qualificação de doutorado - mecanica.ufu.br · •robótica móvel –cada vez mais aplicada em...
TRANSCRIPT

Qualificação de Doutorado
Planejamento de Trajetória aplicado à Veículos Autônomos
Aluno: Alexandre Rodrigues de Sousa Orientador: Prof. Dr. José Jean-Paul Zanlucchi de Souza
Tavares

• Introdução • Objetivos • Justificativa • Metodologia
– Cronograma
• Revisão bibliográfica • Definição dos sensores • Elaboração do modelo do sistema • Análise de desempenho dos algoritmos do estado da arte • Desenvolvimento do algoritmo de planejamento de trajetória • Trabalhos futuros • Referências bibliográficas
Sumário

• Robótica móvel – Cada vez mais aplicada em diversos campos
– Executar tarefas difíceis em ambientes perigosos
– Complementar ação humana
– Segurança, confiabilidade, praticidade ou produtividade
• Autonomia – Movimentação com menor capacidade possível de
interação humana
– Estimar, definir e executar ações que devem ser realizadas
– Guiada, autônoma ou semiautônoma
Introdução

• Navegação de um robô móvel
– Percepção do ambiente
– Localização
– Mapeamento
– Planejamento cognitivo
– Planejamento de trajetória
Introdução
Figura 1 – Divisão de áreas da navegação de robôs móveis (adaptado
de Raja e Pugazhenthi, 2012)
SLAM
Ambiente
Controle de movimento
Cognição / Planejamento de trajetória
Percepção
Localização e mapeamento
Posição / Mapa
Tarefa / Missão
Mapa local Caminho

• Principal – Desenvolver um algoritmo de planejamento de trajetória
• Específicos: – Estudar algoritmos de planejamento de trajetória
– Estudar abordagens de representação do ambiente para o robô móvel
– Propor um novo algoritmo de planejamento para um sistema robótico desenvolvido no laboratório.
– Implementar e aplicar o algoritmo proposto em um estudo de caso de monitoramento de lavoura cafeeira.
Objetivos

• Planejamento de trajetória é importante no desenvolvimento de sistemas mais autônomos: – Componente chave no ramo da robótica móvel
• Diferenciação: prisma mecatrônico – Mecânica, eletrônica e software
• Crescente relevância da agricultura de precisão – Maior competitividade
– Veículos autônomos: caminho natural de evolução da área
Justificativa

Metodologia
I. Revisão bibliográfica II. Levantamento de requisitos III. Definição dos sensores IV. Elaboração do modelo do sistema V. Análise de desempenho dos algoritmos do estado da arte VI. Desenvolvimento do algoritmo de planejamento de trajetória VII. Redação do relatório de qualificação VIII. Realização de testes simulados IX. Defesa da qualificação X. Definição do hardware de processamento embarcado XI. Construção do protótipo do robô móvel XII. Implementação do algoritmo em uma plataforma embarcada XIII. Testes em ambientes controlados XIV. Redação da tese de doutorado XV. Defesa da tese de doutorado
Etapas

Metodologia Cronograma
Etapas Meses
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36
I
II
III
IV
V
VI
VII
VIII
IX
X
XI
XII
XIII
XIV
XV
Figura 2 – Cronograma atualizado de execução
Atividades realizadas Atividades previstas

Revisão bibliográfica Representação do ambiente

Revisão bibliográfica Representação do ambiente
Figura 3 – Exemplo de grade de localização (Truncer e Yildirim, 2012)

Revisão bibliográfica Representação do ambiente
Figura 4 – Exemplo de grafo de visibilidade (Lozano-Pérez e Wesley, 1979)

Revisão bibliográfica
• Planejamento de trajetória off-line – Mapa é conhecido previamente – Ambiente estático ou trajetória de agentes dinâmicos é
conhecida previamente – Planejamento de trajetória global
• Planejamento de trajetória on-line – Informações completas sobre o ambiente não estão
disponíveis – Sistema adquire informações através de seus sensores
durante a operação – Planejamento de trajetória local
Planejamento
Revisão bibliográfica
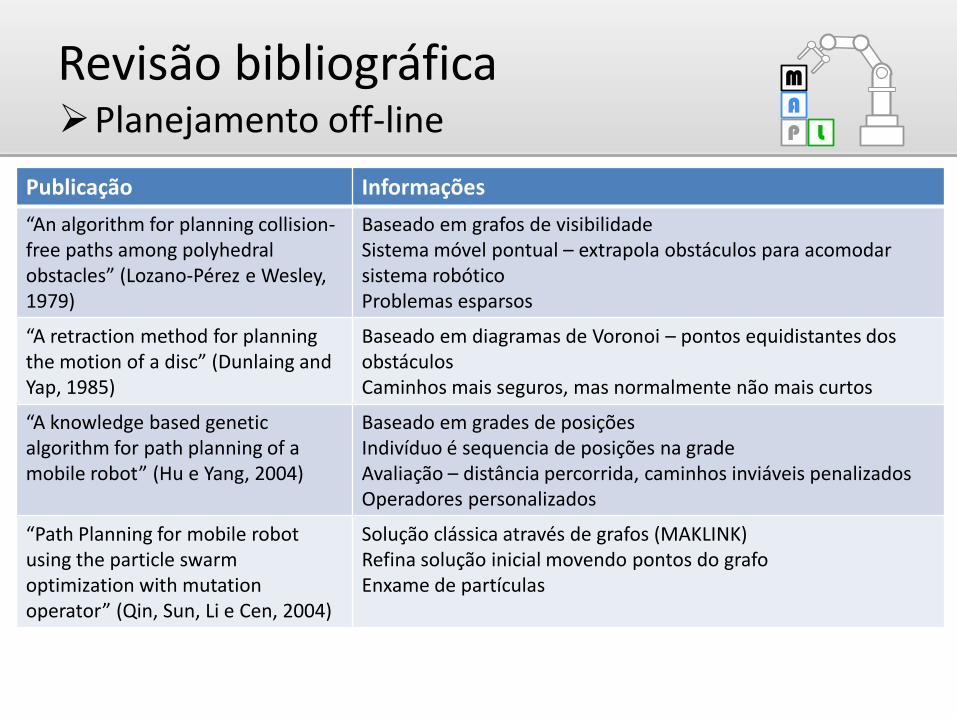
Publicação Informações
“An algorithm for planning collision-free paths among polyhedral obstacles” (Lozano-Pérez e Wesley, 1979)
Baseado em grafos de visibilidade Sistema móvel pontual – extrapola obstáculos para acomodar sistema robótico Problemas esparsos
“A retraction method for planning the motion of a disc” (Dunlaing and Yap, 1985)
Baseado em diagramas de Voronoi – pontos equidistantes dos obstáculos Caminhos mais seguros, mas normalmente não mais curtos
“A knowledge based genetic algorithm for path planning of a mobile robot” (Hu e Yang, 2004)
Baseado em grades de posições Indivíduo é sequencia de posições na grade Avaliação – distância percorrida, caminhos inviáveis penalizados Operadores personalizados
“Path Planning for mobile robot using the particle swarm optimization with mutation operator” (Qin, Sun, Li e Cen, 2004)
Solução clássica através de grafos (MAKLINK) Refina solução inicial movendo pontos do grafo Enxame de partículas
Planejamento off-line

Revisão bibliográfica
Publicação Informações
“Real-time Obstacle Avoidance for Manipulators and Mobile Robots” (Khatib, 1986)
Campo de potencial artificial (APF) Foco em manipuladores e atuadores Forças de atração e repulsão
“The vector field histogram-fast obstacle avoidance for mobile robots” (Borenstein e Koren, 1991)
Histograma do campo de vetores Dois estágios de simplificação de dados Densidade polar dos obstáculos
“Application of evolutionary artificial potential field in robot soccer system” (Vadakkepat, 2000)
Associa APF a algoritmo genético Algoritmo genético ajusta parâmetros do APF
“Robot path planning in unknown environments using particle swarm optimization” (Lu e Gong, 2008)
Problema de planejamento transformado em problema de minimização Baseado em otimização por enxame de partículas
“Path planning with modified A star algorithm for a mobile robot” (Duchoň et al., 2014)
Algoritmo A* modificado Células não subsequentes podem ser conectadas diretamente caso haja visibilidade Redução do número de células avaliadas
“Autonomous robot path planning in dynamic environment using a new optimization technique inspired by bacterial foraging technique” (Hossain e Ferdous, 2015)
Comportamento de colônias bacterianas Cria partículas ao redor da posição do robô e seleciona partícula mais apta como nova posição
“Mobile robot path planning using artificial bee colony and evolutionary programming” (Contreras-Cruz et al., 2015)
Comportamento de colônias de abelhas em busca de comida – busca local Algoritmo evolutivo – busca global
Planejamento on-line

Revisão bibliográfica
• “Real-time Obstacle Avoidance for Manipulators and Mobile Robots” (Khatib, 1986) – Perspectiva local do ambiente do robô
– Algoritmo para controle em tempo real
– Foco em manipuladores/atuadores
– Campo de potencial artificial (APF) • Objetivo cria uma força artificial de atração
• Obstáculos criam uma força artificial de repulsão
• Comando vem da resultante de tais forças artificiais
Planejamento on-line: Estratégias clássicas

Revisão bibliográfica Planejamento on-line: Estratégias clássicas
R
Obstáculo
Obstáculo
Obstáculo
Obstáculo
FG*
FO1 *
FO2
*
FO3 *
FO4 *
F*
Figura 5 – Representação das interações de atração e repulsão

Revisão bibliográfica
• Não demanda grande capacidade computacional
• Problemas com mínimos locais
– Equilíbrio entre as forças de atração e repulsão: posição estável
– Associação com um algoritmo que afaste o sistema de um mínimo local
– Abordagens como deslocamentos aleatórios e obstáculos virtuais.
Planejamento on-line: Estratégias clássicas
Revisão bibliográfica
• Histograma do campo de vetores (Borenstein e Koren, 1991) – Menor simplificação das informações que métodos
baseados em AFP
– Dois estágios de simplificação – Três níveis de dados • Histograma em grade cartesiana C que descreve o ambiente
e é atualizado em tempo real através dos sensores do robô – grade de probabilidade
• Histograma polar H que descreve a densidade polar de obstáculos
• Saída do algoritmo: velocidade e direção do sistema robótico móvel
Planejamento on-line: Estratégias clássicas

Revisão bibliográfica Planejamento on-line: Estratégias clássicas
Janela Ativa C*
R
Ponto inicial
Objetivo
Figura 6 – Representação de um exemplo de histograma em grade cartesiana de um problema (adaptado de Borenstein e Koren, 1991)

Revisão bibliográfica Planejamento on-line: Estratégias clássicas

Revisão bibliográfica Planejamento on-line: Estratégias clássicas
Figura 7 – Representação de um histograma de densidade polar de obstáculos (adaptado de Borenstein e Koren, 1991)

Revisão bibliográfica Planejamento on-line: Estratégias clássicas

Revisão bibliográfica Planejamento on-line: Estratégias clássicas

Revisão bibliográfica
• Planejamento em ambientes desconhecidos através de otimização por enxame de partículas (Lu e Gong, 2008)
– Problema de planejamento de trajetória é transformado em um problema de minimização
– Avaliação de cada partícula:
Planejamento on-line: Estratégias evolutivas
Revisão bibliográfica
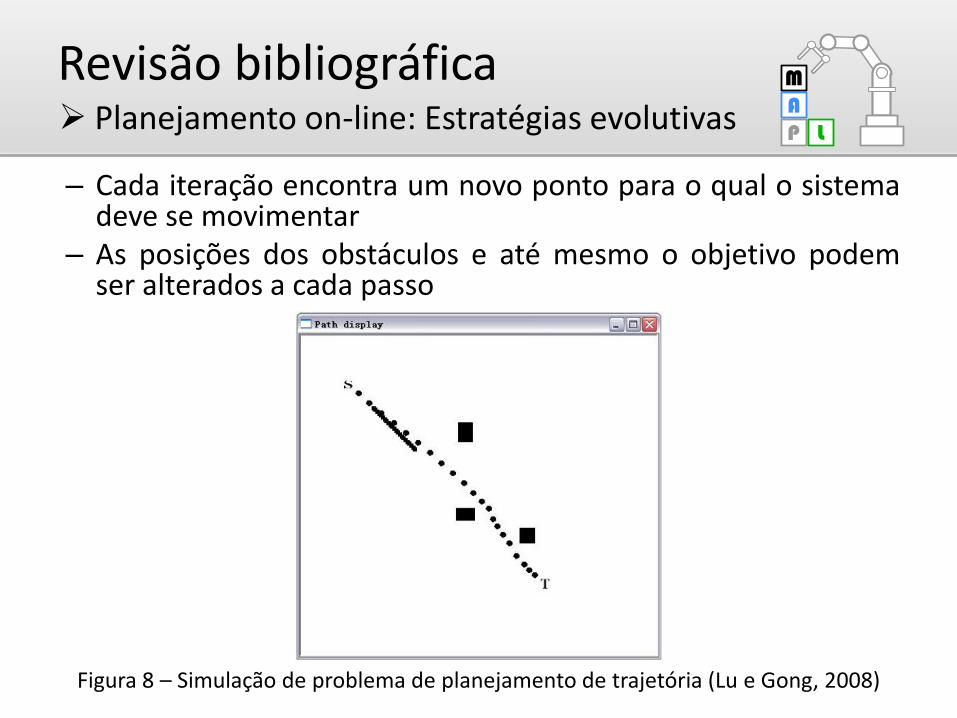
– Cada iteração encontra um novo ponto para o qual o sistema deve se movimentar
– As posições dos obstáculos e até mesmo o objetivo podem ser alterados a cada passo
Planejamento on-line: Estratégias evolutivas
Figura 8 – Simulação de problema de planejamento de trajetória (Lu e Gong, 2008)

• Requisitos do sistema robótico – Locomover em ambiente seminatural – Calcular orientação para preenchimento do mapa – Identificar obstáculos de forma autônoma – Determinar informações sobre posicionamento – Comunicação sem fio – Capacidade de processamento: laço a 10Hz – Velocidade: até 5 km/h – Carga: até 10 kg – Autonomia: não especificada – Resistir à intempéries
Levantamento de Requisitos

• Requisitos do algoritmo:
– Lidar com ambiente dinâmico e parcialmente conhecido
– Atuação em tempo real
– Lidar com incertezas dos dados dos sensores
Levantamento de Requisitos

• IMU – Inertial Measurement Unit
– Acelerômetro e Giroscópio
• Informações combinadas para obter dados sobre a orientação
– Magnetômetro
• Não utilizado
Definição dos sensores do sistema móvel
Figura 9 – Exemplo de IMU

• Encoder
– Informações sobre posicionamento
– Deslocamento relativo
– Erro acumulado
• GPS
– Posição absoluta
– Menor precisão
Definição dos sensores do sistema móvel

• Odometria visual – Deslocamento relativo – Mudança de orientação – Processamento de imagem
• Alto custo computacional
– Detecção de pontos de referências e comparação do deslocamento entre frames
Definição dos sensores do sistema móvel
Figura 10 – Exemplo de odometria visual

Elaboração do modelo do sistema • Veículo de quatro rodas
• Perfil de alumínio
• 70 cm x 40 cm x 25 cm
• Proteger parte elétrica e eletrônica das intempéries: – Corpo fechado com chapas de alumínio
– Sem saídas de ar desprotegidas
Figura 10 – Modelo da estrutura do sistema

• Análise da estrutura: – Superestimar efeito de forças – Não leva em consideração travamentos das chapas das faces –
considera apenas arestas – 4000 kgf*cm – 7mm de deslocamento
Elaboração do modelo do sistema
Figura 11 – Ensaio de torção

• Análise de desempenho dos algoritmos do estado da arte – Implementação da infraestrutura
– Visual C++ 2013
– Mapas cartesianos
– Simulador • APF
• Histograma do campo de vetores
• Enxame de partículas
• Permitir
Análise de desempenho dos algoritmos do estado da arte

Análise de desempenho dos algoritmos do estado da arte
Figura 12 – Diagrama de classes do simulador

Análise de desempenho dos algoritmos do estado da arte
Figura 13 - Simulador

Análise de desempenho dos algoritmos do estado da arte

• Análise preliminar:
– Dois casos com diferentes dimensões
– Testes com os três algoritmos
– Ajuste de parâmetros para cada algoritmo para cada caso
Análise de desempenho dos algoritmos do estado da arte

Análise de desempenho dos algoritmos do estado da arte
Algoritmo Tempo de execução (s:ms)
APF 17:016
Histograma de campo de vetores
-
Enxame de partículas 33:547

Análise de desempenho dos algoritmos do estado da arte
Algoritmo Tempo de execução (m:s:ms)
APF 1:15:547
Histograma de campo de vetores
-
Enxame de partículas
1:47:567

• Apenas odometria visual foi testada. • Sistemas considerados:
– Raspberry Pi 2 / Beaglebone Black • Insuficiente para a odometria visual
– ODROID XU4 • Plataforma ainda não avaliada
– Intel NUC (mini PC) • Poder computacional equivalente ao de um notebook (mesma
arquitetura e processador) • Maior custo
Definição do hardware de processamento embarcado
Figura 11 – Intel NUC (miniPC)

• Aquisição de componentes eletrônicos
• Aquisição de motores
• Fabricação da parte estrutural
Construção do protótipo do robô móvel

• Terminar implementação de algoritmos do estado da arte
• Ampliar o estudo sobre diferentes algoritmos de planejamento de trajetória
• Estruturar algoritmo final visando especificidades do sistema
• Construção do protótipo
• Realização de testes
Trabalhos futuros

• BORENSTEIN, J., KOREN, Y. The vector field histogram-fast obstacle avoidance for mobile robots. Robotics and Automation, IEEE Transactions on, v. 7, n. 3, p. 278-288, 1991.
• CONTRERAS-CRUZ, M. A.; AYALA-RAMIREZ, V.; HERNANDEZ-BELMONTE, U. H. Mobile robot path planning using artificial bee colony and evolutionary programming. Applied Soft Computing, v. 30, p. 319-328, 2015.
• DUCHOŇ, F., BABINEC, A., KAJAN, M., BEŇO, P., FLOREK, M., FICO, T., JURIŠICA, L. Path planning with modified A star algorithm for a mobile robot. Procedia Engineering, v. 96, p. 59-69, 2014.
• DUNLAING C. O., YAP C.K. A retraction method for planning the motion of a disc. J. Algorithms, 1985 6: 104-111. • HARABOR, D., GRASTIEN, A. Online Graph Pruning for Pathfinding On Grid Maps. In: Association for the Advancement of Artificial Intelligence.
2011. • HOSSAIN, M. A.; FERDOUS, I. Autonomous robot path planning in dynamic environment using a new optimization technique inspired by bacterial
foraging technique. Robotics and Autonomous Systems, v. 64, p. 137-141, 2015. • HU, Y.; YANG, S. X. A knowledge based genetic algorithm for path planning of a mobile robot. In: Robotics and Automation, 2004. Proceedings.
ICRA'04. 2004 IEEE International Conference on. IEEE, 2004. p. 4350-4355. • ISMAIL, A.; SHETA, A.; AL-WESHAH, M. A mobile robot path planning using genetic algorithm in static environment. Journal of Computer Science, v.
4, n. 4, p. 341, 2008. • KHATIB, O. Real-time obstacle avoidance for manipulators and mobile robots. The international journal of robotics research, v. 5, n. 1, p. 90-98,
1986. • LOZANO-PEREZ T., WESLEY M. A. An algorithm for planning collision-free paths among polyhedral obstacles. Commun. ACM., 1979. 22(10): 560–570. • LU L., GONG D. Robot path planning in unknown environments using particle swarm optimization. Proceedings of the fourth International
Conference on Natural Computation, 2008. p. 422-426 • QIN, Y. Q., SUN D. B., LI N., CEN Y. G. Path Planning for mobile robot using the particle swarm optimization with mutation operator. In: Proceedings
of the IEEE International Conference on Machine Learning and Cybernetics, IEEE, 2004 Shanghai, pp. 2473-2478 • RAJA, P.; PUGAZHENTHI, S. Optimal path planning of mobile robots: A review. International Journal of Physical Sciences, v. 7, n. 9, p. 1314-1320,
2012. • THRUN, S.; BURGARD, W.; FOX, D. Probabilistic Robotics. The MIT Press, 2005 • TUNCER, A.; YILDIRIM, M. Dynamic path planning of mobile robots with improved genetic algorithm. Computers & Electrical Engineering, v. 38, n. 6,
p. 1564-1572, 2012.. • VADAKKEPAT P, LEE TH, XIN L (2001). Application of evolutionary artificial potential field in robot soccer system. Proceedings of the Joint ninth IFSA
World Congress and twentieth NAFIPS International Conference, Vancouver, BC, Canada, pp. 27812785. • VADAKKEPAT P, TAN KC, MING LIANG W (2000). Evolutionary artificial potential fields and their application in real time robot path planning.
Proceedings of the 2000 Congress on Evolutionary Computation, Piscataway, New Jersey, pp. 256-263.
Referências bibliográficas

Qualificação de Doutorado
Planejamento de Trajetória aplicado à Veículos Autônomos
Aluno: Alexandre Rodrigues de Sousa Orientador: Prof. Dr. José Jean-Paul Zanlucchi de Souza
Tavares