robÓtica & educaÇÃo
DESCRIPTION
ROBÓTICA & EDUCAÇÃO. “Se os instrumentos pudessem realizar suas próprias tarefas, obedecendo ou antecipando o desejo das pessoas....” Aristóteles (séc. IV aC) – Livro Robótica Industrial da MANET. AUTOMAÇÃO. - PowerPoint PPT PresentationTRANSCRIPT
ROBÓTICA & EDUCAÇÃOROBÓTICA & EDUCAÇÃO
““Se os instrumentos pudessem realizar Se os instrumentos pudessem realizar suas próprias tarefas, obedecendo ou suas próprias tarefas, obedecendo ou antecipando o desejo das pessoas....”antecipando o desejo das pessoas....”
Aristóteles (séc. IV aC) – Livro Robótica Industrial da MANET.Aristóteles (séc. IV aC) – Livro Robótica Industrial da MANET.
AUTOMAÇÃOAUTOMAÇÃO
• ““Operação de controle automático de Operação de controle automático de um equipamento, processo ou de um um equipamento, processo ou de um sistema por meio mecânico ou sistema por meio mecânico ou eletrônico, substituindo a observação, eletrônico, substituindo a observação, os esforços e a decisão humana.”os esforços e a decisão humana.”– Livro da MANETLivro da MANET
– Automação FixaAutomação Fixa– Automação ProgramávelAutomação Programável– Automação FlexívelAutomação Flexível
ROBÓTICAROBÓTICA
• “ “Uma máquina manipuladora, com Uma máquina manipuladora, com vários graus de liberdade, controlada vários graus de liberdade, controlada automaticamente, reprogramável, automaticamente, reprogramável, multifuncional, que pode ter base fixa multifuncional, que pode ter base fixa ou móvel para a utilização em ou móvel para a utilização em aplicações de automação industrial” – aplicações de automação industrial” – norma ISO 10218norma ISO 10218
ROBÔS - TiposROBÔS - Tipos
• Robôs FixosRobôs Fixos• Base fixaBase fixa• Braços RobóticosBraços Robóticos
• Robôs MóveisRobôs Móveis• Base móvelBase móvel
Robótica & EducaçãoRobótica & Educação
• Uso de Simuladores de Controle de Uso de Simuladores de Controle de Robôs Robôs – Linguagem de Programação - JogoLinguagem de Programação - Jogo
• Robô Tartaruga e Linguagem LOGORobô Tartaruga e Linguagem LOGO– Ensino de matemática e programaçãoEnsino de matemática e programação
• Braços Manipuladores e Robôs MóveisBraços Manipuladores e Robôs Móveis– Kits LEGOKits LEGO
• Robôs “Domésticos” – Hero IRobôs “Domésticos” – Hero I– Programação e entretenimentoProgramação e entretenimento
Projeto de um Ambiente Didático Projeto de um Ambiente Didático com Robôscom Robôs
• MotivaçãoMotivação– Futebol de RobôsFutebol de Robôs– Projeto do Robô DAVIDProjeto do Robô DAVID– Fascínio e desafioFascínio e desafio– Envolvimento com várias áreas do Envolvimento com várias áreas do
conhecimentoconhecimento
Ambiente DidáticoAmbiente Didático
• Ambiente Didático Experimental com Ambiente Didático Experimental com Robôs Móveis - AEDROMORobôs Móveis - AEDROMO– Objetivos iniciaisObjetivos iniciais
• Interface com o mundo realInterface com o mundo real• Exercícios de ProgramaçãoExercícios de Programação
– DisciplinasDisciplinas• Circuitos DigitaisCircuitos Digitais• Linguagem de MontagemLinguagem de Montagem• Optativa – Introdução à Robótica ExperimentalOptativa – Introdução à Robótica Experimental
Idéia AmpliadaIdéia Ampliada
• AEDROMO I AEDROMO I
• AEDROMO IIAEDROMO II
• AEDROAEDRO
AEDROMO IAEDROMO I
• PerspectivasPerspectivas– Desenvolvimento de interfaces apropriadas Desenvolvimento de interfaces apropriadas
para o ensino fundamental e médiopara o ensino fundamental e médio– Aplicação em outras disciplinasAplicação em outras disciplinas
• Matemática, Física....Matemática, Física....• Uso da linguagem LOGOUso da linguagem LOGO
AEDROMO IIAEDROMO II
• MotivaçãoMotivação– Futebol de RobôsFutebol de Robôs
• Visão ComputacionalVisão Computacional• EstratégiaEstratégia• Protocolos de ComunicaçãoProtocolos de Comunicação
– Portas Paralela, Serial, USB...Portas Paralela, Serial, USB...– Rádio Freqüência, Infra VermelhoRádio Freqüência, Infra Vermelho
• Base MóvelBase Móvel– Mecânica, eletrônica e programaçãoMecânica, eletrônica e programação
AEDROAEDRO
• Ambiente Experimental e Didático com Ambiente Experimental e Didático com RobóticaRobótica– Conjunto reduzido de componentes Conjunto reduzido de componentes
mecânicos, elétricos e eletrônicosmecânicos, elétricos e eletrônicos– Baixo custoBaixo custo– Experimentos com braço e robô móvelExperimentos com braço e robô móvel– Introdução à RobóticaIntrodução à Robótica
• Em estudos preliminaresEm estudos preliminares
Duas ModalidadesDuas Modalidades
Ensino básico – AEDROMO IEnsino básico – AEDROMO I– Robôs programados (configurados) através de Robôs programados (configurados) através de
questionamentos ao usuário sobre o comportamento questionamentos ao usuário sobre o comportamento esperadoesperado
Ensino médio e superior – AEDROMO IIEnsino médio e superior – AEDROMO II– Sistema inclui: Visão global, estratégias, robôs e Sistema inclui: Visão global, estratégias, robôs e
tabuleiro.tabuleiro.– Robôs controlados remotamente sem fio através de Robôs controlados remotamente sem fio através de
um computador pessoalum computador pessoal– Criação de ambientes cooperativos e competitivosCriação de ambientes cooperativos e competitivos
AEDROMO I – ObjetivosAEDROMO I – Objetivos
• Difundir e desmistificar a robótica móvelDifundir e desmistificar a robótica móvel• Incentivar alunos do ensino médio e Incentivar alunos do ensino médio e
fundamental fundamental – No aprendizado de conceitos físicos, No aprendizado de conceitos físicos,
matemáticos e de programaçãomatemáticos e de programação– Motivando em áreas de ciênciasMotivando em áreas de ciências
• Simplificar o desenvolvimento de Simplificar o desenvolvimento de ambientes com robótica móvel para ambientes com robótica móvel para pesquisas e verificaçõespesquisas e verificações
AEDROMO I – Ensino básicoAEDROMO I – Ensino básico
• AplicaçõesAplicações– Didáticas e entretenimentoDidáticas e entretenimento
• Tarefas simplesTarefas simples– Exemplos: seguir ou evitar linhas, caminhar Exemplos: seguir ou evitar linhas, caminhar
por labirinto, ...por labirinto, ...
• Sistema de programação interativaSistema de programação interativa• Linguagem LOGOLinguagem LOGO• Aplicando conceitos básicos em robótica e Aplicando conceitos básicos em robótica e
em outras disciplinasem outras disciplinas
AEDROMO I – ComponentesAEDROMO I – Componentes
• Ambiente específico – área de trabalho Ambiente específico – área de trabalho com tamanho fixo e portátilcom tamanho fixo e portátil
• Um robô realizando tarefas simplesUm robô realizando tarefas simples
• Marcações no área de trabalho e Marcações no área de trabalho e obstáculosobstáculos
• Computador pessoal comanda o robôComputador pessoal comanda o robô
• Conexão entre PC e robô via cordão Conexão entre PC e robô via cordão umbilical ou comunicação sem fioumbilical ou comunicação sem fio
AEDROMO I – RobôsAEDROMO I – Robôs
• RobôsRobôs– Robôs de baixo custo com sensores simples Robôs de baixo custo com sensores simples
• Sensores reflexivos para a identificação de Sensores reflexivos para a identificação de marcações na área de trabalhomarcações na área de trabalho
• Sensores de toque para identificar colisõesSensores de toque para identificar colisões
– Robôs simples podem ser entendidos, Robôs simples podem ser entendidos, programados e construídos por alunosprogramados e construídos por alunos
– Robôs controlados via cordão umbilical ou Robôs controlados via cordão umbilical ou através de rádioatravés de rádio• Todo o processamento do robô é realizado em um Todo o processamento do robô é realizado em um
computador pessoalcomputador pessoal

AEDROMO I – RobôAEDROMO I – Robô
• MichelangeloMichelangelo
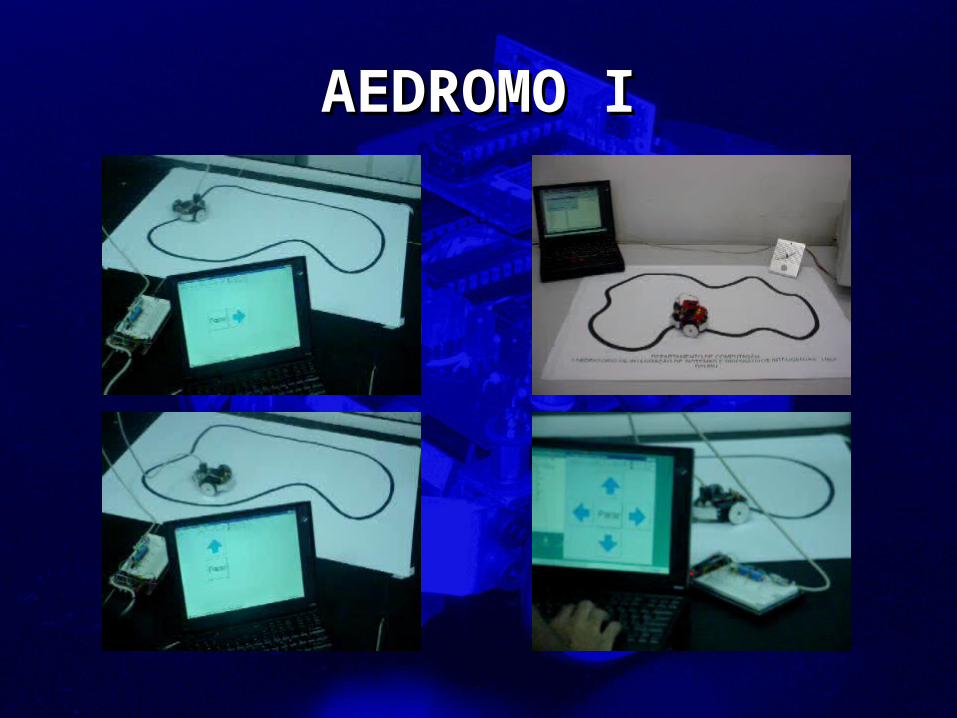
AEDROMO IAEDROMO I
AEDROMO I – Resultados AtuaisAEDROMO I – Resultados Atuais
• Programação com alunos de graduaçãoProgramação com alunos de graduação– Programação de interface paralela para Programação de interface paralela para
leitura dos sensores e acionamento dos leitura dos sensores e acionamento dos atuadores (motores)atuadores (motores)
– Desenvolvimento de hardware para leitura Desenvolvimento de hardware para leitura dos sensores e acionamento dos motoresdos sensores e acionamento dos motores
– Programação de microcontroladores para Programação de microcontroladores para tarefas específicastarefas específicas
AEDROMO I - PerspectivasAEDROMO I - Perspectivas
• Ensino de conceitos de programação e Ensino de conceitos de programação e lógicalógica– Conceitos introduzidos e desenvolvidos Conceitos introduzidos e desenvolvidos
através de questões, do sistema ao usuário, através de questões, do sistema ao usuário, sobre o comportamento esperado para o sobre o comportamento esperado para o robô. robô.
• Reforço em conceitos de geometria, Reforço em conceitos de geometria, matemática e física podem ser obtidosmatemática e física podem ser obtidos
AEDROMOAEDROMO II II – Ensino médio e – Ensino médio e superiorsuperior
AplicaçõesAplicações– Didáticas, pesquisas e entretenimentoDidáticas, pesquisas e entretenimento
Jogos entre robôsJogos entre robôs– Exemplos: tênis, futebol, caça e caçador, Exemplos: tênis, futebol, caça e caçador,
labirinto, ...labirinto, ...
• Sistema abertoSistema aberto– Reutilização e troca de códigos facilitada e Reutilização e troca de códigos facilitada e
incentivadaincentivada
AEDROMO II - ComponentesAEDROMO II - Componentes
• Ambiente específico – área de trabalho Ambiente específico – área de trabalho com tamanho fixo e portátilcom tamanho fixo e portátil
• Dois robôs cooperando ou competindoDois robôs cooperando ou competindo• Bola ou outros objetosBola ou outros objetos• Câmera posicionada sobre o campoCâmera posicionada sobre o campo• Computadores pessoais comandam os Computadores pessoais comandam os
robôsrobôs• Conexão entre PC e robôs via Conexão entre PC e robôs via
comunicação sem fiocomunicação sem fio
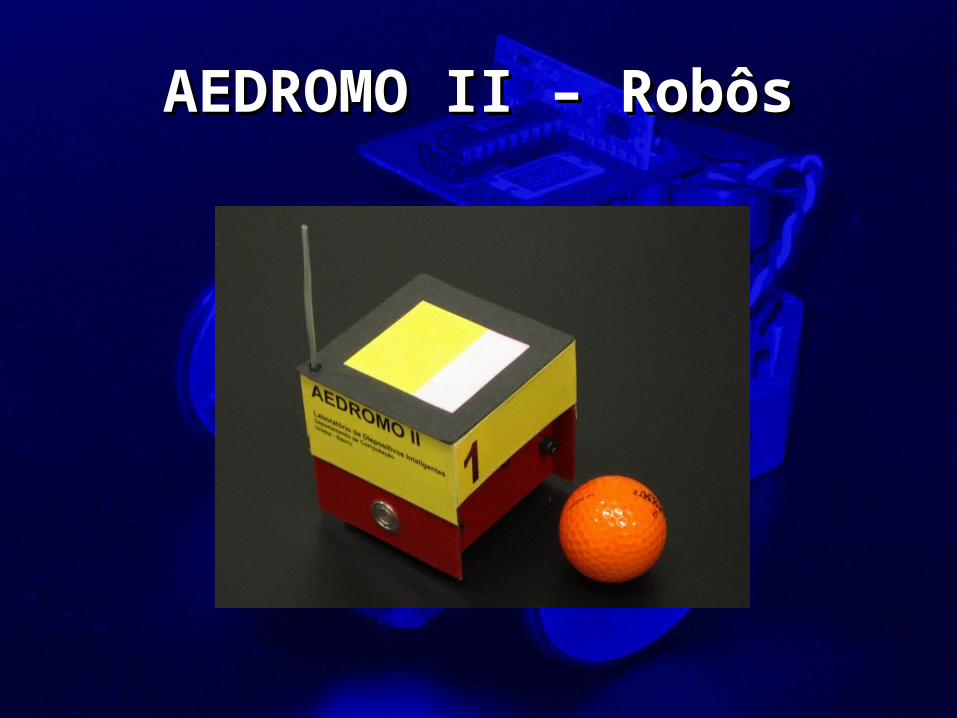
AEDROMO II – RobôsAEDROMO II – Robôs
AEDROMO II – AEDROMO II – FuncionamentoFuncionamento
• Arquitetura de controle é caracterizada por Arquitetura de controle é caracterizada por laço fechado laço fechado – Sentir – imagens capturadas pela câmera Sentir – imagens capturadas pela câmera
satélite são processadas, identificando os satélite são processadas, identificando os objetos e suas posições no tabuleiroobjetos e suas posições no tabuleiro
– Planejar – informações das imagens Planejar – informações das imagens alimentam a estratégia de acordo com as alimentam a estratégia de acordo com as regras da tarefa em execução regras da tarefa em execução
– Atuar – comandos são enviados aos robôs Atuar – comandos são enviados aos robôs para agirem no ambiente para agirem no ambiente
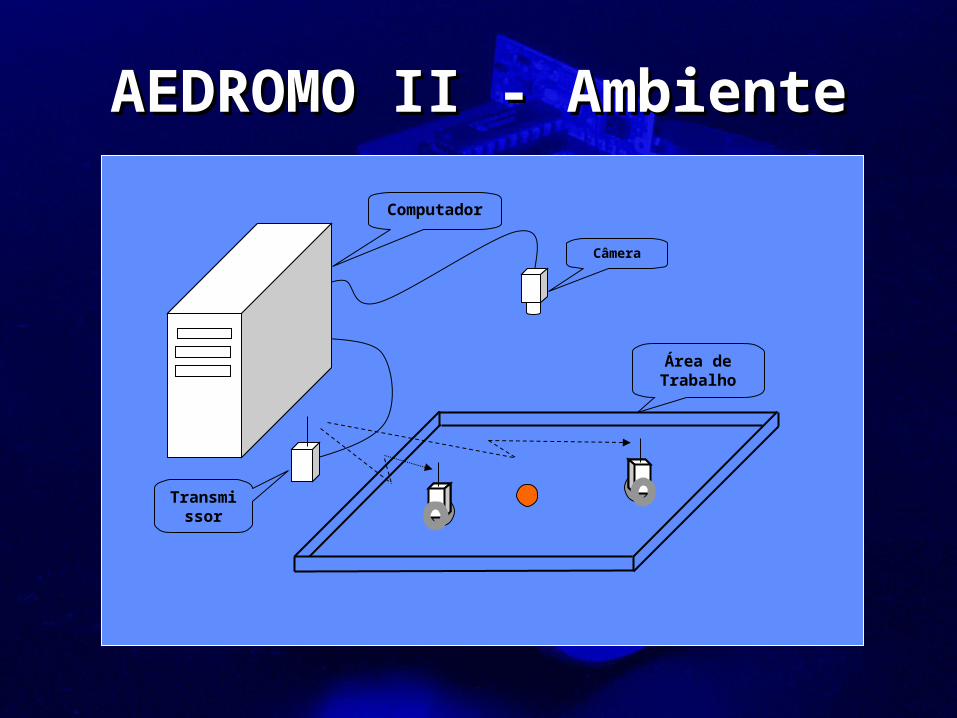
AEDROMO II - AmbienteAEDROMO II - Ambiente
Câmera
Computador
Transmissor
Área de Trabalho
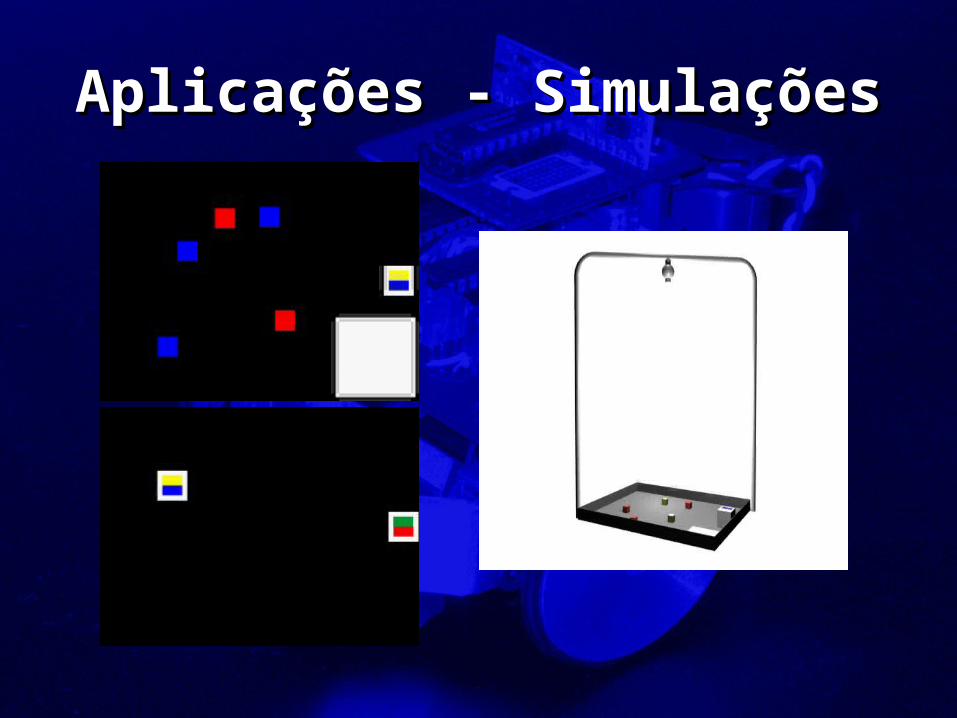
Aplicações - SimulaçõesAplicações - Simulações
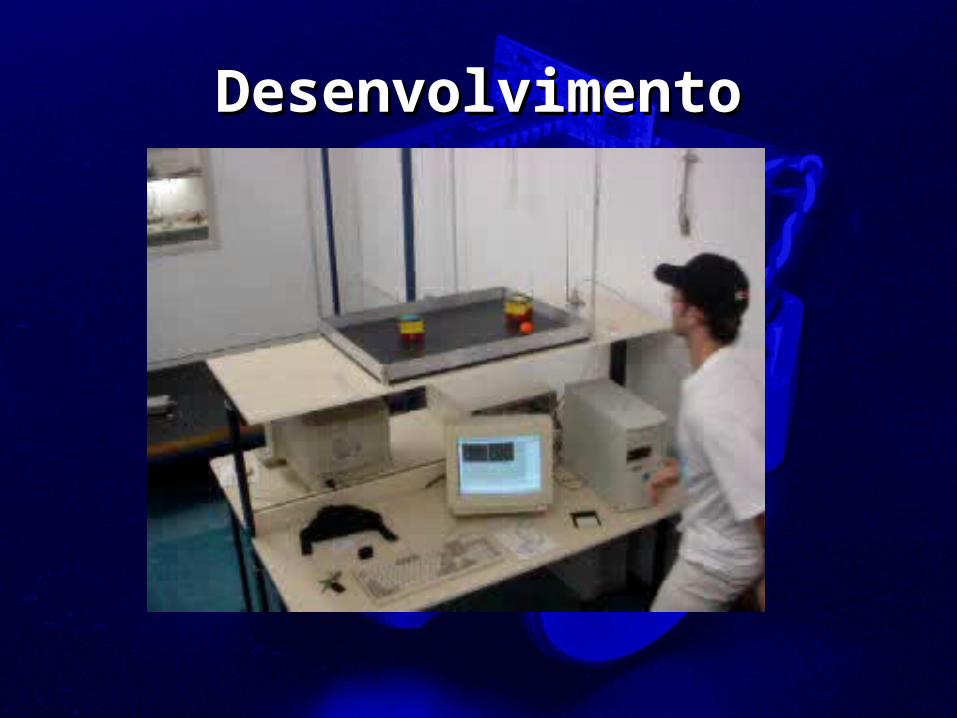
DesenvolvimentoDesenvolvimento
AEDROMO II – Suporte a AEDROMO II – Suporte a PesquisasPesquisas
Programação em camadas padronizadasProgramação em camadas padronizadas– Camadas podem ser alteradas ou substituídasCamadas podem ser alteradas ou substituídas– Possibilidade de comparar resultados entre Possibilidade de comparar resultados entre
paradigmas diferentes em diversas áreas da robótica paradigmas diferentes em diversas áreas da robótica (visão, controle, inteligência artificial, ...)(visão, controle, inteligência artificial, ...)
• Código abertoCódigo aberto– Seções de códigos podem ser estudadas, analisadas Seções de códigos podem ser estudadas, analisadas
e reimplementadas (e reimplementadas (overrideoverride))
• Robôs padronizados colocam o enfoque na Robôs padronizados colocam o enfoque na computaçãocomputação
AEDROMO II – PerspectivasAEDROMO II – Perspectivas
• Maior desenvolvimento em pesquisasMaior desenvolvimento em pesquisas– Maior facilidade para implementar novas Maior facilidade para implementar novas
abordagens em áreas específicas, as outras abordagens em áreas específicas, as outras são reutilizadassão reutilizadas
– Maior facilmente para compartilhar idéias e Maior facilmente para compartilhar idéias e implementaçõesimplementações
– Criação de uma base de códigos ou Criação de uma base de códigos ou bibliotecas binárias como base às bibliotecas binárias como base às implementações implementações
AEDROAEDRO
• Ambiente formado por um conjunto Ambiente formado por um conjunto reduzido de componente, de baixo custo, reduzido de componente, de baixo custo, direcionado a experimentos de robótica.direcionado a experimentos de robótica.– ComponentesComponentes
• Mecânicos - MotoresMecânicos - Motores• Eletrônico - CIs, transistores, etcEletrônico - CIs, transistores, etc• Sensores - Ópticos, contatoSensores - Ópticos, contato• Interface com computadorInterface com computador

Braço 2DBraço 2D
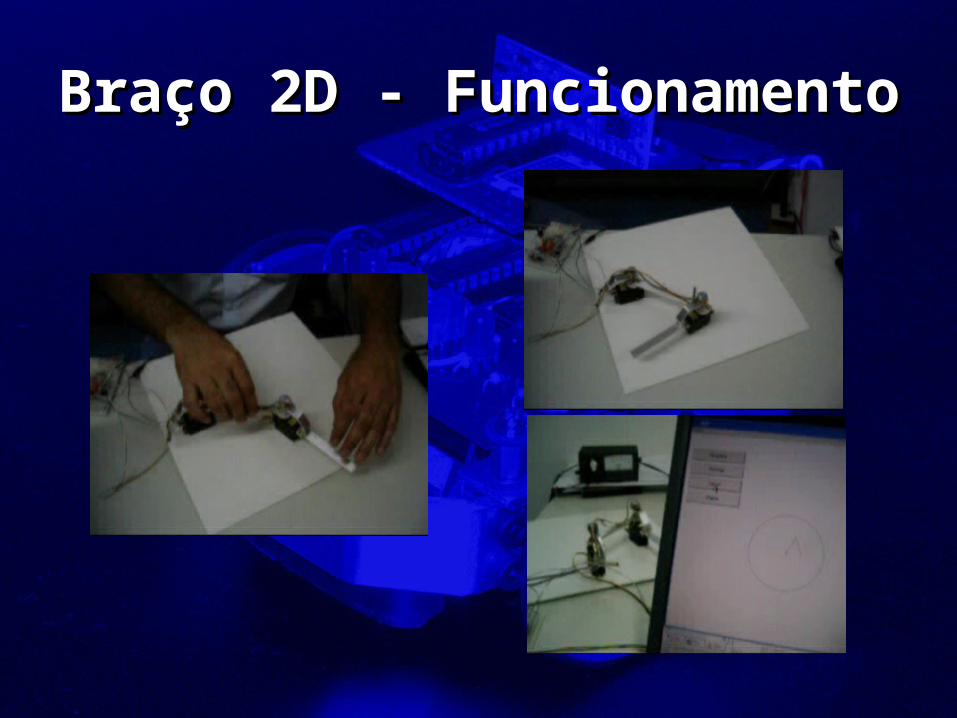
Braço 2D - FuncionamentoBraço 2D - Funcionamento
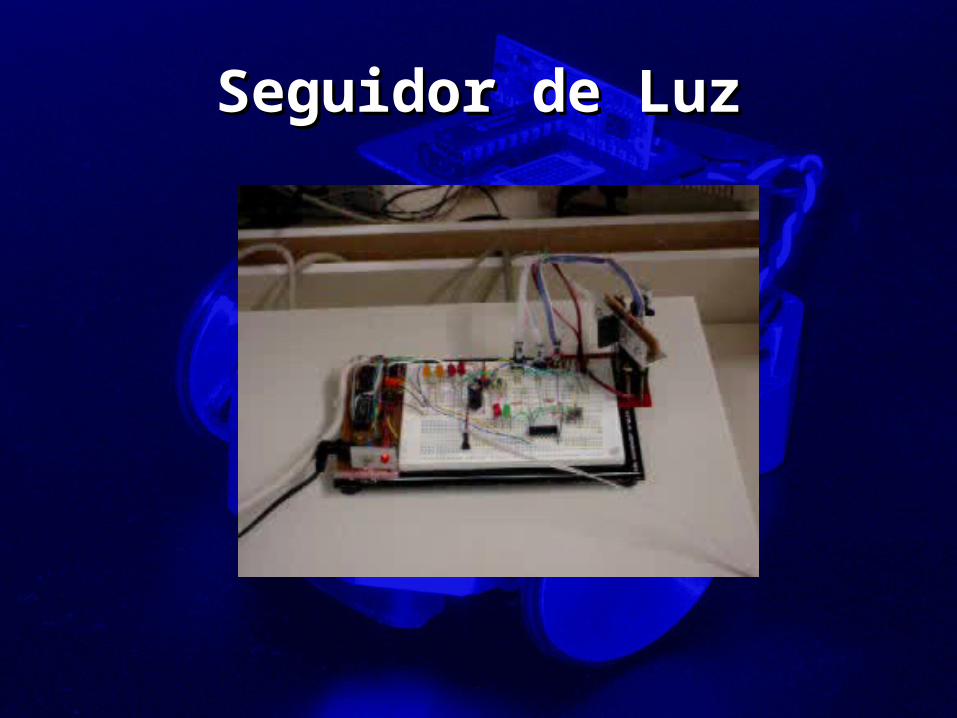
Seguidor de LuzSeguidor de Luz
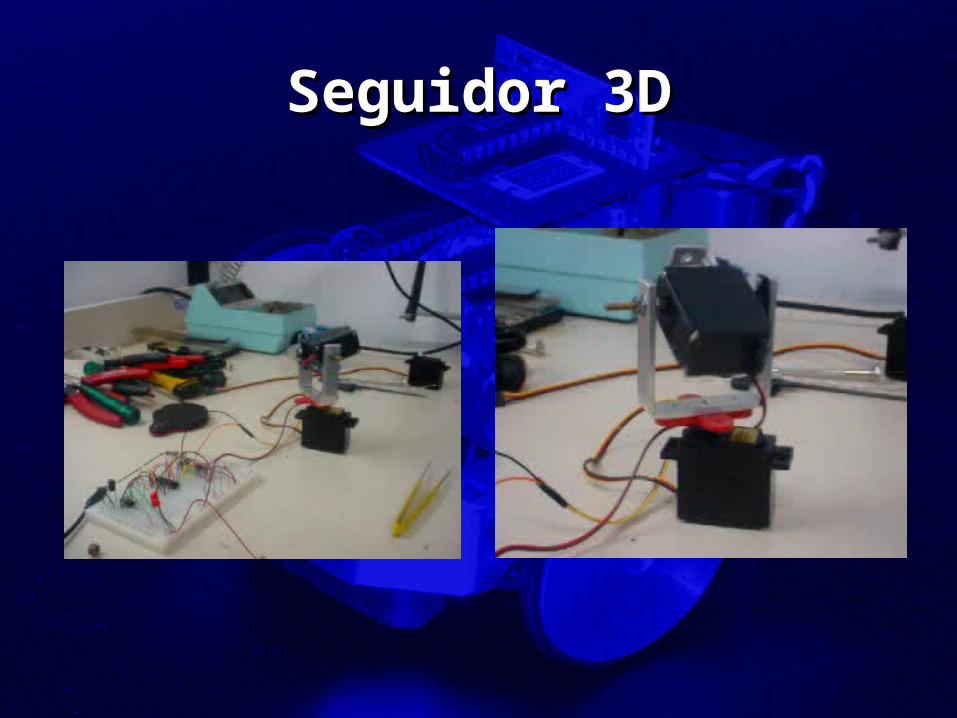
Seguidor 3DSeguidor 3D
AEDROMOAEDROMOAmbiente Experimental Ambiente Experimental
Didático com Robôs MóveisDidático com Robôs Móveis
Humberto Ferasoli FilhoHumberto Ferasoli FilhoRenê PegoraroRenê Pegoraro
Laboratório de Robôs MóveisLaboratório de Robôs MóveisDepto Computação – UNESP – BauruDepto Computação – UNESP – Bauru