novas metodologias para análise de órgãos e músculos a...
TRANSCRIPT

Novas Metodologias para Análise de órgãos e músculos a partir de imagens médicas – Aplicações à Cavidade Pélvica
Feminina
Alex Fernando de Araujo
Relatório Planeamento de Investigação
Programa Doutoral em Engenharia Informática
Orientador: João Manuel R. S. Tavares (DEMec/FEUP)
Julho de 2010

ResumoA análise de órgãos em imagens médicas é muito importante para aplicação em
medicina, quando realizada de forma robusta, eficiente e automática, tornando-se uma
ferramenta útil no auxílio ao diagnóstico médico e na avaliação de planos de tratamento.
Além disso, a construção de modelos geométricos adequados de órgãos a partir de imagens é
requerido pelos sistemas computacionais que realizam a simulação dos órgãos de forma
realística e melhorada.
Disfunções nos órgãos da cavidade pélvica feminina podem causar doenças como
incontinência urinária e fecal. A visualização dos órgãos é feita através de exames por
imagens, como por exemplo ressonância magnética, tomografia computadorizada e ultra-
sonografia. Métodos para analisar e processar imagens médicas têm sido propostos, com
várias aplicações. No entanto, ainda não há metodologias computacionais eficientes e
automatizadas para realizar a análise de imagens dos órgãos da cavidade pélvica feminina.
Propõe-se neste projecto o desenvolvimento de metodologias para a análise
automática, robusta e eficiente de órgãos em imagens médicas, incluindo a reconstrução de
modelos geométricos 3D adequados para os mesmos. Na análise de imagens, será considerada
a segmentação de órgãos com formas e topologias complexas, o seu seguimento, alinhamento
e emparelhamento. Neste projecto pretende-se adoptar imagens da cavidade pélvica feminina.
A análise robusta e automática de órgãos em imagens e a construção de modelos
geométricos adequados para os mesmos apresentam questões complexas ainda por responder.
Este projecto irá superar algumas dessas questões pela adoção de princípios biomecânicos na
modelação dos órgãos em análise.
Com este projecto pretende-se contribuir com o desenvolvimento de novas
metodologias que permitam um melhor entendimento sobre o funcionamento dos órgãos da
cavidade pélvica e suas disfunções. Estas novas metodologias também servirão para auxiliar
no treinamento de profissionais da área médica, bem como em cirurgias auxiliadas por robôs.
2

ÍndiceCapítulo 1 – Introdução ............................................................................................................... 4 Capítulo 2 - Estado da arte .......................................................................................................... 8
2.1 - Introdução ....................................................................................................................... 8 2.2 – Segmentação ................................................................................................................. 9
2.2.1 – Algoritmos baseados em limiar ............................................................................. 10 2.2.2 – Algoritmos baseados em técnicas de agrupamento (clustering) ........................... 14 2.2.3 – Algoritmos baseados em modelos deformáveis .................................................... 15
2.3 – Seguimento (Tracking) ................................................................................................ 19 2.4 – Emparelhamento e alinhamento de imagens ................................................................ 20
Capítulo 3 – Proposta de Tese ................................................................................................... 22 3.1 – Objectivos .................................................................................................................. 22 3.2 – Questão de investigação ............................................................................................... 23 3.3 – Hipótese de pesquisa .................................................................................................... 23
Capítulo 4 – Plano de trabalho .................................................................................................. 24 4.1 – Descrição das tarefas .................................................................................................... 24 4.2 – Cronograma .................................................................................................................. 27 4.3 – Implicações da Pesquisa ............................................................................................... 27
Bibliografia ............................................................................................................................... 29 Apêndice A ............................................................................................................................... 35
3

Capítulo 1 – Introdução
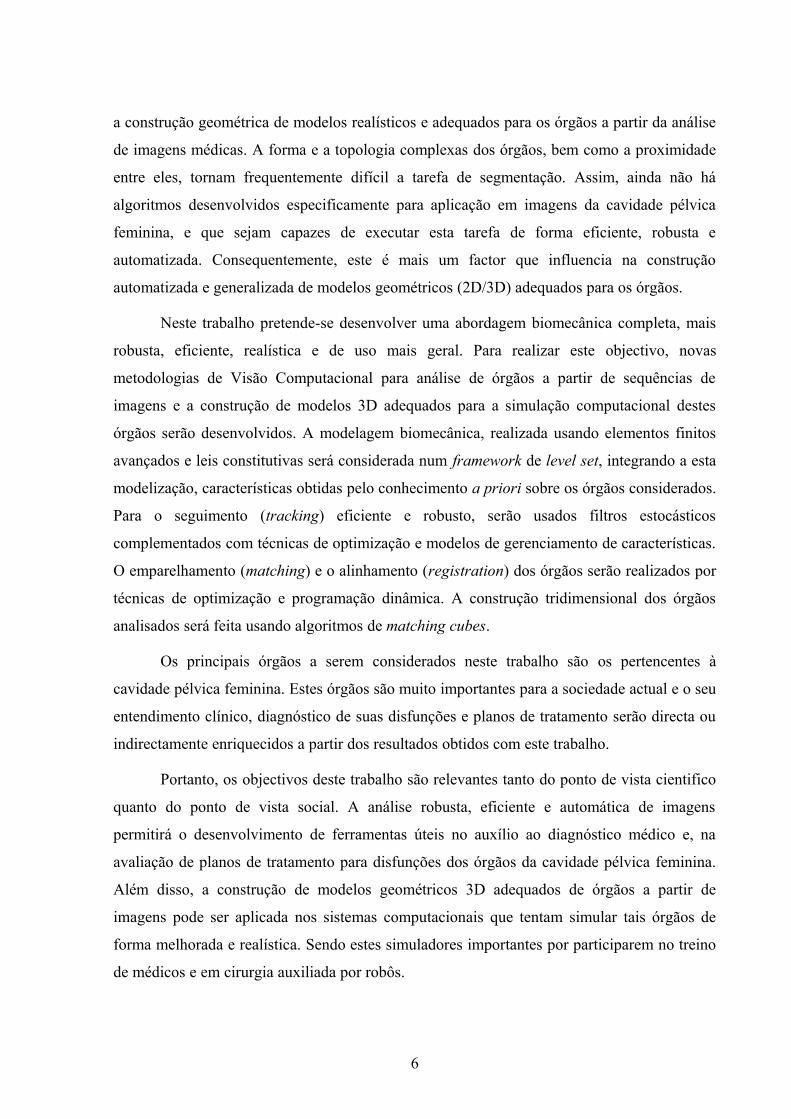
A análise de órgãos e músculos a partir de imagens médicas, geralmente envolve
processar imagens com baixa resolução, como pode-se observar na Figura 1.1. Nota-se na
imagem desta figura, a região central (destacada pelo rectângulo amarelo) é composta por
áreas de baixo contraste e algumas transições suaves, o que pode gerar erros durante a
extração de características dos órgãos representados nesta parte da imagem. Além disso,
alguns órgãos possuem forma e topologia complexas. As imagens mais comumente usadas
neste tipo de análise são obtidas através de exames de tomografia computadorizada,
ressonância magnética e ultra-sonografia.
Figura 1.1: Exemplo de uma imagem da cavidade pélvica feminina de ressonância
magnetica.
4

O funcionamento dos órgãos humanos está sujeito a problemas causados por doença
ou mesmo pela idade. Disfunções nos órgãos da cavidade pélvica feminina, por exemplo,
geram transtornos que afectam mulheres de todo o mundo e de diferentes idades. Estima-se
por exemplo, que entre 30% e 50% das mulheres européias e norte-americanas são afectadas
por incontinência urinária [37]. A elaboração de planos de tratamento, sejam cirúrgicos ou
não, para estas disfunções requer um conhecimento elevado e detalhado das disfunções
ocorridas, bem como do funcionamento normal desses órgãos. Usando apenas imagens de
exames de tomografia computadorizada, ressonância magnética ou ultra-sonografia, é difícil
verificar a maneira como um determinado órgão está funcionando, porque às vezes estes
exames geram imagens bidimensionais, onde cada imagem representa apenas uma “fatia”
(slice) dos órgãos, em um determinando instante de tempo. Além disso, o fato de cada slice
possuir informações sobre várias estruturas dificulta a localização e a definição da forma de
cada órgão.
O primeiro passo para analisar estas imagens, é identificar as regiões que pertencem
aos órgãos de interesse. Fazer tal identificação manualmente demanda muito tempo ao
proffisional de saude, e não é viável devido ao grande número de imagens que são geradas por
estes exames. Para ajudar esta tarefa, têm sido propostos métodos computacionais para
realizar a extracção de regiões características de imagens médicas, usando diferentes
conceitos [37]. No entanto, a baixa resolução de algumas imagens e a forma complexa dos
órgãos, são factores que interferem na eficiência e qualidade dos resultados retornados pelos
métodos computacionais, e constituem problemas que ainda precisam ser superados. Além
disso, quando se trata da análise de órgãos, o ideal é ter a visualização de modelos
geométricos tridimensionais (3D) destes órgãos, construídos a partir das imagens
bidimensionais (2D) obtidas durante os exames. Assim, torna-se possível o entendimento das
funcionalidades fisiológicas destas estruturas, permitindo detectar mais facilmente as
disfunções ocorridas, definir planos de tratamento mais adequados e construir simuladores
médicos realistas para serem usados em treinamento médico.
A análise de órgãos e músculos a partir de imagens médicas, como de ressonância
magnética e tomografia computadorizada, envolve várias áreas de conhecimento de
Processamento e Análise de Imagem. Dentre as principais técnicas de análise de imagens
usadas na área da imagem médica, pode-se destacar a segmentação, o seguimento,
alinhamento e emparelhamento de imagens. É desejável que todas as etapas envolvidas no
tratamento computacional das imagens sejam robustas, eficientes e automáticas, para permitir
5
a construção geométrica de modelos realísticos e adequados para os órgãos a partir da análise
de imagens médicas. A forma e a topologia complexas dos órgãos, bem como a proximidade
entre eles, tornam frequentemente difícil a tarefa de segmentação. Assim, ainda não há
algoritmos desenvolvidos especificamente para aplicação em imagens da cavidade pélvica
feminina, e que sejam capazes de executar esta tarefa de forma eficiente, robusta e
automatizada. Consequentemente, este é mais um factor que influencia na construção
automatizada e generalizada de modelos geométricos (2D/3D) adequados para os órgãos.
Neste trabalho pretende-se desenvolver uma abordagem biomecânica completa, mais
robusta, eficiente, realística e de uso mais geral. Para realizar este objectivo, novas
metodologias de Visão Computacional para análise de órgãos a partir de sequências de
imagens e a construção de modelos 3D adequados para a simulação computacional destes
órgãos serão desenvolvidos. A modelagem biomecânica, realizada usando elementos finitos
avançados e leis constitutivas será considerada num framework de level set, integrando a esta
modelização, características obtidas pelo conhecimento a priori sobre os órgãos considerados.
Para o seguimento (tracking) eficiente e robusto, serão usados filtros estocásticos
complementados com técnicas de optimização e modelos de gerenciamento de características.
O emparelhamento (matching) e o alinhamento (registration) dos órgãos serão realizados por
técnicas de optimização e programação dinâmica. A construção tridimensional dos órgãos
analisados será feita usando algoritmos de matching cubes.
Os principais órgãos a serem considerados neste trabalho são os pertencentes à
cavidade pélvica feminina. Estes órgãos são muito importantes para a sociedade actual e o seu
entendimento clínico, diagnóstico de suas disfunções e planos de tratamento serão directa ou
indirectamente enriquecidos a partir dos resultados obtidos com este trabalho.
Portanto, os objectivos deste trabalho são relevantes tanto do ponto de vista cientifico
quanto do ponto de vista social. A análise robusta, eficiente e automática de imagens
permitirá o desenvolvimento de ferramentas úteis no auxílio ao diagnóstico médico e, na
avaliação de planos de tratamento para disfunções dos órgãos da cavidade pélvica feminina.
Além disso, a construção de modelos geométricos 3D adequados de órgãos a partir de
imagens pode ser aplicada nos sistemas computacionais que tentam simular tais órgãos de
forma melhorada e realística. Sendo estes simuladores importantes por participarem no treino
de médicos e em cirurgia auxiliada por robôs.
6
Este trabalho está organizado da seguinte forma: no capítulo seguinte, apresenta-se
uma revisão bibliográfica sobre as áreas de pesquisas abordadas neste projecto. No capítulo 3,
apresenta-se a proposta de Tese a ser desenvolvida, abordando os objectivos do projecto, a
questão de investigação envolvida, bem como a hipótese de pesquisa para este projecto de
Doutoramento. No último capítulo, apresenta-se um plano de trabalho detalhado do projecto,
com um cronograma e a descrição de todas as tarefas envolvidas. No apêndice A são
apresentadas algumas conferências e revistas, com suas respectivas classificações, bem como
alguns grupos de pesquisa em Processamento de Imagem e Visão Computacional que
trabalham com a análise de imagens médicas.
7
Capítulo 2 - Estado da arteNeste capítulo apresenta-se uma revisão sobre os principais trabalhos e métodos
relacionados com o tema central deste projecto de Douotoramento.
2.1 - IntroduçãoA modelização de estruturas em imagens é uma das áreas com os avanços mais
significantes ocorridos nos últimos anos [4, 30, 57, 63, 73, 74]. Esta modelização tem como
objectivos principais [73, 74]: a segmentação [43, 57, 74], que é a identificação de estruturas
numa imagem; o seguimento e a análise temporal de movimento/deformação de estruturas ao
longo de uma sequência de imagens [61, 63, 73, 74]; a reconstrução de estruturas 3D a partir
de estruturas representadas em imagens 2D [3, 4, 12, 68]; emparelhamento entre estruturas [4,
43, 58, 76]; a simulação de comportamento temporal de estruturas [58]; a codificação de
forma das estruturas [4, 48, 58, 73, 74]; entre outras.
Usualmente, alguns destes propósitos aparecem associados. Por exemplo, a análise
temporal da deformação de estruturas a partir de imagens, usualmente envolve tarefas de
segmentação de estruturas em cada imagem, de emparelhamento entre as estruturas
segmentadas, e finalmente o seguimento temporal e análise das deformações.
As aplicações de Visão Computacional existentes envolvendo a modelização de
estruturas são numerosas [73, 74]. Por exemplo: o reconhecimento e o seguimento de
veículos, o reconhecimento de caracteres, reconhecimento, seguimento e análise de
expressões da face humana, compressão e codificação de dados, reconstrução 3D de objectos
e seguimento e análise de movimento humano e animal.
No entanto, as áreas de aplicação mais relevantes da modelização de estruturas em
imagens são encontradas em medicina [3, 4, 38, 43, 63, 69, 73, 74, 75, 76]. Por exemplo: a
reconstrução 3D de estruturas anatómicas externas a partir de imagens 2D [3]; a análise do
sistema vocal em sistemas de reabilitação [76]; a segmentação, reconstrução e análise de
movimentos do coração e outros órgãos do sistema cardiovascular [68, 75]; a segmentação e
análise de imagens de próstata; a segmentação, reconstrução e análise de órgãos da cavidade
pélvica [21, 36, 37, 47, 56, 63], de pulmões [69], de intestino, de ventrículos do cérebro, entre
8
outras; e a análise de estruturas em imagens de pedobarografia dinâmica, isto é, de imagens
que permite verificar a interacção da planta do pé com a tarefa de caminhar [58, 73, 74].
As metodologias de modelização existentes em Visão Computacional para estruturas
em imagens são baseadas, usualmente nas abordagens geométrica, estatística e física [43, 73,
74].
A modelização baseada na abordagem geométrica tem as vantagens de ser simples e
gerar modelos simples, sendo assim uma abordagem computacionalmente rápida; no entanto,
ela tem a desvantagem de ser construída em função das estruturas em análise e, assim, tendo
aplicação restrita, bem como o fato de que não consideram o comportamento físico das
estruturas, [43, 73, 74].
Por outro lado, a modelização estatística considera as variações geométricas que as
estruturas apresentam em um conjunto de imagens. Nesta abordagem são construídos modelos
em função do comportamento que estas estruturas apresentam dentro do conjunto de imagens
abordado. Portanto, os modelos obtidos têm a desvantagem de aplicação ser restrita, tanto em
relação às estruturas modeladas quanto em relação aos comportamentos das mesmas [43, 73,
74].
Por fim, a metodologia baseada em abordagens físicas é mais complexa que as
anteriores, e por tanto, demandam mais processamento computacional. No entanto, possui a
vantagem de ser de uso mais geral, não exigir conhecimento a priori sobre as estruturas, e
considerar seus comportamentos físicos pela adopção de princípios físicos e, portanto, são
mais realísticos [43, 73, 74].
Recentemente, abordagens baseadas em métodos level set para análise de estruturas
em imagens têm ganho especial atenção, [37, 66, 68, 79]. Estas abordagens permitem
combinar conhecimento a priori sobre as estruturas a serem consideradas [66, 75].
2.2 – Segmentação A segmentação consiste em extrair objectos ou características a partir de imagens.
A precisão deste processo depende de factores como a quantidade de ruído presente, o
contraste das imagens, a textura presente e a variação dos níveis de cizento ou de cor nas
mesmas. Segmentar imagens com precisão é uma tarefa difícil e importante no processamento
e análise de imagens, pois pode determinar o sucesso ou falha dos procedimentos posteriores.
9

Zhen Ma e colaboradores propuseram em [37], classificar algoritmos de
segmentação para aplicação em imagens da cavidade pélvica feminina de acordo com suas
características principais. De acordo com esta proposta, os algoritmos podem ser divididos em
três categorias:
• algoritmos baseados em limiar;
• algoritmos baseados em técnicas de agrupamento (clustering); e
• algoritmos baseados em modelos deformáveis.
2.2.1 – Algoritmos baseados em limiarOs métodos baseados nestes algoritmos executam a segmentação de uma imagem
usando informações como intensidade ou o gradiente dos pixels da imagem, para definir quais
pertencem ao fundo e quais pertencem aos objectos. Para tal, define-se intervalos de valores
limitados por limiares, onde todos os pixels são analisados e separados de acordo estes
intervalos. Os limiares podem ser definidos de forma manual, a partir da análise visual da
imagem de entrada, ou automaticamente através da combinação de características da mesma
imagem [52]. A definição automática do limiar é desejada pela maioria das aplicações, para
permitir o desenvolvimento de métodos de análise automática.
Os algoritmos baseados em limiar podem ser classificados em baseados em arestas,
baseados em regiões e híbridos. Esta distinção ocorre de acordo com as informações usadas
para definir o limiar. A primeira classe destes algoritmos (baseados em arestas) usa limiares
relacionados com informações das arestas dos objectos, usando a intensidade dos pixels para
encontrar os pontos das arestas dos objectos representados na imagem. Os operadores
Laplaciano [28], de Canny [13, 28], de Sobel [28] e os algoritmos baseados em transformada
Wavelet [19] são exemplos de algoritmos baseados em arestas. Estes métodos estão
geralmente associados a uma etapa de pré-processamento para redução da interferência causa
por ruído. Na Figura 2.1b tem-se o resultado da aplicação do algoritmo de Canny sobre a
imagem da Figura 2.1a. Nota-se que neste exemplo, os contornos são descontínuos, gerando
erros na extracção das estruturas presenets na imagem original. Um dos factores que causam
esta descontinuidade é a presença de ruído na imagem original.
10

Figura 2.1: Exemplo da aplicação do detector de Canny (b) sobre uma imagem de
ressonância magnética (a) (retirado de [37]).
Os algoritmos baseados em regiões usam a similaridade entre os pixels da região
interna dos objectos, agrupando os pixels com características semelhantes em regiões
distintas. Os métodos baseados em crescimento de regiões são exemplos desta categoria de
algoritmos [37]. O procedimento de crescimento de regiões visa agrupar o maior número de
pixels possível em regiões maiores, de acordo com um critério de crescimento pré-definido. A
ideia básica é considerar um pixel semente, e ir agrupando a ele os seus vizinhos que possuam
características semelhantes às suas. Quando não tiverem mais pontos com as características da
semente conectados àquela região, define-se uma outra semente que ainda não tenha sido
percorrida e inicia-se o processo novamente obtendo-se uma nova região [16]. A selecção do
conjunto de sementes pode ser baseada na natureza do problema. Enquanto isso, a selecção da
característica usada para a escolha dos vizinhos a serem adicionados à região do pixel
semente, ou seja, o critério de similaridade, depende do problema analisado e de
características da imagem, como por exemplo, se a imagem de entrada é em níveis de
cinzento ou colorida [28].
Na Figura 2.2 tem-se um exemplo da aplicação de um algoritmo de crescimento de
regiões. Assim, na Figura 2.2a tem-se a imagem original e na Figura 2.2b alguns contornos
obtidos com o crescimento de regiões e sobrepostos sobre a imagem original.
11

Figura 2.2: Exemplo da aplicação do algoritmo de crescimento de regiões (b) na imagem (a)
(retirado de [37]).
Os algoritmos híbridos combinam características dos algoritmos baseados em
arestas e em regiões. Os algoritmos de watershed são exemplos de métodos híbridos [9, 29],
combinando informações sobre a intensidade e sobre o gradiente, além de usar técnicas de
morfologia matemática para segmentar as imagens. Proposta por Digabel e Lantuéjoul [23] e
melhorada por Beucher e Lantuéjoul [9], a segmentação por watershed é um método de
segmentação muito utilizado. Usando os conceitos de “inundação de relevos topográficos”,
essa abordagem considera que uma imagem pode ser formada como um relevo composto de
“vales” representando as áreas mais escuras, e “montanhas” representando as mais claras.
Pode ocorrer dois tipos de “inundação”: uma decorrente da “água” vinda de cima, como se
fosse derramada sobre o “relevo”, e uma outra como consequência de “furos nas regiões mais
baixas”, por onde a “água entraria após mergulhar o relevo num reservatório de água” [65].
A proposta inicial para a técnica de watershed considera que a “inundação” acontece
com “água” vinda de cima. Quando uma “gota de água cair sobre a superfície, esta vai
escorrer para o lado mais íngreme até chegar ao fundo do vale (região de mínimo)”. A região
formada por todos os pontos da superfície onde as “gotas escorrem para a mesma região de
mínimo é chamada de represa”. Por outro lado, todos os pontos onde a “gota de água cair e
não escorrer, formam as fronteiras das represas e são chamados de watershed, ou divisores de
água”. Ao ocorrer a “inundação, águas de diferentes bacias se encontram nas linhas divisoras
12

de águas, e o processo de inundação é interrompido quando a água atinge o pico máximo do
relevo” [45]. Esta técnica é muito usada para aplicação em imagens de radiografia, tomografia
computadorizada, entre outras.
Ao ser aplicado em imagens, o método de watershed pode também simular
a“inundação em uma região”, baseando-se na escolha de marcadores rotulados na imagem, a
partir dos quais são definidas as região que pertencem aos objectos de interesse e ao fundo.
Escolhendo-se rótulos distintos, é possível detectar vários objectos simultaneamente [10].
Esta técnica é geralmente aplicada sobre o gradiente morfológico de uma imagem, devido ao
fato deste operador realçar os contornos da mesma, facilitando o processo de segmentação.
Se a imagem for muito ruidosa, pode acontecer de gerar um número excessivo de
mínimos locais decorrente da sensibilidade do operador gradiente à presença de ruídos. Se
isso acontecer, pode resultar em uma super-segmentação da imagem, gerando um número
excessivo de regiões e dificultando a identificação correta das áreas de interesse. Algumas
adaptações têm sido propostas para reduzir o problema da super-segmentação, como em [29,
46], onde foi proposto a marcação de pontos por onde inicia-se o alagamento, passando o
método watershed a ser controlado por sementes. Um exemplo da aplicação do watershed
pode ser visto na Figura 2.3b.
Figura 2.3: Imagem original (a) e imagem segmentada por watershed (b) (retirado de [37]).
13
2.2.2 – Algoritmos baseados em técnicas de agrupamento (clustering)Algoritmos baseados em técnicas de agrupamento são muito utilizados em
segmentação de imagens médicas e podem ser divididos em duas classes principais:
supervisionados e os não supervisionados [37]. Alguns algoritmos de classificação
supervisionados são: o KNN (k-nearest neighbour- ou k- Vizinhos mais próximos) [77], que
usa a sua fase de treinamento para armazenar vetores de características e rótulos de classes,
usando um sistema de voto para fazer a classificação; o ML (maximum likelihood – ou
probabilidade máxima) [67], que identifica, durante o seu treinamento, os parâmetros a serem
usados por modelos estatísticos, sendo estes parâmetros avaliados pela maximização da
função de probabilidade do modelo; e o ANN supervisionados (Artificial Neural Networks –
ou Redes Neurais Artificiais) [8], que são ferramentas de modelização de dados estatísticos e
não lineares, usando pesos obtidos a partir da informação extraída do conjunto de
treinamento, para definir as características a serem extraídas no processo de segmentação.
Entre os algoritmos não supervisionados, pode-se citar: o CM (C-Means) e FCM
(Fuzzy C-Means)[72], que visa minimizar a variação intra-grupos através de interacções, onde
durante estas iterações os pixels não classificados são adicionados ao grupo, cuja distância
entre o pixel e o centróide do grupo é a menor; e os ANN não supervisionados [6], que
baseiam-se em aprendizado não supervisionado, onde os pesos são definidos através de
treinamento com regras de aprendizado, como por exemplo a rede neural de Hopfields [18] e
aprendizado de Hebbian [11].
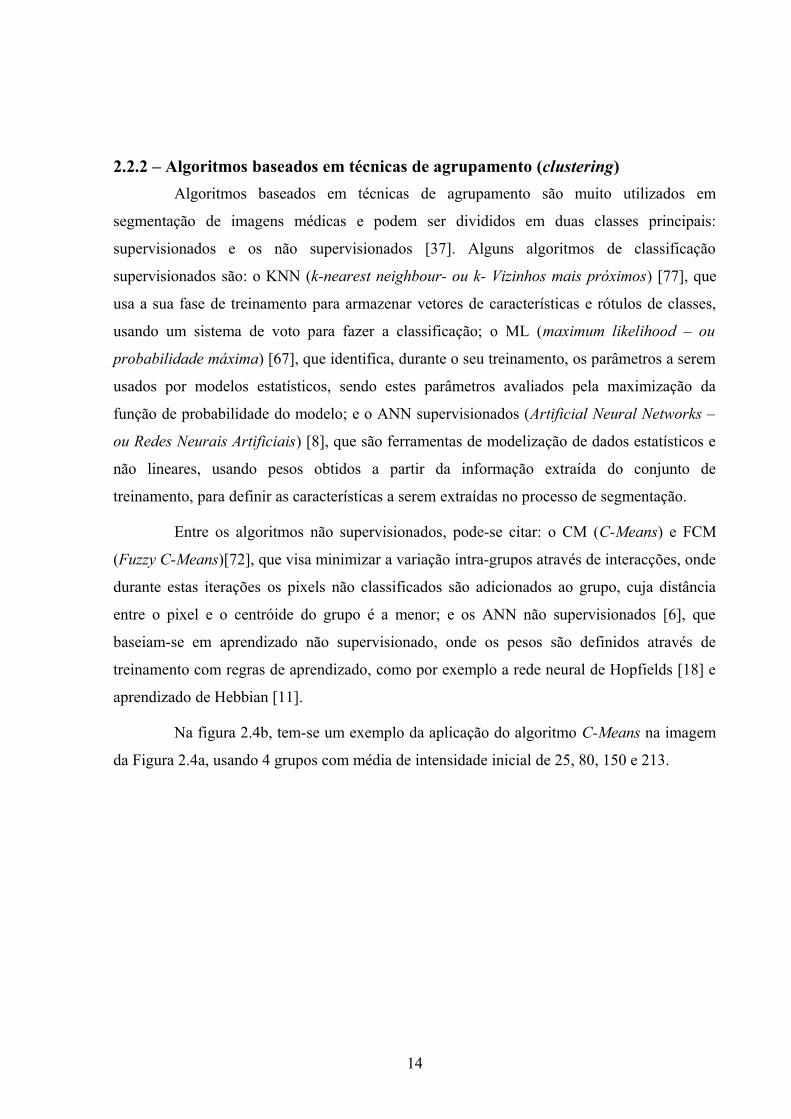
Na figura 2.4b, tem-se um exemplo da aplicação do algoritmo C-Means na imagem
da Figura 2.4a, usando 4 grupos com média de intensidade inicial de 25, 80, 150 e 213.
14
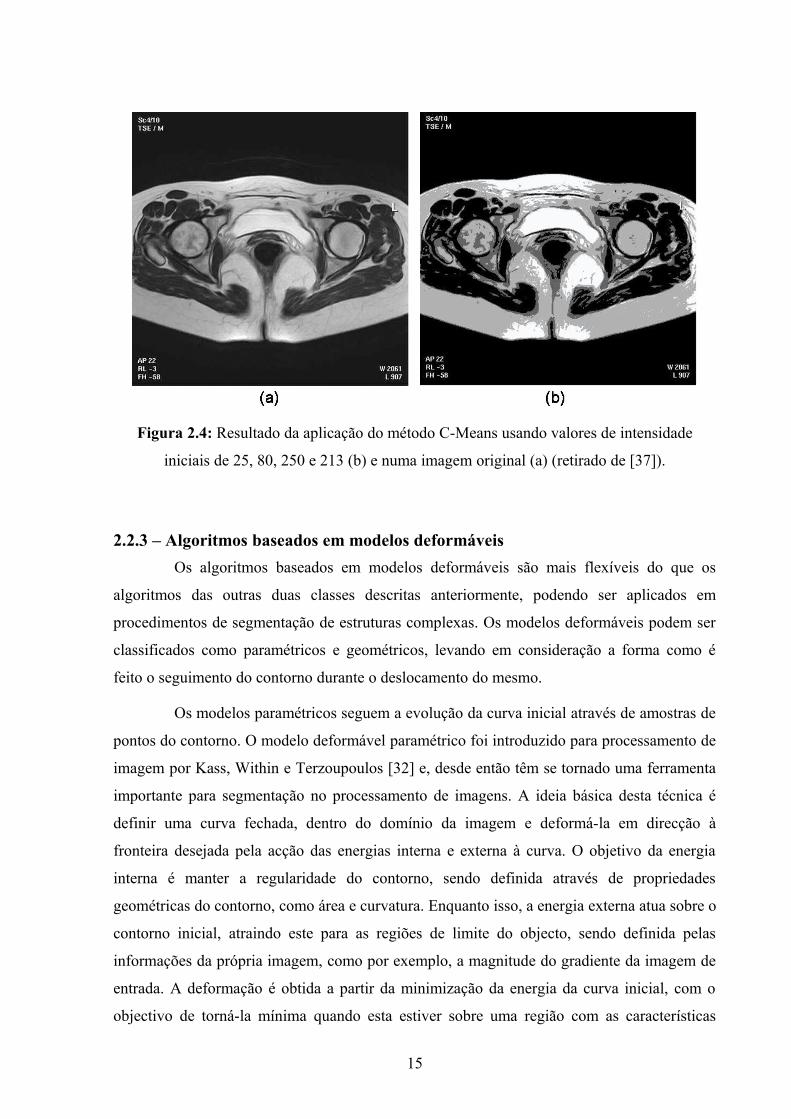
Figura 2.4: Resultado da aplicação do método C-Means usando valores de intensidade
iniciais de 25, 80, 250 e 213 (b) e numa imagem original (a) (retirado de [37]).
2.2.3 – Algoritmos baseados em modelos deformáveisOs algoritmos baseados em modelos deformáveis são mais flexíveis do que os
algoritmos das outras duas classes descritas anteriormente, podendo ser aplicados em
procedimentos de segmentação de estruturas complexas. Os modelos deformáveis podem ser
classificados como paramétricos e geométricos, levando em consideração a forma como é
feito o seguimento do contorno durante o deslocamento do mesmo.
Os modelos paramétricos seguem a evolução da curva inicial através de amostras de
pontos do contorno. O modelo deformável paramétrico foi introduzido para processamento de
imagem por Kass, Within e Terzoupoulos [32] e, desde então têm se tornado uma ferramenta
importante para segmentação no processamento de imagens. A ideia básica desta técnica é
definir uma curva fechada, dentro do domínio da imagem e deformá-la em direcção à
fronteira desejada pela acção das energias interna e externa à curva. O objetivo da energia
interna é manter a regularidade do contorno, sendo definida através de propriedades
geométricas do contorno, como área e curvatura. Enquanto isso, a energia externa atua sobre o
contorno inicial, atraindo este para as regiões de limite do objecto, sendo definida pelas
informações da própria imagem, como por exemplo, a magnitude do gradiente da imagem de
entrada. A deformação é obtida a partir da minimização da energia da curva inicial, com o
objectivo de torná-la mínima quando esta estiver sobre uma região com as características
15

pretendidas para extracção. Por outras palavras, o resultado deste processo retorna
informações sobre a forma e a posição da borda dos objectos na imagem. Portanto, estes
modelos têm grande aplicação em segmentação de imagens médicas [39, 70].
A diferença entre os algoritmos desta classe de métodos deformáveis está na
definição das forças externas. No entanto, estes algoritmos seguem o mesmo raciocínio do
algoritmo proposto por Kass e colaboradores. Nesta abordagem, um modelo deformável é um
contorno embutido em uma imagem, que pode ser representada parametricamente como v(s)
= (x(s); y(s)), onde s Є [0, 1] e é o domínio paramétrico de uma imagem I no plano (x; y) Є
R2. Sua forma final corresponde à mínima energia do funcional em [32] e é definido como:
∫+∫∫ +=1
0
1
0
1
0
int ,))(())(())(( dssvEdssvEdssvEE resimagemsnake
onde Eint é a energia interna referente à deformação da curva, regularizando e quantificando a
deformação de um contorno elástico. Eimagem é a energia dependente da imagem onde o
contorno activo está inserido e Eres é a energia obtida por alguma restrição externa.
Alguns autores como Ballerini [5], Dumitras [24] e Xu [78, 79] utilizam o termo
energia externa (Eext) para representar todas as energias provenientes da imagem. Assim, a
Equação 1 passa a:
∫+∫=1
0
1
0
int .))(())(( dssvEdssvEE extsnake
Os modelos deformáveis paramétricos são sensíveis às condições de inicialização,
não modificando a topologia da curva inicial durante o processo de deformação desta.
Portanto, estes modelos são mais eficientes para as situações onde a curva inicial é definida
próximo da região de interesse, e quanto mais semelhante for a topologia da curva inicial em
relação à da borda desejada.
Algumas abordagens têm sido propostas na tentativa de amenizar este problema dos
algoritmos paramétricos [27 , 78, 79]. Em [79], por exemplo, Xu e Prince propuseram o uso
do fluxo do vetor gradiente (GVF) para actuar como força externa no modelo deformável. A
ideia desta abordagem é aumentar a faixa de actuação da força externa, estendendo-a para
longe dos objectos e guiando a curva em direcção à sua fronteira. Assim, as linhas de força
deixam de convergir para as bordas dos objectos apenas na sua vizinhança. O campo vectorial
do GVF pode ser definido como:
16
(1)
(2)

)],,(),,([),( yxvyxuyxV =
e minimiza a energia do funcional:
∫ ∫ ∇−∇++++= ,||||)( 222222 dxdyIvIvvuuE yxyxµ
onde I∇ é uma função gradiente da imagem de entrada e µ é um parâmetro de equilíbrio
entre o primeiro e segundo termos da equação.
De acordo com a análise feita por Xu e Prince, quando o valor da expressão || I∇ ,
presente na Equação 4, for pequeno, a energia é determinada pelas derivadas parciais dos
campos do vetor. Caso contrário, o segundo termo torna-se dominante na equação, e pode ser
minimizado adoptando: Iv ∇= .
Os modelos deformáveis geométricos possibilitam que sejam efetuadas mudanças na
topologia da curva inicial durante a deformação desta. São modelos baseados nos métodos
level set [51, 80], onde a deformação da curva inicial é realizada de acordo com características
geométricas do contorno do objecto e dirigida por uma função. Esta função pode ser
representada na forma de uma equação diferencial parcial, em que uma função de velocidade
controla a deformação, definindo o local de parada da curva a partir de informações obtidas
da imagem, como por exemplo, o gradiente ou o divergente desta.
O modelo level set foi proposto inicialmente por Osher e Sethian [51], e pode ser
descrito como [37]:
,0|| =∇+ φφ Ft
onde:
• 0),(,0)0,,( Lyxyx ∈=φ ;
• φ é a função level set;
• F é a função velocidade; e
• L0 é a curva inicial.
A função de velocidade dos modelos deformáveis paramétricos pode ser definida
directamente ou através da energia do funcional [36]. Malladi e colaboradores propuseram
uma função de velocidade definida a partir do gradiente da imagem [41, 42]. Neste caso, à
17
(3)
(4)
(5)
medida que a curva deformada se aproxima da região de limite do objecto, a magnitude do
gradiente aumenta, reduzindo o valor da velocidade e tornando a curva mais estável. No
entanto, esta dependência do gradiente da imagem torna este método pouco eficiente para
imagens com muito ruído ou desfocadas, podendo acontecer da deformação parar fora do
lugar adequado [37]. Para imagens com estas características o critério de parada deve ser
cuidadosamente escolhido, e geralmente é diferente para cada tipo de imagem processada.
Para amenizar este problema, pode-se incorporar parâmetros para aumentar a resistência nas
áreas da borda [34].
O algoritmo de contorno activo geodésico define a velocidade da deformação
através da energia de um funcional baseado na equação de Euler-Lagrange, e a curva é
incorporada numa função level set. Assim como no modelo paramétrico, o algoritmo de
contorno activo geodésico é um problema de optimização, estreitando a relação entre os
modelos paramétrico e geométrico, mas flexibilizando a deformação da curva inicial e
permitindo alteração da topologia durante o movimento da curva sobre a imagem. Este
algoritmo foi proposto inicialmente por Caselles, Kimmel e Sapiro [15] e tem sido muito
utilizado para segmentar imagens de ressonância magnética e tomografia computadorizada.
Na figura 2.5 tem-se os resultados obtidos a partir da aplicação dos algoritmos de
Mallid (Figura 2.5b) e do contorno activo geodésico (Figura 2.5c), sobre a imagem da Figura
2.5a. Nota-se na Figura 2.5 que os contornos são regulares, sofrendo menos interferência de
ruídos presentes na imagem.
Figura 2.5: Contornos obtidos pelo algoritmo de Mallid (b) e resultado do algoritmo de
contorno activo geodésico (c) a partir de imagem original (a) (retirado de [37]).
Os modelos de contornos activos geométricos tentam aumentar a eficiência dos
métodos de segmentação, tornando-os menos sensíveis à presença de ruídos nas imagens de
18
entrada. Em [17, 54] tem-se exemplos de propostas de métodos de segmentação baseados
nesta abordagem. Leveton e colaboradores incorporam técnicas estatísticas de conhecimento
a priori ao modelo de contorno activo. Paragios combina o campo do fluxo do vetor gradiente
com o modelo de contorno activo geodésico para eliminar a dependência das condições de
inicialização. Chan e Vese propuseram um método de contorno ativo geométrico baseado na
energia do funcional de Mumford-Shah, extraindo os objectos através da minimização das
variações de intensidade das regiões interna e externa do contorno.
2.3 – Seguimento (Tracking)O seguimento de objectos num conjunto de imagens tem-se tornado uma área de
pesquisa relevante, devido ao aumento no desejo de usar técnicas computacionais para
realizar a análise de movimento/deformação de estruturas representadas ao longo do tempo.
Esta técnica pode ser elaborada usando diferentes metodologias, envolvendo usualmente, o
emparelhamento de informações visuais, tais como pontos, linhas e regiões, [60]. Esta técnica
pode ser aplicada em medicina, por exemplo, para análise de movimentos/deformações de
órgãos [53, 55].
Assim como na etapa de segmentação, a complexidade da forma e da topologia das
estruturas a serem processadas, é um factor que dificulta a elaboração de métodos
computacionais para realizar a tarefa de seguimento. Além disso, o seguimento simultâneo de
várias estruturas, as oclusões e a presença de ruídos nas imagens podem interferir na
elaboração de metodologias eficientes e robustas [60].
Várias abordagens para realizar o seguimento de estruturas têm sido propostas,
geralmente considerando simplificações para obter um equilíbrio entre precisão e custo
computacional. Redes Bayesianas, por exemplo, têm sido aplicadas para realizar o
seguimento de estruturas que apresentam oclusões, descartando informações dos estágios
anteriores para tomada de decisões, mantendo a complexidade da rede em níveis razoáveis
[31]. Noutras abordagens, os parâmetros descritivos do ambiente são definidos através de
filtros estocásticos e representações probabilísticas para definir os indicadores de movimento
de uma estrutura [35]. Em [59] usou-se o filtro de Kalman combinado com técnicas de
optimização para incrementar a robustez do método para situações de oclusão e movimentos
não-lineares.
19

2.4 – Emparelhamento e alinhamento de imagensO emparelhamento é o processo de estabelecimento de correspondências entre
estruturas, geralmente localizadas e extraídas de imagens pela etapa de segmentação. Na
busca por metodologias de emparelhamento adequadas, várias abordagens têm sido propostas.
O emparelhamento modal [14] tenta reconhecer os objetos através de suas simetrias
generalizadas. O emparelhamento baseado em shape context [7] calcula as correspondências
entre pontos de duas estruturas usando um descritor denominado shape context, que verifica a
distribuição dos pontos tomados como referência em relação aos demais pontos. Nesta
abordagem, a semelhança entre as formas é definida pela similaridade do descritor, sendo que
um descritor similar implica em formas similares. Outro descritor que pode ser usado é o
shape signature [49], que utiliza uma função derivada do contorno do objeto, como a
distância do centróide para definir a assinatura da estrutura. Esta abordagem tem sido usada
para desenvolvimento de sistemas de reconhecimento de objetos em imagens de ambientes
complexos e com presença de oclusões parciais [26]. Outra abordagem adotada para o
emparelhamento é o uso de critérios estocásticos [33].
As técnicas de alinhamento de imagens são adoptadas para realizar transformações
geométricas em uma região comum de imagens distintas, com o objectivo de representar estas
regiões com as mesmas coordenadas. O uso desta técnica torna possível comparar duas
estruturas homólogas em imagens diferentes. O alinhamento de imagens pode ser aplicado
para detectar variação em imagens capturadas em diferentes instantes de tempo, comparar
uma estrutura com uma base de dados, fazer reconhecimento automático de objectos, dentre
outras [81].
As abordagens de alinhamento aplicadas em imagens médicas (tanto 2D quanto eD)
têm ganhado atenção especial em processamento e análise de imagens. Desta forma, técnicas
computacionais para alinhamento de imagens também auxiliam no diagnóstico médico,
permitindo por exemplo, verificar variações em músculos e órgãos no decorrer do tempo. As
metodologias de alinhamento geralmente são baseadas na geometria, na intensidade e híbridas
(usando características geométricas e também de intensidade).
Nas metodologias baseadas na geometria pode-se ter: o alinhamento feito usando
correspondência entre pontos, onde os pontos usados podem ser marcas naturais ou artificiais
[40]; alinhamento usando os eixos principais; e alinhamento por aproximação pontual
iterativa [44], que realiza uma aproximação iterativa dos pontos ao modelo mais próximo.
Nos métodos de alinhamento baseados em intensidade pode-se usar a similaridade
entre pixels, onde o alinhamento é realizado através de optimização de uma medida de
20
similaridade de uma característica das imagens, como a própria intensidade ou o gradiente dos
pixels, por exemplo. Geralmente esta medida de similaridade é calculada a partir da soma dos
quadrados da diferença [50], da correlação cruzada [20, 40], da entropia conjunta [71, 22],
entre outras [40, 62]. Além disso, o alinhamento baseado em intensidades e pode ser realizado
no domínio da frequência de uma imagem, realizando as transformações a partir da correlação
entre as fases do espectro de frequência das imagens [1, 25, 64].
Nos métodos de alinhamento híbridos, as técnicas baseadas em geometria e em
intensidade são combinadas [1, 2]. Geralmente esta abordagem é dividida em dois passos: No
primeiro realiza-se um alinhamento grosseiro e aproximado das imagens, e em um segundo
passo, refina-se este alinhamento a partir do resultado retornado pelo passo anterior.
Um estudo detalhado sobre as técnicas de alinhamento de estruturas aplicadas em
imagens médicas é apresentado em [40, 62].
21

Capítulo 3 – Proposta de Tese
Neste capítulo apresenta-se a proposta de Tese de Doutoramento, abordando os seus
objectivos, as questões de investigação envolvidas e a hipótese de pesquisa associada.
3.1 – Objectivos O desenvolvimento de procedimentos robustos, eficientes, confiáveis e automáticos
para análise de órgãos humanos em imagens contribui significativamente para o entendimento
do funcionamento e para a simulação realística destes órgãos. O entendimento detalhado do
funcionamento dos órgãos é muito importante para auxiliar no diagnóstico médico e na
elaboração e avaliação de tratamentos. Além disso, a simulação realística de órgãos é vital
para melhorar o realismo de sistemas médicos virtuais, como do corpo humano, de
simuladores cirúrgicos e cirurgia robótica.
O principal caso de aplicação a ser considerado, denominado análise de órgãos da
cavidade pélvica, em particular da mulher, é muito importante para a sociedade, porque tal
estudo ajudará o diagnóstico e a definição de planos de tratamentos para disfunções da região
pélvica, tais como a incontinência urinária que afecta entre 30% e 50% das mulheres
européias e norte americanas, e a incontinência fecal que atinge cerca de 2.2% a 6.9% das
norte ameircanas e 15% da mulheres da Nova Zelândia [37]. Além disso, esta aplicação
impõe dificuldades e desafios tecnológicos, como a complexidade das formas e das topologias
das estruturas, que continuam a ser enfrentados pela comunidade científica.
Embora tenha grande importância, as abordagens actuais apresentam várias
limitações ao lidar com a complexidade das formas e topologias dos órgãos e,
consequentemente, sua aplicação se torna restrita. Este projecto está focado no sentido de
superar alguns dos inconvenientes existentes através da consideração de princípios
biomecânicos na modelização, bem como a integração de conhecimento a priori no
processamento das imagens. Os objectivos principais deste projecto são:
22
1) A partir de sequências de imagens médicas adquiridas de órgãos a serem analisados, a sua
análise temporal e a reconstrução da suaforma geométrica 3D serão realizadas usando
metodologiasatomáticas, eficientes e robustas.
2) Um modelo biomecânico para cada órgão será desenvolvido, baseado em elementos finitos
avançados e leis constitutivas, e integrado numa framework baseada em level set.
3) Para melhorar a análise e os modelos obtidos, conhecimentos a priori sobre os órgãos serão
considerados pela adopção de uma atlas anatómico da cavidade pélvica a ser construído.
Todas as metodologias e modelos desenvolvidos serão completamente testados e
validados por análise des especialistas clinicos e simulação computacional.
3.2 – Questão de investigaçãoDiante da complexidade da forma e da topologia dos órgãos e músculos humanos,
da baixa resolução das imagens médicas, das oclusões causadas por sobreposição de
estruturas e das elevadas deformações dos órgãos e músculos em relação ao tempo, a principal
questão de investigação que se tem neste trabalho é:
“Como analisar automaticamente, de forma eficiente e robusta e confiável, órgãos e músculos
da cavidade pélvica feminina a partir de imagens médicas, tais como ultra-sonografia,
ressonância magnética e tomografia computadorizada?”
3.3 – Hipótese de pesquisaOs problemas abordados na questão de investigação deste projeto serão superados através da
adoção de modelos baseados em level set para realizar a segmentação das imagens analisadas,
bem como o uso de princípios biomecânicos e elementros finitos avançados para a modelação
adequada dos órgãos em análise.
23

Capítulo 4 – Plano de trabalho
Neste capítulo apresenta-se a descrição das tarefas envolvidas nas etapas de
desenvolvimento do trabalho, bem como o cronograma do projecto de Doutoramento a ser
desenvolvido.
4.1 – Descrição das tarefasA primeira tarefa a ser considerada é o LEVANTAMENTO BIBLIOGRÁFICO (3
meses). Nesta etapa, efectua-se o levantamento, estudo e análise das metodologias e modelos
existentes que podem ser considerados na análise de órgãos em imagens médicas. Os
principais tópicos científicos a serem considerados são: modelização de órgãos em imagens,
com foco especial sobre as modelagens baseadas em princípios físicos; segmentação de
órgãos em imagens, com enfase em metodologias baseadas em level sets e conhecimento a
priori; seguimento de movimento de órgãos em sequências de imagens, especialmente nas
soluções baseadas em abordagens estocásticas; emparelhamento entre órgãos em imagens,
com interesse particular sobre o emparelhamento modal e técnicas de optimização;
alinhamento de órgãos em imagens, realizados usando princípios físicos, programação
dinâmica e optimização; reconstrução 3D de órgãos a partir de dados extraídos de imagens
2D; e sistemas de imagem médica usuais. Ao final da revisão, um artigo completo para
publicação em uma revista internacional será elaborado. No Apêndice A apresenta-se uma
relação das principais conferências e revistas relacionadas às áreas de Processamento de
Imagens, Visão Computacional, Computação Gráfica e análise de imagens médicas.
A segunda tarefa será o DESENVOLVIMENTO DE UMA PLATAFORMA DE
SOFTWARE COMPUTACIONAL USANDO TECNOLOGIA MULTICORE (4 meses).
Nesta tarefa será projectada uma plataforma computacional modular e de acesso livre,
adequada para a análise de órgãos a partir de imagens médicas. Assim, as entidades a serem
consideradas serão definidas, os formatos de arquivo suportados escolhidos, a interface da
plataforma projectada e desenvolvido um mecanismo para integração dos novos algoritmos e
para adaptar automaticamente a plataforma para as diferentes necessidades dos usuários.
24
Depois, serão implementadas e integradas algumas ferramentas usuais para análise
de órgãos de imagens médicas, tais como:
- Processamento e análise de imagens: métodos para filtragem e suavização, transformações
geométricas, operações lógicas e matemáticas, detecção de arestas, binarização de objetos e
análise de regiões;
- Computação gráfica: triangulação de dados, malhas, segmentação;
- Matemática computacional: operações algébricas e matriciais;
- Manipulação de arquivos com formatos comuns em sistemas de imagem médica.
Algumas bibliotecas computacionais disponíveis para uso em domínio publico serão
consideradas para facilitar o desenvolvimento de algumas das funções desejadas. Entre estas
bibliotecas pode-se destacar a OpenCV, Newmat, VTK, ITK, Free DICOM e ezDICOM. Ao
final desta tarefa, será escrito um manual de uso da plataforma.
Com a filosofia de uma plataforma aberta e modular, esta será continuamente
expandida, com o desenvolvimento de novos algoritmos mais simples e rápidos, bem como a
elaboração de um banco de testes para os modelos e algoritmos de análise de órgãos.
A próxima tarefa concentrará na ELABORAÇÃO DE METODOLOGIAS PARA
SEGMENTAR E RECONSTRUIR ÓRGÃOS (15 meses). Nesta etapa, novas metodologias e
modelos para segmentar órgãos em imagens médicas serão desenvolvidos. As metodologias
serão baseadas na consideração de modelização biomecânica adequada para deformações
elevadas e não-lineares, usando abordagem level set. A nova modelização considerará
elementos finitos avançados e leis constitutivas. Para aumentar a robustez da segmentação, o
conhecimento a priori sobre os órgãos será considerado usando um novo atlas anatómico da
cavidade pélvica feminina. Este atlas também será desenvolvido durante esta tarefa, e será
uma importante contribuição deste projecto. Este será o primeiro atlas anatómico da cavidade
pélvica feminina, especialmente construído para ajudar e melhorar a segmentação dos órgãos
incluídos nesta região.
Para a reconstrução geométrica 3D dos órgãos analisados, uma abordagem baseada
no algoritmo marching cubes será considerada e melhorada usando o atlas da cavidade
pélvica construído.
Todas as metodologias e modelos serão integradas na plataforma, iniciada na tarefa
anterior, e completamente testados, analisados e comparados usando dados reais e sintéticos.
25

Artigos científicos descrevendo as contribuições e resultados obtidos serão submetidos a
conferências e revistas internacionais.
A quarta tarefa concentra-se na ELABORAÇÃO DE METODOLOGIAS PARA
EMPARELHAMENTO E ALINHAMENTO DE ÓRGÃOS (6 meses). Durante esta tarefa,
novas metodologias para emparelhar órgãos em imagens médicas serão desenvolvidas,
baseando-se em medidas de a afinidade. Esta tarefa será realizada considerando os
deslocamentos dos órgãos, e técnicas de optimização e programação dinâmica com o
objectivo de encontrar o melhor emparelhamento global possível, minimizando os custos de
associações. O emparelhamento obtido será quantificado através dos valores da energia
elástica, tornando possível o reconhecimento de estruturas com formas similares.
Depois de estabelecer o emparelhamento, o alinhamento dos órgãos envolvidos será
realizado, com isso, as formas dos órgãos poderão ser comparadas e analisadas usando um
sistema referencial comum. Todas as metodologias e modelos serão integrados na plataforma,
iniciada na tarefa de “Desenvolvimento de uma plataforma computacional usando tecnologia
multicore”, e completamente testados, analisados e comparados usando dados reais e
sintéticos.
Artigos científicos descrevendo as contribuições e resultados obtidos com os novos
modelos biomecânicos serão submetidos a conferências e revistas nacionais e internacionais.
A próxima tarefa se concentra na ELABORAÇÃO DE METODOLOGIAS PARA
SEGUIMENTO DE ÓRGÃOS (6 meses). Durante esta tarefa, uma metodologia nova e
robusta será desenvolvida para realizar o seguimento temporal de órgão em sequências de
imagens. Para este objectivo, serão considerados: métodos estocásticos; emparelhamento
modal e técnicas de optimização, complementado com restrições adequadas; e um modelo de
gerenciamento para as características sendo seguidas. Assim, os recursos usados podem ser
tão baixo quanto possível e os problemas de oclusões e surgimento de novas características
podem ser superados com sucesso. Com o objectivo de que o seguimento seja flexível e
robusto, o modelo dinâmico usado no framework estocástico será definido a partir da
informação que é processada ao longo das sequências de imagens.
O movimento e/ou a deformação dos órgãos seguidos serão descritos e
caracterizados usando um conjunto de descritores adequados, como a energia elástica da
deformação distribuída pelos modos próprios modais. Todas as metodologias e modelos serão
integrados na plataforma computacional, sendo completamente testados, analisados e
26

comparados usando dados reais e sintéticos. Artigos científicos descrevendo as contribuições
e os resultados obtidos com a nova abordagem biomecânica serão submetidos para revistas e
conferências nacionais e internacionais.
A última tarefa deste projecto de doutoramento será a ESCRITA DA TESE (3
meses). Todos os resultados experimentais obtidos pelas metodologias e modelos
desenvolvidos para análise de órgãos a partir de imagens médicas da cavidade pélvica serão
avaliados e validados por especialistas com formação médica adeqauda. Além disso, as
malhas geométricas 3D construídas usando as metodologias desenvolvidas serão usadas e
comparadas em simulação computacional dos órgãos associados.
4.2 – CronogramaNa Tabela 4.1, tem-se o cronograma de desenvolvimento deste projecto de
Doutoramento. Os meses são numerados de 1 a 36, sendo o mês 1 referente ao início do
trabalho, que aconteceu em Fevereiro de 2010. Deve-se notar que a tarefa de “Levantamento
Bibliográfico” será mais intensa durante os 3 primeiros meses de trabalho. No entanto, ela
continuará sendo efetuada de forma mais moderada durante todo o projecto, visto que durante
o período de desenvolvimento do trabalho novas metodologias podem ser propostas pela
comunidade científica.
Tabela 4.1: Cronograma de desenvolvimento do trabalho de Doutoramento.
Tarefa Mês de Inicio Mês de términoLevantamento Bibliográfico 1 3Desenvolvimento de uma plataforma computacional
usando tecnologia Multicore
3 6
Elaboração de metodologias para segmentar e
reconstruir órgãos
7 21
Elaboração de metodologias para emparelhamento e
alinhamento de órgãos
22 27
Elaboração de metodologias para seguimento de
órgãos
28 33
Escrita da Tese 31 36
4.3 – Implicações da PesquisaNa literatura há várias propostas de metodologias e modelos para realizar análise de
imagens, inclusive com aplicações em imagens médicas. No entanto, não existem métodos
robustos, eficientes e automáticos para análise de órgãos e músculos da cavidade pélvica
27

feminina. Além disso, a análise destes órgãos quando realizada, é feita de forma totalmente
manual, exigindo muito tempo do especialista para realizar tal análise sendo por isso
altamente subjectiva e sujeita a erros.
Além do conhecimento adquirido sobre as diversas áreas de pesquisa envolvidas
neste trabalho, este projecto terá impactos científicos, académicos e sociais importantes. Com
este trabalho, pretende-se desenvolver novas metodologias que permitam realizar estas
análises de forma robusta, eficiente e principalmente automatizada. Assim, torna-se possível a
modelização automática e realística de estruturas geométricas 3D adequadas para os órgãos,
bem como o acompanhamento e análise do movimento e deformação dos mesmos durante um
período de tempo. Portanto, do ponto de vista científico , este trabalho implica em uma
melhoria dos métodos de segmentação, alinhamento, emparelhamento, seguimento e
reconstrução 3D de estrutras em imagens médicas, principalmente da cavidade pélvica, com
baixa resolução e de complexa análise, como imagens de ultra-sonografia, ressonância
magnética e tomografia computadorizada. Além disso, este trabalho também é importante do
ponto de vista social, porque permitirá um melhor entendimento sobre o funcionamento dos
órgãos analisados, bem como uma melhor observação das disfunções que afectam estes
órgãos e causam complicações na qualidade de vida de diversas mulheres por todo o Mundo.
Com esse melhor entendimento, que será proporcionado pelos modelos construídos a partir
das metodologias desenvolvidas durante este projecto, será possível definir planos de
tratamentos mais adequados, eficazes e com menor custo, ajudando a reduzir os efeitos das
disfunções dos órgãos em questão.
28

Bibliografia[1] M. Andreetto, G. M. Cortelazzo. (2004) “Frequency domain registration of computer tomography data”, Proceedings of the 2nd International Symposium on 3D Data Processing, Visualization, and Transmission, pag. 550-557.
[2] M. Auer, P. Regitnig, G. A. Holzapfel. (2005) “An automatic nonrigid registration for stained histological sections”, IEEE Transactions on Image Processing, 14:4, pag. 475-486.
[3] T. C. S. Azevedo, J. M. R. S. Tavares, M. A. P. Vaz. (2008) “3D Object Reconstruction from Uncalibrated Images using an Off-the-Shelf Camera”, Advances in Computational Vision and Medical Image Processing: Methods and Applications, pag. 117-136, editors: João Manuel R. S. Tavares, R. M. Natal Jorge, Springer.
[4] C. Bajaj, S. Goswami. (2008) “Modeling Cardiovascular Anatomy from Patient-Specific Imaging Data”, Advances in Computational Vision and Medical Image Processing: Methods and Applications, ed. Joao Manuel R.S. Tavares and R.M. Natal Jorge, Chapter 1, pag. 1-28, Springer.
[5] L. Ballerini. (1999) “Genetic snakes for medical images segmentation”, Proceedings of the First European Workshops on Evolutionary Image Analysis, Signal Processing and Telecommunications, 1:1, pag. 59-73.
[6] S. Becker, M. Plumbley. (1996) “Unsupervised neural network learning procedures for feature extraction and classification”, Journal of Applied Intelligence. 6:3, pag. 185–203.
[7] S. Belongie, J. Malik, J. Puzicha. (2002) “Shape matching and object recognition using shape contexts”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 24:4, pag. 509-522.
[8] N. Benamrane, A. Aribi, L. Kraoula. (2006) “Fuzzy neural networks and genetic algorithms for medical images interpretation”, Proceedings of Geometric Modeling and Imaging, 1:1, pag. 259-264.
[9] S. Beucher, C. Lantuejoul. (1979) “Use of watersheds in contour detection”, International Workshop on Image Processing: Real-time Edge and Motion Detection/Estimation, Report n. 136, pag. 2.1-2.12.
[10] S. Beucher, C. D. M. Mathmatique. (1991) “The watershed transformation applied to image segmentation”, Scanning Microscopy International, 1:1, pag. 299-314.
[11] C.M. Bishop. (2006) “Pattern recognition and machine learning”, 1st ed. New York, NY: Springer.
[12] J. G. Brankov, Y. Yang, M. N.Wernick. (2004) “Tomographic Image Reconstruction Based on a Content-Adaptive Mesh Model”, IEEE Transactions on Medical Imaging, 23:2, pag. 202-212.
29
[13] J. Canny. (1986) “A computational approach to edge detection”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 8:6, pag. 679-698.
[14] M. Carcassoni, E. Hancock. (2003) “Correspondence matching with modal clusters”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 25:12, pag. 1609-1615.
[15] V. Caselles, R. Kimmel, G. Sapiro. (1997) “Geodesic active contours”, International Journal of Computer Vision, 22:1, pag. 61–79.
[16] M. E. Celebi, Y. A. Aslandogan, P. R. Bergstresser. (2005) “Unsupervised border detection of skin lesion images”, Proceedings of the International Conference on Information Technology: Coding and Computing, 2:1, pag. 123-128.
[17] T. Chan, L. A. Vese. (2002) “Active contour and segmentation models using geometric PDE’s for medical imaging”, Geometric methods in bio-medical image processing, 1:1, pag. 63–75.
[18] K. S. Cheng, J. S. Lin, C. W. Mao. (1996) “The application of competitive Hopfield neural network to medical image segmentation”, IEEE Transactions Medical Imaging, 15:4, pag. 560–567.
[19] C. K. Chui. (1993) “An introduction to wavelets”, SIAM Rev. 35:2, pag. 12–313.
[20] A. Cideciyan. (1995) “Registration of ocular fundus images: an algorithm using cross-correlation of triple invariant image descriptors”, IEEE Engineering in Medicine and Biology Magazine, 14:1, pag. 52-58.
[21] C. E. Constantinou. (2007) “Dynamics of the Female Pelvic Floor”, International Journal for Computational Vision and Biomechanics, 1:1, pag. 69-81.
[22] N. Cvejic, C N. Cangarajah, D. R. Bull. (2006) “Image fusion metric based on mutual information and Tsallis entropy”, Electronics Letters, 42:11, pag. 626-627.
[23] H. Digabel, C. Lantuéjoul. (1978) “Iterative algorithms. Quantitative analysis of microstructures in materials sciences”, Biology and Medicine, 1:1, pag 85-99.
[24] A. Dumitras, A. N. Venetsanopoulos. (2001) “A comparative study of snake models with application to object shape description in bi-level and gray-level images”, Proceedings of Workshop on Nonlinear Signal and Image Processing.
[25] H. Foroosh, J. B. Zerubia, M. Berthod. (2002) “Extension of phase correlation to subpixel registration”, IEEE Transactions on Image Processing, 11:3, pag. 188-200.
[26] S. Giannarou. T. Stathaki. (2007) “Shape Signature Matching for Object Identification Invariant to Image Transformations and Occlusion”, Proceedings of the 12th International Conference on Computer Analysis of Images and Patterns, pag. 710-717.
[27] P. C.T. Gonçalves, J. M. R.S. Tavares, R.M. Natal Jorge. (2008) “Segmentation and Simulation of Objects Represented in Images using Physical Principles”, Computer Modeling in Engineering & Sciences, 32:1, pag. 45-55.
30

[28] R. C. Gonzalez, R. E. Woods, S. L. Eddins. (2003) “Digital Image Processing Using MATLAB”, Prentice-Hall, Inc., Upper Saddle River, NJ, USA.
[29] V. Grau, A. U. Mewes, M. Alcaniz, R. Kikinis, S. K. Warfield. (2004) “Improved watershed transform for medical image segmentation using prior information”, IEEE Transactions Medical Imaging, 23:4, pag. 447–458.
[30] – M. Holtzman-Gazit, R. Kimmel, N. Peled, D. Goldsher, (2006) “Segmentation of Thin Structures in Volumetric Medical Images”, IEEE Transactions on Image Processing, 15:2, pag. 354-363.
[31] P. M. Jorge, A. J. Abrantes, J. S. Marques. (2004) “On-line Tracking Groups of Pedestrians with Bayesian Networks”, 6th International Workshop on Performance Evaluation for tracking and Surveillance, pag. 65-72.
[32] M. Kass, A. Witkin, D. Terzopoulos. (1988) “Snakes: Active contour models”, International Journal of Computer Vision, 1:4, pág. 321-331.
[33] D. Keren. (2009) “A probabilistic method for point matching in the presence of noise and degeneracy”, Journal of Mathematical Imaging and Vision, 33:3, pag. 338-346.
[34] S. Kichenassamy, A. Kumar, P. Olver, A. Tannenbaum, A. J. Yezzi. (1996) “Conformal curvatures flows: from phase transitions to active vision”, Archive for Rational Mechanics and Analysis, 134:3, pag. 275–301.
[35] L. Lin, Y. Bar-Shalom. (2004) “New Assignment-Based Data Association for Tracking Move-Stop-Move Targets”, IEEE Transactions on Aerospace and Electronic Systems, 40:2, pag. 714-725.
[36] Z. Ma, R. M. Natal Jorge, J. M. R.S. Tavares. (2010) “A shape guided C-V model to segment the levator ani muscle in axial magnetic resonance images”, Medical Engineering & Physics, ISSN 1350-4533, DOI: 10.1016/j.medengphy.2010.05.002.
[37] Z. Ma, J. M. R. S. Tavares, R. Natal Jorge, T. Mascarenhas. (2010) “A review of algorithms for medical image segmentation and their applications to the female pelvic cavity”, Computer Methods in Biomechanics and Biomedical Engineering, 13:2, pag. 235-246.
[38] – T. R. Mackel, J. Rosen, C. M. Pugh. (2007) “Markov Model Assessment of Subjects’ Clinical Skill Using the E-Pelvis Physical Simulator”, IEEE Transactions on Biomedical Engineering, 54:12, pag. 2133-2141.
[39] B. Madeira, L. Velho. (2001) “Utilização de um modelo de contorno ativo para extração de arestas em imagens”, Anais do Encontro Regional de Matemática Aplicada e Computacional, 1:1.
[40] J. B. A. Maintz, M. A. Viergever. (1998) “A survey of medical image registration”, Medical Image Analysis, 2:1, pag. 1-36.
[41] R. Malladi, J. A. Sethian. (1996) “Level set and fast marching methods in image processing and computer vision”, Proceedings of the IEEE International Conference on Image Processing. 1:1, pag. 489-492.
31

[42] R. Malladi, J. A. Sethian, B. Vemuri. (1993). “A topology independent shape modeling scheme”, Proceedings of the Conference on Geometric Methods in Computer Vision II, pag. 246-256.
[43] T. McInerney, D. Terzopoulos. (1996) “Deformable Models in Medical Image Analysis: A Survey”, Medical Image Analysis. 1:2. pag. 91-08.
[44] R. A. McLaughlin, J. Hipwell, D. J. Hawkes, J. Al. Noble, J. V. Byrne, T. C. Cox. (2005) “A Comparison of a similarity-based and a feature-Based 2-D–3-D registration method for neurointerventional use”, IEEE Transactions on Medical Imaging, 24:8, pag. 1058-1066.
[45] F. Meyer. (1994) “Topographic distance and watershed lines”, Signal Processing, 38:1, pag. 113-125.`
[46] F. Meyer, S. Beucher. (1990) “Morphological segmentation”, Journal of Visual Communication Image Representation, 11 :1, pag. 21-46.
[47] N. Morakkabati-Spitz, J. Gieseke, W. A. Willinek, P. J. Bastian, B. Schmitz, F. Träber, U. Jaeger, S. C. Mueller, H. H. Schild. (2008) “Dynamic pelvic floor MR imaging at 3 T in patients with clinical signs of urinary incontinence-preliminary results”, European Radiology, 18:1, pag. 2620-2627.
[48] F. P. M. Oliveira, J. M. R. S. Tavares. (2008) “Algorithm of dynamic programming for optimization of the global matching between two contours defined by ordered points”, Computer Modeling in Engineering & Sciences, 31:1, pag. 1-11.
[49] F. P. M. Oliveira, J. M. R. S. Tavares. (2009) “Matching contours in images through the use of curvature, distance to centroid and global optimization with order-preserving constraint”, Computer Modeling in Engineering & Sciences, vol. 43:1, pag. 91-110.
[50] J. Orchard. (2005) “Efficient global weighted least-squares translation registration in the frequency domain”, Proceedings of International Conference Image Analysis and Recognition, pag. 116-124.
[51] S. Osher, J. Sethian. (1988). “Fronts propagating with curvaturedependent speed: algorithms based on Hamilton-Jacobi formulations”, Journal of Computational Physics. 79:1, pag. 12–49.
[52] N. Otsu. (1979) “A threshold selection method from gray-level histograms”, IEEE Transactions on Systems Man and Cybernetics. 9:1, pág. 62–66.
[53] L. Ozer, W. Wolf. (2002) “Real-time posture and activity recognition”, Proceedings Workshop on Motion and Video Computing, pag. 133-138.
[54] N. Paragios. (2002) “A variational approach for the segmentation of the left ventricle in cardiac image analysis”, International Journal of Computer Vision. 50:3, pag. 345–362.
[55] V. I. Pavlovic, R. Sharma, S. T. S. Huang. (1997) “Visual Interpretation of Hand Gestures for Human-Computer Interaction: A Review”, IEEE Transactions on Pattern Analysis and Machine Intelligence, 19:1, pag. 677-695.
32
[56] Q. Peng, R. Jones, K. Shishido, C. E. Constantinou. (2007) “Ultrasound Evaluation of Dynamic Responses of Female Pelvic Floor Muscles”, Ultrasound Medicine Biology 33:3, pag. 342-352.
[57] D. L. Pham, C. Xu, J. L. Prince. (2000) “Current Methods in Medical Image Segmentation”, Annual Review of Biomedical Engineering, 2:1, pag. 315-337.
[58] R. R. Pinho, J. M. R. S. Tavares. (2004) “Dynamic Pedobarography Transitional Objects by Lagrange’s Equation with FEM, Modal Matching and Optimization Techniques”, Lecture Notes in Computer Science 3212/2004, pag. 92-99.
[59] R. Pinho, J. M. R. S. Tavares, M. Correia. (2005) “Human Movement Tracking and Analysis with Kalman Filtering and Global Optimization Techniques”, II International Conference On Computational Bioengineering, Lisbon, Portugal.
[60] R. R. Pinto, J. M. R. S. Tavares, F. P. V. Correia. (2005) “Seguimento de Objectos em Visão Computacional usando Métodos Estocásticos” Congreso de Métodos Numéricos em Ingeniería, 16:1, pag. 4-7.
[61] R. R. Pinho, J. M. R. S. Tavares e M. F. V. Correia. (2007) “Efficient Approximation of the Mahalanobis Distance for Tracking with the Kalman Filter”, International Journal of Simulation Modelling, 6:2, pag. 84-92.
[62] J. P. W. Pluim, J. B. A. Maintz, M. A. Viergever. (2003) “Mutual information based registration of medical images: a survey”, IEEE Transactions on Medical Imaging, 22:8, pag. 986-1004.
[63] S. Rahmanian, R. Jones, Q. Peng, C. E. Constantinou. (2008) “Visualization of Biomechanical Properties of Female Pelvic Floor Function Using Video Motion Tracking of Ultrasound Imaging”, Studies in Health Technology and Informatics. 132:1, pag. 390-395.
[64] B. Reddy, B. Chatterji. (1996) “An FFT-based technique for translation, rotation, and scale-invariant image registration”, IEEE Transactions on Image Processing, 5:8, pag. 1266-1271.
[65] J. B. T. M. Roerdink, A. Meijster. (2001) “The watershed transform: Definitions, algorithms and parallelization strategies”, Fundamenta Informaticae, 41:1, pag. 187-228.
[66] M. Rousson, N. Paragios. (2008) “Prior Knowledge, Level Set Representations & Visual Grouping”, International Journal Computer Vision, 76:1, pag. 231-243.
[67] A. Sarti, C. Corsi, E. Mazzini, C. Lamberti. (2005) “Maximum likelihood segmentation of ultrasound images with Rayleigh distribution”, IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control., 52:6, pag. 947–960.
[68] C. Schumann, M. Neugebauer, R. Bade, B. Preim, H. O. Peitgen. (2008) “Implicit vessel surface reconstruction for visualization and CFD simulation”, International Journal of Computer Assisted Radiology and Surgery, 2:1, pag. 275-286.
[69] Y. Shi, F. Qi, Z. Xue, L. Chen, K. Ito, H. Matsuo, D. Shen. (2008) “Segmenting Lung Fields in Serial Chest Radiographs Using Both Population-Based and Patient-Specific Shape Statistics”, IEEE Transactions on Medical Imaging, 27:4, pag. 481:494.
33

[70] A. Singh, D. Terzopoulos, D. B. Goldgof. (1998) “Deformable Models in Medical Image Analysis”, IEEE Computer Society Press, Los Alamitos, CA, USA.
[71] S. Sun, L. Zhang, C. Guo. (2007) “Medical image registration by minimizing divergence measure based on Tsallis entropy”, International Journal of Biological and Medical Sciences, 2:2, pag. 75-80.
[72] X. Y. Tai, W. H. Song. (2007) “An improved approach based on FCM using feature fusion for medical image retrieval”, Proceedings of the 4th International Conference on Fuzzy Systems and Knowledge Discovery, 2:1, pag. 336-342.
[73] J. M. R. S. Tavares. (2000) “PhD Thesis: Analysis of the Movement of Deformable Bodies using Computational Vision”, Faculdade de Engenharia da Universidade do Porto (in Portuguese). http://paginas.fe.up.pt/~tavares/downloads/publications/teses/tesePhD_JT.pdf
[74] J. M. R. S. Tavares, F. J. S. Carvalho, F. P. M. Oliveira, I. M. S. Reis, M. J. M. Vasconcelos, P. C. T. Gonçalves, R. R. Pinho e Z. Ma. (2009) “Computer Analysis of Objects’ Movement in Image Sequences: Methods and Applications”, International Journal for Computational Vision and Biomechanics, 2:2, pag. 209-220.
[75] G. Unal, S. Bucher, S. Carlier, G. Slabaugh, T. Fang, K. Tanaka. (2008) “Shape-Driven Segmentation of the Arterial Wall in Intravascular Ultrasound Images”, IEEE Transactions on Information Technology in Biomedicine, 12:3, pag. 335-347.
[76] S. R. Ventura, D. R. Freitas, J. M. R. S. Tavares. (2009) “Application of MRI and Biomedical Engineering in Speech Production Study”, Computer Methods in Biomechanics and Biomedical Engineering, 12:6, pag. 671-681.
[77] H. A. Vrooman, C. A. Cocosco, R. Stokking, I. M. Arfan, M. W. Vemooij, M. M. Breteler, W. J. Niessen. (2006) “kNN-based multi-spectral MRI brain tissue classification: manual training versus automated atlas-based training”, Proceedings of the SPIE Medical Imaging 2006, 6144:1, pag. 1142-1150.
[78] C. Xu, J. L. Prince. (1997) “Gradient vector flow: A new external force for snakes”, IEEE Computer Society Conference on Computer Vision and Pattern Recognition, 1:1, pag. 66-71.
[79] C. Xu, J. L. Prince. (1998) “Snakes, shapes, and gradient vector flow”, IEEE Transactions on Image Processing, 7:3, pag. 359-369.
[80] M. Xu, P. M. Thompson, A. W. Toga. (2004) “An Adaptive Level Set Segmentation on a Triangulated Mesh”, IEEE Transactions on Medical Imaging. 23:2, pag. 191-201.
[81] B. Zitová, J. Flusser. (2003) “Image registration methods: a survey”, Image and Vision Computing, 21:11, pag. 977-1000.
34

Apêndice A
Nas Tabelas A.1 e A.2 apresenta-se, respectivamente, algumas revistas e
conferências relacionadas com Processamento de Imagens, Visão Computacional,
Computação Gráfica e análise de imagens médicas. As revistas e as conferências aparecem
classificadas de acordo com sua relevância, sendo A* o índice mais alto para as revistas e A o
índice mais alto para as conferências.
Tabela A.1: Lista de revistas, com seus respectivos índices.
Item Revista Índice1 Medical Image Analysis A*2 ACM Transactions on Graphics A*3 IEEE Transactions on Image Processing A*4 IEEE Transactions on Medical Imaging A*5 IEEE Transactions on Visualization and Computer Graphics A6 International Journal of Computer Vision A7 Computer Vision and Image Understanding A8 IEEE Computer Graphics and Applications B9 IEEE Engineering in Medicine and Biology Magazine B10 IET Computer Vision B11 IET Image Processing B12 Journal of Flow Visualization and Image Processing B13 Journal of Mathematical Imaging and Vision B
35

Tabela A.2: Lista de conferências, com seus respectivos índices.
Item Conferência Índice1 ACM SIG International Conference on Computer Graphics and Interactive
Techniques
A
2 Medical Image Computing and Computer-Assisted Intervention A3 Annual International Conference of the IEEE Engineering in Medicine and
Biology Society
A
4 IEEE International Symposium on Biomedical Imaging A5 IEEE Conference on Computer Vision and Pattern Recognition A6 IEEE Conference on Computer Vision A7 European Conference on Computer Vision A8 IEEE International Conference on Image Processing B9 ACM SIGGRAPH / Eurographics Symposium on Computer Animation B10 World Congress on Medical Informatics B11 Digital Image Computing Techniques and Applications B12 Image and Vision Computing Conference B13 International Conference on Computer Analysis of Images and Patterns B14 International Conference on Image Analysis and Processing B15 3-D Digital Imaging and Modeling C16 Brazilian Symposium on Computer Graphics and Image Processing C17 Iberian Conference on Pattern Recognition and Image Analysis C18 International Symposium on Visual Computing C
Na Tabela A.3 tem-se alguns grupos de pesquisa que atuam nas áreas de
Processamento de Imagens, Visão Computacional e análise de imagens médicas.
36

Tabela A.3: Alguns grupos de pesquisa nas áreas de Processamento de Imagens, Visão
Computacional e análise de imagens médicas.
Item Grupo1 MIPG – Medical Image Processing Group – Pennsylvania University,
Pennsylvania, USA.2 IPAG - Image Processing and Analysis Group – Yale University School of
Medicine, New Haven, USA.3 MEDISIP – Medical Image and Signal Processing – Ghent University, Ghent,
Belgium.4 Research Group of Medical Image Processing – Bochum University, Bochum,
Germany.5 Image Processing and Pattern Recognition Group – Technical University of Cluj-
Napoca, Cluj-Napoca, Romania.6 Image Processing Group – University of Zagreb, Zagreb, Croatia.7 Medical Graphics and Imaging Group – University College London, London,
United Kingdom.
37