são utilizadas para o cálculo dos ângulos absolutos da perna e do calcanhar, assim, o
ângulo da parte anterior do pé é:
calcanharpernapétraseira . (12)
Figura 3.13 – Definição dos ângulos absolutos da perna e do calcanhar no plano frontal
(adaptado de [Hamill, 2003]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 72
Um ângulo positivo representa a inversão do calcâneo (calcaneal inversion), já um
negativo a eversão do mesmo (calcaneal eversion) e um ângulo nulo representa a posição
neutra. Durante a fase da sustentação do ciclo da marcha, a parte anterior do pé é definida
pelo respectivo ângulo (rearfoot angle), que está na posição invertida na fase inicial de
contacto do pé com o solo. A partir desse ponto, e durante a sustentação, até à distância
intermédia a parte anterior do pé move-se para a posição de eversão. Nessa posição o ângulo é
máximo negativo. A partir da posição intermédia, o pé fica menos revirado e regressa à
posição invertida no dedo de pé (toe-off). A Figura 3.14 ilustra um exemplo típico do ângulo
anterior do pé durante a fase de sustentação da passada de um corredor desportivo [Hamill,
2003].
Ân
gu
lo (
gra
us)
0 20 40 60 80 100
15
10
0
-10
-15
0
5
-5
batida do pé dedo do pé fora
inversão
eversãoângulo
máximo
Figura 3.14 – Exemplo típico do ângulo da parte anterior do pé durante uma corrida
(adaptado de [Hamill, 2003]).
Existem outros ângulos relativos também usualmente analisados em biomecânica, que
são o ângulo na anca, no joelho e no tornozelo, como sendo, respectivamente, a orientação da
coxa em relação à pélvis, orientação da perna relativamente à coxa e a orientação do pé
relativamente à perna [Hamill, 2003; Sousa, 2008; Whittle, 2007]. Pode-se encontrar em
[Hamill 2003] informações e exemplos de cálculo destes ângulos.
flexão
extensão
15
10
0
-
10
-
150 20 40 60 80 100
Fase de suporte Fase de balanço
dorsiflexão
flexão plantar
0 20 40 60 80 100 0 20 40 60 80 100
40
30
20
10
0
60
50
70 15
10
0
5
-5
-
10
-
15
flexão
extensão
Ân
gu
lo (
gra
us)
Figura 3.15 – Gráficos dos ângulos da anca a), joelho b) e tornozelo c) de um sujeito a caminhar
(adaptado de [Hamill, 2003]).
a) b) c)
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 73
3.5 Cinética Linear
A cinética permite descrever as forças (internas e externas) que originam o movimento
Uma força envolve a interacção de dois objectos, provocando a mudança de estado de
movimento destes, podendo “puxá-los ou empurrá-los”. Uma força pode originar ou parar o
movimento de um objecto, com uma aceleração positiva ou negativa, podendo também alterar
a direcção deste [Hamill, 2003; Sousa, 2008 Sutherland 2005; Winter 2005; Whittle, 2007].
As forças que existem na natureza e que, de alguma forma, podem afectar o
movimento dos seres humanos, podem ser classificadas de diversas formas. A classificação
mais vulgar é de forças de contacto e forças sem contacto. As forças de contacto envolvem a
execução de uma acção, empurrar ou puxar, exercida por um objecto em contacto directo com
um outro. Por exemplo, quando um bastão bate numa bola de basebol ou o pé bate com o
solo. Em contraste com este tipo de forças, existem aquelas que exercem força sobre um
objecto que não está em contacto directo com um outro, por exemplo a força da gravidade. As
forças de contacto primordiais na análise de movimento humano são as seguintes: força de
reacção do solo (Ground Reaction Force – GRF), força de reacção de junção (Joint Reaction
Force – JRF), fricção, resistência fluida, força de inércia, força muscular e força elástica
[Hamill 2003]. Seguidamente, são apresentadas duas destas forças, nomeadamente as forças
GRF e JRF. Na literatura ligada à física ou à análise de movimento humano, como por
exemplo em [Hamill 2003; Whittle, 2007], pode-se encontrar informações acerca destas e das
restantes forças, bem como as três leis de Newton que permitem demonstrar a forma de uma
força originar movimento.
3.5.1 Força de Reacção do Solo
Na maioria dos movimentos humanos terrestres, o indivíduo é sujeito a uma força de
reacção do solo (Ground Reaction Force – GRF) originada pela superfície sobe a qual se
move. A superfície pode ser, por exemplo, a areia de uma praia, o pavimento de um recinto
gimnodesportivo, um passeio, etc. Todas as superfícies originam uma força de reacção, ou
seja, quando um indivíduo se move, “empurra” o solo com força e, por sua vez, o solo “puxa”
o indivíduo com uma força igual, mas de direcção oposta. Esta força pode ser descrita por um
vector e representada em vários componentes. Estes componentes são ortogonais entre si e
podem ser representados num sistema de coordenadas tridimensional, como representado na
Figura 3.16. Estes componentes são, vulgarmente, designados pelos eixos Fz, Fy e Fx [Hamill
2003; Whittle, 2007].
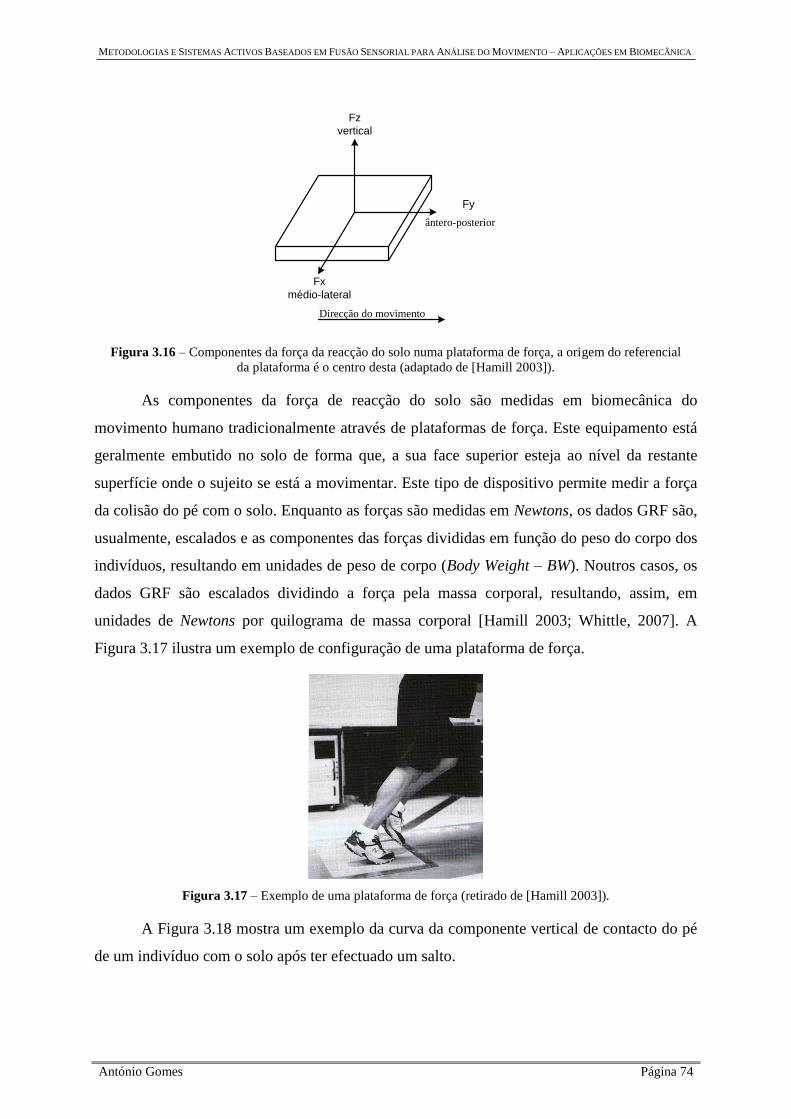
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 74
Fz
vertical
Fx
médio-lateral
Fy
ântero-posterior
Direcção do movimento
Figura 3.16 – Componentes da força da reacção do solo numa plataforma de força, a origem do referencial
da plataforma é o centro desta (adaptado de [Hamill 2003]).
As componentes da força de reacção do solo são medidas em biomecânica do
movimento humano tradicionalmente através de plataformas de força. Este equipamento está
geralmente embutido no solo de forma que, a sua face superior esteja ao nível da restante
superfície onde o sujeito se está a movimentar. Este tipo de dispositivo permite medir a força
da colisão do pé com o solo. Enquanto as forças são medidas em Newtons, os dados GRF são,
usualmente, escalados e as componentes das forças divididas em função do peso do corpo dos
indivíduos, resultando em unidades de peso de corpo (Body Weight – BW). Noutros casos, os
dados GRF são escalados dividindo a força pela massa corporal, resultando, assim, em
unidades de Newtons por quilograma de massa corporal [Hamill 2003; Whittle, 2007]. A
Figura 3.17 ilustra um exemplo de configuração de uma plataforma de força.
Figura 3.17 – Exemplo de uma plataforma de força (retirado de [Hamill 2003]).
A Figura 3.18 mostra um exemplo da curva da componente vertical de contacto do pé
de um indivíduo com o solo após ter efectuado um salto.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 75
Tempo (s)
3000
2000
1000
0
0.00 0.75 1.50
Fo
rça
Ve
rtic
al (N
)
contacto inicial do pé
dianteiro
impacto com a
superfície
Figura 3.18 – Força de contacto com o solo após um salto (adaptado de [Hamill 2003]).
O primeiro pico da Figura 3.18 representa o contacto inicial do pé dianteiro com a
superfície, sendo o segundo, o impacto do restante corpo do indivíduo com a superfície.
Geralmente, o segundo pico costuma ser maior do que o primeiro. Alguns indivíduos após o
salto efectuam o contacto com o solo com os dois pés em simultâneo. Neste caso, o contacto
com a superfície tem apenas um pico.
3.5.2 Força de Reacção da Articulação
Em vários estudos de análise biomecânica, os segmentos individuais são analisados
aleatoriamente ou um de cada vez segundo uma determinada ordem. Nesta análise, os
segmentos são separados das junções, ou juntas, sendo considerada a força que actua
transversalmente entre estes. Por exemplo, se a coxa exercer uma força descendente sobre
perna através da articulação do joelho, por sua vez, a perna exerce uma força ascendente, de
igual valor, sobre a coxa. A Figura 3.19 mostra a força de reacção da articulação do joelho
com as respectivas componentes compressiva e tesoura. Por vezes, em enumeras análises
desta força a sua magnitude é desconhecida podendo ser calculada se forem conhecidos os
dados cinemáticos e cinéticos apropriados.
Figura 3.19 – Força de reacção da articulação do joelho e componentes compressiva e efeito tesoura
(adaptado de [Hamill 2003]).
Força compressiva
Força de reacção da articulação
Força de efeito tesoura
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 76
3.5.3 Análise Estática e Dinâmica
A análise estática permite avaliar as forças que actuam no corpo humano quando a
aceleração é insignificante. Quando esta for relevante, então deve-se proceder à análise
dinâmica. As equações da análise dinâmica são derivadas da segunda lei de movimento de
Newton:
maF . (13)
onde (F) define a unidade de força em N (newtons), (m) a massa em Kg e (a) a aceleração em
ms-2
. Para o caso bidimensional, a aceleração linear pode ser composta nas componentes
horizontal x e vertical y :
yy
xx
maF
maF
, (14)
onde x e y representam as direcções das coordenadas, a é a aceleração do centro de massa
(CM) e m a massa do centro de massa do corpo. As forças envolventes no corpo podem ser
qualquer uma das forças muscular, gravítica, de contacto ou inercial. A força gravítica é o
peso de cada um dos segmentos corporais. As forças de contacto podem ser reacções – forças
com outros segmentos, com o solo ou com algum objecto externo – e as forças de inércia são:
xma e yma . Usando as equações do movimento dinâmico, podem ser calculadas as forças
que actuam num determinado segmento corporal.
Na análise dinâmica é utilizada a aproximação da dinâmica inversa para determinar as
forças baseadas nas acelerações sem efectuar a medição directa das forças. Assim, é utilizado
um modelo do corpo composto por ligações rígidas, em que cada ligação ou segmento tem
uma massa fixa e um centro de massa num ponto fixo. O momento de inércia de cada
segmento, na linha central deste, permanece constante [Hamill 2003].
A Figura 3.20 representa o modelo de corpo livre das forças de reacção das
articulações e das forças de acção a actuarem nos centros de massa dos segmentos de um
modelo estático a levantar-se. Estas forças estão a actuar em várias zonas do corpo,
especificamente no ombro, cotovelo, pulso, quadril, joelho, junções do tornozelo e contacto
com o solo. Este modelo não se encontra completo, pois falta incluir os componentes
angulares [Hamill 2003].
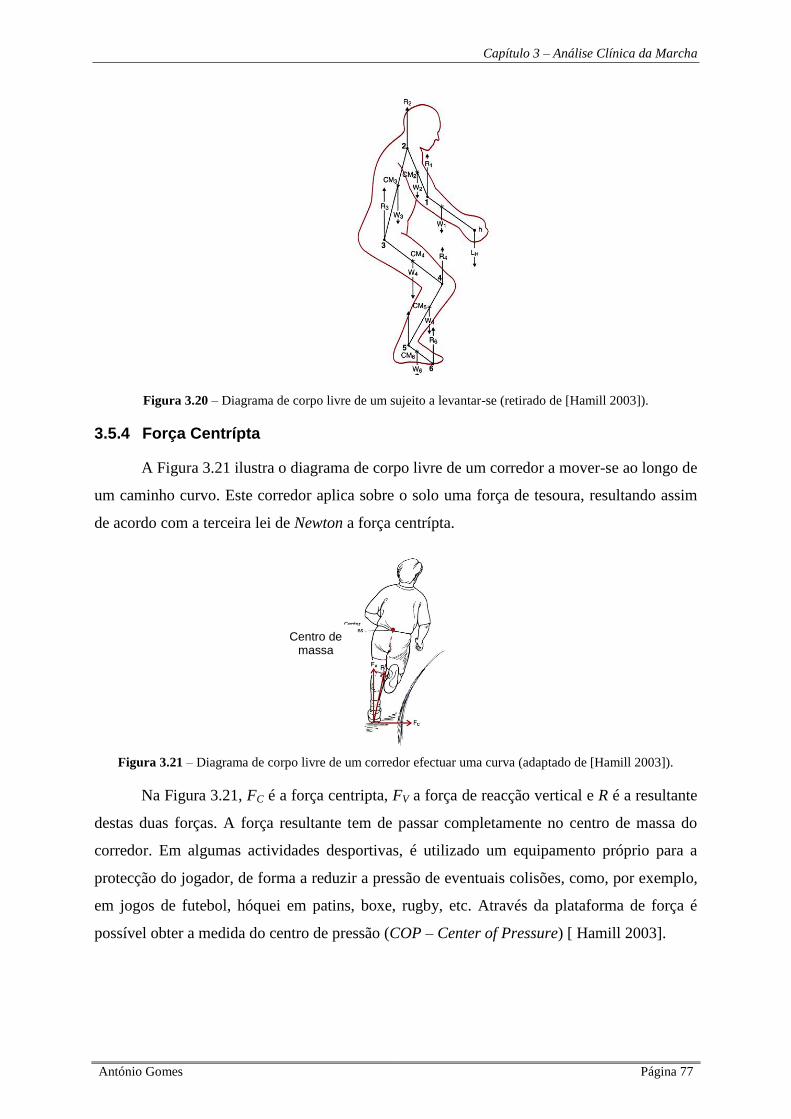
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 77
Figura 3.20 – Diagrama de corpo livre de um sujeito a levantar-se (retirado de [Hamill 2003]).
3.5.4 Força Centrípta
A Figura 3.21 ilustra o diagrama de corpo livre de um corredor a mover-se ao longo de
um caminho curvo. Este corredor aplica sobre o solo uma força de tesoura, resultando assim
de acordo com a terceira lei de Newton a força centrípta.
Figura 3.21 – Diagrama de corpo livre de um corredor efectuar uma curva (adaptado de [Hamill 2003]).
Na Figura 3.21, FC é a força centripta, FV a força de reacção vertical e R é a resultante
destas duas forças. A força resultante tem de passar completamente no centro de massa do
corredor. Em algumas actividades desportivas, é utilizado um equipamento próprio para a
protecção do jogador, de forma a reduzir a pressão de eventuais colisões, como, por exemplo,
em jogos de futebol, hóquei em patins, boxe, rugby, etc. Através da plataforma de força é
possível obter a medida do centro de pressão (COP – Center of Pressure) [ Hamill 2003].
Centro de massa
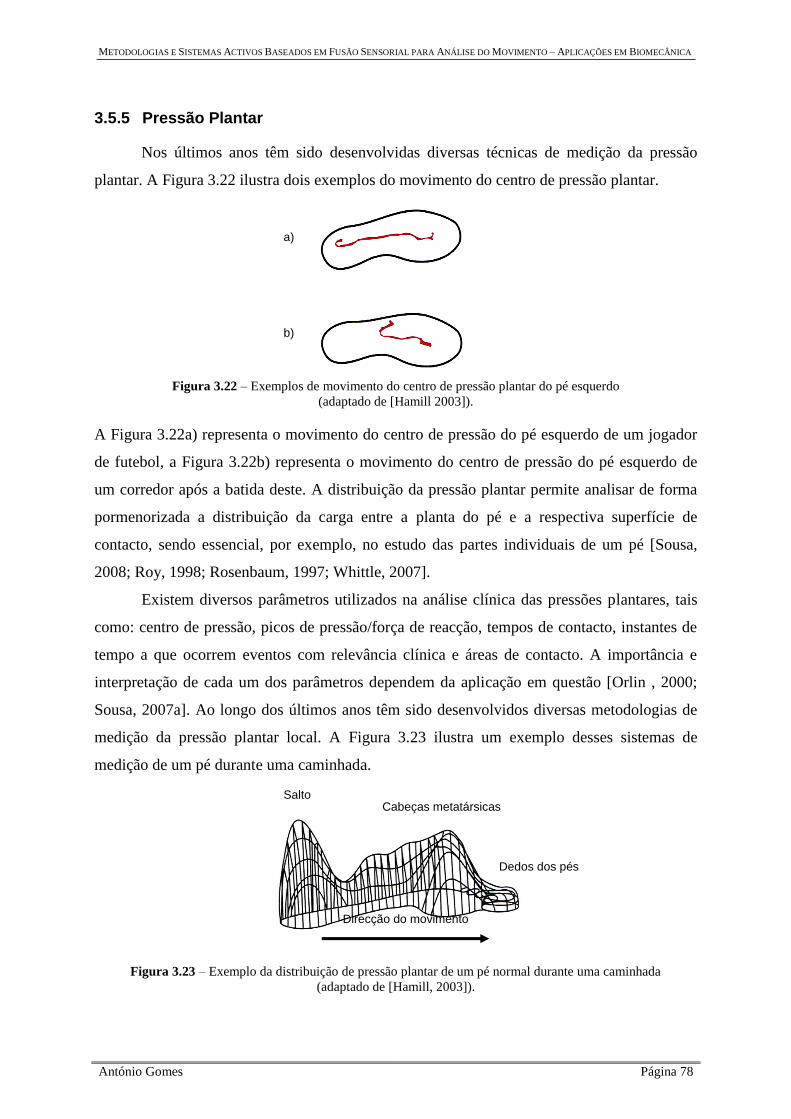
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 78
3.5.5 Pressão Plantar
Nos últimos anos têm sido desenvolvidas diversas técnicas de medição da pressão
plantar. A Figura 3.22 ilustra dois exemplos do movimento do centro de pressão plantar.
Figura 3.22 – Exemplos de movimento do centro de pressão plantar do pé esquerdo
(adaptado de [Hamill 2003]).
A Figura 3.22a) representa o movimento do centro de pressão do pé esquerdo de um jogador
de futebol, a Figura 3.22b) representa o movimento do centro de pressão do pé esquerdo de
um corredor após a batida deste. A distribuição da pressão plantar permite analisar de forma
pormenorizada a distribuição da carga entre a planta do pé e a respectiva superfície de
contacto, sendo essencial, por exemplo, no estudo das partes individuais de um pé [Sousa,
2008; Roy, 1998; Rosenbaum, 1997; Whittle, 2007].
Existem diversos parâmetros utilizados na análise clínica das pressões plantares, tais
como: centro de pressão, picos de pressão/força de reacção, tempos de contacto, instantes de
tempo a que ocorrem eventos com relevância clínica e áreas de contacto. A importância e
interpretação de cada um dos parâmetros dependem da aplicação em questão [Orlin , 2000;
Sousa, 2007a]. Ao longo dos últimos anos têm sido desenvolvidos diversas metodologias de
medição da pressão plantar local. A Figura 3.23 ilustra um exemplo desses sistemas de
medição de um pé durante uma caminhada.
Figura 3.23 – Exemplo da distribuição de pressão plantar de um pé normal durante uma caminhada
(adaptado de [Hamill, 2003]).
a)
b)
Salto Cabeças metatársicas
Dedos dos pés
Direcção do movimento

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 79
A Figura 3.24 ilustra um exemplo dos dados obtidos através de palmilhas de pressão –
modelo Pedar (Novel, Germany) – com interesse clínico para profissionais de saúde. Nesta
figura é possível visualizar os valores de pressão e a área de sensores activa para o instante de
descolagem do pé direito. A grelha a branco representada mostra a matriz de sensores; a
coluna à direita permite estabelecer uma relação entre a cor apresentada e o valor de pressão
associado [Sousa, 2008].
Figura 3.24 – Exemplo de valores de pressão e área activa durante a descolagem do pé direito
(retirado de [Sousa, 2008]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 80
3.6 Cinética Angular
Quando uma força causa uma rotação, esta ocorre em torno de um ponto central,
conhecido como ponto pivô. A linha de acção, perpendicular à força, deve actuar a uma
distância desse ponto pivô. O produto da força por esta distância é designado de binário ou
momento da força. O binário não é uma força, mas sim o efeito da força que faz com que um
objecto gire em torno de um eixo [Hamill 2003; Whittle, 2007].
Tal como na analogia linear, pode-se encontrar informações na literatura ligada à
física ou à análise de movimento humano, como por exemplo em [Hamill 2003; Whittle,
2007], sobre as três leis de Newton que permitem demonstrar a forma de uma força originar
movimento de rotação.
3.6.1 Características de um Binário
Existem duas componentes fundamentais na definição de binário, uma é a magnitude
da força, outra é a distância entre o ponto pivô e a linha perpendicular de acção da força.
Matematicamente, o binário é definido pela seguinte expressão:
rfT , (15)
onde T é o binário produzido, F é a força aplicada em Newtons e r é a distância perpendicular,
em metros, entre a linha de actuação da força e o ponto pivô. Esta distância é designada de
braço do binário ou momento (BM).
Força
Força
50º
Linha de acção
Força
Ponto pivô e eixo de
rotação
Braço do m
omento
Braço do momento
a)
b)
c)
Ponto pivô e eixo de
rotação
Ponto pivô e eixo de
rotação
Figura 3.25 – Exemplos de rotação por aplicação de uma força (adaptado de [Hamill, 2003]).
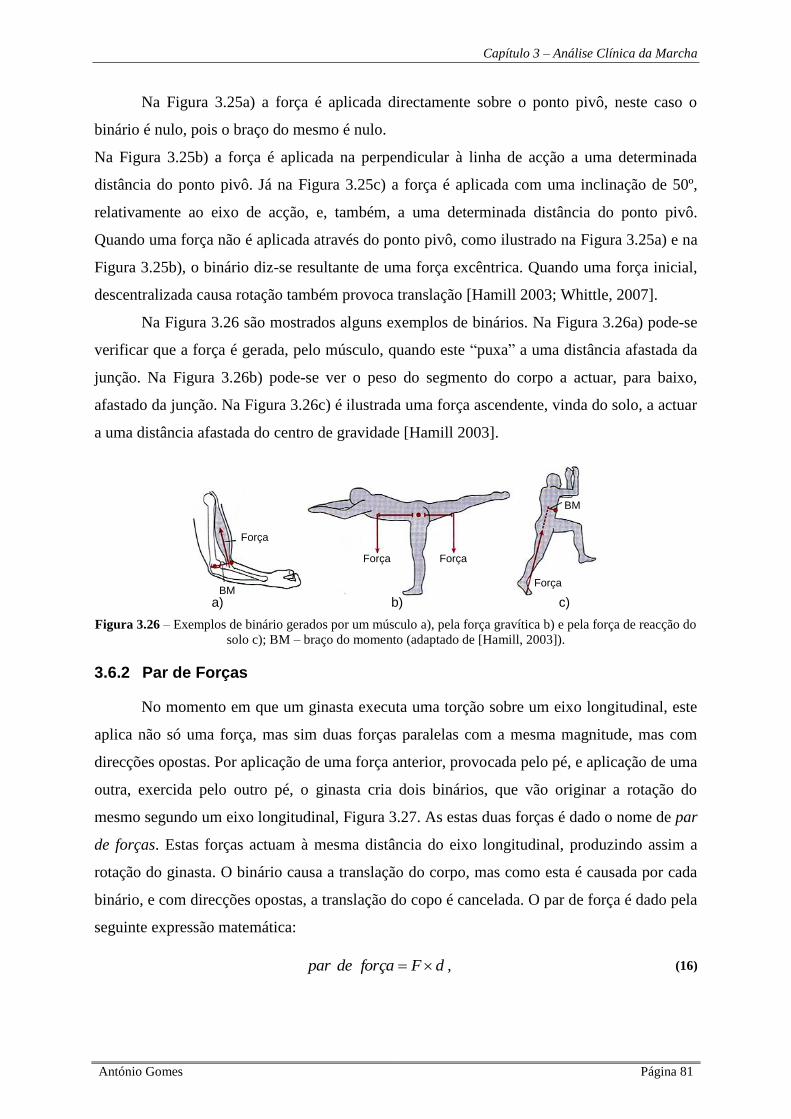
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 81
Na Figura 3.25a) a força é aplicada directamente sobre o ponto pivô, neste caso o
binário é nulo, pois o braço do mesmo é nulo.
Na Figura 3.25b) a força é aplicada na perpendicular à linha de acção a uma determinada
distância do ponto pivô. Já na Figura 3.25c) a força é aplicada com uma inclinação de 50º,
relativamente ao eixo de acção, e, também, a uma determinada distância do ponto pivô.
Quando uma força não é aplicada através do ponto pivô, como ilustrado na Figura 3.25a) e na
Figura 3.25b), o binário diz-se resultante de uma força excêntrica. Quando uma força inicial,
descentralizada causa rotação também provoca translação [Hamill 2003; Whittle, 2007].
Na Figura 3.26 são mostrados alguns exemplos de binários. Na Figura 3.26a) pode-se
verificar que a força é gerada, pelo músculo, quando este “puxa” a uma distância afastada da
junção. Na Figura 3.26b) pode-se ver o peso do segmento do corpo a actuar, para baixo,
afastado da junção. Na Figura 3.26c) é ilustrada uma força ascendente, vinda do solo, a actuar
a uma distância afastada do centro de gravidade [Hamill 2003].
Força
Força Força
ForçaBM
BM
Figura 3.26 – Exemplos de binário gerados por um músculo a), pela força gravítica b) e pela força de reacção do
solo c); BM – braço do momento (adaptado de [Hamill, 2003]).
3.6.2 Par de Forças
No momento em que um ginasta executa uma torção sobre um eixo longitudinal, este
aplica não só uma força, mas sim duas forças paralelas com a mesma magnitude, mas com
direcções opostas. Por aplicação de uma força anterior, provocada pelo pé, e aplicação de uma
outra, exercida pelo outro pé, o ginasta cria dois binários, que vão originar a rotação do
mesmo segundo um eixo longitudinal, Figura 3.27. As estas duas forças é dado o nome de par
de forças. Estas forças actuam à mesma distância do eixo longitudinal, produzindo assim a
rotação do ginasta. O binário causa a translação do corpo, mas como esta é causada por cada
binário, e com direcções opostas, a translação do copo é cancelada. O par de força é dado pela
seguinte expressão matemática:
dFforçadepar , (16)
a) b) c)

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 82
onde F é uma das duas forças, iguais e de direcções opostas, e d é a distância entre as linhas
de acção das duas forças.
Pé
esquerdoPé
direito
FE
FD
Eix
o lo
ng
itu
din
al
dDdE
Figura 3.27 – Par de forças criado por um ginasta a dar origem a um binário (adaptado de [Hamill, 2003]).
O binário DD dF é criado pelo pé direito, e o outro binário EE dF é criado pelo pé
esquerdo. Estes binários são sensivelmente iguais e têm a mesma direcção angular. O par de
forças resulta na rotação do ginasta em torno do eixo longitudinal, localizado no centro de
massa [Hamill 2003; Whittle, 2007].
3.6.3 Cálculo do Centro de Massa de um Segmento
Existem diversas metodologias para o cálculo do centro de massa de um objecto
utilizando técnicas de equilíbrio, como a suspensão e o equilíbrio de uma placa. A técnica
mais comum consiste em determinar o centro de massa individual de cada segmento corporal.
Estes centros de massa individuais, quando combinados, podem fornecer o local exacto do
centro de massa global do sistema. Esta aproximação, chamada de método segmental,
pressupõe o conhecimento da massa e do centro de massa de cada segmento corporal. A
determinação da posição do centro de massa total do corpo é obtida pela aplicação de um
modelo, assumindo que o corpo é constituído por uma série de segmentos rígidos. O centro de
massa total do corpo é então calculado usando os parâmetros inerciais de cada segmento e a
sua posição. Diversos investigadores têm apresentado metodologias, baseadas em equações de
regressão ou predição, para a estimar a massa e a posição do centro de massa dos vários
segmentos corporais, com base no estudo de cadáveres. A Figura 3.28 ilustra o modelo de
Hanavan, que representa o corpo humano usando entidades geométricas sólidas.
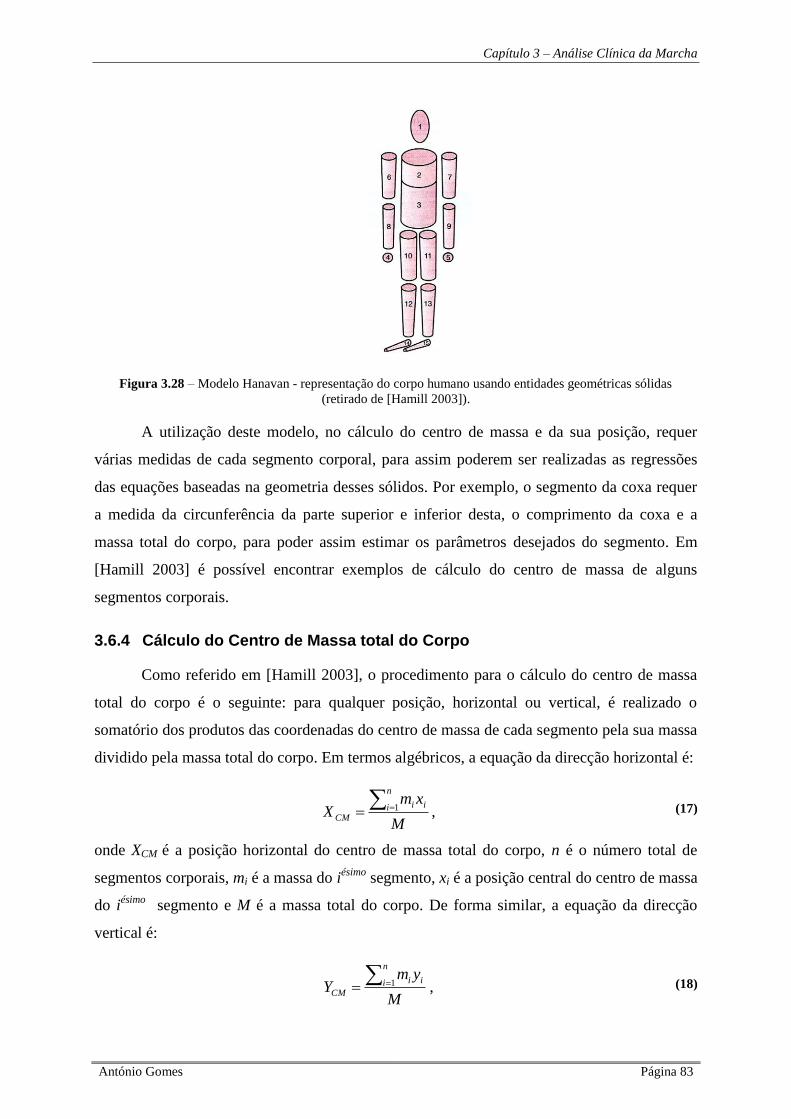
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 83
Figura 3.28 – Modelo Hanavan - representação do corpo humano usando entidades geométricas sólidas
(retirado de [Hamill 2003]).
A utilização deste modelo, no cálculo do centro de massa e da sua posição, requer
várias medidas de cada segmento corporal, para assim poderem ser realizadas as regressões
das equações baseadas na geometria desses sólidos. Por exemplo, o segmento da coxa requer
a medida da circunferência da parte superior e inferior desta, o comprimento da coxa e a
massa total do corpo, para poder assim estimar os parâmetros desejados do segmento. Em
[Hamill 2003] é possível encontrar exemplos de cálculo do centro de massa de alguns
segmentos corporais.
3.6.4 Cálculo do Centro de Massa total do Corpo
Como referido em [Hamill 2003], o procedimento para o cálculo do centro de massa
total do corpo é o seguinte: para qualquer posição, horizontal ou vertical, é realizado o
somatório dos produtos das coordenadas do centro de massa de cada segmento pela sua massa
dividido pela massa total do corpo. Em termos algébricos, a equação da direcção horizontal é:
M
xmX
i
n
i i
CM
1 , (17)
onde XCM é a posição horizontal do centro de massa total do corpo, n é o número total de
segmentos corporais, mi é a massa do iésimo
segmento, xi é a posição central do centro de massa
do iésimo
segmento e M é a massa total do corpo. De forma similar, a equação da direcção
vertical é:
M
ymY
i
n
i i
CM
1 , (18)

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 84
onde YCM é a posição vertical do centro de massa total do corpo, n é o número total de
segmentos, mi é a massa do iésimo
segmento, yi é a posição vertical do centro de massa do iésimo
segmento e M é a massa total do corpo. A utilização desta técnica, para o cálculo do centro de
massa total do corpo, é utilizada em muitos estudos na área da biomecânica. Em muitas
situações, o corpo é descrito por um modelo composto por 14 segmentos: cabeça, tronco,
úmeros, antebraços, mãos, coxa, pernas e pés. A Figura 3.29 ilustra um exemplo deste
modelo.
Figura 3.29 – Exemplo de um modelo com 14 segmentos corporais (retirado de [Hamill 2003]).
Na Figura 3.29 pode-se ver a posição dos pontos da extremidade de cada segmento
corporal, o centro de massa de cada segmento e o centro de massa total do corpo, indicado por
um asterisco, de um atleta a efectuar um salto [Hamill 2003].
3.6.5 Tipos de Binário
O binário a actuar no corpo é criado por uma força que actua a uma distância afastada
do eixo de rotação. Assim, qualquer força referida na secção 3.5 – Cinética Linear – aplicada
no corpo pode produzir um binário, se aplicada numa direcção que não coincida com o eixo
de rotação ou com o ponto pivô. A força da gravidade, força de não-contacto, gera um binário
sempre que a linha da gravidade não passa no ponto pivô. A Figura 3.30 ilustra dois exemplos
da força da gravidade a gerar binários.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 85
a) b)
Figura 3.30 – Exemplo de binários criados pela força da gravidade (retirado de [Hamill 2003]).
A Figura 3.30a) ilustra a força da gravidade a actuar no segmento do tronco,
produzindo, assim um binário com sentido dos ponteiros do relógio sobre as vértebras
lombares. Na Figura 3.30b) o peso do braço, a fazer exercício com um haltére, produz um
binário, com sentido dos ponteiros do relógio, na articulação do ombro. O binário
gravitacional, criado pelo peso dos segmentos do corpo, a actuar a uma distância afastada da
articulação em movimento como, por exemplo, a flexão do tronco e o aumento lateral do
braço, deve-se opor à actuação dos binários musculares de direcções opostas.
3.6.6 Representação de Binários
Através do diagrama de corpo livre é possível visualizar os binários que actuam no
sistema e que, quando combinados com forças lineares, permitem identificar e analisar as
causas que originam o movimento. As diversas metodologias de análises biomecânicas são
iniciadas, geralmente, com a análise do diagrama de corpo livre para cada segmento do corpo,
Figura 3.31.
.
Figura 3.31 – a) Atleta de musculação a elevar um haltere de barra com discos; b) Diagrama de corpo livre
associado (retirado de [Hamill 2003]).
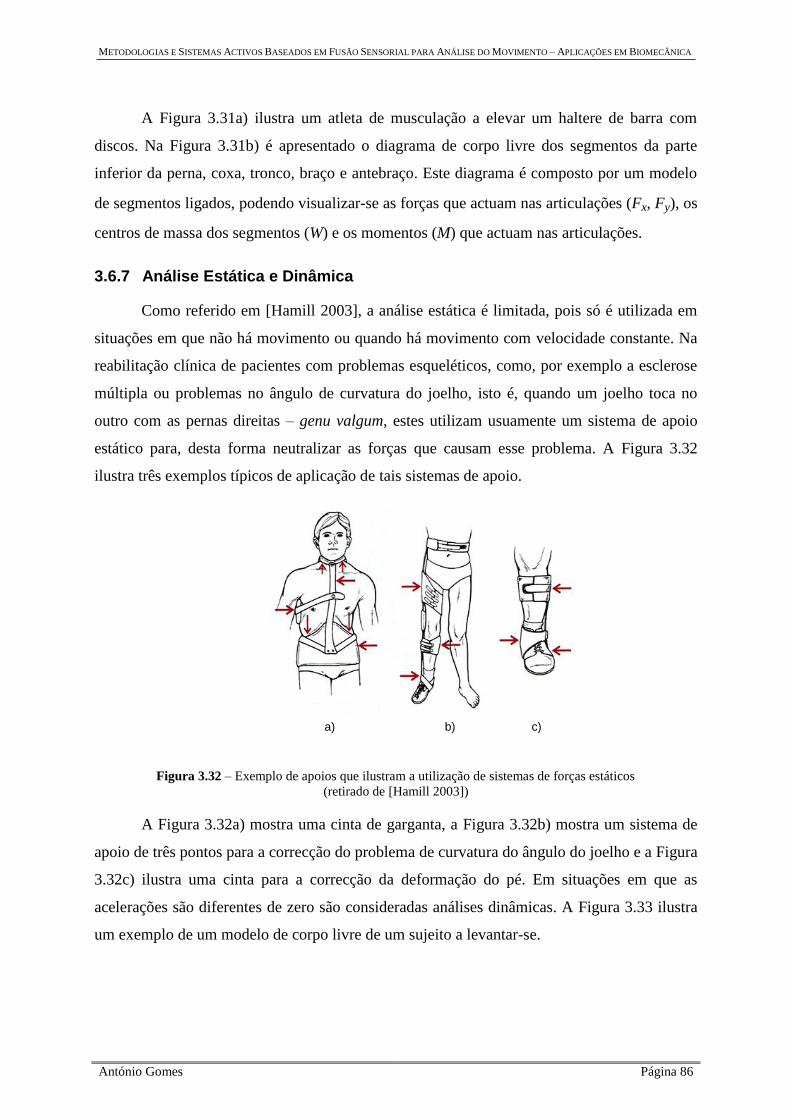
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 86
A Figura 3.31a) ilustra um atleta de musculação a elevar um haltere de barra com
discos. Na Figura 3.31b) é apresentado o diagrama de corpo livre dos segmentos da parte
inferior da perna, coxa, tronco, braço e antebraço. Este diagrama é composto por um modelo
de segmentos ligados, podendo visualizar-se as forças que actuam nas articulações (Fx, Fy), os
centros de massa dos segmentos (W) e os momentos (M) que actuam nas articulações.
3.6.7 Análise Estática e Dinâmica
Como referido em [Hamill 2003], a análise estática é limitada, pois só é utilizada em
situações em que não há movimento ou quando há movimento com velocidade constante. Na
reabilitação clínica de pacientes com problemas esqueléticos, como, por exemplo a esclerose
múltipla ou problemas no ângulo de curvatura do joelho, isto é, quando um joelho toca no
outro com as pernas direitas – genu valgum, estes utilizam usuamente um sistema de apoio
estático para, desta forma neutralizar as forças que causam esse problema. A Figura 3.32
ilustra três exemplos típicos de aplicação de tais sistemas de apoio.
a) b) c)
Figura 3.32 – Exemplo de apoios que ilustram a utilização de sistemas de forças estáticos
(retirado de [Hamill 2003])
A Figura 3.32a) mostra uma cinta de garganta, a Figura 3.32b) mostra um sistema de
apoio de três pontos para a correcção do problema de curvatura do ângulo do joelho e a Figura
3.32c) ilustra uma cinta para a correcção da deformação do pé. Em situações em que as
acelerações são diferentes de zero são consideradas análises dinâmicas. A Figura 3.33 ilustra
um exemplo de um modelo de corpo livre de um sujeito a levantar-se.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 87
Figura 3.33 – Diagrama de corpo livre de um sujeito a levantar-se (retirado de [Hamill 2003]).
A Figura 3.33a) ilustra o modelo de corpo livre das forças lineares a actuarem no
sistema, enquanto a Figura 3.33b) ilustra a adição dos momentos das forças em cada junção.
O modelo total do sujeito a levantar-se está representado na Figura 3.33c). Por exemplo, a
colocação de um sistema de tracção num paciente, exige a implementação de um sistema de
forças estático. Como referido na secção 3.5.3, a análise dinâmica é utilizada quando as
acelerações são diferentes de zero.
a) b) c)
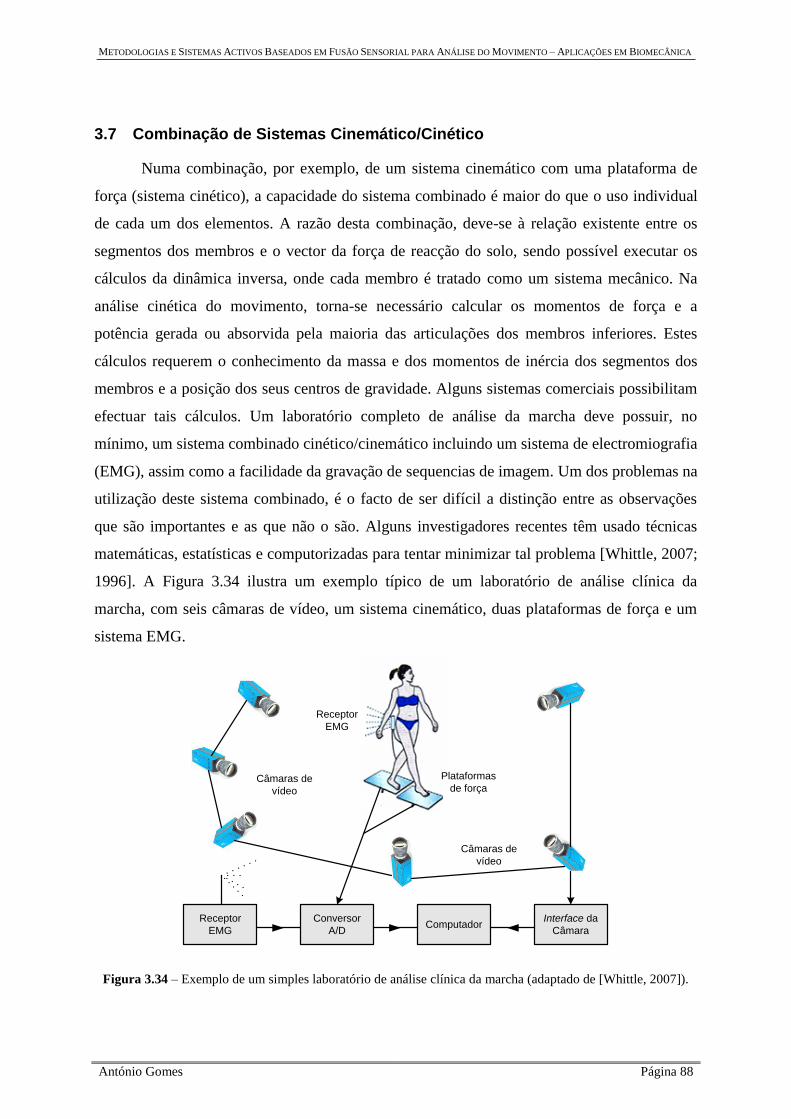
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 88
3.7 Combinação de Sistemas Cinemático/Cinético
Numa combinação, por exemplo, de um sistema cinemático com uma plataforma de
força (sistema cinético), a capacidade do sistema combinado é maior do que o uso individual
de cada um dos elementos. A razão desta combinação, deve-se à relação existente entre os
segmentos dos membros e o vector da força de reacção do solo, sendo possível executar os
cálculos da dinâmica inversa, onde cada membro é tratado como um sistema mecânico. Na
análise cinética do movimento, torna-se necessário calcular os momentos de força e a
potência gerada ou absorvida pela maioria das articulações dos membros inferiores. Estes
cálculos requerem o conhecimento da massa e dos momentos de inércia dos segmentos dos
membros e a posição dos seus centros de gravidade. Alguns sistemas comerciais possibilitam
efectuar tais cálculos. Um laboratório completo de análise da marcha deve possuir, no
mínimo, um sistema combinado cinético/cinemático incluindo um sistema de electromiografia
(EMG), assim como a facilidade da gravação de sequencias de imagem. Um dos problemas na
utilização deste sistema combinado, é o facto de ser difícil a distinção entre as observações
que são importantes e as que não o são. Alguns investigadores recentes têm usado técnicas
matemáticas, estatísticas e computorizadas para tentar minimizar tal problema [Whittle, 2007;
1996]. A Figura 3.34 ilustra um exemplo típico de um laboratório de análise clínica da
marcha, com seis câmaras de vídeo, um sistema cinemático, duas plataformas de força e um
sistema EMG.
Receptor
EMG
Conversor
A/DComputador
Interface da
Câmara
Plataformas
de força
Receptor
EMG
Câmaras de
vídeo
Câmaras de
vídeo
Figura 3.34 – Exemplo de um simples laboratório de análise clínica da marcha (adaptado de [Whittle, 2007]).
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 89
3.8 Sistemas de Medição do Movimento
A medição do movimento utilizando ligações directas com o corpo do sujeito em
estudo, pode ser realizada de diferentes formas. Regra geral, os sistemas de medição directa
do movimento podem ser encontrados em laboratórios ligados à análise clínica da marcha.
Seguidamente, são apresentados alguns dos dispositivos que permitem efectuar a medida
directa do movimento.
3.8.1 Plataforma de Força
A plataforma de força, tal como já referido na secção 3.5.1, serve para medir a força
de reacção do solo quando um sujeito se desloca por cima da mesma, Figura 3.17. Numa
plataforma de força são utilizados transdutores capazes de medir, nos três eixos, pequenos
deslocamentos da superfície superior da plataforma quando sujeita à aplicação de uma força.
O sinal de saída da plataforma é frequentemente fornecido por qualquer um dos seis ou oito
canais. Como descrito em [Whittle, 2007] as saídas típicas dos oito canais são as seguintes:
Quatro sinais verticais, fornecidos pelos transdutores localizados nos quatro cantos da
plataforma;
Dois sinais anterior/posterior localizados nos lados da plataforma;
Dois sinais, lado a lado, da parte posterior e anterior da plataforma.
Já uma plataforma de seis canais tem habitualmente as seguintes saídas:
A magnitude de três vectores de força;
Três momentos de força, num sistema de coordenadas baseado no centro da
plataforma.
É possível visualizar os sinais de saída de uma plataforma de força directamente num
osciloscópio, mas é mais comum, através de uma placa analógico-digital, converter os sinais
analógicos e analisá-los em computador. A utilização de uma plataforma de seis ou oito
canais não é, particularmente, conveniente para cálculos biomecânicos. As plataformas estão,
geralmente, embutidas no chão de forma que as suas superfícies superiores estejam ao nível
da restante superfície onde o sujeito se vai movimentar.
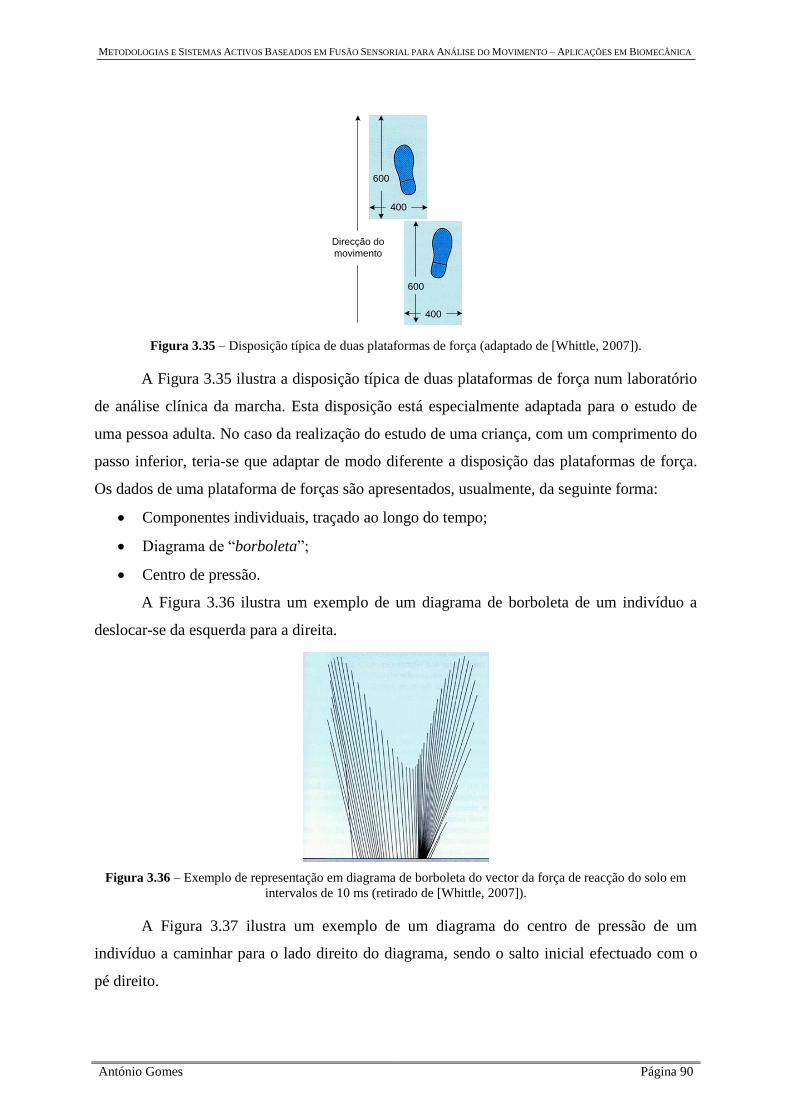
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 90
Direcção do
movimento
400
400
600
600
Figura 3.35 – Disposição típica de duas plataformas de força (adaptado de [Whittle, 2007]).
A Figura 3.35 ilustra a disposição típica de duas plataformas de força num laboratório
de análise clínica da marcha. Esta disposição está especialmente adaptada para o estudo de
uma pessoa adulta. No caso da realização do estudo de uma criança, com um comprimento do
passo inferior, teria-se que adaptar de modo diferente a disposição das plataformas de força.
Os dados de uma plataforma de forças são apresentados, usualmente, da seguinte forma:
Componentes individuais, traçado ao longo do tempo;
Diagrama de “borboleta”;
Centro de pressão.
A Figura 3.36 ilustra um exemplo de um diagrama de borboleta de um indivíduo a
deslocar-se da esquerda para a direita.
Figura 3.36 – Exemplo de representação em diagrama de borboleta do vector da força de reacção do solo em
intervalos de 10 ms (retirado de [Whittle, 2007]).
A Figura 3.37 ilustra um exemplo de um diagrama do centro de pressão de um
indivíduo a caminhar para o lado direito do diagrama, sendo o salto inicial efectuado com o
pé direito.
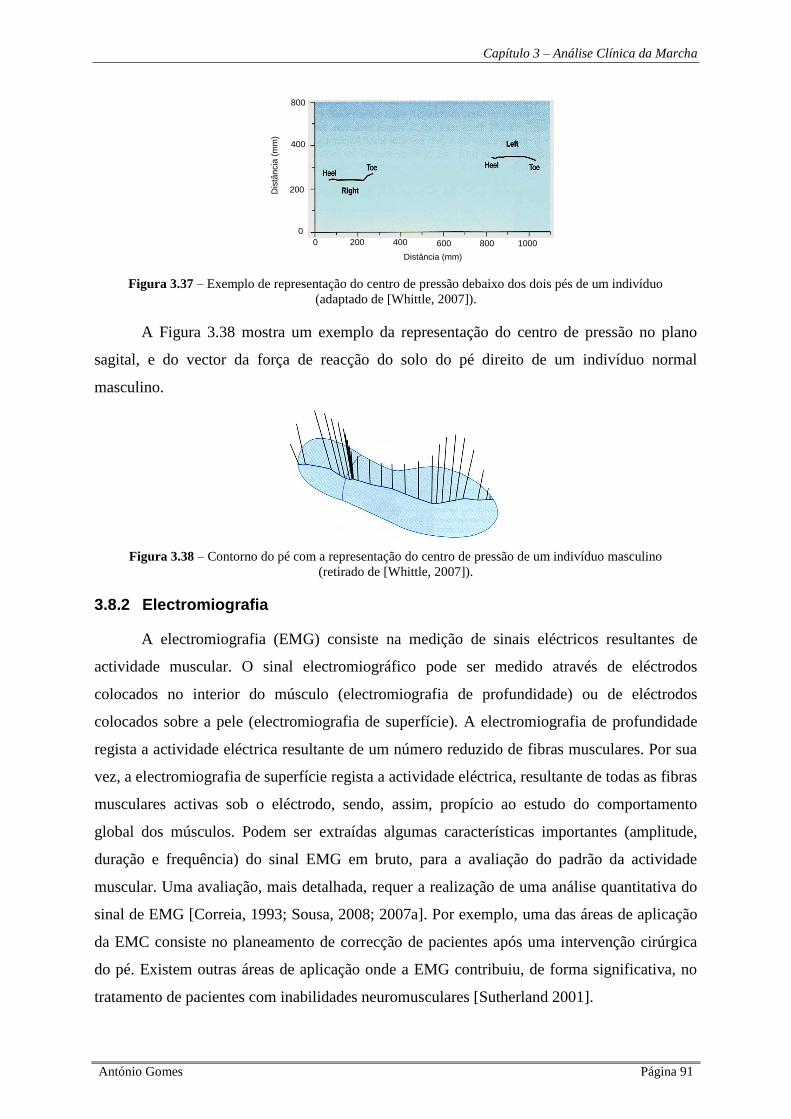
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 91
0 200 400 600 800 1000
0
200
400
800
Distância (mm)
Dis
tân
cia
(m
m)
Figura 3.37 – Exemplo de representação do centro de pressão debaixo dos dois pés de um indivíduo
(adaptado de [Whittle, 2007]).
A Figura 3.38 mostra um exemplo da representação do centro de pressão no plano
sagital, e do vector da força de reacção do solo do pé direito de um indivíduo normal
masculino.
Figura 3.38 – Contorno do pé com a representação do centro de pressão de um indivíduo masculino
(retirado de [Whittle, 2007]).
3.8.2 Electromiografia
A electromiografia (EMG) consiste na medição de sinais eléctricos resultantes de
actividade muscular. O sinal electromiográfico pode ser medido através de eléctrodos
colocados no interior do músculo (electromiografia de profundidade) ou de eléctrodos
colocados sobre a pele (electromiografia de superfície). A electromiografia de profundidade
regista a actividade eléctrica resultante de um número reduzido de fibras musculares. Por sua
vez, a electromiografia de superfície regista a actividade eléctrica, resultante de todas as fibras
musculares activas sob o eléctrodo, sendo, assim, propício ao estudo do comportamento
global dos músculos. Podem ser extraídas algumas características importantes (amplitude,
duração e frequência) do sinal EMG em bruto, para a avaliação do padrão da actividade
muscular. Uma avaliação, mais detalhada, requer a realização de uma análise quantitativa do
sinal de EMG [Correia, 1993; Sousa, 2008; 2007a]. Por exemplo, uma das áreas de aplicação
da EMC consiste no planeamento de correcção de pacientes após uma intervenção cirúrgica
do pé. Existem outras áreas de aplicação onde a EMG contribuiu, de forma significativa, no
tratamento de pacientes com inabilidades neuromusculares [Sutherland 2001].

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 92
3.8.3 Electrogoniómetro
Um electrogoniómetro é um dispositivo para efectuar continuamente medições do
ângulo de junção. A saída de um dispositivo deste tipo é, geralmente o desenho do ângulo da
junção num gráfico ao longo do tempo, como ilustrado na Figura 3.15. Se as medições são
provenientes de duas junções, tipicamente do quadril e do joelho, os dados são definidos num
diagrama de ângulo-ângulo, conhecido como ciclograma. Este formato indica, de forma
clara, a interacção existente entre duas junções, permitindo assim a identificação de
determinadas características [Whittle, 2007].
A Figura 3.39 ilustra um exemplo de um diagrama de ângulo-ângulo de um plano
sagital do ângulo do joelho (eixo horizontal) e do quadril (eixo vertical). O contacto inicial é
da parte inferior direita de um sujeito normal.
10
0Ân
gu
lo d
o J
oe
lho
(g
rau
s)
30
20
50
40
-10
-30 -20 -10 10 20 300
Ângulo do quadril (graus)
flexext
flex
ext
Figura 3.39 – Exemplo de um diagrama de ângulo-ângulo de um plano sagital do ângulo do joelho
e do quadril (adaptado de [Whittle, 2007]).
3.8.4 Dispositivo Potenciométrico
Este dispositivo é uma resistência variável rotativa cujo valor pode ser medida por um
circuito externo, podendo ser utilizado para a medição do ângulo da junção. Para efectuar tal
medição, o dispositivo (potenciómetro) tem de estar colocado de forma que o corpo deste
esteja fixado num segmento de um membro e o eixo central esteja colocado noutro segmento.
O sinal eléctrico de saída deste dispositivo depende da posição de como está colocado na
junção, e pode ser calibrado para indicar o ângulo da junção em graus. Muitos laboratórios
criaram os seus próprios electrogoniómetros baseados em dispositivos deste tipo, tendo vindo
a ser comercializados e disponibilizados em diversas configurações.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 93
Figura 3.40 – Exemplo de um goniómetro triaxial colocado no quadril, joelho e anca
(retirado de [Whittle, 2007]).
3.8.5 Calibres de Tensão Flexíveis
Um calibre de tensão electrogoniómétrico flexível – flexible strain gauge
electrogoniometer, consiste numa tira de metal lisa fina, em que as extremidades são
colocadas e fixadas no membro, em cada lado da junta, que se pretende analisar, Figura 3.41.
Figura 3.41 – Exemplo de um goniómetro flexível colocado no joelho e no pé (retirado de [Whittle, 2007]).
3.8.6 Acelerómetro
Este dispositivo, tal como o nome indica, permite medir a aceleração. Tipicamente,
contém uma pequena massa conectada a uma mola que incorpora sensores que permitem
medir a deflexão da mesma quando esta é acelerada. Os acelerómetros usados na análise
clínica da marcha são muito pequenos pesando apenas algumas gramas. As medições são
efectuadas, normalmente, numa direcção, mas acelerómetros podem ser agregados para
permitirem efectuar medidas em duas ou três dimensões. Tipicamente, os acelerómetros são
usados na análise da marcha, para medirem eventos transientes como, por exemplo, o
transiente da batida do pé, ou medirem o movimento dos membros na análise cinemática
[Whittle, 2007].

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 94
3.8.7 Giroscópio
O giroscópio pode ser utilizado para medir a orientação dos segmentos corporais no
espaço, bem como efectuar medições de velocidade e de aceleração angular. Os giroscópios
são usados em estudos experimentais de análise da marcha e no desenvolvimento de pequenos
dispositivos de estado sólido. Estes dispositivos podem ser combinados com acelerómetros
para o estudo do movimento da coxa e do pé durante a fase de balanço durante a marcha
[Whittle, 2007].
3.9 Modelos Biomecânicos para Análise de Movimento do Corpo Humano
Em [Ambrósio, 2008] é apresentado um estudo para a avaliação das forças internas
que actuam nos no corpo humano. Assim, é proposto um modelo biomecânico para a
determinação do valor destas forças utilizando a técnica de análise de dinâmica inversa,
evitando assim o recurso de técnicas intrusivas. Este trabalho começa com a descrição das
equações de equilíbrio necessárias ao desenvolvimento do modelo biomecânico proposto. A
análise da dinâmica inversa do sistema biomecânico requer o conhecimento do movimento e
de todas as forças externas aplicadas. O movimento do sistema é descrito pela informação
cinemática necessária para definir a posição e a orientação de cada segmento anatómico
durante o intervalo de tempo em análise. As forças externas aplicadas, obtidas através de
plataformas de força, permitem a construção do sistema biomecânico que inclui o vector de
forças. A informação cinemática, consiste na trajectória definida pelo conjunto de pontos
anatómicos, localizados nas junções e nas extremidades dos segmentos corporais em análise,
adquiridos através de técnicas de reconstrução tridimensional do movimento [Silva, 2003].
O processo de reconstrução utiliza técnicas de transformação linear directa (DLT –
Direct Linear Transformation) para a conversão de coordenadas Cartesianas bidimensionais
em coordenadas Cartesianas tridimensionais [Addel-Aziz 1971; Giakas, 1997].
A Figura 3.42 ilustra um exemplo de um conjunto de pontos anatómicos de um
modelo biomecânico usado.
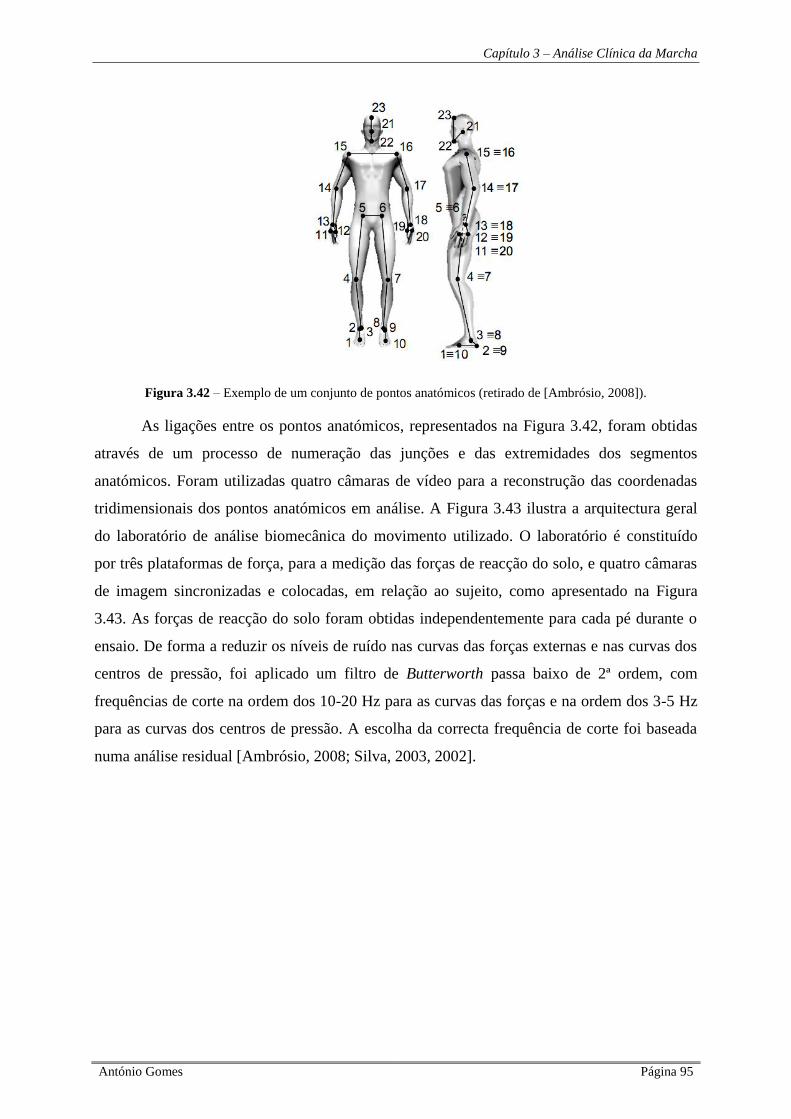
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 95
Figura 3.42 – Exemplo de um conjunto de pontos anatómicos (retirado de [Ambrósio, 2008]).
As ligações entre os pontos anatómicos, representados na Figura 3.42, foram obtidas
através de um processo de numeração das junções e das extremidades dos segmentos
anatómicos. Foram utilizadas quatro câmaras de vídeo para a reconstrução das coordenadas
tridimensionais dos pontos anatómicos em análise. A Figura 3.43 ilustra a arquitectura geral
do laboratório de análise biomecânica do movimento utilizado. O laboratório é constituído
por três plataformas de força, para a medição das forças de reacção do solo, e quatro câmaras
de imagem sincronizadas e colocadas, em relação ao sujeito, como apresentado na Figura
3.43. As forças de reacção do solo foram obtidas independentemente para cada pé durante o
ensaio. De forma a reduzir os níveis de ruído nas curvas das forças externas e nas curvas dos
centros de pressão, foi aplicado um filtro de Butterworth passa baixo de 2ª ordem, com
frequências de corte na ordem dos 10-20 Hz para as curvas das forças e na ordem dos 3-5 Hz
para as curvas dos centros de pressão. A escolha da correcta frequência de corte foi baseada
numa análise residual [Ambrósio, 2008; Silva, 2003, 2002].

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 96
Direcção da Marcha
Cam 3
Cam 4
Cam 2
Cam 1
Plataforma 1
Sujeito
Plataforma 2 Plataforma 3
Figura 3.43 – Arquitectura geral do Laboratório de Análise Biomecânica
(Adaptado de [Silva, 2003, 2002; Rodrigo, 2008]).
Como referido em [Ambrósio, 2008] o modelo biomecânico apropriado para a análise
de movimento humano, requer a descrição pormenorizada dos segmentos anatómicos mais
relevantes, sendo representadas as forças musculares e representado o modelo musculo-
esquelético. O modelo do corpo humano definido é definido por 16 segmentos anatómicos,
possui 44 graus de liberdade, correspondentes a 38 rotações em torno de 26 junções de
rotação e 6 junções universais, estando os restantes graus de liberdade associados às rotações
e translações da base do corpo livre. Assim, para cada segmento/elemento rígido, é descrito o
comprimento, a localização do centro de massa, a massa e os momentos de inércia, para cerca
de 50% dos sujeitos do sexo masculino. A Figura 3.44 ilustra o modelo biomecânico
proposto.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 97
a) b)
Figura 3.44 – Modelo biomecânico proposto com 16 segmentos anatómicos: a) Topologia do modelo; b)
Referência do comprimento e do centro de massa de cada segmento anatómico (retirado de [Ambrósio, 2008]).
Este modelo pode ser aplicado na análise de dinâmica inversa, pois não são utilizadas
junções esféricas na estrutura cinemática. Contudo, a sua aplicação, num determinado
indivíduo em particular, exige que os segmentos corporais sejam escalados de forma correcta
[Ambrósio, 2008]. Em aplicações clínicas, as duas exigências fundamentais na análise da
postura durante a marcha são a estabilidade, que significa a habilidade em manter o equilíbrio
numa posição erecta, e a locomoção. Os nervos musculares são responsáveis pelas acções
agonistas e antagonistas que dão origem a movimentos hábeis de acordo com determinados
objectivos. O regulamento da locomoção depende de alguns aspectos importantes, tais como a
visão, especialmente quando algumas entradas sensoriais são alteradas. A Figura 3.45 ilustra
um caso de um paciente sem problemas ao nível cognitivo, mas com problemas ao nível de
controlo da sincronização entre as acções agonistas e antagonistas com a tensão residual
muscular (muscle tone).
Figura 3.45 – Paciente com um porte deficiente num laboratório de análise clínica da marcha
(retirado de [Ambrósio, 2008]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 98
Um espasmo muscular derivado a uma desordem do sistema nervoso central, conduz à
inabilidade de controlar a velocidade angular entre os segmentos anatómicos. Neste caso, as
canadianas suplementam as capacidades de sustentação, durante as diferentes fases da
marcha. Na Figura 3.46 pode-se ver a relação entre os ângulos do joelho que controlam as
junções, para um sujeito de referência (normal) e um sujeito com deficiência de marcha.
Analisando o gráfico, pode-se observar que a inclinação da curva da velocidade angular,
correspondente aos instantes de tempo em cada salto, têm sinais opostos para uma marcha
dita normal e com deficiência [Ambrósio, 2008].
Ân
gu
lo d
o J
oe
lho
% do Ciclo da Marcha
Marcha normal
Figura 3.46 – Variação do ângulo do joelho para uma marcha deficiente em relação a uma marcha normal
(retirado de [Ambrósio, 2008]).
Na análise da locomoção humana através do modelo apresentado, as acções
musculares ocorrem em torno das junções anatómicas, através dos momentos de força.
Contudo, em modelos mais complexos de análise da locomoção humana requerem uma
descrição mais realística da dinâmica e do sistema musculo-esquelético. A dinâmica do tecido
muscular pode ser dividida na activação dinâmica e na dinâmica de contracção muscular,
como representado na Figura 3.47.
Activação Dinâmica Contracção Muscular
Dinâmica
Sinal Neural Activação Muscular Força Muscular
Figura 3.47 – Dinâmica do tecido muscular (adaptado de [Ambrósio, 2008]).
Como referido em [Ambrósio, 2008], o modelo de contracção muscular dinâmica,
requer a formulação matemática do modelo muscular. Podem ser encontradas em [Ambrósio,
2008] as equações matemáticas que definem o modelo muscular. É aplicado um modelo
muscular do tipo Hill para simulação da dinâmica de contracção muscular. Este modelo é

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 99
apresentado na Figura 3.48 e é composto por um elemento contractivo (CE – contractive
element) e um elemento passivo (PE – passive element). Ambos os elementos contribuem
para a força muscular total )(tF m . Da mesma forma, pode-se encontrar em [Ambrósio, 2008]
as equações matemáticas que descrevem o modelo muscular do tipo Hill.
Saída Saída
PE
CE
Entrada
)(tF m)(tF m
mL
.
)(,)(),( tLtLta mmm
Figura 3.48 – Contracção dinâmica usando o modelo muscular do tipo Hill (adaptado de [Ambrósio, 2008]).
A Figura 3.49 ilustra a arquitectura do modelo de locomoção correspondente à
extremidade inferior do corpo humano. São utilizadas trinta e cinco actuadores musculares
para simulação da coordenação intermuscular da extremidade inferior direita. Em [Ambrósio,
2008] pode-se encontrar uma lista com a descrição do músculo e a acção do mesmo, para os
trinta e cinco músculos da extremidade inferior do corpo.
Figura 3.49 – Arquitectura do modelo de locomoção muscular da extremidade inferior do corpo humano
(retirado de [Ambrósio, 2008]).
Em [Ambrósio, 2008] é também apresentado um exemplo de aplicação do modelo
biomecânico desenvolvido em actividades desportivas. Assim, foi analisado um sujeito
masculino a efectuar diversos saltos, como ilustrado na Figura 3.50. O sujeito tem 25 anos,
mede 168 cm e pesa 68 Kg. Os dados correspondentes ao movimento do corpo e à plataforma
de força foram gravados e sincronizados para cada uma das séries de ensaios. As coordenadas

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 100
dos pontos anatómicos foram introduzidos manualmente. Para minimizar a discrepância na
estimação das forças musculares e assegurar a consistência dos dados cinemáticos, foi
utilizada a técnica proposta em [Ambrósio, 2005].
A Figura 3.50 ilustra as imagens obtidas por quatro câmaras de imagem em diferentes
instantes da análise e a posição dos 23 pontos anatómicos considerados.
Figura 3.50 – Imagens obtidas por quatro câmaras de imagem de um atleta a efectuar diversos saltos
(retirado de [Ambrósio, 2008]).
A Figura 3.51 ilustra os instantes de tempo correspondentes às medições efectuadas
das componentes da força de reacção do solo.
Tempo (s) Tempo (s)
RZ [N
]
RX
e R
Y [N
]
RZ – Plataforma de força
RZ – frame do vídeo
RY – Plataforma de força
RY – frame do vídeo
RX – Plataforma de força
RX – frame do vídeo
a) b)
Figura 3.51 – Componentes da força de reacção do solo: a) vertical; b) anterior-posterior e médio-lareral
(adaptado de [Ambrósio, 2008]).
A Figura 3.52 ilustra os resultados obtidos através da aplicação da análise da dinâmica
inversa para os momentos de força da perna direita durante o salto.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 101
Tempo (s) Tempo (s)
Bin
ário
[N
m/K
g]
Bin
ário
[N
m/K
g]
Bin
ário
[N
m/K
g]
AncaJoelho
Quadril
Figura 3.52 – Rede de binários normalizados do plano sagital correspondentes às junções da extremidade
inferior do corpo humano (retirado de [Ambrósio, 2008]).
Como se pode ver na Figura 3.52, existe um carregamento considerável da junção do
tornozelo do pé de apoio. Por este motivo, é esperada uma forte actividade dos músculos
flexores plantares desta junção. De igual forma, existe um pico do binário na articulação do
quadril, que ocorre no início da fase de contacto do pé com o solo no instante t=0.08 s. A
Figura 3.53 mostra as características temporais das forças musculares seleccionadas.
Tempo (s) Tempo (s)
Tempo (s) Tempo (s)
Tempo (s) Tempo (s)
Tempo (s) Tempo (s)
Tempo (s) Tempo (s)
Músculo Iliopsoas Músculo Hamstrings
Músculo Gluteus maximus Músculo Biceps femoris
Músculo Gluteus medius Músculo Rectus femoris
Músculo Gluteus minimus Músculo Vastus
Músculo Adductor magnus Músculo Triceps surae
Fo
rça
[N
]F
orç
a [
N]
Fo
rça
[N
]F
orç
a [N
]F
orç
a [N
]
Figura 3.53 – Distribuição das forças musculares na perna de suporte do atleta (adaptado de [Ambrósio, 2008]).
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 102
As linhas verticais representadas em cada gráfico da Figura 3.53 indicam o início e o fim da
fase de suporte da perna direita nos instantes 0.08 t s e 0.24 t s , respectivamente.
Em [Pennestrı, 2007] é apresentado um modelo musculo-esquelético virtual para
análise biomecânica dos membros superiores do corpo humano (braços). Este modelo tem
como objectivo o estudo e a optimização de cockpits de automóveis para pessoas com maiores
dificuldades de movimentação dos braços. Este tipo de pessoas, têm de efectuar alguns testes
iniciais, num simulador de condução automóvel, de modo a serem avaliadas as suas
capacidades e as forças internas residuais. Por esta razão, consideram-se técnicas poderosas
para o desenvolvimento de modelos matemáticos que podem ser usados juntamente com os
dados experimentais, de forma a ser avaliada a actividade muscular e as reacções das
articulações durante a condução. Desta forma, são realizadas, de forma virtual, as alterações
necessárias ao projecto e desenvolvimento de cockpits de automóveis. O braço é modelado
por um sistema tridimensional com 7 graus de liberdade ligado ao ombro. O modelo possui 24
músculos, sendo o membro superior composto por quatro articulações, que correspondem aos
segmentos corporais mais importantes do braço, que são: o úmero, a ulna (cúbito), o rádio e a
mão. É de salientar a particularidade dada à modelação das junções, pelo facto destas
poderem realizar todos os movimentos possíveis do braço e do antebraço, que incluem os
movimentos de prono-supination, movimentos complexos e que permitem a rotação de uma
parte do membro em relação a outra. A descrição matemática dos músculos foi efectuada
utilizando o modelo proposto por [Zajac, 1989]. A análise cinemática foi executada incluindo
um índice ergonómico e tendo em consideração a postura e os limites físicos das junções. Os
estudos ergonómicos da interacção homem-máquina, implicam, frequentemente, o
conhecimento das forças musculares envolvidas e a avaliação do comportamento dos
segmentos corporais durante o movimento. O braço pode ser visto como um sistema
biomecânico constituído por quatro articulações rígidas principais, que são: o úmero, o rádio,
o cúbito e a mão, Figura 3.54.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 103
junta esférica
úmero
junta esférica rádio
junção da guia
mãoulna (cúbito)
Z
Y
X
Y
Figura 3.54 – Posição de referência do membro superior (braço), nomenclatura e localização das junções
(adaptado de [Pennestrı, 2007]).
Como referido em [Pennestrı, 2007], as articulações estão articuladas entre si através
das seguintes junções:
Junção do úmero que articula o úmero com o ombro;
Junção do cotovelo que articula o úmero com o rádio e o cúbito;
Junção do pulso que articula o rádio com o cúbito e o rádio com a mão.
De acordo com [Pennestrı, 2007], antes de serem definidas as equações cinemáticas,
tem-se de ter em conta considerações anatómicas importantes. Assim, tem-se de começar por
definir os eixos mecânicos e anatómicos dos ossos, como indicado na Figura 3.55. O eixo
mecânico é aquele onde as forças são transmitidas, enquanto que o eixo anatómico é o eixo
físico do osso (a diferença entre estes é de alguns graus). No modelo proposto, o eixo de
referência do x de cada articulação corresponde ao eixo mecânico. Na simulação não é
suposto haver movimento na articulação do úmero, podendo ser modelada como sendo uma
junção esférica ideal.
eixo mecânico
eixo anatómico
úmero
rádio ulnaulna
(cúbito)
rádio
úmero
Figura 3.55 – Detalhe dos eixos anatómicos e mecânicos da junção do cotovelo (adaptado de [Pennestrı, 2007]).
A modelação da junção do cotovelo é bastante complexa, Figura 3.56. No cotovelo, a
extremidade esférica do rádio está em contacto com uma cavidade na extremidade mais baixa
do úmero. Nesta extremidade, o úmero está em contacto com a superfície cilíndrica da ulna.
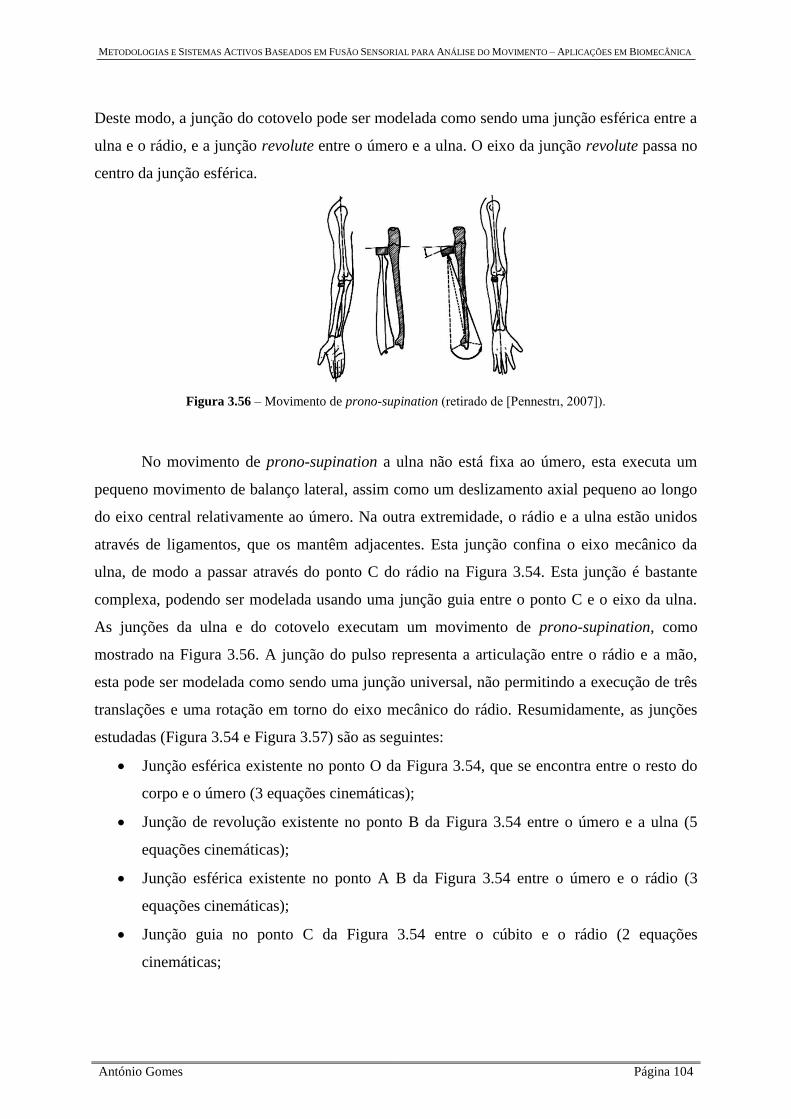
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 104
Deste modo, a junção do cotovelo pode ser modelada como sendo uma junção esférica entre a
ulna e o rádio, e a junção revolute entre o úmero e a ulna. O eixo da junção revolute passa no
centro da junção esférica.
Figura 3.56 – Movimento de prono-supination (retirado de [Pennestrı, 2007]).
No movimento de prono-supination a ulna não está fixa ao úmero, esta executa um
pequeno movimento de balanço lateral, assim como um deslizamento axial pequeno ao longo
do eixo central relativamente ao úmero. Na outra extremidade, o rádio e a ulna estão unidos
através de ligamentos, que os mantêm adjacentes. Esta junção confina o eixo mecânico da
ulna, de modo a passar através do ponto C do rádio na Figura 3.54. Esta junção é bastante
complexa, podendo ser modelada usando uma junção guia entre o ponto C e o eixo da ulna.
As junções da ulna e do cotovelo executam um movimento de prono-supination, como
mostrado na Figura 3.56. A junção do pulso representa a articulação entre o rádio e a mão,
esta pode ser modelada como sendo uma junção universal, não permitindo a execução de três
translações e uma rotação em torno do eixo mecânico do rádio. Resumidamente, as junções
estudadas (Figura 3.54 e Figura 3.57) são as seguintes:
Junção esférica existente no ponto O da Figura 3.54, que se encontra entre o resto do
corpo e o úmero (3 equações cinemáticas);
Junção de revolução existente no ponto B da Figura 3.54 entre o úmero e a ulna (5
equações cinemáticas);
Junção esférica existente no ponto A B da Figura 3.54 entre o úmero e o rádio (3
equações cinemáticas);
Junção guia no ponto C da Figura 3.54 entre o cúbito e o rádio (2 equações
cinemáticas;

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 105
Junção universal nos pontos D e B da Figura 3.54 entre o rádio e a mão (4 equações
cinemáticas).
No trabalho de [Pennestrı, 2007] foram introduzidas algumas funções objectivo para
resolução da cinemática do sistema. Por esta razão, foi implementada uma função ergonómica
apropriada para todas as análises e para qualquer condutor escolhido. Em [Pennestrı, 2007]
pode-se encontrar as equações matemáticas implementadas, bem como as funções
matemáticas que descrevem as forças musculares que originam o movimento: activação
dinâmica e contracção dos músculos. A Figura 3.57 ilustra os pontos e os eixos de referência
dos vários segmentos considerados.
úmero
rádio
ulna
mão de
agarramento
Figura 3.57 – Pontos e eixos de referência dos vários segmentos usados (adaptado de [Pennestrı, 2007]).
O modelo proposto foi usado na avaliação de habilidade da viragem do volante de
direcção num simulador de condução de pessoas com deficiência nos braços. O dispositivo
desenvolvido é composto pelo interior de um automóvel, fixado numa superfície e equipado
com um encoder angular óptico, para efectuar a medição do deslocamento angular do eixo da
roda de direcção, Figura 3.58.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 106
Figura 3.58 – Instalação experimental para a simulação de condução e aquisição de sinais
de EMG (retirado de [Pennestrı, 2007]).
O assento e o painel podem ser ajustados para diferentes posições. Este teste tem a
finalidade de avaliar o comportamento do braço na operação de direcção e quais os músculos
principais envolvidos neste movimento. A simulação permite observar a forma de como o
braço agarra um botão e o volante de direcção. O parâmetro de entrada é o deslocamento
angular do volante de direcção que foi monitorizado experimentalmente.

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 107
Ân
gu
lo d
o v
ola
nte
de
dir
ecçã
o (
rad
)
Tempo (s)
A Figura 3.59 mostra um exemplo da medição do deslocamento angular do volante de
direcção.
Figura 3.59 – Medição do deslocamento angular do volante de direcção (adaptado de [Pennestrı, 2007]).
Na Figura 3.60 estão representados exemplos de curvas das forças de reacção das
junções versus o tempo.
Fo
rça
de
re
acçã
o (
N)
Tempo (s)
Fo
rça
de
re
acçã
o (
N)
Tempo (s)
Reacções da junção Ombro - Úmero Reacções da junção Úmero - Ulna
Reacções da junção Úmero - Rádio Reacções da junção Rádio - Ulna
Tempo (s) Tempo (s)
Fo
rça
de
re
acçã
o (
N)
Fo
rça
de
re
acçã
o (
N)
Reacções da junção da Mão - Rádio
Tempo (s)
Fo
rça
de
re
acçã
o (
N)
Reacções do volante de direcção - Mão
Tempo (s)
Fo
rça
de
re
acçã
o (
N)
Figura 3.60 – Forças de reacção das junções versus o tempo (adaptado de [Pennestrı, 2007]).
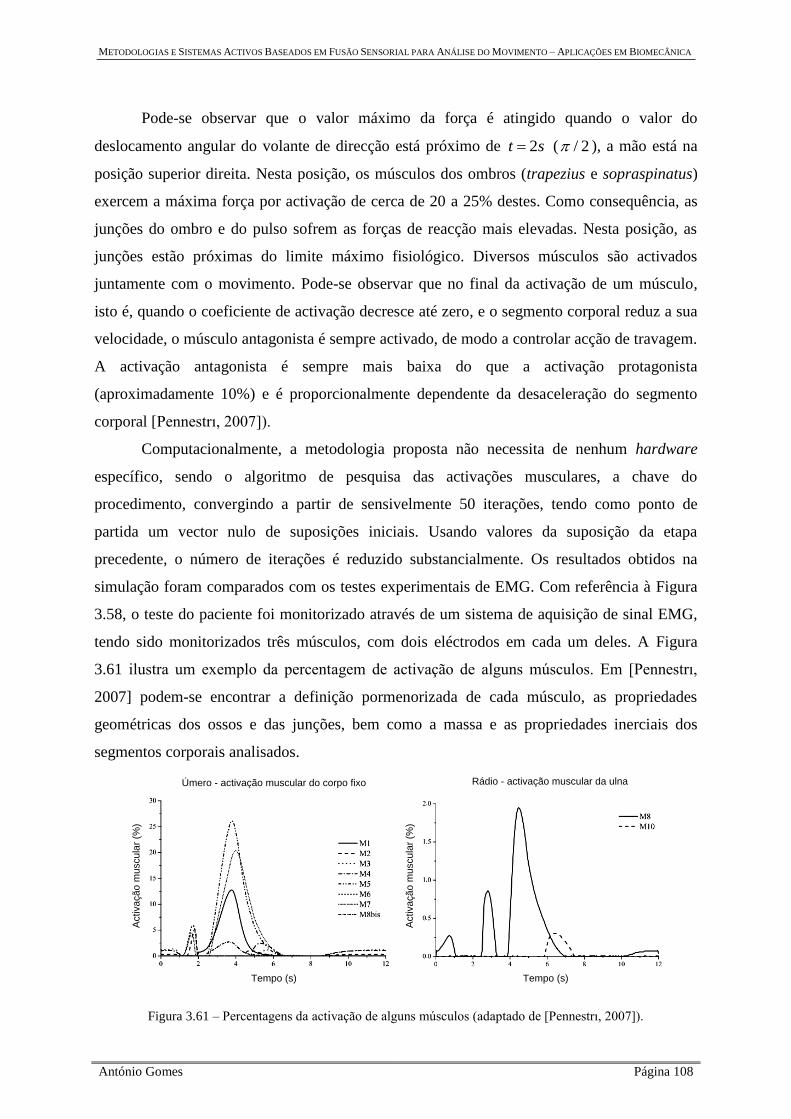
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 108
Pode-se observar que o valor máximo da força é atingido quando o valor do
deslocamento angular do volante de direcção está próximo de st 2 ( 2/ ), a mão está na
posição superior direita. Nesta posição, os músculos dos ombros (trapezius e sopraspinatus)
exercem a máxima força por activação de cerca de 20 a 25% destes. Como consequência, as
junções do ombro e do pulso sofrem as forças de reacção mais elevadas. Nesta posição, as
junções estão próximas do limite máximo fisiológico. Diversos músculos são activados
juntamente com o movimento. Pode-se observar que no final da activação de um músculo,
isto é, quando o coeficiente de activação decresce até zero, e o segmento corporal reduz a sua
velocidade, o músculo antagonista é sempre activado, de modo a controlar acção de travagem.
A activação antagonista é sempre mais baixa do que a activação protagonista
(aproximadamente 10%) e é proporcionalmente dependente da desaceleração do segmento
corporal [Pennestrı, 2007]).
Computacionalmente, a metodologia proposta não necessita de nenhum hardware
específico, sendo o algoritmo de pesquisa das activações musculares, a chave do
procedimento, convergindo a partir de sensivelmente 50 iterações, tendo como ponto de
partida um vector nulo de suposições iniciais. Usando valores da suposição da etapa
precedente, o número de iterações é reduzido substancialmente. Os resultados obtidos na
simulação foram comparados com os testes experimentais de EMG. Com referência à Figura
3.58, o teste do paciente foi monitorizado através de um sistema de aquisição de sinal EMG,
tendo sido monitorizados três músculos, com dois eléctrodos em cada um deles. A Figura
3.61 ilustra um exemplo da percentagem de activação de alguns músculos. Em [Pennestrı,
2007] podem-se encontrar a definição pormenorizada de cada músculo, as propriedades
geométricas dos ossos e das junções, bem como a massa e as propriedades inerciais dos
segmentos corporais analisados.
Úmero - activação muscular do corpo fixo Rádio - activação muscular da ulna
Activa
çã
o m
uscu
lar
(%)
Activa
çã
o m
uscu
lar
(%)
Tempo (s) Tempo (s)
Figura 3.61 – Percentagens da activação de alguns músculos (adaptado de [Pennestrı, 2007]).

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 109
Em [Kim, 2005] é apresentado um modelo biomecânico do corpo humano, para a
análise da transmissibilidade de vibrações na cabeça e da resposta dinâmica às vibrações
verticais na posição de sentado. É possível prever a resposta mecânica do corpo humano em
ambientes que envolvem vibrações, tal como na condução de um automóvel. O
desenvolvimento deste tipo de modelos biomecânicos tem um papel importante na indústria
automóvel, pois permitem efectuar a simulação da qualidade, melhorando, assim, por
exemplo, o design de assentos de automóveis e o isolamento de vibrações. Este estudo
permitiu desenvolver um modelo do corpo humano apropriado, que pudesse descrever da
melhor forma as características do corpo humano real na transmissibilidade de vibrações
verticais na cabeça. A massa aparente na cabeça e a transmissibilidade de vibrações está
relacionada com a sensação de conforto. As vibrações verticais e rotacionais na cabeça
afectam os distúrbios visuais e o conforto da condução. Na posição de sentado, a vibração que
excita o quadril e a coxa é transmitida à cabeça através do resto do corpo. Assim, a
transmissibilidade das vibrações à cabeça e a massa aparente do corpo humano são
características importantes para expressar os parâmetros de vibração de um corpo. Os
parâmetros foram obtidos através da medição da força no assento, e das acelerações na cabeça
e no assento através de um excitador de vibração sob um sinal aleatório numa faixa de
1 50 Hz . A força exercida durante a condução foi medida através de uma plataforma de
força (Kistler 9281c) e amplificada com um amplificador de carga (Kistler 9865E). A
aceleração do assento rígido foi medida com um acelerómetro (B&K4321). A aceleração da
cabeça foi medida através de acelerómetros fixos através de ventosas. A Figura 3.62 ilustra a
arquitectura experimental usada na medição dos parâmetros de vibração durante os ensaios. A
experiência foi realizada em cinco indivíduos, que foram expostos a uma vibração aleatória de
1.0 ms (r.m.s.) na direcção vertical numa frequência entre a faixa de 1 50 Hz .
Acelerómetros
Endevco 63B-100
Acelerómetro
B&K 4321Plataforma de
Força Kistler
9281c
Gravador de dados Sony
Amplificador de
carga Kistler 9865E
Amplificador de carga
B&K 2693
Excitador vertical Kriss
Figura 3.62 – Arquitectura usada na medição dos parâmetros de vibração (adaptado de [Kim, 2005]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 110
Durante os ensaios foi pedido às pessoas que se sentassem numa postura normal, a
olhar para a frente, sem efectuar nenhum movimento voluntário e a manter a parte do corpo
superior numa posição erecta, num estado confortável. Os pés estavam assentes em cima da
plataforma de força e as mãos pousadas sobre o regaço. A Figura 3.63 ilustra a medição dos
parâmetros de vibração de um sujeito sentado numa postura normal.
Figura 3.63 – Medição dos parâmetros numa postura normal de sentado (adaptado de [Kim, 2005]).
Como descrito em [Kim, 2005], a massa aparente e as duas transmissibilidades são
definidas pela equação (19), em que M corresponde à massa aparente do ponto de condução
no quadril, vertH representa a transmissibilidade de vibração vertical entre o quadril e a
cabeça e rotH representa a transmissibilidade de vibração rotacional entre o quadril e a
cabeça:
)(
)()(
fz
fFfM
sentado
sentado
,
,)(
)()(
fz
fzfH
sentado
cabeça
vert
( )( ) ,
( )
cabeça
rot
sentado
fH f
z f
(19)
em que sentadoF representa a força entre o assento e o quadril, z representa a aceleração
vertical, representa a aceleração rotacional em cada ponto e f designa a frequência. A
Figura 3.64 ilustra um exemplo de representação da massa aparente e da transmissibilidade de
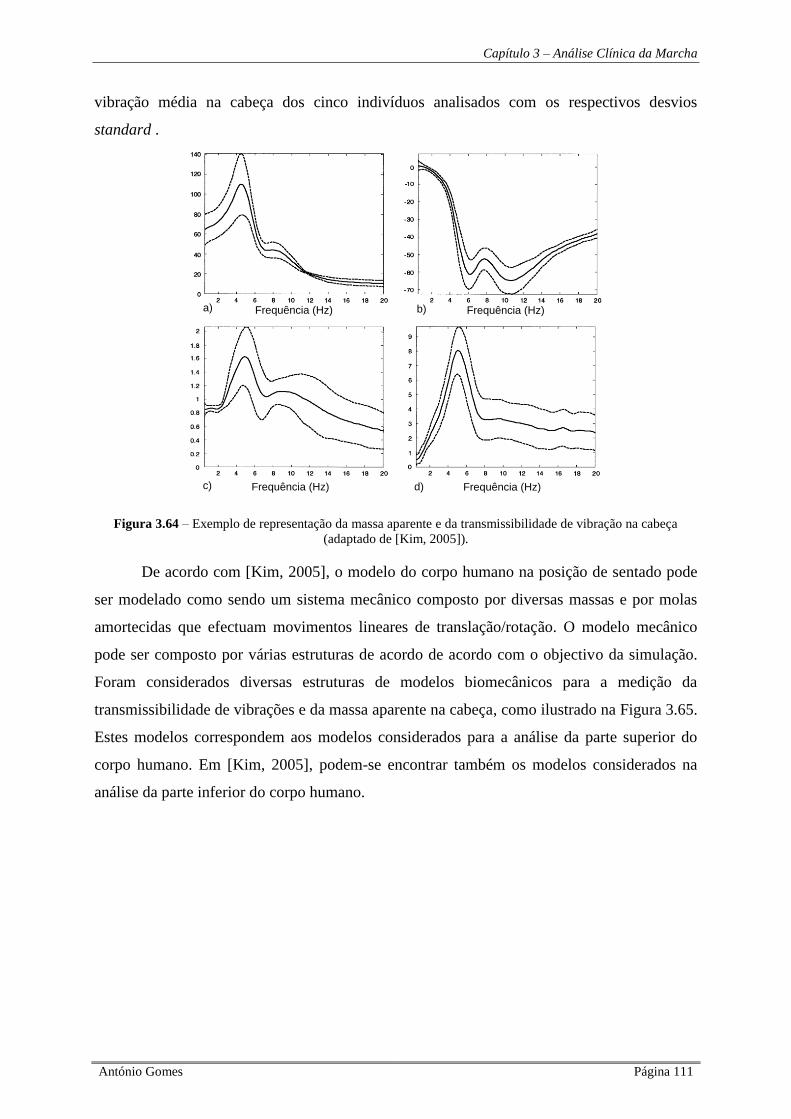
Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 111
vibração média na cabeça dos cinco indivíduos analisados com os respectivos desvios
standard .
Frequência (Hz) Frequência (Hz)
Frequência (Hz) Frequência (Hz)c) d)
a) b)
Figura 3.64 – Exemplo de representação da massa aparente e da transmissibilidade de vibração na cabeça
(adaptado de [Kim, 2005]).
De acordo com [Kim, 2005], o modelo do corpo humano na posição de sentado pode
ser modelado como sendo um sistema mecânico composto por diversas massas e por molas
amortecidas que efectuam movimentos lineares de translação/rotação. O modelo mecânico
pode ser composto por várias estruturas de acordo de acordo com o objectivo da simulação.
Foram considerados diversas estruturas de modelos biomecânicos para a medição da
transmissibilidade de vibrações e da massa aparente na cabeça, como ilustrado na Figura 3.65.
Estes modelos correspondem aos modelos considerados para a análise da parte superior do
corpo humano. Em [Kim, 2005], podem-se encontrar também os modelos considerados na
análise da parte inferior do corpo humano.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 112
a) b)
c) d)
Figura 3.65 – Estruturas de modelos considerados para a análise da parte superior do corpo humano
(adaptado de [Kim, 2005]).
Como descrito em [Kim, 2005], as variáveis K e C correspondem às molas de
translação e aos coeficientes de humidade de cada parte; rK e rC correspondem às molas de
rotação com os respectivos coeficientes de humidade. A estrutura dos modelos e os
parâmetros geométricos são baseados nos dados antropomórficos do corpo humano standard.
Os segmentos corporais estão conectados entre si por intermédio de elementos bucha
(“bushing element”). O segmento da coxa que está em contacto com a superfície do assento é
considerado, simplesmente, por uma mola amortecida com um movimento linear de
translação e de rotação. As equações do movimento derivam a partir do diagrama de corpo
livre de cada segmento e da aplicação da segunda lei de Newton. As equações do movimento
do modelo com n graus de liberdade, em torno da excitação da base inferior vertical, podem
ser escritas como:
000 zAzAzAKzzCzM dva . (20)
onde z , z e z representam os vectores da aceleração, velocidade e deslocamento,
respectivamente, com uma dimensão de 1n . O deslocamento é, medido a partir da posição
inicial de equilíbrio. As variáveis M , C e K são as matrizes correspondentes à massa,

Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 113
humedecimento e rigidez de dimensão nn ; 0z , 0z e 0z designam a aceleração, velocidade e
deslocamento do assento rígido de excitação; aA , vA e dA correspondem aos vectores dos
coeficientes de movimento do assento. Esta equação de movimento é resolvida usando o
algoritmo de Runge-Kutta de quarta ordem. Os parâmetros dos modelos biomecânicos
(movimentos de translação e de rotação das molas e os coeficientes de humidade) são obtidos
através da combinação entre os dados do modelo simulado com os dados medidos
experimentalmente, ou seja a massa aparente e a transmissibilidade de vibrações entre o
quadril e a cabeça (vibrações de translação e de rotação). A equação 21 define o quadrado da
soma do erro da massa aparente e da transmissibilidade vertical/rotacional da cabeça de 1 a 20
Hz [Kim, 2005]:
.)()(
,)()(
,)()(
1
0
1
0
1
0
2
3
2
2
2
1
f
f
rmre
f
f
vmve
f
f
me
dffHfHJ
dffHfHJ
dffMfMJ
(21)
em que f representa a frequência, eM , veH e reH representam a massa aparente experimental
e as transmissibilidades na cabeça a partir do solo, respectivamente; mM , vmH e rmH , reH
representam a massa aparente do modelo e as transmissibilidades na cabeça a partir do solo,
respectivamente [Kim, 2005]. O algoritmo de pesquisa dos parâmetros é realizado de acordo
com o fluxograma da Figura 3.66.
Parâmetros iniciais
Modelo
Análise Dinâmica
Espectro
Cálculo da Função Objectivo
Análise Dinâmica
Aceitável?
Fim
Sim
Não
Espectro
Esperiência
excitação
aceleração
Transmissibilidade
Figura 3.66 – Fluxograma do processo de pesquisa dos parâmetros do modelo (adaptado de [Kim, 2005]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 114
A análise dinâmica de cada modelo é realizada usando o algoritmo de Runge-Kutta, sendo a
função objectivo determinada através da comparação entre os dados simulados e dos dados
obtidos experimentalmente. A solução óptima *X é encontrada pela minimização do critério
mJ que corresponde ao quadrado da soma do desvio relativo de cada função objectivo a partir
das soluções isoladas, de acordo com:
.)(
)()(2
1*
*
N
i ii
iiim
XJ
XJXJJ (22)
onde *
iX é a solução isolada com respeito ao ésimoi elemento da função objectivo [Kim, 2005].
Em [Kim, 2005] estão disponíveis alguns resultados dos parâmetros obtidos no processo de
pesquisa.
3.10 Sumário
Neste capítulo foi realizada uma abordagem geral sobre o que tem vindo a ser desenvolvido
no domínio da análise clínica da marcha. Assim, foi realizada uma introdução a este domínio
de estudo, tendo sido referidos alguns equipamentos vulgarmente utilizados na aquisição de
sequencias de imagens. Seguidamente, foi apresentado um exemplo de um pequeno
laboratório de análise da marcha com gravação de vídeo e medição dos parâmetros gerais que
descrevem a marcha. Posteriormente, foi realizada uma revisão das áreas de estudo
relacionadas com a análise da marcha, a saber: análise cinemática linear, análise cinemática
angular, análise cinética linear e análise cinética angular. No final do capítulo foram
apresentadas algumas das metodologias existentes que utilizam modelos biomecânicos do
corpo humano para o estudo das forças internas que dão origem ao movimento.

Capítulo 4
SOLUÇÕES COMERCIAIS PARA ANÁLISE DE MOVIMENTO


Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 117
4 Soluções Comerciais para Análise de Movimento
O presente capítulo tem como finalidade apresentar o levantamento efectuado sobre
soluções comerciais existentes para o seguimento e análise clínica da marcha. Assim, nas
secções seguintes são apresentadas algumas empresas que disponibilizam soluções de
hardware e de software para a captura e análise de movimento humano, com maior incidência
para a análise da marcha e de actividades desportivas; em particular, as soluções: Simi Motion
[SIMI, 2011], Vicon [Vicon, 2011], Qualisys [Qualisys, 2011], Northern Digital [Ndigital,
2011] e Zebris [Zebris, 2011].
4.1 Simi Motion
A SIMI Reality Motion Systems [SIMI, 2011] é uma empresa especializada na
disponibilização de soluções de software e hardware para a análise de movimento
bidimensional e tridimensional. A sequência de um movimento pode ser analisada,
visualizada e processada através do Simi Motion. O software é composto por um pacote
modular, permitindo a análise de movimento em 2D e em 3D. A nova geração de análise
simples de movimento consiste no novo pacote Simi Aktisys.
4.1.1 Simi Aktisys
De acordo com [SIMI, 2011], o Simi Aktisys faz o seguimento e o reconhecimento dos
marcadores coloridos (díodos emissores de luz) colocados nos segmentos corporais em
análise de forma automática. Os dados de análise do movimento são obtidos rapidamente.
Este software pode capturar os dados de movimentos rápidos e de forma simples. O preço
deste pacote ronda os 6000 €. Foi intregrado no Aktisys um novo algoritmo para a detecção
automática do ciclo da marcha; ou seja, com a utilização de marcadores colocados na parte
dianteira do pé, o software pode reconhecer a fase da posição, do balanço e do comprimento
do passo. A Figura 4.67 ilustra um exemplo de utilização do Simi Aktisys.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 118
Figura 4.67 – Demonstração da utilização do Simi Aktisys (retirado de [SIMI, 2011])
De forma resumida o Simi Aktisys permite:
A captura de marcadores activos (5 no máximo);
Captura realizada através de uma só câmara;
Medição no córrego vivo (por exemplo ângulos);
Medição em vídeos (por exemplo ângulos);
Gravação de vídeos;
Apresentação directa no vídeo dos dados de medição (por exemplo, os
ângulos);
Identificação automática através de marcadores activos;
Detecção automática dos ciclos da marcha;
A possibilidade de criação de relatórios em formato pdf ou Excel;
A possibilidade de criação de áreas para os dados medidos;
A possibilidade de definição de templates de medida incluindo o seguinte
hardware: câmara (100 fps, 0.3 MP), lente com uma distância focal de 4 a 6
mm, tripé, 5 marcadores LEDs, cabo da câmara (10 m), Notebook com Touch
Screen.

Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 119
A Figura 4.68 mostra um exemplo de seguimento automático de marcadores com a
utilização do Simi Aktisys. As marcas são detectadas automaticamente pelo software.
Seguidamente, num menu disponível pelo software, são atribuídos todos os marcadores, na
perspectiva de cada câmara, colocados nos segmentos corporais.
Figura 4.68 – Exemplo de seguimento automático de marcadores (retirado de [SIMI, 2011]).
A Figura 4.69 ilustra um exemplo de análise desportiva de um jogador de golfe na
academia Vandeu em Munich. Foi utilizado o Simi Motion 3D e um sistema de câmaras de
alta velocidade.
Figura 4.69 – Exemplo de análise de um jogador de golfe (retirado de [SIMI, 2011]).
A Figura 4.70 ilustra a utilização do Simi Motion combinado com um sistema de seis
câmaras na captura e análise de expressões faciais de pessoas.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 120
Figura 4.70 – Exemplo de análise da expressão facial de um indivíduo (retirado de [SIMI, 2011]).
O Simi Motion também pode ser aplicado na análise de actividades desportivas. Um
exemplo disso é a sua utilização no treino do salto feminino, Figura 4.71.
Figura 4.71 – Exemplo de análise do treino do salto feminino (retirado de [SIMI, 2011]).
Outro exemplo de utilização é na análise de actividades desportivas de atletas de ginástica,
Figura 4.72.
Figura 4.72 – Exemplo de análise da actividade de uma atleta de ginástica (retirado de [SIMI, 2011]).
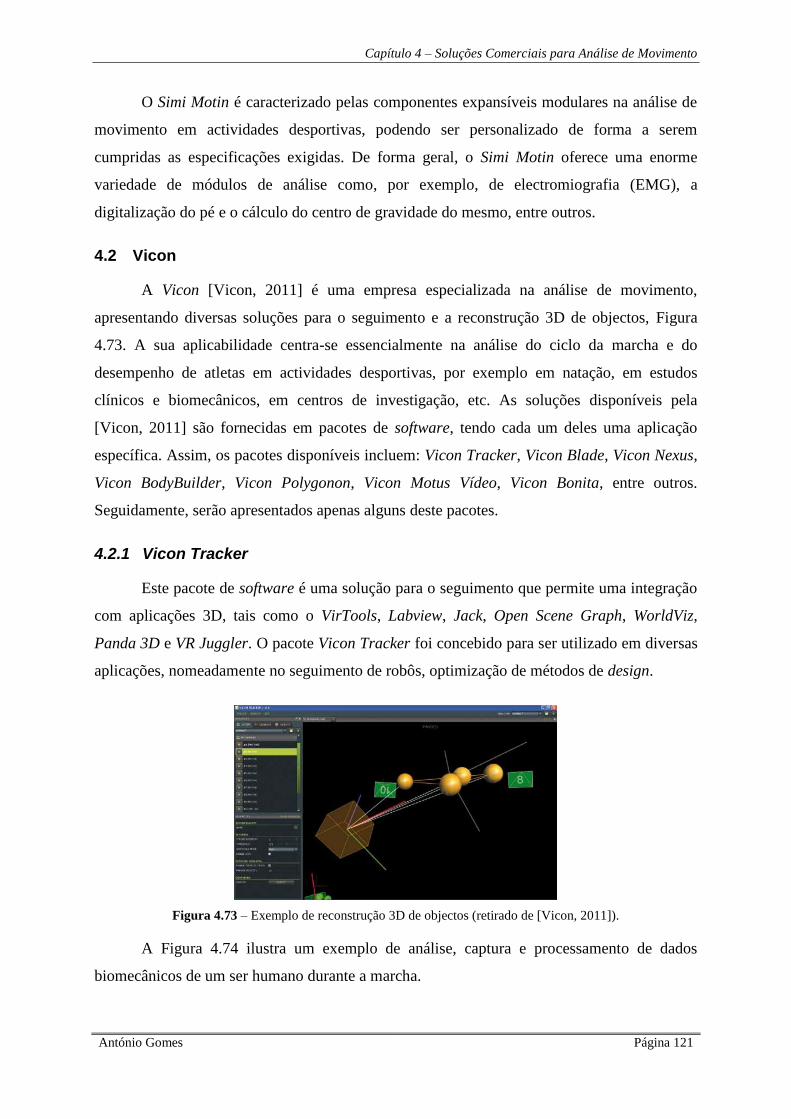
Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 121
O Simi Motin é caracterizado pelas componentes expansíveis modulares na análise de
movimento em actividades desportivas, podendo ser personalizado de forma a serem
cumpridas as especificações exigidas. De forma geral, o Simi Motin oferece uma enorme
variedade de módulos de análise como, por exemplo, de electromiografia (EMG), a
digitalização do pé e o cálculo do centro de gravidade do mesmo, entre outros.
4.2 Vicon
A Vicon [Vicon, 2011] é uma empresa especializada na análise de movimento,
apresentando diversas soluções para o seguimento e a reconstrução 3D de objectos, Figura
4.73. A sua aplicabilidade centra-se essencialmente na análise do ciclo da marcha e do
desempenho de atletas em actividades desportivas, por exemplo em natação, em estudos
clínicos e biomecânicos, em centros de investigação, etc. As soluções disponíveis pela
[Vicon, 2011] são fornecidas em pacotes de software, tendo cada um deles uma aplicação
específica. Assim, os pacotes disponíveis incluem: Vicon Tracker, Vicon Blade, Vicon Nexus,
Vicon BodyBuilder, Vicon Polygonon, Vicon Motus Vídeo, Vicon Bonita, entre outros.
Seguidamente, serão apresentados apenas alguns deste pacotes.
4.2.1 Vicon Tracker
Este pacote de software é uma solução para o seguimento que permite uma integração
com aplicações 3D, tais como o VirTools, Labview, Jack, Open Scene Graph, WorldViz,
Panda 3D e VR Juggler. O pacote Vicon Tracker foi concebido para ser utilizado em diversas
aplicações, nomeadamente no seguimento de robôs, optimização de métodos de design.
Figura 4.73 – Exemplo de reconstrução 3D de objectos (retirado de [Vicon, 2011]).
A Figura 4.74 ilustra um exemplo de análise, captura e processamento de dados
biomecânicos de um ser humano durante a marcha.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 122
Figura 4.74 – Exemplo de análise, captura e processamento de dados biomecânicos durante a marcha
(retirado de [Vicon, 2011]).
4.2.2 Vicon Motus Vídeo
O pacote de software Vicon Motus disponibiliza uma solução flexível para o
seguimento simultâneo, baseado em vídeo e sistemas ópticos. Esta solução pode ser utilizada
simultaneamente com uma única aplicação de software, não sendo necessário muito tempo
para aprender a utilizar a ferramenta
4.2.2.1 Vídeo em 2D
Este sistema permite, através de uma configuração intuitiva, a obtenção e o
processamento de dados, com a indicação do deslocamento de dados lineares e angulares,
velocidades e acelerações de movimento bidimensionais com uma quantidade mínima de
equipamento. Este sistema pode ser utilizado, simplesmente, através de uma conexão de uma
câmara de vídeo ou de uma câmara de alta velocidade e um computador, através da ligação a
partir de uma porta Firewire. A utilização do software para aquisição, seguimento, análise e a
obtenção dos dados de vídeo é de utilização simples e intuitiva.
PC
Câmara
Figura 4.75 – Exemplo de aplicação de um sistema de vídeo em 2D (adaptado de [Vicon, 2011]).
4.2.2.2 Vídeo em 3D
Um sistema típico para a aquisição de dados correspondentes a coordenadas 3D é
mostrado no exemplo da Figura 4.76.

Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 123
PC
Receptor UHF
RVSUTransmissoror UHF
Interruptor de
disparo manualCâmara
Figura 4.76 – Exemplo de aplicação de um sistema de vídeo em 3D (adaptado de [Vicon, 2011]).
No laboratório de ensaio apresentado apenas estão indicadas as câmaras de vídeo, uma
unidade de sincronização e calibração de câmaras, e uma unidade de sincronização de vídeo
remota (Remote Video Synchronization Unit – RVSU), que permite a sincronização
simultânea de múltiplas câmaras de vídeo.
4.2.3 Vicon MX
O pacote de software da Vicon MX é a ferramenta de análise de movimento mais
avançado disponível pela Vicon [Vicon, 2011]. Os dispositivos utilizados por este pacote são
as câmaras de imagem, o módulo de controlo de hardware, o software necessário para a
análise e apresentação dos dados e um computador anfitrião que contém o software. Este
sistema foi projectado para ser flexível, expansível e fácil de integrar com diversos ambientes
de trabalho. Desta forma, é possível adaptar os componentes do sistema MX com o sistema
pretendido, assim é possível ter um sistema com qualquer tipo de dimensão através de uma
simples comunicação entre os componentes. Cada sistema da Vicon MX necessita de pelo
menos um dispositivo MX Giganet para fornecer e transmitir os dados até 10 câmaras e a
outros eventuais dispositivos. O dispositivo MX Giganet permite também controlar o fluxo de
dados ao computador anfitrião que tem o software utilizado no tratamento e análise dos
dados.
Este sistema de hardware possibilita também a criação de um sistema integrado
customizado, permitindo a ligação a unidades de aquisição e troca de dados, como por
exemplo, plataformas de força, luvas de dados, seguidores de olho, sistemas de
electromiográfia (EMG) e qualquer outro dispositivo digital externo.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 124
4.2.4 Câmara Vicon Bonita
De entre alguns modelos de câmaras disponibilizados pela Vicon, destaca-se a câmara
Vicon Bonita, Figura 4.77. Esta câmara consegue captar movimentos lentos até movimentos
rápidos na ordem dos 240 Fps. Este dispositivo é bastante flexível e pode ser montado
facilmente em qualquer ambiente, mesmo em zonas mais complexas. O sistema Bonita é
muito simples de configurar, utiliza apenas uma conexão PoE (Power over Ethernet) ao
computador, permitindo assim uma conexão simples ao sistema de análise de movimento
utilizado.
Figura 4.77 – Câmara Vicom Bonita (retirado de [Vicon, 2011]).
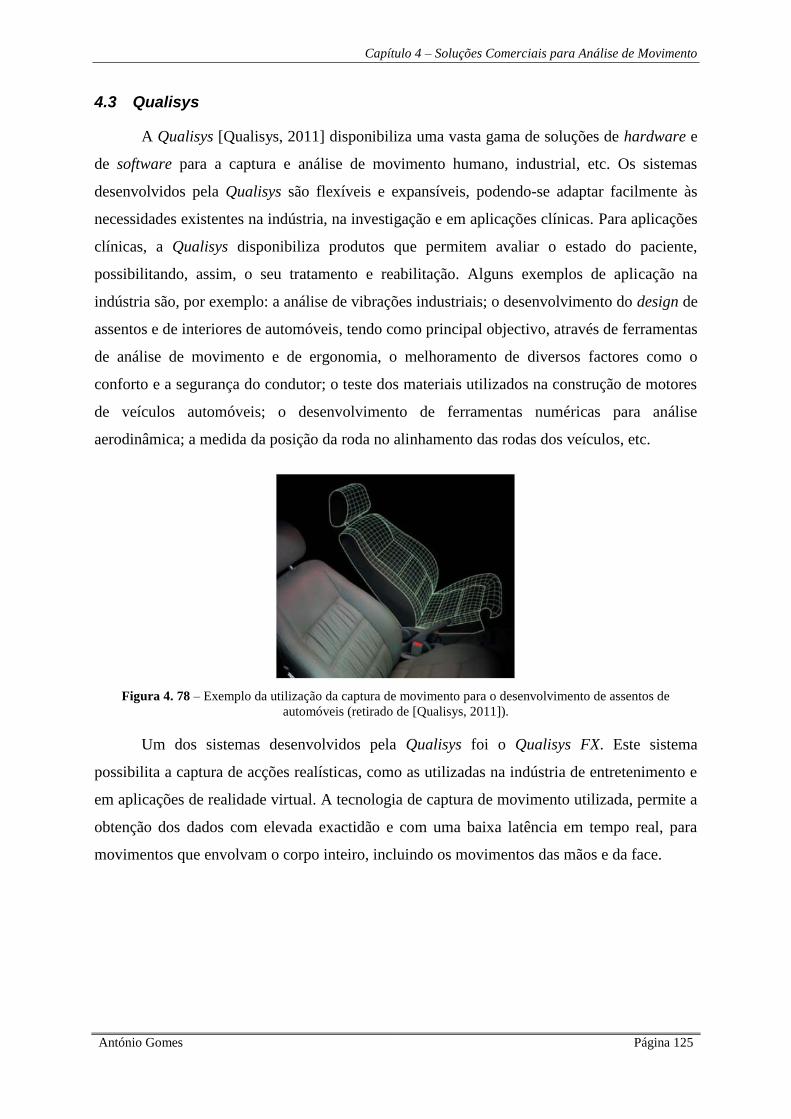
Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 125
4.3 Qualisys
A Qualisys [Qualisys, 2011] disponibiliza uma vasta gama de soluções de hardware e
de software para a captura e análise de movimento humano, industrial, etc. Os sistemas
desenvolvidos pela Qualisys são flexíveis e expansíveis, podendo-se adaptar facilmente às
necessidades existentes na indústria, na investigação e em aplicações clínicas. Para aplicações
clínicas, a Qualisys disponibiliza produtos que permitem avaliar o estado do paciente,
possibilitando, assim, o seu tratamento e reabilitação. Alguns exemplos de aplicação na
indústria são, por exemplo: a análise de vibrações industriais; o desenvolvimento do design de
assentos e de interiores de automóveis, tendo como principal objectivo, através de ferramentas
de análise de movimento e de ergonomia, o melhoramento de diversos factores como o
conforto e a segurança do condutor; o teste dos materiais utilizados na construção de motores
de veículos automóveis; o desenvolvimento de ferramentas numéricas para análise
aerodinâmica; a medida da posição da roda no alinhamento das rodas dos veículos, etc.
Figura 4. 78 – Exemplo da utilização da captura de movimento para o desenvolvimento de assentos de
automóveis (retirado de [Qualisys, 2011]).
Um dos sistemas desenvolvidos pela Qualisys foi o Qualisys FX. Este sistema
possibilita a captura de acções realísticas, como as utilizadas na indústria de entretenimento e
em aplicações de realidade virtual. A tecnologia de captura de movimento utilizada, permite a
obtenção dos dados com elevada exactidão e com uma baixa latência em tempo real, para
movimentos que envolvam o corpo inteiro, incluindo os movimentos das mãos e da face.
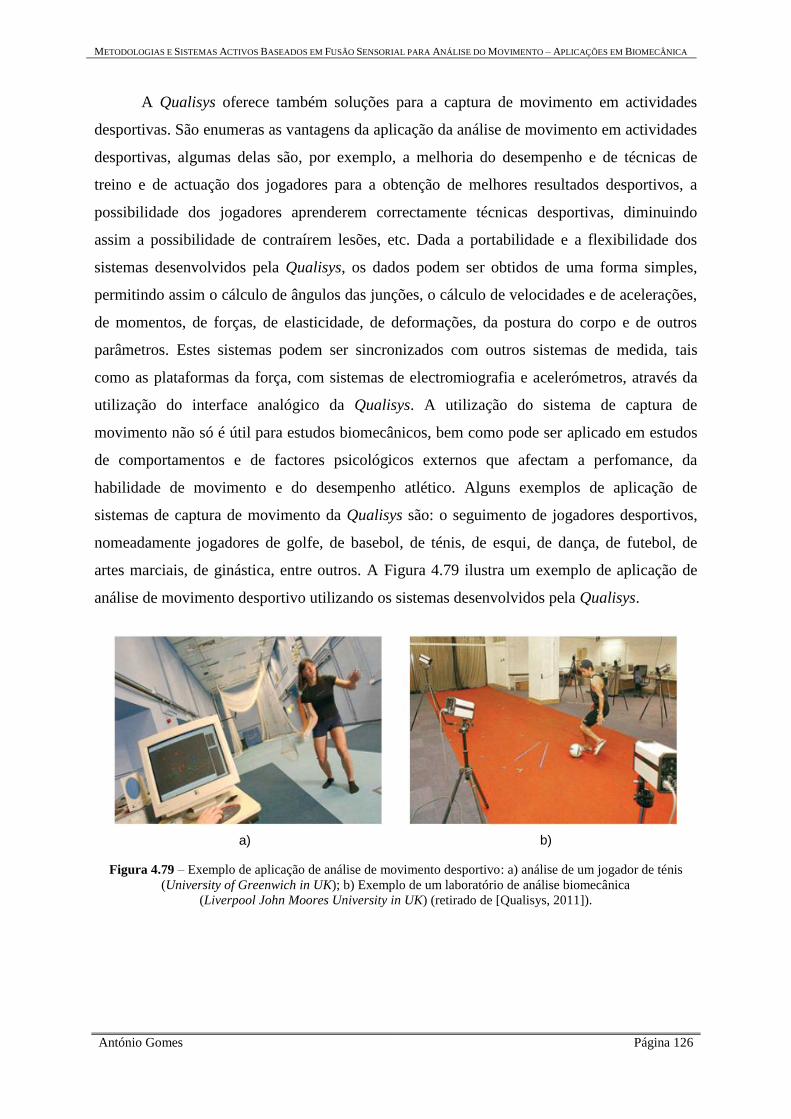
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 126
A Qualisys oferece também soluções para a captura de movimento em actividades
desportivas. São enumeras as vantagens da aplicação da análise de movimento em actividades
desportivas, algumas delas são, por exemplo, a melhoria do desempenho e de técnicas de
treino e de actuação dos jogadores para a obtenção de melhores resultados desportivos, a
possibilidade dos jogadores aprenderem correctamente técnicas desportivas, diminuindo
assim a possibilidade de contraírem lesões, etc. Dada a portabilidade e a flexibilidade dos
sistemas desenvolvidos pela Qualisys, os dados podem ser obtidos de uma forma simples,
permitindo assim o cálculo de ângulos das junções, o cálculo de velocidades e de acelerações,
de momentos, de forças, de elasticidade, de deformações, da postura do corpo e de outros
parâmetros. Estes sistemas podem ser sincronizados com outros sistemas de medida, tais
como as plataformas da força, com sistemas de electromiografia e acelerómetros, através da
utilização do interface analógico da Qualisys. A utilização do sistema de captura de
movimento não só é útil para estudos biomecânicos, bem como pode ser aplicado em estudos
de comportamentos e de factores psicológicos externos que afectam a perfomance, da
habilidade de movimento e do desempenho atlético. Alguns exemplos de aplicação de
sistemas de captura de movimento da Qualisys são: o seguimento de jogadores desportivos,
nomeadamente jogadores de golfe, de basebol, de ténis, de esqui, de dança, de futebol, de
artes marciais, de ginástica, entre outros. A Figura 4.79 ilustra um exemplo de aplicação de
análise de movimento desportivo utilizando os sistemas desenvolvidos pela Qualisys.
a) b)
Figura 4.79 – Exemplo de aplicação de análise de movimento desportivo: a) análise de um jogador de ténis
(University of Greenwich in UK); b) Exemplo de um laboratório de análise biomecânica
(Liverpool John Moores University in UK) (retirado de [Qualisys, 2011]).

Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 127
4.4 Northern Digital
A empresa Ndigital disponibiliza diversas soluções para a captura e análise de
movimento com aplicabilidade no domínio da medicina, da industria e na investigação,
designadamente no domínio das ciências da vida humana. No domínio da medicina, a
disponibiliza sistemas de medida 3D para o apoio a cirurgias e terapias através de imagens; a
nível industrial, apresenta soluções para a inspecção, metrologia e o seguimento de
componentes a velocidades elevadas. Na área de investigação de ciências humanas, a Ndigital
disponibiliza diversas soluções para a captura e análise de movimento, como por exemplo:
Optotrack Smart Markers, Investigator 3D, MRI Compatible, Wave Speech, TMS
(Transcranial Magnetic Stimulation Navigation) Manager, Handheld 3d Laser Scan e
diversos pacotes de software para a utilização com os diversos sistemas de captura [Ndigital,
2011]. Uma solução possível para a análise da marcha é o sistema de captura Optotrack Smart
Markers. Para a análise biomecânica, esta empresa disponibiliza um programa de análise
biomecânica, o Visual3D Biomechanical Analysis Software, que satisfaz as necessidades mais
complexas e mais sofisticadas dos laboratórios de análise de movimento. Seguidamente, nas
secções 4.4.1 e 4.4.2, são apresentados os sistemas de captura Optotrack Smart Markers e 3D
Investigator, sendo apresentado na secção 4.4.3 o software de análise biomecânica Visual3D.
4.4.1 Sistema de Captura Optotrack Smart Markers.
Este sistema de captura oferece flexibilidade e exactidão na análise e captura do
movimento. Trabalha com uma elevada frequência e suporta a utilização de marcadores
wireless. A utilização de marcadores wireless possibilita um movimento livre do sujeito em
análise, conferindo-lhe assim uma maior mobilidade. Desta forma, não são necessários fios
para ligação dos marcadores entre o sujeito e o sistema de captura de movimento. Podem ser
utilizados, no máximo, 50 marcadores por strober e 8 strobers por sistema [Ndigital, 2011]. A
Figura 4.80 ilustra um exemplo de utilização de marcadores wireless.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 128
Figura 4.80 – Exemplo de utilização de marcadores wireless (retirado de [Ndigital, 2011]).
4.4.2 Sistema de Captura de Movimento 3D Investigator
Este sistema de captura garante que os dados medidos e a identidade dos marcadores
nunca são perdidos, conseguindo assim uma correcta interpretação dos dados. Desta forma,
não existe a possibilidade de introdução de erros na sua classificação manual. Os dados são
fornecidos em tempo real e com uma baixa latência, fazendo com que a utilização deste
sistema seja ideal para aplicações de realidade virtual ou outras do mesmo tipo. A instalação
do sistema de captura 3D Investigator é imediata, não sendo necessários grandes
procedimentos de calibração, mesmo que haja movimentação do sistema. A Figura 4.81
ilustra um exemplo do sistema de captura 3D Investigator.
Figura 4.81 – Exemplo do sistema de captura 3D Investigator (retirado de [Ndigital, 2011]).
Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 129
4.4.3 Software de Análise Biomecânica Visual 3D
O software utilizado, pertencente à CMotion, permite uma análise biomecânica com
elevada precisão, podendo satisfazer as necessidades mais complexas e mais sofisticadas dos
laboratórios de análise de movimento [CMotion, 2011]. É compatível com a maioria dos
sistemas de análise de movimento e pode suportar os dados sincronizados obtidos através de
plataformas de força, sistemas de electromiografia, giroscópios e outros dispositivos
utilizados na medição do movimento. Como referido em [Ndigital, 2011] e em [CMotion,
2011], algumas das características deste software são:
Reconhecimento automático de eventos da marcha;
Suporte de marcadores;
Análise de dados em tempo real;
Análise da cinemática e da dinâmica inversa (cinética);
Criação de relatórios;
Tratamento de dados, incluindo a criação normativa da série de dados;
Cálculos dos centros das junções;
Etc.
Os sistemas de captura suportados por este software são: Optotrak Certus; 3D Investigator
e Optotrak 3020. Os requisitos mínimos do software são os seguintes:
Windows 98, sendo compatível com o Windows Vista;
Um computador Pentium III a 300MHz;
512MB de memória RAM;
OpenGL graphics support.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 130
A Figura 4.82 ilustra um exemplo do software de análise biomecânica Visual 3D.
Figura 4.82 – Exemplo do software de análise biomecânica Visual 3D (retirado de [Ndigital, 2011]).
4.5 Zebris
Como se pode verificar em [Zebris, 2011], esta empresa dispõe de soluções para a
análise de sequências específicas de movimento realizadas durante o treino de actividades
desportivas, como o golfe, a corrida e o salto. A nível de aplicações possíveis dos sistemas de
análise da Zebris, destacam-se algumas delas, nomeadamente a análise clínica da marcha, a
análise da medula espinal, testes de equilíbrio do corpo, a análise de deficiências de
movimento dos braços e das mãos, entre outras. Seguidamente, são apresentados alguns dos
sistemas disponibilizados pela Zebris, designadamente o sistema de análise dos movimentos
associados ao jogo do golfe, da corrida e do salto, bem como o software de análise utilizado.
4.5.1 Sistema de Treino do Movimento de Balanço do Jogo de Golfe
Foram desenvolvidos sistemas de medição do movimento dos parâmetros da postura e
da força exercida nos movimentos desportivos pela Zebris [SAM, 2011]. A Figura 4.83 ilustra
os dispositivos que fazem parte do kit que compõem o sistema de captura de movimento.
Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 131
Figura 4.83 – Kit do sistema de captura de movimento (retirado de [Zebris, 2011]).
É de salientar a técnica desenvolvida por esta empresa para a medição do movimento
por intermédio de sensores de ultra-sons. O sistema de captura dispõe de um dispositivo
denominado de DAE (Dispositivo Automático de Entrada) para a medição e detecção de
pequenos movimentos. Assim, torna-se possível efectuar as correcções necessárias dos atletas
durante os treinos, permitindo a melhoria do seu desempenho atlético. Os sensores de ultra-
sons utilizados integram uma pequena bateria e funcionam afastados do atleta em análise
[SAM, 2011]. A Figura 4.84 ilustra um exemplo de aplicação deste tipo de sensores de um
jogador a efectuar um serviço de golfe.
Figura 4.84 – Exemplo de análise de um jogador a efectuar um serviço de golfe através de sensores
de ultra-sons (retirado de [Zebris, 2011]).
A Figura 4.85 ilustra a parte frontal do equipamento wireless que permite uma
montagem e ajuste fácil e rápido.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 132
Figura 4.85 – Vista frontal do equipamento wireless (retirado de [Zebris, 2011]).
O software necessário para utilizar esta tecnologia é disponibilizado pela SAM que tem
uma parceria com a Zebris. A SAM disponibiliza diversos pacotes de software de análise,
salientando-se o SAM PuttLab e o SAM BalanceLab. Seguidamente, é apresentada uma breve
descrição de cada um destes.
4.5.1.1 SAM PuttLab
O SAM PuttLab é um sistema de análise baseado nos dados medidos pelos sensores de
ultra-sons. Este sistema possibilita a medição até 28 parâmetros e apresenta facilmente os
resultados na forma de relatórios, bem como a representação de gráficos concisos. A análise
efectuada por este software permite a obtenção dos detalhes dos movimentos reduzidos,
permitindo assim a melhoria das técnicas de treino. Uma particularidade interessante desta
ferramenta, é o facto de permitir a utilização em modo de treino, possibilitando assim o treino
específico de certos movimentos particulares, como por exemplo a rotação da cabeça num
determinado movimento do serviço de golfe [SAM, 2011]. A Figura 4.86 ilustra a interface
do SAM PuttLab em modo de treino.

Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 133
Figura 4.86 – Exemplo de utilização do software SAM PuttLab no modo de treino (retirado de [SAM, 2011]).
Resumidamente, algumas das possibilidades mais relevantes desta ferramenta são:
O atleta em análise pode comparar movimentos efectuados em diferentes
treinos, possibilitando o aperfeiçoamento de movimentos específicos;
A possibilidade de comparação da perfomance e do desempenho entre atletas;
Ter acesso imediato a todos os parâmetros em análise;
A obtenção de relatórios com 10 tipos de screens diferentes, sendo possível
alternar entre eles a qualquer momento;
Etc.
A Figura 4.87 mostra o primeiro screen do relatório gerado pelo SAM PuttLab,
correspondente ao alinhamento da face de um jogador de um serviço de um jogador de golfe.
Figura 4.87 – Exemplo de um screen do relatório gerado pelo SAM PuttLab (retirado de [SAM, 2011]).

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 134
A Figura 4.88 ilustra um exemplo de variação de alguns tipos de ângulos analisados
durante o impacto, nomeadamente os ângulos do eixo e de ascensão, e a altura do impacto
durante um serviço de golfe.
Figura 4.88 – Exemplo de um screen do relatório gerado pelo SAM PuttLab de alguns ângulos frequentemente
analisados durante o impacto (retirado de [SAM, 2011]).
4.5.1.2 SAM BalanceLab
O SAM BalanceLab é um sistema de análise desenvolvido especialmente para ser
utilizado no domínio da medicina, podendo ser integrado na análise de movimentos em golfe.
A sua principal utilização centra-se, principalmente, na avaliação dos parâmetros
biomecânicos que permitem identificar as limitações de movimento dos pacientes com
problemas de locomoção, a fim de se poderem aplicar os procedimentos adequados de
reabilitação dos mesmos. Este sistema de análise utiliza cerca de 2500 sensores individuais,
que permitem efectuar a medição da distribuição de pressão plantar do pé, fornecendo leituras
extremamente precisas através de uma interface bastante amigável com o utilizador, que
permite a representação dos resultados de uma forma bastante simples. Os dados de elevada
resolução são simultaneamente representados em gráficos 2D e 3D. A Figura 4.89 ilustra uma
plataforma de força utilizada pelo sistema de análise SAM BalanceLab.
Figura 4.89 – Plataforma de força utilizada pelo sistema de análise SAM BalanceLab (retirado de [SAM, 2011]).

Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 135
A Figura 4.90 mostra a interface do sistema de análise SAM BalanceLab relativo a um
jogador a efectuar um balanço correspondente a um serviço de golfe.
Evolução temporal da
distribuição de força
(possibilidade de navegação
de etapa por etapa)
Vistas de dados adicionais:
- distribuição de força plantar
(direita e esquerda)
- distribuição de força do dedo
do pé durante o salto
Vídeo sincronizado com
a plataforma de força
Vista da distribuição
plantar (2D/3D)
Figura 4.90 – Exemplo de um ecran do sistema de análise SAM BalanceLab (adaptado de [SAM, 2011]).
4.5.2 Sistema de Treino Interactivo da Corrida no Tapete Rolante
O sistema de treino interactivo da corrida no tapete rolante, designado de "challenge
run", consiste num tapete rolante que tem cerca de 5000 sensores capacitivos de força de
elevada qualidade colocados por baixo da superfície do tapete e um monitor que origina um
ambiente de corrida virtual, como por exemplo uma corrida ao longo de uma floresta. Ao
longo da corrida, o corredor vê as suas próprias pegadas a aparecerem no monitor, bem como
a monotorização dos parâmetros biomecânicos em análise. Durante a corrida virtual surgem
diversos obstáculos a serem ultrapassados, como por exemplo a necessidade de efectuar saltos
ou o contorno de poças de água. Para os desportistas mais exigente e ambiciosos, este
equipamento possibilita a repetição de treinos com sequências específicas do movimento,
sendo possível ajustar o grau de dificuldade dos exercícios.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 136
A utilização deste equipamento tem uma grande variedade de aplicações no domínio
de análise clínica da marcha, dado que permite a realização de diversos testes padrão, como
por exemplo, a medida do comprimento e do salto do passo. Em aplicações clínicas, o sistema
de treino básico pode-se estender a uma enorme variedade de aplicações de análise de
movimento e de electromiografia. Por exemplo, ao nível de análise da marcha, este sistema de
treino permite a escolha de sapatos ortopédicos que melhor se ajustam a um determinado
paciente com problemas de locomoção, através da realização de determinados testes padrão
de movimento.
Figura 4.91 – Sistema de treino da corrida interactivo da Zebris (retirado de [Zebris, 2011]).
4.5.3 Sistema de Treino do Salto
As plataformas de medida da Zebris permitem a realização de actividades desportivas
que envolvam a coordenação do corpo, como por exemplo a realização de cambalhotas.
Adicionalmente, estas plataformas oferecem a possibilidade de realização de exercícios de
salto a fim de analisar e melhorar as estratégias dessa actividade desportiva. A Figura 4.92
ilustra um exemplo de uma de um salto utilizando a plataforma de medição da Zebris.
Figura 4.92 – Exemplo da realização de um salto utilizando a plataforma de medição da Zebris
(retirado de [Zebris, 2011]).

Capítulo 4 – Soluções Comerciais para Análise de Movimento
António Gomes Página 137
4.6 Sumário
Neste capítulo foi realizada uma abordagem de algumas das soluções comerciais
existentes para o seguimento e análise clínica da marcha. Assim, a primeira empresa
apresentada foi a SIMI, esta empresa é especializada em soluções de software e de hardware
para a análise de movimento bidimensional e tridimensional. O software disponibilizado tem
uma configuração modular, permitindo a análise de movimento em 2D e em 3D. Destacando-
se o pacote modular disponibilizado para a análise de movimento em actividades desportivas.
Seguidamente, foi apresentada a empresa Vicon que é uma empresa especializada na
análise de movimento que disponibiliza diversas soluções para o seguimento e reconstrução
de objectos em 3D. O software proposto é modular, salientando-se os seguintes pacotes:
Vicon Tracker, Vicon Motus Vídeo e o Vicon MX. O pacote de software Vicon Tracker, foi
concebido para especialmente para o seguimento de robôs, optimização de métodos de design,
etc., e perfeitamente integrável com com aplicações 3D, tais como o VirTools, Labview, Jack,
Open Scene Graph, WorldViz, Panda 3D e VR Juggler. O software Vicon Motus permite,
através de uma configuração intuitiva, a obtenção e o processamento de dados, com a
indicação do deslocamento de dados lineares e angulares, velocidades e acelerações de
movimento bidimensionais com uma quantidade mínima de equipamento. Finalmente, o
software Vicon MX é a ferramenta de análise de movimento mais avançada disponível pela
Vicon. Os dispositivos utilizados por este pacote são câmaras de imagem, módulo de controlo
de hardware, software necessário para a análise e apresentação dos dados e um computador
anfitrião que contém o software. O pacote de software foi projectado para ser flexível,
expansível e fácil de integrar com diversos ambientes de trabalho. Foi apresentada, de entre os
modelos de câmaras disponibilizados pela Vicon, a câmara Vicon Bonita. Esta câmara permite
a captura de movimentos lentos até movimentos rápidos, na ordem dos 240 fps. Este
dispositivo é bastante flexível e pode ser montado facilmente em qualquer ambiente, mesmo
em locais mais complexos.
Uma outra empresa apresentada foi a Qualisys. Esta empresa disponibiliza diversas
soluções no domínio da medicina (fisiologia, ortopedia, neurologia) e da indústria. Em
aplicações clínicas, os produtos da Qualisys permitem avaliar o estado do paciente,
possibilitando assim o seu tratamento e reabilitação. A nível desportivo, os produtos
disponibilizados permitem o seguimento de jogadores desportivos, nomeadamente jogadores
de golfe, de basebol, de ténis, de esqui, de dança, de futebol, de artes marciais, de ginástica,
entre outros.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 138
Outra empresa referida foi a NDigital, esta empresa apresenta soluções para a captura
e análise de movimento para as áreas da medicina, da industria e da investigação, em
particular nos domínios das ciências da vida. No domínio da medicina, a Ndigital
disponibiliza sistemas de medida 3D para o apoio a cirurgias e terapias através de imagens.
Algumas das soluções disponíveis são: Optotrack Smart Markers, Investigator 3D, MRI
Compatible, Wave Speech, TMS (Transcranial Magnetic Stimulation Navigation) Manager,
Handheld 3d Laser Scan e diversos pacotes de software para a utilização com os diversos
sistemas de captura, como por exemplo o software de análise biomecânica Visual3D
pertencente à CMotion.
A última empresa apresentada foi a Zebris, esta empresa dispõe de soluções orientadas
para a análise de sequências específicas de movimento durante actividades desportivas como
o golfe, a corrida e o salto. A nível de aplicações possíveis dos sistemas de análise da Zebris,
destacam-se: a análise clínica da marcha, a análise da medula espinal, testes de equilíbrio
postural, análise de deficiências de movimento dos braços e das mãos, entre outras. De
seguida foi apresentada o software de análise SAM BalanceLab, que é utilizado pelas soluções
desta empresa. O SAM BalanceLab foi desenvolvido para ser utilizado particularmente no
domínio da medicina, podendo também ser usado na análise de movimentos em golfe. A sua
principal utilização centra-se principalmente na avaliação dos parâmetros biomecânicos que
permitem identificar as limitações de movimento dos pacientes com problemas de locomoção,
a fim de se poderem aplicar os procedimentos adequados de reabilitação dos mesmos.

Capítulo 5
CONCLUSÕES E PERSPECTIVAS DE TRABALHO FUTURO


Capítulo 3 – Análise Clínica da Marcha
António Gomes Página 141
5 Conclusões e Perspectivas de Trabalho Futuro
A realização deste trabalho permitiu a revisão do estado da arte relativamente a
metodologias principais para a análise biomecânica da marcha e de actividades desportivas.
Sugere-se assim, como objectivos de trabalhos futuros, nomeadamente no âmbito da Tese
associada a este trabalho, o desenvolvimento e a aplicação de metodologias computacionais
robustas e eficientes para analisar o movimento humano em biomecânica. Para tal, será
considerada informação adquirida por diferentes tipos de sensores, como câmaras de imagem,
plataformas de força, tapetes de pressão, goniómetros, acelerómetros e giroscópios,
previamente calibrados e caracterizados, estabelecida a sincronização entre tais sensores, e
analisado e parametrizado o movimento adquirido.
A informação visual será processada envolvendo tarefas de segmentação das estruturas
envolvidas, de seguimento, usando modelos de movimento previamente definidos e
aprendidos ao longo do tempo, visão 3D e de análise 2D/3D de movimento. A informação
adquirida ao longo do tempo, quer pelos sensores de imagem, quer pelos sensores
complementares, permitirá o controlo do sistema de aquisição de forma a optimizar o
processo de seguimento e análise.
Como principais aplicações das metodologias desenvolvidas serão consideradas as
existentes em biomecânica, em particular na análise da marcha e de actividades desportivas.
Outras aplicações possíveis podem ser encontradas em biometria e em sistemas de
videovigilância.


Referências

Referências Bibliográficas
António Gomes Página 145
Referências
[Addel-Aziz 1971] – Addel-Aziz, Y., Karara, H., “Direct Linear Transformation from
Comparator Coordinates into Object Space Coordinates in Close-Range Photogrammetry”,
Proceedings of the Symposium on Close-range Photogrammetry, Falls Church, Virginia, pp.
1-18, 1971.
[Ambrósio, 2008] – Jorge A.C. Ambrósio, João M.C.S. Abrantes, “Developments in
biomechanics of human motion for health and sports”, Instituto Superior Técnico, Portugal,
2008.
[Ambrósio, 2005] – Jorge A.C. Ambrósio , Silva M. “A Biomechanical Multibody Model
with a Detailed Locomotion Muscle Apparatus”, Advances in Computational Multibody
Systems, Dordrecht,The Netherlands, Springer, pp. 155-184, 2005.
[Aggarwal, 1999] – J. Aggarwal e Q. Cai., “Human Motion Analysis: A Review, “Computer
Vision and Image Understanding, Vol. 73, pp. 428-440, 1999.
[Arulampalam, 2002] – M. Sanjeev Arulampalam, Simon Maskell, Neil Gordon, and Tim
Clapp, “A Tutorial on Particle Filters for Online Nonlinear/Non-Gaussian Bayesian
Tracking”, IEEE Transactions on signal processing, Vol. 50, No. 2, February 2002.
[Baumberg, 1995] – A. M. Baumberg and D. C. Hogg, An efficient method for contour
tracking using active shape models, in Workshop on Motion of Non-Rigid and Articulated
Objects, Austin, TX, pp. 2-14. 1994.
[Berclaz, 2006] – J. Berclaz, F. Fleuret, P. Fua, “Robust people tracking with global trajectory
optimization,” in IEEE Conf. Computer Vision and Pattern Recognition, 2006.
[Bregler, 1997] – C. Bregler, “Learning and recognizing human dynamics in video sequences,
in Conference on Computer Vision and Pattern Recognition”, San Juan, Puerto Rico, 1997.
[Cai, 1995] – Q. Cai, A. Mitiche, J. Aggarwal, “Tracking Human Motion in an Indoor
Environment”, Proceedings 2nd. Intl. Conference on Image Processing, Washington D.C.,
1995.
[Cai, 1996] – Q. Cai, J. Aggarwal, “Tracking Human Motion using Multiple Cameras”,
Proceedings of International Conference on Pattern Recognition, Vieena, 1996.
[Campbell, 1995] – Lee Campbell, Aaron Bobick, “Recognition of Human Body Motion
Using Phase Space Constraints”, Abbreviated version appears in Fifth International
Conference on Computer Vision, pp. 624-630, CambridgeMA, 1995

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 146
[Chow, 2009] – John W Chow, Soo-An Park, Mark D Tillman, “Lower trunk kinematics and
muscle activity during different types of tennis serves”, Sports Medicine, Arthroscopy,
Rehabilitation, Therapy & Technology, doi:10.1186/1758-2555-1-24, 2009.
[CMotion, 2011] – C-Motion, www.c-motion.com, acedido em Fevereiro de 2011.
[Corazza, 2010] – Stefano Corazza, Lars Mündermann, Emiliano Gambaretto, Giancarlo
Ferrigno, Thomas P. Andriacchi, “Markerless Motion Capture through Visual Hull,
Articulated ICP and Subject Specific Model Generation”, Int J Comput Vis 87: pp. 156-169,
2010.
[Correia, 2001] – M. Correia, Tese de Doutoramento, Técnicas Computacionais na Percepção
Visual do Movimento, Faculdade de Engenharia, Universidade do Porto, 2001.
[Deutscher, 2005] – Deutscher, J., Reid, I., “Articulated body motion capture by stochastic
search” International Journal of Computer Vision, 61(2), pp. 185-205, 2005.
[Deutscher, 2001] – J. Deutscher, A. Davison, I. Reid, “Automatic Partitioning of High
Dimensional Search Spaces associated with Articulated Body Motion Capture”, Proceedings
IEEE Conference on Computer Vision and Pattern Recognition, Kauai, 2001.
[Deutscher, 2000] – J. Deutscher, A. Blake, I. Reid, “Articulated body motion capture by
annealed particle filtering”, in Proceedings of the IEEE conference on computer vision and
pattern recognition (CVPR), pp. 126-133, 2000.
[Deutscher, 1999] – J. Deutscher, A. Blake, B. North, B. Bascle, “Tracking through
Singularities and Discontinuities by Random Sampling”, 7th. Conference on Computer
Vision, 1999.
[Doucet , 2001] – A. Doucet, N. de Freitas, N. Gordon, “Sequential Monte Carlo Methods in
Practice”, Springer Verlag, 2001.
[Doucet , 2000] – Doucet, A., Godsill, S., & Andrieu, C., “On sequential Monte-Carlo
sampling methods for Bayesian filtering. Statistics and Computing”, 10(3), pp. 197-208,
2000.
[Ducher, 2005] – G. Ducher, D. Courteixa, S. Même, C. Magni, J.F. Viala, C.L. Benhamoua,
“Bone geometry in response to long-term tennis playing and its relationship with muscle
volume: A quantitative magnetic resonance imaging study in tennis players”, Bone 37 457–
466, EA 3895 “Architecture du Tissu Osseux et Exercice Physique”, Faculty of Sport
Sciences, University of Orléans and U658, 2005.
[Gall, 2010] – Juergen Gall, Bodo Rosenhahn, Thomas Brox, Hans-Peter Seidel,
“Optimization and Filtering for Human Motion Capture – A Multi-Layer Framework”, Int J
Comput Vis 87: pp. 75-92, 2010.

Referências Bibliográficas
António Gomes Página 147
[Gall, 2007] – Juergen Gall, Thomas Brox, Bodo Rosenhahn, Hans-Peter Seidel, “ Global
Stochastic Optimization for Robust and Accurate Human Motion Capture”, MPI-I-2007-4-
008, December, 2007.
[Gall, 2006a] – Gall, J., Rosenhahn, B., Brox, T., Seidel, H.P.: “Learning for multi-view 3D
tracking in the context of particle filters. In: Int. Symposium on Visual Computing (ISVC).”,
Volume 4292 of LNCS., Springer, pp. 59-69, 2006.
[Gall, 2006b] – Gall, J., Jurgen Potthoff, Christoph Schnorr, Bodo Rosenhahn, Hans-Peter
Seide, “Interacting and Annealing Particle Filters: Mathematics and a Recipe for
Applications”, September, 2006.
[Gavrila, 1999] – D. M. Gavrila, “The Visual Analysis of Human Movement: A Survey”,
Computer Vision and Image Understanding, Vol. 73, No. 1, January, pp. 82-98, 1999
[Giakas, 1997] – G., Baltzopoulos, V., “A Comparison of Automatic Filtering Techniques
Applied to Biomechanical Walking Data”, J. Biomechanics, 30, pp. 847-850, 1997.
[Greg, 2006] – Greg Welch, Gary Bishop, “An Introduction to the Kalman Filter”,
Department of Computer Science, University of North Carolina at Chapel Hill, Chapel Hill,
NC 27599-3175, July 24, 2006.
[Gu, 1994] – H. Gu, Y. Shirai, M. Asada, “MDL-Based Spatiotemporal Segmentation from
Motion in a Long Image Sequence”, Computer Vision and Pattern Recognition, 1994
[Hamil, 2003] – Joseph Hamil, Kathleen M. Knutzen, “Biomechanical Basis of Human
Movement”, 2nd
ed., Lippincott Williams &Wilkins, 2003.
[Han, 2009] – Bohyung Han, Member, Ying Zhu, Dorin Comaniciu, Larry S. Davis, IEEE
Transactions on pattern analysis and machine intelligence, Vol. 31, No. 5, May, 2009.
[Haritaoglu, 1998] – Ismail Haritaoglu, David Harwood and Larry S. Davis, “W4: Who?
When? Where? What? – A Real Time System for Detecting and Tracking People”,
International Conference on Automatic Face and Gesture Recognition; Nara, Japan, 1998.
[Harald, 2003] – Harald Breit, Gerhard Rigoll, “ A Flexible Multimodal Object Tracking
System”, Institute for Human-Machine-Communication, Munich University of Technology,
Germany, 2003.
[Hogg, 1984] – D. Hogg, PhD Thesis, “Interpreting Images of a Known Moving Object”,
University of Sussex, 1984.
[Horaud, 2009] – Radu Horaud, Matti Niskanen, Guillaume Dewaele, Edmond Boyer,
“Human Motion Tracking by Registering an Articulated Surface to 3D Points and Normals”,
IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 31, No. 1, January,
2009.
METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 148
[Isard, 1998] – M. Isard, A. Blake, “Condensation - Conditional Density Propagation of
Visual Tracking”, International Journal on Computer Vision, 5/28, 1998.
[Ivancevic, 2008] – Tijana Ivančević, Bojan Jovanović, Milorad Đukić, Saša Marković,
Natalia Đukić, “biomechanical analysis of shots and ball motion in tennis and the analogy
with handball throws”, Physical Education and Sport Vol. 6, No 1, pp. 51-66, 2008.
[Jain, 1998] – A. Jain, Y. Zhong, M. Dubuisson-Jolly, “Deformable Template Models: A
Review, Signal Processing 71, pp. 109-129, 1998.
[Jiang, 2008] – Hao Jiang, Sidney Fels, James J. Little, “Optimizing Multiple Object Tracking
and Best View Video Synthesis”, IEEE Transactions on MultimediaA, Vol. 10, No. 6,
October, 2008.
[Julier, 1997] – S. Julier and J. Uhlmann, “A New Extension of the Kalman Filter to
Nonlinear Systems”, Proc. SPIE, vol. 3068, pp. 182-193, 1997.
[Kakadiaris, 1996] – I.A. Kakadiaris and D. Metaxas, "Model-based estimation of 3D human
motion with occlusion based on active multi-viewpoint selection," in Proc. IEEE Computer
Society Conference on Computer Vision and Pattern Recognition, San Francisco, CA, Jun.
18-20, pp. 81-87, 1996.
[Kameda, 1996] – Y. Kameda and M. Minoh, A human motion estimation method using 3-
successive video frames, in Inter-national Conference on Virtual Systems and Multimedia,
1996.
[Kim, 2005] – Tae-Hyeong Kim, Young-Tae Kim, Yong-San Yoon, “Development of a
biomechanical model of the human body in a sitting posture with vibration transmissibility in
the vertical direction”, International Journal of Industrial Ergonomics 35: 817-829, 2005.
[Khan, 2009] –Saad M. Khan and Mubarak Shah, “Tracking Multiple Occluding People by
Localizing on Multiple Scene Planes”, IEEE Transaction on Pattern Analysis and Machine
Intelligence, Vol 31, No. 3, March, 2009.
[Lee, 2009] – Mun Wai Lee, “Human Pose Tracking in Monocular Sequence Using
Multilevel Structured Models”, IEEE Transactions on Pattern Analysis and Machine
Intelligence, Vol. 31, No. 1, January, 2009.
[Lee, 2004] – M. Lee, I. Cohen, “Proposal Maps Driven MCMC for Estimating Human Body
Pose in Static Images,” Proc. IEEE Conf. Computer Vision and Pattern Recognition, 2004.
[Li, 2010] – Rui Li, Tai -Peng Tian, Stan Sclaroff, Ming-Hsuan Yang, “3D Human Motion
Tracking with a Coordinated Mixture of Factor Analyzers”, Int J Comput Vis 87: 170-190,
2010.

Referências Bibliográficas
António Gomes Página 149
[Lipton, 1998] – A. Lipton, H. Fujiyoshi, R. Patil, “Moving Target Classification and
Tracking from Real-time Video”, Proceedings 1998 DARPA Image Understanding Workshop
(IUW'98), 1998.
[Maybeck, 1979] – P. Maybeck, Stochastic Models, Estimation and Control”, Volume 1,
Department Electrical Engineering Air Force Institute of Technology Wright-Paterson Air
Force Base Ohio, 1979.
[Moeslund , 2001] – Thomas B. Moeslund and Erik Granum, “A Survey of Computer Vision-
Based Human Motion Capture”, Computer Vision and Image Understanding 81, pp. 231-268,
2001.
[Monteiro, 2001] – João Monteiro, Manuel João Ferreira; “Visão Artificial”, Documentação
da disciplina de Visão Artificial, MAIC, FEUP, 2001.
[Mori, 2002] – G. Mori, J. Malik, “Estimating human body configurations using shape context
matching”, in Proceedings of the European conference on computer vision (ECCV), pp. 666-
680, 2002.
[Munkelt, 1998] – O. Munkelt, C. Ridder, D. Hansel, and W. Hafner, A model driven 3D
image interpretation system applied to person detection in video images, in International
Conference on Pattern Recognition, 1998.
[Ndigital, 2011] – Northern Digital, www.ndigital.com, acedido em Fevereiro de 2011.
[Patrick, 2010] – Patrick Peursum · Svetha Venkatesh ·GeoffWest, “A Study on Smoothing
for Particle-Filtered 3D Human Body Tracking”, Int J Comput Vis 87: 53-74, 2010.
[Pinho, 2005a] – R. Pinho, J. Tavares, Miguel F. P. V. Correia, ”Seguimento de Objectos em
visão computacional usando métodos estocásticos”, Congreso de Métodos Numéricos em
Ingeniería, Granada, 4 a 7 de Júlio, SEMNI, España, 2005.
[Pinho, 2005b] – R. Pinho, J. Tavares, Miguel F. P. V. Correia, ”Filtro de Kalman no
Seguimento de Movimento em Visão Computacional”, Porto, Portugal, Setembro, 2005.
[Pinho, 2005c] – Raquel Ramos Pinho, João Manuel R. S. Tavares , Miguel V. Correia,
“Correspondência entre pontos no seguimento de movimento em imagens”, Universidade do
Porto, Faculdade de Engenharia, Porto, Portugal, 1995.
[Pinho, 2005d] – Raquel Ramos Pinho , João Manuel R. S. Tavares , Miguel V. Correia,
“Human Movement Tracking and Analysis With Kalman Filtering and Global Optimization
Techniques”, II International conference on Computational Bioengineering, H. Rodrigues et
al. (Eds.), Lisbon, Portugal, September 14-16, 2005.
[Pinho, 2004] – R. Pinho, J. Tavares, Miguel V. Correia, ”Introdução à Análise de
Movimento usando Visão Computacional”, Porto, Portugal, Junho, 2004.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 150
[Plänkers, 1999] – R. Plänkers, P. Fua, N. D'apuzzo, “Automated Body Modelling from
Video Sequences”, IEEE MPEOPLE'99 - International Workshop on Modelling People,
Corfu, Greece, 1999.
[Poppe, 2007a] – R. Poppe, “Evaluating example-based pose estimation: experiments on the
Humaneva sets”, in Online proceedings of the work-shop on evaluation of articulated human
motion and pose estimation (EHuM) at the international conference on computer vision and
pattern recognition (CVPR), 2007.
[Rigoll, 2000] – G. Rigoll, S. Eickeler, S. Muller, “Person Tracking in Real world Scenarios
using Statistical Methods, 4th. International Conference on Automatic Face and Gesture
Recognition”, Grenoble, France, 2000.
[Gonzalez, 2008] – Rafael C. Gonzalez, Richard E. Woods, “Digital Image Processing”,
Third Edition, 2008.
[Qualisys, 20011] – Qualisys, www.qualisys.com, acedido em Fevereiro de 2011.
[Rodrigo, 2008] – Sílvia E. Rodrigo, Jorge A. C. Ambrósio, Miguel P. Tavares da Silva,
Osvaldo H. Penisi, “Analysis of Human Gait Based on Multibody Formulations and
Optimization Tools”, Mechanics Based Design of Structures and Machines, 36: 446-477,
2008.
[Rosales, 1998] – R. Rosales, S. Sclaroff, “Improved Tracking of Multiple Humans with
Trajectory Prediction and Occlusion Modelling”, Proceedings IEEE Conference on Computer
Vision and Pattern Recognition, Workshop on the Interpretation of Visual Motion, Santa
Barbara, 1998.
[SAM, 2011] – Science&Motion, www.scienceandmotion.com, acedido em Março de 2011.
[Shakhnarovich, 2003] – Shakhnarovich, G., Viola, P., Darrel, T., “Fast pose estimation with
parameter sensitive hashing. In Proceedings of the IEEE international conference on computer
vision (ICCV), pp. 750-757, 2003.
[Sidenbladh, 2003] – Hedvig Sidenbladh and Michael J. Black. Learning the statistics of
people in images and video. International Journal of Computer Vision, 54(1-3): pp. 183-209,
2003.
[Sigal, 2009] – Leonid Sigal, Alexandru O. Balan, Michael J. Black, “HUMANEVA
Synchronized Video and Motion Capture Dataset and Baseline Algorithm for Evaluation of
Articulated Human Motion”, Int J Comput Vis (2010) 87: 4-27, August, 2009.
Referências Bibliográficas
António Gomes Página 151
[Silaghi; 1998] – M. C. Silaghi, R. Pl¨ ankers, R. Boulic, P. Fua, and D. Thalmann, “Local
and global skeleton fitting techniques for optical motion capture”, in International Workshop
on Modelling and Motion Capture Techniques for Virtual Environments, Geneva,
Switzerland, November 1998.
[Silva, 2003] – Silva, Miguel P. T. and Ambrósio, Jorge A. C., “Solution of Redundant
Muscle Forces in Human Locomotion with Multibody Dynamics and Optimization Tools”,
Mechanics Based Design of Structures and Machines, 31: 3, pp. 381-411, 2003.
[Silva, 2002] – Silva, Miguel P. T. and Ambrósio, Jorge A. C.,”Kinematic Data Consistency
in the Inverse Dynamic Analysis of Biomechanical Systems”, Multibody System Dynamics 8:
pp. 219-239, 2002.
[Silva, 2000] – Silva, M., Ambrósio, J., “Consequências da Filtragem e Consistência
Cinemática dos Pontos Anatómicos na Dinâmica Inversa do Corpo Humano” (Consequences
of Filtering and of the Kinematic Consistency of the Anatomic Points in the Inverse
Dynamics of the Human Body), Proceedings of the VI National Congress in Applied and
Computational Mechanics, 17-19 Abril, Aveiro, Portugal, pp. 167-180, 2000,
[Simi, 2011] – Simi Reality Motion Systems, www.simi.com, acedido em Janeiro 2011.
[Sminchisescu , 2004] – Sminchisescu, C., & Jepson, A. (2004). Generative modelling for
continuous non-linearly embedded visual inference”, In Proceedings of the IEEE international
conference on machine learning (ICML), pp. 140-147, 2004.
[Sousa, 2008] – Daniela Sofia Seixas Sousa, “Seguimento do Movimento Humano Usando
Visão Computacional – Aplicação na Análise da Marcha”, Tese de Mestrado, Universidade
do Porto, Faculdade de Engenharia da Universidade do Porto, Porto, Portugal, 2002.
[Sousa, 2007a] – Daniela Sofia S. Sousa, João Manuel R. S. Tavares, Miguel Velhote Correia,
Emília Mendes, “Análise Clínica da Marcha Exemplo de Aplicação em Laboratório de
Movimento”, 2º Encontro Nacional de Biomecânica, H. Rodrigues et al., (Eds.), Évora,
Portugal, 8 e 9 de Fevereiro, 2007.
[Stenger, 2003] – Stenger, B., Thayananthan, A., Torr, P., Cipolla, R., “Filtering using a tree-
based esimator. In Proceedings of the IEEE international conference on computer vision
(ICCV), pp. 1063-1070, 2003.
[Sundaresan, 2009] – Aravind Sundaresan, Rama Chellappa, “Multicamera Tracking of
Articulated Human Motion Using Shape and Motion Cues”, IEEE Transactions on image
processing, Vol. 18, No. 9, September, 2009.

METODOLOGIAS E SISTEMAS ACTIVOS BASEADOS EM FUSÃO SENSORIAL PARA ANÁLISE DO MOVIMENTO – APLICAÇÕES EM BIOMECÂNICA
António Gomes Página 152
[Sundaresan, 2008] – A. Sundaresan, R. Chellappa, “Model driven segmentation and
registration of articulating humans in Laplacian Eigenspace,” IEEE Trans. Pattern Anal.
Mach. Intell., vol. 30, no. 10, pp. 1771-1785, Oct. 2008.
[Sundaresan, 2006] – A. Sundaresan, R. Chellappa, “Acquisition of articulated human body
models using multiple cameras,” in Proc. Conf. Articulated Motion and Deformable Objects,
Port d’Andratx, Mallorca, Spain, pp. 78-89, Jul. 2006.
[Sutherland , 2005] – D. H. Sutherland, “The evolution of clinical gait analysis part III , Gait
& Posture”, 21, pp. 447-461, 2005.
[Svoboda , 2005] – T. Svoboda, D. Martinec, T. Pajdla, “A convenient multi-camera self-
calibration for virtual environments,” PRESENCE: Teleoperators and Virtual Environments,
vol. 14, no. 4, Aug. 2005.
[Tavares, 2000], J. Tavares, “Tese de Doutoramento: Análise de Movimento de Corpos
Deformáveis usando Visão Computacional”, FEUP, 2000.
[Tian, 2005b] – T.-P., Li, R., S. Sclaroff, “Tracking human body pose on a learned smooth
space (Technical Report 2005-029). Boston University, 2005b.
[Urtasun, 2005] – R. Urtasun, D. Fleet, A. Hertzmann, P. Fua, “Priors for people tracking
from small training sets”, In Proceedings of the IEEE international conference on computer
vision (ICCV), pp. 403-410, 2005.
[Vasconcelos, 2008] – Vasconcelos, Maria João M. & Tavares, João Manuel R. S. “Human
Motion Analysis: Methodologies and Applications”, CMBEE 2008 – 8th
International
Symposium om Computer Methods in Biomechanics and Biomedical Engineering, 6 pag.,
Porto, Portugal, 27th
February – 1st March, 2008.
[Vicon, 2011] – Vicon Peak, www.vicon.com/, acedido em Janeiro de 2011.
[Wan, 2000] – E.A. Wan and R. van der Merwe, “The Unscented Kalman Filter for Non-
Linear Estimation,” Proc. Symp. 2001 Adaptive Systems for Signal Proc. Comm. and
Control, 2000.
[Wang, 2004] - X. Wang, L. He, W. Wee, “Deformable Contour Method: A Constrained
Optimization Approach”, International Journal of Computer Vision 59(1), pp. 87-108, 2004.
[Wang, 2003] – J. Wang, S. Singh, “Video Analysis of Human Dynamics - A Survey”, Real-
time Imaging Journal 9(5), pp. 320-345, 2003.
[Whittle, 2007] – Whittle, Michael W., “Gait Analysis: An introduction”, Fourth Edition,
2007.
Referências Bibliográficas
António Gomes Página 153
[Wren, 1996] – C. R. Wren, “Pfinder: real-time tracking of the human body”, Masters of
Science in Electrical Engineering and Computer Science, Massachusetts Institute of
Technology, September, 1996.
[Yamada, 1998] – M. Yamada, K. Ebihara, and J. Ohya, “A new robust real-time method for
extracting human silhouettes from color images”, in International Conference on Automatic
Face and Gesture Recognition, Nara, Japan, 1998.
[Yamamoto, 1991] – M. Yamamoto, K. Koshikawa, “Human Motion Analysis Based on a
Robot Arm Model”, Conference on Computer Vision and Pattern Recognition, 1991.
[Zaritsky, 2003] – R. Zaritsky, N. Peterfreund, N. Shimkin, “Velocity-Guided Tracking of
Deformable Contours in Three Dimensional Space”, International Journal of Computer
Vision 51(3), pp. 219-238, 2003.
[Zevbris, 2011] – Qualisys, www.zebris.de, acedido em Março de 2011.
[Zimmermann, 2009] – Karel Zimmermann, Jiri Matas, Tomas Svoboda, “Tracking by an
optimal Sequence of Linear Predictors”, IEEE Transactions on pattern analysis and machine
intelligence, vol. 31, No. 4, April 2009.