o método da rigidez direta sob um enfoque matricial
TRANSCRIPT

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 1/155
Pontifícia
Universidade
Católica
do
Rio de Janeiro
—
PUC-Rio
Departamento
de Engenharia
Civil
O
MÉTODO DA RIGIDEZ
DIRETA
SOB UM
ENFOQUE
MATRICIAL
Luiz
Fernando
Martha
Rio
de
Janeiro, Agosto
de
1993
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 2/155
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 3/155
«M.
<***
Pag
.
1.
CONCEITOS BÁSICOS
DE
ANÁLISE
ESTRUTURAL
.
...
1.1.
Sistemas
de
Coordenadas
.......
1.1.1.
Coordenadas
Globais
...
1.1.2.
Coordenadás
Locais
..
1.2.
Condições
de
Equilíbrio
6
1.3.
Condições
de
Compatibilidade
de
De
s
locamen
t
o s
...
7
1.3.1.
Relações
Entre Deslocamentos
e
Deformações
em
Barras
.....
9
1,4.
Relações
Ent re
Tensões
e
Deformações
2
1.5.
Superposição
de Efeitos
e
Comportamento
Linear
.
.
1
3
1.6.
Estruturas
Estaticamente
Determinadas
e
Inde
t
erini
nadas
.....
....
.
16
1.6.1.
Es
truturas
Isostáticas
6
1.6.2.
Estruturas
Hiperestãticas
18
1.6.3.
Comparação
Entre Estruturas
Isostáticas
e
Hiperestáticas
20
1.7.
Métodos
Básicos da
Análise
Estrutural
...........
23
1.7.1.
Método
das
Forças
.
24
1.7.2.
Método
dos Deslocamentos
24
1.7.3.
Exemplo
de
Aplicação
24
1,8.
Principio
dos
Trabalhos
Virtuais
9
1.8.1.
Principio
dos Deslocamentos Virtuais
.....
34
1.8,2. Principio
das
Forças
Virtuais
...
5
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 4/155
1,8.3..
Teoremas
de
Reciprocidade
................
40
1.9. Matrizes
de
Rigidez
......
....
....
2
1.9.1.
Matriz
de
Rigidez
Global
.....
..
3
1.9.2.
Matriz
de
Rigidez
Local
..................
45
1.10.
Representação
dos
Carregamentos Como
Cargas
Nodais
47
2.
MÉTODO
DA
RIGIDEZ
DIRETA PARA
TRELIÇAS
PLANAS
.
. .
__
___
0
2.1.
Matriz
de
Rigidez
do Elemento
(Barra)
d
e
Tr el
iça
no
Sistema
Local
.
51
2.1.1.
Determinação por
Aplicação d e
Equilíbrio
Diretamente
..
2
2.1.2.
Determinação
de Matriz
de
Rigidez Local
Por Ap
1icação
do
Princípio
dos
Deslocamen¬
tos
Virtuais
...
..
4
2.2.
Matriz
de
Rigidez
do Elemento
(Barra)
de
Treliça
no Sistema
de Eixos
Globais
57
2.2.1.
Determinação
da
Matriz
a Part i r
de
Trans¬
formações
de
Coordenadas
58
2.2.2.
Determinação
Por
Aplicação das
Condições
de
Equilíbrio
Diretamente
61
2.3.
Matriz
de
Rigidez
Global
.
6?
2.3.1.
Método
da
Rigidez
Direta
...
5
2.3.2.
Formalização
do
Método
da
Rigidez
Direta
.
70
2.3.3.
Instruções
em
FORTRAN
Para
Montagem
da
Ma¬
triz
K
.....
3
2.3.4.
Numeração
dos
Nos
Que
Resul
ta na
Matriz
em
Banda
....................................
53
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 5/155
2.4.
Consideração
das
Condições
de
Contorno
£2 .
2.4,1.
Instruções
em
FORTRAN
Para
a
Consideração
das Condições
de
Apoio
. .
......
S
2.5.
Obtenção
do
Vetor
de
Cargas
F
82
2.6. Determinação
dos
Deslocamentos
<3 2
2.7.
Esforços
nas
Barras
2.7.1.
Determinação
dos
Esforços
Util izando
a
Ma_
triz
de
Rigidez k
da
barra
..
3
2.8.
Reações
de
Apoio
3.
MÉTODO
DA
RIGIDEZ
DIRETA
PARA
QUADROS
PLANOS
....
?
3.1.
Matriz
de Rigidez
do
Elemento
(Barra)
de
Quadro
no Sistema
Local
.....
?
3.1.1.
Funções
de
Forma
Para
o
E
1
emento
d
e
Viga
.
3.1.2.
Determinação
da Matriz
de
Rigidez
Por
ApljL
caç
ao
do
Principio
dos
Des
locamentos
Vir¬
tuais
102
3.2.
Matriz
de Rigidez
do
Elemento
(Barra)
de
Quadro
no
Sistema
de
Eixos
Globais
.
..
40
3.3.
Determinação
de
Forças
Equivalentes
Nodais
...
44 3
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 6/155
4
.
INTRODUÇÃO
AO MÉTODO
DOS
ELEMENTOS FINITOS
-
ELEMENTO
TRIANGULAR
CO M DEFORMAÇÃO
CONSTANTE
4l8
Zj.l.
Ideias
Básicas
.......
.....
.
....
4c i
4.2.
Equações
Fundamentais
da
Teoria
da
Elasticidade
AZ&
4.2.1.
Relações
Entre Deslocamentos e Deforma¬
ções
.............................
...
2.4
4.2.2.
Leis
Constitutivas
do
Material
-
Relações
Tensões
x
Deformações \30
4.2.3.
Equações
Diferenciais
de
Equilíbrio
..... A
33
4.3.
Matriz
de
Rigidez
do
Elemento
Finito
Triangular
de
Deformação Constante
134
4.3.1.
Matriz
das
Funções
de
Forma
(N)
.
A3H
4.3.2.
Matriz
Que
Re
la c iona
Deformações
Com
Des¬
locamentos Nodais
(B )
<r*%
4.3.3.
Tensões
Dentro
do
Elemento
432
4.3.4.
Determinação
da Matriz
de Rigidez
Por
A-
plicação
do
Princípio
dos
Deslocamentos
V
ijr
tuais
.
.'
.....
....
34
4.4.
Resumo
e
Conclusões
...
443
5.
REFERÊNCIAS'
..
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 7/155
1
1
.
CONCEITOS BÁSICOS
DE ANÁLISE
ESTRUTURAL
A
analise estrutural
ê
a
fase
do projeto
estrutural
que
corresponde
a
determinação
de
esforços
internos
e
externos
(rea
ções), e as
correspondentes
tensões,
bem
como
determinação
dos
deslocamentos
e
correspondentes
deformações
da
estrutura em
es
tudo
.
Esta
análise deve
ser feita
para
o s
possíveis
estágios
d e
carregamentos
e solicitações que devem
ser
previamente
determ_i
nados
.
0
projeto
estrutural
te m
como
objetivo a
concepção
de
uma estrutura
que
atenda
a todas as
necessidades
para as
quais
e la
será
cons
tru
id a
,
satisfazendo
s egur
ança
,
cond
ições
locais,
condições
económicas
,
estética,
condições
construt ivas e
restr_i
ções legais .
A
análise es
tru
tural está baseada
na def
iniçao
d
e
um
modelo
estrutural
onde o comportamento
da
estrutura
é
previsto
para
as
diversas
solicitações.
0
modelo
estrutural
e um
mod
elo
ma
tema
tico que
incorpora todas
as
hipóteses feitas
para
o
c
om
portamento
da estrutura
tais
como
hipóteses
para
o
equilíbrio
en
tre
forças
e entre
tensões
,
para
as relações entre deslocamentos
e
deformações, para
o
comportamento
dos
materiais
que
constituem
a
estrutura
quando
submetidas
a
solicitações,
e
para
as
condi_
çoes
de
ligação da estrutura
com
outros
sistemas
Co
solo
por
exemplo) .
Estas
hipóteses
fundamentam
as condições
que
governam
o
comportamento
de um sistema
estrutura l
representado
por
seu
mo
d
e
1
o
matemático.
Estas
condições
pod
em
ser
classif icadas
em :
-
condições
d e
equilíbrio
—
condições
d e
compatibi l
idade
d e
deslocamentos
-
relações
entre
tensões
e
deformações
Para
estabelecer
as
condições
acima
e
relaciona-las
com
um
determinado
modelo
estrutural
e
essencial
definir um
sistema
d e
coordenadas para
identificar
forças
e
deslocamentos.
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 8/155
2
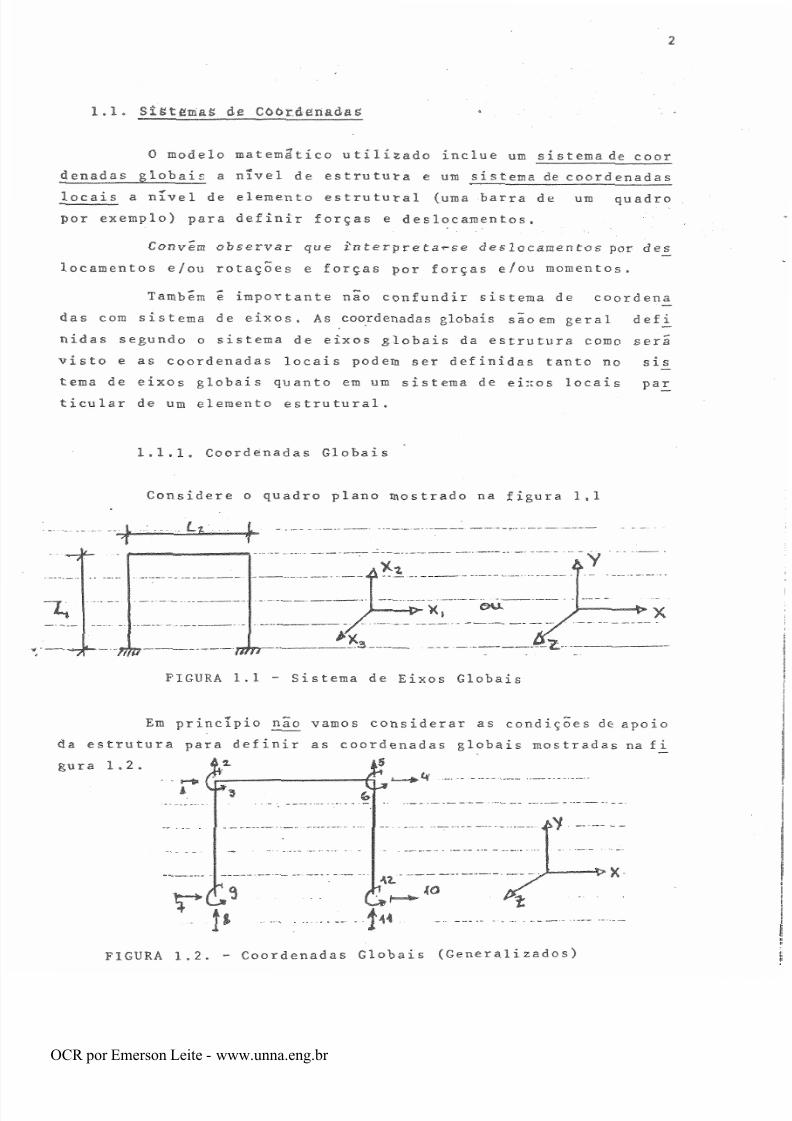
1.1.
SíetÊmaS
de
Coordenada
g
•
O modelo
matemático
ut i l izado
inclue
um
sistema
de
coor
denadas
globais
a
níve l
de
estrutura
e um
sistema
de
coordenadas
locais
a
nível d
e
elemento
e
s
t
ru tu
r
a 1
(uma
barra de
um
quadro
por exemplo)
para definir
forças
e
deslocamentos.
Convêm observar que
i 'nterpretarse
deslocamentos
por
des
locamentos
e/ou
rotações
e
forças por
forças
e/ou
momentos.
Também
e
importante
nao
confundir sistema
de
coordena
das
com
sistema
de
eixos.
As
coordenadas
globais
são em
gera l
defi
nidas
segundo o
sistema
de eixos globais
da
estrutura
como
sera
visto e
as
coordenadas
locais
podem
ser definidas
tanto
no
sis
t
ema d e
eixos
globais
quanto em
um
sistema
d
e
eixos
locais
par
t icular d e
um
e 1eraen t
o
es
tru
tural
.
1.1.1.
Coordenadas
Globais
Considere
o
quadro
plano
mostrado
na
f
igura
1
,
1
Sf
If
-
-
L—
*>-
x,
aY
ou
X
FIGURA
1
.
1
-
S is
t
ema
d e
Eixos
Globais
Em
princípio
não
vamos
considerar
a
s
condições
de apoio
d a
estrutura
para
definir a s
coordenadas
globais
mostradas na
fi
â 2
ur
a
1.2.
J
ir*
-
aY
-
KL
&
ÿ4
IO
-T>
X
FIGURA
1.2.
-
Coordenadas
Globais
(Generalizados)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 9/155
3
As
coordenadas
globais
são
usadas
para
descrever
uma
da
da configuração deformada
da
estrutura,
ou
para
descreverum
gru
po
de
forças
apl
icadas
ã
estrutura.
Fica
claro então
que
a
descrição de
deslocamentos
da
es
trutura
e
forças
aplicadas
a e la
f ica
l imitada
aos
pontos
onde
sao
definidas
as
coordenadas»
Ás
informações
quanto
a
deslocamen
to s e
forças
em
outros
pontos
são
obtidos
em
função das
informa
ç
o e
s
nas
coordenadas
globais
.
0
modelo
matemático
e
feito de
tal
modo
que
se possa
sempre
reportar às coordenadas
globais,
por
is
so
chamadas
de
coordenadas
generalizadas.
Assim
a
configuração
deformada
da
estrutura
da
f igura
1.2 f ica
definida
apenas
pelos
deslocamentos
nas
coordenadas
glo
bais
descritos
pelo
vetor
D
formado
por
12
componentes,
sendoca
da
componente
Dÿ
o deslocamento da coordenada
i.
Analogamente,
o
grupo
de
forças
aplicadas
a
estrutura
ê descrito
pelo vetor F
formado
pelas
componentes
Fÿ,
cada uma
aplicada
à
coordenada
i.
Os vetores
D e
F,
mostrados
abaixo,
são chamados
de
deslocamen
tos
generalizados
e
forças
generalizadas»
D
Di
D2
Db
Dm
Ds
De
D?
De
D
9
Dio
D
n
D
12
(1.1)
F
i
F
2
Fb
Fm
Fs
Fe
F?
Fe
F
9
F
1Q
F
li
F
12
(1.2)
As
componentes
d o vetor
D
sao
ditas
linearmente
inde
pendente
quando
a
configuração
deformada da
estruturà
sõ
f ica
completamente
definida
a
partir
do
conhecimento
de
todas
as
com
ponentes .
As
componentes
do
vetor
F são
ditas
linearmente indeÿ
pendentes
quando
é
preciso conhecer todos
os
componentes
para
d£
finir
o
grupo
de
forças
aplicadas .OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 10/155
1.1.1.1.
Coordenadas
Dependentes
Voltemos
â
mesma estrutura
da
f igura
1,2
e,
ainda
esque
cendo
as
condições
de
apoio,
consideremos
que os
m embros da
es
trutura
são
inf initamente
rígidos
ao
longo
de
suas
d
ireções
axiais,
de modo
que
s eu
s
comprimentos são
invar iáveis,
•
Neste
caso
pod
emo s
estabelecer
as
seguintes
relações
de
dependências
entre
o s
deslocamentos
das coord
enadas
globais;
D3
d2
DS
Du
D
B
D
n
Cl
.3 )
Assim,
a
configuração
deformada da estrutura
f ica
def i
nida
por
9
componentes
e
nao por
12,
como
mostrado
na
f igura
1.3.
Ps
c
ÿ
c
-
Pt
Figura
1.3
-
Deslocamentos independentes
A
dependência
entre'
forças
se
dã
para
garant ir o
equi
l íbrio da
estrutura
como um todo. Para
a
estrutura d a figura
1.2,
a
s
condições
d
e
equilíbrio
nas
direçoes
X
e Y
e de
momentos em
relação
ao
ponto
do apoio
da esquerda
resultam nas
seguintes
re_
lações
de
dependências entre
forças;
Fi
+
Fi»
+
F
7
+
Fio
F2
+
F
5
+
Fe
+
Fn
F
3
+
F
$
+
F
9
+ F
i2
+
F1L1
+
F i,
L
1
—
F
5
L
2
= 0
-
0
-
F
11
L
2
-
0
(1.4)
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 11/155
5
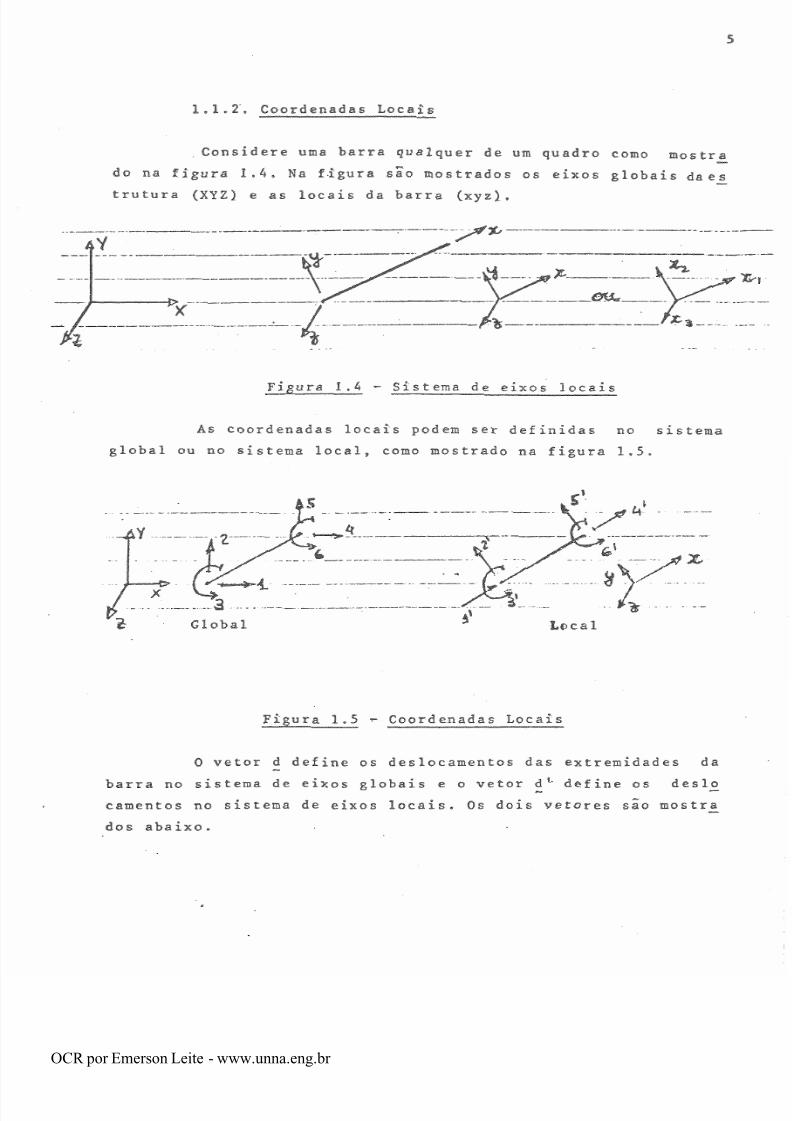
1.1.2.
Coordenadas
Locais
Considere
uma
barra
qualquer
de
um
quadro
como
mostra
do
na
f igura
1.4.
Na
f igura
sao
mostrados
os eixos globais
da
e
s
trutura
(XYZ)
e
as
locais
da
barra (xyz),
Figura
1.4
*-
Sistema
de
eixos
locais
As
coordenadas
locais podem
ser
definidas
no
sistema
global ou
no sistema
loca l ,
como
mo s
trado na
f
igu r
a
1.5.
Global
Figura 1
.
5
Coordenadas Locais
0
ve
t or
d
define
o s
des locamentos das extremidades
d
a
barra
no sistema
d e
eixos
globais
e
o ve tor
d1 define os
des lo
c
amentos
no
sistema
de
eixos locais. Os
dois
vetores
sao mostra
dos
abaixo.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 12/155
6
di
d
2
d
3
d
i»
d
5
d6
Cl.
51
d
•
-
<
d'i
d'
2
d'3
à\
d'
5
d'
e
(1.6)
Analogamente, os
vetores
f
e
f' definem
as
forças
que
a
tuara nas
extremidades
d a
barra
segundo o
s
sistemas
de
eixos
glo
bais
e
locais
respectivamente
e s
ao mos trados
abaixo,
f
=
fi
f
2
f
3
f
f
5
f
6
(1.7)
f
'
f'l
f2
f3
f\
f's
f't
(1.8)
Ás forças
escritas
no
sistema de
eixos
locais
são
con
venientes,
neste caso
da
barra
de um
quadro,
pois
se id
en
t
if i
c
am
com
esforço
norma
1
,
esforço
cortante
e
momento f
1
e t o
r
nas
extre
midade
s
.
A
transformação
dos
vetores
d'
e
f
'
do
sistema
local
pa
~
~
—
ra
d e
f
no sistema
global,
e
vice-versa,
serã
vista mais tar
de
.
1.2.
Condições de
Equilíbrio
Todas
as estruturas
devem
ser
capazes
d e
alcançar
um
es_
t
ad
o
d
e
equilíbrio
estável
para
um
determinado
carregamento
apH
cado
.
Esta cond
i
ç
ao d
e
equilíbrio
deve
ser satisfeita
pela
estru_
tura
como
um
todo
ou
por
qualquer porção
i so lada,
Para uma
estrutura
espacial
a
s
condições
d
e
equilíbrio
global resultam
em
6
equações de
equilíbrio
impondo
que
as
r
e su
tantes d e
força
e
momento sejam
nulas:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 13/155
7
IF
-
0
EF
-
O
EF
«O
x
y
z
(1.9)
EM
-
O
EM
=
O
EM
-
O
x
y
z
O
nosso
modelo
matemático
utiliza a
cond
i
ção
de
equílí
brio
aplicada
às
coordenadas
globais.
Assim»
a
resultante de
fo r
ça
aplicada
na
direção
d
e
cada
coordenada
global
e imposta
ser
nula.
No
caso
da estrutura da f igura
1,2
isto
resultar ia em
12
equações
d e
equilíbrio.
Desta
forma
estaremos
garantindo
o
equilíbrio
dos
pon
tos
onde
são
definidas
a
s
coordenadas
globais
.
Estes
pontos
são
chamado
s
d
e nós
.
Gar ant
indo-se
o
equi
1
íbr
io
d
e
todos
o s
nós d a
estrutura,
garante-se
o equilíbrio da e
s
tru
tura como um
todo
,
ou
d
e
qualquer
porção
iso lada,
Nos
casos
tratados
,
sempre
escreveremos
as
equações
d
e
equilíbrio
para
a geometria indef orraada
da
estrutura.
Os mo
t
i
vos disto
serão
vistos
no item
1.5.
1.3.
Condições
de Compatibil idade de
Deslocamentos
Compatibilidade
de deslocamento
(e/ou
rotações
)
e
um
importante
conceito
da análise estrutural.
E la
expressa
a
exige
£
cia
d
e
que
todas
as partes
da
estrutura
deformada
devem
p
e
rma
n
e
cer
ajustadas
,
unidas,
l igadas,
durante todos os
estágios
de
car
r
egamento
.
Compatibilidade
signif ica
que os
deslocamentos e
d
e
f
o r
mações
das
várias
partes
da estrutura
são
consistentes.
No caso
dos
elementos
estruturais
constituídos por
bar_
ras
a
hipótese
de deformação
da
barra
mantendo
a
seção
transver¬
sa l
plana,
adotada
no nosso model o
matemático,
imp 1ic
a na
exis_
tência
de
compatibil idade
no interior das
mesmas.
Ás
relações
en
tre
deslocamentos
e
deformações,
provenientes
de
tal
hipótese,
para
efeitos
axiais»
de
flexão
e de
torção
são mostrados
no
item
1.3.1a
seguir.
Assim
deve-se
garantir
a compatibilidade
nas
junções
das
barras
e
desta
forma garante-se
a
compatibilidade
no interior
d e
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 14/155
8
toda
a
estrutura.
e
Para
exemplif icar
as
relações que
garantem
a
compatibi
l idade nodal
vamos considerar a
estrutura da
f igura
1.2.
As
coor
denadas globais
e
locais
estão
mostradas
na
f igura 1.6,
7
3
I©
F l
gu
r
a
1
.
6
—
Coordenadas
Globais
e
Lo
cais
A
s
condi
Çoes
d
e
compatibil idade
nas
junções
(nos)
das
barras
podem
ser
expressas
por :
d
i
=
dl
=
Di
dl
=
dl
=
D
2
dl
= d
3
=
d3
d?
-
A
3
-
di»
=
Di,
dl
=
dl
=
DS
dl
= d
g =
D
6
Estas
condições
part
em
d
o
principio
que
as
junções
en
tre as barras são
t
o
t a
lmen
t
e
r ígidas
,
isto
e,
tanto deslocamen
tos
quanto
rotação são
iguai
s
nas
duas
ex tremidades
da
junta
.
Estas condições
são chamadas
de
condições
de
c
omp
a
t
i
b_i
l idade
d e deslocamentos
interna
â es tru
tura
.
Alem
das condições
d
e
compatibil idade
interna,
o s
d
e_s
locam
ent
os
também
d
evem ser
compatíve
i
s
com
as
condições
de apoi
o
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 15/155
9
da estrutura. Estas seriam
condições
de
compatibil idade
de
des
locamentos
externas.
No caso
da
estrutura
das
f iguras
1.1
e
1.2
tais
condições
resultariam
em;
dl
&
D?
0
dl
«
De
=
0
d
ss
Da
SS
0
di
as
D
10
sz
.0
dl
=
D
n
ss
0
dl
sz
D
12
sr
Q
(1.11)
1.3.1.
Relações
entre
Deslocamentos
e
Deformações
em
bar
ras
Estas
relações
garantem
a
compatibi l idade
no
interior
da
s
barras
.
Vamos
considerar
uma barra
definida
segundo
seu
siste
ma de eixos locais
como mostra
a
f igura
1.7.
—
-
à
sf~
Eixo
dos
Centros
de
Gravidade
ÿ
A
j
li
Figura 1.7
-
Barra,
Eixos
Locais
e
Deslocamentos
Vamos
def ini r as seguintes
entidades?
u
(x
i
)
= deslocamento
do eixo da
barra
na
direção
axial
xs
v
(x
i
)
ÿ=
deslocamento
do
eixo
da
barra
na
direção
transversal
x
j
0z(x
i
)
ÿ=
rotaçao
do eixo
em torno
do eixo
X3
;
0z =
drv
curvatura;
k
_
=
d2v
(
cx jpy~o>iLr t \a-Jÿo\
dxT
z(Xl)
dx
i
-
tf
(x
i
)
«=
rotação
em torno
do eixo
xi
(torção)
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 16/155
10
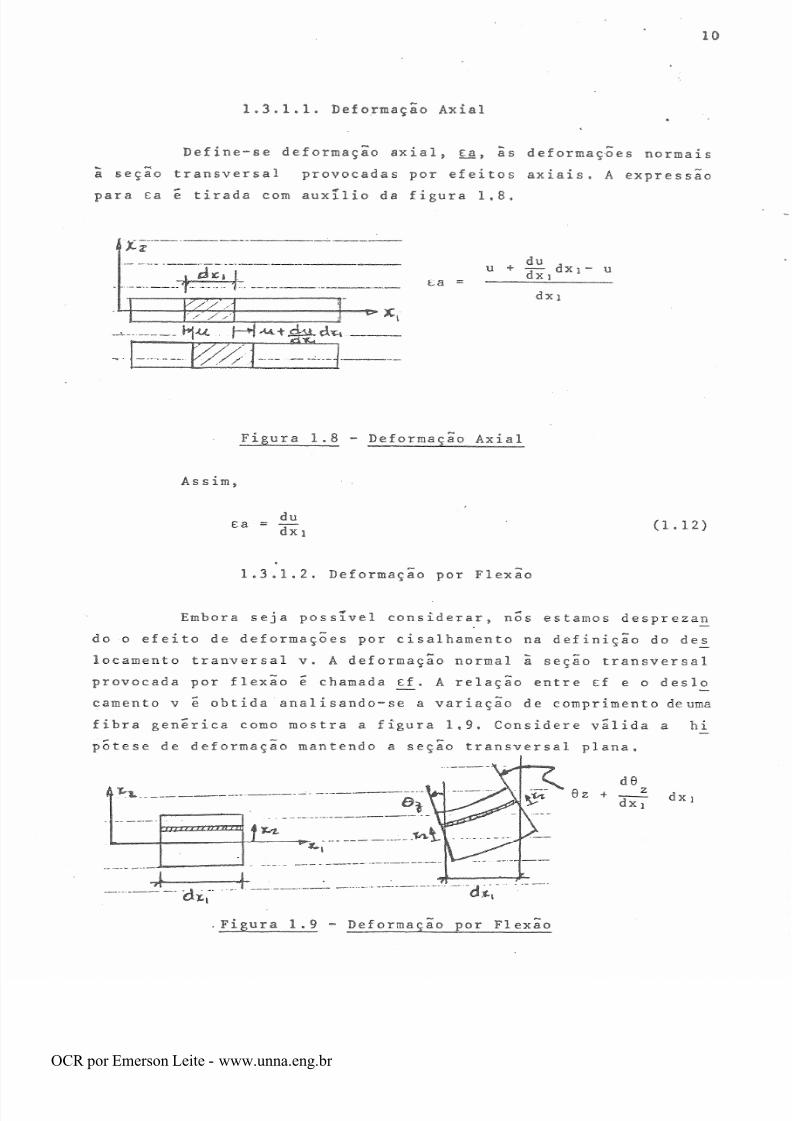
1.3.1.1.
Deformação Axial
«
Define-se
deformação
axial,
ça
, as
deformações
normais
à
seção
transversal
provocadas por
efeitos
axiais.
A
expressão
para
Ga
e
tirada
com
auxílio
da
f igura
1,8»
|
Oic
i
|
ea
V
s
/ x
'
H-u,
-r*
X,
+
cUjL
dlx-v
u
+
-=
—
dx
i
-
u
dx
i
dx
i
Figura
1.8
-
Deformação
Axial
Assim,
ea
du
dx
i
(1,12)
1.3.1.2. Deformação
por
Flexão
Embora
seja
possível
considerar,
nos
estamos
desprezan
d
o o
efeito
de
deformações por
c
i
s
al
hamen t o
na
definição
d o
des
1
ocament o
t ranversal
v
.
A deformação normal
ã
seção
t ransversal
provocada
por
f lexão e
chamada
ef_.
A
relação
entre
ef
e
o
deslo
camento v
e obtida
ana
1i
s and
o-
s
e a
variaçao
de
comprimento
de
uma
f ibra
genérica
como
mostra a f igura
1,9,
Considere
valida
a
hi
põtese
de
deformação
mantendo
a
seção
t ransversal plana.
i
z
+
d
x
dx
.
Figura
1 .
9
-
Deformação
por
FlexãoOCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 17/155
11
Sendo
dxj
,
o
comprimento
inicial da
f ibra, o
compr imen
to final
é
dado por:
dxi
+
0z
,
X2
-
(Oz +
d6z
dxi),
X2
dx
i
Observe
que
para
uma
rotação Gz
e
su a
derivada positi
vas
temos
um
encurtamento
de
uma
f ibra definida
por xj
posit ivo.
Temos,
então:
dx
i
+
0z. x
2
-
(Gz
+
dxi)
,
x
2
-
dxj
ef
=
x
i
-dJv
(1-13>
Ef
-
dJT
ÿ
X2
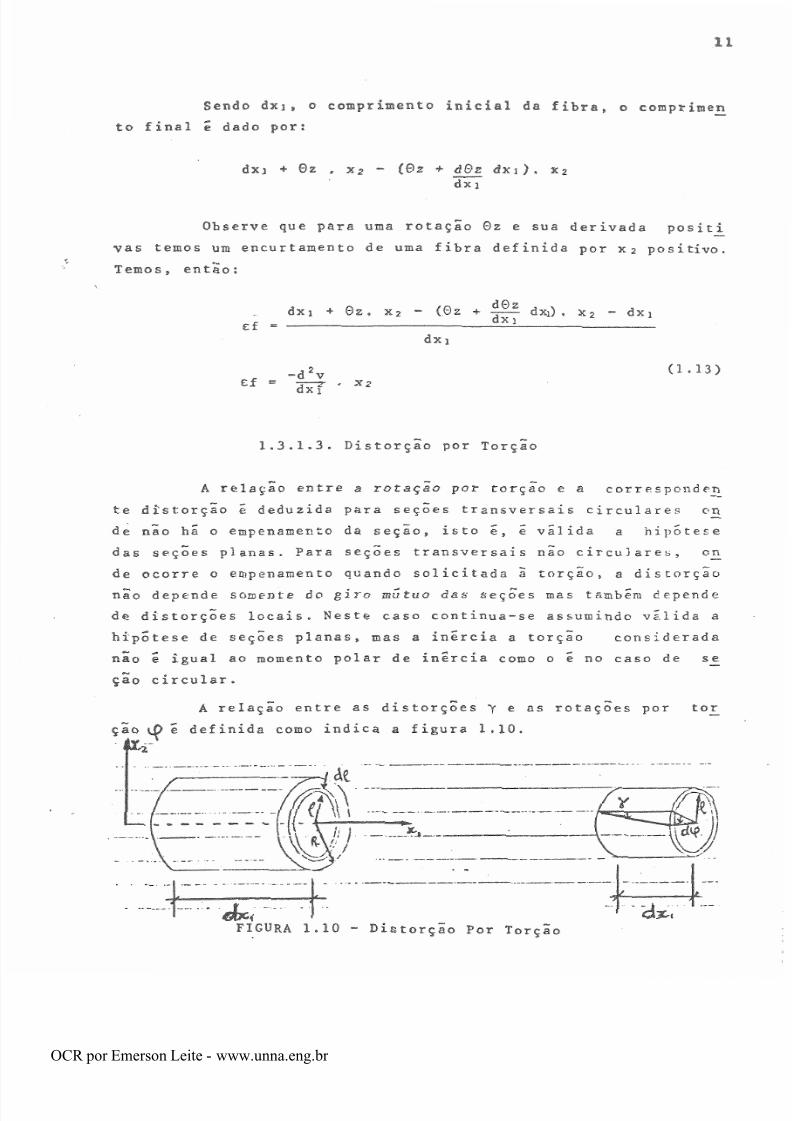
1.3.1.3.
Distorção
por
Torção
A
relação
entre
a
r
o
t
aç
ao
por
torção
e
a
correspond
e
n
te
distorção
é
deduzida
para
seçoes transversais
circulares
on
de nao
ha
o empenamento
da
seção,
isto é ,
e
valida
a
hipótese
das seçoes
planas.
Para
seçoes
transversais não
circulares,
on
de ocorre
o
empenamento
quando
solicitada
a
torção ,
a
distorção
não
depende
somente
do
giro mútuo das
seçoes
mas
também
depende
d
e
distorções
locais
.
Neste
caso
cont i
nua-se
assumindo válida a
hipótese de
seçoes
planas,
mas a inércia
a torção
considerada
não
é
igual
ao
momento polar
d
e
inércia
como o é
no
caso
de
se
ção
circular
.
A
relação
entre
as
distorções
yeas
rotações por
tor
I
FIGURA
1.10
-
Distorção
Por
Torção
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 18/155
12
Ppla
f igura
1.10 vemos
que:
ydxi
=
pdcÿ
Sendo
dvÇ>
a
rotação
por
torção
relativa
entre
duas
se
ções distantes
de um
dxi.
Assim,
temos:
Y
=
P
(1.14)
1,4,
Relações
entre
Tensões e Deformações
0
modelo
matemático r
equ
er
que
o
comportamento
d o
mate
rial
(ou
mater ia is)
que
a estrutura
e
construída
seja
especi£_i
cad
o
a
partir
das
relações
entre
tensões
e
deformações.
Estas
relações
são determinadas
experimentalmente
ou
to
mad
a
s
como conhecidas
a partir
de
problemas
ja
conhecidos.
<
;N
o
s
casos
que
iremos tratar
consideraremos
que o
mate
rial
tem
um
comportamento
l inear, isto é,
segue
a lei
de
Hooke.
As
relações
que
compoem
a lei de
Hooke
no
caso
plano
sao
mostradas
no
item
6.2.2.
Para
o caso de
treliças
e
quadros
pla_
nos,
onde
consideraremos
o
efeito
das
tensões normais
â
seção
t ransversal
(hipótese simplif icadora de
resistência
dos mate
riais)
podemos
escrever :
0Xi=E£xi
(1.15)
Sendo
ox
i
=
tensão
normal
ã
seção
t ransversal
E
=
modulo
de elasticidade
do
material
ex
i
=
deformação
normal
por efeito
axia l
e/ou
flexão
Para
grelhas
e quadros
espaciais , a 1
em
d
a tensão normal ,
temos
a tensão
de
cisaihamento devida
a torção
(embora
exista
tensões
d e
cisaihamento devido
ao
esforço
cor tante,
seu efeito
e
desprezado)
:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 19/155
13
'
t
-
Gy
(1 .16)
Sendo
T
*=
tensão
de
cisalhamento
G
=
modulo
de elasticidade
t ransversal
ou
modulo
d e cisalhamento
y
=
distorção
Ás relações
tensoes-def
ormaçoes
vão
ser
reportadas
ao
sistema
d
e
coordenadas
.
Isto
e,
destas
relações
a
nível
d e
inf
nitesimo chegaremos
ãs
relações
entre
forças
e
deslocamentos
nos
sistemas
d
e
coordenadas,
primeiro
no
local
e depois
no
global
.
Estas últimas
relações
definem as
matrizes
de
rigidez
mostradas
no
i
t
em 1.9.
1.5. Superpôs
ição
de
Efeitos
e
Comportamento
Linear
Em
todos
os
métodos
básicos
d a
análise
estrutural sei
ã
necessário
ter
como
hipótese
que
é válido
o
principio
da
super
posição
de efei tos.
Este
principio prescreve que
todos
o
s
deslo
c
amentos resul tantes
de
um
número
de
sistemas
de
forças
podem
ser
somados
para
dar o deslocamento
resul tante áa soma
de todos
os sistemas
de
forças
. Superposição
também
implica
no
inverso:
as
forças
correspondentes
de
um
número
d
e
deslocamentos podem
ser
somadas
para
dar a
força
correspondente
ã
soma dos
deslocanen
tos.
0 principio
da
superposição
é
mostrado
e s
qu
ema t
icamen
te
para
o
quadro
da f igura
1.11,
onde
as barras
são
consideradas
inextencíveis.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 20/155
14
-fí7®
(I)
(II)
F = <,
F
i
F2
L
f3.
D
=
Di
D2Jv
D
3
fx=
-Ff
-D 1
•m.
** 1
0
-dP
4
P
2
X
D*
=
d2
>
fit=- o
<=Ih
M
II
-dF
0
0
.
_F
3J
dFJ
F1
+
F11
-F i
D
=
D1
+
D11
F2
-D i
r-Df
r-D1 1*
d2
ÿ
=
<
d2
k
+
•
-D1/
_
D3.
-
0_
HH
w™
1
Figura
1.11
-
Principio
da
Superposição
de
Efeitos
Para
que
se
possa
utilizar
o
princípio
da
superposição
de
efeitos e
necessário
que
a
estrutura
tenha
um
compor tamento
l inear.
0
comportamento
l inear
de
uma
estrutura
baseia-se
em
du
as
condições.
A
primeira
i
que
o
material
seja
l inear,
e
portan
to
elást ico.
Materiais
nao
—
e
1
a s
t i
co
s
sempre
levam a
compor t
amen
to
nao
l inear.
A segunda
condição
e
que
os
deslocamentos sejam
pequenos
para
os
carregamentos
aplicados.
Des
locamentos
são
pe
quenos
quando
as
equações
de
equilíbrio
escritas
na
forma
inde
formada
da
estrutura
fornecem
resultados
iguais
àqueles
obtidos
pelas
mesmas
equações
de
equilíbrio
escritas
na
forma
final
de
formada da
estrutura
para
o
carregamento
correspondente.
A
hipótese
de
pequenos
deslocamentos
poderia
ser
resuOCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 21/155
15
mida em
:
Deslocamentos
são
pequenos
quando
a
geometria
inicial
ou
final são iguais em termos
práticos .
Exceto
em
casos part i
culares,
as
estruturas
civis
tem
deslocamentos
pequenos
face
ao
tamanho dos seus
membros.
Um
exemplo
destas
exceções
e o
da
estru
tura
da
f igura 1.12,
onde
o
estado
de
equilíbrio
estável
sõ
po
de
ser
alcançado
a
partir da
forrfca
deformada da
es
tru
tura
.
Ou tr
o
exemplo seria o dos cabos
,
que
são es
truturas mu
i
to
f lexíveis.
P
Figura
1.12
-
Grandes Deslocamentos
A
dependência
do
comportamento
l inear com
a hipótese
dos pequenos deslocamentos
pode
ser
entendida a
partir do
ex
em
pio
da f igura
1.13.
Nesta
estrutura,
o
deslocamento vert ical
d o
ponto
A
,
6a, ê
função das característ icas
geométricas
das
barras, assim
como
das
forças
P
e
H
e
do
comportamento
do
mater ia l
que
é
supo£
t
o
l inear.
'
%
f
Figura
1.13
-
Pequenos Deslocamentos
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 22/155
16
Podemos
ter duas
situações :
.
.
.
1?-
Se 6a
fo r
muito
menor do
que
a
(6a
<<
a)
e 6 a
fo r
muito
menor
d o
que b
(6a
<
<
b)
Podemos
cons
iderar
que
j5_a
depende
das
dimensões
iniciais
da
estrutura,
ou
6a =
6a
(a,b).
Como o
material
e
l inear,
temos
que
6a
e
função
l inear de
P
,
ou
6a
=
C
.P
, onde
C
e
uma
cons
t
an
t
e
.
29-
No
entanto,
se
_Ô_a
nao
fo r
pequeno
em
relação
a
a e
b,
a
de
pendência d
e
6_ a
c
cm
as dimensões d
a
estrutura pode
ser
expressa
por
6a
=
6a
(a
+
6a,
b).
Isto mostra
que
o
conhecimento do
des
locamento
_6_a
dependera
do
seu
próprio
valor
que
não
e
conhec
ido
a
priori.
Isto
fa z com
que
6a
não
seja
mais
função l inear
de
P
.
A
determinação
de
jSa.
so
pode
ser
resolvida
iterativamen
te,
partindo-se d e um
valor inicial
suposto
e
determinando
o
va
lor
correspondente,
e
assim
por
diante
a te
que
o
valor
deterrai
nado
não
difira
signi f icat ivamente
d o
valor
do
passo anter
i
or
.
Este
processo pode
nao
convergir,
e neste
caso
a
estrutura
ê
in s
t.áve
1
.
Assim sendo
sempre
t rabalhar emo s
com a hipótese
-
de
pe
qu
enos
deslocamentos
,
onde
as
equações
d
e
equilíbrio
são
sempre
escritas
para
a forma
i
nd e
f
ormad
a
d
a
es
tru
tura
.
Esta
hipótese
também
é
chamada
de
hipótese
da
manuten
ção das
d
ime
n
soes
iniciais
, básica
,
juntamente
com o
compor
ta
mento
1inear
d
o
mater ia l ,
para
a
uti l ização
d
o
principio
d
a
su
perpos
i
ção
d
e
efei tos.
1.6.
Estruturas
Estaticamente
Determinadas
e
Indeterminadas
As
estruturas
estáveis podem
ser
divididas em dois
ti
po
s
:
a
s
estaticamente
determinadas
e a
s
estaticamente inde t
erm_i
nadas ,
que
sao,
respec t
i
v
amen t e
, chamadas d
e
estruturas
isostã
ticas
e estruturas
hiperestãticas
.
1.6.1.
Estruturas Isostáticas
São
tais
que
tanto
forças
externas
desconhecidas
(rea
ções
d
e
apoio)
como internas
(esforços
simples)
sã o
d
e t
erm i
na
do
s
para
qu
a
1
qu
er caso
d
e
carregamento
com a
utilização
apenas
dasOCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 23/155
17
condições
de
equilíbrio.
Do
ponto de
vista
físico,
uma
estrutura
isostática
tem
o número
estr i to
de
vínculos
(.externos
e
internos)
para
que
per
maneça
estável.
Retirando
um
destes
vínculos
a
estrutura
se
tor
na
instável
(h
ipo
s
t
a
t
ic
a
)
,
e
ad
i
c
ionando-s
e
um
vinculo
qualquer
a
mais,
este não
seria
o
necessário
para dar
estabilidade a
es
tru
tur a
, e ela se
torna
hiperestãtica.
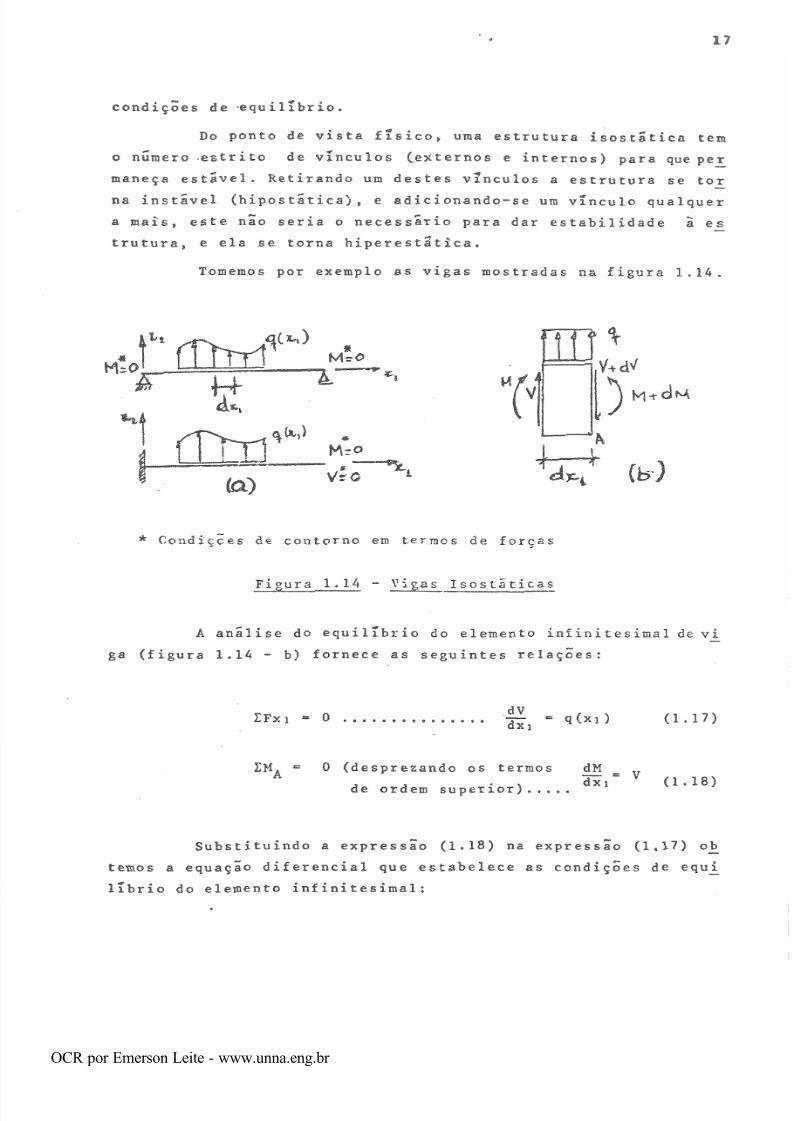
Tomemos
por
exemplo
as
vigas
mostradas
na
f igura
1.14.
*
Condições
de
contorno
em
termos
de
forças
Fi
gura
1.14
- Vigas
Isostáticas
A
análise
d
o
equilíbrio
do
elemento
infinitesimal de
v_i
ga
( f igura
1.14
-
b)
fornece
as
seguintes
relações:
d V
EFx
i
= 0
........
.....
-j—
=
q
(x
i
)
(1.17)
dx
i
EM.
=
0
(desprezando
os
termos dM
.
,
.
.
dxi
(1
.
18)
de ordem
superior)
Substituindo
a
expressão
(1.18)
na
expressão
(1,17)
ob
temos
a
equação
d
if
erencial
que
estabelece
as
condições
d
e
equi.
1
1
br
i
o
do
elemento
inf
ini tesimal
:
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 24/155
18
ú
ÿ
M
-
qC*í)
'
(1.19)
Esta
equação
integrada ao
longo
da
viga
fornece:
ff
'
H(xi)
=
q
dxj d x j
+
Ci
xi
+
Cz
(1.20)
J
J
As
constantes
de
integração
Ci
e
Cz
ficam
definidas
pe_
la s
condições
d
e
contorno
em
termos
de
forças
,
Pela
f igura
1.14,
vemos
que as vigas
isotãticas
sempre
definem
duas
condições
de
contorno
em
força,
sendo
possíve l
de
terminar
C
\
e
C2
.
Com
C
1
e
C2
podemos
determinar
os momentos fie
tores
a
partir
da
expres sao
(1
.20)
e o
s
esforços
cortantes
a
par
tir
da
expressão
(1.18) .
Cone
lu
imo
s
então
que para
e s
tru turas
isostáticas
só
o
car regamento ,
juntamente
com
a
s
condições
d
e
contorno em
termos
de
força,
ja define os
esforços
internos na
estrutura
utilizan
do
apenas
condições
de
equi l íbr io.
1.6.2.
Estruturas
Hiper
e
s t
a t
íca
s
São
tais
que
a s
equações
de
equilíbrio
não são
suf
ici.
entes
para
a
determinação
das
forças
internas
e/ou
externas
(rea
çoes).
Sao necessárias
condições
de compatibilidade de
desloca
mentos
para
a
definição
destes
esforços.
Do
ponto
d
e
vista
físico,
uma
estrutura
hiperestática
t
em
mais
vínculos
(externos
ou
internos)
do
que
os
necessários
para
que
e la
seja
estável.
Retirando
um
destes
vínculos a
estru
tura
ainda
é
estável.
Tomemos
por exemplo
a
s
vigas
d
a
f
igura
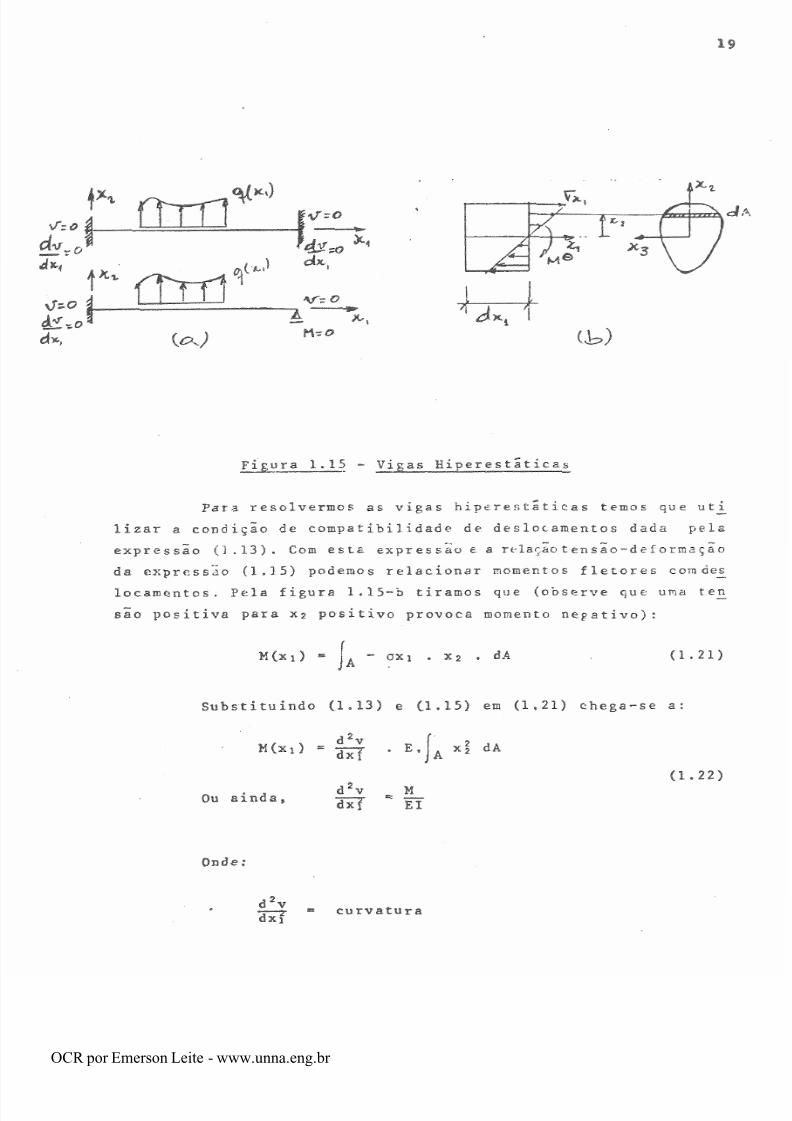
1.15.
Não
ex
i_s
tem
condições
d e
contorno
em t
ermo s de
forças
para
determinarmos
os
momentos
f
1
etor
e
s
pela
expressão
(1.20),
Existem
quatro
co
11
di
ç
o
e s
de
contorno
que envoi
v
em d
e
s
1o c
ament
o
vert ical
,
v
, e
r
o
taçao
,
dv
.
dx
1
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 25/155
19
Figura
1.15
-
Vigas Hip e r
e
s
t
ã
t
i
c
a s
Para
resolvermos
as
vigas
hiperer.tãticas
temos
que
ut_i
lízar
a
condição
de
compatibilidade
de deslocamentos dada
pela
expressão
(1.13).
Com
esta
expressão
e a
relaçao
tensão-deformaçao
da
expressão
(1.15)
podemos
relacionar
momentos
fletores
com
des
locamentcs.
Pela
f igura
1.15-b
tiramos
que
(observe
que
um a
ten
são
posit iva
para
x
2
posit ivo
provoca momento
negat ivo) :
M(xi)=jA~oxi.x2.dA
(1.21)
Substituindo
(1.13)
e
Cl
•
1
3
)
em
(1.21)
chegasse
a
:
K(Xi)
fif
ÿ
E-
j
d
2
v
M
Ou
ainda.
dTf
*
ÊT
x
I
d
A
(1.22)
Ond
e
:
d
v
-T—7
*=
curvatura
dxj
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 26/155
20
I
»
1x3
»
momento
de
inércia
em
torno do
eixo
X3
A
expressão
(1,22)
estabelece
uma
relação
que
garante
compatibilidade
de
des
locamentos
(hipótese das
seçoes
planas)
e
relações
tensoes-def
ormações
,
Para resolvermos
as
vigas
biperestaticas
resta
cons
ide
r
ar a
cond
ição
de
equilíbrio
dada
pela
expressão (1.19)
.
Subst(
tuindo
(1.22)
em
(1.19)
obtemos
a
equação di
f
er ene ia
1
fundamen
tal
das vigas, relacionando deslocamento
com
carregamento
:
d2
dxf
(1.23)
Integrando
esta
equação
obtemos
quatro
constantes
de
in
tegraçao
que
ficam definidas
pelas
quatro
condições
de
contorno
das
vigas
hiperestaticas
da
f igura
1.15.
Os
esforços
internos sao
determinados
pelas
expressões
(1.22)
e
(1.18)
.
Cone
lu
imo
s
que
a
determinação
d
e
esforços
em
estrutu
ras hiperestaticas
requer
a
utilização
tanto das
condições de
equilíbrio
quanto
d
e
compatibil idade
de
deslocamento
interna e
com
os vínculos
externos
.
1.6.3.
Comparação
entre
Estruturas
Isostáticas
e
Hiper
es
taticas
Nas
estruturas
isostáticas
s
5
o
carr
egamento
já
define
os
esforços
internos.
Por
isso
sS
existe
uma solução
para estes
esforços
para
cada
caso
d e
carregamento.
Pode-se observar
também que pequenas
variações
na
geo
metria
da estrutura
(dentro
da
hipótese de
pequenos
deslocamen
tos),
por
não
alterar
em
a
s
equações
d
e
equilíbrio, nao introdu
zem
esforços
adicionais
em estruturas
isostáticas.
Assim
deformações
provenientes
de
variações
de
tempera
tura produzem
deslocamentos
s
em
produ
z ir
esforços.
0
que
pode
ser
entendido
mais
faci lmente se for observado
que
a estrutura
isostática
tem
o
numero estr ito
de vínculos para
impedir
seus
mo
El
9
d
v
dÿJ
=
q
(x
1
)
ou
,
para
I
constante,
El
d\
A
v
q(xi)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 27/155
vimentos,
nao
imped indo
,
por
exemplo,
uma
variação
de
comprimen
to
de
uma
barra devido
a
temperatura,
Ja
se
os
vínculos
externos (apoios)
sofrerem
pequenos
deslocamentos,
so
introduzirão
movimento de
corpo
rígido,
não
can
sando
deformações
internas
e
por
conseguinte
não há
esforços
in
ternos.
Este
e
o
caso
de
recalques de
apoio em
estruturas
isos
taticas,
sendo
esta
uma
vantagem
deste
t ipo de
estrutura.
De
maneira
anãloga
modificações
impostas na
montagem
da
estrutura
isostática,
tais como
imperfeições no comprimento
das
barras de
uma trel iça,
não introduzem
esforços
adicionais,
cau
sando
apenas
des locamentos,
No
caso
da
estrutura hiper es
tãtica existem
inúmeras
so
luções
que
satisfazem
as
condições de
equilíbrio
para um
mesmo
carregamento
(.por
que?).
A solução
correta
é aquela
que
satisfaz
alem
do
equilíbrio,
compatibil idade de
deslocamentos.
Isto
tor
na
a
resolução
da
estrutura
hiper
e
s
ta t
i
ca mais
complexa.
Apesar
das
vantagens
ji
vistas
da
estrutura
isostática,
alexa da
faci l idade
de
resolução,
a
maioria
das estruturas
e
h_i
perestática.
Isto
se
deve
aos seguintes motivos:
19-
Algumas
formas
estruturais sac i
n
t
r
in
s i
c
am
en
t
e
hiper
estáti_
ca s
,
tais
como
á
estrutura
de
um
edifício,
uma
casca
,
u
m
a
tre¬
l iça
espacial,
etc.
2Ç-
Os
esforços
em
uma
estrutura
h
ip
e
r e s t S t
i
c a
são
geralmente
me
nores
do
que
em uma
estrutura
isostática
cor r
e s
pond
en
t
e ,
pois
há
uma
melhor
distribuição
de
esforços.
Isto pode
ser
enten
dido
a
partir
das
estruturas
da
f igura
1.16,
verif icando
que
o
momento
M
2
é menor que
Mi
.
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 28/155
22
(.CK)
à
(b)
J?
A
1
i?
1
A
A
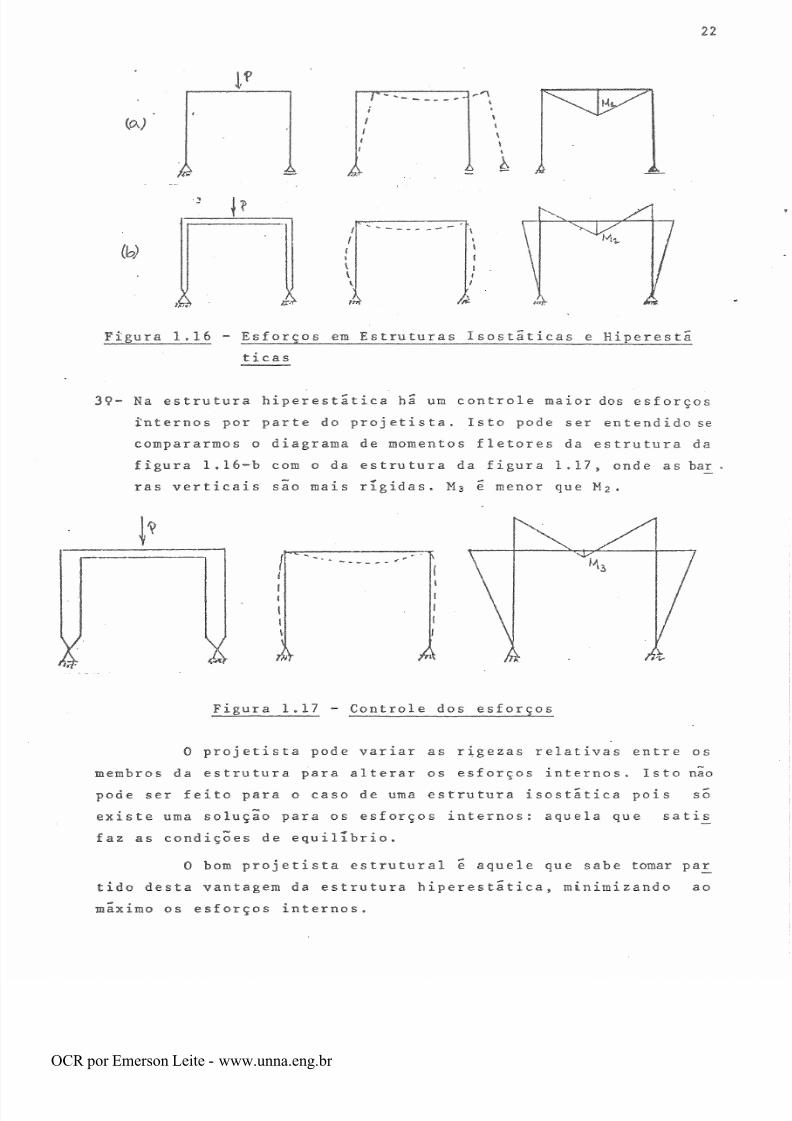
Figura
1.16
-
Esforços
em
Estruturas
Isostát icas
e
Híperestá
t icas
39-
Na estrutura
hiper
estãtica
ha um
controle
maior
dos
esforços
internos
por
parte
do projetista. Isto
pode ser
entendido
se
compararmos
o
diagrama
de
momentos fletores
da
estrutura da
f igura
1.16-b
com o da
estrutura da
f igura
1.17,
onde as bar
ras verticais
sao
mais
rígidas.
M
3
e
menor
que
M
2
.
V
A
A
M-
Figura
1.17
-
Controle dos
esforços
0
projetista
pode variar
as
rigezas
relat ivas
entre
os
membros
da
estrutura
para
alterar
os
esforços
internos.
Isto
nao
pode
ser feito
para
o
caso de
uma estrutura
isostática pois
sõ
existe uma
solução para
o s
esforços
internos
:
aqu e 1
a
que
satis
faz
as
condições
de
equilíbrio.
0 bom
projetista
estrutural
e
aquele
que
sabe
tomar
par
tido
desta
vantagem
da
estrutura
hiperestatica
,
minimizando
ao
máximo
os
esforços
internos.
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 29/155
23
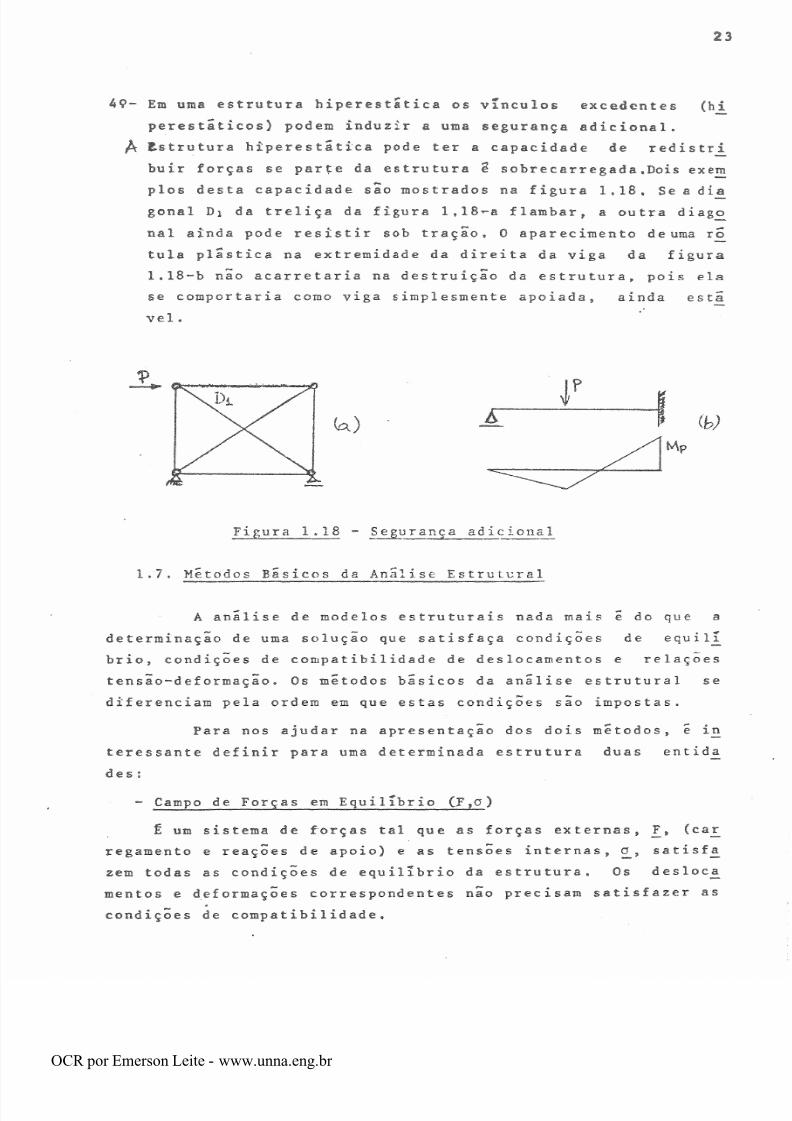
49- Em
uma estrutura
h iper
e
s
t
ã
t
ica
os
vínculos
excedentes
(hi
peres
táticos)
podem
induzir a
uma
segurança
adicional.
jàf
Estrutura
hiper
e
s 1
1
1
i
ca
pode
ter
a
capacidade
de
redistri
buir
forças
se
parte
da
estrutura
2
sobrecarregada ,
Dois
exetn
pios
desta
capacidade
são
mostrados
na
f igura 1,18,
Se
a
dia
gonal
D j
da
treliça
da f igura 1
,
18-a
f
1
ambar ,
a
outra
diago
na l
ainda
pode
resist i r
sob
t raçao,
0
aparecimento
de
um a
r
5
tuia
plãstica
na
extremidade da direita
da viga
da figura
1
.
18-b não
acarretaria
na
destruição
da
estrutura»
pois
ela
se
comportaria
como
viga
simplesmente
apoiada»
ainda esta
ve l
.
V
(a)
Figura
1.18
-
Segurança
adicional
1.7,
Métodos
Básicos
da Analise
Estrutura l
A
análise
de
modelos
estruturais
nada mais
é do que
a
determinação
de uma
solução
que satisfaça
condições
de
e
qu
i
l_í
brio,
condições
de compatibil idade
de
deslocamentos
e
relações
tensao-d ef
ormaçao
.
Os métodos básicos
da
análise est rutura l
se
diferenciam
pela
ordem
em que
estas condições
sao
impostas.
Para
nos
ajudar
na apresentação
dos dois
métodos»
é
in
teressante
def inir para
uma
determinada
estrutura
duas
entída
-
Campo
de
Forças
em
Equilíbrio
ÇF,o)
É
um sistema
de
forças
tal
que
as
forças externas,
_F,
(car
regamento
e
reações
de apoio)
e
as
tensões
internas,
a_,
zem todas as condições
de equilíbrio da estrutura.
Os
_
mentos
e
deformações
correspondentes
nao
precisam
satisfazer
as
condições
de compatibilidade,
sat
isf
a_
desloca
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 30/155
24
-
Configuração
de
Deslocamentos
Compatíveis
(D
,
£)
Ê
uma forma deformada
da estrutura
tal
que os
deslocamentos
externos, D,
e
as
deformações
internas,
_£,
satisfazem
todas
as
condições
de
compatibil idade
da
estrutura.
Ás
forças
e
tensões
associadas
a
esta
forma
deformada
não
precisam
satisfazeres
con
diçoes
de
equilíbrio.
1.7.1.
Método das
Forças
Também
é
chamado
de
Método
da
Compatibil idade, ou
Meto
do
da
Flexibi l idade.
Tem
como ideia
básica
determinar,
dentro
do
conjuntode
campo
d
e
forças
(
F
,
o
)
que satisfazem
as
condições
de equilíbrio,
qual
o
que
fa z com
que
a s
condições
de
compatibil idade
de
deslo
mentos
fiquem
satisfeitas.
As
incognitas do método
são
forças
(e/ou
mom
ento s
)
,
d
a
í
o seu
nome,
e as equações f inais
sao de
compatibi l idade,
1.7.2.
Método
dos
Deslocamentos
Também
é chamado
de
Método
do
Equilíbrio,
ou Método da
Rigidez.
Tem
como
ideia
básica
determinar,
dentro do
conjuntode
configurações
deformadas
(D
,
e)
que satisfazem
a s
condições
de
com
pat
í
b i
1
ídad
e
,
qual
o
que
fa z
com
que
a
estrutura f ique em
equil_í
br io.
As
incógnitas
do método
são
deslocamentos
(e/ou
rota
çoes),
dal
o seu
nome,
as
equações
finais
sao
de
equilíbrio,
Este
é
o
método
que
nós
iremos
tratar,
1.7 .3 .
Exemplo
de Aplicação
Para
exemplif icar
a
utilização dos
dois
métodos
vamos
analisar
a
treliça
da
f igura
1.19.
Todas
as
barras
têm
área
trans
versai
A
e
modulo
d
e
elasticidade
E
•
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 31/155
25
Figura 1.19
-
Exemplo
de Aplicação
Da
f igura
1.19-b tiramos
a
equação
de equilíbrio:
f
í
+
2fi
cosB
=
Fi
(1
.
24)
Da
f igura
1 .19-c tiramos
a
equação de
compatibil idade,
onde
estamos
adotando
a
hipótese de
pequenos
deslocamentos:
d2
=
di'cosB
(1.25)
Da
relação
entre
as tensões e
deformações,
expressão
1.15,
tiramos
as relações
entre
esforços
e
deslocamentos
de
ca
da uma
das
barras:
Li
=
£
,
ou
f
í
-
Y
d j
(1.26)
=
E
Ly
cqS g
'
ou
f
2
17
cos
B
ãl
(1,27)
1.7.3.1.
Solução pelo
Método das
Forças
A
incógnita escolhida
é
a
força
fÿ
. A
sequencia
da
rjs
solução
por
este
método
segue
a
seguinte
ordem:
19-
Equação
de
equilíbr io
(1.24)
que
define
o
conjunto
de
solu
ções
(f
jf
,
f2')
que
satisfazem
equilíbrio.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 32/155
26
fU
~
f3
2cosB
29-
Relações
f
orça-deslocamento
0-.261
e
CI.
27)
j*_L
r
'
J
'
L
/r,
*
'
\
1
EA
3
»
2
=
2EAcoszB
ÿFl
3)
39-
Equação
final
de compatibil idade
(1.25)
escrita
em
termos de
força
CF
i
-
m
=
~
f
icosg
2EAcos'B
ÿ
1
11
EA
Temos
então a
solução
f inal:
fi
=
_
F>
1
l+2coszB
A
força
fá
f ica
determinada
pela expressão
Cl.
24):
f
i
_
Fi
cos
2
B
2
~
l
+
2cosi
B
Os
deslocamentos ficam
determinados
pelas
expressões
Cl.
26)
e
(1 .27).
Normalmente
a
resolução pelo
método
das
forças
é
feita
somando-se
soluções que
satisfazem
equilíbr io
para
no
final
im
por
a
compatibilidade
de
deslocamentos.
Senão,
vejamos.
Observando
a
equação de equilíbrio (1.24)
verifica-se
que
esta
contém
duas
forças
desconhecidas.
Selecionando
f'J
como
redundante
Chiperestãtico)
,
corta-se a
barra
1, transformando
a
estrutura
em isostática,
como
mostrado na
f igura
1.20-a.
Quando
a
força
fi
atuar
na
estrutura assim
l iberada,
causará
um
deslo
camento
relat ivo
entre as
seções
cortadas da barra
1
igual
a:
=
FiL
0
2EAco
s
3
B
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 33/155
27
I
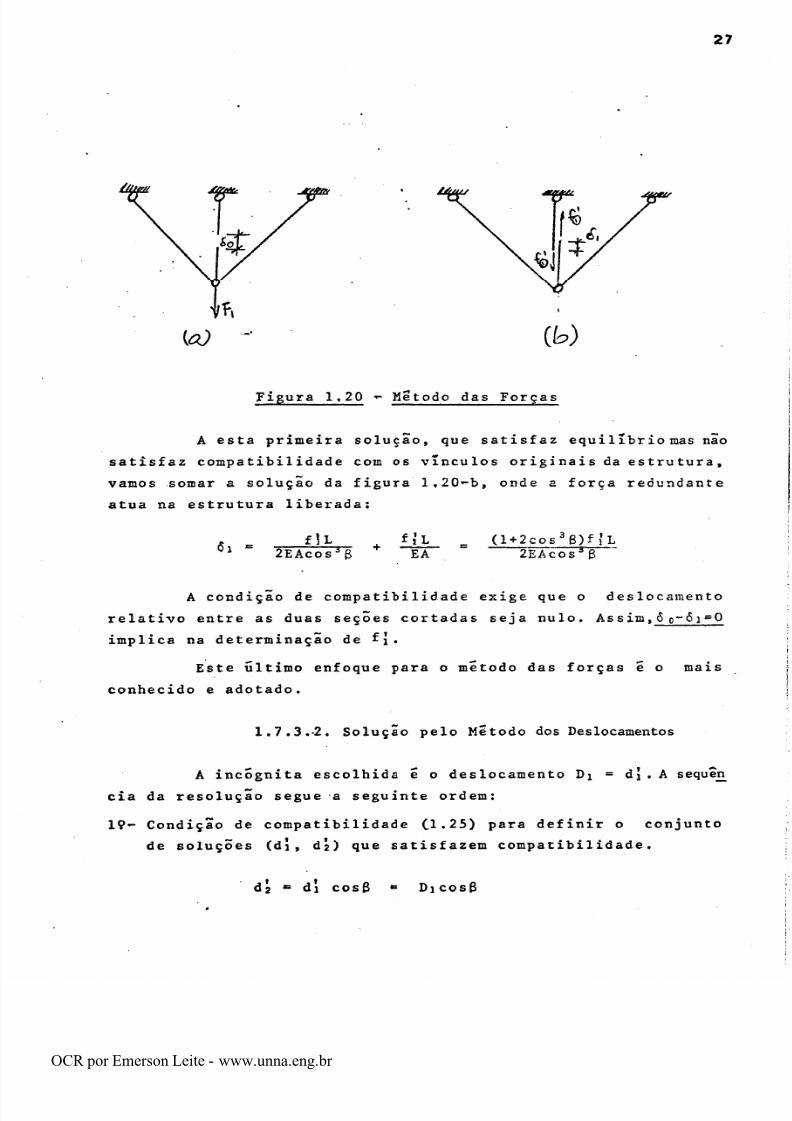
Figura
1,20
Método
das
Forças
A
esta
primeira
solução,
que
satisfaz
equi
1
íbr
io
mas não
satisfaz
compatibilidade com
os
vínculos
originais
da
estrutura,
vamos
somar
a
solução
da f igura l ,20--b,
onde
a
força
redundante
atua
na
estrutura
l iberada:
(l
+
2cos3B)f
i'L
2EA co
s
3
0
A
condição
de
compatibilidade
exige
que
o deslocamento
relativo
entre
as
duas
seções
cortadas
seja
nulo.
As
s
im
,
6
ç-6
\
=0
implica na
determinação
de
f
{
.
Este
último
enfoque para
o
método
das
forças
é
o
mais
conhecido
e
adotado.
1.7.
3.
-2.
Solução
pelo
Método
dos
Deslocamentos
A
incognita
escolhida
é
o deslocamento
Dj
=
dj
.
A
sequéri
cia
da
resolução
segue
a
seguinte
ordem:
19-
Condição
de compatibilidade
Cl
.25)
para
defin ir
o
conjunto
de
soluções
(dj,
dá)
que
satisfazem
compatibilidade.
ÿ
=
111
*
líl
2EAcos3
0
EA
dá
e
dl
cosg
«
DjcosP
0
OCR por Emerson Leite - www.unna.eng.br
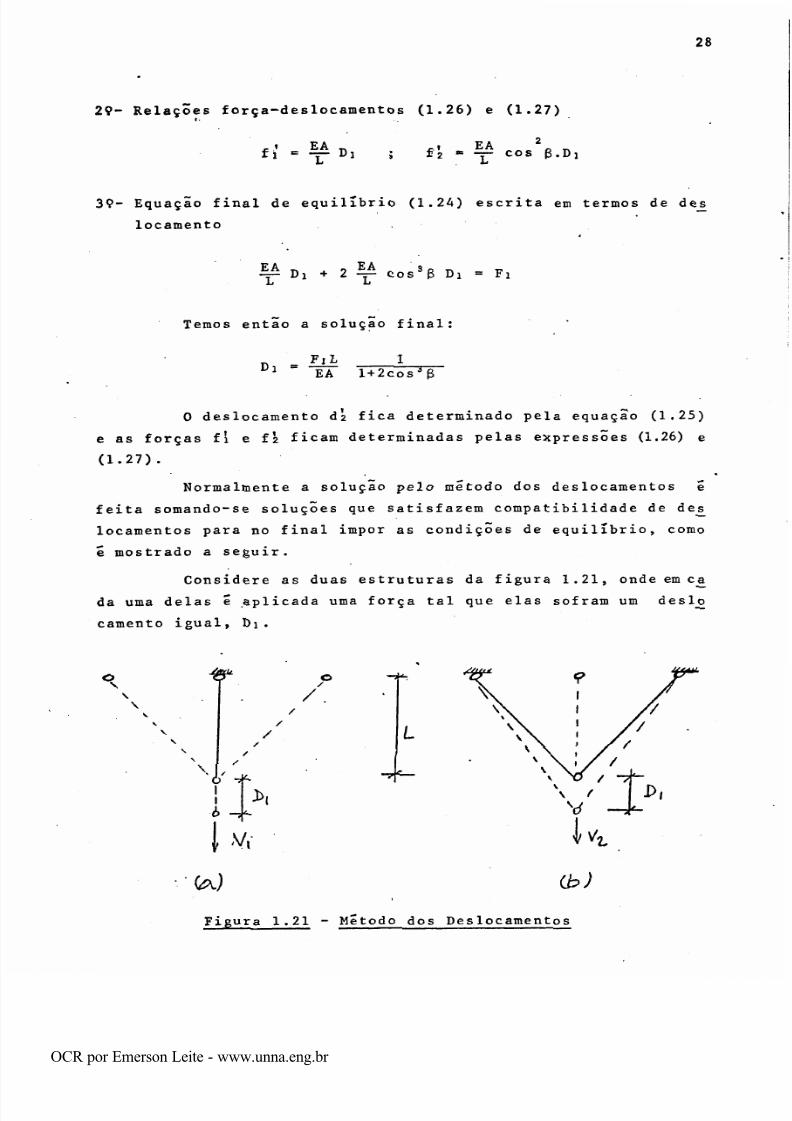
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 34/155
28
29-
Relações
f orça-deslocamentos
(1.26)
e
(1.27)
.c
'
EA
..
EA
£
5
2
—
CO S
3.
Dl
39-
Equação
final
de
equilíbrio
(1.24)
escrita
em termos
de
de£
locamento
ÿ
Di
+
2
ÿ
cos
3
3 Di
=
F
i
L
i-i
Temos
então
a
solução
final
n
_
FiL
1
1
EA
l
+
2cos
3
3
0
deslocamento
d2
f ica
determinado
pela
equação
(1,25)
e as
forças
fi
e
Í2
ficam determinadas
pelas
expressões
(1.26)
e
(1 .27).
Normalmente
a
solução pelo
método
dos
deslocamentos
é
feita
somando-se
soluções que
satisfazem compatibilidade
de
de£
locamentos
para
no final
impor as
condições
de
equilíbrio,
como
é mostrado
a
seguir.
Considere
as duas
estruturas
da
f igura
1.21,
onde em ca
da uma
delas
é
aplicada
uma
força
tal
que
elas
sofram um deslc>
camento
igual,
Di
.
°v
\
/
o
/
/
/
6'
I
i
6
|
Vi
G*0
L
C
b)
Figura
1.21
-
Método
dos Deslocamentos
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 35/155
29
Sendo
que,
Vi
¥»>
V2
B
2
y
cos
3
0
Di
Observe
que
ambas as
estruturas
da f igura
1.21
tem des
locamentos
compatíveis com os
da
estrutura
original
(figura
1.19).
Então,
a soma
das
duas
soluçoes
fornecerá
a
solução
para
o
problema
original
se a condição
de
equilíbrio
Vi
+
V2
~
Fi
fo r
satisfeÿ
ta.
Chega-se
assim
ao valor
de
Di
.
Este
último
enfoque
para
o
método dos
des
locamentos nos
sugestiona
a
somar
as
contribuições
de diversos
elementos
estru
turais,
sempre
satisfazendo
a
compatibilidade,
sendo
que
o
total
das contribuições
deve
ser
igualado ã
força
total
aplicada.
Por
exemplo,
para
a
estrutura
em
estudo,
poderíamos
somar
a
contriÿ
buição das
trés -barras
em
separado,
como mostra
a f igura
1.22.
Observe que
este método
também
se aplica a estruturas
isostátiÿ
cas .
\
/
1/
P.
.
Figura
1.22
-
Soma
de Contribuições
1.8.
Principio
dos
Trabalhos Virtuais
0
princípio
de
conservação de
energia
é
um importante
conceito
uti l izado na
análise
estrutural .
Na
sua forma
natural
ele
expressa
que
o
trabalho
feito
pelas forças
externas
de
um
sistema
estrutural
durante
o
processo
de
carregamento,
,
e
igual ã
energia
de
deformação
interna,
U,
armazenada pelocorpo.
Este princípio pode
ser
uti l izado para
calcular
de s locamentos
em
estruturas
como
mostra
o
exemplo
da
f igura 1.23.
OCR por Emerson Leite - www.unna.eng.br
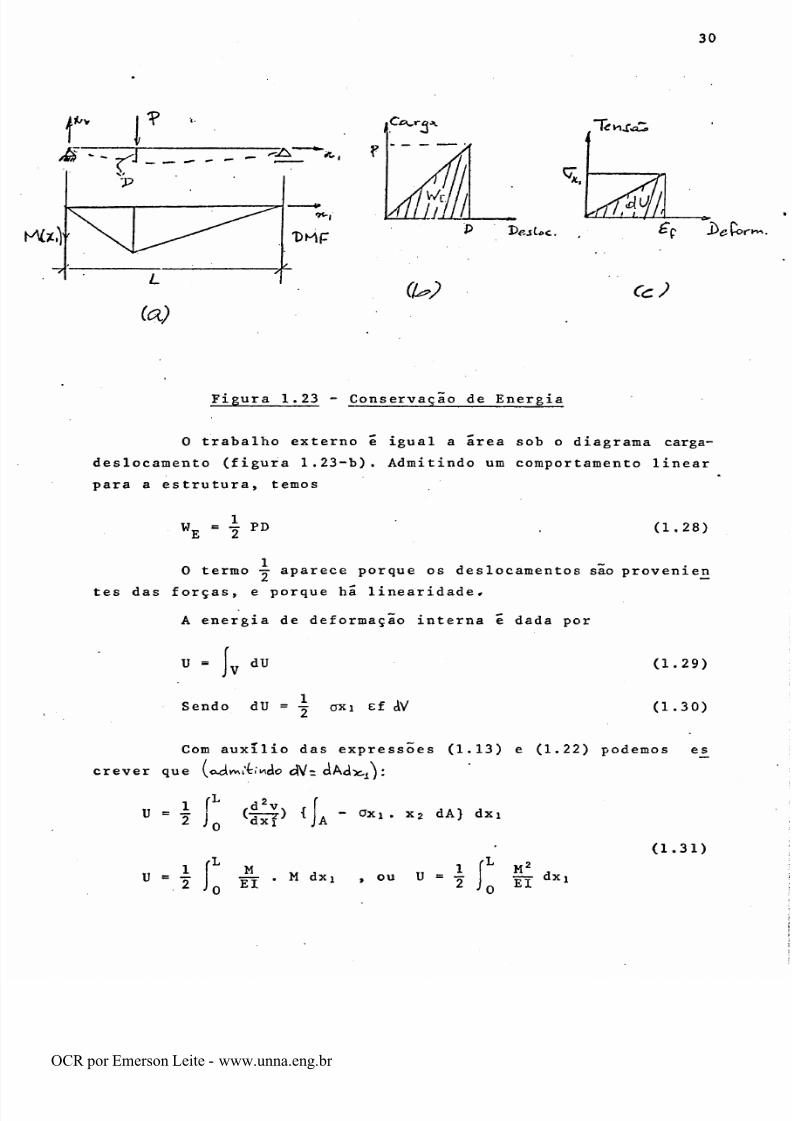
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 36/155
30
?
ÿ
Ccv_r
(u?)
(a)
U
X'ejtoC.
<T c
)
Figura
1.23
-
Conservação
de
Energia
0
trabalho
externo
e
igual
a
ãrea
sob
o
diagrama
carga-
deslocamento ( f igura
1.23-b).
Admitindo
um
comportamento
l inear
para
a
estrutura,
temos
WE
2
?D
(1.28)
0
termo aparece porque
os deslocamentos são provenien
tes
das
forças,
e
porque
há
l inearidade»
A
energia de
deformação
interna é
dada
por
dU
=
V
Sendo
dU
=
-ÿ
oxi
ef
dV
(1.29)
(1.30)
Co m
auxilio
das
expressões (1.13)
e
(1.22)
podemos
e£
crever
que
u
u
1
2
l
2
L
j2
(f-4)
{
0
dxi
-
Oxa
.
x
2
dA}
dxi
L
M
M
,
„
1
0
IT
»
ou
U =
2
.
(1.31)
«1
E l
dx
i
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 37/155
31
O
principio
de
conservação de
energia
nos
diz
que
W
«U.
E
Igualando,
então,
as
expressões
(1.28)
e (1.31)
temos
L
0
EX
**'
(1.32)
Infelizmente
este
principio
na sua
forma
natural
sõ po
de
ser usado para
determinar
o
deslocamento
do
ponto
onde
a
car
ga e
aplicada e na
direção
da
carga.
Também sõ
pode
atuar
um a
car
ga
•
0
princípio
de
conservação
de
energia
pode ter seu
_en
foque
modificado
a fim
de
que
se
possa eliminar as
limitações no
tadas
acima.
Imaginamos
um sistema
de
forças
(F
,
o)
em
equilíbrio
e
uma configuração
de
deslocamentos
(D
,
c)
compatíveis
tal
como
fo
ram
definidas
no
item
1.7.
Não
existe
qualquer
ligação
entre o
campo
de
forças
e a
configuração
de
deslocamentos
a
não
ser
que
vão
ser
aplicadas
a
uma
mesma
estrutura.
0
princípio
de
conservação
de energia
expressa que:
C
trabalho
total
das
forças
externas
£
atuando
sobre
seus
respec
t ivos
deslocamentos
I)
é
igual
ao trabalho total das
tensões in
ternas
o
atuando
sobre
suas
respectivas
deformações
e
•
.
0
que
pode
ser
expresso por:
equilíbrio
1 r
+
EDF =
j
v
E.o
dV
(1.33)
ÿf_
f
comparÿtiveis
a—
a»»
J_
ÿ
Nesta
expressão
nao aparece
o
termo
—
porque
nao ha
qualquer
ligação entre
forças
e
deslocamentos,
e tensões
e
defo£
maçoe
s
.
Se
nos estamos
interessados
em
determinar
as condições
de
equilíbrio
de
um
campo
de
forças
(F,cQ ,
basta
qu e
imaginemos
uma
configu¬
ração
de deslocamentos
compatíveis
(ÔD.õe)
arbitrário,
que
chamaremos
de
vi_r
tual,
e
comprovar
o
princípio
da
conservação
de
energia
dado na
expressão
(1.
33)7
Seja
por
exemplo
a viga
da figura 1.24,
onde
se
deseja
calcu
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 38/155
32
la r a
reação de
apoio
Rj
&
Ri--
ÿX
Campo
de
Forças
(F,o)
Reais
(a)
CD
6e
=
0
M-
3L
L4
Deslocamentos
Virtuais
(ÔD,
ôe)
Compatíveis
(b)
Figura
1.24
-
Princípio
dos
Deslocamentos Virtuais
sulta
em
A
aplicação
do princípio
da
conservação de
energia
re
ÔD.Ri
-
3'6D
.P =
r6e
.
a
.
dV
=
O
ou,
R j
=
P,
o que nada
mais
e
do
que
a
reação
deter
minada
por
equilíbrio.
Se por
outro
lado
estamos
interessados
em
calcular
des
locamentos em estruturas
provenientes
de
um
carregamento, ou
uma
variação
de
temperatura,
ou
qualquer
outro
efeito,
podemos
ima
ginar
o
trabalho
virtual provocado
pelo
sistema de
forças
arbi
trarias
(virtuai
s
) (
6F
,
6
o)
, em equilíbrio,
sobre
o
campo
de
de£
locamentos
reais
(D
,e)
.
Por
exemplo,
para
determinar
o
deslocamento
vert ical
do
ponto
3
da
estrutura
da f igura
1.25-a, utilizamos o
campo
de
fo r
ças
virtuais
da
figura
1.25-b.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 39/155
33
Campo
de
Forças
Virtudes
ampo
de Deslocamentos
Reais
Figura
1.25
-
Princípio
das
Forças Virtuais
A
aplicação do
princípio da
conservação
de
energia
re
sulta
em
dV.
P
.D3
=
f
ôÿxi
.
ef
J
v
Util izando
as
expressões
(1.13)
e
(1.22), chegamos
a
ÔP
.
D
3
=
ÍM.M
,
„
1 ÍL
6M.M
,
0
-Si-
dlil
•
ou
Ds
Sr
J0
~TT
d*>
Na
verdade a
determinação
do
deslocamento
D3
ê
uma
gja
rantia
de
que
os deslocamentos
reais da
estrutura
sao
compatíveis
com
os
vínculos
externos,
jã
que
as
forças
virtuais
externas
ôR ]
e
ÔR2
não
produzem
trabalho
pois
Di
e
Di»
são nulos.
0
princípio
da conservação de
energia nos
indu
z iu
,
então,
aos
dois
Princípios de
Trabalhos
Virtuais,
quais
sejam,
o
Princí
-
pio
dos Deslocamentos Virtuais,
e o
Princípio
das
Forças
Virtuais,
que
serão
apresentados mais formalmente
nos i tens
que
se
seguem.
OCR por Emerson Leite - www.unna.eng.br
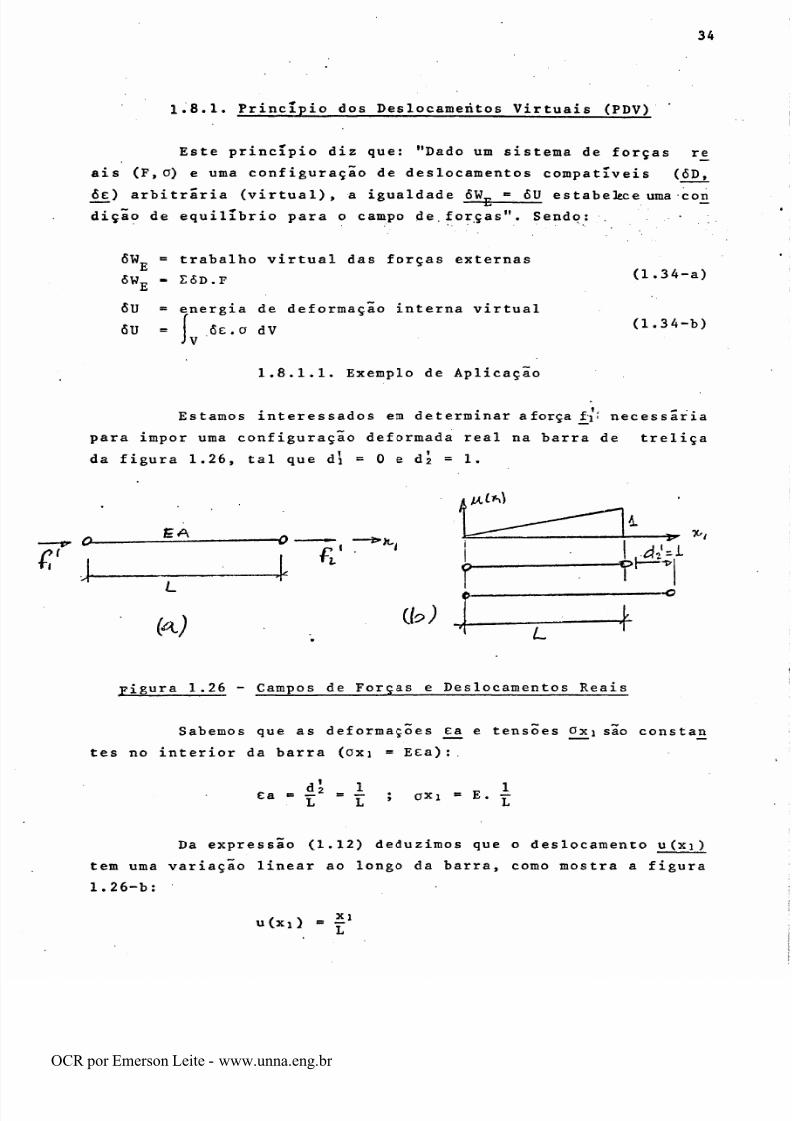
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 40/155
34
1.8.1.
Principio
dos
Deslocamentos
Virtuais
(PDV)
Este
principio
diz
que:
Dado
um
sistema
de
forças
re
ais
(F,o)
e
uma
configuração
de
deslocamentos
compatíveis
(ÔD,
ôe)
arbitrária
(virtual),
a
igualdade
ÔW„
=
ÔU
estabelece um a
con
—
——
L
dição
de
equilíbrio
para
o campo
de.
forças .
Sendo:
.
ÔWj
ôWj
ÔU
ÔU
trabalho virtual das
forças
externas
ZÔD.F
energia
de
deformação
interna
virtual
ôe.o dV
(1.34-a)
(1.34-b)
1.8.1.1.
Exemplo
de
Aplicação
Estamos interessados
em
determinar a
força
fv
necessária
para impor uma
configuração deformada rea l
na
barra de
treliça
da
f igura
1.26,
tal que
dj
ÿ
0
e
dl
ÿ
1.
EA
C
J-
L
Fi
K)
(í?)
*> ,
Figura
1.26
-
Campos
de
Forças
e
Deslocamentos
Reais
Sabemos
que
as
deformações
£a_
e
tensões
£xi
são
constan
tes no
interior
da barra
(oxi
=
Eea)
: .
d
2
1
„
1
L
L
0X1
E
L
Da
expressão
(1.12)
deduzimos
que
o
deslocamento u
(x
i
)
tem uma
variação
l inear
ao
longo
da
barra,
como
mostra
a
figura
1.26-b:
u(xi )
«
£*
OCR por Emerson Leite - www.unna.eng.br
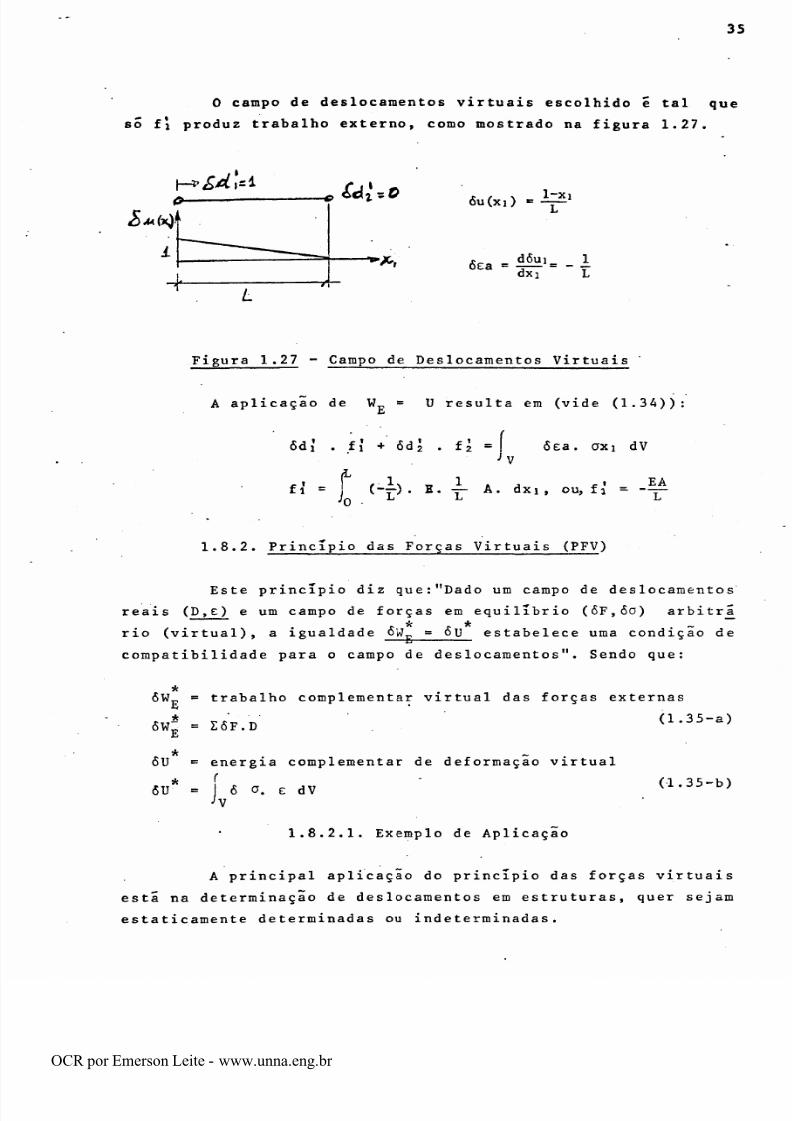
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 41/155
35
O
campo
de
deslocamentos
virtuais
escolhido
e
tal
que
sõ
fj
produz
trabalho
externo,
como
mostrado
na
f igura
1.27.
íd;5
0
**1
ôu(xi
)
=
6ea =
«<>ÿ.
.
i
dxa
L
Figura
1.27
-
Campo
de
Deslocamentos
Virtuais
A
aplicação
de
W„
= U resulta
em
(vide (1.34))
ôdj
.
fi
+
ôd
2
.
t\
=
ôea.
axi
dV
i
-
f
(4
'0
\
_
1
.
j
c
•
EA
ÿ)
.
E.
y
A*
dxi
»
ou>
~
1.8.2.
Principio
das
Forças Virtuais
(PFV)
Este
principio
diz
que: Dado
um campo
de
deslocamentos
reais
(D
,£
)
e
um
campo
de
forças
em
equil íbrio
(ôF,ôo)
arbitrjí
]>
*
r
*
~
rio
(virtual),
a
igualdade
QWÿ
=
QU
estabelece
uma
condição
de
compatibilidade
para
o
campo
de
deslocamentos .
Sendo que:
ÔW,,
=
trabalho
complementar vir tual das
forças
externas
(1.35-a)
ÔW
ÔU
E
*
E
*
=
EôF.D
ÔU
=
energia
complementar
de
deformação
virtual
r
I
6
o.
e
dV
Jv
(1
.35-b)
1.8.2.1.
Exemplo
de Aplicação
A
principal
aplicação
do
principio
das
forças
virtuais
esta na
determinação
de deslocamentos
em
estruturas,
quer
sejam
estaticamente
determinadas
ou indeterminadas.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 42/155
36
Tomemos
como
exemplo a
estrutura
da
f igura
1.28,
que
es
tã
submetida
a
diversas
solicitações
tais
como
carregamento
apli
cado,
variação
de
temperatura e
recalques
de
apoio.
Estamos
que
rendo
determinar
o
deslocamento
vert ical
D.
f
Deslocamentos
.Reais
ÿ
Recalque
de
Apoi<
Figura 1.28
-
Campo
de
Deslocamentos
Reais
As
deformações
reais,
onde
só as
deformações
normais à
seção
transversal
são
consideradas,
podem
ser divididas
em
duas
parcelas
:
-
parcela devida
a
esforço
normal
e
momento
fletor
(vide
expressões
(1.13
e
1.22))
£x
i
-
JL
EA
JL
E l
X2
(1.36-a)
Sendo
X2
a
distancia
do
ponto
da
deformação
ao
centro
de
gra
vidade
da
seção
transversal.
Os
esforços
normais
e
momentos
fletor
es são
provocados pelo
carregamento,
pela
variação
de
temperatura
e
pelos
recalques
de
apoio.
Em
estruturas
isostáticas,
.como
visto no item
1.6.3,
variação
de
temperatura
e recalques
de
apoio
não
produzem
es
forços
internos.
-
parcela
devida
a
variação
de
temperatura
Esta
parcela
aparece tanto
em
estruturas
isostáticas quanto
hi
perestáticas
,
e
e obtida como
mostra
a
f igura
1.29,
onde
ado
ta-se a
hipótese
das
seções planas,
a
é o
coeficiente de d i
latação
térmica.
OCR por Emerson Leite - www.unna.eng.br
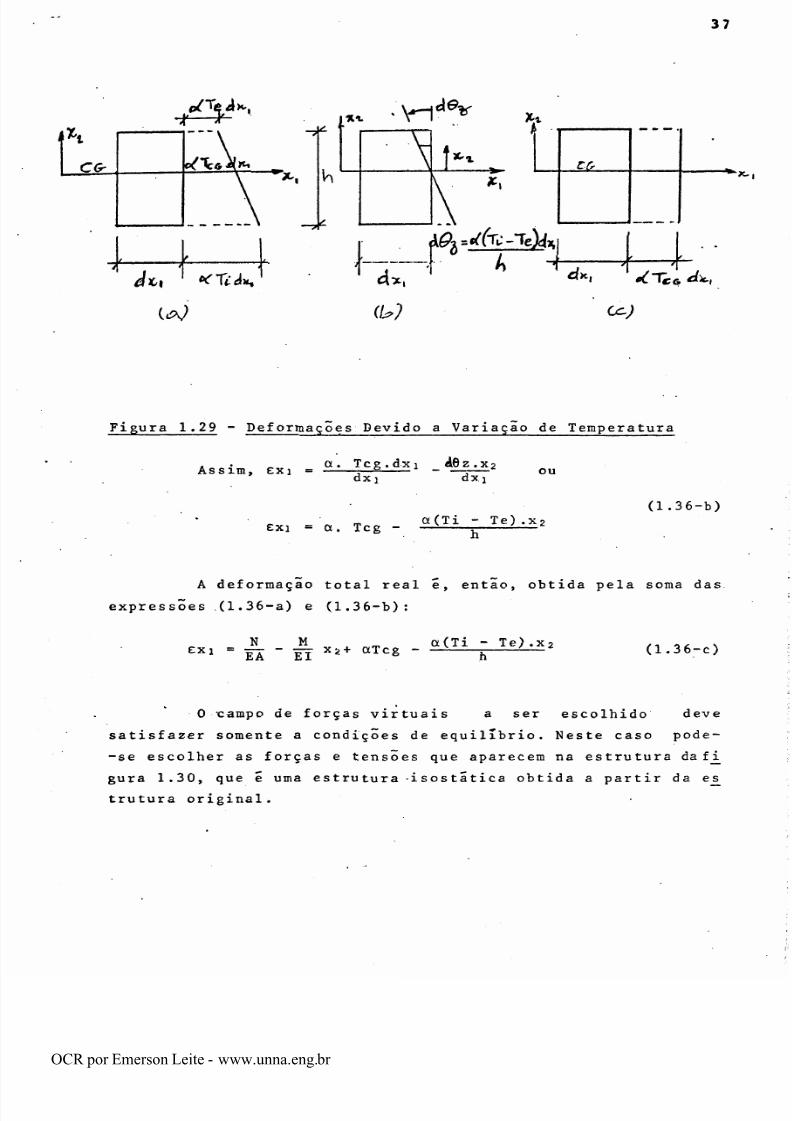
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 43/155
37
h
\
C (r
\
Jtl
I*-
«T,
CJ*
W
1J
1
CCr
-Vfc-Tek
A
c(k,
CG
tdlx.,
<*•)
Figura
1.29
-
Deformações
Devido
a
Variação
de
Temperatura
Assim,
exi
a
ÿ
Tcg
.dx
i
ÀBz.X2
dx
dx.
ÿ
ou
exi
=
a.
Tcg
-
a
(Ti
-
Te)
.X2
(1
.36-b)
A deformação
total
real
é,
então,
obtida
pela soma das
expressões
(1.36-a)
e
(1.36-b) :
N
M
.
a(T i
-
Te)
.x 2
*
ÊÃ
IT
*
+ aTcg
--
—
(1.36-c)
0
-campo de
forças
virtuais
a
ser
escolhido
deve
satisfazer somente
a
condições de
equilíbrio.
Neste caso
pode-
-se
escolher as
forças
e tensões que
aparecem
na
estrutura
da
f
_i
gura
1.30,
que i
uma estrutura
-isostática obtida
a
partir
da
e_s
trutura original.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 44/155
38
1ÿ'
&
í
ÍRi
G$0
f
ÍR'i
Ir
-u
I
Chi
(t>Ert
virtual)
(b)
1
(PhP
viVÓÿt)
u)
Figura
1.30
-
Campo
de
Forças
Virtuais
&
A
A
aplicação
de
ÔW
=
ÔU
resulta
em
(vide
1.35)
ti
ÔP.D
+
ÔR2. P
=
onde ÔOxi
V
ôox
i
.
ex
i
dV
ÔN
ÔM.X2
A
I
(1.3?)
(1.38)
As
expressões
(1.38)
e
(1.36-c)
podem
ser
substituídas
em
(1.37):
ÔP.D
+
ÔR2
•
P
=
{
'
A
estrutura
,
ÔN
N
ÔN
Mx?.
ÔN
m
ÔN
ct(Ti-Te)x2
(X
'
ÊÃ
7
'
íi
a
'
aTcg
T
*
h
_
6M.x2_
N_
+
6M.x2j
H.x2__
ÔM.x2aTce
+
ÔMÿ
a(Ti-Je)
,xt)dA}
dg
Mas
como
dA
=
A,
I
x2
dA
=
0
e
i
A
-se
a
ÔP.D
+
ÔR2P
W-N
ds +f«Mds
.
A
est .
J
E l
est .
[ôN.aTcg
ds
+
est. est .
x
2
dA
=
I,
chega-
ÔM.
-TlhT
ds
(1.39)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 45/155
39
E assim
chega-se
ao
valor
para
o
deslocamento
D.
Algumas
observações
podem
ser feitas
quanto
a
aplicação
da
expressão acima:
-
0
termo
j
ds
(energia de
deformação virtual
provocada
por
est.
esforço
normal)
Pode ser
desprezado
em
presença
dos
outros
para
elementos
es
truturais
que
não
trabalham
fundamentalmente
a
e
s
f
or
ç
os
axiais
.
-
Para
estruturas
isostáticas submetidas
s oment
e
a
variação
de
temperatura
ou
recalques
de apoio
N=0
e
M=0.
Estes
esforços
aparecem
em
estruturas
hiper
e
s
tá
ti
cas
quando
submetidas
a
es
tas
solicitações.
-
A
escolha
mais
natural
para
a
estrutura
onde
se
aplica
o
cam
po
de
forças
virtuais seria
a própria
estrutura
original
(n o
exemplo
hiperestática)
. Como
foi
dito, pode-se
escolher
qual
quer
estrutura
isostática
obtida
a
part ir da
original,
tendo-
-se
como
vantagem
a
faci l idade de obtenção
dos
diagramasde
forços
virtuais
ÔN
e
ÔM.
Isto porque
o
campo
de
forças
deve
sa_
t isfazer
somente
condições
de
equilíbrio,
e
não
compatibilid_a
de com
os
vínculos
da
estrutura original.
Entretanto,
um
cuidado
deve
ser
tomado
na
escolha
da
estrutu
ra
isostática:
não se
deve.
criar vínculos
que
nao
existem
na
estrutura
original,
como por
exemplo
na estruturada
figura
1.31.
Fi
gura
1.31
-
Campo
de
Forças
Virtuais
nao
Conveniente
Neste
caso,
na
parcela
do
trabalho
complementar
virtual
das
forças
externas,
deve-se
computar
o trabalho
feito pelo
m£
OCR por Emerson Leite - www.unna.eng.br
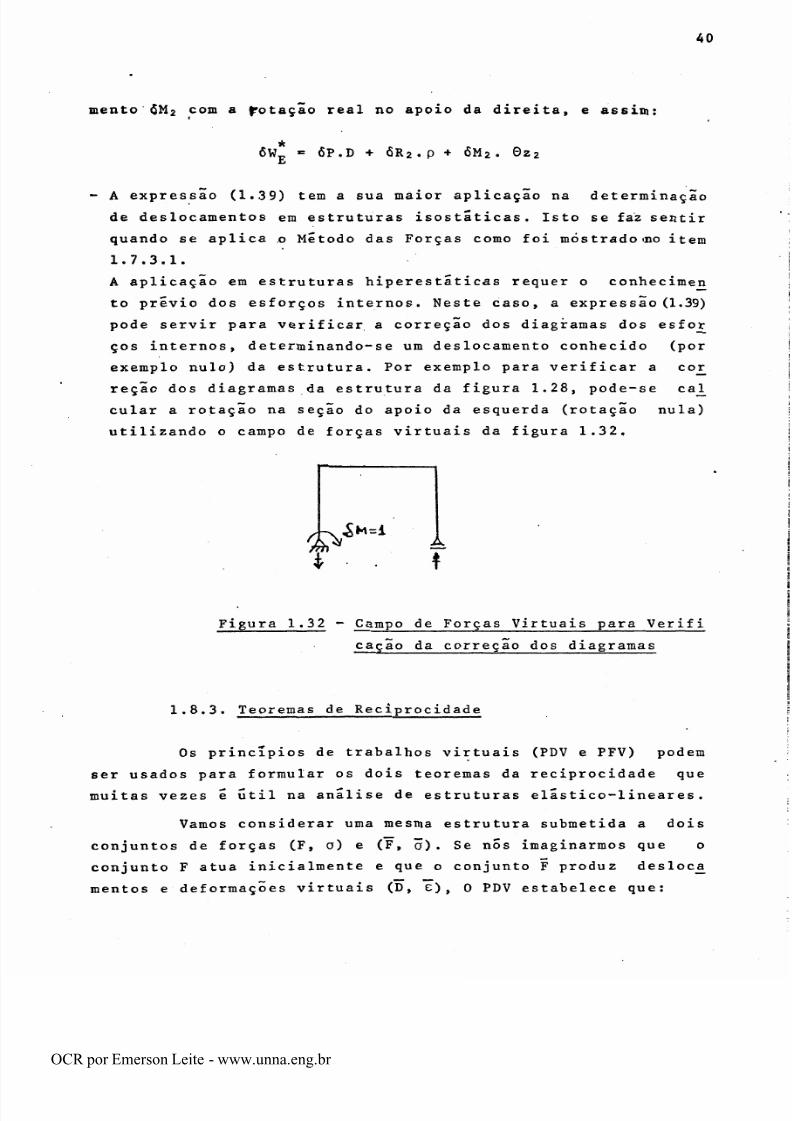
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 46/155
40
mento
$M2
com
a
fotação real
no
apoio
da
direita,
e
assim:
ÔWT
ÔP.D
+
6R2
.
p
+
«SM;.
.
0z2
-
A
expressão
(1.39)
tem a sua
maior aplicação
na
determinação
de
deslocamentos
em
estru turas
isostáticas.
Isto
se faz
sentir
quando se
aplica
o
Método
das
Forças
como
foi
mostrado >no
item
1.7.3.1.
A aplicação em estru turas
hiperestáticas
requer
o
conhecimen
to
prévio
dos
esforços
internos.
Neste
caso,
a
expressão
(1.39)
pode
servir
para
ver i f icar
a correção
dos diagramas
dos esfor
ços internos,
d
e
terminando-
s
e
ura
deslocamento
conhecido
(por
exemplo
nulo)
da
estrutura.
Por exemplo
para
veri f icar
a
cor
reção
dos
diagramas
da
estrutura
da
f igura
1.28,
pode-se
calÿ
cular a
rotação
na
seção
do
apoio da
esquerda (rotação
nula)
uti l izando
o
campo
de
forças
virtuais
da
f igura
1 .32 ,
&
í
Figura
1.32
-
Campo
de
Forças Virtuais
para
Verifi
cação
da
correção
dos
diagramas
1.8.3.
Teoremas
de
Reciprocidade
Os princípios
de
trabalhos virtuais
(PDV
e
PFV)
podem
ser
usados para
formular
os dois teoremas
da
reciprocidade
que
muitas
vezes
é útil
na análise
de
estruturas elástico-1
inear
es
.
Vamos
considerar
uma mesma estrutura
submetida
a dois
conjuntos de
forças
(F ,
o)
e
(F,
õ)
•
Se
nos
imaginarmos
que o
conjunto
F
atua
inicialmente
e que
o
conjunto
F
produz
desloc£
mentos
e deformações virtuais
(D ,
c)
,
0 PDV
estabelece que:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 47/155
41
D
F«j
CO dv
(1.40)
V
Se
por
outro
lado,
nos
imaginarmos
que
o
conjunto
(F,
o
)
produz deslocamentos
e
deformações
virtuais
(D ,
c)
depois
de
o
conjunto
(F ,
õ)
estar
atuando,
temos
também
pelo PDV
que:
Z
D
F
=|
c
a
dv
(1.41)
V
Sendo
a estrutura
elãstico-1
inear
,
as tensões são
rela
cionadas
com
as
deformações
l inearmente
pelo
conjunto
de
coef_i
cientes esquematicamente
chamados
de
E.
Assim,
o
=
E
e
o
= E
c
que
substituídas
nas
expressões
(1.40)
e
(
1.
41
)
resu 1
tam
em
:
E
DF
=
eEe
dV e
I
DF
=
J
eEe
dV
ou
V
J
V
(1 .
42)
E
FD
=
ZFD
A
equação
(1.42)
expressa
o
Teorema
de
Betti, que
diz:
Se
uma estrutura
elástico-linear
é
submetida a dois
sistemas
independentes
de
forças,
o
trabalho
feito
pelo
primeiro s
i_s
tema com
os deslocamentos
produzidos
pelos
segundo
sistema
e
igual
ao
trabalho
feito pelo segundo
com
os deslocamentos
produzidos pelo
primeiro sistema .
Como
um
caso especial
do
teorema de Betti,
vamos
consí
derar
que
cada sistema
de
forças
consiste de apenas uma
força
(ou
momento)
de
magnitude
arbitrária.
Por
exemplo
vamos
considerar
a
estrutura
mostrada
na
f igura
1.33,
submetida
a dois casos
de
carga.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 48/155
42
iÿr
.....
Fr
r
_
L_
_
—
3r
~
J
Figura
1.33
-
Teorema
de
Maxwell
Aplicando
o
teorema de Betti
temos:
F i
Di
= F j
Dj
Se
adotarmos F i
e
Fj
unitários
teremos
Di
=
Dj
(1.43-a)
Se
adotarmos Di
e
Dj
unitários
teremos
F i
= Fj (1.43-b)
A
equaçao
(1.43)
expressa
o
Teorema de
Maxwell,que diz:
Para
uma
estrutura
elás
t
ico-1inear
,
o
deslocamento
(ou
for_
ça)
generalizado na coordenada
iÿ
devido
a
uma
força
(ou
dejs
locamento)
generalizada
unitária
na
coordenada
é
igual
ao
correspondente
deslocamento
(o u
força)
generalizado em
djí
vido
a
uma
força
(o u
deslocamento)
generalizada
unitária em
i .
1.9.
Matrizes
de
Rigidez
Dos
métodos básicos
da
análise
estrutura l
apresentados
no
item
1.7,
o método dos deslocamentos
é
o
que melhor
se
apliÿ
ca
na
utilização
de
computadores,
e
por isso
vai
ser o
método
en
focado
no
nosso
curso.
É
possível
escrever
rotinas
bem
gerais
dentro
do
enfoque
deste
método,
capazes
de
resolver
o
problema
da
análise estrutural ,
qual
seja,
determinar
esforços
e
desloc£
mentos
em estruturas.
0
método
se
aplica
para
t rel iças,
quadros
e
grelhas,
bem como
para
estruturas
compostas por
elementos
es
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 49/155
43
truturais
planos
ou
tridimensionais
(estruturas
nao
compostas
por
barras
)
.
0
método
dos
deslocamentos
trabalha
cora
as
chamadas
ma
tr izes
de
r ig idez.
Estas
matrizes
serão
estudadas
para
cada
ti
po
de estrutura ( t rel iças,
quadros,
etc.)
nos
capítulos
que
se
guem. Neste
item
apenas definimos
o
que
são as
matrizes
de rigi
dez,
exemplificadas
para
o
quadro
da
f igura
1.34.
Coordenadas
Globais
Ca)
Coordenadas
Locais
Cis uêraa
G
1o
b
a
..
(b)
Coordenadas
Locais
Sistemas
Locais
(c)
Figura
j
.34
-
Coordenadas Globais
e
Locais
1.9 .1 .
Matriz
de
Rigidez
Global
Matriz
de
rigidez
global
estabelece relações
entre
fo£
ças
e
deslocamentos
definidos
pelas
coordenadas
globais.
Estas
relações
são escri tas, para
as
coordenadas
globais da
f igura
1.34-a,
como mostra
a
expressão
(1 .44).
i
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 50/155
44
Kii
Da
+
K
i2D2
+
Kj3
D3
+
KJtf
D
,,
+
...............
K1M2D12«=
Fj
K2 1
D
a
+
K
22D2
+K23D3+
........
..............
ÿ
»a2
D
i2*
ÿ2
(1.44-a)
K12, Da
+
K
a
2»
D2
+
.......
....
.....
•...
........
+
K
12
,12
D
12
=
F12
Estas
relações
podem ser
expressas
pelo
produto
de
ma
trizes
K11
Ki2
Ki
,a2
K2i
K22
K2
,12
_Ki2,i
Ka£,2
Ki2,i2
ou,
de forma
condensada
Da
D2
Di2
Fi
F2
.F
12
(1.44-bj
KD
=
F
(1
.
44-c)
Onde :
-
K
=
matriz
de
rigidez global
-
D =
vetor dos
deslocamentos
-
F
=
vetor das
forças
aplicadas
Cada
termo
Kij
da matriz
K
representa :
Força
que
deve
ser
aplicada na
direção
iÿ
para
estabelecer o
equi l íbrio
da estrutura quando
Dj
=
1 e
os outros
Dn =
0,
n
j=
j .
Pelo
teorema
de
Maxwell
(vide
item
1.8.3),
pode-se
concluir que
Kij
=
K
j i,
isto
e,
a
matriz
de
r igidez
é
s
imã
trica.
Assim,
a
i-ãsima
coluna
da
matriz
K
e
o
vetor
de
fo r
1 ÿ
ÿ
'
—
ças
aplicadas
nas
direções
das
coordenadas
globais
para manter
o
equi l íbrio
estático
da
estrutura
submetida ã
configuração
d£
OCR por Emerson Leite - www.unna.eng.br
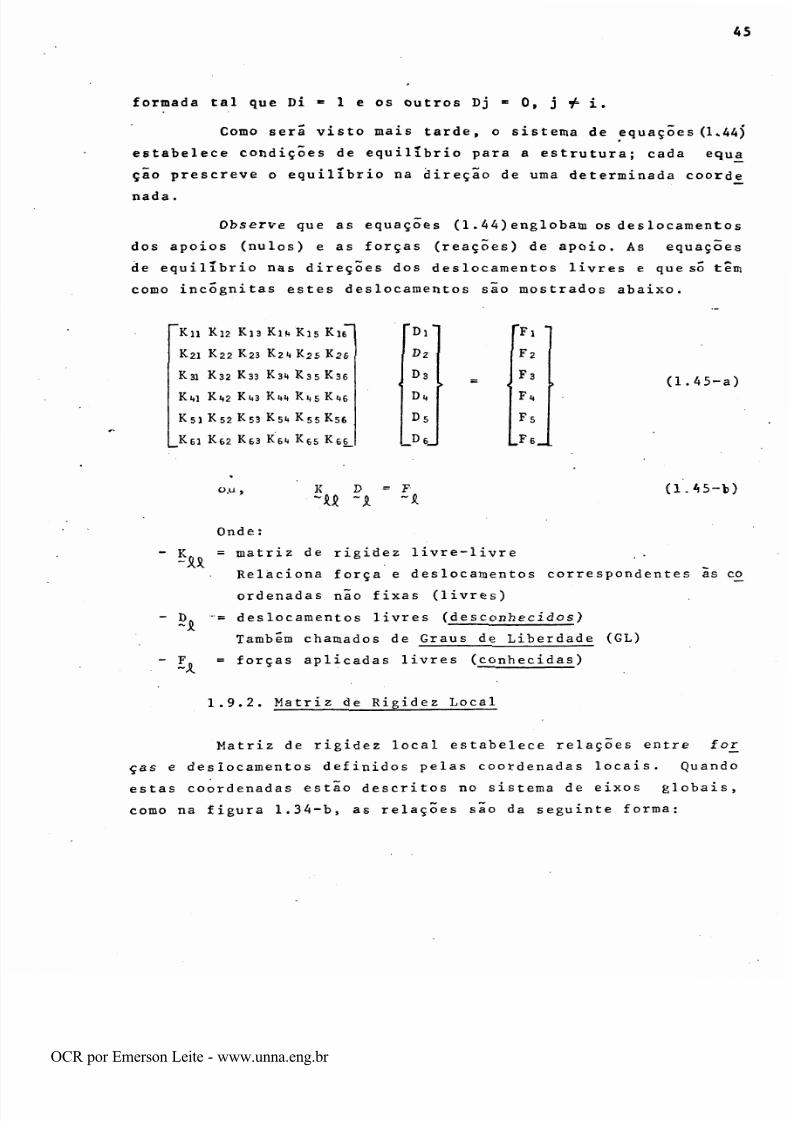
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 51/155
45
formada
tal
que
Di
«
1 e
os outros
Dj
ÿ
0,
j
ÿ
i.
Como
serã
visto
mais
tarde,
o
sistema
de
equações
(1.44)
estabelece
condições
de
equilíbrio
para
a
estrutura;
cada
equa
çao
prescreve
o
equilíbrio
na
direção
de
uma
determinada
coorde
nada .
Observe
que
as
equações
(1
.
44)
englobam
os
deslocamentos
dos
apoios
(nulos)
e as
forças
(reaçoes) de
apoio.
As
equações
de
equilíbrio
nas
direções
dos
deslocamentos
l ivres
e
que
sõ
tem
como
incognitas
estes deslocamentos
são
mostrados
abaixo.
Kn
K
i2
K
1
3
Kih
Kis Kk
*D
1
F
1
*
K21 K22 K.23
K24
K25
K2e
d2
f2
K31 K32
K33
K34
K35
K36
4
d3
s
s
f3
b
Km
K42
Ki»3
Ki,i,
K
í)
5
Ki»g
D.,
F
i,
K51
K52 K53
K54 K55K56 DS
f5
K
s l
K
62
K
63
K
6* t
K
65 Ke§_
_De_ _f6_.
(1.45-a)
o.u
,
K
D
=
F
Onde
:
(1.45-b)
K0
= matriz
de
r igidez
livre-livre
,
.
Relaciona
força
e
desloc
amentos correspondentes
as
co_
ordenadas
não f ixas
(livres)
-=
deslocamentos l ivres
(desconhecidos)
Também
chamados de
Graus
de
Liberdade
(GL)
=
forças
aplicadas
l ivres
(conhecidas
)
1.9.2.
Matriz
de
Rigidez
Local
Matriz
de
r igidez
local
estabelece
relações
entre
f°£.
ças
e deslocamentos
definidos
pelas
coordenadas
locais.
Quando
estas
coordenadas
estão
descritos
no
sistema
de
eixos
globais,
como
na
f igura
1.34-b,
as
relações
sao da
seguinte
forma:
OCR por Emerson Leite - www.unna.eng.br
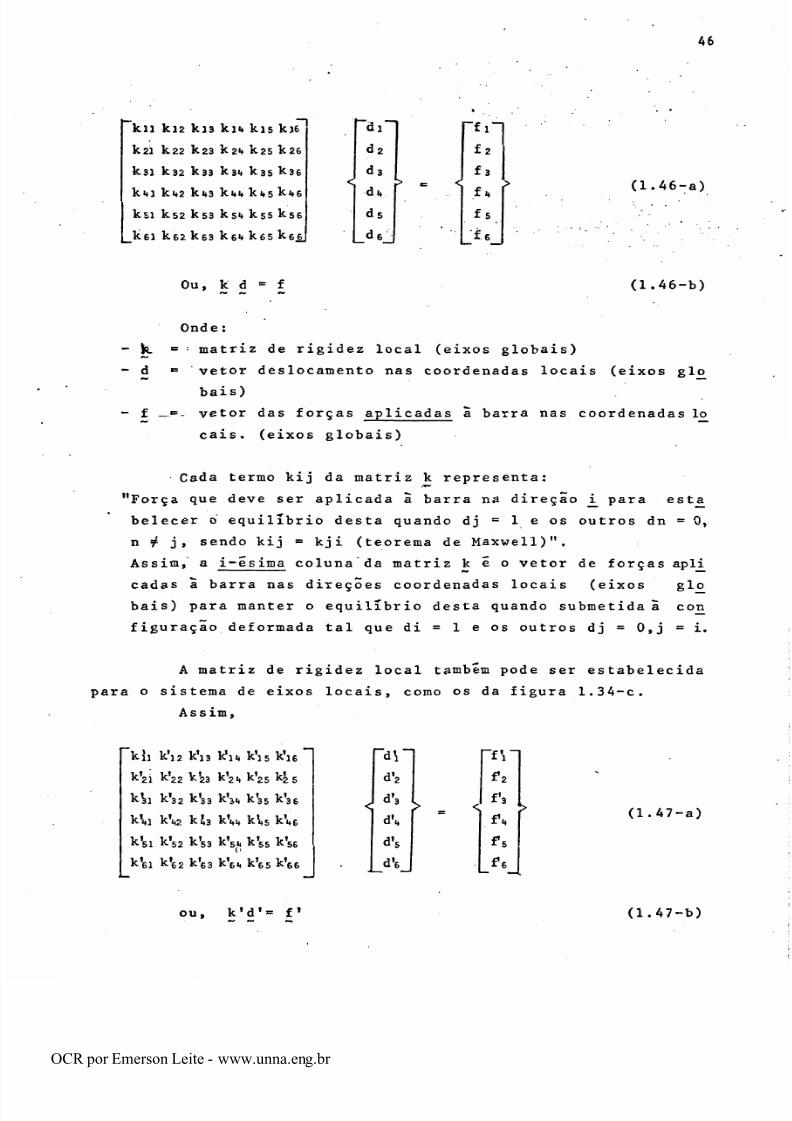
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 52/155
46
kn
ki2
ki3
kiw
kis ki6
k21
k
22
k2 3
k2 W
k2S
k
26
k31
k
32
k33
ksw
k
3
5
k
3
6
kwi
kw2
kw3
kww
kws
kw6
ksi
ks2 ks3 ksw
kss
ks6
_k6l
k
62
ke3
Hw
k
6
5
Hê.
Ou,
k d =
f
(1.46-b)
Onde:
-
k.
=
:
matriz
de
r igidez
loca l
(eixos
globais)
-d
«=
vetor
deslocamento
nas coordenadas
locais
(eixos
g lo
bais)
-
f
vetor
das
forças
aplicadas
a
barra
nas
coordenadas
l£
cais.
(eixos
globais)
Cada
termo
kij
da matriz
k
representa:
Força
que deve
ser aplicada
a barra na
direção
£
para
esta
belecer
o
equilíbr io
desta
quando
dj
=
1
e
os
outros
dn
=
0,
n
ÿ
j
,
sendo
kij
=
k
j
i
(teorema
de
Maxwell) .
Assim,
a
i-é
s
ima
coluna
da
matriz k é
o
vetor
de
forças
apli_
cadas
ã
barra nas direções coordenadas
locais
(eixos
gl£
bais)
para
manter
o
equi l íbrio
desta
quando submetida
à
con
figuração deformada tal
que
di =
1 e
os out ros
d j
=
0,j
=
i.
di ™
f
1~
d
2
f2
d
3
f
3
<
> «=
<
>
d.*
f
w
d
5
f
5
_d6_
ÿf
6
A
matriz de r igidez
loca l também
pode se r estabelecida
para
o
sistema
de
eixos
locais,
como
os
da
f igura 1.34-c.
Ass
im ,
kii k'12
k'i3
Hw k'i5
k'i6
~
~d\~
~f\-
kf21
k'22
k*23
Hw
k*25
k2
5
d*2
f2
Hl
k'32 k*33
k3w
k'35 k'36
<
d's
11
f'3
>
Hl
H2
kfa Hw Hs H6
d'w
Hl H2
k'53 Hw k'55
k
se
(>
d's
fs
H l H2 Hs
Hw
Hs
He
d
'6
fe
(1.47-a)
ou
,
k
'
d
'
(1.47-b)
OCR por Emerson Leite - www.unna.eng.br
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 53/155
47
Onde:
k '
ÿ
matriz
de r igidez
local
(eixos
locais)
Esta
relação
entre
forças
e
deslocamentos
nada mais é
do que
a
relaçao
entre tensões
e
deformações,
Oxi=
E.
exi,
extra
poladas
do níve l
inf initesimal para
o
nível
de
coordenadas lo
cais.
Esta
extrapolação
vai
ser
feita,
para
cada
tipo
de elemeri
to
estrutural ,
nos
capítulos
que
se seguem, a
exemplo
do
que
foi
feito
no
item
1.8.1.1.
1.10.
Representação
dos
Carregamentos
como
Cargas
Nodais
Na
analise
estrutura l
através
do
método dos deslocamen
tos
as
equações
de
equilíbrio
sao
definidas
nas
direções
das
cjo.
-
ordenadas,
ou
melhor,
sao
equações
de
equilíbrio
dos nós
da
e£
trutura. Em
geral ,
entre tanto ,
os
carregamentos reais
não
atuam
diretamentç
sobre
os nós.
Ao
invés
disso,
os
carregamentos
são
divididos
em
dois
t ipos:
-
cargas
nodais
-
cargas
atuando
nas
barras
(elementos
estruturais)
Para fazer a análise,
então,
estas
últimas
serão
sub_s
tituldas
por
forças
equivalentes nodais
(FEN).
Quando
estas for
ças
são
adicionadas
is
cargas
nodais
resultam
em
cargas
nodais
combinada s
ÿ
A estrutura
é analisada
para estas últimas
cargas.
Temos que
garantir
que
o resultado
(esforços
e
desloca
mentos)
da
estrutura
analisada
pelas
cargas nodais combinadas
se
ja
igual
ao
da
análise
feita
para
o
carregamento
real.
Isto
vai
levar
a
escolha das
FEN
adequadas.
0
principio da
superposição
de
efeitos
demonstrará,
a
seguir,
que
as
FEN
são as forças
de engastamento
perfeito
de ca
da
barra com
sentido
inverso.
Considere
o quadro da
f igura
135-
-a
cujo
carregamento
e dividido
em
dois casos
(I
e
II).
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 54/155
48
4
4-
_
*
_
£-
jm
V
ÿ
'
\
'
Í
M,
ÿ-T7T+
It
1
l/-l
Ca)
TmS
-t
'
&
li/wr
CASO
I
(b )
CASO
II
(c)
Figura
1.35
-
Conversão para
Cargas
Nodais
Os
dois
casos
de carga
da
figura
1.35 sao
definidos
co
mo
:
-
Caso
I
Estrutura
submetida
às
forças
(e
momentos)
nodais
combinados.
Atuam
sobre
os
nós
da estrutura.
Para e ste
carregamento
a
es
trutura
vai
ser analisada.
-
Caso II
Estrutura
submetida
ãs cargas
atuando
ao
longo
das barras e
ãs
correspondentes
reações
de
engastamento
perfei to
atuando
nas
extremidades
das barras.
Observe
que
este
carregamento
i
au
to-equ
i1ib r
ado
em cada
bar
ra ,
o que resul ta
em:
19)
Os
deslocamentos
da estrutura
ficam
restritos
apenas ãs
barras
carregadas,
sendo que
todos
os
deslocamentos
e
ro
tações nodais
são nulos
(e
lógico,
são
reações
de
engasta
mento perfei to)
.
29)
As
reações
de
apoio
são
nulas.
A
superposição
dos efeitos dos
CASOS I
e
II resulta
em:
19)
A
soma
dos
carregamentos
resulta
no
carregamento
rea l
origi
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 55/155
49
nal.
29)
Os
deslocamentos
nodais
do
CASO
I
são iguais
aos do
carrega
mento
or ig inal ,
visto
que
os
mesmos sao
nulos
no
CASO
II.
Isto
é
o
que se
desejava
inicialmente
para
as
forças
nodais
combinadas
.
39)
Os deslocamentos
f inais
ao
longo das
barras
carregadas
são
obtidos
pela
soma dos
deslocamentos
do
CASO
I
(obt idos
pe
la
análise)
com
os do CASO
II,
que são
deslocamentos de
ba_r
ras
engastadas
.
49)
Os
esforços
internos
da
estrutura são
obtidos pela
somados
esforços do
CASO
I
(obtidos pela
análise)
com
os
do
CASO
II (esforços
em barras engas tadas).
Observe,
então,
que
os
esforços
nas extremidades
das
barras
obtidas
pela
análise
nao
sao,
como
são os
deslocamentos
,
iguais
aos da
estrutura
com o
carregamento
original.
Esforços
nas
extremidades das
barras sao obtidos
.pela
soma dos
esforços
da
análise
(CA
SO
I)
com
as
reações
de engastamento
perfei to
(CASO
II).
59)
As
xeaçoes
de
apoio
do
CASO
I
sao iguais ás do
carregamento
original,
visto
que as
mesmas
sao
nulas
no CASO
II.
Resumindo,
a
análise
vai
ser feita para
a
estrutura
sul j
metida
ãs
cargas
nodais
combinad
as ,
i
s to
á,
pelas
cargas
aplicja
das
diretamente
sobre
os
nos somadas
ãs cargas
equivalentes
n£
dais
(reações
de engastamento
perfeito
nas
barras,
com
sentido
inverso
e atuando
sobre os
nos) .
Os
deslocamentos
nodais sao
os
obtidos
pela
análise,
e os
esforços
nas extremidades
das
ba_r
ras
são
os
da análise somadas
ãs
reações
de
engastamento
perfeá
to
.
OCR por Emerson Leite - www.unna.eng.br
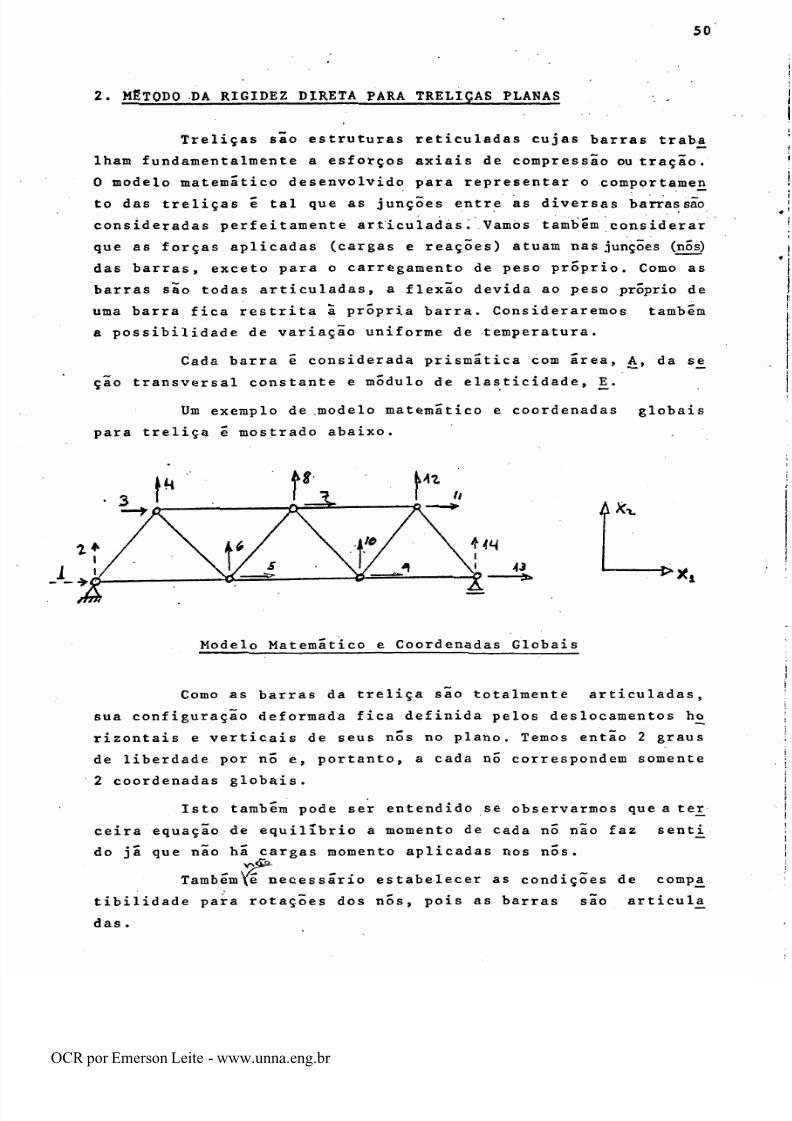
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 56/155
50
2.
MÉTODO
DA
RIGIDEZ
DXRETA
PARA
TRELIÇAS
PLANAS
Treliças
são
estruturas
reticuladas cujas
barras
trabji
lham
fundamentalmente
a
esforços
axiais de
compressão
outração.
O
modelo matemático
desenvolvido para
representar
o
comportamen
to das
treliças
e tal
que
as
junções
entre as
diversas barrassão
consideradas perfeitamente
articuladas. Vamos também
considerar
que
as
forças
aplicadas
(cargas e reações) atuam nas junções
(nós)
das
barras,
exceto para
o
carregamento
de
peso
prõprio.
Como
as
barras
são
todas
art iculadas,
a
flexão
devida
ao
peso
prõprio
de
uma
barra
f ica
restrita
â
própria
barra.
Consideraremos também
a
possibil idade
de
variação
uniforme
de
temperatura.
Cada
barra
é
considerada
prismática
com
área,
A,
da
sje
ção
transversal
constante
e
modulo
de
elasticidade,
IS.
Um
exemplo
de
modelo
matemático
e
coordenadas
globais
para
treliça
é mostrado
abaixo.
A
ÿ*1
Modelo
Matemático
e Coordenadas Globais
Como
as
barras
da
treliça
são
totalmente
articuladas,
sua configuração
deformada
f ica definida pelos
deslocamentos
hjo
rizontais
e verticais
de seus
nos
no
plano.
Temos
então
2
graus
de
liberdade
por
nó
e,
por tanto,
a
cada
nó
correspondem
somente
2
coordenadas
globais.
Isto
também
pode
ser entendido
se
observarmos
que
a
tej:
ceira
equação
de equilíbrio
a
momento
de
cada nõ
não fa z senti.
do
já
que
não
há
cargas
momento
aplicadas nos
nos.
Também\é
necessário
estabelecer as
condições
de compa
t ibil idade
para
rotações
dos
nós,
pois
as
barras são
articulaÿ
das
.
OCR por Emerson Leite - www.unna.eng.br
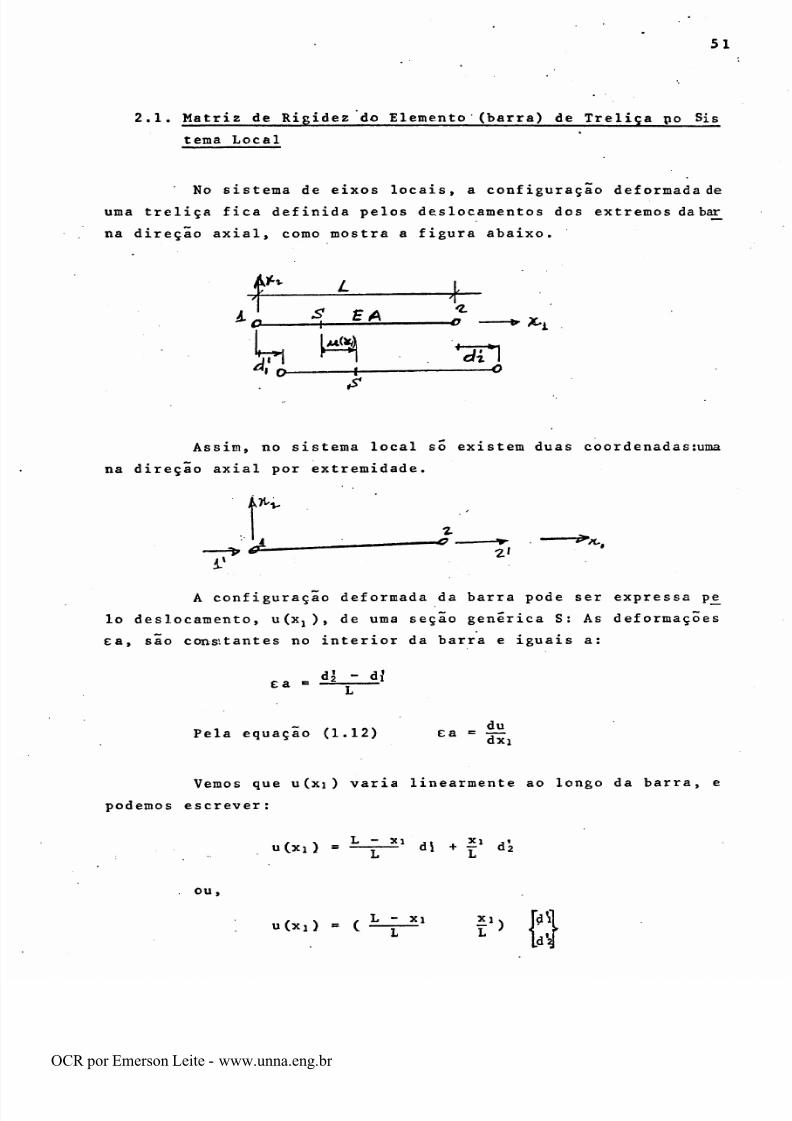
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 57/155
51
2.1.
Matriz de
Rigidez
do
Elemento
(barra)
de
Trel iça
po
Sjs
«
tema Local
No
sistema de
eixos
locais,
a configuração
deformada
de
uma
treliça
f ica
definida
pelos deslocamentos
dos
extremos
da
bar
na direção
axial,
como mostra
a
f igura
abaixo.
P-
L
s,
u
ÿ
t
O
*~j
*-
r-i
0
-
r
4
O-
di
-
o
Assim,
no sistema
loca l
sõ
existem
duas coordenadas
:uma
na
direção
axial
por
extremidade.
2-
-
--
—
j
** -•
A
configuração deformada
da
barra pode
ser
expressa
pj;
lo
deslocamento,
u
(Xj
),
de
uma
seção
genérica
S:
As
deformações
ea,
são
cons'-tantes
no
interior
da
barra
e iguais
a:
dl
-
dí
ea
--
Pela
equação
(1.12)
ea
=
~
Vemos
que
u
(xi
)
varia
linearmente
ao longo da
barra,
e
podemos
escrever:
u(Xl)
=
ÍL-f-*1
d\
+
r1
d'2
ou
,
.(«.)-
£')
MOCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 58/155
52
ou
ainda,
u
(xilV
C
Ni(xi)
N2(x2) )
dl
dl
e
de
forma
condensada
u
(x
i
)
ÿ=
N
d
'
onde
N
e
a
matriz
(vetor)
formado
pelas
funções
de
for
ma
N
1
e
N2
:
Uma
função
de
forma
define
os
deslocamentos
ao longo
do
elemento
(barra)
quando
o
i-ésimo
grau
de
liberdade
dí.
tem
valor
unitário e
os
outros
são
nulos
As
funções
de
forma
Ni
e
N2
são
mostrados
abaixo.
/
N,
N-l
Al
-o
0
nosso interesse está em conhecer
as
relações que
exi£
tem
entre
as
forças
aplicadas
nas
direções
das
coordenadas
1 '
e
21
e os seus
deslocamentos.
Estas relações são
expressas,
no ca
so, pela
matriz
de
r igidez:
f
1
dl
l
o-
2
-O
fi
dl
M
=
kíi
k
li
df
kli
k
12
4
dl
k'
d
2.1.1.
Determinação
por
Aplicação
do Equil íbrio
'
Direta
ment
e
Vamos
impor
d
1
ÿ
0
e
d
1
=
0
e
estudar as
condições
de
equilíbrio.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 59/155
Temos
por
equilíbrio
que
ff
•«
-ff
A
relação entre
tensões
e
deformações
oxi
•«=
Eexi
nos le
va
a
= E
,
ou
ff
«
M
df
E
f5
«
M
df
com
df
de
0 que resul ta em
ff
=
df
e
ff
=
df
L
L
Assim,
1
-1~
-1
1_
Se
observarmos
a
expressão
acima
veremos
que, dado
um
conjunto de
forças
ff e
ff
aplicados ã
barra,
e
impossível
deter
minar os
deslocamentos
df
e
df
.
Isto
porque
as duas
relações
de
f inidas pela matriz
de
rigidez são
linearmente
dependentes,
ou
de t
k
'
ÿ
U
.
Podemos interpretar
fisicamente
is to,
se
notarmos
que
pode
exist i r
um vetor deslocamento
d'de corpo
rígido
(d i ferente
de
zero)
que
nao
esteja
associado
a uma
configuração
de deforma
çao
interna
para
a
barra. Isto
quer
dizer
que
podem haver deslo
camentos sem que
hajam
forças
aplicadas;
assim
k
1
d
1
=
0 para
d
'
é
0 ,
sendo
d'
um vetor
deslocamen
to
de
corpo
rígido.
A
equação
acima
comprova
que
det
k'=0.
Os
dois
coeficientes que
relacionam
ff
e
ff
finem a
primeira coluna
da
matriz
k'.
Para def inir a
segunda coluna
temos;
1
<
ls-
L
'
EA/L -EA/L
EA/L
k'
=
EA
L
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 60/155
54
2,1.2.
Determinação
da
Matriz de
Rigidez
Local
por
Apli
cação
do
Princípio
dos
Deslocamentos
Virtuais
Esta
determinação
pode
se r
feita
para
cada
um
dos
coe
f icientes
da
matriz
em
separado,
a
exemplo
do
que
foi
feito
110
item
1.8.1.1,
ou
pode
ser feita
de
maneira
global
como
mostrado
a seguir.
Queremos
determinar
o
conjunto
de
forças ff
e
f
i
quede
vem
ser
aplicadas ã
barra
para
garantir o
equilíbrio
desta
quan
do
submetida
a
seguinte
configuração
deformada:
1*
'
_ _
t'
____
n
__
_
__
—
o
-
ÿ
ÿí-\
ÿ
_
P,'
£
Isto estabelece
o
campo
de
forças
reais
(F,a)
onde
F
=
forças
externas reais
F=Jÿÿ1_
l
F
=
f'
o
«=
tensões
internas
reais
o
=
oxi
=
Eexi
=
E
4ÿ-
dx
i
Sabendo-se
que
temos
u(xi)
=
Nidf
+
N2d|,
temos
=
e
(§;.
a;
ÿ
g».
a»
_
_
-dN;
dN2.
FdH
„
dN
..
u
ox,
=
E
J
>
L
e
„x,
-
E
.
d'
E,
por
final
Oxÿ
«=
E
Bd
'
Onde
B
c
IE
-
(
-1
Tÿ2)
-
(N i Ni)
dx
J
dxj
dxj
'
1
í
5-c-èè)
B d1
-
Exj
=
C
—
-
)
J~
dfl
=
2Éj_J_É2
(o
que
e
obvio)
**
**
L L c
>
L
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 61/155
55
A
aplicação do principio
dos
deslocamentos
virtuais
vai
fornecer as
condições
de
equilíbrio
para
o
campo
de
forças
reais.
Para
tal,
o
campo
de
deslocamentos
(ôD,ôe)
virtuais
es
colhidos deve
satisfazer condições
de
compatibilidade:
l'
O-
•t-
L
<W(*>
1
Z*
——0
;
-
SAI
+
4
ÔD
= deslocamentos
virtuais
ÔD
=
6u
(xi
)
=
deformações virtuais
ôe
=
ôexi
=
d
6u
dx
i
(cond.
de
com
patibi
1
idade).
ôexi
=
Bôd'
ou
<Sexi
=
(6d
)
.B
ôexÿ
=
-ôdj
+
Ôd
í
0
principio
dos deslocamentos
virtuais
nos diz
que
ôWp
= ÔU
L i
Onde
ÔW ÿ
=
EôD.F
e
:
ÔU
=
ili
jv
ôe.
cr
dv
temos
Assim,
como
sõ temos
forças
externas nas
extremidades,
ÔWg
=
(ôd
'
)
T
. f'
-
ôdjf í
+
Ôdjfí
ÔU
=
IqJa
6exj
.
oxidA
dxi
,
ou
=
M
.
(ôd')T.
BT.
E
. B
.
d'
.
dA
.
dxi
JOJ
A
~
~
~
~
Logo
ÔU
=
(ôd
'
.
Jr
BT
EA
B
dxi
.d'
U
»-
~
r-,
Aplicando o
princípio
temos:
(ôd
O l
f'
=
(6d')T.
fi
BT
EA
B
dxi
.d'
•v
«
* ÿ »
ÿ
O
OCR por Emerson Leite - www.unna.eng.br
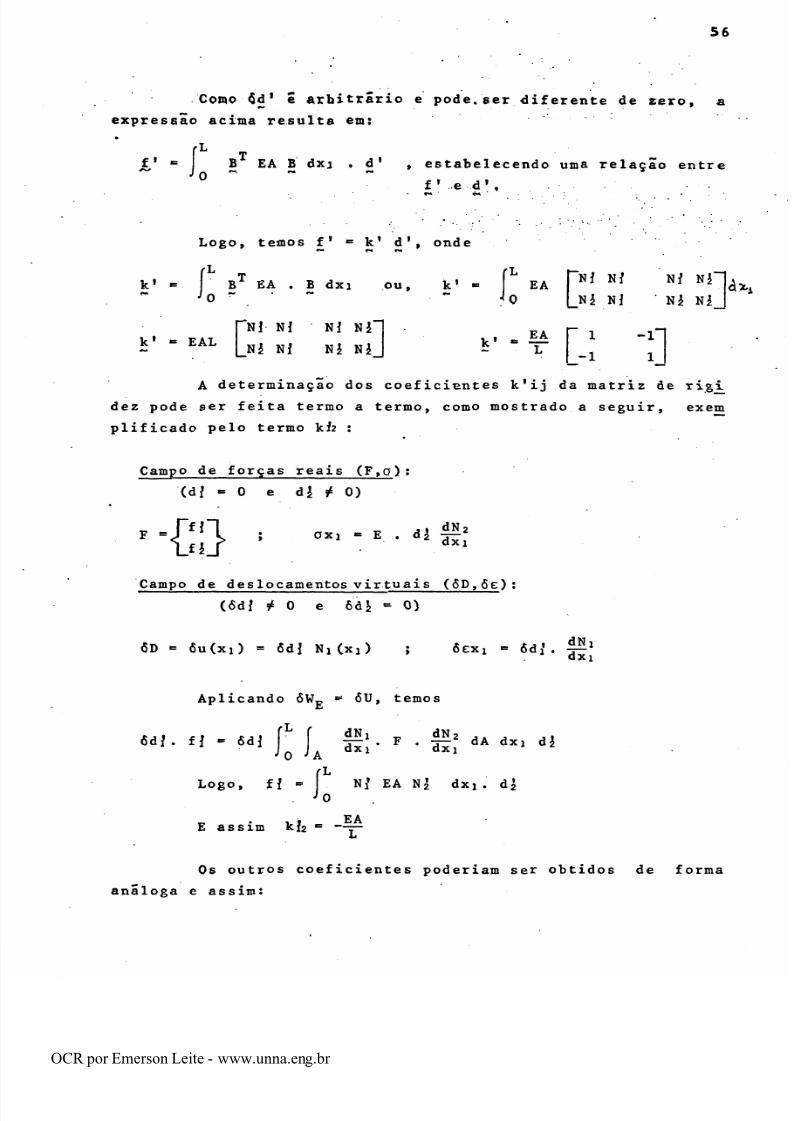
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 62/155
56
Como
6d
'
á
arbitrário
e
pode.
ser
diferente
de
zero,
a
*
*
expressão
acima
resulta
em:
L
T
B
EA
B
dxj
,
d' ,
estabelecendo
uma
relação
entre
0
~
fed'.
k1
Logo, temos
f'
e
k'
d',
onde
BT
EA
.
B
dxi
ou,
k
1
«=
[
EA
Í~NÍ
NÍ
N*
N*
o
-
.
-
'
ÿ0
In* Ní
Ni
Ni
k
'
«=
EAL
í
EA
P
0
[_í
P1
ÿ«« ]ÿ
ea
r 1
-r
l_Ni
Ni
N5
NjJ
S
L
I
1
J
elxA
A determinação
dos
coeficientes
k'ij da
matriz
de
rigi
dez
pode
ser feita termo
a
termo,
como
mostrado
a
seguir,
exem
plif icado
pelo
termo
kÍ2
:
Campo de forças
reais
(F,o)
:
(d
i
=0
e
d
i
f
0)
-€ }
ÿ
=J
X 1
k
;
oxj
«=
E
.
di
Campo
de
deslocamentos
virtuais
(ÔD,6e)
:
(ôdl
t
0
e
ôdi
-
0)
6D
«=
6u(xi)
=
6dJ
Ni(xi)
;
ôexi
=
ôdi
.
Aplicando
ôWg
=
6U,
temos
«df.
a
.
«di
\
f .
|f;
dA
dx,
d j
v»
A
Logo,
f{
=
[
Nj'
EA
N|
dxj
.
d|
J
0
E
assim
kf2
=
L
Os
outros
coeficientes
poderiam
ser
obtidos
de forma
análoga
e
assim:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 63/155
57
f
«=
kÍL
j
dN.
dNj
.
,,
dii'
EA
'
dxj
dxi
'
dÿ
N EA N
dx j
i
J
2.2.
Matriz
de
Rigidez
do
Elemento
(barra)
de
Trel iça
no
Sis
tema
de
Eixos Globa is
Seja uma
barra
de
treliça
com
uma inclinação
0 qualquer
em
relação aos eixos
que
definem
a
estrutura
(eixos
globais
Xi
X2).
K/y
Coordenadas Locais
Sistema Global
Sendo
uma
barra de
treliça
(com
articulações
perfeitas),
a
sua configuração deformada
fica
definida
pelos deslocamentos
no
plano
de suas
extremidades,
resultando em
quatro
coordenadas
locais
mostradas
acima.
Desejamos
conhecer
as relações
que existem entre
as
fojr
ças
e
deslocamentos definidos
nas coordenadas locais.
Forças
Aplicadas ã
Barra
Deslocamentos dos
Extremos
das Barras
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 64/155
58
Tal
relação
e expressa
por;
kn
ki2
kis
kw
k-21
k22
1*ÿ23
k2<»
k31
k
32
k
33
k
3» »
ki»i
ki»2
k.1,3
kiA
ou
f
=
k
d
Onde k
é a
matriz de r igidez
de
barra
no
s
is tema
global
.
2.2.1.
Determinação
da
Matriz a
Partir
de
Transformações
de
Coordenadas
Conhecemos
a
relação
f
1
=
k'd1
para
o
sistema
local
e
queremos
determinar
as
relações
entre d'
e d e
entre
f
e
f1 .
ÿ2-i
Pr
'X,
Da f igura
tiramos
que
dí
dl
Ou
di
cosG
+
d2
sen©
d3
cos©
+
di»
sen©
[cos©
sen©
o
o
o o
cos© sen©
1
E,
assim d'
= R
d
Onde
R
fcos©
sen©
L
cos©
aen©
]OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 65/155
59
As
relações
entre
f
e
f'
são
tiradas
da figura abaixo,
r*
r-
i
(
Logo
f
1
=
ff
COC0
Í2-
f
}
sen©
£3
=
£&
cos©
f
I,
=
f
3
s
en©
Ou
fl
£2
£
3
f
..
cos©
sen©
0
0
0
0
cos©
s en ©
ffH
®
»
assim
f
=
Rÿf
1
Esta
relação
também
poderia ser
determinada
util izando
o
principio
dos deslocamentos
vir tuais,
como
mostrado a seguir .
Dado um
mesmo
campo
de
deslocamentos
virtuais,
o
traba
lho
provocado pelas
forças
externas
não
depende
do sistemade
e i
xos
onde
as forças
estão
definidas.
Assim
o
trabalho
das
forças
no
sistema
global é
igual ao
trabalho
das
forças
no
sistema
lo
cal
para
um campo de
deslocamentos
virtuais
Ôd1
=
R
ôd. Logo
•f«
«v.
~
(íd)T
f
=
(ôd*)T
f'
***
r*->
m
e
($d')T
=
G5
d
>
T
RT .
E,
assim
(ód)T
f =
(<5d)T
RT
f
T
-
omo
(Ód)
é
arbitrário
e
pode
ser
diferente
de
zero,
temos
f
=
R fOCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 66/155
60
A
jrelaçao
que
existe
entre;
d» -Rd
«ÿ>*
r*
e
chamada de
Relação
de Contragradiencia
.
Agora
podemos determinar
a
matriz
de
r igidez,
k,no
si£
tema
global,
em
função
de
k '
no
sistema
local.
Partindo de
f
«
k'd', e
substituindo
d'
por
R ,d
e
pre
T
multipl icando
por R
,
temos
Definido
c
-
cosO
e
s = seri3
,
e
operando
a expressão
an
—
«T
terior, temos:
(exercício
proposto)
Rÿf
'
=
Rÿk'R
d
,
e
assim
f
-
Rÿk'R
d
T
Logo
k
-
R k'
R
2
2
C
CS
-C
~C
S
..
.
AE
tís
s2
-Csí
-s2
k
-
-= —
Observe
que
a
transformação
manteve a
simetria da
ma
triz
de r igidez
Observação
:
A matriz
k
pode
ser
obtida
como
mostrada
abaixo.
(-ç
-
s c
s)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 67/155
2,2,2.
Determinação
por
Aplicação
das
Condições
de
Equi
61
«
líbrio
Diretamente
A
matriz
e
determinada
coluna
por
coluna.
Começando
pje
la
primeira
coluna,
impõe-se
dl
e
1
e
os
outros
nu los ;
A,
Há um
encurtamento
da
barra
de
di
cosO
~
-
AE
A
força
de
compressão
correspondente
e
F
=
-j—
di
cos0.
Para que
haja equi l íbrio
temos
que
ter;
kn
=
-k
3i
'
=
F
cosO
k2i
-
-km
=
F
s
enQ
Assim,
determinamos
a primeira coluna
da
matriz
k;
r
cos
2o
AE
J
cos0 sen0
-co
s 20
-cos0
sen0
}
Se
o
mesmo
procedimento
fo r
feito
para
os
outros
graus
de
liberdade
resultara
na matriz
k mostrada
anteriormente.
Verifica-se
que
não foi ainda imposta nenhuma
condição
quanto
aos deslocamentos
da
barra. Isto
quer
dizer que
ainda
po
de haver
uma
configuração
de
deslocamentos
d
y
0
d e
corpo
rígí
do
tal
que
não
haja
deformação
interna na
barra,
o
que
mostra
que não
ha forças
aplicadas
Cf
=
0).
Assim
k
d
ÿ=
0
para
d
y
Q,
sendo
d
deslocamento
de
cor
po
rígido.
Isto
mostra
que
a
matriz
de
r igidez
k
e
singular
e
não
N
pode ser
invertida
(det
k
-
01,
OCR por Emerson Leite - www.unna.eng.br
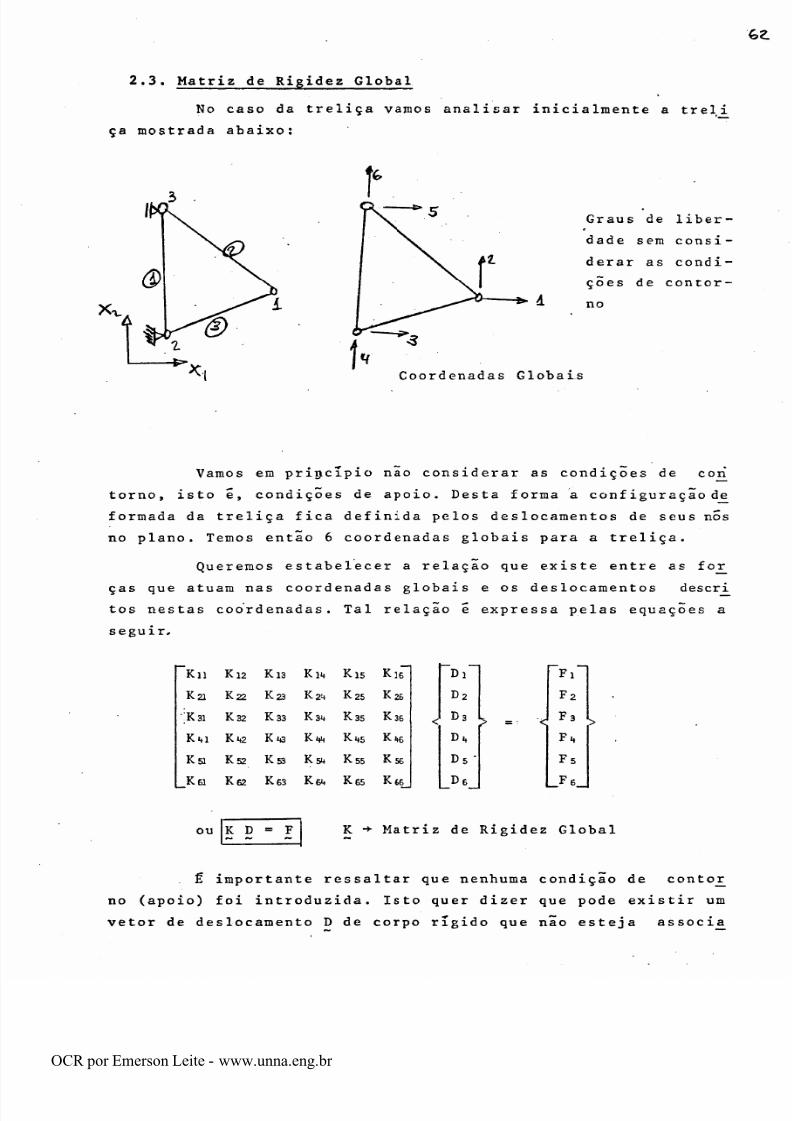
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 68/155
€>2.
2.3.
Matriz
de
Rigidez
Global
No
caso
da
trel iça
vamos analisar
inicia
lm
ente
a
treli
ça
mostrada
abaixo:
Vamos
em
princípio
nao
considerar as
condições de
cori
torno,
isto
?,
condições
de
apoio.
Desta
forma
a
conf
iguração
dje
formada
da
trel iça
f ica
definida
pelos
deslocamentos
de
seus
nós
no
plano.
Temos
então
6
coordenadas
globais
para
a
treliça.
Queremos
estabelecer
a
relaçao
que
existe
entre as
fojr
ças
que
atuam nas
coordenadas
globais e os
deslocamentos
descrji
to s nestas coordenadas.
Tal
relaçao
é
expressa
pelas
equações
a
seguir.
~Kn
K
12
K
13
Km
Kis Kl6~
~Di~
~Fi~
Ka
K22 K23 K2u
K25 K26
d2
f2
•Ra
K32
K33
K34 K35
K
36
<
d3
>
=
<
Fa
Km
K42
K
U3
Ki*
Kw
K
i»6
D-
F
i*
Ka
K
52 Ks Km
K55
K
56
D
5
Fs
_K
61
K
62
K
$3
Km
Kes
K
66_
_d6_
_
F
g
_
ou K
D =
F
K
+
Matriz
de
Rigidez G
1
0
Ê importante ressaltar
que
nenhuma
condição
de contor
no
(apoio)
foi
introduzida.
Isto
quer dizer
que
pode
exist i r
um
vetor
de deslocamento
D
de
corpo
rígido
que
não
esteja
associa
Coordenadas
Globais
Graus
de
l iber
r
dade
sem
consi
derar
as
condi
çoes
de
contor
no
OCR por Emerson Leite - www.unna.eng.br
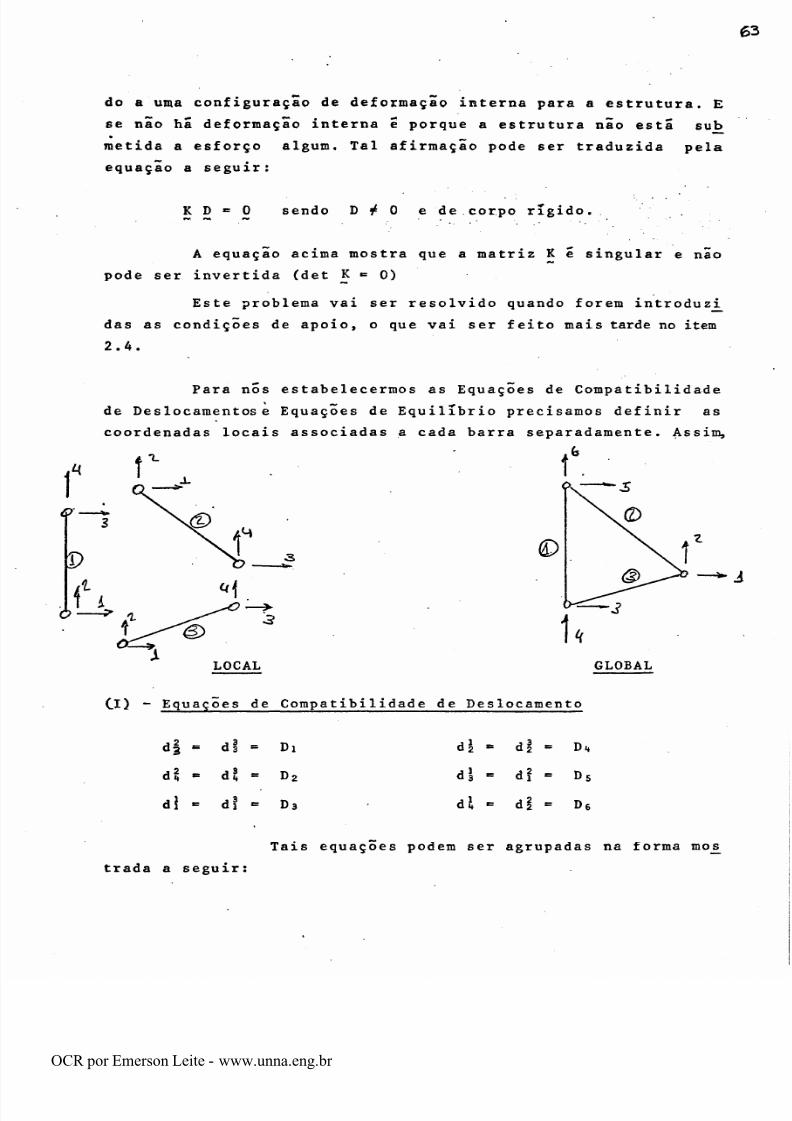
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 69/155
63
do
a
um a
configuração
de
deformação
interna
para a
estrutura. E
se não
hã deformação
interna
e porque
a
estrutura
não
está
sub
metida
a
esforço
algum. Tal
afirmação
pode
ser
traduzida
pela
equaçao
a
seguir:
K
D
sendo
D
ÿ
0
e de
corpo
rígido.
A
equação
acima mostra
que
a
matriz
K
é
singular
e
não
pode
ser
invertida
(det
K
=
0)
Este
problema
vai
ser
resolvido
quando
forem
introduzi
das
as
condições de apoio,
o
que vai ser feito
mais
tarde no
item
2.4.
Para
nós
estabelecermos
as
Equações de
Compatibil idade
de
De s
locamentos
e
Equações
de
Equilíbrio
precisamos
definir
as
coordenadas
locais
associadas
a
cada
barra
separadamente.
Assim,
(s
LOCAL
GLOBAL
Cl)
-
Equações
de
Compatibilidade
de
Deslocamento
d§
-
d
1
=
Di
d
i
~
d
|
=
Di»
d?
ÿ=
d
®
=
d2
à\
=
d?
=
Ds
d] «=
o.
MU
n
d3
dl
ÿ
d
1
=
D6
trada a
seguir:
Tais
equações
podem ser agrupadas
na forma
mos
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 70/155
~dl~
I
o
o
d£
0 0 0
1
0
0
»2
dÿ
0 0
0 0
1
0
dl
0
0
0
0
0
1
X
<
D*
d?
0 0
0 0
1
0
d
1
0
0 0
0 0
1
D6
<5
>
_
.
ÿM.
O
__ J
d|
1
0
0 0
0
Q
d?
0
1
0
0
0
0
d3
0 0
1
0 0
0
dl
0
0
0
1
0
0
d3
1 0
0
0 0
0
_d?_
o
i
(12
x
6)
(12
x
1)
Ou
(6
x
1)
pH
a1
d1
=
A
1
D
d2 >
= Ã2
.
D -»ÿ
ê 5
d2
=
A2D
_d3_
-P-
d
3
=
A3
D
A
Matriz
de
incidência
cinemática
(estabelece
as condições
de
compatibil idade
de
deslocamentos)
A1-»-
Matriz
de incidência
cinemática
para
a
barra
JL
A2-»-
Idem para
a
barra
2ÿ
A3-*
Idem
para
a
barra
3ÿ
II
)
-
Relações Força-deslocamento
para as Barras
f1
= k
J
d
1
;
f2
=
k2d
2
;
f3
=
k3d3
Estas
forças
atuam
nas
extremidades
das
barras
III)
-
Transporte
das
forças
extremas
nas barras
para
as coorde
nadas
globais
As
equações
f inais
sao
equações
de
equil íbrio dos
nos
da
trel iça,
isto é,
uma
equação
para
cada
coordenada
global .
Pa
OCR por Emerson Leite - www.unna.eng.br
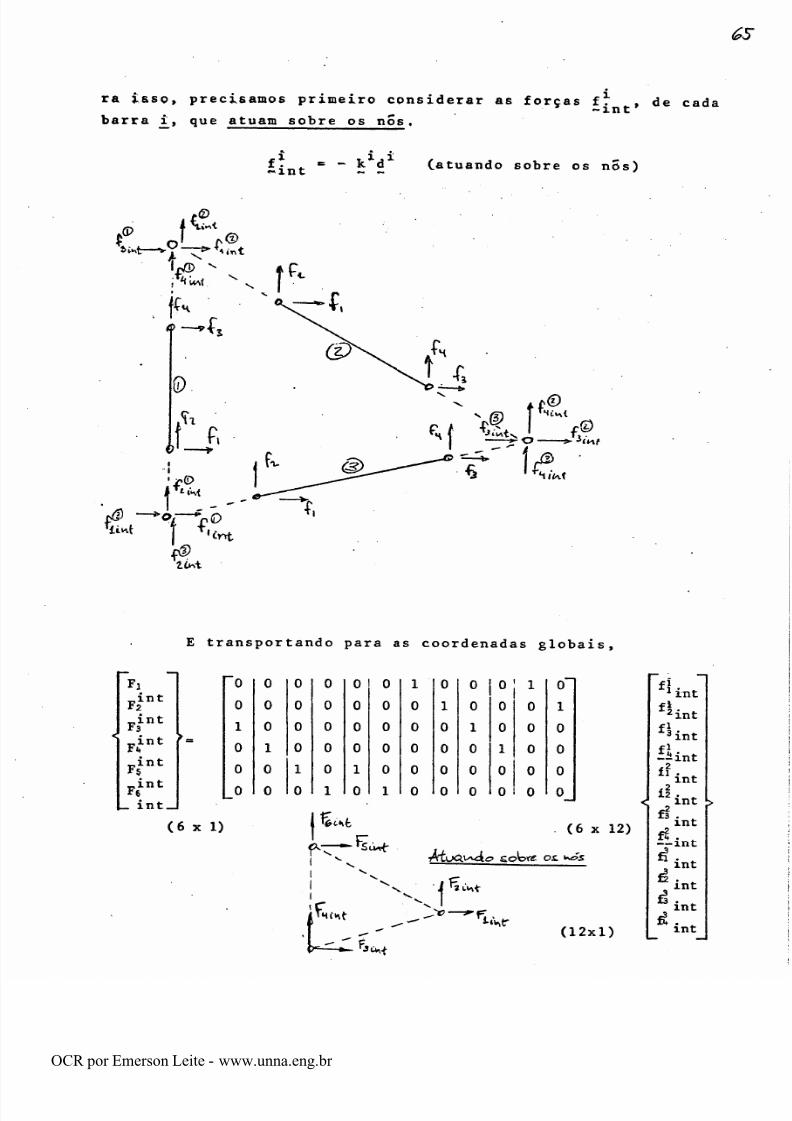
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 71/155
65
ra
isso,
precisamos
primeiro
considerar
as
forças
fj
,
de
cada
barra
_i_,
que atuam
sobre
os
nos ,
f*
<-int
i
,1
£
Í
Catuando
sobre
os
nõs)
E
transportando
para
as
coordenadas
globais,
int_
Fj
0
0
0
0
0
0
1
0
0
0
1
Cf
Faint
0
0
0 0
0 0
0
1
0 0 0
1
r
1
0
0
0
0
0
0
0
1
0
0
0
F,int
ÿ
_
0
1
0
0
0
0 0
0 0
1 0
0
pi«
0
0 1
0
1
0
0
0
0
0
0 0
Feint
0 0 0 1
0
1
0 0
0
0
0
0
(6x1)
r-
(6
x
12)
Á~t\jQ±*Ác>
Spt>«£
OS .
HÍHt
W
(12x1)
f
*
in t
fÿint
fHnt
ílint
íi
.
int
íl
.
int
ff.
int
f? .
.
—
int
á
nt
è
.
int
rJ<M
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 72/155
Ou
Assim,
F.nt=[jA3)T
(A2)1
(A3)1 ]
F.
,
s
A
L
-xnt
~
~M
rfl
~
-xnt
~xnt
f
T
-mt
Podemos escrever
F.
ÿ
~mt
F1.
+
F.2
.
+
F?
_
-xnt
-xnt
~mt
F. .
-
I
FÍ
.
xnt x
-xnt
Onde
:
f
.
=
(a1)1
f
í
~xnt
-
-xnt
F?
=
(A2)T
f?
-xnt
-
-xnt
f|
=
(A3)T
f?
-xnt
—
—
int
contribuição
de
barra
1ÿ
nas
equações
de
equilíbrio
contribuição
da
barra 2
nas
equações
de
equilíbrio
contribuição
da
barra
_3
nas
equações de
equilíbrio
-
i i T i
A
relaçao
=
CA
)
f
ÿ
n
t
também
pode
ser
obtida pe
lo
princípio
dos deslocamentos
vir tuais.
Dado
um mesmo
campo
de
deslocamentos
vir tuais,
ôd1
=
A1
ÔD
,
o
trabalho das
forças
F1
- - -
y
-xnt
definidas
nas
coordenadas globais
é
igual
ao
t rabalho
das
f°£.
ças
f1
definidas
nas coordenadas
locais,
-xnt
(ÔD)T
F1
=
(Ôd1)1
f1
-xnt
-
-xnt
(6D)T
Fint
=
<6d>T-
(A1)1
í\nt
-int
-
~
ÿ
int
Fint
=
(AÍ)T
fint
xnt
-
-xnt
A
relação
entre
d1
=
AXD
laçao
de
con
t
r
a-gr adi
ene
i
a
:
F1
=
(A1)1
f1
-xnt
-
-xnt
e
uma
re
A
2
T
F
.
.
=
A
fu
xnt
-
~M
£6
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 73/155
F
.
«
CA1)1
f*
_
+
Ca
2
)
T
f
2.
+
(a3)t
f?
int
~
in t
~
~int
~
~int
Seguindo
o
procedimento
do
Método
dos
Deslocamentos
pa_r
timos
das
equações
de
compatibilidade
de
deslocamentos
(I)
para
as
re
lações
f
orça-de
s
locamento
(II)
e dal
t ransportamos
as
forças
pja
ra
as
coordenadas
globais
(III)
.
Isto
possibi l i ta
a
determinação
da
matriz
de
r igidez
global ,
como
será
mostrado
no item
2.3.2. 0
enfoque
mais
direto
será
visto
no item
2.3.1.
que
se
segue.
As
equações
de
equilíbrio
também
serão
consideradas no
item 2.3.2.
2.3.1.
Método
da
Rigidez
Direta
0
método
da
Rigidez Direta
nada mais
é do que
a deter
minação dos
coeficientes
Kij a
part ir da
aplicação específica
da sua
definição.
Assim,
por
exemplo
vamos
dar um
deslocamento
Dl
-
1,
e
os outros
nulos.
M
Dr-á
&3
=-1
)
-
©
OCR por Emerson Leite - www.unna.eng.br
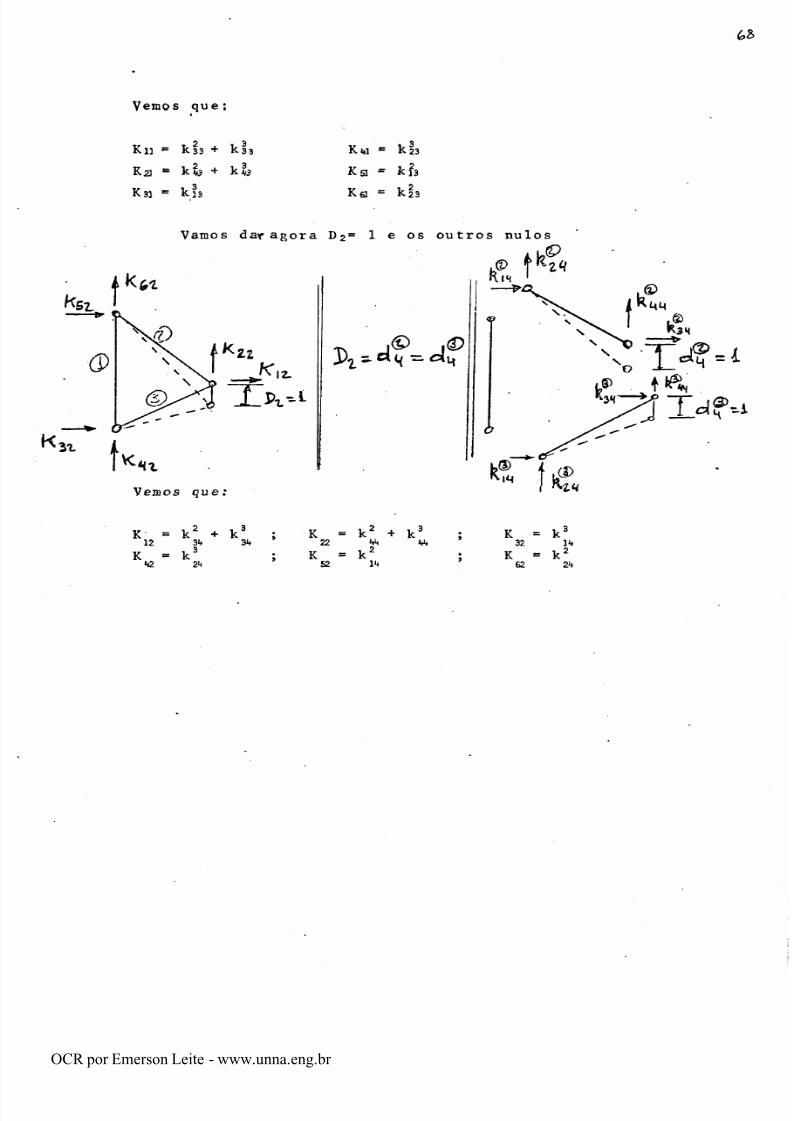
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 74/155
(oh
Vemos
que;
Ku
K21
Ksi
k.33
+
k
1
3
k
M3
+
k
43
ki3
K
41
=
k
23
Ka
=
k?3
Ka
=
k
23
Vamos
dar
agora
D2=
1
e os
outros
nulos
12 .
lír-t
Vemos
que:
1X4-1
3
Id?-i
•
fiC,
K
=
k2
+
k3
12
31»
34
K
= k3
42
24
K
=
22
K
=
k
52
14
1
2
1
3
k
+
k
44
K
=
k3
32
14
K
=
k2
62
24
OCR por Emerson Leite - www.unna.eng.br
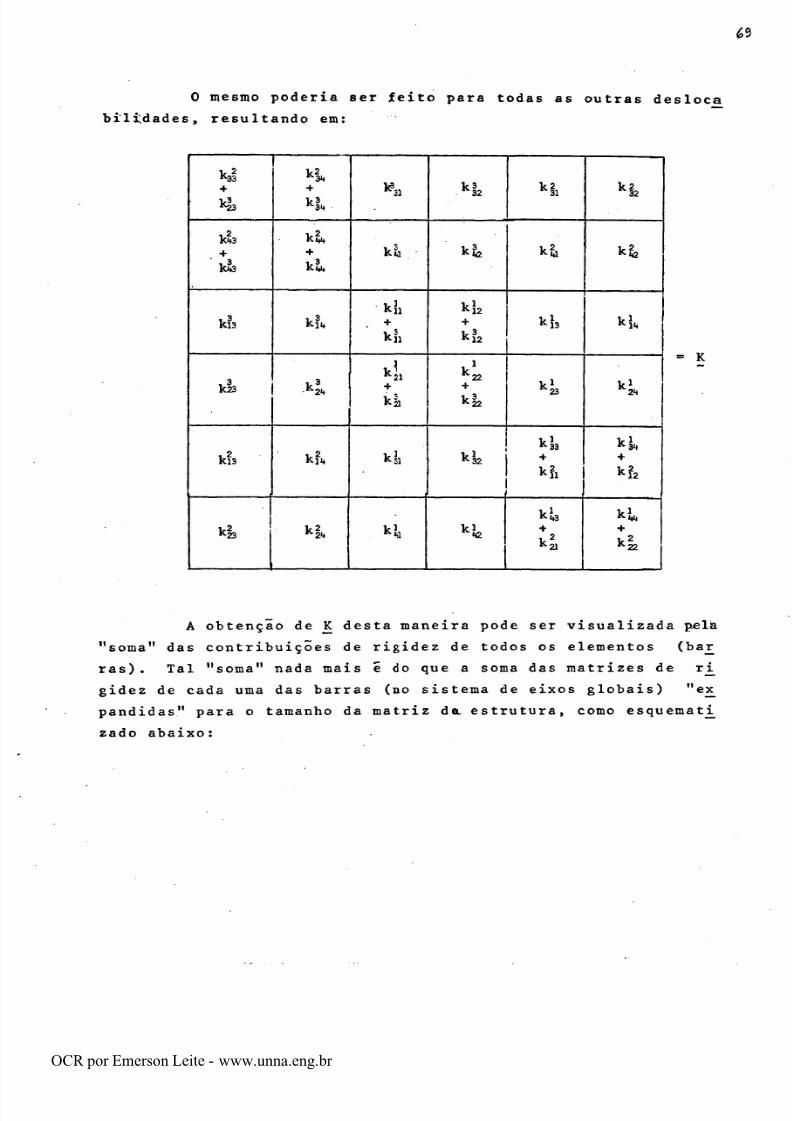
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 75/155
69
O
mesmo
poderia
ser
feito
para
todas as
outras
desloca
bilidades,
resultando em:
ÿ3 3
+
ÿ23
k2
ÿ34
+
k-34
*31
>Í2
k2
31
k§
32
k§3
+
kÿ4
+
k«
kÿ2
kÿ
k
k
k43 kl*
kl3
kfi»
kh
íf,
k}2
+
V3
k12
ki3
kk
k23
k3
K2 4
í
k1
21
+
ki
kL
+
klz
k1
23
kl
24
ki3
k?4
kl
kk
kk
+
kfi
kk
+
k?2
kk
k}|4
k§3
k|4
ky
kk
+
k2
21
+
k2
*
22
A
obtenção
de
K desta
maneira pode ser visualizada pela
soma das contribuições
de
r igidez
de
todos
os
elementos
(bar
ras)
.
Tal soma
nada mais
é
do
que
a
soma
das
matrizes
de
ri_
gidez
de
cada
uma
das
barras
(no
sistema
de
eixos
globais)
eic
pandidas
para
o
tamanho
da
matriz
da.
estrutura,
como esquemati.
zado
abaixo:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 76/155
?0
1
2
0
0
0 0 0
0
k33
k
34
0
0
k
31
k
32
0 0 0
0 0 0
\b
0
0
k,l
k,2
0
0
Ki
Kz
Kb
Kw
+
0
0 0
0
0
0
0
0
ka
Kb
K*
k»
0
0
0
0
0 0
0
0
Kl
kg j
Kb Ki*
K3 kH
0
0
ki
K2
0
0
kM i
ki<2
loa
kw
kz3
0
0
k22
-E
3
ÍE
k33
kÿ
kÿ
K?
0
0
=
K
kw
ki»i«
kj,i
k*
0 0
k
n kT <
kll
K?
0
0
k 23 k2u
k2 i
Iz2
0
0
0 0
0 0
0
0
0
0
0 0
0
0
k3
-E
Esta
soma
é
o
que
caracteriza
o
Método
da
Rigidez
Di'
r
eta .
Convém
lembrar
que para
a
obtenção
da
matriz
de Rigidez
pelo
método
da
r igidez
direta
sao
uti l izados
condições
de
compa
t ibi l idade
de
deslocamentos
e
relações
força-des
locamento
(dadas
na
matriz
de
r igidez
de
cada
barra)
.
2.3.2.
Formalização
do
Método de
Rigidez
Direta
Substituindo
as
equações
de
compatibilidade de
desloc£
.
mentos
(I)
vistas
anteriormente
nas
relações
f
orça-
d e s 1o
c
amen
t o
(II)
,
temos
:
d
1
==
A
1
D
;
d2
=
A2D
;
d3
=
A3D
f*
=
k
1
A1
D
;
f2
-
k2A2D
;
f3
=
k3A3D
(forças
atuando
nas
extremidades
das
barras)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 77/155
?1
Estas
mesmas
forças
atuando
sobre
os nós f icam;
~rnt
-kJ
AaD
f
2
í
in t
-k2A2D
f
3
~int
*-k3A3D
0
t ranspor te
destas
forças
das
coordenadas
locais
para
as
globais
e
dado
pelas
relações
(III)
F.
t
» (A1)1
f1.
+
UZ)T
f?nt
+
(A3)T
f?
~int
~
-
xn t
~
~int
—
*-int
F.
.
~mt
-
PCA1)1
kÿD
+
(A2)1
k2A2D
+
(A3) 1
k3A3D~l
~
~
~
w»
'
fx
«««
(m
*
2
x
T
.2.2,
ou
F
.
ÿ
~mt
-
FíA1)1
k*AJ
+
CA2)T
k2
A2+
(A3)T
k3A3l
D
•
m».
m*
m ,
»«
m pó
«»
Fÿnt
é o conjunto
de
forças
das
barras
atuando
sobre os
nós,
definidas
nas
coordenadas globais.
Estas
forças
vão
ser equilibradas
pelas
forças
exter
nas,
F
,
aplicadas
nos
nós e
definidas
nas
coordenadas
glo
*cX
L
ÿ—
bais.
No
caso
temos
F
_
~ex t
F
i
F2
f3
F
i*
Fs
Fe
:
As
equações
de
equilíbr io
dos
nÓs
nas
direçoes
das
coor
nadas globais sao expressas
por:
F. +
F
.
=
0
~
int
~ex
t
(IV)
As sim,
F
»=
P
(A
1
)
T
k*A>
+
(A2)1
k2
A2+
(A3)T
k3A 3]
D
—
•—
«
*•
r««
r~ cm «w
f»»
ÿ
»
m
Ou,
F
=
K
D
•<*. r—>
onde K
i
a
matriz de
rigidez
global .
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 78/155
1Z
Para
uma
treliça
com
m
barraà:
m
x T í x
K
«
Z
(A
)l
k1
A1
i=
1
•
m
• •
1
ÿ
T
i
1
*
L
l
)
kA
«M
M
barra
i
expandida
para
o
tamanho
da
matriz
da
estrutura.
Observe
que
(A1)
k1
A1
=
k*,
e
a
matriz
de
r igidez
da
***
Hi
Exercício
Proposto
Veri f icar,
para
a
treliça
mostrada
anteriormente,
se
as
ma
trizes
ki,
,
k2
,
kÿ
são obtidas
a part ir da
expressão
acima.
Observação
:
Se
kÿ
e
a
matriz mostrada
abaixo:
-4x4
0
0
0
k2
-4x4
0
0
0
k3
-4x4
(1 2
x
12)
Podemos escrever:
=
-kÿ dÿ
(relações
f
or
ça-desloc .
)
(atuando
nos
nós)
Assim, F.
=
Aÿf
-*ÿ
F
.
=
-Aÿk
d.,
'
~mt
-
~M
~mt
~
~M
~M
Sabemos:
dÿ
=
A
D
(condições de compatibil idade)
Logo»
?int
=
~
5
Equações
de
Equi l íbr io:
+
ÿext
=
®
E,
então, F
„
=
F
=
A
k..
A
D
' '
~ex t
~
-
~M
-
~
Logo
K
=
A
k
A
OCR por Emerson Leite - www.unna.eng.br
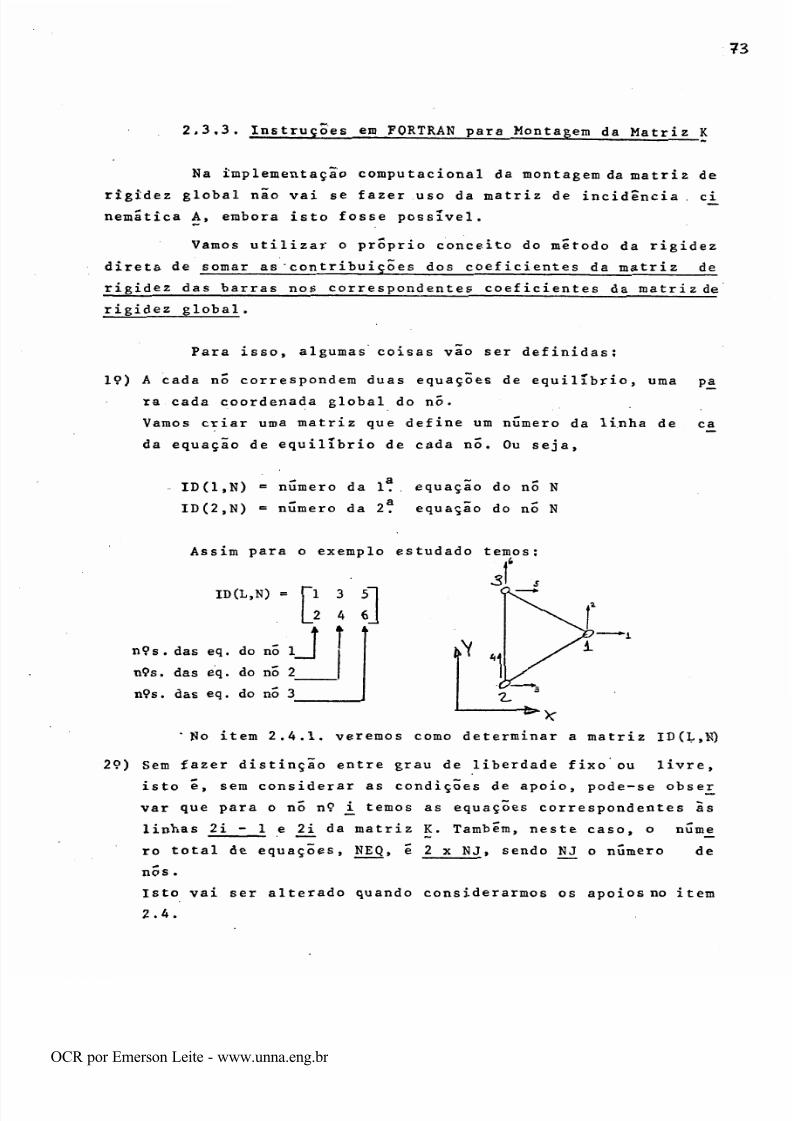
7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 79/155
73
2.3,3.
Instruções
em
FORTRAN
para
Montagem
da
Matriz
K
Na
implementação
computacional
da
montagem
da
matriz
de
rigidez
global
não
vai
se
fazer
uso
da
matriz
de
incidência
.
c i
nemãtica
A,
embora
isto
fosse
possível.
Vamos
utilizar o
próprio
conceito
do
método
da r igidez
direta
de
somar as
•
contribuições
dos
coeficientes da
matriz
de
rigidez
das barras nos
correspondentes
coeficientes
da
matriz
de
r igidez
global
.
Para
isso,
algumas
coisas
vão
ser
definidas;
1?)
A
cada
nó
correspondem
duas
equações
de
equilíbrio,
uma
pa
ra cada
coordenada
global do
nó.
Vamos
criar
uma
matriz
que
define
um
número da
linha
de
ca
da
equação
de equilíbrio
de
cada
nÓ
. Ou
seja,
**
r-~
r—
ID(1,N)
=
numero
da
1.
.
equaçao
do
nó
N
_
£
ÿ
ÿ
ID(2,N)
=
número da
2. equação
do nó
N
Assim para
o
exemplo estudado
temos;
a
s
'
D
(L,N)
=
nÇs
.
das eq.
do
no
n9s. das eq.
do nó
2
n?s.
das
eq.
do
nó
3
C
ó
1_J
3
4
'N o
item
2.4.1.
veremos como
determinar
a
matriz
ID(L,N)
29)
Sem
fazer
distinção
entre
grau de liberdade
f ixo
ou
livre,
isto é, sem considerar
as condições de apoio,
pode-se
obsejr
var
que para
o
nó
n9
i
temos
as equações
correspondentes
ãs
l inhas
2
i
-
1
e
_2i_
da
matriz
K.
Também,
neste
caso,
o
núm£
ro
total
de
equações,
NEQ
,
é
2
x
N
J
,
sendo
NJ
o
número de
nós
.
Isto vai
ser
alterado
quando considerarmos
os
apoios no
item
2.4.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 80/155
39)
Um a
barra
ligando os
nós
_I
e
£
terá os
coeficientes de
sua
matriz
de
r igidez
afetando
as
seguintes
l inhas
e
colunas
da
matriz
K:
ID
(1,1)
,
ID
(
2
,
1
)
,
ID(1,J)
,
ID
(2 ,
J
)
Para
entender
isto
vide a
montagem
das
matrizes de
rigidez
expandidas mostradas
no
item
2.3.1.
49)
A
matriz
de
r igidez
i zerada
inicialmente
e
a
sua
montagem
é
feita
somando-se
a
contribuição
de
cada
barra
em
separado
aos correspondentes
coeficientes.
59)
É
criado um
vetor,
LM(L),
que
define as
posições
(linha
e
coluna)
da matriz
de
r igidez
global
onde
serão
somados
os coe
ficientes
da
matriz
de
rigidez
da
barra.
Todas
estas considerações
estão
mostradas
nas
instruções
FORTRAN
mostradas
abaixo.
(Ví/l&'fcia.yy\be/w\-ftoÿoa1rawva.
a.
SUBROUTINE
STIFF
ÿ
Monta
matriz
K =
S(II ,JJ)
C
ZERA
MATRIZ DE
RIGIDEZ
GLOBAL
DO
10
II
=
1,NEQ
•*
NEQ
=
n9
de
equações
DO
10
JJ
=
1
,NEQ
10
S(II,JJ)
=
0
C LOOP
AO
LONGO
DAS BARRAS
PARA
SOMA
DE
CONTRIBUIÇÕES
DO
30
M = 1
,
NE
HE = n?
de barras
CALL
ESTIFF
(M)
Monta
matriz k
=
SE(I,J)
C
ADICIONA
MATRIZ
DE
RIGIDEZ DO
ELEMENTO
A MATRIZ
TOTAL
I=
NOD
(
1
,
M)
«-
Nõ
inicial
J
=
NOD
(
2
,
M)
«- Nó
final
LM
(
1
)
= ID
(1,1)
LM
(2 )
=
ID
(2
,
1
)
LM
(3 )
=
ID
(
1
,
J
)
LM
(4
)
-
ID
(2
,
I
DO
20
I
-
1,4
II
=
LM(I)
Posiciona
a
l inha
DO
20
J
=
1,4
JJ =
LM(J)
ÿ*-
Posiciona
a coluna
20
S(II ,JJ)
=
S(II,JJ)
+
SE
(
I
,
J
)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 81/155
75
30
CONTINUE
RETURN
END
O
desenho
abaixo
mostra
esquematicamente o
procedimen¬
to adotado
pela
Subrotina STIFF
para
adicionar a contribuição
da
matriz
de
rigidez
de uma
barra
genérica
M
na
matriz de
rigidez
global.
-=ry
X
Coordenadas
Locais
k
=
SE
(1,1)
SE(1,2)
SE
(1
,3)
SE
(1,4)
SE
(2,1)
SE(2,2)
SE
(2,3)
SE(2,4)
SE(3,1)
SE(3,
2)
SE
(3 ,
3) SE(3,4)
SE(4,
1)
SE
(4,
2)
SE
(4 ,3 )
SE(4,4)
Matriz
de
Rigidez
Local
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 82/155
76
»Si>SÿOTifJA
&T\£p
{.S
I
o
\ocs
d-c
GupoCo)
In
\c\o
ÿtKA
>g
C- mama
Kg
ÿ*£
(i.,7)
LMCi)
=XD
(A.moi
>U,m))
LM
(Z)
=XDC2,N)c?P(1iH))
LMlsju
XX
G#moD
(z,
m))
Lm
(q)r
XD
U.NqHZ.m))
'
11ÿ
-
LM
Cx)
<
'
X j
LM
(T)
ÿ(1X.Tj)
=
5(IJi7j)
*
£e(~Z,7)
Top/vs
AS
CO
LvJ/OAS Í-IWK*
fx l
FoRaM
-
Dí
RAPAS ?
TeDAS
AS
A'AJMAS
[3]
FDA
,4
m
C£?«J£ <p£«A
M
s
1
To MS
AS
Sardas
Im] f« ?am
COtJSIPStAp*
s
1
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 83/155
7?
* 3
•S
CM
v-x
Q
M
li
<í*
-
-/
s
o
M
II
/—
s
v»<
s
CM
N -/
Q
H
I
X~N
CM
-
S
n
M
ii
X—
\
•*
t—
1
V—
x
W
CO
x->
<r
*
CM
S-X
W
CO
SE
3,4
x—s
<r
*k
<r
S-X
w
CO
X—N
CO
•»
rH
S- x
W
CO
X*~N
CO
CM
S- x
W
CO
/X-\
CO
#»
CO
v-x
w
CO
/—
N
co
r>
N—
X
w
CO
X S
CM
*
T—
1
X—
X
w
CO
SE 2,2
x—\
CM
#\
CO
w
w
CO
x-s
CM
v-x
W
CO
X—
N
H
4K
1-1
V x'
W
CO
i—l
CM
S—
x
w
CO
x~s
r—
I
•>
CO
S- x
W
CO
XN
l—l
•<
N-X
w
CO
a
hJ
+
-s
CN4
w
s
II
M l
+
CO
s-/
a
ÿj
+
•a
s-
'
5
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 84/155
n
2.3.4.
Numeração
dos
Nos
que
Resulta na
Matriz em
Banda
Vamos
considerar a
treliça abaixo.
A
f igura
em
seguida
representa
a
matriz
de
r igidez
global.
A
matriz
foi
montada,
sem
distinção
e ntre grau de
l iberdade
de
apoio ou
livre,
isto
é,
f£
ram
consideradas
duas
equações
por
nó,
colocadas
na
ordem
cres
cente
da
numeração
dos
nós.
B=6
No
1
No
2
NÓ
3
NÓ 4
Nó 5
Nó
6
Nó
7
nÓ
1
nó
2
nÓ 3
B=6
nó
4
nó
5
nó
6 nó
7
r*—\ t
-*•»
ÿ
r-*-\
rS
-
r
X
X 0
0 X
X
X 0
X
X
X
0
/
'
—
\
X X
X X
X
0
(
J
X
X
0
0 0
\
—
X
0 0
X
X
X
0
X X X
0
X X X X
X
0
X X X
0
0 0
X
X 0 0
X X
X
0
X
X
X
X
X
X
X
X X X
X
X
X
X
X 0
0
X
X
X
0
X
X
X
0
X
X X
X
X
0
X
X
X
0
0
0
X X
0
0
X
X
X
0
X X
X
0
X X X X X
0
X X X
0 0
0
X X
0
0
X X
X
0
X
X X
X
X
X
X
X
X X
/
'
—
\
X X
(
)
X
MAT* ?:
S\HeTtÿCA
J
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 85/155
Observa-se
que
a
formação
natura l
da
matriz
de
r igidez
faz
com
que
os
termos diferentes
de
zero (representados
por
X
na f igura)
fiquem próximos
da diagonal
principal,
e
que
fora
da
faixa
central
só
existam
termos
nulos.
Diz-se
então
que
a
ma
triz tem
a
formação
em
Banda .
Observa-se
que,
como
a
matriz também
e
s imé
tr i
ca
,
tod
as
as
informações
dadas
pela matriz
de r igidez estão
contidas na
ma
triz
retangular com
número de
linhas
igual
a
NEQ
e
número
de
co
lunas igual
a
B,
ondÿe
B
i
chamado
de
semi-lar
gura de
banda .
Assim,
ao
invés
de
se
guardar
uma matriz
cheia
(NEQxNEQ)
pode-se
guardar
a
matriz
em forma
de banda (NEQxB)
,
e
economizar
em
memória de
computador.
As
seguintes
considerações
vão ser
feitas
para
a
deter
minaçao da
semi-largura de banda
(B )
:
19)
Seja
L
o número
de
graus
de l iberdade por nÓ
.
2?)
Seja
uma
barra
genérica
l igando
os
nós
I
e
J .
Suponha
I
<
J.
Lx
(
J-
1
)
+
1
Linhas
Correspondentes
de
K
=
<
(total
-
L
l inhas)
LxJ
Lx
(1-1)
+1
I
-ÿ
Linhas Correspondentes
de K =
<
(total
=
L
l inhas)
Lxl
A
l inha
(ou
coluna)
de menor
numeração
que
é
afetada por
um coeficiente
de
r igidez
desta
barra
e:
Lx(I-l)+l.
A
l inha
(ou coluna)
de
maior
numeração que
é afetada
por
um
coeficiente
de
r igidez
desta barra
é:
LxJ.
Vemos
então
que, para
esta
barra,
a
maior
distancia
de
um
coeficiente
diferente
de zero para
a diagonal
pr incipal
é:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 86/155
So
B
B
LxJ
-
[
L
s
(I
-
1}
+
l]
+
1
L
(J
-
I
+
11
3?)
A
semi-largura
de
banda ê o
maior
valor
de
B encontrado ao
percorrer
todas
as
barras,
ou:
B
=
L x
£
mãx
(_J
**
I)
+
l]3
(semi-largura
de
banda)
Onde
£
max
(.J
~
I)
+
1ÿ
ÿ
chamado de
banda
nodal
.
A?)
Este
procedimento
nao levou
em
conta
as
condições
de
apoio.
Com
base no
que
foi
visto
acima,
encontra-se
em
segui
da
instruções
em
FORTRAN para
calcular
B
( t rel iças).
NDIF
=
0
DO
20
I =
1,
NE
ÿ*-
Vai le r incidência
de
barra
a barra
READ
(5,1002)
M,N0D(1,M),
N0D(2,M)
KDIF
-
IABS
(NOD
(
1,
M)
-
N0D(2,M))
IF
(KDIF.
GT.
NDIF)
NDIF
=
KDIF
20
CONTINUE
MB
=
2*
(NDIF
+
1)
MB
semi-largura de
banda
NDIF
+
1 •* banda
nodal
Observe
pelo
exemplo
mostrado
que
se
a numeração
fosse:
Max
Diferença
=
4
B
=
(4
+
1)
x
2
= 10
Vemos então
que a
numeração
dos
nós
influi
diretamente
na
largura
de
banda.
Deve-se
part i r
com
a numeração
de
um
lado
para
o
outro
da
estrutura
e
não
ir
e
retornar
de novo.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 87/155
21
2.3.4.1.
Instruções
em
FORTRAN para
Armazenar a
Matriz
em
Banda
10
C
20
30
SUBROUTINE STIFF
*ÿ
Monta
K
em
banda
ZERA
MATRIZ DE
RIGIDEZ
DO
10
II
-
1
,
NEQ
DO
10
JJ
=
1
,
MB
S(II ,JJ)
=
0.
LOOP AO
LONGO DAS
BARRAS
PARA
SOMA
DE
CONTRIBUIÇÕES
DO
30
M
=
1
,
NE
MONTA
MATRIZ
DE
RIGIDEZ
DA
BARRA
CALL ESTIFF
(M)
ADICIONA MATRIZ
DE
RIGIDEZ DO
ELEMENTO
A
MATRIZ
TOTAL
I
=
NOD(l.M)
J
=
NOD
(2
,M)
LM
(
1
)
=
ID
(
1
,
I
LM
(
2
)
=
ID
(2
,
I)
LM
(3)
=
ID
(
1
,
J
)
LM
(4
)
-
ID
(
2
,
J
)
DO
20
I
=
1,4
II
=
LM(I)
«-
DO
20
J
=
1,4
Posiciona
a
l inha
JJ = LM
(
J
)
-
II
+
1
Posiciona
a
coluna
IF
(
J
J
.
LE
.
0)
GO TO
20
S(II ,JJ)
=
S(II,JJ)
+
SE
(
I
,
J
)
CONTINUE
CONTINUE
RETURN
END
k
=
SE
(1,1)
SE(1,2)
SE
(1
,
3)
SE
(1,4)
SÊ(2,2)
SE(2,3)
SE
(2,4)
SE(3,3)
SE(3
,4)
SE
(4,4)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 88/155
it-
MB
LM(1)
LM(2)
K
ÿ
LM(3)
LM(4)
SE(1
,
1)
SE (1,2)
SE
(
1
,
3
)
SE(1,4)
SE(2,
2)
SE(2,3)
SE(2,4)
SE(3,3) SE(3,4)
SE(4,4)
2.4.
Consideração
das
Condições
de
Contorno
Observamos
anteriormente que
a matriz
de r igidez
glo¬
bal ,
escrita
para
todos
os
nos
sem preocupação
quanto
a
apoios,
e singular. Isto
quer
dizer
que
o
sistema
K
D
=
F
•w
»ÿ»
»»»
não tem
solução
se
não forem
suprimidos
os
movimentos
de
corpo
rígido
do vetor
D.
Tais
movimentos
de
corpo
rígido
são suprimidos
ao se
im
por as
condições
de contorno
em
termos
de
deslocamentos
(condi.
çoes
de
apoio)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 89/155
S3
Retomemos.,
zvitohj
cl
trcUÿ
oAotcuÁau
tomo
«.x*wi|?Lo:
te
Fj
F2
f3
Fm
Fs
Fç
>
D
=
<
Di
D2
d3
Dm
d5
d6
Temos como
condição de
contorno
em termos
de
deslocamen
to
:
D
<
0
;
Dm
-
0
;
D
5
s
0
As
condições
de
contorno
em
termos
de
forças
são
as
prõ
prias
forças
externas
aplicadas nos
nõs
Fj
>
F2
;
F6
As
forças que faltam
F3
,
F4
e
Fs
são
ainda
desconheci
das .
Observe
que quando
um
deslocamento
Di
é
conhecido
a
cor
respondente
força
Fi
i
desconhecida,
e
vice-versa.
Podemos
escrever as
equações
de
equilíbrio
da
estrutu
ra como mostrado
abaixo:
K
11
K
12
K
13
Kim
K
15
K
16
Di
F
1
Ka K22
K23
K2 m
K
25
K
26
d2
f2
K
31
K32
K33
Ks m
K35
k36
0
f3
<
>
=
<
Km
Ki*
K«
Ki*
Km s
Km 6
0
Fm
K
51
K52
K53 Ksn
K55
K56
0
Fs
Kei
K
62
K
63
Kbm
K
65
K
66_
_D
6_
_F
6_
Vemos
que
todos
os
termos
que multiplicam
D3
,
D1»
e Ds
podem
ser
eliminados pois
sempre
multiplicam
deslocamentos
nulos.
*
***
•
â
Resulta
então
no
sistema
abaixo
(trocando
a
6. linha
de
ordem)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 90/155
Kll
K12
Ki6
k.21 K22 K26
K
61
K
62
K
66 .
K
31
K
32
K
3É.
K
1*1
K
ii2
K
%
Ka
K52
Ksb
J
Vemos
que
o
sistema
assim dividido
resul ta
em
dois
si_s
temas:
-
No primeiro
temos
3 equações e
3
incógnitas
em
deslocamen¬
to
.
Neste
sistema a
matriz não
é
mais
singular,
pois
os
desljo
camentos
de
corpo
rígido
foram
suprimidos.
-
Para
o
segundo sistema
vemos
que, com
os
deslocamentos ob
t idos
no
19
sistema,
podemos
simplesmente
calcular
as re a
çoes
de
apoio.
Podemos
agora
formalizar
a
consideração
das
condições
de contorno sob
uma notação
matricial.
0
sistema
de equações
de
equilíbrio
completo K
D =
F
po
de ser
rearranjado,
trocando l inhas
e
colunas,
de
tal modo
que
as
equações
de
equilíbrio
correspondentes
aos graus
de
l iberda¬
de
com
deslocamentos
conhecidos fiquem
por último.
Assim,
pode
mos
representar
o
sistema
da seguinte
forma:
-u
5»
j
Sir
-ff
J
L?fJ
El
Onde
:
índice
11
V
signif ica
livre
índice
f
significa
f
ixo
deslocamento
livre
(desconhecidos)
deslocamento
fixo
(conhecido)
Em
princípio
vamos
considerar
que
estes
deslocamentos
podem
ser
diferentes de zero
(recalques
de apoio)
,
em
bora normalmente eles
sejam
nulos.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 91/155
25
-
Fjj
forças
conhecidadas
(vetor
de
carga)
-
Fÿ
forças
desconhecidas
(reações
de
apoio)
Podemos
escrever:
£fj>
+
Sff
Ef
=
Ef
Cl)
(2 )
J
a
Do
sistema
(1 )
podemos
determinar
os
deslocamentos
D .,
~X
que
e
F
n
sao
conhecidos a
priori:
~£
~X
<ZX
SW
2f>
se D
= 0
£
Dn
=
Fft
~U
As
reaçoes
de
apoio
ficam
conhecidas
a partir
do
siste
ma (2),
tendo-se determinado
Dn
~X
If
-
5«
Ex
+
Sff
Ef
Na
pratica
nao
se
t rabalha
como
foi
mostrado
acima,
pois
isto
envolveria
um
t rabalho
computacional
muito
grande
(inversões
de
hvitrizes,
etc.)
.
Mas
aqui
foi colocado
para dar
uma
solução
formal
ao
problema.
«
2.4.1.
Instruções
em
FORTRAN
para
a
Consideração das
con
diçoes
de
apoio
0
procedimento uti l izado
consiste em
montar a
matriz
ID(L,N) que define
o
número
da
l inha
correspondente
a
cada
equa
ção de
equilíbrio de
cada grau de
l iberdade. Esta
matriz
i
mon
tada de
tal forma que as l inhas e
colunas
correspondentes
aos
graus
de
l iberdade l ivres tem
numeração
menor
que
as
dos
graus
de
liberdade f ixos.
Dessa forma,
a
matriz de
rigidez
global ,
quando monta
da pela
maneira descrita
no
item
2.3.3,
naturalmente
f ica
partiÿ
cionada
conforme
mostrado
anteriormente,
isto
e;
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 92/155
S6
~ju
ha
hi
Para
montar
a
matriz
ID(L,N)
algumas
observações
são
fe i
ta s
:
19)
Inicialmente
a
matriz
ID(.L,N)
e
montada
definindo
as
condiÿ
ÿ
ções
de
apoio
de
cada
grau
de
liberdade
de
cada
no,
tal
co
mo
mostrado
abaixo:
ID(L,N)
=
0
-+
grau
de
l iberdade
L
do
no
N
ê
livre.
ID(L,N)
=
1
grau
de
l iberdade
L
do no
N.e
fixo.
De tal
forma
que,
para
o
exemplo
em
estudo,
temos:
V
x
ID
(L
,
N)
Desloc.
X
e
Y
do
no
2
são
conhecidos
Desloc.
X
e
Y
do
nó
1 sao
desconhecidos
Desloc
.
X do
nó
3
é
conhe
eido.
Desloc.
Y
do
nó
3
é
descc>
nhecido
.
29)
As
condições
de
apoio sao fornecidas
ao programa
juntamente
com as
coordenadas de
cada
um
dos
nós.
39)
A
matriz
ID(L,N),
a
medida
que
vao sendo l idas
as
condições
de
apoio
de
cada
nó,
vai se
transformando
na matriz que iden
tifica
o
número
da
l inha
correspondente
a
cada
grau
de
l ibei:
dade,
tal
como exemplificado
abaixo.
Yí
ID(L,N)
=
[~1
6
4'
_2
5
3_
Eq.
1
ÿ+
equilíbrio
na
dir. X
do
nó
1
Eq.
2
equilíbrio
na dir.
Y
do
nó 1
Eq.
3
•+
equilíbrio
na dir.
Y
do
nó 3
Eq.
4
-*ÿ
equilíbrio
na
dir.
X
do
nó
3
Eq.
5
equilíbrio
na
dir.
Y
do nó
2
Eq.
6
-»ÿ
equilíbrio
na dir. X
do
nó
2
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 93/155
21
49)
No
final
do
processo
teremos;
NL
«=
n9
de
graus
de
liberdade
l ivres
NF
=
n9
de
graus
de
liberdade
fixos
NEQ
=
NL
+
NF
=
n9
total
de
equações
Obs. ;
Para
treliças
planas
NEQ
= 2*
NJ,
sendo
NJ
=
n9
de
nós.
Com
base no
que
foi
visto
acima
teremos
o
seguinte
al
gor
i
_m o
:
NEQ
=
2*
NJ
NL =
0
NF
=
0
DO
10
I
= 1
,N
J
READ
(5,1001)
N
,
X
(N )
,
Y
(
N
)
,
ID(1,N),
ID(2,N)
DO
5
L
-
1,2
IF
(
ID
(L
,
N
)
.
EQ
.
1
)
THEN
ID
(L
,
N
)
=
NEQ
-
NF
NF
-
NF + 1
ÍTLSE
NL
=
NL +
1
ID
(L
,
N
)
=
NL
ENT>
IF
5
CONTINUE
10
CONTINUE
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 94/155
&
2.5.
Obtenção
do
Vetor
de Cargas
F
Como
dissemos
anteriormente,
além
das
cargas atuando
nos
nos
da
trel iça
consideraremos
o
peso
próprio
das
barras e
a
po£
sibil idade
de
variaçao
uniforme
de
temperatura. Estas
duas
ú
1
1
ÿ
mas solicitações serão
substituídas, na
análise,
por
forças
equiÿ
valentes
nodais tal
como
.descrito
no
item
1.10.
Desta
forma,
existem dois
t ipos de
forças
que atuam
nos
nós
:
-
Forças
aplicadas
nos
nós pelos
elementos
(barras):
F£nt
-
Forças
externas
atuando diretamente sobre
os
nós:
F
***
c
a L
As
forças
internas
incluem as
forças
vindas
das
barras
devidas
aos
deslocamentos
(a
priori
desconhecidos),
chji
madas
de
-k
d,
e as
forças
equivalentes
nodais,
para
cada
barra
chamadas
de f
. Para
a
obtenção
da
matriz
de r igidez,
K,
esta
~E
~
última parcela
não
aparecia. Considere a
barra
mostrada
abaixo:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 95/155
.39
Forças
Modais
. Internas
da
Barra
X.
J.
As
forças
f.
de
cada
barra
(atuando
nos
nos)
vão
fo r
lU l
-
mar
o
vetor
Fÿnt
e
sao
compostas por três
parcelas:
-k
d
devido aos
deslocamentos
fg
devido ao
peso
proprio
Y
-»•
peso
especif ico
A
-*ÿ
ãrea
seção
t ransversal
,
WrÿAL
Xu
W
/
o
L
.O
1
Atuando
na
Barra
Atuando
nos
Nos
-
f devido
a
variaçao
uniforme de
temperatura,
T
Xi
ÿ
X
•ÓTAT,
y°
cSÇÂT
't
c+-
i
c/fAT
cx>s
0
Reações
de
Engastamento
Forças
Equiv.
Nodais
Atuando
na
Barra
Sistema
Local
Forças
Equiv.
Nodais
Sistema
Global
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 96/155
Sendo
,
a
e
coeficiente
de
dilatação
térmica
E
=
módulo
de
elasticidade
0
vetor
de
forças
equivalentes
nodais
f_
considerando
~
£
os
efeitos
de
peso
próprio
e
temperatura resulta
em:
Xol
j
e
<
o
-í
o
-1
>
+
aEAT
<
-Cos
0
-S enB
Co
s
6
Sen6
X
Forças
Equivalentes
Nodais
As
forças
nodais
internas
da
barra, f
. ,
são
agora
de
f inidas
por :
f.
=
-k
d
4
f
~xnt
~
-
~E
0
vetor
de
forças
internas
aplicadas nos
nós
pelas
bar
ras,
F£nt>
é
obtido
pelo
t ransporte
das
forças
f.
das
coorde
nadas
locais
para
as
globais.
Como
visto no
item
2.3,
temos:
F
.
=
I
(A1)1
f*
..
xnt x
v~
'
-xnt
Sendo
A
a
matriz de
incidência
cinemática da
barra
i.
0 vetor
de
cargas
F
é
obtido
em
função
das
forças
ex
ternas
aplicadas,
F
,
e
das
forças
equivalentes
nodais f
,
co
ÿ6X1
«E
—
*
mo
é
mostrado
a
seguir .
Seguindo
o procedimento
do
método
dos
deslocamentos
vis
to
no item
2.3,
temos:
-
Condições
de compatibil idade
de
deslocamentos
A1
D
f\
.int
-k1A1D
+
ti
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 97/155
-
Transporte das forças
nas coordenadas locais
para
globais
íint
l
lnf
-
Equações
f inais
de
equilíbrio
í.ext
+
~int
Fext
+
?
(aÍ)T'
(*kÍAÍD
+
fE)
=
0
E
assim,
l
(A1)1
k1A1D
<=
F
+
I
(AX)T
1
~
6X
t
X
~
~
Ij
Ou,
K D =
F
<w
<V
i T i i
Onde K
=
I
(A
)
.kA
(matr iz
de
rigidez
global)
~
i
~
—
.
D
=
vetor
dos
deslocamentos
i
T i
F
= F
_
+
I
(A
)
f_
(vetor
de
cargas)
~
~ext
.
x ~ ~E
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 98/155
2.6.
Determinação
dos
Deslocamentos
A determinação
dos
deslocamentos
livres
segue o
proce
dimento mostrado
no
item
2,4,
isto
e,
o
vetor
Dÿ
é
obtido
resol
vendo-se
o
sistema
de
equações
mostrado
abaixo:
~n
=
hí
-f
2.7.
Esforços
nas
Barras
A
mos
:
(P
Voltando
ao
exemplo
da
treliça
começado
no
item
2.3
tje
,
t1
f
V'
~7
\\
r
4ÿ-3*
©
f
4
Coordenadas
Globais
ÿk:,
Coordenadas
Locais
0 sistema de
equaçao
para
a determinação
dos
deslocamen
to s desconhecidos e
(vide
item
2.4):
Kn
K
i2
Kie
K
21
K
22
K
26
Kg
Kg2
Ke e
Reso lvendo-se
este
sistema de
equações
chegamos
aos
v£
lores de
Di,
D2
e
D6.
Pode-se
então remontar
o
vetor
de desloca
mentos D.
D
Di
D2
D3
D
i*
Ds
0
0
Q
Generalizando
para
qualquer
estrutura,
os
deslocamentos
f
í
n
am
rl
a
f
â
rm n
n
a /I a
o a r»
a
b í r A
a amiOAnn A
a í
bom
0
A \
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 99/155
ÿ3
K
D
+
K.fD
«=
F«
~í
~f
D-
ÿ deslocamentos
l ivres
(desconhecidos)
r,A
Dj
ÿ deslocamentos
fixos
(conhecidos)
Pode-se,
depoi
s de
determinado
D
,
remontar
o
vetor
de
deslocamento completo:
D =
ÿ0;}
A
partir
de D
podemos
conhecer os
deslocamentos
dos ex
t remos
de
todas
as barras
através
das
condições de
compatibiliÿ
dade
de
deslocamentos:
Barra 1
Barra
2
Barra 3 Para
uma
barra
i
di
=
Da
di
=
Ds di
=
D
3
d*
=
Aÿ
D
d
2
= D
u
d
2
=
D
6
d
2
=
Di»
d3
=
D5
d3
=
Di
d3
=
Di
A1
matriz
de
incidência
cin£
di»
=
Dê
d
i»
=
D2
d»)
-
D2
mãtica
da
barra
_i
Conhecendo-s
e
os deslocamentos
extremos
d
de
cada
bai:
ra
pode-se
determinar
os
esforços
na
barra.
Isto
é
mostrado
a
se
guir .
2.7.1.
Determinação
dos
Esforços Util izando
a Matriz de
Rigidez
k da barra
0
caminho
mais
natural
para
determinar os
esforços
na
barra
depois
de conhecidos
os
deslocamentos de
sua
extremidade
é
uti l izando
a
matriz
de r igidez da
barra
k.
Os
esforços
são
ta n
to
provenientes dos
deslocamentos da
extremidade
(CASO
I
do
item
1.10)
quanto
das
forças
atuando
no
interior das barras
e
as
cor
respondentes
reações
de
engastamento
(CASO
II
do item
1.10).
Assim,
as
{orç<*.s
f inais
atuantes
nas
extremidades
das
barras
são:
f
-
k
d
-
f
f.
~
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 100/155
Onde
f£
«
forças
equivalentes
nodais
«=
(-l)x
forças
de
engas
tajnento
perfei to.
Estas
forças
são
descritas no
sistema
de
eixos
globais,
como
mostradas
abaixo.
X<L.k
Cos0
= c
Sen0 =
s
Onde
(vide
i tens
2.2
e
2.5):
fl
l~
2
2
—
cs
-c
-cs
[d*
f
2
>
=M
2
2
cs s
-cs
-s
d
2
f3
L
2
2
-c
-cs
C
CS .
d
3
_fM_
2 2
-C S
-s
CS
S
d
>+
OcEAT
Observação
:
Resolvendo
por computador,
a
matriz
de
r igidez
k
da
barra
poderia ter
sido guardada quando
da
d£
terminação
da
matriz de
r igidez
global
(subrot i .
na
STIFF),
ou
pode
ser
recalculada agora.
Os
esforços
normais nas
extremidades
da
barra
ficam
d£
terminadas
pelas
projeções
destas
forças
na
direção
axial
da
bar
ra
.
Xxt
ou
C0--
X,
[cos0
sen0
0
0
0
cos0
'
=
R
f
f
}
=
f
i
cos0
+
f
2
sen©
f|
=
f
3
cos0
+
fk
sen0
0
s
en0
]
P.:
U:J
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 101/155
Observe
que
também
aparecem
esforços
nas
direções
trans.
yerçais
(cortantes),
à
da
barra.
Estes
esforços
sao
obtidos
pelas
projeções das
forças
nas
extremidades
na
direção
transversal.
<\5
K
Vi
=
-fisenG
+
Í2cos0
V2
=
'-fssen©
+
fi,cosO
É
de
se
esperar
que
somente
o
efeito
de
,peso
próprio
provoque
esforço
cortante. Isto
pode se r
verificado
calculando-
-se
Vi
e
V2
pelas
expressões
acima
(exercíc io
proposto).
Chega-
-se a :
Vi
«
V2
=
|
o s
0
sendo
W
o
peso
total
da
barra
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 102/155
2,8.
Reaçòes de
Apoio
Seguindo
o
procedimento
mostrado
no
item
2. A
o
sistema
de
equações
K
D
c
F
é
subdividido
em
dois
sistemas;
«N».
*»*
~if
~f
f_
£«J
(d
(2)
Do
sistema
Cl)
determinamos
Dÿ,
e
que
substituído
nosis
tema
(2)
possibi l i ta determinar
Fÿ,
que são as
reações
de
apoio.
Assim,
para
o
exemplo
uti l izando, onde
Df
=
0,
temos:
->
Xt
Coordenadas
Globais
Coordenadas
Locais
SISTEMA
(1 )
Determina
Dn
-X
K
ii
K
12
K
i3
K
21
K
22
K.
23
K
61
K
62
K
63
SISTEMA
(2).
Determina
Fÿ
(reaçoes)
K31
K32
K36
Km
K
i)2
K146.
K
51
K52
K
56 _
Chega-se,
então, ao
valor
das
reaçoes.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 103/155
V
3.
mEtodq
da
rigidez
direta
para
quadros
planos
A
análise
dos
quadros
planos
aqui
t ratada
está sujeita
ás
seguintes
hipóteses
básicas:
-
o elemento
estrutural
(barra)
dos
quadros
planos
e
prismá¬
t ico,
isto
é,
tem
área
(A),
momento
de
inércia
(I)
e
módu¬
lo
de elasticidade
(E )
constantes.
-
não são
considerados
os
efeitos das
deformações
por
cisa
lhamento
.
-
vamos
considerar
que os
efei tos
axiais
de
esforços
normais
são
totalmente
desacoplados
dos
efeitos transversais
defl£
xao e
cortante.
-
as barras podem
ser
articuladas
em
uma,
ou
ambas,
das
ext re¬
midades .
-
as
forças
aplicadas
ã
estrutura
podem tanto
atuar nas
jun
ções
(nós)
como
ao longo das
barras.
3.1.
Matriz
de
Rigidez do
Elemento
(barra)
de
Quadro
no
Sis¬
tema
Local
A
barra
de
um quadro também
é
chamada de
elemento
de
quadro ou
elemento
de
viga.
Vamos
em
principio
considerar
que as
barras
não
são
a£
t iculadas
nas
extremidades,
isto
é, os nós-
sao
rígidos.
Estamos
interessados
em
determinar
as
relações
que
exi_s
tem entre
as
forças
(e
momentos)
aplicadas
e
deslocamentos
(e
r£
tações)
das
extremidades
da barra
definidas
pelas
coordenadas
lo
cais
(sistema
local),
tal
como
mostrado
abaixo.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 104/155
Al
Tais
relações podem
expressas
pela
matriz
de
r igidez
k'
mostrada
abaixo:
~fi
Pk
1
K
11
k
'
12
kÍ3
k
•
1».
k
'
15
k
'
16
~dj~
Í2
k
'
1
k
»
22
k
23
k
'
24
k
'
25
k
•
26
f
3
>
k
'
31
k
'
32
k
'
33
k
'
34
k
'
35
k
'
36
d
3
fí
k
'
4i
k
'
42
k
»
*»3
k
L
k
'
45
kis
dl
tl
k
'
51
k
'
52
k
'
53
k
'54
k
'
55
kk
ds
k
'
61
k
'
62
k
'
63
k
'
64
k
'
65
kfc_ _d6_
f'=
k '
d1
Como
foi
dito,
vamos
considerar
que
os
efeitos
axiais
da
barra
(devidos
a
d ],
d l,
fl
e
fl)
sao
totalmente independen
tes dos
efeitos
transversais
de
flexão
e
cortante.
Isto é,hã
um
total
desacoplamento
entre
as d e
s
1
ocab
i1
idade s
d
{
e
dl
com asres
tantes.
A
matriz
de
r igidez
f ica então
simplif icada para:
~f
l~
kíi
0 0
kÍ4
0
0
~di
f
1
0 k
h.
kh
0
kls
kÿ6
dl
f
1
/
>
0
kÍ2
kl3
0
kis
kÍ6
*
dl
f
l
kli
0 0
kl4
0 0
dl
f
s
0
k
Í2
k
§3
0
kls
kÿ6
d
S
Hl
<T»-«
_0
kk
k|3
0
k
65 kle_
_àl
Podemos
até
encarar
o
elemento
de
viga
como
sendo
a
s_ u
perposição de
um
elemento
de
treliça
(somente
efeitos
axia is)
com um elemento
onde
sé
existem
efeitos
transversais de flexão
e
cortante:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 105/155
3.1,1.
Funções
de
Forma
para
o
Elemento de Viga
A
equação
diferencial
que descreve
o
comportamento de
uma viga
e
(vide
expressão
1,23):
[*•»)
*1
[
X
tTTTrrrrnÿ
J-
U-
ebe,
t
1
ET
X
-f
Esta
equação
estabelece uma
relaçao
entre
os
deslocamen
to s
transversais
v(xj )
e a
carga transversal
q(xi)
s em
conside
rar
o
efeito
de cisalhamento
,
o
que
e
adotado como
simplif ica¬
ção .
No
caso de
El =
constante e
barra
descarregada,
a
equa
çao
f ica:
35}
v
=
0
Podemos então
dizer que
para este caso o
deslocamento
t ransversal
é descrito
por
uma
função polinomial
do
39 grau
em
função
de
xi
:
o a
v
(xi )
=
ai+
a2Xi+
ajxi+
ai,xi
No caso
do
deslocamento axial
u(xi),
como
visto
no
item
2.1,
sabemos
que
é
uma
função
l inear
de
xj:
u(xi)
=
a
5+
a
gx
i
A
função
de
forma
Ni
define, como visto
no
item
2.1,
os
deslocamentos
ao longo
do
elemento
quando o
i-é
s imo
grau
de
ljÿ
berdade
d i
tem
valor
unitário
e
os
outros
nulos,
Para
os
efeitos
axiais
sabemos
(item
2.1);
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 106/155
100
u(.xj)
=
NjCxi) ,
dj
+
Ni,(xj
)dl
Ond
e
,
N
l
(x
i
)
=
1
-
x
i
/L
Ni»
(x
1
)
=
XI
/L
±
Z
Para
os
efeitos
transversais
temos:
V
(x
}
)
= N
2
(x
i
)
d
2
+
N
3
(x
i
)
àl
+
N
5
(x
i
)
d
5
+
N6(x i )
d
I
Onde
,
Cond
.
de
Contorno
X]=
0
v
(x
1
)
=
1.0
dv
dx
1
=
0
x
}
=
L
f~v(xi)
=
0
i
Si,-
0
«((ii).
-
1
-
3
(£')
2
+
2
(S )
3
Cond.
de
Contorno
xi
=
0 v
(
x
1
)
=
0
dv
x
1
=
L
dx
1
= 1.0
v
(xi
)
=
0
Si,-
0
'
N3
(xi
)
=
X I
(1
—
|l)2
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 107/155
4ol
Mi
Cond
. de Contorno;
i.O
xi
=
0
X l
3
N
5
(x
i
)
=
3(f2-
2(f
v(xj)
•«
0
xi
=
L
pv(xi)
=1.0
dv
dx
i
=
0
l_£-
0
NU
Cond.
de
Contorno:
xi
= 0
v(xi)
=
0
X I
=
L
&-
0
v
(xi
)
= 0
dv
dx
i
=
1.0
»«(x i)
-
x,nfv-
f
]
Qualquer
deslocamento
t ransversal
v(xj)
pode ser
escrji
to util izando
as
funções
N2>
N3,
N5
e
Nê
em
função
dos desloca¬
mentos
extremos
dj,
dà,
d£
e
d£:
V
(
x
1
)
=
N
2
d
2
+
N
3
d
3
+ N
sd
s
+
N6d£
Estas funções
descrevem
o
deslocamento t ransversal
de
forma
correta
para
o caso
de
E I
=
const ,
e no
caso
de
barra
de£
carregada.
Mas
podem
servir
como
aproximação para
os
outros
ca
sos.
Os
deslocamentos
no
plano
dos
pontos
da
barra
ficam
en
tão
definidos
pela
matriz das
funções
de
forma
N:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 108/155

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 109/155
403
.No
nosso
caso, como
sõ
consideramos os
trabalhos das
ten
sões
normais,
estas
deformações
também
são
normais ã
se
ção.
Assim
6c
=
6exj
.
Para,
a
part ir
da
expressão
do
princípio
dos
des
locamen
to s
virtuais,
chegarmos
a
relação f
'
-
k
'
d
'
precisamos
das
rela_
ções
entre
os
deslocamentos
externos
u(xj)
e
v(xi)
e
as
deforma
ções
internas
£xi.
Estas
deformações
sao provenientes
dos
efeitos
axiais
e
de
f lexão,
os
quais estamos
considerando
desacoplados.
Tais
deformações são,
então,
definidas
por duas
parce
la s
(vide
expressões
(1.12)
e
(1.13)):
deformação
axial
-»ÿ
deformação
por flexão
curvatura
dx
du
dx
i
A
2
Sendo
-
—
ÿ
=
K
L'
Do
item
3.1.1
temos:
Seção
Transversal
u(xj)
=
Njd j
+
Ni,dJ
dN
i
,
i
dNi*
,
•
ca
=
-
—
.
d
J
+
—
.
d 1,
dxi
dxj
V
(x
i
)
=
N
2d
2
+
N3
d3'
+
N5d5*
+
N6d6'
cf
=
-
d
ÿ
dx f
X
2 •
d
J
-
d2N;
dx
i
x
2.
d
3
-
d
N
5
dx
í
X
2.
d
s
-
d
N
<
dãf
x2
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 110/155
OU
,
4of
ca
<
>
_cf_
m
o
dxj
n
-.d
?
N
2
O
-j
-
2
.
X
2
dxi
-d
2
N
3
dN n
dx.i
O
2,
O
2
ÿ
dxj
X
2
-d
N
5
-d*N6
~r •
X
2
TTT
'
x
2
dxi
dx
j
ou
ainda,
0;}
-
ÿ
í'
-3
T»
TNÍ
0
onde
B
=
|ÿ0
0
Ni
0
O
~|
NÿX2
-NÿX2
O
N*5
X
2
-N,èX2j
d
1
d
$
dl
di
d
l
d |
Vamos
primeiramente
exemplif icar
a
determinação
da ma¬
triz
de
rigidez pelo
principio dos
deslocamentos virtuais
para
o
termo
Depois
a
matriz
vai
ser
determinada
de
forma global , en
volvendo
todos te rm o s.
Assim:
k
h
=
s
is
t ema
real
fi=
kis
d |
f
I
=
k
I3
d
J
fè=
kfe dl
f
1=
k
63
d |
=
Ee.
O
=
-E
d2N3
ÿ?.x2.dl
Vamos
procurar
um
sistema virtual
onde sõ
f|=
k
23 d
|
pro
duza
trabalho
externo:
sistema
virtual
ÔD
-
ôd
|N
2
6e
=
«5d|( -ÿ|2.
x
2
)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 111/155
\05
<5
v,
A
aplicação
dp
princípio
resulta
em;
CdJ.
kkd
j
ÍU
=
[
-dN2
)
£
dÿT
*
2}
'
(-0
•
X2>
I
dv
»]
di
N
2
e
N
3
s
o d
ep
en
d em d
e
x
j
{u
•
3io
[02'
03e
•
Ia
xidA]
dxi-
dS
rL
kfe
= E I
j
NT(xi
)
.
N'|
(
x
i
)
dx
•'0
ÔU =
6d|
<5w
=
=
<5U
E
x
2
d
A
=
I
i
i
6EI
k
23
=
~rz
—
Observe
que ÓU
pode ser
encarado
como o
trabalho
execu¬
tado
pelo
momento
interno
M(xi)
=
E l
|ÿy3.
d|
(vide
expressão
(1.22)
M
-
E l
d
2
v
)
dxí
Submetido
a
uma curvatura
vir tual
ÔK =
òdl
z
dxi
fL
6di
.
kfa.
d |
=
j
ÔK
.
M(xi
)dx i
Jo
Analogamente
para
os
outros
termos
de flexão da
matriz
k'ij
=
E l
(xi
)
N?
(xi
)
dxi
i
=
2,3,5,6
j
=
2,3,5,6
Os
termos
da
matriz de
r igidez
para
o
comportamento
axi
a l
ficam
determinados,
como foi visto no
item
2.1.2, por ;
kij
=
EA
I
N\
(xj
)
N\
(xi )
dxi
i
=
1,4
j
= 1,4
Vamos
agora
determinar
a
matriz
de
r igidez de
uma
forma
global,
envolvendo
todos os
coeficientes
simultaneamente, tambémOCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 112/155
utilizando
o
principio
dos
deslocamentos
virtuais
\0<o
-
Sistema
real
fi
a
forças
externas
reais:
f
1
deslocamentos
reais;
P
u(xi)~l
=
N d'
1_V
(
x
1
)
J
deformações
reais:
j
Ca
=
B
d
tensões
internas
reais
o
a
af
=
E
B
d'
oa
ÿ+
tensão
normal
devido
a
efeitos
axiais
çf
tensão normal
devido
a
efeitos de
flexão
-
Sistema virtual
sai
tt
deslocamentos
virtuais:
j~ôu(xi)~\
= N ôd
L«v(xi)J
~
~
deformações
virtuais:
J~ ~
ôea~l
=
B
ôd
'
Lôcfj
~
~
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 113/155
-
Trabalho
virtual
das forças
externas
CW E
«
OSd'l1.
f'
-
Energia
de
deformação
interna
virtual
<S U
=
(ôea
ôef)
J
aa~l
dV
Jv
<$U
=
f
(6d')T
BT.
E.B.d'
dV
J
V
~
r--
*-ÿ
ÔU
=
(
ôd
'
)
T
£
B E
B
dA]
dxi
.d
'
0
JA
6
WE
=
ÔU
(Ôd
')T.f'
=
(ôd»)T
|0
£
|A
BT
E B
àAj
dxi
r-fc
o
B
E B
dA~|
dxi
.
d
Logo
B
E
B
dAj
dxi
Operando-se
a
expressão
acima chega-se a
k
'
=
L'
EANíNi
0
0
EANÍNÍ
0
0
o
E
IN
¥
Ni'
E
IN
3'
Ni'
0
EINI' Ni'
E
IN
V Ni'
O
EINi'
N|'
E
IN
í1
N|'
O
EINÍ'
Ni1
E
IN
V
N|'
EANjNi
O
O
EANÍN
l
O
0
O
EIN
2
N
5
EIN
I1
N
51
O
EIN
l'
Ni'
EIN
V
N
I1
O
einT
n
v
EINJ'
Nê 1
O
e
in
V
nV
EIN
r
N
v
dx
i
Exercício proposto:
Chegar
a
expressão
acima
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 114/155
ou
,
EA/qN
i
N
I
dx
i
0
0
EA/ÿN{N'udx
1
0
0
0
EI/qNS'
N
dx
íEI/qN
2
N5 '
dx
j
0 El
/jjNy
N»
dx
1
E
I
/qN
ng '
dx
j
0
Ei/JjNy
wy
dxjEI/ÿN
r
N
dx
j
0
ei/qNJ'
N
5'
dx
1
E
I/qN
Nè'
dx
j
EA/gNjNídx
0
0
EA/ÿNÿNidx
1
0
0
0
ei/qNS»
N
2
dx
i
E
I/ÿN
N
3'
dx
j
0
EI/qN'*
N»
1
EI/qN
5'
Nê'
dx
j
0
ei/qNJ'
N
dx
E
I/qN
g'
wy
dx
1
0
EI/qNJ'
N
dx
1
E
I/ÿN
g'
N
r
dx
j
Como
havia
sido
mostrado
anteriormente.
o
(V
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 115/155
103
Exercício
proposto :
Chegar
S
matriz
de
r igidez
k
k '
EA
L
0
0
EA
'
L
0
0
EA
0
0
L
0
12EI
6EI
r\
12EI
6
El
L3
Li
U
L*
Li
6EI
.
4EI
/•*
6EI
2EI
L*
L
Q
L2
L
EA
0
0
L
0
0
12EI
6EI
12EI
6EI
L3
~
L*
0
L3
~U~
6EI
2EI
6EI
4EI
~l2~
L
0
L2
L
Cada
coluna
da
matriz
estabelece
as
forças externas
ne
cessarias
para equil ibrar
a
barra
submetida
a
configuração
defor
mada
N_i.
A
condição
de
equilíbrio
vem
da
própria
aplicação
do
prin
cípio
dos
deslocamentos virtuais
(vide
item
1.8.1).
A
imposição
direta do
equilíbrio
para
cada configuração
deformada
N_ i
também leva ã
determinação
da matriz
k'.
Exercício
proposto
Determinar
a
matriz
k'
a
partir
da
imposição
do
equilí¬
brio
diretamente. Sabe-se:
to
L
BX
f
L
Z.E1
A
parcela
axial pode
ser
tirada do
item
2.1.1.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 116/155

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 117/155
Temos
então;
d-'
*D
?]
f—
d
f-v
6x6
ou
R
d
Onde
R
•
G
fl
também
é
ortogonal
R~
1
= RT
Matriz
de
Rotaçao
Podemos tirar
d
em
função
de d':
d
=
R~
1
d
1
d
=
RTd
1
Analogamente
podemos
def ini r para
o vetor de
forças;
f
'
=
R
f
f
=
RTf
'
_
T
ÿ
A
relaçao
que
existe
d
'
=
R
d
e
f
=
R
f
'
e
uma
relaçao
de contragradiencia
e
poderia
ter
sido determinada
como
foi
feÿ
to
no item
2.2.1.
Temos
conhecida
a
relação k'<
1'
=
f
1
Substituindo
na
equaçao
d'
por
R
d
e
pr é-mu
1
t ip
1i
c ando
por
R
,
resulta
em:
RTk'R
d
R f
'
l—
v—
1
f
k =
R
k'R
Que
é
a
matriz
de r igidez da
barra
nas
co
ordenadas
globais.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 118/155
A
matriz k
e
mostrada
abaixo
onde,
Cx
=
cos9
e
Cy =
sen9
,EA
12EI
r
~L~X
T
-z)CxCy
6EI
_
-
-r-z
Cy
— x
C*
6EI
_
17z
Cy
6EI
„
-2-Z
Cx
6EI
_
ttz
Cx
L
4EI
/EA
rZ
IZEJ.
_2s
/KA
JL/E1
v_
_
-<-jr-x
Cx
+
3'
z Cy)
--
s—
z)CxCy
2EI
/EA
12EI
/EA
12EI
r
—
rs
—
z)
CxCy
6EI
_
—r?z
Cy
/EA
,
12EI
/O
\
x Cy
-i
—
y#-zCx)
6EI
_
-fZ-z
Cy
6EI
_
--
2-Z
CX
•Lj
6EI
z
Cx
2EI
.EA
rz
ÿ
12EI
j
.
.EA 12EI
_
6EI
_
-(-£-x
c± +
y3
z
Cy
)
3
z)
CxCy
z-z
Cy
.'EA
12EI
./,
_
.EA
_2
,
12EI
2. 6EI
„
-(—
x
--
-z)CxCy
Cy
+
l3
zCx)
-ÿ7-z
Cx
6EI
„
6EI
„
2EI
~rr2
Cy
-
ir2
Cx
—
2
EA
,EA
12EI
6EI
c*
+
lipz
C£
(t x
-irz)CxCy
ifz
cy
.EA
12EI
.
(Tx
~
Ls
z)CxCy
EA
12EI
—x
Cy
h
—yÿr-zCx
6EI
z Cx
6EI
-72-z
6E X
-
Cx
4EI
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 119/155
3.
3
.
Forças
Equivalentes
Nodais
Existe
um a
maneira
geral
de
definir
as
forças
equi¬
valentes nodais
para
um
dado
carregamento
definido
no
sistema
lo
cal.
Este
procedimento
sõ
á
válido
para
barras
prismáticas
(E ,
A
e
I cons
tantes
)
.
Tal método
utiliza
o
Princípio
dos Deslocamentos
Virtuais
e
as
funções
de
forma Ni
(vide
item
31.1).
Vamos exemplificar
para o caso de
carregamentos transver
sais
ã
barra.
Para
carregamentos
axiais
uma
analogia
pode
ser
fei
ta
.
IDÉIA
BÃSICA
que
Igualar
trabalho
virtual
externo
provocado
pelas
forças
atuam ao
longo
da barra com
trabalho
virtual
provocado
pelas
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 120/155
m
forças
(e
momentos)
equivalentes
nas
extremidades
da
barra, uti
zando
em
amhos
os
casos
as
mesmas configurações de
deslocamentos
virtuais
que
foram
adotadas
para
deduzir
a matriz de
r igidez
(fun
ções
de
forma)
.
Seja
uma
barra
com
um
carregamento t ransversal
qualquer:
As
forças
equivalentes
nodais
sao
(sistema
local):
f,
Cr
Deslocamento
v ir tu
a
1
ôv
(x
j
)
:
I
•x.
X-
sn \
X
y
Lii
f
6v(xi)=ôdjN2+ôdlN3
+
ôdsNs
+
ôdÿNe
Onde
ôd£,
ôd|,
ôdg
e
ôdè
sao
os
deslocamentos
virtuais das
ex
tr
emi
d
ad e
s
Vamos
agora computar
os trabalhos
virtuais provocados
q(xi)
e
por
f'.
por
Provocado por
q(xi)
rL
ÔW„ =
ôv(xi)
.
q(xi)
dx:
E
0
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 121/155
M5
&d$
}
Provocado
por
fÿ
,
áa,1
Çe
+
££*3t
*
ÿ
+
ÿ
íut;ÿdt
<£=U
Mi
£d&?
Rv
3e
f
\5
C
v£t
Igualando
os
t rabalhos
externos
No
caso
de
termos
também
cargas
concentradas ou
momentos
a
expressão
anterior
pode
ser
ampliada.
?.
%
i'rm
ÿ?
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 122/155
•Mfe
Ê
€
se
r
v
W
íO
3
ÿ
i
2
NÿlPj
2
ÿW)i,
2
tOfeK)ÿ
/-
H-
2
N
2ÿsCx )Mi
ZXw)ÿ
J
ÿ
ÿ
•
Onde
Ni(xj)
é
o
valor
da
função
Ni no
ponto
j
e
N*i
(x®)
a
derivada
(rotaçao)
.
Imagine
agora
que nos
estamos
interessados
em
calcular
as
reaçoes
de
apoio
para
a
mesma
barra
considerada bi-engastada
e
so
l ic i tada pelo
mesmo
carregamento
q(xj)
.
íl
Vamos
determinar
R3
por
exem
pio.
Podemos
interpretar
a
es
trutura
pela
soma de
dois
ca
sos
como
mostrado
ao
lado.
<ÿ*•.)•
$3L
(Somente
se
E l
=
constante)
Os
deslocamentos
do
àstema
(II)
são
proporcionais
ã
fun
çao
de
forma
N3
somente
se
E l
é
constante .
Aplicando
o
teorema de
Bett i aos
dois
sistemas:
Trabalho das
forças
do
sistema
(II)
com os
deslocamentos
do
sistema
(I)
é
igual
ao
trabalho das
forças
do
sistema
(I)com
os deslocamentos
do
sistema
(II) .
Ou
melhor:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 123/155
Ml
Para
que
R3
seja
reação de
apoio
do
engaste é
necessário
que
0J.J .
«=
•
-0J
R3
-
-
/
$(*,)•
<=-€
3
E
que
é
a
força equi
valente
nodal com
sentido
opos to , como
foi'
imaginado
anteriormen
te .
Esta
expressão
e
exata
para
o
caso
de
E l
constante,
mas
tem
carãter
aproximado
para
calcular
as
reações
de
engast
amento
no caso de
El
não
ser
constante .
Para
calcular
uma
das
reações
vert icais:
fT>
—
1
ÿj«t
cm.;
Teo
de
Bett i
íor=
-X-x)
ÿ=$>
-
-[
cU,
-
_
f*
Exercício
Proposto
Verif icar
se as
forças
nodais
equivalentes
calculadas pe
lo
processo
mostrado sao
iguais as
reaçóes
de
engastamento
perfei
to com
sentido trocado para
os seguintes
casos:
<
/
ÿ
«y
u>
*
/
1
Ip
ÿ
.1 -
L
í
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 124/155
118
INTRODUÇÃO
AO
MÉTODO DOS
ELEMENTOS
FINITOS
-
ELEMENTO
TRIAN¬
GULAR
COM
DEFORMAÇÃO
CONSTANTE
A
intenção
deste
capitulo e
mostrar
a ligação
existen¬
te
entre
a
análise
de
quadros
e
o
método
dos elementos
finitos.
Em
essência queremos mostrar
que
a
análise
desenvolvida
ate
ago
ra
para
as
trel iças,
quadros
e
grelhas
pode
ser
incluída em um
método mais
geral
para
análise
de
modelos
estruturais.
A
diferença
básica
entre
a
análise
de
quadros
e
o
métc>
do
dos elementos finitos
está
no prõprio
modelo
estrutural.
Em
ambos os casos
o modelo
estrutural é
formado
pela
montagem
de
componentes
ou
elementos
estruturais
individuais.
No primeiro
ca
so
os
elementos
aparecem
quase que
naturalmente
a
partir da
prõ
pria
concepção
da
estrutura
(vide
f igura
abaixo).
No segundo, a
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 125/155
estrutura e modelada
por
um
número
finito
de
elementos
para
re¬
presentar
um
meio elástico
continuo,
exemplificado
pela
,
seção
transversal
de
uma
barragem
de
gravidade mostrada
abaixo.
MM#/
///ss///
Quadro
Real
M
odeio
E-S.tx.ut
ar
a
1
\
/yÿ\\\
Barragem
Real
#W/
Modelo Estru tura l
H.l.
Ideias
Básicas
As
ideias
básicas
do
método
dos
elementos
finitos
sob o
enfoque
do
método
dos
deslocamentos
(r igidez)
são
descritas,
co
mo
se
segue,
exemplif icadas
para
um meio
cont inuo
unidimensional.
Seja
uma
barra
com
área
t ransversal
A e
módulo
de elas
ticidade
JE
submetida
a
um
carregamento
axial
genérico
q(x).
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 126/155
<flO
Relação
deformação
_
f |.
locamento
(compatibil i¬
dade)
ao
-
De
s
du
dx
AA
E ií
—r
U
du
dx
q
(x)
.
dx
(0+I7
dx>A
Condições
de Equilíbrio
do
dx
.
K~
Lei
Constitutiva
do
Ma
ter
ial
(Le i
de
Hooke)
Ideias
Básicas
19)
O meio
continuo
é
subdividido
(discretizado)
em
uma número
fi
nito
de
elementos finitos
sendo
que,
dentro
de
cada
elemen
to
é
estabelecida
uma lei
de
variação
para os deslocamentos,
por
exemplo que
os
deslocamentos
variam
l inearmente
dentro
de
cada
elemento.
O
deslocamento
u(x)
f ica
então aproxima¬
do
como mostrado abaixo.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 127/155
m
<£>
......
.....
g>
<3>
\
ÿrs>-
0
••
—
icÿz
:
--1-
—
-<*-
ÿ
C
-
-
-
L
u
'
'
7—
>
L.
L
'
i
1
1
1
M
1
r
_
H
i
i
A
A
t
,
Ms
.
.
Aa?
.
.
/
t
Para
um
elemento
genérico
i
u
=
a
i
+
a
2
s
para
s
=
0
para
s
=
L
ou
u
=
=
di
( local)
u = u
.
=
d
2
( local)
J
u
.
l
u
.
J
As s
im
,
1
0
1
L
{:;}
(l)
ía'l
a2_
1=1
L 0
I1
_
ft}
(2 )
Donde
substituindo
(2 )
em
(1)
temos:
•L-s
s
u
=
V
L
L
}
l Ui
I
u
•
L
J-
ou
u
«=
N
d
Ni
função
de
forma
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 128/155
\n.
29)
As
condições
de
compat
ibi lidade
de
deslocamentos
dentro de
cada
elemento
ficam satisfeitas
se
a
função
que
interpola
o
deslocamento
fo r
continuou
No
exemplo a
deformação
dentro
de
cada
elemento
e
constante:
du
dx
dN
ds
d
-*
B
d
du
dx
a
2
=
-d
i
+
d
(vide
expressão
(2))
39)
As condições
de
compatibilidade
de
deslocamentos
entre
os
diversos
elementos
e
introduzida
da
mesma forma
como
vinha
sendo
feita para
quadros,
isto
é, os
graus
de
liberdades
cor
respondentes
de
cada
elementos sao
forçados
serem
iguais.
As
s
im
:
di
= u
i
=
0
d
2
=
di
=
U
2
dÿ
= d
i
= U
3
d|
=
di
=
U
4
d
2
=
u
5
©
©
<
©
©
d i
d
2
~d ã
d
2
di
d
2
d
i
d
2
1 0
0
o
o
U l
0
1
0
0
0
U2
0
1
o
0 0
5
U
3
0
0
1
0
0
u
It
-
—
—
—
—
—
—
0
0
1
0
0
_u
5_
0 0
0
1
0
—
—
—
—
0 0
0
1 0
0
0
0
0
1
Para uma
barra
genérica
i
No
caso do
meio
cont inuo
unidimensional
a
condição de
igualÿ
dade
para
os
correspondentes deslocamentos
nodais
implica
na
va
lidade
da
compatibil idade
de
deslocamentos
em
todo
o
meio.
Para
meios
contínuos b i ou
tridimensionais nem
sempre isto
acontece,
como
será comentado
mais
tarde, embora
seja
dese¬
jável
que
haja
compatibil idade
ao
longo
da
f ronteira
entre
dois
elementos.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 129/155
1-2.3
49)
Ab Leis
constitutivas
do
material
(Lei
de
Hooke)t
definidas
para
tensões
e
deformações em um
paralelepípedo
inf initesi¬
mal,
são
substituídas
por
relações
entre
forças
e
deslocamen
to s nos
graus
de
liberdade
de
um
elemento.
Estas
relações
sao
deduzidas
tomando
como
base
as
funções
de
forma
Ni
que
•
foram uti l izadas
para
interpolar
a
função
de
deslocamentos.
0
resultado
é
a
matriz de
r igidez
do
elemento
finito
k,
ou
seja:
f
«=
k
d
í
T
k
=
B
E B
d
v
J
v~
f
-*ÿ
forças atuando
dos
nos
sobre
o
elemento.
Para
o
exemplo
estudado
a
matriz
de
r igidez
de
uma
genérica
e:
(vide
dedução
no
item
2.1).
EA/L
-EA/L
-EA/L'
EA/L
59)
As
forças
que
atuam
ao
longo do
elemento
são
cons
is tentemen
te
transportadas
para
os
nos
do
elemento. As
forças
nodais
equivalentes
são
consistentes porque
o
transporte
para
os
nos
é
feito com
a
utilização
das
mesmas
funções
(Ni)
que
interpolam
os
deslocamentos
e
utilizados
para
deduzir
a
ma¬
triz de
rigidez do
elemento.
As
forças
nodais equivalentes
são
deduzidas
de
modo
a igua¬
lar o
t rabalho das
forças
que
atuam ao
longo do
elemento,
quan
do
submetidas
a
uma
mesma
configuração
deformada
virtual ba
seada
nas
funções
N i.
Isto
foi
mostrado
para os
quadros
planos
no
item
3.3.
Para
o
nosso exemplo:
-------
2l(s)
-
*
,
-
- -
(P
-
£
'i-f-
—
f-
(0
Te
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 130/155
424
E
L
0
L
0
Nj(s)
q
(
6
)
ds
N
2
(
s
)
q(s)
ds
(atuando
sobre
os
nos)
6Ç)
As
condições
de
equilíbrio
sao
impostas
aos nos
somente,
is¬
to
é,
são equações
de equilíbrio
de
forças
(e
momentos)
nos
nos
;
Nas equações de
equilíbr io
nodais
dois tipos de
força
(e
mo¬
mento)
são
considerados:
m
F
=
forças
que
atuam
diretamente
sobre
os
nós
~ext
F.
ÿ
=.E.Fi
.
-
forças que
atuam
nos
nós
vindo
pelos
elemèn-
~inti=l~int
5
tos
Para escrever as
equações
de
equilíbrio,
então, i
preciso
transportar
forças
extremas a
um elemento
ji
sobre os nós
)
para
o
nível
de
estrutura,
isto
e,
para
F.
ÿ
int
Este transporte
vai
ser
determinada
por
igualdade
de
Traba
lhos
Virtuais
com
mesmos
deslocamentos
virtuais,
como
mostra
do
a
seguir
.
í1 1
1
J1 í1
f
.
.
=
-k d
+
f
„
-mt
~
-E
(atuando
sobre os
nos)
DESLOCAMENTOS VIRTUAIS
ÔD
-*
em
todos
os
nós
de
estrutura
ôd
nas
extremidades
do
elemento
_i
e
compatível
com
os
desloca¬
mentos da estrutura
ÔD
ôd1
=
A1 6D
A
igualdade
de
trabalho é
mostrada
abaixo
(ÔD)
T
.
F1
-
(ôd1)
T
f1
-
~mt
ÿ
~int
(ôd)t.
f1
=
(ôd)t(a1)t
fí-
~mt
~
~
'
~mt
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 131/155
\Vò
Como os
deslocamentos
ÔD são
virtuais
e
podem
ser
dife
rentes de
zero,
podemos eliminá-los
da
relação,
resultandõ
em:
F*
=
(AX)T
f
x
•
-mt
~
~mt
As
condições
de
equilíbrio
Fgxt
+
Fÿnfc
resultam
em:
K
D
onde
:
(cargas
nodais
combinadas)
(matr iz
de
rigidez
global)
A
solução
D
das
condições
de
equilíbrio
são
encontrados
pe¬
la
resolução
do
sistema
K
D
=
F depois
da
consideração
das
condições de
contorno
em
deslocamentos. Esta
consideração
e
feita
da
mesma forma
como
foi
visto
para
treliças
e
quadros.
7?)
No
caso dos
elementos
finitos,
as
tensões
internas
são
de¬
terminadas em
cada
elemento
somente em
função
das
deforma¬
ções
do
elemento,
isto
é, para
o
exemplo
dado
temos:
o =
Ee
= E
B
d
Ob
s
:
:
Poderia
ter
sido
incluído
uma
deformação
inicial
eo
e
uma
tensão
inicial ao:
a
«=
E
(Bd
-
eo)
+
ao
(eo
devido a
temperatura
por
exemplo
(ou
ao)).
Como
no
exemplo
as
.deformações
são
constantes
temos:
+
iíl
<*
>
fj
K =
.1 .
(A1)1,
k1.
A1
w
~
«í
«V
M
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 132/155
real
aproximado
(obt ido
pela
analise
de
elementos
fi
ni
to s
)
Conclusão
:
As tensões
são
determinadas
de
forma
aproximada
e
não
satisfazem
a
condição
de
equilíbrio
inf initesimal.
ÿ
-
0
dx
A
No'
caso
em
que
q
=
0
estas
relações
é
satisfei ta.
Também
se
observa
que não
ha equilíbrio
de
tensões
na
l iga¬
ção
de dois
elementos, isto
e,
a
análise
por
elementos f
ini-
to s
leva a
saltos
de
tensão
entre
um
elemento
e
outro.
89)
Todas
aproximações
feitas
para
a
função
de
des
locamentos
,
de
formações, tensões e
violações
das
condições
de
compatibi l i
dade e
equilíbrio
tendem
a
desaparecer
ã
medida
que se au¬
menta o
número
de
elementos;
e
a resposta
tende
ã
.resposta
rea l
.
Para
o
exemplo
estudado,
a
poligonal
considerada
para
fun¬
ção
de
deslocamentos
tende
cada
vez
mais
ã
curva
real.
As
tensões
resultantes
o
= Ee
também
devem
tender
para
valo
re s que
satisfaçam
a
equação
7T
*
T
*
0
dx
A
0 grau de
discretização
depende
do
nível
de
aproximação
der
se j
ado
.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 133/155
m
OBSERVAÇÕES
IMPORTANTES
ÿ
•
•
i
1.)
No exemplo
estudado
se s o
existissem
cargas
nodais
a
solução
pelo
método
dos
elementos
f initos
seria exata
qualquer
que fos
se
a
discretização
.
Isto porque
a
função
de
deslocamento
.u(x)
seria realmente formada
por
uma pol igonal:
Equação
de
equilíbrio
A
ÿ
e
0
(q
B
0)
du
dx
Ee
Donde
EA
d
u
d
s
z
u(s)
=
ai
+
a2S
(linear)
De
forma
análoga,
para
os
quadros
com
somente
cargas
nodais
e
solução
pelo
método dos
elementos
finitos. é
exa
ta
para
barras
com
área
e
inércia
constantes.
Isto porque
a
função
de
deslocamentos
transversais
ã
barra
v(x)
interpolada
por
funções
Ni do
39 grau
(vide
item
3.1.1)tem
r'e
almente
este
grau
pois
deve
satisfazer
a
condição de
'equilí¬
brio
El
dÿv
dx
'
=
0 (q
=
0)
.
Em
outras
palavras,
as
características de
rigidez
do
elemento
de quadro realmente
representam a r igidez
do
meio
contínuo na
região
do
elemento.
2)
Como foi
visto
no
estudo dos
quadros
planos (veja
item
1.10)a
solução
de
quadros com
carregamento
ao
longo
das
barras
e
di¬
vidida em
duas etapas:
(I)
Estrutura
com cargas
nodais
combinadas,
que
são
obtidas
pela
soma
de
cargas
nodais
e
forças
equivalentes
nodais.
As
forças
equivalentes
nodais são
forças
de
engas
tamento
perfeito com
sentidos
opostos.
Esta
etapa
é
inteiramente análoga
ao
método
dos
elementos
f initos
pois,
para
barras
prismáticas,
a
determinação das
forças
equivalentes
nodais
pelo
método dos elementos
fi¬
nitos
(igualdade de
t rabalhos)
recai
nas
forças
de
engas
tamento
perfeito
com
sentidos
opostos
como
mostrado
no
item
3.3.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 134/155
rt$
ÿ
(II)
Estrutura
cora
cargas
ao
longo
das barras
e
forças
de eii
«
•
gas
taraento
perfeito.
*
A
solução
para
os
deslocamentos nodais
pelo
método
dos
ele¬
mentos
f initos
em
quadros
(etapa
I)
i igual
ã
da
estrutura
rea l
((I)
+
(II))
pois
os
deslocamentos
nodais
da
etapa
(II)
sao nu
lo s .
Para os
deslocamentos
ao
longo
das
barras,
a
sòluçãò
pelo
me
todo
dos
elementos
finitos
(função
do 39
grau)
.
tem
• carãter
aproximado
em
relação
ã
solução
rea l
((I)
+
(II))
para
as
bar;
ras
carregadas,
e
é igual as
barras
descarregadas.
Para
outros
tipos
de
elementos
(bi
ou
t r idimensionais),
os
resultados
obtidos para
os
deslocamentos
nodais
pelo
método
dos
elementos
f initos
são
uma
aproximação dos
deslocamentos
de
estrutura
real, isto
e
,
não
são
exatss.
Isto
porque
as
for¬
çou
&qwCvn,leÿtcs
y\£o
ta *
iÿclsIcl
c l
v«.r
c©t*\
a_s
-fàr-
.
ças
de
engastamento
perfeito
do
elemento,
e
também
porque
as
características
de
r igidez
dos
elementos
sao
uma
aproximação
pqjrct
as características
de
r igidéz do
meio
contínuo na
região
de
de cada elemento.
ÿ1.2.
Equações
Fundamentais
da
Teoria da Elasticidade
(Caso
Plano)
Três
sistemas
de
equações
da
teoria
da
elasticidade
são
necessários
para
a formulação
da matriz
de
r igidez
do
•.
elemento
finito.
Estes sistemas
serão
descritos,
para
o
caso plano,
como
se
segue.
ÿ1.2.1.
Relações
entre
Deslocamentos
e
Def
ormaçoe s
Considere os
deslocamentos e
deformações
de
um
parale
lepípedo
in f ini
te
s
ima
1
:
.
-
ÿ
.
P*
—
/ C
<*1
AT
é
i
/
1
/
C-
1
/
f
/
/
/
/
'—
—
—
n
_____
-V
A
A'
£
M-
-K+kudln.
1/4*
èy
y
:
ÿ
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 135/155
u<\
Da
f igura
temos
(hipótese
de
pequenos
deslocamentos):
3u
A
1
B
1
~
dx
+
dx
AB
= dx
Deformação
normal
na
direção
x
e
definida
como:
A
'
B
'
-
ÃB
ex
Á ~B
ex
=
íi
9x
Para
a
direção
y:
A
1
D1 ~ dy
+
dy
'
3y
AD
= dy
Ey
=
A
'
D
1
-
AD
7TD
mo
:
Deformação por
cisalhamento
ou
distorção e
definida
co
+
fv
dy)
~
u
(v
+
lí
dxÿ
v
Y
=
Ê2
+
3i
-
—
ÿ
y
dy
dx
Y
=
.âH
+
31
xy
3y
3x
Podemos
mostrar as
expressões
acima sob
a
forma matri¬
cial:
e
xy.
_3_
3
x
3
Ty
je l
_a_
_3
y
3
x
J
{:]
ou
e
=
D u
onde
a
matriz
D
e um
ope¬
rador
diferenciação.
Satisfazer
a
expressão
acima
signif ica
garant ir
a
com¬
pat ibi l idade
de
deslocamentos
(nenhum
vazio)
em
cada
ponto
(xy)
do
meio
contínuo.
Em
part icular
esta
expressão
vai
ser
imposta
para
os
pontos
do
inter ior
de
um
elemento
finito.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 136/155
m
4.
2
.
2
.
Leis
Constitutivas
do
Material
-
Relações
Tensões
x
Deformações
i
Vamos considerar o
material
isotrõpico,
elástico
e
li¬
near, isto é, é
válida
a lei
de
Hooke.
Para
o
caso plano
existem
o
estado
plano
de
tensões
e
o
estado
plano
de deformações.
Os dois
vão
ser
t ratados.
4.2.2,1. Estado
Plano
de
Tensões
Tensões
normais
Fx
provocam:
çl-j
X-
<—
1
ÿ
L
i
r~
í
—
— —
-
—
—
—
—
-
1
-*
F*
x
3»
~S
>ÿ
M
.
1
--
1
1
-vax
,
-vox.
Uz
.
-)
..E
-*ÿ
módulo de
elasticidade
v
-K-.coef
iciente
de
Poisson (v
<
0,5)
Tensões
normais
gy
provocam:
1
'i
-
1
1
.
•
í
i
:k
ji
•
£
:
'
•
»
iifw
4r-.|—
crM
----
-
(cz
.
Tensões normais
az
«
0
Tensões
de
cisalhamento
x y
provocam:
(Txy
=
Tyx
como
veremos mais
tarde)
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 137/155
E6te
efeito
I
considerado
desacoplado
do
efeito
de
te n
são normal
....
d
Txy
xy
G
ÿ*
modulo
de
elasticidade
t ransversal
G
=
2
(
1
+v
)
(ou
modulo
de
cisalhamento)
As
out ras
tensões de
cisalhamento
são
nulas:
T
=
T
=0
zx
y
z
As
relações
tensão x
deformação
podem
ser
escritas
sob
a
forma
matricial:
e
X
1
e
y-
E
y
_
x
y
~1
-
V
0
ox
-V
I
0
<
o
y
_0
0
2(l+v)
T
-
xy-1
Invertendo
a
expressão
acima
temos
ox
ay
T
<-
xy-1
E
(1-V)
1
v
0
V
i
o
o
(1-v)
2
-J
CX
ey
e
-
xy-
Estado pia-
no
de
ten-
soes
o
-
E
e
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 138/155
4,2.2.2.
Estado P lano de
Deformações
Isto ocorre
por
exemplo quando
se
analisa
a
seção
t rans
versai
de
uma barragem,
onde
não ha
deformações
perpendiculares,
ao
ponto
da
seção
(ez
=
0;
yxy
=
yzx
=
0)
Sabemos
que
cz =
|
oz
-
v(ox
+
oy)ÿ
=
0
Daí:
Oz
=
v(Ox
+
Oy)
(?*0)
Assim,
ex
=
~r
[ÿ(jx
-
Voy
-
VQzJ
1
+
V
ex
=
i
[]ax
-
voy
-
v2(ox
+
oy)ÿ]
Lu
-
v)
ox
-
v
oy]]
Analogamente
,
ey
ÿ
1
g
-V
LU
~
v)oy
-
vox[]
Podemos
colocar de
forma
mais
conveniente:
1
ex
=
—
Ei
(Ox
-
v i
oy)
1
-
êi
(oy
-
Vl
QX)
onde
Ei
( l -v<)
V
e
Vl
'
1-v
0
efeito
de
distorção e
desacoplado
e
então
yxy
=
Txy
_
2
(1+v)
Txy
Observflt,-se
que
—
ÿ
=
2
£
1
£
e
ass im,
2
( l+Vi
)
yxy
=
r—
Txy
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 139/155
>133
Escrevendo sob
a
forma
matr ic ial
e
invertendo
temos
ox
Oy
Txy
Ei
(1-ví)
1
Vi
0
Gx
Vi
1
0
<
ey
Estado
Plano
de
defor
_0
0
(1-v)
2
J
_yxy_
maçao
Observa-se
que
a.matriz
acima
tem a
mesma
forma
da
matriz
para estado
plano de tensões,
trocando-se
JE
por
JSi
e
v
por
Vi.
Genericamente vamos
ter
o
= E
e,
válido
para
os
dois ca
sos
onde
E tem
a
seguinte
forma:
Eu
E
12
0
E
-
E
21
E
22
0
_G
0
E
33
(
s imé
tr
ica)
1
H
2.3.
Equações
Diferenciais
de Equilíbrio
Seja
um elemento
in f
init
es ima
1 com
espessura
t.
At.
4k
v*
+
*4 v
Fx
Fy
Forças
por
unidade
de
vo
lume
1_|.
3ft.
•
X
Desprezando os
termos
de
ordens
superiores
temos
EMz
=
0
-*ÿ
Txy
dy
t
dx
-
ryx
dx
t dy
=
0
Txy
=
Tyx
EFx
=
0
-
Ox tdy
+
(ox
+
dx)
t dy
-
Txy
t
dx
+
T
x
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 140/155
13*1
+
(Txy
+
dy)
td x
+
Fx
dxdyit
«=
0
9
_o_x
8x
+
-J2Z
+
Fx
8y
iFy
=
0
ax
t
dx
+
(ay
+
dy)
t dx
-
Txy
t dy
+
(Txy
+
t
dy
+
+
Fy
dx
dy
t
=
0
ÿ
+
IF
'
=
o
ÿ.3
.
Matriz
de
Rigidez
do
Elemento
Finito
Triangular
de
Defor
maçao
Constante
(k)
Seja o
elemento
finito
abaixo,
util izado
para
discreti-
zar
o
meio
continuo.
-L
*1
U1
.
f
XI
V l
fy
i
U2
v2
'4
fx2
y
fy
2
U3
fx
3
_v
3_
l fya
-f
X*/4a
f
=
k
d
Fontos Nodais
1
(xi
,
y
j
)
2
(x2
,
y2>
3
(x
3
,
y
3
)
Queremos
determinar
k
M.3.1.
Matriz das
Funções
de
Forma
(N )
Para
o
caso
plano
dada no
tem dois
deslocamentos
(graus
de l iberdade)
.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 141/155
135
A
cada elemento ficam,
então,
associados
6
graus
de
li
berdade
.
Vamos assumir
que
tanto
o
deslocamento
quando
v
va¬
riam
linearmente
dentro
do
elemento
,
is to
é,
na
forma
mais
sim¬
ples
.
Desse
modo
:
u
=
aj
+
a2X
+
a3y
v
=
aÿ,+
a$x
+
asy
As deformações
dentro do
elemento
ficam:
EX
9u
3Í
=
az
3v
ey
=
-ÿ
=
a6
3u
3v
Yxy
=
17
ãí
a
3
+
a
5
(dai
o
nome
triângulo
de
deformação
constanteÿ)
Poderíamos
representar
matr
icialmente
:
TuCx.yri
Lv(x,y)J
1
x
y
0
0
0
0 0 0
1
x
y
u(x,y)
=
X
a
(1 )
a i
a
2
a3
a
i,
a
5
Para
os
pontos
nodais
temos:
{::}ÿ
{::}ÿ
1
X I
yi
0
0 0
_0
0 0
í
XI
yj_
~1
X
2
y
2
0 0
0~
_0
0 0
1 X
2
yz_
~1
X
3
y
3
0 0
0~
_0
0 0
1 X
3
y3_
.
a
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 142/155
Condensando em
uma
mesma
matriz
436
ui
vi
u2
V
2
U
3
V
3
ÿ
s
~1
XI
yi
0
0
0
~
~ai~
0
0
0 í
xi
yi a
2
1
X
2
y2
0
0
0
<
a
3
>
0
0 0
í X
2
y2
at»
1
X
3
y3
0 0
0
as
_0
0
0 í
X
3
y
3_
_
a
6_
d
=
C
a
Podemos
obter
a
em
função
de
d:
(2 )
onde,
_
1
a
=
C
d
(x?y
S-X3y
t)
0
(-x
>
y
3
+
x
jy
)
)
0
(xjyj-xjy
)
)
0
(y
7-y
a
)
0
(y
j-yi
)
0
(yi-y2>
0
(X3-Xj)
0
(x
J
-x j
)
0
(Xj-X
)
0
0
(>:?y3-x
jy
2)
0
(-X)
y
3+x
3y
J
;
0 (xi
y
í-x
2y
1
)
0
(yj-y
3)
0
(y
3 -y
1
)
0 (y
i
-y
2)
0
(X3-X2)
0
(X1-X3)
0
(
X
2
—x )
)
onde
A
=
i
det
xi
y
i
1
x2
y2
1
X3
y
3
=
ãrea
do
triângulo
Substituindo
(2)
e (1) ,
temos
òs
deslocamentos
no inte
rior
do elemento
em
função
dos
deslocamentos
nodais:
_
i
u
(x
,
y
)
=
X C
d u(x,y)
= N
d
[:}ÿ
Na
0
N2
0
N3
0
0
Ni
0
N2
0
N
3
N
-»ÿ
é
a matriz das
fun-
r-,
I
çoes
de
forma
ui
V]
U
2
V
2
UB
V
3
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 143/155
437
As
funções
Ni
sao
as
funções de
forma:
1
N
i
=
N2
x2y
3
l
x2y
3
(x
2y
3
-
y3x
- x
2y
+
x3y)
i
ÿ
(y3x
-
x3y)
N
3
=
—
y
ys
4.3.2.
Matriz
que
Relaciona
Deformação
com
Deslocamentos
Nodais
(B)
As
deformações
dentro
do
elemento
ficam
determinados
pe
la s
relações
deslocamentos
x
deformações
(vide
item
Aj.2.1).
£
=
ID
u
e
-
I)
N
d
£
=
I
X C~
1
d -+
e
=
B
d
onde
D e
um
operador
diferenciação.
Assim,
B
=
1)
X
C
_
1
B
=
3/ax
o
d/dy
0
d/dy
3/9x
1
0
X
o
y
o
o
í
o
x
0
y
b
=
2A
B
=
0
1
0
0
0
0
0
0
0 0
0
1
_0
0
1
0 1
0
1
.
C
(y2-y
3)
0
(ys-yi)
0
(y
j
-ya)
0
0
(x
3
~
X
2
) 0
(x
J
-Xj
)
0
(x2-xi )
(
X
3
X
2
)
(y2-ys)
(x
j
-x
3
)
(y
3-y
1
)
(x
2-X 1
)
(yi-y2>
A
area
do
elemento
tr iangular,
Outra maneira de
calcular B
seria
por
B
=
B)
N
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 144/155

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 145/155
Í33
,E»(y
2-y
s)
E
lj(
*
J -
*
2
)
E>i(y»-yi
)
E
12ÿ*
1
~x
3
)
En<yi-y2>
Eu(x,-v,;
E«(y
2ry
j
)
E2(x,-x
j)
E2)(yj-yi j
E
22ÿ*
)
3
)
E
2i(y
j
~y
2
)
E
22 (
x
?
-
X
,
)
Ej3(Xj-Xj)
E3jCy2-yj) ES3<Xl-Xi)
E
33Cy
a
-y
i
>
E33<X2-X)
)
E33<y
i-y
?)
A
area
do
triângulo
£{,3.4.
Determinação
da Matriz
de
Rigidez
por
Aplicaçãodo
Principio
dos Deslocamentos Virtuais
(PDV)
Este
principio
diz que:
0
trabalho
virtual
realizado
pelos
esforços
externos é
igual
ao
t rabalho
virtual
realizado
pelos
esforços
(ou
tensões)
in
te rnos,
se o
sistema
estiver
em
equilíbrio,
e se
os
desloca¬
mentos
virtuais
internos forem
compatíveis
com
as
deformações
virtuais
internas .
0
princípio pode
ser
expresso
por:
equilíbrio
l
«3 D
F
=
<5e
o
dV
ÔW F
-
=
ÔU
V
A
compatíveis
(3D
= deslocamentos
virtuais
externos
F
=
forças
externas
de
=
deformações
virtuais
internas
o
=
tensões
internas
Como
o campo
de
deslocamentos
virtuais
(e
corresponden
te s
de
deformações)
é
arbitrário
e
s
empr
e
escolhido.
compatível ,
a
imposição
do
PDV
estabelece
uma
condição de equi
l íbr
io
para
o
campo
de
forças
(e
correspondentes
tensões)
.
Como
as tensões
podem
ser escritas em
função
dos
desloÿ
mentos
nodais,
a imposição
do
PDV
leva
a
uma
relação
entre
for¬
ças
externas
(nodais)
e
deslocamentos
nodais
que
satisfaz
o
equi.
l íbrio global
do
elemento.
Esta
relação,
representada
pela ma¬
triz
de
r igidez
do elemento,
leva
também em
consideração
a lei
de variação assumida
para
os deslocamentos
dentro
do elemento
eOCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 146/155
suas
propriedades
elásticas.
No caso
do
elemento
triangular
temos:
F
-*ÿ
f
= |fxi
G
+
C
=
Ox
fyi
oy
fX2
Txy
>
—
f
y2
f
X3
f
y
s_
Como
só
temos
forças
externas nos nós os
deslocamentos
virtuais
externas
que
interessam
os
deslocamentos
virtuais
nodei
is :
6
D
6
d
—
ôuil
ôe
ôe
e
f~ôex
6vi
ôey
ÔU2
_ÿÿxy
6v
2
6u
3
ÔV3
0 campo
de
deslocamentos
virtuais
escolhido
á
tal
que
ôe
= Bôd
sendo
que
B
foi .definido
anteriormente
e
corresponde
a
uma variação l inear
dos
deslocamentos
virtuais
dentro
do
elemen
to.
Este
campo'
ã
compatível dentro
do
elemento.
Impondo
o
PD V
temos:
ôd
<5
d
Ôd
ôd
ôe
o
dV
T
f
-
f
~
~
Jy
dT
f
-
}
-
Jy
dT
f
=
í
J
v
dT f
-
ôdT
ff
BT E
B
dvl
d
ÔdT
BT
o
dV
ôdT
BT
E
B d
dV
«w
f*.
Podemos
eliminar ôd
pois
iarbitrário
e
pode
ser
difeÿ
rente
de
zero.
Como
pode
ser
observado
nos
itens
anteriores,
as
matriÿ
zes
B e E são constantes
dentro
do
elemento.
Assim:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 147/155
B
E
B
t
A
d
s.endo
t a espessura
do
elemento
e
A
=
*2
det
1
xi
yi
1
x2
y2
1
X3
y
3
area
do
triângulo
A espessura
t
adotada
no
caso
plano de
tensões
?
a
re ¬
a l .
No
caso de
estado plano
de
deformação
deve-se
.
adotar
t
=
1
e
obter
os
resultados
por
metro
de
comprimento
(de
barra¬
gem
por
exemplo)
.
Da
relação acima
tiramos:
f
=
k
d
k = B
E
B
t
A
-6x6
k
é
mostrado na
página
seguinte
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 148/155
iqz.
i
N
>»
vu
X
I
\w
+
X
I
U»
>>
i
X
I
ur
\U
+
i
x
i
i
P)
U*
+
<
o
M
DC
H
Y*3
£
H
V )
fs
I
X
I
ur
uf
i
X
I
ur
i
X
I
K
»-c
CM
ur
r-t
>>
X
I
UT
x
i
i
UT
+
Ui
P-.
IT
>S
v-/
IT
ur
+
X
x
«T
ur
+
/-V
tT
cc
Pm
P-.
I
Ui
+
P».
I
Pm
I
Ui
X
I
Pm
I
X X
1
I
1
X
X
u\
+
ur
i
.
Ui
+
1
CM
1
x~
CM
ÿ>
1
'«
1
M
X
Is
y,-«
1
N
m
1
1
V
ur
4
1
~
/ÿs
1
•M
ts
1
1
1
ÿ.
w
>T
ÿ M
w
*
x
K
x
1
1
1
cm
1
IS X*
>L
-c
K
x~
I
~
m
m
Vu
Uf
ur
ttf
+
i
+
•
r
K
Is
1
i_
i 1
1
n
p-> ÿ»
N,/
1
xN
IS
w
y—s
/-M
MMl
1
x
>T
x
CM
Pm
l_
i 1
1
x
ÿT
*-|
S
1
x~
-_
ÿ»
if
x*z
>
1
«X
m
N
IT
uf ur
ur ur
_
+
_ 4
ÿ-N
l
/- N /-s
«kl
Is
1
>T
i
is
i
CM
ÿ»
i
1
IT
1
ÿ
N
X
IT
is
Is
1
>-ÿ
n
u/
1
X
V-P
y- s
i
«V
Is
1
1
.
it
X
1
>T
i
X
1
1
-
>
»ÿ<
X
CM
X
X
S-'
IT
1
Xm
>-ÿ
IT
1
•
**
Ui
1
UT
.
IT
\u
4
_
+
C-M
I
ÿ
'
£
i
XN Is
1
i t—
5-.
CM
>>
IT
1
*
CM
>>
<ÿ N
/-s
1
i
x
»
x~
x~
1
IS
1
1
«*>
X
CM
X
CM
X
1
S
I-*
V_/
1
w
IT
1
CM
IT
VT
,
IT
\u
ur
UT
1
ÿ**N
+
4
IT
ÍS
I
CM
X
ÿ N
IT
>>
CM
1
'cm
IT
CM
>M
X
S_ÿ
1
is
M/
Is
M X
CM
?s
1
ÿ**N
X
1
»>x
X
,
i
CM
X
1
1
>*
CM
X
CM
X
IT
X
'
N-'
w
,
ur
uf
,
uf uf
•c
jj|<r
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 149/155
4M3
kA.
Resumo e Conclusões
0 que
mais queremos salientar
ao
estudante
que
pela
pr
i
meira
vez
se depara
com
o método
dos
elementos
finitos
(MEF)
e
a
poderosa
ferramenta
que
este
representa .
0
grande
problema
do
engenheiro
estrutura l
estaria
em
estabelecer
condições
seguras,
práticas
e
económicas
de
um
sis
tema
estrutural
deformável
resistir aos
esforços
e
solicitações
que
lh e
são impostas.
Em
outras palavras,
o
engenheiro
deve
esta
belecer
relações
entre
as
solicitações
e
os
deslocamentos e
de¬
formações
e
verif icar
se
estes
deslocamentos e
os
esforços
inter
nos
(ou
tensões)
atendem as
condições
acima
descritas.
Quando
o
sistema
estrutural
é
composto
por
elementos es
truturais
basicamente
unidimensionais (quadros,
grelhas,
etc.)as
relações
f
orças-deslocamentos
podem ser
determinadas
uti l izando-
se as
hipóteses
simplif icadoras
da
Resistência
dos
Materiais.
Pa
ra
sistemas
contínuos,
ou
para
problemas
mais
gerais,
a
análise
estrutura l
só
pode
ser
feita tendo
como
base
a
Teoria da
Elasti¬
cidade
.
As
equações
da
teoria
da
elasticidade,
exemplificadas
p-e
las
equações
fundamentais
do
caso
plano,
elástico
e
l inear
mos¬
tradas no
item
ÿ.2,
teriam
que
ser
integradas
ao
longo do
meio
contínuo
e,
depois
de introduzidas
as
condições de
contorno,
fo r
neceriam
as
relações
desejadas.
Esta
solução,
análitica,
requer
um trabalho
matemático
enfadonho
e,
por
muitas
vezes,
virtualmen
te
impossível
de
ser
concluído.
0
MEF
vem apresentar
uma
solução
numérica
e
ÿ
aproximada
para
o
problema introduzido
pela
teoria
da
elasticidade.
No
en¬
tanto,
o
engenheiro
tem
controle
sobre
o
grau
de
aproximação
quan
(to
se
deseje,
tendo
como
l imites o
custo
e
a
capacidade do
ferra
mental
computacional
disponível.
No
MEF
o
meio
contínuo
é
discretizado
em
pequenos,
mas
f in i tos,
elementos,
onde
se
estabelece
de
forma
aproximada as
re
lações entre
as
forças
sobre os
nós
do
elemento e
os deslocamen¬
tos destes nós.
0
importante
a
se
observar
e que,
uma
vez
estabeleciÿ
das
estas
relações
a nível
de
elemento,
o
agrupamento dos elemen¬
tos ,
recompondo
o
meio
contínuo,
e
a
consequente
determinação
das
relações
f
orça-deslocamento
(aproximada s)
a
nível
de
estrutura
se
processam de
maneira
exatamente
análoga
ã
que e
feita
para
o ca-
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 150/155
so
de elementos
unidimensionais
(quadros,
grelhas,
etc.)»
As
con
diçoes
de
contorno também
são
consideradas de
forma
análoga.
0
grau
de
aproximação
depende
do
número de
elementos
que
são
considerados:
quando mais,
mais
próxima
da
solução
real
esta
a
resposta
pelo
MEF.
No
entanto
quanto
mais
elementos,
mais graus
de
liberdade
tem o
problema e a
solução
torna-se mais
cara e de
difícil
implementação
pratica.
0
engenheiro,
então, deve
estabe¬
lecer
o
grau
de
precisão
tendo
como
parâmetros
de um lado
os
re ¬
sultados confiáveis
e do
outro o
custo
e
a
implementação
prática
da
análise.
Em
seguida
sao resumidas as
principais
considerações
do
MEF
no
que
diz
respeito
a
condições
de
equilíbrio,
a
compatibi l i
dade
de
deslocamentos
e
ãs
leis
constitutivas
do
material,
e
em
que
a
sua solução
diferencia
de
uma
solução analítica
do
mesmo
pro
blema
pela
teoria
da
elasticidade:
1Ç)
Os deslocamentos
dos
pontos
do
meio
contínuo
pelo
MEF te m
ca
ráter
aproximado
em
relação aos
deslocamentos
reais dados
pe
la
teoria
da
elasticidade. Uma lei
de
variação
á
suposta
para
estes
deslocamentos
dentro
de
cada
elemento.
Por
exemplo,
no
caso
do
elemento tr iangular
de
deformação
constante
é
assum_í
da
uma
variação
l inear para os
deslocamentos
dentro
do elemen
to.
A
função
de
deslocamentos muda de
elemento
para
elemento,
mas,
neste
caso,
sempre
de
forma
l inear.
29)
As
condições
de compatibil idade
de deslocamentos dentro de
cada elemento ficam
satisfeitas
se as
funções que
interpolam
os
deslocamentos
dentro
do elemento
forem
contínuas.
39)
Compatibilidade
de
deslocamentos
de
um elemento
para
outro e
forçada
somente
nos
nós,
o
que
e
óbvio:
os elementos são co¬
nectados uns
com
os
outros
pelos nós.
49)
Compatibil idade de deslocamentos pode
ou nao
ser satisfeita
ao longo da
fronteira
entre dois
elementos. Isto
vai -depen¬
der da função
de
interpolação
escolhida
para
os
deslocamentos
e
do
número
de
nós
(graus
de
l iberdade)
na
f ronteira.
Assim
á
que
no
caso
de
elementos
triangulares
com
variação
ljl
near para os
deslocamentos
as fronteiras
permanecem retas
de ÿ
pois
de
deformadas,
e
a
compatibilidade
forçada
nos nós
implica
na com¬
patibilidade
ao
loneo
da fronteira como
mostrado abaixo:
J
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 151/155
145
forma
inicial
----
orma
depois
de
defor
mado
Se
os
deslocamentos dentro
do elemento
fossem
aproximados
por
funções de
maior
ordem
perderiam
ocorrer
aparecer
vazios na
fronteira,
não
satisfazendo
a
compatibilidade.
Isto
é
mostra
do
abaixo.
vazio
Elemento
tr iangular
com
deslocamentos do
29
grau
Elementos
que
satisfazem
automaticamente
compatibilidade
ao
longo da
fronteira
são
chamados
elementos
conformes
ou
com
pativeis
. Os
que
nao
sarisfazem
sao
chamados
nao-conf
ormes
ou
incompatíveis
.
Outros
exemplos
de
elementos
conformes:
Frontei¬
ra
compa
tivel
.
Triangulo
baseado
em
função
de
deslocamentos
do
29
grau
(2
graus de
l iberdade por
nó)
(uma
parábola
do
29 grau
f ica
definida
por
3
pon
to s
)
.
ti-
Elemento
retangular
chama¬
do
bi l inear :
Fronteiras
permanecem
retas
depois
de
deformadas.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 152/155
w
u(x,y)
ai+
B2X
+
a3y +
ai»x
y
v(x,y)
*
as
+
aex
+
ayy
+
aex
y
•
Elementos
nao-conf
ormes
podem
ser
aceitos
e
em
alguns
casos
podem até
fornecer
melhores
resultados
que os
elementos
com
patíveis.
59)
As
leis constitutivas do
material (relações
'tensões-def
orma
çao
a
=
E
e)
são extrapoladas do
.nível
infinitesimal,
como
são aplicados
pela
teoria da
elasticidade,
para
o
nível
de
elemento
finito.
Os
resultados
desta
extrapolação
são
as
relações
entre
as
forças
nodais do
elemento e
os
deslocamen
to s
nodais,
relações
estas
representadas
pela
matriz
de
ri¬
gidez do elemento
(k)
,
tal
que:
f
=
k d
(k
=
jvol
BT E
B
dV)
Estas
relações
f
=
k
d
são
tais que
satisfazem o equilíbrio
global
do
elemento
e
são
determinadas tomando
como
base
a
lei
de
variação
escolhida
para
os
deslocamentos
dentro do
elemento.
69)
As
forças
que
atuam
dentro
do elemento
são
transportados
pa
ra
os
nós
consistentemente com a
lei da
variação
assumida pa
ra
os
deslocamentos.
79)
As equações
diferenciais
de
equilíbrio
da
teoria
da
elasti¬
cidade normalmente
não
são
satisfeitas dentro do
elemento.
No
caso
de
elementos
de
deformação
constante,
e
como
não
atuam
forças
dentro
do
elemento
estas
equações
(mostradas
a
baixo)
ficam
satisfei tas.
l£x
+
3TX2
=
0
g
ay
+
atxy
ox
9y
3.y
3x
A
nível
global,
no
entanto,
as
tensões
dentro
de
cada
ele¬
mento
tendem
ã
resposta
correta
(que
satisfaz
as
equações da
teoria
da
elast ic idade),
como
por
exemplo
o
que é
mostrado
abaixo
:
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 153/155
m
Seção
A-A
ÇÍÿx)
Correto
ÿ
Aproximado
(MEF)
i
89)
Equilíbrio
normalmente
não é
satisfeito
de
elemento
para
ele
mento.
Por
exemplo na
fronteira
entre
dois
elementos
trian¬
gulares
as
tensões
de
um
lado
são
diferentes
da
do outro,
co
mo
mostrado
abaixo.
99)
As
condições
de
equilíbrio
são impostas
a
nível
de nõ ,
isto
e,
equilíbrio
de
forças
(e
momentos)
nodais e
s a t
i
sf
ei
to
.As
equações
f inais a
nível
de
estrutura K
D
=
F
são
equações
de
equilíbrio
nodal,
e
os
deslocamentos
D
(solução)
são
tais
que
resultantes de
forças
e
momentos
nos
nós
são
nulas.
109)
Condição
de
contorno
em
deslocamentos e
forças
no
contorno
do
meio
continuo
são
impostos
somente
aos
nos
do
contorno,
co
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 154/155
14*
Finalmente,
gostaríamos
de
salientar
alguns
aspectos
que
diferenciam
a
análise
de elementos
f initos unidimensipnais ,
(4quadros,
grelhas,
etc.)
da análise
para
elementos
bi
ou
tridi¬
mensionais.
1)
As funções
que
interpolam
os
deslocamentos dentro
do
elemen¬
to de
quadro
são
as funções
exatas
(dentro
das hipóteses
da
resistência
dos
mater iais)
quando
temos
barras
•
:p r ismátic
as
(propriedades
constantes ao
longo
do comprimento
e
carrega¬
mento
só
nos nós
(barras
descarregadas).
2)
Por
esse motivo,
e
para barras
prismáticas,
a
matriz
de rigi
dez
do
elemento de
barra representa
realmente
(sem
aproxima¬
ção)
as
características
de
r igidez
do
meio
na
região
do
ele¬
mento.
3)
Também
para barras
prismáticas,
as
forças
que
atuam
ao
longo
das barras
e
que
sao
transportadas
para os
nós
(forças
equi¬
valentes
nodais)
são
iguais
ã
forças
de
engas
taraento
perfei¬
to
com
sentidos
opostos.
4)
Por esses motivos
(1,'
2
e 3 ),
a
análise
da
estrutura
para
as
cargas
nodais
combinadas
(cargas
nodais mais
forças
equiva¬
lentes
nodais)
tem como
resultado
para
os
deslocamentos
no¬
dais
os
valores
exatos
(dentro
das
hipóteses
da
resistência
dos
mater ia is)
.
5)
No
caso
específico
das
estruturas
compostas por
barras,
as
tensões internas (esforços
internos)
são
determinadas
pela
S£
ma de
dois
casos:
(I)
Análise
da
estrutura
para
as
cargas
nodais
combinadas.
(II)
Esforços
internos
devido
ãs
cargas
que
atuam
ao
longo
das
barras
e
forças
de
engastamento perfei to.
Os
esforços
internos
resultantes são
exatos.
No
caso
dos
elementos
f initos
bi
ou
tridimensionais
somente
a
fase
1
é
feita
na
análise.
OCR por Emerson Leite - www.unna.eng.br

7/24/2019 O Método Da Rigidez Direta Sob Um Enfoque Matricial
http://slidepdf.com/reader/full/o-metodo-da-rigidez-direta-sob-um-enfoque-matricial 155/155
5.
REFERÊNCIAS
01
-
Structural
Engineering .
White,
R.N.;
Gergely,
P;
Sexsmith,
R.G.
Volumes
1
e
2
(Edição
Combinada),
02
-
Matrix
Analysis
of Framed
Structures ,
Weaver,
W.jGere,J.
M.
2a.
Edição.
03
-
Ma trix S t ruc tu ra l
Analysis .
Mc
Guire,
W,
;
Gallagher,
R.
04
-
Matrix
Methods
of
Structural
Analysis ,
Wang,
C.K.
05
-
Concepts
and
Applications
of
Finite
Element Analysis .
Cook,
R.D. 2a.
Edição.
06
-
Matrix
Structural
Analysis ,
Meek,
J,L,
07
-
Structural
Systems
Statics,
Dynamics and
Stability .