resposta em frequência de sistemas lti - pads.ufrj.brmariane/cap7_slides.pdf · conceito de...
TRANSCRIPT
Resposta em Frequência de Sistemas LTI
Vimos que a resposta 𝑦(𝑛) de um sistema LTI em estado zero é
dada pela convolução linear do sinal de entrada 𝑥(𝑛) com a sua
resposta ao impulso ℎ(𝑛).
Em particular, para a entrada senoidal complexa 𝑥 𝑛 = 𝑒𝑗𝜔0𝑛, para
𝑛 = −∞, ⋯ , ∞, temos:
𝑦 𝑛 = ℎ 𝑘 𝑥(𝑛 − 𝑘) = ℎ 𝑘 𝑒𝑗𝜔0(𝑛−𝑘)
∞
𝑘=−∞
∞
𝑘=−∞
= 𝑒𝑗𝜔0𝑛 ℎ 𝑘 𝑒−𝑗𝜔0𝑘 = 𝑒𝑗𝜔0𝑛𝐻(𝑒𝑗𝜔0)
∞
𝑘=−∞
Portanto, a resposta de um sistema LTI a uma sequência senoidal
complexa de frequência 𝜔0 aplicada em 𝑛 = −∞, e igual ao produto
da senóide complexa pela DTFT da resposta ao impulso do sistema
avaliada em 𝜔 = 𝜔0.
Resposta em Frequência de Sistemas LTI
Por isso, a DTFT da resposta ao impulso de um sistema LTI é
conhecida como resposta em frequência do sistema.
Escrevendo 𝐻(𝑒𝑗𝜔) na forma polar:
𝑦 𝑛 = 𝐻(𝑒𝑗𝜔0) 𝑒𝑗(𝜔0𝑛+∠𝐻 𝑒𝑗𝜔0 )
onde 𝐻(𝑒𝑗𝜔) é a resposta em frequência de módulo e ∠𝐻 𝑒𝑗𝜔 é a
resposta em frequência de fase.
Portanto, conhecendo as resposta em frequência de módulo e fase,
saberemos de quanto cada componente senoidal do sinal de entrada
será atenuada/amplificada e defasada pelo sistema.

Resposta em Frequência de Sistemas LTI
Para uma entrada senoidal real 𝑥 𝑛 = Acos (𝜔0𝑛 + 𝜑), para
𝑛 = −∞, ⋯ , ∞, temos:
𝑦 𝑛 =𝐴
2𝐻(𝑒𝑗𝜔0) 𝑒𝑗(𝜔0𝑛+𝜑+∠𝐻 𝑒𝑗𝜔0 ) +
𝐴
2𝐻(𝑒−𝑗𝜔0) 𝑒𝑗(−𝜔0𝑛−𝜑+∠𝐻 𝑒−𝑗𝜔0 )
Para ℎ(𝑛) real, 𝐻(𝑒𝑗𝜔) = 𝐻(𝑒−𝑗𝜔) e ∠𝐻 𝑒−𝑗𝜔 = −∠𝐻 𝑒𝑗𝜔 .
Portanto:
𝑦 𝑛 =𝐴
2𝐻(𝑒𝑗𝜔0) 𝑒𝑗 𝜔0𝑛+𝜑+∠𝐻 𝑒𝑗𝜔0 + 𝑒−𝑗 𝜔0𝑛+𝜑+∠𝐻 𝑒𝑗𝜔0
= 𝐴 𝐻(𝑒𝑗𝜔0) cos 𝜔0𝑛 + 𝜑 + ∠𝐻 𝑒𝑗𝜔0
Portanto, a saída será uma senóide de mesma frequência da
entrada, 𝜔0, com amplitude 𝐴 𝐻(𝑒𝑗𝜔0) e fase 𝜑 + ∠𝐻 𝑒𝑗𝜔0 .

Resposta em Frequência de Sistemas LTI
Exemplo: Para o sistema causal descrito pela equação a diferenças:
𝑦 𝑛 − 𝛼𝑦 𝑛 − 1 = 𝑥 𝑛 , 𝛼 < 1
A resposta ao impulso ℎ(𝑛), por definição, é a resposta em estado
zero para a entrada 𝛿 𝑛 . Portanto:
⋯ , ℎ −1 = 0, ℎ 0 = 1, ℎ 1 = 𝛼, ℎ 2 = 𝛼2, ⋯
ou seja:
ℎ 𝑛 = 𝛼𝑛𝑢 𝑛
A resposta em frequência deste sistema é:
𝐻 𝑒𝑗𝜔 = 𝛼𝑒−𝑗𝜔 𝑛∞
𝑛=0
=1
1 − 𝛼𝑒−𝑗𝜔

Resposta em Frequência de Sistemas LTI
Gráficos da resposta em frequência de módulo e de fase para
α = 0,8 (Matlab: freqz(1,[1 -0.8]))
As componentes de baixas frequências serão amplificadas e as de
altas serão atenuadas (sistema passa-baixas).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-60
-40
-20
0
Normalized Frequency ( rad/sample)
Phase (
degre
es)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-10
-5
0
5
10
15
Normalized Frequency ( rad/sample)
Magnitude (
dB
)

Resposta em Frequência de Sistemas LTI
Gráficos da resposta em frequência de módulo e de fase para
α = −0,8 (Matlab: freqz(1,[1 0.8]))
As componentes de frequências altas serão amplificadas e as de
baixas serão atenuadas (sistema passa-altas).
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 10
20
40
60
Normalized Frequency ( rad/sample)
Phase (
degre
es)
0 0.1 0.2 0.3 0.4 0.5 0.6 0.7 0.8 0.9 1-10
-5
0
5
10
15
Normalized Frequency ( rad/sample)
Magnitude (
dB
)
Função de Transferência
A transformada z da resposta ao estado zero de um sistema LTI é:
𝑌 𝑧 = ℎ 𝑘 𝑥(𝑛 − 𝑘)
∞
𝑘=−∞
∞
𝑛=−∞
𝑧−𝑛
Fazendo a troca de variáveis 𝑛 = 𝑚 + 𝑘:
𝑌 𝑧 = ℎ(𝑘)𝑥(𝑚)
∞
𝑘=−∞
∞
𝑚=−∞
𝑧−(𝑚+𝑘)
= 𝑥(𝑚)𝑧−𝑚
∞
𝑚=−∞
ℎ(𝑘)𝑧−𝑘
∞
𝑘=−∞
ou seja:
𝑌(𝑧) = 𝑋 𝑧 𝐻(𝑧)
onde 𝐻(𝑧) é a transformada z da resposta ao impulso ℎ(𝑛).
Função de Transferência
Reescrevendo a equação anterior:
𝐻 𝑧 =𝑌(𝑧)
𝑋(𝑧)
ou seja, 𝐻(𝑧) é a razão entre a transformada z da resposta ao
estado zero e a transformada z da entrada.
Por ser um fator de escala que multiplica 𝑋 𝑧 para obter a saída,
𝐻(𝑧) é chamada de função de transferência do sistema.
Se a ROC de 𝐻(𝑧) incluir o círculo unitário, podemos escrever
𝐻(𝑧) 𝑧=𝑒𝑗𝜔
= 𝐻(𝑒𝑗𝜔)
que é a resposta em frequência do sistema.
Função de Transferência
No exemplo anterior:
𝑦 𝑛 − 𝛼𝑦 𝑛 − 1 = 𝑥 𝑛 , 𝛼 < 1
A equação acima no domínio da transformada Z é:
𝑌 𝑧 − 𝛼𝑧−1𝑌 𝑧 = 𝑋 𝑧
A função de transferência deste sistema é:
𝐻 𝑧 =𝑌(𝑧)
𝑋(𝑧)=
1
1−𝛼𝑧−1, ROC: 𝑧 > 𝛼
Como a ROC de 𝐻(𝑧) inclui o círculo, a resposta em frequência do
sistema é:
𝐻 𝑒𝑗𝜔 = 𝐻 𝑧 𝑧=𝑒𝑗𝜔
=1
1 − 𝛼𝑒−𝑗𝜔

Funções de Transferência Racionais
Uma importante subclasse de sistemas LTI tem relação entrada-
saída definida por uma equação a diferenças do tipo:
𝑎𝑘𝑦 𝑛 − 𝑘 = 𝑏𝑘𝑥 𝑛 − 𝑘
𝑀
𝑘=0
𝑁
𝑘=0
onde 𝑎𝑘 e 𝑏𝑘 são constantes.
Aplicando a transformada Z a ambos os lados da equação, temos:
𝑎𝑘𝑧−𝑘𝑌 𝑧 = 𝑏𝑘𝑧−𝑘𝑋 𝑧
𝑀
𝑘=0
𝑁
𝑘=0
A função de transferência é, portanto, a função racional:
𝐻 𝑧 =𝑌(𝑧)
𝑋(𝑧)=
𝑏𝑘𝑀𝑘=0 𝑧−𝑘
𝑎𝑘𝑁𝑘=0 𝑧−𝑘

Funções de Transferência Racionais
Podemos reescrever 𝐻(𝑧) como:
𝐻 𝑧 = 𝑏𝑘
𝑀𝑘=0 𝑧−𝑘
𝑎𝑘𝑁𝑘=0 𝑧−𝑘
=𝑏0
𝑎0𝑧𝑁−𝑀
(𝑧 − 𝜁𝑘)𝑀𝑘=1
(𝑧 − 𝜓𝑘𝑁𝑘=1 )
onde
𝜁𝑘 são os zeros de 𝐻 𝑧 , ou seja, os valores de 𝑧 tais que 𝐻 𝑧 = 0
𝜓𝑘 são os polos de 𝐻 𝑧 , ou seja, os valores de 𝑧 tais que 𝐻 𝑧 = ∞
Se 𝑁 > 𝑀, 𝐻 𝑧 tem 𝑁 − 𝑀 zeros em 𝑧 = 0
Se 𝑁 < 𝑀, 𝐻 𝑧 tem 𝑀 − 𝑁 polos em 𝑧 = 0
Se a ROC incluir o círculo unitário (sistema estável), a resposta em
frequência do sistema é dada por:
𝐻 𝑒𝑗𝜔 =𝑏0
𝑎0𝑒𝑗𝜔(𝑁−𝑀)
(𝑒𝑗𝜔 − 𝜁𝑘)𝑀𝑘=1
(𝑒𝑗𝜔 − 𝜓𝑘𝑁𝑘=1 )
Estabilidade de Sistemas LTI descritos por
Equações a Diferenças
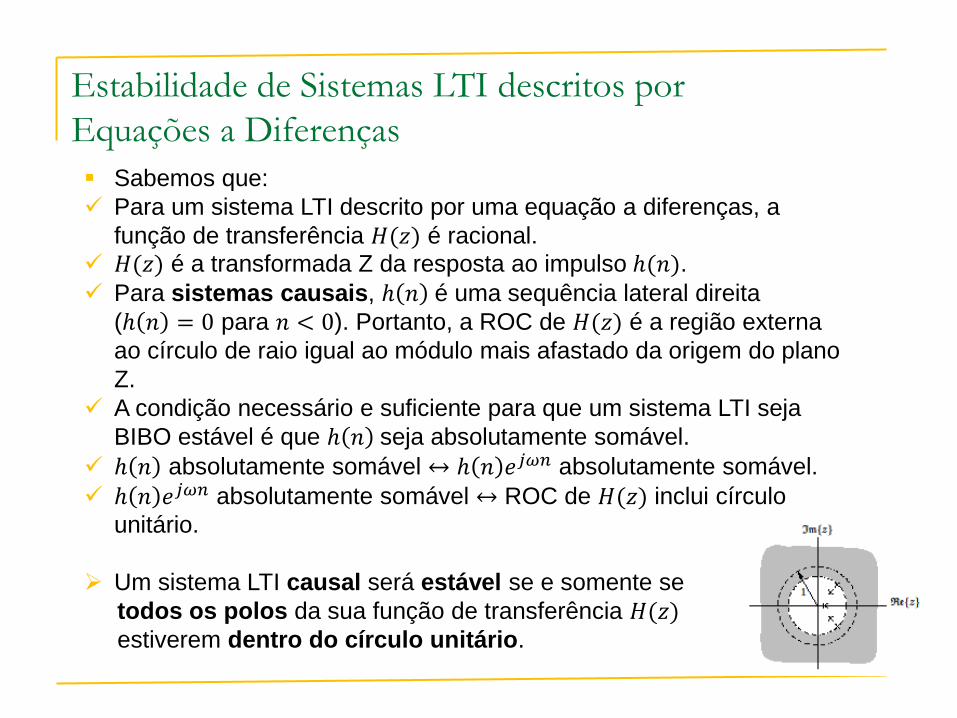
Sabemos que:
Para um sistema LTI descrito por uma equação a diferenças, a
função de transferência 𝐻(𝑧) é racional.
𝐻(𝑧) é a transformada Z da resposta ao impulso ℎ(𝑛). Para sistemas causais, ℎ 𝑛 é uma sequência lateral direita
(ℎ 𝑛 = 0 para 𝑛 < 0). Portanto, a ROC de 𝐻(𝑧) é a região externa
ao círculo de raio igual ao módulo mais afastado da origem do plano
Z.
A condição necessário e suficiente para que um sistema LTI seja
BIBO estável é que ℎ 𝑛 seja absolutamente somável.
ℎ 𝑛 absolutamente somável ↔ ℎ 𝑛 𝑒𝑗𝜔𝑛 absolutamente somável.
ℎ 𝑛 𝑒𝑗𝜔𝑛 absolutamente somável ↔ ROC de 𝐻(𝑧) inclui círculo
unitário.
Um sistema LTI causal será estável se e somente se
todos os polos da sua função de transferência 𝐻(𝑧) estiverem dentro do círculo unitário.

Estabilidade de Sistemas LTI
Exemplo 1: o sistema causal com função de transferência
𝐻 𝑧 =1 + 𝑧−1 + 𝑧−2
1 −34 𝑧−1 +
18 𝑧−2
tem polos 𝜓1 = 1/4 e 𝜓2 = 1/2. A ROC de 𝐻 𝑧 , dada por 𝑧 > 1/2,
inclui o círculo unitário e, portanto, o sistema é estável.
Exemplo 2: o sistema causal com função de transferência
𝐻 𝑧 =𝑧−1
1 + 𝑧−1 −34 𝑧−2
tem polos 𝜓1 = 1/2 e 𝜓2 = −3/2. A ROC de 𝐻 𝑧 , dada por
𝑧 > 3/2, não inclui o círculo unitário e, portanto, o sistema é
instável.
Observe, no entanto, que o sistema não-causal cuja ROC de
𝐻 𝑧 é 1
2< 𝑧 < 3/2 é estável.
Avaliação da Resposta em Frequência a partir dos
Polos e Zeros de 𝐻(𝑧)
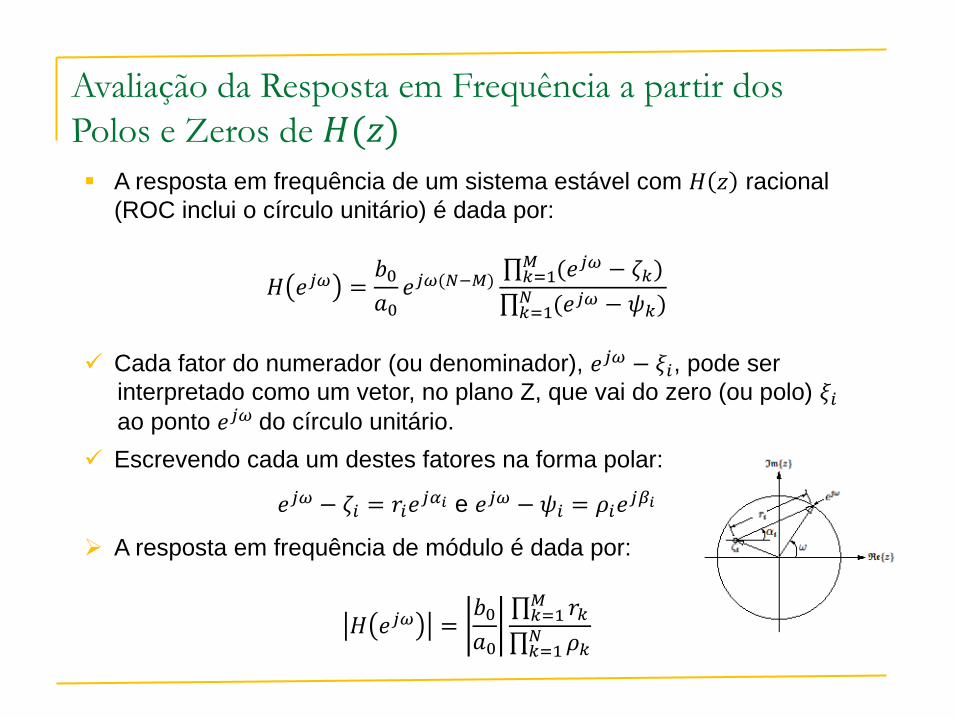
A resposta em frequência de um sistema estável com 𝐻 𝑧 racional
(ROC inclui o círculo unitário) é dada por:
𝐻 𝑒𝑗𝜔 =𝑏0
𝑎0𝑒𝑗𝜔(𝑁−𝑀)
(𝑒𝑗𝜔 − 𝜁𝑘)𝑀𝑘=1
(𝑒𝑗𝜔 − 𝜓𝑘𝑁𝑘=1 )
Cada fator do numerador (ou denominador), 𝑒𝑗𝜔 − 𝜉𝑖, pode ser
interpretado como um vetor, no plano Z, que vai do zero (ou polo) 𝜉𝑖
ao ponto 𝑒𝑗𝜔 do círculo unitário.
Escrevendo cada um destes fatores na forma polar:
𝑒𝑗𝜔 − 𝜁𝑖 = 𝑟𝑖𝑒𝑗𝛼𝑖 e 𝑒𝑗𝜔 − 𝜓𝑖 = 𝜌𝑖𝑒
𝑗𝛽𝑖
A resposta em frequência de módulo é dada por:
𝐻 𝑒𝑗𝜔 =𝑏0
𝑎0
𝑟𝑘𝑀𝑘=1
𝜌𝑘𝑁𝑘=1

Avaliação da Resposta em Frequência a partir dos
Polos e Zeros de 𝐻(𝑧)
A resposta em frequência de fase é dada por:
∠𝐻 𝑒𝑗𝜔 = ∠𝑏0
𝑎0+ ω 𝑁 − 𝑀 + 𝛼𝑖 −
𝑀
𝑖=1
𝛽𝑖
𝑁
𝑖=1
Exemplo:
𝐻 𝑧 =0.0684+0.0519𝑧−1+0.0684𝑧−2
1−1.0642𝑧−1+0.8479𝑧−2
𝐻(𝑒𝑗𝜔) = 0.0684𝑟1𝑟2
𝜌1𝜌2
∠𝐻 𝑒𝑗𝜔 = 𝛼1 + 𝛼2 − (𝛽1 + 𝛽2)
-1 -0.5 0 0.5 1
-1
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
1
Real Part
Imagin
ary
Part
Conceito de Filtragem
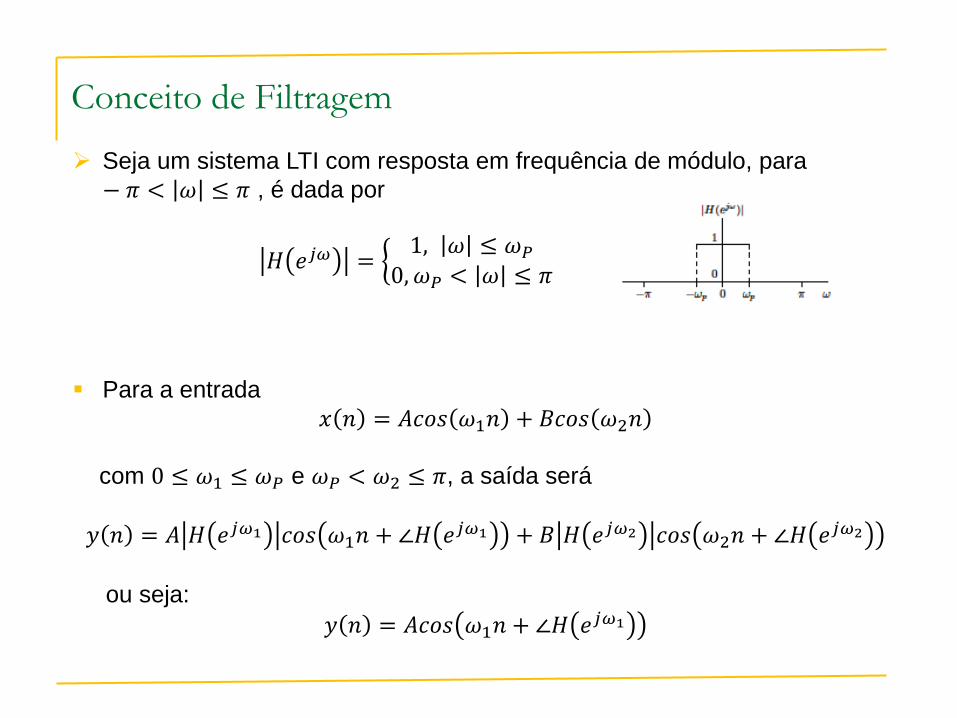
Seja um sistema LTI com resposta em frequência de módulo, para
− 𝜋 < 𝜔 ≤ 𝜋 , é dada por
𝐻 𝑒𝑗𝜔 = 1, 𝜔 ≤ 𝜔𝑃
0, 𝜔𝑃 < 𝜔 ≤ 𝜋
Para a entrada
𝑥 𝑛 = 𝐴𝑐𝑜𝑠 𝜔1𝑛 + 𝐵𝑐𝑜𝑠 𝜔2𝑛
com 0 ≤ 𝜔1 ≤ 𝜔𝑃 e 𝜔𝑃 < 𝜔2 ≤ 𝜋, a saída será
𝑦 𝑛 = 𝐴 𝐻 𝑒𝑗𝜔1 𝑐𝑜𝑠 𝜔1𝑛 + ∠𝐻 𝑒𝑗𝜔1 + 𝐵 𝐻 𝑒𝑗𝜔2 𝑐𝑜𝑠 𝜔2𝑛 + ∠𝐻 𝑒𝑗𝜔2
ou seja:
𝑦 𝑛 = 𝐴𝑐𝑜𝑠 𝜔1𝑛 + ∠𝐻 𝑒𝑗𝜔1
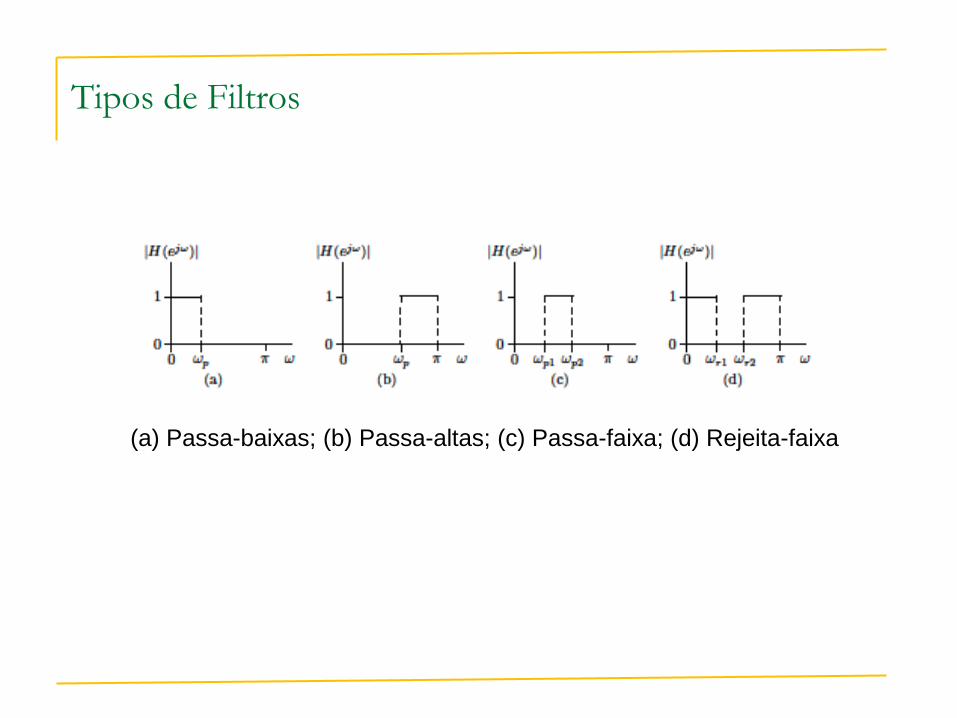
Tipos de Filtros
(a) Passa-baixas; (b) Passa-altas; (c) Passa-faixa; (d) Rejeita-faixa

Filtros com Fase Zero
Passa-baixas ideal de fase zero:
Resposta ao impulso:
ℎ 𝑛 =1
2𝜋 𝐻 𝑒𝑗𝜔 𝑒𝑗𝜔𝑛𝑑𝜔 =
1
2𝜋 𝑒𝑗𝜔𝑛𝑑𝜔 =
𝜔𝑃
−𝜔𝑃
𝑠𝑒𝑛 𝜔𝑃𝑛
𝜋𝑛, −∞ < 𝑛 < ∞
𝜋
−𝜋
Sistema não-causal com resposta ao impulso
de comprimento infinito (não realizável)

Filtros com Fase Linear
Passa-baixas ideal de fase linear:
∠𝐻 𝑒𝑗𝜔 = −𝑛0𝜔
Resposta ao impulso:
ℎ 𝑛 =1
2𝜋 𝐻 𝑒𝑗𝜔 𝑒𝑗𝜔𝑛𝑑𝜔 =
1
2𝜋 𝑒−𝑗𝜔𝑛0𝑒𝑗𝜔𝑛𝑑𝜔 =
𝜔𝑃
−𝜔𝑃
𝑠𝑒𝑛 𝜔𝑃(𝑛 − 𝑛0)
𝜋(𝑛 − 𝑛0)
𝜋
−𝜋
Filtros com Fase Linear
Para a entrada
𝑥 𝑛 = 𝐴𝑐𝑜𝑠 𝜔1𝑛 + 𝐵𝑐𝑜𝑠 𝜔2𝑛
com 0 ≤ 𝜔1, 𝜔2 ≤ 𝜔𝑃, a saída será
𝑦 𝑛 = 𝐴 𝐻 𝑒𝑗𝜔1 𝑐𝑜𝑠 𝜔1𝑛 + ∠𝐻 𝑒𝑗𝜔1
+ 𝐵 𝐻 𝑒𝑗𝜔2 𝑐𝑜𝑠 𝜔2𝑛 + ∠𝐻 𝑒𝑗𝜔2
ou seja:
𝑦 𝑛 = 𝐴𝑐𝑜𝑠 𝜔1(𝑛 − 𝑛0) + 𝐵𝑐𝑜𝑠 𝜔2(𝑛 − 𝑛0)
As duas componentes são atrasadas de um mesmo número de
amostras

Atraso de Grupo
Um parâmetro frequentemente usado para especificar sistemas de
filtragem é o atraso de grupo, definido como
𝜏 𝜔 = −𝑑∠𝐻 𝑒𝑗𝜔
𝑑𝜔
Esse parâmetro fornece o atraso, em número de amostras, introduzido em
uma componente senoidal de frequência 𝜔 ao passar por um sistema com
resposta de fase ∠𝐻 𝑒𝑗𝜔 .
Para um filtro com fase linear ∠𝐻 𝑒𝑗𝜔 = −𝑛0𝜔:
𝜏 𝜔 = 𝑛0 (constante)